

Page 1

vacon nx
®
taajuusmuuttajat
all in one
sovelluskäsikirja
Page 2

Page 3
A
J
B C D E F G H I
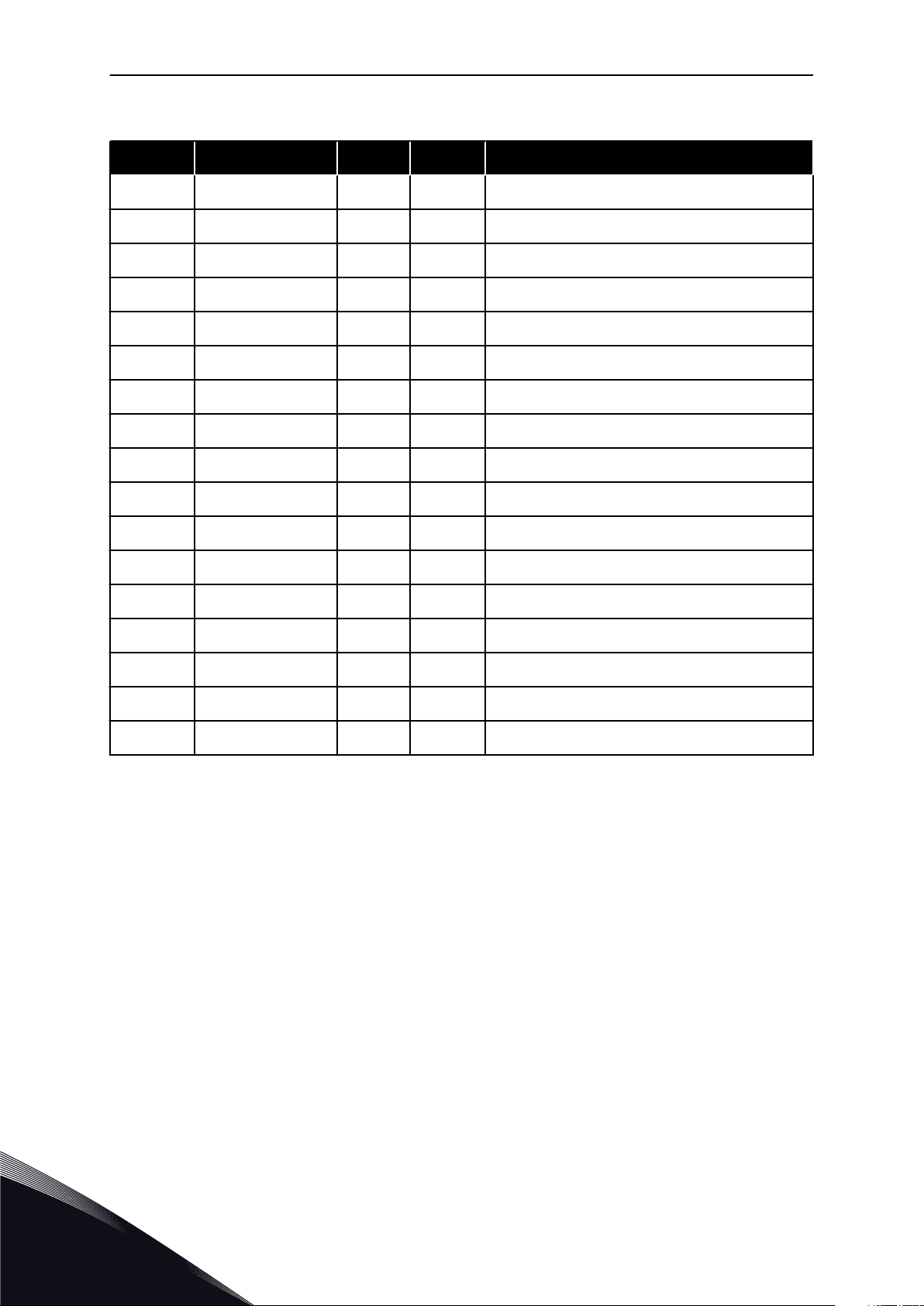
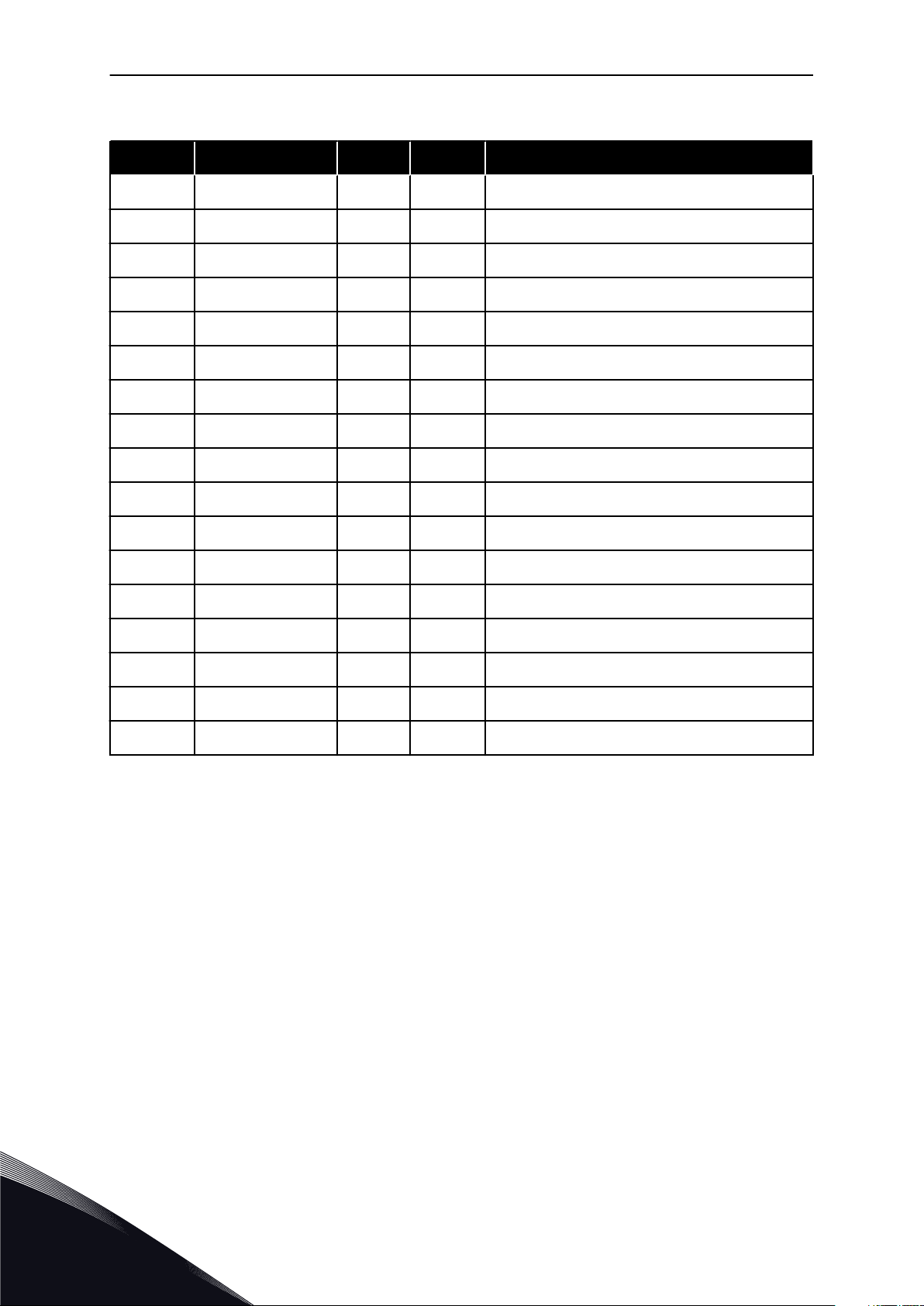
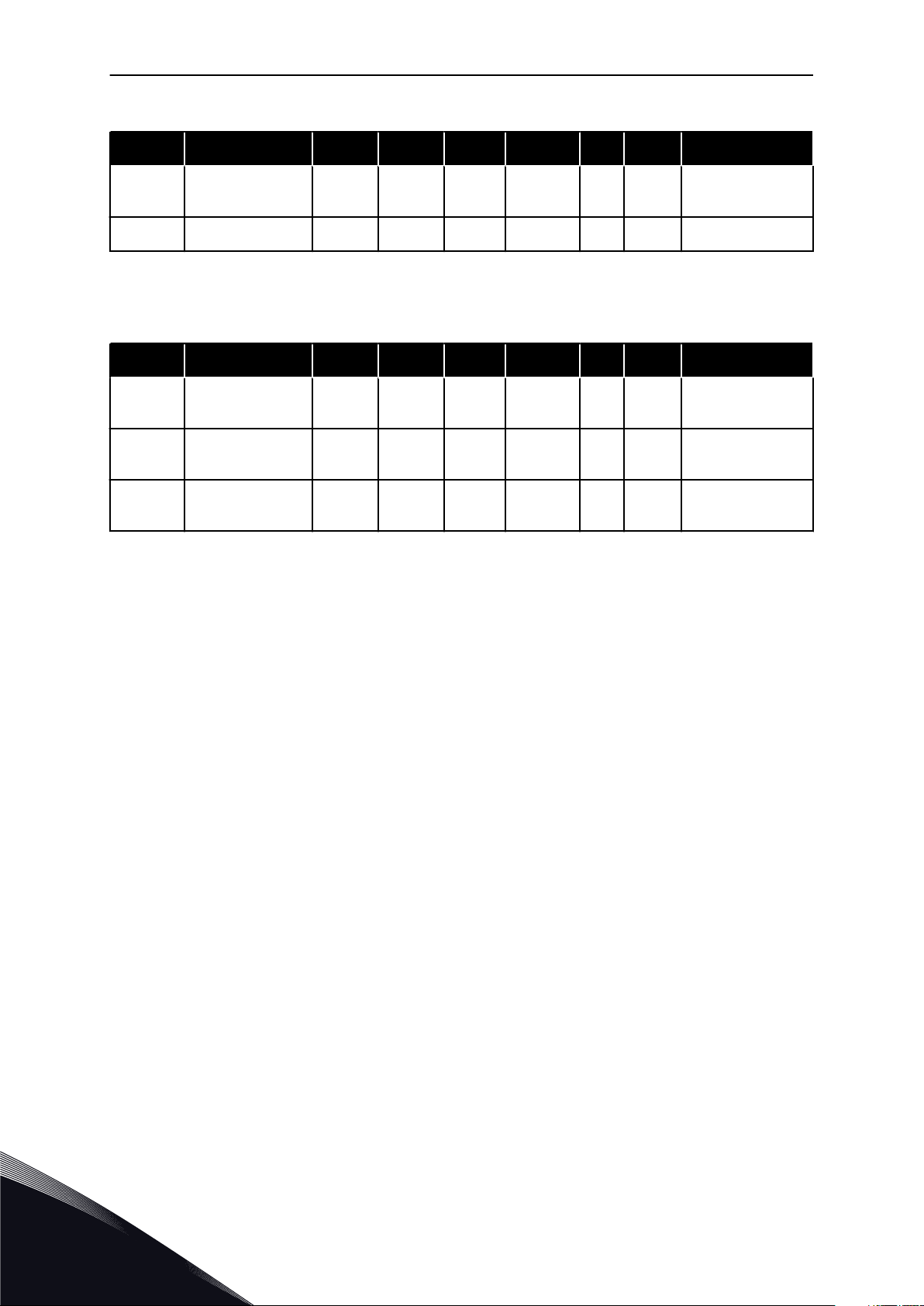
Index Min Max Unit Default
Cust
ID DescriptionParameter
ESIPUHE VACON · 3
ESIPUHE
Asiakirjatunnus: DPD01208E
Päivämäärä: 1.12.2016
Ohjelmistokoodi:
Perussovellus = ASFIFF01
•
Vakiosovellus = ASFIFF02
•
Paikallis-/etäohjaussovellus = ASFIFF03
•
Multi-Step-nopeussovellus = ASFIFF04
•
PID-säätösovellus = ASFIFF05
•
Erikoiskäyttösovellus
•
NXS = ASFIFF06
-
NXP = APFIFF06
-
Pumppu- ja puhallinsovellus = ASFIFF07
•
TIETOJA TÄSTÄ OPPAASTA
Tämän oppaan tekijänoikeudet omistaa Vacon Oyj. Kaikki oikeudet pidätetään. Oikeudet
muutoksiin pidätetään. Näiden ohjeiden alkuperäinen kieli on englanti.
Tässä oppaassa on tietoja VACON®-taajuusmuuttajan toiminnoista sekä käytöstä.
Tämä opas sisältää useita parametritaulukoita. Näissä ohjeissa kerrotaan, miten taulukoita
luetaan.
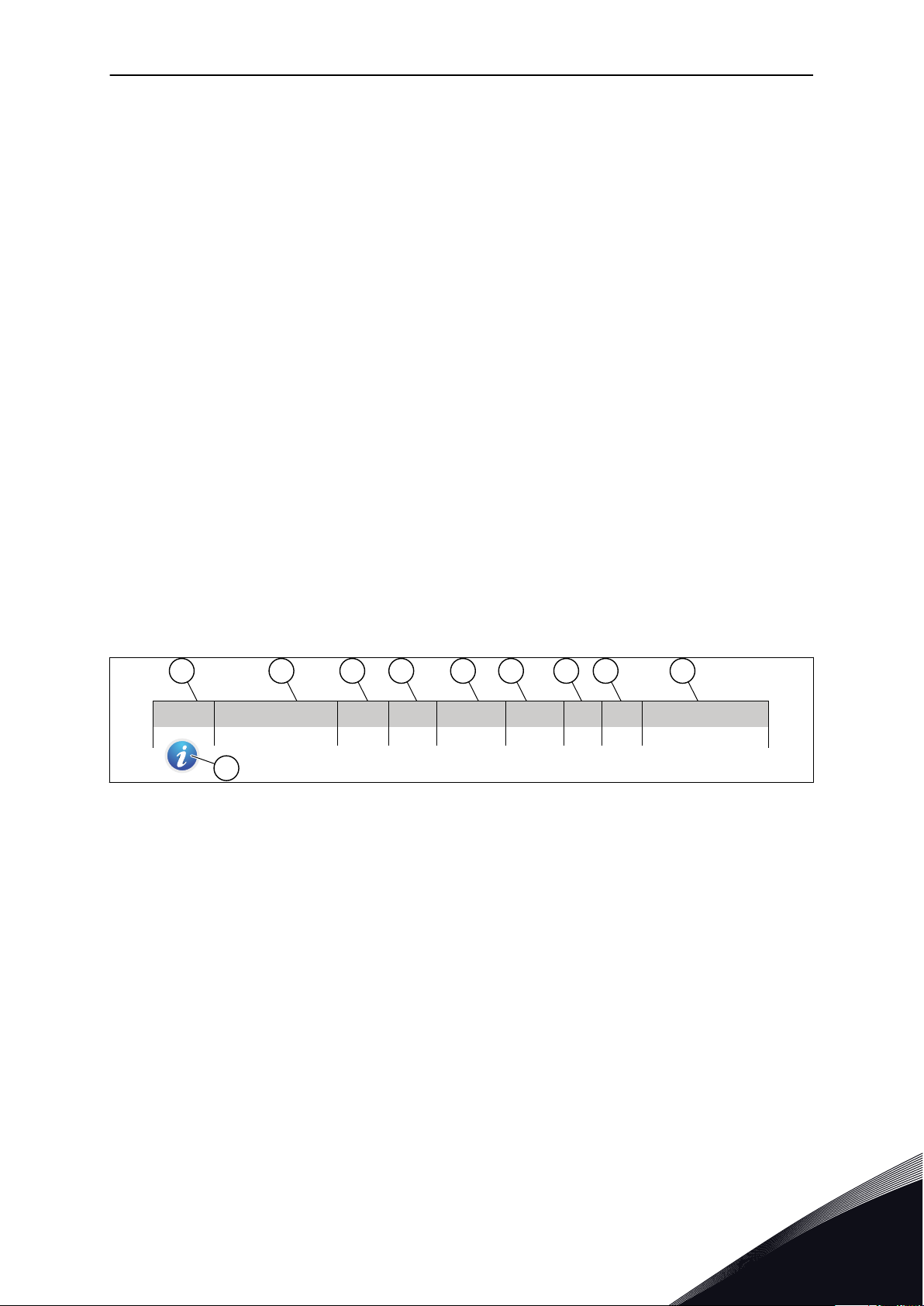
A. Parametrin sijainti taulukossa
(parametrin numero).
B. Parametrin nimi.
C. Parametrin pienin mahdollinen arvo.
D. Parametrin suurin mahdollinen arvo.
E. Parametrin arvon yksikkö. Yksikkö
näytetään, jos sellainen on.
G. Asiakkaan oma asetus.
H. Parametrin tunnus.
I. Parametrin arvojen tai toiminnan lyhyt
kuvaus.
J. Kun tämä symboli on näkyvissä, voit
lukea lisätietoja parametrista luvusta
Parametrikuvaukset.
F. Tehtaalla asetettu arvo.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 4

VACON · 4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 5
SISÄLLYS VACON · 5
SISÄLLYS
Esipuhe
Tietoja tästä oppaasta 3
1 Perussovellus 10
1.1 Yleistä 10
1.1.1 Perussovelluksen moottorinsuojaustoiminnot 10
1.2 Ohjaus-I/O 11
1.3 Perussovelluksen ohjaussignaalilogiikka 13
1.4 Perussovelluksen parametriluettelot 13
1.4.1 Valvonta-arvot (ohjauspaneeli: valikko M1) 13
1.4.2 Perusparametrit (ohjauspaneeli: Menu M2 -> G2.1) 15
1.4.3 Paneeliohjaus (ohjauspaneeli: valikko M3) 17
1.4.4 Järjestelmävalikko (ohjauspaneeli: valikko M6) 17
1.4.5 Laajennuskortit (ohjauspaneeli: valikko M7) 17
2 Vakiosovellus 18
2.1 Yleistä 18
2.2 Ohjaus-I/O 19
2.3 Vakiosovelluksen ohjaussignaalilogiikka 21
2.4 Vakiosovelluksen parametriluettelot 21
2.4.1 Valvonta-arvot (ohjauspaneeli: valikko M1) 21
2.4.2 Perusparametrit (ohjauspaneeli: Menu M2 -> G2.1) 23
2.4.3 Tulosignaalit (ohjauspaneeli: Menu M2 -> G2.2) 24
2.4.4 Lähtösignaalit (ohjauspaneeli: valikko M2 -> G2.3 26
2.4.5 Taajuusmuuttajan ohjausparametrit (ohjauspaneeli: valikko M2 -> G2.4
29
2.4.6 Estotaajuuksien parametrit (ohjauspaneeli: Menu M2 -> G2.5) 30
2.4.7 Moottorin ohjausparametrit (ohjauspaneeli: Menu M2 -> G2.6) 31
2.4.8 Suojaukset (ohjauspaneeli: valikko M2 -> G2.7 34
2.4.9 Automaattisen uudelleenkäynnistyksen parametrit (ohjauspaneeli:
Menu M2 -> G2.8) 36
2.4.10 Paneeliohjaus (ohjauspaneeli: valikko M3) 36
2.4.11 Järjestelmävalikko (ohjauspaneeli: valikko M6) 37
2.4.12 Laajennuskortit (ohjauspaneeli: valikko M7) 37
3 Paikallis-/etäohjaussovellus 38
3.1 Yleistä 38
3.2 Ohjaus-I/O 39
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 6
VACON · 6 SISÄLLYS
3.3 Paikallis-/etäohjaussovelluksen ohjaussignaalilogiikka 41
3.4 Paikallis-/etäohjaussovelluksen parametriluettelot 41
3.4.1 Valvonta-arvot (ohjauspaneeli: valikko M1) 41
3.4.2 Perusparametrit (ohjauspaneeli: Menu M2 -> G2.1) 43
3.4.3 Tulosignaalit (ohjauspaneeli: Menu M2 -> G2.2) 45
3.4.4 Lähtösignaalit (ohjauspaneeli: valikko M2 -> G2.3 49
3.4.5 Taajuusmuuttajan ohjausparametrit (ohjauspaneeli: valikko M2 -> G2.4
53
3.4.6 Estotaajuuksien parametrit (ohjauspaneeli: Menu M2 -> G2.5) 54
3.4.7 Moottorin ohjausparametrit (ohjauspaneeli: Menu M2 -> G2.6) 55
3.4.8 Suojaukset (ohjauspaneeli: valikko M2 -> G2.7 58
3.4.9 Automaattisen uudelleenkäynnistyksen parametrit (ohjauspaneeli:
Menu M2 -> G2.8) 60
3.4.10 Paneeliohjaus (ohjauspaneeli: valikko M3) 60
3.4.11 Järjestelmävalikko (ohjauspaneeli: valikko M6) 61
3.4.12 Laajennuskortit (ohjauspaneeli: valikko M7) 61
4 Multi-Step-nopeussovellus 62
4.1 Yleistä 62
4.2 Ohjaus-I/O 63
4.3 Multi-Step-nopeussovelluksen ohjaussignaalilogiikka 65
4.4 Multi-Step-nopeussovelluksen parametriluettelot 65
4.4.1 Valvonta-arvot (ohjauspaneeli: valikko M1) 65
4.4.2 Perusparametrit (ohjauspaneeli: Menu M2 -> G2.1) 67
4.4.3 Tulosignaalit (ohjauspaneeli: Menu M2 -> G2.2) 69
4.4.4 Lähtösignaalit (ohjauspaneeli: valikko M2 -> G2.3 72
4.4.5 Taajuusmuuttajan ohjausparametrit (ohjauspaneeli: valikko M2 -> G2.4
76
4.4.6 Estotaajuuksien parametrit (ohjauspaneeli: Menu M2 -> G2.5) 77
4.4.7 Moottorin ohjausparametrit (ohjauspaneeli: Menu M2 -> G2.6) 78
4.4.8 Suojaukset (ohjauspaneeli: Menu M2 -> G2.7) 81
4.4.9 Automaattisen uudelleenkäynnistyksen parametrit (ohjauspaneeli:
Menu M2 -> G2.8) 83
4.4.10 Paneeliohjaus (ohjauspaneeli: valikko M3) 83
4.4.11 Järjestelmävalikko (ohjauspaneeli: valikko M6) 84
4.4.12 Laajennuskortit (ohjauspaneeli: valikko M7) 84
5 PID-säätösovellus 85
5.1 Yleistä 85
5.2 Ohjaus-I/O 86
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 7
SISÄLLYS VACON · 7
5.3 PID-säätösovelluksen ohjaussignaalilogiikka 88
5.4 PID-säätösovelluksen parametriluettelot 88
5.4.1 Valvonta-arvot (ohjauspaneeli: valikko M1) 88
5.4.2 Perusparametrit (ohjauspaneeli: Menu M2 -> G2.1) 91
5.4.3 Tulosignaalit 93
5.4.4 Lähtösignaalit (ohjauspaneeli: valikko M2 -> G2.3 99
5.4.5 Taajuusmuuttajan ohjausparametrit (ohjauspaneeli: valikko M2 -> G2.4
103
5.4.6 Estotaajuuksien parametrit (ohjauspaneeli: Menu M2 -> G2.5) 104
5.4.7 Moottorin ohjausparametrit (ohjauspaneeli: Menu M2 -> G2.6) 105
5.4.8 Suojaukset (ohjauspaneeli: valikko M2 -> G2.7 107
5.4.9 Automaattisen uudelleenkäynnistyksen parametrit (ohjauspaneeli:
Menu M2 -> G2.8) 109
5.4.10 Paneeliohjaus (ohjauspaneeli: valikko M3) 109
5.4.11 Järjestelmävalikko (ohjauspaneeli: valikko M6) 110
5.4.12 Laajennuskortit (ohjauspaneeli: valikko M7) 110
6 Erikoiskäyttösovellus 111
6.1 Yleistä 111
6.2 Ohjaus-I/O 113
6.3 Erikoiskäyttösovelluksen ohjaussignaalilogiikka 115
6.4 Erikoiskäyttösovelluksen parametriluettelot 115
6.4.1 Valvonta-arvot (ohjauspaneeli: valikko M1) 115
6.4.2 Perusparametrit (ohjauspaneeli: Menu M2 -> G2.1) 127
6.4.3 Tulosignaalit 130
6.4.4 Lähtösignaalit 137
6.4.5 Taajuusmuuttajan ohjausparametrit (ohjauspaneeli: valikko M2 -> G2.4
146
6.4.6 Estotaajuuksien parametrit (ohjauspaneeli: Menu M2 -> G2.5) 148
6.4.7 Moottorin ohjausparametrit (ohjauspaneeli: Menu M2 -> G2.6) 149
6.4.8 Suojaukset (ohjauspaneeli: valikko M2 -> G2.7 157
6.4.9 Automaattisen uudelleenkäynnistyksen parametrit (ohjauspaneeli:
Menu M2 -> G2.8) 161
6.4.10 Kenttäväyläparametrit (ohjauspaneeli: Valikko M2 -> G2.9) 162
6.4.11 Momenttiohjausparametrit (ohjauspaneeli: Menu M2 -> G2.10) 164
6.4.12 NXP-taajuusmuuttajat: Isäntä/seuraaja-parametrit (ohjauspaneeli:
Menu M2 -> G2.11) 166
6.4.13 Paneeliohjaus (ohjauspaneeli: valikko M3) 167
6.4.14 Järjestelmävalikko (ohjauspaneeli: valikko M6) 168
6.4.15 Laajennuskortit (ohjauspaneeli: valikko M7) 168
7 Pumppu- ja puhallinsovellus 169
7.1 Yleistä 169
7.2 Ohjaus-I/O 170
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 8
VACON · 8 SISÄLLYS
7.3 Pumppu- ja puhallinsovelluksen ohjaussignaalilogiikka 174
7.4 Pumppu- ja puhallinsovelluksen parametriluettelot 174
7.4.1 Valvonta-arvot (ohjauspaneeli: valikko M1) 174
7.4.2 Perusparametrit (ohjauspaneeli: Menu M2 -> G2.1) 177
7.4.3 Tulosignaalit 179
7.4.4 Lähtösignaalit 186
7.4.5 Taajuusmuuttajan ohjausparametrit (ohjauspaneeli: valikko M2 -> G2.4
193
7.4.6 Estotaajuuksien parametrit (ohjauspaneeli: Menu M2 -> G2.5) 194
7.4.7 Moottorin ohjausparametrit (ohjauspaneeli: Menu M2 -> G2.6) 195
7.4.8 Suojaukset (ohjauspaneeli: valikko M2 -> G2.7 196
7.4.9 Automaattisen uudelleenkäynnistyksen parametrit (ohjauspaneeli:
Menu M2 -> G2.8) 198
7.4.10 Pumpun ja puhaltimen ohjausparametrit (ohjauspaneeli: Menu M2 ->
G2.9) 199
7.4.11 Paneeliohjaus (ohjauspaneeli: valikko M3) 201
7.4.12 Järjestelmävalikko (ohjauspaneeli: valikko M6) 201
7.4.13 Laajennuskortit (ohjauspaneeli: valikko M7) 201
8 Valvonta-arvojen kuvaukset 202
9 Parametrikuvaukset 208
9.1 Paneelin ohjausparametrit 358
9.2 Isäntä/seuraaja-toiminto (vain NXP) 359
9.2.1 Isäntä/seuraaja-linkin fyysiset kytkennät 360
9.2.2 Taajuusmuuttajien välinen valokaapeliliitäntä OPTD2-kortilla 360
9.3 Ulkoisen jarrun ohjaus lisärajojen avulla (tunnukset 315, 316, 346–349, 352 ja 353)
360
9.4 Moottorin lämpösuojauksen parametrit (ID704–ID708) 362
9.5 Jumisuojauksen parametrit (ID709–ID712) 363
9.6 Alikuormitussuojauksen parametrit (ID713–ID716) 363
9.7 Kenttäväylän ohjausparametrit (ID850–ID859) 364
9.7.1 Prosessidatalähdöt (slave -> master) 364
9.7.2 Virran skaalaus erikokoisissa yksiköissä 364
9.7.3 Prosessidatatulot (master -> slave) 365
9.8 Closed loop ‑parametrit (ID612–ID621) 366
9.9 TTF (Terminal to Function, riviliitin toimintoon) ‑ohjelmointiperiaate 367
9.9.1 Tulon tai lähdön määrittäminen tietylle toiminnolle paneelin avulla 367
9.9.2 Liittimen määrittäminen tietylle toiminnolle NCDrive-
ohjelmointityökalun avulla 368
9.9.3 Käyttämättömien tulojen ja lähtöjen määrittäminen 369
9.10 Nopeussäätöparametrit (vain sovellus 6) 370
9.11 Käyttöjen vuorottelu (vain sovellus 7) 372
9.12 Lukituksen valinta (P2.9.23) 373
9.13 Esimerkkejä vuorottelu- ja lukitusvalinnoista 374
9.13.1 Pumppu- ja puhallinautomatiikka, jossa käytetään lukituksia mutta ei
vuorottelua 374
9.13.2 Pumppu- ja puhallinautomatiikka, jossa käytetään lukituksia ja
vuorottelua 375
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 9

SISÄLLYS VACON · 9
10 Vianetsintä 378
10.1 Vikakoodit 378
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 10

VACON · 10 PERUSSOVELLUS
1 PERUSSOVELLUS
1.1 YLEISTÄ
Perussovellus on yksinkertainen ja helppokäyttöinen. Se on oletusarvoisesti asetettu
valmiiksi tehtaalla. Jos näin ei ole, valitse perussovellus valikon M6 sivulla S6.2. Lisätietoja
on tuotteen käyttöohjeessa.
Digitaalitulon DIN3 voi ohjelmoida.
Perussovelluksen parametrit selitetään luvussa 9 Parametrikuvaukset jäljempänä tässä
oppaassa. Selitykset on järjestetty parametrien tunnusten mukaan.
1.1.1 PERUSSOVELLUKSEN MOOTTORINSUOJAUSTOIMINNOT
Perussovellus sisältää lähes kaikki samat suojaustoiminnot kuin muutkin sovellukset:
Suojaus ulkoisilta vioilta.
•
Tulovaiheen valvonta.
•
Alijännitesuojaus.
•
Lähtövaiheen valvonta.
•
Maasulkusuojaus.
•
Moottorin lämpösuoja.
•
Termistorivikasuojaus.
•
Kenttäväylän vikasuojaus.
•
Korttipaikan vikasuojaus.
•
Muista sovelluksista poiketen perussovelluksessa ei ole parametreja vikojen
vastetoimintojen tai raja-arvojen valintaan. Lisätietoja moottorin lämpösuojasta on
parametrin ID704 kuvauksessa luvussa 9 Parametrikuvaukset.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 11
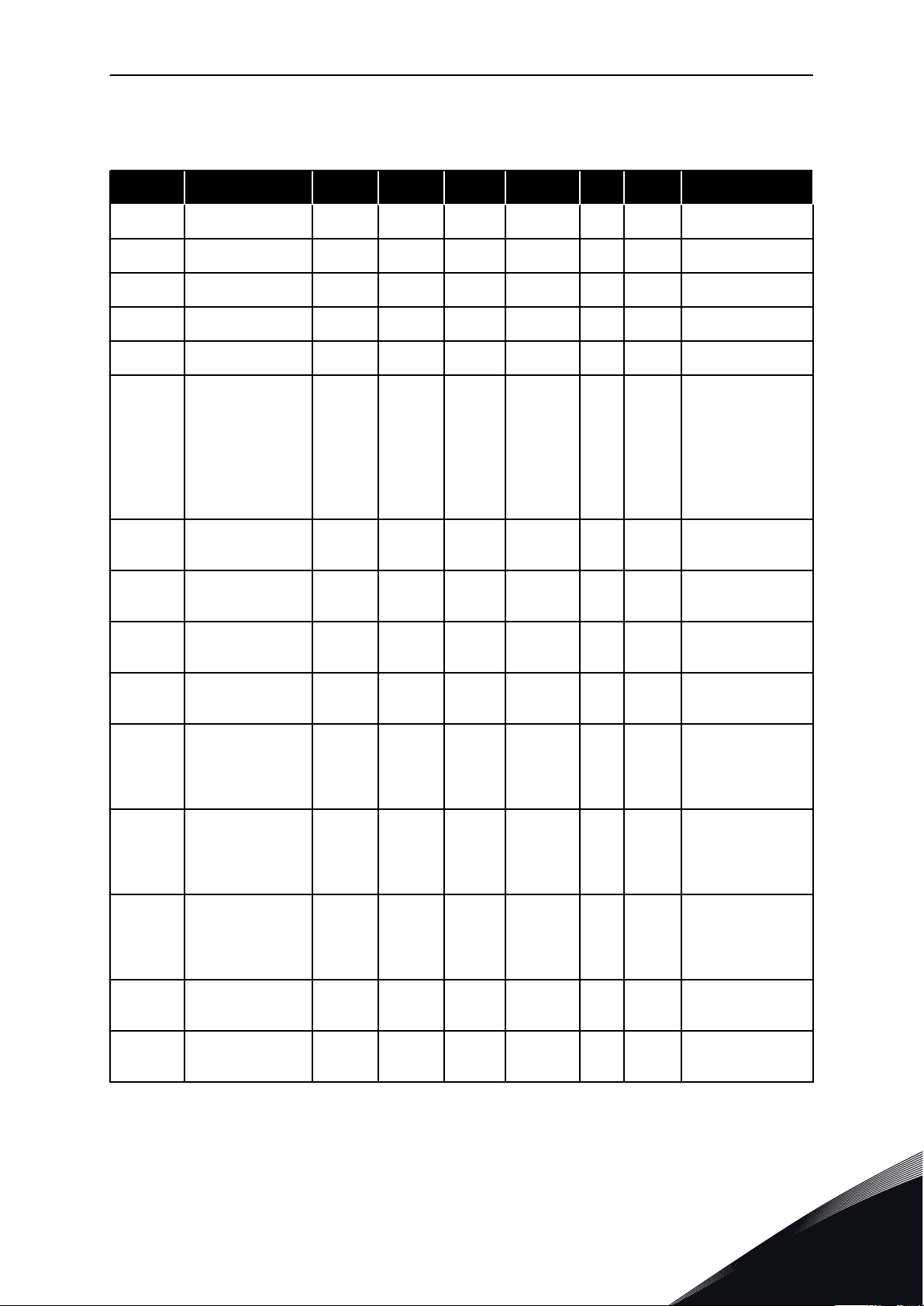
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
OPTA 2 / OPTA 3 *)
22
23
11
17
24
25
26
DIN4
DIN5
Jännite potentiometriin jne.
Ohjearvon ja ohjaustulojen maa
Ohjearvon ja ohjaustulojen maa
Ohjearvon ja ohjaustulojen maa
Analogiatulon 2 taajuusohje
Jännite kytkimiin (katso 6)
Kytke GND tai +24 V
VIKA
Ulkoinen vika -tulo
Ohjelmoitava (P2.17)
Kytke GND tai +24 V
Kosketin auki = ei käytössä
Kosketin kiinni = vian kuittaus
Kosketin auki = ei vikaa
Kosketin kiinni = vika
Kosketin kiinni = käy eteenpäin
Kosketin kiinni = käy taaksepäin
Open collector,
I≤50 mA, U≤48 VDC
KÄY
mA
VALMIS
AO1-
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
Vakiolaajennuskortti
Liitin Signaali Kuvaus
+10 V
ref
AI1+
AI1-
AI2+
AI2-
+24 V
Ohjausjännitelähtö
Analogiatulo 1
Jännitealue 0–10 V DC
Ohjelmoitava (P2.14)
Analogiatulo 2
Virta-alue 0–20 mA
Ohjausjännitelähtö
I/O maa
I/O maa
Vakionopeusvalinta 1
Vakionopeusvalinta 2
Vian kuittaus
Yhteinen (DIN 1 – DIN 3)
Yhteinen tuloille DIN4–DIN6
Ohjausjännitelähtö
I/O maa
Relelähtö 1
Relelähtö 2
AO1+
Analogiatulon 1
taajuusohje
Jännite kytkimiin jne. maks. 0,1 A
Käy eteen
Käy taakse
Taaj.ohje
Auki
Kiinni
Auki
Kiinni
Auki
Auki
Kiinni
Kiinni
I/O-ohjearvo (P2.14)
Vakionopeus 1
Vakionopeus 2
Maksimitaajuus
KÄY
Viitepotentiometri
1–10 kΩ
Analogialähtö 1
Lähtötaajuus
Ohjelmoitava
(P2.16)
Alue 0–20 mA/RL,
maks. 500 Ω
Digitaalilähtö 1
VALMIS
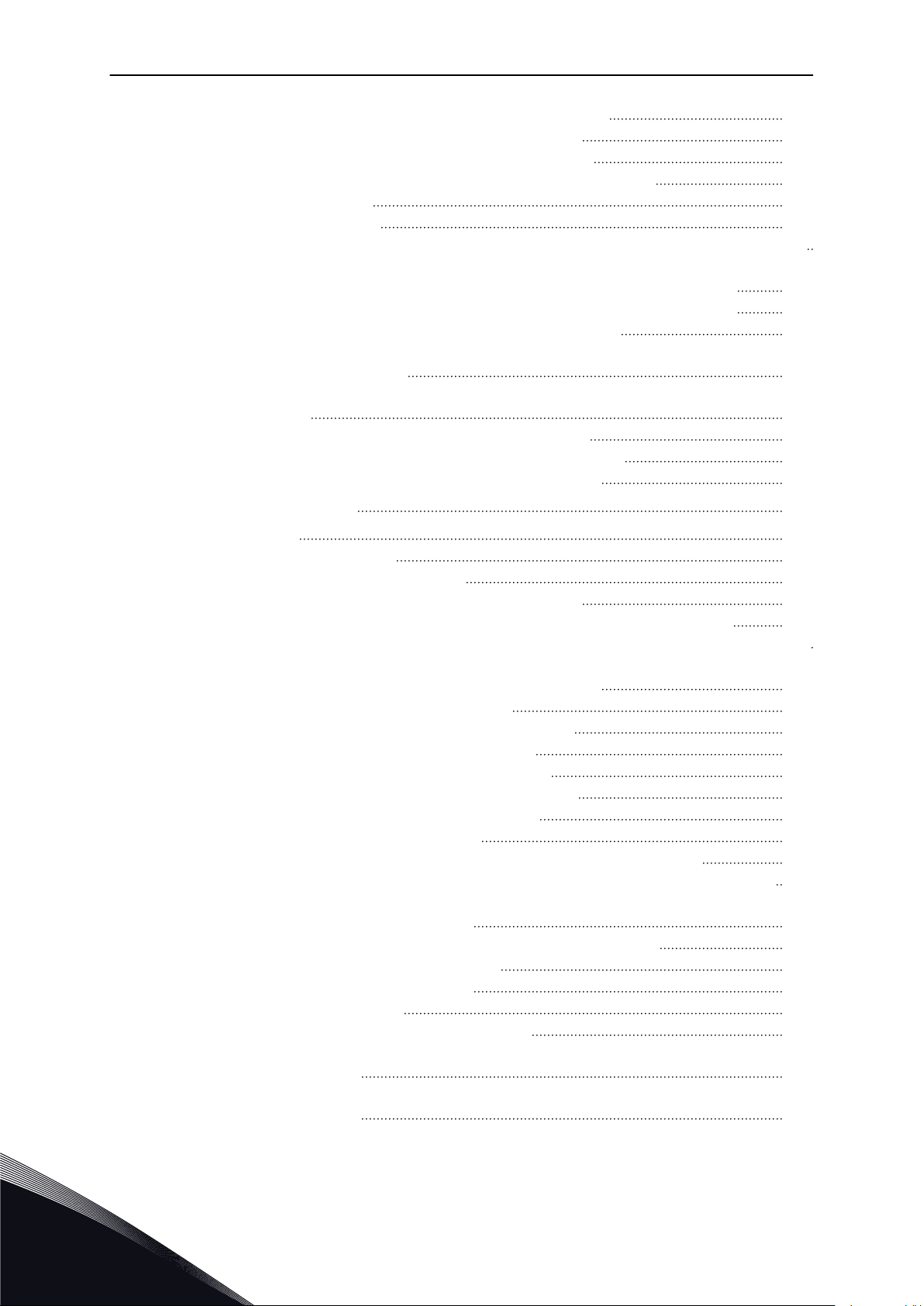
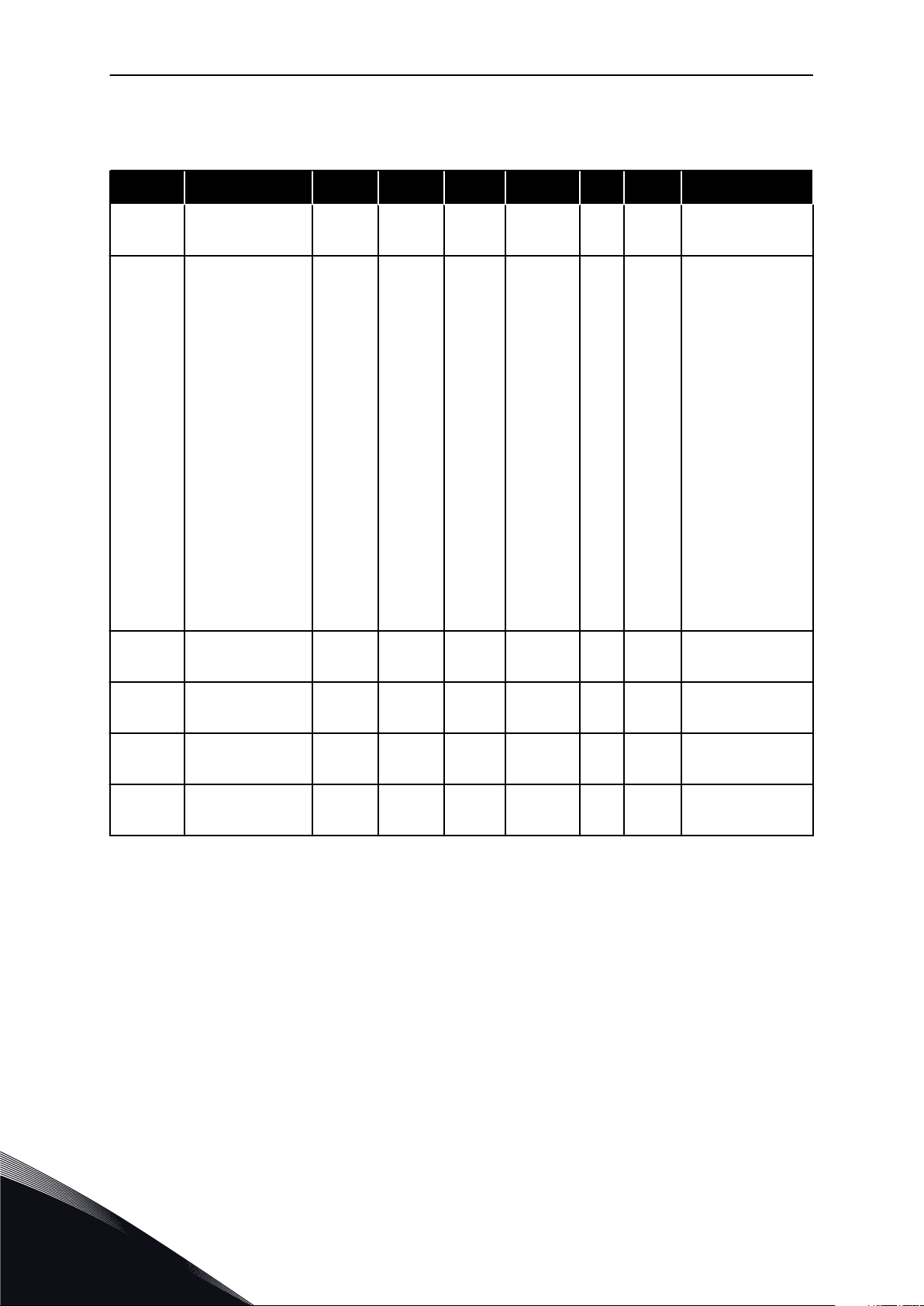
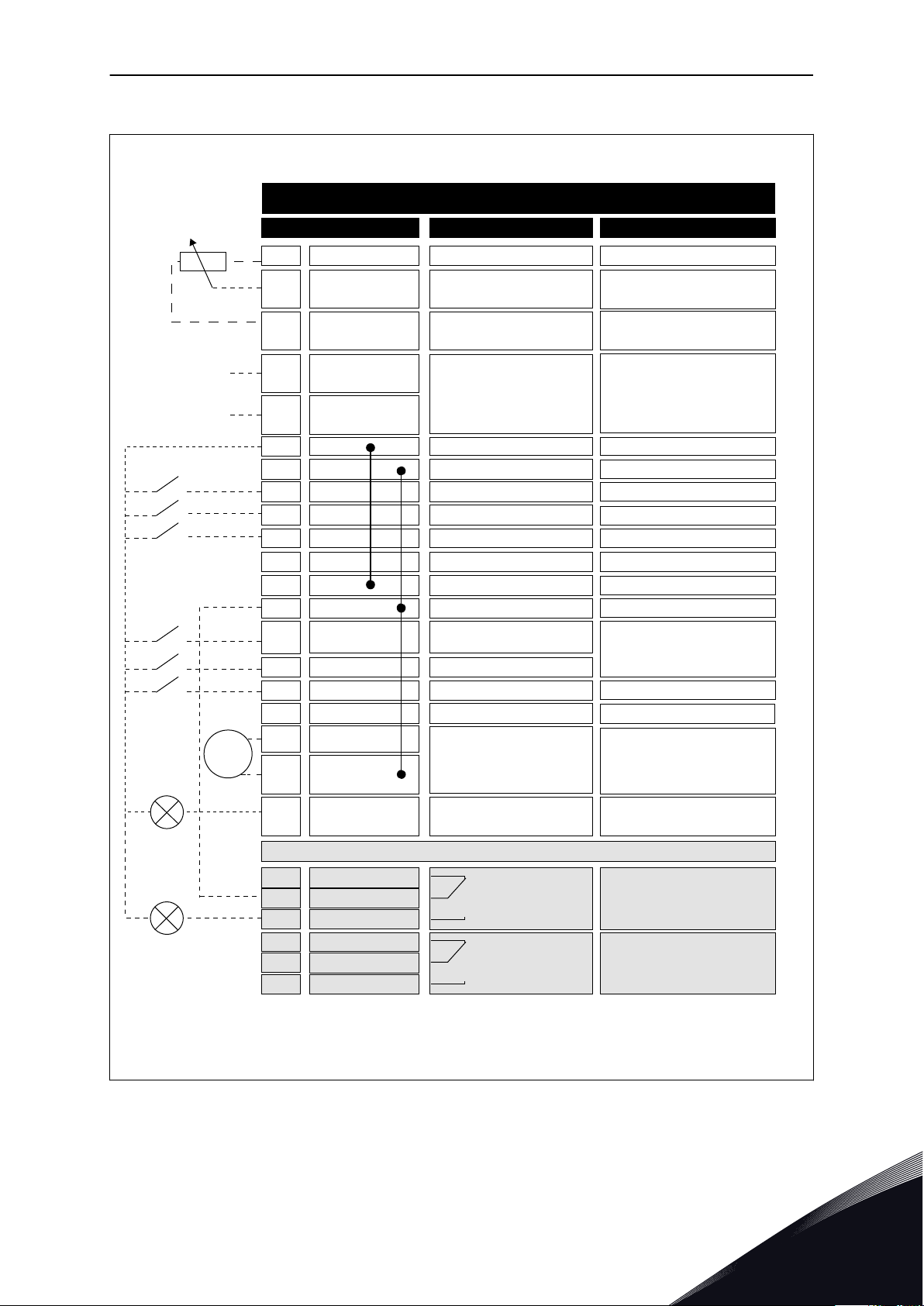
PERUSSOVELLUS VACON · 11
1.2 OHJAUS-I/O
Kuva 1: Perussovelluksen tulojen ja lähtöjen oletusasetukset
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 12
Pistikeryhmä X3:
CMA:n ja CMB:n maadoitus
CMB kytketty maahan
CMA kytketty maahan
CMB erotettu maasta
CMA erotettu maasta
CMB ja CMA sisäisesti kytketty
yhteen, erotettu maasta
= tehdasasetus
VACON · 12 PERUSSOVELLUS
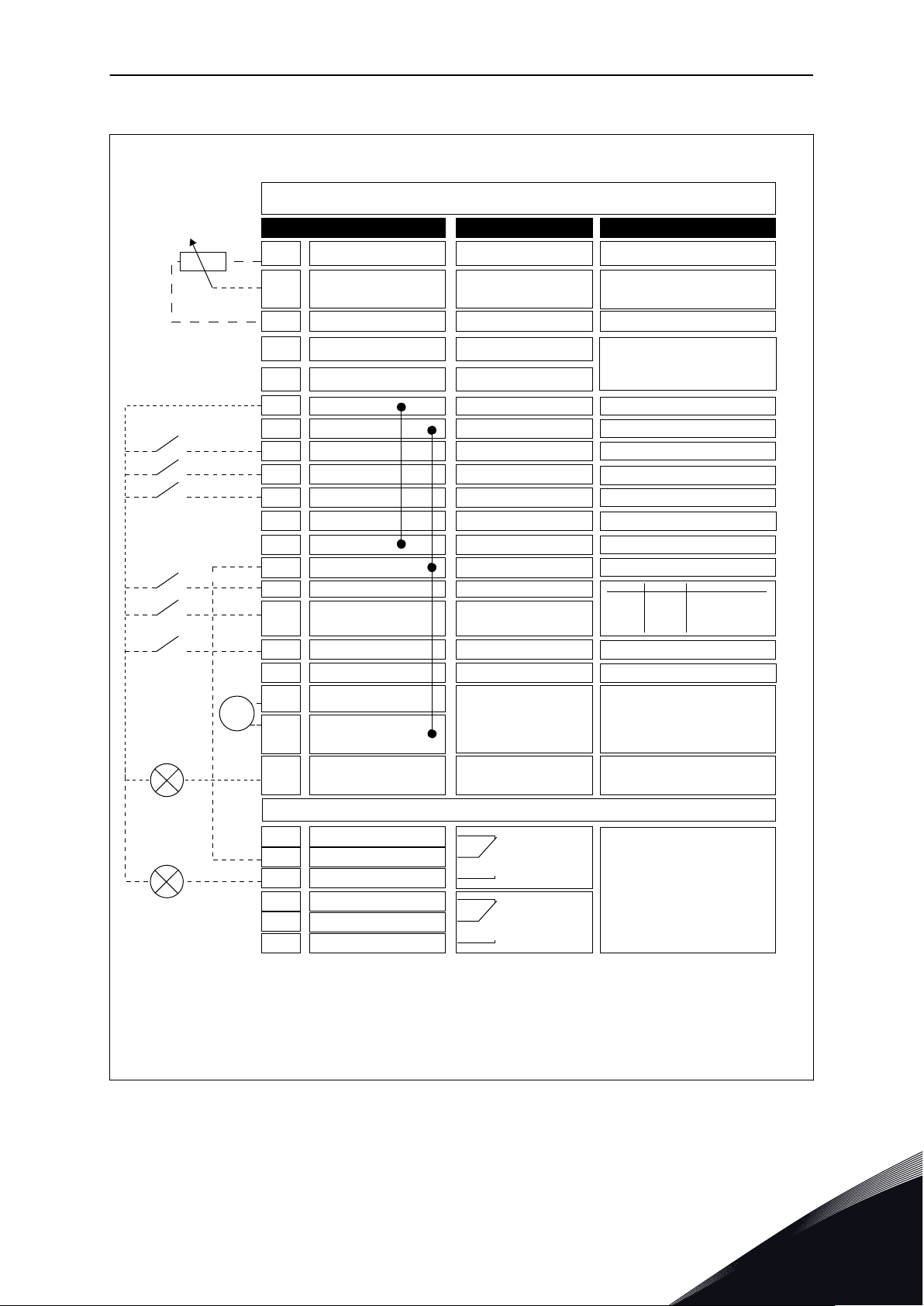
*) Lisäkortin A3 toisessa relelähdössä ei ole avoimen koskettimen liitintä (liitin 24 puuttuu).
HUOMAUTUS!
Katso alla olevat pistikevalinnat. Lisätietoja on tuotteen ohjekirjassa.
Kuva 2: Pistikevalinnat
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 13
DIN4
DIN5
AI1
AI2
DIN1
DIN2
DIN6
DIN3
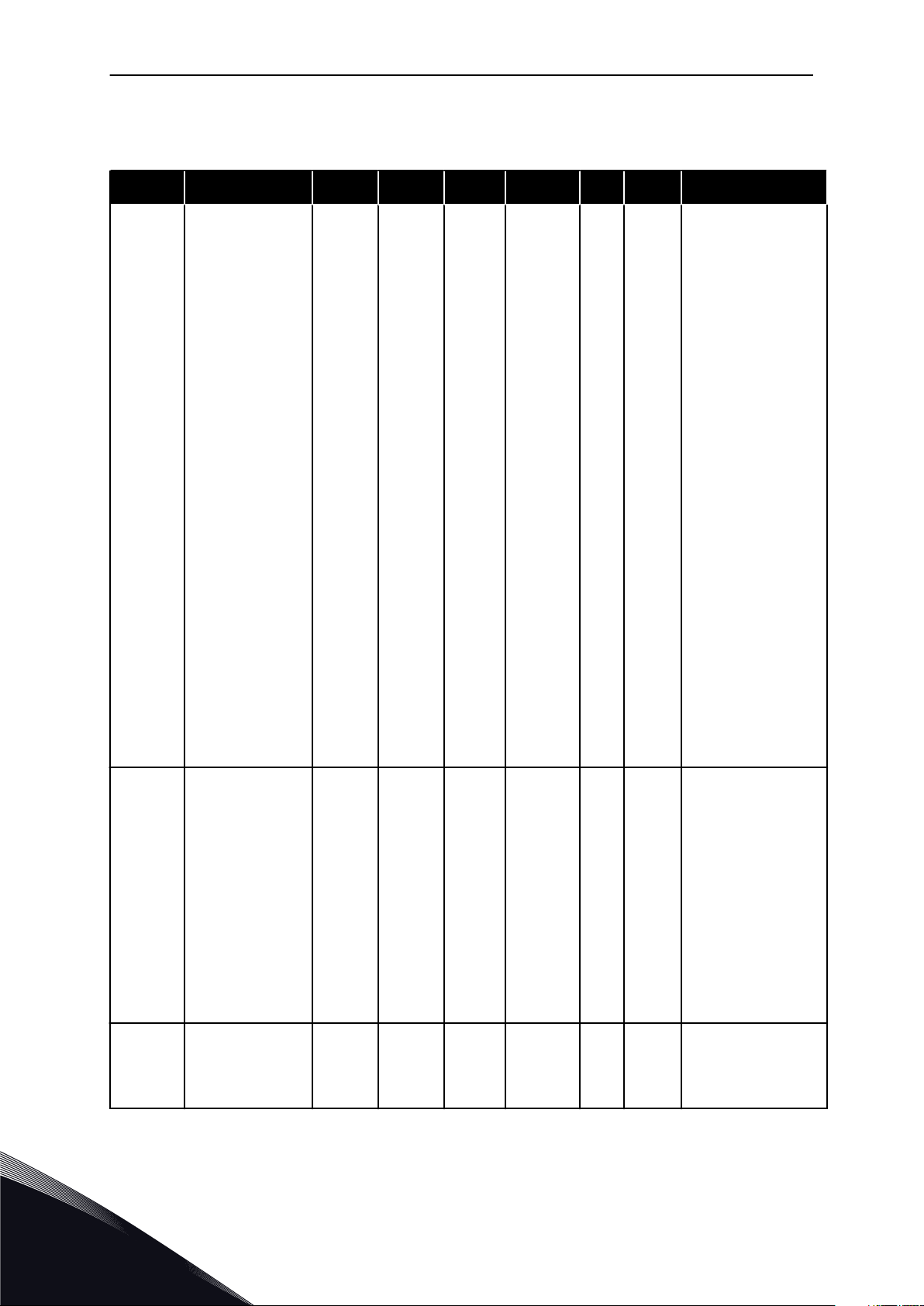
≥ 1
3.2 Paneelin ohjearvo
3.1 Ohjauspaikka
Käy eteen
Käy taakse
Käy/Seis
Taakse
Sisäinen Käy/Seis
Sisäinen taakse
Sisäisen vian kuittaus
Vian kuittaus -tulo
Ulkoinen vika -tulo (ohjelmoitava)
Kuittauspainike
Käy/Seis-painikkeet
Ohje kenttäväylältä
Käy/Seis kenttäväylältä
Suunta kenttäväylältä
3.3 Paneelin suunta
2.14 Riviliittimen ohje
2.19 Vakionopeus 2
2.18 Vakionopeus 1
2.2 Maksimitaajuus
Käy/Seis- ja
taakse-logiikka
Sisäinen
taajuusohje
PERUSSOVELLUS VACON · 13
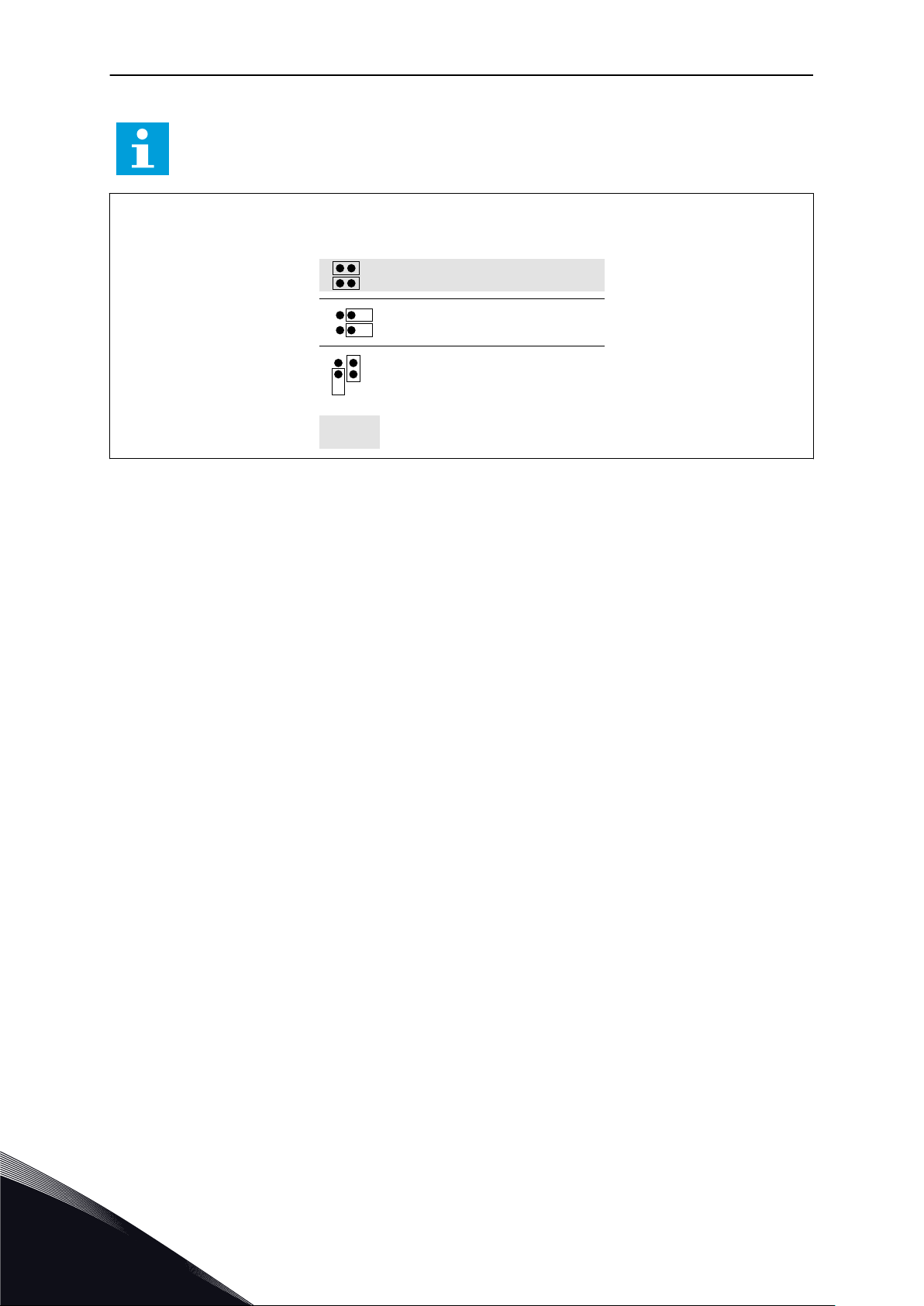
1.3 PERUSSOVELLUKSEN OHJAUSSIGNAALILOGIIKKA
Kuva 3: Perussovelluksen ohjaussignaalilogiikka
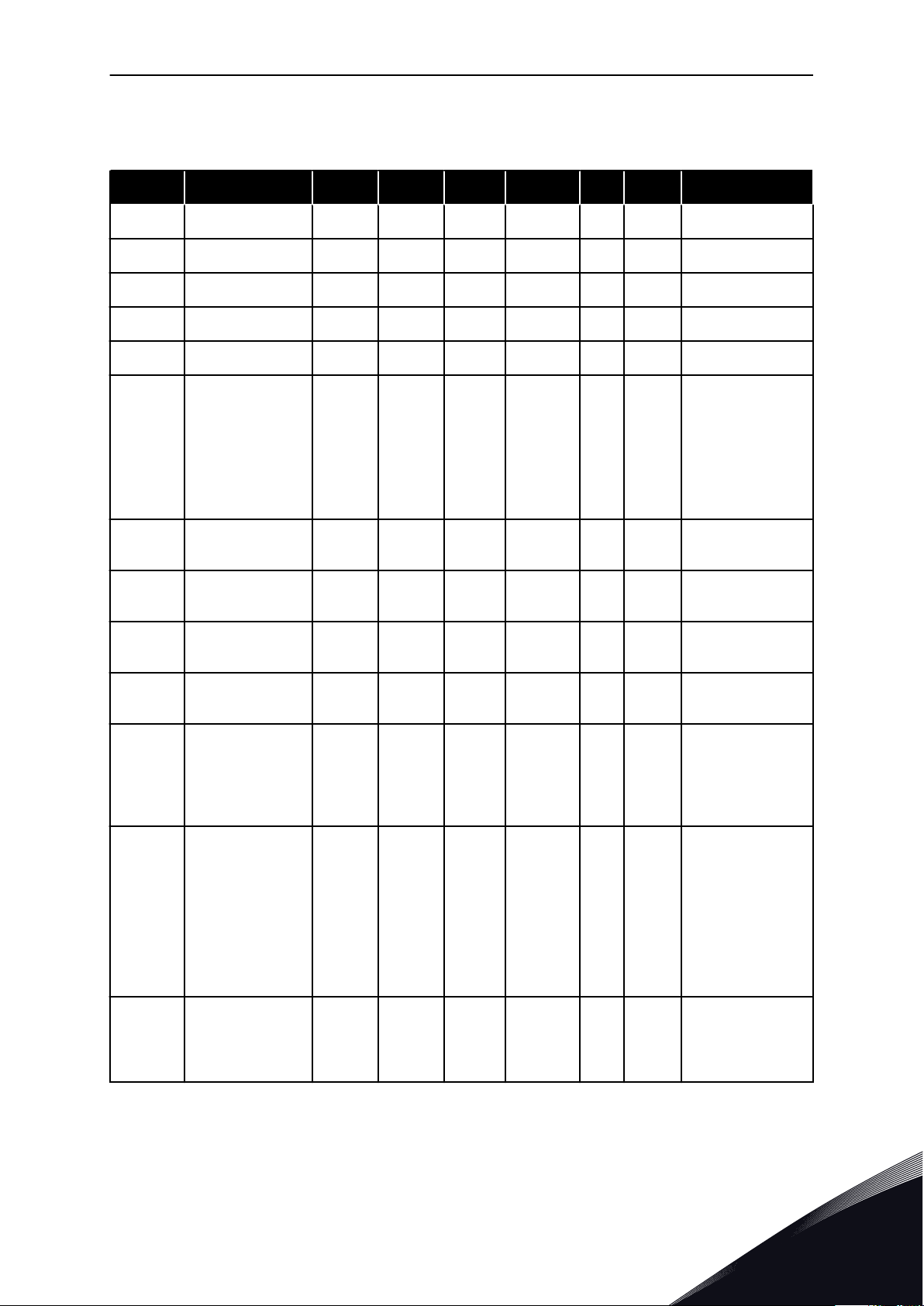
1.4 PERUSSOVELLUKSEN PARAMETRILUETTELOT
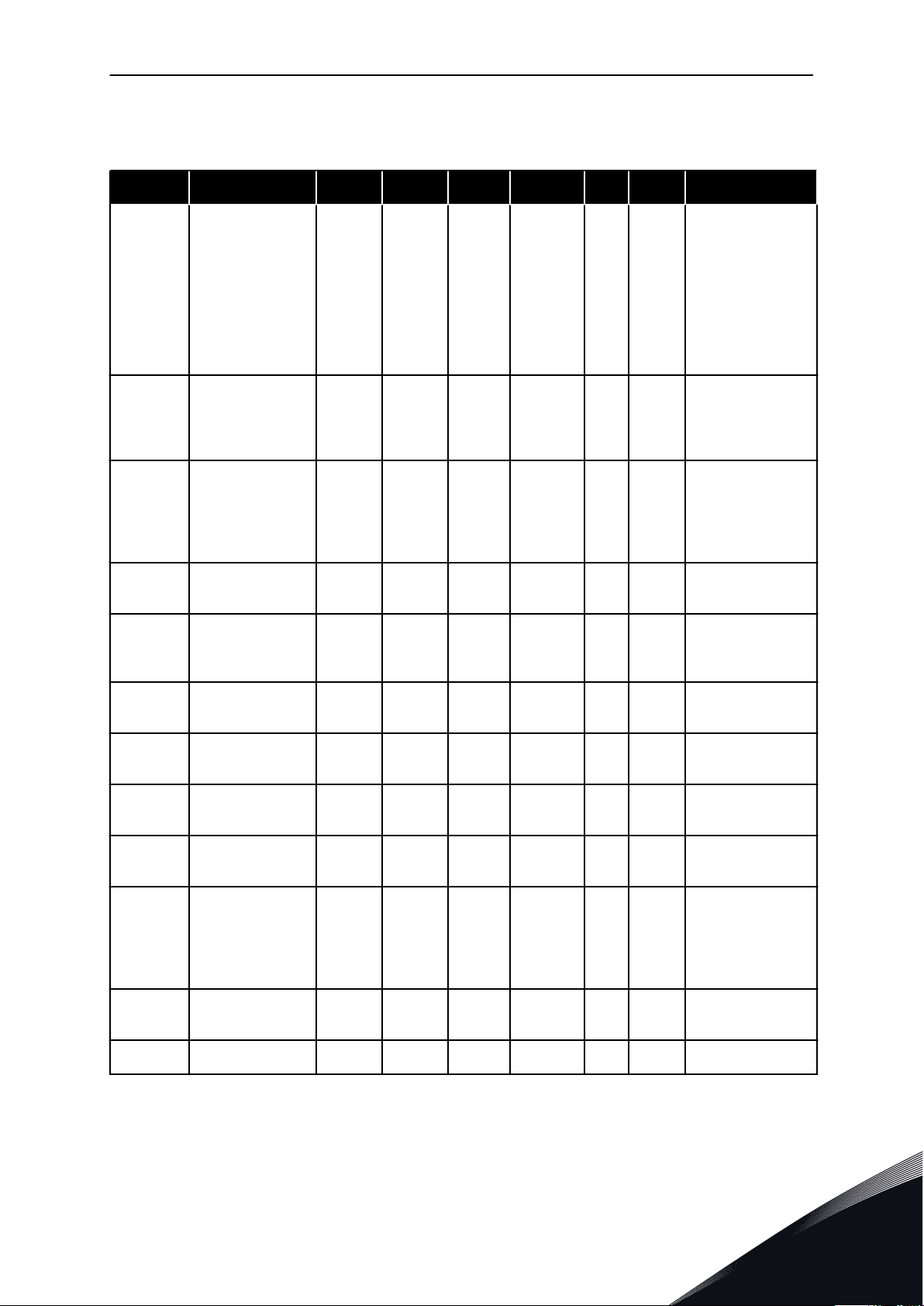
1.4.1 VALVONTA-ARVOT (OHJAUSPANEELI: VALIKKO M1)
Valvonta-arvoja ovat parametrien ja signaalien todelliset arvot sekä niiden tilat ja mitatut
arvot. Näitä arvoja ei voi muokata.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 14
VACON · 14 PERUSSOVELLUS
Taulukko 1: Valvonta-arvot
Numero Valvonta-arvo Laite ID Kuvaus
V1.1 Lähtötaajuus Hz 1
V1.2 Taajuusohje Hz 25
V1.3 Moottorin nopeus rpm 2
V1.4 Moottorin virta A 3
V1.5 Moottorin momentti % 4
V1.6 Moottorin teho % 5
V1.7 Moottorin jännite V 6
V1.8 Välipiirin jännite V 7
1.9 Laitteen lämpötila °C 8
1.10 Moottorin lämpötila % 9
V1.11 Analogiatulo 1 V/mA 13
V1.12 Analogiatulo 2 V/mA 14
V1.13 DIN 1, 2, 3 15
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 Analoginen I
V1.17 Monivalvonta-arvot
out
mA 26
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 15
PERUSSOVELLUS VACON · 15
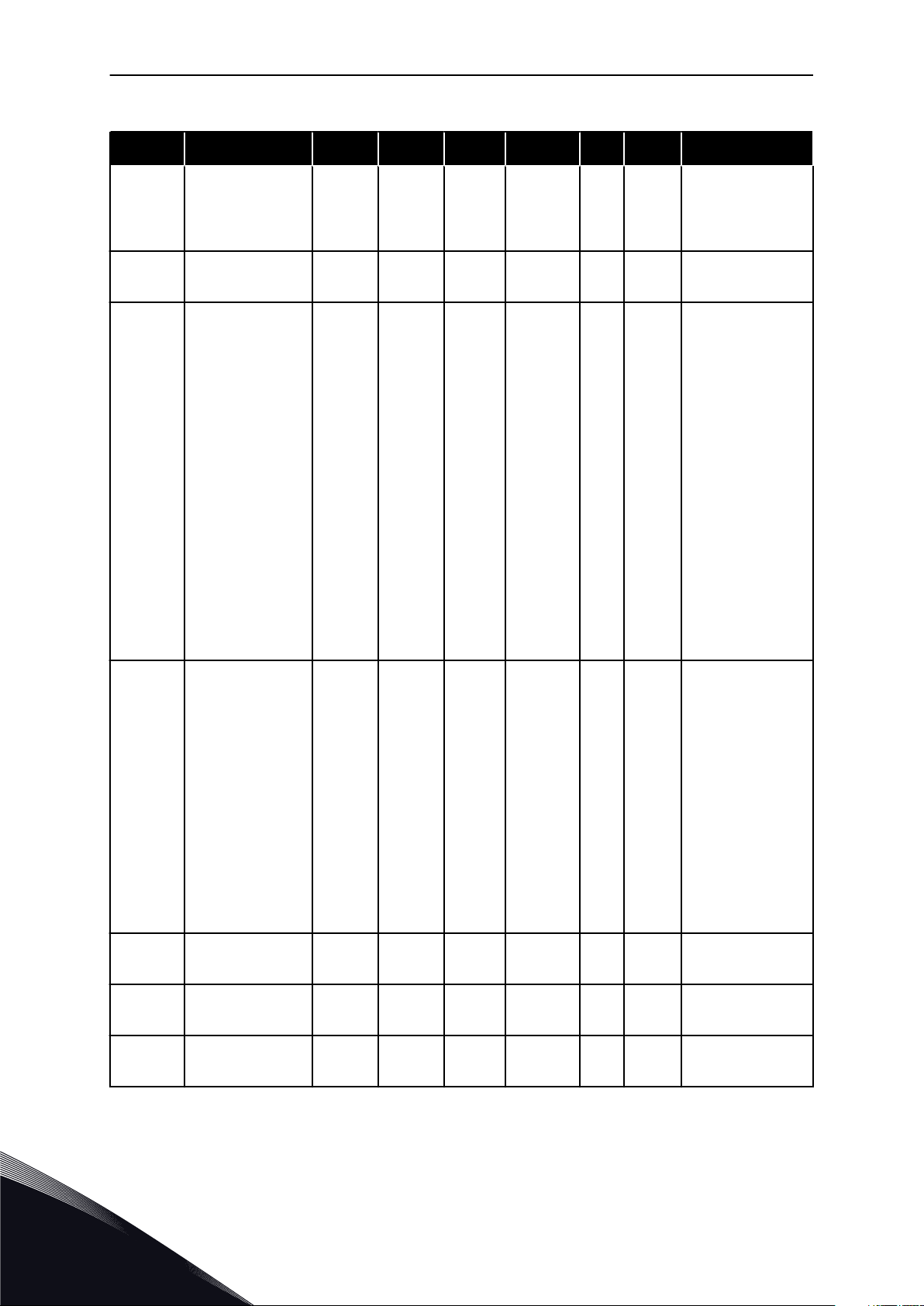
1.4.2 PERUSPARAMETRIT (OHJAUSPANEELI: MENU M2 -> G2.1)
Taulukko 2: Perusparametrit G2.1
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
P2.1 Minimitaajuus 0.00 P2.2 Hz 0.00 101
P2.2 Maksimitaajuus P2.1 320.00 Hz 50.00 102
P2.3 Kiihdytysaika 1 0.1 3000.0 s 3.0 103
P2.4 Hidastusaika 1 0.1 3000.0 s 3.0 104
P2.5 Virtaraja 0.1 x I
P2.6
P2.7
P2.8
P2.9
P2.10
P2.11
moottorin nimel-
lisjännite
moottorin nimel-
listaajuus
Moottorin nimel-
lisnopeus
Moottorin nimel-
lisvirta
Moottorin teho-
kerroin
Käynnistystoi-
minto
180 690 V
8.00 320.00 Hz 50.00 111
24 20 000 rpm 1440 112
0.1 x I
0.30 1.00 0.85 120
2 x I
H
H
0 2 0 505
2 x I
H
H
A I
NX2: 230
NX5: 400
NX6: 690
A I
L
V
V
V
H
107
110
113
0= Ramppi
1 = Vauhtikäynnistys
2=Ehdollinen vauhtikäynnistys
P2.12 Pysäytystoiminto 0 3 0 506
P2.13 U/f-optimointi 0 1 0 109
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
0 = Vapaasti pyörien
2 = 2 = Ramppi +
käynnistys sallittu
vapaasti pyörien
Rampilla
3 = Vapaasti pyörien + käynnistys
sallittu ‑ramppi
0 = Ei käytössä
1 = Automaattinen
momentin maksimointi
1
Page 16
VACON · 16 PERUSSOVELLUS
Taulukko 2: Perusparametrit G2.1
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
0 = AI1
P2.14
Ohjearvopaikan
valinta
0 3 0 117
1 = AI2
2 = Paneeli
3 = Kenttäväylä
P2.15
P2.16
P2.17
Analogiatulo 2,
ohjearvon siirtymä
Analogialähdön
toiminto
DIN3 toiminto 0 7 1 301
0 1 1 302
0 8 1 307
0 = 0–20 mA
1 = 4–20mA
0 = Ei käytössä
1 = Lähtötaajuus
(0–f
)
max
2 = Taajuusohje (0–
f
)
max
3 = Moottorin
nopeus (0–moottorin nimellisnopeus)
4 = Lähtövirta (0–
I
)
nMotor
5 = Moottorin
momentti (0–T
)
tor
6 = Moottorin teho
(0–P
nMotor
7 = Moottorin jännite (0–U
8 = Välipiirin jännite (0–1 000 V)
0 = Ei käytössä
1 = Ulkoinen vika,
sulk. kosketin
2 = Ulkoinen vika,
avaut. kosketin
3 = Käynnistys sallittu, sk
4 = Käynnistys sallittu, ak
5 = Pakota op: riviliitin
6 = Pakota op:
paneeli
7 = Pakota op:
kenttäväylä
)
nMotor
nMo-
)
1
P2.18
P2.19
P2.20
Esiasetettu
nopeus 1
Esiasetettu
nopeus 2
Autom. uudel-
leenkäynnistys
0.00 P2.2 Hz 0.00 105
0.00 P2.2 Hz 50.00 106
0 1 0 731
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
0 = Ei käytössä
2 = Käytössä
Page 17
PERUSSOVELLUS VACON · 17
1.4.3 PANEELIOHJAUS (OHJAUSPANEELI: VALIKKO M3)
Seuraavassa esitetään ohjauspaikan ja paneelista valittavan suunnan valintaparametrit.
Lisätietoja on tuotteen ohjekirjan kohdassa Paneeliohjausvalikko.
Taulukko 3: Paneelin ohjausparametrit, M3.
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
1 = Riviliitin
P3.1 Ohjauspaikka 1 3 1 125
P3.2 Paneelin ohjearvo P2.1 P2.2 Hz 0.00
2 = Paneeli
3 = Kenttäväylä
P3.3
R3.4 Pysäytyspainike 0 1 1 114
Suunta (panee-
lissa)
0 1 0 123
0 = Pysäytyspainikkeen rajallinen toiminta
1 = Pysäytyspainike aina käytössä
1.4.4 JÄRJESTELMÄVALIKKO (OHJAUSPANEELI: VALIKKO M6)
Tuotteen käyttöoppaassa on tietoja taajuusmuuttajan yleiseen käyttöön liittyvistä
parametreista ja toiminnoista, kuten sovelluksen sekä kielen valinnasta ja mukautetuista
parametriryhmistä. Käyttöoppaassa on myös yleisiä laitteisto- ja ohjelmistotietoja.
1.4.5 LAAJENNUSKORTIT (OHJAUSPANEELI: VALIKKO M7)
M7-valikko näyttää ohjauskorttiin liitetyt lisäkortit sekä kortteihin liittyvät tiedot. Lisätietoja
on tuotteen ohjekirjassa.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 18
VACON · 18 VAKIOSOVELLUS
2 VAKIOSOVELLUS
2.1 YLEISTÄ
Valitse vakiosovellus valikon M6 sivulla S6.2.
Vakiosovellusta käytetään tyypillisesti pumppu- ja puhallinsovelluksissa sekä kuljettimissa,
joille perussovellus on liian rajallinen mutta joissa ei tarvita erityisominaisuuksia.
Vakiosovelluksessa on samat tulo- ja lähtösignaalit ja sama ohjauslogiikka kuin
•
perussovelluksessa.
Digitaalitulo DIN3 ja kaikki lähdöt ovat vapaasti ohjelmoitavia.
•
Lisätoiminnot:
Ohjelmoitava Käy/Seis- ja Taakse-signaalilogiikka.
•
Viitearvon skaalaus.
•
Yhden taajuusrajan valvonta.
•
Toisen rampin ja S-rampin ohjelmointi.
•
Ohjelmoitavat Käy- ja Seis-toiminnot.
•
DC-jarru pysäytyksessä.
•
Yksi estotaajuusalue.
•
Ohjelmoitava U/f-käyrä ja kytkentätaajuus.
•
Automaattinen uudelleenkäynnistys.
•
Moottorin lämpö- ja jumisuojaus: ohjelmoitava toiminta – pois, varoitus, vika
•
Vakiosovelluksen parametrit selitetään luvussa 9 Parametrikuvaukset jäljempänä tässä
oppaassa. Selitykset on järjestetty parametrien tunnusten mukaan.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 19
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
DIN4
DIN5
mA
VALMIS
KÄY
AO1-
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
OPTA1
OPTA2 / OPTA3 *)
Liitin Signaali Kuvaus
+10 Vref
AI1+
AI1-
AI2+
AI2-
+24 V
Ohjausjännitelähtö
I/O maa
Analogiatulo 2
Virta-alue
0–20 mA
Ohjausjännitelähtö
I/O maa
Käy eteen
Ohjelmoitava logiikka (P2.2.1)
Käy taakse
Ri min = 5 kΩ
Ulkoinen vika -tulo
Ohjelmoitava (P2.2.2)
Vakionopeusvalinta 1
Vakionopeusvalinta 2
Vian kuittaus
Yhteinen (DIN 1 – DIN 3)
Yhteinen tuloille DIN4–DIN6
Ohjausjännitelähtö
I/O maa
Analogialähtö 1
Lähtötaajuus
Ohjelmoitava (P2.3.2)
Digitaalilähtö 1
VALMIS
Ohjelmoitava (P2.3.7)
Open collector, I≤50 mA,
U≤48 VDC
Relelähtö 1
KÄY
Ohjelmoitava
(P2.3.8)
Relelähtö 2
VIKA
Ohjelmoitava
(P2.3.9)
Alue 0–20 mA/RL,
max. 500 Ω
Kytke GND tai +24 V
Kosketin auki = ei käytössä
Kosketin kiinni = vian kuittaus
AO1+
Analogiatulon 1
taajuusohje
Ohjearvon ja
ohjaustulojen maa
Analogiatulon 2
taajuusohje
Kosketin kiinni = käy eteenpäin
Kosketin kiinni = käy taaksepäin
Kosketin auki = ei vikaa
Kosketin kiinni = vika
Taaj.ohje
Auki
Kiinni
Auki
Kiinni
Auki
Auki
Kiinni
Kiinni
Ohjearvopaikan valinta
Vakionopeus 1
Vakionopeus 2
Analogiatulo 2
Jännite potentiometriin jne.
Analogiatulo 1
Jännitealue 0–10 V DC
Ohjelmoitava (P2.1.11)
Jännite kytkimiin jne. maks. 0,1 A
Jännite kytkimiin (katso 6)
Kytke GND tai +24 V
Ohjearvon ja ohjaustulojen maa
Ohjearvon ja ohjaustulojen maa
Viitepotentiometri
1–10 kΩ
VAKIOSOVELLUS VACON · 19
2.2 OHJAUS-I/O
Kuva 4: Vakiosovelluksen tulojen ja lähtöjen oletusasetukset
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 20
Pistikeryhmä X3:
CMA:n ja CMB:n maadoitus
CMB kytketty maahan
CMA kytketty maahan
CMB erotettu maasta
CMA erotettu maasta
CMB ja CMA sisäisesti kytketty
yhteen, erotettu maasta
= tehdasasetus
VACON · 20 VAKIOSOVELLUS
*) Lisäkortin A3 toisessa relelähdössä ei ole avoimen koskettimen liitintä (liitin 24 puuttuu).
HUOMAUTUS!
Katso alla olevat pistikevalinnat. Lisätietoja on tuotteen ohjekirjassa.
Kuva 5: Pistikevalinnat
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 21
DIN4
DIN5
AI1
AI2
DIN1
DIN2
DIN6
DIN3
≥ 1
3.2 Paneelin ohjearvo
3.1 Ohjauspaikka
Käy eteen
Käy taakse
Käy/Seis
Taakse
Sisäinen Käy/Seis
Sisäinen taakse
Sisäisen vian kuittaus
Vian kuittaus -tulo
Ulkoinen vika -tulo (ohjelmoitava)
Kuittauspainike
Käy/Seis-painikkeet
Ohje kenttäväylältä
Käy/Seis kenttäväylältä
Suunta kenttäväylältä
3.3 Paneelin suunta
2.1.13 Kenttäväylän ohjearvo
2.1.15 Vakionopeus 2
2.1.14 Vakionopeus 1
2.1.11 Riviliittimen ohje
2.1.12 Paneelin nopeus 1
Ohjelmoitava Käy/
Seis- ja Taakselogiikka
Sisäinen
taajuusohje
(ohjelmoitava)
(ohjelmoitava)
VAKIOSOVELLUS VACON · 21
2.3 VAKIOSOVELLUKSEN OHJAUSSIGNAALILOGIIKKA
Kuva 6: Vakiosovelluksen ohjaussignaalilogiikka
2.4 VAKIOSOVELLUKSEN PARAMETRILUETTELOT
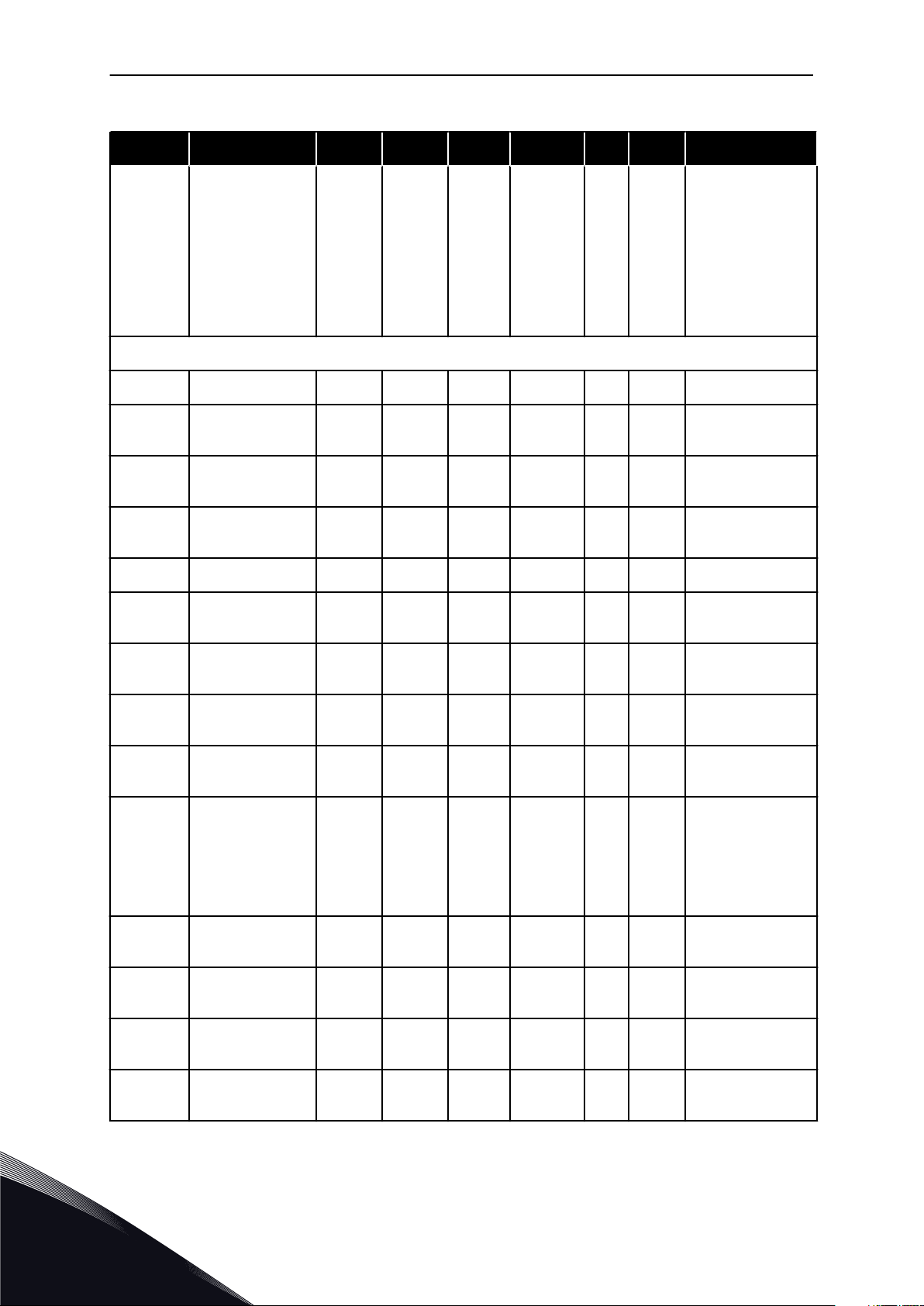
2.4.1 VALVONTA-ARVOT (OHJAUSPANEELI: VALIKKO M1)
Valvonta-arvoja ovat parametrien ja signaalien todelliset arvot sekä niiden tilat ja mitatut
arvot. Näitä arvoja ei voi muokata.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 22
VACON · 22 VAKIOSOVELLUS
Taulukko 4: Valvonta-arvot
Numero Valvonta-arvo Laite ID Kuvaus
V1.1 Lähtötaajuus Hz 1
V1.2 Taajuusohje Hz 25
V1.3 Moottorin nopeus rpm 2
V1.4 Moottorin virta A 3
V1.5 Moottorin momentti % 4
V1.6 Moottorin teho % 5
V1.7 Moottorin jännite V 6
V1.8 Välipiirin jännite V 7
1.9 Laitteen lämpötila °C 8
1.10 Moottorin lämpötila % 9
V1.11 Analogiatulo 1 V/mA 13
V1.12 Analogiatulo 2 V/mA 14
V1.13 DIN 1, 2, 3 15
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 Analoginen I
V1.17 Monivalvonta-arvot
out
mA 26
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 23
VAKIOSOVELLUS VACON · 23
2.4.2 PERUSPARAMETRIT (OHJAUSPANEELI: MENU M2 -> G2.1)
Taulukko 5: Perusparametrit G2.1
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
P2.1.1 Minimitaajuus 0.00 P2.1.2 Hz 0.00 101
P2.1.2 Maksimitaajuus P2.1.1 320.00 Hz 50.00 102
P2.1.3 Kiihdytysaika 1 0.1 3000.0 s 0.0 103
P2.1.4 Hidastusaika 1 0.1 3000.0 s 0.0 104
P2.1.5 Virtaraja 0.1 x I
P2.1.6
P2.1.7
P2.1.8
P2.1.9
P2.1.10
P2.1.11
moottorin nimel-
lisjännite
moottorin nimel-
listaajuus
Moottorin nimel-
lisnopeus
Moottorin nimel-
lisvirta
Moottorin teho-
kerroin
Ohjearvopaikan
valinta
180 690 V
8.00 320.00 Hz 50.00 111
24 20 000 rpm 1440 112
0.1 x I
0.30 1.00 0.85 120
2 x I
H
H
0 3 0 117
2 x I
H
H
A I
NX2: 230
NX5: 400
NX6: 690
A I
L
V
V
V
H
107
110
113
0 = AI1
1 = AI2
2 = Paneeli
3 = Kenttäväylä
P2.1.12 Paneelin ohjearvo 0 3 2 121
P2.1.13
P2.1.14
P2.1.15
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Kenttäväylän
ohjearvo
Esiasetettu
nopeus 1
Esiasetettu
nopeus 2
0 3 3 122
0.00 P2.1.2 Hz 10.00 105
0.00 P2.1.2 Hz 50.00 106
0 = AI1
1 = AI2
2 = Paneeli
3 = Kenttäväylä
0 = AI1
1 = AI2
2 = Paneeli
3 = Kenttäväylä
2
Page 24
VACON · 24 VAKIOSOVELLUS
2.4.3 TULOSIGNAALIT (OHJAUSPANEELI: MENU M2 -> G2.2)
Taulukko 6: Tulosignaalit, G2.2
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
Logiikka = 0
Ohj.sign. 1 = Käy
eteen
Ohj.sign. 2 = Käy
taakse
Logiikka = 1
Ohj.sign. 1 = Käy/seis
Ohj.sign. 2 = Taakse
Logiikka = 2
Ohj.sign. 1 = Käy/seis
Ohj.sign. 2 = Käynn.
sallittu
Logiikka = 3
Ohj.sign. 1 = Käypulssi (reuna)
P2.2.1
Käynnistys-/
pysäytyslogiikka
0 6 0 300
Ohj.sign. 2 = Seispulssi
Logiikka = 4
Ohj.sign. 1 = Eteenpulssi (reuna)
Ohj.sign. 2 = Taaksepulssi (reuna)
Logiikka = 5
Ohj.sign. 1 = Käypulssi (reuna)
Ohj.sign. 2 = Taaksepulssi
Logiikka = 6
Ohj.sign. 1 = Käypulssi (reuna)
Ohj.sign. 2 = Sallipulssi
P2.2.2
P2.2.3
DIN3 toiminto 0 8 1 301
Analogiatulo 2,
ohjearvon siirtymä
0 1 1 302
0 = Ei käytössä
1 = Ulkoinen vika,
sulk. kosketin
2 = Ulkoinen vika,
avaut. kosketin
3 = Käynn. sallittu
4 = Kiihd./hid.aikaval.
5 = Pakota op: riviliitin
6 = Pakota op:
paneeli
7 = Pakota op: kenttäväylä
8 = Taakse
0 = 0–20 mA (0–10 V)
**
1 = 4–20 mA (2–10 V)
**
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 25
VAKIOSOVELLUS VACON · 25
Taulukko 6: Tulosignaalit, G2.2
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
P2.2.4
P2.2.5
P2.2.6 Ohjearvon kääntö 0 1 0 305
P2.2.7
P2.2.8 ***
P2.2.9 ***
Ohjeen skaalauk-
sen minimiarvo
Ohjeen skaalauk-
sen maksimiarvo
Ohjearvon suoda-
tusaika
AI1-signaalin
valinta
AI2-signaalin
valinta
0.00 320.00 Hz 0.00 303
0.00 320.00 Hz 0.00 304
0.00 10.00 s 0.10 306
A1 377
A2 388
0 = Ei käännetty
1 = Käänteinen
0 = Ei suodatusta
** = Muista kytkeä ryhmän X2 pistikkeet vastaavasti. Lisätietoja on tuotteen käyttöohjeessa.
*** = Ohjelmoi nämä parametrit TTF-ohjelmoinnilla.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 26
VACON · 26 VAKIOSOVELLUS
2.4.4 LÄHTÖSIGNAALIT (OHJAUSPANEELI: VALIKKO M2 -> G2.3
Taulukko 7: Lähtösignaalit, G2.3
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
P2.3.1
P2.3.2
P2.3.3
Analogialähdön 1
signaalin valinta
Analogialähdön
toiminto
Analogilähdön
suodatusaika
0 A.1 464
0 8 1 307
0.00 10.00 s 1.00 308
0 = Ei käytössä (20
mA / 10 V)
1 = Lähtötaajuus
(0–f
)
max
2 = Taajuusohje (0–
f
)
max
3 = Moottorin
nopeus (0–moottorin nimellisnopeus)
4 = Moottorin virta
(0–I
5 = Moottorin
momentti (0–T
tor
6 = Moottorin teho
(0–P
7 = Moottorin jännite (0–U
8 = Välipiirin jännite (0–1 000 V)
0 = Ei suodatusta
nMotor
)
nMotor
)
)
nMotor
nMo-
)
P2.3.4
P2.3.5
P2.3.6
Analogialähdön
kääntö
Analogialähdön
minimi
Analogialähdön
skaalaus
0 1 0 309
0 1 0 310
10 1000 % 100 311
0 = Ei käännetty
1 = Käänteinen
0 = 0 mA (0 V)
1 = 4 mA (2 V)
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 27
VAKIOSOVELLUS VACON · 27
Taulukko 7: Lähtösignaalit, G2.3
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
0 = Ei käytössä
1 = Valmis
2 = Käy
3 = Vika
4 = Vika käännetty
5 = Taajuusmuuttajan ylikuumentumisvaroitus
6 = Ulkoinen vika
tai varoitus
7 = Ohjearvon vika
tai varoitus
8= Varoitus
P2.3.7
Digitaalilähdön 1
toiminta
0 16 1 312
9 = Taakse
10 = Vakionopeus 1
11 = Asetetussa
nopeudessa
12 = Moottorisäädin käytössä
13 = Käyttötaaj.rajan 1 valvonta
14 = Ohjauspaikka:
IO
15 = Termistorivika
tai -varoitus
16=kenttäväylän
DIN1
P2.3.8
P2.3.9 RO2 toiminto 0 16 3 314
P2.3.10
P2.3.11
P2.3.12 *
P2.3.13
P2.3.14
RO1 toiminto 0 16 2 313
Lähtötaajuusrajan
1 valvonta
Lähtötaajuusrajan
1 valvonta; val-
vonta-arvo
Analogialähdön 2
signaalin valinta
Analogialähdön 2
toiminto
Analogialähdön 2
suodatusaika
0 2 0 315
0.00 320.00 Hz 0.00 316
0.1 E.10 0.1 471
0 8 4 472
0.00 10.00 s 1.00 473
Kuten parametri
2.3.7
Kuten parametri
2.3.7
0 = Ei rajaa
1 = Alarajan valvonta
2 = Ylärajan valvonta
Kuten parametri
2.3.2
0 = Ei suodatusta
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 28
VACON · 28 VAKIOSOVELLUS
Taulukko 7: Lähtösignaalit, G2.3
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
P2.3.15
P2.3.16
P.2.3.17
Analogialähdön 2
kääntö
Analogialähdön 2
minimi
Analogialähdön 2
skaalaus
0 1 0 474
0 1 0 475
10 1000 % 1.00 476
* = Ohjelmoi nämä parametrit TTF-ohjelmoinnilla.
0 = Ei käännetty
1 = Käänteinen
0 = 0 mA (0 V)
1 = 4 mA (2 V)
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 29
VAKIOSOVELLUS VACON · 29
2.4.5 TAAJUUSMUUTTAJAN OHJAUSPARAMETRIT (OHJAUSPANEELI: VALIKKO M2 -> G2.4
Taulukko 8: Taajuusmuuttajan ohjausparametrit, G2.4
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
0 = Lineaarinen
P2.4.1 Rampin 1 muoto 0.0 10.0 s 0.1 500
P2.4.2 Rampin 2 muoto 0.0 10.0 s 0.0 501
P2.4.3 Kiihtyvyysaika 2 0.1 3000.0 s 1.0 502
P2.4.4 Hidastuvuusaika 2 0.1 3000.0 s 1.0 503
P2.4.5 Jarrukatkoja 0 4 0 504
100 = täydet kiihd./
hid. lis.-/väh.ajat
0 = Lineaarinen
100 = täydet kiihd./
hid. lis.-/väh.ajat
0 = Ei käytössä
1 = Käytössä käynnin aikana
2 = Ulkoinen jarrukatkoja
3 = Käytössä
pysäytettynä /
käynnin aikana
4 = Käytössä käynnin aikana (ei testausta)
P2.4.6
P2.4.7 Pysäytystoiminto 0 3 0 506
P2.4.8 DC-jarrutusvirta 0.00 I
P2.4.9
P2.4.10
P2.4.11
Käynnistystoi-
minto
DC-jarrutusaika
pysäytyksessä
Taajuus, jolla DC-
jarrutus aloitetaan
hidastaen pysäy-
tettäessä
DC-jarrutusaika
käynnistyksessä
0 2 0 505
L
0.00 600.00 s 0.00 508
0.10 10.00 Hz 1.50 515
0.00 600.00 s 0.00 516
A 0.7 x I
H
507
0= Ramppi
1 = Vauhtikäynnistys
2=Ehdollinen vauhtikäynnistys
0 = Vapaasti pyörien
1= Ramppi
2 = Ramppi + käynnistys sallittu
vapaasti pyörien
3 = Vapaasti pyörien + käynnistys
sallittu ‑ramppi
0 = DC-jarru pois
pysäytyksessä
0 = DC-jarru pois
käynnistyksessä
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 30
VACON · 30 VAKIOSOVELLUS
Taulukko 8: Taajuusmuuttajan ohjausparametrit, G2.4
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
P2.4.12 * Vuojarru 0 1 0 520
P2.4.13 Vuojarrutusvirta 0.00 I
L
A I
H
0 = Ei käytössä
0 = Päällä
519
2.4.6 ESTOTAAJUUKSIEN PARAMETRIT (OHJAUSPANEELI: MENU M2 -> G2.5)
Taulukko 9: Estotaajuuden parametrit, G2.5
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
P2.5.1
P2.5.2
P2.5.3
Estotaajuusalue 1,
alaraja
Estotaajuusalue 1,
yläraja
Ei kiihd./
hid.ramppia
0.00 320.00 Hz 0.00 509
0.00 320.00 Hz 0.00 510
0.1 10.0 x 1.0 518
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 31
VAKIOSOVELLUS VACON · 31
2.4.7 MOOTTORIN OHJAUSPARAMETRIT (OHJAUSPANEELI: MENU M2 -> G2.6)
Taulukko 10: Moottorin ohjausparametrit, G2.6
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
0 = Taajuusohje
1 = Nopeusohje
NXP:
2 = Momenttiohjaus, open loop
3 = Nopeusohjaus,
closed loop
4 = Momenttiohjaus, closed loop
0 = Ei käytössä
1 = Automaattinen
momentin maksimointi
0 = Lineaarinen
1 = Neliöllinen
2 = Ohjelmoitava
3 = Lineaarinen,
vuon opt.
P2.6.1 *
P2.6.2 *
P2.6.3 *
Moottorin ohjaus-
tila
Moott./puh. opti-
mointi
U/f-suhteen
valinta
0 1/3 0 600
0 1 0 109
0 3 0 108
P2.6.4 *
P2.6.5 *
P2.6.6 *
P2.6.7 *
P2.6.8 *
P2.6.9 Kytkentätaajuus 1.0
P2.6.10 Ylijännitesäätäjä 0 2 1 607
P2.6.11 Alijännitesäätäjä 0 1 1 608
Kentän heiken-
nyspiste
Jännite kentän
heikennyspis-
teessä
U/f-käyrän keski-
pistetaajuus
U/f-käyrän keski-
pistejännite
Lähtöjännite nol-
lataajuudella
8.00 320.00 Hz 50.00 602
10.00 200.00 % 100.00 603
0.00 P2.6.4 Hz 50.00 604
0.00 100.00 % 100.00 605
0.00 40.00 % Vaihtelee 606
Vaihte-
lee
kHz Vaihtelee 601
0 = Ei käytössä
1 = Käytössä (ei
ramppia)
2 = Käytössä
(ramppi)
0 = Ei käytössä
1 = Käytössä
P2.6.12 Kuormitusjousto 0.00 100.00 % 0.00 620
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 32

VACON · 32 VAKIOSOVELLUS
Taulukko 10: Moottorin ohjausparametrit, G2.6
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
0 = Ei käytössä
1=Tunnistus ilman
käyntiä
2 = Tunnistus ja ajo
P2.6.13 ID ajo 0 1/2 0 631
Closed loop ‑parametriryhmä 2.6.14
3 = Enkooderitunnistusajo
4 = Ei käytössä
5 = Tunnistusajo
epäonnistui
P2.6.14.1 Magnetointivirta 0.00 2 x I
P2.6.14.2
P2.6.14.3
P2.6.14.5
P2.6.14.6 Jättämän säätö 0 500 % 100 619
P2.6.14.7
P2.6.14.8
P2.6.14.9
P2.6.14.10
P2.6.14.11
Nopeusohjauksen
P-vahvistus
Nopeusohjauksen
I-aika
Kiihdytyksen kom-
pensointi
Magnetointivirta
käynnistyksessä
Magnetointiaika
käynnistyksessä
Nollanopeusaika
käynnistyksessä
Nollanopeusaika
pysäytyksessä
Käynnistysmo-
mentti
1 1000 30 613
0.0 3200.0 ms 30.0 614
0.00 300.00 s 0.00 626
0,00 I
0 60000 ms 0 628
0 32000 ms 100 615
0 32000 ms 100 616
0 3 0 621
H
L
A 0.00 612
A 0.00 627
0 = Ei käytössä
1 = Momenttimuisti
2 = Momenttiohje
3 = Käynnistysmomentti eteen/
taakse
2
P2.6.14.12
P2.6.14.13
P2.6.14.15
P2.6.14.17
Käynnistysmo-
mentti ETEEN
Käynnistysmo-
mentti TAAKSE
Enkooderin suo-
datusaika
Virtaohjauksen P-
vahvistus
-300.0 300.0 % 0.0 633
-300.0 300.0 % 0.0 634
0.0 100.0 ms 0.0 618
0.00 100.00 % 40.00 617
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 33

VAKIOSOVELLUS VACON · 33
Taulukko 10: Moottorin ohjausparametrit, G2.6
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
Tunnistusparametriryhmä 2.6.15
P2.6.15.1 Nopeusaskel -50.0 50.0 0.0 0.0 1252
* = Parametrin arvoa voi muuttaa vain, kun taajuusmuuttaja on pysäytettynä.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 34

VACON · 34 VAKIOSOVELLUS
2.4.8 SUOJAUKSET (OHJAUSPANEELI: VALIKKO M2 -> G2.7
Taulukko 11: Suojaukset, G2.7
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
0 = Ei vastetta
1= Varoitus
2 = Varoitus + edellinen taajuus
P2.7.1
Vaste 4 mA:n
ohjearvon vikaan
0 5 0 700
3 = Varoitus + vakionopeus 2.7.2
4 = Vika, pys.
2.4.7:n mukaan
5 = Vika, pysäytys
vapaasti pyörien
P2.7.2
P2.7.3
P2.7.4
P2.7.5
P2.7.6
P2.7.7 Maasulkusuojaus 0 3 2 703
P2.7.8
P2.7.9
P2.7.10
4 mA:n ohjearvon
vian taajuus
Vaste ulkoiseen
vikaan
Tulovaiheen val-
vonta.
Vaste alijännitevi-
kaan
Lähtövaiheen val-
vonta
Moottorin lämpö-
suojaus
Moottorin ympä-
ristön lämpötila-
kerroin
Moottorin jäähdy-
tyskerroin nolla-
nopeudella
0.00 P2.1.2 Hz 0.00 728
0 3 2 701
0 3 0 730
0 1 0 727
0 3 2 702
0 3 2 704
-100.0 100.0 % 0.0 705
0.0 150.0 % 40.0 706
0 = Ei vastetta
1= Varoitus
2 = Vika, pys.
2.4.7:n mukaan
3 = Vika, pysäytys
vapaasti pyörien
0 = Vika tallentuu
vikahistoriaan
Ei vian tallennusta
0 = Ei vastetta
1= Varoitus
2 = Vika, pys.
2.4.7:n mukaan
3 = Vika, pysäytys
vapaasti pyörien
2
P2.7.11
P2.7.12 Käyttösuhde 0 150 % 100 708
P2.7.13 Jumisuojaus 0 3 0 709
Moottorin läm-
pöaikavakio.
1 200 min Vaihtelee 707
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
0 = Ei vastetta
1= Varoitus
2 = Vika, pys.
2.4.7:n mukaan
3 = Vika, pysäytys
vapaasti pyörien
Page 35

VAKIOSOVELLUS VACON · 35
Taulukko 11: Suojaukset, G2.7
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
P2.7.14 Jumivirta 0.00 2 x I
P2.7.15 Jumiaikaraja 1.00 120.00 s 15.00 711
P2.7.16 Jumitaajuusraja 1.0 P2.1.2 Hz 25.00 712
P2.7.17
P2.7.18
P2.7.19
P2.7.20
P2.7.21
Alikuormitussuo-
jaus
Alikuormitussuo-
jaus momentista
Alikuormitussuojauksen nollataa-
juuskuorma
Alikuormitussuo-
jan aikaraja
Vaste termistori-
vikaan
0 3 0 713
10.0 150.0 % 50.0 714
5.0 150.0 % 10.0 715
2.00 600.00 s 20.00 716
0 3 2 732
H
A I
H
710
0 = Ei vastetta
1= Varoitus
2 = Vika, pys.
2.4.7:n mukaan
3 = Vika, pysäytys
vapaasti pyörien
0 = Ei vastetta
1= Varoitus
2 = Vika, pys.
2.4.7:n mukaan
3 = Vika, pysäytys
vapaasti pyörien
P2.7.22
P2.7.23
Vaste kenttäväylä-
vikaan
Vaste korttipaik-
kavikaan
0 3 2 733
0 3 2 734
Katso P2.7.21.
Katso P2.7.21.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 36

VACON · 36 VAKIOSOVELLUS
2.4.9 AUTOMAATTISEN UUDELLEENKÄYNNISTYKSEN PARAMETRIT (OHJAUSPANEELI: MENU M2 -> G2.8)
Taulukko 12: Automaattisen uudelleenkäynnistyksen parametrit, G2.8
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
P2.8.1
P2.8.2 Yritysaika 0.00 60.00 s 30.00 718
P2.8.3
P2.8.4
P2.8.5
P2.8.6
P2.8.7
Jälleenkäynnis-
tysviive
Käynnistystoi-
minto
Yritysten määrä
alijännitelaukai-
sun jälkeen
Yritysten määrä
ylijännitelaukai-
sun jälkeen
Yritysten määrä
ylivirtalaukaisun
jälkeen
Yritysten määrä 4
mA:n ohjearvolau-
kaisun jälkeen
0.10 10.00 s 0.50 717
0 2 0 719
0 10 0 720
0 10 0 721
0 3 0 722
0 10 0 723
0= Ramppi
1 = Vauhtikäynnistys
2 = Parametrin
P2.4.6 mukaan
Yritysten määrä
P2.8.8
P2.8.9
P2.8.10
moottorin lämpötilavian laukaisun
jälkeen
Yritysten määrä
ulkoisen vian lau-
kaisun jälkeen
Yritysten määrä
alikuormitusvikalaukaisun jälkeen
0 10 0 726
0 10 0 725
0 10 0 738
2.4.10 PANEELIOHJAUS (OHJAUSPANEELI: VALIKKO M3)
Seuraavassa esitetään ohjauspaikan ja paneelista valittavan suunnan valintaparametrit.
Lisätietoja on tuotteen ohjekirjan kohdassa Paneeliohjausvalikko.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 37

VAKIOSOVELLUS VACON · 37
Taulukko 13: Paneelin ohjausparametrit, M3.
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
1 = Riviliitin
P3.1 Ohjauspaikka 1 3 1 125
P3.2 Paneelin ohjearvo P2.1 P2.2 Hz 0.00
2 = Paneeli
3 = Kenttäväylä
P3.3
R3.4 Pysäytyspainike 0 1 1 114
Suunta (panee-
lissa)
0 1 0 123
0 = Pysäytyspainikkeen rajallinen toiminta
1 = Pysäytyspainike aina käytössä
2.4.11 JÄRJESTELMÄVALIKKO (OHJAUSPANEELI: VALIKKO M6)
Tuotteen käyttöoppaassa on tietoja taajuusmuuttajan yleiseen käyttöön liittyvistä
parametreista ja toiminnoista, kuten sovelluksen sekä kielen valinnasta ja mukautetuista
parametriryhmistä. Käyttöoppaassa on myös yleisiä laitteisto- ja ohjelmistotietoja.
2.4.12 LAAJENNUSKORTIT (OHJAUSPANEELI: VALIKKO M7)
M7-valikko näyttää ohjauskorttiin liitetyt lisäkortit sekä kortteihin liittyvät tiedot. Lisätietoja
on tuotteen ohjekirjassa.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 38

VACON · 38 PAIKALLIS-/ETÄOHJAUSSOVELLUS
3 PAIKALLIS-/ETÄOHJAUSSOVELLUS
3.1 YLEISTÄ
Valitse paikallis-/etäohjaussovellus valikon M6 sivulla S6.2.
Paikallis-/etäohjaussovellusta käytettäessä käytössä on kaksi erillistä ohjauspaikkaa.
Kummankin ohjauspaikan taajuusohje voidaan valita joko ohjauspaneelin, riviliitinten tai
kenttäväylän kautta. Aktiivinen ohjauspaikka valitaan digitaalitulolla DIN6.
Kaikki lähdöt ovat vapaasti ohjelmoitavissa.
•
Lisätoiminnot:
Ohjelmoitava Käy/Seis- ja Taakse-signaalilogiikka.
•
Viitearvon skaalaus.
•
Yhden taajuusrajan valvonta.
•
Toisen rampin ja S-rampin ohjelmointi.
•
Ohjelmoitavat Käy- ja Seis-toiminnot.
•
DC-jarru pysäytyksessä.
•
Yksi estotaajuusalue.
•
Ohjelmoitava U/f-käyrä ja kytkentätaajuus.
•
Automaattinen uudelleenkäynnistys.
•
Moottorin lämpö- ja jumisuojaus: ohjelmoitava toiminta – pois, varoitus, vika
•
Paikallis-/etäohjaussovelluksen parametrit selitetään luvussa 9 Parametrikuvaukset
jäljempänä tässä oppaassa. Selitykset on järjestetty parametrien tunnusten mukaan.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 39
Viitepotentiometri
1–10 kΩ
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
mA
Etäohje
0(4)–20 mA
KÄY
VALMIS
AO1-
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
OPTA1
OPTA2 / OPTA3 *)
Liitin Signaali Kuvaus
+10 V
ref
AI1+
AI1-
AI2+
AI2-
+24 V
Ohjausjännitelähtö
I/O maa
Analogiatulo 2
Virta-alue 0–20 mA
Ohjelmoitava (P2.1.11)
Ohjausjännitelähtö
I/O maa
Paikka A: Käy eteen
Ohjelmoitava logiikka (P2.2.1)
Paikka A: Käy taakse
Ri min = 5 kohm
Ulkoinen vika -tulo
Ohjelmoitava (P2.2.2)
Paikka B: Käy eteen
Ohjelmoitava logiikka (P2.2.15)
Paikka B: Käy taakse
Ri min = 5 kΩ
Paikan A/B valinta
Yhteinen (DIN 1 – DIN 3)
Yhteinen tuloille DIN4–DIN6
Ohjausjännitelähtö
I/O maa
Analogialähtö 1
Lähtötaajuus
Ohjelmoitava (P2.3.2)
Digitaalilähtö
VALMIS
Ohjelmoitava (P2.3.7)
Open collector, I≤50 mA,
U≤48 VDC
Relelähtö 1
KÄY
Ohjelmoitava
(P2.3.8)
Relelähtö 2
VIKA
Ohjelmoitava
(P2.3.9)
Alue 0–20 mA/RL,
max. 500 Ω
Kosketin auki = paikka A aktiivinen
Kosketin kiinni = paikka B aktiivinen
Kosketin kiinni = käy eteenpäin
Kosketin kiinni = käy taaksepäin
AO1+
Analogiatulon 1 ohjearvo,
ohjauspaikka B
Ohjearvon ja
ohjaustulojen maa
Analogiatulon 2 ohjearvo,
ohjauspaikka A
Kosketin kiinni = käy eteenpäin
Kosketin kiinni = käy taaksepäin
Kosketin auki = ei vikaa
Kosketin kiinni = vika
Jännite potentiometriin jne.
Analogiatulo 1
Jännitealue 0–10 V DC
Ohjelmoitava (P2.1.12)
Jännite kytkimiin jne. maks. 0,1 A
Jännite kytkimiin (katso 6)
Kytke GND tai +24 V
Kytke GND tai +24 V
Ohjearvon ja ohjaustulojen maa
Ohjearvon ja ohjaustulojen maa
PAIKALLIS-/ETÄOHJAUSSOVELLUS VACON · 39
3.2 OHJAUS-I/O
Kuva 7: Paikallis-/etäohjaussovelluksen tulojen ja lähtöjen oletusasetukset
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 40

Pistikeryhmä X3:
CMA:n ja CMB:n maadoitus
CMB kytketty maahan
CMA kytketty maahan
CMB erotettu maasta
CMA erotettu maasta
CMB ja CMA sisäisesti kytketty
yhteen, erotettu maasta
= tehdasasetus
VACON · 40 PAIKALLIS-/ETÄOHJAUSSOVELLUS
*) Lisäkortin A3 toisessa relelähdössä ei ole avoimen koskettimen liitintä (liitin 24 puuttuu).
HUOMAUTUS!
Katso alla olevat pistikevalinnat. Lisätietoja on tuotteen ohjekirjassa.
Kuva 8: Pistikevalinnat
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 41

DIN3
≥ 1
DIN6
DIN2
DIN3
AI1
AI2
DIN1
DIN2
DIN3
DIN4
DIN5
A
B
A
B
A
B
Sisäinen taakse
Sisäisen vian kuittaus
Vian kuittaus -tulo (ohjelmoitava)
3.3 Paneelin suunta
Sisäinen Käy/Seis
Ohje kenttäväylältä
Käy/Seis kenttäväylältä
Suunta kenttäväylältä
Käy/Seis-painikkeet
Kuittauspainike
Käy eteen
(ohjelmoitava)
Käy taakse
(ohjelmoitava)
Käy eteen
Käy taakse
(ohjelmoitava)
(ohjelmoitava)
Käy/Seis
Taakse
Ylös
Alas
3.1 Ohjauspaikka
2.1.15 Ryömintänopeusohje
2.1.14 Kenttäväylän ohjearvo
2.1.13 Paneelin ohjearvo
2.1.12 Riviliittimen B ohje
2.1.11 Riviliittimen A ohje
R3.2 Paneelin ohjearvo
Moottoripotentiometri
Ohjelmoitava
Käy/Seis- ja
Taakselogiikka A
Ohjelmoitava
Käy/Seis- ja
Taakselogiikka B
Sisäinen
taajuusohje
PAIKALLIS-/ETÄOHJAUSSOVELLUS VACON · 41
3.3 PAIKALLIS-/ETÄOHJAUSSOVELLUKSEN OHJAUSSIGNAALILOGIIKKA
Kuva 9: Paikallis-/etäohjaussovelluksen ohjaussignaalilogiikka
3.4 PAIKALLIS-/ETÄOHJAUSSOVELLUKSEN PARAMETRILUETTELOT
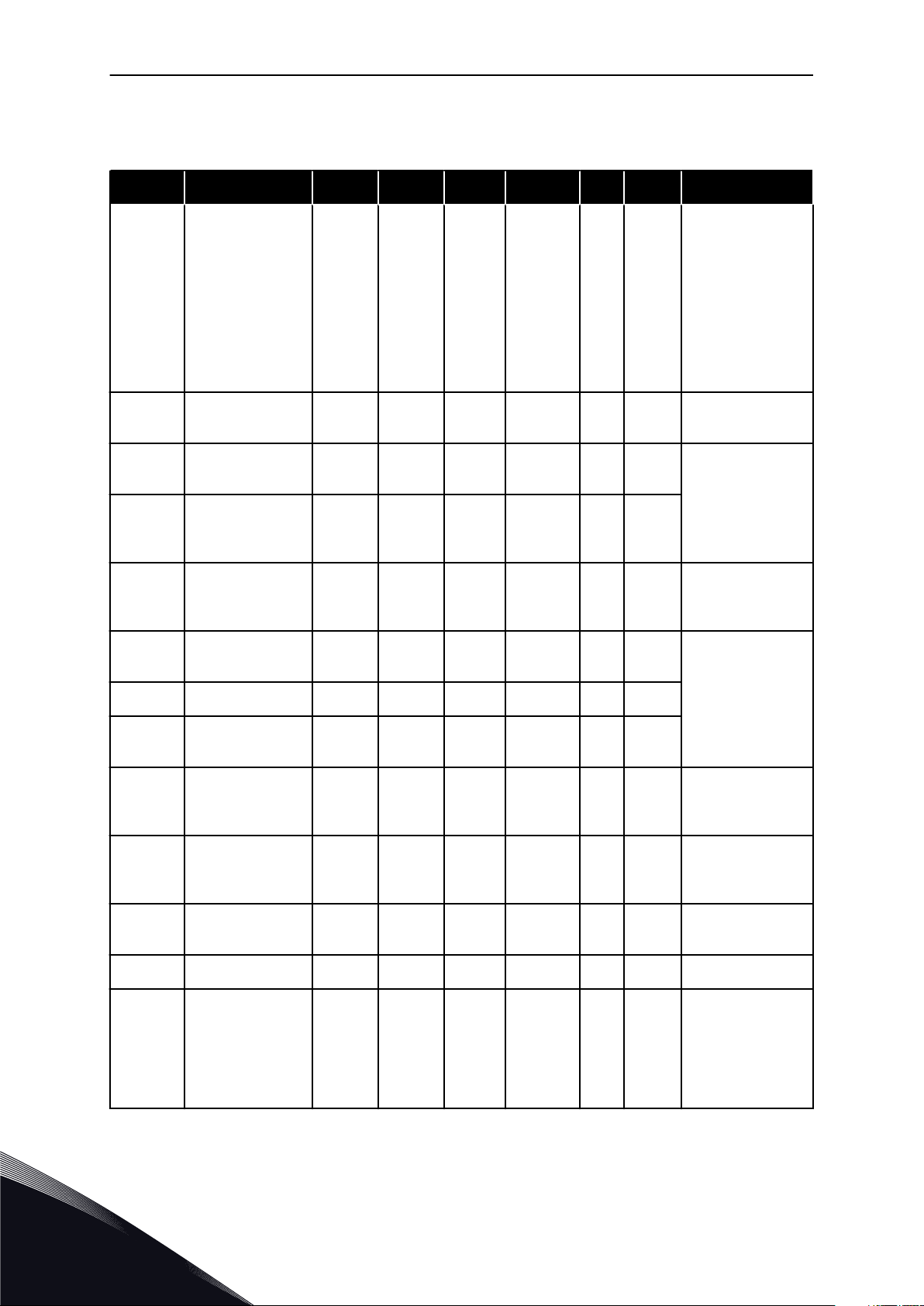
3.4.1 VALVONTA-ARVOT (OHJAUSPANEELI: VALIKKO M1)
Valvonta-arvoja ovat parametrien ja signaalien todelliset arvot sekä niiden tilat ja mitatut
arvot. Näitä arvoja ei voi muokata.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 42
VACON · 42 PAIKALLIS-/ETÄOHJAUSSOVELLUS
Taulukko 14: Valvonta-arvot
Numero Valvonta-arvo Laite ID Kuvaus
V1.1 Lähtötaajuus Hz 1
V1.2 Taajuusohje Hz 25
V1.3 Moottorin nopeus rpm 2
V1.4 Moottorin virta A 3
V1.5 Moottorin momentti % 4
V1.6 Moottorin teho % 5
V1.7 Moottorin jännite V 6
V1.8 Välipiirin jännite V 7
1.9 Laitteen lämpötila °C 8
1.10 Moottorin lämpötila % 9
V1.11 Analogiatulo 1 V/mA 13
V1.12 Analogiatulo 2 V/mA 14
V1.13 DIN 1, 2, 3 15
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 Analoginen I
V1.17 Monivalvonta-arvot
out
mA 26
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 43
PAIKALLIS-/ETÄOHJAUSSOVELLUS VACON · 43
3.4.2 PERUSPARAMETRIT (OHJAUSPANEELI: MENU M2 -> G2.1)
Taulukko 15: Perusparametrit G2.1
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
P2.1.1 Minimitaajuus 0.00 P2.1.2 Hz 0.00 101
P2.1.2 Maksimitaajuus P2.1.1 320.00 Hz 50.00 102
P2.1.3 Kiihdytysaika 1 0.1 3000.0 s 0.0 103
P2.1.4 Hidastusaika 1 0.1 3000.0 s 0.0 104
P2.1.5 Virtaraja 0.1 x I
P2.1.6 *
P2.1.7 *
P2.1.8 *
P2.1.9 *
P2.1.10 *
P2.1.11 * I/O A -ohjearvo 0 4 1 117
moottorin nimel-
lisjännite
moottorin nimel-
listaajuus
Moottorin nimel-
lisnopeus
Moottorin nimel-
lisvirta
Moottorin teho-
kerroin
180 690 V
8.00 320.00 Hz 50.00 111
24 20 000 rpm 1440 112
0.1 x I
0.30 1.00 0.85 120
2 x I
H
H
2 x I
H
H
A I
NX2: 230
NX5: 400
NX6: 690
A I
L
V
V
V
H
107
110
113
0 = AI1
1 = AI2
2 = Paneeli
3 = Kenttäväylä
4 = Moottoripotentiometri
P2.1.12 * I/O B ‑ohjearvo 0 4 0 131
P2.1.13 * Paneelin ohjearvo 0 3 2 121
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
0 = AI1
1 = AI2
2 = Paneeli
3 = Kenttäväylä
4 = Moottoripotentiometri
0 = AI1
1 = AI2
2 = Paneeli
3 = Kenttäväylä
3
Page 44
VACON · 44 PAIKALLIS-/ETÄOHJAUSSOVELLUS
Taulukko 15: Perusparametrit G2.1
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
0 = AI1
P2.1.14 *
Kenttäväylän
ohjearvo
0 3 3 122
1 = AI2
2 = Paneeli
3 = Kenttäväylä
P2.1.15 *
Ryömintänopeus-
ohje
0.00 P2.1.2 Hz 0.00 124
* = Parametrin arvoa voi muuttaa vain, kun taajuusmuuttaja on pysäytettynä.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 45

PAIKALLIS-/ETÄOHJAUSSOVELLUS VACON · 45
3.4.3 TULOSIGNAALIT (OHJAUSPANEELI: MENU M2 -> G2.2)
Taulukko 16: Tulosignaalit, G2.2
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
Logiikka = 0
Ohj.sign. 1 = Käy
eteen
Ohj.sign. 2 = Käy
taakse
Logiikka = 1
Ohj.sign. 1 = Käy/seis
Ohj.sign. 2 = Taakse
Logiikka = 2
Ohj.sign. 1 = Käy/seis
Ohj.sign. 2 = Käynn.
sallittu
Logiikka = 3
Ohj.sign. 1 = Käypulssi (reuna)
Ohj.sign. 2 = Seispulssi
Logiikka = 4
Ohj.sign. 1 = Käy
P2.2.1 ***
Paikan A käynnis-
tys-/pysäytyslogii-
kan valinta
0 8 0 300
eteen
Ohj.sign. 2 = Moottoripotentiometri YLÖS
Logiikka = 5
Ohj.sign. 1 = Käy
eteen (reuna)
Ohj.sign. 2 = Käy
taakse (reuna)
Logiikka = 6
Ohj.sign. 1 = Käy
(reuna) / seis
Ohj.sign. 2 = Taakse
Logiikka = 7
Ohj.sign. 1 = Käy
(reuna) / seis
Ohj.sign. 2 = Käynn.
sallittu
Logiikka = 8
Ohj.sign. 1 = Käy
eteen (reuna)
Ohj.sign. 2 = Moottoripotentiometri YLÖS
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 46

VACON · 46 PAIKALLIS-/ETÄOHJAUSSOVELLUS
Taulukko 16: Tulosignaalit, G2.2
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
0 = Ei käytössä
1 = Ulkoinen vika,
sulk. kosketin
2 = Ulkoinen vika,
avaut. kosketin
3 = Käynn. sallittu
4 = Kiihd./hid.aikaval.
5 = Pakota op: riviliitin
6 = Pakota op:
P2.2.2 DIN3 toiminto 0 13 1 301
paneeli
7 = Pakota op: kenttäväylä
8 = Taakse
9 = Ryömintänopeus
11 = Ei kiihdytystä/
hidastusta
12 = DC-jarrutuskomento
13 = Moottoripotentiometri ALAS
P2.2.3
****
P2.2.4 AI1-signaalialue 0 2 0 320
P2.2.5 AI1 oma minimi -160.00 160.00 % 0.00 321
P2.2.6 AI1 oma maksimi -160.00 160.00 % 100.00 322
P2.2.7
P2.2.8
P2.2.9
****
P2.2.10 AI2-signaalialue 0 2 1 325
AI1-signaalin
valinta
AI1-signaalin
kääntö
AI1-signaalin suo-
datusaika
AI2-signaalin
valinta
0.1 E.10 A1 377
0 1 0 323
0.00 10.00 s 0.10 324
0.1 E.10 A.2 388
0 = 0–10 V (0–20
mA**)
1 = 2–10 V (4–20
mA**)
2=Asiakaskohtainen
asetusalue**
0 = 0–10 V (0–20
mA**)
1 = 2–10 V (4–20
mA**)
2=Asiakaskohtainen
asetusalue**
3
P2.2.11 AI2 oma minimi -160.00 160.00 % 0.00 326
P2.2.12 AI2 oma maksimi -160.00 160.00 % 100.00 327
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 47

PAIKALLIS-/ETÄOHJAUSSOVELLUS VACON · 47
Taulukko 16: Tulosignaalit, G2.2
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
P2.2.13
P2.2.14
P2.2.15
***
AI2-signaalin
kääntö
AI2-signaalin suo-
datusaika
Paikan B käynnis-
tys-/pysäytyslogii-
kan valinta
0 1 0 328
0.00 10.00 s 0.10 329
0 6 0 363
Logiikka = 0
Ohj.sign. 1 = Käy
eteen
Ohj.sign. 2 = Käy
taakse
Logiikka = 1
Ohj.sign. 1 = Käy/seis
Ohj.sign. 2 = Taakse
Logiikka = 2
Ohj.sign. 1 = Käy/seis
Ohj.sign. 2 = Käynn.
sallittu
Logiikka = 3
Ohj.sign. 1 = Käypulssi (reuna)
Ohj.sign. 2 = Seispulssi
Logiikka = 4
Ohj.sign. 1 = Eteenpulssi (reuna)
Ohj.sign. 2 = Taaksepulssi (reuna)
Logiikka = 5
Ohj.sign. 1 = Käypulssi (reuna)
Ohj.sign. 2 = Taaksepulssi
Logiikka = 6
Ohj.sign. 1 = Käypulssi (reuna)
Ohj.sign. 2 = Sallipulssi
Paikan A ohjeen
P2.2.16
P2.2.17
P2.2.18
P2.2.19
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
skaalauksen mini-
miarvo
Paikan A ohjeen
skaalauksen mak-
simiarvo
Paikan B ohjeen
skaalauksen mini-
miarvo
Paikan B ohjeen
skaalauksen mak-
simiarvo
0.00 320.00 Hz 0.00 303
0.00 304
0.00 320.00 Hz 0.00 364
0.00 320.00 Hz 0.00 365
0.00 = ei skaalausta
>0 = skaalattu maksimiarvo
3
Page 48

VACON · 48 PAIKALLIS-/ETÄOHJAUSSOVELLUS
Taulukko 16: Tulosignaalit, G2.2
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
Vapaa analogia-
P2.2.20
P2.2.21
P2.2.22
P2.2.23
P2.2.24 Käy-pulssimuisti 0 1 0 498
tulo, signaalin
valinta
Vapaa analogia-
tulo, toiminto
Moottoripotentio-
metrin ramppi
Moottoripotentio-
metrin taajuusoh-
jeen muistin nol-
laus
0 2 0 361
0 4 0 362
0.1 2000.0 Hz/s 10.0 331
0 2 1 367
0 = Ei käytössä
1 = Analogiatulo 1
2 = Analogiatulo 2
0 = Ei palautusta
1 = Alentaa virtarajaa
(P2.1.5)
2 = Pienentää DCjarrutusvirtaa
3 = Pienentää kiihd.ja hidast.aikoja
4 = Alentaa momentin valvontarajaa
0 = Ei palautusta
1 = Nollaus pysäytyksen tai virrankatkaisun yhteydessä
2 =Nollaus virrankatkaisun yhteydessä
0 = Ei Käy-tilan
kopiointia
1 = Käy-tila kopioidaan
** = Muista kytkeä ryhmän X2 pistikkeet vastaavasti. Lisätietoja on tuotteen käyttöohjeessa.
*** = Parametrin arvoa voi muuttaa vain, kun taajuusmuuttaja on pysäytettynä.
**** = Ohjelmoi nämä parametrit TTF-ohjelmoinnilla.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 49

PAIKALLIS-/ETÄOHJAUSSOVELLUS VACON · 49
3.4.4 LÄHTÖSIGNAALIT (OHJAUSPANEELI: VALIKKO M2 -> G2.3
Taulukko 17: Lähtösignaalit, G2.3
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
P2.3.1
P2.3.2
P2.3.3
AO1-signaalin
valinta
Analogialähdön
toiminto
Analogilähdön
suodatusaika
0.1 E.10 A11 464
0 8 1 307
0.00 10.00 s 1.00 308
0 = Ei käytössä (20
mA / 10 V)
1 = Lähtötaajuus
(0–f
)
max
2 = Taajuusohje (0–
f
)
max
3 = Moottorin
nopeus (0–moottorin nimellisnopeus)
4 = Moottorin virta
(0–I
5 = Moottorin
momentti (0–T
tor
6 = 7 = Moottorin
jännite (0–U
Moottorin teho (0–
P
nMotor
8 = Välipiirin jännite (0–1 000 V)
0 = Ei suodatusta
nMotor
)
)
nMo-
nMotor
)
)
P2.3.4
P2.3.5
P2.3.6
Analogialähdön
kääntö
Analogialähdön
minimi
Analogialähdön
skaalaus
0 1 0 309
0 1 0 310
10 1000 % 100 311
0 = Ei käännetty
1 = Käänteinen
0 = 0 mA (0 V)
1 = 4 mA (2 V)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 50

VACON · 50 PAIKALLIS-/ETÄOHJAUSSOVELLUS
Taulukko 17: Lähtösignaalit, G2.3
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
0 = Ei käytössä
1 = Valmis
2 = Käy
3 = Vika
4 = Vika käännetty
5 = Taajuusmuuttajan ylikuumentumisvaroitus
6 = Ulkoinen vika
tai varoitus
7 = Ohjearvon vika
tai varoitus
8= Varoitus
9 = Taakse
10 = Ryömintänopeus valittu
11 = Asetetussa
nopeudessa
12 = Moottorisäädin käytössä
13 = Käyttö-
P2.3.7
Digitaalilähdön 1
toiminta
0 22 1 312
taaj.rajan valvonta
1
14 = Käyttötaajuusrajan 2 valvonta
15 = Momenttirajan valvonta
16 = Ohjearvon
rajan valvonta
17 = Ulkoisen jarrun ohjaus
18 = Ohjauspaikka:
IO
19 = Taajuusmuuttajan lämpötilarajan valvonta
20 = Pyytämätön
pyörimissuunta
21 = Ulkoisen jarrun ohjaus (käänteinen)
22 = Termistorivika/-varoitus
3
P2.3.8
P2.3.9 RO2 toiminto 0 22 3 314
RO1 toiminto 0 22 2 313
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Kuten parametri
2.3.7
Kuten parametri
2.3.7
Page 51

PAIKALLIS-/ETÄOHJAUSSOVELLUS VACON · 51
Taulukko 17: Lähtösignaalit, G2.3
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
0 = Ei rajaa
1 = Alarajan valvonta
2 = Ylärajan valvonta
0 = Ei rajaa
1 = Alarajan valvonta
2 = Ylärajan valvonta
P2.3.10
P2.3.11
P2.3.12
P2.3.13
Lähtötaajuusrajan
1 valvonta
Lähtötaajuusrajan
1 valvonta; val-
vonta-arvo
Lähtötaajuusrajan
2 valvonta
Lähtötaajuusrajan
2 valvonta; val-
vonta-arvo
0 2 0 315
0.00 320.00 Hz 0.00 316
0 2 0 346
0.00 320.00 Hz 0.00 347
P2.3.14
P2.3.15
P2.3.16
P2.3.17
P2.3.18
P2.3.19
P2.3.20
P2.3.21
Momenttirajan
valvontatoiminto
Momenttirajan
valvonta-arvo
Ohjearvorajan val-
vontatoiminto
Ohjearvorajan val-
vonta-arvo
Ulkoisen jarrun
OFF-viive
Ulkoisen jarrun
ON-viive
Taajuusmuuttajan
lämpötilarajan
valvonta
Taajuusmuuttajan
lämpötilarajan
arvo
0 2 0 348
-300.0 300.0 % 0.0 349
0 2 0 350
0.0 100.0 % 0.0 351
0.0 100.0 s 0.5 352
0.0 100.0 s 1.5 353
0 2 0 354
-10 100 °C 40 355
0 = Ei
1 = Alaraja
2 = Yläraja
0 = Ei
1 = Alaraja
2 = Yläraja
0 = Ei
1 = Alaraja
2 = Yläraja
P2.3.22
P2.3.23
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Analogialähdön 2
skaalaus
Analogialähdön 2
toiminto
0.1 E.10 0.1 471
0 8 4 472
Kuten parametri
2.3.2
3
Page 52
VACON · 52 PAIKALLIS-/ETÄOHJAUSSOVELLUS
Taulukko 17: Lähtösignaalit, G2.3
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
P2.3.24
P2.3.25
P2.3.26
P.2.3.27
Analogialähdön 2
suodatusaika
Analogialähdön 2
kääntö
Analogialähdön 2
minimi
Analogialähdön 2
skaalaus
0.00 10.00 s 1.00 473
0 1 0 474
0 1 0 475
10 1000 % 1.00 476
0 = Ei suodatusta
0 = Ei käännetty
1 = Käänteinen
0 = 0 mA (0 V)
1 = 4 mA (2 V)
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 53
PAIKALLIS-/ETÄOHJAUSSOVELLUS VACON · 53
3.4.5 TAAJUUSMUUTTAJAN OHJAUSPARAMETRIT (OHJAUSPANEELI: VALIKKO M2 -> G2.4
Taulukko 18: Taajuusmuuttajan ohjausparametrit, G2.4
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
0 = Lineaarinen
P2.4.1 Rampin 1 muoto 0.0 10.0 s 0.1 500
P2.4.2 Rampin 2 muoto 0.0 10.0 s 0.0 501
P2.4.3 Kiihtyvyysaika 2 0.1 3000.0 s 1.0 502
P2.4.4 Hidastuvuusaika 2 0.1 3000.0 s 1.0 503
P2.4.5 Jarrukatkoja 0 4 0 504
100 = täydet kiihd./
hid. lis.-/väh.ajat
0 = Lineaarinen
100 = täydet kiihd./
hid. lis.-/väh.ajat
0 = Ei käytössä
1 = Käytössä käynnin aikana
2 = Ulkoinen jarrukatkoja
3 = Käytössä
pysäytettynä /
käynnin aikana
4 = Käytössä käynnin aikana (ei testausta)
P2.4.6
P2.4.7 Pysäytystoiminto 0 3 0 506
P2.4.8 DC-jarrutusvirta 0.00 I
P2.4.9
P2.4.10
P2.4.11
Käynnistystoi-
minto
DC-jarrutusaika
pysäytyksessä
Taajuus, jolla DC-
jarrutus aloitetaan
hidastaen pysäy-
tettäessä
DC-jarrutusaika
käynnistyksessä
0 2 0 505
L
0.00 600.00 s 0.00 508
0.10 10.00 Hz 1.50 515
0.00 600.00 s 0.00 516
A 0.7 x I
H
507
0= Ramppi
1 = Vauhtikäynnistys
2=Ehdollinen vauhtikäynnistys
0 = Vapaasti pyörien
1= Ramppi
2 = Ramppi + käynnistys sallittu
vapaasti pyörien
3 = Vapaasti pyörien + käynnistys
sallittu ‑ramppi
0 = DC-jarru pois
pysäytyksessä
0 = DC-jarru pois
käynnistyksessä
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 54

VACON · 54 PAIKALLIS-/ETÄOHJAUSSOVELLUS
Taulukko 18: Taajuusmuuttajan ohjausparametrit, G2.4
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
P2.4.12 * Vuojarru 0 1 0 520
P2.4.13 Vuojarrutusvirta 0.00 I
L
A I
H
0 = Ei käytössä
0 = Päällä
519
3.4.6 ESTOTAAJUUKSIEN PARAMETRIT (OHJAUSPANEELI: MENU M2 -> G2.5)
Taulukko 19: Estotaajuuden parametrit, G2.5
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
P2.5.1
P2.5.2
P2.5.3
P2.5.4
Estotaajuusalue 1,
alaraja
Estotaajuusalue 1,
yläraja
Estotaajuusalue 2,
alaraja
Estotaajuusalue 2,
yläraja
0.00 320.00 Hz 0.00 509
0.00 320.00 Hz 0.00 510
0.00 320.00 Hz 0.00 511
0.00 320.00 Hz 0.00 512
0 = Estotaajuusalue 1 poissa käytöstä
0 = Estotaajuusalue 2 poissa käytöstä
P2.5.5
P2.5.6
P2.5.7
Estotaajuusalue 3,
alaraja
Estotaajuusalue 3,
yläraja
Ei kiihd./
hid.ramppia
0.00 320.00 Hz 0.00 513
0.00 320.00 Hz 0.00 514
0.1 10.0 x 1.0 518
0 = Estotaajuusalue 3 poissa käytöstä
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 55
PAIKALLIS-/ETÄOHJAUSSOVELLUS VACON · 55
3.4.7 MOOTTORIN OHJAUSPARAMETRIT (OHJAUSPANEELI: MENU M2 -> G2.6)
Taulukko 20: Moottorin ohjausparametrit, G2.6
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
0 = Taajuusohje
1 = Nopeusohje
NXP:
2 = Momenttiohjaus, open loop
3 = Nopeusohjaus,
closed loop
4 = Momenttiohjaus, closed loop
0 = Ei käytössä
1 = Automaattinen
momentin maksimointi
0 = Lineaarinen
1 = Neliöllinen
2 = Ohjelmoitava
3 = Lineaarinen,
vuon opt.
P2.6.1 *
P2.6.2 *
P2.6.3 *
Moottorin ohjaus-
tila
Moott./puh. opti-
mointi
U/f-suhteen
valinta
0 1/3 0 600
0 1 0 109
0 3 0 108
P2.6.4 *
P2.6.5 *
P2.6.6 *
P2.6.7 *
P2.6.8 *
P2.6.9 Kytkentätaajuus 1.0
P2.6.10 Ylijännitesäätäjä 0 2 1 607
P2.6.11 Alijännitesäätäjä 0 1 1 608
Kentän heiken-
nyspiste
Jännite kentän
heikennyspis-
teessä
U/f-käyrän keski-
pistetaajuus
U/f-käyrän keski-
pistejännite
Lähtöjännite nol-
lataajuudella
8.00 320.00 Hz 50.00 602
10.00 200.00 % 100.00 603
0.00 P2.6.4 Hz 50.00 604
0.00 100.00 % 100.00 605
0.00 40.00 % Vaihtelee 606
Vaihte-
lee
kHz Vaihtelee 601
0 = Ei käytössä
1 = Käytössä (ei
ramppia)
2 = Käytössä
(ramppi)
0 = Ei käytössä
1 = Käytössä
P2.6.12 Kuormitusjousto 0.00 100.00 % 0.00 620
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 56
VACON · 56 PAIKALLIS-/ETÄOHJAUSSOVELLUS
Taulukko 20: Moottorin ohjausparametrit, G2.6
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
0 = Ei käytössä
1=Tunnistus ilman
käyntiä
2 = Tunnistus ja ajo
P2.6.13 ID ajo 0 1/2 0 631
Closed loop ‑parametriryhmä 2.6.14
3 = Enkooderitunnistusajo
4 = Ei käytössä
5 = Tunnistusajo
epäonnistui
P2.6.14.1 Magnetointivirta 0.00 2 x I
P2.6.14.2
P2.6.14.3
P2.6.14.5
P2.6.14.6 Jättämän säätö 0 500 % 100 619
P2.6.14.7
P2.6.14.8
P2.6.14.9
P2.6.14.10
P2.6.14.11
Nopeusohjauksen
P-vahvistus
Nopeusohjauksen
I-aika
Kiihdytyksen kom-
pensointi
Magnetointivirta
käynnistyksessä
Magnetointiaika
käynnistyksessä
Nollanopeusaika
käynnistyksessä
Nollanopeusaika
pysäytyksessä
Käynnistysmo-
mentti
1 1000 30 613
0.0 3200.0 ms 30.0 614
0.00 300.00 s 0.00 626
0,00 I
0 60000 ms 0 628
0 32000 ms 100 615
0 32000 ms 100 616
0 3 0 621
H
L
A 0.00 612
A 0.00 627
0 = Ei käytössä
1 = Momenttimuisti
2 = Momenttiohje
3 = Käynnistysmomentti eteen/
taakse
3
P2.6.14.12
P2.6.14.13
P2.6.14.15
P2.6.14.17
Käynnistysmo-
mentti ETEEN
Käynnistysmo-
mentti TAAKSE
Enkooderin suo-
datusaika
Virtaohjauksen P-
vahvistus
-300.0 300.0 % 0.0 633
-300.0 300.0 % 0.0 634
0.0 100.0 ms 0.0 618
0.00 100.00 % 40.00 617
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 57

PAIKALLIS-/ETÄOHJAUSSOVELLUS VACON · 57
Taulukko 20: Moottorin ohjausparametrit, G2.6
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
Tunnistusparametriryhmä 2.6.15
P2.6.15.1 Nopeusaskel -50.0 50.0 0.0 0.0 1252
* = Parametrin arvoa voi muuttaa vain, kun taajuusmuuttaja on pysäytettynä.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 58
VACON · 58 PAIKALLIS-/ETÄOHJAUSSOVELLUS
3.4.8 SUOJAUKSET (OHJAUSPANEELI: VALIKKO M2 -> G2.7
Taulukko 21: Suojaukset, G2.7
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
0 = Ei vastetta
1= Varoitus
2 = Varoitus + edellinen taajuus
P2.7.1
Vaste 4 mA:n
ohjearvon vikaan
0 5 0 700
3 = Varoitus + vakionopeus 2.7.2
4 = Vika, pys.
2.4.7:n mukaan
5 = Vika, pysäytys
vapaasti pyörien
P2.7.2
P2.7.3
P2.7.4
P2.7.5
P2.7.6
P2.7.7 Maasulkusuojaus 0 3 2 703
P2.7.8
P2.7.9
P2.7.10
4 mA:n ohjearvon
vian taajuus
Vaste ulkoiseen
vikaan
Tulovaiheen val-
vonta.
Vaste alijännitevi-
kaan
Lähtövaiheen val-
vonta
Moottorin lämpö-
suojaus
Moottorin ympä-
ristön lämpötila-
kerroin
Moottorin jäähdy-
tyskerroin nolla-
nopeudella
0.00 P2.1.2 Hz 0.00 728
0 3 2 701
0 3 0 730
0 1 0 727
0 3 2 702
0 3 2 704
-100.0 100.0 % 0.0 705
0.0 150.0 % 40.0 706
0 = Ei vastetta
1= Varoitus
2 = Vika, pys.
2.4.7:n mukaan
3 = Vika, pysäytys
vapaasti pyörien
0 = Vika tallentuu
vikahistoriaan
Ei vian tallennusta
0 = Ei vastetta
1= Varoitus
2 = Vika, pys.
2.4.7:n mukaan
3 = Vika, pysäytys
vapaasti pyörien
3
P2.7.11
P2.7.12 Käyttösuhde 0 150 % 100 708
P2.7.13 Jumisuojaus 0 3 0 709
Moottorin läm-
pöaikavakio.
1 200 min Vaihtelee 707
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
0 = Ei vastetta
1= Varoitus
2 = Vika, pys.
2.4.7:n mukaan
3 = Vika, pysäytys
vapaasti pyörien
Page 59

PAIKALLIS-/ETÄOHJAUSSOVELLUS VACON · 59
Taulukko 21: Suojaukset, G2.7
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
P2.7.14 Jumivirta 0.00 2 x I
P2.7.15 Jumiaikaraja 1.00 120.00 s 15.00 711
P2.7.16 Jumitaajuusraja 1.0 P2.1.2 Hz 25.00 712
P2.7.17
P2.7.18
P2.7.19
P2.7.20
P2.7.21
Alikuormitussuo-
jaus
Alikuormitussuo-
jaus momentista
Alikuormitussuojauksen nollataa-
juuskuorma
Alikuormitussuo-
jan aikaraja
Vaste termistori-
vikaan
0 3 0 713
10.0 150.0 % 50.0 714
5.0 150.0 % 10.0 715
2.00 600.00 s 20.00 716
0 3 2 732
H
A I
H
710
0 = Ei vastetta
1= Varoitus
2 = Vika, pys.
2.4.7:n mukaan
3 = Vika, pysäytys
vapaasti pyörien
0 = Ei vastetta
1= Varoitus
2 = Vika, pys.
2.4.7:n mukaan
3 = Vika, pysäytys
vapaasti pyörien
P2.7.22
P2.7.23
Vaste kenttäväylä-
vikaan
Vaste korttipaik-
kavikaan
0 3 2 733
0 3 2 734
Katso P2.7.21.
Katso P2.7.21.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 60

VACON · 60 PAIKALLIS-/ETÄOHJAUSSOVELLUS
3.4.9 AUTOMAATTISEN UUDELLEENKÄYNNISTYKSEN PARAMETRIT (OHJAUSPANEELI: MENU M2 -> G2.8)
Taulukko 22: Automaattisen uudelleenkäynnistyksen parametrit, G2.8
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
P2.8.1
P2.8.2 Yritysaika 0.00 60.00 s 30.00 718
P2.8.3
P2.8.4
P2.8.5
P2.8.6
P2.8.7
Jälleenkäynnis-
tysviive
Käynnistystoi-
minto
Yritysten määrä
alijännitelaukai-
sun jälkeen
Yritysten määrä
ylijännitelaukai-
sun jälkeen
Yritysten määrä
ylivirtalaukaisun
jälkeen
Yritysten määrä 4
mA:n ohjearvolau-
kaisun jälkeen
0.10 10.00 s 0.50 717
0 2 0 719
0 10 0 720
0 10 0 721
0 3 0 722
0 10 0 723
0= Ramppi
1 = Vauhtikäynnistys
2 = Parametrin
P2.4.6 mukaan
Yritysten määrä
P2.8.8
P2.8.9
P2.8.10
moottorin lämpö-
tilavian laukaisun
jälkeen
Yritysten määrä
ulkoisen vian lau-
kaisun jälkeen
Yritysten määrä
alikuormitusvika-
laukaisun jälkeen
0 10 0 726
0 10 0 725
0 10 0 738
3.4.10 PANEELIOHJAUS (OHJAUSPANEELI: VALIKKO M3)
Seuraavassa esitetään ohjauspaikan ja paneelista valittavan suunnan valintaparametrit.
Lisätietoja on tuotteen ohjekirjan kohdassa Paneeliohjausvalikko.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 61

PAIKALLIS-/ETÄOHJAUSSOVELLUS VACON · 61
Taulukko 23: Paneelin ohjausparametrit, M3.
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
1 = Riviliitin
P3.1 Ohjauspaikka 1 3 1 125
P3.2 Paneelin ohjearvo P2.1 P2.2 Hz 0.00
2 = Paneeli
3 = Kenttäväylä
P3.3
R3.4 Pysäytyspainike 0 1 1 114
Suunta (panee-
lissa)
0 1 0 123
0 = Pysäytyspainikkeen rajallinen toiminta
1 = Pysäytyspainike aina käytössä
3.4.11 JÄRJESTELMÄVALIKKO (OHJAUSPANEELI: VALIKKO M6)
Tuotteen käyttöoppaassa on tietoja taajuusmuuttajan yleiseen käyttöön liittyvistä
parametreista ja toiminnoista, kuten sovelluksen sekä kielen valinnasta ja mukautetuista
parametriryhmistä. Käyttöoppaassa on myös yleisiä laitteisto- ja ohjelmistotietoja.
3.4.12 LAAJENNUSKORTIT (OHJAUSPANEELI: VALIKKO M7)
M7-valikko näyttää ohjauskorttiin liitetyt lisäkortit sekä kortteihin liittyvät tiedot. Lisätietoja
on tuotteen ohjekirjassa.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 62

VACON · 62 MULTI-STEP-NOPEUSSOVELLUS
4 MULTI-STEP-NOPEUSSOVELLUS
4.1 YLEISTÄ
Valitse Multi-Step-nopeussovellus valikon M6 sivulla S6.2.
Multi-Step-nopeussovellusta voidaan käyttää sovelluksissa, joissa tarvitaan kiinteitä
nopeuksia. Sovellukseen voi ohjelmoida yhteensä 15 + 2 nopeutta: yhden perusnopeuden,
15 Multi-Step-nopeutta ja yhden ryömintänopeuden. Nopeudet valitaan digitaalisignaaleilla
DIN3, DIN4, DIN5 ja DIN6. Jos ryömintänopeus on käytössä, DIN3 voidaan ohjelmoida
käytettäväksi ryömintänopeuden valintaan vian kuittauksen sijasta.
Perusnopeusohje voi olla analogiatuloliittimen (2/3 tai 4/5) kautta tuotava jännite- tai
virtasignaali. Toinen analogiatulo voidaan ohjelmoida muihin tarkoituksiin.
Kaikki lähdöt ovat vapaasti ohjelmoitavissa.
•
Lisätoiminnot:
Ohjelmoitava Käy/Seis- ja Taakse-signaalilogiikka.
•
Viitearvon skaalaus.
•
Yhden taajuusrajan valvonta.
•
Toisen rampin ja S-rampin ohjelmointi.
•
Ohjelmoitavat Käy- ja Seis-toiminnot.
•
DC-jarru pysäytyksessä.
•
Yksi estotaajuusalue.
•
Ohjelmoitava U/f-käyrä ja kytkentätaajuus.
•
Automaattinen uudelleenkäynnistys.
•
Moottorin lämpö- ja jumisuojaus: ohjelmoitava toiminta – pois, varoitus, vika
•
Multi-Step-nopeussovelluksen parametrit selitetään luvussa 9 Parametrikuvaukset
jäljempänä tässä oppaassa. Selitykset on järjestetty parametrien tunnusten mukaan.
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 63

1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
mA
Perusohje
(valinnainen)
KÄY
VALMIS
AO1-
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
CMA
CMB
OPTA1
OPTA2 /OPTA3 *)
Liitin Signaali Kuvaus
+10 Vref
AI1+
AI1-
AI2+
AI2-
+24 V
Ohjausjännitelähtö
I/O maa
Analogiatulo 2.
Virta-alue 0–20 mA
Ohjelmoitava (P2.1.11)
Ohjausjännitelähtö
I/O maa
Käy eteen
Ohjelmoitava logiikka (P2.2.1)
Käy taakse
Rt min = 5 kΩ
Ulkoinen vika -tulo
Ohjelmoitava (P2.2.2)
Vakionopeusvalinta 1
Vakionopeusvalinta 2
Vakionopeusvalinta 3
Yhteinen (DIN 1 – DIN 3)
Yhteinen tuloille DIN4–DIN6
Ohjausjännitelähtö
I/O maa
Analogialähtö 1:
Lähtötaajuus
Ohjelmoitava (P2.3.2)
Digitaalilähtö
VALMIS
Ohjelmoitava (P2.3.7)
Open collector, I≤50 mA,
U≤48 VDC
Relelähtö 1
KÄY
Ohjelmoitava
Ohjelmoitava
Ohjelmoitava
(P2.3.8)
Relelähtö 2
VIKA
Ohjelmoitava
(P2.3.9)
Alue 0–20 mA/RL,
max. 500 Ω
AO1+
Analogiatulon 1
taajuusohje
Ohjearvon ja
ohjaustulojen maa
Analogiatulon 2
taajuusohje
Oletusohjearvo
Kosketin kiinni = käy eteenpäin
Kosketin kiinni = käy taaksepäin
Kosketin auki = ei vikaa
Kosketin kiinni = vika
Viitepotentiometri
1–10 kΩ
Jännite potentiometriin jne.
Analogiatulo 1.
Jännitealue 0–10 V DC
Jännite kytkimiin jne. maks. 0,1 A
Jännite kytkimiin (katso 6)
Kytke GND tai +24 V
Kytke GND tai +24 V
Ohjearvon ja ohjaustulojen maa
Ohjearvon ja ohjaustulojen maa
val1 val2 val3 val4 (ja DIN3)
0 0 0 0 I/O-ohje
1 0 0 0 Nopeus 1
0 1 0 0 Nopeus 2
---- ------1 1 1 1 Nopeus 15
RO1
RO1
RO1
RO2
RO2
RO2
MULTI-STEP-NOPEUSSOVELLUS VACON · 63
4.2 OHJAUS-I/O
Kuva 10: Multi-Step-nopeussovelluksen tulojen ja lähtöjen oletusasetukset
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 64

Pistikeryhmä X3:
CMA:n ja CMB:n maadoitus
CMB kytketty maahan
CMA kytketty maahan
CMB erotettu maasta
CMA erotettu maasta
CMB ja CMA sisäisesti kytketty
yhteen, erotettu maasta
= tehdasasetus
VACON · 64 MULTI-STEP-NOPEUSSOVELLUS
*) Lisäkortin A3 toisessa relelähdössä ei ole avoimen koskettimen liitintä (liitin 24 puuttuu).
HUOMAUTUS!
Katso alla olevat pistikevalinnat. Lisätietoja on tuotteen ohjekirjassa.
Kuva 11: Pistikevalinnat
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 65

DIN4
DIN5
AI1
AI2
DIN1
DIN2
DIN3
DIN6
DIN3
DIN3
3.2 Paneelin ohjearvo
2.1.11 Riviliittimen ohje
2.1.12 Paneelin ohjearvo
2.1.13 Kenttäväylän ohjearvo
2.1.15 Vakionopeus 1
...2.1.29 Vakionopeus 15
3.1 Ohjauspaikka
Sisäinen
taajuusohje
Käy eteen
(ohjelmoitava)
Käy taakse
(ohjelmoitava)
Käy/Seis
Taakse
Sisäinen Käy/Seis
Sisäinen taakse
Sisäisen vian kuittaus
Vian kuittaus -tulo
Kuittauspainike
Käy/Seispainikkeet
Ohje kenttäväylältä
Käy/Seis kenttäväylältä
Suunta kenttäväylältä
3.3 Paneelin suunta
Vakionopeus 1
Vakionopeus 2
Vakionopeus 3
Vakionopeus 4
2.1.14 Ryömintänopeusohje
(ohjelmoitava)
≥ 1
Ohjelmoitava
Käy/Seis- ja
Taakse-logiikka
MULTI-STEP-NOPEUSSOVELLUS VACON · 65
4.3 MULTI-STEP-NOPEUSSOVELLUKSEN OHJAUSSIGNAALILOGIIKKA
Kuva 12: Multi-Step-nopeussovelluksen ohjaussignaalilogiikka
4.4 MULTI-STEP-NOPEUSSOVELLUKSEN PARAMETRILUETTELOT
4.4.1 VALVONTA-ARVOT (OHJAUSPANEELI: VALIKKO M1)
Valvonta-arvoja ovat parametrien ja signaalien todelliset arvot sekä niiden tilat ja mitatut
arvot. Näitä arvoja ei voi muokata.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 66

VACON · 66 MULTI-STEP-NOPEUSSOVELLUS
Taulukko 24: Valvonta-arvot
Numero Valvonta-arvo Laite ID Kuvaus
V1.1 Lähtötaajuus Hz 1
V1.2 Taajuusohje Hz 25
V1.3 Moottorin nopeus rpm 2
V1.4 Moottorin virta A 3
V1.5 Moottorin momentti % 4
V1.6 Moottorin teho % 5
V1.7 Moottorin jännite V 6
V1.8 Välipiirin jännite V 7
1.9 Laitteen lämpötila °C 8
1.10 Moottorin lämpötila % 9
V1.11 Analogiatulo 1 V/mA 13
V1.12 Analogiatulo 2 V/mA 14
V1.13 DIN 1, 2, 3 15
V1.14 DIN 4, 5, 6 16
V1.15 DO1, RO1, RO2 17
V1.16 Analoginen I
V1.17 Monivalvonta-arvot
out
mA 26
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 67

MULTI-STEP-NOPEUSSOVELLUS VACON · 67
4.4.2 PERUSPARAMETRIT (OHJAUSPANEELI: MENU M2 -> G2.1)
Taulukko 25: Perusparametrit G2.1
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
P2.1.1 Minimitaajuus 0.00 P2.1.2 Hz 0.00 101
P2.1.2 Maksimitaajuus P2.1.1 320.00 Hz 50.00 102
P2.1.3 Kiihdytysaika 1 0.1 3000.0 s 0.0 103
P2.1.4 Hidastusaika 1 0.1 3000.0 s 0.0 104
P2.1.5 Virtaraja 0.1 x I
P2.1.6 *
P2.1.7 *
P2.1.8 *
P2.1.9 *
P2.1.10 *
P2.1.11 *
moottorin nimel-
lisjännite
moottorin nimel-
listaajuus
Moottorin nimel-
lisnopeus
Moottorin nimel-
lisvirta
Moottorin teho-
kerroin
Ohjearvopaikan
valinta
0.1 x I
2 x I
H
180 690 V
8.00 320.00 Hz 50.00 111
24 20 000 rpm 1440 112
H
0.30 1.00 0.85 120
0 3 1 117
2 x I
H
H
A I
NX2: 230
NX5: 400
NX6: 690
A I
L
V
V
V
H
107
110
113
0 = AI1
1 = AI2
2 = Paneeli
3 = Kenttäväylä
P2.1.12 * Paneelin ohjearvo 0 3 2 121
P2.1.13 *
P2.1.14
P2.1.15
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Kenttäväylän
ohjearvo
Ryömintänopeus-
ohje
Esiasetettu
nopeus 1
0 3 3 122
0.00 P2.1.2 Hz 0.00 124
0.00 P2.1.2 Hz 5.00 105
0 = AI1
1 = AI2
2 = Paneeli
3 = Kenttäväylä
0 = AI1
1 = AI2
2 = Paneeli
3 = Kenttäväylä
4
Page 68
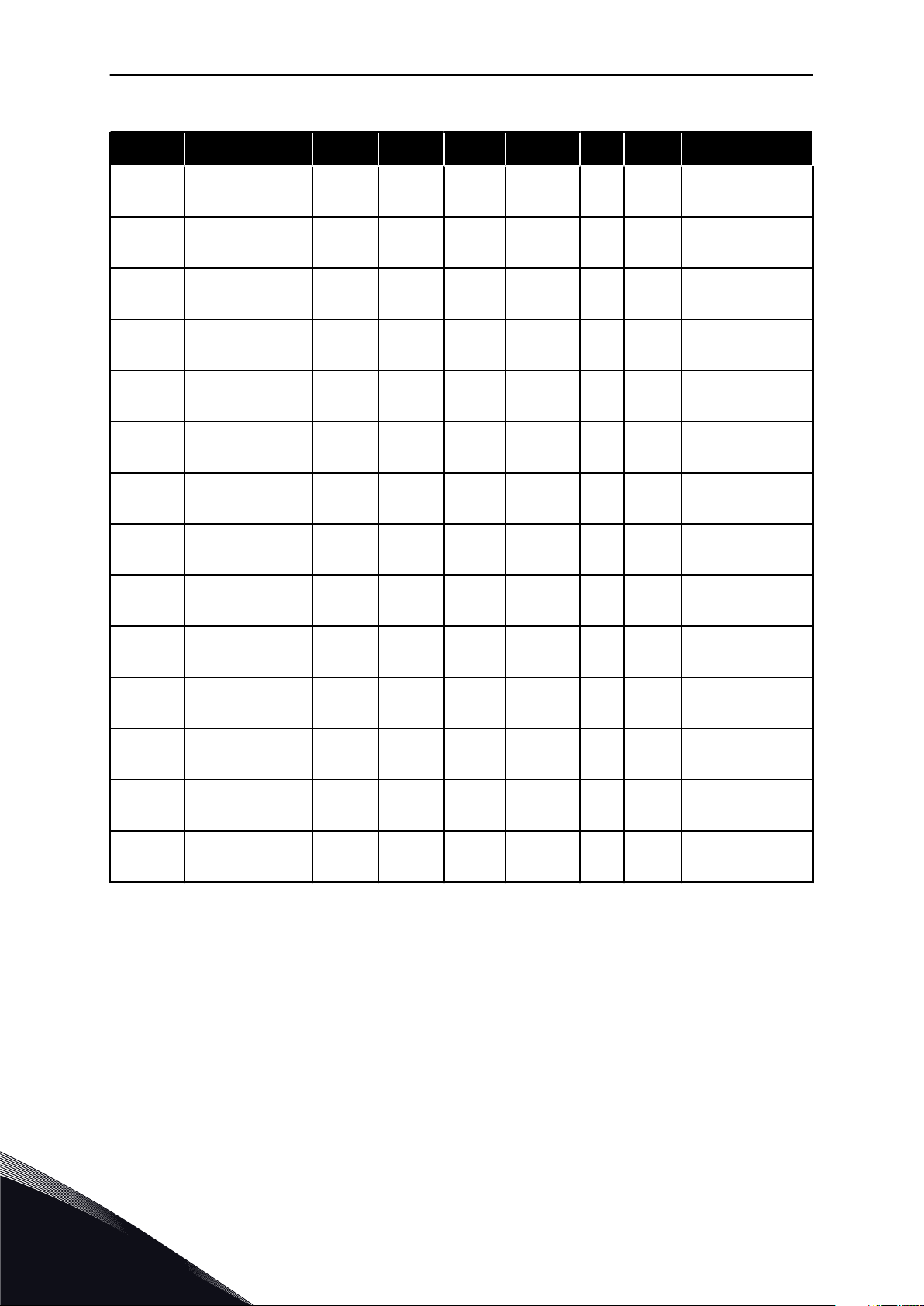
VACON · 68 MULTI-STEP-NOPEUSSOVELLUS
Taulukko 25: Perusparametrit G2.1
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
P2.1.16
P2.1.17
P2.1.18
P2.1.19
P2.1.20
P2.1.21
P2.1.22
P2.1.23
P2.1.24
Esiasetettu
nopeus 2
Esiasetettu
nopeus 3
Esiasetettu
nopeus 4
Esiasetettu
nopeus 5
Esiasetettu
nopeus 6
Esiasetettu
nopeus 7
Esiasetettu
nopeus 8
Esiasetettu
nopeus 9
Esiasetettu
nopeus 10
0.00 P2.1.2 Hz 10.00 106
0.00 P2.1.2 Hz 12.50 126
0.00 P2.1.2 Hz 15.00 127
0.00 P2.1.2 Hz 17.50 128
0.00 P2.1.2 Hz 20.00 129
0.00 P2.1.2 Hz 22.50 130
0.00 P2.1.2 Hz 25.00 133
0.00 P2.1.2 Hz 27.50 134
0.00 P2.1.2 Hz 30.00 135
P2.1.25
P2.1.26
P2.1.27
P2.1.28
P2.1.29
Esiasetettu
nopeus 11
Esiasetettu
nopeus 12
Esiasetettu
nopeus 13
Esiasetettu
nopeus 14
Esiasetettu
nopeus 15
0.00 P2.1.2 Hz 32.50 136
0.00 P2.1.2 Hz 35.00 137
0.00 P2.1.2 Hz 40.00 138
0.00 P2.1.2 Hz 45.00 139
0.00 P2.1.2 Hz 50.00 140
* = Parametrin arvoa voi muuttaa vain, kun taajuusmuuttaja on pysäytettynä.
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 69

MULTI-STEP-NOPEUSSOVELLUS VACON · 69
4.4.3 TULOSIGNAALIT (OHJAUSPANEELI: MENU M2 -> G2.2)
Taulukko 26: Tulosignaalit, G2.2
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
Logiikka = 0
Ohj.sign. 1 = Käy
eteen
Ohj.sign. 2 = Käy
taakse
Logiikka = 1
Ohj.sign. 1 = Käy/seis
Ohj.sign. 2 = Taakse
Logiikka = 2
Ohj.sign. 1 = Käy/seis
Ohj.sign. 2 = Käynn.
sallittu
Logiikka = 3
Ohj.sign. 1 = Käypulssi (reuna)
P2.2.1 ***
Käynnistys-/
pysäytyslogiikka
0 6 0 300
Ohj.sign. 2 = Seispulssi
Logiikka = 4
Ohj.sign. 1 = Eteenpulssi (reuna)
Ohj.sign. 2 = Taaksepulssi (reuna)
Logiikka = 5
Ohj.sign. 1 = Käypulssi (reuna)
Ohj.sign. 2 = Taaksepulssi
Logiikka = 6
Ohj.sign. 1 = Käypulssi (reuna)
Ohj.sign. 2 = Sallipulssi
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 70

VACON · 70 MULTI-STEP-NOPEUSSOVELLUS
Taulukko 26: Tulosignaalit, G2.2
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
0 = Ei käytössä
1 = Ulkoinen vika,
sulk. kosketin
2 = Ulkoinen vika,
avaut. kosketin
3 = Käynn. sallittu
4 = Kiihd./hid.aikaval.
5 = Pakota op: riviliitin
6 = Pakota op:
P2.2.2 DIN3 toiminto 0 13 1 301
paneeli
7 = Pakota op: kenttäväylä
8 = Taakse (jos
P2.2.1 ≠ 2, 3 tai 6)
9 = Ryömintänopeus
10 = Vian kuittaus
11 = Ei kiihdytystä/
hidastusta
12 = DC-jarrutuskomento
13 = Vakionopeus
P2.2.3
****
P2.2.4 AI1-signaalialue 0 2 0 320
P2.2.5 AI1 oma minimi -160.00 160.00 % 0.00 321
P2.2.6 AI1 oma maksimi -160.00 160.00 % 100.00 322
P2.2.7
P2.2.8
P2.2.9
****
P2.2.10 AI2-signaalialue 0 2 1 325
AI1-signaalin
valinta
AI1-signaalin
kääntö
AI1-signaalin suo-
datusaika
AI2-signaalin
valinta
0.1 E.10 A1 377
0 1 0 323
0.00 10.00 s 0.10 324
0.1 E.10 A.2 388
0 = 0–10 V (0–20
mA**)
1 = 2–10 V (4–20
mA**)
2=Asiakaskohtainen
asetusalue**
0 = 0–10 V (0–20
mA**)
1 = 2–10 V (4–20
mA**)
2=Asiakaskohtainen
asetusalue**
4
P2.2.11 AI2 oma minimi -160.00 160.00 % 0.00 326
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 71
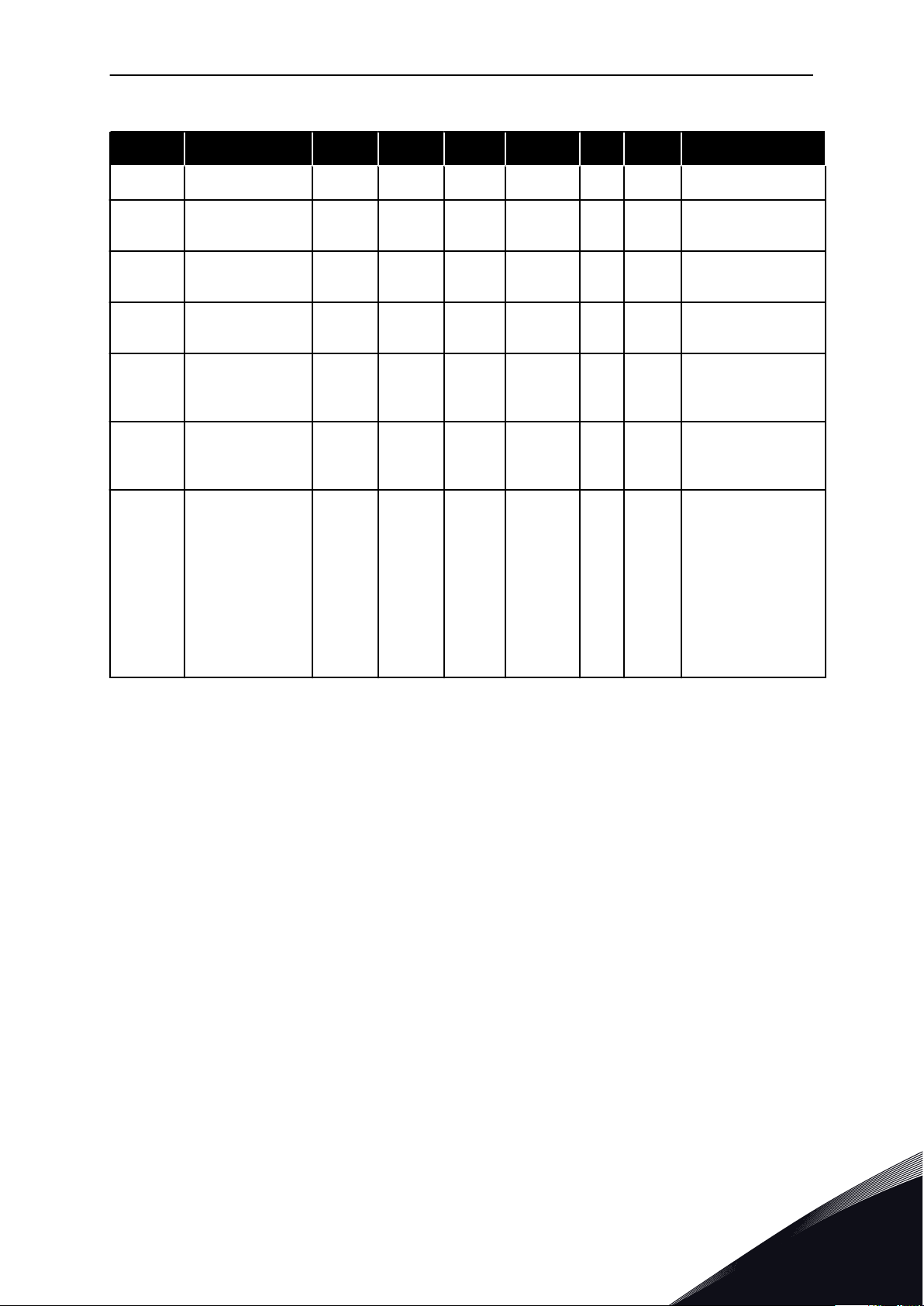
MULTI-STEP-NOPEUSSOVELLUS VACON · 71
Taulukko 26: Tulosignaalit, G2.2
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
P2.2.12 AI2 oma maksimi -160.00 160.00 % 100.00 327
P2.2.13
P2.2.14
P2.2.15
P2.2.16
P2.2.17
P2.2.18
AI2-signaalin
kääntö
AI2-signaalin suo-
datusaika
Ohjeen skaalauk-
sen minimiarvo
Ohjeen skaalauk-
sen maksimiarvo
Vapaa analogia-
tulo, signaalin
valinta
Vapaa analogia-
tulo, toiminto
0 1 0 328
0.00 10.00 s 0.10 329
0.00 320.00 Hz 0.00 303
0.00 320.00 Hz 0.00 304
0 2 0 361
0 4 0 362
0.00 = ei skaalausta
>0 = skaalattu maksimiarvo
0 = Ei käytössä
1 = AI1
2 = AI2
0 = Ei toimintoa
1 = Alentaa virtarajaa
(P2.1.5)
2 = Pienentää DCjarrutusvirtaa P2.4.8
3 = Pienentää kiihd.ja hidast.aikoja
4 = Alentaa momentin valvontarajaa
P2.3.15
OP = ohjauspaikka
sk = sulkeutuva kosketin
ak = avautuva kosketin
** = Muista kytkeä ryhmän X2 pistikkeet vastaavasti. Lisätietoja on tuotteen käyttöohjeessa.
*** = Parametrin arvoa voi muuttaa vain, kun taajuusmuuttaja on pysäytettynä.
**** = Ohjelmoi nämä parametrit TTF-ohjelmoinnilla.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 72

VACON · 72 MULTI-STEP-NOPEUSSOVELLUS
4.4.4 LÄHTÖSIGNAALIT (OHJAUSPANEELI: VALIKKO M2 -> G2.3
Taulukko 27: Lähtösignaalit, G2.3
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
P2.3.1 *
P2.3.2
P2.3.3
AO1-signaalin
valinta
Analogialähdön
toiminto
Analogilähdön
suodatusaika
0.1 E.10 A11 464
0 8 1 307
0.00 10.00 s 1.00 308
0 = Ei käytössä (20
mA / 10 V)
1 = Lähtötaajuus
(0–f
)
max
2 = Taajuusohje (0–
f
)
max
3 = Moottorin
nopeus (0–moottorin nimellisnopeus)
4 = Moottorin virta
(0–I
5 = Moottorin
momentti (0–T
tor
6 = Moottorin teho
(0–P
7 = Moottorin jännite (0–U
8 = Välipiirin jännite (0–1 000 V)
0 = Ei suodatusta
nMotor
)
nMotor
)
)
nMotor
nMo-
)
P2.3.4
P2.3.5
P2.3.6
Analogialähdön
kääntö
Analogialähdön
minimi
Analogialähdön
skaalaus
0 1 0 309
0 1 0 310
10 1000 % 100 311
0 = Ei käännetty
1 = Käänteinen
0 = 0 mA (0 V)
1 = 4 mA (2 V)
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 73

MULTI-STEP-NOPEUSSOVELLUS VACON · 73
Taulukko 27: Lähtösignaalit, G2.3
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
0 = Ei käytössä
1 = Valmis
2 = Käy
3 = Vika
4 = Vika käännetty
5 = Taajuusmuuttajan ylikuumentumisvaroitus
6 = Ulkoinen vika
tai varoitus
7 = Ohjearvon vika
tai varoitus
8= Varoitus
9 = Taakse
10 = Ryömintänopeus valittu
11 = Asetetussa
nopeudessa
12 = Moottorisäädin käytössä
13 = Käyttö-
P2.3.7
Digitaalilähdön 1
toiminta
0 22 1 312
taaj.rajan valvonta
1
14 = Käyttötaajuusrajan 2 valvonta
15 = Momenttirajan valvonta
16 = Ohjearvon
rajan valvonta
17 = Ulkoisen jarrun ohjaus
18 = Ohjauspaikka:
IO
19 = Taajuusmuuttajan lämpötilarajan valvonta
20 = Pyytämätön
pyörimissuunta
21 = Ulkoisen jarrun ohjaus (käänteinen)
22 = Termistorivika/-varoitus
P2.3.8
P2.3.9 RO2 toiminto 0 22 3 314
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
RO1 toiminto 0 22 2 313
Kuten parametri
2.3.7
Kuten parametri
2.3.7
4
Page 74
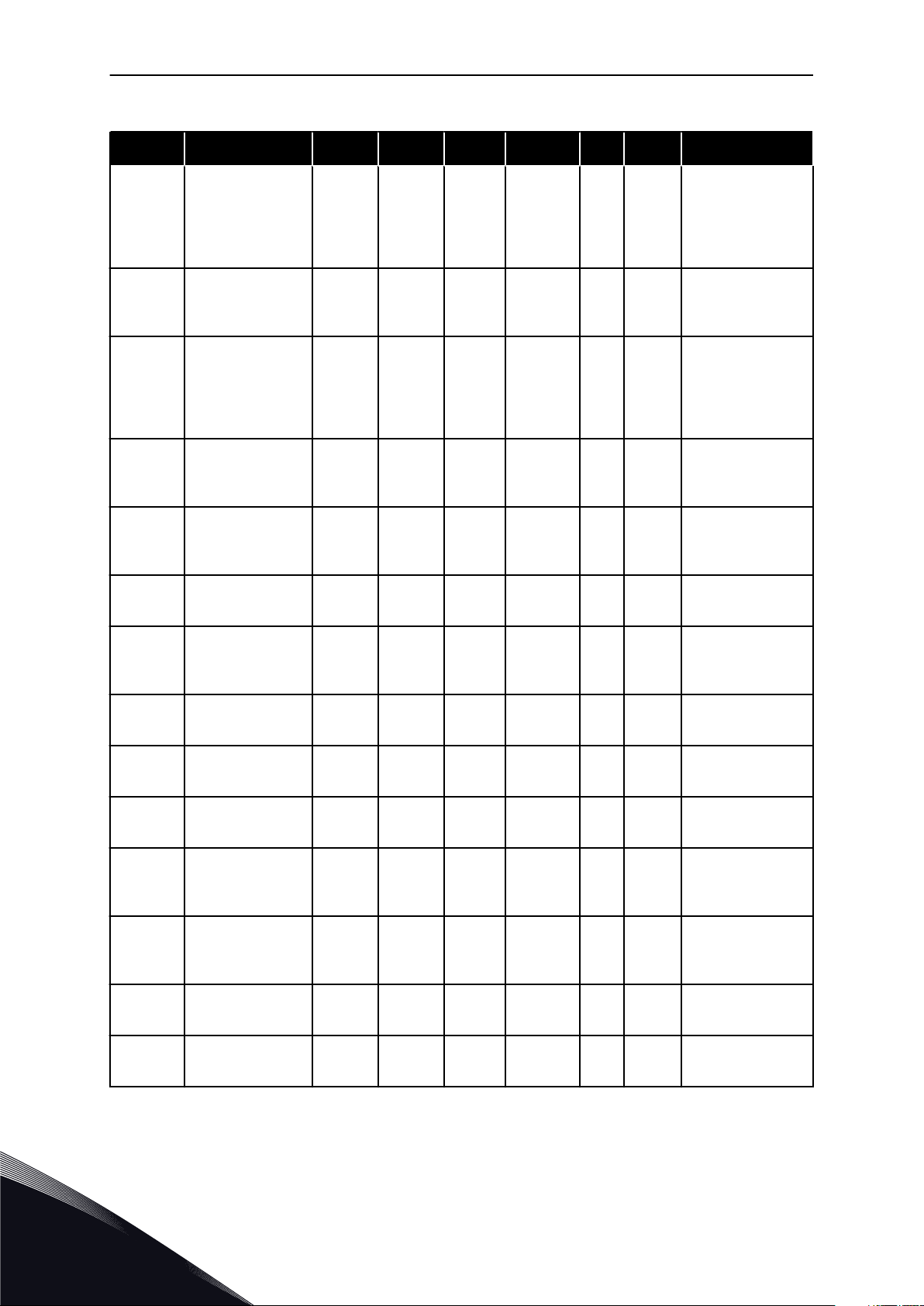
VACON · 74 MULTI-STEP-NOPEUSSOVELLUS
Taulukko 27: Lähtösignaalit, G2.3
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
0 = Ei rajaa
1 = Alarajan valvonta
2 = Ylärajan valvonta
0 = Ei rajaa
1 = Alarajan valvonta
2 = Ylärajan valvonta
P2.3.10
P2.3.11
P2.3.12
P2.3.13
Lähtötaajuusrajan
1 valvonta
Lähtötaajuusrajan
1 valvonta; val-
vonta-arvo
Lähtötaajuusrajan
2 valvonta
Lähtötaajuusrajan
2 valvonta; val-
vonta-arvo
0 2 0 315
0.00 320.00 Hz 0.00 316
0 2 0 346
0.00 320.00 Hz 0.00 347
P2.3.14
P2.3.15
P2.3.16
P2.3.17
P2.3.18
P2.3.19
P2.3.20
P2.3.21
Momenttirajan
valvontatoiminto
Momenttirajan
valvonta-arvo
Ohjearvorajan val-
vontatoiminto
Ohjearvorajan val-
vonta-arvo
Ulkoisen jarrun
OFF-viive
Ulkoisen jarrun
ON-viive
Taajuusmuuttajan
lämpötilarajan
valvonta
Taajuusmuuttajan
lämpötilarajan
arvo
0 2 0 348
-300.0 300.0 % 0.0 349
0 2 0 350
0.0 100.0 % 0.0 351
0.0 100.0 s 0.5 352
0.0 100.0 s 1.5 353
0 2 0 354
-10 100 °C 40 355
0 = Ei
1 = Alaraja
2 = Yläraja
0 = Ei
1 = Alaraja
2 = Yläraja
0 = Ei
1 = Alaraja
2 = Yläraja
4
P2.3.22 *
P2.3.23 *
Analogialähdön 2
skaalaus
Analogialähdön 2
toiminto
0.1 E.10 0.1 471
0 8 4 472
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Kuten parametri
2.3.2
Page 75

MULTI-STEP-NOPEUSSOVELLUS VACON · 75
Taulukko 27: Lähtösignaalit, G2.3
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
P2.3.24 *
P2.3.25 *
P2.3.26 *
P.2.3.27 *
Analogialähdön 2
suodatusaika
Analogialähdön 2
kääntö
Analogialähdön 2
minimi
Analogialähdön 2
skaalaus
0.00 10.00 s 1.00 473
0 1 0 474
0 1 0 475
10 1000 % 1.00 476
* = Ohjelmoi nämä parametrit TTF-ohjelmoinnilla.
0 = Ei suodatusta
0 = Ei käännetty
1 = Käänteinen
0 = 0 mA (0 V)
1 = 4 mA (2 V)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 76

VACON · 76 MULTI-STEP-NOPEUSSOVELLUS
4.4.5 TAAJUUSMUUTTAJAN OHJAUSPARAMETRIT (OHJAUSPANEELI: VALIKKO M2 -> G2.4
Taulukko 28: Taajuusmuuttajan ohjausparametrit, G2.4
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
0 = Lineaarinen
P2.4.1 Rampin 1 muoto 0.0 10.0 s 0.1 500
P2.4.2 Rampin 2 muoto 0.0 10.0 s 0.0 501
P2.4.3 Kiihtyvyysaika 2 0.1 3000.0 s 1.0 502
P2.4.4 Hidastuvuusaika 2 0.1 3000.0 s 1.0 503
P2.4.5 Jarrukatkoja 0 4 0 504
100 = täydet kiihd./
hid. lis.-/väh.ajat
0 = Lineaarinen
100 = täydet kiihd./
hid. lis.-/väh.ajat
0 = Ei käytössä
1 = Käytössä käynnin aikana
2 = Ulkoinen jarrukatkoja
3 = Käytössä
pysäytettynä /
käynnin aikana
4 = Käytössä käynnin aikana (ei testausta)
P2.4.6
P2.4.7 Pysäytystoiminto 0 3 0 506
P2.4.8 DC-jarrutusvirta 0.00 I
P2.4.9
P2.4.10
P2.4.11
Käynnistystoi-
minto
DC-jarrutusaika
pysäytyksessä
Taajuus, jolla DC-
jarrutus aloitetaan
hidastaen pysäy-
tettäessä
DC-jarrutusaika
käynnistyksessä
0 2 0 505
L
0.00 600.00 s 0.00 508
0.10 10.00 Hz 1.50 515
0.00 600.00 s 0.00 516
A 0.7 x I
H
507
0= Ramppi
1 = Vauhtikäynnistys
2=Ehdollinen vauhtikäynnistys
0 = Vapaasti pyörien
1= Ramppi
2 = Ramppi + käynnistys sallittu
vapaasti pyörien
3 = Vapaasti pyörien + käynnistys
sallittu ‑ramppi
0 = DC-jarru pois
pysäytyksessä
0 = DC-jarru pois
käynnistyksessä
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 77

MULTI-STEP-NOPEUSSOVELLUS VACON · 77
Taulukko 28: Taajuusmuuttajan ohjausparametrit, G2.4
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
P2.4.12 * Vuojarru 0 1 0 520
P2.4.13 Vuojarrutusvirta 0.00 I
L
A I
H
0 = Ei käytössä
0 = Päällä
519
4.4.6 ESTOTAAJUUKSIEN PARAMETRIT (OHJAUSPANEELI: MENU M2 -> G2.5)
Taulukko 29: Estotaajuuden parametrit, G2.5
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
P2.5.1
P2.5.2
P2.5.3
P2.5.4
Estotaajuusalue 1,
alaraja
Estotaajuusalue 1,
yläraja
Estotaajuusalue 2,
alaraja
Estotaajuusalue 2,
yläraja
0.00 320.00 Hz 0.00 509
0.00 320.00 Hz 0.00 510
0.00 320.00 Hz 0.00 511
0.00 320.00 Hz 0.00 512
0 = Estotaajuusalue 1 poissa käytöstä
0 = Estotaajuusalue 2 poissa käytöstä
P2.5.5
P2.5.6
P2.5.7
Estotaajuusalue 3,
alaraja
Estotaajuusalue 3,
yläraja
Ei kiihd./
hid.ramppia
0.00 320.00 Hz 0.00 513
0.00 320.00 Hz 0.00 514
0.1 10.0 x 1.0 518
0 = Estotaajuusalue 3 poissa käytöstä
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 78

VACON · 78 MULTI-STEP-NOPEUSSOVELLUS
4.4.7 MOOTTORIN OHJAUSPARAMETRIT (OHJAUSPANEELI: MENU M2 -> G2.6)
Taulukko 30: Moottorin ohjausparametrit, G2.6
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
0 = Taajuusohje
1 = Nopeusohje
NXP:
2 = Momenttiohjaus, open loop
3 = Nopeusohjaus,
closed loop
4 = Momenttiohjaus, closed loop
0 = Ei käytössä
1 = Automaattinen
momentin maksimointi
0 = Lineaarinen
1 = Neliöllinen
2 = Ohjelmoitava
3 = Lineaarinen,
vuon opt.
P2.6.1 *
P2.6.2 *
P2.6.3 *
Moottorin ohjaus-
tila
Moott./puh. opti-
mointi
U/f-suhteen
valinta
0 1/3 0 600
0 1 0 109
0 3 0 108
P2.6.4 *
P2.6.5 *
P2.6.6 *
P2.6.7 *
P2.6.8 *
P2.6.9 Kytkentätaajuus 1.0
P2.6.10 Ylijännitesäätäjä 0 2 1 607
P2.6.11 Alijännitesäätäjä 0 1 1 608
Kentän heiken-
nyspiste
Jännite kentän
heikennyspis-
teessä
U/f-käyrän keski-
pistetaajuus
U/f-käyrän keski-
pistejännite
Lähtöjännite nol-
lataajuudella
8.00 320.00 Hz 50.00 602
10.00 200.00 % 100.00 603
0.00 P2.6.4 Hz 50.00 604
0.00 100.00 % 100.00 605
0.00 40.00 % Vaihtelee 606
Vaihte-
lee
kHz Vaihtelee 601
0 = Ei käytössä
1 = Käytössä (ei
ramppia)
2 = Käytössä
(ramppi)
0 = Ei käytössä
1 = Käytössä
4
P2.6.12 Kuormitusjousto 0.00 100.00 % 0.00 620
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 79

MULTI-STEP-NOPEUSSOVELLUS VACON · 79
Taulukko 30: Moottorin ohjausparametrit, G2.6
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
0 = Ei käytössä
1=Tunnistus ilman
käyntiä
2 = Tunnistus ja ajo
P2.6.13 ID ajo 0 1/2 0 631
Closed loop ‑parametriryhmä 2.6.14
3 = Enkooderitunnistusajo
4 = Ei käytössä
5 = Tunnistusajo
epäonnistui
P2.6.14.1 Magnetointivirta 0.00 2 x I
P2.6.14.2
P2.6.14.3
P2.6.14.5
P2.6.14.6 Jättämän säätö 0 500 % 100 619
P2.6.14.7
P2.6.14.8
P2.6.14.9
P2.6.14.10
P2.6.14.11
Nopeusohjauksen
P-vahvistus
Nopeusohjauksen
I-aika
Kiihdytyksen kom-
pensointi
Magnetointivirta
käynnistyksessä
Magnetointiaika
käynnistyksessä
Nollanopeusaika
käynnistyksessä
Nollanopeusaika
pysäytyksessä
Käynnistysmo-
mentti
1 1000 30 613
0.0 3200.0 ms 30.0 614
0.00 300.00 s 0.00 626
0,00 I
0 60000 ms 0 628
0 32000 ms 100 615
0 32000 ms 100 616
0 3 0 621
H
L
A 0.00 612
A 0.00 627
0 = Ei käytössä
1 = Momenttimuisti
2 = Momenttiohje
3 = Käynnistysmomentti eteen/
taakse
P2.6.14.12
P2.6.14.13
P2.6.14.15
P2.6.14.17
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Käynnistysmo-
mentti ETEEN
Käynnistysmo-
mentti TAAKSE
Enkooderin suo-
datusaika
Virtaohjauksen P-
vahvistus
-300.0 300.0 % 0.0 633
-300.0 300.0 % 0.0 634
0.0 100.0 ms 0.0 618
0.00 100.00 % 40.00 617
4
Page 80

VACON · 80 MULTI-STEP-NOPEUSSOVELLUS
Taulukko 30: Moottorin ohjausparametrit, G2.6
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
Tunnistusparametriryhmä 2.6.15
P2.6.15.1 Nopeusaskel -50.0 50.0 0.0 0.0 1252
* = Parametrin arvoa voi muuttaa vain, kun taajuusmuuttaja on pysäytettynä.
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 81

MULTI-STEP-NOPEUSSOVELLUS VACON · 81
4.4.8 SUOJAUKSET (OHJAUSPANEELI: MENU M2 -> G2.7)
Taulukko 31: Suojaukset, G2.7
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
0 = Ei vastetta
1= Varoitus
2 = Varoitus +
edellinen taajuus
3 = Varoitus + vakionopeus 2.7.2
4 = Vika, pys.
2.4.7:n mukaan
5 = Vika, pysäytys
vapaasti pyörien
P2.7.1
Vaste 4 mA:n
ohjearvon vikaan
0 5 0 700
P2.7.2
P2.7.3
P2.7.4
P2.7.5
P2.7.6
P2.7.7 Maasulkusuojaus 0 3 2 703
P2.7.8
P2.7.9
4 mA:n ohjearvon
vian taajuus
Vaste ulkoiseen
vikaan
Tulovaiheen val-
vonta.
Vaste alijännitevi-
kaan
Lähtövaiheen val-
vonta
Moottorin lämpö-
suojaus
Moottorin ympä-
ristön lämpötila-
kerroin
0.00 P2.1.2 Hz 0.00 728
0 3 2 701
0 3 3 730
0 1 0 727
0 3 2 702
0 3 2 704
-100.0 100.0 % 0.0 705
0 = Ei vastetta
1= Varoitus
2 = Vika, pys.
2.4.7:n mukaan
3 = Vika, pysäytys
vapaasti pyörien
0 = Vika tallentuu
vikahistoriaan
Ei vian tallennusta
0 = Ei vastetta
1= Varoitus
2 = Vika, pys.
2.4.7:n mukaan
3 = Vika, pysäytys
vapaasti pyörien
Moottorin jäähdy-
P2.7.10
P2.7.11
P2.7.12 Käyttösuhde 0 150 % 100 708
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
tyskerroin nolla-
nopeudella
Moottorin läm-
pöaikavakio.
0.0 150.0 % 40.0 706
1 200 min Vaihtelee 707
4
Page 82

VACON · 82 MULTI-STEP-NOPEUSSOVELLUS
Taulukko 31: Suojaukset, G2.7
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
0 = Ei vastetta
1= Varoitus
P2.7.13 Jumisuojaus 0 3 0 709
2 = Vika, pys.
2.4.7:n mukaan
3 = Vika, pysäytys
vapaasti pyörien
P2.7.14 Jumivirta 0.00 2 x I
P2.7.15 Jumiaikaraja 1.00 120.00 s 15.00 711
P2.7.16 Jumitaajuusraja 1.00 P2.1.2 Hz 25.00 712
P2.7.17
P2.7.18 YLÖS momentista 10.0 150.0 % 50.0 714
P2.7.19
P2.7.20
P2.7.21
Alikuormitussuo-
jaus
Alikuormitussuojauksen nollataa-
juuskuorma
Alikuormitussuo-
jan aikaraja
Vaste termistori-
vikaan
0 3 0 713
5.0 150.0 % 10.0 715
2.00 600.00 s 20.00 716
0 3 2 732
H
A 1
H
710
0 = Ei vastetta
1= Varoitus
2 = Vika, pys.
2.4.7:n mukaan
3 = Vika, pysäytys
vapaasti pyörien
0 = Ei vastetta
1= Varoitus
2 = Vika, pys.
2.4.7:n mukaan
3 = Vika, pysäytys
vapaasti pyörien
4
P2.7.22
P2.7.23
Vaste kenttäväylä-
vikaan
Vaste korttipaik-
kavikaan
0 3 2 733
0 3 734
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Katso P2.7.21.
Katso P2.7.21.
Page 83

MULTI-STEP-NOPEUSSOVELLUS VACON · 83
4.4.9 AUTOMAATTISEN UUDELLEENKÄYNNISTYKSEN PARAMETRIT (OHJAUSPANEELI: MENU M2 -> G2.8)
Taulukko 32: Automaattisen uudelleenkäynnistyksen parametrit, G2.8
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
P2.8.1
P2.8.2 Yritysaika 0.00 60.00 s 30.00 718
P2.8.3
P2.8.4
P2.8.5
P2.8.6
P2.8.7
Jälleenkäynnis-
tysviive
Käynnistystoi-
minto
Yritysten määrä
alijännitelaukai-
sun jälkeen
Yritysten määrä
ylijännitelaukai-
sun jälkeen
Yritysten määrä
ylivirtalaukaisun
jälkeen
Yritysten määrä 4
mA:n ohjearvolau-
kaisun jälkeen
0.10 10.00 s 0.50 717
0 2 0 719
0 10 0 720
0 10 0 721
0 3 0 722
0 10 0 723
0= Ramppi
1 = Vauhtikäynnistys
2 = Parametrin
P2.4.6 mukaan
Yritysten määrä
P2.8.8
P2.8.9
P2.8.10
moottorin lämpö-
tilavian laukaisun
jälkeen
Yritysten määrä
ulkoisen vian lau-
kaisun jälkeen
Yritysten määrä
alikuormitusvika-
laukaisun jälkeen
0 10 0 726
0 10 0 725
0 10 0 738
4.4.10 PANEELIOHJAUS (OHJAUSPANEELI: VALIKKO M3)
Seuraavassa esitetään ohjauspaikan ja paneelista valittavan suunnan valintaparametrit.
Lisätietoja on tuotteen ohjekirjan kohdassa Paneeliohjausvalikko.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
4
Page 84

VACON · 84 MULTI-STEP-NOPEUSSOVELLUS
Taulukko 33: Paneelin ohjausparametrit, M3.
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
1 = Riviliitin
P3.1 Ohjauspaikka 1 3 1 125
P3.2 Paneelin ohjearvo P2.1.1 P2.1.2 Hz 0.00
2 = Paneeli
3 = Kenttäväylä
P3.3
R3.4 Pysäytyspainike 0 1 1 114
Suunta (panee-
lissa)
0 1 0 123
0 = Pysäytyspainikkeen rajallinen toiminta
1 = Pysäytyspainike aina käytössä
4.4.11 JÄRJESTELMÄVALIKKO (OHJAUSPANEELI: VALIKKO M6)
Tuotteen käyttöoppaassa on tietoja taajuusmuuttajan yleiseen käyttöön liittyvistä
parametreista ja toiminnoista, kuten sovelluksen sekä kielen valinnasta ja mukautetuista
parametriryhmistä. Käyttöoppaassa on myös yleisiä laitteisto- ja ohjelmistotietoja.
4.4.12 LAAJENNUSKORTIT (OHJAUSPANEELI: VALIKKO M7)
M7-valikko näyttää ohjauskorttiin liitetyt lisäkortit sekä kortteihin liittyvät tiedot. Lisätietoja
on tuotteen ohjekirjassa.
4
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 85

PID-SÄÄTÖSOVELLUS VACON · 85
5 PID-SÄÄTÖSOVELLUS
5.1 YLEISTÄ
Valitse PID-säätösovellus valikon M6 sivulla S6.2.
PID-säätösovelluksessa on kaksi riviliitinohjauspaikkaa. Paikka A on PID-säätimelle, ja
lähde B on suora taajuusohje. Ohjauspaikka A tai B valitaan digitaalitulolla DIN6.
PID-säätimen ohje voidaan valita analogiatuloista, kenttäväylältä, moottoripotentiometrista,
ottamalla PID-ohjearvo 2 käyttöön tai käyttämällä ohjauspaneelin ohjearvoa. PID-säätimen
oloarvo voidaan valita analogiatuloista, kenttäväylältä tai moottorin oloarvoista tai näiden
matemaattisten funktioiden kautta.
Suoraa taajuusohjetta voidaan käyttää ohjaukseen ilman PID-säädintä. Se valitaan
analogiatuloista, kenttäväylältä, moottoripotentiometrista tai ohjauspaneelista.
PID-sovellusta käytetään yleensä esimerkiksi tasonmittauksen tai pumppujen ja puhaltimien
ohjaukseen. Näissä sovelluksissa PID-säätösovellus antaa käyttöön kitkattoman hallinnan
sekä integroidun mittaus- ja ohjauspaketin, jossa ei tarvita lisäosia.
Digitaalitulot DIN2, DIN3 ja DIN5 sekä kaikki lähdöt ovat vapaasti ohjelmoitavia.
•
Lisätoiminnot:
Analogiatulosignaalialueen valinta.
•
Kahden taajuusrajan valvonta.
•
Momenttirajan valvonta.
•
Ohjearvorajan valvonta.
•
Toisen rampin ja S-rampin ohjelmointi.
•
Ohjelmoitavat Käy- ja Seis-toiminnot.
•
DC-jarru käynnistyksessä ja pysäytyksessä.
•
Kolme estotaajuusaluetta.
•
Ohjelmoitava U/f-käyrä ja kytkentätaajuus.
•
Automaattinen uudelleenkäynnistys.
•
Moottorin lämpö- ja jumisuojaus: täysin ohjelmoitavissa – pois, varoitus, vika.
•
Moottorin alikuormitussuojaus.
•
Tulo- ja lähtövaiheen valvonta.
•
Summapistetaajuuden lisäys PID-lähtöön.
•
PID-säädintä voidaan käyttää myös I/O B ‑ohjauspaikasta, paneelista ja kenttäväylältä.
•
PehmoOP-toiminto.
•
Lepotoiminto.
•
PID-säätösovelluksen parametrit selitetään luvussa 9 Parametrikuvaukset jäljempänä tässä
oppaassa. Selitykset on järjestetty parametrien tunnusten mukaan.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5
Page 86

-
+
1
6
2
3
4
5
18
19
20
12
7
13
8
9
10
14
15
16
21
22
23
11
17
24
25
26
Kaksijohdinlähetin
Viitepotentiometri
1–10 kΩ
mA
KÄY
VALMIS
AO1-
DO1
+24 V
GND
GND
DIN1
DIN2
DIN3
DIN4
DIN5
DIN6
RO1
RO1
RO1
CMA
CMB
RO2
RO2
RO2
OPTA1
OPTA2 / OPTA3 *)
Liitin Signaali Kuvaus
+10 V
ref.
AI1+
AI1-
AI2+
AI2-
+24 V
Ohjausjännitelähtö
I/O maa
Analogiatulo 2
Virta-alue 0–20 mA
Ohjelmoitava (P2.2.9)
Ohjausjännitelähtö
I/O maa
Paikka A: Käy eteen
Ri smin = 5kΩ
Vian kuittaus
Ohjelmoitava (P2.2.2)
Ulkoinen vika -tulo
Ohjelmoitava (P2.2.2)
Paikka B: Käy eteen
Ri min = 5 kΩ
Ryömintänopeusvalinta
Ohjelmoitava (P2.2.3)
Ohjauspaikan A/B valinta
Ohjauspaikan B käynnistyssignaali
Taajuuden ohjearvo (P2.2.5.)
Yhteinen (DIN 1 – DIN 3)
Yhteinen tuloille
DIN4–DIN6
Ohjausjännitelähtö
I/O maa
Analogialähtö 1
Lähtötaajuus
Ohjelmoitava (P2.3.2)
Digitaalilähtö
VALMIS
Ohjelmoitava (P2.3.7)
Open collector, I≤50 mA,
U≤48 VDC
Relelähtö 1
KÄY
Ohjelmoitava
(P2.3.8)
Relelähtö 2
VIKA
Ohjelmoitava
(P2.3.9)
AO1+
Analogiatulo 1
PID-ohjearvo
Ohjearvon ja
ohjaustulojen maa
Analogiatulo 2
PID-oloarvo 1
Kosketin kiinni = käy eteenpäin
Kosketin kiinni = vian kuittaus
Kosketin kiinni = käy taaksepäin
Kosketin kiinni = vika
Kosketin auki = ei vikaa
Potentiometrin ohjejännite jne.
Analogiatulo 1
Jännitealue 0–10 V DC
Ohjelmoitava (P2.1.11)
Jännite kytkimiin jne. maks. 0,1 A
Jännite kytkimiin (katso 6)
Kytke GND tai +24 V
Olo-
arvo
(0)4–20
mA
Kytke GND tai +24 V
Ohjearvon ja ohjaustulojen maa
Ohjearvon ja ohjaustulojen maa
Alue 0–20 mA/RL,
max. 500 Ω
Kosketin auki = ohjauspaikka A
aktiivinen Kosketin kiinni =
ohjauspaikka B aktiivinen
Kosketin kiinni = ryömintänopeus aktiivinen
VACON · 86 PID-SÄÄTÖSOVELLUS
5.2 OHJAUS-I/O
Kuva 13: PID-säätösovelluksen tulojen ja lähtöjen oletusasetukset (kaksijohdinlähetin)
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 87

Pistikeryhmä X3:
CMA:n ja CMB:n maadoitus
CMB kytketty maahan
CMA kytketty maahan
CMB erotettu maasta
CMA erotettu maasta
CMB ja CMA sisäisesti kytketty
yhteen, erotettu maasta
= tehdasasetus
PID-SÄÄTÖSOVELLUS VACON · 87
*) Lisäkortin A3 toisessa relelähdössä ei ole avoimen koskettimen liitintä (liitin 24 puuttuu).
HUOMAUTUS!
Katso alla olevat pistikevalinnat. Lisätietoja on tuotteen ohjekirjassa.
Kuva 14: Pistikevalinnat
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5
Page 88
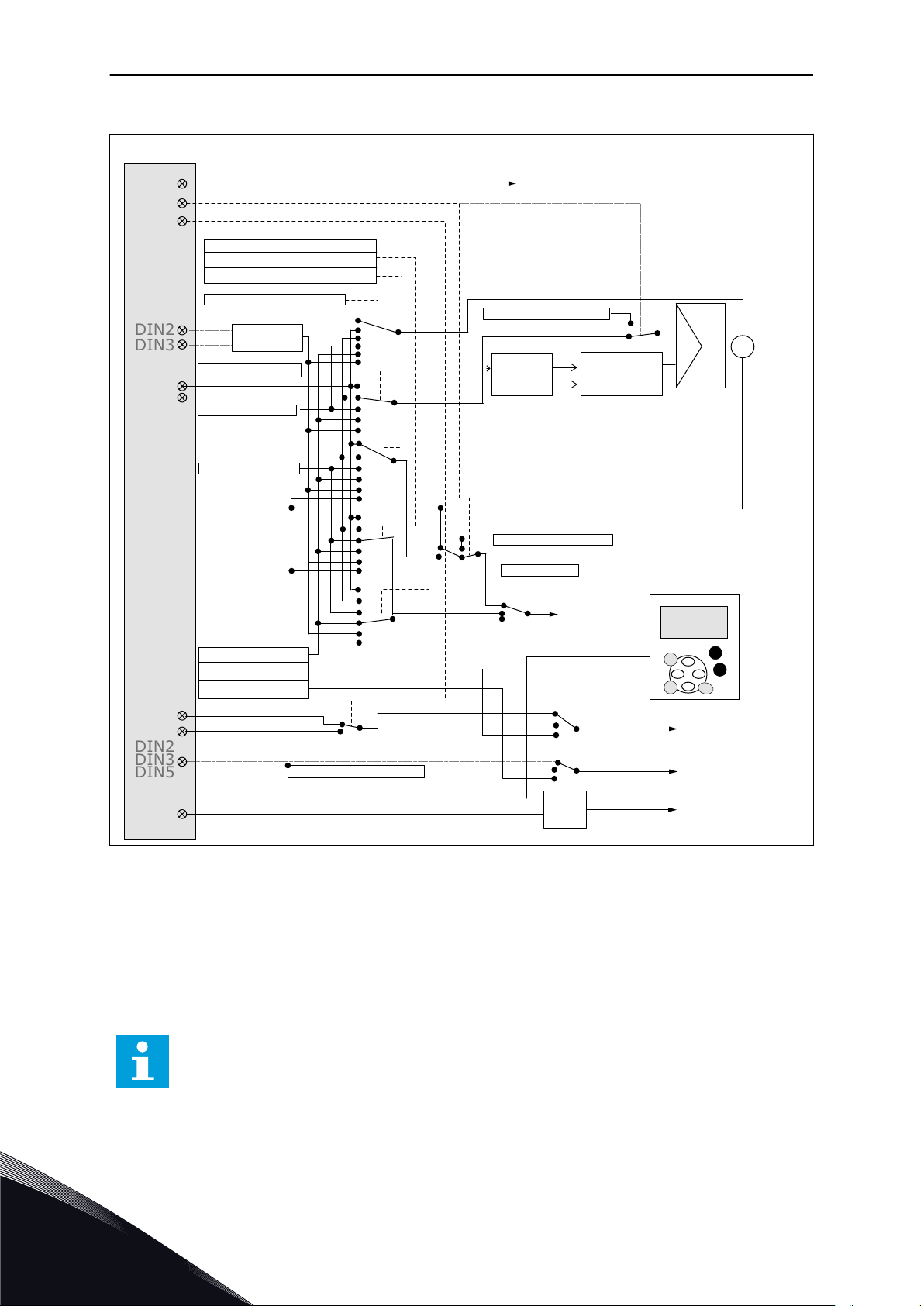
DIN2
DIN5
DIN3
DIN2
DIN3
DIN5
DIN6
DIN2
DIN3
AI1
AI2
0
1
2
3
4
0
1
2
3
4
5
+A
A
B
0
1
2
3
4
5
0
1
2
3
4
5
K
0
1
2
3
4
5
F
PID
+
DIN1
DIN4
A
B
A
B
A/B
Sisäinen taakse
Sisäisen vian kuittaus
Vian kuittaus -tulo (ohjelmoitava)
3.3 Paneelin suunta
Sisäinen Käy/Seis
Ohje kenttäväylältä
Käy/Seis kenttäväylältä
Suunta kenttäväylältä
Ulkoinen vika (ohjelmoitava)
Ryömintänopeus (ohjelmoitava)
Paikan A/B valinta
2.2.4 PID-pääohje
Ylös
Alas
2.1.11 PID-ohjearvo
Riviliitin taakse
R3.4 PID-paneeliohje
R3.2 Paneeliohje
Olo 1
Olo 2
R3.5 PID-paneeliohje 2
Käytä PID-paneeliohjetta
2 (DIN5 = 13)
Käy; Paikka A
Käy; Paikka B
Käy/Seis
Käy/Seis-painikkeet
Sisäinen
taajuusohje
2.1.19 Ryömintänopeusohje
Paneeli
Kenttäväylä
Kuittauspainike
3.1 Ohjauspaikka
2.2.7 Kenttäväylän ohjearvo
2.2.6 Paneelin ohjearvo
2.2.5 Riviliittimen B ohje
≥ 1
Oloarvon
valinta, par.
2.2.9 ja
2.2.10
Oloarvon
valinta
par. 2.2.8
Moottoripotentiometri
VACON · 88 PID-SÄÄTÖSOVELLUS
5.3 PID-SÄÄTÖSOVELLUKSEN OHJAUSSIGNAALILOGIIKKA
Kuva 15: PID-säätösovelluksen ohjaussignaalilogiikka
5.4 PID-SÄÄTÖSOVELLUKSEN PARAMETRILUETTELOT
5.4.1 VALVONTA-ARVOT (OHJAUSPANEELI: VALIKKO M1)
Valvonta-arvoja ovat parametrien ja signaalien todelliset arvot sekä niiden tilat ja mitatut
arvot. Näitä arvoja ei voi muokata.
HUOMAUTUS!
Valvonta-arvot V1.19–V1.22 ovat käytettävissä vain PID-säätösovelluksessa.
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 89

PID-SÄÄTÖSOVELLUS VACON · 89
Taulukko 34: Valvonta-arvot
Numero Valvonta-arvo Laite ID Kuvaus
V1.1 Lähtötaajuus Hz 1
V1.2 Taajuusohje Hz 25
V1.3 Moottorin nopeus rpm 2
V1.4 Moottorin virta A 3
V1.5 Moottorin momentti % 4
V1.6 Moottorin teho % 5
V1.7 Moottorin jännite V 6
V1.8 Välipiirin jännite V 7
1.9 Laitteen lämpötila °C 8
1.10 Moottorin lämpötila % 9
V1.11 Analogiatulo 1 V/mA 13
V1.12 Analogiatulo 2 V/mA 14
V1.13 Analogiatulo 3 27
V1.14 Analogiatulo 4 28
V1.15 DIN 1, 2, 3 15
V1.16 DIN 4, 5, 6 16
V1.17 DO1, RO1, RO2 17
V1.18 Analoginen I
V1.19 PID-säät.ohje % 20
V1.20 PID-oloarvo % 21
V1.21 PID-virheen arvo % 22
V1.22 PID lähtöarv % 23
V1.23
Oloarvon erikois-
näyttö
out
mA 26
29
V1.24 PT-100-lämpötila ºC 42
G1.25 Valvonta-arvot
V1.26.1 Virta A 1113
V1.26.2 Momentti % 1125
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5
Page 90

VACON · 90 PID-SÄÄTÖSOVELLUS
Taulukko 34: Valvonta-arvot
Numero Valvonta-arvo Laite ID Kuvaus
V1.26.3 DC-jännite V 44
V1.26.4 Tilasana 43
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 91
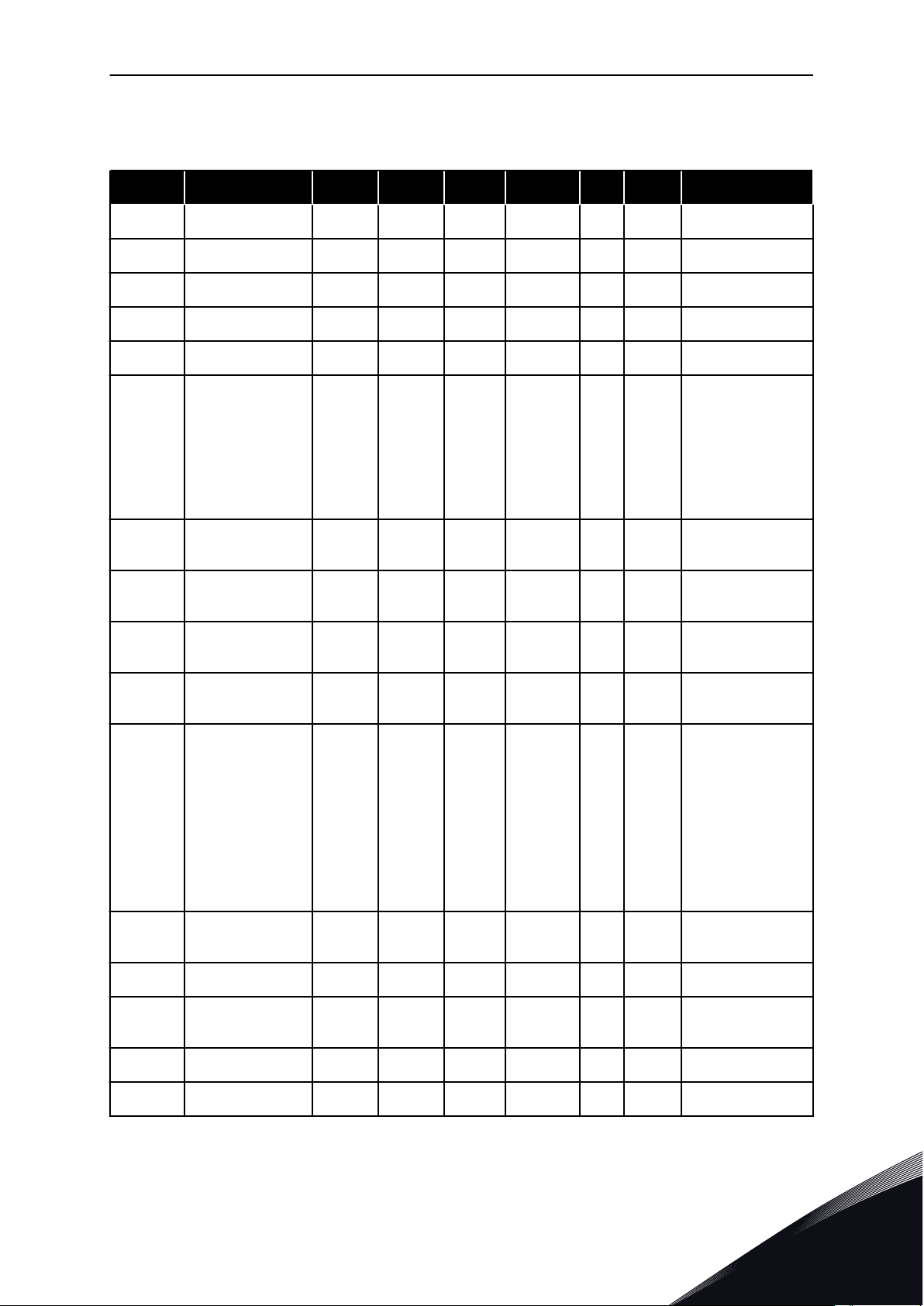
PID-SÄÄTÖSOVELLUS VACON · 91
5.4.2 PERUSPARAMETRIT (OHJAUSPANEELI: MENU M2 -> G2.1)
Taulukko 35: Perusparametrit G2.1
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
P2.1.1 Minimitaajuus 0.00 P2.1.2 Hz 0.00 101
P2.1.2 Maksimitaajuus P2.1.1 320.00 Hz 50.00 102
P2.1.3 Kiihdytysaika 1 0.1 3000.0 s 0.0 103
P2.1.4 Hidastusaika 1 0.1 3000.0 s 0.0 104
P2.1.5 Virtaraja 0.1 x I
P2.1.6 *
P2.1.7 *
P2.1.8 *
P2.1.9 *
P2.1.10 *
P2.1.11 *
moottorin nimel-
lisjännite
moottorin nimel-
listaajuus
Moottorin nimel-
lisnopeus
Moottorin nimel-
lisvirta
Moottorin teho-
kerroin
PID-säätimen
ohjearvosignaali
(paikka A)
0.1 x I
2 x I
H
180 690 V
8.00 320.00 Hz 50.00 111
24 20 000 rpm 1440 112
H
0.30 1.00 0.85 120
0 4 1 332
2 x I
H
H
A I
NX2: 230
NX5: 400
NX6: 690
A I
L
V
V
V
H
107
110
113
0 = AI1
1 = AI2
2 = PID-ohjearvo
paneelin ohjaussivulta, P3.4
3 = PID-ohjearvo
kenttäväylältä
(ProcessDataIN 1)
4 = Moottoripotentiometri
P2.1.12
P2.1.13 PID-säädin, I-aika 0.00 320.00 s 1.00 119
P2.1.14
P2.1.15 Lepotaajuus 0.00 P2.1.2 Hz 10.00 1016
P2.1.16 Lepoviive 0 3600 s 30 1017
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
PID-säätimen
vahvistus
PID-säädin, D-
aika
0.0 1000.0 % 100.0 118
0.00 100.00 s 0.00 132
5
Page 92

VACON · 92 PID-SÄÄTÖSOVELLUS
Taulukko 35: Perusparametrit G2.1
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
P2.1.17 Havahtumisraja 0.00 100.00 % 25.00 1018
0 = Havahtuminen,
kun havahtumis-
P2.1.18
Havahtumistoi-
minto
0 1 0 1019
raja (2.1.17) alittuu
1 = Havahtuminen,
kun havahtumisraja (2.1.17) ylittyy
P2.1.19
Ryömintänopeus-
ohje
0.00 P2.1.2 Hz 10.00 124
* = Parametrin arvoa voi muuttaa vain, kun taajuusmuuttaja on pysäytettynä.
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 93

PID-SÄÄTÖSOVELLUS VACON · 93
5.4.3 TULOSIGNAALIT
Taulukko 36: Tulosignaalit, G2.2
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
0 = Ei käytössä
1 = Ulkoinen vika
(sk)
2 = Ulkoinen vika
(ak)
3 = Käynn. sallittu
4 = Kiihd./hid.aikavalinta
5=OP: Riviliittimet
(ID125)
6 = OP: Paneeli
(ID125)
P2.2.1 ** DIN2 toiminto 0 13 1 319
7 = OP: Kenttäväylä
(ID125)
8 = Eteen/taakse
9 = Ryömintätaajuus (sk)
10 = Vian kuittaus
(sk)
11 = Ei kiihdyt./
hidast. (sk)
12 = DC-jarrutuskomento
13 = Moottoripot.
YLÖS (sk)
P2.2.2 **
P2.2.3 ** DIN5 toiminto 0 13 9 330
P2.2.4 **
DIN3 toiminto 0 13 10 301
PID-summapis-
teen ohjearvo
0 7 0 376
Katso edellinen,
paitsi:
13 = Moottoripot.
ALAS (sk)
Katso edellinen,
paitsi:
13 = Käytä PIDohjearvoa 2
0 = Suora PID-lähdön arvo
1 = AI1 + PID-lähtö
2 = AI2 + PID-lähtö
3 = AI3 + PID-lähtö
4 = AI4 + PID-lähtö
5 = PID:n paneeli +
PID-lähtö
6 = Kenttäväylä +
PID-lähtö (ProcessDataIN3)
7 = Moottoripot. +
PID-lähtö
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5
Page 94
VACON · 94 PID-SÄÄTÖSOVELLUS
Taulukko 36: Tulosignaalit, G2.2
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
0 = AI1
1 = AI2
2 = AI3
3 = AI4
4 = Paneelin
ohjearvo
5 = Kenttäväylän
ohjearvo
(FBSpeedReference)
6 = Moottoripotentiometri
7 = PID-säädin
P2.2.5 **
I/O B -ohjearvon
valinta
0 7 1 343
P2.2.6 **
P2.2.7 **
P2.2.8 ** Oloarvon valinta 0 7 0 333
P2.2.9 ** Oloarvon 1 valinta 0 10 2 334
Paneeliohjauksen
ohjearvon valinta
Kenttäväyläoh-
jauksen ohjearvo
0 7 4 121
0 7 5 122
Kuten P2.2.5
Kuten P2.2.5
0 = Oloarvo 1
1 = Oloarvo 1 +
Oloarvo 2
2 = Oloarvo 1 - Oloarvo 2
3 = Oloarvo 1 x
Oloarvo 2
4=Min(O.arvo 1,
O.arvo 2)
5=Max(O.arvo 1,
O.arvo 2)
6 = Keskiarvo(O.arvo 1,
O.arvo 2)
7 = Neliöjuuri(O.arvo1) +
Neliöjuuri(O.arvo2)
0 = Ei käytössä
1 = AI1-signaali (ckortti)
2 = AI2-signaali (ckortti)
3 = AI3
4 = AI4
5 = Kenttäväylän
ProcessDataIN2
6 = Moottorin
momentti
7 = Moottorin
nopeus
8 = Moottorin virta
9 = Moottorin teho
10 = Enkooderin
taajuus
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 95
PID-SÄÄTÖSOVELLUS VACON · 95
Taulukko 36: Tulosignaalit, G2.2
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
0 = Ei käytössä
1=AI1 signaali
2=AI2 signaali
3 = AI3
4 = AI4
5 = Kenttäväylän
ProcessDataIN3
P2.2.10 ** Oloarvon 2 tulo 0 10 0 335
6 = Moottorin
momentti
7 = Moottorin
nopeus
8 = Moottorin virta
9 = Moottorin teho
10 = Enkooderin
taajuus
P2.2.11
P2.2.12
P2.2.13
P2.2.14
P2.2.15
***
P2.2.16 AI1-signaalialue 0 2 0 320
P2.2.17
P2.2.18
Oloarvon 1 mini-
miskaalaus
Oloarvon 1 maksi-
miskaalaus
Oloarvon 2 mini-
miskaalaus
Oloarvon 2 maksi-
miskaalaus
AI1-signaalin
valinta
AI1 oma minimia-
setus
AI1 oma maksi-
miasetus
–1600.0 1600.0 % 0.0 336
–1600.0 1600.0 % 100.0 337
–1600.0 1600.0 % 0.0 338
–1600.0 1600.0 % 100.0 339
0.1 E.10 A.1 377
–160.00 160.00 % 0.00 321
–160.00 160.00 % 100.0 322
0=0–10 V (0–20
mA*)
1 = 2–10 V (4–20
mA*)
2=Asiakaskohtainen alue*
P2.2.19 AI1:n kääntö 0 1 0 323
P2.2.20 AI1 suodatusaika 0.00 10.00 s 0.10 324
P2.2.21
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
AI2-signaalin
valinta
0.1 E.10 A.2 388
0 = Ei käännetty
1 = Käänteinen
0 = 0–20 mA (0–10
V*)
1=4–20 mA (2–10
V*)
2=Asiakaskohtainen alue*
5
Page 96

VACON · 96 PID-SÄÄTÖSOVELLUS
Taulukko 36: Tulosignaalit, G2.2
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
0 = 0–20 mA*
P2.2.22 AI2-signaalialue 0 2 1 325
1 = 4–20 mA*
2=Asiakaskohtainen*
P2.2.23
P2.2.24
P2.2.25 AI2:n kääntö 0 1 0 328
P2.2.26 AI2 suodatusaika 0.00 10.00 s 0.10 329
P2.2.27
P2.2.28
P2.2.29
AI2 oma minimia-
setus
AI2 oma maksi-
miasetus
Moottoripotentio-
metrin ramppi
Moottoripotentio-
metrin taajuusoh-
jeen muistin nol-
laus
Moottoripotentio-
metrin PID-
ohjearvomuistin
nollaus
-160.00 160.00 % 0.00 326
-160.00 160.00 % 0.00 327
0.1 2000.0 Hz/s 10.0 331
0 2 1 367
0 2 0 370
0 = Ei käännetty
1 = Käänteinen
0 = Ei palautusta
1 = Nollaus pysäytyksen tai virrankatkaisun yhteydessä
2 = Palautus virrankatkaisun
yhteydessä
0 = Ei palautusta
1 = Nollaus pysäytyksen tai virrankatkaisun yhteydessä
2 = Palautus virrankatkaisun
yhteydessä
5
P2.2.30 PID-minimiraja -1600.0 P2.2.31 % 0.0 359
P2.2.31 PID-maksimiraja P2.2.30 1600.0 % 100.0 360
P2.2.32 Virhearvon kääntö 0 1 0 340
P2.2.33
P2.2.34
P2.2.35
PID-ohjearvon
nousuaika
PID-ohjearvon
laskuaika
Ohjearvon skaa-
lauksen mini-
miarvo, paikka B
0.1 100.0 s 5.0 341
0.1 100.0 s 5.0 342
0.00 320.0 Hz 0.00 344
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
0 = Ei kääntöä
1 = Kääntö
Page 97

PID-SÄÄTÖSOVELLUS VACON · 97
Taulukko 36: Tulosignaalit, G2.2
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
Ohjearvon skaa-
P2.2.36
P2.2.37 PehmoOP vaihto 0 1 0 366
lauksen maksi-
miarvo, paikka B
0.00 320.0 Hz 0.00 345
0 = Pidä ohje
1 = Kopioi nykyinen
ohje
P2.2.38
***
P2.2.39 AI3-signaalialue 0 1 1 143
P2.2.40 AI3:n kääntö 0 1 0 151
P2.2.41 AI3 suodatusaika 0.00 10.00 s 0.10 142
P2.2.42
***
P2.2.43 AI4-signaalialue 0 1 1 154
P2.2.44 AI4:n kääntö 0 1 0 162
P2.2.45 AI4 suodatusaika 0.00 10.00 s 0.10 153
P2.2.46
AI3-signaalin
valinta
AI4-signaalin
valinta
Oloarvon erikois-
näytön minimi
0.1 E.10 0.1 141
0.1 E.10 0.1 152
0 30000 0 1033
0 = Signaalialue 0–
10 V
1 = Signaalialue 2–
10 V
0 = Ei käännetty
1 = Käänteinen
0 = Signaalialue 0–
10 V
1 = Signaalialue 2–
10 V
0 = Ei käännetty
1 = Käänteinen
P2.2.47
P2.2.48
P2.2.49
Oloarvon erikois-
näytön maksimi
Oloarvon erikois-
näytön desimaalit
Oloarvon erikois-
näytön yksikkö
0 30000 100 1034
0 4 1 1035
0 29 4 1036
Katso ID1036
luvussa 9 Paramet-
rikuvaukset.
OP = ohjauspaikka
sk = sulkeutuva kosketin
ak = avautuva kosketin
* = Muista kytkeä ryhmän X2 pistikkeet vastaavasti. Lisätietoja on tuotteen käyttöohjeessa.
** = Parametrin arvoa voi muuttaa vain, kun taajuusmuuttaja on pysäytettynä.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
5
Page 98

VACON · 98 PID-SÄÄTÖSOVELLUS
*** = Ohjelmoi nämä parametrit TTF-ohjelmoinnilla.
5
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 99

PID-SÄÄTÖSOVELLUS VACON · 99
5.4.4 LÄHTÖSIGNAALIT (OHJAUSPANEELI: VALIKKO M2 -> G2.3
Taulukko 37: Lähtösignaalit, G2.3
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
P2.3.1 *
P2.3.2
AO1-signaalin
valinta
Analogialähdön
toiminto
0.1 E.10 A.1 464
0 14 1 307
0 = Ei käytössä
1 = Lähtötaajuus
(0–f
)
max
2 = Taajuusohje (0–
f
)
max
3 = Moottorin
nopeus (0–moottorin nimellisnopeus)
4 = Moottorin virta
(0–I
5 = Moottorin
momentti (0–T
tor
6 = Moottorin teho
(0–P
7 = Moottorin jännite (0–U
8 = Välipiirin jännite (0–1 000 V)
9 = PID-säätimen
ohjearvo
10 = PID-säätimen
oloarvo 1
11 = PID-säätimen
oloarvo 2
12 = PID-säätimen
virhearvo
13 = PID-säätimen
lähtö
14 = PT100-lämpötila
nMotor
)
nMotor
)
)
nMotor
nMo-
)
P2.3.3
P2.3.4
P2.3.5
P2.3.6
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Analogilähdön
suodatusaika
Analogialähdön
kääntö
Analogialähdön
minimi
Analogialähdön
skaalaus
0.00 10.00 s 1.00 308
0 1 0 309
0 1 0 310
10 1000 % 100 311
0 = Ei käännetty
1 = Käänteinen
0 = 0 mA (0 V)
1 = 4 mA (2 V)
5
Page 100

VACON · 100 PID-SÄÄTÖSOVELLUS
Taulukko 37: Lähtösignaalit, G2.3
Numero Parametri Min. Maks. Yks. Oletus Oma ID Kuvaus
0 = Ei käytössä
1 = Valmis
2 = Käy
3 = Vika
4 = Vika käännetty
5 = Taajuusmuuttajan ylikuumentumisvaroitus
6 = Ulkoinen vika
tai varoitus
7 = Ohjearvon vika
tai varoitus
8= Varoitus
9 = Taakse
10 = Vakionopeus 1
11 = Asetetussa
nopeudessa
12 = Moottorisää-
P2.3.7
Digitaalilähdön 1
toiminta
0 23 1 312
din käytössä
13 = Käyttötaaj.rajan valvonta
1
14 = Käyttötaajuusrajan 2 valvonta
15 = Momenttirajan valvonta
16 = Ohjearvon
rajan valvonta
17 = Ulkoisen jarrun ohjaus
18 = Ohjauspaikka:
IO
19 = Taajuusmuuttajan lämpötilarajan valvonta
20 = Pyytämätön
pyörimissuunta
5
P2.3.7
P2.3.8 RO1 toiminto 0 23 2 313
P2.3.9 RO2 toiminto 0 23 3 314
Digitaalilähdön 1
toiminta
0 23 1 312
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
21 = Ulkoisen jarrun ohjaus (käänteinen)
22 = Termistorivika/-varoitus
23 = Kenttäväylän
DIN1
Kuten parametri
2.3.7
Kuten parametri
2.3.7
 Loading...
Loading...