

Page 1

vacon nx
®
ac drives
all-in-one
사용자 매뉴얼
Page 2

2• vacon
CONTENTS
VACON NX "All in One" APPLICATION MANUAL
INDEX
1. 베이직 어플리케이션
2. 스탠다드 어플리케이션
3. LOCAL/REMOTE 제어 어플리케이션
4. 다단속제어 어플리케이션
5. PID 제어 어플리케이션
6. MULTI-PURPOSE 제어 어플리케이션
7. 펌프 및 팬 제어 어플리케이션
8. 파라미터 설명
9. 부록
10. 폴트 추적
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 3

vacon • 3
“ All in One” 어플리케이션 매뉴얼에 대하여
올인원 어플리케이션 매뉴얼에서 귀하는 올인원 어플리케이션 패키지에 포함되어있는 여러 어플리케이션
들의 정보를 알 수 있을 것입니다. 이 어플리케이션들이 귀하의 프로세스 요구사항에 맞지 않는다면, 스
페셜 어플리케이션의 정보에 대하여 제조사에 연락해 주시기 바랍니다.
본 매뉴얼은 책자 및 전자파일로 제공이 가능합니다. 저희는 귀하에게 가능하다면 전자파일을 사용하시기
를 권장 드립니다. 만약 전자파일을 소지하고 계시다면 아래와 같은 장점들을 활용하실 수 있습니다 :
본 매뉴얼은 여러 링크 및 매뉴얼 내 다른 페이지로의 상호 참조 기능을 포함하고 있어서 사용자가 매뉴
얼에서 쉽게 이동 하여 어떤 사항을 확인하거나 찾는 것을 더 빠르고 용이하게 만들었습니다.
본 매뉴얼은 또한 웹 페이지로의 하이퍼링크를 포함하고 있습니다. 링크를 통하여 이러한 웹 페이지를
방문하기 위해서는 귀하의 컴퓨터에 인터넷 브라우저가 설치되어있어야 합니다.
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
Page 4

4• vacon
구성
document: DPD01655A
발행일: 6.21.2007
1. 베이직 어플리케이션 6
1.1 도입 .................................................................................................................................................................... 6
1.2 제어 I/O............................................................................................................................................................ 7
1.3 베이직 어플리케이션 제어 신호 논리 ............................................................................................... 8
1.4 베이직 어플리케이션 – 파라미터 리스트 ........................................................................................ 9
2. 스탠다드 어플리케이션 12
2.1 도입 ................................................................................................................................................................. 12
2.2 제어 I/O......................................................................................................................................................... 13
2.3 제어 신호 logic in 스탠다드 어플리케이션 ................................................................................. 14
2.4 스탠다드 어플리케이션 – 파라미터 리스트 ................................................................................ 15
3. LOCAL/REMOTE 제어 어플리케이션 23
3.1 도입 ................................................................................................................................................................. 23
3.2 제어 I/O......................................................................................................................................................... 24
3.3 Local/Remote 어플리케이션에서의 제어신호 ............................................................................. 25
3.4 Local/Remote 제어 – 파라미터 리스트 ......................................................................................... 26
4. 다단속제어어플리케이션 36
4.1 도입 ................................................................................................................................................................. 36
4.2 제어 I/O......................................................................................................................................................... 37
4.3 다단속 제어 어플리케이션에서의 제어 신호 로직 ................................................................... 38
4.4 다단속제어어플리케이션 파라미터 리스트 .................................................................................. 39
5. PID 제어 어플리케이션 49
5.1 도입 ................................................................................................................................................................. 49
5.2 Control I/O ................................................................................................................................................... 50
5.3 제어 어플리케이션에서의 제어 신호 .............................................................................................. 51
5.4 PID 어플리케이션 – 파라미터 ............................................................................................................ 52
6. MU LTI-PURPOSE 제어 어플리케이션 63
6.1 도입 ................................................................................................................................................................. 63
6.2 제어 I/O......................................................................................................................................................... 64
6.3 Multi-Purpose 제어 어플리케이션의 제어신호 로직 .............................................................. 65
6.4 “Terminal To Function” (TTF) 프로그래밍 원칙 ........................................................................... 66
6.5 마스터/팔로워 기능 (NXP only) ......................................................................................................... 68
6.6 Multi-purpose 제어 어플리케이션 – 파라미터 리스트.......................................................... 69
7. 펌프 및 팬 제어 어플리케이션 97
7.1 도입 ................................................................................................................................................................. 97
7.2 제어 I/O......................................................................................................................................................... 98
7.3 펌프 및 팬 제어 어플리케이션에서의 제어신호 로직 .......................................................... 100
7.4 베이직 파라미터의 기능과 설명 ...................................................................................................... 101
7.5 펌프 및 팬 제어 어플리케이션 – 파라미터 리스트 .............................................................. 107
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 5

vacon • 5
8. 파라미터 설명 122
8.1 속도 제어 파라미터(어플리케이션 6 만 해당 ............................................................................ 218
8.2 키패드 제어 파라미터 .......................................................................................................................... 219
9. 부록 221
9.1 추가 제한있는 외부제동 제어 (ID’s 315, 316, 346 to 349, 352, 353) ............................ 221
9.2 클로즈드 루프 파라미터(ID’s 612 to 621) ................................................................................... 223
9.3 모터 과열 보호 파라미터(ID’s 704 to 708): ................................................................................ 224
9.4 모터 스톨 보호 파라미터 (ID’s 709 to 712): ............................................................................. 224
9.5 경부하 보호 파라미터 (ID’s 713 to 716): .................................................................................... 225
9.6 필드 버스 제어 파라미터(ID’s 850 to 859) ................................................................................. 225
9.7 프로세스 데이터 출력 (Slave Master) .................................................................................... 225
10. 폴트 추적 227
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
Page 6

6• vacon
1
1. 베이직 어플리케이션
Software 코드: ASFIFF01
1.1 도입
베이직 어플리케이션은 아주 간단하고 사용하기 쉬운 어플리케이션 입니다. 배송시 초기 세팅이
되어있으며, 베이직 어플리케이션 의 M6 메뉴와 페이지 S6.2을 통해 세팅 가능합니다. 제품의 유저
메뉴를 참조하십시오.
디지텰 입력 DIN3 이 프로그램될 수 있습니다.
베이직 어플리케이션 의 파라미터들은 이 매뉴얼의 각 장에 소개되어 있습니다. 설명의 각각의
파라미터의
각각의 ID number 에 따라 되어 있습니다.
1.1.1 베이직 어플리케이션 의 모터 보호 기능
베이직 어플리케이션은 다른 것과 매우 유사한 보호 기능을 제공합니다:
•
외부 폴트 보호
• 입력 단계 감시
• 저전압 보호
• 출력 단계 감시
• 지락 보호
• 모터 단열 보호
• 온도센서 폴트 보호
• 필드버스 폴트 보호
• 스톨 폴트 보호
다른과 마찬가지로, 베이직 어플리케이션은 응답 기능 및 폴트의 한도 값에 대하여 어떤
파라미터도 제공하지 않습니다. 모터 온도 보호에 관한 자세한 사항은 200 페이지를 참조하십시오.
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 7
1
Jumper block X3:
CMA and CMB grounding
OP TA 1
프로그램가능함(P2.17)
접점 닫힘 = 폴트
12
+24V
콘트롤 전압 출력
스위치 전압(see #6)
14
DIN4
프리셋 속도선택 1
DIN4
DIN5
주파수 레퍼런스
18
AO1+
OP TA 2
22
RO1
24
RO2
RUN
220
VAC
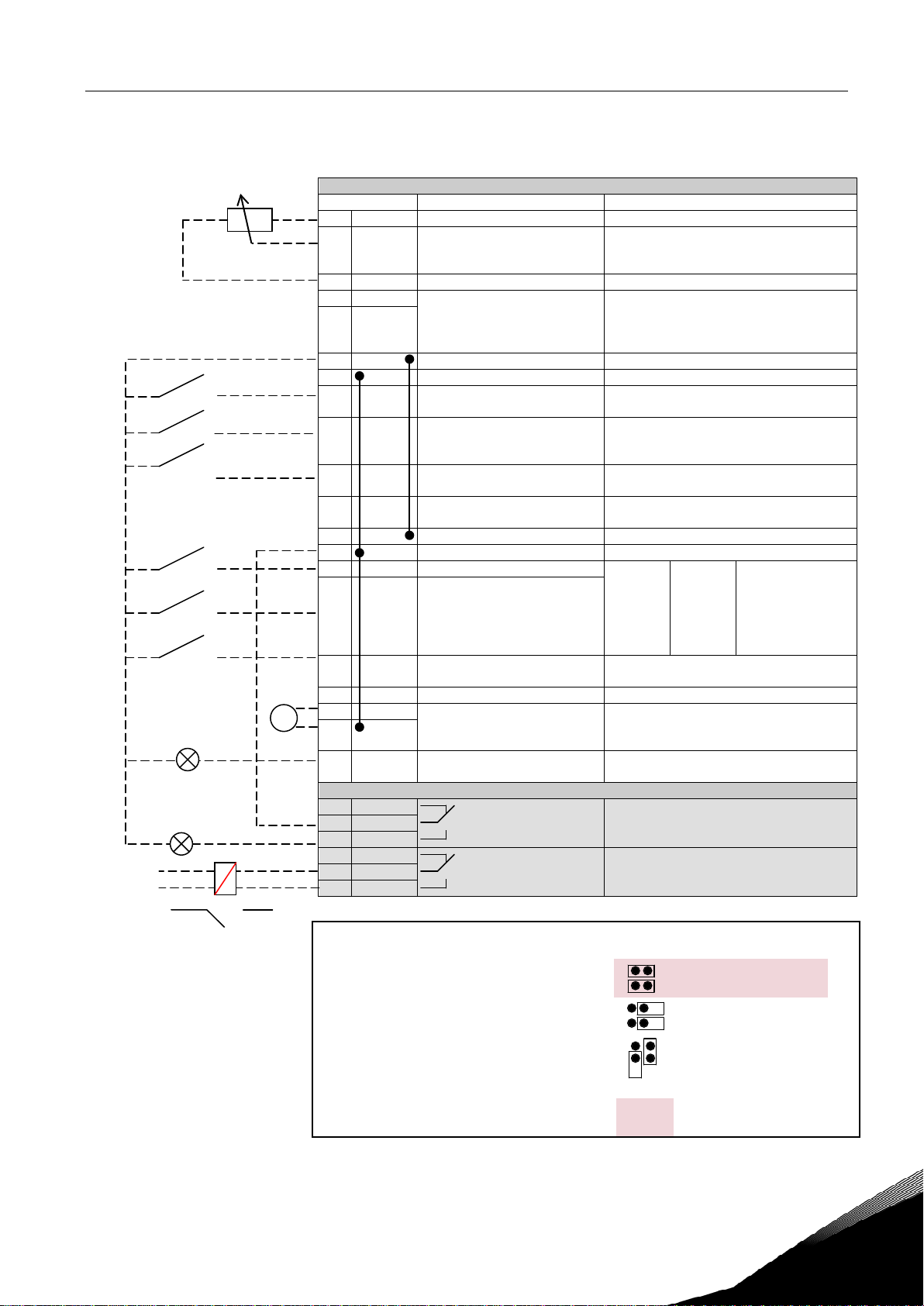
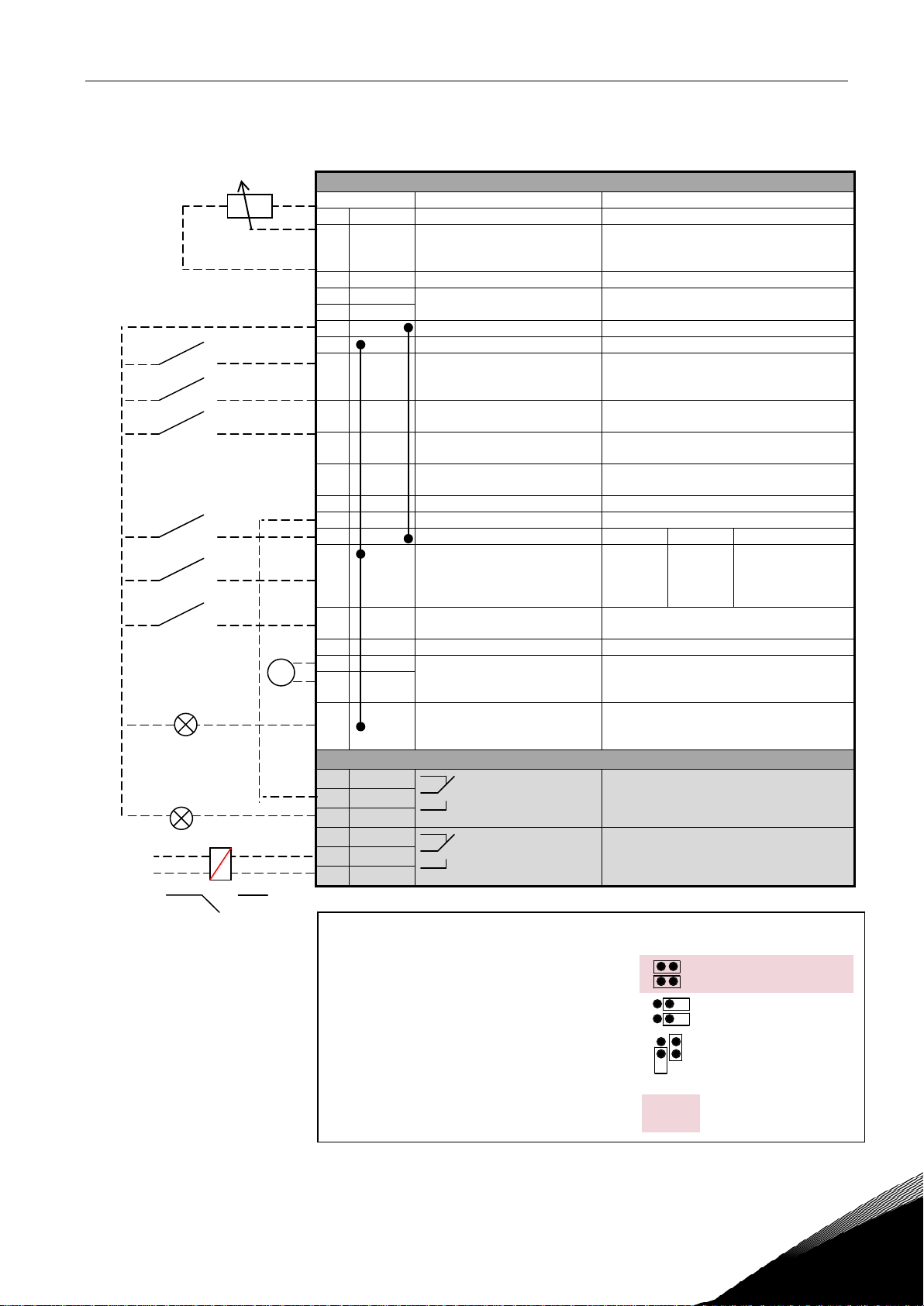
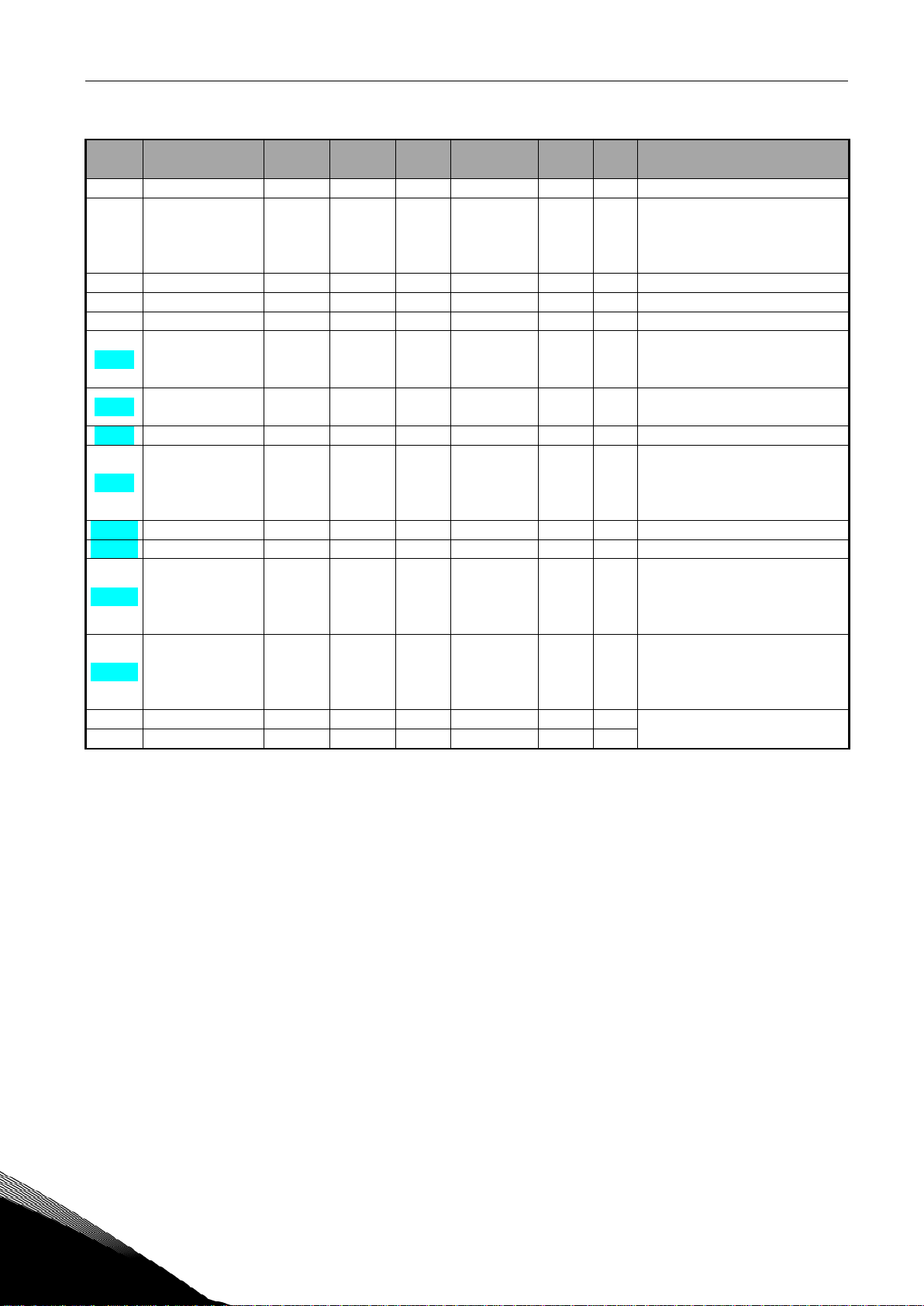
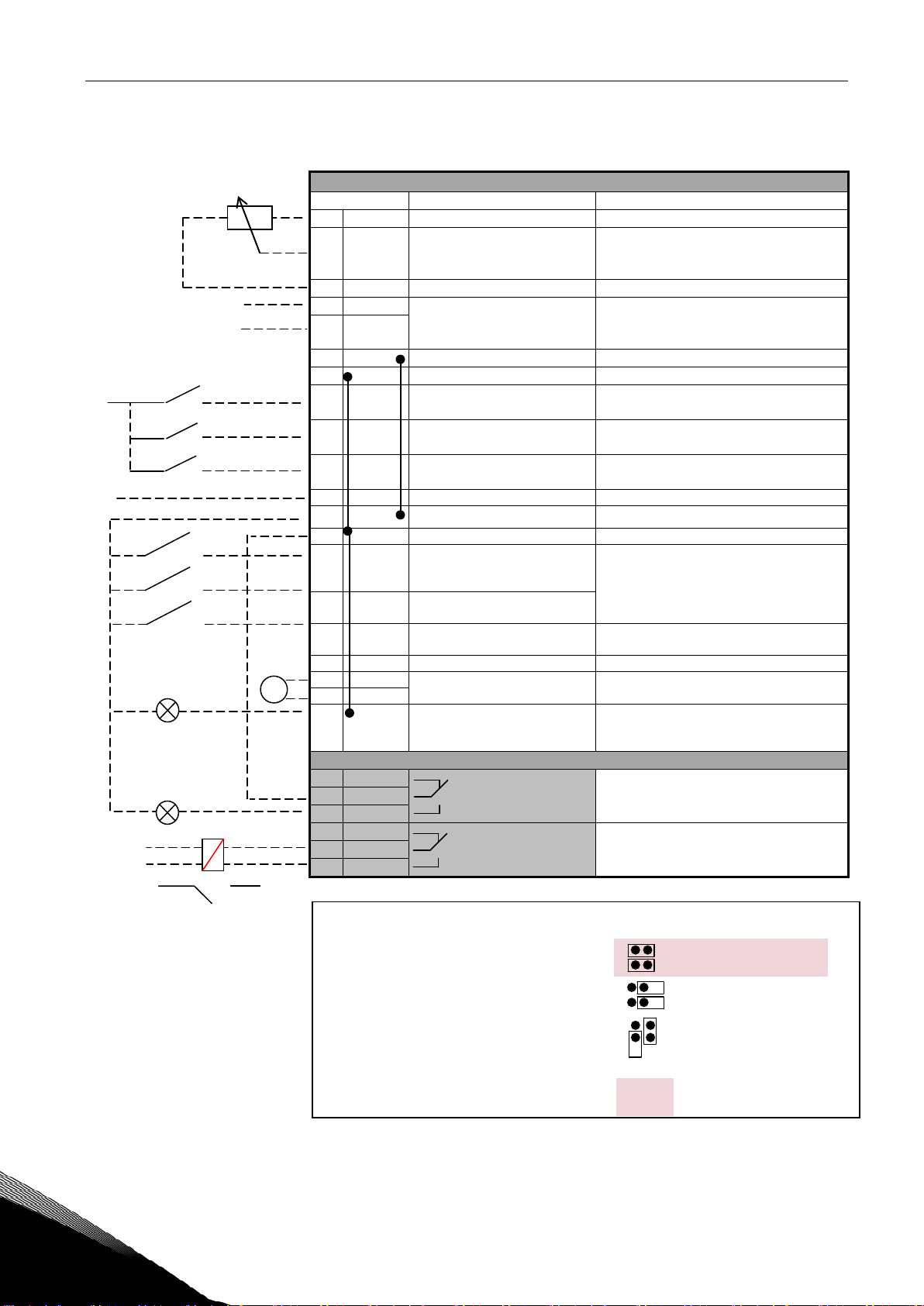
1.2 제어 I/O
레퍼런스 포텐쇼미터,
1…10 kΩ
vacon • 7
터미널 신호 설명
1 +10V
2 AI1+ 아날로그입력1
3 AI1- I/O 그라운드 레퍼런스 및 콘트롤의 그라운드
4 AI2+ 아날로그입력2
5 AI2-
6 +24V 콘트롤 전압 출력 스위치 전압 등. max 0.1 A
7 GND I/O 그라운드 레퍼런스 및 콘트롤의 그라운드
8 DIN1 정방향으로 스타트
레퍼런스 출력 포텐셔미터 전압 외
ref
전압범위0—10V DC
프로그램가능함(P2.14)
전류범위 0—20mA
아날로그입력1 주파수 레퍼런스
아날로그입력2 주파수 레퍼런스
접점닫힘 = 정방향으로 스타트
mA
9 DIN2 역방향으로 스타트
10 DIN3 외부 폴트 입력
11 CMA DIN 1—DIN 3까지 공통 GND 혹은 +24V에 연결
13 GND I/O 그라운드 레퍼런스 및 콘트롤의 그라운드
15
DIN5 프리셋 속도선택 2 열림
16 DIN6 폴트 리셋 접점 열림 = 아무반응 없음
17 CMB DIN4—DIN6까지 공통 GND 혹은+24V에 연결
19 AO1-
20 DO1 디지털 출력1
21 RO1 릴레이 출력1
23 RO1
25 RO2
26 RO2
아날로그 출력1
출력 레퍼런스
프로그램가능함 (P2.16)
준비됨(READY)
런(RUN)
릴레이 출력 2
접점닫힘 = 역방향으로 스타트
접점 열림 = 폴트 없음
닫힘
열림
닫힘
접점 닫힘 = 폴트 리셋
범위는 0—20 mA/RL, max. 500Ω
오픈 콜렉터, I≤50mA, U≤48 VDC
폴트
Tab le 1-1. 베이직 어플리케이션의 디폴트로 설정된 I/O 구성.
주의: 아래 점퍼 선정을 참조하시오. 제
열림
열림
닫힘
닫힘
I/O 레퍼런스
(P2.14)
프리셋 속도1
프리셋 속도 2
최대 주파수
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
품의 사용자 매뉴얼에 더 많은 정보가
있습니다.
CMB connected to GND
CMA connected to GND
CMB isolated from GND
CMA isolated from GND
CMB and CMA
internally connected together,
isolated from GND
= Factory default
Page 8
8• vacon
1
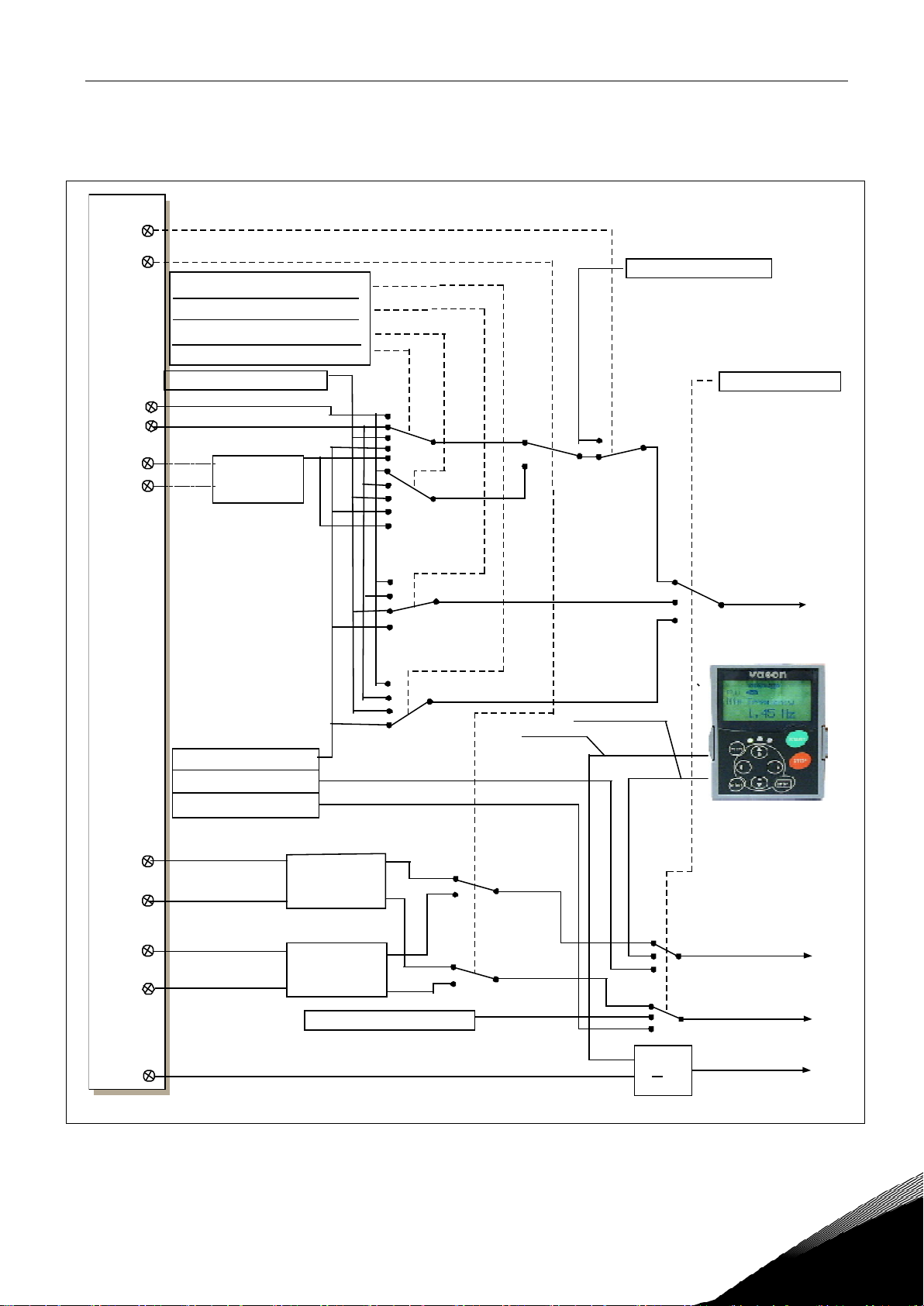
DIN4
DIN5
AI1
AI2
DIN1
DIN2
DIN6
DIN3
> 1
NX12k00.fh8
3.2 Keypad reference
3.1 Control place
Internal frequency
reference
Start forward
Start reverse
Start/Stop and
reverse logic
Start/Stop
Reverse
Internal Start/Stop
Internal reverse
Internal fault reset
Fault reset input
External fault input (programmable)
Reset button
Start/Stop buttons
Reference from fieldbus
Start/Stop from fieldbus
Direction from fieldbus
3.3 Keypad direction
2.14 I/O Reference
2.19 Preset Speed 2
2.
18 Preset Speed 1
2.2 Max Frequency
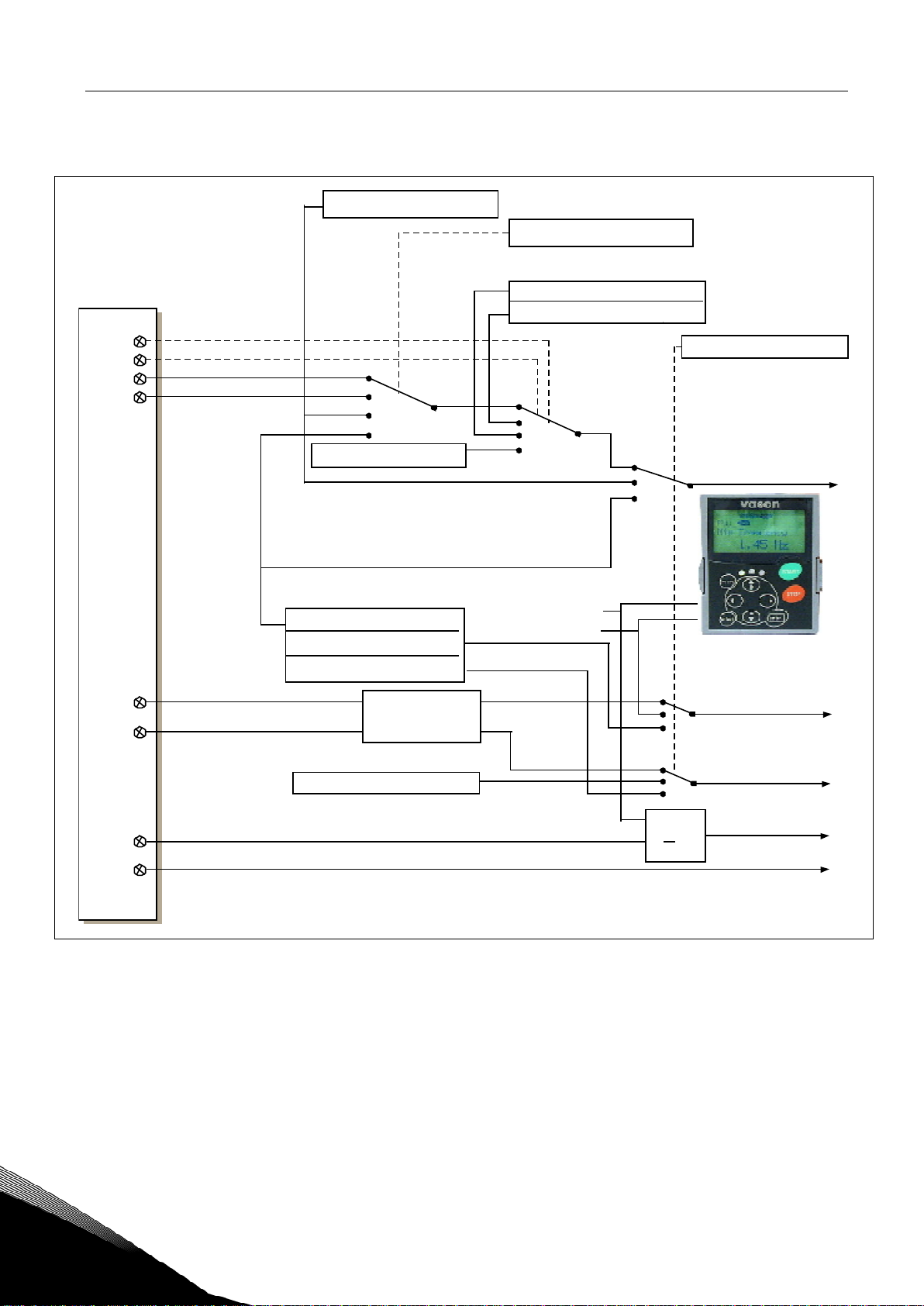
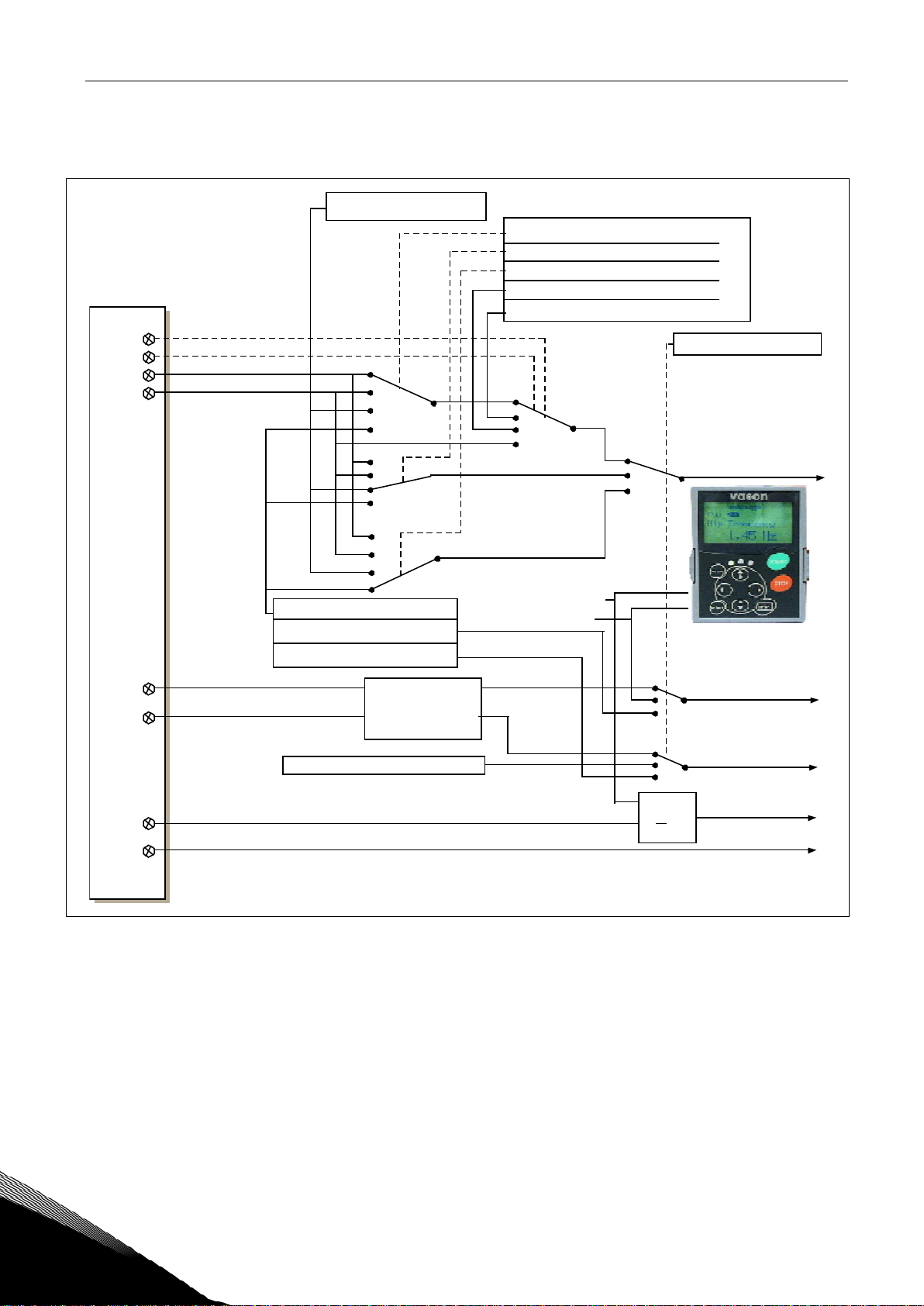
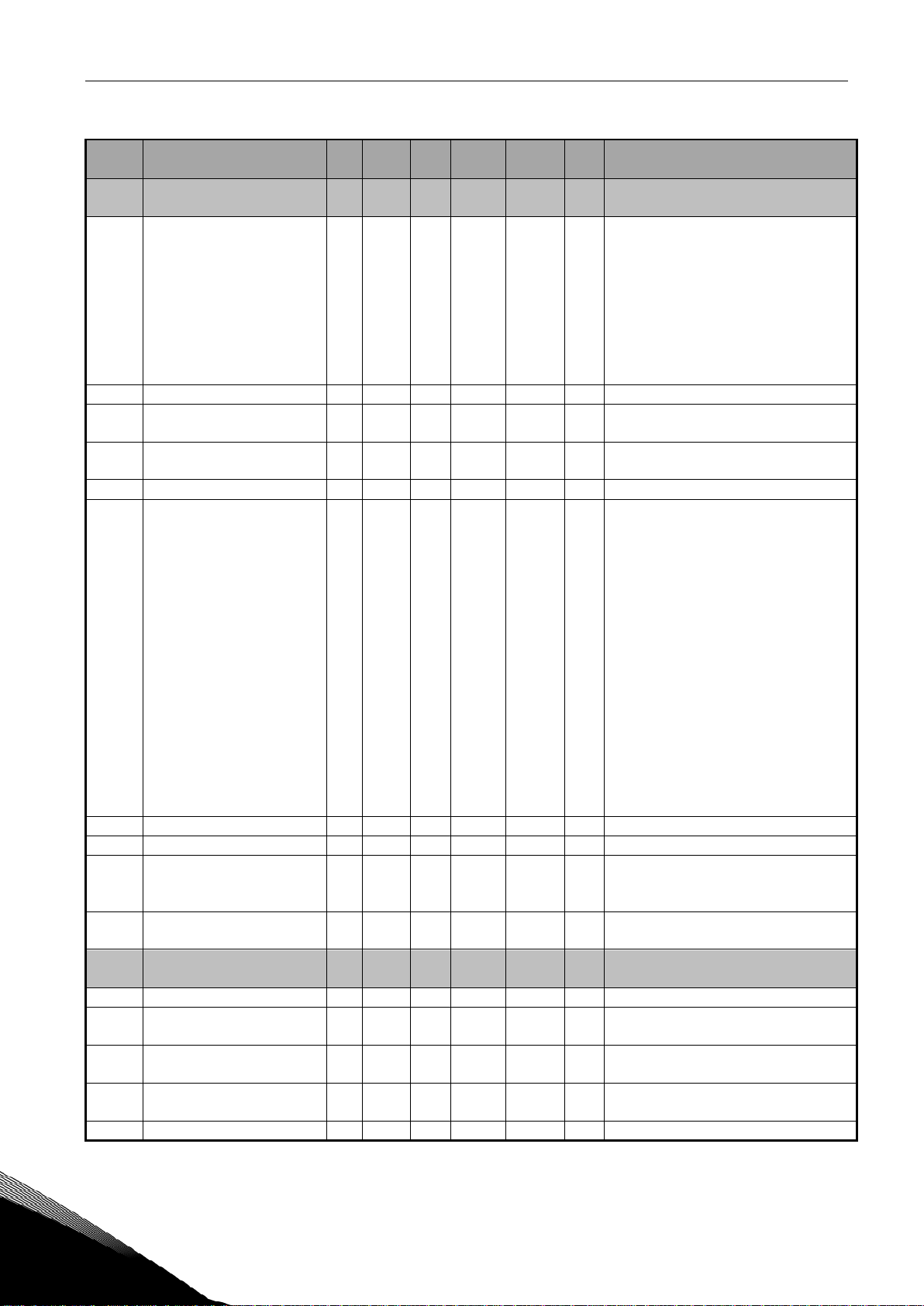
1.3 베이직 어플리케이션의 제어 신호 로직
Figure 1-1. 베이직 어플리케이션의 제어신호논리
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 9
1
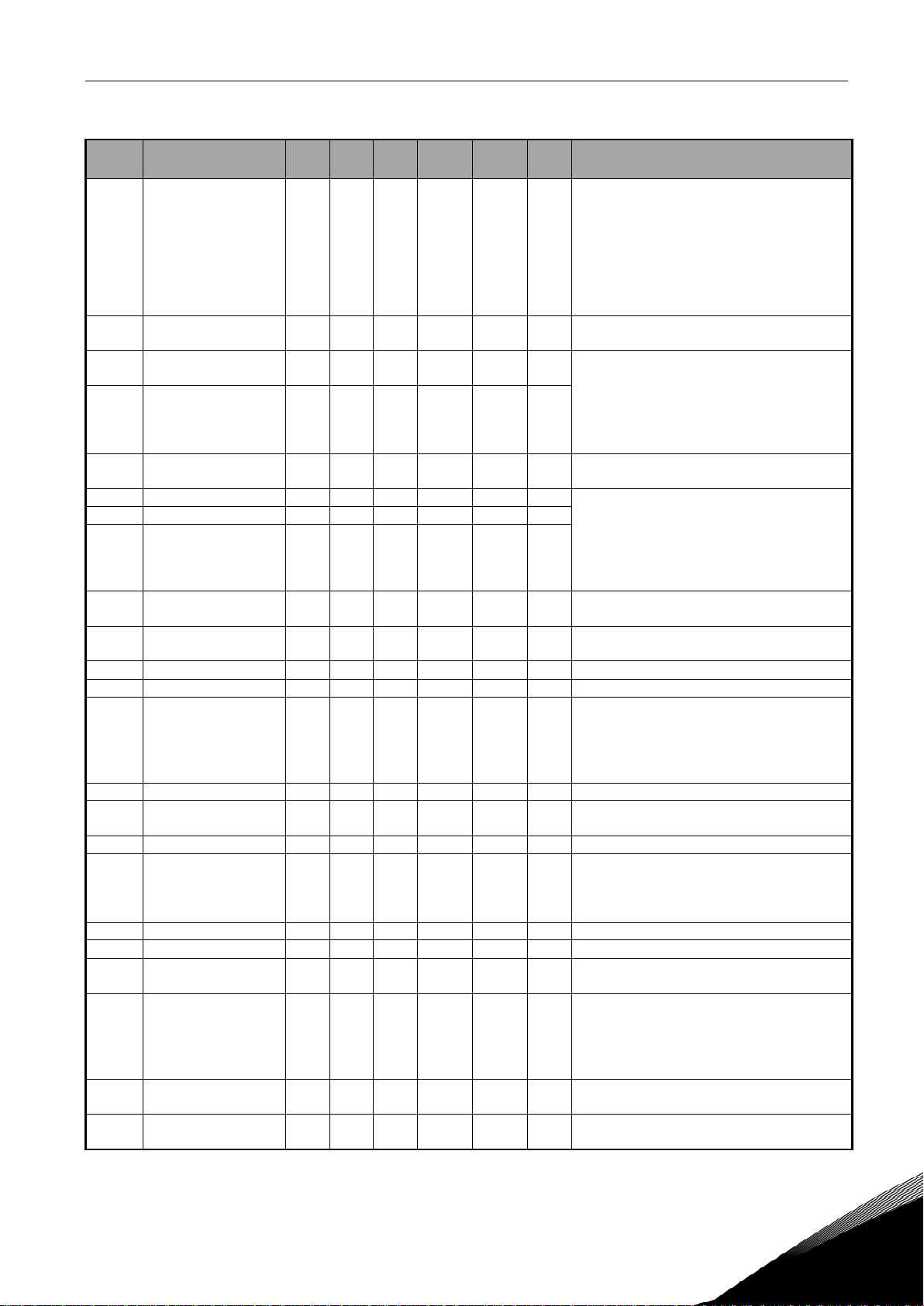
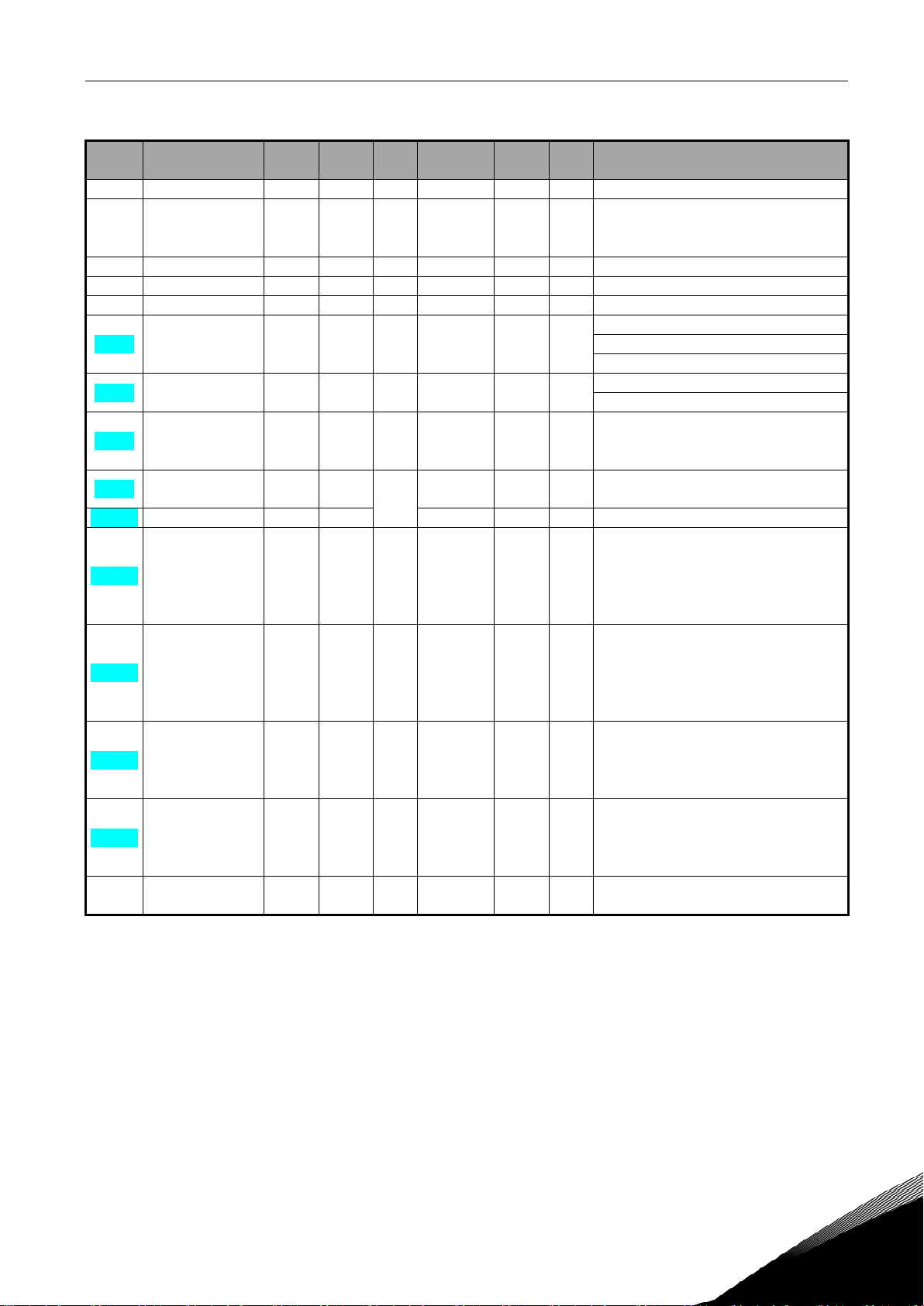
1.4 베이직 어플리케이션 – 파라미터 리스트
다음 페이지에서는 관련된 파라미터 리스트가 있습니다. 파라미터에 관한 설명은 131 에서 230
쪽 사이에 나와있습니다.
컬럼 설명:
코드 = 키패드상의 위치; 현재 파라미터 넘버 표시
파라미터 = 파라미터 이름
최소 = 파라미터 최소값
최대 = 파라미터 최대값
단위 = 파라미터값; 있을 경우 표시
공장 초기값 = 공장 초기 프리셋 값
임의 입력값 = 사용자 세팅
ID = 파라미터의 ID 넘버
= 주파수 변환기가 정지되었을 경우에는 파라미터값이 변동 가능함.
vacon • 9
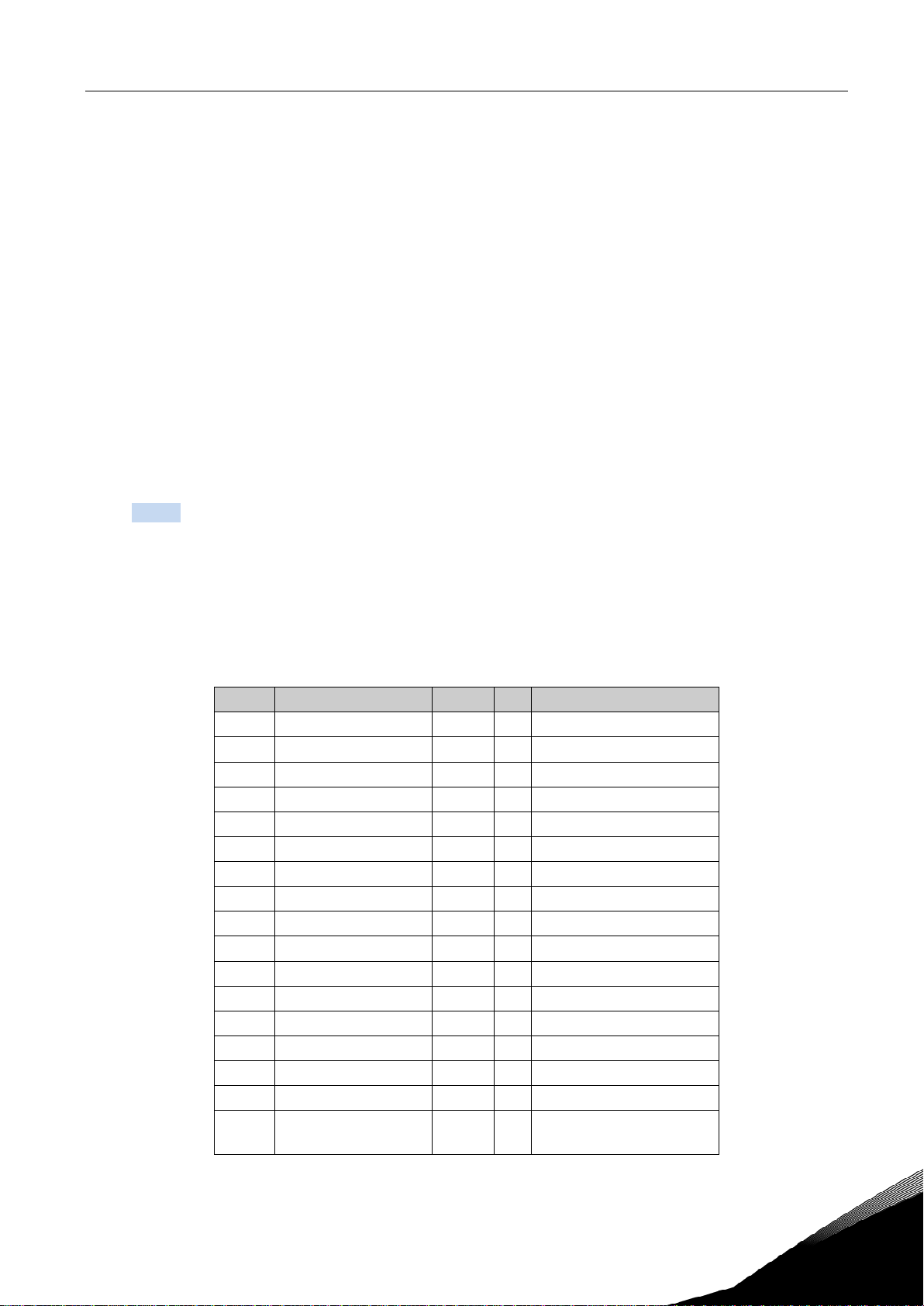
1.4.1 수치의 확인 (제어 키패드: 메뉴 M1)
모니터되는 수치는 파라미터의 현재 값으로 상태와 정도를 나타냅니다. 모니터되는 값은 변경할 수
없습니다.
더 많은 정보를 위하여 각 제품의 매뉴얼을 참조하십시오.
코드 파라미터 단위 ID 설명
V1.1
V1.2
V1.3
V1.4
V1.5
V1.6
V1.7
V1.8
V1.9
V1.10
V1.11
V1.12
V1.13
V1.14
V1.15
V1.16
M1.17
출력 주파수 Hz 1 모터로의 출력 주파수
주파수 레퍼런스
모터 속도 rpm 2 rpm으로 표시되는 속도
모터전류 A 3
모터 토크 % 4 계산된 샤프트 토크
모터 출력 % 5 모터 샤프트 출력
모터 전압 V 6
DC 링크 전압 V 7
단위 온도 °C 8 히트싱크 온도
모터 온도 % 9 계산된 모터 온도
아날로그 입력1 V/mA 13 AI1
아날로그 입력 2 V/mA 14 AI2
DIN1, DIN2, DIN3 15
DIN4, DIN5, DIN6 16
DO1, RO1, RO2
아날로그 I
멀티 모니터링 아이템
out
Hz 25 모터제어로의 주파수
디지털 입력 상태
디지털 입력 상태
mA
디지털 및 릴레이 출력 상태
17
AO1
26
선택 가능한3 개의 모니터값
을 보여줌
Tab le 1-2. 모니터링 값
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
Page 10
10• vacon
1
P2.1
최소 주파수
0,00
P2.2
Hz
0,00
101
주의: 만약 최대주파수가 모터의
주파수
모터의 명판을 확인하시오.
정격전류
P2.10
모터역률(cosϕ)
0,30
1,00 0,85
120
모터의 명판을 확인하시오.
0=램프
2=조건부 플라잉 스타트
0=코스팅
1=자동 토크 부스트
0=AI1
레퍼런스 옵셋
1=4mA—20 mA
0=사용안함
8=DC링크 전압 (0—1000V)
0=사용안함
1=활성화됨
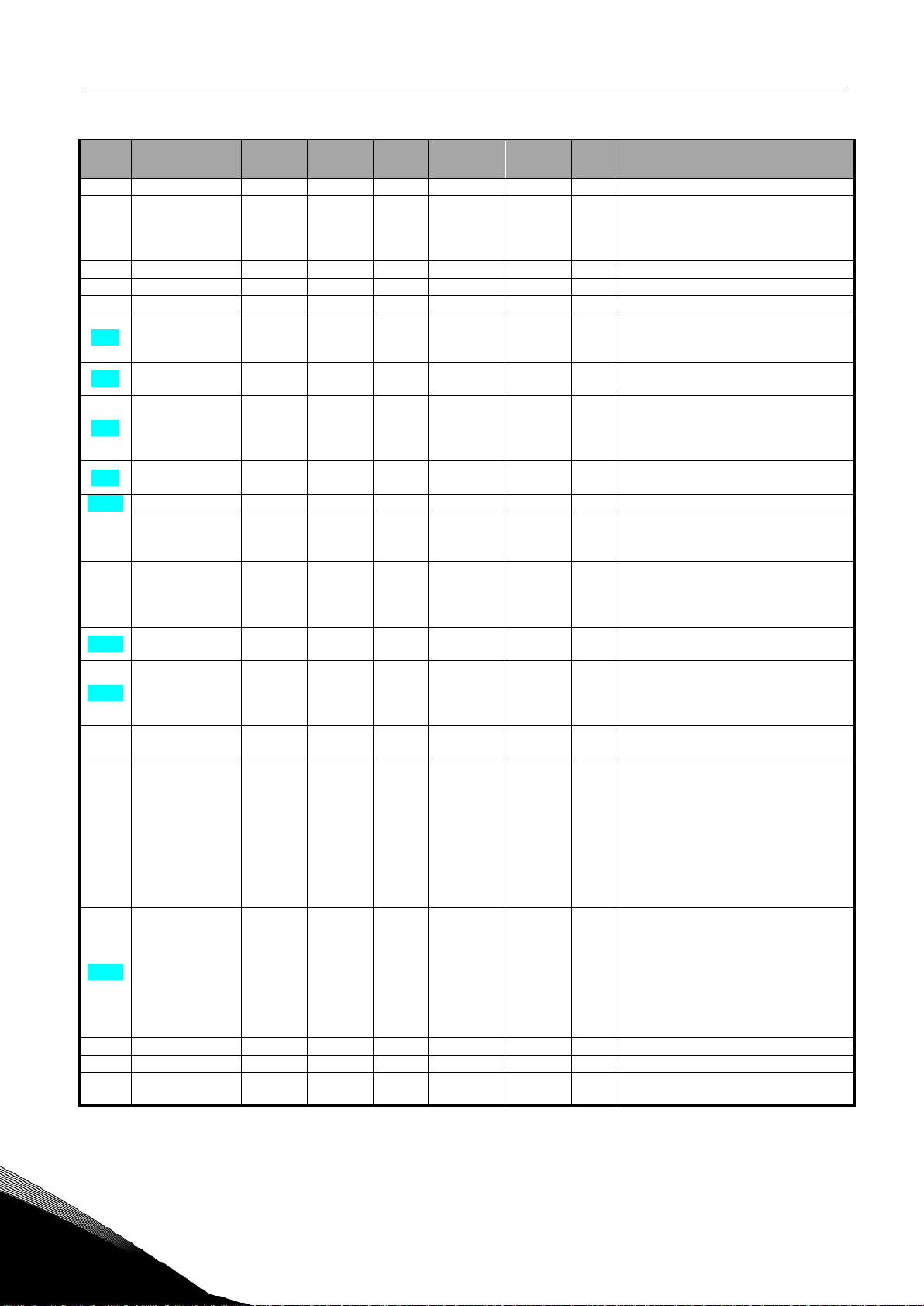
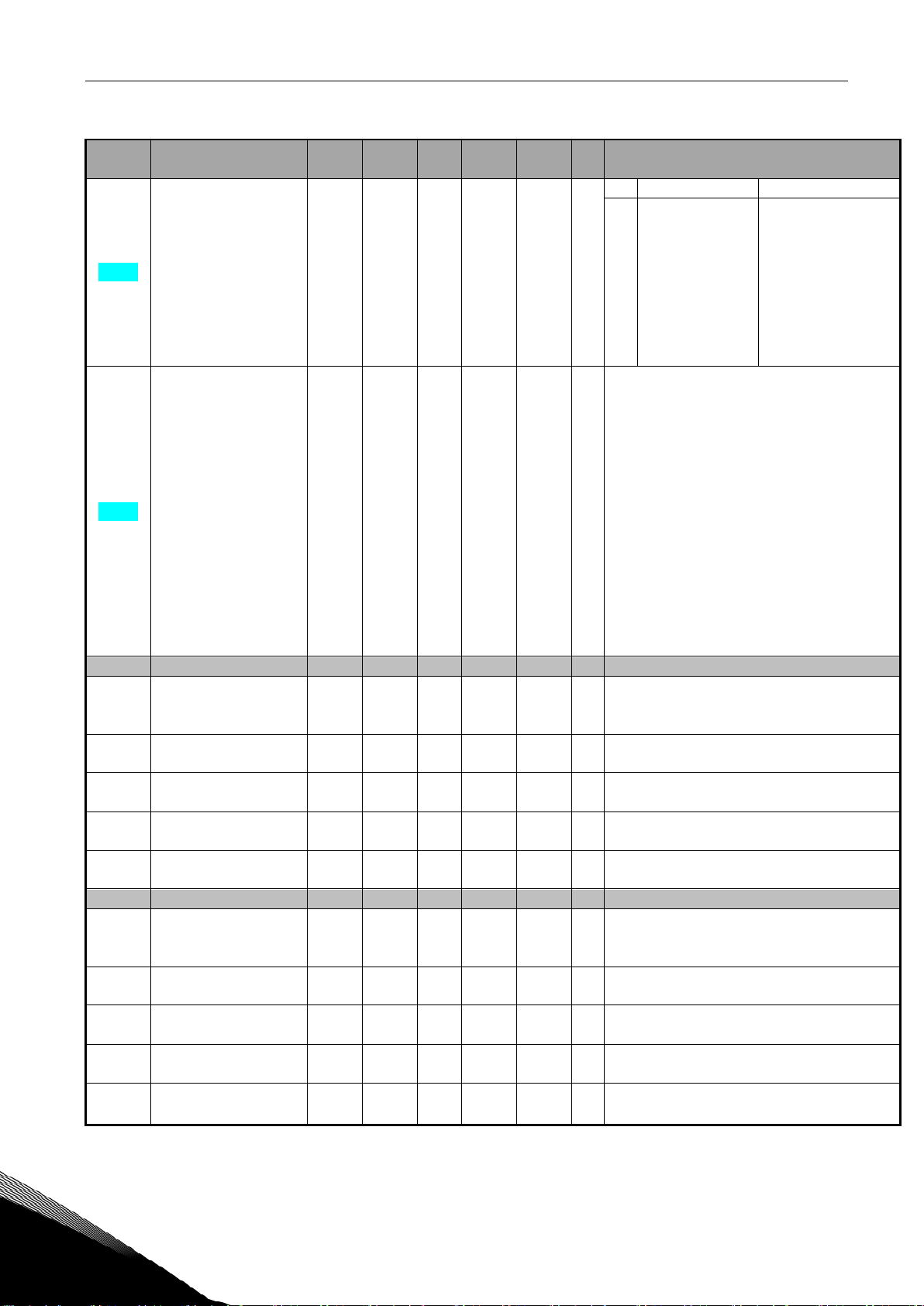
1.4.2 베이직 파라미터(콘트롤 키패드: Menu M2 G2.1)
코드 파라미터 최소값 최대값 단위 디폴트 값
고객
세팅값
ID 비고
P2.2 최대 주파수 P2.1 320,00 Hz 50,00 102
P2.3 가속시간1 0,1 3000,0 s 3,0 103
P2.4 감속시간1 0,1 3000,0 s 3,0 104
P2.5 전류 한계 0,1 x IH 2 x IH A IL 107
P2.6
P2.7
P2.8
P2.9
P2.11 스타트 기능 0 2 0 505
P2.12 정지 기능 0 3 0 506
P2.13 U/f 최적화 0 1 0 109
모터의
정격전압
모터의 정격
모터의
정격속도
모터의
180 690 V
8,00 320,00 Hz 50,00 111 모터의 명판을 확인하시오.
24 20 000 rpm 1440 112
0,1 x IH 2 x IH A IH 113 모터의 명판을 확인하시오.
NX2: 230V
NX5: 400V
NX6: 690V
110 모터의 명판을 확인하시오.
동기 속도보다 클 경우, 모터와
드라이브 시스템의 적합성을
확인하시오
디폴트 값은 4극 모터 및 정격
싸이즈의 주파수 변환기에
적용됩니다.
1=플라잉 스타트
1=램프
2=램프+런 가능 코스트
3=코스트+런가능 램프
0=사용안함
P2.14 I/O 레퍼런스 0 3 0 117
P2.15
P2.16
P2.17 DIN3 기능 0 7 1 301
P2.18 프리셋 속도1 0,00 P2.2 Hz 0,00 105 작동자에 의해 미리 설정된 속도
P2.19 프리셋속도2 0,00 P2.2 Hz 50,00 106 작동자에 의해 미리 설정된 속도
P2.20 자동 재시작 0 1 0 731
아날로그입력2,
아날로그 출력
기능
Tab le 1-3. 베이직파라미터 G2.1
0 1 1 302
0 8 1 307
1=AI2
2=키패드
3=필드버스
0=0—20mA
1=출력 주파수 (0—fmax)
2=주파수 레퍼런스 (0—fmax)
3=모터 속도(0—모터정격속도)
4=출력전류 (0-InMotor)
5=모터토크 (0—TnMoto r )
6=모터출력 (0—PnMotor)
7=모터전류 (0-UnMotor)
1=외부폴트, 접점닫힘.
2=외부폴트, 접점열림.
3=런 활성화, 접점닫힘
4=런 활성화, 접점열림.
5= 접점을 IO로 강제함.
6= 접점을 키패드로 강제함.
7= 접점을 필드버스로 강제함.
0=작동불가
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 11
vacon • 11
1
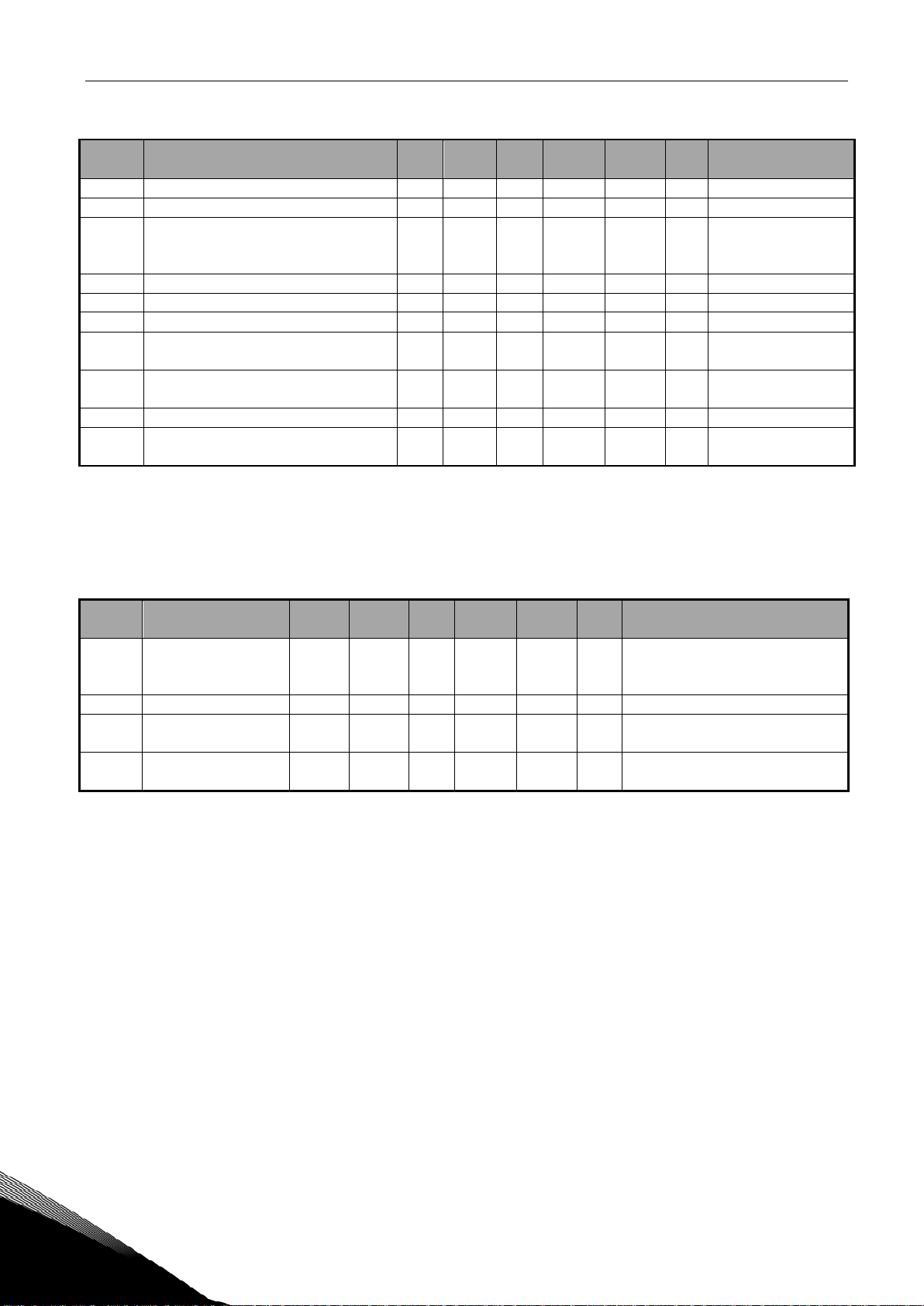
1.4.3 키패드 제어 (제어 키패 드: 메뉴 M3)
키패드의 제어 위치와 방향의 설정에 대한 파라미터는 아래에 있습니다. 각 제품 사용자 매뉴얼의
키패드 제어 메뉴를 참조하십시오.
코드 파라미터 최소값 최대값 단위 디폴트 값
P3.1 제어 위치 1 3 1 125
R3.2 키패드 레퍼런스 P2.1 P2.2 Hz
P3.3
R3.4 정지 버튼 0 1 1 114
방향(키패드
조작시)
Tab le 1-4. 키패드 콘트롤 파라미터, M3
0 1 0 123
고객
세팅값
ID 비고
1=I/O 터미널
2=키패드
3=필드버스
키패드로부터 역방향 요청이
활성화됨
0=
정지 버튼의 제한된 기능
정지 버튼이 항상 활성화
1=
1.4.4 시스템 메뉴 (제어 키패드: 메뉴 M6)
주파수 변환기의 파라미터 및 기능 관련된 일반 사용에 관한 메뉴로 어플리케이션, 언어
됨
설정, 파라미터 설정 혹은 하드웨어 및 소프트 웨어 정보 확인이 가능합니다. 제품의
사용자 매뉴얼을 확인하십시오.
1.4.5 확장 보드 (제어 키패드: 메뉴 M7)
M7 메뉴는 제어 보드에 부착된 확장 및 옵션 보드 관련된 정보를 제공합니다. 더 많은 정보를
위해서는 각 제품의 사용자 매뉴얼을 참조하십시오.
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com
Page 12

12• vacon
2
2. 스탠다드 어플리케이션
Software 코드: ASFIFF02
2.1 도입
S6.2 페이지의 메뉴 M6 의 스탠다드 어플리케이션을 선택하십시오.
스탠다드 어플리케이션은 베이직 어플리케이션을 적용하기에는 너무 제한적이지만 한편 특별한
사양이 없을 경우 펌프, 팬 및 컨베이어에 사용됩니다.
• 스탠다드 어플리케이션의 I/O 신호와 제어 논리는 베이직과 같습니다.
• 디지털 입력 DIN3 와 모든 출력은 자유롭게 프로그램 가능합니다.
추가 기능 :
• 프로그램 가능한 스타트/스톱와 역 신호 논리
• 표준 전압
• 주파수 제한 감시
• 2차 램프와 S-형 램프 프로그래밍
• 프로그램 가능한 스타트/스톱
• 정지시 DC-제동
• 1 개의 금지 전류 구역
• 프로그램가능한 U/f 곡선과 주파수 변경
• 오토 스타트
• 모터의 온도 실속 보호: Off, 주의, 폴트 프로그램 가능
스탠다드 어플리케이션 의 파라미터는 8 장에 각 ID 넘버에 따라 설명되어 있습니다.
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 13
2
Jumper block X3:
CMA and CMB grounding
CMB connected to GND
CMA connected to GND
CMB isolated from GND
CMA isolated from GND
CMB and CMA
internally connected together,
isolated from GND
= Factory default
RUN
220
VAC
2.2 제어 I/O
vacon • 13
레퍼런스 포텐쇼미터,
1…10 kΩ
mA
OPTA1
터미널 신호 설명
1 +10V
2 AI1+
3 AI1- I/O 그라운드 레퍼런스 및 콘트롤의 그라운드
4 AI2+
5 AI26 +24V 콘트롤 전압 출력 스위치 전압 등, max 0.1 A
7 GND I/O 그라운드 레퍼런스 및 콘트롤 그라운드
8 DIN1
9 DIN2
10 DIN3
CMA
11
12 +24V 콘트롤 전압 출력 스위치 전압 (#6 참조)
13 GND I/O 그라운드 레퍼런스 및 콘트롤 그라운드
14 DIN4 프리셋 속도선택1 DIN4 DIN5 주파수 레퍼런스
15 DIN5 프리셋 속도선택 2
16 DIN6 폴트 리셋
17 CMB DIN4—DIN6까지 공통 적용 GND 혹은 +24V에 연결
18 AO1+ 아날로그 출력 1
19
AO1-
20
DO1
레퍼런스 출력 포텐쇼미터 전압 등.
ref
아날로그입력 1
전압범위 0—10V DC
프로그램 가능함 (P2.1.11)
아날로그입력2
전류범위 0—20mA
정방향으로 스타트
프로그램 가능한 로직
(P2.2.1)
역방향으로 스타트
Ri min = 5 kohm
외부폴트 입력
프로그램가능함 (P2.2.2)
DIN 1—DIN 3에 공통 적용 GND 혹은+24V에 연결
출력주파수
프로그램가능함 (P2.3.2)
디지털 출력1
READY
프로그램가능함 (P2.3.7)
아날로그 입력1 주파수 레퍼런스
아날로그 입력2 주파수 레퍼런스
접점 닫힘 = 정방향으로 스타트
접점 닫힘 = 역방향으로 스타트
접점 열림 = 폴트 없음
접점 닫힘 = 폴트
열림
닫힘
열림
닫힘
접점열림 = 아무런 반을 없음
접점닫힘 = 폴트 리셋
범위 : 0—20 mA/R
Collector 개방시킴, I≤50mA, U≤48 VDC
열림
열림
닫힘
닫힘
I/O 레퍼런스
프리셋 속도1
프리셋 속도 2
아날로그 입력2
, max. 500Ω
L
OPTA2
21 RO1
23 RO1
24 RO2
26 RO2
프로그램가능함 (P2.3.8)
프로그램가능함 (P2.3.9)
릴레이출력 1
런(RUN)
릴레이출력 2
폴트
22 RO1
25 RO2
Tab le 2-1. 스탠다드어플리케이션디폴트 I/O 구성.
주의: 아래의 점퍼 선택을 참조하시오.
24-hour support +358 (0) 201 212 575 • Email: vacon@vacon.com
제품의 사용자 매뉴얼에 더 많은
정보가 있습니다.
Page 14
14• vacon
2
2.3 스탠다드 어플리케이션의 제어 신호 로직
3.2 Keypad reference
2.1.11 I/O Reference
2.1.12 Keypad Ctrl Reference
2.1.13 Fieldbus Ctrl Reference
2.1.14 Preset Speed 1
2.1.15 Preset Speed 2
DIN4
DIN5
AI1
AI2
DIN1
DIN2
Reference from fieldbus
Start/Stop from fieldbus
Direction from fieldbus
Start forward
(programmable)
Start reverse (programmable)
3.3 Keypad direction
Programmable
Start/Stop and
reverse logic
Reset button
Start/Stop buttons
Start/Stop
Reverse
3.1 Control place
Internal frequency
reference
Internal Start/Stop
Internal reverse
DIN6
DIN3
Fault reset input
External fault input (prog
Figure 2-1. 제어 신호 logic in 스탠다드 어플리케이션
rammable)
Internal fault reset
> 1
NX12k01
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 15
vacon • 15
2
2.4 스탠다드 어플리케이션 – 파라미터 리스트
다음 페이지에서는 관련된 파라미터 리스트가 있습니다. 파라미터에 관한 설명은 131 에서 230
쪽 사이에 나와있습니다.
컬럼 설명:
코드 = 키패드상의 위치; 현재 파라미터 넘버 표시
파라미터 = 파라미터 이름
최소 = 파라미터 최소값
최대 = 파라미터 최대값
단위 = 파라미터 값; 있을 경우 표시
공장 초기값 = 공장 초기 프리셋 값
임의 입력값 = 사용자 세팅
ID = 파라미터의 ID 넘버
= 파라미터열 에 이 파라미터를 프로그램하기 위해 TTF 방법를 사용하십시오.
= 주파수 변환기가 정지되었을 경우에는 파라미터 값이 변동 가능함.
2.4.1 수치의 확인 (제어 키패드: 메뉴 M1)
모니터되는 수치는 파라미터의 현재 값으로 상태와 정도를 나타냅니다. 모니터되는 값은 변경할 수
없습니다.
더 많은 정보를 위하여 각 제품의 매뉴얼을 참조하십시오.
코드 파라미터 단위 ID 설명
V1.1 출력 주파수 Hz 1 모터로의 출력 주파수
V1.2 주파수 레퍼런스 Hz 25 모터제어의 주파수
V1.3 모터 속도 rpm 2 모터속도 rpm
V1.4 모터 전류 A 3
V1.5 모터 토크 % 4 계산된 샤프트 토크
V1.6 모터 출력 % 5 모터 샤프트 파워
V1.7 모터 전압 V 6
V1.8 DC 링크 전압 V 7
V1.9 단위 온도 °C 8 히트싱크 온도
V1.10 모터 온도 % 9 계산된 모터 온도
V1.11 아날로그 입력1 V/mA 13 AI1
V1.12 아날로그 입력 2 V/mA 14 AI2
V1.13 DIN1, DIN2, DIN3 15 디지털 입력 상태
V1.14 DIN4, DIN5, DIN6 16 디지털 입력 상태
V1.15 DO1, RO1, RO2 17 디지털 및 릴레이 출력
V1.16 아날로그 Iout mA 26 AO1
M1.17 모니터링 아이템 선택 가능한3 개의 모니터값을 보여줌
Tab le 2-2. 모니터링 값
24-hour support +358 (0) 201 212 575 • Email: vacon@vacon.com
Page 16
16• vacon
2
2.4.2 베이직 파라미터(콘트롤 키패드: Menu M2 G2.1)
코드 파라미터 최소값 최대값 단위 디폴트값
P2.1.1 최소 주파수 0,00 P2.1.2 Hz 0,00 101
P2.1.2 최대 주파수 P2.1.1 320,00 Hz 50,00 102
P2.1.3 가속시간 1 0,1 3000,0 s 3,0 103
P2.1.4 감속시간1 0,1 3000,0 s 3,0 104
P2.1.5 전류제한 0,1 x IH 2 x IH A IL 107
NX2: 230V
P2.1.6 모터의 정격전압 180 690 V
P2.1.7
P2.1.8 모터의 정격속도 24 20 000 rpm 1440 112 모터의 명판을 확인하시오.
P2.1.9 모터의 정격전류 0,1 x IH 2 x IH A IH 113
P2.1.10 모터 역률(cosϕ) 0,30 1,00 0,85 120 모터의 명판을 확인하시오.
P2.1.11 I/O 레퍼런스 0 3 0 117 모터의 명판을 확인하시오.
P2.1.12
P2.1.13
P2.1.14 프리셋 속도1 0,00 P2.1.2 Hz 10,00 105
P2.1.15 프리셋 속도2 0,00 P2.1.2 Hz 50,00 106
모터의
정격주파수
키패드 콘트롤
레퍼런스
필드버스 콘트롤
레퍼런스
Tab le 2-3. 베이직 파라미터 G2.1
8,00 320,00 Hz 50,00 111 모터의 명판을 확인하시오.
0 3 2 121
0 3 3 122
NX5: 400V
NX6: 690V
임의
입력값
110
ID 참조
주의: 만약 최대주파수가
모터의 동기 속도보다 클
경우, 모터와 드라이브
시스템의 적합성을 확인하시오
모터의 명판을 확인하시오.
디폴트 값은 4극 모터 및정격
싸이즈의 주파수 변환기에
적용됩니다.
0=AI1
1=AI2
2=키패드
3=필드버스
0=AI1
1=AI2
2= 키패드
3=필드버스
작동자에 의해 미리 설정된
속도
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 17

2
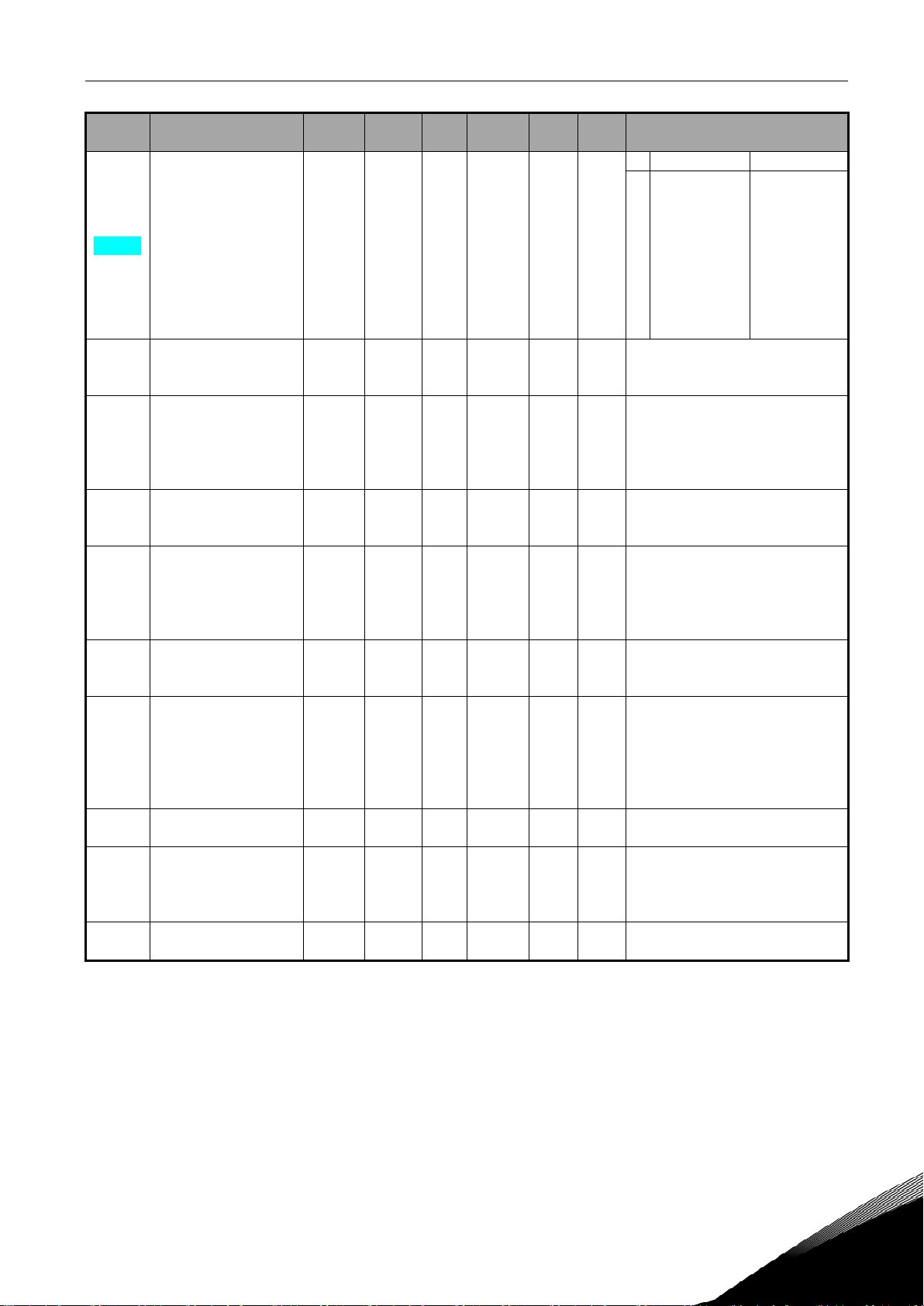
2.4.3 입력신호(콘트롤 키패드 : Menu M2 G2.2)
코드 파라미터 최소값 최대값 단위
디폴트
값
vacon • 17
임의
입력값 ID 참조
P2.2.1 스타트/스톱 로직 0 6 0
P2.2.2 DIN3 기능 0 8 1 301
P2.2.3
P2.2.4
P2.2.5
P2.2.6 레버런스 변환 0 1 0 305
P2.2.7 레퍼런스 필터시간 0,00 10,00 s 0,10 306 0 = 필터링 없음
P2.2.8 AI1 신호선택 A.1 377
P2.2.9 AI2 신호선택 A.2 388
아날로그입력2
레퍼런스 옵셋
레퍼런스 검출
최소값
레퍼런스 검출
최대값
Tab le 2-4. 입력신호, G2.2
0 1 1 302
0,00 320,00 Hz 0,00 303
0,00 320,00 Hz 0,00 304
300
0123456
DIN1 DIN2
정방향 스타트
스타트/스톱
스타트 펄스
정방향
스타트*
스타트*/스톱
스타트*/스톱
0=사용안함
1=외부폴트, 접점닫힘.
2=외부폴트, 접점열림.
3=런 활성화
4=가속/감속 시간 선택.
5= 접점을 IO로 강제함
6= 접점을 키패드로 강제함
7= 접점을 필드버스로 강제함
8=역방향
0=0—20mA (0—10V)**
1=4—20mA (2—10V)**
최소 레퍼런스 신호에 해당하는
주파수를 선택하십시오.
0,00 = 검출없음
최대 레퍼런스 신호에 해당하는
주파수를 선택하십시오.
0,00 = 검출없음
0 = 변환되지않음
1 = 변환됨
TTF 프로그래밍 방법이 사용됨. page 66
참조.
TTF 프로그래밍 방법이 사용됨. page 66
참조.
* = 스타트를 위해 라이징 엣지가 필요합니다.
역방향 스타트
역방향/정방향
런 활성화
스톱 펄스
스타트 역방향*
역방향/정방향
런 활성화
** = 블록 X2 의 점퍼를 놓아야 함을 명심하십시오.
제품 사용자 매뉴얼을 참조하십시오.
24-hour support +358 (0) 201 212 575 • Email: vacon@vacon.com
Page 18
18• vacon
2
2.4.4 출력 신호 (제어 키패드: 메뉴 M2 -> G2.3)
코드 파라미터 최소 최대 단위
P2.3.1
P2.3.2 아날로그 출력 기능 0 8 1 307
P2.3.3 아날로그 출력 검출 시간 0,00 10,00 s 1,00 308 0 = 검출이 없음
P2.3.4 아날로그 출력 변환 0 1 0 309
P2.3.5 아날로그 출력 최소 0 1 0 310
P2.3.6 아날로그 출력 검출 10 1000 % 100 311
P2.3.7 디지털 출력 1 기능 0 16 1 312
P2.3.8 RO1 기능 0 16 2 313 As 파라미터:2.3.7
P2.3.9 RO2 기능 0 16 3 314 As 파라미터:2.3.7
P2.3.10 출력 주파수 한도 1 감시 0 2 0 315
P2.3.11
P2.3.12
P2.3.13 아날로그 출력 2 기능 0 8 4 472 As 파라미터:2.3.2
P2.3.14
P2.3.15 아날로그 출력 2 변환 0 1 0 474
P2.3.16 아날로그 출력 2 최소 0 1 0 475
P2.3.17 아날로그 출력 2 검출 10 1000 % 1,00 476
아날로그 출력 1 신호
선택
출력 주파수 한도 1;
감시된 값
아날로그 출력 2 신호
선택
아날로그 출력 2 검출
시간
Tab le 2-5. 출력 신호, G2.3
0 A.1 464
0,00 320,00 Hz 0,00 316
0.1 E.10 0.1 471
0,00 10,00
공장
초기값
1,00 473 0 = 검출 없음
s
임의
입력값
ID 참조
TTF 프로그래밍 사용. 72 쪽
참조. 72 .
0 = 사용하지 않음(20 mA/10 V)
1 = 출력 주파수 (0—f최대)
2 = 주파수 레퍼런스 (0—f최대)
3 = 모터 속도(0—모터 정격 속도)
4 = 직류 모터(0—In모터)
5 = 모터 토크(0—Tn모터)
6 = 모터 파워(0—Pn모터)
7 = 모터 전압(0--Un모터)
8 = DC-링크 전압(0—1000V)
0 = 변환없음
1 = 변환됨
0 = 0 mA (0 V)
1 = 4 mA (2 V)
0 = 사용하지 않음
1 = 준비됨
2 = 런
3 = 폴트
4 = 폴트 변환됨
5 = FC 오버히트 경고
6 = 외부 폴트나 경고
7 = 참조의 폴프나 경고
8 = 경고
9 = 역으로 됨
10 = 프리셋 속도 1
11 = At 속도
12 = 모터 조정기 활성
13 = OP 주파스 제한 1감시
14 = 제어위치: IO
15 = 서미스터 폴트/경고
16 = 필드 버스 DIN1
0 = 무제한
1 = 낮은 제한 감시
2 = 높은 제한 감시
TTF 프로그래밍 사용. 72 쪽
참조. 72.
0 = 변환없음
1 =변환됨
0 = 0 mA (0 V)
1 = 4 mA (2 V)
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 19
2
2.4.5 드라이브 파라미터 (제어 키패드: 메뉴 M2 -> G2.4)
코드 파라미터 최소 최대 단위
P2.4.1 램프1 모양 0,0 10,0 s 0,1 500
P2.4.2 램프 2 모양 0,0 10,0 s 0,0 501
P2.4.3 가속시간 2 0,1 3000,0 s 10,0 502
P2.4.4 감속시간 2 0,1 3000,0 s 10,0 503
P2.4.5 제동 쵸퍼 0 4 0 504
P2.4.6 스타트 기능 0 2 0 505
P2.4.7 스톱 기능 0 3 0 506
P2.4.8 DC 제동 전류 0,00 IL A
P2.4.9 정지시 DC 제동시간 0,00 600,00 s 0,00 508
램프 정지시 DC
P2.4.10
P2.4.11
P2.4.12 플럭스 제동 0 1 0 520
P2.4.13 플럭스 제동 전류 0,00 IL A IH 519
제동을 시작하는
주파수
스타트시 DC 제동
시간
Tab le 2-6. 드라이브 제어 파라미터, G2.4
0,10 10,00 Hz 1,50 515
0,00 600,00 s 0,00 516 0 = DC제동은 기동시 OFF상태
공장
초기값
0,7 x
I
임의
입력값
507
ID 참조
0 = 직선 모양
>0 = S-커브 램프 시간
0 = 직선 모양
>0 = S-커브 램프 시간
0 = 불가능
1 = 가동시 사용
2 = 외부 제동 초퍼
3 = 멈춤 및 가동시 사용
4 = 가동시 사용(테스트 아님)
0 = 램프
1 = 빠른 출발
2 = 빠른 출발 상태
0 = 코스팅
1 = 램프
2 = 램프+런 가능한 코스트
3 = 코스트+런 가능한 램프
0 = 정지시 DC제동은
OFF상태
0 = Off
1 = On
vacon • 19
2.4.6 금지 주파수 파라미터 (제어 키패드: 메뉴 M2 -> G2.5)
코드 파라미터 최소 최대 단위
P2.5.1
P2.5.2
P2.5.2
금지 주파수 범위 1
낮은 한도
금지 주파수 범위 1
높은 한도
가속/감속 램프
금지
Tab le 2-7. 금지 주파수 파라미터, G2.5
0,00 320,00 Hz 0,00 509
0,00 320,00 Hz 0,00 510
0,1 10,0 x 1,0 518
공장
초기값
24-hour support +358 (0) 201 212 575 • Email: vacon@vacon.com
임의
입력값
ID 참조
Page 20
20• vacon
2
2.4.7 모터 제어 파라미터 (제어 키패드: 메뉴 M2 -> G2.6)
코드 파라미터 최소 최대 단위
P2.6.1 모터 제어 모드 0 1/3 0 600
P2.6.2 U/f 최적화 0 1 0 109
P2.6.3 U/f 비율 선택 0 3 0 108
P2.6.4 약계자 영역 8,00 320,00 Hz 50,00 602
P2.6.5 약계자 영역에서의 전압 10 200,00 % 100,00 603 n% x Unmot
P2.6.6
P2.67
P2.6.8
P2.6.9 스위칭 주파수 1.0 Varies kHz Varies 601
P2.6.10 과전압 제어기 0 2 1 607
P2.6.11 저전압 제어기 0 1 1 608
P2.6.12 부하 감소 0.00 100,00 % 0,00 620
P2.6.13 모터 인식 0 1/2 0 631
U/f 곡선 중간지점
주파수
U/f 곡선 중간지점
전압
제로 주파수에서의 출력
전압
0.00 P2.6.4 Hz 50,00 604
0.00 100,00 % 100,00 605
0.00 40,00 % Varie s 606 n% x Umnot
공장
초기값
클로즈드 루프 파라미터 그룹 2.6.14
P2.6.14.1 자화 전류 0,00 2xIH A 0,00 612
P2.6.14.2 속도 제어 P 게인 1 1000 30 613
P2.6.14.3 속도 제어 I 시간 0,0 3200,0 ms 30,0 614
P2.6.14.5 가속 보상 0,00 300,00 s 0,00 626
P2.6.14.6 수면 조정 0 500 % 100 619
P2.6.14.7 기동시 자화 전류 0,00 IL A 0,00 627
P2.6.14.8 기동시 자화시간 0 60000 ms 0 628
P2.6.14.9 기동시0-속도 시간 0 32000 ms 100 615
P2.6.14.10 정지시0-속도 시간 0 32000 ms 100 616
P2.6.14.11 스타트 업 토크 0 32000 0 621
P2.6.14.12 스타트 업 토크 정방향 –300,0 3 % 0,0 633
P2.6.14.13 스타트 업 토크 역방향 –300,0 300,0 % 0,0 634
P2.6.14.15 엔코더 필터 시간 0,0 100,0 ms 0,0 618
P2.6.14.17 전류 제어 P 게인 0,00 100,00 % 40,00 617
Tab le 2-8. 모터제어 파라미터, G2.6
임의
입력값
ID 참조
0=주파수 제어
1=속도 제어
NXP에만 추가로 부여된 기능
2=사용하지 않음
3=클로즈드 루프 제어
0=사용하지 않음
1=자동 토크 상승
0=사용하지 않음
1=자동 토크 상승
0=직선 모양
1=제곱
2=프로그램 자동이 가능한
3=플럭스 최적화와 신형
n% x Umnot
파라미터 최대값=P2.6.5
정확한 값에 대한 8-14를
참조하시오.
0=사용하지않음
1=사용 (램핑이 없음)
2=사용 (램핑)
0=사용하지 않음
1=사용
0=비활성화
1=모터인식없이 가동
2=모터인식과 함께 가동
0 = 사용하지 않음
1 = 토크 메모리
2 = 토크 레퍼런스
3 = 시동 토크 정방향/역방향
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 21
2
응답
1 = 폴트저장되지않은 폴트
P2.7.11
모터 열 시간 상수
1
200
최소
Varies
707
P2.7.19
제로 주파수 부하
5,0
150,0
%
10,0
715
3 = 폴트폴트, 코스팅에 의한 정지
응답
2.4.8 보호 (제어 키패드: 메뉴M2 -> G2.7)
코드 파라미터 최소 최대 단위
P2.7.1
P2.7.2
P2.7.3
P2.7.4 입력 상 감시 0 3 0 730
P2.7.5
P2.7.6 출력 상 감시 0 3 2 702 0 = 응답 없음
P2.7.7 지락 보호 0 3 2 703
P2.7.8
P2.7.9 모터 주변 온도 변수
P2.7.10
Re 4mA 레퍼런스
폴트에 응답
4mA 레퍼런스 폴트
주파수
외부폴트에 대한
응답
저전압 폴트에 대한
모터의 열보호
제로 속도에서의
모터 냉각 변수
0 3 2 704
0 5 0 700
P2.1.2 Hz 0,00 728
0,00
0 3 2 701
0 1 0 727
–
100,0 % 0,0 705
100,0
150,0 % 40,0 706
0,0
공장
초기값
임의
입력값
ID 참조
0 = 응답 없음
1 = 경고
2 = 경고 + 이전 주파수
3 = 경고+프리셋 주파수 2.7.2
4 = 폴트 2.4.7에 의한 정지 폴트,
2.4.7에 의한 정지
5 = 폴트, 코스팅에 의한 정지폴트,
코스팅에 의한 정지
0 = 응답 없음
1 = 경고
2 = 폴트2.4.7에 의한 정지폴트, 2.4.7에
의한 정지
3 = 폴트, 코스팅에 의한 정지폴트,
코스팅에 의한 정지
0 = 폴트 이력에 저장된 폴트
1 = 경고
2 = 폴트 2..4.7에 의한 정지폴트, 2.4.7에
의한 정지
3 = 폴트스톱코스팅폴트, 코스팅에 의한
정지 폴트, 코스팅에 의한 정지
vacon • 21
P2.7.12 모터 듀티 싸이클 0 150 % 100 708
0 = 응답없음
1 = 경고
P2.7.13
P2.7.14
P2.7.15 스톨 시간 한도 1,00
P2.7.16 스톨 주파수 한도 1,0 P2.1.2 Hz 25,0 712
P2.7.17
P2.7.18 약계자 영역 부하 10 150 % 50 714
P2.7.20
P2.7.21
P2.7.22
P2.7.23
스톨 보호 0 3 0 709
스톨 전류 0,00 2 x I A I
120,0
경부하 보호 0 3 0 713
경부하 보호 시간
한도
온도계 폴트에
대한 응답
필드버스 폴트에
대한 응답
슬롯 폴트에 대한
2 600 s 20 716
0 3 2 732
0 3 2 733 P2.7.21 참조
0 3 2 734 P2.7.21 참조
s 15,00 711
0
710
2 = 폴트, 2.4.7에 의한 정지
3 = 폴트, 코스팅에 의한 정지
3 = 폴트코스팅에 의한 정지
0 = 응답없음
1 = 경고
2 = 폴트, 2.4.7에 의한 정지
3 = 폴트, 코스팅에 의한 정지
0 = 응답없음
1 = 경고
2 = 폴트, 2.4.7에 의한 정지
3 = 폴트, 코스팅에 의한 정지
Tab le 2-9. 보호, G2.7
24-hour support +358 (0) 201 212 575 • Email: vacon@vacon.com
Page 22
22• vacon
2
2.4.9 오토 스타트 파라미터 (제어 키패드: 메뉴 M2 -> G2.8)
코드 파라미터 최소 최대 단위
P2.8.1 대기 시간 0,10 10,00 s 0,50 717
P2.8.2 시도 시간 0,00 60,00 s 30,00 718
P2.8.3 스타트 기능 0 2 0 719
P2.8.4 저전압 트립 후에 시도한 횟수 0 10 0 720
P2.8.5 과전압 트립 후에 시도한 횟수 0 10 0 721
P2.8.6 과 전류 트립 후에 시도한 횟수 0 3 0 722
P2.8.7
P2.8.8
P2.8.9 외부 폴트 트립 후에 시도한 횟수 0 10 0 725
P2.8.10
4mA 레퍼런스 트립 후에 시도한
횟수
모터 온도 폴트 트립 후에 시도한
횟수
경부하 폴트 트립 후에 시도한
횟수
Tab le 2 -10. 오토 스타트 파라미터, G2.8
0 10 0 723
0 10
0 10
공장
초기값
0
0
임의
입력값
ID 참조
0 =램프
1 = 빠른 출발
2 = P2.4.6에 따름
726
738
2.4.10 키패드 제어 (제어 키패드: 메뉴 M3)
키패드의 제어 위치와 방향의 설정에 대한 파라미터는 아래에 있습니다. 각 제품 사용자 매뉴얼의
키패드 제어 메뉴를 참조하십시오.
공장
초기값
0
1
코드 파라미터 최소 최대 단위
P3.1 제어 위치 1 3 1 125
P3.2 키패드 레퍼런스 P2.1.1 P2.1.2 Hz
P3.3 방향(키패드에서)
R3.4
Tab le 2 -11. Keypad control parameters, M3
스톱 버튼
0
0
1
1
임의
입력값
ID 참조
1 = I/O단자대
2 = 키패드
3 = 필드버스
0 = 정방향
123
1 = 역방향
0 = 정지버튼의 제한적인 기능
114
1 = 정지버튼 항상 활성화됨
2.4.11 시스템 메뉴 (제어 키패드: 메뉴 M 6)
파라미터와 주파수 변환기의, 얶어 선택, 파라미터 세팅, 하드웨어 및 소프트웨어 정보같은
일반적인 사용은, 제품의 사용자 매뉴얼을 참조하십시오.
2.4.12 확장 보드 (제어 키패드: 메뉴 M7)
M7 메뉴는 제어 보드에 연결된 확장 및 옵션 보드와 관련된 정보를 보여줍니다. 더 많은 정보를
위하여 제품의 사용자 매뉴얼을 참조하십시오.
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 23

vacon • 23
3
3. LOCAL/REMOTE 제어 어플리케이션
Software 코드: ASFIFF03
3.1 도입
페이지 S6.2 메뉴 M6 에서 Local/Remote 제어 어플리케이션을 선택하십시오.
Local/Remote 제어 어플리케이션을 활용하여, 두개의 다른 위치에서 제어가 가능합니다. 각각의
제어 위치에서 주파수 레퍼런스는 제어 키패드, I/O 단자대 혹은 필드버스에서 확인 가능합니다.
디지털 입력 DIN6을 활용하여 제어 위치 설정이 가능합니다.
• 모든 출력은 자유롭게 프로그램가능합니다.
추가 기능:
• 프로그램 가능한 스타트/스톱과 리버스 신호 논리
• 전압 검출
• 하나의 전류 제한 감시
• 2 차 램프 및 S-형 램프 프로그래밍
• 프로그램 가능한 시작 및 정지 기능
• 정지시DC-제동
• 하나의 금지 전류 구역
• 프로그램가능한 U/f 곡선 및 주파수 변환
• 오토 스타트
• 모터 온도의 실속 보호: Off, 주의, 폴트 프로그램 가능
Local/Remote 제어 어플리케이션 의 파라미터는 이 매뉴얼의 8 장에 각 ID 넘버에 따라 설명되어
있습니다.
24-hour support +358 (0) 201 212 575 • Email: vacon@vacon.com
Page 24
24• vacon
3
Jumper block X3:
CMA and CMB grounding
11
CMA
DIN 1—DIN 3까지 공통적용
GND 혹은 +24V에 연결
13
GND
I/O 그라운드
레퍼런스 및 콘트롤 그라운드
위치B: 역방향 스타트
접점 닫힘 = 위치B가 활성화됨
17
CMB
DIN4—DIN6까지 공통 적용
GND 혹은 +24V에 연결
18
AO1+
19
AO1-
프로그램가능함(P2.3.7)
READY
RUN
10
220
VAC
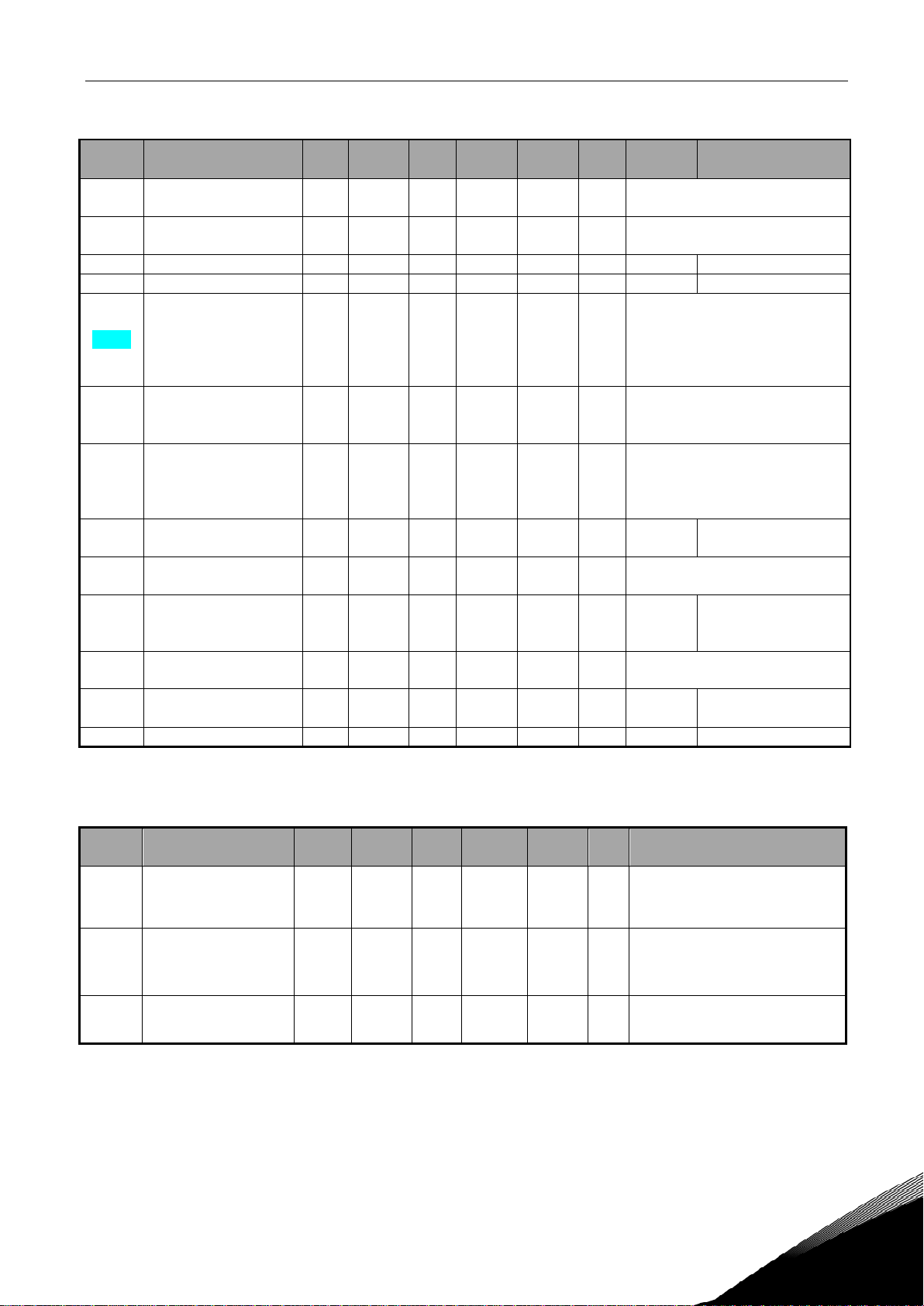
3.2 제어 I/O
레퍼런스포텐쇼미터, 1…
kΩ
리모트 제어 24V
리모트 레퍼런스
0(4)-20mA
리모트 컨트롤 그라운드
OPT-A1
터미널 신호 설명
1 +10Vref 레퍼런스 출력 포텐쇼미터 전압외.
2 AI1+
아날로그입력 1
전압범위 0—10V DC
프로그램 가능함(P2.1.12)
위치B의 아날로그 입력1 레퍼런스
3 AI1- I/O 그라운드 레퍼런스 및 콘트롤 그라운드
4 AI2+ 아날로그입력 2
5 AI2-
전류 범위 0—20mA
프로그램 가능함(P2.1.11)
위치A의 아날로그 입력 2 레퍼런스
6 +24V 콘트롤 전압 출력 스위치 전압 외. max 0.1 A
7 GND I/O 그라운드 레퍼런스 및 콘트롤 그라운드
8 DIN1 위치A: 정방향 스타트
프로그램가능한 로직(P2.2.1)
9 DIN2
10 DIN3
12
+24V 콘트롤 전압 출력 스위치 전압 (#6참조)
위치A: 역방향 스타트
Ri min = 5 kohm
외부폴트입력
프로그램가능한 (P2.2.2)
접점닫힘 = 정방향 스타트
접점닫힘 = 역방향 스타트
접점열림 = 폴트 없음
접점닫힘 = 폴트
위치B: 정방향 스타트
mA
14 DIN4
15 DIN5
16 DIN6 위치 A/B 선택
프로그램가능한 로직
(P2.2.15)
Ri min = 5 kohm
아날로그출력1 출력주파스
프로그램가능함(P2.3.2)
접점닫힘 = 정방향 스타트
접점닫힘 = 역방향 스타트
접점 열림 = 위치A가 활성화됨
범위 0—20 mA/RL, max. 500Ω
디지털 출력
20 DO1
READY
콜렉터 개방, I≤50mA, U≤48 VDC
OPT-A2
21 RO1
23 RO1
24 RO2
26 RO2
프로그램가능함 (P2.3.8)
프로그램가능함 (P2.3.9)
릴레이 출력 1
런
릴레이 출력 2
폴트
22 RO1
25 RO2
Tab le 3-1. 로컬/리모트컨트롤 어플리케이션 디폴트 I/O 구성.
주의: 아래 점퍼선택을 참조하시오. 제
품의 사용자 매뉴얼에 더 많은 정보가
있습니다.
CMB connected to GND
CMA connected to GND
CMB isolated from GND
CMA isolated from GND
CMB and CMA
internally connected together,
isolated from GND
= Factory default
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 25
3
DIN3
> 1
DIN6
DIN2
DIN3
AI1
AI2
DIN1
DIN2
DIN3
DIN4
DIN5
A
B
A
B
A
B
NX12k05.fh8
Internal reverse
Internal fault reset
Fault reset input (programmable)
3.3 Keypad direction
Internal Start/Stop
Reference from fieldbus
Start/Stop from fieldbus
Direction from fieldbus
Start/Stop buttons
Internal
frequency ref.
Reset button
Programmable
Start/Stop and
reverse logic A
Programmable
Start/Stop and
reverse logic B
Start forward
(programmable)
Start reverse
(programmable)
Start forward
Start rever
se
(programmable)
(programmable)
Start/Stop
Reverse
Up
Down
3.1 Control place
2.1.15 Jogging speed ref.
2.1.14 Fieldbus Ctrl reference
2.1.13 Keypad Ctrl reference
2.1.12 I/O B reference
2.1.11 I/O A reference
R3.2 Keypad reference
Motor
potentiometer
vacon • 25
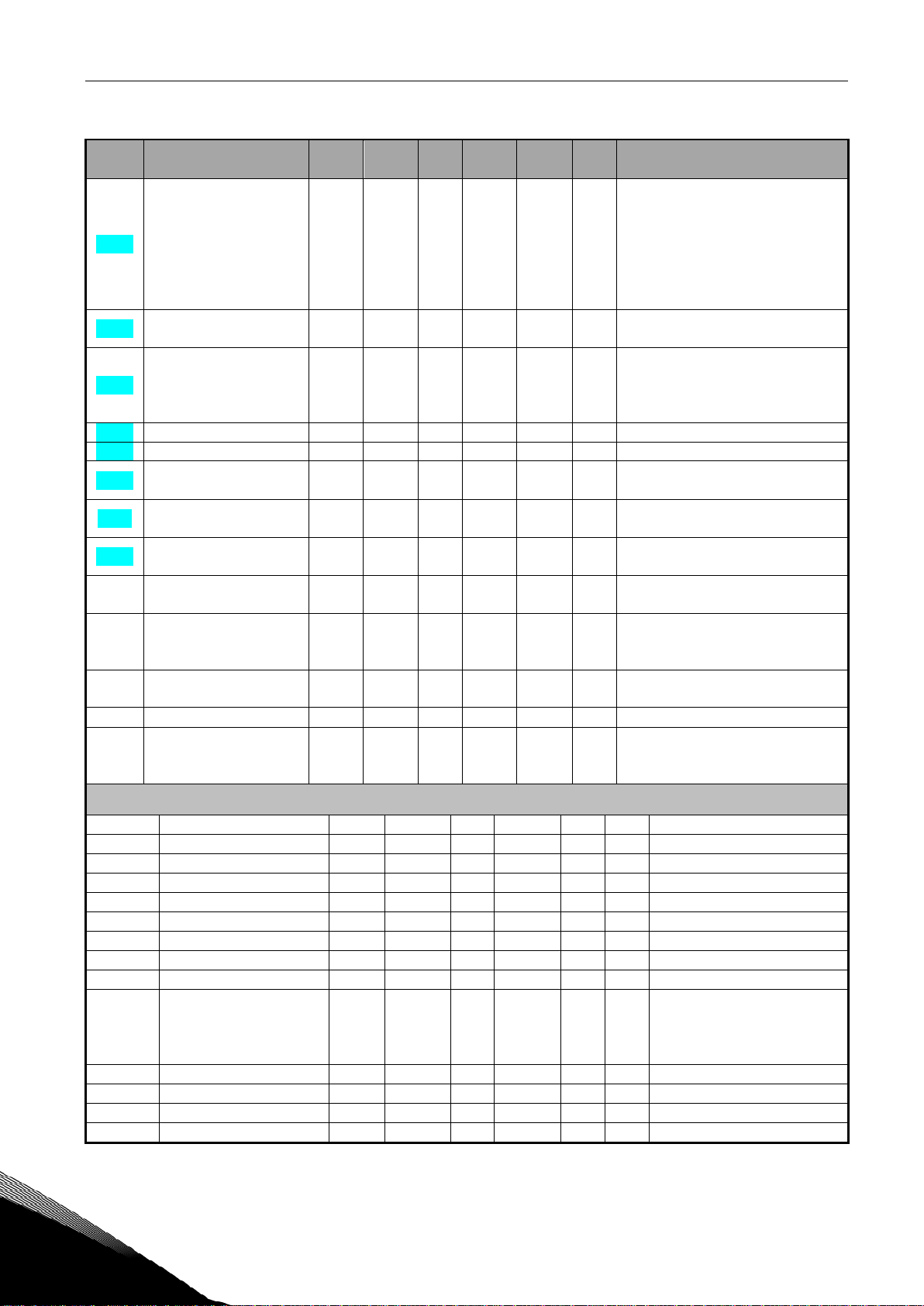
3.3 Local/Remote 어플리케이션에서의 제어신호 로직
Figure 3-1. Local/Remote제어 어플리케이션의 제어 신호 로직
24-hour support +358 (0) 201 212 575 • Email: vacon@vacon.com
Page 26
26• vacon
3
3.4 Local/Remote 제어 – 파라미터 리스트
다음 페이지에서는 관련된 파라미터 리스트가 있습니다. 파라미터에 관한 설명은 131에서 230쪽
사이에 나와있습니다.
컬럼 설명:
코드 = 키패드상의 위치; 현재 파라미터 넘버 표시
파라미터 = 파라미터 이름
최소 = 파라미터 최소값
최대 = 파라미터 최대값
단위 = 파라미터 값; 있을 경우 표시
공장 초기값 = 공장 초기 프리셋 값
임의 입력값 = 사용자 세팅
ID = 파라미터의 ID 넘버
= 파라미터열 에 이 파라미터를 프로그램하기 위해 TTF 방법를 사용하십시오.
= 주파수 변환기가 정지되었을 경우에는 파라미터 값이 변동 가능함.
3.4.1 모니터링 값 (제어 키패드: 메뉴 M1)
모니터되는 수치는 상황과 측정 뿐는 아니라 파라미터와 신호의 실제 값입니다. 모니터되는 값은
수정할 수 없습니다. 더많은 정보를 위하여 제품의 사용자 매뉴얼을 참조하십시오
코드 파라미터 단위 ID 설명
V1.1 출력 주파수 Hz 1 모터로의 출력 주파수
V1.2 주파수 레퍼런스 Hz 25 모터제어의 주파수
V1.3 모터 속도 rpm 2 모터속도 rpm
V1.4 모터 전류 A 3
V1.5 모터 토크 % 4 계산된 샤프트 토크
V1.6 모터 출력 % 5 모터의 샤프트 파워
V1.7 모터 전압 V 6
V1.8 DC링크 전압 V 7
V1.9 단위 온도 C 8 히트싱크 온도
V1.10 모터 온도 % 9 계산된 모터 온도
V1.11 아날로그 입력 1 % 13 AI1
V1.12 아날로그 입력 2 V/mA 14 AI2
V1.13 DIN1, DIN2, DIN3 V/mA 15 디지털 입력 상태
V1.14 DIN4, DIN5, DIN6 16 디지털 입력 상태
V1.15 DO1, RO1, RO2 디지털 및 릴레이 출력 상태
V1.16 아날로그 전류 출력 mA 26 AO1
멀티 모니터링 아이템 3개의 모니터값 선택
Tab le 3-2. 모니터링 값
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 27
3
3.4.2 베이직 파라미터(제어 키패드: 메뉴 M2 -> G2.1)
코드 파라미터 최소 최대 단위
P2.1.1 최소 주파수 0,00 P2.1.2 Hz 0,00 101
P2.1.2 최대 주파수 P2.1.1 320,00 Hz 50,00 102
P2.1.3 가속시간 1 0,1 3000,0 s 3,0 103
P2.1.4 감속시간 1 0,1 3000,0 s 3,0 104
P2.1.5 전류 한도 0,1xIH 2xIH A IL 107
P2.1.6
P2.1.7
모터의 정격
전압
모터의 정격
주파수
180 690 V
8,00 320,00 Hz 50,00 111
공장
초기값
NX2:230V
NX5:400V
NX6:690V
임의
입력값
110
ID 참조
참조:f최대>싱크로된 모터 속도 일
경우 모터와 드라이브 시스템의
적합성을 확인하십시오.
모터 명판확인
vacon • 27
P2.1.8
P2.1.9
P2.1.10
P2.1.11 I/O A 레퍼런스 0 4 1 117
P2.1.12 I/O B 레퍼런스 0 4 0 131
P2.1.13
P2.1.14
P2.1.15
모터의 정격
속도
모터의 정격
전류
모터 역률 0,30 1,00 0,85 120 모터 명판확인
키패드 제어
레퍼런스
필드버스 제어
레퍼런스
조깅 속도
레퍼런스
Tab le 3-3. 베이직 파라미터 값 G2.1
0,1xIH 2xIH
20 000 rpm 1440 112
24
A
0 3 2 121
0 3 3 122
0,00 P2.1.2 Hz 0,000 124
IH 113 모터 명판확인
초기값은 4-극 모터와 정격 사이즈의
주파수 변화기에 해당됩니다.
0=AI1
1=AI2
2=키패드
3=필드 버스
4=모터의 전위차계
0=AI1
1=AI2
2=키패드
3=필드 버스
4=모터의 전위차계
0=AI1
1=AI2
2=키패드
3=필드 버스
0=AI
1=AI2
2=키패드
3=필드 버스
24-hour support +358 (0) 201 212 575 • Email: vacon@vacon.com
Page 28
28• vacon
3
3.4.3 입력 신호(제어 키패드:메뉴M2->G2.2)
코드 파라미터 최소 최대 단위
P2.2.1
P2.2.2 DIN3 기능 0 13 1 301
P2.2.3 AI1 신호 선택 0.1 E.10 A.1 377 TTF프로그래밍 사용. 72쪽 참조.
P2.2.4 AI1 신호 범위 0 2 0 320
P2.2.5
P2.2.6
위치 A 스타트/스톱
로직 버튼
AI1 임의 입력값 세팅
최소
AI1 임의 입력값세팅
최대
0 8 0
-160,00 160,00 % 0,00 321 아날로그 입력1검출 최소
-160,00 160,00 % 100,0 322 아날로그 입력1 검출 최대
공장
초기값
임의
입력값
ID 참조
0 DIN1 DIN2
1
정방향 스타트
2
스타트/스톱
3
스타트/스톱
4
300
스타트 펄스
5
정방향 스타트
6
정방향 스타트*
7
스타트*/스톱
8
스타트*/스톱
9
정방향 스타트*
0 = 사용하지 않음
1 = 외부 폴트, 접점닫힘.
2 = 외부 폴트,접점열림
3 = 런 활성화
4 = 가속/감속시간 선택
5 = 접점이 IO로 강제함.
6 = 키패드접점이 키패드로 강제함.
7 = 필드버스접점이 필드버스로 강제함.
8 = 역방향
9 = 조깅 속도
10 = 폴트 리셋
11 = 가속/감속 작동 금지.
12 = DC 제동 명령
13 = 모터 전위차계
DOWN
0=0-10V (0-20mA**)
1=2-10V (4-20mA**)
2=임의 입력값변경 가능한 범위.**
역방향 스타트
역방향 런
정지 활성화
펄스
모터 포텐셔 UP
역방향 스타트*
역방향 런
활성화
모터 포텐셔 UP
P2.2.7 AI1 신호 변환 0 1 0 323 아날로그 입력 레퍼런스변환 예스/노 ?
P2.2.8 AI1 신호 검출 시간 0,00 10,00 s 0,10 324 아날로그 입력1레퍼런스 검출 시간, 상수.
P2.2.9 AI2 신호 선택 0.1 E.10 A.2 388 TTF프로그래밍 사용. 72쪽 참조.
0=0-20mA (0-10V**)
P2.2.10 AI2 신호 범위 0 2 1 325
P2.2.11
P2.2.12
P2.2.13 AI2 신호 변환 0 1 0 328 아날로그 입력2레퍼런스변환 예스/노 ?
P2.2.14 AI2 신호 검출 시간 0,00 10,00 s 0,10 329
AI2 임의 입력값 세팅
최소
AI2 임의 입력값 세팅
최대
Tab le 3-4. 입력신호 G2.2
-160,00 160,00 % 0,00 326
-160,00 160,00 % 100,00 327 아날로그 입력 2검출 최대
1=4-20mA (2-10V**)
2=임의 입력값 임의변경 가능한 범위.
아날로그 입력2 검출 최소
최소
아날로그 입력 2 레퍼런스 검출 시간,
상수.
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 29
vacon • 29
3
>0 = 최대값으로 검출.
코드 파라미터 최소 최대 단위
P2.2.15
P2.2.16
P2.2.17
P2.2.18
P2.2.19
P2.2.20 프리 아날로그 입력,
P2.2.21
P2.2.22
P2.2.23
P2.2.24 스타트 펄스 메모리 0 1 0 498
위치 B 스타트/스톱
로직 선택
위치 A 레퍼런스 검출
최소 값
위치 A 레퍼런스 검출
최대값
위치 B 레퍼런스 검출
최소값
위치 B 레퍼런스 검출
최대값
신호 선택
프리 아날로그 입력,
기능
모터 포텐셔미터 램프
시간
모터 포텐셔미터
주파수 레퍼런스
메모리 리셋
Tab le 3-4. 입력신호 G2.2
0 6 0 363
0,00
0,00 304
0,00 320,00 Hz 0,00
0,00 320,00 Hz 0,00 365
0 2 0 361
0 4 0 362
0,1 2000,0 Hz/s 10,0 331
0 2 1 367
320,00 Hz 0,00
공장
초기값
임의
입력값
303
ID 참조
364
* = 시작을 위해 라이징 엣지를 요함
DIN4 DIN5
0
정방향
1
스타트
2
스타트/스톱
3
스타트/스톱
4
스타트 펄스
5
정방향
6
스타트*
스타트*/스톱
스타트*/스톱
최소 레퍼런스 신호에
해당하는 주파수를
선택하십시오.
최대 레퍼런스 신호에
해당하는 주파수를
선택하십시오.
0,00 = 검출없음.
>0 = 최대값으로 검출.
최소 레퍼런스 신호에
해당하는 주파수를
선택하십시오.
최대 레퍼런스 신호에
해당하는 주파수를
선택하십시오.
0,00 =검출없음.
0 = 사용안함
1 = 아날로그 입력1
2 = 아날로그 입력2
0 = 기능 없음
1 = 전류한계를 낮춤
(P2.1.5)
2 = DC제동 전류 줄임
3 =가속/감속시간을 줄임.
4 =토크 감시 한계를 낮춤.
0 = 리셋 안됨
1 = 정지시 혹은 출력 감소시
리셋하시오.
2 = 출력감소시 리셋하시오.
0 = 가동상태가 복사되지않음.
1 = 가동상태가 복사됨.
역방향
스타트
역방향 런
활성화 스톱
펄스 역방향
스타트*
역방향 런
활성화
24-hour support +358 (0) 201 212 575 • Email: vacon@vacon.com
** = 블록 X2 의 점퍼를 놓아야 함을 명심하십시오. 제품의 사용자 매뉴얼을 참조하십시오.
Page 30
30• vacon
3
3.4.4 출력 신호(제어 키패드:메뉴 M2->G2.3)
코드 파라미터 최소 최대 단위
P2.3.1 AO1 신호 선택 0.1 E.10 A.1 464
P2.3.2 아날로그 출력 기능 0 8 1 307
P2.3.3 아날로그 출력 검출 시간 0,00 10,00 s 1,00 308 0 = 검출 없음
P2.3.4 아날로그 출력 변환 0 1 0 309
P2.3.5 아날로그 출력 최소 0 1 0 310
P2.3.6 아날로그 출력 검출 10 1000 % 100 311
P2.3.7 디지털 출력 1 기능 0 22 1 312
P2.3.8 릴레이 출력 1 기능 0 22 2 313 As 파라미터:2.3.7
P2.3.9 릴레이 출력 2 기능 0 22 3 314 As 파라미터:2.3.7
P2.3.10 출력 주파수 한도 1 감시 0 2 0 315
P2.3.11 출력 주파수 한도 1; 감시 값 0,00 320,00 Hz 0,00 316
P2.3.12 출력 주파수 한도 2 감시 0 2 0 346
P2.3.13 출력 주파수 한도 2; 감시 값 0,00 320,00 Hz 0,00 347
공장
초기값
임의
입력값
ID 참조
TTF 프로그래밍 사용. 72 쪽
참조. 72.
0 = 사용하지 않음(20 mA / 10
V)
1 = 출력 주파수(0—f최대)
2 = 레퍼런스 주파수(0—f최대)
3 = 모터 속도(0—모터 정격
속도)
4 = 모터 전류(0—In모터)
5 = 모터 토크(0—Tn모터)
6 = 모터 출력(0—Pn모터)
7 = 모터 전압(0-Un모터)
8 = DC링크 전압 (0—1000V)
0 = 변환없음
1 =변환됨
0 = 0 mA
1 = 4 mA
0 = 사용하지 않음
1 = 준비
2 = 런
3 = 폴트
4 = 폴트 변환됨
5 = FC 오버히트 경고
6 = 외부 폴트 경고
7 = 참조 폴트 경고
8 = 경고
9 = 역방향으로 됨
10 = 조깅의 속도 선택
11 = 제 속도를 내고
12 = 모터 레귤레이터 활성화됨
13 = 출력 주파수 한계 감시1
14 = 출력 주파수 한계 감시2
15 = 토크 한계 감시.
16 = 레퍼런스 한계 감시.
17 = 외부 제동 제어
18 = 제어위치: IO
19 = FC온도한계 감시.
20 = 요청되지않은 회전 방향.
21 = 외부 제동 제어변환됨
22 = 온도계 폴트/경고
0 = 한계없음.
1 = 낮은 한계의 감시
2 = 높은 한계의 감시
0 = 한계없음.
1 = 낮은 한계의 감시
2 =높은 한계의 감시
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 31

vacon • 31
3
P2.3.15 토크
-300,0
300,0 % 0,0
349
P2.3.17
0,0
100,0 % 0,0
351
P2.3.19
On-지연
0,0
100,0 s 1,5
353
.
P2.3.23
2 기능
0
8 4 472
As
:2.3.2
1 =
P2.3.27
2
10
1000 % 100
476
코드 파라미터 최소 최대 단위
P2.3.14 토크 한도 감시 기능 0 2 0 348
한도 감시 값
P2.3.16
P2.3.18 외부 제동Off-지연 0,0 100,0 s 0,5 352
P2.3.20
P2.3.21
P2.3.22 아날로그 출력 2 검출 0.1 E.10 0.1 471
P2.3.24
P2.3.25 아날로그 출력 2 변환 0 1 0 474
P2.3.26 아날로그 출력 2 최소 0 1 0 475
레퍼런스 한도 감시
기능
레퍼런스 한도 감시 값
외부 제동
주파수컨버터 온도 한도
감시
주파수 컨버터 온도 한도
값
아날로그 출력
아날로그 출력 2 검출
시간
아날로그 출력
Tab le 3-5. 출력 신호 G2.3
검출
0 2 0 350
0 2 0 354
-10 100 C 40 355
0,00 10,00 s 1,00 473 0 =검출 없음
공장
초기값
임의
입력값
ID 참조
0 = 없음
1 = 낮은 한도
2 = 높은 한도
0 = 없음
1 =낮은 한도
2 = 높은 한도
0 = 없음
1 = 낮은한도
2 = 높은 한도
TTF 프로그래밍 사용. 72 쪽
72.
참조
파라미터
0 = 변환없음
변환됨
0 = 0 mA
1 = 4 mA
24-hour support +358 (0) 201 212 575 • Email: vacon@vacon.com
Page 32

32• vacon
3
3.4.5 드라이브 제어 파라미터(제어 키패드:메뉴 M2 -> G2.4)
코드 파라미터 최소 최대 단위
P2.4.1 램프1 모양 0,0 10,0 s 0,1 500
P2.4.2 램프2 모양 0,0 10,0 s 0,0 501
P2.4.3 가속시간 2 0,1 3000,0 s 10,0 502
P2.4.4 감속시간 2 0,1 3000,0 s 10,0 503
P2.4.5 제동 쵸퍼 0 4 0 504
P2.4.6 스타트 기능 0 2 0 505
P2.4.7 스톱 기능 0 3 0 506
P2.4.8 DC 제동 전류 0,00 I
P2.4.9 정지시 DC 제동시간 0,00 600,00 s 0,00 508
램프 정지시 DC
P2.4.10
P2.4.11
P2.4.12 플럭스 제동 0 1 0 520
P2.4.13 플럭스 제동 전류 0,00 I
제동을 시작하는
주파수
스타트시 DC 제동
시간
Tab le 3-6. 드라이브 제어 파라미터 G2.4
0,10 10,00 Hz 1,50 515
0,00 600,00 s 0,00 516
A 0,7 x I
A I
공장
초기값
임의
입력값
507
519
ID 참조
0 = 직선 모양
>0 = S-커브 램프 시간
0 = 직선 모양
>0 = S-커브 램프 시간
0 =비활성화
1 =가동시 사용됨
2 = 외장형 제동 쵸퍼
3 = 정지 / 가동시 사용
4 = 가동시 작용됨(테스트
아님)
0 = 램프
1 = 빠른 출발
2 = 빠른 출발 상태
0 = 코스팅
1 = 램프
2 = 램프+런 가능한 코스트
3 = 코스트+런 가능한 램프
0 = 정지시 DC제동 OFF
0 = 기동시 DC제동 OFF
0 = Off
1 = On
3.4.6 금지 주파수 파라미터(제어 키패드: 메뉴 M2 -> G2.5)
코드 파라미터 최소 최대 단위
P2.5.1
P2.5.2
P2.5.3
P2.5.4
P2.5.5
P2.5.6
P2.5.7 가속/감속램프 금지 0,1 10,0 x 1,0 518
금지 주파수 범위 1
낮은 한도
금지 주파수 범위 1
높은 한도
금지 주파수 범위 2
낮은 한도
금지 주파수 범위 2
높은 한도
금지 주파수 범위 3
낮은 한도
금지 주파수 범위 3
높은 한도
Tab le 3-7. 금지 주파수 파라미터 G2.5
0,00 320,00 Hz 0,00 509
0,00 320,00 Hz 0,0 510 0 =금지범위 1이 OFF
0,00 320,00 Hz 0,00 511
0,00 320,00 Hz 0,0 512 0 = 금지범위 2가 OFF
0,00 320,00 Hz 0,00 513
0,00 320,00 Hz 0,0 514 0 금지범위 3이 OFF
공장
초기값
임의
입력값
ID 참조
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 33

3
P2.6.4
약계자 영역
8,00
320,00
Hz
50,00
602
주파수
출력 전압
P2.6.12
부하 감소
0,00
100,00
%
0,00
620
클로즈드 루프 파라미터 그룹 2.6.14
P2.6.14.7
기동시 자화 전류
0,00
IL A 0,00
627
P 게인
3.4.7 모터 제어 파라미터(제어 키패드:메뉴 M2 -> G2.6)
코드 파라미터 최소 최대 단위
P2.6.1 모터 제어 모드 0 1/3 0 600
P2.6.2 U/f 최적화 0 1 0 109
P2.6.3 U/f 비율 선택 0 3 0 108
공장
초기값
임의
입력값
vacon • 33
ID 참조
0 = 주파수 제어
1 = 속도 제어
2 = 사용하지 않은
3 = 클로즈드 루프 속도 제어
0 = 사용하지 않음
1 = 자동 토크 상승
0 = 직선 모양
1 = 제곱
2 = 프로그램
3 = 플럭스 최적화와 함께 직선
모양
NXP에 부가된 기능:
P2.6.5
P2.6.6
P2.6.7
P2.6.8
P2.6.9 스위칭 주파수 1,0 Varies kHz 가변적임
P2.6.10
P2.6.11
P2.6.13 모터 인식 0 1/2 0 631
P2.6.14.1 자화 전류 0,00 2 x I
P2.6.14.2 속도 제어 P 게인 1 1000 30 613
P2.6.14.3 속도 제어 I 시간 0,0 3200,0 ms 30,0 614
P2.6.14.5 가속 보상 0,00 300,00 s 0,00 626
P2.6.14.6 수면 조정 0 500 % 100 619
약계자 영역에서의
전압
U/f 커브 중간점
U/f 커브 중간점
전압
제로 주파수에서의
과전압
제어기
저전압
제어기
10,00 200,00 % 100,00 603 n% x U
0,00 P2.6.4 Hz 50,00 604
0,00 100,00 % 100,00 605
0,00 40,00 % 가변적임
0 2 1 607
0 1 1 608
A 0,00 612
606 n% x U
601
n% x U
최대값 값 = P2.6.5
정확한 값을 찾기위해서는 Table
121 참조
0 =사용하지 않은
1 = 사용 (램핑없음)
2 = 사용(램핑)
0 = 사용하지 않음
1 = 사용
0 = 아무런 작동없음
1 = 모터 구동없이 인식
2 = 모터 구동과 함께 인식
nmot
nmot
nmot
P2.6.14.8 기동시 자화 시간 0 60000 ms 0 628
P2.6.14.9 기동시 0-속도 시간 0 32000 ms 100 615
P2.6.14.10
P2.6.14.11 스타트 업 토크 0 3 0 621
P2.6.14.12
P2.6.14.13
P2.6.14.15 엔코터 검출 시간 0,0 100,0 ms 0,0 618
P2.6.14.17
모터 인식 파라미터 그룹 2.6.15
P2.6.15.1 속도 스톱 -50,0 50,0 0,0 0,0 1252 NC드라이브 속도 튜닝
정지시0-속도 시간
스톱
스타트 업 토크
정방향
스타트 업 토크
역방향
전류 제어
Tab le 3-8. 모터 제어 파라미터. G2.6
24-hour support +358 (0) 201 212 575 • Email: vacon@vacon.com
0 32000 ms 100 616
0 = 사용하지 않음
1 = 토크 메모리
2 = 토크의 참조
3 = 시동
토크정방향/역방향
–300,0 300,0 % 0,0 633
–300,0 300,0 % 0,0 634
0,00 100,00 % 40,00 617
Page 34

34• vacon
3
3.4.8 보호(제어 키패드: 메뉴 M2->G2.7)
코드 파라미터 최소 최대 단위
P2.7.1
P2.7.2
P2.7.3
P2.7.4 입력 상 감시 0 3 0 730
P2.7.5
P2.7.6 출력 상 감시 0 3 2 702
P2.7.7 지락 보호 0 3 2 703
P2.7.8 모터의 열 보호
P2.7.9 모터 주변온도 변수 –100,0 100,0 % 0,0 705
P2.7.10
P2.7.11 모터 열 시간 상수 1 200 최소 Varies 707
P2.7.12 모터 듀티 싸이클 0 150 % 100 708
P2.7.13 스톨 보호 0 3 0 709
P2.7.14 스톨 전류 0,00 2 x I
P2.7.15 스톨 시간 한도 1,00 120,00 s 15,00 711
P2.7.16 스톨 주파수 한도 1,0 P2.1.2 Hz 25,0 712
P2.7.17 경부하 보호 0 3 0 713
P2.7.18 약계자 영역 부하 10 150 % 50 714
P2.7.19 제로 주파수 부하 5,0 150,0 % 10,0 715
P2.7.20
P2.7.21
P2.7.22
P2.7.23
4mA 레퍼런스 폴트에
대한 응답
4mA 레퍼런스 폴트
주파수
외부 폴트에 대한
응답
저전압 폴트 에 대한
응답
제로 속도에서의
모터 냉각 변수
경부하 보호 시간
한도
온도계 폴트에 대한
응답
필드버스 폴트 에
대한 응답
슬롯 폴트 에 대한
응답
Tab le 3-9. 보호. G2.7
0 5 0 700
0,00 P2.1.2 Hz 0,00 728
0 3 2 701
0 1 0 727
0
0,0 150,0 % 40,0 706
2 600 s 20 716
0 3 2 732
0 3 2 733 See P2.7.21
0 3 734 See P2.7.21
3
A I
공장
초기값
임의
입력값
2
710
ID 참조
704
0 = 응답없음
1 = 경고
2 = 경고+이전 주파수.
3 = 경고+프리셋 주파수 2.7.2
4 = 폴트 2.4.7에 의한 정지
5 = 폴트코스팅에 의한 정지
0 = 응답없음
1 = 경고
2 = 폴트, 2.4.7에 의한 정지
3 = 폴트코스팅에 의한 정지
0 = 이력에 저장된 폴트
1 = 이력에 저장되지 않은 폴트
0 = 응답없음
1 = 경고
2 = 폴트 2.4.7에 의한 정지
3 = 폴트, 코스팅에 의한 정지
0 = 응답없음
1 = 경고
2 = 폴트2.4.7에 의한 정지
3 = 폴트코스팅에 의한 정지
0 = 응답없음
1 = 경고
2 = 폴트, 2.4.7에 의한 정지
3 = 폴트, 코스팅에 의한 정지
0 = 응답없음
1 = 경고
2 = 폴트, 2.4.7에 의한 정지
3 = 폴트, 코스팅에 의한 정지
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 35

3
P3.2
P2.1.1
P2.1.2
Hz
1 =
3.4.9 오토 스타트 파라미터(제어 키패드: 메뉴 M2 -> G2.8)
코드 파라미터 최소 최대 단위
P2.8.1 대기 시간 0,10 10,00 s 0,50 717
P2.8.2 시도 시간 0,00 60,00 s 30,00 718
P2.8.3 스타트 기능 0 2 0 719
P2.8.4
P2.8.5
P2.8.6
P2.8.7
P2.8.8
P2.8.9
P2.8.10
저전압 트립 후에
시도한 횟수
과전압 트립 후에
시도한 횟수
후에 시도한 횟수
과전류 트립 후에
시도한 횟수
4mA 레퍼런스 트립
후에 시도한 횟수
모터 temp 폴트 트립
후에 시도한 횟수
외부 폴트 트립 후에
시도한 횟수
경부하 폴트 트립
후에 시도한 횟수
Tab le 3-10. 보호. G2.8
0 10 0 720
0 10 0 721
0 3 0 722
0 10 0 723
0 10 0 726
0 10 0 725
0 10 0 738
공장
초기값
임의
입력값
ID 참조
0 = 램프
1 = 빠른 출발
2 = P2.4.6에 의함
vacon • 35
3.4.10 키패드 제어(제어 키패드: 메뉴 M3)
키패드의 제어 위치와 방향의 설정에 대한 파라미터는 아래에 있습니다. 각 제품 사용자 매뉴얼의
키패드 제어 메뉴를 참조하십시오.
코드 파라미터 최소 최대 단위
P3.1 제어 위치 1 3 1 125
키패드 레퍼런스
P3.3 방향(키패드에서) 0 1 0 123
R3.4 스톱 버튼 0 1 1 114
Tab le 3-11. 키패드제어파라미터. G2.8
공장
초기값
임의
입력값
ID 참조
1 = I/O단자대
2 = 키패드
3 = 필드버스
0 = 정방향
1 = 역방향
0 = 정지버튼의 제한적인 기능
정지버튼 항상 활성화됨
3.4.11
시스템 메뉴
(
제어 키패드: 메뉴
M 6)
파라미터와 주파수 변환기의, 얶어 선택, 파라미터 세팅, 하드웨어 및 소프트웨어 정보같은
일반적인 사용은, 제품의 사용자 매뉴얼을 참조하십시오.
3.4.12
확장 보드
(
제어 키패드: 메뉴
M7)
M7 메뉴는 제어 보드에 연결된 확장 및 옵션 보드와 관련된 정보를 보여줍니다. 더 많은 정보를
위하여 제품의 사용자 매뉴얼을 참조하십시오.
24-hour support +358 (0) 201 212 575 • Email: vacon@vacon.com
Page 36

36• vacon
4
4. 다단속제어 어플리케이션
Software 코드: ASFIFF04
4.1 도입
메뉴 M6 페이지 S6.2 의 메뉴 M6 에서 다단속제어 어플리케이션을 선택하십시오.
다단속제어 어플리케이션은 고정된 속도가 필요할 경우 사용됩니다. 15+2 개의 다른 속도가
프로그램 가능하며, 1가지의 베이직 속도, 15 가지의 다단계 속도, 그리고 한가지의 조깅 속도
설정이 가능합니다. 속도 단계는 디지털 신호 DIN3, DIN4, DIN5, DIN6으로 설정 가능하며, 조깅
속도가 사용될 경우 DIN3 이 폴트 리셋에서 조깅 속도로 설정 가능합니다.
베이직 속도 레퍼런스는 아날로그 입력 단자대(2/3 혹은 4/5)의 전압 혹은 전류 신호일 수 있으며,
다른 목적의 아날로그 입력이 프로그램 가능합니다.
• 모든 출력은 자유롭게 프로그램 가능합니다.
추가 기능:
• 프로그램 가능한 스타트/스톱과 리버스 신호 논리
• 전압 검출
• One 전류 제한 감시
• 2 차 램프 및 S-형 램프 프로그래밍
• 프로그램 가능한 시작 및 정지 기능
• 정지시 DC-제동
• 한개의 금지 전류 구역
• 프로그램가능한 U/f 곡선 및 주파수 변환
• 오토 스타트
• 모터 온도의 실속 보호: Off, 주의, 폴트 프로그램 가능
다단속제어 어플리케이션의 파라미터는 매뉴얼의 8 장에 각 ID 넘버에 따라 설명되어 있습니다.
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 37

4
Jumper block X3:
CMA and CMB grounding
RUN
220
VAC
4.2 제어 I/O
vacon • 37
레퍼런스 포텐쇼미터,
1…10kΩ
베이직레퍼런스
(옵션)
mA
OPTA1
단자대 신호 설명
1 +10V
2 AI1+
3 AI1- I/O 그라운드 레퍼런스 및 콘트롤 그라운드
4 AI2+
5 AI2-
6 +24V 콘트롤 전압 스위치 기타 등등의 전압, max 0.1 A
7 GND I/O 그라운드 레퍼런스 및 콘트롤 그라운드
8
DIN1
9
DIN2
10
DIN3
11 CMA DIN 1—DIN 3까지 공통 적용 GND 혹은 +24V에 연결
12 +24V 컨트롤 전압 출력 스위치 전압 (#6 참조)
13 GND I/O 그라운드 레퍼런스 및 콘트롤 그라운드
14 DIN4 프리셋 속도선택 1
15 DIN5 프리셋 속도선택 2
16 DIN6 프리셋 속도선택 3
17 CMB DIN4—DIN6까지 공통적용 GND 혹은+24V에 연결
18 AO1+ 아날로그출력 1:
19
AO1-
20
DO1
레퍼런스 출력 포텐쇼미터 전압 등.
ref
아날로그입력 1.
전압범위 0—10V DC
아날로그입력2.
전류범위 0 – 20 mA
프로그램 가능함(P2.1.11)
정방향 스타트
프로그램 가능한 로직 (P2.2.1 )
역방향 스타트
R
min. = 5kΩ
i
외부폴트입력 프로그램 가능함
(P2.2.2)
출력주파수
프로그램가능함(P2.3.2)
디지털 출력
READY
프로그램가능함 (P2.3.7)
아날로그 입력1 주파수 레퍼런스
아날로그 입력2 주파수 레퍼런스
공장초기값 레퍼런스
접점닫힘 = 정방향 스타트
접점닫힘 = 역방향 스타트
접점열림 = 폴트없음
접점닫힘 = 폴트
Sel1 Sel2 Sel3 Sel4 (with DIN3)
0 0 0 0 I/O 래퍼런스
1 0 0 0 속도 1
0 1 0 0 속도 2
--- --1 1 1 1 속도 15
범위 0—20 mA/R
콜렉터 개방, I≤50mA, U≤48 VDC
, max. 500Ω
L
OPTA2
21 RO1
23 RO1
24 RO2
25 RO2
26 RO2
프로그램가능함 (P2.3.8)
프로그램가능함 (P2.3.9)
릴레이 출력 1
RUN
릴레이 출력 2
FAU LT
프로그램가능함 22 RO1
프로그램가능함
Tab le 4-1. 멀티 스탭 속도 콘트롤어플리케이션 디폴트 I/O 구성.
주의: 아래 점퍼 선택 참조하시오. 더 많
24-hour support +358 (0) 201 212 575 • Email: vacon@vacon.com
은 정보가 제품 사용자 매뉴얼에 있습
니다.
CMB connected to GND
CMA connected to GND
CMB isolated from GND
CMA isolated from GND
CMB and CMA
internally connected together,
isolated from GND
= Factory default
Page 38

38• vacon
4
D I N 4 D I N 5 A I 1 A I 2 D I N 1 D I N 2 D I N
3
>
1
D I N 6 D I N 3 D I N
3
N X 1 2 k 0 3 . f h 8
3 . 2
K e y p a
d
r e f e r e n c e 2 . 1 . 1 1
I / O
2 . 1 . 1
2
K e y p a
d
C t r
l
R e f e r e n c e 2 . 1 . 1 3
F i e l d b u
s
C t r
l
R e f e r e n c e 2 . 1 . 1 5
P r e s e
t
S p e e d
1 . . . 2 . 1 . 2
9
P r e s e
t
S p e e d
1 5 3 . 1
C o n t r o l
p l a c e I n t e r n a l
f r e q u e n c y r e f e r e n c e S t a r t
f o r w a r d ( p r o g r a m m a b l e ) S t a r
t
r e v e r s e
( p r o g r a m m a b l e ) P r o g r a m m a b l e S t a r t / S t o
p
a n d r e v e r s
e
l o g i c S t a r t / S t o p R e v e r s e I n t e r n a
l
S t a r t / S t o p I n t e r n a
l
r e v e r s e I n t e r n a l
f a u l t
r e s e t F a u l
t
r e s e t
i n p u t R e s e
t
b u t t o n S t a r t / S t o
p
b u t t o n s R e f e r e n c
e
f r o
m
f i e l d b u s S t a r t / S t o
p
f r o
m
f i e l d b u s D i r e c t i o n
f r o
m
f i e l d b u s 3 . 3
K e y p a
d
d i r e c t i o n P r e s e t
S p e e d
1 P r e s e t
S p e e d
2 P r e s e t
S p e e d
3 P r e s e t
S p e e d
4 2 . 1 . 1 4
J o g g i n g
s p e e d
r e f e r e n c e ( p r o g r a m m a b l e )
4.3 다단속 제어 어플리케이션에서의 제어 신호 로직
레퍼런스
Figure 4-1. 제어 어플리케이션에서의 제어 신호
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 39

4
4.4 다단속제어 어플리케이션 파라미터 리스트
다음
페이지에서는 관련된 파라미터 리스트가 있습니다. 파라미터에
사이에 나와있습니다.
설명 :
코드 = 키패드상의 위치; 현재 파라미터 넘버 표시
파라미터 = 파라미터 이름
최소 = 파라미터 최소값
최대 = 파라미터 최대값
단위 = 파라미터 값; 있을 경우 표시
공장 초기값 = 공장 초기 프리셋 값
임의 입력값 = 사용자 세팅
ID = 파라미터의 ID 넘버
관한
설명은 131
vacon • 39
에서
230
쪽
= 파라미터열 에 이 파라미터를 프로그램하기 위해 TTF 방법를 사용하십시오.
= 주파수 변환기가 정지되었을 경우에는 파라미터 값이 변동 가능함.
4.4.1 모니터링 값 (제어 키패드: 메뉴 M1)
모니터되는 수치는 상황과 측정 뿐는 아니라 파라미터와 신호의 실제 값입니다. 모니터되는 값은
수정할 수 없습니다..
더 많은 정보를 위하여 제품의 사용자 매뉴얼을 참조하십시오.
파라미터 단위 ID 설명
출력 주파수 Hz 1 모터의 출력 주파수
주파수 레퍼런스 Hz 15 모터 주파수 참조
모터 속도 rpm 2 모터 속도 rpm
모터 전류 A 3
모터 토크 % 4 계산된 샤프트 토크
모터 출력 % 5 모터 샤프트 파워
모터 전압 V 6
DC링크 전압 V 7
단위 온도 8 히트싱크 온도
모터 온도 % 9 계산된 모터의 온도
아날로그 입력 1 V/mA 13 AI1
아날로그 입력 2 V/mA 14 AI2
DIN1, DIN2, DIN3 15 디지털 입력 상태
DIN4, DIN5, DIN6 17 디지털 입력 상태
DO1, RO1, RO2 26 디지털 및 릴레이 출력 상태
아날로그 전류 출력 mA AO1
모니터링 아이템 3개의 모니터값 선택
Tab le 4-2. 모니터링 값
24-hour support +358 (0) 201 212 575 • Email: vacon@vacon.com
Page 40

40• vacon
4
4.4.2 베이직 파라미터 (제어 키패드: 메뉴 M2 -> G2.1)
코드 파라미터 최소 최대 단위
P2.1.1 최소 주파수 0,00 P2.1.2 Hz 0,00 101
P2.1.2 최대 주파수 P2.1.1 320,00 Hz 50,00 102
P2.1.3 가속시간 1 0,1 3000,0 s 3,0 103
P2.1.4 감속시간 1 0,1 3000,0 s 3,0 104
P2.1.5 전류 한도 0,1xIH 2xIH A IL 107
모터의 정격 전압 180 690 V
P2.1.6
모터의 정격
주파수
P2.1.8 모터의 정격 속도 24 20 000 rpm 1440 112
P2.1.9 모터의 정격 전류 0,1xIH 2xIH A IH 113 모터의 명판을 확인하십시오
P2.1.10
P2.1.11 I/O 레퍼런스 0 3 1 117
P2.1.12
P2.1.13
P2.1.14 조깅 속도 주파수 0,00 P2.1.2 Hz 0,00 124
P2.1.15 프리셋 속도 1 0,00 P2.1.2 Hz 5,00 105 다단속1
P2.1.16 프리셋 속도 2 0,00 P2.1.2 Hz 10,00 106 다단속2
P2.1.17 프리셋 속도 3 0,00 P2.1.2 Hz 12,50 126 다단속3
P2.1.18 프리셋 속도 4 0,00 P2.1.2 Hz 15,00 127 다단속4
P2.1.19 프리셋 속도 5 0,00 P2.1.2 Hz 17,50 128 다단속5
P2.1.20 프리셋 속도 6 0,00 P2.1.2 Hz 20,00 129 다단속6
P2.1.21 프리셋 속도 7 0,00 P2.1.2 Hz 22,50 130 다단속7
P2.1.22 프리셋 속도 8 0,00 P2.1.2 Hz 25,00 133 다단속8
P2.1.23 프리셋 속도 9 0,00 P2.1.2 Hz 27,50 134 다단속9
P2.1.24 프리셋 속도 10 0,00 P2.1.2 Hz 30,00 135 다단속10
P2.1.25 프리셋 속도 11 0,00 P2.1.2 Hz 32,50 136 다단속11
P2.1.26 프리셋 속도 12 0,00 P2.1.2 Hz 35,00 137 다단속12
P2.1.27 프리셋 속도 13 0,00 P2.1.2 Hz 40,00 138 다단속13
P2.1.28 프리셋 속도 14 0,00 P2.1.2 Hz 45,00 139 다단속14
P2.1.29 프리셋 속도 15 0,00 P2.1.2 Hz 50,00 140 다단속15
모터 역률 0,30 1,00 0,85 120 모터의 명판을 확인하십시오
키패드 제어
레퍼런스
조깅 제어
레퍼런스
Tab le 4-3. 베이직 파라미터G2.1
8,00 320,00 Hz 50,00 111 모터의 명판을 확인하십시오
0 3 2 121
0 3 3 122
공장
초기값
NX2:230V
NX5:400V
NX6:690V
임의
입력값
110
ID 참조
참조: f최대 > 모터의 싱크로된
속도일 경우, 모터와 드라이브
시스템의 적합성을 확인하십시오.
4-극 모터와 정격 사이즈의
주파수변환기에 디폴드가
적용됩니다.
0 = AI1
1 = AI2
2 = 키패드
3 = 필드버스
0 = AI1
1 = AI2
2 = 키패드
3 = 필드버스
0 = AI1
1 = AI2
2 = 키패드
3 = 필드버스
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 41

4
4.4.3 입력 신호 (제어 키패드: 메뉴 M2 -> G2.2)
코드 파라미터 최소 최대 단위
P2.2.1 스타트/스톱 로직 0 6 0 300
P2.2.2 DIN3 기능 0 13 1 301
P2.2.3 AI1 신호 선택 0.1 E.10 A.1 377
P2.2.4 AI1 신호 범위 0 2 0 320
P2.2.5
P2.2.6
P2.2.7 AI1 신호 변환 0 1 0 323
P2.2.8 AI1 신호 검출 시간 0,00 10,00 s 0,10 324
P2.2.9 AI2 신호 선택 0.1 E.10 A.2 388
P2.2.10 AI2 신호 범위 0 2 1 325
P2.2.11
P2.2.12
P2.2.13 AI2 신호 변환 0 1 0 328
P2.2.14 AI2 신호 검출 시간 0,00 10,00 s 0,10 329
P2.2.15
AI1 임의 입력값
세팅 최소
AI1 임의 입력값
세팅 최대값
AI2 임의 입력값
세팅 최소
AI2 임의 입력값
세팅 최대값
레퍼런스 검출 최소
값
-160,00 160,00 % 0,00 321 아날로그 입력1 검출 최소
-160,00 160,00 % 100,0 322 아날로그 입력1 최대값 검출
-160,00 160,00 % 0,00 326 아날로그 입력2 검출 최소
-160,00 160,00
0,00 320,00 Hz 0,00 303
공장
% 100,00
임의
ID 참조
327
vacon • 41
DIN1 DIN2
0
정방향 스타트
1
스타트/스톱
2
스타트/스톱
3
스타트 펄스
4
정방향 스타트*
5
스타트*/스톱스타
6
트*/스톱
0 = 사용안됨
1 = 외부 폴트,,접점닫힘.
2 = 외부 폴트,, 접점열림
3 = 런 활성화됨
4 = 가속/감속시간 선택
5 접점이 IO로 강제함.
6 = 접점이 키패드로 강제함.
7 = 접점이 필드버스로 강제함.
8 = 만약 파라미터가 2.2.1 혹은 2.3
혹은 6일경우 역으로 전환됨.
9 = 조깅속도
10 = 폴트리셋
11 = 가속/감속 작동 금지.
12 = DC 제동 명령
13 = 프리셋 속도
TFT 프로그래밍 방법 사용됨.
72페이지 참조.
0 = 0–10 V (0-20 mA**)
1 = 2-10 V (4-20 mA**)
2 = 임의변경 가능한 범위.**
아날로그 입력 1 레퍼런스 변환
예스/노 ?
아날로그 입력 1 레퍼런스검출 시간,
상수.
TFT 프로그래밍 방법 사용됨.
72페이지 참조.
0 = 0-20 mA (0–10 V**)
1 = 4-20 mA (2-10 V**)
2 = 임의 입력값 세팅범위.
아날로그 입력2 검출 최대값
아날로그 입력 2 레퍼런스 변환
예스/노
아날로그 입력 1 레퍼런스검출 시간,
상수.
최소 레퍼런스 신호에 해당하는
주파수를 선택.
역방향 스타트
역방향/정방향 런
활성화 스톱
펄스 역방향
스타트* 역방향
런 활성화
24-hour support +358 (0) 201 212 575 • Email: vacon@vacon.com
Page 42

42• vacon
4
코드 파라미터 최소 최대 단위
P2.2.16
레퍼런스 검출
최대값 값
0,00 320,00 Hz 0,00 304
공장
초기값
임의
입력값
ID 참조
최대 레퍼런스 신호에 해당하는 주파수
선택
0,00=검출 없음
>0=검출최대값
0=사용하지 않음
1=AI1
2=AI2
0=기능이 없음
1=전류 한계값을 줄임(P2.1.5)
2= DC 제동전류를 줄임, P2.4.8
3=가속 및 감속시간을 줄임
4=토크감시한도를 줄임
(P2.3.15)
P2.2.17
P2.2.18
프리 아날로그
입력, 신호 선택
프리 아날로그
입력, 기능
Tab le 4-4. 입력신호, G2.2
0 2 0 361
0 4 0 362
* = 시작을 위해 라이징 엣지를 요함
** = 블록 X2 의 점퍼를 놓아야 함을 명심하십시오. 제품의 사용자 매뉴얼을 참조하십시오
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 43

vacon • 43
4
4.4.4 출력 신호 (제어 키패드: 메뉴 M2 -> G2.3)
코드 파라미터 최소 최대 단위
P2.3.1 AO1 신호 선택 0,1 E.10 A.1 464 TTF프로그래밍 사용. 72쪽 참조.
P2.3.2 아날로그 출력 기능 0 8 1 307
P2.3.3
2.3.4 아날로그 출력 변환 0 1
P2.3.5 아날로그 출력 최소 0 1 0 310
P2.3.6 아날로그 출력 검출 10 1000 % 1000 311
P2.3.7 디지털 출력 1 기능 0 22 1 312
P2.3.8 릴레이 출력 1 기능 0 22 2 313 As 파라미터:2.3.7
P2.3.9 릴레이 출력 2 기능 0 22 3 314 As 파라미터:2.3.7
P2.3.10
P2.3.11
P2.3.12
P2.3.13
P2.3.14 토크 한도 감시 기능 0 2 0 348 0 = 한도 없음
아날로그 출력 검출
시간
출력 주파수 한도 1
감시
출력 주파수 한도 1
감시 값
출력 주파수 한도 2
감시
출력 주파수 한도 2
감시 값
0,00 10,00 S 1,00 308 0 = 검출없음
0 2 0 315
0,00 320,00 Hz 0,00 316
0 2 0 346
0,00 320,00 Hz 0,00 347
공장
초기값
임의
입력값
0 309
ID 참조
0 = 사용하지 않음(20 mA / 10 V)
1 =출력 주파수 (0—f최대)
2 = 주파수 레퍼런스(0—f최대)
3 = 모터 속도(0—모터 정격 속도)
4 = 모터 전류(0—In모터)
5 = 모터 토크(0—Tn모터)
6 = 모터 파워 (0—Pn모터)
7 = 모터 전압(0-Un모터)
8 = DC-링크 전압(0—1000V)
0 = 변환되지 않음
1 = 변환됨
0 = 0 mA (0 V)
1 = 4 mA (2 V)
0 = 사용하지 않음
1 = 준비됨
2 = 런
3 = 폴트
4 = 폴트 변환됨
5 = FC 오버히트 경고
6 = 외부 폴트거나 경고
7 = 레퍼런스 폴트거나 경고
8 = 경고
9 = 역방향으로 전환
10 = 조깅 속도 선택
11 = 제 속도를 내고 있음
12 = 모터 레귤레이터 활성화됨
13 = OP 주파수 한도 감시 1
14 = OP 주파수 한도 감시2
15 = 토크 한도 감시
16 = 레퍼런스 한도 감시
17 = 외부 제동 제어
18 = 제어위치: IO
19 = FC 온도 한도 감시
20 = 원하지않은 회전방향
21 = 외부 제동 제어 변환됨
22 = 온도계 폴트/경고
0 = 한도 없음
1 = 낮은 한도 감시
2 = 높은 한도 감시
0 = 한도없음
1 = 낮은 한도 감시
2 = 높은 한도 감시
24-hour support +358 (0) 201 212 575 • Email: vacon@vacon.com
Page 44

44• vacon
4
1 = 낮은 제한
2 = 높은 제한
P2.3.15 토크 한도 감시 값 -300,0 300,0 % 100,0 349
P2.3.16
P2.3.17
P2.3.18 외부 제동 Off-딜레이 0,0 100,0 s 0,5 352
P2.3.19 외부 제동 On-딜레이 0,0 100,0 s 1,5 353
P2.3.20
P2.3.21
P2.3.22
P2.3.23 아날로그 출력 2 기능 0 8 4 472 As 파라미터:2.3.2
P2.3.24
P2.3.25 아날로그 출력 2 변환 0 1 0 474
P2.3.26 아날로그 출력 2 최소 0 1 0 475
P2.3.27 아날로그 출력 2 검출 10 1000 % 100 476
레퍼런스 한도 감시
기능
레퍼런스 한도 감시
값
주파수 컨버터 온도
한도감시
주파수 컨버터 온도
한도 값
아날로그 출력 2 신호
선택
아날로그 출력 2 검출
시간
Tab le 4-5. 출력신호, G2.3
0 2 0 350
0,0 100,0 % 0,0 351
0 2 0 354
-10 100 C 40 355
0.1 E.10 0.1 471
0,00 10,00 s 1,00 473 0 = 검출없음
0 = 한도 없음
1 = 낮은 제한
2 = 높은 제한
0 = 한도 없음
1 = 낮은 제한
2 = 높은 제한
TFT 프로그래밍 방법 사용됨.
72페이지 참조.
0 = 변환없음
1 =변환됨
0 = 0 mA (0 V)
1 = 4 mA (2 V)
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 45

4
4.4.5 드라이브 제어 파라미터s (제어 키패드: 메뉴 M2 -> G2.4)
코드 파라미터 최소 최대 단위
P2.4.1 램프1 모양 0,0 10,0 s 0,1 500
P2.4.2 램프 2 모양 0,0 10,0 s 0,0 501
P2.4.3 가속시간 2 0,1 3000,0 S 10,0 502
P2.4.4 감속시간 2 0,1 3000,0 S 10,0 503
P2.4.5 제동 쵸퍼 0 4 0 504
P2.4.6 스타트 기능 0 2 0 505
P2.4.7 스톱 기능 0 3 0 506
P2.4.8 DC 제동 전류 0,00 I
P2.4.9 정지시 DC 제동시간 0,00 600,00 s 0,00 508
P2.4.10
P2.4.11
P2.4.12 플럭스 제동 0 1 0 520
P2.4.13 플럭스 제동 전류 0,00 I
램프 정지시 DC 제동을
시작하는 주파수
스타트시 DC 제동
시간
Tab le 4-6. 드라이브 제어 파라미터, G2.4
0,10 10,00 Hz 1,50 515
0,00 600,00 s 0,00 516 0 = 가동시 DC제동은 OFF
A 0,7 x I
A I
공장
초기값
임의
입력값
507
519
ID 참조
vacon • 45
0 = 직선 모양
>0 = S-커브 램프 시간
0 = 직선 모양
>0 = S-커브 램프 시간
0=비활성화
1= 가동시
사용됨2=외부제동
쵸퍼3=정지/가동시
가동4=가동시
사용됨(테스팅 아님)
0 = 램프
1 = 빠른 출발
2 = 빠른 출발 상태
0 = 코스팅
1 = 램프
2 =램프+런 가능한
코스트
3 = 코스트+런 가능한
램프
0 = 정지시 DC제동은
OFF
0 = Off
1 = On
4.4.6 금지 주파수 파라미터 (제어 키패드: 메뉴 M2 -> G2.5)
코드 파라미터 최소 최대 단위
P2.5.1
P2.5.2
P2.5.3
P2.5.4
P2.5.5
P2.5.6
P2.5.7 가속/감속 램프 금지 0,1 10,0 x 1,0 518
금지 주파수 범위 1
낮은 한도
금지 주파수 범위 1
높은
금지 주파수 범위 2
낮은 한도
금지 주파수 범위 2
높은
금지 주파수 범위 3
낮은 한도
금지 주파수 범위 3
높은
Tab le 4-7. 금지 주파수 파라미터, G2.5
한도
한도
한도
0,00 320,00 Hz 0,00 509
0,00 320,00 Hz 0,00 510 0 = 금지 범위 1 = OFF
0,00 320,00 Hz 0,00 511
0,00 320,00 Hz 0,00 512 0 = 금지범위 2= OFF
0,00 320,00 Hz 0,00 513
0,00 320,00 Hz 0,00 514 0 = 금지범위 3= OFF
공장
초기값
임의
입력값
ID 참조
24-hour support +358 (0) 201 212 575 • Email: vacon@vacon.com
Page 46

46• vacon
4
4.4.7 모터 제어 파라미터 (제어 키패드: 메뉴 M2>G2.6)
코드 파라미터 최소 최대 단위
P2.6.1 모터 제어 모드 0 1/3 0 600
P2.6.2 U/f 최적화 0 1 0 109
P2.6.3 U/f 비율 선택 0 3 0 108
P2.6.4 약계자 영역 8,00 320,00 Hz 50,00 602
P2.6.5 약계자 영역에서의 전압 10,00 200,00 % 100,00 603 n% x U
P2.6.6 U/f 곡선 중간점 주파수 0,00 P2.6.4 Hz 50,00 604
P2.6.7 U/f 곡선 중간점 전압 0,00 100,00 % 100,00 605
P2.6.8
P2.6.9 스위칭 주파수 1,0 Varies kHz Varies 601
P2.6.10 과전압 컨트롤러 0 2 1 607
P2.6.11 저전압 컨트롤러 0 1 1 608
P2.6.12 부하 감소 0,00 100,00 % 0,00 620
P2.6.13 모터 인식 0 1/2 0 631
클로즈드 루프 파라미터 그룹 2.6.14
P2.6.14.1 자화 전류 0,00 2 x IH A 0,00 612
P2.6.14.2 속도 제어 P 게인 1 1000 30 613
P2.6.14.3 속도 제어 I 시간 0,0 3200,0 ms 30,0 614
P2.6.14.5 가속 보상 0,00 300,00 s 0,00 626
P2.6.14.6 수면 조정 0 500 % 100 619
P2.6.14.7 기동시 자화 전류 0,00 IL A 0,00 627
P2.6.14.8 기동시 자화 시간 0 60000 ms 0 628
P2.6.14.9 기동시 0-속도시간 0 32000 ms 100 615
P2.6.14.10 정지시0-속도 시간 0 32000 ms 100 616
P2.6.14.11
P2.6.14.12
P2.6.14.13
P2.6.14.15 엔코더 검출 시간 0,0 100,0 ms 0,0 618
P2.6.14.17
모터 인식 파라미터 그룹 2.6.15
P2.6.15.1 속도 스톱 -50,0 50,0 0,0 0,0 1252 NC 드라이브 속도 튜닝
제로 주파수에서의 출력
전압
스타트 업 토크 0 3 0 621
스타트 업 토크
정방향
스타트 업 토크
역방향
전류 제어 0,00 100,00 % 617
Tab le 4-8. 모터 제어 파라미터, G2.6
0,00 40,00 %
–300,0 300,0 % 0,0 633
–300,0 300,0 % 0,0 634
공장
초기값
Varies 606 n% x U
임의
입력값
ID 참조
0=주파수 제어
1=속도 제어 NXP에 추가된 기능:
2=사용하지 않음
3= 클로즈드 루프 속도 제어
0=사용하지 않음
1=자동 토크 상승
0=직선 모양
1=제곱
2=프로그램
3=직선 모양 및 플럭스 최적화
nmot
n% x U
최대의 값의 파라미터=P2.6.5
정확한 값을 위해서는 Table 121
참조
0=사용하지 않음
1=사용된 (램핑이 없음)
2=사용된 (램핑)
0=사용하지 않음
1=사용됨
0=아무런 작동 없음
1=모터 인식없이 가동
2=모터인식 후 가동
0 = 사용하지 않음
1 = 토크 메모리
2 = 레퍼런스 토크
3 = 시동 토크정방향/역방향
nmot
mnot
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 47

4
4.4.8 보호 (제어 키패드: 메뉴 M2 -> G2.7)
코드 파라미터 최소 최대 단위
P2.7.1
P2.7.2
P2.7.3 외부 폴트에 대한 응답 0 3 2 701 0=응답없음
P2.7.4 입력 상 감시 0 3 0 730
P2.7.5 저전압 폴트에 대한 응답 0 3 0 727
P2.7.6 출력 상 감시 0 3 2 702
P2.7.7 지락 보호 0 3 2 703
P2.7.8 모터 열 보호 0 3 2 704
4mA 레퍼런스
폴트 에 대한 응답
4mA 레퍼런스 폴트
주파수
0 5 0 700
0,00 P2.1.2 Hz 0,00 728
공장
초기값
임의
입력값
ID 참조
0=응답없음
1=경고
2=경고+이전 주파수.
3=경고+ 사전에 설정된
주파수. 2.7.2
폴트, 2.4.7에 의한 정지
5= 폴트, 코스팅에 의한
정지
1=경고
2=경고+이전 주파수.
3=경고+ 사전에 설정된
주파수. 2.7.2
2.4.7에 의한 정지
= 폴트, 코스팅에 의한 정지
0=이력에 저장된 폴트
1=저장되지 않은 폴트
0=응답없음
1=경고
2.4.7에 의한 정지
폴트, 코스팅에 의한 정지
vacon • 47
P2.7.9
P2.7.10
P2.7.11
P2.7.12
P2.7.13
P2.7.14
P2.7.15
P2.7.16
P2.7.17
P2.7.18
P2.7.19
P2.7.20 경부하 보호 시간 한도 2 600 s 20 716
P2.7.21 온도계 폴트에 대한 응답 0 3 2 732
P2.7.22 필드버스 폴트에 대한 응답 0 3 2 733 P2.7.21 참조
P2.7.23 슬롯 폴트에 대한 응답 0 3 2 734 P2.7.21 참조
모터 주위 온도
변수
제로속도에서의 모터 냉각
변수
모터 열 시간 상수 1 200 최소 Varies 707
모터 듀티 싸이클 0 150 % 100 708
스톨 보호 0 3 0 709
스톨 전류 0,00 2xIH A IH 710
스톨 시간 한도 1,00 120,00 s 15,00 711
스톨 주파수 한도 1,0 P2.1.2 Hz 25,0 712
경부하 보호 0 3 0 713
약계자 영역 부하 10 150 % 50 714
제로 주파수 부하 5,0 150,0 % 10,0 715
Tab le 4-9. 보호, G2.7
-
100,00
100,0 % 0,0 705
0,0 150,0 % 40,0 706
0=응답없음
1=경고
2.4.7에 의한 정지
폴트, 코스팅에 의한 정지
0=응답없음
1=경고
2.4.7에 의한 정지
폴트, 코스팅에 의한 정지
0=응답없음
1=경고
2.4.7에 의한 정지
폴트, 코스팅에 의한 정지
24-hour support +358 (0) 201 212 575 • Email: vacon@vacon.com
Page 48

48• vacon
4
4.4.9 오토 스타트 파라미터 (제어 키패드: 메뉴 M2 -> G2.8)
코드 파라미터 최소 최대 단위
P2.8.1 대기 시간 0,10 10,00 s 0,50 717
P2.8.2 시도 시간 0,00 60,00 s 30,00 718
P2.8.3 스타트 기능 0 2 0 719
P2.8.4
P2.8.5
P2.8.6
P2.8.7
P2.8.8
P2.8.9
P2.8.10
저전압 트립 후에
시도한 횟수
과전압 트립 후에
시도한 횟수
과전류 트립 후에
시도한 횟수
4mA 레퍼런스 트립
후에 시도한 횟수
모터 temp 폴트 트립
후에 시도한 횟수
외부 폴트 트립 후에
시도한 횟수
경부하 폴트 트립
후에 시도한 횟수
Tab le 4-10. 오토스타트 파라미터, G2.8
0 10 0 720
0 10 0 721
0 3 0 722
0 10 0 723
0 10 0 726
0 10 0 725
0 10 0 738
공장
초기값
임의
입력값
ID 참조
0 = 램프
1 = 빠른 출발
2 = P2.4.6에 따름
4.4.10 키패드 제어 (제어 키패드: 메뉴 M3)
키패드의 제어 위치와 방향의 설정에 대한
파라미터는
아래에 있습니다. 각 제품 사용자 매뉴얼의
키패드 제어 메뉴를 참조하십시오.
코드 파라미터 최소 최대 단위
P3.1 제어 위치 1 3 1 125
P3.2 키패드 레퍼런스 P2.1.1 P2.1.2 Hz
P3.3 방향(키패드에서) 0 1 0 123
R3.4 스톱 버튼 0 1 1 114
Tab le 4-11. 키패드 제어 파라미터, M3
공장
초기값
임의
입력값
ID 참조
1 = I/O 단자대
2 = 키패드
3 = 필드버스
0 = 정방향
1 = 역방향
0 = 정지버튼의 제한적인 기능
1 = 정지버튼 항상 활성화됨
4.4.11 시스템 메뉴 (제어 키패드: M6)
주파수 변환기의 파라미터 및 기능 관련된 일반 사용에 관한 메뉴로, 언어 설정, 파라미터 설정
혹은 하드웨어 및 소프트 웨어 정보 확인이 가능합니다. 제품의 사용자 매뉴얼을 확인하십시오.
4.4.12 확장 보드 (제어 키패드: 메뉴 M7)
M7 메뉴는 제어 보드에 부착된 확장 및 옵션 보드 관련된 정보를 제공합니다. 더 많은 정보를
위해서는 각 제품의 사용자 매뉴얼을 참조하십시오.
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 49

vacon • 49
5
5. PID 제어 어플리케이션
Software 코드: ASFIFF04
5.1 도입
페이지 S6.2 메뉴 M6 에서 PID 제어를 선택하십시오.
PID 제어 에서 두개의 I/O 단자대 제어 위치가 있습니다. 위치 A 는 PID 제어기이고 B 는 직접
주파수 레퍼런스 입니다. 제어 위치 A 혹은 B 는 디지털 입력 DIN6으로 선택 가능합니다.
PID 제어기 레퍼런스는 아날로그 입력, 필드버스, 모터화된 전위차, PID 레퍼런스 2 를 활성화
시키거나 제어 키패드 레퍼런스를 적용함으로써 선택가능합니다. PID 제어기의 실제 값은 아날로그
입력, 필드버스, 모터의 실제 수치, 혹은 이들의 수학적 기능을 통해 선택 가능합니다.
직접 전류 레퍼런스는 PID 제어기 없이 바로 사용될 수 있으며, 아날로그 입력, 필드버스, 모터
포텐셔메터 혹은 키패드를 통해 선택 가능합니다.
PID는 제어 레벨을 측정하거나 펌프와 펜을 제어할 때 사용되며, 이 에 PID는 부드럽이고, 융화된
수치와 추가 구성품이 필요 없는 제어링 패키지를 제공합니다..
• 디지털 입력 DIN2, DIN3, DIN5 및 모든 출력은 자유롭게 프로그램 가능합니다.
추가 기능:
• 아날로그 입력 신호 범위 선택
• 두개의 주파수 한계 감시
• 토크 한계 감시
• 레퍼런스 한계 감시
• 2 차 램프 및 S-형 램프 프로그래밍
• 프로그램 가능한 시작 및 정지 기능
• 시작과 정지시 DC-제동
• 세개의 금지 주파수 구역
• 프로그램가능한 U/f 곡 선 및 주파수 변환
• 오토 스타트
• 모터 온도의 실속 보호: off, 주의, 폴트가 완전히 프로그램 가능함
• 모터 경부하 보호
• 입력 및 출력단계 감시
• PID 출력과 더불어 Sum 포인트 주파수
• 제어 위치 I/O B, 키패드 와 필드버스를 통해 PID 제어기 사용가능
• Easy Change 기능
• 수면 기능
PID 제어
24-hour support +358 (0) 201 212 575 • Email: vacon@vacon.com
의 파라미터들은
8 장에서 각 ID 넘버에 따라 설명되어 있습니다.
Page 50

50• vacon
5
Jumper block X3:
CMA and CMB grounding
(0)4…20 mA
2중선
RUN
220
VAC
5.2 Control I/O
레퍼런스 포텐쇼미터,
1…10 kΩ
트랜스미터
실제값I
OP TA 1
터미널 신호 설명
1 +10V
2 AI1+
3 AI1- I/O 그라운드 레퍼런스 및 콘트롤 그라운드
–
+
mA
4 AI2+ 아날로그입력 2
5 AI2-
6 +24V 콘트롤 전압 출력 스위치 가타 등등의 전압. max 0.1 A
7 GND I/O 그라운드 레퍼런스 및 콘트롤 그라운드
8
DIN1
9
DIN2
10 DIN3
11 CMA DIN 1—DIN 3까지 공통 적용 GND 혹은+24V에 연결
12 +24V 콘트롤 전압 출력 스위치 전압 (#6 참조)
13 GND I/O 그라운드 레퍼런스 및 콘트롤 그라운드
14 DIN4
15 DIN5
16
DIN6 콘트롤 위치 A/B 선택
17 CMB DIN4—DIN6까지 공통적용 GND 혹은 +24V에 연결
18 AO1+ 아날로그 출력1
19
AO1-
20
DO1
레퍼런스 출력 포텐쇼미터 전압 기타등등.
ref
아날로그입력 1
전압범위0—10V DC
프로그램가능함 (P2.1.11)
전류범위 0—20mA
프로그램가능함(P2.2.9)
위치A: 정방향 스타트
R
min. = 5kΩ
i
외부폴트입력
프로그램가능함 (P2.2.1)
폴트 리셋
프로그램가능함 (P2.2.2)
위치B: 정방향 스타트
R
min. = 5kΩ
i
조깅 속도 선택
프로그램가능함 (P2.2.3)
출력주파수
프로그램가능함 (P2.3.2)
디지털 출력
READY
프로그램가능함(P2.3.7)
아날로그입력1 PID 레퍼런스
아날로그입력2 PID 실제값 1
콘트롤 위치 A PID 콘트롤러용 스타트 신호.
접점닫힘 = 폴트
접점열림 = 폴트 없음
접점닫힘 = 폴트 리셋
콘트롤 위치B의 스타트 신호
주파수 레퍼런스(P2.2.5.)
접점닫힘 = 조깅 속도 활성화됨
접점열림 = 콘트롤 위치A가 활성화됨
접점닫힘 = 콘트롤 위치B가 활성화됨
범위 0—20 mA/R
콜렉터 개방, I≤50mA, U≤48 VDC
, max. 500Ω
L
OP TA 2
21 RO1
23 RO1
24 RO2
26 RO2
프로그램가능함 (P2.3.8)
릴레이 출력 1
RUN
릴레이 출력 2
폴트
프로그램가능함(P2.3.9)
22 RO1
25 RO2
Tab le 5-1. PID 어플리케이션 디폴트 I/O 구성(2-중선 트랜스미터).
Note: 점퍼 선택을 참조하시오.
더 많은 정보가 제품 사용자 매뉴얼에 있
습니다.
CMB connected to GND
CMA connected to GND
CMB isolated from GND
CMA isolated from GND
CMB and CMA
internally connected together,
isolated from GND
= Factory default
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 51

5
DIN2
DIN5
DIN3
> 1
DIN2
DIN3
DIN5
DIN6
DIN2
DIN3
AI1
AI2
0
1
2
3
4
0
1
2
3
4
5
+A
A
B
0
1
2
3
4
5
0
1
2
3
4
5
K
0
1
2
3
4
5
F
PID
+
DIN1
DIN4
A
B
A
B
A/B
NX12k04.fh8
Internal reverse
Internal fault reset
Fault reset input (programmable)
3.3 Keypad direction
Internal Start/Stop
Reference from fieldbus
Start/Stop from fieldbus
Direction from fieldbus
External fault (programmable)
Jogging speed (programmable)
Place A/B selection
2.2.4 PID main reference
Motor
potentiometer
Up
Down
2.1.11 PID reference
I/O reverse
R3.4 PID keypad refer.
R3.2 Keypad reference
Actual values
selection, par.
2.2.9 & 2.2.10
Actual value
selection par. 2.2.8
Act 1
Act 2
R3.5 PID keypad ref. 2
Enable PID keypad ref. 2 (DIN5=13)
Start; Place A
Start; Place B
Start/Stop
Start/Stop buttons
Internal
frequency ref.
2.1.19 Jogging speed ref.
Keypad
Fieldbus
Reset button
3.1 Control place
2.2.7 Fieldbus Ctrl Reference
2.2.6 Keypad Crtl Reference
2.2.5 I/O B Reference
5.3 제어 어플리케이션에서의 제어 신호 로직
vacon • 51
Figure 5-1. 제어 어플리케이션에서의 제어 신호
24-hour support +358 (0) 201 212 575 • Email: vacon@vacon.com
Page 52

52• vacon
5
5.4 PID 어플리케이션 – 파라미터
다음 페이지에서는 관련된 파라미터 리스트가 있습니다. 파라미터에 관한 설명은 131 에서 230 쪽
사이에 나와있습니다.
컬럼 설명:
코드 = 키패드상의 위치; 현재 파라미터 넘버 표시
파라미터 = 파라미터 이름
최소 = 파라미터 최소값
최대 = 파라미터 최대값
단위 = 파라미터 값; 있을 경우 표시
공장 초기값 = 공장 초기 프리셋 값
임의 입력값 = 사용자 세팅
ID = 파라미터의 ID 넘버
= 파라미터열 에 이 파라미터를 프로그램하기 위해 TTF 방법를 사용하십시오.
= 주파수 변환기가 정지되었을 경우에는 파라미터 값이 변동 가능함.
5.4.1 모니터링 값 (제어 키패드: 메뉴 M1)
모니터되는 수치는 상황과 측정 뿐는 아니라 파라미터와 신호의 실제값입니다. 모니터되는 값은
수정할 수 없습니다..
더 많은 정보를 위하여 제품의 사용자 매뉴얼을 참조하십시오. V1.19 에서 V1.22 의 모니터링 값은
PID 제어를 통해서는 모니터링 가능합니다.
코드 파라미터 단위 ID 설명
V1.1 출력 주파수 Hz 1 모터의 출력 주파수
V1.2 주파수 레퍼런스 Hz 25 모터 제어의 주파수값
V1.3 모터 속도 rpm 2 모터 속도 ( rpm)
V1.4 모터 전류 A 3
V1.5 모터 토크 % 4 계산된 샤프트 토크
V1.6 모터 출력 % 5 모터 샤프트 파워
V1.7 모터 전압 V 6
V1.8 DC링크 전압 V 7
V1.9 단위 온도 8 히트싱크 온도
V1.10 모터 온도 % 9 계산된 모터온도
V1.11 아날로그 입력 1 V/mA 13 AI1
V1.12 아날로그 입력 2 V/mA 14 AI2
V1.13 아날로그 입력 3 27 AI3
V1.14 아날로그 입력 4 28 AI4
V1.15 DIN1, DIN2, DIN3 15 디지털 입력 상태
V1.16 DIN4, DIN5, DIN6 16 디지털 입력 상태
V1.17 DO1, RO1, RO2 17 디지털 및 릴레이 출력 상태
V1.18 아날로그 전류 출력 mA 26 AO1
V1.19 PID 레퍼런스 % 20 최대 출력 %
V1.20 PID 실제값 % 21 최대 실제 값 %
V1.21 PID 에러값 % 22 최대 에러 값 %
V1.22 PID 출력 % 23 최대 출력 값 %
V1.23 실제값의 특별한 디스플에이 29
V1.24 PT-100 온도 Cº 42 사용된 입력의 최대 온도
G1.25 모니터링 아이템 3 개의 지정된 아이템 모니터링
Tab le 5-2. 모니터링 값
파라미터 2.2.46 에서 2.2.49 를
참조하시오.
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 53

5
5.4.2 베이직 파라미터 (제어 키패드: 메뉴 M2 -> G2.1)
vacon • 53
코드 파라미터 최소 최대 단위
P2.1.1 최소 주파수 0,00 P2.1.2 Hz 0,00 101
P2.1.2 최대 주파수 P2.1.1 320,00 Hz 50,00 102
P2.1.3 가속시간 1 0,1 3000,0 s 1,0 103
P2.1.4 감속시간 1 0,1 3000,0 s 1,0 104
P2.1.5 전류 한도 0,1 x IH 2 x IH A IL 107
P2.1.6 모터의 정격 전압 180 690 V
P2.1.7 모터의 정격 주파수 8,00 320,00 Hz 50,00 111
P2.1.8 모터의 정격 속도 24 20 000 rpm 1440 112
P2.1.9 모터의 정격 전류 0,1 x IH 2 x IH A IH 113
공장
초기값
NX2:
230V
NX5:
400V
NX6:
임의
입력값
110
ID 참조
주의: f최대 >싱크로된 모터
속도일 경우, 모터와 드라이브
시스템의 적합성을
확인하시오.
주의: PID-컨트롤러 가 사용될
경우 가속시간 2
(P2.4.3)가 자동적으로 적용
주의: PID-컨트롤러 가 사용될
경우, 감속시간 2
(P2.4.4)가 자동적으로 적용
모터터의 명판을
확인하시오.
초기값은 4 극 모터와
주파수 변환기의 정격 값에
적용됨.
모터의 명판을
확인하시오.
P2.1.10 모터 역률 0,30 1,00 0,85 120 모터의 명판을 확인하시오.
0 = AI1
1 = AI2
P2.1.11
P2.1.12 PID 컨트롤러 게인 0,0 1000,0 % 100,0 118
P2.1.13 PID 컨트롤러 I-시간 0,00 320,00 s 1,00 119
P2.1.14 PID 컨트롤러 D-시간 0,00 100,00 s 0,00 132
P2.1.15 수면 주파수 0,00 P 2.1.2 Hz 10,00 1016
P2.1.16 수면 지연 0 3600 s 30 1017
P2.1.17 Wake up 레벨 0,00 100,00 % 25,00 1018
P2.1.18 Wake up 기능 0 1 0 1019
P2.1.19 조깅 속도 레퍼런스 0,00 P2.1.2 Hz 10,00 124
PID 컨트롤러 레퍼런스
신호 (위치 A)
Tab le 5-3. 베이직 파라미터 G2.1
0 4 0 332
2 = 키패드의 PID 수치, P3.4
참조
3 = 필드버스의 PID
수치(프로세스 데이터IN 1)
0 = Wake-up 레벨 이하 시
Wake-up (2.1.17)
1 = Wake-up 레벨 초과 시
Wake-up (2.1.17)
24-hour support +358 (0) 201 212 575 • Email: vacon@vacon.com
Page 54

54• vacon
5
5.4.3 입력신호 (제어 키패드: 메뉴 M2 -> G2.2)
코드 파라미터 최소 최대 단위
P2.2.1
P2.2.2
P2.2.3
P2.2.4 PID 총점 레퍼런스 0 7 0 376
P2.2.5 I/O B 레퍼런스 선정 0 7 1 343
P2.2.6
P2.2.7
P2.2.8
DIN2 기능 0 13 1 319
DIN3 기능 0 13 10 301
DIN5 기능 0 13 9 330
키패드 제어 레퍼런스
선택
필드버스 제어 레퍼런스
선택
실제 값 선택 0 7 0 333
0 7 4
0 7 5
공장
초기값
임의
입력값
ID 참조
0 = 사용하지 않음
1 = 외부 폴트cc
2 = 외부 폴트oc
3 = 런 가능
4 = 가속/감속 시간 선택
5 = CP: I/O 단자대 (ID125)
6 = CP: 키패드 (ID125)
7 = CP: 필드버스 (ID125)
8 =정방향/역방향
9 = 조깅 주파수(cc)
10 = 폴트 리셋 (cc)
11 = 가속/감속 금지 (cc)
12 = DC 제동 명령
13 = 모터 포텐셔. UP (cc)
아래 사항만 제외하고는 윗 내용과
동일:
13 = 모터 포텐셔. DOWN (cc)
아래 사항만 제외하고는 윗 내용과
동일:
13 = PID 레퍼런스 2 활성화
0 = 다이렉트 PID 출력값
1 = AI1+PID 출력
2 = AI2+PID 출력
3 = AI3+PID 출력
4 = AI4+PID 출력
5 = PID 키패드+PID 출력
6 = 필드버스+PID o출력
(포로세스 데이터 IN3)
7 = 모터 포텐셔.+PID 출력
0 = AI1
1 = AI2
2 = AI3
3 = AI4
4 = 스탠다드 키패드
5 = 스탠다드 필드버스
(FB속도레퍼런스)
6 = 모터 포텐셔미터
7 = PID 컨트롤러
121 P2.2.5와 동일
122 P2.2.5와 동일
0 = 실제l 값 1
1 = 실제l 1 + 실제l 2
2 = 실제l 1 – 실제l 2
3 = 실제l 1 * 실제l 2
4 = 최소(실제l 1, 실제l 2)
5 = 최대(실제l 1, 실제l 2)
6 = 평균(실제l1, 실제l2)
7 = 제곱근 (실제1) + 제곱근
(실제2)
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 55

vacon • 55
5
0
0
0
TTF 프로그래밍 방법 사용됨.
리셋하시오
코드 파라미터 최소 최대 단위
P2.2.9 실제값1 선택 0 10 2 334
P2.2.10 실제값 2입력 0 9 0 335
P2.2.11 실제값1최소값 검출 –1600,0 1600,0 % 0,0 336
P2.2.12 실제값1최대값 검출 –1600,0 1600,0 % 100,0 337
P2.2.13 실제값2최소값 검출
P2.2.14 실제값2최대값 검출
P2.2.15 AI1 신호선택 0.1 E.10 A.1 377
P2.2.16 AI1 신호범위 0 2 0 320
P2.2.17
P2.2.18
P2.2.19 AI1 변환 0 1 0 323 0=변환되지 않음 1=변환됨
P2.2.20 AI1 검출 시간 0,00 10,00 s 0,10 324 0= 검출 없음
P2.2.21 AI2 신호선택 0.1 E.10 A.2 388
P2.2.22 AI2 신호 범위 0 2 1 325
P2.2.23
P2.2.24
P2.2.25 AI2 변환 0 1 0 328
P2.2.26 AI2 검출 시간 0,00 10,00 s 0,10 329 0= 검출 없음
AI1 임의 입력 최소
세팅
AI1 임의 입력 최대
세팅
AI2 임의 입력 최소
세팅
AI2 임의 입력 최대
세팅
–1600,0 1600,0 % 0,0 338
–1600,0 1600,0 % 100,0 339 100= 최대값 검출 없음
-160,00 160,00 % 0,00
-160,00 160,00 % 100,00
-160,00 160,00 % 0,00
-160,00 160,00 % 100,00
공장
초기값
임의
입력값
ID 참조
=사용안함
1=AI1 신호 (c-보드)
2=AI2 신호 (c-보드)
3=AI3
4=AI4
5=필드버스 프로세스 데이터
6=모터 토크
7=모터 속도
8=모터 전류
9=모터 출력
10=엔코더 주파수
0= 사용안함
1=AI1 신호
2=AI2 신호
3=AI3
4=AI4
5= 필드버스 프로세스 데이터
6= 모터 토크
7= 모터 속도
8= 모터 전류
9= 모터 출력
=최소값 검출 없음
100= 최대값 검출 없음
= 최소값 검출 없음
페이지 66 참조
0=0—10 V (0—20 mA*)
1=2—10 V (4 – 20 mA*)
2=임의 입력 가능 범위*
321
322
0=0—20 mA (0—10 V *)
1=4 – 20 mA (2—10 V *)
2= 임의 입력 가능 범위*
0=0—20 mA*
1=4—20 mA*
2=임의 입력됨*
326
327
0=변환되지 않음
1=변환됨
IN2
IN3
코드 파라미터 최소 최대 단위
P2.2.27
P2.2.28
모터 포텐셔미터 램프
시간
모터 포텐셔미터 주파수
레퍼런스 메모리 리셋
0,1 2000,0 Hz/s 10,0 331
0 2 1 367
공장
초기값
임의
입력값
ID 참조
0=리셋없음
1=작동이 멈추거나 전력이
차단되었을때 리셋하시오
2=전력이 차단되었을때
24-hour support +358 (0) 201 212 575 • Email: vacon@vacon.com
Page 56

56• vacon
5
P2.2.29
P2.2.30
P2.2.31
P2.2.32
P2.2.33 PID 레퍼런스 상승 시간 0,0 100,0 s 5,0 341
P2.2.34 PID 레퍼런스 실패 시간 0,0 100,0 s 5,0 342
P2.2.35
모터 포텐셔미터 PID
레퍼런스 메모리 리셋
PID 최소 한도 -1600,00 P2.2.31 % 0,0 359
PID 최대값 한도 P2.2.30 1600,0 % 100,00 360
에러값 변환 0 1 0 340
레퍼런스 검출 최소
값, 위치 B
0 2 0 370
0,00 320,00 Hz 0,00 344
0= 리셋없음
1=작동이 멈추거나 전력이
차단되었을때 리셋하시오
전력이 차단되었을때
리셋하시오
0=변환없음
1=변환
P2.2.36
P2.2.37
P2.2.38
P2.2.39
P2.2.40
P2.2.41
P2.2.42
P2.2.43
P2.2.44
P2.2.45
P2.2.46
P2.2.47
레퍼런스 검출 최대값
값 위치 B
이지 체인지 0 1 0 366
AI3 신호 선택 0,1 E.10 0,1 141
AI3 신호 범위 0 1 1 143
AI3 변환 0 1 0 151
AI3 검출 시간 0,00 10,00 s 0,10 142 0= 검출 없음
AI4 신호 선택 0,1 E.10 0,1 152
AI4 신호 범위 0 1 1 154
AI4 변환 0 1 0 162
AI4 검출 시간 0,00 10,00 s 0,10 153 검출 없음
실제l 값 스페셜
디스플레이 최소
실제l 값 스페셜
디스플레이 최대값
0,00 320,00 0,00 345
0 30000 0 1033
0 30000 100 1034
0=레퍼런스값 유지
1=실지 레퍼런스값 복사
TTF 프로그래밍법 사용됨.
72페이지 참조.
0=신호 범위 0-10V
1=신호 범위 2-10V
0=변환없음
1=변환
TTF 프로그래밍법 사용됨.
72페이지 참조.
0=신호 범위 0-10V
1=신호 범위 2-10V
0=변환없음
1=변환
P2.2.48
P2.2.49
실제l 값 스페셜
디스플레이 소숫점
실제l 값 스페셜
디스플레이 단위
Tab le 5-4. 입력 신호, G2.2
0 4 1 1035
0 28 4 1036 220페이지 참조.
CP=제어 위치, cc= 접점 닫힘, oc=접점 열림
*점퍼를 블록 X2에 정확히 위치시켜야 함을 유의하십시오.
각 제품의 사용자 매뉴얼을 참조하십시오.
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 57

5
5.4.4 출력신호 (제어 키패드: 메뉴 M2 -> G2.3)
코드 파라미터 최소 최대 단위
P2.3.1
P2.3.2 아날로그 출력 기능 0 14 1 307
P2.3.3 아날로그 출력 검출 시간 0,00 10,00 5 1,00 308 0=검출없음
P2.3.4 아날로그 출력 변환 0 1 0 309
P2.3.5 아날로그 출력 최소 0 1 0 310
P2.3.6 아날로그 출력 검출 10 1000 % 100 311
P2.3.7 디지털 출력 1 기능 0 23 1 312
P2.3.8
아날로그 출력 1 신호
선택
코드 파라미터 최소 최대 단위
릴레이 출력 1
기능
0,1 E.10 A.1 464
0 23 2 313 파라미터s 2.3.7 와 같음
공장
초기값
공장초기값 임의입력값
임의
입력값
ID 참조
TTF 프로그래밍법 사용됨.
72페이지 참조.
0 = 사용하지 않음
1 = 출력 주파수. (0—f최대)
2 = 레퍼런스 주파수(0—f최대)
3 = 모터 속도(0—모터 정격 속도)
4 = 모터 전류(0—In모터)
5 = 모터 토크 (0—Tn모터)
6 = 모터 파워(0—Pn모터)
7 = 모터 전압(0-Un모터)
8 = DC 링크 전압 (0—1000V)
9 = PID 제어기 레퍼런스 값
10 = PID 제어기 실제값 1
11 = PID 제어기 실제값 2
12 = PID 제어기 에러값
13 = PID 제어기 출력
14 = PT100 온도
0 = 변환없음
1 =변환됨
0=0mA (0V)
1=4mA (2V)
0 = 사용하지 않음
1 = 준비됨
2 = 런
3 = 폴트
4 = 폴트 변환됨
5 = FC 오버히트 경고
6 = 외부 폴트나 경고
7 = 레퍼런스 폴트나 경고
8 = 경고
9 = 역으로 됨
10 = 프리셋 속도 1
11 = 제 속도를 내고 있음
12 = 모터 레귤레이터 활성화됨
13 = OP 주파수 한계 감시.1
14 = OP 주파수 한계 감시.2
15 =토크 한계 감시
16 = 레퍼런스 한계 감시
17 = 외부 제동 제어
18 = 제어위치: IO
19 = FC 온도 한계 감시
20 = 원하지않는 방향
21 = 외부 제동 제어 포함..
22 = 온도계 폴트/경고
23 = 필드버스 DIN1
ID 참조
vacon • 57
P2.3.9 릴레이 출력 2 기능 0 23 3 314 파라미터s 2.3.7 와 같음
24-hour support +358 (0) 201 212 575 • Email: vacon@vacon.com
Page 58

58• vacon
5
P2.3.10
P2.3.11
P2.3.12
P2.3.13
P2.3.14 토크 한도 감시 0 2 0 348
P2.3.15
P2.3.16 레퍼런스 한도 감시 0 2 0 350
P2.3.17
P2.3.18 외부 제동-off 지연 0,0 100,0 s 0,5 352
출력 주파수 한도 1
감시
출력 주파수 한도 1;
감시된 값
출력 주파수 한도 2
감시
출력 주파수 한도 2;
감시된 값
토크 한도
감시 값
레퍼런스 한도
감시
0 2 0 315
0,00 320,00 Hz 0,00 316
0 2 0 346
0,00 320,00 Hz 0,00 347
-
300,0 300,0 %
0,00 100,00 % 0,00 351
100,0
349
0 = 한도없음
1 = 낮은 한계 감시
2 = 높은 한계 감시
0 = 한도없음
1 = 낮은 한계 감시
2 = 높은 한계 감시
0 = 사용하지 않음
1 = 낮은 한계 감시
2 = 높은 한계 감시
0 = 사용하지 않음
1 = 낮은 한계 감시
2 = 높은 한계 감시
P2.3.19
P2.3.20 FC 온도 감시 0 2 0 354
P2.3.21 FC 온도 감시된 값 –10 100 C 40 355
P2.3.22
P2.3.23
P2.3.24
P2.3.25
P2.3.26
P2.3.27
Tab le 5-5. 출력 신호, G2.3
외부
제동-on 지연
아날로그 출력 2
신호 선택
아날로그 출력 2
기능
아날로그 출력 2
검출 시간
아날로그 출력 2
변환
아날로그 출력 2
최소
아날로그 출력 2
검출
0,0 100,0 s 1,5 353
0.1 E.10 0.1 471
0 14 4 472 As 파라미터s 2.3.2
0,00 10,00 s 1,00 473 0 = 검출없음
0 1 0 474
0 1 0 475
10 1000 % 100 476
0 = 사용하지 않음
1 = 높은 한계 감시
TTF 프로그래밍법 사용됨.
72페이지 참조.
0 = 변환없음
1 = 변환됨
0 = 0 mA
1 = 4 mA
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 59

5
5.4.5 드라이브 제어 파라미터 (제어 키패드: 메뉴 M2 -> G2.4)
코드 파리미터 최소 최대 단위
P2.4.1 램프1 모양 0,0 10,0 s 0,1 500
P2.4.2 램프 2 모양 0,0 10,0 s 0,0 501
P2.4.3 가속시간 2 0,1 3000,0 s 0,1 502
P2.4.4 감속시간 2 0,1 3000,0 s 0,1 503
P2.4.5 제동 쵸퍼 0 4 0 504
P2.4.6 스타트 기능
P2.4.7 스톱 기능 0 3 0 506
P2.4.8 DC 제동 전류 0,00 IL A 0,7 x IH 507
P2.4.9 정지시 DC 제동시간 0,00 600,00 s 0,00 508
램프 정지시 DC
P2.4.10
P2.4.11
P2.4.12 플럭스 제동 0 1 0 520
P2.4.13 플럭스 제동 전류 0,00 I
제동을 시작하는
주파수
스타트시 DC 제동
시간
Tab le 5-6. 드라이브 제어 파라미터, G2.4
0
0,10 10,00 Hz 1,50 515
0,00 600,00 s 0,00 516
2
A I
공장
초기값
임의
입력값
0
519
505
vacon • 59
ID 참조
0 = 직선 모양
>0 = S-커브 램프 시간
0 = 직선 모양
>0 = S-커브 램프 시간
0 = 비활성화
1 = 가동시 사용됨
2 = 외부 제동 쵸퍼
3 = 정지시 / 가동시 사용됨
4 = 가동시 사용됨 (테스트
아님)
0 = 램프
1 = 빠른 출발
2 = 빠른 출발 상태
0 = 코스팅
1 = 램프
2 = 램프+런 가능한 코스트
3 = 코스트+런 가능한 램프
0 = 정지시 DC 제동이 OFF
0 = 정지시 DC 제동이 OFF
0 = Off
1 = On
5.4.6 금지 주파수 파라미터 (제어 키패드: 메뉴 M2 -> G2.5)
코드 파라미터 최소 최대 단위
P2.5.1 금지 주파수 범위 1 낮은
P2.5.2 금지 주파수 범위 1 높은
P2.5.3 금지 주파수 범위 2 낮은
P2.5.4 금지 주파수 범위 2 높은
P2.5.5 금지 주파수 범위 3 낮은
P2.5.6 금지 주파수 범위 3 높은
P2.5.7 가속/감속 금지. 램프
Tab le 5-7. 금지 주파수 파라미터, G2.5
한도
0,00 320,00 Hz 0,00 509 0=사용하지 않음
한도
0,00 320,00 Hz 0,00 510 0= 사용하지 않음
한도
0,00 320,00 Hz 0,00 511 0= 사용하지 않음
한도
0,00 320,00 Hz 0,00 512 0= 사용하지 않음
한도
0,00 320,00 Hz 0,00 513 0= 사용하지 않음
한도
0,00 320,00 Hz 0,00 514 0= 사용하지 않음
0,1
10,0
24-hour support +358 (0) 201 212 575 • Email: vacon@vacon.com
공장
초기값
x
1,0 518
임의
입력값
ID 참조
Page 60

60• vacon
5
P2.6.4
약계자 영역
8,00
320,00
Hz
50,00
602
주파수
출력전압
P2.6.12
부하 감소
0,00
100,00
%
0,00
620
P2.6.14.7
기동시 자화 전류
0,00
IL A 0,00
627
역방햘
역방향
5.4.7 모터 제어 파라미터 (제어 키패드: 메뉴 M2 -> G2.6)
코드 파라미터 최소 최대 단위
P2.6.1 모터 제어 모드 0 1/3 0 600
P2.6.2 U/f 최적화 0 1 0 109
P2.6.3 U/f 비율 선택 0 3 0 108
공장
초기값
임의
입력값
ID 참조
0 = 주파수 제어
1 = 속도 제어
NXP에 부가된 기능
2 = 사용하지 않음
3 = 클로즈드 루프 속도 제어
0 = 사용하지 않음
1 = 오토 토크 상승
0 = 비례
1 = 제곱
2 =프로그램
3 = 비례 및 플럭스 최적화.
P2.6.5
P2.6.6
P2.6.7
P2.6.8
P2.6.9 스위칭 주파수 1,0 Varies kHz Varies 601
P2.6.10 과전압 제어기 0 2 1 607
P2.6.11 저전압 제어기 0 1 1 608
P2.6.13 모터 인식 0 1/2 0 631
클로즈드 루프 파라미터 그룹 2.6.14
P2.6.14.1 자화 전류 0,00 2 x I
P2.6.14.2 속도 제어 P 게인 1 1000 30 613
P2.6.14.3 속도 제어 I 시간 0,0 3200,0 ms 30,0 614
P2.6.14.5 가속 보상 0,00 300,00 s 0,00 626
P2.6.14.6 수면 조정 0 500 % 100 619
약계자 영역에서의
전압
U/f 곡선 중간점
U/f 곡선 중간점
전압
제로 주파수에서의
10,00 200,00 % 100,00 603 n% x U
0,00 P2.6.4 Hz 50,00 604
0,00 100,00 % 100,00 605
0,00 40,00 % Varies 606 n% x U
A 0,00 612
nmot
n% x U
파라미터 최대값 = P2.6.5
정확한 수치를 위해서는 8-14
참조요망
0 = 사용하지 않음
1 = 사용됨 (램핑 없음)
2 =사용된(램핑)
0 = 사용하지 않음
1 = 사용됨
0 = 응답없음
1 = 모터 운전 없이 인식 실시
2 = 모터 운전 하면서 인식 실시
nmot
nmot
P2.6.14.8 기동시 자화 시간 0 60000 ms 0,0 628
P2.6.14.9 기동시 0-속도 시간 0 32000 ms 100 615
P2.6.14.10 정지시0-속도 시간 0 32000 ms 100 616
P2.6.14.11 스타트 업 토크 0 3 0 621
P2.6.14.12
P2.6.14.13
P2.6.14.15 엔코더 검출 시간 0,0 100,0 ms 0,0 618
P2.6.14.17 전류 제어 P 게인 0,00 100,00 % 40,00 617
모터 인식 파라미터 그룹 2.6.15
P2.6.15.1 속도 스톱 -50,0 50,0 0,0 0,0 1252 NC 드라이브 속도 튜닝
스타트 업 토크
정방향
스타트 업 토크
Tab le 5-8. 모터 제어 파라미터, G2.6
–300,0 300,0 % 0,0 633
–300,0 300,0 % 0,0 634
0 = 사용하지 않음
1 = 토크 메모리
2 = 레퍼런스 토크
3 = 기동 토크 정방향/
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 61

5
0 = 응답없음
주파수
외부 폴트 에 대한
0 = 응답없음
응답
1 = 폴트가 이력에 저장안됨
P2.7.6
출력 상 감시
0 3 2
702
0 = 응답없음
P2.7.7
지락 보호
0 3 2
703
P2.7.9
모터 주위 온도 변수
–100,0
100,0
%
0,0
705
제로 속도에서의 모터
P2.7.11
모터 열 시간 상수
1
200
최소
Varies
707
P2.7.12
모터 듀티 싸이클
0
150
%
100
708
3 = 폴트, 코스팅에 의한 정지
P2.7.14
스톨 전류
0,00
2 x I A I
710 P2.7.15
스톨 시간 한도
1,00
120,00
s
15,00
711 P2.7.16
스톨 주파수 한도
1,0
P2.1.2
Hz
25,0
712
3 = 폴트, 코스팅에 의한 정지
P2.7.18
약계자 영역 부하
10
150
%
50
714
P2.7.19
제로 주파수 부하
5,0
150,0
%
10,0
715
P2.7.20
경부하 보호 시간 한도
2
600
s
20
716
정지
필드버스 폴트 에 대한
P2.7.23
슬롯 폴트 에 대한 응답
0 3 2
734
P2.7.21 참조
P2.7.24
PT100 입력 숫자
0 3 0
739
정지
P2.7.26
PT100 경고 한도
–30,0
200,0
Cº
120,0
741
P2.7.27
PT100 폴트 한도
–30,0
200,0
Cº
130,0
742
5.4.8 보호 (제어 키패드: 메뉴 M2 -> G2.7)
코드 파라미터 최소 최대 단위
P2.7.1
P2.7.2
4mA레퍼런스 폴트에
대한 응답
4mA 레퍼런스 폴트
0 5 4 700
0,00 P2.1.2 Hz 0,00 728
공장
초기값
임의
입력값
vacon • 61
ID 참조
1 = 경고
2 = 경고+이전 주파수
3 = 경고+미리 설정된
레퍼런스2.7.2
4 = 폴트, 2.4.7에 의한
정지폴트, 2.4.7에 의한 정지
5 = 폴트,코스팅에 의한 정지
P2.7.3
P2.7.4 입력 상 감시 0 3 0 730
P2.7.5
P2.7.8 모터 열보호 0 3 2 704
P2.7.10
P2.7.13 스톨 보호 0 3 1 709
P2.7.17 경부하 보호 0 3 0 713
저전압 폴트에 대한
응답
냉각 변수
0 3 2 701
0 1 0 727
0,0 150,0 % 40,0 706
1 = 경고
2 = 폴트, 2.4.7에 의한
정지폴트, 2.4.7에 의한 정지
3 = 폴트, 코스팅에 의한 정지
0 = 폴트가 이력에 저장됨
1 = 경고
2=2.4.7에 의한 정지폴트,
2.4.7에 의한 정지
3 = 폴트, 코스팅에 의한 정지
0 = 응답없음
1 = 경고
2=2.4.7에 의한 정지폴트,
2.4.7에 의한 정지
0 = 응답없음
1 = 경고
2=2.4.7에 의한 정지폴트,
2.4.7에 의한 정지
P2.7.21
P2.7.22
P2.7.25
온도계 폴트 에 대한
PT100 폴트에 대한
Tab le 5-9. 보호, G2.7
24-hour support +358 (0) 201 212 575 • Email: vacon@vacon.com
응답
응답
응답
0 = 응답없음
1 = 경고
0 3 2 732
0 3 2 733 P2.7.21 참조
0 3 2 740
2 = 폴트, 2.4.7에 의한 정지
3 = 폴트, 코스팅에 의한
0 = 응답없음
1 = 경고
2 = 폴트, 2.4.7에 의한 정지
3 = 폴트, 코스팅에 의한
Page 62

62• vacon
5
P2.8.1 대기 시간
0,10
10,00
s
0,50
717
P2.8.2
시도 시간
0,00
60,00
s
30,00
718
0 = 램프
2 = P2.4.6
횟수
횟수
4mA
R3.2
P2.1.1
P2.1.2
Hz
P3.4
PID
0,00
100,00
%
0,00
167
5.4.9 오토 스타트 파라미터 (제어 키패드: 메뉴 M2 -> G2.8)
코드 파라미터 최소 최대 단위
공장
초기값
임의
입력값
ID 참조
P2.8.3 스타트 기능 0 2 0 719
P2.8.4
P2.8.5
P2.8.6
P2.8.7
P2.8.8
P2.8.9
P2.8.10
저전압 트립 후에
시도한
과전압 트립 후에
시도한 횟수
과전류 트립 후에
시도한
레퍼런스 트립
시도한 횟수
후에
모터 온도 폴트 트립
시도한 횟수
후에
외부 폴트 트립 후에
시도한 횟수
경부하 폴트 트립
시도한 횟수
후에
Tab le 5-10. 오토스타트 파라미터, G2.8
0 10 0 720
0 10 0 721
0 3 0 722
0 10 0 723
0 10 0 726
0 10 0 725
0 10 0 738
1 = 빠른 출발
에 의함
5.4.10 키패드 제어 (제어 키패드: 메뉴 M3)
키패드의 제어 위치와 방향의 설정에 대한
파라미터는
아래에 있습니다. 각 제품 사용자 매뉴얼의
키패드 제어 메뉴를 참조하십시오.
코드 파라미터 최소 최대 단위
P3.1 제어 위치 1 3 1 125
키패드 레퍼런스
P3.3 방향(키패드에서) 0 1 0 123
레퍼런스
P3.5 PID 레퍼런스 2 0,00 100,00 % 0,00 168
R3.6 스톱 버튼 0 1 1 114
Tab le 5-11. 키패드 제어 파라미터, M3
공장
초기값
임의
입력값
ID 참조
1 = I/O 단자대
2 = 키패드
3 = 필드버스
0 = 정방향
1 = 역방향
0 = 정지버튼의 제한적인
기능
1 = 정지버튼이 항상
활성화됨
5.4.11 시스템 메뉴 (제어 키패드: M6)
주파수 변환기의 파라미터 및 기능 관련된 일반 사용에 관한 메뉴로, 언어 설정, 파라미터 설정
혹은 하드웨어 및 소프트 웨어 정보 확인이 가능합니다. 제품의 사용자 매뉴얼을 확인하십시오.
5.4.12 확장 보드 (제어 키패드: 메뉴 M7)
M7 메뉴는 제어 보드에 부착된 확장 및 옵션 보드 관련된 정보를 제공합니다. 더 많은 정보를
위해서는 각 제품의 사용자 매뉴얼을 참조하십시오.
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 63

vacon • 63
6
6. MULTI-PURPOSE 제어 어플리케이션
Software 코드: ASFIFF05
6.1 도입
페이지 S6.2 의 메뉴 M6 의 Multi-purpose 제어 어플리케이션을 선하십시오.
Multi-purpose 제어 어플리케이션 은 모터의 제어에 필요한 여러 파라미터를 제공합니다. 다양한
I/O 신호가 필요하고, PID 제어가 필요하지 않을 경우 여러 용도로 사용될 수 있습니다. (PID 제어
기능이 필요할 경우, PID 제어 이나 펌프 및 팬 제어 을 사용하십시오.). 주파수 레퍼런스는
아날로그 입력, 조이스틱 제어, 모터 전위차계 및 수학적 기능이 있는 아날로그 입력기계에서
선택이 가능합니다. 필드버스 커뮤니케이션에 필요한 파라미터가 있으며, 디지털 입력이
프로그램되어 있을 경우, 다단계 속도 및 조깅 속도가 조정가능합니다.
• 디지털 입력 및 모든 출력은 자유롭게 프로그램 가능하며, 모든 은 모든 I/O 보드를
지원합니다.
추가 기능:
아날로그 입력 신호 범위 선택
• 2개의 주파수 한계 감시
• 토크 한계 감시
• 레퍼런스 한계 감시
• 2 차 램프 및 S-형 램프 프로그래밍
• 프로그램 가능한 스타트/스톱 및 리버스 논리
• 시작과 정지시 DC-제동
• 3개의 금지 주파수 구역
• 프로그램가능한 U/f 곡선 및 주파수 변환
• 오토 스타트
• 모터의 온도의 실속 보호: 완전히 프로그램 가능한 off, 주의, 폴트
• 모터 경부하 보호
• 입력 및 출력 단계 감시
• 조이스틱 히스테리시스
• 수면 기능
NXP 기능:
• 파워 제한 기능
• 모터와 발전 측면의 다른 파워 제한
• Master Follower 기능
• 모터와 발전 측면의 다른 토크 제한
• 열 교환 유닛에서의 냉각 모니터 입력
• 즉시 제동 정지를 필요한 현재 모니터와, 제동 모니터링 입력.
• 속도와 부하에 따른 분리된 속도 제어 조율
• 2개의 다른 레퍼런스의 인칭 기능
• FB 프로세스 데이터와 다른 데이터의 연결
• 인식 파라미터의 수동 조정
더 자세한 설명은 8장에 되어있습니다.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
Page 64

64• vacon
6
Jumper block X3:
CMA and CMB grounding
RUN
220
VAC
6.2 제어 I/O
레퍼런스포텐쇼미터, 1…10 kΩ
mA
OP TA 1
단자대 신호 설명
1 +10V
2 AI1+
3 AI1- I/O 접지 레퍼런스 및 제어 접지
4 AI2+ 아날로그입력 2
5 AI2-
6 +24V 제어 전압 출력 스위치 전압 기타 등등 max 0.1 A
7 GND I/O 접지 레퍼런스 및 제어 접지
8
DIN1
9
DIN2
10 DIN3
11 CMA DIN 1—DIN 3까지 공통 적용 GND 혹은+24V에 연결
12 +24V 콘트롤 전압 출력 스위치 전압 (#6 참조)
13 GND I/O 그라운드 레퍼런스 및 콘트롤 그라운드
14 DIN4
15 DIN5
16
DIN6 콘트롤 위치 A/B 선택
17 CMB DIN4—DIN6까지 공통적용 GND 혹은 +24V에 연결
18 AO1+ 아날로그 출력1
19 AO1-
20 DO1
레퍼런스 출력 포텐쇼미터 전압 기타등등.
ref
아날로그입력 1
전압범위0—10V DC
프로그램가능함 (P2.1.11)
전류범위 0—20mA
정방향 스타트
프로그램 가능한 로직(P2.2.1.1)
역방향 스타트
R, min. = 5kΩ
폴트 리셋
프로그램가능함 (G2.2.7)
조깅 속도 선택
프로그램 가능함 (G2.2.7)
외부폴트
프로그램 가능함 (G2.2.7)
출력주파수
프로그램가능함 (P2.3.5.2)
디지털 출력
READY
프로그램가능함(G2.3.3)
아날로그입력1
주파수 레퍼런스
아날로그입력2
주파수 레퍼런스
접점 닫힘 = 정방향 스타트
접점 닫힘 = 역방향 스타트
접점 닫힘(라이징 엣지)=폴트 리셋
접점 열림 = IO 레퍼런스 활성화됨
접점 닫힘 = 조깅 속도 활성화됨
접점 열림 = 폴트 없음
접점 닫힘 = 외부 폴트
접점 열림 = P2.1.3 및 P2.1.4 이 사용 중
접점 닫힘 = P2.4.3 및 P2.4.4 이 사용 중
범위 0—20 mA/R
콜렉터 개방, I≤50mA, U≤48 VDC
, max. 500Ω
L
OP TA 2
21 RO1
23 RO1
24 RO2
26 RO2
프로그램가능함 (G2.3.3)
프로그램가능함(G2.3.3)
릴레이 출력 1
RUN
릴레이 출력 2
폴트
22 RO1
25 RO2
Tab le 6-1. 멀티 퍼포스 제어 어플리케이션 디폴트 I/O 구성 및 연결 예
Note: 점퍼 선택을 참조하시오.
더 많은 정보가 제품 사용자 매뉴얼에 있
습니다.
CMB connected to GND
CMA connected to GND
CMB isolated from GND
CMA isolated from GND
CMB and CMA
internally connected together,
isolated from GND
= Factory default
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 65

6
DIN#
DIN#
AIA#
AIA#
DIN#
DIN#
DIN#
> 1
DIN#
DIN#
NX12k103.fh8
DIN#
DIN#
DIN#
DIN#
AI#
AI#
DIN#
DIN#
DIN#
> 1
DIN#
DIN#
NX12k103.fh8
DIN#
DIN#
3.2 Keypad reference
2.1.11 I/O Reference
2.1.12 Keypad Ctrl Reference
2.1.13 Fieldbus Ctrl Reference
2.1.15 Preset Speed 1
...2.1.21 Preset Speed 7
3.1 Control place
Internal frequency
reference
Start forward
(programmable)
Start reverse (programmable)
Programmable
Start/Stop and
reverse logic
Start/Stop
Reverse
Internal Start/Stop
Internal reverse
Internal fault reset
Fault reset input
Reset button
Start/Stop buttons
Reference from fieldbus
Start/Stop from fieldbus
Direction from fieldbus
3.3 Keypad direction
Preset Speed 1
Preset Speed 2
Preset Speed 3
2.1.14 Jogging speed
reference
(programmable)
Motor
Potentiometer
6.3 Multi-Purpose 제어 어플리케이션의 제어신호 로직
vacon • 65
Figure 6-1. Multi-Purpose 제어 어플리케이션의 제어신호 로직
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
Page 66

66• vacon
6
READY
I/Oterm
DigOUT:B.1
AI Ref Faul/Warn
READY
I/Oterm
DigOUT:0.0
READY
I/Oterm
DigOUT:0.0
READY
I/Oterm
DigOUT:B.1
AI Ref Faul/Warn AI Ref Faul/Warn AI Ref Faul/Warn
6.4 “ Ter minal To Function” (TTF) 프로그래밍 원칙
Multi purpose 제어와 펌프 및 팬 제어의 입력 및 출력 신호의 베이직 프로그래밍 원칙은 기존의
Vacon NX 과 다릅니다. 기존의 프로그래밍 방법은 Function to Ter minal 프로그래밍 방법 (FTT)으로
기능에 따라 이미 고정된 입력과 출력이 있습니다. 그러나 Terminal to Function 프로그래밍 방법
(TTF)의 경우 프로그래밍 과정이 다른 과정으로 수행됩니다: 기능은 파라미터로 나타나며 사용자가
입력 및 출력을 정의합니다. 73 페이지의 주의사항을 참조하십시오.
6.4.1 키패드에서 특정 기능의 입력 및 출력 설정
파라미터에 특정 값을 줄 경우, 특정 입력이나 출력을 특정 기능 (파라미터)과 연결합니다. 그 값은
Vacon NX 제어 보드(제품의 사용자 매뉴얼을 참조하십시오)의 슬롯과 연관된 신호 넘버를 통해
형성됩니다. 아래를 참조하십시오.
Function name
Slot Terminal number
Terminal type
예시: 디지털 출력 기능 레퍼런스 폴트/경고 (파라미터 2.3.3.7)와 디지털 출력 DO1 베이직 보드
OPTA1 에서 연결 (제품의 사용자 매뉴얼을 참조하십시오).
먼저 키패드의 파라미터 2.3.3.7을 찾으십시오. 메뉴버튼을 한번 누르시고, 수정모드에 들어가십시오.
line 에서 단자대 타입을 왼쪽 (DigIN, DigOUT, An.IN, An.OUT) 그리고 오른쪽에는 현재 연결된 입력
및 출력 기능 (B.3, A.2 기타 등등) 을 보실 수 있습니다. 연결되지 않았을 경우 (0.#) 값이
표시됩니다.
값이 깜빡일 경우, 브라우저 버튼을 아래 혹은 위로 눌러 바라는 보드 슬롯과 신호 넘버를
찾습니다. 프로그램은 보드 슬롯을 0 에서부터 시작하여 A 에서 E까지 진행하고, I/O 선택 에서는
1에서 10까지 스크롤 합니다.
원하는 값을 설정 후에, 엔터버튼을 눌러 수정사항을 적용하십시오.
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 67

vacon • 67
6
6.4.2 NC 드라이브 프로그래밍 툴을 활용한 특정기능의 단자대 정의
NC 드라이브 프로그래밍 툴을 활용하여 파라미터를 만들 경우 제어 판넬과 마찬가지로 기능과
입력 및 출력 사이를 연결해야 합니다. 드롭다운 메뉴에서 주소 코드를 값 열에서 찾으십시오.
(아래 그림 참조).
Figure 6-2. NC 드라이브프로그래밍 툴의 스크린 샷; 어드레스 코드 입력
오버런을 방지하고 원활한 작동을 위해 같은 출력을 연결하는 것을
피하십시오.
참조: 출력과 다르게 입력할 경우 런 상태로 바꿀 수 없습니다.
6.4.3 사용하지 않는 입력과 출력 정의하기
모든 사용하지 않는 입력과 출력은 보드 슬롯에서 0값을 주어야하며, 단자대 넘버에서는 1을
주어야 합니다. 값 0.1 모든 기능의 초기 값입니다. 테스트 목적을 위해서 디지털 입력 신호 값을
사용할 시, 입력을 TRUE 상태로 만들이기 위해, 보드 슬롯 값을 0으로 설정하고 단자대 값을 2 와
10 사이 값으로 설정할 수 있습니다. 즉 값 1은 접점열림(open contact)을 의미하며, 값 2 에서 10
은 접점닫힘(closed contact)을 의미합니다.
아날로그 입력의 경우 단자대 넘버에 1을 입력할 경우, 0% 신호 레벨에 해당하고, 값 2는 20%, 값
3은 30% 그리고 값 10은 100%에 해당합니다.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
Page 68

68• vacon
6
6.5 마스터/팔로워 기능 (NXP only)
Master/Follower 기능은 여러 NXP 드라이브에 의해 운영되는 시스템 및 모터 샤프트가 기어링,
체인, 벨트 기타 등등으로 연결된 상황을 위해 설계되었으며, 클로즈드 루프 제어 모드를 사용할
것을 권장합니다.
외부 스타트/스톱 제어 신호는 마스터 드라이브에는 연결할 수 있습니다. 속도와 토크 레퍼런스와
제어모드는 각 드라이브 마다 선택합니다. 마스터는 시스템 버스를 경유하여 제어 하며, 마스터
스테이션은 속도 조절과 다른 드라이브 의 토크와 속도 레퍼런스를 팔로우 합니다.
6.5.1 마스터/팔로워 링크연결
아래 그림과 같이 마스터 드라이버는 왼쪽에 있으며 나머지는 다른 팔로워 입니다. 마스터 /
팔로워의 물리적 링크는 OPTD2 옵션 보드로 연결합니다. Vacon 옵션 보드 매뉴얼 (ud00741)을
참조하십시오.
6.5.2 OPTD2를 사용한 주파수 변환기들간의 광통신 연결
마스터의 OPTD2 보드는 디폴트 점퍼 섹션을 가지고 있습니다. 예: X6:1-2, X5:1-2. 팔로워를
위해서는 점퍼포지션은 변경되어야 합니다: X6:1-2, X5:2-3. 이러한 보드는 CAN 커뮤니케이션
옵션을 가지고 있어, 여러 개의 드라이브를 NC드라이브 PC소프트웨어로 모니터링할 수 있습니다.
Figure 6-3. OPTD2 보드를 통한 시스템 버스의 물리적 연결
OPTD2 확장 보드의 파라미터 정보를 위해 Vacon 옵션보드 사용자 매뉴얼을 참조하십시오.
(다큐먼트 코드 ud00741).
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 69

vacon • 69
6
6.6 Multi-purpose 제어 어플리케이션 – 파라미터 리스트
다음 페이지에서는 관련된 파라미터 리스트가 있습니다. 파라미터에 관한 설명은 131 에서 230 쪽
사이에 나와있습니다.
컬럼 설명:
코드 = 키패드상의 위치; 현재 파라미터 넘버 표시
파라미터 = 파라미터 이름
최소 = 파라미터 최소값
최대 = 파라미터 최대값
단위 = 파라미터 값; 있을 경우 표시
공장 초기값 = 공장 초기 프리셋 값
임의 입력값 = 사용자 세팅
ID = 파라미터의 ID 넘버
= 필드버스의 ID넘버를 활용하여 모니터되는 수치 조정가능
6.6.1 모니터링 값 (제어 키패드: 메뉴 M1)
= 이 파라미터를 프로그램하기 위해 TTF 방법을 사용하십시오.
= FC 멈췄을 경우에는 파라미터 값 변경 가능
모니터되는 수치는 상황과 측정 뿐만 아니라 파라미터와 신호의 실제 값입니다. 회색 배경의 값은
필드버스에서 조정될 수 있습니다. 더 많은 정보를 위하여 제품의 사용자 매뉴얼을 참조하십시오.
코드 파라미터 단위 ID 설명
V1.1 출력 주파수 Hz 1 모터쪽으로의 출력 주파수
V1.2 주파수 레퍼런스 Hz 25 모터 제어로의 주파수 레퍼런스
V1.3 모터 속도 rpm 2 모터 속도의rpm
V1.4 모터 전류 A 3
V1.5 모터 토크 % 4 계산된 샤프트 토크
V1.6 모터 출력 % 5 모터 샤프트 파워
V1.7 모터 전압 V 6
V1.8 DC링크 전압 V 7
V1.9 단위 온도 8 히트싱크 온도
V1.10 모터 온도 % 9 계산된 모터 온도
V1.11 아날로그 입력 1 V/mA 13 AI1
V1.12 아날로그 입력 2 V/mA 14 AI2
V1.13 DIN1, DIN2, DIN3 15 디지털 입력 상태
V1.14 DIN4, DIN5, DIN6 16 디지털 입력 상태
V1.15 아날로그 출력 1 V/mA 26 AO1
V1.16 아날로그 입력 3 V/mA 27 AI3
V1.17 아날로그 입력 4 V/mA 28 AI4
V1.18 토크 레퍼런스 % 18
V1.19 PT-100 온도 Cº 42 사용된PT100 입력의 최고온도
G1.20 멀티모니터링 아이템 3개의 선택가능한 모니터링 값을 보여줌
V1.21.1 전류 A 1113 정류되지않은 모터 전류
V1.21.2 토크 % 1125 정류되지않은 모터 토크
V1.21.3 DC 전압 v 44 정류되지않은 DC링크 전압
V1.21.4 상태 언어 43 6.6.1.8장 참조
V1.21.5 FB로의 모터 전류 A 45 소숫점 한자리로 주어지는 별개 동작하는 모터전류
Tab le 6-2. 모니터링 값, NXS 드라이브
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
Page 70

70• vacon
6
ID
코드
V1.1 출력 주파수 Hz 1 모터의 출력 주파수
V1.2 주파수 레퍼런스 Hz 25 모터 제어의 표준 주파수
V1.3 모터 속도 rpm 2 모터 속도의 rpm
V1.4 모터 전류 A 3
V1.5 모터 토크 % 4 계산된 샤프트 토크
V1.6 모터 출력 % 5 모터의 샤프트 파워
V1.7 모터 전압 V 6
V1.8 DC링크 전압 V 7
V1.9 단위 온도 8 히트싱크 온도
V1.10 모터 온도 % 9 계산된 모터의 온도
V1.11 아날로그 입력 1 V/mA 13 AI1
V1.12 아날로그 입력 2 V/mA 14 AI2
V1.13 DIN1, DIN2, DIN3 15 디지털 입력 상태
V1.14 DIN4, DIN5, DIN6 16 디지털 입력 상태
V1.15 아날로그 출력 1 V/mA 26 AO1
V1.16 아날로그 입력 3 V/mA 27 AI3
V1.17 아날로그 입력 4 V/mA 28 AI4
V1.18 토크 레퍼런스 % 18
V1.19 PT-100 온도 Cº 42 사용된PT100 입력의 최고온도
G1.20 멀티 모니터링 아이템 3개의 선택가능한 모니터링 값을 보여줌
V1.21.1 전류 A 1113 정류되지않은 모터 전류
V1.21.2 토크 % 1125 정류되지않은 모터 토크
V1.21.3 DC 전압 V 44 정류되지않은 DC링크 전압
V1.21.4 상태 언어 43 챕터6 6.1.8 참조
V1.21.5 엔코더 1 주파수 Hz 1124 입력 C.1
V1.21.6 축회전 r 1170 ID1090 참조
V1.21.7 축 각도 Deg 1169 ID1090 참조
V1.21.8 측정된 온도 1 Cº 50
V1.21.9 측정된 온도 2 Cº 51
V1.21.10 측정된 온도 3 Cº 52
V1.21.11 엔코더 2 주파수 Hz 53 OPTA7 보드로 부터 (입력 C.3)
V1.21.12 순수 엔코더 위치 54 OPTBB 보드로 부터
V1.21.13 순수 엔코터 회전 55 OPTBB 보드로 부터
V1.21.14 ID 런 상태 49
V1.21.15 극 페어 넘버 58 모터 정격수치로부터 사용된 PPT
V1.21.16 아날로그 입력 1 % 59 AI1
V1.21.17 아날로그 입력 2 % 60 AI2
V1.21.18 아날로그 입력 3 % 61 AI3
V1.21.19 아날로그 입력 4 % 62 AI4
V1.21.20 아날로그 출력 2 % 50 AO2
V1.21.21 아날로그 출력 3 % 51 AO3
V1.21.22
V1.21.23 스톱 응답 Hz 1132 클로즈드 루프 속도 튜닝
V1.21.24 출력 전력 kW 1508 kW로 표시되는 드라이브 출력 전력
V1.21.25 PT100 4 온도 Cº 69
V1.21.26 PT100 5 온도 Cº 70
V1.21.27 PT100 6 온도 Cº 71
V1.22.1 FB 토크 레퍼런스 % 1140 FB PD In 1의 공장 초기값 제어
V1.22.2 FB 한도 검출 % 46 FB PD In 2 공장 초기값 제어
V1.22.3 FB 조정 레퍼런스 % 47 FB PD In 3 공장 초기값 제어
V1.22.4 FB 아날로그 출력 % 48 FB PD In 4 공장 초기값 제어
V1.22.5 마지막으로 활성화된 폴트 37
V1.22.6 FB로의 모터 전류 A 45 소숫점 한자리로 주어지는 별개 동작하는
파라미터
최종 주파수 레퍼런스
클로즈드 루프
단위
Hz 1131 클로즈드 루프 속도 튜닝
설명
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 71

vacon • 71
6
모터전류
V1.22.7 DIN 상태언어 1 56 79 페이지 참조
V1.22.8 DIN 상태언어 2 57 79 페이지 참조
V1.22.9 경고 74 마지막으로 보여주는 경고 코드
V1.22.10 폴트 언어1 1172 79 페이지 참조
V1.22.11 폴트 언어2 1173 79 페이지 참조
V1.22.12 경고 언어1 1174 80 페이지 참조
V1.23.1 시스템 버스, 시스템 상태 1601 80 페이지 참조
V1.23.2 총 전류 A 83 마스터 팔로워 시스템 드라이브의 총전류값
V1.23.3.1 모터 전류 D1 A 1616
V1.23.3.2 모터 전류 D2 A 1605
V1.23.3.3 모터 전류 D3 A 1606
V1.23.3.4 모터 전류 D4 A 1607
V1.23.4.1 상태언어 D1 1615 81 페이지 참조
V1.23.4.2 상태언어 D2 1602 81. 페이지 참조
V1.23.4.3 상태언어 D3 1603 81. 페이지 참조
V1.23.4.4 상태언어 D4 1604 81. 페이지 참조
Tab le 6-3. 모니터링 값, NXP 드라이브
D1: 이 수치는 첫번째 드라이브의 전류값임
D2, D3 및D4: 업데이트 되지 않음.
D1:이 수치는 두번째 드라이브의 전류값임
D2, D3 및 D4: 업데이트 되지 않음
D1: 이 수치는 세번째 드라이브의 전류값임
D2, D3 및 D4: . 업데이트 되지 않음
D1: 이 수치는 네번째 드라이브의 전류값임
D2, D3 및 D4: 업데이트 되지 않음 .
6.6.1.1 디지털 입력 상태: 1D15 및 1D16
DIN1/DIN2/DIN3 상태 DIN4/DIN5/DIN6 상태
b0 DIN3 DIN6
b1 DIN2 DIN5
b2 DIN1 DIN4
Tab le 6-4. 디지털 입력 상태
6.6.1.2 디지털 입력 상태: ID56 및 ID57
DIN 상태언어 1 DIN 상태언어 2
b0 DIN: A.1 DIN: C.5
b1 DIN: A.2 DIN: C.6
b2 DIN: A.3 DIN: D.1
b3 DIN: A.4 DIN: D.2
b4 DIN: A.5 DIN: D.3
b5 DIN: A.6 DIN: D.4
b6 DIN: B.1 DIN: D.5
b7 DIN: B.2 DIN: D.6
b8 DIN: B.3 DIN: E.1
b9 DIN: B.4 DIN: E.2
b10 DIN: B.5 DIN: E.3
b11 DIN: B.6 DIN: E.4
b12 DIN: C.1 DIN: E.5
b13 DIN: C.2 DIN: E.6
b14 DIN: C.3
b15 DIN: C.4
Tab le 6-5. 디지털 입력 상태
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
Page 72

72• vacon
6
b0
W15
b2
W17
b4
W11
b10
b14
W58
6.6.1.3 폴트 언어 1, ID1172
b0 과전류 혹은 IGBT F1, F31, F41
b1 과전압 F2
b2 저전압 F9
b3 모터 스톨 되었음 F15
b4 지락 F3
b5 모터 경부하 F17
b6 드라이브 과온도 F14
b7 과온도 F16, F56, F29
b8 입력 상 F10
b11 키패드혹은 PC 제어 F52
b12 필드버스 F53
b13 시스템 버스 F59
b14 슬롯 F54
b15 4 mA F50
Tab le 6-6. 폴트 언어 1
6.6.1.4 폴트 언어 2, ID1173
Tab le 6-7. 폴트 언어 2
폴트 코멘트
폴트 코멘트
b2 엔코더 F43
b4
b6 외부 F51
b9 IGBT F31, F41
b10 제동 F58
b14 주 스위치 개방 F64
b15
6.6.1.5 경고 언어1, ID1174
b13 사용안됨
b15 키패드 혹은 PC 폴트/경고 FW52
Tab le 6-8. 경고 언어 1
폴트 코멘트
모터 스톨되었음
b1 모터 과온도 W16
모터 경부하
b3 입력 상 손실 W10
출력 상 손실
b9 아날로그 입력 < 4mA W50
사용안됨
기계적 제동
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 73

6
6.6.1.6 시스템 버스 상태 언어, ID1601
FALSE TRUE
b0 보유함
b1 드라이브 1 레디
b2 드라이브 1 가동
b3 드라이브 1 폴트
b4 보유함
b5 드라이브 2 레디
b6 드라이브 2 가동
b7 드라이브 2 폴트
b8 보유함
b9 드라이브 3 레디
b10 드라이브 3 가동
b11 드라이브 3 폴트
b12 보유함
b13 드라이브 4 레디
b14 드라이브 4 가동
b15 드라이브 4 폴트
Tab le 6-9. 시스템 버스 상태 언어
vacon • 73
6.6.1.7 Follower 드라이브 상태 언어
FALS E TRUE
b0 플럭스 레디 안됨 플럭스 레디 (>90 %)
b1 레디 상태 아님 레디
b2 가동 안함 가동
b3 폴트 없음 폴트
b4 스위치 챠징 상태
b5
b6 런 비활성화 런 활성화
b7 경고없음 경고
b8
b9
b10
b11 DC 제동 없음 DC 제동 활성화됨
b12 런 요청없음 런 요청
b13 한도 제어활성화 없음 한도 제어 활성화됨
b14 외부 제동 제어 OFF 외부 제동 제어 ON
b15 심박동
Tab le 6-10. Follower 드라이브 상태 언어
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
Page 74

74• vacon
6
6.6.2 어플리케이션 상태 언어
어플리케이션 상태 언어는 여러가지 드라이브 상황을 하나의 데이터 워드로 결합합니다. 상태
워드는 Multi-Purpose 에서는 보실 수 있습니다. 다른의 상태 언어는 NC드라이브 PC 소프트웨어로
읽으실 수 있습니다.
어플리케이션 상태 언어
어플리케이션
상태 언어
b0
b1 레디 레디 레디 레디 레디 레디
b2 런 런 런 런 런 런
b3 폴트 폴트 폴트 폴트 폴트 폴트
b4
b5
b6 런 활성화 런 활성화 런 활성화 런 활성화 런 활성화 런 활성화
b7 경고 경고 경고 경고 경고 경고
b8
b9
b10
b11 DC 제동 DC 제동 DC 제동 DC 제동 DC 제동 DC 제동
b12 런 요청 런 요청 런 요청 런 요청 런 요청 런 요청
b13 한도 제어 한도 제어 한도 제어 한도 제어 한도 제어 한도 제어
b14 제동 제어 Aux 1
b15
Tab le 6-11. 어플리케이션 상태 언어 내용
스탠다드 Loc/Rem 다단속 PID MP PFC
위치 B 활성화됨
PID 활성화됨
비상정지 없음
(NXP)
Aux 2
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 75

vacon • 75
6
적합성을 확인하시오.
P2.1.15
프리셋 속도 1
0,00
P2.1.2
Hz
10,00
105
다단속1
P2.1.21
프리셋 속도 7
0,00
P2.1.2
Hz
50,00
130
다단속7
6.6.3 베이직 파라미터 (제어 키패드: 메뉴 M2 -> G2.1)
코드 파라미터 최소 최대 단위 공장 초기값
P2.1.1 최소 주파수 0,00 P2.1.2 Hz 0,00 101
P2.1.2 최대 주파수 P2.1.1 320,00 Hz 50,00 102
P2.1.3 가속시간 1 0,1 3000,0 s 3,0 103 0 Hz에서 최대주파수 까지
P2.1.4 감속시간 1 0,1 3000,0 s 3,0 104 최대주파수에서 0 Hz 까지
P2.1.5 전류 한도 0,1xIH 2xIH A IL 107
NX2:230V
P2.1.6 모터의 정격 전압 180 690 V
P2.1.7 모터의 정격 주파수 8,00 320,00 Hz 50,00 111
P2.1.8 모터의 정격 속도 24 20 000 rpm 1440 112
P2.1.9 모터의 정격 전류 0,1xIH 2xIH A IH 113 . 모터명판을 확인하시오
P2.1.10
P2.1.11
P2.1.12 키패드 제어 레퍼런스 0 9 8 121
P2.1.13 필드버스 제어 레퍼런스 0 9 9 122 See P2.1.12
P2.1.14 조깅 속도 레퍼런스 0,00 P2.1.2 Hz 5,00
모터 역률 0,30 1,00 0,85 120 . 모터명판을 확인하시오
I/O 레퍼런스 0 15/16 0 117
NX5:400V
NX6:690V
임의
입력값
110
ID 참조
주의 : 만약 최대주파수가
모터 동기속도보다 크면,
모터 및 드라이브 시스템의
모터명판을 확인하시오.
또한 델타/스타 연결을
확인하시오
. 모터명판을 확인하시오
디폴트값은 4극 모터 및
주파수 변환기 정격
싸이즈에 적용되어있습니다
0=AI1
1=AI2
2=AI1+AI2
3=AI1-AI2
4=AI2-AI1
5=AI1xAI2
6=AI1 조이스틱
7=AI2 조이스틱
8=키패드
9=필드버스
10=모터 전위차계
11=AI1, AI2 최소
12=AI1, AI2 최대
13=최대의 주파수
14=AI1/AI2 선택
15=엔코더 1
16=엔코더 2 (NXP only)
0=AI1
1=AI2
2=AI1+AI2
3=AI1-AI2
4=AI2-AI1
5=AI1xAI2
6=AI1 조이스틱
7=AI2 조이스틱
8=키패드
9=필드버스
124 ID413 참조.
P2.1.16
P2.1.17
P2.1.18
P2.1.19
P2.1.20
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
프리셋 속도 2 0,00 P2.1.2 Hz 15,00
프리셋 속도 3 0,00 P2.1.2 Hz 20,00
프리셋 속도 4 0,00 P2.1.2 Hz 25,00
프리셋 속도 5 0,00 P2.1.2 Hz 30,00
프리셋 속도 6 0,00 P2.1.2 Hz 40,00
Tab le 6-12. 기본 파라미터 G2.1
106 다단속2
126 다단속3
127 다단속4
128 다단속5
129 다단속6
Page 76

76• vacon
6
6.6.4 입력 신호
6.6.4.1 기본 세팅(제어 키패드: 메뉴M2 -> G2.2.1)
코드 파라미터 최소 최대 단위
P2.2.1.1
P2.2.1.2
P2.2.1.3
P2.2.1.4 입력 조정 0 5 0 493
P2.2.1.5 최소값 조정 0,0 100,0 % 0,0 494
P2.2.1.6 최대값 조정 0,0 100,0 % 0,0 495
스타트/스톱 로직
선택
모터 포텐셔미터
램프 시간
모터 포텐셔미터
주파수 레퍼런스
메모리 리셋
Tab le 6-13. 입력신호 기본 세팅, G2.2.1
0 7 0
0,1 2000,0 Hz/s 10,0
0 2 1
공장
초기값
임의
입력값
300
331
367
ID 참조
스타트 신호 1
(공장 초기값:
DIN1)
0
정방향 스타트
1
스타트/스톱
2
스타트/스톱
3
스타트 펄스
4
스타트
5
정방향 스타트*
6
스타트*/스톱
7
스타트*/스톱
0 = 리셋 없음
1 = 정지하거나 전력 차단시
리셋하시오.
2 = 전력 차단시 리셋하시오.
0 = 사용하지 않음
1 = AI1
2 = AI2
3 = AI3
4 = AI4
5 = 필드버스 (그룹 G2.9 참조)
스타트 신호 2
(공장 초기값:
DIN2)
역방향 스타트
역방향
런 활성화
스톱 펄스
모터 포텐셔 .UP
역방향 스타트*
역방향
런 활성화
6.6.4.2 아날로그 입력1(컨트롤 키패드 : 메뉴 M2 -> G2.2.2)
코드 파라미터 최소 최대 단위
P2.2.2.1 AI1 신호 선택 0.1 E.10 A.1 377
P2.2.2.2 AI1 검출 시간 0,00 10,00 s 0,10 324 0 정류없음
P2.2.2.3 AI1 신호 범위 0 3 0 320
P2.2.2.4
P2.2.2.5
P2.2.2.6
P2.2.2.7
P2.2.2.8
AI1 임의 입력값
최소값 세팅
AI1 임의 입력값
최대값 세팅
AI1 레퍼런스 검출,
최소 값
AI1 레퍼런스 검출,
최대값 값
AI1
조이스틱히스테리시스
-160,00 160,00 % 0,00 321
-160,00 160,00 % 100,00 322 예를들면9 V = 90 %
0,00 320,00 Hz 0,00 303
0,00 320,00 Hz 0,00
0,00 20,00 % 0,00
공장
초기값
임의
입력값
ID 참조
TTF 프로그래밍으로서
챕터 6.4 참조요망
0 = 0-10 V (0-20 mA*)
1 = 2-10 V (4-20 mA*)
2 = -10V…+10V*
3 = 임의 입력값om
범위*
입력 신호범위의 퍼센트.
예를들면
3 V = 30 %
최소 레퍼런스 신호에
해당하는 주파수를
선택하십시오.
최대 레퍼런스 신호에
해당하는 주파수를
304
선택하십시오.
조이스틱 입력의 데드 존
384
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 77

6
P2.2.2.9 AI1 수면 한도 0,00 100,00 % 0,00 385
P2.2.2.10 AI1 수면 딜레이 0,00 320,00 s 0,00 386
P2.2.2.11 AI1 조이스틱 옵셋 -100,00 100,00 % 0,00 165
Tab le 6-14. 아날로그 입력 1 파라미터, G2.2.2
*블록 X2 의 점퍼를 놓아야 함을 명심하십시오. 제품의 사용자 매뉴얼을 참조하십시오
6.6.4.3 아날로그 입력 2(제어 키패드: 메뉴 M2 -> G2.2.3)
코드 파라미터 최소 최대 단위
P2.2.3.1 AI2 신호 선택 0.1 E.10 A.2 388
P2.2.3.2
P2.2.3.3 AI2 신호 범위 0 3 1 325
P2.2.3.4
P2.2.3.5
P2.2.3.6
P2.2.3.7
P2.2.3.8
P2.2.3.9 AI2 수면 한도 0,00 100,00 % 0,00 396
P2.2.3.10 AI2 수면 딜레이 0,00 320,00 s 0,00 397
P2.2.3.11 AI2 조이스틱 옵셋 -100,00 100,00 % 0,00 166
AI2 검출 시간AI2
검출 시간
AI2 임의 입력값
최소값 세팅
AI2 임의 입력값
최대값 세팅
AI2 레퍼런스 검출,
최소 값
AI2 레퍼런스 검출,
최대값
AI2 조이스틱
히스테리시스
Tab le 6-15. 아날로그 입력 2 파라미터s, G2.2.3
0,00 10,00 s 0,10 329 0 = 정류 없음
-160,00 160,00 % 20,00 326
-160,00 160,00 % 100,00 327 e.g. 18 mA = 90 %
0,00 320,00 Hz 0,00 393
0,00 320,00 Hz 0,00 394
0,00 20,00 % 0,00 395
공장
초기값
임의
입력값
ID 참조
vacon • 77
만약 입력값이 세팅
시간에서 이 한계 이하로
될 경우, 드라이브는
수면 모드가 됩니다.
옵셋으로 세팅하기위해
엔터를 1초동안
누릅니다. 0.00으로
세팅하기 위해
리셋합니다.
TTF 프로그래밍으로서
챕터 6.4 참조요망
0 = 0-20 mA (0-10 V *)
1 = 4-20 mA (2-10 V *)
2 = -10V…+10V*
3 = 임의 입력값 범위*
입력 신호 범위의 %. e.g.
2 mA = 10 %
최소 레퍼런스 신호에
해당하는 주파수를
선택하십시오.
최대 레퍼런스 신호에
해당하는 주파수를
선택하십시오.
조이스틱 입력의 데드존
e.g. 10 % = +/- 5 %
한계치 아래로 내려갈시
수면모드
옵셋으로 세팅하기위해
엔터를 1초동안
누릅니다. 0.00으로
세팅하기 위해
리셋합니다.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
Page 78

78• vacon
6
.
6.6.4.4 아날로그 입력 3 (제어 키패드 메뉴: M2 -> G2.2.4)
코드 파라미터 최소 최대 단위
P2.2.4.1 AI3 신호 선정 0.1 E.10 0.1 141 6.4장의 TFT 프로그래밍 참조
P2.2.4.2 AI3 검출 시간 0,00 10,00 s 0,00 142 0 = 검출 없음
P2.2.4.3 AI3 신호 범위 0 3 0 143
P2.2.4.4
P2.2.4.5
P2.2.4.6 AI3 신호 변환 0 1 0 151
AI3 임의 입력값
최소값 세팅
AI3 임의 입력값
최대값 세팅
Tab le 6-16. 아날로그 입력 3 파라미터, G2.2.4
-160,00 160,00 % 0,00 144
-160,00 160,00 % 100,00 145 e.g. 18 mA = 90 %
공장
초기값
임의
입력값
ID 참조
0 = 0-20 mA (0-10 V *)
1 = 4-20 mA (2-10 V *)
2 = -10V…+10V*
3 = 임의 입력값 범위*
입력 신호 범위의 %. e.g. 2 mA
= 10 %
0 = 변환안됨
1 = 변환됨
* 블록 X2 의 점퍼를 놓아야 함을 명심하십시오. 제품의 사용자 매뉴얼을 참조하십시오.
6.6.4.5 아날로그 입력4 (컨트롤 키패드: 메뉴 M2 -> G2.2.5)
코드 파라미터 최소 최대 단위
P2.2.5.1 AI4 신호 선택 0 0.1 152
P2.2.5.2 AI4 검출 시간 0,00 10,00 s 0,00 153 0 = 정류 없음
P2.2.5.3 AI4 신호 범위 0 3 1 154
P2.2.5.4
P2.2.5.5
P2.2.5.6 AI4 신호 변환 0 1 0 162
AI4 임의 입력값
최소값 세팅
AI4 임의 입력값
최대값 세팅
Tab le 6-17. 아날로그 입력 4 파라미터, G2.2.5
-160,00 160,00 % 20,00 155
-160,00 160,00 % 100,00 156 e.g. 18 mA = 90 %
공장
초기값
임의
입력값
ID 참조
6.4장의 TFT 프로그래밍
참조
0 =0-20 mA (0-10 V *)
1 = 4-20 mA (2-10 V *)
2 = -10V…+10V*
3 = 임의 입력값 범위*
입력 신호범위의 퍼센트
e.g. 2 mA = 10 %
0 = 변환안됨
1 = 변환됨
6.6.4.6 프리 아날로그 입력, 신호 선택(키패드: 메뉴 M2 -> G2.2.6)
코드 파라미터 최소 최대 단위
P2.2.6.1 전류 한도 검출 0 5 0 399
P2.2.6.2 DC-제동 전류 검출 0 5 0 400
P2.2.6.3 가속/감속시간 검출 0 5 0 401
P2.2.6.4 토크 감시 한도 검출 0 5 0 402 파라미터 P2.2.6.1에 따라
공장
초기값
임의
입력값
ID 참조
0 = 사용하지 않음
1 = AI1
2 = AI2
3 = AI3
4 = AI4
5 = 필드버스 검출. G2.9
그룹 참조.
파라미터 P2.2.6.1에
따라 0에서 ID507까지
검출
파라미터 P2.2.6.1에
따라 활성화된 램프를
100%에서 10%까지 검출
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 79

6
P2.2.7.1
1
0.1
A.1
403
P2.2.1.1
P2.2.7.3 런
0.1
0.2
407
(cc)
P2.2.7.5
1
0.1
0.1
419
P2.2.7.7
3
0.1
0.1
421
UP
P2.2.7.11 외부
(close)
0.1
A.5
405
(F51)
(cc)
P2.2.6.5 토크 한도 검출 0 5 0 485
NXP 드라이브 only
vacon • 79
0에서 ID348까지 검출
파라미터 P2.2.6.1에 따라
0에서 ID609(NXS)혹은
ID1287(NXP)까지 검출
P2.2.6.6
P2.2.6.7 모터 출력 한도 검출 0 5 0 179
P2.2.6.8
제너레이터 토크 한도
검출
제너레이터 출력
한도 검출
Tab le 6-18. 프리 아날로그 입력 신호 선택, G2.2.6
0 5 0 1087
0 5 0 1088
파라미터 P2.2.6.1에 따라
0에서 ID1288까지 검출
파라미터 P2.2.6.1에 따라
0에서 ID1289까지 검출
파라미터 P2.2.6.1에 따라
0에서 ID1290까지 검출
6.6.4.7 Digital inputs (제어 키패드: 메뉴 M2 -> G2.2.4)
이 모든 파라미터를 위해 TTF 프로그래밍을 사용하십시오. 6.4장 참조하십시오.
코드 파라미터 최소
스타트 신호
P2.2.7.2 스타트 신호 2 0.1 A.2 404 P2.2.1.1 참조
활성화
P2.2.7.4 역방향 0.1 0.1 412
프리셋 속도
P2.2.7.6 프리셋 속도 2 0.1 0.1 420
프리셋 속도
P2.2.7.8
P2.2.7.9
모터 포텐셔미터 레퍼런스
DOWN
모터 포텐셔미터 레퍼런스
0.1 0.1 417 모터 포텐셔미터 레퍼런스 감소(cc)
0.1 0.1 418 모터 포텐셔미터 레퍼런스 증가(cc)
공장
초기값
임의
입력값
ID 참조
모터 기동 활성화됨
정방향(oc)
역방향(cc)
베이직 파라미터 (G2.1)의 기설정
속도 참조
참조
P2.2.7.10 폴트 리셋 0.1 A.3 414 모든 폴트 리셋(cc)
폴트
P2.2.7.12 외부 폴트 (open) 0.1 0.2 406 외부폴트(F51) 표시 (oc)
P2.2.7.13 가속/감속 시간 선택 0.1 A.6 408
P2.2.7.14 가속/감속 금지 0.1 0.1 415 가속/감속 금지(cc)
P2.2.7.15 DC 제동 0.1 0.1 416 DC제동 활성화됨 (cc)
P2.2.7.16 조깅 속도 0.1 A.4 413
P2.2.7.17 AI1/AI2 선택 0.1 0.1 422
P2.2.7.18
P2.2.7.19 키패드로부터의 제어 0.1 0.1 410
P2.2.7.20 필드버스로부터의 제어 0.1 0.1 411
P2.2.7.21
P2.2.7.22 모터 제어 모드 1/2 0.1 0.1 164
NXP 드라이브 only
P2.2.7.23 냉각 모니터 0.1 0.2 750 수냉식 드라이브에 사용됨
I/O 단자대로부터의
제어
파라미터 set 1/set 2
선정
0.1 0.1 409
0.1 0.1 496
외부폴트
가속/감속시간1 (oc)
가속/감속시간2 (cc)
주파수 레퍼런스를 위해 조깅
속도가 선정됨(cc)
ID117 = 14일때 CC=AI2가
레퍼런스로 사용됨
제어위치를 I/O터미털에
강제로 함(CC)
제어위치를 키패드에 강제함
(cc)
제어위치를 필드버스에
강제함(cc)
클로즈드 제어 = Set2가 사용됨
오픈 제어 = Set1이 사용됨
클로즈드 제어= 모드2가 사용됨
오픈제어는 모드1이 사용됨
파리미터 2.6.1, 2.6.12
표시
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
Page 80

80• vacon
6
P2.2.7.24 외부 제동 인식 0.1 0.2 1210 기계적 제동으로부터 신호 검출
P2.2.7.26 인칭 활성화 0.1 0.1 532 인칭 기능 활성화
인칭 레퍼런스1. (정방향 2Hz가
P2.2.7.27 인칭 레퍼런스 1 0.1 0.1 530
P2.2.7.28 인칭 레퍼런스 2 0.1 0.1 531
P2.2.7.29 엔코더카운터 리셋 0.1 0.1 1090
P2.2.7.30 비상정지 0.1 0.2 1213
P2.2.7.31 Master /Follower 모드 2 0.1 0.1 1092 6.5장 파라미터 P2.11.1참조
P2.2.7.32 입력 스위치 인식 0.1 0.2 1209 낮은 신호가 폴트 유발함(F64)
Tab le 6-19. 디지털 입력 신호 G2.2.4
cc = 접점닫힘
oc=접점 열림
공장초기값임. P2.4.15참조).
이렇게 하면 드라이브가 작동됨.
인칭 레퍼런스2. (정방향 2Hz가
디폴트임. P2.4.16참조).
이렇게 하면 드라이브가 작동됨
샤프트 회전 및 각도 리셋
(6.3참조)
낮은 신호가 비상정지를 활성화
시킴
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 81

6
6.6.5 출력 신호
6.6.5.1 지연된 디지털 출력 1 (키패드: 메뉴 M2 -> G2.3.1)
코드 파라미터 최소 최대 단위
P2.3.1.1
P2.3.1.2
P2.3.1.3
P2.3.1.4
디지털 출력 1
신호 선택
디지털 출력 1
기능
디지털 출력
1 on 딜레이
디지털 출력
1 off 딜레이
Tab le 6-20. 지연된 디지털 출력 1 파라미터, G2.3.1
0.1 E.10 0.1 486
0 26 1 312
320,0
0,00
0,00
0
320,0
0
공장
초기값
s 0,00 487 0,00 = 지연 상태이며 사용상태 아님
s 0,00 488
임의
입력값
vacon • 81
ID 참조
6.4장의 TFT 프로그래밍 참조
ID1084와 변환가능(NXP에서만 가능)
0 = 사용하지 않음
1 = 준비됨
2 = 런
3 = 폴트
4 = 폴트 변환됨
5 = FC 오버히트 경고
6 = 외부 폴트나 경고
7 = 레퍼런스 폴트 경고
8 = 경고
9 = 역방향
10 = 조깅 속도 선택
11 = 제 속도를 내고 있음
12 = 모터 레귤레이터 활성화됨
13 = 주파수 한계 1 감시
14 = 주파수 한계 2 감시.
15 = 토크 한계 감시.
16 = 레퍼런스 한계 감시
17 = 외부 제동 제어
18 = I/O 실제 제어위치
19 = FC 온도 한계 감시
20 = 레퍼런스값 변환됨
21 = 외부 제동 제어 변환됨
22 = 열로인한 폴트 혹은 경고
23 = 아날로그 인풋(AI) 감시
24 = 필드버스 DIN 1
25 = 필드버스DIN 2
26 = 필드버스 DIN 3
0,00 = 지연 상태 아니며 사용상태
아님
6.6.5.2 지연된 디지털 출력 2(키패드: 메뉴 M2 -> G2.3.2)
코드 파라미터 최소 최대 단위
P2.3.2.1
P2.3.2.2 디지털 출력 2 기능 0 26 0 490 P2.3.1.2 참조
P2.3.2.3
P2.3.2.4
디지털 출력 2 신호
선택
디지털 출력 2 on
딜레이
디지털 출력 2 off
딜레이
Tab le 6-21. 지연된 디지털 출력 2, G2.3.2
0.1 E.10 0.1 489
0,00 320,00
0,00 320,00 s 0,00 492
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
공장
초기값
s
0,00
임의
입력값
ID 참조
6.4장의 TFT 프로그래밍
참조. NXP에서만 ID1084와
변환 가능
0,00 = 지연 상태이며
491
사용상태 아님
0,00 = 지연 상태 아니며
사용상태 아님
Page 82

82• vacon
6
P2.3.3.1
0.1
A.1
432
P2.3.3.3
0.1
B.2
434
P2.3.3.5
0.1
0.1
436
P2.3.3.7
0.1
0.1
438
4mA
P2.3.3.9
0.1
0.1
440
P2.3.3.11 제 속도
0.1
0.1
442
P2.3.3.13
I/O 제어
0.1
0.1
444
IO
179페이지 ㅍ참조
P2.3.3.15 외부
0.1
0.1
446
P2.3.3.17 출력
2
0.1
0.1
448
ID346
P2.3.3.19 온도
0.1
0.1
450
.
P2.3.3.21
0.1
0.1
452
P2.3.3.23 모터
0.1
0.1
454
P2.3.3.25
DIN 2
0.1
0.1
456
P2.3.3.27
DIN 4
0.1
0.1
169
P2.3.3.30
0.1
0.1
756
6.6.5.3 디지털출력 신호(제어 키패드: 메뉴 M2 -> G2.3.3)
이 모든 파라미터 사용을 위하여 TTF 프로그래밍 방법을 사용하시오.
코드 파라미터 최소
레디
P2.3.3.2 런 0.1 B.1 433 운전 중
폴트
P2.3.3.4 변환된 폴트 0.1 0.1 435 드라이브가 폴트 상태가 아님
경고
P2.3.3.6 외부 폴트 0.1 0.1 437 외부 폴트 활성화 됨
레퍼런스 폴트/경고
P2.3.3.8 과열 경고 0.1 0.1 439 드라이브 과열 경고 활성화 됨
역방향
P2.3.3.10 요청되지 않은 방향 0.1 0.1 441 실제 방향이 요구되는 방향과 다름
P2.3.3.12 조깅 속도 0.1 0.1 443
위치
P2.3.3.14 외부 제동 제어 0.1 0.1 445
제동 제어, 변환된
P2.3.3.16 출력 주파수 한도 1 감시 0.1 0.1 447 ID315 참조.
주파수 한도
P2.3.3.18 레퍼런스 한도 감시 0.1 0.1 449 ID350 참조.
한도 감시
P2.3.3.20 토크 한도 감시 0.1 0.1 451 ID348참조
온도계 폴트 혹은 경고
P2.3.3.22 아날로그 입력 감시 한도 0.1 0.1 463 ID356 참조
레귤레이터 활성화
P2.3.3.24 필드버스 DIN 1 0.1 0.1 455 필드버스 매뉴얼 참조
필드버스
P2.3.3.26 필드버스 DIN 3 0.1 0.1 457 필드버스 매뉴얼 참조
필드버스
P2.3.3.28 필드버스 DIN 5 0.1 0.1 170 필드버스 매뉴얼 참조
NXP 드라이브 only
P2.3.3.29 DC 레디 펄스 0.1 0.1 1218 외부DC충전기용
안전한 비작동 활성화
Tab le 6-22. 디지털 출력 신호, G2.3.3
감시
공장
초기값
임의
입력값
ID 참조
가동준비 완료
드라이브가 폴트 상태임
경고가 활성화 됨
폴트 혹은 경고가 활성화 됨
출력주파수가 0Hz이하로 됨
레퍼런스값 = 출력 주파수
조깅 혹은 기설정 속도명령이
활성화됨
제어가 활성화 됨
179페이지 참조
179페이지 설명 참조
참조.
드라이브 온도 감시 ID354참조
필드버스 매뉴얼 참조
필드버스 매뉴얼 참조
과도한 기능의 사용제한과 원활한 운영을 위하여 두가지 기능과 같은 출력을 연결하는
것을 피하십시오.
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 83

vacon • 83
6
6.6.5.4 한도 세팅(제어 키패드: 메뉴 M2 -> G2.3.4)
코드 파라미터 최소 최대 단위
P2.3.4.1 출력 주파수 한도 1 감시 0 3 0 315
P2.3.4.2
P2.3.4.3 출력 주파수 한도 2 감시 0 4 0 346
P2.3.4.4
P2.3.4.5 토크 한도 감시 0 3 0 348
P2.3.4.6 토크 한도 감시 값 -300,0 300,0 % 100,0 349
P2.3.4.7 레퍼런스 한도 감시 0 2 0 350
P2.3.4.8 레퍼런스 한도 감시 값 0,0 100,0 % 0,0 351
P2.3.4.9 외부 제동-off 딜레이 0,0 100,0 s 0,5 352 제동 OFF한계로부터
P2.3.4.10 외부 제동-on 딜레이 0,0 100,0 s 1,5 353
P2.3.4.11 FC 온도 감시 0 2 0 354
P2.3.4.12 FC 온도 감시된 값 –10 100 C 40 355
P2.3.4.13 아날로그 감시 신호 0 4 0 356
P2.3.4.14 아날로그 감시 낮은 한도 0,00 100,00 % 10,00 357
P2.3.4.15 아날로그 감시 높은 한도 0,00 100,00 % 90,00 358
NXP 드라이브 only
P2.3.4.16 제동 On/Off 전류 한도 0 2 x IH A 0 1085
출력 주파수 한도 1; 감시된
값
출력 주파수 한도 2; 감시된
값
Tab le 6-23. 한도 세팅, G2.3.4
0,00 320,00 Hz 0,00 316
0,00 320,00 Hz 0,00 347
공장
초기값
임의
입력값
ID 참조
0 = 사용하지 않음
1 = 낮은 한계 감시
2 = 높은 한계 감시
3 = 제동 ON제어
0 = 사용하지 않음
1 = 낮은 한계 감시
2 = 높은 한계 감시
3 = 제동 OFF 제어
4 = 제동 ON/OFF 제어
0 = 사용하지 않음
1 = 낮은 한계 감시
2 = 높은 한계 감시
3 = 제동 OFF 제어
제동 제어에서는
절대값이 사용됨
0 = 사용하지 않음
1 = 낮은 한계
2 = 높은 한계
0,0 = 최소한의 주파수
100,0 = 최대한의 주파수
런 명령으로부터.
P2.1.4보다 길게 사용할 것
0 = 사용하지 않음
1 = 낮은 한계
2 = 높은 한계
0 = 사용하지 않음
1 = AI1
2 = AI2
3 = AI3
4 = AI4
DO Off 한계 P2.3.3.22
참조
DO Off 한계 P2.3.3.22
참조
제동이 닫혔으며 전류가
이 수치 이하라면 계속
닫힌 상태 유지함.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
Page 84

84• vacon
6
선택
기능
6.6.5.5 아날로그 출력(제어 키패드: 메뉴 M2 -> G2.3.5)
코드 파라미터 최소 최대 단위
P2.3.5.1
P2.3.5.2
P2.3.5.3
P2.3.5.4
P2.3.5.5
P2.3.5.6
P2.3.5.7
아날로그 출력 1
신호 선택
아날로그 출력 1
기능
아날로그 출력 1 검출
시간
아날로그 출력 1
변환
아날로그 출력 1
최소
아날로그 출력 1
검출
아날로그 출력 1
옵셋
Tab le 6-24. 아날로그 출력 1 파라미터, G2.3.5
0.1 E.10 A.1 464 6.4장의 TFT 프로그래밍 참조
0 15 1 307
0,00 10,00 s 1,00 308 0 = 정류 없음
0 1 0
0 1 0 310
10 1000 % 100 311
-100,00 100,00 % 0,00 375
공장
초기값
임의
입력값
ID 참조
0 = 사용하지 않음 / 10 V)
1 =출력 주파수 (0—f최대)
2 = 레퍼런스 주파수(0—f최대)
3 = 모터 속도(0—모터 정격 속도)
4 = 모터 전류(0—I
5 = 모터 토크(0—T
6 = 모터 파워(0—P
7 = 모터 전압(0-U
8 = DC-링크 전압 (0—1000V)
9 = AI1
10 = AI2
11 = 출력 주파수(f
12 = 모터 토크(–2…+2xT
13 = 모터 파워(–2…+2xT
14 = PT100 온도
15 = FB 아날로그 출력
프로세스 데이터4 (NXS)
0 = 변환되지 않음
309
1 = 변환됨
0 = 0 mA (0 V)
1 = 4 mA (2 V)
n모터
n모터
n모터
n모터
최소
)
)
)
)
- f
최대
Nmot
Nmot
)
)
)
6.6.5.6 아날로그 출력 2 (제어 키패드: 메뉴 M2 -> G2.3.6)
코드 파라미터 최소 최대 단위
P2.3.6.1
P2.3.6.2 아날로그 출력 2
P2.3.6.3
P2.3.6.4 아날로그 출력 2 변환 0 1 0 474
P2.3.6.5 아날로그 출력 2 최소 0 1 0 475
P2.3.6.6 아날로그 출력 2 검출 10 1000 % 100 476
P2.3.6.7 아날로그 출력 2 옵셋 -
아날로그 출력 2 신호
아날로그 출력 2검출
시간
Tab le 6-25. 아날로그 출력 2 파라미터, G2.3.6
0.1 E.10 0.1 471
0 15 4 472 P2.3.5.2 참조
0,00 10,00 s 1,00 473 0 = 정류 없음
100,00 % 0,00 477
100,0
공장
초기값
임의
입력값
ID 참조
TTF 프로그래밍임. 6.4장
참조.
0 = 변환되지 않음
1=변환됨
0 = 0 mA (0 V)
1 = 4 mA (2 V)
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 85

vacon • 85
6
6.6.5.7 아날로그 출력 3 (제어 키패드: 메뉴 M2 -> G2.3.7)
코드 파라미터 최소 최대 단위
P2.3.7.1 아날로그 출력 3 신호 선택 0.1 E.10 0.1 478
P2.3.7.2 아날로그 출력 3 기능 0 15 5 479 P2.3.5 참조
P2.3.7.3 아날로그 출력 3 검출 시간 0,00 10,00 s 1,00 480 0 = 정류 없음
P2.3.7.4 아날로그 출력 3 변환 0 1 0 481
P2.3.7.5 아날로그 출력 3 최소 0 1 0 482
P2.3.7.6 아날로그 출력 3 검출 10 1000 % 100 483
P2.3.7.7 아날로그 출력 3 옵셋 -100,00 100,00 % 0,00 484
Tab le 6-26. 아날로그 출력 3 파라미터, G2.3.7
공장
초기값
임의
입력값
ID ID
TTF프로그래밍, 6.2 및
6.4장 참조.
0 = 변환되지 않음
1 = 변환됨
0 = 0 mA (0 V)
1 = 4 mA (2 V)
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
Page 86

86• vacon
6
P2.4.4
감속시간 2
0,1
3000,0
s
10,0
503
주파수
1 = On
P2.4.17
인칭 램프
0,1
3200,0
s
1,0
1257
가능함
6.6.6 드라이브 제어 파라미터(제어 키패드: 메뉴 M2 G2.4)
코드 파라미터 최소 최대 단위
P2.4.1 램프1 모양 0,0 10,0 s 0,1 500
P2.4.2 램프 2 모양 0,0 10,0 s 0,0 501
P2.4.3 가속시간 2 0,1 3000,0 s 10,0 502
P2.4.5 제동 쵸퍼 0 4 0 504
P2.4.6 스타트 기능 0 2 0 505
P2.4.7 스톱 기능 0 3 0 506
P2.4.8 DC 제동 전류 0 IL A 0,7 x IH 507
P2.4.9 정지시 DC 제동시간 0,00 600,00 s 0,00 508
램프 정지시 DC
P2.4.10
제동을 시작하는
0,10 10,00 Hz 1,50 515
공장
초기값
임의
입력값
ID 참조
0 = 비례
>0 = S-곡선 램프 시간
0 = 비례
>0 = S-곡선 램프 시간
0 = 불가능
1 = 작동할 때 사용된
2 = 외부 제동 쵸퍼
3 = 정지/작동시 사용됨
4 = 작동할 때
사용된(테스팅 아님)
0 = 램프
1 = 빠른 출발
2 = 빠른 출발 상태
0 = 코스팅
1 = 램프
2 = 램프+작동 가능한
코스트
3 = 코스트 + 작동 가능한
램프
0 = 정지시 DC 제동이
OFF
P2.4.11
P2.4.12 플럭스 제동 0 1 0 520
P2.4.13 플럭스 제동 전류 0 IL A IH 519
NXP 드라이브 only
P2.4.14 정지시 DC-제동 전류
P2.4.15 인칭 레퍼런스 1 -320,00 320,00 Hz 2,00 1239
P2.4.16 인칭 레퍼런스 2 -320,00 320,00 Hz -2,00 1240
P2.4.18 비상정지 모드 0 1 0 1276
P2.4.19 제어 옵션 0 65536 0 1084
스타트시 DC 제동
시간
Tab le 6-27. 드라이브 제어 파라미터, G2.4
0,00 600,00 s
0 IL A 0,1 x IH 1080
0,0
516 0 = 기동시 DC제동이 OFF
0 = Off
0 = 코스팅
1 = 램프
정지상태에서만 변환이
6.6.7 금지 주파수 파라미터 (제어 키패드: 메뉴 M2 G2.5)
코드 파라미터 최소 최대 단위
P2.5.1 금지 주파수 범위 1 낮은 한도 -1,00 320,00 Hz 0,00 509 0 = 사용하지 않음
P2.5.2 금지 주파수 범위 1 높은 한도 0,00 320,00 Hz 0,00 510 0 = 사용하지 않음
P2.5.3 금지 주파수 범위 2 낮은 한도 0,00 320,00 Hz 0,00 511 0 = 사용하지 않음
P2.5.4 금지 주파수 범위 2 높은 한도 0,00 320,00 Hz 0,00 512 0 = 사용하지 않음
P2.5.5 금지 주파수 범위 3 낮은 한도 0,00 320,00 Hz 0,00 513 0 = 사용하지 않음
P2.5.6 금지 주파수 범위 3 높은 한도 0,00 320,00 Hz 0,00 514 0 = 사용하지 않음
P2.5.7 가속/감속 금지. 램프 0,1 10,0 x 1,0 518
Tab le 6-28. 금지 주파수, (G2.5)
공장
초기값
임의
입력값
ID 참조
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 87

vacon • 87
6
6.6.8 모터 제어 파라미터 (제어 키패드: 메뉴 M2 -> G2.6)
코드 파라미터 최소 최대 단위
P2.6.1 모터 제어 모드 0 2/4 0 600
P2.6.2 U/f 최적화 0 1 0 109
P2.6.3 U/f 비율 선택 0 3 0 108
P2.6.4 약계자 영역 8,00 320,00 Hz 50,00 602
P2.6.5
P2.6.6
P2.6.7 U/f 곡선 중간점 전압 0,00 100,00 % 100,00 605
P2.6.8
P2.6.9 스위칭 주파수 1,0 Varies kHz Var ies 601 정확한 값을 위해서는 8.14참조
P2.6.10 과전압 컨트롤러 0 2 1 607
P2.6.11 저전압 컨트롤러 0 2 1 608
P2.6.12 모터 제어 모드 2 0 4 2 521 P2.6.1참조
P2.6.13
P2.6.14
P2.6.15 부하 감소 0,00 100,00 % 0,00 620
약계자 영역에서의
전압
U/f 곡선 중간점
주파수
제로 주파수에서의
출력전압
속도 컨트롤러
P 게인 (open loop)
속도 컨트롤러
I 게인 (open loop)
10,00 200,00 % 100,00 603 n% x Unmot
0,00 P2.6.4 Hz 50,00 604
0,00 40,00 % Varies 606 n% x Unmot
0 32767 3000 637
0 32767 300 638
공장
초기값
임의
입력값
ID 참조
0 = 주파수 제어
1 = 고속 제어
2 = 토크 제어
NXP에 부가된 기능
3 = 클로즈드 루프 속도 제어
4 = 클로즈드 루프 토크 제어
0 = 사용하지 않음
1 = 자동 토크 상승
0 =비례
1 = 제곱
2 = 프로그램
3 =비례 및 플럭스 최적화
n% x Unmot
파라미터 최대 값 = P2.6.5
0 = 사용하지 않음
1 = 사용됨(램핑이 없음)
2 = 사용됨 (램핑)
0 = 사용하지 않음
1 = 사용됨(램핑이 없음)
2 = 사용됨 (램핑)
P2.6.16 모터 인식 0 1/3 0 631
NXP 드라이브 only
P2.6.17 리스타트 딜레이 0,000 65,535 s Varies 1424 코스팅목적의 OL지연
P2.6.18 부하 감소 시간 0 32000 ms 0 656 역동적인 변화를 위함
P2.6.19
P2.6.20
P2.6.21
P2.6.22 모터 토크 한도 0,0 300,0 % 300,0 1287
네거티브 주파수
한도
포지티브 주파수
한도
제너레이터 토크
한도
Tab le 6-29. 모터 제어 파라미터
-320,00 320,00 Hz -320,00
-320,00 320,00 Hz 320,00 1285 포지티브 방향의 대체한계
0,0 300,0 % 300,0 1288
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
0 = 반응없음
1 = 작동없이 모터인식 NXP에
부가된 기능:
2 = 작동하면서 모터 인식
3 = 엔코더 ID런(PMSM)
1286 네거티브방향의 대체한계
Page 88

88• vacon
6
6.6.8.1 클로즈드 루프 파라미터 (제어 키패드: 메뉴 M2 -> G2.6.23)
참조: 버전에 따라 파라미터 코드는 2.6.23.xx 대신 2.6.17.xx 일 수 있습니다.
코드 파라미터 최소 최대 단위
P2.6.23.1 자화 전류 0,00 2 x IH A 0,00 612
P2.6.23.2 속도 제어 P 1 1000 30 613
P2.6.23.3 속도 제어 I 시간 -32000 3200,0 ms 100,0 614
P2.6.23.5 가속 보상 0,00 300,00 s 0,00 626
P2.6.23.6 수면 조정 0 500 % 75 619
P2.6.23.7 스타트 시 자화 전류 0 IL A 0,00 627
P2.6.23.8 스타트 시 자화 시간 0 32000 ms 0 628
P2.6.23.9 스타트 시0-속도 도달 시간 0 32000 ms 100 615
P2.6.23.10 정지시 0-속도 도달 시간 0 32000 ms 100 616
P2.6.23.11 스타트 업 토크 0 3 0 621
P2.6.23.12 스타트 업 토크 정방향 –300,0 300,0 % 0,0 633
P2.6.23.13 스타트 업 토크 역방향 –300,0 300,0 % 0,0 634
P2.6.23.15 엔코더 검출 시간 0,0 100,0 ms 0,0 618
P2.6.23.17 전류 제어 P 게인 0,00 100,00 % 40,00 617
P2.6.23.19 제너레이터 출력 한도 0,0 300,0 % 300,0 1290
P2.6.23.20 모터출력 한도 0,0 300,0 % 300,0 1289
P2.6.23.21 네거티브 토크 한도 0,0 300,0 % 300,0 645
P2.6.23.22 포지티브 토크 한도 0,0 300,0 % 300,0 646
P2.6.23.23 플럭스 off 딜레이 -1 32000 s 0 1402 -1 = 상시 적용
P2.6.23.24 정지상태 플럭스 0,0 150,0 % 100,0 1401
P2.6.23.25 SPC f1 점 0,00 320,00 Hz 0,00 1301
P2.6.23.26 SPC f0 점 0,00 320,00 Hz 0,00 1300
P2.6.23.27 SPC Kp f0 0 1000 % 100 1299
P2.6.23.28 SPC Kp FWP 0 1000 % 100 1298
P2.6.23.29 SPC 토크 최소 0 400,0 % 0,0 1296
P2.6.23.30 SPC 토크 최소 Kp 0 1000 % 100 1295
P2.6.23.31 SPC Kp TC 토크 0 1000 ms 0 1297
P2.6.23.32 플럭스 레퍼런스 0,0 500,0 % 100,0 1250
P2.6.23.33 속도 에러 검출 TC 0 1000 ms 0 1311
P2.6.23.34 모듈레이션 한도 0 150 % 100 655
Tab le 6-30. 클로즈드 루프 모터 제어 파라미터s(G2.6.23)
공장
초기값
임의
입력값
ID 참조
제로인 경우, 내부에서
계산됨
마이너스 숫자는
0.1ms대신 1ms사용
0 = 사용하지 않음
1 = 토크 메모리
2 = 레퍼런스 토크
3 = 시동
토크정방향/역방향
만약 사인필터를 사용할
경우, 이 수치는 96%로
세팅할 것
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 89

vacon • 89
6
6.6.8.2 NXP 드라이브: PMS 모터 제어 파라미터(제어 키패드: 메뉴 M2 -> G2.6.24)
코드 파라미터 최소 최대 단위
P2.6.24.1 모터 타입 0 1 0 650
P2.6.24.2 플럭스 전류 Kp 0 32000 5000 651
P2.6.24.3 플럭스 전류 Ti 0 1000 25 652
P2.6.24.4 PMSM 축 포지션 0 65565 0 649
P2.6.24.5
역방향 모터인식
활성화
Tab le 6-31. PMS 모터 제어 파라미터, NXP 드라이브
0 1 1 654
공장
초기값
임의
입력값
ID 참조
0 =유도전동기
1 = PMS모터
0 = No
1 = Yes
6.6.8.3 NXP 드라이브: 모터 인식 파라미터 (제어 키패드: 메뉴 M2 -> G2.6.25)
코드 파라미터 최소 최대 단위
P2.6.25.1 플럭스 10 % 0 2500 % 10 1355
P2.6.25.2 플럭스 20 % 0 2500 % 20 1356
P2.6.25.3 플럭스 30 % 0 2500 % 30 1357
P2.6.25.4 플럭스 40 % 0 2500 % 40 1358
P2.6.25.5 플럭스 50 % 0 2500 % 50 1359
P2.6.25.6 플럭스 60 % 0 2500 % 60 1360
P2.6.25.7 플럭스 70 % 0 2500 % 70 1361
P2.6.25.8 플럭스 80 % 0 2500 % 80 1362
P2.6.25.9 플럭스 90 % 0 2500 % 90 1363
P2.6.25.10 플럭스 100 % 0 2500 % 100 1364
P2.6.25.11 플럭스 110 % 0 2500 % 110 1365
P2.6.25.12 플럭스 120 % 0 2500 % 120 1366
P2.6.25.13 플럭스 130 % 0 2500 % 130 1367
P2.6.25.14 플럭스 140 % 0 2500 % 140 1368
P2.6.25.15 플럭스 150 % 0 2500 % 150 1369
P2.6.25.16 Rs 전압 강하 0 30000 Varies 662
P2.6.25.17 Ir add 제로 포인트 전압 0 30000 Varies 664
P2.6.25.18 Ir add 제너레이터 검출 0 30000 Varies 665
P2.6.25.19 Ir add 모터 검출 0 30000 Varies 667
P2.6.25.20 MotoeBEM 전압 0,00 320,00 % 674
Tab le 6-32. 모터 인식 파라미터, NXP 드라이브
공장
초기값
임의
입력값
ID 참조
오픈루프에서 토크 계산에
사용됨
모터에 유도된 회생전압
10000 = 100.00%
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
Page 90

90• vacon
6
응답
1 = 이력에 기록되지 않은 폴트
3 = 폴트, 코스팅에 의한 정지
6.6.9 보호 (제어 키패드: 메뉴 M2 -> G2.7)
코드 파라미터 최소 최대 단위
P2.7.1
P2.7.2
P2.7.3
P2.7.4 입력 상 감시 0 3 3 730
P2.7.5
4mA 레퍼런스 폴트에
대한 응답
4mA 레퍼런스 폴트
주파수
외부 폴트 에대한
응답
저 전압 폴트에 대한
0 5 0 700
0,00 P2.1.2 Hz 0,00 728
0 3 2 701
0 1 0 727
공장
초기값
임의
입력값
ID 참조
0 = 응답없음
1 =경고
2 = 경고+이전 주파수
3 = 경고+프리셋 주파수 2.7.2
4 = 풀트, 2.4.7에 의한 정지
5 = 폴트, 코스팅에 의한
정지폴트, 코스팅에 의한 정지
0 = 응답없음
1 = 경고
2 = 2.4.7에 의한 정지
3 = 폴트, 코스팅에 의한 정지
0 = 이력에 기록된 폴트
P2.7.6 출력 상 감시 0 3 2 702
P2.7.7 지락 보호 0 3 2 703
P2.7.8 모터의 열보호 0 3 2 704
P2.7.9 모터 주변온도 요소 –100,0 100,0 % 0,0 705
P2.7.10
P2.7.11 모터 열 시간 상수 1 200 최소
P2.7.12 모터 듀티 싸이클 0 150 % 100 708
P2.7.13 스톨 보호 0 3 0 709
P2.7.14 스톨 전류 0,00 2 x IH A IH 710
P2.7.15 스톨 시간 한도 1,00 120,00 s 15,00 711
P2.7.16 스톨 주파수 한도 1,00 P2.1.2 Hz 25,00 712
P2.7.17 경부하 보호 0 3 0 713
P2.7.18 약계자 영역 부하 10,0 150,0 % 50,0 714
제로속도에서의 모터
냉각요소
0,0 150,0 % 40,0 706
가변적임
707
0 = 응답없음
1 = 경고
2 = 2.4.7에 의한 정지
3 = 폴트, 코스팅에 의한 정지
0 = 응답없음
1 = 경고
2 = 2.4.7에 의한 정지
0 = 응답없음
1 = 경고
2 =
2.4.7에 의한 정지
3 =
폴트, 코스팅에 의한 정지
P2.7.19 제로 주파수 부하 5,0 150,0 % 10,0 715
P2.7.20
P2.7.21
P2.7.22
P2.7.23 슬롯 폴트 0 3 2 734 P2.7.21 참조
P2.7.24 PT100 입력 넘버 0 3 0 739
P2.7.25
경부하 보호 시간
온도계 폴트 에 대한
필드버스 폴트에 대한
PT100 폴트 에 대한
한도
응답
응답
응답
2,00 600,00 s 20,00 716
0 = 응답없음
0 3 2 732
0 3 2 733 P2.7.21 참조
0 3 0 740
1 = 경고
2 = 2.4.7에 의한 정지
3 = 폴트, 코스팅에 의한 정지
0 = 응답없음
1 = 경고
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 91

vacon • 91
6
2 = 2.4.7에 의한 정지
3 = 폴트, 코스팅에 의한 정지
PT100보드가 경고를 일으킬
P2.7.26 PT100 경고 한도 –30,0 200,0 Cº 120,0 741
P2.7.27 PT100 폴트 한도 –30,0 200,0 Cº 130,0 742
NXP 드라이브 only
P2.7.28 제동 폴트 액션 1 3 1 1316
P2.7.29 제동 폴트 딜레이 0,00 320,00 s 0,20 1317
P2.7.30 시스템 버스 폴트 3 3 3 1082
P2.7.31
P2.7.32 냉각폴트 딜레이 0,00 7,00 s 2,00 751
P2.7.33 속도 에러 모드 0 2 0 752
P2.7.34
P2.7.35
P2.7.36 안전한 비가동 모드 1 2 1 755
P2.7.37 PT100 2 넘버 0 5 X 743
P2.7.38 PT100 2 경고 한도 -30,0 200,0 Cº 745 파라미터 ID741참조.
P2.7.39 PT100 2 폴트 한도 -30,0 200,0 Cº 746 파라미터 ID742 참조.
시스템 버스 폴트
딜레이
속도 에러 최대값
편차
속도 에러 폴트
딜레이
Tab le 6-33. 보호, G2.7
0,00 320,00 s 3,00 1352
0 100 % 5 753
0,00 10,00 S 0,50 754
수 있도록 한계를 여기에
설정하시오.
PT100보드가 경고를 일으킬
수 있도록 한계를 여기에
설정하시오.
1 = 경고
2 = 2.4.7에 의한 정지
3 = 폴트, 코스팅에 의한 정지
응답없음
0 =
1 = 경고
2 = 2.4.7에 의한 정지
3 = 폴트, 코스팅에 의한 정지
0 = 응답없음
1 = 경고
2 = 폴트, 코스팅에 의한 정지
1 경고, 코스팅에 의한 정지
2 =폴트, 코스팅에 의한 정지
두번째 PT100 보드
0 = 사용안함 (ID쓰기,
최대온도는 필드버스로부터
입력가능)
1 = PT100 입력 1
2 = PT100 입력 1 & 2
3 = PT100 입력 1 & 2 & 3
4 = PT100 입력 2 & 3
5 = PT100 입력t 3
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
Page 92

92• vacon
6
6.6.10 오토 스타트 파라미터 (제어 키패드: 메뉴 M2 -> G2.8)
코드 파라미터 최소 최대 단위
P2.8.1 대기 시간 0,10 10,00 s 0,50 717
P2.8.2 시도 시간 0,00 60,00 s 30,00 718
P2.8.3 스타트 기능 0 2 0 719
P2.8.4
P2.8.5
P2.8.6
P2.8.7
P2.8.8
P2.8.9
P2.8.10
저전압 트립 후에
시도한 횟수
과전압 트립 후에
시도한 횟수
과전류 트립 후에
시도한 횟수
4mA 레퍼런스 트립
후에 시도한 횟수
모터 온도 폴트 트립
후에 시도한 횟수
외부 폴트 트립 후에
시도한 횟수
경부하 폴트 트립
후에 시도한 횟수
Tab le 6-34. 오토 스타트 파라미터, G2.8
0 10 0 720
0 10 0 721
0 3 0 722
0 10 0 723
0 10 0 726
0 10 0 725
0 10 0 738
공장
임의
ID 참조
0 = 램프
1 = 빠른 출발
2 = P2.4.6에 따름
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 93

6
6.6.11 필드버스 파라미터 (제어 키패드: 메뉴 M2 G2.9)
코드 파라미터 최소 최대 단위
P2.9.1 필드버스 최소 검출 0,00 320,00 Hz 0,00 850
P2.9.2 필드버스 최대 검출 0,00 320,00 Hz 0,00 851
P2.9.3
P2.9.4
P2.9.5
P2.9.6
P2.9.7
P2.9.8
P2.9.9
P2.9.10
NXP 드라이브 only (NXS에서는 공장 초기값을 변경할 수 없음)
P2.9.11
P2.9.12
P2.9.13
P2.9.14
P2.9.15
P2.9.16
P2.9.17
P2.9.18
필드버스 프로세스
데이터 1 선택
필드버스 프로세스
데이터 2 선택
필드버스 프로세스
데이터 3 선택
필드버스 프로세스
데이터 4 선택
필드버스 프로세스
데이터 5 선택
필드버스 프로세스
데이터 6 선택
필드버스 프로세스
데이터 7 선택
필드버스 프로세스
데이터 8 선택
필드버스에서 가져온
프로세스 데이터 1 선택
필드버스에서 가져온
프로세스 데이터 2 선택
필드버스에서 가져온
프로세스 데이터 3 선택
필드버스에서 가져온
프로세스 데이터 4 선택
필드버스에서 가져온
프로세스 데이터 5 선택
필드버스에서 가져온
프로세스 데이터 6 선택
필드버스에서 가져온
프로세스 데이터 7 선택
필드버스에서 가져온
프로세스 데이터 8 선택
Tab le 6-35. 필드버스 파라미터
0 10000 1 852
0 10000 2 853
0 10000 45 854
0 10000 4 855
0 10000 5 856
0 10000 6 857
0 10000 7 858
0 10000 37 859
0 10000 1140 876
0 10000 46 877
0 10000 47 878
0 10000 48 879
0 10000 0 880
0 10000 0 881
0 10000 0 882
0 10000 0 883
공장
초기값
임의
입력값
ID 참조
vacon • 93
파라미터 ID로 모니터링
데이터 선정하시오.
Def: 출력주파수
파라미터 ID로 모니터링
데이터 선정하시오.
Def: 모터 속도
파라미터 ID로 모니터링
데이터 선정하시오.
Def: 모터 전류 to FB
필드버스로의 모터 전류
파라미터 ID로 모니터링
데이터 선정하시오.
Def: 모터 토크
파라미터 ID로 모니터링
데이터 선정하시오.
Def: 모터 출력
파라미터 ID로 모니터링
데이터 선정하시오.
Def: 모터 전압
파라미터 ID로 모니터링
데이터 선정하시오.
Def: DC-Link 전압
파라미터 ID로 모니터링
데이터 선정하시오.
Def: 마지막으로 나타난 폴트
파라미터 ID로 제어된
데이터를 선정하시오.
Def: 필드버스 레퍼런스
파라미터 ID로 제어된
데이터를 선정하시오.
Def: 필드버스 한계검츨
파라미터 ID로 제어된
데이터를 선정하시오.
Def: 필드버스 조정 레퍼런스
파라미터 ID로 제어된
데이터를 선정하시오.
Def: 필드버스 아날로그 출력.
파라미터 ID로 제어된
데이터를 선정하시오.
파라미터 ID로 제어된
데이터를 선정하시오.
파라미터 ID로 제어된
데이터를 선정하시오.
파라미터 ID로 제어된
데이터를 선정하시오.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
Page 94

94• vacon
6
6.6.12 토크 제어 파라미터(제어 키패드: 메뉴 M2 G2.10)
코드 파라미터 최소 최대 단위
P2.10.1 토크 한도 0,0 300,0 % 300,0 609
P2.10.2
P2.10.3
P2.10.4
P2.10.5
P2.10.6
P2.10.7
P2.10.8
P2.10.9
P2.10.10
NXP 드라이브 only
P2.10.11
P2.10.12
P2.10.13 윈도 네거티브 0,00 50,00 Hz 2,00 1305
P2.10.14 윈도 포지티브 0,00 50,00 Hz 2,00 1304
P2.10.15 윈도 포지티브 off 0,00 P2.10.13 Hz 0,00 1307
P2.10.16 윈도 포지티브 off 0.00 P2.10.14 Hz 0.00 1306
P2.10.17
토크 한도 제어 P-
게인
토크 한도 제어
I-게인
토크 레퍼런스
선택
토크 레퍼런스
최대.
토크 레퍼런스
최소.
토크 속도 한도
(OL)
오픈루프토크
제어에 필요한
최소 주파수
토크 컨트롤러
P 게인
토크 컨트롤러
I 게인
토크 속도 한도
(CL)
토크 레퍼런스
검출 시간
속도 제어 출력
한도
Tab le 6-36. 토크 제어 파라미터, G2.10
0,0 32000 3000 610
0,0 32000 200 611
0 8 0 641
–300,0 300,0 % 100 642
–300,0 300,0 % 0,0 643
0 2 1 644
0,00 50,00 Hz 3,00 636
0 32000 150 639
0 32000 10 640
0 7 2 1278
0 32000 ms 0 1244
0,0 300,0 % 300,0 1382
공장
초기값
임의
입력값
ID 참조
ID1288, ID 1287
콤비네이션으로 적은 것을
사용
오픈 루프 제어모드에서만
사용
0 = 사용하지 않ㄹ음
1 = AI1
2 = AI2
3 = AI3
4 = AI4
5 = AI1 조이스틱 (-10 ..10 V)
6 = AI2 조이스틱 (-10 ..10 V)
7 = 키패드의 레퍼런스 토크,
R3.5
8 = 스탠다드 필드버스 토크
0 = 최대 주파수
1 = 선택한 레퍼런스 주파수
2 = 기설정된 속도 7
0 = CL 속도 제어
1 = 포지티브/네거티브 주파수
한도
2 = 램프출력 (-/+)
3 = 네거티브 주파수 한도램프출력
4 = 램프출력-포지티브 주파수
한도
5 = 램프출력 윈도
6 = 0-램프출력
7 = 램프출력 윈도 On/Off
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 95

vacon • 95
6
6.6.13 NXP 드라이브: Master Follower 파라미터(제어 키패드: 메뉴 M2 G2.11)
코드 파라미터 최소 최대 단위
P2.11.1 Master Follower 모드 0 2 0 1324
P2.11.2 Follower 스톱 기능 0 2 2 1089
P2.11.3
P2.11.4
P2.11.5 속도 분배 -300,00 300,00 % 100,00 1241 싱글 모드에서도 작동
P2.11.6 부하 분배 0,0 500,0 % 100,0 1248 싱글 모드에서도 작동
P2.11.7
P2.11.8 Follower 폴트 0 2 0 1536
Follower 속도 레퍼런스
선택
Follower 토크 레퍼런스
선택
Master Follower 모드
2
Tab le 6-37. Master Follower 파라미터, G2.5
0 18 18 1081
0 9 9 1083
0 2 0 1093
공장
초기값
임의
입력값
ID 참조
0 = 싱글 드라이브
1 = 마스터 드라이브
2 = 팔로워 드라이브
0 = 코스팅
1 =램핑
2 = 마스터로 작용
0 = AI1
1 = AI2
2 = AI1+AI2
3 = AI1-AI2
4 = AI2-AI1
5 = AI1xAI2
6 = AI1 조이스틱
7 = AI2 조이스틱
8 = 키패드
9 = 필드버스
10 = 모터 전위차계
11 = AI1, AI2 최소
12 = AI1, AI2 최대
13 = 최대의 주파수
14 = AI1/AI2 선택
15 = 엔코더 1 (C.1)
16 = 엔코더 2 (C.3)
17 = 마스터 레퍼런스
18 = 마스터 램프 출력
0 =사용하지 않음
1 = AI1
2 = AI2
3 = AI3
4 = AI4
5 = AI1 조이스틱
6 = AI2 조이스틱
7 = 토크 레퍼런스는 키패드
R3.5로부터 옴.
8 = FB 토크 레퍼런스
9 = 마스터 토크
P2.2.7.31에 의해 작동함.
0 = 싱글 드라이브
1 = 마스터 드라이브
2 = 팔로워 드라이브
0 = 싱글 드라이브
1 = 마스터 드라이브
2 = 팔로워 드라이브
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
Page 96

96• vacon
6
6.6.14 키패드 컨트롤(제어 키패드: 메뉴 M3)
키패드의 제어 위치와 방향의 설정에 대한 파라미터는 아래에 있습니다. 각 제품 사용자 매뉴얼의
키패드 제어 메뉴를 참조하십시오.
코드 파라미터 최소 최대 단위
P3.1 제어 위치 0 3 1 125
R3.2 키패드 레퍼런스 P2.1.1 P2.1.2 Hz
P3.3 방향(키패드에서) 0 1 0 123
P3.4 스톱 버튼 0 1 1 114
R3.5 토크 레퍼런스 -300,0 300,0 % 0,0
Tab le 6-38. 키패드 제어 파라미터, M3
공장
초기값
임의
입력값
ID 참조
0 = PC 제어
1 = I/O 단자대
2 =키패드
3 = 필드버스
0 = 정방향
1 = 역방향
0 = 스톱 버튼의 제한된 기능
1 = 스톱 버튼을 항상 활성화
시스템 메뉴 (제어 키패드: 메뉴
6.6.15
주파수 변환기의 파라미터 및 기능 관련된 일반 사용에 관한 메뉴로, 언어 설정, 파라미터 설정
혹은 하드웨어 및 소프트 웨어 정보 확인이 가능합니다. 제품의 사용자 매뉴얼을 확인하십시오..
확장 보드 (제어 키패드: 메뉴 M7)
6.6.16
M7 메뉴는 제어 보드에 연결된 확장 및 옵션 보드와 관련된 정보를 보여줍니다. 더 많은 정보를
위하여 각 제품의 사용자 매뉴얼을 참조하십시오.
M 6)
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 97

vacon • 97
7
7. 펌프 및 팬 제어 어플리케이션
Software 코드: ASFIFF07
7.1 도입
S6.2 페이지의 메뉴 M6 에서 펌프 및 팬 제어 어플리케이션을 선택합니다.
펌프 및 팬 제어 어플리케이션 은 하나의 변동 속도 드라이브와 최대 4 개의 보조 드라이브 제어할
수 있습니다. 주파수 변환기의 PID 제어기는 변동 속도 드라이브의 속도를 제어하고, 보조
드라이브의 시작과 정지 신호를 제어합니다. 8 개의 표준 파라미터 그룹과 더불어, 멀티 펌프 및 팬
제어 기능의 파라미터 그룹을 제공합니다.
이것은 I/O 단자대에서 2 개의 제어 위치를 가지고 있습니다. 위치 A 는 펌프 및 팬 제어이고
B 는 직접 주파수 레퍼런스입니다. 제어 위치는 입력 DIN6으로 선택가능합니다.
이름과 같이 펌프 및 팬 제어 어플리케이션 은 펌프와 팬을 제어하는데 쓰입니다. 예를 들어
부스터 스테이션의 압력을 낮추기 위하여, 입력 압력이 설정된 한계치 이하일 경우 작동합니다.
이것은 외부 연결단자를 활용하여, 연결된 모터에서 주파수 변환기로 스위칭을 합니다. 자동
변경 기능은 보조 드라이브의 시작 순서를 변경할 수 있습니다. 오토 체인지는 메인드라이브와
1 개의 보조
드라이브 사이의 변경이 초기값으로 설정되어 있습니다. 7.4.1 장을 참조하십시오.
• 모든 입력과 출력은 자유롭게 프로그램가능합니다.
추가 기능:
• 아날로그 입력 신호 범위 선택
• 두개의 주파수 한계 감시
• 토크 한계 감시
• 레퍼런스 한계 감시
• 2 차 램프 및 S-형 램프 프로그래밍
• 프로그램 가능한 스타트/스톱 및 리버스 논리
• 시작과 정지시 DC-제동
• 3개의 금지 주파수 구역
• 프로그램가능한 U/f 곡선 및 주파수 변환
• 오토 스타트
• 모터 온도의 실속 보호: 완전히 프로그램 가능한 off, 주의, 폴트
• 모터 경부하 보호
• 입력 및 출력 단계 감시
• 수면 기능
펌프 및 팬 제어 어플리케이션에 관한 파라미터는 8 장에 각 ID 넘버에 따라 설명되어 있습니다.
24-hour support +358 (0) 201 212 575 • Email: vacon@vacon.com
Page 98

98• vacon
7
Jumper block X3:
CMA and CMB grounding
CMB connected to GND
CMA connected to GND
CMB isolated from GND
CMA isolated from GND
CMB and CMA
internally connected together,
isolated from GND
= Factory default
OP TA 2
220
VAC
7.2 제어 I/O
레퍼런스포텐쇼미터,
1…10 kΩ
2중선
트랜스미터
실제값
I
(0)4…20 mA
OP TA 1
터미널 신호 설명
1 +10V
2
AI1+
3 AI1- I/O 그라운드 레퍼런스 및 콘트롤 레퍼런스
–
+
4 AI2+ 아날로그입력2
5
6 +24V 콘트롤 전압 출력 스위치 기타 등등의 전압. max 0.1 A
7 GND I/O 그라운드 레퍼런스 및 콘트롤의 그라운드
8
DIN1
9
DIN2
10
DIN3
11 CMA DIN 1—DIN 3까지 공통 적용 GND 혹은 +24V에 연결
12 +24V 콘트롤 전압 출력 스위치 전압 (#6 참조)
13 GND I/O 그라운드 레퍼런스및 콘트롤 그라운드
14
DIN4
15
DIN5
16
DIN6
17 CMB DIN4—DIN6까지 공통 적용 GND 혹은 +24V에 연결
18 AO1+
AO1-
19
(GND)
20
DO1
레퍼런스 출력 포텐쇼미터 전압 기타 등등.
ref
아날로그입력1
전압범위 0—10V DC
전류범위 0—20mA
AI2-
프로그램가능함 (P2.2.1.9)
위치A: 스타트/스톱
프로그램가능함 (G2.2.6)
인터록1
프로그램가능함(G2.2.6)
인터록2
프로그램가능함 (G2.2.6)
위치 B: 스타트/스톱
프로그램가능함 (G2.2.6)
조깅 속도 선택
프로그램가능함 (G2.2.6)
콘트롤 위치 A/B 선택
프로그램가능함 (G2.2.6)
아날로그 출력1
출력 주파수
프로그램가능함 (P2.3.3.2)
디지털 출력
폴트
프로그램가능함 (G2.3.1)
I/O로부터의 아날로그입력 1 PID 레퍼런스
키패드 P3.4로부터의 디폴트 레퍼런스
아날로그 입력2 PID 실제값 1
콘트롤위치 A의 스타트 신호
PID 콘트롤러.
접점 닫힘 = 인터록 사용됨
접점 열림 = 인터록 사용안됨
접점 닫힘 = 인터록 사용됨
접점 열림 = 인터록 사용안됨
접점 닫힘 = 스타트
접점 닫힘 = 조깅 속도 활성화
접점 열림 = 콘트롤 위치 A가 활성화
접점 닫힘 = 콘트롤 위치 B가 활성화
0, 7.5.4.4 및 0 참조
범위0—20 mA/R
콜렉터 개방, I≤50mA, U≤48 VDC
, max. 500Ω
L
21 RO1
23 RO1
24 RO2
26 RO2
프로그램가능함 (G2.3.1)
프로그램가능함 (G2.3.1)
릴레이출력 1
Aux/Autochange 1
릴레이출력 2
Aux/Autochange 2
7.5.4.1 참조 22 RO1
7.5.4.1 참조 25 RO2
Tab le 7-1. 펌프 및 팬 콘트롤 어플리케이션 디폴트 I/O 구성 및 연결 예(2-wire
transmitter 사용).
주의: 아래 점퍼 선택 참조하시오.
더 많은 정보가 제품의 사용자 매뉴얼에
있습니다.
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 99

vacon • 99
7
22
23
DIN2
AOMains
AOMains
25
26
230 VAC
S1
K1
K1.1
K1.1
K2
K2
K1
VACON OPT-B5
K1
K2
K2
K2.1
M1/Vacon
M2/
Vacon
M2/mains
M1/mains
24 VDC
S2
K3
K3
K2.1
K1
K3
DIN3
K3
28
29
AOMains
S3
K3
K3.1
K3.1
K2
K2
K3
M3/Vacon M3/mains
K1
K1
DIN4
NX12k106.dsf
10
12 9
14
VACON OPT-B5
VACON OPT-A1
VACON OPT-A1
VACON OPT-A1
230 VAC
K2.1
25
RO2
26
K1
K2
DIN3
10
K2
K1.1
K1
Autom.OMains
S1
K1
K1.1
22
RO1
23
K2
24 VDC
12
VACON OPT-A2
DIN2
9
Autom.OMains
S2
K1
K2.1
K2
Figure 7-1. 2-펌프 오토체인지시스템, 주요 제어 다이어그램
Figure 7-2. 3-펌프 오토체인지시스템, 주요 제어 다이어그램
24-hour support +358 (0) 201 212 575 • Email: vacon@vacon.com
Page 100

100• vacon
7
>
1
D I N # D I N 6 D I N
#
A I 1
A I 2
0
1
3
1
3 4 5
A 1
B
1
3
0 1 2 3 4
K
1
2
4
P I D
D I N
4
A B A B A / B
D I N 2 D I N
3
6
5
7
5
5
5
6
A I 4
4
>
1
A
1
=
P I D
r e f e r e n c e
( I /
O
A ) ;
A
2
=
P I D
r e f e r e n c e
2
( I /
O
A ) ;
B
=
D i r e c
t
f r e q u e n c y
r e f e r e n c e
( I /
O
B ) ; I n t e r n a l
r e v e r s e
3 . 3
K e y p a
d
d i r e c t i o n I n t e r n a l
S t a r t / S t o p reference from fielbus
S t a r t / S t o
p
f r o
m
f i e l d b u s D i r e c t i o n
f r o
m
f i e l d b u
s
P l a c e
A / B
s e l e c t i o n
( p r o g r a m m a b l e
,
p a r
.
2 . 2 . 6 . 3 ) I / O
r e v e r s e
,
p a r
.
2 . 2 . 6 . 1 1 ( p r o g r a m m a b l e ) S t a r t
;
P l a c e
A
,
p r o g r
.
p a r
.
2 . 2 . 6 . 1 S t a r t ;
P l a c e
B
,
p r o g r
.
p a r . 2 . 2 . 6 . 2
S t a r t / S t o
p
I n t e r n a
l
2 . 1 . 1 9
K e y p a
d
R e s e t
3 . 1
2 . 2 . 1 . 3
F i e l d b u
s
C t r
l
r e f e r e n c e 2 . 2 . 1 .
2
K e y p a
d
C r t
l
r e f e r e n c e 2 . 2 . 1 .
1
I / O
B
r e f e r e n c e
2 . 1 . 1
1
P I D
r e f e r e n c e
1
I n t e r l o c k
1
( p r o g r a m m a b l e
,
p a r
.
2 . 2 . 6 . 1 8 )
t
g
b
9
A c t u a
l
v a l u e
1 2 . 2 . 1 .
9
0
=
N o t
u s e d 1
=
A I 1
3
=
A I 3
4
=
A I 4
5
=
F i e l d b u
s
A c t u a
l
v a l u e
2
1
=
A I 1
2
=
A I 2
4
5
=
F i e l d b u
s
f r e q . r e f .
a n d c o n t r o
l
l o g i c
o f a u x i l i a r y
d r i v e s A u t o c h a n g e l o g i c A u t o c h a n g e
1 A u t o c h a n g e
2 R O 1 R O 2 P I
D
f i e l d b u
s
r e f
.
( F B P r o c e s s D a t a I N 1
)
p o t e n t i o m e t e r
d o w n P I D
f i e l d b u
s
r e f
.
2
A
r e f e r e n c e
) ( p r o g r a m m a b l e ) ( p r o g r a m m a b l e ) S t o p
b u t t o
n
P I D
k e y p a
d
r e f
.
1 R 3 . 4 P I
D
k e y p a
d
r e f
.
2 R 3 . 5
A
E n a b l
e
P I D
k e y p a
d
r e f
.
2
7.3 펌프 및 팬 제어 어플리케이션에서의 제어신호 로직
J o g g i n g
s p e e d
D I N 5
I n
2 . 2 . 1 . 4
e r l o c k
2
( p r o
P I D
r e f e r e n c e
A I 3
( F B P r o c e s s D a t a I N 3 )
K e y p a d
r e f . ,
( p r o g r a m m a b l e ,
r a m m a
2
R 3 . 2
p a r .
2 . 2 . 6 . 1 2 )
2 . 2 . 6 . 1
0
2
2
6
0
2
4
6
)
( p a r .
2 . 2 . 6 . 2 3 )
2
=
A I 2
A 2
N o t
A I 3
A I 4
u s e d
0
=
3
=
=
l e ,
p a r .
C a l c u l a t i o n
o f
r e f e r e n c e
u p
D I N #
D I N 1
M o t o r
( p r o g r a m m a b l e
R e s e t
0
3
F
6
f r o m
t h e
f i e l d b u s
F i e l d b u s
Figure 7-3. 펌프 및 팬 제어 어플리케이션의 제어 신호 로직
J o g g i n g
C o n t r o l
s p e e d
p l a c e
f r e q u e n c y
b u t t o n
S t a r t / S t o p
r e f .
r e f .
b u t t o n s
I n t e r n a l
f a u l t
r e s e t
a c t i v e ,
P 3 . 6 = 1
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
 Loading...
Loading...