

Page 1
vacon®20 cp/x
Frequenzumrichter
Handbuch für die
Multi-Applikation
Page 2

Page 3

vacon • 0
INHALT
Unterlagen-ID: DPD00808H
Bestellcode: DOC-APP03982+DLDE
Überarb. H
Datum der Veröffentlichung der Ausgabe: 27.3.15
Entspricht Anwendungspaket ACIT1075V111.vcx
1. Multi- Applikation............................................................................................ 2
1.1 Spezielle Funktionen der Vacon-Universal-Applikation erklärt ...................................... 2
1.2 Beispiel für Steueranschlüsse.......................................................................................... 3
1.3 Optionale Platinen............................................................................................................. 5
1.3.1 Optionskarteninstallation ................................................................................................. 8
2. Beschreibung der Parametergruppen........................................................... 12
2.1 Steuertafelsollwert: Menü REF ...................................................................................... 12
2.2 Überwachungsgruppe: Menü MON................................................................................. 13
2.3 Parametergruppen: Menü PAR ...................................................................................... 14
2.3.1 Gruppe Basisparameter: Menü PAR G1 ......................................................................... 15
2.3.2 Gruppe erweiterte Einstellungen: Menü PAR G2 ........................................................... 17
2.3.3 Gruppe Analogeingänge: Menü PAR G3 ......................................................................... 19
2.3.4 Gruppe Digitaleingänge: Menü PAR G4 .......................................................................... 20
2.3.5 Gruppe Digitalausgänge: Menü PAR G5 ......................................................................... 22
2.3.6 Gruppe Analogausgänge: Menü PAR G6 ........................................................................ 23
2.3.7 Gruppenüberwachungen: Menü PAR G7 ........................................................................ 24
2.3.8 Gruppe Motorsteuerung: Menü PAR G8 ......................................................................... 25
2.3.9 Gruppe Schutzfunktionen: Menü PAR G9 ....................................................................... 27
2.3.10 Gruppe automatische Rücksetzung: Menü PAR G10 ..................................................... 30
2.3.11 Gruppe Feldbus: Menü PAR G11..................................................................................... 31
2.3.12 Gruppe PID-Regler: Menü PAR G12 ............................................................................... 32
2.3.13 Gruppentemperaturmessung: Menü PAR G13............................................................... 33
2.4 Systemparameter, Fehler und Fehlerspeicher: Menü SYS/FLT.................................... 34
3. Parameterbeschreibung................................................................................ 38
3.1 Basisparameter...............................................................................................................38
3.2 Erweiterte Einstellungen ................................................................................................ 39
3.3 Analogeingänge...............................................................................................................48
3.4 Digitaleingänge ............................................................................................................... 52
3.5 Digitalausgänge............................................................................................................... 54
3.6 Analogausgang................................................................................................................56
3.7 Überwachungsfunktionen............................................................................................... 57
3.8 Motorsteuerung...............................................................................................................59
3.9 Schutzfunktionen ............................................................................................................ 63
3.10 Autoreset ......................................................................................................................... 69
3.11 Feldbus............................................................................................................................ 71
3.11.1 Feldbusdatenmapping .................................................................................................... 72
3.12 PID-Regelung .................................................................................................................. 75
3.13 Temperaturmessung ...................................................................................................... 77
4. Fehlersuche................................................................................................... 80
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
Page 4
vacon • 1
Page 5

Multi- Applikation vacon • 2
1. MULTI- APPLIKATION
Der VACON® 20 CP/X Frequenzumrichter wird mit bereits installierter Anwendung betriebsbereit geliefert.
Die Parameter dieser Anwendung werden in Kapitel 2.3 dieses Handbuchs aufgelistet und in
Kapitel 2 näher erläutert.
1.1 Spezielle Funktionen der Vacon-Universal-Applikation
erklärt
Die Vacon-Universal-Applikation gestattet einen flexiblen Einsatz der VACON® 20 CP/X Frequenzumrichter.
Merkmale
Der Frequenzumrichter kann über E/A-Klemmen, einen Feldbus oder die optionale Steuertafel gesteuert werden. Es stehen zwei programmierbare Steuerplätze und Quellen für den
Frequenzsollwert für eine einfache lokale bzw. Fernsteuerung zur Verfügung.
Der Frequenzsollwert kann direkt übertragen werden (Analogeingang, Festfrequenzen, Motorpotentiometer, Feldbus) oder durch den internen PID-Regler gesteuert werden.
PID-Sollwert und Istwert sind frei programmierbar. Es steht eine „Sleepfunktion“ zur Verfügung, wobei Druckregelung und Verlustprüfung vor dem Eintritt in den Standby-Modus möglich sind.
Alle Funktionen können über einen Feldbus gesteuert werden.
Die Funktion Motor-Einmessung gestattet eine automatische Optimierung der Spannungs-/
Frequenzkurve, um auch bei geringer Motordrehzahl ein optimales Drehmoment zu erreichen.
Für die E/A- oder Feldbus-Erweiterung kann eine optionale Karte installiert werden.
Beide Motoren, der Wechselstrom-Induktionsmotor und der Dauermagnetmotor, können ge-
steuert werden.
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
1
Page 6
vacon • 3 Multi- Applikation
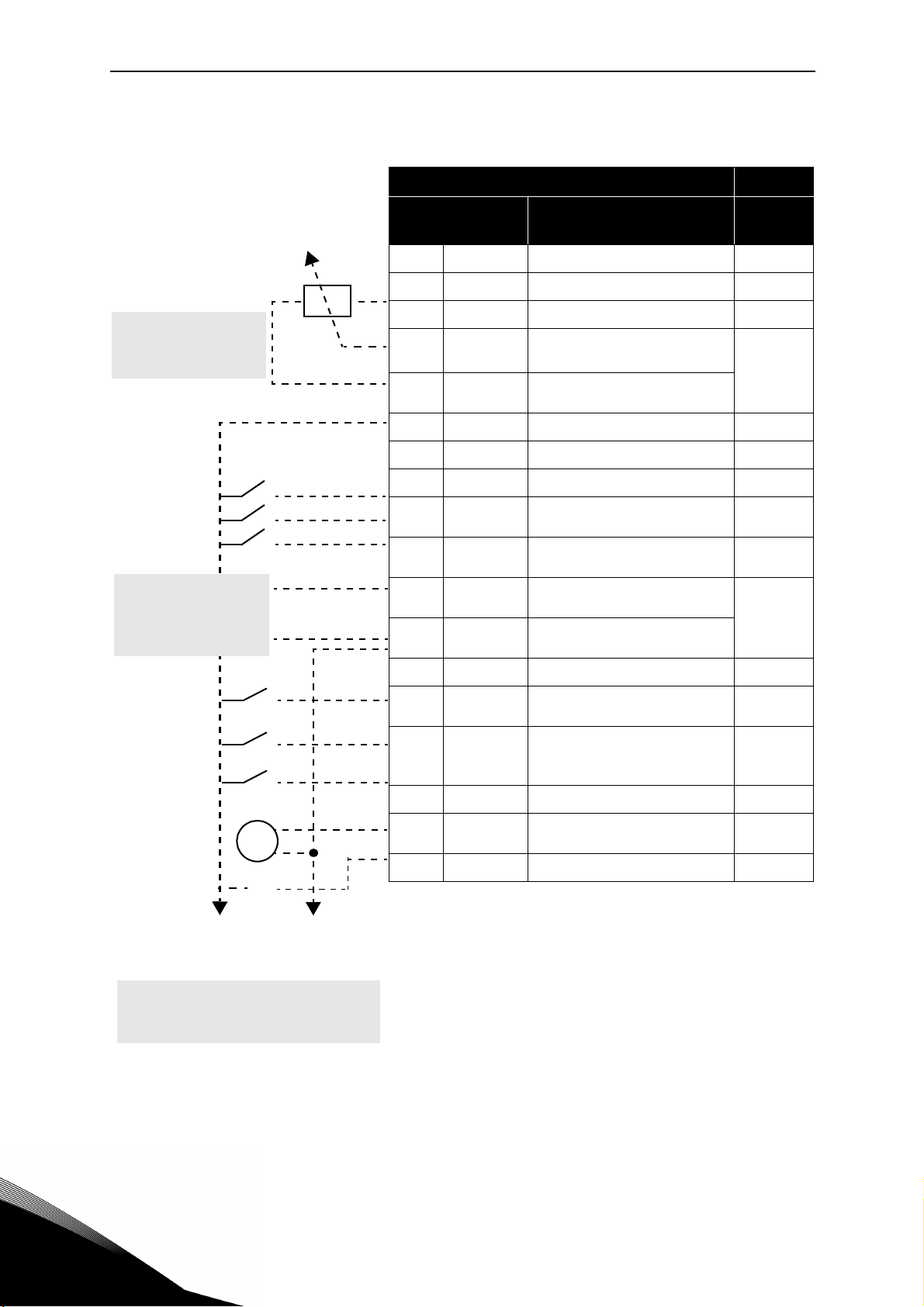
1.2 Beispiel für Steueranschlüsse
E/A-Standard-Klemmen
Bezug Potentiometer
1...10kΩ
PID-Istwert
4...20mA/0...10V
(programmierbar)
V
X1
Klemme Signal
A RS485 Serieller Bus, negativ
B RS485 Serieller Bus, positiv
1 +10 Vref Sollwertversorgung
2 AI1+
3 AI1-/MASSE
6 24Vout 24V Hilfsspannung
7 DIN COM Bezugspunkt für Digitaleingang
8 DI1 Digitaleingang 1 Start VORW
9 DI2 Digitaleingang 2
10 DI3 Digitaleingang 3
4 AI2+
5 AI2-/MASSE
13 DO1- Bezugspunkt für Digitalausgang
14 DI4 Digitaleingang 4
15 DI5 Digitaleingang 5
16 DI6 Digitaleingang 6 Rampe 2
18 AO1+ Analogsignal (+Ausgang)
20 DO1+ Digitalausgang + Bereit
*
Auswählbar mit DIP-Schaltern, siehe VACON® 20 CP/X
Installationshandbuch
Analogeingang,
Spannung oder Strom
Bezugspunkt für Analogeingang
(Strom)
Analogeingang,
Spannung oder Strom*
Bezugspunkt für Analogeingang
(Strom)
*
Werks ein-
stellung
Spannung
Start
RÜCKW
Festfrequenz B0
Strom
Festfrequenz B1
Fehlerrücksetzung
Ausgangsfrequenz
1
Tabelle 1. Anschlussbeispiel, Standard- E/A-Klemmen.
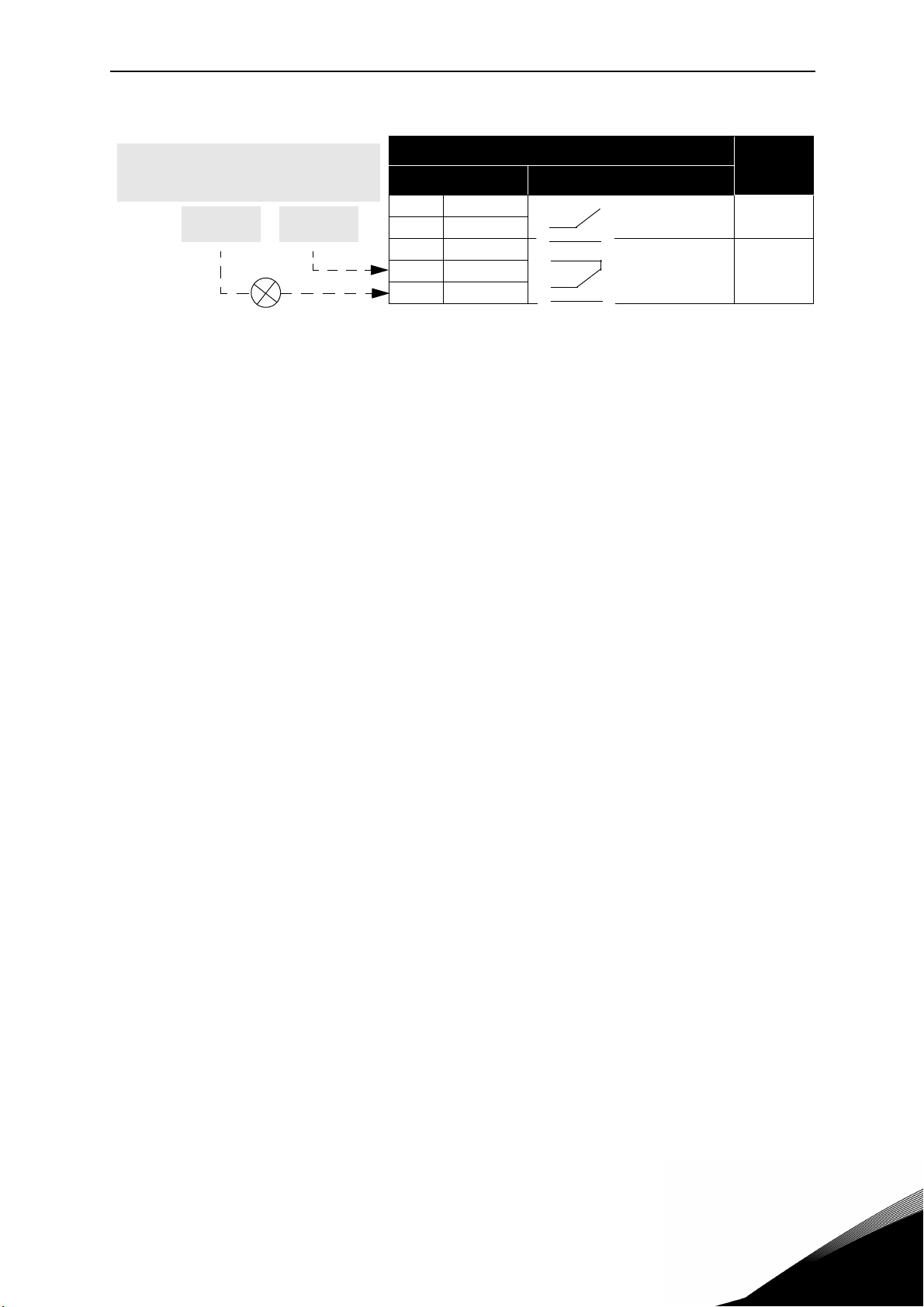
Zu Relaisklemmen
1 oder 2
Page 7
Multi- Applikation vacon • 4
Von
Standard E/A-Klemmen
Von
Kl. #6
Von Kl. #3
oder #5
FEHLER
Tabelle 2. Anschlussbeispiel, Relaisklemmen
Relaisklemmen
Klemme Signal
22 RO1/2 CM
23 RO1/3 NO
24 RO1/1 NC
26 RO1/3 NO
Werksein
stellung
Relaisausgang 1 RUN
Relaisausgang 1 FEHLER25 RO1/2 CM
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
1
Page 8

vacon • 5 Multi- Applikation
1.3 Optionale Platinen
Eine optionale E/A-Erweiterungsplatine kann im Steckplatz auf der rechten Seite des Frequenzumrichters installiert werden. Es werden die folgenden Karten unterstützt:
OPTB1: 6 Digitalein-/ausgänge
Die ersten 3 Klemmen sind für Digitaleingänge reserviert (DI7, DI8, DI9). Die nächsten 3
Klemmen können als Eingänge (DI10, DI11, DI12) oder als Digitalausgänge (EO1, EO2, EO3) benutzt werden. Die Anzahl der als Eingänge benutzten Klemmen muss mit dem Parameter
P2.24 angegeben werden (nicht angezeigt, falls die Platine nicht installiert ist). Diese Zahl bestimmt den Höchstwert für die Auswahl des Digitaleingangs, der mit einer bestimmten Logikfunktion verbunden ist. Sie ändert auch die Anzeige von Parametern für die Auswahl der
Funktion der Digitalausgänge (P5.9, P5.10, P5.11).
OPTB2: 1 Thermistoreingang, 2 Relaisausgänge
Das Ansprechen auf den Thermistorfehler kann mit Parameter P9.16 programmiert werden.
Die Relaisfunktionen können mit den Parametern P5.9, P5.10 programmiert werden (nicht
angezeigt, falls die Platine nicht installiert ist).
OPTB4: 1 Analogeingang, 2 Analogausgänge
Ein weiterer Eingang steht für den Frequenzsollwert zur Verfügung. Das Signal kann mit den
Parametern P3.9 - 12 programmiert werden. Zwei weitere Ausgänge stehen für die Überwachung der Motor-/Frequenzumrichtersignale zur Verfügung. Die Ausgänge können mit den
Parametern P6.5 - 12 programmiert werden.
Die Parameter werden nicht anzeigt, falls die Platine nicht installiert ist.
OPTB5: 3 Relaisausgänge
Die Relaisfunktionen können mit den Parametern P5.9, P5.10, P5.11 programmiert werden
(nicht angezeigt, falls die Platine nicht installiert ist).
OPTB9: 5 Digitaleingänge, 1 Relaisausgang
Der Höchstwert für die Auswahl des Digitaleingangs (DI7, DI8, DI9, DI10. DI11), der mit einer bestimmten Logikfunktion verbunden ist, ist auf 11 eingestellt. Die Relaisfunktionen können mit
dem Parameter P5.9 programmiert werden (nicht angezeigt, falls die Platine nicht installiert ist).
OPTBF: 1 Analogausgang, 1 Digitalausgang, 1 Relaisausgang
Der Analogausgang kann mit den Parametern P6.5 - 8 programmiert werden. Der Digitalausgang kann mit P5.12 programmiert werden. Der Relaisausgang kann mit P5.9 programmiert
werden. Die Parameter werden nicht anzeigt, falls die Platine nicht installiert ist.
OPTBH: 3 Temperatursensoren
Wenn die Platine installiert ist, wird das spezifische Menü G13 angezeigt. Die Temperaturmessung kann für die Einstellung eines Digital-/Relaisausgangs und/oder für die Auslösung eines
Fehlers benutzt werden. Sie kann auch als direkter Frequenzsollwert oder als Istwert für die
PID-Regelung benutzt werden.
OPTBK: 4 ASi Ausgänge, 4 ASi Eingänge
ASi Ausgänge werden als 4 optionale Digitaleingänge (DI7, DI8, DI9, DI10) verwaltet. Der
Höchstwert für die Auswahl des Digitaleingangs, der mit einer bestimmten Logikfunktion verbunden ist, ist auf 10 eingestellt.
ASi Eingänge 1-4 werden als 4 optionale Ausgänge (EO1, EO2, EO3, EO4) verwaltet, die mit den
Parametern P5.9 - 12 programmiert werden können.
ASi Eingänge 1-3 werden als 3 optionale Relaisausgänge verwaltet (die mit den Parametern
P5.9 - 11 programmiert werden können).
1
Page 9

Multi- Applikation vacon • 6
ASi Eingang 4 wird als optionaler Digitalausgang verwaltet (der mit dem Parameter P5.12 programmiert werden kann).
OPTC3/E3: Profibus DPV1 Feldbus-Platine
Die Vacon 20CP/X Frequenzumrichter können mit dieser Feldbus-Platine mit dem PROFIBUS
DP-Netzwerk verbunden werden. Der Frequenzumrichter kann dann vom Hauptrechner gesteuert, überwacht und programmiert werden. Die OPTE3 Optionskarte unterstützt auch einen
Anschluss vom DP Master (Klasse 2), wenn DP-V1 freigegeben ist. In diesem Fall kann der
Klasse 2 Master einen Anschluss herstellen, über den PROFIdrive Parameter Zugangsdienst
Parameter auslesen und schreiben, und den Anschluss trennen. Der PROFIBUS DP-Feldbus
ist mit einem 5-poligen Bus-Steckverbinder mit der OPTE3-Platine verbunden. Der einzige
Unterschied zwischen der OPTE3- und der OPTE5-Platine ist der Feldbus-Steckverbinder.
OPTC4 Lonworks Feldbus-Platine
Die Vacon 20CP/X Frequenzumrichter können mit dieser Feldbus-Platine mit dem LonWorks®
-Netzwerk verbunden werden. Der Frequenzumrichter kann dann vom Hauptrechner gesteu-
ert, überwacht und programmiert werden.
OPTC5/E5: Profibus DPV1 Feldbus-Platine (Typ-D-Stecker)
Die Vacon 20CP/X Frequenzumrichter können mit dieser Feldbus-Platine mit dem PROFIBUS
DP-Netzwerk verbunden werden. Der Frequenzumrichter kann dann vom Hauptrechner gesteuert, überwacht und programmiert werden. Die OPTE5 Optionskarte unterstützt auch einen
Anschluss vom DP Master (Klasse 2), wenn DP-V1 freigegeben ist. In diesem Fall kann der
Klasse 2 Master einen Anschluss herstellen, über den PROFIdrive Parameter Zugangsdienst
Parameter auslesen und schreiben, und den Anschluss trennen. Der PROFIBUS DP-Feldbus
ist mit der OPTE5-Platine mit einer 9-poligen D-Sub-Buchse verbunden. Der einzige Unterschied zwischen der OPTE3- und der OPTE5-Platine ist der Feldbus-Steckverbinder.
OPTC6/E6: CanOpen Feldbus-Platine
Die Vacon 20CP/X Frequenzumrichter können mit dieser Feldbus-Platine mit dem CanOpenSystem verbunden werden. Der Frequenzumrichter kann dann vom Hauptrechner gesteuert,
überwacht und programmiert werden. Die Vacon CanOpen-Platine ist mit dem Feldbus über
einen 5-poligen Bus-Stecker verbunden.
OPTC7/E7: DeviceNet Feldbus-Platine
Die Vacon 20CP/X Frequenzumrichter können mit dieser Feldbus-Platine mit dem DeviceNet
verbunden werden. Der Frequenzumrichter kann dann vom Hauptrechner gesteuert, überwacht und programmiert werden. Die Vacon DeviceNet-Platine ist mit dem Feldbus über einen
5-poligen Bus-Stecker verbunden.
OPTCI: Modbus TCP Feldbus-Platine
Die Vacon 20CP/X Frequenzumrichter können mit dieser OPTCI Ethernet Feldbus-Platine mit
dem Ethernet verbunden werden. Jedes an ein Ethernet-Netzwerk angeschlossene Gerät hat
zwei Identifikatoren; eine MAC-Adresse und eine IP-Adresse. Die MAC-Adresse (Adressformat: xx:xx:xx:xx:xx:xx) ist eindeutig dem Gerät zugeordnet und kann nicht verändert werden.
Die MAC-Adresse der Ethernet-Platine befindet sich auf dem Aufkleber auf der Platine bzw.
kann diese mit der Vacon IP Tool Software NCIPConfig. herausgefunden werden. Für die Softwareinstallation siehe www.vacon.com. In einem lokalen Netzwerk können die IP-Adressen
vom User definiert werden, sofern alle mit dem Netzwerk verbundenen Geräte denselben
Netzwerkanteil der Adresse haben. Um mehr über IP-Adressen zu erfahren, kontaktieren Sie
bitte Ihren Netzwerkadministrator. Überlappende IP-Adressen können zu Konflikten zwischen
Geräten führen.
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
1
Page 10

vacon • 7 Multi- Applikation
OPTCP: Profinet Fieldbus-Platine
Die Vacon 20CP/X Frequenzumrichter können mit dieser OPTCP Ethernet-Feldbus-Platine mit
dem Ethernet verbunden werden. Jedes an ein Ethernet-Netzwerk angeschlossene Gerät hat
zwei Identifikatoren; eine MAC-Adresse und eine IP-Adresse. Die MAC-Adresse (Adressformat: xx:xx:xx:xx:xx:xx) ist eindeutig dem Gerät zugeordnet und kann nicht verändert werden.
Die MAC-Adresse der Ethernet-Platine befindet sich auf dem Aufkleber auf der Platine bzw.
kann diese mit der Vacon IP Tool Software NCIPConfig. herausgefunden werden. Für die Softwareinstallation siehe www.vacon.com. In einem lokalen Netzwerk können die IP-Adressen
vom User definiert werden, sofern alle mit dem Netzwerk verbundenen Geräte denselben
Netzwerkanteil der Adresse haben. Um mehr über IP-Adressen zu erfahren, kontaktieren Sie
bitte Ihren Netzwerkadministrator. Überlappende IP-Adressen können zu Konflikten zwischen
Geräten führen.
OPTCQ: Ethernet IP Feldbus-Platine
Die Vacon 20CP/X Frequenzumrichter können mit dieser OPT-CQ Ethernet/IP Feldbus-Platine
mit dem Ethernet verbunden werden. Jedes an ein Ethernet-Netzwerk angeschlossene Gerät
hat zwei Identifikatoren; eine MAC-Adresse und eine IP-Adresse. Die MAC-Adresse (Adressformat: xx:xx:xx:xx:xx:xx) ist eindeutig dem Gerät zugeordnet und kann nicht verändert werden. Die MAC-Adresse der Ethernet/IP-Platine befindet sich auf dem Aufkleber auf der Platine
bzw. kann diese mit der Vacon IP Tool Software NCIPConfig. herausgefunden werden. Für die
Softwareinstallation siehe www.vacon.com. In einem lokalen Netzwerk können die IP-Adressen vom User definiert werden, sofern alle mit dem Netzwerk verbundenen Geräte denselben
Netzwerkanteil der Adresse haben. Um mehr über IP-Adressen zu erfahren, kontaktieren Sie
bitte Ihren Netzwerkadministrator. Überlappende IP-Adressen können zu Konflikten zwischen
Geräten führen.
1
Page 11
Multi- Applikation vacon • 8
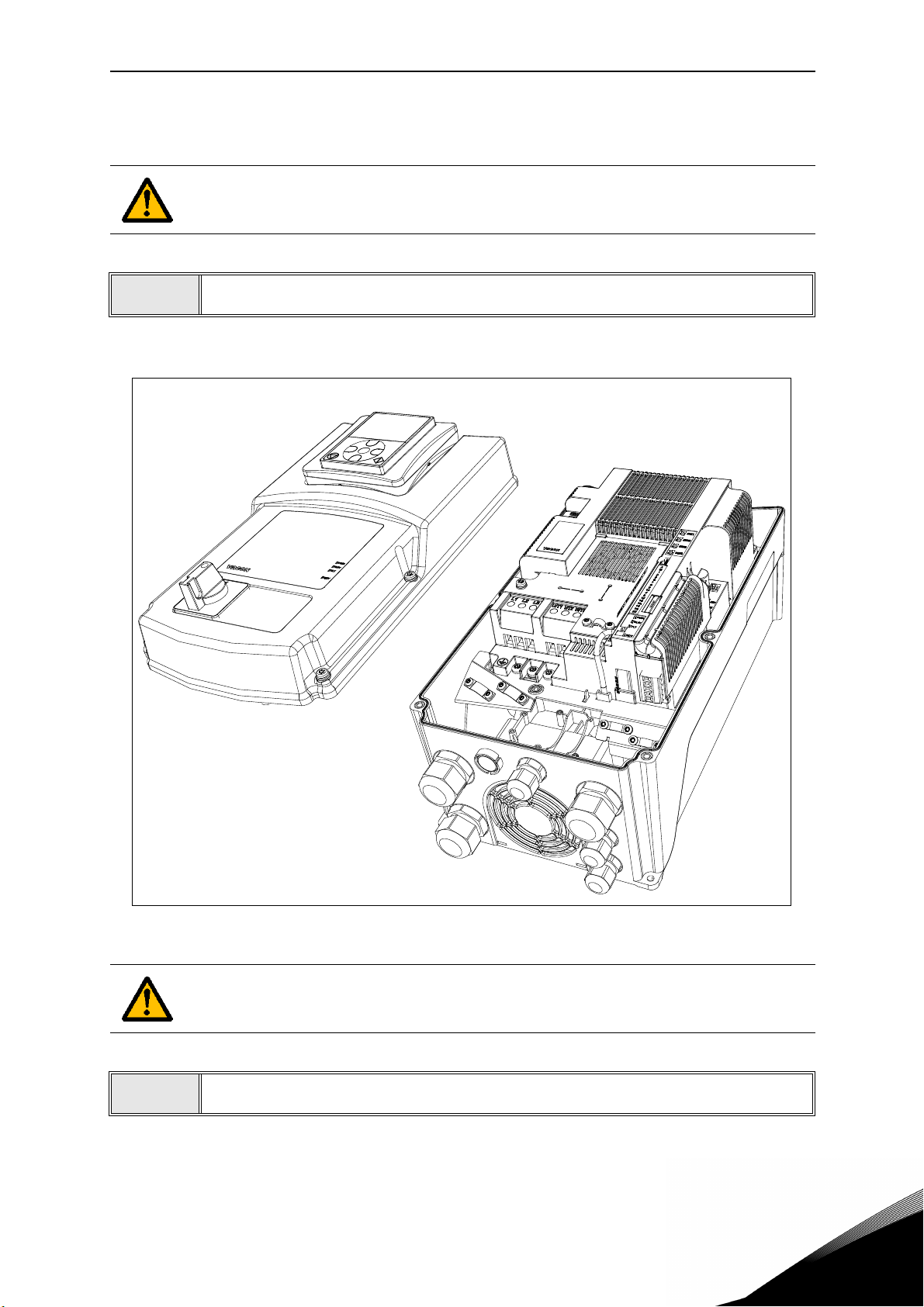
1.3.1 Optionskarteninstallation
HINWEIS! Es ist nicht erlaubt, Optionskarten oder Feldbus-Platinen bei einem Frequenzumrichter hinzuzufügen oder auszutauschen, wenn das Gerät eingeschaltet ist.
Dies kann die Platinen beschädigen.
1
• Die Abdeckung des Frequenzumrichters öffnen.
Abbildung 1. Öffnung der Hauptabdeckung, MU3 Beispiel.
Die Relaisausgänge und andere E/A-Klemmen können eine gefährliche Steuerspannung aufweisen, auch wenn der Frequenzumrichter vom Netz getrennt ist.
2
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
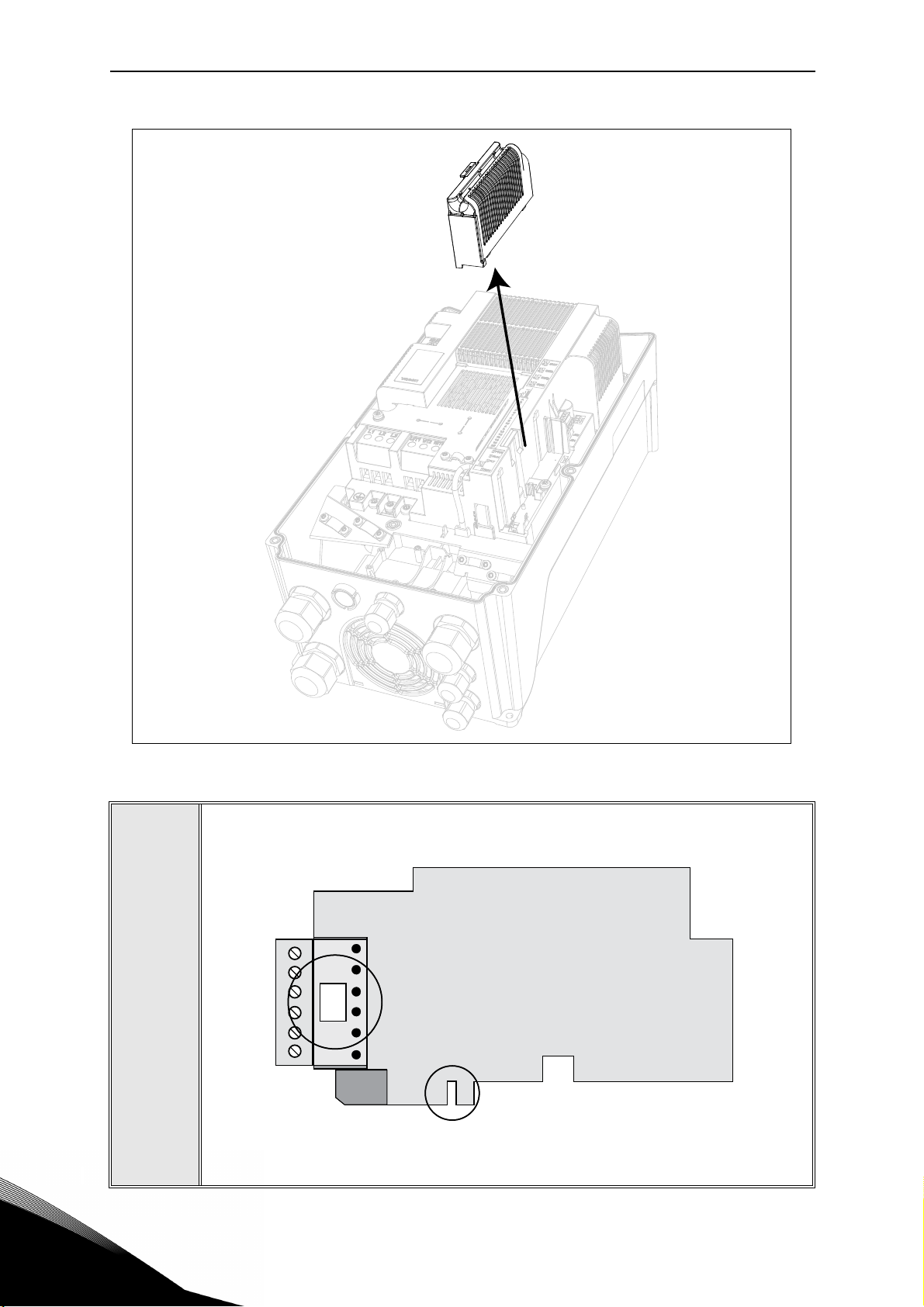
• Die Abdeckung des Options-Steckplatzes abnehmen.
1
Page 12
vacon • 9 Multi- Applikation
Slot coding
OPT
dv
9116.emf
Abbildung 2. Entfernung der Abdeckung des Options-Steckplatzes.
• Sicherstellen, dass auf dem Aufkleber des Platinensteckers „dv“ (dual
voltage - Dualspannung) steht. Das bedeutet, dass die Platine mit Vacon
20CP/X kompatibel ist. Siehe unten:
3
• HINWEIS: Inkompatible Platinen dürfen beim 20CP/X nicht installiert werden. Kompatible Platinen haben eine Steckplatzkodierung, die eine
Anbringung der Platinen ermöglichen (siehe oben).
1
Page 13
Multi- Applikation vacon • 10
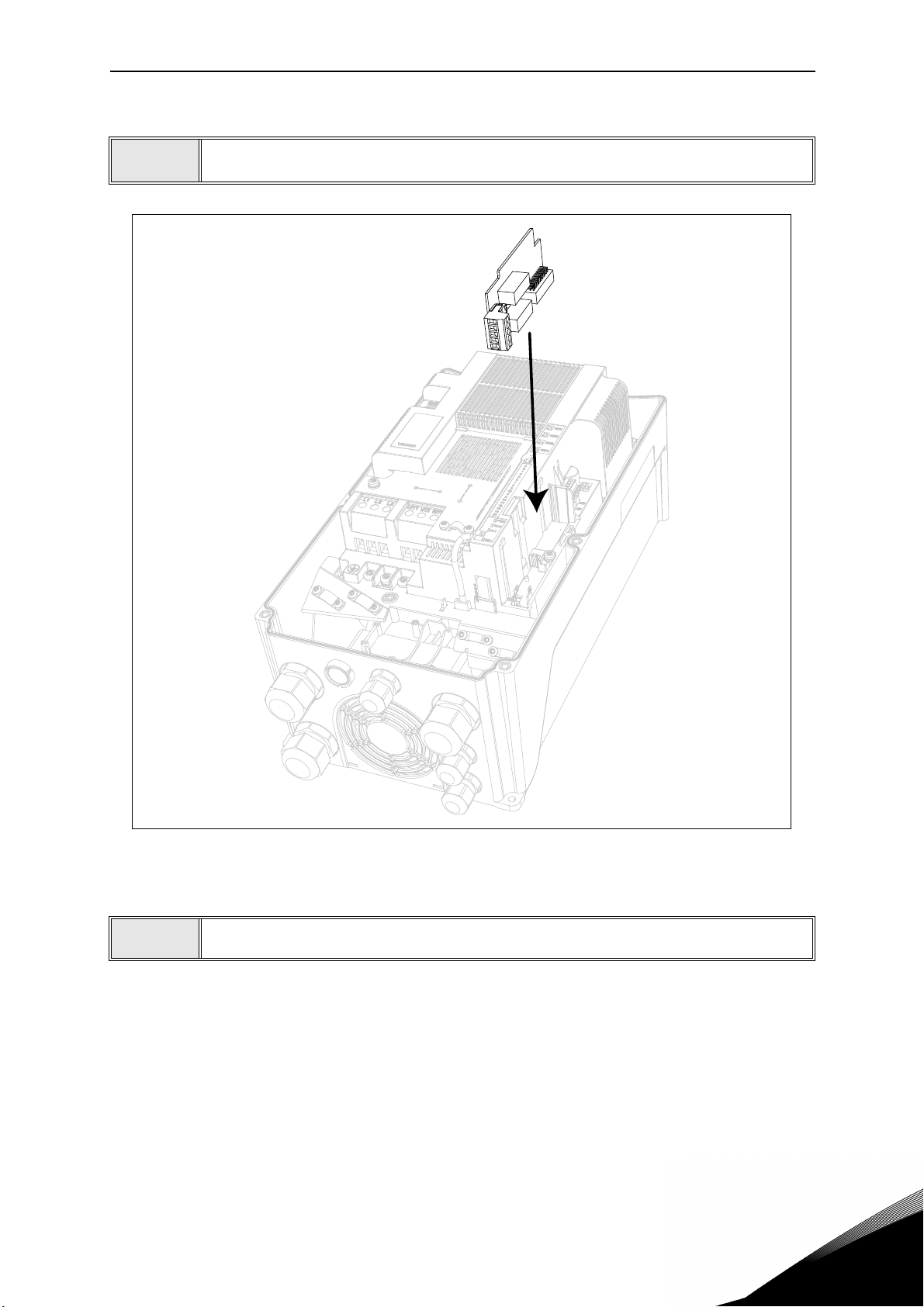
4
• Die Optionskarte wie auf unten stehendem Bild ersichtlich in den Steckplatz stecken.
Abbildung 3. Optionskarteninstallation.
5
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
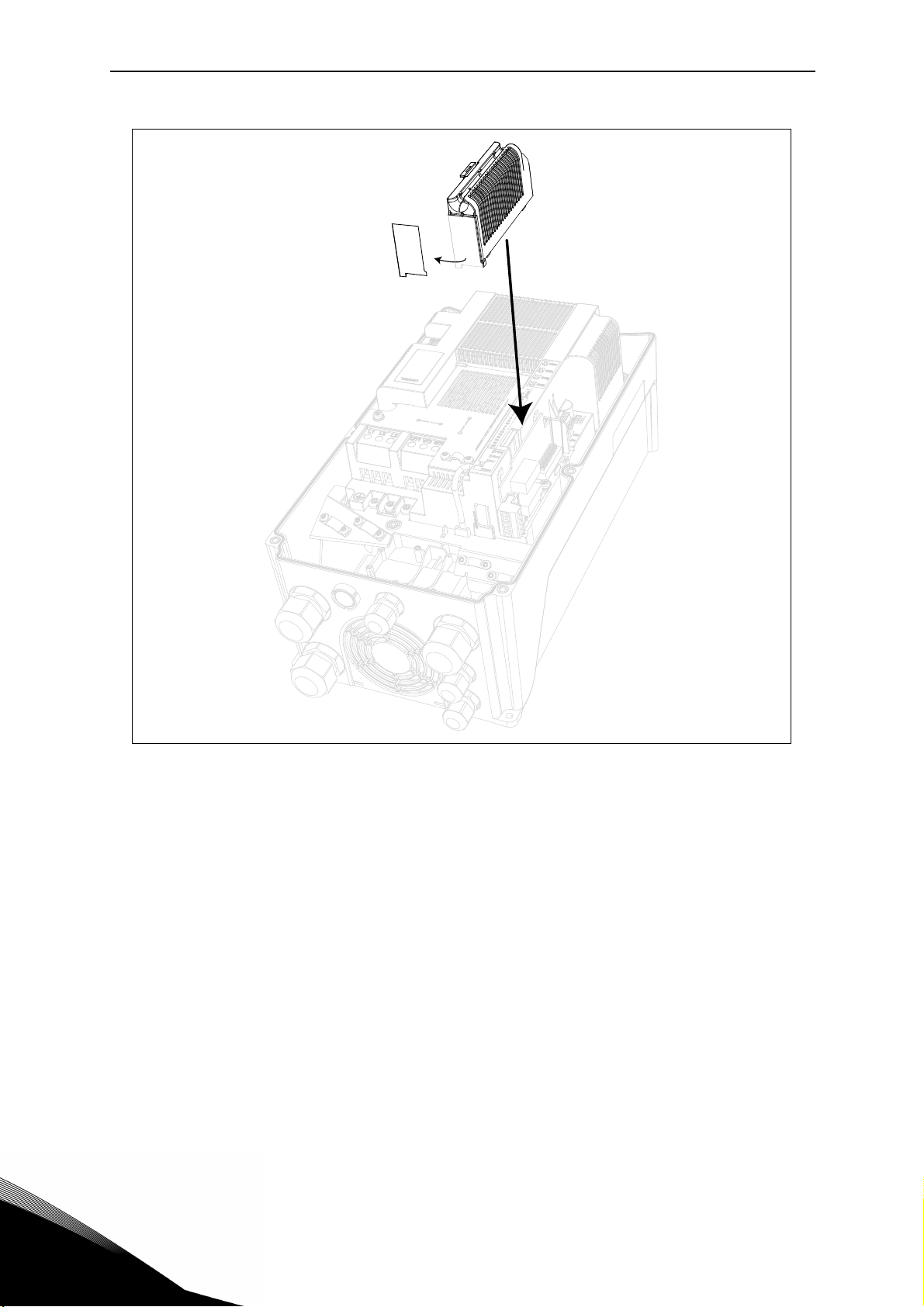
• Die Steckplatz-Abdeckung anbringen.
1
Page 14
vacon • 11 Multi- Applikation
Abbildung 4. Anbringen der Steckplatz-Abdeckung:
Entfernen Sie die Plastiköffnung für die Klemmen der Optionskarte.
1
Page 15

Beschreibung der Parametergruppen vacon • 12
2. BESCHREIBUNG DER PARAMETERGRUPPEN
2.1 Steuertafelsollwert: Menü REF
Wenn die Taste LOC/REM auf der Steuertafel gedrückt wird, gelangt man automatisch in dieses Menü und es wird der Frequenzsollwert im lokalen Steuermodus angezeigt.
Der Sollwert ist auch aktiv, wenn er als Hauptsollwert (P1.12=4) oder als sekundärer Sollwert
(P2.15=4) ausgewählt wird.
Der Wert ist zwischen min. Frequenz P1.1 und max. Frequenz P1.2 beschränkt.
Im Lokalmodus oder wenn die Steuertafel der aktive Steuerplatz ist (P1.11=1 oder P2.14=1)
wird die Drehrichtung mit P2.23 oder durch Drücken der linken oder rechten Pfeiltaste festgelegt: Diese Funktion könnte gesperrt sein, wenn P2.27=1 eingestellt ist.
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
2
Page 16
vacon • 13 Beschreibung der Parametergruppen
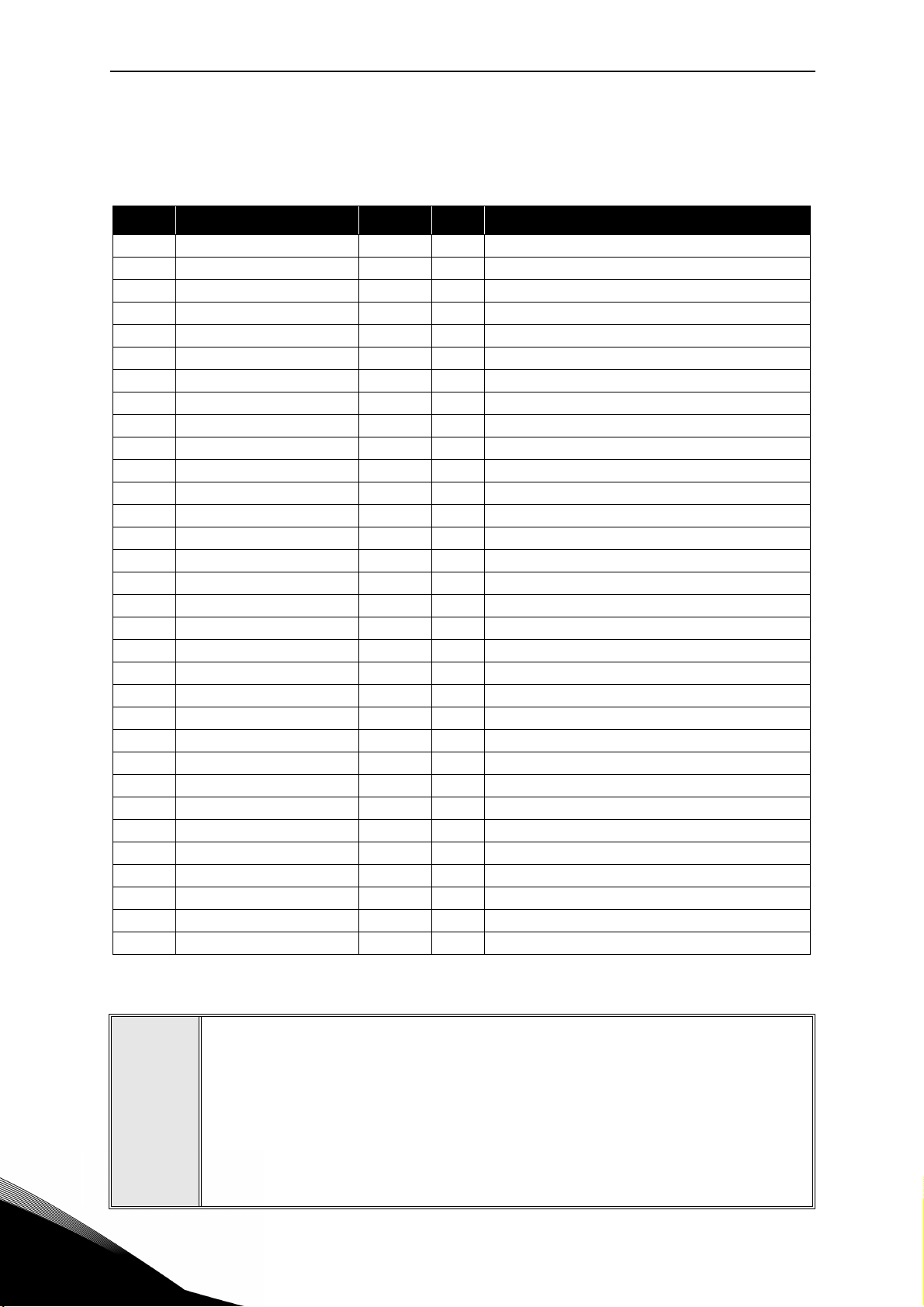
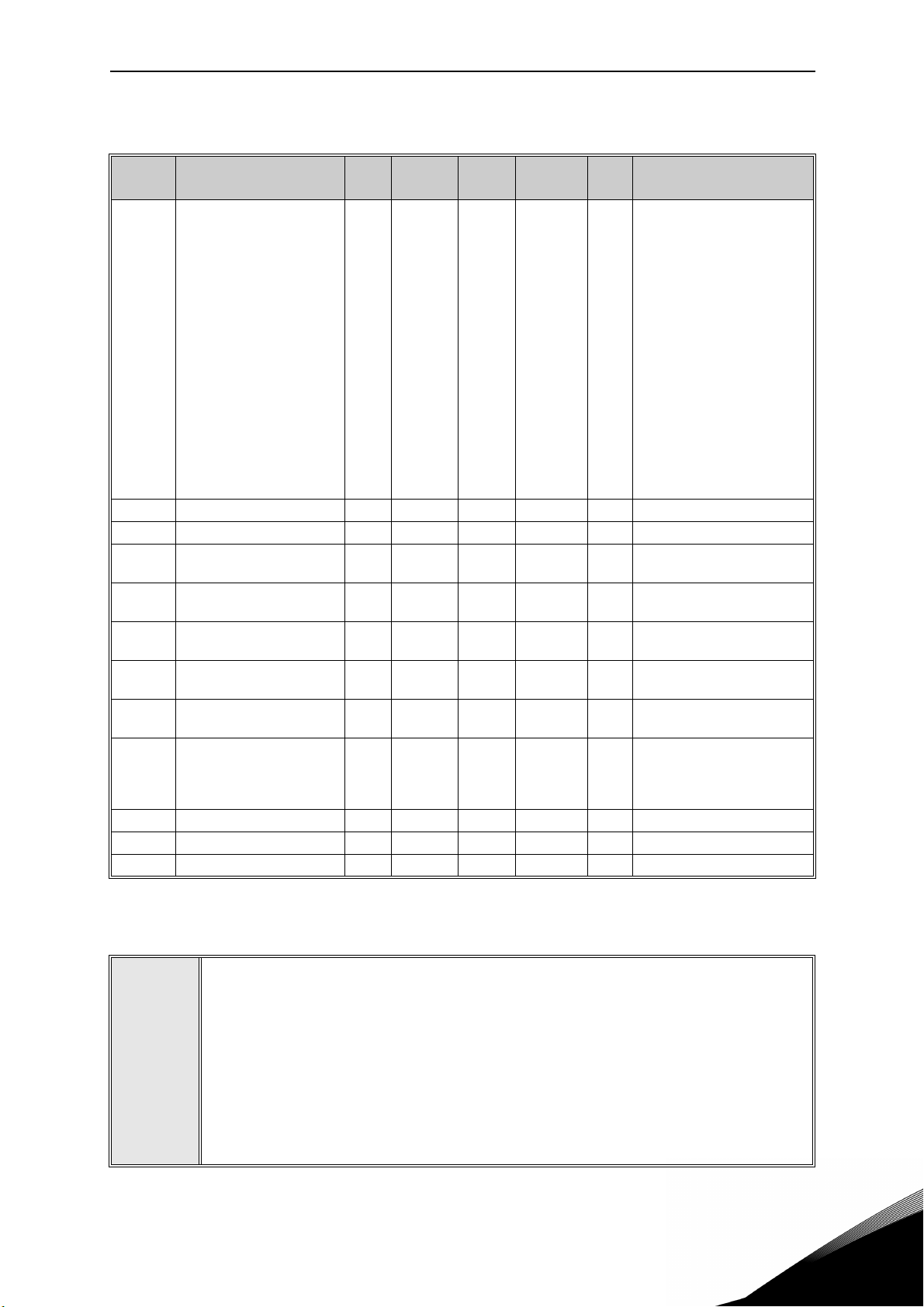
2.2 Überwachungsgruppe: Menü MON
Der Frequenzumrichter VACON ®20 CP/X A C bietet Ihnen die Möglichkeit, die Istwerte von
Parametern und Signalen sowie Zustände und Messungen zu überwachen.Siehe Tabelle ,in
der die grundlegenden Überwachungswerte aufgeführt werden.
Code Überwachungswert Einheit ID Beschreibung
V1.1 Ausgangsfrequenz Hz 1 Ausgangsfrequenz zum Motor
V1.2 Frequenzsollwert Hz 25 Frequenzsollwert zur Motorsteuerung
V1.3 Drehzahl Motorwelle rpm 2 Motordrehzahl in rpm
V1.4 Motorstrom A 3
V1.5 Motordrehmoment % 4 Berechnetes Wellendrehmoment
V1.6 Motorleistung % 5 Gesamtenergieverbrauch des Frequenzumrichters
V1.7 Motorspannung V 6
V1.8 Motortemperatur % 9 Berechnete Motortemperatur
V1.9 DC-Zwischenkreisspannung V 7
V1.10 Gerätetemperatur °C 8 Kühlkörpertemperatur
V1.11 Platinentemperatur °C 1825 Leistungsplatinentemperatur
V1.12 Analogeingang 1 % 13 Analogeingang AI1
V1.13 Analogeingang 2 % 14 Analogeingang AI2
V1.14 Erw. Analogeingang % 1837 Analogeingang auf OPTB4
V1.15 Analogausgang % 26 Analogausgang
V1.16 Erw. Analogausg. 1 % 1838 Analogausgang 1 auf OPTB4-BF
V1.17 Erw. Analogausg. 2 % 1839 Analogausgang 2 auf OPTB4
V1.18 DI1, DI2, DI3 15 Status Digitaleingänge
V1.19 DI4, DI5, DI6 16 Status Digitaleingänge
V1.20 DI7, DI8, DI9 1835 Status Digitaleingänge auf OPTB1
V1.21 DI10, DI11, DI12 1836 Status Digitaleingänge auf OPTB1
V1.22 RO1, RO2, DO 17 Status Digitalausgänge
V1.23 EO1, EO2, EO3, EO4 1852 Status Digitalausgänge auf Erweiterungsplatine
V1.24 Prozessvariable 29 Skalierte Prozessvariable. Siehe P7.10
V1.25 PID-Sollwert % 20 Sollwert PID-Regler
V1.26 PID-Fehlerwert % 22 Fehler PID-Regler
V1.27 PID-Istwert % 21 Istwert PID-Regler
V1.28 PID-Ausgang % 23 Ausgang PID-Regler
V1.29 Temperatursensor 1 °C oder °K 1860 OPTBH Sensor 1
V1.30 Temperatursensor 2 °C oder °K 1861 OPTBH Sensor 2
V1.31 Temperatursensor 3 °C oder °K 1862 OPTBH Sensor 3
V1.32 Status ASi-Platine 1894 OPTBK Status
2
HINWEIS!
Tabelle 3: Optionen Überwachungsmenü.
Die Werte V1.25-28 werden nicht angezeigt, wenn der PID-Ausgang nicht als Frequenzsollwert
benutzt wird.
Die Werte V1.14, V1.17 werden nicht angezeigt, wenn die Erweiterungsplatine OPTB4 nicht
installiert ist.
Der Wert V1.16 wird nicht angezeigt, wenn die Erweiterungsplatine OPTB4-BF nicht installiert ist.
Die Werte V1.20, V1.21 werden nicht angezeigt, wenn keine Erweiterungsplatine mit verfügbaren
Ausgängen installiert ist. Der Wert V1.23 wird nicht angezeigt, wenn keine Erweiterungsplatine mit
verfügbaren Ausgängen installiert ist.
Die Werte V1.29, V1.30, V1.31 werden nicht angezeigt, wenn die Erweiterungsplatine OPTBH nicht
installiert ist.
Der Wert V1.32 wird nicht angezeigt, wenn die Erweiterungsplatine OPTBK nicht installiert ist.
Page 17
Beschreibung der Parametergruppen vacon • 14
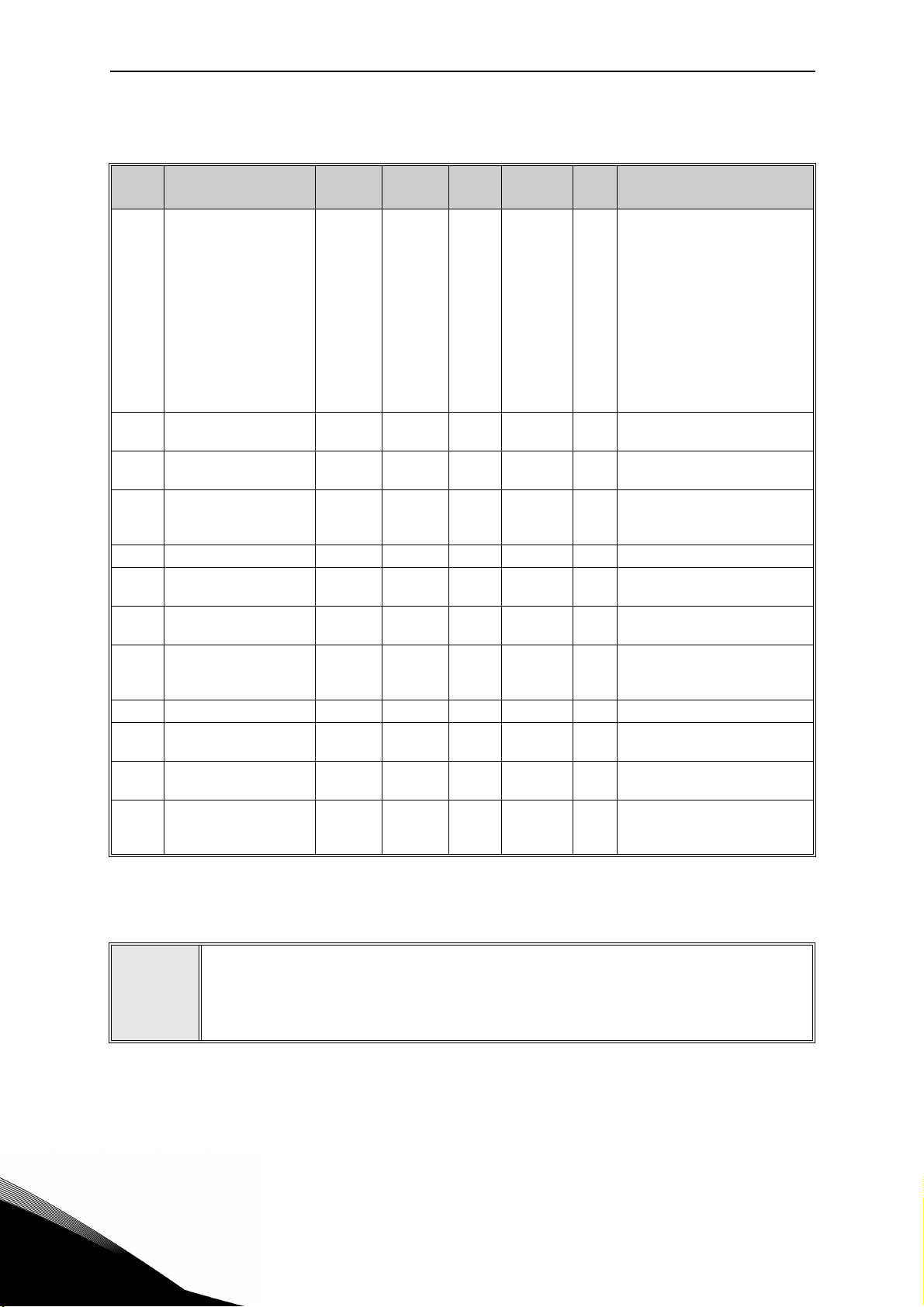
2.3 Parametergruppen: Menü PAR
Die Universal-Applikation umfasst die folgenden Parametergruppen:
Menü und Parametergruppe Beschreibung
Gruppe Basisparameter: Menü PAR G1 Grundeinstellungen
Gruppe erweiterte Einstellungen: Menü PAR G2 Erweiterte Parametereinstellungen
Gruppe Analogeingänge: Menü PAR G3 Programmierung Analogeingang
Gruppe Digitaleingänge: Menü PAR G4 Programmierung Digitaleingang
Gruppe Digitalausgänge: Menü PAR G5 Programmierung Digitalausgang
Gruppe Analogausgänge: Menü PAR G6 Programmierung Analogausgänge
Gruppenüberwachungen: Menü PAR G7
Gruppe Motorsteuerung: Menü PAR G8 Motorsteuerung und U/f-Parameter
Gruppe Schutzfunktionen: Menü PAR G9 Konfiguration der Schutzfunktionen
Gruppe automatische Rücksetzung: Menü PAR G10
Gruppe Feldbus: Menü PAR G11 Parameter Feldbus-Prozessdaten
Gruppe PID-Regler: Menü PAR G12 Parameter für PID-Regler.
Gruppentemperaturmessung: Menü PAR G13 Temperaturmessungsparameter.
Programmierung Frequenzausblendungs-Bereiche
Konfiguration autom. Rücksetzung
nach Fehler
Tabelle 4. Parametergruppen.
Spaltenerklärungen:
Code = Angabe der Position auf der Steuertafel Zeigt dem Bediener die
Parameternummer
Parameter = Parameterbezeichnung
Min. = Mindestwert des Parameters
Max. = Höchstwert des Parameters
Einheit = Einheit des Parameterwerts. Gezeigt, wenn verfügbar
Werkseinstellung = Ab Werk eingestellter Wert
ID = ID-Nummer des Parameters
Beschreibung = Kurzbeschreibung der Parameterwerte oder seiner Funktion
= Der Parameter kann nur im Stopp-Status geändert werden
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
2
Page 18
vacon • 15 Beschreibung der Parametergruppen
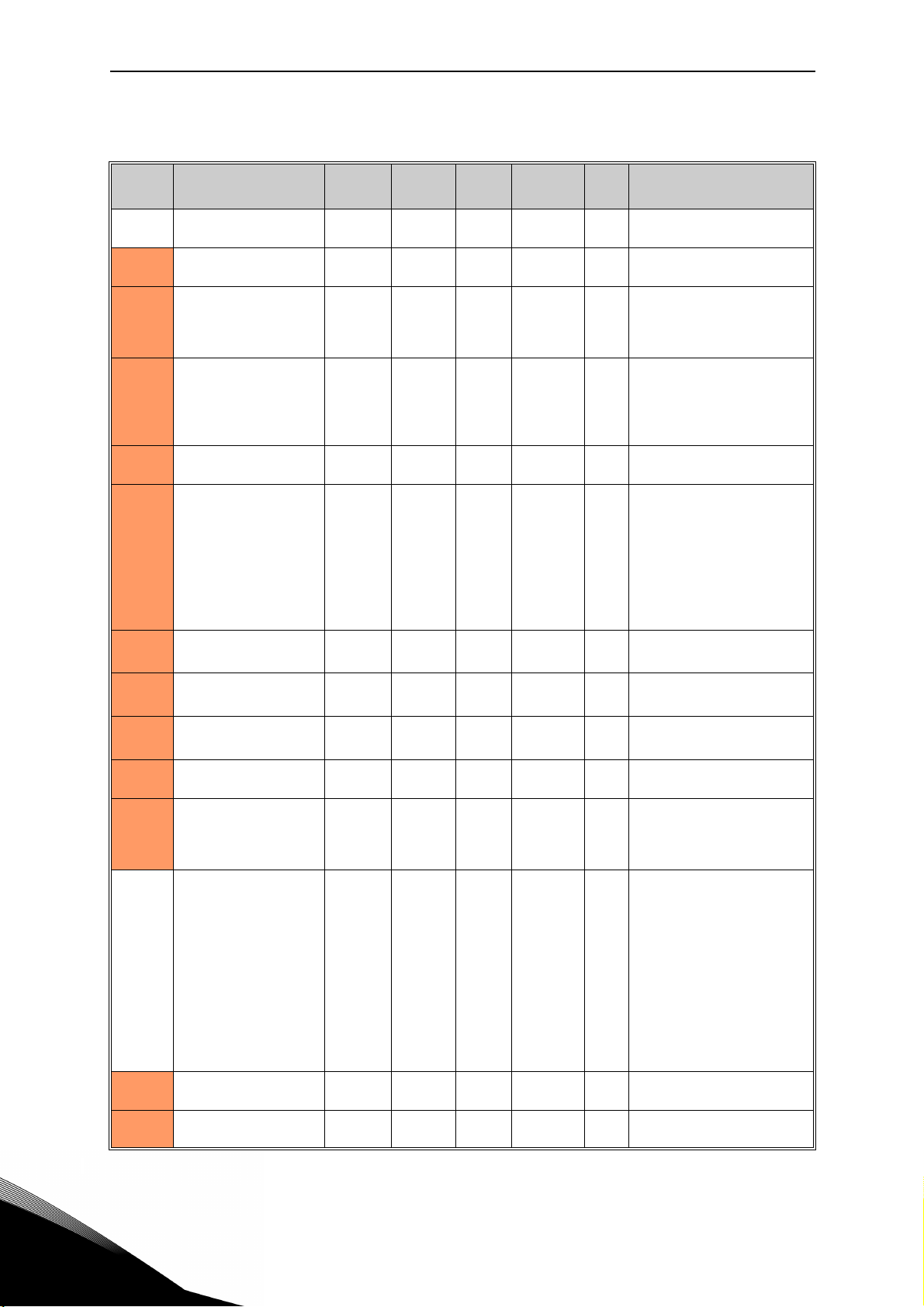
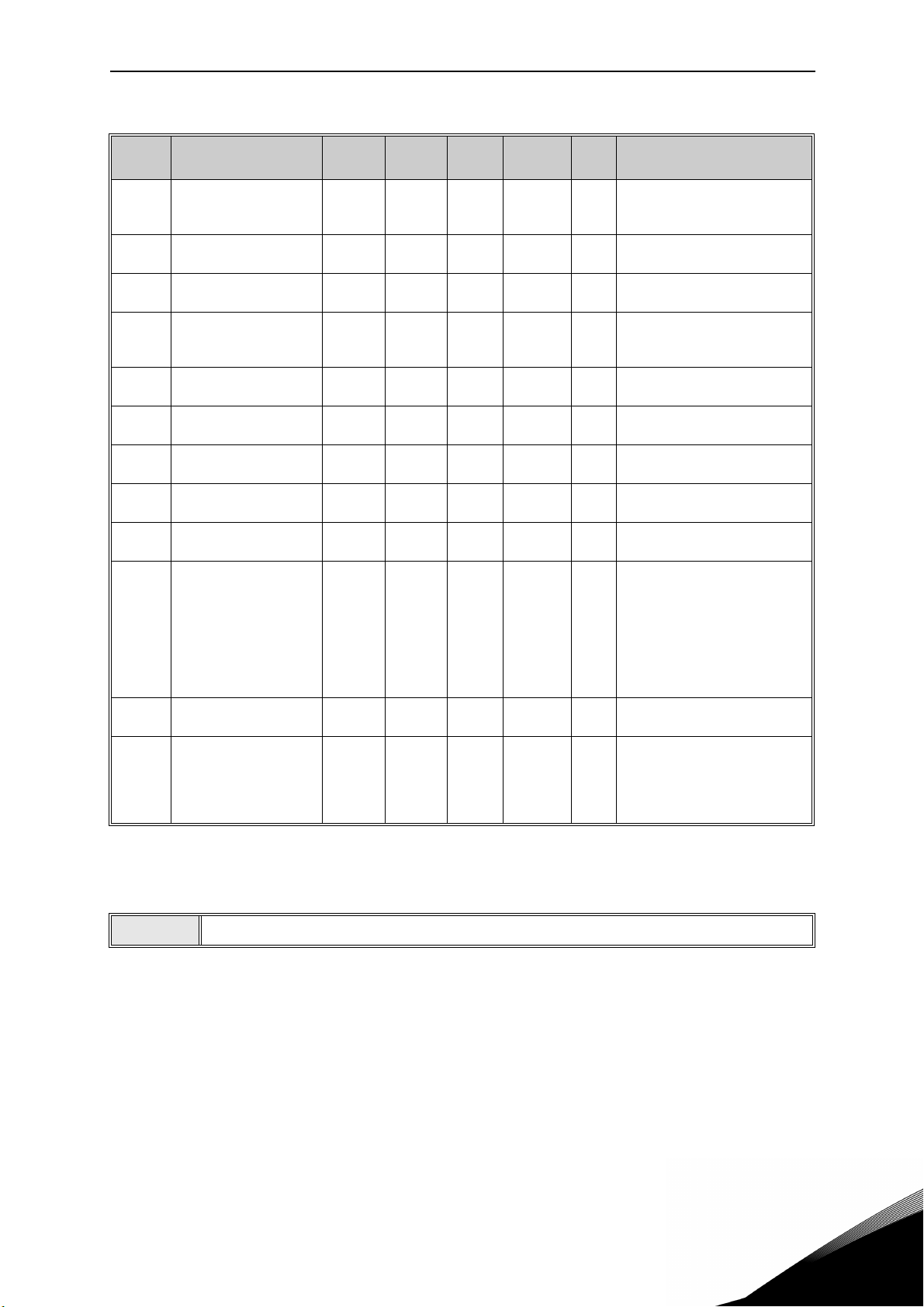
2.3.1 Gruppe Basisparameter: Menü PAR G1
A
A
Werksein
stellung
I
H
I
H
ID Beschreibung
107
113
Code Parameter Min. Max. Einheit
P1.1 Min. Frequenz 0,00 P1.2 Hz 0,00 101
P1.2 Max. Frequenz P1.1 320,00 Hz 50,00 102
P1.3 Beschleunigungszeit 1 0,1 3000,0 s 3,0 103
P1.4 Abbremszeit 1 0,1 3000,0 s 3,0 104
P1.5 Stromgrenze
P1.6 Motornennspannung 180 500 V 400 110
P1.7
P1.8 Motornenndrehzahl 24 20000 rpm 1440 112
P1.9 Motornennstrom
P1.10 Motor Cos ϕ 0,30 1,00 0,85 120
P1.11 Steuerplatz 0 2 0 125
P1.12
P1.13 Startfunktion 0 1 0 505
P1.14 Stoppfunktion 0 1 0 506
Motornenn-
frequenz
Quelle
Frequenzsollwert
0,2 x I
8,00 320,00 Hz 50,00 111
0,2 x I
0 5-7* 0 1819
2 x I
H
H
2 x I
H
H
Minimal zulässiger Frequenzsollwert
Maximal zulässiger Frequenzsollwert
Bestimmt die erforderliche
Zeit, damit die Ausgangsfrequenz von Nullfrequenz auf
maximale Frequenz ansteigt
Bestimmt die erforderliche
Zeit, damit die Ausgangsfrequenz von maximaler Frequenz auf Nullfrequenz
absinkt
Maximaler Motorstrom von
Frequenzumrichter
Den Wert U
dem Typenschild des Motors.
Dieser Parameter stellt die
Spannung am Feldschwächungspunkt auf 100% *
U
nMotor
benutzten Anschluss
beachten (Dreieck/Stern).
Den Wert f
dem Typenschild des Motors.
Den Wert n
dem Typenschild des Motors.
Den Wert I
dem Typenschild des Motors.
Den Wert findet man auf dem
Typenschild des Motors
Lauf- und Richtungssteuerung:
0 = E/A-Klemmen
1 = Steuertafel
2 = Feldbus
Auswahl der Sollwertquelle:
0 = AI1
1 = AI2
2 = PID-Sollwert
3 = Motorpotentiometer
4 = Steuertafel
5 = Feldbus
6 = Erweiterung AI1
7 = Temperatur
(*)6 erfordert Erweiterungsplatine OPTB4; 7 erfordert
Erweiterungsplatine OPTBH.
0=Rampenstart
1=Fliegender Start
0=Leerauslauf
1=Rampenstopp
findet man auf
n
ein. Auch den
findet man auf
n
findet man auf
n
findet man auf
n
2
Tabelle 5. Basisparameter.
Page 19
Beschreibung der Parametergruppen vacon • 16
0 = Nicht aktiv
P1.15 Drehmomentanhebung 0 1 0 109
P1.16
Alle Parameter
anzeigen
0 1 0 115
1 = Autom.
Drehmomentanhebung
0 = nur Basisp.
1 = Alle Gruppen
Tabelle 5. Basisparameter.
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
2
Page 20
vacon • 17 Beschreibung der Parametergruppen
2.3.2 Gruppe erweiterte Einstellungen: Menü PAR G2
Code Parameter Min. Max. Einheit
P2.1 Start-/Stopplogik 0 3 0 300
P2.2 Festfrequenz 1 0,00 P1.2 Hz 10,00 105 Mehrstufige Frequenz 1
P2.3 Festfrequenz 2 0,00 P1.2 Hz 15,00 106 Mehrstufige Frequenz 2
P2.4 Festfrequenz 3 0,00 P1.2 Hz 20,00 126 Mehrstufige Frequenz 3
P2.5 Festfrequenz 4 0,00 P1.2 Hz 25,00 127 Mehrstufige Frequenz 4
P2.6 Festfrequenz 5 0,00 P1.2 Hz 30,00 128 Mehrstufige Frequenz 5
P2.7 Festfrequenz 6 0,00 P1.2 Hz 40,00 129 Mehrstufige Frequenz 6
P2.8 Festfrequenz 7 0,00 P1.2 Hz 50,00 130 Mehrstufige Frequenz 7
P2.9 Beschleunigungszeit 2 0,1 3000,0 s 10,0 502 Zeit von 0 bis max Frequenz
P2.10 Abbremszeit 2 0,1 3000,0 s 10,0 503 Zeit von 0 bis max Frequenz
P2.11
P2.12
P2.13 S-Rampenform 1 0,0 10,0 s 0,0 500 Rampenverschliff.
P2.14 Steuerplatz 2 0 2 0 1806
P2.15
P2.16
P2.17
Übergangsfrequenz
Beschl1 zu Beschl2
Übergangsfrequenz
Abbr1 zu Abbr2
Frequenzsollwertg-
renze 2
Rampe
Motorpotentiometer
MotorPotentiometer
Speicher
0,00 P1.2 Hz 0,00 527
0,00 P1.2 Hz 0,00 528
0 5-7* 1 1820
1 50 Hz/s 5 331
0 2 0 367
Werk sein-
stellung
ID Beschreibung
Logik = 0:
Startsignal 1= Start Vorwärts
Startsignal 2 = Start Rückwärts
Logik = 1:
Startsignal 1 = Start
Startsignal 2 = Rückwärts
Logik = 2:
Startsignal 1 = Startimpuls
Startsignal 2 = Stoppimpuls
Logik = 3:
Startsignal 1= Start Vorwärts
(Flanke)
Startsignal 2 = Start Rückwärts
(Flanke)
Schwelle für autom. Wechsel
von Beschl1 zu Beschl2
Schwelle für autom. Wechsel
von Brems2 zu Brems1
Alternativer Steuerplatz:
0: E/A-Klemmen
1: Steuertafel
2: Feldbus
Auswahl der Sollwertquelle 2:
0 = AI1
1 = AI2
2 = PID-Sollwert
3 = Motorpotentiometer
4 = Steuertafel
5 = Feldbus
6 = Erweiterung AI1
7 = Temperatur
(*)6 erfordert Erweiterungsplatine OPTB4; 7 erfordert Erweiterungsplatine OPTBH.
Sollwert-Änderung bei Motorpotentiometer-Sollwert.
Rücksetzungslogik Frequenzsollwert Motorpotentiometer.
0 = Keine Rücksetzung
1 = Rücksetzung, wenn
angehalten oder abgeschaltet
2 = Rücksetzung, wenn abgeschaltet
2
Tabelle 6. Gruppe erweiterte Einstellungen.
Page 21
Beschreibung der Parametergruppen vacon • 18
P2.18
P2.19
P2.20
P2.21
P2.22 Steuertafel Stopptaste 0 1 1 114
P2.23 Steuertafel Richtung 0 1 0 123
P2.24 OPTB1 Digitaleingänge 3 6 6 1829
P2.25
P2.26 S-Rampenform 2 0,0 10,0 s 0,0 501
P2.27
Ausblendfrequenzbe-
reich 1, Untergrenze
Ausblendfrequenzbe-
reich 1, Obergrenze
Ausblendfrequenzbe-
reich 2, Untergrenze
Ausblendfrequenzbe-
reich 2, Obergrenze
Schnellstopp-
Abbremszeit
Steuertafel Richtungs-
änderung
0,00 P1.2 Hz 0,00 509 0 = Nicht benutzt
0,00 P1.2 Hz 0,00 510 0 = Nicht benutzt
0,00 P1.2 Hz 0,00 511 0 = Nicht benutzt
0,00 P1.2 Hz 0,00 512 0 = Nicht benutzt
0,1 3000,0 s 2,0 1889 Zeit von max Frequenz bis 0
0 1 0 1897
0 = Eingeschränkte Funktion
der Stopptaste
1 = Stopptaste ist immer
freigegeben
Motordrehung, wenn Steuerplatz Steuertafel ist
0 = Vorwärts
1 = Rückwärts
Anzahl der als Digitaleingänge
benutzten Klemmen.
Dieser Parameter wird nur
angezeigt, wenn die Platine
OPTB1 installiert ist
Rampenverschliff bei Beschl/
Bremsr. 2.
Ermöglicht die Änderung der
Bewegungsrichtung des
Motors mithilfe der LINKEN
und RECHTEN Pfeiltaste im
REF-Menü der Steuertafel
0: Zulässig
1: Gesperrt
HINWEIS!
Tabelle 6. Gruppe erweiterte Einstellungen.
Die Anzeige der Gruppe hängt von P1.16 ab.
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
2
Page 22
vacon • 19 Beschreibung der Parametergruppen
2.3.3 Gruppe Analogeingänge: Menü PAR G3
Code Parameter Min. Max. Einheit
P3.1 AI1 Signalbereich 0 1 0 379
P3.2
P3.3
P3.4 AI1 Filterzeit 0,0 10,0 s 0,1 378 Filterzeit für Analogeingang
P3.5 AI2 Signalbereich 0 1 1 390
P3.6
P3.7
P3.8 AI2 Filterzeit 0,0 10,0 s 0,1 389 Siehe P3.4
P3.9 Erw. AI Signalbereich 0 1 0 1841
P3.10
P3.11
P3.12 Erw. AI Filterzeit 0,0 10,0 s 0,1 1844 Filterzeit für Analogeingang
AI1 benut-
zerdefiniert min
AI1 benut-
zerdefiniert max
AI2 benut-
zerdefiniert min
AI2 benut-
zerdefiniert max
Erw. AI
benutzerdefiniert
Min.
Erw. AI benut-
zerdefiniert max
-100,00 100,00 % 0,00 380
-100,00 300,00 % 100,00 381
-100,00 100,00 % 0,00 391 Siehe P3.2
-100,00 300,00 % 100,00 392 Siehe P3.3
-100,00 100,00 % 0,00 1842
-100,00 300,00 % 100,00 1843
Werksein-
stellung
ID Beschreibung
0 = 0…10V / 0…20mA
1 = 2…10V / 4…20mA
Minimaleinstellung benutzerdefinierter Bereich
20% = 4-20 mA/2-10 V
Maximaleinstellung benutzerdefinierter Bereich
0 = 0…10V / 0…20mA
1 = 2…10V / 4…20mA
0 = 0…10V / 0…20mA
1 = 2…10V / 4…20mA
Min. Signalpegel benutzerdefinierter Bereich
Max. Signalpegel benutzerdefinierter Bereich
HINWEIS!
Tabelle 7. Gruppe Analogeingänge.
Die Anzeige der Gruppe hängt von P1.16 ab. Die Parameter P3.9 - P3.12 werden nur
angezeigt, wenn die Erweiterungsplatine OPTB4 installiert ist.
2
Page 23
Beschreibung der Parametergruppen vacon • 20
2.3.4 Gruppe Digitaleingänge: Menü PAR G4
Werksei
Code Parameter Min. Max. Einheit
P4.1 Startsignal 1 0 6* 1 403
P4.2 Startsignal 2 0 6* 2 404
P4.3 Rückwärts 0 6* 0 412
P4.4
P4.5 Externer Fehler Öffner 0 6* 0 406
P4.6 Fehlerrücksetzung 0 6* 5 414
P4.7 Lauffreigabe 0 6* 0 407
P4.8 Festfrequenz B0 0 6* 3 419
P4.9 Festfrequenz B1 0 6* 4 420
P4.10 Festfrequenz B2 0 6* 0 421
P4.11 Ausw. Beschl/Abbr 2 0 6* 6 408
P4.12 MotorPotent + 0 6* 0 418
P4.13 MotorPotent - 0 6* 0 417
P4.14 Ausw. Steuerplatz 2 0 6* 0 1813
P4.15 Ausw Frequenzsollw. 2 0 6* 0 1814
P4.16 Ausw. PID-Sollwert 2 0 6* 0 431
Externer Fehler Schlie-
ßer
0 6* 0 405
nstellun
g
ID Beschreibung
Startsignal 1, wenn Steuerplatz E/A 1 (VORW) ist
Siehe P2.1 für Funktion.
0 = Nicht benutzt
1 = DIN1
2 = DIN2
3 = DIN3
4 = DIN4
5 = DIN5
6 = DIN6
7 = DIN7
8 = DIN8
9 = DIN9
10 = DIN10
11 = DIN11
12 = DIN12
Startsignal 2, wenn Steuerplatz E/A 1 (RÜCKW) ist.
Siehe P2.1 für Funktion.
Siehe P4.1 für Optionen.
Unabhängig von P2.1
Siehe P4.1 für Optionen
Fehler, wenn Signal high
Siehe P4.1 für Optionen
Fehler, wenn Signal low
Siehe P4.1 für Optionen
Setzt alle aktiven Fehler
zurück
Muss Ein sein, um Frequenzumrichter in Status Bereit zu
versetzen
Binär-Selektor für Festfrequenzen (0-7).
Binär-Selektor für Festfrequenzen (0-7).
Binär-Selektor für Festfrequenzen (0-7).
Aktiviert Rampe 2
Siehe P4.1 für Optionen
Sollwerterhöhung
Siehe P4.1 für Optionen
Sollwertverringerung
Siehe P4.1 für Optionen
Aktiviert Steuerplatz 2
Siehe P4.1 für Optionen
Aktiviert Sollwert 2
Siehe P4.1 für Optionen
Aktiviert Sollwert 2
Siehe P4.1 für Optionen
Tabelle 8. Parameter Digitaleingänge.
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
2
Page 24
vacon • 21 Beschreibung der Parametergruppen
Wenn konfiguriert, aktiviert
low-Signal Stopp mit spezifischer Rampe. Siehe P4.1 für
P4.17 Schnellstopp Öffner 0 6* 0 1888
P4.18
Aktivierung
Anhaltemodus
0 2 0 1895
Optionen.
HINWEIS: Schnell-Stoppfunktion muss mit P4.18=1 aktiviert
werden
0: normal
1: Schnell-Stopp
2: genauer Stopp (von Startsignal 1 oder 2)
Tabelle 8. Parameter Digitaleingänge.
(*)Der Höchstwert ist höher, wenn eine Optionskarte mit Digitaleingängen installiert ist
HINWEIS!
(siehe Kapitel 1.3 und Tabelle 9 für weitere Details). Der Parameter wird automatisch
zurückgesetzt, wenn der Wert über der aktuellen Grenze liegt.
HINWEIS!
Die Anzeige der Gruppe hängt von P1.16 ab.
Installierte
Optionskarte
Höchstwert für Auswahl
des Digitaleingangs
Verfügbare Digitaleingänge
OPTB1 12 DIN7, DIN8, DIN9, DIN10, DIN11, DIN12
OPTB9 7 DIN7
OPTBK 10 DIN7, DIN8, DIN9, DIN10
Tabelle 9. Höchstwert für Auswahl des Digitaleingangs je nach installierter Optionskarte.
2
Page 25
Beschreibung der Parametergruppen vacon • 22
2.3.5 Gruppe Digitalausgänge: Menü PAR G5
Code Parameter Min. Max. Einheit
P5.1 Inhalt Relaisausgang 1 0 14 2 313
P5.2 Inhalt Relaisausgang 2 0 14 3 314 Siehe P5.1
P5.3 Inhalt Digitalausgang 0 14 1 312 Siehe P5.1
P5.4
P5.5
P5.6
P5.7
P5.8
P5.9 Erw. EO1 Funktion 0 14 0 1826
P5.10 Erw. EO2 Funktion 0 14 0 1827 Siehe P5.9
P5.11 Erw. EO3 Funktion 0 14 0 1828 Siehe P5.9
P5.12 Erw. EO4 Funktion 0 14 0 1872 Siehe P5.9
Relaisausgang 1 EIN
Verzögerung
Relaisausgang 1 AUS
Verzögerung
Relaisausgang 1
invertieren
Relaisausgang 2 EIN
Verzögerung
Relaisausgang 2 AUS
Verzögerung
0,00 320,00 s 0,00 458 EIN Verzögerung für Relais
0,00 320,00 s 0,00 459 AUS Verzögerung für Relais
0 1 0 1804
0,00 320,00 s 0,00 460 Siehe P5.4
0,00 320,00 s 0,00 461 Siehe P5.5
Werk sein-
stellung
ID Beschreibung
Funktionsauswahl für RO1:
0 = Nicht benutzt
1 = Bereit
2 = Betrieb
3 = Allgemeiner Fehler
4 = Allgemeiner Fehler invertiert
5 = Warnung
6 = Richtung invertiert
7 = Auf Drehzahl
8 = Ausgangsfrequenzüberw.
9 = Ausgangsstromüberw.
10 = Überw. Analogeingang
11 = Feldbus 1
12 = Feldbus 2
13 = Externe Bremse
14 = Temperaturüberwachung (OPTBH)
0 = nicht invertiert
1 = invertiert
Der Parameter wird angezeigt wenn eine E/A-Erweiterungsplatine installiert ist.
Siehe P5.1 für Optionen
Tabelle 10. Parameter Digitalausgänge.
Die Anzeige der Gruppe hängt von P1.16 ab.
P5.9 wird angezeigt, wenn OPTB2, OPTB5, OPTB9 oder OPTBF installiert ist (erstes
Relais EO1).
P5.10 wird angezeigt, wenn OPTB2 oder OPTB5 installiert ist (zweites Relais EO2).
P5.11 wird angezeigt, wenn oder OPTB5 installiert ist (drittes Relais EO3).
HINWEIS!
P5.9, P5.10, P5.11 werden auch angezeigt, wenn OPTB1 installiert ist und einige Ausgänge mit P2.24 (Digitalausgänge EO1, EO2, EO3) eingestellt wurden.
P5.12 wird anzeigt, wenn OPTBF installiert ist (Digitalausgang E04).
Auswahl 14 als Ausgangsfunktion erfordert die Installation der OPTBH Platine.
P5.9, P5.10, P5.11, P5.12 werden auch angezeigt, wenn OPTBK installiert ist (EO1,2,3,4
entsprechen den ASi-Eingängen 1,2,3,4).
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
2
Page 26
vacon • 23 Beschreibung der Parametergruppen
2.3.6 Gruppe Analogausgänge: Menü PAR G6
Code Parameter Min. Max. Einheit
P6.1
P6.2
P6.3
P6.4
P6.5 Erw. AO1 Funktion 0 8 2 1844 Siehe P5.1
P6.6 Erw. AO1 Minimum 0 1 0 1845
P6.7
P6.8 Erw. AO1 Filterzeit 0,00 10,00 s 0,10 1847
P6.9 Erw. AO2 Funktion 0 8 2 1848 Siehe P6.1
P6.10 Erw. AO2 Minimum 0 1 0 1849
P6.11
P6.12 Erw. AO2 Filterzeit 0,00 10,00 s 0,10 1851
Analogausgang
Funktion
Analogausgang
Minimum
Analogaus-
gangsskalierung
Analogausgang
Filterzeit
Erw. AO1
Ausgangsskalierung
Erw. AO2
Ausgangsskalierung
0 8 2 307
0 1 0 310
0,0 1000,0 % 100,0 311 Skalierfaktor
0,00 10,00 s 0,10 308
0,0 1000,0 % 100,0 1846 Skalierfaktor
0,0 1000,0 % 100,0 1850 Skalierfaktor
Werksein
stellung
ID Beschreibung
0 = Nicht benutzt (fest 100%)
1 = Frequ. Sollwert (0-fmax)
2 = Ausgangsfrequ. (0 -fmax)
3 = Motordrehzahl (0 - max
Drehzahl)
4 = Ausgangsstrom (0-I
5 = Motordrehmoment (0-T
)
tor
6 = Motorleistung (0-P
7 = PID-Ausgang (0-100%)
8 = Feldbus(0-10000)
0 = 0V
1 = 2V
Filterzeit des analogen Ausgangssignals.
0 = Keine Filterung
0 = 0 mA
1 = 4 mA
Filterzeit des analogen Ausgangssignals.
0 = Keine Filterung
0 = 0 mA
1 = 4 mA
Filterzeit des analogen Ausgangssignals.
0 = Keine Filterung
nMotor
nMo-
nMotor
)
)
2
HINWEIS!
Tabelle 11. Parameter Analogausgänge.
Die Anzeige der Gruppe hängt von P1.16 ab.
Die Parameter P6.5 - P6.18 werden nur angezeigt, wenn die Erweiterungsplatine OPTB4
oder OPTBF installiert ist.
Die Parameter P6.9 - P6.12 werden nur angezeigt, wenn die Erweiterungsplatine OPTB4
installiert ist.
Page 27
Beschreibung der Parametergruppen vacon • 24
2.3.7 Gruppenüberwachungen: Menü PAR G7
Code Parameter Min. Max. Einheit
P7.1
P7.2
P7.3
P7.4 Überw.sig. Analogein. 0 2 0 356
P7.5
P7.6
P7.7
P7.8
P7.9
P7.10 Ausw Prozessquelle 0 5 2 1036
P7.11
P7.12 Max Wert Prozess 0,0 3276,7 100,0 1034
Frequenz-
überwachung 1
Frequenzüber-
wachungswert
Stromüberwachungs-
wert
Überw. EIN-Pegel
Analogein
Überw. AUS-Pegel
Analogein
Öffnungsfrequenz
externe Bremse
Öffnungsstrom externe
Bremse
Schließfrequenz externe
Bremse
Dezim.stellen
Prozesswert
0 2 0 315
0,00 P1.2 Hz 0,00 316
0,00
0,00 100,00 % 80,00 357 EIN-Schwelle AI-Überwachung
0,00 100,00 % 40,00 358 AUS-Schwelle AI-Überwachung
0,00 10,00 Hz 2,00 1808
0,0 100,0 % 30,0 1810
0,00 10,00 Hz 2,00 1809
0 3 1 1035 Dezimalstellen auf Display
2 x I
H
Werk sein
stellung
A 0,00 1811 Stromüberwachungsschwelle
ID Beschreibung
0 = Nicht benutzt
1 = Untere Grenze
2 = Obere Grenze
Ausgangsfrequenzüberwachungsschwelle
0 = AI1
1 = AI2
2 AIE (bei Option OPTB4)
Frequenzschwelle für Bremsenöffnung
Stromschwelle für Bremsenöffnung
Frequenzschwelle für Bremsenschließung (Start = 0)
Auswahl der Variablen proportional zum Prozess:
0 = PID-Istwert
1 = Ausgangsfrequenz
2 = Motordrehzahl
3 = Motordrehmoment
4 = Motorleistung
5 = Motorstrom
Max. Wert Prozessanzeige
(hängt von P7.11 ab: mit null
Dezimalstellen ist der max Wert
32767; mit 1 Dezimalstelle ist
der max Wert 3276.7)
Tabelle 12. Überwachungsparameter.
HINWEIS!
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
Die Anzeige der Gruppe hängt von P1.16 ab.
2
Page 28

vacon • 25 Beschreibung der Parametergruppen
2.3.8 Gruppe Motorsteuerung: Menü PAR G8
A
Werk sein-
stellung
I
H
ID Beschreibung
507
Code Parameter Min. Max. Einheit
P8.1 Motorsteuermodus (*) 0 1 0 600
P8.2 Feldschwächungspunkt 30,00 320,00 Hz 50,00 602
P8.3
P8.4
P8.5
P8.6
P8.7
P8.8 Schaltfrequenz 1,5 16,0 kHz 6,0 601
P8.9 Bremschopper 0 2 0 504
P8.10
P8.11 DC-Bremsstrom
P8.12 DC-Bremszeit bei Stopp 0,00 600,00 s 0,00 508
P8.13
P8.14 DC-Bremszeit bei Start 0,00 600,00 s 0,00 516
P8.15
Spannung am Feldschwächungspunkt
Auswahl U/f-
Kennlinie(*)
U/f-Kennlinie Mittel-
punkt-frequenz(*)
U/f-Kennlinie Mittel-
punktspannung(*)
Ausgangsspannung bei
Nullfrequenz (*)
Schwelle
Bremschopper
Frequenz zum Starten
der DC-Bremse bei
Rampenstopp
Spannungsabfall
Motorstator(*)
10,00 200,00 % 100,00 603
0 2 0 108
0,00 P8.2 Hz 50,00 604
0,00 P8.3 % 100,00 605
0,00 40,00 % 0,00 606
600 900 V 765 1807
0,3 x I
0,10 10,00 Hz 1,50 515
0,00 100,00 % 0,00 662
2 x I
H
H
0 = Frequenzsteuerung
1 = Drehzahlsteuerung
Frequenz Feldschwächungspunkt
Spannung am FWP als % der
Motornennspannung
0 = linear
1 = quadratisch
2 = programmierbar
Mittelpunktfrequenz für programmierbare U/f-Kurve
Mittelpunktspannung für
programmierbare U/f-Kurve
Spannung bei 0,00 Hz als %
der Motornennspannung
Das Motorgeräusch kann mit
einer hohen Schaltfrequenz
auf ein Minimum reduziert
werden. Eine Steigerung der
Schaltfrequenz verringert
die Kapazität des Frequenzumrichters. Es wird empfohlen, eine niedrigere
Frequenz zu benutzen, wenn
die Bremswiderstandsleitungen lang sind, um kapazitive Ströme im Kabel gering
zu halten.
0 = Deaktiviert
1 = Freigegeben in RUN
2 = Freigegeben in BEREIT
DC-Zwischenkreisspannung, um Chopper zu
starten.
Bestimmt den während der
DC-Bremsung an den Motor
übertragenen Strom.
0 = Deaktiviert
Legt fest, ob DC-Aufsch. EIN
oder AUS ist, und bestimmt
die Zeit der DC-Aufschaltung
bei Motor-Stopp.
Die Ausgangsfrequenz, bei
der die DC-Bremsung
angewandt wird.
Dieser Parameter bestimmt
die Dauer, für die der Motor
mit DC-Strom versorgt wird,
bevor die Beschleunigung
beginnt.
Spannungsabfall in den
Motorwindungen in % der
Motornennspannung
2
Tabelle 13. Parameter Motorsteuerung.
Page 29

Beschreibung der Parametergruppen vacon • 26
0 = Nicht aktiv
P8.16 Motor-Einmessung 0 1 0 631
P8.17
P8.18
P8.19
P8.20 Motortyp 0 1 0 650
Überspannungsregler
deaktivieren
Unterspannungsregler
deaktivieren
Schaltfrequenzregler
deaktivieren
0 1 0 1853
0 1 0 1854
0 1 0 1855
1 = Stillstands-Einmessung
(zur Aktivierung RUN-Befehl
innerhalb von 20s)
0 = Freigegeben
1 = Deaktiviert
0 = Freigegeben
1 = Deaktiviert
0 = Freigegeben
1 = Deaktiviert
0: Induktionsmotor
1: Dauermagnetmotor (PMMotor)
Tabelle 13. Parameter Motorsteuerung.
HINWEIS!
HINWEIS!
(*) Der Parameter wird automatisch von der Motor-Einmessung eingestellt.
Die Anzeige der Gruppe hängt von P1.16 ab.
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
2
Page 30

vacon • 27 Beschreibung der Parametergruppen
2.3.9 Gruppe Schutzfunktionen: Menü PAR G9
Parameter des Motorthermoschutzes (P9.11 bis P9.14 und P9.21P9.22)
Der Motorthermoschutz schützt den Motor vor Überhitzung. Der Frequenzumrichter kann den
Motor mit höherem Strom als dem Nennstrom versorgen. Wenn die Last diesen hohen Strom
erfordert, besteht die Gefahr, dass der Motor überhitzt wird. Dies ist besonders bei niedrigen
Frequenzen der Fall. Bei niedrigen Frequenzen sind Kühleffekt des Motors und Kapazität verringert. Wenn der Motor mit einem Fremdlüfter ausgerüstet ist, ist die Lastverringerung bei
niedrigen Drehzahlen gering.
Der Motorthermoschutz basiert auf einem berechneten Modell und nutzt den Ausgangsstrom
des Frequenzumrichters zur Bestimmung der Motorlast.
Der Motorthermoschutz kann mit Parametern angepasst werden. Der thermische Strom I
gibt den Laststrom an, über dem der Motor überlastet ist. Diese Stromgrenze ist eine Funktion
der Ausgangsfrequenz.
Die Temperaturstufe des Motors kann auf dem Display der Steuertafel überwacht werden.
Siehe Kapitel 1.
Wenn lange Motorleitungen (max. 100m) zusammen mit kleinen Frequenzumrichtern (≤1,5 kW) benutzt werden, kann der vom Frequenzumrichter gemessene
Motorstrom aufgrund von kapazitiven Strömen in den Motorleitungen viel höher als
der tatsächliche Motorstrom sein. Dies muss bei der Einstellung der Funktionen
des Motorthermoschutzes beachtet werden.
Das berechnete Modell schützt den Motor nicht, wenn der Luftstrom zum Motor
aufgrund eines verstopften Lufteinlassgitters verringert ist. Das Modell beginnt bei
Null, wenn die Stromzufuhr zur Steuerplatine unterbrochen wird.
T
Parameter des Motorblockierschutzes (P9.4 bis P9.6)
Der Motorblockierschutz schützt den Motor vor kurzen Überlastsituationen, wie zum Beispiel
der durch eine blockierte Welle verursachten Überlast. Die Reaktionszeit des Blockierschutzes kann kürzer als die des Motorthermoschutzes eingestellt werden. Der Blockierzustand
wird mit zwei Parametern, P9.5 (
Wenn der Strom so hoch ist wie P1.5 (Stromgrenze) und der Strombegrenzer die Ausgangsfrequenz für die Zeit P9.5 unter P9.6 verringert hat, dann ist die eingestellte Grenze des
Blockierzustands wahr. Es gibt keine richtige Angabe der Wellendrehung. Der Blockierschutz
ist eine Art von Überstromschutz.
Wenn lange Motorleitungen (max. 100m) zusammen mit kleinen Frequenzumrichtern (≤1,5 kW) benutzt werden, kann der vom Frequenzumrichter gemessene
Motorstrom aufgrund von kapazitiven Strömen in den Motorleitungen viel höher als
der tatsächliche Motorstrom sein. Dies muss bei der Einstellung der Funktionen
des Motorthermoschutzes beachtet werden.
Parameter des Unterlastschutzes (P9.7 bis P9.10)
Zweck des Motorunterlastschutzes ist es, sicherzustellen, dass Last am Motor vorhanden ist,
wenn der Frequenzumrichter läuft. Wenn der Motor seine Last verliert, könnte ein Problem im
Prozess vorhanden sein, z.B. ein gerissener Riemen oder eine trockene Pumpe.
Der Motorunterlastschutz kann durch die Einstellung der Unterlastkurve mit den Parametern
P9.8 (Unterlastschutz: Last Feldschwächungspunkt) und P9.9 (
quenz-Last
zwischen der Nullfrequenz und dem Feldschwächungspunkt. Der Schutz ist unter 5Hz nicht
aktiv (der Unterlastzeitzähler ist angehalten).
) angepasst werden (siehe unten). Die Unterlastkurve ist eine quadratische Kurve
Blockierzeit) und P9.6 (Blockierfrequenzgrenze) festgelegt.
Unterlastschutz: Nullfre-
2
Page 31

Beschreibung der Parametergruppen vacon • 28
Die Drehmomentwerte für die Einstellung der Unterlastkurve werden in Prozentzahlen eingestellt, die sich auf das Nenndrehmoment des Motors beziehen. Die Kenndaten des Motors, der
Parameter Motornennstrom und der Nennstrom des Frequenzumrichters I
werden benutzt,
L
um das Skalierverhältnis für den internen Drehmomentwert zu finden. Wenn ein anderer als
der Nennmotor mit dem Frequenzumrichter benutzt wird, verringert sich die Genauigkeit der
Drehmomentberechnung.
Wenn lange Motorleitungen (max. 100m) zusammen mit kleinen Frequenzumrichtern (≤1,5 kW) benutzt werden, kann der vom Frequenzumrichter gemessene
Motorstrom aufgrund von kapazitiven Strömen in den Motorleitungen viel höher als
der tatsächliche Motorstrom sein. Dies muss bei der Einstellung der Funktionen
des Motorthermoschutzes beachtet werden.
Code Parameter Min. Max. Einheit
Fehler Sollwertsignal
P9.1
P9.2 4mA Fehlererkennungszeit 0,0 10,0 s 0,5 1430 Zeitgrenze
P9.3 Erdschlussschutz 0 2 2 703
P9.4 Motorblockierschutz 0 2 1 709 Siehe P9.3
P9.5 Blockierzeitgrenze 0,0 300,0 s 5,0 711
P9.6 Blockierfrequenzgrenze 0,10 320,00 Hz 15,00 712
P9.7 Unterlastschutz 0 2 0 713 Siehe P9.3
Unterlast Lastkennlinie
P9.8
Unterlast Lastkennlinie
P9.9
P9.10 Unterlast Zeitgrenze 1,0 300,0 s 20,0 716
P9.11
P9.12
P9.13
4mA
(< 4mA)
bei Nennfrequenz
bei Nullfreq
Thermoschutz
des Motors
Motorumgebungs-
temperatur
Motorkühlfaktor bei
Nulldrehzahl
0 4 1 700
10,0 150,0 % 50,0 714
5,0 150,0 % 10,0 715
0 2 2 704 Siehe P9.3
-20 100 °C 40 705 Umgebungstemperatur in °C
0,0 150,0 % 40,0 706
Werksein-
stellung
ID Beschreibung
0 = Keine Reaktion
1 = Warnung
2 = Fehler
3 = Warnung, wenn Start aktiv
4 = Fehler, wenn Start aktiv
0 = Keine Reaktion
1 = Warnung
2 = Fehler
Das ist die maximal zulässige
Zeit für den Blockierzustand.
Damit ein Blockierzustand auftritt, muss die Ausgangsfrequenz
eine bestimmte Zeit lang unter
dieser Grenze geblieben sein.
Dieser Parameter gibt den
Wert für den zulässige
Mindestdrehmoment, wenn die
Ausgangsfrequenz über dem
Feldschwächungspunkt liegt.
Dieser Parameter gibt den Wert
für das zulässige Mindestdrehmoment mit Nullfrequenz an.
Dies ist die maximal zulässige
Zeit für das Vorhandensein
eines Unterlastzustands.
Bestimmt den Kühlfaktor bei
Nulldrehzahl im Verhältnis
zum Punkt, an dem der Motor
mit Nenndrehzahl ohne
externe Kühlung läuft.
Tabelle 14. Einstellungen der Schutzfunktionen.
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
2
Page 32

vacon • 29 Beschreibung der Parametergruppen
Die Zeitkonstante ist die Zeit,
P9.14
P9.15
P9.16 Thermistorfehler 0 2 2 732
P9.17
P9.18
P9.19
P9.20
P9.21
P9.22
P9.24 Ausgangphasenfehler 0 2 2 702 Siehe P9.3
Zeitkonstante
Motortemperatur
Fehler Ansprechzeit
Feldbuskommunikation
Parameter-
Schreibschutz
Ansprechen auf STO
deaktivieren
Ansprechen auf
Eingangphasenfehler
Eingangphasenfehler
Welligkeitsobergrenze
Initialisierung
Motortemperatur
Motortemperatur
Anfangswert
1 200 Min. 45 707
0 2 2 733 Siehe P9.3
0 1 0 1805
0 3 1 1876
0 2 2 1877 Siehe P9.3
0 75 0 1893
0 2 2 1891
0 100 % 33 1892
innerhalb derer die berechnete
Temperaturstufe 63% ihres
Endwerts erreicht hat.
Siehe P9.3
Nur verfügbar, wenn die
OPTB2 Optionskarte installiert
ist.
0 = Editieren freigegeben
1 = Editieren gesperrt
0 = Keine Reaktion
1 = Warnung
2 = Fehler, nicht im Fehlerspeicher gespeichert
3 = Fehler, im Fehlerspeicher
gespeichert
0 = interner Wert
1 = max. Empfindlichkeit ->
75 = min. Empfindlichkeit
0 = Initialisiert auf Mindestwert
1 = Initialisiert auf konstanten
Wert
2 = Initialisiert auf letzten Wert
Anfangswert(P9.21 = 1) oder
Faktor für letzten Wert (P9.21 =
2)
HINWEIS!
Tabelle 14. Einstellungen der Schutzfunktionen.
Die Anzeige der Gruppe hängt von P1.16 ab.
2
Page 33

Beschreibung der Parametergruppen vacon • 30
2.3.10 Gruppe automatische Rücksetzung: Menü PAR G10
Code Parameter Min. Max. Einheit
P10,1
P10.2 Wartezeit 0,10 10,0 s 0,50 717
P10.3 Versuchszeit 0,00 60,0 s 30,00 718
P10.4
P10.5 Startfunktion 0 2 0 719
P10.6
P10.7
P10.8
P10.9
P10.10
Automatische Fehler-
rücksetzung
Automatische Rückset-
zungsversuche
Automatische Rückset-
zung Unterspannungs-
fehler
Automatische Rückset-
zung Überspannungs-
fehler
Automatische Rückset-
zung Überstromfehler
Automatische Rückset-
zung Motorübertem-
peraturfehler
Automatische Rückset-
zung Unterlastfehler
0 1 0 731
1 10 3 759
0 1 1 720 Siehe P10.1
0 1 1 721 Siehe P10.1
0 1 1 722 Siehe P10.1
0 1 1 725 Siehe P10.1
0 1 1 738 Siehe P10.1
Werksein-
stellung
ID Beschreibung
0 = Deaktiviert
1 = Freigegeben
Wartezeit vor der Durchführung der ersten Rücksetzung.
Wenn die Versuchszeit
abgelaufen ist und der Fehler
immer noch aktiv ist, wird der
Frequenzumrichter in den
Fehlerzustand versetzt.
HINWEIS: Gesamtanzahl der
Versuche (unabhängig von der
Fehlerart)
Der Startmodus für (d.h. nach)
die automatische Rücksetzung wird mit diesem Parameter ausgewählt:
0 = Rampe
1 = Fliegender Start
2 = Gemäß P. P1.13
Tabelle 15. Einstellungen automatische Rücksetzung
HINWEIS!
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
Die Anzeige der Gruppe hängt von P1.16 ab.
2
Page 34

vacon • 31 Beschreibung der Parametergruppen
2.3.11 Gruppe Feldbus: Menü PAR G11
Code Parameter Min. Max. Einheit
P11.1
P11.2
P11.3
P11.4
P11.5
P11.6
P11.7
P11.8
P11.9
P11.10
P11.11
P11.12
Auswahl
Prozessdatenaus. 1
Auswahl
Prozessdatenaus. 2
Auswahl
Prozessdatenaus. 3
Auswahl
Prozessdatenaus. 4
Auswahl
Prozessdatenaus. 5
Auswahl
Prozessdatenaus. 6
Auswahl
Prozessdatenaus. 7
Auswahl
Prozessdatenaus. 8
Ausw. Aux-Steuerwort
FB
FB PID-Sollwert
Auswahl
FB PID-Istwert
Auswahl
FB Auswahl Analogaus-
gang Steuerung
0 16 0 852
0 16 1 853
0 16 2 854
0 16 4 855
0 16 5 856
0 16 3 857
0 16 6 858
0 16 7 859
0 5 0 1821
0 5 1 1822
0 5 2 1823
0 5 3 1824
Werk sein-
stellung
ID Beschreibung
Auf PD1 gemappte Variable:
0 = Ausgangsfrequenz
1 = Motordrehzahl
2 = Motorstrom
3 = Motorspannung
4 = Motordrehmoment
5 = Motorleistung
6 = DC-Zwischenkreisspannung
7 = Aktiver Fehlercode
8 = Analog AI1
9 = Analog AI2
10 = Status Digitaleingänge
11 = PID-Istwert
12 = PID-Sollwert
13 = Analog AI3
14 = Temperatur 1
15 = Temperatur 2
16 = Temperatur 3
Auf PD2 gemappte Variable.
Siehe P11.1
Auf PD3 gemappte Variable.
Siehe P11.1
Auf PD4 gemappte Variable.
Siehe P11.1
Auf PD5 gemappte Variable.
Siehe P11.1
Auf PD6 gemappte Variable.
Siehe P11.1
Auf PD7 gemappte Variable.
Siehe P11.1
Auf PD8 gemappte Variable.
Siehe P11.1
PDI für Aux-Steuerwort
0 = Nicht benutzt
1 = PDI1
2 = PDI2
3 = PDI3
4 = PDI4
5 = PDI5
PDI für PID-Sollwert
Siehe P11.9
PDI für PID-Istwert
Siehe P11.9
PDI für CTRL Analogausg.
Siehe P11.9
2
HINWEIS!
Tabelle 16. Feldbusdatenmapping.
Die Anzeige der Gruppe hängt von P1.16 ab.
Für die Auswahl von 13 muß die OPT-B4-Karte installiert sein.
Für die Auswahl von 14-16 muß die OPT-BH-Karte installiert sein.
Page 35

Beschreibung der Parametergruppen vacon • 32
2.3.12 Gruppe PID-Regler: Menü PAR G12
Code Parameter Min. Max. Einheit
P12.1 Sollwert 0 3 0 332
P12.2 PID-Sollwert 1 0,0 100,0 % 50,0 167 Fester Sollwert 1
P12.3 PID-Sollwert 2 0,0 100,0 % 50,0 168 Fester Sollwert 2
P12.4 Istwert 0 4 0 334
P12.5 Istwert-Minimum 0,0 50,0 % 0,0 336 Wert bei Mindestsignal
P12.6 Istwert-Maximum 10,0 300,0 % 100,0 337 Wert bei Höchstsignal
P12.7 PID-Regler Verstärkung 0,0 1000,0 % 100,0 118
P12.8 PID-Regler Nachstellzeit 0,00 320,00 s 10,00 119
P12.9 PID-Regler Vorhaltzeit 0,00 10,00 s 0,00 132
P12.10 Regelumkehr 0 1 0 340
P12.11 Grenze PID-Fehler 0,0 100,0 % 100,0 1812 Grenze PID-Fehler
P12.12 Sleepfrequenz 0,00 P1.2 Hz 0,00 1016
P12.13 Sleepzeitverzögerung 0 3600 s 30 1017
P12.14 Wake-Up-Grenze 0,0 100,0 % 5,0 1018
P12.15 Steigerung Sleepsollwert 0,0 50,0 % 10,0 1815 Bezogen auf Sollwert
P12.16
P12.17 Max. Verlust Sleep 0,0 50,0 % 5,0 1817 Bezogen auf Istwert nach Steigerung
P12.18 Prüfzeit Verlust Sleep 1 300 s 30 1818 Nach Steigerungszeit P12.16
Steigerungszeit
Sleepmodus
0 60 s 10 1816 Steigerungszeit nach P12.13
Werksein
stellung
ID Beschreibung
0 = PID-Sollwert 1/2
1 = AI1
2 = AI2
3 = Feldbus
0 = AI2
1 = AI1
2 = Feldbus
3 = AI1- AI2
4 = Temperatur (OPTBH)
Wenn der Parameterwert auf 100%
eingestellt ist, führt eine Änderung
von 10% des Fehlerwerts zur
Änderung des Reglerausgangs um
10%.
Wenn dieser Parameter auf 1,00
Sekunden eingestellt ist, führt eine
Änderung von 10% des Fehlerwerts zur Änderung des
Reglerausgangs um 10,00%/s.
Wenn dieser Parameter auf 1,00
Sekunden eingestellt ist, führt eine
Änderung von 10 % des Fehlerwerts während 1.00 s zur
Änderung des Reglerausgangs um
10,00%.
0 = Normal (Istwert < Sollwert ->
Erhöht PID-Ausgang)
1 = Invertiert (Istwert < Sollwert ->
Verringert PID-Ausgang
Der Frequenzumrichter geht in
den Sleepmodus, wenn die Ausgangsfrequenz für eine längere
Zeit, als jene, die durch den
Parameter P12.13 festgelegt
wurde, unter dieser Grenze bleibt.
Die Mindestzeit, für die die Frequenz
unter dem Sleeppegel bleiben muss,
bevor der Frequenzumrichter
angehalten wird.
Bestimmt den Pegel für den PIDIstwert Wake-Up.
)
Tabelle 17. Parameter PID-Regler.
HINWEIS!
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
Diese Gruppe wird nicht angezeigt, wenn der PID-Ausgang nicht als Frequenzsollwert
benutzt wird.
2
Page 36

vacon • 33 Beschreibung der Parametergruppen
2.3.13 Gruppentemperaturmessung: Menü PAR G13
°C
°K
°C
°K
°C
°K
°C
°K
°C
°K
Werk sein-
stellung
80,0 1867 Schwelle für Überwachung
100,0 1866
2,0 1868 Hysterese für Statusänderung
0,0 1870 Temperatur für min Soll/Ist
100,0 1871 Temperatur für max Soll/Ist
ID Beschreibung
Code Parameter Min. Max. Einheit
P13.1 Temperatureinheit 0 1 0 1863
P13.2
P13.3 Überwachungsmodus 0 2 1 1864
P13.4 Fehlermodus 0 2 0 1865
P13.5 Überwachungspegel
P13.6 Fehlerpegel
P13.7 Hysterese Überw/Fehler 0,0 50,0
P13.8 Ausw Sensor Soll/Ist 0 6 0 1869
P13.9
P13.10
Ausw Sensor Überw/
Fehler
Min. Soll/Ist
Tem pe ratur
Max. Soll/Ist
Tem pe ratur
0 6 0 1873
-30,0
223,2
-30,0
223,2
-30,0
223,2
-30,0
223,2
200,0
473,2
200,0
473,2
200,0
473,2
200,0
473,2
0 = °C
1 = °K
0= T1
1= T2
2= T1 + T2
3= T3
4= T3 + T1
5= T3 + T2
6= T3 + T2 + T1
0: Nicht benutzt
1: oberhalb der Schwelle
2: unterhalb der Schwelle
0: Nicht benutzt
1: oberhalb der Schwelle
2: unterhalb der Schwelle
Fehler-Schwellenwert (F56
Fehlercode)
0= T1
1= T2
2= T3
3= max(T1,T2)
4= min(T1,T2)
5= max(T1, T2, T3)
6= min(T1, T2, T3)
HINWEIS!
Tabelle 18. Temperaturmessungsparameter.
Diese Gruppe wird nicht angezeigt, wenn die OPTBH Platine nicht installiert ist.
2
Page 37

Beschreibung der Parametergruppen vacon • 34
2.4 Systemparameter, Fehler und Fehlerspeicher: Menü SYS/FLT
Code Parameter Min. Max. Einheit
V1.1 API System SW ID 2314
V1.2 API System SW Version 835
V1.3 Power SW ID 2315
V1.4 Power SW Version 834
V1.5 ID-Anwendung 837
V1.6 Anwendungsrevision 838
V1.7 Systemlast 839
Wenn keine Feldbusplatine oder keine OPTBH-Platine installiert wurde, werden folgende Werte angezeigt:
V2.1 Kommunikationsstatus 808
V2.9
P2.2 Feldbusprotokoll 0 1 0 809
P2.3 Slave-Adresse 1 255 1 810
P2.4 Baudrate 0 8 5 811
P2.6 Paritätstyp 0 2 0 813
P2.7 Kommunikations-Timeout 0 255 s 0 814
P2.8
Kommunikationsstatus
Letzter
Kommunikationsfehler
Rücksetzung
0 1 0 815
Werksein
stellung
ID Beschreibung
Status der Modbus
Kommunikation.
Format: xx.yyy
wobei xx = 0 - 64
(Anzahl Fehlermeldungen) yyy = 0 999 (Anzahl der positiven
Meldungen)
Der Fehlercode, der sich auf die
zuletzt gezählten Fehlermeldungen bezieht, wird angezeigt:
1 = Ungültige Funktion
2 = Ungültige Adresse
3 = Ungültiger Datumswert
4 = Ungültige Slavevorrichtung
816
53 = USART Empfangsfehler
(Paritätsfehler/ Baugrößenfehler/USART Pufferüberlauf)
90 = Empfangspufferüberlauf
100 = Baugröße CRC Fehler
101 = Ringpufferüberlauf
0 = Nicht benutzt
1 = Modbus benutzt
0 = 300
1 = 600
2 = 1200
3 = 2400
4 = 4800
5 = 9600
6 = 19200
7 = 38400
8 = 57800
Paritätstyp:
0 = Kein
1 = Gerade
2 = Ungerade
Stopp-Bit:
- 2-Bits mit Paritätstyp „Kein“;
- 1-Bit mit Paritätstyp „Gerade“
und „Ungerade“.
Tabelle 19. Systemparameter, Fehler und Fehlerspeicher:
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
2
Page 38

vacon • 35 Beschreibung der Parametergruppen
Wenn die OPTE6 (CANopen)-Optionskarte installiert wurde, werden folgende Werte angezeigt:
V2.1
P2.2 CANopen Betriebsmodus 1 2 1 14003
P2.3
P2.4 CANopen Baudrate 1 8 6 14002
Wenn die OPTE7 (DeviceNet)-Optionskarte installiert wurde, werden folgende Werte angezeigt:
V2.1
P2.2 Montageart Ausgang 20 111 21 14012
P2.3 MAC ID 0 63 63 14010
P2.4 Baudrate 1 3 1 14011
P2.5 Montageart Eingang 70 117 71 14013
V2.1
P2.2 Feldbusprotokoll 14023
P2.3 Aktives Protokoll 14024
P2.4 Aktive Baudrate 14025
P2.5 Telegrammtyp 14027
P2.6 Betriebsmodus 1 3 1 14021
P2.7 Slave-Adresse 2 126 126 14020
V2.1 Versionsnummer 0
V2.2 Kartenstatus 0 Status der OPTEC-Karte
P2.1 Service PIN 0 0 14217
P2.1 Sensor 1 Typ 0 6 0 14072
P2.2 Sensor 2 Typ 0 6 0 14073 Siehe P2.1
P2.3 Sensor 3 Typ 0 6 0 14073 Siehe P2.1
V3.1 MWh Zähler 827
V3.2 Einschalten Tageszähler 828
V3.3 Einschalten Stundenzähler 829
V3.4 RUN Tageszähler 840
V3.5 RUN Stundenzähler 841
V3.6 Fehlerzähler 842
V3.7
P4.2
DeviceNet Kommunikations-
Wenn die OPTE3 E5 (Profibus)-Optionskarte installiert wurde, werden folgende Werte angezeigt:
Wenn die OPTEC (EtherCAT)-Optionskarte installiert wurde, werden folgende Werte angezeigt:
Wenn die OPTC4 (Lonworks)-Optionskarte installiert wurde, werden folgende Werte angezeigt:
Steuertafelparameter Ein-
CANopen
Kommunikationsstatus
CANopen
Node ID
status
Profibus
Kommunikationsstatus
Wenn die OPTBH-Optionskarte installiert wurde, werden folgende Werte angezeigt:
stellstatus-Monitor
Rücksetzung auf
Werkseinstellung
1 127 1 14001
Weitere Informationen:
0 1 0 831
14004
14014
14022
Versionsnummer der SoftwarePlatine
Überträgt eine Service PinMeldung an das Netzwerk.
0 = Kein Sensor
1 = PT100
2 = PT1000
3 = Ni1000
4 = KTY84
5 = 2 x PT100
6 = 3 x PT100
Nicht angezeigt, wenn der PC
angeschlossen ist
1 = Werkseitige Einstellungen für
alle Parameter zurücksetzen
2
Tabelle 19. Systemparameter, Fehler und Fehlerspeicher:
Page 39

Beschreibung der Parametergruppen vacon • 36
P4.3 Passwort 0 9999 0000 832
P4.4
P4.5
P4.6
F5.x Aktives Fehlermenü 0 9
F6.x Fehlerspeichermenü 0 9
Zeit für Steuertafel-
Hintergrundbeleuchtung
Parameter in Steuertafel
speichern
Parameter von der Steuertafel
herunterladen
0 99 Min. 5 833
01 0
01 0
1= Alle Parameter auf Steuertafel laden
Nicht angezeigt, wenn der PC
angeschlossen ist.
Diese Funktion funktioniert nur
ordnungsgemäß an Netz angeschl. FU.
1= Alle Parameter auf die Steuertafel herunterladen
Nicht angezeigt, wenn der PC
angeschlossen ist.
Diese Funktion funktioniert nur
ordnungsgemäß an Netz angeschl. FU.
Nicht angezeigt, wenn der PC
angeschlossen ist
Nicht angezeigt, wenn der PC
angeschlossen ist
Tabelle 19. Systemparameter, Fehler und Fehlerspeicher:
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
2
Page 40

vacon • 37 Beschreibung der Parametergruppen
2
Page 41

Parameterbeschreibung vacon • 38
3. PARAMETERBESCHREIBUNG
Dank ihrer Benutzerfreundlichkeit und der einfachen Handhabung, erfordern die meisten
Parameter nur eine grundlegende Beschreibung, die in den Parametertabellen in Kapitel 2.2
geliefert wird.
In diesem Kapitel werden zusätzliche Informationen zu einigen Parametern für die erweiterten
Einstellungen gegeben. Sollten Sie die gewünschten Informationen nicht finden, wenden Sie
sich bitte an Ihren Händler.
3.1 Basisparameter
P1.1 MIN. FREQUENZ
Minimaler Frequenzsollwert.
HINWEIS: Wenn die Motorstromgrenze erreicht wird, kann die tatsächliche Ausgangsfrequenz
niedriger als der Parameter sein. Wenn dies nicht akzeptabel ist, sollte der Blockierschutz aktiviert werden.
P1.2 M
Maximaler Frequenzsollwert.
P1.3 B
Rampenzeit, bezogen auf die Variation von Nullfrequenz zu Maximalfrequenz.
Eine zweite Beschleunigungszeit ist unter P2.5 verfügbar.
P1.4 A
Rampenzeit, bezogen auf die Variation von Maximalfrequenz zu Null.
Eine zweite Abbremszeit ist unter P2.6 verfügbar.
P1.5 M
Dieser Parameter bestimmt den maximalen Motorstrom des Frequenzumrichters. Der
Parameterwert hängt von der Baugröße ab.
Wenn die Strombegrenzung aktiv ist, wird die Ausgangsfrequenz des Frequenzumrichters verringert.
HINWEIS: Es handelt sich nicht um eine Auslösegrenze für den Überstromschutz.
P1.11 S
Lauf- und Richtungssteuerung. Ein zweiter Steuerplatz kann mit P2.10 programmiert werden.
AX. FREQUENZ
ESCHLEUNIGUNGSZEIT 1
BBREMSZEIT 1
OTORSTROMGRENZE
TEUERPLATZ
0: E/A-Klemmen
1: Steuertafel
2: Feldbus
P1.12 F
Bestimmt die Quelle für den Frequenzsollwert. Eine zweite Sollwertquelle kann mit P2.10 programmiert werden.
0: Analogeingang AI1
1: Analogeingang AI2
2: PID-Regelung
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
REQUENZSOLLWERTQUELLE
3
Page 42

vacon • 39 Parameterbeschreibung
3: Motorpotentiometer
4: Steuertafel
5: Feldbus
6: Erweiterung AI1 (nur mit Platine OPTB4)
7: Temperatur (nur mit Platine OPTBH, siehe P13.8-10)
P1.13 S
0: Rampenstart
1: Fliegender Start
P1.14 S
Auswahl Funktion Beschreibung
0 Leerauslauf
1Rampe
HINWEIS: Ein Ausfall des Freigabesignals führt, falls konfiguriert, immer zu einem Leerauslauf.
P1.15 D
0: Nicht benutzt
TOPPFUNKTION
TARTFUNKTION
Der Motor hält durch seine eigene Trägheit an. Die Steuerung durch den Frequenzumrichter wird unterbrochen und
der Frequenzumrichterstrom wird Null, sobald der Stoppbefehl gegeben wird.
Nach dem Stoppbefehl wird die Motordrehzahl entsprechend den eingestellten Bremsrampenparametern bis
Null abgebremst.
REHMOMENTSTEIGERUNG
1: Automatische Spannungserhöhung (verbessert das Motordrehmoment).
P1.16 A
0: Nur Basisparameter (und PI-Regelung, falls Funktion benutzt wird)
1: Alle Parametergruppen werden angezeigt.
LLE PARAMETER ANZEIGEN
3.2 Erweiterte Einstellungen
P2.1 START-/STOPPLOGIK
Diese Logiken basieren auf den Startsignalen 1 und 2 (die mit P4.1 und P4.2 festgelegt werden). Normalerweise sind sie mit den Eingängen DIN1 und DIN2 verknüpft.
Die Werte 0...3 ermöglichen eine Steuerung des Starts und des Stopps des Frequenzumrichters mit einem mit den Digitaleingängen verbundenen Digitalsignal.
Die Optionen, die den Text 'Flanke' enthalten, werden benutzt, um die Möglichkeit eines
ungewollten Starts auszuschließen, zum Beispiel bei Netzanschluss, Wiederanschluss nach
einem Stromausfall, nach einer Fehlerrücksetzung, nachdem der Frequenzumrichter durch
Wegnahme des Freigabesignals angehalten wird, oder wenn der Steuerplatz auf E/A-Steuerung geändert wird. Der Start-/Stoppkontakt muss geöffnet werden, bevor der Motor ge-
startet werden kann.
Bei allen Beispielen wird zum Anhalten der Modus
Leerauslauf benutzt.
3
Page 43

Parameterbeschreibung vacon • 40
t
Output
frequency
FWD
REV
Start sgn 2
Start sgn 1
Run enable
Set frequency
Set frequency
0 Hz
Keypad Stop
button
Keypad Start
button
1 2 3 4 5 6 7 8 9 10 11 12 13
Auswahl Funktion Hinweis
Startsignal 1: Start Vorwärts
0
Startsignal 2: Start
Rückwärts
Die Funktionen erfolgen, wenn die Kontakte
geschlossen sind.
Abbildung 5. Start-/Stopplogik = 0.
Erklärungen:
Das Startsignal 1 wird aktiviert, was zum
1
Anstieg der Ausgangsfrequenz führt. Der Motor
dreht sich vorwärts.
Startsignal 2 wird aktiviert und lässt den Motor
2
auf 0 abfallen. Warnmeldung 55 erscheint auf
der Steuertafel.
Das Startsignal 1 wird deaktiviert, was zu einer
Richtungsänderung führt (von VORW auf
3
RÜCKW), da das Startsignal 2 immer noch aktiv
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
ist.
Das Startsignal 2 wird deaktiviert und die Fre-
4
quenzversorgung des Motors fällt auf 0 ab.
Das Startsignal 2 wird erneut aktiviert, was zur
5
Beschleunigung des Motors (RÜCKW) bis zur
eingestellten Frequenz führt.
Das Startsignal 2 wird deaktiviert und die Fre-
6
quenzversorgung des Motors fällt auf 0 ab.
Das Startsignal 1 wird aktiviert und der Motor
7
beschleunigt (VORW) bis zur eingestellten Frequenz.
Das Lauffreigabesignal ist auf logisch Null
gestellt und lässt die Frequenz auf 0 abfallen.
8
Das Lauffreigabesignal wird mit Parameter P4.7
konfiguriert.
Das Lauffreigabesignal wird auf WAHR eingestellt, was die Frequenz bis zur eingestellten
9
Frequenz ansteigen lässt, da das Startsignal 1
immer noch aktiv ist.
Die Stopptaste der Steuertafel wird gedrückt
und die Frequenzversorgung des Motors fällt
10
auf 0 ab. (Dieses Signal funktioniert nur, wenn
P2.22 Stopptaste Steuertafel = 1)
Ein Drücken der Starttaste auf der Steuertafel
11
hat keine Auswirkung auf den Frequenzumrichterstatus.
Die Stopptaste der Steuertafel wird erneut betä-
12
tigt, um den Frequenzumrichter anzuhalten.
Der Versuch, den Frequenzumrichter mit der
13
Starttaste zu starten, ist nicht erfolgreich, auch
wenn das Startsignal 1 nicht aktiv ist.
3
Page 44

vacon • 41 Parameterbeschreibung
t
Output
frequency
FWD
REV
Start sgn 2
Start sgn 1
Run enable
Set frequency
Set frequency
0 Hz
Keypad stop
button
Keypad start
button
1 2 3 4 6 7 8 9 10 11 12
5
Auswahl Funktion Hinweis
1
Startsignal 1: Start Vorwärts
Startsignal 2: Rückwärts
Die Funktionen erfolgen, wenn die Kontakte
geschlossen sind.
Erklärungen:
1
2
3
4
5
6
Abbildung 6. Start-/Stopplogik = 1.
Das Startsignal 1 wird aktiviert, was zum
Anstieg der Ausgangsfrequenz führt. Der Motor
dreht sich vorwärts.
Das Startsignal 2 wird aktiviert, wodurch ein
Richtungswechsel in Gang gesetzt wird (von
VORW auf RÜCKW).
Das Startsignal 2 wird deaktiviert, was einen
Richtungswechsel in Gang setzt (von RÜCKW auf
VORW), da das Startsignal 1 immer noch aktiv
ist.
Auch das Startsignal 1 wird deaktiviert und die
Frequenz fällt auf 0 ab.
Trotz der Aktivierung des Startsignals 2 startet
der Motor nicht, da das Startsignal 1 nicht aktiv
ist.
Das Startsignal 1 wird aktiviert, was zum
erneuten Anstieg der Ausgangsfrequenz führt.
Der Motor läuft vorwärts, da das Startsignal 2
nicht aktiv ist.
Das Lauffreigabesignal ist auf logisch Null
gestellt und lässt die Frequenz auf 0 abfallen.
7
Das Lauffreigabesignal wird mit Parameter P4.7
konfiguriert.
Das Lauffreigabesignal wird auf WAHR eingestellt, was die Frequenz bis zur eingestellten
8
Frequenz ansteigen lässt, da das Startsignal 1
immer noch aktiv ist.
Die Stopptaste der Steuertafel wird gedrückt
und die Frequenzversorgung des Motors fällt
9
auf 0 ab. (Dieses Signal funktioniert nur, wenn
P2.22 Stopptaste Steuertafel = Ja)
Ein Drücken der Starttaste auf der Steuertafel
10
hat keine Auswirkung auf den Frequenzumrichterstatus.
Der Frequenzumrichter wird wieder mit der
11
Stopptaste der Steuertafel angehalten.
Der Versuch, den Frequenzumrichter mit der
12
Starttaste zu starten, ist nicht erfolgreich, auch
wenn das Startsignal 1 nicht aktiv ist.
3
Page 45

Parameterbeschreibung vacon • 42
t
Output
frequency
FWD
REV
Start sgn 2
Start sgn 1
Run enable
Set frequency
Set frequency
0 Hz
Keypad stop
button
71 2 3 4 5 6 98
Auswahl Funktion Hinweis
2
Startsignal 1: Startimpuls
Startsignal 2: Stoppimpuls
Die Funktionen erfolgen an der positiven Flanke
des Startimpulses und der negativen Flanke des
Stoppimpulses.
Erklärungen:
1
2
3
4
5
Abbildung 7. Start-/Stopplogik = 2.
Das Startsignal 1 wird aktiviert, was zum
Anstieg der Ausgangsfrequenz führt. Der Motor
dreht sich vorwärts.
Das Startsignal 2 wird deaktiviert, was die Frequenz auf 0 abfallen lässt.
Das Startsignal 1 wird aktiviert, was zum
erneuten Anstieg der Ausgangsfrequenz führt.
Der Motor dreht sich vorwärts.
Das Lauffreigabesignal ist auf logisch Null
gestellt und lässt die Frequenz auf 0 abfallen.
Das Lauffreigabesignal wird mit Parameter P4.7
konfiguriert.
Der Startversuch mit dem Startsignal 1 ist nicht
erfolgreich, da das Lauffreigabesignal immer
noch logisch Null ist.
Das Startsignal 1 wird aktiviert und der Motor
beschleunigt (VORW) bis zur eingestellten Fre-
6
quenz, da das Lauffreigabesignal auf WAHR
eingestellt wurde.
Die Stopptaste der Steuertafel wird gedrückt
und die Frequenzversorgung des Motors fällt
7
auf 0 ab. (Dieses Signal funktioniert nur, wenn
P2.22 Stopptaste Steuertafel = Ja)
Das Startsignal 1 wird aktiviert, was zum
8
erneuten Anstieg der Ausgangsfrequenz führt.
Der Motor dreht sich vorwärts.
Das Startsignal 2 wird deaktiviert, was die Fre-
9
quenz auf 0 abfallen lässt.
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
3
Page 46

vacon • 43 Parameterbeschreibung
t
Output
frequency
FWD
REV
Start sgn 2
Start sgn 1
Run enable
Set frequency
Set frequency
0 Hz
Keypad stop
button
1 2 3 4 5 6 7 8 9 10 11 12
Auswahl Funktion Hinweis
Startsignal 1: Start Vorwärts
3
(Flanke)
Startsignal 2: Start
Rückwärts (Flanke)
Wird benutzt, um die Möglichkeit eines
ungewollten Starts auszuschließen. Der Start-/
Stoppkontakt muss geöffnet werden, bevor der
Motor wieder gestartet werden kann.
Erklärungen:
1
2
3
4
5
6
Abbildung 8. Start-/Stopplogik = 3.
Das Startsignal 1 wird aktiviert, was zum
Anstieg der Ausgangsfrequenz führt. Der Motor
dreht sich vorwärts.
Startsignal 2 wird aktiviert und lässt den Motor
auf 0 abfallen. Warnmeldung 55 erscheint auf
der Steuertafel.
Das Startsignal 1 wird deaktiviert, was zu einer
Richtungsänderung führt (von VORW auf
RÜCKW), da das Startsignal 2 immer noch aktiv
ist.
Das Startsignal 2 wird deaktiviert und die Frequenzversorgung des Motors fällt auf 0 ab.
Das Startsignal 2 wird erneut aktiviert, was zur
Beschleunigung des Motors (RÜCKW) bis zur
eingestellten Frequenz führt.
Das Startsignal 2 wird deaktiviert und die Frequenzversorgung des Motors fällt auf 0 ab.
Das Startsignal 1 wird aktiviert und der Motor
7
beschleunigt (VORW) bis zur eingestellten Frequenz.
Das Lauffreigabesignal ist auf logisch Null
gestellt und lässt die Frequenz auf 0 abfallen.
8
Das Lauffreigabesignal wird mit Parameter P4.7
konfiguriert.
Das Lauffreigabesignal ist auf WAHR eingestellt, was im Gegensatz zur Auswahl des Wer-
9
tes 0 für diesen Parameter keine Auswirkungen
hat, da für den Start eine positive Flanke notwendig ist, auch wenn das Startsignal 1 aktiv ist.
Die Stopptaste der Steuertafel wird gedrückt
und die Frequenzversorgung des Motors fällt
10
auf 0 ab. (Dieses Signal funktioniert nur, wenn
P2.22 Stopptaste Steuertafel = Ja)
Das Startsignal 1 wird geöffnet und wieder
11
geschlossen, wodurch der Motor in Gang
gesetzt wird.
Das Startsignal 1 wird deaktiviert und die Fre-
12
quenzversorgung des Motors fällt auf 0 ab.
3
Page 47

Parameterbeschreibung vacon • 44
P2.2 BIS
P2.8 FESTFREQUENZEN 1 BIS 7
Die Parameter für Festfrequenzen können zur Festlegung bestimmter Frequenzsollwerte im
Voraus benutzt werden. Der Sollwert wird dann durch die Aktivierung/Deaktivierung von mit
den Parametern P4.8, P4.9 und P4.10 verknüpften Digitaleingängen gewählt (Binärcode). Die
Werte der Festfrequenzen werden automatisch zwischen der Mindest- und der Höchstfrequenz eingeschränkt.
Erforderliche Maßnahme Aktivierte Frequenz
B2 B1 B0 Festfrequenz 1
B2 B1 B0 Festfrequenz 2
B2 B1 B0 Festfrequenz 3
B2 B1 B0 Festfrequenz 4
B2 B1 B0 Festfrequenz 5
B2 B1 B0 Festfrequenz 6
B2 B1 B0 Festfrequenz 7
Tabelle 20. Auswahl der Festfrequenzen; = Eingang aktiviert
P2.9 B
P2.10 A
Die Rampe 2 wird durch den mit Parameter P4.11 festgelegten Digitaleingang oder durch den
Feldbus aktiviert. Eine automatische Auswahl basierend auf der Ausgangsfrequenz ist
ebenfalls möglich.
P2.11 Ü
P2.12 Ü
Wenn P2.11 nicht gleich 0 ist, wird die Beschleunigungszeit 2 aktiviert, wenn die Ausgangsfrequenz höher als der Wert ist.
Wenn P2.12 nicht gleich 0 ist, wird die Abbremszeit 2 aktiviert, wenn die Ausgangsfrequenz höher als der Wert ist.
ESCHLEUNIGUNGSZEIT 2
BBREMSZEIT 2
BERGANGSFREQUENZ BESCHL1 ZU BESCHL2
BERGANGSFREQUENZ BREMS1 ZU BREMS2
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
3
Page 48

vacon • 45 Parameterbeschreibung
P1.3, P1.4
[Hz]
[t]
P2.13
P2.13
P2.13 S-FORM RAMPE 1
Wenn der Wert größer als Null ist, haben die Beschleunigungs- und die Bremsrampe eine SForm. Der Parameter ist die benötigte Zeit, um volle Beschl./Abbrems. zu erreichen.
Der Beginn und das Ende der Beschleunigungs- und Bremsrampen kann mit diesem Parameter geglättet werden. Wenn der Wert auf 0 eingestellt wird, entsteht eine lineare Rampe, was
zur sofortigen Reaktion der Beschleunigung und Abbremsung bei der Änderung des Sollwertsignals führt.
Wenn der Wert dieses Parameters auf 0,1…10 Sekunden eingestellt wird, wird eine s-förmige
Beschleunigung/Abbremsung erzeugt. Die Beschleunigungszeit wird mit den Parametern
P1.3 und P1.4 festgelegt.
Abbildung 9. Beschleunigung/Abbremsung (S-förmig).
Diese Parameter werden benutzt, um mechanischen Verschleiß und Stromspitzen bei der
Änderung des Sollwerts zu verringern.
P2.14 S
Alternative Lauf- und Richtungssteuerung. Aktiviert durch den mit P4.14 festgelegten
Digitaleingang.
0: E/A-Klemmen
1: Steuertafel
2: Feldbus
P2.15 F
Alternative Quelle für den Frequenzsollwert. Aktiviert durch den mit P4.15 festgelegten
Digitaleingang oder Feldbus.
0: Analogeingang AI1
1: Analogeingang AI2
2: PID-Regelung
3: Motorpotentiometer
TEUERPLATZ 2
REQUENZSOLLWERTQUELLE 2
3
Page 49

Parameterbeschreibung vacon • 46
4: Steuertafel
5: Feldbus
6: Erweiterung AI1 (nur mit Platine OPTB4)
7: Temperatur (nur mit Platine OPTBH, siehe P13.8-10)
P2.16 R
AMPENZEIT MOTORPOTENTIOMETER
Drehzahländerung Rampe.
P2.17 R
ÜCKSETZUNG MOTORPOT.
0: Keine Rücksetzung
1: Rücksetzung bei Stopp und Ausschalten
2: Rücksetzung bei Ausschalten
P2.18 A
USBLENDBEREICH 1 UNTERGRENZE
P2.19 AUSBLENDBEREICH 1 OBERGRENZE
P2.20 AUSBLENDBEREICH 2 UNTERGRENZE
P2.21 AUSBLENDBEREICH 2 OBERGRENZE
Es sind zwei Ausblendfrequenzbereich verfügbar, wenn bestimmte Frequenzen aufgrund
mechanischer Resonanz vermieden werden sollen.
P2.22 S
TOPPTASTE AKTIV
0: Nur im Steuertafel-Kontrollmodus aktiv
1: Immer aktiv
P2.23 S
TEUERTAFEL RICHTUNG
Effektiv, wenn gewählte Steuerplatz die Steuertafel ist
0: Vorwärts
1: Rückwärts
P2.24 OPTB1 D
IGITALEINGÄNGE
Dieser Parameter wird nur angezeigt, wenn die Platine OPTB1 installiert ist.
Die Anzahl der als Eingang benutzten Klemmen muss programmiert werden, damit der ma-
ximale Wert für Parameter der Gruppe Digitaleingänge entsprechend eingestellt wird.
Die Parameter für optionale Funktionen der Digitalausgänge werden angezeigt, wenn die An-
zahl der Eingänge unter 6 liegt.
P2.25 S
CHNELLSTOPP-ABBREMSZEIT
Spezifische Rampenzeit für Schnell-Stopp. Siehe Beschreibung unter P4.17 für Details über
die Funktion.
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
3
Page 50

vacon • 47 Parameterbeschreibung
P2.26 S-FORM RAMPE 2
Wenn der Wert größer als Null ist, haben die Beschleunigungs- und die Bremsrampe eine SForm. Der Parameter ist die benötigte Zeit, um volle Beschl./Abbrems. zu erreichen.
Der Beginn und das Ende der Beschleunigungs- und Bremsrampen kann mit diesem Parameter geglättet werden. Wenn der Wert auf 0 eingestellt wird, entsteht eine lineare Rampe, was
zur sofortigen Reaktion der Beschleunigung und Abbremsung bei der Änderung des Sollwertsignals führt.
Wenn der Wert dieses Parameters auf 0,1…10 Sekunden eingestellt wird, wird eine s-förmige
Beschleunigung/Abbremsung erzeugt. Die Beschleunigungszeit wird mit den Parametern
P2.9 und P2.10 festgelegt.
P2.27 R
Mit diesem Parameter kann die Bewegungsrichtung des Motors mithilfe der LINKEN und
RECHTEN Pfeiltaste im REF-Menü der Steuertafel geändert werden:
0: Zulässig
1: Gesperrt
ICHTUNGSÄNDERUNG ÜBER STEUERTAFEL
3
Page 51

Parameterbeschreibung vacon • 48
%
100%
63%
P3.2
t
Gefiltertes Signal
Ungefiltertes Signal
3.3 Analogeingänge
P3.1 AI1-SIGNALBEREICH
P3.5 AI2-SIGNALBEREICH
Bereich des elektrischen Signals.
0: 0-100%: 0…10V oder 0… 20mA
1: 20-100%: 2…10V oder 4… 20mA
P3.4 AI1-F
P3.8 AI2-FILTERZEIT
Zeitkonstante Tiefpassfilter zur Rauschdämpfung. Wenn dieser Parameter einen Wert über 0
erhält, ist die Funktion, die Störungen aus dem eingehenden Analogsignal filtert, aktiviert.
HINWEIS: Eine lange Filterzeit verlangsamt das Ansprechen auf die Regelungen!
ILTERZEIT
Abbildung 10. AI1 Signalfilterung.
P3.2 AI1 BENUTZERDEFINIERT MIN
P3.6 AI2 BENUTZERDEFINIERT MIN
Benutzerdefinierter Wert für Mindestsignal. Effektiv, wenn ungleich 0%
P3.3 AI1
BENUTZERDEFINIERT MAX
P3.7 AI2 BENUTZERDEFINIERT MAX
Benutzerdefinierter Wert für Höchstsignal. Effektiv, wenn ungleich 100%.
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
3
Page 52

vacon • 49 Parameterbeschreibung
0100-100 20050
Max Freq.
Min Freq.
Analogeingang AI [%]
Frequenzsollwert
Beispiel für Nutzung im benutzerdefinierten Bereich mit Analogeingang:
Abbildung 11.
Beschreibung von Abbildung 11.
Die Parameter Benutzerdefiniert min und Benutzerdefiniert konfigurieren den Eingangsbe-
reich für den Analogeingang, der den Frequenzsollwert betrifft.
Die blaue Linie zeigt ein Beispiel mit Benutzerdefiniert Min = -100% und Benutzerdefiniert Max
= 100%. Diese Einstellungen liefern einen Frequenzbereich zwischen (Maximale Frequenz Minimale Frequenz)/2 und Maximaler Frequenz. Bei einem minimalen analogen Signal liegt
der Frequenzwollwert bei 50% des eingestellten Frequenzbereichs (Max. Frequenz - Min. Frequenz)/2. Bei einem maximalen analogen Signal liegt der Frequenzsollwert bei einer Maximalen Frequenz.
Die grüne Linie zeigt die Standardeinstellungen der benutzerdefinierten Werte: Benutzerdefiniert Min =0% und Benutzerdefiniert Max = 100%. Diese Einstellungen liefern einen
Frequenzbereich zwischen Minimaler und Maximaler Frequenz. Bei einem minimalen analogen Signal liegt der Frequenzsollwert bei einer Minimalen Frequenz, während er bei einem
maximalen Signal bei einer Maximalen Frequenz liegt.
Die orangefarbene Linie zeigt ein Beispiel mit Benutzerdefiniert Min = 50% und Benutzerdefiniert Max = 100%. Diese Einstellungen liefern einen Frequenzbereich zwischen
Minimaler und Maximaler Frequenz. Der Frequenzsollwert ändert sich linear innerhalb des
Frequenzbereichs bei einem analogen Signal zwischen 50% und 100% seines Bereichs.
3
Page 53

Parameterbeschreibung vacon • 50
0100-100 20050
Max Freq.
Min Freq.
Analogeingang AI [%]
Frequenzsollwert
Abbildung 12.
Beschreibung von Abbildung 12.
Die grüne Linie zeigt ein Beispiel mit Benutzerdefiniert Min = 100% und Benutzerdefiniert Max
= -100%. Diese Einstellungen liefern einen Frequenzbereich zwischen Minimaler Frequenz
und (Maximale Frequenz - Minimale Frequenz)/2. Bei einem minimalen analogen Signal liegt
der Frequenzwollwert bei 50% des eingestellten Frequenzbereichs (Max. Frequenz - Min. Frequenz)/2 und mit einem maximalen Signal liegt der Frequenzsollwert bei einer Minimalen Frequenz.
Die blaue Linie zeigt die Umkehrung der Standardeinstellungen der benutzerdefinierten Werte: Benutzerdefiniert Min =100% und Benutzerdefiniert Max = 0%. Diese Einstellungen liefern
einen Frequenzbereich zwischen Minimaler und Maximaler Frequenz. Bei einem minimalen
analogen Signal liegt der Frequenzsollwert bei einer Maximalen Frequenz, während er bei
einem maximalen Signal bei einer Minimalen Frequenz liegt.
Die orangefarbene Linie zeigt ein Beispiel mit Benutzerdefiniert Min = -100% und Benutzerdefiniert Max = 0%. Diese Einstellungen liefern einen Frequenzbereich zwischen Minimaler
und Maximaler Frequenz. Der Frequenzsollwert liegt immer beim Minimalwert (minimale
Frequenz) innerhalb des Analogsignalbereichs.
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
3
Page 54

vacon • 51 Parameterbeschreibung
0100-100 20050
Max Freq.
Min Freq
Analogeingang AI [%]
Frequenzsollwert
Abbildung 13.
Beschreibung von Abbildung 13.
Die blaue Linie zeigt ein Beispiel mit Benutzerdefiniert Min = 0% und Benutzerdefiniert Max =
200%. Diese Einstellungen liefern einen Frequenzbereich zwischen Minimaler Frequenz und
(Maximale Frequenz - Minimale Frequenz)/2. Bei einem minimalen analogen Signal liegt der
Frequenzwollwert bei einem Mindestwerts des eingestellten Frequenzbereichs (Min. Frequenz), und mit einem maximalen analogen Signal liegt der Frequenzsollwert bei (Maximale
Frequenz - Minimale Frequenz)/2.
Die grüne Linie zeigt ein Beispiel mit Benutzerdefiniert Min = 100% und Benutzerdefiniert Max
= 200%. Diese Einstellung liefert einen Frequenzbereich stets bei Minimaler Frequenz. Der
Frequenzsollwert liegt innerhalb des gesamten Analogsignalbereichs bei einer minimalen
Frequenz.
Die orangefarbene Linie zeigt ein Beispiel mit Benutzerdefiniert Min = 0% und Benutzerdefiniert Max = 50%. Diese Einstellungen liefern einen Frequenzbereich zwischen
Minimaler und Maximaler Frequenz. Der Frequenzsollwert ändert sich linear innerhalb des
Frequenzbereichs bei einem analogen Signal zwischen 0% und 50% seines Bereichs. Bei
einem analogen Signal zwischen 50% und 100% seines Bereichs liegt der Frequenzsollwert
immer bei seinem Maximalwert (Maximale Frequenz).
3
P3.9 E
RW. AL-SIGNALBEREICH
P3. 10 ERW. AI BENUTZERDEFINIERT MIN
P3. 11 ERW. AI BENUTZERDEFINIERT MAX
P3.12 E
RW. AL-FILTERZEIT
Parameter für OPTB4 Erweiterung Analogeingang.
Page 55

Parameterbeschreibung vacon • 52
3.4 Digitaleingänge
P4.1 STARTSIGNAL 1
P4.2 S
TARTSIGNAL 2
Signale für Start und Richtung. Logik wird mit P2.1 ausgewählt.
P4.3 R
ÜCKWÄRTS
Sollte verwendet werden, wenn dem Startsignal 2 nicht die Bedeutung Rückwärts zugewiesen
wurde.
P4.4 E
XTERNER FEHLER SCHLIESSER
Fehler wird durch einen High Pegel am Digitaleingang ausgelöst.
P4.5 E
XTERNER FEHLER ÖFFNER
Fehler wird durch einen Low Pegel am Digitaleingang ausgelöst.
P4.6 F
EHLERRÜCKSETZUNG
Aktiv an der positiven Flanke.
P4.7 L
AUFFREIGABE
Der Motor hält durch Leerauslauf an, wenn das Signal ausbleibt.
Hinweis: Der Frequenzumrichter befindet sich nicht im Status „Bereit“, wenn das Freigabesi-
gnal LOW ist.
P4.8 F
P4.9 F
P4.10 F
ESTFREQUENZ B0
ESTFREQUENZ B1
ESTFREQUENZ B2
Digitaleingänge für Auswahl von Festfrequenzen, mit binärer Codierung.
P4.11 A
USW. BESCHL/BREMS2
Rampe 2 wird durch einen High Pegel am Digitaleingang ausgewählt.
P4.12 M
OTORPOTENT. DREHZAHL ERHÖHEN
High Pegel am Digitaleingang sorgt für Drehzahlerhöhung. Die Motorpotentiometer-Funktion
wird nur mit P1.12 = 3 oder P2.15 = 3 aktiviert.
P4.13 M
OTORPOTENT. DREHZAHL VERRINGERN
High Pegel am Digitaleingang sorgt für Drehzahlsenkung. Die Motorpotentiometer-Funktion
wird nur mit P1.12 = 3 oder P2.15 = 3 aktiviert.
P4.14 A
USW. STEUERPLATZ 2
High Pegel am Digitaleingang aktiviert Steuerplatz 2 (P2.10).
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
3
Page 56

vacon • 53 Parameterbeschreibung
P4.15 AUSW FREQUENZSOLLW. 2
High Pegel am Digitaleingang aktiviert Frequenzsollwertquelle 2 (P2.11).
P4.16 A
High Pegel am Digitaleingang aktiviert Sollwert 2 (P8.2), wenn P8.1=0.
P4.17 S
Low Pegel am Digitaleingang zwingt Frequenzumrichter zum Stopp, Bremsen an Rampe mit
der unter P2.25 definierten Zeit. Dieselbe Funktion kann über das Steuerwort der Feldbusse
Profibus, Profinet und CANOpen (Informationen in den Handbüchern der spezifischen Erweiterungsplatine) gesteuert werden.
Der Frequenzumrichter verlässt den Schnellstopp-Status, wenn folgende Bedingungen erfüllt
sind:
- Stopp-Status.
- Haupt-Startbefehl ist zurückgesetzt.
- Schnellstopp-Digitaleingang ist zurückgestellt (oder der Feldbus-Befehl wird gelöscht).
- Alarm 63 wird angezeigt, wenn der Schnell-Stopp aktiv ist.
HINWEIS: Die Schnellstoppfunktion wird mit Parameter P4.18 aktiviert. Der in P4.17 festgelegte Digitaleingang und der Feldbus-Befehl haben keine Auswirkung, wenn P4.18 nicht =1 eingestellt ist.
USW. PID-SOLLWERT 2
CHNELLSTOPP ÖFFNEN
P4.18 A
Dieser Parameter aktiviert spezielle Anhaltemodi.
0: Normal. Das Anhalten wird durch Wegnahme des Startbefehls ausgelöst. Anhaltemodus
(Rampenstopp oder Leerauslauf) wird mit Parameter P1.14 festgelegt
1: Schnell-Stopp. Für die Aktivierung des Schnell-Stopps wird ein spezifischer Digitaleingang
(siehe P4.17) oder Feldbus-Befehl festgelegt. Der Anhaltemodus ist immer ein Rampenstopp
und die Abbremszeit wird in P2.25 festgelegt.
2: Genau. Diese Funktion legt für die (in P4.1 und P4.2 festgelegten) Startsignale 1 und 2 die
maximale Wiederholbarkeit beim Anhalten des Frequenzumrichters fest.
HINWEIS:
P4.1 und P4.2 müssen innerhalb der Werte 1-6 liegen (keine Erweiterungsplatine).
P1.14 muss als Rampenstopp festgelegt sein.
Es liegt keine Rampenzeitänderung vor.
Diese Auswahl deaktiviert das Schnellstoppsignal.
KTIVIERUNG DES STOPPMODUS
3
Page 57

Parameterbeschreibung vacon • 54
3.5 Digitalausgänge
P5.1 FUNKTION RELAISAUSGANG 1
P5.2 F
P5.3 F
UNKTION RELAISAUSGANG 2
UNKTION DIGITALAUSGANG
Funktion für Relais und Digitalausgänge.
Option Funktion Beschreibung
0 Nicht benutzt
1 Bereit Der Frequenzumrichter ist betriebsbereit
2 Run Der Frequenzumrichter ist in Betrieb (Motor läuft)
3 Allgemeiner Fehler Ein Fehler wurde ausgelöst
4
Allgemeiner Fehler
invertiert
Ein Fehler wurde nicht ausgelöst
5Allgemeiner Alarm
6 Richtung invertiert Der Rückwärtsbefehl wurde ausgewählt
7 Auf Drehzahl
Die Ausgangsfrequenz hat den eingestellten
Sollwert erreicht
Die Ausgangsfrequenz befindet sich über/unter den
8 Frequenzüberwachung
mit den Parametern P5.9 und P5.10 eingestellten
Grenzwerten
9 Stromüberwachung
10
Überwachung der Analogeingänge
Der Motorstrom befindet sich über der mit dem
Parameter P5.11 eingestellten Grenze
Die mit dem Parameter P5.12 ausgewählten Analogeingänge befinden sich über/unter den mit P5.13
und P5.14 festgelegten Grenzwerten
11 Feldbus Bit 1 Bit vom Feldbus Aux-Steuerwort
12 Feldbus Bit 2 Bit vom Feldbus Aux-Steuerwort
13 Externe Bremse
Der Frequenzumrichter ist in Betrieb und die
Schwellen für die Bremseröffnung wurden erreicht
Die gemessene Temperatur liegt oberhalb/unter14 Temperaturüberwachung
halb der Grenze (nur mit OPTBH Platine, siehe
P13.2-3-5-7)
Tabelle 21. Funktionen für digitale Relais.
P5.4 R
ELAISAUSGANG 1 EIN VERZÖGERUNG
P5.5 RELAISAUSGANG 1 AUS VERZÖGERUNG
Mögliche Verzögerungen für EIN/AUS-Umschaltungen.
P5.6 R
ELAISAUSGANG 1 INVERTIEREN
Umkehr des Relaisstatus.
P5.7 R
ELAISAUSGANG 2 EIN VERZÖGERUNG
P5.8 RELAISAUSGANG 2 AUS VERZÖGERUNG
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
3
Page 58

vacon • 55 Parameterbeschreibung
Mögliche Verzögerungen für EIN/AUS-Umschaltungen.
P5.9
BIS
P5.12 ERWEITERUNG EO1, EO2, EO3, EO4 AUSGANGSFUNKTION
Diese Parameter werden nur angezeigt, wenn eine Erweiterungsplatine mit Ausgängen installiert ist (siehe untenstehende Tabelle). Relais stehen auf den Platinen OPT-B2, B5 und B9
zur Verfügung.
Digitalausgänge sind auf der Platine OPTB1, wenn weniger als 6 Klemmen als Eingänge verwendet werden, und auf OPTBF verfügbar.
P5.12 wird nur angezeigt, wenn die Erweiterungsplatine OPTBF oder OPTBK installiert ist.
Bei installierter Erweiterungsplatine OPTBK, wird die Bedeutung der ASi Eingänge 1-4 durch
Parameter festgelegt.
OPTB1 OPTB2 OPTB5 OPTB9 OPTBF OPTBK
wird angezeigt,
P5.9 EO1
P5.10 EO2
P5.11 EO3
P5.12 EO4 - - - -
wenn P2.24 < 4
Digitalausgang
Klemme 5
wird angezeigt,
wenn P2.24 < 5
Digitalausgang
Klemme 6
wird angezeigt,
wenn P2.24 < 6
Digitalausgang
Klemme 7
Relaisklemmen 2122-23
Relaisklemmen 2526
-
Relaisklemmen
22-23
Relaisklemmen
25-26
Relaisklemmen
28-29
Relaisklemmen
7-8
- - ASi Bit 2
- - ASi Bit 3
Relaisklemmen
22-23
DigitalausgangKlemme 3
ASi Bit 1
ASi Bit 4
Tabelle 22. Mit OPTB-Platinen verfügbare Digitalausgänge
3
Page 59

Parameterbeschreibung vacon • 56
3.6 Analogausgang
P6.1 FUNKTION ANALOGAUSGANG
Mit dem Analogausgang gekoppeltes Signal.
Option Funktion Wert entspricht dem maximalen Ausgangssignal
0 Nicht benutzt Ausgangssignal immer fest auf 100%
1 Frequenzsollwert Max Frequenz (P1.2)
2 Ausgangsfrequenz Max Frequenz (P1.2)
3 Motordrehzahl Motornenndrehzahl
4 Motorstrom Motornennstrom
5 Motordrehmoment Motornenndrehmoment (absoluter Wert)
6 Motorleistung Motornennleistung (absoluter Wert)
7 PID-Ausgang 100%
8 Feldbussteuerung 10000
Tabelle 23. Analoge Ausgangssignale.
P6.2 A
NALOGAUSGANG MINIMUM
0: 0V
1: 2V
P6.3 A
NALOGAUSGANG SKALIERUNG
Skalierfaktor.
P6.4 A
NALOGAUSGANG FILTERZEIT
Zeitkonstante des Tiefpassfilters.
P6.5 E
RW. AO1 FUNKTION
P6.6 ERW. AO1 MINIMUM
P6.7 E
RW. AO1 AUSGANGSSKALIERUNG
P6.8 ERW. AO1 FILTERZEIT
Parameter für OPTB4- OPTBF Erweiterung Analogausgang.
P6.9 E
RW. AO2 FUNKTION
P6.10 ERW. AO2 MINIMUM
P6.11 E
RW. AO2 AUSGANGSSKALIERUNG
P6.12 ERW. AO2 FILTERZEIT
Parameter für OPTB4- OPTBF Erweiterung Analogausgang 2.
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
3
Page 60

vacon • 57 Parameterbeschreibung
3.7 Überwachungsfunktionen
P7.1 FUNKTION FREQUENZÜBERWACHUNG
0:Keine Überwachung
1:Untergrenze
2: Obergrenze
P7.2 F
REQUENZÜBERWACHUNGSGRENZE
Schwellenwert für Frequenzüberwachung.
P7.3 S
TROMÜBERWACHUNGSGRENZE
Schwellenwert für Stromüberwachung.
P7.4 A
NALOGEINGANGÜBERWACHUNG
Analogeingangauswahl für Überwachung:
0: AI1
1: AI2
2: AIE (Analogeingang auf OPTB4 Optionskarte).
P7.5 A
NALOGÜBERW. EIN PEGEL
Digitalausgang (als Analogeingangüberwachung programmiert) schaltet auf „high“, wenn AI
höher als dieser Wert ist.
P7.6 A
NALOGÜBERW. AUS PEGEL
Digitalausgang (als Analogeingangüberwachung programmiert) schaltet auf „low“, wenn AI
niedriger als dieser Wert ist.
P7.7 Ö
FFNUNGSFREQUENZGRENZE EXTERNE BREMSE
Dabei handelt es sich um den Ausgangsfrequenzschwellwert des Frequenzumrichters zum
Öffnen der mechanischen Bremse. Beim offenen Regelkreis empfiehlt es sich einen Wert zu
verwenden, der dem Nennschlupf des Motors entspricht.
P7.8 Ö
FFNUNGSSTROMGRENZE EXTERNE BREMSE
Die mechanische Bremse öffnet, wenn der Motorstrom den in diesem Parameter eingestellten
Grenzwert überschreitet. Es empfiehlt sich den Wert auf den halben Wert des Magnetisierungsstroms einzustellen.
Wenn der Frequenzumrichter im Feldschwächungsbereich arbeitet, verringert sich der
Bremsstromgrenzwert automatisch als eine Funktion der Ausgangsfrequenz.
Hinweis: Wenn ein Digitalausgang für die Bremsensteuerung programmiert wurde, wird der
Frequenzsollwert intern auf P7.7 + 0,1Hz begrenzt, bis die Bremse geöffnet ist.
P7.9 S
CHLIEßFREQUENZGRENZE EXTERNE BREMSE
Die Bremse wird geschlossen, wenn der Startbefehl LOW ist und die Ausgangsfrequenz unter
diesem Grenzwert liegt. Die Bremse wird auch immer dann geschlossen, wenn der Frequenzumrichter sich nicht mehr im Status RUN befindet.
3
Page 61

Parameterbeschreibung vacon • 58
P7.10 QUELLENAUSWAHL PROZESSANZEIGE
Die Monitorgröße V1.24 kann einen Prozesswert anzeigen, der proportional zu einer vom Frequenzumrichter gemessenen Variable ist. Quellenvariablen sind:
0: PID-Istwert (max: 100%)
1: Ausgangsfrequenz (max: Fmax)
2: Motordrehzahl (max: Drehzahl bei Fmax)
3: Motordrehmoment (max: Tnom)
4: Motorleistung (max: Pnom)
5: Motorstrom (max: Inom)
P7.11 P
Anzahl der Dezimalstellen, die bei V1.24 und auch unter Parameter P7.12 angezeigt werden.
P7.12 M
Wert, der auf V1.24 angezeigt wird, wenn die Quellenvariable ihren Höchstwert hat. Das Verhältnis wird beibehalten, wenn die Quelle den Maximalwert überschreitet.
ROZESSANZEIGE DEZIMALSTELLEN
AXIMALWERT PROZESSANZEIGE
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
3
Page 62

vacon • 59 Parameterbeschreibung
U[V]
f[Hz]
Werkeinst.:
Nennspannung
des Motors
Linear
Quadratisch
Feldschwächpunkt
Werkeinst.:
Nennfrequenz
des Motors
3.8 Motorsteuerung
P8.1 MOTORSTEUERMODUS
0: Frequenzsteuerung
1: Drehzahlsteuerung (sensorlose Steuerung)
Bei der Drehzahlsteuerung wird der Motorschlupf kompensiert.
Hinweis: Die Motor-Einmessung stellt diesen Parameter automatisch auf 1 ein.
P8.2 F
Die der maximalen Spannung entsprechende Ausgangsfrequenz.
Hinweis: Wenn P1.7 Nennfrequenz geändert wird, wird P8.2 auf denselben Wert eingestellt.
P8.3 S
Die Motorspannung, wenn die Frequenz über dem FWP (Feldschwächungspunkt) liegt,
definiert als % der Nennspannung.
Hinweis: Wenn P1.6 Nennfrequenz geändert wird, wird P8.3 auf 100% eingestellt.
P8.4 A
0: linear
Die Motorspannung ändert sich linear als Funktion der Ausgangsfrequenz
von der Nullfrequenz Spannung P8.7 zur Feldschwächungspunkt- (FWP)
Spannung P8.3 bei FWP-Frequenz P8.2 Diese Standardeinstellung sollte
verwendet werden, wenn keine anderen Einstellungen nötig sind.
ELDSCHWÄCHUNGSPUNKT
PANNUNG BEI FELDSCHWÄCHUNGSPUNKT
USWAHL U/F-KENNLINIE
3
Abbildung 14. Lineare und quadratische Kurve der Motorspannung.
Page 63

Parameterbeschreibung vacon • 60
U[V]
f[Hz]
P2
P3
P1
Werkeinst.:
Nennspannung
des Motors
Linear
Feldschwächpunkt
Werkeinst.:
Nennfrequenz
des Motors
1: quadratisch
(von Spannung P8.7 bei 0Hz zu Spannung P8.3 bei P8.2-Frequenz)
Die Motorspannung ändert sich von der Nullpunktspannung P8.7 in einer quadratischen Kurve
von Null bis zum Feldschwächungspunkt P8.3. Der Motor läuft untermagnetisiert unter dem
Feldschwächungspunkt und erzeugt ein geringeres Drehmoment. Diese Einstellung kann in
Anwendungen benutzt werden, wo die Drehmomentanforderung proportional zum Quadrat
der Drehzahl ist, z.B. bei Zentrifugalgebläsen und Pumpen.
2: programmierbar
Die U/f-Kurve kann mit drei verschiedenen Punkten programmiert werden: Nullfrequenz-
Spannung (P1), Mittelpunkt Spannung/Frequenz (P2) und Feldschwächungspunkt (P3).
Eine programmierbare U/f-Kurve kann benutzt werden, wenn ein größeres Drehmoment bei
niedrigen Frequenzen benötigt wird. Die optimalen Einstellungen können mit einer MotorEinmessung erreicht werden.
Hinweis: Die Motor-Einmessung stellt diesen Parameter automatisch auf 2 ein.
P8.5 U/F-KENNLINIE MITTELPUNKTFREQUENZ
Freigegeben, wenn P8.4= 2.
Hinweis: Die Motor-Einmessung stellt diesen Parameter automatisch ein.
P8.6 U/
Freigegeben, wenn P8.4= 2.
Hinweis: Die Motor-Einmessung stellt diesen Parameter automatisch ein.
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
Abbildung 15. Programmierbare Kurve.
F-KENNLINIE MITTELPUNKTSPANNUNG
3
Page 64

vacon • 61 Parameterbeschreibung
P8.7 NULLFREQUENZSPANNUNG
Motorspannung bei Nullfrequenz.
Hinweis: Die Motor-Einmessung stellt diesen Parameter automatisch ein.
P8.8 S
CHALTFREQUENZ
PWM-Frequenz. Werte über der Standardeinstellung können zu einer thermischen Überlastung des Frequenzumrichters führen.
P8.9 B
REMSCHOPPER
0 = Chopper deaktiviert
1 = Chopper freigegeben im Status Run
2 = Chopper freigegeben im Status Bereit
P8.10 B
REMSCHOPPERPEGEL
DC-Zwischenkreisspannung, über der der Chopper aktiviert wird.
P8.11 DC-B
REMSSTROM
DC-Strom der bei Start auf den Motor aufgeschaltet wird.
P8.12 DC-B
REMSZEIT BEI STOPP
Zeit für die Aufschaltung des DC-Stroms bei Stopp.
P8.13 F
REQUENZ ZUM STARTEN DER DC-BREMSE BEI RAMPENSTOPP
DC-Stromübertragung beginnt unter dieser Frequenz.
P8.14 DC-B
REMSZEIT BEI START
Zeit für die Aufschaltung des DC-Stroms bei Start.
P8.15 S
PANNUNGSABFALL MOTORSTATOR
Spannungsabfall an den Statorwindungen bei Motornennstrom, definiert als % der Nennspannung. Der Wert beeinflusst die Schätzung des Motordrehmoments, die Schlupfkompensation
und die Spannungssteigerung.
Hinweis: Es wird empfohlen, den Wert nicht manuell zu programmieren, sondern eine MotorEinmessung durchzuführen, die den Wert automatisch einstellt.
P8.16 M
OTOR-EINMESSUNG
Dieses Verfahren misst den Widerstand des Motorstators und stellt die U/f-Kurve automatisch
ein, um auch bei geringer Drehzahl ein gutes Drehmoment zu erhalten.
0 = Nicht aktiv
1 = Einmessung bei Stillstand
Der Run-Befehl muss innerhalb von 20 s nach der Programmierung des Werts 1 gegeben und
auf HIGH gehalten werden. Der Motor dreht sich nicht und der Frequenzumrichter verlässt den
Status Run automatisch am Ende der Messungen.
Hinweis: Der Frequenzumrichter verlässt den Status nur, wenn der gemessene Strom 55%
des Motornennstroms übersteigt. Das Verfahren stellt die folgenden Parameter ein: P8.4,
P8.5, P8.6, P8.7, P8.15.
3
Page 65

Parameterbeschreibung vacon • 62
Hinweis: Optimierte U/f-Einstellungen führen auch bei sehr geringen Drehzahlen zu mit den
Nennwerten vergleichbaren Motorstromwerten. Eine externe Kühlung des Motors ist notwendig, wenn der Motor beträchtliche Zeit unter diesen Bedingungen arbeitet.
P8.17 Ü
Der Überspannungsregler verlängert automatisch die Zeit der Bremsrampe, wenn die interne
DC-Zwischenkreisspannung zu hoch ist.
0: freigegeben
1: deaktiviert
P8.18 U
Der Unterspannungsregler bremst den Motor automatisch ab, wenn die interne DC-Zwischenkreisspannung zu niedrig ist.
0: freigegeben
1: deaktiviert
P8.19 S
Der Schaltfrequenzregler verringert automatisch die PWM-Frequenz, wenn die Gerätetemperatur zu hoch ist.
0: freigegeben
1: deaktiviert
P8.20 M
OTORTYP
BERSPANNUNGSREGLER DEAKTIVIEREN
NTERSPANNUNGSREGLER DEAKTIVIEREN
CHALTFREQUENZREGLER DEAKTIVIEREN
In diesem Parameter können Sie den Motortyp in Ihrem Prozess einstellen.
Auswahlmöglichkeiten:
0: Induktionsmotor (IM) Treffen Sie diese Auswahl, wenn Sie einen DS-Asynchronmotor ver-
wenden.
1: Dauermagnetmotor (PM) Treffen Sie diese Auswahl, wenn Sie einen PM-Synchronmotor
verwenden.
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
3
Page 66

vacon • 63 Parameterbeschreibung
f
I
Par. P1.5
Par. P9.6
Blockierbereich
3.9 Schutzfunktionen
P9.1 FEHLER SOLLWERTSIGNAL 4MA (AI< 4mA)
0: Keine Reaktion
1: Warnmeldung
2: Fehler
3: Warnmeldung, wenn Start aktiv
4: Fehler, wenn Start aktiv
Analogsollwert unter 4mA.
P9.2 4mA F
Verzögerung als Filter für Fehlergenerierung
P9.3 E
0: Keine Reaktion
1: Warnmeldung
2: Fehler
Ausgangssummenstrom ist nicht Null.
P9.4 M
0: Keine Reaktion
1: Warnmeldung
2: Fehler
Das ist ein Überlastschutz. Die Blockierung wird bei maximalem Motorstrom (=P1.5) und
geringer Ausgangsfrequenz erkannt.
RDSCHLUSSSCHUTZ
EHLERERKENNUNGSZEIT
OTORBLOCKIERSCHUTZ
3
Abbildung 16. Einstellungen Blockierschutz.
Page 67

Parameterbeschreibung vacon • 64
Par. P9.5
Auslösebereich
Zeit
Blockierzeitzähler
Blockierung
Keine
Blockierung
Auslösung/
Warnung
(par. P9.4)
P9.5 BLOCKIERZEITGRENZE
Diese Zeit kann zwischen 0,0 und 300,0 s eingestellt werden.
Dies ist die für alle Stufen maximal zulässige Zeit. Die Blockierzeit wird von einem internen
Aufwärts-Abwärts-Zähler gezählt. Wenn der Blockierzeitzähler diese Grenze übersteigt, löst
die Schutzfunktion eine Störabschaltung aus.
Abbildung 17. Blockierzeitzähler.
P9.6 BLOCKIERFREQUENZGRENZE
Eine Blockierung wird erkannt, wenn der Strombegrenzer die Ausgangsfrequenz für die Zeit
in P9.5 unter P9.6 verringert hat.
P9.7 U
0: Keine Reaktion
1: Warnmeldung
2: Fehler
Eine Unterlast wird erkannt, wenn das Drehmoment für die programmierte Zeit P9.10 über der
Mindestkurve liegt, die durch P9.8 und P9.9 festgelegt wird.
P9.8 U
Die Drehmomentgrenze kann zwischen 10,0-150,0% x T
Dieser Parameter gibt den Wert für den zulässige Mindestdrehmoment, wenn die Ausgangsf-
requenz über dem Feldschwächungspunkt liegt.
NTERLASTSCHUTZ
NTERLAST LAST BEI NENNFREQUENZ
eingestellt werden.
nMotor
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
3
Page 68

vacon • 65 Parameterbeschreibung
Par.
P9.8
Par.
P9.9
f
5 Hz
Drehmoment
Unterlastbereich
Feldschwächpunkt
Par. P9.10
Auslösebereich
Unterlastzeitzähler
Zeit
Abschaltung/
Warnung
(par. P9.7)
Unterlastzustand
kein Unterlastzustand
Abbildung 18. Einstellungen Unterlastmerkmale.
P9.9 UNTERLAST LAST BEI NULLFREQUENZ
P9.10 UNTERLAST ZEITGRENZE
Festlegung der Mindestlast bei Nenndrehzahl und Nulldrehzahl. Verzögerung Fehlerzustand.
Diese Zeit kann zwischen 1,0 und 300,0 s eingestellt werden.
Dies ist die maximal zulässige Zeit für das Vorhandensein eines Unterlastzustands. Ein interner Aufwärts-Abwärts-Zähler zählt die vergangene Unterlastzeit. Wenn der Unterlastzähler
diese Grenze überschreitet, löst die Schutzfunktion entsprechend Parameter P9.7 eine
Störabschaltung aus). Wenn der Frequenzumrichter angehalten wird, wird der Unterlastzähler auf Null zurückgesetzt.
3
Abbildung 19. Unterlastzeitzähler.
Page 69

Parameterbeschreibung vacon • 66
f
f
n
Par.
P9.13=40%
0
I
T
100%
Eckfrequenz
P
Kühlung
Überlastbereich
P9.11 MOTORTHERMOSCHUTZ
0: Keine Reaktion
1: Warnmeldung
2: Fehler
Dies ist eine Softwareschutzfunktion, die auf einem Zeitintegral des Stroms basiert.
P9.12 U
Zu ändern, falls es keine Standardumgebung ist.
P9.13 M
Bestimmt den Kühlfaktor bei Nulldrehzahl im Verhältnis zum Punkt, an dem der Motor mit
Nenndrehzahl ohne externe Kühlung läuft. Siehe Abbildung 20.
Für den Standardwert wird angenommen, dass kein externes Kühlgebläses für den Motor vorhanden ist. Wenn ein externes Gebläse benutzt wird, kann dieser Parameter auf 90% (oder sogar höher) eingestellt werden.
Die Einstellung dieses Parameters beeinflusst den maximalen Ausgangsstrom des Frequenzumrichters nicht, welcher nur mit dem Parameter P1.5 festgelegt wird.
Die Knickfrequenz für den Thermoschutz beträgt 70% der Motornennfrequenz (P1.7).
100% einstellen, wenn der Motor fremdbelüftet ist. 30-40% einstellen, wenn eigenbelüftet ist.
MGEBUNGSTEMPERATUR DES MOTORS
OTORKÜHLFAKTOR BEI NULLDREHZAHL
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
Abbildung 20. Kurve thermischer Motorstrom IT.
3
Page 70

vacon • 67 Parameterbeschreibung
105%
Q = (I/IT)2 x (1-e
-t/T
)
I/I
T
Auslösebereich
Fehler/Warnung
P9.11
Zeitkonstante T
*)
Motortemperatur Zeit
Motortemperatur
Motorstrom
*)
Änderung durch Motorgröße, •
Anpassung mit P9.14
P9.14 ZEITKONSTANTE MOTORTEMPERATUR
Zeit bei Nennstrom, um die Nenntemperatur zu erreichen.
Die Zeitkonstante ist die Zeit, innerhalb derer die berechnete Temperaturstufe 63% ihres
Endwerts erreicht hat. Je größer die Baugröße und / oder geringer die Motordrehzahl, umso
höher ist die Zeitkonstante.
Die Motortemperaturzeit hängt vom Motorentwurf ab und variiert je nach Motorhersteller. Der
Standardwert des Parameters hängt von der Baugröße ab.
Wenn die t6-Zeit des Motors (t6 ist die Zeit in Sekunden, innerhalb derer der Motor sicher mit
sechsfachem Nennstrom arbeiten kann) bekannt ist (vom Motorhersteller angegeben), kann
der Parameter Zeitkonstante darauf basierend eingestellt werden. Als Faustformel ist die Motortemperatur-Zeitkonstante in Minuten gleich 2*t6. Wenn der Frequenzumrichter sich in der
Stopp-Stufe befindet, wird die Zeitkonstante intern auf den dreifachen Wert des eingestellten
Parameterwerts erhöht. Die Kühlung in der Stopp-Stufe erfolgt durch Konvektion und die Zeitkonstante wird erhöht.
3
Abbildung 21. Motortemperaturberechnung.
P9.15 FEHLER FELDBUSKOMMUNIKATION
0: Keine Reaktion
1: Warnmeldung
2: Fehler
Kommunikation unterbrochen.
P9.16 T
0: Keine Reaktion
1: Warnmeldung
2: Fehler
Die Impedanz am Thermistoreingang (optionale Platine OPTB2) liegt über der Fehlerschwelle.
HERMISTORFEHLER
Page 71

Parameterbeschreibung vacon • 68
P9.17 PARAMETER-SCHREIBSCHUTZ
0: Editieren freigegeben
1: Editieren deaktiviert
P9.18 A
NSPRECHEN AUF SAFE TORQUE OFF DEAKTIVIEREN
0: Keine Reaktion
1: Warnmeldung
2: Fehler, nicht im Fehlerspeicher gespeichert
3: Fehler, im Fehlerspeicher gespeichert
Safe Torque Off deaktiviert.
P9.19 A
NSPRECHEN AUF EINGANGPHASENFEHLER
0: Keine Reaktion
1: Warnmeldung
2: Fehler
Eingangsphase fehlt.
P9.20 E
INGANGSPHASENFEHLER WELLIGKEITSOBERGRENZE
Empfindlichkeit für Überprüfung Eingangsphasen
0: Interner Wert (Standard)
1-75: Empfindlichkeit von Maximum (1) bis Minimum (75)
P9.21 M
OTORTEMPERATUR INITIALISIERUNG
Einstellung der geschätzten Motortemperatur beim Einschalten
0: Initialisiert auf Mindestwert
1: Initialisiert auf konstanten Wert von P9.22
2: Initialisiert auf letzten Wert, mit P9.22 als Faktor
P9.22 M
OTORTEMP. ANFANGSWERT
If P9.21= 1, Motortemperatur wird mit diesem Wert initialisiert.
If P9.21= 2, Motortemperatur wird mit dem letzten Wert initialisiert, multipliziert mit diesem
Wert als %-Faktor.
P9.23 A
USGANGPHASENFEHLER
0: Keine Reaktion
1: Warnmeldung
2: Fehler
Strommessung hat erfasst, dass in einer Motorphase kein Strom vorhanden ist.
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
3
Page 72

vacon • 69 Parameterbeschreibung
3.10 Autoreset
P10.1 AUTOMATISCHE FEHLERRÜCKSETZUNG
0: deaktiviert
1: freigegeben
Die automatische Rücksetzungsfunktion löscht Fehlerzustände, wenn die Fehlerursache be-
seitigt wurde und die Wartezeit P10.2 abgelaufen ist. Der Parameter P10.4 bestimmt die maximale Anzahl automatischer Rücksetzungen, die innerhalb der mit Parameter P10.3
eingestellten Versuchszeit durchgeführt werden können. Die Zeitzählung beginnt mit der
ersten automatischen Rücksetzung. Wenn die Anzahl der während der Versuchszeit erfassten
Fehler die Versuchswerte überschreitet, wird der Fehlerzustand permanent und es ist ein
Rücksetzungsbefehl notwendig.
P10.2 W
ARTEZEIT
Die Zeit, nach der der Umrichter versucht, den Motor nach der Fehlerbeseitigung automatisch
neu zu starten.
P10.3 V
ERSUCHSZEIT
Gesamtzeit für die Rücksetzungsversuche.
P10.4 A
UTOMATISCHE RÜCKSETZUNGSVERSUCHE
Während der Zeit P10.3 durchgeführte Versuche.
P10.5 S
TARTFUNKTION
Startfunktion nach einer automatischen Fehlerrücksetzung.
0: Rampenstart
1: Fliegender Start
2: Wie mit P1.13 festgelegt
P10.6 A
UTOMATISCHE RÜCKSETZUNG UNTERSPANNUNGSFEHLER
0: deaktiviert
1: freigegeben
3
Funktion Automatische Rücksetzung für Unterspannungsfehler aktivieren/deaktivieren.
P10.7 A
UTOMATISCHE RÜCKSETZUNG ÜBERSPANNUNGSFEHLER
0: deaktiviert
1: freigegeben
Funktion Automatische Rücksetzung für Überspannungsfehler aktivieren/deaktivieren.
P10.8 A
UTOMATISCHE RÜCKSETZUNG ÜBERSTROMFEHLER
0: deaktiviert
1: freigegeben
Funktion Automatische Rücksetzung für Überstromfehler aktivieren/deaktivieren.
Page 73

Parameterbeschreibung vacon • 70
P10.9 AUTOMATISCHE RÜCKSETZUNG MOTORÜBERTEMPERATURFEHLER
0: deaktiviert
1: freigegeben
Funktion Automatische Rücksetzung für Motorübertemperaturfehler aktivieren/deaktivieren.
P10.10 A
0: deaktiviert
1: freigegeben
Funktion Automatische Rücksetzung für Unterlastfehler aktivieren/deaktivieren.
UTOMATISCHE RÜCKSETZUNG UNTERLASTFEHLER
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
3
Page 74

vacon • 71 Parameterbeschreibung
3.11 Feldbus
P11.1 BIS
P11.8 AUSW. PROZESSDATENAUSG 1 - 8
Der Parameter verknüpft nicht editierbare Variablen mit den Ausgangsprozessdaten 1.
0: Ausgangsfrequenz
1: Motordrehzahl
2: Motorstrom
3: Motorspannung
4: Motordrehmoment
5: Motorleistung
6: DC-Zwischenkreisspannung
7: Aktiver Fehlercode
8: Analog AI1
9: Analog AI2
10: Status Digitaleingänge
11: PID-Istwert
12: PID-Sollwert
13: analog AI3 (OPTB4 benötigt)
14: Temperatursensor 1 (OPTBH benötigt)
15: Temperatursensor 2 (OPTBH benötigt)
16: Temperatursensor 3 (OPTBH benötigt)
P11.9 FB A
Der Parameter bestimmt die Eingangs-Prozess-Datengrösse, die mit dem Aux-Steuerwort
verknüpft wird.
0: Nicht benutzt
1: PDI1
2: PDI2
3: PDI3
4: PDI4
UX-STEUERWORT AUSWAHL
3
5: PDI5
P11.10 FB PID-S
Der Parameter bestimmt die Eingangs-Prozess-Datengrösse, die mit dem PID-Sollwert verknüpft wird. Optionen wie P11.9.
P11.11 FB PID-I
Der Parameter bestimmt die Eingangs-Prozess-Datengrösse, die mit dem PID-Istwert verknüpft wird. Optionen wie P11.9.
OLLWERT AUSWAHL
STWERT AUSWAHL
Page 75

Parameterbeschreibung vacon • 72
P11.12 FB ANALOGAUSG. STEUERUNG AUSWAHL
Der Parameter bestimmt die Eingangs-Prozess-Datengrösse, die mit der Analogausgangszuordnung verknüpft wird. Optionen wie P11.9.
3.11.1 Feldbusdatenmapping
3.11.1.1 Feldbus Daten IN: Master -> Slave
Modbus-
Register
2001 Steuerwort(*)
2002 Allgemeines Steuerwort Nicht benutzt
2003 Drehzahlsollwert(*) Sollwert
2004 Feldbus Daten IN 1 Programmierbar 0...10000
2005 Feldbus Daten IN 2 Programmierbar 0...10000
2006 Feldbus Daten IN 3 Programmierbar 0...10000
2007 Feldbus Daten IN 4 Programmierbar 0...10000
2008 Feldbus Daten IN 5 Programmierbar 0...10000
Name Beschreibung Grenze
Binär codiert:
b0: Run
b1: Rückwärts
b2: Fehlerrücksetzung(an
Frequenzumrichter-
steuerung
Flanke)
b8: zwingt Steuerplatz zu
Feldbus
b9: zwingt Sollwertquelle
zu Feldbus
0...10000 als
0,00...100,00% des Min
freq. - Max freq. bereichs
2009 Feldbus Daten IN 6 Nicht benutzt 2010 Feldbus Daten IN 7 Nicht benutzt 2011 Feldbus Daten IN 8 Nicht benutzt -
Tabelle 24. (*) Modbus Dateneingänge. Können je nach verwendetem Feldbus variieren
(Siehe Installationshandbuch spezifische Feldbus-Optionskarte).
Anmerkungen:
• Steuerwort b0 Run wird an der Flanke erfasst, nur wenn der Frequenzumrichter im
Status Bereit ist (siehe Status Wort b0) und der tatsächliche Steuerplatz der Feldbus
ist.
• Steuerwort b2 Fehlerrücksetzung ist aktiv, auch wenn der Steuerplatz nicht der
Feldbus ist.
• Im Unterschied zu Modbus gibt es bei Feldbus ein eigenes Steuerwort (siehe Handbuch
der spezifischen Feldbus-Platine).
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
3
Page 76

vacon • 73 Parameterbeschreibung
Feldbusdaten-Eingangsmapping
Fedlbusdateneingänge von 1 bis 5 können mit den Parametern P11.9 - P11.12 folgendermaßen
konfiguriert werden:
Prozessdaten IN Beschreibung Hinweis
Aux-Steuerwort
PID-Sollwert
PID-Istwert
Analogausg. Strg
b0: Freigabe
b1: Auswahl Rampe 2 Be-
schl/Brems
b2: Auswahl Frequenz-
sollwert 2
b3: Digitalausgang 1 Steue-
rung
b4: Digitalausgang 2 Steue-
rung
aktiv, wenn P12.1 = 3,
Grenze 0 - 10000 als 0 100,00% der Regelung.
aktiv, wenn P12.4 = 2,
Grenze 0 - 10000 als 0 100,00% der Regelung.
aktiv, wenn P5.1 = 8, Grenze
0 - 10000 als 0 - 100,00% der
Regelung.
• b0 Freigabe wird nur in Betracht gezogen, wenn der Steuerplatz der
Feldbus ist. Wird in UND mit einer
möglichen Freigabe vom
Digitaleingang berechnet. Ein Ausfall
der Freigabe führt zu einem Leerauslauf.
•b2 FreqRef2 Ausw wird nur in
Betracht gezogen, wenn der Steuerplatz der Feldbus ist.
• Funktionen in Zusammenhang mit
bit1, b3 und b4 sind auch verfügbare,
wenn der Steuerplatz nicht der
Feldbus ist. Das Aux-Steuerwort muss
über Parameter P11.9 auf ein PDI
gemappt werden.
Tabelle 25.
3
Page 77

Parameterbeschreibung vacon • 74
3.11.1.2 Feldbus Daten OUT: Slave ->Master
Modbus-
Register
2101 Statuswort(*)
2102 Allgemeines Statuswort
2103 Ist-Drehzahl(*) Ist-Drehzahl
2104 Feldbus Daten OUT 1 Programmierbar Siehe P11.1
2105 Feldbus Daten OUT 2 Programmierbar Siehe P11.2
2106 Feldbus Daten OUT 3 Programmierbar Siehe P11.3
2107 Feldbus Daten OUT 4 Programmierbar Siehe P11.4
Name Beschreibung Grenze
Binär codiert:
b0: Bereit
b1: Run
Frequenzumrichter-
status
Frequenzumrichter-
status
b2: Rückwärts
b3: Fehler
b4: Warnmeldung
b5: Frequenzsollwert
erreicht
b6: Nulldrehzahl
Wie Statuswort zusätzl.:
b7: Steuerplatz ist Feldbus
0...10000 als 0,00...100,00%
des Min freq. - Max freq.
bereichs
2108 Feldbus Daten OUT 5 Programmierbar Siehe P11.5
2109 Feldbus Daten OUT 6 Programmierbar Siehe P11.6
2110 Feldbus Daten OUT 7 Programmierbar Siehe P11.7
2111 Feldbus Daten OUT 8 Programmierbar Siehe P11.8
Tabelle 26. (*) Modbus Datenausgänge. Können je nach verwendetem Feldbus variieren
(Siehe Installationshandbuch spezifische Feldbus-Optionskarte).
Anmerkungen:
• Im Unterschied zu Modbus gibt es bei Feldbus ein eigenes Steuerwort (siehe Handbuch
der spezifischen Feldbus-Platine).
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
3
Page 78

vacon • 75 Parameterbeschreibung
3.12 PID-Regelung
Die Parameter dieser Gruppe werden nur angezeigt, wenn der PID-Reglerausgang als Frequenzsollwert benutzt wird (P1.12= oder P2.15=2)
P12.1 S
OLLWERT
0: fester Sollwert 1-2
1: Analog AI1
2: Analog AI2
3: Feldbus
P12.2 PID-S
P12.3 PID-S
OLLWERT 1
OLLWERT 2
Programmierbare Sollwerte. Sollwert 2 wird durch den mit P4.16 festgelegten Digitaleingang
aktiviert.
P12.4 I
STWERT
0: Analog AI2
1: Analog AI1
2: Feldbus
3: AI2-AI1 (differential)
4: Temperatur (nur mit Platine OPTBH, siehe P13.8-10)
P12.5 I
STWERT-MINIMUM
P12.6 ISTWERT-MAXIMUM
Minimaler und maximaler Istwert, die dem Mindest- und Höchstwert des Signals entsprechen.
P12.7 PID-R
EGLER VERSTÄRKUNG
Proportionale Verstärkung. Wenn 100% eingestellt ist, führt eine Variation von 10% des
Fehlers zu einer Variation von 10% des Reglerausgangs.
P12.8 PID-REGLER NACHSTELLZEIT
Integrationszeitkonstante. Wenn 1s eingestellt ist, führt eine Variation von 10% des Fehlers
nach 1s zu einer Variation von 10% des Reglerausgangs.
P12.9 PID-R
EGLER VORHALTZEIT
Differentialzeit. Wenn 1s eingestellt ist, führt eine Variation von 10% in 1s des Fehlers zu einer
Variation von 10% des Reglerausgangs.
P12.10 R
EGELUMKEHR
0: Direktsteuerung. Frequenz wird erhöht wenn Sollwert > Istwert
1: invertierte Steuerung. Frequenz wird verringert wenn Sollwert < Istwert
3
Page 79

Parameterbeschreibung vacon • 76
P12.11 MAXIMALER PID-FEHLER
Wenn unter 100% wird eine Grenze für max Fehler festgelegt. Nützlich, um eine übertriebene
Reaktion bei der Motoranlauf zu vermeiden.
P12.12 S
Diese Funktion versetzt den Frequenzumrichter in den Sleepmodus, wenn der Sollwert erreicht wurde und die Ausgangsfrequenz länger als die mit der Sleepverzögerung (P12.13)
eingestellte Zeit unter der Sleepfrequenz bleibt. Das bedeutet, dass der Startbefehl Ein bleibt,
der FU jedoch nicht mehr im Betriebs-Zustand ist. Wenn der PID-Fehlerwert je nach eingestellter Funktionsweise (P12.10), unter den Wake-Up-Pegel sinkt oder darüber ansteigt, geht
der Fu wieder in den Zustand Betrieb, wenn der Startbefehl immer noch ein ist.
P12.13 S
Betriebszeit mit minimaler Frequenz, bevor der Sleepzustand beginnt.
P12.14 W
Der Frequenzumrichter verlässt den Sleepmodus, wenn der PID-Fehler über diesem Wert
liegt. Regelrichtung (P12.10) wird intern beachtet.
P12.15 S
P12.16 STEIGERUNGSZEIT SLEEPMODUS
P12.17 MAX. VERLUST SLEEP
LEEPFREQUENZ
LEEPZEITVERZÖGERUNG
AKE-UP-PEGEL
TEIGERUNG SLEEPSOLLWERT
P12.18 PRÜFZEIT VERLUST SLEEP
Diese Parameter verwalten eine komplexere Sleepsequenz. Nach der Zeit von P12.13 wird der
Sollwert der Option in P12.15 für die Zeit in P12.16 erhöht. Dies verursacht eine höhere Ausgangsfrequenz. Der Frequenzsollwert wird dann auf die minimale Frequenz gezwungen und
der Istwert wird abgetastet.
Wenn die Variation des Istwerts dann für die Zeit in P12.18 unter P12.17 bleibt, geht der Frequenzumrichter in den Sleepmodus.
Wenn diese Sequenz nicht benötigt wird, P12.15=0%, P12.16=0s, P12.17=50%, P12.18=1s programmieren.
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
3
Page 80

vacon • 77 Parameterbeschreibung
3.13 Temperaturmessung
Die Parameter dieser Gruppe werden nicht anzeigt, falls die OPTBH Platine nicht installiert ist
P13.1 T
EMPERATUREINHEIT
0: °C
1: K
P13.2 A
USWAHL SENSOR ÜBERWACHUNG/FEHLER
Temperatursensor(en) für Überwachung und Fehleraktivierung verwendet.
0: T1
1: T2
2: T1 +T2
3: T3
4: T3 +T1
5: T3 +T2
6: T3 +T2T1
P13.3 Ü
BERWACHUNGSMODUS
Es kann ein Digital-/Relaisausgang aktiviert werden
0: Nicht benutzt
1: oberhalb der Grenze (max. Temperatur wenn mehrere Sensoren)
1: unterhalb der Grenze (min. Temperatur wenn mehrere Sensoren)
P13.4 F
EHLERMODUS
Es kann ein Fehlerzustand aktiviert werden
0: Nicht benutzt
1: oberhalb der Grenze (max. Temperatur wenn mehrere Sensoren)
1: unterhalb der Grenze (min. Temperatur wenn mehrere Sensoren)
P13.5 Ü
BERWACHUNGSPEGEL
Schwelle für Überwachungs-Aktivierung.
P13.6 F
EHLERPEGEL
Schwelle für Fehler F56-Aktivierung.
P13.7 H
YSTERESE ÜBERW/FEHLER
Temperatur muss sich um diesen Wert ändern, damit der Überwachsungs-/Fehlerzustand
wiederhergestellt wird.
3
Page 81

Parameterbeschreibung vacon • 78
P13.8 AUSWAHL SENSOR SOLL/IST
Temperatursensor(en) für direkte Sollwertkontrolle oder als PID-Istwert verwendet.
0: T1
1: T2
2: T3
3: max (T1, T2)
4: min (T1, T2)
5: max (T1, T2, T3)
6: min (T1, T2, T3)
P13.9 M
Temperatur entsprechend dem minimalen Soll/Ist.
P13.10 M
Temperatur entsprechend dem maximalen Soll/Ist.
IN TEMPERATUR SOLL/IST
AX TEMPERATUR SOLL/IST
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
3
Page 82

vacon • 79 Parameterbeschreibung
3
Page 83

Fehlersuche vacon • 80
4. FEHLERSUCHE
Fehle
rcode
Fehlername Subcode Mögliche Ursache Abhilfe
Frequenzumrichter hat einen zu hohen
Strom (>4*I
1 Überstromschutz
2 Überspannung
3 Erdschlussschutz
84 MPI Kommunikation CRC-Fehler
89 HMI empfängt Pufferüberlauf
90 Modbus empfängt Pufferüberlauf
8 Systemfehler 93 Fehler bei der Leistungserkennung
97 MPI Offline-Fehler
98 MPI-Treiberfehler
99 Optionskarte Treiberfehler
• plötzliche, starke Lasterhöhung
• Kurzschluss in den Motorkabeln
• ungeeigneter Motor
DC-Zwischenkreisspannung hat die festgelegten Grenzwerte überschritten.
• zu kurze Abbremszeit
• Bremschopper ist deaktiviert
• hohe Überspannungsspitzen im
• Start/Stopp-Sequenz zu schnell
Strommessung hat erfasst, dass die
Summer des Motorphasenstroms nicht
gleich Null ist.
• Isolationsfehler in Kabeln oder
) im Motorkabel erfasst:
H
Netz
Motor
Last prüfen.
Motor prüfen.
Kabel und Anschlüsse prüfen.
Motor-Einmessung durchführen.
Rampenzeiten prüfen.
Abbremszeit verlängern.
Bremschopper oder Bremswiderstand (als Zubehör lieferbar) benutzen.
Überspannungsregler aktivieren.
Eingangsspannung prüfen.
Motorkabel und Motor prüfen.
Fehler quittieren und neu starten.
Sollte der Fehler erneut auftreten,
wenden Sie sich an den nächsten
Vacon-Vertrieb.
Kabelverbindung PC-Frequenzumrichter prüfen.
EMV-Störpegel nach Möglichkeit
reduzieren
Modbus Spezifikationen für Timeout
prüfen.
Kabellänge prüfen.
EMV-Störpegel nach Möglichkeit
reduzieren.
Baudrate prüfen.
EMV-Störpegel nach Möglichkeit
reduzieren.
Fehler quittieren und neu starten.
Sollte der Fehler erneut auftreten,
wenden Sie sich an den nächsten
Vacon-Vertrieb.
Fehler quittieren und neu starten.
Sollte der Fehler erneut auftreten,
wenden Sie sich an den nächsten
Vacon-Vertrieb.
Fehler quittieren und neu starten.
Sollte der Fehler erneut auftreten,
wenden Sie sich an den nächsten
Vacon-Vertrieb.
Kontakt im Steckplatz der Optionskarte prüfen
EMV-Störpegel nach Möglichkeit
reduzieren;
Fehler quittieren und neu starten.
Sollte der Fehler erneut auftreten,
wenden Sie sich an den nächsten
Vacon-Vertrieb.
Tabelle 27. Fehlercodes und -Beschreibungen.
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
4
Page 84

vacon • 81 Fehlersuche
Fehle
rcode
Fehlername Subcode Mögliche Ursache Abhilfe
100 Optionskarte Konfigurationsfehler
101 Modbus Pufferüberlauf
104 Optionskarte Kanal voll
105
8 Systemfehler 106 Optionskarte Objekt Warteschlange voll
107 Optionskarte HMI Warteschlange voll
108 Optionskarte SPI Warteschlange voll
111 Fehler beim Kopieren der Parameter
113 Frequenzerfassung Timer-Überlauf
114 PC-Steuerung Timeout-Fehler
115 DeviceProperty Datenformat
Optionskarte Speicherzuweisung fehlgeschlagen
Kontakt im Steckplatz der Optionskarte prüfen
EMV-Störpegel nach Möglichkeit
reduzieren;
Sollte der Fehler erneut auftreten,
wenden Sie sich an den nächsten
Vacon-Vertrieb.
Modbus Spezifikationen für Timeout
prüfen.
Kabellänge prüfen.
EMV-Störpegel nach Möglichkeit
reduzieren.
Baudrate prüfen.
Kontakte im Steckplatz der Optionskarte prüfen.
EMV-Störpegel nach Möglichkeit
reduzieren.
Sollte der Fehler erneut auftreten,
wenden Sie sich an den nächsten
Vacon-Vertrieb.
Kontakte im Steckplatz der Optionskarte prüfen.
EMV-Störpegel nach Möglichkeit
reduzieren.
Sollte der Fehler erneut auftreten,
wenden Sie sich an den nächsten
Vacon-Vertrieb.
Kontakte im Steckplatz der Optionskarte prüfen.
EMV-Störpegel nach Möglichkeit
reduzieren.
Sollte der Fehler erneut auftreten,
wenden Sie sich an den nächsten
Vacon-Vertrieb.
Kontakte im Steckplatz der Optionskarte prüfen.
EMV-Störpegel nach Möglichkeit
reduzieren.
Sollte der Fehler erneut auftreten,
wenden Sie sich an den nächsten
Vacon-Vertrieb.
Kontakte im Steckplatz der Optionskarte prüfen.
EMV-Störpegel nach Möglichkeit
reduzieren.
Sollte der Fehler erneut auftreten,
wenden Sie sich an den nächsten
Vacon-Vertrieb.
Prüfen, ob die Parametereinstellung
mit dem Frequenzumrichter kompatibel ist.
Die Steuertafel erst abnehmen, wenn
der Kopiervorgang abgeschlossen ist.
Kontakte der Steuertafel prüfen.
EMV-Störpegel nach Möglichkeit
reduzieren.
Sollte der Fehler erneut auftreten,
wenden Sie sich an den nächsten
Vacon-Vertrieb.
Bei aktiver PC-Steuerung Vacon Live
nicht schließen.
Kabelverbindung PC-Frequenzumrichter prüfen.
EMV-Störpegel nach Möglichkeit
reduzieren.
Fehler quittieren und neu starten.
Sollte der Fehler erneut auftreten,
wenden Sie sich an den nächsten
Vacon-Vertrieb.
4
Tabelle 27. Fehlercodes und -Beschreibungen.
Page 85

Fehlersuche vacon • 82
Fehle
rcode
Fehlername Subcode Mögliche Ursache Abhilfe
8 Systemfehler 120 Aufgabenstapel-Überlauf
DC-Zwischenkreisspannung hat die festgelegten Grenzwerte unterschritten.
• wahrscheinlichste Ursache: zu
niedrige Versorgungsspannung
• interner Fehler des Frequenzu-
9 Unterspannung
10 Eingangsphase Phase der Eingangsleitung fehlt.
11 Ausgangsphase
Frequenzumrichter-
13
Untertemperatur
Frequenzumrichter-
14
Übertemperatur
15 Blockierter Motor Motor-Kippschutz hat ausgelöst.
Motor-
16
Übertemperatur
17 Motorunterlast Motor ist unterbelastet
19 Leistungsüberlastung
25 Watchdog
27 Back EMF
mrichters
• defekte Eingangssicherung
• externer Ladeschalter nicht
geschlossen
HINWEIS! Dieser Fehler wird nur aktiviert, wenn der Frequenzumrichter sich
im Status RUN befindet.
Strommessung hat erfasst, dass in einer
Motorphase kein Strom vorhanden ist.
Zu niedrige Temperatur am Kühlkörper
der Leistungseinheit oder an der Platine
gemessen. Kühlkörpertemperatur liegt
unter -10°C.
Zu hohe Temperatur am Kühlkörper der
Leistungseinheit oder an der Platine
gemessen. Kühlkörpertemperatur liegt
über 100°C.
Motor ist überlastet.
Überwachung für Frequenzumrichterleistung
Fehler in der Mikroprozessorüberwachung
Betriebsstörung
Komponentenfehler
Geräteschutz, wenn mit drehendem
Motor gestartet wird
Fehler quittieren und neu starten.
Sollte der Fehler erneut auftreten,
wenden Sie sich an den nächsten
Vacon-Vertrieb.
Im Falle einer vorübergehenden
Unterbrechung der Versorgungsspannung den Fehler quittieren und den
Frequenzumrichter neu starten. Versorgungsspannung prüfen. Wenn sie
angemessen ist, ist ein interner
Fehler aufgetreten.
Wenden Sie sich an den nächsten
Vacon-Vertrieb.
Versorgungsspannung, Sicherungen
und Kabel prüfen.
Motorkabel und Motor prüfen.
Umgebungstemperatur prüfen.
Korrekte Menge und Zirkulation der
Kühlluft prüfen.
Kühlkörper auf Staub prüfen.
Umgebungstemperatur prüfen.
Sicherstellen, dass die Schaltfrequenz nicht zu hoch für die
Umgebungstemperatur und die
Motorlast ist.
Motor und Last prüfen.
Nicht genügend Motorleistung,
Parametrierung des Motorblockierschutzes prüfen.
Motorlast verringern.
Wenn keine Motorüberlast vorhanden
ist, die Temperaturmodellparameter
prüfen.
Last prüfen. Parametrierung des
Unterlastschutzes prüfen.
Leistung des Frequenzumrichters zu
hoch: Last verringern.
Fehler quittieren und neu starten.
Wenn der Fehler erneut auftritt,
wenden Sie sich bitte an Ihre nächste
Vacon-Vertretung.
Fehler quittieren und neu starten.
Sollte der Fehler erneut auftreten,
wenden Sie sich an den nächsten
Vacon-Vertrieb.
Tabelle 27. Fehlercodes und -Beschreibungen.
Kundenservice: Finden Sie Ihr nächstgelegenes Vacon-Servicezentrum auf www.vacon.com
4
Page 86

vacon • 83 Fehlersuche
Fehle
rcode
Fehlername Subcode Mögliche Ursache Abhilfe
Fehler quittieren und neu starten.
30 STO-Fehler
Applikations-
35
fehler
41 IGBT-Temperatur
Fehler 4 mA
50
(Analogeingang)
51 Externer Fehler
Kommunikationsfehler Steu-
52
ertafel
Fehler Feldbuskommunika-
53
tion
54 Feldbus Schnittstellenfehler Optionskarte oder Steckplatz defekt Karte und Steckplatz prüfen.
55 Falscher Run-Befehl Falscher Run-Alarm und Stopp-Befehl
56 Temperatur Temperaturfehler
57 Einmessung Einmessungsalarm
63 Schnell-Stopp Schnell-Stopp aktiviert
STO-Signal gestattet die Einstellung des
Frequenzumrichters auf bereit nicht
Firmware-Schnittstellenversion zwi-
0
schen Anwendung und Steuerung nicht
kompatibel
1 Anwendungssoftware Flash-Fehler Anwendung nochmals laden
2 Anwendungsfehler in der Kopfzeile
IGBT-Temperatur (Gerätetemperatur +
I2T) zu hoch
Ausgewählter Signalbereich: 4...20 mA
(siehe Applikationshandbuch)
Strom unter 4 mA
Signalleitung defekt / unterbrochen
Fehlerhafte Signalquelle
Fehlermeldung am Digitaleingang. Der
Digitaleingang wurde als Eingang für
externe Fehlermeldungen programmiert. Der Eingang ist aktiv.
Verbindung zwischen Steuertafel und
Frequenzumrichter ist unterbrochen.
Die Datenverbindung zwischen dem
Feldbus-Master und der Feldbus-Platine
ist unterbrochen
Sollte der Fehler erneut auftreten,
wenden Sie sich an den nächsten
Vacon-Vertrieb.
Eine kompatible Anwendung laden.
Bitte wenden Sie sich an Ihre nächste
Vacon-Vertretung.
Eine kompatible Anwendung laden.
Bitte wenden Sie sich an Ihre nächste
Vacon-Vertretung.
Last prüfen.
Antriebsauslegung prüfen.
Motor-Einmessung durchführen.
Stromquelle und Kreis des Analogeingangs prüfen.
Programmierung und von der Fehlermeldung angegebenes Gerät prüfen.
Verkabelung des entsprechenden
Geräts ebenfalls prüfen.
Steuertafelanschluss und Steuertafelkabel prüfen.
Installation und Feldbus-Master
prüfen.
Vorwärts- und Rückwärts-Lauf
gleichzeitig aktiviert
OPTBH Platine ist installiert und die
gemessene Temperatur liegt oberhalb (oder unterhalb) der Grenze
Die Motor-Einmessung wurde nicht
erfolgreich abgeschlossen
Der Frequenzumrichter wurde mit
einem Schnell-Stopp-Digitaleingang
oder einem Schnell-Stopp-Befehl
über Feldbus gestoppt
4
Tabelle 27. Fehlercodes und -Beschreibungen.
Page 87

Page 88

Finden Sie Ihre nächste
Vacon-Niederlassung im Internet auf:
www.vacon.com
Unterlagen-ID:
Verfassung der Handbücher:
documentation@vacon.com
Vacon Plc.
Runsorintie 7
65380 Vaasa
Finland
Unterliegt Änderungen ohne Vorankündigung
© 2015 Vacon Plc.
Bestellnummer:
Rev.H
 Loading...
Loading...