


Application Guide
VACON® 100 INDUSTRIAL
drives.danfoss.com

VACON® 100 INDUSTRIAL
Application Guide
Contents
1
Introduction 11
1.1
Purpose of this Application Guide 11
Manual and Software Version 11
1.2
Additional Resources 11
1.3
1.4
Parameter Table Reading Guide 11
1.5
Functions of the AC Drive 12
1.6
Start-up Quick Guide 13
1.6.1
Start-Up Wizard 13
User Interfaces 15
2
Description of the Control Panel 15
2.1
Control Panel and the Keypad 15
2.1.1
Displays of the Control Panel 15
2.1.2
Contents
Menu Structure 16
2.2
2.3
Graphical Display 19
2.3.1
Editing the Text Values 19
2.3.2
Editing the Numerical Values 19
2.3.3
Selecting More than 1 Value 20
2.3.4
Resetting a Fault 20
2.3.5
[FUNCT] Button 20
2.3.5.1
2.3.5.2
2.3.5.3
2.3.5.4
2.3.5.5
2.3.6
Copying the Parameters of an AC Drive 23
2.3.7
Comparing the Parameters 23
2.3.8
Reading Help Texts 24
2.3.9
Using the Favourites Menu 25
Different Control Places 20
Changing the Control Place 21
Going into the Control Page 21
Changing the Rotation Direction 22
Using the Quick Edit Function 22
2.4
Text Display 25
2.4.1
Editing the Text Values 25
2.4.2
Editing the Numerical Values 25
2.4.3
Resetting a Fault 20
2.4.4
[FUNCT] Button 26
2.4.4.1
2.4.4.2
2.4.4.3
Different Control Places 20
Changing the Control Place 26
Going into the Control Page 27
AB275637269262en-000101/DPD00927 | 3Danfoss A/S © 2021.05
VACON® 100 INDUSTRIAL
Application Guide
2.4.4.4
2.4.4.5
2.5
VACON® Live PC Tool 28
3
Applications 29
3.1
Using the Applications 29
3.2
Standard Application 29
3.3
Local/Remote Application 33
3.4
Multi-step Speed Application 37
3.5
PID Control Application 42
3.6
Multi-purpose Application 46
3.7
Motor Potentiometer Application 51
4
Wizards 56
4.1
Application Wizards 56
Changing the Rotation Direction 27
Using the Quick Edit Function 22
Contents
4.1.1
Standard Application Wizard 56
4.1.2
Local/Remote Application Wizard 56
4.1.3
Multi-step Speed Application Wizard 57
4.1.4
PID Control Application Wizard 57
4.1.5
Multi-purpose Application Wizard 58
4.1.6
Motor Potentiometer Application Wizard 59
4.2
Function Wizards 59
4.2.1
Wizards in Menu 1.1 59
4.2.2
Multi-pump Wizard 60
4.2.3
Fire Mode Wizard 61
5
Monitor Menu 62
5.1
Uses of the Monitor Menu 62
5.2
Multimonitor Monitoring 62
5.2.1
Changing the Items to Monitor 62
5.3
Trend Curve Monitoring 62
5.3.1
Uses of the Trend Curve 62
5.3.2
Changing the Values in Trend Curve Monitoring 62
5.3.3
Stopping the Progression of the Curve 63
5.3.4
Trend Curve Parameters 64
5.4
Basic Monitoring 64
5.4.1
Uses of the Basic Monitoring 64
5.4.2
Basic Monitoring Parameters 64
5.5
I/O Monitoring 65
AB275637269262en-000101/DPD009274 | Danfoss A/S © 2021.05
VACON® 100 INDUSTRIAL
Application Guide
5.6
Temperature Inputs 65
5.7
Extras and Advanced 66
5.8
Timer Functions Monitoring 67
5.9
PID Controller Monitoring 68
5.10
External PID Controller Monitoring 68
5.11
Multi-pump Monitoring 68
5.12
Monitoring of Maintenance Counters 69
5.13
Fieldbus Process Data Monitoring 69
5.14
Drive Customizer Monitoring 70
5.15
Condition-based Monitoring 71
6
Parameters Menu 73
6.1
Group 3.1: Motor Settings 73
6.2
Group 3.2: Start/Stop Setup 76
6.3
Group 3.3: References 77
Contents
6.4
Group 3.4: Ramps and Brakes Setup 82
6.5
Group 3.5: I/O Configuration 83
6.6
Group 3.6: Fieldbus Data 90
6.7
Group 3.7: Prohibit Frequencies 92
6.8
Group 3.8 Supervisions 92
6.9
Group 3.9: Protections 93
6.10
Group 3.10: Automatic Reset 97
6.11
Group 3.11: Application Settings 98
6.12
Group 3.12: Timer Functions 98
6.13
Group 3.13: PID Controller 100
6.14
Group 3.14: External PID Controller 107
6.15
Group 3.15: Multi-pump 110
6.16
Group 3.16: Maintenance Counters 111
6.17
Group 3.17: Fire Mode 111
6.18
Group 3.18: Motor Preheat Parameters 112
6.19
Group 3.19: Drive Customizer 113
6.20
Group 3.20: Mechanical Brake 113
6.21
Group 3.21: Pump Control 114
6.22
Group 3.22: Advanced Harmonic Filter 115
6.23
Group 3.23: Condition-based Monitoring 115
7
Diagnostics Menu 120
7.1
Faults 120
7.1.1
Uses of the Active Faults Submenu 120
AB275637269262en-000101/DPD00927 | 5Danfoss A/S © 2021.05
VACON® 100 INDUSTRIAL
Application Guide
7.1.2
Reset Faults 120
7.1.2.1
7.1.2.2
7.1.2.3
7.1.3
Uses of the Fault History 121
7.1.3.1
7.1.3.2
7.2
Software Info 122
7.3
Drive Info 122
7.4
Unit Status 123
8
I/O and Hardware Menu 124
8.1
Basic I/O 124
8.2
Option Board Slots 124
8.3
Real-time Clock 125
Resetting Faults with the [BACK/RESET] Button 120
Resetting Faults with a Parameter on the Graphical Display 120
Resetting Faults with a Parameter on the Text Display 120
Examining the Fault History on the Graphical Display 121
Examining the Fault History on the Text Display 121
Contents
8.4
Simple Network Time Protocol (SNTP) 125
8.5
Power Unit Settings 126
8.6
Keypad 126
8.7
Fieldbus 127
8.8
Fieldbus General 129
8.9
STO 130
8.10
Fieldbus Redundancy 130
9
User Settings, Favourites, and User Level Menus 131
9.1
User Settings 131
9.1.1
User Settings Parameters 131
9.1.2
Parameter Back-up Parameters 131
9.1.3
Parameter Compare Parameters 132
9.1.4
License Parameters 132
9.2
Favourites 132
9.2.1
Using the Favourites Menu 132
9.2.2
Adding an Item to the Favourites 132
9.2.3
Removing an Item from the Favourites 132
9.3
User Levels 133
9.3.1
Using the User Levels Menu 133
9.3.2
The User Level Parameters 133
9.3.3
Changing the Access Code of the User Levels 133
AB275637269262en-000101/DPD009276 | Danfoss A/S © 2021.05
VACON® 100 INDUSTRIAL
Application Guide
10
Monitoring value descriptions 135
Multimonitor 135
10.1
10.2
Basic 136
I/O 137
10.3
10.4
Temperature Inputs 138
10.5
Extras and Advanced 139
10.6
Timer Functions 140
10.7
PID Controller 141
10.8
External PID Controller 141
10.9
Multi-pump 142
10.10
Maintenance Counters 142
10.11
Fieldbus Data 142
10.11.7
Fieldbus Data In 144
10.11.8
Fieldbus Data Out 145
Contents
Drive Customizer 147
10.12
10.13
Condition-based Monitoring 147
10.13.1
Baseline Data 147
10.13.2
Stator Winding Monitor 148
10.13.3
Vibration 149
10.13.4
Load 149
11
Parameter descriptions 151
11.2
Trend Curve 151
11.3
Fieldbus Redundancy 152
11.4
Motor Settings 152
11.4.1
Motor Nameplate Parameters 152
11.4.2
Motor Control Parameters 153
11.4.3
Motor Limits 158
11.4.4
Open Loop Parameters 159
11.4.5
I/f Start Function 162
11.4.6
Torque Stabilator Function 162
11.4.7
Advanced Sensorless Control 163
11.5
Start/Stop Setup 165
11.5.1
Start and Stop Commands in Different Control Places 165
11.6
References 173
11.6.1
Frequency Reference 173
11.6.2
Torque Reference 174
11.6.3
Torque Control in Open Loop Control 177
AB275637269262en-000101/DPD00927 | 7Danfoss A/S © 2021.05
VACON® 100 INDUSTRIAL
Application Guide
11.6.4
Torque Control in Advanced Sensorless Control 178
11.6.5
Preset Frequencies 178
11.6.6
Motor Potentiometer Parameters 181
11.6.7
Joystick Parameters 182
11.6.8
Jogging Parameters 183
11.7
Ramps and Brakes Setup 185
11.7.1
Ramp 1 185
11.7.2
Ramp 2 186
11.7.3
Start Magnetizing 187
11.7.4
DC Brake 188
11.7.5
Flux Braking 188
11.8
I/O Configuration 188
11.8.1
Programming of Digital and Analog Inputs 188
11.8.1.1
Contents
General Information on the Programming 188
11.8.1.2
11.8.1.3
11.8.1.4
11.8.1.5
11.8.1.6
11.8.1.7
11.8.2
Descriptions of Signal Sources 194
11.8.3
Default Functions of Programmable Inputs 195
11.8.4
Digital Inputs 195
11.8.5
Analog Inputs 200
11.8.6
Digital Outputs 204
11.8.7
Analog Outputs 208
11.9
Fieldbus Data 210
11.10
Prohibit Frequencies 212
11.11
Supervisions 214
11.12
Protections 215
Programming of Digital Inputs 189
Programming of Digital Inputs in the Graphical Display 191
Programming of Digital Inputs in the Text Display 191
Programming of Analog Inputs 192
Programming of Analog Inputs in the Graphical Display 193
Programming of Analog Inputs in the Text Display 194
11.12.1
General 215
11.12.2
Motor Thermal Protections 217
11.12.3
Motor Stall Protection 220
11.12.4
Underload Protection 221
11.12.5
Quick Stop 223
11.12.6
Temperature Input Fault 224
11.12.7
AI Low Protection 225
11.12.8
User Defined Fault 1 226
AB275637269262en-000101/DPD009278 | Danfoss A/S © 2021.05
VACON® 100 INDUSTRIAL
Application Guide
11.12.9
User Defined Fault 2 226
11.13
Automatic Reset 227
11.14
Application Settings 229
11.15
Timer Functions 230
11.15.1
Introduction to Timer Functions 230
11.15.2
Time Channels, Intervals, and Timers 230
11.15.3
Editing an Interval 232
11.16
PID Controller 234
11.16.1
Basic Settings 234
11.16.2
Setpoints 235
11.16.3
Feedback 237
11.16.4
Feedforward 237
11.16.5
Sleep Function 239
11.16.6
Feedback Supervision 241
Contents
11.16.7
Pressure Loss Compensation 243
11.16.8
Soft Fill 245
11.16.9
Input Pressure Supervision 247
11.16.10
Frost Protection 249
11.17
External PID Controller 250
11.17.1
Basic Settings 250
11.17.2
Setpoints 252
11.17.3
Feedback 253
11.17.4
Feedback Supervision 253
11.18
Multi-pump Function 255
11.18.1
The Multi-pump Function 255
11.18.12
Overpressure Supervision 261
11.19
Maintenance Counters 261
11.19.1
The Maintenance Counters 261
11.20
Fire Mode 262
11.20.1
The Fire Mode Function 262
11.21
Motor Preheat Function 265
11.22
Drive Customizer 266
11.23
Mechanical Brake 266
11.23.1
The Mechanical Brake Function 266
11.24
Pump Control 268
11.24.1
Auto-Cleaning 268
11.24.2
Jockey Pump 270
11.24.3
Priming Pump 271
AB275637269262en-000101/DPD00927 | 9Danfoss A/S © 2021.05

VACON® 100 INDUSTRIAL
Application Guide
11.25
Advanced Harmonic Filter 272
11.26
Condition-based Monitoring 273
11.26.1
Introduction to Condition-based Monitoring 273
11.26.1.1
11.26.6
Manual Run 275
11.26.7
Stator Winding Monitoring 275
11.26.8
Threshold Value 275
11.26.9
Warning and Alarm/Fault Stages 277
11.27
Default Values of Parameters in the Different Applications 282
11.28
Settings for Different Motor Types 285
11.28.1
Automatic Tuning of the U/f Curve 285
11.28.2
Manual Tuning of the U/f Curve 286
12
Fault tracing 288
12.1
Fault Types 288
Stages of Condition-based Monitoring 273
Contents
12.2
Alarms and Warnings 288
12.3
Fault Codes 288
12.4
Total and Trip Counters 314
12.4.1
Operating Time Counter 314
12.4.2
Operating Time Trip Counter 315
12.4.3
Run Time Counter 315
12.4.4
Power on Time Counter 316
12.4.5
Energy Counter 316
12.4.6
Energy Trip Counter 317
AB275637269262en-000101/DPD0092710 | Danfoss A/S © 2021.05
Edition
Software version
DPD00927K
FW0072V033
NOTE! Download the English and French product guides with applicable safety, warning and caution information from https://
www.danfoss.com/en/service-and-support/.
REMARQUE Vous pouvez télécharger les versions anglaise et française des guides produit contenant l'ensemble des informations
de sécurité, avertissements et mises en garde applicables sur le site https://www.danfoss.com/en/service-and-support/.
Index
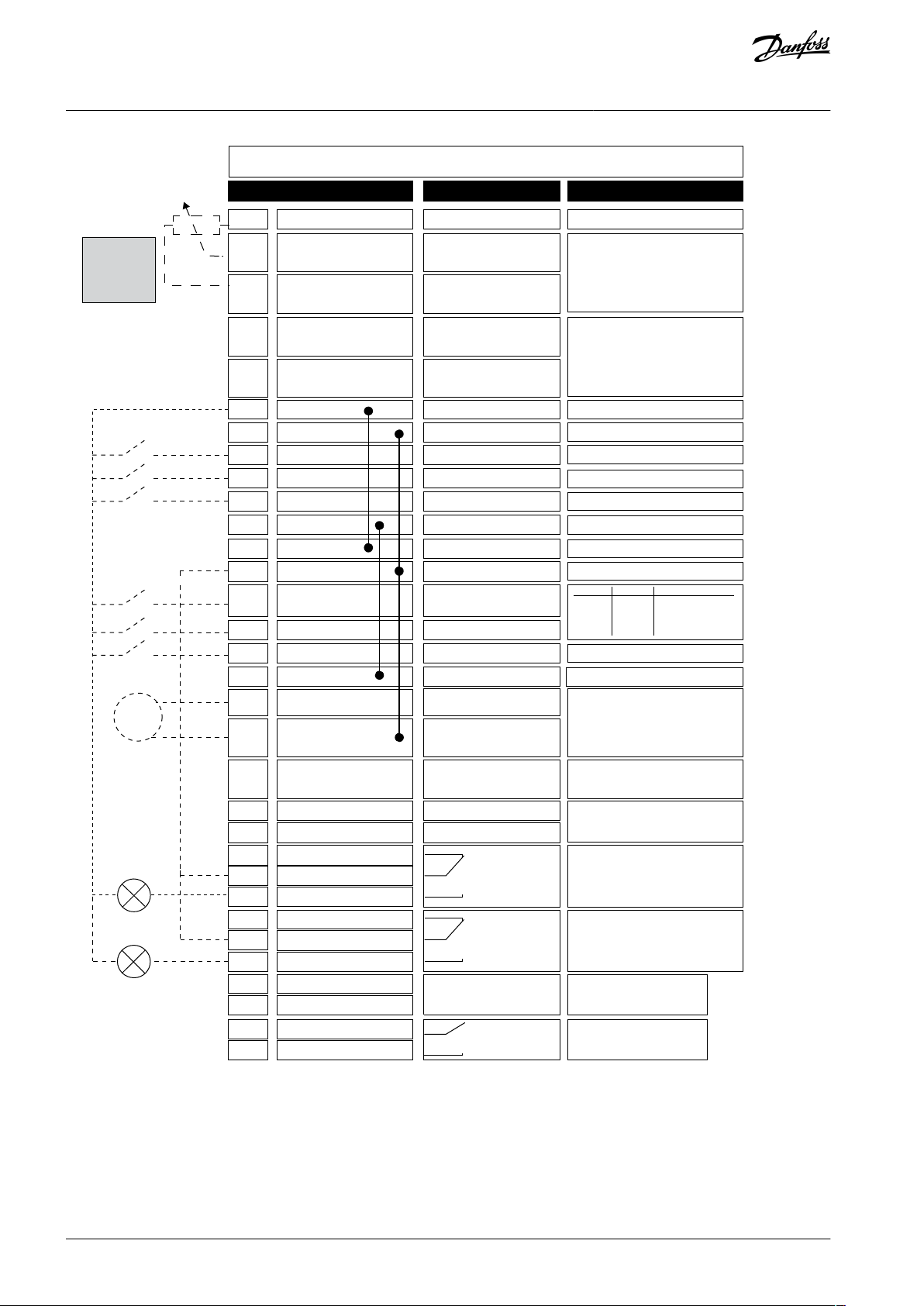
Min Max Unit Default
ID Description
Parameter
e30bg858.10
A
B
C
D E F G H
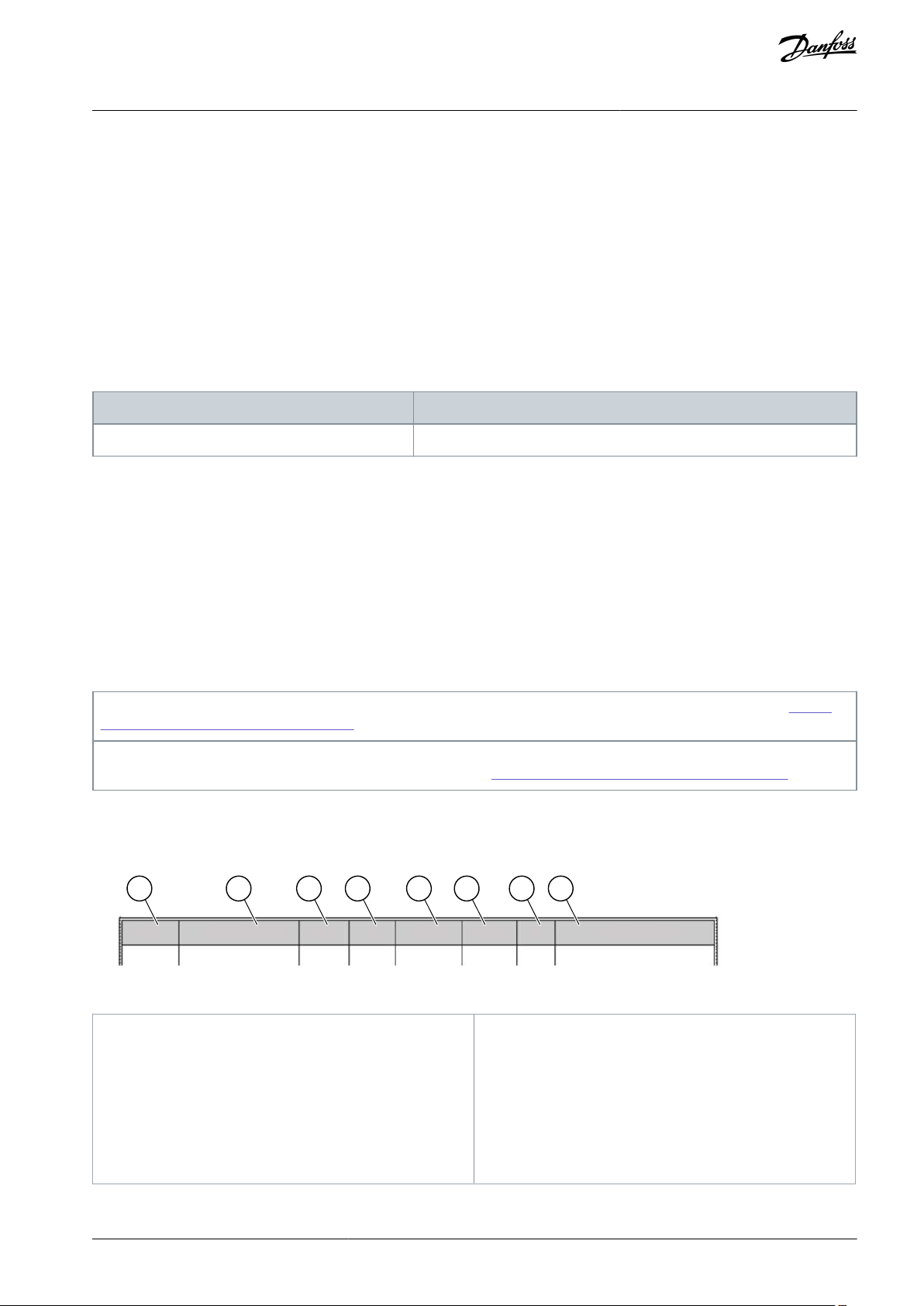
A
The location of the parameter in the menu, that is,
the parameter number.
B
The name of the parameter.
C
The minimum value of the parameter.
D
The maximum value of the parameter.
E
The unit of the value of the parameter. The unit
shows if it is available.
F
The value that was set in the factory.
G
The ID number of the parameter.
H
A short description of the values of the parameter
and/or its function.
VACON® 100 INDUSTRIAL
Application Guide
Introduction
1 Introduction
1.1 Purpose of this Application Guide
This Application Guide provides information for configuring the system, controlling the AC drive, accessing parameters, programming, and troubleshooting of the AC drive. It is intended for use by qualified personnel. Read and follow the instructions to use the
drive safely and professionally. Pay particular attention to the safety instructions and general warnings that are provided in this
manual and other documentation delivered with the drive.
1.2 Manual and Software Version
This manual is regularly reviewed and updated. All suggestions for improvement are welcome.
The original language of this manual is English.
Table 1: Manual and Software Version
1.3 Additional Resources
Other resources are available to understand advanced AC drive functions and operation.
•
VACON® 100 Wall-mounted Drives Operating Guide
•
VACON® 100 Enclosed Drives Installation Manual
VACON® 100 IP00 Drive Modules Installation Manual
•
VACON® 100 X Installation Manual
•
Instructions for operation with option boards and other optional equipment.
•
Supplementary publications and manuals are available from Danfoss.
For US and Canadian markets:
1.4 Parameter Table Reading Guide
This manual includes a large quantity of parameter tables. These instructions tell you how to read the tables.
Illustration 1: Parameter Table Reading Guide
AB275637269262en-000101 / DPD00927 | 11Danfoss A/S © 2021.05

VACON® 100 INDUSTRIAL
Application Guide
1.5 Functions of the AC Drive
•
Easy setup functions
-
Applications with preset parameters and I/O configuration for your process: Standard, Local/Remote, Multi-step speed, PID
control, Multi-purpose, or Motor potentiometer
-
Start-up wizards for fast and easy parameterization
•
Navigation functions
-
The [FUNCT] button for an easy change between the local and the remote control place (I/O or fieldbus)
-
A control page to operate and monitor of the most important values quickly
•
Advanced monitoring functions
-
Multimonitor
-
Trend curve
•
Fieldbus and I/O control
•
Motor control
-
Open loop control with frequency, speed, and torque reference
-
Advanced sensorless control mode
-
Support for induction, permanent magnet, and synchronous reluctance motors
-
Identification run for setup of motor parameters
-
Many advanced functions for motor control setting, such as load drooping
-
Flux and DC brake
•
Start and stop logic configuration
•
Reference selection and handling
-
8 preset frequencies
-
Motor potentiometer functions
-
A joystick control
-
A jogging function
-
2 programmable ramp times
-
3 ranges of prohibited frequencies
-
A forced stop
•
PID control
-
An external PID controller is available. Use it, for example, to control a valve with the I/O of the AC drive.
-
A sleep mode function that automatically enables and disables the operation of the drive to save energy
-
A 2-zone PID controller with 2 different feedback signals: minimum and maximum control
-
2 setpoint sources for the PID control. Selection to be made with a digital input.
-
A function for PID setpoint boost
-
A feedforward function to make the response to the process changes better
•
Pump control
-
Multi-pump control
-
Priming pump control, jockey pump control, pump impeller auto-cleaning, pump input pressure supervision, and frost protection function
•
Mechanical brake control
•
Timer functions and a real-time clock and (an optional battery is necessary)
•
Fire mode
•
Diagnostic and maintenance functions
-
Variety of configurable protection functions including user-defined faults
-
Supervision functions for frequency and motor variables and analog inputs
Introduction
AB275637269262en-000101 / DPD0092712 | Danfoss A/S © 2021.05
VACON® 100 INDUSTRIAL
Application Guide
-
Motor overload protections
-
An automatic reset
-
Different preheat modes to prevent condensation problems
-
Maintenance counters
•
Drive Customizer for custom logic programming
•
Control, parametrization, and diagnostics via PC-tools
Introduction
1.6 Start-up Quick Guide
There are 6 applications available for the product. When an application is selected, a group of parameters get their preset values.
The selection of the application makes the commissioning of the drive easy and reduces the manual work with the parameters. It is
also possible to edit these parameters later.
W A R N I N G
ACCIDENTAL START BECAUSE OF CHANGE OF SETTINGS
Running the Startup wizard, changing the application or the software can cause the I/O functions to change.
Disconnect the motor from the drive if an accidental start can be dangerous.
-
The available applications:
•
Standard application (3.2 Standard Application)
•
Local/remote application (3.3 Local/Remote Application)
•
Multi-step speed application (3.4 Multi-step Speed Application)
•
PID control application (3.5 PID Control Application)
•
Multi-purpose application (3.6 Multi-purpose Application)
•
Motor potentiometer application (3.7 Motor Potentiometer Application)
Wizards make it more convenient to use the AC drive. There is a start-up wizard (see 1.6.1 Start-Up Wizard), 6 applications wizards
(see 4.1 Application Wizards), and 2 function wizards (see 4.2.2 Multi-pump Wizard and 4.2.3 Fire Mode Wizard).
1.6.1 Start-Up Wizard
The Start-up wizard asks for necessary data for the drive to control the procedure.
Procedure
1.
Select language (P6.1).
If a battery is installed, the steps 2–5 are shown.
2.
Set daylight saving time (P5.5.5). (Russia, US, EU, or OFF)
3.
Set time (P5.5.2).
4.
Set year (P5.5.4).
5.
Set date (P5.5.3).
6.
Run Startup wizard?
If the selection is No, the Start-up wizard ends.
7.
Select an application (P1.2 Application, ID212).
8.
Set a value for P3.1.2.2 Motor Type (so that it agrees with the nameplate).
9.
Set a value for P3.1.1.1 Motor Nominal Voltage (so that it agrees with the nameplate).
10.
Set a value for P3.1.1.2 Motor Nominal Frequency (so that it agrees with the nameplate).
11.
Set a value for P3.1.1.3 Motor Nominal Speed (so that it agrees with the nameplate).
12.
Set a value for P3.1.1.4 Motor Nominal Current.
13.
Set a value for P3.1.1.5 Motor Cos Phi.
If parameter P3.1.2.2 Motor Type is set to Induction Motor, this step is shown. If the selection is PM Motor, the value of
parameter P3.1.1.5 Motor Cos Phi is set to 1.00 and the wizard goes directly to step 14.
14.
Set a value for P3.3.1.1 Minimum Frequency Reference.
15.
Set a value for P3.3.1.2 Maximum Frequency Reference.
AB275637269262en-000101 / DPD00927 | 13Danfoss A/S © 2021.05
VACON® 100 INDUSTRIAL
Application Guide
16.
Set a value for P3.4.1.2 Acceleration Time 1.
17.
Set a value for P3.4.1.3 Deceleration Time 1.
18.
Run the Application wizard?
a.
To continue to the application wizard, set the selection to Yes and push the [OK] button. See the description of the
different application wizards in chapter 4.1 Application Wizards.
After these selections, the Start-up wizard is completed. To start the Start-up wizard again, there are 2 alternatives.
Go to the parameter P6.5.1 Restore Factory Defaults or to the parameter B1.1.1 Start-up Wizard. Then set the value
to Activate.
Introduction
AB275637269262en-000101 / DPD0092714 | Danfoss A/S © 2021.05
e30bu012
A
B C
I
H D
G
F E
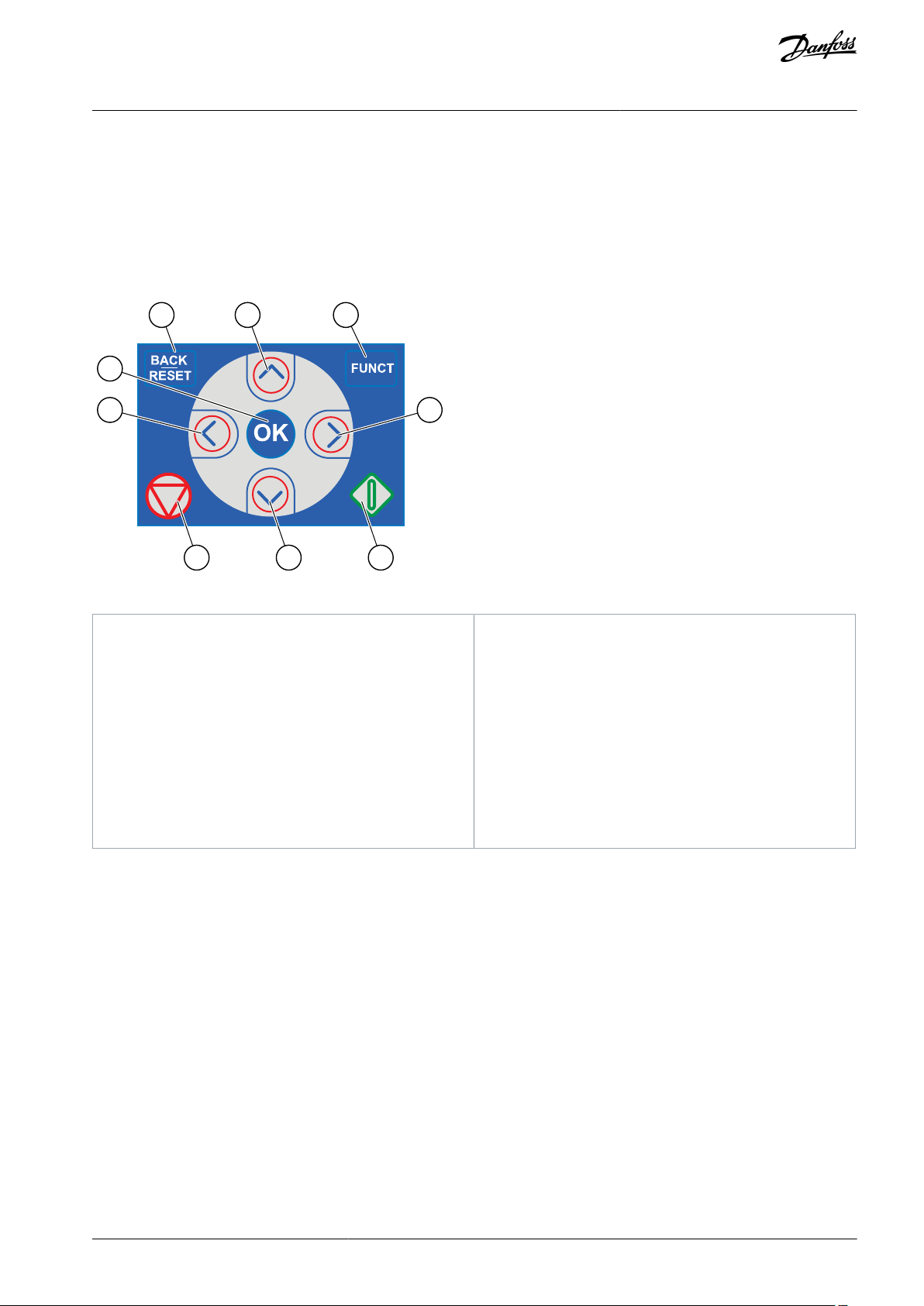
A
The [BACK/RESET] button. Use it to move back in the
menu, exit the Edit mode, reset a fault.
B
The arrow button UP. Use it to scroll up the menu
and to increase a value.
C
The [FUNCT] button. Use it to change the rotation
direction of the motor, access the control page, and
change the control place.
D
The arrow button RIGHT.
E
The START button.
F
The arrow button DOWN. Use it to scroll the menu
down and to decrease a value.
G
The STOP button.
H
The arrow button LEFT. Use it to move the cursor
left.
I
The [OK] button. Use it to go into an active level or
item, or to accept a selection.
VACON® 100 INDUSTRIAL
Application Guide
User Interfaces
2 User Interfaces
2.1 Description of the Control Panel
2.1.1 Control Panel and the Keypad
The control panel is the interface between the AC drive and the user. With the control panel, it is possible to control the speed of a
motor and monitor the status of the AC drive. It is also possible to set the parameters of the AC drive.
Illustration 2: Buttons of the VACON® 100 Keypad
2.1.2 Displays of the Control Panel
There are 2 display types: the graphical display and the text display. The control panel always has the same keypad and buttons.
The display shows this data.
•
The status of the motor and the drive.
•
Faults in the motor and in the drive.
•
Your location in the menu structure.
If the text in the text display is too long for the display, the text scrolls to show the full text string. Some functions are only available
in the graphical display.
AB275637269262en-000101 / DPD00927 | 15Danfoss A/S © 2021.05
STOP
READY
I/O
Main Menu
A
B C D E
F
H
G
Quick Setup
( 17 )
Monitor
( 5 )
Parameters
( 12 )
M1ID:
e30bu013.10
A
The first status field: STOP/RUN
B
The rotation direction of the motor
C
The second status field: READY/NOT READY/FAULT
D
The alarm field: ALARM/-
E
The control place field: PC/I/O/KEYPAD/ FIELDBUS
F
The location field: the ID number of the parameter
and the current location in the menu
G
An activated group or item
H
The number of items in the group in question
A B
F
C
D
E
e30bu014.10
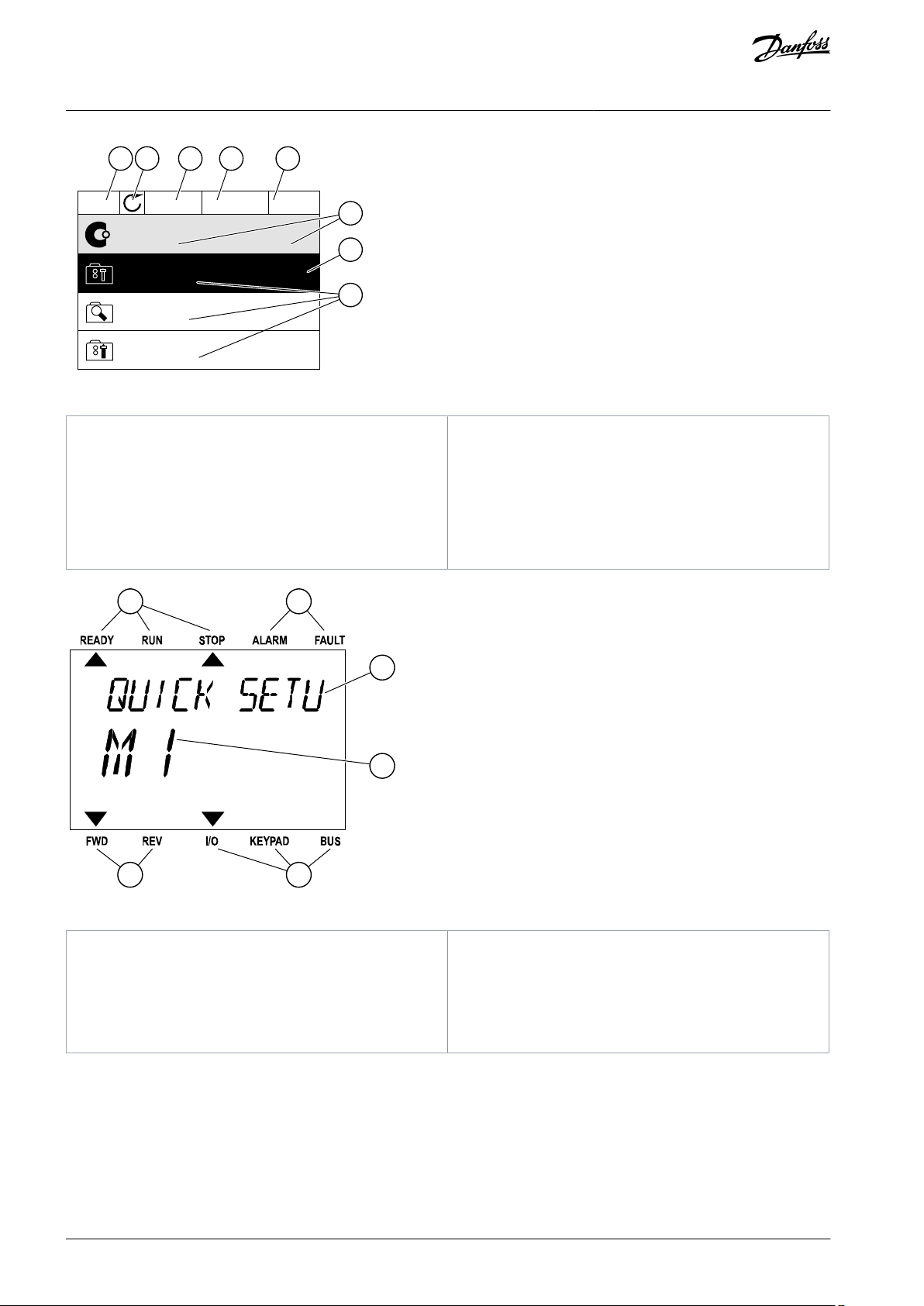
A
The indicators of status
B
The indicators of alarm and fault
C
The name of the group or item of the current locationDThe current location in the menu
E
The indicators of the control place
F
The indicators of the rotation direction
VACON® 100 INDUSTRIAL
Application Guide
Illustration 3: Graphical Display of the Control Panel
User Interfaces
Illustration 4: Text Display of the Control Panel
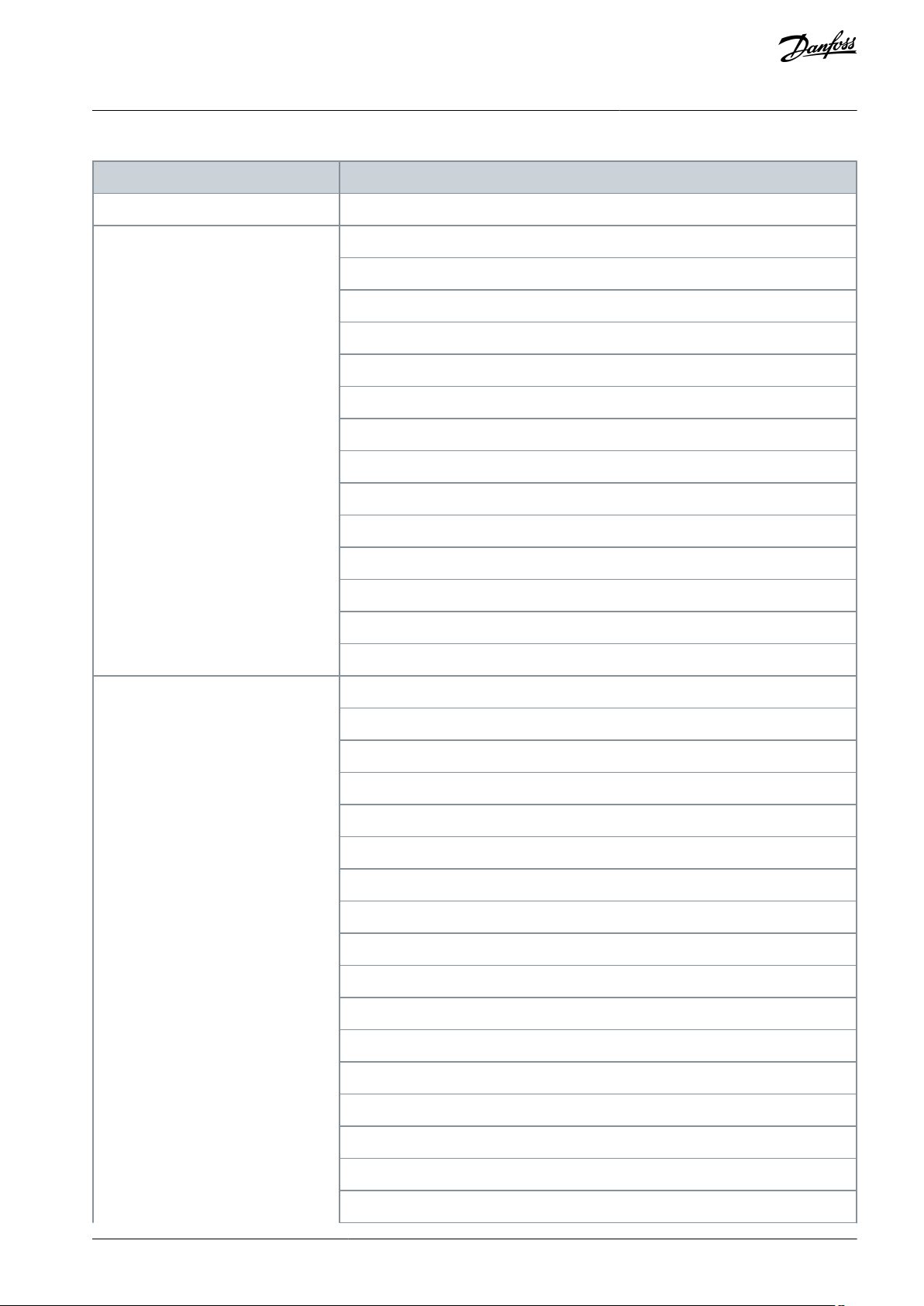
2.2 Menu Structure
The data of the AC drive is in menus and submenus. To move between the menus, use the arrow buttons Up and Down in the
keypad. To go into a group or an item, push the [OK] button. To go back to the previous level, push the [BACK/RESET] button.
On the display, current location in the menu shows, for example M3.2.1. The display also shows the name of the group or item in the
current location.
AB275637269262en-000101 / DPD0092716 | Danfoss A/S © 2021.05
Menu
Function
M1 Quick setup
Wizards (Content depends on P1.2 Application.)
M2 Monitor
Multimonitor
Trend curve
Basic
I/O
Temperature inputs
Extras/Advanced
Timer functions
PID controller
External PID controller
Multi-pump
Maintenance counters
Fieldbus data
Drive customizer
Condition-based monitoring
M3 Parameters
Motor settings
Start/Stop setup
References
Ramps and brakes
I/O Configuration
Fieldbus data
Prohibit frequencies
Supervisions
Protections
Automatic reset
Application settings
Timer functions
PID controller
External PID controller
Multi-pump
Maintenance counters
Fire mode
VACON® 100 INDUSTRIAL
Application Guide
Table 2: Menu Structure
User Interfaces
AB275637269262en-000101 / DPD00927 | 17Danfoss A/S © 2021.05
Menu
Function
Motor preheat
Drive customizer
Mechanical brake
Pump control
Advanced harmonic filter
Condition-based monitoring
M4 Diagnostics
Active faults
Reset faults
Fault history
Total counters
Trip counters
Software info
Drive info
Unit status
M5 I/O and Hardware
Basic I/O
Slot C
Slot D
Slot E
Real-time clock
Power unit settings
Keypad
RS485
Ethernet
Fieldbus general
M6 User settings
Language selections
Parameter back-up
Drive name
Parameter compare
Licenses
M7 Favourites
See 9.2.1 Using the Favourites Menu.
M8 User levels
See 9.3.1 Using the User Levels Menu.
VACON® 100 INDUSTRIAL
Application Guide
User Interfaces
AB275637269262en-000101 / DPD0092718 | Danfoss A/S © 2021.05
STOP
READY
I/O
Rem Control Place
M3.2.1
ID:
Edit
Help
Add to favourites
e30bu017.10
STOP
READY
I/O
Rem Control Place
M3.2.1ID:
FieldbusCTRL
I/O Control
e30bu018.10
STOP
READY
I/O
MinFreqReference
P3.3.1.1
ID:101
0.00 Hz
Min: 0.00Hz
Max: 50.00Hz
e30bu020.10
VACON® 100 INDUSTRIAL
Application Guide
2.3 Graphical Display
2.3.1 Editing the Text Values
This topic gives instructions on how to edit the text values on the graphical display.
Procedure
1.
Find the parameter with the arrow buttons.
2.
To go to the Edit mode, push the [OK] button 2 times or push the arrow button Right.
3.
To set a new value, push the arrow buttons Up and Down.
User Interfaces
4.
To accept the change, push the [OK] button. To ignore the change, use the [BACK/RESET] button.
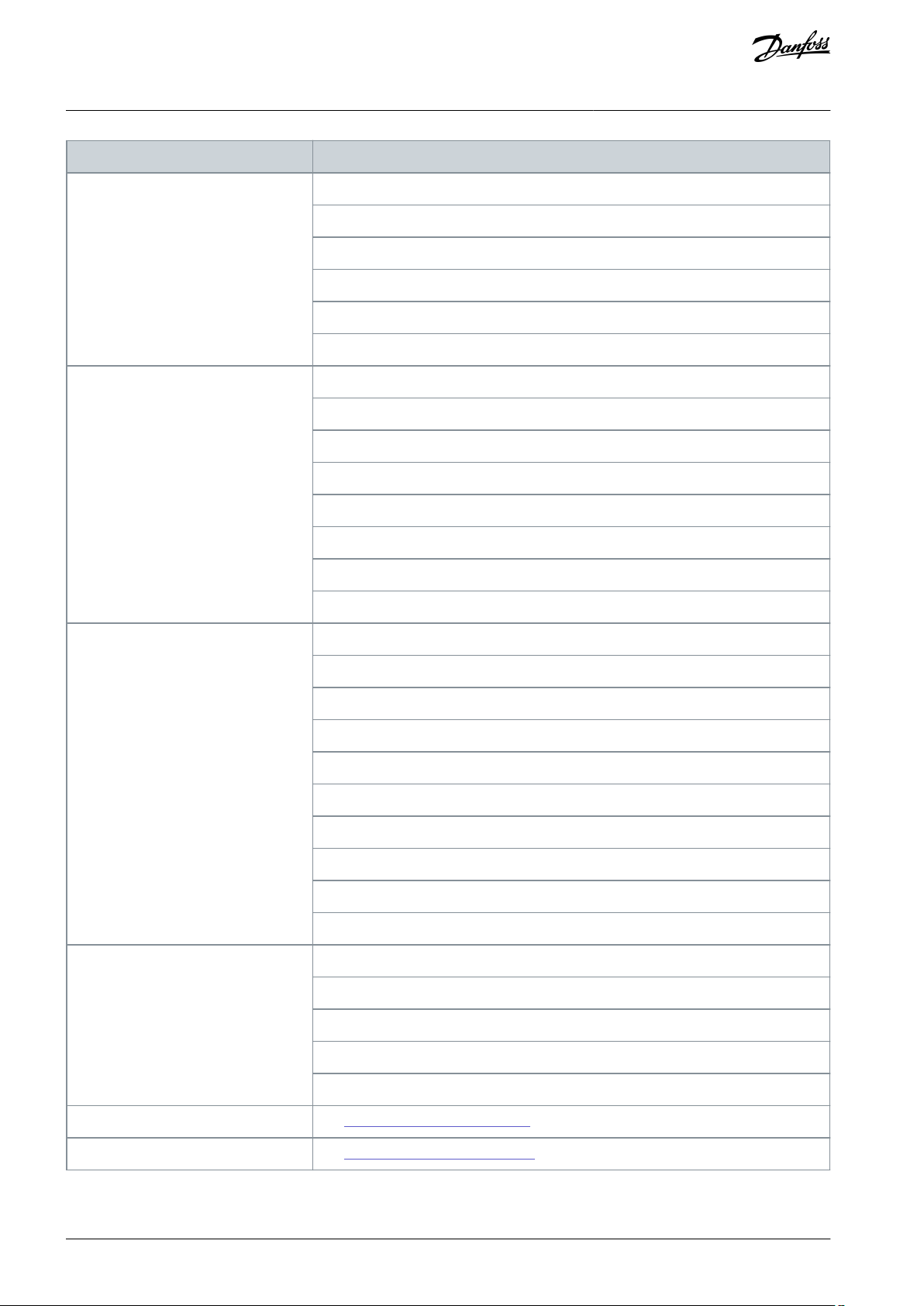
2.3.2 Editing the Numerical Values
This topic gives instructions on how to edit the numerical values on the graphical display.
Procedure
1.
Find the parameter with the arrow buttons.
2.
To go to the Edit mode, push the [OK] button 2 times or push the arrow button Right.
Move from digit to digit with the arrow buttons Left and Right. Change the digits with the arrow buttons Up and Down.
3.
4.
To accept the change, push the [OK] button. To ignore the change, use the [BACK/RESET] button.
AB275637269262en-000101 / DPD00927 | 19Danfoss A/S © 2021.05
STOP
READY
I/O
P3.12.1.3ID:1466
Interval 1
00:00:00
00:00:00
ON Time
OFF Time
Days
0
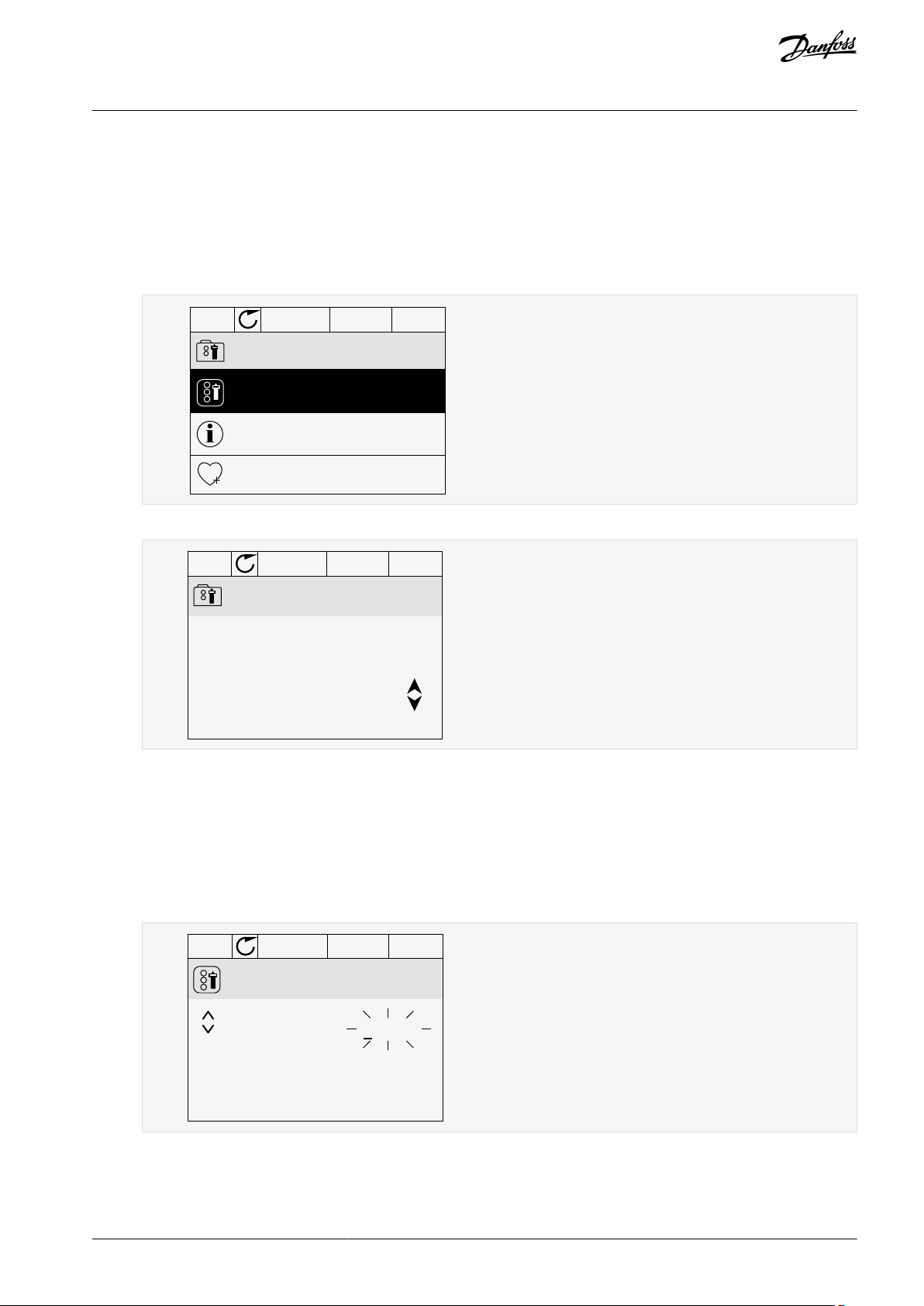
A
e30bu023.10
A
The symbol of the checkbox selection
STOP
READY
I/O
M 3.12.1.3.1
ID:
Days
Monday
Tuesday
Wednesday
Thursday
Friday
Sunday
e30bu025.10
VACON® 100 INDUSTRIAL
Application Guide
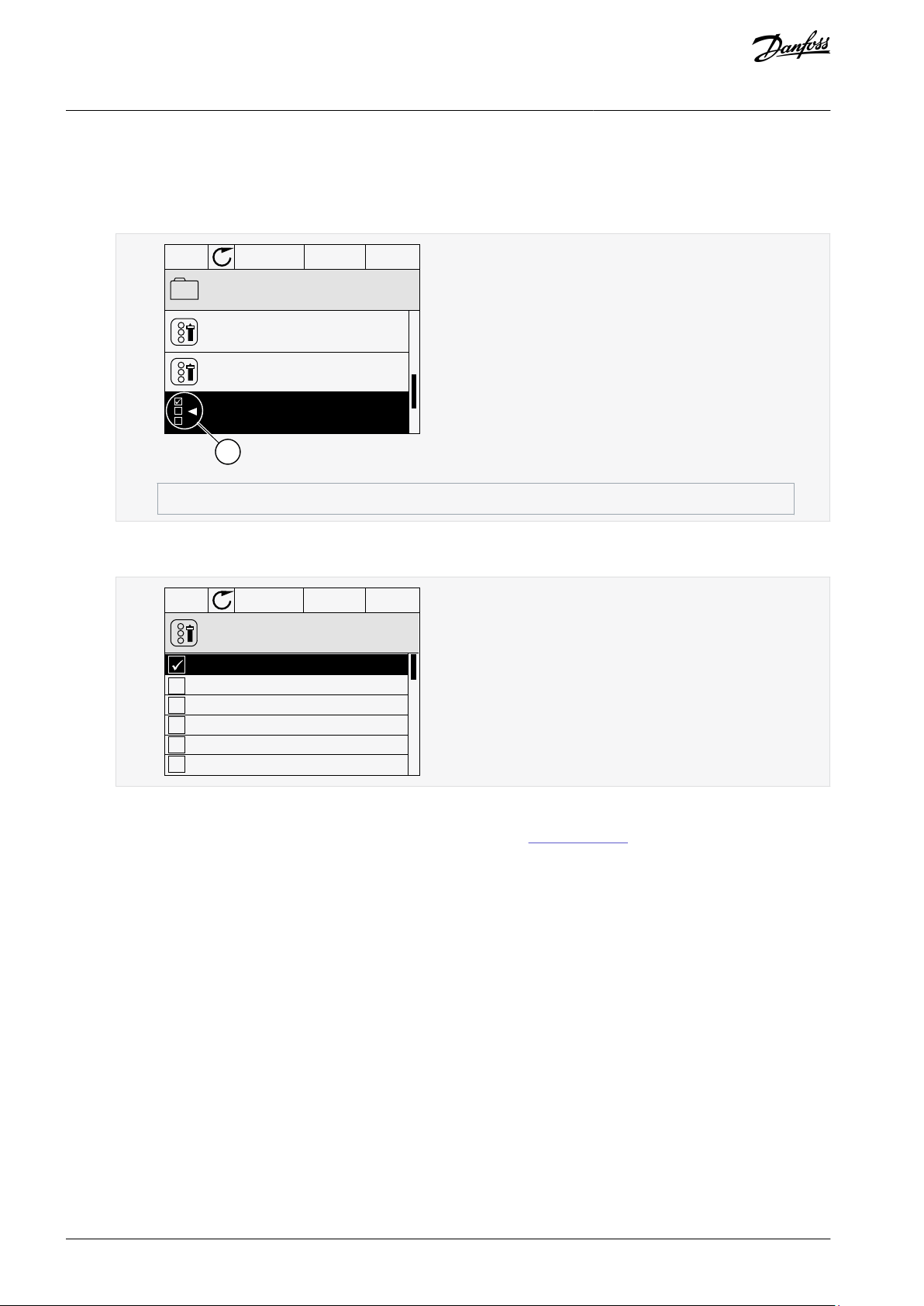
2.3.3 Selecting More than 1 Value
With some parameters, more than 1 value can be selected. Select a checkbox at each necessary value.
Procedure
1.
Find the parameter. There is a symbol on the display when a checkbox selection is possible.
2.
To move in the list of values, use the arrow buttons Up and Down.
3.
To add a value into your selection, select the box that is next to it with the arrow button Right.
User Interfaces
2.3.4 Resetting a Fault
To reset a fault, use the [BACK/RESET] button or the parameter Reset Faults. See 7.1.2 Reset Faults.
2.3.5 [FUNCT] Button
The [FUNCT] button can be used for 4 functions.
•
To have access to the Control page.
•
To change easily between the Local and Remote control places.
•
To change the rotation direction.
•
To edit quickly a parameter value.
2.3.5.1 Different Control Places
The selection of the control place determines from where the AC drive takes the start and stop commands. All the control places
have a parameter for the selection of the frequency reference source. The Local control place is always Keypad. The Remote control
place is I/O or Fieldbus. The status bar of the display shows the current control place.
It is possible to use I/O A, I/O B, and Fieldbus as Remote control places. I/O A and Fieldbus have the lowest priority. Select them with
P3.2.1 (Remote Control Place). I/O B can bypass the Remote control places I/O A and Fieldbus with a digital input. Select the digital
input with parameter P3.5.1.7 (I/O B Control Force).
Keypad is always used as a control place when the control place is Local. Local control has higher priority than Remote control. For
example, if parameter P3.5.1.7 bypasses the control place with a digital input, and Local is selected in Remote control, Keypad becomes the control place. Use the [FUNCT] button or P3.2.2 Local/Remote to change between the Local and Remote control.
AB275637269262en-000101 / DPD0092720 | Danfoss A/S © 2021.05
STOP
READY Keypad
ID:1805
Choose action
Control page
Change direction
Local/Remote
e30bu027.10
STOP
READY Keypad
ID:211
Local/Remote
Remote
Local
e30bu028.10
VACON® 100 INDUSTRIAL
Application Guide
2.3.5.2 Changing the Control Place
This topic gives instructions on how to change the control place on the control panel.
Procedure
1.
Anywhere in the menu structure, push the [FUNCT] button.
2.
To select Local/Remote, use the arrow buttons Up and Down. Push the [OK] button.
3.
To select Local or Remote, use the arrow buttons Up and Down again. To accept the selection, push the [OK] button.
User Interfaces
4.
If Remote control place is changed to Local, that is, Keypad, give a keypad reference.
After the selection, the display goes back into the same location where it was when the [FUNCT] button was push-
ed.
2.3.5.3 Going into the Control Page
It is easy to monitor the most important values in the Control page.
See more information about Keypad Reference in
display shows the frequency reference, which cannot be edited. The other values on the page are Multimonitor values. These values
can be selected (see 5.2.1 Changing the Items to Monitor).
Procedure
1.
Anywhere in the menu structure, push the [FUNCT] button.
2.
To select the Control page, push the arrow buttons Up and Down. Go in with the [OK] button.
The Control page opens.
With the Local control place and the keypad reference selected, P3.3.1.8 Keypad Reference can be set with the [OK] button.
3.
6.3 Group 3.3: References. If other control places or reference values are used, the
AB275637269262en-000101 / DPD00927 | 21Danfoss A/S © 2021.05
STOP
READY Keypad
ID: 168
Keypad Reference
0.00Hz
Output Frequency
Motor Current
Motor Torque
Motor Power
0.00Hz
0.00A
0.00%
0.00%
e30bg671.10
RUN
READY Keypad
ID:1805
Choose action
Forward
Reverse
e30bg672.10
STOP
READY I/O
ID:
M1
Main Menu
Monitor
( 7 )
Parameters
( 15 )
Diagnostics
( 6 )
e30bg673.10
VACON® 100 INDUSTRIAL
Application Guide
4.
To change the digits in the value, push the arrow buttons Up and Down. Accept the change with the [OK] button.
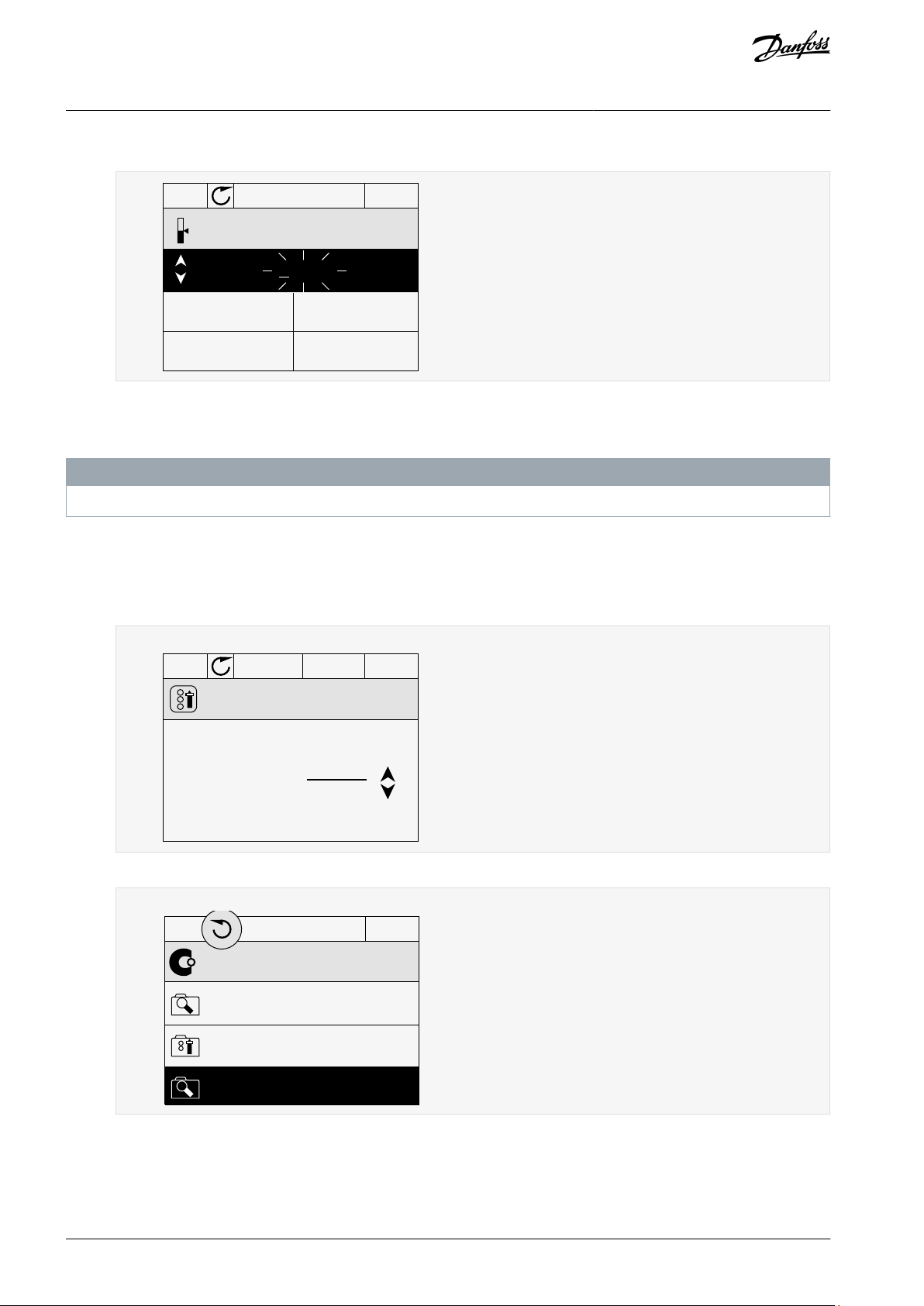
2.3.5.4 Changing the Rotation Direction
The rotation direction of the motor can be changed quickly with the [FUNCT] button.
N O T I C E
The command Change direction is available in the menu only if the current control place is Local.
Procedure
1.
Anywhere in the menu structure, push the [FUNCT] button.
2.
To select Change direction, push the arrow buttons Up and Down. Push the [OK] button.
3.
Select a new rotation direction.
User Interfaces
The current rotation direction blinks.
4.
Push the [OK] button.
The rotation direction changes immediately. The arrow indication in the status field of the display changes.
2.3.5.5 Using the Quick Edit Function
With the Quick Edit function, a parameter can be accessed quickly by typing the ID number of the parameter.
Procedure
Anywhere in the menu structure, push the [FUNCT] button.
1.
AB275637269262en-000101 / DPD0092722 | Danfoss A/S © 2021.05
STOP
READY Keypad
ID: M6.5
User settings
Language selection
English
Parameter backup
( 7 )
Drive name
Drive
e30bg674.10
STOP
READY Keypad
ID: M6.5.1
Parameter backup
Restore factory defaults
Save to keypad
Restore from keypad
e30bg675.10
VACON® 100 INDUSTRIAL
Application Guide
2.
Push the arrow buttons Up and Down to select Quick Edit and accept with the [OK] button.
3.
Write the ID number of a parameter or monitoring value. Push [OK].
The display shows the parameter value in the edit mode and the monitoring value in the monitoring mode.
User Interfaces
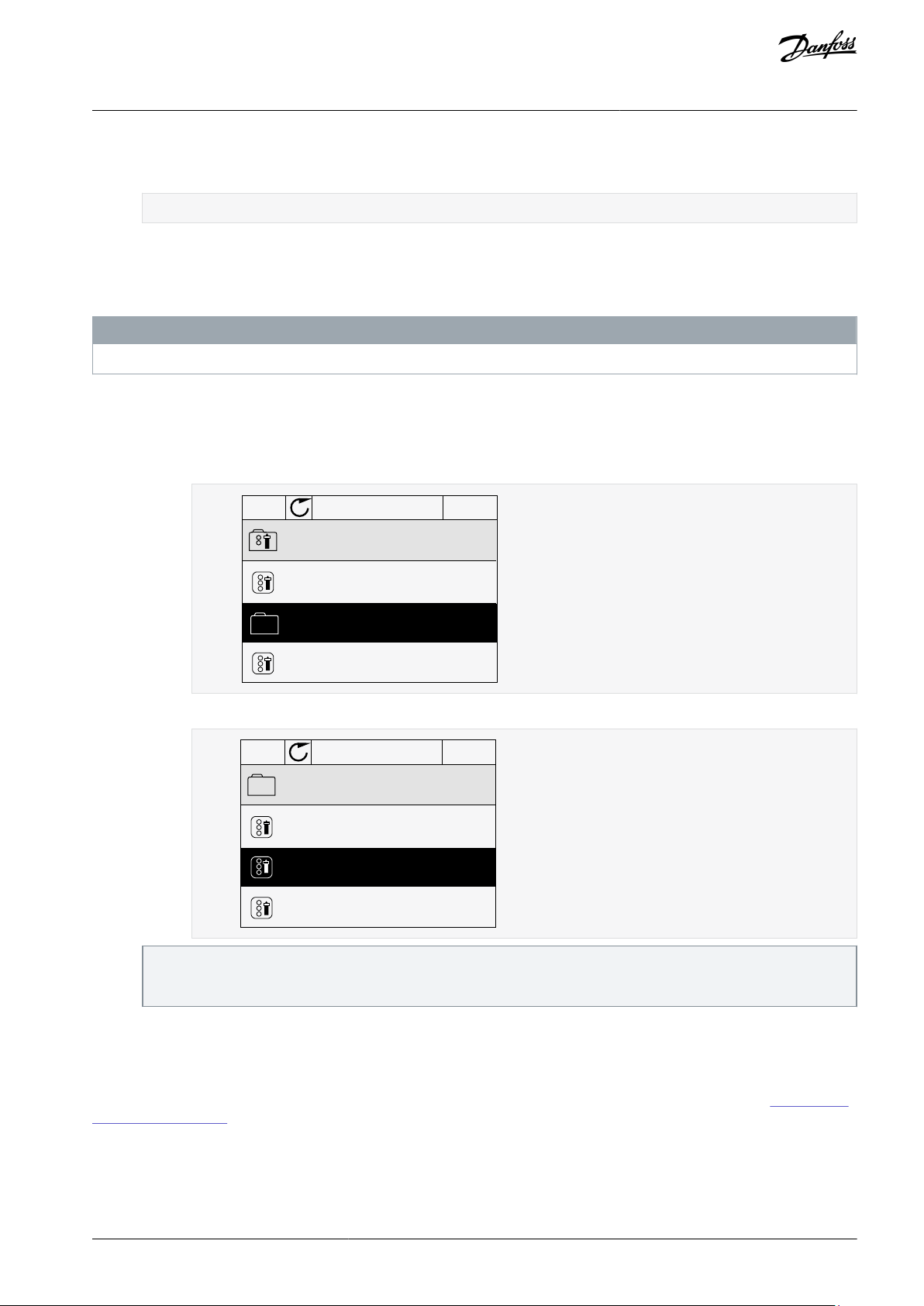
2.3.6 Copying the Parameters of an AC Drive
Use this function to copy parameters from a drive to another. Before downloading parameters from the control panel to the drive,
stop the drive.
N O T I C E
This function is available only in the graphical display.
Procedure
1.
Save the parameters to the control panel.
a.
Go into the User settings menu.
b.
Go into the Parameter backup submenu.
2.
3.
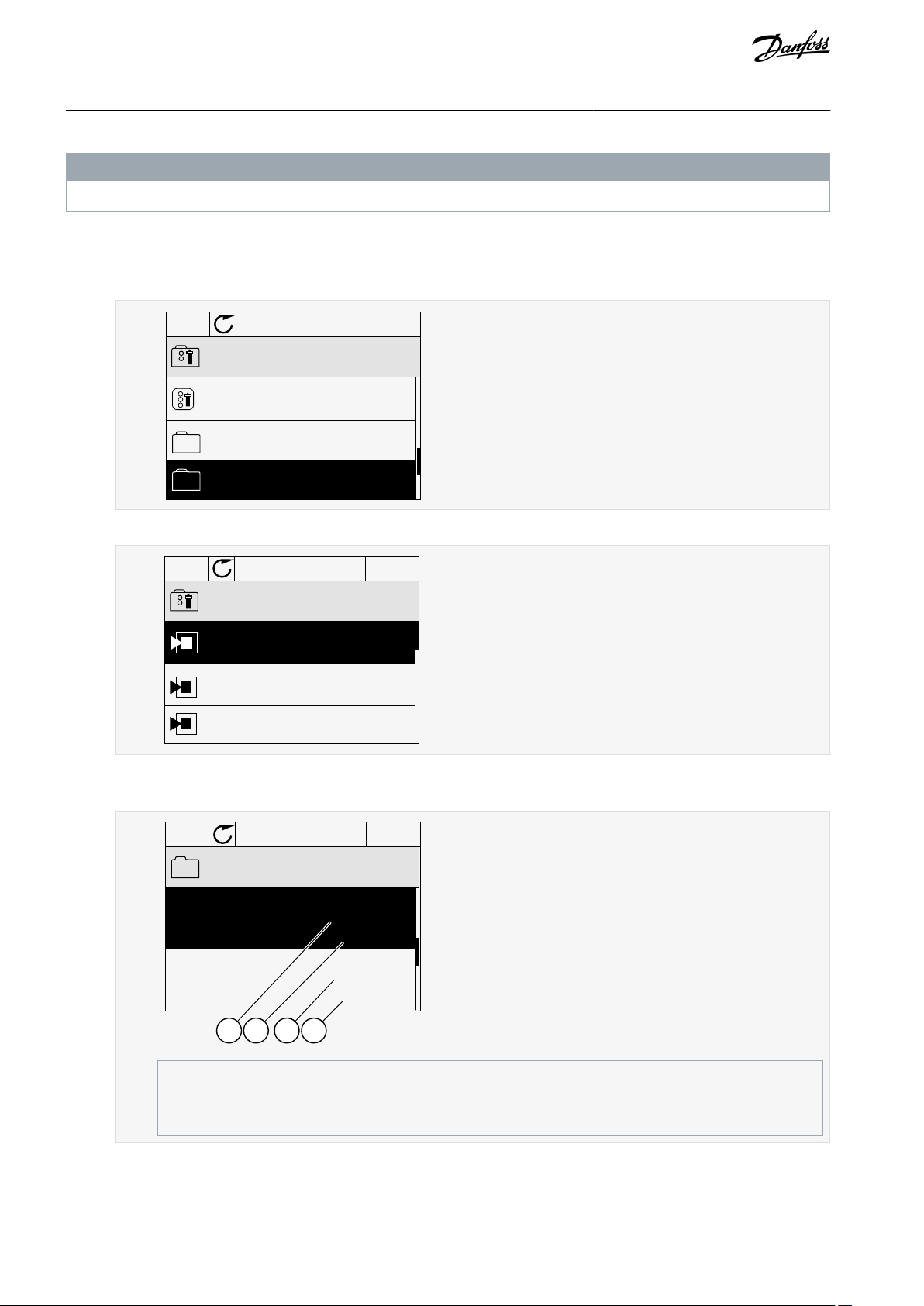
2.3.7 Comparing the Parameters
Use this function to compare the current parameter set with one of these 4 sets. See more about these parameters in
ter Back-up Parameters.
•
Set 1 (P6.5.4 Save to Set 1)
•
Set 2 (P6.5.6 Save to Set 2)
•
Defaults (P6.5.1 Restore Factory Defaults)
•
Keypad set (P6.5.2 Save to Keypad)
c.
Use the arrow buttons Up and Down to select a function. Accept the selection with the [OK] button.
The command Restore factory defaults brings back the parameter settings that were made at the factory. Use the command Save to keypad to copy all the parameters to the control panel. The command Restore from keypad copies all the
parameters from the control panel to the drive.
Detach the control panel and connect it to another drive.
Download the parameters to the new drive with the command Restore from keypad.
9.1.2 Parame-
AB275637269262en-000101 / DPD00927 | 23Danfoss A/S © 2021.05
STOP
READY I/O
ID: M6.6
User Settings
Language Selection
Parameter Backup
Parameter Compare
English
(4)
(7)
e30bg676.10
STOP
READY I/O
ID:
B6.6.1
Parameter Compare
Active set-Set 1
Active set-Set 2
Active set-Defaults
e30bg677.10
STOP
READY I/O
ID:113
Active set-Set 1
Motor Nom Currnt
Motor Cos Phi
0.56A
1.90A
0.68
1.74
A B C D
e30bg678.10
A
The current value
B
The value of the other set
C
The current value
D
The value of the other set
VACON® 100 INDUSTRIAL
Application Guide
User Interfaces
N O T I C E
If the parameter set with which the current set is compared was not saved, the display shows the text Comparing failed.
Procedure
1.
Go into the User settings menu.
2.
Go into the Parameter Compare function.
3.
Select the pair of sets. Push [OK] to accept the selection.
4.
Select Active and push [OK].
5.
Examine the comparing between the current values and the values of the other set.
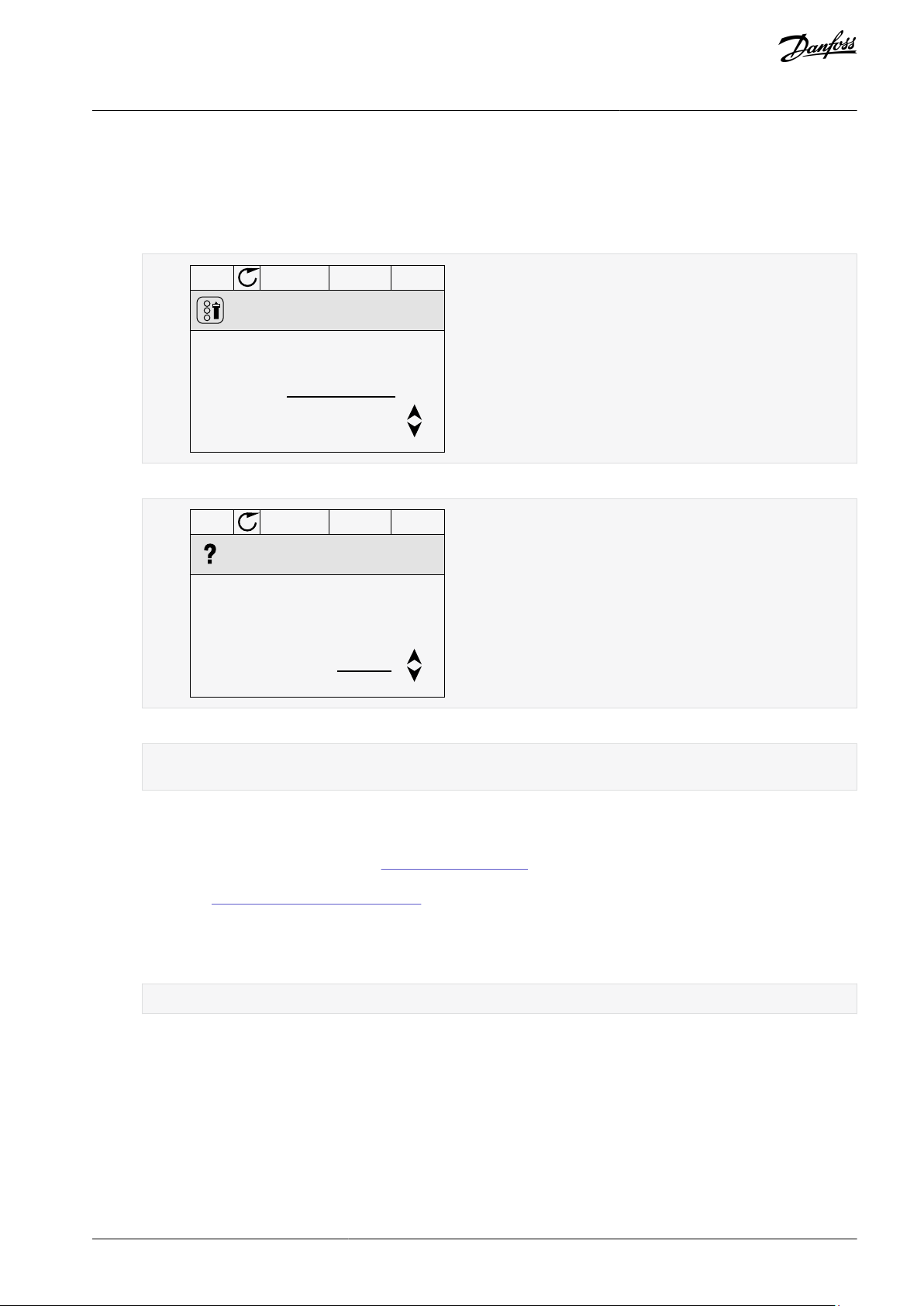
2.3.8 Reading Help Texts
The graphical display can show help texts on many topics. All the parameters have a help text. The help texts are also available for
the faults, alarms, and the start-up wizard.
AB275637269262en-000101 / DPD0092724 | Danfoss A/S © 2021.05
STOP
READY I/O
ID:403 M3.5.1.1
Ctrl signal 1 A
Edit
Help
Add to favourites
e30bg679.10
READY
FAULT
ALARM
STOP
RUN
KEYPAD
I/O
REV
FWD
BUS
e30bg680.10
VACON® 100 INDUSTRIAL
Application Guide
The help texts are always in English.
Procedure
1.
Find the item to read.
2.
Use the arrow buttons Up and Down to select Help.
3.
To open the help text, push the [OK] button.
User Interfaces
N O T I C E
2.3.9 Using the Favourites Menu
If the same items are used frequently, add them into Favourites. Collect a set of parameters or monitoring signals from all the control panel menus. See 9.2.2 Adding an Item to the Favourites.
2.4 Text Display
2.4.1 Editing the Text Values
This topic gives instructions on how to edit text values on the text display.
Procedure
1.
Find the parameter with the arrow buttons.
2.
To go to the Edit mode, push the [OK] button.
3.
To set a new value, push the arrow buttons Up and Down.
4.
Accept the change with the [OK] button. To ignore the change, use the [BACK/RESET] button.
2.4.2 Editing the Numerical Values
This topic gives instructions on how to edit the numerical values on the text display.
Procedure
1.
Find the parameter with the arrow buttons.
2.
3.
4.
Go to the Edit mode.
Move from digit to digit with the arrow buttons Left and Right. Change the digits with the arrow buttons Up and Down.
Accept the change with the [OK] button. To ignore the change, use the [BACK/RESET] button.
AB275637269262en-000101 / DPD00927 | 25Danfoss A/S © 2021.05
READY
FAULT
ALARM
STOP
RUN
KEYPAD
I/O
REV
FWD
BUS
e30bg681.10
READY
FAULT
ALARM
STOP
RUN
KEYPAD
I/O
REV
FWD
BUS
e30bg682.10
VACON® 100 INDUSTRIAL
Application Guide
User Interfaces
2.4.3 Resetting a Fault
To reset a fault, use the [BACK/RESET] button or the parameter Reset Faults. See 7.1.2 Reset Faults.
2.4.4 [FUNCT] Button
The [FUNCT] button can be used for 4 functions.
•
To have access to the Control page.
•
To change easily between the Local and Remote control places.
•
To change the rotation direction.
•
To edit quickly a parameter value.
2.4.4.1 Different Control Places
The selection of the control place determines from where the AC drive takes the start and stop commands. All the control places
have a parameter for the selection of the frequency reference source. The Local control place is always Keypad. The Remote control
place is I/O or Fieldbus. The status bar of the display shows the current control place.
It is possible to use I/O A, I/O B, and Fieldbus as Remote control places. I/O A and Fieldbus have the lowest priority. Select them with
P3.2.1 (Remote Control Place). I/O B can bypass the Remote control places I/O A and Fieldbus with a digital input. Select the digital
input with parameter P3.5.1.7 (I/O B Control Force).
Keypad is always used as a control place when the control place is Local. Local control has higher priority than Remote control. For
example, if parameter P3.5.1.7 bypasses the control place with a digital input, and Local is selected in Remote control, Keypad becomes the control place. Use the [FUNCT] button or P3.2.2 Local/Remote to change between the Local and Remote control.
2.4.4.2 Changing the Control Place
This topic gives instructions on how to change the control place on the control panel.
Procedure
Anywhere in the menu structure, push the [FUNCT] button.
1.
2.
To select Local/Remote, use the arrow buttons Up and Down. Push the [OK] button.
3.
To select Local or Remote, use the arrow buttons Up and Down again. To accept the selection, push the [OK] button.
4.
If Remote control place is changed to Local, that is, the keypad, give a keypad reference.
After the selection, the display goes back into the same location where it was when the [FUNCT] button was pushed.
AB275637269262en-000101 / DPD0092726 | Danfoss A/S © 2021.05
READY
FAULT
ALARM
STOP
RUN
KEYPAD
I/O
REV
FWD
BUS
e30bg683.10
READY
FAULT
ALARM
STOP
RUN
KEYPAD
I/O
REV
FWD
BUS
e30bg684.10
VACON® 100 INDUSTRIAL
Application Guide
User Interfaces
2.4.4.3 Going into the Control Page
It is easy to monitor the most important values in the Control page.
See more information about Keypad Reference in 6.3 Group 3.3: References. If other control places or reference values are used, the
display shows the frequency reference that cannot be edited. The other values on the page are Multimonitor values. These values
can be selected (see
Procedure
1.
Anywhere in the menu structure, push the [FUNCT] button.
2.
To select the Control page, push the arrow buttons Up and Down. Go in with the [OK] button.
5.2.1 Changing the Items to Monitor).
The Control page opens.
3.
If the Local control place and the keypad reference are used, P3.3.1.8 Keypad Reference can be set with the [OK] button.
2.4.4.4 Changing the Rotation Direction
The rotation direction of the motor can be changed quickly with the [FUNCT] button.
N O T I C E
The command Change direction is available in the menu only if the current control place is Local.
Procedure
1.
Anywhere in the menu structure, push the [FUNCT] button.
2.
To select Change direction, push the arrow buttons Up and Down. Push the [OK] button.
3.
Select a new rotation direction.
The current rotation direction blinks.
4.
Push the [OK] button.
The rotation direction changes immediately. The arrow indication in the status field of the display changes.
2.4.4.5 Using the Quick Edit Function
With the Quick Edit function, a parameter can be accessed quickly by typing the ID number of the parameter.
Procedure
AB275637269262en-000101 / DPD00927 | 27Danfoss A/S © 2021.05
e30bg685.10
VACON® 100 INDUSTRIAL
Application Guide
1.
Anywhere in the menu structure, push the [FUNCT] button.
2.
Push the arrow buttons Up and Down to select Quick Edit and accept with the [OK] button.
3.
Write the ID number of a parameter or monitoring value. Push [OK].
The display shows the parameter value in the edit mode and the monitoring value in the monitoring mode.
User Interfaces
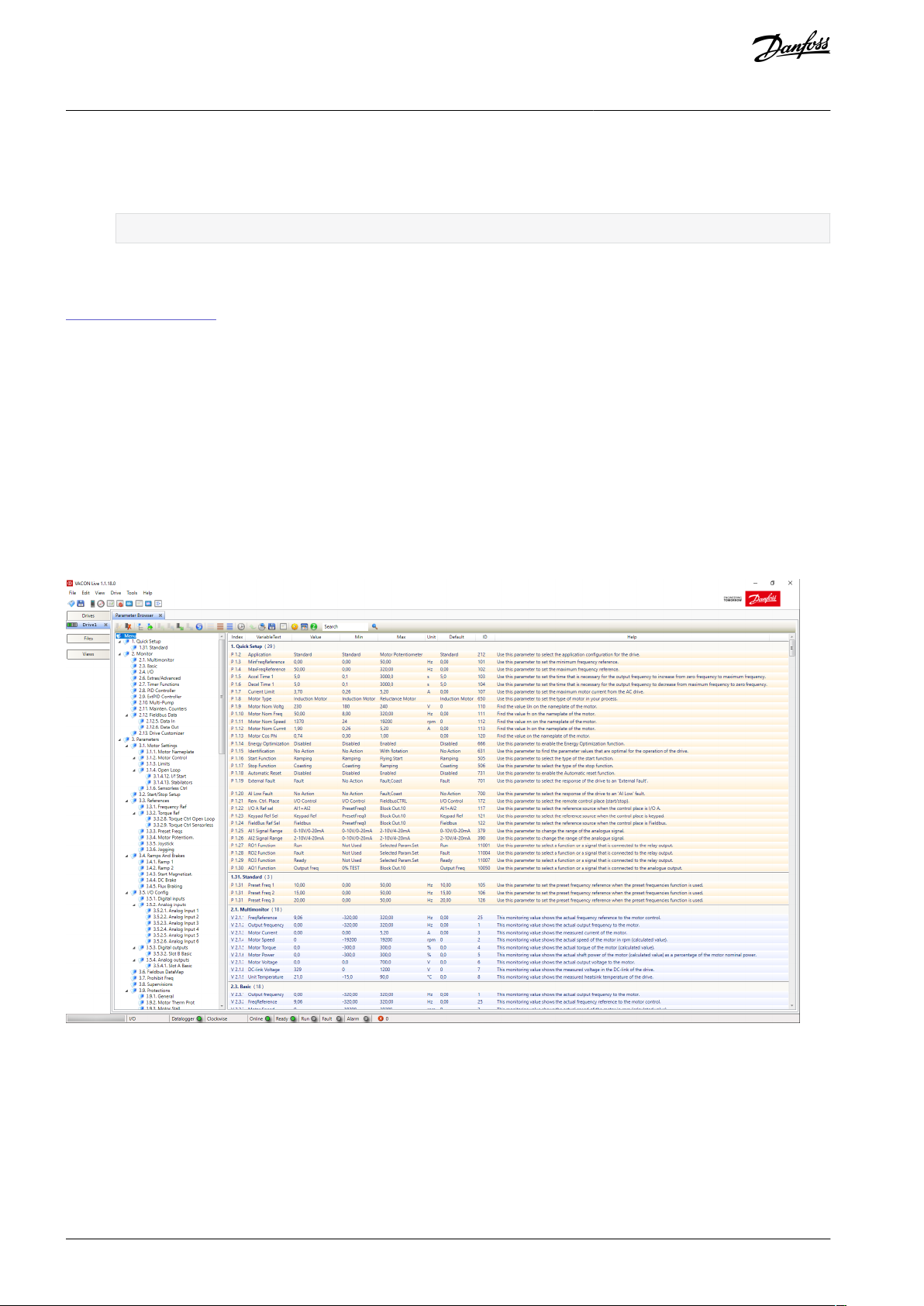
2.5 VACON® Live PC Tool
VACON® Live is a PC tool for commissioning and maintenance of the VACON® AC drives. VACON® Live can be downloaded from
https://www.danfoss.com.
The VACON® Live PC tool includes these functions.
•
Parameterization, monitoring, drive info, data logger, and so on.
•
The software download tool VACON® Loader
Serial communication and Ethernet support
•
Windows XP, Vista, 7, 8, and 10 support
•
17 languages: English, German, Spanish, Finnish, French, Italian, Russian, Swedish, Chinese, Czech, Danish, Dutch, Polish, Portu-
•
guese, Romanian, Slovak and Turkish
Make the connection between the AC drive and the PC tool with the VACON® serial communication cable. The serial communication drivers are installed automatically during the installation of VACON® Live. After the cable is installed, VACON® Live finds the
connected drive automatically.
See more on how to use VACON® Live in the help menu of the program.
Illustration 5: The VACON® Live PC Tool
AB275637269262en-000101 / DPD0092728 | Danfoss A/S © 2021.05

VACON® 100 INDUSTRIAL
Application Guide
Applications
3 Applications
3.1 Using the Applications
Use the parameter P1.2 (Application) to select an application for the drive. Immediately when the parameter P1.2 changes, parameter groups get their preset values.
3.2 Standard Application
Use the Standard application in speed-controlled processes where no special functions are necessary, for example pumps, fans, or
conveyors.
It is possible to control the drive from the control panel (keypad), Fieldbus, or I/O terminal.
When the drive is controlled with the I/O terminal, the frequency reference signal is connected to AI1 (0…10 V) or AI2 (4…20 mA).
The connection depends the type of the signal. There are also 3 preset frequency references available. The preset frequency references can be activated with DI4 and DI5. The start/stop signals of the drive are connected to DI1 (start forward) and DI2 (start reverse).
It is possible to configure all the drive outputs freely in all the applications. There is 1 analog output (Output Frequency) and 3 relay
outputs (Run, Fault, Ready) available on the basic I/O board.
AB275637269262en-000101 / DPD00927 | 29Danfoss A/S © 2021.05
DI4
DI5
**)
*)
Modbus RTU,
N2, BACnet
1
6
2
3
4
5
18
19
30
12
7
13
8
9
10
14
15
16
21
22
23
11
17
A
B
24
25
26
32
33
28
29
e30bg590.10
mA
FAULT
RUN
RUN
AO1-
+24Vin
24Vout
GND
GND
DI1
DI2
DI3
DI4
DI5
DI6
R
O1/1 NC
R
O1/2 CM
R
O1/3 NO
CM
CM
RS485
RS485
R
O2/1 NC
R
O2/2 CM
R
O2/3 NO
R
O3/2 CM
R
O3/3 NO
Standard I/O board
Terminal Signal Description
+10 Vref
AI1+
AI1-
AI2+
AI2-
24Vout
Reference output
Analog input 1 +
Analog input 1 -
Analog input 2 +
Analog input 2 -
24 V auxiliary voltage
I/O ground
Digital input 1
Digital input 2
Digital input 3
Digital input 4
Digital input 5
Digital input 6
Common for DI1-DI6
Common for DI1-DI6
24 V auxiliary voltage
I/O ground
Analog output 1 +
Analog output 1 -
24V auxiliary
input voltage
Output
frequency
0...20 mA)
READY
Serial bus, negative
Serial bus, positive
Relay output 1
Relay output 2
Relay output 3
FAULT
Fault reset
AO1+
Frequency reference
(default 0...10 V)
Frequency reference
(Default 4...20 mA)
Start forward
Start reverse
External fault
Freq. ref.
Open
Closed
Open
Closed
Open
Open
Closed
Closed
Analog input 1
Preset Freq. 1
Preset Freq. 2
Preset Freq. 3
Reference-
potentiome-
ter
1...10 kΩ
TI1+
TI1-
Thermistor input
VACON® 100 INDUSTRIAL
Application Guide
Applications
Illustration 6: The Default Control Connections of the Standard Application
*) Available only in VACON® 100 X. **) For the DIP switch configurations in VACON® 100 X, see the VACON® 100 X Installation manual.
AB275637269262en-000101 / DPD0092730 | Danfoss A/S © 2021.05

A
B
C
e30bg589.10
A
Digital input DIP switch
B
Floating
C
Connected to GND (Default)
Index
Parameter
Min
Max
Unit
Default
ID
Description
1.2
Application
050
212
0 = Standard
1 = Local/Remote
2 = Multi-step Speed
3 = PID Control
4 = Multi-purpose
5 = Motor Potentiometer
1.3
Minimum Frequency
Reference
0.00
P1.4Hz0.0
101
1.4
Maximum Frequency
Reference
P1.3
320.0
Hz
50.0/60.0
102
1.5
Acceleration Time 1
0.1
300.0
s
5.0
103
1.6
Deceleration Time 1
0.1
300.0
s
5.0
104
1.7
Motor Current Limit
IH*0.1
ISA
Varies
107
1.8
Motor Type
020
650
0 = Induction Motor
1 = Permanent Magnet Motor
2 = Reluctance Motor
1.9
Motor Nominal Voltage
Varies
Varies
V
Varies
110
Find this value Un on the nameplate of the motor.
NOTE! Find out if the motor connection is Delta
or Star.
1.10
Motor Nominal Frequency
8.0
320.0
Hz
50/60
111
Find this value fn on the nameplate of the motor.
VACON® 100 INDUSTRIAL
Application Guide
Illustration 7: The DIP Switch
Applications
See information on the Startup, Multi-pump, and Fire mode wizards in 4.2.1 Wizards in Menu 1.1.
Table 3: M1 Quick Setup
AB275637269262en-000101 / DPD00927 | 31Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
1.11
Motor Nominal Speed
24
19200
RPM
Varies
112
Find this value nn on the nameplate of the motor.
1.12
Motor Nominal Current
IH * 0.1
IH * 2
A
Varies
113
Find this value In on the nameplate of the motor.
1.13
Motor Cos Phi (Power
Factor)
0.30
1.00
Varies
120
Find this value on the nameplate of the motor.
1.14
Energy Optimization
010
666
0 = Disabled
1 = Enabled
1.15
Identification
020
631
0 = No action
1 = At standstill
2 = With rotation
1.16
Start Function
010
505
0 = Ramping
1 = Flying Start
1.17
Stop Function
010
506
0 = Coasting
1 = Ramping
1.18
Automatic Reset
010
731
0 = Disabled
1 = Enabled
1.19
Response to External
Fault
032
701
0 = No action
1 = Alarm
2 = Fault (Stop according to stop mode)
3 = Fault (Stop by coasting)
1.20
Response to AI Low
Fault
050
700
0 = No action
1 = Alarm
2 = Alarm+preset fault frequency (P3.9.1.13)
3 = Alarm + previous frequency
4 = Fault (Stop according to stop mode)
5 = Fault (Stop by coasting)
1.21
Remote Control Place
010
172
0 = I/O control
1 = Fieldbus control
1.22
I/O Control Reference
A Selection
1206
117
1 = Preset Frequency 0
2 = Keypad reference
3 = Fieldbus
4 = AI1
5 = AI2
6 = AI1+AI2
7 = PID reference
8 = Motor potentiometer
9 = Joystick reference
10 = Jogging reference
11 = Block Out.1
12 = Block Out.2
13 = Block Out.3
VACON® 100 INDUSTRIAL
Application Guide
Applications
AB275637269262en-000101 / DPD0092732 | Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
14 = Block Out.4
15 = Block Out.5
16 = Block Out.6
17 = Block Out.7
18 = Block Out.8
19 = Block Out.9
20 = Block Out.10
1.23
Keypad Control Reference Selection
1202
121
See P1.22.
1.24
Fieldbus Control Reference Selection
1203
122
See P1.22.
1.25
AI1 Signal Range
010
379
0= 0..10 V/0...20 mA
1= 2...10 V/4...20 mA
1.26
AI2 Signal Range
011
390
0= 0..10 V/0...20 mA
1= 2...10 V/4...20 mA
1.27
RO1 Function
0612
11001
See P3.5.3.2.1.
1.28
RO2 Function
0563
11004
See P3.5.3.2.1.
1.29
RO3 Function
0561
11007
See P3.5.3.2.1.
1.30
AO1 Function
0312
10050
See P3.5.4.1.1.
Index
Parameter
Min
Max
Unit
Default
ID
Description
1.31.1
Preset Frequency 1
P1.3
P1.4Hz10.0
105
1.31.2
Preset Frequency 2
P1.3
P1.4Hz15.0
106
1.31.3
Preset Frequency 3
P1.3
P1.4Hz20.0
126
VACON® 100 INDUSTRIAL
Application Guide
Applications
Table 4: M1.31 Standard
3.3 Local/Remote Application
Use the Local/Remote application when, for example, it is necessary to switch between 2 different control places.
To change between the Local and the Remote control place, use DI6. When Remote control is active, the start/stop commands can
be given from Fieldbus or from I/O terminal (DI1 and DI2). When Local control is active, give the start/stop commands from the
control panel.
For each control place, the frequency reference can be selected from the control panel (keypad), Fieldbus, or I/O terminal (AI1 or
AI2).
It is possible to configure all the drive outputs freely in all the applications. There is 1 analog output (Output Frequency) and 3 relay
outputs (Run, Fault, Ready) available on the basic I/O board.
AB275637269262en-000101 / DPD00927 | 33Danfoss A/S © 2021.05

1
6
2
3
4
5
18
19
30
12
7
13
8
9
10
14
15
16
21
22
23
11
17
A
B
24
25
26
32
33
Modbus RTU,
N2, BACnet
28
29
*)
**)
e30bg591.10
mA
FAULT
RUN
RUN
AO1-/GND
+24Vin
24Vout
GND
GND
DI1
DI2
DI3
DI4
DI5
DI6
R
O1/1 NC
R
O1/2 CM
R
O1/3 NO
CM
CM
RS485
RS485
R
O2/1 NC
R
O2/2 CM
R
O2/3 NO
R
O3/2 CM
R
O3/3 NO
Standard I/O board
Terminal
Signal Description
+10 Vref
AI1+
AI1-
AI2+
AI2-
24 Vout
Reference output
Analog input 1 +
Analog input 1 -
Analog input 2 +
Analog input 2 -
24 V auxiliary voltage
I/O ground
Digital input 1
Digital input 2
Digital input 3
Digital input 4
Digital input 5
Digital input 6
Common for DI1-DI6
Common for DI1-DI6
24 V auxiliary voltage
I/O ground
Analog output 1 +
Analog output 1 -
24 V auxiliary
input voltage
Output
frequency
0...20 mA)
READY
Serial bus, negative
Serial bus, positive
Relay output 1
Relay output 2
Relay output 3
FAULT
AO1+
Reference
potentiome-
ter
1...10 kΩ
Remote reference
(4...20 mA)
Remote
control
(+24 V)
Remote
control ground
REMOTE:
Frequency reference
(default: 4...20 mA)
LOCAL:
Frequency reference
(default: 0...10 V)
REMOTE: Start forward
REMOTE: Start reverse
External fault
LOCAL: Start forward
LOCAL: Start reverse
LOCAL/REMOTE selection
TI1+
TI1-
Thermistor input
VACON® 100 INDUSTRIAL
Application Guide
Applications
Illustration 8: The Default Control Connections of the Local/Remote Application
*) Available only in VACON® 100 X. **) For the DIP switch configurations in VACON® 100 X, see the VACON® 100 X Installation manual.
AB275637269262en-000101 / DPD0092734 | Danfoss A/S © 2021.05

A
B
C
e30bg589.10
A
Digital input DIP switch
B
Floating
C
Connected to GND (Default)
Index
Parameter
Min
Max
Unit
Default
ID
Description
1.2
Application
051
212
0 = Standard
1 = Local/Remote
2 = Multi-step Speed
3 = PID Control
4 = Multi-purpose
5 = Motor Potentiometer
1.3
Minimum Frequency
Reference
0.00
P1.4Hz0.0
101
1.4
Maximum Frequency
Reference
P1.3
320.0
Hz
50.0/60.0
102
1.5
Acceleration Time 1
0.1
300.0
s
5.0
103
1.6
Deceleration Time 1
0.1
300.0
s
5.0
104
1.7
Motor Current Limit
IH*0.1
ISA
Varies
107
1.8
Motor Type
020
650
0 = Induction Motor
1 = Permanent Magnet Motor
2 = Reluctance Motor
1.9
Motor Nominal Voltage
Varies
Varies
V
Varies
110
Find this value Un on the nameplate of the motor.
NOTE! Find out if the motor connection is Delta
or Star.
1.10
Motor Nominal Frequency
8.0
320.0
Hz
50/60
111
Find this value fn on the nameplate of the motor.
VACON® 100 INDUSTRIAL
Application Guide
Illustration 9: The DIP Switch
Applications
See information on the Startup, Multi-pump, and Fire mode wizards in 4.2.1 Wizards in Menu 1.1.
Table 5: M1 Quick Setup
AB275637269262en-000101 / DPD00927 | 35Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
1.11
Motor Nominal Speed
24
19200
RPM
Varies
112
Find this value nn on the nameplate of the motor.
1.12
Motor Nominal Current
IH * 0.1
IH * 2
A
Varies
113
Find this value In on the nameplate of the motor.
1.13
Motor Cos Phi (Power
Factor)
0.30
1.00
Varies
120
Find this value on the nameplate of the motor.
1.14
Energy Optimization
010
666
0 = Disabled
1 = Enabled
1.15
Identification
020
631
0 = No action
1 = At standstill
2 = With rotation
1.16
Start Function
010
505
0 = Ramping
1 = Flying Start
1.17
Stop Function
010
506
0 = Coasting
1 = Ramping
1.18
Automatic Reset
010
731
0 = Disabled
1 = Enabled
1.19
Response to External
Fault
032
701
0 = No action
1 = Alarm
2 = Fault (Stop according to stop mode)
3 = Fault (Stop by coasting)
1.20
Response to AI Low
Fault
050
700
0 = No action
1 = Alarm
2 = Alarm+preset fault frequency (P3.9.1.13)
3 = Alarm + previous frequency
4 = Fault (Stop according to stop mode)
5 = Fault (Stop by coasting)
1.21
Remote Control Place
010
172
0 = I/O control
1 = Fieldbus control
1.22
I/O Control Reference
A Selection
1205
117
1 = Preset Frequency 0
2 = Keypad reference
3 = Fieldbus
4 = AI1
5 = AI2
6 = AI1+AI2
7 = PID reference
8 = Motor potentiometer
9 = Joystick reference
10 = Jogging reference
11 = Block Out.1
12 = Block Out.2
13 = Block Out.3
VACON® 100 INDUSTRIAL
Application Guide
Applications
AB275637269262en-000101 / DPD0092736 | Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
14 = Block Out.4
15 = Block Out.5
16 = Block Out.6
17 = Block Out.7
18 = Block Out.8
19 = Block Out.9
20 = Block Out.10
1.23
Keypad Control Reference Selection
1202
121
See P1.22.
1.24
Fieldbus Control Reference Selection
1203
122
See P1.22.
1.25
AI1 Signal Range
010
379
0= 0..10 V/0...20 mA
1= 2...10 V/4...20 mA
1.26
AI2 Signal Range
011
390
0= 0...10 V/0...20 mA
1= 2...10 V/4...20 mA
1.27
RO1 Function
0612
11001
See P3.5.3.2.1.
1.28
RO2 Function
0563
11004
See P3.5.3.2.1.
1.29
RO3 Function
0561
11007
See P3.5.3.2.1.
1.30
AO1 Function
0312
10050
See P3.5.4.1.1.
Index
Parameter
Min
Max
Unit
Default
ID
Description
1.32.1
I/O Control Reference B Selection
1204
131
See P1.22.
1.32.2
I/O B Control Force
digIN SlotA.6
425
CLOSED = Force control place to I/O B
1.32.3
I/O B Reference Force
digIN SlotA.6
343
CLOSED = Used frequency reference is
specified by I/O Reference B parameter
(P1.32.1)
1.32.4
Control Signal 1 B
digIN SlotA.4
423
1.32.5
Control Signal 2 B
digIN SlotA.5
424
1.32.6
Keypad Control Force
digIN SlotA.1
410
1.32.7
Fieldbus Control Force
digIN Slot0.1
411
1.32.8
External Fault (Close)
digIN SlotA.3
405
OPEN = OK
CLOSED = External fault
1.32.9
Fault Reset (Close)
digIN Slot0.1
414
Resets all active faults when CLOSED
VACON® 100 INDUSTRIAL
Application Guide
Applications
Table 6: M1.32 Local/Remote
3.4 Multi-step Speed Application
Use the Multi-step speed application with processes where more than 1 fixed frequency reference is necessary (for example test
benches).
It is possible to use 1 + 7 frequency references: 1 basic reference (AI1 or AI2) and 7 preset references.
AB275637269262en-000101 / DPD00927 | 37Danfoss A/S © 2021.05

DI4 DI5
1
DI6
0
0
0
0
0
1
0
0
1
1
1
1
1
1
1
0
0
0
0
0
1
1
1
1
6
2
3
4
5
18
19
30
12
7
13
8
9
10
14
15
16
21
22
23
11
17
A
B
24
25
26
32
33
Modbus RTU,
N2, BACnet
28
29
*)
**)
e30bg592.10
mA
FAULT
RUN
RUN
AO1-
+24Vin
24 Vout
GND
GND
DI1
DI2
DI3
DI4
DI5
DI6
R
O1/1 NC
R
O1/2 CM
R
O1/3 NO
CM
CM
RS485
RS485
R O2/1 NC
R O2/2 CM
R O2/3 NO
R O3/2 CM
R O3/3 NO
Standard I/O board
Terminal Signal Description
+10 Vref
AI1+
AI1-
AI2+
AI2-
24 Vout
Reference output
Analog input 1 +
Analog input 1 -
Analog input 2 +
Analog input 2 -
24 V auxiliary voltage
I/O ground
Digital input 1
Digital input 2
Digital input 3
Digital input 4
Digital input 5
Digital input 6
Common for DI1-DI6
Common for DI1-DI6
24V auxiliary voltage
I/O ground
Analog output 1 +
Analog output 1 -
24 V auxiliary
input voltage
Output
frequency
0...20 mA)
READY
Serial bus, negative
Serial bus, positive
Relay output 1
Relay output 2
Relay output 3
FAULT
AO1+
Frequency reference
(default 0...10 V)
Frequency reference
(Default 4...20 mA)
Start forward
Start reverse
External fault
Analog input
Preset Freq. 1
Preset Freq. 2
Preset Freq. 3
Preset Freq. 4
Preset Freq. 5
Preset Freq. 6
Preset Freq. 7
Freq. ref.
TI1+
TI1-
Thermistor input
Reference
potentiome-
ter
1...10 kΩ
VACON® 100 INDUSTRIAL
Application Guide
Applications
Make a selection of the preset frequency references with digital signals DI4, DI5, and DI6. If none of these inputs are active, the
frequency reference is removed from the analog input (AI1 or AI2). Give the start/stop commands from the I/O terminal (DI1 and
DI2).
It is possible to configure all the drive outputs freely in all the applications. There is 1 analog output (Output Frequency) and 3 relay
outputs (Run, Fault, Ready) available on the basic I/O board.
Illustration 10: The Default Control Connections of the Multi-step Speed Application
AB275637269262en-000101 / DPD0092738 | Danfoss A/S © 2021.05

A
B
C
e30bg589.10
A
Digital input DIP switch
B
Floating
C
Connected to GND (Default)
Index
Parameter
Min
Max
Unit
Default
ID
Description
1.2
Application
052
212
0 = Standard
1 = Local/Remote
2 = Multi-step Speed
3 = PID Control
4 = Multi-purpose
5 = Motor Potentiometer
1.3
Minimum Frequency
Reference
0.00
P1.4Hz0.0
101
1.4
Maximum Frequency
Reference
P1.3
320.0
Hz
50.0/60.0
102
1.5
Acceleration Time 1
0.1
300.0
s
5.0
103
1.6
Deceleration Time 1
0.1
300.0
s
5.0
104
1.7
Motor Current Limit
IH*0.1
ISA
Varies
107
1.8
Motor Type
020
650
0 = Induction Motor
1 = Permanent Magnet Motor
2 = Reluctance Motor
1.9
Motor Nominal Voltage
Varies
Varies
V
Varies
110
Find this value Un on the nameplate of the motor.
NOTE! Find out if the motor connection is Delta
or Star.
VACON® 100 INDUSTRIAL
Application Guide
*) Available only in VACON® 100 X. **) For the DIP switch configurations in VACON® 100 X, see the VACON® 100 X Installation manual.
Illustration 11: The DIP Switch
Applications
See information on the Startup, Multi-pump, and Fire mode wizards in 4.2.1 Wizards in Menu 1.1.
Table 7: M1 Quick Setup
AB275637269262en-000101 / DPD00927 | 39Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
1.10
Motor Nominal Frequency
8.0
320.0
Hz
50/60
111
Find this value fn on the nameplate of the motor.
1.11
Motor Nominal Speed
24
19200
RPM
Varies
112
Find this value nn on the nameplate of the motor.
1.12
Motor Nominal Current
IH * 0.1
IH * 2
A
Varies
113
Find this value In on the nameplate of the motor.
1.13
Motor Cos Phi (Power
Factor)
0.30
1.00
Varies
120
Find this value on the nameplate of the motor.
1.14
Energy Optimization
010
666
0 = Disabled
1 = Enabled
1.15
Identification
020
631
0 = No action
1 = At standstill
2 = With rotation
1.16
Start Function
010
505
0 = Ramping
1 = Flying Start
1.17
Stop Function
010
506
0 = Coasting
1 = Ramping
1.18
Automatic Reset
010
731
0 = Disabled
1 = Enabled
1.19
Response to External
Fault
032
701
0 = No action
1 = Alarm
2 = Fault (Stop according to stop mode)
3 = Fault (Stop by coasting)
1.20
Response to AI Low
Fault
050
700
0 = No action
1 = Alarm
2 = Alarm+preset fault frequency (P3.9.1.13)
3 = Alarm + previous frequency
4 = Fault (Stop according to stop mode)
5 = Fault (Stop by coasting)
1.21
Remote Control Place
010
172
0 = I/O control
1 = Fieldbus control
1.22
I/O Control Reference
A Selection
1206
117
1 = Preset Frequency 0
2 = Keypad reference
3 = Fieldbus
4 = AI1
5 = AI2
6 = AI1+AI2
7 = PID reference
8 = Motor potentiometer
9 = Joystick reference
10 = Jogging reference
VACON® 100 INDUSTRIAL
Application Guide
Applications
AB275637269262en-000101 / DPD0092740 | Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
11 = Block Out.1
12 = Block Out.2
13 = Block Out.3
14 = Block Out.4
15 = Block Out.5
16 = Block Out.6
17 = Block Out.7
18 = Block Out.8
19 = Block Out.9
20 = Block Out.10
1.23
Keypad Control Reference Selection
1202
121
See P1.22.
1.24
Fieldbus Control Reference Selection
1203
122
See P1.22.
1.25
AI1 Signal Range
010
379
0= 0...10 V/0...20 mA
1= 2...10 V/4...20 mA
1.26
AI2 Signal Range
011
390
0= 0...10 V/0...20 mA
1= 2...10 V/4...20 mA
1.27
RO1 Function
0612
11001
See P3.5.3.2.1.
1.28
RO2 Function
0563
11004
See P3.5.3.2.1.
1.29
RO3 Function
0561
11007
See P3.5.3.2.1.
1.30
AO1 Function
0312
10050
See P3.5.4.1.1.
Index
Parameter
Min
Max
Unit
Default
ID
Description
1.33.1
Preset Frequency 1
P1.3
P1.4Hz10.0
105
1.33.2
Preset Frequency 2
P1.3
P1.4Hz15.0
106
1.33.3
Preset Frequency 3
P1.3
P1.4Hz20.0
126
1.33.4
Preset Frequency 4
P1.3
P1.4Hz25.0
127
1.33.5
Preset Frequency 5
P1.3
P1.4Hz30.0
128
1.33.6
Preset Frequency 6
P1.3
P1.4Hz40.0
129
1.33.7
Preset Frequency 7
P1.3
P1.4Hz50.0
130
1.33.8
Preset Frequency Mode
010
182
0 = Binary Coded
1 = Number of inputs. Preset frequency is selec-
ted according to how many of preset speed digital inputs are active.
1.33.9
External Fault (Close)
DigIN SlotA.3
405
CLOSED = OK
VACON® 100 INDUSTRIAL
Application Guide
Applications
Table 8: M1.33 Multi-step Speed
AB275637269262en-000101 / DPD00927 | 41Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
OPEN = External fault
1.33.10
Fault Reset (Close)
DigIN Slot0.1
414
Resets all active faults when CLOSED
VACON® 100 INDUSTRIAL
Application Guide
Applications
3.5 PID Control Application
Use the PID control application with processes where the process variable (for example pressure) is controlled through control of
the speed of the motor.
In this application, the internal PID controller of the drive is configured for 1 setpoint and 1 feedback signal.
It is possible to use 2 control places. Make the selection of the control place A or B with DI6. When control place A is active, the start/
stop commands are given by DI1, and the PID controller gives the frequency reference. When control place B is active, start/stop
commands are given by DI4, and AI1 gives the frequency reference.
It is possible to configure all the drive outputs freely in all the applications. There are 1 analog output (Output Frequency) and 3
relay outputs (Run, Fault, Ready) available on the basic I/O board.
AB275637269262en-000101 / DPD0092742 | Danfoss A/S © 2021.05

1
6
2
3
4
5
18
19
30
12
7
13
8
9
10
14
15
16
21
22
23
11
17
A
B
24
25
26
32
33
Modbus RTU,
N2, BACnet
28
29
+
-
*)
**)
e30bg593.10
mA
FAUL
T
RUN
RUN
AO1-/GND
+24Vin
24 Vout
GND
GND
DI1
DI2
DI3
DI4
DI5
DI6
R
O1/1 NC
R
O1/2 CM
R
O1/3 NO
CM
CM
RS485
RS485
R
O2/1 NC
R
O2/2 CM
R
O2/3 NO
R
O3/2 CM
R
O3/3 NO
Standard I/O board
Terminal Signal Description
+10 Vref
AI1+
AI1-
AI2+
AI2-
24 Vout
Reference output
Analog input 1 +
Analog input 1 -
Analog input 2 +
Analog input 2 -
24 V auxiliary voltage
I/O ground
Digital input 1
Digital input 2
Digital input 3
Digital input 4
Digital input 5
Digital input 6
Common for DI1-DI6
Common for DI1-DI6
24 V auxiliary voltage
I/O ground
Analog output 1 +
Analog output 1 -
24 V auxiliary
input voltage
Output
frequency
0...20 mA)
READY
Serial bus, negative
Serial bus, positive
Relay output 1
Relay output 2
Relay output 3
FAULT
Fault reset
AO1+
Place A: PID setpoint
(reference)
Place B: Frequency
reference
(default: 0...10 V)
PID feedback
(actual value)
(default: 4...20 mA)
Place A: Start forward
(PID controller)
External fault
Control place A/B selection
Reference-
potentiome-
ter
1...10 kΩ
Preset frequency 1
I =
(0)4...20 mA
Actual
value
2-wire
transmitter
Place B: Start forward
(Freq. reference P3.3.1.6)
TI1+
TI1-
Thermistor input
VACON® 100 INDUSTRIAL
Application Guide
Applications
Illustration 12: The Default Control Connections of the PID Control Application
*) Available only in VACON® 100 X. **) For the DIP switch configurations in VACON® 100 X, see the VACON® 100 X Installation manual.
AB275637269262en-000101 / DPD00927 | 43Danfoss A/S © 2021.05

A
B
C
e30bg589.10
A
Digital input DIP switch
B
Floating
C
Connected to GND (Default)
Index
Parameter
Min
Max
Unit
Default
ID
Description
1.2
Application
053
212
0 = Standard
1 = Local/Remote
2 = Multi-step Speed
3 = PID Control
4 = Multi-purpose
5 = Motor Potentiometer
1.3
Minimum Frequency
Reference
0.00
P1.4Hz0.0
101
1.4
Maximum Frequency
Reference
P1.3
320.0
Hz
50.0/60.0
102
1.5
Acceleration Time 1
0.1
300.0
s
5.0
103
1.6
Deceleration Time 1
0.1
300.0
s
5.0
104
1.7
Motor Current Limit
IH*0.1
ISA
Varies
107
1.8
Motor Type
020
650
0 = Induction Motor
1 = Permanent Magnet Motor
2 = Reluctance Motor
1.9
Motor Nominal Voltage
Varies
Varies
V
Varies
110
Find this value Un on the nameplate of the motor.
NOTE! Find out if the motor connection is Delta
or Star.
1.10
Motor Nominal Frequency
8.0
320.0
Hz
50/60
111
Find this value fn on the nameplate of the motor.
VACON® 100 INDUSTRIAL
Application Guide
Illustration 13: The DIP Switch
Applications
See information on the Startup, Multi-pump, and Fire mode wizards in 4.2.1 Wizards in Menu 1.1.
Table 9: M1 Quick Setup
AB275637269262en-000101 / DPD0092744 | Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
1.11
Motor Nominal Speed
24
19200
RPM
Varies
112
Find this value nn on the nameplate of the motor.
1.12
Motor Nominal Current
IH * 0.1
IH * 2
A
Varies
113
Find this value In on the nameplate of the motor.
1.13
Motor Cos Phi (Power
Factor)
0.30
1.00
Varies
120
Find this value on the nameplate of the motor.
1.14
Energy Optimization
010
666
0 = Disabled
1 = Enabled
1.15
Identification
020
631
0 = No action
1 = At standstill
2 = With rotation
1.16
Start Function
010
505
0 = Ramping
1 = Flying Start
1.17
Stop Function
010
506
0 = Coasting
1 = Ramping
1.18
Automatic Reset
010
731
0 = Disabled
1 = Enabled
1.19
Response to External
Fault
032
701
0 = No action
1 = Alarm
2 = Fault (Stop according to stop mode)
3 = Fault (Stop by coasting)
1.20
Response to AI Low
Fault
050
700
0 = No action
1 = Alarm
2 = Alarm+preset fault frequency (P3.9.1.13)
3 = Alarm + previous frequency
4 = Fault (Stop according to stop mode)
5 = Fault (Stop by coasting)
1.21
Remote Control Place
010
172
0 = I/O control
1 = Fieldbus control
1.22
I/O Control Reference
A Selection
1207
117
1 = Preset Frequency 0
2 = Keypad reference
3 = Fieldbus
4 = AI1
5 = AI2
6 = AI1+AI2
7 = PID reference
8 = Motor potentiometer
9 = Joystick reference
10 = Jogging reference
11 = Block Out.1
12 = Block Out.2
13 = Block Out.3
VACON® 100 INDUSTRIAL
Application Guide
Applications
AB275637269262en-000101 / DPD00927 | 45Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
14 = Block Out.4
15 = Block Out.5
16 = Block Out.6
17 = Block Out.7
18 = Block Out.8
19 = Block Out.9
20 = Block Out.10
1.23
Keypad Control Reference Selection
1202
121
See P1.22.
1.24
Fieldbus Control Reference Selection
1203
122
See P1.22.
1.25
AI1 Signal Range
010
379
0= 0...10 V/0...20 mA
1= 2...10 V/4...20 mA
1.26
AI2 Signal Range
011
390
0= 0...10 V/0...20 mA
1= 2...10 V/4...20 mA
1.27
RO1 Function
0612
11001
See P3.5.3.2.1.
1.28
RO2 Function
0563
11004
See P3.5.3.2.1.
1.29
RO3 Function
0561
11007
See P3.5.3.2.1.
1.30
AO1 Function
0312
10050
See P3.5.4.1.1.
Index
Parameter
Min
Max
Unit
Default
ID
Description
1.34.1
PID Gain
0.00
100.00
%
100.00
118
1.34.2
PID Integration Time
0.00
600.00
s
1.00
119
1.34.3
PID Derivation Time
0.00
100.00
s
0.00
132
1.34.4
Feedback 1 Source Selection
0302
334
See P3.13.3.3.
1.34.5
Setpoint 1 Source Selection
0321
332
See P3.13.2.6.
1.34.6
Keypad Setpoint 1
Varies
Varies
Varies
0
167
1.34.7
Sleep Frequency Limit 1
0.00
320.0
Hz
0.0
1016
1.34.8
Sleep Delay 1
0
3000s0
1017
1.34.9
Wake-up Level 1
Varies
Varies
Varies
Varies
1018
1.34.10
Preset Frequency 1
P1.3
P1.4Hz10.0
105
VACON® 100 INDUSTRIAL
Application Guide
Applications
Table 10: M1.34 PID control
3.6 Multi-purpose Application
The Multi-purpose application can be used for different processes (for example conveyors) where a wide range of motor control
functions is necessary.
It is possible to control the drive from the keypad, Fieldbus, or I/O terminal. When using I/O terminal control, the start/stop commands are given through DI1 and DI2, and the frequency reference from AI1 or AI2.
There are 2 acceleration/deceleration ramps available. The selection between Ramp1 and Ramp2 is made by DI6.
AB275637269262en-000101 / DPD0092746 | Danfoss A/S © 2021.05

1
6
2
3
4
5
18
19
30
12
7
13
8
9
10
14
15
16
21
22
23
11
17
A
B
24
25
26
32
33
Modbus RTU,
N2, BACnet
28
29
(0)4...20 mA
+
-
*)
**)
e30bg594.10
mA
FAUL
T
RUN
RUN
AO1-/GND
+24Vin
24 Vout
GND
GND
DI1
DI2
DI3
DI4
DI5
DI6
R
O1/1 NC
R
O1/2 CM
R
O1/3 NO
CM
CM
RS485
RS485
R
O2/1 NC
R
O2/2 CM
R
O2/3 NO
R
O3/2 CM
R
O3/3 NO
Standard I/O board
Terminal Signal Description
+10 Vref
AI1+
AI1-
AI2+
AI2-
24 Vout
Reference output
Analog input 1 +
Analog input 1 -
Analog input 2 +
Analog input 2 -
24 V auxiliary voltage
I/O ground
Digital input 1
Digital input 2
Digital input 3
Digital input 4
Digital input 5
Digital input 6
Common for DI1-DI6
Common for DI1-DI6
24 V auxiliary voltage
I/O ground
Analog output 1 +
Analog output 1 -
24 V auxiliary
input voltage
Output
frequency
0...20 mA)
READY
Serial bus, negative
Serial bus, positive
Relay output 1
Relay output 2
Relay output 3
FAULT
Fault reset
AO1+
Frequency reference
(default 0...10 V)
Frequency reference
(Default 4...20 mA)
Start forward
Start reverse
External fault
Ramp 1/Ramp 2 selection
Reference-
potentiome-
ter
1...10 kΩ
Preset frequency 1
2-wire
transducer
TI1+
TI1-
Thermistor input
VACON® 100 INDUSTRIAL
Application Guide
It is possible to configure all the drive outputs freely in all the applications. There is 1 analog output (Output Frequency) and 3 relay
outputs (Run, Fault, Ready) available on the basic I/O board.
Applications
Illustration 14: The Default Control Connections of the Multi-purpose Application
*) Available only in VACON® 100 X. **) For the DIP switch configurations in VACON® 100 X, see the VACON® 100 X Installation manual.
AB275637269262en-000101 / DPD00927 | 47Danfoss A/S © 2021.05

A
B
C
e30bg589.10
A
Digital input DIP switch
B
Floating
C
Connected to GND (Default)
Index
Parameter
Min
Max
Unit
Default
ID
Description
1.2
Application
054
212
0 = Standard
1 = Local/Remote
2 = Multi-step Speed
3 = PID Control
4 = Multi-purpose
5 = Motor Potentiometer
1.3
Minimum Frequency
Reference
0.00
P1.4Hz0.0
101
1.4
Maximum Frequency
Reference
P1.3
320.0
Hz
50.0/60.0
102
1.5
Acceleration Time 1
0.1
300.0
s
5.0
103
1.6
Deceleration Time 1
0.1
300.0
s
5.0
104
1.7
Motor Current Limit
IH*0.1
ISA
Varies
107
1.8
Motor Type
020
650
0 = Induction Motor
1 = Permanent Magnet Motor
2 = Reluctance Motor
1.9
Motor Nominal Voltage
Varies
Varies
V
Varies
110
Find this value Un on the nameplate of the motor.
NOTE! Find out if the motor connection is Delta
or Star.
1.10
Motor Nominal Frequency
8.0
320.0
Hz
50/60
111
Find this value fn on the nameplate of the motor.
VACON® 100 INDUSTRIAL
Application Guide
Illustration 15: The DIP Switch
Applications
See information on the Startup, Multi-pump, and Fire mode wizards in 4.2.1 Wizards in Menu 1.1.
Table 11: M1 Quick Setup
AB275637269262en-000101 / DPD0092748 | Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
1.11
Motor Nominal Speed
24
19200
Rpm
Varies
112
Find this value nn on the nameplate of the motor.
1.12
Motor Nominal Current
IH * 0.1
IH * 2
A
Varies
113
Find this value In on the nameplate of the motor.
1.13
Motor Cos Phi (Power
Factor)
0.30
1.00
Varies
120
Find this value on the nameplate of the motor.
1.14
Energy Optimization
010
666
0 = Disabled
1 = Enabled
1.15
Identification
020
631
0 = No action
1 = At standstill
2 = With rotation
1.16
Start Function
010
505
0 = Ramping
1 = Flying Start
1.17
Stop Function
010
506
0 = Coasting
1 = Ramping
1.18
Automatic Reset
010
731
0 = Disabled
1 = Enabled
1.19
Response to External
Fault
032
701
0 = No action
1 = Alarm
2 = Fault (Stop according to stop mode)
3 = Fault (Stop by coasting)
1.20
Response to AI Low
Fault
050
700
0 = No action
1 = Alarm
2 = Alarm+preset fault frequency (P3.9.1.13)
3 = Alarm + previous frequency
4 = Fault (Stop according to stop mode)
5 = Fault (Stop by coasting)
1.21
Remote Control Place
010
172
0 = I/O control
1 = Fieldbus control
1.22
I/O Control Reference
A Selection
1206
117
1 = Preset Frequency 0
2 = Keypad reference
3 = Fieldbus
4 = AI1
5 = AI2
6 = AI1+AI2
7 = PID reference
8 = Motor potentiometer
9 = Joystick reference
10 = Jogging reference
11 = Block Out.1
12 = Block Out.2
13 = Block Out.3
VACON® 100 INDUSTRIAL
Application Guide
Applications
AB275637269262en-000101 / DPD00927 | 49Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
14 = Block Out.4
15 = Block Out.5
16 = Block Out.6
17 = Block Out.7
18 = Block Out.8
19 = Block Out.9
20 = Block Out.10
1.23
Keypad Control Reference Selection
1202
121
See P1.22.
1.24
Fieldbus Control Reference Selection
1203
122
See P1.22.
1.25
AI1 Signal Range
010
379
0= 0...10 V/0...20 mA
1= 2...10 V/4...20 mA
1.26
AI2 Signal Range
011
390
0= 0...10 V/0...20 mA
1= 2...10 V/4...20 mA
1.27
RO1 Function
0612
11001
See P3.5.3.2.1.
1.28
RO2 Function
0563
11004
See P3.5.3.2.1.
1.29
RO3 Function
0561
11007
See P3.5.3.2.1.
1.30
AO1 Function
0312
10050
See P3.5.4.1.1.
Index
Parameter
Min
Max
Unit
Default
ID
Description
1.35.1
Control Mode
020
600
0 = U/f Freq Control open loop
1 = Speed control open loop
2 = Torque Control open loop
1.35.2
Auto Torque Boost
010
109
0 = Disabled
1 = Enabled
1.35.3
Acceleration Time 2
0.1
300.0
s
10.0
502
1.35.4
Deceleration Time 2
0.1
300.0
s
10.0
503
1.35.5
Preset Frequency 1
P1.3
P1.4Hz5.0
105
1.35.6
U/f Ratio Select
020
108
0 = Linear
1 = Squared
2 = Programmable
1.35.7
Field Weakening Point Frequency
8.00
P1.4HzVaries
602
1.35.8
Voltage at Field Weakening Point
10.00
200.00
%
100.00
603
1.35.9
U/f Midpoint Frequency
0.0
P1.35.7
Hz
Varies
604
1.35.10
U/f Midpoint Voltage
0.0
100.00
%
100.0
605
1.35.11
Zero Frequency Voltage
0.00
40.00
%
Varies
606
VACON® 100 INDUSTRIAL
Application Guide
Applications
Table 12: M1.35 Multi-purpose
AB275637269262en-000101 / DPD0092750 | Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
1.35.12
Start Magnetizing Current
0.00
Varies
A
Varies
517
1.35.13
Start Magnetizing Time
0.00
600.00
s
0.00
516
1.35.14
DC Brake Current
Varies
Varies
A
Varies
507
0 = Disabled
1.35.15
DC Braking Time at stop
0.00
600.00
s
0.00
508
1.35.16
Frequency to Start DC Braking at
Ramp Stop
0.10
50.00
%
1.5
515
1.35.17
Load Drooping
0.00
50.00
%
0.00
620
1.35.18
Load Drooping Time
0.00
2.00s0.00
656
1.35.19
Load Drooping Mode
010
1534
0 = Normal; Load drooping factor is
constant through the whole frequency range
1 = Linear removal; Load drooping is
removed linearly from nominal frequency to zero frequency
VACON® 100 INDUSTRIAL
Application Guide
Applications
3.7 Motor Potentiometer Application
Use the Motor potentiometer application for the processes where the frequency reference of the motor is controlled (that is, increased and decreased) through digital inputs.
In this application, the I/O terminal is set to the default control place. The start/stop commands are given with DI1 and DI2. The
frequency reference of the motor is increased with DI5 and decreased with DI6.
It is possible to configure all the drive outputs freely in all the applications. There is 1 analog output (Output Frequency) and 3 relay
outputs (Run, Fault, Ready) available on the basic I/O board.
AB275637269262en-000101 / DPD00927 | 51Danfoss A/S © 2021.05

1
6
2
3
4
5
18
19
30
12
7
13
8
9
10
14
15
16
21
22
23
11
17
A
B
24
25
26
32
33
28
29
*)
**)
e30bg595.10
mA
FAUL
T
RUN
RUN
AO1-/GND
+24Vin
24 Vout
GND
GND
DI1
DI2
DI3
DI4
DI5
DI6
R
O1/1 NC
R
O1/2 CM
R
O1/3 NO
CM
CM
RS485
RS485
R O2/1 NC
R O2/2 CM
R O2/3 NO
R O3/2 CM
R O3/3 NO
Standard I/O board
Terminal Signal Description
+10V ref
AI1+
AI1-
AI2+
AI2-
24 Vout
Reference output
Analog input 1 +
Analog input 1 -
Analog input 2 +
Analog input 2 -
Not used
Not used
24 V auxiliary voltage
I/O ground
Digital input 1
Digital input 2
Digital input 3
Digital input 4
Digital input 5
Digital input 6
Start forward
Start reverse
External fault
Common for DI1-DI6
Common for DI1-DI6
24 V auxiliary voltage
I/O ground
Analogue output 1 +
Analogue output 1 -
24 V auxiliary
input voltage
Output
frequency
0...20mA)
Modbus, RTU,
BACnet, N2
READY
Serial bus, negative
Serial bus, positive
Relay output 1
Relay output 2
Relay output 3
FAULT
Preset frequency 1
Frequency reference UP
Frequency reference DOWN
AO1+
TI1+
TI1-
Thermistor input
VACON® 100 INDUSTRIAL
Application Guide
Applications
Illustration 16: The Default Control Connections of the Motor Potentiometer Application
*) Available only in VACON® 100 X. **) For the DIP switch configurations in VACON® 100 X, see the VACON® 100 X Installation manual.
AB275637269262en-000101 / DPD0092752 | Danfoss A/S © 2021.05

A
B
C
e30bg589.10
A
Digital input DIP switch
B
Floating
C
Connected to GND (Default)
Index
Parameter
Min
Max
Unit
Default
ID
Description
1.2
Application
055
212
0 = Standard
1 = Local/Remote
2 = Multi-step Speed
3 = PID Control
4 = Multi-purpose
5 = Motor Potentiometer
1.3
Minimum Frequency
Reference
0.00
P1.4Hz0.0
101
1.4
Maximum Frequency
Reference
P1.3
320.0
Hz
50.0/60.0
102
1.5
Acceleration Time 1
0.1
300.0
s
5.0
103
1.6
Deceleration Time 1
0.1
300.0
s
5.0
104
1.7
Motor Current Limit
IH*0.1
ISA
Varies
107
1.8
Motor Type
020
650
0 = Induction Motor
1 = Permanent Magnet Motor
2 = Reluctance Motor
1.9
Motor Nominal Voltage
Varies
Varies
V
Varies
110
Find this value Un on the nameplate of the motor.
NOTE! Find out if the motor connection is Delta
or Star.
1.10
Motor Nominal Frequency
8.0
320.0
Hz
50/60
111
Find this value fn on the nameplate of the motor.
VACON® 100 INDUSTRIAL
Application Guide
Illustration 17: The DIP Switch
Applications
See information on the Startup, Multi-pump, and Fire mode wizards in 4.2.1 Wizards in Menu 1.1.
Table 13: M1 Quick Setup
AB275637269262en-000101 / DPD00927 | 53Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
1.11
Motor Nominal Speed
24
19200
RPM
Varies
112
Find this value nn on the nameplate of the motor.
1.12
Motor Nominal Current
IH * 0.1
IH * 2
A
Varies
113
Find this value In on the nameplate of the motor.
1.13
Motor Cos Phi (Power
Factor)
0.30
1.00
Varies
120
Find this value on the nameplate of the motor.
1.14
Energy Optimization
010
666
0 = Disabled
1 = Enabled
1.15
Identification
020
631
0 = No action
1 = At standstill
2 = With rotation
1.16
Start Function
010
505
0 = Ramping
1 = Flying Start
1.17
Stop Function
010
506
0 = Coasting
1 = Ramping
1.18
Automatic Reset
010
731
0 = Disabled
1 = Enabled
1.19
Response to External
Fault
032
701
0 = No action
1 = Alarm
2 = Fault (Stop according to stop mode)
3 = Fault (Stop by coasting)
1.20
Response to AI Low
Fault
050
700
0 = No action
1 = Alarm
2 = Alarm+preset fault frequency (P3.9.1.13)
3 = Alarm + previous frequency
4 = Fault (Stop according to stop mode)
5 = Fault (Stop by coasting)
1.21
Remote Control Place
010
172
0 = I/O control
1 = Fieldbus control
1.22
I/O Control Reference
A Selection
1208
117
1 = Preset Frequency 0
2 = Keypad reference
3 = Fieldbus
4 = AI1
5 = AI2
6 = AI1+AI2
7 = PID reference
8 = Motor potentiometer
9 = Joystick reference
10 = Jogging reference
11 = Block Out.1
12 = Block Out.2
13 = Block Out.3
VACON® 100 INDUSTRIAL
Application Guide
Applications
AB275637269262en-000101 / DPD0092754 | Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
14 = Block Out.4
15 = Block Out.5
16 = Block Out.6
17 = Block Out.7
18 = Block Out.8
19 = Block Out.9
20 = Block Out.10
1.23
Keypad Control Reference Selection
1202
121
See P1.22.
1.24
Fieldbus Control Reference Selection
1203
122
See P1.22.
1.25
AI1 Signal Range
010
379
0= 0...10 V/0...20 mA
1= 2...10 V/4...20 mA
1.26
AI2 Signal Range
011
390
0= 0...10 V/0...20 mA
1= 2...10 V/4...20 mA
1.27
RO1 Function
0612
11001
See P3.5.3.2.1.
1.28
RO2 Function
0563
11004
See P3.5.3.2.1.
1.29
RO3 Function
0561
11007
See P3.5.3.2.1.
1.30
AO1 Function
0312
10050
See P3.5.4.1.1.
Index
Parameter
Min
Max
Unit
Default
ID
Description
1.36.1
Motor Potentiometer Ramp Time
0.1
500.0
Hz/s
10.0
331
1.36.2
Motor Potentiometer Reset
021
367
0 = No reset
1 = Reset if stopped
2 = Reset if powered down
1.36.3
Preset Frequency 1
P1.3
P1.4Hz10.0
105
VACON® 100 INDUSTRIAL
Application Guide
Applications
Table 14: M1.36 Motor Potentiometer
AB275637269262en-000101 / DPD00927 | 55Danfoss A/S © 2021.05

VACON® 100 INDUSTRIAL
Application Guide
Wizards
4 Wizards
4.1 Application Wizards
4.1.1 Standard Application Wizard
The application wizard helps to set the basic parameters that are related to the application.
To start the Standard application wizard, set the value Standard to parameter P1.2 Application (ID 212) in the keypad.
If the application wizard is started from the Start-up wizard, the wizard goes directly to step 11.
See the range of values of the parameters in 6.1 Group 3.1: Motor Settings, 6.3 Group 3.3: References, 6.4 Group 3.4: Ramps and
Brakes Setup.
Procedure
1.
Set a value for P3.1.2.2 Motor Type (so that it agrees with the nameplate of the motor).
If Motor Type is set to Induction Motor, also step 6 is shown. If the selection is PM Motor, the value of parameter
P3.1.1.5 Motor Cos Phi is set to 1.00, and the wizard skips step 6.
2.
Set a value for P3.1.1.1 Motor Nominal Voltage (so that it agrees with the nameplate of the motor).
3.
Set a value for P3.1.1.2 Motor Nominal Frequency (so that it agrees with the nameplate of the motor).
4.
Set a value for P3.1.1.3 Motor Nominal Speed (so that it agrees with the nameplate of the motor).
5.
Set a value for P3.1.1.4 Motor Nominal Current (so that it agrees with the nameplate of the motor).
6.
Set a value for P3.1.1.5 Motor Cos Phi (so that it agrees with the nameplate of the motor).
7.
Set a value for P3.3.1.1 Minimum Frequency Reference.
8.
Set a value for P3.3.1.2 Maximum Frequency Reference.
9.
Set a value for P3.4.1.2 Acceleration Time 1.
10.
Set a value for P3.4.1.3 Deceleration Time 1.
11.
Select the a control place (where to give the start and stop commands, and the frequency reference of the drive).
The Standard application wizard is completed.
4.1.2 Local/Remote Application Wizard
The application wizard helps to set the basic parameters that are related to the application.
To start the Local/Remote application wizard, set the value Local/Remote to parameter P1.2 Application (ID 212) in the keypad.
If the application wizard is started from the Start-up wizard, the wizard goes directly to step 11.
See the range of values of the parameters in 6.1 Group 3.1: Motor Settings, 6.3 Group 3.3: References, 6.4 Group 3.4: Ramps and
Brakes Setup.
Procedure
1.
Set a value for P3.1.2.2 Motor Type (so that it agrees with the nameplate of the motor).
If Motor Type is set to Induction Motor, also step 6 is shown. If the selection is PM Motor, the value of parameter
P3.1.1.5 Motor Cos Phi is set to 1.00, and the wizard skips step 6.
2.
Set a value for P3.1.1.1 Motor Nominal Voltage (so that it agrees with the nameplate of the motor).
3.
Set a value for P3.1.1.2 Motor Nominal Frequency (so that it agrees with the nameplate of the motor).
4.
Set a value for P3.1.1.3 Motor Nominal Speed (so that it agrees with the nameplate of the motor).
5.
Set a value for P3.1.1.4 Motor Nominal Current (so that it agrees with the nameplate of the motor).
6.
Set a value for P3.1.1.5 Motor Cos Phi (so that it agrees with the nameplate of the motor).
7.
Set a value for P3.3.1.1 Minimum Frequency Reference.
8.
Set a value for P3.3.1.2 Maximum Frequency Reference.
9.
Set a value for P3.4.1.2 Acceleration Time 1.
10.
Set a value for P3.4.1.3 Deceleration Time 1.
11.
Select the Remote control place (where to give the start and stop commands, and the frequency reference of the drive
when Remote control is active).
If I/O Terminal is set as the value for Remote Control Place, the next step is shown. If Fieldbus is selected, the wizard
goes directly to step 14.
AB275637269262en-000101 / DPD0092756 | Danfoss A/S © 2021.05

VACON® 100 INDUSTRIAL
Application Guide
12.
Set a value for P1.26 Analog Input 2 Signal Range.
13.
Set Local Control Place (where the drive start/stop commands, and the frequency reference is given when Local control is
active).
If I/O (B) Terminal is set as the value for Local Control Place, the next step is shown. With other selections, the wiz-
ard goes directly to step 16.
14.
Set a value for P1.25 Analog Input 1 Signal Range.
The Local/Remote application wizard is completed.
Wizards
4.1.3 Multi-step Speed Application Wizard
The application wizard helps to set the basic parameters that are related to the application.
To start the Multi-step Speed application wizard, set the value Multi-step Speed to parameter P1.2 Application (ID 212) in the key-
pad.
If the application wizard is started from the Start-up wizard, the wizard shows only the I/O configuration.
See the range of values of the parameters in 6.1 Group 3.1: Motor Settings, 6.3 Group 3.3: References, 6.4 Group 3.4: Ramps and
Brakes Setup.
Procedure
1.
Set a value for P3.1.2.2 Motor Type (so that it agrees with the nameplate of the motor).
If Motor Type is set to Induction Motor, also step 6 is shown. If the selection is PM Motor, the value of parameter
P3.1.1.5 Motor Cos Phi is set to 1.00, and the wizard skips step 6.
2.
Set a value for P3.1.1.1 Motor Nominal Voltage (so that it agrees with the nameplate of the motor).
3.
Set a value for P3.1.1.2 Motor Nominal Frequency (so that it agrees with the nameplate of the motor).
4.
Set a value for P3.1.1.3 Motor Nominal Speed (so that it agrees with the nameplate of the motor).
5.
Set a value for P3.1.1.4 Motor Nominal Current (so that it agrees with the nameplate of the motor).
6.
Set a value for P3.1.1.5 Motor Cos Phi (so that it agrees with the nameplate of the motor).
7.
Set a value for P3.3.1.1 Minimum Frequency Reference.
8.
Set a value for P3.3.1.2 Maximum Frequency Reference.
9.
Set a value for P3.4.1.2 Acceleration Time 1.
10.
Set a value for P3.4.1.3 Deceleration Time 1.
The Multi-step Speed application wizard is completed.
4.1.4 PID Control Application Wizard
The application wizard helps to set the basic parameters that are related to the application.
To start the PID Control application wizard, set the value PID Control to parameter P1.2 Application (ID 212) in the keypad.
If the application wizard is started from the Start-up wizard, the wizard goes directly to step 11.
See the range of values of the parameters in 6.1 Group 3.1: Motor Settings, 6.3 Group 3.3: References, 6.4 Group 3.4: Ramps and
Brakes Setup, 6.13 Group 3.13: PID Controller.
Procedure
1.
Set a value for P3.1.2.2 Motor Type (so that it agrees with the nameplate of the motor).
If Motor Type is set to Induction Motor, also step 6 is shown. If the selection is PM Motor, the value of parameter
P3.1.1.5 Motor Cos Phi is set to 1.00, and the wizard skips step 6.
2.
Set a value for P3.1.1.1 Motor Nominal Voltage (so that it agrees with the nameplate of the motor).
3.
Set a value for P3.1.1.2 Motor Nominal Frequency (so that it agrees with the nameplate of the motor).
4.
Set a value for P3.1.1.3 Motor Nominal Speed (so that it agrees with the nameplate of the motor).
5.
Set a value for P3.1.1.4 Motor Nominal Current (so that it agrees with the nameplate of the motor).
6.
Set a value for P3.1.1.5 Motor Cos Phi (so that it agrees with the nameplate of the motor).
7.
Set a value for P3.3.1.1 Minimum Frequency Reference.
8.
Set a value for P3.3.1.2 Maximum Frequency Reference.
9.
Set a value for P3.4.1.2 Acceleration Time 1.
AB275637269262en-000101 / DPD00927 | 57Danfoss A/S © 2021.05

VACON® 100 INDUSTRIAL
Application Guide
10.
Set a value for P3.4.1.3 Deceleration Time 1.
11.
Select a control place (where to give the start and stop commands, and the frequency reference of the drive).
12.
Set a value for P3.13.1.4 Process Unit Selection.
If the selection is other than %, the next steps are shown. If the selection is %, the wizard goes directly to step 17.
13.
Set a value for P3.13.1.5 Process Unit Min.
The range depends on the selection in step 12.
14.
Set a value for P3.13.1.6 Process Unit Max.
The range depends on the selection in step 12.
15.
Set a value for P3.13.1.7 Process Unit Decimals.
16.
Set a value for P3.13.3.3 Feedback 1 Source Selection.
See the table Feedback settings in chapter 6.13 Group 3.13: PID Controller.
If analog input signal is selected, step 18 is shown. With other selections, the wizard goes to step 19.
17.
Set the signal range of the analog input.
18.
Set a value for P3.13.1.8 Error Inversion.
19.
Set a value for P3.13.2.6 Setpoint Source Selection.
Wizards
See table Setpoints in chapter 6.13 Group 3.13: PID Controller.
If analog input signal is selected, step 21 is shown. With other selections, the wizard goes to step 23. If Keypad
Setpoint 1 or Keypad Setpoint 2 are set for the value, the wizard goes directly to step 22.
20.
Set the signal range of the analog input.
21.
Set a value for P3.13.2.1 (Keypad Setpoint 1) and P3.13.2.2 (Keypad Setpoint 2).
Depends on the range set in step 20.
22.
Using the sleep function.
If value Yes is set for step 22, the next 3 steps are shown. If the value No is selected, the wizard is completed.
23.
Set a value for P3.34.7 Sleep Frequency Limit.
24.
Set a value for P3.34.8 Sleep Delay 1.
25.
Set a value for P3.34.9 Wake-up Level.
The range depends on the set process unit.
The PID Control application wizard is completed.
4.1.5 Multi-purpose Application Wizard
The application wizard helps to set the basic parameters that are related to the application.
To start the Multi-purpose application wizard, set the value Multi-purpose to parameter P1.2 Application (ID 212) in the keypad.
If the application wizard is started from the Start-up wizard, the wizard goes directly to step 11.
See the range of values of the parameters in 6.1 Group 3.1: Motor Settings, 6.3 Group 3.3: References, 6.4 Group 3.4: Ramps and
Brakes Setup.
Procedure
1.
Set a value for P3.1.2.2 Motor Type (so that it agrees with the nameplate of the motor).
If Motor Type is set to Induction Motor, also step 6 is shown. If the selection is PM Motor, the value of parameter
P3.1.1.5 Motor Cos Phi is set to 1.00, and the wizard skips step 6.
2.
Set a value for P3.1.1.1 Motor Nominal Voltage (so that it agrees with the nameplate of the motor).
3.
Set a value for P3.1.1.2 Motor Nominal Frequency (so that it agrees with the nameplate of the motor).
4.
Set a value for P3.1.1.3 Motor Nominal Speed (so that it agrees with the nameplate of the motor).
AB275637269262en-000101 / DPD0092758 | Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
1.1.1
Start-up wizard
010
1171
0 = Do not activate
1 = Activate
The selection Activate starts the Start-up wizard (see 1.6.1
Start-Up Wizard.
1.1.3
Multi-pump Wizard
010
1671
The selection Activate starts the Multi-pump wizard (see 4.2.2
Multi-pump Wizard).
1.1.4
Fire mode Wizard
010
1672
The selection Activate starts the Fire mode wizard (see 4.2.3
Fire Mode Wizard).
VACON® 100 INDUSTRIAL
Application Guide
5.
Set a value for P3.1.1.4 Motor Nominal Current (so that it agrees with the nameplate of the motor).
6.
Set a value for P3.1.1.5 Motor Cos Phi (so that it agrees with the nameplate of the motor).
7.
Set a value for P3.3.1.1 Minimum Frequency Reference.
8.
Set a value for P3.3.1.2 Maximum Frequency Reference.
9.
Set a value for P3.4.1.2 Acceleration Time 1.
10.
Set a value for P3.4.1.3 Deceleration Time 1.
11.
Select a control place (where to give the start and stop commands, and the frequency reference of the drive).
The Multi-purpose application wizard is completed.
Wizards
4.1.6 Motor Potentiometer Application Wizard
The application wizard helps to set the basic parameters that are related to the application.
To start the Motor Potentiometer application wizard, set the value Motor Potentiometer to parameter P1.2 Application (ID 212) in
the keypad.
If the application wizard is started from the Start-up wizard, the wizard goes directly to step 11.
See the range of values of the parameters in 6.1 Group 3.1: Motor Settings, 6.3 Group 3.3: References, 6.4 Group 3.4: Ramps and
Brakes Setup.
Procedure
1.
Set a value for P3.1.2.2 Motor Type (so that it agrees with the nameplate of the motor).
If Motor Type is set to Induction Motor, also step 6 is shown. If the selection is PM Motor, the value of parameter
P3.1.1.5 Motor Cos Phi is set to 1.00, and the wizard skips step 6.
2.
Set a value for P3.1.1.1 Motor Nominal Voltage (so that it agrees with the nameplate of the motor).
3.
Set a value for P3.1.1.2 Motor Nominal Frequency (so that it agrees with the nameplate of the motor).
4.
Set a value for P3.1.1.3 Motor Nominal Speed (so that it agrees with the nameplate of the motor).
5.
Set a value for P3.1.1.4 Motor Nominal Current (so that it agrees with the nameplate of the motor).
6.
Set a value for P3.1.1.5 Motor Cos Phi (so that it agrees with the nameplate of the motor).
7.
Set a value for P3.3.1.1 Minimum Frequency Reference.
8.
Set a value for P3.3.1.2 Maximum Frequency Reference.
9.
Set a value for P3.4.1.2 Acceleration Time 1.
10.
Set a value for P3.4.1.3 Deceleration Time 1.
11.
Set a value for P1.36.1 Motor Potentiometer Ramp Time.
12.
Set a value for P1.36.2 Motor Potentiometer Reset.
The Motor Potentiometer application wizard is completed.
4.2 Function Wizards
4.2.1 Wizards in Menu 1.1
Table 15: M1.1 Wizards
AB275637269262en-000101 / DPD00927 | 59Danfoss A/S © 2021.05

VACON® 100 INDUSTRIAL
Application Guide
Wizards
4.2.2 Multi-pump Wizard
To start the Multi-pump wizard, make the selection Activate for parameter B1.1.3 in the Quick setup menu. The default settings tell
to use the PID controller in the one feedback/one setpoint mode. The default control place is I/O A, and the default process unit is
%.
See the range of values of the parameters in 6.13 Group 3.13: PID Controller, 6.17 Group 3.17: Fire Mode.
Procedure
1.
Set a value for P3.13.1.4 Process Unit Selection.
If the selection is other than %, the next steps are shown. If the selection is %, the wizard goes directly to step 5.
2.
Set a value for P3.13.1.5 Process Unit Min.
3.
Set a value for P3.13.1.6 Process Unit Max.
4.
Set a value for P3.13.1.7 Process Unit Decimals.
5.
Set a value for P3.13.3.3 Feedback 1 Source Selection.
See the table Feedback settings in chapter 6.13 Group 3.13: PID Controller.
If analog input signal is selected, step 6 is shown. With other selections, the wizard goes to step 7.
6.
Set the signal range of the analog input.
See table Analog inputs in chapter 6.5 Group 3.5: I/O Configuration.
7.
Set a value for P3.13.1.8 Error Inversion.
8.
Set a value for P3.13.2.6 Setpoint Source 1 Selection.
See table Setpoints in chapter 6.13 Group 3.13: PID Controller.
If analog input signal is selected, step 9 is shown. With other selections, the wizard goes to step 11. If Keypad Set-
point 1 or Keypad Setpoint 2 is selected for the value, step 10 is shown.
9.
Set the signal range of the analog input.
See table Analog inputs in chapter 6.5 Group 3.5: I/O Configuration.
10.
Set a value for P3.13.2.1 (Keypad setpoint 1) and P3.13.2.2 (Keypad setpoint 2).
11.
Using the sleep function.
If the value "Yes" in given step 11, the next 3 steps are shown.
12.
Set a value for P3.13.5.1 Sleep Frequency Limit 1.
13.
Set a value for P3.13.5.2 Sleep Delay 1.
14.
Set a value for P3.13.5.6 Wake-up Level 1.
15.
Set a value for P3.15.1 Number of Motors.
16.
Set a value for P3.15.2 Interlock Function.
17.
Set a value for P3.15.4 Autochange.
If the Autochange function is enabled, the next 3 steps are shown. If the Autochange function is not used, the wiz-
ard goes directly to step 21.
18.
Set a value for P3.15.3 Include FC.
19.
Set a value for P3.15.5 Autochange Interval.
20.
Set a value for P3.15.6 Autochange: Frequency Limit.
21.
Set a value for P3.15.8 Bandwidth.
22.
Set a value for P3.15.9 Bandwidth Delay.
After this, the display shows the digital input and relay output configuration that the application does automatically.
Write down these values. This function is not available in the text display.
AB275637269262en-000101 / DPD0092760 | Danfoss A/S © 2021.05

VACON® 100 INDUSTRIAL
Application Guide
Wizards
4.2.3 Fire Mode Wizard
To start the Fire Mode Wizard, make the selection Activate for parameter B1.1.4 in the Quick setup menu. See 11.20.1 The Fire Mode
Function for information on the password and warranty.
See the range of values of the parameters in 6.17 Group 3.17: Fire Mode.
N O T I C E
Before continuing, read about the password and warranty.
Procedure
1.
Set a value for parameter P3.17.2 Fire Mode Frequency Source.
If other value than Fire mode frequency is selected, the wizard goes directly to step 3.
2.
Set a value for parameter P3.17.3 Fire Mode Frequency.
3.
Activate the signal when the contact opens or when it closes.
4.
Set a value for parameters P3.17.4 Fire Mode Activation on OPEN/P3.17.5 Fire Mode Activation on CLOSE.
See also chapter 11.8.1.1 General Information on the Programming.
5.
Set a value for parameter P3.17.6 Fire Mode Reverse.
6.
Set a value for P3.17.1 Fire Mode Password.
AB275637269262en-000101 / DPD00927 | 61Danfoss A/S © 2021.05

STOP
READY I/O
ID:25
FreqReference
Multimonitor
20.0 Hz
Motor Curre
0.00A
DC-link volt
0.0V
Output Freq
0.00 Hz
Motor Speed
0.0 rpm
Motor Voltage
0.0V
Motor Tempera
0.0%
Motor Torque
0.00 %
Unit Tempera
81.9°C
FreqReference
e30bg686.10
STOP
READY I/O
ID:1 M2.1.1.1
FreqReference
0.00 %
Motor Power
Output frequency
FreqReference
Motor Speed
Motor Current
Motor Torque
0.00 Hz
10.00 Hz
0.00 rpm
0.00 A
0.00 %
e30bg687.10
VACON® 100 INDUSTRIAL
Application Guide
Monitor Menu
5 Monitor Menu
5.1 Uses of the Monitor Menu
Monitor Menu allows monitoring the actual values of the parameters and signals. It also allows monitoring the statuses and measurements. Some of the values to be monitored can be customized.
5.2 Multimonitor Monitoring
5.2.1 Changing the Items to Monitor
On the Multimonitor page, 4–9 items to monitor can be collected. Select the number of items with the parameter 3.11.4 Multimonitor View. See more in 6.11 Group 3.11: Application Settings.
Procedure
1.
Go into the Monitor menu with the [OK] button.
2.
Go into Multimonitor.
To replace an old item, activate it. Use the arrow buttons.
3.
5.3 Trend Curve Monitoring
5.3.1 Uses of the Trend Curve
The Trend curve is a graphical presentation of 2 monitor values.
When a value is selected, the drive starts to record the values. The Trend curve submenu allows examining the trend curve, and
making the signal selections. Also the minimum and maximum settings and the sampling interval, and use autoscaling can be given
there.
5.3.2 Changing the Values in Trend Curve Monitoring
Procedure
4.
To select a new item in the list, push [OK].
1.
In the Monitor menu, find the Trend curve submenu and push [OK].
2.
Go into the submenu View trend curve with the [OK] button.
AB275637269262en-000101 / DPD0092762 | Danfoss A/S © 2021.05

STOP
READY I/O
FreqReference
Motor Speed
0.00Hz
0rpm
e30bg688.10
STOP
READY I/O
ID:3 V2.2.1.1.4
FreqReference
Motor Shaft Power
Output frequency
FreqReference
Motor Speed
Motor Current
Motor Torque
e30bg689.10
RUN
READY
ALARM
I/O
Motor Current
Motor Speed
0.02A
-317rpm
e30bg690.10
VACON® 100 INDUSTRIAL
Application Guide
3.
To select the current value that to change, use the arrow buttons up and down. Push [OK].
Only 2 values as trend curves can be monitored at the same time. The current selections, FreqReference, and Motor speed,
are at the bottom of the display.
4.
Go through the list of the monitoring values with the arrow buttons.
Monitor Menu
5.3.3 Stopping the Progression of the Curve
The Trend curve function allows stopping the curve and reading the current values. After, the progression of the curve can be restarted.
Procedure
5.
Make a selection and push [OK].
1.
In Trend curve view, activate a curve with the arrow button Up.
The frame of the display turns bold.
2.
Push [OK] at the target point of the curve.
A vertical line comes into view on the display. The values at the bottom of the display agree to the location of the
line.
AB275637269262en-000101 / DPD00927 | 63Danfoss A/S © 2021.05

RUN
READY
ALARM
I/O
Motor Current
Motor Speed
0.01A
-252rpm
e30bg691.10
Index
Parameter
Min
Max
Unit
Default
ID
Description
M2.2.1
View Trend curve
Go into this menu to monitor values in a curve form.
P2.2.2
Sampling interval
100
432000
ms
100
2368
P2.2.3
Channel 1 min
-214748
1000
-1000
2369
P2.2.4
Channel 1 max
-1000
214748
1000
2370
P2.2.5
Channel 2 min
-214748
1000
-1000
2371
P2.2.6
Channel 2 max
-1000
214748
1000
2372
P2.2.7
Autoscale
010
2373
0 = Disabled
1 = Enabled
Index
Monitoring value
Unit
Scale
ID
Description
V2.3.1
Output frequency
Hz
0.011V2.3.2
Frequency reference
Hz
0.0125V2.3.3
Motor speed
RPM12
V2.3.4
Motor current
A
Varies
3
V2.3.5
Motor torque
%
0.14V2.3.7
Motor shaft power
%
0.1
5
VACON® 100 INDUSTRIAL
Application Guide
3.
To move the line to see the values of some other location, use the arrow buttons Left and Right.
5.3.4 Trend Curve Parameters
Table 16: The Trend Curve Parameters
Monitor Menu
5.4 Basic Monitoring
5.4.1 Uses of the Basic Monitoring
Only the standard I/O board statuses are available in the Monitor menu. For the statuses of all the I/O board signals as raw data, see
the I/O and Hardware menu.
Check the statuses of the expander I/O board in the I/O and Hardware menu when the system asks.
5.4.2 Basic Monitoring Parameters
Table 17: Items in the Basic Monitoring Menu
AB275637269262en-000101 / DPD0092764 | Danfoss A/S © 2021.05

Index
Monitoring value
Unit
Scale
ID
Description
V2.3.8
Motor shaft power
kW/hp
Varies
73
V2.3.9
Motor voltage
V
0.16V2.3.10
DC link voltage
V17
V2.3.11
Unit temperature
°C
0.18V2.3.12
Motor temperature
%
0.1
9
V2.3.13
Motor Preheat
1
1228
0 = OFF
1 = Heating (feeding DC-current)
V2.3.14
Torque reference
%
0.1
18
Index
Monitoring value
Unit
Scale
ID
Description
V2.4.1
Slot A DIN 1, 2, 3
115V2.4.2
Slot A DIN 4, 5, 6
116V2.4.3
Slot B RO 1, 2, 3
117V2.4.4
Analog input 1
%
0.0159Slot A.1 as default.
V2.4.5
Analog input 2
%
0.0160Slot A.2 as default.
V2.4.6
Analog input 3
%
0.0161Slot D.1 as default.
V2.4.7
Analog input 4
%
0.0162Slot D.2 as default.
V2.4.8
Analog input 5
%
0.0175Slot E.1 as default.
V2.4.9
Analog input 6
%
0.0176Slot E.2 as default.
V2.4.10
Slot A AO1
%
0.01
81
Index
Monitoring value
Unit
Scale
ID
Description
V2.5.1
(1)
Temperature input 1
°C
0.150V2.5.2
(1)
Temperature input 2
°C
0.151V2.5.3
(1)
Temperature input 3
°C
0.152V2.5.4
(1)
Temperature input 4
°C
0.169V2.5.5
(1)
Temperature input 5
°C
0.170V2.5.6
(1)
Temperature input 6
°C
0.1
71
VACON® 100 INDUSTRIAL
Application Guide
5.5 I/O Monitoring
Table 18: I/O Signal Monitoring
Monitor Menu
5.6 Temperature Inputs
Table 19: Monitoring the Temperature Inputs
1
This parameter group is visible with an option board for temperature measurement (OPTBH).
AB275637269262en-000101 / DPD00927 | 65Danfoss A/S © 2021.05

Index
Monitoring value
Unit
Scale
ID
Description
V2.6.1
Drive Status Word
1
43
B1 = Ready
B2 = Run
B3 = Fault
B6 = Run Enable
B7 = Alarm Active
B10 = DC current in stop
B11 = DC brake active
B12 = Run Request
B13 = Motor Regulator Active
B15 = Brake Chopper Active
V2.6.2
Ready status
1
78
B0 = Run Enable high
B1 = No fault active
B2 = Charge switch closed
B3 = DC voltage within limits
B4 = Power manager initialised
B5 = Power unit is not blocking start
B6 = System software is not blocking start
V2.6.3
Application Status Word1
1
89
B0 = Interlock 1
B1 = Interlock 2
B2 = Reserved
B3 = Ramp 2 active
B4 = Mechanical brake control
B5 = I/O A control active
B6 = I/O B control active
B7 = Fieldbus Control Active
B8 = Local control active
B9 = PC control active
B10 = Preset frequencies active
B11 = Jogging active
B12 = Fire Mode active
B13 = Motor Preheat active
B14 = Quick stop active
B15 = Drive stopped from keypad
V2.6.4
Application Status Word2
1
90
B0 = Acc/Dec prohibited
B1 = Motor switch open
B5 = Jockey pump active
B6 = Priming pump active
B7 = Input pressure supervision (Alarm/ Fault)
B8 = Frost protection (Alarm/Fault)
B9 = Autocleaning active
V2.6.5
DIN Status Word 1
156V2.6.6
DIN Status Word 2
157V2.6.7
Motor current 1 decimal
0.1
45
VACON® 100 INDUSTRIAL
Application Guide
5.7 Extras and Advanced
Table 20: Monitoring of the Advanced Values
Monitor Menu
AB275637269262en-000101 / DPD0092766 | Danfoss A/S © 2021.05

Index
Monitoring value
Unit
Scale
ID
Description
V2.6.8
Frequency reference source
1
1495
0 = PC
1 = Preset Freqs
2 = Keypad Reference
3 = Fieldbus
4 = AI1
5 = AI2
6 = AI1+AI2
7 = PID Controller
8 = Motor Potentiom.
9 = Joystick
10 = Jogging
100 = Not defined
101 = Alarm,PresetFreq
102 = Auto-cleaning
V2.6.9
Last active fault code
137V2.6.10
Last active fault ID
195V2.6.11
Last active alarm code
174V2.6.12
Last active alarm ID
1
94
V2.6.13
Motor regulator status
1
77
B0 = Current Limit (Motor)
B1 = Current Limit (Generator)
B2 = Torque Limit (Motor)
B3 = Torque Limit (Generator)
B4 = Overvoltage Control
B5 = Undervoltage Control
B6 = Power Limit (Motor)
B7 = Power Limit (Generator)
V2.6.14
Motor Shaft Power 1 Decimal
kW/hp
98
Index
Monitoring value
Unit
Scale
ID
Description
V2.7.1
TC 1, TC 2, TC 3
1
1441
V2.7.2
Interval 1
1
1442
V2.7.3
Interval 2
1
1443
V2.7.4
Interval 3
1
1444
V2.7.5
Interval 4
1
1445
V2.7.6
Interval 5
1
1446
V2.7.7
Timer 1
s11447
VACON® 100 INDUSTRIAL
Application Guide
Monitor Menu
5.8 Timer Functions Monitoring
Table 21: Monitoring of the Timer Functions
AB275637269262en-000101 / DPD00927 | 67Danfoss A/S © 2021.05

Index
Monitoring value
Unit
Scale
ID
Description
V2.7.8
Timer 2
s11448
V2.7.9
Timer 3
s11449
V2.7.10
Real-time clock
1450
Index
Monitoring value
Unit
Scale
ID
Description
V2.8.1
PID1 setpoint
Varies
As is set in P3.13.1.7 (See 6.13 Group
3.13: PID Controller.)
20
V2.8.2
PID1 feedback
Varies
As is set in P3.13.1.7
21
V2.8.3
PID1 error value
Varies
As is set in P3.13.1.7
22
V2.8.4
PID1 output
%
0.01
23
V2.8.5
PID1 status
1
24
0 = Stopped
1 = Running
3 = Sleep mode
4 = In dead band (see 6.13 Group 3.13: PID
Controller)
Index
Monitoring value
Unit
Scale
ID
Description
V2.9.1
ExtPID Setpoint
Varies
As set in P3.14.1.10 (See 6.14 Group 3.14:
External PID Controller.)
83
V2.9.2
ExtPID Feedback
Varies
As set in P3.14.1.10
84
V2.9.3
ExtPID Error
Varies
As set in P3.14.1.10
85
V2.9.4
ExtPID Output
%
0.01
86
V2.9.5
ExtPID Status
1
87
0 = Stopped
1 = Running
2 = In dead band (See 6.14 Group 3.14:
External PID Controller.)
Index
Monitoring value
Unit
Scale
ID
Description
V2.10.1
Motors Running
130V2.10.2
Autochange
1
1114
VACON® 100 INDUSTRIAL
Application Guide
5.9 PID Controller Monitoring
Table 22: Monitoring of the Values of the PID Controller
Monitor Menu
5.10 External PID Controller Monitoring
Table 23: Monitoring of the Values of the External PID Controller
5.11 Multi-pump Monitoring
Table 24: Multi-pump Monitoring
AB275637269262en-000101 / DPD0092768 | Danfoss A/S © 2021.05

Index
Monitoring value
Unit
Scale
ID
Description
V2.11.1
Maintenance Counter 1
h/kRev
Varies
1101
Index
Monitoring value
Unit
Scale
ID
Description
V2.12.1
FB Control Word
874
V2.12.2
FB Status Word
864
V2.12.3
FB Speed Reference
875
V2.12.4
FB Speed Actual
865
V2.12.5
Fieldbus General Control Word
861
V2.12.6
Fieldbus General Status Word
862
Index
Monitoring value
Unit
Scale
ID
Description
V2.12.7.1
FB Data In 1
1
876
V2.12.7.2
FB Data In 2
1
877
V2.12.7.3
FB Data In 3
1
878
V2.12.7.4
FB Data In 4
1
879
V2.12.7.5
FB Data In 5
1
880
V2.12.7.6
FB Data In 6
1
881
V2.12.7.7
FB Data In 7
1
882
V2.12.7.8
FB Data In 8
1
883
V2.12.7.9
FB Data In 9
1
229
V2.12.7.10
FB Data In 10
1
230
V2.12.7.11
FB Data In 11
1
231
V2.12.7.12
FB Data In 12
1
232
V2.12.7.13
FB Data In 13
1
233
V2.12.7.14
FB Data In 14
1
234
V2.12.7.15
FB Data In 15
1
235
V2.12.7.16
FB Data In 16
1
236
VACON® 100 INDUSTRIAL
Application Guide
5.12 Monitoring of Maintenance Counters
Table 25: Maintenance Counter Monitoring
5.13 Fieldbus Process Data Monitoring
Table 26: Fieldbus Process Data Monitoring
Monitor Menu
Table 27: Fieldbus Data In
AB275637269262en-000101 / DPD00927 | 69Danfoss A/S © 2021.05

Index
Monitoring value
Unit
Scale
ID
Description
V2.12.8.1
FB Data Out 1
1
866
V2.12.8.2
FB Data Out 2
1
867
V2.12.8.3
FB Data Out 3
1
868
V2.12.8.4
FB Data Out 4
1
869
V2.12.8.5
FB Data Out 5
1
870
V2.12.8.6
FB Data Out 6
1
871
V2.12.8.7
FB Data Out 7
1
872
V2.12.8.8
FB Data Out 8
1
873
V2.12.8.9
FB Data Out 9
1
245
V2.12.8.10
FB Data Out 10
1
246
V2.12.8.11
FB Data Out 11
1
247
V2.12.8.12
FB Data Out 12
1
248
V2.12.8.13
FB Data Out 13
1
249
V2.12.8.14
FB Data Out 14
1
250
V2.12.8.15
FB Data Out 15
1
251
V2.12.8.16
FB Data Out 16
1
252
Index
Monitoring value
Unit
Scale
ID
Description
V2.13.2
Block Out.1
15020
V2.13.3
Block Out.2
15040
V2.13.4
Block Out.3
15060
V2.13.5
Block Out.4
15080
V2.13.6
Block Out.5
15100
V2.13.7
Block Out.6
15120
V2.13.8
Block Out.7
15140
V2.13.9
Block Out.8
15160
V2.13.10
Block Out.9
15180
V2.13.11
Block Out.10
15200
VACON® 100 INDUSTRIAL
Application Guide
Table 28: Fieldbus Data Out
Monitor Menu
5.14 Drive Customizer Monitoring
Table 29: Drive Customizer Monitoring
AB275637269262en-000101 / DPD0092770 | Danfoss A/S © 2021.05

Index
Name
Min
Max
Unit
Default
ID
Description
V2.16.1 Baseline Data
V2.16.1.1
BaselineDataElem1
-300.00
320.00
various
0.00
3601
V2.16.1.2
BaselineDataElem2
-300.00
320.00
various
0.00
3602
V2.16.1.3
BaselineDataElem3
-300.00
320.00
various
0.00
3603
V2.16.1.4
BaselineDataElem4
-300.00
320.00
various
0.00
3604
V2.16.1.5
BaselineDataElem5
-300.00
320.00
various
0.00
3605
V2.16.1.6
BaselineDataElem6
-300.00
320.00
various
0.00
3606
V2.16.1.7
BaselineDataElem7
-300.00
320.00
various
0.00
3607
V2.16.1.8
BaselineDataElem8
-300.00
320.00
various
0.00
3608
V2.16.1.9
BaselineDataElem9
-300.00
320.00
various
0.00
3609
V2.16.1.10
BaselineDataElem10
-300.00
320.00
various
0.00
3610
V2.16.1.11
BaselineRun Status
0140
3622
0=Not Started
1=Running
2=Running 10%
3=Running 20%
4=Running 30%
5=Running 40%
6=Running 50%
7=Running 60%
8=Running 70%
9=Running 80%
10=Running 90%
11=Completed
12=Run Failed
13=Manual Before Baseline
14=Manual After Baseline
V2.16.2 Stator Winding Monitor
V2.16.2.1
Current Unbalance
0.00
100.00
%
0.00
3617
V2.16.2.2
Current Threshold Value
0.00
100.00
%
0.00
3620
V2.16.2.3
Current Warning S1 High Threshold
0.00
100.00
%
0.00
3611
V2.16.2.4
Current Warning S2 High Threshold
0.00
100.00
%
0.00
3612
V2.16.2.5
Current Alarm High Threshold
0.00
100.00
%
0.00
3613
V2.16.3 Vibration
V2.16.3.1
Vibration
0.00
100.00
%
0.00
3623
V2.16.3.2
Vibration Threshold Value
0.00
100.00
%
0.00
3624
VACON® 100 INDUSTRIAL
Application Guide
5.15 Condition-based Monitoring
Table 30: Condition-based Monitoring
Monitor Menu
AB275637269262en-000101 / DPD00927 | 71Danfoss A/S © 2021.05

Index
Name
Min
Max
Unit
Default
ID
Description
V2.16.3.3
Vibration Warning S1 High Threshold
0.00
100.00
%
0.00
3625
V2.16.3.4
Vibration Warning S2 High Threshold
0.00
100.00
%
0.00
3626
V2.16.3.5
Vibration Alarm High Threshold
0.00
100.00
%
0.00
3627
V2.16.4 Load
V2.16.4.1
Motor Torque
-300.0
300.0
%
0.04V2.16.4.2
Load Threshold Value
-300.0
300.0
%
0.00
3628
V2.16.4.3
Load Warning S1 High Threshold
-300.0
300.0
%
0.00
3629
V2.16.4.4
Load Warning S2 High Threshold
-300.0
300.0
%
0.00
3630
V2.16.4.5
Load Alarm High Threshold
-300.0
300.0
%
0.00
3631
V2.16.4.6
Load Warning S1 Low Threshold
-300.0
300.0
%
0.00
3632
V2.16.4.7
Load Warning S2 Low Threshold
-300.0
300.0
%
0.00
3633
V2.16.4.8
Load Alarm Low Threshold
-300.0
300.0
%
0.00
3634
V2.16.5
Condition Based Monitoring Status
0
65535
0
3619
B0= Stator current warning S1
B2= Vibration warning S1
B3= Load warning S1
B5= Stator current warning S2
B7= Vibration warning S2
B8= Load warning S2
B10= Stator current alarm/
fault
B12= Vibration alarm/fault
B13= Load alarm/fault
VACON® 100 INDUSTRIAL
Application Guide
Monitor Menu
AB275637269262en-000101 / DPD0092772 | Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.1.1.1
Motor Nominal Voltage
Varies
Varies
V
Varies
110
P3.1.1.2
Motor Nominal Frequency
8.00
320.00
Hz
50/60
111
P3.1.1.3
Motor Nominal Speed
24
19200
RPM
Varies
112
P3.1.1.4
Motor Nominal Current
IH * 0.1
IH * 2
A
Varies
113
P3.1.1.5
Motor Cos Phi (Power Factor)
0.30
1.00
Varies
120
P3.1.1.6
Motor Nominal Power
Varies
Varies
kW
Varies
116
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.1.2.1
Control Mode
020
600
0 = Frequency control
1 = Speed control
2 = Torque control
P3.1.2.2
Motor Type
020
650
0 = Induction motor
1 = PM motor
2 = Reluctance motor
P3.1.2.3
Switching Frequency
1.5
Max Switching frequency (ID 2620)
kHz
Varies
601
P3.1.2.4
Identification
020
631
0 = No action
1 = At standstill
2 = With rotation
P3.1.2.5
Magnetizing Current
0.0
2*IHA0.0
612
P3.1.2.6
Motor Switch
010
653
0 = Disabled
1 = Enabled
P3.1.2.7
Load Drooping
0.00
20.00
%
0.00
620
P3.1.2.8
Load Drooping Time
0.00
2.00s0.00
656
P3.1.2.9
Load Drooping Mode
010
1534
0 = Normal
1 = Linear removal
P3.1.2.10
Overvoltage Control
011
607
0 = Disabled
1 = Enabled
P3.1.2.11
Undervoltage Control
011
608
0 = Disabled
1 = Enabled
VACON® 100 INDUSTRIAL
Application Guide
6 Parameters Menu
6.1 Group 3.1: Motor Settings
Table 31: Motor Nameplate Parameters
Table 32: Motor Control Settings
Parameters Menu
AB275637269262en-000101 / DPD00927 | 73Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.1.2.12
Energy Optimization
010
666
0 = Disabled
1 = Enabled
P3.1.2.13
Stator Voltage Adjust
50.0
150.0
%
100.0
659
P3.1.2.14
Overmodulation
011
1515
0 = Disabled
1 = Enabled
P3.1.2.15
Rs Voltage Drop
0.00
50.00
%
0.00
662
P3.1.2.16
Ls Voltage Drop
0.00
200.00
%
0.00
673
P3.1.2.17
Motor BEM Voltage
0
Varies
V0674
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.1.3.1
Motor Current Limit
IH*0.1
ISAVaries
107
P3.1.3.2
Motor Torque Limit
0.0
300.0
%
300.0
1287
P3.1.3.3
Generator Torque Limit
0.0
300.0
%
300.0
1288
P3.1.3.4
Motor Power Limit
0.0
300.0
%
300.0
1289
P3.1.3.5
Generator Power Limit
0.0
300.0
%
300.0
1290
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.1.4.1
U/f Ratio
020
108
0 = Linear
1 = Squared
2 = Programmable
P3.1.4.2
Field Weakening Point Frequency
8.00
P3.3.1.2
Hz
Varies
602
P3.1.4.3
Voltage at Field Weakening
Point
10.00
200.00
%
100.00
603
P3.1.4.4
U/f Midpoint Frequency
0.00
P3.1.4.2
Hz
Varies
604
P3.1.4.5
U/f Midpoint Voltage
0.0
100.0
%
100.00
605
P3.1.4.6
Zero Frequency Voltage
0.00
40.00
%
Varies
606
P3.1.4.7
Flying Start Options
0
25501590
B0 = Search the shaft frequency only from
the same direction as the frequency reference
B1 = Disable AC scanning
VACON® 100 INDUSTRIAL
Application Guide
Table 33: Motor Limit Settings
Parameters Menu
Table 34: Open Loop Settings
AB275637269262en-000101 / DPD0092774 | Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
B4 = Use the frequency reference for the
initial guess
B5 = Disable DC pulses
B6 = Flux build with current control
B7 = Reverse injection direction
P3.1.4.8
Flying Start Scan Current
0.0
100.0
%
45.0
1610
P3.1.4.9
Auto Torque Boost
010
109
0 = Disabled
1 = Enabled
P3.1.4.10
Torque Boost Motor Gain
0.0
100.0
%
100.0
667
P3.1.4.11
Torque Boost Generator
Gain
0.0
100.0
%
0.0
665
M3.1.4.12
I/f Start
This menu includes 3 parameters. See Table 35.
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.1.4.12.1
I/f Start
010
534
0 = Disabled
1 = Enabled
P3.1.4.12.2
I/f Start Frequency
5.0
0.5 * P3.1.1.2
0.2 * P3.1.1.2
535
P3.1.4.12.3
I/f Start Current
0.0
150.0
%
80.0
536
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.1.4.13.1
Torque Stabilator Gain
0.0
500.0
%
50.0
1412
P3.1.4.13.2
Torque Stabilator Gain at Field Weakening Point
0.0
500.0
%
50.0
1414
P3.1.4.13.3
Torque Stabilator Damping Time Constant
0.0005
1.0000
s
0.0050
1413
P3.1.4.13.4
Torque Stabilator Damping Time Constant for PM motors
0.0005
1.0000
s
0.0500
1735
P3.1.4.13.5
Torque Stabilator Filter Time Constant
0.0000
0.5000
s
0.0005
15650
P3.1.4.13.6
Torque Stabilator Filter Time Constant for PM motors
0.0000
0.5000
s
0.0005
15651
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.1.6.1
Sensorless Control
010
1724
0 = Disabled
VACON® 100 INDUSTRIAL
Application Guide
Parameters Menu
Table 35: I/f Start Parameters
Table 36: Torque Stabilator Parameters
Table 37: Sensorless Control Settings
AB275637269262en-000101 / DPD00927 | 75Danfoss A/S © 2021.05

•
•
•
•
•
•
•
•
•
Index
Parameter
Min
Max
Unit
Default
ID
Description
1 = Enabled
P3.1.6.3
Sensorless Control Options
16384
1726
B0 = Stator resistance identification
B3 = Limit frequency polarity
B6 = Enable IR-compensation adjust
B8 = Voltage based current limit
B14 = Ramp antiwindup
P3.1.6.8
Speed Control Gain
0.00
500.00
20.00
1733
P3.1.6.9
Speed Control Time
0.00
100.00
0.100
1734
P3.1.6.14
Flux Reference
30
130
100
1250
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.2.1
Remote Control Place
0
1
0
(1)
172
0 = I/O control
1 = Fieldbus control
P3.2.2
Local/Remote
0
1
0
(1)
211
0 = Remote
1 = Local
P3.2.3
Keypad Stop Button
010
114
0 = Yes
1 = No
P3.2.4
Start Function
010
505
0 = Ramping
1 = Flying start
P3.2.5
Stop Function
010
506
0 = Coasting
1 = Ramping
P3.2.6
I/O A Start/Stop Logic
0
4
2
(1)
300
Logic = 0
Ctrl sgn 1 = Forward
Ctrl sgn 2 = Backward
Logic = 1
Ctrl sgn 1 = Forward (edge)
Ctrl sgn 2 = Inverted Stop
Ctrl sgn 3 = Bckwrd (edge)
Logic = 2
Ctrl sgn 1 = Forward (edge)
Ctrl sgn 2 = Bckwrd (edge)
Logic = 3
Ctrl sgn 1 = Start
Ctrl sgn 2 = Reverse
Logic = 4
VACON® 100 INDUSTRIAL
Application Guide
6.2 Group 3.2: Start/Stop Setup
Table 38: Start/Stop Setup
Parameters Menu
AB275637269262en-000101 / DPD0092776 | Danfoss A/S © 2021.05

•
•
Index
Parameter
Min
Max
Unit
Default
ID
Description
Ctrl sgn 1 = Start (edge)
Ctrl sgn 2 = Reverse
P3.2.7
I/O B Start/Stop Logic
0
4
2
(1)
363
See P3.2.6.
P3.2.8
Fieldbus Start Logic
010
889
0 = A rising edge is necessary
1 = State
P3.2.9
Start Delay
0.000
60.000
s
0.000
524
P3.2.10
Remote to Local Function
022
181
0 = Keep Run
1 = Keep Run & Reference
2 = Stop
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.3.1.1
Minimum Frequency Reference
0.00
P3.3.1.2
Hz
0.00
101
P3.3.1.2
Maximum Frequency Reference
P3.3.1.1
320.00
Hz
50.00/60.00
102
P3.3.1.3
Positive Frequency Reference Limit
-320.0
320.0
Hz
320.00
1285
P3.3.1.4
Negative Frequency Reference Limit
-320.0
320.0
Hz
-320.00
1286
P3.3.1.5
I/O Control Reference A Selection
1
20
6
(1)
117
1 = Preset Frequency 0
2 = Keypad reference
3 = Fieldbus
4 = AI1
5 = AI2
6 = AI1+AI2
7 = PID reference
8 = Motor potentiometer
9 = Joystick reference
10 = Jogging reference
11 = Block Out.1
12 = Block Out.2
13 = Block Out.3
14 = Block Out.4
15 = Block Out.5
16 = Block Out.6
17 = Block Out.7
18 = Block Out.8
19 = Block Out.9
20 = Block Out.10
VACON® 100 INDUSTRIAL
Application Guide
1
The selection of the application with parameter P1.2 Application gives the default value. See 11.27 Default Values of Parameters in the Different
Applications.
Parameters Menu
6.3 Group 3.3: References
Table 39: Frequency Reference Parameters
AB275637269262en-000101 / DPD00927 | 77Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.3.1.6
I/O Control Reference B Selection
1
20
4
(1)
131
See P3.3.1.5.
P3.3.1.7
Keypad Control Reference Selection
1
20
2
(1)
121
1 = Preset Frequency 0
2 = Keypad reference
3 = Fieldbus
4 = AI1
5 = AI2
6 = AI1+AI2
7 = PID reference
8 = Motor potentiometer
9 = Joystick reference
10 = Jogging reference
11 = Block Out.1
12 = Block Out.2
13 = Block Out.3
14 = Block Out.4
15 = Block Out.5
16 = Block Out.6
17 = Block Out.7
18 = Block Out.8
19 = Block Out.9
20 = Block Out.10
P3.3.1.8
Keypad Reference
P3.3.1.1
P3.3.1.2
Hz
0.00
184
P3.3.1.9
Keypad Direction
010
123
0 = Forward
1 = Reverse
P3.3.1.10
Fieldbus Control Reference Selection
1
20
3
(1)
122
1 = Preset Frequency 0
2 = Keypad reference
3 = Fieldbus
4 = AI1
5 = AI2
6 = AI1+AI2
7 = PID reference
8 = Motor potentiometer
9 = Joystick reference
10 = Jogging reference
11 = Block Out.1
12 = Block Out.2
13 = Block Out.3
14 = Block Out.4
15 = Block Out.5
16 = Block Out.6
17 = Block Out.7
18 = Block Out.8
19 = Block Out.9
VACON® 100 INDUSTRIAL
Application Guide
Parameters Menu
AB275637269262en-000101 / DPD0092778 | Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
20 = Block Out.10
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.3.2.1
Torque Reference Selection
0
26
0
(1)
641
0 = Not used
1 = Keypad
2 = Joystick
3 = AI1
4 = AI2
5 = AI3
6 = AI4
7 = AI5
8 = AI6
9 = ProcessDataIn 1
10 = ProcessDataIn 2
11 = ProcessDataIn 3
12 = ProcessDataIn 4
13 = ProcessDataIn 5
14 = ProcessDataIn 6
15 = ProcessDataIn 7
16 = ProcessDataIn 8
17 = Block Out.1
18 = Block Out.2
19 = Block Out.3
20 = Block Out.4
21 = Block Out.5
22 = Block Out.6
23 = Block Out.7
24 = Block Out.8
25 = Block Out.9
26 = Block Out.10
P3.3.2.2
Torque Minimum Reference
-300.0
300.0
%
0.0
643
P3.3.2.3
Torque Maximum Reference
-300.0
300.0
%
100.0
642
P3.3.2.4
Torque Reference Filter Time
0.00
300.00
s
0.00
1244
P3.3.2.5
Torque Reference Dead Zone
0.0
300.00
%
0.0
1246
P3.3.2.6
Keypad Torque Reference
0.0
P3.3.2.3
%
0.0
1439
P3.3.2.7
Torque Control Frequency Limit
010
1278
0 = Pos/Neg frequency limits
VACON® 100 INDUSTRIAL
Application Guide
1
The selection of the application with parameter P1.2 Application gives the default value. See the default values in 11.27 Default Values of Parame-
ters in the Different Applications.
Table 40: Torque Reference Parameters
Parameters Menu
AB275637269262en-000101 / DPD00927 | 79Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
1 = Frequency reference
P3.3.2.8
Torque Control Open Loop
This menu includes 3 parameters. See Table 41.
P3.3.2.9
Torque Control Sensorless
This menu includes 2 parameters. See Table 42.
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.3.2.8.1
Open Loop Torque Control Minimum Frequency
0.0
P3.3.1.2
Hz
3.0
636
P3.3.2.8.2
Open Loop Torque Control P Gain
0.0
32000.0
0.01
639
P3.3.2.8.3
Open Loop Torque Control I Gain
0.0
32000.0
2.0
640
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.3.2.9.1
Sensorless Torque Control P Gain
0.00
214748.36
0.06
1731
P3.3.2.9.2
Sensorless Torque Control I Gain
0.00
214748.36
5.00
1732
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.3.3.1
Preset Frequency Mode
0
1
0
(1)
182
0 = Binary coded
1 = Number of inputs
P3.3.3.2
Preset Frequency 0
P3.3.1.1
P3.3.1.2
Hz
5.00
180
P3.3.3.3
Preset Frequency 1
P3.3.1.1
P3.3.1.2
Hz
10.00
(1)
105
P3.3.3.4
Preset Frequency 2
P3.3.1.1
P3.3.1.2
Hz
15.00
(1)
106
P3.3.3.5
Preset Frequency 3
P3.3.1.1
P3.3.1.2
Hz
20.00
(1)
126
P3.3.3.6
Preset Frequency 4
P3.3.1.1
P3.3.1.2
Hz
25.00
(1)
127
P3.3.3.7
Preset Frequency 5
P3.3.1.1
P3.3.1.2
Hz
30.00
(1)
128
P3.3.3.8
Preset Frequency 6
P3.3.1.1
P3.3.1.2
Hz
40.00
(1)
129
P3.3.3.9
Preset Frequency 7
P3.3.1.1
P3.3.1.2
Hz
50.00
(1)
130
VACON® 100 INDUSTRIAL
Application Guide
1
The selection of the application with parameter P1.2 Application gives the default value. See the default values in 11.27 Default Values of Parame-
ters in the Different Applications.
Table 41: Parameters for Torque Control in Open Loop Control
Parameters Menu
Table 42: Parameters for Torque Control in Advanced Sensorless Control
Table 43: Preset Frequency Parameters
AB275637269262en-000101 / DPD0092780 | Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.3.3.10
Preset Frequency Selection 0
DigIN SlotA.4
419
P3.3.3.11
Preset Frequency Selection 1
DigIN SlotA.5
420
P3.3.3.12
Preset Frequency Selection 2
DigIN Slot0.1
421
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.3.4.1
Motor Potentiometer UP
DigIN Slot0.1
418
OPEN = Not active
CLOSED = Active
P3.3.4.2
Motor Potentiometer DOWN
DigIN Slot0.1
417
OPEN = Not active
CLOSED = Active
P3.3.4.3
Motor Potentiometer Ramp Time
0.1
500.0
Hz/s
10.0
331
P3.3.4.4
Motor Potentiometer Reset
021
367
0 = No reset
1 = Reset if stopped
2 = Reset if powered down
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.3.5.1
Joystick Signal Selection
060
451
0 = Not Used
1 = AI1 (0–100%)
2 = AI2 (0–100%)
3 = AI3 (0–100%)
4 = AI4 (0–100%)
5 = AI5 (0–100%)
6 = AI6 (0–100%)
P3.3.5.2
Joystick Dead Zone
0.0
20.0%2.0
384
P3.3.5.3
Joystick Sleep Zone
0.0
20.0%0.0
385
0 = Not used
P3.3.5.4
Joystick Sleep Delay
0.00
300.00
s
0.00
386
0 = Not used
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.3.6.1
Enable DI Jogging
Varies
Varies
DigIN Slot0.1
532
P3.3.6.2
Jogging Reference 1 Activation
Varies
Varies
DigIN Slot0.1
530
P3.3.6.3
Jogging Reference 2 Activation
Varies
Varies
DigIN Slot0.1
531
VACON® 100 INDUSTRIAL
Application Guide
1
The selection of the application with parameter P1.2 Application gives the default value. See the default values in 11.27 Default Values of Parame-
ters in the Different Applications.
Table 44: Motor Potentiometer Parameters
Parameters Menu
Table 45: Joystick Control Parameters
Table 46: Jogging Parameters
AB275637269262en-000101 / DPD00927 | 81Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.3.6.4
Jogging Reference 1
-MaxRef
MaxRef
Hz
0.00
1239
P3.3.6.5
Jogging Reference 2
-MaxRef
MaxRef
Hz
0.00
1240
P3.3.6.6
Jogging Ramp
0.1
300.0
s
10.0
1257
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.4.1.1
Ramp 1 Shape
0.0
100.0
%
0.0
500
P3.4.1.2
Acceleration Time 1
0.1
300.0
s
5.0
103
P3.4.1.3
Deceleration Time 1
0.1
300.0
s
5.0
104
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.4.2.1
Ramp 2 Shape
0.0
100.0
%
0.0
501
P3.4.2.2
Acceleration Time 2
0.1
300.0
s
10.0
502
P3.4.2.3
Deceleration Time 2
0.1
300.0
s
10.0
503
P3.4.2.4
Ramp 2 Selection
Varies
Varies
DigIN Slot0.1
408
0 = OPEN
1 = CLOSED
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.4.3.1
Start Magnetizing Current
0.00ILAIH517
0 = Disabled
P3.4.3.2
Start Magnetizing Time
0.00
600.00
s
0.00
516
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.4.4.1
DC Brake Current
0ILAIH507
0 = Disabled
P3.4.4.2
DC Braking Time at Stop
0.00
600.00
s
0.00
508
P3.4.4.3
Frequency to Start DC Braking at Ramp Stop
0.10
10.00
Hz
1.50
515
VACON® 100 INDUSTRIAL
Application Guide
6.4 Group 3.4: Ramps and Brakes Setup
Table 47: Ramp 1 Setup
Parameters Menu
Table 48: Ramp 2 Setup
Table 49: Start Magnetization Parameters
Table 50: DC Brake Parameters
AB275637269262en-000101 / DPD0092782 | Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.4.5.1
Flux Braking
010
520
0 = Disabled
1 = Enabled
P3.4.5.2
Flux Braking Current
0ILAIH519
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.5.1.1
Control Signal 1 A
DigIN SlotA.1
(1)
403
P3.5.1.2
Control Signal 2 A
DigIN SlotA.2
(1)
404
P3.5.1.3
Control Signal 3 A
DigIN Slot0.1
434
P3.5.1.4
Control Signal 1 B
DigIN Slot0.1
(1)
423
P3.5.1.5
Control Signal 2 B
DigIN Slot0.1
(1)
424
P3.5.1.6
Control Signal 3 B
DigIN Slot0.1
435
P3.5.1.7
I/O B Control Force
DigIN Slot0.1
(1)
425
CLOSED = Force the control place to
I/O B
P3.5.1.8
I/O B Reference Force
DigIN Slot0.1
(1)
343
CLOSED = I/O reference B (P3.3.1.6)
gives the frequency reference
P3.5.1.9
Fieldbus Control Force
DigIN Slot0.1
(1)
411
P3.5.1.10
Keypad Control Force
DigIN Slot0.1
(1)
410
P3.5.1.11
External Fault Close
DigIN SlotA.3
(1)
405
OPEN = OK
CLOSED = External fault
P3.5.1.12
External Fault Open
DigIN Slot0.2
406
OPEN = External fault
CLOSED = OK
P3.5.1.13
Fault Reset Close
Varies
414
CLOSED = Resets all active faults
P3.5.1.14
Fault Reset Open
DigIN Slot0.1
213
OPEN = Resets all active faults
P3.5.1.15
Run Enable
DigIN Slot0.2
407
P3.5.1.16
Run Interlock 1
DigIN Slot0.2
1041
P3.5.1.17
Run Interlock 2
DigIN Slot0.2
1042
P3.5.1.18
Motor Preheat ON
DigIN Slot0.1
1044
OPEN = No action
VACON® 100 INDUSTRIAL
Application Guide
Table 51: Flux Braking Parameters
6.5 Group 3.5: I/O Configuration
Table 52: Digital Input Settings
Parameters Menu
AB275637269262en-000101 / DPD00927 | 83Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
CLOSED = Uses the DC current of
the motor preheat in Stop state.
Used when the value of P3.18.1 is 2.
P3.5.1.19
Ramp 2 Selection
DigIN Slot0.1
(1)
408
OPEN = Ramp 1 Shape, Acceleration
Time 1, and Deceleration Time 1.
CLOSED = Ramp 2 Shape, Acceleration Time 2, and Deceleration Time
2.
P3.5.1.20
Acc/Dec Prohibit
DigIN Slot0.1
415
P3.5.1.21
Preset Frequency Selection 0
DigIN SlotA.4
(1)
419
P3.5.1.22
Preset Frequency Selection 1
Varies
420
P3.5.1.23
Preset Frequency Selection 2
DigIN Slot0.1
(1)
421
P3.5.1.24
Motor Potentiometer UP
DigIN Slot0.1
(1)
418
OPEN = Not active
CLOSED = Active
P3.5.1.25
Motor Potentiometer DOWN
DigIN Slot0.1
(1)
417
OPEN = Not active
CLOSED = Active
P3.5.1.26
Quick Stop Activation
Varies
1213
OPEN = Activated
P3.5.1.27
Timer 1
DigIN Slot0.1
447
P3.5.1.28
Timer 2
DigIN Slot0.1
448
P3.5.1.29
Timer 3
DigIN Slot0.1
449
P3.5.1.30
PID1 Setpoint Boost
DigIN Slot0.1
1046
OPEN = No boost
CLOSED = Boost
P3.5.1.31
PID1 Select Setpoint
DigIN Slot0.1
1047
OPEN = Setpoint 1
CLOSED = Setpoint 2
P3.5.1.32
External PID Start Signal
DigIN Slot0.2
1049
OPEN = PID2 in stop mode
CLOSED = PID2 regulating
P3.5.1.33
External PID Select Setpoint
DigIN Slot0.1
1048
OPEN = Setpoint 1
CLOSED = Setpoint 2
P3.5.1.34
Motor 1 Interlock
DigIN Slot0.1
426
OPEN = Not active
CLOSED = Active
P3.5.1.35
Motor 2 Interlock
DigIN Slot0.1
427
OPEN = Not active
CLOSED = Active
P3.5.1.36
Motor 3 Interlock
DigIN Slot0.1
428
OPEN = Not active
CLOSED = Active
VACON® 100 INDUSTRIAL
Application Guide
Parameters Menu
AB275637269262en-000101 / DPD0092784 | Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.5.1.37
Motor 4 Interlock
DigIN Slot0.1
429
OPEN = Not active
CLOSED = Active
P3.5.1.38
Motor 5 Interlock
DigIN Slot0.1
430
OPEN = Not active
CLOSED = Active
P3.5.1.39
Motor 6 Interlock
DigIN Slot0.1
486
OPEN = Not active
CLOSED = Active
P3.5.1.40
Reset Maintenance Counter
DigIN Slot0.1
490
CLOSED = Reset
P3.5.1.41
Enable DI Jogging
DigIN Slot0.1
532
P3.5.1.42
Jogging Reference 1 Activation
DigIN Slot0.1
530
P3.5.1.43
Jogging Reference 2 Activation
DigIN Slot0.1
531
P3.5.1.44
Mechanical Brake Feedback
DigIN Slot0.1
1210
P3.5.1.45
Fire Mode Activation OPEN
DigIN Slot0.2
1596
OPEN = Fire Mode active
CLOSED = No action
P3.5.1.46
Fire Mode Activation CLOSE
DigIN Slot0.1
1619
OPEN = No action
CLOSED = Fire Mode active
P3.5.1.47
Fire Mode Reverse
DigIN Slot0.1
1618
OPEN = Forward
CLOSED = Reverse
P3.5.1.48
Auto-cleaning Activation
DigIN Slot0.1
1715
P3.5.1.49
Parameter Set 1/2 Selection
DigIN Slot0.1
496
OPEN = Parameter set 1
CLOSED = Parameter set 2
P3.5.1.50
User Defined Fault 1 Activation
DigIN Slot0.1
15523
OPEN = No action
CLOSED = Fault activated
P3.5.1.51
User Defined Fault 2 Activation
DigIN Slot0.1
15524
OPEN = No action
CLOSED = Fault activated
P3.5.1.52
AHF Overtemperature
DigIN Slot0.2
15513
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.5.2.1.1
AI1 Signal Selection
AnIN SlotA.1
377
P3.5.2.1.2
AI1 Signal Filter Time
0.00
300.00
s
0.1
(1)
378
VACON® 100 INDUSTRIAL
Application Guide
Parameters Menu
1
The selection of the application with parameter P1.2 Application gives the default value. See the default values in
ters in the Different Applications.
Table 53: Analog Input 1 Settings
11.27 Default Values of Parame-
AB275637269262en-000101 / DPD00927 | 85Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.5.2.1.3
AI1 Signal Range
0
1
0
(1)
379
0 = 0…10 V/0…20 mA
1 = 2…10 V/4…20 mA
P3.5.2.1.4
AI1 Custom. Min
-160.00
160.00
%
0.00
(1)
380
P3.5.2.1.5
AI1 Custom. Max
-160.00
160.00
%
100.00
(1)
381
P3.5.2.1.6
AI1 Signal Inversion
0
1
0
(1)
387
0 = Normal
1 = Signal inverted
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.5.2.2.1
AI2 Signal Selection
AnIN SlotA.2
388
See P3.5.2.1.1.
P3.5.2.2.2
AI2 Signal Filter Time
0.00
300.00
s
0.1
(1)
389
See P3.5.2.1.2.
P3.5.2.2.3
AI2 Signal Range
0
1
1
(1)
390
See P3.5.2.1.3.
P3.5.2.2.4
AI2 Custom. Min
-160.00
160.00
%
0.00
(1)
391
See P3.5.2.1.4.
P3.5.2.2.5
AI2 Custom. Max
-160.00
160.00
%
100.00
(1)
392
See P3.5.2.1.5.
P3.5.2.2.6
AI2 Signal Inversion
0
1
0
(1)
398
See P3.5.2.1.6.
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.5.2.3.1
AI3 Signal Selection
AnIN SlotD.1
141
See P3.5.2.1.1.
P3.5.2.3.2
AI3 Signal Filter Time
0.00
300.00
s
0.1
142
See P3.5.2.1.2.
P3.5.2.3.3
AI3 Signal Range
010
143
See P3.5.2.1.3.
P3.5.2.3.4
AI3 Custom. Min
-160.00
160.00
%
0.00
144
See P3.5.2.1.4.
P3.5.2.3.5
AI3 Custom. Max
-160.00
160.00
%
100.00
145
See P3.5.2.1.5.
P3.5.2.3.6
AI3 Signal Inversion
0
1
0
(1)
151
See P3.5.2.1.6.
VACON® 100 INDUSTRIAL
Application Guide
1
The selection of the application with parameter P1.2 Application gives the default value. See the default values in 11.27 Default Values of Parame-
ters in the Different Applications.
Table 54: Analog Input 2 Settings
Parameters Menu
1
The selection of the application with parameter P1.2 Application gives the default value. See the default values in
ters in the Different Applications.
Table 55: Analog Input 3 Settings
1
The selection of the application with parameter P1.2 Application gives the default value. See the default values in
ters in the Different Applications.
11.27 Default Values of Parame-
11.27 Default Values of Parame-
AB275637269262en-000101 / DPD0092786 | Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.5.2.4.1
AI4 Signal Selection
AnIN SlotD.2
152
See P3.5.2.1.1.
P3.5.2.4.2
AI4 Signal Filter Time
0.00
300.00
s
0.1
153
See P3.5.2.1.2.
P3.5.2.4.3
AI4 Signal Range
010
154
See P3.5.2.1.3.
P3.5.2.4.4
AI4 Custom. Min
-160.00
160.00
%
0.00
155
See P3.5.2.1.4.
P3.5.2.4.5
AI4 Custom. Max
-160.00
160.00
%
100.00
156
See P3.5.2.1.5.
P3.5.2.4.6
AI4 Signal Inversion
010
162
See P3.5.2.1.6.
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.5.2.5.1
AI5 Signal Selection
AnIN SlotE.1
188
See P3.5.2.1.1.
P3.5.2.5.2
AI5 Signal Filter Time
0.00
300.00
s
0.1
189
See P3.5.2.1.2.
P3.5.2.5.3
AI5 Signal Range
010
190
See P3.5.2.1.3.
P3.5.2.5.4
AI5 Custom. Min
-160.00
160.00
%
0.00
191
See P3.5.2.1.4.
P3.5.2.5.5
AI5 Custom. Max
-160.00
160.00
%
100.00
192
See P3.5.2.1.5.
P3.5.2.5.6
AI5 Signal Inversion
010
198
See P3.5.2.1.6.
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.5.2.6.1
AI6 Signal Selection
AnIN SlotE.2
199
See P3.5.2.1.1.
P3.5.2.6.2
AI6 Signal Filter Time
0.00
300.00
s
0.1
200
See P3.5.2.1.2.
P3.5.2.6.3
AI6 Signal Range
010
201
See P3.5.2.1.3.
P3.5.2.6.4
AI6 Custom. Min
-160.00
160.00
%
0.00
203
See P3.5.2.1.4.
P3.5.2.6.5
AI6 Custom. Max
-160.00
160.00
%
100.00
204
See P3.5.2.1.5.
P3.5.2.6.6
AI6 Signal Inversion
010
209
See P3.5.2.1.6.
VACON® 100 INDUSTRIAL
Application Guide
Table 56: Analog Input 4 Settings
Table 57: Analog Input 5 Settings
Parameters Menu
Table 58: Analog Input 6 Settings
N O T I C E
Shows only the parameters for the outputs on option boards in slots C, D, and E. Make the selections as in RO1 Function
(P3.5.3.2.1). This group or these parameters are not visible if there are no digital outputs in slots C, D, or E.
AB275637269262en-000101 / DPD00927 | 87Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.5.3.2.1
RO1 Function
062Varies
11001
0 = None
1 = Ready
2 = Run
3 = General fault
4 = General fault inverted
5 = General alarm
6 = Reversed
7 = At speed
8 = Thermistor fault
9 = Motor regulator active
10 = Start signal active
11 = Keypad control active
12 = I/O B control activated
13 = Limit supervision 1
14 = Limit supervision 2
15 = Fire Mode active
16 = Jogging activated
17 = Preset speed active
18 = Quick stop activated
19 = PID in Sleep mode
20 = PID soft fill active
21 = PID feedback supervision (limits)
22 = Ext. PID supervision (limits)
23 = Input press. alarm/fault
24 = Frost prot. alarm/fault
25 = Motor 1 control
26 = Motor 2 control
27 = Motor 3 control
28 = Motor 4 control
29 = Motor 5 control
30 = Motor 6 control
31 = Time Channel 1
32 = Time Channel 2
33 = Time Channel 3
34 = FB ControlWord B13
35 = FB ControlWord B14
36 = FB ControlWord B15
37 = FB Process- Data1.B0
38 = FB Process- Data1.B1
39 = FB Process- Data1.B2
40 = Maintenance alarm
41 = Maintenance fault
42 = Mechanical brake (Open brake command)
43 = Mech. brake inverted
44 = Block Out.1
45 = Block Out.2
46 = Block Out.3
47 = Block Out.4
VACON® 100 INDUSTRIAL
Application Guide
Table 59: Digital Output Settings on Standard I/O Board
Parameters Menu
AB275637269262en-000101 / DPD0092788 | Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
48 = Block Out.5
49 = Block Out.6
50 = Block Out.7
51 = Block Out.8
52 = Block Out.9
53 = Block Out.10
54 = Jockey pump control
55 = Priming pump control
56 = Auto-cleaning active
57 = Motor Switch Open
58 = TEST (Always Closed)
59 = Motor preheat active
60 = AHF Cap Disconnect
61 = AHF Cap Disconnect Inv
62 = Run Indication
P3.5.3.2.2
RO1 ON
Delay
0.00
320.00
s
0.00
11002
P3.5.3.2.3
RO1 OFF
Delay
0.00
320.00
s
0.00
11003
P3.5.3.2.4
RO2 Function
056Varies
11004
See P3.5.3.2.1.
P3.5.3.2.5
RO2 ON
Delay
0.00
320.00
s
0.00
11005
See P3.5.3.2.2.
P3.5.3.2.6
RO2 OFF
Delay
0.00
320.00
s
0.00
11006
See P3.5.3.2.3.
P3.5.3.2.7
RO3 Function
056Varies
11007
See P3.5.3.2.1. Not visible if only 2 output relays are installed.
P3.5.3.2.8
RO3 ON
Delay
0.00
320.00
s
0.00
11008
See P3.5.3.2.2. Not visible if only 2 output relays are installed.
P3.5.3.2.9
RO3 OFF
Delay
0.00
320.00
s
0.00
11009
See P3.5.3.2.3. Not visible if only 2 output relays are installed.
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.5.4.1.1
AO1 function
0
31
2
(1)
10050
0 = TEST 0% (Not used)
1 = TEST 100%
2 = Output freq (0 - fmax)
3 = Freq reference (0 - fmax)
VACON® 100 INDUSTRIAL
Application Guide
Parameters Menu
Shows only the parameters for the outputs on option boards in slots C, D, and E. Make the selections as in Basic AO1 Function
(P3.5.4.1.1). This group or these parameters are not visible if there are no digital outputs in slots C, D, or E.
Table 60: Analog Output Settings on Standard I/O board
N O T I C E
AB275637269262en-000101 / DPD00927 | 89Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
4 = Motor speed (0 - Motor nominal speed)
5 = Output current (0 - InMotor)
6 = Motor torque (0 - TnMotor)
7 = Motor power (0 - PnMotor)
8 = Motor voltage (0 - UnMotor)
9 = DC link voltage (0–1000 V)
10 = PID Setpoint (0–100%)
11 = PID Feedback (0–100%)
12 = PID1 output (0–100%)
13 = Ext.PID output (0–100%)
14 = ProcessDataIn1 (0–100%)
15 = ProcessDataIn2 (0–100%)
16 = ProcessDataIn3 (0–100%)
P3.5.4.1.1
AO1 function
0
31
2
(1)
10050
17 = ProcessDataIn4 (0–100%)
18 = ProcessDataIn5 (0–100%)
19 = ProcessDataIn6 (0–100%)
20 = ProcessDataIn7 (0–100%)
21 = ProcessDataIn8 (0–100%)
22 = Block Out.1 (0–100%)
23 = Block Out.2 (0–100%)
24 = Block Out.3 (0–100%)
25 = Block Out.4 (0–100%)
26 = Block Out.5 (0–100%)
27 = Block Out.6 (0–100%)
28 = Block Out.7 (0–100%)
29 = Block Out.8 (0–100%)
30 = Block Out.9 (0–100%)
31 = Block Out.10 (0–100%)
P3.5.4.1.2
AO1 Filter Time
0.0
300.0
s
1.0
(1)
10051
0 = No filtering
P3.5.4.1.3
AO1 minimum
0
1
0
(1)
10052
P3.5.4.1.4
AO1 minimum scale
Varies
Varies
Varies
0.0
(1)
10053
0 = 0 mA/0 V
1 = 4 mA/2 V
P3.5.4.1.5
AO1 maximum scale
Varies
Varies
Varies
0.0
(1)
10054
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.6.1
Fieldbus Data Out 1 Selection
0
35000
1
852
P3.6.2
Fieldbus Data Out 2 Selection
0
35000
2
853
VACON® 100 INDUSTRIAL
Application Guide
Parameters Menu
1
The selection of the application with parameter P1.2 Application gives the default value. See the default values in
ters in the Different Applications.
6.6 Group 3.6: Fieldbus Data
Table 61: Fieldbus Data Parameters
11.27 Default Values of Parame-
AB275637269262en-000101 / DPD0092790 | Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.6.3
Fieldbus Data Out 3 Selection
0
35000
3
854
P3.6.4
Fieldbus Data Out 4 Selection
0
35000
4
855
P3.6.5
Fieldbus Data Out 5 Selection
0
35000
5
856
P3.6.6
Fieldbus Data Out 6 Selection
0
35000
6
857
P3.6.7
Fieldbus Data Out 7 Selection
0
35000
7
858
P3.6.8
Fieldbus Data Out 8 Selection
0
35000
37
859
P3.6.9
Fieldbus Data Out 9 Selection
0
35000
0
890
P3.6.10
Fieldbus Data Out 10 Selection
0
35000
0
891
P3.6.11
Fieldbus Data Out 11 Selection
0
35000
0
892
P3.6.12
Fieldbus Data Out 12 Selection
0
35000
0
893
P3.6.13
Fieldbus Data Out 13 Selection
0
35000
0
894
P3.6.14
Fieldbus Data Out 14 Selection
0
35000
0
895
P3.6.15
Fieldbus Data Out 15 Selection
0
35000
0
896
P3.6.16
Fieldbus Data Out 16 Selection
0
35000
0
897
P3.6.17
FB Sign of Actual
020
888
0 = Positive
1 = Actual direction
2 = Follow reference
Data
Default Value
Scale
Process Data Out 1
Output frequency
0.01 Hz
Process Data Out 2
Motor speed
1 RPM
Process Data Out 3
Motor current
0.1 A
Process Data Out 4
Motor torque
0.1%
Process Data Out 5
Motor power
0.1%
Process Data Out 6
Motor voltage
0.1 V
Process Data Out 7
DC link voltage
1 V
Process Data Out 8
Last active fault code
1
VACON® 100 INDUSTRIAL
Application Guide
Parameters Menu
Table 62: The Default Values for Process Data Out in Fieldbus
Example
The value 2500 for output frequency equals 25.00 Hz, because the scale is 0.01. All the monitoring values in the Monitor menu
(chapter 5.1 Uses of the Monitor Menu) are given the scale value.
AB275637269262en-000101 / DPD00927 | 91Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.7.1
Prohibit Frequency Range 1 Low Limit
-1.00
320.00
Hz
0.00
509
0 = Not used
P3.7.2
Prohibit Frequency Range 1 High Limit
0.00
320.00
Hz
0.00
510
0 = Not used
P3.7.3
Prohibit Frequency Range 2 Low Limit
0.00
320.00
Hz
0.00
511
0 = Not used
P3.7.4
Prohibit Frequency Range 2 High Limit
0.00
320.00
Hz
0.00
512
0 = Not used
P3.7.5
Prohibit Frequency Range 3 Low Limit
0.00
320.00
Hz
0.00
513
0 = Not used
P3.7.6
Prohibit Frequency Range 3 High Limit
0.00
320.00
Hz
0.00
514
0 = Not used
P3.7.7
Ramp Time Factor
0.1
10.0
Times
1.0
518
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.8.1
Supervision #1 Item Selection
0170
1431
0 = Output frequency
1 = Frequency reference
2 = Motor current
3 = Motor torque
4 = Motor power
5 = DC link voltage
6 = Analog input 1
7 = Analog input 2
8 = Analog input 3
9 = Analog input 4
10 = Analog input 5
11 = Analog input 6
12 = Temperature input 1
13 = Temperature input 2
14 = Temperature input 3
15 = Temperature input 4
16 = Temperature input 5
17 = Temperature input 6
P3.8.2
Supervision #1 Mode
020
1432
0 = Not used
1 = Low limit supervision
2 = High limit supervision
P3.8.3
Supervision #1 Limit
-50.00
50.00
Varies
25.00
1433
P3.8.4
Supervision #1 Limit Hysteresis
0.00
50.00
Varies
5.00
1434
P3.8.5
Supervision #2 Item Selection
0171
1435
See P3.8.1
VACON® 100 INDUSTRIAL
Application Guide
6.7 Group 3.7: Prohibit Frequencies
Table 63: Prohibit Frequencies Parameters
6.8 Group 3.8 Supervisions
Parameters Menu
Table 64: Supervision Settings
AB275637269262en-000101 / DPD0092792 | Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.8.6
Supervision #2 Mode
020
1436
See P3.8.2
P3.8.7
Supervision #2 Limit
-50.00
50.00
Varies
40.00
1437
P3.8.8
Supervision #2 Limit Hysteresis
0.00
50.00
Varies
5.00
1438
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.9.1.2
Response to External Fault
032
701
0 = No action
1 = Alarm
2 = Fault (Stop according to stop func-
tion)
3 = Fault (Stop by coasting)
P3.9.1.3
Input Phase Fault
010
730
0 = 3-phase support
1 = 1-phase support
P3.9.1.4
Undervoltage Fault
010
727
0 = Fault stored in history
1 = Fault not stored in history
P3.9.1.5
Response to Output Phase
Fault
032
702
See P3.9.1.2.
P3.9.1.6
Response to Fieldbus Communication Fault
053
733
0 = No action
1 = Alarm
2 = Alarm + preset fault frequency
(P3.9.1.13)
3 = Fault (Stop according to stop func-
tion)
4 = Fault (Stop by coasting)
P3.9.1.7
Slot Communication Fault
032
734
See P3.9.1.2.
P3.9.1.8
Thermistor Fault
030
732
See P3.9.1.2.
P3.9.1.9
PID Soft Fill Fault
032
748
See P3.9.1.2.
P3.9.1.10
Response to PID Supervision Fault
032
749
See P3.9.1.2.
P3.9.1.11
Response to External PID
Supervision Fault
032
757
0 = No action
1 = Alarm
2 = Fault
3 = Fault, Coast
P3.9.1.12
Earth Fault
033
703
This parameter is available only in enclosure sizes MR7, MR8, MR9, MR10,
MR11, and MR12, and also MR6 600 V
and 690 V.
VACON® 100 INDUSTRIAL
Application Guide
6.9 Group 3.9: Protections
Table 65: General Protection Settings
Parameters Menu
AB275637269262en-000101 / DPD00927 | 93Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.9.1.13
Preset Alarm Frequency
P3.3.1.1
P3.3.1.2
Hz
25.00
183
P3.9.1.14
Response to Safe Torque
Off (STO) Fault
022
775
0 = No action
1 = Alarm
2 = Fault (Stop by coasting)
P3.9.1.15
Startup Prevented Fault
010
15593
0 = Fault
1 = No action
P3.9.1.16
Response to Fieldbus Redundant Control Switchover
021
750
0 = No action
1 = Alarm
2 = Alarm + reset
P3.9.1.17
Fieldbus Communication
Fault Force Delay
0.00
320.00
s
0.00
751
P3.9.1.18
Fieldbus Communication
Fault Clear Delay
0.00
320.00
s
0.00
752
P3.9.1.19
Unbalance Current Alarm
011
753
0 = No action
1 = Alarm
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.9.2.1
Motor Thermal Protection
032
704
0 = No action
1 = Alarm
2 = Fault (Stop by stop mode)
3 = Fault (Stop by coasting)
P3.9.2.2
Ambient Temperature
-20.0
100.0
°C
40.0
705
P3.9.2.3
Zero Speed Cooling Factor
5.0
150.0
%
Varies
706
P3.9.2.4
Motor Thermal Time Constant
1
200
min
Varies
707
P3.9.2.5
Motor Thermal Loadability
10
150%100
708
P3.9.2.6
Motor Thermal Memory Adjust
0
100%33
778
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.9.3.1
Motor Stall Fault
030
709
0 = No action
1 = Alarm
2 = Fault (Stop according to stop mode)
VACON® 100 INDUSTRIAL
Application Guide
Parameters Menu
Table 66: Motor Thermal Protection Settings
Table 67: Motor Stall Protection Settings
AB275637269262en-000101 / DPD0092794 | Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
3 = Fault (Stop by coasting)
P3.9.3.2
Stall Current
0.00
Varies
A
Varies
710
P3.9.3.3
Stall Time Limit
1.00
120.00
s
15.00
711
P3.9.3.4
Stall Frequency Limit
1.00
P3.3.1.2
Hz
25.00
712
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.9.4.1
Underload Fault
030
713
0 = No action
1 = Alarm
2 = Fault (Stop according to stop
mode)
3 = Fault (Stop by coasting)
P3.9.4.2
Underload Protection: Field Weakening
Area Load
10.0
150.0
%
50.0
714
P3.9.4.3
Underload Protection: Zero Frequency
Load
5.0
150.0
%
10.0
715
P3.9.4.4
Underload Protection: Time Limit
2.00
600.00
s
20.00
716
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.9.5.1
Quick Stop Mode
02Varies
1276
0 = Coasting
1 = Quick stop deceleration time
2 = Stop according to Stop function
(P3.2.5)
P3.9.5.2
Quick Stop Activation
Varies
Varies
DigIN Slot0.2
1213
OPEN = Activated
P3.9.5.3
Quick Stop Deceleration
Time
0.1
300.0
s
Varies
1256
P3.9.5.4
Response to Quick Stop
Fault
02Varies
744
0 = No action
1 = Alarm
2 = Fault (Stop according to Quick stop
mode)
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.9.6.1
(1)
Temperature Signal 1
0630
739
B0 = Temperature Signal 1
B1 = Temperature Signal 2
B2 = Temperature Signal 3
B3 = Temperature Signal 4
B4 = Temperature Signal 5
VACON® 100 INDUSTRIAL
Application Guide
Table 68: Motor Underload Protection Settings
Parameters Menu
Table 69: Quick Stop Settings
Table 70: Temperature Input Fault 1 Settings
AB275637269262en-000101 / DPD00927 | 95Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
B5 = Temperature Signal 6
P3.9.6.2
(1)
Alarm Limit 1
-30.0
200.0
°C
130.0
741
P3.9.6.3
(1)
Fault Limit 1
-30.0
200.0
°C
155.0
742
P3.9.6.4
(1)
Fault Limit Response 1
032
740
0 = No response
1 = Alarm
2 = Fault (Stop according to stop mode)
3 = Fault (Stop by coasting)
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.9.6.5
(1)
Temperature Signal 2
0630
763
B0 = Temperature Signal 1
B1 = Temperature Signal 2
B2 = Temperature Signal 3
B3 = Temperature Signal 4
B4 = Temperature Signal 5
B5 = Temperature Signal 6
P3.9.6.6
(1)
Alarm Limit 2
-30.0
200.0
°C
130.0
764
P3.9.6.7
(1)
Fault Limit 2
-30.0
200.0
°C
155.0
765
P3.9.6.8
(1)
Fault Limit Response 2
032
766
0 = No response
1 = Alarm
2 = Fault (Stop according to stop mode)
3 = Fault (Stop by coasting)
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.9.8.1
Analog Input Low Protection
02767
0 = No protection
1 = Protection enabled in Run state
2 = Protection enabled in Run and Stop state
P3.9.8.2
Analog Input Low Fault
050
700
0 = No action
1 = Alarm
2 = Alarm + preset fault frequency (P3.9.1.13)
3 = Alarm + previous frequency reference
4 = Fault (Stop according to stop mode)
5 = Fault (Stop by coasting)
VACON® 100 INDUSTRIAL
Application Guide
1
Temperature input settings are only available if a B8 or BH option board is installed.
Table 71: Temperature Input Fault 2 Settings
Parameters Menu
1
Temperature input settings are only available if a B8 or BH option board is installed.
Table 72: AI Low Protection Settings
AB275637269262en-000101 / DPD0092796 | Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.9.9.1
User Defined Fault 1
--DigIN Slot0.1
15523
OPEN = No operation
CLOSED = Fault activated
P3.9.9.2
Response to User Defined Fault 1
--Fault, Coast
15525
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.9.10.1
User Defined Fault 2
--DigIN Slot0.1
15524
OPEN = No operation
CLOSED = Fault activated
P3.9.10.2
Response to User Defined Fault 2
--Fault, Coast
15526
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.10.1
Automatic Reset
010
731
0 = Disabled
1 = Enabled
P3.10.2
Restart Function
011
719
0 = Flying start
1 = According to P3.2.4.
P3.10.3
Wait Time
0.10
10000.00
s
0.50
717
P3.10.4
Trial Time
0.00
10000.00
s
60.00
718
P3.10.5
Number of Trials
1104
759
P3.10.6
Autoreset: Undervoltage
011
720
0 = No
1 = Yes
P3.10.7
Autoreset: Overvoltage
011
721
0 = No
1 = Yes
P3.10.8
Autoreset: Overcurrent
011
722
0 = No
1 = Yes
P3.10.9
Autoreset: AI Low
011
723
0 = No
1 = Yes
P3.10.10
Autoreset: Unit Overtemperature
011
724
0 = No
1 = Yes
P3.10.11
Autoreset: Motor Overtemperature
011
725
0 = No
1 = Yes
P3.10.12
Autoreset: External Fault
010
726
0 = No
VACON® 100 INDUSTRIAL
Application Guide
Table 73: User Defined Fault 1
Table 74: User Defined Fault 2
6.10 Group 3.10: Automatic Reset
Table 75: Automatic Reset Settings
Parameters Menu
AB275637269262en-000101 / DPD00927 | 97Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
1 = Yes
P3.10.13
Autoreset: Underload Fault
010
738
0 = No
1 = Yes
P3.10.14
Autoreset: PID Supervision Fault
010
776
0 = No
1 = Yes
P3.10.15
Autoreset: Ext PID Supervision Fault
010
777
0 = No
1 = Yes
P3.10.16
Fault Simulation
0
65535
0
1569
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.11.1
Password
0
999901806
P3.11.2
C/F Selection
0
1
0
(1)
1197
0 = Celsius
1 = Fahrenheit
P3.11.3
kW/hp Selection
0
1
0
(1)
1198
0 = kW
1 = hp
P3.11.4
Multimonitor View
021
1196
0 = 2x2 sections
1 = 3x2 sections
2 = 3x3 sections
P3.11.5
FUNCT Button Configuration
01515
1195
B0 = Local/Remote
B1 = Control Page
B2 = Change Direction
B3 = Quick Edit
P3.11.6
Set ParamLock
0
999901807
P3.11.7
ParamLock Key
0
999901808
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.12.1.1
ON Time
00:00:00
23:59:59
hh:mm:ss
00:00:00
1464
P3.12.1.2
OFF Time
00:00:00
23:59:59
hh:mm:ss
00:00:00
1465
P3.12.1.3
Days
1466
B0 = Sunday
VACON® 100 INDUSTRIAL
Application Guide
6.11 Group 3.11: Application Settings
Table 76: Application Settings
Parameters Menu
1
The default value in the US is 1.
6.12 Group 3.12: Timer Functions
Table 77: Interval 1
AB275637269262en-000101 / DPD0092798 | Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
B1 = Monday
B2 = Tuesday
B3 = Wednesday
B4 = Thursday
B5 = Friday
B6 = Saturday
P3.12.1.4
Assign to Channel
1468
B0 = Time channel 1
B1 = Time channel 2
B2 = Time channel 3
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.12.2.1
ON Time
00:00:00
23:59:59
hh:mm:ss
00:00:00
1469
See Interval 1.
P3.12.2.2
OFF Time
00:00:00
23:59:59
hh:mm:ss
00:00:00
1470
See Interval 1.
P3.12.2.3
Days
1471
See Interval 1.
P3.12.2.4
Assign to Channel
1473
See Interval 1.
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.12.3.1
ON Time
00:00:00
23:59:59
hh:mm:ss
00:00:00
1474
See Interval 1.
P3.12.3.2
OFF Time
00:00:00
23:59:59
hh:mm:ss
00:00:00
1475
See Interval 1.
P3.12.3.3
Days
1476
See Interval 1.
P3.12.3.4
Assign to Channel
1478
See Interval 1.
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.12.4.1
ON Time
00:00:00
23:59:59
hh:mm:ss
00:00:00
1479
See Interval 1.
P3.12.4.2
OFF Time
00:00:00
23:59:59
hh:mm:ss
00:00:00
1480
See Interval 1.
P3.12.4.3
Days
1481
See Interval 1.
P3.12.4.4
Assign to Channel
1483
See Interval 1.
VACON® 100 INDUSTRIAL
Application Guide
Table 78: Interval 2
Parameters Menu
Table 79: Interval 3
Table 80: Interval 4
AB275637269262en-000101 / DPD00927 | 99Danfoss A/S © 2021.05

Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.12.5.1
ON Time
00:00:00
23:59:59
hh:mm:ss
00:00:00
1484
See Interval 1.
P3.12.5.2
OFF Time
00:00:00
23:59:59
hh:mm:ss
00:00:00
1485
See Interval 1.
P3.12.5.3
Days
1486
See Interval 1.
P3.12.5.4
Assign to Channel
1488
See Interval 1.
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.12.6.1
Duration
0
72000
s01489
P3.12.6.2
Timer 1
DigINSlot 0.1
447
P3.12.6.3
Assign to Channel
1490
B0 = Time channel 1
B1 = Time channel 2
B2 = Time channel 3
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.12.7.1
Duration
0
72000
s01491
See Timer 1.
P3.12.7.2
Timer 2
DigINSlot 0.1
448
See Timer 1.
P3.12.7.3
Assign to Channel
1492
See Timer 1.
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.12.8.1
Duration
0
72000
s01493
See Timer 1.
P3.12.8.2
Timer 3
DigINSlot 0.1
449
See Timer 1.
P3.12.8.3
Assign to Channel
1494
See Timer 1.
Index
Parameter
Min
Max
Unit
Default
ID
Description
P3.13.1.1
PID Gain
0.00
1000.00
%
100.00
118
P3.13.1.2
PID Integration Time
0.00
600.00
s
1.00
119
P3.13.1.3
PID Derivation Time
0.00
100.00
s
0.00
132
VACON® 100 INDUSTRIAL
Application Guide
Table 81: Interval 5
Table 82: Timer 1
Parameters Menu
Table 83: Timer 2
Table 84: Timer 3
6.13 Group 3.13: PID Controller
Table 85: PID Controller Basic Settings
AB275637269262en-000101 / DPD00927100 | Danfoss A/S © 2021.05
 Loading...
Loading...