


vacon 100 flow
®
convertidores de frecuencia
manual de aplicación


PREFACIO VACON · 3
PREFACIO
DETALLES DEL DOCUMENTO
ID de documento: DPD01252F
Fecha: 13.12.2016
Versión del software: FW0159V016
ACERCA DE ESTE MANUAL
Los derechos de autor de este manual son de Vacon Ltd. Todos los derechos reservados. El
manual está sujeto a cambios sin previo aviso. El idioma original de estas instrucciones es
inglés.
En este manual puede consultar las funciones del convertidor de frecuencia VACON® y su
modo de uso. El manual sigue la misma estructura de menús del convertidor (capítulos 1 y
4-8).
Capítulo 1, Guía de inicio rápido
Cómo iniciar el trabajo con el cuadro de control.
•
Capítulo 2, Asistentes
Cómo seleccionar la configuración de la aplicación.
•
Configuración rápida de una aplicación
•
Las diferentes aplicaciones con ejemplos
•
Capítulo 3, Interfaces de usuario
Los tipos de pantallas y cómo utilizar el cuadro de control
•
La herramienta de PC VACON® Live.
•
Las funciones del Fieldbus
•
Capítulo 4, Menú monitor
Datos sobre los valores de monitor
•
Capítulo 5, Menú de parámetros
Una lista de todos los parámetros del convertidor
•
Capítulo 6, Menú Diagnóstico
Capítulo 7, Menú I/O y hardware
Capítulo 8, Ajustes de usuario, favoritos y menús de nivel de usuario
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
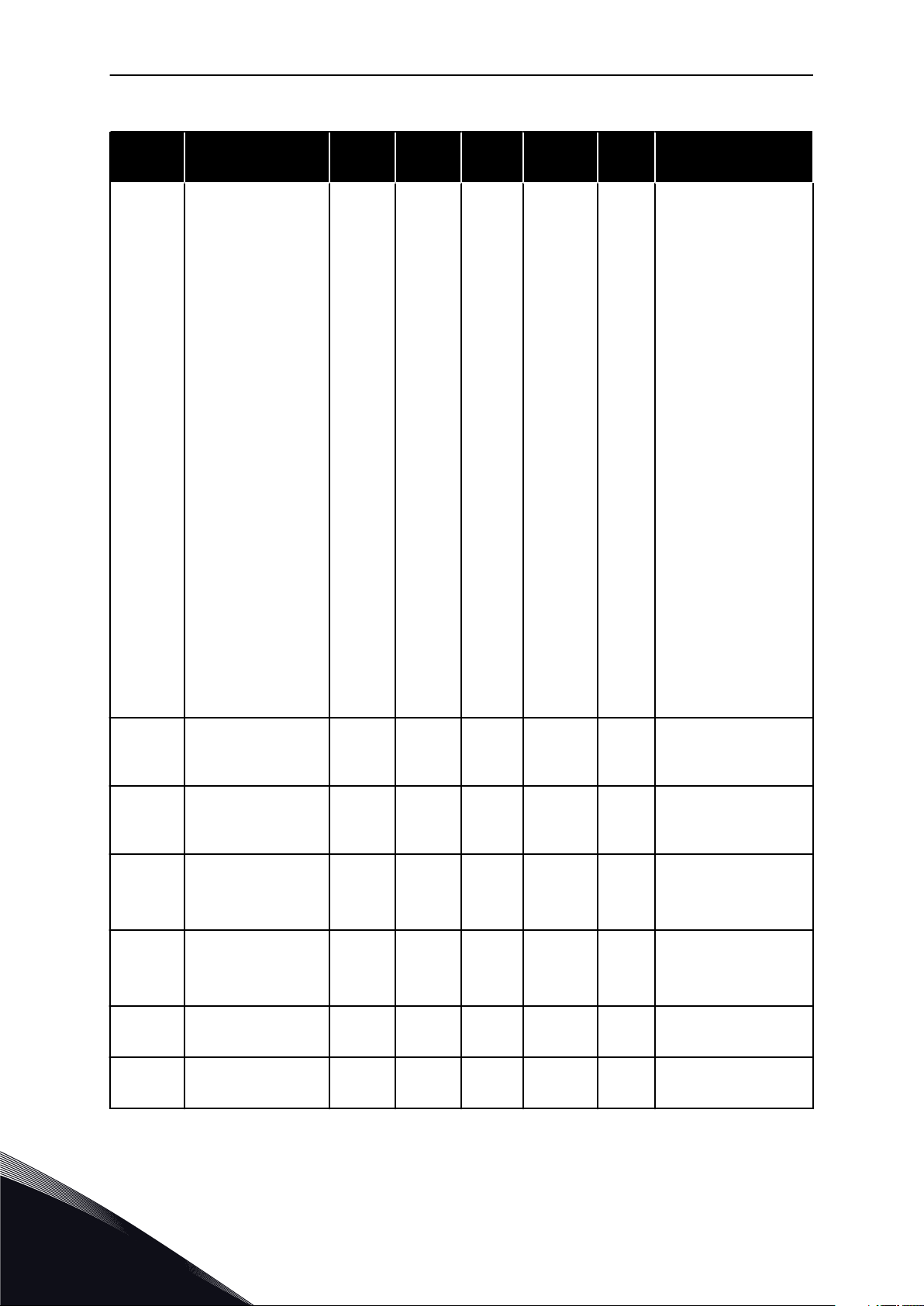
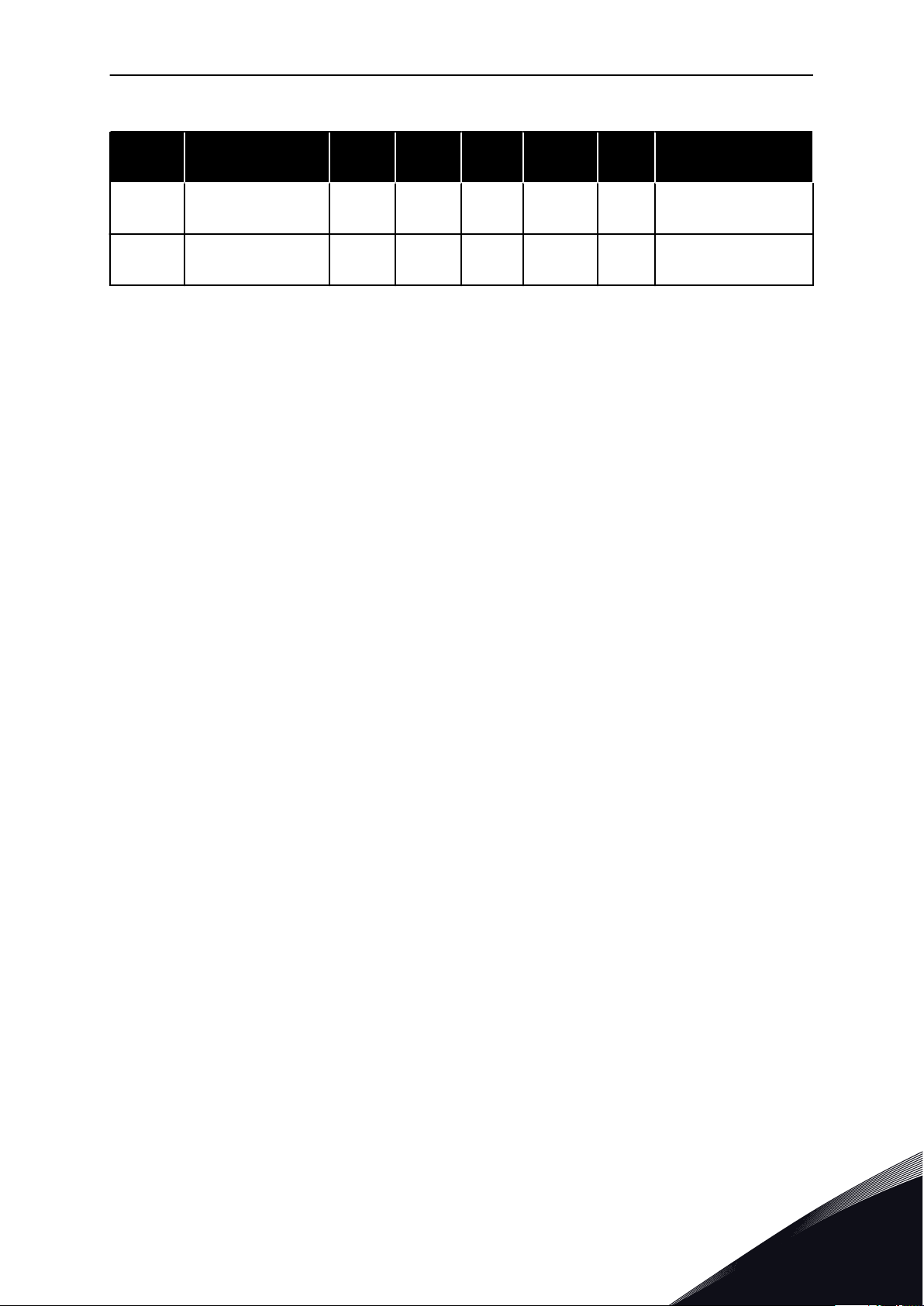
Index Min Max Unit Default ID DescriptionParameter
A B C D E F G H
VACON · 4 PREFACIO
Capítulo 9, Descripciones de los valores de monitor
Capítulo 10, Descripciones de parámetros
Cómo utilizar los parámetros.
•
Programación de entradas analógicas y digitales
•
Funciones específicas de la aplicación
•
Capítulo 11, Búsqueda de fallos
Los fallos y sus causas
•
Reset de los fallos
•
Capítulo 12, Apéndice
Datos sobre los diferentes valores por defecto de las aplicaciones
•
Este manual incluye una gran cantidad de tablas de parámetros. Estas instrucciones indican
cómo leer las tablas.
A. La ubicación del parámetro en el menú,
es decir, el número de parámetro
B. El nombre del parámetro
C. El valor mínimo del parámetro
D. El valor máximo del parámetro
E. La unidad del valor del parámetro La
unidad muestra si está disponible
F. El valor que se ha establecido en la
fábrica
G. El número ID del parámetro
H. Una descripción breve de los valores del
parámetro y/o su función
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

PREFACIO VACON · 5
FUNCIONES DEL CONVERTIDOR DE FRECUENCIA VACON
Puede seleccionar la aplicación necesaria para su proceso: Estándar, HVAC, Control PID,
•
®
PFC o MultiMaster. El convertidor realiza automáticamente alguno de los ajustes
necesarios, lo que facilita la puesta en marcha.
Asistentes para la primera puesta en marcha y el modo Anti-Incendio.
•
Asistentes para cada aplicación: Estándar, HVAC, Control PID, PFC y MultiMaster.
•
El botón FUNCT permite cambiar con facilidad entre el lugar de control panel y remoto.
•
El lugar de control remoto puede ser I/O o Fieldbus. Puede realizar la selección del lugar
de control remoto con un parámetro.
Ocho frecuencias fijas
•
Funciones de potenciómetro motorizado
•
Función de limpieza
•
Dos tiempos de rampa que puede programar, dos supervisiones y tres rangos de
•
frecuencias prohibidas.
Paro forzado
•
Página de control para utilizar y monitorizar rápidamente los valores más importantes
•
Mapa Fieldbus
•
Reset automático
•
Diferentes modos de caldeo para evitar problemas de condensación
•
Frecuencia de salida máxima de 320 Hz
•
Funciones de reloj en tiempo real y temporizador (se necesita una batería opcional). Es
•
posible programar tres canales de tiempo para obtener distintas funciones en el
convertidor.
Hay disponible un controlador PID externo. Puede utilizarlo, por ejemplo, para controlar
•
una válvula con las I/O del convertidor de frecuencia.
Función de modo dormir que habilita y deshabilita automáticamente el funcionamiento
•
del convertidor para ahorrar energía
Un controlador PID de dos zonas con dos señales de valor actual diferentes: control de
•
mínimo y máximo.
Dos fuentes de referencia para el control PID. Puede realizar la selección con una
•
entrada digital.
Función de aumento de referencia PID
•
Función de valor actual estimado para mejorar la respuesta a los cambios del proceso
•
Supervisión del valor del proceso
•
Control multibomba para sistemas de un convertidor (PFC) y de varios convertidores
•
(MultiMaster).
Los modos MultiMaster y MultiFollower en el sistema MultiMaster.
•
Sistema multibomba que utiliza un reloj en tiempo real para la rotación automática de
•
las bombas.
Contador de mantenimiento
•
Funciones del control de bomba: control de bomba de cebado, control de bomba jockey,
•
autolimpieza del impulsor de la bomba, supervisión de la presión de la entrada de la
bomba y función de protección congelación.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

VACON · 6
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
ÍNDICE VACON · 7
ÍNDICE
Prefacio
Detalles del documento 3
Acerca de este manual 3
Funciones del convertidor de frecuencia VACON® 5
1 Guía de inicio rápido 12
1.1 Panel de control 12
1.2 Los paneles 12
1.3 Primera puesta en marcha 13
1.4 Descripción de las aplicaciones 14
1.4.1 Aplicaciones Estándar y HVAC 14
1.4.2 Aplicación de control PID 22
1.4.3 Aplicación PFC 31
1.4.4 Aplicación MultiMaster 46
2 Asistentes 81
2.1 Asistente de aplicación estándar 81
2.2 Asistente de aplicación HVAC 82
2.3 Asistente de aplicación de control PID 84
2.4 Asistente de aplicación multibomba (PFC) 86
2.5 Asistente de aplicación MultiMaster 90
2.6 Asistente modo anti-incendio 93
3 Interfaces de usuario 95
3.1 Navegación en el panel 95
3.2 Uso de la pantalla gráfica 97
3.2.1 Edición de los valores 97
3.2.2 Reset de un fallo 100
3.2.3 El botón FUNCT 100
3.2.4 Copia de los parámetros 104
3.2.5 Comparación de parámetros 105
3.2.6 Textos de ayuda 107
3.2.7 Uso del menú Favoritos 108
3.3 Uso de la pantalla de texto 108
3.3.1 Edición de los valores 109
3.3.2 Restablecimiento de un fallo 110
3.3.3 El botón FUNCT 110
3.4 Estructura de menús 114
3.4.1 Guía rápida 115
3.4.2 Monitor 115
3.5 VACON® Live 117
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
VACON · 8 ÍNDICE
4 Menú monitor 119
4.1 Grupo monitor 119
4.1.1 Multimonitor 119
4.1.2 Gráficas 120
4.1.3 Valores básicos 123
4.1.4 I/O 125
4.1.5 Entradas de temperatura 125
4.1.6 Extras/avanzado 127
4.1.7 Monitorización de las funciones de temporizador 128
4.1.8 Monitorización del controlador PID 130
4.1.9 Monitorización del controlador PID externo 131
4.1.10 Monitorización MultiBomba 131
4.1.11 Contadores de mantenimiento 133
4.1.12 Monitorización de los datos de proceso de fieldbus 134
4.1.13 Monitorización del Programador de Lógicas 135
5 Menú Parámetros 136
5.1 Grupo 3.1: Ajustes del motor 136
5.2 Grupo 3.2: Configuración de marcha/paro 140
5.3 Grupo 3.3: Referencias 143
5.4 Grupo 3.4: Configuración de rampas y frenos 146
5.5 Grupo 3.5: Configuración de I/O 149
5.6 Grupo 3.6: Mapa Fieldbus 160
5.7 Grupo 3.7: Frecuencias prohibidas 161
5.8 Grupo 3.8: Supervisiones 162
5.9 Grupo 3.9: Protecciones 164
5.10 Grupo 3.10: Reset automático 170
5.11 Grupo 3.11: Ajustes de la aplicación 171
5.12 Grupo 3.12: Funciones de temporizador 171
5.13 Grupo 3.13: Controlador PID 175
5.14 Grupo 3.14: Controlador PID externo 191
5.15 Grupo 3.15: MultiBomba 195
5.16 Grupo 3.16: Contadores de mantenimiento 199
5.17 Grupo 3.17: Modo Anti-Incendio 200
5.18 Grupo 3.18: Parámetros de caldeo del motor 201
5.19 Grupo 3.19: Programador de lógicas 201
5.20 Grupo 3.21: Control de bomba 203
5.21 Grupo 3.23: Filtro armónico avanzado 206
6 Menú Diagnóstico 207
6.1 Fallos activos 207
6.2 Reset fallos 207
6.3 Historial de fallos 207
6.4 Contadores totales 207
6.5 ContadorDisparos 209
6.6 Información de software 211
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

ÍNDICE VACON · 9
7 Menú I/O y hardware 212
7.1 I/O estándar 212
7.2 Ranuras de las placas opcionales 214
7.3 Reloj en tiempo real 215
7.4 Ajustes de la unidad de potencia 216
7.5 Panel 217
7.6 Fieldbus 218
8 Ajustes de usuario, favoritos y menús de nivel de usuario 219
8.1 Ajustes de usuario 219
8.1.1 Ajustes de usuario 219
8.1.2 Copia seguridad parámetros 220
8.2 Favoritos 220
8.2.1 Adición de un elemento a Favoritos 221
8.2.2 Eliminación de un elemento de Favoritos 221
8.3 Niveles de usuario 222
8.3.1 Cambio del código de acceso de los niveles de usuario 223
9 Descripciones de los valores de monitor 225
9.1 Básica 225
9.2 I/O 226
9.3 Entradas de temperatura 227
9.4 Extras/avanzado 228
9.5 Funciones de temporizador 230
9.6 Controlador PID 231
9.7 Controlador PID externo 232
9.8 MultiBomba 232
9.9 Contadores de mantenimiento 234
9.10 Fieldbus Data 234
9.11 Programador de lógicas 238
10 Descripciones de parámetros 240
10.1 Gráficas 240
10.2 Ajustes del motor 241
10.2.1 Datos nominales de motor de la placa de características 241
10.2.2 Parámetros de control del motor 242
10.2.3 Límites de motor 246
10.2.4 Parámetros de bucle abierto 247
10.2.5 Función de arranque I/f 251
10.3 Configuración de marcha/paro 252
10.4 Referencias 261
10.4.1 Referencia de frecuencia 261
10.4.2 Frecuencias fijas 263
10.4.3 Parámetros de potenciómetro motorizado 267
10.4.4 Parámetros de Flushing 269
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
VACON · 10 ÍNDICE
10.5 Configuración de rampas y frenos 269
10.5.1 Rampa 1 269
10.5.2 Rampa 2 270
10.5.3 Intensidad magnetizante al arranque 272
10.5.4 Freno CC 272
10.5.5 Frenado por flujo 273
10.6 Configuración de I/O 273
10.6.1 Programación de entradas analógicas y digitales 273
10.6.2 Funciones por defecto de las entradas programables 284
10.6.3 Entradas digitales 284
10.6.4 Entradas analógicas 290
10.6.5 Salidas digitales 295
10.6.6 Salidas analógicas 299
10.7 Mapa de datos de Fieldbus 303
10.8 Frecuencias prohibidas 304
10.9 Supervisiones 306
10.10 Protecciones 307
10.10.1 General 307
10.10.2 Protecciones térmicas del motor 309
10.10.3 Protección motor bloqueado 313
10.10.4 Protección contra baja carga (bomba sin agua) 315
10.10.5 Paro rápido. 317
10.10.6 Protección de nivel bajo de entrada analógica (AI) 319
10.11 Reset automático 320
10.12 Ajustes de la aplicación 322
10.13 Funciones de temporizador 323
10.14 Controlador PID 327
10.14.1 Ajustes básicos 327
10.14.2 Consignas 329
10.14.3 Comentarios 330
10.14.4 Valor actual estimado 331
10.14.5 Función dormir 332
10.14.6 Supervisión valor actual 335
10.14.7 Compensación por pérdidas de presión 337
10.14.8 Prellenado 339
10.14.9 Fallo de supervisión presión de entrada 341
10.14.10 Función dormir cuando no se detecta ninguna demanda 343
10.15 Controlador PID externo 345
10.16 Función multibomba 345
10.16.1 Checklist de puesta en servicio para MultiMaster 346
10.16.2 Configuración del sistema 349
10.16.3 Enclavamientos 354
10.16.4 Conexión del sensor de valor actual en un sistema multibomba 354
10.16.5 Supervisión de sobrepresión 365
10.16.6 Contadores de tiempo de marcha de bombas 366
10.16.7 Ajustes avanzados 368
10.17 Contadores de mantenimiento 369
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
ÍNDICE VACON · 11
10.18 Modo Anti-Incendio 370
10.19 Función caldeo motor 373
10.20 Programador de lógicas 374
10.21 Control de bomba 374
10.21.1 Autolimpieza 374
10.21.2 Bomba jockey 377
10.21.3 Bomba de cebado 379
10.21.4 Función de AntiBloqueo 380
10.21.5 Protección anticongelación 380
10.22 Contadores 381
10.22.1 Contador de tiempo de funcionamiento 381
10.22.2 Contador reseteable del tiempo de funcionamiento 382
10.22.3 Contador tiempo marcha 382
10.22.4 Contador del tiempo de conexión 383
10.22.5 Contador de energía 383
10.22.6 Contador de disparos de energía 384
10.23 Filtro armónico avanzado 386
11 Localización de fallos 387
11.1 Aparece un fallo. 387
11.1.1 Reset con el botón Reset 388
11.1.2 Reset con un parámetro en la pantalla gráfica 388
11.1.3 Reset con un parámetro en la pantalla de texto 389
11.2 Historial de fallos 390
11.2.1 Examen del historial de fallos en la pantalla gráfica 390
11.2.2 Examen del historial de fallos en la pantalla de texto 391
11.3 Códigos de fallo 393
12 Apéndice 1 410
12.1 Los valores por defecto de los parámetros en las diferentes aplicaciones 410
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
A B C
I
H D
G F E
VACON · 12 GUÍA DE INICIO RÁPIDO
1 GUÍA DE INICIO RÁPIDO
1.1 PANEL DE CONTROL
El panel de control es la interfaz entre el convertidor y el usuario. Con el panel de control, se
puede controlar la velocidad de un motor y monitorizar el estado del convertidor. También se
pueden establecer los parámetros del convertidor.
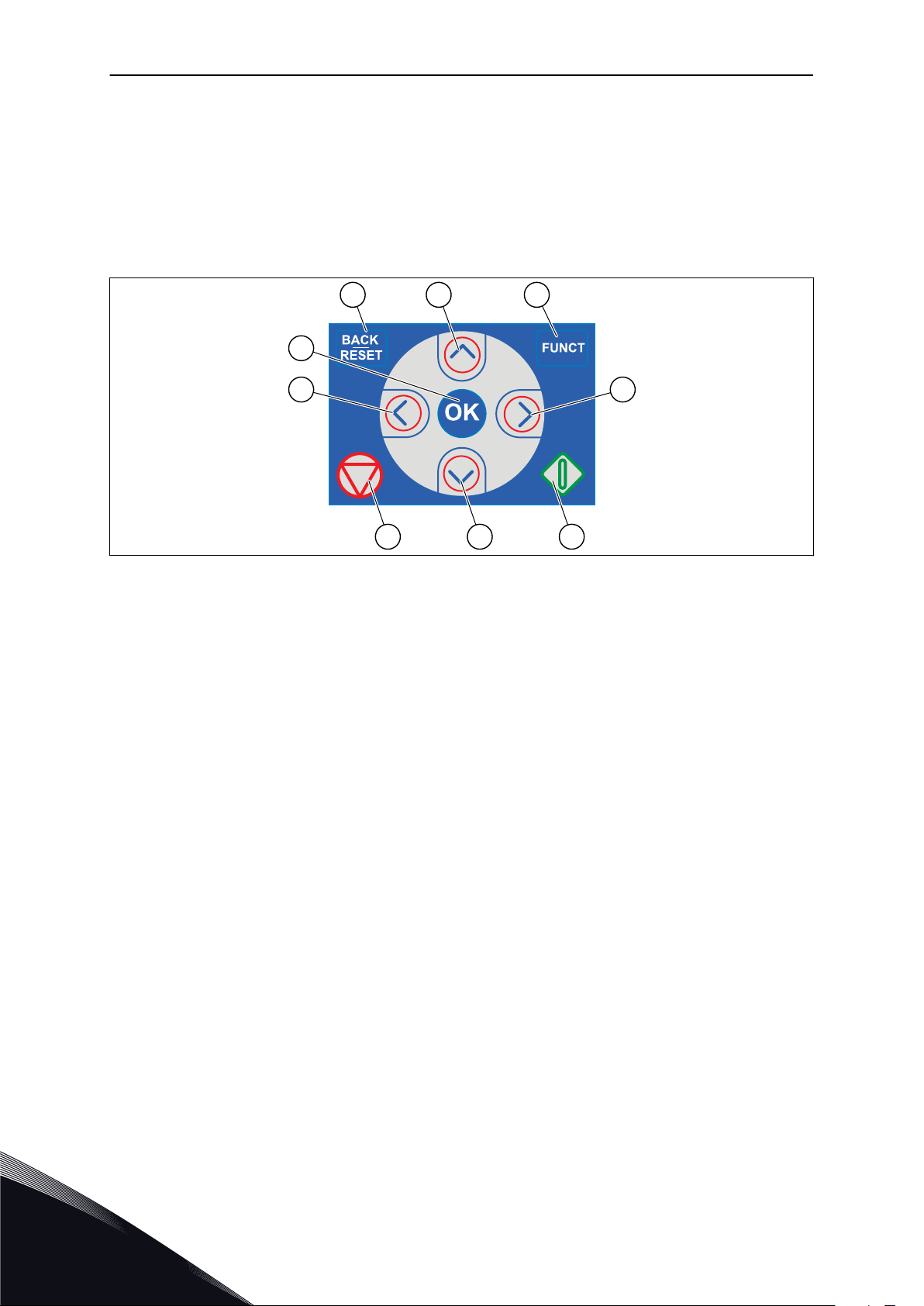
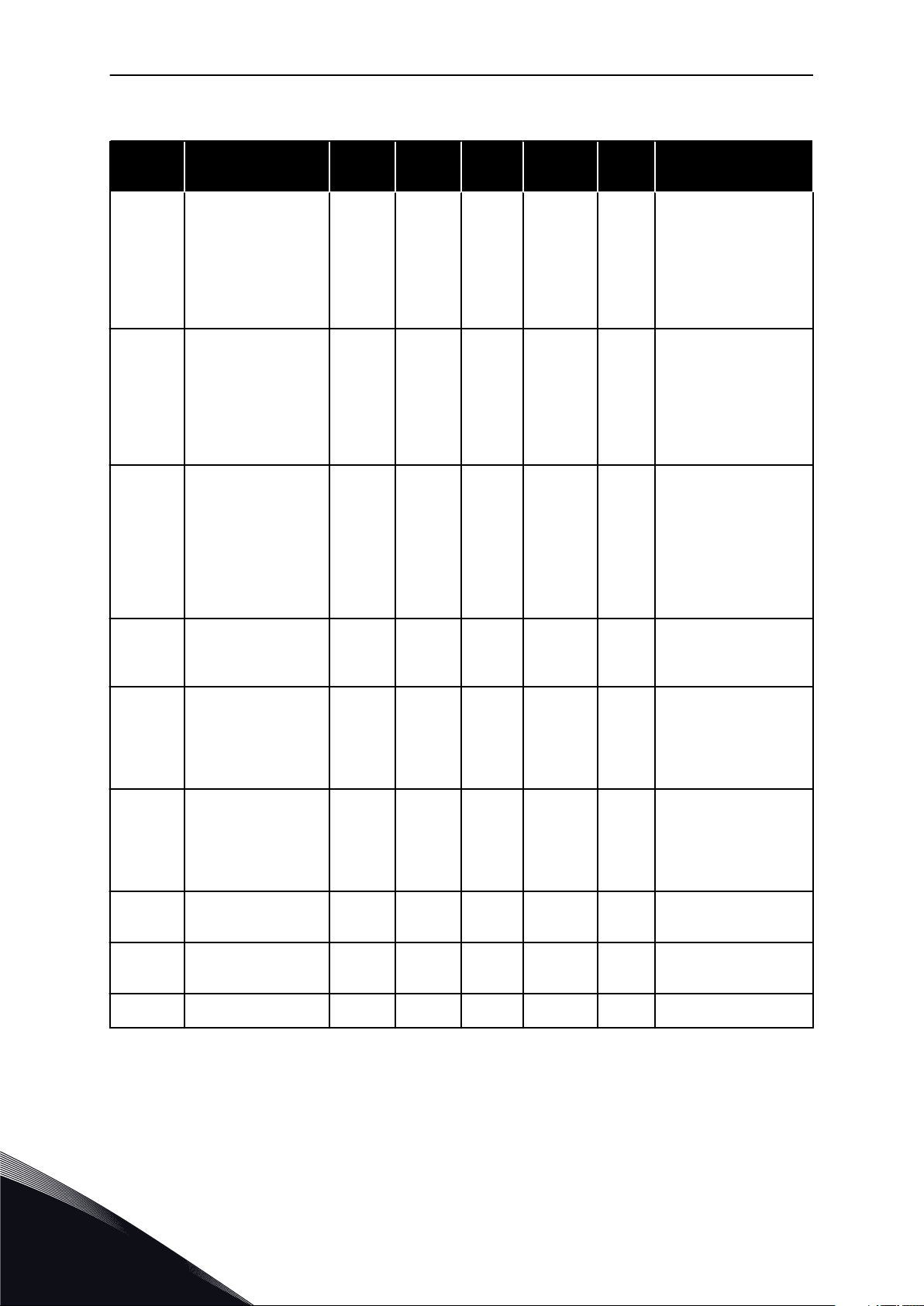
Imag. 1: Los botones del panel
A. El botón BACK/RESET. Utilícelo para
retroceder en el menú, salir del modo de
edición y resetear un fallo.
B. El botón de flecha ARRIBA. Utilícelo para
subir por el menú y para aumentar un
valor.
C. El botón FUNCT. Utilícelo para cambiar
el sentido de giro del motor, acceder a la
página de control y cambiar el lugar de
control. Más información en 3.3.3 El
botón FUNCT.
D. El botón de flecha DERECHA.
E. El botón MARCHA.
F. El botón de flecha ABAJO. Utilícelo para
bajar por el menú y para reducir un
valor.
G. El botón PARO.
H. El botón de flecha IZQUIERDA. Utilícelo
para mover el cursor a la izquierda.
I. El botón OK. Utilícelo para ir a un nivel o
elemento activo, o para aceptar una
selección.
1.2 LOS PANELES
Hay dos tipos de paneles: el panel gráfico y el panel de texto. El panel de control siempre
tiene los mismos botones.
La pantalla muestra estos datos.
El estado del motor y el convertidor.
•
Fallos en el motor y en el convertidor.
•
Su ubicación en la estructura de menús.
•
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
STOP
READY I/O
Main Menu
A B C D E
F
H
G
Quick Setup
( 17 )
Monitor
( 5 )
Parameters
( 12 )
M1ID:
A B
F
C
D
E
GUÍA DE INICIO RÁPIDO VACON · 13
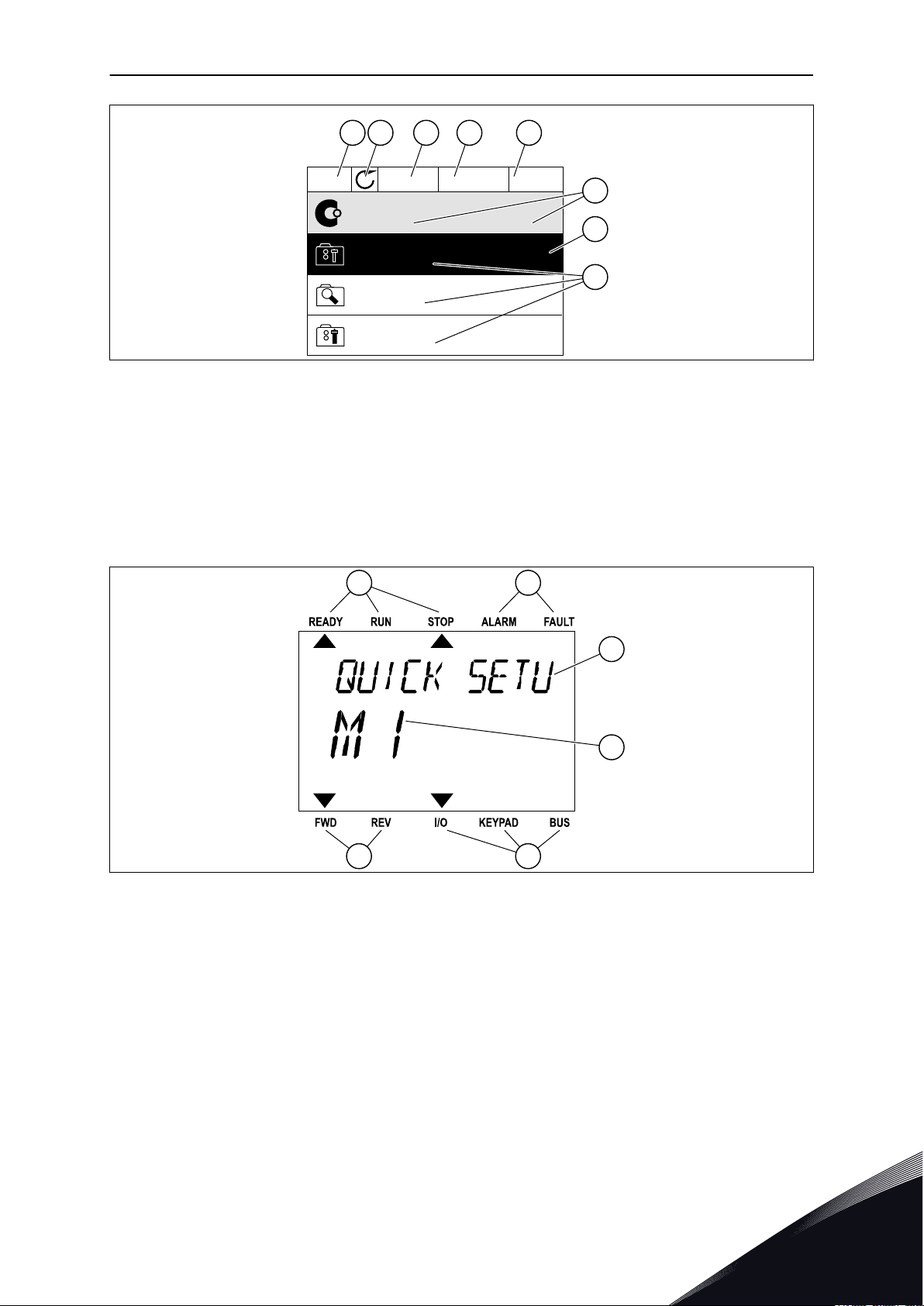
Imag. 2: El panel gráfico
A. El primer campo de estado: PARO/
MARCHA
B. El sentido de giro del motor
C. El segundo campo de estado: LISTO/NO
LISTO/FALLO
D. El campo de alarma: ALARM/-
F. El campo de ubicación: el número ID del
parámetro y la ubicación actual en el
menú
G. Grupo o elemento activado
H. El número de elementos del grupo en
cuestión
E. El campo del lugar de control: PC/I/O/
PANEL/FIELDBUS
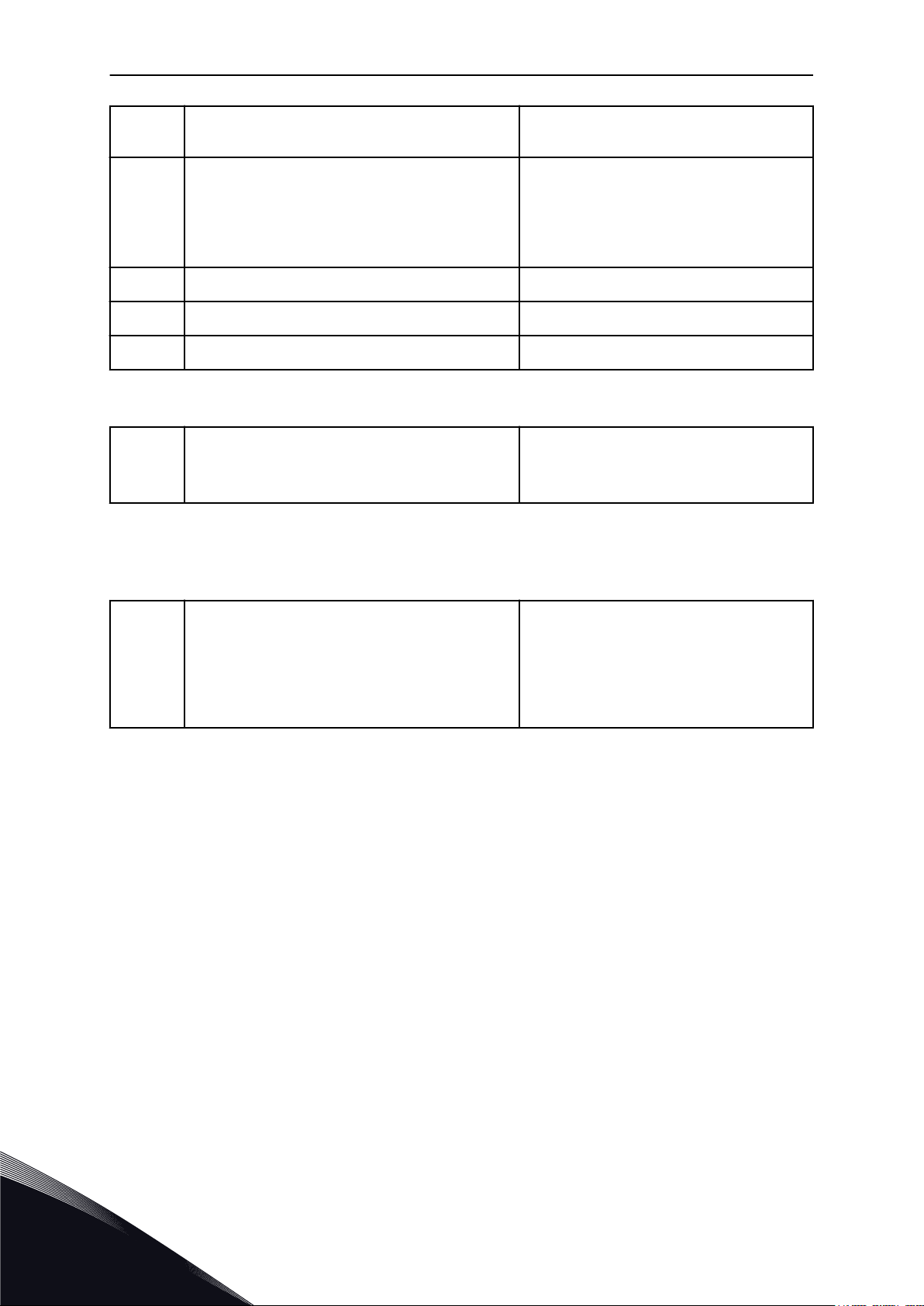
Imag. 3: El panel de texto. Si el texto es demasiado largo para verlo, se desplaza automáticamente
en la pantalla.
A. Los indicadores de estado
B. Los indicadores de alarmas y fallos
C. El nombre del grupo o elemento de la
ubicación actual
1.3 PRIMERA PUESTA EN MARCHA
Una vez encendido el convertidor, se inicia el Asistente para la puesta en marcha.
El Asistente para la puesta en marcha le solicita los datos que el convertidor necesita para
controlar el proceso.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
D. La ubicación actual en el menú
E. Los indicadores del lugar de control
F. Los indicadores del sentido de giro
1
VACON · 14 GUÍA DE INICIO RÁPIDO
1
2
3 Hora* (P5.5.2) hh:mm:ss
4 Año* (P5.5.4) aaaa
5 Fecha* (P5.5.3) dd.mm
Selección de idioma (P6.1) La selección es diferente en todos los paque-
tes de idiomas
Horario de verano* (P5.5.5)
Rusia
EE.UU.
UE
OFF
* Si se ha instalado una batería, verá estos pasos
¿Iniciar el Asistente de puesta en marcha?
6
Sí
No
Seleccione Sí y pulse el botón OK. Si selecciona No, el convertidor de frecuencia saldrá del
Asistente para la puesta en marcha.
Para configurar manualmente los valores de parámetros, seleccione No y pulse el botón OK.
Seleccione la aplicación (P1.2 Aplicación, ID212)
Standard
7
HVAC
Control PID
PFC
MultiMaster
Para continuar con el asistente de la aplicación que seleccionó en el paso 7, seleccione Sí y
pulse el botón OK. Vea la descripción de los asistentes para aplicaciones en 2 Asistentes.
Si selecciona No y pulsa el botón OK, el Asistente para la puesta en marcha se detendrá y
deberá seleccionar manualmente todos los valores de parámetros.
El Asistente de puesta en marcha puede volver a iniciarse activando el parámetro P6.5.1
Restaurar valores por defecto de fábrica o bien eligiendo Activar el parámetro B1.1.2
Asistente de puesta en marcha. A continuación, establezca el valor en Activar.
1.4 DESCRIPCIÓN DE LAS APLICACIONES
Utilice el parámetro P1.2 (Aplicación) para seleccionar una aplicación para el convertidor.
Cuando el parámetro P1.2 cambia, un grupo de parámetros obtiene sus valores fijos
inmediatamente.
1.4.1 APLICACIONES ESTÁNDAR Y HVAC
Utilice las aplicaciones Estándar y HVAC para controlar bombas o ventiladores, por ejemplo.
Es posible controlar el convertidor desde el Panel, el Fieldbus o los terminales de I/O.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

GUÍA DE INICIO RÁPIDO VACON · 15
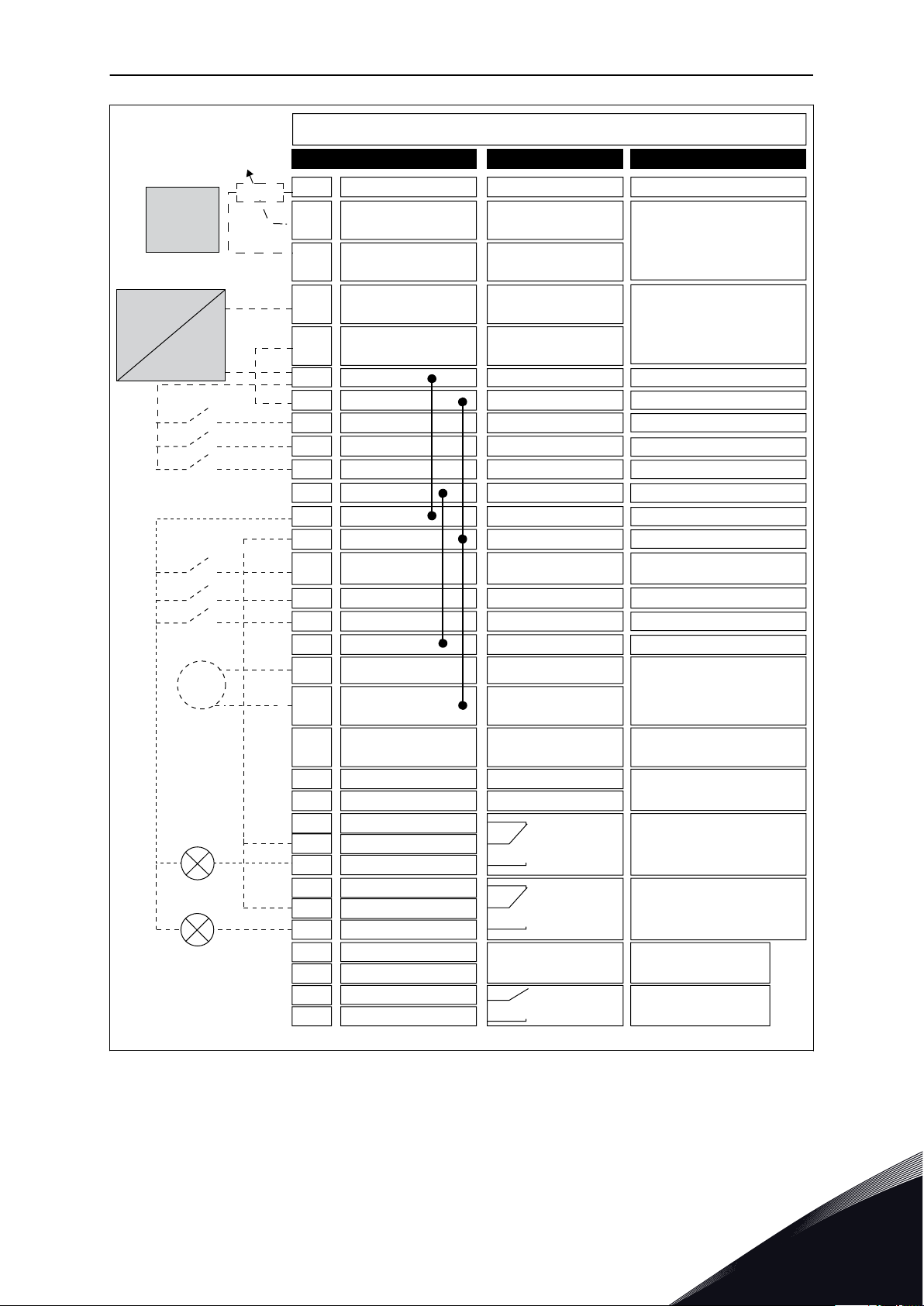
Cuando se controla el convertidor con los terminales de I/O, la señal de referencia de
frecuencia se conecta a la entrada analógica 1 (AI1) (0…10 V) o la entrada analógica 2 (AI2)
(4…20 mA). La conexión viene especificada por el tipo de señal. También hay tres referencias
de frecuencias fijas disponibles. Puede activarlas con la entrada digital 4 (DI4) y la entrada
digital 5 (DI5). Las señales de marcha y paro del convertidor están conectadas a DI1 (marcha
directa) y DI2 (marcha inversa).
Es posible configurar todas las salidas del convertidor libremente en todas las aplicaciones.
Hay una salida analógica (frecuencia de salida) y tres salidas de relé (marcha, fallo, listo)
disponibles en la tarjeta de I/O estándar.
Vea las descripciones de los parámetros en 10 Descripciones de parámetros.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
DI4
DI5
**)
*)
Modbus RTU,
N2, BACnet
1
6
2
3
4
5
18
19
30
12
7
13
8
9
10
14
15
16
21
22
23
11
17
A
B
24
25
26
32
33
28
29
mA
FALLO
MARCHA
MARCHA
AO1-
GND
GND
DI1
DI2
DI3
DI4
DI5
DI6
RO1/1 NC
RO1/2 CM
RO1/3 NA
CM
CM
RS485
RS485
RO2/1 NC
RO2/2 CM
RO2/3 NA
RO3/2 CM
RO3/3 NA
Placa de I/O estándar
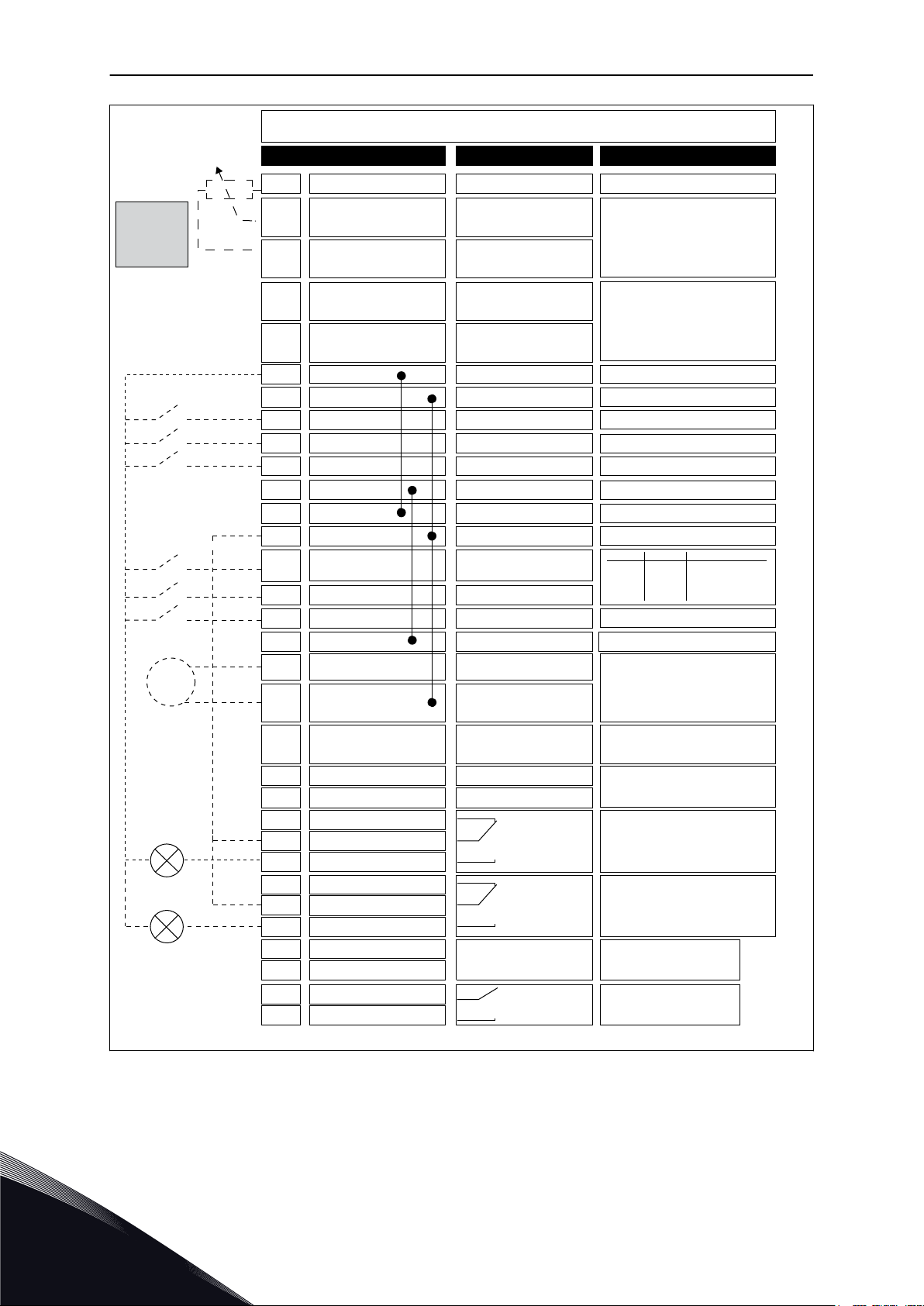
Terminal Señal Descripción
+10Vref
AI1+
AI1-
AI2+
AI2-
24 Vsalida
Salida de referencia
Entrada analógica 1 +
Entrada analógica 1 -
Entrada analógica 2 +
Entrada analógica 2 -
Tensión auxiliar 24 V
GND de I/O
Entrada digital 1
Entrada digital 2
Entrada digital 3
Entrada digital 4
Entrada digital 5
Entrada digital 6
Común para DIN1-DIN6
Común para DIN1-DIN6
Tensión auxiliar 24 V
GND de I/O
Salida analógica 1 +
Salida analógica 1 -
LISTO
Bus serie, negativo
Bus serie, positivo
Salida de relé 1
Salida de relé 2
Salida de relé 3
FALLO
Reset de fallo
AO1+
Referencia de frecuencia
(predeterminada 0...10V)
Referencia de frecuencia
(predeterminado 4…20mA)
Marcha directa
Marcha inversa
Fallo externo
Ref. de frec.
Abierto
Cerrado
Abierto
Cerrado
Abierto
Abierto
Cerrado
Cerrado
Entrada analógica 1
Frecuencia fija 1
Frecuencia fija 2
Frecuencia fija 3
Potenciómetro
para referencia
1...10 kΩ
Frecuencia de salida
(0...20mA)
+24 Vin
24 Vsalida
Tensión de entrada
auxiliar 24 V
TI1+
TI1-
Entrada del termistor
VACON · 16 GUÍA DE INICIO RÁPIDO
1
Imag. 4: Las conexiones de control por defecto de las aplicaciones Estándar y HVAC
* = Disponible solo en VACON® 100 X.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
A
B
C
GUÍA DE INICIO RÁPIDO VACON · 17
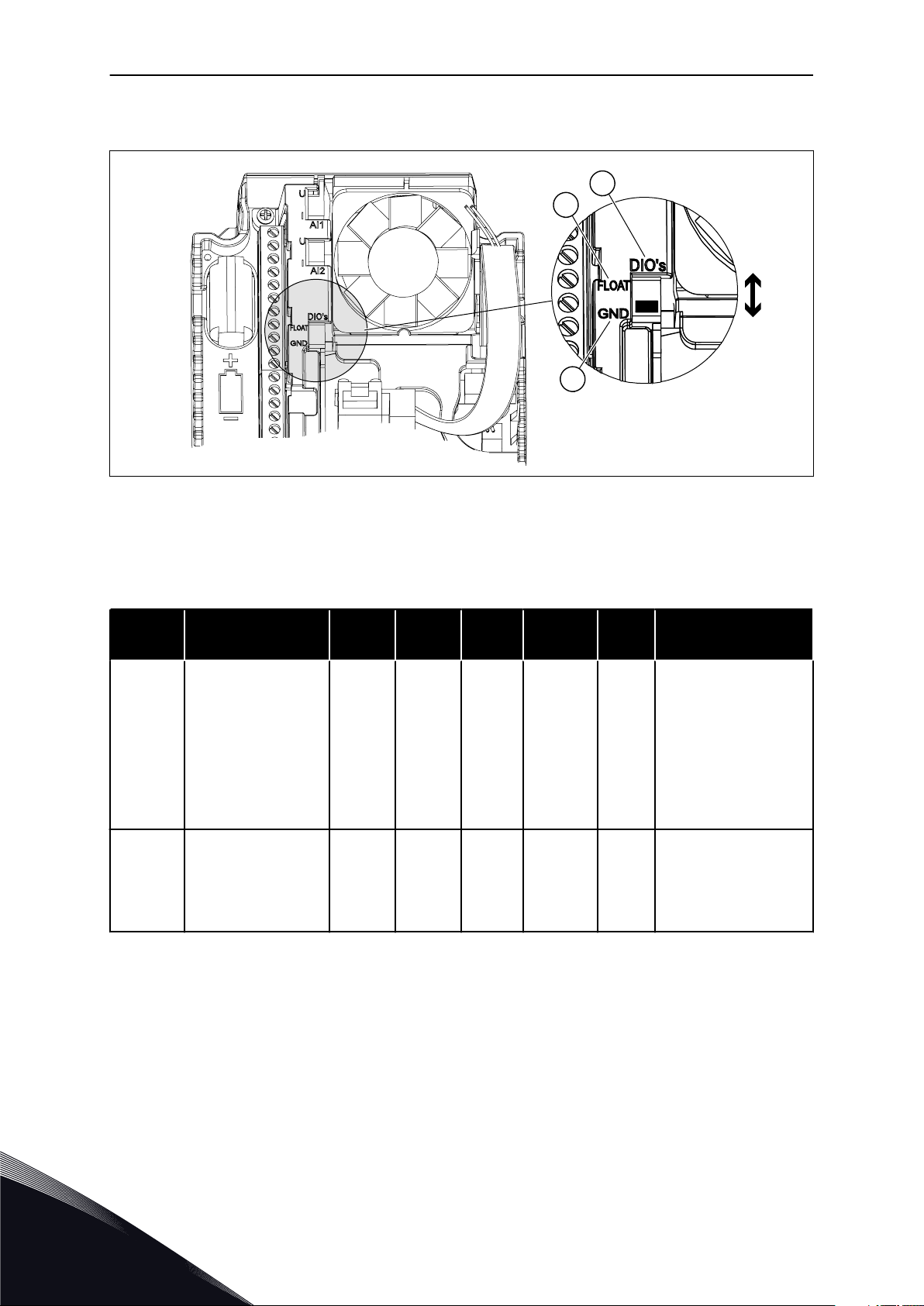
** = Para las configuraciones de los interruptores DIP de VACON® 100 X, consulte el Manual
de instalación de VACON 100® X.
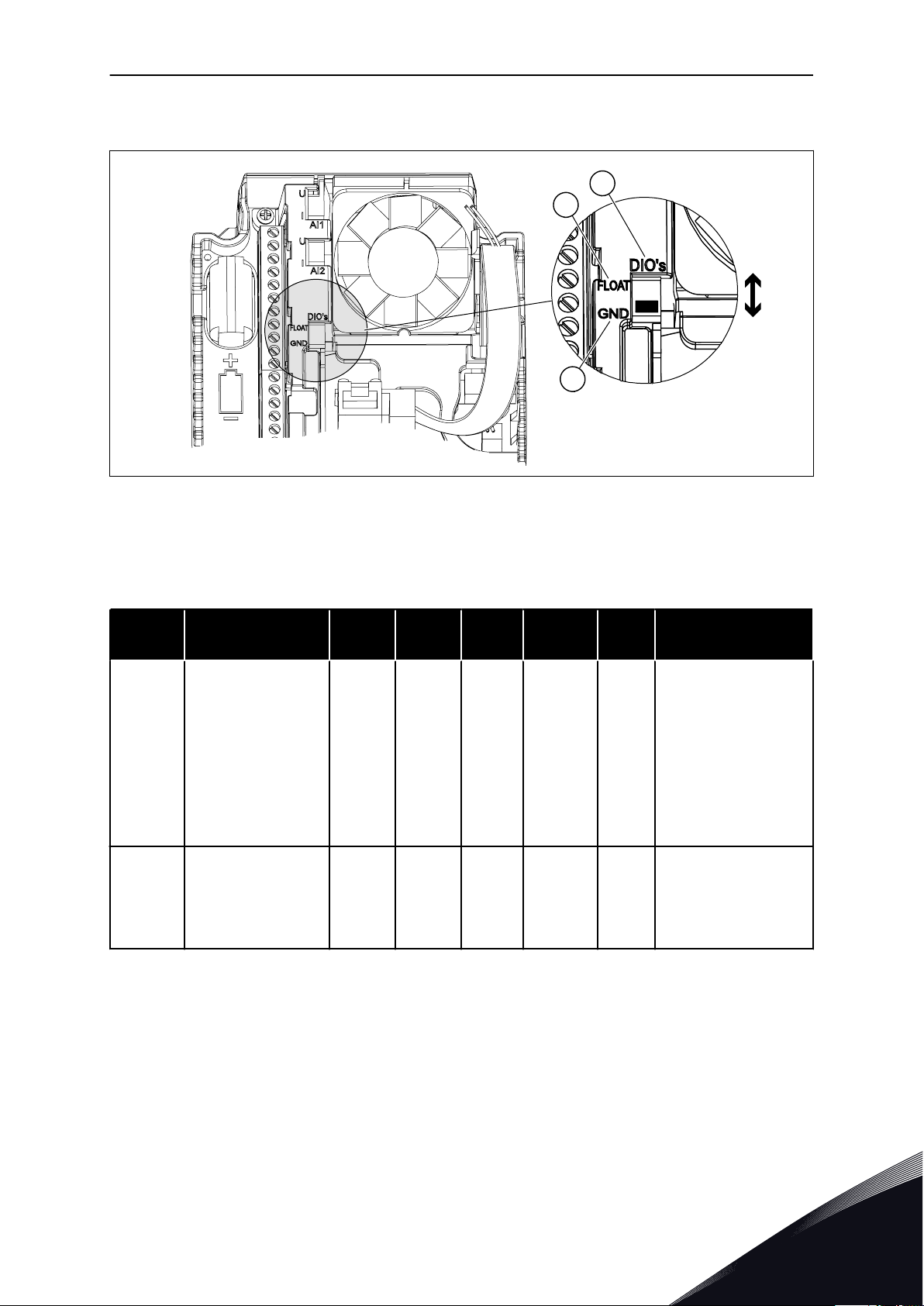
Imag. 5: El interruptor DIP
A. Entradas digitales
C. Conectado a TIERRA (GND) (por defecto)
B. Aisladas
Tabla 2: M1.1 Asistentes
Índice Parámetro Mín. Máx. Unidad
1.1.1
1.1.2
Asistente de puesta
en marcha
Asistente de modo
Anti-Incendio
0 1 0 1170
0 1 0 1672
Por
defecto
ID Descripción
0 = No activar
1 = Activar
La selección Activar
inicia el Asistente para
la puesta en marcha
(vea Tabla 1 El Asis-
tente para la puesta en
marcha).
La selección Activar
inicia el Asistente para
el modo Anti-Incendio
(vea 2.6 Asistente modo
anti-incendio).
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
VACON · 18 GUÍA DE INICIO RÁPIDO
Tabla 3: M1 Guía rápida
Índice Parámetro Mín. Máx. Unidad
1.2
Aplicación 0 4 0 212
1.3 Frecuencia mínima 0.00 P1.4 Hz 0.0 101
1.4 Frecuencia máxima P1.3 320.0 Hz
1.5
Tiempo de acelera-
ción 1
0.1 3000.0 s 5.0 103
Por
defecto
50.0 /
60.0
ID Descripción
0 = Estándar
1 = HVAC
2 = Control PID
3 = PFC
4 = MultiMaster
La referencia de frecuencia mínima que se
acepta.
La referencia de fre-
102
cuencia máxima que se
acepta.
Proporciona la cantidad de tiempo que se
necesita para que la
frecuencia de salida
aumente de la frecuencia 0 a la frecuencia
máxima.
1.6
1.7
1.8 Tipo de motor 0 2 0 650
1.9
Tiempo de decelera-
ción 1
Límite de intensidad
del motor
Tensión nominal del
motor
0.1 3000.0 s 5.0 104
IH*0.1 I
Varía Varía V Varía 110
S
A Varía 107
Proporciona la cantidad de tiempo que se
necesita para que la
frecuencia de salida
disminuya de la frecuencia máxima a la
frecuencia 0.
La intensidad máxima
del motor desde el
convertidor.
0 = Motor Inducción
1 = Imanes permanentes
2 = Motor de reluctancia
Busque este valor U
en la placa de características del motor.
n
NOTA!
Averigüe si la conexión es estrella o
triángulo.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
GUÍA DE INICIO RÁPIDO VACON · 19
Tabla 3: M1 Guía rápida
Índice Parámetro Mín. Máx. Unidad
1.10
1.11
1.12
1.13
1.14
Frecuencia nominal
del motor
Velocidad nominal
del motor
Intensidad nominal
del motor
Cos phi motor (Fac-
tor de potencia)
Optimización de
energía
8.0 320.0 Hz 50 / 60 111
24 19200 Rpm Varía 112
IH * 0.1 IH * 2 A Varía 113
0.30 1.00 Varía 120
0 1 0 666
Por
defecto
ID Descripción
Busque este valor fn en
la placa de características del motor.
Busque este valor n
en la placa de características del motor.
Busque este valor In en
la placa de características del motor.
Busque este valor en la
placa de características del motor.
El convertidor busca la
intensidad mínima del
motor para consumir
menos energía y reducir el ruido del motor.
Utilice esta función
con, por ejemplo, los
procesos de la bomba y
el ventilador.
n
1.15 Identificación 0 2 0 631
1.16
Tipo de Marcha 0 1 0 505
0 = Deshabilitado
1 = Habilitado
La identificación en
marcha calcula o mide
los parámetros del
motor que son necesarios para obtener un
buen control del motor
y la velocidad.
0 = Sin acción
1 = Sin giro
2 = Con giro
Antes de realizar la
identificación en marcha, debe establecer
los parámetros de la
placa de características del motor.
0 = Rampa
1 = Arranque al vuelo
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
VACON · 20 GUÍA DE INICIO RÁPIDO
Tabla 3: M1 Guía rápida
Índice Parámetro Mín. Máx. Unidad
1.17 Tipo de Paro 0 1 0 506
1.18 Reset automático 0 1 0 731
1.19
1.20
Respuesta frente a
fallo externo
Respuesta frente a
fallo de AI < 4mA
0 3 2 701
0 5 0 700
Por
defecto
ID Descripción
0 = Deshabilitado
1 = Habilitado
0 = Deshabilitado
1 = Habilitado
0 = Sin acción
1 = Alarma
2 = Fallo (paro de
acuerdo con modo de
paro)
3 = Fallo (mediante
paro libre)
0 = Sin acción
1 = Alarma
2 = Alarma + frecuencia de fallo fija
(P3.9.1.13)
3 = Alarma + frecuencia previa
4 = Fallo (paro de
acuerdo con modo de
paro)
5 = Fallo (mediante
paro libre)
1.21
Lugar Control
Remoto
La selección del lugar
de control remoto
(marcha/paro).
0 1 0 172
0 = Control de I/O
1 = Control de Fieldbus
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
GUÍA DE INICIO RÁPIDO VACON · 21
Tabla 3: M1 Guía rápida
Índice Parámetro Mín. Máx. Unidad
Selección de la refe-
1.22
rencia de control de
I/O lugar A
0 20 5 117
Por
defecto
ID Descripción
La selección de la referencia de frecuencia
cuando el lugar de
control I/O es A.
0 = PC
1 = Frecuencia fija 0
2 = Referencia Panel
3 = Fieldbus
4 = AI1
5 = AI2
5 = AI1+AI2
7 = Referencia PID
8 = Potenciómetro
motorizado
11 = Block Out.1
12 = Block Out.2
13 = Block Out.3
14 = Block Out.4
15 = Block Out.5
16 = Block Out.6
17 = Block Out.7
18 = Block Out.8
19 = Block Out.9
20 = Block Out.10
1.23
1.24
1.25
1.26
1.27
Selección de la referencia de control del
panel
Selección de refe-
rencia de control de
Fieldbus
Rango señal entrada
analógica 1 (AI1)
Rango señal entrada
analógica 2 (AI2)
Función para salida
de relé 1 (RO1)
0 20 1 121
0 20 2 122
0 1 0 379
0 1 1 390
0 73 2 11001
La aplicación que se
establece con el parámetro 1.2 proporciona
el valor por defecto.
La selección de la referencia de frecuencia
cuando el lugar de
control es el panel.
Consulte P1.22.
La selección de la referencia de frecuencia
cuando el lugar de
control es el Fieldbus.
Consulte P1.22.
0= 0..10V / 0..20mA
1= 2..10V / 4..20mA
0= 0..10V / 0..20mA
1= 2..10V / 4..20mA
Consulte P3.5.3.2.1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
VACON · 22 GUÍA DE INICIO RÁPIDO
Tabla 3: M1 Guía rápida
Índice Parámetro Mín. Máx. Unidad
1.28
1.29
1.30
Función de salida de
relé 2 (RO2)
Función para salida
de relé 3 (RO3)
Función salida ana-
lógica 1 (AO1)
0 73 3 11004
0 73 1 11007
0 31 2 10050
Por
defecto
Tabla 4: M1.31 Estándar/M1.32 HVAC
Índice Parámetro Mín. Máx. Unidad
1.31.1 Frecuencia fija 1 P1.3 P1.4 Hz 10.0 105
1.31.2 Frecuencia fija 2 P1.3 P1.4 Hz 15.0 106
Por
defecto
ID Descripción
Consulte P3.5.3.2.1
Consulte P3.5.3.2.1
Consulte P3.5.4.1.1
ID Descripción
Seleccione la frecuencia fija con la entrada
digital 4 (DI4).
Seleccione la frecuencia fija con la entrada
digital 5 (DI5).
Seleccione una frecuencia fija con la
1.31.3 Frecuencia fija 3 P1.3 P1.4 Hz 20.0 126
entrada digital 4 (DI4) y
la entrada digital 5
(DI5).
1.4.2 APLICACIÓN DE CONTROL PID
Puede usar la aplicación Control PID con aplicaciones en las que se controla la variable de
proceso, por ejemplo la presión, mediante el control de la velocidad del motor.
En esta aplicación, el controlador PID interno del convertidor está configurado para una
referencia y una señal de valor actual.
Puede usar dos lugares de control. Seleccione el lugar de control A o B con la entrada digital
6 (DI6). Cuando el lugar de control A está activo, DI1 proporciona los comandos de marcha y
paro, y el controlador PID proporciona la referencia de frecuencia. Cuando el lugar de
control B está activo, DI4 proporciona los comandos de marcha y paro, y AI1 proporciona la
referencia de frecuencia.
Puede configurar todas las salidas del convertidor libremente en todas las aplicaciones. Hay
una salida analógica (frecuencia de salida) y tres salidas de relé (marcha, fallo, listo)
disponibles en la tarjeta de I/O estándar.
Vea las descripciones de los parámetros en Tabla 1 El Asistente para la puesta en marcha.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
6
2
3
4
5
18
19
30
12
7
13
8
9
10
14
15
16
21
22
23
11
17
A
B
24
25
26
28
29
32
33
Modbus RTU
+
-
*)
**)
TI1-
TI1+
mA
FALLO
MARCHA
Salida analógica 1 -
Tensión de entrada
auxiliar 24 V
Tensión auxiliar 24 V
Tierra de I/O
Tierra de I/O
Entrada digital 1
Entrada digital 2
Entrada digital 3
Entrada digital 4
Entrada digital 5
Entrada digital 6
RO1/1 NC
RO1/2 CM
RO1/3 NO
Común para DI1-DI6
Común para DI1-DI6
RS485
RS485
RO2/1 NC
RO2/2 CM
RO2/3 NO
Tarjeta de I/O estándar
Terminal Señal Descripción
+10Vref
AI1+
AI1-
AI2+
AI2-
24 Vsal
Salida de referencia
Entrada analógica 1 +
Entrada analógica 1 -
Entrada analógica 2 +
Entrada analógica 2 -
Tensión auxiliar 24 V
AO1+
Frecuencia de
salida (0...20mA)
MARCHA
FALLO
Bus serie, negativo
Bus serie, positivo
Salida de relé 1
Salida de relé 2
RO3/2 CM
RO3/3 NO
LISTO
Salida de relé 3
+24VEntrada
Salida analógica 1 +
DI4
DI5
DI6
DI1
DI2
DI3
24 VSal
GND
GND
CM
CM
Reset de fallo
Fallo externo
Potencióme-
tro para
referencia
1...10kΩ
AO1-/GND
Frecuencia fija 1
I =
(0)4...20mA
Transductor de 2 cables
Valor actual
Lugar A: Referencia del
PID
Lugar B: Referencia de
frecuencia
(por defecto: 0–10V)
Valor actual de PID
(valor real)
(por defecto: 4–20mA)
Lugar A: Marcha directa
(controlador PID)
Lugar B: marcha directa
(Referencia de frec. P3.3.1.6)
Selección del lugar de control A/B
Entrada de
termistor
GUÍA DE INICIO RÁPIDO VACON · 23
Imag. 6: Las conexiones de control por defecto de la aplicación de control PID
* = Disponible solo en VACON® 100 X.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
A
B
C
VACON · 24 GUÍA DE INICIO RÁPIDO
** = Para las configuraciones de los interruptores DIP de VACON® 100 X, consulte el manual
de instalación de VACON® 100 X.
Imag. 7: El interruptor DIP
A. Entradas digitales
C. Conectado a TIERRA (GND) (por defecto)
B. Aisladas
Tabla 5: M1.1 Asistentes
Índice Parámetro Mín. Máx. Unidad
1.1.1
1.1.2
Asistente de puesta
en marcha
Asistente de modo
Anti-Incendio
0 1 0 1170
0 1 0 1672
Por
defecto
ID Descripción
0 = No activar
1 = Activar
La selección Activar
inicia el Asistente para
la puesta en marcha
(vea 1.3 Primera puesta
en marcha).
La selección Activar
inicia el Asistente para
el modo Anti-Incendio
(vea 2.6 Asistente modo
anti-incendio).
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
GUÍA DE INICIO RÁPIDO VACON · 25
Tabla 6: M1 Guía rápida
Índice Parámetro Mín. Máx. Unidad
1.2
Aplicación 0 4 2 212
1.3 Frecuencia mínima 0.00 P1.4 Hz 0.0 101
1.4 Frecuencia máxima P1.3 320.0 Hz
1.5
Tiempo de acelera-
ción 1
0.1 3000.0 s 5.0 103
Por
defecto
50.0 /
60.0
ID Descripción
0 = Estándar
1 = HVAC
2 = Control PID
3 = PFC
4 = MultiMaster
La referencia de frecuencia mínima que se
acepta.
La referencia de fre-
102
cuencia máxima que se
acepta.
Proporciona la cantidad de tiempo que se
necesita para que la
frecuencia de salida
aumente de la frecuencia 0 a la frecuencia
máxima.
1.6
1.7
1.8 Tipo de motor 0 2 0 650
1.9
Tiempo de decelera-
ción 1
Límite de intensidad
del motor
Tensión nominal del
motor
0.1 3000.0 s 5.0 104
IH*0.1 I
Varía Varía V Varía 110
S
A Varía 107
Proporciona la cantidad de tiempo que se
necesita para que la
frecuencia de salida
disminuya de la frecuencia máxima a la
frecuencia 0.
La intensidad máxima
del motor desde el
convertidor.
0 = Motor Inducción
1 = Imanes permanentes
2 = Motor de reluctancia
Busque este valor U
en la placa de características del motor.
n
NOTA!
Averigüe si la conexión es estrella o
triángulo.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
VACON · 26 GUÍA DE INICIO RÁPIDO
Tabla 6: M1 Guía rápida
Índice Parámetro Mín. Máx. Unidad
1.10
1.11
1.12
1.13
1.14
Frecuencia nominal
del motor
Velocidad nominal
del motor
Intensidad nominal
del motor
Cos phi motor (Fac-
tor de potencia)
Optimización de
energía
8.0 320.0 Hz
24 19200 Rpm Varía 112
IH * 0.1 I
0.30 1.00 Varía 120
0 1 0 666
S
A Varía 113
Por
defecto
50.0 /
60.0
ID Descripción
Busque este valor fn en
111
la placa de características del motor.
Busque este valor n
en la placa de características del motor.
Busque este valor In en
la placa de características del motor.
Busque este valor en la
placa de características del motor.
El convertidor busca la
intensidad mínima del
motor para consumir
menos energía y reducir el ruido del motor.
Utilice esta función
con, por ejemplo, los
procesos de la bomba y
el ventilador.
n
1.15 Identificación 0 2 0 631
1.16
Tipo de Marcha 0 1 0 505
0 = Deshabilitado
1 = Habilitado
La identificación en
marcha calcula o mide
los parámetros del
motor que son necesarios para obtener un
buen control del motor
y la velocidad.
0 = Sin acción
1 = Sin giro
2 = Con giro
Antes de realizar la
identificación en marcha, debe establecer
los parámetros de la
placa de características del motor.
0 = Rampa
1 = Arranque al vuelo
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
GUÍA DE INICIO RÁPIDO VACON · 27
Tabla 6: M1 Guía rápida
Índice Parámetro Mín. Máx. Unidad
1.17 Tipo de Paro 0 1 0 506
1.18 Reset automático 0 1 0 731
1.19
1.20
Respuesta frente a
fallo externo
Respuesta frente a
fallo de AI < 4mA
0 3 2 701
0 5 0 700
Por
defecto
ID Descripción
0 = Deshabilitado
1 = Habilitado
0 = Deshabilitado
1 = Habilitado
0 = Sin acción
1 = Alarma
2 = Fallo (paro de
acuerdo con modo de
paro)
3 = Fallo (mediante
paro libre)
0 = Sin acción
1 = Alarma
2 = Alarma + frecuencia de fallo fija
(P3.9.1.13)
3 = Alarma + frecuencia previa
4 = Fallo (paro de
acuerdo con el modo
de paro)
5 = Fallo (mediante
paro libre)
1.21
Lugar Control
Remoto
La selección del lugar
de control remoto
(marcha/paro).
0 1 0 172
0 = Control de I/O
1 = Control de Fieldbus
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
VACON · 28 GUÍA DE INICIO RÁPIDO
Tabla 6: M1 Guía rápida
Índice Parámetro Mín. Máx. Unidad
Selección de la refe-
1.22
rencia de control de
I/O lugar A
1 20 6 117
Por
defecto
ID Descripción
La selección de la referencia de frecuencia
cuando el lugar de
control I/O es A.
0 = PC
1 = Frecuencia fija 0
2 = Referencia Panel
3 = Fieldbus
4 = AI1
5 = AI2
6 = AI1+AI2
7 = Referencia PID
8 = Potenciómetro
motorizado
11 = Block Out.1
12 = Block Out.2
13 = Block Out.3
14 = Block Out.4
15 = Block Out.5
16 = Block Out.6
17 = Block Out.7
18 = Block Out.8
19 = Block Out.9
20 = Block Out.10
1.23
1.24
1.25
1.26
1.27
1.28
Selección de la referencia de control del
panel
Selección de refe-
rencia de control de
Fieldbus
Rango señal entrada
analógica 1 (AI1)
Rango señal entrada
analógica 2 (AI2)
Función para salida
de relé 1 (RO1)
Función de salida de
relé 2 (RO2)
1 20 1 121
1 20 2 122
0 1 0 379
0 1 1 390
0 73 2 11001
0 73 3 11004
La aplicación que se
establece con el parámetro 1.2 proporciona
el valor por defecto.
Consulte P1.22.
Consulte P1.22.
0= 0..10V / 0..20mA
1= 2..10V / 4..20mA
0= 0..10V / 0..20mA
1= 2..10V / 4..20mA
Consulte P3.5.3.2.1
Consulte P3.5.3.2.1
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
GUÍA DE INICIO RÁPIDO VACON · 29
Tabla 6: M1 Guía rápida
Índice Parámetro Mín. Máx. Unidad
1.29
1.30
Función para salida
de relé 3 (RO3)
Función salida ana-
lógica 1 (AO1)
0 73 1 11007
0 31 2 10050
Por
defecto
ID Descripción
Consulte P3.5.3.2.1
Consulte P3.5.4.1.1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
VACON · 30 GUÍA DE INICIO RÁPIDO
Tabla 7: M1.33 Control PID
Índice Parámetro Mín. Máx. Unidad
1.33.1 Ganancia de PID 0.00 100.00 % 100.00 118
1.33.2 Tiempo integral PID 0.00 600.00 s 1.00 119
1.33.3 Tiempo derivada PID 0.00 100.00 s 0.00 1132
Por
defecto
ID Descripción
SI el valor del parámetro se establece en
100%, un cambio del
10% del valor del error
hace que la salida del
controlador cambie en
un 10%.
Si este parámetro se
establece en 1,00 seg.,
un cambio del 10% en
el valor de error provocará que la salida del
controlador cambie en
un 10,00%/seg.
Si este parámetro se
establece en 1,00 seg.,
un cambio del 10 % en
el valor de error
durante 1,00 seg. provocará que la salida del
controlador cambie en
un 10,00 %.
1.33.4 Unidades de proceso 1 44 1 1036
1.33.5
1.33.6
1.33.7
1.33.8
1.33.9 Referencia panel 1 Varía Varía Varía 0 167
Unidad mínima de
proceso
Unidad máxima de
proceso
Selección de fuente
de valor actual 1
Selección de refe-
rencia 1
Varía Varía Varía 1033
Varía Varía Varía 1034
0 30 2 334
0 32 1 332
Se selecciona la unidad
del proceso. Consulte
P3.13.1.4
El valor de la unidad de
proceso que es el
mismo que el 0% de la
señal de valor actual
de PID.
El valor de la unidad de
proceso que es el
mismo que el 100% de
la señal de valor actual
de PID.
Consulte P3.13.3.3
Consulte P3.13.2.6
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

GUÍA DE INICIO RÁPIDO VACON · 31
Tabla 7: M1.33 Control PID
Índice Parámetro Mín. Máx. Unidad
1.33.10
1.33.11
1.33.12 Nivel despertar 1 Varía Varía Varía Varía 1018
Límite Frecuencia
dormir 1
Retraso de dormir de
SP1
0.0 320.0 Hz 0.0 1016
0 3000 s 0 1017
Por
defecto
ID Descripción
El convertidor pasa al
modo dormir cuando la
frecuencia de salida se
mantiene por debajo de
este límite durante un
tiempo superior al
especificado en el
parámetro Retardo al
dormir.
0 = Deshabilitado
Período mínimo de
tiempo que la frecuencia se mantiene por
debajo del nivel de dormir antes de que se
detenga el convertidor.
0 = Deshabilitado
El valor de despertar
de la supervisión de
valor actual de PID. El
Nivel de despertar 1
utiliza las unidades de
proceso seleccionadas.
0 = Deshabilitado
Frecuencia fija selec-
1.33.12 Frecuencia fija 1 P1.3 P1.4 Hz 10.0 105
cionada mediante la
entrada digital 5 (DI5).
1.4.3 APLICACIÓN PFC
Puede usar la aplicación PFC en aplicaciones en que un convertidor controla un sistema que
tiene hasta un máximo de ocho motores en paralelo, por ejemplo, bombas, ventiladores o
compresores. Por defecto, la aplicación PFC está configurada para tres motores en paralelo.
El convertidor se conecta a uno de los motores que se convierte en el motor de regulación.
El controlador PID interno del convertidor controla la velocidad del motor de regulación y
proporciona señales de control mediante salidas de relé para poner en marcha o detener los
motores auxiliares. Se necesitan contactores externos para conectar los motores auxiliares
a la red eléctrica.
Puede controlar una variable de proceso, por ejemplo la presión, mediante el control de la
velocidad del motor de regulación y mediante el número de motores funcionando.
Vea las descripciones de los parámetros en 10 Descripciones de parámetros.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

PT
RO2
RO3
Marcha/
Paro
VACON · 32 GUÍA DE INICIO RÁPIDO
Imag. 8: Configuración de PFC
La función de rotación automática (cambio del orden de arranque) iguala el desgaste de los
motores del sistema. La función de rotación automática supervisa las horas de
funcionamiento y establece el orden de arranque de cada motor. El motor que tiene el menor
número de horas de funcionamiento arranca el primero y el motor que tiene el mayor
número de horas de funcionamiento arranca el último. Puede configurar el inicio de la
rotación automática basándose en el intervalo de rotación automática establecido con el
reloj en tiempo real interno (se necesita una batería de RTC) del convertidor.
Puede configurar la rotación automática de todos los motores del sistema o solo de los
motores auxiliares.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

K2 K3
K1 K2 K2 K1.1 K2.1 K3.1
GUÍA DE INICIO RÁPIDO VACON · 33
Imag. 9: Diagrama de control cuando solo las bombas auxiliares son objeto de rotación
automática
Imag. 10: Diagrama de control cuando todas las bombas son objeto de rotación automática
Puede usar dos lugares de control. Seleccione el lugar de control A o B con la entrada digital
6 (DI6). Cuando el lugar de control Seleccione el lugar de control A o B con la entrada digital
6 (DI6). Cuando el lugar de control A está activo, DI1 proporciona los comandos de marcha y
paro, y el controlador PID proporciona la referencia de frecuencia. Cuando el lugar de
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 34 GUÍA DE INICIO RÁPIDO
control B está activo, DI4 proporciona los comandos de marcha y paro, y AI1 proporciona la
referencia de frecuencia.
Puede configurar todas las salidas del convertidor libremente en todas las aplicaciones. Hay
una salida analógica (frecuencia de salida) y tres salidas de relé (marcha, fallo, listo)
disponibles en la tarjeta de I/O estándar.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

1
6
2
3
4
5
18
19
30
12
7
13
8
9
10
14
15
16
21
22
23
11
17
A
B
24
25
26
28
29
Modbus RTU
*)
32
33
**)
+
-
A1
A1
A1
A2
A2
A2
TI1-
TI1+
mA
Control de motor 1
(Contactor multibomba K2)
Control de motor 2
(Contactor multibomba K2)
AO1-/GND
+24 Vin
GND
GND
DI1
DI2
DI3
DI4
DI5
DI6
RO1/1 NC
RO1/2 CM
RO1/3 NA
CM
CM
RS485
RS485
RO2/1 NC
RO2/2 CM
RO2/3 NA
RO3/2 CM
RO3/3 NA
Tarjeta de I/O estándar
Terminal Señal Descripción
+10Vref
AI1+
AI1-
AI2+
AI2-
24 Vsalida
Salida de referencia
Entrada analógica 1 +
Entrada analógica 1 -
Entrada analógica 2 +
Entrada analógica 2 -
Tensión auxiliar 24 V
Tierra de I/O
Entrada digital 1
Entrada digital 2
Entrada digital 3
Entrada digital 4
Entrada digital 5
Entrada digital 6
Común para DIN1-DIN6
Común para DIN1-DIN6
Tensión auxiliar 24 V
Tierra de I/O
Salida analógica 1 +
Salida analógica 1 -
Bus serie, negativo
Bus serie, positivo
Salida de relé 1
Salida de relé 2
Salida de relé 3
AO1+
Lugar A: No usado
Lugar B: Referencia de
frecuencia
(por defecto: 0–10V)
Valor actual de PID
(valor real)
(por defecto: 4–20mA)
Lugar A: Marcha directa
(controlador PID)
Lugar B: Marcha directa
(Ref. de frec. P3.3.1.6)
Potenciómetro
para referencia
1...10 kΩ
I = (0)4...20 mA
Valor
actual
Transductor de 2 cables
Enclavamiento del motor 1
Enclavamiento del motor 2
Enclavamiento del motor 3
24 Vsalida
Frecuencia de salida
(por defecto 0...20 mA)
Tensión de
entrada auxiliar 24 V
Control de motor 3
(Contactor multibomba K2)
Selección del lugar de control A/B
Entrada de
termistor
GUÍA DE INICIO RÁPIDO VACON · 35
Imag. 11: Las conexiones de control por defecto de la aplicación PFC
* = Disponible solo en VACON® 100 X.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

A
B
C
VACON · 36 GUÍA DE INICIO RÁPIDO
** = Para las configuraciones de los interruptores DIP de VACON® 100 X, consulte el manual
de instalación de VACON® 100 X.
Imag. 12: El interruptor DIP
A. Entradas digitales
C. Conectado a TIERRA (GND) (por defecto)
B. Aisladas
Tabla 8: M1.1 Asistentes
Índice Parámetro Mín. Máx. Unidad
1.1.1
1.1.2
Asistente de puesta
en marcha
Asistente de modo
Anti-Incendio
0 1 0 1170
0 1 0 1672
Por
defecto
ID Descripción
0 = No activar
1 = Activar
La selección Activar
inicia el Asistente para
la puesta en marcha
(vea 1.3 Primera puesta
en marcha).
La selección Activar
inicia el Asistente para
el modo Anti-Incendio
(vea 2.6 Asistente modo
anti-incendio).
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

GUÍA DE INICIO RÁPIDO VACON · 37
Tabla 9: M1 Guía rápida
Índice Parámetro Mín. Máx. Unidad
1.2
Aplicación 0 4 2 212
1.3 Frecuencia mínima 0.00 P1.4 Hz 0.0 101
1.4 Frecuencia máxima P1.3 320.0 Hz
1.5
Tiempo de acelera-
ción 1
0.1 3000.0 s 5.0 103
Por
defecto
50.0 /
60.0
ID Descripción
0 = Estándar
1 = HVAC
2 = Control PID
3 = PFC
4 = MultiMaster
La referencia de frecuencia mínima que se
acepta.
La referencia de fre-
102
cuencia máxima que se
acepta.
Proporciona la cantidad de tiempo que se
necesita para que la
frecuencia de salida
aumente de la frecuencia 0 a la frecuencia
máxima.
1.6
1.7
1.8 Tipo de motor 0 2 0 650
1.9
Tiempo de decelera-
ción 1
Límite de intensidad
del motor
Tensión nominal del
motor
0.1 3000.0 s 5.0 104
IH*0.1 I
Varía Varía V Varía 110
S
A Varía 107
Proporciona la cantidad de tiempo que se
necesita para que la
frecuencia de salida
disminuya de la frecuencia máxima a la
frecuencia 0.
La intensidad máxima
del motor desde el
convertidor.
0 = Motor Inducción
1 = Imanes permanentes
2 = Motor de reluctancia
Busque este valor U
en la placa de características del motor.
n
NOTA!
Averigüe si la conexión es estrella o
triángulo.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 38 GUÍA DE INICIO RÁPIDO
Tabla 9: M1 Guía rápida
Índice Parámetro Mín. Máx. Unidad
1.10
1.11
1.12
1.13
1.14
Frecuencia nominal
del motor
Velocidad nominal
del motor
Intensidad nominal
del motor
Cos phi motor (Fac-
tor de potencia)
Optimización de
energía
8.0 320.0 Hz
24 19200 Rpm Varía 112
IH * 0.1 I
0.30 1.00 Varía 120
0 1 0 666
S
A Varía 113
Por
defecto
50.0 /
60.0
ID Descripción
Busque este valor fn en
111
la placa de características del motor.
Busque este valor n
en la placa de características del motor.
Busque este valor In en
la placa de características del motor.
Busque este valor en la
placa de características del motor.
El convertidor busca la
intensidad mínima del
motor para consumir
menos energía y reducir el ruido del motor.
Utilice esta función
con, por ejemplo, los
procesos de la bomba y
el ventilador.
n
1.15 Identificación 0 2 0 631
1.16
Tipo de Marcha 0 1 0 505
0 = Deshabilitado
1 = Habilitado
La identificación en
marcha calcula o mide
los parámetros del
motor que son necesarios para obtener un
buen control del motor
y la velocidad.
0 = Sin acción
1 = Sin giro
2 = Con giro
Antes de realizar la
identificación en marcha, debe establecer
los parámetros de la
placa de características del motor.
0 = Rampa
1 = Arranque al vuelo
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

GUÍA DE INICIO RÁPIDO VACON · 39
Tabla 9: M1 Guía rápida
Índice Parámetro Mín. Máx. Unidad
1.17 Tipo de Paro 0 1 0 506
1.18 Reset automático 0 1 0 731
1.19
1.20
Respuesta frente a
fallo externo
Respuesta frente a
fallo de AI < 4mA
0 3 2 701
0 5 0 700
Por
defecto
ID Descripción
0 = Deshabilitado
1 = Habilitado
0 = Deshabilitado
1 = Habilitado
0 = Sin acción
1 = Alarma
2 = Fallo (paro de
acuerdo con modo de
paro)
3 = Fallo (mediante
paro libre)
0 = Sin acción
1 = Alarma
2 = Alarma + frecuencia de fallo fija
(P3.9.1.13)
3 = Alarma + frecuencia previa
4 = Fallo (paro de
acuerdo con el modo
de paro)
5 = Fallo (mediante
paro libre)
1.21
Lugar Control
Remoto
La selección del lugar
de control remoto
(marcha/paro).
0 1 0 172
0 = Control de I/O
1 = Control de Fieldbus
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 40 GUÍA DE INICIO RÁPIDO
Tabla 9: M1 Guía rápida
Índice Parámetro Mín. Máx. Unidad
Selección de la refe-
1.22
rencia de control de
I/O lugar A
1 20 6 117
Por
defecto
ID Descripción
La selección de la referencia de frecuencia
cuando el lugar de
control I/O es A.
0 = PC
1 = Frecuencia fija 0
2 = Referencia Panel
3 = Fieldbus
4 = AI1
5 = AI2
6 = AI1+AI2
7 = Referencia PID
8 = Potenciómetro
motorizado
11 = Block Out.1
12 = Block Out.2
13 = Block Out.3
14 = Block Out.4
15 = Block Out.5
16 = Block Out.6
17 = Block Out.7
18 = Block Out.8
19 = Block Out.9
20 = Block Out.10
1.23
1.24
1.25
1.26
1.27
1.28
Selección de la referencia de control del
panel
Selección de refe-
rencia de control de
Fieldbus
Rango señal entrada
analógica 1 (AI1)
Rango señal entrada
analógica 2 (AI2)
Función para salida
de relé 1 (RO1)
Función de salida de
relé 2 (RO2)
1 20 1 121
1 20 2 122
0 1 0 379
0 1 1 390
0 73 2 11001
0 73 3 11004
La aplicación que se
establece con el parámetro 1.2 proporciona
el valor por defecto.
Consulte P1.22.
Consulte P1.22.
0= 0..10V / 0..20mA
1= 2..10V / 4..20mA
0= 0..10V / 0..20mA
1= 2..10V / 4..20mA
Consulte P3.5.3.2.1
Consulte P3.5.3.2.1
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

GUÍA DE INICIO RÁPIDO VACON · 41
Tabla 9: M1 Guía rápida
Índice Parámetro Mín. Máx. Unidad
1.29
1.30
Función para salida
de relé 3 (RO3)
Función salida ana-
lógica 1 (AO1)
0 73 1 11007
0 31 2 10050
Por
defecto
ID Descripción
Consulte P3.5.3.2.1
Consulte P3.5.4.1.1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 42 GUÍA DE INICIO RÁPIDO
Tabla 10: M1.34 PFC
Índice Ocultación Mín. Máx. Unidad
1.34.1 Ganancia de PID 0.00 100.00 % 100.00 118
1.34.2
1.34.3
Tiempo integral
PID
Tiempo derivada
PID
0.00 600.00 s 1.00 119
0.00 100.00 s 0.00 1132
Por
defecto
ID Descripción
SI el valor del parámetro se establece
en 100%, un cambio del 10% del
valor del error
hace que la salida
del controlador
cambie en un 10%.
Si este parámetro
se establece en
1,00 seg., un cambio del 10% en el
valor de error provocará que la
salida del controlador cambie en un
10,00%/seg.
Si este parámetro
se establece en
1,00 seg., un cambio del 10 % en el
valor de error
durante 1,00 seg.
provocará que la
salida del controlador cambie en un
10,00 %.
1.34.4
1.34.5
1.34.6
1.34.7
1.34.8
Unidades de pro-
ceso
Unidad mínima
de proceso
Unidad máxima
de proceso
Selección de
fuente de valor
actual 1
Selección de
referencia 1
1 44 1 1036
Varía Varía Varía 1033
Varía Varía Varía 1034
0 30 2 334
0 32 1 332
Se selecciona la
unidad del proceso.
Consulte P3.13.1.4
El valor de la unidad de proceso que
es el mismo que el
0% de la señal de
valor actual de PID.
El valor de la unidad de proceso que
es el mismo que el
100% de la señal
de valor actual de
PID.
Consulte P3.13.3.3
Consulte P3.13.2.6
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

GUÍA DE INICIO RÁPIDO VACON · 43
Tabla 10: M1.34 PFC
Índice Ocultación Mín. Máx. Unidad
1.34.9
1.34.10
1.34.11
Referencia panel
1
Límite Frecuen-
cia dormir 1
Retraso de dor-
mir de SP1
Varía Varía Varía 0 167
0.0 320.0 Hz 0.0 1016
0 3000 s 0 1017
Por
defecto
ID Descripción
El convertidor pasa
al modo dormir
cuando la frecuencia de salida se
mantiene por
debajo de este
límite durante un
tiempo superior al
especificado en el
parámetro Retardo
al dormir.
0 = Deshabilitado
Período mínimo de
tiempo que la frecuencia se mantiene por debajo del
nivel de dormir
antes de que se
detenga el convertidor.
0 = Deshabilitado
1.34.12 Nivel despertar 1 Varía Varía Varía Varía 1018
1.34.13
1.34.14
Modo multi-
bomba
Número de bom-
bas
0 2 0 1785
1 8 1 1001
El valor de despertar de la supervisión de valor actual
de PID. El Nivel de
despertar 1 utiliza
las unidades de
proceso seleccionadas.
0 = Deshabilitado
Selecciona el modo
multibomba.
0 = PFC
1 = MultiFollower
2 = MultiMaster
Número total de
motores (bombas/
ventiladores) utilizados en el sistema
multibomba.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 44 GUÍA DE INICIO RÁPIDO
Tabla 10: M1.34 PFC
Índice Ocultación Mín. Máx. Unidad
1.34.15 Enclavamientos 0 1 1 1032
1.34.16
Rotación auto-
mática
0 2 1 1027
Por
defecto
ID Descripción
Habilitar/deshabilitar enclavamientos. Los enclavamientos notifican al
sistema si un
motor está conectado o no.
0 = Deshabilitado
1 = Habilitado
(Intervalo)
Deshabilitar/habilitar la rotación del
orden de arranque
y la prioridad de los
motores.
0 = Deshabilitado
1 = Habilitado
(intervalo)
2 = Habilitado
(tiempo real)
1.34.17
1.34.18
Bomba rotada
automática-
mente
Intervalo de
rotación automá-
tica
0 1 1 1028
0.0 3000.0 h 48.0 1029
0 = Bombas auxiliares
1 = Todas las bombas
Cuando se utiliza el
tiempo especificado por este parámetro, se inicia la
función de rotación
automática. Pero la
rotación automática solo se inicia si
la capacidad está
por debajo del nivel
especificado por
los parámetros
P1.34.21 y
P1.34.22.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

GUÍA DE INICIO RÁPIDO VACON · 45
Tabla 10: M1.34 PFC
Índice Ocultación Mín. Máx. Unidad
1.34.19
1.34.20
1.34.21
1.34.22
Días para rota-
ción automática
Hora del día de
rotación automá-
tica
Rotación auto-
mática: Límite de
frecuencia
Rotación auto-
mática: Límite de
bombas
0 127 15904
00:00:00 23:59:59 Hora 15905
0.00 P3.3.1.2 Hz 25:00 1031
1 6 1030
Por
defecto
ID Descripción
Rango
B0 = Domingo
B1 = Lunes
B2 = Martes
B3 = Miércoles
B4 = Jueves
B5 = Viernes
B6 = Sábado
Rango:
00:00:00-23:59:59
Estos parámetros
establecen el nivel
por debajo del cual
debe mantenerse
la capacidad para
que se inicie la
rotación automática.
1.34.23
1.34.24
1.34.25
Límite de cone-
xión/desconexión
auxiliares
Tiempo de cone-
xión/desconexión
auxiliares
Enclavamiento
de bomba 1
0 100 % 10 1097
0 3600 s 10 1098
DigIN
ranura
0.1
426
El porcentaje de la
referencia. Por
ejemplo,
Referencia = 5 bar
Límite de conexión/desconexión
auxiliares = 10%
Cuando el valor
actual se mantiene
entre 4,5 y 5,5 bar,
el motor permanece conectado.
Cuando el valor
actual está fuera
del límite de conexión/desconexión
auxiliares, el
tiempo, pasado el
cual, se añaden o
se quitan bombas.
OPEN = No activo
CLOSED = Activo
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 46 GUÍA DE INICIO RÁPIDO
Tabla 10: M1.34 PFC
Índice Ocultación Mín. Máx. Unidad
1.34.26
1.34.27
1.34.28
1.34.29
1.34.30
1.34.31
Enclavamiento
de bomba 2
Enclavamiento
de bomba 3
Enclavamiento
de bomba 4
Enclavamiento
de bomba 5
Enclavamiento
de bomba 6
Enclavamiento
de bomba 7
Por
defecto
DigIN
ranura
0.1
DigIN
ranura
0.1
DigIN
ranura
0.1
DigIN
ranura
0.1
DigIN
ranura
0.1
DigIN
ranura
0.1
ID Descripción
Consulte 1.34.25
427
Consulte 1.34.25
428
Consulte 1.34.25
429
Consulte 1.34.25
430
Consulte 1.34.25
486
Consulte 1.34.25
487
1.34.32
Enclavamiento
de bomba 8
DigIN
ranura
0.1
488
Consulte 1.34.25
1.4.4 APLICACIÓN MULTIMASTER
Puede usar la aplicación MultiMaster en un sistema que tenga el máximo de ocho motores
en paralelo con velocidades diferentes, por ejemplo, bombas, ventiladores o compresores.
Por defecto, la aplicación MultiMaster está configurada para tres motores en paralelo.
Vea las descripciones de los parámetros en 10 Descripciones de parámetros.
La lista de comprobación para la puesta en marcha de un sistema MultiMaster está en
10.16.1 Checklist de puesta en servicio para MultiMaster.
Cada motor tiene un convertidor que controla dicho motor aplicable. Los convertidores del
sistema se comunican entre sí mediante comunicación Modbus RTU.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

Marcha/
Parada
PT
FB
GUÍA DE INICIO RÁPIDO VACON · 47
Imag. 13: Configuración de MultiMaster
Puede controlar una variable de proceso, por ejemplo la presión, mediante el control de la
velocidad del motor de regulación y mediante el número de motores funcionando. El
controlador PID interno del convertidor del motor de regulación controla la velocidad, la
marcha y la parada de los motores.
El funcionamiento del sistema se especifica mediante el modo de funcionamiento
seleccionado. En modo MultiFollower, los motores auxiliares siguen la velocidad del motor
de regulación.
La bomba 1 controla y las bombas 2 y 3 siguen la velocidad de la bomba 1, como muestran
las curvas A.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

A
P1 P2 P3
f
máx.
f
mín.
RPM
t
A
B
f
máx.
f
mín.
RPM
t
P1
P2
P3
VACON · 48 GUÍA DE INICIO RÁPIDO
Imag. 14: Control en modo MultiFollower
En la figura siguiente se muestra un ejemplo del modo MultiMaster, en que la velocidad del
motor de regulación se bloquea en la velocidad de producción constante B cuando el
siguiente motor arranca. Las curvas A muestran la regulación de las bombas.
Imag. 15: Control en modo MultiMaster
La función de rotación automática (cambio del orden de arranque) iguala el desgaste de los
motores del sistema. La función de rotación automática supervisa las horas de
funcionamiento y establece el orden de arranque de cada motor. El motor que tiene el menor
número de horas de funcionamiento arranca el primero y el motor que tiene el mayor
número de horas de funcionamiento arranca el último. Puede configurar el inicio de la
rotación automática basándose en el intervalo de rotación automática o en el reloj en tiempo
real interno del convertidor (se necesita una batería de RTC).
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

1
6
2
3
4
5
18
19
30
12
7
13
8
9
10
14
15
16
21
22
23
11
17
A
B
24
25
26
28
29
32
33
*)
**)
+
-
TI1+
TI1-
mA
MARCHA
MARCHA
AO1-
+24 V
in
Valor actual
GND
GND
DI1
DI2
DI3
DI4
DI5
DI6
RO1/1 NC
RO1/2 CM
RO1/3 NA
CM
CM
RS485
RS485
RO2/1 NC
RO2/2 CM
RO2/3 NA
Tarjeta de I/O estándar
Terminal Señal Descripción
+10V
ref
AI1+
AI1-
AI2+
AI2-
24 V
salida
24 V
salida
Salida de referencia
Entrada analógica 1 +
Entrada analógica 1 -
Entrada analógica 2 +
Entrada analógica 2 -
Tensión auxiliar 24 V
GND de I/O
Entrada digital 1
Entrada digital 2
Entrada digital 3
Entrada digital 4
Entrada digital 5
Entrada digital 6
Común para DIN1-DIN6
Común para DIN1-DIN6
Tensión auxiliar 24 V
Tierra de I/O
Salida analógica 1 +
Salida analógica 1 -
24 V auxiliar
tensión de entrada
Bus serie, negativo
Bus serie, positivo
Salida de
relé 1
Salida de
relé 2
RO3/2 CM
RO3/3 NA
LISTO
Salida de
relé 3
FALLO
Reset de fallo
Fallo externo
Frecuencia de salida
(0...20mA)
AO1+
No usado por defecto
(por defecto: 0...10V)
Valor actual PID
(valor real)
(Por defecto 4...20 mA)
Marcha directa
Flushing (Marcha directa +
Referencia Flushing)
Selección de referencia 1/2 PID
(Abierto = Panel SP1, Cerrado = Panel SP2)
Enclavamiento de bomba
(Abierto = No disponible, Cerrado = Disponible)
Comunicación entre
convertidores
(Modbus RTU)
Transductor de
2 cables
A terminal
A en otros
convertidores
A terminal B
en otros
convertidores
FALLO
(0)4...20mA
Entrada de
termistor
GUÍA DE INICIO RÁPIDO VACON · 49
Imag. 16: Las conexiones de control por defecto de la aplicación MultiMaster
* = Disponible solo en VACON® 100 X.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

A
B
C
VACON · 50 GUÍA DE INICIO RÁPIDO
** = Para las configuraciones de los interruptores DIP de VACON® 100 X, consulte el manual
de instalación de VACON® 100 X.
Imag. 17: El interruptor DIP
A. Entradas digitales
C. Conectado a TIERRA (GND) (por defecto)
B. Aisladas
Cada convertidor tiene un sensor de presión. Cuando el nivel de redundancia es alto, el
convertidor y los sensores de presión son redundantes.
Si se produce un fallo del convertidor, el siguiente convertidor empieza a funcionar como
•
maestro.
Si se produce un fallo de sensor, el siguiente convertidor (que tiene un sensor
•
independiente) empieza a funcionar como maestro.
Un contactor individual que tiene un ajuste auto, off y man controla cada convertidor.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
+ -
0
P
I
2
4
1
3
CONVERTIDOR 1
VACON 100 FLOW
TRANSMISOR
DE 2 CABLES
SENSOR
DE PRESIÓN 1
Tensión de referencia
NO USADO (0...10 V)
FRECUENCIA DE SALIDA
(0...20 mA)
VALOR ACTUAL PID (4...20 mA)
Salida de tensión auxiliar 24 V
Entrada de tensión auxiliar 24 V
GND de I/O
GND de I/O
RESET DE FALLO
FALLO EXTERNO
MARCHA DIRECTA
Común para DIN1-DIN6
Común para DIN1-DIN6
Salida de tensión auxiliar 24 V
ENCLAVAMIENTO DE BOMBA
(No usado por defecto)
Comunicación entre unidades
(Modbus RTU)
Salida relé 1
(MARCHA)
Salida relé 2
(FALLO)
Salida relé 3
(PREPARADO)
FLUSHING
(Marcha directa + Referencia Flushing)
SELECCIÓN DE REFERENCIA DE PID
(Abierto = Panel SP1, Cerrado = Panel SP2)
DIO´S
FLOT
GND
U
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
salida
GND
DIN1
DIN2
DIN3
CM
+24 V
salida
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS48
I
U
I
U
I
OFF
ON
AnIN1
AnIN2
AO
Terminación
RS485
AUTO MAN
1S1
P1.2
Aplicación
= MultiMaster
P3.15.3
Número ID Bomba
= 1
P3.15.4
Marcha y Valor Actual
= Señales conectadas
CONVERTIDOR 1 CONVERTIDOR 2 CONVERTIDOR 3
GUÍA DE INICIO RÁPIDO VACON · 51
Imag. 18: Diagrama de cableado eléctrico del sistema MultiMaster, ejemplo 1A
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
+ -
0
P
I
2
4
1
3
CONVERTIDOR 2
VACON 100 FLOW
TRANSMISOR
DE 2 CABLES
SENSOR
DE PRESIÓN 2
Tensión de referencia
NO USADO (0...10 V)
FRECUENCIA DE SALIDA
(0...20 mA)
VALOR ACTUAL PID (4...20 mA)
Salida de tensión auxiliar 24 V
Entrada de tensión auxiliar 24 V
GND de I/O
GND de I/O
RESET DE FALLO
FALLO EXTERNO
MARCHA DIRECTA
Común para DIN1-DIN6
Común para DIN1-DIN6
Salida de tensión auxiliar 24 V
ENCLAVAMIENTO DE BOMBA
(No usado por defecto)
Comunicación entre unidades
(Modbus RTU)
Salida relé 1
(MARCHA)
Salida relé 2
(FALLO)
Salida relé 3
(PREPARADO)
FLUSHING
(Marcha directa + Referencia Flushing)
SELECCIÓN DE REFERENCIA DE PID
(Abierto = Panel SP1, Cerrado = Panel SP2)
DIO´S
FLOT
GND
U
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
salida
GND
DIN1
DIN2
DIN3
CM
+24 V
salida
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS48
I
U
I
U
I
OFF
ON
AnIN1
AnIN2
AO
Terminación
RS485
AUTO MAN
2S1
P1.2
Aplicación
= MultiMaster
P3.15.3
Número ID Bomba
= 2
P3.15.4
Marcha y Valor Actual
= Señales conectadas
CONVERTIDOR 1 CONVERTIDOR 2 CONVERTIDOR 3
VACON · 52 GUÍA DE INICIO RÁPIDO
Imag. 19: Diagrama de cableado eléctrico del sistema MultiMaster, ejemplo 1B
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
+ -
0
P
I
2
4
1
3
CONVERTIDOR 3
VACON 100 FLOW
TRANSMISOR
DE 2 CABLES
SENSOR
DE PRESIÓN 3
Tensión de referencia
NO USADO (0...10 V)
FRECUENCIA DE SALIDA
(0...20 mA)
VALOR ACTUAL PID (4...20 mA)
Salida de tensión auxiliar 24 V
Entrada de tensión auxiliar 24 V
GND de I/O
GND de I/O
RESET DE FALLO
FALLO EXTERNO
MARCHA DIRECTA
Común para DIN1-DIN6
Común para DIN1-DIN6
Salida de tensión auxiliar 24 V
ENCLAVAMIENTO DE BOMBA
(No usado por defecto)
Comunicación entre unidades
(Modbus RTU)
Salida relé 1
(MARCHA)
Salida relé 2
(FALLO)
Salida relé 3
(PREPARADO)
FLUSHING
(Marcha directa + Referencia Flushing)
SELECCIÓN DE REFERENCIA DE PID
(Abierto = Panel SP1, Cerrado = Panel SP2)
DIO´S
FLOT
GND
U
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
salida
GND
DIN1
DIN2
DIN3
CM
+24 V
salida
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS48
I
U
I
U
I
OFF
ON
AnIN1
AnIN2
AO
Terminación
RS485
AUTO MAN
3S1
P1.2
Aplicación
= MultiMaster
P3.15.3
Número ID Bomba
= 3
P3.15.4
Marcha y Valor Actual
= Señales conectadas
CONVERTIDOR 1 CONVERTIDOR 2 CONVERTIDOR 3
GUÍA DE INICIO RÁPIDO VACON · 53
Imag. 20: Diagrama de cableado eléctrico del sistema MultiMaster, ejemplo 1C
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 54 GUÍA DE INICIO RÁPIDO
Un sensor está conectado a todos los convertidores. El nivel de redundancia del sistema es
bajo porque solo los convertidores son redundantes.
Si se produce un fallo del convertidor, el siguiente convertidor empieza a funcionar como
•
maestro.
Si se produce un fallo de sensor, el sistema se detiene.
•
Un contactor individual que tiene un ajuste auto, off y man controla cada convertidor.
El terminal 17 conecta +24V entre el convertidor 1 y el convertidor 2. Diodos externos se
conectan entre los terminales 1 y 2. Las señales de entradas digitales utilizan lógica negativa
(ON = OV).
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13
GND
14
DIN4
15 DIN5
16 DIN6
17
CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B
RS485
21 RO1
22 RO1
23
RO1
24
RO2
25 RO2
26
RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9
DIN2
10 DIN3
11
CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26
RO2
32
RO3
33
RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21 RO1
22 RO1
23 RO1
24
RO2
25 RO2
26
RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
-
+
+ -
0
P
I
2
4
1
3
CONVERTIDOR 1
VACON 100 FLOW
TRANSMISOR
DE 2 CABLES
SENSOR DE
PRESIÓN 1
Tensión de referencia
NO USADO (0...10 V)
FRECUENCIA DE SALIDA
(0...20 mA)
VALOR ACTUAL PID (4...20 mA)
Salida de tensión auxiliar 24 V
Entrada de tensión auxiliar 24 V
GND de I/O
GND de I/O
RESET DE FALLO
FALLO EXTERNO
MARCHA DIRECTA
Común para DIN1-DIN6
Común para DIN1-DIN6
Salida de tensión auxiliar 24 V
ENCLAVAMIENTO DE BOMBA
(No usado por defecto)
Comunicación entre unidades
(Modbus RTU)
Salida relé 1
(MARCHA)
Salida relé 2
(FALLO)
Salida relé 3
(PREPARADO)
FLUSHING
(Marcha directa + Referencia Flushing)
SELECCIÓN DE REFERENCIA DE PID
(Abierto = Panel SP1, Cerrado = Panel SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
salida
GND
DIN1
DIN2
DIN3
CM
+24 V
salida
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
AUTO MAN
1S1
DIO´S
FLOT
GND
U
I
U
I
U
I
OFF
ON
AnIN1
AnIN2
AO
Terminación
RS485
CONVERTIDOR 1 CONVERTIDOR 2 CONVERTIDOR 3
P1.2
P3.15.3
P3.15.4
Aplicación
Número ID Bomba
Marcha y Valor Actual
= MultiMaster
= 1
= Señales conectadas
GUÍA DE INICIO RÁPIDO VACON · 55
Imag. 21: Diagrama de cableado eléctrico del sistema MultiMaster, ejemplo 2A
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13
GND
14
DIN4
15 DIN5
16 DIN6
17
CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B
RS485
21 RO1
22 RO1
23
RO1
24
RO2
25 RO2
26
RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9
DIN2
10 DIN3
11
CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26
RO2
32
RO3
33
RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21 RO1
22 RO1
23 RO1
24
RO2
25 RO2
26
RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
-
+
0
2
4
1
3
CONVERTIDOR 2
VACON 100 FLOW
Tensión de referencia
NO USADO (0...10 V)
FRECUENCIA DE SALIDA
(0...20 mA)
VALOR ACTUAL PID (4...20 mA)
Salida de tensión auxiliar 24 V
Entrada de tensión auxiliar 24 V
GND de I/O
GND de I/O
RESET DE FALLO
FALLO EXTERNO
MARCHA DIRECTA
Común para DIN1-DIN6
Común para DIN1-DIN6
Salida de tensión auxiliar 24 V
ENCLAVAMIENTO DE BOMBA
(No usado por defecto)
Comunicación entre unidades
(Modbus RTU)
Salida relé 1
(MARCHA)
Salida relé 2
(FALLO)
Salida relé 3
(PREPARADO)
FLUSHING
(Marcha directa + Referencia Flushing)
SELECCIÓN DE REFERENCIA DE PID
(Abierto = Panel SP1, Cerrado = Panel SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
salida
GND
DIN1
DIN2
DIN3
CM
+24 V
salida
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
AUTO MAN
2S1
DIO´S
FLOT
GND
U
I
U
I
U
I
OFF
ON
AnIN1
AnIN2
AO
Terminación
RS485
CONVERTIDOR 1 CONVERTIDOR 2 CONVERTIDOR 3
P1.2
P3.15.3
P3.15.4
Aplicación
Número ID Bomba
Marcha y Valor Actual
= MultiMaster
= 2
= Señales conectadas
VACON · 56 GUÍA DE INICIO RÁPIDO
Imag. 22: Diagrama de cableado eléctrico del sistema MultiMaster, ejemplo 2B
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13
GND
14
DIN4
15 DIN5
16 DIN6
17
CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B
RS485
21 RO1
22 RO1
23
RO1
24
RO2
25 RO2
26
RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9
DIN2
10 DIN3
11
CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26
RO2
32
RO3
33
RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21 RO1
22 RO1
23 RO1
24
RO2
25 RO2
26
RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
-
+
0
2
4
1
3
CONVERTIDOR 3
VACON 100 FLOW
Tensión de referencia
NO USADO (0...10 V)
FRECUENCIA DE SALIDA
(0...20 mA)
VALOR ACTUAL PID (4...20 mA)
Salida de tensión auxiliar 24 V
Entrada de tensión auxiliar 24 V
GND de I/O
GND de I/O
RESET DE FALLO
FALLO EXTERNO
MARCHA DIRECTA
Común para DIN1-DIN6
Común para DIN1-DIN6
Salida de tensión auxiliar 24 V
ENCLAVAMIENTO DE BOMBA
(No usado por defecto)
Comunicación entre unidades
(Modbus RTU)
Salida relé 1
(MARCHA)
Salida relé 2
(FALLO)
Salida relé 3
(PREPARADO)
FLUSHING
(Marcha directa + Referencia Flushing)
SELECCIÓN DE REFERENCIA DE PID
(Abierto = Panel SP1, Cerrado = Panel SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
salida
GND
DIN1
DIN2
DIN3
CM
+24 V
salida
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
AUTO MAN
3S1
DIO´S
FLOT
GND
U
I
U
I
U
I
OFF
ON
AnIN1
AnIN2
AO
Terminación
RS485
CONVERTIDOR 1 CONVERTIDOR 2 CONVERTIDOR 3
P1.2
P3.15.3
P3.15.4
Aplicación
Número ID Bomba
Marcha y Valor Actual
= MultiMaster
= 3
= Señales conectadas
GUÍA DE INICIO RÁPIDO VACON · 57
Imag. 23: Diagrama de cableado eléctrico del sistema MultiMaster, ejemplo 2C
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 58 GUÍA DE INICIO RÁPIDO
Dos convertidores tienen sensores de presión individuales. El nivel de redundancia del
sistema es medio porque los convertidores y los sensores de presión están duplicados.
Si se produce un fallo del convertidor, el segundo convertidor empieza a funcionar como
•
maestro.
Si se produce un fallo del sensor, el segundo convertidor (que tiene un sensor
•
independiente) empieza a funcionar como maestro.
Un contactor individual que tiene un ajuste auto, off y man controla cada convertidor.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

1
+10V
ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8
DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23
RO1
24 RO2
25 RO2
26 RO2
32 RO3
33
RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9
DIN2
10 DIN3
11 CM
12
+24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18
AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10
DIN3
11 CM
12 +24V out
13
GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30
+24V in
A RS485
B RS485
21 RO1
22
RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Start Signal Only
-
+
-
+
+ -
0
P
I
2
4
1
3
CONVERTIDOR 1
VACON 100 FLOW
TRANSMISOR
DE 2 CABLES
SENSOR DE
PRESIÓN 1
Tensión de referencia
NO USADO (0...10 V)
FRECUENCIA DE SALIDA
(0...20 mA)
VALOR ACTUAL PID (4...20 mA)
Salida de tensión auxiliar 24 V
Entrada de tensión auxiliar 24 V
GND de I/O
GND de I/O
RESET DE FALLO
FALLO EXTERNO
MARCHA DIRECTA
Común para DIN1-DIN6
Común para DIN1-DIN6
Salida de tensión auxiliar 24 V
ENCLAVAMIENTO DE BOMBA
(No usado por defecto)
Comunicación entre unidades
(Modbus RTU)
Salida relé 1
(MARCHA)
Salida relé 2
(FALLO)
Salida relé 3
(PREPARADO)
FLUSHING
(Marcha directa + Referencia Flushing)
SELECCIÓN DE REFERENCIA DE PID
(Abierto = Panel SP1, Cerrado = Panel SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
salida
GND
DIN1
DIN2
DIN3
CM
+24 V
salida
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
AUTO MAN
1S1
DIO´S
FLOT
GND
U
I
U
I
U
I
OFF
ON
AnIN1
AnIN2
AO
Terminación
RS485
CONVERTIDOR 1 CONVERTIDOR 2 CONVERTIDOR 3
P1.2
P3.15.3
P3.15.4
Aplicación
Número ID Bomba
Marcha y Valor Actual
= MultiMaster
= 1
= Señales conectadas
GUÍA DE INICIO RÁPIDO VACON · 59
Imag. 24: Diagrama de cableado eléctrico del sistema MultiMaster, ejemplo 3A
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

1
+10V
ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8
DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23
RO1
24 RO2
25 RO2
26 RO2
32 RO3
33
RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9
DIN2
10 DIN3
11 CM
12
+24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18
AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10
DIN3
11 CM
12 +24V out
13
GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30
+24V in
A RS485
B RS485
21 RO1
22
RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Start Signal Only
-
+
-
+
+ -
0
P
I
2
4
1
3
CONVERTIDOR 1
VACON 100 FLOW
TRANSMISOR
DE 2 CABLES
SENSOR DE
PRESIÓN 1
Tensión de referencia
NO USADO (0...10 V)
FRECUENCIA DE SALIDA
(0...20 mA)
VALOR ACTUAL PID (4...20 mA)
Salida de tensión auxiliar 24 V
Entrada de tensión auxiliar 24 V
GND de I/O
GND de I/O
RESET DE FALLO
FALLO EXTERNO
MARCHA DIRECTA
Común para DIN1-DIN6
Común para DIN1-DIN6
Salida de tensión auxiliar 24 V
ENCLAVAMIENTO DE BOMBA
(No usado por defecto)
Comunicación entre unidades
(Modbus RTU)
Salida relé 1
(MARCHA)
Salida relé 2
(FALLO)
Salida relé 3
(PREPARADO)
FLUSHING
(Marcha directa + Referencia Flushing)
SELECCIÓN DE REFERENCIA DE PID
(Abierto = Panel SP1, Cerrado = Panel SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
salida
GND
DIN1
DIN2
DIN3
CM
+24 V
salida
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
AUTO MAN
1S1
DIO´S
FLOT
GND
U
I
U
I
U
I
OFF
ON
AnIN1
AnIN2
AO
Terminación
RS485
CONVERTIDOR 1 CONVERTIDOR 2 CONVERTIDOR 3
P1.2
P3.15.3
P3.15.4
Aplicación
Número ID Bomba
Marcha y Valor Actual
= MultiMaster
= 1
= Señales conectadas
VACON · 60 GUÍA DE INICIO RÁPIDO
Imag. 25: Diagrama de cableado eléctrico del sistema MultiMaster, ejemplo 3B
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

1
+10V
ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8
DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23
RO1
24 RO2
25 RO2
26 RO2
32 RO3
33
RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9
DIN2
10 DIN3
11 CM
12
+24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18
AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10
DIN3
11 CM
12 +24V out
13
GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30
+24V in
A RS485
B RS485
21 RO1
22
RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Start Signal Only
-
+
-
+
0
2
4
1
3
CONVERTIDOR 3
VACON 100 FLOW
Tensión de referencia
NO USADO (0...10 V)
FRECUENCIA DE SALIDA
(0...20 mA)
VALOR ACTUAL PID (4...20 mA)
Salida de tensión auxiliar 24 V
Entrada de tensión auxiliar 24 V
GND de I/O
GND de I/O
RESET DE FALLO
FALLO EXTERNO
MARCHA DIRECTA
Común para DIN1-DIN6
Común para DIN1-DIN6
Salida de tensión auxiliar 24 V
ENCLAVAMIENTO DE BOMBA
(No usado por defecto)
Comunicación entre unidades
(Modbus RTU)
Salida relé 1
(MARCHA)
Salida relé 2
(FALLO)
Salida relé 3
(PREPARADO)
FLUSHING
(Marcha directa + Referencia Flushing)
SELECCIÓN DE REFERENCIA DE PID
(Abierto = Panel SP1, Cerrado = Panel SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
salida
GND
DIN1
DIN2
DIN3
CM
+24 V
salida
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
AUTO MAN
3S1
DIO´S
FLOT
GND
U
I
U
I
U
I
OFF
ON
AnIN1
AnIN2
AO
Terminación
RS485
CONVERTIDOR 1 CONVERTIDOR 2 CONVERTIDOR 3
P1.2
P3.15.3
P3.15.4
Aplicación
Número ID Bomba
Marcha y Valor Actual
= MultiMaster
= 3
= Señales conectadas
GUÍA DE INICIO RÁPIDO VACON · 61
Imag. 26: Diagrama de cableado eléctrico del sistema MultiMaster, ejemplo 3C
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 62 GUÍA DE INICIO RÁPIDO
Un sensor de presión común está conectado a 2 convertidores. El nivel de redundancia del
sistema es bajo porque solo los convertidores son redundantes.
Si se produce un fallo del convertidor, el segundo convertidor empieza a funcionar como
•
maestro.
Si se produce un fallo de sensor, el sistema se detiene.
•
Un contactor individual que tiene un ajuste auto, off y man controla cada convertidor.
El terminal 17 conecta +24V entre el convertidor 1 y el convertidor 2. Diodos externos se
conectan entre los terminales 1 y 2. Las señales de entradas digitales utilizan lógica negativa
(ON = OV).
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

+ -
0
P
I
2
4
1
3
CONVERTIDOR 1
VACON 100 FLOW
TRANSMISOR
DE 2 CABLES
SENSOR DE
PRESIÓN 1
Tensión de referencia
NO USADO (0...10 V)
FRECUENCIA DE SALIDA
(0...20 mA)
VALOR ACTUAL PID (4...20 mA)
Salida de tensión auxiliar 24 V
Entrada de tensión auxiliar 24 V
GND de I/O
GND de I/O
RESET DE FALLO
FALLO EXTERNO
MARCHA DIRECTA
Común para DIN1-DIN6
Común para DIN1-DIN6
Salida de tensión auxiliar 24 V
ENCLAVAMIENTO DE BOMBA
(No usado por defecto)
Comunicación entre unidades
(Modbus RTU)
Salida relé 1
(MARCHA)
Salida relé 2
(FALLO)
Salida relé 3
(PREPARADO)
FLUSHING
(Marcha directa + Referencia Flushing)
SELECCIÓN DE REFERENCIA DE PID
(Abierto = Panel SP1, Cerrado = Panel SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
salida
GND
DIN1
DIN2
DIN3
CM
+24 V
salida
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
AUTO MAN
1S1
DIO´S
FLOT
GND
U
I
U
I
U
I
OFF
ON
AnIN1
AnIN2
AO
Terminación
RS485
CONVERTIDOR 1 CONVERTIDOR 2 CONVERTIDOR 3
P1.2
P3.15.3
P3.15.4
Aplicación
Número ID Bomba
Marcha y Valor Actual
= MultiMaster
= 1
= Señales conectadas
GUÍA DE INICIO RÁPIDO VACON · 63
Imag. 27: Diagrama de cableado eléctrico del sistema MultiMaster, ejemplo 4A
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

0
2
4
1
3
CONVERTIDOR 2
VACON 100 FLOW
Tensión de referencia
NO USADO (0...10 V)
FRECUENCIA DE SALIDA
(0...20 mA)
VALOR ACTUAL PID (4...20 mA)
Salida de tensión auxiliar 24 V
Entrada de tensión auxiliar 24 V
GND de I/O
GND de I/O
RESET DE FALLO
FALLO EXTERNO
MARCHA DIRECTA
Común para DIN1-DIN6
Común para DIN1-DIN6
Salida de tensión auxiliar 24 V
ENCLAVAMIENTO DE BOMBA
(No usado por defecto)
Comunicación entre unidades
(Modbus RTU)
Salida relé 1 (MARCHA)
Salida relé 2 (FALLO)
Salida relé 3 (PREPARADO)
FLUSHING
(Marcha directa + Referencia Flushing)
SELECCIÓN DE REFERENCIA DE PID
(Abierto = Panel SP1, Cerrado = Panel SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10Vref
AI2+
AI1-
AI2+
AI2-
+24 Vsalida
+24 Vsalida
GND
DIN1
DIN2
DIN3
CM
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 Vin
RS485
RS485
AUTO MAN
2S1
DIO´S
FLOT
GND
U
I
U
I
U
I
OFF
ON
AnIN1
AnIN2
AO
Terminación
RS485
CONVERTIDOR 1 CONVERTIDOR 2 CONVERTIDOR 3
P1.2
P3.15.3
P3.15.4
Aplicación
Número ID Bomba
Marcha y Valor Actual
= MultiMaster
= 2
= Señales conectadas
VACON · 64 GUÍA DE INICIO RÁPIDO
Imag. 28: Diagrama de cableado eléctrico del sistema MultiMaster, ejemplo 4B
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

0
2
4
1
3
CONVERTIDOR 3
VACON 100 FLOW
Tensión de referencia
NO USADO (0...10 V)
FRECUENCIA DE SALIDA
(0...20 mA)
VALOR ACTUAL PID (4...20 mA)
Salida de tensión auxiliar 24 V
Entrada de tensión auxiliar 24 V
GND de I/O
GND de I/O
RESET DE FALLO
FALLO EXTERNO
MARCHA DIRECTA
Común para DIN1-DIN6
Común para DIN1-DIN6
Salida de tensión auxiliar 24 V
ENCLAVAMIENTO DE BOMBA
(No usado por defecto)
Comunicación entre unidades
(Modbus RTU)
Salida relé 1
(MARCHA)
Salida relé 2
(FALLO)
Salida relé 3
(PREPARADO)
FLUSHING
(Marcha directa + Referencia Flushing)
SELECCIÓN DE REFERENCIA DE PID
(Abierto = Panel SP1, Cerrado = Panel SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
salida
GND
DIN1
DIN2
DIN3
CM
+24 V
salida
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
AUTO MAN
3S1
DIO´S
FLOT
GND
U
I
U
I
U
I
OFF
ON
AnIN1
AnIN2
AO
Terminación
RS485
CONVERTIDOR 1 CONVERTIDOR 2 CONVERTIDOR 3
P1.2
P3.15.3
P3.15.4
Aplicación
Número ID Bomba
Marcha y Valor Actual
= MultiMaster
= 3
= Señales conectadas
GUÍA DE INICIO RÁPIDO VACON · 65
Imag. 29: Diagrama de cableado eléctrico del sistema MultiMaster, ejemplo 4C
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 66 GUÍA DE INICIO RÁPIDO
Un sensor de presión está conectado al primer convertidor. El sistema no es redundante,
porque se detiene si se produce un fallo de convertidor o de sensor.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

+ -
P
I
2
1
CONVERTIDOR 1
VACON 100 FLOW
TRANSMISOR
DE 2 CABLES
SENSOR
DE PRESIÓN 1
Tensión de referencia
NO USADO (0...10 V)
FRECUENCIA DE SALIDA
(0...20 mA)
VALOR ACTUAL PID (4...20 mA)
Salida de tensión auxiliar 24 V
Entrada de tensión auxiliar 24 V
GND de I/O
GND de I/O
RESET DE FALLO
FALLO EXTERNO
MARCHA DIRECTA
Común para DIN1-DIN6
Común para DIN1-DIN6
Salida de tensión auxiliar 24 V
ENCLAVAMIENTO DE BOMBA
(No usado por defecto)
Comunicación entre unidades
(Modbus RTU)
Salida relé 1
(MARCHA)
Salida relé 2
(FALLO)
Salida relé 3
(PREPARADO)
FLUSHING
(Marcha directa + Referencia Flushing)
SELECCIÓN DE REFERENCIA DE PID
(Abierto = Panel SP1, Cerrado = Panel SP2)
DIO´S
FLOT
GND
U
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
salida
GND
DIN1
DIN2
DIN3
CM
+24 V
salida
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS48
I
U
I
U
I
OFF
ON
AnIN1
AnIN2
AO
Terminación
RS485
1S1
P1.2
Aplicación
= MultiMaster
P3.15.3
Número ID Bomba
= 1
P3.15.4
Marcha y Valor Actual
= Señales conectadas
CONVERTIDOR 1 CONVERTIDOR 2 CONVERTIDOR 3
STOP
ARRANQUE
ORDEN DE
MARCHA
DEL SISTEMA
GUÍA DE INICIO RÁPIDO VACON · 67
Imag. 30: Diagrama de cableado eléctrico del sistema MultiMaster, ejemplo 5A
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

CONVERTIDOR 2
VACON 100 FLOW
Tensión de referencia
NO USADO (0...10 V)
FRECUENCIA DE SALIDA
(0...20 mA)
VALOR ACTUAL PID (4...20 mA)
Salida de tensión auxiliar 24 V
Entrada de tensión auxiliar 24 V
GND de I/O
GND de I/O
RESET DE FALLO
FALLO EXTERNO
MARCHA DIRECTA
Común para DIN1-DIN6
Común para DIN1-DIN6
Salida de tensión auxiliar 24 V
ENCLAVAMIENTO DE BOMBA
(No usado por defecto)
Comunicación entre unidades
(Modbus RTU)
Salida relé 1 (MARCHA)
Salida relé 2 (FALLO)
Salida relé 3 (PREPARADO)
FLUSHING
(Marcha directa + Referencia Flushing)
SELECCIÓN DE REFERENCIA DE PID
(Abierto = Panel SP1, Cerrado = Panel SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10Vref
AI2+
AI1-
AI2+
AI2-
+24 Vsalida
+24 Vsalida
GND
DIN1
DIN2
DIN3
CM
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 Vin
RS485
RS485
DIO´S
FLOT
GND
U
I
U
I
U
I
OFF
ON
AnIN1
AnIN2
AO
Terminación
RS485
CONVERTIDOR 1 CONVERTIDOR 2 CONVERTIDOR 3
P1.2
P3.15.3
P3.15.4
Aplicación
Número ID Bomba
Marcha y Valor Actual
= MultiMaster
= 2
= Señales conectadas
VACON · 68 GUÍA DE INICIO RÁPIDO
Imag. 31: Diagrama de cableado eléctrico del sistema MultiMaster, ejemplo 5B
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

CONVERTIDOR 3
VACON 100 FLOW
Tensión de referencia
NO USADO (0...10 V)
FRECUENCIA DE SALIDA (0...20 mA)
VALOR ACTUAL PID (4...20 mA)
Salida de tensión auxiliar 24 V
Entrada de tensión auxiliar 24 V
GND de I/O
GND de I/O
RESET DE FALLO
FALLO EXTERNO
MARCHA DIRECTA
Común para DIN1-DIN6
Común para DIN1-DIN6
Salida de tensión auxiliar 24 V
ENCLAVAMIENTO DE BOMBA
(No usado por defecto)
Comunicación entre unidades
(Modbus RTU)
Salida relé 1 (MARCHA)
Salida relé 2 (FALLO)
Salida relé 3 (PREPARADO)
FLUSHING
(Marcha directa + Referencia Flushing)
SELECCIÓN DE REFERENCIA DE PID
(Abierto = Panel SP1, Cerrado = Panel SP2)
DIO´S
FLOT
GND
U
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
salida
GND
DIN1
DIN2
DIN3
CM
+24 V
salida
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
I
U
I
U
I
OFF
ON
AnIN1
AnIN2
AO
Terminación
RS485
CONVERTIDOR 1 CONVERTIDOR 2 CONVERTIDOR 3
P1.2
P3.15.3
P3.15.4
Aplicación
Número ID Bomba
Marcha y Valor Actual
= MultiMaster
= 3
= Señales conectadas
GUÍA DE INICIO RÁPIDO VACON · 69
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 70 GUÍA DE INICIO RÁPIDO
Tabla 11: M1.1 Asistentes
Índice Parámetro Mín. Máx. Unidad
1.1.1
1.1.2
Asistente de puesta
en marcha
Asistente de modo
Anti-Incendio
0 1 0 1170
0 1 0 1672
Por
defecto
ID Descripción
0 = No activar
1 = Activar
La selección Activar
inicia el Asistente para
la puesta en marcha
(vea el Capítulo 1.3 Pri-
mera puesta en marcha).
La opción Activar inicia
el asistente de modo
Anti-Incendio (consulte
el capítulo 1.3 Primera
puesta en marcha).
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

GUÍA DE INICIO RÁPIDO VACON · 71
Tabla 12: M1 Guía rápida
Índice Parámetro Mín. Máx. Unidad
1.2
Aplicación 0 4 2 212
1.3
1.4
1.5
Frecuencia
mínima
Frecuencia
máxima
Tiempo de
aceleración
1
0.00 P1.4 Hz 0.0 101
P1.3 320.0 Hz
0.1 3000.0 s 5.0 103
Por
defecto
50.0 /
60.0
ID Descripción
0 = Estándar
1 = HVAC
2 = Control PID
3 = PFC
4 = MultiMaster
La referencia de frecuencia mínima que
se acepta.
La referencia de fre-
102
cuencia máxima que
se acepta.
Proporciona la cantidad de tiempo que se
necesita para que la
frecuencia de salida
aumente de la frecuencia 0 a la frecuencia máxima.
1.6
1.7
1.8
1.9
Tiempo de
decelera-
ción 1
Límite de
intensidad
del motor
Tipo de
motor
Tensión
nominal del
motor
0.1 3000.0 s 5.0 104
IH*0.1 I
0 2 0 650
Varía Varía V Varía 110
S
A Varía 107
Proporciona la cantidad de tiempo que se
necesita para que la
frecuencia de salida
disminuya de la frecuencia máxima a la
frecuencia 0.
La intensidad
máxima del motor
desde el convertidor.
0 = Motor Inducción
1 = Imanes permanentes
2 = Motor de reluctancia
Busque este valor U
en la placa de características del motor.
NOTA!
Averigüe si la conexión es estrella o
triángulo.
n
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 72 GUÍA DE INICIO RÁPIDO
Tabla 12: M1 Guía rápida
Índice Parámetro Mín. Máx. Unidad
Frecuencia
1.10
1.11
1.12
1.13
1.14
nominal del
motor
Velocidad
nominal del
motor
Intensidad
nominal del
motor
Cos phi
motor (Fac-
tor de
potencia)
Optimiza-
ción de
energía
8.0 320.0 Hz
24 19200 Rpm Varía 112
IH * 0.1 I
0.30 1.00 Varía 120
0 1 0 666
S
A Varía 113
Por
defecto
50.0 /
60.0
ID Descripción
Busque este valor f
111
en la placa de características del motor.
Busque este valor n
en la placa de características del motor.
Busque este valor I
en la placa de características del motor.
Busque este valor en
la placa de características del motor.
El convertidor busca
la intensidad mínima
del motor para consumir menos energía
y reducir el ruido del
motor. Utilice esta
función con, por
ejemplo, los procesos de la bomba y el
ventilador.
n
n
n
1.15
Identifica-
ción
0 2 0 631
0 = Deshabilitado
1 = Habilitado
La identificación en
marcha calcula o
mide los parámetros
del motor que son
necesarios para
obtener un buen
control del motor y
la velocidad.
0 = Sin acción
1 = Sin giro
2 = Con giro
Antes de realizar la
identificación en
marcha, debe establecer los parámetros de la placa de
características del
motor.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

GUÍA DE INICIO RÁPIDO VACON · 73
Tabla 12: M1 Guía rápida
Índice Parámetro Mín. Máx. Unidad
1.16
1.17 Tipo de Paro 0 1 0 506
1.18
1.19
Tipo de Mar-
cha
Reset auto-
mático
Respuesta
frente a fallo
externo
0 1 0 505
0 1 0 731
0 3 2 701
Por
defecto
ID Descripción
0 = Rampa
1 = Arranque al
vuelo
0 = Deshabilitado
1 = Habilitado
0 = Deshabilitado
1 = Habilitado
0 = Sin acción
1 = Alarma
2 = Fallo (paro de
acuerdo con modo
de paro)
3 = Fallo (mediante
paro libre)
1.20
1.21
Respuesta
frente a fallo
de AI < 4mA
Lugar Con-
trol Remoto
0 5 0 700
0 1 0 172
0 = Sin acción
1 = Alarma
2 = Alarma + frecuencia de fallo fija
(P3.9.1.13)
3 = Alarma + frecuencia previa
4 = Fallo (paro de
acuerdo con el modo
de paro)
5 = Fallo (mediante
paro libre)
La selección del
lugar de control
remoto (marcha/
paro).
0 = Control de I/O
1 = Control de Fieldbus
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 74 GUÍA DE INICIO RÁPIDO
Tabla 12: M1 Guía rápida
Índice Parámetro Mín. Máx. Unidad
Selección de
la referencia
1.22
de control
de I/O lugar
A
1 20 6 117
Por
defecto
ID Descripción
La selección de la
referencia de frecuencia cuando el
lugar de control I/O
es A.
0 = PC
1 = Frecuencia fija 0
2 = Referencia Panel
3 = Fieldbus
4 = AI1
5 = AI2
6 = AI1+AI2
7 = Referencia PID
8 = Potenciómetro
motorizado
11 = Block Out.1
12 = Block Out.2
13 = Block Out.3
14 = Block Out.4
15 = Block Out.5
16 = Block Out.6
17 = Block Out.7
18 = Block Out.8
19 = Block Out.9
20 = Block Out.10
1.23
1.24
1.25
1.26
Selección de
la referencia
de control
del panel
Selección de
referencia
de control
de Fieldbus
Rango señal
entrada
analógica 1
(AI1)
Rango señal
entrada
analógica 2
(AI2)
1 20 1 121
1 20 2 122
0 1 0 379
0 1 1 390
La aplicación que se
establece con el
parámetro 1.2 proporciona el valor por
defecto.
Consulte P1.22.
Consulte P1.22.
0= 0..10V / 0..20mA
1= 2..10V / 4..20mA
0= 0..10V / 0..20mA
1= 2..10V / 4..20mA
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

GUÍA DE INICIO RÁPIDO VACON · 75
Tabla 12: M1 Guía rápida
Índice Parámetro Mín. Máx. Unidad
Función
1.27
1.28
1.29
1.30
para salida
de relé 1
(RO1)
Función de
salida de
relé 2 (RO2)
Función
para salida
de relé 3
(RO3)
Función
salida ana-
lógica 1
(AO1)
0 73 2 11001
0 73 3 11004
0 73 1 11007
0 31 2 10050
Por
defecto
ID Descripción
Consulte P3.5.3.2.1
Consulte P3.5.3.2.1
Consulte P3.5.3.2.1
Consulte P3.5.4.1.1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 76 GUÍA DE INICIO RÁPIDO
Tabla 13: M1.35 MultiMaster
Índice Ocultación Mín. Máx. Unidad
1.35.1 Ganancia de PID 0.00 100.00 % 100.00 118
1.35.2
1.35.3
Tiempo integral
PID
Tiempo derivada
PID
0.00 600.00 s 1.00 119
0.00 100.00 s 0.00 1132
Por
defecto
ID Descripción
SI el valor del parámetro se establece
en 100%, un cambio del 10% del
valor del error
hace que la salida
del controlador
cambie en un 10%.
Si este parámetro
se establece en
1,00 seg., un cambio del 10% en el
valor de error provocará que la
salida del controlador cambie en un
10,00%/seg.
Si este parámetro
se establece en
1,00 seg., un cambio del 10 % en el
valor de error
durante 1,00 seg.
provocará que la
salida del controlador cambie en un
10,00 %.
1.35.4
1.35.5
1.35.6
1.35.7
1.35.8
Unidades de pro-
ceso
Unidad mínima
de proceso
Unidad máxima
de proceso
Selección de
valor actual 1
Selección refe-
rencia 1 PID
1 44 1 1036
Varía Varía Varía 1033
Varía Varía Varía 1034
0 30 2 334
0 32 1 332
Se selecciona la
unidad del proceso.
Consulte P3.13.1.4
El valor de la unidad de proceso que
es el mismo que el
0% de la señal de
valor actual de PID.
El valor de la unidad de proceso que
es el mismo que el
100% de la señal
de valor actual de
PID.
Consulte P3.13.3.3
Consulte P3.13.2.6
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

GUÍA DE INICIO RÁPIDO VACON · 77
Tabla 13: M1.35 MultiMaster
Índice Ocultación Mín. Máx. Unidad
1.35.9
1.35.10
1.35.11
Referencia panel
1
Límite Frecuen-
cia dormir 1
Retraso de dor-
mir de SP1
Varía Varía Varía 0 167
0.0 320.0 Hz 0.0 1016
0 3000 s 0 1017
Por
defecto
ID Descripción
El convertidor pasa
al modo dormir
cuando la frecuencia de salida se
mantiene por
debajo de este
límite durante un
tiempo superior al
especificado en el
parámetro Retardo
al dormir.
0 = Deshabilitado
Período mínimo de
tiempo que la frecuencia se mantiene por debajo del
nivel de dormir
antes de que se
detenga el convertidor.
0 = Deshabilitado
1.35.12 Nivel despertar 1 Varía Varía Varía Varía 1018
1.35.13
1.35.14
Modo multi-
bomba
Número de bom-
bas
0 2 0 1785
1 8 1 1001
El valor de despertar de la supervisión de valor actual
de PID. El Nivel de
despertar 1 utiliza
las unidades de
proceso seleccionadas.
0 = Deshabilitado
Selecciona el modo
multibomba.
0 = PFC
1 = MultiFollower
2 = MultiMaster
Número total de
motores (bombas/
ventiladores) utilizados en el sistema
multibomba.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 78 GUÍA DE INICIO RÁPIDO
Tabla 13: M1.35 MultiMaster
Índice Ocultación Mín. Máx. Unidad
1.35.15
1.35.16
Número ID
Bomba
Señales de mar-
cha y valor
actual
1 8 1 1500
0 2 1 1782
Por
defecto
ID Descripción
El número de
orden del convertidor en el sistema
de bombas. Este
parámetros solo se
utiliza en los
modos MultiFollower o MultiMaster.
Este parámetro se
utiliza para seleccionar si la señal
de marcha y/o las
señales de retroalimentación de PID
están conectadas a
la unidad.
0=Señales no
conectadas
1=Solo señal de
marcha conectada
2=Señales conectadas
1.35.17 Enclavamientos 0 1 1 1032
1.35.18
Rotación auto-
mática
0 1 1 1027
Habilitar/deshabilitar enclavamientos. Los enclavamientos notifican al
sistema si un
motor está conectado o no.
0 = Deshabilitado
1 = Habilitado
(Intervalo)
Deshabilitar/habilitar la rotación del
orden de arranque
y la prioridad de los
motores.
0 = Deshabilitado
1 = Habilitado
(intervalo)
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

GUÍA DE INICIO RÁPIDO VACON · 79
Tabla 13: M1.35 MultiMaster
Índice Ocultación Mín. Máx. Unidad
Bomba rotada
1.35.19
1.35.20
1.35.21
automática-
mente
Intervalo de
rotación automá-
tica
Días para rota-
ción automática
0 1 1 1028
0.0 3000.0 h 48.0 1029
0 127 1786
Por
defecto
ID Descripción
0 = Bombas auxiliares
1 = Todas las bombas
Cuando se utiliza el
tiempo especificado por este parámetro, se inicia la
función de rotación
automática. Pero la
rotación automática solo se inicia si
la capacidad está
por debajo del nivel
especificado por
los parámetros
P1.35.23 y
P1.35.24.
Rango: Lunes a
sábado
1.35.22
1.35.23
1.35.24
1.35.25
Hora del día de
rotación automá-
tica
Rotación auto-
mática: Límite de
frecuencia
Rotación auto-
mática: Limite de
bombas
Límite de cone-
xión/desconexión
auxiliares
Hora 1787
0.00 P3.3.1.2 Hz 25:00 1031
1 6 1030
0 100 % 10 1097
Rango: 00:00:00 a
23:59:59
Estos parámetros
establecen el nivel
por debajo del cual
debe mantenerse
la capacidad para
que se inicie la
rotación automática.
Cuando el valor
actual se mantiene
entre 4,5 y 5,5 bar,
el motor permanece conectado.
Referencia = 5 bar
Límite de conexión/desconexión
auxiliares = 10%
Cuando el valor
actual se mantiene
entre 4,5 y 5,5 bar,
el motor permanece conectado.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 80 GUÍA DE INICIO RÁPIDO
Tabla 13: M1.35 MultiMaster
Índice Ocultación Mín. Máx. Unidad
Tiempo de cone-
1.35.26
1.35.27
1.35.28
xión/desconexión
auxiliares
Velocidad de
producción cons-
tante
Enclavamiento
de bomba 1
0 3600 s 10 1098
0 100 % 100 1513
Por
defecto
DigIN
ranura
0.1
ID Descripción
Cuando el valor
actual está fuera
del límite de conexión/desconexión
auxiliares, el
tiempo, pasado el
cual, se añaden o
se quitan bombas.
Proporciona la
velocidad constante a la que la
bomba se bloquea
cuando llega a la
frecuencia máxima.
La siguiente bomba
inicia la regulación
en modo MultiMaster.
426
OPEN = No activo
CLOSED = Activo
1.35.29
Referencia Flus-
hing
Referencia
máxima
Referencia
máxima
HZ 50.00 1239
Proporciona la
referencia de frecuencia cuando la
función de limpieza
está activada.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

ASISTENTES VACON · 81
2 ASISTENTES
2.1 ASISTENTE DE APLICACIÓN ESTÁNDAR
El asistente de aplicación le ayuda a establecer los parámetros básicos que están
relacionados con la aplicación.
Para iniciar el asistente de aplicación estándar, establezca el valor Estándar en P1.2
Aplicación (ID 212) en el panel.
NOTA!
Si se inicia el Asistente de aplicación Estándar desde el Asistente para puesta en
marcha, el asistente irá directamente al paso 11.
Establecer un valor para P3.1.2.2 Tipo de motor
1
(para que coincida con la placa de características
del motor)
Imanes permanentes
Motor Inducción
Motor de reluctancia
Establecer un valor para P3.1.1.1 Tensión nominal
2
3
4
5
del motor (para que coincida con la placa de características del motor)
Establecer un valor para P3.1.1.2 Frecuencia nominal del motor (para que coincida con la placa de
características del motor)
Establecer un valor para P3.1.1.3 Velocidad nominal
del motor (para que coincida con la placa de características del motor)
Establecer un valor para P3.1.1.4 Intensidad nominal del motor (para que coincida con la placa de
características del motor)
Rango: Varía
Rango: 8.00-320.00 Hz
Rango: 24-19200 rpm
Rango: Varía
El paso 6 solo muestra datos si se ha seleccionado Motor Inducción en el paso 1.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 82 ASISTENTES
6 Establecer un valor para P3.1.1.5 Cos phi motor Rango: 0.30-1.00
10
11
7
8
9
Establecer un valor para P3.3.1.1 Frecuencia
mínima
Establecer valor para P3.3.1.2 Referencia de frecuencia máxima
Establecer un valor para P3.4.1.2 Tiempo de aceleración 1
Establecer valor para P3.4.1.3 tiempo de deceleración 1
Seleccione el lugar de control que proporciona al
convertidor los comandos de marcha o paro y la
referencia de frecuencia.
Rango: 0.00-P3.3.1.2 Hz
Rango: P3.3.1.1-320.00 Hz
Rango: 0,1-3000.0 s
Rango: 0,1-3000.0 s
Terminal I/O
Fieldbus
Panel
El asistente de aplicación estándar se ha completado.
2.2 ASISTENTE DE APLICACIÓN HVAC
El asistente de aplicación le ayuda a establecer los parámetros básicos que están
relacionados con la aplicación.
Para iniciar el asistente de aplicación HVAC, establezca el valor HVAC en el parámetro P1.2
Aplicación (ID 212) en el panel.
Seleccione el tipo de proceso (o aplicación) que se
desea controlar.
1
Compresor
Ventilador
Bomba
Otros
Algunos parámetros tienen valores fijos especificados por la selección realizada en el paso
1. Vea los parámetros y sus valores al final de este capítulo en Tabla 14.
2
Establecer un valor para P3.2.11 Retraso Rearranque.
Rango: 0-20 min
El paso 2 solo muestra datos si se ha seleccionado Compresor en el paso 1.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

ASISTENTES VACON · 83
Establecer un valor para P3.1.2.2 Tipo de motor
3
(para que coincida con la placa de características
del motor)
Imanes permanentes
Motor Inducción
Motor de reluctancia
Establecer un valor para P3.1.1.1 Tensión nominal
4
5
6
7
8
del motor (para que coincida con la placa de características del motor)
Establecer un valor para P3.1.1.2 Frecuencia nominal del motor (para que coincida con la placa de
características del motor)
Establecer un valor para P3.1.1.3 Velocidad nominal
del motor (para que coincida con la placa de características del motor)
Establecer un valor para P3.1.1.4 Intensidad nominal del motor (para que coincida con la placa de
características del motor)
Establecer un valor para P3.1.1.5 Cos Phi motor
(para que coincida con la placa de características
del motor)
Rango: Varía
Rango: 8.00-320.00 Hz
Rango: 24-19200 rpm
Rango: Varía
Rango: 0.30-1.00
El paso 8 solo muestra datos si se ha seleccionado Motor Inducción en el paso 3.
9
10 Establecer valor para P3.3.1.2 Frecuencia máxima Rango: P3.3.1.1-320.00 Hz
Establecer un valor para P3.3.1.1 Frecuencia
mínima
Rango: 0.00-3.3.1.2 Hz
Los pasos 11 y 12 solo muestran datos si se ha seleccionado Otros en el paso 1.
11
12
Establecer un valor para P3.4.1.2 Tiempo de aceleración 1
Establecer un valor para P3.4.1.3 Tiempo de deceleración 1
Rango: 0,1-3000.0 s
Rango: 0,1-3000.0 s
A continuación, el asistente va a los pasos especificados por la aplicación.
Seleccione el lugar de control (donde se proporcio-
13
nan los comandos de marcha y paro y la referencia
de frecuencia)
Terminal I/O
Fieldbus
Panel
El asistente de aplicación HVAC se ha completado.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 84 ASISTENTES
Tabla 14: Valores fijos de parámetros
Tipo de proceso
Índice Parámetro
Bomba Ventilador Compresor
P3.1.4.1 Ratio U/f Lineal Cuadrática Lineal
P3.2.4 Función de arran-
que
P3.2.5 Función de paro Rampas Paro libre Rampas
P3.4.1.2 Tiempo de acelera-
ción
P3.4.1.3 Tiempo de decelera-
ción
Rampas Arranque al vuelo Rampas
5.0 s 30.0 s 30 s
5.0 s 30.0 s 30 s
2.3 ASISTENTE DE APLICACIÓN DE CONTROL PID
El asistente de aplicación le ayuda a establecer los parámetros básicos que están
relacionados con la aplicación.
Para iniciar el asistente de aplicación de control PID, establezca el valor de Control PID en el
parámetro P1.2 Aplicación (ID 212) en el panel.
NOTA!
Si se inicia el asistente de aplicación desde el Asistente para puesta en marcha, el
asistente irá directamente al paso 11.
Establecer un valor para P3.1.2.2 Tipo de motor
1
2
3
4
5
(para que coincida con la placa de características
del motor)
Establecer un valor para P3.1.1.1 Tensión nominal
del motor (para que coincida con la placa de características del motor)
Establecer un valor para P3.1.1.2 Frecuencia nominal del motor (para que coincida con la placa de
características del motor)
Establecer un valor para P3.1.1.3 Velocidad nominal
del motor (para que coincida con la placa de características del motor)
Establecer un valor para P3.1.1.4 Intensidad nominal del motor (para que coincida con la placa de
características del motor)
Imanes permanentes
Motor Inducción
Motor de reluctancia
Rango: Varía
Rango: 8.00…320.00 Hz
Rango: 24…19200 rpm
Rango: Varía
El paso 6 solo muestra datos si se ha seleccionado Motor Inducción en el paso 1.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

ASISTENTES VACON · 85
6 Establecer un valor para P3.1.1.5 Cos phi motor Rango: 0.30-1.00
10
11
12
7
8
9
Establecer un valor para P3.3.1.1 Frecuencia
mínima
Establecer valor para P3.3.1.2 Referencia de frecuencia máxima
Establecer un valor para P3.4.1.2 Tiempo de aceleración 1
Establecer valor para P3.4.1.3 tiempo de deceleración 1
Seleccione un lugar de control (donde se proporcionan los comandos de marcha y paro y la referencia
de frecuencia)
Establecer un valor para P3.13.1.4 Selección de unidad de proceso
Rango: 0.00-P3.3.1.2 Hz
Rango: P3.3.1.1-320.00 Hz
Rango: 0,1-3000.0 s
Rango: 0,1-3000.0 s
Terminal I/O
Fieldbus
Panel
Más de una selección
Si se selecciona algo diferente a %, aparecerán las siguientes preguntas. Si selecciona %, el
asistente irá directamente al paso 16.
13
Establecer un valor para P3.13.1.5 Mínima unidad
de proceso
El rango se especifica mediante la selección
que se realiza en el paso 12.
14
15
16
Establecer un valor para P3.13.1.6 Máxima unidad
de proceso
Establecer un valor para P3.13.1.7 Decimales de
unidad de proceso
Establecer un valor para P3.13.3.3 Selección de
fuente de valor actual 1
El rango se especifica mediante la selección
que se realiza en el paso 12.
Rango: 0-4
Vea la tabla Ajustes de valor actual en Tabla
75 Ajustes de valor actual
Si selecciona una señal de entrada analógica, verá el paso 18. Con otras selecciones, el
asistente irá al paso 19.
Establecer el rango de señal de la entrada analó-
17
18
19
gica
Establecer un valor para P3.13.1.8 Inversión del
error
Establecer un valor para P3.13.2.6 Selección de
referencia
0 = 0-10V/0-20mA
1 = 2-10V/4-20mA
0 = Normal
1 = Invertido
Vea la tabla Referencias en Tabla 75 Ajustes
de valor actual
Si selecciona una señal de entrada analógica, el paso 21 muestra datos. Con otras
selecciones, el asistente irá al paso 23.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 86 ASISTENTES
Si establece Referencia de panel 1 o Referencia de panel 2 como valor, el asistente irá
directamente al paso 22.
Establecer el rango de señal de la entrada analó-
20
gica
0 = 0-10V/0-20mA
1 = 2-10V/4-20mA
21
22
Establecer un valor para P3.13.2.6 (Referencia de
panel 1) y P3.13.2.2 (Referencia de panel 2)
Utilice la función dormir
Especificado mediante el rango establecido
en el paso 20
0 = No
1 = Sí
Si proporciona el valor Sí en la pregunta 22, verá las siguientes tres preguntas. Si
proporciona el valor No, el asistente finalizará.
23
24
25
Establecer un valor para P3.13.5.1 SP1 Límite frecuencia dormir
Establecer un valor para P3.13.5.2 SP1 Retraso de
dormir
Establecer un valor para P3.13.5.3 SP1 Nivel despertar
Rango: 0.00-320.00 Hz
Rango: 0-3000 s
El rango se especifica mediante la unidad de
proceso establecida.
El asistente de aplicación Control PID se ha completado.
2.4 ASISTENTE DE APLICACIÓN MULTIBOMBA (PFC)
El asistente de aplicación le ayuda a establecer los parámetros básicos que están
relacionados con la aplicación.
Para iniciar el Asistente de aplicación multibomba (PFC), establezca el valor PFC en el
parámetro P1.2 Aplicación (ID 212) en el panel.
NOTA!
Si se inicia el asistente de aplicación desde el Asistente para puesta en marcha, el
asistente irá directamente al paso 11.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

ASISTENTES VACON · 87
Establecer un valor para P3.1.2.2 Tipo de motor
1
(para que coincida con la placa de características
del motor)
Imanes permanentes
Motor Inducción
Motor de reluctancia
Establecer un valor para P3.1.1.1 Tensión nominal
2
3
4
5
del motor (para que coincida con la placa de características del motor)
Establecer un valor para P3.1.1.2 Frecuencia nominal del motor (para que coincida con la placa de
características del motor)
Establecer un valor para P3.1.1.3 Velocidad nominal
del motor (para que coincida con la placa de características del motor)
Establecer un valor para P3.1.1.4 Intensidad nominal del motor (para que coincida con la placa de
características del motor)
Rango: Varía
Rango: 8.00-320.00 Hz
Rango: 24-19200 rpm
Rango: Varía
El paso 6 solo muestra datos si se ha seleccionado Motor Inducción en el paso 1.
6
7
8
Establecer un valor para P3.1.1.5 Cos phi motor Rango: 0.30-1.00
Establecer un valor para P3.3.1.1 Frecuencia
mínima
Establecer valor para P3.3.1.2 Referencia de frecuencia máxima
Rango: 0.00-P3.3.1.2 Hz
Rango: P3.3.1.1-320.00 Hz
10
11
12
9
Establecer un valor para P3.4.1.2 Tiempo de aceleración 1
Establecer valor para P3.4.1.3 tiempo de deceleración 1
Seleccione un lugar de control (donde se proporcionan los comandos de marcha y paro y la referencia
de frecuencia)
Establecer un valor para P3.13.1.4 Selección de unidad de proceso
Rango: 0,1-3000.0 s
Rango: 0,1-3000.0 s
Terminal I/O
Fieldbus
Panel
Más de una selección
Si selecciona algo diferente a %, se mostrarán los tres pasos siguientes. Si selecciona %, el
asistente irá directamente al paso 16.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 88 ASISTENTES
13
14
15
16
Establecer un valor para P3.13.1.5 Mínima unidad
de proceso
Establecer un valor para P3.13.1.6 Máxima unidad
de proceso
Establecer un valor para P3.13.1.7 Decimales de
unidad de proceso
Establecer un valor para P3.13.3.3 Selección de
fuente de valor actual 1
El rango se especifica mediante la selección
que se realiza en el paso 12.
El rango se especifica mediante la selección
que se realiza en el paso 12.
Rango: 0-4
Vea la tabla Ajustes de valor actual en Tabla
75 Ajustes de valor actual
Si selecciona una señal de entrada analógica, verá el paso 17. Con otras selecciones, el
asistente irá al paso 18.
Establecer el rango de señal de la entrada analó-
17
18
19
gica
Establecer un valor para P3.13.1.8 Inversión del
error
Establecer un valor para P3.13.2.6 Selección de
referencia
0 = 0-10V/0-20mA
1 = 2-10V/4-20mA
0 = Normal
1 = Invertido
Vea la tabla Referencias en Tabla 74 Ajustes
de referencia
Si selecciona una señal de entrada analógica, se mostrará primero el paso 20 y, a
continuación, el paso 22. Con otras selecciones, el asistente irá al paso 21.
Si establece Referencia de panel 1 o Referencia de panel 2 como valor, el asistente irá
directamente al paso 22.
Establecer el rango de señal de la entrada analó-
20
21
22
gica
Establecer un valor para P3.13.2.6 (Referencia de
panel 1) y P3.13.2.2 (Referencia de panel 2)
Utilice la función dormir
0 = 0-10V/0-20mA
1 = 2-10V/4-20mA
Especificado mediante el rango establecido
en el paso 19
0 = No
1 = Sí
Si proporciona el valor Sí en el paso 22, se mostrarán los tres pasos siguientes. Si
proporciona el valor No, el asistente irá al paso 26.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

ASISTENTES VACON · 89
23
24
25
26
27
28
Establecer un valor para P3.13.5.1 SP1 Límite frecuencia dormir
Establecer un valor para P3.13.5.2 SP1 Retraso de
dormir
Establecer un valor para P3.13.5.3 SP1 Nivel despertar
Establezca un valor para P3.15.2 Número de bombas
Establezca un valor para P3.15.5 Enclavamientos
Establecer un valor para P3.15.6 Rotación automática
Rango: 0.00-320.00 Hz
Rango: 0-3000 s
El rango se especifica mediante la unidad de
proceso establecida.
Rango: 1-8
0 = Deshabilitado
1 = Habilitado (Intervalo)
0 = Deshabilitado
1 = Habilitado (Intervalo)
2 = Habilitado (Tiempo real)
Si establece el valor Habilitado (Intervalo o Tiempo real) en el parámetro Rotación
automática, se mostrarán los pasos 29 a 34. Si establece el valor Deshabilitado en el
parámetro Rotación automática, el asistente irá directamente al paso 35.
Establezca un valor para P3.15.7 Bombas rotadas
29
automáticamente
0 = Bombas auxiliares
1 = Todas las bombas
El paso 30 solo se muestra si establece el valor Habilitado (Intervalo) en el parámetro
Rotación automática en el paso 28.
30
Establecer un valor para P3.15.8 Intervalo de rotación
Rango: 0-3000 h
Los pasos 31 y 32 solo se muestran si establece el valor Habilitado (Tiempo real) en el
parámetro Rotación automática en el paso 28.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 90 ASISTENTES
31
32
33
34
35
36
Establecer un valor para P3.15.9 Días para rotación
automática
Establecer un valor para P3.15.10 Hora del día de
rotación automática
Establezca un valor para P3.15.11 Límite de frecuencia de rotación automática
Establezca un valor para P3.15.12 Límite de bombas
de rotación automática
Establecer un valor para P3.15.13 Límite de conexión/desconexión auxiliares
Establecer un valor para P3.15.14 Tiempo de conexión/desconexión auxiliares
Rango: Lunes a sábado
Rango: 00:00:00 a 23:59:59
Rango: P3.3.1.1-P3.3.1.2 Hz
Rango: 1-8
Rango: 0-100%
Rango: 0-3600 s
El Asistente de aplicación multibomba (PFC) se ha completado.
2.5 ASISTENTE DE APLICACIÓN MULTIMASTER
El asistente de aplicación le ayuda a establecer los parámetros básicos que están
relacionados con la aplicación.
Para iniciar el Asistente de aplicación MultiMaster, establezca el valor MultiMaster en el
parámetro P1.2 Aplicación (ID 212) en el panel.
NOTA!
Si se inicia el asistente de aplicación desde el Asistente para puesta en marcha, el
asistente irá directamente al paso 11.
Establecer un valor para P3.1.2.2 Tipo de motor
1
2
3
4
(para que coincida con la placa de características
del motor)
Establecer un valor para P3.1.1.1 Tensión nominal
del motor (para que coincida con la placa de características del motor)
Establecer un valor para P3.1.1.2 Frecuencia nominal del motor (para que coincida con la placa de
características del motor)
Establecer un valor para P3.1.1.3 Velocidad nominal
del motor (para que coincida con la placa de características del motor)
Imanes permanentes
Motor Inducción
Motor de reluctancia
Rango: Varía
Rango: 8.00-320.00 Hz
Rango: 24-19200 rpm
2
Establecer un valor para P3.1.1.4 Intensidad nomi-
5
nal del motor (para que coincida con la placa de
características del motor)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Rango: Varía

ASISTENTES VACON · 91
El paso 6 solo muestra datos si se ha seleccionado Motor Inducción en el paso 1.
6 Establecer un valor para P3.1.1.5 Cos phi motor Rango: 0.30-1.00
10
11
12
7
8
9
Establecer un valor para P3.3.1.1 Frecuencia
mínima
Establecer valor para P3.3.1.2 Referencia de frecuencia máxima
Establecer un valor para P3.4.1.2 Tiempo de aceleración 1
Establecer valor para P3.4.1.3 tiempo de deceleración 1
Seleccione un lugar de control (donde se proporcionan los comandos de marcha y paro y la referencia
de frecuencia)
Establecer un valor para P3.13.1.4 Selección de unidad de proceso
Rango: 0.00-P3.3.1.2 Hz
Rango: P3.3.1.1-320.00 Hz
Rango: 0,1-3000.0 s
Rango: 0,1-3000.0 s
Terminal I/O
Fieldbus
Panel
Más de una selección
Si selecciona algo diferente a %, se mostrarán los tres pasos siguientes. Si selecciona %, el
asistente irá directamente al paso 16.
13
Establecer un valor para P3.13.1.5 Mínima unidad
de proceso
El rango se especifica mediante la selección
que se realiza en el paso 12.
14
15
16
Establecer un valor para P3.13.1.6 Máxima unidad
de proceso
Establecer un valor para P3.13.1.7 Decimales de
unidad de proceso
Establecer un valor para P3.13.3.3 Selección de
fuente de valor actual 1
El rango se especifica mediante la selección
que se realiza en el paso 12.
Rango: 0-4
Consulte los Ajustes de valor actual en el
capítulo Tabla 74 Ajustes de referencia
Si selecciona una señal de entrada analógica, verá el paso 17. Con otras selecciones, el
asistente irá al paso 18.
Establecer el rango de señal de la entrada analó-
17
18
19
gica
Establecer un valor para P3.13.1.8 Inversión del
error
Establecer un valor para P3.13.2.6 Selección de
referencia
0 = 0-10V/0-20mA
1 = 2-10V/4-20mA
0 = Normal
1 = Invertido
Consulte la tabla Referencias en el capítulo
Tabla 74 Ajustes de referencia
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 92 ASISTENTES
Si selecciona una señal de entrada analógica, se mostrará primero el paso 20 y, a
continuación, el paso 22. Con otras selecciones, el asistente irá al paso 21.
Si establece Referencia de panel 1 o Referencia de panel 2 como valor, el asistente irá
directamente al paso 22.
Establecer el rango de señal de la entrada analó-
20
gica
0 = 0-10V/0-20mA
1 = 2-10V/4-20mA
21
22
Establecer un valor para P3.13.2.6 (Referencia de
panel 1) y P3.13.2.2 (Referencia de panel 2)
Utilice la función dormir
Especificado mediante el rango establecido
en el paso 19
0 = No
1 = Sí
Si proporciona el valor Sí en el paso 22, se mostrarán los tres pasos siguientes. Si
proporciona el valor No, el asistente irá al paso 26.
23
24
25
26
27 Establezca un valor para P3.15.3 Número ID Bomba Rango: 1-8
Establecer un valor para P3.13.5.1 SP1 Límite frecuencia dormir
Establecer un valor para P3.13.5.2 SP1 Retraso de
dormir
Establecer un valor para P3.13.5.3 SP1 Nivel despertar
Establezca un valor para P3.15.1 Modo MultiBomba
Rango: 0.00-320.00 Hz
Rango: 0-3000 s
El rango se especifica mediante la unidad de
proceso establecida.
Multiseguidor
Multimaestro
Establezca un valor para P3.15.4 Marcha y Valor
28
29
30
31
Actual
Establezca un valor para P3.15.2 Número de bombas
Establezca un valor para P3.15.5 Enclavamientos
Establecer un valor para P3.15.6 Rotación automática
0=Señales no conectadas
1=Solo señal de marcha conectada
2=Señales conectadas
Rango: 1-8
0 = Deshabilitado
1 = Habilitado (Intervalo)
0 = Deshabilitado
1 = Habilitado (Intervalo)
2 = Habilitado (Tiempo real)
Si establece el valor Habilitado (Intervalo) en el parámetro Rotación automática, se mostrará
el paso 33. Si establece el valor Habilitado (TiempoReal) en el parámetro Rotación automática,
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

ASISTENTES VACON · 93
se mostrará el paso 34. Si establece el valor Deshabilitado en el parámetro Rotación
automática, el asistente irá directamente al paso 36.
Establezca un valor para P3.15.7 Bombas rotadas
32
automáticamente
0 = Bombas auxiliares
1 = Todas las bombas
El paso 33 solo se muestra si establece el valor Habilitado (Intervalo) en el parámetro
Rotación automática en el paso 31.
33
Establecer un valor para P3.15.8 Intervalo de rotación
Rango: 0-3000 h
Los pasos 34 y 35 solo se muestran si establece el valor Habilitado (TiempoReal) en el
parámetro Rotación automática en el paso 31.
34
35
36
37
Establecer un valor para P3.15.9 Días para rotación
automática
Establecer un valor para P3.15.10 Hora del día de
rotación automática
Establecer un valor para P3.15.13 Límite de conexión/desconexión auxiliares
Establecer un valor para P3.15.14 Tiempo de conexión/desconexión auxiliares
Rango: Lunes a sábado
Rango: 00:00:00 a 23:59:59
Rango: 0-100%
Rango: 0-3600 s
El Asistente de aplicación multibomba se ha completado.
2.6 ASISTENTE MODO ANTI-INCENDIO
Para iniciar el Asistente para el modo Anti-Incendio, seleccione Activar para el parámetro
1.1.2 en el menú Guía rápida.
PRECAUCIÓN!
Antes de continuar, lea la información acerca de la contraseña y la garantía en el
capítulo 10.18 Modo Anti-Incendio.
1
Establecer el valor para el parámetro P3.17.2
Selección referencia frecuencia
Más de una selección
Si establece un valor diferente de Frecuencia de modo Anti-Incendio, el asistente irá
directamente al paso 3.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 94 ASISTENTES
2
3
Establecer un valor para el parámetro P3.17.3 Frecuencia de modo anti-incendio
Activa la señal cuando el contacto se abre o se cierra
Rango: varía
0 = Contacto abierto
1 = Contacto cerrado
Si establece el valor Contacto abierto en el paso 3, el asistente irá directamente al paso 5. Si
establece el valor Contacto cerrado en el paso 3, el paso 5 es innecesario.
Establecer un valor para los parámetros P3.17.4
4
5
6
Activación de modo anti-incendio en OPEN / P3.17.5
Activación anti-incendio en CLOSE
Establecer un valor para el parámetro P3.17.6
Inversión giro
Establecer un valor para P3.17.1 Contraseña Establecer una contraseña para habilitar la
Seleccionar la entrada digital para activar el
modo anti-incendio. Consulte también el
capítulo 10.6.1 Programación de entradas ana-
lógicas y digitales.
Seleccionar la entrada digital para activar el
sentido inverso en el modo anti-incendio.
DigIn ranura0.1 = DIRECTO
DigIn ranura0.2 = INVERSO
función anti-incendio.
1234 = Habilitar modo de prueba
1002 = Habilitar el modo anti-incendio
El Asistente para el modo Anti-Incendio se ha completado.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

INTERFACES DE USUARIO VACON · 95
3 INTERFACES DE USUARIO
3.1 NAVEGACIÓN EN EL PANEL
Los datos del convertidor de frecuencia están organizados en menús y submenús. Para
desplazarse por los menús, utilice los botones de flecha arriba y abajo en el panel. Para
entrar en un grupo o un elemento, presione el botón OK. Para regresar al nivel en el que se
encontraba, presione el botón Back/Reset.
En la pantalla, aparece su ubicación actual en el menú, por ejemplo M3.2.1. También
aparece el nombre del grupo o elemento en la ubicación actual.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

Menú principal
Submenús Submenús Submenús
Menú principal Menú principal
M2 Monitor
M1 Guía
rápida
M1.1 Asistentes
(el contenido depende
de P1.2, Selecc. aplicación)
M2.1 Multimonitor
M3.1 Ajustes motor
M3.2
Modo Marcha/Paro
M3.3 Referencias
M3.4
Rampas y frenos
M3.5
Configuración de E/S
M3.6
Asignación datos FB
M3.10
Reset automático
M3.11
Ajustes aplicación
M3.12 Funciones de
temporizador
M3.19
Personaliz. unidad
M3.13
Controlador PID
M3.14 Ctrl. PID ext.
M3.15 Multibomba
M3.16 Mantenimiento
contadores
M3.17 Modo
Anti-Incendio
M3.21 Control bomba
M3.18 Caldeo Motor
M3.7 Frec. prohibidas
M3.8 Supervisiones
M3.9 Protecciones
M2.2 Gráficas
M2.3 Básico
M2.4 I/O
M2.5
EntradasTemperatura
M2.6
Extras/Avanzado
M2.7 Funciones
de temporizador
M2.8 Controlador PID
M2.9 Controlador
PID externo
M2.10 Multibomba
M2.11 Contador
mantenimiento
M2.12
Datos de fieldbus
M3
Parámetros
M8 Niveles
de usuario
M7
Favoritos
M4
Diagnóstico
M5 I/O y
hardware
M6 Ajustes
de usuario
M4.4
Contadores total
M4.5 Cont. disparos
M4.6 Info software
M5.1 E/S básicas
M5.2...M5.4
Ranuras C,D,E
M5.5 Reloj tiemp real
M5.6 Ajustes unidad
de potencia
M5.8 RS-485
M5.9 Ethernet
M6.1
Selección de idioma
M6.5 Backup de
parámetros
M6.6 Comparar
parámetros
M6.7
Nombre variador
M8.1 Nivel de usuario
M8.2 Código de acceso
VACON · 96 INTERFACES DE USUARIO
Imag. 32: La estructura básica de menús del convertidor de frecuencia
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

STOP
READY I/O
Main Menu
A B C D E
F
H
G
Quick Setup
( 17 )
Monitor
( 5 )
Parameters
( 12 )
M1ID:
STOP
READY
I/O
Rem Control Place
I/O Control
KeypadStopButton
Yes
Start Function
Ramping
Start / Stop Setup
M3.2.1ID:172
INTERFACES DE USUARIO VACON · 97
3.2 USO DE LA PANTALLA GRÁFICA
Imag. 33: El menú principal de pantalla gráfica
A. El primer campo de estado: PARO/
MARCHA
B. El sentido de giro
C. El segundo campo de estado: LISTO/NO
LISTO/FALLO
D. El campo de alarma: ALARM/E. El lugar de control: PC/I/O/PANEL/
FIELDBUS
F. El campo de ubicación: el número ID del
parámetro y la ubicación actual en el
menú
G. Un grupo o elemento activado: presione
OK para entrar
H. El número de elementos del grupo en
cuestión
3.2.1 EDICIÓN DE LOS VALORES
En la pantalla gráfica, hay dos procedimientos diferentes para editar el valor de un
elemento.
Por lo general, solo se puede establecer un valor para un parámetro. Seleccione un valor en
una lista de valores de texto o en un rango de valores numéricos.
CAMBIO DEL VALOR DE TEXTO DE UN PARÁMETRO
1 Busque el parámetro con los botones de flecha.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

STOP
READY
I/O
Rem Control Place
M3.2.1ID:
Edit
Help
Add to favourites
STOP
READY
I/O
Rem Control Place
M3.2.1ID:
FieldbusCTRL
I/O Control
STOP
READY
I/O
Frequency Ref
P3.3.1.1ID:101
MaxFreqReference
0.00 Hz
MinFreqReference
50.00 Hz
PosFreqRefLimit
320.00 Hz
STOP
READY
I/O
MinFreqReference
P3.3.1.1ID:101
0.00 Hz
Min: 0.00Hz
Max: 50.00Hz
VACON · 98 INTERFACES DE USUARIO
2 Para ir al modo Editar, presione el botón OK dos
veces o presione el botón de flecha de la derecha.
3 Para establecer un nuevo valor, presione los
botones de flecha arriba y abajo.
4 Para aceptar el cambio, presione el botón OK. Para
ignorar el cambio, utilice el botón Back/Reset.
EDICIÓN DE LOS VALORES NUMÉRICOS
1 Busque el parámetro con los botones de flecha.
2 Pase al modo de edición.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

STOP
READY
I/O
MinFreqReference
P3.3.1.1ID:101
00.00 Hz
Min: 0.00Hz
Max: 50.00Hz
STOP
READY
I/O
MinFreqReference
P3.3.1.1ID:101
11.00 Hz
Min: 0.00Hz
Max: 50.00Hz
STOP
READY
I/O
P3.12.1.3ID:1466
Interval 1
00:00:00
00:00:00
ON Time
OFF Time
Days
0
A
INTERFACES DE USUARIO VACON · 99
3 Si el valor es numérico, muévase de dígito a dígito
con los botones de flecha izquierda y derecha.
Cambie los dígitos con los botones de flecha arriba
y abajo.
4 Para aceptar el cambio, presione el botón OK. Para
ignorar el cambio, regrese al nivel en el que se
encontraba con el botón Back/Reset.
LA SELECCIÓN DE MÁS DE UN VALOR
Algunos parámetros le permiten seleccionar más de un valor. Seleccione una casilla de
verificación en cada valor necesario.
1 Busque el parámetro. Hay un símbolo en la
pantalla cuando es posible seleccionar una casilla
de verificación.
A. El símbolo de selección de
casilla de verificación
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

STOP
READY
I/O
M 3.12.1.3.1ID:
Days
Monday
Tuesday
Wednesday
Thursday
Friday
Sunday
STOP
READY
I/O
M 3.12.1.3.1ID:
Days
Monday
Tuesday
Wednesday
Thursday
Friday
Sunday
VACON · 100 INTERFACES DE USUARIO
2 Para desplazarse por la lista de valores, utilice los
botones de flecha arriba y abajo.
3 Para añadir un valor a la selección, seleccione la
casilla que se encuentra junto a él con el botón de
flecha a la derecha.
3.2.2 RESET DE UN FALLO
Para resetear un fallo, puede utilizar el botón Reset o el parámetro Reset fallos. Consulte
las instrucciones en 11.1 Aparece un fallo..
3.2.3 EL BOTÓN FUNCT
Puede utilizar el botón FUNCT para 4 funciones.
Para acceder a la página de control.
•
Para cambiar fácilmente entre los lugares de control panel y remoto.
•
Para cambiar el sentido de giro.
•
Para editar rápidamente un valor de parámetro.
•
La selección de un lugar de control determina desde dónde se proporcionan las órdenes de
marcha y paro del convertidor. Todos los lugares de control tienen un parámetro para la
selección de la referencia de frecuencia. El lugar de control panel siempre es el panel. El
lugar de control remoto es I/O o Fieldbus. Puede ver el lugar de control actual en la barra de
estado de la pantalla.
Es posible utilizar I/O lugar A, I/O lugar B y Fieldbus como lugares de control remoto. I/O
lugar A y Fieldbus tienen la prioridad menor. Puede seleccionarlos con P3.2.1 (Lugar de
control remoto). I/O lugar B puede omitir los lugares de control remoto, I/O lugar A y
Fieldbus con una entrada digital. Puede seleccionar la entrada digital con el parámetro
P3.5.1.7 (Forzar Ctrl. I/O lugar B).
El panel se utiliza siempre como un lugar de control cuando el lugar de control es local. El
control panel tiene una prioridad más alta que el control remoto. Por ejemplo, cuando se
encuentra en el control remoto, si el parámetro P3.5.1.7 anula el lugar de control con una
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
 Loading...
Loading...