

Page 1

vacon 100 flow
®
frequenzumrichter
applikationshandbuch
Page 2

Page 3

VORWORT VACON · 3
VORWORT
DOKUMENTDETAILS
Dokument-ID: DPD01248F
Datum: 13.12.2016
Software-Version: FW0159V016
ÜBER DIESE ANLEITUNG
Diese Anleitung ist urheberrechtliches Eigentum von Vacon Ltd. Alle Rechte vorbehalten. Die
Anleitung kann sich ohne Vorankündigung ändern. Die Originalsprache dieser Anleitung ist
Englisch.
In diesem Handbuch finden Sie Informationen zu den Funktionen und zur Verwendung Ihres
VACON® Frequenzumrichters. Der Aufbau dieses Handbuchs orientiert sich an der
Menüstruktur des Umrichters (Kapitel 1 und 4-8).
Kapitel 1: Kurzanleitung
Einführung in die Steuertafel
•
Kapitel 2: Assistenten
Auswahl der Anwendungskonfiguration
•
Schnelle Einrichtung von Anwendungen
•
Vorstellung der verschiedenen Anwendungen mit Beispielen
•
Kapitel 3: Benutzerschnittstellen
Vorstellung der verschiedenen Displays und Einführung in die Benutzung der Steuertafel
•
Das PC-Tool VACON® Live
•
Die Feldbus-Funktionen
•
Kapitel 4: Das Menü „Betriebsdaten“
Angaben zu den Betriebsdaten
•
Kapitel 5: Das Menü „Parameter“
Eine Liste aller Parameter des Umrichters
•
Kapitel 6: Das Menü „Fehlerspeicher“
Kapitel 7: Das Menü „E/A und Hardware“
Kapitel 8: Die Menüs „Benutzereinstellungen“, „Favoriten“ und „Anwendergruppe“
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 4
Index Min Max Unit Default ID DescriptionParameter
A B C D E F G H
VACON · 4 VORWORT
Kapitel 9, Betriebswertbeschreibungen
Kapitel 10: Parameterbeschreibungen
Parameter und ihre Verwendung
•
Programmieren von Digital- und Analogeingängen
•
Anwendungsspezifische Funktionen
•
Kapitel 11: Fehlersuche
Fehler und ihre Ursachen
•
Quittieren von Fehlern
•
Kapitel 12: Anhang
Angaben zu den verschiedenen Werkseinstellungen der Anwendungen
•
Dieses Handbuch enthält viele Parametertabellen. Diese Anleitung erklärt Ihnen, wie Sie
diese Tabellen richtig lesen.
A. Position des Parameters im Menü, d. h.
die Parameternummer
B. Name des Parameters
C. Mindestwert des Parameters
D. Höchstwert des Parameters
E. Einheit des Parameters; wird angezeigt,
sofern vorhanden
F. Werkseitig voreingestellter Wert
G. Identifikationsnummer des Parameters
H. Kurzbeschreibung der Werte und/oder
der Funktion des Parameters
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 5

VORWORT VACON · 5
FUNKTIONEN DES VACON® FREQUENZUMRICHTERS
Sie können die für Ihren Prozess erforderliche Applikation auswählen: Standard, HVAC,
•
PID-Regler, Multi-Pump (einzelner Frequenzumrichter) oder Multi-Pump (mehrere
Frequenzumrichter). Der Frequenzumrichter nimmt automatisch einige der
erforderlichen Einstellungen vor, wodurch die Inbetriebnahme einfach wird.
Assistenten für den ersten Start und den Brand-Modus.
•
Assistenten für jede Applikation: Standard, HVAC, PID-Regler, Multi-Pump (einzelner
•
Frequenzumrichter) und Multi-Pump (mehrere Frequenzumrichter).
Taste „FUNCT“ für den einfachen Wechsel zwischen den Steuerplätzen „Ort“ und „Fern“.
•
Als Fernsteuerungsplatz können Sie E/A oder Feldbus festgelegen. Die Auswahl des
Fernsteuerungsplatzes erfolgt über einen Parameter.
8 Festfrequenzen
•
Motorpotentiometer-Funktionen
•
Eine Spülfunktion.
•
2 programmierbare Rampenzeiten, 2 Überwachungsfunktionen und 3
•
Frequenzausblendungsbereiche.
Erzwungener Stopp
•
Steuerungsseite für die schnelle Bedienung und Überwachung der wichtigsten Werte
•
Datenzuordnung für den Feldbus
•
Automatische Fehlerquittierung
•
Verschiedene Vorheiz-Modi zur Vermeidung von Problemen durch Kondensation
•
Maximale Ausgangsfrequenz von 320 Hz
•
Echtzeituhr und Timerfunktionen (optionale Batterie erforderlich). Möglichkeit der
•
Programmierung von 3 Zeitkanälen für verschiedene Funktionen am Umrichter
Externer PID-Regler verfügbar. Mit diesem kann z. B. ein Ventil über den E/A des
•
Frequenzumrichters gesteuert werden.
Energiesparender Sleep-Modus zum automatischen Aktivieren und Deaktivieren des
•
Frequenzumrichters
2-Zonen PID-Regler mit 2 unterschiedliche Rückmeldungssignale: minimale und
•
maximale Regelung
Zwei Einstellwert-Quellen für die PID-Regelung. Die Quelle kann über einen
•
Digitaleingang ausgewählt werden.
Funktion zur PID-Einstellwerterhöhung
•
Vorausschauende Regelung zur Verbesserung der Reaktion auf Prozessänderungen
•
Prozesswertüberwachung
•
Eine Multi-Pump-Steuerung für Systeme mit einzelnem Frequenzumrichter und
•
mehreren Frequenzumrichtern.
Die Multimaster- und Multifollower-Modi im System mit mehreren Frequenzumrichtern.
•
Ein Multi-Pump-System, das eine Echtzeituhr für den Autowechsel der Pumpen
•
verwendet.
Wartungszähler
•
Pumpenregelung: Ansaugpumpensteuerung, Jockeypumpensteuerung, Pumpenrad-
•
Auto-Cleaning, Pumpeneingangsdruck-Überwachung und Frostschutzfunktion
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 6

VACON · 6
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 7
INHALTSVERZEICHNIS VACON · 7
INHALTSVERZEICHNIS
Vorwort
Dokumentdetails 3
Über diese Anleitung 3
Funktionen des VACON® Frequenzumrichters 5
1 Kurzanleitung 12
1.1 Steuertafel und Tastenfeld 12
1.2 Die Displays 12
1.3 Erster Start 13
1.4 Beschreibung der Anwendungen 14
1.4.1 Standard- und HVAC-Applikationen 15
1.4.2 PID-Regler 22
1.4.3 Multi-Pump-Applikation (einzelner Frequenzumrichter) 31
1.4.4 Multi-Pump-Applikation (mehrere Frequenzumrichter) 46
2 Assistenten 82
2.1 Standardanwendungsassistent 82
2.2 HVAC-Anwendungsassistent 83
2.3 Anwendungsassistent für PID-Regler 84
2.4 Multi-Pump-Applikationsassistent (einzelner Frequenzumrichter) 86
2.5 Multi-Pump-Applikationsassistent (mehrere Frequenzumrichter) 90
2.6 Brand-Modus-Assistent 93
3 Benutzerschnittstellen 95
3.1 Navigation auf dem Tastenfeld 95
3.2 Verwendung des Grafik-Displays 97
3.2.1 Bearbeiten der Werte 97
3.2.2 Quittieren von Fehlern 100
3.2.3 FUNCT-Taste 100
3.2.4 Kopieren der Parameter 104
3.2.5 Parametervergleich 105
3.2.6 Hilfetexte 107
3.2.7 Verwendung des Menüs „Favoriten“ 108
3.3 Verwendung des Text-Displays 108
3.3.1 Bearbeiten der Werte 109
3.3.2 Quittieren von Fehlern 110
3.3.3 FUNCT-Taste 110
3.4 Menüstruktur 114
3.4.1 Schnelleinstellungen 115
3.4.2 Monitor 115
3.5 VACON® Live 117
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 8
VACON · 8 INHALTSVERZEICHNIS
4 Menü „Betriebsdaten“ 119
4.1 Monitorgruppe 119
4.1.1 Multimonitor 119
4.1.2 Trendkurve 120
4.1.3 Basis 123
4.1.4 E/A 125
4.1.5 Temperatureingänge 125
4.1.6 Extras und Erweitert 127
4.1.7 Überwachen der Timerfunktionen 129
4.1.8 PID-Regler-Überwachung 130
4.1.9 Überwachen des externen PID-Reglers 131
4.1.10 Überwachen der MultiPump-Funktion 131
4.1.11 Wartungszähler 133
4.1.12 Feldbus-Prozessdatenüberwachung 134
4.1.13 Betriebsdaten Umrichter anpassen 135
5 Menü „Parameter“ 136
5.1 Gruppe 3.1: Motoreinstellungen 136
5.2 Gruppe 3.2: Start/Stopp-Einstellungen 140
5.3 Gruppe 3.3: Referenzen 142
5.4 Gruppe 3.4: Rampen- und Bremsverhalten 145
5.5 Gruppe 3.5: E/A-Konfiguration 147
5.6 Gruppe 3.6: Datenzuordnung für den Feldbus 158
5.7 Gruppe 3.7: Frequenzausblendungen 159
5.8 Gruppe 3.8: Überwachungen 160
5.9 Gruppe 3.9: Schutzfunktionen 161
5.10 Gruppe 3.10: Automatische Fehlerquittierung 167
5.11 Gruppe 3.11: Anwendungseinstellungen 168
5.12 Gruppe 3.12: Timerfunktionen 169
5.13 Gruppe 3.13: PID-Regler 172
5.14 Gruppe 3.14: Externer PID-Regler 187
5.15 Gruppe 3.15: Multi-Pump 191
5.16 Gruppe 3.16: Wartungszähler 194
5.17 Gruppe 3.17: Brand-Modus 195
5.18 Gruppe 3.18: Parameter für Motorvorheizung 196
5.19 Gruppe 3.19: Umrichter anpassen 196
5.20 Gruppe 3.21: Pumpenregelung 198
5.21 Gruppe 3.23: Erweiterter Oberschwingungenfilter 201
6 Menü „Fehlerspeicher“ 202
6.1 Aktive Fehler 202
6.2 Fehler quittieren 202
6.3 Fehlerspeicher 202
6.4 Gesamtzähler 202
6.5 Rückstellbare Zähler 204
6.6 Software-Info 206
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 9
INHALTSVERZEICHNIS VACON · 9
7 Menü „E/A und Hardware“ 207
7.1 Standard-E/A 207
7.2 Steckplätze für Optionskarten 209
7.3 Echtzeituhr 210
7.4 Einstellungen: Leistungseinheit (Einst:LeistEinh) 210
7.5 Steuertafel 212
7.6 Feldbus 213
8 Benutzereinstellungen, Favoriten und Anwendergruppenmenüs 214
8.1 Benutzereinstellungen 214
8.1.1 Benutzereinstellungen 214
8.1.2 Parameter-Backup 215
8.2 Favoriten 216
8.2.1 Hinzufügen von Elementen zu den Favoriten 216
8.2.2 Entfernen eines Elements aus den Favoriten 217
8.3 Anwendergruppen 217
8.3.1 Ändern des Zugangscodes zu den Anwendergruppen 218
9 Beschreibungen wichtiger Kenngrößen 220
9.1 Basis 220
9.2 E/A 221
9.3 Temperatureingänge 222
9.4 Extras und Erweitert 223
9.5 Timerfunktionen 225
9.6 PID-Regler 226
9.7 Externer PID-Regler 227
9.8 Multi-Pump 227
9.9 Wartungszähler 228
9.10 Feldbusdaten 229
9.11 Umrichter anpassen 233
10 Parameterbeschreibungen 235
10.1 Trendkurve 235
10.2 Motoreinstellungen 236
10.2.1 Motortypenschild-Parameter 236
10.2.2 Motorregelungsparameter 237
10.2.3 Motorgrenzen 241
10.2.4 Open Loop-Parameter 242
10.2.5 I/f-Startfunktion 246
10.3 Start/Stopp-Einstellungen 247
10.4 Sollwerte 257
10.4.1 Frequenzsollwert 257
10.4.2 Festfrequenzen 258
10.4.3 Motorpotentiometer-Parameter 262
10.4.4 Parameter für „Spülen“ 264
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 10
VACON · 10 INHALTSVERZEICHNIS
10.5 Rampen- und Bremsverhalten 264
10.5.1 Rampe 1 264
10.5.2 Rampe 2 265
10.5.3 Magnetis. starten 267
10.5.4 DC-Bremse 267
10.5.5 Flussbremsung 268
10.6 E/A-Konfiguration 268
10.6.1 Programmieren von Digital- und Analogeingängen 268
10.6.2 Standardfunktionen der programmierbaren Eingänge 279
10.6.3 Digitaleingänge 279
10.6.4 Analogeingänge 285
10.6.5 Digitalausgänge 290
10.6.6 Analogausgänge 294
10.7 Feldbusdatenzuordnung 298
10.8 Frequenzausblendungen 299
10.9 Überwachung 301
10.10 Schutzfunktionen 302
10.10.1 Allgemeines 302
10.10.2 Motortemperatur-Schutzfunktionen 304
10.10.3 Motorblockierschutz 308
10.10.4 Unterlastschutz (trocken gelaufene Pumpe) 310
10.10.5 Erzw.Stopp 312
10.10.6 AI NiedrigSchutz 314
10.11 Automatische Fehlerquittierung 315
10.12 Anwendungseinstellungen 317
10.13 Timerfunktionen 318
10.14 PID-Regler 322
10.14.1 Grundeinstellungen 322
10.14.2 Einstellwerte 324
10.14.3 Rückmeldung 325
10.14.4 Vorausschauende Regelung 326
10.14.5 Sleep-Funktion 327
10.14.6 Rückmeldung Überwachung 330
10.14.7 Druckverlustausgleich 332
10.14.8 Sanfter Anlauf 334
10.14.9 Eingangsdrucküberwachung 336
10.14.10 Sleep-Funktion, wenn kein Bedarf ermittelt wird 339
10.15 Externer PID-Regler 340
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 11
INHALTSVERZEICHNIS VACON · 11
10.16 Multi-Pump-Funktion 341
10.16.1 Checkliste für die Inbetriebnahme der Multi-Pumpe (mehrere
Frequenzumrichter) 341
10.16.2 Systemkonfiguration 344
10.16.3 Interlocks 349
10.16.4 Anschluss des Rückmeldungssensors in einem Multi-Pump-System
349
10.16.5 Überdrucküberwachung 360
10.16.6 Pumpenlaufzeitzähler 361
10.16.7 Erweiterte Einstellungen 363
10.17 Wartungszähler 364
10.18 Brand-Modus 365
10.19 Motor-Vorheizfunktion 368
10.20 Umrichter anpassen 369
10.21 Pumpenregelung 369
10.21.1 Auto-Cleaning 369
10.21.2 Jockeypumpe 372
10.21.3 Ansaugpumpe 374
10.21.4 Antiblockierungsfunktion 375
10.21.5 Frostschutz 375
10.22 Zähler 376
10.22.1 Betriebszeitzähler 377
10.22.2 Rückstellbarer Betriebszeitzähler 377
10.22.3 Laufzeitzähler 378
10.22.4 Betriebsdauerzähler 378
10.22.5 Energiezähler 378
10.22.6 Rückstellbarer Energiezähler 379
10.23 Erweiterter Oberschwingungsfilter 381
11 Fehlersuche 382
11.1 Anzeige eines Fehlers 382
11.1.1 Quittieren mit der RESET-Taste 383
11.1.2 Quittieren mit einem Parameter im Grafik-Display 383
11.1.3 Quittieren mit einem Parameter im Text-Display 384
11.2 Fehlerspeicher 385
11.2.1 Durchsuchen des Fehlerspeichers im Grafik-Display 385
11.2.2 Durchsuchen des Fehlerspeichers im Grafik-Display 386
11.3 Fehlercodes 388
12 Anhang 1 405
12.1 Die Standardwerte der Parameter in den verschiedenen Anwendungen 405
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 12
A B C
I
H D
G F E
VACON · 12 KURZANLEITUNG
1 KURZANLEITUNG
1.1 STEUERTAFEL UND TASTENFELD
Die Steuertafel bildet die Schnittstelle zwischen Frequenzumrichter und Benutzer. Mit der
Steuertafel können Sie die Drehzahl von Motoren regeln und den Status des
Frequenzumrichters überwachen. Sie können außerdem die Parameter des
Frequenzumrichters einstellen.
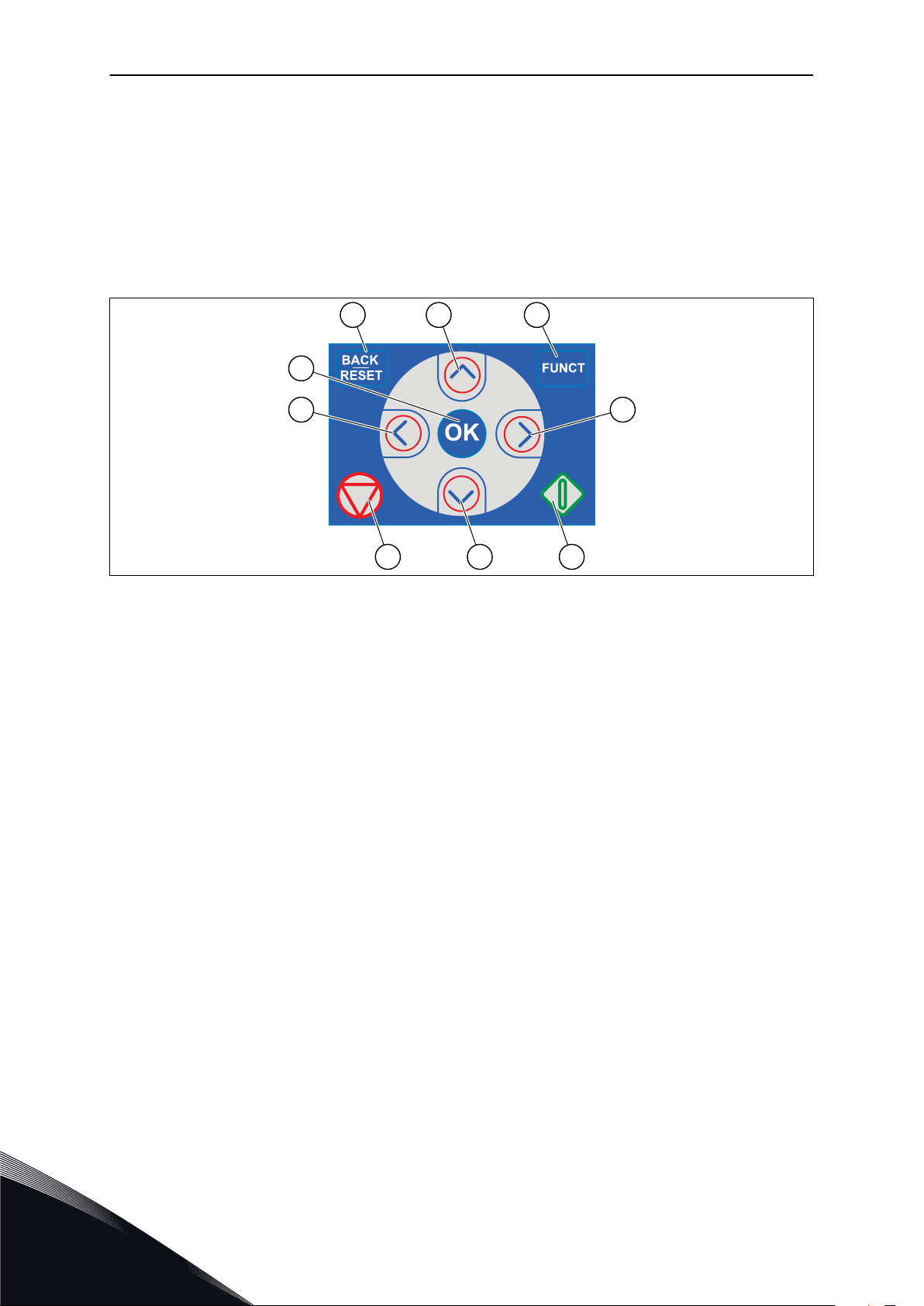
Abb. 1: Die Tasten des Tastenfelds
A. BACK/RESET-Taste: Zurückblättern im
Menü, Bearbeitungsmodus verlassen,
Fehler quittieren
B. Pfeiltaste NACH OBEN: Zurückblättern
im Menü und Werte erhöhen
C. FUNCT-Taste: Drehrichtung des Motors
ändern, Steuerungsseite aufrufen und
Steuerplatz ändern. Weitere
Informationen finden Sie in 3.3.3 FUNCT-
Taste.
D. Pfeiltaste NACH RECHTS:
E. START-Taste
F. Pfeiltaste NACH UNTEN: Vorblättern im
Menü und Werte verringern
G. STOP-Taste.
H. Pfeiltaste NACH LINKS: Cursor nach
links bewegen
I. OK-Taste: Zu aktiver Ebene oder aktivem
Element wechseln oder die Auswahl
bestätigen
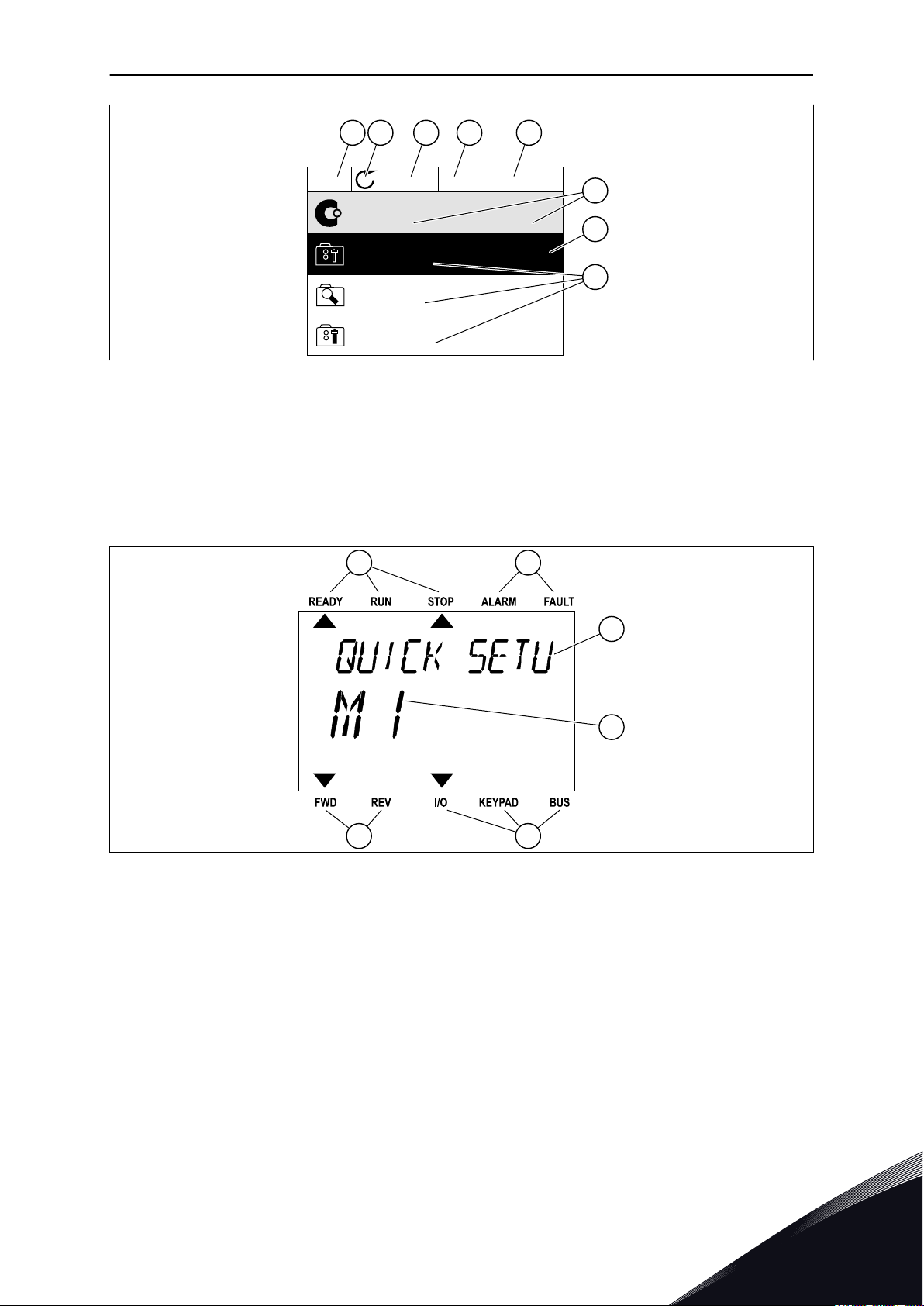
1.2 DIE DISPLAYS
Es gibt zwei Arten von Displays: ein Grafik-Display und ein Text-Display. Die Steuertafel hat
immer dasselbe Tastenfeld mit denselben Tasten.
Das Display zeigt die folgenden Daten:
den Status von Motor und Frequenzumrichter
•
eventuelle Fehler des Motors und des Frequenzumrichters
•
Ihre aktuelle Position in der Menüstruktur
•
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 13
STOP
READY I/O
Main Menu
A B C D E
F
H
G
Quick Setup
( 17 )
Monitor
( 5 )
Parameters
( 12 )
M1ID:
A B
F
C
D
E
KURZANLEITUNG VACON · 13
Abb. 2: Das Grafik-Display
A. Das erste Statusfeld: STOPP/BETRIEB
B. Die Drehrichtung des Motors
C. Das zweite Statusfeld: BEREIT/NICHT
BEREIT/FEHLER
D. Das Alarmfeld: ALARM/E. Das Steuerplatzfeld: PC/EA/
STEUERTAFEL/FELDBUS
F. Das Positionsfeld: ID-Nummer des
Parameters und aktuelle Position im
Menü
G. Aktivierte Gruppe oder aktiviertes
Element
H. Anzahl der Elemente in der betreffenden
Gruppe
Abb. 3: Das Text-Display Wenn der Text zu lang ist, läuft er automatisch durch das Display.
A. Die Statusanzeigen
B. Die Alarm- und Fehleranzeigen
C. Der Name der Gruppe oder des
Elements der aktuellen Position
1.3 ERSTER START
Nachdem Sie den Frequenzumrichter eingeschaltet haben, wird der Anlaufassistent
gestartet.
Der Anlaufassistent fordert Sie zur Eingabe der Daten auf, die der Umrichter zur Steuerung
Ihres Verfahrens benötigt.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
D. Die aktuelle Position im Menü
E. Die Steuerplatzanzeigen
F. Die Drehrichtungsanzeigen
1
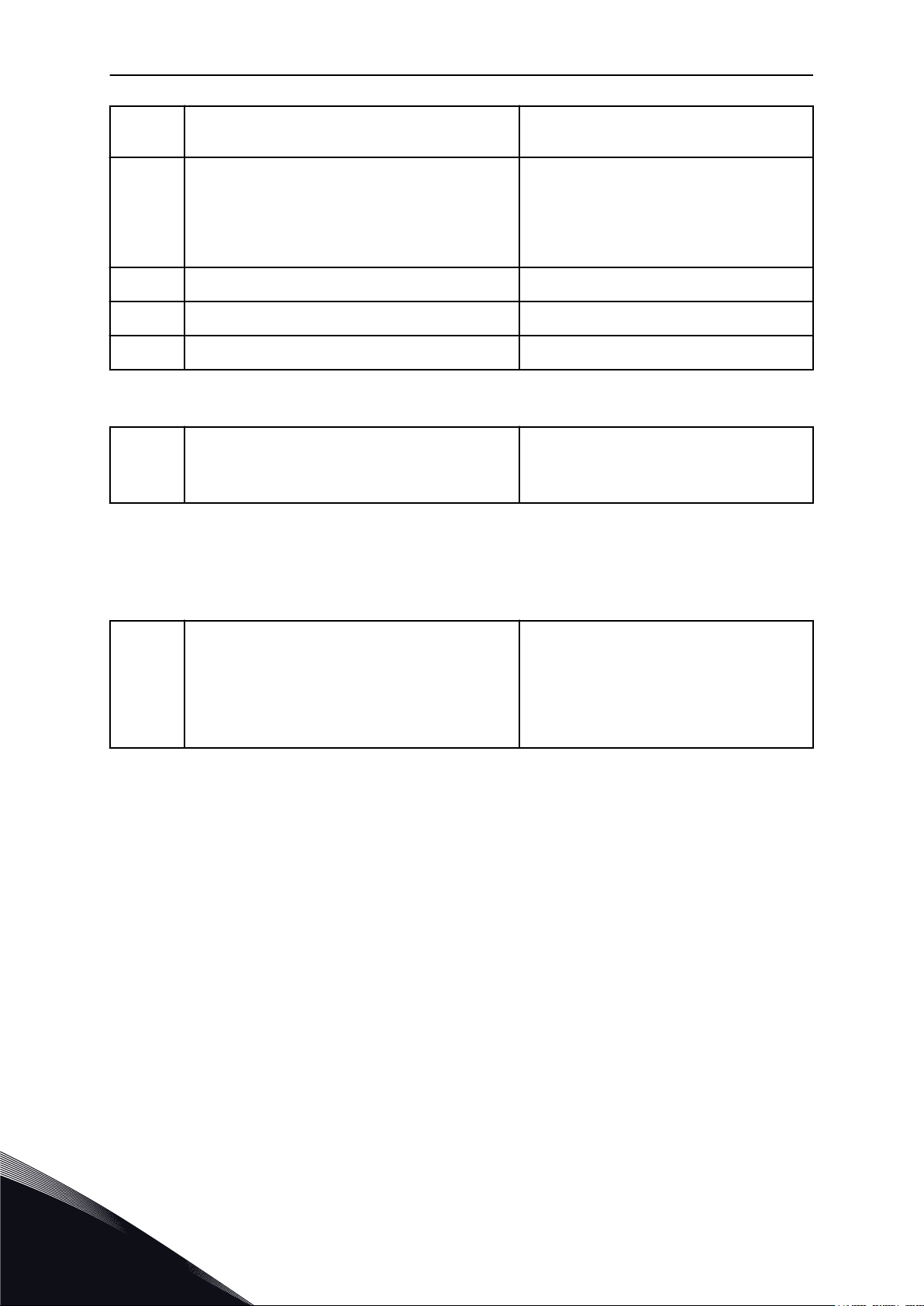
Page 14
VACON · 14 KURZANLEITUNG
1
2
3 Zeit* (P5.5.2) hh:mm:ss
4 Jahr* (P5.5.4) JJJJ
5 Datum* (P5.5.3) tt.mm.
Sprachenauswahl (P6.1) Die Auswahl ist in allen Sprachpaketen
unterschiedlich.
Sommerzeit* (P5.5.5)
Russland
US
EU
AUS
* Diese Schritte werden angezeigt, wenn eine Batterie eingebaut ist
Anlaufassistent?
6
Ja
Nein
Wählen Sie Ja und drücken Sie auf die Taste „OK“. Wenn Sie Nein wählen, wird der
Frequenzumrichter aus dem Anlaufassistenten entfernt.
Um die Parameterwerte manuell festzulegen, wählen Sie Nein und bestätigen mit der „OK“Taste.
Wählen Sie die Applikation aus (P1.2 Applikation,
ID212)
7
Standard
HVAC
PID-Regler
Multi-Pump (einzelner Frequenzumrichter)
Multi-Pump (mehrere Frequenzumrichter)
Um den Assistenten für die in Schritt 7 ausgewählte Applikation weiter auszuführen, wählen
Sie Ja und bestätigen mit der „OK“-Taste. Siehe die Beschreibung der
Anwendungsassistenten in 2 Assistenten.
Wenn Sie Nein wählen und auf die „OK“-Taste drücken, stoppt der Assistent und Sie müssen
alle Parameterwerte manuell festlegen.
Wenn Sie den Anlaufassistenten erneut aufrufen möchten, haben Sie zwei Möglichkeiten:
Gehen Sie entweder zu Parameter P6.5.1 Werkseinstell. oder zu Parameter B1.1.2
Anlaufassistent. Stellen Sie hier den Wert auf Aktivieren.
1.4 BESCHREIBUNG DER ANWENDUNGEN
Verwenden Sie Parameter P1.2 (Anwendung), um eine Anwendung für den Umrichter
auszuwählen. Bei Änderung des Parameters P1.2 wird eine Gruppe von Parametern sofort
auf ihre vordefinierten Werte gesetzt.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 15

KURZANLEITUNG VACON · 15
1.4.1 STANDARD- UND HVAC-APPLIKATIONEN
Verwenden Sie beispielsweise für die Regelung von Pumpen oder Gebläsen die Standardund HVAC-Applikationen.
Der Frequenzumrichter kann entweder über das Tastenfeld, den Feldbus oder die E/AKlemmleiste gesteuert werden.
Bei Steuerung des Frequenzumrichters über die E/A-Klemmleiste wird das
Frequenzsollwertsignal an AI1 (0 bis 10 V) oder AI2 (4 bis 20 mA) angeschlossen. Der
Anschluss hängt von der Art des Signals ab. Es sind auch drei vorab definierte
Frequenzsollwerte verfügbar. Die vorab definierten Frequenzsollwerte können über DI4 und
DI5 aktiviert werden. Die Start-/Stopp-Signale des Frequenzumrichters sind an DI1 (Start
vorwärts) und DI2 (Start rückwärts) gekoppelt.
Alle Umrichterausgänge lassen sich in allen Anwendungen frei konfigurieren. Die E/AStandardkarte verfügt über einen Analogausgang (Ausgangsfrequenz) und drei
Relaisausgänge (Betrieb, Fehler, Bereit).
Siehe die Beschreibungen der Parameter in 10 Parameterbeschreibungen.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 16
DI4
DI5
**)
*)
Modbus RTU,
N2, BACnet
1
6
2
3
4
5
18
19
30
12
7
13
8
9
10
14
15
16
21
22
23
11
17
A
B
24
25
26
32
33
28
29
DI4
DI5
mA
FAULT
(FEHLER)
RUN (BETRIEB)
RUN
(BETRIEB)
AO1-
GND
GND
DI1
DI2
DI3
DI4
DI5
DI6
RO1/1 NC
RO1/2 CM
RO1/3 NO
CM
CM
RS485
RS485
RO2/1 NC
RO2/2 CM
RO2/3 NO
RO3/2 CM
RO3/3 NO
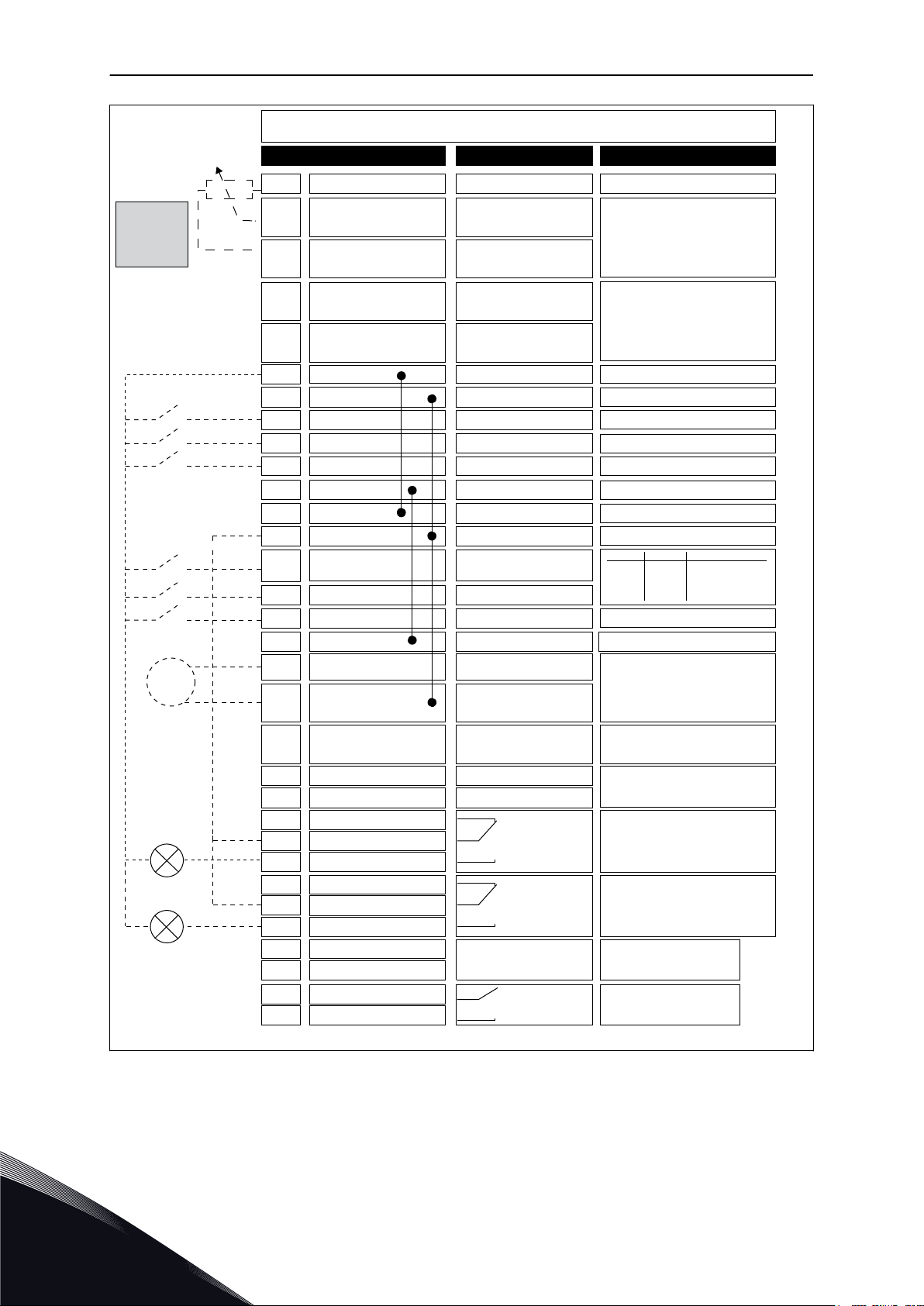
Standard-E/A-Karte
Klemme Signal Beschreibung
+10 Vref
AI1+
AI1-
AI2+
AI2-
24 Vout
Sollausgang
Analogeingang 1 +
Analogeingang 1 -
Analogeingang 2 +
Analogeingang 2 -
24 V Hilfsspannung
E/A Masse
Digitaleingang 1
Digitaleingang 2
Digitaleingang 3
Digitaleingang 4
Digitaleingang 5
Digitaleingang 6
Gemeinsamer Bezug für DI1-DI6
Gemeinsamer Bezug für DI1-DI6
24 V Hilfsspannung
E/A Masse
Analogausgang 1 +
Analogausgang 1 -
READY (BEREIT)
Serieller Bus, negativ
Serieller Bus, positiv
Relaisausgang 1
Relaisausgang 2
Relaisausgang 3
FAULT (FEHLER)
Fehlerquittierung
AO1+
Frequenzsollwert
(Standard 0 bis 10 V)
Frequenzsollwert
(Standard 4 bis 20 mA)
Start vorwärts
Start rückwärts
Externer Fehler
Freq.sollw.
Offen
Geschlossen
Offen
Geschlossen
Offen
Offen
Geschlossen
Geschlossen
Analogeingang 1
Festfrequenz 1
Festfrequenz 2
Festfrequenz 3
Ausgangsfrequenz
(0 bis 20 mA)
+24 Vin
24 Vout
24 V
Hilfseingangsspannung
Sollwertpotentiometer
1 bis 10 kΩ
TI1+
TI1-
Thermistoreingang
VACON · 16 KURZANLEITUNG
1
Abb. 4: Die werkseitig festgelegten Steueranschlüsse der Standard- und HVAC-Applikationen
* = Nur verfügbar in VACON® 100 X.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 17
A
B
C
KURZANLEITUNG VACON · 17
** = Weitere Informationen über die DIP-Schalter-Konfigurationen im VACON® 100 X finden
Sie im Installationshandbuch des Vacon 100® X.
Abb. 5: Der DIP-Schalter
A. Digitaleingänge
C. An GND angeschlossen (Standard)
B. Isoliert
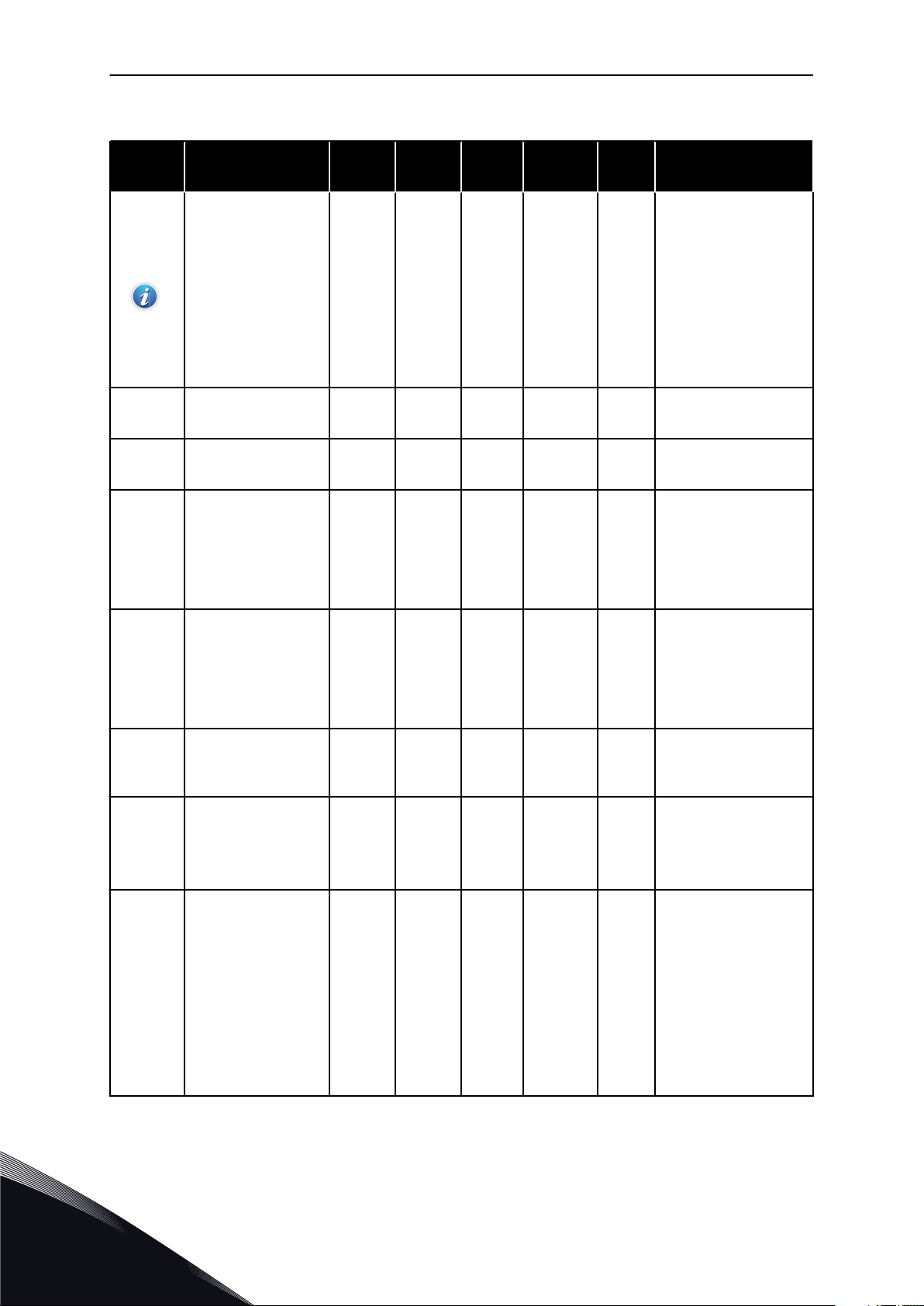
Tabelle 2: M1.1 Assistenten
Index Parameter Min. Max. Einheit
1.1.1 Anlaufassistent 0 1 0 1170
1.1.2
Brand-Modus-Assis-
tent
0 1 0 1672
Werksein
st.
ID Beschreibung
0 = Nicht aktivieren
1 = Aktivieren
Wenn Sie „Aktivieren“
wählen, wird der
Anlaufassistent gestartet (siehe Kapitel
Tabelle 1 Der Anlaufassistent).
Wenn Sie „Aktivieren“
wählen, wird der
Brand-Modus-Assistent gestartet (siehe
2.6 Brand-Modus-Assistent).
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 18
VACON · 18 KURZANLEITUNG
Tabelle 3: M1 Schnelleinstellungen
Index Parameter Min. Max. Einheit
1.2
Applikation 0 4 0 212
1.3
1.4
1.5
Sollwert Mindestfre-
quenz
Sollwert Höchstfre-
quenz
Beschleunigungszeit
1
0.00 P1.4 Hz 0.0 101
P1.3 320.0 Hz
0.1 3000.0 s 5.0 103
Werksein
st.
50.0 /
60.0
ID Beschreibung
0 = Standard
1 = HVAC
2 = PID-Regler
3 = Multi-Pump (einzelner Frequenzumrichter)
4 = Multi-Pump (mehrere Frequenzumrichter)
Der minimal zulässige
Frequenzsollwert.
Der maximal zulässige
102
Frequenzsollwert.
Definiert die erforderliche Zeit für das Steigern der Ausgangsfrequenz von der Nullfrequenz bis zur Höchstfrequenz.
1.6 Bremszeit 1 0.1 3000.0 s 5.0 104
1.7 Motorstromgrenze IH * 0,1 I
1.8 Motortyp 0 2 0 650
1.9 Motornennspannung variiert variiert V variiert 110
S
A variiert 107
Definiert die erforderliche Zeit für das Verringern der Ausgangsfrequenz von der Höchstfrequenz bis zur Nullfrequenz.
Maximaler Strom vom
Frequenzumrichter
zum Motor
0 = Asynchronmotor
1 = Dauermagnetmotor
2 = Reluktanzmotor
Dieser Wert (Un) kann
dem Typenschild des
Motors entnommen
werden.
HINWEIS!
Überprüfen Sie, ob
der Motor in Dreieckoder Sternschaltung
angeschlossen ist.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 19
KURZANLEITUNG VACON · 19
Tabelle 3: M1 Schnelleinstellungen
Index Parameter Min. Max. Einheit
1.10 Motornennfrequenz 8.0 320.0 Hz 50 / 60 111
1.11 Motornenndrehzahl 24 19200 1/min variiert 112
1.12 Motornennstrom IH * 0,1 IH * 2 A variiert 113
1.13
1.14 Energieoptimierung 0 1 0 666
Motor Cos Phi (Leis-
tungsfaktor)
0.30 1.00 variiert 120
Werksein
st.
ID Beschreibung
Dieser Wert (fn) kann
dem Typenschild des
Motors entnommen
werden.
Dieser Wert nn kann
dem Typenschild des
Motors entnommen
werden.
Dieser Wert In kann
dem Typenschild des
Motors entnommen
werden.
Dieser Wert kann dem
Typenschild des
Motors entnommen
werden.
Der Frequenzumrichter sucht nach dem
Motormindeststrom,
um den Geräuschpegel
des Motors zu senken
und Energie zu sparen.
Verwenden Sie diese
Funktion z. B. für Lüfter- oder Pumpenanwendungen.
1.15 Identifikation 0 2 0 631
0 = Gesperrt
1 = Freigegeben
Bei der automatischen
Motoridentifikation
werden die Motorparameter berechnet bzw.
gemessen, die für eine
optimale Motor- und
Drehzahlsteuerung
erforderlich sind.
0 = Keine Aktion
1 = Bei Stillstand
2 = Mit Drehung
Vor der Durchführung
der Identifikation müssen die Motortypenschild-Parameter eingegeben werden.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 20
VACON · 20 KURZANLEITUNG
Tabelle 3: M1 Schnelleinstellungen
Index Parameter Min. Max. Einheit
1.16 Startfunktion 0 1 0 505
1.17 Stoppfunktion 0 1 0 506
1.18
1.19
1.20
Automatische Feh-
lerquittierung
Reaktion auf exter-
nen Fehler
Reaktion auf Feh-
ler:AI-Signal
0 1 0 731
0 3 2 701
0 5 0 700
Werksein
st.
ID Beschreibung
0 = Rampe
1 = Fliegender Start
0 = Leerauslauf
1 = Rampe
0 = Gesperrt
1 = Freigegeben
0 = Keine Aktion
1 = Alarm
2 = Fehler (Stopp
gemäß Stopp-Modus)
3 = Fehler (Stopp
durch Leerauslauf)
0 = Keine Aktion
1 = Alarm
2 = Alarm + FehlerFestfrequenz
(P3.9.1.13)
3 = Alarm + Vorheriger
Frequenzsollwert
4 = Fehler (Stopp
gemäß Stopp-Modus)
5 = Fehler (Stopp
durch Leerauslauf)
1.21 Fernsteuerungsplatz 0 1 0 172
Auswahl des Fernsteuerungsplatzes (Start/
Stopp).
0 = E/A-Steuerung
1 = Feldbus-Steuerung
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 21
KURZANLEITUNG VACON · 21
Tabelle 3: M1 Schnelleinstellungen
Index Parameter Min. Max. Einheit
1.22
E/A-Sollwert A, Aus-
wahl
0 20 5 117
Werksein
st.
ID Beschreibung
Auswahl der Frequenzsollwert-Quelle, wenn
als Steuerplatz E/A A
festgelegt ist
0 = PC
1 = Festfrequenz 0
2 = Steuertafelsollwert
3 = Feldbus
4 = AI1
5 = AI2
5 = AI1+AI2
7 = PID-Sollwert
8 = Motorpotentiometer
11 = Block-Ausg. 1
12 = Block-Ausg. 2
13 = Block-Ausg. 3
14 = Block-Ausg. 4
15 = Block-Ausg. 5
16 = Block-Ausg. 6
17 = Block-Ausg. 7
18 = Block-Ausg. 8
19 = Block-Ausg. 9
20 = Block-Ausg. 10
1.23
1.24
1.25 AI1 Signalbereich 0 1 0 379
Steuertafelsollwert,
Auswahl
Feldbussollwert,
Auswahl
0 20 1 121
0 20 2 122
Der Standardwert ist
von der mit Parameter
1.2 ausgewählten
Anwendung abhängig.
Auswahl der Frequenzsollwert-Quelle, wenn
als Steuerplatz das
Tastenfeld festgelegt
ist
Siehe P1.22.
Auswahl der Frequenzsollwert-Quelle, wenn
als Steuerplatz Feldbus festgelegt ist.
Siehe P1.22.
0 = 0 bis 10 V / 0 bis
20 mA
1 = 2 bis 10 V / 4 bis 20
mA
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 22
VACON · 22 KURZANLEITUNG
Tabelle 3: M1 Schnelleinstellungen
Index Parameter Min. Max. Einheit
1.26 AI2 Signalbereich 0 1 1 390
1.27 RO1 Funktion 0 73 2 11001 Siehe P3.5.3.2.1
1.28 RO2 Funktion 0 73 3 11004 Siehe P3.5.3.2.1
1.29 RO3 Funktion 0 73 1 11007 Siehe P3.5.3.2.1
1.30 AO1 Funktion 0 31 2 10050 Siehe P3.5.4.1.1
Werksein
st.
ID Beschreibung
0 = 0 bis 10 V / 0 bis
20 mA
1 = 2 bis 10 V / 4 bis 20
mA
Tabelle 4: M1.31 Standard/M1.32 HVAC
Index Parameter Min. Max. Einheit
1.31.1 Festfrequenz 1 P1.3 P1.4 Hz 10.0 105
Werksein
st.
ID Beschreibung
Wählen Sie eine Festfrequenz mit Digitaleingang DI4.
Wählen Sie eine Fest-
1.31.2 Festfrequenz 2 P1.3 P1.4 Hz 15.0 106
1.31.3 Festfrequenz 3 P1.3 P1.4 Hz 20.0 126
frequenz mit Digitaleingang DI5.
Wählen Sie eine Festfrequenz mit den Digitaleingängen DI4 und
DI5.
1.4.2 PID-REGLER
Der PID-Regler wird in der Regel bei Anwendungen eingesetzt, bei denen die
Prozessvariable (z. B. Druck) über die Motordrehzahl gesteuert wird.
Bei dieser Anwendung wird der interne PID-Regler des Umrichters für einen Einstellwert
und für ein Rückmeldungssignal konfiguriert.
Sie können zwei Steuerplätze verwenden. Wählen Sie Steuerplatz A oder B mit DI6. Wenn
Steuerplatz A aktiv ist, werden die Start- und Stopp-Befehle über DI1 gegeben und der
Frequenzsollwert wird vom PID-Regler bezogen. Wenn Steuerplatz B aktiv ist, werden die
Start- und Stopp-Befehle über DI4 gegeben und der Frequenzsollwert wird von AI1 bezogen.
Sie können alle Umrichterausgänge in allen Anwendungen frei konfigurieren. Die E/AStandardkarte verfügt über einen Analogausgang (Ausgangsfrequenz) und drei
Relaisausgänge (Betrieb, Fehler, Bereit).
Siehe die Beschreibungen der Parameter in Tabelle 1 Der Anlaufassistent.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 23
1
6
2
3
4
5
18
19
30
12
7
13
8
9
10
14
15
16
21
22
23
11
17
A
B
24
25
26
28
29
32
33
Modbus RTU
+
-
*)
**)
TI1-
TI1+
mA
FEHLER
BETRIEB
24 V
Hilfseingangsspannung
24 V Hilfsspannung
E/A Masse
E/A Masse
Digitaleingang 1
Digitaleingang 2
Digitaleingang 3
Digitaleingang 4
Digitaleingang 5
Digitaleingang 6
RO1/1 NC
RO1/2 CM
RO1/3 NO
Gemeinsamer
Bezug für DI1-DI6
Gemeinsamer
Bezug für DI1-DI6
RS485
RS485
RO2/1 NC
RO2/2 CM
RO2/3 NO
Standard-E/A-Karte
Klemme Signal Beschreibung
+10 Vref
AI1+
AI1-
AI2+
AI2-
24 Vout
Sollausgang
Analogeingang 1 +
Analogeingang 1 -
Analogeingang 2 +
Analogeingang 2 -
24 V Hilfsspannung
Analogausgang 1 +
Ausgangsfrequenz
(0 bis 20 mA)
BETRIEB
FEHLER
Serieller Bus, negativ
Serieller Bus, positiv
Relaisausgang 1
Relaisausgang 2
RO3/2 CM
RO3/3 NO
BEREIT
Relaisausgang 3
Analogausgang 1 -
+24 Vin
AO1+
DI4
DI5
DI6
DI1
DI2
DI3
CM
CM
24 Vout
GND
GND
CM
Fehlerquittierung
Externer Fehler
Sollwertpotentiometer
1 bis 10 kΩ
AO1-/GND
Festfrequenz 1
I =(0)4 bis
20 mA
2-Anschluss-Geber
Istwert
Platz A:
PID-Einstellwert
(Sollwert)
Platz B:
Frequenzsollwert
(Standard: 0 bis 10 V)
PID-Rückmeldung
(Istwert)
(Standard: 4 bis 20 mA)
Platz A: Start vorwärts (PID-Regler)
Platz B: Start vorwärts
(Frequenzsollwert P3.3.1.6)
Auswahl Steuerplatz A/B
Thermistoreingang
KURZANLEITUNG VACON · 23
Abb. 6: Werkseitig festgelegte Steueranschlüsse des PID-Reglers
* = Nur verfügbar in VACON® 100 X.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 24
A
B
C
VACON · 24 KURZANLEITUNG
** = Weitere Informationen über die DIP-Schalter-Konfigurationen im VACON® 100 X finden
Sie im Installationshandbuch des VACON® 100 X.
Abb. 7: Der DIP-Schalter
A. Digitaleingänge
C. An GND angeschlossen (Standard)
B. Isoliert
Tabelle 5: M1.1 Assistenten
Index Parameter Min. Max. Einheit
1.1.1 Anlaufassistent 0 1 0 1170
1.1.2
Brand-Modus-Assis-
tent
0 1 0 1672
Werksein
st.
ID Beschreibung
0 = Nicht aktivieren
1 = Aktivieren
Wenn Sie „Aktivieren“
wählen, wird der
Anlaufassistent gestartet (siehe Kapitel 1.3
Erster Start).
Wenn Sie „Aktivieren“
wählen, wird der
Brand-Modus-Assistent gestartet (siehe
2.6 Brand-Modus-Assistent).
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 25
KURZANLEITUNG VACON · 25
Tabelle 6: M1 Schnelleinstellungen
Index Parameter Min. Max. Einheit
1.2
Applikation 0 4 2 212
1.3
1.4
1.5
Sollwert Mindestfre-
quenz
Sollwert Höchstfre-
quenz
Beschleunigungszeit
1
0.00 P1.4 Hz 0.0 101
P1.3 320.0 Hz
0.1 3000.0 s 5.0 103
Werksein
st.
50.0 /
60.0
ID Beschreibung
0 = Standard
1 = HVAC
2 = PID-Regler
3 = Multi-Pump (einzelner Frequenzumrichter)
4 = Multi-Pump (mehrere Frequenzumrichter)
Der minimal zulässige
Frequenzsollwert.
Der maximal zulässige
102
Frequenzsollwert.
Definiert die erforderliche Zeit für das Steigern der Ausgangsfrequenz von der Nullfrequenz bis zur Höchstfrequenz.
1.6 Bremszeit 1 0.1 3000.0 s 5.0 104
1.7 Motorstromgrenze IH * 0,1 I
1.8 Motortyp 0 2 0 650
1.9 Motornennspannung variiert variiert V variiert 110
S
A variiert 107
Definiert die erforderliche Zeit für das Verringern der Ausgangsfrequenz von der Höchstfrequenz bis zur Nullfrequenz.
Maximaler Strom vom
Frequenzumrichter
zum Motor
0 = Asynchronmotor
1 = Dauermagnetmotor
2 = Reluktanzmotor
Dieser Wert (Un) kann
dem Typenschild des
Motors entnommen
werden.
HINWEIS!
Überprüfen Sie, ob
der Motor in Dreieckoder Sternschaltung
angeschlossen ist.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 26
VACON · 26 KURZANLEITUNG
Tabelle 6: M1 Schnelleinstellungen
Index Parameter Min. Max. Einheit
1.10 Motornennfrequenz 8.0 320.0 Hz
1.11 Motornenndrehzahl 24 19200 1/min variiert 112
1.12 Motornennstrom IH * 0,1 I
1.13
1.14 Energieoptimierung 0 1 0 666
Motor Cos Phi (Leis-
tungsfaktor)
0.30 1.00 variiert 120
S
Werksein
st.
50.0 /
60.0
A variiert 113
ID Beschreibung
Dieser Wert (fn) kann
dem Typenschild des
111
Motors entnommen
werden.
Dieser Wert nn kann
dem Typenschild des
Motors entnommen
werden.
Dieser Wert In kann
dem Typenschild des
Motors entnommen
werden.
Dieser Wert kann dem
Typenschild des
Motors entnommen
werden.
Der Frequenzumrichter sucht nach dem
Motormindeststrom,
um den Geräuschpegel
des Motors zu senken
und Energie zu sparen.
Verwenden Sie diese
Funktion z. B. für Lüfter- oder Pumpenanwendungen.
1.15 Identifikation 0 2 0 631
0 = Gesperrt
1 = Freigegeben
Bei der automatischen
Motoridentifikation
werden die Motorparameter berechnet bzw.
gemessen, die für eine
optimale Motor- und
Drehzahlsteuerung
erforderlich sind.
0 = Keine Aktion
1 = Bei Stillstand
2 = Mit Drehung
Vor der Durchführung
der Identifikation müssen die Motortypenschild-Parameter eingegeben werden.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 27
KURZANLEITUNG VACON · 27
Tabelle 6: M1 Schnelleinstellungen
Index Parameter Min. Max. Einheit
1.16 Startfunktion 0 1 0 505
1.17 Stoppfunktion 0 1 0 506
1.18
1.19
1.20
Automatische Feh-
lerquittierung
Reaktion auf exter-
nen Fehler
Reaktion auf Feh-
ler:AI-Signal
0 1 0 731
0 3 2 701
0 5 0 700
Werksein
st.
ID Beschreibung
0 = Rampe
1 = Fliegender Start
0 = Leerauslauf
1 = Rampe
0 = Gesperrt
1 = Freigegeben
0 = Keine Aktion
1 = Alarm
2 = Fehler (Stopp
gemäß Stopp-Modus)
3 = Fehler (Stopp
durch Leerauslauf)
0 = Keine Aktion
1 = Alarm
2 = Alarm + FehlerFestfrequenz
(P3.9.1.13)
3 = Alarm + Vorheriger
Frequenzsollwert
4 = Fehler (Stopp
gemäß Stopp-Modus)
5 = Fehler (Stopp
durch Leerauslauf)
1.21 Fernsteuerungsplatz 0 1 0 172
Auswahl des Fernsteuerungsplatzes (Start/
Stopp).
0 = E/A-Steuerung
1 = Feldbus-Steuerung
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 28
VACON · 28 KURZANLEITUNG
Tabelle 6: M1 Schnelleinstellungen
Index Parameter Min. Max. Einheit
1.22
E/A-Sollwert A, Aus-
wahl
1 20 6 117
Werksein
st.
ID Beschreibung
Auswahl der Frequenzsollwert-Quelle, wenn
als Steuerplatz E/A A
festgelegt ist
0 = PC
1 = Festfrequenz 0
2 = Steuertafelsollwert
3 = Feldbus
4 = AI1
5 = AI2
6 = AI1+AI2
7 = PID-Sollwert
8 = Motorpotentiometer
11 = Block-Ausg. 1
12 = Block-Ausg. 2
13 = Block-Ausg. 3
14 = Block-Ausg. 4
15 = Block-Ausg. 5
16 = Block-Ausg. 6
17 = Block-Ausg. 7
18 = Block-Ausg. 8
19 = Block-Ausg. 9
20 = Block-Ausg. 10
Der Standardwert ist
von der mit Parameter
1.2 ausgewählten
Anwendung abhängig.
1.23
1.24
1.25 AI1 Signalbereich 0 1 0 379
1.26 AI2 Signalbereich 0 1 1 390
1.27 RO1 Funktion 0 73 2 11001 Siehe P3.5.3.2.1
1.28 RO2 Funktion 0 73 3 11004 Siehe P3.5.3.2.1
Steuertafelsollwert,
Auswahl
Feldbussollwert,
Auswahl
1 20 1 121
1 20 2 122
Siehe P1.22.
Siehe P1.22.
0 = 0 bis 10 V / 0 bis
20 mA
1 = 2 bis 10 V / 4 bis 20
mA
0 = 0 bis 10 V / 0 bis
20 mA
1 = 2 bis 10 V / 4 bis 20
mA
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 29
KURZANLEITUNG VACON · 29
Tabelle 6: M1 Schnelleinstellungen
Index Parameter Min. Max. Einheit
1.29 RO3 Funktion 0 73 1 11007 Siehe P3.5.3.2.1
1.30 AO1 Funktion 0 31 2 10050 Siehe P3.5.4.1.1
Werksein
st.
ID Beschreibung
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 30
VACON · 30 KURZANLEITUNG
Tabelle 7: M1.33 PID-Regler
Index Parameter Min. Max. Einheit
1.33.1 PID-Verstärkung 0.00 100.00 % 100.00 118
1.33.2 PID I-Zeit 0.00 600.00 s 1.00 119
1.33.3 PID D-Zeit 0.00 100.00 s 0.00 1132
Werksein
st.
ID Beschreibung
Wenn der Parameter
auf 100 % eingestellt
ist, bewirkt eine Fehlerwertabweichung von
10 % eine Änderung
des Reglerausgangs
um 10 %.
Wenn dieser Parameter auf 1,00 s eingestellt ist, bewirkt eine
Fehlerwertabweichung
von 10 % eine Änderung des Reglerausgangs um 10,00 %/s.
Wenn dieser Parameter auf 1,00 s eingestellt ist, bewirkt eine
Fehlerwertabweichung
während 1,00 s eine
Änderung des Reglerausgangs um 10,00 %.
1.33.4 Wahl der Einheit 1 44 1 1036
1.33.5 Anzeigeeinheit Min variiert variiert variiert 1033
1.33.6 Anzeigeeinheit Max variiert variiert variiert 1034
1.33.7
1.33.8
1.33.9
Rückmeldung 1
Quellenauswahl
Einstellwert 1 Quel-
lenauswahl
Einstellwert 1 Steu-
ertafel
0 30 2 334
0 32 1 332
variiert variiert variiert 0 167
Wählen Sie die Einheit
für den Prozess aus.
(siehe P3.13.1.4)
Der Wert der Anzeigeeinheit, der 0% des
PID-Rückmeldungssignals entspricht.
Der Wert der Anzeigeeinheit, der 100 % des
PID-Rückmeldungssignals entspricht.
Siehe P3.13.3.3.
Siehe P3.13.2.6.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 31
KURZANLEITUNG VACON · 31
Tabelle 7: M1.33 PID-Regler
Index Parameter Min. Max. Einheit
1.33.10
1.33.11 SP1 Sleep-Verzög. 0 3000 s 0 1017
1.33.12 SP1 Wakeup-Pegel variiert variiert variiert variiert 1018
Einstellwert Sleep-
Frequenz SP1
0.0 320.0 Hz 0.0 1016
Werksein
st.
ID Beschreibung
Der Frequenzumrichter wechselt in den
Sleep-Modus, wenn die
Ausgangsfrequenz länger als die durch den
Parameter Sleep-Verzögerung definierte
Zeit unterhalb dieses
Einstellwerts bleibt.
0 = Nicht verwendet
Die Mindestdauer, die
die Frequenz unterhalb
der Sleep-Frequenz
liegt, bevor der Frequenzumrichter
gestoppt wird
0 = Nicht verwendet
Der Wakeup-Wert für
die PID-Rückmeldungsüberwachung.
Wakeup-Pegel 1 verwendet die ausgewählten Anzeigeeinheiten.
0 = Nicht verwendet
Die Festfrequenz, die
1.33.12 Festfrequenz 1 P1.3 P1.4 Hz 10.0 105
der Digitaleingang DI5
auswählt.
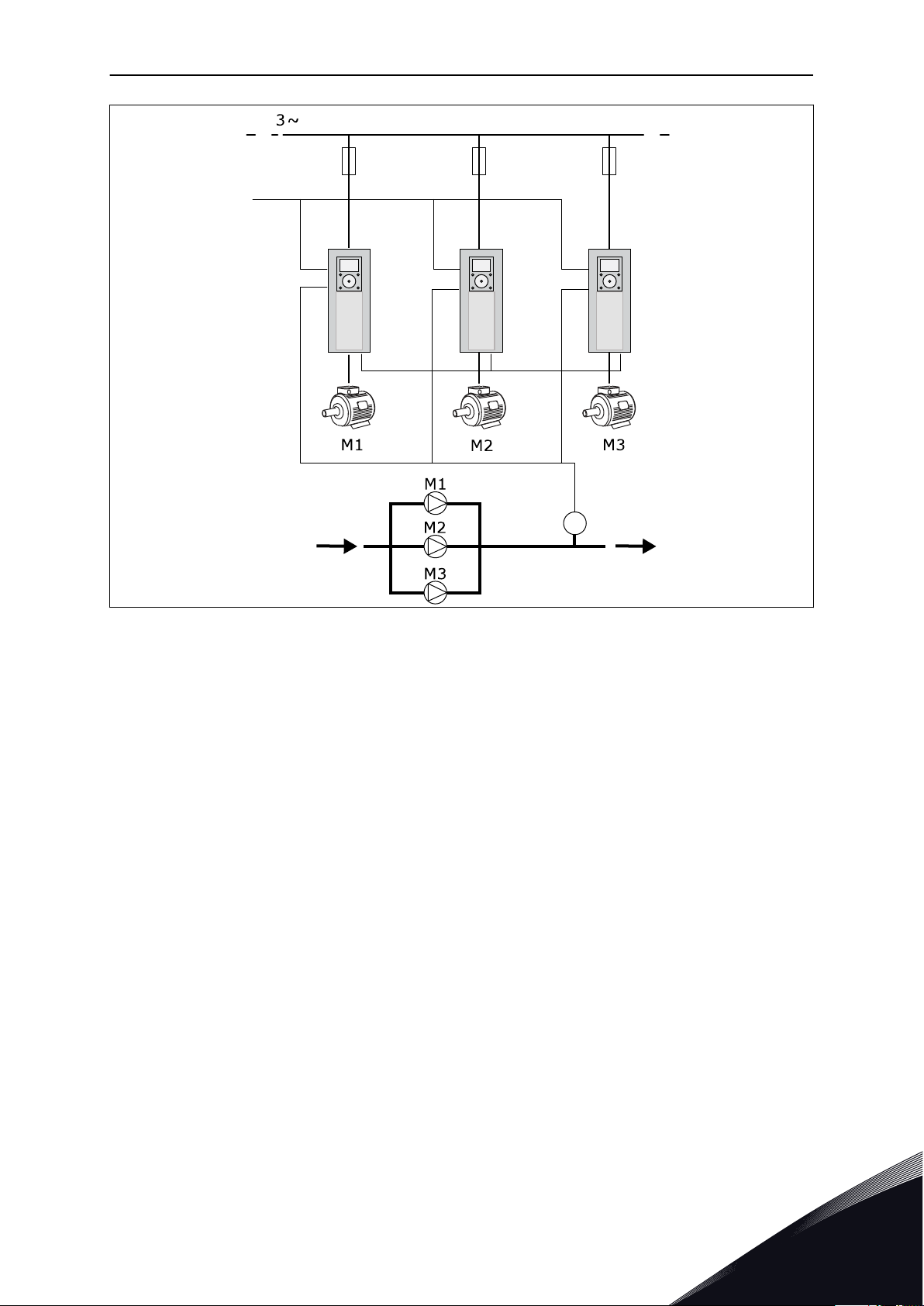
1.4.3 MULTI-PUMP-APPLIKATION (EINZELNER FREQUENZUMRICHTER)
Sie können die Multi-Pump-Applikation (einzelner Frequenzumrichter) in Applikationen
verwenden, bei denen ein Frequenzumrichter ein System mit maximal 8 parallel laufenden
Motoren steuert, z. B. Pumpen, Lüfter oder Kompressoren. Werkseitig ist die Multi-PumpApplikation (einzelner Frequenzumrichter) für 3 parallele Motoren konfiguriert.
Der Frequenzumrichter wird an einen der Motoren angeschlossen, der zum regelnden Motor
wird. Der interne PID-Regler des Frequenzumrichters regelt die Drehzahl des regelnden
Motors und gibt über Relaisausgänge Steuersignale) zum Starten oder Stoppen der
Hilfsmotoren aus. Die Hilfsmotoren werden mit Hilfe externer Schütze (Schalter) auf die
Stromversorgung geschaltet.
Sie können eine Prozessvariable wie beispielsweise den Druck über die Drehzahlsteuerung
des regelnden Motors sowie die Anzahl der zu bedienenden Motoren regeln.
Siehe die Beschreibungen der Parameter in 10 Parameterbeschreibungen.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 32

PT
RO2
RO3
Start/Stopp
VACON · 32 KURZANLEITUNG
Abb. 8: Multi-Pump-Konfiguration (einzelner Frequenzumrichter)
Die Autowechselfunktion (Änderung der Startreihenfolge) sorgt für einen gleichmäßigeren
Verschleiß der Motoren im System. Die Autowechselfunktion überwacht die Betriebsstunden
jedes einzelnen Motors und legt ihre die Startreihenfolge fest. Der Motor mit den wenigsten
Betriebsstunden wird als erster, der Motor mit den meisten Betriebsstunden als letzter
gestartet. Sie können den Autowechsel so konfigurieren, dass er auf Basis einer
Autowechselintervalldauer startet, die über die interne Echtzeituhr des Frequenzumrichters
festgelegt wird.
Sie können den Autowechsel für alle Motoren im System oder nur für die Hilfsmotoren
konfigurieren.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 33

K2 K3
K1 K2 K2 K1.1 K2.1 K3.1
KURZANLEITUNG VACON · 33
Abb. 9: Regelschema, wenn der Autowechsel nur für die Hilfsmotoren konfiguriert ist
Abb. 10: Regelschema, wenn der Autowechsel für alle Motoren konfiguriert ist
Sie können zwei Steuerplätze verwenden. Wählen Sie Steuerplatz A oder B mit DI6. Wählen
Sie Steuerplatz A oder B mit DI6. Wenn Steuerplatz A aktiv ist, werden die Start- und StoppBefehle über DI1 gegeben und der Frequenzsollwert wird vom PID-Regler bezogen. Wenn
Steuerplatz B aktiv ist, werden die Start- und Stopp-Befehle über DI4 gegeben und der
Frequenzsollwert wird von AI1 bezogen.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 34

VACON · 34 KURZANLEITUNG
Sie können alle Umrichterausgänge in allen Anwendungen frei konfigurieren. Die E/AStandardkarte verfügt über einen Analogausgang (Ausgangsfrequenz) und drei
Relaisausgänge (Betrieb, Fehler, Bereit).
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 35
1
6
2
3
4
5
18
19
30
12
7
13
8
9
10
14
15
16
21
22
23
11
17
A
B
24
25
26
28
29
Modbus RTU
*)
32
33
**)
+
-
A1
A1
A1
A2
A2
A2
TI1-
TI1+
mA
Motor 1 Steuerung
(Multi-Pump K2 Schütz)
Motor 2 Steuerung
(Multi-Pump K2 Schütz)
AO1-/GND
+24 Vin
GND
GND
DI1
DI2
DI3
DI4
DI5
DI6
RO1/1 NC
RO1/2 CM
RO1/3 NO
CM
CM
RS485
RS485
RO2/1 NC
RO2/2 CM
RO2/3 NO
RO3/2 CM
RO3/3 NO
Standard-E/A-Karte
Klemme Signal Beschreibung
+10 Vref
AI1+
AI1-
AI2+
AI2-
24 Vout
Sollausgang
Analogeingang 1 +
Analogeingang 1 -
Analogeingang 2 +
Analogeingang 2 -
24 V Hilfsspannung
E/A Masse
Digitaleingang 1
Digitaleingang 2
Digitaleingang 3
Digitaleingang 4
Digitaleingang 5
Digitaleingang 6
Gemeinsamer
Bezug für DI1-DI6
Gemeinsamer
Bezug für DI1-DI6
24 V Hilfsspannung
E/A Masse
Analogausgang 1 +
Analogausgang 1 -
Serieller Bus, negativ
Serieller Bus, positiv
Relaisausgang 1
Relaisausgang 2
Relaisausgang 3
AO1+
Platz A: Nicht verwendet
Position B:
Frequenzsollwert
(Standard: 0 bis 10 V)
PID-Rückmeldung
(Istwert)
(Standard: ... 20 mA)
Platz A: Start vorwärts
(PID-Regler)
Platz B: Start vorwärts
(Freq.sollw. P3.3.1.6)
I = (0)4 bis 20 mA
Istwert
2-Anschluss-Geber
Motor 1 Interlock
Motor 2 Interlock
Motor 3 Interlock
24 Vout
Ausgangsfrequenz
(Standard 0 – 20 mA)
24 V
Hilfseingangsspannung
Motor 3 Steuerung
(Multi-Pump K2 Schütz)
Sollwertpotentiometer
1 bis 10 kΩ
Auswahl Steuerplatz A/B
Thermistoreingang
KURZANLEITUNG VACON · 35
Abb. 11: Die werkseitig festgelegte Steueranschlüsse der Multi-Pump-Applikation (einzelner
Frequenzumrichter)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 36

A
B
C
VACON · 36 KURZANLEITUNG
* = Nur verfügbar in VACON® 100 X.
** = Weitere Informationen über die DIP-Schalter-Konfigurationen im VACON® 100 X finden
Sie im Installationshandbuch des VACON® 100 X.
Abb. 12: Der DIP-Schalter
A. Digitaleingänge
C. An GND angeschlossen (Standard)
B. Isoliert
Tabelle 8: M1.1 Assistenten
Index Parameter Min. Max. Einheit
1.1.1 Anlaufassistent 0 1 0 1170
1.1.2
Brand-Modus-Assis-
tent
0 1 0 1672
Werksein
st.
ID Beschreibung
0 = Nicht aktivieren
1 = Aktivieren
Wenn Sie „Aktivieren“
wählen, wird der
Anlaufassistent gestartet (siehe Kapitel 1.3
Erster Start).
Wenn Sie „Aktivieren“
wählen, wird der
Brand-Modus-Assistent gestartet (siehe
2.6 Brand-Modus-Assistent).
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 37

KURZANLEITUNG VACON · 37
Tabelle 9: M1 Schnelleinstellungen
Index Parameter Min. Max. Einheit
1.2
Applikation 0 4 2 212
1.3
1.4
1.5
Sollwert Mindestfre-
quenz
Sollwert Höchstfre-
quenz
Beschleunigungszeit
1
0.00 P1.4 Hz 0.0 101
P1.3 320.0 Hz
0.1 3000.0 s 5.0 103
Werksein
st.
50.0 /
60.0
ID Beschreibung
0 = Standard
1 = HVAC
2 = PID-Regler
3 = Multi-Pump (einzelner Frequenzumrichter)
4 = Multi-Pump (mehrere Frequenzumrichter)
Der minimal zulässige
Frequenzsollwert.
Der maximal zulässige
102
Frequenzsollwert.
Definiert die erforderliche Zeit für das Steigern der Ausgangsfrequenz von der Nullfrequenz bis zur Höchstfrequenz.
1.6 Bremszeit 1 0.1 3000.0 s 5.0 104
1.7 Motorstromgrenze IH * 0,1 I
1.8 Motortyp 0 2 0 650
1.9 Motornennspannung variiert variiert V variiert 110
S
A variiert 107
Definiert die erforderliche Zeit für das Verringern der Ausgangsfrequenz von der Höchstfrequenz bis zur Nullfrequenz.
Maximaler Strom vom
Frequenzumrichter
zum Motor
0 = Asynchronmotor
1 = Dauermagnetmotor
2 = Reluktanzmotor
Dieser Wert (Un) kann
dem Typenschild des
Motors entnommen
werden.
HINWEIS!
Überprüfen Sie, ob
der Motor in Dreieckoder Sternschaltung
angeschlossen ist.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 38

VACON · 38 KURZANLEITUNG
Tabelle 9: M1 Schnelleinstellungen
Index Parameter Min. Max. Einheit
1.10 Motornennfrequenz 8.0 320.0 Hz
1.11 Motornenndrehzahl 24 19200 1/min variiert 112
1.12 Motornennstrom IH * 0,1 I
1.13
1.14 Energieoptimierung 0 1 0 666
Motor Cos Phi (Leis-
tungsfaktor)
0.30 1.00 variiert 120
S
Werksein
st.
50.0 /
60.0
A variiert 113
ID Beschreibung
Dieser Wert (fn) kann
dem Typenschild des
111
Motors entnommen
werden.
Dieser Wert nn kann
dem Typenschild des
Motors entnommen
werden.
Dieser Wert In kann
dem Typenschild des
Motors entnommen
werden.
Dieser Wert kann dem
Typenschild des
Motors entnommen
werden.
Der Frequenzumrichter sucht nach dem
Motormindeststrom,
um den Geräuschpegel
des Motors zu senken
und Energie zu sparen.
Verwenden Sie diese
Funktion z. B. für Lüfter- oder Pumpenanwendungen.
1.15 Identifikation 0 2 0 631
0 = Gesperrt
1 = Freigegeben
Bei der automatischen
Motoridentifikation
werden die Motorparameter berechnet bzw.
gemessen, die für eine
optimale Motor- und
Drehzahlsteuerung
erforderlich sind.
0 = Keine Aktion
1 = Bei Stillstand
2 = Mit Drehung
Vor der Durchführung
der Identifikation müssen die Motortypenschild-Parameter eingegeben werden.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 39

KURZANLEITUNG VACON · 39
Tabelle 9: M1 Schnelleinstellungen
Index Parameter Min. Max. Einheit
1.16 Startfunktion 0 1 0 505
1.17 Stoppfunktion 0 1 0 506
1.18
1.19
1.20
Automatische Feh-
lerquittierung
Reaktion auf exter-
nen Fehler
Reaktion auf Feh-
ler:AI-Signal
0 1 0 731
0 3 2 701
0 5 0 700
Werksein
st.
ID Beschreibung
0 = Rampe
1 = Fliegender Start
0 = Leerauslauf
1 = Rampe
0 = Gesperrt
1 = Freigegeben
0 = Keine Aktion
1 = Alarm
2 = Fehler (Stopp
gemäß Stopp-Modus)
3 = Fehler (Stopp
durch Leerauslauf)
0 = Keine Aktion
1 = Alarm
2 = Alarm + FehlerFestfrequenz
(P3.9.1.13)
3 = Alarm + Vorheriger
Frequenzsollwert
4 = Fehler (Stopp
gemäß Stopp-Modus)
5 = Fehler (Stopp
durch Leerauslauf)
1.21 Fernsteuerungsplatz 0 1 0 172
Auswahl des Fernsteuerungsplatzes (Start/
Stopp).
0 = E/A-Steuerung
1 = Feldbus-Steuerung
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 40

VACON · 40 KURZANLEITUNG
Tabelle 9: M1 Schnelleinstellungen
Index Parameter Min. Max. Einheit
1.22
E/A-Sollwert A, Aus-
wahl
1 20 6 117
Werksein
st.
ID Beschreibung
Auswahl der Frequenzsollwert-Quelle, wenn
als Steuerplatz E/A A
festgelegt ist
0 = PC
1 = Festfrequenz 0
2 = Steuertafelsollwert
3 = Feldbus
4 = AI1
5 = AI2
6 = AI1+AI2
7 = PID-Sollwert
8 = Motorpotentiometer
11 = Block-Ausg. 1
12 = Block-Ausg. 2
13 = Block-Ausg. 3
14 = Block-Ausg. 4
15 = Block-Ausg. 5
16 = Block-Ausg. 6
17 = Block-Ausg. 7
18 = Block-Ausg. 8
19 = Block-Ausg. 9
20 = Block-Ausg. 10
Der Standardwert ist
von der mit Parameter
1.2 ausgewählten
Anwendung abhängig.
1.23
1.24
1.25 AI1 Signalbereich 0 1 0 379
1.26 AI2 Signalbereich 0 1 1 390
1.27 RO1 Funktion 0 73 2 11001 Siehe P3.5.3.2.1
1.28 RO2 Funktion 0 73 3 11004 Siehe P3.5.3.2.1
Steuertafelsollwert,
Auswahl
Feldbussollwert,
Auswahl
1 20 1 121
1 20 2 122
Siehe P1.22.
Siehe P1.22.
0 = 0 bis 10 V / 0 bis
20 mA
1 = 2 bis 10 V / 4 bis 20
mA
0 = 0 bis 10 V / 0 bis
20 mA
1 = 2 bis 10 V / 4 bis 20
mA
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 41

KURZANLEITUNG VACON · 41
Tabelle 9: M1 Schnelleinstellungen
Index Parameter Min. Max. Einheit
1.29 RO3 Funktion 0 73 1 11007 Siehe P3.5.3.2.1
1.30 AO1 Funktion 0 31 2 10050 Siehe P3.5.4.1.1
Werksein
st.
ID Beschreibung
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 42

VACON · 42 KURZANLEITUNG
Tabelle 10: M1.34 Multi-Pump (einzelner Frequenzumrichter)
Index Parameter Min. Max. Einheit
1.34.1 PID-Verstärkung 0.00 100.00 % 100.00 118
1.34.2 PID I-Zeit 0.00 600.00 s 1.00 119
1.34.3 PID D-Zeit 0.00 100.00 s 0.00 1132
Werks
einst.
ID Beschreibung
Wenn der Parameter auf 100 % eingestellt ist, bewirkt
eine Fehlerwertabweichung von 10 %
eine Änderung des
Reglerausgangs
um 10 %.
Wenn dieser Parameter auf 1,00 s
eingestellt ist,
bewirkt eine Fehlerwertabweichung
von 10 % eine
Änderung des Reglerausgangs um
10,00 %/s.
Wenn dieser Parameter auf 1,00 s
eingestellt ist,
bewirkt eine Fehlerwertabweichung
während 1,00 s
eine Änderung des
Reglerausgangs
um 10,00 %.
1.34.4 Wahl der Einheit 1 44 1 1036
1.34.5
1.34.6
1.34.7
1.34.8
Anzeigeeinheit
Min
Anzeigeeinheit
Max
Rückmeldung 1
Quellenauswahl
Einstellwert 1
Quellenauswahl
variiert variiert variiert 1033
variiert variiert variiert 1034
0 30 2 334
0 32 1 332
Wählen Sie die Einheit für den Prozess aus. (siehe
P3.13.1.4)
Der Wert der
Anzeigeeinheit, der
0% des PID-Rückmeldungssignals
entspricht.
Der Wert der
Anzeigeeinheit, der
100 % des PIDRückmeldungssignals entspricht.
Siehe P3.13.3.3.
Siehe P3.13.2.6.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 43
KURZANLEITUNG VACON · 43
Tabelle 10: M1.34 Multi-Pump (einzelner Frequenzumrichter)
Index Parameter Min. Max. Einheit
1.34.9
1.34.10
1.34.11
Einstellwert 1
Steuertafel
Einstellwert
Sleep-Frequenz
SP1
SP1 Sleep-Ver-
zög.
variiert variiert variiert 0 167
0.0 320.0 Hz 0.0 1016
0 3000 s 0 1017
Werks
einst.
ID Beschreibung
Der Frequenzumrichter wechselt in
den Sleep-Modus,
wenn die Ausgangsfrequenz länger als die durch
den Parameter
Sleep-Verzögerung
definierte Zeit
unterhalb dieses
Einstellwerts
bleibt.
0 = Nicht verwendet
Die Mindestdauer,
die die Frequenz
unterhalb der
Sleep-Frequenz
liegt, bevor der
Frequenzumrichter
gestoppt wird
0 = Nicht verwendet
1.34.12
1.34.13
1.34.14 Anzahl Pumpen 1 8 1 1001
SP1 Wakeup-
Pegel
Multi-Pump-
Modus
variiert variiert variiert variiert 1018
0 2 0 1785
Der Wakeup-Wert
für die PID-Rückmeldungsüberwachung. WakeupPegel 1 verwendet
die ausgewählten
Anzeigeeinheiten.
0 = Nicht verwendet
Wählt den MultiPump-Modus aus.
0 = Einzelantrieb
1 = Multifollower
2 = Multimaster
Gesamtzahl der
Motoren (Pumpen/
Lüfter), die im
Multi-Pump-System betrieben werden.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 44

VACON · 44 KURZANLEITUNG
Tabelle 10: M1.34 Multi-Pump (einzelner Frequenzumrichter)
Index Parameter Min. Max. Einheit
1.34.15
1.34.16 Autowechsel 0 2 1 1027
Pumpe Interlo-
cking
0 1 1 1032
Werks
einst.
ID Beschreibung
Aktivieren/deaktivieren Sie die Interlocks. Interlocks
informieren das
System, ob ein
Motor angeschlossen ist oder nicht.
0 = Gesperrt
1 = Freigegeben
Deaktivieren/aktivieren Sie die
Startreihenfolge
und Priorität der
Motoren.
0 = Gesperrt
1 = Freigegeben
(Intervall)
2 = Freigegeben
(Wochentage)
1.34.17
1.34.18
Autom. gewech-
selte Pumpe
Autowechselin-
tervall
0 1 1 1028
0.0 3000.0 h 48.0 1029
0 = Hilfspumpe
1 = Alle Pumpen
Wenn die mit diesem Parameter
festgelegte Zeit
abgelaufen ist, wird
die Autowechselfunktion gestartet.
Die Autowechselfunktion startet
jedoch nur, wenn
die Leistung den
mit den Parametern P1.34.21 und
P1.34.22 festgelegten Pegel unterschreitet.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 45

KURZANLEITUNG VACON · 45
Tabelle 10: M1.34 Multi-Pump (einzelner Frequenzumrichter)
Index Parameter Min. Max. Einheit
1.34.19 Autowechseltage 0 127 15904
1.34.20
1.34.21
1.34.22
Autowechsel-
Tageszeit
Autowechsel:
Frequenzgrenze
Autowechsel:
Pumpengrenze
00:00:00 23:59:59 Zeit 15905
0.00 P3.3.1.2 Hz 25:00 1031
1 6 1030
Werks
einst.
ID Beschreibung
Bereich
B0 = Sonntag
B1 = Montag
B2 = Dienstag
B3 = Mittwoch
B4 = Donnerstag
B5 = Freitag
B6 = Samstag
Bereich:
00:00:00-23:59:59
Diese Parameter
legen den Pegel
fest, unter dem die
genutzte Leistung
liegen muss, damit
der Autowechsel
startet.
Der Prozentsatz
des Einstellwerts.
Zum Beispiel
1.34.23 Regelbereich 0 100 % 10 1097
1.34.24
1.34.25
1.34.26
Regelbereichver-
zögerung
Pumpe 1 Inter-
lock
Pumpe 2 Inter-
lock
0 3600 s 10 1098
DigIN
Slot0.1
DigIN
Slot0.1
426
427
Einstellwert = 5
bar
Regelbereich = 10
%
Solange der Rückmeldungswert zwischen 4,5 und
5,5 bar liegt, bleibt
der Motor angeschlossen.
Liegt der Rückmeldungswert außerhalb des Regelbereichs, die Zeit,
nach der Pumpen
hinzugefügt oder
entfernt werden.
OPEN = Nicht aktiv
CLOSED = Aktiv
Siehe 1.34.25
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 46
VACON · 46 KURZANLEITUNG
Tabelle 10: M1.34 Multi-Pump (einzelner Frequenzumrichter)
Index Parameter Min. Max. Einheit
1.34.27
1.34.28
1.34.29
1.34.30
1.34.31
1.34.32
Pumpe 3 Inter-
lock
Pumpe 4 Inter-
lock
Pumpe 5 Inter-
lock
Pumpe 6 Inter-
lock
Pumpe 7 Inter-
lock
Pumpe 8 Inter-
lock
Werks
einst.
DigIN
Slot0.1
DigIN
Slot0.1
DigIN
Slot0.1
DigIN
Slot0.1
DigIN
Slot0.1
DigIN
Slot0.1
ID Beschreibung
428
429
430
486
487
488
Siehe 1.34.25
Siehe 1.34.25
Siehe 1.34.25
Siehe 1.34.25
Siehe 1.34.25
Siehe 1.34.25
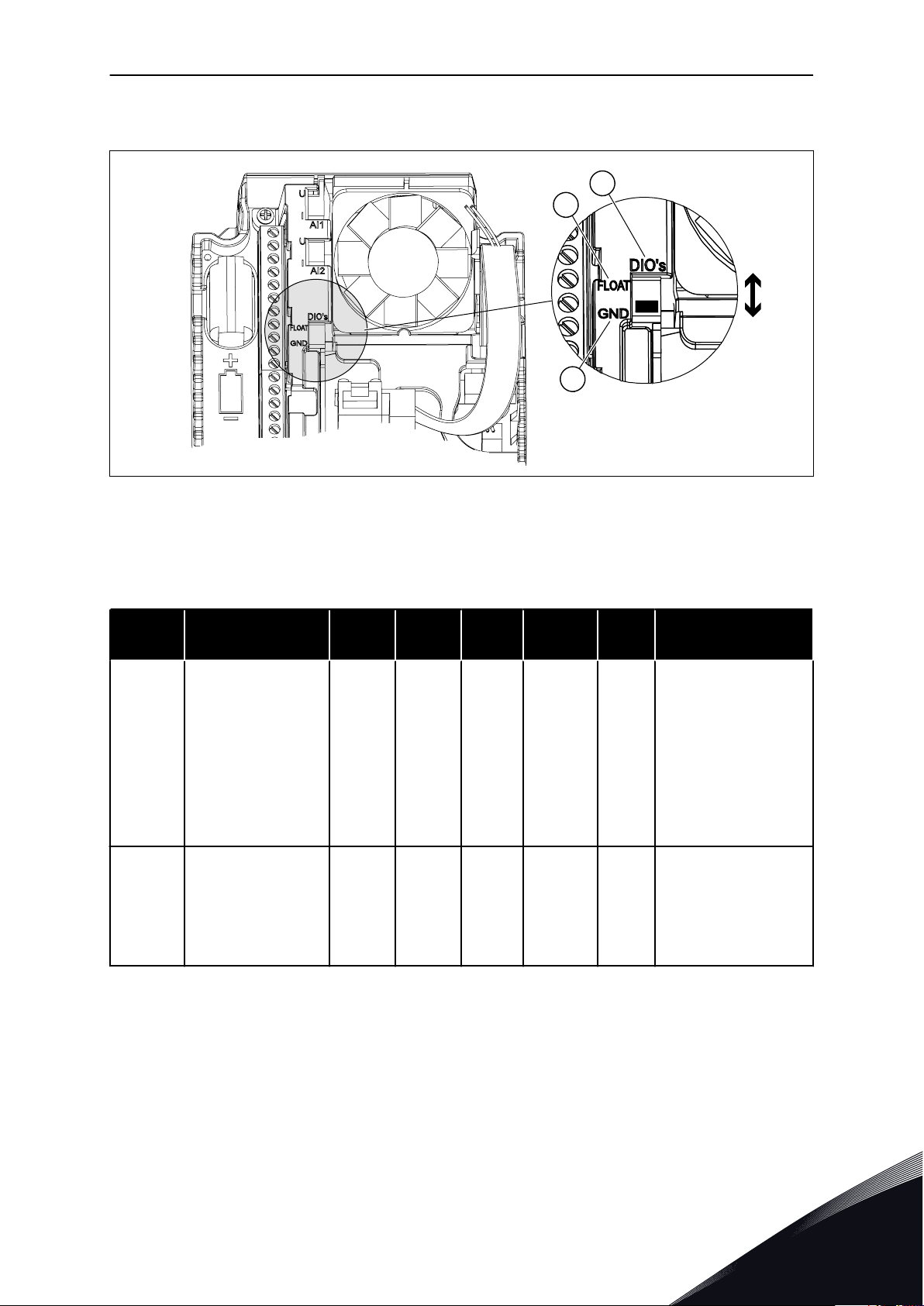
1.4.4 MULTI-PUMP-APPLIKATION (MEHRERE FREQUENZUMRICHTER)
Sie können die Multi-Pump-Applikation (mehrere Frequenzumrichter) in einem System
verwenden, in dem maximal 8 parallel laufende Motoren mit unterschiedlichen Drehzahlen
laufen, z. B. Pumpen, Lüfter oder Kompressoren. Werkseitig ist die Multi-Pump-Applikation
(mehrere Frequenzumrichter) für 3 parallele Motoren konfiguriert.
Siehe die Beschreibungen der Parameter in 10 Parameterbeschreibungen.
Die Checkliste für die Inbetriebnahme eines System mit Multi-Pump (mehrere
Frequenzumrichter) finden Sie in 10.16.1 Checkliste für die Inbetriebnahme der Multi-Pumpe
(mehrere Frequenzumrichter).
Jeder Motor hat einen Frequenzumrichter, der den betreffenden Motor steuert. Die
Frequenzumrichter des Systems kommunizieren über Modbus RTU miteinander.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 47
Start/Stopp
PT
FB
KURZANLEITUNG VACON · 47
Abb. 13: Multi-Pump-Konfiguration (mehrere Frequenzumrichter)
Sie können eine Prozessvariable wie beispielsweise den Druck über die Drehzahlsteuerung
des regelnden Motors sowie die Anzahl der zu bedienenden Motoren regeln. Der interne PIDRegler im Frequenzumrichter des regelnden Motors steuert die Drehzahl, das Starten und
Stoppen der Motoren.
Der Betrieb des Systems hängt vom gewählten Betriebsmodus ab. Im Multifollower-Modus
folgen die Hilfsmotoren der Drehzahl des regelnden Motors.
Pumpe 1 regelt, und die Pumpen 2 und 3 orientieren sich an der Drehzahl von Pumpe 1, wie
in den Kurven A gezeigt.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 48

A
P1 P2 P3
f
max
f
min
RPM
t
A
B
f
max
f
min
RPM
t
P1
P2
P3
VACON · 48 KURZANLEITUNG
Abb. 14: Regelung im Multifollower-Modus
Die Abbildung unten zeigt ein Beispiel für den Multimaster-Modus, bei dem die Drehzahl des
regelnden Motors auf eine konstante Produktionsfrequenz B festgelegt ist, wenn der nächste
Motor startet. Die Kurven A zeigen die Regelung der Pumpen.
Abb. 15: Regelung im Multimaster-Modus
Die Autowechselfunktion (Änderung der Startreihenfolge) sorgt für einen gleichmäßigeren
Verschleiß der Motoren im System. Die Autowechselfunktion überwacht die Betriebsstunden
jedes einzelnen Motors und legt ihre die Startreihenfolge fest. Der Motor mit den wenigsten
Betriebsstunden wird als erster, der Motor mit den meisten Betriebsstunden als letzter
gestartet. Sie können den Autowechsel so konfigurieren, dass er auf Basis einer
Autowechselintervalldauer oder auf Basis der internen Echtzeituhr des Frequenzumrichters
startet (für die Echtzeituhr wird eine Batterie benötigt).
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 49

1
6
2
3
4
5
18
19
30
12
7
13
8
9
10
14
15
16
21
22
23
11
17
A
B
24
25
26
28
29
32
33
*)
**)
+
-
TI1+
TI1-
mA
RUN (BETRIEB)
RUN
(BETRIEB)
AO1-
+24 V
in
Istwert
GND
GND
DI1
DI2
DI3
DI4
DI5
DI6
RO1/1 NC
RO1/2 CM
RO1/3 NO
CM
CM
RS485
RS485
RO2/1 NC
RO2/2 CM
RO2/3 NO
Standard-E/A-Karte
Klemme Signal Beschreibung
+10 V
ref
AI1+
AI1-
AI2+
AI2-
24 V
out
24 V
out
Sollausgang
Analogeingang 1 +
Analogeingang 1 -
Analogeingang 2 +
Analogeingang 2 -
24 V Hilfsspannung
E/A Masse
Digitaleingang 1
Digitaleingang 2
Digitaleingang 3
Digitaleingang 4
Digitaleingang 5
Digitaleingang 6
Gemeinsamer Bezug für DI1-DI6
Gemeinsamer Bezug für DI1-DI6
24 V Hilfsspannung
E/A Masse
Analogausgang 1 +
Analogausgang 1 -
24 V Hilfsversorgung
Eingangsspannung
Serieller Bus, negativ
Serieller Bus, positiv
Relaisausgang
1
Relaisausgang
2
RO3/2 CM
RO3/3 NO
READY (BEREIT)
Relaisausgang
3
FAULT (FEHLER)
Fehlerquittierung
Externer Fehler
Ausgangsfrequenz
(0 bis 20 mA)
AO1+
Standardmäßig nicht
verwendet (Standard:
0 bis 10 V)
PID-Rückmeldung
(Istwert) (Standard
4 bis 20 mA)
Start vorwärts
Spülen (Start vorwärts + Spülfreq.)
Auswahl PID-Einstellwert
(Offen = Steuertafel SP1, geschlossen = Steuertafel SP2)
Pumpe Interlock
(offen = nicht verfügbar, geschlossen = verfügbar)
Kommunikation zwischen
Umrichtern
(Modbus RTU)
2-Draht-Wandler
An Anschluss
A an anderen
Umrichtern
An Anschluss B an
anderen Umrichtern
FAULT
(FEHLER)
(0)4 bis 20 mA
Thermistoreingang
KURZANLEITUNG VACON · 49
Abb. 16: Die werkseitig festgelegten Steueranschlüsse der Multi-Pump-Applikation (mehrere
Frequenzumrichter)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 50

A
B
C
VACON · 50 KURZANLEITUNG
* = Nur verfügbar in VACON® 100 X.
** = Weitere Informationen über die DIP-Schalter-Konfigurationen im VACON® X finden Sie
im Installationshandbuch des VACON® 100 X.
Abb. 17: Der DIP-Schalter
A. Digitaleingänge
C. An GND angeschlossen (Standard)
B. Isoliert
Jeder Frequenzumrichter hat einen Drucksensor. Bei hohem Redundanzgrad sind der
Frequenzumrichter und die Drucksensoren redundant.
Falls ein Frequenzumrichter ausfällt, startet der nächste Frequenzumrichter als Master.
•
Falls ein Sensor ausfällt, startet der nächste Frequenzumrichter (der einen separaten
•
Sensor besitzt) als Master.
Jeder Frequenzumrichter wird durch einen separaten Schalter mit den Einstellungen Auto,
Aus und Manuell gesteuert.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 51

1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 3
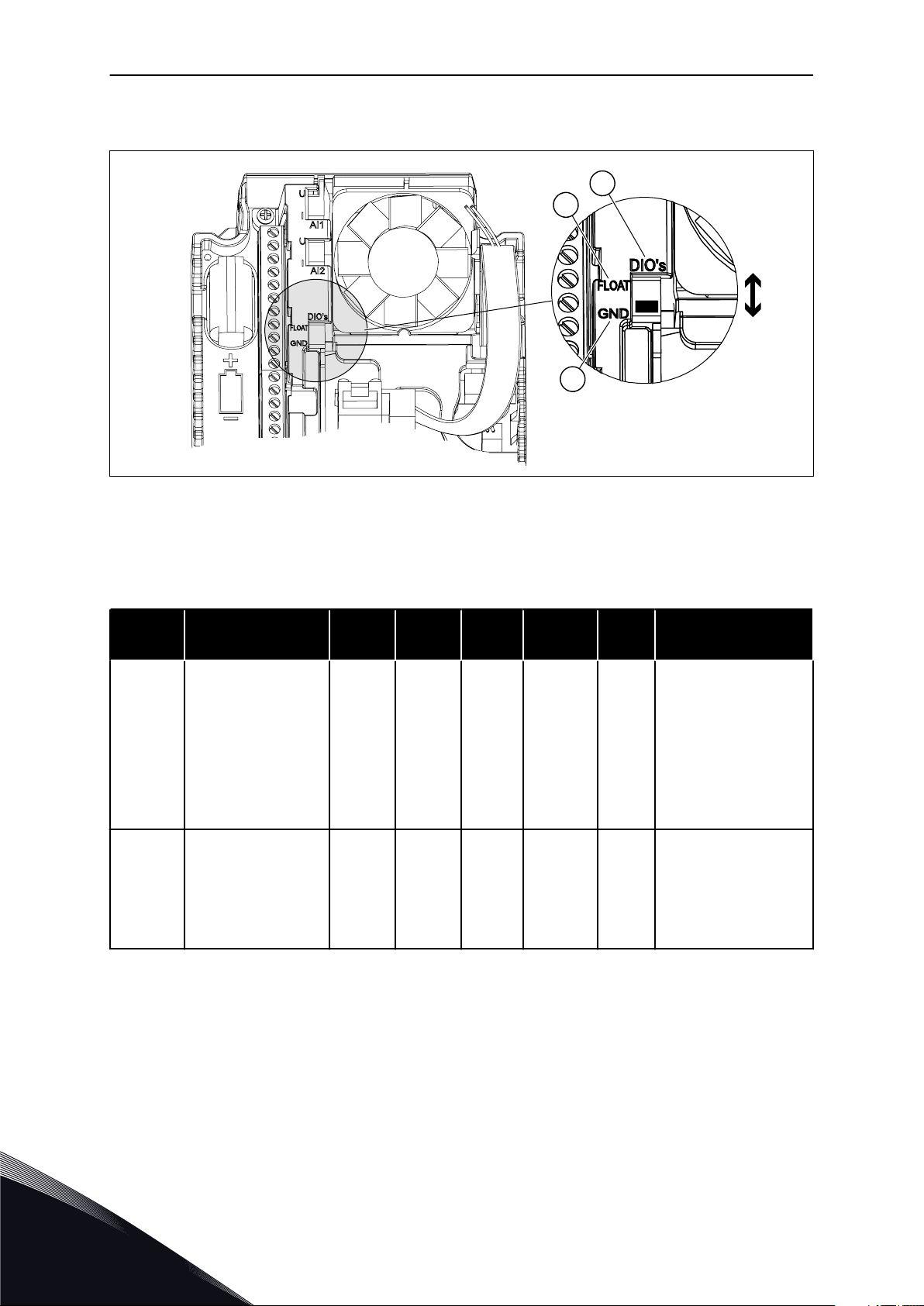
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
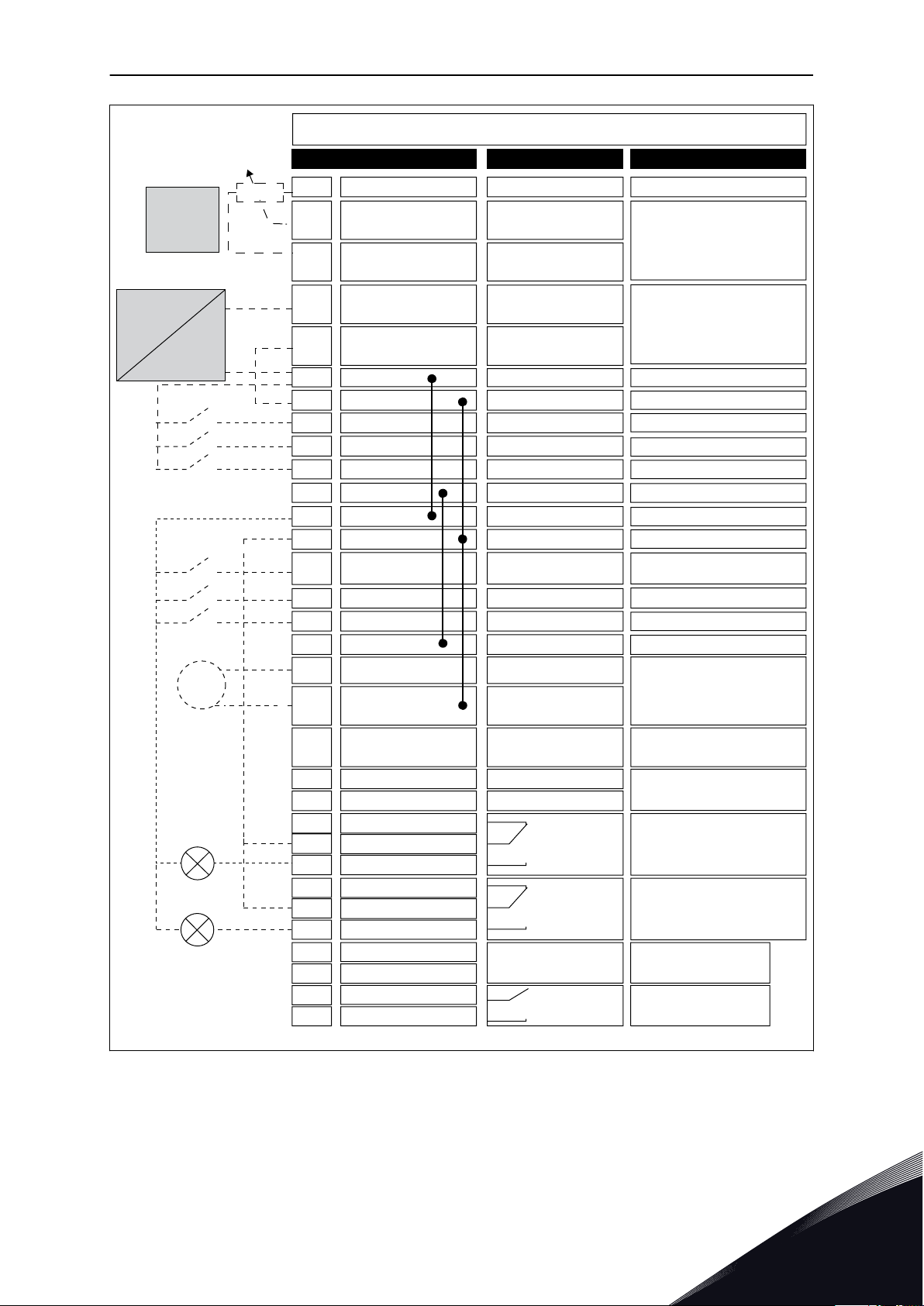
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
+ -
0
P
I
2
4
1
3
UMRICHTER 1
VACON 100 FLOW
2-ANSCHLUSS-
GEBER
DRUCKSENSOR 1
Referenzspannung
NICHT VERWENDET
(0 – 10 V)
AUSGANGSFREQUENZ
(0 bis 20 mA)
PID-RÜCKMELDUNG
(4 – 20 mA)
24V Hilfsspannung Ausgang
24V Hilfsspannung Eingang
E/A Masse
E/A Masse
FEHLERQUITTIERUNG
EXTERNER FEHLER
START VORWÄRTS
Gemeinsamer Bezug für DI1-DI6
Gemeinsamer Bezug für DI1-DI6
24V Hilfsspannung Ausgang
PUMPEN-INTERLOCK
(standardmäßig nicht verwendet)
Kommunikation zwischen Umrichtern
(Modbus RTU)
Relaisausgang 1
(BETRIEB)
Relaisausgang 2
(FEHLER)
Relaisausgang 3
(BEREIT)
SPÜLEN (Start vorwärts + Spülfreq.)
PID WAHL DES EINSTELLWERTS
(Offen = Steuertafel SP1,
geschlossen = Steuertafel SP2)
DIOs
ISOLIERT
GND
U
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
out
GND
DIN1
DIN2
DIN3
CM
+24 V
out
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
I
U
I
U
I
AUS
EIN
AI1
AI2
AO
RS485-
Abschluss
AUTO MAN
1S1
P1.2
Applikation
= Multi-Pump (mehrere Frequenzumrichter)
P3.15.3
Pumpenidentifikationsnummer
= 1
P3.15.4
Start & Rückmeldung
= SignalsConnected
(Signale verbunden)
UMRICHTER 1 UMRICHTER 2 UMRICHTER 3
KURZANLEITUNG VACON · 51
Abb. 18: Schaltplan des Multi-Pump-Systems (mehrere Frequenzumrichter), Beispiel 1A
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 52

1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
+ -
0
P
I
2
4
1
3
UMRICHTER 2
VACON 100 FLOW
2-ANSCHLUSS-
GEBER
DRUCKSENSOR 2
Referenzspannung
NICHT VERWENDET
(0 – 10 V)
AUSGANGSFREQUENZ
(0 bis 20 mA)
PID-RÜCKMELDUNG
(4 – 20 mA)
24V Hilfsspannung Ausgang
24V Hilfsspannung Eingang
E/A Masse
E/A Masse
FEHLERQUITTIERUNG
EXTERNER FEHLER
START VORWÄRTS
Gemeinsamer Bezug für DI1-DI6
Gemeinsamer Bezug für DI1-DI6
24V Hilfsspannung Ausgang
PUMPEN-INTERLOCK
(standardmäßig nicht verwendet)
Kommunikation zwischen Umrichtern
(Modbus RTU)
Relaisausgang 1
(BETRIEB)
Relaisausgang 2
(FEHLER)
Relaisausgang 3
(BEREIT)
SPÜLEN (Start vorwärts + Spülfreq.)
PID WAHL DES EINSTELLWERTS
(Offen = Steuertafel SP1,
geschlossen = Steuertafel SP2)
DIOs
ISOLIERT
GND
U
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
out
GND
DIN1
DIN2
DIN3
CM
+24 V
out
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
I
U
I
U
I
AUS
EIN
AI1
AI2
AO
RS485-
Abschluss
AUTO MAN
2S1
P1.2
Applikation
= Multi-Pump (mehrere Frequenzumrichter)
P3.15.3
Pumpenidentifikationsnummer
= 2
P3.15.4
Start & Rückmeldung
= SignalsConnected
(Signale verbunden)
UMRICHTER 1 UMRICHTER 2 UMRICHTER 3
VACON · 52 KURZANLEITUNG
Abb. 19: Schaltplan des Multi-Pump-Systems (mehrere Frequenzumrichter), Beispiel 1B
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 53
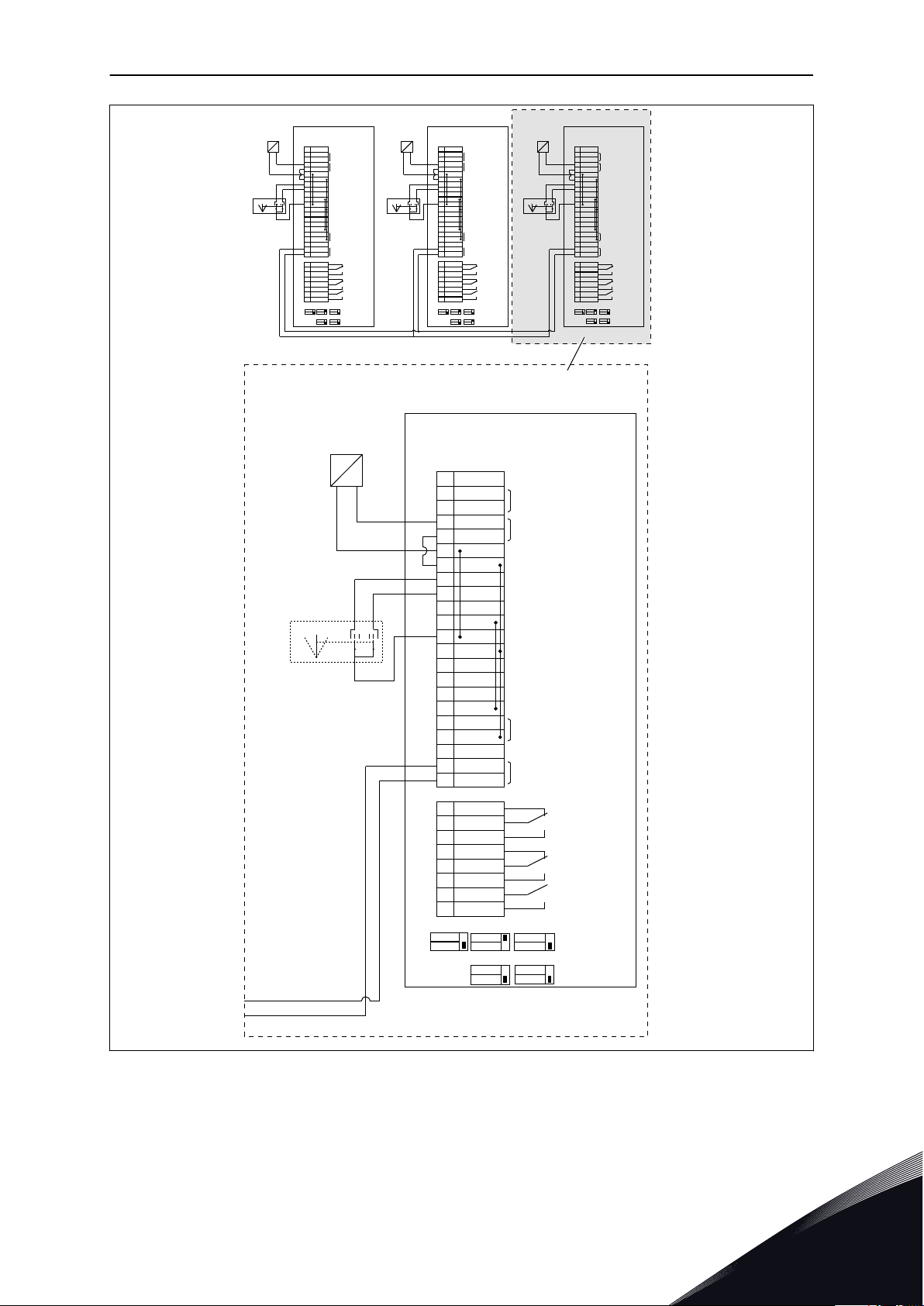
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
+ -
0
P
I
2
4
1
3
UMRICHTER 3
VACON 100 FLOW
2-ANSCHLUSS-
GEBER
DRUCKSENSOR 3
Referenzspannung
NICHT VERWENDET
(0 – 10 V)
AUSGANGSFREQUENZ
(0 bis 20 mA)
PID-RÜCKMELDUNG
(4 – 20 mA)
24V Hilfsspannung Ausgang
24V Hilfsspannung Eingang
E/A Masse
E/A Masse
FEHLERQUITTIERUNG
EXTERNER FEHLER
START VORWÄRTS
Gemeinsamer Bezug für DI1-DI6
Gemeinsamer Bezug für DI1-DI6
24V Hilfsspannung Ausgang
PUMPEN-INTERLOCK
(standardmäßig nicht verwendet)
Kommunikation zwischen Umrichtern
(Modbus RTU)
Relaisausgang 1
(BETRIEB)
Relaisausgang 2
(FEHLER)
Relaisausgang 3
(BEREIT)
SPÜLEN (Start vorwärts + Spülfreq.)
PID WAHL DES EINSTELLWERTS
(Offen = Steuertafel SP1,
geschlossen = Steuertafel SP2)
DIOs
ISOLIERT
GND
U
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
out
GND
DIN1
DIN2
DIN3
CM
+24 V
out
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
I
U
I
U
I
AUS
EIN
AI1
AI2
AO
RS485-
Abschluss
AUTO MAN
3S1
P1.2
Applikation
= Multi-Pump (mehrere Frequenzumrichter)
P3.15.3
Pumpenidentifikationsnummer
= 3
P3.15.4
Start & Rückmeldung
= SignalsConnected
(Signale verbunden)
UMRICHTER 1 UMRICHTER 2 UMRICHTER 3
KURZANLEITUNG VACON · 53
Abb. 20: Schaltplan des Multi-Pump-Systems (mehrere Frequenzumrichter), Beispiel 1C
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 54

VACON · 54 KURZANLEITUNG
An alle Frequenzumrichter ist 1 Sensor angeschlossen. Das System weist einen niedrigen
Redundanzgrad auf, weil nur die Frequenzumrichter redundant sind.
Falls ein Frequenzumrichter ausfällt, startet der nächste Frequenzumrichter als Master.
•
Wenn ein Sensor ausfällt, stoppt das System.
•
Jeder Frequenzumrichter wird durch einen separaten Schalter mit den Einstellungen Auto,
Aus und Manuell gesteuert.
Klemme 17 schließt +24 V zwischen Frequenzumrichter 1 und 2 an. Zwischen den Klemmen
1 und 2 werden externe Dioden angeschlossen. Die digitalen Eingangssignale verwenden
eine negative Logik (ON = OV).
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 55

1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13
GND
14
DIN4
15 DIN5
16 DIN6
17
CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B
RS485
21 RO1
22 RO1
23
RO1
24
RO2
25 RO2
26
RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9
DIN2
10 DIN3
11
CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26
RO2
32
RO3
33
RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21 RO1
22 RO1
23 RO1
24
RO2
25 RO2
26
RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
-
+
+ -
0
P
I
2
4
1
3
UMRICHTER 1
VACON 100 FLOW
2-ANSCHLUSS-
GEBER
DRUCKSENSOR 1
Referenzspannung
NICHT VERWENDET (0 – 10 V)
AUSGANGSFREQUENZ (0 bis 20 mA)
PID-RÜCKMELDUNG (4 – 20 mA)
24V Hilfsspannung Ausgang
24V Hilfsspannung Eingang
E/A Masse
E/A Masse
FEHLERQUITTIERUNG
EXTERNER FEHLER
START VORWÄRTS
Gemeinsamer Bezug für DI1-DI6
Gemeinsamer Bezug für DI1-DI6
24V Hilfsspannung Ausgang
PUMPEN-INTERLOCK
(standardmäßig nicht verwendet)
Kommunikation zwischen
Umrichtern (Modbus RTU)
Relaisausgang 1
(BETRIEB)
Relaisausgang 2
(FEHLER)
Relaisausgang 3
(BEREIT)
SPÜLEN (Start vorwärts + Spülfreq.)
PID WAHL DES EINSTELLWERTS
(Offen = Steuertafel SP1, geschlossen = Steuertafel SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
out
GND
DIN1
DIN2
DIN3
CM
+24 V
out
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
AUTO MAN
1S1
DIOs
ISOLIERT
GND
U
I
U
I
U
I
AUS
EIN
AI1
AI2
AO
RS485-
Abschluss
UMRICHTER 1 UMRICHTER 2 UMRICHTER 3
P1.2
P3.15.3
P3.15.4
Applikation
Pumpenidentifikationsnummer
Start & Rückmeldung
= Multi-Pump (mehrere Frequenzumrichter)
= 1
= SignalsConnected (Signale verbunden)
KURZANLEITUNG VACON · 55
Abb. 21: Schaltplan des Multi-Pump-Systems (mehrere Frequenzumrichter), Beispiel 2A
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 56
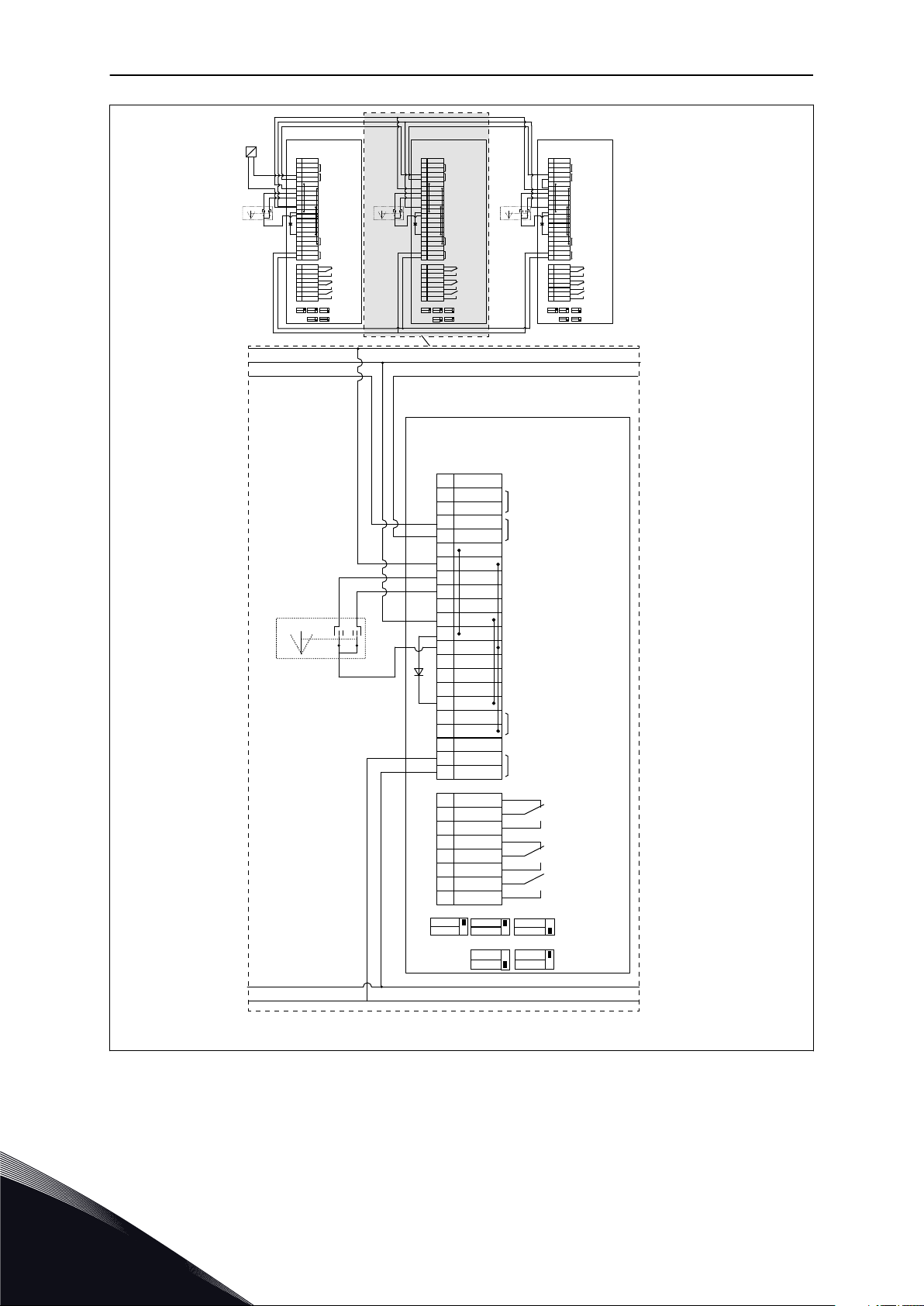
1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13
GND
14
DIN4
15 DIN5
16 DIN6
17
CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B
RS485
21 RO1
22 RO1
23
RO1
24
RO2
25 RO2
26
RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9
DIN2
10 DIN3
11
CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26
RO2
32
RO3
33
RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21 RO1
22 RO1
23 RO1
24
RO2
25 RO2
26
RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
-
+
0
2
4
1
3
UMRICHTER 2
VACON 100 FLOW
Referenzspannung
NICHT VERWENDET (0 – 10 V)
AUSGANGSFREQUENZ (0 bis 20 mA)
PID-RÜCKMELDUNG (4 – 20 mA)
24V Hilfsspannung Ausgang
24V Hilfsspannung Eingang
E/A Masse
E/A Masse
FEHLERQUITTIERUNG
EXTERNER FEHLER
START VORWÄRTS
Gemeinsamer Bezug für DI1-DI6
Gemeinsamer Bezug für DI1-DI6
24V Hilfsspannung Ausgang
PUMPEN-INTERLOCK
(standardmäßig nicht verwendet)
Kommunikation zwischen
Umrichtern (Modbus RTU)
Relaisausgang 1
(BETRIEB)
Relaisausgang 2
(FEHLER)
Relaisausgang 3
(BEREIT)
SPÜLEN (Start vorwärts + Spülfreq.)
PID WAHL DES EINSTELLWERTS
(Offen = Steuertafel SP1, geschlossen = Steuertafel SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
out
GND
DIN1
DIN2
DIN3
CM
+24 V
out
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
AUTO MAN
2S1
DIOs
ISOLIERT
GND
U
I
U
I
U
I
AUS
EIN
AI1
AI2
AO
RS485-
Abschluss
UMRICHTER 1 UMRICHTER 2 UMRICHTER 3
P1.2
P3.15.3
P3.15.4
Applikation
Pumpenidentifikationsnummer
Start & Rückmeldung
= Multi-Pump (mehrere Frequenzumrichter)
= 2
= SignalsConnected (Signale verbunden)
VACON · 56 KURZANLEITUNG
Abb. 22: Schaltplan des Multi-Pump-Systems (mehrere Frequenzumrichter), Beispiel 2B
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 57

1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13
GND
14
DIN4
15 DIN5
16 DIN6
17
CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B
RS485
21 RO1
22 RO1
23
RO1
24
RO2
25 RO2
26
RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9
DIN2
10 DIN3
11
CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26
RO2
32
RO3
33
RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21 RO1
22 RO1
23 RO1
24
RO2
25 RO2
26
RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
-
+
0
2
4
1
3
UMRICHTER 3
VACON 100 FLOW
Referenzspannung
NICHT VERWENDET (0 – 10 V)
AUSGANGSFREQUENZ (0 bis 20 mA)
PID-RÜCKMELDUNG (4 – 20 mA)
24V Hilfsspannung Ausgang
24V Hilfsspannung Eingang
E/A Masse
E/A Masse
FEHLERQUITTIERUNG
EXTERNER FEHLER
START VORWÄRTS
Gemeinsamer Bezug für DI1-DI6
Gemeinsamer Bezug für DI1-DI6
24V Hilfsspannung Ausgang
PUMPEN-INTERLOCK
(standardmäßig nicht verwendet)
Kommunikation zwischen
Umrichtern (Modbus RTU)
Relaisausgang 1
(BETRIEB)
Relaisausgang 2
(FEHLER)
Relaisausgang 3
(BEREIT)
SPÜLEN (Start vorwärts + Spülfreq.)
PID WAHL DES EINSTELLWERTS
(Offen = Steuertafel SP1, geschlossen = Steuertafel SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
out
GND
DIN1
DIN2
DIN3
CM
+24 V
out
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
AUTO MAN
3S1
DIOs
ISOLIERT
GND
U
I
U
I
U
I
AUS
EIN
AI1
AI2
AO
RS485-
Abschluss
UMRICHTER 1 UMRICHTER 2 UMRICHTER 3
P1.2
P3.15.3
P3.15.4
Applikation
Pumpenidentifikationsnummer
Start & Rückmeldung
= Multi-Pump (mehrere Frequenzumrichter)
= 3
= SignalsConnected (Signale verbunden)
KURZANLEITUNG VACON · 57
Abb. 23: Schaltplan des Multi-Pump-Systems (mehrere Frequenzumrichter), Beispiel 2C
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 58

VACON · 58 KURZANLEITUNG
2 Frequenzumrichter haben separate Drucksensoren. Das System weist einen mittleren
Redundanzgrad auf, weil die Frequenzumrichter und die Drucksensoren doppelt vorhanden
sind.
Falls ein Frequenzumrichter ausfällt, startet der zweite Frequenzumrichter als Master.
•
Falls ein Sensor ausfällt, startet der zweite Frequenzumrichter (der einen separaten
•
Sensor besitzt) als Master.
Jeder Frequenzumrichter wird durch einen separaten Schalter mit den Einstellungen Auto,
Aus und Manuell gesteuert.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 59

1
+10V
ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8
DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23
RO1
24 RO2
25 RO2
26 RO2
32 RO3
33
RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9
DIN2
10 DIN3
11 CM
12
+24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18
AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10
DIN3
11 CM
12 +24V out
13
GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30
+24V in
A RS485
B RS485
21 RO1
22
RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Start Signal Only
-
+
-
+
+ -
0
P
I
2
4
1
3
UMRICHTER 1
VACON 100 FLOW
2-ANSCHLUSS-
GEBER
DRUCKSENSOR 1
Referenzspannung
NICHT VERWENDET (0 – 10 V)
AUSGANGSFREQUENZ (0 bis 20 mA)
PID-RÜCKMELDUNG (4 – 20 mA)
24V Hilfsspannung Ausgang
24V Hilfsspannung Eingang
E/A Masse
E/A Masse
FEHLERQUITTIERUNG
EXTERNER FEHLER
START VORWÄRTS
Gemeinsamer Bezug für DI1-DI6
Gemeinsamer Bezug für DI1-DI6
24V Hilfsspannung Ausgang
PUMPEN-INTERLOCK
(standardmäßig nicht verwendet)
Kommunikation zwischen
Umrichtern (Modbus RTU)
Relaisausgang 1
(BETRIEB)
Relaisausgang 2
(FEHLER)
Relaisausgang 3
(BEREIT)
SPÜLEN (Start vorwärts + Spülfreq.)
PID WAHL DES EINSTELLWERTS
(Offen = Steuertafel SP1, geschlossen = Steuertafel SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
out
GND
DIN1
DIN2
DIN3
CM
+24 V
out
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
AUTO MAN
1S1
DIOs
ISOLIERT
GND
U
I
U
I
U
I
AUS
EIN
AI1
AI2
AO
RS485-
Abschluss
UMRICHTER 1 UMRICHTER 2 UMRICHTER 3
P1.2
P3.15.3
P3.15.4
Applikation
Pumpenidentifikationsnummer
Start & Rückmeldung
= Multi-Pump (mehrere Frequenzumrichter)
= 1
= SignalsConnected (Signale verbunden)
KURZANLEITUNG VACON · 59
Abb. 24: Schaltplan des Multi-Pump-Systems (mehrere Frequenzumrichter), Beispiel 3A
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 60
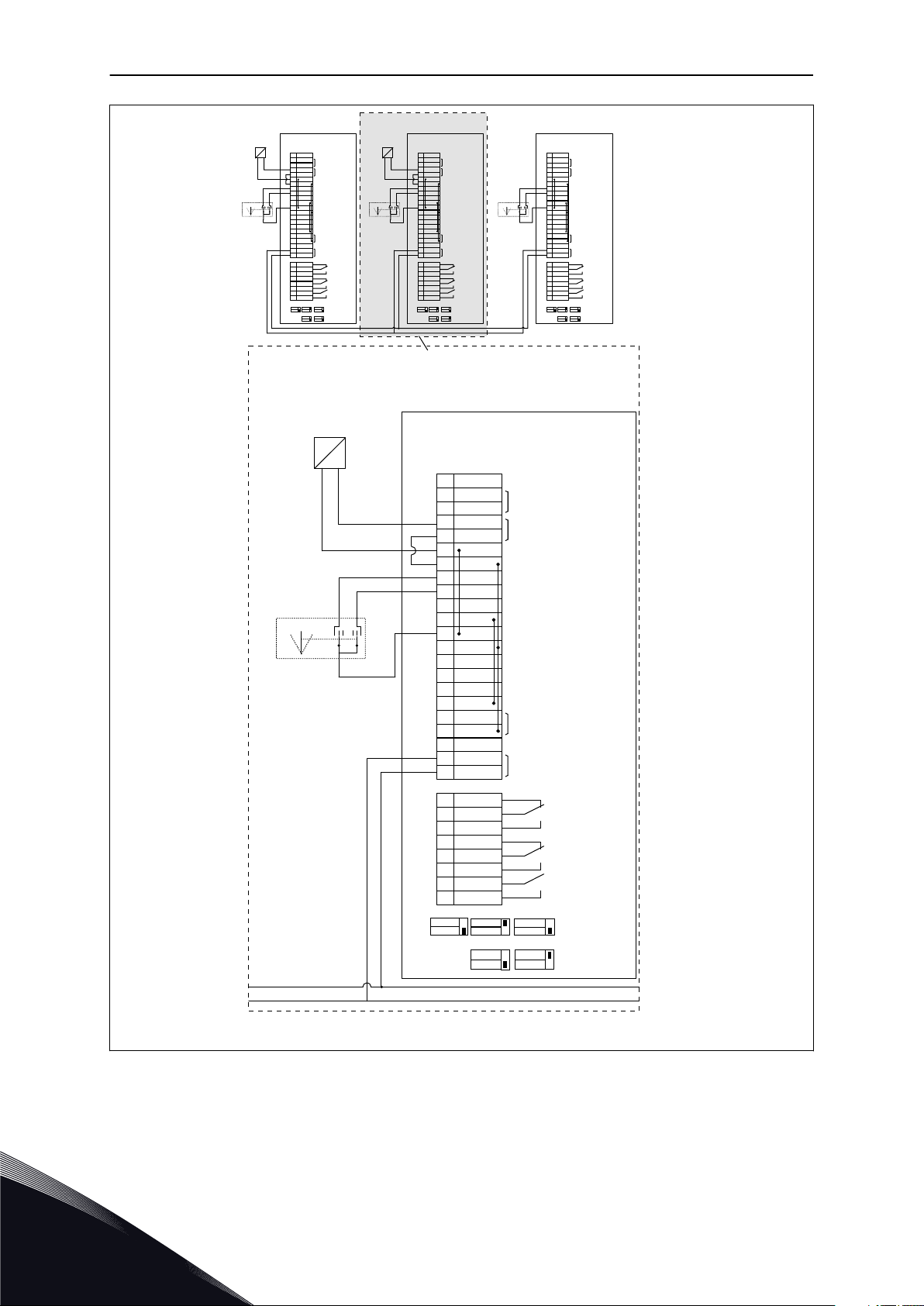
1
+10V
ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8
DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23
RO1
24 RO2
25 RO2
26 RO2
32 RO3
33
RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9
DIN2
10 DIN3
11 CM
12
+24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18
AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10
DIN3
11 CM
12 +24V out
13
GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30
+24V in
A RS485
B RS485
21 RO1
22
RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Start Signal Only
-
+
-
+
+ -
0
P
I
2
4
1
3
UMRICHTER 1
VACON 100 FLOW
2-ANSCHLUSS-
GEBER
DRUCKSENSOR 1
Referenzspannung
NICHT VERWENDET (0 – 10 V)
AUSGANGSFREQUENZ (0 bis 20 mA)
PID-RÜCKMELDUNG (4 – 20 mA)
24V Hilfsspannung Ausgang
24V Hilfsspannung Eingang
E/A Masse
E/A Masse
FEHLERQUITTIERUNG
EXTERNER FEHLER
START VORWÄRTS
Gemeinsamer Bezug für DI1-DI6
Gemeinsamer Bezug für DI1-DI6
24V Hilfsspannung Ausgang
PUMPEN-INTERLOCK
(standardmäßig nicht verwendet)
Kommunikation zwischen
Umrichtern (Modbus RTU)
Relaisausgang 1
(BETRIEB)
Relaisausgang 2
(FEHLER)
Relaisausgang 3
(BEREIT)
SPÜLEN (Start vorwärts + Spülfreq.)
PID WAHL DES EINSTELLWERTS
(Offen = Steuertafel SP1, geschlossen = Steuertafel SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
out
GND
DIN1
DIN2
DIN3
CM
+24 V
out
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
AUTO MAN
1S1
DIOs
ISOLIERT
GND
U
I
U
I
U
I
AUS
EIN
AI1
AI2
AO
RS485-
Abschluss
UMRICHTER 1 UMRICHTER 2 UMRICHTER 3
P1.2
P3.15.3
P3.15.4
Applikation
Pumpenidentifikationsnummer
Start & Rückmeldung
= Multi-Pump (mehrere Frequenzumrichter)
= 1
= SignalsConnected (Signale verbunden)
VACON · 60 KURZANLEITUNG
Abb. 25: Schaltplan des Multi-Pump-Systems (mehrere Frequenzumrichter), Beispiel 3B
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 61
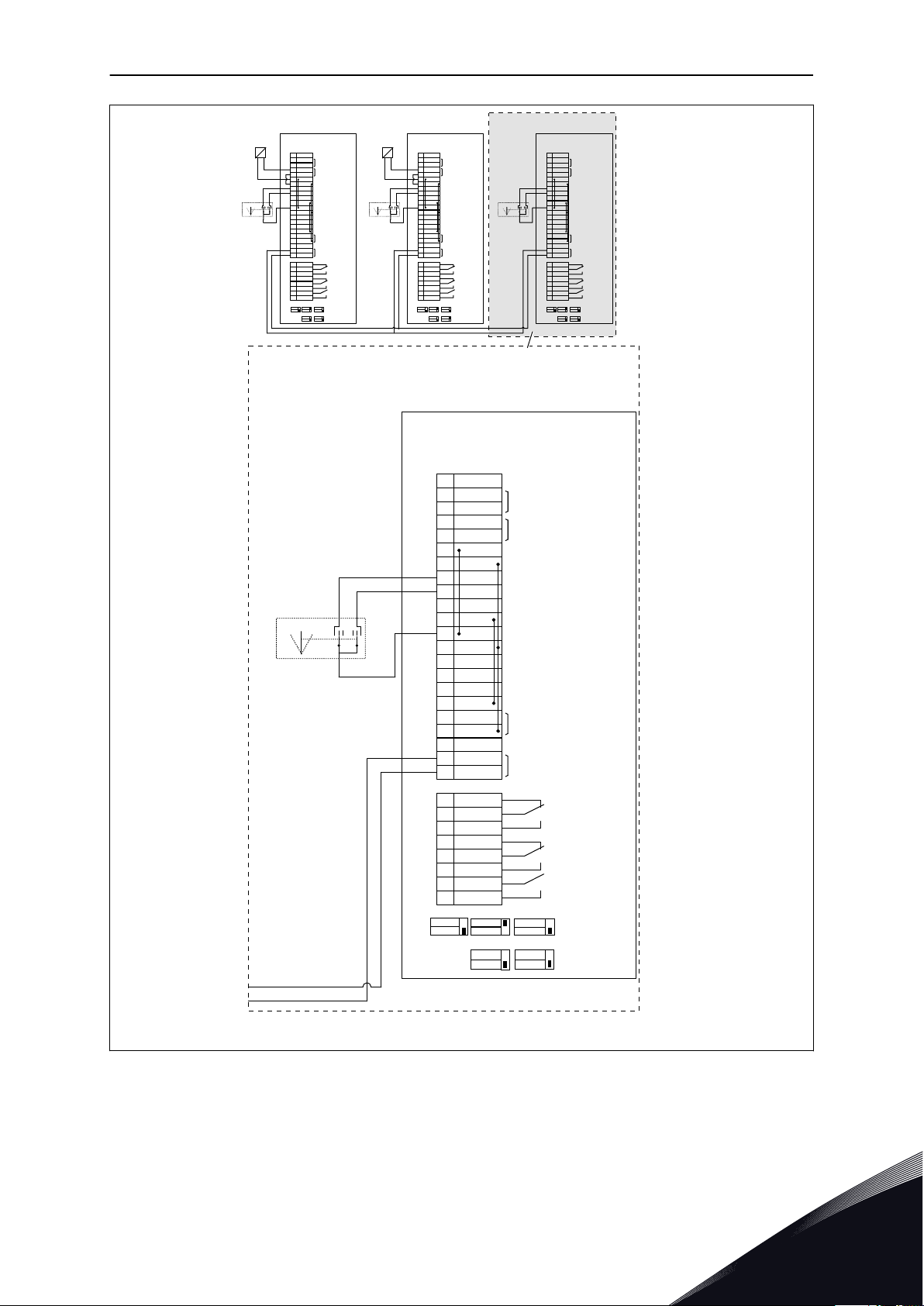
1
+10V
ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8
DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23
RO1
24 RO2
25 RO2
26 RO2
32 RO3
33
RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9
DIN2
10 DIN3
11 CM
12
+24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18
AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10
DIN3
11 CM
12 +24V out
13
GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30
+24V in
A RS485
B RS485
21 RO1
22
RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Start Signal Only
-
+
-
+
0
2
4
1
3
UMRICHTER 3
VACON 100 FLOW
Referenzspannung
NICHT VERWENDET (0 – 10 V)
AUSGANGSFREQUENZ (0 bis 20 mA)
PID-RÜCKMELDUNG (4 – 20 mA)
24V Hilfsspannung Ausgang
24V Hilfsspannung Eingang
E/A Masse
E/A Masse
FEHLERQUITTIERUNG
EXTERNER FEHLER
START VORWÄRTS
Gemeinsamer Bezug für DI1-DI6
Gemeinsamer Bezug für DI1-DI6
24V Hilfsspannung Ausgang
PUMPEN-INTERLOCK
(standardmäßig nicht verwendet)
Kommunikation zwischen
Umrichtern (Modbus RTU)
Relaisausgang 1
(BETRIEB)
Relaisausgang 2
(FEHLER)
Relaisausgang 3
(BEREIT)
SPÜLEN (Start vorwärts + Spülfreq.)
PID WAHL DES EINSTELLWERTS
(Offen = Steuertafel SP1, geschlossen = Steuertafel SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
out
GND
DIN1
DIN2
DIN3
CM
+24 V
out
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
AUTO MAN
3S1
DIOs
ISOLIERT
GND
U
I
U
I
U
I
AUS
EIN
AI1
AI2
AO
RS485-
Abschluss
UMRICHTER 1 UMRICHTER 2 UMRICHTER 3
P1.2
P3.15.3
P3.15.4
Applikation
Pumpenidentifikationsnummer
Start & Rückmeldung
= Multi-Pump (mehrere Frequenzumrichter)
= 3
= SignalsConnected (Signale verbunden)
KURZANLEITUNG VACON · 61
Abb. 26: Schaltplan des Multi-Pump-Systems (mehrere Frequenzumrichter), Beispiel 3C
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 62

VACON · 62 KURZANLEITUNG
An 2 Frequenzumrichter ist 1 gemeinsamer Sensor angeschlossen. Das System weist einen
niedrigen Redundanzgrad auf, weil nur die Frequenzumrichter redundant sind.
Falls ein Frequenzumrichter ausfällt, startet der zweite Frequenzumrichter als Master.
•
Wenn ein Sensor ausfällt, stoppt das System.
•
Jeder Frequenzumrichter wird durch einen separaten Schalter mit den Einstellungen Auto,
Aus und Manuell gesteuert.
Klemme 17 schließt +24 V zwischen Frequenzumrichter 1 und 2 an. Zwischen den Klemmen
1 und 2 werden externe Dioden angeschlossen. Die digitalen Eingangssignale verwenden
eine negative Logik (ON = OV).
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 63
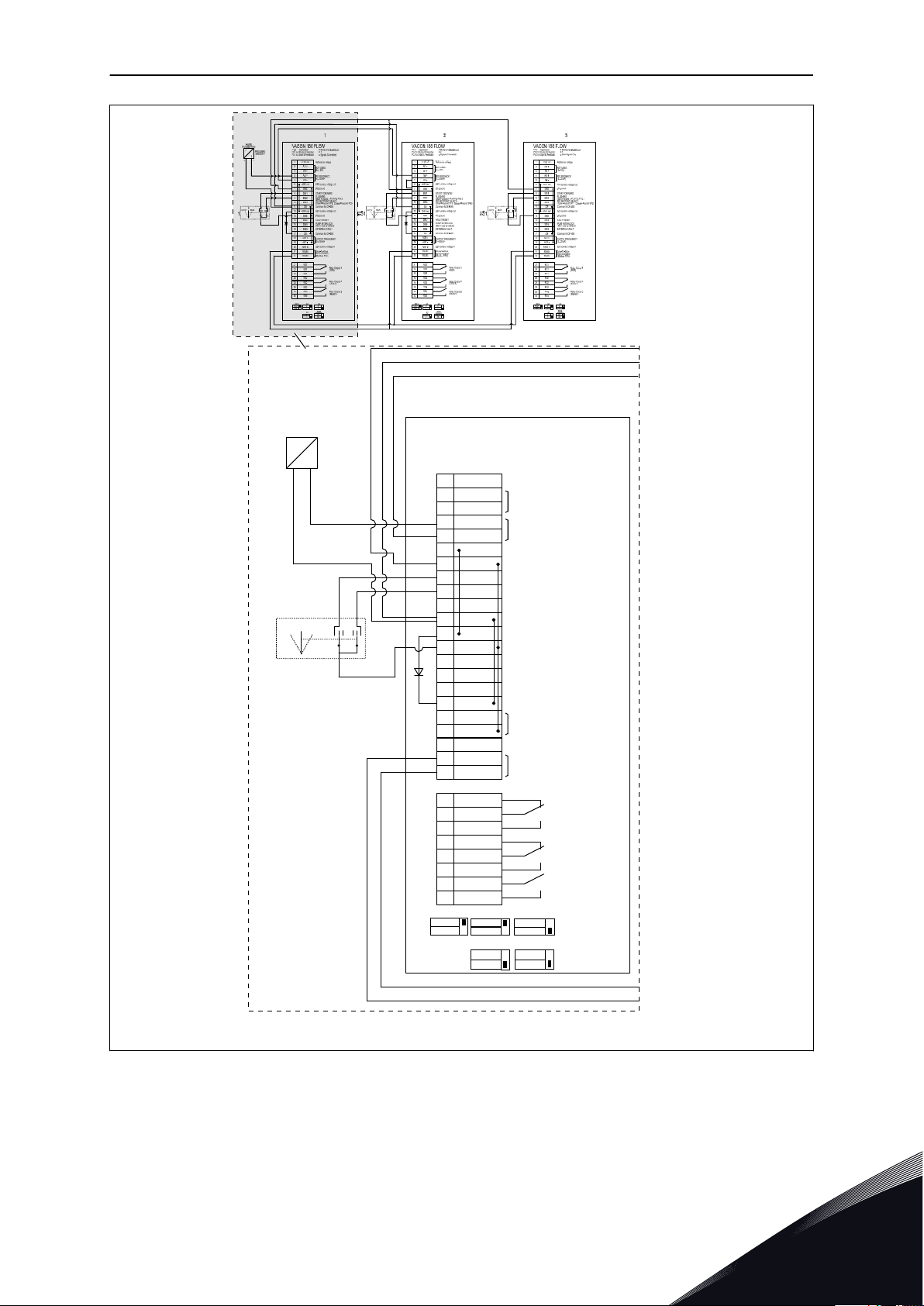
+ -
0
P
I
2
4
1
3
UMRICHTER 1
VACON 100 FLOW
2-ANSCHLUSS-
GEBER
DRUCKSENSOR 1
Referenzspannung
NICHT VERWENDET (0 – 10 V)
AUSGANGSFREQUENZ (0 bis 20 mA)
PID-RÜCKMELDUNG (4 – 20 mA)
24V Hilfsspannung Ausgang
24V Hilfsspannung Eingang
E/A Masse
E/A Masse
FEHLERQUITTIERUNG
EXTERNER FEHLER
START VORWÄRTS
Gemeinsamer Bezug für DI1-DI6
Gemeinsamer Bezug für DI1-DI6
24V Hilfsspannung Ausgang
PUMPEN-INTERLOCK
(standardmäßig nicht verwendet)
Kommunikation zwischen
Umrichtern (Modbus RTU)
Relaisausgang 1
(BETRIEB)
Relaisausgang 2
(FEHLER)
Relaisausgang 3
(BEREIT)
SPÜLEN (Start vorwärts + Spülfreq.)
PID WAHL DES EINSTELLWERTS
(Offen = Steuertafel SP1, geschlossen = Steuertafel SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
out
GND
DIN1
DIN2
DIN3
CM
+24 V
out
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
AUTO MAN
1S1
DIOs
ISOLIERT
GND
U
I
U
I
U
I
AUS
EIN
AI1
AI2
AO
RS485-
Abschluss
UMRICHTER 1 UMRICHTER 2 UMRICHTER 3
P1.2
P3.15.3
P3.15.4
Applikation
Pumpenidentifikationsnummer
Start & Rückmeldung
= Multi-Pump (mehrere Frequenzumrichter)
= 1
= SignalsConnected (Signale verbunden)
KURZANLEITUNG VACON · 63
Abb. 27: Schaltplan des Multi-Pump-Systems (mehrere Frequenzumrichter), Beispiel 4A
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 64

0
2
4
1
3
UMRICHTER 2
VACON 100 FLOW
Referenzspannung
NICHT VERWENDET (0 – 10 V)
AUSGANGSFREQUENZ (0 bis 20 mA)
PID-RÜCKMELDUNG (4 – 20 mA)
24V Hilfsspannung Ausgang
24V Hilfsspannung Eingang
E/A Masse
E/A Masse
FEHLERQUITTIERUNG
EXTERNER FEHLER
START VORWÄRTS
Gemeinsamer Bezug für DI1-DI6
Gemeinsamer Bezug für DI1-DI6
24V Hilfsspannung Ausgang
PUMPEN-INTERLOCK
(standardmäßig nicht verwendet)
Kommunikation zwischen Umrichtern
(Modbus RTU)
Relaisausgang 1
(BETRIEB)
Relaisausgang 2
(FEHLER)
Relaisausgang 3
(BEREIT)
SPÜLEN (Start vorwärts + Spülfreq.)
PID WAHL DES EINSTELLWERTS
(Offen = Steuertafel SP1, geschlossen = Steuertafel SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 Vref
AI2+
AI1-
AI2+
AI2-
+24 Vout
+24 Vout
GND
DIN1
DIN2
DIN3
CM
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 Vin
RS485
RS485
AUTO MAN
2S1
DIOs
ISOLIERT
GND
U
I
U
I
U
I
AUS
EIN
AI1
AI2
AO
RS485-
Abschluss
UMRICHTER 1 UMRICHTER 2 UMRICHTER 3
P1.2
P3.15.3
P3.15.4
Applikation
Start & Rückmeldung
= Multi-Pump (mehrere Frequenzumrichter)
= 2
= SignalsConnected (Signale verbunden)
Pumpenidentifikationsnummer
VACON · 64 KURZANLEITUNG
Abb. 28: Schaltplan des Multi-Pump-Systems (mehrere Frequenzumrichter), Beispiel 4B
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 65

0
2
4
1
3
UMRICHTER 3
VACON 100 FLOW
Referenzspannung
NICHT VERWENDET (0 – 10 V)
AUSGANGSFREQUENZ (0 bis 20 mA)
PID-RÜCKMELDUNG (4 – 20 mA)
24V Hilfsspannung Ausgang
24V Hilfsspannung Eingang
E/A Masse
E/A Masse
FEHLERQUITTIERUNG
EXTERNER FEHLER
START VORWÄRTS
Gemeinsamer Bezug für DI1-DI6
Gemeinsamer Bezug für DI1-DI6
24V Hilfsspannung Ausgang
PUMPEN-INTERLOCK
(standardmäßig nicht verwendet)
Kommunikation zwischen
Umrichtern (Modbus RTU)
Relaisausgang 1
(BETRIEB)
Relaisausgang 2
(FEHLER)
Relaisausgang 3
(BEREIT)
SPÜLEN (Start vorwärts + Spülfreq.)
PID WAHL DES EINSTELLWERTS
(Offen = Steuertafel SP1, geschlossen = Steuertafel SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
out
GND
DIN1
DIN2
DIN3
CM
+24 V
out
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
AUTO MAN
3S1
DIOs
ISOLIERT
GND
U
I
U
I
U
I
AUS
EIN
AI1
AI2
AO
RS485-
Abschluss
UMRICHTER 1 UMRICHTER 2 UMRICHTER 3
P1.2
P3.15.3
P3.15.4
Applikation
Pumpenidentifikationsnummer
Start & Rückmeldung
= Multi-Pump (mehrere Frequenzumrichter)
= 3
= SignalsConnected (Signale verbunden)
KURZANLEITUNG VACON · 65
Abb. 29: Schaltplan des Multi-Pump-Systems (mehrere Frequenzumrichter), Beispiel 4C
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 66

VACON · 66 KURZANLEITUNG
An den ersten Frequenzumrichter ist 1 Drucks angeschlossen. Das System ist nicht
redundant, weil es stoppt, wenn ein Frequenzumrichter oder ein Sensor ausfallen.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 67

+ -
P
I
2
1
UMRICHTER 1
VACON 100 FLOW
2-ANSCHLUSS-
GEBER
DRUCKSENSOR 1
Referenzspannung
NICHT VERWENDET
(0 – 10 V)
AUSGANGSFREQUENZ
(0 bis 20 mA)
PID-RÜCKMELDUNG
(4 – 20 mA)
24V Hilfsspannung Ausgang
24V Hilfsspannung Eingang
E/A Masse
E/A Masse
FEHLERQUITTIERUNG
EXTERNER FEHLER
START VORWÄRTS
Gemeinsamer Bezug für DI1-DI6
Gemeinsamer Bezug für DI1-DI6
24V Hilfsspannung Ausgang
PUMPEN-INTERLOCK
(standardmäßig nicht verwendet)
Kommunikation zwischen Umrichtern
(Modbus RTU)
Relaisausgang 1
(BETRIEB)
Relaisausgang 2
(FEHLER)
Relaisausgang 3
(BEREIT)
SPÜLEN (Start vorwärts + Spülfreq.)
PID WAHL DES EINSTELLWERTS
(Offen = Steuertafel SP1,
geschlossen = Steuertafel SP2)
DIOs
ISOLIERT
GND
U
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
out
GND
DIN1
DIN2
DIN3
CM
+24 V
out
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
I
U
I
U
I
AUS
EIN
AI1
AI2
AO
RS485-
Abschluss
1S1
P1.2
Applikation
= Multi-Pump (mehrere Frequenzumrichter)
P3.15.3
Pumpenidentifikationsnummer
= 1
P3.15.4
Start & Rückmeldung
= SignalsConnected
(Signale verbunden)
UMRICHTER 1 UMRICHTER 2 UMRICHTER 3
STOPP
START
SYSTEM-
STARTBEFEHL
KURZANLEITUNG VACON · 67
Abb. 30: Schaltplan des Multi-Pump-Systems (mehrere Frequenzumrichter), Beispiel 5A
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 68
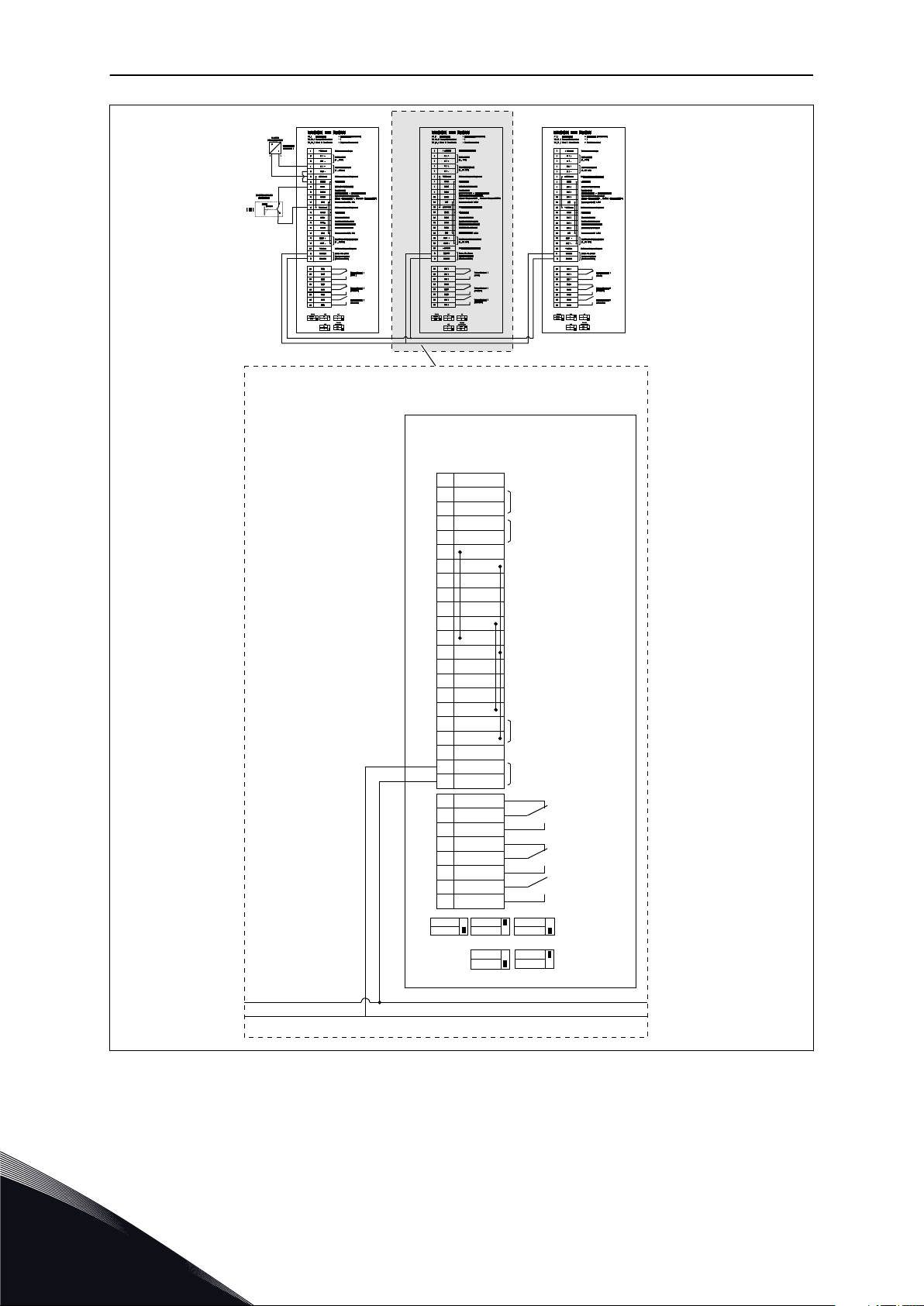
UMRICHTER 2
VACON 100 FLOW
Referenzspannung
NICHT VERWENDET (0 – 10 V)
AUSGANGSFREQUENZ (0 bis 20 mA)
PID-RÜCKMELDUNG (4 – 20 mA)
24V Hilfsspannung Ausgang
24V Hilfsspannung Eingang
E/A Masse
E/A Masse
FEHLERQUITTIERUNG
EXTERNER FEHLER
START VORWÄRTS
Gemeinsamer Bezug für DI1-DI6
Gemeinsamer Bezug für DI1-DI6
24V Hilfsspannung Ausgang
PUMPEN-INTERLOCK
(standardmäßig nicht verwendet)
Kommunikation zwischen Umrichtern
(Modbus RTU)
Relaisausgang 1
(BETRIEB)
Relaisausgang 2
(FEHLER)
Relaisausgang 3
(BEREIT)
SPÜLEN (Start vorwärts + Spülfreq.)
PID WAHL DES EINSTELLWERTS
(Offen = Steuertafel SP1, geschlossen = Steuertafel SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 Vref
AI2+
AI1-
AI2+
AI2-
+24 Vout
+24 Vout
GND
DIN1
DIN2
DIN3
CM
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 Vin
RS485
RS485
DIOs
ISOLIERT
GND
U
I
U
I
U
I
AUS
EIN
AI1
AI2
AO
RS485-
Abschluss
UMRICHTER 1 UMRICHTER 2 UMRICHTER 3
P1.2
P3.15.3
P3.15.4
Applikation
Start & Rückmeldung
= Multi-Pump (mehrere Frequenzumrichter)
= 2
= SignalsConnected (Signale verbunden)
Pumpenidentifikationsnummer
VACON · 68 KURZANLEITUNG
Abb. 31: Schaltplan des Multi-Pump-Systems (mehrere Frequenzumrichter), Beispiel 5B
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 69
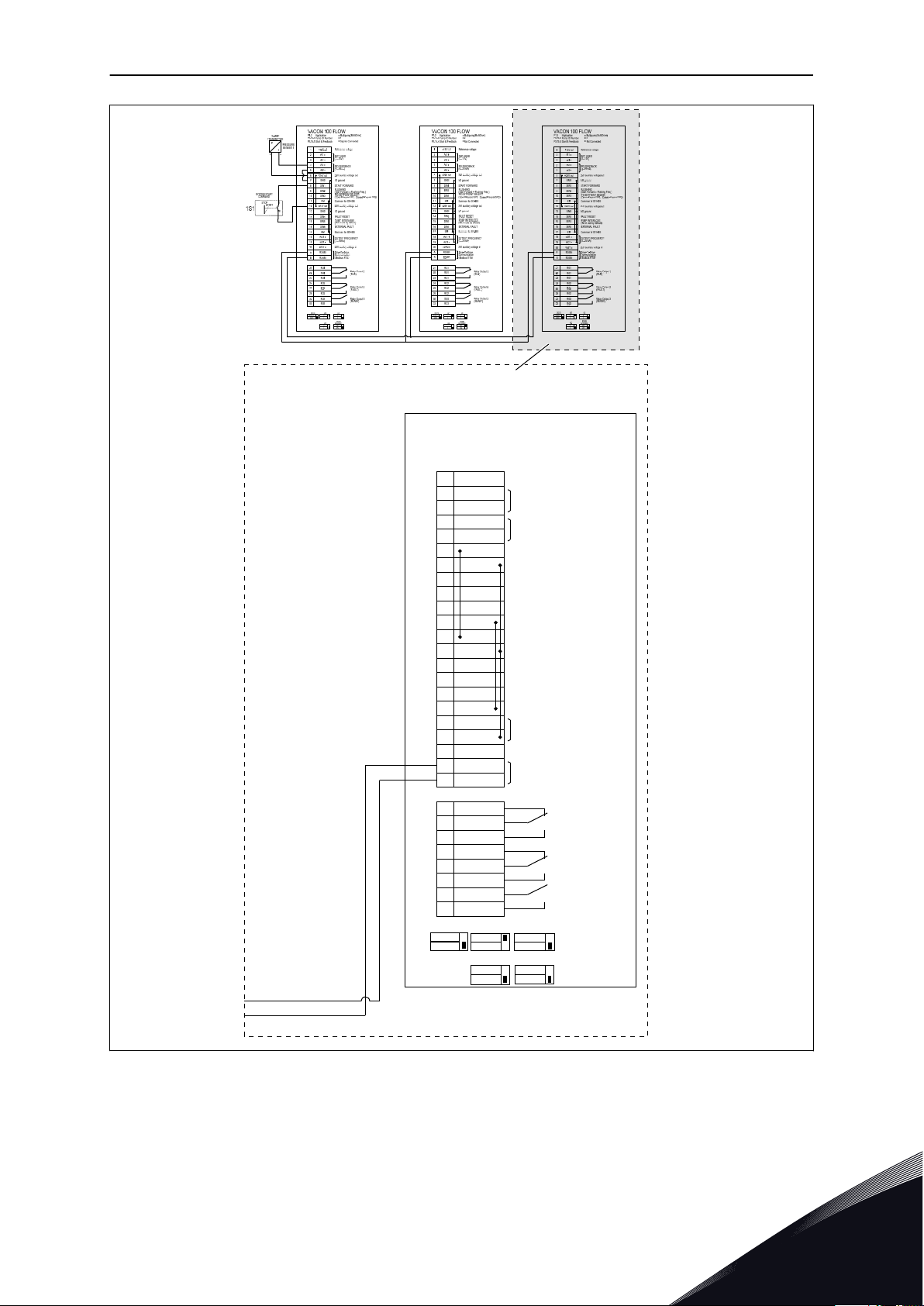
UMRICHTER 3
VACON 100 FLOW
Referenzspannung
NICHT VERWENDET (0 – 10 V)
AUSGANGSFREQUENZ (0 bis 20 mA)
PID-RÜCKMELDUNG (4 – 20 mA)
24V Hilfsspannung Ausgang
24V Hilfsspannung Eingang
E/A Masse
E/A Masse
FEHLERQUITTIERUNG
EXTERNER FEHLER
START VORWÄRTS
Gemeinsamer Bezug für DI1-DI6
Gemeinsamer Bezug für DI1-DI6
24V Hilfsspannung Ausgang
PUMPEN-INTERLOCK
(standardmäßig nicht verwendet)
Kommunikation zwischen Umrichtern (Modbus RTU)
Relaisausgang 1
(BETRIEB)
Relaisausgang 2
(FEHLER)
Relaisausgang 3
(BEREIT)
SPÜLEN
(Start vorwärts + Spülfreq.)
PID WAHL DES EINSTELLWERTS
(Offen = Steuertafel SP1, geschlossen = Steuertafel SP2)
DIOs
ISOLIERT
GND
U
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
out
GND
DIN1
DIN2
DIN3
CM
+24 V
out
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
in
RS485
RS485
I
U
I
U
I
AUS
EIN
AI1
AI2
AO
RS485-
Abschluss
UMRICHTER 1 UMRICHTER 2 UMRICHTER 3
P1.2
P3.15.3
P3.15.4
Applikation
Pumpenidentifikationsnummer
Start & Rückmeldung
= Multi-Pump (mehrere Frequenzumrichter)
= 3
= SignalsConnected (Signale verbunden)
KURZANLEITUNG VACON · 69
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 70

VACON · 70 KURZANLEITUNG
Tabelle 11: M1.1 Assistenten
Index Parameter Min. Max. Einheit
1.1.1 Anlaufassistent 0 1 0 1170
1.1.2
Brand-Modus-Assis-
tent
0 1 0 1672
Werksein
st.
ID Beschreibung
0 = Nicht aktivieren
1 = Aktivieren
Wenn Sie „Aktivieren“
wählen, wird der
Anlaufassistent gestartet (siehe Kapitel 1.3
Erster Start).
Wenn Sie „Aktivieren“
wählen, wird der
Brand-Modus-Assistent gestartet (siehe
Kapitel 1.3 Erster Start).
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 71
KURZANLEITUNG VACON · 71
Tabelle 12: M1 Schnelleinstellungen
Index Parameter Min. Max. Einheit
1.2
Applikation 0 4 2 212
Sollwert
1.3
1.4
1.5
Mindestfre-
quenz
Sollwert
Höchstfre-
quenz
Beschleuni-
gungszeit 1
0.00 P1.4 Hz 0.0 101
P1.3 320.0 Hz
0.1 3000.0 s 5.0 103
Werksei
nst.
50.0 /
60.0
ID Beschreibung
0 = Standard
1 = HVAC
2 = PID-Regler
3 = Multi-Pump (einzelner Frequenzumrichter)
4 = Multi-Pump
(mehrere Frequenzumrichter)
Der minimal zulässige Frequenzsollwert.
Der maximal zuläs-
102
sige Frequenzsollwert.
Definiert die erforderliche Zeit für das
Steigern der Ausgangsfrequenz von
der Nullfrequenz bis
zur Höchstfrequenz.
1.6 Bremszeit 1 0.1 3000.0 s 5.0 104
Motor-
1.7
1.8 Motortyp 0 2 0 650
stromgrenze
IH * 0,1 I
S
A variiert 107
Definiert die erforderliche Zeit für das
Verringern der Ausgangsfrequenz von
der Höchstfrequenz
bis zur Nullfrequenz.
Maximaler Strom
vom Frequenzumrichter zum Motor
0 = Asynchronmotor
1 = Dauermagnetmotor
2 = Reluktanzmotor
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 72
VACON · 72 KURZANLEITUNG
Tabelle 12: M1 Schnelleinstellungen
Index Parameter Min. Max. Einheit
1.9
1.10
1.11
1.12
Motornenn-
spannung
Motornenn-
frequenz
Motor-
nenndreh-
zahl
Motornenn-
strom
variiert variiert V variiert 110
8.0 320.0 Hz
24 19200 1/min variiert 112
IH * 0,1 I
S
A variiert 113
Werksei
nst.
50.0 /
60.0
ID Beschreibung
Dieser Wert (Un)
kann dem Typenschild des Motors
entnommen werden.
HINWEIS!
Überprüfen Sie, ob
der Motor in Dreieck- oder Sternschaltung angeschlossen ist.
Dieser Wert (fn) kann
111
dem Typenschild des
Motors entnommen
werden.
Dieser Wert nn kann
dem Typenschild des
Motors entnommen
werden.
Dieser Wert In kann
dem Typenschild des
Motors entnommen
werden.
1.13
1.14
Motor Cos
Phi (Leis-
tungsfaktor)
Energieopti-
mierung
0.30 1.00 variiert 120
0 1 0 666
Dieser Wert kann
dem Typenschild des
Motors entnommen
werden.
Der Frequenzumrichter sucht nach
dem Motormindeststrom, um den
Geräuschpegel des
Motors zu senken
und Energie zu sparen. Verwenden Sie
diese Funktion z. B.
für Lüfter- oder
Pumpenanwendungen.
0 = Gesperrt
1 = Freigegeben
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 73

KURZANLEITUNG VACON · 73
Tabelle 12: M1 Schnelleinstellungen
Index Parameter Min. Max. Einheit
1.15
1.16
Identifika-
tion
Startfunk-
tion
0 2 0 631
0 1 0 505
Werksei
nst.
ID Beschreibung
Bei der automatischen Motoridentifikation werden die
Motorparameter
berechnet bzw.
gemessen, die für
eine optimale Motorund Drehzahlsteuerung erforderlich
sind.
0 = Keine Aktion
1 = Bei Stillstand
2 = Mit Drehung
Vor der Durchführung der Identifikation müssen die
MotortypenschildParameter eingegeben werden.
0 = Rampe
1 = Fliegender Start
1.17
1.18
1.19
Stoppfunk-
tion
Automati-
sche Fehler-
quittierung
Reaktion auf
externen
Fehler
0 1 0 506
0 1 0 731
0 3 2 701
0 = Leerauslauf
1 = Rampe
0 = Gesperrt
1 = Freigegeben
0 = Keine Aktion
1 = Alarm
2 = Fehler (Stopp
gemäß StoppModus)
3 = Fehler (Stopp
durch Leerauslauf)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 74
VACON · 74 KURZANLEITUNG
Tabelle 12: M1 Schnelleinstellungen
Index Parameter Min. Max. Einheit
Reaktion auf
1.20
1.21
Fehler:AI-
Signal
Fernsteue-
rungsplatz
0 5 0 700
0 1 0 172
Werksei
nst.
ID Beschreibung
0 = Keine Aktion
1 = Alarm
2 = Alarm + FehlerFestfrequenz
(P3.9.1.13)
3 = Alarm + Vorheriger Frequenzsollwert
4 = Fehler (Stopp
gemäß StoppModus)
5 = Fehler (Stopp
durch Leerauslauf)
Auswahl des Fernsteuerungsplatzes
(Start/Stopp).
0 = E/A-Steuerung
1 = Feldbus-Steuerung
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 75

KURZANLEITUNG VACON · 75
Tabelle 12: M1 Schnelleinstellungen
Index Parameter Min. Max. Einheit
E/A-Soll-
1.22
wert A, Aus-
wahl
1 20 6 117
Werksei
nst.
ID Beschreibung
Auswahl der FrequenzsollwertQuelle, wenn als
Steuerplatz E/A A
festgelegt ist
0 = PC
1 = Festfrequenz 0
2 = Steuertafelsollwert
3 = Feldbus
4 = AI1
5 = AI2
6 = AI1+AI2
7 = PID-Sollwert
8 = Motorpotentiometer
11 = Block-Ausg. 1
12 = Block-Ausg. 2
13 = Block-Ausg. 3
14 = Block-Ausg. 4
15 = Block-Ausg. 5
16 = Block-Ausg. 6
17 = Block-Ausg. 7
18 = Block-Ausg. 8
19 = Block-Ausg. 9
20 = Block-Ausg. 10
1.23
1.24
1.25
1.26
Steuertafel-
sollwert,
Auswahl
Feldbussoll-
wert, Aus-
wahl
AI1 Signal-
bereich
AI2 Signal-
bereich
1 20 1 121
1 20 2 122
0 1 0 379
0 1 1 390
Der Standardwert ist
von der mit Parameter 1.2 ausgewählten
Anwendung abhängig.
Siehe P1.22.
Siehe P1.22.
0 = 0 bis 10 V / 0 bis
20 mA
1 = 2 bis 10 V / 4 bis
20 mA
0 = 0 bis 10 V / 0 bis
20 mA
1 = 2 bis 10 V / 4 bis
20 mA
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 76

VACON · 76 KURZANLEITUNG
Tabelle 12: M1 Schnelleinstellungen
Index Parameter Min. Max. Einheit
1.27
1.28
1.29
1.30
RO1 Funk-
tion
RO2 Funk-
tion
RO3 Funk-
tion
AO1 Funk-
tion
0 73 2 11001
0 73 3 11004
0 73 1 11007
0 31 2 10050
Werksei
nst.
ID Beschreibung
Siehe P3.5.3.2.1
Siehe P3.5.3.2.1
Siehe P3.5.3.2.1
Siehe P3.5.4.1.1
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 77
KURZANLEITUNG VACON · 77
Tabelle 13: M1.35 Multi-Pump (mehrere Frequenzumrichter)
Index Parameter Min. Max. Einheit
1.35.1 PID-Verstärkung 0.00 100.00 % 100.00 118
1.35.2 PID I-Zeit 0.00 600.00 s 1.00 119
1.35.3 PID D-Zeit 0.00 100.00 s 0.00 1132
Werks
einst.
ID Beschreibung
Wenn der Parameter auf 100 % eingestellt ist, bewirkt
eine Fehlerwertabweichung von 10 %
eine Änderung des
Reglerausgangs
um 10 %.
Wenn dieser Parameter auf 1,00 s
eingestellt ist,
bewirkt eine Fehlerwertabweichung
von 10 % eine
Änderung des Reglerausgangs um
10,00 %/s.
Wenn dieser Parameter auf 1,00 s
eingestellt ist,
bewirkt eine Fehlerwertabweichung
während 1,00 s
eine Änderung des
Reglerausgangs
um 10,00 %.
1.35.4 Wahl der Einheit 1 44 1 1036
1.35.5
1.35.6
1.35.7
1.35.8
Anzeigeeinheit
Min
Anzeigeeinheit
Max
Rückmeldung 1
Quellenauswahl
Einstellwert 1
Quellenauswahl
variiert variiert variiert 1033
variiert variiert variiert 1034
0 30 2 334
0 32 1 332
Wählen Sie die Einheit für den Prozess aus. (siehe
P3.13.1.4)
Der Wert der
Anzeigeeinheit, der
0% des PID-Rückmeldungssignals
entspricht.
Der Wert der
Anzeigeeinheit, der
100 % des PIDRückmeldungssignals entspricht.
Siehe P3.13.3.3.
Siehe P3.13.2.6.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 78
VACON · 78 KURZANLEITUNG
Tabelle 13: M1.35 Multi-Pump (mehrere Frequenzumrichter)
Index Parameter Min. Max. Einheit
1.35.9
1.35.10
1.35.11
Einstellwert 1
Steuertafel
Einstellwert
Sleep-Frequenz
SP1
SP1 Sleep-Ver-
zög.
variiert variiert variiert 0 167
0.0 320.0 Hz 0.0 1016
0 3000 s 0 1017
Werks
einst.
ID Beschreibung
Der Frequenzumrichter wechselt in
den Sleep-Modus,
wenn die Ausgangsfrequenz länger als die durch
den Parameter
Sleep-Verzögerung
definierte Zeit
unterhalb dieses
Einstellwerts
bleibt.
0 = Nicht verwendet
Die Mindestdauer,
die die Frequenz
unterhalb der
Sleep-Frequenz
liegt, bevor der
Frequenzumrichter
gestoppt wird
0 = Nicht verwendet
1.35.12
1.35.13
1.35.14 Anzahl Pumpen 1 8 1 1001
SP1 Wakeup-
Pegel
Multi-Pump-
Modus
variiert variiert variiert variiert 1018
0 2 0 1785
Der Wakeup-Wert
für die PID-Rückmeldungsüberwachung. WakeupPegel 1 verwendet
die ausgewählten
Anzeigeeinheiten.
0 = Nicht verwendet
Wählt den MultiPump-Modus aus.
0 = Einzelantrieb
1 = Multifollower
2 = Multimaster
Gesamtzahl der
Motoren (Pumpen/
Lüfter), die im
Multi-Pump-System betrieben werden.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 79
KURZANLEITUNG VACON · 79
Tabelle 13: M1.35 Multi-Pump (mehrere Frequenzumrichter)
Index Parameter Min. Max. Einheit
1.35.15
1.35.16
Pumpenidentifi-
kationsnummer
Start- und Rück-
meldungssignale
1 8 1 1500
0 2 1 1782
Werks
einst.
ID Beschreibung
Die Nummer für
die Reihenfolge des
Frequenzumrichters im PumpenSystem. Dieser
Parameter wird
nur im Multifollower- oder Multimaster-Modus verwendet.
Verwenden Sie diesen Parameter, um
auszuwählen, ob
das Startsignal
und/oder die PIDRückmeldungssignale mit dem
Umrichter verbunden sind.
0=Nicht angeschlossen
1=Nur Startsignal
angeschlossen
2=Beide Signale
angeschlossen
1.35.17
1.35.18
Pumpe Interlo-
cking
Autowechsel 0 1 1 1027
0 1 1 1032
Aktivieren/deaktivieren Sie die Interlocks. Interlocks
informieren das
System, ob ein
Motor angeschlossen ist oder nicht.
0 = Gesperrt
1 = Freigegeben
Deaktivieren/aktivieren Sie die
Startreihenfolge
und Priorität der
Motoren.
0 = Gesperrt
1 = Freigegeben
(Intervall)
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 80
VACON · 80 KURZANLEITUNG
Tabelle 13: M1.35 Multi-Pump (mehrere Frequenzumrichter)
Index Parameter Min. Max. Einheit
1.35.19
1.35.20
1.35.21
Autom. gewech-
selte Pumpe
Autowechselin-
tervall
Autowechseltage 0 127 1786
0 1 1 1028
0.0 3000.0 h 48.0 1029
Werks
einst.
ID Beschreibung
0 = Hilfspumpe
1 = Alle Pumpen
Wenn die mit diesem Parameter
festgelegte Zeit
abgelaufen ist, wird
die Autowechselfunktion gestartet.
Die Autowechselfunktion startet
jedoch nur, wenn
die Leistung den
mit den Parametern P1.35.23 und
P1.35.24 festgelegten Pegel unterschreitet.
Bereich: Montag
bis Sonntag
1.35.22
1.35.23
1.35.24
1.35.25 Regelbereich 0 100 % 10 1097
Autowechsel-
Tageszeit
Autowechsel:
Frequenzgrenze
Autowechsel:
Pumpengrenze
Zeit 1787
0.00 P3.3.1.2 Hz 25:00 1031
1 6 1030
Bereich: 00:00:00
bis 23:59:59
Diese Parameter
legen den Pegel
fest, unter dem die
genutzte Leistung
liegen muss, damit
der Autowechsel
startet.
Solange der Rückmeldungswert zwischen 4,5 und
5,5 bar liegt, bleibt
der Motor angeschlossen.
Einstellwert = 5
bar
Regelbereich = 10
%
Solange der Rückmeldungswert zwischen 4,5 und
5,5 bar liegt, bleibt
der Motor angeschlossen.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 81

KURZANLEITUNG VACON · 81
Tabelle 13: M1.35 Multi-Pump (mehrere Frequenzumrichter)
Index Parameter Min. Max. Einheit
1.35.26
1.35.27
1.35.28
Regelbereichver-
zögerung
Konst. Produkti-
onsgeschwindig-
keit
Pumpe 1 Inter-
lock
0 3600 s 10 1098
0 100 % 100 1513
Werks
einst.
DigIN
Slot0.1
ID Beschreibung
Liegt der Rückmeldungswert außerhalb des Regelbereichs, die Zeit,
nach der Pumpen
hinzugefügt oder
entfernt werden.
Gibt die konstante
Drehzahl an, bei
der die Pumpe
sperrt, wenn sie die
maximale Frequenz erreicht. Die
nächste Pumpe
startet die Regelung im Multimaster-Modus.
426
OPEN = Nicht aktiv
CLOSED = Aktiv
1.35.29 Spülen Sollwert
Maximaler
Sollwert
Maximaler
Sollwert
HZ 50.00 1239
Gibt den Frequenzsollwert an, bei
dem die Spülfunktion aktiviert wird.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
Page 82

VACON · 82 ASSISTENTEN
2 ASSISTENTEN
2.1 STANDARDANWENDUNGSASSISTENT
Der Anwendungsassistent hilft Ihnen beim Eingeben der anwendungsspezifischen
Basisparameter.
Um den Standardanwendungsassistenten zu aktivieren, setzen Sie auf der Steuertafel den
Wert von Parameter P1.2 Anwendung (ID 212) auf Standard.
HINWEIS!
Wenn Sie den Standard-Anwendungsassistenten aus dem Anlaufassistenten
heraus starten, fährt der Assistent direkt mit Schritt 11 fort.
Stellen Sie den Wert für P3.1.2.2 Motortyp ein (siehe
1
Typenschild).
PM-Motor
Asynchronmotor
Reluktanzmotor
2
3
4
5
Stellen Sie den Wert für P3.1.1.1 Motornennspannung ein (siehe Typenschild).
Stellen Sie den Wert für P3.1.1.2 Motornennfrequenz ein (siehe Typenschild).
Stellen Sie den Wert für P3.1.1.3 Motornenndrehzahl ein (siehe Typenschild).
Stellen Sie den Wert für P3.1.1.4 Motornennstrom
ein (siehe Typenschild).
Bereich: variiert
Bereich: 8.00 – 320.00 Hz
Bereich: 24-19200 U/min
Bereich: variiert
Schritt 6 zeigt nur, ob Sie in Schritt 1 Asynchronmotor ausgewählt haben.
6
7
8
9
Stellen Sie den Wert für P3.1.1.5 Motor Cos Phi ein. Bereich: 0.30-1.00
Stellen Sie den Wert für P3.3.1.1 Sollwert Mindestfrequenz ein.
Stellen Sie den Wert für P3.3.1.2 Sollwert Höchstfrequenz ein.
Stellen Sie den Wert für P3.4.1.2 Beschleunigungszeit 1 ein.
Bereich: 0,00 - P3.3.1.2 Hz
Bereich: P3.3.1.1 - 320,00 Hz
Bereich: 0,1 – 3000.0 s
10 Stellen Sie den Wert für P3.4.1.3 Bremszeit 1 ein. Bereich: 0,1 – 3000.0 s
Wählen Sie den Steuerplatz aus, der dem Frequen-
11
zumrichter die Start-/Stopp-Befehle und den Frequenzsollwert vorgibt.
Der Standardanwendungsassistent ist nun abgeschlossen.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
E/A-Klemmleiste
Feldbus
Steuertafel
Page 83
ASSISTENTEN VACON · 83
2.2 HVAC-ANWENDUNGSASSISTENT
Der Anwendungsassistent hilft Ihnen beim Eingeben der anwendungsspezifischen
Basisparameter.
Um den HVAC-Anwendungsassistenten zu aktivieren, setzen Sie auf der Steuertafel den
Wert von Parameter P1.2 Applikation (ID 212) auf HVAC-Regler.
Wählen Sie den Typ oder Prozess (oder die Applikation) aus, die Sie regeln.
1
Für einige Parameter werden aufgrund der Auswahl in Schritt 1 bestimmte Werte
voreingestellt. Diese Parameter und ihre Werte finden Sie am Ende dieses Kapitels in
Tabelle 14.
Kompressor
Lüfter
Pumpe
Anderes
2
Legen Sie den Wert für P3.2.11 Verzög. Neustart
ein.
Bereich: 0-20 min
Schritt 2 zeigt nur, ob Sie in Schritt 1 Kompressor ausgewählt haben.
Stellen Sie den Wert für P3.1.2.2 Motortyp ein (siehe
3
4
5
6
7
8
Typenschild).
Stellen Sie den Wert für P3.1.1.1 Motornennspannung ein (siehe Typenschild).
Stellen Sie den Wert für P3.1.1.2 Motornennfrequenz ein (siehe Typenschild).
Stellen Sie den Wert für P3.1.1.3 Motornenndrehzahl ein (siehe Typenschild).
Stellen Sie den Wert für P3.1.1.4 Motornennstrom
ein (siehe Typenschild).
Stellen Sie den Wert für P3.1.1.5 Motor Cos Phi ein
(siehe Typenschild).
PM-Motor
Asynchronmotor
Reluktanzmotor
Bereich: variiert
Bereich: 8.00 – 320.00 Hz
Bereich: 24-19200 U/min
Bereich: variiert
Bereich: 0.30-1.00
Schritt 8 zeigt nur, ob Sie in Schritt 3 Asynchronmotor ausgewählt haben.
10
9
Stellen Sie den Wert für P3.3.1.1 Sollwert Mindestfrequenz ein.
Stellen Sie den Wert für P3.3.1.2 Sollwert Höchstfrequenz ein.
Bereich: 0.00 – 3.3.1.2 Hz
Bereich: P3.3.1.1 - 320,00 Hz
Die Schritte 11 und 12 zeigen nur, ob Sie in Schritt 1 Anderes ausgewählt haben.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 84

VACON · 84 ASSISTENTEN
11
12 Stellen Sie den Wert für P3.4.1.3 Bremszeit 1 ein. Bereich: 0,1 – 3000.0 s
Stellen Sie den Wert für P3.4.1.2 Beschleunigungszeit 1 ein.
Bereich: 0,1 – 3000.0 s
Anschließend geht der Assistent zu den von der Applikation vorgegebenen Schritten.
Wählen Sie den Steuerplatz aus (von dem aus Sie
13
die Start-/Stopp-Befehle geben und den Frequenzsollwert des Umrichters vorgeben)
E/A-Klemmleiste
Feldbus
Steuertafel
Der HVAC-Anwendungsassistent ist nun abgeschlossen.
Tabelle 14: Voreingestellte Parameterwerte
Prozesstyp
Index Parameter
Pumpe Lüfter Kompressor
P3.1.4.1 U/f-Verhältnis Linear Quadratisch Linear
P3.2.4 Startfunktion Rampe Fliegender Start Rampe
P3.2.5 Stoppfunktion Rampe Leerauslauf Rampe
P3.4.1.2 Beschleunigungs-
zeit
P3.4.1.3 Verzögerungszeit 5.0 s 30.0 s 30 s
5.0 s 30.0 s 30 s
2.3 ANWENDUNGSASSISTENT FÜR PID-REGLER
Der Anwendungsassistent hilft Ihnen beim Eingeben der anwendungsspezifischen
Basisparameter.
Um den PID-Regler-Assistenten zu aktivieren, setzen Sie auf der Steuertafel den Wert von
Parameter P1.2 Anwendung (ID 212) auf PID-Regler.
HINWEIS!
Wenn Sie den Anwendungsassistenten aus dem Anlaufassistenten heraus starten,
fährt der Assistent direkt mit Schritt 11 fort.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 85

ASSISTENTEN VACON · 85
Stellen Sie den Wert für P3.1.2.2 Motortyp ein (siehe
1
Typenschild).
PM-Motor
Asynchronmotor
Reluktanzmotor
2
3
4
5
Stellen Sie den Wert für P3.1.1.1 Motornennspannung ein (siehe Typenschild).
Stellen Sie den Wert für P3.1.1.2 Motornennfrequenz ein (siehe Typenschild).
Stellen Sie den Wert für P3.1.1.3 Motornenndrehzahl ein (siehe Typenschild).
Stellen Sie den Wert für P3.1.1.4 Motornennstrom
ein (siehe Typenschild).
Bereich: variiert
Bereich: 8,00 bis 320,00 Hz
Bereich: 24 bis 19200 1/min
Bereich: variiert
Schritt 6 zeigt nur, ob Sie in Schritt 1 Asynchronmotor ausgewählt haben.
6
7
8
9
10 Stellen Sie den Wert für P3.4.1.3 Bremszeit 1 ein. Bereich: 0,1 – 3000.0 s
Stellen Sie den Wert für P3.1.1.5 Motor Cos Phi ein. Bereich: 0.30-1.00
Stellen Sie den Wert für P3.3.1.1 Sollwert Mindestfrequenz ein.
Stellen Sie den Wert für P3.3.1.2 Sollwert Höchstfrequenz ein.
Stellen Sie den Wert für P3.4.1.2 Beschleunigungszeit 1 ein.
Bereich: 0,00 - P3.3.1.2 Hz
Bereich: P3.3.1.1 - 320,00 Hz
Bereich: 0,1 – 3000.0 s
Wählen Sie einen Steuerplatz (von dem aus Sie die
11
12
Start-/Stopp-Befehle geben und den Frequenzsollwert des Umrichters vorgeben)
Stellen Sie einen Wert für P3.13.1.4 Wahl der Einheit ein.
E/A-Klemmleiste
Feldbus
Steuertafel
Mehr als eine Auswahl
Wenn Sie eine andere Einheit als „%“ auswählen, werden die nächsten Fragen angezeigt.
Wenn Sie „%“ auswählen, fährt der Assistent direkt mit Schritt 16 fort.
13
14
15
16
Stellen Sie einen Wert für P3.13.1.5 Anzeigeeinheit
Min. ein.
Stellen Sie einen Wert für P3.13.1.6 Anzeigeeinheit
Max. ein.
Stellen Sie einen Wert für P3.13.1.7 Dezimalstellen
Anzeigeeinheit ein.
Stellen Sie einen Wert für P3.13.3.3 Rückmeldung 1
Quellenauswahl ein.
Der Bereich hängt von der in Schritt 12
getroffenen Auswahl ab.
Der Bereich hängt von der in Schritt 12
getroffenen Auswahl ab.
Bereich: 0-4
Siehe Tabelle „Einstellungen für Rückmeldungen“ in Tabelle 75 Einstellungen für Rück-
meldungen
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 86

VACON · 86 ASSISTENTEN
Wenn Sie ein Analogeingangssignal auswählen, sehen Sie Schritt 18. Bei einer anderen
Auswahl fährt der Assistent direkt mit Schritt 19 fort.
Stellen Sie den Signalbereich für den Analogein-
17
18
gang ein.
Stellen Sie den Wert für P3.13.1.8 Invert.Reg.Abw.
(Invertierte Regelabweichung) ein.
0 = 0-10 V / 0-20 mA
1 = 2-10 V / 4-20 mA
0 = Normal
1 = Invertiert
19
Stellen Sie einen Wert für P3.13.3.3 Einstellwertquelle Auswahl ein.
Siehe Tabelle „Einstellwerte“ in Tabelle 75
Einstellungen für Rückmeldungen
Wenn Sie ein Analogeingangssignal auswählen, wird Schritt 21 angezeigt. Bei einer anderen
Auswahl fährt der Assistent mit Schritt 23 fort.
Wenn Sie Einstellwert Steuertafel 1 oder Einstellwert Steuertafel 2 als Wert auswählen, fährt
der Assistent direkt zu Schritt 22 fort.
Stellen Sie den Signalbereich für den Analogein-
20
21
22
gang ein.
Stellen Sie einen Wert für P3.13.2.1 (Einstellwert
Steuertafel 1) und P3.13.2.2 (Einstellwert Steuertafel 2) ein.
Verwendung der Sleep-Funktion
0 = 0-10 V / 0-20 mA
1 = 2-10 V / 4-20 mA
Ist von dem in Schritt 20 eingestellten
Bereich abhängig.
0 = Nein
1 = Ja
Wenn Sie bei Frage 22 Ja wählen, sehen Sie die nächsten drei Fragen. Wenn Sie Nein wählen,
wird der Assistent beendet.
23
24
25
Stellen Sie den Wert für P3.13.5.1 SP1 Einstellwert
Sleep-Frequenz ein.
Stellen Sie den Wert für P3.13.5.2 SP1 Sleep-Verzögerung ein.
Stellen Sie den Wert für P3.13.5.3 SP1 WakeupPegel ein.
Bereich: 0.00 – 320.00 Hz
Bereich: 0 – 3000 s
Der Wertebereich hängt von der ausgewählten Anzeigeeinheit ab.
Der PID-Regler-Assistent ist nun abgeschlossen.
2.4 MULTI-PUMP-APPLIKATIONSASSISTENT (EINZELNER FREQUENZUMRICHTER)
Der Anwendungsassistent hilft Ihnen beim Eingeben der anwendungsspezifischen
Basisparameter.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 87
ASSISTENTEN VACON · 87
Um den Assistenten für die Multi-Pump-Applikation (einzelner Frequenzumrichter) zu
aktivieren, setzen Sie auf der Steuertafel den Wert von Parameter P1.2 Applikation (ID 212)
auf Multi-Pump (einzelner Frequenzumrichter).
HINWEIS!
Wenn Sie den Anwendungsassistenten aus dem Anlaufassistenten heraus starten,
fährt der Assistent direkt mit Schritt 11 fort.
Stellen Sie den Wert für P3.1.2.2 Motortyp ein (siehe
1
Typenschild).
PM-Motor
Asynchronmotor
Reluktanzmotor
2
3
4
5
Stellen Sie den Wert für P3.1.1.1 Motornennspannung ein (siehe Typenschild).
Stellen Sie den Wert für P3.1.1.2 Motornennfrequenz ein (siehe Typenschild).
Stellen Sie den Wert für P3.1.1.3 Motornenndrehzahl ein (siehe Typenschild).
Stellen Sie den Wert für P3.1.1.4 Motornennstrom
ein (siehe Typenschild).
Bereich: variiert
Bereich: 8.00 – 320.00 Hz
Bereich: 24-19200 U/min
Bereich: variiert
Schritt 6 zeigt nur, ob Sie in Schritt 1 Asynchronmotor ausgewählt haben.
6
7
8
9
10 Stellen Sie den Wert für P3.4.1.3 Bremszeit 1 ein. Bereich: 0,1 – 3000.0 s
Stellen Sie den Wert für P3.1.1.5 Motor Cos Phi ein. Bereich: 0.30-1.00
Stellen Sie den Wert für P3.3.1.1 Sollwert Mindestfrequenz ein.
Stellen Sie den Wert für P3.3.1.2 Sollwert Höchstfrequenz ein.
Stellen Sie den Wert für P3.4.1.2 Beschleunigungszeit 1 ein.
Bereich: 0,00 - P3.3.1.2 Hz
Bereich: P3.3.1.1 - 320,00 Hz
Bereich: 0,1 – 3000.0 s
Wählen Sie einen Steuerplatz (von dem aus Sie die
11
12
Start-/Stopp-Befehle geben und den Frequenzsollwert des Umrichters vorgeben)
Stellen Sie einen Wert für P3.13.1.4 Wahl der Einheit ein.
E/A-Klemmleiste
Feldbus
Steuertafel
Mehr als eine Auswahl
Wenn Sie etwas anderes als „%“ auswählen, werden die nächsten 3 Schritte angezeigt. Wenn
Sie „%“ auswählen, fährt der Assistent direkt mit Schritt 16 fort.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 88

VACON · 88 ASSISTENTEN
13
14
15
16
Stellen Sie einen Wert für P3.13.1.5 Anzeigeeinheit
Min. ein.
Stellen Sie einen Wert für P3.13.1.6 Anzeigeeinheit
Max. ein.
Stellen Sie einen Wert für P3.13.1.7 Dezimalstellen
Anzeigeeinheit ein.
Stellen Sie einen Wert für P3.13.3.3 Rückmeldung 1
Quellenauswahl ein.
Der Bereich hängt von der in Schritt 12
getroffenen Auswahl ab.
Der Bereich hängt von der in Schritt 12
getroffenen Auswahl ab.
Bereich: 0-4
Siehe Tabelle „Einstellungen für Rückmeldungen“ in Tabelle 75 Einstellungen für Rück-
meldungen
Wenn Sie ein Analogeingangssignal auswählen, sehen Sie Schritt 17. Bei einer anderen
Auswahl fährt der Assistent direkt mit Schritt 18 fort.
Stellen Sie den Signalbereich für den Analogein-
17
18
gang ein.
Stellen Sie den Wert für P3.13.1.8 Invert.Reg.Abw.
(Invertierte Regelabweichung) ein.
0 = 0-10 V / 0-20 mA
1 = 2-10 V / 4-20 mA
0 = Normal
1 = Invertiert
19
Stellen Sie einen Wert für P3.13.3.3 Einstellwertquelle Auswahl ein.
Siehe Tabelle „Einstellwerte“ in Tabelle 74
Einstellungen für Einstellwerte
Wenn Sie ein Analogeingangssignal auswählen, wird zuerst Schritt 20 und dann Schritt 22
angezeigt. Bei einer anderen Auswahl fährt der Assistent mit Schritt 21 fort.
Wenn Sie Einstellwert Steuertafel 1 oder Einstellwert Steuertafel 2 als Wert auswählen, fährt
der Assistent direkt zu Schritt 22 fort.
Stellen Sie den Signalbereich für den Analogein-
20
21
22
gang ein.
Stellen Sie einen Wert für P3.13.2.1 (Einstellwert
Steuertafel 1) und P3.13.2.2 (Einstellwert Steuertafel 2) ein.
Verwendung der Sleep-Funktion
0 = 0-10 V / 0-20 mA
1 = 2-10 V / 4-20 mA
Ist von dem in Schritt 19 eingestellten
Bereich abhängig.
0 = Nein
1 = Ja
Wenn Sie in Schritt 22 Ja wählen, sehen Sie die nächsten drei Schritte. Wenn Sie Nein
wählen, fährt der Assistent mit Schritt 26 fort.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 89

ASSISTENTEN VACON · 89
23
24
25
26
27
28
Stellen Sie den Wert für P3.13.5.1 SP1 Einstellwert
Sleep-Frequenz ein.
Stellen Sie den Wert für P3.13.5.2 SP1 Sleep-Verzögerung ein.
Stellen Sie den Wert für P3.13.5.3 SP1 WakeupPegel ein.
Stellen Sie den Wert für P3.15.2 Anzahl Pumpen
ein.
Stellen Sie den Wert für P3.15.5 Pumpe Interlocking
ein.
Stellen Sie den Wert für P3.15.6 Autowechsel ein.
Bereich: 0.00 – 320.00 Hz
Bereich: 0 – 3000 s
Der Wertebereich hängt von der ausgewählten Anzeigeeinheit ab.
Bereich: 1-8
0 = Nicht verwendet
1 = Freigegeben
0 = Gesperrt
1 = Freigegeben (Intervall)
2 = Freigegeben (Echtzeit)
Wenn Sie für den Parameter Autowechsel den Wert Freigegeben (Intervall oder Echtzeit)
auswählen, werden die Schritte 29 bis 34 angezeigt. Wenn Sie für den Parameter
Autowechsel den Wert Gesperrt festlegen, fährt der Assistent direkt mit Schritt 35 fort.
Stellen Sie den Wert für P3.15.7 Autom. gewech-
29
selte Pumpen ein
0 = Hilfspumpen
1 = Alle Pumpen
Schritt 30 wird nur angezeigt, wenn Sie für den Parameter Autowechsel in Schritt 28 den
Wert Freigegeben (Intervall) auswählen.
30
Stellen Sie den Wert für P3.15.8 Autowechselintervall ein.
Bereich: 0-3000 h
Die Schritte 31 und 32 werden nur angezeigt, wenn Sie für den Parameter Autowechsel in
Schritt 28 den Wert Freigegeben (Echtzeit) auswählen.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 90

VACON · 90 ASSISTENTEN
31
32
33
34
35 Stellen Sie den Wert für P3.15.13 Bandbreite ein. Bereich: 0-100%
36
Stellen Sie den Wert für P3.15.9 Autowechseltage
ein
Stellen Sie den Wert für P3.15.10 Autowechseltageszeit ein
Stellen Sie den Wert für P3.15.11 Autowechsel-Frequenzgrenze ein
Stellen Sie den Wert für P3.15.12 AutowechselPumpengrenze ein
Stellen Sie den Wert für P3.15.14 Bandbreitenverzögerung ein.
Bereich: Montag bis Sonntag
Bereich: 00:00:00 bis 23:59:59
Bereich: P3.3.1.1-P3.3.1.2 Hz
Bereich: 1-8
Bereich: 0 – 3600 s
Der Multi-Pump-Applikationsassistent (einzelner Frequenzumrichter) ist nun
abgeschlossen.
2.5 MULTI-PUMP-APPLIKATIONSASSISTENT (MEHRERE FREQUENZUMRICHTER)
Der Anwendungsassistent hilft Ihnen beim Eingeben der anwendungsspezifischen
Basisparameter.
Um den Assistenten für die Multi-Pump-Applikation (mehrere Frequenzumrichter) zu
aktivieren, setzen Sie auf der Steuertafel den Wert von Parameter P1.2 Applikation (ID 212)
auf Multi-Pump (mehrere Frequenzumrichter).
HINWEIS!
Wenn Sie den Anwendungsassistenten aus dem Anlaufassistenten heraus starten,
fährt der Assistent direkt mit Schritt 11 fort.
Stellen Sie den Wert für P3.1.2.2 Motortyp ein (siehe
1
2
3
4
5
Typenschild).
Stellen Sie den Wert für P3.1.1.1 Motornennspannung ein (siehe Typenschild).
Stellen Sie den Wert für P3.1.1.2 Motornennfrequenz ein (siehe Typenschild).
Stellen Sie den Wert für P3.1.1.3 Motornenndrehzahl ein (siehe Typenschild).
Stellen Sie den Wert für P3.1.1.4 Motornennstrom
ein (siehe Typenschild).
PM-Motor
Asynchronmotor
Reluktanzmotor
Bereich: variiert
Bereich: 8.00 – 320.00 Hz
Bereich: 24-19200 U/min
Bereich: variiert
Schritt 6 zeigt nur, ob Sie in Schritt 1 Asynchronmotor ausgewählt haben.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 91

ASSISTENTEN VACON · 91
6 Stellen Sie den Wert für P3.1.1.5 Motor Cos Phi ein. Bereich: 0.30-1.00
7
8
9
10 Stellen Sie den Wert für P3.4.1.3 Bremszeit 1 ein. Bereich: 0,1 – 3000.0 s
11
12
Stellen Sie den Wert für P3.3.1.1 Sollwert Mindestfrequenz ein.
Stellen Sie den Wert für P3.3.1.2 Sollwert Höchstfrequenz ein.
Stellen Sie den Wert für P3.4.1.2 Beschleunigungszeit 1 ein.
Wählen Sie einen Steuerplatz (von dem aus Sie die
Start-/Stopp-Befehle geben und den Frequenzsollwert des Umrichters vorgeben)
Stellen Sie einen Wert für P3.13.1.4 Wahl der Einheit ein.
Bereich: 0,00 - P3.3.1.2 Hz
Bereich: P3.3.1.1 - 320,00 Hz
Bereich: 0,1 – 3000.0 s
E/A-Klemmleiste
Feldbus
Steuertafel
Mehr als eine Auswahl
Wenn Sie etwas anderes als „%“ auswählen, werden die nächsten 3 Schritte angezeigt. Wenn
Sie „%“ auswählen, fährt der Assistent direkt mit Schritt 16 fort.
13
Stellen Sie einen Wert für P3.13.1.5 Anzeigeeinheit
Min. ein.
Der Bereich hängt von der in Schritt 12
getroffenen Auswahl ab.
14
15
16
Stellen Sie einen Wert für P3.13.1.6 Anzeigeeinheit
Max. ein.
Stellen Sie einen Wert für P3.13.1.7 Dezimalstellen
Anzeigeeinheit ein.
Stellen Sie einen Wert für P3.13.3.3 Rückmeldung 1
Quellenauswahl ein.
Der Bereich hängt von der in Schritt 12
getroffenen Auswahl ab.
Bereich: 0-4
Siehe Tabelle „Einstellungen für Rückmeldungen“ in Kapitel Tabelle 74 Einstellungen
für Einstellwerte
Wenn Sie ein Analogeingangssignal auswählen, sehen Sie Schritt 17. Bei einer anderen
Auswahl fährt der Assistent direkt mit Schritt 18 fort.
Stellen Sie den Signalbereich für den Analogein-
17
18
19
gang ein.
Stellen Sie den Wert für P3.13.1.8 Invert.Reg.Abw.
(Invertierte Regelabweichung) ein.
Stellen Sie einen Wert für P3.13.3.3 Einstellwertquelle Auswahl ein.
0 = 0-10 V / 0-20 mA
1 = 2-10 V / 4-20 mA
0 = Normal
1 = Invertiert
Siehe Tabelle „Einstellwerte“ in Kapitel
Tabelle 74 Einstellungen für Einstellwerte
Wenn Sie ein Analogeingangssignal auswählen, wird zuerst Schritt 20 und dann Schritt 22
angezeigt. Bei einer anderen Auswahl fährt der Assistent mit Schritt 21 fort.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 92

VACON · 92 ASSISTENTEN
Wenn Sie Einstellwert Steuertafel 1 oder Einstellwert Steuertafel 2 als Wert auswählen, fährt
der Assistent direkt zu Schritt 22 fort.
Stellen Sie den Signalbereich für den Analogein-
20
gang ein.
0 = 0-10 V / 0-20 mA
1 = 2-10 V / 4-20 mA
21
22
Stellen Sie einen Wert für P3.13.2.1 (Einstellwert
Steuertafel 1) und P3.13.2.2 (Einstellwert Steuertafel 2) ein.
Verwendung der Sleep-Funktion
Ist von dem in Schritt 19 eingestellten
Bereich abhängig.
0 = Nein
1 = Ja
Wenn Sie in Schritt 22 Ja wählen, sehen Sie die nächsten drei Schritte. Wenn Sie Nein
wählen, fährt der Assistent mit Schritt 26 fort.
23
24
25
26
Stellen Sie den Wert für P3.13.5.1 SP1 Einstellwert
Sleep-Frequenz ein.
Stellen Sie den Wert für P3.13.5.2 SP1 Sleep-Verzögerung ein.
Stellen Sie den Wert für P3.13.5.3 SP1 WakeupPegel ein.
Stellen Sie einen Wert für P3.15.1 Multi-PumpModus ein
Bereich: 0.00 – 320.00 Hz
Bereich: 0 – 3000 s
Der Wertebereich hängt von der ausgewählten Anzeigeeinheit ab.
Multifollower
Multimaster
27
28
29
30
31
Stellen Sie den Wert für P3.15.3 Pumpenidentifikationsnummer ein
Stellen Sie einen Wert für P3.15.4 Start und Rückmeldung ein
Stellen Sie den Wert für P3.15.2 Anzahl Pumpen
ein.
Stellen Sie den Wert für P3.15.5 Pumpe Interlocking
ein.
Stellen Sie den Wert für P3.15.6 Autowechsel ein.
Bereich: 1-8
0=Nicht angeschlossen
1=Nur Startsignal angeschlossen
2=Beide Signale angeschlossen
Bereich: 1-8
0 = Nicht verwendet
1 = Freigegeben
0 = Gesperrt
1 = Freigegeben (Intervall)
2 = Freigegeben (Wochentage)
Wenn Sie für den Parameter Autowechsel den Wert Freigegeben (Intervall) auswählen, wird
Schritt 33 angezeigt. Wenn Sie für den Parameter Autowechsel den Wert Freigegeben
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 93
ASSISTENTEN VACON · 93
(Wochentage) auswählen, wird Schritt 34 angezeigt. Wenn Sie für den Parameter
Autowechsel den Wert Gesperrt festlegen, fährt der Assistent direkt mit Schritt 36 fort.
Stellen Sie den Wert für P3.15.7 Autom. gewech-
32
selte Pumpen ein
0 = Hilfspumpen
1 = Alle Pumpen
Schritt 33 wird nur angezeigt, wenn Sie für den Parameter Autowechsel in Schritt 31 den
Wert Freigegeben (Intervall) auswählen.
33
Stellen Sie den Wert für P3.15.8 Autowechselintervall ein.
Bereich: 0-3000 h
Die Schritte 34 und 35 werden nur angezeigt, wenn Sie für den Parameter Autowechsel in
Schritt 31 den Wert Freigegeben (Wochentage) auswählen.
34
35
36 Stellen Sie den Wert für P3.15.13 Bandbreite ein. Bereich: 0-100%
37
Stellen Sie den Wert für P3.15.9 Autowechseltage
ein
Stellen Sie den Wert für P3.15.10 Autowechseltageszeit ein
Stellen Sie den Wert für P3.15.14 Bandbreitenverzögerung ein.
Bereich: Montag bis Sonntag
Bereich: 00:00:00 bis 23:59:59
Bereich: 0 – 3600 s
Der Multi-Pump-Applikationsassistent (mehrere Frequenzumrichter) ist nun abgeschlossen.
2.6 BRAND-MODUS-ASSISTENT
Sie können den Band-Modus-Assistenten aufrufen, indem Sie im Schnelleinst.-Menü
Aktivieren für Parameter 1.1.2 wählen.
ACHTUNG!
Bevor Sie fortfahren, lesen Sie bitte erst die Informationen zu Kennwort- und
Garantieproblemen in Kapitel 10.18 Brand-Modus.
1
Stellen Sie den Wert für P3.17.2 Brand-Modus-Frequenzquelle ein.
Mehr als eine Auswahl
Wenn Sie einen anderen Wert als Brand-Modus-Frequenz wählen, springt der Assistent direkt
zu Schritt 3.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2
Page 94

VACON · 94 ASSISTENTEN
2
3
Stellen Sie den Wert für P3.17.2 Brand-Modus-Frequenz ein.
Soll das Signal beim Öffnen oder beim Schließen
des Kontakts aktiviert werden?
Bereich: variiert
0 = Offener Kontakt
1 = Geschlossener Kontakt
Wenn Sie in Schritt 3 den Wert Offener Kontakt eingestellt haben, fährt der Assistent direkt
mit Schritt 5 fort. Wenn Sie den Wert in Schritt 3 auf Geschlossener Kontakt eingestellt haben,
wird Schritt 5 nicht benötigt.
Stellen Sie einen Wert für die Parameter P3.17.4
4
5
6
Brand-Modus-Aktivierung bei ÖFFNEN und P3.17.5
Brand-Modus-Aktivierung bei SCHLIESSEN ein.
Stellen Sie den Wert für P3.17.6 Brand-Modus rückwärts ein.
Stellen Sie einen Wert für P3.17.1 Brand-ModusKennwort ein.
Wählen Sie einen Digitaleingang zur Aktivierung des Brand-Modus. Siehe auch Kapitel
10.6.1 Programmieren von Digital- und Analogeingängen.
Wählen Sie einen Digitaleingang zur Aktivierung der Rückwärtsrichtung im BrandModus.
DigIn Slot0.1 = VORWÄRTS
DigIn Slot0.2 = RÜCKWÄRTS
Legen Sie ein Kennwort zum Aktivieren der
Brand-Modus-Funktion fest.
1234 = Testmodus aktivieren
1002 = Brand-Modus aktivieren
Der Brand-Modus-Assistent ist abgeschlossen.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 95

BENUTZERSCHNITTSTELLEN VACON · 95
3 BENUTZERSCHNITTSTELLEN
3.1 NAVIGATION AUF DEM TASTENFELD
Die Daten des Frequenzumrichters sind in Menüs und Untermenüs unterteilt. Verwenden Sie
für die Navigation zwischen den Menüs die Pfeiltasten NACH OBEN/NACH UNTEN auf dem
Tastenfeld. Drücken Sie die OK-Taste, um eine Gruppe oder ein Element aufzurufen.
Drücken Sie die Taste BACK/RESET, um zur vorherigen Ebene zurückzukehren.
Auf dem Display wird Ihnen die aktuelle Position im Menü angezeigt, z. B. M3.2.1. Außerdem
wird Ihnen der Name der Gruppe oder des Elements der aktuellen Position angezeigt.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 96

Hauptmenü
Untermenüs Untermenüs Untermenüs
Hauptmenü Hauptmenü
M2 Monitor
M1.1 Assistenten
(Inhalt hängt ab von
P1.2 Anwendungsauswahl)
M2.1 Multimonitor
M3.1
Motoreinstellung
M3.2
Start/Stopp-Einst
M3.3 Sollwerte
M3.4
Rampen & Bremsen
M3.5
E/A-Konfiguration
M3.6 FB
Datenzuordnung
M3.10 Automatische
Fehlerquittierung
M3.11
Applikationseinstell.
M3.12
Timerfunktionen
M3.19
Umrichter anpassen
M3.13 PID-Regler
M3.14
Ext. PID-Regler
M3.15 Multi-Pump
M3.16
Wartungszähler
M3.17 Brand-Modus
M3.21
Pumpenregelung
M3.18
Motor Vorheizung
M3.7
Freq.ausblendung
M3.8 Überwachungen
M3.9
Schutzfunktionen
M2.2 Trendkurve
M2.3 Basis
M2.4 E/A
M2.5
Temperat. Eingänge
M2.6
Extras/Erweitert
M2.7
Timerfunktionen
M2.8 PID-Regler
M2.9
Ext. PID-Regler
M2.10 Multi-Pump
M2.11
Wartungszähler
M2.12 Feldbusdaten
M3
Parameter
M7 Favoriten
M4
Fehlerspeicher
M5 E/A und
Hardware
M4.4 Gesamtzähler
M4.5
RückstellbZähler
M4.6 Software-Info
M5.1 Standard-I/O
M5.2 bis M5.4
St.pl. C,D,E
M5.5 Echtzeituhr
M5.6
Leistungseinh.Einst.
M5.8 RS-485
M5.9 Ethernet
M6.1 Sprachwahl
M6.5
Parameter-Backup
M6.6
Parametervergleich
M6.7 Name d. FU
M8.1
Anwendergruppe
M8.2 Zugangscode
M1
Schnelleinstel-
lungen
M8
Anwender-
gruppen
M6
Benutzer-
einstell.
VACON · 96 BENUTZERSCHNITTSTELLEN
Abb. 32: Die Menüstruktur des Frequenzumrichters
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 97

STOP
READY I/O
Main Menu
A B C D E
F
H
G
Quick Setup
( 17 )
Monitor
( 5 )
Parameters
( 12 )
M1ID:
STOP
READY
I/O
Rem Control Place
I/O Control
KeypadStopButton
Yes
Start Function
Ramping
Start / Stop Setup
M3.2.1ID:172
BENUTZERSCHNITTSTELLEN VACON · 97
3.2 VERWENDUNG DES GRAFIK-DISPLAYS
Abb. 33: Das Hauptmenü des Grafik-Displays
A. Das erste Statusfeld: STOPP/BETRIEB
B. Die Drehrichtung
C. Das zweite Statusfeld: BEREIT/NICHT
BEREIT/FEHLER
D. Das Alarmfeld: ALARM/E. Der Steuerplatz: PC/EA/STEUERTAFEL/
FELDBUS
F. Das Positionsfeld: ID-Nummer des
Parameters und aktuelle Position im
Menü
G. Aktivierte Gruppe oder aktiviertes
Element: mit OK aufrufen
H. Anzahl der Elemente in der betreffenden
Gruppe
3.2.1 BEARBEITEN DER WERTE
Das Grafik-Display bietet zwei verschiedene Möglichkeiten zur Bearbeitung der Werte eines
Elements.
Normalerweise können Sie nur einen Wert pro Parameter einstellen. Treffen Sie eine
Auswahl aus einer Liste von Textwerten oder aus einem Bereich von Zahlenwerten.
ÄNDERN DES TEXTWERTS EINES PARAMETERS
1 Suchen Sie den Parameter mit Hilfe der
Pfeiltasten.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 98

STOP
READY
I/O
Rem Control Place
M3.2.1ID:
Edit
Help
Add to favourites
STOP
READY
I/O
Rem Control Place
M3.2.1ID:
FieldbusCTRL
I/O Control
STOP
READY
I/O
Frequency Ref
P3.3.1.1ID:101
MaxFreqReference
0.00 Hz
MinFreqReference
50.00 Hz
PosFreqRefLimit
320.00 Hz
STOP
READY
I/O
MinFreqReference
P3.3.1.1ID:101
0.00 Hz
Min: 0.00Hz
Max: 50.00Hz
VACON · 98 BENUTZERSCHNITTSTELLEN
2 Drücken Sie zweimal die OK-Taste oder einmal die
Pfeiltaste NACH RECHTS, um in den
Bearbeitungsmodus zu wechseln.
3 Stellen Sie den neuen Wert mithilfe der Pfeiltasten
NACH OBEN/NACH UNTEN ein.
4 Bestätigen Sie die Änderung mit OK. Drücken Sie
die Taste BACK/RESET, um die Änderung zu
verwerfen.
BEARBEITEN DER ZAHLENWERTE
1 Suchen Sie den Parameter mit Hilfe der
Pfeiltasten.
2 Wechseln Sie in den Bearbeitungsmodus.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Page 99
STOP
READY
I/O
MinFreqReference
P3.3.1.1ID:101
00.00 Hz
Min: 0.00Hz
Max: 50.00Hz
STOP
READY
I/O
MinFreqReference
P3.3.1.1ID:101
11.00 Hz
Min: 0.00Hz
Max: 50.00Hz
STOP
READY
I/O
P3.12.1.3ID:1466
Interval 1
00:00:00
00:00:00
ON Time
OFF Time
Days
0
A
BENUTZERSCHNITTSTELLEN VACON · 99
3 Wenn Sie einen Zahlenwert bearbeiten wollen,
springen Sie mit den Pfeiltasten NACH LINKS/
NACH RECHTS von Ziffer zu Ziffer. Ändern Sie die
Ziffern mithilfe der Pfeiltasten NACH OBEN/NACH
UNTEN.
4 Bestätigen Sie die Änderung mit OK. Drücken Sie
die Taste BACK/RESET, um die Änderung zu
verwerfen und zur vorherigen Ebene
zurückzukehren.
AUSWÄHLEN VON MEHR ALS EINEM WERT
Bei einigen Parametern können Sie mehr als einen Wert auswählen. Markieren Sie für jeden
erforderlichen Wert ein Kontrollkästchen.
1 Suchen Sie den Parameter. Wenn eine
Kontrollkästchen-Auswahl möglich ist, sehen Sie
ein entsprechendes Symbol im Display.
A. Symbol für Kontrollkästchen-
Auswahl
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3
Page 100

STOP
READY
I/O
M 3.12.1.3.1ID:
Days
Monday
Tuesday
Wednesday
Thursday
Friday
Sunday
STOP
READY
I/O
M 3.12.1.3.1ID:
Days
Monday
Tuesday
Wednesday
Thursday
Friday
Sunday
VACON · 100 BENUTZERSCHNITTSTELLEN
2 Verwenden Sie für die Navigation in der Werteliste
die Pfeiltasten NACH OBEN/NACH UNTEN.
3 Um einen Wert zu Ihrer Auswahl hinzuzufügen,
markieren Sie das nebenstehende Kästchen mit
der Pfeiltaste NACH RECHTS.
3.2.2 QUITTIEREN VON FEHLERN
Um einen Fehler zu quittieren, können Sie entweder die RESET-Taste oder den Parameter
„Fehl.quittieren“ verwenden. Siehe hierzu die Anleitung in 11.1 Anzeige eines Fehlers.
3.2.3 FUNCT-TASTE
Die FUNCT-Taste verfügt über vier Funktionen:
Schnellzugriff auf die Steuerungsseite
•
einfacher Wechsel zwischen den Steuerplätzen „Ort“ und „Fern“
•
Ändern der Drehrichtung
•
schnelles Ändern eines Parameterwerts
•
Die Auswahl des Steuerplatzes entscheidet darüber, woher der Frequenzumrichter die
Start- und Stopp-Befehle erhält. Für jeden Steuerplatz gibt es einen eigenen Parameter zur
Wahl der Frequenzsollwert-Quelle. Der lokale Steuerplatz ist immer die Steuertafel. Als
Fernsteuerungsplatz können Sie E/A oder Feldbus festgelegen. Der aktuelle Steuerplatz
wird in der Statuszeile des Displays angezeigt.
Als Fernsteuerungsplätze können Sie E/A A, E/A B und Feldbus verwenden. E/A A und
Feldbus haben die niedrigste Priorität. Die Auswahl des Fernsteuerungsplatzes erfolgt über
P3.2.1. E/A B kann die Fernsteuerungsplätze E/A A und Feldbus mit einem Digitaleingang
umgehen. Die Auswahl des Digitaleingangs erfolgt über P3.5.1.7 „Steuerplatz E/A B
erzwingen“.
Zur lokalen Steuerung wird immer die Steuertafel als Steuerplatz verwendet. Die lokale
Steuerung hat eine höhere Priorität als die Fernsteuerung. Daher wechselt der Steuerplatz
beispielsweise auch dann zu „Steuertafel“, wenn eine Umgehung über Parameter P3.5.1.7
via Digitaleingang stattgefunden hat (während „Fern“ eingestellt ist), sobald „Ort“ gewählt
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
 Loading...
Loading...