


vacon 100 flow
®
taajuusmuuttajat
sovelluskäsikirja

ESIPUHE VACON · 3
ESIPUHE
ASIAKIRJAN TIEDOT
Asiakirjatunnus: DPD01266F
Päivämäärä: 13.12.2016
Ohjelmistoversio: FW0159V016
TIETOJA TÄSTÄ OPPAASTA
Tämän oppaan tekijänoikeudet omistaa Vacon Oyj. Kaikki oikeudet pidätetään. Oikeudet
muutoksiin pidätetään. Näiden ohjeiden alkuperäinen kieli on englanti.
Tässä oppaassa on tietoja VACON®-taajuusmuuttajan toiminnoista sekä käytöstä. Oppaassa
on sama rakenne kuin taajuusmuuttajan valikossa (luvut 1 ja 4–8).
Luku 1, Pikaopas
Työskentelyn aloittaminen ohjauspaneelin avulla.
•
Luku 2, ohjatut toiminnot
sovellusasetusten valitseminen.
•
Sovelluksen nopea määrittäminen.
•
Erilaisia sovelluksia esimerkkeineen.
•
Luku 3, Käyttöliittymät
Paneelityypit ja ohjauspaneelin käyttö.
•
PC-työkalu VACON® Live.
•
Kenttäväylän toiminnot.
•
Luku 4, Valvontavalikko
Tietoja valvonta-arvoista.
•
Luku 5, Parametrivalikko
Kaikkien taajuusmuuttajan parametrien luettelo.
•
Luku 6, Viat ja tiedot ‑valikko
Luku 7, I/O ja laitteisto ‑valikko
Luku 8, Käyttäjän asetukset, suosikkiasetukset ja käyttäjätason valikot
Luku 9, Valvonta-arvojen kuvaukset
Luku 10, Parametrikuvaukset
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Index Min Max Unit Default ID DescriptionParameter
A B C D E F G H
VACON · 4 ESIPUHE
Parametrien käyttö.
•
Digitaali- ja analogiatulojen ohjelmointi.
•
Sovelluskohtaiset toiminnot.
•
Luku 11, Vianetsintä
Viat ja niiden mahdolliset syyt.
•
Vikojen kuittaaminen.
•
Luku 12, Liite
Tietoja sovellusten oletusarvoista.
•
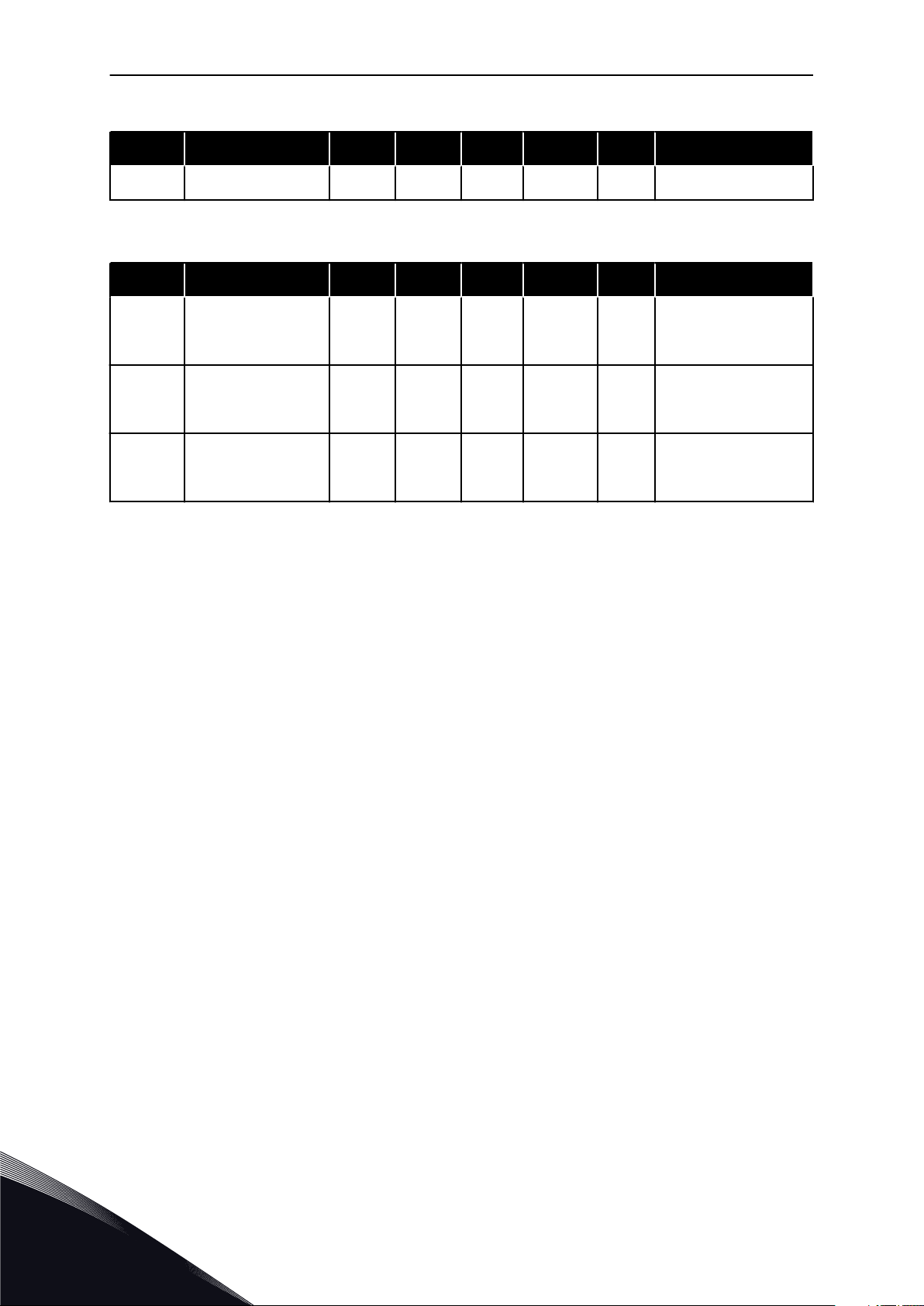
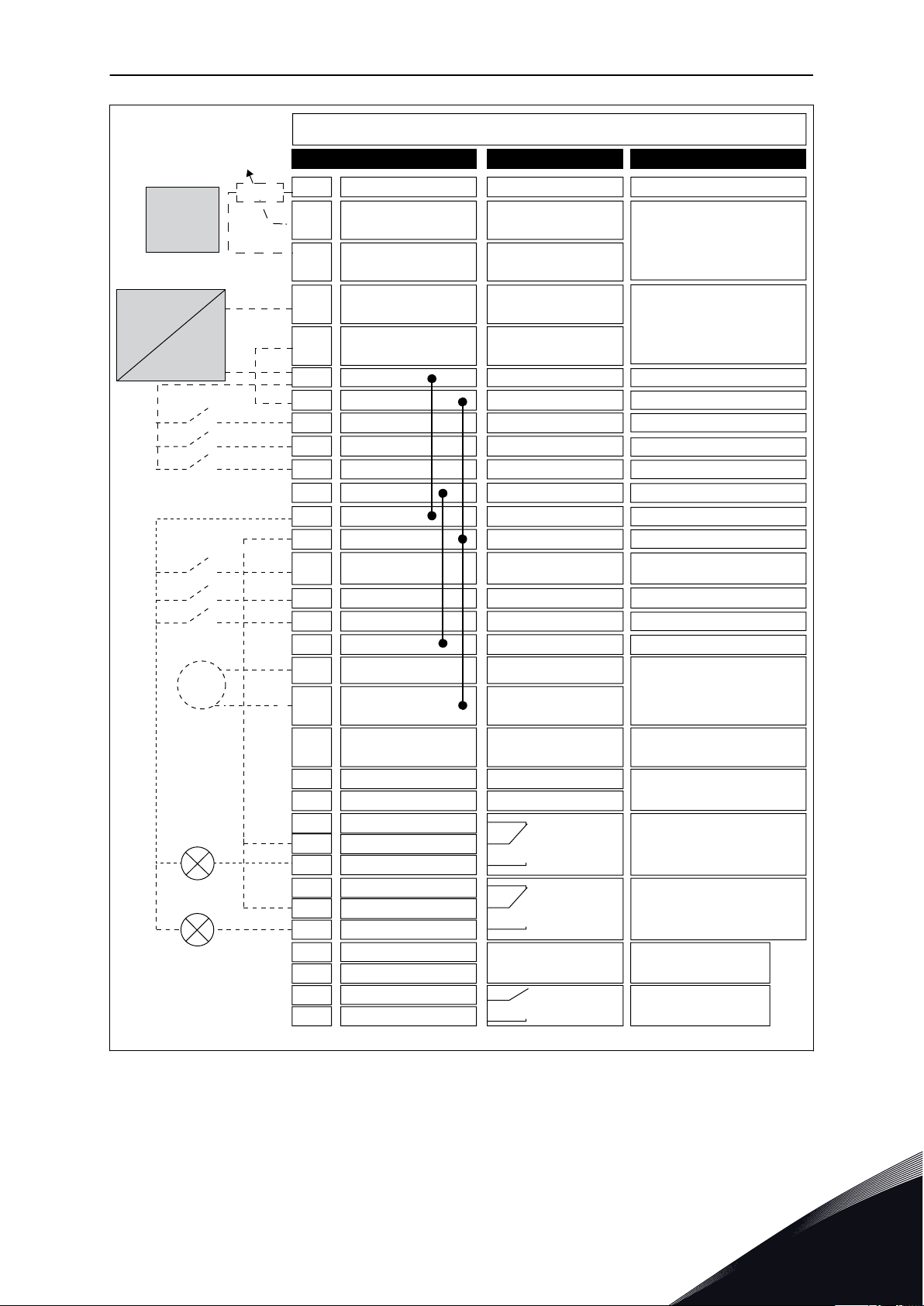
Tämä opas sisältää useita parametritaulukoita. Näissä ohjeissa kerrotaan, miten taulukoita
luetaan.
A. Parametrin sijainti taulukossa
(parametrin numero).
B. Parametrin nimi.
C. Parametrin pienin mahdollinen arvo.
D. Parametrin suurin mahdollinen arvo.
E. Parametrin arvon yksikkö. Yksikkö
näytetään, jos sellainen on.
F. Tehtaalla asetettu arvo.
G. Parametrin tunnus.
H. Parametrin arvojen tai toiminnan lyhyt
kuvaus.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

ESIPUHE VACON · 5
VACON®-TAAJUUSMUUTTAJAN TOIMINNOT
Voit valita prosessiin parhaiten sopivan sovelluksen: vakiosovellus, HVAC, PID-ohjaus tai
•
monipumppuohjaus yhden ja usean taajuusmuuttajan järjestelmille. Taajuusmuuttaja
tekee jotkin tarvittavista asetuksista automaattisesti, mikä helpottaa käyttöönottoa.
Ohjatut toiminnot ensimmäiseen käynnistykseen ja Fire Mode -tilaan.
•
Ohjatut toiminnot kullekin sovellukselle: vakiosovellus, HVAC, PID-ohjaus tai
•
monipumppuohjaus yhden ja usean taajuusmuuttajan järjestelmille.
FUNCT-painike, jonka avulla voi helposti siirtyä paikallisohjauksesta etäohjaukseen ja
•
päinvastoin. Etäohjauspaikka voi olla riviliitin tai kenttäväylä. Voit valita etäohjauspaikan
parametrin avulla.
Kahdeksan vakionopeutta.
•
Moottoripotentiometritoiminnot.
•
Huuhtelutoiminto.
•
Kaksi ohjelmoitavaa ramppiaikaa, kaksi valvontaa ja kolme estotaajuusaluetta.
•
Pakotettu pysäytys.
•
Ohjaussivu tärkeimpien arvojen nopeaan käyttöön ja valvontaan.
•
Kenttäväylädatan kartoitus.
•
Automaattinen viankuittaus.
•
Erilaiset esilämmitystilat kondensaatio-ongelmien estämiseksi.
•
Suurin lähtötaajuus 320 Hz.
•
Reaaliaikakello ja ajastintoiminnot (edellyttävät lisävarusteena hankittavaa akkua).
•
Mahdollisuus ohjelmoida kolme aikakanavaa, joihin voidaan määrittää erilaisia
taajuusmuuttajan toimintoja.
Saatavana on myös ulkoinen PID-säädin. Sitä voidaan käyttää esimerkiksi venttiilin
•
ohjaamiseen taajuusmuuttajan riviliitinohjauksella.
Lepotilatoiminto, joka säästää energiaa ottamalla taajuusmuuttajan käyttöön ja
•
poistamalla sen käytöstä automaattisesti.
Kahden vyöhykkeen PID-säädin, jossa on kaksi takaisinkytkentäsignaalia: minimin ja
•
maksimin ohjaus.
Kaksi asetusarvon lähdettä PID-säätimelle. Voit valita arvon digitaalitulon avulla.
•
PID-asetusarvon tehostustoiminto.
•
Myötäkytkentätoiminto, joka parantaa reagointia prosessin muutoksiin.
•
Prosessiarvojen valvonta.
•
Monipumppuohjaus yhden ja usean taajuusmuuttajan järjestelmille.
•
Monisäätö- ja rinnansäätötilat usean taajuusmuuttajan järjestelmässä.
•
Monipumppujärjestelmä, joka käyttää reaaliaikakelloa pumppujen vuorottelussa.
•
Huoltolaskuri.
•
Pumpun ohjaustoiminnot: siemenvesipumpun ohjaus, paineen ylläpitopumpun ohjaus,
•
pumpun juoksupyörän automaattinen puhdistus, pumpun syöttöpaineen valvonta sekä
jäätymisenestotoiminto.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

VACON · 6
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
SISÄLLYS VACON · 7
SISÄLLYS
Esipuhe
Asiakirjan tiedot 3
Tietoja tästä oppaasta 3
VACON®-taajuusmuuttajan toiminnot 5
1 Pikaopas 12
1.1 Ohjauspaneeli ja paneeli 12
1.2 Paneelit 12
1.3 Ensimmäinen käynnistys 13
1.4 Sovellusten kuvaukset 14
1.4.1 Vakio- ja LVI-sovellukset 14
1.4.2 PID-säätösovellus 22
1.4.3 Yhden taajuusmuuttajan monipumppusovellus 30
1.4.4 Usean taajuusmuuttajan monipumppusovellus 44
2 Ohjatut toiminnot 78
2.1 Ohjattu vakiosovellustoiminto 78
2.2 Ohjattu HVAC-sovellustoiminto 79
2.3 Ohjattu PID-säätösovellustoiminto 80
2.4 Ohjattu yhden taajuusmuuttajan monipumppusovellustoiminto 82
2.5 Ohjattu usean taajuusmuuttajan monipumppusovellustoiminto 86
2.6 Ohjattu Fire Mode -asetustoiminto 89
3 Käyttöliittymät 91
3.1 Siirtyminen paneelissa 91
3.2 Graafisen paneelin käyttö 93
3.2.1 Arvojen muokkaaminen 93
3.2.2 Vian kuittaaminen 96
3.2.3 FUNCT-painike 96
3.2.4 Parametrien kopioiminen 100
3.2.5 Parametrien vertaaminen 101
3.2.6 Ohjetekstit 103
3.2.7 Suosikit-valikon käyttäminen 104
3.3 Tekstipaneelin käyttö 104
3.3.1 Arvojen muokkaaminen 105
3.3.2 Vian kuittaaminen 106
3.3.3 FUNCT-painike 106
3.4 Valikkorakenne 110
3.4.1 Nopea käyttöönotto 111
3.4.2 Valvonta 111
3.5 VACON® Live 113
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
VACON · 8 SISÄLLYS
4 Valvontavalikko 114
4.1 Valvontavalikko 114
4.1.1 Monivalvonta 114
4.1.2 Trendikäyrä 115
4.1.3 Perus 118
4.1.4 I/O 120
4.1.5 Lämpötilatulot 120
4.1.6 Lisävalvonnat ja kehittyneet valvonnat 121
4.1.7 Ajastintoimintojen valvonta 122
4.1.8 PID-säätimen valvonta 124
4.1.9 Ulkoisen PID-säätimen valvonta 125
4.1.10 Monipumpputoimintojen valvonta 125
4.1.11 Huoltolaskurit 127
4.1.12 Kenttäväylän prosessidatan valvonta 128
4.1.13 Lohkojen ohjelmoinnin valvonta 129
5 Parametrivalikko 130
5.1 Ryhmä 3.1: Moottorin asetukset 130
5.2 Ryhmä 3.2: Käynnistys- ja pysäytysasetukset 133
5.3 Ryhmä 3.3: Viittaukset 135
5.4 Ryhmä 3.4: Ramppi- ja jarruasetukset 138
5.5 Ryhmä 3.5: I/O-määritykset 140
5.6 Ryhmä 3.6: Kenttäväylädatan kartoitus. 151
5.7 Ryhmä 3.7: Estotaajuudet. 152
5.8 Ryhmä 3.8: Valvonta 153
5.9 Ryhmä 3.9: Suojaukset 154
5.10 Ryhmä 3.10: Automaattinen viankuittaus 160
5.11 Ryhmä 3.11: Sovelluksen asetukset 161
5.12 Ryhmä 3.12: Ajastintoiminnot 161
5.13 Ryhmä 3.13: PID-säädin 164
5.14 Ryhmä 3.14: Ulkoinen PID-säädin 177
5.15 Ryhmä 3.15: Monipumpputoiminto 180
5.16 Ryhmä 3.16: Huoltolaskurit 183
5.17 Ryhmä 3.17: Fire Mode 184
5.18 Ryhmä 3.18: Moottorin esilämmityksen parametrit. 185
5.19 Ryhmä 3.19: Lohkojen ohjelmointi 185
5.20 Ryhmä 3.21: Pumpun ohjaus 186
5.21 Ryhmä 3.23: Yliaaltosuodattimen lisäasetukset 189
6 Viat ja tiedot -valikko 190
6.1 Aktiiviset viat 190
6.2 Kuittaa viat 190
6.3 Vikahistoria 190
6.4 Laskurit 190
6.5 Väliaikalaskurit 192
6.6 Ohjelmistotiedot 193
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
SISÄLLYS VACON · 9
7 I/O ja laitteisto -valikko 194
7.1 Perus I/O 194
7.2 Lisäkorttipaikat 196
7.3 Reaaliaikakello 197
7.4 Teho-osan asetukset 197
7.5 Paneeli 199
7.6 Kenttäväylä 199
8 Käyttäjän asetukset, suosikkiasetukset ja käyttäjätason valikot 200
8.1 Käyttäjän tiedot 200
8.1.1 Käyttäjän tiedot 200
8.1.2 Parametrien automaattinen tallennus 201
8.2 Suosikit 201
8.2.1 Kohteen lisääminen suosikkeihin 202
8.2.2 Kohteen poistaminen suosikeista 202
8.3 Käyttäjäryhmät 203
8.3.1 Käyttäjäryhmien käyttäjäkoodin muuttaminen 204
9 Valvonta-arvojen kuvaukset 206
9.1 Perus 206
9.2 I/O 207
9.3 Lämpötilatulot 208
9.4 Lisävalvonnat ja kehittyneet valvonnat 209
9.5 Ajastintoiminnot 211
9.6 PID-säädin 211
9.7 Ulkoinen PID-säädin 212
9.8 Monipumpputoiminto 213
9.9 Huoltolaskurit 214
9.10 Kenttäväylädata 214
9.11 Lohkojen ohjelmointi 218
10 Parametrikuvaukset 220
10.1 Trendikäyrä 220
10.2 Moottorin asetukset 221
10.2.1 Moottorin arvokilven parametrit. 221
10.2.2 Moottorin ohjausparametrit 222
10.2.3 Moottorien raja-arvot 226
10.2.4 Open loop ‑parametrit 226
10.2.5 I/f-käynnistys-toiminto 230
10.3 Käynnistys- ja pysäytysasetukset 231
10.4 Ohjeet 241
10.4.1 Taajuusohje 241
10.4.2 Vakionopeudet 242
10.4.3 Moottoripotentiometrin parametrit 246
10.4.4 Huuhteluparametrit. 247
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
VACON · 10 SISÄLLYS
10.5 Ramppi- ja jarruasetukset 248
10.5.1 Rampin 1 248
10.5.2 Rampin 2 249
10.5.3 Käynnistyksen magnetointi 250
10.5.4 DC-jarrutus 251
10.5.5 Vuojarrutus 251
10.6 I/O-määritykset 251
10.6.1 Digitaali- ja analogiatulojen ohjelmointi 251
10.6.2 Ohjelmoitavien tulojen oletustoiminnot 262
10.6.3 Digitaalitulot 262
10.6.4 Analogiatulot 268
10.6.5 Digitaalilähdöt 273
10.6.6 Analogialähdöt 276
10.7 Kenttäväylädatan määritys 281
10.8 Estotaajuudet. 282
10.9 Valvonta 284
10.10 Suojaukset 284
10.10.1 Yleinen 284
10.10.2 Moottorin lämpösuojaukset 286
10.10.3 Moottorin jumisuojaus 290
10.10.4 Alikuormitussuojaus (kuiva pumppu) 292
10.10.5 Pikapysäytys. 294
10.10.6 Analogiatulon alarajasuojaus 295
10.11 Automaattinen viankuittaus 297
10.12 Sovelluksen asetukset 299
10.13 Ajastintoiminnot 299
10.14 PID-säädin 304
10.14.1 Perusasetukset 304
10.14.2 Asetusarvot 305
10.14.3 Takaisinkytkentä 307
10.14.4 Myötäkytkentä 307
10.14.5 Lepotila 309
10.14.6 Takaisinkytkennän valvonta 311
10.14.7 Painehäviön kompensointi 313
10.14.8 Pehmotäyttö 314
10.14.9 Syöttöpaineen valvonta. 316
10.14.10 Lepotilatoiminto, kun kysyntää ei havaita 318
10.15 Ulkoinen PID-säädin 320
10.16 Monipumpputoiminto 320
10.16.1 Usean taajuusmuuttajan monipumppujärjestelmän käyttöönoton
tarkistusluettelo 320
10.16.2 Järjestelmän määritykset 323
10.16.3 Lukitukset 327
10.16.4 Takaisinkytkentäanturin kytkentä monipumppujärjestelmässä 328
10.16.5 Ylipaineen valvonta 337
10.16.6 Pumpun käyntiaikalaskurit 338
10.16.7 Lisäasetukset 340
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
SISÄLLYS VACON · 11
10.17 Huoltolaskurit 341
10.18 Fire Mode 342
10.19 Moottorin esilämmitystoiminto 345
10.20 Lohkojen ohjelmointi 346
10.21 Pumpun ohjaus 346
10.21.1 Automaattinen puhdistus 346
10.21.2 Paineen ylläpitopumppu 349
10.21.3 Siemenvesipumppu 351
10.21.4 Tukkeutumisestotoiminto 351
10.21.5 Jäätymisenesto 352
10.22 Laskurit 353
10.22.1 Käyttöaikalaskuri 353
10.22.2 Käytön väliaikalaskuri 353
10.22.3 Käyntiaikalaskuri 354
10.22.4 Virran päälläoloajan laskuri 354
10.22.5 Energialaskuri 355
10.22.6 Energian väliaikalaskuri 356
10.23 Yliaaltosuodattimen lisäasetukset 357
11 Vianetsintä 358
11.1 Vika tulee näkyviin 358
11.1.1 Kuittaaminen kuittauspainikkeella 358
11.1.2 Kuittaaminen graafisen paneelin parametrilla 358
11.1.3 Kuittaaminen tekstipaneelin parametrilla 359
11.2 Vikahistoria 360
11.2.1 Vikahistorian tarkasteleminen graafisessa paneelissa 360
11.2.2 Vikahistorian tarkasteleminen tekstipaneelissa 361
11.3 Vikakoodit 363
12 Liite 1 378
12.1 Eri sovellusten parametrien oletusarvot 378
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
A B C
I
H D
G F E
VACON · 12 PIKAOPAS
1 PIKAOPAS
1.1 OHJAUSPANEELI JA PANEELI
Ohjauspaneeli toimii linkkinä taajuusmuuttajan ja käyttäjän välillä. Ohjauspaneelin avulla
säädetään moottorin nopeutta ja seurataan taajuusmuuttajan tilaa. Lisäksi voit asettaa
taajuusmuuttajan parametrit.
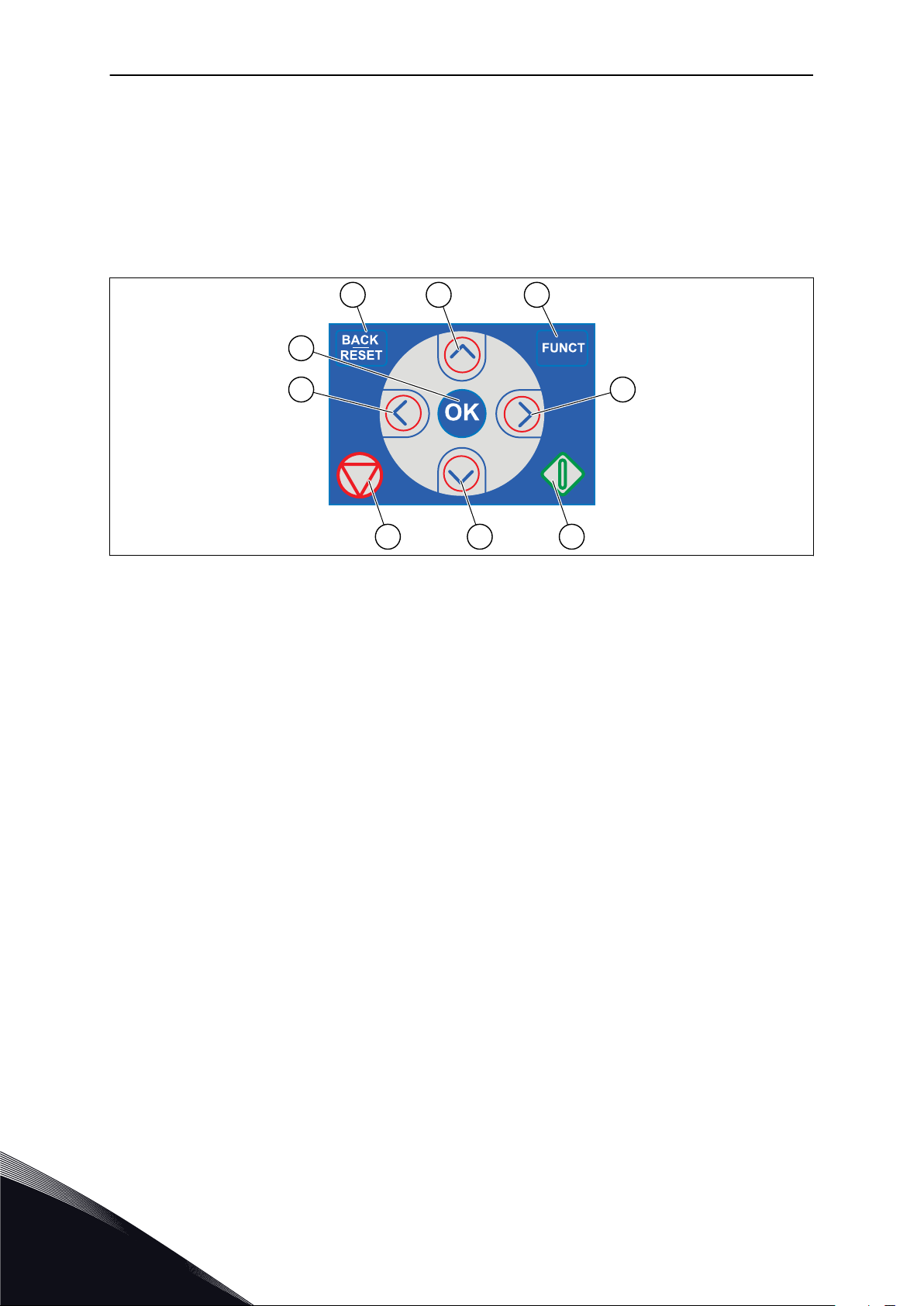
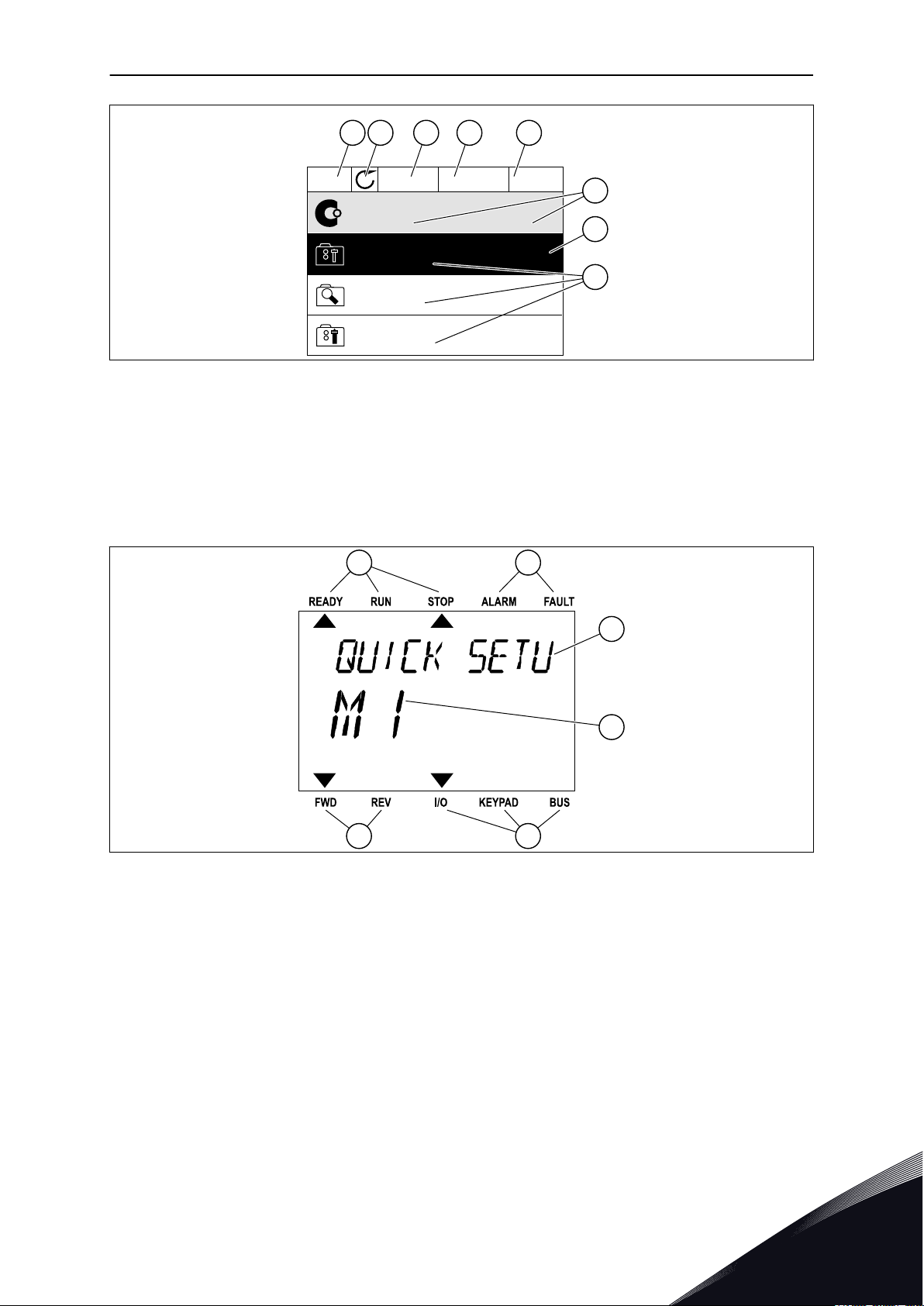
Kuva 1: Paneelin painikkeet
A. BACK/RESET-painike. Tällä painikkeella
voit palata takaisinpäin valikossa,
poistua muokkaustilasta tai kuitata vian.
B. Ylänuolipainike. Tällä painikkeella voit
selata valikkoa ylöspäin ja suurentaa
arvoa.
C. FUNCT-painike. Tällä painikkeella voit
muuttaa moottorin pyörimissuuntaa,
käyttää ohjaussivua ja vaihtaa
ohjauspaikan. Lisätietoja on kohdassa
3.3.3 FUNCT-painike.
D. Oikea nuolipainike.
E. Käynnistyspainike (Start).
F. Alanuolipainike. Tällä painikkeella voit
selata valikkoa alaspäin ja pienentää
arvoa.
G. Pysäytyspainike (Stop).
H. Vasen nuolipainike. Tällä painikkeella
voit siirtää kohdistinta vasemmalle.
I. OK-painike. Tällä painikkeella voit siirtyä
valitulle tasolle tai valittuun kohteeseen
ja vahvistaa valinnan.
1.2 PANEELIT
Laitteen paneeli voi olla graafinen paneeli tai tekstipaneeli. Ohjauspaneelissa on aina sama
näppäimistö ja samat painikkeet.
Nämä tiedot näkyvät paneelissa.
Moottorin ja taajuusmuuttajan tila.
•
Moottorin ja taajuusmuuttajan viat.
•
Sijaintisi valikkorakenteessa.
•
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
STOP
READY I/O
Main Menu
A B C D E
F
H
G
Quick Setup
( 17 )
Monitor
( 5 )
Parameters
( 12 )
M1ID:
A B
F
C
D
E
PIKAOPAS VACON · 13
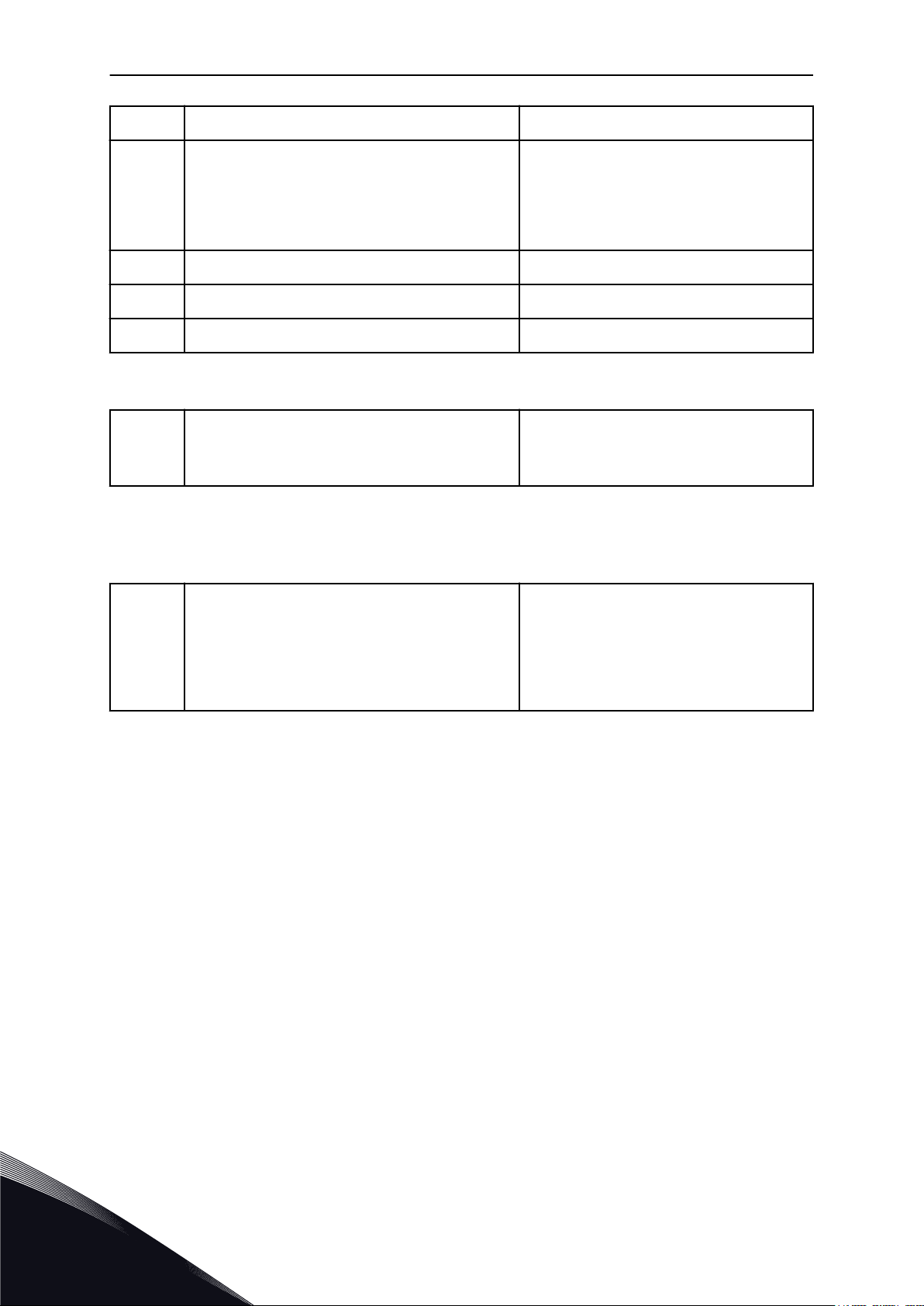
Kuva 2: Graafinen paneeli
A. Ensimmäinen tilakenttä: SEIS/KÄY
B. Moottorin pyörimissuunta
C. Toinen tilakenttä: VALMIS / EI VALMIS /
VIKA
F. Sijaintikenttä: parametrin tunnus ja
nykyinen sijainti valikossa
G. Valittu ryhmä tai kohde
H. Kohteiden lukumäärä ryhmässä
D. Hälytyskenttä: HÄLYTYS/E. Ohjauspaikkakenttä: PC / I/O /
PANEELI / KENTTÄVÄYLÄ
Kuva 3: Tekstipaneeli. Jos teksti on liian pitkä näyttöön, järjestelmä vierittää sen paneelissa
automaattisesti.
A. Tilan merkkivalot
B. Hälytyksen ja vian ilmaisimet
C. Nykyisen sijainnin ryhmän tai kohteen
nimi
1.3 ENSIMMÄINEN KÄYNNISTYS
Kun taajuusmuuttajaan kytketään virta, Ohjatut asetukset ‑toiminto käynnistyy.
Ohjatut asetukset ‑toiminto kehottaa antamaan tiedot, joita taajuusmuuttaja tarvitsee
voidakseen ohjata toimintoja.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
D. Nykyinen sijainti valikossa
E. Ohjauspaikan merkkivalot
F. Pyörimissuunnan merkkivalot
1
VACON · 14 PIKAOPAS
1 Kielivalinta (P6.1) Valinta on erilainen eri kielipaketeissa.
Kesäaika* (P5.5.5)
Venäjä
2
3 Aika* (P5.5.2) hh:mm:ss
4 Vuosi* (P5.5.4) vvvv
5 Päivämäärä* (P5.5.3) pp.kk.
US
EU
POIS
* Nämä vaiheet tulevat näkyviin, jos akku on asennettuna.
Käynnistä Ohjatut asetukset?
6
Kyllä
Ei
Valitse Kyllä ja paina OK-painiketta. Jos valitset Ei-vaihtoehdon, taajuusmuuttaja lopettaa
Ohjatut asetukset -toiminnon.
Jos haluat asettaa parametrien arvot manuaalisesti, valitse Ei ja paina OK-painiketta.
Valitse sovellus (P1.2 Sovellus, ID212)
Vakio
7
LVI
PID-ohjaus
Multi-Pump (yksi taajuusmuuttaja)
Multi-Pump (useita taajuusmuuttajia)
Voit jatkaa vaiheessa 7 valitun sovelluksen ohjattuun toimintoon valitsemalla Kyllä ja
painamalla OK-painiketta. Ohjattujen sovellustoimintojen kuvaukset ovat luvussa 2 Ohjatut
toiminnot.
Jos valitset Ei-vaihtoehdon ja painat OK-painiketta, Ohjatut asetukset -toiminto keskeytyy ja
sinun täytyy valita kaikki parametriarvot manuaalisesti.
Voit aloittaa Ohjatut asetukset ‑toiminnon uudelleen kahdella tavalla: Siirry parametriin
P6.5.1 (Palauta oletusasetukset) tai parametriin B1.1.2 (Ohjatut asetukset). Aseta sitten
arvoksi Aktiivinen.
1.4 SOVELLUSTEN KUVAUKSET
Parametrin P1.2 (Sovellus) avulla voit valita taajuusmuuttajan käyttötarkoituksen. Heti, kun
parametrin P1.2 arvoa muutetaan, parametriryhmät saavat valmiiksi asetetut arvonsa.
1.4.1 VAKIO- JA LVI-SOVELLUKSET
Vakio- ja HVAC-sovellusten avulla voit ohjata esimerkiksi pumppuja tai puhaltimia.
Taajuusmuuttajaa voidaan ohjata paneelin, kenttäväylän tai riviliitinten välityksellä.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

PIKAOPAS VACON · 15
Riviliitinohjauksessa taajuusmuuttajan taajuusohjesignaali kytketään joko liittimeen AI1 (0–
10 V) tai AI2 (4–20 mA). Kytkentä määräytyy signaalin tyypin mukaan. Käytettävissä on myös
kolme vakionopeusohjetta. Voit aktivoida ne liittimien DI4 ja DI5 avulla. Taajuusmuuttajan
käynnistys- ja pysäytyssignaalit on kytketty liittimiin DI1 (käynnistys eteenpäin) ja DI2
(käynnistys taaksepäin).
Kaikki taajuusmuuttajan lähdöt voidaan määrittää vapaasti sovelluksissa.
Peruslaajennuskortissa on käytettävissä yksi analogialähtö (Lähtötaajuus) ja kolme
relelähtöä (Käy, Vika, Valmis).
Parametrien kuvaukset ovat luvussa 10 Parametrikuvaukset.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
DI4
DI5
**)
*)
Modbus RTU,
N2, BACnet
1
6
2
3
4
5
18
19
30
12
7
13
8
9
10
14
15
16
21
22
23
11
17
A
B
24
25
26
32
33
28
29
DI4
DI5
mA
VIKA
KÄY
KÄY
AO1-
GND
GND
DI1
DI2
DI3
DI4
DI5
DI6
RO1/1 NC
RO1/2 CM
RO1/3 NO
CM
CM
RS485
RS485
RO2/1 NC
RO2/2 CM
RO2/3 NO
RO3/2 CM
RO3/3 NO
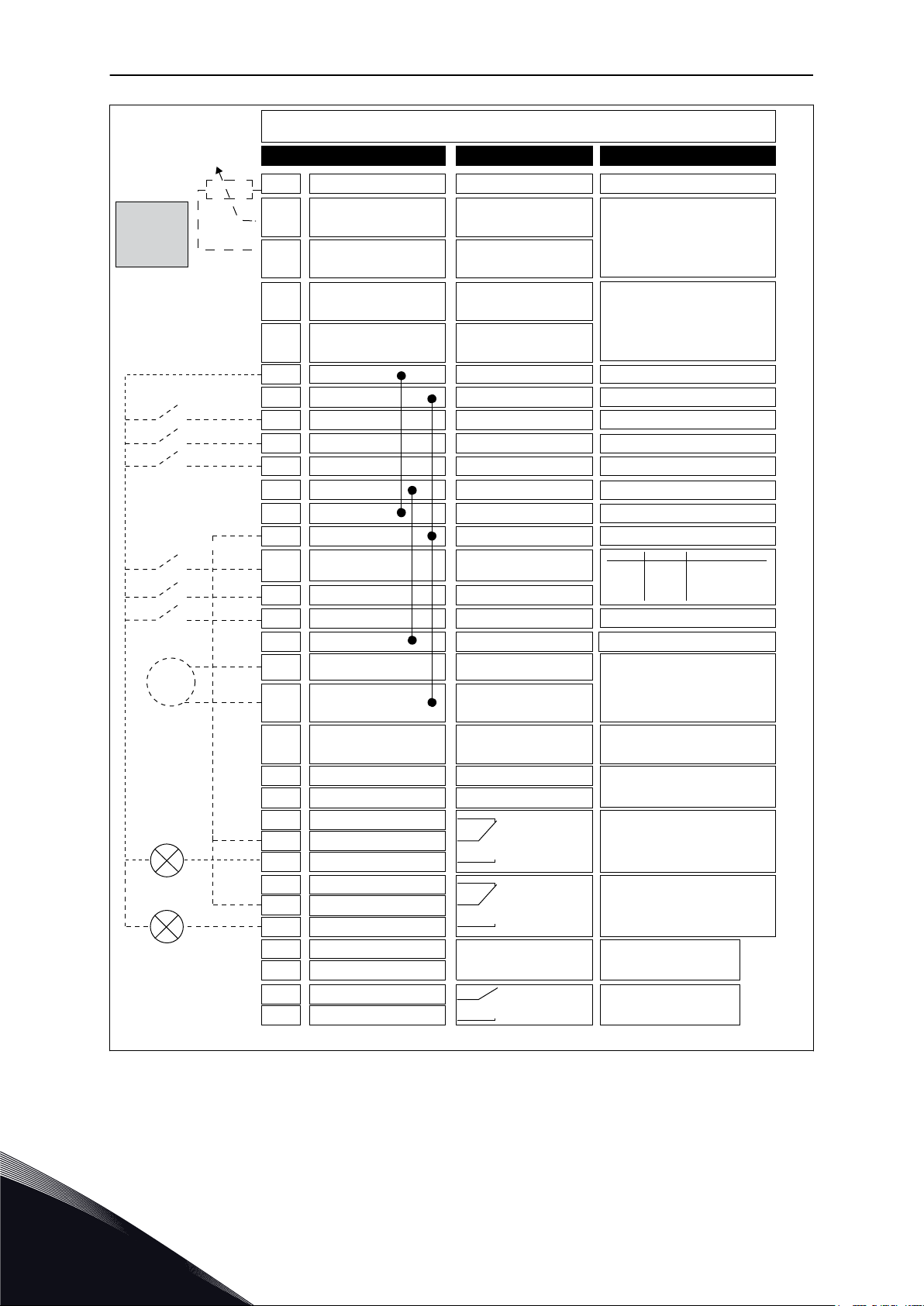
Vakiolaajennuskortti
Liitin Signaali Kuvaus
+10 Vref
AI1+
AI1-
AI2+
AI2-
24 Vout
Ohjausjännitelähtö
Analogiatulo 1 +
Analogiatulo 1 -
Analogiatulo 2 +
Analogiatulo 2 -
24 V:n apujännite
I/O maa
Digitaalitulo 1
Digitaalitulo 2
Digitaalitulo 3
Digitaalitulo 4
Digitaalitulo 5
Digitaalitulo 6
Yhteinen tuloille DI1–DI6
Yhteinen tuloille DI1–DI6
24 V:n apujännite
I/O maa
Analogialähtö 1 +
Analogialähtö 1 -
VALMIS
Sarjaväylä, negatiivinen
Sarjaväylä, positiivinen
Relelähtö 1
Relelähtö 2
Relelähtö 3
VIKA
Vian kuittaus
AO1+
Taajuusohje
(oletusarvo 0–10 V)
Taajuusohje
(oletusarvo 4–20 mA)
Käy eteen
Käy taakse
Ulkoinen vika
Taaj.ohje
Auki
Kiinni
Auki
Kiinni
Auki
Auki
Kiinni
Kiinni
Analogiatulo 1
Vakionopeus 1
Vakionopeus 2
Vakionopeus 3
Lähtötaajuus (0–20 mA)
+24 Vin
24 Vout
24 V:n aputulojännite
Viitepotentiometri
1–10 kΩ
TI1+
TI1-
Termistoritulo
VACON · 16 PIKAOPAS
Kuva 4: Vakio- ja HVAC-sovellusten oletusohjausliitännät
* = Käytettävissä vain VACON® 100 X ‑mallissa.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
A
B
C
PIKAOPAS VACON · 17
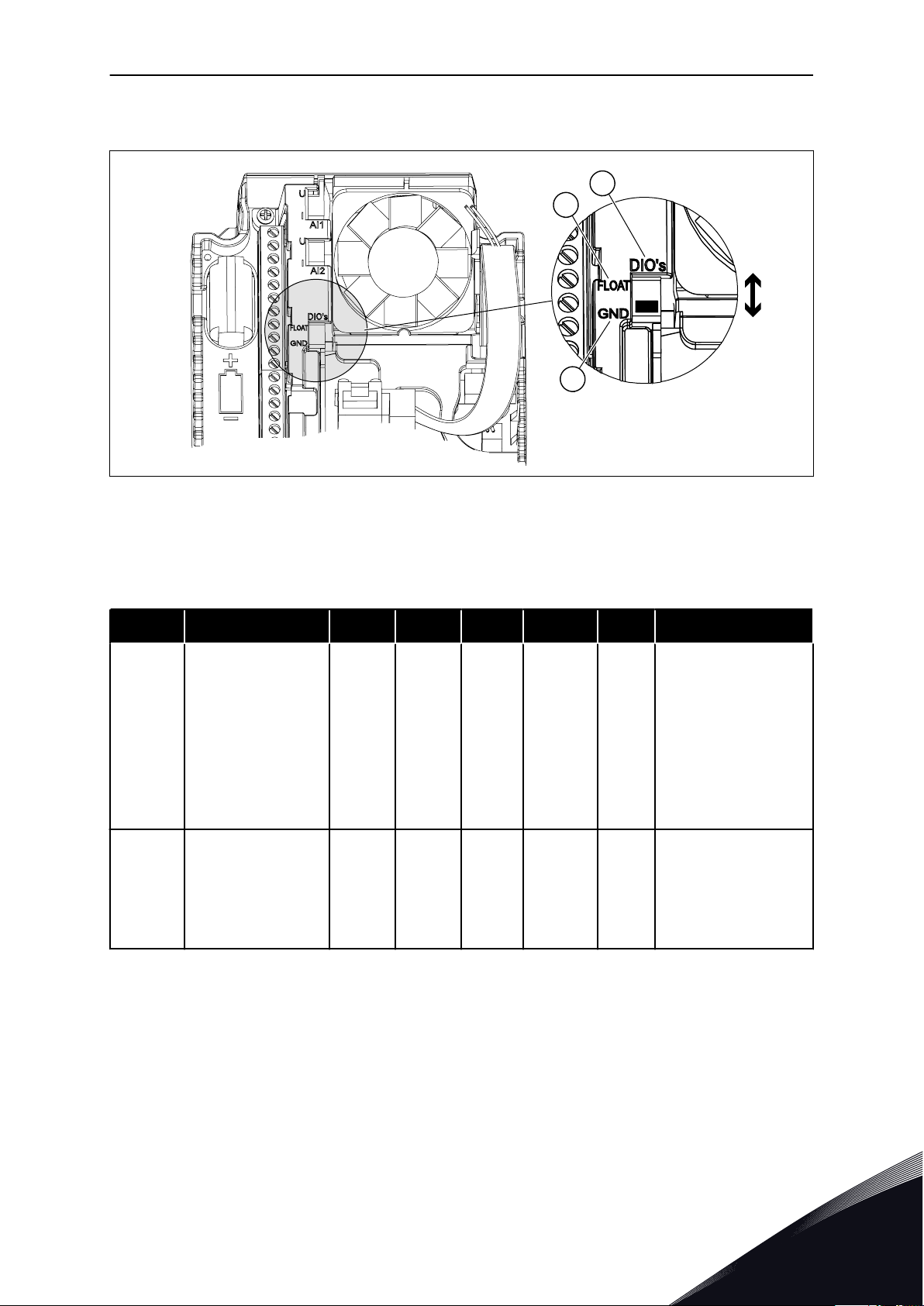
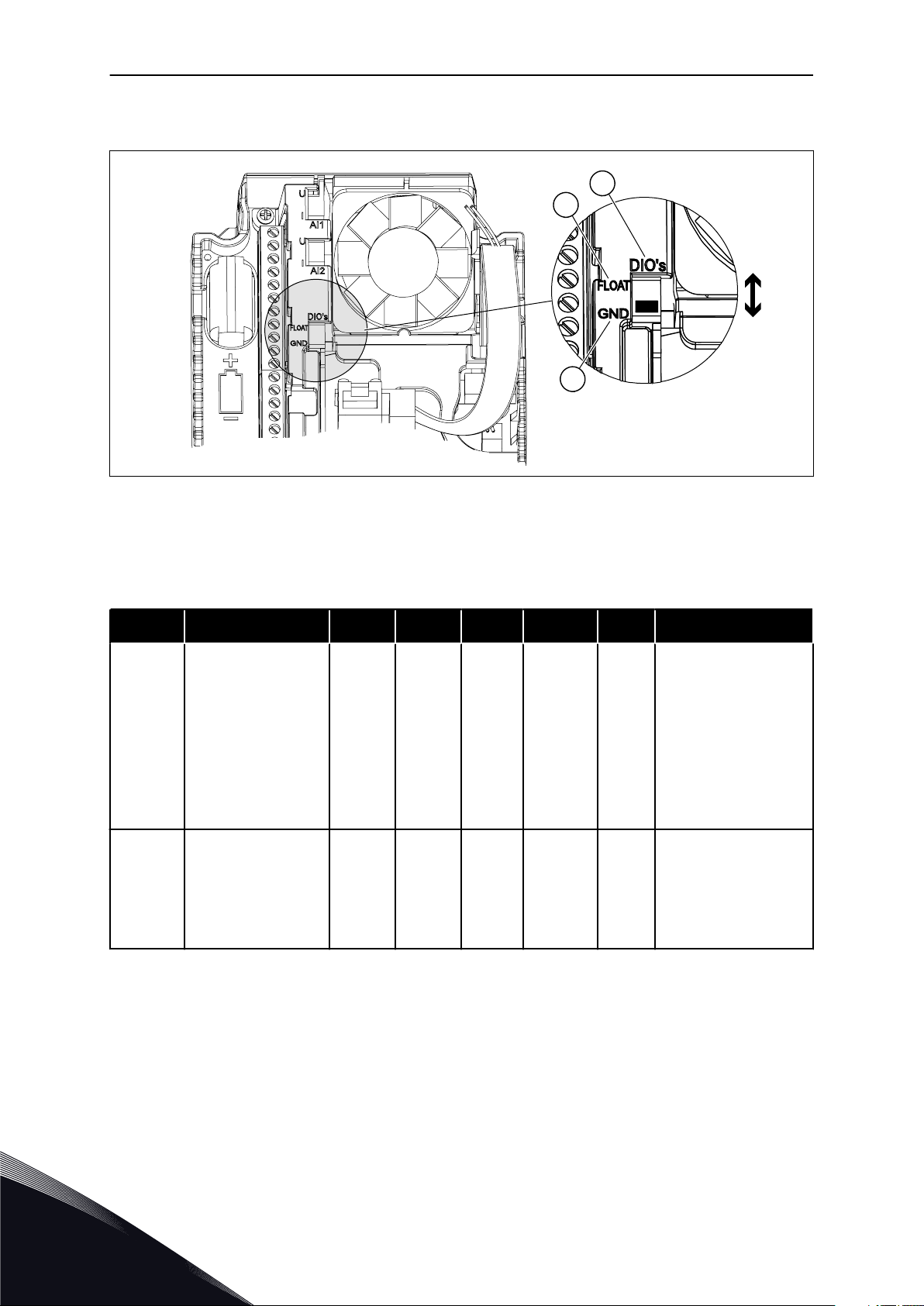
** = VACON® 100 X ‑mallin DIP-kytkimien määritykset ovat VACON 100® X asennusoppaassa.
Kuva 5: DIP-kytkin
A. Digitaalitulot
C. Kytketty maahan (oletus)
B. Kelluva
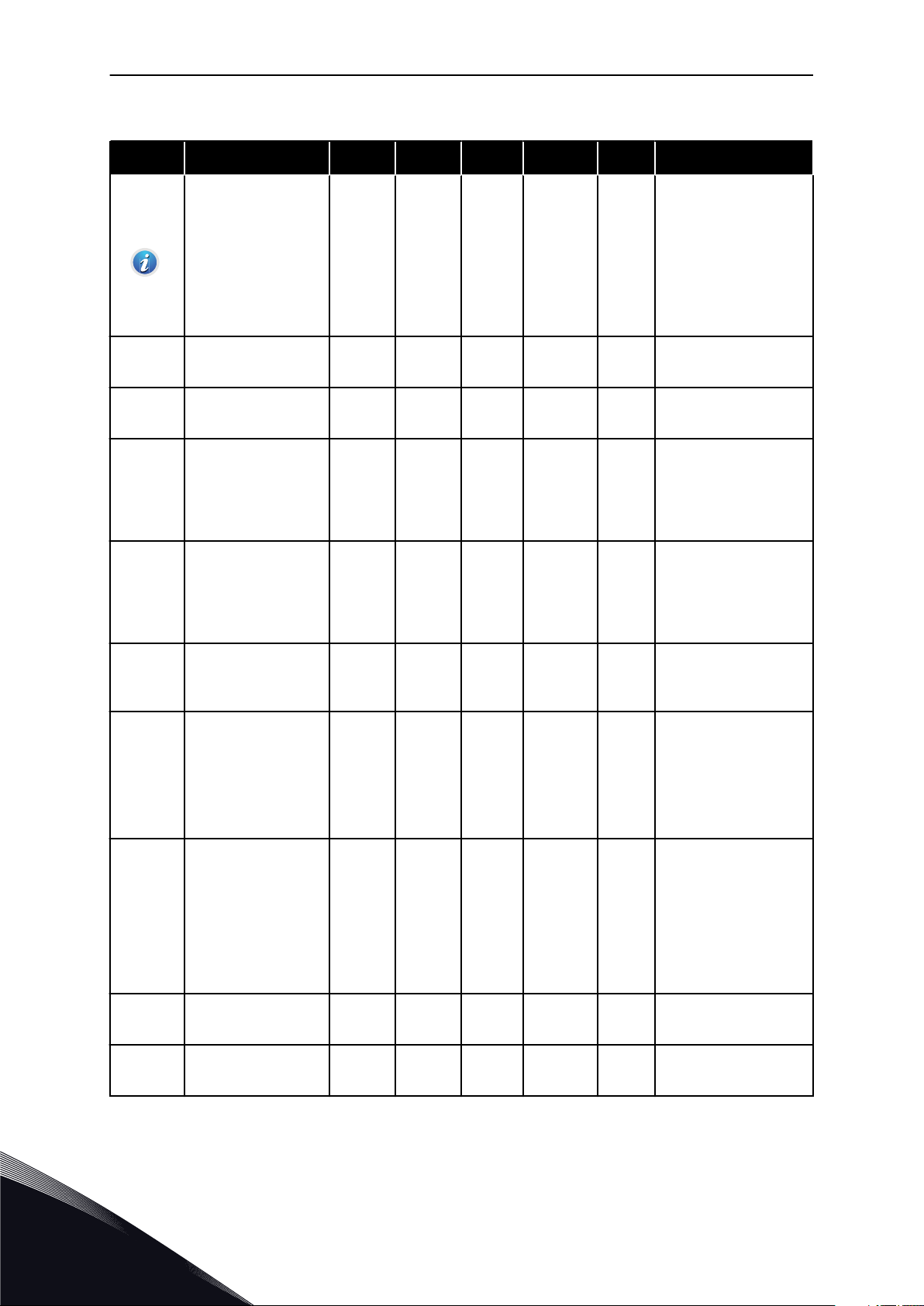
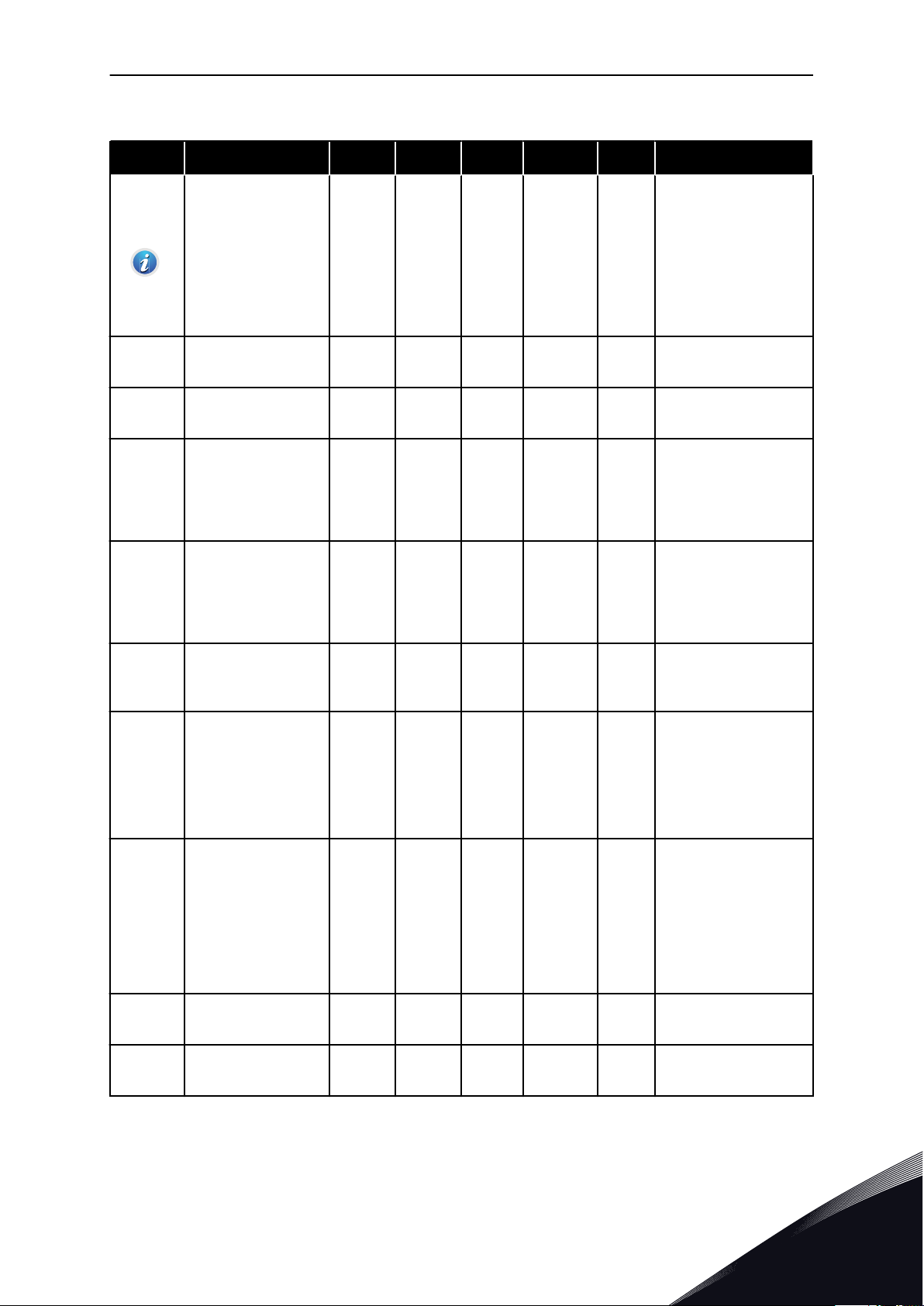
Taulukko 2: M1.1 Ohjatut toiminnot
Numero Parametri Min. Maks. Yks. Oletus ID Kuvaus
0 = Ei aktiivinen
1 = Aktiivinen
1.1.1 Ohjatut aset. 0 1 0 1170
1.1.2 Fire Mode -aset. 0 1 0 1672
Voit käynnistää Ohjatut
asetukset ‑toiminnon
valitsemalla arvoksi
Aktiivinen (katso Tau-
lukko 1 Ohjatut asetukset ‑toiminto).
Voit käynnistää ohjatun
Fire Mode ‑asetustoiminnon valitsemalla
arvoksi Aktiivinen
(katso 2.6 Ohjattu Fire
Mode -asetustoiminto).
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
VACON · 18 PIKAOPAS
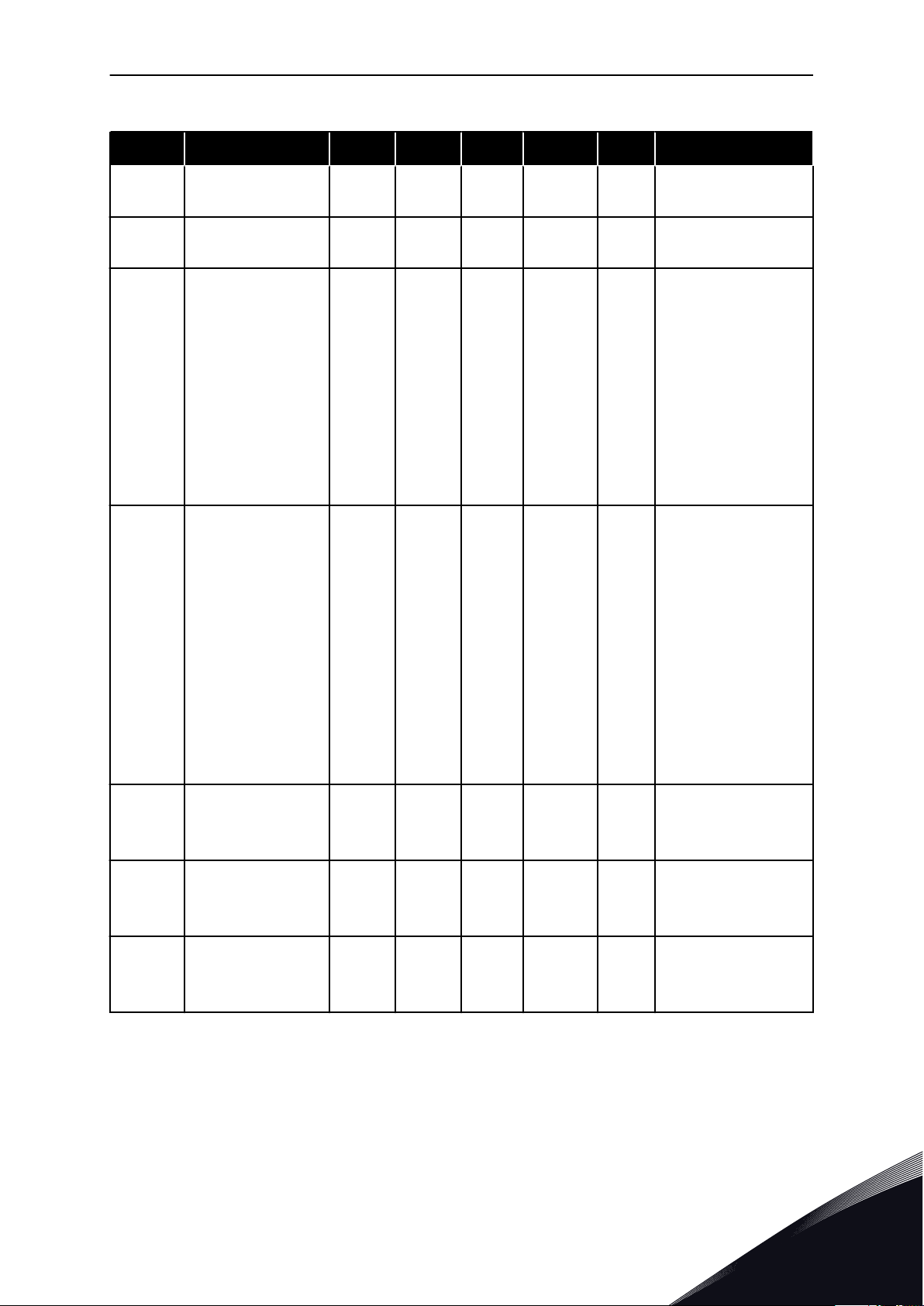
Taulukko 3: M1 Nopea käyttöönotto
Numero Parametri Min. Maks. Yks. Oletus ID Kuvaus
0 = Vakio
1.2
Sovellus 0 4 0 212
1 = HVAC
2 = PID-säätö
3 = Multi-Pump (yksi
taajuusmuuttaja)
4 = Multi-Pump (useita
taajuusmuuttajia)
1.3 Minimitaajuusohje 0.00 P1.4 Hz 0.0 101
1.4 Maksimitaajuusohje P1.3 320.0 Hz
1.5 Kiihdytysaika 1 0.1 3000.0 s 5.0 103
1.6 Hidastusaika 1 0.1 3000.0 s 5.0 104
1.7 Moottorin virtaraja IH * 0,1 I
1.8 Moottorin tyyppi 0 2 0 650
S
A Vaihtelee 107
50.0 /
60.0
102
Pienin sallittu taajuusohje.
Suurin sallittu taajuusohje
Määrittää ajan, jonka
kuluessa lähtötaajuus
kasvaa nollataajuudesta maksimitaajuuteen.
Määrittää ajan, jonka
kuluessa lähtötaajuus
pienenee maksimitaajuudesta nollataajuuteen.
Suurin taajuusmuuttajasta lähtevä moottorin
virta.
0 = Induktiomoottori
1 = Kestomagneettimoottori
2 = Reluktanssimoottori
1
1.9
1.10
1.11
Moottorin nimellis-
jännite
Moottorin nimellis-
taajuus
Moottorin nimellis-
nopeus
Katso arvo Un moottorin arvokilvestä.
Vaihte-
lee
8.0 320.0 Hz 50 / 60 111
24 19200 rpm Vaihtelee 112
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Vaihte-
lee
V Vaihtelee 110
HUOMAUTUS!
Selvitä, onko moottorin kytkentä kolmiovai tähtityyppinen.
Katso arvo fn moottorin
arvokilvestä.
Katso arvo nn moottorin arvokilvestä.
PIKAOPAS VACON · 19
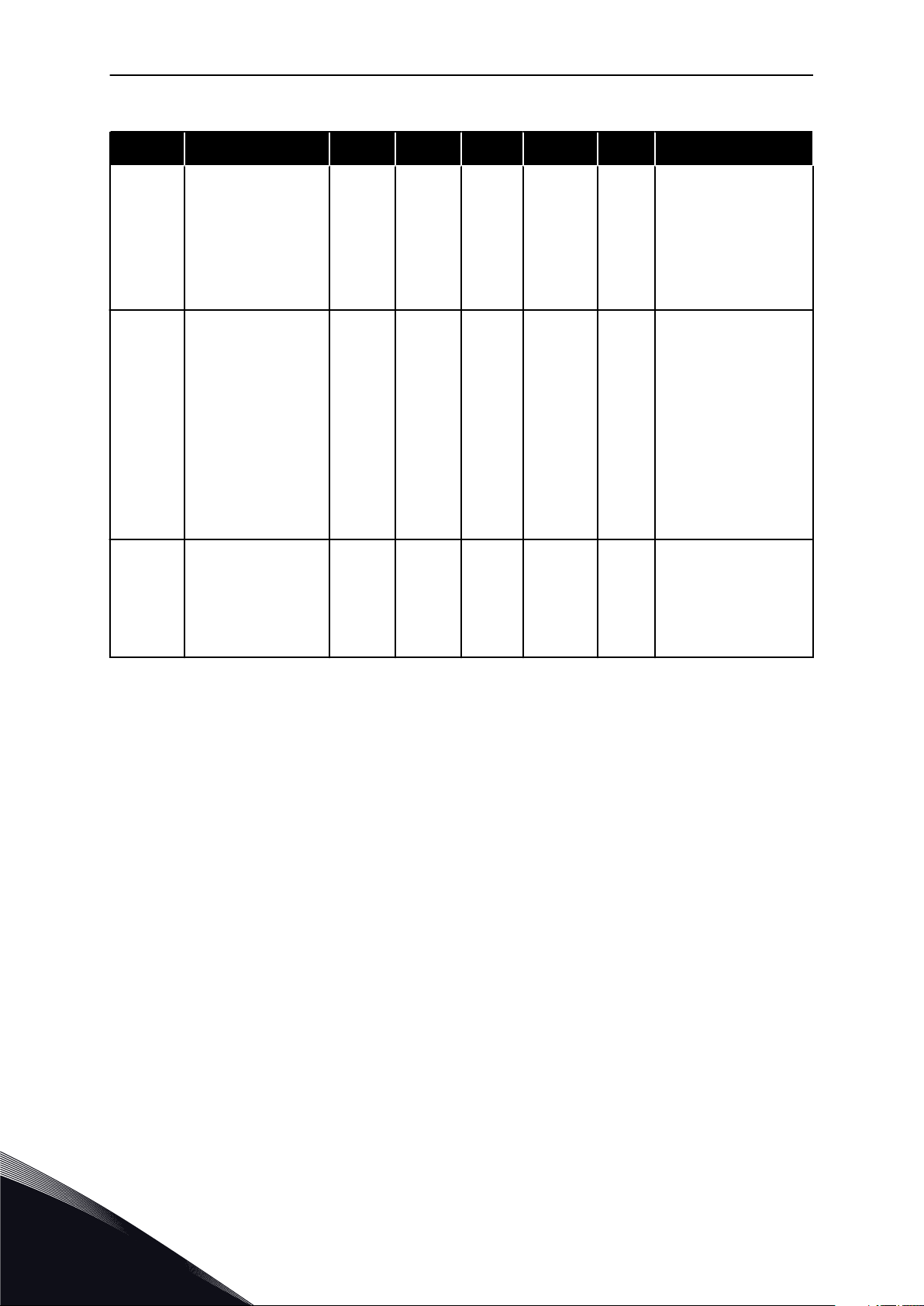
Taulukko 3: M1 Nopea käyttöönotto
Numero Parametri Min. Maks. Yks. Oletus ID Kuvaus
1.12
1.13
1.14
Moottorin nimellis-
virta
Moottorin tehoker-
roin
Energiankäytön opti-
mointi
IH * 0,1 IH * 2 A Vaihtelee 113
0.30 1.00 Vaihtelee 120
0 1 0 666
Katso arvo In moottorin
arvokilvestä.
Katso tämä arvo moottorin arvokilvestä.
Taajuusmuuttaja etsii
mahdollisimman pienen moottorin virran
voidakseen säästää
energiaa ja vähentää
moottorin melua. Käytä
tätä toimintoa esimerkiksi puhallin- ja
pumppuprosesseissa.
0 = Ei käytössä
1 = Käytössä
Tunnistusajo laskee tai
mittaa ne moottorin
parametrit, joita tarvitaan moottorin ja
nopeuden tehokkaaseen säätöön.
1.15 Tunnistus 0 2 0 631
1.16
1.17 Pysäytystoiminto 0 1 0 506
1.18
Käynnistystoiminto 0 1 0 505
Automaattinen vian-
kuittaus
0 1 0 731
0 = Ei käytössä
1 = Pysäytettynä
2 = Pyörii
Moottorin arvokilven
parametrit on asetettava ennen tunnistusajon suorittamista.
0 = Rampilla
1 = Vauhtikäynnistys
0 = Vapaasti pyörien
1 = Rampilla
0 = Ei käytössä
1 = Käytössä
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
VACON · 20 PIKAOPAS
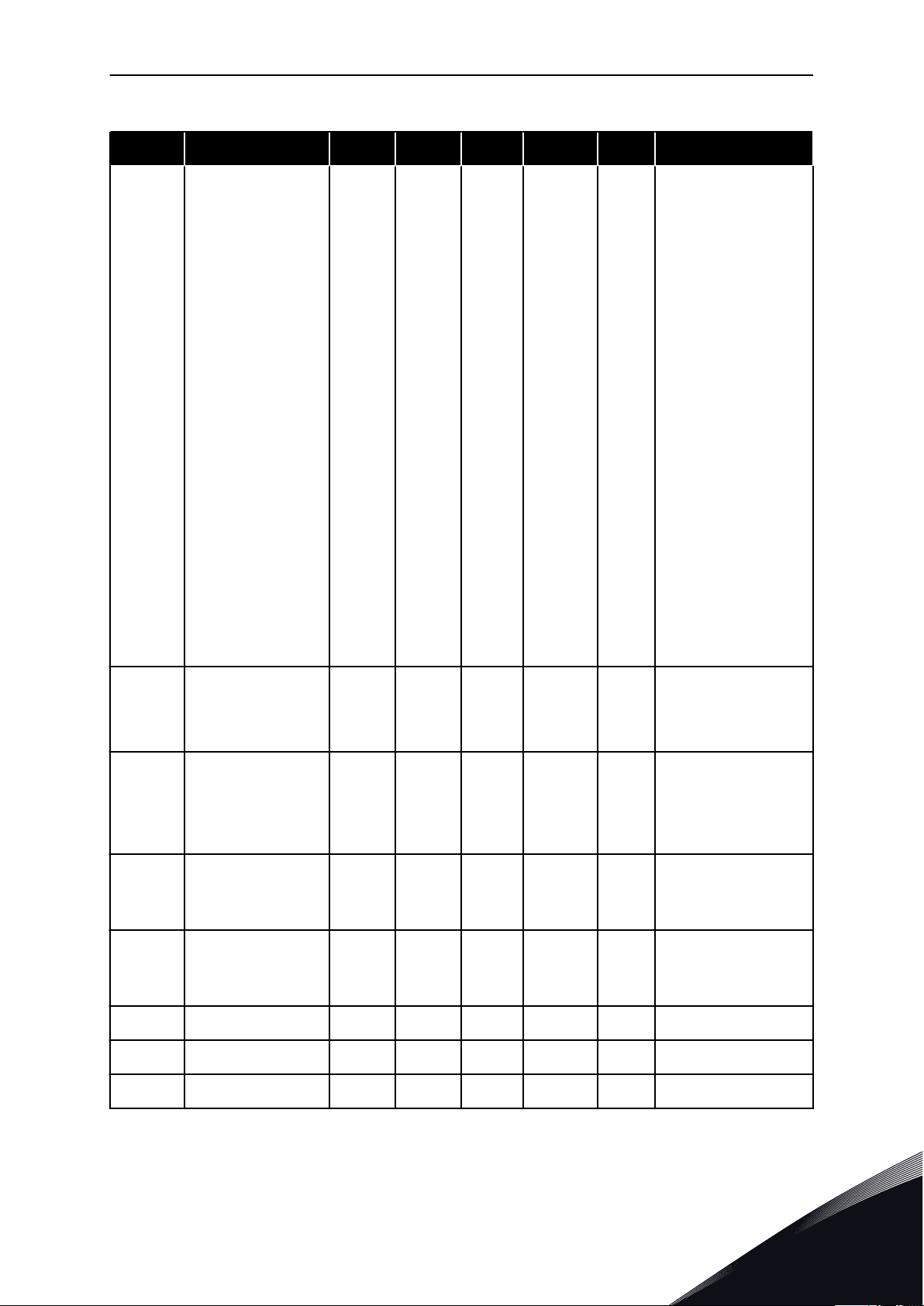
Taulukko 3: M1 Nopea käyttöönotto
Numero Parametri Min. Maks. Yks. Oletus ID Kuvaus
0 = Ei käytössä
1 = Hälytys
2 = Vika (pysäytys pikapysäytystavalla)
3 = Vika (pysäytys
vapaasti pyörien)
0 = Ei käytössä
1 = Hälytys
2 = Hälytys + vian
vakiotaajuus
(P3.9.1.13)
3 = Hälytys + edellinen
taajuus
4 = Vika (pysäytys pikapysäytystavalla)
5 = Vika (pysäytys
vapaasti pyörien)
1.19
1.20
Vaste ulkoiseen
vikaan
Analogiatulovian
vaste
0 3 2 701
0 5 0 700
1.21 Etäohjauspaikka 0 1 0 172
Etäohjauspaikan (Käy/
Seis) valinta.
0 = I/O-ohjaus
1 = Kenttäväyläohjaus
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
PIKAOPAS VACON · 21
Taulukko 3: M1 Nopea käyttöönotto
Numero Parametri Min. Maks. Yks. Oletus ID Kuvaus
Taajuusohjelähteen
valinta, kun ohjauspaikaksi on valittu I/O A.
0 = PC
1 = Vakionopeus 0
2 = Paneelin ohjearvo
3 = Kenttäväylä
4 = AI1
5 = AI2
5 = AI1 + AI2
7 = PID-ohjearvo
8 = Moottoripotentiometri
11 = Lohkon 1 lähtö
12 = Lohkon 2 lähtö
13 = Lohkon 3 lähtö
14 = Lohkon 4 lähtö
15 = Lohkon 5 lähtö
16 = Lohkon 6 lähtö
17 = Lohkon 7 lähtö
18 = Lohkon 8 lähtö
19 = Lohkon 9 lähtö
20 = Lohkon 10 lähtö
1.22
I/O-ohjearvopaikan A
valinta
0 20 5 117
Parametrilla 1.2 valittu
sovellus määrittää oletusarvon.
Taajuusohjelähteen
1.23
1.24
1.25 AI1-signaalialue 0 1 0 379
1.26 AI2-signaalialue 0 1 1 390
1.27 RO1 toiminto 0 73 2 11001 Katso P3.5.3.2.1.
1.28 RO2 toiminto 0 73 3 11004 Katso P3.5.3.2.1.
Paneelin ohjearvon
valinta
Kenttäväyläohjear-
von valinta
0 20 1 121
0 20 2 122
valinta, kun ohjauspaikaksi on valittu paneeli.
Katso P1.22.
Taajuusohjelähteen
valinta, kun ohjauspaikaksi on valittu kenttäväylä.
Katso P1.22.
0 = 0–10 V / 0–20 mA
1 = 2–10 V / 4–20 mA
0 = 0–10 V / 0–20 mA
1 = 2–10 V / 4–20 mA
1.29 RO3 toiminto 0 73 1 11007 Katso P3.5.3.2.1.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
VACON · 22 PIKAOPAS
Taulukko 3: M1 Nopea käyttöönotto
Numero Parametri Min. Maks. Yks. Oletus ID Kuvaus
1.30 AO1 toiminto 0 31 2 10050 Katso P3.5.4.1.1.
Taulukko 4: M1.31 Vakio / M1.32 LVI
Numero Parametri Min. Maks. Yks. Oletus ID Kuvaus
Valitse vakionopeus
1.31.1 Vakionopeus 1 P1.3 P1.4 Hz 10.0 105
1.31.2 Vakionopeus 2 P1.3 P1.4 Hz 15.0 106
1.31.3 Vakionopeus 3 P1.3 P1.4 Hz 20.0 126
digitaalitulon DI4
avulla.
Valitse vakionopeus
digitaalitulon DI5
avulla.
Valitse vakionopeus
digitaalitulojen DI4 ja
DI5 avulla.
1.4.2 PID-SÄÄTÖSOVELLUS
Voit käyttää PID-säätösovellusta prosesseissa, joissa prosessimuuttujaa (esimerkiksi
painetta) ohjataan säätämällä moottorin nopeutta.
Tässä sovelluksessa taajuusmuuttajan sisäinen PID-säädin on määritetty käyttämään yhtä
asetusarvoa ja yhtä takaisinkytkentäsignaalia.
Käytettävissä on kaksi ohjauspaikkaa. Valitse ohjauspaikka A tai B digitaalitulon DI6 avulla.
Kun ohjauspaikka A on käytössä, DI1 antaa käynnistys- ja pysäytyskomennot ja PID-säädin
antaa taajuusohjeen. Kun ohjauspaikka B on käytössä, DI4 antaa käynnistys- ja
pysäytyskomennot ja AI1 antaa taajuusohjeen.
Voit määrittää kaikki taajuusmuuttajan lähdöt vapaasti kaikissa sovelluksissa.
Peruslaajennuskortissa on käytettävissä yksi analogialähtö (Lähtötaajuus) ja kolme
relelähtöä (Käy, Vika, Valmis).
Parametrien kuvaukset ovat taulukossa Taulukko 1 Ohjatut asetukset ‑toiminto.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
6
2
3
4
5
18
19
30
12
7
13
8
9
10
14
15
16
21
22
23
11
17
A
B
24
25
26
28
29
32
33
Modbus RTU
+
-
*)
**)
TI1-
TI1+
mA
VIKA
KÄY
Analogialähtö 1 -
24 V:n
aputulojännite
24 V:n apujännite
I/O Maa
I/O Maa
Digitaalitulo 1
Digitaalitulo 2
Digitaalitulo 3
Digitaalitulo 4
Digitaalitulo 5
Digitaalitulo 6
RO1/1 NC
RO1/2 CM
RO1/3 NO
Yhteinen tuloille DI1–DI6
Yhteinen tuloille DI1–DI6
RS485
RS485
RO2/1 NC
RO2/2 CM
RO2/3 NO
Vakiolaajennuskortti
Liitin Signaali Kuvaus
+10 Vref
AI1+
AI1-
AI2+
AI2-
24 V:n lähtö
24 V:n lähtö
Ohjausjännitelähtö
Analogiatulo 1 +
Analogiatulo 1 -
Analogiatulo 2 +
Analogiatulo 2 -
24 V:n apujännite
AO1+
Lähtötaajuus
(0–20 mA)
KÄY
VIKA
Sarjaväylä, negatiivinen
Sarjaväylä, positiivinen
Relelähtö 1
Relelähtö 2
RO3/2 CM
RO3/3 NO
VALMIS
Relelähtö 3
Analogialähtö 1 +
+24 V:n tulo
DI4
DI5
DI6
DI1
DI2
DI3
GND
GND
CM
CM
Vian kuittaus
Ulkoinen vika
Ohjearvopo-
tentiometri
1–10 000 Ω
AO1-/GND
Vakionopeus 1
I =
(0)4...20mA
Kaksijohdinlähetin
Oloarvo
Paikka A:
PID-asetusarvo (ohje)
Paikka B:
Taajuusohje
(oletusarvo: 0–10 V)
PID-takaisinkytkentäarvo
(oloarvo)
(oletusarvo: 4–20 mA)
Paikka A: Käy eteen (PID-säädin)
Paikka B: Käy eteen
(taajuusohje P3.3.1.6)
Ohjauspaikan A/B valinta
Termistoritulo
PIKAOPAS VACON · 23
Kuva 6: PID-säätösovelluksen oletusohjausliitännät
* = Käytettävissä vain VACON® 100 X ‑mallissa.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
A
B
C
VACON · 24 PIKAOPAS
** = VACON® 100 X ‑mallin DIP-kytkimien määritykset ovat VACON® 100 X asennusoppaassa.
Kuva 7: DIP-kytkin
A. Digitaalitulot
C. Kytketty maahan (oletus)
B. Kelluva
Taulukko 5: M1.1 Ohjatut toiminnot
Numero Parametri Min. Maks. Yks. Oletus ID Kuvaus
0 = Ei aktiivinen
1 = Aktiivinen
1.1.1 Ohjatut aset. 0 1 0 1170
1.1.2 Fire Mode -aset. 0 1 0 1672
Voit käynnistää Ohjatut
asetukset ‑toiminnon
valitsemalla arvoksi
Aktiivinen (katso 1.3
Ensimmäinen käynnistys).
Voit käynnistää ohjatun
Fire Mode ‑asetustoiminnon valitsemalla
arvoksi Aktiivinen
(katso 2.6 Ohjattu Fire
Mode -asetustoiminto).
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
PIKAOPAS VACON · 25
Taulukko 6: M1 Nopea käyttöönotto
Numero Parametri Min. Maks. Yks. Oletus ID Kuvaus
0 = Vakio
1.2
Sovellus 0 4 2 212
1 = HVAC
2 = PID-säätö
3 = Multi-Pump (yksi
taajuusmuuttaja)
4 = Multi-Pump (useita
taajuusmuuttajia)
1.3 Minimitaajuusohje 0.00 P1.4 Hz 0.0 101
1.4 Maksimitaajuusohje P1.3 320.0 Hz
1.5 Kiihdytysaika 1 0.1 3000.0 s 5.0 103
1.6 Hidastusaika 1 0.1 3000.0 s 5.0 104
1.7 Moottorin virtaraja IH * 0,1 I
1.8 Moottorin tyyppi 0 2 0 650
S
A Vaihtelee 107
50.0 /
60.0
102
Pienin sallittu taajuusohje.
Suurin sallittu taajuusohje
Määrittää ajan, jonka
kuluessa lähtötaajuus
kasvaa nollataajuudesta maksimitaajuuteen.
Määrittää ajan, jonka
kuluessa lähtötaajuus
pienenee maksimitaajuudesta nollataajuuteen.
Suurin taajuusmuuttajasta lähtevä moottorin
virta.
0 = Induktiomoottori
1 = Kestomagneettimoottori
2 = Reluktanssimoottori
1.9
1.10
1.11
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Moottorin nimellis-
jännite
Moottorin nimellis-
taajuus
Moottorin nimellis-
nopeus
Vaihte-
lee
8.0 320.0 Hz
24 19200 rpm Vaihtelee 112
Vaihte-
lee
V Vaihtelee 110
50.0 /
60.0
Katso arvo Un moottorin arvokilvestä.
HUOMAUTUS!
Selvitä, onko moottorin kytkentä kolmiovai tähtityyppinen.
Katso arvo fn moottorin
111
arvokilvestä.
Katso arvo nn moottorin arvokilvestä.
1
VACON · 26 PIKAOPAS
Taulukko 6: M1 Nopea käyttöönotto
Numero Parametri Min. Maks. Yks. Oletus ID Kuvaus
1.12
1.13
1.14
Moottorin nimellis-
virta
Moottorin tehoker-
roin
Energiankäytön opti-
mointi
IH * 0,1 I
0.30 1.00 Vaihtelee 120
0 1 0 666
S
A Vaihtelee 113
Katso arvo In moottorin
arvokilvestä.
Katso tämä arvo moottorin arvokilvestä.
Taajuusmuuttaja etsii
mahdollisimman pienen moottorin virran
voidakseen säästää
energiaa ja vähentää
moottorin melua. Käytä
tätä toimintoa esimerkiksi puhallin- ja
pumppuprosesseissa.
0 = Ei käytössä
1 = Käytössä
Tunnistusajo laskee tai
mittaa ne moottorin
parametrit, joita tarvitaan moottorin ja
nopeuden tehokkaaseen säätöön.
1.15 Tunnistus 0 2 0 631
1.16
1.17 Pysäytystoiminto 0 1 0 506
1.18
Käynnistystoiminto 0 1 0 505
Automaattinen vian-
kuittaus
0 1 0 731
0 = Ei käytössä
1 = Pysäytettynä
2 = Pyörii
Moottorin arvokilven
parametrit on asetettava ennen tunnistusajon suorittamista.
0 = Rampilla
1 = Vauhtikäynnistys
0 = Vapaasti pyörien
1 = Rampilla
0 = Ei käytössä
1 = Käytössä
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
PIKAOPAS VACON · 27
Taulukko 6: M1 Nopea käyttöönotto
Numero Parametri Min. Maks. Yks. Oletus ID Kuvaus
0 = Ei käytössä
1 = Hälytys
2 = Vika (pysäytys pikapysäytystavalla)
3 = Vika (pysäytys
vapaasti pyörien)
0 = Ei käytössä
1 = Hälytys
2 = Hälytys + vian
vakiotaajuus
(P3.9.1.13)
3 = Hälytys + edellinen
taajuus
4 = Vika (pysäytys pikapysäytystavalla)
5 = Vika (pysäytys
vapaasti pyörien)
1.19
1.20
Vaste ulkoiseen
vikaan
Analogiatulovian
vaste
0 3 2 701
0 5 0 700
1.21 Etäohjauspaikka 0 1 0 172
Etäohjauspaikan (Käy/
Seis) valinta.
0 = I/O-ohjaus
1 = Kenttäväyläohjaus
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
VACON · 28 PIKAOPAS
Taulukko 6: M1 Nopea käyttöönotto
Numero Parametri Min. Maks. Yks. Oletus ID Kuvaus
Taajuusohjelähteen
valinta, kun ohjauspaikaksi on valittu I/O A.
0 = PC
1 = Vakionopeus 0
2 = Paneelin ohjearvo
3 = Kenttäväylä
4 = AI1
5 = AI2
6 = AI1 + AI2
7 = PID-ohjearvo
8 = Moottoripotentiometri
11 = Lohkon 1 lähtö
12 = Lohkon 2 lähtö
13 = Lohkon 3 lähtö
14 = Lohkon 4 lähtö
15 = Lohkon 5 lähtö
16 = Lohkon 6 lähtö
17 = Lohkon 7 lähtö
18 = Lohkon 8 lähtö
19 = Lohkon 9 lähtö
20 = Lohkon 10 lähtö
1.22
I/O-ohjearvopaikan A
valinta
1 20 6 117
Parametrilla 1.2 valittu
sovellus määrittää oletusarvon.
1.23
1.24
1.25 AI1 signaalialue 0 1 0 379
1.26 AI2-signaalialue 0 1 1 390
1.27 RO1 toiminto 0 73 2 11001 Katso P3.5.3.2.1.
1.28 RO2 toiminto 0 73 3 11004 Katso P3.5.3.2.1.
1.29 RO3 toiminto 0 73 1 11007 Katso P3.5.3.2.1.
1.30 AO1 toiminto 0 31 2 10050 Katso P3.5.4.1.1.
Paneelin ohjearvon
valinta
Kenttäväyläohjear-
von valinta
1 20 1 121
1 20 2 122
Katso P1.22.
Katso P1.22.
0 = 0–10 V / 0–20 mA
1 = 2–10 V / 4–20 mA
0 = 0–10 V / 0–20 mA
1 = 2–10 V / 4–20 mA
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
PIKAOPAS VACON · 29
Taulukko 7: M1.33 PID-säätö
Numero Parametri Min. Maks. Yks. Oletus ID Kuvaus
Jos parametrin arvo on
1.33.1
1.33.2 PID-säätimen I-aika 0.00 600.00 s 1.00 119
1.33.3 PID-säätimen D-aika 0.00 100.00 s 0.00 1132
PID-säätimen vah-
vistus
0.00 100.00 % 100.00 118
100 %, 10 prosentin
muutos virhearvossa
muuttaa säätimen lähtöarvoa 10 prosentilla.
Jos parametrin arvoksi
asetetaan 1,00 s, 10
prosentin muutos virhearvossa muuttaa
säätimen lähtöarvoa
10,00 prosentilla
sekunnissa.
Jos parametrin arvoksi
asetetaan 1,00 s, 10
prosentin muutos virhearvossa 1,00 sekunnin aikana aiheuttaa
10,00 prosentin muutoksen säätimen lähtöarvossa.
Valitse prosessin
1.33.4 Yksikön valinta 1 44 1 1036
1.33.5
1.33.6
1.33.7
1.33.8 Asetusarvon 1 lähde 0 32 1 332 Katso P3.13.2.6.
1.33.9
Valitun yksikön
minimi
Valitun yksikön mak-
simi
Takaisinkytkentä 1,
paikka
Paneelin asetusarvo1Vaihte-
Vaihte-
lee
Vaihte-
lee
0 30 2 334
lee
Vaihte-
lee
Vaihte-
lee
Vaihte-
lee
Vaihte-
lee
Vaihtelee 1033
Vaihtelee 1034
0 167
yksikkö. Katso
P3.13.1.4.
Prosessiyksikön arvo,
joka on sama kuin
nolla prosenttia PIDtakaisinkytkentäsignaalista.
Prosessiyksikön arvo,
joka on sama kuin
sata prosenttia PIDtakaisinkytkentäsignaalista.
Katso P3.13.3.3.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
VACON · 30 PIKAOPAS
Taulukko 7: M1.33 PID-säätö
Numero Parametri Min. Maks. Yks. Oletus ID Kuvaus
Taajuusmuuttaja siirtyy
lepotilaan, kun lähtötaajuus pysyy tämän
1.33.10 SP1 Lepotaajuusraja 0.0 320.0 Hz 0.0 1016
1.33.11 SP1-lepoviive 0 3000 s 0 1017
1.33.12 SP1 Havahtumisraja
Vaihte-
lee
Vaihte-
lee
Vaihte-
lee
Vaihtelee 1018
rajan alapuolella
pidempään kuin parametrin Lepoviive määrittämän ajan.
0 = Ei käytössä
Aika, joka taajuus pysyy
lepotilarajan alapuolella, ennen kuin taajuusmuuttaja pysähtyy.
0 = Ei käytössä
PID-takaisinkytkennän
valvonnan havahtumisraja. Havahtumisraja 1
käyttää valittuja prosessiyksikköjä.
0 = Ei käytössä
1.33.12 Vakionopeus 1 P1.3 P1.4 Hz 10.0 105
Digitaalitulon DI5 valitsema vakionopeus.
1.4.3 YHDEN TAAJUUSMUUTTAJAN MONIPUMPPUSOVELLUS
Voit käyttää yhden taajuusmuuttajan monipumppusovellusta käyttötarkoituksiin, joissa yksi
taajuusmuuttaja ohjaa enintään kahdeksasta rinnakkaisesta moottorista (esimerkiksi
pumpusta, puhaltimesta tai kompressorista) koostuvaa järjestelmää. Oletusasetuksen
mukaan yhden taajuusmuuttajan monipumppusovellus määritetään kolmelle rinnakkaiselle
moottorille.
Taajuusmuuttaja kytketään yhteen moottoreista, josta tulee säätelevä moottori.
Taajuusmuuttajan sisäinen PID-säädin ohjaa säätömoottorin nopeutta ja antaa käynnistys- ja
pysäytysohjaussignaalit apumoottoreille relelähtöjen kautta. Ulkoiset kontaktorit (kytkimet)
kytkevät apumoottorit verkkojännitteeseen.
Voit ohjata prosessimuuttujaa (esimerkiksi painetta) säätämällä säätömoottorin nopeutta ja
muuttamalla käytössä olevien moottorien määrää.
Parametrien kuvaukset ovat luvussa 10 Parametrikuvaukset.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

PT
RO2
RO3
Käy/Seis
PIKAOPAS VACON · 31
Kuva 8: Yhden taajuusmuuttajan monipumppukokoonpano
Vuorottelutoiminto (käynnistysjärjestyksen muuttaminen) tasaa järjestelmässä olevien
moottorien kulumista. Vuorottelutoiminto valvoo kunkin moottorin käyntiaikaa ja asettaa
moottorien käynnistysjärjestyksen. Moottori, jolla on vähiten käyntitunteja, käynnistyy ensin
ja moottori, jolla on vähiten käyntitunteja, käynnistyy viimeisenä. Voit määrittää vuorottelun
käynnistymään sisäisen reaaliaikakellon (edellyttää paristoa) asettaman vuorotteluvälin
perusteella.
Voit määrittää vuorottelun kattamaan kaikki järjestelmän pumput tai vain apupumput.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

K2 K3
K1 K2 K2 K1.1 K2.1 K3.1
VACON · 32 PIKAOPAS
Kuva 9: Ohjauskaavio, kun vain apumoottorit on määritetty vuorottelemaan.
Kuva 10: Ohjauskaavio, kun kaikki moottorit on määritetty vuorottelemaan.
Käytettävissä on kaksi ohjauspaikkaa. Valitse ohjauspaikka A tai B digitaalitulon DI6 avulla.
Valitse ohjauspaikka A tai B digitaalitulon DI6 avulla. Kun ohjauspaikka A on käytössä, DI1
antaa käynnistys- ja pysäytyskomennot ja PID-säädin antaa taajuusohjeen. Kun ohjauspaikka
B on käytössä, DI4 antaa käynnistys- ja pysäytyskomennot ja AI1 antaa taajuusohjeen.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

PIKAOPAS VACON · 33
Voit määrittää kaikki taajuusmuuttajan lähdöt vapaasti kaikissa sovelluksissa.
Peruslaajennuskortissa on käytettävissä yksi analogialähtö (Lähtötaajuus) ja kolme
relelähtöä (Käy, Vika, Valmis).
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

1
6
2
3
4
5
18
19
30
12
7
13
8
9
10
14
15
16
21
22
23
11
17
A
B
24
25
26
28
29
Modbus RTU
*)
32
33
**)
+
-
A1
A1
A1
A2
A2
A2
TI1-
TI1+
mA
Moottorin 1 ohjaus
(monipumpputoiminnon
K2-kontaktori)
Moottorin 2 ohjaus
(monipumpputoiminnon
K2-kontaktori)
Moottorin 3 ohjaus
(monipumpputoiminnon
K2-kontaktori)
AO1-/MAA
+24 Vin
GND
GND
DI1
DI2
DI3
DI4
DI5
DI6
RO1/1 NC
RO1/2 CM
RO1/3 NO
CM
CM
RS485
RS485
RO2/1 NC
RO2/2 CM
RO2/3 NO
RO3/2 CM
RO3/3 NO
Vakiolaajennuskortti
Liitin Signaali Kuvaus
+10 Vref
AI1+
AI1-
AI2+
AI2-
24 Vout
Ohjausjännitelähtö
Analogiatulo 1 +
Analogiatulo 1 -
Analogiatulo 2 +
Analogiatulo 2 -
24 V:n apujännite
I/O maa
Digitaalitulo 1
Digitaalitulo 2
Digitaalitulo 3
Digitaalitulo 4
Digitaalitulo 5
Digitaalitulo 6
Yhteinen tuloille DI1–DI6
Yhteinen tuloille DI1–DI6
24 V:n apujännite
I/O maa
Analogialähtö 1 +
Analogialähtö 1 -
Sarjaväylä, negatiivinen
Sarjaväylä, positiivinen
Relelähtö 1
Relelähtö 2
Relelähtö 3
AO1+
Paikka A: Ei käytössä
Paikka B:
Taajuusohje
(oletusarvo: 0–10 V)
Paikka A: Käy eteen (PID-säädin)
Paikka B: Käy eteen
(taajuusohje P3.3.1.6)
I = (0)4–20 mA
Oloarvo
Kaksijohdinlähetin
Moottorin 1 lukitus
Ohjauspaikan A/B valinta
Moottorin 2 lukitus
Moottorin 3 lukitus
24 Vout
Lähtötaajuus
(oletusarvo 0–20 mA)
24 V:n aputulojännite
Viitepotentiometri
1–10 kΩ
PID-takaisinkytkentäarvo (oloarvo)
(oletusarvo: –20 mA)
Termistoritulo
VACON · 34 PIKAOPAS
Kuva 11: Yhden taajuusmuuttajan monipumppusovelluksen oletusohjausliitännät
* = Käytettävissä vain VACON® 100 X ‑mallissa.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

A
B
C
PIKAOPAS VACON · 35
** = VACON® 100 X ‑mallin DIP-kytkimien määritykset ovat VACON® 100 X asennusoppaassa.
Kuva 12: DIP-kytkin
A. Digitaalitulot
C. Kytketty maahan (oletus)
B. Kelluva
Taulukko 8: M1.1 Ohjatut toiminnot
Numero Parametri Min. Maks. Yks. Oletus ID Kuvaus
0 = Ei aktiivinen
1 = Aktiivinen
1.1.1 Ohjatut aset. 0 1 0 1170
1.1.2 Fire Mode -aset. 0 1 0 1672
Voit käynnistää Ohjatut
asetukset ‑toiminnon
valitsemalla arvoksi
Aktiivinen (katso 1.3
Ensimmäinen käynnistys).
Voit käynnistää ohjatun
Fire Mode ‑asetustoiminnon valitsemalla
arvoksi Aktiivinen
(katso 2.6 Ohjattu Fire
Mode -asetustoiminto).
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 36 PIKAOPAS
Taulukko 9: M1 Nopea käyttöönotto
Numero Parametri Min. Maks. Yks. Oletus ID Kuvaus
0 = Vakio
1.2
Sovellus 0 4 2 212
1 = HVAC
2 = PID-säätö
3 = Multi-Pump (yksi
taajuusmuuttaja)
4 = Multi-Pump (useita
taajuusmuuttajia)
1.3 Minimitaajuusohje 0.00 P1.4 Hz 0.0 101
1.4 Maksimitaajuusohje P1.3 320.0 Hz
1.5 Kiihdytysaika 1 0.1 3000.0 s 5.0 103
1.6 Hidastusaika 1 0.1 3000.0 s 5.0 104
1.7 Moottorin virtaraja IH * 0,1 I
1.8 Moottorin tyyppi 0 2 0 650
S
A Vaihtelee 107
50.0 /
60.0
102
Pienin sallittu taajuusohje.
Suurin sallittu taajuusohje
Määrittää ajan, jonka
kuluessa lähtötaajuus
kasvaa nollataajuudesta maksimitaajuuteen.
Määrittää ajan, jonka
kuluessa lähtötaajuus
pienenee maksimitaajuudesta nollataajuuteen.
Suurin taajuusmuuttajasta lähtevä moottorin
virta.
0 = Induktiomoottori
1 = Kestomagneettimoottori
2 = Reluktanssimoottori
1
1.9
1.10
1.11
Moottorin nimellis-
jännite
Moottorin nimellis-
taajuus
Moottorin nimellis-
nopeus
Katso arvo Un moottorin arvokilvestä.
Vaihte-
lee
8.0 320.0 Hz
24 19200 rpm Vaihtelee 112
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Vaihte-
lee
V Vaihtelee 110
50.0 /
60.0
111
HUOMAUTUS!
Selvitä, onko moottorin kytkentä kolmiovai tähtityyppinen.
Katso arvo fn moottorin
arvokilvestä.
Katso arvo nn moottorin arvokilvestä.

PIKAOPAS VACON · 37
Taulukko 9: M1 Nopea käyttöönotto
Numero Parametri Min. Maks. Yks. Oletus ID Kuvaus
1.12
1.13
1.14
Moottorin nimellis-
virta
Moottorin tehoker-
roin
Energiankäytön opti-
mointi
IH * 0,1 I
0.30 1.00 Vaihtelee 120
0 1 0 666
S
A Vaihtelee 113
Katso arvo In moottorin
arvokilvestä.
Katso tämä arvo moottorin arvokilvestä.
Taajuusmuuttaja etsii
mahdollisimman pienen moottorin virran
voidakseen säästää
energiaa ja vähentää
moottorin melua. Käytä
tätä toimintoa esimerkiksi puhallin- ja
pumppuprosesseissa.
0 = Ei käytössä
1 = Käytössä
Tunnistusajo laskee tai
mittaa ne moottorin
parametrit, joita tarvitaan moottorin ja
nopeuden tehokkaaseen säätöön.
1.15 Tunnistus 0 2 0 631
1.16
1.17 Pysäytystoiminto 0 1 0 506
1.18
Käynnistystoiminto 0 1 0 505
Automaattinen vian-
kuittaus
0 1 0 731
0 = Ei käytössä
1 = Pysäytettynä
2 = Pyörii
Moottorin arvokilven
parametrit on asetettava ennen tunnistusajon suorittamista.
0 = Rampilla
1 = Vauhtikäynnistys
0 = Vapaasti pyörien
1 = Rampilla
0 = Ei käytössä
1 = Käytössä
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 38 PIKAOPAS
Taulukko 9: M1 Nopea käyttöönotto
Numero Parametri Min. Maks. Yks. Oletus ID Kuvaus
0 = Ei käytössä
1 = Hälytys
2 = Vika (pysäytys pikapysäytystavalla)
3 = Vika (pysäytys
vapaasti pyörien)
0 = Ei käytössä
1 = Hälytys
2 = Hälytys + vian
vakiotaajuus
(P3.9.1.13)
3 = Hälytys + edellinen
taajuus
4 = Vika (pysäytys pikapysäytystavalla)
5 = Vika (pysäytys
vapaasti pyörien)
1.19
1.20
Vaste ulkoiseen
vikaan
Analogiatulovian
vaste
0 3 2 701
0 5 0 700
1.21 Etäohjauspaikka 0 1 0 172
Etäohjauspaikan (Käy/
Seis) valinta.
0 = I/O-ohjaus
1 = Kenttäväyläohjaus
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

PIKAOPAS VACON · 39
Taulukko 9: M1 Nopea käyttöönotto
Numero Parametri Min. Maks. Yks. Oletus ID Kuvaus
Taajuusohjelähteen
valinta, kun ohjauspaikaksi on valittu I/O A.
0 = PC
1 = Vakionopeus 0
2 = Paneelin ohjearvo
3 = Kenttäväylä
4 = AI1
5 = AI2
6 = AI1 + AI2
7 = PID-ohjearvo
8 = Moottoripotentiometri
11 = Lohkon 1 lähtö
12 = Lohkon 2 lähtö
13 = Lohkon 3 lähtö
14 = Lohkon 4 lähtö
15 = Lohkon 5 lähtö
16 = Lohkon 6 lähtö
17 = Lohkon 7 lähtö
18 = Lohkon 8 lähtö
19 = Lohkon 9 lähtö
20 = Lohkon 10 lähtö
1.22
I/O-ohjearvopaikan A
valinta
1 20 6 117
Parametrilla 1.2 valittu
sovellus määrittää oletusarvon.
1.23
1.24
1.25 AI1 signaalialue 0 1 0 379
1.26 AI2-signaalialue 0 1 1 390
1.27 RO1 toiminto 0 73 2 11001 Katso P3.5.3.2.1.
1.28 RO2 toiminto 0 73 3 11004 Katso P3.5.3.2.1.
1.29 RO3 toiminto 0 73 1 11007 Katso P3.5.3.2.1.
1.30 AO1 toiminto 0 31 2 10050 Katso P3.5.4.1.1.
Paneelin ohjearvon
valinta
Kenttäväyläohjear-
von valinta
1 20 1 121
1 20 2 122
Katso P1.22.
Katso P1.22.
0 = 0–10 V / 0–20 mA
1 = 2–10 V / 4–20 mA
0 = 0–10 V / 0–20 mA
1 = 2–10 V / 4–20 mA
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 40 PIKAOPAS
Taulukko 10: M1.34 Multi-Pump (yksi taajuusmuuttaja)
Indeksi Parametri Min. Maks. Yks. Oletus ID Kuvaus
Jos parametrin
arvo on 100 %, 10
prosentin muutos
virhearvossa muuttaa säätimen lähtöarvoa 10 prosentilla.
Jos parametrin
arvoksi asetetaan
1,00 s, 10 prosentin
muutos virhearvossa muuttaa säätimen lähtöarvoa
10,00 prosentilla
sekunnissa.
Jos parametrin
arvoksi asetetaan
1,00 s, 10 prosentin
muutos virhearvossa 1,00 sekunnin aikana aiheuttaa 10,00 prosentin
muutoksen säätimen lähtöarvossa.
1.34.1
1.34.2
1.34.3
PID-säätimen
vahvistus
PID-säätimen I-
aika
PID-säätimen D-
aika
0.00 100.00 % 100.00 118
0.00 600.00 s 1.00 119
0.00 100.00 s 0.00 1132
1.34.4 Yksikön valinta 1 44 1 1036
1.34.5
1.34.6
1.34.7
1.34.8
1.34.9
Valitun yksikön
minimi
Valitun yksikön
maksimi
Takaisinkytkentä
1, paikka
Asetusarvon 1
lähde
Paneelin asetus-
arvo 1
Vaihtelee Vaihtelee
Vaihtelee Vaihtelee
0 30 2 334
0 32 1 332
Vaihtelee Vaihtelee
Vaihte-
lee
Vaihte-
lee
Vaihte-
lee
0 167
1033
1034
Valitse prosessin
yksikkö. Katso
P3.13.1.4.
Prosessiyksikön
arvo, joka on sama
kuin nolla prosenttia PID-takaisinkytkentäsignaalista.
Prosessiyksikön
arvo, joka on sama
kuin sata prosenttia PID-takaisinkytkentäsignaalista.
Katso P3.13.3.3.
Katso P3.13.2.6.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

PIKAOPAS VACON · 41
Taulukko 10: M1.34 Multi-Pump (yksi taajuusmuuttaja)
Indeksi Parametri Min. Maks. Yks. Oletus ID Kuvaus
Taajuusmuuttaja
siirtyy lepotilaan,
kun lähtötaajuus
1.34.10
1.34.11 SP1-lepoviive 0 3000 s 0 1017
1.34.12
SP1 Lepotaa-
juusraja
SP1 Havahtumis-
raja
0.0 320.0 Hz 0.0 1016
Vaihtelee Vaihtelee
Vaihte-
lee
Vaihte-
lee
1018
pysyy tämän rajan
alapuolella pidempään kuin parametrin Lepoviive
määrittämän ajan.
0 = Ei käytössä
Aika, joka taajuus
pysyy lepotilarajan
alapuolella, ennen
kuin taajuusmuuttaja pysähtyy.
0 = Ei käytössä
PID-takaisinkytkennän valvonnan
havahtumisraja.
Havahtumisraja 1
käyttää valittuja
prosessiyksikköjä.
0 = Ei käytössä
1.34.13 Multi-Pump-tila 0 2 0 1785
1.34.14
1.34.15 Pumpun lukitus 0 1 1 1032
Pumppujen
määrä
1 8 1 1001
Valitsee monipumpputilan.
0 = yksi taajuusmuuttaja
1 = Rinnansäätö
2 = Monisäätö
Monipumppujärjestelmässä käytettävien moottorien
(pumppujen tai
puhaltimien) kokonaismäärä.
Ottaa lukitukset
käyttöön tai poistaa
ne käytöstä. Lukitukset kertovat järjestelmälle, onko
moottori kytketty
vai ei.
0 = Ei käytössä
1 = Käytössä
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 42 PIKAOPAS
Taulukko 10: M1.34 Multi-Pump (yksi taajuusmuuttaja)
Indeksi Parametri Min. Maks. Yks. Oletus ID Kuvaus
Ota käynnistysjärjestyksen ja moottorien prioriteetin
kierto käyttöön tai
poista se käytöstä.
1.34.16 Vuorottelu 0 2 1 1027
0 = Ei käytössä
1 = Käytössä (aikaväli)
2 = Käytössä (viikonpäivät)
1.34.17
1.34.18 Vuorotteluväli 0.0 3000.0 h 48.0 1029
1.34.19 Vuorottelupäivät 0 127 15904
Vuorotteleva
pumppu
0 1 1 1028
0 = Apupumppu
1 = Kaikki pumput
Vuorottelu alkaa
tämän parametrin
määrittämän ajan
kuluttua. Vuorottelu alkaa kuitenkin
vain, jos kapasiteetti on parametrien P1.34.21 ja
P1.34.22 määrittämän tason alapuolella.
Alue
B0 = sunnuntai
B1 = maanantai
B2 = tiistai
B3 = keskiviikko
B4 = torstai
B5 = perjantai
B6 = lauantai
1
1.34.20
1.34.21
1.34.22
Vuorottelun kel-
lonaika
Vuorottelu: raja-
arvo) arvo.
Vuorottelu: Pum-
pun raja-arvo
00:00:00 23:59:59 Aika 15905
0.00 P3.3.1.2 Hz 25:00 1031
1 6 1030
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Alue:
00:00:00-23:59:59
Nämä parametrit
määrittävät tason,
jonka alapuolella
kapasiteetin on
pysyttävä, jotta
vuorottelu voi
käynnistyä.

PIKAOPAS VACON · 43
Taulukko 10: M1.34 Multi-Pump (yksi taajuusmuuttaja)
Indeksi Parametri Min. Maks. Yks. Oletus ID Kuvaus
Prosenttiosuus
asetusarvosta. Esimerkki:
Asetusarvo = 5 bar
1.34.23 Säätöalue 0 100 % 10 1097
1.34.24 Säätöal. viive 0 3600 s 10 1098
Säätöalue = 10 %
Kun takaisinkytkentäarvo on alueella 4,5–5,5 bar,
moottori pysyy kytkettynä.
Aika, jonka jälkeen
pumppuja lisätään
tai poistetaan, kun
takaisinkytkentäarvo on säätöalueen ulkopuolella.
1.34.25
1.34.26
1.34.27
1.34.28
1.34.29
1.34.30
1.34.31
Pumpun 1 luki-
tus
Pumpun 2 luki-
tus
Pumpun 3 luki-
tus
Pumpun 4 luki-
tus
Pumpun 5 luki-
tus
Pumpun 6 luki-
tus
Pumpun 7 luki-
tus
DigIN
paikka
0.1
DigIN
paikka
0.1
DigIN
paikka
0.1
DigIN
paikka
0.1
DigIN
paikka
0.1
DigIN
paikka
0.1
DigIN
paikka
0.1
426
427
428
429
430
486
487
OPEN = Ei aktiivinen
CLOSED = Aktiivinen
Katso 1.34.25
Katso 1.34.25
Katso 1.34.25
Katso 1.34.25
Katso 1.34.25
Katso 1.34.25
1.34.32
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Pumpun 8 luki-
tus
DigIN
paikka
0.1
Katso 1.34.25
488
1

PT
Käy/Seis
PT
KV
VACON · 44 PIKAOPAS
1.4.4 USEAN TAAJUUSMUUTTAJAN MONIPUMPPUSOVELLUS
Voit käyttää usean taajuusmuuttajan monipumppusovellusta järjestelmässä, jossa on
enintään kahdeksan rinnakkaista eri nopeuksilla toimivaa moottoria (esimerkiksi pumppua,
puhallinta tai kompressoria). Oletusasetuksen mukaan usean taajuusmuuttajan
monipumppusovellus määritetään kolmelle rinnakkaiselle moottorille.
Parametrien kuvaukset ovat luvussa 10 Parametrikuvaukset.
Usean taajuusmuuttajan monipumppujärjestelmän käyttöönoton tarkistusluettelo on luvussa
10.16.1 Usean taajuusmuuttajan monipumppujärjestelmän käyttöönoton tarkistusluettelo.
Kullakin moottorilla on taajuusmuuttaja, joka ohjaa moottoria. Järjestelmän
taajuusmuuttajat ovat yhteydessä toisiinsa Modbus RTU -tietoliikenneväylän kautta.
Kuva 13: Usean taajuusmuuttajan monipumppukokoonpano
Voit ohjata prosessimuuttujaa (esimerkiksi painetta) säätämällä säätömoottorin nopeutta ja
muuttamalla käytössä olevien moottorien määrää. Säätömoottorin taajuusmuuttajan
sisäinen PID-säädin ohjaa moottorien nopeutta, käynnistymistä ja pysähtymistä.
Järjestelmän toiminta määräytyy valitun toimintatilan mukaan. Rinnansäätötilassa
apumoottorit seuraavat säätömoottorin nopeutta.
Pumppu 1 on ohjaa, ja pumput 2–3 seuraavat pumpun 1 nopeutta käyrien A osoittamalla
tavalla.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

A
P1 P2 P3
f
max
f
min
RPM
t
A
B
f
max
f
min
RPM
t
P1
P2
P3
PIKAOPAS VACON · 45
Kuva 14: Ohjaus rinnansäätötilassa.
Seuraavassa kuvassa on esimerkki monisäätötilasta, jossa säätävän moottorin nopeus
lukittuu vakiotuotantonopeuteen B, kun seuraava moottori käynnistyy. Käyrät A kuvaavat
pumppujen säätelyä.
Kuva 15: Ohjaus monisäätötilassa.
Vuorottelutoiminto (käynnistysjärjestyksen muuttaminen) tasaa järjestelmässä olevien
moottorien kulumista. Vuorottelutoiminto valvoo kunkin moottorin käyntiaikaa ja asettaa
moottorien käynnistysjärjestyksen. Moottori, jolla on vähiten käyntitunteja, käynnistyy ensin
ja moottori, jolla on vähiten käyntitunteja, käynnistyy viimeisenä. Voit määrittää vuorottelun
käynnistymään vuorotteluvälin tai taajuusmuuttajan sisäisen reaaliaikakellon (edellyttää
paristoa) perusteella.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

1
6
2
3
4
5
18
19
30
12
7
13
8
9
10
14
15
16
21
22
23
11
17
A
B
24
25
26
28
29
32
33
*)
**)
+
-
TI1+
TI1-
mA
KÄY
KÄY
AO1-
+24 V:n
tulo
Oloarvo
GND
GND
DI1
DI2
DI3
DI4
DI5
DI6
RO1/1 NC
RO1/2 CM
RO1/3 NO
CM
CM
RS485
RS485
RO2/1 NC
RO2/2 CM
RO2/3 NO
Vakiolaajennuskortti
Liitin Signaali Kuvaus
+10 V
ref
AI1+
AI1-
AI2+
AI2-
24 V
out
24 V
out
Ohjausjännitelähtö
Analogiatulo 1 +
Analogiatulo 1 -
Analogiatulo 2 +
Analogiatulo 2 -
24 V:n apujännite
I/O maa
Digitaalitulo 1
Digitaalitulo 2
Digitaalitulo 3
Digitaalitulo 4
Digitaalitulo 5
Digitaalitulo 6
Yhteinen tuloille DI1–DI6
Yhteinen tuloille DI1–DI6
24 V:n apujännite
I/O maa
Analogialähtö 1 +
Analogialähtö 1 -
24 V:n aputulojännite
Sarjaväylä, negatiivinen
Sarjaväylä, positiivinen
Relelähtö 1
Relelähtö 2
RO3/2 CM
RO3/3 NO
VALMIS
Relelähtö 3
VIKA
Vian kuittaus
Ulkoinen vika
Lähtötaajuus (0–20 mA)
AO1+
Oletuksena ei käytössä
(oletusarvo: 0–10 V)
PID-säätäjän (todellinen)
takaisinkytkentäarvo
(oletusarvo 4…20 mA)
Käy eteen
Huuhtelu (Käy eteen + huuhtelutaajuus)
PID-asetusarvon valinta
(Auki = Paneeli SP1, Kiinni = Paneeli SP2)
Pumpun lukitus
(Auki = Ei käytettävissä, Kiinni = Käytettävissä)
Taajuusmuuttajien välinen
tietoliikenne
(Modbus RTU)
Kaksijohdinanturi
Muiden
taajuusmuuttajien
liittimeen A
Muiden
taajuusmuuttajien
liittimeen B
VIKA
(0)4–20 mA
Termistoritulo
VACON · 46 PIKAOPAS
1
Kuva 16: Usean taajuusmuuttajan monipumppusovelluksen oletusohjausliitännät
* = Käytettävissä vain VACON® 100 X ‑mallissa.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

A
B
C
PIKAOPAS VACON · 47
** = VACON® 100 X ‑mallin DIP-kytkimien määritykset ovat VACON® 100 X asennusoppaassa.
Kuva 17: DIP-kytkin
A. Digitaalitulot
C. Kytketty maahan (oletus)
B. Kelluva
Kussakin taajuusmuuttajassa on paineanturi. Kun korvautuvuustaso on korkea,
taajuusmuuttaja ja paineanturit ovat redundantteja.
Jos taajuusmuuttaja vikaantuu, seuraava taajuusmuuttaja alkaa toimia säätölaitteena.
•
Jos anturi vikaantuu, seuraava taajuusmuuttaja (jolla on erillinen anturi) alkaa toimia
•
säätölaitteena.
Kutakin taajuusmuuttajaa ohjaa erillinen kytkin, jossa on automaatti-, pois- ja
manuaaliasetus.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
+ -
0
P
I
2
4
1
3
TAAJUUSMUUTTAJA 1
VACON 100 FLOW
KAKSIJOHDINLÄHETIN
PAINEANTURI 1
Referenssijännite
EI KÄYTÖSSÄ (0–10 V)
LÄHTÖTAAJUUS (0–20 mA)
PID-TAK.KYTKENTÄ (4–20 mA)
24 V:n apujännitelähtö
24 V:n apujännitetulo
I/O maa
I/O maa
VIAN KUITTAUS
ULKOINEN VIKA
KÄY ETEEN
Yhteinen tuloille DI1–DI6
Yhteinen tuloille DI1–DI6
24 V:n apujännitelähtö
PUMPUN LUKITUS
(oletuksena ei käytössä)
Taajuusmuuttajien välinen
tietoliikenne (Modbus RTU)
Relelähtö 1
(KÄY)
Relelähtö 2
(VIKA)
Relelähtö 3
(VALMIS)
HUUHTELU
(Käy eteen + huuhtelutaajuus)
PID-ASETUSARVON VALINTA.
(Auki = Paneeli SP1, Kiinni = Paneeli SP2)
DIO:t
KELLUVA
GND
U
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
out
GND
DIN1
DIN2
DIN3
CM
+24 V
out
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V:n tulo
RS485
RS485
I
U
I
U
I
POIS
PÄÄLLE
AI1
AI2AORS485-pääte
AUTO MAN
1S1
P1.2
Sovellus
= Monipumppu (useita taajuusmuuttajia)
P3.15.3
Pumpun tunnus
= 1
P3.15.4
Käynn. & tak.kytkentä
= Signaalit kytketty
TAAJUUSMUUNTAJA 1 TAAJUUSMUUNTAJA 2 TAAJUUSMUUNTAJA 3
VACON · 48 PIKAOPAS
Kuva 18: Usean taajuusmuuttajan monipumppujärjestelmän kytkentäkaavio, esimerkki 1A
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
+ -
0
P
I
2
4
1
3
TAAJUUSMUUTTAJA 2
VACON 100 FLOW
KAKSIJOHDINLÄHETIN
PAINEANTURI 2
Referenssijännite
EI KÄYTÖSSÄ (0–10 V)
LÄHTÖTAAJUUS (0–20 mA)
PID-TAK.KYTKENTÄ (4–20 mA)
24 V:n apujännitelähtö
24 V:n apujännitetulo
I/O maa
I/O maa
VIAN KUITTAUS
ULKOINEN VIKA
KÄY ETEEN
Yhteinen tuloille DI1–DI6
Yhteinen tuloille DI1–DI6
24 V:n apujännitelähtö
PUMPUN LUKITUS
(oletuksena ei käytössä)
Taajuusmuuttajien välinen
tietoliikenne (Modbus RTU)
Relelähtö 1
(KÄY)
Relelähtö 2
(VIKA)
Relelähtö 3
(VALMIS)
HUUHTELU
(Käy eteen + huuhtelutaajuus)
PID-ASETUSARVON VALINTA.
(Auki = Paneeli SP1, Kiinni = Paneeli SP2)
DIO:t
KELLUVA
GND
U
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
out
GND
DIN1
DIN2
DIN3
CM
+24 V
out
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V:n tulo
RS485
RS485
I
U
I
U
I
POIS
PÄÄLLE
AI1
AI2AORS485-pääte
AUTO MAN
2S1
P1.2
Sovellus
= Monipumppu (useita taajuusmuuttajia)
P3.15.3
Pumpun tunnus
= 2
P3.15.4
Käynn. & tak.kytkentä
= Signaalit kytketty
TAAJUUSMUUNTAJA 1 TAAJUUSMUUNTAJA 2 TAAJUUSMUUNTAJA 3
PIKAOPAS VACON · 49
Kuva 19: Usean taajuusmuuttajan monipumppujärjestelmän kytkentäkaavio, esimerkki 1B
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
+ -
0
P
I
2
4
1
3
TAAJUUSMUUTTAJA 3
VACON 100 FLOW
KAKSIJOHDINLÄHETIN
PAINEANTURI 3
Referenssijännite
EI KÄYTÖSSÄ (0–10 V)
LÄHTÖTAAJUUS (0–20 mA)
PID-TAK.KYTKENTÄ (4–20 mA)
24 V:n apujännitelähtö
24 V:n apujännitetulo
I/O maa
I/O maa
VIAN KUITTAUS
ULKOINEN VIKA
KÄY ETEEN
Yhteinen tuloille DI1–DI6
Yhteinen tuloille DI1–DI6
24 V:n apujännitelähtö
PUMPUN LUKITUS
(oletuksena ei käytössä)
Taajuusmuuttajien välinen
tietoliikenne (Modbus RTU)
Relelähtö 1
(KÄY)
Relelähtö 2
(VIKA)
Relelähtö 3
(VALMIS)
HUUHTELU
(Käy eteen + huuhtelutaajuus)
PID-ASETUSARVON VALINTA.
(Auki = Paneeli SP1, Kiinni = Paneeli SP2)
DIO:t
KELLUVA
GND
U
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
out
GND
DIN1
DIN2
DIN3
CM
+24 V
out
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V:n tulo
RS485
RS485
I
U
I
U
I
POIS
PÄÄLLE
AI1
AI2AORS485-pääte
AUTO MAN
3S1
P1.2
Sovellus
= Monipumppu (useita taajuusmuuttajia)
P3.15.3
Pumpun tunnus
= 3
P3.15.4
Käynn. & tak.kytkentä
= Signaalit kytketty
TAAJUUSMUUNTAJA 1 TAAJUUSMUUNTAJA 2 TAAJUUSMUUNTAJA 3
VACON · 50 PIKAOPAS
Kuva 20: Usean taajuusmuuttajan monipumppujärjestelmän kytkentäkaavio, esimerkki 1C
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

PIKAOPAS VACON · 51
Kaikkiin taajuusmuuttajiin on kytketty yksi anturi. Järjestelmän korvautuvuustaso on matala,
koska vain taajuusmuuttajat ovat redundantteja.
Jos taajuusmuuttaja vikaantuu, seuraava taajuusmuuttaja alkaa toimia säätölaitteena.
•
Anturivian ilmetessä järjestelmä pysähtyy.
•
Kutakin taajuusmuuttajaa ohjaa erillinen kytkin, jossa on automaatti-, pois- ja
manuaaliasetus.
Liitin 17 kytkee +24 voltin jännitteen taajuusmuuttajien 1 ja 2 välille. Ulkoiset diodit kytketään
liittimien 1 ja 2 välille. Digitaalitulosignaalit toimivat käänteislogiikalla (ON = 0 V).
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13
GND
14
DIN4
15 DIN5
16 DIN6
17
CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B
RS485
21 RO1
22 RO1
23
RO1
24
RO2
25 RO2
26
RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9
DIN2
10 DIN3
11
CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26
RO2
32
RO3
33
RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21 RO1
22 RO1
23 RO1
24
RO2
25 RO2
26
RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
-
+
+ -
0
P
I
2
4
1
3
TAAJUUSMUUTTAJA 1
VACON 100 FLOW
KAKSIJOHDINLÄHETIN
PAINEANTURI 1
Referenssijännite
EI KÄYTÖSSÄ (0–10 V)
LÄHTÖTAAJUUS (0–20 mA)
PID-TAK.KYTKENTÄ (4–20 mA)
24 V:n apujännitelähtö
24 V:n apujännitetulo
I/O maa
I/O maa
VIAN KUITTAUS
ULKOINEN VIKA
KÄY ETEEN
Yhteinen tuloille DI1–DI6
Yhteinen tuloille DI1–DI6
24 V:n apujännitelähtö
PUMPUN LUKITUS
(oletuksena ei käytössä)
Taajuusmuuttajien välinen tietoliikenne
(Modbus RTU)
Relelähtö 1
(KÄY)
Relelähtö 2
(VIKA)
Relelähtö 3
(VALMIS)
HUUHTELU
(Käy eteen + huuhtelutaajuus)
PID-ASETUSARVON VALINTA.
(Auki = Paneeli SP1, Kiinni = Paneeli SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
out
GND
DIN1
DIN2
DIN3
CM
+24 V
out
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V:n tulo
RS485
RS485
AUTO MAN
1S1
DIO:t
KELLUVA
GND
U
I
U
I
U
I
POIS
PÄÄLLE
AI1
AI2
AO
RS485-
pääte
TAAJUUSMUUTTAJA 1
TAAJUUSMUUTTAJA 2
TAAJUUSMUUTTAJA 3
P1.2
P3.15.3
P3.15.4
Sovellus
Pumpun tunnus
Käynn. & tak.kytkentä
= Monipumppu (useita taajuusmuuttajia)
= 1
= Signaalit kytketty
VACON · 52 PIKAOPAS
Kuva 21: Usean taajuusmuuttajan monipumppujärjestelmän kytkentäkaavio, esimerkki 2A
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13
GND
14
DIN4
15 DIN5
16 DIN6
17
CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B
RS485
21 RO1
22 RO1
23
RO1
24
RO2
25 RO2
26
RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9
DIN2
10 DIN3
11
CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26
RO2
32
RO3
33
RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21 RO1
22 RO1
23 RO1
24
RO2
25 RO2
26
RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
-
+
0
2
4
1
3
TAAJUUSMUUTTAJA 2
VACON 100 FLOW
Referenssijännite
EI KÄYTÖSSÄ (0–10 V)
LÄHTÖTAAJUUS (0–20 mA)
PID-TAK.KYTKENTÄ (4–20 mA)
24 V:n apujännitelähtö
24 V:n apujännitetulo
I/O maa
I/O maa
VIAN KUITTAUS
ULKOINEN VIKA
KÄY ETEEN
Yhteinen tuloille DI1–DI6
Yhteinen tuloille DI1–DI6
24 V:n apujännitelähtö
PUMPUN LUKITUS
(oletuksena ei käytössä)
Taajuusmuuttajien välinen tietoliikenne
(Modbus RTU)
Relelähtö 1
(KÄY)
Relelähtö 2
(VIKA)
Relelähtö 3
(VALMIS)
HUUHTELU
(Käy eteen + huuhtelutaajuus)
PID-ASETUSARVON VALINTA.
(Auki = Paneeli SP1, Kiinni = Paneeli SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
out
GND
DIN1
DIN2
DIN3
CM
+24 V
out
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V:n tulo
RS485
RS485
AUTO MAN
2S1
DIO:t
KELLUVA
GND
U
I
U
I
U
I
POIS
PÄÄLLE
AI1
AI2
AO
RS485-
pääte
TAAJUUSMUUTTAJA 1
TAAJUUSMUUTTAJA 2
TAAJUUSMUUTTAJA 3
P1.2
P3.15.3
P3.15.4
Sovellus
Pumpun tunnus
Käynn. & tak.kytkentä
= Monipumppu (useita taajuusmuuttajia)
= 2
= Signaalit kytketty
PIKAOPAS VACON · 53
Kuva 22: Usean taajuusmuuttajan monipumppujärjestelmän kytkentäkaavio, esimerkki 2B
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13
GND
14
DIN4
15 DIN5
16 DIN6
17
CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B
RS485
21 RO1
22 RO1
23
RO1
24
RO2
25 RO2
26
RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9
DIN2
10 DIN3
11
CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26
RO2
32
RO3
33
RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21 RO1
22 RO1
23 RO1
24
RO2
25 RO2
26
RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
-
+
0
2
4
1
3
TAAJUUSMUUTTAJA 3
VACON 100 FLOW
Referenssijännite
EI KÄYTÖSSÄ (0–10 V)
LÄHTÖTAAJUUS (0–20 mA)
PID-TAK.KYTKENTÄ (4–20 mA)
24 V:n apujännitelähtö
24 V:n apujännitetulo
I/O maa
I/O maa
VIAN KUITTAUS
ULKOINEN VIKA
KÄY ETEEN
Yhteinen tuloille DI1–DI6
Yhteinen tuloille DI1–DI6
24 V:n apujännitelähtö
PUMPUN LUKITUS
(oletuksena ei käytössä)
Taajuusmuuttajien välinen tietoliikenne
(Modbus RTU)
Relelähtö 1
(KÄY)
Relelähtö 2
(VIKA)
Relelähtö 3
(VALMIS)
HUUHTELU
(Käy eteen + huuhtelutaajuus)
PID-ASETUSARVON VALINTA.
(Auki = Paneeli SP1, Kiinni = Paneeli SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
out
GND
DIN1
DIN2
DIN3
CM
+24 V
out
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V:n tulo
RS485
RS485
AUTO MAN
3S1
DIO:t
KELLUVA
GND
U
I
U
I
U
I
POIS
PÄÄLLE
AI1
AI2
AO
RS485-
pääte
TAAJUUSMUUTTAJA 1
TAAJUUSMUUTTAJA 2
TAAJUUSMUUTTAJA 3
P1.2
P3.15.3
P3.15.4
Sovellus
Pumpun tunnus
Käynn. & tak.kytkentä
= Monipumppu (useita taajuusmuuttajia)
= 3
= Signaalit kytketty
VACON · 54 PIKAOPAS
Kuva 23: Usean taajuusmuuttajan monipumppujärjestelmän kytkentäkaavio, esimerkki 2C
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

PIKAOPAS VACON · 55
Kummassakin taajuusmuuttajassa on erillinen paineanturi. Järjestelmän korvautuvuustaso
on keskitasoa, koska sekä taajuusmuuttajia että paineantureita on kaksi.
Jos taajuusmuuttaja vikaantuu, toinen taajuusmuuttaja alkaa toimia säätölaitteena.
•
Jos anturi vikaantuu, toinen taajuusmuuttaja (jolla on erillinen anturi) alkaa toimia
•
säätölaitteena.
Kutakin taajuusmuuttajaa ohjaa erillinen kytkin, jossa on automaatti-, pois- ja
manuaaliasetus.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

1
+10V
ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8
DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23
RO1
24 RO2
25 RO2
26 RO2
32 RO3
33
RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9
DIN2
10 DIN3
11 CM
12
+24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18
AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10
DIN3
11 CM
12 +24V out
13
GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30
+24V in
A RS485
B RS485
21 RO1
22
RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Start Signal Only
-
+
-
+
+ -
0
P
I
2
4
1
3
TAAJUUSMUUTTAJA 1
VACON 100 FLOW
KAKSIJOHDINLÄHETIN
PAINEANTURI 1
Referenssijännite
EI KÄYTÖSSÄ (0–10 V)
LÄHTÖTAAJUUS (0–20 mA)
PID-TAK.KYTKENTÄ (4–20 mA)
24 V:n apujännitelähtö
24 V:n apujännitetulo
I/O maa
I/O maa
VIAN KUITTAUS
ULKOINEN VIKA
KÄY ETEEN
Yhteinen tuloille DI1–DI6
Yhteinen tuloille DI1–DI6
24 V:n apujännitelähtö
PUMPUN LUKITUS
(oletuksena ei käytössä)
Taajuusmuuttajien välinen tietoliikenne
(Modbus RTU)
Relelähtö 1
(KÄY)
Relelähtö 2
(VIKA)
Relelähtö 3
(VALMIS)
HUUHTELU
(Käy eteen + huuhtelutaajuus)
PID-ASETUSARVON VALINTA.
(Auki = Paneeli SP1, Kiinni = Paneeli SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
out
GND
DIN1
DIN2
DIN3
CM
+24 V
out
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V:n tulo
RS485
RS485
AUTO MAN
1S1
DIO:t
KELLUVA
GND
U
I
U
I
U
I
POIS
PÄÄLLE
AI1
AI2
AO
RS485-
pääte
TAAJUUSMUUTTAJA 1
TAAJUUSMUUTTAJA 2
TAAJUUSMUUTTAJA 3
P1.2
P3.15.3
P3.15.4
Sovellus
Pumpun tunnus
Käynn. & tak.kytkentä
= Monipumppu (useita taajuusmuuttajia)
= 1
= Signaalit kytketty
VACON · 56 PIKAOPAS
Kuva 24: Usean taajuusmuuttajan monipumppujärjestelmän kytkentäkaavio, esimerkki 3A
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

1
+10V
ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8
DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23
RO1
24 RO2
25 RO2
26 RO2
32 RO3
33
RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9
DIN2
10 DIN3
11 CM
12
+24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18
AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10
DIN3
11 CM
12 +24V out
13
GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30
+24V in
A RS485
B RS485
21 RO1
22
RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Start Signal Only
-
+
-
+
+ -
0
P
I
2
4
1
3
TAAJUUSMUUTTAJA 1
VACON 100 FLOW
KAKSIJOHDINLÄHETIN
PAINEANTURI 1
Referenssijännite
EI KÄYTÖSSÄ (0–10 V)
LÄHTÖTAAJUUS (0–20 mA)
PID-TAK.KYTKENTÄ (4–20 mA)
24 V:n apujännitelähtö
24 V:n apujännitetulo
I/O maa
I/O maa
VIAN KUITTAUS
ULKOINEN VIKA
KÄY ETEEN
Yhteinen tuloille DI1–DI6
Yhteinen tuloille DI1–DI6
24 V:n apujännitelähtö
PUMPUN LUKITUS
(oletuksena ei käytössä)
Taajuusmuuttajien välinen tietoliikenne
(Modbus RTU)
Relelähtö 1
(KÄY)
Relelähtö 2
(VIKA)
Relelähtö 3
(VALMIS)
HUUHTELU
(Käy eteen + huuhtelutaajuus)
PID-ASETUSARVON VALINTA.
(Auki = Paneeli SP1, Kiinni = Paneeli SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
out
GND
DIN1
DIN2
DIN3
CM
+24 V
out
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V:n tulo
RS485
RS485
AUTO MAN
1S1
DIO:t
KELLUVA
GND
U
I
U
I
U
I
POIS
PÄÄLLE
AI1
AI2
AO
RS485-
pääte
TAAJUUSMUUTTAJA 1
TAAJUUSMUUTTAJA 2
TAAJUUSMUUTTAJA 3
P1.2
P3.15.3
P3.15.4
Sovellus
Pumpun tunnus
Käynn. & tak.kytkentä
= Monipumppu (useita taajuusmuuttajia)
= 1
= Signaalit kytketty
PIKAOPAS VACON · 57
Kuva 25: Usean taajuusmuuttajan monipumppujärjestelmän kytkentäkaavio, esimerkki 3B
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

1
+10V
ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8
DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23
RO1
24 RO2
25 RO2
26 RO2
32 RO3
33
RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9
DIN2
10 DIN3
11 CM
12
+24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18
AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10
DIN3
11 CM
12 +24V out
13
GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30
+24V in
A RS485
B RS485
21 RO1
22
RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Start Signal Only
-
+
-
+
0
2
4
1
3
TAAJUUSMUUTTAJA 3
VACON 100 FLOW
Referenssijännite
EI KÄYTÖSSÄ (0–10 V)
LÄHTÖTAAJUUS (0–20 mA)
PID-TAK.KYTKENTÄ (4–20 mA)
24 V:n apujännitelähtö
24 V:n apujännitetulo
I/O maa
I/O maa
VIAN KUITTAUS
ULKOINEN VIKA
KÄY ETEEN
Yhteinen tuloille DI1–DI6
Yhteinen tuloille DI1–DI6
24 V:n apujännitelähtö
PUMPUN LUKITUS
(oletuksena ei käytössä)
Taajuusmuuttajien välinen tietoliikenne
(Modbus RTU)
Relelähtö 1
(KÄY)
Relelähtö 2
(VIKA)
Relelähtö 3
(VALMIS)
HUUHTELU
(Käy eteen + huuhtelutaajuus)
PID-ASETUSARVON VALINTA.
(Auki = Paneeli SP1, Kiinni = Paneeli SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
out
GND
DIN1
DIN2
DIN3
CM
+24 V
out
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V:n tulo
RS485
RS485
AUTO MAN
3S1
DIO:t
KELLUVA
GND
U
I
U
I
U
I
POIS
PÄÄLLE
AI1
AI2
AO
RS485-
pääte
TAAJUUSMUUTTAJA 1
TAAJUUSMUUTTAJA 2
TAAJUUSMUUTTAJA 3
P1.2
P3.15.3
P3.15.4
Sovellus
Pumpun tunnus
Käynn. & tak.kytkentä
= Monipumppu (useita taajuusmuuttajia)
= 3
= Signaalit kytketty
VACON · 58 PIKAOPAS
Kuva 26: Usean taajuusmuuttajan monipumppujärjestelmän kytkentäkaavio, esimerkki 3C
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

PIKAOPAS VACON · 59
Kahteen taajuusmuuttajaan on kytketty yksi yhteinen paineanturi. Järjestelmän
korvautuvuustaso on matala, koska vain taajuusmuuttajat ovat redundantteja.
Jos taajuusmuuttaja vikaantuu, toinen taajuusmuuttaja alkaa toimia säätölaitteena.
•
Anturivian ilmetessä järjestelmä pysähtyy.
•
Kutakin taajuusmuuttajaa ohjaa erillinen kytkin, jossa on automaatti-, pois- ja
manuaaliasetus.
Liitin 17 kytkee +24 voltin jännitteen taajuusmuuttajien 1 ja 2 välille. Ulkoiset diodit kytketään
liittimien 1 ja 2 välille. Digitaalitulosignaalit toimivat käänteislogiikalla (ON = 0 V).
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

+ -
0
P
I
2
4
1
3
TAAJUUSMUUTTAJA 1
VACON 100 FLOW
KAKSIJOHDINLÄHETIN
PAINEANTURI 1
Referenssijännite
EI KÄYTÖSSÄ (0–10 V)
LÄHTÖTAAJUUS (0–20 mA)
PID-TAK.KYTKENTÄ (4–20 mA)
24 V:n apujännitelähtö
24 V:n apujännitetulo
I/O maa
I/O maa
VIAN KUITTAUS
ULKOINEN VIKA
KÄY ETEEN
Yhteinen tuloille DI1–DI6
Yhteinen tuloille DI1–DI6
24 V:n apujännitelähtö
PUMPUN LUKITUS
(oletuksena ei käytössä)
Taajuusmuuttajien välinen tietoliikenne
(Modbus RTU)
Relelähtö 1
(KÄY)
Relelähtö 2
(VIKA)
Relelähtö 3
(VALMIS)
HUUHTELU
(Käy eteen + huuhtelutaajuus)
PID-ASETUSARVON VALINTA.
(Auki = Paneeli SP1, Kiinni = Paneeli SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
out
GND
DIN1
DIN2
DIN3
CM
+24 V
out
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V:n tulo
RS485
RS485
AUTO MAN
1S1
DIO:t
KELLUVA
GND
U
I
U
I
U
I
POIS
PÄÄLLE
AI1
AI2
AO
RS485-
pääte
TAAJUUSMUUTTAJA 1
TAAJUUSMUUTTAJA 2
TAAJUUSMUUTTAJA 3
P1.2
P3.15.3
P3.15.4
Sovellus
Pumpun tunnus
Käynn. & tak.kytkentä
= Monipumppu (useita taajuusmuuttajia)
= 1
= Signaalit kytketty
VACON · 60 PIKAOPAS
Kuva 27: Usean taajuusmuuttajan monipumppujärjestelmän kytkentäkaavio, esimerkki 4A
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

0
2
4
1
3
TAAJUUSMUUTTAJA 2
VACON 100 FLOW
Referenssijännite
EI KÄYTÖSSÄ (0–10 V)
LÄHTÖTAAJUUS (0–20 mA)
PID-TAK.KYTKENTÄ (4–20 mA)
24 V:n apujännitelähtö
24 V:n apujännitetulo
I/O maa
I/O maa
VIAN KUITTAUS
ULKOINEN VIKA
KÄY ETEEN
Yhteinen tuloille DI1–DI6
Yhteinen tuloille DI1–DI6
24 V:n apujännitelähtö
PUMPUN LUKITUS (oletuksena ei käytössä)
Taajuusmuuttajien välinen tietoliikenne
(Modbus RTU)
Relelähtö 1 (KÄY)
Relelähtö 2 (VIKA)
Relelähtö 3 (VALMIS)
HUUHTELU (Käy eteen + huuhtelutaajuus)
PID-ASETUSARVON VALINTA.
(Auki = Paneeli SP1, Kiinni = Paneeli SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 Vref
AI2+
AI1-
AI2+
AI2-
+24 Vout
+24 Vout
GND
DIN1
DIN2
DIN3
CM
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V:n tulo
RS485
RS485
AUTO MAN
2S1
DIO:t
KELLUVA
GND
U
I
U
I
U
I
POIS
PÄÄLLE
AI1
AI2
AO
RS485-
pääte
TAAJUUSMUUTTAJA 1 TAAJUUSMUUTTAJA 2 TAAJUUSMUUTTAJA 3
P1.2
P3.15.3
P3.15.4
Sovellus
Pumpun tunnus
Käynn. & tak.kytkentä
= Monipumppu (useita taajuusmuuttajia)
= 2
= Signaalit kytketty
PIKAOPAS VACON · 61
Kuva 28: Usean taajuusmuuttajan monipumppujärjestelmän kytkentäkaavio, esimerkki 4B
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

0
2
4
1
3
TAAJUUSMUUTTAJA 3
VACON 100 FLOW
Referenssijännite
EI KÄYTÖSSÄ (0–10 V)
LÄHTÖTAAJUUS (0–20 mA)
PID-TAK.KYTKENTÄ (4–20 mA)
24 V:n apujännitelähtö
24 V:n apujännitetulo
I/O maa
I/O maa
VIAN KUITTAUS
ULKOINEN VIKA
KÄY ETEEN
Yhteinen tuloille DI1–DI6
Yhteinen tuloille DI1–DI6
24 V:n apujännitelähtö
PUMPUN LUKITUS
(oletuksena ei käytössä)
Taajuusmuuttajien välinen tietoliikenne
(Modbus RTU)
Relelähtö 1
(KÄY)
Relelähtö 2
(VIKA)
Relelähtö 3
(VALMIS)
HUUHTELU
(Käy eteen + huuhtelutaajuus)
PID-ASETUSARVON VALINTA.
(Auki = Paneeli SP1, Kiinni = Paneeli SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
out
GND
DIN1
DIN2
DIN3
CM
+24 V
out
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V:n tulo
RS485
RS485
AUTO MAN
3S1
DIO:t
KELLUVA
GND
U
I
U
I
U
I
POIS
PÄÄLLE
AI1
AI2
AO
RS485-
pääte
TAAJUUSMUUTTAJA 1
TAAJUUSMUUTTAJA 2
TAAJUUSMUUTTAJA 3
P1.2
P3.15.3
P3.15.4
Sovellus
Pumpun tunnus
Käynn. & tak.kytkentä
= Monipumppu (useita taajuusmuuttajia)
= 3
= Signaalit kytketty
VACON · 62 PIKAOPAS
Kuva 29: Usean taajuusmuuttajan monipumppujärjestelmän kytkentäkaavio, esimerkki 4C
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

PIKAOPAS VACON · 63
Ensimmäiseen taajuusmuuttajaan on kytketty yksi paineanturi. Järjestelmä ei ole
redundantti, koska vain se pysähtyy, jos taajuusmuuttaja tai anturi vikaantuu.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

+ -
P
I
2
1
TAAJUUSMUUTTAJA 1
VACON 100 FLOW
KAKSIJOHDINLÄHETIN
PAINEANTURI 1
Referenssijännite
EI KÄYTÖSSÄ (0–10 V)
LÄHTÖTAAJUUS (0–20 mA)
PID-TAK.KYTKENTÄ (4–20 mA)
24 V:n apujännitelähtö
24 V:n apujännitetulo
I/O maa
I/O maa
VIAN KUITTAUS
ULKOINEN VIKA
KÄY ETEEN
Yhteinen tuloille DI1–DI6
Yhteinen tuloille DI1–DI6
24 V:n apujännitelähtö
PUMPUN LUKITUS
(oletuksena ei käytössä)
Taajuusmuuttajien välinen
tietoliikenne (Modbus RTU)
Relelähtö 1
(KÄY)
Relelähtö 2
(VIKA)
Relelähtö 3
(VALMIS)
HUUHTELU
(Käy eteen + huuhtelutaajuus)
PID-ASETUSARVON VALINTA.
(Auki = Paneeli SP1, Kiinni = Paneeli SP2)
DIO:t
KELLUVA
GND
U
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
out
GND
DIN1
DIN2
DIN3
CM
+24 V
out
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V:n tulo
RS485
RS485
I
U
I
U
I
POIS
PÄÄLLE
AI1
AI2AORS485-pääte
1S1
P1.2
Sovellus
= Monipumppu (useita taajuusmuuttajia)
P3.15.3
Pumpun tunnus
= 1
P3.15.4
Käynn. & tak.kytkentä
= Signaalit kytketty
TAAJUUSMUUNTAJA 1 TAAJUUSMUUNTAJA 2 TAAJUUSMUUNTAJA 3
SEIS
KÄY
JÄRJESTELMÄN
KÄYNNISTYS-
KOMENTO
VACON · 64 PIKAOPAS
Kuva 30: Usean taajuusmuuttajan monipumppujärjestelmän kytkentäkaavio, esimerkki 5A
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

TAAJUUSMUUTTAJA 2
VACON 100 FLOW
Referenssijännite
EI KÄYTÖSSÄ (0–10 V)
LÄHTÖTAAJUUS (0–20 mA)
PID-TAK.KYTKENTÄ (4–20 mA)
24 V:n apujännitelähtö
24 V:n apujännitetulo
I/O maa
I/O maa
VIAN KUITTAUS
ULKOINEN VIKA
KÄY ETEEN
Yhteinen tuloille DI1–DI6
Yhteinen tuloille DI1–DI6
24 V:n apujännitelähtö
PUMPUN LUKITUS
(oletuksena ei käytössä)
Taajuusmuuttajien välinen tietoliikenne
(Modbus RTU)
Relelähtö 1 (KÄY)
Relelähtö 2 (VIKA)
Relelähtö 3 (VALMIS)
HUUHTELU (Käy eteen + huuhtelutaajuus)
PID-ASETUSARVON VALINTA.
(Auki = Paneeli SP1, Kiinni = Paneeli SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 Vref
AI2+
AI1-
AI2+
AI2-
+24 Vout
+24 Vout
GND
DIN1
DIN2
DIN3
CM
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V:n tulo
RS485
RS485
DIO:t
KELLUVA
GND
U
I
U
I
U
I
POIS
PÄÄLLE
AI1
AI2
AO
RS485-
pääte
TAAJUUSMUUTTAJA 1 TAAJUUSMUUTTAJA 2 TAAJUUSMUUTTAJA 3
P1.2
P3.15.3
P3.15.4
Sovellus
Pumpun tunnus
Käynn. & tak.kytkentä
= Monipumppu (useita taajuusmuuttajia)
= 2
= Signaalit kytketty
PIKAOPAS VACON · 65
Kuva 31: Usean taajuusmuuttajan monipumppujärjestelmän kytkentäkaavio, esimerkki 5B
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

TAAJUUSMUUTTAJA 3
VACON 100 FLOW
Referenssijännite
EI KÄYTÖSSÄ (0–10 V)
LÄHTÖTAAJUUS
(0–20 mA)
PID-TAK.KYTKENTÄ (4–20 mA)
24 V:n apujännitelähtö
24 V:n apujännitetulo
I/O maa
I/O maa
VIAN KUITTAUS
ULKOINEN VIKA
KÄY ETEEN
Yhteinen tuloille DI1–DI6
Yhteinen tuloille DI1–DI6
24 V:n apujännitelähtö
PUMPUN LUKITUS
(oletuksena ei käytössä)
Taajuusmuuttajien välinen tietoliikenne
(Modbus RTU)
Relelähtö 1 (KÄY)
Relelähtö 2 (VIKA)
Relelähtö 3 (VALMIS)
HUUHTELU
(Käy eteen + huuhtelutaajuus)
PID-ASETUSARVON VALINTA.
(Auki = Paneeli SP1, Kiinni = Paneeli SP2)
DIO:t
KELLUVA
GND
U
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
ref
AI2+
AI1-
AI2+
AI2-
+24 V
out
GND
DIN1
DIN2
DIN3
CM
+24 V
out
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24 V
:n tulo
RS485
RS485
I
U
I
U
I
POIS
PÄÄLLE
AI1
AI2
AO
RS485-
pääte
TAAJUUSMUUTTAJA 1 TAAJUUSMUUTTAJA 2 TAAJUUSMUUTTAJA 3
P1.2
P3.15.3
P3.15.4
Sovellus
Pumpun tunnus
Käynn. & tak.kytkentä
= Monipumppu (useita taajuusmuuttajia)
= 3
= Signaalit kytketty
VACON · 66 PIKAOPAS
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

PIKAOPAS VACON · 67
Taulukko 11: M1.1 Ohjatut toiminnot
Numero Parametri Min. Maks. Yks. Oletus ID Kuvaus
0 = Ei aktiivinen
1 = Aktiivinen
1.1.1 Ohjatut aset. 0 1 0 1170
1.1.2 Fire Mode -aset. 0 1 0 1672
Voit käynnistää Ohjatut
asetukset ‑toiminnon
valitsemalla arvoksi
Aktiivinen (katso luku
1.3 Ensimmäinen käynnistys).
Voit käynnistää ohjatun
Fire Mode ‑asetustoiminnon valitsemalla
arvoksi Aktiivinen
(katso luku 1.3 Ensim-
mäinen käynnistys).
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 68 PIKAOPAS
Taulukko 12: M1 Nopea käyttöönotto
Numero Parametri Min. Maks. Yks. Oletus ID Kuvaus
0 = Vakio
1.2
Sovellus 0 4 2 212
1 = HVAC
2 = PID-säätö
3 = Multi-Pump (yksi
taajuusmuuttaja)
4 = Multi-Pump
(useita taajuusmuuttajia)
1.3
1.4
1.5
1.6
1.7
1.8
Minimitaa-
juusohje
Maksimitaa-
juusohje
Kiihdytys-
aika 1
Hidastus-
aika 1
Moottorin
virtaraja
Moottorin
tyyppi
0.00 P1.4 Hz 0.0 101
P1.3 320.0 Hz
0.1 3000.0 s 5.0 103
0.1 3000.0 s 5.0 104
IH * 0,1 I
0 2 0 650
S
A
50.0 /
60.0
Vaihte-
lee
102
107
Pienin sallittu taajuusohje.
Suurin sallittu taajuusohje
Määrittää ajan, jonka
kuluessa lähtötaajuus kasvaa nollataajuudesta maksimitaajuuteen.
Määrittää ajan, jonka
kuluessa lähtötaajuus pienenee maksimitaajuudesta nollataajuuteen.
Suurin taajuusmuuttajasta lähtevä moottorin virta.
0 = Induktiomoottori
1 = Kestomagneettimoottori
2 = Reluktanssimoottori
1
1.9
1.10
Moottorin
nimellisjän-
nite
Moottorin
nimellistaa-
juus
Katso arvo Un moottorin arvokilvestä.
Vaihtelee Vaihtelee V
8.0 320.0 Hz
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Vaihte-
lee
50.0 /
60.0
110
111
HUOMAUTUS!
Selvitä, onko moottorin kytkentä kolmio- vai tähtityyppinen.
Katso arvo fn moottorin arvokilvestä.

PIKAOPAS VACON · 69
Taulukko 12: M1 Nopea käyttöönotto
Numero Parametri Min. Maks. Yks. Oletus ID Kuvaus
1.11
1.12
1.13
1.14
Moottorin
nimellisno-
peus
Moottorin
nimellisvirta
Moottorin
tehokerroin
Energian-
käytön opti-
mointi
24 19200 rpm
IH * 0,1 I
0.30 1.00
0 1 0 666
S
A
Vaihte-
lee
Vaihte-
lee
Vaihte-
lee
112
113
120
Katso arvo nn moottorin arvokilvestä.
Katso arvo In moottorin arvokilvestä.
Katso tämä arvo
moottorin arvokilvestä.
Taajuusmuuttaja
etsii mahdollisimman pienen moottorin virran voidakseen
säästää energiaa ja
vähentää moottorin
melua. Käytä tätä
toimintoa esimerkiksi puhallin- ja
pumppuprosesseissa.
0 = Ei käytössä
1 = Käytössä
1.15 Tunnistus 0 2 0 631
1.16
1.17
Käynnistys-
toiminto
Pysäytystoi-
minto
0 1 0 505
0 1 0 506
Tunnistusajo laskee
tai mittaa ne moottorin parametrit, joita
tarvitaan moottorin
ja nopeuden tehokkaaseen säätöön.
0 = Ei käytössä
1 = Pysäytettynä
2 = Pyörii
Moottorin arvokilven
parametrit on asetettava ennen tunnistusajon suorittamista.
0 = Rampilla
1 = Vauhtikäynnistys
0 = Vapaasti pyörien
1 = Rampilla
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 70 PIKAOPAS
Taulukko 12: M1 Nopea käyttöönotto
Numero Parametri Min. Maks. Yks. Oletus ID Kuvaus
Automaatti-
1.18
1.19
1.20
nen vian-
kuittaus
Vaste ulkoi-
seen vikaan
Analogiatulovian vaste
0 1 0 731
0 3 2 701
0 5 0 700
0 = Ei käytössä
1 = Käytössä
0 = Ei käytössä
1 = Hälytys
2 = Vika (pysäytys
pikapysäytystavalla)
3 = Vika (pysäytys
vapaasti pyörien)
0 = Ei käytössä
1 = Hälytys
2 = Hälytys + vian
vakiotaajuus
(P3.9.1.13)
3 = Hälytys + edellinen taajuus
4 = Vika (pysäytys
pikapysäytystavalla)
5 = Vika (pysäytys
vapaasti pyörien)
1.21
Etäohjaus-
paikka
0 1 0 172
Etäohjauspaikan
(Käy/Seis) valinta.
0 = I/O-ohjaus
1 = Kenttäväyläohjaus
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

PIKAOPAS VACON · 71
Taulukko 12: M1 Nopea käyttöönotto
Numero Parametri Min. Maks. Yks. Oletus ID Kuvaus
Taajuusohjelähteen
valinta, kun ohjauspaikaksi on valittu
I/O A.
0 = PC
1 = Vakionopeus 0
2 = Paneelin
ohjearvo
3 = Kenttäväylä
4 = AI1
5 = AI2
6 = AI1 + AI2
7 = PID-ohjearvo
8 = Moottoripotentiometri
11 = Lohkon 1 lähtö
12 = Lohkon 2 lähtö
13 = Lohkon 3 lähtö
14 = Lohkon 4 lähtö
15 = Lohkon 5 lähtö
16 = Lohkon 6 lähtö
17 = Lohkon 7 lähtö
18 = Lohkon 8 lähtö
19 = Lohkon 9 lähtö
20 = Lohkon 10 lähtö
1.22
I/O-ohjearvopaikan A
valinta
1 20 6 117
1.23
1.24
1.25
1.26
1.27
1.28
Paneelin
ohjearvon
valinta
Kenttäväylä-
ohjearvon
valinta
AI1 signaali-
alue
AI2-signaa-
lialue
RO1 toi-
minto
RO2 toi-
minto
1 20 1 121
1 20 2 122
0 1 0 379
0 1 1 390
0 73 2 11001
0 73 3 11004
Parametrilla 1.2
valittu sovellus määrittää oletusarvon.
Katso P1.22.
Katso P1.22.
0 = 0–10 V / 0–20 mA
1 = 2–10 V / 4–20 mA
0 = 0–10 V / 0–20 mA
1 = 2–10 V / 4–20 mA
Katso P3.5.3.2.1.
Katso P3.5.3.2.1.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 72 PIKAOPAS
Taulukko 12: M1 Nopea käyttöönotto
Numero Parametri Min. Maks. Yks. Oletus ID Kuvaus
1.29
1.30
RO3 toi-
minto
AO1 toi-
minto
0 73 1 11007
0 31 2 10050
Katso P3.5.3.2.1.
Katso P3.5.4.1.1.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

PIKAOPAS VACON · 73
Taulukko 13: M1.35 Multi-Pump (useita taajuusmuuttajia)
Indeksi Parametri Min. Maks. Yks. Oletus ID Kuvaus
Jos parametrin
arvo on 100 %, 10
prosentin muutos
virhearvossa muuttaa säätimen lähtöarvoa 10 prosentilla.
Jos parametrin
arvoksi asetetaan
1,00 s, 10 prosentin
muutos virhearvossa muuttaa säätimen lähtöarvoa
10,00 prosentilla
sekunnissa.
Jos parametrin
arvoksi asetetaan
1,00 s, 10 prosentin
muutos virhearvossa 1,00 sekunnin aikana aiheuttaa 10,00 prosentin
muutoksen säätimen lähtöarvossa.
1.35.1
1.35.2
1.35.3
PID-säätimen
vahvistus
PID-säätimen I-
aika
PID-säätimen D-
aika
0.00 100.00 % 100.00 118
0.00 600.00 s 1.00 119
0.00 100.00 s 0.00 1132
1.35.4 Yksikön valinta 1 44 1 1036
1.35.5
1.35.6
1.35.7
1.35.8
1.35.9
Valitun yksikön
minimi
Valitun yksikön
maksimi
Takaisinkytkentä
1, paikka
Asetusarvon 1
lähde
Paneelin asetus-
arvo 1
Vaihtelee Vaihtelee
Vaihtelee Vaihtelee
0 30 2 334
0 32 1 332
Vaihtelee Vaihtelee
Vaihte-
lee
Vaihte-
lee
Vaihte-
lee
0 167
1033
1034
Valitse prosessin
yksikkö. Katso
P3.13.1.4.
Prosessiyksikön
arvo, joka on sama
kuin nolla prosenttia PID-takaisinkytkentäsignaalista.
Prosessiyksikön
arvo, joka on sama
kuin sata prosenttia PID-takaisinkytkentäsignaalista.
Katso P3.13.3.3.
Katso P3.13.2.6.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 74 PIKAOPAS
Taulukko 13: M1.35 Multi-Pump (useita taajuusmuuttajia)
Indeksi Parametri Min. Maks. Yks. Oletus ID Kuvaus
Taajuusmuuttaja
siirtyy lepotilaan,
kun lähtötaajuus
1.35.10
1.35.11 SP1-lepoviive 0 3000 s 0 1017
1.35.12
SP1 Lepotaa-
juusraja
SP1 Havahtumis-
raja
0.0 320.0 Hz 0.0 1016
Vaihtelee Vaihtelee
Vaihte-
lee
Vaihte-
lee
1018
pysyy tämän rajan
alapuolella pidempään kuin parametrin Lepoviive
määrittämän ajan.
0 = Ei käytössä
Aika, joka taajuus
pysyy lepotilarajan
alapuolella, ennen
kuin taajuusmuuttaja pysähtyy.
0 = Ei käytössä
PID-takaisinkytkennän valvonnan
havahtumisraja.
Havahtumisraja 1
käyttää valittuja
prosessiyksikköjä.
0 = Ei käytössä
1.35.13 Multi-Pump-tila 0 2 0 1785
1.35.14
1.35.15 Pumpun tunnus 1 8 1 1500
Pumppujen
määrä
1 8 1 1001
Valitsee monipumpputilan.
0 = Yksi taajuusmuuttaja
1 = Rinnansäätö
2 = Monisäätö
Monipumppujärjestelmässä käytettävien moottorien
(pumppujen tai
puhaltimien) kokonaismäärä.
Taajuusmuuttajan
järjestysnumero
pumppujärjestelmässä. Parametria
käytetään vain rinnansäätö- ja monisäätötiloissa.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

PIKAOPAS VACON · 75
Taulukko 13: M1.35 Multi-Pump (useita taajuusmuuttajia)
Indeksi Parametri Min. Maks. Yks. Oletus ID Kuvaus
Tällä parametrilla
voit valita, kytketäänkö taajuusmuuttajaan käynnistyssignaali tai
Käynnistys- ja
1.35.16
1.35.17 Pumpun lukitus 0 1 1 1032
takaisinkytkentä-
signaalit
0 2 1 1782
PID-takaisinkytkentäsignaali.
0 = Ei kytketty
1 = Vain käynnistyssignaali kytketty
2 = Kumpikin signaali kytketty
Ottaa lukitukset
käyttöön tai poistaa
ne käytöstä. Lukitukset kertovat järjestelmälle, onko
moottori kytketty
vai ei.
1.35.18
Vuorottelu 0 1 1 1027
1.35.19
1.35.20 Vuorotteluväli 0.0 3000.0 h 48.0 1029
Vuorotteleva
pumppu
0 1 1 1028
0 = Ei käytössä
1 = Käytössä
Ota käynnistysjärjestyksen ja moottorien prioriteetin
kierto käyttöön tai
poista se käytöstä.
0 = Ei käytössä
1 = Käytössä (aikaväli)
0 = Apupumppu
1 = Kaikki pumput
Vuorottelu alkaa
tämän parametrin
määrittämän ajan
kuluttua. Vuorottelu alkaa kuitenkin
vain, jos kapasiteetti on parametrien P1.35.23 ja
P1.35.24 määrittämän tason alapuolella.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 76 PIKAOPAS
Taulukko 13: M1.35 Multi-Pump (useita taajuusmuuttajia)
Indeksi Parametri Min. Maks. Yks. Oletus ID Kuvaus
1.35.21 Vuorottelupäivät 0 127 1786
1.35.22
1.35.23
1.35.24
1.35.25 Säätöalue 0 100 % 10 1097
Vuorottelun kel-
lonaika
Vuorottelu: raja-
arvo) arvo.
Vuorottelu: Pum-
pun raja-arvo
Aika 1787
0.00 P3.3.1.2 Hz 25:00 1031
1 6 1030
Alue: Maanantai–
sunnuntai
Alue: 00:00:00–
23:59:59
Nämä parametrit
määrittävät tason,
jonka alapuolella
kapasiteetin on
pysyttävä, jotta
vuorottelu voi
käynnistyä.
Kun takaisinkytkentäarvo on alueella 4,5–5,5 bar,
moottori pysyy kytkettynä.
Asetusarvo = 5 bar
Säätöalue = 10 %
Kun takaisinkytkentäarvo on alueella 4,5–5,5 bar,
moottori pysyy kytkettynä.
1.35.26 Säätöal. viive 0 3600 s 10 1098
1.35.27
1.35.28
Vakiotuotantono-
peus
Pumpun 1 luki-
tus
0 100 % 100 1513
DigIN
paikka
0.1
426
Aika, jonka jälkeen
pumppuja lisätään
tai poistetaan, kun
takaisinkytkentäarvo on säätöalueen ulkopuolella.
Määrittää vakionopeuden, johon
pumppu lukittuu,
kun pumppu saavuttaa maksiminopeuden. Seuraava
pumppu alkaa säätelyn monisäätötilassa.
OPEN = Ei aktiivinen
CLOSED = Aktiivinen
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

PIKAOPAS VACON · 77
Taulukko 13: M1.35 Multi-Pump (useita taajuusmuuttajia)
Indeksi Parametri Min. Maks. Yks. Oletus ID Kuvaus
Määrittää taajuu-
1.35.29 Huuhteluohje
Ohjearvon
maksimi
Ohjearvon
maksimi
Hz 50.00 1239
sohjeen, kun huuhtelutoiminto aktivoituu.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 78 OHJATUT TOIMINNOT
2 OHJATUT TOIMINNOT
2.1 OHJATTU VAKIOSOVELLUSTOIMINTO
Ohjattu sovellustoiminto opastaa sovellukseen liittyvien parametriarvojen asettamisessa.
Aloita ohjattu vakiosovellustoiminto asettamalla paneelista parametrin P1.2 (Sovellus) (ID
212) arvoksi Vakio.
HUOMAUTUS!
Jos ohjattu vakiosovellustoiminto aloitetaan Ohjatut asetukset ‑toiminnosta,
toiminto siirtyy suoraan vaiheeseen 11.
Aseta parametrin P3.1.2.2. (Moottorin tyyppi) arvo
1
vastaamaan moottorin arvokilven tietoja.
Kestomagneettimoottori
Induktiomoottori
Reluktanssimoottori
2
3
4
5
Aseta parametrin P3.1.1.1. (Moottorin nimellisjännite) arvo vastaamaan moottorin arvokilven tietoja.
Aseta parametrin P3.1.1.2. (Moottorin nimellistaajuus) arvo vastaamaan moottorin arvokilven tietoja.
Aseta parametrin P3.1.1.3. (Moottorin nimellisnopeus) arvo vastaamaan moottorin arvokilven tietoja.
Aseta parametrin P3.1.1.4. (Moottorin nimellisvirta)
arvo vastaamaan moottorin arvokilven tietoja.
Alue: Vaihtelee
Alue: 8.00-320.00 Hz
Alue: 24–19 200 rpm
Alue: Vaihtelee
Vaihe 6 tulee näkyviin vain, jos vaiheessa 1 valittiin Induktiomoottori.
6
7 Aseta parametrin P3.3.1.1 (Minimitaajuusohje) arvo. Alue: 0,00–P3.3.1.2 Hz
8
9 Aseta parametrin P3.4.1.2 (Kiihdytysaika 1) arvo. Alue: 0,1-3000.0 s
10 Aseta parametrin P3.4.1.3 (Hidastuvuusaika 1) arvo. Alue: 0,1-3000.0 s
Aseta parametrin P3.1.1.5 (Moottorin tehokerroin)
arvo.
Aseta parametri P3.3.1.2, Ohjeellinen maksimitaajuus
Alue: 0.30-1.00
Alue: P3.3.1.1–320,00 Hz
Valitse ohjauspaikka, josta taajuusmuuttajalle
11
annetaan käynnistys- ja pysäytyskomennot sekä
taajuusohje.
Ohjattu vakiosovellustoiminto on nyt valmis.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
I/O Riviliitin
Kenttäväylä
Paneeli

OHJATUT TOIMINNOT VACON · 79
2.2 OHJATTU HVAC-SOVELLUSTOIMINTO
Ohjattu sovellustoiminto opastaa sovellukseen liittyvien parametriarvojen asettamisessa.
Aloita ohjattu HVAC-sovellustoiminto asettamalla paneelista parametrin P1.2 (Sovellus) (ID
212) arvoksi HVAC.
Valitse ohjattavan prosessin (tai sovelluksen) tyyppi.
Kompressori
1
Joillakin parametreilla on esiasetetut arvot, jotka määräytyvät vaiheessa 1 tehdyn valinnan
mukaan. Parametrit ja niiden arvot: katso tämän luvun lopussa oleva Taulukko 14.
Puhallin
Pumppu
Muu
2
Aseta parametrin P3.2.11 (Uudelleenkäynnistysviive) arvo.
Alue: 0–20 min
Vaihe 2 tulee näkyviin vain, jos vaiheessa 1 valittiin Kompressori.
Aseta parametrin P3.1.2.2. (Moottorin tyyppi) arvo
3
4
5
6
7
8
vastaamaan moottorin arvokilven tietoja.
Aseta parametrin P3.1.1.1. (Moottorin nimellisjännite) arvo vastaamaan moottorin arvokilven tietoja.
Aseta parametrin P3.1.1.2. (Moottorin nimellistaajuus) arvo vastaamaan moottorin arvokilven tietoja.
Aseta parametrin P3.1.1.3. (Moottorin nimellisnopeus) arvo vastaamaan moottorin arvokilven tietoja.
Aseta parametrin P3.1.1.4. (Moottorin nimellisvirta)
arvo vastaamaan moottorin arvokilven tietoja.
Aseta parametrin P3.1.1.5. (Moottorin tehokerroin)
arvo vastaamaan moottorin arvokilven tietoja.
Kestomagneettimoottori
Induktiomoottori
Reluktanssimoottori
Alue: Vaihtelee
Alue: 8.00-320.00 Hz
Alue: 24–19 200 rpm
Alue: Vaihtelee
Alue: 0.30-1.00
Vaihe 8 tulee näkyviin vain, jos vaiheessa 3 valittiin Induktiomoottori.
9
10
Aseta parametrin P3.3.1.1 (Minimitaajuusohje) arvo. Alue: 0.00-3.3.1.2 Hz
Aseta parametrin P3.3.1.2 (Maksimitaajuusohje)
arvo.
Alue: P3.3.1.1–320,00 Hz
Vaiheet 11 ja 12 tulevat näkyviin vain, jos vaiheessa 1 valittiin Muu.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 80 OHJATUT TOIMINNOT
11 Aseta parametrin P3.4.1.2 (Kiihdytysaika 1) arvo. Alue: 0,1-3000.0 s
12 Aseta parametrin P3.4.1.3 (Hidastusaika 1) arvo. Alue: 0,1-3000.0 s
Seuraavaksi ohjattu toiminto siirtyy sovelluksen määrittämiin vaiheisiin.
Valitse ohjauspaikka (paikka, josta käynnistys- ja
13
pysäytyskomennot sekä taajuusohje annetaan).
I/O Riviliitin
Kenttäväylä
Paneeli
Ohjattu HVAC-sovellustoiminto on nyt valmis.
Taulukko 14: Parametrien tehdasasetukset
Prosessin tyyppi
Numero Parametri
Pumppu Puhallin Kompressori
P3.1.4.1 U/f-suhde Lineaarinen Neliöllinen Lineaarinen
P3.2.4 Käynnistystoiminto Rampilla Vauhtikäynnistys Rampilla
P3.2.5 Pysäytystoiminto Rampilla Vap. pyörien Rampilla
P3.4.1.2 Kiihtyvyysaika 5.0 s 30.0 s 30 s
P3.4.1.3 Hidastusaika 5.0 s 30.0 s 30 s
2.3 OHJATTU PID-SÄÄTÖSOVELLUSTOIMINTO
Ohjattu sovellustoiminto opastaa sovellukseen liittyvien parametriarvojen asettamisessa.
Aloita ohjattu PID-säätösovellustoiminto asettamalla paneelista parametrin P1.2 (Sovellus)
(ID 212) arvoksi PID-säätö.
HUOMAUTUS!
Jos ohjattu sovellustoiminto aloitetaan Ohjatut asetukset ‑toiminnosta, toiminto
siirtyy suoraan vaiheeseen 11.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

OHJATUT TOIMINNOT VACON · 81
Aseta parametrin P3.1.2.2. (Moottorin tyyppi) arvo
1
vastaamaan moottorin arvokilven tietoja.
Kestomagneettimoottori
Induktiomoottori
Reluktanssimoottori
2
3
4
5
Aseta parametrin P3.1.1.1. (Moottorin nimellisjännite) arvo vastaamaan moottorin arvokilven tietoja.
Aseta parametrin P3.1.1.2. (Moottorin nimellistaajuus) arvo vastaamaan moottorin arvokilven tietoja.
Aseta parametrin P3.1.1.3. (Moottorin nimellisnopeus) arvo vastaamaan moottorin arvokilven tietoja.
Aseta parametrin P3.1.1.4. (Moottorin nimellisvirta)
arvo vastaamaan moottorin arvokilven tietoja.
Alue: Vaihtelee
Alue: 8,00–320,00 Hz
Alue: 24–19 200 rpm
Alue: Vaihtelee
Vaihe 6 tulee näkyviin vain, jos vaiheessa 1 valittiin Induktiomoottori.
6
7 Aseta parametrin P3.3.1.1 (Minimitaajuusohje) arvo. Alue: 0,00–P3.3.1.2 Hz
8
9 Aseta parametrin P3.4.1.2 (Kiihdytysaika 1) arvo. Alue: 0,1-3000.0 s
10 Aseta parametrin P3.4.1.3 (Hidastuvuusaika 1) arvo. Alue: 0,1-3000.0 s
Aseta parametrin P3.1.1.5 (Moottorin tehokerroin)
arvo.
Aseta parametri P3.3.1.2, Ohjeellinen maksimitaajuus
Alue: 0.30-1.00
Alue: P3.3.1.1–320,00 Hz
Valitse ohjauspaikka (paikka, josta käynnistys- ja
11
pysäytyskomennot sekä taajuusohje annetaan).
12 Aseta parametrin P3.13.1.4 (Yksikön valinta) arvo. Enemmän kuin yksi valinta
I/O Riviliitin
Kenttäväylä
Paneeli
Jos valintasi on muu kuin %, seuraavat kysymykset tulevat näkyviin. Jos valitset vaihtoehdon
%, ohjattu toiminto siirtyy suoraan vaiheeseen 16.
13
14
15
16
Aseta parametrin P3.13.1.5 (Valitun yksikön minimi)
arvo.
Aseta parametrin P3.13.1.6 (Valitun yksikön maksimi) arvo.
Aseta parametrin P3.13.1.7 (Valitun yksikön desimaalit) arvo.
Aseta parametrin P3.13.3.3 (Takaisinkytkentä 1,
paikka) arvo.
Arvoalue määräytyy vaiheessa 12 tehdyn
valinnan mukaan.
Arvoalue määräytyy vaiheessa 12 tehdyn
valinnan mukaan.
Alue: 0-4
Katso takaisinkytkentäasetukset taulukossa
Taulukko 75 Takaisinkytkentäasetukset.
Jos valitset analogiatulosignaalin, näkyviin tulee vaihe 18. Muussa tapauksessa ohjattu
toiminto siirtyy vaiheeseen 19.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 82 OHJATUT TOIMINNOT
Aseta analogiatulon signaalialue.
17
Aseta parametrin P3.13.1.8 (Eron korjaus alas) arvo.
18
0 = 0–10 V / 0–20 mA
1 = 2–10 V / 4–20 mA
0 = Normaali
1 = Käänteinen
19
Aseta parametrin P3.13.2.6 (Asetusarvon lähde)
arvo.
Katso asetusarvot taulukossa Taulukko 75
Takaisinkytkentäasetukset.
Jos valitset analogiatulosignaalin, näkyviin tulee vaihe 21. Jos valitset jonkin muun
vaihtoehdon, ohjattu toiminto siirtyy vaiheeseen 23.
Jos asetat arvoksi Paneelin asetusarvo 1 tai Paneelin asetusarvo 2, ohjattu toiminto siirtyy
suoraan vaiheeseen 22.
Aseta analogiatulon signaalialue.
20
21
22
Aseta parametrien P3.13.2.1 (Paneelin asetusarvo 1) ja P3.13.2.2 (Paneelin asetusarvo 2) arvot.
Käytä lepotilaa
0 = 0–10 V / 0–20 mA
1 = 2–10 V / 4–20 mA
Määräytyy vaiheessa 20 asetetun arvoalueen
mukaan.
0 = Ei
1 = Kyllä
Jos vastaat kysymykseen 22 Kyllä, seuraavat kolme kysymystä tulevat näkyviin. Jos valitset
vaihtoehdon Ei, ohjattu toiminto on valmis.
23
24 Aseta parametrin P3.13.5.2 SP1 (Lepoviive 1) arvo. Alue: 0-3000 s
25
Aseta parametrin P3.13.5.1 SP1 (Lepotaajuusraja)
arvo.
Aseta parametrin P3.13.5.3 SP1 (Havahtumisraja)
arvo.
Alue: 0.00-320.00 Hz
Arvoalue määräytyy valitun prosessiyksikön
mukaan.
Ohjattu PID-säätösovellustoiminto on nyt valmis.
2.4 OHJATTU YHDEN TAAJUUSMUUTTAJAN MONIPUMPPUSOVELLUSTOIMINTO
Ohjattu sovellustoiminto opastaa sovellukseen liittyvien parametriarvojen asettamisessa.
Aloita ohjattu yhden taajuusmuuttajan monipumppusovellustoiminto asettamalla paneelista
parametrin P1.2 (Sovellus) (ID 212) arvoksi Multi-Pump (yksi taajuusmuuttuja).
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

OHJATUT TOIMINNOT VACON · 83
HUOMAUTUS!
Jos ohjattu sovellustoiminto aloitetaan Ohjatut asetukset ‑toiminnosta, toiminto
siirtyy suoraan vaiheeseen 11.
Aseta parametrin P3.1.2.2. (Moottorin tyyppi) arvo
1
vastaamaan moottorin arvokilven tietoja.
Kestomagneettimoottori
Induktiomoottori
Reluktanssimoottori
2
3
4
5
Aseta parametrin P3.1.1.1. (Moottorin nimellisjännite) arvo vastaamaan moottorin arvokilven tietoja.
Aseta parametrin P3.1.1.2. (Moottorin nimellistaajuus) arvo vastaamaan moottorin arvokilven tietoja.
Aseta parametrin P3.1.1.3. (Moottorin nimellisnopeus) arvo vastaamaan moottorin arvokilven tietoja.
Aseta parametrin P3.1.1.4. (Moottorin nimellisvirta)
arvo vastaamaan moottorin arvokilven tietoja.
Alue: Vaihtelee
Alue: 8.00-320.00 Hz
Alue: 24–19 200 rpm
Alue: Vaihtelee
Vaihe 6 tulee näkyviin vain, jos vaiheessa 1 valittiin Induktiomoottori.
6
7 Aseta parametrin P3.3.1.1 (Minimitaajuusohje) arvo. Alue: 0,00–P3.3.1.2 Hz
8
9 Aseta parametrin P3.4.1.2 (Kiihdytysaika 1) arvo. Alue: 0,1-3000.0 s
10 Aseta parametrin P3.4.1.3 (Hidastuvuusaika 1) arvo. Alue: 0,1-3000.0 s
Aseta parametrin P3.1.1.5 (Moottorin tehokerroin)
arvo.
Aseta parametri P3.3.1.2, Ohjeellinen maksimitaajuus
Alue: 0.30-1.00
Alue: P3.3.1.1–320,00 Hz
Valitse ohjauspaikka (paikka, josta käynnistys- ja
11
pysäytyskomennot sekä taajuusohje annetaan).
12 Aseta parametrin P3.13.1.4 (Yksikön valinta) arvo. Enemmän kuin yksi valinta
I/O Riviliitin
Kenttäväylä
Paneeli
Jos valintasi on muu kuin %, seuraavat kolme vaihetta tulevat näkyviin. Jos valitset
vaihtoehdon %, ohjattu toiminto siirtyy suoraan vaiheeseen 16.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 84 OHJATUT TOIMINNOT
13
14
15
16
Aseta parametrin P3.13.1.5 (Valitun yksikön minimi)
arvo.
Aseta parametrin P3.13.1.6 (Valitun yksikön maksimi) arvo.
Aseta parametrin P3.13.1.7 (Valitun yksikön desimaalit) arvo.
Aseta parametrin P3.13.3.3 (Takaisinkytkentä 1,
paikka) arvo.
Arvoalue määräytyy vaiheessa 12 tehdyn
valinnan mukaan.
Arvoalue määräytyy vaiheessa 12 tehdyn
valinnan mukaan.
Alue: 0-4
Katso takaisinkytkentäasetukset taulukossa
Taulukko 75 Takaisinkytkentäasetukset.
Jos valitset analogiatulosignaalin, näkyviin tulee vaihe 17. Muussa tapauksessa ohjattu
toiminto siirtyy vaiheeseen 18.
Aseta analogiatulon signaalialue.
17
18
19
Aseta parametrin P3.13.1.8 (Eron korjaus alas) arvo.
Aseta parametrin P3.13.2.6 (Asetusarvon lähde)
arvo.
0 = 0–10 V / 0–20 mA
1 = 2–10 V / 4–20 mA
0 = Normaali
1 = Käänteinen
Katso asetusarvot taulukossa Taulukko 74
Asetusarvon asetukset.
Jos valitset analogiatulosignaalin, näkyviin tulee ensin vaihe 20 ja sitten vaihe 22. Jos valitset
jonkin muun vaihtoehdon, ohjattu toiminto siirtyy vaiheeseen 21.
Jos asetat arvoksi Paneelin asetusarvo 1 tai Paneelin asetusarvo 2, ohjattu toiminto siirtyy
suoraan vaiheeseen 22.
Aseta analogiatulon signaalialue.
20
21
22
Aseta parametrien P3.13.2.1 (Paneelin asetusarvo 1) ja P3.13.2.2 (Paneelin asetusarvo 2) arvot.
Käytä lepotilaa
0 = 0–10 V / 0–20 mA
1 = 2–10 V / 4–20 mA
Määräytyy vaiheessa 19 asetetun arvoalueen
mukaan.
0 = Ei
1 = Kyllä
Jos annat vaiheessa 22 arvon Kyllä, seuraavat kolme vaihetta tulevat näkyviin. Jos annat
arvon Ei, ohjattu toiminto siirtyy vaiheeseen 26.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

OHJATUT TOIMINNOT VACON · 85
23
24 Aseta parametrin P3.13.5.2 SP1 (Lepoviive 1) arvo. Alue: 0-3000 s
25
26 Aseta parametrin P3.15.2 (Pumppujen määrä) arvo. Alue: 1-8
27
28
Aseta parametrin P3.13.5.1 SP1 (Lepotaajuusraja)
arvo.
Aseta parametrin P3.13.5.3 SP1 (Havahtumisraja)
arvo.
Aseta parametrin P3.15.5 (Pumpun lukitus) arvo.
Aseta parametrin P3.15.6 (Vuorottelu) arvo.
Alue: 0.00-320.00 Hz
Arvoalue määräytyy valitun prosessiyksikön
mukaan.
0 = Ei käytössä
1 = Käytössä
0 = Ei käytössä
1 = Käytössä (aikaväli)
2 = Käytössä (reaaliaika)
Jos asetat vuorotteluparametrin arvoksi Käytössä (aikaväli tai reaaliaika), näkyviin tulevat
vaiheet 29–34. Jos asetat vuorotteluparametrin arvoksi Ei käytössä, ohjattu toiminto siirtyy
suoraan vaiheeseen 35.
Aseta parametrin P3.15.7 (Vuorottelevat pumput)
29
arvo.
0 = Apupumput
1 = Kaikki pumput
Vaihe 30 tulee näkyviin vain, jos asetat vaiheessa 28 vuorotteluparametrin arvoksi Käytössä
(aikaväli).
30
Aseta parametrin P3.15.8 (Vuorotteluväli) arvo. Alue: 0–3 000 h
Vaiheet 31 ja 32 tulevat näkyviin vain, jos asetat vaiheessa 28 vuorotteluparametrin arvoksi
Käytössä (reaaliaika).
31
32
33
34
35 Aseta parametrin P3.15.13 (Säätöalue) arvo. Alue: 0-100%
36
Aseta parametrin P3.15.9 (Vuorottelupäivät) arvo. Alue: Maanantai–sunnuntai
Aseta parametrin P3.15.10 (Vuorottelun kellonaika)
arvo.
Aseta parametrin P3.15.11 (Vuorottelutaajuuden
raja-arvo) arvo.
Aseta parametrin P3.15.12 (Vuorottelupumpun rajaarvo) arvo.
Aseta parametrin P3.15.14 (Säätöalueen viive) arvo.
Alue: 00:00:00–23:59:59
Alue: P3.3.1.1–P3.3.1.2 Hz
Alue: 1-8
Alue: 0-3600 s
Ohjattu yhden taajuusmuuttajan monipumppusovellustoiminto on nyt valmis.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 86 OHJATUT TOIMINNOT
2.5 OHJATTU USEAN TAAJUUSMUUTTAJAN MONIPUMPPUSOVELLUSTOIMINTO
Ohjattu sovellustoiminto opastaa sovellukseen liittyvien parametriarvojen asettamisessa.
Aloita ohjattu usean taajuusmuuttajan monipumppusovellustoiminto asettamalla paneelista
parametrin P1.2 (Sovellus) (ID 212) arvoksi Multi-Pump (useita taajuusmuuttujia).
HUOMAUTUS!
Jos ohjattu sovellustoiminto aloitetaan Ohjatut asetukset ‑toiminnosta, toiminto
siirtyy suoraan vaiheeseen 11.
Aseta parametrin P3.1.2.2. (Moottorin tyyppi) arvo
1
vastaamaan moottorin arvokilven tietoja.
Kestomagneettimoottori
Induktiomoottori
Reluktanssimoottori
2
3
4
5
Aseta parametrin P3.1.1.1. (Moottorin nimellisjännite) arvo vastaamaan moottorin arvokilven tietoja.
Aseta parametrin P3.1.1.2. (Moottorin nimellistaajuus) arvo vastaamaan moottorin arvokilven tietoja.
Aseta parametrin P3.1.1.3. (Moottorin nimellisnopeus) arvo vastaamaan moottorin arvokilven tietoja.
Aseta parametrin P3.1.1.4. (Moottorin nimellisvirta)
arvo vastaamaan moottorin arvokilven tietoja.
Alue: Vaihtelee
Alue: 8.00-320.00 Hz
Alue: 24–19 200 rpm
Alue: Vaihtelee
Vaihe 6 tulee näkyviin vain, jos vaiheessa 1 valittiin Induktiomoottori.
6
7 Aseta parametrin P3.3.1.1 (Minimitaajuusohje) arvo. Alue: 0,00–P3.3.1.2 Hz
8
9 Aseta parametrin P3.4.1.2 (Kiihdytysaika 1) arvo. Alue: 0,1-3000.0 s
10 Aseta parametrin P3.4.1.3 (Hidastuvuusaika 1) arvo. Alue: 0,1-3000.0 s
Aseta parametrin P3.1.1.5 (Moottorin tehokerroin)
arvo.
Aseta parametri P3.3.1.2, Ohjeellinen maksimitaajuus
Alue: 0.30-1.00
Alue: P3.3.1.1–320,00 Hz
Valitse ohjauspaikka (paikka, josta käynnistys- ja
11
pysäytyskomennot sekä taajuusohje annetaan).
12 Aseta parametrin P3.13.1.4 (Yksikön valinta) arvo. Enemmän kuin yksi valinta
I/O Riviliitin
Kenttäväylä
Paneeli
Jos valintasi on muu kuin %, seuraavat kolme vaihetta tulevat näkyviin. Jos valitset
vaihtoehdon %, ohjattu toiminto siirtyy suoraan vaiheeseen 16.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

OHJATUT TOIMINNOT VACON · 87
13
14
15
16
Aseta parametrin P3.13.1.5 (Valitun yksikön minimi)
arvo.
Aseta parametrin P3.13.1.6 (Valitun yksikön maksimi) arvo.
Aseta parametrin P3.13.1.7 (Valitun yksikön desimaalit) arvo.
Aseta parametrin P3.13.3.3 (Takaisinkytkentä 1,
paikka) arvo.
Arvoalue määräytyy vaiheessa 12 tehdyn
valinnan mukaan.
Arvoalue määräytyy vaiheessa 12 tehdyn
valinnan mukaan.
Alue: 0-4
Katso takaisinkytkentäasetusten taulukko
luvussa Taulukko 74 Asetusarvon asetukset.
Jos valitset analogiatulosignaalin, näkyviin tulee vaihe 17. Muussa tapauksessa ohjattu
toiminto siirtyy vaiheeseen 18.
Aseta analogiatulon signaalialue.
17
18
19
Aseta parametrin P3.13.1.8 (Eron korjaus alas) arvo.
Aseta parametrin P3.13.2.6 (Asetusarvon lähde)
arvo.
0 = 0–10 V / 0–20 mA
1 = 2–10 V / 4–20 mA
0 = Normaali
1 = Käänteinen
Katso asetusarvotaulukko luvussa Taulukko
74 Asetusarvon asetukset.
Jos valitset analogiatulosignaalin, näkyviin tulee ensin vaihe 20 ja sitten vaihe 22. Jos valitset
jonkin muun vaihtoehdon, ohjattu toiminto siirtyy vaiheeseen 21.
Jos asetat arvoksi Paneelin asetusarvo 1 tai Paneelin asetusarvo 2, ohjattu toiminto siirtyy
suoraan vaiheeseen 22.
Aseta analogiatulon signaalialue.
20
21
22
Aseta parametrien P3.13.2.1 (Paneelin asetusarvo 1) ja P3.13.2.2 (Paneelin asetusarvo 2) arvot.
Käytä lepotilaa
0 = 0–10 V / 0–20 mA
1 = 2–10 V / 4–20 mA
Määräytyy vaiheessa 19 asetetun arvoalueen
mukaan.
0 = Ei
1 = Kyllä
Jos annat vaiheessa 22 arvon Kyllä, seuraavat kolme vaihetta tulevat näkyviin. Jos annat
arvon Ei, ohjattu toiminto siirtyy vaiheeseen 26.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 88 OHJATUT TOIMINNOT
23
24 Aseta parametrin P3.13.5.2 SP1 (Lepoviive 1) arvo. Alue: 0-3000 s
25
26
27 Aseta parametrin P3.15.3 (Pumpun tunnus) arvo. Alue: 1-8
28
29 Aseta parametrin P3.15.2 (Pumppujen määrä) arvo. Alue: 1-8
30
31
Aseta parametrin P3.13.5.1 SP1 (Lepotaajuusraja)
arvo.
Aseta parametrin P3.13.5.3 SP1 (Havahtumisraja)
arvo.
Aseta parametrin P3.15.1 (Multi-Pump-tila) arvo.
Aseta parametrin P3.15.4 (Käynnistys ja takaisinkytkentä) arvo.
Aseta parametrin P3.15.5 (Pumpun lukitus) arvo.
Aseta parametrin P3.15.6 (Vuorottelu) arvo.
Alue: 0.00-320.00 Hz
Arvoalue määräytyy valitun prosessiyksikön
mukaan.
Rinnansäätö
Monisäätö
0 = Ei kytketty
1 = Vain käynnistyssignaali kytketty
2 = Kumpikin signaali kytketty
0 = Ei käytössä
1 = Käytössä
0 = Ei käytössä
1 = Käytössä (aikaväli)
2 = Käytössä (viikonpäivät)
Jos asetat vuorotteluparametrin arvoksi Käytössä (aikaväli), näkyviin tulee vaihe 33. Jos
asetat vuorotteluparametrin arvoksi Käytössä (viikonpäivät), näkyviin tulee vaihe 34. Jos
asetat vuorotteluparametrin arvoksi Ei käytössä, ohjattu toiminto siirtyy suoraan
vaiheeseen 36.
Aseta parametrin P3.15.7 (Vuorottelevat pumput)
32
arvo.
0 = Apupumput
1 = Kaikki pumput
Vaihe 33 tulee näkyviin vain, jos asetat vaiheessa 31 vuorotteluparametrin arvoksi Käytössä
(aikaväli).
33
Aseta parametrin P3.15.8 (Vuorotteluväli) arvo. Alue: 0–3 000 h
Vaiheet 34 ja 35 tulevat näkyviin vain, jos asetat vaiheessa 31 vuorotteluparametrin arvoksi
Käytössä (viikonpäivät).
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

OHJATUT TOIMINNOT VACON · 89
34 Aseta parametrin P3.15.9 (Vuorottelupäivät) arvo. Alue: Maanantai–sunnuntai
35
36 Aseta parametrin P3.15.13 (Säätöalue) arvo. Alue: 0-100%
37
Aseta parametrin P3.15.10 (Vuorottelun kellonaika)
arvo.
Aseta parametrin P3.15.14 (Säätöalueen viive) arvo.
Alue: 00:00:00–23:59:59
Alue: 0-3600 s
Ohjattu usean taajuusmuuttajan monipumppusovellustoiminto on nyt valmis.
2.6 OHJATTU FIRE MODE -ASETUSTOIMINTO
Voit aloittaa ohjatun Fire Mode ‑asetustoiminnon valitsemalla nopean käyttöönoton valikossa
parametrin 1.1.2 arvoksi Aktiivinen.
HUOMIO!
Ennen kuin jatkat, lue salasanoja ja takuuta koskevat tiedot luvusta 10.18 Fire Mode.
1
Aseta parametrin P3.17.2 (Fire Mode ‑taajuuden
lähde) arvo.
Jos asetat muun arvon kuin Fire Mode -taajuus, ohjattu toiminto siirtyy suoraan vaiheeseen 3.
Enemmän kuin yksi valinta
2
3
Aseta parametrin P3.17.3 (Fire Mode ‑taajuus) arvo. Alue: vaihtelee
Aktivoi signaali koskettimen avautuessa tai sulkeutuessa.
0 = Avoin kosketin
1 = Suljettu kosketin
Jos asetat vaiheessa 3 arvoksi Avoin kosketin, ohjattu toiminto siirtyy suoraan vaiheeseen 5.
Jos asetat arvoksi Suljettu kosketin, vaihetta 5 ei tarvita.
Aseta parametrien P3.17.4 (Aktivoi Fire Mode AUKI)
4
5
6
ja P3.17.5 (Aktivoi Fire Mode KIINNI) arvot.
Aseta parametrin P3.17.6 (Fire Mode taakse) arvo. Valitse digitaalitulo, joka ottaa Fire Mode
Aseta parametrin P3.17.1 (Fire Mode ‑salasana)
arvo.
Valitse digitaalitulo, joka ottaa Fire Mode
‑tilan käyttöön. Katso myös luku 10.6.1 Digi-
taali- ja analogiatulojen ohjelmointi.
‑tilan käänteisen suunnan käyttöön.
DigIN paikka 0.1 = Eteen
DigIN paikka 0.2 = Taakse
Aseta Fire Mode ‑toiminnon käyttöönoton
edellyttämä salasana.
1234 = Salli testitila
1002 = Salli Fire Mode -tila
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 90 OHJATUT TOIMINNOT
Ohjattu Fire Mode ‑asetustoiminto on nyt valmis.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

KÄYTTÖLIITTYMÄT VACON · 91
3 KÄYTTÖLIITTYMÄT
3.1 SIIRTYMINEN PANEELISSA
Taajuusmuuttajan tiedot on järjestetty valikkoihin ja alavalikkoihin. Voit siirtyä valikoiden
välillä paneelin ylä- ja alanuolipainikkeilla. Voit avata ryhmän tai kohteen painamalla OKpainiketta. Voit siirtyä takaisin edelliselle tasolle painamalla Back/Reset-painiketta.
Paneelissa näkyy nykyinen valikkosijaintisi, esimerkiksi M3.2.1. Näet myös nykyisen sijainnin
ryhmän tai kohteen nimen.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

Päävalikko
Alivalikot Alivalikot Alivalikot
Päävalikko Päävalikko
M2
Valvonta
M1 Nopea
käyttöönotto
M1.1 Ohjatut toiminnot
(sisältö vaihtelee parametrin
P1.2 (Sovellus) valinnan mukaan)
M2.1 Monivalvonta
M3.1
Moottoriasetukset
M3.2 Käynnistys/
Pysäytysasetukset
M3.3 Ohjearvot
M3.4
Rampit ja jarrut
M3.5
I/O-konfiguraatio
M3.6
KV kartoitus
M3.10 Automaattinen
viankuittaus
M3.11 Sovelluksen
asetukset
M3.12
Ajastintoiminnot
M3.19 Lohkojen
ohjelmointi
M3.13 PID-säädin
M3.14 Ulkoinen
PID-säädin
M3.15 Monipumppu
M3.16 Huoltolaskurit
M3.17 Fire Mode
M3.21
Pumpun ohjaus
M3.18 Moottorin
esilämmitys
M3.7 Estotaajuudet
M3.8 Valvonnat
M3.9 Suojaukset
M2.2 Trendikäyrä
M2.3 Perus
M2.4 I/O
M2.5
Lämpötilatulot
M2.6Lisävalvonnat/
kehittyneet
M2.7
Ajastintoiminnot
M2.8 PID-säädin
M2.9
Ulkoinen PID-säädin
M2.10 Monipumppu
M2.11 Huoltolaskuri
M2.12
Kenttäväylädata
M3
Parametrit
M8
Käyttäjäryhmät
M7
Suosikit
M4 Viat
ja tiedot
M5 I/O ja
laitteisto
M6
Käyttöasetukset
M4.4 Laskurit
M4.5 Väliaikalaskurit
M4.6
Ohjelmistotiedot
M5.1 Perus I/O
M5.2–M5.4
Paikat C, D, E
M5.5 Reaaliaika
M5.6 Tehoyksikön
asetukset
M5.8 RS-485
M5.9 Ethernet
M6.1 Kielivalinnat
M6.5
Parametrien aut.tall.
M6.6
Parametrien vertailu
M6.7
Taajuusmuutt. nimi
M8.1 Käyttäjäryhmä
M8.2 Käyttäjäkoodi
VACON · 92 KÄYTTÖLIITTYMÄT
Kuva 32: Taajuusmuuttajan perusvalikkorakenne.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

STOP
READY I/O
Main Menu
A B C D E
F
H
G
Quick Setup
( 17 )
Monitor
( 5 )
Parameters
( 12 )
M1ID:
STOP
READY
I/O
Rem Control Place
I/O Control
KeypadStopButton
Yes
Start Function
Ramping
Start / Stop Setup
M3.2.1ID:172
KÄYTTÖLIITTYMÄT VACON · 93
3.2 GRAAFISEN PANEELIN KÄYTTÖ
Kuva 33: Graafisen paneelin päävalikko
A. Ensimmäinen tilakenttä: SEIS/KÄY
B. Pyörimissuunta
C. Toinen tilakenttä: VALMIS / EI VALMIS /
VIKA
D. Hälytyskenttä: HÄLYTYS/E. Ohjauspaikka: PC / I/O / PANEELI /
KENTTÄVÄYLÄ
F. Sijaintikenttä: parametrin tunnus ja
nykyinen sijainti valikossa
G. Valittu ryhmä tai kohde: avaa painamalla
OK-painiketta
H. Kohteiden lukumäärä ryhmässä
3.2.1 ARVOJEN MUOKKAAMINEN
Graafisessa paneelissa on kaksi toimintatapaa kohteen arvon muokkaamiseen.
Yleensä parametrilla voi olla vain yksi arvo. Valitse arvo tekstiarvojen luettelosta tai
numeroarvojen alueelta.
PARAMETRIN TEKSTIARVON MUUTTAMINEN
1 Etsi parametri nuolipainikkeilla.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

STOP
READY
I/O
Rem Control Place
M3.2.1ID:
Edit
Help
Add to favourites
STOP
READY
I/O
Rem Control Place
M3.2.1ID:
FieldbusCTRL
I/O Control
STOP
READY
I/O
Frequency Ref
P3.3.1.1ID:101
MaxFreqReference
0.00 Hz
MinFreqReference
50.00 Hz
PosFreqRefLimit
320.00 Hz
STOP
READY
I/O
MinFreqReference
P3.3.1.1ID:101
0.00 Hz
Min: 0.00Hz
Max: 50.00Hz
VACON · 94 KÄYTTÖLIITTYMÄT
2 Siirry muokkaustilaan ja paina OK-painiketta kaksi
kertaa tai paina oikeaa nuolipainiketta.
3 Aseta uusi arvo ylä- tai alanuolipainikkeella.
4 Vahvista muutos painamalla OK-painiketta. Voit
peruuttaa muutoksen painamalla Back/Resetpainiketta.
NUMEROARVOJEN MUOKKAAMINEN
1 Etsi parametri nuolipainikkeilla.
2 Siirry muokkaustilaan.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

STOP
READY
I/O
MinFreqReference
P3.3.1.1ID:101
00.00 Hz
Min: 0.00Hz
Max: 50.00Hz
STOP
READY
I/O
MinFreqReference
P3.3.1.1ID:101
11.00 Hz
Min: 0.00Hz
Max: 50.00Hz
STOP
READY
I/O
P3.12.1.3ID:1466
Interval 1
00:00:00
00:00:00
ON Time
OFF Time
Days
0
A
KÄYTTÖLIITTYMÄT VACON · 95
3 Jos arvo on numeroarvo, siirry numeroiden välillä
vasemmalla ja oikealla nuolipainikkeella. Muuta
numeroa ylä- tai alanuolipainikkeella.
4 Vahvista muutos painamalla OK-painiketta. Voit
peruuttaa muutoksen palaamalla edelliselle tasolle
Back/Reset-painikkeella.
USEIDEN ARVOJEN VALITSEMINEN
Joillekin parametreille voi valita useita arvoja. Valitse kunkin tarvittavan arvon valintaruutu.
1 Paikanna parametri. Paneelissa näkyy symboli, kun
valintaruudun voi valita.
A. Valintaruudun valintamerkki.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

STOP
READY
I/O
M 3.12.1.3.1ID:
Days
Monday
Tuesday
Wednesday
Thursday
Friday
Sunday
STOP
READY
I/O
M 3.12.1.3.1ID:
Days
Monday
Tuesday
Wednesday
Thursday
Friday
Sunday
VACON · 96 KÄYTTÖLIITTYMÄT
2 Voit siirtyä arvoluettelossa ylä- ja
alanuolipainikkeilla.
3 Voit lisätä arvon valintaan valitsemalla arvon
vieressä olevan ruudun oikealla nuolipainikkeella.
3.2.2 VIAN KUITTAAMINEN
Voit kuitata vian kuittauspainikkeella tai Kuittaa viat ‑parametrilla. Katso kohdan 11.1 Vika
tulee näkyviin ohjeet.
3.2.3 FUNCT-PAINIKE
FUNCT-painikkeella voidaan suorittaa neljä toimintoa:
ohjaussivun avaaminen
•
siirtyminen paikallisen ohjauspaikan ja etäohjauspaikan välillä
•
pyörimissuunnan vaihtaminen
•
parametrin arvon nopea muuttaminen.
•
Ohjauspaikan valinta määrittää, mistä taajuusmuuttaja ottaa käynnistys- ja
pysäytyskomennot. Kaikilla ohjauspaikoilla on parametri taajuusohjelähteen valintaan.
Paikallinen ohjauspaikka on aina laitteen paneeli. Etäohjauspaikka voi olla riviliitin (I/O) tai
kenttäväylä. Nykyinen ohjauspaikka näkyy paneelin tilarivillä.
Etäohjauspaikaksi voidaan valita I/O A, I/O B tai kenttäväylä. I/O A:lla ja kenttäväylällä on alin
prioriteetti. Voit valita ne parametrilla P3.2.1 (Etäohjauspaikka). I/O B voi ohittaa
etäohjauspaikat I/O ja Kenttäväylä digitaalitulon avulla. Voit valita digitaalitulon parametrin
P3.5.1.7 (Pakota ohjaus I/O B) avulla.
Kun paikallisohjaus on käytössä, ohjauspaikkana on aina paneeli. Paikallisohjaus ohittaa
etäohjauksen. Kun esimerkiksi etäohjaus on käytössä, parametri P3.5.1.7 ohittaa
ohjauspaikan digitaalitulon avulla ja valitset paikallisohjauksen, ohjauspaikaksi tulee paneeli.
Voit siirtyä paikallisohjauksesta etäohjaukseen ja päinvastoin FUNCT-painikkeella tai
parametrilla P3.2.2 (Paik/kauko).
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

STOP
READY Keypad
ID: M1
Main Menu
Monitor
( 12 )
( 21 )
( 6 )
Parameters
Diagnostics
STOP
READY Keypad
ID:1805
Choose action
Control page
Change direction
Local/Remote
STOP
READY Keypad
ID:211
Local/Remote
Remote
Local
STOP
READY I/O
ID: M1
Main Menu
( 21 )
( 6 )
Parameters
( 12 )
Monitor
Diagnostics
KÄYTTÖLIITTYMÄT VACON · 97
OHJAUSPAIKAN MUUTTAMINEN
1 Paina FUNCT-painiketta missä tahansa
valikkorakenteen kohdassa.
2 Voit valita paikallisen ohjauksen tai etäohjauksen
ylä- tai alanuolipainikkeella. Paina OK-painiketta.
3 Valitse paikallinen ohjaus tai etäohjaus painamalla
ylä- tai alanuolipainiketta uudelleen. Vahvista
valinta painamalla OK-painiketta.
4 Jos siirryit etäohjauspaikasta paikalliseen
ohjaukseen (paneeliin), sinun on annettava
paneelin ohjearvo.
Valinnan jälkeen paneeliin tulee näkyviin sama valikkorakenteen sijainti, joka siinä oli ennen
FUNCT-painikkeen painamista.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

STOP
READY I/O
Main Menu
( 21 )
( 6 )
Parameters
( 12 )
Monitor
Diagnostics
M1ID:
STOP
READY Keypad
ID:1805
Choose action
Control page
Change direction
Local/Remote
STOP
READY Keypad
ID: 184
Keypad Reference
0.00Hz
Output Frequency
Motor Current
Motor Torque
Motor Power
0.00Hz
0.00A
0.00%
0.00%
STOP
READY Keypad
ID: 168
Keypad Reference
0.00Hz
Output Frequency
Motor Current
Motor Torque
Motor Power
0.00Hz
0.00A
0.00%
0.00%
VACON · 98 KÄYTTÖLIITTYMÄT
OHJAUSSIVUN AVAAMINEN
Tärkeimpiä arvoja on helppo valvoa ohjaussivulla.
1 Paina FUNCT-painiketta missä tahansa
valikkorakenteen kohdassa.
2 Valitse ohjaussivu ylä- tai alanuolipainikkeella.
Avaa sivu OK-painikkeella. Ohjaussivu avautuu.
3 Jos käytät paikallista ohjauspaikkaa ja
paneeliohjearvoa, voit määrittää
parametrin P3.3.1.8 (Paneelin ohjearvo) painamalla
OK-painiketta.
4 Voit muuttaa arvoa ylä- ja alanuolipainikkeilla.
Vahvista muutos painamalla OK-painiketta.
3
Lisätietoja paneelin ohjearvosta on kohdassa 5.3 Ryhmä 3.3: Viittaukset. Jos käytössä on jokin
toinen ohjauspaikka tai ohjearvo, paneelissa näkyy taajuusohje, jota ei voi muokata. Muut
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

STOP
READY I/O
ID: M1
Main Menu
Monitor
( 7 )
Parameters
( 15 )
Diagnostics
( 6 )
RUN
READY Keypad
ID:1805
Choose action
Control page
Change direction
Local/Remote
RUN
READY Keypad
ID:1805
Choose action
Forward
Reverse
KÄYTTÖLIITTYMÄT VACON · 99
sivulla olevat arvot ovat Monivalvonta-arvoja. Voit valita tässä näkyvät arvot (ohjeet ovat
kohdassa 4.1.1 Monivalvonta).
PYÖRIMISSUUNNAN VAIHTAMINEN
Voit vaihtaa moottorin pyörimissuunnan nopeasti FUNCT-painikkeella.
HUOMAUTUS!
Suunnanmuutoskomento näkyy valikossa vain, jos paikallinen ohjauspaikka on
valittuna.
1 Paina FUNCT-painiketta missä tahansa
valikkorakenteen kohdassa.
2 Voit valita Vaihda suunta ‑sivun ylä- tai
alanuolipainikkeella. Paina OK-painiketta.
3 Valitse uusi pyörimissuunta. Nykyinen
pyörimissuunta vilkkuu. Paina OK-painiketta.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

STOP
READY I/O
ID: M1
Main Menu
Monitor
( 7 )
Parameters
( 15 )
Diagnostics
( 6 )
VACON · 100 KÄYTTÖLIITTYMÄT
4 Pyörimissuunta vaihtuu heti, ja paneelissa näkyvä
tilakentän ilmaisinnuoli muuttuu.
PIKAMUOKKAUSTOIMINTO
Pikamuokkaustoiminnolla voit avata haluamasi parametrin nopeasti kirjoittamalla
parametrin tunnuksen.
1 Paina FUNCT-painiketta missä tahansa
valikkorakenteen kohdassa.
2 Valitse Pikamuokkaus ylä- tai alanuolipainikkeella
ja vahvista valinta painamalla OK-painiketta.
3 Kirjoita parametrin tai valvonta-arvon tunnus.
Paina OK-painiketta. Parametrin arvo tulee
näkyviin muokkaustilassa ja valvonta-arvo
valvontatilassa.
3.2.4 PARAMETRIEN KOPIOIMINEN
HUOMAUTUS!
Tämä toiminto on käytettävissä vain graafisessa paneelissa.
Ennen kuin voit kopioida parametreja ohjauspaneelista taajuusmuuttajaan, taajuusmuuttaja
on pysäytettävä.
TAAJUUSMUUTTAJAN PARAMETRIEN KOPIOIMINEN
Tämän toiminnon avulla voit kopioida parametrit taajuusmuuttajasta toiseen.
1 Tallenna parametrit ohjauspaneeliin.
2 Irrota ohjauspaneeli ja liitä se toiseen
taajuusmuuttajaan.
3 Lataa parametrit uuteen taajuusmuuttajaan
paneelin palautuskomennon avulla.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
 Loading...
Loading...