


vacon 100 flow
®
sagedusmuundurid
kasutusjuhend


EESSÕNA VACON · 3
EESSÕNA
DOKUMENDI ÜKSIKASJAD
Dokumendi ID: DPD01523F
Kuupäev: 13.12.2016
Tarkvara versioon: FW0159V016
TEAVE JUHENDI KOHTA
Juhendi autoriõigus kuulub ettevõttele Vacon Ltd. Kõik õigused kaitstud. Juhend võib ette
teatamata muutuda. Nende juhiste originaalkeel on inglise keel.
See kasutusjuhend sisaldab teavet VACON®-i vahelduvvooluajami funktsioonide ja ajami
kasutamise kohta. Kasutusjuhend on sarnase ülesehitusega nagu ajami menüü (peatükid 1
ja 4–8).
1. peatükk. Käivitamise kiirjuhend
Kuidas alustada juhtpaneeli kasutamist.
•
2. peatükk. Viisardid
Rakenduskonfiguratsiooni valimine.
•
Rakenduse kiire seadistamine.
•
Erinevad rakendused koos näidetega.
•
3. peatükk. Kasutajaliidesed
Ekraanitüübid ja kuidas kasutada juhtpaneeli.
•
Personaalarvuti tööriist VACON® Live.
•
Fieldbusi funktsioonid.
•
4. peatükk. Jälgimismenüü
Jälgimisväärtuste andmed.
•
5. peatükk. Parameetrimenüü
Ajami kõikide parameetrite loend.
•
6. peatükk. Diagnostikamenüü
7. peatükk. I/O ja riistvara menüü
8. peatükk. Kasutaja seaded, lemmikud ja kasutaja taseme menüüd
9. peatükk. Jälgimisväärtuste kirjeldused
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
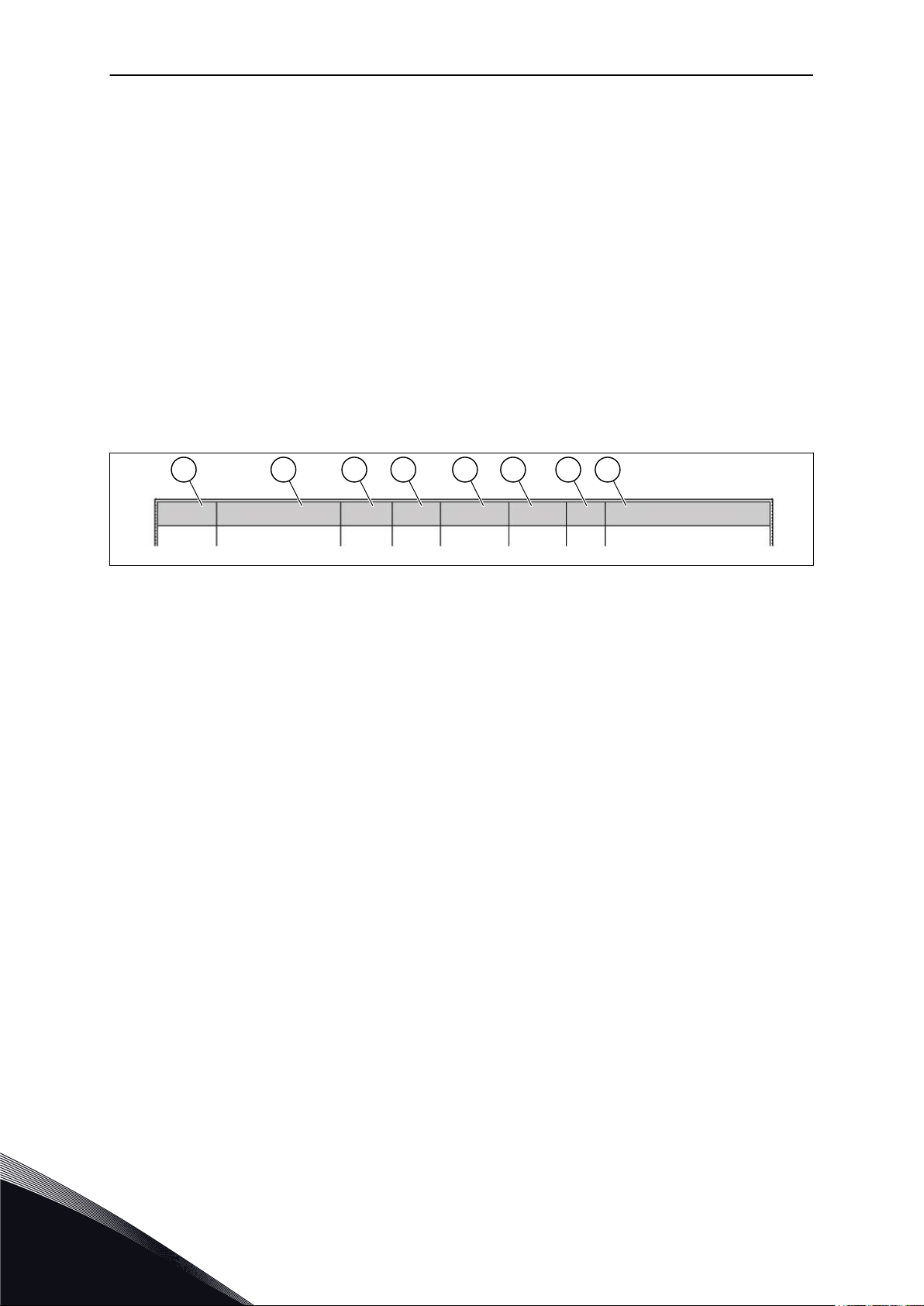
Index Min Max Unit Default ID DescriptionParameter
A B C D E F G H
VACON · 4 EESSÕNA
10. peatükk. Parameetrite kirjeldused
Kuidas kasutada parameetreid.
•
Digitaal- ja analoogsisendi programmeerimine.
•
Rakenduste eriomased funktsioonid.
•
11. peatükk. Vigade jälgimine
Vead ja nende põhjused.
•
Vigade lähtestamine.
•
12. peatükk. Lisa
Rakenduste erinevate vaikeväärtuste andmed.
•
See kasutusjuhend sisaldab arvukalt parameetrite tabeleid. Tabelite mõistmiseks on lisatud
vastavad juhised.
A. Parameetri asukoht menüüs, st
parameetri number.
B. Parameetri nimi.
C. Parameetri miinimumväärtus.
D. Parameetri maksimumväärtus.
E. Parameetri väärtuse mõõtühik.
Mõõtühikut näidatakse siis, kui see on
olemas.
F. Tehases seadistatud väärtus.
G. Parameetri ID-number.
H. Parameetri väärtuste ja/või funktsiooni
lühikirjeldus.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

EESSÕNA VACON · 5
VACON®-I VAHELDUVVOOLUAJAMI FUNKTSIOONID
Iga protsessi jaoks saab valida sobiva rakenduse: standardne, HVAC, PID juhtimine,
•
multipump (üksikajam) või multipump (multiajam). Ajam teostab automaatselt mõned
vajalikud seadistamised, muutes kasutuselevõtu lihtsaks.
Esmase käivitamise ja tulekahjurežiimi viisardid.
•
Iga rakenduse viisardid: standardne, HVAC, PID juhtimine, multipump (üksikajam) ja
•
multipump (multiajam).
Nupp FUNCT, millega saab hõlpsalt vahetada kohaliku juhtimiskoha ja kaugjuhtimiskoha
•
vahel. Kaugjuhtimiskohaks võib olla I/O või fieldbus. Kaugjuhtimiskoha saab valida
parameetriga.
8 eelseadistatud sagedust.
•
Mootori potentsiomeetri funktsioonid.
•
Loputusfunktsioon.
•
2 programmeeritavat rambi aega, 2 järelevalvet ja 3 keelatud sageduste vahemikku.
•
Sunnitud seiskumine.
•
Kontroll-leht kõige olulisemate väärtuste kiireks käsitsemiseks ja jälgimiseks.
•
Fieldbusi andmete kaardistamine.
•
Automaatne lähtestamine.
•
Erinevad eelsoojendusrežiimid kondensatsiooniprobleemide vältimiseks.
•
Maksimaalne väljundsagedus 320 Hz.
•
Reaalajas kella ja taimeri funktsioonid (vajalik on lisavarustusse kuuluva patarei
•
olemasolu). Ajami erinevate funktsioonide kasutamiseks saab programmeerida 3
ajakanalit.
Saadaval on väline PID kontroller. Seda saab kasutada näiteks vahelduvvooluajami
•
sisendi/väljundiga ventiili reguleerimiseks.
Unerežiim, mis lülitab energia säästmiseks ajami automaatselt sisse ja välja.
•
2-tsooniline PID kontroller 2 erineva tagasisidesignaaliga: minimaalne ja maksimaalne
•
juhtimine.
PID kontrolleri 2 seadepunkti allikat. Valiku saab teostada digitaalsisendiga.
•
PID seadepunkti võimenduse funktsioon.
•
Edasiside funktsioon, mis parendab reageerimist protsessi muutustele.
•
Protsessi väärtuse järelevalve.
•
Üksikajamiga ja multiajamiga süsteemide multipumba juhtimine.
•
Multiajamiga süsteemi režiimid Multimaster ja Multifollower.
•
Multipumba süsteem, mis kasutab pumpade automaatseks vahetuseks reaalaja kella.
•
Hoolduse loendur.
•
Pumba juhtimisfunktsioonid: primingu pumba juhtimine, džoki pumba juhtimine, pumba
•
laba automaatne puhastamine, pumba sisendsurve järelevalve ja külmakaitse
funktsioon.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

VACON · 6
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
SISUKORD VACON · 7
SISUKORD
Eessõna
Dokumendi üksikasjad 3
Teave juhendi kohta 3
VACON®-i vahelduvvooluajami funktsioonid 5
1 Kiirseadistuse juhend 12
1.1 Juhtpaneel ja klahvistik 12
1.2 Kuvad 12
1.3 Esmane käivitamine 13
1.4 Rakenduste kirjeldused 14
1.4.1 Standardne ning Küte-ventilatsioon-õhkjahutuse (HVAC) rakendus 14
1.4.2 PID juhtimise rakendus 22
1.4.3 Multipumba (üksikajam) rakendus 30
1.4.4 Multipumba (multiajam) rakendus 43
2 Viisardid 79
2.1 Standardse rakenduse viisard 79
2.2 Küte-ventilatsioon-õhkjahutuse (HVAC) rakenduse viisard 80
2.3 PID juhtimise rakenduse viisard 82
2.4 Multipumba (üksikajam) rakenduse viisard 84
2.5 Multipumba (multiajam) rakenduse viisard 88
2.6 Tulekahjurežiimi viisard 91
3 Kasutajaliidesed 93
3.1 Navigeerimine klahvistikul 93
3.2 Graafilise kuva kasutamine 95
3.2.1 Väärtuste redigeerimine 95
3.2.2 Vea lähtestamine 98
3.2.3 Nupp FUNCT 98
3.2.4 Parameetrite kopeerimine 102
3.2.5 Parameetrite võrdlemine 103
3.2.6 Abitekstid 105
3.2.7 Lemmikute menüü kasutamine 106
3.3 Tekstikuva kasutamine 106
3.3.1 Väärtuste redigeerimine 107
3.3.2 Vea lähtestamine 108
3.3.3 Nupp FUNCT 108
3.4 Menüüpuu 112
3.4.1 Kiirseadistus 113
3.4.2 Monitor 113
3.5 VACON® Live 115
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
VACON · 8 SISUKORD
4 Jälgimismenüü 116
4.1 Rühma jälgimine 116
4.1.1 Mitmikmonitor 116
4.1.2 Tendentsikõver 117
4.1.3 Põhiline 120
4.1.4 I/O 122
4.1.5 Temperatuuri sisendid 122
4.1.6 Lisad ja täppisväärtused 123
4.1.7 Taimeri funktsioonide jälgimine 124
4.1.8 PID kontrolleri jälgimine 126
4.1.9 Välise PID kontrolleri jälgimine 127
4.1.10 Multipumba jälgimine 127
4.1.11 Hoolduse loendurid 129
4.1.12 Fieldbusi protsessi andmete jälgimine 130
4.1.13 Ajami kohandaja jälgimine 131
5 Parameetrite menüü 132
5.1 Rühm 3.1: Mootori sätted 132
5.2 Rühm 3.2: Käivitamise/seiskamise seadistamine 135
5.3 Rühm 3.3: Referentsid 137
5.4 Rühm 3.4: Rampide ja pidurite seadistamine 140
5.5 Rühm 3.5: I/O konfiguratsioon 142
5.6 Rühm 3.6: Fieldbusi andmete kaardistamine 153
5.7 Rühm 3.7: Lubamatud sagedused 154
5.8 Rühm 3.8: Järelevalved 155
5.9 Rühm 3.9: Kaitse 156
5.10 Rühm 3.10: Automaatne lähtestus 162
5.11 Rühm 3.11: Rakenduse seaded 163
5.12 Rühm 3.12: Taimeri funktsioonid 163
5.13 Rühm 3.13: PID kontroller 166
5.14 Rühm 3.14: Väline PID kontroller 181
5.15 Rühm 3.15: Multipump 186
5.16 Rühm 3.16: Hoolduse loendurid 190
5.17 Rühm 3.17: Tulekahjurežiim 191
5.18 Rühm 3.18: Mootori eelsoojenduse parameetrid 192
5.19 Rühm 3.19: Ajami kohandaja 192
5.20 Rühm 3.21: Pumba juhtimine 193
5.21 Rühm 3.23: Täiustatud ühtlustusfilter 196
6 Diagnostikamenüü 197
6.1 Aktiivsed vead 197
6.2 Vigade lähtestamine 197
6.3 Vigade ajalugu 197
6.4 Koguloendurid 197
6.5 Kordusloendurid 199
6.6 Tarkvara info 200
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
SISUKORD VACON · 9
7 I/O ja riistvara menüü 201
7.1 I/O põhimenüü 201
7.2 Valikupaneeli pilud 203
7.3 Reaalajas kell 204
7.4 Jõuallika seaded 204
7.5 Klahvistik 206
7.6 Fieldbus 206
8 Kasutaja seaded, lemmikud ja kasutaja taseme menüüd 207
8.1 Kasutaja seaded 207
8.1.1 Kasutaja seaded 207
8.1.2 Parameetri varundus 208
8.2 Lemmikud 208
8.2.1 Elemendi lisamine lemmikute hulka 209
8.2.2 Elemendi eemaldamine lemmikute hulgast 209
8.3 Kasutaja tasemed 210
8.3.1 Kasutaja tasemete ligipääsukoodi muutmine 211
9 Jälgimisväärtuse kirjeldused 213
9.1 Põhiline 213
9.2 I/O 214
9.3 Temperatuuri sisendid 215
9.4 Lisad ja täppisväärtused 216
9.5 Taimeri funktsioonid 218
9.6 PID kontroller 218
9.7 Väline PID kontroller 219
9.8 Multipump 220
9.9 Hoolduse loendurid 221
9.10 Fieldbusi andmed 221
9.11 Ajami kohandaja 225
10 Parameetrite kirjeldused 227
10.1 Tendentsikõver 227
10.2 Mootori sätted 228
10.2.1 Mootori nimesildi parameetrid 228
10.2.2 Mootori juhtimise parameetrid 228
10.2.3 Mootori piirangud 233
10.2.4 Avatud kontuuri parameetrid 233
10.2.5 I/f käivitamise funktsioon 237
10.3 Käivitamise/seiskamise seadistamine 238
10.4 Referentsid 248
10.4.1 Sagedusetalon 248
10.4.2 Eelhäälestatud sagedused 249
10.4.3 Mootori potentsiomeetri parameetrid 253
10.4.4 Loputuse parameetrid 255
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
VACON · 10 SISUKORD
10.5 Rampide ja pidurite seadistamine 255
10.5.1 Ramp 1 255
10.5.2 Ramp 2 256
10.5.3 Magnetiseerimise alustamine 258
10.5.4 Alalisvoolupidurdus 258
10.5.5 Voogpidurdus 259
10.6 I/O konfiguratsioon 259
10.6.1 Digitaal- ja analoogsisendite programmeerimine 259
10.6.2 Programmeeritavate sisendite vaikefunktsioonid 270
10.6.3 Digitaalsed sisendid 270
10.6.4 Analoogsisendid 276
10.6.5 Digitaalsed väljundid 281
10.6.6 Analoogväljundid 284
10.7 Fieldbusi andmete kaart 288
10.8 Lubamatud sagedused 289
10.9 Järelevalved 292
10.10 Kaitse 292
10.10.1 Üldine 292
10.10.2 Mootori kuumuskaitsed 294
10.10.3 Mootori seiskumiskaitse 298
10.10.4 Alakoormuse (kuiv pump) kaitse 300
10.10.5 Kiirpeatamine 302
10.10.6 AI madal kaitse 303
10.11 Automaatne lähtestus 305
10.12 Rakenduse seaded 307
10.13 Taimeri funktsioonid 307
10.14 PID kontroller 312
10.14.1 Põhiseaded 312
10.14.2 Seadistuspunktid 313
10.14.3 Tagasiside 315
10.14.4 Edasisöötmine 315
10.14.5 Unefunktsioon 317
10.14.6 Tagasiside järelevalve 319
10.14.7 Rõhukao kompenseerimine 321
10.14.8 Pehme täide 322
10.14.9 Sisendrõhu järelevalve 324
10.14.10 Unefunktsioon nõudluse mittetuvastamisel 326
10.15 Väline PID kontroller 328
10.16 Multipumba funktsioon 328
10.16.1 Multipumba (multiajam) kasutuselevõtu kontrollnimekiri 328
10.16.2 Süsteemi konfiguratsioon 330
10.16.3 Blokeeringud 336
10.16.4 Tagasiside anduri ühendamine multipumba süsteemis 336
10.16.5 Ülerõhu järelevalve 345
10.16.6 Pumba tööaja loendurid 346
10.16.7 Täpsemad seaded 348
10.17 Hoolduse loendurid 349
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
SISUKORD VACON · 11
10.18 Tulekahjurežiim 350
10.19 Mootori eelsoojenduse funktsioon 353
10.20 Ajami kohandaja 354
10.21 Pumba juhtimine 354
10.21.1 Automaatne puhastus 354
10.21.2 Džoki pump 357
10.21.3 Primingu pump 359
10.21.4 Blokeerimisvastasuse funktsioon 359
10.21.5 Külmakaitse 360
10.22 Loendurid 361
10.22.1 Käitusaja loendur 361
10.22.2 Käitusaja kordusloendur 361
10.22.3 Tööaja loendur 362
10.22.4 Sisselülitusaja loendur 362
10.22.5 Energialoendur 363
10.22.6 Energia kordusloendur 364
10.23 Täiustatud ühtlustusfilter 365
11 Vigade jälgimine 366
11.1 Kuvatakse viga 366
11.1.1 Lähtestamine lähtestusnupuga 366
11.1.2 Lähtestamine parameetriga graafilisel kuval 366
11.1.3 Lähtestamine parameetriga tekstikuval 367
11.2 Vigade ajalugu 368
11.2.1 Vigade ajaloo vaatamine graafilisel kuval 368
11.2.2 Vigade ajaloo vaatamine tekstikuval 369
11.3 Veakoodid 371
12 Lisa 1 386
12.1 Erinevate rakenduste parameetrite vaikeväärtused 386
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
A B C
I
H D
G F E
VACON · 12 KIIRSEADISTUSE JUHEND
1 KIIRSEADISTUSE JUHEND
1.1 JUHTPANEEL JA KLAHVISTIK
Juhtpaneel toimib liidesena vahelduvvooluajami ja kasutaja vahel. Juhtpaneeli abil saate
juhtida mootori kiirust ja jälgida vahelduvvooluajami olekut. Samuti saate seadistada
vahelduvvooluajami parameetreid.
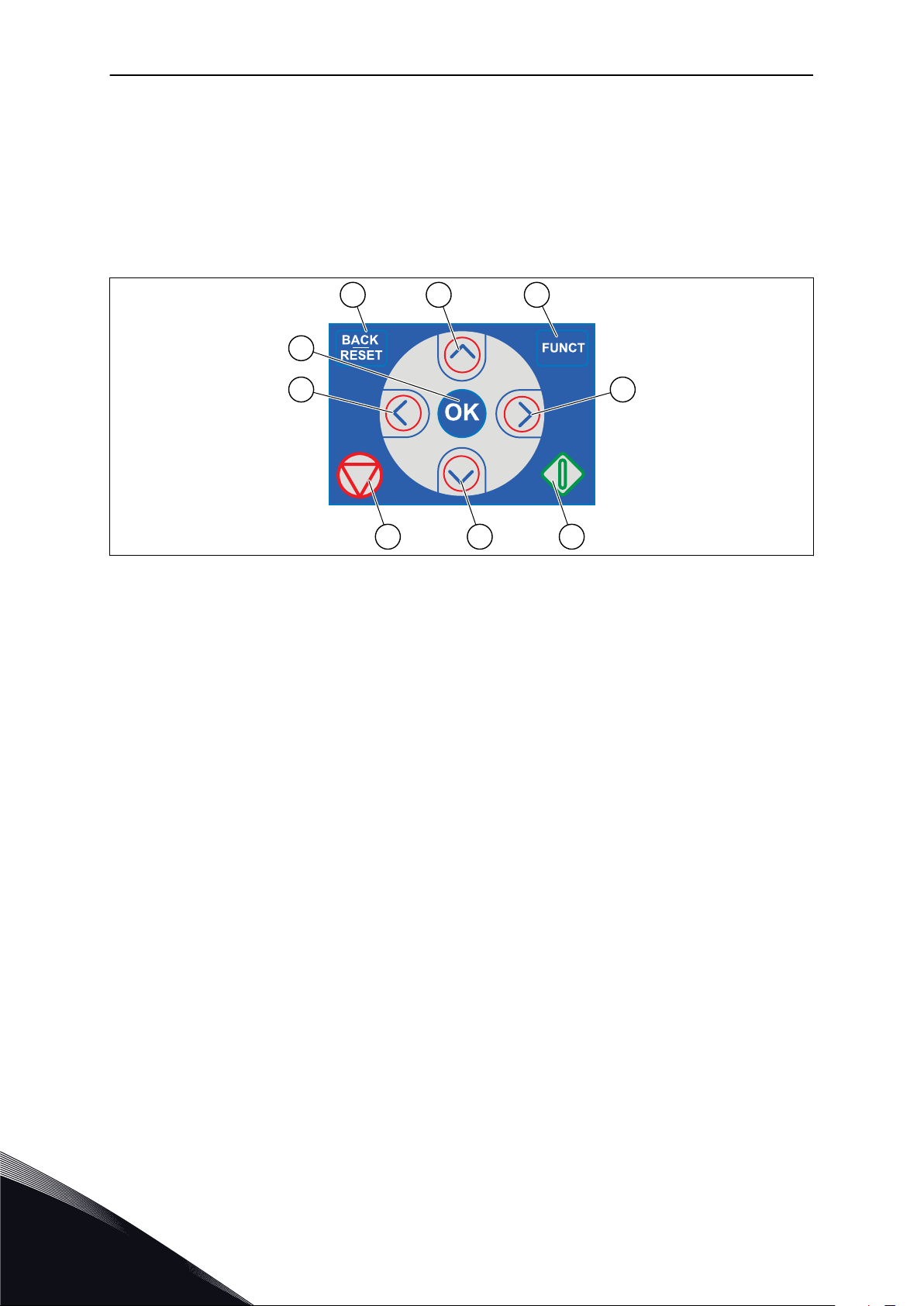
Fig. 1: Klahvistiku nupud
A. Nupp BACK/RESET (tagasi/lähtesta).
Selle nupu abil saab liikuda menüüdes,
väljuda redigeerimisrežiimist, lähtestada
vigu.
B. Noolenupp ÜLES. Selle nupu abil saab
menüüd ülespoole kerida ja väärtust
suurendada.
C. Nupp FUNCT. Selle nupu abil saab
muuta mootori pöörlemissuunda,
siseneda kontroll-lehele ja muuta
juhtimiskohta. Lisateabe saamiseks vt
3.3.3 Nupp FUNCT.
D. Noolenupp PAREMALE.
E. Nupp START.
F. Noolenupp ALLA. Selle nupu abil saab
menüüd allapoole kerida ja väärtust
vähendada.
G. Nupp STOPP.
H. Noolenupp VASAKULE. Selle nupu abil
saab liigutada kursorit vasakule.
I. Nupp OK. Selle nupu abil saab liikuda
aktiivsele tasemele või elemendile või
nõustuda valikuga.
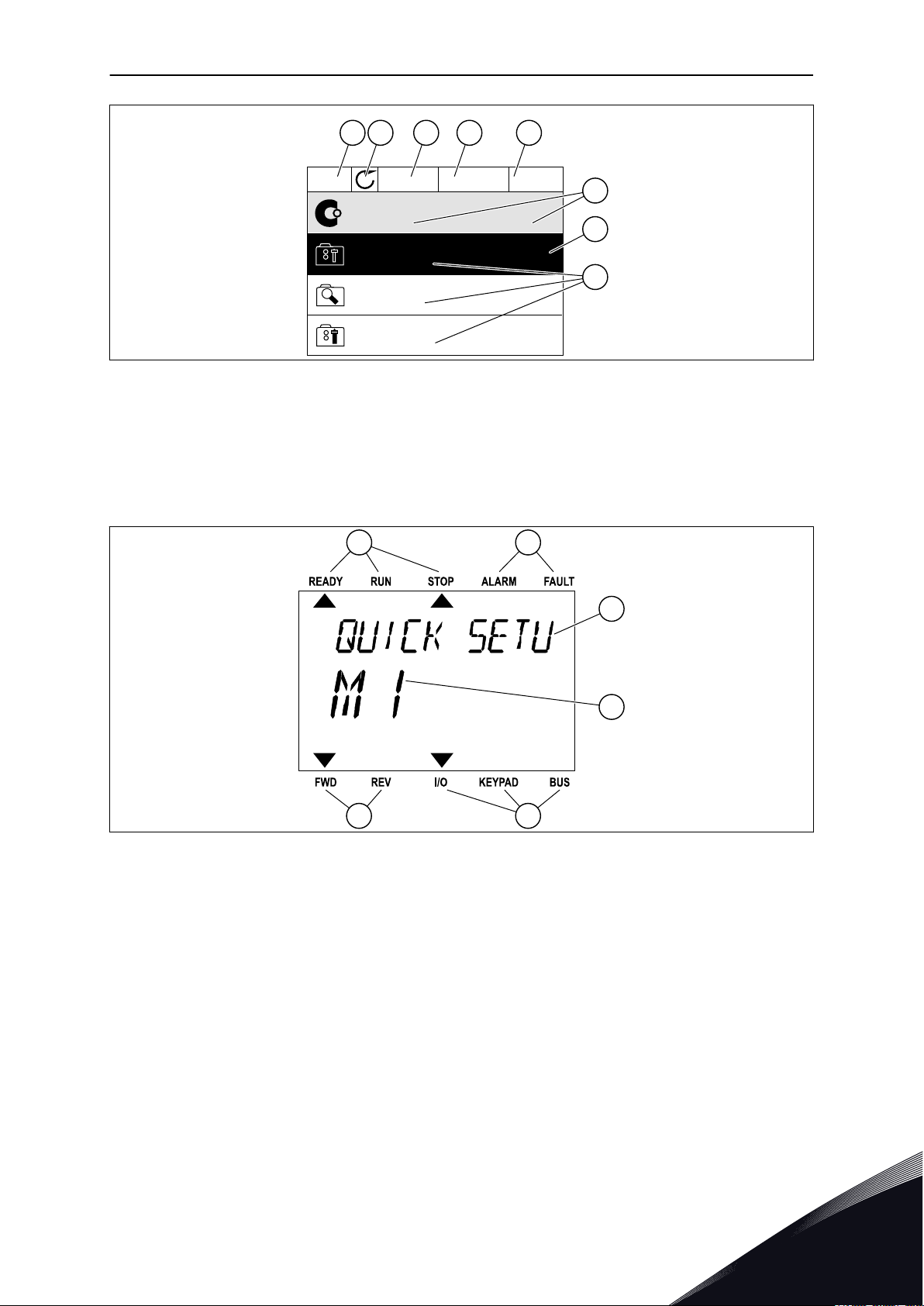
1.2 KUVAD
Leidub 2 tüüpi kuvasid: graafiline kuva ja tekstikuva. Juhtpaneelil on alati ühesugune
klahvistik ja ühesugused nupud.
Ekraanil näidatakse järgmisi andmeid.
Mootori ja ajami olek.
•
Mootori ja ajami vead.
•
Teie asukoht menüüpuus.
•
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
STOP
READY I/O
Main Menu
A B C D E
F
H
G
Quick Setup
( 17 )
Monitor
( 5 )
Parameters
( 12 )
M1ID:
A B
F
C
D
E
KIIRSEADISTUSE JUHEND VACON · 13
Fig. 2: Graafiline kuva
A. Esimene olekuväli: PEATAMINE/
KÄITAMINE
B. Mootori pöörlemissuund
C. Teine olekuväli: VALMIS/MITTEVALMIS/
VIGA
D. Alarmi väli: ALARM/-
E. Juhtimiskoha väli: PC/IO/KLAHVISTIK/
FIELDBUS
F. Asukoha väli: parameetri ID-number ja
praegune asukoht menüüs
G. Aktiveeritud rühm või element
H. Elementide arv kõnealuses rühmas
Fig. 3: Tekstikuva. Kui tekst on kuvamiseks liiga pikk, keritakse seda ekraanil automaatselt.
A. Oleku näidikud
B. Alarmi- ja veanäidikud
C. Praeguse asukoha rühma või elemendi
nimi
1.3 ESMANE KÄIVITAMINE
Ajami toite sisselülitamisel alustab tööd käivitusviisard.
Käivitusviisard palub teil sisestada vajalikud andmed, et ajam saaks protsessi juhtida.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
D. Praegune asukoht menüüs
E. Juhtimiskoha näidikud
F. Pöörlemissuuna näidikud
1
VACON · 14 KIIRSEADISTUSE JUHEND
1 Keele valikud (P6.1) Valik erineb iga keelepaketi puhul
Suveaeg* (P5.5.5)
Venemaa
2
3 Aeg* (P5.5.2) hh:mm:ss
4 Aasta* (P5.5.4) aaaa
5 Kuupäev* (P5.5.3) pp.kk.
USA
EL
OFF (VÄLJAS)
* Need sammud kuvatakse, kui on paigaldatud patarei
Käivitada käivitusviisard?
6
Jah
Ei
Valige Jah ning vajutage nuppu OK. Valides Ei lahkub vahelduvvooluajam käivitusviisardist.
Parameetri väärtuste käsitsi seadistamiseks valige Ei ning vajutage nuppu OK.
Valige rakendus (P1.2 Rakendus, ID212)
Standard
7
HVAC
PID juhtimine
Multipump (üksikajam)
Multipump (multiajam)
7. sammuga valitud rakenduse viisardiga jätkamiseks valige Jah ning vajutage nuppu OK.
Rakenduste viisardite kirjeldusi vt 2 Viisardid.
Kui valite Ei ja vajutate nuppu OK, peatub käivitusviisard ning teil tuleb kõik parameetri
väärtused valida käsitsi.
Käivitusviisardi taaskäivitamiseks on 2 võimalust. Liikuge parameetrile P6.5.1 Taasta
tehaseseaded või parameetrile B1.1.2 Käivitusviisard. Seejärel määrake väärtuseks
Aktiveerimine.
1.4 RAKENDUSTE KIRJELDUSED
Ajamile rakenduse valimiseks kasutage parameetrit P1.2 (Rakendus). Parameetri P1.2
muutumisel omistatakse kohe rühmale parameetritele nende eelhäälestatud väärtused.
1.4.1 STANDARDNE NING KÜTE-VENTILATSIOON-ÕHKJAHUTUSE (HVAC) RAKENDUS
Kasutage rakendusi Standardne ning HVAC nt pumpade või ventilaatorite juhtimiseks.
Ajamit saab juhtida klahvistikuga, fieldbusiga või I/O terminaliga.
Kui juhite ajamit I/O terminaliga, on sageduse referentssignaal ühendatud AI1-ga (0…10 V)
või AI2-ga (4…20 mA). Ühenduse määrab signaali tüüp. Saadaval on ka 3 eelhäälestatud
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
KIIRSEADISTUSE JUHEND VACON · 15
sageduse referentsi. Eelhäälestatud sageduse referentsid saab aktiveerida DI4-ga ja DI5-ga.
Ajami käivitamise ja peatamise signaalid on ühendatud DI1-ga (käivitamine edasisuunas) ja
DI2-ga (käivitamine tagasisuunas).
Kõikides rakendustes saab kõiki ajami väljundeid vabalt konfigureerida. Tavalisel I/O paneelil
on 1 analoogväljund (väljundsagedus) ja 3 releeväljundit (käitamine, viga, valmis).
Parameetrite kirjeldusi vt 10 Parameetrite kirjeldused.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
DI4
DI5
**)
*)
Modbus RTU,
N2, BACnet
1
6
2
3
4
5
18
19
30
12
7
13
8
9
10
14
15
16
21
22
23
11
17
A
B
24
25
26
32
33
28
29
mA
RIKE
TÖÖS
TÖÖS
AO1-
GND
GND
DI1
DI2
DI3
DI4
DI5
DI6
RO1/1 NC
RO1/2 CM
RO1/3 NO
CM
CM
RS485
RS485
RO2/1 NC
RO2/2 CM
RO2/3 NO
RO3/2 CM
RO3/3 NO
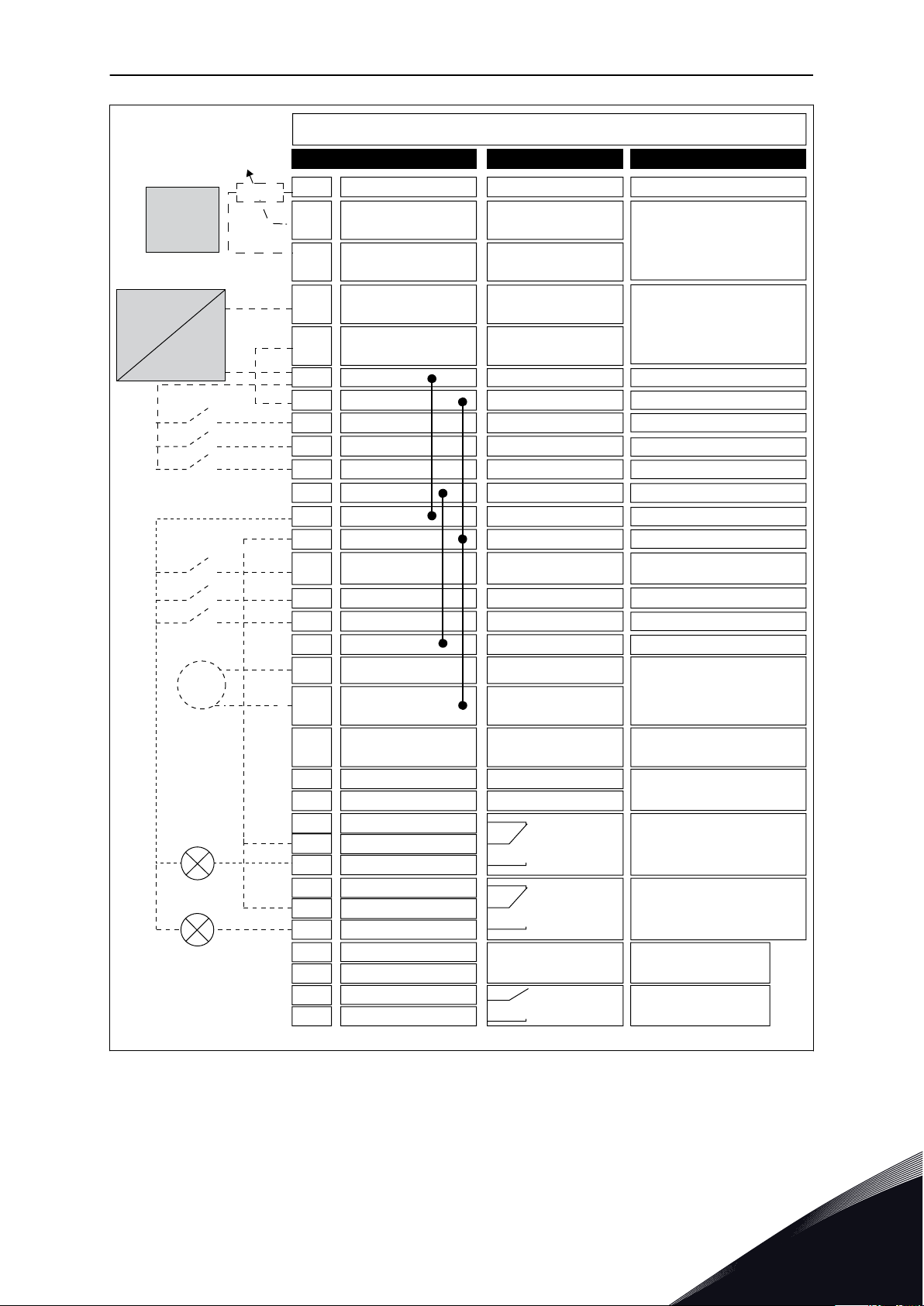
Standardne sisend-/väljundkilp
Terminal Signaal Kirjeldus
+10 V etalon
AI1+
AI1–
AI2+
AI2–
24 V väljund
Etalonväljund
Analoogsisend 1 +
Analoogsisend 1 –
Analoogsisend 2 +
Analoogsisend 2 –
24 V lisapinge
Sisendi/väljundi maandus
Digitaalsisend 1
Digitaalsisend 2
Digitaalsisend 3
Digitaalsisend 4
Digitaalsisend 5
Digitaalsisend 6
Ühine DI1–DI6 jaoks
Ühine DI1–DI6 jaoks
24 V lisapinge
Sisendi/väljundi maandus
Analoogväljund 1 +
Analoogväljund 1 –
VALMIS
Jadasiin, negatiivne
Jadasiin, positiivne
Releeväljund 1
Releeväljund 2
Releeväljund 3
RIKE
Rikke lähtestamine
AO1+
Sageduse referents
(vaikimisi 0...10 V)
Sageduse referents
(vaikimisi 4...20 mA)
Algusest edasi
Algusest tagasi
Väline rike
Sagedusetalon
Avatud
Suletud
Avatud
Suletud
Avatud
Avatud
Suletud
Suletud
Analoogsisend 1
Eelhäälestatud sagedus 1
Eelhäälestatud sagedus 2
Eelhäälestatud sagedus 3
Väljundsagedus
(0...20 mA)
+24Vin
24 V väljund
24 V lisasisendpinge
Referentspotentsiomeeter
1...10 kΩ
TI1+
TI1-
Termistori sisend
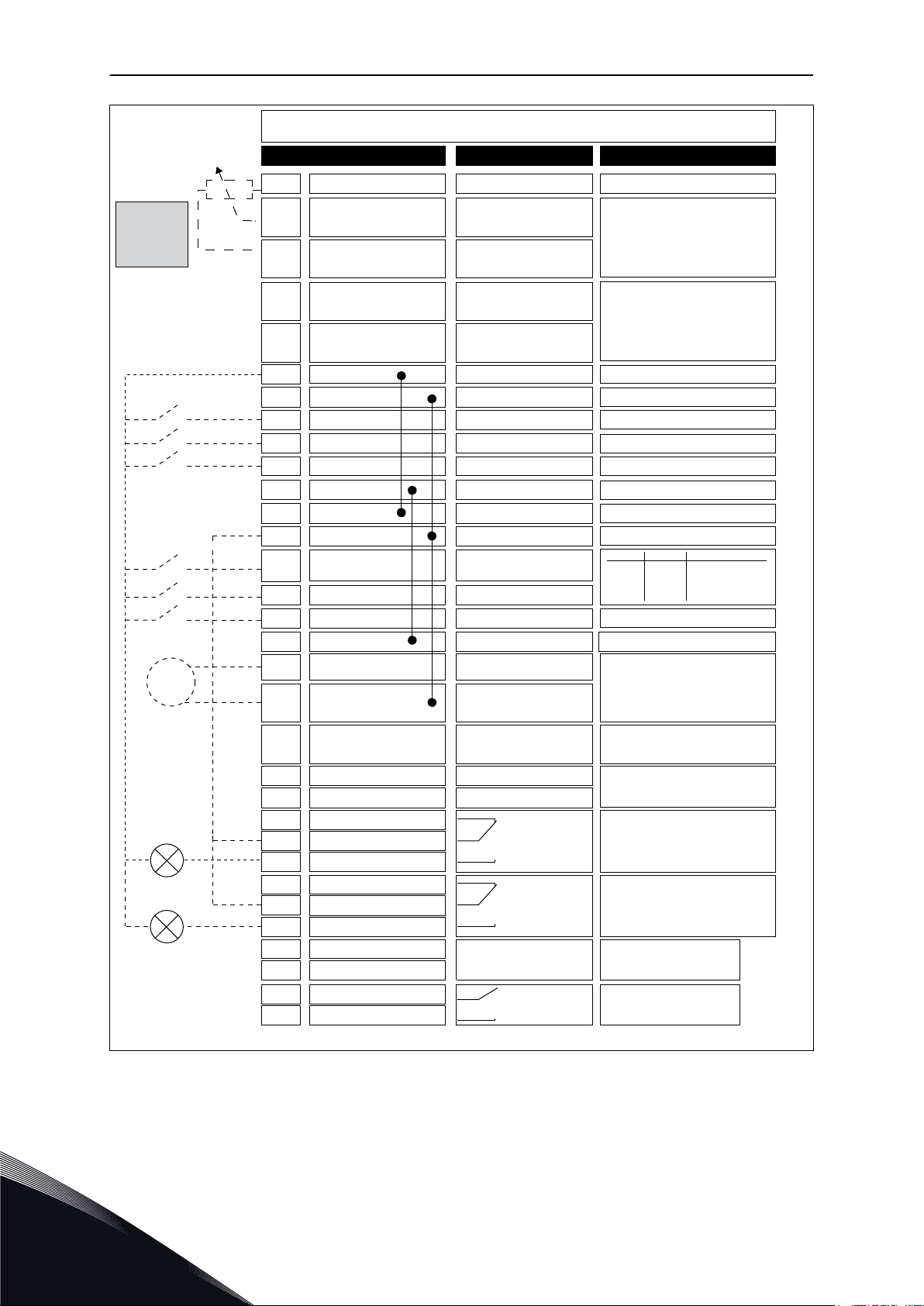
VACON · 16 KIIRSEADISTUSE JUHEND
Fig. 4: Standardse ning HVAC rakenduste vaikimisi juhtühendused
* = kasutatav ainult VACON® 100 X korral.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
A
B
C
KIIRSEADISTUSE JUHEND VACON · 17
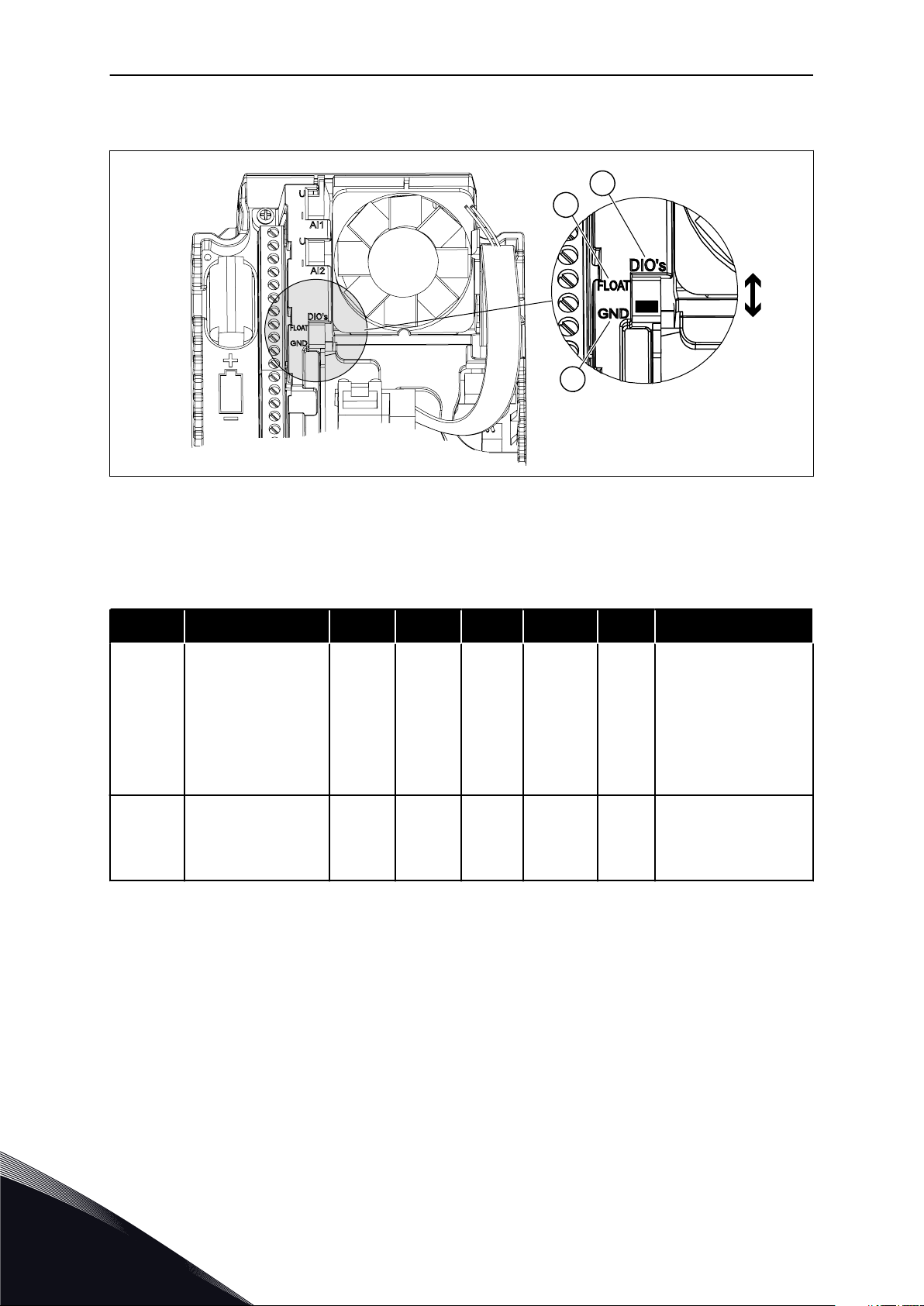
** = VACON® 100 X kiiplüliti konfiguratsioonidega tutvumiseks vaadake VACON® 100 X
paigaldusjuhendit.
Fig. 5: Kiiplüliti
A. Digitaalsed sisendid
C. Ühendatud terminaliga GND (vaikimisi)
B. Ujuv
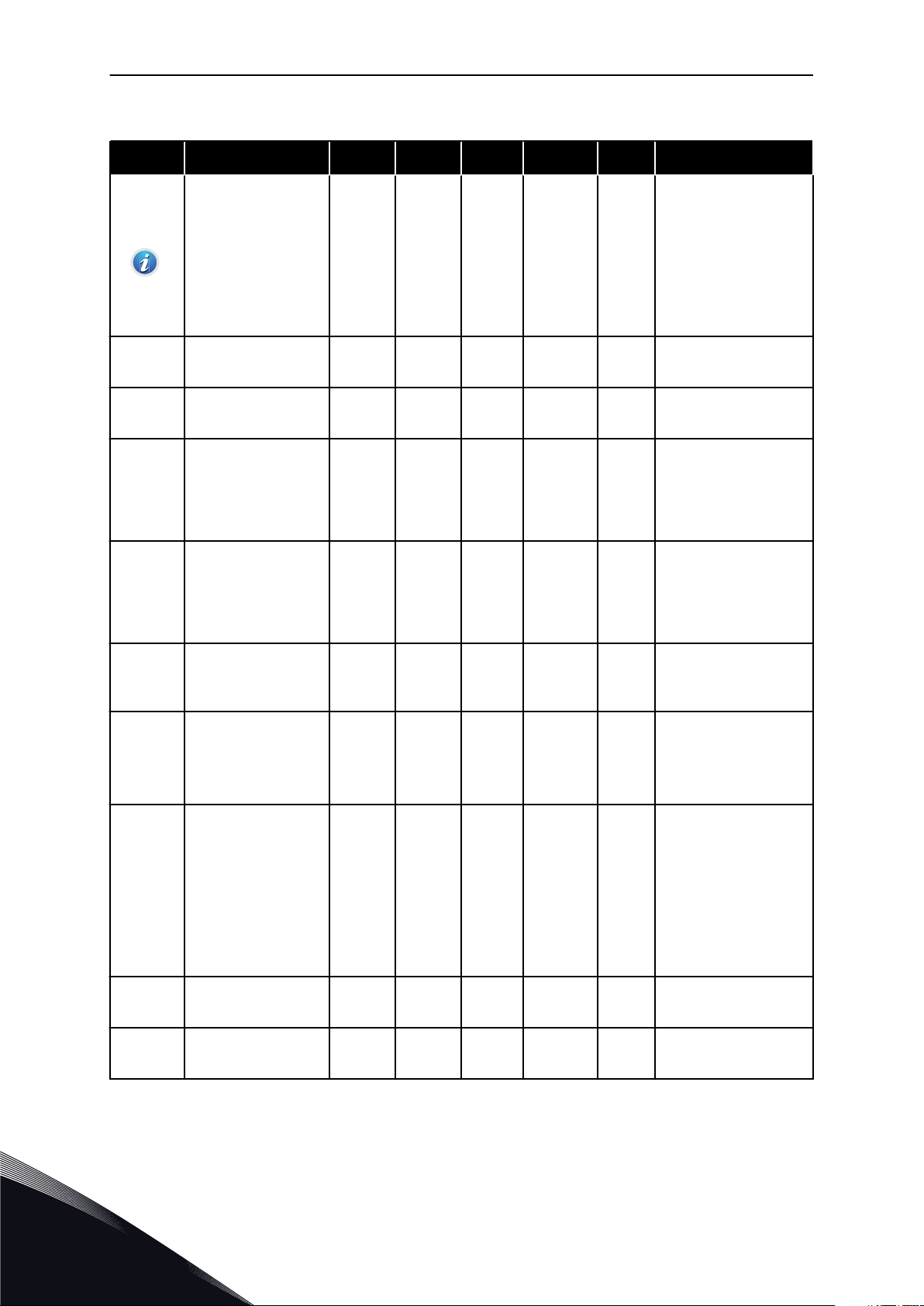
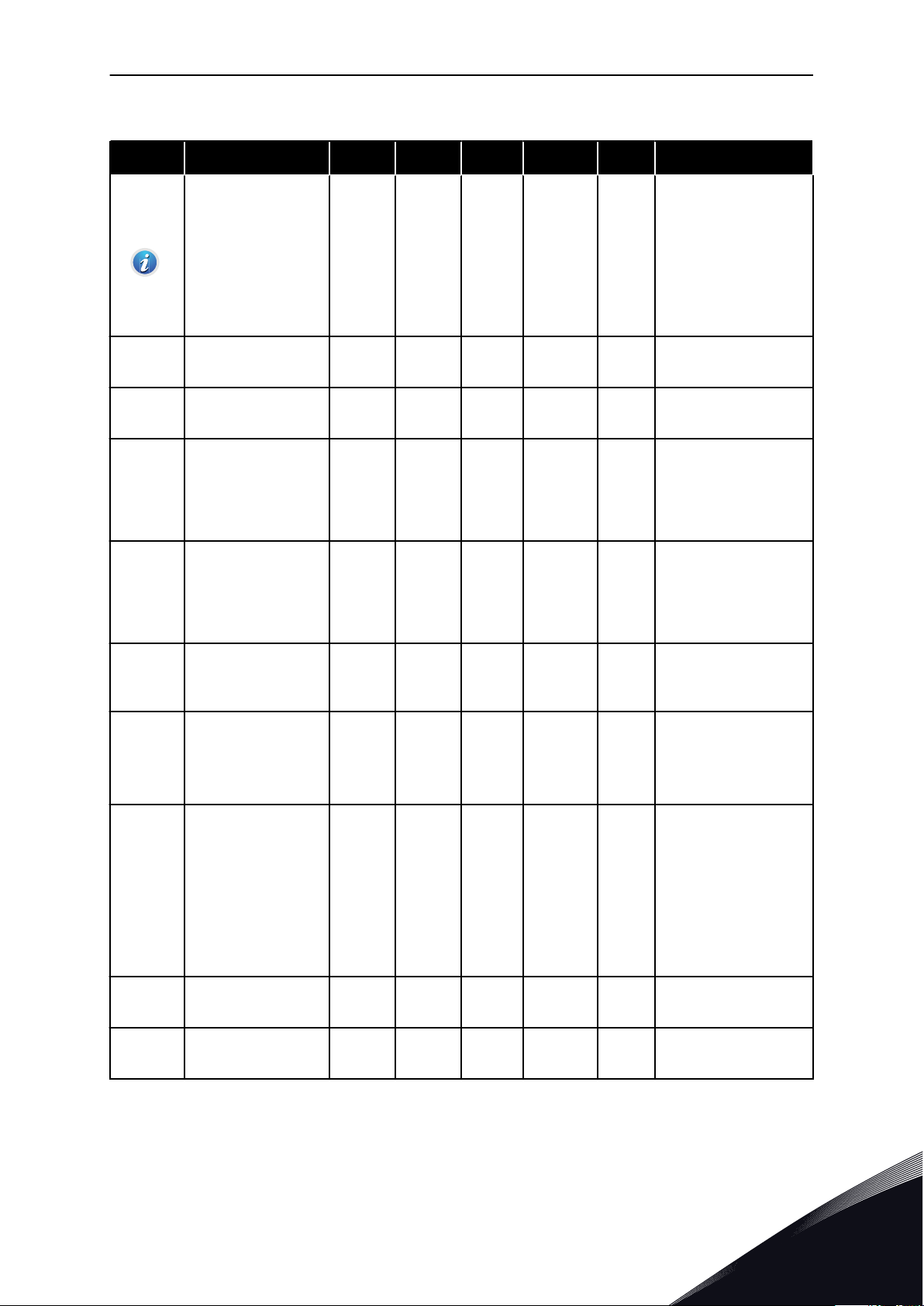
Tabel 2: M1.1 Viisardid
Register Parameeter Min Max Ühik Vaikimisi ID Kirjeldus
0 = mitte aktiveerida
1.1.1 Käivitusviisard 0 1 0 1170
1.1.2
Tulekahjurežiimi vii-
sard
0 1 0 1672
1 = aktiveerida
Valik Aktiveerida käivitab käivitusviisardi (vt:
Tabel 1 Käivitusviisard).
Valik Aktiveerida käivitab tulekahjurežiimi
viisardi (vt: 2.6 Tulekah-
jurežiimi viisard).
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
VACON · 18 KIIRSEADISTUSE JUHEND
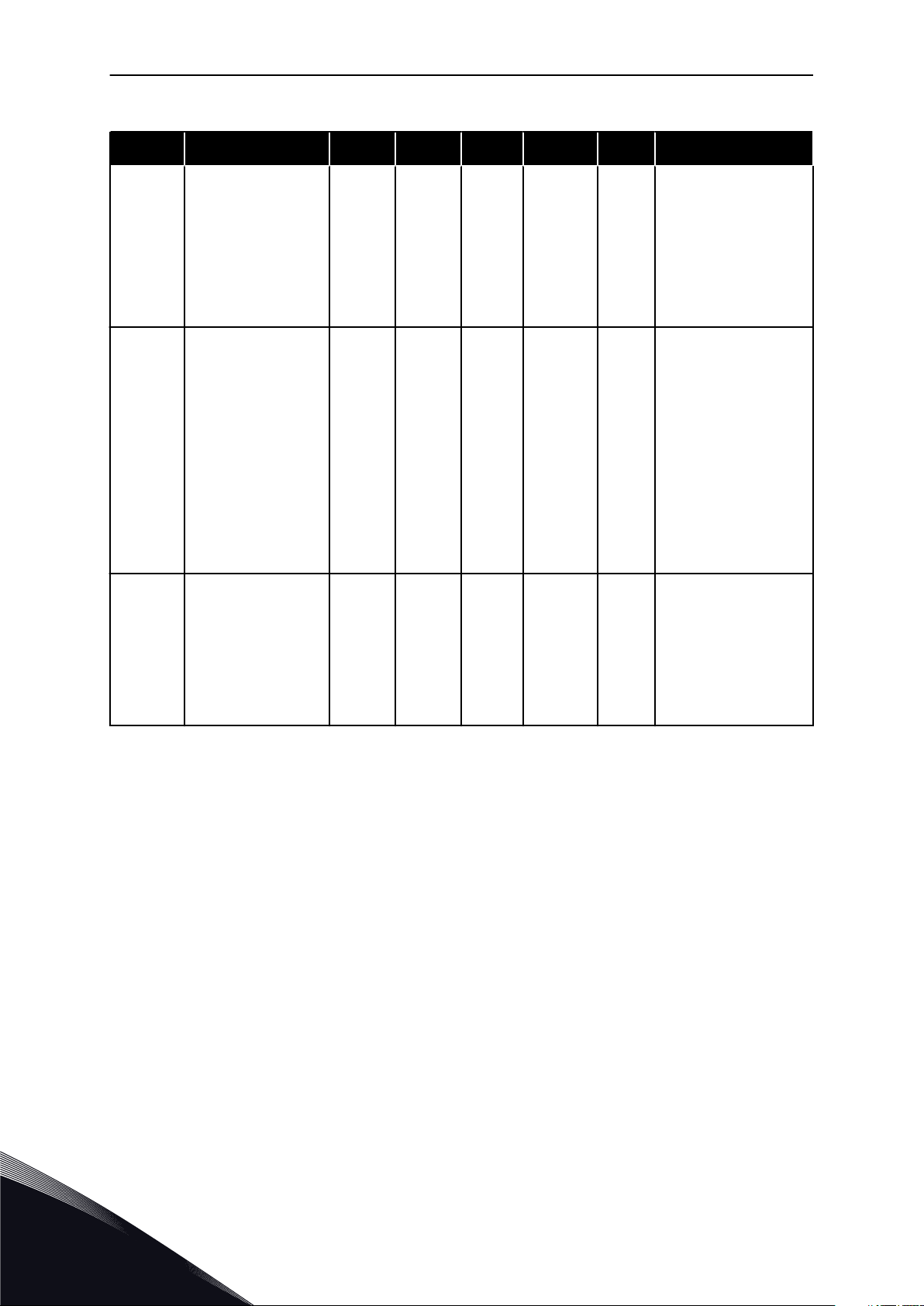
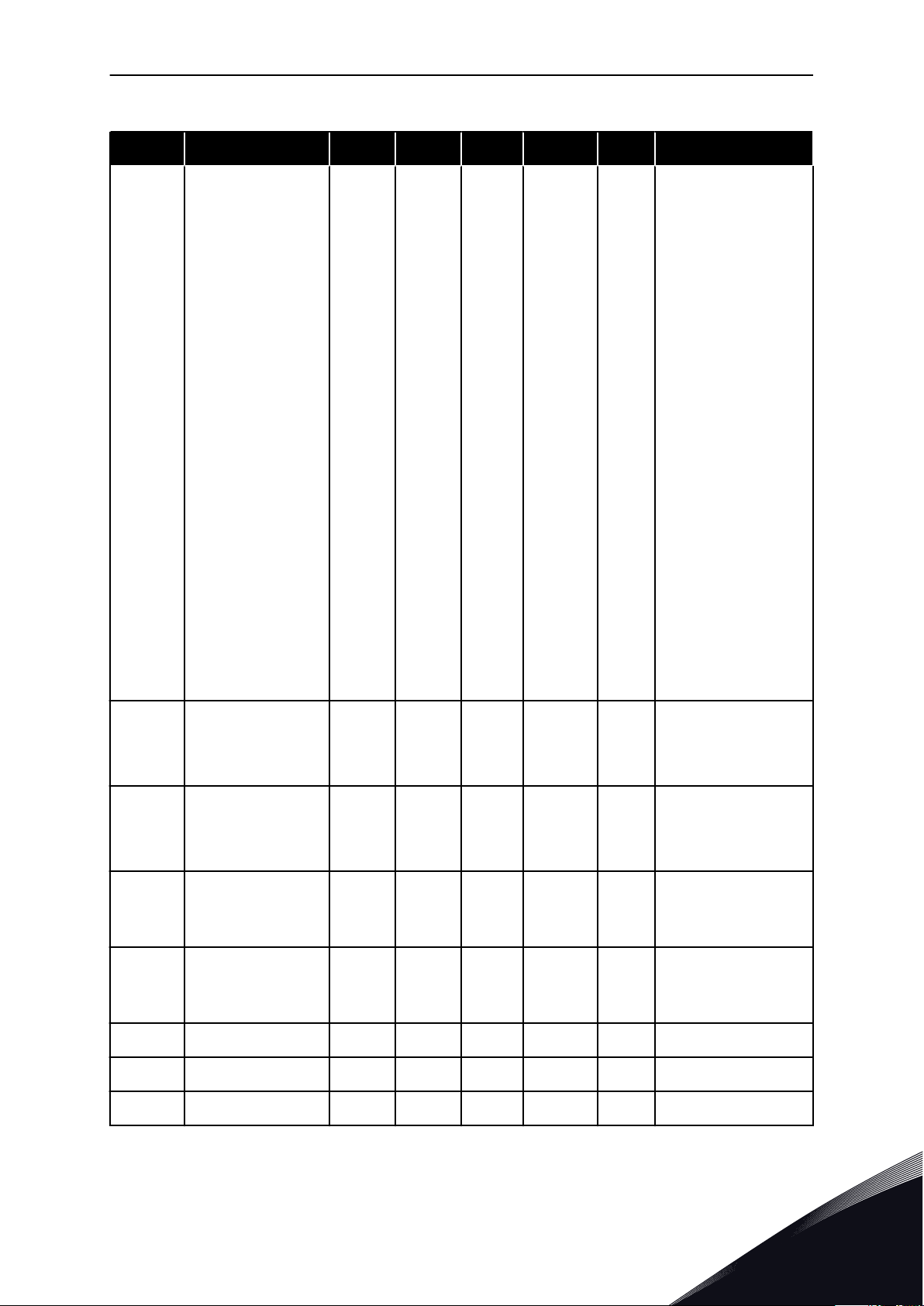
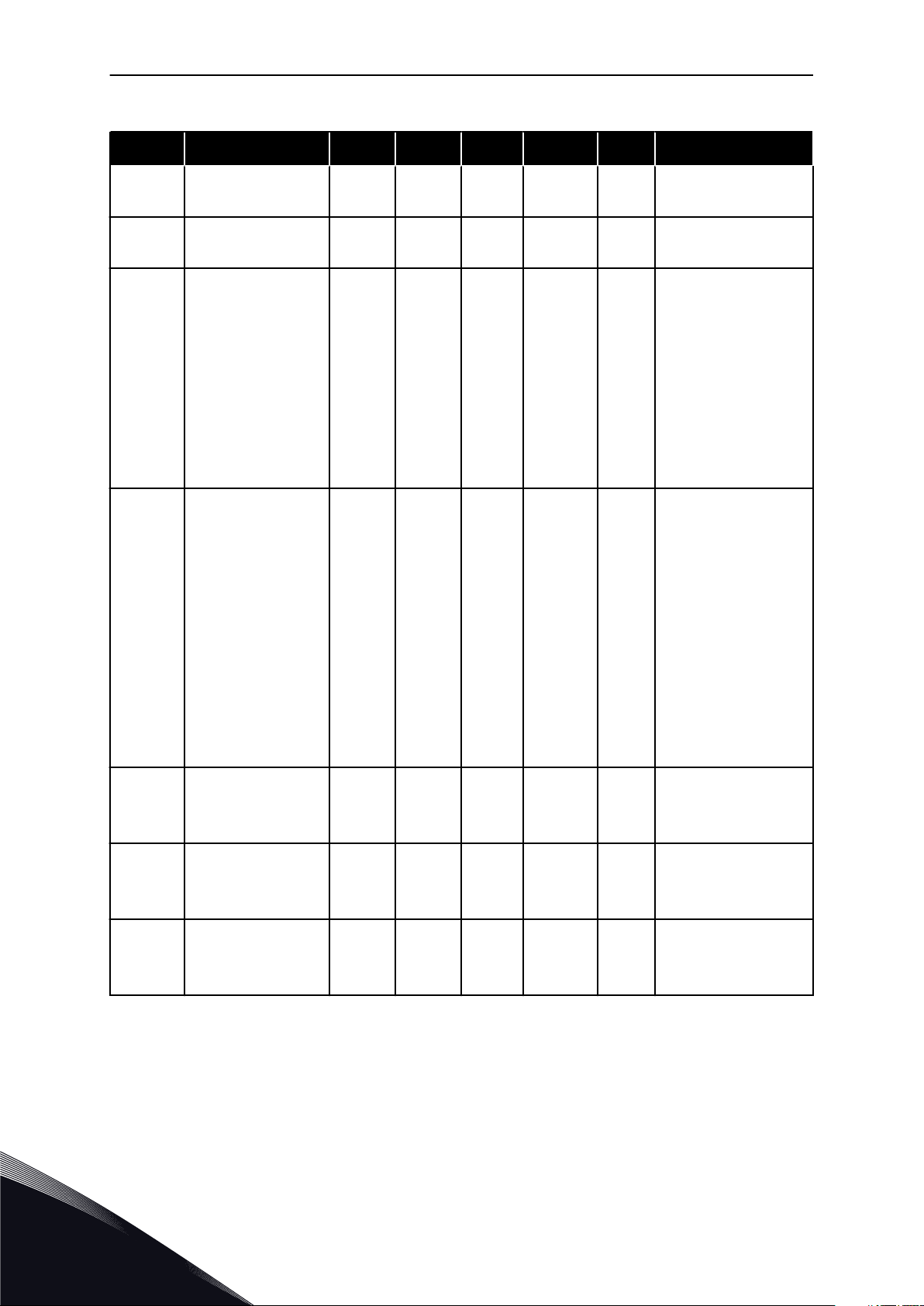
Tabel 3: M1 Kiirseadistus
Register Parameeter Min Max Ühik Vaikimisi ID Kirjeldus
0 = standardne
1.2
Rakendus 0 4 0 212
1 = HVAC
2 = PID juhtimine
3 = multipump (üksikajam)
4 = multipump (multiajam)
1.3
1.4
1.5 Kiirendusaeg 1 0.1 3000.0 s 5.0 103
1.6 Aeglustusaeg 1 0.1 3000.0 s 5.0 104
1.7 Mootori voolupiirang IH*0,1 I
1.8 Mootori tüüp 0 2 0 650
Minimaalne sage-
duse referents
Maksimaalne sage-
duse referents
0.00 P1.4 Hz 0.0 101
P1.3 320.0 Hz
S
A Varieerub 107
50.0 /
60.0
102
Minimaalne lubatud
sageduse referents.
Maksimaalne lubatud
sageduse referents.
Määrab ajaperioodi,
mis on vajalik väljundsageduse tõusmiseks
0-sageduselt maksimumsagedusele.
Määrab ajaperioodi,
mis on vajalik väljundsageduse langemiseks
maksimumsageduselt
0-sagedusele.
Maksimaalne mootori
vool vahelduvvooluajamist.
0 = induktsioonmootor
1 = püsimagnetmootor
2 = reluktantsmootor
1
1.9
1.10
1.11
Mootori nominaal-
pinge
Mootori nominaalsa-
gedus
Mootori nominaalkii-
rus
Leidke mootori nimesildilt väärtus Un.
Variee-
rub
8.0 320.0 Hz 50 / 60 111
24 19200 p/min Varieerub 112
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Variee-
rub
V Varieerub 110
MÄRKUS!
Tehke kindlaks, kas
mootoril on deltaühendus või tähtühendus.
Leidke mootori nimesildilt väärtus fn.
Leidke mootori nimesildilt väärtus nn.

KIIRSEADISTUSE JUHEND VACON · 19
Tabel 3: M1 Kiirseadistus
Register Parameeter Min Max Ühik Vaikimisi ID Kirjeldus
1.12
1.13
1.14
1.15 Identifitseerimine 0 2 0 631
Mootori nominaal-
vool
Mootori Cos Phi
(võimsusfaktor)
Energia optimeeri-
mine
IH * 0,1 IH * 2 A Varieerub 113
0.30 1.00 Varieerub 120
0 1 0 666
Leidke mootori nimesildilt väärtus In.
Leidke mootori nimesildilt see väärtus.
Ajam leiab minimaalse
mootori voolu, et tarvitada vähem energiat ja
vähendada mootori
müra. Kasutage seda
funktsiooni nt ventilaatori ja pumba protsesside puhul.
0 = keelatud
1 = lubatud
Identifitseerimiskäivitus arvutab või mõõdab
mootori parameetrid,
mis on vajalikud mootori ja kiiruse tõhusaks
juhtimiseks.
0 = tegevust pole
1 = seisuajal
2 = pöörlemisega
1.16
1.17 Peatamisfunktsioon 0 1 0 506
1.18
Käivitusfunktsioon 0 1 0 505
Automaatne lähtes-
tus
0 1 0 731
Enne identifitseerimiskäivituse alustamist
tuleb määrata mootori
nimesildi parameetrid.
0 = rambiga
1 = lendkäivitus
0 = vabakäik
1 = rambiga
0 = keelatud
1 = lubatud
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
VACON · 20 KIIRSEADISTUSE JUHEND
Tabel 3: M1 Kiirseadistus
Register Parameeter Min Max Ühik Vaikimisi ID Kirjeldus
0 = tegevust pole
1 = alarm
1.19
1.20
Reaktsioon välisele
veale
Reaktsioon veale AI
madal
0 3 2 701
0 5 0 700
2 = viga (seiskamine
vastavalt seiskamisrežiimile)
3 = viga (seiskamine
laskumisega)
0 = tegevust pole
1 = alarm
2 = alarm + eelhäälestatud vea sagedus
(P3.9.1.13)
3 = alarm + eelmine
sagedus
4 = viga (seiskamine
vastavalt seiskamisrežiimile)
5 = viga (seiskamine
laskumisega)
1.21 Kaugjuhtimiskoht 0 1 0 172
Kaugjuhtimiskoha (käivitamine/seiskamine)
valik.
0 = I/O juhtimine
1 = fieldbusiga juhtimine
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
KIIRSEADISTUSE JUHEND VACON · 21
Tabel 3: M1 Kiirseadistus
Register Parameeter Min Max Ühik Vaikimisi ID Kirjeldus
Sageduse referentsiallika valik, kui juhtimiskohaks on I/O A.
0 = personaalarvuti
1 = eelhäälestatud
sagedus 0
2 = klahvistiku referents
3 = Fieldbus
4 = AI1
5 = AI2
5 = AI1+AI2
7 = PID referents
8 = mootori potentsiomeeter
11 = plokk 1 väljas
12 = plokk 2 väljas
13 = plokk 3 väljas
14 = plokk 4 väljas
15 = plokk 5 väljas
16 = plokk 6 väljas
17 = plokk 7 väljas
18 = plokk 8 väljas
19 = plokk 9 väljas
20 = plokk 10 väljas
1.22
I/O juhtimise refe-
rentsi A valik
0 20 5 117
Parameetriga 1.2 seadistatud rakendus
annab vaikeväärtuse.
Sageduse referentsial-
1.23
1.24
1.25 AI1 signaalivahemik 0 1 0 379
1.26 AI2 signaalivahemik 0 1 1 390
1.27 RO1 funktsioon 0 73 2 11001 Vt P3.5.3.2.1
1.28 RO2 funktsioon 0 73 3 11004 Vt P3.5.3.2.1
Klahvistiku juhtimise
referentsi valik
Fieldbusiga juhtimise
referentsi valik
0 20 1 121
0 20 2 122
lika valik, kui juhtimiskohaks on klahvistik.
Vt P1.22.
Sageduse referentsiallika valik, kui juhtimiskohaks on fieldbus.
Vt P1.22.
0 = 0...10 V / 0...20 mA
1 = 2...10 V / 4...20 mA
0 = 0...10 V / 0...20 mA
1 = 2...10 V / 4...20 mA
1.29 RO3 funktsioon 0 73 1 11007 Vt P3.5.3.2.1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
VACON · 22 KIIRSEADISTUSE JUHEND
Tabel 3: M1 Kiirseadistus
Register Parameeter Min Max Ühik Vaikimisi ID Kirjeldus
1.30 AO1 funktsioon 0 31 2 10050 Vt P3.5.4.1.1
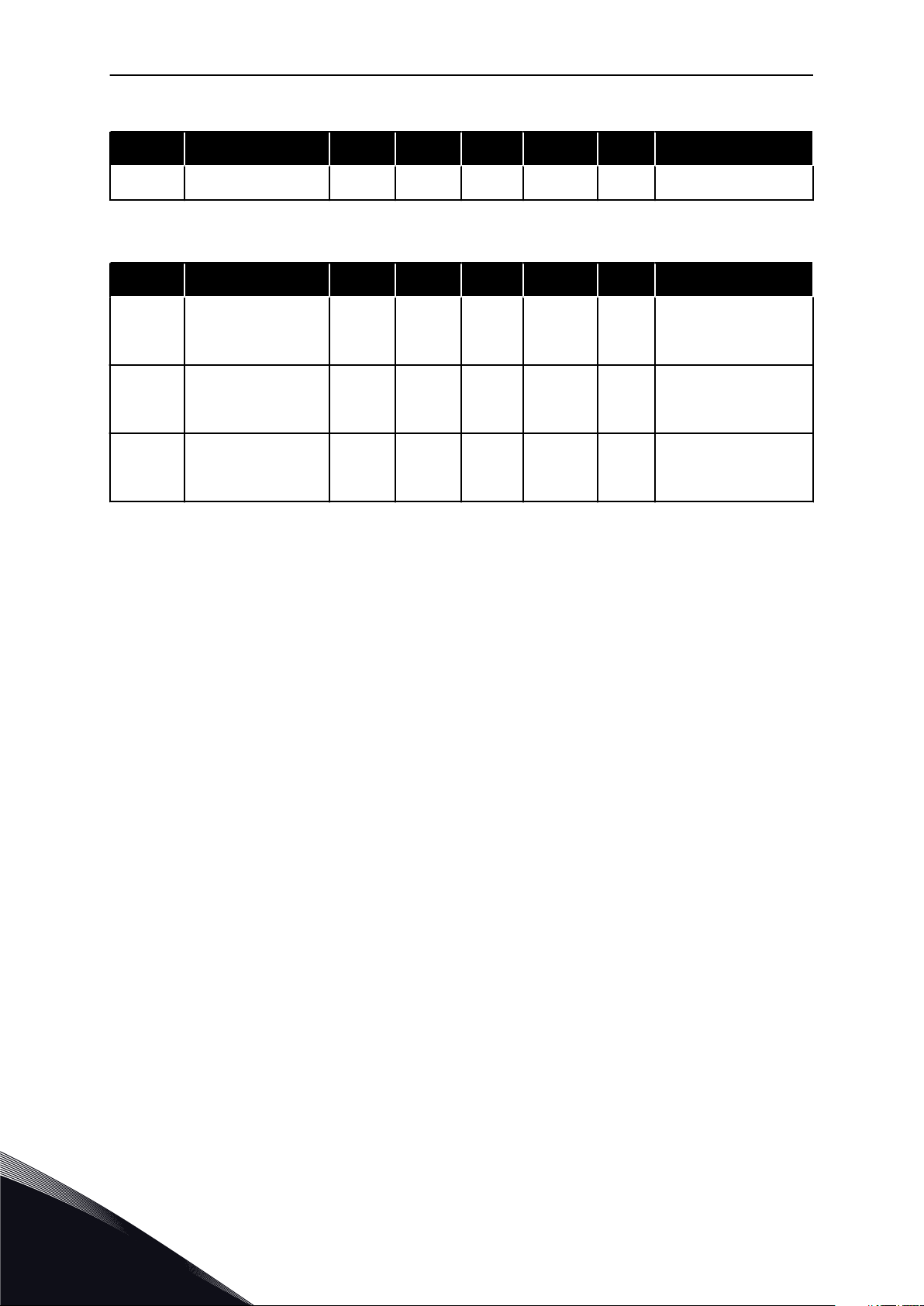
Tabel 4: M1.31 standardne / M1.32 HVAC
Register Parameeter Min Max Ühik Vaikimisi ID Kirjeldus
Valige eelhäälestatud
sagedus digitaalsisendiga DI4.
Valige eelhäälestatud
sagedus digitaalsisendiga DI5.
Valige eelhäälestatud
sagedus digitaalsisendiga DI4 ja DI5.
1.31.1
1.31.2
1.31.3
Eelhäälestatud sage-
dus 1
Eelhäälestatud sage-
dus 2
Eelhäälestatud sage-
dus 3
P1.3 P1.4 Hz 10.0 105
P1.3 P1.4 Hz 15.0 106
P1.3 P1.4 Hz 20.0 126
1.4.2 PID JUHTIMISE RAKENDUS
PID juhtimise rakendust saab kasutada protsesside puhul, kus te juhite protsessi muutujat,
nt rõhku, mootori kiiruse juhtimise teel.
Selles rakenduses konfigureeritakse ajami sisemine PID kontroller 1 seadepunktile ja 1
tagasisidesignaalile.
Kasutada saab 2 juhtimiskohta. Valige DI6-ga juhtimiskoht A või B. Kui aktiivne on
juhtimiskoht A, annab DI1 käivitamise ja seiskamise käsklused ning PID kontroller annab
sageduse referentsi. Kui aktiivne on juhtimiskoht B, annab DI4 käivitamise ja seiskamise
käsklused ning AI1 annab sageduse referentsi.
Kõikides rakendustes saab kõiki ajami väljundeid vabalt konfigureerida. Tavalisel I/O paneelil
on 1 analoogväljund (väljundsagedus) ja 3 releeväljundit (käitamine, viga, valmis).
Parameetrite kirjeldusi vt Tabel 1 Käivitusviisard.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
6
2
3
4
5
18
19
30
12
7
13
8
9
10
14
15
16
21
22
23
11
17
A
B
24
25
26
28
29
32
33
Modbus RTU
+
-
*)
**)
TI1-
TI1+
mA
TÖÖS
TÖÖS
AO1–/GND
+24 Vin
24Vvälja
GND
GND
DI1
DI2
DI3
DI4
DI5
DI6
RO1/1 NC
RO1/2 CM
RO1/3 NO
CM
CM
RS485
RS485
RO2/1 NC
RO2/2 CM
RO2/3 NO
Standardne sisend-/väljundkilp
Terminal Signaal Kirjeldus
+10 V etalon
AI1+
AI1–
AI2+
AI2–
24 V väljund
Etalonväljund
Analoogsisend 1 +
Analoogsisend 1 –
Analoogsisend 2 +
Analoogsisend 2 –
24 V lisapinge
Sisendi/väljundi maandus
Digitaalsisend 1
Digitaalsisend 2
Digitaalsisend 3
Digitaalsisend 4
Digitaalsisend 5
Digitaalsisend 6
Ühine DI1–DI6 jaoks
Ühine DI1–DI6 jaoks
24 V lisapinge
Sisendi/väljundi maandus
Analoogväljund 1 +
Analoogväljund 1 –
24 V lisasisendpinge
Jadasiin, negatiivne
Jadasiin, positiivne
Releeväljund 1
Releeväljund 2
RO3/2 CM
RO3/3 NO
VALMIS
Releeväljund 3
RIKE
Rikke lähtestamine
AO1+
PID tagasiside
(tegelik väärtus)
(vaikimisi: 4...20 mA)
Koht A: Käivitamine
edasisuunas (PID kontroller)
Väline rike
Juhtimiskoha A/B valimine
Eelhäälestatud sagedus 1
I =(0)4 kuni 20 mA
Tegelik
väärtus
Kahejuhtmeline saatja
Koht B: Käivitamine edasisuunas
(sageduse referents P3.3.1.6)
Väljundsagedus
(0...20 mA)
RIKE
Referentspotentsiomeeter
1...10 kΩ
Koht A: PID seadistuspunkt (referents) Koht
B: Sageduse referents
(vaikimisi: 0...10 V)
Termistori sisend
KIIRSEADISTUSE JUHEND VACON · 23
Fig. 6: PID juhtimise rakenduse vaikimisi juhtühendused
* = kasutatav ainult VACON® 100 X korral.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
A
B
C
VACON · 24 KIIRSEADISTUSE JUHEND
** = VACON® 100 X kiiplüliti konfiguratsioonidega tutvumiseks vaadake VACON® 100 X
paigaldusjuhendit.
Fig. 7: Kiiplüliti
A. Digitaalsed sisendid
C. Ühendatud terminaliga GND (vaikimisi)
B. Ujuv
Tabel 5: M1.1 Viisardid
Register Parameeter Min Max Ühik Vaikimisi ID Kirjeldus
0 = mitte aktiveerida
1 = aktiveerida
1.1.1 Käivitusviisard 0 1 0 1170
1.1.2
Tulekahjurežiimi vii-
sard
0 1 0 1672
Valik Aktiveerida käivitab käivitusviisardi (vt:
1.3 Esmane käivitamine).
Valik Aktiveerida käivitab tulekahjurežiimi
viisardi (vt: 2.6 Tulekah-
jurežiimi viisard).
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
KIIRSEADISTUSE JUHEND VACON · 25
Tabel 6: M1 Kiirseadistus
Register Parameeter Min Max Ühik Vaikimisi ID Kirjeldus
0 = standardne
1.2
Rakendus 0 4 2 212
1 = HVAC
2 = PID juhtimine
3 = multipump (üksikajam)
4 = multipump (multiajam)
1.3
1.4
1.5 Kiirendusaeg 1 0.1 3000.0 s 5.0 103
1.6 Aeglustusaeg 1 0.1 3000.0 s 5.0 104
1.7 Mootori voolupiirang IH*0,1 I
1.8 Mootori tüüp 0 2 0 650
Minimaalne sage-
duse referents
Maksimaalne sage-
duse referents
0.00 P1.4 Hz 0.0 101
P1.3 320.0 Hz
S
A Varieerub 107
50.0 /
60.0
102
Minimaalne lubatud
sageduse referents.
Maksimaalne lubatud
sageduse referents.
Määrab ajaperioodi,
mis on vajalik väljundsageduse tõusmiseks
0-sageduselt maksimumsagedusele.
Määrab ajaperioodi,
mis on vajalik väljundsageduse langemiseks
maksimumsageduselt
0-sagedusele.
Maksimaalne mootori
vool vahelduvvooluajamist.
0 = induktsioonmootor
1 = püsimagnetmootor
2 = reluktantsmootor
1.9
1.10
1.11
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Mootori nominaal-
pinge
Mootori nominaalsa-
gedus
Mootori nominaalkii-
rus
Variee-
rub
8.0 320.0 Hz
24 19200 p/min Varieerub 112
Variee-
rub
V Varieerub 110
50.0 /
60.0
Leidke mootori nimesildilt väärtus Un.
MÄRKUS!
Tehke kindlaks, kas
mootoril on deltaühendus või tähtühendus.
Leidke mootori nime-
111
sildilt väärtus fn.
Leidke mootori nimesildilt väärtus nn.
1
VACON · 26 KIIRSEADISTUSE JUHEND
Tabel 6: M1 Kiirseadistus
Register Parameeter Min Max Ühik Vaikimisi ID Kirjeldus
1.12
1.13
1.14
1.15 Identifitseerimine 0 2 0 631
Mootori nominaal-
vool
Mootori Cos Phi
(võimsusfaktor)
Energia optimeeri-
mine
IH * 0,1 I
0.30 1.00 Varieerub 120
0 1 0 666
S
A Varieerub 113
Leidke mootori nimesildilt väärtus In.
Leidke mootori nimesildilt see väärtus.
Ajam leiab minimaalse
mootori voolu, et tarvitada vähem energiat ja
vähendada mootori
müra. Kasutage seda
funktsiooni nt ventilaatori ja pumba protsesside puhul.
0 = keelatud
1 = lubatud
Identifitseerimiskäivitus arvutab või mõõdab
mootori parameetrid,
mis on vajalikud mootori ja kiiruse tõhusaks
juhtimiseks.
0 = tegevust pole
1 = seisuajal
2 = pöörlemisega
1.16
1.17 Peatamisfunktsioon 0 1 0 506
1.18
Käivitusfunktsioon 0 1 0 505
Automaatne lähtes-
tus
0 1 0 731
Enne identifitseerimiskäivituse alustamist
tuleb määrata mootori
nimesildi parameetrid.
0 = rambiga
1 = lendkäivitus
0 = vabakäik
1 = rambiga
0 = keelatud
1 = lubatud
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
KIIRSEADISTUSE JUHEND VACON · 27
Tabel 6: M1 Kiirseadistus
Register Parameeter Min Max Ühik Vaikimisi ID Kirjeldus
0 = tegevust pole
1 = alarm
1.19
1.20
Reaktsioon välisele
veale
Reaktsioon veale AI
madal
0 3 2 701
0 5 0 700
2 = viga (seiskamine
vastavalt seiskamisrežiimile)
3 = viga (seiskamine
laskumisega)
0 = tegevust pole
1 = alarm
2 = alarm + eelhäälestatud vea sagedus
(P3.9.1.13)
3 = alarm + eelmine
sagedus
4 = viga (seiskamine
vastavalt seiskamisrežiimile)
5 = viga (seiskamine
laskumisega)
1.21 Kaugjuhtimiskoht 0 1 0 172
Kaugjuhtimiskoha (käivitamine/seiskamine)
valik.
0 = I/O juhtimine
1 = fieldbusiga juhtimine
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
VACON · 28 KIIRSEADISTUSE JUHEND
Tabel 6: M1 Kiirseadistus
Register Parameeter Min Max Ühik Vaikimisi ID Kirjeldus
Sageduse referentsiallika valik, kui juhtimiskohaks on I/O A.
0 = personaalarvuti
1 = eelhäälestatud
sagedus 0
2 = klahvistiku referents
3 = Fieldbus
4 = AI1
5 = AI2
6 = AI1+AI2
7 = PID referents
8 = mootori potentsiomeeter
11 = plokk 1 väljas
12 = plokk 2 väljas
13 = plokk 3 väljas
14 = plokk 4 väljas
15 = plokk 5 väljas
16 = plokk 6 väljas
17 = plokk 7 väljas
18 = plokk 8 väljas
19 = plokk 9 väljas
20 = plokk 10 väljas
1.22
I/O juhtimise refe-
rentsi A valik
1 20 6 117
Parameetriga 1.2 seadistatud rakendus
annab vaikeväärtuse.
1.23
1.24
1.25 AI1 signaalivahemik 0 1 0 379
1.26 AI2 signaalivahemik 0 1 1 390
1.27 RO1 funktsioon 0 73 2 11001 Vt P3.5.3.2.1
1.28 RO2 funktsioon 0 73 3 11004 Vt P3.5.3.2.1
1.29 RO3 funktsioon 0 73 1 11007 Vt P3.5.3.2.1
1.30 AO1 funktsioon 0 31 2 10050 Vt P3.5.4.1.1
Klahvistiku juhtimise
referentsi valik
Fieldbusiga juhtimise
referentsi valik
1 20 1 121
1 20 2 122
Vt P1.22.
Vt P1.22.
0 = 0...10 V / 0...20 mA
1 = 2...10 V / 4...20 mA
0 = 0...10 V / 0...20 mA
1 = 2...10 V / 4...20 mA
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
KIIRSEADISTUSE JUHEND VACON · 29
Tabel 7: M1.33 PID juhtimine
Register Parameeter Min Max Ühik Vaikimisi ID Kirjeldus
Kui parameetri väärtuseks on seadistatud
1.33.1 PID kasu 0.00 100.00 % 100.00 118
1.33.2 PID ühendamisaeg 0.00 600.00 s 1.00 119
1.33.3 PID tuletusaeg 0.00 100.00 s 0.00 1132
100%, põhjustab 10%
muutus vea väärtuses
kontrolleri väljundi
muutumise 10% võrra.
Kui see parameeter on
seadistatud 1,00
sekundile, põhjustab
10% muutus vea väärtuses kontrolleri väljundi muutumise
10,00%/s võrra.
Kui see parameeter on
seadistatud 1,00
sekundile, põhjustab
10% muutus vea väärtuses 1,00 sekundi vältel kontrolleri väljundi
muutumise 10,00%
võrra.
1.33.4
1.33.5
1.33.6
1.33.7
1.33.8
1.33.9
1.33.10
Protsessi mõõtühiku
valimine
Protsessi mõõtühik
min
Protsessi mõõtühik
max
Tagasiside 1 allika
valimine
Seadepunkti 1 allika
valimine
Klahvistiku seade-
punkt 1
SP1 une sageduse
piirang
1 44 1 1036
Variee-
rub
Variee-
rub
0 30 2 334
0 32 1 332
Variee-
rub
0.0 320.0 Hz 0.0 1016
Variee-
rub
Variee-
rub
Variee-
rub
Variee-
rub
Varieerub 1033
Varieerub 1034
0 167
Valige protsessi mõõtühik. Vt P3.13.1.4
Protsessi mõõtühiku
väärtus on sama, mis
0% PID tagasisidesignaalist.
Protsessi mõõtühiku
väärtus on sama, mis
100% PID tagasisidesignaalist.
Vt P3.13.3.3
Vt P3.13.2.6
Ajam lülitub unerežiimile siis, kui väljundsagedus jääb alla seda
piirväärtust kauemaks,
kui on määratletud
parameetriga Une viivitus.
0= pole kasutusel
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1
VACON · 30 KIIRSEADISTUSE JUHEND
Tabel 7: M1.33 PID juhtimine
Register Parameeter Min Max Ühik Vaikimisi ID Kirjeldus
Minimaalne ajaperiood,
mille vältel püsib sage-
1.33.11 SP1 une viivitus 0 3000 s 0 1017
1.33.12 SP1 äratuse tase
Variee-
rub
Variee-
rub
Variee-
rub
Varieerub 1018
dus alla une taset,
enne kui ajam seiskub.
0= pole kasutusel
PID tagasiside järelevalve ärkamise väärtus. Ärkamise tase 1
kasutab valitud protsessi mõõtühikuid.
0= pole kasutusel
Eelhäälestatud sagedus, mille valib digitaalsisend DI5.
1.33.12
Eelhäälestatud sage-
dus 1
P1.3 P1.4 Hz 10.0 105
1.4.3 MULTIPUMBA (ÜKSIKAJAM) RAKENDUS
Multipumba (üksikajam) rakendust saab kasutada rakendustes, kus 1 ajam juhib
maksimaalselt 8 paralleelse mootoriga (nt pumbad, ventilaatorid või kompressorid)
süsteemi. Vaikimisi on multipumba (üksikajam) rakendus konfigureeritud 3 paralleelsele
mootorile.
Ajam on ühendatud 1 mootoriga, millest saab reguleeriv mootor. Ajami sisemine PID
kontroller juhib reguleeriva mootori kiirust ja annab releeväljundite juhtsignaale
lisamootorite käivitamiseks või seiskamiseks. Välised kontaktorid (lüliti) ühendavad
lisamootorid peatoitega.
Protsessi muutujat, nt rõhku, saab juhtida reguleeriva mootori kiiruse reguleerimisega ja
töötavate mootorite arvuga.
Parameetrite kirjeldusi vt 10 Parameetrite kirjeldused.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

PT
RO2
RO3
Käivitamine
/peatamine
KIIRSEADISTUSE JUHEND VACON · 31
Fig. 8: Multipumba (üksikajam) konfiguratsioon
Automaatvahetuse funktsioon (käivitumisjärjekorra muutmine) ühtlustab süsteemi mootorite
kulumist. Automaatvahetuse funktsioon jälgib mootorite töötunde ja määrab iga mootori
käivitumisjärjekorra. Väiksema töötundide arvuga mootor käivitub esimesena ja suurima
töötundide arvuga mootor viimasena. Automaatvahetuse funktsiooni saab konfigureerida
käivituma vastavalt automaatvahetuse intervalli ajale, mille määrab ajami reaalajas kell
(vajalik on RTC patarei olemasolu).
Automaatvahetuse funktsiooni saab konfigureerida kõigile süsteemi mootoritele või ainult
lisamootoritele.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

K2 K3
K1 K2 K2 K1.1 K2.1 K3.1
VACON · 32 KIIRSEADISTUSE JUHEND
Fig. 9: Juhtskeem, kus automaatvahetuse funktsioon on konfigureeritud ainult lisamootoritele
Fig. 10: Juhtskeem, kus automaatvahetuse funktsioon on konfigureeritud kõigile mootoritele
Kasutada saab 2 juhtimiskohta. Valige DI6-ga juhtimiskoht A või B. Valige DI6-ga
juhtimiskoht A või B. Kui aktiivne on juhtimiskoht A, annab DI1 käivitamise ja seiskamise
käsklused ning PID kontroller annab sageduse referentsi. Kui aktiivne on juhtimiskoht B,
annab DI4 käivitamise ja seiskamise käsklused ning AI1 annab sageduse referentsi.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

KIIRSEADISTUSE JUHEND VACON · 33
Kõikides rakendustes saab kõiki ajami väljundeid vabalt konfigureerida. Tavalisel I/O paneelil
on 1 analoogväljund (väljundsagedus) ja 3 releeväljundit (käitamine, viga, valmis).
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

1
6
2
3
4
5
18
19
30
12
7
13
8
9
10
14
15
16
21
22
23
11
17
A
B
24
25
26
28
29
Modbus RTU
*)
32
33
**)
+
-
A1
A1
A1
A2
A2
A2
TI1-
TI1+
mA
Mootori 1 juhtimine
(multipumba K2 kontaktor)
Mootori 2 juhtimine
(multipumba K2 kontaktor)
AO1–/GND
+24Vin
GND
GND
DI1
DI2
DI3
DI4
DI5
DI6
RO1/1 NC
RO1/2 CM
RO1/3 NO
CM
CM
RS485
RS485
RO2/1 NC
RO2/2 CM
RO2/3 NO
RO3/2 CM
RO3/3 NO
Standardne sisend-/väljundkilp
Terminal Signaal Kirjeldus
+10 V etalon
AI1+
AI1–
AI2+
AI2–
24 V väljund
Etalonväljund
Analoogsisend 1 +
Analoogsisend 1 –
Analoogsisend 2 +
Analoogsisend 2 –
24 V lisapinge
Sisendi/väljundi maandus
Digitaalsisend 1
Digitaalsisend 2
Digitaalsisend 3
Digitaalsisend 4
Digitaalsisend 5
Digitaalsisend 6
Ühine DI1–DI6 jaoks
Ühine DI1–DI6 jaoks
24 V lisapinge
Sisendi/väljundi maandus
Analoogväljund 1 +
Analoogväljund 1 –
Jadasiin, negatiivne
Jadasiin, positiivne
Releeväljund 1
Releeväljund 2
Releeväljund 3
Juhtimiskoha A/B valimine
AO1+
Koht A:
pole kasutusel
Koht B: sageduse
referents
(vaikimisi: 0...10 V)
PID tagasiside
(tegelik väärtus)
(vaikimisi: ...20 mA)
Koht A: käivitamine
edasisuunas (PID kontroller)
Koht B: käivitamine edasisuunas
(sageduse referents P3.3.1.6)
I =
(0)4 kuni 20 mA
Tegelik
väärtus
Kahejuhtmeline saatja
Mootori 1 blokeering
Mootori 2 blokeering
Mootori 3 blokeering
24 V väljund
Väljundsagedus
(vaikimisi 0...20 mA)
24 V lisasisendpinge
Mootori 3 juhtimine
(multipumba K2 kontaktor)
Referentspotentsiomeeter
1...10 kΩ
Termistori sisend
VACON · 34 KIIRSEADISTUSE JUHEND
Fig. 11: Multipumba (üksikajam) rakenduse vaikimisi juhtühendused
* = kasutatav ainult VACON® 100 X korral.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

A
B
C
KIIRSEADISTUSE JUHEND VACON · 35
** = VACON® 100 X kiiplüliti konfiguratsioonidega tutvumiseks vaadake VACON® 100 X
paigaldusjuhendit.
Fig. 12: Kiiplüliti
A. Digitaalsed sisendid
C. Ühendatud terminaliga GND (vaikimisi)
B. Ujuv
Tabel 8: M1.1 Viisardid
Register Parameeter Min Max Ühik Vaikimisi ID Kirjeldus
0 = mitte aktiveerida
1 = aktiveerida
1.1.1 Käivitusviisard 0 1 0 1170
1.1.2
Tulekahjurežiimi vii-
sard
0 1 0 1672
Valik Aktiveerida käivitab käivitusviisardi (vt:
1.3 Esmane käivitamine).
Valik Aktiveerida käivitab tulekahjurežiimi
viisardi (vt: 2.6 Tulekah-
jurežiimi viisard).
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 36 KIIRSEADISTUSE JUHEND
Tabel 9: M1 Kiirseadistus
Register Parameeter Min Max Ühik Vaikimisi ID Kirjeldus
0 = standardne
1.2
Rakendus 0 4 2 212
1 = HVAC
2 = PID juhtimine
3 = multipump (üksikajam)
4 = multipump (multiajam)
1.3
1.4
1.5 Kiirendusaeg 1 0.1 3000.0 s 5.0 103
1.6 Aeglustusaeg 1 0.1 3000.0 s 5.0 104
1.7 Mootori voolupiirang IH*0,1 I
1.8 Mootori tüüp 0 2 0 650
Minimaalne sage-
duse referents
Maksimaalne sage-
duse referents
0.00 P1.4 Hz 0.0 101
P1.3 320.0 Hz
S
A Varieerub 107
50.0 /
60.0
102
Minimaalne lubatud
sageduse referents.
Maksimaalne lubatud
sageduse referents.
Määrab ajaperioodi,
mis on vajalik väljundsageduse tõusmiseks
0-sageduselt maksimumsagedusele.
Määrab ajaperioodi,
mis on vajalik väljundsageduse langemiseks
maksimumsageduselt
0-sagedusele.
Maksimaalne mootori
vool vahelduvvooluajamist.
0 = induktsioonmootor
1 = püsimagnetmootor
2 = reluktantsmootor
1
1.9
1.10
1.11
Mootori nominaal-
pinge
Mootori nominaalsa-
gedus
Mootori nominaalkii-
rus
Leidke mootori nimesildilt väärtus Un.
Variee-
rub
8.0 320.0 Hz
24 19200 p/min Varieerub 112
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
Variee-
rub
V Varieerub 110
50.0 /
60.0
MÄRKUS!
Tehke kindlaks, kas
mootoril on deltaühendus või tähtühendus.
Leidke mootori nime-
111
sildilt väärtus fn.
Leidke mootori nimesildilt väärtus nn.

KIIRSEADISTUSE JUHEND VACON · 37
Tabel 9: M1 Kiirseadistus
Register Parameeter Min Max Ühik Vaikimisi ID Kirjeldus
1.12
1.13
1.14
1.15 Identifitseerimine 0 2 0 631
Mootori nominaal-
vool
Mootori Cos Phi
(võimsusfaktor)
Energia optimeeri-
mine
IH * 0,1 I
0.30 1.00 Varieerub 120
0 1 0 666
S
A Varieerub 113
Leidke mootori nimesildilt väärtus In.
Leidke mootori nimesildilt see väärtus.
Ajam leiab minimaalse
mootori voolu, et tarvitada vähem energiat ja
vähendada mootori
müra. Kasutage seda
funktsiooni nt ventilaatori ja pumba protsesside puhul.
0 = keelatud
1 = lubatud
Identifitseerimiskäivitus arvutab või mõõdab
mootori parameetrid,
mis on vajalikud mootori ja kiiruse tõhusaks
juhtimiseks.
0 = tegevust pole
1 = seisuajal
2 = pöörlemisega
1.16
1.17 Peatamisfunktsioon 0 1 0 506
1.18
Käivitusfunktsioon 0 1 0 505
Automaatne lähtes-
tus
0 1 0 731
Enne identifitseerimiskäivituse alustamist
tuleb määrata mootori
nimesildi parameetrid.
0 = rambiga
1 = lendkäivitus
0 = vabakäik
1 = rambiga
0 = keelatud
1 = lubatud
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 38 KIIRSEADISTUSE JUHEND
Tabel 9: M1 Kiirseadistus
Register Parameeter Min Max Ühik Vaikimisi ID Kirjeldus
0 = tegevust pole
1 = alarm
1.19
1.20
Reaktsioon välisele
veale
Reaktsioon veale AI
madal
0 3 2 701
0 5 0 700
2 = viga (seiskamine
vastavalt seiskamisrežiimile)
3 = viga (seiskamine
laskumisega)
0 = tegevust pole
1 = alarm
2 = alarm + eelhäälestatud vea sagedus
(P3.9.1.13)
3 = alarm + eelmine
sagedus
4 = viga (seiskamine
vastavalt seiskamisrežiimile)
5 = viga (seiskamine
laskumisega)
1.21 Kaugjuhtimiskoht 0 1 0 172
Kaugjuhtimiskoha (käivitamine/seiskamine)
valik.
0 = I/O juhtimine
1 = fieldbusiga juhtimine
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

KIIRSEADISTUSE JUHEND VACON · 39
Tabel 9: M1 Kiirseadistus
Register Parameeter Min Max Ühik Vaikimisi ID Kirjeldus
Sageduse referentsiallika valik, kui juhtimiskohaks on I/O A.
0 = personaalarvuti
1 = eelhäälestatud
sagedus 0
2 = klahvistiku referents
3 = Fieldbus
4 = AI1
5 = AI2
6 = AI1+AI2
7 = PID referents
8 = mootori potentsiomeeter
11 = plokk 1 väljas
12 = plokk 2 väljas
13 = plokk 3 väljas
14 = plokk 4 väljas
15 = plokk 5 väljas
16 = plokk 6 väljas
17 = plokk 7 väljas
18 = plokk 8 väljas
19 = plokk 9 väljas
20 = plokk 10 väljas
1.22
I/O juhtimise refe-
rentsi A valik
1 20 6 117
Parameetriga 1.2 seadistatud rakendus
annab vaikeväärtuse.
1.23
1.24
1.25 AI1 signaalivahemik 0 1 0 379
1.26 AI2 signaalivahemik 0 1 1 390
1.27 RO1 funktsioon 0 73 2 11001 Vt P3.5.3.2.1
1.28 RO2 funktsioon 0 73 3 11004 Vt P3.5.3.2.1
1.29 RO3 funktsioon 0 73 1 11007 Vt P3.5.3.2.1
1.30 AO1 funktsioon 0 31 2 10050 Vt P3.5.4.1.1
Klahvistiku juhtimise
referentsi valik
Fieldbusiga juhtimise
referentsi valik
1 20 1 121
1 20 2 122
Vt P1.22.
Vt P1.22.
0 = 0...10 V / 0...20 mA
1 = 2...10 V / 4...20 mA
0 = 0...10 V / 0...20 mA
1 = 2...10 V / 4...20 mA
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 40 KIIRSEADISTUSE JUHEND
Tabel 10: M1.34 Multipump (üksikajam)
Index Parameetrite Min Max Ühik
1.34.1 PID kasu 0.00 100.00 % 100.00 118
1.34.2
1.34.3 PID tuletusaeg 0.00 100.00 s 0.00 1132
PID ühendamis-
aeg
0.00 600.00 s 1.00 119
Vaikimi
si
ID Kirjeldus
Kui parameetri
väärtuseks on seadistatud 100%,
põhjustab 10%
muutus vea väärtuses kontrolleri väljundi muutumise
10% võrra.
Kui see parameeter on seadistatud
1,00 sekundile,
põhjustab 10%
muutus vea väärtuses kontrolleri väljundi muutumise
10,00%/s võrra.
Kui see parameeter on seadistatud
1,00 sekundile,
põhjustab 10%
muutus vea väärtuses 1,00 sekundi
vältel kontrolleri
väljundi muutumise
10,00% võrra.
1.34.4
1.34.5
1.34.6
1.34.7
1.34.8
1.34.9
Protsessi mõõtü-
hiku valimine
Protsessi mõõtü-
hik min
Protsessi mõõtü-
hik max
Tagasiside 1
allika valimine
Seadepunkti 1
allika valimine
Klahvistiku sea-
depunkt 1
1 44 1 1036
Varieerub Varieerub
Varieerub Varieerub
0 30 2 334
0 32 1 332
Varieerub Varieerub
Variee-
rub
Variee-
rub
Variee-
rub
0 167
1033
1034
Valige protsessi
mõõtühik. Vt
P3.13.1.4
Protsessi mõõtühiku väärtus on
sama, mis 0% PID
tagasisidesignaalist.
Protsessi mõõtühiku väärtus on
sama, mis 100%
PID tagasisidesignaalist.
Vt P3.13.3.3
Vt P3.13.2.6
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

KIIRSEADISTUSE JUHEND VACON · 41
Tabel 10: M1.34 Multipump (üksikajam)
Index Parameetrite Min Max Ühik
1.34.10
1.34.11 SP1 une viivitus 0 3000 s 0 1017
1.34.12 SP1 äratuse tase Varieerub Varieerub
SP1 une sage-
duse piirang
0.0 320.0 Hz 0.0 1016
Variee-
rub
Vaikimi
si
Variee-
rub
ID Kirjeldus
Ajam lülitub unerežiimile siis, kui väljundsagedus jääb
alla seda piirväärtust kauemaks, kui
on määratletud
parameetriga Une
viivitus.
0= pole kasutusel
Minimaalne ajaperiood, mille vältel
püsib sagedus alla
une taset, enne kui
ajam seiskub.
0= pole kasutusel
PID tagasiside järelevalve ärkamise
väärtus. Ärkamise
1018
tase 1 kasutab valitud protsessi mõõtühikuid.
0= pole kasutusel
1.34.13
1.34.14 Pumpade arv 1 8 1 1001
1.34.15
Multipumba
režiim
Pumba blokee-
ring
0 2 0 1785
0 1 1 1032
Valib multipumba
režiimi.
0 = üksikajam
1 = Multifollower
2 = Multimaster
Multipumba süsteemis kasutatavate mootorite
(pumbad/ventilaatorid) koguarv.
Blokeeringu lubamine/tõkestamine.
Blokeering ütleb
süsteemile, kas
mootor on ühendatud või mitte.
0 = keelatud
1 = lubatud
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 42 KIIRSEADISTUSE JUHEND
Tabel 10: M1.34 Multipump (üksikajam)
Index Parameetrite Min Max Ühik
1.34.16
1.34.17
1.34.18
Automaatvahe-
tus
Automaatvahetu-
sega pump
Automaatvahe-
tuse intervall
0 2 1 1027
0 1 1 1028
0.0 3000.0 h 48.0 1029
Vaikimi
si
ID Kirjeldus
Mootorite käivitumisjärjekorra ja
prioriteedi rotatsiooni lubamine/
tõkestamine.
0 = keelatud
1 = lubatud (intervall)
2 = lubatud (nädalapäevad)
0 = abipump
1 = kõik pumbad
Kui kasutatakse
selle parameetriga
määratud aega,
käivitub automaatvahetuse funktsioon. Kuid automaatvahetus käivitub ainult siis, kui
maht jääb alla
parameetritega
P1.34.21 ja
P1.34.22 määratud
taset.
1.34.19
1.34.20
1.34.21
Automaatvahe-
tuse päevad
Automaatvahe-
tuse kellaaeg
Automaatvahe-
tus: Sageduse
piirang
Automaatvahetus: Pumba pii-
rang
0 127 15904
00:00:00 23:59:59 Aeg 15905
0.00 P3.3.1.2 Hz 25:00 1031
1 6 1030
Vahemik
B0 = pühapäev
B1 = esmaspäev
B2 = teisipäev
B3 = kolmapäev
B4 = neljapäev
B5 = reede
B6 = laupäev
Vahemik:
00:00:00-23:59:59
Need parameetrid
määravad taseme,
mida maht ei tohi
ületada, et automaatvahetus saaks
käivituda.1.34.22
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

KIIRSEADISTUSE JUHEND VACON · 43
Tabel 10: M1.34 Multipump (üksikajam)
Index Parameetrite Min Max Ühik
1.34.23 Ülekandekiirus 0 100 % 10 1097
1.34.24
1.34.25
Ülekandekiiruse
viivitus
Pumba 1 blokee-
ring
0 3600 s 10 1098
Vaikimi
si
DigSIS
pilu0.1
ID Kirjeldus
Seadepunkti protsent. Näiteks:
seadepunkt = 5
baari;
ülekandekiirus =
10%
Kui tagasiside
väärtus püsib vahemikus 4,5 kuni 5,5
baari, jääb mootor
ühendatuks.
Kui tagasiside jääb
väljapoole ülekandekiirust, siis aeg,
mille möödumisel
pumpasid lisatakse
või eemaldatakse.
AVATUD = mitteak-
426
tiivne
SULETUD =
aktiivne
1.34.26
1.34.27
1.34.28
1.34.29
1.34.30
1.34.31
1.34.32
Pumba 2 blokee-
ring
Pumba 3 blokee-
ring
Pumba 4 blokee-
ring
Pumba 5 blokee-
ring
Pumba 6 blokee-
ring
Pumba 7 blokee-
ring
Pumba 8 blokee-
ring
DigSIS
pilu0.1
DigSIS
pilu0.1
DigSIS
pilu0.1
DigSIS
pilu0.1
DigSIS
pilu0.1
DigSIS
pilu0.1
DigSIS
pilu0.1
427
428
429
430
486
487
488
Vt 1.34.25
Vt 1.34.25
Vt 1.34.25
Vt 1.34.25
Vt 1.34.25
Vt 1.34.25
Vt 1.34.25
1.4.4 MULTIPUMBA (MULTIAJAM) RAKENDUS
Multipumba (multiajam) rakendust saab kasutada süsteemis, kus on maksimaalselt 8
paralleelset, erineva kiirusega mootorit (nt pumbad, ventilaatorid või kompressorid).
Vaikimisi on multipumba (multiajam) rakendus konfigureeritud 3 paralleelsele mootorile.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

PT
FB
Käivitamine/
peatamine
PT
FB
VACON · 44 KIIRSEADISTUSE JUHEND
Parameetrite kirjeldusi vt 10 Parameetrite kirjeldused.
Multipumba (multiajam) süsteemi kasutusele võtmise kontrollnimekirjaga tutvumiseks vt
10.16.1 Multipumba (multiajam) kasutuselevõtu kontrollnimekiri.
Igal mootoril on ajam, mis juhib antud mootorit. Süsteemi ajamite omavaheline sideühendus
toimub Modbus RTU side abil.
Fig. 13: Multipumba (multiajam) konfiguratsioon
Protsessi muutujat, nt rõhku, saab juhtida reguleeriva mootori kiiruse reguleerimisega ja
töötavate mootorite arvuga. Reguleeriva mootori ajami sisemine PID kontroller juhib
mootorite kiirust, käivitamist ja seiskamist.
Süsteemi tööpõhimõte määratakse valitud töörežiimiga. Multifollower-režiimis järgivad
lisamootorid reguleeriva mootori kiirust.
Pump 1 juhib ning pumbad 2 ja 3 järgivad pumba 1 kiirust, nagu näitavad kõverad A.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

A
P1 P2 P3
f
max
f
min
p/min
t
A
B
f
max
f
min
p/min
t
P1
P2
P3
KIIRSEADISTUSE JUHEND VACON · 45
Fig. 14: Juhtimine Multifollower-režiimis
Joonis kujutab näidet Multimaster-režiimist, kus järgmise mootori käivitumisel lukustub
reguleeriva mootori kiirus püsivale tootmiskiirusele B. Kõverad A näitavad pumpade
reguleerimist.
Fig. 15: Juhtimine Multimaster-režiimis
Automaatvahetuse funktsioon (käivitumisjärjekorra muutmine) ühtlustab süsteemi mootorite
kulumist. Automaatvahetuse funktsioon jälgib mootorite töötunde ja määrab iga mootori
käivitumisjärjekorra. Väiksema töötundide arvuga mootor käivitub esimesena ja suurima
töötundide arvuga mootor viimasena. Automaatvahetuse funktsiooni saab konfigureerida
käivituma vastavalt automaatvahetuse intervalli ajale või ajami sisemisele reaalajas kellale
(vajalik on RTC patarei olemasolu).
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

1
6
2
3
4
5
18
19
30
12
7
13
8
9
10
14
15
16
21
22
23
11
17
A
B
24
25
26
28
29
32
33
*)
**)
+
-
TI1+
TI1-
mA
TÖÖS
TÖÖS
AO1-
+24Vin
Tegelik
väärtus
GND
GND
DI1
DI2
DI3
DI4
DI5
DI6
RO1/1 NC
RO1/2 CM
RO1/3 NO
CM
CM
RS485
RS485
RO2/1 NC
RO2/2 CM
RO2/3 NO
Standardne sisend-/väljundkilp
Terminal Signaal Kirjeldus
+10 V etalon
AI1+
AI1–
AI2+
AI2–
24 V väljund
24 V väljund
Etalonväljund
Analoogsisend 1 +
Analoogsisend 1 –
Analoogsisend 2 +
Analoogsisend 2 –
24 V lisapinge
Sisendi/väljundi maandus
Digitaalsisend 1
Digitaalsisend 2
Digitaalsisend 3
Digitaalsisend 4
Digitaalsisend 5
Digitaalsisend 6
Ühine DI1–DI6 jaoks
Ühine DI1–DI6 jaoks
24 V lisapinge
Sisendi/väljundi maandus
Analoogväljund 1 +
Analoogväljund 1 –
24 V lisa
sisendpinge
Jadasiin, negatiivne
Jadasiin, positiivne
Releeväljund 1
Releeväljund 2
RO3/2 CM
RO3/3 NO
VALMIS
Releeväljund 3
RIKE
Rikke lähtestamine
Väline rike
Väljundsagedus
(0...20 mA)
AO1+
Vaikimisi pole kasutusel
(vaikimisi: 0...10 V)
PID tagasiside
(tegelik väärtus)
(vaikimisi 4...20 mA)
Algusest edasi
Loputus (käivitamine
edasisuunas + loputuse sagedus)
PID seadistuspunkti valimine
(avatud = klahvistik SP1, suletud = klahvistik SP2)
Pumba blokeering
(avatud = pole saadaval, suletud = saadaval)
Ajamilt-ajamile side
(Modbus RTU)
2 juhtmega andur
Teistel
ajamitel
terminali A
Teistel ajamitel
terminali B
RIKE
(0) 4...20 mA
Termistori sisend
VACON · 46 KIIRSEADISTUSE JUHEND
Fig. 16: Multipumba (multiajam) rakenduse vaikimisi juhtühendused
* = kasutatav ainult VACON® 100 X korral.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

A
B
C
KIIRSEADISTUSE JUHEND VACON · 47
** = VACON® 100 X kiiplüliti konfiguratsioonidega tutvumiseks vaadake VACON® 100 X
paigaldusjuhendit.
Fig. 17: Kiiplüliti
A. Digitaalsed sisendid
C. Ühendatud terminaliga GND (vaikimisi)
B. Ujuv
Igal ajamil on rõhuandur. Kui liiasuse tase on kõrge, on ajam ja rõhuandurid liiased.
Ajami rikke korral hakkab ülemana tööle järgmine ajam.
•
Anduri rikke korral hakkab ülemana tööle järgmine ajam (millel on eraldi andur).
•
Iga ajamit juhib individuaalne lüliti, millel on seaded Automaatne, Väljas ja Inimene.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 3
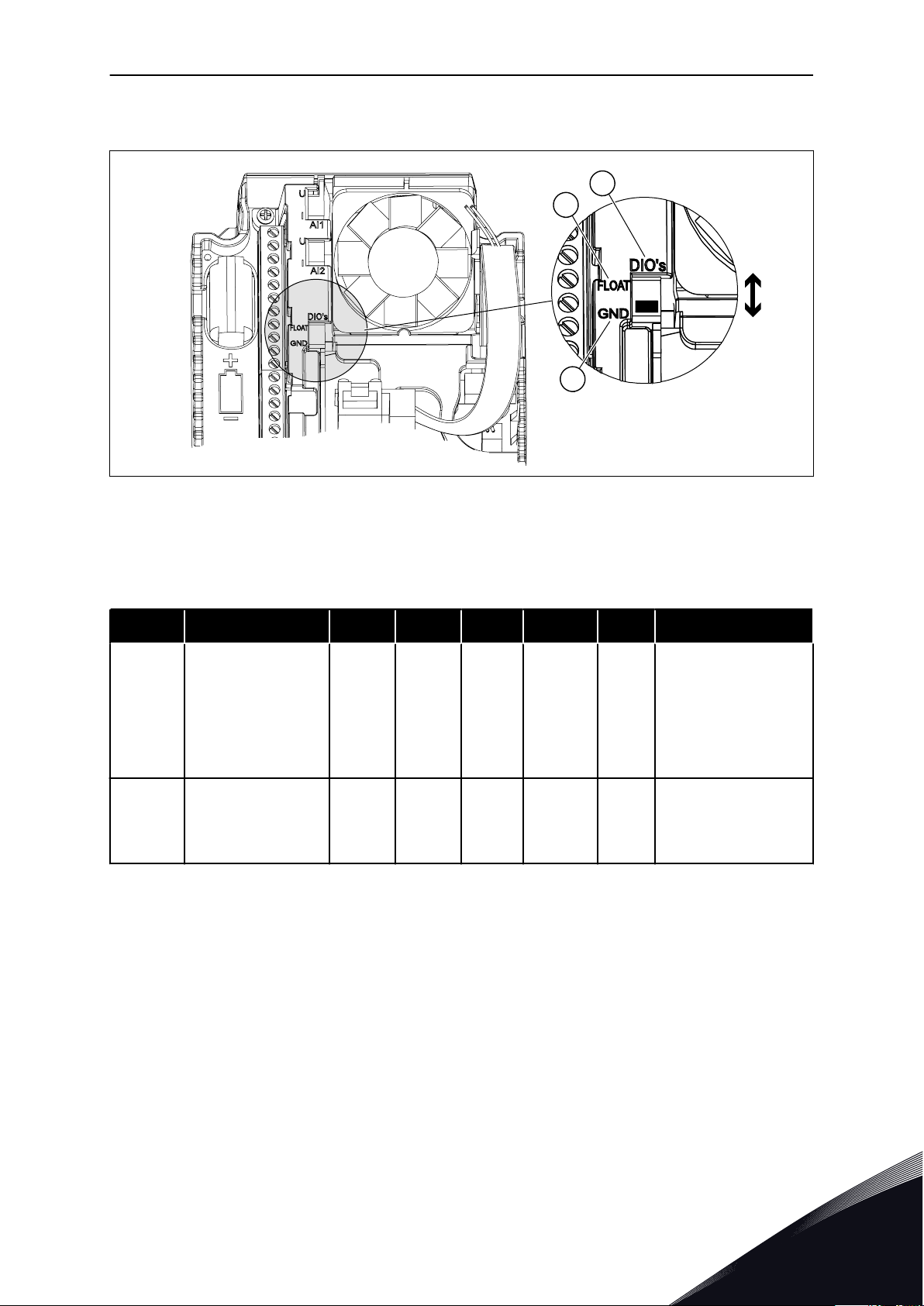
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
+ -
0
P
I
2
4
1
3
AJAM 1
AJAM 1 AJAM 2 AJAM 3
VACON 100 FLOW
2 JUHTMEGA
SAATJA
RÕHUANDUR 1
Referentspinge
POLE KASUTUSEL (0...10 V)
VÄLJUNDSAGEDUS
(0...20 mA)
PID TAGASISIDE (4...20 mA)
24 V lisapinge välja
24 V lisapinge sisse
Sisendi/väljundi maandus
Sisendi/väljundi maandus
VEA LÄHTESTAMINE
VÄLINE RIKE
KÄIVITAMINE EDASISUUNAS
Ühine DI1–DI6 jaoks
Ühine DI1–DI6 jaoks
24 V lisapinge välja
PUMBA BLOKEERING
(vaikimisi pole kasutusel)
Ajamilt-ajamile side
(Modbus RTU)
Relee väljund 1
(KÄITA)
Relee väljund 2
(VIGA)
Relee väljund 3
(VALMIS)
LOPUTUS
(käivitamine edasisuunas + loputuse sagedus)
PID SEADISTUSPUNKTI VALIK
(avatud = klahvistik SP1, suletud = klahvistik SP2)
DIO-d
UJUV
GND
U
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
etalon
AI2+
AI1–
AI2+
AI2–
+24 V
välja
GND
DIN1
DIN2
DIN3
CM
+24 V
välja
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1–
+24V
in
RS485
RS485
I
U
I
U
I
OFF
ON
AI1
AI2
AO
RS485
lõpetamine
AUTO MAN
1S1
P1.2
Rakendus
= multipump (multiajam)
P3.15.3
Pumba ID-number
= 1
P3.15.4
Käivitamine ja tagasiside
= signaalid on ühendatud
VACON · 48 KIIRSEADISTUSE JUHEND
Fig. 18: Multipumba (multiajam) süsteemi elektriskeem, näide 1A
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
+ -
0
P
I
2
4
1
3
AJAM 2
AJAM 1 AJAM 2 AJAM 3
VACON 100 FLOW
2 JUHTMEGA
SAATJA
RÕHUANDUR 2
Referentspinge
POLE KASUTUSEL (0...10 V)
VÄLJUNDSAGEDUS
(0...20 mA)
PID TAGASISIDE (4...20 mA)
24 V lisapinge välja
24 V lisapinge sisse
Sisendi/väljundi maandus
Sisendi/väljundi maandus
VEA LÄHTESTAMINE
VÄLINE RIKE
KÄIVITAMINE EDASISUUNAS
Ühine DI1–DI6 jaoks
Ühine DI1–DI6 jaoks
24 V lisapinge välja
PUMBA BLOKEERING
(vaikimisi pole kasutusel)
Ajamilt-ajamile side
(Modbus RTU)
Relee väljund 1
(KÄITA)
Relee väljund 2
(VIGA)
Relee väljund 3
(VALMIS)
LOPUTUS
(käivitamine edasisuunas + loputuse sagedus)
PID SEADISTUSPUNKTI VALIK
(avatud = klahvistik SP1, suletud = klahvistik SP2)
DIO-d
UJUV
GND
U
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
etalon
AI2+
AI1–
AI2+
AI2–
+24 V
välja
GND
DIN1
DIN2
DIN3
CM
+24 V
välja
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1–
+24V
in
RS485
RS485
I
U
I
U
I
OFF
ON
AI1
AI2
AO
RS485
lõpetamine
AUTO MAN
2S1
P1.2
Rakendus
= multipump (multiajam)
P3.15.3
Pumba ID-number
= 2
P3.15.4
Käivitamine ja tagasiside
= signaalid on ühendatud
KIIRSEADISTUSE JUHEND VACON · 49
Fig. 19: Multipumba (multiajam) süsteemi elektriskeem, näide 1B
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
+ -
0
P
I
2
4
1
3
AJAM 3
AJAM 1 AJAM 2 AJAM 3
VACON 100 FLOW
2 JUHTMEGA
SAATJA
RÕHUANDUR 3
Referentspinge
POLE KASUTUSEL (0...10 V)
VÄLJUNDSAGEDUS
(0...20 mA)
PID TAGASISIDE (4...20 mA)
24 V lisapinge välja
24 V lisapinge sisse
Sisendi/väljundi maandus
Sisendi/väljundi maandus
VEA LÄHTESTAMINE
VÄLINE RIKE
KÄIVITAMINE EDASISUUNAS
Ühine DI1–DI6 jaoks
Ühine DI1–DI6 jaoks
24 V lisapinge välja
PUMBA BLOKEERING
(vaikimisi pole kasutusel)
Ajamilt-ajamile side
(Modbus RTU)
Relee väljund 1
(KÄITA)
Relee väljund 2
(VIGA)
Relee väljund 3
(VALMIS)
LOPUTUS
(käivitamine edasisuunas + loputuse sagedus)
PID SEADISTUSPUNKTI VALIK
(avatud = klahvistik SP1, suletud = klahvistik SP2)
DIO-d
UJUV
GND
U
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
etalon
AI2+
AI1–
AI2+
AI2–
+24 V
välja
GND
DIN1
DIN2
DIN3
CM
+24 V
välja
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1–
+24V
in
RS485
RS485
I
U
I
U
I
OFF
ON
AI1
AI2
AO
RS485
lõpetamine
AUTO MAN
3S1
P1.2
Rakendus
= multipump (multiajam)
P3.15.3
Pumba ID-number
= 3
P3.15.4Käivitamine ja tagasiside = signaalid on ühendatud
VACON · 50 KIIRSEADISTUSE JUHEND
Fig. 20: Multipumba (multiajam) süsteemi elektriskeem, näide 1C
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

KIIRSEADISTUSE JUHEND VACON · 51
1 andur on ühendatud kõigi ajamitega. Süsteemi liiasuse tase on kõrge, kuna liiased on
ainult ajamid.
Ajami rikke korral hakkab ülemana tööle järgmine ajam.
•
Anduri rikke korral süsteem seiskub.
•
Iga ajamit juhib individuaalne lüliti, millel on seaded Automaatne, Väljas ja Inimene.
Terminal 17 ühendab +24 V ajamitega 1 ja 2. Välised dioodid on ühendatud terminalidega 1 ja
2. Digitaalsisendi signaalid kasutavad negatiivset loogikat (ON = OV).
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13
GND
14
DIN4
15 DIN5
16 DIN6
17
CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B
RS485
21 RO1
22 RO1
23
RO1
24
RO2
25 RO2
26
RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9
DIN2
10 DIN3
11
CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26
RO2
32
RO3
33
RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21 RO1
22 RO1
23 RO1
24
RO2
25 RO2
26
RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
-
+
+ -
0
P
I
2
4
1
3
AJAM 1
VACON 100 FLOW
2 JUHTMEGA
SAATJA
RÕHUANDUR 1
Referentspinge
POLE KASUTUSEL (0...10 V)
VÄLJUNDSAGEDUS
(0...20 mA)
PID TAGASISIDE (4...20 mA)
24 V lisapinge välja
24 V lisapinge sisse
Sisendi/väljundi maandus
Sisendi/väljundi maandus
VEA LÄHTESTAMINE
VÄLINE RIKE
KÄIVITAMINE EDASISUUNAS
Ühine DI1–DI6 jaoks
Ühine DI1–DI6 jaoks
24 V lisapinge välja
PUMBA BLOKEERING
(vaikimisi pole kasutusel)
Ajamilt-ajamile side
(Modbus RTU)
Relee väljund 1
(KÄITA)
Relee väljund 2
(VIGA)
Relee väljund 3
(VALMIS)
LOPUTUS
(käivitamine edasisuunas + loputuse sagedus)
PID SEADISTUSPUNKTI VALIK
(avatud = klahvistik SP1, suletud = klahvistik SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
etalon
AI2+
AI1–
AI2+
AI2–
+24 V
välja
GND
DIN1
DIN2
DIN3
CM
+24 V
välja
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24V
in
RS485
RS485
AUTO MAN
1S1
DIO-d
UJUV
GND
U
I
U
I
U
I
OFF
ON
AI1
AI2
AO
RS485
lõpetamine
AJAM 1 AJAM 2 AJAM 3
P1.2
P3.15.3
P3.15.4
Rakendus
Pumba ID-number
Käivitamine ja tagasiside
= multipump (multiajam)
= 1
= signaalid on ühendatud
VACON · 52 KIIRSEADISTUSE JUHEND
Fig. 21: Multipumba (multiajam) süsteemi elektriskeem, näide 2A
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13
GND
14
DIN4
15 DIN5
16 DIN6
17
CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B
RS485
21 RO1
22 RO1
23
RO1
24
RO2
25 RO2
26
RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9
DIN2
10 DIN3
11
CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26
RO2
32
RO3
33
RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21 RO1
22 RO1
23 RO1
24
RO2
25 RO2
26
RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
-
+
0
2
4
1
3
AJAM 2
VACON 100 FLOW
Referentspinge
POLE KASUTUSEL (0...10 V)
VÄLJUNDSAGEDUS
(0...20 mA)
PID TAGASISIDE (4...20 mA)
24 V lisapinge välja
24 V lisapinge sisse
Sisendi/väljundi maandus
Sisendi/väljundi maandus
VEA LÄHTESTAMINE
VÄLINE RIKE
KÄIVITAMINE EDASISUUNAS
Ühine DI1–DI6 jaoks
Ühine DI1–DI6 jaoks
24 V lisapinge välja
PUMBA BLOKEERING
(vaikimisi pole kasutusel)
Ajamilt-ajamile side
(Modbus RTU)
Relee väljund 1
(KÄITA)
Relee väljund 2
(VIGA)
Relee väljund 3
(VALMIS)
LOPUTUS
(käivitamine edasisuunas + loputuse sagedus)
PID SEADISTUSPUNKTI VALIK
(avatud = klahvistik SP1, suletud = klahvistik SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
etalon
AI2+
AI1–
AI2+
AI2–
+24 V
välja
GND
DIN1
DIN2
DIN3
CM
+24 V
välja
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24V
in
RS485
RS485
AUTO MAN
2S1
DIO-d
UJUV
GND
U
I
U
I
U
I
OFF
ON
AI1
AI2
AO
RS485
lõpetamine
AJAM 1 AJAM 2 AJAM 3
P1.2
P3.15.3
P3.15.4
Rakendus
Pumba ID-number
Käivitamine ja tagasiside
= multipump (multiajam)
= 2
= signaalid on ühendatud
KIIRSEADISTUSE JUHEND VACON · 53
Fig. 22: Multipumba (multiajam) süsteemi elektriskeem, näide 2B
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13
GND
14
DIN4
15 DIN5
16 DIN6
17
CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B
RS485
21 RO1
22 RO1
23
RO1
24
RO2
25 RO2
26
RO2
32 RO3
33 RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9
DIN2
10 DIN3
11
CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26
RO2
32
RO3
33
RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3 AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16
DIN6
17 CM
18 AO1 +
19 AO1 -
30
+24V in
A
RS485
B
RS485
21 RO1
22 RO1
23 RO1
24
RO2
25 RO2
26
RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Signals Connected
-
+
0
2
4
1
3
AJAM 3
VACON 100 FLOW
Referentspinge
POLE KASUTUSEL (0...10 V)
VÄLJUNDSAGEDUS
(0...20 mA)
PID TAGASISIDE (4...20 mA)
24 V lisapinge välja
24 V lisapinge sisse
Sisendi/väljundi maandus
Sisendi/väljundi maandus
VEA LÄHTESTAMINE
VÄLINE RIKE
KÄIVITAMINE EDASISUUNAS
Ühine DI1–DI6 jaoks
Ühine DI1–DI6 jaoks
24 V lisapinge välja
PUMBA BLOKEERING
(vaikimisi pole kasutusel)
Ajamilt-ajamile side
(Modbus RTU)
Relee väljund 1
(KÄITA)
Relee väljund 2
(VIGA)
Relee väljund 3
(VALMIS)
LOPUTUS
(käivitamine edasisuunas + loputuse sagedus)
PID SEADISTUSPUNKTI VALIK
(avatud = klahvistik SP1, suletud = klahvistik SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
etalon
AI2+
AI1–
AI2+
AI2–
+24 V
välja
GND
DIN1
DIN2
DIN3
CM
+24 V
välja
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24V
in
RS485
RS485
AUTO MAN
3S1
DIO-d
UJUV
GND
U
I
U
I
U
I
OFF
ON
AI1
AI2
AO
RS485
lõpetamine
AJAM 1 AJAM 2 AJAM 3
P1.2
P3.15.3
P3.15.4
Rakendus
Pumba ID-number
Käivitamine ja tagasiside
= multipump (multiajam)
= 3
= signaalid on ühendatud
VACON · 54 KIIRSEADISTUSE JUHEND
Fig. 23: Multipumba (multiajam) süsteemi elektriskeem, näide 2C
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

KIIRSEADISTUSE JUHEND VACON · 55
2 ajamil on individuaalsed rõhuandurid. Süsteemi liiasuse tase on keskmine, kuna ajamid ja
rõhuandurid on dubleeritud.
Ajami rikke korral hakkab ülemana tööle teine ajam.
•
Anduri rikke korral hakkab ülemana tööle teine ajam (millel on eraldi andur).
•
Iga ajamit juhib individuaalne lüliti, millel on seaded Automaatne, Väljas ja Inimene.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

1
+10V
ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8
DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23
RO1
24 RO2
25 RO2
26 RO2
32 RO3
33
RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9
DIN2
10 DIN3
11 CM
12
+24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18
AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10
DIN3
11 CM
12 +24V out
13
GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30
+24V in
A RS485
B RS485
21 RO1
22
RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Start Signal Only
-
+
-
+
+ -
0
P
I
2
4
1
3
AJAM 1
VACON 100 FLOW
2 JUHTMEGA
SAATJA
RÕHUANDUR 1
Referentspinge
POLE KASUTUSEL (0...10 V)
VÄLJUNDSAGEDUS
(0...20 mA)
PID TAGASISIDE (4...20 mA)
24 V lisapinge välja
24 V lisapinge sisse
Sisendi/väljundi maandus
Sisendi/väljundi maandus
VEA LÄHTESTAMINE
VÄLINE RIKE
KÄIVITAMINE EDASISUUNAS
Ühine DI1–DI6 jaoks
Ühine DI1–DI6 jaoks
24 V lisapinge välja
PUMBA BLOKEERING
(vaikimisi pole kasutusel)
Ajamilt-ajamile side
(Modbus RTU)
Relee väljund 1
(KÄITA)
Relee väljund 2
(VIGA)
Relee väljund 3
(VALMIS)
LOPUTUS
(käivitamine edasisuunas + loputuse sagedus)
PID SEADISTUSPUNKTI VALIK
(avatud = klahvistik SP1, suletud = klahvistik SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
etalon
AI2+
AI1–
AI2+
AI2–
+24 V
välja
GND
DIN1
DIN2
DIN3
CM
+24 V
välja
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24V
in
RS485
RS485
AUTO MAN
1S1
DIO-d
UJUV
GND
U
I
U
I
U
I
OFF
ON
AI1
AI2
AO
RS485
lõpetamine
AJAM 1 AJAM 2 AJAM 3
P1.2
P3.15.3
P3.15.4
Rakendus
Pumba ID-number
Käivitamine ja tagasiside
= multipump (multiajam)
= 1
= signaalid on ühendatud
VACON · 56 KIIRSEADISTUSE JUHEND
Fig. 24: Multipumba (multiajam) süsteemi elektriskeem, näide 3A
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

1
+10V
ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8
DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23
RO1
24 RO2
25 RO2
26 RO2
32 RO3
33
RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9
DIN2
10 DIN3
11 CM
12
+24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18
AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10
DIN3
11 CM
12 +24V out
13
GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30
+24V in
A RS485
B RS485
21 RO1
22
RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Start Signal Only
-
+
-
+
+ -
0
P
I
2
4
1
3
AJAM 1
VACON 100 FLOW
2 JUHTMEGA
SAATJA
RÕHUANDUR 1
Referentspinge
POLE KASUTUSEL (0...10 V)
VÄLJUNDSAGEDUS
(0...20 mA)
PID TAGASISIDE (4...20 mA)
24 V lisapinge välja
24 V lisapinge sisse
Sisendi/väljundi maandus
Sisendi/väljundi maandus
VEA LÄHTESTAMINE
VÄLINE RIKE
KÄIVITAMINE EDASISUUNAS
Ühine DI1–DI6 jaoks
Ühine DI1–DI6 jaoks
24 V lisapinge välja
PUMBA BLOKEERING
(vaikimisi pole kasutusel)
Ajamilt-ajamile side
(Modbus RTU)
Relee väljund 1
(KÄITA)
Relee väljund 2
(VIGA)
Relee väljund 3
(VALMIS)
LOPUTUS
(käivitamine edasisuunas + loputuse sagedus)
PID SEADISTUSPUNKTI VALIK
(avatud = klahvistik SP1, suletud = klahvistik SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
etalon
AI2+
AI1–
AI2+
AI2–
+24 V
välja
GND
DIN1
DIN2
DIN3
CM
+24 V
välja
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24V
in
RS485
RS485
AUTO MAN
1S1
DIO-d
UJUV
GND
U
I
U
I
U
I
OFF
ON
AI1
AI2
AO
RS485
lõpetamine
AJAM 1 AJAM 2 AJAM 3
P1.2
P3.15.3
P3.15.4
Rakendus
Pumba ID-number
Käivitamine ja tagasiside
= multipump (multiajam)
= 1
= signaalid on ühendatud
KIIRSEADISTUSE JUHEND VACON · 57
Fig. 25: Multipumba (multiajam) süsteemi elektriskeem, näide 3B
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

1
+10V
ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8
DIN1
9 DIN2
10 DIN3
11 CM
12 +24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30 +24V in
A RS485
B RS485
21 RO1
22 RO1
23
RO1
24 RO2
25 RO2
26 RO2
32 RO3
33
RO3
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 1
1S1
2 4
1
3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
0
AUTO MAN
2-WIRE
TRANSMITTER
P
I
PRESSURE
SENSOR 2
2S1
2 4
1
3
0
AUTO MAN
3S1
2 4
1
3
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
FLOAT
GND
DIO´S
U
I
AI1
U
I
AI2
U
I
AO
OFF
ON
RS485
termination
1 +10V ref
2
AI1 +
3 AI1 -
4
AI2 +
5 AI2 -
6 +24V out
7
GND
8 DIN1
9
DIN2
10 DIN3
11 CM
12
+24V out
13 GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18
AO1 +
19 AO1 -
30 +24V in
A RS485
B RS485
21
RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
32
RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
1 +10V ref
2 AI1 +
3
AI1 -
4 AI2 +
5 AI2 -
6 +24V out
7 GND
8 DIN1
9 DIN2
10
DIN3
11 CM
12 +24V out
13
GND
14 DIN4
15 DIN5
16 DIN6
17 CM
18 AO1 +
19
AO1 -
30
+24V in
A RS485
B RS485
21 RO1
22
RO1
23 RO1
24 RO2
25 RO2
26 RO2
32 RO3
33 RO3
Reference voltage
NOT USED
(0...10V)
PID FEEDBACK
(4...20mA)
24V auxilary voltage out
I/O ground
START FORWARD
FLUSHING
(Start Forward + Flushing Freq.)
PID SETPOINT SELECT.
(Open=Keypad SP1, Closed=Keypad SP2)
Common for DI1-DI6
24V auxilary voltage out
I/O ground
FAULT RESET
PUMP INTERLOCK
(Not in use by default)
EXTERNAL FAULT
Common for DI1-DI6
OUTPUT FREQUENCY
(0...20mA)
24V auxilary voltage in
Drive-To-Drive
Communication
(Modbus RTU)
Relay Output 1
(RUN)
Relay Output 2
(FAULT)
Relay Output 3
(READY)
VACON 100 FLOW
P1.2 Application
= Multipump(MultiDrive)
P3.15.3 Pump ID Number = 1
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 2
P3.15.4 Start & Feedback = Signals Connected
VACON 100 FLOW
P1.2 Application = Multipump(MultiDrive)
P3.15.3 Pump ID Number = 3
P3.15.4 Start & Feedback = Start Signal Only
-
+
-
+
0
2
4
1
3
AJAM 3
VACON 100 FLOW
Referentspinge
POLE KASUTUSEL (0...10 V)
VÄLJUNDSAGEDUS
(0...20 mA)
PID TAGASISIDE (4...20 mA)
24 V lisapinge välja
24 V lisapinge sisse
Sisendi/väljundi maandus
Sisendi/väljundi maandus
VEA LÄHTESTAMINE
VÄLINE RIKE
KÄIVITAMINE EDASISUUNAS
Ühine DI1–DI6 jaoks
Ühine DI1–DI6 jaoks
24 V lisapinge välja
PUMBA BLOKEERING
(vaikimisi pole kasutusel)
Ajamilt-ajamile side
(Modbus RTU)
Relee väljund 1
(KÄITA)
Relee väljund 2
(VIGA)
Relee väljund 3
(VALMIS)
LOPUTUS
(käivitamine edasisuunas + loputuse sagedus)
PID SEADISTUSPUNKTI VALIK
(avatud = klahvistik SP1, suletud = klahvistik SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
etalon
AI2+
AI1–
AI2+
AI2–
+24 V
välja
GND
DIN1
DIN2
DIN3
CM
+24 V
välja
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24V
in
RS485
RS485
AUTO MAN
3S1
DIO-d
UJUV
GND
U
I
U
I
U
I
OFF
ON
AI1
AI2
AO
RS485
lõpetamine
AJAM 1 AJAM 2 AJAM 3
P1.2
P3.15.3
P3.15.4
Rakendus
Pumba ID-number
Käivitamine ja tagasiside
= multipump (multiajam)
= 3
= signaalid on ühendatud
VACON · 58 KIIRSEADISTUSE JUHEND
Fig. 26: Multipumba (multiajam) süsteemi elektriskeem, näide 3C
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

KIIRSEADISTUSE JUHEND VACON · 59
1 üldrõhuandur on ühendatud 2 ajamiga. Süsteemi liiasuse tase on kõrge, kuna liiased on
ainult ajamid.
Ajami rikke korral hakkab ülemana tööle teine ajam.
•
Anduri rikke korral süsteem seiskub.
•
Iga ajamit juhib individuaalne lüliti, millel on seaded Automaatne, Väljas ja Inimene.
Terminal 17 ühendab +24 V ajamitega 1 ja 2. Välised dioodid on ühendatud terminalidega 1 ja
2. Digitaalsisendi signaalid kasutavad negatiivset loogikat (ON = OV).
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

+ -
0
P
I
2
4
1
3
AJAM 1
VACON 100 FLOW
2 JUHTMEGA
SAATJA
RÕHUANDUR 1
Referentspinge
POLE KASUTUSEL (0...10 V)
VÄLJUNDSAGEDUS
(0...20 mA)
PID TAGASISIDE (4...20 mA)
24 V lisapinge välja
24 V lisapinge sisse
Sisendi/väljundi maandus
Sisendi/väljundi maandus
VEA LÄHTESTAMINE
VÄLINE RIKE
KÄIVITAMINE EDASISUUNAS
Ühine DI1–DI6 jaoks
Ühine DI1–DI6 jaoks
24 V lisapinge välja
PUMBA BLOKEERING
(vaikimisi pole kasutusel)
Ajamilt-ajamile side
(Modbus RTU)
Relee väljund 1
(KÄITA)
Relee väljund 2
(VIGA)
Relee väljund 3
(VALMIS)
LOPUTUS
(käivitamine edasisuunas + loputuse sagedus)
PID SEADISTUSPUNKTI VALIK
(avatud = klahvistik SP1, suletud = klahvistik SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
etalon
AI2+
AI1–
AI2+
AI2–
+24 V
välja
GND
DIN1
DIN2
DIN3
CM
+24 V
välja
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24V
in
RS485
RS485
AUTO MAN
1S1
DIO-d
UJUV
GND
U
I
U
I
U
I
OFF
ON
AI1
AI2
AO
RS485
lõpetamine
AJAM 1 AJAM 2 AJAM 3
P1.2
P3.15.3
P3.15.4
Rakendus
Pumba ID-number
Käivitamine ja tagasiside
= multipump (multiajam)
= 1
= signaalid on ühendatud
VACON · 60 KIIRSEADISTUSE JUHEND
Fig. 27: Multipumba (multiajam) süsteemi elektriskeem, näide 4A
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

0
2
4
1
3
AJAM 2
VACON 100 FLOW
Referentspinge
POLE KASUTUSEL (0...10 V)
VÄLJUNDSAGEDUS (0...20 mA)
PID TAGASISIDE (4...20 mA)
24 V lisapinge välja
24 V lisapinge sisse
Sisendi/väljundi maandus
Sisendi/väljundi maandus
VEA LÄHTESTAMINE
VÄLINE RIKE
KÄIVITAMINE EDASISUUNAS
Ühine DI1–DI6 jaoks
Ühine DI1–DI6 jaoks
24 V lisapinge välja
PUMBA BLOKEERING (vaikimisi pole kasutusel)
Ajamilt-ajamile side (Modbus RTU)
Relee väljund 1 (KÄITA)
Relee väljund 2 (VIGA)
Relee väljund 3 (VALMIS)
LOPUTUS
(käivitamine edasisuunas + loputuse sagedus)
PID SEADISTUSPUNKTI VALIK
(avatud = klahvistik SP1, suletud = klahvistik SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V etalon
AI2+
AI1–
AI2+
AI2–
+24 V välja
+24 V välja
GND
DIN1
DIN2
DIN3
CM
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1–
+24Vin
RS485
RS485
AUTO MAN
2S1
DIO-d
UJUV
GND
U
I
U
I
U
I
OFF (VÄLJAS)
ON (SEES)
AI1
AI2
AO
RS485
lõpetamine
AJAM 1 AJAM 2 AJAM 3
P1.2
P3.15.3
P3.15.4
Rakendus
Pumba ID-number
Käivitamine ja tagasiside
= multipump (multiajam)
= 2
= signaalid on ühendatud
KIIRSEADISTUSE JUHEND VACON · 61
Fig. 28: Multipumba (multiajam) süsteemi elektriskeem, näide 4B
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

0
2
4
1
3
AJAM 3
VACON 100 FLOW
Referentspinge
POLE KASUTUSEL (0...10 V)
VÄLJUNDSAGEDUS
(0...20 mA)
PID TAGASISIDE (4...20 mA)
24 V lisapinge välja
24 V lisapinge sisse
Sisendi/väljundi maandus
Sisendi/väljundi maandus
VEA LÄHTESTAMINE
VÄLINE RIKE
KÄIVITAMINE EDASISUUNAS
Ühine DI1–DI6 jaoks
Ühine DI1–DI6 jaoks
24 V lisapinge välja
PUMBA BLOKEERING
(vaikimisi pole kasutusel)
Ajamilt-ajamile side
(Modbus RTU)
Relee väljund 1
(KÄITA)
Relee väljund 2
(VIGA)
Relee väljund 3
(VALMIS)
LOPUTUS
(käivitamine edasisuunas + loputuse sagedus)
PID SEADISTUSPUNKTI VALIK
(avatud = klahvistik SP1, suletud = klahvistik SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
etalon
AI2+
AI1–
AI2+
AI2–
+24 V
välja
GND
DIN1
DIN2
DIN3
CM
+24 V
välja
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24V
in
RS485
RS485
AUTO MAN
3S1
DIO-d
UJUV
GND
U
I
U
I
U
I
OFF
ON
AI1
AI2
AO
RS485
lõpetamine
AJAM 1 AJAM 2 AJAM 3
P1.2
P3.15.3
P3.15.4
Rakendus
Pumba ID-number
Käivitamine ja tagasiside
= multipump (multiajam)
= 3
= signaalid on ühendatud
VACON · 62 KIIRSEADISTUSE JUHEND
Fig. 29: Multipumba (multiajam) süsteemi elektriskeem, näide 4C
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

KIIRSEADISTUSE JUHEND VACON · 63
1 rõhuandur on ühendatud esimese ajamiga. Süsteem ei ole liiane, kuna ajami või anduri
rikke korral süsteem seiskub.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

+ -
P
I
2
1
AJAM 1
AJAM 1 AJAM 2 AJAM 3
VACON 100 FLOW
2 JUHTMEGA
SAATJA
RÕHUANDUR 1
Referentspinge
POLE KASUTUSEL (0...10 V)
VÄLJUNDSAGEDUS
(0...20 mA)
PID TAGASISIDE (4...20 mA)
24 V lisapinge välja
24 V lisapinge sisse
Sisendi/väljundi maandus
Sisendi/väljundi maandus
VEA LÄHTESTAMINE
VÄLINE RIKE
KÄIVITAMINE EDASISUUNAS
Ühine DI1–DI6 jaoks
Ühine DI1–DI6 jaoks
24 V lisapinge välja
PUMBA BLOKEERING
(vaikimisi pole kasutusel)
Ajamilt-ajamile side
(Modbus RTU)
Relee väljund 1
(KÄITA)
Relee väljund 2
(VIGA)
Relee väljund 3
(VALMIS)
LOPUTUS
(käivitamine edasisuunas + loputuse sagedus)
PID SEADISTUSPUNKTI VALIK
(avatud = klahvistik SP1, suletud = klahvistik SP2)
DIO-d
UJUV
GND
U
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
etalon
AI2+
AI1–
AI2+
AI2–
+24 V
välja
GND
DIN1
DIN2
DIN3
CM
+24 V
välja
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1–
+24V
in
RS485
RS485
I
U
I
U
I
OFF
ON
AI1
AI2
AO
RS485
lõpetamine
1S1
P1.2
Rakendus
= multipump (multiajam)
P3.15.3
Pumba ID-number
= 1
P3.15.4
Käivitamine ja tagasiside
= signaalid on ühendatud
PEATA
KÄIVITAMINE
SÜSTEEMI
KÄIVITAMISE
KÄSKLUS
VACON · 64 KIIRSEADISTUSE JUHEND
Fig. 30: Multipumba (multiajam) süsteemi elektriskeem, näide 5A
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

AJAM 2
VACON 100 FLOW
Referentspinge
POLE KASUTUSEL (0...10 V)
VÄLJUNDSAGEDUS (0...20 mA)
PID TAGASISIDE (4...20 mA)
24 V lisapinge välja
24 V lisapinge sisse
Sisendi/väljundi maandus
Sisendi/väljundi maandus
VEA LÄHTESTAMINE
VÄLINE RIKE
KÄIVITAMINE EDASISUUNAS
Ühine DI1–DI6 jaoks
Ühine DI1–DI6 jaoks
24 V lisapinge välja
PUMBA BLOKEERING
(vaikimisi pole kasutusel)
Ajamilt-ajamile side (Modbus RTU)
Relee väljund 1 (KÄITA)
Relee väljund 2 (VIGA)
Relee väljund 3 (VALMIS)
LOPUTUS
(käivitamine edasisuunas + loputuse sagedus)
PID SEADISTUSPUNKTI VALIK
(avatud = klahvistik SP1, suletud = klahvistik SP2)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V etalon
AI2+
AI1–
AI2+
AI2–
+24 V välja
+24 V välja
GND
DIN1
DIN2
DIN3
CM
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1–
+24Vin
RS485
RS485
DIO-d
UJUV
GND
U
I
U
I
U
I
OFF (VÄLJAS)
ON (SEES)
AI1
AI2
AO
RS485
lõpetamine
AJAM 1 AJAM 2 AJAM 3
P1.2
P3.15.3
P3.15.4
Rakendus
Pumba ID-number
Käivitamine ja tagasiside
= multipump (multiajam)
= 2
= signaalid on ühendatud
KIIRSEADISTUSE JUHEND VACON · 65
Fig. 31: Multipumba (multiajam) süsteemi elektriskeem, näide 5B
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

AJAM 3
VACON 100 FLOW
Referentspinge
POLE KASUTUSEL (0...10 V)
VÄLJUNDSAGEDUS (0...20 mA)
PID TAGASISIDE (4...20 mA)
24 V lisapinge välja
24 V lisapinge sisse
Sisendi/väljundi maandus
Sisendi/väljundi maandus
VEA LÄHTESTAMINE
VÄLINE RIKE
KÄIVITAMINE EDASISUUNAS
Ühine DI1–DI6 jaoks
Ühine DI1–DI6 jaoks
24 V lisapinge välja
PUMBA BLOKEERING
(vaikimisi pole kasutusel)
Ajamilt-ajamile side
(Modbus RTU)
Relee väljund 1
(KÄITA)
Relee väljund 2
(VIGA)
Relee väljund 3
(VALMIS)
LOPUTUS
(käivitamine edasisuunas + loputuse sagedus)
PID SEADISTUSPUNKTI VALIK
(avatud = klahvistik SP1, suletud = klahvistik SP2)
DIO-d
UJUV
GND
U
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
30
A
B
21
22
23
24
25
26
32
33
RO1
RO1
RO1
RO2
RO2
RO2
RO3
RO3
+10 V
etalon
AI2+
AI1–
AI2+
AI2–
+24 V
välja
GND
DIN1
DIN2
DIN3
CM
+24 V
välja
GND
DIN4
DIN5
DIN6
CM
AO1+
AO1-
+24V
in
RS485
RS485
I
U
I
U
I
OFF
ON
AI1
AI2
AO
RS485
lõpetamine
AJAM 1 AJAM 2 AJAM 3
P1.2
P3.15.3
P3.15.4
Rakendus
Pumba ID-number
Käivitamine ja tagasiside
= multipump (multiajam)
= 3
= signaalid on ühendatud
VACON · 66 KIIRSEADISTUSE JUHEND
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

KIIRSEADISTUSE JUHEND VACON · 67
Tabel 11: M1.1 Viisardid
Register Parameeter Min Max Ühik Vaikimisi ID Kirjeldus
0 = mitte aktiveerida
1 = aktiveerida
1.1.1 Käivitusviisard 0 1 0 1170
1.1.2
Tulekahjurežiimi vii-
sard
0 1 0 1672
Valik Aktiveerida käivitab käivitusviisardi (vt
peatükki 1.3 Esmane
käivitamine).
Valik Aktiveerida käivitab tulekahjurežiimi
viisardi (vt peatükki 1.3
Esmane käivitamine).
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 68 KIIRSEADISTUSE JUHEND
Tabel 12: M1 Kiirseadistus
Register Parameeter Min Max Ühik
1.2
Rakendus 0 4 2 212
Minimaalne
1.3
1.4
1.5
sageduse
referents
Maksi-
maalne
sageduse
referents
Kiirendus-
aeg 1
0.00 P1.4 Hz 0.0 101
P1.3 320.0 Hz
0.1 3000.0 s 5.0 103
Vaikimis
i
50.0 /
60.0
ID Kirjeldus
0 = standardne
1 = HVAC
2 = PID juhtimine
3 = multipump (üksikajam)
4 = multipump (multiajam)
Minimaalne lubatud
sageduse referents.
Maksimaalne luba-
102
tud sageduse referents.
Määrab ajaperioodi,
mis on vajalik väljundsageduse tõusmiseks 0-sageduselt
maksimumsagedusele.
1.6
1.7
1.8 Mootori tüüp 0 2 0 650
Aeglustus-
aeg 1
Mootori voo-
lupiirang
0.1 3000.0 s 5.0 104
IH*0,1 I
S
A
Variee-
rub
107
Määrab ajaperioodi,
mis on vajalik väljundsageduse langemiseks maksimumsageduselt 0-sagedusele.
Maksimaalne mootori vool vahelduvvooluajamist.
0 = induktsioonmootor
1 = püsimagnetmootor
2 = reluktantsmootor
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

KIIRSEADISTUSE JUHEND VACON · 69
Tabel 12: M1 Kiirseadistus
Register Parameeter Min Max Ühik
Mootori
1.9
1.10
1.11
1.12
1.13
nominaal-
pinge
Mootori
nominaalsa-
gedus
Mootori
nominaalkii-
rus
Mootori
nominaal-
vool
Mootori Cos
Phi (võim-
susfaktor)
Varieerub Varieerub V
8.0 320.0 Hz
24 19200 p/min
IH * 0,1 I
0.30 1.00
S
A
Vaikimis
i
Variee-
rub
50.0 /
60.0
Variee-
rub
Variee-
rub
Variee-
rub
ID Kirjeldus
Leidke mootori
nimesildilt väärtus
Un.
110
111
112
113
120
MÄRKUS!
Tehke kindlaks, kas
mootoril on deltaühendus või tähtühendus.
Leidke mootori
nimesildilt väärtus
fn.
Leidke mootori
nimesildilt väärtus
nn.
Leidke mootori
nimesildilt väärtus
In.
Leidke mootori
nimesildilt see väärtus.
1.14
Energia
optimeeri-
mine
0 1 0 666
Ajam leiab minimaalse mootori
voolu, et tarvitada
vähem energiat ja
vähendada mootori
müra. Kasutage seda
funktsiooni nt ventilaatori ja pumba
protsesside puhul.
0 = keelatud
1 = lubatud
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 70 KIIRSEADISTUSE JUHEND
Tabel 12: M1 Kiirseadistus
Register Parameeter Min Max Ühik
1.15
1.16
Identifitsee-
rimine
Käivitus-
funktsioon
0 2 0 631
0 1 0 505
Vaikimis
i
ID Kirjeldus
Identifitseerimiskäivitus arvutab või
mõõdab mootori
parameetrid, mis on
vajalikud mootori ja
kiiruse tõhusaks juhtimiseks.
0 = tegevust pole
1 = seisuajal
2 = pöörlemisega
Enne identifitseerimiskäivituse alustamist tuleb määrata
mootori nimesildi
parameetrid.
0 = rambiga
1 = lendkäivitus
1.17
1.18
1.19
Peatamisfunktsioon
Automaatne
lähtestus
Reaktsioon
välisele
veale
0 1 0 506
0 1 0 731
0 3 2 701
0 = vabakäik
1 = rambiga
0 = keelatud
1 = lubatud
0 = tegevust pole
1 = alarm
2 = viga (seiskamine
vastavalt seiskamisrežiimile)
3 = viga (seiskamine
laskumisega)
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

KIIRSEADISTUSE JUHEND VACON · 71
Tabel 12: M1 Kiirseadistus
Register Parameeter Min Max Ühik
Reaktsioon
1.20
1.21
veale AI
madal
Kaugjuhti-
miskoht
0 5 0 700
0 1 0 172
Vaikimis
i
ID Kirjeldus
0 = tegevust pole
1 = alarm
2 = alarm + eelhäälestatud vea sagedus
(P3.9.1.13)
3 = alarm + eelmine
sagedus
4 = viga (seiskamine
vastavalt seiskamisrežiimile)
5 = viga (seiskamine
laskumisega)
Kaugjuhtimiskoha
(käivitamine/seiskamine) valik.
0 = I/O juhtimine
1 = fieldbusiga juhtimine
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 72 KIIRSEADISTUSE JUHEND
Tabel 12: M1 Kiirseadistus
Register Parameeter Min Max Ühik
I/O juhtimise
1.22
referentsi A
valik
1 20 6 117
Vaikimis
i
ID Kirjeldus
Sageduse referentsiallika valik, kui juhtimiskohaks on I/O A.
0 = personaalarvuti
1 = eelhäälestatud
sagedus 0
2 = klahvistiku referents
3 = Fieldbus
4 = AI1
5 = AI2
6 = AI1+AI2
7 = PID referents
8 = mootori potentsiomeeter
11 = plokk 1 väljas
12 = plokk 2 väljas
13 = plokk 3 väljas
14 = plokk 4 väljas
15 = plokk 5 väljas
16 = plokk 6 väljas
17 = plokk 7 väljas
18 = plokk 8 väljas
19 = plokk 9 väljas
20 = plokk 10 väljas
1.23
1.24
1.25
1.26
Klahvistiku
juhtimise
referentsi
valik
Fieldbusiga
juhtimise
referentsi
valik
AI1 signaali-
vahemik
AI2 signaali-
vahemik
1 20 1 121
1 20 2 122
0 1 0 379
0 1 1 390
Parameetriga 1.2
seadistatud rakendus annab vaikeväärtuse.
Vt P1.22.
Vt P1.22.
0 = 0...10 V / 0...20
mA
1 = 2...10 V / 4...20
mA
0 = 0...10 V / 0...20
mA
1 = 2...10 V / 4...20
mA
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

KIIRSEADISTUSE JUHEND VACON · 73
Tabel 12: M1 Kiirseadistus
Register Parameeter Min Max Ühik
1.27
1.28
1.29
1.30
RO1 funktsi-
oon
RO2 funktsi-
oon
RO3 funktsi-
oon
AO1 funktsi-
oon
0 73 2 11001
0 73 3 11004
0 73 1 11007
0 31 2 10050
Vaikimis
i
ID Kirjeldus
Vt P3.5.3.2.1
Vt P3.5.3.2.1
Vt P3.5.3.2.1
Vt P3.5.4.1.1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 74 KIIRSEADISTUSE JUHEND
Tabel 13: M1.35 Multipump (multiajam)
Index Parameetrite Min Max Ühik
1.35.1 PID kasu 0.00 100.00 % 100.00 118
1.35.2
1.35.3 PID tuletusaeg 0.00 100.00 s 0.00 1132
PID ühendamis-
aeg
0.00 600.00 s 1.00 119
Vaikimi
si
ID Kirjeldus
Kui parameetri
väärtuseks on seadistatud 100%,
põhjustab 10%
muutus vea väärtuses kontrolleri väljundi muutumise
10% võrra.
Kui see parameeter on seadistatud
1,00 sekundile,
põhjustab 10%
muutus vea väärtuses kontrolleri väljundi muutumise
10,00%/s võrra.
Kui see parameeter on seadistatud
1,00 sekundile,
põhjustab 10%
muutus vea väärtuses 1,00 sekundi
vältel kontrolleri
väljundi muutumise
10,00% võrra.
1.35.4
1.35.5
1.35.6
1.35.7
1.35.8
1.35.9
Protsessi mõõtü-
hiku valimine
Protsessi mõõtü-
hik min
Protsessi mõõtü-
hik max
Tagasiside 1
allika valimine
Seadepunkti 1
allika valimine
Klahvistiku sea-
depunkt 1
1 44 1 1036
Varieerub Varieerub
Varieerub Varieerub
0 30 2 334
0 32 1 332
Varieerub Varieerub
Variee-
rub
Variee-
rub
Variee-
rub
0 167
1033
1034
Valige protsessi
mõõtühik. Vt
P3.13.1.4
Protsessi mõõtühiku väärtus on
sama, mis 0% PID
tagasisidesignaalist.
Protsessi mõõtühiku väärtus on
sama, mis 100%
PID tagasisidesignaalist.
Vt P3.13.3.3
Vt P3.13.2.6
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

KIIRSEADISTUSE JUHEND VACON · 75
Tabel 13: M1.35 Multipump (multiajam)
Index Parameetrite Min Max Ühik
1.35.10
1.35.11 SP1 une viivitus 0 3000 s 0 1017
1.35.12 SP1 äratuse tase Varieerub Varieerub
SP1 une sage-
duse piirang
0.0 320.0 Hz 0.0 1016
Variee-
rub
Vaikimi
si
Variee-
rub
ID Kirjeldus
Ajam lülitub unerežiimile siis, kui väljundsagedus jääb
alla seda piirväärtust kauemaks, kui
on määratletud
parameetriga Une
viivitus.
0= pole kasutusel
Minimaalne ajaperiood, mille vältel
püsib sagedus alla
une taset, enne kui
ajam seiskub.
0= pole kasutusel
PID tagasiside järelevalve ärkamise
väärtus. Ärkamise
1018
tase 1 kasutab valitud protsessi mõõtühikuid.
0= pole kasutusel
1.35.13
1.35.14 Pumpade arv 1 8 1 1001
1.35.15
Multipumba
režiim
Pumba ID-num-
ber
0 2 0 1785
1 8 1 1500
Valib multipumba
režiimi.
0 = üksikajam
1 = Multifollower
2 = Multimaster
Multipumba süsteemis kasutatavate mootorite
(pumbad/ventilaatorid) koguarv.
Ajami järjekorranumber pumbasüsteemis. Seda
parameetrit kasutatakse ainult Multifollower- või Multimaster-režiimis.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 76 KIIRSEADISTUSE JUHEND
Tabel 13: M1.35 Multipump (multiajam)
Index Parameetrite Min Max Ühik
Käivitamise ja
1.35.16
1.35.17
tagasiside sig-
naalid
Pumba blokee-
ring
0 2 1 1782
0 1 1 1032
Vaikimi
si
ID Kirjeldus
Selle parameetriga
saate valida, kas
käivitamissignaal
ja/või PID tagasiside signaalid on
ajamiga ühendatud.
0 = pole ühendatud
1 = ühendatud on
ainult käivitamissignaal
2 = mõlemad signaalid on ühendatud
Blokeeringu lubamine/tõkestamine.
Blokeering ütleb
süsteemile, kas
mootor on ühendatud või mitte.
1.35.18
1.35.19
Automaatvahe-
tus
Automaatvahetu-
sega pump
0 1 1 1027
0 1 1 1028
0 = keelatud
1 = lubatud
Mootorite käivitumisjärjekorra ja
prioriteedi rotatsiooni lubamine/
tõkestamine.
0 = keelatud
1 = lubatud (intervall)
0 = abipump
1 = kõik pumbad
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

KIIRSEADISTUSE JUHEND VACON · 77
Tabel 13: M1.35 Multipump (multiajam)
Index Parameetrite Min Max Ühik
1.35.20
1.35.21
1.35.22
1.35.23
Automaatvahe-
tuse intervall
Automaatvahe-
tuse päevad
Automaatvahe-
tuse kellaaeg
Automaatvahe-
tus: sageduse
piirang
Automaatvahe-
tus: pumba pii-
rang
0.0 3000.0 h 48.0 1029
0 127 1786
Aeg 1787
0.00 P3.3.1.2 Hz 25:00 1031
1 6 1030
Vaikimi
si
ID Kirjeldus
Kui kasutatakse
selle parameetriga
määratud aega,
käivitub automaatvahetuse funktsioon. Kuid automaatvahetus käivitub ainult siis, kui
maht jääb alla
parameetritega
P1.35.23 ja
P1.35.24 määratud
taset.
Vahemik: esmaspäevast pühapäevani
Vahemik: 00:00:00
kuni 23:59:59
Need parameetrid
määravad taseme,
mida maht ei tohi
ületada, et automaatvahetus saaks
käivituda.1.35.24
1.35.25 Ülekandekiirus 0 100 % 10 1097
1.35.26
Ülekandekiiruse
viivitus
0 3600 s 10 1098
Kui tagasiside
väärtus püsib vahemikus 4,5 kuni 5,5
baari, jääb mootor
ühendatuks.
seadepunkt = 5
baari;
ülekandekiirus =
10%
Kui tagasiside
väärtus püsib vahemikus 4,5 kuni 5,5
baari, jääb mootor
ühendatuks.
Kui tagasiside jääb
väljapoole ülekandekiirust, siis aeg,
mille möödumisel
pumpasid lisatakse
või eemaldatakse.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
1

VACON · 78 KIIRSEADISTUSE JUHEND
Tabel 13: M1.35 Multipump (multiajam)
Index Parameetrite Min Max Ühik
1.35.27
1.35.28
1.35.29
Pideva tootmise
kiirus
Pumba 1 blokee-
ring
Loputuse refe-
rents
0 100 % 100 1513
Maksi-
maalne
referents
Maksi-
maalne
referents
Vaikimi
si
DigSIS
pilu0.1
HZ 50.00 1239
ID Kirjeldus
426
Määrab püsiva kiiruse, millel pump
lukustub, kui pump
saavutab maksimumsageduse.
Multimaster-režiimis alustab reguleerimist järgmine
pump.
AVATUD = mitteaktiivne
SULETUD =
aktiivne
Määrab sageduse
referentsi, kui aktiveeritakse loputusfunktsioon.
1
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

VIISARDID VACON · 79
2 VIISARDID
2.1 STANDARDSE RAKENDUSE VIISARD
See rakenduse viisard aitab teil seadistada rakendusega seotud põhiparameetrid.
Standardse rakenduse viisardi käivitamiseks seadistage klahvistikul parameetrile P1.2
Rakendus (ID 212) väärtus Standardne.
MÄRKUS!
Käivitades standardse rakenduse viisardi käivitusviisardilt, liigub viisard otse
sammule 11.
Seadistage parameetri P3.1.2.2 Mootori tüüp väär-
1
tus (see peab vastama väärtusele mootori nimesildil)
PM mootor
Induktsioonmootor
Reluktantsmootor
Seadistage parameetri P3.1.1.1 Mootori nominaal-
2
3
4
5
pinge väärtus (see peab vastama väärtusele mootori
nimesildil)
Seadistage parameetri P3.1.1.2 Mootori nominaalsagedus väärtus (see peab vastama väärtusele
mootori nimesildil)
Seadistage parameetri P3.1.1.3 Mootori nominaalkiirus väärtus (see peab vastama väärtusele mootori nimesildil)
Seadistage parameetri P3.1.1.4 Mootori nominaalvool väärtus (see peab vastama väärtusele mootori
nimesildil)
Vahemik: Varieerub
Vahemik: 8.00–320.00 Hz
Vahemik: 24 – 19 200 p/min
Vahemik: Varieerub
Samm 6 kuvatakse ainult juhul, kui valisite 1. sammus Induktsioonmootori.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 80 VIISARDID
10
11
6
7
8
9
Seadistage parameetri P3.1.1.5 Mootori Cos Phi
väärtus
Seadistage parameetri P3.3.1.1 Minimaalne sageduse referents väärtus
Seadistage parameetri P3.3.1.2 Maksimaalne sageduse referents väärtus
Seadistage parameetri P3.4.1.2 Kiirendusaeg 1
väärtus
Seadistage parameetri P3.4.1.3 Aeglustusaeg 1
väärtus
Valige juhtimiskoht, mis annab ajami käivitamise ja
seiskamise käsklused ning sageduse referentsi.
Vahemik: 0.30-1.00
Vahemik: 0,00 – P3.3.1.2 Hz
Vahemik: P3.3.1.1 – 320,00 Hz
Vahemik: 0,1–3000.0 s
Vahemik: 0,1–3000.0 s
I/O terminal
Fieldbus
Klahvistik
Standardse rakenduse viisard on lõpetatud.
2.2 KÜTE-VENTILATSIOON-ÕHKJAHUTUSE (HVAC) RAKENDUSE VIISARD
See rakenduse viisard aitab teil seadistada rakendusega seotud põhiparameetrid.
HVAC rakenduse viisardi käivitamiseks seadistage klahvistikul parameetrile P1.2 Rakendus
(ID 212) väärtus HVAC.
Valige juhitav tüüp või protsess (või rakendus).
Kompressor
1
Ventilaator
Pump
Muu
Mõnedel parameetritel on eelhäälestatud väärtused, mis tulenevad teie 1. sammus tehtud
valikust. Vt parameetreid ja nende väärtusi selle peatüki lõpus: Tabel 14.
2
Seadistage parameetri P3.2.11 Taaskäivituse viivitus väärtus.
Vahemik: 0–20 min
Samm 2 kuvatakse ainult juhul, kui valisite 1. sammus Kompressori.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

VIISARDID VACON · 81
Seadistage parameetri P3.1.2.2 Mootori tüüp väär-
3
tus (see peab vastama väärtusele mootori nimesildil)
PM mootor
Induktsioonmootor
Reluktantsmootor
Seadistage parameetri P3.1.1.1 Mootori nominaal-
4
5
6
7
8
pinge väärtus (see peab vastama väärtusele mootori
nimesildil)
Seadistage parameetri P3.1.1.2 Mootori nominaalsagedus väärtus (see peab vastama väärtusele
mootori nimesildil)
Seadistage parameetri P3.1.1.3 Mootori nominaalkiirus väärtus (see peab vastama väärtusele mootori nimesildil)
Seadistage parameetri P3.1.1.4 Mootori nominaalvool väärtus (see peab vastama väärtusele mootori
nimesildil)
Seadistage parameetri P3.1.1.5 Mootori Cos Phi
väärtus (see peab vastama väärtusele mootori
nimesildil)
Vahemik: Varieerub
Vahemik: 8.00–320.00 Hz
Vahemik: 24 – 19 200 p/min
Vahemik: Varieerub
Vahemik: 0.30-1.00
Samm 8 kuvatakse ainult juhul, kui valisite 3. sammus Induktsioonmootori.
10
9
Seadistage parameetri P3.3.1.1 Minimaalne sageduse referents väärtus
Seadistage parameetri P3.3.1.2 Maksimaalne sageduse referents väärtus
Vahemik: 0.00–3.3.1.2 Hz
Vahemik: P3.3.1.1 – 320,00 Hz
Sammud 11 ja 12 kuvatakse ainult juhul, kui valisite 1. sammus Muu.
11
12
Seadistage parameetri P3.4.1.2 Kiirendusaeg 1
väärtus
Seadistage parameetri P3.4.1.3 Aeglustusaeg 1
väärtus
Vahemik: 0,1–3000.0 s
Vahemik: 0,1–3000.0 s
Edasi liigub viisard rakendusele eriomaste sammude juurde.
Valige juhtimiskoht (kus annate ajami käivitamise ja
13
seiskamise käsklused ning sageduse referentsi).
I/O terminal
Fieldbus
Klahvistik
Küte-ventilatsioon-õhkjahutus (HVAC) rakenduse viisard on lõpetatud.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 82 VIISARDID
Tabel 14: Parameetrite eelhäälestatud väärtused
Protsessi tüüp
Register Parameeter
Pump Ventilaator Kompressor
P3.1.4.1 U/f suhe Lineaarne Ruudus Lineaarne
P3.2.4 Käivitusfunktsioon Kiiruse ülesvõtmine Lendkäivitus Kiiruse ülesvõtmine
P3.2.5 Peatamisfunktsioon Kiiruse ülesvõtmine Laskumine Kiiruse ülesvõtmine
P3.4.1.2 Kiirendusaeg 5.0 s 30.0 s 3.0 s
P3.4.1.3 Aeglustusaeg 5.0 s 30.0 s 3.0 s
2.3 PID JUHTIMISE RAKENDUSE VIISARD
See rakenduse viisard aitab teil seadistada rakendusega seotud põhiparameetrid.
PID juhtimise rakenduse viisardi käivitamiseks seadistage klahvistikul parameetrile P1.2
Rakendus (ID 212) väärtus PID juhtimine.
MÄRKUS!
Käivitades rakenduse viisardi käivitusviisardilt, liigub viisard otse sammule 11.
Seadistage parameetri P3.1.2.2 Mootori tüüp väär-
1
2
3
4
5
tus (see peab vastama väärtusele mootori nimesildil)
Seadistage parameetri P3.1.1.1 Mootori nominaalpinge väärtus (see peab vastama väärtusele mootori
nimesildil)
Seadistage parameetri P3.1.1.2 Mootori nominaalsagedus väärtus (see peab vastama väärtusele
mootori nimesildil)
Seadistage parameetri P3.1.1.3 Mootori nominaalkiirus väärtus (see peab vastama väärtusele mootori nimesildil)
Seadistage parameetri P3.1.1.4 Mootori nominaalvool väärtus (see peab vastama väärtusele mootori
nimesildil)
PM mootor
Induktsioonmootor
Reluktantsmootor
Vahemik: Varieerub
Vahemik: 8,00…320,00 Hz
Vahemik: 24…19 200 p/min
Vahemik: Varieerub
Samm 6 kuvatakse ainult juhul, kui valisite 1. sammus Induktsioonmootori.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

VIISARDID VACON · 83
10
11
12
6
7
8
9
Seadistage parameetri P3.1.1.5 Mootori Cos Phi
väärtus
Seadistage parameetri P3.3.1.1 Minimaalne sageduse referents väärtus
Seadistage parameetri P3.3.1.2 Maksimaalne sageduse referents väärtus
Seadistage parameetri P3.4.1.2 Kiirendusaeg 1
väärtus
Seadistage parameetri P3.4.1.3 Aeglustusaeg 1
väärtus
Valige juhtimiskoht (kus annate ajami käivitamise ja
seiskamise käsklused ning sageduse referentsi)
Seadistage parameetri P3.13.1.4 Protsessi mõõtühiku valimine väärtus
Vahemik: 0.30-1.00
Vahemik: 0,00 – P3.3.1.2 Hz
Vahemik: P3.3.1.1 – 320,00 Hz
Vahemik: 0,1–3000.0 s
Vahemik: 0,1–3000.0 s
I/O terminal
Fieldbus
Klahvistik
Rohkem kui 1 valik
Kui valite midagi muud peale %, näete järgmisi küsimusi. Kui valite %, liigub viisard otse 16.
sammu juurde.
13
14
15
16
Seadistage parameetri P3.13.1.5 Protsessi mõõtühik min väärtus
Seadistage parameetri P3.13.1.6 Protsessi mõõtühik max väärtus
Seadistage parameetri P3.13.1.7 Protsessi mõõtühiku komakohad väärtus
Seadistage parameetri P3.13.3.3 Tagasiside 1 allika
valimine väärtus
Vahemiku määrab 12. sammus tehtud valik.
Vahemiku määrab 12. sammus tehtud valik.
Vahemik: 0-4
Vt tagasiside seadeid: Tabel 75 Tagasiside
seaded
Kui valite analoogsisendsignaali, kuvatakse 18. samm. Muude valikute puhul liigub viisard
19. sammu juurde.
Seadistage analoogsisendi signaalivahemik.
17
18
19
Seadistage parameetri P3.13.1.8 Inversiooni viga
väärtus
Seadistage parameetri P3.13.2.6 Seadepunkti allika
valik väärtus
0 = 0–10 V / 0–20 mA
1 = 2–10 V / 4–20 mA
0 = tavaline
1 = pööratud
Vt seadepunkte: Tabel 75 Tagasiside seaded
Kui valite analoogsisendsignaali, kuvatakse 21. samm. Muude valikute puhul liigub viisard
23. sammu juurde.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 84 VIISARDID
Kui seadistate väärtusena Klahvistiku seadepunkt 1 või Klahvistiku seadepunkt 2, liigub viisard
otse 22. sammu juurde.
Seadistage analoogsisendi signaalivahemik.
20
0 = 0–10 V / 0–20 mA
1 = 2–10 V / 4–20 mA
21
22
Seadistage parameetri P3.13.2.1 (Klahvistiku seadepunkt 1) ja P3.13.2.2 (Klahvistiku seadepunkt 2)
väärtus
Kasuta unefunktsiooni
Määratletud 20. sammus seadistatud vahemikuga.
0 = ei
1 = jah
Kui määrate 22. sammus väärtuse Jah, kuvatakse järgmised 3 küsimust. Kui määrate
väärtuse Ei, on viisard lõpetatud.
23
24
25
Seadistage parameetri P3.13.5.1 SP1 Ooterežiimi
sageduse piirang väärtus
Seadistage parameetri P3.13.5.2 SP1 Ooterežiimi
viivitus väärtus
Seadistage parameetri P3.13.5.3 SP1 Äratuse tase
väärtus
Vahemik: 0.00–320.00 Hz
Vahemik: 0–3000 s
Vahemiku määrab seadistatud protsessi
mõõtühik.
PID juhtimise rakenduse viisard on lõpetatud.
2.4 MULTIPUMBA (ÜKSIKAJAM) RAKENDUSE VIISARD
See rakenduse viisard aitab teil seadistada rakendusega seotud põhiparameetrid.
Multipumba (üksikajam) rakenduse viisardi käivitamiseks seadistage klahvistikul
parameetrile P1.2 Rakendus (ID 212) väärtus Multipump (üksikajam).
MÄRKUS!
Käivitades rakenduse viisardi käivitusviisardilt, liigub viisard otse sammule 11.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

VIISARDID VACON · 85
Seadistage parameetri P3.1.2.2 Mootori tüüp väär-
1
tus (see peab vastama väärtusele mootori nimesildil)
PM mootor
Induktsioonmootor
Reluktantsmootor
Seadistage parameetri P3.1.1.1 Mootori nominaal-
2
3
4
5
pinge väärtus (see peab vastama väärtusele mootori
nimesildil)
Seadistage parameetri P3.1.1.2 Mootori nominaalsagedus väärtus (see peab vastama väärtusele
mootori nimesildil)
Seadistage parameetri P3.1.1.3 Mootori nominaalkiirus väärtus (see peab vastama väärtusele mootori nimesildil)
Seadistage parameetri P3.1.1.4 Mootori nominaalvool väärtus (see peab vastama väärtusele mootori
nimesildil)
Vahemik: Varieerub
Vahemik: 8.00–320.00 Hz
Vahemik: 24 – 19 200 p/min
Vahemik: Varieerub
Samm 6 kuvatakse ainult juhul, kui valisite 1. sammus Induktsioonmootori.
6
7
8
Seadistage parameetri P3.1.1.5 Mootori Cos Phi
väärtus
Seadistage parameetri P3.3.1.1 Minimaalne sageduse referents väärtus
Seadistage parameetri P3.3.1.2 Maksimaalne sageduse referents väärtus
Vahemik: 0.30-1.00
Vahemik: 0,00 – P3.3.1.2 Hz
Vahemik: P3.3.1.1 – 320,00 Hz
10
11
12
9
Seadistage parameetri P3.4.1.2 Kiirendusaeg 1
väärtus
Seadistage parameetri P3.4.1.3 Aeglustusaeg 1
väärtus
Valige juhtimiskoht (kus annate ajami käivitamise ja
seiskamise käsklused ning sageduse referentsi)
Seadistage parameetri P3.13.1.4 Protsessi mõõtühiku valimine väärtus
Vahemik: 0,1–3000.0 s
Vahemik: 0,1–3000.0 s
I/O terminal
Fieldbus
Klahvistik
Rohkem kui 1 valik
Kui valite midagi muud peale %, näete järgmist 3 sammu. Kui valite %, liigub viisard otse 16.
sammu juurde.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 86 VIISARDID
13
14
15
16
Seadistage parameetri P3.13.1.5 Protsessi mõõtühik min väärtus
Seadistage parameetri P3.13.1.6 Protsessi mõõtühik max väärtus
Seadistage parameetri P3.13.1.7 Protsessi mõõtühiku komakohad väärtus
Seadistage parameetri P3.13.3.3 Tagasiside 1 allika
valimine väärtus
Vahemiku määrab 12. sammus tehtud valik.
Vahemiku määrab 12. sammus tehtud valik.
Vahemik: 0-4
Vt tagasiside seadeid: Tabel 75 Tagasiside
seaded
Kui valite analoogsisendsignaali, kuvatakse 17. samm. Muude valikute puhul liigub viisard
18. sammu juurde.
Seadistage analoogsisendi signaalivahemik.
17
18
19
Seadistage parameetri P3.13.1.8 Inversiooni viga
väärtus
Seadistage parameetri P3.13.2.6 Seadepunkti allika
valik väärtus
0 = 0–10 V / 0–20 mA
1 = 2–10 V / 4–20 mA
0 = tavaline
1 = pööratud
Vt seadepunkte: Tabel 74 Seadepunkti seaded
Kui valite analoogsisendsignaali, kuvatakse esmalt 20. samm ja seejärel 22. samm. Muude
valikute puhul liigub viisard 21. sammu juurde.
Kui seadistate väärtusena Klahvistiku seadepunkt 1 või Klahvistiku seadepunkt 2, liigub viisard
otse 22. sammu juurde.
Seadistage analoogsisendi signaalivahemik.
20
21
22
Seadistage parameetri P3.13.2.1 (Klahvistiku seadepunkt 1) ja P3.13.2.2 (Klahvistiku seadepunkt 2)
väärtus
Kasuta unefunktsiooni
0 = 0–10 V / 0–20 mA
1 = 2–10 V / 4–20 mA
Määratletud 19. sammus seadistatud vahemikuga.
0 = ei
1 = jah
Kui määrate 22. sammus väärtuse Jah, kuvatakse järgmised 3 sammu. Kui määrate väärtuse
Ei, liigub viisard 26. sammu juurde.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

VIISARDID VACON · 87
23
24
25
26
27
28
Seadistage parameetri P3.13.5.1 SP1 Ooterežiimi
sageduse piirang väärtus
Seadistage parameetri P3.13.5.2 SP1 Ooterežiimi
viivitus väärtus
Seadistage parameetri P3.13.5.3 SP1 Äratuse tase
väärtus
Seadistage parameetri P3.15.2 Pumpade arv väärtus
Seadistage parameetri P3.15.5 Pumba blokeering
väärtus
Seadistage parameetri P3.15.6 Automaatvahetus
väärtus
Vahemik: 0.00–320.00 Hz
Vahemik: 0–3000 s
Vahemiku määrab seadistatud protsessi
mõõtühik.
Vahemik: 1-8
0= pole kasutusel
1 = lubatud
0 = keelatud
1 = lubatud (intervall)
2 = lubatud (reaalajas)
Kui seadistate automaatvahetuse parameetrile väärtuse Lubatud (intervall või reaalajas),
kuvatakse sammud 29–34. Kui seadistate automaatvahetuse parameetrile väärtuse
Blokeeritud, liigub viisard otse 35. sammu juurde.
Seadistage parameetri P3.15.7 Automaatvahetu-
29
sega pumbad väärtus
0 = abipumbad
1 = kõik pumbad
30. samm kuvatakse ainult juhul, kui seadistate 28. sammus automaatvahetuse parameetrile
väärtuse Lubatud (intervall).
30
Seadistage parameetri P3.15.8 Automaatvahetuse
intervall väärtus
Vahemik: 0–3000 h
31. ja 32. samm kuvatakse ainult juhul, kui seadistate 28. sammus automaatvahetuse
parameetrile väärtuse Lubatud (reaalajas).
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 88 VIISARDID
31
32
33
34
35
36
Seadistage parameetri P3.15.9 Automaatvahetuse
päevad väärtus
Seadistage parameetri P3.15.10 Automaatvahetuse
päeva aeg väärtus
Seadistage parameetri P3.15.11 Automaatvahetuse
sageduse piirang väärtus
Seadistage parameetri P3.15.12 Automaatvahetuse
pumba piirang väärtus
Seadistage parameetri P3.15.13 Ülekandekiirus
väärtus
Seadistage parameetri P3.15.14 Ülekandekiiruse
viivitus väärtus
Vahemik: esmaspäevast pühapäevani
Vahemik: 00:00:00 kuni 23:59:59
Vahemik: P3.3.1.1–P3.3.1.2 Hz
Vahemik: 1-8
Vahemik: 0-100%
Vahemik: 0–3600 s
Multipumba (üksikajam) rakenduse viisard on lõpetatud.
2.5 MULTIPUMBA (MULTIAJAM) RAKENDUSE VIISARD
See rakenduse viisard aitab teil seadistada rakendusega seotud põhiparameetrid.
Multipumba (multiajam) rakenduse viisardi käivitamiseks seadistage klahvistikul
parameetrile P1.2 Rakendus (ID 212) väärtus Multipump (multiajam).
MÄRKUS!
Käivitades rakenduse viisardi käivitusviisardilt, liigub viisard otse sammule 11.
Seadistage parameetri P3.1.2.2 Mootori tüüp väär-
1
2
3
4
5
tus (see peab vastama väärtusele mootori nimesildil)
Seadistage parameetri P3.1.1.1 Mootori nominaalpinge väärtus (see peab vastama väärtusele mootori
nimesildil)
Seadistage parameetri P3.1.1.2 Mootori nominaalsagedus väärtus (see peab vastama väärtusele
mootori nimesildil)
Seadistage parameetri P3.1.1.3 Mootori nominaalkiirus väärtus (see peab vastama väärtusele mootori nimesildil)
Seadistage parameetri P3.1.1.4 Mootori nominaalvool väärtus (see peab vastama väärtusele mootori
nimesildil)
PM mootor
Induktsioonmootor
Reluktantsmootor
Vahemik: Varieerub
Vahemik: 8.00–320.00 Hz
Vahemik: 24 – 19 200 p/min
Vahemik: Varieerub
Samm 6 kuvatakse ainult juhul, kui valisite 1. sammus Induktsioonmootori.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

VIISARDID VACON · 89
10
11
12
6
7
8
9
Seadistage parameetri P3.1.1.5 Mootori Cos Phi
väärtus
Seadistage parameetri P3.3.1.1 Minimaalne sageduse referents väärtus
Seadistage parameetri P3.3.1.2 Maksimaalne sageduse referents väärtus
Seadistage parameetri P3.4.1.2 Kiirendusaeg 1
väärtus
Seadistage parameetri P3.4.1.3 Aeglustusaeg 1
väärtus
Valige juhtimiskoht (kus annate ajami käivitamise ja
seiskamise käsklused ning sageduse referentsi)
Seadistage parameetri P3.13.1.4 Protsessi mõõtühiku valimine väärtus
Vahemik: 0.30-1.00
Vahemik: 0,00 – P3.3.1.2 Hz
Vahemik: P3.3.1.1 – 320,00 Hz
Vahemik: 0,1–3000.0 s
Vahemik: 0,1–3000.0 s
I/O terminal
Fieldbus
Klahvistik
Rohkem kui 1 valik
Kui valite midagi muud peale %, näete järgmist 3 sammu. Kui valite %, liigub viisard otse 16.
sammu juurde.
13
14
15
16
Seadistage parameetri P3.13.1.5 Protsessi mõõtühik min väärtus
Seadistage parameetri P3.13.1.6 Protsessi mõõtühik max väärtus
Seadistage parameetri P3.13.1.7 Protsessi mõõtühiku komakohad väärtus
Seadistage parameetri P3.13.3.3 Tagasiside 1 allika
valimine väärtus
Vahemiku määrab 12. sammus tehtud valik.
Vahemiku määrab 12. sammus tehtud valik.
Vahemik: 0-4
Vt tagasiside seadete tabelit peatükis Tabel
74 Seadepunkti seaded
Kui valite analoogsisendsignaali, kuvatakse 17. samm. Muude valikute puhul liigub viisard
18. sammu juurde.
Seadistage analoogsisendi signaalivahemik.
17
18
19
Seadistage parameetri P3.13.1.8 Inversiooni viga
väärtus
Seadistage parameetri P3.13.2.6 Seadepunkti allika
valik väärtus
0 = 0–10 V / 0–20 mA
1 = 2–10 V / 4–20 mA
0 = tavaline
1 = pööratud
Vt tabelit Seadepunktid peatükis Tabel 74
Seadepunkti seaded
Kui valite analoogsisendsignaali, kuvatakse esmalt 20. samm ja seejärel 22. samm. Muude
valikute puhul liigub viisard 21. sammu juurde.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 90 VIISARDID
Kui seadistate väärtusena Klahvistiku seadepunkt 1 või Klahvistiku seadepunkt 2, liigub viisard
otse 22. sammu juurde.
Seadistage analoogsisendi signaalivahemik.
20
0 = 0–10 V / 0–20 mA
1 = 2–10 V / 4–20 mA
21
22
Seadistage parameetri P3.13.2.1 (Klahvistiku seadepunkt 1) ja P3.13.2.2 (Klahvistiku seadepunkt 2)
väärtus
Kasuta unefunktsiooni
Määratletud 19. sammus seadistatud vahemikuga.
0 = ei
1 = jah
Kui määrate 22. sammus väärtuse Jah, kuvatakse järgmised 3 sammu. Kui määrate väärtuse
Ei, liigub viisard 26. sammu juurde.
23
24
25
26
Seadistage parameetri P3.13.5.1 SP1 Ooterežiimi
sageduse piirang väärtus
Seadistage parameetri P3.13.5.2 SP1 Ooterežiimi
viivitus väärtus
Seadistage parameetri P3.13.5.3 SP1 Äratuse tase
väärtus
Seadistage parameetri P3.15.1 Multipumba režiim
väärtus
Vahemik: 0.00–320.00 Hz
Vahemik: 0–3000 s
Vahemiku määrab seadistatud protsessi
mõõtühik.
Multifollower
Multimaster
27
28
29
30
31
Seadistage parameetri P3.15.3 Pumba ID-number
väärtus
Seadistage parameetri P3.15.4 Käivitamine ja tagasiside väärtus
Seadistage parameetri P3.15.2 Pumpade arv väärtus
Seadistage parameetri P3.15.5 Pumba blokeering
väärtus
Seadistage parameetri P3.15.6 Automaatvahetus
väärtus
Vahemik: 1-8
0 = pole ühendatud
1 = ühendatud on ainult käivitamissignaal
2 = mõlemad signaalid on ühendatud
Vahemik: 1-8
0= pole kasutusel
1 = lubatud
0 = keelatud
1 = lubatud (intervall)
2 = lubatud (nädalapäevad)
Kui seadistate automaatvahetuse parameetrile väärtuse Lubatud (intervall), kuvatakse 33.
samm. Kui seadistate automaatvahetuse parameetrile väärtuse Lubatud (nädalapäevad),
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

VIISARDID VACON · 91
kuvatakse 34. samm. Kui seadistate automaatvahetuse parameetrile väärtuse Blokeeritud,
liigub viisard otse 36. sammu juurde.
Seadistage parameetri P3.15.7 Automaatvahetu-
32
sega pumbad väärtus
0 = abipumbad
1 = kõik pumbad
33. samm kuvatakse ainult juhul, kui seadistate 31. sammus automaatvahetuse parameetrile
väärtuse Lubatud (intervall).
33
Seadistage parameetri P3.15.8 Automaatvahetuse
intervall väärtus
Vahemik: 0–3000 h
34. ja 35. samm kuvatakse ainult juhul, kui seadistate 31. sammus automaatvahetuse
parameetrile väärtuse Lubatud (nädalapäevad).
34
35
36
37
Seadistage parameetri P3.15.9 Automaatvahetuse
päevad väärtus
Seadistage parameetri P3.15.10 Automaatvahetuse
päeva aeg väärtus
Seadistage parameetri P3.15.13 Ülekandekiirus
väärtus
Seadistage parameetri P3.15.14 Ülekandekiiruse
viivitus väärtus
Vahemik: esmaspäevast pühapäevani
Vahemik: 00:00:00 kuni 23:59:59
Vahemik: 0-100%
Vahemik: 0–3600 s
Multipumba (multiajam) rakenduse viisard on lõpetatud.
2.6 TULEKAHJUREŽIIMI VIISARD
Tulekahjurežiimi viisardi käivitamiseks valige kiirhäälestusmenüüs parameetrile 1.1.2
väärtus Aktiveerida.
ETTEVAATUST!
Enne jätkamist lugege läbi parooli ja garantii teave peatükis 10.18 Tulekahjurežiim.
1
Seadistage parameetri P3.17.2 tulerežiimi sageduse
allika väärtus
Rohkem kui 1 valik
Kui seadistate mõne muu väärtuse peale Tulekahjurežiimi sageduse, liigub viisard otse 3.
sammu juurde.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
2

VACON · 92 VIISARDID
2
3
Seadistage parameetri P3.17.3 Tulekahjurežiimi
sagedus väärtus
Signaali aktiveerimine kontakti avanemisel või sulgumisel
Vahemik: Varieerub
0 = avatud kontakt
1 = suletud kontakt
Kui seadistate 3. sammus väärtuse Avatud kontakt, liigub viisard otse 5. sammu juurde. Kui
seadistate 3. sammus väärtuse Suletud kontakt, on 5. samm tarbetu.
Seadistage väärtus parameetrile P3.17.4 Tulekahju-
4
5
6
režiimi aktiveerimine, AVATUD / P3.17.5 Tulekahjurežiimi aktiveerimine, SULETUD
Seadistage parameetri P3.17.6 Tulekahjurežiim
tagurpidi väärtus
Seadistage parameetri P3.17.1 Tulekahjurežiimi
parool väärtus
Valige digitaalsisend tulekahjurežiimi aktiveerimiseks. Vt ka peatükki 10.6.1 Digitaal- ja
analoogsisendite programmeerimine.
Valige digitaalsisend tulekahjurežiimi tagasisuuna aktiveerimiseks.
DigSIS pilu0.1 = EDASI
DigSIS pilu0.2 = TAGURPIDI
Seadistage parool tulekahjurežiimi funktsiooni lubamiseks.
1234 = luba katserežiim
1002 = luba tulekahjurežiim
Tulekahjurežiimi viisard on lõpetatud.
2
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

KASUTAJALIIDESED VACON · 93
3 KASUTAJALIIDESED
3.1 NAVIGEERIMINE KLAHVISTIKUL
Andmed vahelduvvooluajami kohta on toodud menüüdes ja alammenüüdes. Menüüde vahel
liikumiseks kasutage klahvistikul üles- ja allanoole nuppe. Rühma või elementi liikumiseks
vajutage nuppu OK. Tagasi eelmisele tasemele liikumiseks vajutage nuppu Back/Reset.
Ekraanil näete oma praegust asukohta menüüs, nt M3.2.1. Samuti näete praeguse asukoha
rühma või elemendi nime.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

Peamenüü
Alammenüüd Alammenüüd Alammenüüd
Peamenüü Peamenüü
M2
Jälgimine
M1
Kiirseadistus
M1.1 Viisardid
(sisu oleneb parameetrist
P1.2 Rakenduse valimine)
M2.1 Mitmikmonitor
M3.1 Mootori seaded
M3.2 Käivitamise/
seiskamise seadistamine
M3.3 Referentsid
M3.4 Rambid ja pidurid
M3.5 I/O konfiguratsioon
M3.6 FB andmete
kaardistamine
M3.10 Automaatne
lähtestus
M3.11 Rakenduse seaded
M3.12 Taimeri funktsioonid
M3.19 Ajami kohandaja
M3.13 PID kontroller
M3.14 Välise PID kontroller
M3.15 Multipump
M3.16 Hoolduse loendurid
M3.17 Tulekahjurežiim
M3.21 Pumba juhtimine
M3.18 Mootori eelsoojendus
M3.7 Lubamatud
sagedused
M3.8 Järelevalved
M3.9 Kaitsed
M2.2 Tendentsikõver
M2.3 Põhiline
M2.4 I/O
M2.5 Temperatuuri
sisendid
M2.6 Lisad/täiendav
M2.7 Taimeri funktsioonid
M2.8 PID kontroller
M2.9 Välise PID kontroller
M2.10 Multipump
M2.11 Hoolduse loendurid
M2.12 Fieldbusi andmed
M3
Parameetrid
M8 Kasutaja
tasemed
M7
Lemmikud
M4
Diagnostika
M5 I/O
ja riistvara
M6 Kasutaja
seaded
M4.4 Koguloendurid
M4.5 Kordusloendurid
M4.6 Tarkvara info
M5.1 I/O põhimenüü
M5.2...M5.4 Pilud C, D, E
M5.5 Reaalajas kell
M5.6 Jõuallika seaded
M5.8 RS-485
M5.9 Ethernet
M6.1 Keele valikud
M6.5 Parameetri varundus
M6.6 Parameetri võrdlus
M6.7 Ajami nimi
M8.1 Kasutaja tase
M8.2 Ligipääsukood
VACON · 94 KASUTAJALIIDESED
Fig. 32: Vahelduvvooluajami põhimenüüpuu.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

STOP
READY I/O
Main Menu
A B C D E
F
H
G
Quick Setup
( 17 )
Monitor
( 5 )
Parameters
( 12 )
M1ID:
STOP
READY
I/O
Rem Control Place
I/O Control
KeypadStopButton
Yes
Start Function
Ramping
Start / Stop Setup
M3.2.1ID:172
KASUTAJALIIDESED VACON · 95
3.2 GRAAFILISE KUVA KASUTAMINE
Fig. 33: Graafilise kuva peamenüü
A. Esimene olekuväli: PEATAMINE/
KÄITAMINE
B. Pöörlemissuund
C. Teine olekuväli: VALMIS/MITTEVALMIS/
VIGA
D. Alarmi väli: ALARM/E. Juhtimiskoht: PC/IO/KLAHVISTIK/
FIELDBUS
F. Asukoha väli: parameetri ID-number ja
praegune asukoht menüüs
G. Aktiveeritud rühm või element:
sisenemiseks vajutage OK
H. Elementide arv kõnealuses rühmas
3.2.1 VÄÄRTUSTE REDIGEERIMINE
Graafilisel kuval on elemendi väärtuse redigeerimiseks 2 erinevat toimingut.
Tavaliselt saate parameetrile seadistada ainult 1 väärtuse. Valige tekstiväärtuste loendist või
numbriliste väärtuste vahemikust.
PARAMEETRI TEKSTIVÄÄRTUSE MUUTMINE
1 Leidke noolenuppude abil parameeter.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

STOP
READY
I/O
Rem Control Place
M3.2.1ID:
Edit
Help
Add to favourites
STOP
READY
I/O
Rem Control Place
M3.2.1ID:
FieldbusCTRL
I/O Control
STOP
READY
I/O
Frequency Ref
P3.3.1.1ID:101
MaxFreqReference
0.00 Hz
MinFreqReference
50.00 Hz
PosFreqRefLimit
320.00 Hz
STOP
READY
I/O
MinFreqReference
P3.3.1.1ID:101
0.00 Hz
Min: 0.00Hz
Max: 50.00Hz
VACON · 96 KASUTAJALIIDESED
2 Redigeerimisrežiimi liikumiseks vajutage 2 korda
nuppu OK või vajutage paremnoole nuppu.
3 Uue väärtuse seadistamiseks vajutage üles- ja
allanoole nuppe.
4 Muudatuse kinnitamiseks vajutage nuppu OK.
Muudatusest loobumiseks kasutage nuppu Back/
Reset.
NUMBRILISTE VÄÄRTUSTE REDIGEERIMINE
1 Leidke noolenuppude abil parameeter.
2 Liikuge redigeerimisrežiimi.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

STOP
READY
I/O
MinFreqReference
P3.3.1.1ID:101
00.00 Hz
Min: 0.00Hz
Max: 50.00Hz
STOP
READY
I/O
MinFreqReference
P3.3.1.1ID:101
11.00 Hz
Min: 0.00Hz
Max: 50.00Hz
STOP
READY
I/O
P3.12.1.3ID:1466
Interval 1
00:00:00
00:00:00
ON Time
OFF Time
Days
0
A
KASUTAJALIIDESED VACON · 97
3 Kui tegemist on numbrilise väärtusega, liikuge
vasak- ja paremnoole nuppudega numbrilt
numbrile. Numbrite muutmiseks kasutage üles- ja
allanoole nuppe.
4 Muudatuse kinnitamiseks vajutage nuppu OK.
Muudatusest loobumiseks liikuge nupu Back/Reset
abil tagasi eelmisele tasemele.
ROHKEM KUI 1 VÄÄRTUSE VALIMINE
Mõnede parameetrite puhul saab valida rohkem kui 1 väärtuse. Tähistage iga sobiva
väärtuse juures asuv märkeruut.
1 Leidke parameeter. Kui märkeruute saab valida,
kuvatakse ekraanil vastav sümbol.
A. Märkeruudu valiku sümbol
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

STOP
READY
I/O
M 3.12.1.3.1ID:
Days
Monday
Tuesday
Wednesday
Thursday
Friday
Sunday
STOP
READY
I/O
M 3.12.1.3.1ID:
Days
Monday
Tuesday
Wednesday
Thursday
Friday
Sunday
VACON · 98 KASUTAJALIIDESED
2 Väärtuste loendis liikumiseks kasutage üles- ja
allanoole nuppe.
3 Väärtuse valikusse lisamiseks valige paremnoole
nupu abil valiku kõrval asuv märkeruut.
3.2.2 VEA LÄHTESTAMINE
Vea lähtestamiseks saate kasutada lähtestusnuppu või parameetrit Vigade lähtestamine.
Vaadake suuniseid osas 11.1 Kuvatakse viga.
3.2.3 NUPP FUNCT
Nuppu FUNCT saab kasutada 4 funktsioonis.
Sisenemiseks juhtleheküljele
•
Kohaliku juhtimiskoha ja kaugjuhtimiskohtade hõlpsaks vahetamiseks
•
Pöörlemissuuna muutmiseks
•
Parameetri väärtuse kiireks muutmiseks
•
Juhtimiskoha valik määratleb, kust tulevad vahelduvvooluajami käivitamise ja seiskamise
käsklused. Kõikidel juhtimiskohtadel on parameeter sageduse referentsiallika valimiseks.
Kohalikuks juhtimiskohaks on alati klahvistik. Kaugjuhtimiskohaks on I/O või Fieldbus.
Praegust juhtimiskohta näete ekraani olekuribal.
Kaugjuhtimiskohana saab kasutada üksusi I/O A, I/O B ja Fieldbus. I/O A ja Fieldbus on
madalaima prioriteediga. Neid saab valida parameetriga P3.2.1 (Kaugjuhtimiskoht). I/O B
saab digitaalsisendi abil mööduda kaugjuhtimiskohtadest I/O A ja Fieldbus. Digitaalsisendi
saab valida parameetriga P3.5.1.7 (I/O B juhtjõud).
Kohaliku juhtimiskoha korral kasutatakse juhtimiskohana alati klahvistikku. Kohalikul
juhtimiskohal on kõrgem prioriteet kui kaugjuhtimiskohal. Näiteks olles kaugjuhtimisel, kui
parameeter P3.5.1.7 möödub juhtimiskohast digitaalsisendiga, ja valides kohaliku
juhtimiskoha, muutub juhtimiskohaks klahvistik. Kohaliku ja kaugjuhtimise vahetamiseks
kasutage nuppu FUNCT või parameetrit P3.2.2 Kohalik/kaug.
3
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/

STOP
READY Keypad
ID: M1
Main Menu
Monitor
( 12 )
( 21 )
( 6 )
Parameters
Diagnostics
STOP
READY Keypad
ID:1805
Choose action
Control page
Change direction
Local/Remote
STOP
READY Keypad
ID:211
Local/Remote
Remote
Local
STOP
READY I/O
ID: M1
Main Menu
( 21 )
( 6 )
Parameters
( 12 )
Monitor
Diagnostics
KASUTAJALIIDESED VACON · 99
JUHTIMISKOHA MUUTMINE
1 Mis tahes kohas menüüpuus vajutage nuppu
FUNCT.
2 Kohaliku/kaugjuhtimise valimiseks kasutage üles-
ja allanoole nuppe. Vajutage nuppu OK.
3 Kohaliku juhtimise või kaugjuhtimise valimiseks
kasutage uuesti üles- ja allanoole nuppe. Valiku
kinnitamiseks vajutage nuppu OK.
4 Kui muutsite kaugjuhtimiskoha kohalikuks, st
klahvistikuks, andke klahvistiku referents.
Pärast valimist liigub kuva tagasi kohta, kus viibisite nupu FUNCT vajutamise hetkel.
KONTROLL-LEHELE LIIKUMINE
Kontroll-lehel saab lihtsalt jälgida kõige olulisemaid väärtusi.
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
3

STOP
READY I/O
Main Menu
( 21 )
( 6 )
Parameters
( 12 )
Monitor
Diagnostics
M1ID:
STOP
READY Keypad
ID:1805
Choose action
Control page
Change direction
Local/Remote
STOP
READY Keypad
ID: 184
Keypad Reference
0.00Hz
Output Frequency
Motor Current
Motor Torque
Motor Power
0.00Hz
0.00A
0.00%
0.00%
STOP
READY Keypad
ID: 168
Keypad Reference
0.00Hz
Output Frequency
Motor Current
Motor Torque
Motor Power
0.00Hz
0.00A
0.00%
0.00%
VACON · 100 KASUTAJALIIDESED
1 Mis tahes kohas menüüpuus vajutage nuppu
FUNCT.
2 Kontroll-lehe valimiseks kasutage üles- ja
allanoole nuppe. Sisenege nupuga OK. Avaneb
kontroll-leht.
3 Kui kasutate kohalikku juhtimiskohta ja klahvistiku
referentsi, saate nupuga OK seadistada parameetri
P3.3.1.8 Klahvistiku referents.
4 Väärtuse numbrite muutmiseks kasutage üles- ja
allanoole nuppe. Muudatuse kinnitamiseks
vajutage nuppu OK.
3
Lisateavet klahvistiku referentsi kohta vt 5.3 Rühm 3.3: Referentsid. Kui kasutate muid
juhtimiskohti või referentsi väärtusi, kuvatakse ekraanil sageduse referents, mida ei saa
redigeerida. Ülejäänud leheküljel olevad väärtused on multijälgimise väärtused. Siin
kuvatavaid väärtusi saab valida (vt suunised 4.1.1 Mitmikmonitor).
LOCAL CONTACTS: HTTP://DRIVES.DANFOSS.COM/DANFOSS-DRIVES/LOCAL-CONTACTS/
 Loading...
Loading...