


vacon 10
®
ac drives
사용자 매뉴얼


vacon • 1
찾기 DPD01652E1
1. 안전 .................................................................................................................................... 3
1.1 경고 .................................................................................................................................................................... 3
1.2 주의 사항 ......................................................................................................................................................... 5
1.3 접지 및 접지 폴트 보호 ........................................................................................................................... 5
1.4 모터 기동 전 .................................................................................................................................................. 6
2. 배송 수령. ......................................................................................................................... 7
2.1 타입 지정코드................................................................................................................................................ 7
2.2 보관 .................................................................................................................................................................... 8
2.3 유지 및 보수 .................................................................................................................................................. 8
2.4 품질보증 ........................................................................................................................................................... 8
2.5 제조업체의 관련법규 준수 선언........................................................................................................... 9
3 설치 .................................................................................................................................. 10
3.1 기계 설치 ...................................................................................................................................................... 10
3.2 배선 및 결선 ............................................................................................................................................... 21
4. 시운전 .............................................................................................................................. 31
4.1 Vacon 10 의 작동 순서 .......................................................................................................................... 31
5. 폴트 추적 ........................................................................................................................ 33
VACON 10 어플리케이션 인터페이스 ........................................................................ 36
6.
6.1 소개 ................................................................................................................................................................. 36
6.2 콘트롤 I/O .................................................................................................................................................... 38
7. 콘트롤 판넬 .................................................................................................................... 39
7.1 일반사항 ........................................................................................................................................................ 39
7.2 디스플레이 ................................................................................................................................................... 39
7.3 키패드 ............................................................................................................................................................. 40
7.4 Vacon 10 제어제어 판넬에서의 내비게이션................................................................................ 42
8. 스탠다드 어플리케이션 파라미터 ................................................................................ 50
8.1 퀵 셋업 파라미터(가상 메뉴, 파라미터. 17.2 = 1) .................................................................... 51
8.2 모터 셋팅 (콘트롤 판넬: 메뉴 PAR -> P1) ................................................................................... 53
8.3 스타트/스톱 셋업(콘트롤 판넬: 메뉴 PAR -> P2) ..................................................................... 55
8.4 주파스레퍼런스(제어제어 판넬: 메뉴 PAR -> P3) ..................................................................... 55
8.5 램프 및 브레이크 셋업(콘트롤 판넬: 메뉴 PAR -> P4) ......................................................... 56
8.6 디지털 입력(콘트롤 판넬: 메뉴 PAR -> P5) ................................................................................ 57
8.7 아날로그 입력(콘트롤 판넬: 메뉴 PAR -> P6) ............................................................................ 57
8.8 디지털 출력(콘트롤 판넬: 메뉴 PAR -> P8) ................................................................................ 58
8.9 아날로그 출력(콘트롤 판넬: 메뉴 PAR -> P9) ............................................................................ 58
8.10 보호(콘트롤 판넬: 메뉴 PAR -> P13) .............................................................................................. 59
8.11 폴트 자동 리셋 파리미터(콘트롤 판넬: 메뉴 PAR -> P14) .................................................. 59
8.12 PI 콘트롤 파라미터 (콘트롤 판넬: 메뉴 PA R -> P15) ............................................................ 60
8.13 어플리케이션 셋팅콘트롤 판넬: 메뉴 PAR -> P17) ................................................................. 60
8.14 시스템 파라미터 ........................................................................................................................................ 61
9. 파라미터 설명 ................................................................................................................ 62
9.1 모터 셋팅콘트롤 판넬: 메뉴 PAR -> P1) ...................................................................................... 62
9.2 스타트/스톱 셋업(콘트롤 판넬: 메뉴 PAR -> P2) ..................................................................... 67
9.3 주파수 레퍼런스 s (콘트롤 판넬: 메뉴 PAR -> P3) .................................................................. 74
9.4 램프 및 브레이크 셋업(콘트롤 판넬 메뉴 PAR -> P4) .......................................................... 75
24-hour support: +358 (0)40 837 1150 • Email: vacon@vacon.com

2• vacon
9.5 디지털 입력(콘트롤 판넬: 메뉴 PAR -> P5) ................................................................................ 79
9.6 아날로그 입력(콘트롤 판넬: 메뉴 PAR -> P6) ............................................................................ 80
9.7 디지털 출력(콘트롤 판넬 메뉴 PAR -> P8) ................................................................................. 81
9.8 아날로그 출력(콘트롤 판넬: 메뉴 PAR -> P9) ............................................................................ 81
9.9 보호(콘트롤 판넬:메뉴 Par->P13) ..................................................................................................... 82
9.10 자동 리셋(콘트롤 판넬: 메뉴 PA R -> P14) .................................................................................. 86
9.11 PI 콘트롤 파라미터(콘트롤 판넬: 메뉴 PAR -> P15) .............................................................. 87
9.12 어플리케이션 셋팅(콘트롤 판넬: 메뉴 PAR->P17) ................................................................... 88
9.13 Modbus RTU ............................................................................................................................................... 90
10. 기술사양 .......................................................................................................................... 93
10.1 Vacon 10 기술사양 .................................................................................................................................. 93
10.2 정격 용량 ...................................................................................................................................................... 95
10.3 제동저항 ........................................................................................................................................................ 97
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
1. 안전
숙련된 전기 기술자만 설치 할 수 있습니다.
이 설명서에 포함된 내용은 주의 사항 및 사용자의 안전을 위한 것이며, 제품이나 연결된
기기에 손상을 방지하기 위하여 주의 사항과 경고 사항을 담았습니다.
주의 사항과 경고에 포함 된 정보를 참조하십시오 :
=위험한 전압
사망 또는 심각한 부상의 위험!
= 일반적인 경고
vacon • 3
1.1 경고
제품이나 연결된 기기가 손상이 될
위험
Vacon 10이 주전원 전원에 연결 되어 있다면, 주파수 변환기 파워 유닛의구성품
및 설치된 캐비닛 장치들은 전류가 흐릅니다. 이 전압과 접촉하는 것은 매우
위험하며, 때에 따라서 사망사고나 심각한 부상을 유발 할 수 있습니다.
Vacon 10이 메인 전원에 연결되어 있거나, 모터가 운전 중이 아닐 때라도 모터
단자대 U,V,W 및DC-link/브레이크 저항 단자대 -/+ 및 다른 모든 주요 장치는
전류가 흐릅니다.
제어 I/O-단자는 주전원 전원으로부터 분리되어 있습니다. 그러나, Vacon
10이메인에 연결되지 않은 경우라도 릴레이 출력 및 다른 I/O-단자는 위험한 제어
전압을 가지고 있을 수도 있습니다.
Vacon 10의 누설전류가 3.5mA AC를 초과할 경우, EN61800-5-1에 따라, 강화된
보호 접지가 설치 되어 있어야 합니다.
주파수 변환기가 기계의 한 부분으로 사용 된다면, 기계 제조사는 메인 스위치(EN
60204-1)와 기계를 함께 제공 해야 할 책임이 있습니다.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
1
4 • vacon
Vacon 10이 주전원과 연결되지 않은 상태에서 모터가 작동할 경우, 모터에 전기가
공급될 경우 계속 작동합니다. 이 경우 모터가 발전기 역을 수행하며, 변환기에
에너지를 공급합니다.
주파수 변환기를 주전원 전원으로부터 분리한 후, 화면의 표시가 꺼질 때 까지
기다리십시오. Vacon 10에서 어떤 결선작업이라도 하기 전에 5분 이상
기다리십시오.
모터의 자동 재시작이 활성화되어 있을 경우, 모터는 폴트 상황에서 자동으로
재시작 합니다.
1
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
1.2 주의 사항
Vacon 10 주파수 변환기는 고정 설치되어야 합니다.
주파수 변환기가 주전원 전원에 연결되어 있으면, 어떤 측정도 하지 마십시오.
Vacon 10의 어떤 부분에서도 전압 내력 시험을 하지 마십시오. 수행될 테스트에
따라 정해진 절차가 있습니다. 이 절차를 무시하는 것은 제품을 손상 시킬 수
있습니다.
모터와 모터 케이블의 측정에 앞서 모터 케이블을 주파수 변환기로부터
분리하십시오.
vacon • 5
VACON 10의 커버를 열지 마십시오. 손가락의 정전기 전압 방전 구성 요소가 손상
될 수 있으며, 덮개를 열면 또한 장치가 손상 될 수 있습니다. VACON 10의 덮개가
열렸을 경우, 보증은 무효가 됩니다.
1.3 접지 및 접지 폴트 보호
Vacon 10 주파수 변환기는 항상 접지도체에 연결관 접지선으로 연결되어 있어야 합니다.
다음 그림을 참조하십시오:
• 주파수 변환기 내부의 접지 고장 보호 접지 고장에 대해서만 변환기만을 보호합니다.
• 폴트 전류 보호 스위치를 사용하는 경우, 스위치는 드라이브와 접지 폴트 전류를
가지고 결함 상황을 가정하여 테스트 해야 합니다.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
1
6 • vacon
1.4 모터 기동 전
체크리스트 :
모터를 스타트하기 전에, 모터가 적절히 마운트 되었는지 확인하고 모터에 연결된
장비가 모터를 기동 할 수 있는지 확인하십시오.
모터와 모터에 연결된 기계 장비에 따라, 모터 최대 스피드(주파수)를
설정하십시오.
모터의 회전 방향을 바꾸기 전에, 안전하게 변경 될 수 있는지 확인 하십시오.
모터 단자가 주전원 전원에 연결 되어 있지 않은지 확인 하십시오.
1
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
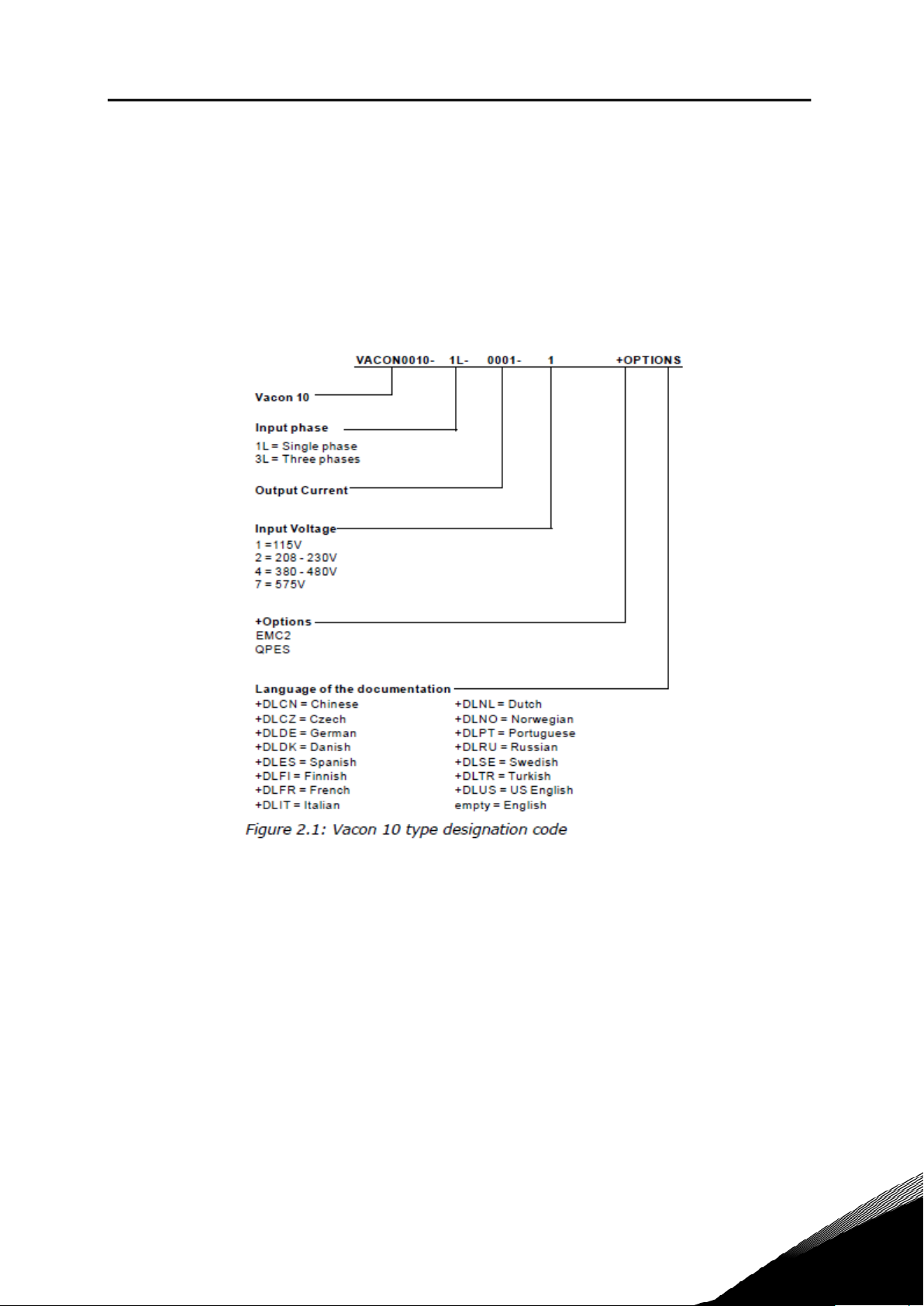
2. 배송 수령
제품 포장 해체작업 후에, 제품에서 배송 중에 손상이 있었는지, 구매한 제품이 제대로 배송
되었는지 확인하십시오 (아래의 코드와 제품의 타입 명칭을 비교해 보십시오).
만약 운송도중 드라이브에 손상이 있었다면, 먼저 화물 보험사 또는 운송사에 연락하십시오.
만약 주문한 제품이 아닐 경우에는, 즉시 공급사에 연락 하십시오
2.1 타입 지정코드
vacon • 7
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
2
8 • vacon
2.2 보관
주파수 변환기가 사용되기 전에 보관될 경우 다음 조건에 맞도록 하십시오:
보관온도 –40…+70 C
상대습도 <95%, 방수 불가
2.3 유지 및 보수
정상적인 운전 상황에서 Vacon 10 주파수 변환기는 유지 보수할 필요가 없습니다.
2.4 품질보증
제조 결함의 경우에만 보증이 적용 됩니다. 제조사는 배송, 수취 도중 발생한 손상 및 취부,
시운전, 사용시 발생한 손상에 대해서는 책임이 없습니다.
제조사는 오용, 남용, 잘못된 설치, 부적절한 주위 온도, 먼지, 부식성 물질 및 정격 설계
내역서를 벗어난 동작으로 인해 발생한 손상이나 기계 고장에 대해서는 어떠한 경우에도
책임을 지지 않습니다.
또한 제조사는 간접적으로 발생한 손상에 대해서도 책임을 지지 않습니다.
제조사의 보증 기간은 배송 일자로부터 18개월 또는 시운전 일자로부터 12개월의 기간 중,
둘 중에 먼저 만기 일자가 되는 날로 결정됩니다. (Vacon 보증 기간)
지역 협력사는 상기에 기술된 것과 다른 보증 기간을 가질 수 있습니다. 이 보증 기간은
지역 협력사의 판매 보증 기간에 기술 되어 있습니다. Vacon에는 Vacon 보증기간을
초과하는 다른 어떤 보증에 대한 책임이 없습니다.
보증에 대한 모든 사항은 대리점에 연락 하십시오.
2
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
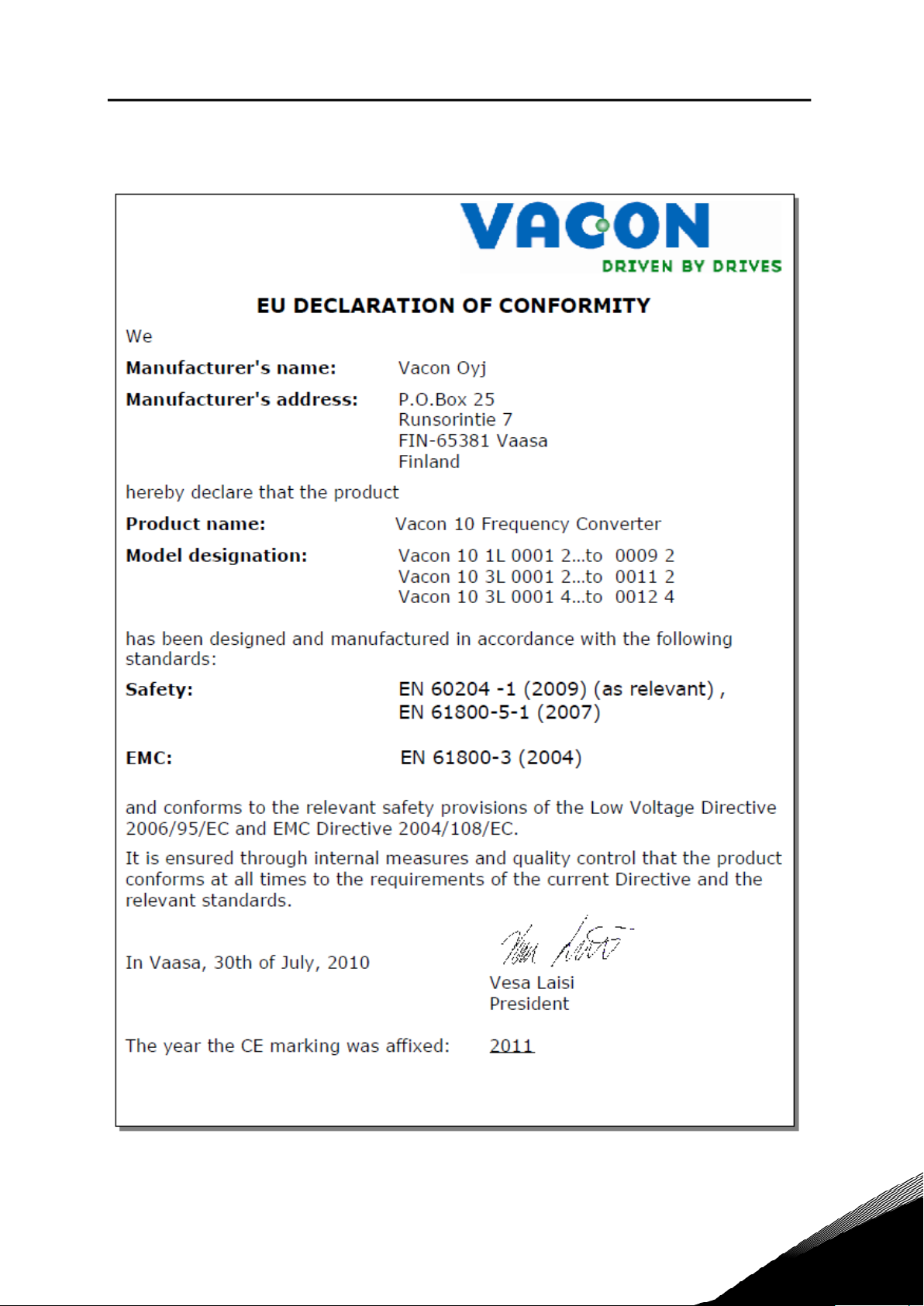
2.5 제조업체의 관련법규 준수 선언
vacon • 9
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
2
10 • vacon
3 설치
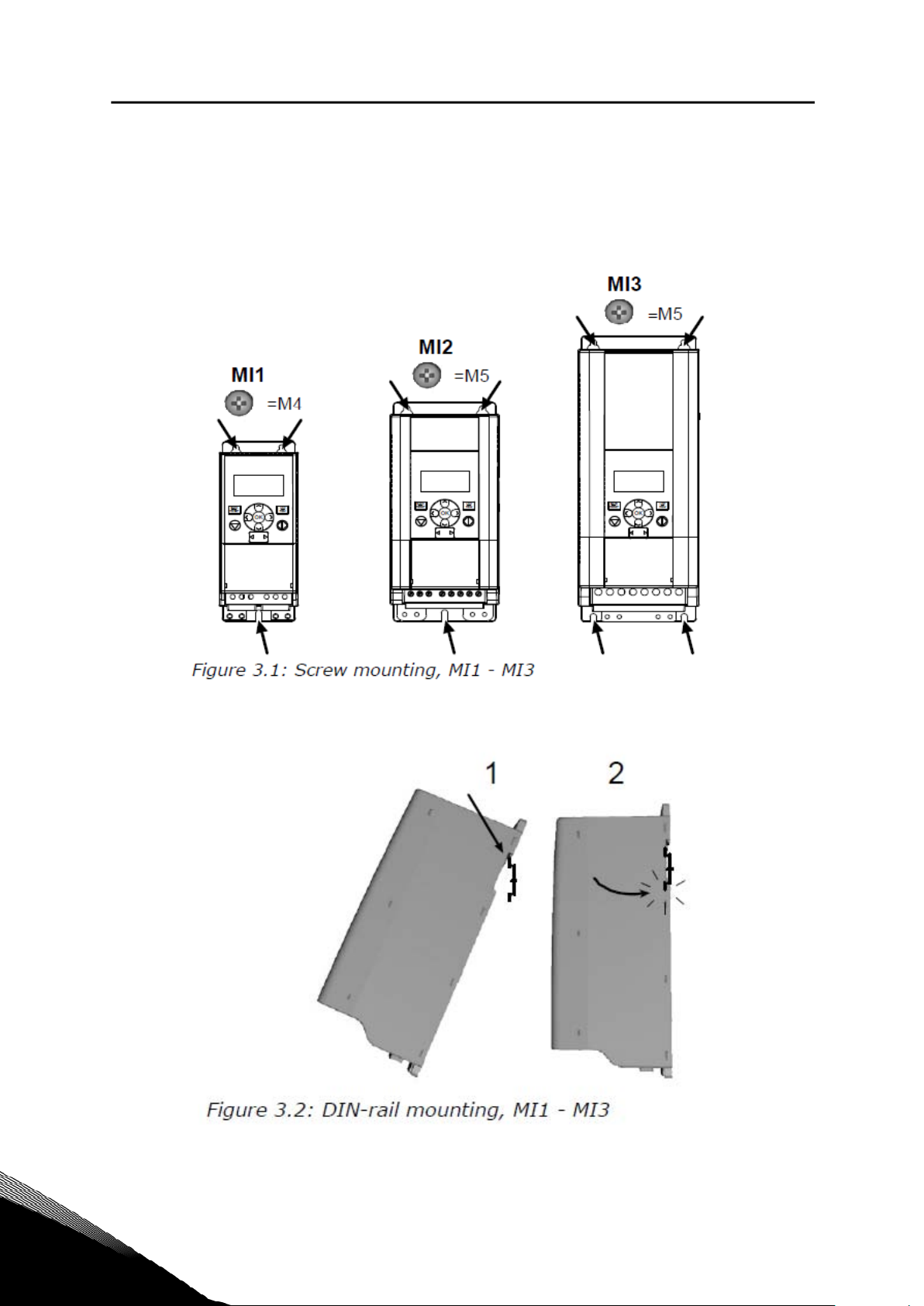
3.1 기계 설치
벽에 VACON 10마운트하는 두 가지 방법이 있습니다. MI1-MI3의 경우, 하나 나사 또는 DIN
레일 설치가 가능합니다. 설치 치수는 드라이브의 뒷면 과 다음 페이지에 제공됩니다.
3
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

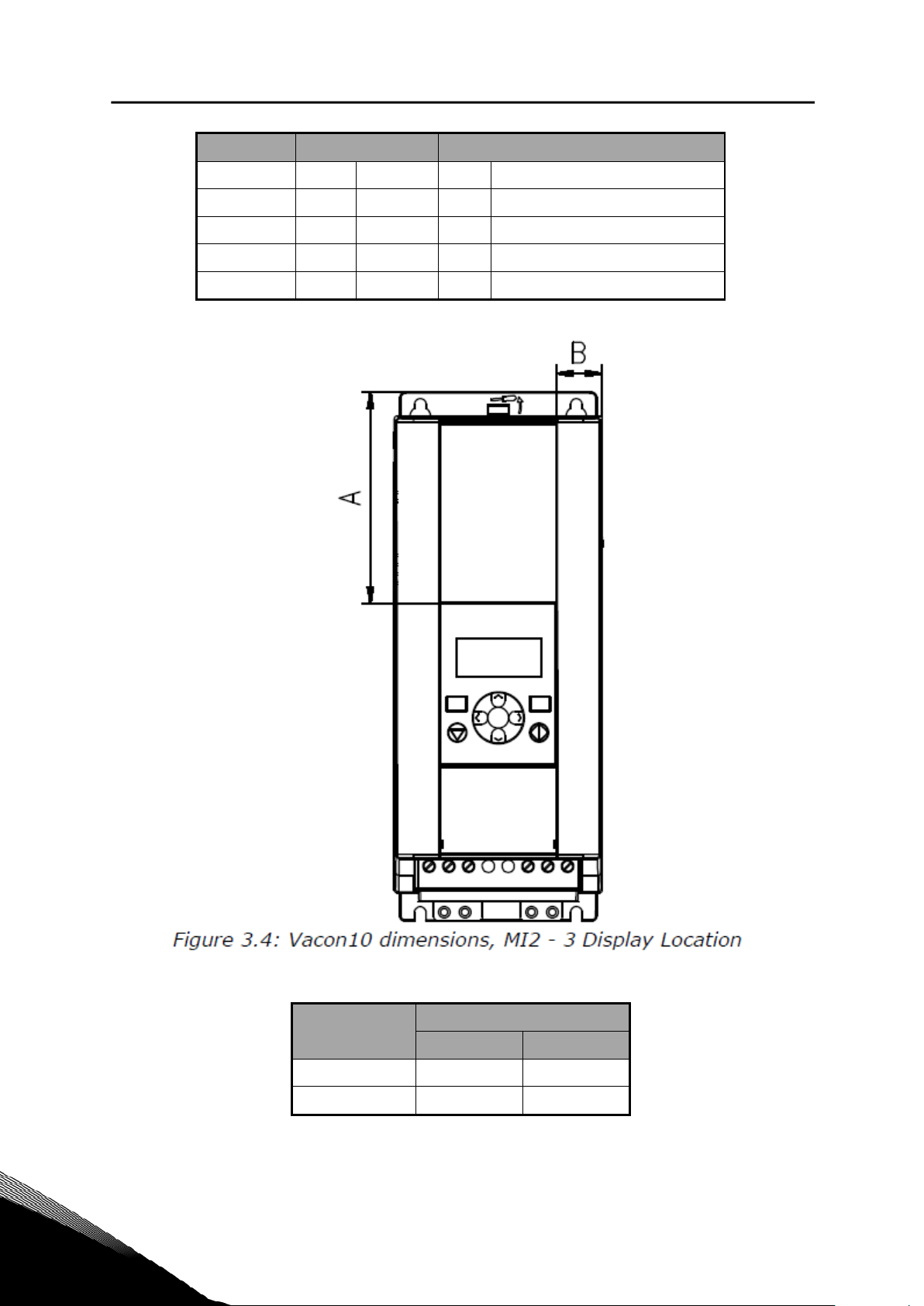
3.1.1 Vacon 10 치수
vacon • 11
프레임 H1 H2 H3 W1 W2 W3 D1 D2
MI1 160.1 147 137.3 65.5 37.8 4.5 98.5 7
MI2 195 183 170 90 62.5 5.5 101.5 7
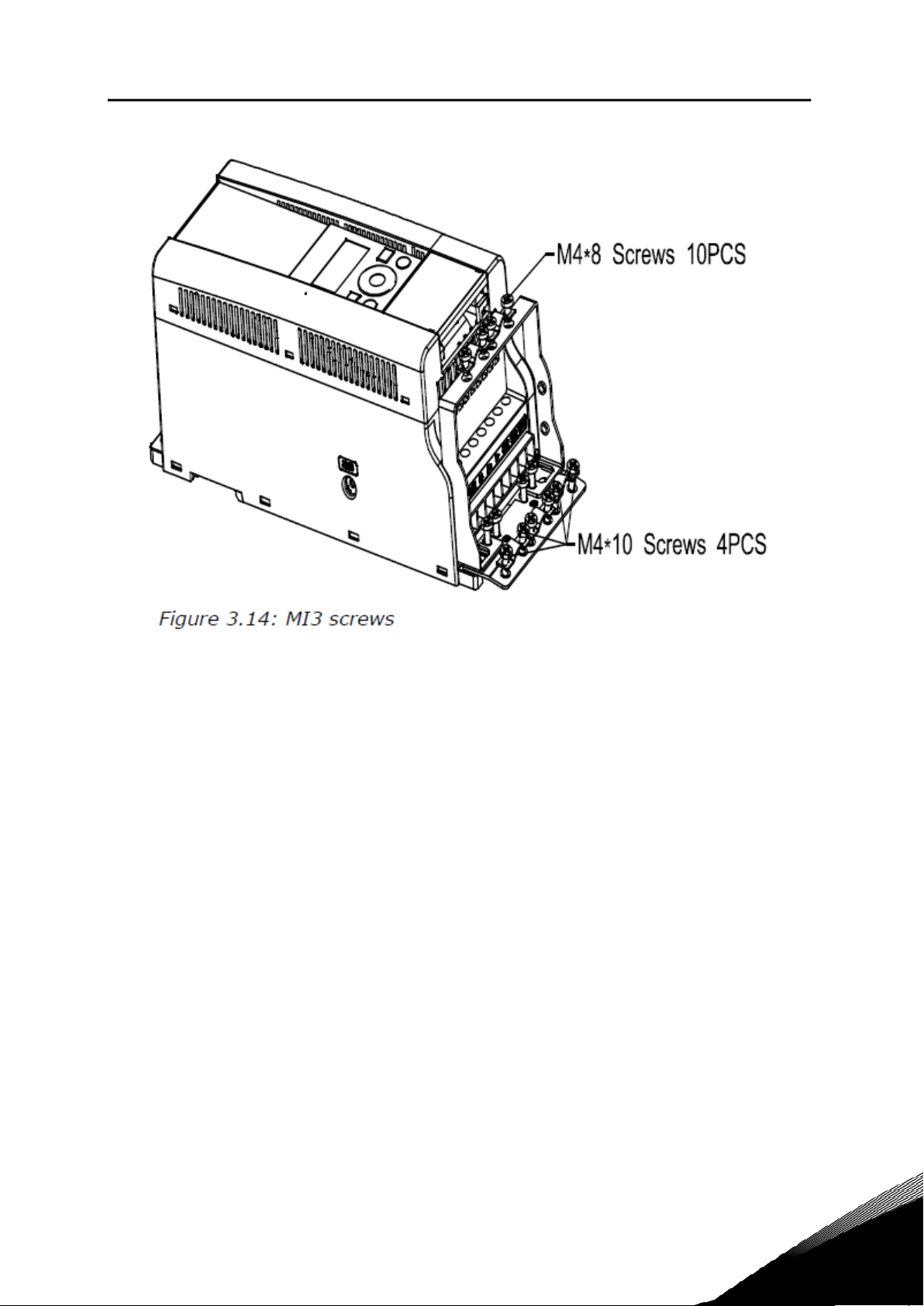
MI3 254.3 244 229.3 100 75 5.5 108.5 7
표 3.1: Vacon 10 치수 : 밀리미터 단위
프레임 크기 무게*
W H D (kg.)
MI1 66 160 98 0.5
MI2 90 195 102 0.7
MI3 100 254.3 109 1
표 3.2: Vacon 10 프레임 치수(밀리미터) 와 무게(KG_
*배송 패키지가 없음
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
3
12 • vacon
프레임 크기 (인치) 무게*
W H D (lbs.)
MI1 2.6 6.2 3.9 1.2
MI2 3.5 9.9 4 1.5
MI3 3.9 10.3 4.3 2.2
*배송 패키지가 없음
표 3.3: Vacon 10 프레임 치수(인치)와 무게(KG)
3
크기 (mm)
A 17 22.3
B 44 102
표 3.4: Vacon 10 프레임 치수(밀리미터)
프레임
MI2 MI3
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
vacon • 13
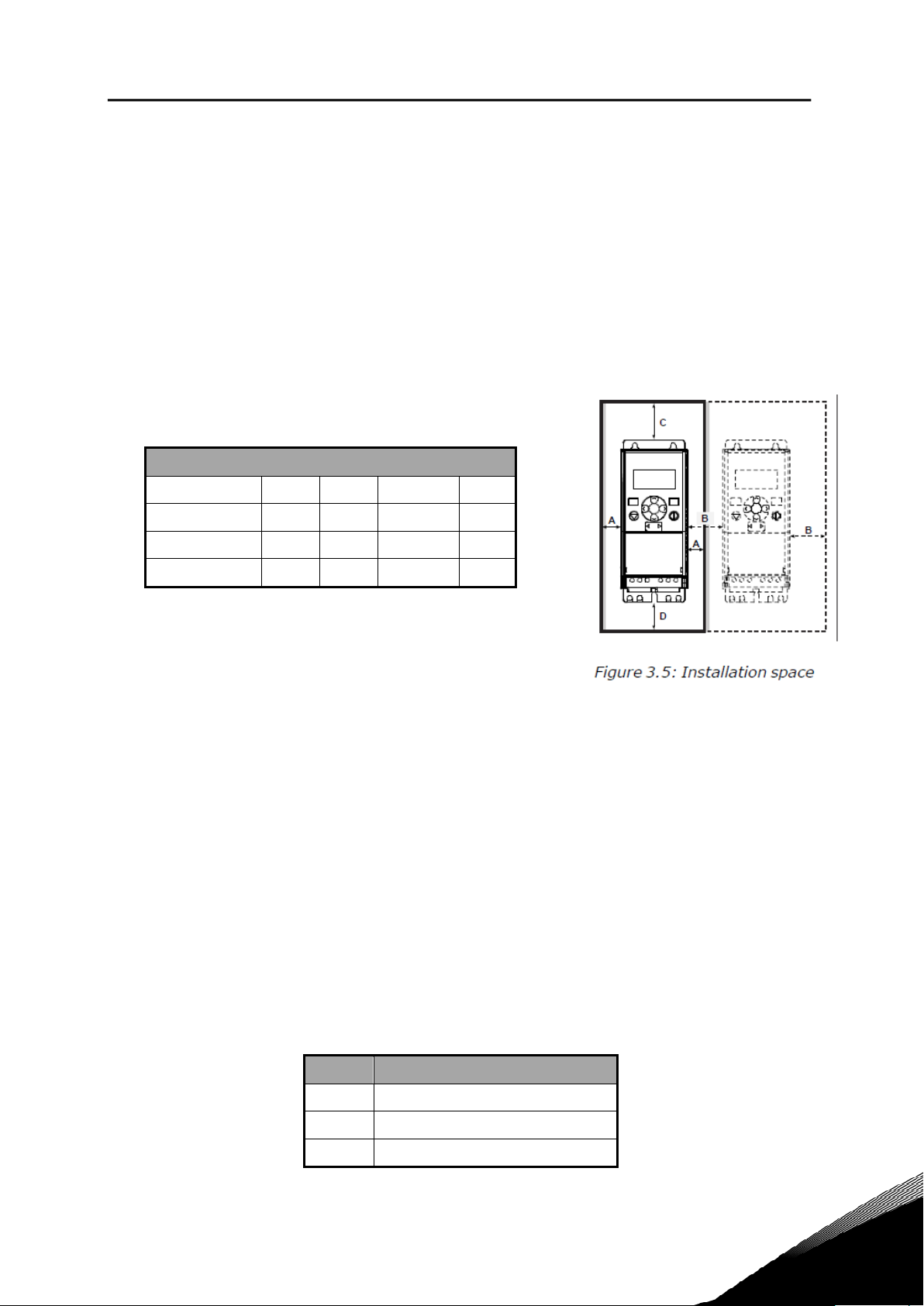
3.1.2 냉각
효율적인 환기와 냉각과 유지 보수를 위하여 충분한 여유 공간을 확보해야 합니다. 여유
공간에 필요한 면적은 아래의 표를 참조하십시오.
여러 유닛이 위로 겹겹이 설치 될 경우, 필요한 여유 공간은 C + D 수치입니다.(아래 도면
참조). 냉각에 사용되는 공기 배출구의 경우 상단의 공기 유입구와 접촉하지 않도록 각별히
유의 해야 합니다.
냉각에 필요한 공기의 양은 아래와 같습니다. 냉각에 필요한 공기의 온도가 변환기의
최대적정온도를 넘어가지 않도록 주의하십시오.
최소 여유 (mm)
프레임 A* B* C D
MI1 20 20 100 50
MI2 20 20 100 50
MI3 20 20 100 50
표 3.5: AC 드라이브 주위의 최소공간
MI1~MI3 싸이즈의 드라이브의 A및B의 최소공간은 주위온도가 40도 이하일 때는 0mm가
될 수 있습니다.
A = 인버터 주변의 공간(B참조)
B = 인버터간의 거리 혹은 캐비넷 벽으로부터의 거리
C = 인버터 윗쪽으로의 여유공간
D = 인버터 아랫쪽으로의 여유공간
주의! 드라이브의 뒷면에 설치 치수를 참조하십시오.
위 (100mm)아래 (50mm) 이상 냉각 여유 공간을두고, VACON 10의 양쪽에는 20mm를
두십시오. MI1 용 - MI3, 좌우 설치는 주위 온도가 40 ° C이하인 경우에만 허용됩니다.
프레임 소요 냉각공기량 (m3/h)
MI1 10
MI2 10
MI3 30
표 3.6: 소요 냉각 공기량
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
3
14 • vacon
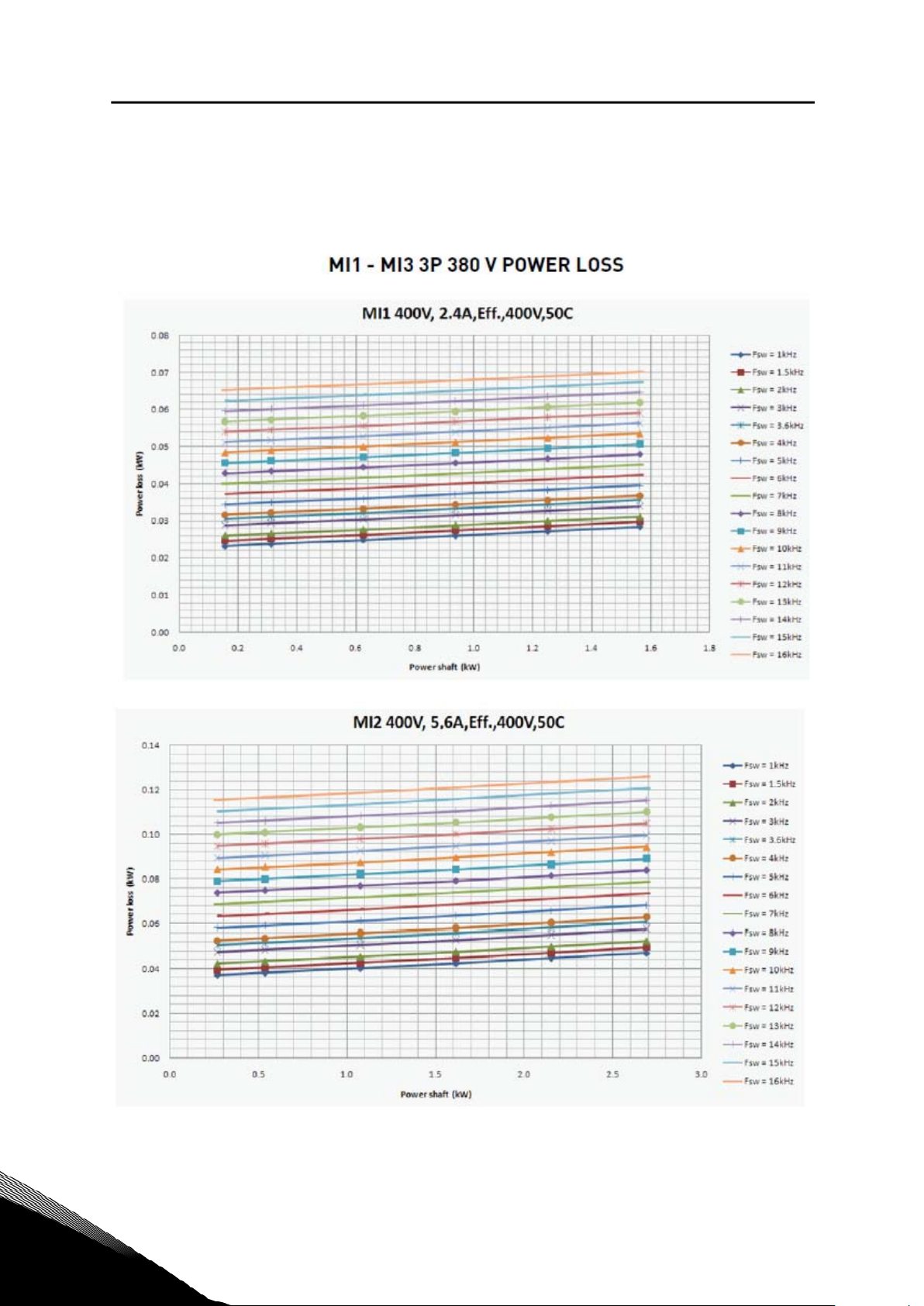
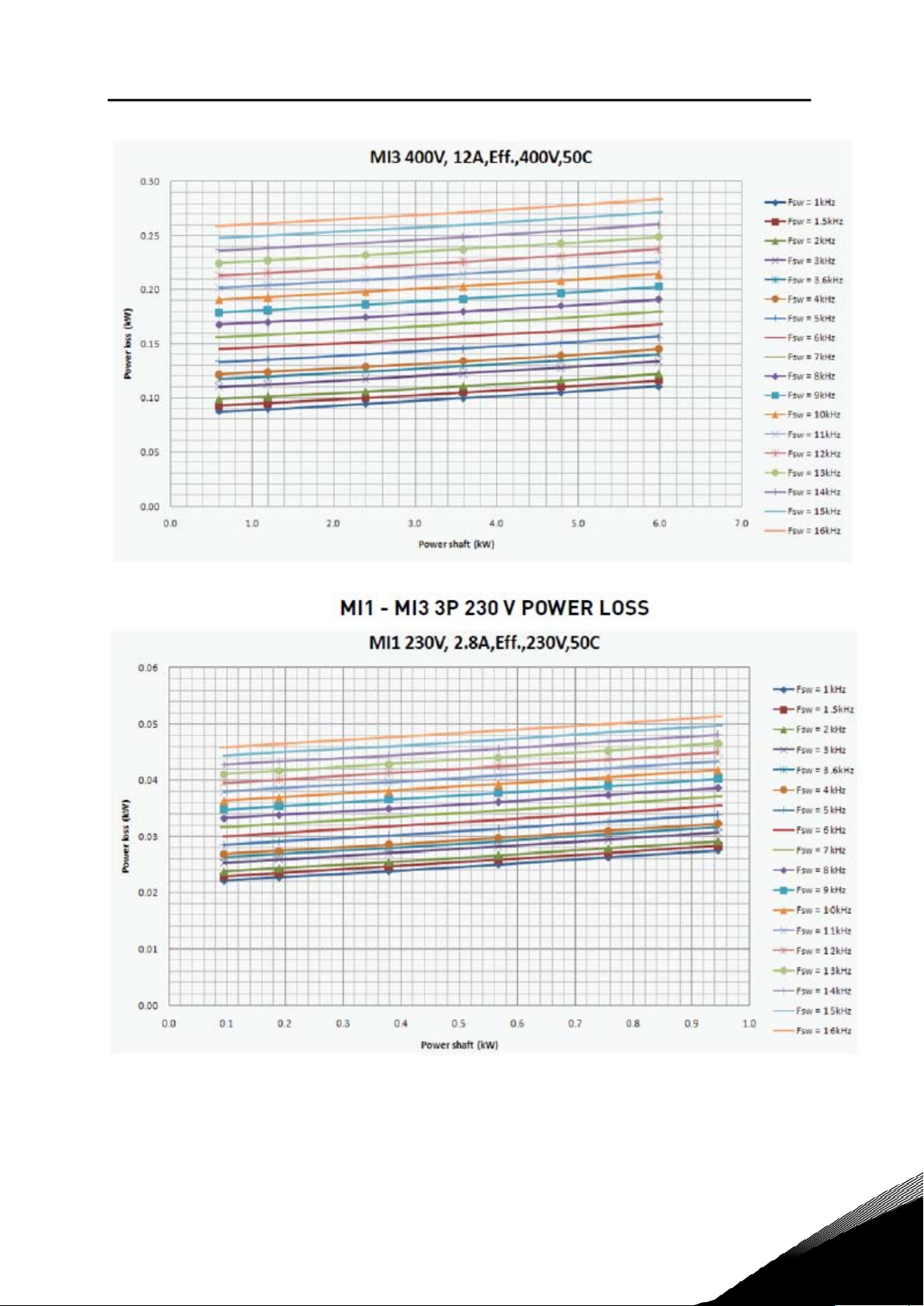
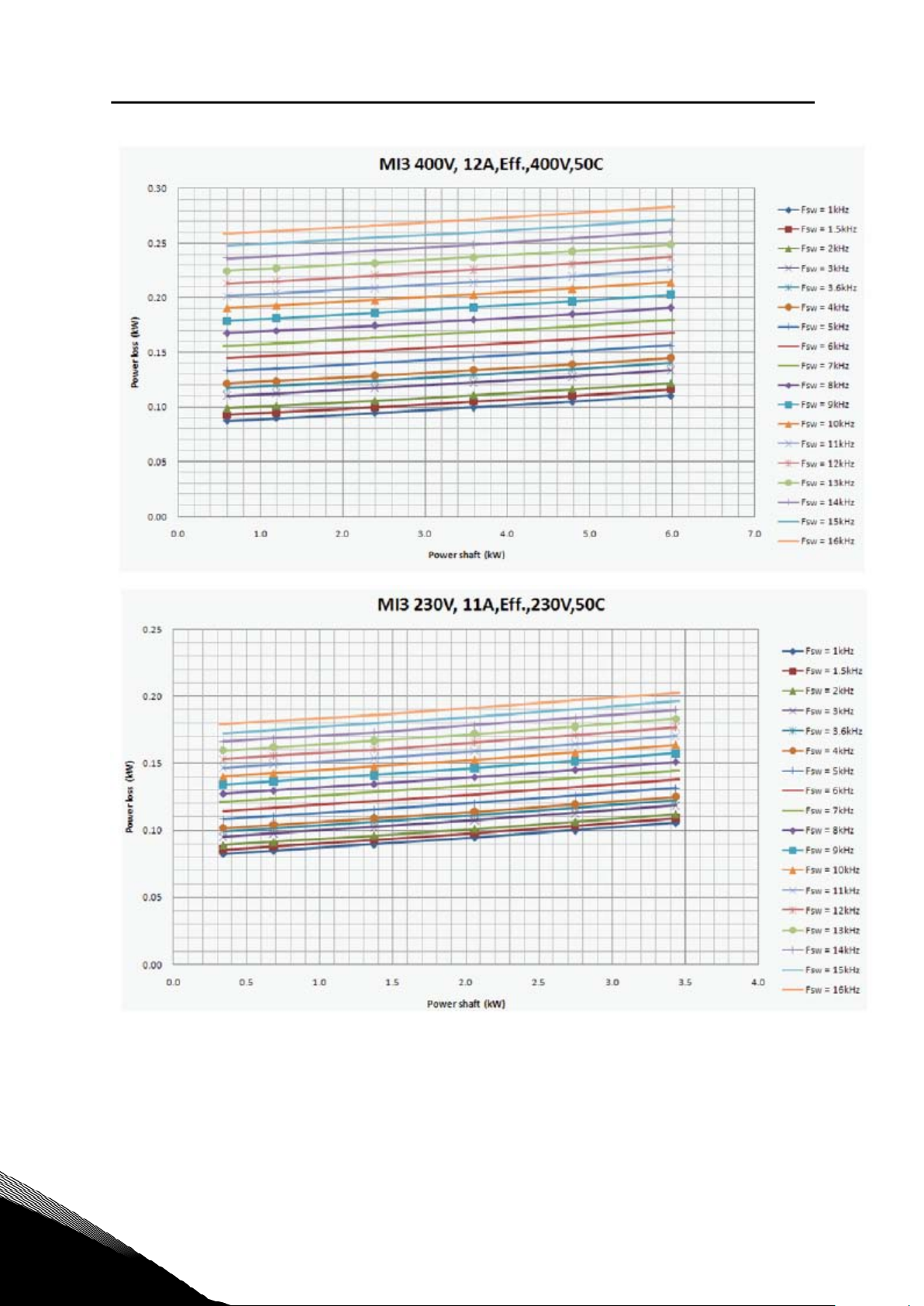
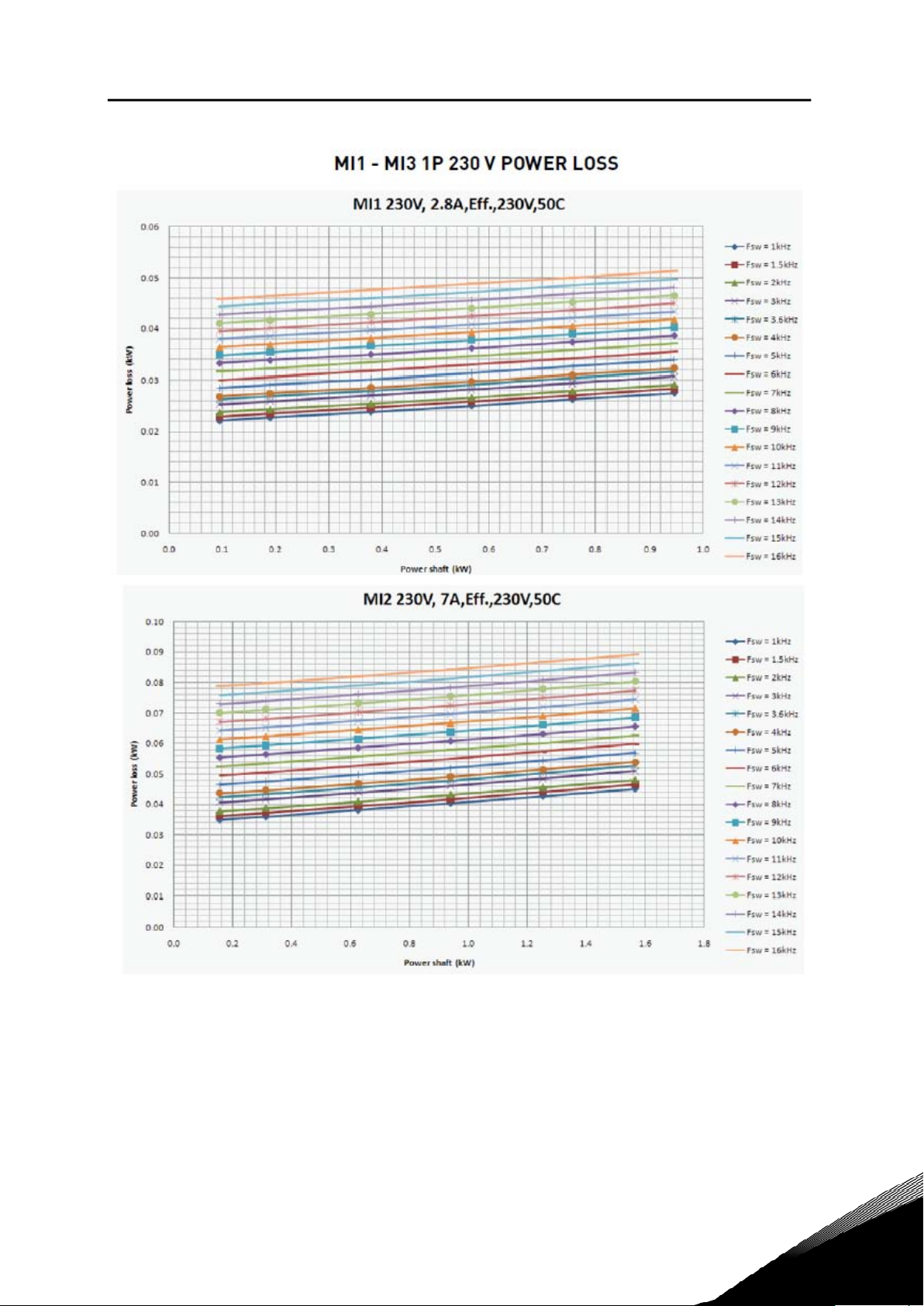
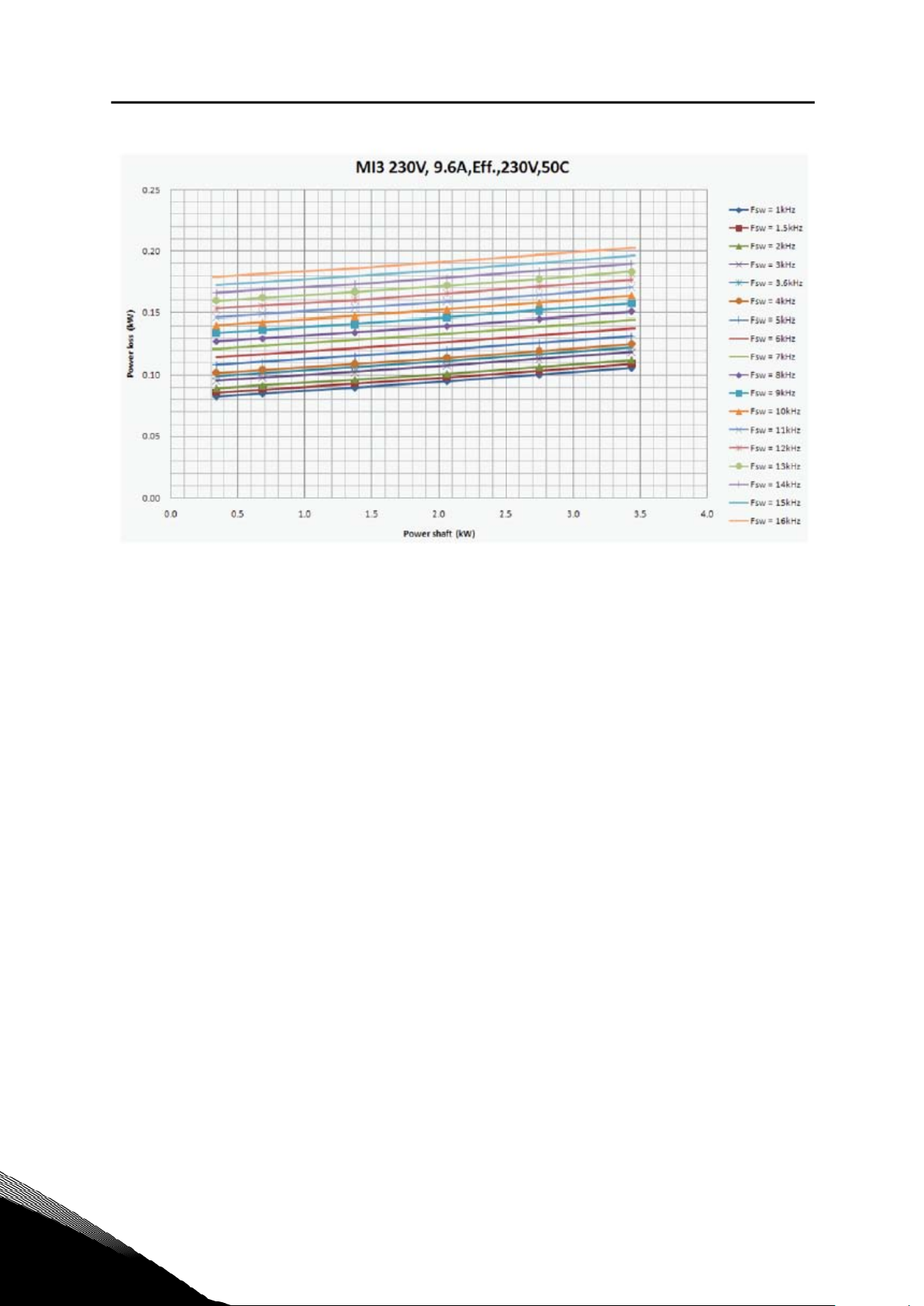
3.1.3 전력손실
사용자가 예를 들어 모터 소음을 줄이기 위해 드라이브의 스위칭 주파수를 높이고 싶은
경우에, 이것은 반드시 전력 손실 및 냉각 요구 사항에 영향을 미칩니다. 다른 모터 축
파워를 위해서 사용자는 스위칭 주파수를 선택할 수 있습니다. 아래 그래프를 참조하십시오.
3
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
vacon • 15
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
3
16 • vacon
3
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
vacon • 17
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
3
18 • vacon
3
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 19
3.1.4 EMC 등급
EN61800-3 방출 전자파 장애, 전력 시스템 네트워크 설치 환경 (아래 참조)의 요구 사항의
수준에 따라 네 개의 클래스로 주파수 변환기의 부분을 정의합니다. 각 제품의 EMC
클래스는 형식 지정 코드에 정의되어
카테고리 C1:이 클래스의 주파수 변환기 제품 표준 EN 61800-3 (2004)의 카테고리 C1의
요구 사항을 준수합니다. 카테고리 C1은 최고의 EMC 특성을 보장하고 변환기에게 1 차
환경에서 사용하기위한 정격 전압1000V 이하의 주파수를 포함합니다.
주의: 클래스 C의 요구 사항은 실시간 배출량 안에서만 충족됩니다.
카테고리 C2:이 클래스의 주파수 변환기는 제품 표준 EN 61800-3 (2004)의 카테고리 C2의
요구 사항을 준수합니다. 카테고리 C2 고정 설치에서 정격 전압 1000v이하의 변환 기기를
포함하며, C2 클래스 주파수 변환기는 1 차 및 2차 환경 모두에서 사용가능합니다. .
카테고리 C3:이 클래스의 주파수 변환기는 제품 표준 EN 61800-3 (2004)의 카테고리 C2의
요구 사항을 준수합니다. 카테고리 C3는 정격 전압 1000v이하의 변환 기기를 포함하며, C2
클래스 주파수 변환기는 2차 환경에서만 사용가능합니다.
카테고리C4:이 클래스의 드라이브는 EMC 방출 보호를 제공하지 않습니다. 이러한 종류의
드라이브는 외부에 장착됩니다.
EN 61800-3 (2004)의 제품 환경 표준
사용환경 1 (First environment): 이 사용환경은 가정내 사용 환경을 전제로 하며, 가정내
사용을 전제로 한 저 전압 공급 네트워크에 중간 변압기(intermediate transformers) 없이
연결된 경우를 의미합니다.
주의: 주택, 아파트, 상가, 거주용 건물의 사무실이 사용환경 1의 대표적 예입니다.
사용환경 2 (초ond environment): 이 사용환경은 저 전압 공급 네트워크에 가정용 사용
용도로 연결된 환경을 제외한 모든 환경을 포함합니다.
주의: 건물의 산업 구역, 기술 구역 혹은 변압기로부터 공급받는 이와 같은 구역이
사용환경 2의 대표적 예입니다..
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
3
20 • vacon
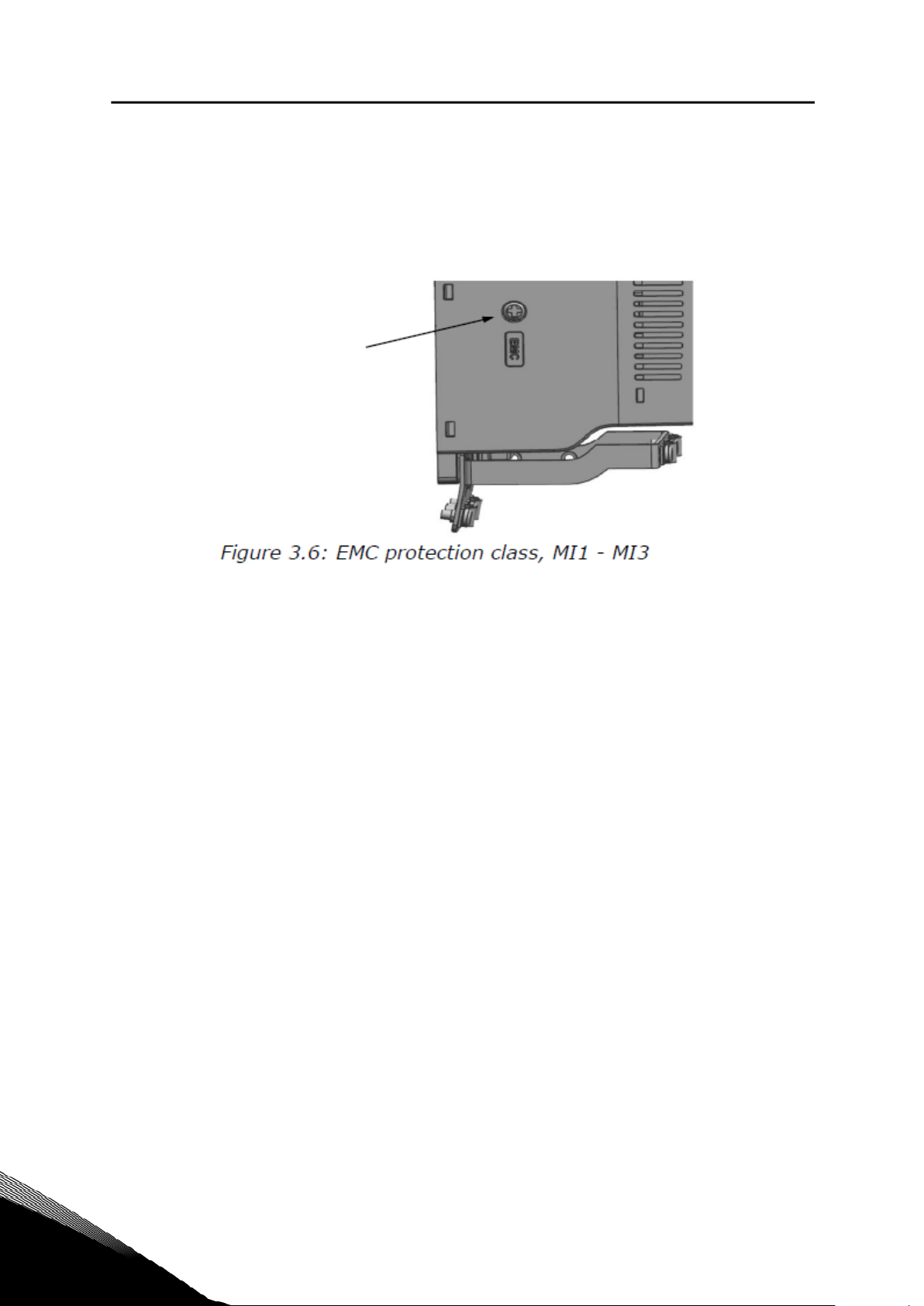
3.1.5 EMC보호등급을 C2에서C4로 변경하기
MI1-3 주파수변환기의 EMC 보호클래스는 EMC 커패시터분리 나사를제거하여클래스 C2
에서 C4 클래스를변경할수있습니다, 아래그림을 참조하십시오.
주의! 클래스 C2로 EMC 레벨을 변경하지 마십시오. 위의 과정이 반대하라 하더라도,
주파수 변환기는 더 이상 클래스 C2 EMC 요건을 충족하지 않습니다.
3
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
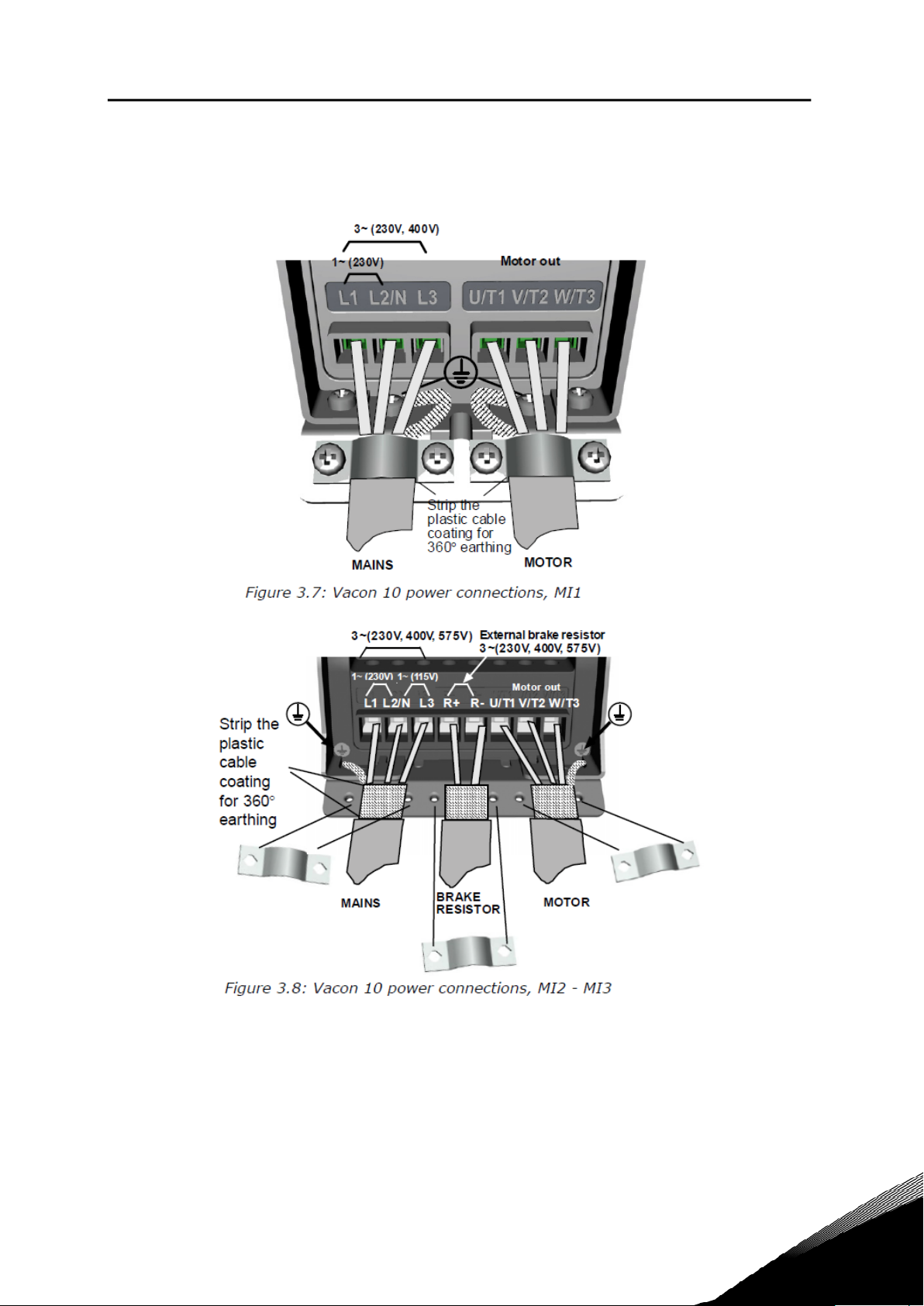
3.2 배선 및 결선
3.2.1 전력선 배선
주의! 전원케이블의 토크 조임은 0.5 - 0.6 Nm입니다.
vacon • 21
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
3
22 • vacon
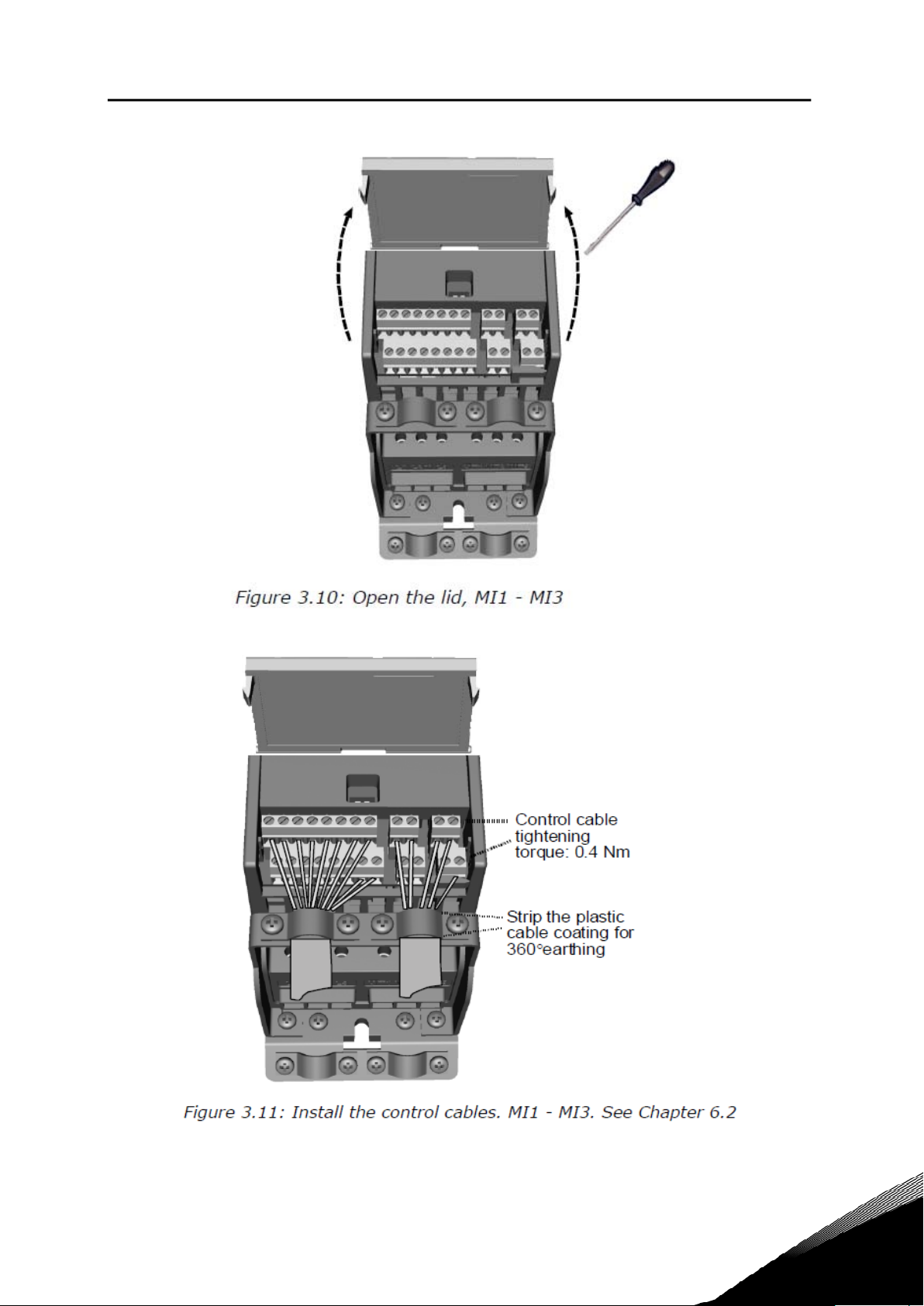
3.2.2 콘트롤선 배선
3
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
vacon • 23
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
3
24 • vacon
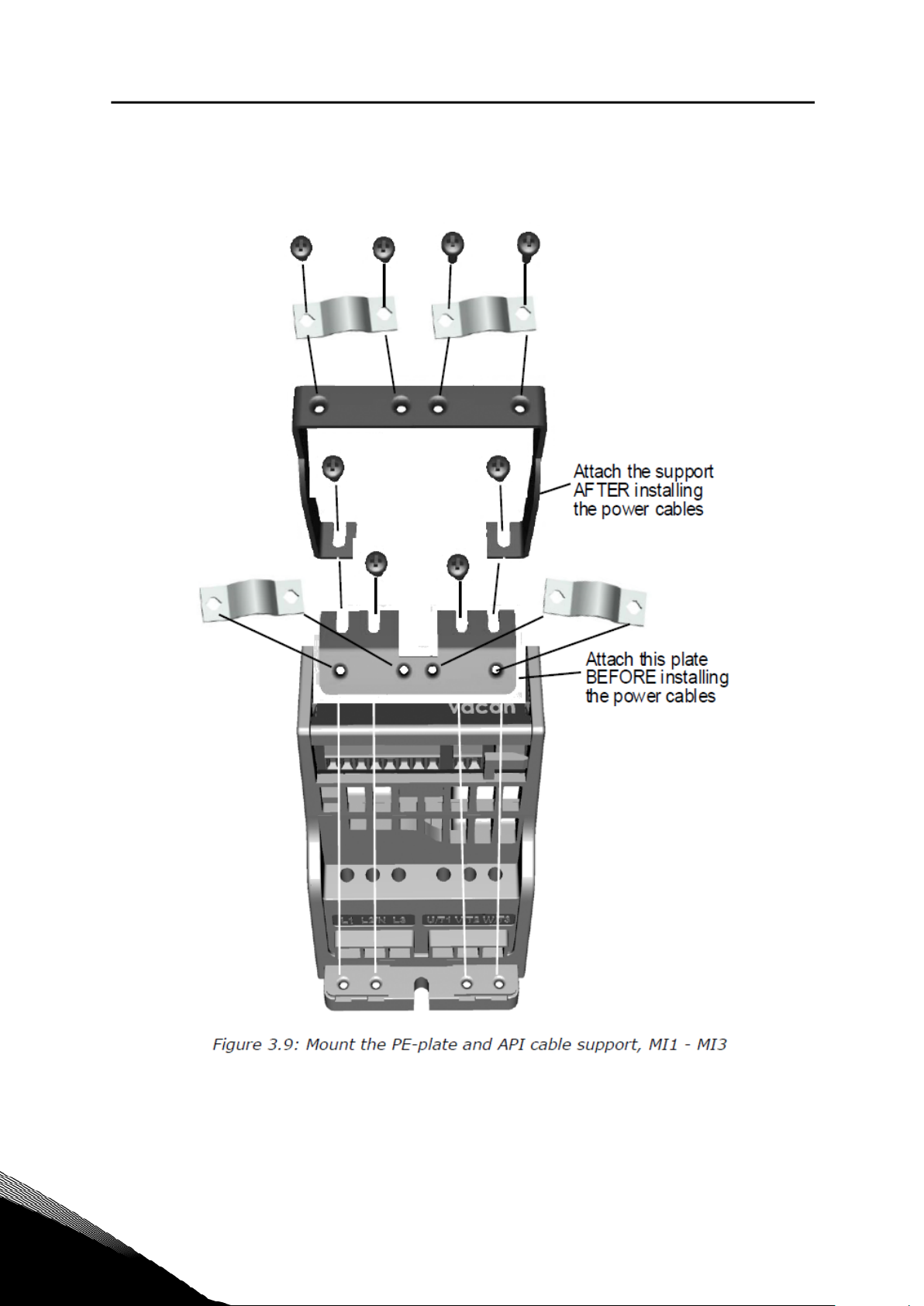
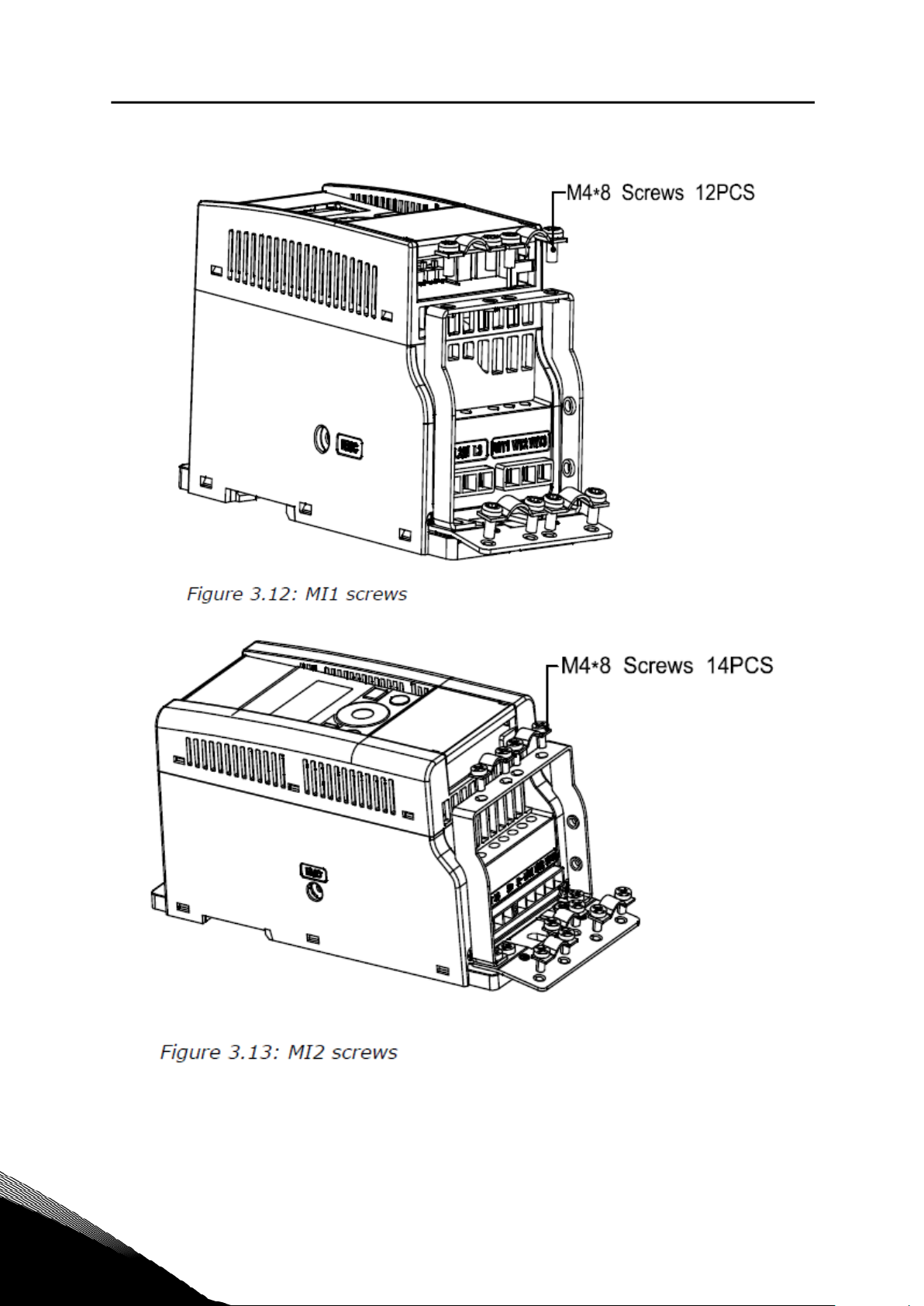
3.2.3 케이블 나사
3
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
vacon • 25
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
3
26 • vacon
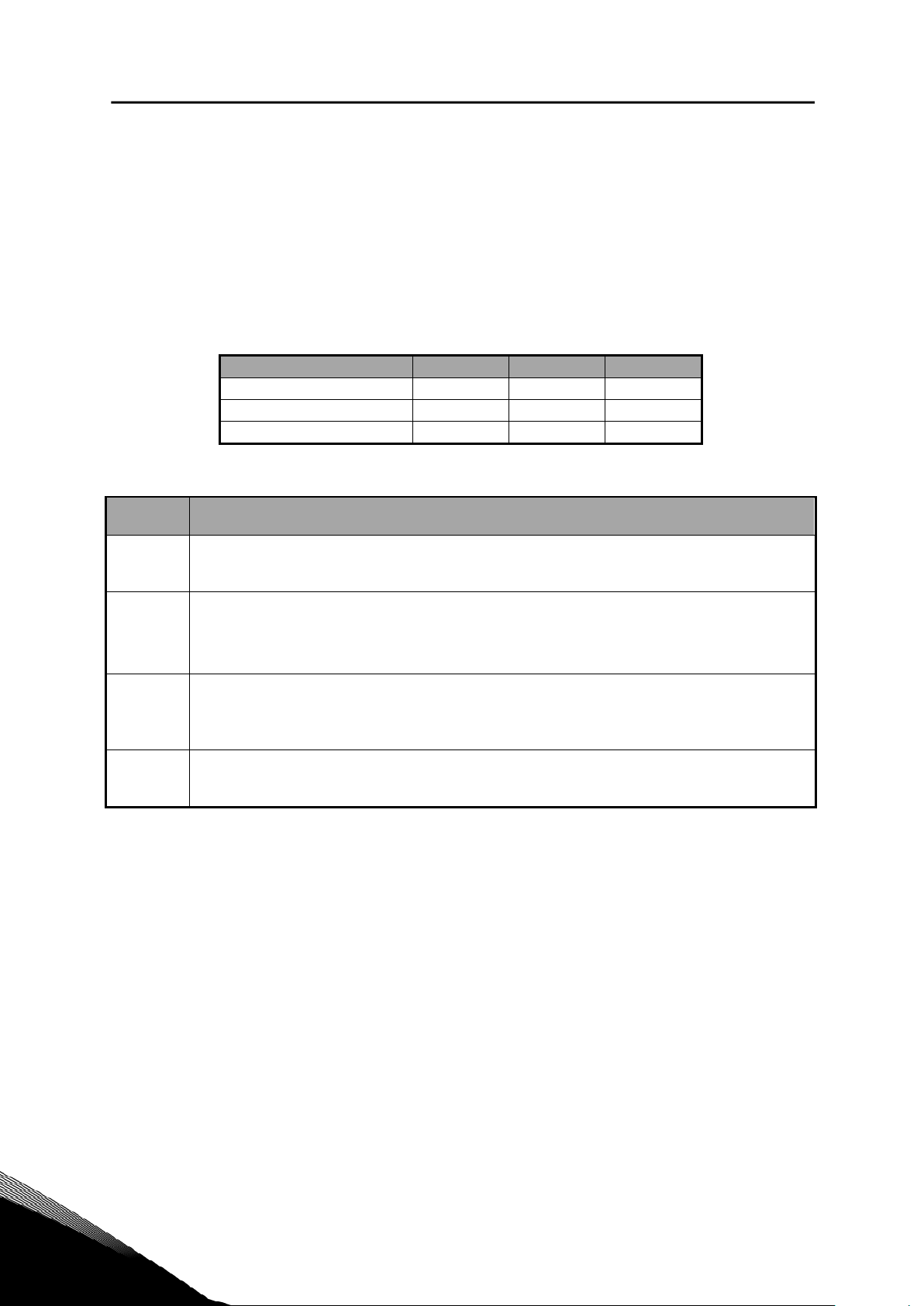
3.2.4 케이블 및 퓨즈 사양
최소한 +70°C 온도 등급의 케이블을 사용하십시오. 아래 테이블에 따라 케이블과 퓨즈의
치수를 선정할 수 있습니다. 주파수 변환기 입력 전류는 출력 전류를 결코 두드러지게
초과하지는 않기 때문에, 출력 전류에 따라 치수를 선정하는 것을 권장 합니다.UL 기준에
따른 케이블 설치지침은 케이블 설치 및 UL규격에 관한 장을 참조하십시오.
퓨즈는 케이블 과부하 보호 기능으로도 사용됩니다.
위의 지침은 1개의 모터와 1개의 케이블이 주파수 변환기에 접속되었을 때에만 적용
가능하며, 이와 다른 경우에는 제조사에 문의하십시오.
EMC 부류 C2 부류 C3 부류 C4 부류
전원 케이블 타입 1 1 1
모터 케이블 타입 3 2 1
제어제어 케이블 타입 4 4 4
표 3.7: Cable types required to meet standards. EMC categories are
케이블
타입
설명
1
2
3
4
파워 케이블 고정 설치 및 특정 전원 전압 위한.
(NK케이블S/ MCMK 또는 비슷한 케이블을 추천합니다.)
장착한 파워 케이블과 동심원의 보호 와이어 그리고 구체적인 메인 전압을 위해
의도됩니다.
(NK케이블S/ MCMK 또는 비슷한 케이블을 추천합니다).
장착한 파워 케이블 콤팩트 낮은 임피던스 실드 그리고 주전원 전압을 위해 의도됩니다.
(NK케이블S/ MCCMK, SAB/ ÖZUCY-J또는 비슷한 케이블을 추천합니다).
* 둘다 모터 및 FC 커넥션360°접지 스탠더드를 적당하기 위해 필수입니다.
장착한 스크리인 케이블과 콤팩트 낮은 임피던스 실드 (NKCABLES/ Jamak, SAB/ ÖZCUY-O 또는 비슷한 케이블).
표 3.8: 케이블 타입 기술
3
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
vacon • 27
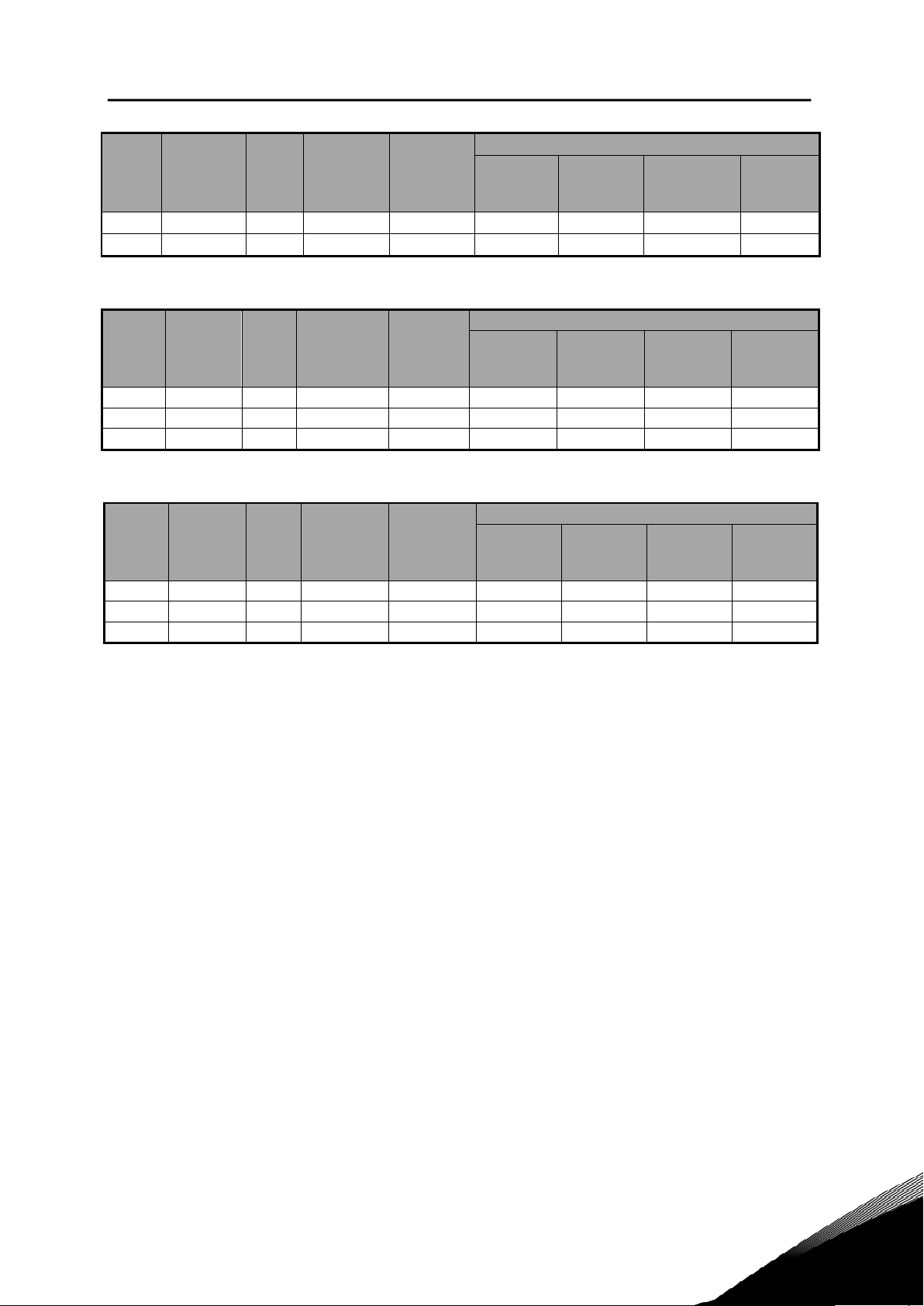
퓨즈
프레입 타입
MI2 0001-0004 20 2*2.5+2.5 3*1.5+1.5 1.5-4 1.5-4 0.5-1.5 0.5-1.5
MI3 5 32 2*6+6 3*1.5+1.5 1.5-4 1.5-4 0.5-1.5 0.5-1.5
표 3.9: Vacon 10, 115 V, 1~를 위해 케이블 및 퓨즈 사이즈
[A]
전원 케이블
Cu [mm2]
모터
케이블
Cu [mm2]
단자대 케이블의 사이즈 (최소/최대)
전원
단자대
[mm2]
지구
단자대
[mm2]
제어제어
단자대
[mm2]
계전기
단자대
[mm2]
프레입 타입
MI1 0001-0003 10 2*1.5+1.5 3*1.5+1.5 1.5-4 1.5-4 0.5-1.5 0.5-1.5
MI2 0004-0007 20 2*2.5+2.5 3*1.5+1.5 1.5-4 1.5-4 0.5-1.5 0.5-1.5
MI3 0009 32 2*6+6 3*1.5+1.5 1.5-6 1.5-6 0.5-1.5 0.5-1.5
표 3.10: Vacon 10, 208 - 240 V, 1~를 위해 케이블 및 퓨즈 사이즈
퓨즈
[A]
전원 케이블
Cu [mm2]
모터
케이블
Cu [mm2]
전원 단자대
단자대 케이블의 사이즈 (최소/최대)
제어제어
단자대
[mm2]
[mm2]
지구 단자대
[mm2]
계전기
단자대
[mm2]
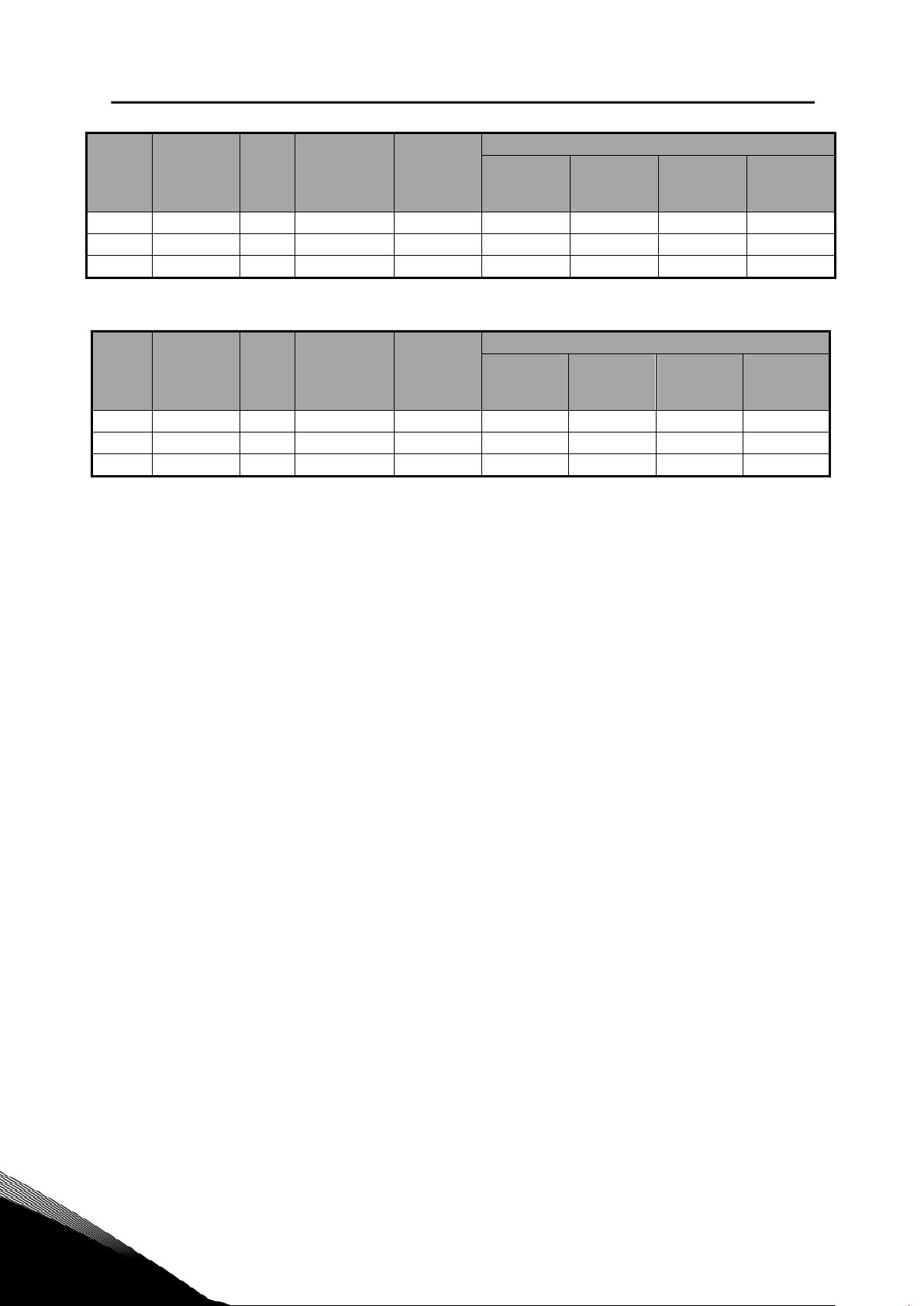
퓨즈
프레입 타입
MI1 0001-0003 6 3*1.5+1.5 3*1.5+1.5 1.5-4 1.5-4 0.5-1.5 0.5-1.5
MI2 0004-0007 10 3*1.5+1.5 3*1.5+1.5 1.5-4 1.5-4 0.5-1.5 0.5-1.5
MI3 0011 20 3*2.5+2.5 3*2.5+2.5 1.5-6 1.5-6 0.5-1.5 0.5-1.5
표 3.11: Vacon 10, 208 - 240 V, 3~를 위해 케이블 및 퓨즈 사이즈
[A]
전원 케이블
Cu [mm2]
모터
케이블
Cu [mm2]
단자대 케이블의 사이즈 (최소/최대)
전원
단자대
[mm2]
지구
단자대
[mm2]
제어제어
단자대
[mm2]
계전기
단자대
[mm2]
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
3
28 • vacon
프레입 타입
MI1 0001-0003 6 3*1.5+1.5 3*1.5+1.5 1.5-4 1.5-4 0.5-1.5 0.5-1.5
MI2 0004-0006 10 3*1.5+1.5 3*1.5+1.5 1.5-4 1.5-4 0.5-1.5 0.5-1.5
MI3 0008-0012 20 3*2.5+2.5 3*2.5+2.5 1.5-6 1.5-6 0.5-1.5 0.5-1.5
표 3.12: Vacon 10, 380 - 480 V, 3~를 위해 케이블 및 퓨즈 사이즈
퓨즈
[A]
전원 케이블
Cu [mm2]
모터
케이블
Cu [mm2]
전원 단자대
단자대 케이블의 사이즈 (최소/최대)
제어제어
단자대
[mm2]
[mm2]
지구 단자대
[mm2]
계전기
단자대
[mm2]
프레입 타입
MI3 0002-0004 6 3*1.5+1.5 3*1.5+1.5 1.5-4 1.5-4 0.5-1.5 0.5-1.5
MI3 0005-0006 10 3*1.5+1.5 3*1.5+1.5 1.5-4 1.5-4 0.5-1.5 0.5-1.5
MI3 0009 20 3*2+2.5 3*2.5+2.5 1.5-6 1.5-6 0.5-1.5 0.5-1.5
표 3.13: Vacon 10, 575 V,3~를 위해 케이블 및 퓨즈 사이즈
퓨즈
[A]
전원 케이블
Cu [mm2]
모터
케이블
Cu [mm2]
전원 단자대
단자대 케이블의 사이즈 (최소/최대)
제어제어
단자대
[mm2]
[mm2]
지구 단자대
[mm2]
계전기
단자대
[mm2]
주의! EN61800-5-1 표준을 충족하기 위하여, 보호, 보호 도체는10 mm2 Cu 혹은 16 mm2
Al 이어야 합니다. 원래의 것과 같은 보호 도체를 추가하는 것도 가능합니다.
3
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

3.2.5 일반 배선규칙
1 설치하기 전, 주파수 변환기의 컴포넌트는 작동하는 지를 확인하십시오.
모터의 케이블들은 다른 케이블에서 충분히 멀리 놓으십시오:
• 다른 케이블을 긴 평행선에서 모터 케이블을 방지하십시오.
• 모터 케이블은 다른 케이블과 병렬로 실행되는 경우, 모터 케이블과 다른 케이블
2
사이의 최소 0.3 m입니다.
• 주어진 거리는 모터 케이블과 다른 시스템의 신호 케이블 사이에 적용됩니다.
• MI-3 모터 케이블의 최대 길이는 30 미터입니다. 케이블 이상 사용하면, 전류
정확도가 감소됩니다.
• 모터 케이블은 90도 각도로 다른 케이블과 교차해야 하셔야 합니다.
3 케이블 절연의 확인이 필요하면, 케이블 및 모터 절연의 확인 장을 참조하십시오.
케이블을 연결:
• 스트리핑 케이블의 그림에서 조언하는 것처럼 모터와 메인 케이블을 벗기십시오.
• 메인 모터와 메인 케이블 및 제어제어 케이블은 안으로 각각의 단자대와 연결하십시오.
Vacon 10 파워 연결 그림 및 MI1 - 제어제어 케이블 설치를 참조하십시오.
• Vacon 1 0 파워 연결에 주어진 정식 토크 챕터 3.2.1장 및 파워 케이블의 3.2.2장을
주의하시고, MI1 및 제어제어 케이블을 설치하십시오. MI1 - MI3. 6.2. 참조하십시오.
• UL 규칙에 의하면 케이블의 설치에의 정보를 위해서 케이블 설치 챕터 및 UL 표준을
4
참조하십시오.
• 제어제어 케이블 와이어와 단위의 전자 컴포넌트와 접촉하지 않은 것을 확인하십시오.
• 외부의 브레이크 저항기 (옵션) 사용하기 되면 그것의 케이블을 적절한 단자대와
연결하십시오.
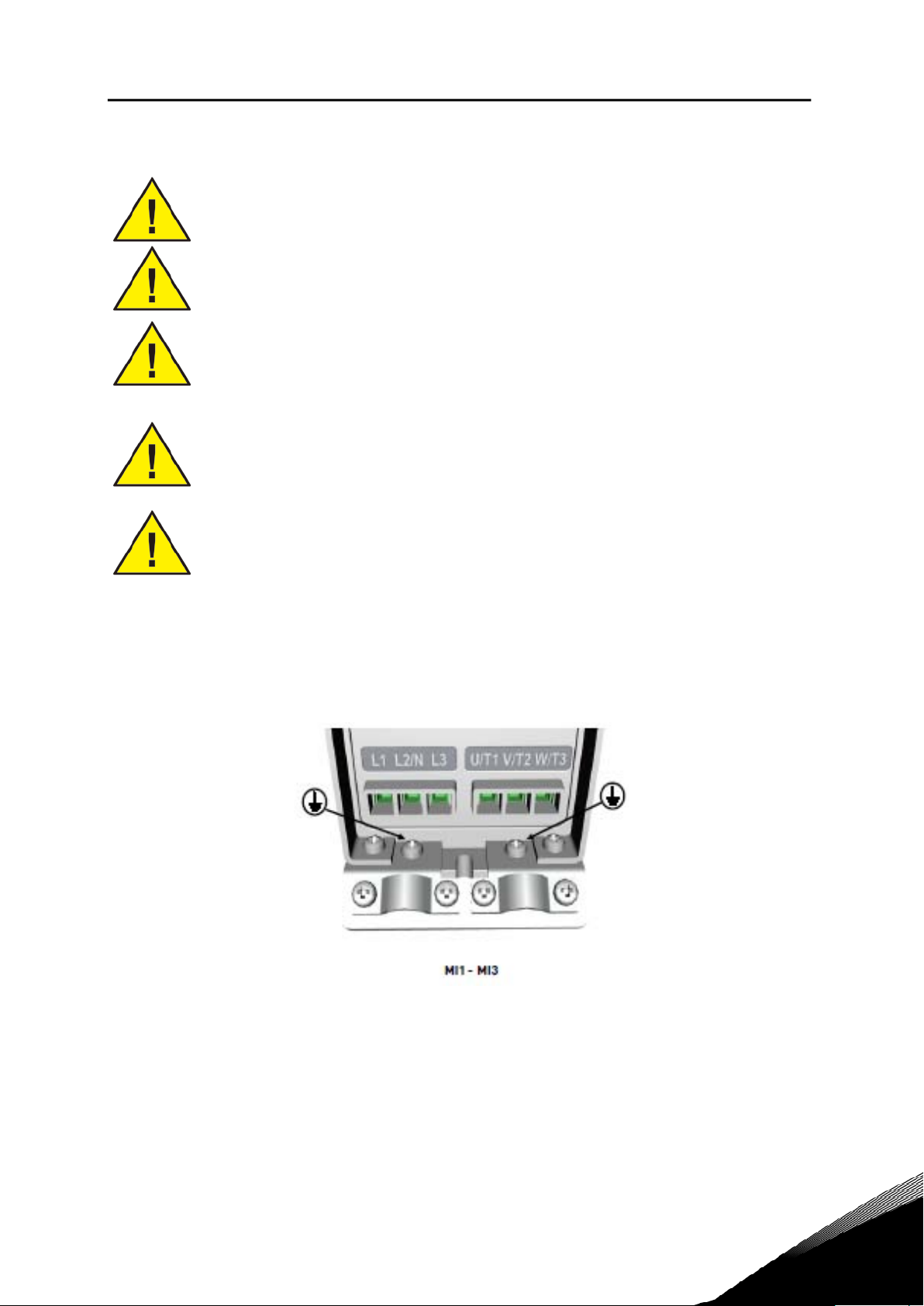
• 접지 케이블과 모터 및 주파수 변환기 단자대 (아래 표시)의 연결을 확인하십시오.
vacon • 29
• 분리된 실드의 모터 케이블과 주파수 변환기의 접지판, 모터 및 공급 센터와
연결하십시오.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
3

30 • vacon
3.2.6 모터 전원 케이블의 스트리핑 길이
주의! 360도 접지 용 케이블의 플라스틱 덮개를 벗겨야합니다. VACON 10 MI1전원 연결그림
및VACON 10MI2ㅡ3전원 연결그림은 6.2장에 있습니다. 6.2장을 참조하십시오.
3.2.7 케이블 설치와 UL 표준
UL(보험업자 연구소) 규정에 맞추기 위해, UL에서 승인 받은 +60/75℃의 최소 발열 저항
동선을 사용 해야 합니다.
3.2.8 케이블 및 모터 절연확인
모터 나 케이블의 절연체에 결함이 의심되는 경우 이러한 검사는 다음과 같이 수행 할 수
있습니다.
1. 모터 케이블 절연 확인
모터케이블을 주파수변환기 와 모터단자대U / T1, V / T2, W / T3에서 분리하고, 컨덕터와
보호접지 컨덕터의 각 단계마다 모터케이블의 절연저항을 측정합니다.
절연저항은>1 MOhm이어야합니다.
2. 메인 케이블 절연 확인
메인 케이블을 주파수 변환기의 단자대 L1, L2/N, L3과 메인에서 분리합니다. 메인 케이블의
3
절연저항을 컨덕터와 보호접지 컨덕터의 각 단계마다 측정합니다. 절연저항은>1
MOhm 이어야 합니다.
3. 모터 절연 확인
모터케이블을 모터에서 분리하고, 모터커넥션박스에 브릿징 커넥션을 오픈합니다. 각
모터권선마다 절연저항을 측정합니다. 측정전압은 적어도 모터의 정격전압과 같아야 하고,
1000V를 초과해서는 안됩니다. 절연저항은>1 MOhm 이어야 합니다.
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

4. 시운전
작동 전에 1장의 주의사항을 읽으십시오.
4.1 Vacon 10의 작동 순서
1 1장의 설명을 조심스럽게 읽으시고 지키십시오.
설치한 후에 다음 사항을 반드시 확인하십시오:
• 주파수 변환기 및 모터의 접지 상태를 확인하십시오.
• 챕터3.2.4 주어진 주전원 및 모터 케이블과 필요
2
• 제어제어 케이블들은 파워에서 아주 멀게 위치합니다. 케이블 (장 3.2.5, 스텝 2) 및
실드의 차폐된 케이블과 접지 보호와 연결합니다.
3 냉각 공기의 품질 및 풍량을 확인하십시오 (Chapter 3.1.2).
I/O 단자대와 연결된 모든 스타트/ 스톱 스위치들을 스톱 포지션에서 있는 것을
4
확인하십시오.
vacon • 31
5 주파수 변환기와 메인들과 연결하십시오.
당신의 애플리케이션 필요에 따라 파라미터 그룹 1를 놓으십시오.
최소한 그 다음 파라미터들을 놓아야 하십시오:
• 모터 정격 속도 (par. 1.3)
6
• 모터 공칭 전류(par. 1.4)
• 애플리케이션 타입 (par. 17.1)
파라미터 세팅에 필요한 수치는 모터명판에서 찾을 수 있습니다.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
4

32 • vacon
모터없이 테스트 A 혹은 B를 시작합니다
A) 제어제어 I / O 단자대:
7
B) 제어제어 키패드:
부하 없이 테스트를 모터가 연결되지 않은 상태로 진행합니다, 가능하면 모든 테스트를
실행전에 해보고, 테스트에 관하여 동료들에게 알립니다.
• 드라이브가 멈추면 공급 전압을 오프로 해놓습니다.
8
• 모터 케이블을 모터와 주파수 컨버터의 모터에 연결합니다.
• 모든 스타트/스톱스위치가 스탑위치에 있는지 확인하고,.
• 주전원을ON으로 놓습니다.
• 테스트 7A or 7B를 반복합니다.
• 스타트/스톱스위치를 On 으로 놓습니다.
• 주파수 레퍼런스를 바꿉니다.
• 모니터링 메뉴를 확인하고 출력 주파수가 주파수 레퍼런스에 따라 바뀌는걸
확인합니다.
• 스타트/스톱스위치를 오프로 놓습니다.
• Loc / Rem 버튼을 눌러 키패드를 제어 장소로 놓거나 파라미터 2.5로 Local
제어제어로 놓습니다.
• 키패드 스타트 버튼을 누릅니다.
• 모니터링 메뉴를 확인하고 출력 주파수가 주파수 레퍼런스에 따라 바뀌는걸
확인합니다.
• 스타트/스톱스위치를 오프로 놓습니다.
9
10
어플리케이션이 높은 스타트업 토크와 낮은 속도로 높은 토크를 필요로 할 경우 시험 운행
(par. 1.18)을 실행합니다
No-load테스트가 모터가 연결되지 않은 상태로 진행시 모터를 프로세스에 연결합니다.
• 테스트 시작 전 안전사항을 점검합니다.
• 동료들에게 테스트를 알립니다
• 테스트 7A 혹은 7B를 반복합니다.
4
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 33
5. 폴트 추적
치명적인 오류가 주파수 변환기의 제어 전자 장치에 의해 감지되면 드라이브는 정지하고
기호 FT와 오류 코드가 디스플레이에 점멸은 다음과 같은 형식으로 나타납니다.
활성화된 폴트는 API가활성화시 고장 메뉴 레벨 (FT XX)에 있을 때 BACK / RESET 버튼을
누르거나 API가 활성화 오류 하위 메뉴에있을 때 API가 폴트하위메뉴 (F5.x)에 있을 시
BACK / RESET 장시간 (> 2 초)눌러 재시작할 수 있습니다. I/O 단자 또는 필드 버스를 통해
재설정하는 것도 가능합니다. API가 고장 이력 하위 메뉴 레벨 (F6.x)에 고장 이력을 길게
누름(> 5 초)으로 재설정합니다. 서브 코드와 시간이 레이블 오류는 탐색 할 수 있습니다.
고장 이력 하위 메뉴에 저장됩니다.
다른폴트 코드, 원인과 교정 방법은 아래의 표에 있습니다.
폴트
코드
1 과전류
2 과전압
3 접지 폴트
폴트 이름 원인 해결 방법
모터 케이블에서 주파수 변환기는
너무 높은 전류를 감지했습니다
(>4*IN):
• 갑자기 무거운 로드 증가
• 모터 케이블에서 있는 단락
• 맞지 않은 모터
DC-링크는 내부의 안전 한계를
초과합니다:
• 감속 시간은 너무 짧습니다.
• 주전압에서 높은 과전압 피크
발생
기동시 전류측정이 추가적인
누설전류 감지
• 케이블 또는 모터에서 절연실패
표 5.1: 폴트 코드
로딩을 확인하십시오.
모터 사이즈를 확인하십시오.
케이블을 확인하십시오..
감속 시간을 증가하십시오
(Par.4.3 or Par.4.6)
모터 케이블 및 모터를
확인하십시오.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
5

34 • vacon
폴트
코드
8 시스템 폴트
9 부족전압
11 출력상폴트
폴트 이름 원인 해결 방법
- 컴포넌트 실패
- 작동 불량
DC-링크: 전압이 내부 안전 한계치
이하로 내려감 :
- 가장 큰 원인: 공급 전압 너무
낮습니다
- 주파수 변환기 내부의 폴트
- 전력부족
모터의 한개의 상(相)에 전류가
없음을 감지함
폴트 리셋을 하시고 리스타트를
하십시오. 폴트는 다시 발생하면
가까운 대리점에 연락하십시오.
주의! 폴트 F8는 다시 발생하면, Id
xxx 에 폴트 기록의 폴트 서브코드를
발견하십시오.
일시적인 공급 전압 차단기의 경우
폴트를 재설정을 하시고 주파수
변환기를 다시 시작하십시오. 공급
전압을 확인하십시오. 충분하면,
내부의 실패를 발생합니다. 가까운
대리점에 연락하십시오.
모터 케이블과 케이블을
확인하십시오.
13
14
15 모터 스톨 모터 스톨 보호 트립
16 모터 과열
17 모터 저부하 부족부하 트립 발생
주파수 변환기가
적정온도 이하
주파수 변환기
과열
표 5.1: 폴트 코드
히트 싱크 온도가 -10°C
이하입니다
과열된 히트 싱크.
모터가 과부하 상태이며 모터가
과열되어 있습니다.
주변 온도를 확인하십시오.
냉각 공기가 들어오는지
확인하십시오.
주위 온도를 확인하십시오.
주위 온도와 모터 부하에 비하여
스위칭 주파수가 너무 높지 않은지
확인하십시오.
모터가 자유롭게 회전하는지
확인하십시오.
모터 부하를 감소시키십시오.
과부하가 아니라면 모터 온도
파라미터를 조정하십시오.
모터와 부하를 확인하십시오.
예: 망가진 벨트나 물이 없는 펌프.
5
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 35
폴트
코드
22
25
27 백 EMF 보호
34
35
41 IGBT 과열
50
51 외부의 폴트
폴트 이름 원인 해결 방법
EEPROM
checksum
폴트
마이크로
제어제어러
감시 계기 폴트
내부 버스
커뮤니케이션
애플리케이션
폴트
아날로그 입력
선택
20% - 100%
선택된
신호범위가
4~20mA 혹은
2~10V
파라미터 저장 폴트
• 작동 불량
• 컴포넌트 실패
• 작동 불량
• 컴포넌트 실패
자성화된 모터가 드라이브
시작전에 회전 중임이 감지
• 회전 중인PM-모터
주변 간섭 혹은 감지 하드웨어
어플리케이션 작동 불량 가까운 대리점에 연락하십시오.
스위치 IGBT 가 110°C를 넘어갈
경우 과열 알람 발생
아날로그 입력의 전류가 < 4mA;
아날로그 입력의 전압이 < 2 V
입니다.
- 제어제어 케이블이 망가지거나
헐겁습니다.
- 신호 소스 문제.
디지털 입력 폴트. 디지털 입력이
외부 폴트 입력으로 프로그램 되어
있으며 이 입력이 활성화됨
가까운 대리점에 연락하십시오
폴트를 재시작하십시오. 다시 폴트가
발생할 경우 가까운 대리점에
연락하십시오.
시작 명령이 주어졌을 시 PM모터가 회전하지 않는지
확인하십시오.
폴트가 다시 발생할 경우
가까운 대리점에 연락하십시오.
부하, 모터를 확인하고 인식 작동을
하십시오.
전류 루프회로를 확인하십시오.
외부 장치를 제거하십시오.
53 필드버스 폴트
55 오작동폴트
57 확인 폴트 인식 작동 실패
표 5.1: 폴트 코드
필드버스 마스터와 드라이브의
필드버스 사이에 문제 발생
모터가 순방향 역방향으로 동시
회전
설치 상태를 확인하고 가까운
대리점에 연락하십시오.
콘트롤 시그널 1 및 2를 확인
인식작동이 끝나기 이전에 작동
신호가 없어졌으며, 모터가
주파수변환기에 연결이 안됨. 모터
샤프트에 부하가 있음.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
5

36 • vacon
6. VACON 10 어플리케이션 인터페이스
6.1 소개
Vacon 10 드라이브에서는 한가지의 제어보드만 있습니다:
버전 구성
6 디지털 입력
2 아날로그 입력
Vacon 10
표 6.1: 사용 가능한 제어제어 보드
이 섹션은 VACON 10 범용 응용 프로그램에서 사용되는 I / O - 신호에 대한 설명을
1 아날로그 출력
1 디지털 출력
2 계전기 출력
RS-485 인터페이스
제공합니다.
주파수 레퍼런스를 Preset Speed 0-7, 키패드, 필드 버스, AI1, AI2, PI에서 선택할 수
있습니다.
기본적인 특성
• 디지털 입력 DI1... DI6 는 자유롭게 프로그래밍 할 수있다. 사용자는 많은 기능을
단일 입력에 할당 할 수 있습니다.
• 디지털 릴레이 및 아날로그 출력은 자유롭게 프로그래밍 할 수있습니다.
• 아날로그 출력은 전류 출력으로 설정할 수 있습니다.
• 아날로그 입력 1 은 전압 입력으로 설정할 수 있습니다 전류 입력과 아날로그 입력
2 를 설정할 수 있습니다.
특장점
• 프로그램가능한 시작 / 중지 및 리버스 신호 논리
• 레퍼런스 스케일링
6
• 시작 및 중지 시 DC 브레이크
• 프로그램가능한 U / F 곡선
• 조정 가능한 스위칭 주파수
• 폴트 후 자동 리셋 기능
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 37
• 보호 및 감독 (모두 완벽하게 프로그램가능한 해제, 알람, 오류):
- 아날로그 입력 낮은 폴트
- 저전압폴트
- 지락
- 출력 위상 폴트
- 모터 온도, 정지 및 부하 보호
• 8 속도 설정
• 아날로그 입력 범위 선택, 신호 스케일링 및 필터링
• PI 제어제어러
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
6

38 • vacon
6.2 콘트롤 I/O
6
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 39
7. 콘트롤 판넬
7.1 일반사항
판넬은 해당 제어 보드로 구성된 드라이브에서 제거가 불가능하며, 커버와 버튼의
디스플레이 상태 오버레이는 사용자 언어를 표현합니다.
User Panel은 LCD 백라이트 디스플레이와, 9개푸시버튼 및 키패드 (그림 7.1 참조) 구성되어
있습니다.
7.2 디스플레이
디스플레이는 14 세그먼트 7 세그먼트 블록, 화살촉 및 일반 텍스트 단위 기호를
포함합니다. 화살 촉은 다음과 같은 의미와 영어 오버레이 텍스트 (그림 7.1 참조) 3
그룹으로 분류됩니다 :
화살촉은 오버레이 (아래 그림의 숫자 1... 14)에 사용자의 언어로 드라이브에 대한 정보를
나타냅니다. 화살촉은 다음과 같은 의미와 영어 오버레이 텍스트 (그림 7.1 참조) 3
그룹으로 분류됩니다 :
Group 1 - 5; 드라이브 상태
1 = 드라이브 시작 준비 (READY)
2 = 드라이브 작동 상태 (RUN)
3 = 드라이브 정지 (STOP)
4 = 알람 활성화 (ALARM)
5 = 폴트로 인하여 드라이브 정지 (FAULT)
Group 6 - 10; 제어 선택
6 = 모터 정방향 회전 (FWD)
7 = 모터 역방향 회전 (REV)
8 = I/O 단자대 block 이 현재 선택된 제어위치 (I / O)
9 = Keypad 가 현재 선택된 제어위치 (KEY PAD)
10 = Fieldbus가 현재 선택된 제어 위치 (BUS)
Group 11 - 14; 메인메뉴네비게이션
11 = 레퍼런스 메인 메뉴 (REF)
12 = 메인메뉴 모니터링 (MON)
13 = 파라미터메인메뉴 (PAR)
14 = 시스템 메인 메뉴 (SYS)
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
7

40 • vacon
7
7.3 키패드
키패드는 9개의 버튼 (그림 7.1 참조)을 가지고 있으며, 자세한 기능은 표7.1을
참조하십시오.
STOP버튼을 눌러 드라이브를 정지합니다.
KEYPA D 가 제어위치일 경우 START 버튼을 눌러 드라이브를 시작합니다..
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

기호 버튼명 기능 설명
vacon • 41
Start
Stop
OK
Back / Reset
Up and Down
모터 스타트
판넬에서 모터 스톱
확인을 위해서 사용.
파라미터 수정 모드나 파라미터 값 변경
후 적용 시에 사용.
파라미터 수정 취소 및 메뉴 뒤로 이동,
폴트 리셋
파라미터 번호 선택이나 리스트에서
위치 변경.
REF, PAR SYS 메뉴 파라미터 자릿수
세팅에서 사용 가능. MON, PAR, SYS에서
파라미터 그룹사이를 움직일때 사용
Left and Right
표 7.1: 키패드 기능
주의! 모든 9 버튼의 상태는 응용 프로그램에서 사용할 수 있습니다!
Loc / Rem
가능 MON 메뉴 REF위치 변경도 가능함.
로컬 모드에서의 메뉴:
- 오른쪽은 reverse (REV)
- 왼쪽은 forward (FWD) 를 의미합니다.
제어제어의 장소를 바꿉니다.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
7

42 • vacon
7.4 Vacon 10 제어제어 판넬에서의 내비게이션
이 장에서는 VACON 10 메뉴를 탐색하고 파라미터의 값을 편집하는데 필요한 대한 정보를
제공합니다.
7.4.1 메인 메뉴
VACON 10 제어 소프트웨어의 메뉴 구조는 메인 메뉴와 여러 하위 메뉴로 구성되어
있습니다. 메인 메뉴의 탐색은 다음과 같습니다:
7
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

7.4.2 레퍼런스 메뉴
vacon • 43
UP / DOWN 버튼 (그림 7.2 참조)으로 레퍼런스 메뉴로 이동합니다.
그림 7.3에서와 같이 레퍼런스값은상/하 버튼으로 변경될 수 있습니다.
값을 크게 바꾸려고 할 경우 왼쪽 오른쪽 버튼으로 자릿수를 조정하고 상/하 버튼으로 값을
바꿉니다. 드라이브가 실행 모드에있을 때, 레퍼런스 값을 상 / 하 / 좌 / 우 버튼으로 변경
한 다음, OK 버튼을 누르지 않아도 즉시 적용됩니다.
주의! 왼쪽 및 오른쪽 버튼은 로컬 제어 모드에서 레퍼런스 메뉴에서 방향을 변경하는 데
사용할 수 있습니다.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
7

44 • vacon
7.4.3 모니터링 메뉴
7
모니터링 값은 실제 측정 된 신호 값뿐만 아니라 몇 가지 제어 설정 상태를 의미합니다.
이는 VACON 10 디스플레이에서 볼 수 있지만 편집은 불가능하며, 모니터링 값은 표 7.2에
나열되어 있습니다.
왼쪽 / 오른쪽 버튼을 눌러V1.x에서V2.1로 그 후 V4.1로 다음 그룹 파라미터값을 바꿀 수
있습니다. 원하는 그룹에서 아래/위 버튼으로 모니터링 값을 탐색하고, 그림 7.4에서와 같이
원하는 그룹을 입력 한 후 모니터링 값은 OK 버튼을 눌러 적용할 수 있습니다.
주의! 드라이브 전원을 켜고 MON의 메인 메뉴의 화살촉이 V X.X 또는 VX.X의 모니터
파라미터 값을 판넬에 표시합니다.
전원이 종료하기 전에 디스플레이 VX.X 또는 VX.X의 모니터 파라미터 값은
마지막상태에 의해 결정됩니다. 예를 들면, V4.5로 종료되면, 다시 시작하는 경우에도
V4.5로 시작합니다.
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 45
코드 모니터링 신호 단위 ID 설명
V1.1 출력 주파수 Hz 1 모터의 출력 주파수
V1.2 주파수 레퍼런스 Hz 25 모터 제어제어의 주파수 레퍼런스
V1.3 모터의 속도 rpm 2 계산된 모터 속도
V1.4 모터 전류 A 3 측정 전류 모터
V1.5 모터 토크 % 4 실제 계산/모터의 정격 토크
V1.6 모터 파워 % 5 실제 계산/ 모터의 정격 파워
V1.7 모터 전압 V 6 모터 전압
V1.8 DC-링크 전압 V 7 계산된 DC-링크 전압
V1.9 드라이브 온도 °C 8 히트싱크 온도
V1.10 모터 온도 % 9 계산된 모터 온도
V2.1 아날로그 입력 1 % 59 AI1 신호가 사용되는 퍼센트 범위
V2.2 아날로그 입력 2 % 60 AI2 신호가 사용되는 퍼센트 범위
V2.3 아날로그 입력 % 81 A0 신호가 사용되는 퍼센트 범위
V2.4
V2.5
V2.6 RO1, RO2, DO
V4.1 PI 설정 값 % 20 레귤레이터 설정값
V4.2 PI 피드백 값 % 21 레귤레이터 현재 값
V4.3 PI 에러 % 22 레귤레이터 에러
V4.4 PI 출력 % 23 레귤레이터 출력
표 7.2: Vacon 10 모니토링 신호
디지털 입력 상태
DI1, DI2, DI3
디지털 입력 상태
DI4,DI5, DI6
15 디지털 입력 상태
16 디지털 입력 상태
17 계전기/ 디지털 출력 상태
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
7

46 • vacon
7.4.4 파라미터메뉴
파라미터 메뉴에서 Quick setup 파라미터 리스트만 초기 설정상태에서 보입니다. 파라미터
17.2에 0값을 주면 다른 고급 파라미터를 열 수 있습니다. 파라미터 그룹 및 설명은 8 장과
9장에서 찾을 수 있습니다.
다음 그림은 파라미터 메뉴를 보여줍니다:
7
이 파라미터는 그림 7.5에 따라 변경 될 수 있습니다.
왼쪽 / 오른쪽 버튼 파라미터 메뉴 안에서 움직이고 왼쪽/오른쪽 버튼을 눌러 현재
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 47
파라미터 값을 처음 파라미터에서 다음 파라미터로 움직일 수 있습니다. (예: P1 파라미터->
오른쪽 버튼 -> P2.1이 표시됩니다 –오른쪽 버튼 -> P3.1 P1의 모든 파라미터가 표시됩니다.
원하는파라미터 그룹에서 아래/위 버튼을 눌러 루트 파라미터 번호를 선택하고OK 버튼을
누르면 값을 표시하고 편집 모드로 들어갈 수 있습니다.
편집 모드에서 왼쪽 및 오른쪽 버튼으로 자릿수를 변경하고, 아래/위 버튼으로 수차 값을
증가시키거나 감소시킬 수 있습니다.
편집 모드에서 Px.x의 값은 판넬에 반짝이고, 아무 버튼도 누르지 않으면약 10 초 후에
Px.x가 다시 판넬에 표시됩니다.
주의! 편집 모드에서 값을 편집하고 OK 버튼을 누르지 않을 경우, 값이 성공적으로
변경되지 않습니다.
편집 모드에서 값을 편집 할 경우, 새로 고침 / 뒤로 버튼을 눌러 다시 Px.x을
표시할 수 있습니다.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
7

48 • vacon
7.4.5 시스템메뉴
SYS 메뉴는 오류 하위 메뉴 및 시스템 파라미터 하위 메뉴, SYS 메뉴 PAR 메뉴 또는
MON메뉴와 같이 시스템 파라미터 하위 메뉴의 표시와 동작을 포함합니다. 시스템
파라미터 하위 메뉴에서 몇가지 편집 가능한 파라미터 (P) 및 일부 편집 할 파라미터 (V)가
있습니다.
SYS 메뉴의 Fault 하위 메뉴에는 활성화 폴트 하위 메뉴 및 고장 이력 하위 메뉴가
포함되어 있습니다.
7
활성 폴트 상황에서 FAULT 화살표가 깜박이고활성 폴트 메뉴 항목화면이 폴트 코드와 함께
깜박입니다. 여러 활성 폴트가 있다면, F5.x활성 폴트 하위 메뉴를 입력하여 폴트들을
확인할 수 있습니다. F5.1는 항상 가장 최근의 활성 폴트코드이고, 활성 폴트는 API가
활성화된 상태에서 폴트 하위 레벨 (F5.x)에있을 때 Reset / Back 버튼을 장시간
(> 2 초)눌러 재설정 할 수 있습니다. 폴트가 리셋되지 않는 경우, 화면은 계속 깜빡입니다.
폴트 활성화시 다른화면의 메뉴를 선택할 수 있으나, 아무런 버튼을 10 초이내에 누르지
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 49
않으면 이 경우 디스플레이가 자동으로 고장메뉴로 돌아갑니다. 폴트코드, 하위코드와
운영일, 시간 값이 폴트순간에는 value 메뉴에(운영시간 = 읽기표시) 표시됩니다.
주의! 폴트 이력은 Back/Reset 버튼을 5초 이상 눌러 리셋 가능하며, API가 폴트 히스토리
하위 메뉴 레벨 (F6.x)에있을때도 모든 활성화 폴트를 지웁니다.
폴트에 대한 설명은 챕터 5를 참조하십시오
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
7

50 • vacon
8. 스탠다드 어플리케이션 파라미터
다음 페이지에서 당신은 각각의 파라미터 그룹 내에서 파라미터목록을 찾을 수 있습니다.
파라미터의 설명은 9 장에 나와있습니다.
설명
Code: 키패드에서의 위치 및 모니터링 값 과 파라미터 값 표시
Parameter: 모니터링 값 혹은 파라미터
Min: Minimum value of parameter
Max: Maximum value of parameter
Unit: Unit of parameter value; given if available
공장초기값: Factory preset value
ID: 파라미터 ID number (필드버스 제어로 사용)
9장의 파라미터 설명에 더 자세한 정보 수록
정지상태에서만 수정 가능
주의: 이 설명서는 VACON 10 표준 응용 프로그램에서만 사용가능합니다. http://www.vacon.com에
적절한 사용자 설명서를 다운로드하십시오 -> 지원 및 다운로드에서 특수 응용 프로그램에 관한
정보를 얻으십시오.
8
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

8.1 퀵 셋업 파라미터(가상 메뉴, 파라미터. 17.2 = 1)
코드 파라미터 최소 최대 단위 공장 초기값 ID 참조
vacon • 51
P1.1
P1.2
P1.3
P1.4
P1.5
P1.7 전류 한도 0,2xINunit 2,0xINunit A 1,5xINunit 107 최대 모터 전류
P1.15 토크 상승 0 1 0 109
P2.1
P2.2 기능 시작 0 1 0 505
모터 정격
전압
모터 정격
주파수
모터 정격
속도
모터 정격
전류
모터 cos
(파워 요인)
장소 선택의
리모트
제어제어
180 690 V 변화 110
30,00 320,00 Hz
30 20000 rpm
0,2xINunit 2,0xINunit A INunit 113
0,30 1,00 0,85 120
0 1 0 172
50,00/
60,00
1440/
1720
모터 정격 수치를
확인하십시오
모터 정격 수치를
111
확인하십시오
4극 모터에 공장 초기값이
112
적용됩니다
모터 정격 수치를
확인하십시오
모터 정격 수치를
확인하십시오
0=사용하지 않음
1=사용됨
0=I/O 단자대
1=필드버스
0=램프
1=재빠른 출발
P2.3
P3.1 최소 주파수 0,00 P3.2 Hz 0,00 101 최소 주파수 레퍼런스
P3.2 최대 주파수 P3.1 320,00 Hz
P3.3
P3.4
P3.5
P3.6
P3.7
기능 정지 0 1
리모트
제어제어
레퍼런스의
장소 주파수
선택
설정 속도 0 P3.1 P3.2 Hz 5,00 180
설정 속도 1 P3.1 P3.2 Hz 10,00 105
설정 속도 2 P3.1 P3.2 Hz 15,00
설정 속도 3 P3.1 P3.2 Hz 20,00 126
표 8.1: Quick setup parameters
1 6
0 506
50,00/
60,00
4 117
0=코스팅(프리런)
1=램프
102 최대 주파수 레퍼런스
1=설정 속도 0-7
2=키패드
3=필드버스
4=AI1
5=AI2
6=PI
디지털 입력에 의해 활성화됨
디지털 입력에 의해 활성화됨
106
디지털 입력에 의해
활성화됨
디지털 입력에 의해 활성화됨
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
8

52 • vacon
코드 파라미터 최소 최대 단위
P4.2 가속 시간 1 0,1 3000,0 s 3,0 103
P4.3 감속 시간 1 0,1 3000,0 s 3,0 104
P6.1
P6.5
P14.1 자동 재설정 0 1 0 731
P17.2
AI1 신호
범위
AI2 신호
범위
파라미터
숨기기
0 1 0 379
0 1 0 390
0 1 1 115
공장
초기값
ID 참조
0Hz에서 최대주파수로의
가속
최대주파수에서
0주파수로의 감속
0= 0-100%
1= 20% - 100%
20%는 동일한 2V의
최소신호임.
0= 0 - 100%
1= 20% - 100%
20%는 동일한 4mA의
최소신호임.
0= 가능하지 않음
1= 가능함
0= 볼 수 있는 모든
파라미터
1= Quick setup
파라미터만 보임
표 8.1: Quick setup parameters
8
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

8.2 모터 셋팅 (콘트롤 판넬: 메뉴 PAR -> P1)
코드 파라미터 최소 최대 단위
P1.1 모터 정격 전압 180 690 V 변화 110
P1.2 모터 정격 주파수 30,00 320,00 Hz
P1.3 모터 정격 속도 30 20000 rpm
P1.4 모터 정격 전류
P1.5
P1.7
P1.8
P1.9
P1.10
모터 cos
(파워 요인)
전류 한도
모터 제어제어
모드
U / f 비울 0 2 0 108
약계자지점 8,00 320,00 Hz
0,2x
Inunit
0,30 1,00 0,85 120
0,2x
Inunit
0 1 0 600
2,0x
Inunit
2,0x
Inunit
공장
초기값
50,00/
60,00
1440/
1720
A Inunit 113
1,5x
A
Inunit
50,00/
60,00
ID 참조
모터의 정격 수치를
확인합니다
모터의 정격 수치를
111
확인합니다
4극 모터에 공장 초기값이
112
적용됩니다
모터의 정격 수치를
확인합니다
모터의 정격 수치를
확인합니다
107 최대 모터 전류
0= 주파수 제어제어
1= 오픈 루프 속도
제어제어
0= Linear
1= Square
2= Programmable
602 약계자지점주파수
vacon • 53
P1.11 약계자지점 전압 10,00 200,00 % 100,00 603
P1.12
P1.13
P1.14
P1.15 토크 상승 0 1 0 109
P1.16
P1.17
U / f 중앙의
포인트 주파수
U / f 중앙의
포인트 전압
0 주파수 전압 0,00 40,00 % 0,00 606
전환 주파수 1,5 16,0 kHz
브레이크 초퍼 0 2 0 504
표 8.2: Motor settings
0,00 P1.10 Hz
0,00 P1.11 % 100,00 605
50,00/
60,00
4,0/
2,0
약계자지점 전압
% of Unmot
604 U / f 중간 지점주파수
U / f 중간 지점 전압 % of
Unmot
0 Hz % of
Unmot의 전압
0= 가능하지 않음
1= 가능함
PWM 주파수. If values
are higher than 공장 초기값,
601
reduce the current
capacity
0= 가능하지 않음
1= 가능함: 항상
2= 런 state
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
8

54 • vacon
코드 파라미터 최소 최대 단위
P1.19 모터의 확인 0 1 0 631
P1.20 Rs 전압 강하 0,00 100,00 % 0,00 662
P1.21
P1.22
P1.23 Sine 필터 0 1 0 522
P1.24 0 65535 28928 648
과전압
제어제어러
부족전압
제어제어러
0 2 1 607
0 1 1 608
공장
초기값
ID 참조
0= 작동안함
1= 작동하다 멈춘 상태
확인(활성화 하기 위해 20초
이내 런 코맨드가 필요)
모터 권선을 초과하는
전압강하를 정격전류에서
Unmost의 몇%라고 표기
0= 가능하지 않음
1= 가능함, 기준 모드
2= 가능함, 쇼크 로드 모드
0= 가능하지 않음
1= 가능함
0= 사용하지 않음
1= 사용하고 있음
모듈레이터 구성 언어
B1= 불연속모듈레이션
(DPWMMIN)
오버 모듈레이션 상태에서 펄스
강하B6= 모듈레이션 중
B8= 순간적인 DC전압보상
B11= 노이즈가 적음
B12= 죽은 시간 보상
* 공장 초기값으로 가능함
8
표 8.2: 모터 세팅
주의! P17.2 = 0일 경우 이 파라미터들이 보입니다.
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

8.3 스타트/스톱 셋업(콘트롤 판넬: 메뉴 PAR -> P2)
코드 파라미터 최소 최대 단위
P2.1
P2.2
P2.3
P2.4
P2.5
P2.6
P2.9 키패드 버튼 로크 0 1 0 15520
표 8.3: Start / stop setup
리모트 제어제어
장소 선택
시작 기능 0 1 0 505
정지 기능 0 1 0 506
I / O 스타트/스톱
로직
로컬/ 리모트 0 1 0 211
키패드 제어제어
방향
0 1 0 172
0 3 2 300
0 1 0 123
공장
초기값
vacon • 55
ID 참조
0= I/O 단자대
1= 필드버스
0= 램프
1= Flying start
0= 코스팅
1= 램프
I/O 제어제어 I/O 제어제어
신호 1 신호 2
0 포워드 Reverse
1 Fwd(edge) Inverted Stop
2 Fwd(edge) Rev(edge)
3 Start Reverse
0= 리모트 제어제어
1= 로컬 제어제어
0= Forward
1= Reverse
0= 모든 키패드 버튼 개방
1= Lock/Rem 버튼 잠김
8.4 주파스레퍼런스(제어제어 판넬: 메뉴 PAR -> P3)
코드 파라미터 최소 최대 단위
P3.1 최소 주파수 0,00 P3.2 Hz 0,00 101
P3.2 최대 주파수 P3.1 320,00 Hz
리모트 제어제어
P3.3
P3.4 설정 속도 0 P3.1 P3.2 Hz 5,00 180 디지털 입력에 의해 활성화
P3.5 설정 속도 1 P3.1 P3.2 Hz 10,00 105 디지털 입력에 의해 활성화
P3.6 설정 속도 2 P3.1 P3.2 Hz 15,00 106 디지털 입력에 의해 활성화
P3.7 설정 속도 3 P3.1 P3.2 Hz 20,00 126 디지털 입력에 의해 활성화
P3.8 설정 속도 4 P3.1 P3.2 Hz 25,00 127 디지털 입력에 의해 활성화
P3.9 설정 속도 5 P3.1 P3.2 Hz 30,00 128 디지털 입력에 의해 활성화
P3.10 설정 속도 6 P3.1 P3.2 Hz 40,00 129 디지털 입력에 의해 활성화
P3.11 설정 속도 7 P3.1 P3.2 Hz 50,00 130 디지털 입력에 의해 활성화
장소 주파수
레퍼런스의선택
1 6 4 117
공장
초기값
50,00/
60,00
ID 참조
최소 허용
주파수 레퍼런스
최대 허용
102
주파수 레퍼런스
1= 설정 속도 0-7
2= 키패드
3= 필드버스
4= AI1
5= AI2
6= PI
표 8.4: Frequency 레퍼런스
주의! 이 파라미터들은P17.2 = 0일 경우 보입니다.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
8

56 • vacon
8.5 램프 및 브레이크 셋업(콘트롤 판넬: 메뉴 PAR -> P4)
코드 파라미터 최소 최대 단위 공장 초기값 ID 참조
0= Linear
P4.1 램프 S - shape 0,0 10,0 s 0,0 500
P4.2 가속 시간 1 0,1 3000,0 s 3,0 103
P4.3 감속 시간 1 0,1 3000,0 s 3,0 104
P4.4 램프 S - 세이프 2 0,0 10,0 s 0,0 501 파라미터 P4.1
P4.5 가속 시간 2 0,1 3000,0 s 10,0 502 파라미터 P4.2
P4.6 감속 시간 2 0,1 3000,0 s 10,0 503 파라미터 P4.3
P4.7 플럭스 브레이킹 0 3 0 520
P4.8
P4.9 DC 브레이킹 전류
P4.10 정지 DC 전류 시간 0,00 600,00 s 0,00 508
플럭스 브레이킹
전류
0,5x
INunit
0,3x
Inunit
2,0x
INunit
2,0x
Inunit
A Inunit 519
A Inunit 507
>0= S-curve 램프
시간
제로 주파수에서 최대
주파수로 증대시키기
위한 출력주파수에
필요한 시간을
정의함.
최대주파수에서 제로
주파수로 감소시키기
위한 출력주파수에
필요한 시간을
정의함.
0= 오프
1= 감속
2= 초퍼
3= 풀 모드
플럭스 브레이킹을
위한 전류 레벨을
정의함.
DC 브레이킹 동안
모터에 주입된 전류를
정의함.
브레이킹이 ON인지
혹은 OFF인지를,
그리고 모터가 정지할
때 DC브레이크의
브레이킹 시간을
정의함.
0,00= 비활성화 상태
8
P4.11
P4.12 시작 DC 전류 시간 0,00 600,00 s 0,00 516 0,00= 비활성화 상태
표 8.5: Ramps and brakes setup
정지 DC 전류
주파수
0,10 10,00 Hz 1,50 515
DC브레이킹이 적용된
때의 출력 주파수
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 57
8.6 디지털 입력(콘트롤 판넬: 메뉴 PAR -> P5)
코드 파라미터 최소 최대 단위 공장 초기값 ID 참조
0= 사용하지 않음
1= DI1
2= DI2
P5.1 I/O 제어제어 신호 1 0 6 1 403
P5.2 I/O 제어제어 신호 2 0 6 2 404 파라미터 5.1
P5.3 리버스 0 6 0 412 파라미터 5.1
P5.4 외부폴트 Close 0 6 6 405 파라미터 5.1
P5.5 외부. 폴트 Open 0 6 0 406 파라미터 5.1
P5.6 폴트 리셋 0 6 3 414 파라미터 5.1
P5.7 런 가능 0 6 0 407 파라미터 5.1
P5.8 설정 속도 B0 0 6 4 419 파라미터 5.1
P5.9 설정 속도 B1 0 6 5 420 파라미터 5.1
P5.10 설정 속도 B2 0 6 0 421 파라미터 5.1
P5.11 램프 시간 2 선택 0 6 0 408 파라미터 5.1
P5.12 Disable PI 0 6 0 1020 파라미터 5.1
P5.13 Force to I/O 0 6 0 409 파라미터 5.1
3= DI3
4= DI4
5= DI5
6= DI6
표 8.6: Digital inputs
8.7 아날로그 입력(콘트롤 판넬: 메뉴 PAR -> P6)
코드 파라미터 최소 최대
P6.1 AI1 신호 범위 0 1
P6.2 AI1 custom최소 -100,00 100,00 % 0,00 380 0,00= 최소 검출량 없슴
P6.3 AI1 custom 최대 -100,00 300,00 % 100,00 381 100,00= 최대 검출량 없슴
P6.4 AI1 필터 시간 0,0 10,0 s 0,1 378 0= 필터링 없슴
P6.5 AI2 신호 범위 0 1
P6.6 AI2 custom 최소 -100,00 100,00 % 0,00 391 0,00= 최소검출량 없슴
P6.7 AI2 custom 최대 -100,00 300,00 % 100,00 392 100,00= 최대검출량 없슴
P6.8 AI2 필터 시간 0,0 10,0 s 0,1 389 0= 필터링 없슴
표 8.7: Analogue inputs
단
공장 초기값 ID 참조
위
0 379
0 390
0= 0-100% (0-10V)
1= 20% - 100% (2-10V)
0= 0-100% (0-20 mA)
1= 20%-100%(4-20 mA)
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
8

58 • vacon
8.8 디지털 출력(콘트롤 판넬: 메뉴 PAR -> P8)
코드 파라미터 최소 최대 단위 공장 초기값 ID 선택
0= 사용하지 않음
1= 준비됨
2= 런
3= 폴트
4= 폴트 인버티드
5= 주위
P8.1 RO1 신호 선택 0 11
2 313
6= 역으로됨
7= 정해진 속도에 도달함
8= 모터레귤레이터가
활성화됨
9= FB 제어제어 워드. B13
10= FB 제어제어 워드. B14
11= FB 제어제어 워드. B15
P8.2 RO2 신호 선택 0 11
P8.3 DO1 신호 선택 0 11
P8.4 RO2 전화 0 1
표 8.8: Digital outputs
3 314 파라미터 8.1
1 312 파라미터 8.1
0 1588
0= 변환없슴
1= Inverted변환되었음
8.9 아날로그 출력(콘트롤 판넬: 메뉴 PAR -> P9)
코드 파라미터 최소 최대 단위 공장 초기값 ID 선택
0= 사용하지 않음
P9.1
P9.2
아날로그 출력
신호 선택
아나로그 출력
최소
표 8.9: Analogue output
0 4
0 1
1 307
0 310
1= 출력 주파수 (0-fmax)
2= 출력 전류 (0-Inmotor)
3= 모터 토크 (0-TnMotor)
4= PI 출력 (0-100%)
0= 0 mA
1= 4 mA
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
8

8.10 보호(콘트롤 판넬: 메뉴 PAR -> P13)
코드 파라메타 최소 최대 단위 공장 초기값 ID 참조
아날로그 입력
P13.1
P13.2 저 전압 폴트 1 2 2 727
P13.3 지구 폴트 0 2 2 703 파라미터 13.1
P13.4 출력 단계 폴트 0 2 2 702 파라미터 13.1
P13.5 스톨 보호 0 2 0 709 파라미터 13.1
P13.6 저하중 보호 0 2 0 713 파라미터 13.1
P13.7 모터 온도 보호 0 2 2 704 파라미터 13.1
P13.8 Mtp: 주변 온도 -20 100 °C 40 705 주위 온도
로
폴트
0 2 1 700
0= 아무것도 안함
1= 알람
2= 폴트: 프리런
1= 응답없음 (폴트는
없으나 드라이브가
멈춤)
2= 폴트: 프리런
vacon • 59
P13.9
P13.10
P13.23
표 8.10: Protections
Mtp: 제로 속도
냉각
Mtp: 온도 시간
상수
FWD/REV conflict
supervision
0,0 150,0 % 40,0 706 냉각 % 제로 속도
1 200 min 45 707 모터 온도 시간 상수
0 2 1 1463 P13.1과 동일
주의! 이파라미터들은P17.2 = 0일경우 보입니다.
8.11 폴트 자동 리셋 파리미터(콘트롤 판넬: 메뉴 PAR -> P14)
코드 파라미터 최소 최대 단위 공장 초기값 ID 참조
P14.1 자동 리셋 0 1
P14.2 기다리는 시간 0,10 10,00 s 0,50 717 폴트 다음 대기
P14.3 트라이얼 시간 0,00 60,00 s 30,00 718 트라이얼 최대 시간
P14.5 재시동 기능 0 2
표 8.11: Fault autoreset parameters
0 731
2 719
주의! 이 파라미터 들은P17.2 = 0일 경우 보입니다.
0= 불가능
1= 가능
0= 램핑
1= Flying
2= From Start Function
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
8

60 • vacon
8.12 PI 콘트롤 파라미터 (콘트롤 판넬: 메뉴 PAR -> P15)
코드 파라미터 최소 최대 단위 공장 초기값 ID 참조
0= Fixed setpoint %
P15.1
P15.2 고정된 세트포인트 0,0 100,0 % 50,0 167 고정된 세트포인트
P15.4
P15.5 최소 피드백가치 0,0 50,0 % 0,0 336 최소 신호값
P15.6 최대 피드백 가치 10,0 300,0 % 100,0 337 최대 신호값
P15.7 P gain 0,0 1000,0 % 100,0 118 비례하는 게인값
P15.8 I time 0,00 320,00 s 10,00 119 통합적 시간
P15.10 오류 전환 0 1 0 340
표 8-12: PI control parameters
세트포인트 소스
선택
피드백 소스
선택
0 3 0 332
0 2 1 334
주의! 이 파라미터 들은P17.2 = 0일 경우 보입니다.
1= AI1
2= AI2
3= 필드버스
(ProcessDataln1)
0= AI1
1=AI2
3= 필드버스(ProcessDataln2)
0= Direc (피드백 <
Setpoint -> PID 출력
증가)
1= Inverted (피드백 >
Setpoint -> PID 출력
감소)
8.13 어플리케이션 셋팅콘트롤 판넬: 메뉴 PAR -> P17)
코드 파라미터 최소 최대 단위 공장 초기값 참조
0= 베이직
1= 펌프
2= 팬 드라이브
P17.1 애플리케이션 유형 0 3 0
P17.2 파라미터 숨기기 0 1 1
표 8.13: Application Setting parameters
3= 높은 토크
주의 !
Startup wizard 활성화시만
보임.
0= All 파라미터가보임
1= quick setup만 보임
8
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

8.14 시스템 파라미터
코드 파라미터 최소 최대
소프프웨어 정보 (메뉴 PAR -> V1)
V1.1 API SW ID
V1.2 API SW 버전
V1.3 파워 SW ID
V1.4 파워 SW 버전
V1.5 애플리케이션 ID
V1.6 애플리케이션 개정
V1.7 시스템 로드
필드버스 파라미터 (메뉴 PAR -> V2)
V2.1 커뮤니케이션 상태
공장
초기값
ID 참조
2314
835
2315
834
837
838
839
모드버스 통신
Format: xx= 0 - 64
808
(에러 메세지 숫자)
yyy= 0 - 999 (양호한
메세지 숫자
vacon • 61
V2.2 필드버스 프로토콜 0 1 0 809
V2.3 슬레이브 주소 1 255 1 810
V2.4 보(Baud) 비율 0 5 5 811
P2.7
P2.8
코드 파라미터 최소 최대
V3.1 MWh 카운터
V3.2 일에 파워
V3.3 시간에 파워
V3.4 런 카운터: 일
V3.5 런카운터: 시간
V3.6 폴트 카운터
커뮤니케이션
타임아웃
커뮤니케이션 상태
리셋
0 255 10 814
0 1 0 815
공장
초기값
다른 정보
ID 참조
827 백만와트Hour
828
829
840
841
842
0=사용하지 않음
1= Modbus 사용됨
0= 300
1= 600
2= 1200
3= 2400
4= 4800
5= 9600
1= 1초
2= 2초, etc
P4.2
F5.x 액티브 폴트 메뉴
F6.x 폴트 기록 메뉴
재기록하는 공장
공장 초기값
표 8.14: System parameters
0 1 0 831
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
1= 모든 파라미터 를
공장 초기화
8

62 • vacon
9. 파라미터 설명
이 장에는 특정 파라미터에 관한 셜명이 나와있으며, 파라미터 설명은 파라미트 그룹과
이름에 따라 정렬이 되어 있습니다.
9.1 모터 셋팅콘트롤 판넬: 메뉴 PAR -> P1)
1.7 전류 한도
이 파라미터는 주파수 변환기에서 최대모터전류를 결정합니다. 모터 과부하를 방지하기
의해 모터의 정격 전류에 따라이파라미터를 설정합니다. 전류 제한은 기본적으로 (1.5*
In)입니다.
1.8 모터 콘트롤 모드
이 파라미터로모터 제어 모드를 선택할 수 있습니다. 선택은 다음과 같습니다:
0 = 주파수 제어:
드라이브 주파수 레퍼런스는절전모드 보정 없이 모터 속도 레퍼런스로 설정되어
있으며, 모터의 실제 속도는모터의 부하에 따라 정해집니다.
1 = 오픈루프속도제어:
드라이브 주파수 레퍼런스는 모토 속도 레퍼런스로 설정되어 있으며, 모터의 실제
속도는모터의 부하와 상관없이 유지되고 절전모드는 보정됩니다.
1.9 U / F 비율
이 파라미터에서 3가지 선택이 가능합니다:
0 = Linear:
0 Hz에서부터 필드가 포인트 전압을 약계자 지점까지 도달하는 동안 일정한 전류
영역에서 주파수가 선형으로모터의 전압을 변경합니다. 이는 선형 U / F 비율이
일정한 토크 응용 프로그램에서 사용되어야하며, 그림 9.1을 참조하십시오.
기타 설정과 같이 특별한 설정이 필요가없는 경우는 기본 설정이 사용되어야
합니다.
9
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 63
1 = Square:
0 Hz에서부터 필드가 포인트 전압을 약화 계자 지점까지 도달하는 동안 일정한
전류영역에서 주파수가제곱으로모터의 전압을 변경합니다.
모터는 약계자 점 아래 자화(magnetized)된 상태에서 실행되고, 적은토크, 전력
손실 및 전기 노이즈를 생성합니다. 제곱 U / F 비율은 부하의 토크 수요가 속도의
제곱에 비례하는 원심 팬 및 펌프 어플리케이션에서 사용될 수 있습니다.
2 = Programmable U / f curve:
U / F 곡선은 세 가지 지점으로 프로그래밍 할 수 있습니다. 다른 설정들이 응용
프로그램의 요구 사항을 충족하지 못하는 경우 포르그램가능한 U / F 곡선을
사용할 수 있습니다.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
9

64 • vacon
1.10 약계자점
약 계자 점은 출력 전압이 par 1.11에 설정된 값에 도달하는 출력 주파수입니다.
1.11 약계자점 전압
약 계자 지점 이상의 주파수에서 출력 전압은파라미터를 사용하여 설정 한 값으로
유지됩니다. 약 계자 지점 이하의 주파수는, 출력 전압은 U / F 곡선의 파라미터의설정에
따라 달라집니다. 파라미터1.9-1.14 및 그림 9.1과 9.2을 참조하십시오.
파라미터 1.1 및 1.2 (모터의 정격 전압 및 정격 주파수)를 설정하는 경우, 파라미터 1.10과
1.11은 자동으로 해당 값을 제공합니다. 약 계자 점과 전압에 대해 다른 값이 필요한 경우,
파라미터 1.1과 1.2를 설정한 후에 이 파라미터를 변경하면 됩니다.
1.12 U / F 중간점 주파수
프로그램가능한 U / F 곡선이파라미터1.9로 선택되어있는 경우, 이파라미터 곡선의 중간
점 주파수를 정의합니다. 그림 9.2을 참조하십시오.
1.13 U / F 중간점 전압
9
프로그램가능한 U / F 곡선이 파라미터1.9로 선택되어있는 경우, 이파라미터 곡선의
중간 점 전압을 정의합니다. 그림 9.2을 참조하십시오.
1.14 제로 주파수 전압
이 파라미터는 곡선의 제로 주파수 전압을 정합니다. 그림 9.1과 9.2를 참조하십시오.
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

1.15 토크 부스트
이 파라미터가 활성화될 경우, 모터로의 전압은 부하가 높은 토크로 바뀌어 저
주파수에서도 시작하고 운행할 수 있을 만큼 충분한 토크를 제공합니다. 전압은 모터
타입과 파워에 따라 달라지고 자동 토크 부스트는 시작 마찰이 높은 컨베이어와 같은
곳에서 사용할 수 있습니다.
0 = 작동불능
1 = 작동가능
주의: 높은 토크 - 저속 응용 어플리케이션에서 모터가 과열될 가능성이 높습니다.
모터가 이러한 조건에서 장시간 동안운행해야하는 경우 모터 냉각에 각별한 주의를
기울여야 합니다. 온도가 너무 높아질 경우 외부 쿨러를 사용해야 합니다.
주의: 최고의 성능은 모터 시범운행 (파라미터 1.18)을 실행하여 도달할 수 있습니다.
1.16 스위칭 주파수
모터 소음은 높은 스위칭 주파수를 사용하여 최소화 할 수 있습니다. 스위칭 주파수를
vacon • 65
높이면 주파수 변환 장치의 용량은 줄어듭니다.
VACON 10 스위칭주파수 : 1.5 ... 16 kHz
1.17 브레이크 쵸퍼(제동유닛)
주의! 내장형 브레이크 쵸퍼는 3상 MI2 및 MI3 프레임에 설치됩니다.
0 = Disable (초퍼사용안함)
1 = Enable: Always (작동 및 정지 상태에서 사용)
2 = Enable: Run state (작동상태에서 사용)
브레이크초퍼가 활성화 된 경우 주파수 변환기가 모터를 감속할 때, 모터와 부하의
관성에 저장된 에너지가 외부 브레이크 저항에 공급됩니다. 주파수 변환기가 이
가속도의 (올바른 브레이크 저항이 선택되어 경우) 와 같은 토크 부하를 감속할 수
있습니다. 별도의 브레이크 저항 설치 설명서를 참조하십시오.
1.19 모터인식
0 = 비활성화됨
1 = 휴지상태 인식
이 선택 제어 위치에서 시작할 때 휴지상태 인식(Standstill Identification)을 선택하면,
드라이브는 인식 실행을 수행합니다. 드라이브를 20 초 이내에 시작해야하며, 그렇지
않으면 식별이 중단됩니다.
드라이브는 정지 식별 과정에서 모터를회전시키지 않습니다. ID 실행 준비가되면
드라이브가 중지, 다음 시작 명령이 주어지면 드라이브가 정상적으로 시작됩니다.
인식이 끝난 후에, 제어 장소 키패드인 경우, 사용자가 정지 버튼을 눌러서 드라이브에
시작 명령을 중지할 필요가 있습니다. 제어 장소가 IO인 경우사용자는 DI (제어 신호)를
비활성화하면 되고, 제어장소가 필드버스인 경우 제어 비트를 0으로 설정해야 합니다.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
9

66 • vacon
인식 실행은 토크 계산 및 자동 토크 부스트 기능을 향상시킵니다. 또한 속도 제어에서
더 나은 슬립 보상 (더 정확한 RPM)을 가능하게 합니다.
인식 실행을 성공적으로 끝낼 경우 아래의 파라미터들이 변합니다:
a. P1.8 모터 콘트롤 모드
b. P1.9 U / f 비율
c. P1.12 U / f 중간 지점주파수 d. P1.13 U / f 중간 지점전압
e. P1.14 제로 주파수 전압
f. P1.19 모터 인식(1->0)
g. P1.20 Rs 전압 강하
주의! 모터의 명판 데이터를 인식실행을 실작하기 전에 설정해야합니다.
1.21 과전압 콘트롤러
0 = 작동 불능
1 = 작동가능, 표준 모드(OP 주파수 약간 조정)
2 = 작동가능, 충격 하중 모드(OP 주파수를 최대까지 조정 가능)
1.22 저전압 콘트롤러
0 = 작동불능
1 = 작동가능
이 파라미터는 저/고전압제어제어러를 끕니다. 공급 전압이 에서 –15% +10% 이상
변동할 때 매우 유용하며, 이 어프리케이션은 저/고 전압을 허용하지 않습니다. 이
케이스에서, 레귤레이터는 공급 변동을 고려하여 주파수 출력을 제어합니다.
0 이외의 값을 선택하는 경우도 폐쇄 루프 과전압 제어기가 활성화됩니다 (Multi-
Purpose Control Application에서 해당).
주의! 제어제어러를 끌 경우 저/과전압 트립이 일어날 수 있습니다.
9
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

9.2 스타트/스톱 셋업(콘트롤 판넬: 메뉴 PAR -> P2)
2.1 원격조종 위치 선택
이 파라미터로 활성화할 제어 위치를 선택할 수 있으며, 주파수 레퍼런스는파라미터
P3.3으로 선택할 수 있습니다.
0 = I / O 단자대
1 = Fieldbus
제어위치 선택의 우선권은 다음과 같습니다:
1. 디지털 입력의 P5.13 (Force to I/O)가 활성화되어 있을 경우 강제로 I/O 선택.
2. Loc/Rem 버튼을 누르거나 P2.5 (Local/Remote) =1일 경우.
3. P2.1 (Remote Control Place Selection)에 의해 선택.
주의: 파라미턱 2.5나 2.1이나 Loc/Rem버튼을 눌러서 원격 제어위치를 변경할 수
있으나 Local제어위치에는 변함이 없습니다.
Local = 키패드가 제어위치
vacon • 67
Remote = I / O 단자대 혹은FieldBus
2.2 기동 기능
이 파라미터로Vacon 10의 2가지 시작모드를 선택할 수 있습니다:
0 = Ramp start
주파수 변환기는 0 Hz에서 시작 설정 가속 시간 (자세한 설명은ID103 참조) 내 설정
주파수 레퍼런스에 도달하게 가속합니다. (부하 관성, 토크, 또는 시작 마찰이 가속
시간을 길게 할 수 있습니다.)
1 = Flying start
주파수 변환기는작은 전류 펄스로 모터를 실행모터에서 실행되는 속도에 상응하는
주파수를 검색하고 이를 적용하는 기능입니다. 최대 주파수에서 검색을 시작하여
올바른 값이 감지 될 때까지 실제 주파수쪽으로 검색합니다. 그 후, 출력 주파수가
설정 가속 / 감속 파라미터에 따라 설정 참조 값으로 증가/ 감소될 것입니다.
시작 명령이 주어지고, 모터가 프리런경우이 모드를 사용합니다. Flying start는 레퍼런스
속도로 램핑하기 전에 현재 모터를 제로로 맞추지 않고도 모터를 시작할 있습니다.
2.3 스톱 기능
이 어플리케이션에서 두 가지 정지 기능을 선택할 수 있습니다:
0 = Coasting
정지 명령 후 주파수 변환기의 제어없이 중단 모터를 프리런 합니다.
1 = Ramping
정지 명령후 설정된 감속 파라미터에 따라 모터가 감속합니다..
재생 에너지가 큰 경우는 허용 시간 내에 모터를 감속 할 수 있도록 외부 브레이크
저항을 사용할 필요가 있습니다.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
9

68 • vacon
2.4 I / O 스타트/스톱 로직
0...3사이 값은 디지털입력에 연결된 디지털신호와 AC 드라이브의 시작 및 중지를
제어하는 3가지 기능입니다. CS = 제어신호.
‘Edge’를 포함한 텍스트는 예를 들어, 전원이 연결되어 드라이브 후, 폴트리셋 후, 전원
실패 후 재접속, Run Enable (Run Enable = False)후 드라이브 정지 혹은 제어 위치를
I/O로 변경과 같은 의도하지 않은 시작을 배제하기 의해 사용됩니다.
모터가 시작되기 전에 시작 / 정지 접점이 열려 있어야합니다.
Selection
number
0
선택사항 참조
CS1:포워드
CS2:백워드
접촉이 닫힐 때 시작
9
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

제어제어 신호 (CS) 1은 모터가 정방향
1
회전하고 출력 주파수가 올라갈 때
활성화됩니다.
설명
8
vacon • 69
Run Enable신호를 FALSE로 놓아 주파수를
0으로 내립니다. Run enable
신호 par. 5.7로 설정합니다.
CS2 가 활성화 되지만 출력 주파수에는
2
영향을 안 미칩니다.
CS1가 비활성화되어도 CS2가 활성화되어
3
있기 때문에 회전 방향을 (순방향 에서
역방향)으로 바꿉니다
CS2 비활성화되고 모터 주파수는 0이
4
됩니다. .
CS2 가 활성화되고 모터가 역방향으로
5
설정된 주파수에 도달합니다.
CS1가 비활성화되고 모터 주파수는 0으로
6
내려갑니다.
CS1 가 활성화되고 모터가 순방향으로
7
설정된 주파수를 향해 주파수를 올립니다.
CS1이 활성화 되어있기 때문에, Run enable
9
신호를 True 로 바꿔 주파수를 설정
주파수로 올라가게 합니다.
키패드 stop 버튼 을 눌러 모터 주파수를
10
0으로 만듭니다.
키패드의 Start 버튼을 눌러 드라이브를
11
시작합니다
키패드 Stop 버튼을 눌러 드라이브를
12
멈춥니다.
CS1 이 비활성화 되어있기 때문에
13
Start버튼을 눌러 모터를 시작할 수 없습니다.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
9

70 • vacon
선택번호 선택명 참조
1
CS1:Forward (edge)
CS2:Inverted stop
제어제어 신호 (CS) 1은 모터가 정방향
1
회전하고 출력 주파수가 올라갈 때
활성화됩니다.
CS2 비활성화되고 모터 주파수는 0이
2
됩니다.
CS1 가 활성화되고 모터가 순방향으로
3
설정된 주파수를 향해 주파수를 올립니다.
Run Enable신호를 FALSE로 놓아 주파수를
4
0으로 내립니다. Run enable
신호 par. 5.7로 설정합니다.
Run Enable신호를 FALSE로 놓여 있기
5
때문에 CS1 신호가 들어가지 않습니다.
설명
CS1이 활성화 되어있기 때문에, Run enable
6
신호를 True 로 바꿔 주파수를 설정
주파수로 올라가게 합니다.
키패드 Stop 버튼을 눌러 드라이브를
7
멈춥니다.
CS1 가 활성화되고 모터가 순방향으로
8
설정된 주파수를 향해 주파수를 올립니다.
CS2 를 비활성화 하여 주파수가 0으로
9
내려갑니다.
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205
9

선택번호 선택사항 참조
의도하지 않은 상태를 제외하기 위하여 사용되며,
Start / Stop 컨택트는 모터가 재시작되기 전에
오픈되어 있어야 합니다.
2
CS1:포워드(에지)
CS2:백워드(에지)
vacon • 71
제어제어 신호 (CS) 1은 모터가 정방향
1
회전하고 출력 주파수가 올라갈 때
활성화됩니다.
CS2 가 활성화 되지만 출력 주파수에는
2
영향을 안 미칩니다.
CS1가 비활성화되어도 CS2가 활성화되어
3
있기 때문에 회전 방향을 (정방향 에서
역방향)으로 바꿉니다
CS2 비활성화되고 모터 주파수는 0이
4
됩니다. .
CS2 가 활성화되고 모터가 역방향으로
5
설정된 주파수에 도달합니다.
6 비활성화되고 모터 주파수는 0이 됩니다. .
설명
제어제어 신호 (CS) 1은 모터가 정방향
7
회전하고 출력 주파수가 올라갈 때
활성화됩니다.
CS1이 활성화 되어있기 때문에, Run enable
8
신호를 True 로 바꿔 주파수를 설정
주파수는 파라미토 5.7로 설정합니다.
CS1 이 다시 활성화 되어 역방향으로
9
설정된 주파수를 도달하게 만듭니다.
10 CS1 이 열리고 모터가 시작합니다.
CS1 가 비활성화되고 모터 주파수가 0이
11
됩니다.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
9

72 • vacon
선택번호 선택사항 참조
3
CS1:Star t
CS2:Reverse
9
설명
제어 신호 (CS) 1은 모터가 정방향
1
회전하고 출력 주파수가 올라갈 때
활성화됩니다.
CS2 활성화되고 순방향에서 역방향으로
2
바뀝니다.
CS1가 활성화 되어있기 때문에, CS2 가
3
비활성화되고 순환 방향은 역방향에서
정방향으로 바뀝니다
CS1가 비활성화되고 모터 주파수는 0으로
4
내려갑니다.
CS2를 활성화하여도 CS1가 비활성화되어
5
있기 때문에 모터는 시작하지 않습니다.
CS1이 활성화 되어있기 때문에, Run
enable 신호를 True 로 바꿔 주파수를
7
설정 주파수는 파라미토 5.7로
설정합니다.
S1이 활성화 되어있기 때문에, Run
8
enable 신호를 True 로 바꿔 주파수를
설정 주파수로 올라가게 합니다.
키패드 stop 버튼 을 눌러 모터 주파수를
9
0으로 만듭니다.
키패드의 Start 버튼을 눌러 드라이브를
10
시작합니다
키패드 Stop 버튼을 눌러 드라이브를
11
멈춥니다.
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 73
CS1 가 활성화되고 모터가 정방향(CS2
6
비활성화)으로 설정된 주파수를 향해
주파수를 올립니다.
2.5 LOCAL / REMOTE
이 파라미터는 Remote (I / O혹은FieldBus) 제어위치에서 제어할 것인지 Local에서
제어할 것인지 선택합니다.
0 = Remote 제어
1 = Local 제어
CS1 이 비활성화 되어있기 때문에
12
Start버튼을 눌러 모터를 시작할 수
없습니다.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
9

74 • vacon
9.3 주파수 레퍼런스s (콘트롤 판넬: 메뉴 PAR -> P3)
3.3 remote조종 위치 주파수 레퍼런스 선정
드라이브가 Remote 제어로 되어 있을 때 주파수 레퍼런스 소스를 선택합니다.
1 = Preset speed 0-7
2 = Keypad 레퍼런스
3 = Fieldbus 레퍼런스
4 = AI1
5 = AI2
6 = PI
3.4 - 3.11 프리셋 속도 0 - 7
속도 설정은 0 - 7의 적절한 디지털 입력 조합이 활성화될 때 적용되는 주파수 참조를
확인하는 데 사용할 수 있습니다. 파라미터 3.3 (Remote 제어 place frequency 레퍼런스
selection) =1일 경우 디지털 입력으로 프리셋 속도를 활성화 할 수 있습니다.
파라미터 값은 자동으로 최대 및 최소 주파수 주파수 사이 제한됩니다. (par. 3.1, 3.2)
속도
설정 속도 0
설정 속도 1
설정 속도 2
설정 속도 3
설정 속도 4 x
설정 속도 5 x
설정 속도 6 x x
설정 속도 7 x x x
표 9.1: Preset speeds 0 - 7
설정
속도 B2
설정
속도 B1
x
x x
설정
속도 B0
x
x
9
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

9.4 램프 및 브레이크 셋업(콘트롤 판넬 메뉴 PAR -> P4)
4.1 램프 S곡선
이 파라미터로 시작 및 종료 가속 감속 램프를 부드럽게할 수 있습니다. 0값으로
입력시레퍼런스 신호의 변동에 맞춰서 즉시 선형 램프 형태로 가속이나 감속을 합니다.
0.1…10 초 사이에 값을 설정하면, S-형 가속/감속을 합니다. 가속 및 감속 시간은
파라미터 4.2와 4.3으로 결정됩니다.
vacon • 75
4.2 가속시간 1
4.3 감속시간 1
4.4 램프 S곡선2
4.5 가속시간2
4.6 감속시간2
이러한 제한은 주파수 0에서 설정된 최대 주파수까지 가속하거나, 설정된 최대
주파수에서 0까지 감속하는데 출력 주파수가 필요로하는 시간입니다.
사용자는 서로 다른 두 개의 가속 / 감속 시간을 설정하고 두 개의 서로 다른 S-형
램프의 모양을 할 수 있습니다. 활성화된 세트는 디지털 입력 (par. 5.11)으로 선택할 수
있습니다.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
9

76 • vacon
4.7 플럭스 브레이킹
DC 브레이크 대신에 플럭스브레이크는 최대 15kW 급의 모터 브레이크에 유용합니다.
브레이크가 필요한 경우, 주파수가 감소하고 모터의 플럭스가 증가하면서 모터가
브레이크할 수 있게 합니다. DC 브레이크와는 달리, 모터 속도는 브레이크시 에도
제어를 할 수가 있습니다.
0 = Off
1 = Deceleration
2 = Chopper
3 = Full Mode
주의: 플럭스브레이크는모터에서에너지를열로 변환하기 때문에 및 모터 손상을
방지하기 의해 간헐적으로 사용되어야 합니다.
4.10 DC전류 시간 정지
브레이크가 ON 또는 OFF일 때 모터가 정지되는 DC 브레이크 시간이며, DC브레이크의
기능은 정지 기능에 따라 달라집니다.(파라미터 2.3 참조)
0 = DC brake 는 활성화되지 않음
>0 = DC brake 가 활성화되었으며 Stop 기능에 따라 (par. 2.3.)에 따라 DC
브레이크 시간이 결정됩니다.
Par. 2.3 = 0 (스톱기능= 프리런):
정지 명령 후, 모터는 주파수 변환기의 제어 없이 정지까지 프리런합니다.
DC의 주입으로 모터는 전기적 사양 외부 브레이크 저항기를 사용하지 않고, 가능한
최단 시간에 중지 할 수 있습니다.
DC 브레이크가 시작할 때 브레이크 시간은 주파수에 의해 조정됩니다. 주파수가
크거나 모터의 정격 주파수에 맞춰져 있는 경우, 파라미터 4.10의 설정 값이 브레이크
시간을 결정합니다. 주파수가 정격의 10%인 경우, 브레이크 시간은 4.10 파라미터의
설정 값의 10 %입니다.
9
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 77
Par. 2.3 = 1 (스톱기능램프):
정지 명령 후, 모터의 속도는 설정된 감속 파라미터에따라 감소, 모터와 부하의 관성이
허용하는 경우 DC-브레이크가파라미터 4.11에 정의된 속도에 맞춰 시작합니다.
브레이크 시간은 파라미터 4.10으로 정해지며 그림 9.9를 참조하십시오.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
9

78 • vacon
4.11 DC전류 주파수 정지
DC 브레이크가 적용되는 출력 주파수입니다.
4.12 DC전류 시간 기동
시작 명령이 주어진 경우 DC 브레이크가 활성화되고, 이 파라미터는 DC 제동의
시간을 정합니다. 브레이크가 해제 된 후, 파라미터 2.2 의해 설정 시작 기능에 따라
출력 주파수가 증가합니다.
9
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 79
9.5 디지털 입력(콘트롤 판넬: 메뉴 PAR -> P5)
이 파라미터는 고정된 입력 혹은 출력으로 특정 기능을 정의하는 FTT-Method (Function to
단자대)를 사용하여 프로그래밍됩니다. Start signal 1 및 Preset Speed B1을 DI1로 지정하듯
하나 이상의 기능을 디지털 입력에 지정할 수 있습니다.
이 파라미터는 다음 값을 선택할 수 있습니다:
0 = Not used
1 = DI1
2 = DI2
3 = DI3
4 = DI4
5 = DI5
6 = DI6
5.1 I/O 콘트롤 시그널1
5.2 I/O 콘트롤 시그널2
5.3 리버스
P2.4 (I/O Start stop logic) =1일 경우에만 디지털 입력이 활성화됩니다.
P5.3을 활성화할 경우 모터가 반대 방향으로 움직입니다.
5.4 외부 폴트 폐쇄
5.5 외부 폴트개방
5.6 폴트 리셋
5.7 런 가능케함
5.8 프리셋 속도B0
5.9 프리셋속도 B1
5.10 프리셋 속도B2
5.11 램프타임2 선택
Contact 열림: 가속/감속시간1 및 램프 S곡선이 선택됨
Contact 닫힘: 가속/감속시간2 및 램프 S곡선2가 선택됨
파라미터 4.2와 4.3을 활영하여 가속/감속 시간을 설정하거나 대체 램프 타임은
파라미터 4.4와 4.5로 설정합니다.
S-형 램프를 파라미터 4.1로 설정하고 S-형 램프2를 파라미터 4.4로 설정합니다.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
9

80 • vacon
9.6 아날로그 입력(콘트롤 판넬: 메뉴 PAR -> P6)
6.4 AI1 필터링 시간
6.8 AI2 필터링 시간
이 파라미터를 0이상으로 설정하면, 들어오는 아날로그 입력에 관한 방해를
필터링합니다.
긴 필터링 시간은 제어 반응속도를 느리게 만듭니다. 그림 9.11을 참조하십시오.
9
6.2 AI1 커스텀 최소
6.3 AI1 커스텀 최대
6.6 AI2 커스텀 최소
6.7 AI2 커스텀 최대
이 파라미터는 아날로그 입력 신호 스팬을-100 에서 100% 사이로 설정합니다.
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

9.7 디지털 출력(콘트롤 판넬 메뉴 PAR -> P8)
8.1 RO1 신호 선택
8.2 RO2 신호선택
8.3 DO1 신호선택
설치 신호내용
0= 사용하지 않음 출력이 작동하지 않음.
1= 준비됨 주파수 변환기가 작동 준비됨.
2= 런 주파수 변환기가 작동(모터 작동 중)
3= 폴트 폴트 트립 발생.
4= 폴트 인버티드 폴트 트립 발생안함.
5= 주의 경고 활성화.
6= Reverse 역방향 운전이 선택 되어출력 주파수가 음수로 내려갑니다
7= At speed 출력 주파수가 설정된 레퍼런스 도달.
8= 모터 조정기 작동
9= FB 제어 워드. B13 B13 출력 필드버스 제어 워드로 출력조정이 가능합니다.
10= FB 제어 워드. B14 B14 출력 필드버스 제어 워드로 출력조정이 가능합니다.
모터 전류 레규레이터, 발생 전류, 과전압 저전압 기타 등등의
조정기가 활성화됩니다.
vacon • 81
11= FB 제어 워드. B15 B15 출력 필드버스 제어 워드로 출력조정이 가능합니다.
표 9.2: Output signals via RO1, RO2 and DO1
9.8 아날로그 출력(콘트롤 판넬: 메뉴 PAR -> P9)
9.1 아날로그 출력 신호 선택
0 = 사용안함
1 = 출력주파수(0 - fmax)
2 = 출력전류 (0 - InMotor)
3 = 모터 토크(0 - TnMotor)
4 = PID 출력 (0 - 100%)
9.2 아날로그 출력 최소
0 = 0 mA
1 = 4 mA
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
9

82 • vacon
9.9 보호(콘트롤 판넬:메뉴 Par->P13)
13.5 스톨 보호
0 = 반응안함
1 = 알람
2 = 폴트, 프리런상태
모터 스톨 보호는 스톨샤프트에 의해 발생되는 짧은 과부하 상황에서 모터를
보호합니다. 스톨 전류는 InMotor * 1.3, 스톨 시간은 15 초이고, 정지 주파수 한계는
25 Hz입니다. 전류가 한계보다 높고, 출력 주파수가 한도보다 낮고, 스톨 상태가 true일
경우 드라이브는 이 파라미터에 따라 반응합니다. 실제 축 회전에 관한 표시는없습니다.
13.6 저부하 보호
0 = 아무것도 안함
1 = 알람
2 = 폴트, 프리런
모터 저부하 보호의 목적은 드라이브를 실행할 때, 모터에 부하가 있는지 확인하는
것입니다. 벨트가 망가지거나 펌프가 건조한 경우와 같이 모터의 부하를 잃는 경우,
프로세스에 문제가 있을 수 있습니다. 예를 들면 벨트가 망가지거나 펌프에 물이
없다든가 하는.
부하 보호 시간 제한 파라미터에 따라 트립이 발생하기 전에 존재하는 저 부하 상태가
허용되는 최대 시간은 20초입니다.
9
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 83
13.7 모터 열 보호
0 = 아무것도 안함
1 = 알람
2 = 폴트, 프리런
Tripping을 하고 모터의 온도가 너무 높게 될 경우 드라이브는 정지하고 폴트
스테이지를 활성화합니다. 설정 파라미터를 0으로 설정하고 모터 온도 모델을 0 %로
재 설정하면 보호가 비활성화됩니다.
모터 열 보호는 과열로부터 모터를 보호하는 것입니다. 드라이브는 모터 정격 전류보다
높은 공급을 할 수 있으며, 부하가 높은 전류를 필요로하는 경우 모터가 열 과부하
될위험이 있습니다. 특히 이는 낮은 주파수에서 일어날 수 있는 경우입니다. 낮은
주파수에서 모터의 냉각 효과는 용량과 함께 감소됩니다. 모터 외부 팬이 장착되어있는
경우 저속에서 부하 감소는 작습니다.
모터 열 보호는 계산된 모델을 기반으로하고 모터의 부하를 결정하기 의해 드라이브의
출력 전류를 사용합니다.
모터 열 보호 파라미터를 조정할 수 있으며, 열 전류 IT는 모터가 과부하되는 부하
전류를 지정합니다. 이 전류 제한은 출력 주파수의 기능 중 하나입니다.
주의! 계산된 모델은 모터가 공기흡입구 그릴이 차단되어 공기 흐름이 감소되는 경우
모터를 보호하지 않습니다.
주의! 파라메타 값이 0일때, UL 508C 규격을 따르기 위헤 모터 과열 센서의 설치가
요구됩니다.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
9

84 • vacon
13.8 MTP: 주변온도
모터 주위 온도도 고려되어야 할 사항 중 하나이며 이 파라미터 값은 섭씨-20 에서
100도 사이에 설정될 수 있습니다.
13.9 MTP: 제로 속도 냉각
냉각 전력은 정격 주파수에서0과 150.0 % x 냉각 전력사이에서 설정할 수 있습니다.
그림 9.14을 참조하십시오.
9
13.10 MTP: 열 시간 상수
이 시간은 1에서 200 분으로 설정할 수 있으며 이는 모터의 상수 열 시간입니다.
모더가 크면 클수록 상수도 길어집니다. 시간 상수는 계산 된 열 모델이 최종 값의
63 %에 도달하는 시간을 의미합니다.
모터 열 시간은 모터의 디자인과 제조 업체에 따라 다릅니다.
모터의 T6-시간 (T6는 모터가 정격 전류에서 안전하게 여섯 번 동작 할 수있는 시간
(초)입니다)이 알려진 경우(모터 제조사에 의해 주어진 시간) 시간 상수 파라미터를
그것에 기초하여 설정할 수 있습니다. 엄지 손가락의 규칙으로, 모터 열 상수 시간은
T6 X 2의 값과 동일합니다. 드라이브가 정지 상태에있는 경우 시간 상수는 내부적으로
파라미터의 3배만큼 증가합니다. 그림 9.15를 참조하십시오.
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 85
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
9

86 • vacon
9.10 자동 리셋(콘트롤 판넬: 메뉴 PAR -> P14)
14.1 자동 리셋
이 파라미터 폴트 후에 자동 리셋을 활성화 합니다.
주의: 자동 리셋은 다음과 같은 특정 폴트에서만 허용됩니다.
1. 저전압
2. 과전압
3. 과전류
4. 모터 온도
5. 저부하
14.3 Trial 시간
자동 재시작 기능은 폴트가 없어지고 대기 시간이 지날 경우 주파수 변환기를 재시작
합니다.
첫 자동리셋부터 시간을 카운트하기 시작하며, 시도시간 동안 오류횟수가 3회를 초과할
경우 폴트 상태가 활성화됩니다. 그렇지 않으면 시도 시간이 지난 후 폴트는
클리어되고 다음 폴트에서 다시 카운트하기 시작합니다. 그림 9.16을 참조하십시오.
트라이얼 시간 중에 하나의 폴트라도 남아있을 경우 폴트 상태는 True 입니다.
9
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

9.11 PI 콘트롤 파라미터(콘트롤 판넬: 메뉴 PAR -> P15)
15.7 P 게인
이 파라미터는 PI 제어기의 게인을 정의합니다. 파라미터값이 100 %로 설정되어 있으면
오류 값이 10 % 바뀌면 제어기 출력이 10 % 변경됩니다.
15.8 I-시간
이 파라미터는 PI 제어기의 적분 시간을 정의합니다. 이 파라미터가 1.00 초로
설정되어있는 경우, 제어러의 출력은 매초마다 게인에서 발생하는 출력에 상응하는
값으로 변경됩니다. (Gain*Error/초).
15.9 PID 콘트롤러 D-시간
이 파라미터는 PID 제어기 미분 시간을 정의합니다. 이 파라미터가 1.00 초로 설정되어
있으면 오류 값이 10 %바뀌면 제어기 출력이 10 % 변경됩니다.
vacon • 87
15.5 피드백 수치 최소
15.6 피드백 수치 최대
이 파라미터는 피드백의 최소 및 최대 검출 포인트를 설정합니다.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
9

88 • vacon
9.12 어플리케이션 셋팅(콘트롤 판넬: 메뉴 PAR->P17)
17.1 드라이브 셋업
이 파라미터를 사용하면 쉽게 네 가지 응용 프로그램으로 드라이브를 설정할 수
있습니다.
주의! 이 파라미터는 Startup Wizard가 활성화되어 있을 때만 활성화되고, 시작
마법사는 처음 전원 시 자동으로 나타나나 다음과 같이 시작할 수도 있습니다. 아래
그림을 참조하십시오.
주의! 시작 마법사를 실행하면 모든 파라미터가 공장 초기화 상태로 돌아갑니다.
주의! Stop 버튼을 30초간 누르면 시작 마법사는 건너뛰게 됩니다.
9
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 89
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
9

90 • vacon
9.13 Modbus RTU
VACON 10은 내장 된 모드 버스 RTU 버스 인터페이스를 가지고 있습니다. 인터페이스의
신호 레벨은 RS-485 표준에 따릅니다.
VACON10의 기본 모드 버스 연결은 다음과 같은 기능 코드를 지원합니다:
기능
코드
03 Read Holding Registers All ID numbers No
04 Read Input Registers All ID numbers No
06 Write Single Registers All ID numbers Yes
16 Write Multiple registers All ID numbers Yes
표 9.3: Modbus RTU
기능명 주수
동보 통신
메시지
9.13.1 터미네이션 저항
VACON 10은 내장된 모드 버스 RTU 버스 인터페이스를 가지고 있습니다. 인터페이스의
신호 레벨은 RS-485 표준에 따릅니다.
VACON을 10의 기본 모드 버스 연결은 다음과 같은 기능 코드를 지원합니다:
9
9.13.2 Modbus 주소 영역
VACON 10의 모드 버스 인터페이스는 주소로 응용 프로그램 파라미터의 ID 번호를
사용합니다. ID 번호는 8 장의 파라미터 테이블에서 찾을 수 있습니다. 여러 파라미터 /
모니터링 값이 한 번에 보일 때, 그 숫자들은 연속적이어야 합니다. 11개의 주소를 읽을 수
있으며, 주소는 파라미터 또는 감독 값이 될 수 있습니다.
주의! 일부 PLC 제조 업체에서 모드 버스 RTU 통신을 위한 인터페이스 드라이버는 offset
1을 포함할 수 있습니다. (사용되는 ID 번호에서 1을 빼게 됩니다.)
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

vacon • 91
9.13.3 Modbus 프로세스 데이터
프로세스 데이터는 필드 버스 제어를 위한 주소 영역입니다. 파라미터 2.1의 값 (제어
장소)이 3 (= 필드 버스) 인 경우 필드 버스 (Fieldbus) 제어가 활성화됩니다. 프로세스
데이터의 내용은 응용 프로그램에서 정해졌습니다. 다음 표는 범용 응용 프로그램에서
프로세스 데이터 내용을 제시합니다.
ID 모드버스 레지스터 이름 스케일 타입
2101 32101, 42101 FB 상태 워드 - Binary coded
2102 32102, 42102 FB 일반적인 상태 워드 - Binary coded
2103 32103, 42103 FB 실제의 속도 0,01 %
2104 32104, 42104 출력 주파수 0,01 +/- Hz
2105 32105, 42105 모터 속도 1 +/- Rpm
2106 32106, 42106 모터 전류 0.01 A
2107 32107, 42107 모터 토크 0,1
2108 32108, 42108 모터 파워 0,1
2109 32109, 42109 모터 전압 0,1 V
2110 32110, 42110 DC 링크 전압 1 V
+/- % (of
nominal)
+/- % (of
nominal)
2111 32111, 42111 액티브 폴트 코드 1 -
표 9.4: Output process data
ID 모드버스 레지스터 이름 스케일 타입
2001 32001, 42001 FB 제어 워드 - Binary coded
2002 32002, 42002 FB 일반적인 제어 워드 - Binary coded
2003 32003, 42003 FB 속도 레퍼런스 0,01 %
2004 32004, 42004 프로그램 가능 by P15.1
2005 32005, 42005 프로그램 가능 by P15.4
2006 32006, 42006 - - -
2007 32007, 42007 - - -
2008 32008, 42008 - - -
2009 32009, 42009 - - -
2010 32010, 42010 - - -
2011 31011, 42011 - - -
표 9.5: Input process data
주의! P15.1(Setpoint selection)에서 PI 제어 레퍼런스로 2004가 설정될 수 있습니다. 혹은
파라미터 P15.4(Feedback value selction)의 값을 2005로 설정하여 PI 현재값으로
설정할 수 있습니다.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
9

92 • vacon
Status word (output process data)
장치의 상태에 관한 정보가 표시됩니다. 상태 단어는 다음 테이블의 설명에 따라 16비트로
구성됩니다.
Bit
Value = 0 Value = 1
B0, RDY 드라이브 준비하지 않음 드라이브 준비됨
B1, 런 스톱 런
B2, DIR 클록와이즈 카운터 - 클록와이즈
B3, FLT 폴트가 없음 폴트 액티브
B4, W 얼람이 없음 얼람 액티브
B5, AREF 램핑 속도 레퍼런스 메수된
B6, Z - 드라이브 런닝 at zero 속도
B7 - B15 - -
표 9.6: Status word (output process data)
설명
실제속도(출력 프로세스 데이터)
이는 현재 주파수 변환기의 현재 속도 값이며, 범위는 -10000에서 10000입니다. 이 값은
주파수 최소와 최대값 퍼센테이지 사이에 설정되어 있습니다.
콘트롤 언어(입력 프로세스 데이터)
콘트롤 언어의 첫 3비트는 주파수 변환기를 제어하는데 사용됩니다. 콘트롤언어를 사용하여
드라이브의 작동을 사용할 수 있으며, 콘트롤 언어의 비트는 아래 표에 설명되어 있습니다.
Bit
Value = 0 Value = 1
B0, 런 스톱 런
B1, DIR 클록와이즈 카운터 - 클록와이즈
B2, RST 활성화 폴트 리셋
표 9.7: 제어 word (input process data)
설명
속도레퍼런스 (입력 프로세스 데이터
이는 주파수 변환기의 레퍼런스 1이며, Speed 레퍼런스로 사용됩니다. 허용되는 값은
0...10000 사이이며 주파수 범위는 최대 주파수와 최소 주파수 퍼센테이지 사이에 설정되어
있습니다.
9
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

10. 기술사양
10.1 Vacon 10 기술사양
입력 전압 Uin
일반적인 연결
입력주파수 45…66 Hz
라인 전류 THD > 120%
기본 연결 일반적으로 1분에 한번 혹은 그 이하
vacon • 93
115V, -15%...+10% 1~
208...240V, -15%...+10% 1~
208...240V, -15%...+10% 3~
380 - 480V, -15%...+10% 3~
575V, -15%...+10% 3~
공급 네트워크
모터
연결
제어
캐릭터리스틱
표 10.1: Vacon 10 technical data
네트워크 Vacon 10 (400V) 코너 접지 네트워크에서 사용 불가
단락전류 최대 쇼트 써킷 전류 < 50 kA.
연속 정격 전류IN (주위온도)
출력 전류
기동 전류/ 토크
출력 주파수 0…320 Hz
주파수 결의안 0,01 Hz
제어 방법
스위칭 주파수 1…16 kHz; Factory 공장 초기값 4 kHz
주파수 분해능 0.01 Hz
약화계자제어 30…320 Hz
가속 시간 0.1…3000 초
감속 시간 0.1…3000 초
브레이킹 토크
max. +50° (유닛사이즈에 따라), 과부하
1.5 x IN max.
1 min/ 10 min
2초동안의 전류x IN이 매 20초 시간마다 발생. 토크는
모터에 따라 달라짐.
주파수 제어 U / f
Open loop Sensorless Vector 제어
100%* TN (브레이크 옵션) (only in 3~드라이브 sizes MI2-5)
30%*TN (브레이크 옵션 없음)
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
10

94 • vacon
주변
조건
-10 °C (빙결없음)…+40 / 50 °C (기계 사이즈에 따라):
주변 온도
보관 온도 -40°C...+70°C
상대 습도
공기 품질:
- 화학적 증기
- 기계적 입자
고도
진동:
EN60068-2-6
충격
IEC 68-2-27
외함등급
오염도 PD2
면역 Complies with EN50082-1, -2, EN61800-3
MI1~MI3까지는옆에 나란히 설치할 수 있는 조건은 40도
인데, 이는 IP21/NEMA1옵션에서최대한 견딜 수 있는
온도임.
0...95% RH, 응축이 없으며, 부식이 없으며, 흘러내리는
응축수가 없을 것
IEC 721-3-3, unit in operation, class 3C2
IEC 721-3-3, unit in operation, class 3S2
1000m까지는 디레이팅이 없이 100%의 성능을 냄.
1000m이상에서는 매 100m당 1%의 디레이팅 발생.
3…150 Hz
변위 진폭 1 mm (peak) @ 3...15.8 Hz 최대
최대 가속 진폭1 G @15.8...150 Hz
UPS 낙하테스트(UPS무게를 적용)
보관 및 선적: max 15 G, 11 ms (in package)
IP20 / IP21 / Nema 1 for MI1-3
EMC
표준
인증 및
제조업체의
관련법규 준수
선언
표 10.1: Vacon 10 technical data
방출
230V: 내부 RFI 필터로 EMC 카테고리 C2 적합;
400V: 내부 RFI 필터로 EMC 카테고리 C2 적합;
Both: No EMC emission protection (Vacon level N): RFI
필터가 없음
For EMC: EN61800-3
For safety: UL508C, EN61800-5
안전: CE, UL, cUL
For EMC: CE
더 자세한 인증관련 사항은 인버터 명판을 참조하십시오
10
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

10.2 정격 용량
10.2.1 Vacon 10 – 입력전압208-240 V
주 전압208-240V, 50/60 Hz, 1~ series
vacon • 95
주파수
변환기
타입
0001 1.7 2.6 0.33 0.25 4.2 MI1 0.55
0002 2.4 3.6 0.5 0.37 5.7 MI1 0.55
0003 2.8 4.2 0.75 0.55 6.6 MI1 0.55
0004 3.7 5.6 1 0.75 8.3 MI2 0.7
0005 4.8 7.2 1.5 1.1 11.2 MI2 0.7
0007 7 10.5 2 1.5 14.1 MI2 0.7
0009* 9.6 14.4 3 2.2 22.1 MI3 0.99
100% contin.
Current IN[A]
표 10.2: Vacon 10 power ratings, 208-240V
* 드라이브의 주위 최대온도는 40 °C 입니다.
정격 부하
150% over-
load current
[A]
모터 샤프트
파워
P
[HP] P [KW]
정격입력
전류
[A]
미케니컬l
사이즈
무게
(kg)
입력전압208 - 240 V, 50/60 Hz, 3~ series
주파수
변환기
타입
0001 1.7 2.6 0.33 0.25 2.7 MI1 0.55
100% contin.
Current IN[A]
정격 부하
150% over-
load IN [A] P [HP] P [KW]
모터 샤프트
파워
주입력
전류
[A]
기계
사이즈
무게
(kg)
0002 2.4 3.6 0.5 0.37 3.5 MI1 0.55
0003 2.8 4.2 0.75 0.55 3.8 MI1 0.55
0004 3.7 5.6 1 0.75 4.3 MI2 0.7
0005 4.8 7.2 1.5 1.1 6.8 MI2 0.7
0007* 7 10.5 2 1.5 8.4 MI2 0.7
0011* 11 16.5 3 2.2 13.4 MI3 0.99
표 10.3: Vacon 10 power ratings, 208-240 V, 3~
* 드라이브의 주위 최대온도는 +40 °C 입니다.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
10

96 • vacon
10.2.2 Vacon 10 – 입력전압115 V
주 전압115 V, 50/60 Hz, 1~series
주파수
변환기
타입
0001 1.7 2.6 0.33 0.25 9.2 MI2 0.7
0002 2.4 3.6 0.5 0.37 11.6 MI2 0.7
0003 2.8 4.2 0.75 0.55 12.4 MI2 0.7
0004 3.7 5.6 1 0.75 15 MI2 0.7
0005 4.8 7.2 1.5 1.1 16.5 MI3 0.99
100% contin.
Current IN [A]
표 10.4: Vacon 10 power ratings, 115 V, 1~
정격 부하
150% over-
load current[A] P [HP] P [KW]
모터 샤프트
파워
정격 입력
전류
기계
사이즈
[A]
10.2.3 Vacon 10 – 입력전압380-480 V
입력전압380-480 V, 50/60 Hz, 3~ series
주파수
변환기
타입
정격 부하
100% contin.
Current IN [A]
모터 샤프트
파워
150% over-
load current[A] P [HP] P [KW]
공칭 입력
전류
기계
사이즈
[A]
무게
(kg)
무게
[kg]
0001 1.3 2 0.5 0.37 2.2 MI1 0.55
0002 1.9 2.9 0.75 0.55 2.8 MI1 0.55
0003 2.4 3.6 1 0.75 3.2 MI1 0.55
0004 3.3 5 1.5 1.1 4 MI2 0.7
0005 4.3 6.5 2 1.5 5.6 MI2 0.7
0006 5.6 8.4 3 2.2 7.3 MI2 0.7
0008 7.6 11.4 4 3 9.6 MI3 0.99
0009 9 13.5 5 4 11.5 MI3 0.99
0012 12 18 7.5 5.5 14.9 MI3 0.99
표 10.5: Vacon 10 power ratings, 380-480 V
10
Tel. +358 (0)201 2121 • Fax +358 (0)201 212 205

10.2.4 Vacon 10 – 입력전압575 V
vacon • 97
주전압575V, 50/60 Hz, 3~ series
주파수
변환기
타입
0002 1,7 2,6 1 0,75 2 MI3 0,99
0003 2,7 4,2 2 1,5 3,6 MI3 0,99
0004 3,9 5,9 3 2,2 5 MI3 0,99
0006 6,1 9,2 5 3.7 7,6 MI3 0,99
0009 9 13,5 7.5 5,5 10,4 MI3 0,99
100% contin.
Current IN [A]
표 10.6: Vacon 10 power ratings, 575 V
정격 부하
150% over-
load current [A] P [HP] P [KW]
모터 샤프트
파워
정격입력
전류
기계
사이즈
[A]
주의 1: 이 전류 입력 값은 100 kVA 라인 변압기 공급으로 계산되었습니다.
주의 2: 기계 치수는 챕터3.1.1에 소개되어 있습니다.
10.3 제동저항
Vacon 10 타입
MI2 204-240V, 3~ 50 Ohm - - -
최소
제동저항
레지스터 타입 코드 (from Vacon NX family)
경부하 중부하 저항
무게
(kg)
MI2 380-480V, 3~ 118 Ohm - - -
MI3 204-240V, 3~ 31 Ohm - - -
MI3 380-480V, 3~ 55 Ohm BRR-0022-LD-5 BRR-0022-HD-5 63 Ohm
MI3 575V, 3~ 100 Ohm BRR-0013-LD-6 BRR-0013-HD-6 100 Ohm
주의! MI2와 MI3 3페이스 유닛만 브레이크 쵸퍼가 연결되어 있습니다.
더 많은 정보를 위하여 Vacon NX Brake Resistor 매뉴얼(UD00971C)를
http://www.vacon.com / Support & Downloads 에서 찾으십시오.
24-hour support +358 (0)201 212 575 • Email: vacon@vacon.com
10

Find your nearest Vacon office
on the Internet at:
www.vacon.com
Manual authoring:
documentation@vacon.com
Vacon Plc.
Runsorintie 7
65380 Vaasa
Finland
Subject to change without prior notice
© 2015 Vacon Plc.
Document ID:
Rev. E1
Sales code: DOC-INSV10+DLKR
 Loading...
Loading...