

Page 1

操作指南
VLT® Multiaxis Servo Drive MSD 510
System
Page 2

Page 3
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
目录
1
简介 15
1.1
本操作指南的目的 15
其他资源 15
1.2
版权所有 15
1.3
1.4
批准和认证 15
1.5
应用领域 16
1.6
软件 17
1.7
术语 17
2
安全性 18
安全符号 18
2.1
安全说明和预防措施 18
2.2
操作安全 18
2.2.1
目录
重要安全警告 19
2.3
2.4
具备资质的人员 20
2.5
尽职事项 20
2.6
预期用途 20
2.6.1
禁止应用区域 21
2.7
可预测的误用 21
2.8
服务和支持 21
3
系统描述 22
3.1
VLT® Multiaxis Servo Drive System MSD 510 的概述 22
3.1.1
应用示例 23
3.1.2
模块最大数量 23
3.2
电源模块 PSM 510 24
3.2.1
概述 24
3.2.2
PSM 510 顶部的连接器 25
3.2.3
PSM 510 底部的连接器 25
3.3
伺服驱动器模块 SDM 511/SDM 512 26
3.3.1
概述 26
3.3.2
SDM 511/SDM 512 类型 26
3.3.3
组件 27
3.3.3.1
3.3.4
SDM 511 上的连接器 27
3.3.4.1
3.3.4.2
冷却 27
SDM 511 顶部的连接器 28
SDM 511 底部的连接器 28
AQ262450196490zh-000101/175R1170 | 3Danfoss A/S © 2019.10
Page 4
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
3.4
3.5
3.6
3.7
目录
3.3.5
SDM 512 上的连接器 29
3.3.5.1
3.3.5.2
分布式访问模块 DAM 510 30
3.4.1
概述 30
3.4.2
DAM 510 顶部的连接器 31
3.4.3
DAM 510 底部的连接器 32
辅助电容器模块 ACM 510 32
3.5.1
概述 32
3.5.2
ACM 510 顶部的连接器 33
扩展模块 EXM 510 34
本地控制面板 (LCP) 35
3.7.1
本地控制面板概述 35
3.7.2
本地控制面板的布局 35
SDM 512 顶部的连接器 29
SDM 512 底部的连接器 29
3.7.2.1
3.7.2.2
3.7.2.3
3.7.2.4
3.8
电缆 38
3.8.1
混合电缆 38
3.8.2
以太网电缆 39
3.8.3
LCP 电缆 39
3.9
电缆布局和敷设 39
3.9.1
最大电缆长度 40
3.9.2
输出滤波器的接线 40
3.9.3
用于 2 个分布式访问模块 (DAM 510) 的标准布线概念 40
3.10
软件 41
3.11
现场总线 41
3.11.1
EtherCAT® 42
3.11.2
以太网 POWERLINK® 43
A: 显示区 35
B: 显示菜单键 37
C: 导航键和指示灯 (LED)。 37
D: 操作键和复位 38
3.11.3
PROFINET® 43
4
机械安装 44
4.1
提供的物品 44
4.2
运输 44
4.3
收货查验 44
4.4
安装过程中的安全措施 44
4.5
安装环境 44
AQ262450196490zh-000101/175R11704 | Danfoss A/S © 2019.10
Page 5
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
4.5.1
系统组件 44
4.6
安装准备 45
4.6.1
系统模块 45
4.6.2
钻孔样板 45
4.7
安装过程 45
4.7.1
系统模块的空间要求 45
4.7.2
需要的安装辅助装置和工具 47
4.7.3
系统模块安装说明 47
5
电气安装 52
5.1
电气安装警告 52
5.2
电气环境条件 52
5.3
接地 53
5.3.1
接地确保电气安全 53
5.3.2
接地确保安装符合 EMC 规范 53
目录
5.4
主电源要求 55
5.4.1
熔断器 55
5.4.2
断路器 55
5.5
辅助电源要求 55
5.5.1
熔断器 56
5.6
安全电源要求 56
5.7
UL 要求 56
5.8
连接伺服驱动器模块 SDM 511/SDM 512 57
5.8.1
连接电机电缆 57
5.8.2
连接制动/热敏电阻电缆 58
5.8.3
连接伺服驱动器模块 SDM 511/SDM 512 顶部的电缆 59
5.9
连接电源模块 PSM 510 60
5.9.1
交流线路电抗器 60
5.9.1.1
5.9.1.2
5.9.1.3
将 1 个 PSM 510 连接到交流电抗器 60
将 2 个 PSM 510 模块连接到交流电抗器 61
将 2 个 PSM 510 模块连接到带有系统拆分装置的交流电抗器 61
5.9.2
连接电源模块 PSM 510 上的电缆 62
5.9.2.1
5.9.2.2
5.10
连接分布式访问模块 (DAM 510) 63
5.10.1
连接分布式访问模块 DAM 510 顶部的电缆 63
5.10.2
连接馈电电缆 64
5.11
连接辅助电容器模块 ACM 510 65
连接电源模块 PSM 510 顶部的电缆 62
连接电源模块 PSM 510 底部的电缆 63
AQ262450196490zh-000101/175R1170 | 5Danfoss A/S © 2019.10
Page 6
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
5.12
连接扩展模块 EXM 510 66
5.13
连接 PSM 510 上的制动电阻器 67
6
调试 70
6.1
调试警告 70
6.2
预调试检查表 70
6.3
SDM 511/SDM 512 配置参数和变频器调试 70
6.3.1
配置参数子工具 70
6.3.2
变频器调试子工具 71
6.4
EtherCAT® ID 分配 71
6.5
以太网 POWERLINK® ID 分配 71
6.5.1
概述 71
6.5.2
单设备 ID 分配 71
6.5.2.1
6.5.2.2
在伺服驱动器或系统模块上直接设置节点 ID 71
通过 LCP 为连接到电源模块 (PSM 510) 或分布式访问模块 (DAM 510) 的单个伺服驱动器设置节点
ID 72
目录
6.5.3
多设备 ID 分配 72
6.5.3.1
6.6
PROFINET® ID 分配 73
6.7
加电时间 73
6.8
系统模块充电时间 74
6.9
打开 MSD 510 系统 74
6.9.1
打开 MSD 510 系统的操作步骤 74
6.10
库 74
6.11
使用 Automation Studio™ 编程 75
6.11.1
使用 Automation Studio™ 编程的要求 75
6.11.2
创建 Automation Studio™ 项目 75
6.11.3
在 Automation Studio™ 项目中包括伺服运动库 75
6.11.4
DDS_Drive 库内的常量 76
6.11.5
在 Automation Studio™ 中实例化 AXIS_REF_DDS 77
6.11.6
在 Automation Studio™ 中实例化 PSM_REF 78
设置分布式访问模块 (DAM 510)/电源模块 (PSM 510) 线路上的所有伺服驱动器和系统模块的节点
ID 72
6.11.7
在 Automation Studio™ 中实例化 DAM_REF 78
6.11.8
在 Automation Studio™ 中实例化 ACM_REF 78
6.11.9
将伺服驱动器导入到 Automation Studio™ 中 78
6.11.9.1
6.11.9.2
6.11.10
将 PSM 510、DAM 510 和 ACM 510 导入到 Automation Studio™ 中 80
6.11.10.1
版本 V3.0.90 78
版本 V4.x 79
版本 V3.0.90 80
AQ262450196490zh-000101/175R11706 | Danfoss A/S © 2019.10
Page 7
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
6.12
目录
6.11.10.2
6.11.11
I/O 配置和 I/O 映射 81
6.11.12
设置 PLC 周期时间 83
6.11.13
连接到 PLC 83
使用 TwinCAT® 编程 84
6.12.1
使用 TwinCAT® 编程的要求 84
6.12.2
创建 TwinCAT® 项目 84
6.12.3
在 TwinCAT® 项目中包括 TwinCAT® 库 84
6.12.4
DDS_Drive 库内的常量 76
6.12.5
在 TwinCAT® 中实例化 AXIS_REF_DDS 86
6.12.6
在 TwinCAT® 中实例化 PSM_REF 87
6.12.7
在 TwinCAT® 中实例化 DAM_REF 87
6.12.8
在 TwinCAT® 中实例化 ACM_REF 87
6.12.9
在 TwinCAT® System Manager 中添加 PLC 项目 87
版本 V4.x 80
6.12.10
将设备导入 TwinCAT® 87
6.12.11
I/O 配置和 I/O 映射 90
6.12.12
将输入和输出变量与物理数据点相关联 91
6.12.13
将映射传回 PLC 程序 92
6.12.14
在 TwinCAT® PLC Control 中设置 PLC 周期时间 93
6.12.15
配置为 TwinCAT® NC 轴 94
6.12.15.1
6.12.16
连接到 PLC 94
6.13
Automation Studio™ 和 TwinCAT® 编程指南 94
6.14
使用 SIMOTION SCOUT® 编程 95
6.14.1
使用 SIMOTION SCOUT® 编程的要求 95
6.14.2
连接到 PLC 95
6.14.3
创建 SIMOTION SCOUT® 项目 95
6.14.4
在 SIMOTION SCOUT® 项目中包括伺服运动库 95
6.14.5
将设备导入 SIMOTION SCOUT® 98
6.14.6
分配 IP 配置和设备名 99
用作 NC 轴的伺服驱动器的 I/O 配置 94
6.14.7
创建同步域 102
6.14.8
配置拓扑结构 105
6.14.9
定义发送时钟和更新时间 106
6.14.9.1
6.14.9.2
6.14.10
访问输入和输出 107
6.14.11
使用丹佛斯 VLT® Servo Motion Library 编程 107
6.14.12
在 SIMOTION SCOUT® 中实例化 AXIS_REF_DDS 108
配置发送时钟时间 106
配置更新时间 106
AQ262450196490zh-000101/175R1170 | 7Danfoss A/S © 2019.10
Page 8
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
6.15
6.16
目录
6.14.13
在 SIMOTION SCOUT® 中实例化 PSM_REF 108
6.14.14
在 SIMOTION SCOUT® 中实例化 DAM_REF 108
6.14.15
在 SIMOTION SCOUT® 中实例化 ACM_REF 109
6.14.16
全局编译器设置 109
6.14.17
分配任务 110
SIMOTION SCOUT® 编程指南 112
VLT® Servo Toolbox 软件 112
6.16.1
概述 112
6.16.2
系统要求 113
6.16.3
安装 VLT® Servo Toolbox 软件 113
6.16.4
VLT® Servo Toolbox 通信 113
6.16.4.1
6.16.4.2
6.16.4.3
概述 113
防火墙 113
间接通信 113
6.16.4.4
6.17
VLT® Servo Toolbox 调试 118
6.17.1
步骤 1: 打开主窗口 118
6.17.2
步骤 2: 连接到网络 119
6.17.3
步骤 3: 扫描设备 120
6.18
运动库 120
6.18.1
功能块 120
6.18.2
简单编程模板 120
7
运行 122
7.1
运行模式 122
7.1.1
支持的运行模式 122
7.1.2
运动功能 122
7.2
运行状态指示灯 122
7.2.1
SDM 511 和 SDM 512 上的工作指示 LED 123
7.2.2
PSM 510 上的工作指示 LED 124
7.2.3
DAM 510 上的工作指示 LED 125
直接通信 116
7.2.4
ACM 510 上的工作指示 LED 126
8
功能安全概念 128
8.1
功能说明 128
8.2
安全事项 128
8.3
由具备资质的人员处理功能安全 129
8.4
适用标准和合规性 129
8.5
缩略语与约定 129
AQ262450196490zh-000101/175R11708 | Danfoss A/S © 2019.10
Page 9
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
8.6
安装 130
8.6.1
保护措施 130
8.7
应用示例 131
8.8
启用测试 131
8.8.1
使用库进行启用测试 131
8.8.2
使用 PROFINET® 设备执行启用测试 133
8.9
STO 功能的操作 133
8.9.1
错误代码 134
8.9.2
故障复位 134
8.10
功能安全特性数据 134
8.11
维护、安全性和用户可访问性 135
9
诊断 136
9.1
故障 136
9.2
故障排查 136
目录
9.2.1
伺服驱动器模块 SDM 511/SDM 512 故障排查 136
9.2.1.1
9.2.1.2
9.2.1.3
9.2.1.4
9.2.1.5
9.2.1.6
9.2.1.7
9.2.1.8
9.2.1.9
9.2.1.10
9.2.1.11
9.2.1.12
9.2.1.13
9.2.1.14
9.2.1.15
驱动器不运行/启动慢 136
驱动器发出嗡嗡声且消耗高电流 136
驱动器突然停机,无法重启。 136
电机旋转方向错误 137
电机无法产生期望的转矩 137
驱动器发出尖啸声 137
运行不平稳 137
振动 137
异常运行噪音 137
驱动器速度突降至欠载状态 138
制动不松开 138
夹持制动而不夹持伺服驱动器 138
制动接合延迟 138
断电制动接合时发出噪音 138
LED 指示灯不亮 138
9.2.1.16
9.2.2
伺服系统故障排查 139
9.2.2.1
9.2.2.2
9.2.2.3
9.2.2.4
9.2.2.5
驱动器立即出现保护跳闸 138
LCP 黑屏/无法使用 139
电源熔断器开路或断路器跳闸 139
直流回路电压过高(错误 0x3210/0x103) 139
直流回路电压过低(错误 0x3220/0x104) 140
直流回路过电流(错误 0x2396/0x15C) 140
AQ262450196490zh-000101/175R1170 | 9Danfoss A/S © 2019.10
Page 10
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
9.3
目录
9.2.2.6
9.2.2.7
9.2.2.8
9.2.2.9
9.2.2.10
9.2.2.11
9.2.2.12
9.2.2.13
9.2.2.14
9.2.2.15
错误代码 142
9.3.1
无错误 (0x0000 / 0x0) 142
9.3.2
一般性错误 (0x1000 / 0x100) 142
9.3.3
输出端过电流 (0x2310 / 0x101) 142
直流回路过功率(错误 0x2313/0x161) 140
PT 功率过载(错误 0x2314/0x162) 140
UAUX 过电流(错误 0x2391/0x125) 140
UAUX 过电压(错误 0x3292/0x133) 141
UAUX 欠压(错误 0x3294/0x135) 141
主电源缺相(错误 0x3130/0x12F) 141
接地故障 141
制动电阻器出错 141
制动斩波器出错 142
内部风扇出错 142
9.3.4
高电流过载 (0x2311 / 0x15F) 142
9.3.5
I2T 电流过载 (0x2312 / 0x160) 143
9.3.6
高功率过载 (0x2313 / 0x161) 143
9.3.7
PT 功率过载 (0x2314 / 0x162) 143
9.3.8
短路 (0x2320 / 0x163) 143
9.3.9
接地漏电 (0x2330 / 0x151) 143
9.3.10
辅助线路过电流 (0x2391 / 0x125) 143
9.3.11
辅助线路用户限制电流 (0x2393 / 0x127) 144
9.3.12
辅助线路用户限制电流警告 (0x2394 / 0x128) 144
9.3.13
辅助线路熔断器出错 (0x2395 / 0x129) 144
9.3.14
直流过电流跳闸 (0x2396 / 0x15C) 144
9.3.15
输出功率跳闸 (0x2397 / 0x12B) 144
9.3.16
电机 I2T 过载 (0x239B / 0x102) 144
9.3.17
主电源缺相 (0x3130 / 0x12F) 145
9.3.18
直流回路过电压 (0x3210 / 0x103) 145
9.3.19
软件过电流跳闸 (0x3210 / 0x103) 145
9.3.20
直流回路欠压 (0x3220 / 0x104) 145
9.3.21
UDC 充电错误 (0x3230 / 0x152) 145
9.3.22
直流回路电压不平衡 (0x3280 / 0x153) 145
9.3.23
UAUX 电压过高 (0x3291 / 0x132) 146
9.3.24
UAUX 过电压 (0x3292 / 0x133) 146
9.3.25
UAUX 电压过低 (0x3293 / 0x134) 146
9.3.26
UAUX 欠压 (0x3294 / 0x135) 146
9.3.27
UDC 电压过高 (0x3295 / 0x136) 146
AQ262450196490zh-000101/175R117010 | Danfoss A/S © 2019.10
Page 11
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
9.3.28
UDC 电压过低 (0x3296 / 0x137) 146
9.3.29
UAUX 充电错误 (0x3297 / 0x154) 147
9.3.30
UDC 关闭错误 (0x3298 / 0x165) 147
9.3.31
UAUX 关闭错误 (0x3299 / 0x155) 147
9.3.32
UAUX 欠压硬件 (0x329A / 0x156) 147
9.3.33
自动故障复位出错 (0x329B / 0x168) 147
9.3.34
设备温度过高 (0x4210 / 0x157) 148
9.3.35
温度过低 (0x4220 / 0x138) 148
9.3.36
温度过高: 电源模块 (0x4290 / 0x105) 148
9.3.37
温度过高: 控制卡 (0x4291 / 0x106) 148
9.3.38
温度过高: 功率卡 (0x4292 / 0x107) 148
9.3.39
浪涌导致温度过高: 直流回路 (0x4293 / 013C) 149
9.3.40
AUX 线路浪涌导致温度过高 (0x4294 / 0x13D) 149
9.3.41
温度过高: 电机 (0x4310 / 0x108) 149
目录
9.3.42
UAUX 欠压 (0x5112 / 0x109) 149
9.3.43
充电开关故障电压 (0x5121 /0x158) 149
9.3.44
EE 校验和错误(参数缺失)(0x5530 / 0x10A) 149
9.3.45
参数错误 (0x6320 / 0x10B) 150
9.3.46
配置参数版本错误 (0x6382 / 0x15D) 150
9.3.47
配置参数限值错误 (0x6383 / 0x164) 150
9.3.48
功率 EEprom 配置错误 (0x6384 / 0x166) 150
9.3.49
制动斩波器出错 (0x7111 / 0x141) 150
9.3.50
制动斩波器过电流 (0x7112 / 0x167) 151
9.3.51
制动电阻器最大功率极限 (0x7181 / 0x142) 151
9.3.52
制动电阻器用户功率极限 (0x7182 / 0x143) 151
9.3.53
制动电压过高 (0x7183 / 0x159) 151
9.3.54
内部位置传感器错误 (0x7320 / 0x10C) 151
9.3.55
外部位置传感器错误 (0x7380 / 0x10D) 151
9.3.56
跟随性错误 (0x8611 / 0x10E) 152
9.3.57
进入归位模式时出现归位错误 (0x8693 / 0x10F) 152
9.3.58
启动归位方法时出现归位错误 (0x8694 / 0x110) 152
9.3.59
归位错误距离 (0x8695 / 0x111) 152
9.3.60
机械制动故障 (0xFF01 / 0x112) 152
9.3.61
机械制动控制中出现短路 (0xFF02 / 0x113) 152
9.3.62
外部接口电源故障 (0xFF0A / 0x114) 153
9.3.63
通信中断 (0xFF10 / 0x14F) 153
9.3.64
风扇反馈不一致 (0xFF21 / 0x145) 153
9.3.65
风扇使用寿命到期 (0xFF22 / 0x15A) 153
AQ262450196490zh-000101/175R1170 | 11Danfoss A/S © 2019.10
Page 12
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
9.3.66
定时违规 1 (0xFF60 / 0x115) 153
9.3.67
定时违规 2 (0xFF61 / 0x116) 153
9.3.68
定时违规 3 (0xFF62 / 0x117) 154
9.3.69
定时违规 4 (0xFF63 / 0x118) 154
9.3.70
定时违规 5 (0xFF64 / 0x119) 154
9.3.71
定时违规 6 (0xFF65 / 0x11A) 154
9.3.72
定时违规 7 (0xFF66 / 0x168) 154
9.3.73
定时违规 8 (0xFF67 / 0x16B) 154
9.3.74
定时违规 9 (0xFF68 / 0x16C) 155
9.3.75
固件: 程序包描述不匹配 (0xFF70 / 0x11B) 155
9.3.76
固件: 需要重启 (0xFF71 / 0x11C) 155
9.3.77
固件: 已开始更新 (0xFF72 / 0x11D) 155
9.3.78
固件: 更新无效 (0xFF73 / 0x15B) 155
9.3.79
启用驱动器后激活 STO (0xFF80 / 0x11E) 155
目录
9.3.80
STO 不匹配 (0xFF81 / 0x11F) 156
9.3.81
P_STO 错误 (0xFF85 / 0x120) 156
9.3.82
指导值相反 (0xFF90 / 0x121) 156
9.3.83
指导值不可信 (0xFF91 / 0x122) 156
9.3.84
运行迹象错误 (0xFF95 / 0x14E) 156
10
维护、报废和处置 157
10.1
警告 157
10.2
维护任务 157
10.3
运行期间的检查 157
10.3.1
系统组件 157
10.4
维修 157
10.5
系统组件更换 157
10.5.1
拆装系统组件 157
10.5.2
安装和调试系统组件 159
10.6
电缆更换 160
10.6.1
概述 160
10.6.2
馈电电缆更换 160
10.6.2.1
10.6.2.2
10.6.2.3
10.6.3
环路电缆更换 160
10.6.3.1
10.6.3.2
断开馈电电缆的连接 160
更换馈电电缆 160
连接馈电电缆 160
断开环路电缆的连接 160
更换环路电缆 161
AQ262450196490zh-000101/175R117012 | Danfoss A/S © 2019.10
Page 13
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
10.6.3.3
10.7
在分布式访问模块 (DAM 510) 中更换熔断器 161
10.8
更换风扇 162
10.9
产品退回 163
10.10
回收 163
10.11
处置 163
11
规格 164
11.1
铭牌 164
11.1.1
系统模块正面的铭牌示例 164
11.1.2
系统模块侧面的铭牌示例 164
11.2
电源模块 (PSM 510) 165
11.2.1
PSM 510 的尺寸 165
11.2.2
PSM 510 的特性数据 166
11.3
伺服驱动器模块 (SDM 511/SDM 512) 167
连接环路电缆 161
目录
11.3.1
电机过载保护 167
11.3.2
电机温度过高保护 167
11.3.3
尺寸 168
11.3.4
SDM 511 特性数据 169
11.3.5
SDM 512 特性数据 170
11.4
分布式访问模块 (DAM 510) 171
11.4.1
DAM 510 的尺寸 171
11.4.2
DAM 510 的特性数据 172
11.4.3
混合电缆保护 172
11.5
辅助电容器模块 (ACM 510) 173
11.5.1
尺寸 173
11.5.2
ACM 510 的特性数据 173
11.6
扩展模块 (EXM 510) 174
11.6.1
尺寸 174
11.6.2
EXM 510 的特性数据 174
11.7
系统模块上的连接器 174
11.7.1
背部链路连接器 174
11.7.2
制动连接器 176
11.7.2.1
11.7.2.2
11.7.3
以太网连接器 177
11.7.3.1
11.7.3.2
PSM 510 上的制动电阻器连接器 176
SDM 511/SDM 512 上的制动和电机温度传感器连接器 176
PSM 510 和 ACM 510 上的以太网连接器 177
DAM 510 上的以太网连接器 178
AQ262450196490zh-000101/175R1170 | 13Danfoss A/S © 2019.10
Page 14
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
11.7.3.3
11.7.4
I/O 连接器 178
11.7.4.1
11.7.4.2
11.7.5
UAUX 连接器 180
11.7.5.1
11.7.6
LCP 连接器(M8,6 芯) 181
11.7.7
交流主电源连接器 181
11.7.7.1
11.7.8
电机连接器 182
11.7.8.1
11.7.8.2
11.7.9
继电器连接器 183
11.7.9.1
SDM 511/SDM 512 上的以太网连接器 178
PSM 510/ACM 510 上的 I/O 连接器 178
SDM 511/512 上的 I/O 连接器 179
PSM 510 的 24/48 V 电缆横截面积 180
PSM 510 的电源电缆横截面积 182
SDM 511 的电机电缆横截面积 182
SDM 512 的电机电缆横截面积 182
PSM 510/ACM 510 上的继电器连接器 183
目录
11.7.9.2
11.7.10
STO 连接器 184
11.7.10.1
11.7.10.2
11.7.10.3
11.7.11
UDC 连接器 187
11.7.12
AUX 连接器 188
11.7.13
电机反馈连接器 188
11.7.14
外部编码器连接器 190
11.7.15
扩展模块连接器 191
11.8
MSD 510 系统的一般规格和环境条件 192
11.9
存放 192
SDM 511/SDM 512 上的继电器连接器 183
SDM 511 和 SDM 512 上的 STO 连接器 184
PSM 510 上的 STO 连接器 185
DAM 510 上的 STO 连接器 186
AQ262450196490zh-000101/175R117014 | Danfoss A/S © 2019.10
Page 15

手册
说明
VLT® Multiaxis Servo Drive MSD 510 系统操作手册
有关 MSD 510 伺服系统的安装、调试和操作的信息。
VLT® Servo Drive System ISD 510、DSD 510、MSD 510 设计指南
有关 MSD 510 伺服系统的设置的信息和详细技术数据。
VLT® Servo Drive System ISD 510、DSD 510、MSD 510 编程指南
有关 MSD 510 伺服系统编程的信息。
认证
说明
IEC/EN 61800-3
可调速电力传动系统。
第 3 部分: EMC 要求和特定测试方法。
IEC/EN 61800-5-1
可调速电力传动系统。
第 5-1 部分: 安全要求 - 电、热和能量。
IEC/EN 61800-5-2
可调速电力传动系统。
第 5-2 部分: 安全要求 - 功能。
IEC/EN 61508-1
电气/电子/可编程电子安全相关系统的功能安全。
第 1 部分: 一般要求。
IEC/EN 61508-2
电气/电子/可编程电子安全相关系统的功能安全。
第 2 部分: 电气/电子/可编程电子安全相关系统的要求。
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
简介
1 简介
1.1 本操作指南的目的
本操作指南旨在介绍 VLT® Multiaxis Servo Drive MSD 510 系统。
本操作系统包含有关以下方面的信息:
安装
•
调试
•
编程
•
运行
•
故障排查
•
保养和维护
•
本操作指南适用于具备相应资质的人员。请完整阅读本操作指南,保证安全且专业地使用伺服系统,特别注意安全说明和一般
性警告。
本操作指南是伺服系统不可或缺的一部分,其中还包含重要的维护信息。因此,务必妥善保管本操作指南,以便使用伺服系统
时随时可查。
遵守本手册中的信息是下列事项的前提条件:
无故障运行
•
产品责任索赔确认
•
因此,在开始使用 MSD 510 之前必须阅读本操作指南。
1.2 其他资源
表 1: 其他资源
1.3 版权所有
VLT® 是 Danfoss 的注册商标。
1.4 批准和认证
表 2: 批准和认证
AQ262450196490zh-000101 / 175R1170 | 15Danfoss A/S © 2019.10
Page 16
认证
说明
EN ISO 13849-1
机械安全 - 控制系统安全相关部件。
第 1 部分: 一般设计原则。
EN ISO 13849-2
机械安全 - 控制系统安全相关部件。
第 2 部分: 验证。
IEC/EN 60204-1
机械安全 - 机械电气设备。
第 1 部分: 一般要求。
IEC/EN 62061
机械安全 - 电气、电子和可编程电子控制系统的安全相关的功能安全。
IEC/EN 61326-3-1
用于测量、控制和实验室使用的电气设备 – EMC 要求。
第 3-1 部分: 与安全相关的系统和用于执行安全相关功能(功能安全)的设备的抗扰性要求 -
一般工业应用。
IEC/EN 60529
机箱提供的防护等级(IP 代码)。
UL 508C
电力转换设备安全性的 UL 标准。
UL 61800-5-1
可调速电力传动系统。
第 5-1 部分: 安全要求 - 电、热和能量。
ISD 510 伺服驱动器尺寸 3 和 4:
MSD 510:
CE
2014/30/EU
电磁兼容性 (EMC) 指令。
2014/35/EU
低电压指令 (LVD)。
(2011/65/EU) 未修订
(EU) 2015/863
有害物质限制 (RoHS)。
2006/42/EC
机械指令 (MD)。
EtherCAT
®
用于控制自动化技术的以太网。基于以太网的现场总线系统。
以太网 POWERLINK
®
基于以太网的现场总线系统。
PROFINET RT/IRT
®
基于以太网的现场总线系统。
PLCopen
®
技术规格。运动控制功能块(以前称为第 1 部分和第 2 部分),版本 2.0,2011 年 3 月 17 日。
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
简介
1.5 应用领域
可能的应用领域:
AQ262450196490zh-000101 / 175R117016 | Danfoss A/S © | 2019.10
Page 17
术语
说明
ACM 510
辅助电容器模块
DAM 510
通过混合电缆将 Danfoss 分布式伺服驱动器(ISD 510 和 DSD 510)连接到伺服系统的分布式访问模
块。
DSD 510
分布式伺服驱动器
DSD 510 系统组件
包括 DSD 510 伺服驱动器、PSM 510、DAM 510 和可选的 ACM 510。
EXM 510
扩展模块
馈电电缆
用于从 DAM 510 连接到第一个伺服驱动器的混合电缆。
ISD 510
集成伺服驱动器
ISD 510 系统组件
包括 ISD 510 伺服驱动器、PSM 510、DAM 510 和可选的 ACM 510。
LCP
本地控制面板
环路电缆
用于按菊花链式连接伺服驱动器的混合电缆。
MSD 510
多轴伺服驱动器
MSD 510 系统组件
包括 SDM 511/SDM 512、PSM 510、DAM 510 和可选的 ACM 510。
PLC
可编程逻辑控制器(用于控制伺服系统的外部设备)。
PSM 510
生成 565–680 V 直流电源的电源模块。
SDM 511
伺服驱动器模块(单轴)
SDM 512
伺服驱动器模块(双轴)
系统模块
包括 PSM 510、DAM 510 和可选的 ACM 510。
VIN PSM
PSM 510 (V AC) 的输入。
V
OUT
PSM
PSM 510 (V DC) 的输出。
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
•
食品饮料设备
•
包装机
•
制药设备
•
运行一组伺服驱动器的应用
1.6 软件
固件更新,可使用 VLT® Servo Toolbox 软件和 PLC 库。有可用更新时,即可从 danfoss.com 网站下载。
可使用 VLT® Servo Toolbox 软件或 PLC 库在伺服驱动器或系统模块上安装固件。
1.7 术语
表 3: 术语
简介
AQ262450196490zh-000101 / 175R1170 | 17Danfoss A/S © 2019.10
Page 18
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
2 安全性
2.1 安全符号
本指南使用了下述符号:
警 告
表明某种潜在危险情况,将可能导致死亡或严重伤害。
注 意
表明某种潜在危险情况,将可能导致轻度或中度伤害。这还用于防范不安全的行为。
注 意
表示重要信息,包括可能导致设备或财产损坏的情况。
2.2 安全说明和预防措施
必须始终遵循安全说明并采取预防措施。
要实现伺服系统及其组件的无故障和安全运行,必须保证正确有序的运输、存放、安装以及仔细操作和维护。
•
只有经过相关培训且具备相应资质的人员才能在 MSD 510 系统及其组件上或其附近进行操作。
•
只能使用经 Danfoss 批准的附件和备件。
•
遵循指定的环境条件。
•
本手册中有关使用可用组件的信息全部通过应用示例和建议来提供。
•
设备工程师或系统工程师个人负责检查提供的组件的适用性,本手册中针对特定应用提供的信息涉及:
•
遵守与特定应用相关的安全法规和标准。
-
采取必要的措施以及实施更改和扩展。
-
在确定要将伺服系统或其组件安装到的机器、系统或工厂符合适用于使用国的应用的法定条款、安全法规和标准之前,不
•
允许对它们进行调试。
仅在符合相关应用的国家 EMC 法规时才允许操作。
•
遵循国家规范指定的限值是设备、系统或机器生产商的责任。
•
必须遵守本手册中的规格、连接条件和安装条件。
•
必须遵守使用设备时所在国家的安全法规和安全条款。
•
为防止用户遭受电击和伺服系统过载,必须进行保护接地,且必须按照地方和国家法规来执行。
•
安全性
2.2.1 操作安全
操作安全
仅当本手册中明确无误地提到与安全相关的应用时,才允许使用它们。
•
会导致人身伤害或财产损坏的所有应用都是与安全相关的应用。
•
在 PLC 软件中实施的停止功能不会中断电源模块 (PSM 510) 的市电电源。因此,不得使用它们来保证伺服系统的电气安
•
全。
伺服系统可通过软件命令或零速设置点停止,但是,伺服驱动器上仍存在直流电压和/或 PSM 510 中存在电源电压。而且,
•
当系统停止后,如果电路存在缺陷或临时过载状况消失后、电源电压存在问题或系统存在问题,则它可能自动再次启动。
如果出于人身安全方面(例如,在意外启动之后因接触运转中的机器部件而造成人身伤害的风险)的考虑,而必须保证不
会发生意外启动,这些停止功能是不够的。在此情况下,确保伺服系统与电网断开,防止电机意外启动,例如通过使用
Safe Torque Off 功能。
在参数配置或编程过程中,伺服系统可能会意外开始运行。如果这样会导致人身安全风险(例如,由于接触正在移动的机
•
器部件而造成人身伤害的风险),则需防止电机意外启动,例如通过使用 Safe Torque Off 功能或安全断开伺服驱动器。
除了 PSM 510 上的 L1、L2 和 L3 电源电压输入外,伺服系统还具有其他电源电压输入,包括外部辅助电压。在开始执行
•
修理工作前,请检查以确保所有电源电压输入已关闭,且直流回路电容器所需的放电时间已经过去。
AQ262450196490zh-000101 / 175R117018 | Danfoss A/S © | 2019.10
Page 19
最短等待时间(分钟)
15
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
安全性
2.3 重要安全警告
以下安全说明和注意事项与 VLT® Multiaxis Servo Drive MSD 510 系统相关。开始以任何方式使用伺服系统或其组件前,请
仔细阅读安全说明。特别注意本手册相关章节中的安全说明。
警 告
危险情况
如果伺服驱动器或总线线路错误连接,则存在死亡、严重伤害或设备损坏的风险。
务必遵守本手册中的说明以及国家和地方安全规定。
-
警 告
高电压
MSD 510 系统包含连接到电网后在高电压下运行的组件。这些组件上没有指示灯来指示是否已通电。错误安装、调试或维护
可能导致严重伤亡。
安装、调试和维护只能由具备相应资质的人员执行。
-
警 告
漏电/接地电流危险
漏电/接地电流超过 3.5 mA。MSD 510 系统模块错误接地可能会导致严重伤亡。
为了保护操作人员的安全,请按照适用的地方和国家电气标准和指令以及本手册中的操作说明,由经认证的电气安装员
-
将系统正确接地。
警 告
放电时间
MSD 510 系统包含直流回路电容器,该电容器在电源模块 (PSM 510) 的主电源关闭后保持充电一段时间。如果切断电源后
在规定的时间结束之前就执行维护或修理作业,可能导致死亡或严重伤害。
为避免电击,将电源模块 (PSM 510) 与主电源完全断开,并等待电容器完全放电后,再在伺服系统或其组件上执行任何
-
维护或维修工作。
危 险
Risque du choc électrique. Une tension dangereuse peut être présentée jusqu’à 15 min après avoir coupé
-
l’alimentation.
警 告
意外启动
MSD 510 系统包含连接到电网的伺服驱动器、PSM 510 和 DAM 510,可随时开始运行。这可能由现场总线命令、参考值信号
或消除故障状态的操作引发。伺服驱动器和所有连接的设备都必须具有良好运行状况。将设备连接到电网后,存在缺陷的运
行状况可能导致死亡、严重伤害、设备损坏或其他实质性损坏。
采取适合措施防止意外启动。
-
AQ262450196490zh-000101 / 175R1170 | 19Danfoss A/S © 2019.10
Page 20
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
警 告
意外运动
立即执行参数更改时,可能会出现意外运动,从而导致严重伤亡或设备损坏。
更改参数时,采取适合措施以确保意外运动不会导致任何危险。
-
注 意
灼伤危险
在工作期间,伺服驱动器的表面温度可能达到 90˚C 以上。
在伺服驱动器冷却之前,请勿触摸。
-
注 意
RCD 兼容性
MSD 510 系统包含可导致保护性接地导体中出现直流电流的组件,这可能会导致连接到该系统的任何设备出现故障。
在直接或间接接触情况下,如果使用漏电保护 (RCD) 或监控 (RCM) 装置来提供保护,则在 MSD 510 系统组件的电源
-
侧使用 B 型 RCD 或 RCM 装置。
安全性
2.4 具备资质的人员
安装、调试和维护只能由具备相应资质的人员执行。对于本手册和本手册中的安全说明而言,具备资质的人员是指经过培训且
经授权按照安全技术标准安装和调试设备、系统和电路并对它们进行接地和标记且熟悉自动化工程的安全概念的人员。
此外,这些人员还必须熟悉本手册中所述的所有操作说明和安全措施。他们必须具有适合的安全装备且经过急救培训。
2.5 尽职事项
操作员和/或装配工必须确保:
•
只按预期方式使用伺服系统及其组件。
•
只在理想工作条件下运行组件。
•
本操作手册始终放置在伺服系统附近,而且应完整且可读。
•
伺服系统及其组件的装配、安装、调试和维护只能由具备相应资质且获得授权的人员执行。
•
定期就职业安全和环境保护的所有相关事项,以及本操作手册的内容和其中的操作说明,对这些人员进行指导。
•
组件上的产品标识和识别标牌以及安全和警告说明没有去除,并始终保持清晰可读。
•
遵守与机器和设备控制有关的在伺服系统使用地适用的国家和国际法规。
•
用户始终掌握与他们在伺服系统及其使用和运行方面的利益相关的所有最新信息。
2.6 预期用途
MSD 510 系统的组件适用于按照当地法律和标准安装在工业环境中所用的机器中。
注 意
在家庭环境中,该产品可能会导致无线电干扰,此时可能需要采取补充抑制措施。
-
为确保按预期用途使用产品,使用前必须满足以下条件:
无论以何种方式使用 Danfoss 产品,所有操作人员都必须阅读并理解相应的安全法规和有关预期用途的说明。
•
请勿更改硬件的初始状态。
•
请勿对软件产品进行反向工程或更改它们的源代码。
•
请勿安装或操作损坏或出现故障的产品。
•
确保按照文档中提到的法规安装产品。
•
遵循所有规定的维护和保养间隔。
•
AQ262450196490zh-000101 / 175R117020 | Danfoss A/S © | 2019.10
Page 21

VLT® Multiaxis Servo Drive MSD 510 System
操作指南
•
采取所有保护措施。
•
仅安装本操作指南中所述的组件。仅当向 Danfoss 咨询后,才能使用第三方装置和设备。
安全性
2.6.1 禁止应用区域
不可在以下应用区域中使用该伺服系统:
•
存在潜在爆炸性环境的区域。
•
移动或便携式系统。
•
浮动或机载系统。
•
住宅。
•
存在放射性材料的地点。
•
存在极端温度变化或可能超过最高额定温度的区域。
•
水下。
2.7 可预测的误用
未经 Danfoss 明确许可的任何使用均属于错误使用。不遵守指定运行条件和应用的行为同样属于错误使用。对于错误使用造
成的任何损失,Danfoss 不承担任何种类的责任。
2.8 服务和支持
如需服务和支持,请与当地的服务代表联系。
AQ262450196490zh-000101 / 175R1170 | 21Danfoss A/S © 2019.10
Page 22
e30bg579.10
PSM
SDM 511
FS2
SDM 511
FS1
SDM 512
FS1
DAM 510
ACM 510
EXM 510
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
系统描述
3 系统描述
3.1 VLT® Multiaxis Servo Drive System MSD 510 的概述
VLT® Multiaxis Servo Drive System MSD 510 是一种高性能中央伺服运动解决方案。此开放式系统支持实时以太网协议
EtherCAT®、以太网 POWERLINK® 和 PROFINET®。
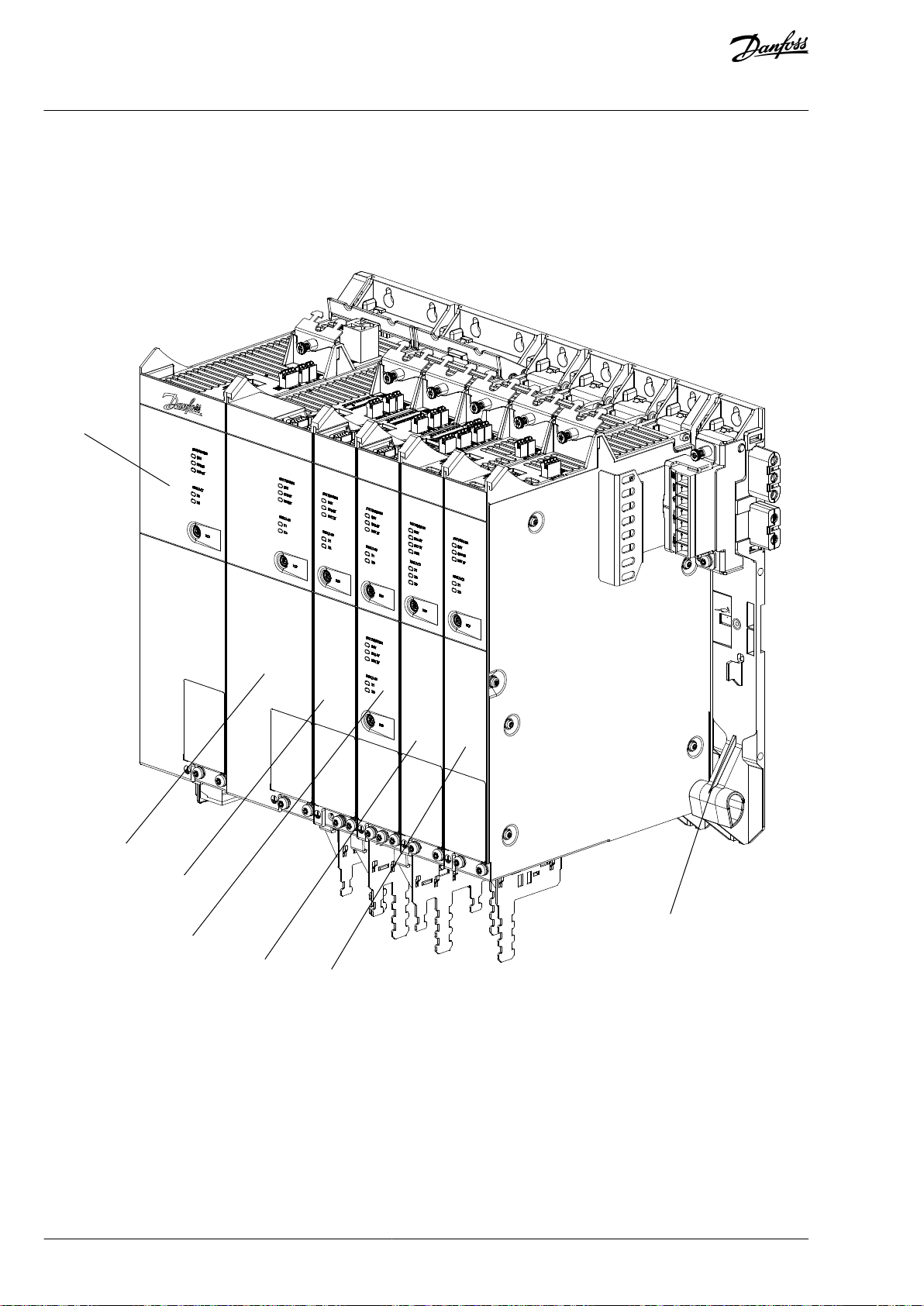
图解 1: MSD 模块
该系统包括:
•
电源模块 (PSM 510)
•
驱动器模块:
-
-
•
分布式访问模块 (DAM 510)
•
辅助电容器模块 (ACM 510)
单轴伺服驱动器模块 (SDM 511)
双轴伺服驱动器模块 (SDM 512)
AQ262450196490zh-000101 / 175R117022 | Danfoss A/S © | 2019.10
Page 23
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
•
扩展模块 (EXM 510)
•
软件:
-
伺服驱动器模块(SDM 511 和 SDM 512)的固件
-
电源模块 (PSM 510) 的固件
-
分布式访问模块 (DAM 510) 的固件
-
辅助电容器模块 (ACM 510) 的固件
-
VLT® Servo Toolbox
-
AutomationStudio©、TwinCAT®、SIMOTION Scout 和 TIA Portal 的 PLC 库。
一些模块提供 2 种机箱(机架)规格,宽度为 50 毫米 (FS1) 或 100 毫米 (FS2),具体取决于功率规格。
根据具体应用,可在中央系统中独占使用该系统,也可在混合系统中与 Danfoss 分布式伺服驱动器(ISD 510 和 DSD 510)一
起使用。必须使用交流电抗器。
系统模块 PSM 510、DAM 510、ACM 510 和驱动器模块 SDM 511/SDM 512 安装在位于控制柜中的背板上。该背板中集成有直流回
路和控制电压电源。“click and lock” 背板概念使安装变得非常简单。
系统描述
注 意
MSD 510 模块不能在其他制造商提供的伺服系统中使用。其他制造商提供的驱动器不能在 MSD 510 系统中使用。
-
请联系 Danfoss 了解详情。
-
注 意
系统模块的防护等级为 IP20,符合 IEC/EN 60529(连接器除外,防护等级为 IP00)标准。它们仅适合在控制柜内使
-
用。如果系统模块接触到液体,则可能会损坏。
3.1.1 应用示例
根据以下示例,VLT® Multiaxis Servo Drive MSD 510 系统有许多潜在的应用领域。
饮料设备
灌装
•
PET 吹塑
•
食品饮料包装机:
流程包装
•
制袋机
•
托盘密封
•
膜包
•
工业和制药包装机:
托盘分装
•
顶部上料器
•
纸箱包装
•
管道填充
•
吸塑机
•
液体灌装
•
固体计量
•
3.1.2 模块最大数量
MSD 510 系统中各模块的最大数量为:
AQ262450196490zh-000101 / 175R1170 | 23Danfoss A/S © 2019.10
Page 24
2
1
3
4
5
6
7
8
9
e30bg581.11
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
•
PSM 510: 每系统 2 个
•
DAM 510: 每系统 3 个(取决于系统体系结构,可添加更多个。与 Danfoss 联系以了解更多信息。)
•
SDM 511/SDM 512: 取决于伺服驱动器模块的电流额定值和输出功率以及工作过程中的辅助电流消耗量。请联系 Danfoss
了解详情。
系统描述
3.2 电源模块 PSM 510
3.2.1 概述
PSM 是电源模块 (Power Supply Module) 的缩写。它是伺服系统的电源。PSM 510 提供直流电压,并保证高密度输出。直流回
路和 24/48 V 直流电压通过背板中的背部链路分配到所有系统模块。PSM 510 可通过基于以太网的现场总线进行控制。
PSM 510 正面的 LED 指示工作状态和警告。
注 意
MSD 510 系统适合在控制机柜内使用。如果使用 STO 功能,则机柜防护等级必须至少为 IP54。
-
PSM 510 的防护等级为 IP20,符合 IEC/EN 60529(连接器除外,防护等级为 IP00)标准。
-
如果 PSM 510 接触到液体,则可能会损坏。
-
所有电源线都连接到 PSM 510,因此,每个系统至少需要一个 PSM 510。
PSM 510 还执行服务功能,比如电压测量,且通过内部风扇冷却。
PSM 510 具有 3 种功率规格,提供 10 kW、20 kW 或 30 kW 的输出功率,具有持续 3 秒的 200% 过载能力。可并联使用两个
PSM 510 模块,以实现最高达 60 kW 的输出功率。
PSM 510 类型代码的一个示例为: MSD510PSM510F2P10C0D6E20PLSXXXXXXXXXXXXX。
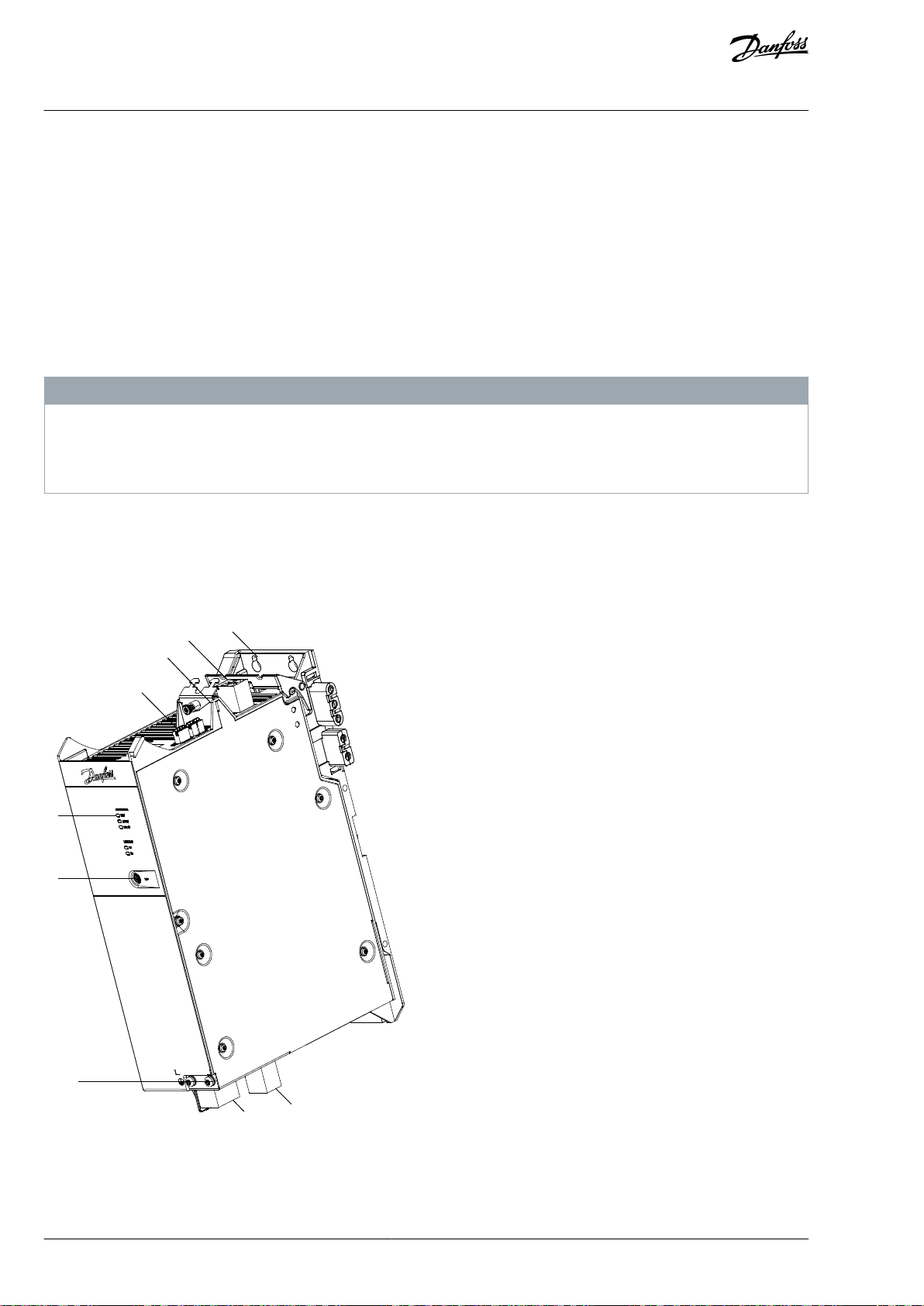
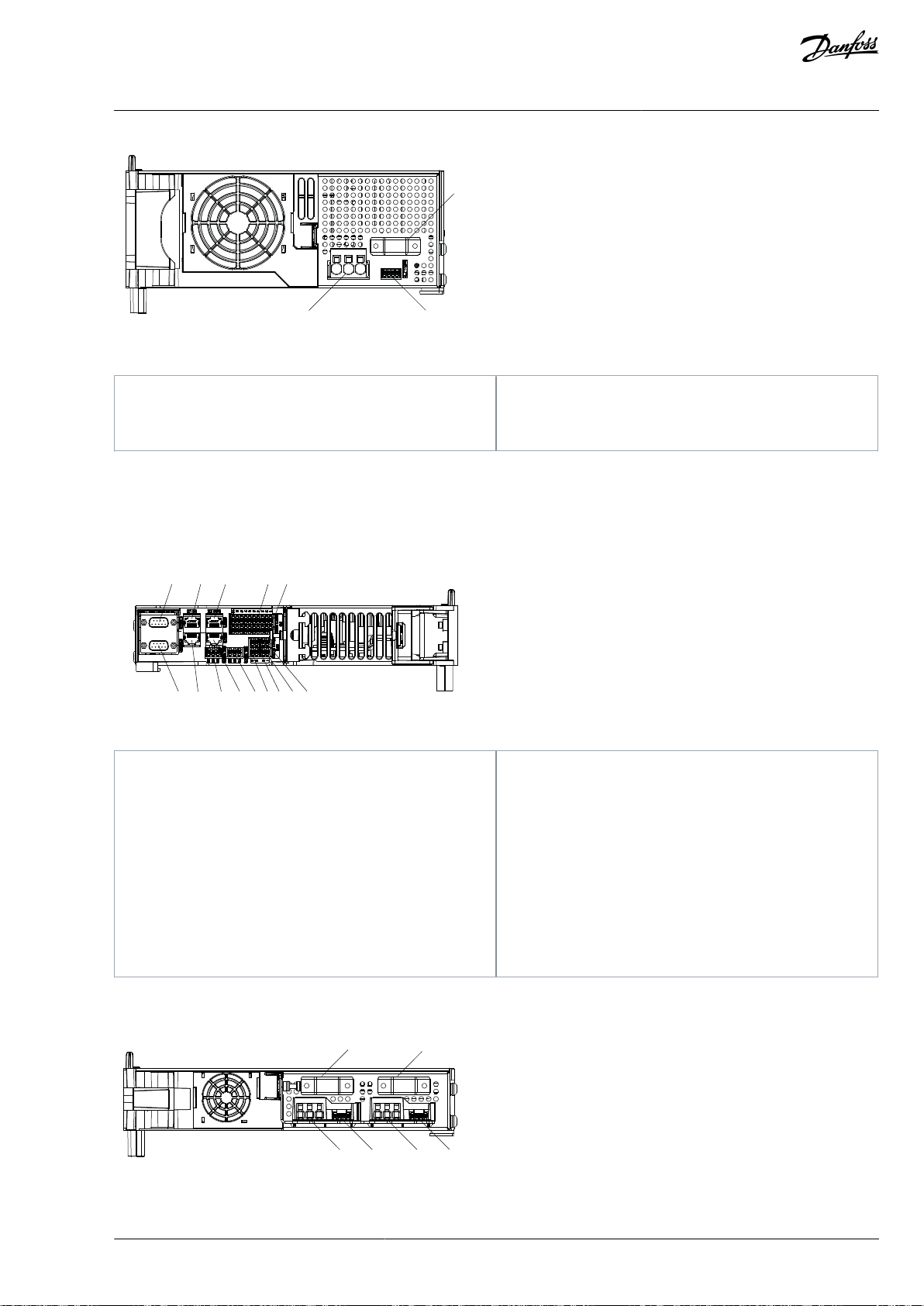
图解 2: PSM 510
AQ262450196490zh-000101 / 175R117024 | Danfoss A/S © | 2019.10
Page 25
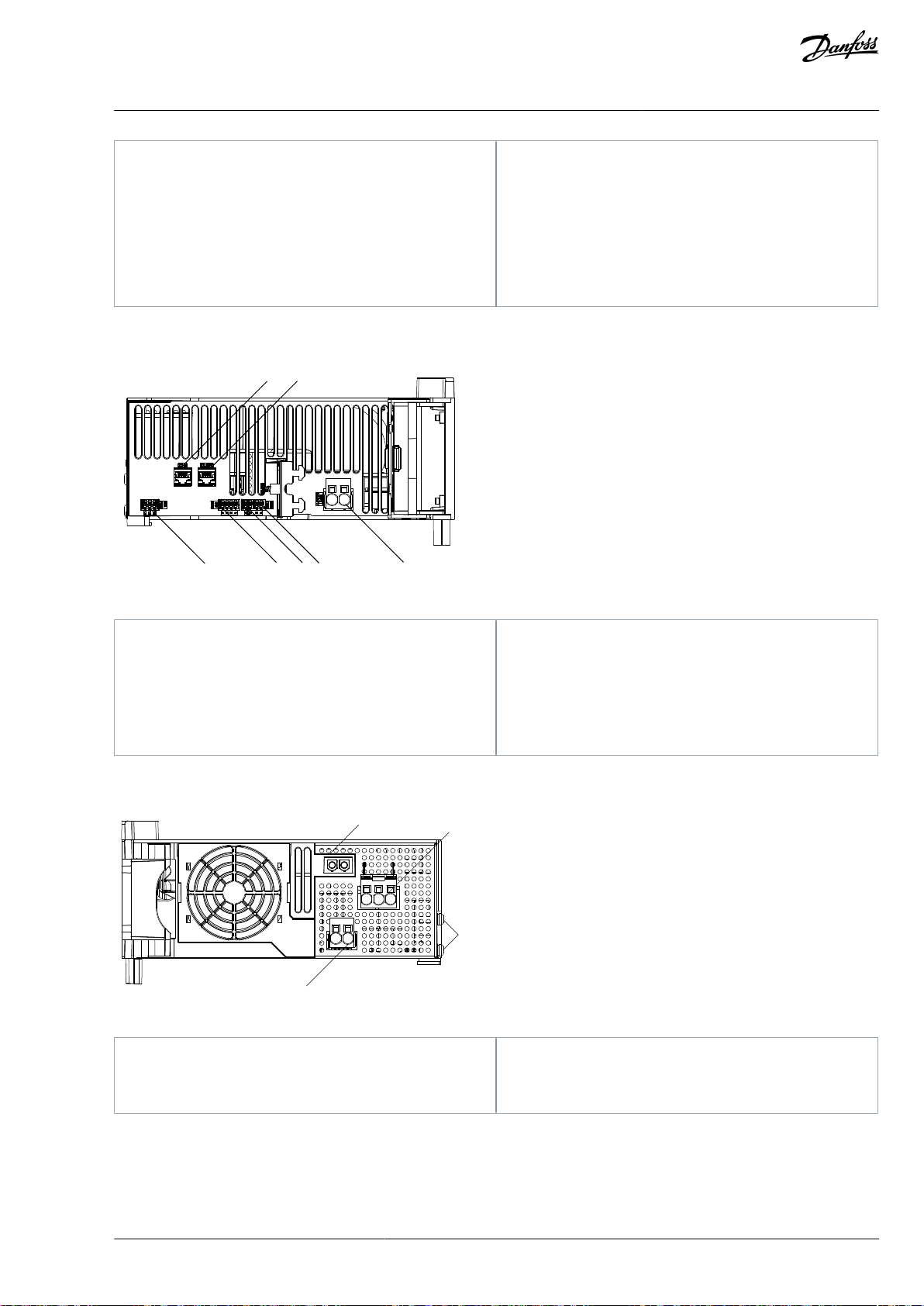
1背板2
24/48 V 输入连接器
3
电缆应力消除和屏幕
4
连接器: I/O、STO、继电器和以太网
5
工作指示 LED
6
LCP 连接器
7
PE 螺钉
8
交流主电源连接器
9
内部/外部制动电阻器连接器
1 2
3
45
6
7
e30bg465.11
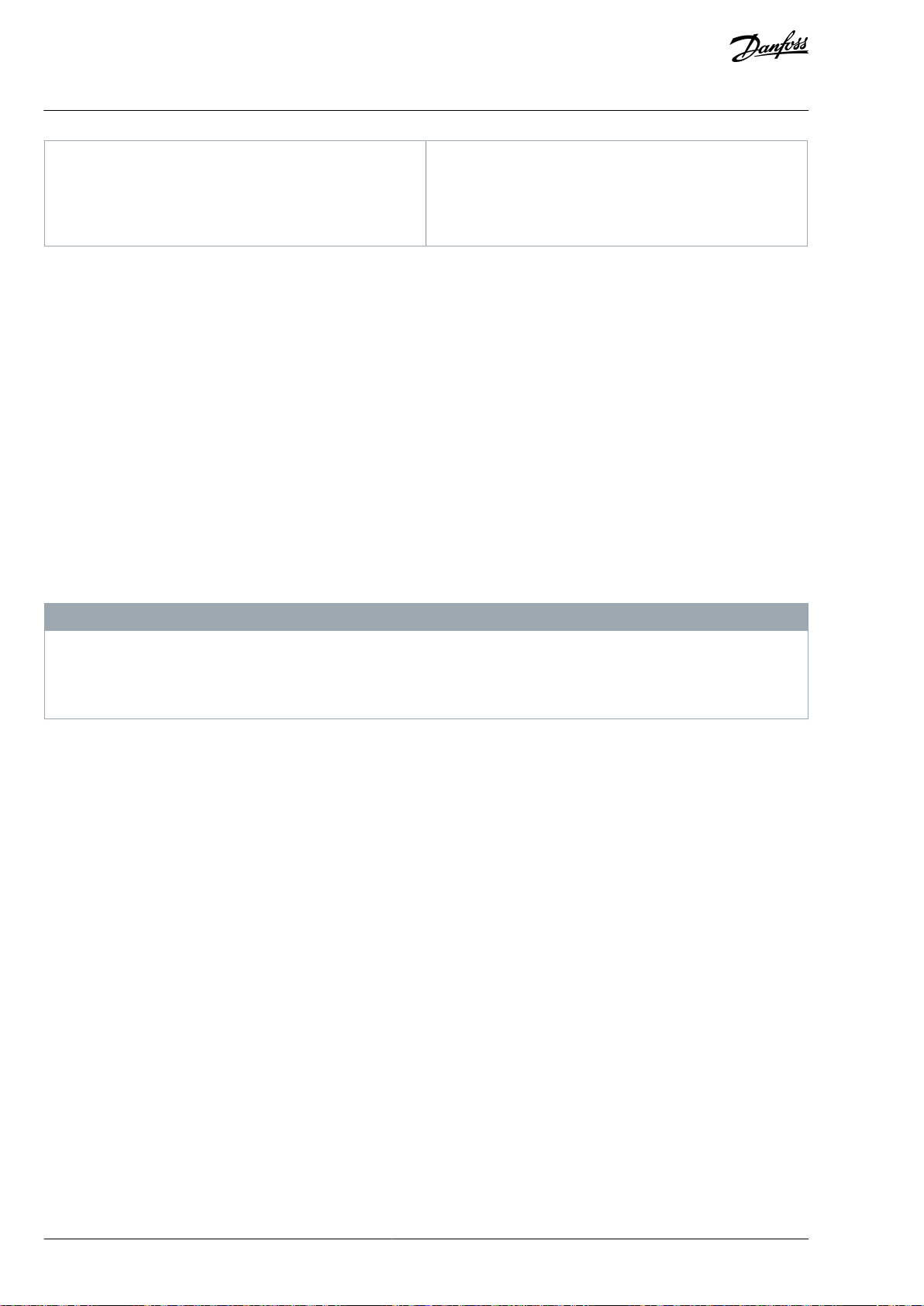
1
以太网连接器输入端
2
以太网连接器输出端
3
24/48 V 输入连接器
4
STO 连接器输入端
5
STO 连接器输出端
6
I/O 连接器
7
继电器连接器
2
1
3
4
e30bg466.10
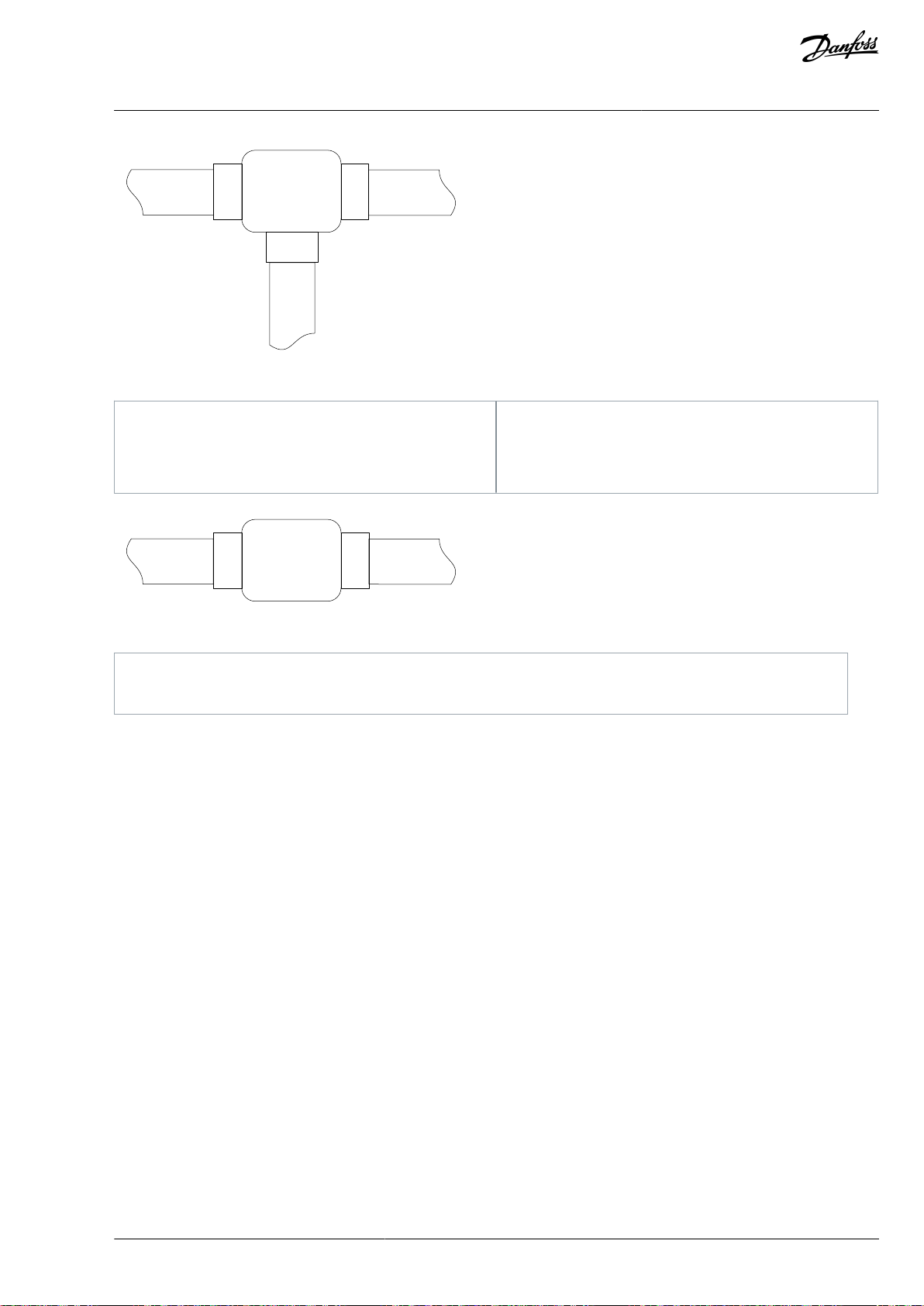
1
用于插入未用的内部制动电阻器连接器的支座
2
交流主电源连接器
3
PE 螺钉
4
内部/外部制动电阻器连接器
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
3.2.2 PSM 510 顶部的连接器
系统描述
图解 3: PSM 510 顶部的连接器
3.2.3 PSM 510 底部的连接器
图解 4: PSM 510 底部的连接器
AQ262450196490zh-000101 / 175R1170 | 25Danfoss A/S © 2019.10
Page 26
1
SDM 512 Frame Size 1
1
2
3
4
5
SDM 511 Frame Size 2
1
SDM 511 Frame Size 1
2
3
5
4
2
3
2
3
4
5
e30bg580.10
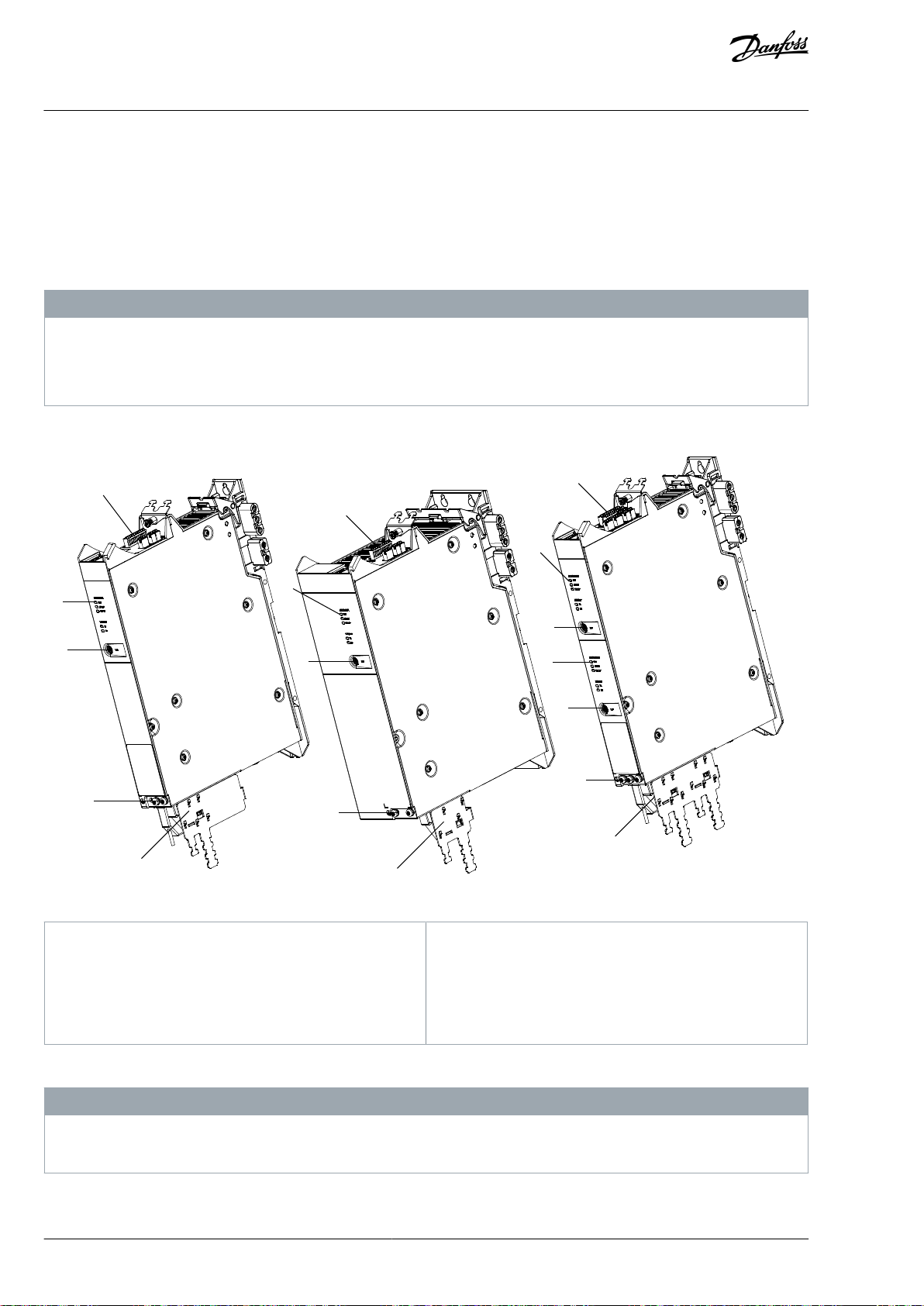
1
连接器: I/O、STO、继电器、以太网和外部编码
器。2工作指示 LED
3
LCP 连接器
4
PE 螺钉
5
连接器: 电机、电机反馈、热敏电阻、制动、屏
蔽和电缆应力消除
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
系统描述
3.3 伺服驱动器模块 SDM 511/SDM 512
3.3.1 概述
SDM 是 Servo Drive Module(伺服驱动器模块)的缩写。SDM 511 是单轴伺服驱动器,具有 5 种功率规格和 2 种机箱规格
(FS1 为 50 毫米,FS2 为 100 毫米)。SDM 512 是双轴伺服驱动器,具有 3 种功率规格和 1 种机箱规格(FS1,50 毫米)。双
轴模块独立运行 2 个伺服电机。可使用多个反馈选件。SDM 配有数字 I/O 和 Safe Torque Off (STO),支持多个电机反馈编
码器。
注 意
MSD 510 系统适合在控制机柜内使用。如果使用 STO 功能,则机柜防护等级必须至少为 IP54。
-
SDM 的防护等级为 IP20,符合 IEC/EN 60529(连接器除外,防护等级为 IP00)标准。
-
如果 SDM 接触到液体,则可能会损坏。
-
图解 5: SDM 511/SDM 512 模块
3.3.2 SDM 511/SDM 512 类型
产品定制软件显示出伺服驱动器型号的有效配置。仅显示出有效组合。因此,并非在类型代码中详细介绍的所有型号都
-
可见。
注 意
AQ262450196490zh-000101 / 175R117026 | Danfoss A/S © | 2019.10
Page 27
e30bg570.10
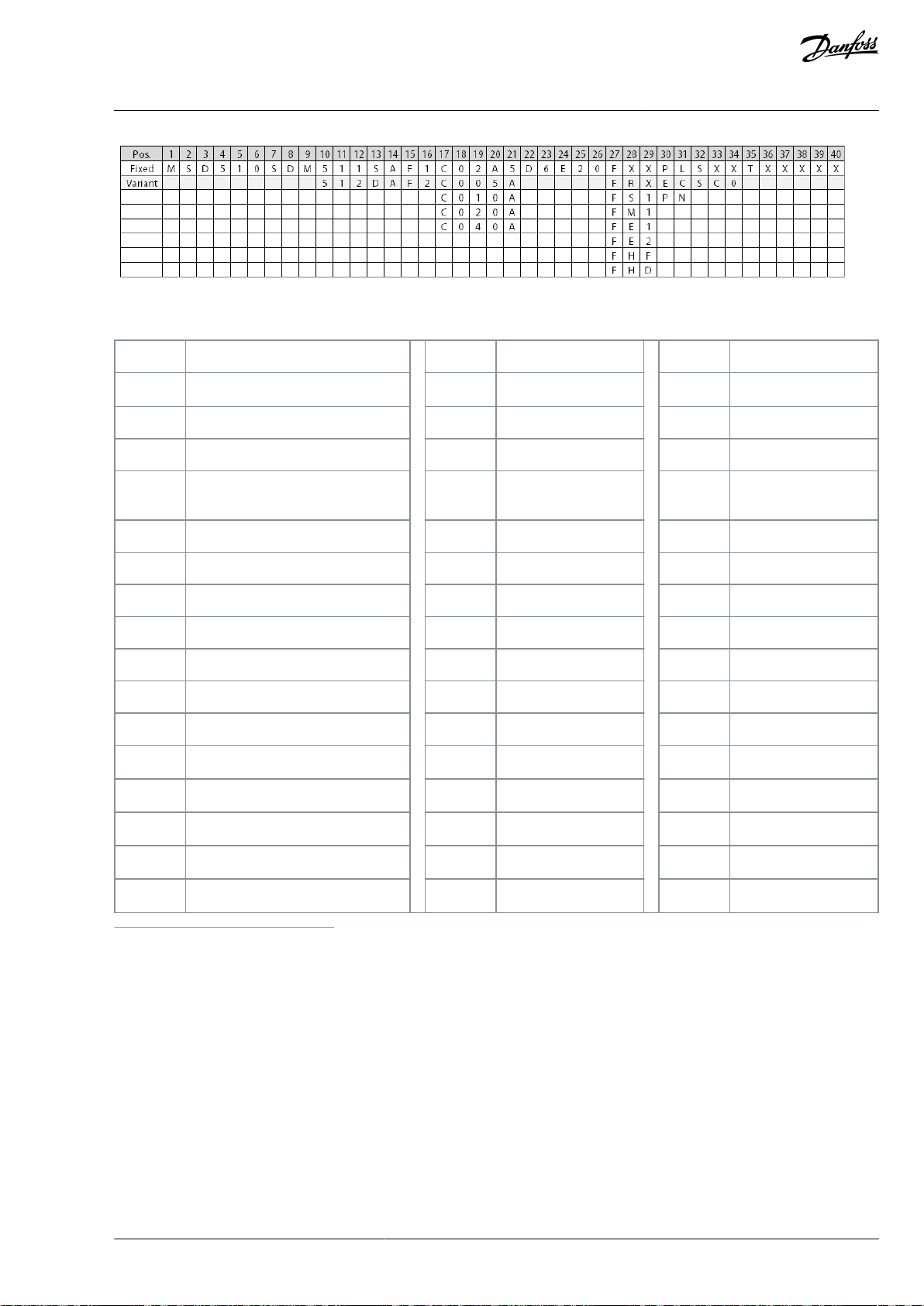
[01–06]
产品组
[22–23]
直流电压
[32–34]
固件
MSD510
VLT® Multiaxis Servo Drive
D6
600 V 直流回路电压
SXX
标准
[07–12]
产品型号
[24–26]
驱动器机箱
SC0定制SDM511
MSD 510 Servo Drive Module 511
E20
IP20
(1)
[35]
安全性
SDM512
MSD 510 Servo Drive Module 512
[27–29]
总线系统
T
Safe torque off
(STO)
[13–14]
驱动器型号
FXX
无反馈
(2)
[36–40]
预留
SA
单轴伺服驱动器
FRX旋变XXXXX
预留DA双轴伺服驱动器
FS1
BiSS ST 反馈,17 位
[15–16]
机箱(机架)规格
FM1
BiSS MT 反馈,17 位
F1
机箱(机架)规格 1,50 毫米
FE1
EnDat 2.1
F2
机箱(机架)规格 2,100 毫米
FE2
EnDat 2.2
[17–21]
额定电流
FHF
HIPERFACE®
(2)
C02A5
2.5 A
rms
FHD
HIPERFACE® DSL
(2)
C005A
5 A
rms
[30–31]
总线系统
C010A
10 A
rms
PL
POWERLINK
C020A
20 A
rms
EC
EtherCAT
C040A
40 A
rms
PN
PROFINET
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
图解 6: 类型代码
表 4: 图例与类型代码的对应关系
系统描述
1
IP20,符合 IEC/EN 60529(连接器除外,它的防护等级为 IP00)
2
准备中
3.3.3 组件
3.3.3.1 冷却
伺服驱动器模块 SDM 511 和 SDM 512 由速度控制的内部风扇进行冷却。
3.3.4 SDM 511 上的连接器
本节详细介绍机箱规格 1(FS1,50 毫米)和 2(FS2,100 毫米)中的 SDM 511 上的所有连接器。
AQ262450196490zh-000101 / 175R1170 | 27Danfoss A/S © 2019.10
Page 28
1
243
657
e30bg443.10
1
外部编码器连接器
2
以太网连接器输入端
3
以太网连接器输出端
4
I/O 连接器
5
STO 连接器输入端
6
STO 连接器输出端
7
继电器连接器
1
2 3 4
6 5
7
e30bg444.10
1
外部编码器连接器
2
以太网连接器输入端
3
以太网连接器输出端
4
I/O 连接器
5
STO 连接器输入端
6
STO 连接器输出端
7
继电器连接器
1
3 2
e30bg446.10
1
电机反馈连接器
2
电机制动和热敏电阻连接器
3
电机连接器
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
3.3.4.1 SDM 511 顶部的连接器
图解 7: SDM 511,机箱规格 1 (FS1)
系统描述
图解 8: SDM 511,机箱规格 2 (FS2)
3.3.4.2 SDM 511 底部的连接器
图解 9: SDM 511,机箱规格 1 (FS1)
AQ262450196490zh-000101 / 175R117028 | Danfoss A/S © | 2019.10
Page 29
1
2
3
e30bg447.10
1
电机反馈连接器
2
电机制动和热敏电阻连接器
3
电机连接器
e30bg445.10
1 2 3 4 5
67
89
10
11
12
13
14
1
外部编码器连接器 SDM1
2
以太网连接器输入端 SDM1
3
以太网连接器输出端 SDM1
4
I/O 连接器 SDM1
5
I/O 连接器 SDM2
6
STO 连接器输入端 SDM1
7
STO 连接器输入端 SDM2
8
STO 连接器输出端 SDM1
9
STO 连接器输出端 SDM2
10
继电器连接器 SDM1
11
以太网连接器输出端 SDM2
12
继电器连接器 SDM2
13
以太网连接器输入端 SDM2
14
外部编码器连接器 SDM2
e30bg448.10
1 2
3456
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
图解 10: SDM 511,机箱规格 2 (FS2)
3.3.5 SDM 512 上的连接器
本节详细介绍机箱规格 1(FS1,50 毫米)中的 SDM 512 上的所有连接器。
3.3.5.1 SDM 512 顶部的连接器
系统描述
图解 11: SDM 512,机箱规格 1 (FS1)
3.3.5.2 SDM 512 底部的连接器
图解 12: SDM 512,机箱规格 1 (FS1)
AQ262450196490zh-000101 / 175R1170 | 29Danfoss A/S © 2019.10
Page 30
1
电机反馈连接器 SDM2
2
电机反馈连接器 SDM1
3
电机制动和热敏电阻连接器 SDM1
4
电机连接器 SDM1
5
电机制动和热敏电阻连接器 SDM2
6
电机连接器 SDM2
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
系统描述
3.4 分布式访问模块 DAM 510
3.4.1 概述
DAM 是分布式访问模块 (Decentral Access Module) 的缩写。DAM 510 是连接至分布式伺服系统的中央接口/网关。它用于通
过混合馈电电缆将 Danfoss VLT® Integrated Servo Drives ISD 510 和 VLT® Decentral Servo Drives DSD 510 连接到伺
服系统。
DAM 510 通过混合馈电电缆为分布式伺服驱动器提供直流回路、U
比如:
混合电缆的过电流保护
•
过电压保护
•
直流回路的充电电路
•
外部编码器连接
•
分布式伺服驱动器的直流回路电容缓冲区
•
DAM 510 可通过基于以太网的现场总线进行控制。
DAM 510 正面的 LED 指示工作状态和警告。
、STO 和基于以太网的现场总线。DAM 510 提供许多功能,
AUX
注 意
MSD 510 系统适合在控制机柜内使用。如果使用 STO 功能,则机柜防护等级必须至少为 IP54。
-
AM 510 的防护等级为 IP20,符合 IEC/EN 60529(连接器除外,防护等级为 IP00)标准。
-
如果 DAM 510 接触到液体,则可能会损坏。
-
DAM 510 类型代码的一个示例为: MSD510DAM510F1C015AD6E20PLSXXXXXXXXXXXXX。
AQ262450196490zh-000101 / 175R117030 | Danfoss A/S © | 2019.10
Page 31

1
2
3
4
5
e30bg582.11
1
连接器: I/O、STO、继电器和以太网
2
工作指示 LED
3
LCP 连接器
4
PE 螺钉
5
连接器: UDC、AUX、STO 输出和以太网
1 2
3
4
5
e30bg467.10
1
以太网连接器输入端
2
以太网连接器输出端
3
STO 连接器输入端
4
STO 连接器输出端
5
外部编码器连接器
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
系统描述
图解 13: DAM 510
3.4.2 DAM 510 顶部的连接器
图解 14: DAM 510 顶部的连接器
AQ262450196490zh-000101 / 175R1170 | 31Danfoss A/S © 2019.10
Page 32

1
234
e30bg468.10
1
以太网连接器
2
AUX 连接器
3
STO 输出连接器
4
UDC 连接器
1
2
3
4
e30bg583.10
CAP ST
NET ST
X1
X2
LCP
LINK/ACT
DEV
STATUS ACM
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
系统描述
3.4.3 DAM 510 底部的连接器
图解 15: DAM 510 底部的连接器
3.5 辅助电容器模块 ACM 510
3.5.1 概述
ACM 是辅助电容器模块 (Auxiliary Capacitors Module) 的缩写。可将 ACM 510 连接到 MSD 510 系统以储存能量,以便在
紧急情况下控制机器停机。
注 意
MSD 510 系统适合在控制机柜内使用。如果使用 STO 功能,则机柜防护等级必须至少为 IP54。
-
ACM 510 的防护等级为 IP20,符合 IEC/EN 60529(连接器除外,防护等级为 IP00)标准。
-
如果 ACM 510 接触到液体,则可能会损坏。
-
ACM 510 类型代码的一个示例为: MSD510ACM510F1E00C8D6E20PLSXXXXXXXXXXXXX。
图解 16: ACM 510
AQ262450196490zh-000101 / 175R117032 | Danfoss A/S © | 2019.10
Page 33

1
连接器: I/O、继电器和以太网
2
工作指示 LED
3
LCP 连接器
4
PE 螺钉
e30bg469.11
1
2
4 3
1
以太网连接器输入端
2
以太网连接器输出端
3
I/O 连接器
4
继电器连接器
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
3.5.2 ACM 510 顶部的连接器
图解 17: ACM 510 顶部的连接器
系统描述
AQ262450196490zh-000101 / 175R1170 | 33Danfoss A/S © 2019.10
Page 34

e30bh660.10
2
3
4
1
1
EMC 屏蔽板
2背板3
PE 螺钉
4
扩展连接器
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
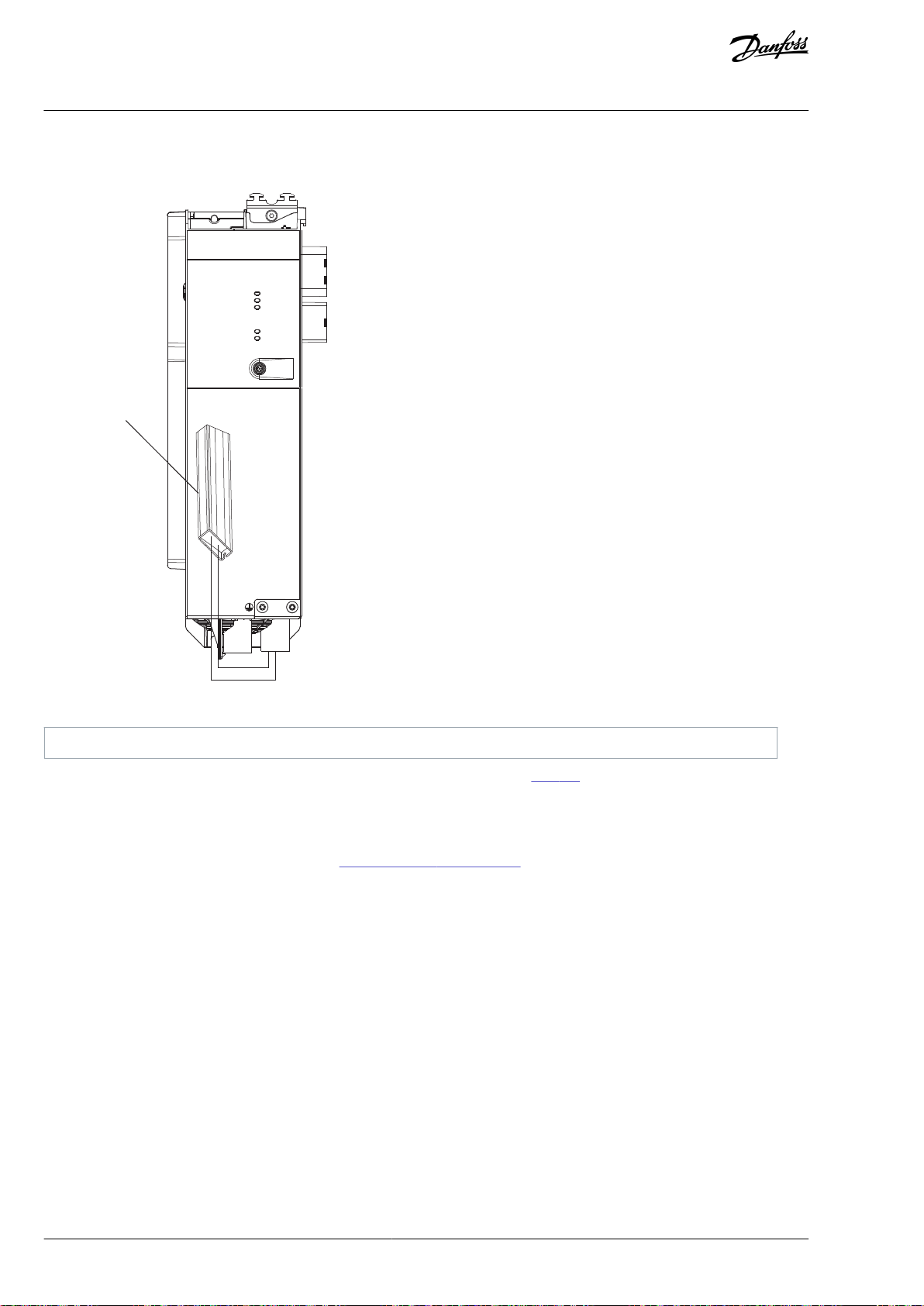
3.6 扩展模块 EXM 510
系统描述
图解 18: EXM 510
MSD 510 系统适合在控制机柜内使用。如果使用 STO 功能,则机柜防护等级必须至少为 IP54。
-
EXM 510 的防护等级为 IP20,符合 IEC/EN 60529(连接器除外,防护等级为 IP00)标准。
-
如果 EXM 510 接触到液体,则可能会损坏。
-
EXM 510 类型代码的一个示例为:
MSD510EXM510F1C062AD6E20XXXXXXXXXXXXXXXX
注 意
AQ262450196490zh-000101 / 175R117034 | Danfoss A/S © | 2019.10
Page 35

Auto
On
Reset
Hand
On
Off
Main
Menu
Quick
Menu
Alarm
Log
Back
Cancel
Info
OK
2.1 kW
On
Alarm
Warn.
A
38 °C
11.5 A
24 V
B
C
D
565V
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18 19
20
21
Status
e30bg799.10
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
系统描述
3.7 本地控制面板 (LCP)
3.7.1 本地控制面板概述
LCP 是图形用户界面,用于诊断和工作目的。它以选件形式提供,可通过可选电缆(M8 - LCP SUB-D 扩展电缆)连接到系统
模块。
通过 LCP 显示屏,操作人员可快速查看系统模块的状态,具体取决于所连接的设备。显示屏上显示出参数和警报/错误,可用
于调试和故障排查。
此外,它还可用于执行简单功能,比如,激活和禁用 DAM 510 上的输出线路以及打开 SDM 511/512 上的机械制动。
可使用安装套件(作为附件提供)将 LCP 安装在控制柜正面,然后通过 M8 - SUB-D 电缆(作为附件提供)连接到模块。请
参阅 VLT® Servo Drive System ISD 510、DSD 510、MSD 510 设计指南查看附件订单号。
注 意
有关 LCP 功能的更多信息,请参阅 VLT® Servo Drive System ISD 510、DSD 510、MSD 510 编程指南。
-
3.7.2 本地控制面板的布局
本地控制面板分为 4 个功能组:
A: 显示区
•
B: 显示菜单键
•
•
C: 导航键和指示灯 (LED)。
•
D: 操作键和复位
要调整显示屏的对比度,请按 [Status](状态)和 [▵]/[▿] 键。
3.7.2.1 A: 显示区
显示区中的值随 LCP 所连接到的模块不同而异。
当所连接到的模块通过 U
图解 19: 连接到电源模块 PSM 510 或分布式访问模块 DAM 510 时的显示区
供电时,将激活显示区。
AUX
AQ262450196490zh-000101 / 175R1170 | 35Danfoss A/S © 2019.10
Page 36

1
AUX 线电压
2
温度功率卡
3
实际 UDC(电流)
4
功率消耗
5
实际 UDC(电压)
Auto
On
Reset
Hand
On
Off
Main
Menu
Quick
Menu
Alarm
Log
Back
Cancel
Info
OK
37 rpm
On
Alarm
Warn.
A
38 °C 750 deg0.10 A
B
C
D
1
2
3
4
6
7
8
9
10
11
12
13
14
15
16
17
18 19 20 21
Status
e30bh719.10
Velocity
Status
Enabled
1
电流实际值
2
温度功率卡
3
位置实际值
4
实际速度
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
系统描述
图解 20: 连接到伺服驱动器模块 SDM 511/SDM 512 时的显示区
AQ262450196490zh-000101 / 175R117036 | Danfoss A/S © | 2019.10
Page 37

Auto
On
Reset
Hand
On
Off
Main
Menu
Quick
Menu
Alarm
Log
Back
Cancel
Info
OK
24 V
On
Alarm
Warn.
A
38 °C
40 °C
39 °C
B
C
D
565V
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18 19
20
21
Status
e30bg798.10
1
温度功率卡
2
电容器组 1 的温度
3
电容器组 2 的温度
4
AUX 线电压
5
实际 UDC(电压)
按键
功能
6
Status(状态)
显示运行信息。
7
Quick Menu(快捷菜单)
可访问参数。
8
Main Menu(主菜单)
可访问参数。
9
Alarm Log(报警记录)
显示最后 10 个报警。
按键
功能
10
Back(后退)
用于返回菜单结构的上一步或上一列表。
11
Cancel(取消)
取消最近的改动或命令(只要显示模式尚未发生变化)。
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
系统描述
图解 21: 连接到辅助电容器模块 ACM 510 时的显示区
3.7.2.2 B: 显示菜单键
菜单键用于菜单访问、参数设置、切换正常操作期间的状态显示模式以及查看故障日志数据。
表 5: 显示菜单键
3.7.2.3 C: 导航键和指示灯 (LED)。
导航键用于移动显示光标,在本地操作中提供操作控制。此区域还有 3 个状态 LED。
表 6: 导航键
AQ262450196490zh-000101 / 175R1170 | 37Danfoss A/S © 2019.10
Page 38

按键
功能
12
Info(信息)
按此键可查看要显示的功能的定义。
13
导航键
使用四个导航键可以在菜单的各个项之间移动。
14
OK(确定)
借此可访问参数组或启用某个选项。
LED颜色功能
15
On(通电)
绿色
当模块连接到 U
AUX
而加电后,On(通电)LED 将点亮。
16
Warn(警告)
黄色
当符合警告条件时,黄色的 Warn(警告)指示灯将亮起,同时会在显示区中出现标识相关问题
的文字。
17
Alarm(报警)
红色
故障状态会使红色 Alarm(报警)指示灯闪烁,同时将显示报警文字。
按键
功能
18
Hand On
动)
允许通过 LCP 控制连接的 MSD 510 模块。
仅在特定状态下,才能在 Hand On(手动启动)和 Auto On(自动启动)模式之间切换(请参阅 VLT
®
Servo Drive System ISD 510、DSD 510、MSD 510 编程指南了解详细信息)。
19
Off(关闭)
将伺服驱动器模块 (SDM 511/512) 置于状态 Switch on Disabled(禁止打开),并可将其他系统模块置
于状态 Standby(待机)。
此按键仅在 Hand On(手动启动)模式下有效。
Off(关闭)按键将使系统从 Hand On(手动启动)模式切换到 Auto On(自动启动)模式。
20
Auto On
动)
将系统置于远程操作模式。
在 Auto On(自动启动)模式下,设备由现场总线 (PLC) 控制。仅当伺服驱动器模块处于 Switch on
Disabled(禁止启动)状态和/或 PSM 510、DAM 510 或 ACM 510 处于 Standby(待机)状态后,才能在
Auto On(自动启动)和 Hand On(手动启动)模式之间切换。
21
复位
在故障被清除后,复位 MSD 510 系统模块。
仅当处于 Hand On(手动启动)模式时,才能复位。
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
表 7: 指示灯 (LED)
3.7.2.4 D: 操作键和复位
操作键位于 LCP 的底部。
表 8: 操作键和复位
系统描述
3.8 电缆
3.8.1 混合电缆
预配置的混合电缆用于将分布式伺服驱动器(使用时)连接到分布式访问模块 (DAM 510)。
共有 2 种类型的混合电缆同时适用于弯式和直式 M23 连接器:
馈电电缆,用于将一个组的第一个 ISD 510/DSD 510 伺服驱动器连接到分布式访问模块 (DAM 510) 上的连接点。
•
环路电缆,用于连接应用中呈菊花链式的 ISD 510/DSD 510 伺服驱动器。
•
这两种电缆都由 Danfoss 提供,具有各种长度。请参阅 VLT© Servo Drive System ISD 510、DSD 510、MSD 510 设计指南了
解更多信息。
环路电缆的两端都配有 M23 连接器。
输出端配有 M23 连接器的馈电电缆用于连接到第一个 ISD 510/DSD 510 伺服驱动器。输入端带有尾纤,连接器安装在分布式
访问模块 (DAM 510) 的对应端子上。
AQ262450196490zh-000101 / 175R117038 | Danfoss A/S © | 2019.10
Page 39

电缆类型
屏蔽/非屏蔽
注释
馈电电缆
屏蔽
混合电缆(带有附加现场总线和安全部分屏蔽层的全屏蔽型)。
环路电缆
规格
以太网标准
标准以太网(符合 IEEE 802.3)、100Base-TX(快速以太网)
电缆类型
S/FTP(铝箔屏蔽双绞线)、ISO(IEC 11801 或 EN 50173)、CAT 5e 或 6
衰减
23.2 dB(100 Mhz 下,每 100 米衰减值)
串音衰减
24 dB(100 Mhz 下,每 100 米衰减值)
回波损耗
10 dB(每 100 米)
浪涌阻抗
100 Ω
最大电缆长度
开关或网络设备之间为 100 米
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
表 9: 混合电缆
注 意
混合电缆分为两种横截面积: 2.5 mm2 (15 A) 和 4 mm2 (25 A)。请参阅 VLT® Servo Drive System ISD 510、DSD 510、
-
MSD 510 设计指南,了解更多信息。
注 意
最小弯曲半径
在最小弯曲半径为 7.5 倍电缆直径 (15.6 mm) 的情况下,最大弯曲次数为 5 百万次。
-
永久柔性: 电缆直径的 12 倍。
-
永久安装: 电缆直径的 5 倍。
-
系统描述
3.8.2 以太网电缆
表 10: 以太网电缆建议
注 意
通过 RJ45 连接器将以太网电缆接地。请勿在应力消除装置上将它接地。
-
3.8.3 LCP 电缆
LCP 电缆用于通过每个系统模块前面的 M8 连接器将 LCP 连接到系统模块。
LCP 电缆可从 Danfoss 购买(请参阅 VLT® Servo Drive System ISD 510、DSD 510、MSD 510 设计指南,了解更多信息)。
3.9 电缆布局和敷设
MSD 510 模块通过背部链路连接器连接(请参阅
使用标准以太网电缆(未提供)将实时以太网现场总线连接到 MSD 510 系统中的第一个模块。
使用 Danfoss 提供的以太网回路电缆采用菊花链式连接到其他模块。
11.7.1 背部链路连接器)。
AQ262450196490zh-000101 / 175R1170 | 39Danfoss A/S © 2019.10
Page 40

电缆类型
规格
最大长度
混合电缆
M23 馈电
40 m
M23 环路
25 m
现场总线扩展
长度: 2 m
至下一端口的最大长度: 100 m
每个线路的最大电缆长度
100 m
电机电缆
–
无附加输出滤波器或电抗器的最大长度: 30 m
带附加输出滤波器或电抗器的最大长度: 80 m
反馈电缆
–
80 m
扩展模块电缆
–
5 m
SDM 511/
SDM 512
Output filter
MCC
U
V
W
PE
U
V
W
3
M
PE
U1
V1
W1
PE
U2
V2
W2
PE
e30bh656.10
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
3.9.1 最大电缆长度
表 11: 最大电缆长度
3.9.2 输出滤波器的接线
系统描述
图解 22: 输出滤波器的接线图
3.9.3 用于 2 个分布式访问模块 (DAM 510) 的标准布线概念
在此例中,通过带有速卸连接器的混合馈电电缆,可从 DAM 510 为第一个 ISD 510/DSD 510 伺服驱动器供电。
AQ262450196490zh-000101 / 175R117040 | Danfoss A/S © | 2019.10
Page 41

AC 400–480 V
. . .
ISD 510
DSD 510
. . .
Status
Hand
On
Off Reset
Auto
On
OK
Back
Cancel
Info
Quick
Menu
Main
Menu
Alarm
Log
LCP
PSM
510
DAM
510
DAM
510
STATUS PSM
LINK/ACT
DEV
STO
NET ST
X1
X2
STATUS DAM
LINK/ACT
DEV
STO
NET ST
AUX
X1
X2
X3
STATUS DAM
LINK/ACT
DEV
STO
NET ST
AUX
X1
X2
X3
PLC
1
2
e30bg794.10
UDC + Real-Time Ethernet Bus + STO + U
AUX
UDC + Real-Time Ethernet Bus + STO + U
AUX
3
24/48 V
STO
1
混合馈电电缆
2
混合环路电缆
3
交流电抗器
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
系统描述
图解 23: 用于 2 个分布式访问模块 (DAM 510) 的标准布线概念
3.10 软件
伺服系统的软件包括:
已安装到模块上的系统模块的固件。
•
用于操作 MSD 510 设备的 Automation Studio© 的 PLC 库的文件包(请参阅
•
了解更多信息)。
用于操作 MSD 510 设备的 TwinCAT® 2 的 PLC 库(请参阅 6.12.2 创建 TwinCAT® 项目 了解更多信息)。
•
用于操作 MSD 510 设备的 SIMOTION SCOUT 的 PLC 库(请参阅
•
•
用于操作 MSD 510 设备的 TIA Portal 的 PLC 库。
•
VLT® Servo Toolbox: Danfoss 提供的基于 PC 的软件,用于调试设备。
3.11 现场总线
6.14.3 创建 SIMOTION SCOUT® 项目)。
伺服系统具有通过基于快速以太网 (100BASE-T) 通信来实现的开放系统架构。该系统支持 EtherCAT®、以太网 POWERLINK
和 PROFINET® 现场总线。请参阅 VLT© Servo Drive System ISD 510、DSD 510、MSD 510 编程指南,了解更多信息。
在生产环境中,与设备的通信始终通过作为主站的 PLC 来进行。ISD 510/DSD 510 伺服驱动器、伺服驱动器模块 SDM 511/
SDM 512 和系统模块可通过以下通信方法来控制:
6.11.2 创建 Automation Studio™ 项目
®
AQ262450196490zh-000101 / 175R1170 | 41Danfoss A/S © 2019.10
Page 42

EtherCAT
Slave
Controller
(ESC)
OUT
LAN 1 (B)
OUT
2 (C)
IN
0
(A
)
X2
X
1
X3
e30be695.11
LAN
LAN
X1
用于连接至分布式访问模块 (DAM 510) 或上一伺
服驱动器的 M23 混合电缆连接器。
X2
用于连接至下一伺服驱动器的 M23 混合电缆连接
器。
X3
用于连接至其他 EtherCAT® 从站(比如 Ether‐
CAT® 编码器)的 M8 以太网电缆连接器。
该连接器仅在高级伺服驱动器上可用。
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
•
使用 VLT® Servo Motion 库(适用于 TwinCAT®、Automation Studio©、SIMOTION SCOUT® 和 TiA Portal)。
•
使用 TwinCAT 的 NC 轴功能®(仅限 ISD 510/DSD 510 和 SDM 511/SDM 512)。
通过读取并写入到对象来使用 CANopen® CiA DS 402 标准。
•
使用应用类 1 (AC1),仅适用于 PROFINET®。
•
ISD 510/DSD 510 伺服驱动器、伺服驱动器模块 SDM 511/SDM 512 和系统模块可使用以下周期时间来运行:
EtherCAT® 和以太网 POWERLINK® 现场总线:
•
400 µs 及其倍数(例如,800 µs 和 1200 µs)。
-
500 µs 及其倍数(例如,1 ms)。
-
PROFINET® 现场总线
•
500 µs 及其倍数(例如,1 ms)。
-
当周期时间为 400 µs 和 500 µs 的倍数时,使用 500 µs 的时基。
ISD 510/DSD 510 伺服驱动器、伺服驱动器模块 SDM 511/SDM 512 和系统模块已根据相应规定和法规通过现场总线认证。这些
伺服驱动器符合 CANopen® CiA DS 402 变频器行规。
系统描述
3.11.1 EtherCAT®
ISD 510/DSD 510 伺服驱动器、伺服驱动器模块 SDM 511/SDM 512 和系统模块支持以下 EtherCAT® 协议:
CANopen over EtherCAT® (CoE)
•
File Access over EtherCAT® (FoE)
•
Ethernet over EtherCAT® (EoE)
•
ISD 510/DSD 510 伺服驱动器、伺服驱动器模块 SDM 511/SDM 512 和系统模块支持分布式时钟。为补偿系统中的通信电缆部分
的故障,所有现场总线都可使用冗余电缆。请参阅 VLT® Servo Drive System ISD 510、DSD 510、MSD 510 系统设计指南了解
更多信息。
图解 24: ISD 510/DSD 510 伺服驱动器的 EtherCAT© 端口分配
AQ262450196490zh-000101 / 175R117042 | Danfoss A/S © | 2019.10
Page 43
X1
X2
X3
ESC DAM
EtherCAT®
slave
OUT
LAN 2
IN
LAN 1
OUT
LAN 3
e30be696.11
X1
用于连接到上一从站的 RJ45 电缆连接器。
X2
用于将 M23 混合馈电电缆连接到第一个 ISD 510/
DSD 510 伺服驱动器的 RJ45。
X3
用于连接到 PLC(冗余电缆)或下一从站的 RJ45
电缆连接器。
X1 X2
ESC
PSM/ACM/SDM
EtherCAT®
slave
IN
LAN 1
OUT
LAN 2
e30bg797.10
X1
用于连接到 PLC 或上一从站的 RJ45 电缆连接器。
X2
用于连接到 PLC(冗余电缆)或下一从站的 RJ45 电缆连接器。
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
图解 25: 分布式访问模块 (DAM 510) 的 EtherCAT© 端口分配
系统描述
图解 26: 电源模块 (PSM 510)、伺服驱动器模块 SDM 511/SDM 512 和辅助电容器模块 (ACM 510) 的 EtherCAT© 端口分配
3.11.2 以太网 POWERLINK®
ISD 510/DSD 510 伺服驱动器、伺服驱动器模块 SDM 511/SDM 512 和系统模块通过 DS 301 V1.1.0 认证,支持以下功能:
作为受控节点工作。
•
可作为多路复用站工作。
•
支持交叉通信。
•
对介质冗余支持环冗余。
•
对以太网 POWERLINK® 未分配特定端口。
3.11.3 PROFINET®
ISD 510/DSD 510 伺服驱动器、伺服驱动器模块 SDM 511/SDM 512 和系统模块支持 PROFINET® 一致性等级 C,符合
IEC 61158-5-10:2014、IEC 61158-6-10:2014、IEC 61784-2:2014 和 IEC 61784-5-3:2013 标准。所有系统组件(伺服驱动器
和系统模块)都可在 PROFINET® 网络中用作 I/O 设备。
支持以下功能:
I/O-设备 - 由 I/O 控制器控制的设备
•
动态模块配置
•
Net load class III
•
环路冗余 (MRPD) 作为客户端
•
PROFINET® 现场总线设备始终通过现场总线设备中集成的交换机作为网络组件连接。ISD 510/DSD 510 伺服驱动器、伺服驱动
器模块 SDM 511/SDM 512、 PSM 510 和 ACM 510 上有 2 个端口。DAM 510 上有 3 个端口。
AQ262450196490zh-000101 / 175R1170 | 43Danfoss A/S © 2019.10
Page 44

VLT® Multiaxis Servo Drive MSD 510 System
操作指南
4 机械安装
4.1 提供的物品
为 MSD 510 系统提供的物品如下(具体取决于应用):
VLT® Power Supply Module (PSM 510)
•
VLT® Single axis Servo Drive Module (SDM 511)
•
VLT® Double axis Servo Drive Module (SDM 512)
•
VLT® Decentral Access Module (DAM 510)
•
VLT® Auxiliary Capacitors Module (ACM 510)
•
VLT® Expansion Module (EXM 510)
•
交流电抗器
•
本操作指南
•
馈电(混合)电缆
•
环路(混合)电缆
•
注 意
在伺服系统中使用 ISD510/DSD510 伺服驱动器时,需要使用混合馈电和回路电缆。
-
机械安装
包装情况取决于交付的模块数。将包装箱保留好,以便在需要退回产品时使用。
4.2 运输
•
始终使用具有足够承载能力的运输和起吊装置来运输伺服系统组件。
•
避免运输过程中振动。
•
避免重击和冲击。
4.3 收货查验
操作步骤
1.
在收到货物后,应立即检查提供的物品是否与发运单据一致。Danfoss 将不承认以后登记的差错索赔。
2.
如果发现明显的运输损坏,立即向承运商处进行投诉登记。
3.
如果发现明显缺陷或交付物品不完整,立即向 Danfoss 负责代表进行投诉登记。
4.4 安装过程中的安全措施
在安装过程中,务必遵守本手册中的安全说明。特别注意确保始终遵守以下各点:
•
安装只能由具备相应资质的人员执行。
安装时必须保持适当地小心谨慎。
•
•
必须遵守所有安全法规、采取相应保护措施并保持相应环境条件。
•
已阅读并理解手册。
4.5 安装环境
4.5.1 系统组件
MSD 510 系统组件的环境状况为:
•
不得超过允许的工作环境温度范围和振动级别(请参阅 11.8 MSD 510 系统的一般规格和环境条件)。
•
允许的相对湿度范围为 5–93%,无冷凝。
•
系统模块上方和下方必需的最小空隙在 4.7.1 系统模块的空间要求中详细说明。
AQ262450196490zh-000101 / 175R117044 | Danfoss A/S © | 2019.10
Page 45

(100 x number of FS2 + 50 x number of FS1) - 50
FS2 FS1
50 50
[1.97]
[0.42]
[14.45]
[1.97]
50 50
[1.97] [1.97]
M5
M5
367
UNF 10-32
UNF 10-32
Ø10,6
e30bg819.10
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
4.6 安装准备
4.6.1 系统模块
进行以下准备以确保能够可靠有效地安装伺服系统。
始终按照当地法规安装系统模块。
操作步骤
提供适合应用的安装布置。这取决于模块类型和重量。
1.
为避免未对齐,确保背板完全水平。
2.
为确保冷却不足,注意指定的最小空间要求。
3.
将模块接地。
4.
4.6.2 钻孔样板
机械安装
图解 27: 用于 50 mm 和 100 mm 系统模块的钻孔样板
4.7 安装过程
4.7.1 系统模块的空间要求
这些模块可并排安装,但需要在顶部和底部留出最小空间以便冷却。
AQ262450196490zh-000101 / 175R1170 | 45Danfoss A/S © 2019.10
Page 46

270
[10.63]
[3.94]
[3.3][15][6.1]
[0.24]
[14.4][0.28]
[1.18]
max. 100
min. 85
min. 30
[1.57]
min. 40
63677
max. 120
[4.72]
e30bg820.10
380min. 155
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
机械安装
图解 28: 顶部和底部所需的最小空间
AQ262450196490zh-000101 / 175R117046 | Danfoss A/S © | 2019.10
Page 47

60
[2.36]
60
[2.36]
101
[3.98]
106
[4.17]
e30bg821.10
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
机械安装
图解 29: 侧面所需的最小空间
4.7.2 需要的安装辅助装置和工具
安装 MSD 510 系统模块时,需要使用与固定螺钉相配套的工具(不含)。
4.7.3 系统模块安装说明
注 意
将输出功率最高的 MSD 510 系统组件安装在 PSM 510 旁边。然后按输出功率从高到低安装剩余系统组件。
-
操作步骤
1.
按照钻孔样板(请参阅 4.6.2 钻孔样板)钻取用于安装背板的孔。
2.
通过 "click and lock" 方法连接背板。
AQ262450196490zh-000101 / 175R1170 | 47Danfoss A/S © 2019.10
Page 48

e30bg802.10
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
机械安装
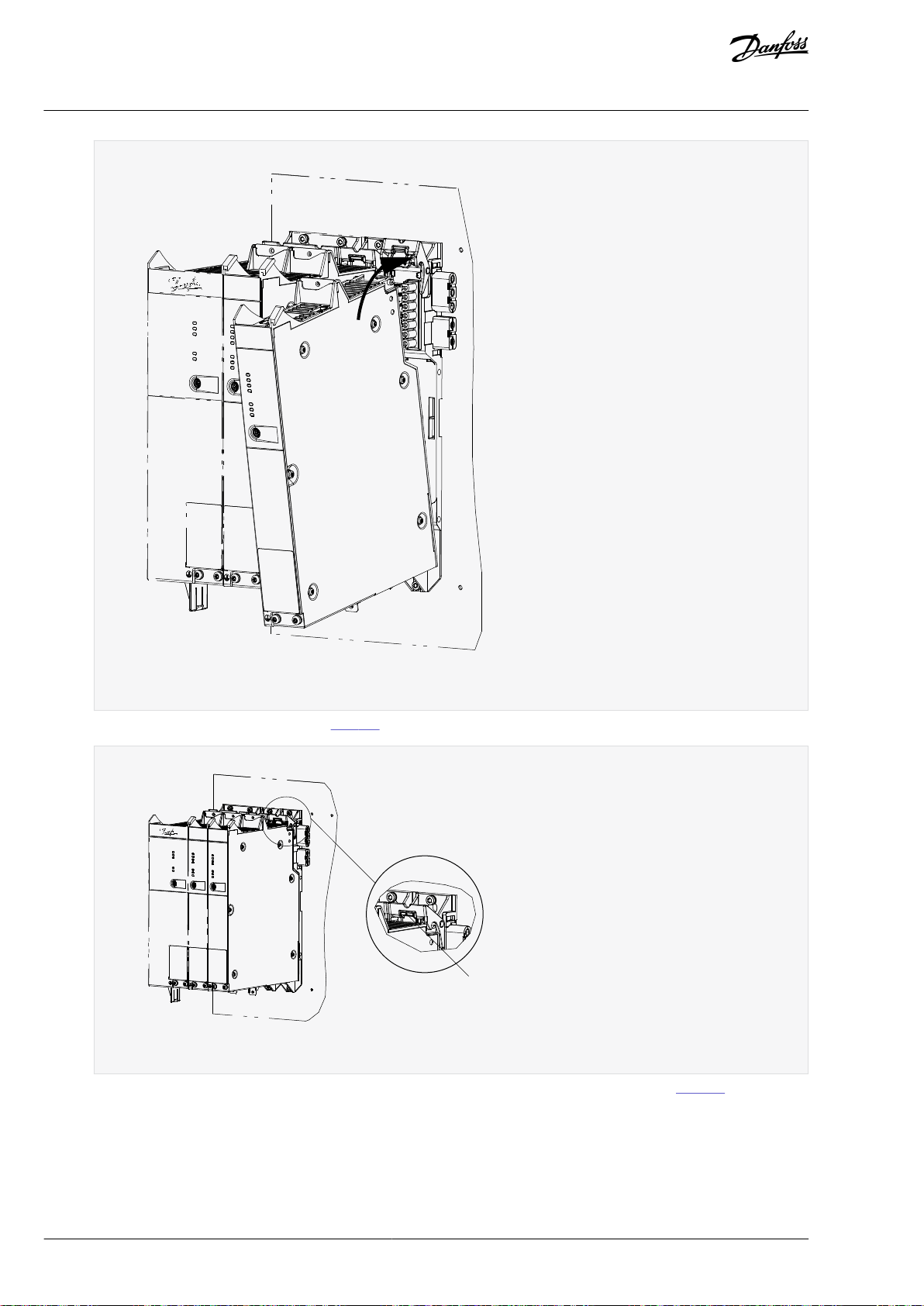
图解 30: 连接背板
3.
使用具有 9.5 毫米的最小螺钉头直径或垫圈直径的 M5 螺钉将背板安装到控制柜中的安装板上。紧固力矩为 3 Nm。
AQ262450196490zh-000101 / 175R117048 | Danfoss A/S © | 2019.10
Page 49

e30bg803.10
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
机械安装
图解 31: 在控制柜中安装背板
4.
将模块滑到背板底部的支架上。
5.
将第一个模块按入到背板顶部的背部链路连接器中。
AQ262450196490zh-000101 / 175R1170 | 49Danfoss A/S © 2019.10
Page 50
e30bg804.10
STATUS PSM
DEV
SVS ST
NET ST
LINK/ACT
X2
LCP
LCP
X1
STATUS DAM
DEV
SVS ST
NET ST
AUX
LINK/ACT
X1
X2
X3
X2
LIN
S
X
X3
1
e30bg815.10
STATUS PSM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
STATUS DAM
DEV
SVS ST
NET ST
AUX
LINK/ACT
X1
X2
X3
STATUS DAM
DEV
SVS ST
NET ST
AUX
LINK/ACT
X1
X2
X3
LCP
LCP
LCP
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
机械安装
图解 32: 将模块按入到背部链路连接器中
6.
要固定模块,按下背板顶部的固定夹(图解 33 中的 [1])。
7.
图解 33: 按下背板顶部的固定夹
对剩余模块重复步骤 4、5 和 6,确保第 2 个模块左侧的边沿位于第一个模块右侧的导向槽内(图解 34 中的 ([1])。
AQ262450196490zh-000101 / 175R117050 | Danfoss A/S © | 2019.10
Page 51

1
e30bg822.10
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
机械安装
图解 34: 导向槽
AQ262450196490zh-000101 / 175R1170 | 51Danfoss A/S © 2019.10
Page 52

VLT® Multiaxis Servo Drive MSD 510 System
操作指南
电气安装
5 电气安装
5.1 电气安装警告
在电气安装过程中,除遵守本手册中的信息外,还需遵守相关的地方和国家法规。
警 告
漏电/接地电流危险
漏电/接地电流超过 3.5 mA。MSD 510 系统模块错误接地可能会导致严重伤亡。
为了保护操作人员的安全,请按照适用的地方和国家电气标准和指令以及本手册中的操作说明,由经认证的电气安装员
-
将系统正确接地。
警 告
高电压
MSD 510 系统包含连接到电网后在高电压下运行的组件。这些组件上没有指示灯来指示是否已通电。错误安装、调试或维护
可能导致严重伤亡。
安装、调试和维护只能由具备相应资质的人员执行。
-
警 告
高电压
连接器上存在可能致命的电压,这可能会导致严重伤亡。
在电源连接器(断开或连接电缆)上开始操作之前,应将 PSM 510 与主电源断开,然后等待一段时间,直到放电完毕。
-
5.2 电气环境条件
要安全高效地操作伺服系统,必须满足以下电气环境条件:
•
仅适用于 TN-S、TN-C、TN-CS、TT(非角接地)电源接地系统
•
预期短路电流: 5 kA
•
保护等级 I
•
接地 3 相电网,400–480 V AC ±10%
•
3 相频率 44–66 Hz
•
3 相线路和 PE 线路
•
辅助电压的外部电源,24–48 V DC (PELV)
•
交流电抗器(请参阅 5.9.1 交流线路电抗器)
•
遵守国家法律规定。
•
漏电电流大于 3.5 mA。
注 意
RCD 兼容性
MSD 510 系统包含可导致保护性接地导体中出现直流电流的组件,这可能会导致连接到该系统的任何设备出现故障。
在直接或间接接触情况下,如果使用漏电保护 (RCD) 或监控 (RCM) 装置来提供保护,则在 MSD 510 系统组件的电源
-
侧使用 B 型 RCD 或 RCM 装置。
所有模块都必须安装在控制柜中。
-
注 意
AQ262450196490zh-000101 / 175R117052 | Danfoss A/S © | 2019.10
Page 53

e30bh391.10
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
5.3 接地
5.3.1 接地确保电气安全
电气安装
图解 35: 接地确保电气安全
•
使用馈电电缆的 PE 线缆将 ISD 510/DSD 510 伺服驱动器接地。DSD 510 伺服驱动器的正面有一个专用 PE 螺钉,背面也有
一个。
•
确保将机器框架通过正确的电气连接方式连接到伺服驱动器的法兰。使用正面的法兰面。确保机器该部件已进行 PE 连
接。
•
为符合 CE 要求,确保最小接地线缆横截面积至少为 16 mm2(最低 70 °C,铜芯)。
为符合 UL 要求,确保最小接地线缆横截面积至少为 6 AWG(最低 60 °C,铜芯)。
如果使用 10 kW 的 PSM 510 模块,则可将电缆横截面积降低至:
-
10 mm2(最低 70 °C,铜芯),符合 CE 要求
8 AWG(最低 60 °C,铜芯),符合 UL 要求
-
请勿以菊花链方式将 MSD 510 系统组件接地。使用 图解 35 中描述的接地方法。
•
地线连接应尽可能短
•
遵守本手册中的接线要求。
•
5.3.2 接地确保安装符合 EMC 规范
在每个模块上使用 I/O 屏蔽板在电缆屏蔽层和机箱之间建立电气接触。
•
AQ262450196490zh-000101 / 175R1170 | 53Danfoss A/S © 2019.10
Page 54

1
2
3
e30bg805.10
1电缆2
电缆扎带
3
I/O 屏蔽板
1
2
3
e30bh343.10
1
电缆扎带
2
EMC 金属屏蔽板
3
PE 螺钉
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
图解 36: 系统组件顶部的电缆屏蔽层
电气安装
图解 37: 系统组件底部的电缆屏蔽层
使用带有高覆盖率的屏蔽层的电缆来减小电气干扰。
•
请勿使用辫子状线缆来连接屏蔽层。建议采用 360° 线缆连接。
•
电位均衡
如果伺服系统和机器之间的大地电位不同,可能会出现电气干扰。在它们之间安装等势电缆。推荐的电缆横截面积为
-
16 mm2。
注 意
AQ262450196490zh-000101 / 175R117054 | Danfoss A/S © | 2019.10
Page 55

型号和功率额定值
符合 CE 要求 (IEC 60364)
符合 UL 要求 (NEC 2014)
熔断器最大规格
熔断器最大规格
PSM 510 (10 kW)
gG 25 A
30 A(仅限 T 类或 J 类)
PSM 510 (20 kW)
gG 50 A
50 A(仅限 T 类或 J 类)
PSM 510 (30 kW)
gG 63 A
80 A(仅限 T 类或 J 类)
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
注 意
EMC 干扰
使用屏蔽电缆作为控制线缆,对电源线和控制线缆使用单独的电缆。未隔离电源线和控制线缆可能会导致意外操作或降
-
低性能。
确保信号电缆和电源线之间至少相距 200 毫米。
-
只能以 90° 交叉电缆。
-
5.4 主电源要求
确保电源具有以下属性:
TN-S、TN-C、TN-CS、TT(非角接地)电源接地系统。
•
预期短路电流: 5 kA。
•
保护等级 I。
•
接地 3 相电网,400–480 V AC ±10%。
•
3 相线路和 PE 线路。
•
3 相频率: 44–66 Hz
•
30 kW 时,1 个 PSM 510 的最大输入电流: 55 A
•
rms
电气安装
5.4.1 熔断器
注 意
在电源模块 PSM 510 的供电侧使用符合 CE 和 UL 要求的熔断器(请参阅 表 12)。
-
使用 2 个 PSM 510 模块时,每个 PSM 510 都必须有自己的专用熔断器组。
-
表 12: 熔断器
5.4.2 断路器
使用分断能力为 PSM 510 额定电流的 1.5 倍的 B 类或 C 类断路器来满足 CE 要求。
注 意
不允许在要求 C-UL 认证的装置中使用断路器。仅允许使用 UL 推荐的熔断器。
-
5.5 辅助电源要求
为 PSM 510 提供输出为 24/48 V DC ±10% (PELV)、最大电流 50 A(实际电流取决于所用模块)的电源。所需输出取决于系统
拓扑结构。电源的输出纹波电压必须小于 250 mVpp。
有关额定功率的壳层图,请参阅 VLT® Servo Drive System ISD 510、DSD 510、MSD 510 设计指南。
AQ262450196490zh-000101 / 175R1170 | 55Danfoss A/S © 2019.10
Page 56

符合 CE 要求 (IEC 60364)
符合 UL 要求 (NEC 2014)
熔断器最大规格
熔断器最大规格
50 A
(1)
63 A
(2)
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
电气安装
注 意
只能使用符合 PELV 规范的电源。
-
对于工业用途,使用带有 CE 标志的符合 EN 61000-6-2、EN 61000-6-4 或类似标准的电源。
-
辅助电路必须由外部单独电源供电。
-
提供辅助电压的 24/48 V 直流外部电源必须由 MSD 510 系统专用,这意味着,该电源仅用于为 PSM 510 供电。该电源和
PSM 510 之间的电缆最大长度为 3 米。
5.5.1 熔断器
推荐使用 UL 列名的熔断器来保护 24–48 V 直流线路上的线缆。
表 13: 熔断器
1
如果最大电流低于此值,则可使用具有更低电流额定值的熔断器。IEC 熔断器的等级: 根据最大电流的 100% 确定。使用根据所用的直流
电压分级的延时熔断器。
2
如果最大电流低于此值,则可使用具有更低电流额定值的熔断器。UL 熔断器的等级: 根据最大电流的 125% 确定。使用根据所用的直流电
压分级的延时熔断器。
5.6 安全电源要求
使用具有以下属性的 24 V 直流电源为 STO 线路供电:
输出范围: 24 V DC ±10%
•
最大电流: 1 A
•
对工业用途使用通过 CE 认证的 24 V 电源。确保电源满足 PELV 规格,且仅适用于系统安全输入。
可对辅助和安全电源使用公用电源,只要两个电路的唯一连接点靠近该电源。这可避免由于公用电源出现压降而导致的干扰。
24 V 电源和伺服系统之间的电缆最大长度为 3 米。
安全电源可从 PSM 510 沿环路连接到其他 MSD 510 系统组件(ACM 510 除外),且未连接到 STO。不提供用于此连接的电缆。
有关详细信息,请参阅
8.6 安装。
注 意
确保安全信号和其他信号、电源(主电源)和外露的导电部件之间采用了加强绝缘。
-
5.7 UL 要求
注 意
集成的固态短路保护装置不提供支路保护功能。提供支路保护功能时必须遵守国家电气规范/加拿大电气规范和任何其
-
他地方规范或同等规定。
适用于在使用最大 80 A 的 J 类或 T 类熔断器进行保护时,能够提供不超过 5000 rms 对称电流且最大电压为 480 V
-
的电路。
为符合 UL(美国安全检测实验室)规范,请使用最低耐热能力为 60 °C 的 UL 认可的铜线。只能使用 1 类线缆。对
-
于额定功率为 30 kW 的 PSM 510,使用最大耐热能力 75 °C。
需要使用控制电路过电流保护功能。
-
AQ262450196490zh-000101 / 175R117056 | Danfoss A/S © | 2019.10
Page 57

1
2
3
4
5
e30bg808.10
40
Axis 2:170
Axis 1:120
10
60
12
1
屏蔽区域
2U3V4W5
PE
40
60
15
15
150
1
2
3
4
5
e30bh465.10
1
屏蔽区域
2U3V4W5
PE
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
5.8 连接伺服驱动器模块 SDM 511/SDM 512
5.8.1 连接电机电缆
电气安装
图解 38: 用于 50 毫米宽伺服驱动器模块的电机电缆
图解 39: 用于 100 毫米宽伺服驱动器模块的电机电缆
AQ262450196490zh-000101 / 175R1170 | 57Danfoss A/S © 2019.10
Page 58

1
2
e30bg809.10
1
2
e30bg810.10
1
55
8
2
3
4
e30bg811.10
1
电机温度 –
2
电机温度 +
3
电机制动器 –
4
电机制动器 +
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
图解 40: 连接 50 毫米宽伺服驱动器模块上的电机电缆
电气安装
图解 41: 连接 100 毫米宽伺服驱动器模块上的电机电缆
操作步骤
将线缆插入到电机连接器中。
1.
插入电机连接器 [1]。
2.
使用电缆扎带 [2] 固定和屏蔽电机电缆。
3.
5.8.2 连接制动/热敏电阻电缆
图解 42: 制动/热敏电阻电缆
AQ262450196490zh-000101 / 175R117058 | Danfoss A/S © | 2019.10
Page 59

1
3
2
4
5
e30bg812.10
1
电机 PE 螺钉
2
制动/热敏电阻连接器
3
制动/热敏电阻电缆的电缆扎带
4
EMC 板
5
EMC 板螺钉
1
2 3 4
6 5
7
e30bg444.10
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
图解 43: 连接制动/热敏电阻电缆
电气安装
注 意
在热敏电阻和电机绕组之间使用具有加强绝缘功能的电机(在 4300 V 直流和 8000 V
-
操作步骤
将线缆插入到制动/热敏电阻连接器中。
1.
将制动/热敏电阻连接器 [2] 插入到伺服驱动器模块 SDM 511/SDM 512 中。
2.
使用电缆扎带 [3] 固定制动/热敏电阻电缆。
3.
拧紧 EMC 板螺钉 [5]。紧固力矩为 3 Nm。
4.
将电机反馈连接器(SUB-D,26 引脚)插入伺服驱动器模块中。
5.
要将伺服驱动器模块 SDM 511/SDM 512 连接到 PE,将 PE 线缆连接到模块正面的 PE 螺钉 [1] 即可。紧固力矩为 3
6.
Nm。
5.8.3 连接伺服驱动器模块 SDM 511/SDM 512 顶部的电缆
脉冲下经过测试)。
peak
图解 44: SDM 511/SDM 512 顶部的连接器(示例)
AQ262450196490zh-000101 / 175R1170 | 59Danfoss A/S © 2019.10
Page 60

1
外部编码器连接器 (E SDM 511/512)
2
以太网连接器输入端 (X1 IN)
3
以太网连接器输出端 (X2 OUT)
4
I/O 连接器 (I/O SDM 511/512)
5
STO 连接器输入端 (STO SDM 511/512)
6
STO 连接器输出端 (STO SDM 511/512)
7
继电器连接器 (REL SDM 511/512)
型号
最低 I
rms
[A]
U
rms
[V]
电感 [mH]
PSM 510 (10 kW)
20
500
最小值: 0.47
最大值: 1.47
PSM 510 (20 kW)
40
500
最小值: 0.47
最大值: 1.47
PSM 510 (30 kW)
60
500
0.47 ±10%
型号
最低 I
rms
[A]
U
rms
[V]
电感 [mH]
PSM 510 (2 x 30 kW)
125
500
0.24 ±10%
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
操作步骤
1.
2.
3.
4.
5.
6.
使用以太网电缆将上一模块的输出端连接到输入连接器 [2]。
将线缆从上一模块的 STO 输出端连接到 24 V IN(STO 输入端)连接器中。
将 24 V 输入(STO 输入端)连接器 [5] 插入到 SDM 511/SDM 512 中。
如果需要,插入外部编码器连接器 [1]。
如果需要 I/O,将线缆插入 I/O 连接器中,然后插入连接器 [4]。
如果需要继电器,将线缆插入继电器连接器中,然后插入连接器 [7]。
电气安装
5.9 连接电源模块 PSM 510
5.9.1 交流线路电抗器
必须使用 3 相交流线路电抗器(请参阅 5.9.1.1 将 1 个 PSM 510 连接到交流电抗器和 5.9.1.2 将 2 个 PSM 510 模块连
接到交流电抗器)。
表 14: 用于 1 个 PSM 510 的线路电抗器特征
如果并联安装了 2 个 PSM 510 模块,则使用表 15 中指定的交流电抗器。有关详细信息,请参阅 5.9.1.2 将 2 个 PSM 510
模块连接到交流电抗器。
表 15: 用于并联安装的 2 个 PSM 510 的线路电抗器特征
Danfoss 建议将交流线路电抗器安装在 PSM 510 近处。
最大电缆长度取决于横截面积以及直流回路所需的电压和电流。
如果将交流线路电抗器安装在距 PSM 510 较远的位置,则最大电缆距离为 5 米。
5.9.1.1 将 1 个 PSM 510 连接到交流电抗器
将 PSM 510 连接到带有适用于 PSM 510 的功率规格的正确交流电抗器的电网。
AQ262450196490zh-000101 / 175R117060 | Danfoss A/S © | 2019.10
Page 61

STATUS PSM
DEV
STO
NET ST
LINK/ACT
X1
X2
LCP LCP LCP
STATUS SDM
DEV
STO
NET ST
LINK/ACT
X1
X2
STATUS SDM
DEV
STO
NET ST
LINK/ACT
X1
X2
LCP
STATUS DAM
DEV
STO
NET ST
AUX
LINK/ACT
X1
X2
X3
e30bh420.10
PSM 510
SDM 511
SDM 511/
SDM 512
DAM 510
STATUS PSM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
LCP
STATUS PSM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
LCP
LCP LCP
STATUS SDM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
STATUS SDM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
LCP
STATUS DAM
DEV
SVS ST
NET ST
AUX
LINK/ACT
X1
X2
X3
PSM 510
PSM 510
SDM 511
SDM 511/
SDM512
DAM 510
e30bh421.11
... ...
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
电气安装
图解 45: 将 1 个 PSM 510 连接到交流电抗器
5.9.1.2 将 2 个 PSM 510 模块连接到交流电抗器
将 PSM 510 模块连接到同一交流电抗器,如
确保所用的电抗器是与 PSM 510 模块的总功率相匹配的正确规格。
使用 2 个 PSM 510 模块时,交流线路电抗器和每个 PSM 510 之间的线缆长度必须相同,容差在 0.5 米内。
将每个 PSM 510 直接连接到交流电抗器。不允许将线缆并联。
图解 46 所示。
图解 46: 将 2 个 PSM 510 模块连接到交流电抗器
5.9.1.3 将 2 个 PSM 510 模块连接到带有系统拆分装置的交流电抗器
无论负载位置如何(比如,安装在系统拆分装置之前或之后),将 PSM 510 模块连接到同一交流电抗器,如
确保所用的电抗器是与 PSM 510 模块的总功率相匹配的正确规格。
使用 2 个 PSM 510 模块时,交流线路电抗器和每个 PSM 510 之间的线缆长度必须相同,容差在 0.5 米内。
AQ262450196490zh-000101 / 175R1170 | 61Danfoss A/S © 2019.10
图解 47 所示。
Page 62

STATUS PSM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
LCP LCP LCP LCP LCP LCP LCP LCP
STATUS PSM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
STATUS SDM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
STATUS SDM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
e30bh422.10
STATUS DAM
DEV
SVS ST
NET ST
AUX
LINK/ACT
X1
X2
X3
STATUS ACM
DEV
CAP ST
NET ST
LINK/ACT
X1
X2
STATUS SDM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
STATUS SDM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
PSM 510
PSM 510
SDM 511
SDM 511/
SDM512
SDM 511
SDM 511/
SDM512
ACM 510
DAM 510
EXM 510
...
1 2
3
45
6
7
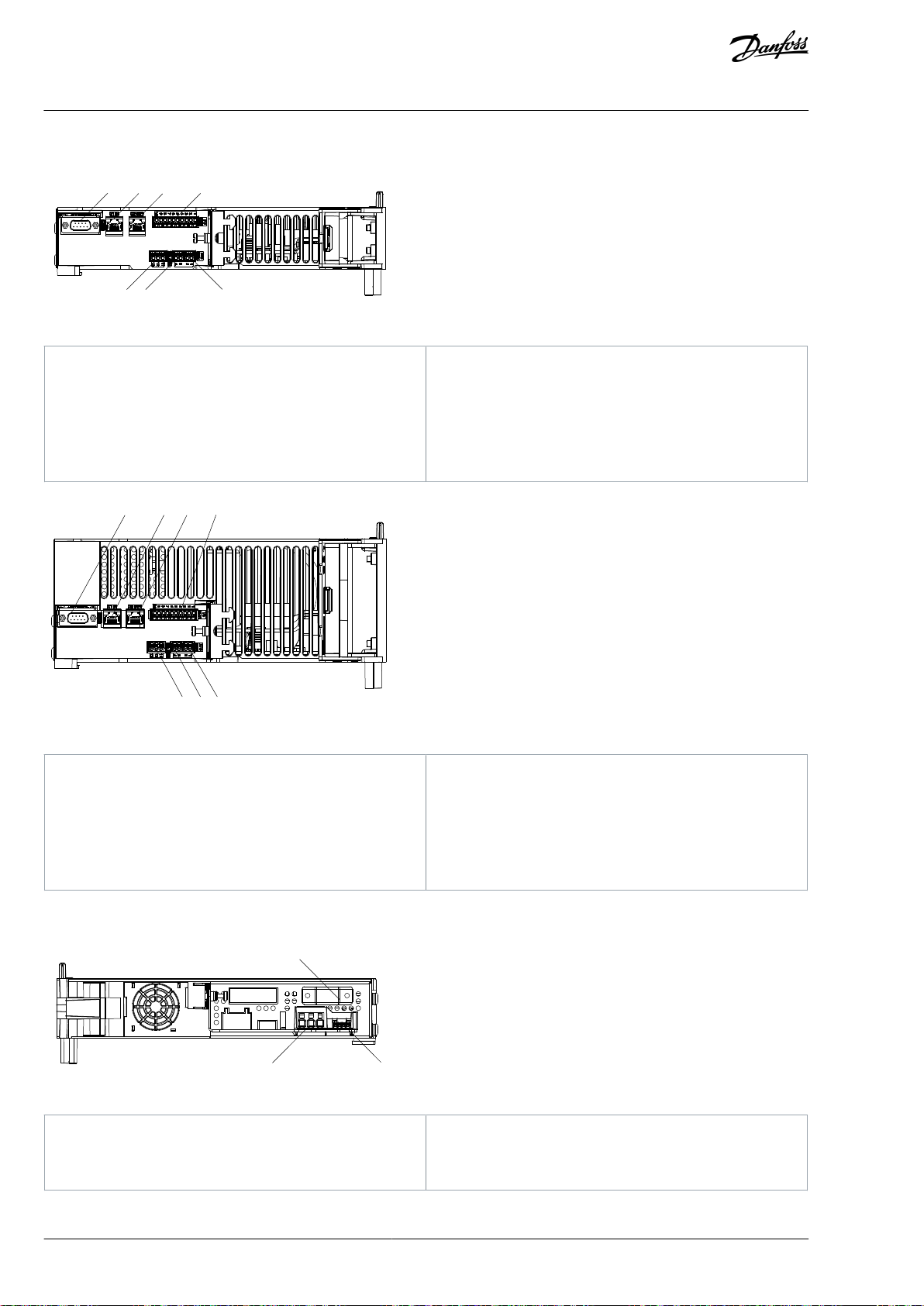
e30bg465.11
1
以太网连接器输入端 (X1 IN)
2
以太网连接器输出端 (X2 OUT)
3
24/48 V 输入连接器 (INPUT 24/48 V)
4
STO 连接器输入端 (STO PSM)
5
STO 连接器输出端 (STO PSM)
6
I/O 连接器 (I/O PSM)
7
继电器连接器 (REL PSM)
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
电气安装
将每个 PSM 510 直接连接到交流电抗器。不允许将线缆并联。
图解 47: 将 2 个 PSM 510 模块连接到带有系统拆分装置的交流电抗器
如果使用 2 个交流电抗器(每个 PSM 510 一个)且两个 PSM 510 模块都安装在系统拆分装置的同一侧,则允许将降容设置为
等于交流电抗器的容差,即 60 kW。例如,降容 10% 后为 54 kW。
如果使用 2 个交流电抗器(每个 PSM 510 一个)且一个 PSM 510 模块安装在系统拆分装置之前,另一个安装在该装置之后,
则必须均衡分配负载。否则,两个 PSM 510 模块的降容将等于交流电抗器的容差。例如,容差为 10% + 10%,则表示降容
20%。
如果使用 2 个交流电抗器(每个 PSM 510 一个)且一个 PSM 510 模块安装在系统拆分装置之前,另一个安装在该装置之后,
则将一半负载设置在系统拆分装置之前,将另一半负载设置在系统拆分装置之后,且允许将降容设置为等于交流电抗器的容
差,即 60 kW。例如,降容 10% 后为 54 kW。
有关 EXM 510 模块和接线的更多信息,请参阅 11.7.15 扩展模块连接器。
-
5.9.2 连接电源模块 PSM 510 上的电缆
5.9.2.1 连接电源模块 PSM 510 顶部的电缆
图解 48: PSM 510 顶部的连接器
注 意
AQ262450196490zh-000101 / 175R117062 | Danfoss A/S © | 2019.10
Page 63

2
1
3
4
e30bg466.10
1
用于插入未用的内部制动电阻器连接器的支座
2
交流主电源连接器
3
PE 螺钉
4
内部/外部制动电阻器连接器
1 2
3
4
5
e30bg467.10
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
操作步骤
将以太网电缆从 PLC 连接到以太网输入连接器 [1]。
1.
将以太网电缆从以太网输出连接器 [2] 连接到下一模块。
2.
将线缆插入到 24/48 V 输入端连接器中。
3.
插入 24/48 V 输入连接器 [3]。
4.
将线缆插入 STO 连接器输入端连接器中。
5.
插入 STO 连接器输入端 (STO PSM) 连接器 [4]。
6.
将线缆插入 STO 连接器输出端连接器中。
7.
插入 STO 连接器输出端 (STO PSM) 连接器 [5]。
8.
如果需要 I/O,将线缆插入 I/O 连接器中,然后插入连接器 (I/O PSM) [6]。
9.
如果需要继电器,将线缆插入继电器连接器中,然后插入连接器 (REL PSM) [7]。
10.
5.9.2.2 连接电源模块 PSM 510 底部的电缆
电气安装
图解 49: PSM 510 底部的连接器
操作步骤
1.
将线缆插入到交流电源连接器中。
2.
插入交流电源连接器 [2] 中。
3.
如果需要使用外部制动电阻器:
a.
拔下内部制动电阻器连接器 [4] 然后将外部制动连接器插入到位。
b.
将内部制动电阻器连接器插入到内部制动连接器座 [1] 中。
4.
使用 PE 线缆将 PSM 510 连接到正面的 PE 螺钉 [3] 上。紧固力矩为 3 Nm。
5.10 连接分布式访问模块 (DAM 510)
5.10.1 连接分布式访问模块 DAM 510 顶部的电缆
图解 50: DAM 510 顶部的连接器
AQ262450196490zh-000101 / 175R1170 | 63Danfoss A/S © 2019.10
Page 64

1
以太网连接器输入端 (X1 IN)
2
以太网连接器输出端 (X3 OUT)
3
STO 连接器输入端 (STO DAM)
4
STO 连接器输出端 (STO DAM)
5
外部编码器连接器 (E DAM)
1
234
e30bg468.10
1
以太网连接器
2
AUX 连接器
3
STO 输出连接器
4
UDC 连接器
1
26
117
80
10
20
87
18
10
7
2
3
4
5
6
7
8
9
e30bg806.10
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
操作步骤
使用以太网电缆将上一模块的输出端连接到输入连接器 [1]。
1.
将上一模块的 STO 输出端的线缆插入到 24 V 输入(STO 输入)连接器中,请参阅
2.
连接器。
3.
将 24 V 输入(STO 连接器输入端)连接器 [3] 插入到 DAM 510 中。
4.
如果需要,连接外部编码器连接器 [5]。
5.10.2 连接馈电电缆
电气安装
11.7.10.3.1 DAM 510 顶部的 STO
图解 51: DAM 510 底部的连接器
图解 52: 馈电电缆
AQ262450196490zh-000101 / 175R117064 | Danfoss A/S © | 2019.10
Page 65

1
屏蔽区域
2
UDC+(黑色,2.5 mm2/4 mm2)
3
UDC–(灰色,2.5 mm2/4 mm2)
4
STO+(粉色,0.5 mm2)
5
STO–(灰色,0.5 mm2)
6
AUX+(红色,2.5 mm2)
7
AUX–(蓝色,2.5 mm2)
8
以太网/现场总线(绿色,RJ45 连接器)
9
PE(黄色/绿色,2.5 mm2/4 mm2,叉形接线头)
1
2
3
4
5
6
e30bg807.10
1
馈电电缆 PE 螺钉
2
总线连接器
3
馈电电缆的扎带
4
STO 电缆的扎带
5
EMC 板
6
EMC 板螺钉
e30bh350
.11
1
2
4 3
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
电气安装
图解 53: 连接馈电电缆
操作步骤
将线缆插入 UDC、AUX 和 STO 连接器中。
1.
使用电缆扎带 [3] 固定馈电电缆,确保屏蔽区域恰好位于电缆扎带下。
2.
使用电缆扎带 [4] 固定 STO 电缆,确保屏蔽区域恰好位于电缆扎带下。
3.
将馈电电缆上的连接器插入到 DAM 510 上的对应端子块中。
4.
拧紧 EMC 板上的螺钉 [6]。紧固力矩为 3 Nm。
5.
插入 RJ45 总线连接器 [2]。
6.
使用 PE 线缆将 DAM 510 连接到正面的 PE 螺钉 [1] 上。紧固力矩为 3 Nm。
7.
5.11 连接辅助电容器模块 ACM 510
图解 54: ACM 510 顶部的连接器
AQ262450196490zh-000101 / 175R1170 | 65Danfoss A/S © 2019.10
Page 66

1
以太网连接器输入端 (X1 IN)
2
以太网连接器输出端 (X2 OUT)
3
I/O 连接器 (I/O ACM)
4
继电器连接器 (REL ACM)
12
5315
8
1
2
3
4
5
6
7
e30bh661.10
1
24/48 V
2
GND3功能地
4
DC–5DC–6DC+7DC+8屏蔽区域
e30bh392.11
1
2
3
4
5
6
7
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
操作步骤
1.
使用以太网电缆将上一系统模块的输出端连接到输入连接器 (X1 IN) [1]。
2.
如果需要 I/O,将线缆插入 I/O 连接器 (I/O ACM) 中,然后插入连接器 [3]。
3.
如果需要继电器,将线缆插入继电器连接器 (REL ACM) 中,然后插入连接器 [4]。
4.
使用 PE 线缆将 ACM 510 连接到正面的 PE 螺钉上。紧固力矩为 3 Nm。
5.12 连接扩展模块 EXM 510
电气安装
图解 55: 扩展模块电缆
图解 56: 连接扩展模块 EXM 510
AQ262450196490zh-000101 / 175R117066 | Danfoss A/S © | 2019.10
Page 67

1
EMC 屏蔽板螺钉
2
PE 螺钉
3
直流电缆
4
功能地电缆
5
GND 电缆
6
24/48 V 电缆
7
电缆扎带
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
注 意
如果使用两个单独的背部链路(通过 1 或 2 对 EXM 510 模块连接),还必须使用横截面积为 16 mm2 (6 AWG) 的电缆
-
将 2 个接地汇流条连接在一起。
操作步骤
将线缆 [3]、[4]、[5] 和 [6] 插入扩展连接器中。
1.
使用电缆扎带 [7] 固定直流电缆 [3],确保屏蔽区域恰好位于电缆扎带下。
2.
使用电缆扎带 [7] 固定电缆 [4]、[5] 和 [6]。
3.
将连接器插入背板中。
4.
拧紧 EMC 屏蔽板 [1] 上的螺钉。紧固力矩为 3 Nm。
5.
使用 PE 线缆和 PE 螺钉 [2] 将扩展模块连接到 PE 以接地。紧固力矩为 3 Nm。
6.
电气安装
5.13 连接 PSM 510 上的制动电阻器
PSM 510 连接到内部制动电阻器,如
或者,也可将 PSM 510 连接到外部制动电阻器。在此情况下,PSM 510 上的内部制动电阻器必须保持未连接状态,可将连接器
置于内部制动电阻器连接器座中(请参阅 3.2.3 PSM 510 底部的连接器)。
不允许并联或串联制动电阻器。
图解 57 所示。
AQ262450196490zh-000101 / 175R1170 | 67Danfoss A/S © 2019.10
Page 68
STATUS PSM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
LCP
1
e30bh423.10
PSM 510
1
内部制动电阻器
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
电气安装
图解 57: 连接 1 个 PSM 510 上的内部制动电阻器
使用 2 个 PSM 510 模块时,将每个 PSM 510 连接到各自的内部制动电阻器,如图解 58(出厂设置)中所示。
2 个 PSM 510 模块的允许替代配置为:
将一个 PSM 510 连接到内部制动电阻器,另一个连接到外部制动电阻器。
•
两个 PSM 510 模块都连接到外部制动电阻器。在此情况下,PSM 510 上的内部制动电阻器必须保持未连接状态,可将连接
•
器置于内部制动电阻器连接器座中(请参阅 3.2.3 PSM 510 底部的连接器)。
不允许并联或串联制动电阻器。
AQ262450196490zh-000101 / 175R117068 | Danfoss A/S © | 2019.10
Page 69

STATUS PSM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
LCP
STATUS PSM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
LCP
1
1
e30bh424.10
PSM 510
PSM 510
1
内部制动电阻器
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
电气安装
图解 58: 连接 2 个并联 PSM 510 模块上的制动电阻器
AQ262450196490zh-000101 / 175R1170 | 69Danfoss A/S © 2019.10
Page 70

e30bh657.10
1 2 3
123
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
6 调试
6.1 调试警告
警 告
意外启动
MSD 510 系统包含连接到电网的伺服驱动器、PSM 510 和 DAM 510,可随时开始运行。这可能由现场总线命令、参考值信号
或消除故障状态的操作引发。伺服驱动器和所有连接的设备都必须具有良好运行状况。将设备连接到电网后,存在缺陷的运
行状况可能导致死亡、严重伤害、设备损坏或其他实质性损坏。
采取适合措施防止意外启动。
-
6.2 预调试检查表
在初次调试前以及在长时间停机或存储后开始运行前,请务必完成这些检查。
操作步骤
检查机械和电气组件的所有螺纹连接器是否牢靠拧紧。
1.
检查能否确保冷却空气自由流动(入口和出口)。
2.
检查电气连接是否正确。
3.
确保已为可能会变得很烫的旋转部件和表面准备好接触防护装置。
4.
如果使用 STO 功能,则执行功能安全概念启用测试(请参阅 8.8 启用测试)。
5.
调试
6.3 SDM 511/SDM 512 配置参数和变频器调试
6.3.1 配置参数子工具
配置参数子工具是 VLT® Servo Toolbox 子工具,用于配置:
电机数据
•
应用数据
•
控制数据
•
输入 / 输出配置
•
外部编码器
•
图解 59: 配置参数子工具
配置参数存储在一个文件中。
AQ262450196490zh-000101 / 175R117070 | Danfoss A/S © | 2019.10
Page 71

e30bh658.10
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
•
单击从设备读取配置 按钮 [2] 可加载该文件。
•
单击保存/另存为 按钮 [1] 可在本地保存文件。
•
单击将配置写入设备 按钮 [3] 可将该文件传输到设备。重新启动设备以激活传输的配置。
注 意
请参考子工具了解每个参数的详细说明。
-
6.3.2 变频器调试子工具
变频器调试子工具是 VLT® Servo Toolbox 子工具,用于执行调试任务,比如:
电机反馈调整
•
旋变振幅校准
•
惯量测量
•
调试
图解 60: 变频器调试子工具
6.4 EtherCAT® ID 分配
EtherCAT® 无需特殊 ID 分配(IP 地址)。仅当通过 VLT® Servo Toolbox 软件使用间接通信时,才需要特殊 ID 分配。
6.5 以太网 POWERLINK® ID 分配
6.5.1 概述
使用 VLT® Servo Toolbox 为设备分配 ID 时,不得激活以太网 POWERLINK® 主站通信。仅当使用非循环以太网 POWERLINK
通信时,才能通过 VLT® Servo Toolbox 分配 ID。如果已启动以太网 POWERLINK® 循环通信,则重新启动以停止它。
设置 ID 之前,断开 PLC 连接并重新启动。或者,在 POWERLINK® 界面中,在 Service Mode(维护模式)下重启计算机,同
时,将参数 Basic Ethernet in Service Mode(维护模式下的基本以太网)设置为 Basic Ethernet enabled(已启用基本以
太网)。
6.5.2 单设备 ID 分配
为单个设备分配 ID 时,使用 VLT® Servo Toolbox 中的 Device Information(设备信息)窗口(请参阅 VLT® Servo Drive
System ISD 510、DSD 510、MSD 510 编程指南 了解更多信息)。
此外,还可通过 LCP 将一个 ID 分配给一个设备。
6.5.2.1 在伺服驱动器或系统模块上直接设置节点 ID
所有与 IP 相关的参数都位于参数组 12-0* IP Settings(12-0* IP 设置)中。根据以太网 POWERLINK® 标准,IP 地址固定
为 192.168.100.xxx。最后一个数字是参数 12-60 Node ID(12-60 节点 ID)中的值。对于参数 12-02 Subnet Mask(12-02
子网掩码),IP 地址固定为 255.255.255.0,无法更改。
®
操作步骤
1.
2.
3.
4.
5.
6.
将 LCP 连接到应更改 节点 ID 的伺服驱动器或系统模块。
按 Hand On(手动启动)按钮并保持 1 秒以上以将 LCP 设置为控制界面。
按 Main Menu(主菜单)按钮,向下滚动到子菜单 12-** Ethernet(12-** 以太网)然后按 OK(确定)。
向下滚动到子菜单 12-6* Ethernet POWERLINK(12-6* 以太网 POWERLINK)然后按 OK(确定)。
将 PSM 510/DAM 510 节点 ID 更改为所需值 (1–239)。
按 OK(确定)以确认选定内容,然后等待 ID 分配过程完成。
AQ262450196490zh-000101 / 175R1170 | 71Danfoss A/S © 2019.10
Page 72

VLT® Multiaxis Servo Drive MSD 510 System
操作指南
7.
执行重启以确保所有 ID 更改都生效且能够在现场总线上正常工作。
调试
6.5.2.2 通过 LCP 为连接到电源模块 (PSM 510) 或分布式访问模块 (DAM 510) 的单个伺服驱
动器设置节点 ID
当 LCP 连接到 PSM 510 或 DAM 510 时,还可更改伺服驱动器的节点 ID。此功能包括在子组 54-1* Manual(54-1* 手动)中
的参数组 54-** ID Assignment(54-** ID 分配)中。
操作步骤
1.
将 LCP 连接到特定 PSM 510/DAM 510,后者已连接到应更改节点 ID 的伺服驱动器和系统模块。
2.
按 Hand On(手动启动)按钮并保持 1 秒以上以将 LCP 设置为 PSM 510/DAM 510 的控制界面。
按 Main Menu(主菜单)按钮,向下滚动到子菜单 12-** Ethernet(12-** 以太网)然后按 OK(确定)。
3.
向下滚动到子菜单 12-6* Ethernet POWERLINK(12-6* 以太网 POWERLINK)然后按 OK(确定)。
4.
通过按 OK(确定)按钮,将 PSM 510/DAM 510 节点 ID 更改为所需值 (1–239) 。
5.
返回到 Main Menu(主菜单),然后选择参数 54-** ID Assignment(54-** ID 分配)。
6.
选择参数 54-1* Manual(54-1* 手动)。
7.
仅限 PSM 510: 在参数 54-01 Epl id assignment line(54-01 Epl ID 分配线路)中,选择以太网端口 X1 或 X2。
8.
PSM 510 将通过所选端口和现场总线网络把 ID 分配给选定设备。在 DAM 510 端口上,将自动使用 X2。
选择参数 54-12 Epl ID assignment start id(54-12 Epl ID 分配启动 ID)然后选择一个有效值 (1–239)。该值
9.
将被分配给指定位置索引处的设备。连接到 LCP 的 PSM 510/DAM 510 处于位置 0,选定端口上第一个可用设备位于位
置索引 1,以此类推。
选择参数 54-14 Manual Epl ID assignment start(54-14 手动 Epl ID 分配启动),然后将状态从 [0] ready([0]
10.
就绪)更改为 [1] start([1] 启动)。
按 OK(确定)以确认选定内容,然后等待 ID 分配过程完成。
11.
使用以下参数检查 ID 分配是否已成功完成:
12.
参数 54-15 Epl ID assignment state(54-15 Epl ID 分配状态)
a.
参数 54-16 Epl ID assignment error code(54-16 Epl ID 分配错误代码)
b.
参数 54-17 Epl ID assignment device count(54-17 Epl ID 分配设备计数)
c.
执行重启以确保所有 ID 更改都生效且能够在现场总线上正常工作。
13.
如果在 ID 分配过程中出错,则 LCP 上将显示出检测到的错误。可能会报告以下错误:
无效 NMT 状态
•
无效备粒
•
无效以太网端口
•
无效节点 ID
•
ID 分配失败
•
MAC 地址重复
•
无效软件版本
•
不完整的分配
•
找不到设备
•
内部错误
•
6.5.3 多设备 ID 分配
为多个设备分配 ID 时(例如,设置一个新网络时),使用 VLT® Servo Toolbox 子工具 DAM ID assignment(DAM ID 分配)
(请参阅 VLT® Servo Drive System ISD 510、DSD 510、MSD 510 编程指南了解更多信息)。
同时为连接到分布式访问模块 (DAM 510) 或电源模块 (PSM 510) 的所有伺服驱动器设置 ID 时,当 DAM 510/PSM 510 连接有
LCP 时,还可通过 LCP 来完成。
6.5.3.1 设置分布式访问模块 (DAM 510)/电源模块 (PSM 510) 线路上的所有伺服驱动器和系
统模块的节点 ID
使用自动 PSM 510/DAM 510 ID 分配功能,可自动设置指定 PSM 510/DAM 510 线路的所有伺服驱动器和系统模块上的节点 ID。
此功能包括在子组 54-0* Automatic(54-0* 自动)中的参数组 54- ** ID Assignment(54-** ID 分配)中。
AQ262450196490zh-000101 / 175R117072 | Danfoss A/S © | 2019.10
Page 73

VLT® Multiaxis Servo Drive MSD 510 System
操作指南
操作步骤
将 LCP 连接到特定 PSM 510/DAM 510,后者已连接到应更改节点 ID 的伺服驱动器和系统模块。
1.
按 Hand On(手动启动)按钮并保持 1 秒以上以将 LCP 设置为 PSM 510/DAM 510 的控制界面。
2.
按 Main Menu(主菜单)按钮,向下滚动到子菜单 12-** Ethernet(12-** 以太网)然后按 OK(确定)。
3.
向下滚动到子菜单 12-6* Ethernet POWERLINK(12-6* 以太网 POWERLINK)然后按 OK(确定)。
4.
通过按 OK(确定)按钮,将 PSM 510/DAM 510 节点 ID 更改为所需值 (1–239) 。
5.
返回到 Main Menu(主菜单),然后选择参数 54-** ID Assignment(54-** ID 分配)。
6.
选择参数 54-0* Automatic(54-0* 自动)。
7.
仅限 PSM 510: 在参数 54-01 Epl id assignment line(54-01 Epl ID 分配线路)中,选择以太网端口 X1 或 X2。
8.
PSM 510 将通过所选端口和现场总线网络把 ID 分配给选定设备。在 DAM 510 端口上,将自动使用 X2。
选择参数 54-02 Epl ID assignment start id(54-02 Epl ID 分配启动 ID)然后选择一个有效值 (1–239)。该值
9.
将被分配给指定位置索引处的设备。连接到 LCP 的 PSM 510/DAM 510 处于位置 0,选定端口上第一个可用设备位于位
置索引 1,以此类推。
选择参数 54-03 Automatic Epl ID assignment start(54-03 自动 Epl ID 分配启动),然后将状态从 [0] ready
10.
([0] 就绪)更改为 [1] start([1] 启动)。
按 OK(确定)以确认选定内容,然后等待 ID 分配过程完成。
11.
使用以下参数检查 ID 分配是否已成功完成:
12.
参数 54-04 Epl ID assignment state(54-04 Epl ID 分配状态)
a.
参数 54-05 Epl ID assignment error code(54-05 Epl ID 分配错误代码)
b.
参数 54-06 Epl ID assignment device count(54-06 Epl ID 分配设备计数)
c.
执行重启以确保所有 ID 更改都生效且能够在现场总线上正常工作。
13.
调试
如果在 ID 分配过程中出错,则 LCP 上将显示出检测到的错误。可能会报告以下错误:
无效 NMT 状态
•
无效备粒
•
无效以太网端口
•
无效节点 ID
•
ID 分配失败
•
MAC 地址重复
•
无效软件版本
•
不完整的分配
•
找不到设备
•
内部错误
•
6.6 PROFINET® ID 分配
每个 PROFINET® 设备都需要一个设备名称和 IP 地址。建立与 I/O 设备的连接后,IP 地址和设备名称将由 I/O 控制器分
配。
通过 VLT® Servo Toolbox 软件使用间接通信时,也需要进行 IP 地址分配(请参阅 VLT® Servo Drive System ISD 510、
DSD 510、MSD 510 编程指南了解更多信息)。
IP 地址和设备名还可使用 PRONETA 分配,这是一个支持 PROFINET® 网络分析和配置的免费工具。
6.7 加电时间
系统组件的最长加电时间为 15 秒。这是指,从使用辅助电源为系统供电到模块完全初始化所需的时间。
列出的加电时间是相应的状态指示时间。模块的准确状态可通过状态字查看。
注 意
在所有系统模块全都正确加电之前,请勿操作任何系统模块。
-
如果并联安装 2 个 PSM510 模块,则同时为两个 PSM 510 模块加电(最多延迟 1 秒)。
-
AQ262450196490zh-000101 / 175R1170 | 73Danfoss A/S © 2019.10
Page 74

规格单位PSM 510
DAM 510
ACM 510
UDC 充电时间
s
2.0
2.0
3.5
规格
单位
SDM 511
2.5 A
SDM 511
5 A
SDM 511
10 A
SDM 511
20 A
UDC 充电时间
s
2.0
规格
单位
SDM 512
2 x 2.5 A
SDM 512
2 x 5 A
SDM 512
2 x 10 A
UDC 充电时间
s
2.0
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
6.8 系统模块充电时间
系统充电时间由每个单独系统模块的最长充电时间决定。
每个模块的准确状态可通过状态字查看。
注 意
在所有系统模块都完全充电且处于 Operation enabled(允许运行)状态之前,请勿操作任何系统模块。
-
表 16: PSM 510、DAM 510 和 ACM 510 的直流回路 (UDC) 充电时间
表 17: SDM 511 的直流回路 (UDC) 充电时间
表 18: SDM 512 的直流回路 (UDC) 充电时间
调试
6.9 打开 MSD 510 系统
在对伺服驱动器模块 (SDM 511/SDM 512) 加电前,完成 MSD 510 系统的接线。此线路可为 MSD 510 系统提供电源电压和通
信信号。这是伺服驱动器正常工作的基本要求。
通过使用 U
连接的模块的控制单元在运行。当主电源和 STO 加电后,系统将准备好运行。
为电源模块 (PSM 510) 供电,可打开 MSD 510 系统。然后,该电源将被自动输送到连接的所有系统模块,仅
AUX
6.9.1 打开 MSD 510 系统的操作步骤
操作步骤
打开 U
1.
打开主电源。
2.
将 PSM 510 设置为状态 Operation enabled(允许运行)。
3.
现在,系统模块已准备好运行。
将 DAM 510 设置为状态 Operation enabled(允许运行)。
4.
电源,与 PSM 510、DAM 510 和 SDM 模块建立通信。
AUX
6.10 库
为 MSD 510 系统提供的库可在以下工具中使用:
TwinCAT® V2
•
SIMOTION SCOUT® V4.4 和 V4.5:
•
V4.4 中的 C240
-
V4.4 中的 D410-2
-
V4.4 中的 D425-2
-
V4.4 中的 D435-2
-
V4.4 中的 D445-2
-
AQ262450196490zh-000101 / 175R117074 | Danfoss A/S © | 2019.10
Page 75

VLT® Multiaxis Servo Drive MSD 510 System
操作指南
-
V4.4 中的 D455-2
-
V4.4 中的 P320
•
Automation Studio© 环境(版本 3.0.90 和 4.x,支持的平台 SG4),可轻松集成功能,而无需控制器上具有专用运动运
行时。
•
V13 中的 TiA
提供的功能块符合 PLCopen® 标准。不必具备有关基础现场总线通信和/或 CANopen® CiA DS 402 行规的知识。
库中包含:
用于控制和监测 ISD 510/DSD 510 伺服驱动器、伺服驱动器模块 SDM 511/SDM 512 和系统模块的功能块。
•
用于 ISD 510/DSD 510 伺服驱动器和 SDM 511/SDM 512 伺服驱动器模块的所有可用运动命令的功能块。
•
用于控制和监测 PSM 510、DAM 510 和 ACM 510 的功能块。
•
用于创建基本 CAM 轨迹的功能块和结构。
•
用于创建标记 CAM 轨迹的功能块和结构。
•
调试
6.11 使用 Automation Studio™ 编程
6.11.1 使用 Automation Studio™ 编程的要求
要将 ISD 510/DSD 510 伺服驱动器、SDM 511/SDM 512 伺服驱动器模块和系统模块集成到 Automation Studio© 项目中,需要
使用以下文件:
用于 MSD 510 伺服系统的库文件包: Danfoss_VLT_ServoMotion_V_x_y_z.zip
•
用于标准型 ISD 510 伺服驱动器的 XDD 文件(XML Device Description,XML 设备描述): 0x0300008D_ISD510_S.xdd
•
用于高级型 ISD 510 伺服驱动器的 XDD 文件(XML Device Description,XML 设备描述): 0x0300008D_ISD510_A.xdd
•
用于标准型 DSD 510 伺服驱动器的 XDD 文件(XML Device Description,XML 设备描述): 0x0300008D_DSD510_S.xdd
•
用于高级型 DSD 510 伺服驱动器的 XDD 文件(XML Device Description,XML 设备描述): 0x0300008D_DSD510_A.xdd
•
用于 SDM 511/SDM 512 伺服驱动器模块的 XDD 文件(XML Device Description,XML 设备描述): 0x0300008D_SDM510.xdd
•
用于电源模块 (PSM 510) 的 XDD 文件(XML Device Description,XML 设备描述): 0x0300008D_PSM.xdd
•
用于分布式访问模块 (DAM 510) 的 XDD 文件(XML Device Description,XML 设备描述): 0x0300008D_DAM.xdd
•
用于辅助电容器模块 (ACM 510) 的 XDD 文件(XML Device Description,XML 设备描述): 0x0300008D_ACM.xdd
•
6.11.2 创建 Automation Studio™ 项目
除非另外指明,否则,本章中所述的操作步骤适用于 Automation Studio© 版本 3.0.90 和 V4.x。
有关如何安装 Automation Studio© 的详细信息,请参阅 Automation Studio© 帮助。打开 B&R Help Explorer(B&R 帮助管
理器)然后转到 [Automation software → Software Installation → Automation Studio](自动化软件 → 软件安装 →
Automation Studio)。
有关如何在 Automation Studio© 中创建项目的详细信息,请参阅 Automation Studio© 帮助。
V3.0.90:
打开 B&R Help Explorer(B&R 帮助管理器)然后转到 [Automation Software → Getting Started → Creating programs
with Automation Studio → First project with X20 CPU](自动化软件 → 入门 → 使用 Automation Studio 创建程序
→ 使用 X20 CPU 的第一个项目)。
V4.x:
打开 B&R Help Explorer(B&R 帮助管理器)然后转到 [Automation Software → Getting Started → Creating programs
with Automation Studio → Example project for a target system with CompactFlash](自动化软件 → 入门 → 在
Automation Studio 中创建程序 → 使用 CompactFlash 的目标系统的示例项目)。
6.11.3 在 Automation Studio™ 项目中包括伺服运动库
操作步骤
在 Logical View(逻辑视图)中,打开菜单条目 [File → Import...](文件 → 导入...)。
1.
在下一窗口中,选择 Danfoss_VLT_ServoMotion_V_x_y_z.zip 文件(根据在硬盘上的位置)。
2.
单击 Open(打开)。
3.
在下一窗口中,将库分配给 CPU。
4.
单击 Finish(完成)。现在,库已被集成到 Automation Studio© 项目中。
5.
AQ262450196490zh-000101 / 175R1170 | 75Danfoss A/S © 2019.10
Page 76

VLT® Multiaxis Servo Drive MSD 510 System
操作指南
在集成过程中,将创建包含 ISD 库的新文件夹:
•
DDS_Drive
•
包含由 PLCopen® 定义的程序组织单元 (POU)(名称以 MC_ 开头)和由 Danfoss 定义的 POU(名称以 DD_
开头)。Danfoss POU 为轴提供附加功能。
•
可组合使用由 PLCopen® 定义的 POU 和由 Danfoss 定义的 POU。
面向伺服驱动器的 POU 的名称全都以 _DDS 结尾。
•
DDS_PSM
•
包含由 Danfoss 定义的 POU(名称以 DD_ 开头),为电源模块 (PSM) 提供功能。
•
面向 PSM 的 POU 的名称全都以 _PSM 结尾。
•
DDS_DAM
•
包含由 Danfoss 定义的 POU(名称以 DD_ 开头),为分布式访问模块 (DAM) 提供功能。
•
面向 DAM 的 POU 的名称全都以 _DAM 结尾。
•
DDS_ACM
•
包含由 Danfoss 定义的 POU(名称以 DD_ 开头),为辅助电容器模块 (ACM) 提供功能。
•
面向 ACM 的 POU 的名称全都以 _ACM 结尾。
•
DDS_BasCam
•
包含用于创建基本 CAM 的 POU。
•
DDS_LabCam
•
包含用于创建标记 CAM 的 POU。
•
DDS_Intern
•
包含使用库时内部需要的 POU。
•
请不要在应用程序中使用这些 POU。
•
集成 DDS_Drive 文件包时,将自动集成一些标准库,除非这些库已是项目的组成部分。
调试
注 意
请勿删除这些库,否则,Danfoss 伺服运动库将无法使用。
-
6.11.4 DDS_Drive 库内的常量
在该库内,定义了以下列出的常量:
•
Danfoss_VLT_ServoMotion
-
包含库的版本信息。
•
DDS_AxisErrorCodes
轴的错误代码的常量。
-
-
可使用功能块 MC_ReadAxisError_DDS 和/或 DD_ReadAxisWarning_DDS 读取错误代码。
DDS_AxisTraceSignals
•
轴的轨迹信号的常量。
-
适合与功能块 DD_Trace_DDS 一起使用。
-
DDS_BasCam
•
用于创建基本 CAM 的常量。
-
DDS_CamParsingErrors
•
分析 CAM 问题的常量。
-
错误原因由功率块 MC_CamTableSelect_DDS 返回。
-
DDS_FB_ErrorConstants
•
AQ262450196490zh-000101 / 175R117076 | Danfoss A/S © | 2019.10
Page 77

VLT® Multiaxis Servo Drive MSD 510 System
操作指南
-
POU 内错误的常量。
-
原因在所有 POU 中都可用的输出 ErrorInfo.ErrorID 中提供。
•
DDS_Intern
-
库在系统内部需要的常量。
-
它们不适合在应用中使用。
•
DDS_LabCam
-
用于创建标记 CAM 的常量。
•
DDS_SdoAbortCodes
-
有关读取和写入参数的错误的常量。
-
原因在多个 POU 中可用的输出 AbortCode 中提供。
•
PSM_ErrorCodes
-
电源模块 (PSM 510) 的错误代码的常量。
-
可使用功能块 DD_ReadPsmError_PSM 和/或 DD_ReadPsmWarning_PSM 读取错误代码。
•
PSM_TraceSignals
-
电源模块 (PSM 510) 的轨迹信号的常量。
-
适合与功能块 DD_Trace_PSM 一起使用。
DAM_ErrorCodes
•
分布式访问模块 (DAM 510) 的错误代码的常量。
-
可使用功能块 DD_ReadDamError_DAM 和/或 DD_ReadDamWarning_DAM 读取错误代码。
-
DAM_TraceSignals
•
分布式访问模块 (DAM 510) 的轨迹信号的常量。
-
适合与功能块 DD_Trace_DAM 一起使用。
-
ACM_ErrorCodes
•
辅助电容器模块 (ACM 510) 的错误代码的常量。
-
可使用功能块 DD_ReadAcmError_ACM 和/或 DD_ReadAcmWarning_ACM 读取错误代码。
-
ACM_TraceSignals
•
辅助电容器模块 (ACM 510) 的轨迹信号的常量。
-
适合与功能块 DD_Trace_ACM 一起使用。
-
调试
6.11.5 在 Automation Studio™ 中实例化 AXIS_REF_DDS
操作步骤
为必须控制或监测的每个 SDM 511/SDM 512 驱动器模块和伺服驱动器创建功能块 AXIS_REF_DDS(位于文件夹
1.
DDS_Drive 中)的一个实例。
要创建指向物理伺服驱动器的链接,将 AXIS_REF_DDS 的每个实例链接到 1 个物理伺服驱动器。这将使它成为一个物
2.
理伺服驱动器的逻辑表示。
打开 Logical View(逻辑视图)。
-
使用其节点编号和所连接到的插槽的名称(如,IF3)初始化每个实例。
-
使用 DriveType 初始化每个驱动器实例。
-
AQ262450196490zh-000101 / 175R1170 | 77Danfoss A/S © 2019.10
Page 78

VLT® Multiaxis Servo Drive MSD 510 System
操作指南
示例
图解 61: AXIS_REF_DDS 的实例化和初始值的设置
6.11.6 在 Automation Studio™ 中实例化 PSM_REF
操作步骤
为每个必须控制或监测的电源模块 (PSM) 创建功能块 PSM_REF(位于文件夹 DDS_PSM 中)的一个实例。
1.
要创建指向物理 PSM 的链接,将 PSM_REF 的每个实例都链接到一个物理 PSM。这将使它成为一个物理 PSM 的逻辑表
2.
示。
打开 Logical View(逻辑视图)。
-
使用其节点编号和所连接到的插槽的名称(如,IF3)初始化每个实例。
-
调试
6.11.7 在 Automation Studio™ 中实例化 DAM_REF
操作步骤
为每个必须控制或监测的分布式访问模块 (DAM) 创建功能块 DAM_REF(位于文件夹 DDS_DAM 中)的一个实例。
1.
要创建指向物理 DAM 的链接,将 DAM_REF 的每个实例都链接到一个物理 DAM。这将使它成为一个物理 DAM 的逻辑表
2.
示。
打开 Logical View(逻辑视图)。
-
使用其节点编号和所连接到的插槽的名称(如,IF3)初始化每个实例。
-
6.11.8 在 Automation Studio™ 中实例化 ACM_REF
操作步骤
为每个必须控制或监测的辅助电容器模块 (ACM) 创建功能块 ACM_REF(位于文件夹 DDS_ACM 中)的一个实例。
1.
要创建指向物理 ACM 的链接,将 ACM_REF 的每个实例都链接到一个物理 ACM。这将使它成为一个物理 ACM 的逻辑表
2.
示。
打开 Logical View(逻辑视图)。
-
使用其节点编号和所连接到的插槽的名称(如,IF3)初始化每个实例。
-
6.11.9 将伺服驱动器导入到 Automation Studio™ 中
注 意
对于每个物理伺服驱动器,在 Automation Studio© 的 Physical View(物理视图)中添加一个条目。
-
6.11.9.1 版本 V3.0.90
AQ262450196490zh-000101 / 175R117078 | Danfoss A/S © | 2019.10
Page 79

e30bh513.10
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
操作步骤
选择菜单项 [Tools → Import Fieldbus Device...](工具 → 导入现场总线设备...)。
1.
从硬盘上的相应位置选择 XDD 文件(例如,0x0300008D_ISD510_S.xdd 或 0x0300008D_ISD510_A.xdd)。对于每个项
2.
目,仅需执行一次此导入。然后,Automation Studio© 将能识别该设备。
现在,在 Physical View(物理视图)中,为控制器的以太网 POWERLINK® 接口添加 SDM 511/SDM 512 驱动器模块或
3.
伺服驱动器:
-
-
-
-
-
调试
在 Physical View(物理视图)中,右键单击相应控制器,然后选择 [Open POWERLINK](打开 POWERLINK)。
右键单击该接口然后选择 Insert..(插入..)。
在 Select controller module(选择控制器模块)窗口中,在组 POWERLINK Devices(POWERLINK 设备)中选择
伺服驱动器。
单击 Next(下一步)。
在下一窗口中,输入伺服驱动器的节点数量。
图解 62: 在 V3.0.90 中为项目添加伺服驱动器
6.11.9.2 版本 V4.x
操作步骤
选择菜单项 [Tools → Import Fieldbus Device...](工具 → 导入现场总线设备...)。
1.
从硬盘上的相应位置选择 XDD 文件(例如,0x0300008D_ISD510_S.xdd 或 0x0300008D_ISD510_A.xdd)。然后,Au‐
2.
tomation Studio© 将能识别该设备。
现在,在 Physical View(物理视图)中,为控制器的以太网 POWERLINK® 接口添加 SDM 511/SDM 512 驱动器模块或
3.
伺服驱动器:
选择菜单项 [Open → System Designer](打开 → 系统设计器)以打开 System Designer(系统设计器)。
-
要在 Physical View(物理视图)或 System Designer(系统设计器)中添加硬件模块,在 Hardware Catalog(硬
-
件目录)工具箱中的组 POWERLINK 中选择伺服驱动器。
将选定模块拖到目标位置以将它连接到所选硬件模块、网络接口或插槽。
-
要更改节点编号,右键单击相应设备然后选择 [Node Number → Change Node Number](节点编号 → 更改节点编
-
号)。
AQ262450196490zh-000101 / 175R1170 | 79Danfoss A/S © 2019.10
Page 80

e30bh514.10
e30bh515.10
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
图解 63: 在 V4.x 中为项目添加伺服驱动器
6.11.10 将 PSM 510、DAM 510 和 ACM 510 导入到 Automation Studio™ 中
注 意
对于每个物理电源模块 (PSM 510)、分布式访问模块 (DAM 510) 和辅助电容器模块 (ACM 510),在 Automation Studio
-
的 Physical View(物理视图)中添加一个条目。
调试
©
6.11.10.1 版本 V3.0.90
操作步骤
选择菜单项 [Tools → Import Fieldbus Device...](工具 → 导入现场总线设备...)。
1.
从硬盘上的相应位置选择 PSM 510、DAM 510 或 ACM 510 的 XDD 文件。对于每个项目,仅需执行一次此导入。然后,
2.
Automation Studio© 将能识别该设备。
电源模块 (PSM 510): 0x0300008D_PSM.xdd
-
分布式访问模块 (DAM 510): 0x0300008D_DAM.xdd
-
辅助电容器模块 (ACM 510): 0x0300008D_ACM.xdd
-
现在,在 Physical View(物理视图)中,为控制器的以太网 POWERLINK® 接口添加 PSM 510、DAM 510 或 ACM 510:
3.
在 Physical View(物理视图)中,右键单击相应控制器,然后选择 [Open POWERLINK](打开 POWERLINK)。
-
右键单击该接口然后选择 Insert...(插入..)。
-
在 Select controller module(选择控制器模块)窗口中,在组 POWERLINK Devices(POWERLINK 设备)中选择
-
PSM 510、DAM 510 或 ACM 510。
单击 Next(下一步)。
-
在下一窗口中,输入 PSM 510、DAM 510 或 ACM 510 的节点数量。
-
图解 64: 在 V3.0.90 中,为以太网 POWERLINK® 接口添加了 1 个 PSM 510、1 个 DAM 510 和 2 个 ISD 510 伺服驱动器
6.11.10.2 版本 V4.x
操作步骤
选择菜单项 [Tools → Import Fieldbus Device...](工具 → 导入现场总线设备...)。
1.
从硬盘上的相应位置选择 PSM 510、DAM 510 或 ACM 510 的 XDD 文件。然后,Automation Studio© 将能识别该设备。
2.
AQ262450196490zh-000101 / 175R117080 | Danfoss A/S © | 2019.10
Page 81

e30bh516.10
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
-
-
-
3.
现在,在 Physical View(物理视图)中,为控制器的以太网 POWERLINK® 接口添加 PSM 510、DAM 510 或 ACM 510:
-
-
-
-
调试
电源模块 (PSM 510): 0x0300008D_PSM.xdd
分布式访问模块 (DAM 510): 0x0300008D_DAM.xdd
辅助电容器模块 (ACM 510): 0x0300008D_ACM.xdd
选择菜单项 [Open → System Designer](打开 → 系统设计器)以打开 System Designer(系统设计器)。
要在 Physical View(物理视图)或 System Designer(系统设计器)中添加硬件模块,在 Hardware Catalog(硬
件目录)工具箱中的组 POWERLINK 中选择 PSM 510、DAM 510 或 ACM 510。
将选定模块拖到目标位置以将它连接到所选硬件模块、网络接口或插槽。
要更改节点编号,右键单击相应设备然后选择 [Node Number → Change Node Number](节点编号 → 更改节点编
号)。
PSM: Danfoss _VLT_R_PSM
DAM: Danfoss _VLT_R_DAM
ACM: Danfoss _VLT_R_ACM
图解 65: 在 V4.x 中,为以太网 POWERLINK® 接口添加了 1 个 PSM 510、1 个 DAM 510 和 2 个 ISD 510 伺服驱动器
6.11.11 I/O 配置和 I/O 映射
操作步骤
对 SDM 511/SDM 512 驱动器模块或伺服驱动器的 I/O 配置进行参数化,以便库有权访问所有必需对象。
1.
右键单击 SDM 511/SDM 512 驱动器模块或伺服驱动器的条目,然后,在 V3.0.90 中,选择 Open I/O Configuration
(打开 I/O 配置),在 V4.x 中, 选择 Configuration(配置)。
在 Channels(通道)部分,更改以下对象的 Cyclic transmission(循环传输):
-
将对象 0x5050 (Lib pdo rx_I5050 ARRAY[]) 的所有子索引更改为 Write(写入)。
将对象 0x5051 (Lib pdo tx_I5051 ARRAY[]) 的所有子索引更改为 Read(读取)。
对电源模块 (PSM 510)、分布式访问模块 (DAM 510) 和辅助电容器模块 (ACM 510) 的 I/O 配置进行参数化,以便库
2.
有权访问所有必需对象。
右键单击 PSM/DAM/ACM 的条目,然后,在 V3.0.90 中,选择 Open I/O Configuration(打开 I/O 配置),在
-
V4.x 中, 选择 Configuration(配置)。
在 Channels(通道)部分,更改以下对象的 Cyclic transmission(循环传输):
-
将对象 0x5050 (Lib pdo rx_I5050 ARRAY[]) 的所有子索引更改为 Write(写入)。
将对象 0x5051 (Lib pdo tx_I5051 ARRAY[]) 的所有子索引更改为 Read(读取)。
这些设置用于配置与设备的循环通信。要使库正常工作,必须对这些参数进行设置。
注 意
可使用复制和粘贴功能向同一类型的多个设备应用同一 I/O 配置。
-
对于伺服驱动器和 PSM/DAM/ACM,将 Module supervised(监督的模块)设置为 off(关闭)。可在设备的 I/O 配置
3.
中找到该参数。
AQ262450196490zh-000101 / 175R1170 | 81Danfoss A/S © 2019.10
Page 82

e30bg341.10
e30bg342.10
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
调试
图解 66: ISD 510 设备的 I/O 配置
图解 67: 成功配置后的 I/O 配置
4.
映射 AXIS_REF_DDS 功能块的实例的输入和输出以及 ISD 510 伺服驱动器的物理数据点(其中,myAxis 是 AX‐
IS_REF_DDS 的一个实例):
AQ262450196490zh-000101 / 175R117082 | Danfoss A/S © | 2019.10
Page 83

e30bg343.10
e30bg344.10
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
调试
图解 68: ISD 510 伺服驱动器的 I/O 映射
5.
分别映射 PSM_REF、DAM_REF 和 ACM_REF 功能块的实例的输入和输出以及 PSM/DAM/ACM 的物理数据点。
6.11.12 设置 PLC 周期时间
最短周期时间为 400 µs。伺服系统设备运行以太网 POWERLINK® 的周期时间可以为 400 µs 和 500 µs 的倍数。这些设备在
启动时由 PLC 自动参数化,具体取决于物理接口的 POWERLINK® 配置。要访问以太网 POWERLINK® 配置:对于 V3.0.90,在
Physical View(物理视 图)中,右键单击 [CPU → Open IF3 POWERLINK Configuration](CPU → 打开 IF3 POWERLINK 配
置);对于 V4.x,右键单击 [PLK → Configuration](PLK → 配置)。
注 意
确保 PLC 程序的任务周期时间与以太网 POWERLINK® 周期时间相同。否则,数据可能会丢失,性能将降低。
-
图解 69: 用于参数化以太网 POWERLINK® 周期时间的以太网 POWERLINK<® 配置窗口
在 Automation Studio 中设置 PLC 时间的操作步骤
在 Physical View(物理视图)中,对于 V3.0.90,右键单击 [CPU → Open Software Configuration](CPU → 打
1.
开软件配置),对于 V4.x,右键单击 [CPU → Configuration → Timing](CPU → 配置 → 定时)。
确保 PLC 周期时间与以太网 POWERLINK® 周期时间相同。
2.
6.11.13 连接到 PLC
有关如何连接到 PLC 的详细信息,请参阅 Automation Studio© 帮助。
版本 V3.0.90:
打开 B&R Help Explorer(B&R 帮助管理器)然后转到 [Automation Software → Getting Started → Creating programs
with Automation Studio → First project with X20 CPU → Configure online connection](自动化软件 → 入门 → 使
用 Automation Studio 创建程序 → 使用 X20 CPU 的第一个项目 → 配置联机连接)。
版本 V4.x:
打开 B&R Help Explorer(B&R 帮助管理器)然后转到 [Automation Software → Getting Started → Creating programs
in Automation Studio → Example project for a target system with CompactFlash](自动化软件 → 入门 → 在 Au‐
tomation Studio 中创建程序 → 使用 CompactFlash 的目标系统的示例项目)。
©
AQ262450196490zh-000101 / 175R1170 | 83Danfoss A/S © 2019.10
Page 84

e30bh611.10
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
调试
6.12 使用 TwinCAT® 编程
6.12.1 使用 TwinCAT® 编程的要求
要将 ISD 510/DSD 510 伺服驱动器、伺服驱动器模块 SDM 511/SDM 512 和 PSM 510、DAM 510 或 ACM 510 集成到 TwinCAT® 项
目中,需要使用以下文件:
用于 MSD 510 伺服系统的库: Danfoss_VLT_ServoMotion_V_x_y_z.lib
•
用于标准型 ISD 510 伺服驱动器的 ESI 文件(EtherCAT® Slave Information,从站设备描述): Danfoss_ISD510_S.xml
•
用于高级 ISD 510 伺服驱动器的 ESI 文件(EtherCAT® Slave Information,从站设备描述): Danfoss_ISD510_A.xml
•
用于标准型 DSD 510 伺服驱动器的 ESI 文件(EtherCAT® Slave Information,从站设备描述): Danfoss_DSD510_S.xml
•
用于高级 DSD 510 伺服驱动器的 ESI 文件(EtherCAT® Slave Information,从站设备描述): Danfoss_DSD510_A.xml
•
用于伺服驱动器模块的 ESI 文件(EtherCAT® Slave Information,从站设备描述): Danfoss_SDM510.xml
•
用于电源模块的 ESI 文件(EtherCAT® Slave Information,从站设备描述): Danfoss_PSM510.xml
•
用于分布式访问模块的 ESI 文件(EtherCAT® Slave Information,从站设备描述): Danfoss_DAM510.xml
•
用于辅助电容器模块的 ESI 文件(EtherCAT® Slave Information,从站设备描述): Danfoss_ACM510.xml
•
6.12.2 创建 TwinCAT® 项目
有关如何安装 TwinCAT® 的详细信息,请访问 Beckhoff 信息系统 (
后选择 [TwinCAT 2 → TwinCAT Quick Start → Installation](TwinCAT 2 → TwinCAT 快速入门 → 安装)。
有关如何在 TwinCAT® 中创建项目的详细信息,请访问 Beckhoff 信息系统 (
系统,然后选择 [TwinCAT 2 → TwinCAT Quick Start or TwinCAT 2 → TX1200 TwinCAT PLC → TwinCAT PLC Control]
(TwinCAT 2 → TwinCAT 快速入门或 TwinCAT 2 → TX1200 TwinCAT PLC → TwinCAT PLC Control)。
https://infosys.beckhoff.com/)。打开该信息系统,然
https://infosys.beckhoff.com/)。打开该信息
6.12.3 在 TwinCAT® 项目中包括 TwinCAT® 库
操作步骤
在 TwinCAT® PLC Control 的 Resources(资源)选项卡中,打开 Library Manager(库管理器)。
1.
在 Library Manager(库管理器)窗口的左上区域中,右键单击然后选择 Additional Library...(附加库...)。
2.
选择 Danfoss_VLT_ServoMotion_V_x_y_z 文件(根据在硬盘上的位置)。
3.
单击 Open(打开)。现在,库已被集成到 TwinCAT® PLC Control 项目中。
4.
图解 70: 包括 ServoMotion 库后的库管理器
在库内,POU 以文件夹形式来组织:
•
DDS_Drive
•
包含由 PLCopen® 定义的程序组织单元 (POU)(名称以 MC_ 开头)和由 Danfoss 定义的 POU(名称以 DD_
开头)。Danfoss POU 为轴提供附加功能。
AQ262450196490zh-000101 / 175R117084 | Danfoss A/S © | 2019.10
Page 85

VLT® Multiaxis Servo Drive MSD 510 System
操作指南
•
可组合使用由 PLCopen® 定义的 POU 和由 Danfoss 定义的 POU。
•
面向 SDM 511/SDM 512 驱动器模块和伺服驱动器的 POU 的名称全都以 _DDS 结尾。
•
DDS_PSM
•
包含由 Danfoss 定义的 POU(名称以 DD_ 开头),为电源模块 (PSM 510) 提供功能。
•
面向 PSM 510 的 POU 的名称全都以 _PSM 结尾。
•
DDS_DAM
•
包含由 Danfoss 定义的 POU(名称以 DD_ 开头),为分布式访问模块 (DAM 510) 提供功能。
•
面向 DAM 510 的 POU 的名称全都以 _DAM 结尾。
•
DDS_ACM
•
包含由 Danfoss 定义的 POU(名称以 DD_ 开头),为辅助电容器模块 (ACM 510) 提供功能。
•
面向 ACM 510 的 POU 的名称全都以 _ACM 结尾。
•
DDS_BasCam
•
包含用于创建基本 CAM 的 POU。
•
DDS_LabCam
•
包含用于创建标记 CAM 的 POU。
•
DDS_Intern
•
包含使用库时内部需要的 POU。
•
请不要在应用程序中使用这些 POU。
集成 VLT® Multiaxis Servo Drive 库时,将自动集成一些标准库,除非这些库已是项目的组成部分。
调试
注 意
请勿删除这些库,否则,DDS 库将无法使用。
-
6.12.4 DDS_Drive 库内的常量
在该库内,定义了以下列出的常量:
Danfoss_VLT_ServoMotion
•
包含库的版本信息。
-
DDS_AxisErrorCodes
•
轴的错误代码的常量。
-
可使用功能块 MC_ReadAxisError_DDS 和/或 DD_ReadAxisWarning_DDS 读取错误代码。
-
DDS_AxisTraceSignals
•
轴的轨迹信号的常量。
-
适合与功能块 DD_Trace_DDS 一起使用。
-
DDS_BasCam
•
用于创建基本 CAM 的常量。
-
DDS_CamParsingErrors
•
分析 CAM 问题的常量。
-
错误原因由功率块 MC_CamTableSelect_DDS 返回。
-
DDS_FB_ErrorConstants
•
POU 内错误的常量。
-
原因在所有 POU 中都可用的输出 ErrorInfo.ErrorID 中提供。
-
DDS_Intern
•
AQ262450196490zh-000101 / 175R1170 | 85Danfoss A/S © 2019.10
Page 86

VLT® Multiaxis Servo Drive MSD 510 System
操作指南
-
库在系统内部需要的常量。
-
它们不适合在应用中使用。
•
DDS_LabCam
-
用于创建标记 CAM 的常量。
•
DDS_SdoAbortCodes
-
有关读取和写入参数的错误的常量。
-
原因在多个 POU 中可用的输出 AbortCode 中提供。
•
PSM_ErrorCodes
-
电源模块 (PSM 510) 的错误代码的常量。
-
可使用功能块 DD_ReadPsmError_PSM 和/或 DD_ReadPsmWarning_PSM 读取错误代码。
•
PSM_TraceSignals
-
电源模块 (PSM 510) 的轨迹信号的常量。
-
适合与功能块 DD_Trace_PSM 一起使用。
•
DAM_ErrorCodes
-
分布式访问模块 (DAM 510) 的错误代码的常量。
-
可使用功能块 DD_ReadDamError_DAM 和/或 DD_ReadDamWarning_DAM 读取错误代码。
DAM_TraceSignals
•
分布式访问模块 (DAM 510) 的轨迹信号的常量。
-
适合与功能块 DD_Trace_DAM 一起使用。
-
ACM_ErrorCodes
•
辅助电容器模块 (ACM 510) 的错误代码的常量。
-
可使用功能块 DD_ReadAcmError_ACM 和/或 DD_ReadAcmWarning_ACM 读取错误代码。
-
ACM_TraceSignals
•
辅助电容器模块 (ACM 510) 的轨迹信号的常量。
-
适合与功能块 DD_Trace_ACM 一起使用。
-
调试
6.12.5 在 TwinCAT® 中实例化 AXIS_REF_DDS
操作步骤
为必须控制或监测的 SDM 511/SDM 512 驱动器模块或伺服驱动器创建功能块 AXIS_REF_DDS(位于文件夹 DDS_Drive
1.
中)的一个实例。
对其他 SDM 511/SDM 512 驱动器模块或伺服驱动器重复步骤 1。
2.
AQ262450196490zh-000101 / 175R117086 | Danfoss A/S © | 2019.10
Page 87

e30bg349.10
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
示例
图解 71: AXIS_REF_DDS 的实例化
调试
6.12.6 在 TwinCAT® 中实例化 PSM_REF
操作步骤
为每个必须控制或监测的电源模块创建功能块 PSM_REF(位于文件夹 DDS_PSM 中)的一个实例。
1.
对其他电源模块重复步骤 1。
2.
6.12.7 在 TwinCAT® 中实例化 DAM_REF
操作步骤
为每个必须控制或监测的分布式访问模块创建功能块 DAM_REF(位于文件夹 DDS_DAM 中)的一个实例。
1.
对其他分布式访问模块重复步骤 1。
2.
6.12.8 在 TwinCAT® 中实例化 ACM_REF
操作步骤
为每个必须控制或监测的辅助电容器创建功能块 ACM_REF(位于文件夹 DDS_ACM 中)的一个实例。
1.
对其他辅助电容器模块重复步骤 1。
2.
6.12.9 在 TwinCAT® System Manager 中添加 PLC 项目
要在 TwinCAT® PLC Control 项目和 TwinCAT® System Manager 之间创建链接,将保存的项目连接到 TwinCAT® System
Manager,尤其是输入和输出:
操作步骤
要在 TwinCAT® System Manager 中添加项目信息,右键单击 PLC-Configuration(PLC 配置)然后选择 Append PLC
1.
project...(添加 PLC 项目...)。
在 Insert IEC 1131 Project(插入 IEC 1131 项目)窗口中,根据硬盘上的位置选择项目信息文件。该文件与 PLC
2.
项目具有相同名称,但文件扩展名为 .tpy。
单击 Open(打开)。
3.
6.12.10 将设备导入 TwinCAT®
以下操作步骤是如何将 ISD 510 伺服驱动器导入到 TwinCAT® 中的示例。
操作步骤
将 ESI 文件 Danfoss ISD 510 S.xml 复制到硬盘上的文件夹 TwinCAT Installation Folder\Io\EtherCAT 中。对
1.
于每个项目,仅需执行一次此操作。TwinCAT® System Manager 自动在启动过程中在硬盘上的此位置搜索 ESI 文件。
AQ262450196490zh-000101 / 175R1170 | 87Danfoss A/S © 2019.10
Page 88

e30bg350.10
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
2.
3.
调试
要添加一个 EtherCAT® 主站,右键单击 [I/O-Configuration → I/O Devices](I/O 配置 → I/O 设备)然后选择
Append Device...(附加设备...)。
在以下窗口中,选择 [EtherCAT → EtherCAT] 然后单击 OK(确定)。
图解 72: 在项目中添加 EtherCAT 主站
4.
选择 Device 1 (EtherCAT)(设备 1 (EtherCAT))然后在 Adapter(适配器)选项卡中的窗口右侧选择正确的 Network
Adapter(网络适配器)。
5.
要添加一个电源模块,右键单击 Device1 (EtherCAT)(设备 1 (EtherCAT))然后选择 Append Box...(附加框...)。
6.
在 Insert EtherCAT Device(插入 EtherCAT 设备)窗口中,选择 [Danfoss GmbH → VLT® FlexMotion → VLT
Power Supply Module PSM 510] 然后单击 OK(确定)。
要添加一个分布式访问模块,右键单击 Device1 (EtherCAT)(设备 1 (EtherCAT))然后选择 Append Box...(附加
7.
框...)。
在 Insert EtherCAT Device(插入 EtherCAT 设备)窗口中,选择 [Danfoss GmbH → VLT® FlexMotion → VLT
8.
Decentral Access Module] 然后单击 OK(确定)。
要添加一个辅助电容器模块,右键单击 Device1 (EtherCAT)(设备 1 (EtherCAT))然后选择 Append Box...(附加
9.
框...)。
在 Insert EtherCAT Device(插入 EtherCAT 设备)窗口中,选择 [Danfoss GmbH → VLT® FlexMotion → VLT
10.
Auxiliary Capacitors Module] 然后单击 OK(确定)。
要在分布式访问模块 DAM 510 中添加伺服驱动器,右键单击 Box 1 (VLT® Decentral Access Module)(框 1 (VLT®
11.
Decentral Access Module))然后选择 Append Box...(附加框...)。
在 Insert EtherCAT Device(插入 EtherCAT 设备)窗口中,选择 [Danfoss GmbH → VLT® FlexMotion → VLT®MSD
12.
510 Integrated Servo Drive Standard] 然后单击 OK(确定)。
®
®
®
AQ262450196490zh-000101 / 175R117088 | Danfoss A/S © | 2019.10
Page 89

e30bh517.10
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
调试
图解 73: 为项目添加伺服驱动器
AQ262450196490zh-000101 / 175R1170 | 89Danfoss A/S © 2019.10
Page 90

e30bh518.10
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
调试
图解 74: 附加 PLC 项目并添加分布式访问模块和 2 个 ISD 510 伺服驱动器后的 TwinCAT System Manager
13.
如果将伺服驱动器用作 NC 轴,则对问题回答 No(否)。如果要将伺服驱动器用作 NC 轴,则请参阅 6.12.15 配置为
TwinCAT® NC 轴。
注 意
对于每个物理伺服驱动器、PSM 510、DAM 510 和 ACM 510,在 TwinCAT System Manager 的 EtherCAT® 主站
-
中添加一个条目。将伺服驱动器添加到正确的 DAM 510 线路。
6.12.11 I/O 配置和 I/O 映射
连接多个 SDM 511/SDM 512 驱动器模块或伺服驱动器时,将上一伺服驱动器的端口 C (X2) 连接到下一伺服驱动器的端口 A
(X1)。此外,为分布式访问模块 (DAM 510) 执行端口分配。
如果已显示出硬件设置选项,则可使用 TwinCAT® System Manager Scan devices(扫描设备)功能按正确顺序自动将连接的
设备添加到配置。
使用 TwinCAT® System Manager,配置 SDM 511/SDM 512 驱动器模块或伺服驱动器,以便 PDO 映射与库的要求相匹配。
操作步骤(以 ISD 510 伺服驱动器为例)
AQ262450196490zh-000101 / 175R117090 | Danfoss A/S © | 2019.10
Page 91

e30bg353.11
e30bh519.10
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
1.
单击 ISD 510 伺服驱动器项。
2.
在右侧窗口中选择 Slots(插槽)选项卡。
3.
通过选择 Slot(插槽)框中的 Module 1 (CSV PDO)( 模块 1 (CSV PDO))条目,删除当前 PDO 配置。
4.
单击 X。
5.
在 Module(模块)框中选择 Library PDO(库 PDO)。
单击 <。
6.
调试
图解 75: 具有正确 I/O 配置的 ISD 510 伺服驱动器
6.12.12 将输入和输出变量与物理数据点相关联
使用 TwinCAT® System Manager,可将 PLC 程序的输入和输出变量与设备的物理输入和输出相关联。这可确保库能够访问所
有必需的对象。
警 告
对 Box 1 (VLT® Power Supply Module)(框 1 (VLT Power Supply Module))和实例 myPSM 重复步骤 2–22。
-
对 Box 2 (VLT® Decentral Access Module)(框 2 (VLT Decentral Access Module))和实例 myDAM 重复步骤 2–
-
22。
操作步骤
在菜单项中依次选择 [I/O-Configuration → I/O Devices → Device1 (EtherCAT) → Box 1 (VLT Decentral
1.
Access Module) → Drive 1 (VLT ISD 510 Integrated Servo Drive) → Module 1 (Library PDO) → Library
TxPDO](I/O 配置 → I/O 设备 → 设备 1 (EtherCAT) → 框 1 (VLT Decentral Access Module) → 驱动器 1
(VLT ISD 510 Integrated Servo Drive) → 模块 1(库 PDO)→ 库 TxPDO),然后选择 Library TxPDO(库 TxPDO)。
选择窗口右侧从 Lib pdo tx1 至 Lib pdo tx9 的所有条目。
2.
图解 76: 将输入和输出与物理数据点相关联
3.
右键单击然后选择 Change Multi Link...(更改多链路...)。
AQ262450196490zh-000101 / 175R1170 | 91Danfoss A/S © 2019.10
Page 92

VLT® Multiaxis Servo Drive MSD 510 System
操作指南
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
调试
在 Attach Variable 36.0 Byte(s) (Input)(关联变量 36.0 字节(输入))窗口中,选择 [PLC-Configuration →
MyFirstFlexMotionProject → Standard → .myAxis.TPDO](PLC 配置 → MyFirstFlexMotionProject → 标准
→ .myAxis.TPDO)。确保在 Attach Variable(关联变量)窗口中选中 Matching Size(匹配大小)选项。
单击 OK(确定)。
在菜单项中依次选择 [I/O-Configuration → I/O Devices → Device1 (EtherCAT©) → Box1 (VLT© Decentral
Access Module) → Drive2 (VLT© ISD 510 Integrated Servo Drive) → Module1 (Library PDO) → Library
RxPDO](I/O 配置 → I/O 设备 → 设备 1 (EtherCAT) → 框 1 (VLT Decentral Access Module) → 驱动器 2
(VLT ISD 510 Integrated Servo Drive) → 模块 1(库 PDO)→ 库 RxPDO),然后单击库 RxPDO。
选择窗口右侧从 Lib pdo rx1 至 Lib pdo rx9 的所有条目。
右键单击然后选择 Change Multi Link...(更改多链路...)。
在 Attach Variable 36.0 Byte(s) (Output)(关联变量 36.0 字节(输出))窗口中,选择 [PLC-Configuration →
MyFirstIsd510Project → Standard → .myAxis.RPDO](PLC 配置 → MyFirstIsd510Project → 标准 → .myAx‐
is.RPDO)。
单击 OK(确定)。
在菜单项中依次选择 [I/O-Configuration → I/O Devices → Device1 (EtherCAT©) → Box1 (VLT© Decentral
Access Module) → Drive2 (VLT© ISD 510 Integrated Servo Drive) → WcState](I/O 配置 → I/O 设备 → 设
备 1 (EtherCAT) → 框 1 (VLT Decentral Access Module) → 驱动器 2 (VLT ISD 510 Integrated Servo Drive)
→ WcState),右键单击 WcState,然后选择 Change Link...(更改链路...)。
在 Attach Variable State (Input)(关联变量状态(输入))窗口中,选择 [PLC-Configuration → MyFirst‐
Isd510Project → Standard → .myAxis.WcState](PLC 配置 → MyFirstIsd510Project → 标准 → .myAx‐
is.WcState)。
单击 OK(确定)。
在菜单项中依次选择 [I/O-Configuration → I/O Devices → Device1 (EtherCAT©) → Box1 (VLT© Decentral
Access Module) → Drive2 (VLT© ISD 510 Integrated Servo Drive) → InfoData](I/O 配置 → I/O 设备 → 设
备 1 (EtherCAT) → 框 1 (VLT Decentral Access Module) → 驱动器 2 (VLT ISD 510 Integrated Servo Drive)
→ InfoData),右键单击 State(状态),然后选择 Change Link...(更改链路...)。
在 Attach Variable State (Input)(关联变量状态(输入))窗口中,选择 [PLC-Configuration → MyFirst‐
Isd510Project → Standard → .myAxis.State](PLC 配置 → MyFirstIsd510Project → 标准 → .myAx‐
is.State)。
单击 OK(确定)。
在菜单项中依次选择 [I/O-Configuration → I/O Devices → Device1 (EtherCAT→) → Box1 (VLT® Decentral
Access Module) → Drive2 (VLT ISD 510 Integrated Servo Drive) → InfoData → AdsAddr](I/O 配置 → I/O
设备 → 设备 1 (EtherCAT) → 框 1 (VLT Decentral Access Module) → 驱动器 2 (VLT ISD 510 Integrated
Servo Drive) → InfoData → AdsAddr),右键单击 netId,然后选择 Change Link...(更改链路...)。
在 Attach Variable netId (Input)(关联变量 netId(输入))窗口中,选择 [PLC-Configuration → MyFirst‐
Isd510Project → Standard → .myAxis.AmsNetId](PLC 配置 → MyFirstIsd510Project → 标准 → .myAx‐
is.AmsNetId)。
单击 OK(确定)。
在菜单项中依次选择 [I/O-Configuration → I/O Devices → Device1 (EtherCAT→) → Box1 (VLT Decentral
Access Module) → Drive2 (VLT ISD 510 Integrated Servo Drive) → InfoData → AdsAddr](I/O 配置 → I/O
设备 → 设备 1 (EtherCAT) → 框 1 (VLT Decentral Access Module) → 驱动器 2 (VLT ISD 510 Integrated
Servo Drive) → InfoData → AdsAddr),右键单击 Port(端口),然后选择 Change Link...(更改链路...)。
在 Attach Variable port (Input)(关联变量端口(输入))窗口中,选择 [PLC-Configuration → MyFirst‐
Isd510Project → Standard → .myAxis.NodeNumber](PLC 配置 → MyFirstIsd510Project → 标准 → .myAx‐
is.NodeNumber)。
单击 OK(确定)。
6.12.13 将映射传回 PLC 程序
要将映射传回 PLC 程序,在菜单项 Actions(操作)中选择 Activate Configuration...(激活配置...)。
在 TwinCAT® PLC Control 中重建后,TwinCAT® 配置如
实例,myPSM 是 PSM_REF 的实例,myDAM 是 DAM_REF 的实例)。具体地址可能不同。
图解 77 所示(其中,myAxis 和 mySecondAxis 是 AXIS_REF_DDS 的
AQ262450196490zh-000101 / 175R117092 | Danfoss A/S © | 2019.10
Page 93

e30bh520.10
e30bg356.10
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
图解 77: TwinCAT® 配置: 2 个伺服驱动器、1 个 PSM 510 和 1 个 DAM 510 的 I/O 映射
调试
注 意
将 PSM 510、DAM 510、ACM 510 和 SDM 511/SDM 512 连接到一个 SYNC 单元,将 ISD 510/DSD 510 伺服驱动器连接到另
-
一个单元。如果由于错误而关闭了分布式伺服驱动器的 U
电源,则可防止与 PSM 510 和 DAM 510 的通信中断。
AUX
6.12.14 在 TwinCAT® PLC Control 中设置 PLC 周期时间
最短周期时间为 400 µs。MSD 510 设备运行的 EtherCAT® 周期时间为 400 µs 或 500 µs 的倍数。这些设备在启动时由
PLC 自动参数化,具体取决于物理接口的 EtherCAT® 配置。要访问系统基础时间,在 TwinCAT® System Manager 中选择
[SYSTEM-Configuration → Real-Time Settings](系统配置 → 实时设置)。然后,即可使用此基础时间的倍数来作为
EtherCAT® 周期时间。
注 意
将 PLC 程序的任务周期时间设置为与 EtherCAT® 周期时间相同。否则,数据可能会丢失,性能将降低。
-
操作步骤
在 Resources(资源)选项卡中双击 Task configuration(任务配置)。
1.
确保 PLC 周期时间与 EtherCAT® 周期时间相同。
2.
图解 78: 用于参数化 PLC 周期时间的任务配置
AQ262450196490zh-000101 / 175R1170 | 93Danfoss A/S © 2019.10
Page 94

VLT® Multiaxis Servo Drive MSD 510 System
操作指南
注 意
在 TwinCAT® PLC Control 中更改任务周期时间后,在 TwinCAT® System Manager 内执行 PLC 配置的
-
ReScan 以更新设置。然后,激活 PLC 中的配置。
6.12.15 配置为 TwinCAT® NC 轴
伺服驱动器可与 TwinCAT® 的内置 NC 功能一起使用。
与 PSM 510 和 DAM 510 相关的一切都必须按
操作步骤
除 Danfoss_VLT_ServoMotion_V_x_y_z.lib 文件外,包括 TcMC2.lib 文件。
1.
为每个用作 NC 轴的 ISD 510/DSD 510 伺服驱动器创建一个 AXIS_REF(而不是 AXIS_REF_DDS)实例。
2.
在 TwinCAT® System Manager 中附加 PLC 项目,导入设备然后将它们添加到 TwinCAT® 中,但是,在最后一步,如
3.
果将伺服驱动器用作 NC 轴,则对问题回答 Yes(是)。然后,将自动创建 NC 任务。
6.12.15.1 用作 NC 轴的伺服驱动器的 I/O 配置
在 TwinCAT® System Manager 中,为用作 NC 轴的伺服驱动器选择一个不同 I/O 配置。
操作步骤
1.
根据要使用的运行模式,选择插槽 CSP PDO 或 CSV PDO。默认情况下,已映射并预先选定 CSV PDO。如果需要使用
VLT® Multiaxis Servo Drive 伺服驱动器来与 CSP PDO 一起使用,则映射以下变量:
在 NC 轴的 Settings(设置)选项卡中,选择 [NC-Configuration → NC-Task 1 SAF → Axes → Axis 1](NC
-
配置 → NC 任务 1 SAF → 轴 → 轴 1)。单击 Link To (all Types)...(链接到(所有类型)...)按钮,然后
选择目标伺服驱动器。
在同一选项卡中,选择首选 Unit(单位)。
2.
根据所选单位,通过 Parameter(参数)选项卡中的菜单 [NC-Configuration → NC-Task 1 SAF → Axes → Axis 1
3.
→ Axis 1_Enc](NC 配置 → NC 任务 1 SAF → 轴 → 轴 1 → 轴 1_Enc)为轴编码器调整 Scaling Factor(标定
因数)。示例: 当选中单位 Degrees(度)时,标定因数为 360°/220 = 0.00034332275390625。
在菜单项中依次选择 [NC-Configuration → NC-Task 1 SAF → Axes → Axis 1 → Axis 1_Enc](NC 配置 → NC
4.
任务 1 SAF → 轴 → 轴 1 → 轴 1_Enc),然后在 Parameter(参数)选项卡中设置 Reference Velocity(参考速
度)。
将 Output Scaling Factor(输出标定因数)(速度)设置为 125。
5.
在轴的 Online(联机)选项卡中,测试功能和配置。
6.
6.12.2 创建 TwinCAT® 项目中所述执行。
调试
6.12.16 连接到 PLC
有关如何连接到 PLC 的详细信息,请访问 Beckhoff Information System 。
打开信息系统然后转到 [TwinCAT 2 → TwinCAT System Manager → Operation → Controls → Choose Target System]
(TwinCAT 2 → TwinCAT System Manager → 操作 → 控制 → 选择目标系统)。
6.13 Automation Studio™ 和 TwinCAT® 编程指南
实施建议:
初始化通常不会在程序开始时只更改一次的参数。在 Automation Studio© 中,使用 _INIT 部分。
•
在程序开始时使用 Enable(启用)输入调用提供状态或错误信息的功能块。
•
对每个轴使用功能块 MC_Power_DDS 的一个实例来控制其功率级。在每个 PLC 循环中调用此功能块。
•
对每个电源模块使用功能块 DD_Power_PSM 的一个实例来控制输出端的直流回路电压。在每个 PLC 循环中调用此功能块。
•
对每个分布式访问模块使用功能块 DD_Power_DAM 的一个实例来控制输出端的直流回路电压。在每个 PLC 循环中调用此
•
功能块。
对每个辅助电容器模块使用功能块 DD_Power_ACM 的一个实例来控制直流回路与 ACM 510 之间的连接。在每个 PLC 循环
•
中调用此功能块。
调用在程序结束时执行(运动)命令的功能块。
•
AQ262450196490zh-000101 / 175R117094 | Danfoss A/S © | 2019.10
Page 95

系统模块
需要的文件
整个伺服系统
用于 MSD 510 伺服系统的库文件包: Danfoss_VLT_ServoMotion_V_x_y_z.zip
联机帮助文件 (.chm): 使用 SIMOTION SCOUT 编程
®
伺服驱动器模块 SDM 511/SDM 512 和
ISD 510/DSD 510 伺服驱动器
GSDML 文件(通用站描述):
GSDML-V2.31-Danfoss-DDS-yyyymmdd.xml
电源模块 PSM 510
GSDML 文件(通用站描述):
GSDML-V2.31-Danfoss-PSM-yyyymmdd.xml
分布式访问模块 DAM 510
GSDML 文件(通用站描述):
GSDML-V2.31-Danfoss-DAM-yyyymmdd.xml
辅助电容器模块 ACM 510
GSDML 文件(通用站描述):
GSDML-V2.31-Danfoss-ACM-yyyymmdd.xml
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
•
请勿使用任何来自库(文件夹)DDS_Intern 的 POU。
•
请勿在一个功能块正忙时更改对其轴的引用。
注 意
完整参数列表可在 VLT® Servo Drive System ISD 510、DSD 510、MSD 510 编程指南中找到。
-
6.14 使用 SIMOTION SCOUT® 编程
6.14.1 使用 SIMOTION SCOUT® 编程的要求
要将伺服系统模块集成到 SIMOTION SCOUT® 项目中,需要使用以下文件:
表 19: 需要的文件
调试
6.14.2 连接到 PLC
有关如何连接到 PLC 的详细信息,请参阅 SIMOTION SCOUT® 帮助。
打开 SIMOTION SCOUT®,转到 [Help → Help Topics → Getting Started with SIMOTION SCOUT → Download the project
to the target system → Connect to selected target devices → Go online](帮助 → 帮助主题 → SIMOTION SCOUT
入门 → 将项目下载到目标系统 → 连接到所选目标设备 → 联机 )。
6.14.3 创建 SIMOTION SCOUT® 项目
有关如何安装 SIMOTION SCOUT®® 的详细信息,请参阅 SIMOTION SCOUT® 配置手册。
注 意
必须安装带有 HF11 的 SIMATIC STEP 7 V5.5 或更高版本才能创建项目。
-
有关如何在 SIMOTION SCOUT® 中创建项目的详细信息,请参阅 SIMOTION SCOUT® 联机帮助。打开 SIMOTION SCOUT® 然后转
至 [Help → Help Topics → Getting started with SIMOTION SCOUT → Create SIMOTION device and configure PG/PC
communication connection](帮助 → 帮助主题 → SIMOTION SCOUT 入门 → 创建 SIMOTION 设备和配置 PG/PC 通信连
接)。
6.14.4 在 SIMOTION SCOUT® 项目中包括伺服运动库
Project(项目)选项卡中的文件夹 LIBRARIES 包含以下库:
DDS_Drive
•
AQ262450196490zh-000101 / 175R1170 | 95Danfoss A/S © 2019.10
Page 96

VLT® Multiaxis Servo Drive MSD 510 System
操作指南
-
包含由 PLCopen® 定义的程序组织单元 (POU)(名称以 MC_ 开头)和由 Danfoss 定义的 POU(名称以 DD_ 开头)。
Danfoss POU 为伺服驱动器提供附加功能。
-
可组合使用由 PLCopen® 定义的 POU 和由 Danfoss 定义的 POU。
面向 SDM 511/SDM 512 驱动器模块和伺服驱动器的 POU 的名称全都以 _DDS 结尾。
-
DDS_PSM
•
包含由 Danfoss 定义的 POU(名称以 DD_ 开头),为电源模块 (PSM 510) 提供功能。
-
面向 PSM 510 的 POU 的名称全都以 _PSM 结尾。
-
DDS_DAM
•
包含由 Danfoss 定义的 POU(名称以 DD_ 开头),为分布式访问模块 (DAM 510) 提供功能。
-
面向 DAM 510 的 POU 的名称全都以 _DAM 结尾。
-
DDS_ACM
•
包含由 Danfoss 定义的 POU(名称以 DD_ 开头),为辅助电容器模块 (ACM 510) 提供功能。
-
面向 ACM 510 的 POU 的名称全都以 _ACM 结尾。
-
DDS_BasCam
•
包含用于创建基本 CAM 的 POU。
-
DDS_LabCam
•
包含用于创建标记 CAM 的 POU。
-
DDS_Intern
•
包含使用库时内部需要的 POU。
-
请不要在应用程序中使用这些 POU。
-
集成 DDS_Drive 文件包时,将自动集成一些标准库,除非这些库已是项目的组成部分。
调试
AQ262450196490zh-000101 / 175R117096 | Danfoss A/S © | 2019.10
Page 97

e30bg359.11
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
调试
图解 79: 包括丹佛斯伺服运动库后的项目树
请勿删除或重命名这些库。
-
操作步骤
1.
从 Danfoss_VLT_ServoMotion_V_x_y_z.zip 文件(根据在硬盘上的位置)解压文件。
必须将 DDS_Xxxx.xml 文件和 XML_DDS_Xxxx 文件夹置于同一文件夹下以导入库。
在 Project(项目)选项卡中,右键单击 LIBRARIES(库),然后选择 [Export/import → Import folders/objects]
2.
(导出/导入 → 导入文件夹/对象)。
注 意
AQ262450196490zh-000101 / 175R1170 | 97Danfoss A/S © 2019.10
Page 98

e30bg358.10
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
调试
图解 80: 导入库
3.
根据在硬盘上的位置选择文件 DDS_Intern.xml。
4.
单击 OK(确定)。现在,库已被集成到 SIMOTION SCOUT® 项目中。
对 DDS_BasCam.xml、DDS_Drive.xml、DDS_LabCam.xml、DDS_PSM.xml、DDS_DAM.xml 和 DDS_ACM.xml 重复步骤 2–
5.
4。
6.14.5 将设备导入 SIMOTION SCOUT®
注 意
对于每个物理伺服驱动器、PSM 510、DAM 510 或 ACM 510,在 HW Config(硬件配置)工具中的 PROFINET® 以太网中添
-
加一项。
操作步骤
打开 HW Config(硬件配置)工具。
1.
选择 [Options → Install GSD File...](选项 → 安装 GSD 文件...)。
2.
要添加 SDM 511/SDM 512 驱动器模块或伺服驱动器,选择以下 xml 文件之一(根据在硬盘上的位置)然后单击 Install
3.
(安装)。
GSDML-V2.31-Danfoss-DDS-yyyymmdd.xml
-
GSDML-V2.32-Danfoss-DDS-yyyymmdd.xml
-
GSDML-V2.33-Danfoss-DDS-yyyymmdd.xml
-
GSDML-V2.34-Danfoss-DDS-yyyymmdd.xml
-
对以下模块重复步骤 2 和 3:
4.
电源模块 (PSM 510): GSDML-V2.31-Danfoss-PSM-yyyymmdd.xml
-
分布式访问模块 (DAM 510): GSDML-V2.31-Danfoss-DAM-yyyymmdd.xml
-
辅助电容器模块 (ACM 510): GSDML-V2.31-Danfoss-ACM-yyyymmdd.xml
-
将设备 Danfoss Drive Servo IRT 拖到现有 PROFINET® 以太网中。
5.
在屏幕右侧的硬件目录中展开 PROFINET IO 条目然后选择 [Additional Field Devices → Drives → VLT
FlexMotion](附加现场设备 → 驱动器 → VLT FlexMotion),查找名为 Danfoss Drive Servo IRT 的伺服
AQ262450196490zh-000101 / 175R117098 | Danfoss A/S © | 2019.10
®
Page 99

e30bh521.10
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
6.
在屏幕右侧的硬件目录中展开 Drive Object 1(驱动器对象 1)和文件夹 Profile,然后将 Danfoss Telegram(丹
佛斯报文)拖到屏幕底部的 Drive Object 1(驱动器对象 1)的可用插槽中。
7.
要设置通信参数,在显示出以太网的主窗口中双击表示伺服驱动器的图标。
8.
在 General(常规)选项卡中,在字段 Device name(设备名称)中输入一个名称。
9.
在 General(常规)选项卡中,单击 Ethernet...(以太网...)按钮以设置伺服驱动器的 IP 地址,然后单击 OK(确
定)。
对以下模块重复步骤 6–9:
10.
-
-
-
调试
驱动器设备。如果看不到该设备,则选择 [Options → Update catalog](选项 → 更新目录)以更新硬件目
录。
图解 81: 将丹佛斯报文拖到可用插槽
电源模块 (PSM 510): VLT PSM IRT
分布式访问模块 (DAM 510): VLT DAM IRT
辅助电容器模块 (ACM 510): VLT ACM IRT
6.14.6 分配 IP 配置和设备名
注 意
如果在同一 PROFINET® 网络中使用了多个伺服驱动器,则每个伺服驱动器都必须具有不同名称和 IP 地址。
-
通过 VLT® Servo Toolbox 软件使用间接通信时,也需要进行 IP 地址分配(请参阅 VLT® Servo Drive System
-
ISD 510、DSD 510、MSD 510 编程指南了解更多信息)。
操作步骤
打开菜单 [PLC → Ethernet → Edit Ethernet Node](PLC → 以太网 → 编辑以太网代码)。
1.
在下一窗口中,单击 Browse(浏览)。
2.
AQ262450196490zh-000101 / 175R1170 | 99Danfoss A/S © 2019.10
Page 100

e30bh522.10
e30bh523.10
VLT® Multiaxis Servo Drive MSD 510 System
操作指南
调试
图解 82: 编辑以太网节点
此窗口中显示出所有可访问的以太网节点。
ISD 510 伺服驱动器在设备类型 VLT® ISD 510 下列出。
DSD 510 伺服驱动器在设备类型 VLT® DSD 510 下列出。
SDM 511/SDM 512 伺服驱动器模块在设备类型 VLT® SDM 510 下列出。
3.
选择所需的伺服驱动器然后单击 OK(确定)(使用 Flash(快闪)按钮来识别特定伺服驱动器)。
图解 83: 选择伺服驱动器
4.
在 Edit Ethernet Node(编辑以太网节点)窗口中,选择选项 Use IP parameters(使用 IP 参数)。
5.
输入 IP address(IP 地址)和 Subnet mask(子网掩码)然后单击 Assign IP configuration(分配 IP 配置)。
AQ262450196490zh-000101 / 175R1170100 | Danfoss A/S © | 2019.10
 Loading...
Loading...