

Page 1

Bedienungsanleitung
drives.danfoss.com
VLT® Multiaxis Servo Drive MSD 510-System
Page 2

Page 3

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Inhalt
1
Einführung 15
1.1
Zweck der Bedienungsanleitung 15
Zusätzliche Materialien 15
1.2
Copyright 15
1.3
1.4
Zulassungen und Zertizierungen 15
1.5
Anwendungsgebiete 17
1.6
Software 17
1.7
Begrie 17
Sicherheit 19
2
Sicherheitssymbole 19
2.1
Sicherheitshinweise und Schutzmaßnahmen 19
2.2
Betriebssicherheit 19
2.2.1
Inhalt
Wichtige Sicherheitswarnungen 20
2.3
2.4
Qualiziertes Personal 22
2.5
Sorgfaltspicht 22
2.6
Bestimmungsgemäße Verwendung 22
2.6.1
Unzulässige Anwendungsbereiche 22
2.7
Vorhersehbarer Missbrauch 23
2.8
Service und Support 23
3
Systembeschreibung 24
3.1
Übersicht über das VLT® Multiaxis Servo Drive System MSD 510 24
3.1.1
Anwendungsbeispiele 25
3.1.2
Maximale Anzahl von Modulen 25
3.2
Power Supply Module PSM 510 26
3.2.1
Übersicht 26
3.2.2
Stecker an der Oberseite des PSM 510 27
3.2.3
Anschlüsse an der Unterseite des PSM 510 28
3.3
Servo Drive Module SDM 511/SDM 512 28
3.3.1
Übersicht 28
3.3.2
SDM 511/SDM 512-Typen 29
3.3.3
Komponenten 30
3.3.3.1
3.3.4
Stecker am SDM 511 30
3.3.4.1
3.3.4.2
Kühlung 30
Stecker an der Oberseite des SDM 511 30
Anschlüsse an der Unterseite des SDM 511 31
AQ262450196490de-000101/175R1170 | 3Danfoss A/S © 2019.10
Page 4

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
3.3.5
Stecker am SDM 512 31
3.3.5.1
3.3.5.2
3.4
Decentral Access Module DAM 510 32
3.4.1
Übersicht 32
3.4.2
Anschlüsse an der Oberseite des DAM 510 34
3.4.3
Anschlüsse an der Unterseite des DAM 510 34
3.5
Auxiliary Capacitors Module ACM 510 34
3.5.1
Übersicht 34
3.5.2
Anschlüsse an der Oberseite des ACM 510 35
3.6
Expansion Module EXM 510 36
3.7
Bedieneinheit (LCP) 37
3.7.1
Übersicht über die LCP-Bedieneinheit 37
3.7.2
Layout der LCP-Bedieneinheit 37
Inhalt
Stecker an der Oberseite des SDM 512 32
Anschlüsse an der Unterseite des SDM 512 32
3.7.2.1
3.7.2.2
3.7.2.3
3.7.2.4
3.8
Kabel 41
3.8.1
Hybridkabel 41
3.8.2
Ethernetkabel 42
3.8.3
LCP-Kabel 42
3.9
Kabellayout und -führung 43
3.9.1
Maximale Kabellängen 43
3.9.2
Verkabelung des Ausgangslters 43
3.9.3
Standardverkabelungskonzept für 2 Decentral Access Modules (DAM 510) 43
3.10
Software 44
3.11
Feldbus 44
3.11.1
EtherCAT® 45
3.11.2
Ethernet POWERLINK® 46
A: Displaybereich 37
B: Menütasten am Display 40
C: Navigationstasten und Anzeigeleuchten (LEDs) 40
D: Bedientasten und Reset 41
3.11.3
PROFINET® 46
4
Mechanische Installation 47
4.1
Gelieferte Teile 47
4.2
Transport 47
4.3
Eingangskontrolle 47
4.4
Sicherheitsmaßnahmen bei der Installation 47
4.5
Installationsumgebung 47
AQ262450196490de-000101/175R11704 | Danfoss A/S © 2019.10
Page 5

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
4.5.1
Systemkomponenten 47
4.6
Vorbereitungen für die Installation 48
4.6.1
Systemmodule 48
4.6.2
Bohrschablonen 48
4.7
Installationsanleitung 48
4.7.1
Platzbedarf der Systemmodule 48
4.7.2
Montagehilfen und benötigte Werkzeuge 50
4.7.3
Montageanleitung für Systemmodule 50
5
Elektrische Installation 55
5.1
Warnungen für die elektrische Installation 55
5.2
Elektrische Umgebungsbedingungen 55
5.3
Erdung 56
5.3.1
Erdung für die elektrische Sicherheit 56
5.3.2
Erdung für eine EMV-gerechte Installation 57
Inhalt
5.4
Netzversorgungsanforderungen 58
5.4.1
Sicherungen 58
5.4.2
Trennschalter 59
5.5
Anforderungen an die Zusatzspannungsversorgung 59
5.5.1
Sicherungen 59
5.6
Anforderungen an die Sicherheitsstromversorgung 59
5.7
UL-Anforderungen 60
5.8
Anschluss des Servo Drive Module SDM 511/SDM 512 60
5.8.1
Anschließen des Motorkabels 60
5.8.2
Anschließen des Brems-/Thermistorkabels 62
5.8.3
Anschluss der Kabel an der Oberseite der Servo Drive Modules SDM 511/SDM 512 63
5.9
Anschließen des Power Supply Module PSM 510 63
5.9.1
AC-Netzdrossel 63
5.9.1.1
5.9.1.2
5.9.1.3
Anschluss von einem PSM 510 an der Netzdrossel 64
Anschluss von zwei PSM 510-Modulen an die Netzdrossel 64
Anschluss von zwei PSM 510-Modulen an die Netzdrossel mit Systemaufteilung 65
5.9.2
Anschließen der Kabel am Power Supply Module PSM 510 66
5.9.2.1
5.9.2.2
5.10
Anschluss des Decentral Access Module (DAM 510) 67
5.10.1
Anschluss der Kabel an der Oberseite des Decentral Access Module DAM 510 67
5.10.2
Anschließen des Einspeisekabels 68
5.11
Anschließen des Auxiliary Capacitors Module ACM 510 69
Anschließen der Kabel an der Oberseite des Power Supply Module PSM 510 66
Anschließen der Kabel an der Unterseite des Power Supply Module PSM 510 67
AQ262450196490de-000101/175R1170 | 5Danfoss A/S © 2019.10
Page 6

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
5.12
Anschließen des Expansion Module EXM 510 70
5.13
Anschließen des Bremswiderstands am PSM 510 71
6
Inbetriebnahme 73
6.1
Warnungen für die Inbetriebnahme 73
6.2
Checkliste vor der Inbetriebnahme 73
6.3
SDM 511/SDM 512 – Parameterkonguration und Inbetriebnahme des Antriebs 73
6.3.1
Sub-Tool zur Parameterkonguration 73
6.3.2
Sub-Tool zur Inbetriebnahme des Antriebs 74
6.4
EtherCAT® ID-Zuweisung 74
6.5
Ethernet POWERLINK® ID-Zuweisung 74
6.5.1
Übersicht 74
6.5.2
ID-Zuweisung für einzelne Geräte 74
6.5.2.1
6.5.2.2
Einstellen der Knoten-ID direkt in einem Servoantrieb oder in den Systemmodulen 75
Einstellen der Node ID für einen einzelnen Servoantrieb über das Power Supply Module (PSM 510) oder
Decentral Access Module (DAM 510) per LCP 75
Inhalt
6.5.3
ID-Zuweisung für mehrere Geräte 76
6.5.3.1
6.6
PROFINET® ID-Zuweisung 77
6.7
Einschaltzeit 77
6.8
Ladezeit Systemmodul 77
6.9
Einschalten des MSD 510-Systems 78
6.9.1
Verfahren zum Einschalten des MSD 510-Systems 78
6.10
Bibliotheken 78
6.11
Programmierung mit Automation Studio™ 78
6.11.1
Anforderungen für die Programmierung mit Automation Studio™ 78
6.11.2
Erstellen eines Automation Studio™ Projekts 79
6.11.3
Einbinden der Servoantriebsbibliotheken in ein Automation Studio™ Projekt 79
6.11.4
Konstanten innerhalb der DDS_Drive-Bibliothek 80
6.11.5
Instanziierung von AXIS_REF_DDS in Automation Studio™ 81
6.11.6
Instanziierung von PSM_REF in Automation Studio™ 81
Einstellen der Node-IDs für alle Servoantriebe und Systemmodule an einer Decentral Access Module
(DAM 510)-/Power Supply Module (PSM 510)-Linie 76
6.11.7
Instanziierung von DAM_REF in Automation Studio™ 82
6.11.8
Instanziierung von ACM_REF in Automation Studio™ 82
6.11.9
Importieren eines Servoantriebs in Automation Studio™ 82
6.11.9.1
6.11.9.2
6.11.10
Importieren von PSM 510, DAM 510 und ACM 510 in Automation Studio™ 84
6.11.10.1
Version V3.0.90 82
Version V4.x 83
Version V3.0.90 84
AQ262450196490de-000101/175R11706 | Danfoss A/S © 2019.10
Page 7

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
6.11.10.2
6.11.11
E/A-Konguration und E/A-Mapping 85
6.11.12
Einstellen der SPS-Zykluszeit 87
6.11.13
Verbinden mit der SPS 87
6.12
Programmieren mit TwinCAT® 88
6.12.1
Anforderungen für die Programmierung mit TwinCAT® 88
6.12.2
Erstellen eines TwinCAT®-Projekts 88
6.12.3
Einbinden der TwinCAT® Bibliothek in ein TwinCAT® Projekt 88
6.12.4
Konstanten innerhalb der DDS_Drive-Bibliothek 80
6.12.5
Instanziierung von AXIS_REF_DDS in TwinCAT® 90
6.12.6
Instanziierung von PSM_REF in TwinCAT® 91
6.12.7
Instanziierung von DAM_REF in TwinCAT® 91
6.12.8
Instanziierung von ACM_REF in TwinCAT® 91
6.12.9
Hinzufügen eines SPS-Projekts zu TwinCAT® System Manager 91
Inhalt
Version V4.x 84
6.12.10
Importieren von Geräten in TwinCAT® 91
6.12.11
E/A-Konguration und E/A-Mapping 94
6.12.12
Anschließen der Ein- und Ausgangsvariablen an physische Datenpunkte 95
6.12.13
Übertragen der Zuordnungen (Mapping) zurück zum SPS-Programm 96
6.12.14
Einstellen der SPS-Zykluszeit in TwinCAT® PLC Control 97
6.12.15
Konguration als TwinCAT® NC-Achse 98
6.12.15.1
6.12.16
Verbinden mit der SPS 98
6.13
Programmierrichtlinien für Automation Studio™ und TwinCAT® 99
6.14
Programmieren mit SIMOTION SCOUT® 99
6.14.1
Anforderungen für die Programmierung mit SIMOTION SCOUT® 99
6.14.2
Verbinden mit der SPS 99
6.14.3
Erstellen eines SIMOTION SCOUT®-Projekts 100
6.14.4
Einbinden der Servoantriebsbibliotheken in ein SIMOTION SCOUT® Projekt 100
6.14.5
Importieren von Geräten in SIMOTION SCOUT® 102
6.14.6
Zuweisen von IP-Konguration und Gerätenamen 103
E/A-Konguration für als NC-Achsen verwendete Servoantriebe 98
6.14.7
Erstellen einer Synchronisierungsdomäne 106
6.14.8
Kongurieren einer Topologie 109
6.14.9
Denieren des Sendezyklus und der Aktualisierungszeit 110
6.14.9.1
6.14.9.2
6.14.10
Zugang zu Ein- und Ausgängen 111
6.14.11
Programmieren mithilfe der Danfoss VLT® Servo Motion Library 112
6.14.12
Instanziierung von AXIS_REF_DDS in SIMOTION SCOUT® 112
Kongurieren der Sendezeit 110
Kongurieren der Aktualisierungszeit 110
AQ262450196490de-000101/175R1170 | 7Danfoss A/S © 2019.10
Page 8

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
6.14.13
Instanziierung von PSM_REF in SIMOTION SCOUT® 112
6.14.14
Instanziierung von DAM_REF in SIMOTION SCOUT® 113
6.14.15
Instanziierung von ACM_REF in SIMOTION SCOUT® 113
6.14.16
Global Compiler-Einstellungen 113
6.14.17
Zuweisen von Aufgaben 114
6.15
Programmierrichtlinien für SIMOTION SCOUT® 115
6.16
VLT® Servo Toolbox Software 116
6.16.1
Übersicht 116
6.16.2
Systemanforderungen 117
6.16.3
Installation der VLT® Servo Toolbox-Software 117
6.16.4
Kommunikation der VLT® Servo Toolbox 117
6.16.4.1
6.16.4.2
6.16.4.3
Inhalt
Übersicht 117
Firewall 117
Indirekte Kommunikation 117
6.16.4.4
6.17
Inbetriebnahme der VLT® Servo Toolbox 123
6.17.1
Schritt 1: Önen des Main Window 123
6.17.2
Schritt 2: Anschluss an das Netzwerk 124
6.17.3
Schritt 3: Suchen nach Geräten 125
6.18
Motion-Bibliothek 125
6.18.1
Funktionsbausteine 125
6.18.2
Einfache Programmiervorlage 125
7
Betrieb 127
7.1
Betriebsarten 127
7.1.1
Unterstützte Betriebsmodi 127
7.1.2
Bewegungsfunktionen 128
7.2
Betriebszustandsanzeigen 128
7.2.1
Betriebs-LED an SDM 511 und SDM 512 128
7.2.2
Betriebs-LED am PSM 510 129
7.2.3
Betriebs-LED am DAM 510 130
Direkte Kommunikation 120
7.2.4
Betriebs-LED am ACM 510 131
8
Konzept der funktionalen Sicherheit 133
8.1
Funktionsbeschreibung 133
8.2
Sicherheitsmaßnahmen 133
8.3
Qualiziertes Personal für die Arbeit mit funktionaler Sicherheit 134
8.4
Angewendete Normen und Konformität 134
8.5
Abkürzungen und Konventionen 135
AQ262450196490de-000101/175R11708 | Danfoss A/S © 2019.10
Page 9

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
8.6
Installation 135
8.6.1
Schutzmaßnahmen 136
8.7
Anwendungsbeispiel 136
8.8
Inbetriebnahmeprüfung 137
8.8.1
Inbetriebnahmeprüfung mittels Bibliotheken 137
8.8.2
Inbetriebnahmeprüfung mit PROFINET®-Geräten 138
8.9
Betrieb der STO-Funktion 139
8.9.1
Fehlercodes 139
8.9.2
Fehlerrückstellung 140
8.10
Kenndaten Funktionale Sicherheit 140
8.11
Wartung, Sicherheit und Benutzerzugänglichkeit 141
9
Diagnose 142
9.1
Störungen 142
9.2
Fehlersuche und -behebung 142
Inhalt
9.2.1
Fehlersuche und -behebung für die Servo Drive Modules SDM 511/SDM 512 142
9.2.1.1
9.2.1.2
9.2.1.3
9.2.1.4
9.2.1.5
9.2.1.6
9.2.1.7
9.2.1.8
9.2.1.9
9.2.1.10
9.2.1.11
9.2.1.12
9.2.1.13
9.2.1.14
9.2.1.15
Antrieb läuft nicht/startet langsam 142
Antrieb brummt und hat hohe Stromaufnahme 142
Antrieb stoppt plötzlich und läuft nicht wieder an 143
Die Motordrehrichtung ist falsch 143
Motor erzeugt nicht das erwartete Drehmoment 143
Antrieb sehr laut 143
Unruhiger Lauf 143
Vibrationen 143
Ungewöhnliche Laufgeräusche 144
Starker Drehzahlrückgang bei Belastung 144
Bremse wird nicht freigegeben 144
Haltebremse hält den Servoantrieb nicht 144
Einfallen der Bremse verzögert 144
Geräusche bei eingeschalteter Abstellbremse 144
LED leuchten nicht 145
9.2.1.16
9.2.2
Fehlersuche und -behebung am Servosystem 145
9.2.2.1
9.2.2.2
9.2.2.3
9.2.2.4
9.2.2.5
Antriebsüberlastschutz schaltet sofort ab 145
LCP-Display ist dunkel/ohne Funktion 145
Oene Netzsicherungen oder Trennschalter ausgelöst 145
Zwischenkreisspannung zu hoch (Fehler 0x3210/0x103) 146
Zwischenkreisspannung zu niedrig (Fehler 0x3220/0x104) 146
Überstrom im Zwischenkreis (Fehler 0x2396/0x15C) 146
AQ262450196490de-000101/175R1170 | 9Danfoss A/S © 2019.10
Page 10

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
9.2.2.6
9.2.2.7
9.2.2.8
9.2.2.9
9.2.2.10
9.2.2.11
9.2.2.12
9.2.2.13
9.2.2.14
9.2.2.15
9.3
Fehlercodes 149
9.3.1
Kein Fehler (0x0000 / 0x0) 149
9.3.2
Generic err (0x1000 / 0x100) 149
9.3.3
Überstrom am Ausgang (0x2310 / 0x101) 149
Inhalt
Zwischenkreisüberleistung (Fehler 0x2313/0x161) 147
Überlast PT-Leistung (Fehler 0x2314 / 0x162) 147
UAUX-Überstrom (Fehler 0x2391/0x125) 147
UAUX-Überspannung (Fehler 0x3292/0x133) 147
UAUX-Unterspannung (Fehler 0x3294/0x135) 147
Netzphasenfehler (Fehler 0x3130/0x12F) 148
Erdungsfehler 148
Bremswiderstandsfehler 148
Bremschopperfehler 148
Interner Lüfterfehler 148
9.3.4
Überlast hoher Strom (0x2311 / 0x15F) 149
9.3.5
I2T Überlast Strom (0x2312 / 0x160) 149
9.3.6
Überlast Hochleistung (0x2313 / 0x161) 149
9.3.7
Überlast PT-Leistung (0x2314 / 0x162) 150
9.3.8
Kurzschluss (0x2320 / 0x163) 150
9.3.9
Erdableitstrom (0x2330 / 0x151) 150
9.3.10
AUX Überstrom (0x2391 / 0x125) 150
9.3.11
AUX-Anwenderstromgrenze (0x2393 / 0x127) 150
9.3.12
Warnung AUX-Anwenderstromgrenze (0x2394 / 0x128) 151
9.3.13
AUX-Sicherungsfehler (0x2395 / 0x129) 151
9.3.14
DC-Überstromabschaltung (0x2396 / 0x15C) 151
9.3.15
Ausgangsstromabschaltung (0x2397 / 0x12B) 151
9.3.16
I2T Überlast Motor (0x239B/0x102) 151
9.3.17
Netzphasenfehler (0x3130 / 0x12F) 152
9.3.18
Zwischenkreisüberspannung (0x3210 / 0x103) 152
9.3.19
Überstromabschaltung SW (0x3210 / 0x103) 152
9.3.20
Zwischenkreisunterspannung (0x3220 / 0x104) 152
9.3.21
UDC-Ladefehler (0x3230 / 0x152) 152
9.3.22
Zwischenkreisspannung asymmetrisch (0x3280 / 0x153) 153
9.3.23
UAUX-Hochspannung (0x3291 / 0x132) 153
9.3.24
UAUX-Überspannung (0x3292 / 0x133) 153
9.3.25
UAUX-Niederspannung (0x3293 / 0x134) 153
9.3.26
UAUX-Unterspannung (0x3294 / 0x135) 153
9.3.27
UDC-Hochspannung (0x3295 / 0x136) 154
AQ262450196490de-000101/175R117010 | Danfoss A/S © 2019.10
Page 11

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
9.3.28
UDC-Niederspannung (0x3296 / 0x137) 154
9.3.29
UAUX-Ladefehler (0x3297 / 0x154) 154
9.3.30
UDC-Abschaltfehler (0x3298 / 0x165) 154
9.3.31
UAUX-Abschaltfehler (0x3299 / 0x155) 154
9.3.32
UAUX-Unterspannung Hardware (0x329A / 0x156) 155
9.3.33
Automatischer Fehler-Reset Störung (0x329B / 0x168) 155
9.3.34
Übertemperatur Gerät (0x4210 / 0x157) 155
9.3.35
Temperatur zu niedrig (0x4220 / 0x138) 155
9.3.36
Übertemperatur: Leistungsmodul (0x4290 / 0x105) 156
9.3.37
Übertemperatur: Steuerkarte (0x4291 / 0x106) 156
9.3.38
Übertemperatur: Leistungskarte (0x4292 / 0x107) 156
9.3.39
Einschaltstrom-Übertemperatur: Zwischenkreis (0x4293 / 013C) 156
9.3.40
Einschaltstrom-Übertemperatur AUX-Leitung (0x4294 / 0x13D) 156
9.3.41
Übertemperatur: Motor (0x4310 / 0x108) 157
Inhalt
9.3.42
UAUX-Unterspannung (0x5112 / 0x109) 157
9.3.43
Störung Ladeschalterspannung (0x5121 /0x158) 157
9.3.44
EE-Prüfsummenfehler (Parameter fehlt) (0x5530 / 0x10A) 157
9.3.45
Parameterfehler (0x6320 / 0x10B) 157
9.3.46
Conf par ver (0x6382 / 0x15D) 157
9.3.47
Kongurationsparameter Versionsfehler (0x6383 / 0x164) 158
9.3.48
Leistungs-EEprom-Kongurationsfehler (0x6384 / 0x166) 158
9.3.49
Bremschopperfehler (0x7111 / 0x141) 158
9.3.50
Bremschopper-Überstrom (0x7112 / 0x167) 158
9.3.51
Bremswiderstand Leistungsgrenze (0x7181 / 0x142) 159
9.3.52
Bremswiderstand benutzerdenierte Leistungsgrenze (0x7182 / 0x143) 159
9.3.53
Bremsennetzspannung zu hoch (0x7183 / 0x159) 159
9.3.54
Interne Position Sensor Fehler (0x7380/0x10C) 159
9.3.55
Externe Position Sensor Fehler (0x7380 / 0x10D) 160
9.3.56
Folgefehler (0x8611/0x10E) 160
9.3.57
Referenzfahrtfehler beim Aufruf des Referenzfahrtmodus (0x8693/0x10F) 160
9.3.58
Referenzfahrtfehler beim Start der Referenzfahrtmethode (0x8694/0x110) 160
9.3.59
Referenzfahrtfehler Abstand (0x8695/0x111) 160
9.3.60
Störung mechanische Bremse (0xFF01 / 0x112) 161
9.3.61
Kurzschluss in mechanischer Bremssteuerung (0xFF02 / 0x113) 161
9.3.62
Externe Schnittstelle Stromausfall (0xFF0A / 0x114) 161
9.3.63
Kommunikation unterbrochen (0xFF10 / 0x14F) 161
9.3.64
Lüfteristwert inkonsistent (0xFF21 / 0x145) 161
9.3.65
Lüfterlebensdauer kritisch (0xFF22 / 0x15A) 162
AQ262450196490de-000101/175R1170 | 11Danfoss A/S © 2019.10
Page 12

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
9.3.66
Timing-Fehler 1 (0xFF60 / 0x115) 162
9.3.67
Timing-Fehler 2 (0xFF61 / 0x116) 162
9.3.68
Timing-Fehler 3 (0xFF62 / 0x117) 162
9.3.69
Timing-Fehler 4 (0xFF63 / 0x118) 162
9.3.70
Timing-Fehler 5 (0xFF64 / 0x119) 163
9.3.71
Timing-Fehler 6 (0xFF65 / 0x11A) 163
9.3.72
Timing-Fehler 7 (0xFF66 / 0x168) 163
9.3.73
Timing-Fehler 8 (0xFF67 / 0x16B) 163
9.3.74
Timing-Fehler 9 (0xFF68 / 0x16C) 163
9.3.75
Firmware: Abweichung Paketbeschreibung (0xFF70 / 0x11B) 164
9.3.76
Firmware: Aus- und Einschaltzyklus erforderlich (0xFF71 / 0x11C) 164
9.3.77
Firmware: Update gestartet (0xFF72 / 0x11D) 164
9.3.78
Firmware: Update ungültig (0xFF73 / 0x15B) 164
9.3.79
STO bei aktiviertem Antrieb aktiv (0xFF80 / 0x11E) 165
Inhalt
9.3.80
STO-Abweichung (0xFF81 / 0x11F) 165
9.3.81
P_STO-Fehler (0xFF85 / 0x120) 165
9.3.82
Führungswert umgekehrt (0xFF90 / 0x121) 165
9.3.83
Führungswert unplausibel (0xFF91/0x122) 165
9.3.84
Lebenszeichenfehler (0xFF95/0x14E) 166
10
Wartung, Außerbetriebnahme und Entsorgung 167
10.1
Warnungen 167
10.2
Wartungsarbeiten 167
10.3
Inspektionen während des Betriebs 167
10.3.1
Systemkomponenten 167
10.4
Reparatur 167
10.5
Austausch der Systemkomponente 168
10.5.1
Ausbau der Systemkomponenten 168
10.5.2
Montage und Inbetriebnahme der Systemkomponenten 170
10.6
Kabel austauschen 170
10.6.1
Übersicht 170
10.6.2
Austauschen des Einspeisekabels 170
10.6.2.1
10.6.2.2
10.6.2.3
10.6.3
Loop-Kabel austauschen 171
10.6.3.1
10.6.3.2
Trennen des Einspeisekabels 170
Austauschen des Einspeisekabels 171
Anschließen des Einspeisekabels 171
Trennen des Loop-Kabels 171
Austauschen des Loop-Kabels 171
AQ262450196490de-000101/175R117012 | Danfoss A/S © 2019.10
Page 13
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
10.6.3.3
10.7
Austausch der Sicherungen im Decentral Access Module (DAM 510) 172
10.8
Austausch des Lüfters 173
10.9
Rücknahme 173
10.10
Recycling 173
10.11
Entsorgung 174
11
Spezikationen 175
11.1
Typenschilder 175
11.1.1
Beispiel-Typenschild an der Vorderseite der Systemmodule 175
11.1.2
Beispiel-Typenschild an der Seite der Systemmodule 175
11.2
Power Supply Module (PSM 510) 176
11.2.1
Abmessungen des PSM 510 176
11.2.2
Kenndaten für PSM 510 177
11.3
Servo Drive Module (SDM 511/SDM 512) 178
Anschließen des Loop-Kabels 171
Inhalt
11.3.1
Motorüberlastschutz 178
11.3.2
Motor-Übertemperaturschutz 178
11.3.3
Abmessungen 179
11.3.4
Kenndaten SDM 511 180
11.3.5
Kenndaten SDM 512 181
11.4
Decentral Access Module (DAM 510) 183
11.4.1
Abmessungen des DAM 510 183
11.4.2
Kenndaten für DAM 510 183
11.4.3
Schutz des Hybridkabels 184
11.5
Auxiliary Capacitors Module (ACM 510) 184
11.5.1
Abmessungen 184
11.5.2
Kenndaten für ACM 510 185
11.6
Expansion Module (EXM 510) 185
11.6.1
Abmessungen 185
11.6.2
Kenndaten für EXM 510 185
11.7
Anschlüsse an den Systemmodulen 186
11.7.1
Backlink-Anschluss 186
11.7.2
Bremsanschlussstecker 187
11.7.2.1
11.7.2.2
11.7.3
Ethernet-Anschlüsse 188
11.7.3.1
11.7.3.2
Bremswiderstands-Anschlussstecker am PSM 510 187
Anschlussstecker für Bremse und Motortemperatursensor am SDM 511/SDM 512 187
Ethernet-Anschlüsse am PSM 510 und ACM 510 189
Ethernet-Anschlüsse am DAM 510 189
AQ262450196490de-000101/175R1170 | 13Danfoss A/S © 2019.10
Page 14

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
11.7.3.3
11.7.4
E/A-Stecker 190
11.7.4.1
11.7.4.2
11.7.5
UAUX-Stecker 191
11.7.5.1
11.7.6
LCP-Anschluss (M8, 6-polig) 192
11.7.7
Versorgungsnetzstecker 193
11.7.7.1
11.7.8
Motorstecker 193
11.7.8.1
11.7.8.2
11.7.9
Relaisstecker 194
11.7.9.1
Inhalt
Ethernet-Anschlussstecker am SDM 511/SDM 512 189
E/A-Stecker am PSM 510/ACM 510 190
E/A-Stecker am SDM 511/SDM 512 190
24/48 V Kabelquerschnitte für PSM 510 192
Netzkabelquerschnitte für PSM 510 193
Motorkabelquerschnitte für SDM 511 194
Motorkabelquerschnitte für SDM 512 194
Relaisstecker am PSM 510/ACM 510 195
11.7.9.2
11.7.10
STO-Stecker 196
11.7.10.1
11.7.10.2
11.7.10.3
11.7.11
UDC-Stecker 199
11.7.12
AUX-Stecker 200
11.7.13
Motor-Geberstecker 200
11.7.14
Externe Geber-Stecker 202
11.7.15
Expansion Module-Anschlussstecker 203
11.8
Allgemeine Daten und Umgebungsbedingungen für das MSD 510-System 204
11.9
Lagerung 205
Relaisstecker am SDM 511/SDM 512 195
STO-Anschlussstecker am SDM 511 und SDM 512 196
STO-Stecker am PSM 510 197
STO-Anschlüsse am DAM 510 198
AQ262450196490de-000101/175R117014 | Danfoss A/S © 2019.10
Page 15

Handbuch
Beschreibung
VLT® Multiaxis Servo Drive MSD 510 -System – Produkthandbuch
Informationen zu Installation, Inbetriebnahme und Betrieb des MSD
510 -Servosystems.
VLT® Servo Drive System ISD 510, DSD 510, MSD 510
Projektierungshandbuch
Informationen zur Konguration des MSD 510 -Servosystems und detaillierte technische Daten.
VLT® Servo Drive System ISD 510, DSD 510, MSD 510
Programmierhandbuch
Information zur Programmierung des MSD 510 -Servosystems.
Zertizierung
Beschreibung
IEC/EN 61800-3
Elektrische Antriebssysteme mit Drehzahlregelung.
Teil 3: EMV-Anforderungen und spezielle Prüfungsmethoden
IEC/EN 61800-5-1
Elektrische Antriebssysteme mit Drehzahlregelung.
Teil 5-1: Sicherheitsanforderungen - elektrisch, thermisch und energiebezogen.
IEC/EN 61800-5-2
Elektrische Antriebssysteme mit Drehzahlregelung.
Teil 5-2: Sicherheitsanforderungen - Funktionale Sicherheit.
IEC/EN 61508-1
Funktionale Sicherheit sicherheitsbezogener elektrischer/elektronischer/programmierbarer Systeme.
Teil 1: Allgemeine Anforderungen.
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Einführung
1 Einführung
1.1 Zweck der Bedienungsanleitung
Diese Bedienungsanleitung beschreibt die Verwendung des VLT® Multiaxis Servo Drive MSD 510 -Systems.
Diese Bedienungsanleitung enthält Informationen zu:
•
Installation
•
Inbetriebnahme
•
Programmieren
•
Betrieb
•
Fehlersuche und -behebung
•
Service und Wartung
Diese Bedienungsanleitung richtet sich ausschließlich an qualiziertes Personal. Lesen Sie die Bedienungsanleitung vollständig
durch, um sicher und professionell mit dem Servosystem zu arbeiten. Berücksichtigen Sie insbesondere die Sicherheitshinweise und
allgemeinen Warnungen.
Diese Bedienungsanleitung ist wesentlicher Bestandteil des Servosystems und enthält auch wichtige Hinweise zum Service. Bewahren Sie diese Bedienungsanleitung daher immer zusammen mit dem Servosystem auf.
Die Einhaltung der Angaben in der Anleitung ist Voraussetzung für:
•
den störungsfreien Betrieb
•
die Erfüllung von Mängelhaftungsansprüchen
Lesen Sie deshalb zuerst die Bedienungsanleitung, bevor Sie mit dem MSD 510 -System arbeiten.
1.2 Zusätzliche Materialien
Tabelle 1: Zusätzliche Materialien
1.3 Copyright
VLT® ist eine eingetragene Marke von Danfoss .
1.4 Zulassungen und Zertizierungen
Tabelle 2: Zulassungen und Zertizierungen
AQ262450196490de-000101 / 175R1170 | 15Danfoss A/S © 2019.10
Page 16

Zertizierung
Beschreibung
IEC/EN 61508-2
Funktionale Sicherheit sicherheitsbezogener elektrischer/elektronischer/programmierbarer Systeme.
Teil 2: Anforderungen für sicherheitsbezogene elektrische/elektronische/programmierbare Systeme.
EN ISO 13849-1
Sicherheit von Maschinen – Sicherheitsbezogene Teile von Steuerungen.
Teil 1: Allgemeine Projektierungsleitlinien.
EN ISO 13849-2
Sicherheit von Maschinen – Sicherheitsbezogene Teile von Steuerungen.
Teil 2: Prüfung.
IEC/EN 60204-1
Sicherheit von Maschinen – elektrische Ausrüstung von Maschinen.
Teil 1: Allgemeine Anforderungen.
IEC/EN 62061
Maschinensicherheit – funktionale Sicherheit sicherheitsbezogener elektrischer, elektromechanischer
und programmierbarer elektronischer Steuerungssysteme
IEC/EN 61326-3-1
Elektrische Mess-, Steuer-, Regel- und Laborgeräte - EMV-Anforderungen.
Teil 3-1: Störfestigkeitsanforderungen für sicherheitsbezogene Systeme und Geräte, die für sicherheitsbe-
zogene Funktionen vorgesehen sind (funktionale Sicherheit) – allgemeine industrielle Anwendungen.
IEC/EN 60529
Schutzarten von Gehäusen (IP-Code).
UL 508C
UL-Standard für die Sicherheit von Leistungswandlern.
(Gilt nur für ISD 510-Servoantriebe der Größen 1 und 2.)
UL 61800-5-1
Elektrische Antriebssysteme mit Drehzahlregelung.
Teil 5-1: Sicherheitsanforderungen - elektrisch, thermisch und energiebezogen.
ISD 510-Servoantrieb der Größen 3 und 4:
MSD 510:
CE
2014/30/EU
Richtlinie über elektromagnetische Verträglichkeit (EMV).
2014/35/EU
Niederspannungsrichtlinie.
(2011/65/EU) überarbeitet (EU) 2015/863
Beschränkung der Verwendung bestimmter gefährlicher Stoe (RoHS).
2006/42/EG
Maschinenrichtlinie.
EtherCAT
®
Ethernet für die Steuerungsautomatisierungstechnologie. Ethernet-basiertes Feldbussystem.
Ethernet POWERLINK
®
Ethernet-basiertes Feldbussystem.
PROFINET RT/IRT
®
Ethernet-basiertes Feldbussystem.
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Einführung
AQ262450196490de-000101 / 175R117016 | Danfoss A/S © | 2019.10
Page 17

Zertizierung
Beschreibung
PLCopen
®
Technische Spezikation. Funktionsblöcke zur Bewegungssteuerung (früher Teil 1 und Teil 2) Version 2.0,
17. März 2011.
Begri
Beschreibung
ACM 510
Auxiliary Capacitors Module
DAM 510
Decentral Access Module zum Anschluss der dezentralen Servoantriebe von Danfoss (ISD 510
und DSD 510) an das Servosystem mittels Hybridkabel.
DSD 510
Decentral Servo Drive
DSD 510-Systemkomponenten
Umfasst DSD 510-Servoantriebe, PSM 510, DAM 510 und das optionale ACM 510.
EXM 510
Erweiterungsmodul
Einspeisekabel
Hybridkabel für den Anschluss des ersten Servoantriebs an das DAM 510.
ISD 510
Integrated Servo Drive
ISD 510-Systemkomponenten
Umfasst ISD 510-Servoantriebe, PSM 510, DAM 510 und das optionale ACM 510.
LCP
LCP-Bedieneinheit
Loop-Kabel
Hybridkabel zum Anschluss der Servoantriebe im Daisy-Chain-Format.
MSD 510
Multiaxis Servo Drive
MSD 510-Systemkomponenten
Umfasst SDM 511/SDM 512, PSM 510, DAM 510 und das optionale ACM 510.
SPS
Speicherprogrammierbare Steuerung (externes Gerät zur Steuerung des Servosystem).
PSM 510
Spannungsversorgungsmodul zur Erzeugung einer 565–680 V DC-Versorgung.
SDM 511
Servo Drive Module (für eine Achse)
SDM 512
Servo Drive Module (für zwei Achsen)
Systemmodule
Umfasst PSM 510, DAM 510 und das optionale ACM 510.
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Einführung
1.5 Anwendungsgebiete
Potenzielle Anwendungsgebiete:
•
Lebensmittel- und Abfüllanlagen
•
Verpackungsmaschinen
•
Pharmamaschinen
•
Anwendungen, die einen Verbund von Servoantrieben erfordern.
1.6 Software
Von Zeit zu Zeit können Updates für Firmware, VLT® Servo Toolbox-Software und SPS-Bibliotheken verfügbar sein. Wenn Updates
erhältlich sind, können Sie diese von danfoss.com website herunterladen.
Mit Hilfe der VLT® Servo Toolbox-Software oder der SPS-Bibliotheken lässt sich die Firmware auf den Servoantrieben oder auf den
Systemmodulen installieren.
1.7 Begrie
Tabelle 3: Begrie
AQ262450196490de-000101 / 175R1170 | 17Danfoss A/S © 2019.10
Page 18

Begri
Beschreibung
VIN PSM
Eingang des PSM 510 (V AC).
V
OUT
PSM
Ausgang des PSM 510 (V DC).
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Einführung
AQ262450196490de-000101 / 175R117018 | Danfoss A/S © | 2019.10
Page 19

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Sicherheit
2 Sicherheit
2.1 Sicherheitssymbole
Folgende Symbole kommen in diesem Handbuch zum Einsatz:
W A R N U N G
Weist auf eine potenziell gefährliche Situation hin, die zum Tod oder zu schweren Verletzungen führen kann!
V O R S I C H T
Weist auf eine potenziell gefährliche Situation hin, die zu leichten oder mittelschweren Verletzungen führen kann. Die Kennzeichnung kann ebenfalls als Warnung vor unsicheren Verfahren dienen.
H I N W E I S
Weist auf eine wichtige Information hin, z. B. eine Situation, die zu Geräte- oder sonstigen Sachschäden führen kann.
2.2 Sicherheitshinweise und Schutzmaßnahmen
Die Sicherheitshinweise und Schutzmaßnahmen müssen jederzeit eingehalten werden.
•
Der einwandfreie und sichere Betrieb des Servosystems und seiner Komponenten setzt sachgemäßen und fachgerechten Transport, Lagerung, Montage und Installation sowie sorgfältige Bedienung und Instandhaltung voraus.
•
Nur entsprechend geschultes und qualiziertes Personal darf am MSD 510 -System und seinen Komponenten oder in deren
Umkreis arbeiten.
•
Verwenden Sie ausschließlich von Danfoss zugelassene Zubehör- und Ersatzteile.
•
Die angegebenen Umgebungsbedingungen müssen eingehalten werden.
•
Die in diesem Handbuch gemachten Angaben zur Verwendung der lieferbaren Komponenten stellen lediglich Anwendungsbeispiele und Vorschläge dar.
•
Der Anlagenbauer muss für seine individuelle Anwendung die Eignung der gelieferten Komponenten und die in diesem Handbuch gemachten Angaben zu ihrer Verwendung selbst überprüfen,
-
mit den für seine Anwendung geltenden Sicherheitsvorschriften und Normen abstimmen und
-
die erforderlichen Maßnahmen, Änderungen sowie Ergänzungen durchführen.
•
Die Inbetriebnahme des Servosystems oder seiner Komponenten ist solange untersagt, bis festgestellt wurde, dass die Maschine oder Anlage, in der sie eingebaut sind, den länderspezischen Bestimmungen, Sicherheitsvorschriften und Normen der
Anwendung entspricht.
•
Der Betrieb ist nur bei Übereinstimmung mit den nationalen EMV-Vorschriften für den vorliegenden Anwendungsfall erlaubt.
•
Für die Einhaltung der durch nationale Vorschriften geforderten Grenzwerte ist der Hersteller der Anlage, Maschine oder des
Systems verantwortlich.
•
Sie müssen die technischen Daten sowie die Anschluss- und Installationsbedingungen in diesem Handbuch unbedingt einhalten.
•
Die Sicherheitsvorschriften und -bestimmungen des Landes, in dem die Geräte verwendet werden, müssen strengstens befolgt
werden.
•
Zum Schutz des Benutzers vor Stromschlägen sowie zum Schutz des Servosystems gegen Überlast ist eine Schutzerdung obligatorisch, die gemäß örtlichen und nationalen Vorschriften ausgeführt sein muss.
2.2.1 Betriebssicherheit
Betriebssicherheit
•
Sicherheitsrelevante Anwendungen sind nur zugelassen, wenn sie ausdrücklich und eindeutig in diesem Handbuch angegeben
sind.
•
Sicherheitsrelevant sind alle Anwendungen, durch die Personengefährdung und Sachschäden entstehen können.
•
Die über die Software der SPS ausgeführten Stoppfunktionen unterbrechen nicht die Netzversorgung des Power Supply Module (PSM 510). Sie dürfen sie deshalb nicht zwecks elektrischer Sicherheit des Servosystems verwenden.
AQ262450196490de-000101 / 175R1170 | 19Danfoss A/S © 2019.10
Page 20

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
•
Das Servosystem lässt sich mit einem Softwarebefehl oder einem Sollwert Null anhalten, obwohl der Servoantrieb weiter unter
DC-Spannung und/oder der PSM 510 weiter unter Netzspannung steht. Wenn das System abgeschaltet ist, kann es von selbst
wieder anlaufen, sofern die Elektronik defekt ist, oder falls eine kurzfristige Überlastung oder ein Fehler in der Versorgungsspannung oder am System beseitigt wurde. Wenn ein unerwarteter Anlauf des Servomotors gemäß den Bestimmungen zur Personensicherheit (z. B. Verletzungsgefahr durch Kontakt mit sich bewegenden Maschinenteilen nach einem unerwarteten Anlauf)
jedoch nicht zulässig ist, sind die oben genannten Stoppfunktionen nicht ausreichend. Achten Sie in diesem Fall darauf, dass Sie
das Servosystem vom Netz trennen oder eine geeignete Stoppfunktion implementieren, und vermeiden Sie einen unvorhergesehenen Motoranlauf, zum Beispiel durch Verwendung der Funktion Safe Torque O.
•
Das Servosystem kann während der Parametereinstellung oder der Programmierung ungewollt anlaufen. Wenn dies die Personensicherheit gefährdet (z. B. Verletzungsgefahr durch Kontakt mit sich bewegenden Maschinenteilen), ist ein unerwarteter Anlauf beispielsweise mithilfe der Safe Torque O-Funktion oder durch eine sichere Trennung der Servoantriebe zu verhindern.
•
Das Servosystem hat außer den Spannungseingängen L1, L2 und L3 am PSM 510 noch weitere Spannungseingänge, z. B. eine
externe Hilfsspannung. Überprüfen Sie vor dem Beginn von Reparaturarbeiten, ob alle Versorgungsspannungseingänge abgeschaltet sind und die erforderliche Entladezeit für die Zwischenkreiskondensatoren abgelaufen ist.
Sicherheit
2.3 Wichtige Sicherheitswarnungen
Die folgenden Sicherheitshinweise und Schutzmaßnahmen beziehen sich auf das VLT® Multiaxis Servo Drive MSD 510 -System. Lesen Sie die Sicherheitshinweise sorgfältig, bevor Sie mit irgendwelchen Arbeiten am Servosystem oder seinen Komponenten beginnen. Beachten Sie besonders die Sicherheitshinweise in den entsprechenden Kapiteln dieser Anleitung.
W A R N U N G
GEFÄHRLICHE SITUATION
Wenn der Servoantrieb oder die Bus-Leitungen falsch angeschlossen sind, besteht Lebensgefahr, Gefahr schwerer Verletzungen
und/oder die Gefahr der Beschädigung am Gerät!
Halten Sie daher unbedingt die Anweisungen in diesem Produkthandbuch sowie die lokalen und nationalen Sicherheitsvors-
-
chriften ein.
W A R N U N G
HOCHSPANNUNG
Das MSD 510 -System arbeitet mit Hochspannung, wenn es an das elektrische Versorgungsnetz angeschlossen ist. Es gibt keine
Anzeige an den Komponenten, die die anliegende Netzspannung anzeigt. Fehler bei Installation, Inbetriebnahme oder Wartung
können zum Tod oder zu schweren Verletzungen führen!
Nur qualiziertes Personal darf Installation, Inbetriebnahme und Wartung vornehmen.
-
W A R N U N G
GEFAHR DURCH ABLEIT-/ERDUNGSSTRÖME
Die Ableit-/Erdungsströme sind größer als 3,5 mA. Eine fehlerhafte Erdung der MSD 510 -Systemmodule kann zum Tod oder zu
schweren Verletzungen führen!
Aus Gründen der Bedienersicherheit ist es wichtig, das System ordnungsgemäß nach nationalen oder örtlichen Elektrovors-
-
chriften sowie den Hinweisen in diesem Handbuch von einem zugelassenen Elektroinstallateur erden zu lassen.
AQ262450196490de-000101 / 175R117020 | Danfoss A/S © | 2019.10
Page 21

Mindestwartezeit (Minuten)
15
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Sicherheit
W A R N U N G
ENTLADEZEIT
Das MSD 510 -System enthält Zwischenkreiskondensatoren, die auch nach Abschalten der Netzversorgung am Power Supply
Module (PSM 510) eine gewisse Zeit geladen bleiben. Das Nichteinhalten der vorgesehenen Entladungszeit nach dem Trennen
der Spannungsversorgung vor Wartungs- oder Reparaturarbeiten kann zu schweren oder tödlichen Verletzungen führen.
Trennen Sie zur Vermeidung von Stromschlägen vor allen Wartungs- oder Reparaturarbeiten am -System oder dessen Kom-
-
ponenten das Power Supply Module (PSM 510) vollständig vom Netz und warten Sie ab, bis sich die Kondensatoren vollständig entladen haben.
G E F A H R
Risque du choc électrique. Une tension dangereuse peut être présentée jusqu’à 15 min après avoir coupé l’alimentation.
-
W A R N U N G
UNERWARTETER ANLAUF
Das MSD 510 -System enthält Servoantriebe und PSM 510 sowie DAM 510, die an das elektrische Versorgungsnetz angeschlossen
sind und jederzeit anlaufen können. Dies kann durch einen Feldbusbefehl, ein Sollwertsignal oder einen zurückgesetzten Fehler
erfolgen. Servoantriebe und alle angeschlossenen Geräte müssen betriebsbereit sein. Fehler in der Betriebsbereitschaft können
bei Anschluss an das elektrische Versorgungsnetz zum Tod, zu schweren Verletzungen, Schäden an der Ausrüstung oder zu anderen Sachschäden führen.
Treen Sie geeignete Maßnahmen gegen unerwarteten Anlauf.
-
W A R N U N G
UNERWARTETE BEWEGUNG
Wenn sofort Änderungen an den Parametern durchgeführt werden, kann es zu unerwarteter Bewegung kommen, was zum Tod,
zu schweren Verletzungen oder zu Sachschäden führen kann!
Ergreifen Sie bei der Änderung von Parametern geeignete Maßnahmen, um sicherzustellen, dass es bei unerwarteter Bewe-
-
gung nicht zu Gefahren kommt.
V O R S I C H T
GEFAHR VON VERBRENNUNGEN
Die Oberäche der Servoantriebe kann sich während des Betriebs mit Temperaturen über 90 °C sehr stark aufheizen.
Berühren Sie Servoantriebe erst dann, wenn diese sich abgekühlt haben.
-
H I N W E I S
FEHLERSTROM (FI) SCHUTZSCHALTER (RCD) - KOMPATIBILITÄT
Das MSD 510 -System enthält Komponenten, die einen Gleichstrom im Leiter der Schutzerde verursachen können, was zu einer
Funktionsstörung sämtlicher an das System angeschlossenen Geräte führen kann.
Bei Verwendung einer Fehlerstromschutzeinrichtung (RCD) oder eines Dierenzstrom-Überwachungsgeräts (RCM) zum
-
Schutz bei direktem oder indirektem Kontakt darf auf der Primärseite der MSD 510 -Systemkomponenten nur ein RCD bzw.
RCM des Typs B verwendet werden.
AQ262450196490de-000101 / 175R1170 | 21Danfoss A/S © 2019.10
Page 22

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Sicherheit
2.4 Qualiziertes Personal
Die Installation, Inbetriebnahme und Wartung darf nur qualiziertes Personal durchführen. Im Sinne dieses Handbuchs und der Sicherheitshinweise in diesem Handbuch ist qualiziertes Personal ausgebildete Fachkräfte, die die Berechtigung haben, Geräte, Systeme und Stromkreise gemäß den Standards der Sicherheitstechnik zu montieren, zu installieren, in Betrieb zu nehmen, zu erden
und zu kennzeichnen und die mit den Sicherheitskonzepten der Automatisierungstechnik vertraut sind.
Ferner muss das Personal mit allen Anweisungen und Sicherheitsmaßnahmen gemäß dieser Anleitung vertraut sein. Das Fachpersonal muss über eine geeignete Sicherheitsausrüstung verfügen und in Erster Hilfe ausgebildet sein.
2.5 Sorgfaltspicht
Der Betreiber und/oder der Weiterverarbeiter muss sicherstellen, dass:
•
das Servosystem und seine Komponenten ausschließlich bestimmungsgemäß verwendet werden.
•
die Komponenten nur in einwandfreiem, funktionstüchtigen Zustand betrieben werden.
•
das Produkthandbuch stets vollständig und in leserlichem Zustand in der Nähe des Servosystems zur Verfügung steht.
•
nur ausreichend qualizierte und autorisierte Fachkräfte das Servosystem montieren, installieren, in Betrieb nehmen und warten.
•
diese Fachkräfte regelmäßig in allen zutreenden Fragen der Arbeitssicherheit und des Umweltschutzes unterwiesen werden
und die Inhalte des Produkthandbuchs sowie die darin enthaltenen Sicherheitshinweise kennen.
•
die an den Komponenten angebrachten Produktkennzeichnungen und Identikationen sowie Sicherheits- und Warnhinweise
nicht entfernt und in stets lesbarem Zustand gehalten werden.
•
die am jeweiligen Einsatzort des Servosystems geltenden nationalen und internationalen Vorschriften für die Steuerung von
Maschinen und Anlagen eingehalten werden.
•
die Anwender stets über alle aktuellen, für ihre Belange relevanten, Informationen zum Servosystem sowie dessen Anwendung
und Bedienung verfügen.
2.6 Bestimmungsgemäße Verwendung
Die Komponenten des MSD 510 -Systems sind zum Einbau in Maschinen, die im industriellen Umfeld eingesetzt werden, übereinstimmend mit den lokalen Gesetzen, vorgesehen.
H I N W E I S
In einer Wohnumgebung kann dieses Produkt Funkstörungen verursachen. In diesem Fall sind zusätzliche Maßnahmen zur
-
Abschwächung dieser Störungen erforderlich.
Bevor Sie das Servosystem einsetzen, müssen die folgenden Voraussetzungen erfüllt sein, um einen bestimmungsgemäßen Gebrauch der Produkte zu gewährleisten:
•
Alle Anwender von Danfoss -Produkten müssen die entsprechenden Sicherheitsvorschriften und die Beschreibung der bestimmungsgemäßen Verwendung gelesen und verstanden haben.
•
Änderungen an der Hardware dürfen nicht vorgenommen werden.
•
Führen Sie keine Rückentwicklung von Softwareprodukten durch und ändern Sie nicht deren Quellcode.
Installieren und betreiben Sie keine beschädigten oder fehlerhaften Produkte.
•
•
Stellen Sie sicher, dass die Produkte entsprechend den in der Dokumentation genannten Vorschriften installiert sind.
•
Halten Sie vorgegebene Wartungs- und Serviceintervalle ein.
•
Ergreifen Sie alle vorgesehenen Schutzmaßnahmen.
•
Montieren oder installieren Sie nur die in dieser Bedienungsanleitung beschriebenen Komponenten. Drittgeräte und -anlagen
dürfen nur in Abstimmung mit Danfoss verwendet werden.
2.6.1 Unzulässige Anwendungsbereiche
Das Servosystem darf nicht in folgenden Anwendungsbereichen eingesetzt werden:
Bereiche mit explosionsgefährdeten Atmosphären.
•
Mobile oder tragbare Systeme.
•
Schwimmende oder schwebende Systeme.
•
Bewohnte Einrichtungen.
•
AQ262450196490de-000101 / 175R117022 | Danfoss A/S © | 2019.10
Page 23

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
•
Anlagen, in denen Radioaktivität vorhanden ist.
•
Bereiche mit extremen Temperaturschwankungen oder in denen die maximale Nenntemperatur überschritten werden kann.
•
Unter Wasser.
Sicherheit
2.7 Vorhersehbarer Missbrauch
Jede Verwendung, die Danfoss nicht ausdrücklich freigegeben hat, gilt als Missbrauch. Dies gilt auch für die Nicht-Einhaltung der
festgelegten Betriebsbedingungen und Anwendungen. Für Schäden, die auf missbräuchliche Verwendung zurückzuführen sind,
übernimmt Danfoss keinerlei Haftung.
2.8 Service und Support
Wenden Sie sich für Service und Support an den lokalen Servicepartner.
AQ262450196490de-000101 / 175R1170 | 23Danfoss A/S © 2019.10
Page 24
e30bg579.10
PSM
SDM 511
FS2
SDM 511
FS1
SDM 512
FS1
DAM 510
ACM 510
EXM 510
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Systembeschreibung
3 Systembeschreibung
3.1 Übersicht über das VLT® Multiaxis Servo Drive System MSD 510
Das VLT® Multiaxis Servo Drive System MSD 510 ist eine leistungsstarke zentrale Servoantriebslösung. Das oene System unterstützt
die Echtzeit-Ethernet Protokolle EtherCAT®, Ethernet POWERLINK® und PROFINET®.
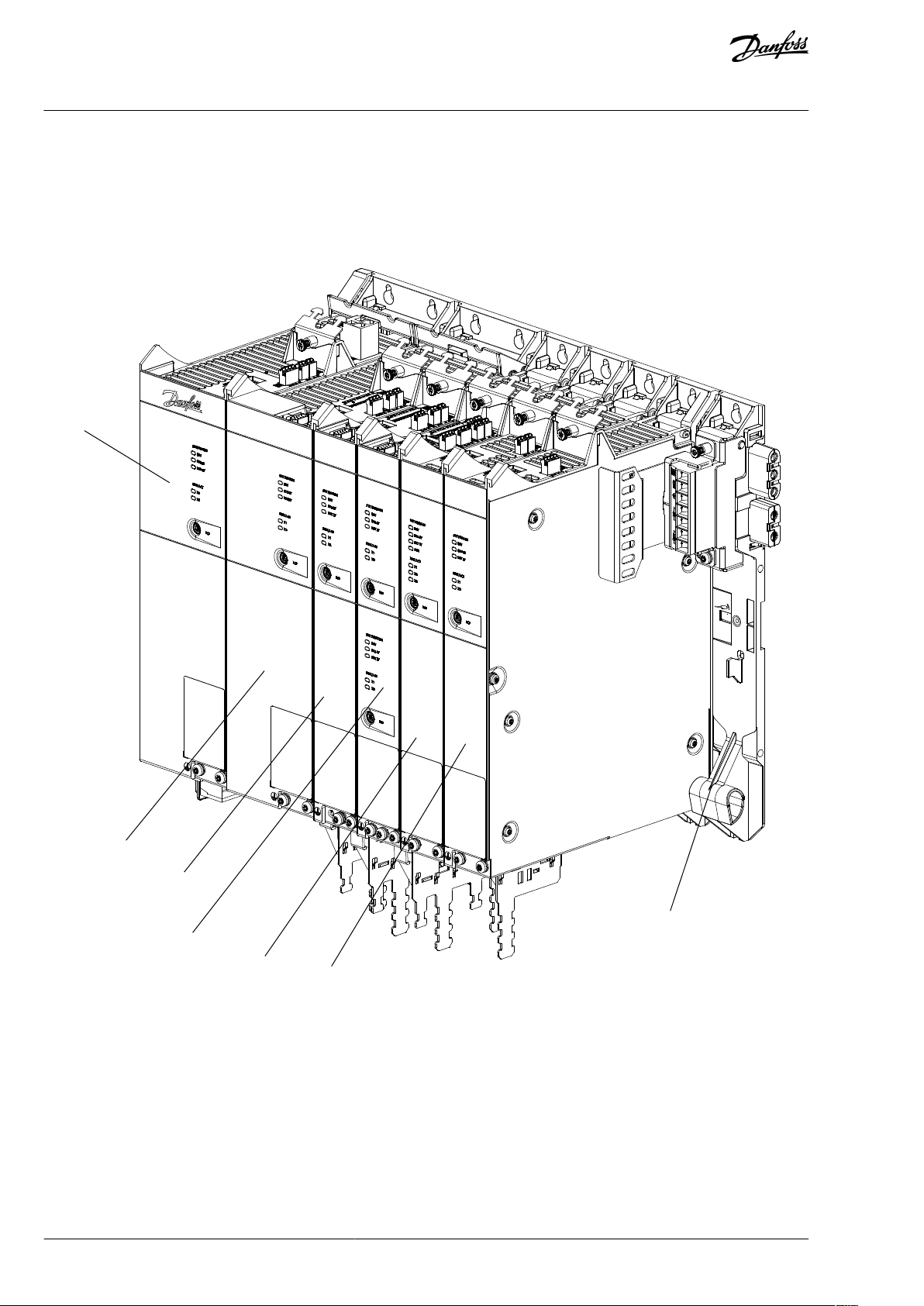
Abbildung 1: MSD-Module
Das System besteht aus:
•
Power Supply Module (PSM 510)
•
Antriebsmodule:
-
Servo Drive Module (SDM 511) für eine Achse
-
Servo Drive Module (SDM 512) für zwei Achsen
•
Decentral Access Module (DAM 510)
•
Auxiliary Capacitors Module (ACM 510)
AQ262450196490de-000101 / 175R117024 | Danfoss A/S © | 2019.10
Page 25

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
•
Expansion Module (EXM 510)
•
Software:
-
Firmware für die Servo Drive Modules (SDM 511 und SDM 512)
-
Firmware für das Power Supply Module (PSM 510)
-
Firmware für das Decentral Access Module (DAM 510)
-
Firmware für das Auxiliary Capacitors Module (ACM 510)
-
VLT® Servo Toolbox
-
SPS-Bibliotheken für AutomationStudio©, TwinCAT®, SIMOTION Scout und TIA Portal.
Einige Module sind je nach Leistungsgröße in zwei Baugrößen mit Breiten von 50 mm (FS1) oder 100 mm (FS2) erhältlich.
Abhängig von der Anwendung lässt sich das System in einem rein zentralen System oder gemeinsam mit den Danfoss Decentral
Servo Drives (ISD 510 und DSD 510) in einem gemischten System einsetzen. Die Verwendung einer Netzdrossel ist obligatorisch.
Die Systemmodule PSM 510, DAM 510 und ACM 510 sowie die Antriebsmodule SDM 511/SDM 512 sind an einer Rückwand im
Schaltschrank montiert. Zwischenkreis- und Steuerspannungsversorgung sind in die Rückwand integriert. Das Click-and-Lock-Konzept an der Rückwand ermöglicht eine einfach Montage und Installation.
Systembeschreibung
H I N W E I S
Die MSD 510 -Module können nicht in Servosystemen anderer Hersteller eingesetzt werden. Antriebe anderer Hersteller kön-
-
nen nicht im MSD 510 -System eingesetzt werden.
Wenden Sie sich für weitere Informationen an Danfoss.
-
H I N W E I S
Die Systemmodule verfügen gemäß IEC/EN 60529 über die Schutzart IP20 (mit Ausnahme der Stecker, die über die Schutzart
-
IP00 verfügen). Sie sind nur für den Einsatz in einem Schaltschrank ausgelegt. Der Kontakt mit Flüssigkeiten kann die Systemmodule beschädigen.
3.1.1 Anwendungsbeispiele
Es gibt zahlreiche potenzielle Anwendungsgebiete für das VLT® Multiaxis Servo Drive MSD 510 -System, wie in den folgenden Beispielen gezeigt.
Getränkeautomaten
•
Befüllen
•
PET-Blasformen
Lebensmittel- und Getränkeverpackungsmaschinen:
•
Verpackung in Schlauchbeuteln
•
Beutelherstellung
•
Schalenversiegelung
•
Verpackung in Schrumpolie
Industrielle- und Pharma-Verpackungsmaschinen:
•
Palettieren
•
Toplader
•
Kartonieren
•
Tubenabfüllung
•
Blistermaschine
•
Flüssigkeitsabfüllung
•
Dosierung von Feststoen
3.1.2 Maximale Anzahl von Modulen
Die maximale Anzahl der Module im MSD 510 -System ist:
AQ262450196490de-000101 / 175R1170 | 25Danfoss A/S © 2019.10
Page 26

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
•
PSM 510: 2 pro System
•
DAM 510: 3 pro System (je nach Systemarchitektur können ggf. mehr hinzugefügt werden. Wenden Sie sich für weitere Informationen an Danfoss .)
•
SDM 511/SDM 512: Je nach Nennstrom und Ausgangsleistung der Servoantriebsmodule und des AUX-Stromverbrauchs beim
Betrieb. Wenden Sie sich für weitere Informationen an Danfoss .
Systembeschreibung
3.2 Power Supply Module PSM 510
3.2.1 Übersicht
PSM ist die Abkürzung für Power Supply Module. Es ist das Netzteil für das Servosystem. Das PSM 510 liefert eine DC-Versorgungsspannung und garantiert eine hohe Leistungsdichte. Zwischenkreis und 24/48 V DC werden über den Backlink-Anschluss in den
Rückwänden auf alle Systemmodule verteilt. Das PSM 510 kann über einen Ethernet-basierten Feldbus kontrolliert werden.
LED an der Vorderseite des PSM 510 zeigen Betriebszustände und Warnungen an.
H I N W E I S
Das MSD 510-System ist für den Einsatz in einem Schaltschrank ausgelegt. Wird die STO-Funktion verwendet, muss der
-
Schaltschrank mindestens über die Schutzart IP54 verfügen.
Das PSM 510 verfügt gemäß IEC/EN 60529 über die Schutzart IP20 (mit Ausnahme der Stecker, die über die Schutzart IP00
-
verfügen).
Der Kontakt mit Flüssigkeiten kann das PSM 510 beschädigen.
-
Alle Leistungskabel sind mit dem PSM 510 verkabelt, daher ist für jedes System mindestens 1 PSM 510 erforderlich.
Das PSM 510 führt auch Wartungsfunktionen aus, zum Beispiel eine Spannungsmessung, und wird durch einen internen Lüfter ge-
kühlt.
Das PSM 510 ist in drei Leistungsgrößen erhältlich und liefert für 3 Sekunden eine Ausgangsleistung von 10, 20 oder 30 kW mit
200 % Überlastkapazität. Es können zwei parallel betriebene PSM 510-Module zum Einsatz kommen, wodurch sich eine Ausgangsleistung von bis zu 60 kW realisieren lässt.
Ein Beispiel für einen Typencode des PSM 510 ist: MSD510PSM510F2P10C0D6E20PLSXXXXXXXXXXXXX.
AQ262450196490de-000101 / 175R117026 | Danfoss A/S © | 2019.10
Page 27

2
1
3
4
5
6
7
8
9
e30bg581.11
1
Rückwand
2
24/48 V-Eingangsstecker
3
Zugentlastung und Abschirmung
4
Anschlüsse: E/A, STO, Relais und Ethernet
5
Betriebs-LED
6
LCP-Stecker
7
PE-Schraube
8
Versorgungsnetzstecker
9
Anschluss des internen/externen Bremswiderstands
1 2
3
45
6
7
e30bg465.11
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Systembeschreibung
Abbildung 2: PSM 510
3.2.2 Stecker an der Oberseite des PSM 510
Abbildung 3: Stecker an der Oberseite des PSM 510
AQ262450196490de-000101 / 175R1170 | 27Danfoss A/S © 2019.10
Page 28

1
Ethernet-Anschluss Eingang
2
Ethernet-Anschluss Ausgang
3
24/48 V IN Stecker
4
STO-Stecker EIN
5
STO-Stecker AUS
6
E/A-Stecker
7
Relaisstecker
2
1
3
4
e30bg466.10
1
Halter für den Stecker des internen Bremswiderstands, wenn nicht in Verwendung
2
Versorgungsnetzstecker
3
PE-Schrauben
4
Anschluss des internen/externen Bremswiderstands
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
3.2.3 Anschlüsse an der Unterseite des PSM 510
Abbildung 4: Anschlüsse an der Unterseite des PSM 510
Systembeschreibung
3.3 Servo Drive Module SDM 511/SDM 512
3.3.1 Übersicht
SDM ist die Abkürzung für Servo Drive Module. Das SDM 511 ist ein Einzelachs-Servoantrieb, der in 5 Leistungsgrößen und 2 Gehäusegrößen erhältlich ist (FS1 mit 50 mm und FS2 mit 100 mm). Das SDM 512 ist ein Doppelachs-Servoantrieb, der in 3 Leistungsgrößen und 1 Gehäusegröße erhältlich ist (FS1, 50 mm). Ein Doppelachs-Modul betreibt 2 Servomotoren unabhängig voneinander.
Es sind mehrere Geber Optionen erhältlich. Die SDMs sind mit digitalen Ein-/Ausgabeschnittstellen und Safe Torque O (STO) ausgestattet und unterstützen verschiedene Motor-Istwertgeber.
H I N W E I S
Das MSD 510-System ist für den Einsatz in einem Schaltschrank ausgelegt. Wird die STO-Funktion verwendet, muss der
-
Schaltschrank mindestens über die Schutzart IP54 verfügen.
Die SDMs verfügen gemäß IEC/EN 60529 über die Schutzart IP20 (mit Ausnahme der Stecker, die über die Schutzart IP00
-
verfügen).
Der Kontakt mit Flüssigkeiten kann die SDMs beschädigen.
-
AQ262450196490de-000101 / 175R117028 | Danfoss A/S © | 2019.10
Page 29

1
SDM 512 Frame Size 1
1
2
3
4
5
SDM 511 Frame Size 2
1
SDM 511 Frame Size 1
2
3
5
4
2
3
2
3
4
5
e30bg580.10
1
Anschlüsse: E/A, STO, Relais, Ethernet und externer
Geber
2
Betriebs-LED
3
LCP-Stecker
4
PE-Schrauben
5
Anschlüsse: Motor, Motorgeber, Thermistor, Bremse,
Abschirmung und Zugentlastung
e30bg570.10
[01–06]
Produktgruppe
[22–23]
Gleichspannung
[32–34]
Firmware
MSD510
VLT® Multiaxis Servo Drive
D6
600 V DC-Zwischenkreisspannung
SXX
Standard
[07–12]
Produktvariante
[24–26]
Gehäuse
SC0
Kundenspezisch
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Systembeschreibung
Abbildung 5: SDM 511/SDM 512-Module
3.3.2 SDM 511/SDM 512-Typen
H I N W E I S
Der Antriebskongurator zeigt die zulässige Konguration der verschiedenen Servoantriebsausführungen. Nur zulässige
-
Kombinationen werden angezeigt. Daher sind nicht alle im Typencode aufgeführten Ausführungen sichtbar.
Abbildung 6: Typencode
Tabelle 4: Legende für Typencode
AQ262450196490de-000101 / 175R1170 | 29Danfoss A/S © 2019.10
Page 30

SDM511
MSD 510 Servo Drive Module 511
E20
IP20
(1)
[35]
Sicherheit
SDM512
MSD 510 Servo Drive Module 512
[27–29]
Bussystem
T
Safe Torque O
(STO)
[13–14]
Antriebsausführung
FXX
Ohne Istwert
(2)
[36–40]
Reserviert
SA
Servoantrieb für eine Achse
FRX
Resolver
XXXXX
Reserviert
DA
Servoantrieb für zwei Achsen
FS1
BiSS ST Geber, 17 Bit
[15–16]
Baugröße Gehäuse
FM1
BiSS MT Geber, 17 bit
F1
Baugröße Gehäuse 1, 50 mm
FE1
EnDat 2.1
F2
Baugröße Gehäuse 2, 100 mm
FE2
EnDat 2.2
[17–21]
Nennstrom
FHF
HIPERFACE®
(2)
C02A5
2,5 AeFHD
HIPERFACE® DSL
(2)
C005A
5 A
e
[30–31]
Bussystem
C010A
10 AePL
POWERLINK
C020A
20 AeEC
EtherCAT
C040A
40 AePN
PROFINET
1
243
657
e30bg443.10
1
Externer Geber Anschluss
2
Ethernet-Anschluss Eingang
3
Ethernet-Anschluss Ausgang
4
E/A-Stecker
5
STO-Stecker EIN
6
STO-Stecker AUS
7
Relaisstecker
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Systembeschreibung
1
IP20 gemäß IEC/EN 60529 (mit Ausnahme der Stecker, die über die Schutzart IP00 verfügen)
2
In Vorbereitung
3.3.3 Komponenten
3.3.3.1 Kühlung
Die Servo Drive Modules SDM 511 und SDM 512 werden durch einen internen Lüfter mit Drehzahlregelung gekühlt.
3.3.4 Stecker am SDM 511
In diesem Abschnitt sind alle Stecker am SDM 511 der Gehäusegröße 1 (FS1, 50 mm) und 2 (FS2, 100 mm) aufgeführt.
3.3.4.1 Stecker an der Oberseite des SDM 511
Abbildung 7: SDM 511, Gehäusegröße 1 (FS1)
AQ262450196490de-000101 / 175R117030 | Danfoss A/S © | 2019.10
Page 31

1
2 3 4
6 5
7
e30bg444.10
1
Externer Geber Anschluss
2
Ethernet-Anschluss Eingang
3
Ethernet-Anschluss Ausgang
4
E/A-Stecker
5
STO-Stecker EIN
6
STO-Stecker AUS
7
Relaisstecker
1
3 2
e30bg446.10
1
Motor-Geberstecker
2
Stecker für Motorbremse und Thermistor
3
Motorstecker
1
2
3
e30bg447.10
1
Motor-Geberstecker
2
Stecker für Motorbremse und Thermistor
3
Motorstecker
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Abbildung 8: SDM 511, Gehäusegröße 2 (FS2)
Systembeschreibung
3.3.4.2 Anschlüsse an der Unterseite des SDM 511
Abbildung 9: SDM 511, Gehäusegröße 1 (FS1)
Abbildung 10: SDM 511, Gehäusegröße 2 (FS2)
3.3.5 Stecker am SDM 512
In diesem Abschnitt sind alle Stecker am SDM 512 der Gehäusegröße 1 (FS1, 50 mm) aufgeführt.
AQ262450196490de-000101 / 175R1170 | 31Danfoss A/S © 2019.10
Page 32

e30bg445.10
1 2 3 4 5
67
89
10
11
12
13
14
1
Externer Geber Anschluss SDM1
2
Ethernet-Anschluss Eingang SDM1
3
Ethernet-Anschluss Ausgang SDM1
4
E/A-Stecker SDM1
5
E/A-Stecker SDM2
6
STO-Stecker Eingang SDM1
7
STO-Stecker Eingang SDM2
8
STO-Stecker Ausgang SDM1
9
STO-Stecker Ausgang SDM2
10
Relaisstecker SDM1
11
Ethernet-Anschluss Ausgang SDM2
12
Relaisstecker SDM2
13
Ethernet-Anschluss Eingang SDM2
14
Externer Geber Anschluss SDM2
e30bg448.10
1 2
3456
1
Motor-Geberstecker SDM2
2
Motor-Geberstecker SDM1
3
Stecker für Motorbremse und Thermistor SDM1
4
Motorstecker SDM1
5
Stecker für Motorbremse und Thermistor SDM2
6
Motorstecker SDM2
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
3.3.5.1 Stecker an der Oberseite des SDM 512
Abbildung 11: SDM 512, Gehäusegröße 1 (FS1)
Systembeschreibung
3.3.5.2 Anschlüsse an der Unterseite des SDM 512
Abbildung 12: SDM 512, Gehäusegröße 1 (FS1)
3.4 Decentral Access Module DAM 510
3.4.1 Übersicht
DAM ist die Abkürzung für Decentral Access Module. Das DAM 510 ist zentrale Schnittstelle/Gateway zum dezentralen Servosystem.
Es dient dazu, die Danfoss VLT® Integrated Servo Drives ISD 510 und VLT® Decentral Servo Drives DSD 510 über ein Hybrid-Einspeisekabel mit dem Servosystem zu verbinden.
Das DAM 510 versorgt die dezentralen Servoantriebe mit Zwischenkreis, U
brid-Einspeisekabel. Das DAM 510 bietet Funktionen wie z. B.:
•
Überstromschutz des Hybridkabels
•
Überspannungsschutz
•
Ladekreis des Zwischenkreises
•
Externe Drehgeberverbindung
•
Zwischenkreis-Kapazitätspuer für die dezentralen Servoantriebe
, STO und Ethernet-basiertem Feldbus über das Hy-
AUX
AQ262450196490de-000101 / 175R117032 | Danfoss A/S © | 2019.10
Page 33

1
2
3
4
5
e30bg582.11
1
Anschlüsse: E/A, STO, Relais und Ethernet
2
Betriebs-LED
3
LCP-Stecker
4
PE-Schraube
5
Anschlüsse: UDC, AUX, STO out und Ethernet
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Das DAM 510 kann über einen Ethernet-basierten Feldbus kontrolliert werden.
LED an der Vorderseite des DAM 510 zeigen Betriebszustände und Warnungen an.
Systembeschreibung
H I N W E I S
Das MSD 510-System ist für den Einsatz in einem Schaltschrank ausgelegt. Wird die STO-Funktion verwendet, muss der
-
Schaltschrank mindestens über die Schutzart IP54 verfügen.
Das DAM 510 verfügt gemäß IEC/EN 60529 über die Schutzart IP20 (mit Ausnahme der Stecker, die über die Schutzart IP00
-
verfügen).
Der Kontakt mit Flüssigkeiten kann das DAM 510 beschädigen.
-
Ein Beispiel für einen Typencode des DAM 510 ist: MSD510DAM510F1C015AD6E20PLSXXXXXXXXXXXXX.
Abbildung 13: DAM 510
AQ262450196490de-000101 / 175R1170 | 33Danfoss A/S © 2019.10
Page 34

1 2
3
4
5
e30bg467.10
1
Ethernet-Anschluss Eingang
2
Ethernet-Anschluss Ausgang
3
STO-Stecker Eingang
4
STO-Stecker Ausgang
5
Externer Geber Anschluss
1
234
e30bg468.10
1
Ethernet-Anschluss
2
AUX-Anschluss
3
STO Ausgang-Anschluss
4
UDC-Anschluss
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
3.4.2 Anschlüsse an der Oberseite des DAM 510
Abbildung 14: Anschlüsse an der Oberseite des DAM 510
3.4.3 Anschlüsse an der Unterseite des DAM 510
Systembeschreibung
Abbildung 15: Anschlüsse an der Unterseite des DAM 510
3.5 Auxiliary Capacitors Module ACM 510
3.5.1 Übersicht
ACM ist die Abkürzung für Auxiliary Capacitors Module. Das ACM 510 lässt sich an das MSD 510 -System anschließen, um durch die
Aktivierung eines kontrollierten Maschinenstopps in Notfallsituationen Energie zu speichern.
H I N W E I S
Das MSD 510-System ist für den Einsatz in einem Schaltschrank ausgelegt. Wird die STO-Funktion verwendet, muss der
-
Schaltschrank mindestens über die Schutzart IP54 verfügen.
Das ACM 510 verfügt gemäß IEC/EN 60529 über die Schutzart IP20 (mit Ausnahme der Stecker, die über die Schutzart IP00
-
verfügen).
Der Kontakt mit Flüssigkeiten kann das ACM 510 beschädigen.
-
Ein Beispiel für einen Typencode des ACM 510 ist: MSD510ACM510F1E00C8D6E20PLSXXXXXXXXXXXXX.
AQ262450196490de-000101 / 175R117034 | Danfoss A/S © | 2019.10
Page 35

1
2
3
4
e30bg583.10
CAP ST
NET ST
X1
X2
LCP
LINK/ACT
DEV
STATUS ACM
1
Anschlüsse: E/A, Relais und Ethernet
2
Betriebs-LED
3
LCP-Stecker
4
PE-Schraube
e30bg469.11
1
2
4 3
1
Ethernet-Anschluss Eingang
2
Ethernet-Anschluss Ausgang
3
E/A-Stecker
4
Relaisstecker
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Systembeschreibung
Abbildung 16: ACM 510
3.5.2 Anschlüsse an der Oberseite des ACM 510
Abbildung 17: Anschlüsse an der Oberseite des ACM 510
AQ262450196490de-000101 / 175R1170 | 35Danfoss A/S © 2019.10
Page 36

e30bh660.10
2
3
4
1
1
EMV-Abschirmplatte
2
Rückwand
3
PE-Schraube
4
Erweiterungsstecker
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
3.6 Expansion Module EXM 510
Systembeschreibung
Abbildung 18: EXM 510
Das MSD 510-System ist für den Einsatz in einem Schaltschrank ausgelegt. Wird die STO-Funktion verwendet, muss der
-
Schaltschrank mindestens über die Schutzart IP54 verfügen.
Das EXM 510 verfügt gemäß IEC/EN 60529 über die Schutzart IP20 (mit Ausnahme der Stecker, die über die Schutzart IP00
-
verfügen).
Der Kontakt mit Flüssigkeiten kann das EXM 510 beschädigen.
-
Ein Beispiel für einen Typencode des EXM 510 ist:
MSD510EXM510F1C062AD6E20XXXXXXXXXXXXXXXX
H I N W E I S
AQ262450196490de-000101 / 175R117036 | Danfoss A/S © | 2019.10
Page 37

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Systembeschreibung
3.7 Bedieneinheit (LCP)
3.7.1 Übersicht über die LCP-Bedieneinheit
Das LCP ist die grasche Benutzerschnittstelle für Diagnose- und Betriebszwecke. Es ist optional erhältlich und kann über ein optionales Kabel (M8 an LCP SUB-D-Erweiterungskabel) an die Systemmodule angeschlossen werden.
Das LCP-Display bietet dem Bediener eine schnelle Übersicht über den Zustand der Systemmodule, je nachdem, mit welchem Gerät
es verbunden ist. Das Display zeigt Parameter und Alarme/Fehler an und erleichtert Inbetriebnahme und Fehlersuche und -behebung.
Darüber hinaus lassen sich einfache Funktionen ausführen, wie z. B. die Aktivierung und Deaktivierung der Ausgangsleitungen am
DAM 510 und das Önen der mechanischen Bremse am SDM 511/512.
Das LCP lässt sich mithilfe eines Montagesets (als Zubehör erhältlich) auf der Vorderseite des Schaltschranks montieren und über M8
an SUB-D-Kabel (als Zubehör erhältlich) an die Module anschließen. Siehe VLT® Servo Drive System ISD 510, DSD 510, MSD 510
Projektierungshandbuch für die Bestellnummern des Zubehörs.
H I N W E I S
Weitere Informationen zu den LCP-Funktionen nden Sie im VLT® Servo Drive System ISD 510, DSD 510, MSD 510 Program-
-
mierhandbuch.
3.7.2 Layout der LCP-Bedieneinheit
Die Bedieneinheit (LCP) ist in 4 Funktionsgruppen unterteilt:
A: Displaybereich
•
B: Menütasten am Display
•
C: Navigationstasten und Anzeigeleuchten (LEDs)
•
D: Bedientasten und Reset
•
Drücken Sie zur Einstellung des Display-Kontrasts [Status] und [▵]/[▿].
3.7.2.1 A: Displaybereich
Die Werte im Displaybereich unterscheiden sich je nach dem, mit welchem Modul das LCP verbunden ist.
Der Displaybereich wird aktiviert, wenn das Modul an den Eingangsstrom des U
angeschlossen wird.
AUX
AQ262450196490de-000101 / 175R1170 | 37Danfoss A/S © 2019.10
Page 38

Auto
On
Reset
Hand
On
Off
Main
Menu
Quick
Menu
Alarm
Log
Back
Cancel
Info
OK
2.1 kW
On
Alarm
Warn.
A
38 °C
11.5 A
24 V
B
C
D
565V
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18 19
20
21
Status
e30bg799.10
1
AUX-Leitungsspannung
2
Temperatur Leistungskarte
3
Aktuelle UDC (Strom)
4
Leistungsaufnahme
5
Aktuelle UDC (Spannung)
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Systembeschreibung
Abbildung 19: Displaybereich beim Anschluss des Power Supply Module PSM 510 und des Decentral Access Module DAM 510
AQ262450196490de-000101 / 175R117038 | Danfoss A/S © | 2019.10
Page 39

Auto
On
Reset
Hand
On
Off
Main
Menu
Quick
Menu
Alarm
Log
Back
Cancel
Info
OK
37 rpm
On
Alarm
Warn.
A
38 °C 750 deg0.10 A
B
C
D
1
2
3
4
6
7
8
9
10
11
12
13
14
15
16
17
18 19 20 21
Status
e30bh719.10
Velocity
Status
Enabled
1
Stromistwert
2
Temperatur Leistungskarte
3
Positionsistwert
4
Istgeschwindigkeit
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Systembeschreibung
Abbildung 20: Displaybereich beim Anschluss an die Servo Drive Modules SDM 511/SDM 512
AQ262450196490de-000101 / 175R1170 | 39Danfoss A/S © 2019.10
Page 40

Auto
On
Reset
Hand
On
Off
Main
Menu
Quick
Menu
Alarm
Log
Back
Cancel
Info
OK
24 V
On
Alarm
Warn.
A
38 °C
40 °C
39 °C
B
C
D
565V
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18 19
20
21
Status
e30bg798.10
1
Temperatur Leistungskarte
2
Temperatur-Kondensatorbatterie 1
3
Temperatur-Kondensatorbatterie 2
4
AUX-Leitungsspannung
5
Aktuelle UDC (Spannung)
Taste
Funktion
6
Status
Zeigt Betriebszustände an.
7
Quick Menu
Ermöglicht den Zugri auf Parameter.
8
Hauptmenü
Ermöglicht den Zugri auf Parameter.
9
Alarm Log
Zeigt die letzten 10 Alarme.
Taste
Funktion
10
Back
Kehrt zum vorhergehenden Schritt oder Liste in der Menüstruktur zurück.
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Systembeschreibung
Abbildung 21: Displaybereich beim Anschluss des Auxiliary Capacitors Module ACM 510
3.7.2.2 B: Menütasten am Display
Die Menütasten dienen dem Menüzugri für die Parametereinstellung, dem Umschalten zwischen Statusanzeigemodi im Normalbetrieb und der Anzeige von Fehlerspeicherdaten.
Tabelle 5: Menütasten am Display
3.7.2.3 C: Navigationstasten und Anzeigeleuchten (LEDs)
Navigationstasten dienen zum Bewegen des Cursors und zur Regelung bei Hand-Steuerung. In diesem Bereich gibt es 3 Status-LED.
Tabelle 6: Navigationstasten
AQ262450196490de-000101 / 175R117040 | Danfoss A/S © | 2019.10
Page 41

Taste
Funktion
11
Cancel (Abbrechen)
Löscht die letzte Änderung oder den letzten Befehl, solange der Anzeigemodus nicht geändert wird.
12
Info
Zeigt Informationen zur angezeigten Funktion an.
13
Navigationstasten
Navigieren Sie mit Hilfe der vier Navigationstasten zwischen den verschiedenen Optionen in den Menüs.
14OKNutzen Sie diese Taste, um auf Parametergruppen zuzugreifen oder die Wahl eines Parameters zu bestätigen.
LED
Farbe
Funktion
15OnGrün
Die On LED wird aktiviert, wenn das Modul angeschlossen ist und die Stromversorgung über U
AUX
erfolgt.
16
Warn
Gelb
Die gelbe Warning-LED leuchtet, wenn eine Warnung auftritt. Im Display erscheint zusätzlich ein Text, der
das Problem angibt.
17
Alarm
Rot
Die rote Alarm-LED blinkt bei einem Fehlerzustand. Im Display erscheint zusätzlich ein Text, der den Alarm
näher speziziert.
Taste
Funktion
18
Hand
On
Ermöglicht die Steuerung der angeschlossenen MSD 510 -Module über das LCP.
Das Umschalten zwischen den Modi Hand On (Hand) und Auto On (Auto) ist nur in bestimmten Zuständen mö-
glich (weitere Informationen im VLT® Servo Drive System ISD 510, DSD 510, MSD 510 Programmierhandbuch).
19
O
Schaltet das Servoantriebsmodul (SDM 511/512) in den Zustand Switch on Disabled (Einschalten deaktiviert) und
die anderen Systemmodule in den Zustand Standby.
Dies funktioniert nur im Modus Hand On (Hand).
Der Modus O (Aus) ermöglicht den Übergang vom Modus Hand On (Hand) zum Modus Auto On (Auto).
20
Auto On
Diese Taste schaltet das System in den Fernbetrieb (Autobetrieb).
Im Modus Auto On (Auto) wird das Gerät vom Feldbus gesteuert (SPS). Das Umschalten zwischen den Modi Auto
On (Auto) und Hand On (Hand) ist nur möglich, wenn sich der Antrieb im Zustand Switch on Disabled (Einschalten
deaktiviert) bzw. das PSM 510, DAM 510 oder ACM 510 im Zustand Standby bendet.
21
Reset
Setzt das MSD 510 -Systemmodul nach der Beseitigung eines Fehlers zurück.
Das Rücksetzen ist nur im Hand On-Modus (Hand) möglich.
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Tabelle 7: Anzeigeleuchten (LEDs)
Systembeschreibung
3.7.2.4 D: Bedientasten und Reset
Die Bedientasten benden sich unten am LCP.
Tabelle 8: Bedientasten und Reset
3.8 Kabel
3.8.1 Hybridkabel
Es werden vorkongurierte Hybridkabel zum Anschluss der dezentralen Servoantriebe (falls verwendet) an das Decentral Access
Module (DAM 510) verwendet.
Es gibt 2 Arten von Hybridkabeln, die mit gewinkelten und geraden M23-Steckern erhältlich sind:
AQ262450196490de-000101 / 175R1170 | 41Danfoss A/S © 2019.10
Page 42

Kabeltyp
Geschirmt/ungeschirmt
Hinweise
Einspeisekabel
Abgeschirmte
Hybridkabel (Gesamtabschirmung mit zusätzlicher Feldbus- und Sicherheitsabschirmung).
Loop-Kabel
Spezikation
Ethernet-Standard
Standard-Ethernet (gemäß IEEE 802.3), 100Base-TX (Fast-Ethernet)
Kabeltyp
S/FTP (abgeschirmtes, foliertes, verdrilltes Adernpaar), ISO (IEC 11801 oder EN 50173), CAT 5e oder 6
Dämpfung
23,2 dB (jeweils bei 100 MHz und 100 m)
Crosstalk-Dämpfung
24 dB (jeweils bei 100 MHz und 100 m)
Rückführungsverlust
10 dB (jeweils 100 m)
Überspannungsimpedanz
100 Ω
Maximale Kabellänge
100 m zwischen Schaltern oder Netzwerkgeräten
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
•
Einspeisekabel zum Anschließen des ersten Servoantriebs einer Gruppe am Anschlusspunkt des Decentral Access Module (DAM
510).
•
Loop-Kabel zum vorkonfektionierten Anschließen der ISD 510/DSD 510-Servoantriebe in einer Anwendung.
Beide Kabel werden von Danfoss angeboten und sind in unterschiedlichen Längen erhältlich. Weitere Informationen nden Sie im
VLT© Servo Drive System ISD 510, DSD 510, MSD 510 Design Guide.
Beide Enden des Loop-Kabels sind mit M23-Steckern versehen.
Das Einspeisekabel ist ausgangsseitig mit einem M23-Stecker für den Anschluss an den ersten ISD 510/DSD 510-Servorantrieb ver-
sehen. Am Eingangsende ist es verdrillt und die Stecker benden sich an den entsprechenden Klemmen am Decentral Access Module (DAM 510).
Tabelle 9: Hybridkabel
Systembeschreibung
H I N W E I S
Hybridkabel sind in 2 Querschnitten erhältlich: 2,5 mm2 (15 A) und 4 mm2 (25 A). Weitere Informationen nden Sie im VLT
-
Servo Drive System ISD 510, DSD 510, MSD 510 Projektierungshandbuch.
®
H I N W E I S
MINIMALER BIEGERADIUS
Die maximale Anzahl an Biegezyklen beträgt 5 Millionen beim 7,5-fachen Kabeldurchmesser (15,6 mm).
-
Dauerhaft exibel: 12-facher Kabeldurchmesser.
-
Dauerhaft installiert: 5-facher Kabeldurchmesser.
-
3.8.2 Ethernetkabel
Tabelle 10: Ethernetkabelempfehlungen
H I N W E I S
Erden Sie das Ethernetkabel über die RJ45-Stecker. Erden Sie es nicht an der Zugentlastung.
-
3.8.3 LCP-Kabel
Das LCP-Kabel wird zum Anschluss eines LCP an ein Systemmodul über den M8-Stecker an der Vorderseite des jeweiligen Systemmoduls verwendet.
Das LCP-Kabel ist bei Danfoss erhältlich (weitere Informationen nden Sie im VLT® Servo Drive System ISD 510, DSD 510, MSD 510
Projektierungshandbuch).
AQ262450196490de-000101 / 175R117042 | Danfoss A/S © | 2019.10
Page 43

Kabeltyp
Spezikation
Maximale Länge
Hybridkabel
M23-Einspeisekabel
40 m
M23 Loop-Kabel
25 m
Feldbusverlängerungskabel
Länge: 2 m
Maximallänge zum nächsten Anschluss: 100 m
Maximale Kabellänge pro Linie
100 m
Motorkabel
–
Maximale Länge ohne zusätzliche Ausgangslter oder Drossel: 30 m
Maximale Länge mit zusätzlichem Ausgangslter oder zusätzlicher
Drossel: 80 m
Geberkabel
–
80 m
Expansion Module-Kabel
–
5 m
SDM 511/
SDM 512
Output filter
MCC
U
V
W
PE
U
V
W
3
M
PE
U1
V1
W1
PE
U2
V2
W2
PE
e30bh656.10
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Systembeschreibung
3.9 Kabellayout und -führung
Die MSD 510 -Module sind über den Backlink-Anschlussstecker miteinander verbunden (siehe 11.7.1 Backlink-Anschluss).
Schließen Sie den Echtzeit-Ethernet-Feldbus über ein Standard-Ethernetkabel (nicht im Lieferumfang enthalten) an das erste Modul
im MSD 510 -System an.
Verwenden Sie die von Danfoss gelieferten Ethernet-Loop-Kabel, um die anderen Module im Daisy-Chain-Format anzuschließen.
3.9.1 Maximale Kabellängen
Tabelle 11: Maximale Kabellängen
3.9.2 Verkabelung des Ausgangslters
Abbildung 22: Schaltplan des Ausgangslters
3.9.3 Standardverkabelungskonzept für 2 Decentral Access Modules (DAM 510)
In diesem Beispiel leitet ein Hybrideinspeisekabel mit Schnellverschlusssteckern die Versorgungsspannung vom DAM 510 zum ersten ISD 510/DSD 510 -Servoantrieb.
AQ262450196490de-000101 / 175R1170 | 43Danfoss A/S © 2019.10
Page 44

AC 400–480 V
. . .
ISD 510
DSD 510
. . .
Status
Hand
On
Off Reset
Auto
On
OK
Back
Cancel
Info
Quick
Menu
Main
Menu
Alarm
Log
LCP
PSM
510
DAM
510
DAM
510
STATUS PSM
LINK/ACT
DEV
STO
NET ST
X1
X2
STATUS DAM
LINK/ACT
DEV
STO
NET ST
AUX
X1
X2
X3
STATUS DAM
LINK/ACT
DEV
STO
NET ST
AUX
X1
X2
X3
PLC
1
2
e30bg794.10
UDC + Real-Time Ethernet Bus + STO + U
AUX
UDC + Real-Time Ethernet Bus + STO + U
AUX
3
24/48 V
STO
1
Hybrides Einspeisekabel
2
Hybrides Verbindungskabel (Loop Kabel)
3
AC-Drossel
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Systembeschreibung
Abbildung 23: Standardverkabelungskonzept für 2 Decentral Access Modules (DAM 510)
3.10 Software
Die Software für das Servosystem umfasst:
•
Die Firmware der Systemmodule, die bereits auf den Modulen installiert ist.
•
Ein Paket mit SPS-Bibliotheken für Automation Studio© zur Bedienung der MSD 510 -Geräte (siehe 6.11.2 Erstellen eines Auto-
mation Studio™ Projekts für weitere Informationen).
•
Eine SPS-Bibliothek für TwinCAT® 2 zur Bedienung der MSD 510 -Geräte (siehe 6.12.2 Erstellen eines TwinCAT®-Projekts für wei-
tere Informationen).
•
Eine SPS-Bibliothek für SIMOTION SCOUT zur Bedienung der MSD 510 -Gerät (siehe 6.14.3 Erstellen eines SIMOTION SCOUT®-
Projekts).
•
Eine SPS-Bibliothek für TIA Portal zur Bedienung der MSD 510 -Geräte.
•
VLT® Servo Toolbox: Ein Danfoss PC-basiertes Softwaretool zur Inbetriebnahme und Fehlerbehebung.
3.11 Feldbus
Das Servosystem verfügt über eine oene Systemarchitektur, die durch eine schnelle Ethernet (100BASE-T)-basierte Kommunikation
realisiert wird. Das System unterstützt EtherCAT®-, Ethernet POWERLINK®- und PROFINET®-Feldbusse. Weitere Informationen nden
Sie im VLT© Servo Drive System ISD 510, DSD 510, MSD 510 Programmierhandbuch.
In produktiven Umgebungen erfolgt die Kommunikation mit den Geräten immer über eine SPS, die als Master fungiert. Die ISD 510/
DSD 510-Servoantriebe, die Servoantriebsmodule SDM 511/SDM 512 und die Systemmodule lassen sich mit folgenden Kommunikationsmethoden steuern:
AQ262450196490de-000101 / 175R117044 | Danfoss A/S © | 2019.10
Page 45

EtherCAT
Slave
Controller
(ESC)
OUT
LAN 1 (B)
OUT
2 (C)
IN
0
(A
)
X2
X
1
X3
e30be695.11
LAN
LAN
X1
M23-Hybridkabelstecker zum Decentral Access
Module (DAM 510) oder dem vorherigen Servoantrieb.
X2
M23-Hybridkabelstecker zum nächsten Servoantrieb.
X3
M8 Ethernet-Kabelstecker für andere EtherCAT® Follower wie zum Beispiel dem EtherCAT® Geber.
Der Stecker ist nur an erweiterten Servoantrieben
verfügbar.
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
•
Mithilfe der VLT® Servo Motion-Bibliotheken (erhältlich für TwinCAT®, Automation Studio© und SIMOTION SCOUT® sowie TiA
Portal).
•
Mithilfe der NC-Achsenfunktionalität von TwinCAT® (nur ISD 510/DSD 510 und SDM 511/SDM 512).
•
Mithilfe des CANopen® CiA DS 402 Standards durch Lesen und Schreiben in Objekte.
•
Mithilfe der Anwendungsklasse 1 (AC1), nur PROFINET®.
Die ISD 510/DSD 510-Servoantriebe, die Servoantriebsmodule SDM 511/SDM 512 und die Systemmodule lassen sich mit folgenden
Zykluszeiten betreiben.
•
EtherCAT®- und Ethernet POWERLINK®-Feldbusse:
-
400 µs und Vielfache davon (z. B. 800 µs, 1200 µs).
-
500 µs und Vielfache davon (z. B. 1 ms).
•
PROFINET®-Feldbus
-
500 µs und Vielfache davon (z. B. 1 ms).
Wenn die Zykluszeit ein Vielfaches von 400 µs und 500 µs ist, wird 500 µs als Zeitbasis verwendet.
Die ISD 510/DSD 510-Servoantriebe, die Servoantriebsmodule SDM 511/SDM 512 und die Systemmodule sind für Feldbusse nach
den entsprechenden Regeln und Vorschriften zertiziert. Die Servoantriebe sind mit dem CANopen® CiA DS 402-Antriebsprol konform.
Systembeschreibung
3.11.1 EtherCAT®
Die ISD 510/DSD 510-Servoantriebe, Servoantriebsmodule SDM 511/SDM 512 und Systemmodule unterstützen die folgenden
EtherCAT® Protokolle:
•
CANopen über EtherCAT® (CoE)
•
Dateizugri über EtherCAT® (FoE)
•
Ethernet über EtherCAT® (EoE)
Die ISD 510/DSD 510-Servoantriebe, Servoantriebsmodule SDM 511/SDM 512 und Systemmodule unterstützen dezentrale Uhren.
Zum Ausgleich der Störung eines Kommunikationskabelabschnitts im System steht die Kabelredundanz allen Feldbussen zur Verfügung. Weitere Informationen nden Sie im VLT® Servo Drive System ISD 510, DSD 510, MSD 510 Projektierungshandbuch.
Abbildung 24: EtherCAT© Anschlusszuweisung für den ISD 510/DSD 510-Servoantrieb
AQ262450196490de-000101 / 175R1170 | 45Danfoss A/S © 2019.10
Page 46

X1
X2
X3
ESC DAM
EtherCAT®
slave
OUT
LAN 2
IN
LAN 1
OUT
LAN 3
e30be696.11
X1
Kabel mit RJ45-Stecker zum vorherigen Follower.
X2
RJ45-auf-M23-Hybrid-Einspeisekabel zum ersten
ISD 510/DSD 510-Servoantrieb.
X3
Kabel mit RJ45-Stecker zur SPS (Kabelredundanz)
oder zum nächsten Follower.
X1 X2
ESC
PSM/ACM/SDM
EtherCAT®
slave
IN
LAN 1
OUT
LAN 2
e30bg797.10
X1
Kabel mit RJ45-Stecker zur SPS oder zum vorherigen Slave.
X2
Kabel mit RJ45-Stecker zur SPS (Kabelredundanz) oder zum nächsten Follower.
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Abbildung 25: EtherCAT© Anschlusszuweisung für das Decentral Access Module (DAM 510)
Systembeschreibung
Abbildung 26: EtherCAT© Anschlusszuweisung für das Power Supply Module (PSM 510), das Servo Drive Module SDM 511/SDM 512 und das
Auxiliary Capacitors Module (ACM 510)
3.11.2 Ethernet POWERLINK®
Die ISD 510/DSD 510-Servoantriebe, die Servoantriebsmodule SDM 511/SDM 512 und die Systemmodule sind gemäß DS 301 V1.1.0
zertiziert und unterstützen die folgenden Funktionen:
•
Arbeiten als geregelte Knoten.
•
Lassen sich als Multiplex-Stationen betreiben.
•
Unterstützung der Querkommunikation.
•
Ringredundanz wird für Medienredundanz unterstützt.
Spezische Anschlüsse sind nicht für Ethernet POWERLINK® zugewiesen.
3.11.3 PROFINET®
Der ISD 510/DSD 510-Servoantrieb, die Servoantriebsmodule SDM 511/SDM 512 und die Systemmodule unterstützen PROFINET
Konformitätsklasse C gemäß IEC 61158-5-10:2014, IEC 61158-6-10:2014, IEC 61784-2:2014 und IEC 61784-5-3:2013. Alle Systemkomponenten (Servoantriebe und Systemmodule) fungieren als E/A-Geräte in einem PROFINET®-Netzwerk.
Die folgenden Funktionen werden unterstützt:
•
E/A-Gerät - Gerät, das von einem E/A-Regler gesteuert wird
•
Dynamische Modulkonguration
•
Net Load Class III
•
Ringredundanz (MRPD) als Client
PROFINET®-Feldbusgeräte sind immer als Netzwerkkomponenten über Switches verbunden, die in das Feldbusgerät integriert sind.
An den ISD 510/DSD 510-Servoantrieben, Servoantriebsmodule SDM 511/SDM 512, PSM 510 und ACM 510, sind 2 Anschlüsse vorhanden. Am DAM 510 sind 3 Anschlüsse vorhanden.
®
AQ262450196490de-000101 / 175R117046 | Danfoss A/S © | 2019.10
Page 47

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Mechanische Installation
4 Mechanische Installation
4.1 Gelieferte Teile
Je nach Anwendung sind im Lieferumfang des MSD 510 -Systems enthalten:
•
VLT® Power Supply Module (PSM 510)
•
VLT® Servo Drive Module (SDM 511) für eine Achse
•
VLT® Servo Drive Module (SDM 512) für zwei Achsen
•
VLT® Decentral Access Module (DAM 510)
•
VLT® Auxiliary Capacitors Module (ACM 510)
•
VLT® Expansion Module (EXM 510)
•
AC-Drossel
•
Diese Bedienungsanleitung
•
Einspeisungskabel (Hybridkabel)
•
Loop-Kabel (hybrid)
H I N W E I S
Die Hybrid-Einspeise- und Loop-Kabel sind bei Verwendung der ISD510/DSD510-Servoantriebe im Servosystem erforderlich.
-
Die Verpackungseinheit hängt von der Zahl der gelieferten Module ab. Heben Sie die Verpackung für einen eventuellen Rückversand auf.
4.2 Transport
•
Transportieren Sie Servosystemkomponenten nur mit ausreichend belastbaren Transportmitteln und Hebewerkzeugen.
•
Sorgen Sie für einen vibrationsfreien Transport.
•
Schwere Stöße und Schläge vermeiden.
4.3 Eingangskontrolle
Vorgehensweise
1.
Überprüfen Sie nach Erhalt der Lieferung sofort, ob der Lieferumfang mit den Warenbegleitpapieren übereinstimmt. Für
nachträglich reklamierte Mängel übernimmt Danfoss keine Gewährleistung.
2.
Erkennbare Transportschäden sofort beim Spediteur reklamieren.
3.
Erkennbare Mängel/unvollständige Lieferung sofort bei der zuständigen Danfoss -Vertretung reklamieren.
4.4 Sicherheitsmaßnahmen bei der Installation
Beachten Sie bei der Installation unbedingt die Sicherheitshinweise in diesem Handbuch. Achten Sie insbesondere darauf, dass folgende Punkte stets beachtet werden:
•
Nur qualiziertes Personal darf die Installation vornehmen.
•
Die Sorgfaltspichten werden eingehalten.
•
Sämtliche Sicherheitsvorschriften und Schutzmaßnahmen müssen eingehalten und die Umgebungsbedingungen beachtet
werden.
•
Das Handbuch wurde gelesen und verstanden.
4.5 Installationsumgebung
4.5.1 Systemkomponenten
Die Umgebungsbedingungen für die MSD 510 -Systemkomponenten sind:
AQ262450196490de-000101 / 175R1170 | 47Danfoss A/S © 2019.10
Page 48

(100 x number of FS2 + 50 x number of FS1) - 50
FS2 FS1
50 50
[1.97]
[0.42]
[14.45]
[1.97]
50 50
[1.97] [1.97]
M5
M5
367
UNF 10-32
UNF 10-32
Ø10,6
e30bg819.10
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
•
Der zulässige Bereich der Umgebungstemperatur für Betrieb und der Vibrationspegel dürfen nicht überschritten werden (siehe
Mechanische Installation
11.8 Allgemeine Daten und Umgebungsbedingungen für das MSD 510-System).
•
Der zulässige Bereich der relativen Luftfeuchtigkeit liegt bei 5–93 % (ohne Betauung).
•
Der minimale erforderliche Platz über und unter den Systemmodulen ist in 4.7.1 Platzbedarf der Systemmodule aufgeführt.
4.6 Vorbereitungen für die Installation
4.6.1 Systemmodule
Treen Sie folgende Vorbereitungen, damit das Servosystem zuverlässig und eektiv installiert werden kann.
Installieren Sie die Systemmodule gemäß den lokalen Vorschriften.
Vorgehensweise
1.
Halten Sie die passende Halterungen für die Anwendung bereit. Die zu verwendende Halterung ist vom Typ und Gewicht
der Module abhängig.
2.
Stellen Sie zur Vermeidung einer falschen Ausrichtung sicher, dass die Rückwände absolut eben sind.
3.
Achten Sie zur Gewährleistung einer ausreichenden Kühlung auf den angegebenen Mindestplatzbedarf.
4.
Erden Sie die Module.
4.6.2 Bohrschablonen
Abbildung 27: Bohrschablonen für 50-mm- und 100-mm-Systemmodule
4.7 Installationsanleitung
4.7.1 Platzbedarf der Systemmodule
Die Module können Seite an Seite montiert werden, benötigen jedoch für Kühlungszwecke einen Mindestabstand an der Ober- und
Unterseite.
AQ262450196490de-000101 / 175R117048 | Danfoss A/S © | 2019.10
Page 49

270
[10.63]
[3.94]
[3.3][15][6.1]
[0.24]
[14.4][0.28]
[1.18]
max. 100
min. 85
min. 30
[1.57]
min. 40
63677
max. 120
[4.72]
e30bg820.10
380min. 155
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Mechanische Installation
Abbildung 28: Erforderlicher Mindestabstand an der Ober- und Unterseite
AQ262450196490de-000101 / 175R1170 | 49Danfoss A/S © 2019.10
Page 50

60
[2.36]
60
[2.36]
101
[3.98]
106
[4.17]
e30bg821.10
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Mechanische Installation
Abbildung 29: Erforderlicher Mindestabstand an den Seiten
4.7.2 Montagehilfen und benötigte Werkzeuge
Für den Einbau der MSD 510 -Systemmodule werden entsprechende Werkzeuge für die Befestigungsschrauben (nicht enthalten)
benötigt.
4.7.3 Montageanleitung für Systemmodule
H I N W E I S
Montieren Sie die MSD 510 -Systemkomponente mit der höchsten Ausgangsleistung neben dem PSM 510. Montieren Sie die
-
übrigen Systemkomponenten in absteigender Reihenfolge der Ausgangsleistung.
Vorgehensweise
1.
Bohren Sie die Löcher zur Montage der Rückwand entsprechend der Bohrschablone (siehe
2.
Montieren Sie die Rückwände über die Click-and-Lock-Methode.
4.6.2 Bohrschablonen).
AQ262450196490de-000101 / 175R117050 | Danfoss A/S © | 2019.10
Page 51

e30bg802.10
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Mechanische Installation
Abbildung 30: Anbringen der Rückwände
3.
Montieren Sie die Rückwände mit M5-Schrauben an der Montageplatte im Schaltschrank und halten Sie dabei einen Mindest-Kopfabstand bzw. Mindest-Scheibenabstand von 9,5 mm ein. Das Anzugsmoment beträgt 3 Nm.
AQ262450196490de-000101 / 175R1170 | 51Danfoss A/S © 2019.10
Page 52

e30bg803.10
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Mechanische Installation
Abbildung 31: Anbringen der Rückwände im Schaltschrank
4.
Schieben Sie das Modul auf den Träger an der Unterseite der Rückwand.
5.
Drücken Sie das erste Modul auf den Steckmechanismus an der Oberseite der Rückwand.
AQ262450196490de-000101 / 175R117052 | Danfoss A/S © | 2019.10
Page 53

e30bg804.10
STATUS PSM
DEV
SVS ST
NET ST
LINK/ACT
X2
LCP
LCP
X1
STATUS DAM
DEV
SVS ST
NET ST
AUX
LINK/ACT
X1
X2
X3
X2
LIN
S
X
X3
1
e30bg815.10
STATUS PSM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
STATUS DAM
DEV
SVS ST
NET ST
AUX
LINK/ACT
X1
X2
X3
STATUS DAM
DEV
SVS ST
NET ST
AUX
LINK/ACT
X1
X2
X3
LCP
LCP
LCP
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Mechanische Installation
Abbildung 32: Drücken des Moduls auf den Steckmechanismus
6.
Ziehen Sie zum Befestigen des Moduls die Halteschelle an der Oberseite der Rückwand herunter ([1] in Abbildung 33).
7.
Abbildung 33: Herunterziehen der Halteschelle an der Oberseite der Rückwand
Wiederholen Sie die Schritte 4, 5 und 6 für die restlichen Module und stellen Sie sicher, dass sich die Lippe auf der linken
Seite des zweiten Moduls innerhalb der Führungsnut auf der rechten Seite des ersten Moduls bendet (([1] in Abbildung
34).
AQ262450196490de-000101 / 175R1170 | 53Danfoss A/S © 2019.10
Page 54

1
e30bg822.10
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Abbildung 34: Führungsnut
Mechanische Installation
AQ262450196490de-000101 / 175R117054 | Danfoss A/S © | 2019.10
Page 55

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Elektrische Installation
5 Elektrische Installation
5.1 Warnungen für die elektrische Installation
Beachten Sie für den elektrischen Anschluss zusätzlich zu den Angaben in diesem Handbuch die nationalen und regionalen Vorschriften.
W A R N U N G
GEFAHR DURCH ABLEIT-/ERDUNGSSTRÖME
Die Ableit-/Erdungsströme sind größer als 3,5 mA. Eine fehlerhafte Erdung der MSD 510 -Systemmodule kann zum Tod oder zu
schweren Verletzungen führen!
Aus Gründen der Bedienersicherheit ist es wichtig, das System ordnungsgemäß nach nationalen oder örtlichen Elektrovors-
-
chriften sowie den Hinweisen in diesem Handbuch von einem zugelassenen Elektroinstallateur erden zu lassen.
W A R N U N G
HOCHSPANNUNG
Das MSD 510 -System arbeitet mit Hochspannung, wenn es an das elektrische Versorgungsnetz angeschlossen ist. Es gibt keine
Anzeige an den Komponenten, die die anliegende Netzspannung anzeigt. Fehler bei Installation, Inbetriebnahme oder Wartung
können zum Tod oder zu schweren Verletzungen führen!
Nur qualiziertes Personal darf Installation, Inbetriebnahme und Wartung vornehmen.
-
W A R N U N G
HOCHSPANNUNG
An den Anschlüssen liegt lebensgefährliche Spannung an, die zu schweren Verletzungen oder sogar zum Tod führen kann!
Trennen Sie vor der Arbeit an den Leistungssteckern (Kabel anschließen oder trennen) unbedingt den PSM 510 vom Netz
-
und warten Sie die Entladezeit ab.
5.2 Elektrische Umgebungsbedingungen
Folgende elektrische Umgebungsbedingungen müssen eingehalten werden, um das Servosystem sicher und ezient betreiben zu
können:
•
Nur zur Verwendung mit den Versorgungserdungssystemen TN-S, TN-C, TN-CS, TT (nicht eckgeerdet).
•
Prospektiver Kurzschlussstrom: 5 kA
•
Schutzklasse I
•
Geerdetes Drehstromnetz, 400–480 V AC ±10%
•
Drehfeldfrequenz von 44–66 Hz
•
3 Phasen-Leitungen und Erdungsleitung
•
Externe Versorgung für Hilfsspannung, 24–48 V DC (PELV)
•
Netzdrossel (siehe
•
Beachten Sie die nationalen gesetzlichen Bestimmungen.
•
Der Ableitstrom ist größer als 3,5 mA.
5.9.1 AC-Netzdrossel)
H I N W E I S
FEHLERSTROM (FI) SCHUTZSCHALTER (RCD) - KOMPATIBILITÄT
Das MSD 510 -System enthält Komponenten, die einen Gleichstrom im Leiter der Schutzerde verursachen können, was zu einer
Funktionsstörung sämtlicher an das System angeschlossenen Geräte führen kann.
Bei Verwendung einer Fehlerstromschutzeinrichtung (RCD) oder eines Dierenzstrom-Überwachungsgeräts (RCM) zum
-
Schutz bei direktem oder indirektem Kontakt darf auf der Primärseite der MSD 510 -Systemkomponenten nur ein RCD bzw.
RCM des Typs B verwendet werden.
AQ262450196490de-000101 / 175R1170 | 55Danfoss A/S © 2019.10
Page 56

e30bh391.10
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
H I N W E I S
Alle Module müssen in einem Schaltschrank montiert werden.
-
5.3 Erdung
5.3.1 Erdung für die elektrische Sicherheit
Elektrische Installation
Abbildung 35: Erdung für die elektrische Sicherheit
•
Erden Sie die ISD 510/DSD 510-Servoantriebe mit dem Schutzleiter des Einspeisekabels. An der Vorderseite des DSD 510 Servo
Drive gibt es eine spezielle PE-Schraube, an der Rückseite gibt es eine weitere.
•
Achten Sie darauf, dass der Maschinenrahmen über eine sachgemäße elektrische Verbindung mit dem Flansch des Servoantriebs verfügt. Nutzen Sie die Flanschoberäche an der Vorderseite. Achten Sie auf eine Schutzleiterverbindung an diesem Teil
der Maschine.
•
Sorgen Sie zur Erfüllung der CE-Anforderungen für einen Kabelquerschnitt von mindestens 16 mm2 (mindestens 70 °C, Cu).
Sorgen Sie zur Erfüllung der UL-Anforderungen für einen Kabelquerschnitt von mindestens 6 AWG (mindestens 60 °C, Cu).
Wird ein PSM 510-Modul mit 10 kW verwendet, kann der Kabelquerschnitt reduziert werden auf:
-
10 mm2 (mindestens 70 °C, Cu) zur Erfüllung der CE-Anforderungen
-
8 AWG (mindestens 60 °C, Cu) zur Erfüllung der UL-Anforderungen
•
Erden Sie die MSD 510-Systemkomponenten nicht im Daisy-Chain-Format. Wenden Sie die in Abbildung 35 beschriebene Erdungsmethode an.
•
Halten Sie die Erdungskabel so kurz wie möglich.
•
Folgen Sie den Kabelanforderungen in diesem Handbuch.
AQ262450196490de-000101 / 175R117056 | Danfoss A/S © | 2019.10
Page 57

1
2
3
e30bg805.10
1
Kabel
2
Kabelbinder
3
E/A-Abschirmblechs
1
2
3
e30bh343.10
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Elektrische Installation
5.3.2 Erdung für eine EMV-gerechte Installation
•
Stellen Sie einen elektrischen Kontakt zwischen Kabelschirm und Gehäuse her, indem Sie das E/A-Abschirmblech an jedem
Modul verwenden.
Abbildung 36: Kabelschirm an der Oberseite der Systemkomponenten
Abbildung 37: Kabelschirm an der Unterseite der Systemkomponenten
AQ262450196490de-000101 / 175R1170 | 57Danfoss A/S © 2019.10
Page 58

1
Kabelbinder
2
EMV-Metallabschirmungsplatte
3
PE-Schraube
Modell und Nennleistung
CE-Konformität (IEC 60364)
UL-Konformität (NEC 2014)
Maximaler Sicherungstyp
Maximaler Sicherungstyp
PSM 510 (10 kW)
gG 25 A
30 A (nur Klasse T oder J)
PSM 510 (20 kW)
gG 50 A
50 A (nur Klasse T oder J)
PSM 510 (30 kW)
gG 63 A
80 A (nur Klasse T oder J)
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
•
Verwenden Sie ein Kabel mit einer Abschirmung und hoher Litzenzahl, um Schalttransienten zu vermindern.
•
Verwenden Sie keine verdrillten Abschirmungsenden (Pigtails) zur Verbindung der Abschirmung. Eine 360°-Aderverbindung
wird empfohlen.
Elektrische Installation
H I N W E I S
POTENZIALAUSGLEICH
Es besteht die Gefahr elektrischer Störungen, wenn das Massepotenzial zwischen dem Servosystem und der Maschine ab-
-
weicht. Installieren Sie zwischen diesen ein Ausgleichskabel. Der empfohlene Leitungsquerschnitt beträgt 16 mm2.
H I N W E I S
EMV-STÖRUNGEN
Verwenden Sie abgeschirmte Kabel für Steuerleitungen und separate Kabel für Netzversorgungs- und Steuerleitungen. Die
-
Nichtbeachtung dieser Vorgabe kann zu nicht vorgesehenem Verhalten oder reduzierter Leistung der Anlage führen.
Halten Sie einen Mindestabstand von 200 mm zwischen Kommunikations- und Leistungskabeln ein.
-
Kreuzen Sie Kabel ausschließlich im 90°-Winkel.
-
5.4 Netzversorgungsanforderungen
Stellen Sie sicher, dass die Netzversorgung folgende Eigenschaften hat:
•
Versorgungserdungssystem TN-S, TN-C, TN-CS, TT (nicht eckgeerdet).
•
Prospektiver Kurzschlussstrom: 5 kA.
•
Schutzklasse I.
•
Geerdetes Drehstromnetz, 400–480 V AC ±10%.
•
3 Phasen-Leitungen und Erdungsleitung.
•
Drehfeldfrequenz: 44–66 Hz
•
Maximaler Eingangsstrom für 1 PSM 510 bei 30 kW: 55 A
e
5.4.1 Sicherungen
H I N W E I S
Verwenden Sie am Power Supply Module PSM 510 versorgungsseitig Sicherungen, die den CE- und UL-Anforderungen en-
-
tsprechen (siehe Tabelle 12).
Wenn 2 PSM 510-Module verwendet werden, muss jedes PSM 510 über eigene Sicherungen verfügen.
-
Tabelle 12: Sicherungen
AQ262450196490de-000101 / 175R117058 | Danfoss A/S © | 2019.10
Page 59

CE-Konformität (IEC 60364)
UL-Konformität (NEC 2014)
Maximaler Sicherungstyp
Maximaler Sicherungstyp
50 A
(1)
63 A
(2)
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Elektrische Installation
5.4.2 Trennschalter
Verwenden Sie einen Hauptschalter vom Typ B oder C mit einer Kapazität, die dem Anderthalbfachen des Nennstroms des PSM 510
entspricht, um alle CE-Anforderungen zu erfüllen.
H I N W E I S
Trennschalter sind nicht in Installationen zulässig, in denen C-UL erforderlich ist. Es dürfen ausschließlich UL-zugelassene Si-
-
cherungen verwendet werden.
5.5 Anforderungen an die Zusatzspannungsversorgung
Versorgen Sie das PSM 510 mit einem Netzteil mit einer Leistung von 24/48 V DC ±10 % (PELV) und maximal 50 A (der tatsächliche
Strom ist von den verwendeten Modulen abhängig). Der erforderliche Ausgang hängt von der Systemtopologie ab. Die Ausgangswelligkeit des Netzteils muss kleiner als 250 mVpp sein.
Nennleistungsdiagramme nden Sie im VLT® Servo Drive System ISD 510, DSD 510, MSD 510 Projektierungshandbuch.
H I N W E I S
Verwenden Sie Ausschließlich Netzteile, die der PELV-Spezikation entsprechen.
-
Verwenden Sie eine Spannungsversorgung, die nach Normen EN 61000-6-2 und EN 61000-6-4 oder ähnlich für Industriege-
-
brauch CE-markiert ist.
Der Sekundärkreis muss von einer externen, isolierten Quelle versorgt werden.
-
Das externe 24/48 V DC-Netzteil für die Zusatzspannung muss auf das MSD 510 -System ausgelegt sein, was bedeutet, dass es ausschließlich zur Versorgung des PSM 510 verwendet wird. Die maximale Kabellänge zwischen Netzteil und PSM 510 beträgt 3 m.
5.5.1 Sicherungen
UL-gelistete Sicherungen werden zum Schutz der Verkabelung an 24–48 V DC empfohlen.
Tabelle 13: Sicherungen
1
Wenn der maximale Strom geringer ist, können Sie eine Sicherung mit geringerem Nennstrom verwenden. Nennwert der IEC-Sicherungen: en-
tsprechend 100 % des maximalen Stroms. Verwenden Sie eine Zeitverzögerungssicherung, die für die verwendete Gleichspannung ausgelegt ist.
2
Wenn der maximale Strom geringer ist, können Sie eine Sicherung mit geringerem Nennstrom verwenden. Nennwert der UL-Sicherungen: en-
tsprechend 125 % des maximalen Stroms. Verwenden Sie eine Zeitverzögerungssicherung, die für die verwendete Gleichspannung ausgelegt ist.
5.6 Anforderungen an die Sicherheitsstromversorgung
Versorgen Sie die STO-Linie mit einem 24 V DC-Netzteil mit folgenden Eigenschaften:
Ausgangsbereich: 24 V DC ±10 %
•
Maximale Stromstärke: 1 A
•
Verwenden Sie ein 24-V-Netzteil, das über eine CE-Zulassung für die industrielle Nutzung verfügt. Stellen Sie sicher, dass das Netzteil
der PELV-Spezikation entspricht und nur für den Systemsicherheitseingang verwendet wird.
Eine gemeinsame Versorgung für die Hilfs- und Sicherheitsversorgung kann verwendet werden, sofern sich der einzige Anschlusspunkt der beiden Stromkreise in der Nähe der Versorgung bendet. Hierdurch sollen Störungen durch einen gemeinsamen Spannungsabfall vermieden werden. Die maximale Kabellänge zwischen dem 24-V-Netzteil und dem Servosystem beträgt 3 m.
Die Sicherheitsversorgung kann vom PSM 510 zu den anderen MSD 510 -Systemkomponenten mit Ausnahme des ACM 510, das
über keinen STO-Anschluss verfügt, durchgeschleift werden. Das kabel hierfür ist nicht im Lieferumfang enthalten. Nähere Informationen nden Sie im Abschnitt
8.6 Installation.
AQ262450196490de-000101 / 175R1170 | 59Danfoss A/S © 2019.10
Page 60

1
2
3
4
5
e30bg808.10
40
Axis 2:170
Axis 1:120
10
60
12
1
Geschirmter Bereich
2U3V4W5
PE
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Elektrische Installation
H I N W E I S
Sorgen Sie für eine verstärkte Trennung zwischen Sicherheitssignalen und anderen Signalen, Versorgungen (Netzversor-
-
gung) und freiliegenden leitenden Teilen.
5.7 UL-Anforderungen
H I N W E I S
Integrierter elektronischer Kurzschlussschutz bietet keinen Schutz des Abzweigkreises. Der Schutz des Abzweigkreises muss
-
gemäß den nationalen und allen weiteren lokalen Richtlinien und Vorschriften hergestellt werden.
Eignet sich für Netzversorgungen, die bei einem Schutz mit 80 A-Sicherungen der Klasse J oder T maximal 5.000 Ae (symme-
-
trisch) bei maximal 480 V liefern können.
Um den Vorschriften der UL (Underwriters Laboratories) zu entsprechen, muss ein von UL zugelassenes Kupferkabel mit ei-
-
ner Hitzebeständigkeit von mindestens 60 °C verwendet werden. Verwenden Sie ausschließlich Kabel der Klasse 1. Legen Sie
beim PSM 510 mit einem Nennstrom von 30 kW eine maximale Hitzebeständigkeit von 75 °C zugrunde.
Ein Überstromschutz des Steuerkreises ist erforderlich.
-
5.8 Anschluss des Servo Drive Module SDM 511/SDM 512
5.8.1 Anschließen des Motorkabels
Abbildung 38: Motorkabel für 50 mm breite Servoantriebsmodule
AQ262450196490de-000101 / 175R117060 | Danfoss A/S © | 2019.10
Page 61

40
60
15
15
150
1
2
3
4
5
e30bh465.10
1
Geschirmter Bereich
2U3V4W5
PE
1
2
e30bg809.10
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Abbildung 39: Motorkabel für 100 mm breite Servoantriebsmodule
Elektrische Installation
Abbildung 40: Anschließen des Motorkabels an 50 mm breite Servoantriebsmodule
AQ262450196490de-000101 / 175R1170 | 61Danfoss A/S © 2019.10
Page 62

1
2
e30bg810.10
1
55
8
2
3
4
e30bg811.10
1
Motortemperatur –
2
Motortemperatur +
3
Motorbremse –
4
Motorbremse +
1
3
2
4
5
e30bg812.10
1
PE-Schraube Motor
2
Brems-/Thermistorstecker
3
Kabelbinder für Brems-/Thermistorkabel
4
EMV-Platte
5
EMV-Plattenschraube
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Abbildung 41: Anschließen des Motorkabels an 100 mm breite Servoantriebsmodule
Vorgehensweise
1.
Verbinden Sie die Adern mit dem Motorstecker.
2.
Stecken Sie den Motoranschlussstecker [1] ein.
3.
Sichern und schirmen Sie das Motorkabel mithilfe des Kabelbinders [2] ab.
Elektrische Installation
5.8.2 Anschließen des Brems-/Thermistorkabels
Abbildung 42: Brems-/Thermistorkabel
Abbildung 43: Anschließen des Brems-/Thermistorkabels
AQ262450196490de-000101 / 175R117062 | Danfoss A/S © | 2019.10
Page 63

1
2 3 4
6 5
7
e30bg444.10
1
Externer Encoder-Anschluss (E SDM 511/512)
2
Ethernet-Anschluss Eingang (X1 IN)
3
Ethernet-Anschluss Ausgang (X2 OUT)
4
E/A-Stecker (E/A SDM 511/512)
5
STO-Stecker Eingang (STO SDM 511/512)
6
STO-Stecker Ausgang (STO SDM 511/512)
7
Relaisstecker (REL SDM 511/512)
Modell
Minimum Ie [A]
Ue [V]
Induktivität [mH]
PSM 510 (10 kW)
20
500
Minimal: 0.47
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Elektrische Installation
H I N W E I S
Verwenden Sie einen Motor mit verstärkter Isolierung zwischen dem Thermistor und den Motorwicklungen (getestet mit ei-
-
nem Impuls von 4300 V DC und 8000 V
Vorgehensweise
1.
Verbinden Sie die Adern mit dem Brems-/Thermistorstecker.
2.
Stecken Sie den Brems-/Thermistorstecker [2] in das Servoantriebsmodul SDM 511/SDM 512 ein.
3.
Befestigen Sie das Brems-/Thermistorkabel mithilfe des Kabelbinders [3].
4.
Ziehen Sie die EMV-Plattenschraube [5] fest. Das Anzugsmoment beträgt 3 Nm.
5.
Stecken Sie den Motor-Geberstecker (SUB-D, 26 pin) in das Servoantriebsmodul ein.
6.
Schließen Sie das Servoantriebsmodul SDM 511/SDM 512 an die Schutzerde an, indem Sie den PE-Leiter an die PESchraube an der Vorderseite des Moduls [1] anschließen. Das Anzugsmoment beträgt 3 Nm.
5.8.3 Anschluss der Kabel an der Oberseite der Servo Drive Modules SDM 511/SDM 512
peak
).
Abbildung 44: Stecker an der Oberseite von SDM 511/SDM 512 (Beispiel)
Vorgehensweise
1.
Schließen Sie das Ethernetkabel vom Ausgang des vorgelagerten Moduls am Eingangsanschluss [2] an.
2.
Verbinden Sie die Adern vom STO-Ausgang des vorgelagerten Moduls am 24 V IN-Stecker (STO-Eingang).
3.
Stecken Sie den 24 V IN-Stecker (STO-Eingang) [5] in das SDM 511/SDM 512 ein.
4.
Schließen Sie bei Bedarf den externen Encoder-Stecker [1] an.
5.
Sind E/As erforderlich, führen Sie die Adern in den E/A-Stecker ein und stecken Sie den Stecker [4] ein.
6.
Ist ein Relais erforderlich, führen Sie die Adern in den Relaisstecker ein und stecken Sie den Stecker [7] ein.
5.9 Anschließen des Power Supply Module PSM 510
5.9.1 AC-Netzdrossel
Die Verwendung einer 3-phasigen Netzdrossel ist obligatorisch (siehe
5.9.1.2 Anschluss von zwei PSM 510-Modulen an die Netzdrossel).
5.9.1.1 Anschluss von einem PSM 510 an der Netzdrossel und
Tabelle 14: Netzdrosseleigenschaften für 1 PSM 510
AQ262450196490de-000101 / 175R1170 | 63Danfoss A/S © 2019.10
Page 64

Modell
Minimum Ie [A]
Ue [V]
Induktivität [mH]
Maximal: 1.47
PSM 510 (20 kW)
40
500
Minimal: 0.47
Maximal: 1.47
PSM 510 (30 kW)
60
500
0.47 ±10%
Modell
Minimum Ie [A]
Ue [V]
Induktivität [mH]
PSM 510 (2 x 30 kW)
125
500
0.24 ±10%
STATUS PSM
DEV
STO
NET ST
LINK/ACT
X1
X2
LCP LCP LCP
STATUS SDM
DEV
STO
NET ST
LINK/ACT
X1
X2
STATUS SDM
DEV
STO
NET ST
LINK/ACT
X1
X2
LCP
STATUS DAM
DEV
STO
NET ST
AUX
LINK/ACT
X1
X2
X3
e30bh420.10
PSM 510
SDM 511
SDM 511/
SDM 512
DAM 510
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Elektrische Installation
Wenn 2 PSM 510-Module parallel geschaltet sind, verwenden Sie eine Netzdrossel, wie in Tabelle 15 beschrieben. Weitere Informa-
tionen nden Sie in 5.9.1.2 Anschluss von zwei PSM 510-Modulen an die Netzdrossel.
Tabelle 15: Netzdrosseleigenschaften für 2 PSM 510, parallel geschaltet
Danfoss empehlt, die Netzdrossel nahe am PSM 510 zu montieren.
Die maximale Kabellänge hängt vom Querschnitt, von der erforderlichen Spannung sowie dem benötigten Strom im Zwischenkreis
ab.
Wenn die Netzdrosseln mit Abstand zum PSM 510 montiert werden, beträgt der maximale Kabelabstand 5 m.
5.9.1.1 Anschluss von einem PSM 510 an der Netzdrossel
Schließen Sie den PSM 510mit der richtigen Netzdrossel für die Leistungsgröße des PSM 510 an das Stromnetz an.
Abbildung 45: Anschluss von einem PSM 510 an die Netzdrossel
5.9.1.2 Anschluss von zwei PSM 510-Modulen an die Netzdrossel
Schließen Sie die PSM 510-Module an die gleiche Netzdrossel wie in Abbildung 46 gezeigt an.
Vergewissern Sie sich, dass die verwendete Drossel eine geeignete Leistungsgröße aufweist, die der kombinierten Leistung der
PSM 510-Module entspricht.
Wenn 2 PSM 510-Module verwendet werden, muss die Verdrahtung zwischen Netzdrossel und jedem PSM 510 die gleiche Länge
haben, mit einer Toleranz von 0,5 m.
Schließen Sie jedes PSM 510-Modul direkt an der Netzdrossel an. Eine parallele Verdrahtung ist nicht zulässig.
AQ262450196490de-000101 / 175R117064 | Danfoss A/S © | 2019.10
Page 65

STATUS PSM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
LCP
STATUS PSM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
LCP
LCP LCP
STATUS SDM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
STATUS SDM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
LCP
STATUS DAM
DEV
SVS ST
NET ST
AUX
LINK/ACT
X1
X2
X3
PSM 510
PSM 510
SDM 511
SDM 511/
SDM512
DAM 510
e30bh421.11
... ...
STATUS PSM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
LCP LCP LCP LCP LCP LCP LCP LCP
STATUS PSM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
STATUS SDM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
STATUS SDM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
e30bh422.10
STATUS DAM
DEV
SVS ST
NET ST
AUX
LINK/ACT
X1
X2
X3
STATUS ACM
DEV
CAP ST
NET ST
LINK/ACT
X1
X2
STATUS SDM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
STATUS SDM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
PSM 510
PSM 510
SDM 511
SDM 511/
SDM512
SDM 511
SDM 511/
SDM512
ACM 510
DAM 510
EXM 510
...
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Abbildung 46: Anschluss von zwei PSM 510-Modulen an die Netzdrossel
Elektrische Installation
5.9.1.3 Anschluss von zwei PSM 510-Modulen an die Netzdrossel mit Systemaufteilung
Schließen Sie die PSM 510-Module unabhängig von der Lastposition an die gleiche Netzdrossel an (zum Beispiel vor oder nach der
Systemaufteilung), wie in Abbildung 47 gezeigt.
Vergewissern Sie sich, dass die verwendete Drossel eine geeignete Leistungsgröße aufweist, die der kombinierten Leistung der
PSM 510-Module entspricht.
Wenn 2 PSM 510-Module verwendet werden, muss die Verdrahtung zwischen Netzdrossel und jedem PSM 510 die gleiche Länge
haben, mit einer Toleranz von 0,5 m.
Schließen Sie jedes PSM 510-Modul direkt an der Netzdrossel an. Eine parallele Verdrahtung ist nicht zulässig.
Abbildung 47: Anschluss von zwei PSM 510-Modulen an die Netzdrossel mit Systemaufteilung
Bei Verwendung von 2 Netzdrosseln (eine pro PSM 510-Modul) und einer Montage beider PSM 510-Module auf derselben Seite der
Systemaufteilung ist die Konguration unter Verwendung einer Leistungsreduzierung zulässig, die der Netzdrosseltoleranz in Bezug
auf 60 kW entspricht. Beispielsweise ergibt eine Leistungsreduzierung von 10 % folglich 54 kW.
Bei Verwendung von 2 Netzdrosseln (eine pro PSM 510-Modul) und einer der Aufteilung vorgelagerten Montage eines PSM 510Moduls sowie einer der Aufteilung nachgelagerten Montage des anderen PSM 510-Moduls muss die Last symmetrisch sein. Die
Leistungsreduzierung beider PSM 510-Module entspricht andernfalls der Toleranz der Netzdrossel. Beispielsweise entspricht eine
Toleranz von 10 % + 10 % Mittelwert einer Leistungsreduzierung von –20 %.
Bei Verwendung von 2 Netzdrosseln (eine pro PSM 510-Modul) und einer der Aufteilung vorgelagerten Montage eines PSM 510Moduls sowie einer der Aufteilung nachgelagerten Montage des anderen PSM 510-Moduls und jeweils der Hälfte der Last auf bei-
AQ262450196490de-000101 / 175R1170 | 65Danfoss A/S © 2019.10
Page 66

1 2
3
45
6
7
e30bg465.11
1
Ethernet-Anschluss Eingang (X1 IN)
2
Ethernet-Anschluss Ausgang (X2 OUT)
3
24/48 V IN-Stecker (EINGANG 24/48 V)
4
STO-Stecker Eingang (STO PSM)
5
STO-Stecker Ausgang (STO PSM)
6
E/A-Stecker (E/A PSM)
7
Relaisstecker (REL PSM)
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
den Seiten der Systemaufteilung ist die Konguration unter Verwendung einer Leistungsreduzierung zulässig, die der Netzdrosseltoleranz in Bezug auf 60 kW entspricht. Beispielsweise ergibt eine Leistungsreduzierung von 10 % folglich 54 kW.
Elektrische Installation
H I N W E I S
Weitere Informationen zum EXM 510-Modul und zur Verdrahtung nden Sie in 11.7.15 Expansion Module-Anschlussstecker.
-
5.9.2 Anschließen der Kabel am Power Supply Module PSM 510
5.9.2.1 Anschließen der Kabel an der Oberseite des Power Supply Module PSM 510
Abbildung 48: Stecker an der Oberseite des PSM 510
Vorgehensweise
1.
Schließen Sie das Ethernetkabel zwischen SPS und Ethernet-Anschluss Eingang [1] an.
2.
Schließen Sie das Ethernetkabel zwischen Ethernet-Anschluss Ausgang [2] und dem nächsten Modul an.
3.
Verbinden Sie die Adern mit dem 24/48 V IN-Stecker.
4.
Stecken Sie den 24/48 V IN-Stecker [3] ein.
5.
Verbinden Sie die Adern mit dem STO-Stecker IN.
6.
Stecken Sie den STO-Stecker IN (STO PSM) [4] ein.
7.
Verbinden Sie die Adern mit dem STO-Stecker OUT.
8.
Stecken Sie den STO-Stecker OUT (STO PSM) [5] ein.
9.
Sind E/As erforderlich, führen Sie die Adern in den E/A-Stecker ein und stecken Sie den Stecker (I/O PSM) [6] ein.
10.
Ist ein Relais erforderlich, führen Sie die Adern in den Relaisstecker ein und stecken Sie den Stecker (REL PSM) [7] ein.
AQ262450196490de-000101 / 175R117066 | Danfoss A/S © | 2019.10
Page 67

2
1
3
4
e30bg466.10
1
Halter für den Stecker des internen Bremswiderstands, wenn nicht in Verwendung
2
Versorgungsnetzstecker
3
PE-Schrauben
4
Anschluss des internen/externen Bremswiderstands
1 2
3
4
5
e30bg467.10
1
Ethernet-Anschluss Eingang (X1 IN)
2
Ethernet-Anschluss Ausgang (X3 OUT)
3
STO-Stecker Eingang (STO DAM)
4
STO-Stecker Ausgang (STO DAM)
5
Externer Encoder-Anschluss (E DAM)
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Elektrische Installation
5.9.2.2 Anschließen der Kabel an der Unterseite des Power Supply Module PSM 510
Abbildung 49: Anschlüsse an der Unterseite des PSM 510
Vorgehensweise
1.
Verbinden Sie die Adern mit dem Netzversorgungsstecker.
2.
Stecken Sie den Netzanschlussstecker [2] ein.
3.
Falls ein externer Bremswiderstand erforderlich ist:
a.
Ziehen Sie den Stecker [4] des internen Bremswiderstands und stecken Sie stattdessen den Stecker des externen
Bremswiderstands ein.
b.
Stecken Sie den Stecker des internen Bremswiderstands in die Halterung für den Stecker des internen Bremswiderstands [1].
4.
Schließen Sie das PSM 510 mittels Schutzleiter an die PE-Schraube an der Vorderseite [3] an. Das Anzugsmoment beträgt 3
Nm.
5.10 Anschluss des Decentral Access Module (DAM 510)
5.10.1 Anschluss der Kabel an der Oberseite des Decentral Access Module DAM 510
Abbildung 50: Anschlüsse an der Oberseite des DAM 510
Vorgehensweise
1.
Schließen Sie das Ethernetkabel vom Ausgang des vorgelagerten Moduls am Eingangsanschluss [1] an.
2.
Verbinden Sie die Drähte vom STO-Ausgang des vorherigen Moduls mit dem 24 V IN-Stecker (STO-Eingang), siehe
11.7.10.3.1 STO-Anschlüsse an der Oberseite des DAM 510.
3.
Stecken Sie den 24 V IN-Stecker (STO-Stecker IN) [3] in das DAM 510 ein.
4.
Schließen Sie bei Bedarf den externen Encoder-Stecker [5] an.
AQ262450196490de-000101 / 175R1170 | 67Danfoss A/S © 2019.10
Page 68

1
234
e30bg468.10
1
Ethernet-Anschluss
2
AUX-Anschluss
3
STO Ausgang-Anschluss
4
UDC-Anschluss
1
26
117
80
10
20
87
18
10
7
2
3
4
5
6
7
8
9
e30bg806.10
1
Geschirmter Bereich
2
UDC+ (schwarz, 2,5 mm2/4 mm2)
3
UDC– (grau, 2,5 mm2/4 mm2)
4
STO+ (rosa, 0,5 mm2)
5
STO– (grau, 0,5 mm2)
6
AUX+ (rot, 2,5 mm2)
7
AUX– (blau, 2,5 mm2)
8
Ethernet/Feldbus (grün, RJ45-Stecker)
9
Schutzerdung (gelb/grün, 2,5 mm2/4 mm2, Gabelöse)
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
5.10.2 Anschließen des Einspeisekabels
Abbildung 51: Anschlüsse an der Unterseite des DAM 510
Elektrische Installation
Abbildung 52: Einspeisekabel
AQ262450196490de-000101 / 175R117068 | Danfoss A/S © | 2019.10
Page 69

1
2
3
4
5
6
e30bg807.10
1
Einspeisekabel PE-Schrauben
2
Busstecker
3
Kabelbinder für Einspeisekabel
4
Kabelbinder für STO-Kabel
5
EMV-Platte
6
EMV-Plattenschraube
e30bh350
.11
1
2
4 3
1
Ethernet-Anschluss Eingang (X1 IN)
2
Ethernet-Anschluss Ausgang (X2 OUT)
3
E/A-Stecker (I/O ACM)
4
Relaisstecker (REL ACM)
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Abbildung 53: Anschließen des Einspeisekabels
Elektrische Installation
Vorgehensweise
1.
Verbinden Sie die Adern mit den UDC-, AUX- und STO-Steckern.
2.
Befestigen Sie das Einspeisekabel mithilfe der Kabelbinder [3], sodass der Schirmbereich genau unter dem Kabelbinder positioniert wird.
3.
Befestigen Sie das STO-Kabel mithilfe des Kabelbinders [4], sodass der Schirmbereich genau unter dem Kabelbinder positioniert wird.
4.
Verbinden Sie die Stecker des Einspeisekabels mit den jeweiligen Anschlussklemmen des DAM 510.
5.
Ziehen Sie die Schraube an der EMV-Platte fest [6]. Das Anzugsmoment beträgt 3 Nm.
6.
Stecken Sie den RJ45-Busstecker [2] ein.
7.
Schließen Sie das DAM 510 mittels Schutzleiter an die PE-Schraube an der Vorderseite [1] an. Das Anzugsmoment beträgt 3
Nm.
5.11 Anschließen des Auxiliary Capacitors Module ACM 510
Abbildung 54: Anschlüsse an der Oberseite des ACM 510
Vorgehensweise
1.
Schließen Sie das Ethernetkabel vom Ausgang des vorgelagerten Systemmoduls am Eingangsanschluss (X1 IN)] [1] an.
AQ262450196490de-000101 / 175R1170 | 69Danfoss A/S © 2019.10
Page 70

12
5315
8
1
2
3
4
5
6
7
e30bh661.10
1
24/48 V
2
GND3Funktionale Erde
4
DC–5DC–6DC+7DC+8Geschirmter Bereich
e30bh392.11
1
2
3
4
5
6
7
1
EMV-Abschirmplattenschraube
2
PE-Schraube
3
DC-Kabel
4
Kabel der funktionalen Erde
5
GND-Kabel
6
24/48 V-Kabel
7
Kabelbinder
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
2.
Sind E/As erforderlich, führen Sie die Adern in den E/A-Stecker (I/O ACM) ein und stecken Sie den Stecker [3] ein.
3.
Ist ein Relais erforderlich, führen Sie die Adern in den Relaisstecker (REL ACM) ein und stecken Sie den Stecker [4] ein.
4.
Schließen Sie das ACM 510 mittels Schutzleiter an die PE-Schraube an der Vorderseite an. Das Anzugsmoment beträgt 3
Nm.
5.12 Anschließen des Expansion Module EXM 510
Abbildung 55: Expansion Module-Kabel
Elektrische Installation
Abbildung 56: Anschließen des Expansion Module EXM 510
AQ262450196490de-000101 / 175R117070 | Danfoss A/S © | 2019.10
Page 71

STATUS PSM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
LCP
1
e30bh423.10
PSM 510
1
Interner Bremswiderstand
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Elektrische Installation
H I N W E I S
Wenn 2 separate Backlinks verwendet werden (angeschlossen über 1 oder 2 Paare von EXM 510-Modulen), müssen die 2
-
Erdungsschienen auch mit einem Kabelquerschnitt von 16 mm2 (6 AWG) miteinander verbunden werden.
Vorgehensweise
1.
Verbinden Sie die Adern [3], [4], [5] und [6] mit dem Erweiterungsstecker.
2.
Befestigen Sie die DC-Kabel [3] mithilfe des Kabelbinders [7], sodass der Schirmbereich genau unter dem Kabelbinder positioniert wird.
3.
Befestigen Sie die Kabel [4], [5] und [6] mit den Kabelbindern [7].
4.
Stecken Sie die Stecker in die Rückwand ein.
5.
Ziehen Sie die Schraube an der EMV-Abschirmplatte [1] fest. Das Anzugsmoment beträgt 3 Nm.
6.
Erden Sie das Erweiterungsmodul mit einem PE-Kabel und der PE-Schraube [2] über den Schutzleiter. Das Anzugsmoment
beträgt 3 Nm.
5.13 Anschließen des Bremswiderstands am PSM 510
Das PSM 510 ist an den internen Bremswiderstand angeschlossen, wie in Abbildung 57 gezeigt.
Alternativ kann das PSM 510 an einen externen Bremswiderstand angeschlossen werden. In diesem Fall muss der interne Bremswi-
derstand am PSM 510 getrennt bleiben, und der Stecker kann in den Steckerhalter des internen Bremswiderstands eingesteckt werden (siehe 3.2.3 Anschlüsse an der Unterseite des PSM 510).
Eine Parallel- oder Reihenschaltung von Bremswiderständen ist nicht zulässig.
Abbildung 57: Anschluss des internen Bremswiderstands an einem PSM 510
AQ262450196490de-000101 / 175R1170 | 71Danfoss A/S © 2019.10
Page 72

STATUS PSM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
LCP
STATUS PSM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
LCP
1
1
e30bh424.10
PSM 510
PSM 510
1
Interner Bremswiderstand
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Elektrische Installation
Schließen Sie bei Verwendung von 2 PSM 510-Modulen jedes PSM 510 an einen eigenen internen Bremswiderstand an, wie in Abbil-
dung 58 gezeigt (Werkseinstellung).
Alternative zulässige Kongurationen für 2 PSM 510-Module:
•
Ein PSM 510 ist am internen Bremswiderstand angeschlossen, und das andere ist an einen externen Bremswiderstand angeschlossen.
•
Beide PSM 510-Module sind an einen externen Bremswiderstand angeschlossen. In diesem Fall muss der interne Bremswiderstand am PSM 510 getrennt bleiben, und der Stecker kann in den Steckerhalter des internen Bremswiderstands eingesteckt werden (siehe 3.2.3 Anschlüsse an der Unterseite des PSM 510).
Eine Parallel- oder Reihenschaltung von Bremswiderständen ist nicht zulässig.
Abbildung 58: Parallelschaltung des Bremswiderstands an zwei PSM 510-Modulen
AQ262450196490de-000101 / 175R117072 | Danfoss A/S © | 2019.10
Page 73

e30bh657.10
1 2 3
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Inbetriebnahme
6 Inbetriebnahme
6.1 Warnungen für die Inbetriebnahme
W A R N U N G
UNERWARTETER ANLAUF
Das MSD 510 -System enthält Servoantriebe und PSM 510 sowie DAM 510, die an das elektrische Versorgungsnetz angeschlossen
sind und jederzeit anlaufen können. Dies kann durch einen Feldbusbefehl, ein Sollwertsignal oder einen zurückgesetzten Fehler
erfolgen. Servoantriebe und alle angeschlossenen Geräte müssen betriebsbereit sein. Fehler in der Betriebsbereitschaft können
bei Anschluss an das elektrische Versorgungsnetz zum Tod, zu schweren Verletzungen, Schäden an der Ausrüstung oder zu anderen Sachschäden führen.
Treen Sie geeignete Maßnahmen gegen unerwarteten Anlauf.
-
6.2 Checkliste vor der Inbetriebnahme
Führen Sie unbedingt vor der ersten Inbetriebnahme und vor Inbetriebnahme nach längerer Stillstandszeit oder Lagerung diese
Prüfungen durch.
Vorgehensweise
1.
Überprüfen Sie, ob alle Schraubverbindungen der mechanischen und elektrischen Teile fest angezogen sind.
2.
Überprüfen Sie, ob die freie Zu- und Abfuhr der Kühlluft sichergestellt ist.
3.
Vergewissern Sie sich, dass alle elektrischen Anschlüsse korrekt sind.
4.
Vergewissern Sie sich, dass der Berührschutz vor umlaufenden Teilen und vor Oberächen, die heiß werden können, besteht.
5.
Führen Sie bei Verwendung einer STO-Funktion den Inbetriebnahmetest zur funktionalen Sicherheit durch (siehe 8.8 Inbe-
triebnahmeprüfung).
6.3 SDM 511/SDM 512 – Parameterkonguration und Inbetriebnahme des Antriebs
6.3.1 Sub-Tool zur Parameterkonguration
Das Sub-Tool Conguration Parameter (Parameterkonguration) ist das Sub-Tool VLT® Servo Toolbox zur Konguration von Folgendem:
•
Motordaten
•
Anwendungsdaten
•
Regelungsdaten
•
Eingangs-/Ausgangskongurationen
•
Externer Geber
Abbildung 59: Sub-Tool zur Parameterkonguration
AQ262450196490de-000101 / 175R1170 | 73Danfoss A/S © 2019.10
Page 74

1
Schaltäche „Speichern/Speichern unter“
2
Schaltäche „Konguration von Gerät lesen“
3
Schaltäche „Konguration in Gerät schreiben“
e30bh658.10
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Die Kongurationsparameter werden in einer Datei gespeichert.
•
Klicken Sie auf die Schaltäche Read conguration from device (Konguration aus Gerät auslesen) [2], um die Datei zu laden.
•
Klicken Sie auf die Schaltäche Save/Save as (Speichern/Speichern unter) [1], um die Datei lokal zu speichern.
•
Klicken Sie auf die Schaltäche Write conguration to device (Konguration in Gerät schreiben) [3], um die Datei auf ein Gerät zu
übertragen. Führen Sie einen Aus-/Einschaltzyklus des Geräts durch, um die übertragene Konguration zu aktivieren.
Inbetriebnahme
H I N W E I S
Detaillierte Beschreibungen der einzelnen Parameter nden Sie im Sub-Tool.
-
6.3.2 Sub-Tool zur Inbetriebnahme des Antriebs
Bei dem Sub-Tool Drive Commissioning (Umrichter-Inbetriebnahme) handelt es sich um das Sub-Tool VLT® Servo Toolbox zur Durchführung von Inbetriebnahmeaufgaben, z. B.:
Einstellung des Motor-Istwerts
•
Kalibrierung der Resolver-Amplitude
•
•
Trägheitsmessung
Abbildung 60: Sub-Tool zur Inbetriebnahme des Antriebs
6.4 EtherCAT® ID-Zuweisung
EtherCAT® benötigt keine spezielle ID-Zuweisung (IP-Adresse). Eine spezielle ID-Zuweisung ist nur bei Verwendung der indirekten
Kommunikation über die VLT® Servo Toolbox-Software erforderlich.
6.5 Ethernet POWERLINK® ID-Zuweisung
6.5.1 Übersicht
Die Ethernet POWERLINK® Masterkommunikation darf nicht aktiv sein, wenn eine ID-Zuweisung an die Geräte über die VLT® Servo
Toolbox erfolgt. Eine ID-Zuweisung über die VLT® Servo Toolbox ist nur möglich, wenn Sie eine azyklische Ethernet POWERLINK
Kommunikation verwenden. Wenn die zyklische Kommunikation von Ethernet POWERLINK® bereits begonnen hat, führen Sie einen
Aus-/Einschaltzyklus durch, um diese zu stoppen.
Lösen Sie die SPS und führen Sie einen Aus-/Einschaltzyklus durch, bevor Sie die IDs festlegen. Starten Sie alternativ in der POWERLINK®-Schnittstelle die SPS im Service Mode (Servicemodus), während der Parameter Basic Ethernet in Service Mode (Basis-Ethernet
im Servicemodus) auf Basic Ethernet enabled (Basis-Ethernet aktiviert) eingestellt ist.
®
6.5.2 ID-Zuweisung für einzelne Geräte
Wenn Sie einem einzelnen Gerät eine ID zuweisen möchten, können Sie dazu das Fenster Device Information (Geräteinformation) in
der VLT® Servo Toolbox verwenden (weitere Informationen nden Sie im VLT® Servo Drive System ISD 510, DSD 510, MSD 510
Programmierhandbuch).
Die Einstellung einer ID für ein Gerät kann auch über das LCP erfolgen.
AQ262450196490de-000101 / 175R117074 | Danfoss A/S © | 2019.10
Page 75

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Inbetriebnahme
6.5.2.1 Einstellen der Knoten-ID direkt in einem Servoantrieb oder in den Systemmodulen
Alle IP-bezogenen Parameter benden sich in der Parametergruppe 12-0* IP Settings (IP-Einstellungen). Gemäß dem Ethernet POWERLINK® Standard ist die IP-Adresse auf 192.168.100.xxx festgelegt. Die letzte Zahl ist der Wert von Parameter 12-60 Node ID (Knoten-ID). Für Parameter 12-02 Subnet Mask (Subnetzmaske) ist die Adresse auf 255.255.255.0 festgelegt und kann nicht geändert werden.
Vorgehensweise
1.
Montieren Sie das LCP an dem Servoantrieb oder Systemmodul, dessen Node ID (Knoten-ID) geändert werden soll.
2.
Drücken Sie die Taste Hand On (Hand) und halten Sie diese >1 Sek. gedrückt, um das LCP als Steuerschnittstelle festzulegen.
3.
Drücken Sie auf die Taste Main Menu (Hauptmenü), navigieren Sie nach unten zum Untermenü 12-** Ethernet und drücken
Sie OK.
4.
Navigieren Sie nach unten zum Untermenü 12-6* Ethernet POWERLINK und drücken Sie OK.
Ändern Sie die Node-ID des PSM 510/DAM 510 auf den gewünschten Wert (1–239).
5.
6.
Drücken Sie OK, um Ihre Auswahl zu bestätigen, und warten Sie, bis das ID-Zuweisungsverfahren abgeschlossen ist.
Führen Sie einen Aus-/Einschaltzyklus durch, um sicherzustellen, dass alle ID-Änderungen am Feldbus in Kraft treten und
7.
funktionieren.
6.5.2.2 Einstellen der Node ID für einen einzelnen Servoantrieb über das Power Supply Module
(PSM 510) oder Decentral Access Module (DAM 510) per LCP
Außerdem können Sie die Node ID (Knoten-ID) eines Servoantriebs ändern, wenn das LCP mit dem PSM 510 oder DAM 510 verbunden ist. Diese Funktion ist in Parametergruppe 54-** ID Assignment (ID-Zuweisung) in Untergruppe 54-1* Manual (Manuell) enthalten.
Vorgehensweise
1.
Montieren Sie das LCP am PSM 510/DAM 510, das mit den Servoantrieben und Systemmodulen verbunden ist, deren Node
ID (Knoten-ID) geändert werden soll.
2.
Drücken Sie die Taste Hand On (Hand) und halten Sie diese >1 Sek. gedrückt, um das LCP als Steuerschnittstelle für das
PSM 510/DAM 510 festzulegen.
3.
Drücken Sie auf die Taste Main Menu (Hauptmenü), navigieren Sie nach unten zum Untermenü 12-** Ethernet und drücken
Sie OK.
4.
Navigieren Sie nach unten zum Untermenü 12-6* Ethernet POWERLINK und drücken Sie OK.
5.
Ändern Sie die Node ID des PSM 510/DAM 510 durch Drücken der Taste OK auf den gewünschten Wert (1–239).
6.
Kehren Sie zum Main Menu (Hauptmenü) zurück und wählen Sie Parameter 54-** ID Assignment (ID-Zuweisung) aus.
7.
Wählen Sie Parameter 54-1* Manual (Manuell) aus.
Nur PSM 510: Wählen Sie in Parameter 54-01 Epl id assignment line Ethernet-Anschluss X1 oder X2 aus. Das PSM 510 weist
8.
dem ausgewählten Gerät über den ausgewählten Anschluss und das Feldbusnetzwerk IDs zu. Am DAM 510-Anschluss wird
automatisch X2 verwendet.
9.
Wählen Sie Parameter 54-12 Epl ID assignment start id (Epl ID Zuweisung Start-ID) und anschließend einen gültigen Wert (1–
239) aus. Der Wert wird dem Gerät am angegebenen Positionsindex zugewiesen. Das mit dem LCP verbundene PSM 510/
DAM 510 bendet sich an Position 0 und das erste erreichbare Gerät am ausgewählten Anschluss ist Positionsindex 1 usw.
10.
Wählen Sie Parameter 54-14 Manual Epl ID assignment start (Manuell Epl ID Zuweisung start) und ändern Sie den Status von
[0] ready (bereit) zu[1] start (starten).
11.
Drücken Sie OK, um Ihre Auswahl zu bestätigen, und warten Sie, bis das ID-Zuweisungsverfahren abgeschlossen ist.
Prüfen Sie, ob die ID-Zuweisung erfolgreich abgeschlossen wurde (über folgende Parameter):
12.
a.
b.
c.
Führen Sie einen Aus-/Einschaltzyklus durch, um sicherzustellen, dass alle ID-Änderungen am Feldbus in Kraft treten und
13.
funktionieren.
Parameter 54-15 Epl ID assignment state (Epl ID Zuweisung Zustand)
Parameter 54-16 Epl ID assignment error code (Epl ID Zuweisung Fehlercode)
Parameter 54-17 Epl ID assignment device count (Epl ID Zuweisung Gerätezahl)
Wenn während der ID-Zuweisung ein Fehler auftritt, wird der erkannte Fehler auf dem LCP angezeigt. Die folgenden Fehler können
gemeldet werden:
Ungültiger NMT-Zustand
•
Ungültiger Kommentar
•
Ungültiger Ethernet-Anschluss
•
AQ262450196490de-000101 / 175R1170 | 75Danfoss A/S © 2019.10
Page 76

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
•
Ungültige Node-ID
•
ID-Zuweisung fehlgeschlagen
•
Doppelte MAC-Adresse
•
Ungültige SW-Version
•
Unvollständige Zuweisung
•
Kein Gerät gefunden
•
Interner Fehler
Inbetriebnahme
6.5.3 ID-Zuweisung für mehrere Geräte
Wenn Sie mehreren Geräten IDs zuweisen möchten (zum Beispiel beim Einrichten eines neuen Netzwerks), können Sie dazu das
VLT® Servo Toolbox Sub-Tool DAM ID assignment (DAM ID-Zuweisung) verwenden (weitere Informationen nden Sie im VLT® Servo
Drive System ISD 510, DSD 510, MSD 510 Programmierhandbuch).
Die Einstellung der IDs aller Servoantriebe, die gleichzeitig mit einem Decentral Access Module (DAM 510) oder Power Supply Module (PSM 510) verbunden sind, kann auch über das LCP erfolgen, wenn es mit dem DAM 510/PSM 510 verbunden ist.
6.5.3.1 Einstellen der Node-IDs für alle Servoantriebe und Systemmodule an einer Decentral Access
Module (DAM 510)-/Power Supply Module (PSM 510)-Linie
Über die automatische PSM 510/DAM 510-ID-Zuweisung können Sie die Node IDs (Knoten-IDs) an allen Servoantrieben für eine bestimmte PSM 510/DAM 510-Linie automatisch einstellen lassen. Diese Funktion ist in Parametergruppe 54- ** ID Assignment (ID-Zuweisung) in Untergruppe 54-0* Automatic (Automatisch) enthalten.
Vorgehensweise
1.
Montieren Sie das LCP am PSM 510/DAM 510, das mit den Servoantrieben und Systemmodulen verbunden ist, deren Node
ID (Knoten-ID) geändert werden soll.
2.
Drücken Sie die Taste Hand On (Hand) und halten Sie diese >1 Sek. gedrückt, um das LCP als Steuerschnittstelle für das
PSM 510/DAM 510 festzulegen.
3.
Drücken Sie auf die Taste Main Menu (Hauptmenü), navigieren Sie nach unten zum Untermenü 12-** Ethernet und drücken
Sie OK.
4.
Navigieren Sie nach unten zum Untermenü 12-6* Ethernet POWERLINK und drücken Sie OK.
5.
Ändern Sie die Node ID des PSM 510/DAM 510 durch Drücken der Taste OK auf den gewünschten Wert (1–239).
6.
Kehren Sie zum Main Menu (Hauptmenü) zurück und wählen Sie Parameter 54-** ID Assignment (ID-Zuweisung) aus.
7.
Wählen Sie Parameter 54-0* Automatic (Automatisch) aus.
Nur PSM 510: Wählen Sie in Parameter 54-01 Epl id assignment line Ethernet-Anschluss X1 oder X2 aus. Das PSM 510 weist
8.
dem ausgewählten Gerät über den ausgewählten Anschluss und das Feldbusnetzwerk IDs zu. Am DAM 510-Anschluss wird
automatisch X2 verwendet.
9.
Wählen Sie Parameter 54-02 Epl ID assignment start id (Epl ID Zuweisung Start-ID) und anschließend einen gültigen Wert (1–
239) aus. Der Wert wird dem Gerät am angegebenen Positionsindex zugewiesen. Das mit dem LCP verbundene PSM 510/
DAM 510 bendet sich an Position 0 und das erste erreichbare Gerät am ausgewählten Anschluss ist Positionsindex 1 usw.
10.
Wählen Sie Parameter 54-03 Automatic Epl ID assignment start (Automatische Epl ID Zuweisung Start) und ändern Sie den
Status von [0] ready (bereit) zu [1] start (starten).
11.
Drücken Sie OK, um Ihre Auswahl zu bestätigen, und warten Sie, bis das ID-Zuweisungsverfahren abgeschlossen ist.
Prüfen Sie, ob die ID-Zuweisung erfolgreich abgeschlossen wurde (über folgende Parameter):
12.
a.
b.
c.
Führen Sie einen Aus-/Einschaltzyklus durch, um sicherzustellen, dass alle ID-Änderungen am Feldbus in Kraft treten und
13.
funktionieren.
Parameter 54-04 Epl ID assignment state (Epl ID Zuweisung Zustand)
Parameter 54-05 Epl ID assignment error code (Epl ID Zuweisung Fehlercode)
Parameter 54-06 Epl ID assignment device count (Epl ID Zuweisung Gerätezahl)
Wenn während der ID-Zuweisung ein Fehler auftritt, wird der erkannte Fehler auf dem LCP angezeigt. Die folgenden Fehler können
gemeldet werden:
Ungültiger NMT-Zustand
•
Ungültiger Kommentar
•
Ungültiger Ethernet-Anschluss
•
Ungültige Node-ID
•
AQ262450196490de-000101 / 175R117076 | Danfoss A/S © | 2019.10
Page 77

Spezikation
Einheit
PSM 510
DAM 510
ACM 510
UDC-Ladezeit
s
2.0
2.0
3.5
Spezikation
Einheit
SDM 511
2,5 A
SDM 511
5 A
SDM 511
10 A
SDM 511
20 A
UDC-Ladezeit
s
2.0
Spezikation
Einheit
SDM 512
2 x 2,5 A
SDM 512
2 x 5 A
SDM 512
2 x 10 A
UDC-Ladezeit
s
2.0
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
•
ID-Zuweisung fehlgeschlagen
•
Doppelte MAC-Adresse
•
Ungültige SW-Version
•
Unvollständige Zuweisung
•
Kein Gerät gefunden
•
Interner Fehler
Inbetriebnahme
6.6 PROFINET® ID-Zuweisung
Jedes PROFINET®-Gerät benötigt einen Gerätenamen und eine IP-Adresse. IP-Adresse und Gerätename werden von der SPS zugewiesen, wenn die Verbindung zur SPS hergestellt wurde.
Die IP-Adresszuweisung ist bei Verwendung der indirekten Kommunikation über die VLT® Servo Toolbox-Software ebenfalls erforderlich (weitere Informationen nden Sie im VLT® Servo Drive System ISD 510, DSD 510, MSD 510 Programmierhandbuch).
Die IP-Adresse und der Gerätename können auch mit PRONETA vergeben werden, einem kostenlosen Tool, das bei der Analyse und
Konguration von PROFINET®-Netzwerken unterstützt.
6.7 Einschaltzeit
Die maximale Einschaltzeit der Systemkomponenten beträgt 15 s. Das ist die Zeit von der Versorgung des Systems mit Hilfsspannung bis zur vollständigen Initialisierung des Moduls.
Die angegebene Einschaltzeit ist eine Richtzeit. Der genaue Status des Moduls ist über das Statuswort einsehbar.
H I N W E I S
Nehmen Sie keines der Systemmodule in Betrieb, bevor diese korrekt eingeschaltet wurden.
-
Wenn 2 PSM510-Module parallel geschaltet sind, schalten Sie beide PSM 510-Module gleichzeitig ein (mit einer maximalen
-
Verzögerung von 1 Sekunde).
6.8 Ladezeit Systemmodul
Die Ladezeit des Systems wird durch die längste Ladezeit der einzelnen Systemmodule bestimmt.
Der genaue Status der einzelnen Module ist über das Statuswort einsehbar.
H I N W E I S
Nehmen Sie keines der Systemmodule in Betrieb, bevor diese vollständig geladen sind und sich im Zustand Operation ena-
-
bled (Betrieb aktiviert) benden.
Tabelle 16: Ladezeit Zwischenkreis (UDC) für PSM 510, DAM 510 und ACM 510
Tabelle 17: Ladezeit Zwischenkreis (UDC) für SDM 511
Tabelle 18: Ladezeit Zwischenkreis (UDC) für SDM 512
AQ262450196490de-000101 / 175R1170 | 77Danfoss A/S © 2019.10
Page 78

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Inbetriebnahme
6.9 Einschalten des MSD 510-Systems
Schließen Sie die Verdrahtung des MSD 510 -Systems ab, bevor Sie die Spannungsversorgung der Servo Drive Modules (SDM 511/
SDM 512) einschalten. Diese Verdrahtung beinhaltet die Spannungsversorgung und die Kommunikation des MSD 510 -Systems.
Ohne diese Grundvoraussetzungen können Sie die Servoantriebe nicht starten.
Das MSD 510 -System wird durch Versorgung des Power Supply Module (PSM 510) mit U
anschließend an alle angeschlossenen Systemmodule weitergegeben, und nur die Steuereinheiten der angeschlossenen Module
sind in Betrieb. Das System ist betriebsbereit, wenn Netz- und STO-Versorgung bestehen.
eingeschaltet. Diese Versorgung wird
AUX
6.9.1 Verfahren zum Einschalten des MSD 510-Systems
Vorgehensweise
1.
Einschalten der U
2.
Netzspannung einschalten.
3.
Versetzen Sie das PSM 510 in den Zustand Operation enabled (Betrieb aktiviert).
Nun sind die Systemmodule betriebsbereit.
4.
Versetzen Sie das DAM 510 in den Zustand Operation enabled (Betrieb aktiviert).
-Spannung zur Aktivierung der einzurichtenden PSM 510-, DAM 510- und SDM-Module.
AUX
6.10 Bibliotheken
Die für das MSD 510 -System bereitgestellten Bibliotheken können verwendet werden in:
TwinCAT® V2
•
SIMOTION SCOUT® V4.4 und V4.5:
•
C240 ab V4.4
-
D410-2 ab V4.4
-
D425-2 ab V4.4
-
D435-2 ab V4.4
-
D445-2 ab V4.4
-
D455-2 ab V4.4
-
P320 ab V4.4
-
Automation Studio©-Umgebung (Version 3.0.90 und 4.x, unterstützte Plattform SG4) zur einfachen Integration der Funktionen
•
ohne Bedarf einer speziellen Bewegungsbetriebszeit am Regler.
TiA ab V13
•
Den vorhandenen Funktionsblöcke entsprechen dem PLCopen® Standard. Kenntnisse der zugrunde liegenden Feldbuskommunikation und/oder des CANopen® CiA DS 402-Prols sind nicht erforderlich.
Die Bibliothek enthält:
Funktionsblöcke zur Steuerung und Überwachung der ISD 510/DSD 510-Servoantriebe, der Servoantriebsmodule SDM 511/
•
SDM 512 und der Systemmodule.
Funktionsblöcke für alle verfügbaren Bewegungsbefehle der ISD 510/DSD 510-Servoantriebe und der SDM 511/SDM 512-Ser-
•
voantriebsmodule.
Funktionsblöcke zur Steuerung und Überwachung von PSM 510, DAM 510 und ACM 510.
•
•
Funktionsblöcke und Strukturen für die Erstellung von Basic CAM-Prolen.
•
Funktionsblöcke und Strukturen für die Erstellung von Labeling CAM-Prolen.
6.11 Programmierung mit Automation Studio™
6.11.1 Anforderungen für die Programmierung mit Automation Studio™
Die folgenden Dateien sind erforderlich, um die ISD 510/DSD 510-Servoantriebe, die SDM 511/SDM 512-Servoantriebsmodule und
die Systemmodule in ein Automation Studio© Projekt zu integrieren:
Bibliothekenpaket für das MSD 510 Servosystem: Danfoss_VLT_ServoMotion_V_x_y_z.zip
•
XDD-Datei (XML-Gerätebeschreibung) für den Standard-ISD 510-Servoantrieb: 0x0300008D_ISD510_S.xdd
•
XDD-Datei (XML-Gerätebeschreibung) für den erweiterten ISD 510-Servoantrieb: 0x0300008D_ISD510_A.xdd
•
AQ262450196490de-000101 / 175R117078 | Danfoss A/S © | 2019.10
Page 79

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
•
XDD-Datei (XML-Gerätebeschreibung) für den Standard-DSD 510-Servoantrieb: 0x0300008D_DSD510_S.xdd
•
XDD-Datei (XML-Gerätebeschreibung) für den erweiterten DSD 510-Servoantrieb: 0x0300008D_DSD510_A.xdd
•
XDD-Datei (XML-Gerätebeschreibung) für das SDM 511/SDM 512-Servoantriebsmodul: 0x0300008D_SDM510.xdd
•
XDD-Datei (XML-Gerätebeschreibung) für das Power Supply Module (PSM 510): 0x0300008D_PSM.xdd
•
XDD-Datei (XML-Gerätebeschreibung) für das Decentral Access Module (DAM 510): 0x0300008D_DAM.xdd
•
XDD-Datei (XML-Gerätebeschreibung) für das Auxiliary Capacitors Module (ACM 510): 0x0300008D_ACM.xdd
Inbetriebnahme
6.11.2 Erstellen eines Automation Studio™ Projekts
Die in diesem Kapitel beschriebenen Verfahren beziehen sich auf die Automation Studio© Versionen 3.0.90 und V4.x, sofern nicht
anders angegeben.
Detaillierte Informationen zur Installation von Automation Studio© nden Sie in der Automation Studio© Hilfe. Önen Sie den B&R
Help Explorer und wählen Sie dort die Option [Automation software → Software Installation → Automation Studio].
Detaillierte Hinweise zur Erstellung eines Projekts in Automation Studio© nden Sie in der Automation Studio© Hilfe.
V3.0.90:
Önen Sie den B&R Help Explorer und wählen Sie die Option [Automation Software → Getting Started → Creating programs with
Automation Studio → First project with X20 CPU].
V4.x:
Önen Sie den B&R Help Explorer und navigieren Sie zu [Automation Software → Getting Started → Creating programs with Auto-
mation Studio → Example project for a target system with CompactFlash].
6.11.3 Einbinden der Servoantriebsbibliotheken in ein Automation Studio™ Projekt
Vorgehensweise
1.
Önen Sie in Logical View (Logische Ansicht) den Menüeintrag [File → Import...].
2.
Wählen Sie im nächsten Fenster die Datei Danfoss_VLT_ServoMotion_V_x_y_z.zip aus (je nach Speicherort auf der Festplatte).
3.
Klicken Sie auf Open (Önen).
Weisen Sie im nächsten Fenster die Bibliotheken der CPU zu.
4.
5.
Klicken Sie auf Finish (Beenden). Jetzt werden die Bibliotheken in das Automation Studio© Projekt integriert.
Während des Einbindens wird ein neuer Ordner angelegt, der die ISD-Bibliotheken enthält:
DDS_Drive
•
Enthält Programmorganisationseinheiten (POUs), die von PLCopen® (Name beginnt mit MC_) deniert werden,
•
und POUs, die von Danfoss (Name beginnt mit DD_) deniert werden. Die von Danfoss denierten POUs bieten
zusätzliche Funktionen für die Achse.
Sie können POUs, die von PLCopen® deniert wurden, mit POUs kombinieren, die von Danfoss deniert wurden.
•
Die Namen der POUs, die den Servoantrieb als Ziel haben, enden alle auf _DDS.
•
DDS_PSM
•
Enthält POUs, die von Danfoss (Name beginnend mit DD_) deniert werden und Funktionen für das Power Sup-
•
ply Module (PSM) bereitstellen.
Die Namen der POUs, die das PSM zum Ziel haben, enden alle auf _PSM.
•
DDS_DAM
•
Enthält POUs, die von Danfoss (Name beginnend mit DD_) deniert werden und Funktionen für das Decentral
•
Access Module (DAM) bereitstellen.
Die Namen der POUs, die das DAM zum Ziel haben, enden alle auf _DAM.
•
DDS_ACM
•
Enthält POUs, die von Danfoss (Name beginnend mit DD_) deniert werden und Funktionen für das Auxiliary Ca-
•
pacitors Module (ACM) bereitstellen.
Die Namen der POUs, die das ACM zum Ziel haben, enden alle auf _ACM.
•
DDS_BasCam
•
Enthält POUs für die Erstellung grundlegender CAMs.
•
DDS_LabCam
•
AQ262450196490de-000101 / 175R1170 | 79Danfoss A/S © 2019.10
Page 80

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
•
Enthält POUs für die Erstellung von Kennzeichnungs-CAMs.
•
DDS_Intern
•
Enthält POUs, die intern für die Bibliotheken benötigt werden.
•
Verwenden Sie diese POUs nicht in einer Anwendung.
Beim Einbinden des DDS_Drive-Pakets werden einige Standardbibliotheken automatisch integriert, wenn sie nicht bereits
Teil des Projekts sind.
H I N W E I S
Entfernen Sie diese Bibliotheken nicht, weil andernfalls die Danfoss Servo-Motion-Bibliotheken nicht funktionie-
-
ren.
6.11.4 Konstanten innerhalb der DDS_Drive-Bibliothek
Innerhalb der Bibliothek sind die folgenden Listen mit Konstanten deniert:
•
Danfoss_VLT_ServoMotion
-
Enthält die Versionsinformation der Bibliothek.
•
DDS_AxisErrorCodes
-
Konstanten für Fehlercodes der Achse.
-
Fehlercodes lassen sich mithilfe des Funktionsblocks MC_ReadAxisError_DDS bzw. DD_ReadAxisWarning_DDS lesen.
•
DDS_AxisTraceSignals
-
Konstanten für die Trace Signale der Achse.
-
Zur Verwendung mit Funktionsblock DD_Trace_DDS bestimmt.
•
DDS_BasCam
-
Konstanten für die Erstellung der grundlegender CAMs.
•
DDS_CamParsingErrors
-
Konstanten für Parsing-Probleme eines CAM.
-
Die Fehlerursache gibt Funktionsblock MC_CamTableSelect_DDS zurück.
DDS_FB_ErrorConstants
•
Konstanten für Fehler in POUs.
-
-
Der Grund wird in einer Ausgabe ErrorInfo.ErrorID angegeben, die in allen POUs verfügbar ist.
DDS_Intern
•
Konstanten zur internen Verwendung in der Bibliothek.
-
Sie sind nicht zur Verwendung in einer Anwendung gedacht.
-
DDS_LabCam
•
Konstanten für die Erstellung von Kennzeichnung-CAMs.
-
DDS_SdoAbortCodes
•
Konstanten für Fehler beim Lesen und Schreiben von Parametern.
-
-
Der Grund wird in einer Ausgabe AbortCode angegeben, die in mehreren POUs verfügbar ist.
PSM_ErrorCodes
•
Konstanten für Fehlercodes des Power Supply Module (PSM 510).
-
-
Fehlercodes lassen sich mithilfe des Funktionsblocks DD_ReadPsmError_PSM bzw. DD_ReadPsmWarning_PSM lesen.
PSM_TraceSignals
•
Konstanten für die Trace-Signale des Power Supply Module (PSM 510).
-
-
Zur Verwendung mit Funktionsblock DD_Trace_PSM bestimmt.
DAM_ErrorCodes
•
Inbetriebnahme
AQ262450196490de-000101 / 175R117080 | Danfoss A/S © | 2019.10
Page 81

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
-
Konstanten für Fehlercodes des Decentral Access Module (DAM 510).
-
Fehlercodes lassen sich mithilfe des Funktionsblocks DD_ReadDamError_DAM bzw. DD_ReadDamWarning_DAM lesen.
•
DAM_TraceSignals
-
Konstanten für Trace-Signale des Decentral Access Module (DAM 510).
-
Zur Verwendung mit Funktionsblock DD_Trace_DAM bestimmt.
ACM_ErrorCodes
•
Konstanten für Fehlercodes des Auxiliary Capacitors Module (ACM 510).
-
-
Fehlercodes lassen sich mithilfe des Funktionsblocks DD_ReadAcmError_ACM bzw. DD_ReadAcmWarning_ACM lesen.
ACM_TraceSignals
•
Konstanten für Trace-Signale des Auxiliary Capacitors Module (ACM 510).
-
-
Zur Verwendung mit Funktionsblock DD_Trace_ACM bestimmt.
6.11.5 Instanziierung von AXIS_REF_DDS in Automation Studio™
Vorgehensweise
1.
Erstellen Sie eine Instanz des Funktionsblocks AXIS_REF_DDS (im Ordner DDS_Drive) für jedes SDM 511/SDM 512-Antriebsmodul und jeden Servoantrieb, den Sie regeln oder überwachen müssen.
2.
Zum Herstellen einer Verbindung zum physischen Servoantrieb verknüpfen Sie jede Instanz von AXIS_REF_DDS mit einem
physischen Servoantrieb. Hierdurch wird sie zur logischen Darstellung eines physischen Servoantriebs.
-
Önen Sie die Logical View (Logische Ansicht).
Initialisieren Sie jede Instanz mit ihrer Knotennummer und dem Steckplatznamen, mit der diese verbunden ist (beis-
pielsweise IF3).
-
Initialisieren Sie jede Instanz eines Antriebs mit seinem DriveType (Umrichtertyp).
Inbetriebnahme
Beispiel
Abbildung 61: Instantiation von AXIS_REF_DDS und Einstellung der Anfangswerte
6.11.6 Instanziierung von PSM_REF in Automation Studio™
Vorgehensweise
1.
Erstellen Sie eine Instanz des Funktionsblocks PSM_REF (im Ordner DDS_PSM) für jedes Power Supply Module (PSM), das Sie
regeln oder überwachen müssen.
2.
Zum Herstellen einer Verbindung zum physischen PSM verknüpfen Sie jede Instanz von PSM_REF mit einem physischen
PSM. Hierdurch wird sie zur logischen Darstellung eines physischen PSM.
-
Önen Sie die Logical View (Logische Ansicht).
AQ262450196490de-000101 / 175R1170 | 81Danfoss A/S © 2019.10
Page 82

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
-
Initialisieren Sie jede Instanz mit ihrer Knotennummer und dem Steckplatznamen, mit der diese verbunden ist (beispielsweise IF3).
6.11.7 Instanziierung von DAM_REF in Automation Studio™
Vorgehensweise
1.
Erstellen Sie eine Instanz des Funktionsblocks DAM_REF (im Ordner DDS_DAM) für jedes Decentral Access Module (DAM),
das Sie regeln oder überwachen müssen.
2.
Zum Herstellen einer Verbindung zum physischen DAM verknüpfen Sie jede Instanz von DAM_REF mit einem physischen
DAM. Hierdurch wird sie zur logischen Darstellung eines physischen DAM.
-
Önen Sie die Logical View (Logische Ansicht).
Initialisieren Sie jede Instanz mit ihrer Knotennummer und dem Steckplatznamen, mit der diese verbunden ist (beis-
pielsweise IF3).
6.11.8 Instanziierung von ACM_REF in Automation Studio™
Vorgehensweise
1.
Erstellen Sie eine Instanz des Funktionsblocks ACM_REF (im Ordner DDS_ACM) für jedes Auxiliary Capacitors Module (ACM),
das Sie regeln oder überwachen müssen.
2.
Zum Herstellen einer Verbindung zum physischen ACM verknüpfen Sie jede Instanz von ACM_REF mit einem physischen
ACM. Hierdurch wird sie zur logischen Darstellung eines physischen ACM.
-
Önen Sie die Logical View (Logische Ansicht).
Initialisieren Sie jede Instanz mit ihrer Knotennummer und dem Steckplatznamen, mit der diese verbunden ist (beis-
pielsweise IF3).
Inbetriebnahme
6.11.9 Importieren eines Servoantriebs in Automation Studio™
H I N W E I S
Für jeden physischen Servoantrieb fügen Sie dem Physical View (Physische Ansicht) von Automation Studio© einen Eintrag
-
hinzu.
6.11.9.1 Version V3.0.90
Vorgehensweise
1.
Wählen Sie den Menüeintrag [Tools → Import Fieldbus Device...].
2.
Wählen Sie die XDD-Datei (zum Beispiel 0x0300008D_ISD510_S.xdd oder 0x0300008D_ISD510_A.xdd) an ihrem Speicherort
auf der Festplatte aus. Diesen Import müssen Sie nur einmal für jedes Projekt ausführen. Danach ist das Gerät in Automation Studio© bekannt.
3.
Fügen Sie jetzt das SDM 511/SDM 512-Antriebsmodul zur Ethernet POWERLINK® Schnittstelle des Controllers in der Physical View (Physische Ansicht) hinzu:
-
Klicken Sie mit der rechten Maustaste auf den Controller in der Physical View (Physische Ansicht) und wählen Sie [Open
POWERLINK].
-
Klicken Sie mit der rechten Maustaste auf die Schnittstelle und wählen Sie Insert... (Einfügen...).
-
Wählen Sie im Fenster Select controller module (Controller-Modul auswählen) den Servoantrieb in der Gruppe POWER-
LINK Devices (POWERLINK-Geräte) aus.
-
Klicken Sie auf Next (Weiter).
Geben Sie im nächsten Fenster die Knotennummer des Servoantriebs ein.
-
AQ262450196490de-000101 / 175R117082 | Danfoss A/S © | 2019.10
Page 83

e30bh513.10
e30bh514.10
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Abbildung 62: Hinzufügen eines Servoantriebs zum Projekt in V3.0.90
Inbetriebnahme
6.11.9.2 Version V4.x
Vorgehensweise
1.
Wählen Sie den Menüeintrag [Tools → Import Fieldbus Device...].
2.
Wählen Sie die XDD-Datei (zum Beispiel 0x0300008D_ISD510_S.xdd oder 0x0300008D_ISD510_A.xdd) an ihrem Speicherort
auf der Festplatte aus. Danach ist das Gerät in Automation Studio© bekannt.
3.
Fügen Sie jetzt das SDM 511/SDM 512-Antriebsmodul zur Ethernet POWERLINK® Schnittstelle des Controllers in der Physical View (Physische Ansicht) hinzu:
-
Wählen Sie den Menüeintrag [Open → System Designer], um den System Designer anzuzeigen.
-
Wählen Sie zum Hinzufügen eines Hardware-Moduls zu Physical View (Physische Ansicht) oder System Designer den Servoantrieb in der Gruppe POWERLINK in der Toolbox Hardware Catalog (Hardwarekatalog) aus.
Ziehen Sie das ausgewählte Modul an die gewünschte Position, um es mit dem ausgewählten Hardwaremodul, der
Netzwerkschnittstelle oder dem Steckplatz zu verbinden.
Klicken Sie zum Ändern der Knotennummer mit der rechten Maustaste auf das Gerät und wählen Sie [Node Number →
Change Node Number].
Abbildung 63: Hinzufügen eines Servoantriebs zum Projekt in V4.x
AQ262450196490de-000101 / 175R1170 | 83Danfoss A/S © 2019.10
Page 84

e30bh515.10
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Inbetriebnahme
6.11.10 Importieren von PSM 510, DAM 510 und ACM 510 in Automation Studio™
H I N W E I S
Fügen Sie für jedes physische Power Supply Module (PSM 510), Decentral Access Module (DAM 510) und Auxiliary Capacitors
-
Module (ACM 510) einen Eintrag zur Physical View (Physische Ansicht) von Automation Studio© hinzu.
6.11.10.1 Version V3.0.90
Vorgehensweise
1.
Wählen Sie den Menüeintrag [Tools → Import Fieldbus Device...].
2.
Wählen Sie die XDD-Datei für das PSM 510, DAM 510 oder ACM 510 an ihrem Speicherort auf der Festplatte aus. Diesen
Import müssen Sie nur einmal für jedes Projekt ausführen. Danach ist das Gerät in Automation Studio© bekannt.
-
Power Supply Module (PSM 510): 0x0300008D_PSM.xdd
-
Decentral Access Module (DAM 510): 0x0300008D_DAM.xdd
-
Auxiliary Capacitors Module (ACM 510): 0x0300008D_ACM.xdd
3.
Fügen Sie jetzt das PSM 510, DAM 510 oder ACM 51 zur Ethernet POWERLINK® Schnittstelle des Controllers in der Physical
View (Physische Ansicht) hinzu:
-
Klicken Sie mit der rechten Maustaste auf den Controller in der Physical View (Physische Ansicht) und wählen Sie [Open
POWERLINK].
-
Klicken Sie mit der rechten Maustaste auf die Schnittstelle und wählen Sie Insert... (Einfügen...).
-
Wählen Sie im Fenster Select controller module (Controller-Modul auswählen) das PSM 510, DAM 510 oder ACM 510 in
der Gruppe POWERLINK Devices (POWERLINK-Geräte).
-
Klicken Sie auf Next (Weiter).
Geben Sie im nächsten Fenster die Knotennummer von PSM 510, DAM 510 oder ACM 510 ein.
-
Abbildung 64: 1 PSM 510, 1 DAM 510 und 2 ISD 510-Servoantriebe zur Ethernet POWERLINK®-Schnittstelle in V3.0.90 hinzugefügt
6.11.10.2 Version V4.x
Vorgehensweise
Wählen Sie den Menüeintrag [Tools → Import Fieldbus Device...].
1.
Wählen Sie die XDD-Datei für das PSM 510, DAM 510 oder ACM 510 an ihrem Speicherort auf der Festplatte aus. Danach ist
2.
das Gerät in Automation Studio© bekannt.
-
Power Supply Module (PSM 510): 0x0300008D_PSM.xdd
-
Decentral Access Module (DAM 510): 0x0300008D_DAM.xdd
-
Auxiliary Capacitors Module (ACM 510): 0x0300008D_ACM.xdd
3.
Fügen Sie jetzt das PSM 510, DAM 510 oder ACM 51 zur Ethernet POWERLINK® Schnittstelle des Controllers in der Physical
View (Physische Ansicht) hinzu:
-
Wählen Sie den Menüeintrag [Open → System Designer], um den System Designer anzuzeigen.
-
Wählen Sie zum Hinzufügen eines Hardware-Moduls zu Physical View (Physische Ansicht) oder System Designer das
PSM 510, DAM 510 oder ACM 510 in der Gruppe POWERLINK in der Toolbox Hardware Catalog (Hardwarekatalog) aus.
Ziehen Sie das ausgewählte Modul an die gewünschte Position, um es mit dem ausgewählten Hardwaremodul, der
Netzwerkschnittstelle oder dem Steckplatz zu verbinden.
AQ262450196490de-000101 / 175R117084 | Danfoss A/S © | 2019.10
Page 85

e30bh516.10
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
-
Klicken Sie zum Ändern der Knotennummer mit der rechten Maustaste auf das Gerät und wählen Sie [Node → Change
Node Number].
PSM: Danfoss _VLT_R_PSM
DAM: Danfoss _VLT_R_DAM
ACM: Danfoss _VLT_R_ACM
Abbildung 65: 1 PSM 510, 1 DAM 510 und 2 ISD 510-Servoantriebe zur Ethernet POWERLINK®-Schnittstelle in V4.x hinzugefügt
6.11.11 E/A-Konguration und E/A-Mapping
Vorgehensweise
1.
Parametrieren Sie die E/A-Konguration der SDM 511/SDM 512-Antriebsmodule oder Servoantriebe so, dass die Bibliothek
Zugri auf alle notwendigen Objekte hat.
-
Klicken Sie mit der rechten Maustaste auf das SDM 511/SDM 512-Antriebsmodul oder den Servoantrieb und wählen Sie
Open I/O Conguration (E/A-Konguration önen) in V3.0.90 und Conguration (Konguration) in V4.x.
-
Ändern Sie im Abschnitt Channels (Kanäle) die Cyclic transmission (Zyklische Übertragung) der folgenden Objekte:
Alle Subindizes des Objektes 0x5050 (Lib pdo rx_I5050 ARRAY[]) auf Write (Schreiben).
Alle Subindizes des Objektes 0x5051 (Lib pdo tx_I5051 ARRAY[]) auf Read (Lesen).
Parametrieren Sie die E/A-Konguration des Power Supply Module (PSM 510), des Decentral Access Module (DAM 510) und
2.
des Auxiliary Capacitors Module (ACM 510) so, dass die Bibliothek Zugri auf alle notwendigen Objekte hat.
-
Klicken Sie mit der rechten Maustaste auf das PSM/DAM/ACM und wählen Sie Open I/O Conguration (E/A-Kongura-
tion önen) in V3.0.90 und Conguration (Konguration) in V4.x.
-
Ändern Sie im Abschnitt Channels (Kanäle) die Cyclic transmission (Zyklische Übertragung) der folgenden Objekte:
Alle Subindizes des Objektes 0x5050 (Lib pdo rx_I5050 ARRAY[]) auf Write (Schreiben).
Alle Subindizes des Objektes 0x5051 (Lib pdo tx_I5051 ARRAY[]) auf Read (Lesen).
Inbetriebnahme
Mit diesen Einstellungen wird die zyklische Kommunikation mit dem Gerät konguriert. Diese Parameter sind für das
Funktionieren der Bibliothek erforderlich.
H I N W E I S
Sie können die Funktion „Copy & Paste“ verwenden, um dieselbe E/A-Konguration für mehrere Geräte desselben
-
Typs zu übernehmen.
3.
Stellen Sie die Option Module supervised (Modul überwacht) für die Servoantriebe und das PSM/DAM/ACM auf o (aus).
Den Parameter nden Sie in der E/A-Konguration des Geräts.
AQ262450196490de-000101 / 175R1170 | 85Danfoss A/S © 2019.10
Page 86

e30bg341.10
e30bg342.10
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Inbetriebnahme
Abbildung 66: E/A-Konguration eines ISD 510-Geräts
Abbildung 67: E/A-Mapping nach erfolgreicher Konguration
4.
Mappen Sie die Ein- und Ausgänge der Instanz des Funktionsblocks AXIS_REF_DDS und die physischen Datenpunkte des
Servoantriebs nach (in diesem Fall ist myAxis eine Instanz von AXIS_REF_DDS):
AQ262450196490de-000101 / 175R117086 | Danfoss A/S © | 2019.10
Page 87

e30bg343.10
e30bg344.10
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Inbetriebnahme
Abbildung 68: E/A-Mapping eines ISD 510 Servo Drive
5.
Mappen Sie die Ein- und Ausgänge der Instanz der Funktionsblöcke PSM_REF, DAM_REF und ACM_REF und die physischen
Datenpunkte des PSM/DAM/ACM entsprechend.
6.11.12 Einstellen der SPS-Zykluszeit
Die Mindestzykluszeit beträgt 400 µs. Die Servosystemgeräte können die Ethernet POWERLINK® Zykluszeiten in Vielfachen von 400
µs und in Vielfachen von 500 µs starten. Die Geräte werden je nach Ethernet POWERLINK® Konguration der physischen Schnittstelle beim Einschalten automatisch von der SPS parametriert. Sie können die Ethernet POWERLINK® Konguration überprüfen, indem Sie mit der rechten Maustaste unter Physical View (Physische Ansicht) auf [CPU → Open IF3 POWERLINK Conguration] für
V3.0.90 oder [PLK → Conguration] für V4.x klicken.
H I N W E I S
Stellen Sie sicher, dass die Aufgabenzykluszeiten des SPS-Programms und von Ethernet POWERLINK® identisch sein. Andern-
-
falls könnten Daten verloren gehen und die Leistung wird verringert.
Abbildung 69: Ethernet POWERLINK<® Kongurationsfenster zur Parametrierung der Ethernet POWERLINK® Zykluszeit
Verfahren zum Einstellen der SPS-Zeit in Automation Studio
1.
Klicken Sie unter Physical View (Physische Ansicht) mit der rechten Maustaste auf [CPU → Open Software Conguration] für
V3.0.90 und [CPU → Conguration → Timing] für V4.x
2.
Achten Sie darauf, dass die SPS-Zykluszeit mit der Ethernet POWERLINK® Zykluszeit identisch ist.
6.11.13 Verbinden mit der SPS
Ausführliche Informationen zum Anschließen an die SPS nden Sie in der Hilfe zum Automation Studio©.
Version V3.0.90:
Önen Sie den B&R Help Explorer und navigieren Sie zu [Automation Software → Getting Started → Creating programs with Auto-
mation Studio → First project with X20 CPU → Congure online connection].
Version V4.x:
Önen Sie den B&R Help Explorer und navigieren Sie zu [Automation Software → Getting Started → Creating programs in Automa-
tion Studio → Example project for a target system with CompactFlash].
©
AQ262450196490de-000101 / 175R1170 | 87Danfoss A/S © 2019.10
Page 88

e30bh611.10
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Inbetriebnahme
6.12 Programmieren mit TwinCAT®
6.12.1 Anforderungen für die Programmierung mit TwinCAT®
Um die ISD 510/DSD 510-Servoantriebe, die Servoantriebsmodule SDM 511/SDM 512 und PSM 510, DAM 510 oder ACM 510 in ein
TwinCAT®-Projekt zu integrieren, benötigen Sie folgende Dateien:
•
Bibliothek für das MSD 510 -Servosystem: Danfoss_VLT_ServoMotion_V_x_y_z.lib
•
ESI-Datei (Informationen zum EtherCAT® Follower) für den ISD 510-Standard-Servoantrieb: Danfoss_ISD510_S.xml
•
ESI-Datei (Informationen zum EtherCAT® Follower) für den erweiterten ISD 510-Servoantrieb: Danfoss_ISD510_A.xml
•
ESI-Datei (Informationen zum EtherCAT® Follower) für den DSD 510-Standard-Servoantrieb: Danfoss_DSD510_S.xml
•
ESI-Datei (Informationen zum EtherCAT® Follower) für den erweiterten DSD 510-Servoantrieb: Danfoss_DSD510_A.xml
•
ESI-Datei (Informationen zum EtherCAT® Follower) für das Servo Drive Module: Danfoss_SDM510.xml
•
ESI-Datei (Informationen zum EtherCAT® Follower) für das Power Supply Module: Danfoss_PSM510.xml
•
ESI-Datei (Informationen zum EtherCAT® Follower) für das Decentral Access Module: Danfoss_DAM510.xml
•
ESI-Datei (Informationen zum EtherCAT® Follower) für das Auxiliary Capacitor Module: Danfoss_ACM510.xml
6.12.2 Erstellen eines TwinCAT®-Projekts
Ausführliche Informationen zum Installieren von TwinCAT® nden Sie im Beckho Information System (https://infosys.beckh-
o.com/). Önen Sie das Informationssystem und wählen Sie [TwinCAT 2 → TwinCAT Quick Start → Installation].
Ausführliche Informationen zum Erstellen eines Projekts in TwinCAT® nden Sie im Beckho Information System (https://info-
sys.beckho.com/). Önen Sie das Informationssystem und wählen Sie [TwinCAT 2 → TwinCAT Quick Start or TwinCAT 2 → TX1200
TwinCAT PLC → TwinCAT PLC Control].
6.12.3 Einbinden der TwinCAT® Bibliothek in ein TwinCAT® Projekt
Vorgehensweise
1.
Önen Sie in der Registerkarte Resources (Ressourcen) von TwinCAT® PLC Control den Library Manager (Bibliotheksmanag-
er).
2.
Klicken Sie mit der rechten Maustaste oben links auf das Fenster Library Manager (Bibliotheksmanager) und wählen Sie
Additional Library... (Zusätzliche Bibliothek...).
Wählen Sie die Datei Danfoss_VLT_ServoMotion_V_x_y_z aus (je nach Speicherort auf der Festplatte).
3.
4.
Klicken Sie auf Open (Önen). Nun werden die Bibliotheken in das TwinCAT® PLC Control-Projekt integriert.
Abbildung 70: Library Manager nach Integration der ServoMotion-Bibliothek
In der Bibliothek werden die POUs in Ordner aufgeteilt:
•
DDS_Drive
AQ262450196490de-000101 / 175R117088 | Danfoss A/S © | 2019.10
Page 89

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
•
Enthält Programmorganisationseinheiten (POUs), die von PLCopen® (Name beginnt mit MC_) deniert werden,
und POUs, die von Danfoss (Name beginnt mit DD_) deniert werden. Die von Danfoss denierten POUs bieten
zusätzliche Funktionen für die Achse.
•
Sie können POUs, die von PLCopen® deniert wurden, mit POUs kombinieren, die von Danfoss deniert wurden.
•
Die Namen der POUs, die die SDM 511/SDM 512-Antriebsmodule als Ziel haben, enden alle auf _DDS.
•
DDS_PSM
•
Enthält POUs, die von Danfoss (Name beginnend mit DD_) deniert werden und Funktionen für das Power Supply Module (PSM 510) bereitstellen.
•
Die Namen der POUs, die das PSM 510 zum Ziel haben, enden alle auf _PSM.
•
DDS_DAM
•
Enthält POUs, die von Danfoss (Name beginnend mit DD_) deniert werden und Funktionen für das Decentral
Access Module (DAM 510) bereitstellen.
•
Die Namen der POUs, die das DAM 510 zum Ziel haben, enden alle auf _DAM.
•
DDS_ACM
•
Enthält POUs, die von Danfoss (Name beginnend mit DD_) deniert werden und Funktionen für das Auxiliary Capacitors Module (ACM 510) bereitstellen.
•
Die Namen der POUs, die das ACM 510 zum Ziel haben, enden alle auf _ACM.
•
DDS_BasCam
•
Enthält POUs für die Erstellung grundlegender CAMs.
•
DDS_LabCam
•
Enthält POUs für die Erstellung von Kennzeichnungs-CAMs.
•
DDS_Intern
•
Enthält POUs, die intern für die Bibliotheken benötigt werden.
•
Verwenden Sie diese POUs nicht in einer Anwendung.
Beim Integrieren der VLT® Multiaxis Servo Drive -Bibliothek werden einige Standardbibliotheken automatisch integriert,
außer wenn sie bereits Bestandteil des Projekts sind.
Inbetriebnahme
H I N W E I S
Entfernen Sie diese Bibliotheken nicht, weil andernfalls die DDS-Bibliotheken nicht funktionieren.
-
6.12.4 Konstanten innerhalb der DDS_Drive-Bibliothek
Innerhalb der Bibliothek sind die folgenden Listen mit Konstanten deniert:
•
Danfoss_VLT_ServoMotion
-
Enthält die Versionsinformation der Bibliothek.
•
DDS_AxisErrorCodes
-
Konstanten für Fehlercodes der Achse.
-
Fehlercodes lassen sich mithilfe des Funktionsblocks MC_ReadAxisError_DDS bzw. DD_ReadAxisWarning_DDS lesen.
•
DDS_AxisTraceSignals
-
Konstanten für die Trace Signale der Achse.
-
Zur Verwendung mit Funktionsblock DD_Trace_DDS bestimmt.
•
DDS_BasCam
-
Konstanten für die Erstellung der grundlegender CAMs.
•
DDS_CamParsingErrors
-
Konstanten für Parsing-Probleme eines CAM.
-
Die Fehlerursache gibt Funktionsblock MC_CamTableSelect_DDS zurück.
•
DDS_FB_ErrorConstants
AQ262450196490de-000101 / 175R1170 | 89Danfoss A/S © 2019.10
Page 90

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
-
Konstanten für Fehler in POUs.
-
Der Grund wird in einer Ausgabe ErrorInfo.ErrorID angegeben, die in allen POUs verfügbar ist.
•
DDS_Intern
-
Konstanten zur internen Verwendung in der Bibliothek.
-
Sie sind nicht zur Verwendung in einer Anwendung gedacht.
•
DDS_LabCam
-
Konstanten für die Erstellung von Kennzeichnung-CAMs.
•
DDS_SdoAbortCodes
-
Konstanten für Fehler beim Lesen und Schreiben von Parametern.
-
Der Grund wird in einer Ausgabe AbortCode angegeben, die in mehreren POUs verfügbar ist.
PSM_ErrorCodes
•
Konstanten für Fehlercodes des Power Supply Module (PSM 510).
-
-
Fehlercodes lassen sich mithilfe des Funktionsblocks DD_ReadPsmError_PSM bzw. DD_ReadPsmWarning_PSM lesen.
PSM_TraceSignals
•
Konstanten für die Trace-Signale des Power Supply Module (PSM 510).
-
-
Zur Verwendung mit Funktionsblock DD_Trace_PSM bestimmt.
DAM_ErrorCodes
•
Konstanten für Fehlercodes des Decentral Access Module (DAM 510).
-
-
Fehlercodes lassen sich mithilfe des Funktionsblocks DD_ReadDamError_DAM bzw. DD_ReadDamWarning_DAM lesen.
DAM_TraceSignals
•
Konstanten für Trace-Signale des Decentral Access Module (DAM 510).
-
-
Zur Verwendung mit Funktionsblock DD_Trace_DAM bestimmt.
ACM_ErrorCodes
•
Konstanten für Fehlercodes des Auxiliary Capacitors Module (ACM 510).
-
-
Fehlercodes lassen sich mithilfe des Funktionsblocks DD_ReadAcmError_ACM bzw. DD_ReadAcmWarning_ACM lesen.
ACM_TraceSignals
•
Konstanten für Trace-Signale des Auxiliary Capacitors Module (ACM 510).
-
-
Zur Verwendung mit Funktionsblock DD_Trace_ACM bestimmt.
Inbetriebnahme
6.12.5 Instanziierung von AXIS_REF_DDS in TwinCAT®
Vorgehensweise
1.
Erstellen Sie eine Instanz des Funktionsblocks AXIS_REF_DDS (im Ordner DDS_Drive) für das SDM 511/SDM 512-Antriebsmodul oder den Servoantrieb, den Sie regeln oder überwachen müssen.
Wiederholen Sie Schritt 1 für zusätzliche SDM 511/SDM 512-Antriebsmodule oder Servoantriebe.
2.
AQ262450196490de-000101 / 175R117090 | Danfoss A/S © | 2019.10
Page 91

e30bg349.10
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Beispiel
Abbildung 71: Instanziierung von AXIS_REF_DDS
Inbetriebnahme
6.12.6 Instanziierung von PSM_REF in TwinCAT®
Vorgehensweise
1.
Erstellen Sie eine Instanz des Funktionsblocks PSM_REF (im Ordner DDS_PSM) für jedes Power Supply Module, das Sie regeln oder überwachen müssen.
2.
Wiederholen Sie Schritt 1 für weitere Power Supply Modules.
6.12.7 Instanziierung von DAM_REF in TwinCAT®
Vorgehensweise
1.
Erstellen Sie eine Instanz des Funktionsblocks DAM_REF (im Ordner DDS_DAM) für jedes Decentral Access Module, das Sie
regeln oder überwachen müssen.
Wiederholen Sie Schritt 1 für weitere Decentral Access Modules.
2.
6.12.8 Instanziierung von ACM_REF in TwinCAT®
Vorgehensweise
1.
Erstellen Sie eine Instanz des Funktionsblocks ACM_REF (im Ordner DDS_ACM) für jedes Auxiliary Capacitors Module, das Sie
regeln oder überwachen müssen.
Wiederholen Sie Schritt 1 für weitere Auxiliary Capacitors Module.
2.
6.12.9 Hinzufügen eines SPS-Projekts zu TwinCAT® System Manager
Um eine Verknüpfung zwischen dem TwinCAT® PLC Control-Projekt und dem TwinCAT® System Manager zu erstellen, verbinden Sie
das gespeicherte Projekt, insbesondere die Ein- und Ausgänge mit dem TwinCAT® System Manager:
Vorgehensweise
1.
Um die Projektinformationen im TwinCAT® System Manager hinzuzufügen, klicken Sie mit der rechten Maustaste auf PLCConguration (SPS-Konguration) und wählen Sie Append PLC project... (SPS-Projekt anhängen...).
2.
Wählen Sie im Fenster Insert IEC 1131 Project (IEC 1131-Projekt einfügen) die Projektinformationsdatei am entsprechenden
Speicherort auf der Festplatte. Die Datei hat denselben Namen wie das SPS-Projekt, nur mit der Dateiendung .tpy.
3.
Klicken Sie auf Open (Önen).
6.12.10 Importieren von Geräten in TwinCAT®
Das folgende Verfahren ist ein Beispiel für den Import eines ISD 510-Servoantriebs in TwinCAT®.
Vorgehensweise
AQ262450196490de-000101 / 175R1170 | 91Danfoss A/S © 2019.10
Page 92

e30bg350.10
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
1.
Kopieren Sie die ESI-Datei Danfoss ISD 510 S.xml in den Ordner TwinCAT Installation Folder\Io\EtherCAT auf der Festplatte.
Dies müssen Sie nur einmal für jedes Projekt ausführen. Der TwinCAT® System Manager sucht bei der Inbetriebnahme automatisch nach ESI-Dateien an diesem Speicherort.
2.
Um einen EtherCAT® Master hinzuzufügen, klicken Sie mit der rechten Maustaste auf [I/O-Conguration → I/O Devices]
und wählen Sie Append Device... (Gerät anhängen...).
3.
Wählen Sie im folgenden Fenster [EtherCAT → EtherCAT] und klicken Sie auf OK.
Inbetriebnahme
Abbildung 72: Fügen Sie einen EtherCAT Master zum Projekt hinzu
4.
Wählen Sie Device 1 (EtherCAT) (Gerät 1 (EtherCAT)) und anschließend den richtigen Network Adapter (Netzwerkadapter) auf
der rechten Seite des Fensters in der Registerkarte Adapter.
5.
Um ein Power Supply Module hinzuzufügen, klicken Sie mit der rechten Maustaste auf Device1 (EtherCAT ) (Gerät 1 (Ether-
CAT)) und wählen Sie Append Box... (Feld anhängen...).
6.
Navigieren Sie zum Fenster Insert EtherCAT Device (EtherCAT-Gerät einfügen), wählen Sie [Danfoss GmbH → VLT® FlexMotion → VLT® Power Supply Module PSM 510] und klicken Sie auf OK.
7.
Um ein Decentral Access Module hinzuzufügen, klicken Sie mit der rechten Maustaste auf Device1 (EtherCAT) (Gerät 1
(EtherCAT)) und wählen Sie Append Box... (Feld anhängen...).
8.
Navigieren Sie zum Fenster Insert EtherCAT Device (EtherCAT-Gerät einfügen), wählen Sie [Danfoss GmbH → VLT® FlexMotion → VLT® Decentral Access Module] und klicken Sie auf OK.
9.
Um ein Auxiliary Capacitors Module hinzuzufügen, klicken Sie mit der rechten Maustaste auf Device1 (EtherCAT) (Gerät 1
(EtherCAT)) und wählen Sie Append Box... (Feld anhängen...).
10.
Navigieren Sie zum Fenster Insert EtherCAT Device (EtherCAT-Gerät einfügen), wählen Sie [Danfoss GmbH → VLT® FlexMotion → VLT® Auxiliary Capacitors Module] und klicken Sie auf OK.
11.
Um einen Servoantrieb zum Decentral Access Module DAM 510 hinzuzufügen, klicken Sie auf Box 1 (VLT® Decentral Access
Module) (Feld 1 (VLT® Decentral Access Module)) und wählen Sie Append Box... (Feld anhängen...).
12.
Navigieren Sie zum Fenster Insert EtherCAT Device (EtherCAT-Gerät einfügen), wählen Sie [Danfoss GmbH → VLT® FlexMotion → VLT®MSD 510 Integrated Servo Drive Standard] und klicken Sie auf OK.
AQ262450196490de-000101 / 175R117092 | Danfoss A/S © | 2019.10
Page 93

e30bh517.10
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Abbildung 73: Hinzufügen eines Servoantriebs zum Projekt
Inbetriebnahme
AQ262450196490de-000101 / 175R1170 | 93Danfoss A/S © 2019.10
Page 94

e30bh518.10
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Inbetriebnahme
Abbildung 74: TwinCAT System Manager nach Hinzufügen des SPS-Projekts und Hinzufügen von einem Decentral Access
Module und 2 ISD 510-Servoantrieben
13.
Wenn Sie den Servoantrieb als NC-Achse verwenden, beantworten Sie die Frage mit No (Nein). Wenn der Antrieb als NCAchse verwendet werden sollte, ziehen Sie 6.12.15 Konguration als TwinCAT® NC-Achse heran.
H I N W E I S
Fügen Sie einen Eintrag in den EtherCAT® Master des TwinCAT System Manager für jeden physischen Servoantrieb,
-
PSM 510, DAM 510 und ACM 510 hinzu. Fügen Sie den Servoantrieb in der richtigen DAM 510-Leitung hinzu.
6.12.11 E/A-Konguration und E/A-Mapping
Wenn Sie mehr als ein SDM 511/SDM 512-Antriebsmodul bzw. mehr als einen Servoantrieb anschließen, schließen Sie Anschluss C
(X2) des vorigen Antriebs an Anschluss A (X1) des nächsten Servoantriebs an. Führen Sie auch die Anschlusszuweisung für das Decentral Access Module (DAM 510) durch.
Wenn die Hardware-Einrichtung bereits vorhanden ist, können Sie die TwinCAT® System Manager-Funktion Scan devices (Geräte
scannen) verwenden, um automatisch die angeschlossenen Geräte in der richtigen Reihenfolge in die Konguration hinzuzufügen.
AQ262450196490de-000101 / 175R117094 | Danfoss A/S © | 2019.10
Page 95

e30bg353.11
e30bh519.10
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Kongurieren Sie mithilfe von TwinCAT® System Manager das SDM 511/SDM 512-Servomodul bzw. den Servoantrieb, sodass das
PDO-Mapping den Anforderungen der Bibliothek entspricht.
Verfahren (Beispiel mit einem ISD 510 Servoantrieb)
1.
Klicken Sie auf den Eintrag des ISD 510-Servoantriebs.
2.
Wählen Sie die Registerkarte Slots (Steckplätze) auf der rechten Seite des Fensters.
3.
Entfernen Sie die aktuelle PDO-Konguration, indem Sie den Eintrag Module 1 (CSV PDO) (Modul 1 (CSV PDO)) im Feld Slot
(Steckplatz) auswählen.
4.
Klicken Sie auf X.
5.
Wählen Sie Library PDO (Bibliothek PDO) im Feld Module (Modul).
6.
Klicken Sie auf <.
Inbetriebnahme
Abbildung 75: ISD 510 Servo Drive mit korrekter I/O-Konguration
6.12.12 Anschließen der Ein- und Ausgangsvariablen an physische Datenpunkte
Verwenden Sie den TwinCAT® System Manager, um die Eingangs- und Ausgangsvariablen des SPS-Programms mit den physischen
Eingängen und Ausgängen des Geräts zu verbinden. Hierdurch wird sichergestellt, dass die Bibliothek Zugang zu allen erforderlichen Objekten hat.
W A R N U N G
Wiederholen Sie die Schritte 2–22 für Box 1 (VLT® Power Supply Module) und die Instanz myPSM.
-
Wiederholen Sie die Schritte 2–22 für Box 2 (VLT® Decentral Access Module) und die Instanz myDAM.
-
Vorgehensweise
1.
Wählen Sie Library TxPDO (Bibliothek TxPDO) über das Menü [I/O-Conguration → I/O Devices → Device1 (EtherCAT) →
Box 1 (VLT Decentral Access Module) → Drive 1 (VLT ISD 510 Integrated Servo Drive) → Module 1 (Library PDO) → Library
TxPDO].
2.
Wählen Sie alle Einträge von Lib pdo tx1 bis Lib pdo tx9 auf der rechten Seite des Fensters aus.
Abbildung 76: Anschließen von Ein- und Ausgängen an physische Datenpunkte
AQ262450196490de-000101 / 175R1170 | 95Danfoss A/S © 2019.10
Page 96

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
3.
Klicken Sie mit der rechten Maustaste und wählen Sie Change Multi Link... (Multi-Link ändern...).
4.
Navigieren Sie zum Fenster Attach Variable 36.0 Byte(s) (Input) (Variable 36.0 Byte(s) anhängen (Eingang)) und wählen Sie
[PLC-Conguration → MyFirstFlexMotionProject → Standard → .myAxis.TPDO]. Achten Sie darauf, dass die Option Matching Size (Größe anpassen) im Fenster Attach Variable (Variable anhängen) ausgewählt ist.
5.
Klicken Sie auf OK.
6.
Wählen Sie Library RxPDO über das Menü [I/O-Conguration → I/O Devices → Device1 (EtherCAT©) → Box1 (VLT© Decentral Access Module) → Drive2 (VLT© ISD 510 Integrated Servo Drive) → Module1 (Library PDO) → Library RxPDO].
7.
Wählen Sie alle Einträge von Lib pdo rx1 bis Lib pdo rx9 auf der rechten Seite des Fensters aus.
8.
Klicken Sie mit der rechten Maustaste und wählen Sie Change Multi Link... (Multi-Link ändern...).
9.
Navigieren Sie zum Fenster Attach Variable 36.0 Byte(s) (Output) (Variable 36.0 Byte(s) anhängen (Ausgang)) und wählen Sie
[PLC-Conguration → MyFirstIsd510Project → Standard → .myAxis.RPDO].
10.
Klicken Sie auf OK.
11.
Klicken Sie mit der rechten Maustaste auf WcState über das Menü [I/O-Conguration → I/O Devices → Device1 (EtherCAT©)
→ Box1 (VLT© Decentral Access Module) → Drive2 (VLT© ISD 510 Integrated Servo Drive) → WcState] und wählen Sie
Change Link... (Verknüpfung ändern...).
12.
Navigieren Sie zum Fenster Attach Variable State (Input) (Variablenzustand anhängen (Eingang)) und wählen Sie [PLC-Con-
guration → MyFirstIsd510Project → Standard → .myAxis.WcState].
13.
Klicken Sie auf OK.
14.
Klicken Sie mit der rechten Maustaste auf State (Zustand) über das Menü [I/O-Conguration → I/O Devices → Device1
(EtherCAT©) → Box1 (VLT© Decentral Access Module) → Drive2 (VLT© ISD 510 Integrated Servo Drive) → InfoData] und
wählen Sie Change Link... (Verknüpfung ändern...).
15.
Navigieren Sie zum Fenster Attach Variable State (Input) (Variablenzustand anhängen (Eingang)) und wählen Sie [PLC-Con-
guration → MyFirstIsd510Project → Standard → .myAxis.State].
16.
Klicken Sie auf OK.
17.
Klicken Sie mit der rechten Maustaste auf netId über das Menü [I/O-Conguration → I/O Devices Device1 (EtherCAT→) →
Box1 (VLT® Decentral Access Module) → Drive2 (VLT→ ISD 510 Integrated Servo Drive) → InfoData → AdsAddr] und wählen Sie Change Link... (Verknüpfung ändern...).
18.
Navigieren Sie zum Fenster Attach Variable netId (Input) (Variablen-netId anhängen (Eingang)) und wählen Sie [PLC-Congu-
ration → MyFirstIsd510Project → Standard → .myAxis.AmsNetId].
19.
Klicken Sie auf OK.
20.
Klicken Sie mit der rechten Maustaste auf Port über das Menü [I/O-Conguration → I/O Devices → Device1 (EtherCAT→) →
Box1 (VLT→ Decentral Access Module) → Drive2 (VLT→ ISD 510 Integrated Servo Drive) → InfoData → AdsAddr] und wählen Sie Change Link... (Verknüpfung ändern...).
21.
Navigieren Sie zum Fenster Attach Variable port (Input) (Variablen-Port anhängen (Eingang)) und wählen Sie [PLC-Congura-
tion → MyFirstIsd510Project → Standard → .myAxis.NodeNumber].
22.
Klicken Sie auf OK.
Inbetriebnahme
6.12.13 Übertragen der Zuordnungen (Mapping) zurück zum SPS-Programm
Um die Mappings zurück zum SPS-Programm zu übertragen, wählen Sie Activate Conguration... (Konguration aktivieren...) in der
Menüoption Actions (Aktionen) aus.
Nach einer Neustrukturierung in TwinCAT® PLC Control entspricht die TwinCAT®-Konguration
myAxis und mySecondAxis Instanzen von AXIS_REF_DDS, myPSM ist eine Instanz von PSM_REF und myDAM ist eine Instanz von
DAM_REF). Die konkreten Adressen können variieren.
Abbildung 77 (in diesem Fall sind
AQ262450196490de-000101 / 175R117096 | Danfoss A/S © | 2019.10
Page 97

e30bh520.10
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Abbildung 77: TwinCAT® Konguration: E/A-Mapping von 2 Servoantrieben, 1 PSM 510 und 1 DAM 510
Inbetriebnahme
H I N W E I S
Schließen Sie PSM 510, DAM 510, ACM 510 und SDM 511/SDM 512 an eine SYNC-Einheit und die ISD 510/DSD 510-Servoan-
-
triebe an eine andere an. Dies schützt vor Unterbrechungen der Kommunikation zu PSM 510 und DAM 510, falls die U
Versorgung zum dezentralen Servoantrieb aufgrund eines Fehlers ausgeschaltet wird.
AUX
-
6.12.14 Einstellen der SPS-Zykluszeit in TwinCAT® PLC Control
Die Mindestzykluszeit beträgt 400 µs. Die MSD 510 -Geräte können die EtherCAT® Zykluszeiten in Vielfachen von 400 µs oder 500 µs
starten. Die Geräte werden je nach EtherCAT® Konguration der physischen Schnittstelle beim Einschalten automatisch von der SPS
parametriert. Sie können auf die Basiszeit des Systems zugreifen, indem Sie zum TwinCAT® System Manager navigieren und [SYSTEM-Conguration → Real-Time Settings] auswählen. Dann können Sie ein Vielfaches dieser Basiszeit als Zykluszeiten für EtherCAT
auswählen.
H I N W E I S
Stellen Sie die Zykluszeit des Tasks für das SPS-Programm so ein, dass sie mit der EtherCAT® Zykluszeit identisch ist. Andern-
-
falls könnten Daten verloren gehen und die Leistung wird verringert.
Vorgehensweise
1.
Doppelklicken Sie auf Task conguration (Aufgabenkonguration) auf der Registerkarte Resources (Ressourcen).
2.
Achten Sie darauf, dass die SPS-Zykluszeit mit der EtherCAT® Zykluszeit identisch ist.
®
AQ262450196490de-000101 / 175R1170 | 97Danfoss A/S © 2019.10
Page 98

e30bg356.10
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Abbildung 78: Task-Konguration zur Parametrierung der SPS-Zykluszeit
Nachdem Sie die Task-Zykluszeit in TwinCAT® PLC Control geändert haben, führen Sie einen ReScan der SPS-
-
Konguration im TwinCAT® System Manager durch, um die Einstellungen zu aktualisieren. Aktivieren Sie ans-
chließend die Konguration in der SPS.
Inbetriebnahme
H I N W E I S
6.12.15 Konguration als TwinCAT® NC-Achse
Die Servoantriebe können mit der integrierten NC-Funktion von TwinCAT® verwendet werden.
Sie müssen alle Elemente, die mit PSM 510 und DAM 510 verbunden sind, gemäß der Beschreibung in 6.12.2 Erstellen eines Twin-
CAT®-Projekts durchführen.
Vorgehensweise
1.
Beziehen Sie zusätzlich zur Datei Danfoss_VLT_ServoMotion_V_x_y_z.lib die Datei TcMC2.lib mit ein.
2.
Erstellen Sie eine Instanz von AXIS_REF (anstelle von AXIS_REF_DDS) für jeden ISD 510/DSD 510-Servoantrieb, der als NCAchse verwendet wird.
Fügen Sie das SPS-Projekt im TwinCAT® System Manager hinzu, importieren Sie die Geräte und fügen Sie diese in TwinCAT
3.
hinzu. Beantworten Sie jedoch im letzten Schritt die Frage, ob der Servoantrieb als NC-Achse verwendet wird, mit Yes (Ja).
Dann wird eine NC-Aufgabe automatisch erstellt.
6.12.15.1 E/A-Konguration für als NC-Achsen verwendete Servoantriebe
Im TwinCAT® System Manager müssen Sie für als NC-Achsen verwendete Servoantriebe eine andere E/A-Konguration verwenden.
Vorgehensweise
1.
Wählen Sie abhängig vom zu verwendenden Betriebsmodus den Slot CSP PDO oder CSV PDO. Standardmäßig ist CSV PDO
gemappt und vorausgewählt. Mappen Sie die folgenden Variablen, wenn der VLT® Multiaxis Servo Drive -Servoantrieb mit
CSP PDO arbeiten muss:
-
Navigieren Sie zur Registerkarte Settings (Einstellungen) der NC-Achse und wählen Sie [NC-Conguration → NC-Task 1
SAF → Axes → Axis 1]. Klicken Sie auf die Schaltäche Link To (all Types)... (Verknüpfen mit (allen Typen)...) und wählen
Sie den gewünschten Servoantrieb.
2.
Wählen Sie auf derselben Registerkarte die gewünschte Unit (Einheit).
3.
Stellen Sie je nach ausgewählter Einheit den Scaling Factor (Skalierungsfaktor) für den Achsengeber über das Menü [NCConguration → NC-Task 1 SAF → Axes → Axis 1 → Axis 1_Enc] auf der Registerkarte Parameter ein. Beispiel: Wenn die
Einheit Degrees (Grad) ausgewählt ist, beträgt der Skalierfaktor 360°/220 = 0,00034332275390625.
4.
Stellen Sie die Reference Velocity (Referenzgeschwindigkeit) in der Registerkarte Parameter über das Menü [NC-Conguration → NC-Task 1 SAF → Axes → Axis 1 → Axis 1_Enc] ein.
5.
Stellen Sie den Output Scaling Factor (Ausgangsskalierungsfaktor) (Geschwindigkeit) auf 125 ein.
6.
Prüfen Sie die Funktionalität und die Konguration in der Registerkarte Online der Achse.
®
6.12.16 Verbinden mit der SPS
Ausführliche Informationen zum Anschließen an die SPS nden Sie im Beckho Information System .
AQ262450196490de-000101 / 175R117098 | Danfoss A/S © | 2019.10
Page 99

Systemmodul
Erforderliche Datei
Gesamtes Servosystem
Bibliothekenpaket für das MSD 510 Servosystem: Danfoss_VLT_ServoMotion_V_x_y_z.zip
Online-Hilfe-Datei (.chm): Programmieren mit SIMOTION SCOUT
®
Servo Drive Module SDM 511/SDM 512 und
ISD 510/DSD 510-Servoantrieb
GSDML-Datei (Gerätestammdatei):
GSDML-V2.31-Danfoss-DDS-yyyymmdd.xml
Power Supply Module PSM 510
GSDML-Datei (Gerätestammdatei):
GSDML-V2.31-Danfoss-PSM-yyyymmdd.xml
Decentral Access Module DAM 510
GSDML-Datei (Gerätestammdatei):
GSDML-V2.31-Danfoss-DAM-yyyymmdd.xml
Auxiliary Capacitors Module ACM 510
GSDML-Datei (Gerätestammdatei):
GSDML-V2.31-Danfoss-ACM-yyyymmdd.xml
VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Önen Sie das Informationssystem und navigieren Sie zu [TwinCAT 2 → TwinCAT System Manager → Operation → Controls →
Choose Target System].
Inbetriebnahme
6.13 Programmierrichtlinien für Automation Studio™ und TwinCAT®
Empfehlungen zur Umsetzung:
•
Initialisieren Sie die Parameter, die sich in der Regel nicht nur einmal zu Beginn des Programms ändern. Navigieren Sie zum
Automation Studio© und verwenden Sie den Abschnitt _INIT.
•
Rufen Sie Funktionsblöcke auf, die Informationen zum Status oder zu Fehlern liefern. Verwenden Sie dazu den Eingang Enable
(Aktivieren) zu Beginn des Programms.
•
Verwenden Sie eine Instanz des Funktionsblocks MC_Power_DDS für jede Achse zur Regelung der Leistungsstufe. Rufen Sie die-
sen Funktionsblock bei jedem SPS-Zyklus auf.
•
Verwenden Sie eine Instanz des Funktionsblocks DD_Power_PSM für jedes Spannungsversorgungsmodul, um die Zwischenk-
reisspannung am Ausgang zu regeln. Rufen Sie diesen Funktionsblock bei jedem SPS-Zyklus auf.
•
Verwenden Sie eine Instanz des Funktionsblocks DD_Power_DAM für jedes Decentral Access Module, um die Zwischenkreiss-
pannung am Ausgang zu regeln. Rufen Sie diesen Funktionsblock bei jedem SPS-Zyklus auf.
•
Verwenden Sie eine Instanz des Funktionsblocks DD_Power_ACM für jedes Auxiliary Capacitors Module, um die Verbindung zwi-
schen Zwischenkreis und ACM 510 zu regeln. Rufen Sie diesen Funktionsblock bei jedem SPS-Zyklus auf.
Rufen Sie die Funktionsblöcke auf, die (Bewegungs-)Befehle am Ende des Programms ausführen.
•
•
Verwenden Sie keine POUs der Bibliothek (Ordner) DDS_Intern.
Ändern Sie bei einem Funktionsblock nicht den Referenzwert zu einer Achse, während dieser in Betrieb ist.
•
H I N W E I S
Die vollständige Parameterliste nden Sie im Programmierhandbuch des VLT® Servo Drive System ISD 510, DSD 510,
-
MSD 510.
6.14 Programmieren mit SIMOTION SCOUT®
6.14.1 Anforderungen für die Programmierung mit SIMOTION SCOUT®
Die folgenden Dateien sind für die Integration der Servosystemmodule in ein SIMOTION SCOUT® Projekt erforderlich:
Tabelle 19: Erforderliche Dateien
6.14.2 Verbinden mit der SPS
Ausführliche Informationen zum Anschließen an die SPS nden Sie in der Hilfe von SIMOTION SCOUT® .
AQ262450196490de-000101 / 175R1170 | 99Danfoss A/S © 2019.10
Page 100

VLT® Multiaxis Servo Drive MSD 510-System
Bedienungsanleitung
Önen Sie SIMOTION SCOUT® und navigieren Sie zu [Help → Help Topics → Getting Started with SIMOTION SCOUT → Download the
project to the target system → Connect to selected target devices → Go online].
Inbetriebnahme
6.14.3 Erstellen eines SIMOTION SCOUT®-Projekts
Detaillierte Informationen zur Installation von SIMOTION SCOUT®® nden Sie im SIMOTION SCOUT® Kongurationshandbuch.
H I N W E I S
Zum Erstellen eines Projekts muss SIMATIC STEP 7 V5.5 oder höher mit HF11 installiert werden.
-
Detaillierte Informationen zum Erstellen eines Projekts in SIMOTION SCOUT® nden Sie in der SIMOTION SCOUT® Onlinehilfe. Ö-
nen Sie SIMOTION SCOUT® und navigieren Sie zu [Help → Help Topics → Getting started with SIMOTION SCOUT → Create SIMO-
TION device and congure PG/PC communication connection].
6.14.4 Einbinden der Servoantriebsbibliotheken in ein SIMOTION SCOUT® Projekt
Der Ordner LIBRARIES (BIBLIOTHEKEN) auf der Registerkarte Project (Projekt) enthält diese Bibliotheken:
•
DDS_Drive
-
Enthält Programmorganisationseinheiten (POUs), die von PLCopen® (Name beginnt mit MC_) deniert werden, und POUs,
die von Danfoss (Name beginnt mit DD_) deniert werden. Die Danfoss POUs bieten zusätzliche Funktionen für den Servoantrieb.
-
Sie können POUs, die von PLCopen® deniert wurden, mit POUs kombinieren, die von Danfoss deniert wurden.
-
Die Namen der POUs, die die SDM 511/SDM 512-Antriebsmodule als Ziel haben, enden alle auf _DDS.
•
DDS_PSM
-
Enthält POUs, die von Danfoss (Name beginnend mit DD_) deniert werden und Funktionen für das Power Supply Module
(PSM 510) bereitstellen.
-
Die Namen der POUs, die das PSM 510 zum Ziel haben, enden alle auf _PSM.
•
DDS_DAM
-
Enthält POUs, die von Danfoss (Name beginnend mit DD_) deniert werden und Funktionen für das Decentral Access Module (DAM 510) bereitstellen.
-
Die Namen der POUs, die das DAM 510 zum Ziel haben, enden alle auf _DAM.
•
DDS_ACM
-
Enthält POUs, die von Danfoss (Name beginnend mit DD_) deniert werden und Funktionen für das Auxiliary Capacitors
Module (ACM 510) bereitstellen.
-
Die Namen der POUs, die das ACM 510 zum Ziel haben, enden alle auf _ACM.
•
DDS_BasCam
-
Enthält POUs für die Erstellung grundlegender CAMs.
•
DDS_LabCam
-
Enthält POUs für die Erstellung von Kennzeichnungs-CAMs.
•
DDS_Intern
-
Enthält POUs, die intern für die Bibliotheken benötigt werden.
-
Verwenden Sie diese POUs nicht in einer Anwendung.
Beim Einbinden des DDS_Drive-Pakets werden einige Standardbibliotheken automatisch integriert, wenn sie nicht bereits Teil des
Projekts sind.
AQ262450196490de-000101 / 175R1170100 | Danfoss A/S © | 2019.10
 Loading...
Loading...