

Page 1

Guida operativa
drives.danfoss.com
Sistema VLT® Multiaxis Servo Drive MSD 510
Page 2

Page 3
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Contenuti
Contenuti
1
Introduzione 15
1.1
Scopo della Guida operativa 15
Risorse aggiuntive 15
1.2
Copyright 15
1.3
1.4
Omologazioni e certicazioni 15
1.5
Aree di applicazione 17
1.6
Software 17
1.7
Terminologia 17
Sicurezza 19
2
Simboli di sicurezza 19
2.1
Istruzioni e precauzioni di sicurezza 19
2.2
Sicurezza operativa 19
2.2.1
Importanti avvisi di sicurezza 20
2.3
2.4
Personale qualicato 22
2.5
Debita cura 22
2.6
Uso previsto 22
2.6.1
Aree di applicazione vietate 22
2.7
Uso improprio prevedibile 23
2.8
Manutenzione e supporto 23
3
Descrizione del sistema 24
3.1
Panoramica del VLT® Multiaxis Servo Drive System MSD 510 24
3.1.1
Esempi applicativi 25
3.1.2
Numero massimo di moduli 25
3.2
Modulo di alimentazione PSM 510 26
3.2.1
Panoramica 26
3.2.2
Connettori sulla parte superiore di PSM 510 27
3.2.3
Connettori sulla parte inferiore di PSM 510 28
3.3
Modulo di servoazionamento SDM 511/SDM 512 28
3.3.1
Panoramica 28
3.3.2
Tipi SDM 511/SDM 512 29
3.3.3
Componenti 30
3.3.3.1
3.3.4
Connettori su SDM 511 30
3.3.4.1
3.3.4.2
Rareddamento 30
Connettori sulla parte superiore dell'SDM 511 30
Connettori sulla parte inferiore dell'SDM 511 31
AQ262450196490it-000101/175R1170 | 3Danfoss A/S © 2019.10
Page 4
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
3.3.5
3.4
Modulo di accesso decentralizzato DAM 510 33
3.4.1
3.4.2
3.4.3
3.5
Auxiliary Capacitors Module ACM 510 34
3.5.1
3.5.2
3.6
Modulo di espansione EXM 510 36
3.7
Pannello di Controllo Locale (LCP) 37
3.7.1
3.7.2
Contenuti
Connettori su SDM 512 32
3.3.5.1
3.3.5.2
Panoramica 33
Connettori sulla parte superiore di DAM 510 34
Connettori sulla parte inferiore di DAM 510 34
Panoramica 34
Connettori sulla parte superiore di ACM 510 35
Panoramica del Pannello di controllo locale 37
Layout del Pannello di controllo locale 37
Connettori sulla parte superiore dell'SDM 512 32
Connettori sulla parte inferiore dell'SDM 512 32
3.7.2.1
3.7.2.2
3.7.2.3
3.7.2.4
3.8
Cavi 41
3.8.1
Cavo ibrido 41
3.8.2
Cavo Ethernet 42
3.8.3
Cavo LCP 43
3.9
Disposizione e instradamento dei cavi 43
3.9.1
Massime lunghezze del cavo 43
3.9.2
Cablaggio del ltro di uscita 43
3.9.3
Sistema di cablaggio standard per due moduli di accesso decentralizzati (DAM 510) 43
3.10
Software 44
3.11
Bus di campo 44
3.11.1
EtherCAT® 45
3.11.2
Ethernet POWERLINK® 46
A: Area di visualizzazione 37
B: Tasti del menu Display 40
C: Tasti di navigazione e spie luminose (LED) 40
D: Tasti di funzionamento e ripristino 41
3.11.3
PROFINET® 46
4
Installazione meccanica 47
4.1
Elementi forniti 47
4.2
Trasporto 47
4.3
Ispezione alla consegna 47
4.4
Misure di sicurezza durante l'installazione 47
4.5
Ambiente di installazione 47
AQ262450196490it-000101/175R11704 | Danfoss A/S © 2019.10
Page 5
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
4.5.1
Componenti del sistema 47
4.6
Preparativi per l'installazione 48
4.6.1
Moduli di sistema 48
4.6.2
Schemi di perforazione 48
4.7
Procedura di installazione 48
4.7.1
Requisiti di spazio per i moduli di sistema 48
4.7.2
Supporti e utensili necessari per l'installazione 50
4.7.3
Istruzioni di installazione per i moduli di sistema 50
5
Installazione elettrica 55
5.1
Avvisi per l'installazione elettrica 55
5.2
Condizioni ambientali elettriche 55
5.3
Messa a terra 56
5.3.1
Messa a terra per la sicurezza elettrica 56
5.3.2
Messa a terra per l'installazione conforme ai requisiti EMC 57
Contenuti
5.4
Requisiti dell'alimentazione di rete 58
5.4.1
Fusibili 58
5.4.2
Interruttori 58
5.5
Requisiti per l'alimentazione ausiliaria 58
5.5.1
Fusibili 59
5.6
Requisiti dell'alimentazione di sicurezza 59
5.7
Requisiti UL 59
5.8
Collegamento del modulo di servoazionamento SDM 511/SDM 512 60
5.8.1
Collegamento del cavo motore 60
5.8.2
Collegamento del cavo del freno/termistore 61
5.8.3
Collegamento dei cavi sulla parte superiore dei moduli di servoazionamento SDM 511/SDM 512 62
5.9
Collegamento al modulo di alimentazione PSM 510 63
5.9.1
Induttanza della linea CA 63
5.9.1.1
5.9.1.2
5.9.1.3
Collegamento di un PSM 510 all'induttanza CA 63
Collegamento di due moduli PSM 510 all'induttanza CA 64
Collegamento di due moduli PSM 510 all'induttanza CA con ripartizione del sistema 64
5.9.2
Collegamento dei cavi sul modulo di alimentazione PSM 510 65
5.9.2.1
5.9.2.2
5.10
Collegamento del modulo di accesso decentralizzato (DAM 510) 67
5.10.1
Collegamento dei cavi sulla parte superiore del modulo di accesso decentralizzato DAM 510 67
5.10.2
Collegamento del cavo di alimentazione 67
5.11
Collegamento dell'Auxiliary Capacitors Module ACM 510 69
Collegamento dei cavi sulla parte superiore del modulo di alimentazione PSM 510 65
Collegamento dei cavi sulla parte inferiore del modulo di alimentazione PSM 510 66
AQ262450196490it-000101/175R1170 | 5Danfoss A/S © 2019.10
Page 6
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
5.12
Collegamento del modulo di espansione EXM 510 69
5.13
Collegamento della resistenza di frenatura sul PSM 510 70
6
Messa in funzione 73
6.1
Avvisi per la messa in funzione 73
6.2
Lista di controllo prima della messa in funzione 73
6.3
Parametri di congurazione SDM 511/SDM 512 e messa in funzione del convertitore di frequenza 73
6.3.1
Sottostrumento Conguration Parameter 73
6.3.2
Sottostrumento Drive Commissioning 74
6.4
Assegnazione ID EtherCAT® 74
6.5
Assegnazione ID Ethernet POWERLINK® 74
6.5.1
Panoramica 74
6.5.2
Assegnazione ID al singolo dispositivo 74
6.5.2.1
6.5.2.2
Impostazione dell'ID del nodo direttamente su un servoazionamento o sui moduli di sistema 75
Impostazione dell'ID del nodo per un singolo servoazionamento tramite il modulo di alimentazione
(PSM 510) o il modulo di accesso decentralizzato (DAM 510) tramite LCP 75
Contenuti
6.5.3
Assegnazione ID a più dispositivi 76
6.5.3.1
6.6
Assegnazione ID PROFINET® 77
6.7
Tempo di accensione 77
6.8
Tempo di carica del modulo di sistema 77
6.9
Accensione del sistema MSD 510 77
6.9.1
Procedura per l'accensione del sistema MSD 510 78
6.10
Librerie 78
6.11
Programmazione con Automation Studio™ 78
6.11.1
Requisiti per la programmazione con Automation Studio™ 78
6.11.2
Creazione di progetti Automation Studio™ 79
6.11.3
Inclusione delle librerie di servoazionamento in un progetto Automation Studio™ 79
6.11.4
Costanti all'interno della libreria DDS_Drive 80
6.11.5
Creazione di un'istanza AXIS_REF_DDS in Automation Studio™ 81
6.11.6
Creazione di un'istanza PSM_REF in Automation Studio™ 81
Impostazione degli ID del nodo di tutti i servoazionamenti e dei moduli di sistema su una linea di modu-
lo di accesso decentralizzato (DAM 510)/modulo di alimentazione (PSM 510) 76
6.11.7
Creazione di un'istanza DAM_REF in Automation Studio™ 81
6.11.8
Creazione di un'istanza ACM_REF in Automation Studio™ 82
6.11.9
Importazione di un servoazionamento in Automation Studio™ 82
6.11.9.1
6.11.9.2
6.11.10
Importazione di PSM 510, DAM 510 e ACM 510 in Automation Studio™ 83
6.11.10.1
Versione V3.0.90 82
Versione V4.x 83
Versione V3.0.90 83
AQ262450196490it-000101/175R11706 | Danfoss A/S © 2019.10
Page 7

Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
6.11.11
6.11.12
6.11.13
6.12
Programmazione con TwinCAT® 87
6.12.1
6.12.2
6.12.3
6.12.4
6.12.5
6.12.6
6.12.7
6.12.8
6.12.9
Contenuti
6.11.10.2
Congurazione e mappatura I/O 84
Impostazione del tempo di ciclo PLC 86
Collegamento al PLC 87
Requisiti per la programmazione con TwinCAT® 87
Creazione di un progetto TwinCAT® 87
Inclusione di una libreria TwinCAT® in un progetto TwinCAT® 87
Costanti all'interno della libreria DDS_Drive 80
Creazione di un'istanza AXIS_REF_DDS in TwinCAT® 90
Creazione di un'istanza PSM_REF in TwinCAT® 90
Creazione di un'istanza DAM_REF in TwinCAT® 90
Creazione di un'istanza ACM_REF in TwinCAT® 90
Aggiunta di un progetto PLC a TwinCAT® System Manager 91
Versione V4.x 84
6.12.10
Importazione dei dispositivi in TwinCAT® 91
6.12.11
Congurazione e mappatura I/O 93
6.12.12
Collegamento delle variabili di ingresso e di uscita ai punti di dati sici 94
6.12.13
Ritrasferimento delle mappature nel programma PLC 95
6.12.14
Impostazione del tempo di ciclo PLC in TwinCAT® PLC Control 96
6.12.15
Congurazione come asse NC TwinCAT® 97
6.12.15.1
6.12.16
Collegamento al PLC 97
6.13
Linee guida alla programmazione di Automation Studio™ e TwinCAT® 97
6.14
Programmazione con SIMOTION SCOUT® 98
6.14.1
Requisiti per la programmazione con SIMOTION SCOUT® 98
6.14.2
Collegamento al PLC 98
6.14.3
Creazione di un progetto SIMOTION SCOUT® 98
6.14.4
Inclusione delle librerie di servoazionamenti in un progetto SIMOTION SCOUT® 98
6.14.5
Importazione dei dispositivi in SIMOTION SCOUT® 101
6.14.6
Congurazione dell'assegnazione IP e del nome del dispositivo 102
Congurazione I/O dei servoazionamenti utilizzati come assi NC 97
6.14.7
Creazione di un dominio di sincronizzazione 105
6.14.8
Congurazione di una topologia 108
6.14.9
Denizione di Send Clock Time (Tempo di invio orologio) e di Update Time (Tempo di aggiornamento) 109
6.14.9.1
6.14.9.2
6.14.10
Accesso agli ingressi e alle uscite 110
6.14.11
Programmazione con Danfoss VLT® Servo Motion Library 111
6.14.12
Creazione di un'istanza AXIS_REF_DDS in SIMOTION SCOUT® 111
Congurazione del Send Clock Time (Tempo di invio orologio) 109
Congurazione di Update Time (Tempo di aggiornamento) 109
AQ262450196490it-000101/175R1170 | 7Danfoss A/S © 2019.10
Page 8
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
6.14.13
6.14.14
6.14.15
6.14.16
6.14.17
6.15
Linee guida alla programmazione per SIMOTION SCOUT® 115
6.16
VLT® Servo Toolbox Software 115
6.16.1
6.16.2
6.16.3
6.16.4
Contenuti
Creazione di un'istanza PSM_REF in SIMOTION SCOUT® 111
Creazione di un'istanza DAM_REF in SIMOTION SCOUT® 112
Creazione di un'istanza ACM_REF in SIMOTION SCOUT® 112
Impostazioni globali del compilatore 112
Assegnazione delle attività 113
Panoramica 115
Requisiti del sistema 116
Installazione del software VLT® Servo Toolbox 116
VLT® Servo Toolbox Communication 116
6.16.4.1
6.16.4.2
6.16.4.3
Panoramica 116
Firewall 116
Comunicazione indiretta 116
6.16.4.4
6.17
Messa in funzione di VLT® Servo Toolbox 122
6.17.1
Fase 1: apertura della nestra principale 122
6.17.2
Fase 2: collegamento alla rete 123
6.17.3
Passaggio 3: scansione dei dispositivi 124
6.18
Libreria dei movimenti 124
6.18.1
Blocchi funzioni 124
6.18.2
Modello di programmazione semplice 124
7
Funzionamento 126
7.1
Modi di funzionamento 126
7.1.1
Modi di funzionamento supportati 126
7.1.2
Funzioni di movimento 126
7.2
Indicatori di stato operativo 127
7.2.1
LED di funzionamento su SDM 511 e SDM 512 127
7.2.2
LED di funzionamento sul PSM 510 128
7.2.3
LED di funzionamento sul DAM 510 129
Comunicazione diretta 119
7.2.4
LED di funzionamento sull'ACM 510 130
8
Sistema di sicurezza funzionale 132
8.1
Descrizione funzionale 132
8.2
Precauzioni di sicurezza 132
8.3
Personale qualicato per lavorare con la sicurezza funzionale 133
8.4
Norme applicate e conformità 133
8.5
Abbreviazioni e convenzioni 133
AQ262450196490it-000101/175R11708 | Danfoss A/S © 2019.10
Page 9
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
8.6
Installazione 134
8.6.1
Misure di protezione 135
8.7
Esempio applicativo 135
8.8
Test di messa in funzione 135
8.8.1
Test di messa in funzione con le librerie 136
8.8.2
Test di messa in funzione con dispositivi PROFINET® 137
8.9
Funzionamento della funzione STO 138
8.9.1
Codici di errore 138
8.9.2
Ripristino del guasto 139
8.10
Dati caratteristici di sicurezza funzionale 139
8.11
Manutenzione, sicurezza e accessibilità utente 139
9
Diagnostica 140
9.1
Guasti 140
9.2
Ricerca guasti 140
Contenuti
9.2.1
Ricerca guasti per i moduli di servoazionamento SDM 511/SDM 512 140
9.2.1.1
9.2.1.2
9.2.1.3
9.2.1.4
9.2.1.5
9.2.1.6
9.2.1.7
9.2.1.8
9.2.1.9
9.2.1.10
9.2.1.11
9.2.1.12
9.2.1.13
9.2.1.14
9.2.1.15
Il convertitore di frequenza non funziona/si avvia lentamente 140
Ronzii del convertitore di frequenza e il convertitore assorbe una corrente elevata 140
Il convertitore di frequenza si arresta all'improvviso e il riavvio non è possibile 141
Motore che ruota nella direzione sbagliata 141
Motore non genera la coppia prevista 141
Rumorosità del convertitore di frequenza 141
Funzionamento irregolare 141
Vibrazioni 141
Rumori di funzionamento insoliti 142
La velocità del convertitore di frequenza diminuisce bruscamente in presenza di un carico 142
Il freno non viene rilasciato 142
Il freno di stazionamento non mantiene il servoazionamento 142
Innesto freno ritardato 142
Rumori quando il freno di arresto è innestato 142
I LED non si accendono 143
9.2.1.16
9.2.2
Ricerca guasti per il servosistema 143
9.2.2.1
9.2.2.2
9.2.2.3
9.2.2.4
9.2.2.5
La protezione del convertitore di frequenza scatta immediatamente 143
Il display LCP è spento/non funziona 143
Fusibili aperti o scatto interruttore 143
Tensione del collegamento CC troppo elevata (errore 0x3210/0x103) 144
Tensione del collegamento CC troppo bassa (errore 0x3220/0x104) 144
Sovraccorrente del collegamento CC (errore 0x2396/0x15C) 144
AQ262450196490it-000101/175R1170 | 9Danfoss A/S © 2019.10
Page 10

Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
9.3
Codici di errore 147
9.3.1
9.3.2
9.3.3
Contenuti
9.2.2.6
9.2.2.7
9.2.2.8
9.2.2.9
9.2.2.10
9.2.2.11
9.2.2.12
9.2.2.13
9.2.2.14
9.2.2.15
Nessun errore (0x0000/0x0) 147
Errore generico (0x1000/0x100) 147
Sovraccorrente su uscita (0x2310/0x101) 147
Sovrapotenza del collegamento CC (errore 0x2313/0x161) 145
PT Power Overload (errore 0x2314/0x162) 145
Sovraccorrente UAUX (errore 0x2391/0x125) 145
Sovratensione UAUX (errore 0x3292/0x133) 145
Sottotensione UAUX (errore 0x3294/0x135) 145
Perdita di fase di rete (errore 0x3130/0x12F) 146
Guasto di messa a terra 146
Errore di resistenza di frenatura 146
Errore chopper di frenatura 146
Errore ventola interna 146
9.3.4
Sovraccarico di corrente elevato (0x2311/0x15F) 147
9.3.5
Sovraccarico di corrente I2T (0x2312/0x160) 147
9.3.6
Sovraccarico ad alta potenza (0x2313/0x161) 147
9.3.7
Sovraccarico potenza PT (0x2314/0x162) 148
9.3.8
Cortocircuito (0x2320/0x163) 148
9.3.9
Dispersione verso terra (0x2330/0x151) 148
9.3.10
Sovracorrente AUX (0x2391/0x125) 148
9.3.11
Limite corrente utente AUX (0x2393/0x127) 148
9.3.12
Avviso limite corrente utente AUX (0x2394/0x128) 149
9.3.13
Guasto fusibile AUX (0x2395/0x129) 149
9.3.14
Scatto per sovraccorrente CC (0x2396/0x15C) 149
9.3.15
Scatto per potenza di uscita (0x2397/0x12B) 149
9.3.16
Sovraccarico motore I2T (0x239B/0x102) 149
9.3.17
Perdita di fase di rete (0x3130/0x12F) 150
9.3.18
Sovratensione del collegamento CC (0x3210/0x103) 150
9.3.19
Scatto da sovracorrente SW (0x3210/0x103) 150
9.3.20
Sottotensione del collegamento CC (0x3220/0x104) 150
9.3.21
Errore carica UDC (0x3230/0x152) 150
9.3.22
Tensione bus CC sbilanciata (0x3280/0x153) 151
9.3.23
Alta tensione UAUX (0x3291/0x132) 151
9.3.24
Sovratensione UAUX (0x3292/0x133) 151
9.3.25
Bassa tensione UAUX (0x3293/0x134) 151
9.3.26
Sottotensione UAUX (0x3294/0x135) 151
9.3.27
Alta tensione UDC (0x3295/0x136) 152
AQ262450196490it-000101/175R117010 | Danfoss A/S © 2019.10
Page 11

Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
9.3.28
9.3.29
9.3.30
9.3.31
9.3.32
9.3.33
9.3.34
9.3.35
9.3.36
9.3.37
9.3.38
9.3.39
9.3.40
9.3.41
Contenuti
Bassa tensione UDC (0x3296/0x137) 152
Errore di carica UAUX (0x3297/0x154) 152
Errore arresto UDC (0x3298/0x165) 152
Errore di arresto UAUX (0x3299/0x155) 152
Hardware di sottotensione UAUX (0x329A/0x156) 153
Errore di ripristino automatico del guasto (0x329B/0x168) 153
Sovratemperatura del dispositivo (0x4210/0x157) 153
Temperatura troppo bassa (0x4220/0x138) 153
Sovratemperatura: modulo di potenza (0x4290/0x105) 153
Sovratemperatura: scheda di controllo (0x4291/0x106) 154
Sovratemperatura: scheda di potenza (0x4292/0x107) 154
Sovratemperatura di accensione: collegamento CC 0x4293/013C) 154
Sovratemperatura di accensione della linea AUX (0x4294/0x13D) 154
Sovratemperatura: motore (0x4310/0x108) 154
9.3.42
Sottotensione UAUX (0x5112/0x109) 155
9.3.43
Tensione di guasto dell'interruttore di carica (0x5121/0x158) 155
9.3.44
Errore Checksum EE (parametro mancante) (0x5530/0x10A) 155
9.3.45
Errore parametro (0x6320/0x10B) 155
9.3.46
Versione parametri di congurazione (0x6382/0x15D) 155
9.3.47
Errore per limiti dei parametri di congurazione (0x6383/0x164) 156
9.3.48
Errore di congurazione dell'EEprom della scheda di potenza (0x6384/0x166) 156
9.3.49
Guasto al chopper di frenatura (0x7111/0x141) 156
9.3.50
Sovraccorrente del chopper di frenatura (0x7112/0x167) 156
9.3.51
Limite di potenza massima della resistenza di frenatura (0x7181/0x142) 157
9.3.52
Limite di potenza utente della resistenza di frenatura (0x7182/0x143) 157
9.3.53
Tensione di rete del freno troppo alta (0x7183/0x159) 157
9.3.54
Errore sensore di posizione interno (0x7320/0x10C) 157
9.3.55
Errore sensore di posizione esterno (0x7380/0x10D) 158
9.3.56
Errore di monitoraggio (0x8611/0x10E) 158
9.3.57
Errore di homing quando si accede alla modalità di homing (0x8693/0x10F) 158
9.3.58
Errore di homing in fase di avvio del metodo di homing (0x8694/0x110) 158
9.3.59
Errore distanza di homing (0x8695/0x111) 158
9.3.60
Guasto del freno meccanico (0xFF01/0x112) 159
9.3.61
Cortocircuito nel controllo del freno meccanico (0xFF02/0x113) 159
9.3.62
Guasto di alimentazione dell'interfaccia esterna (0xFF0A/0x114) 159
9.3.63
Comunicazione interrotta (0xFF10/0x14F) 159
9.3.64
Retroazione della ventola irregolare (0xFF21/0x145) 159
9.3.65
Durata della ventola critica (0xFF22/0x15A) 160
AQ262450196490it-000101/175R1170 | 11Danfoss A/S © 2019.10
Page 12
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
9.3.66
9.3.67
9.3.68
9.3.69
9.3.70
9.3.71
9.3.72
9.3.73
9.3.74
9.3.75
9.3.76
9.3.77
9.3.78
9.3.79
Contenuti
Violazione temporizzazione 1 (0xFF60/0x115) 160
Violazione temporizzazione 2 (0xFF61/0x116) 160
Violazione temporizzazione 3 (0xFF62/0x117) 160
Violazione temporizzazione 4 (0xFF63/0x118) 160
Violazione temporizzazione 5 (0xFF64/0x119) 161
Violazione temporizzazione 6 (0xFF65/0x11A) 161
Violazione temporizzazione 7 (0xFF66/0x168) 161
Violazione temporizzazione 8 (0xFF67/0x16B) 161
Violazione temporizzazione 9 (0xFF68/0x16C) 161
Firmware: mancata corrispondenza della descrizione del pacchetto (0xFF70/0x11B) 162
Firmware: spegnimento e riaccensione necessari (0xFF71/0x11C) 162
Firmware: aggiornamento avviato (0xFF72/0x11D) 162
Firmware: aggiornamento non valido (0xFF73/0x15B) 162
STO attivo mentre il convertitore di frequenza è abilitato (0xFF80/0x11E) 163
9.3.80
Mancata corrispondenza di STO (0xFF81/0x11F) 163
9.3.81
Errore P_STO (0xFF85/0x120) 163
9.3.82
Valore guida invertito (0xFF90/0x121) 163
9.3.83
Valore guida non plausibile (0xFF91/0x122) 163
9.3.84
Errore indicazione attività (0xFF95/0x14E) 163
10
Manutenzione, disinstallazione e smaltimento 165
10.1
Avvisi 165
10.2
Attività di manutenzione 165
10.3
Ispezione durante il funzionamento 165
10.3.1
Componenti del sistema 165
10.4
Riparazione 165
10.5
Sostituzione dei componenti del sistema 166
10.5.1
Smontaggio dei componenti del sistema 166
10.5.2
Installazione e messa in funzione dei componenti del sistema 168
10.6
Sostituzione del cavo 168
10.6.1
Panoramica 168
10.6.2
Sostituzione del cavo di alimentazione 168
10.6.2.1
10.6.2.2
10.6.2.3
10.6.3
Sostituzione del cavo di loop 169
10.6.3.1
10.6.3.2
Scollegamento del cavo di alimentazione 168
Sostituzione del cavo di alimentazione 169
Collegamento del cavo di alimentazione 169
Scollegamento del cavo di loop 169
Sostituzione del cavo di loop 169
AQ262450196490it-000101/175R117012 | Danfoss A/S © 2019.10
Page 13

Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
10.6.3.3
10.7
Sostituzione del fusibile nel Modulo di accesso decentralizzato (DAM 510) 170
10.8
Sostituzione della ventola 171
10.9
Restituzioni dei prodotti 171
10.10
Riciclo 171
10.11
Smaltimento 172
11
Speciche 173
11.1
Targhe 173
11.1.1
Esempio di targa sul lato anteriore dei moduli di sistema 173
11.1.2
Esempio di targa presente sul lato dei moduli di sistema 173
11.2
Modulo di alimentazione (PSM 510) 174
11.2.1
Dimensioni di PSM 510 174
11.2.2
Dati caratteristici per PSM 510 175
11.3
Modulo di servoazionamento (SDM 511/SDM 512) 176
Collegamento del cavo di loop 169
Contenuti
11.3.1
Protezione da sovraccarico motore 176
11.3.2
Protezione da sovratemperatura del motore 176
11.3.3
Dimensioni 177
11.3.4
Dati caratteristici SDM 511 178
11.3.5
Dati caratteristici SDM 512 179
11.4
Modulo di accesso decentralizzato (DAM 510) 181
11.4.1
Dimensioni di DAM 510 181
11.4.2
Dati caratteristici per DAM 510 181
11.4.3
Protezione del cavo ibrido 182
11.5
Modulo di condensatori ausiliari (ACM 510) 182
11.5.1
Dimensioni 182
11.5.2
Dati caratteristici per ACM 510 183
11.6
Modulo di espansione (EXM 510) 183
11.6.1
Dimensioni 183
11.6.2
Dati caratteristici per EXM 510 183
11.7
Connettori sui moduli di sistema 184
11.7.1
Connettore di backlink 184
11.7.2
Connettori del freno 185
11.7.2.1
11.7.2.2
11.7.3
Connettori Ethernet 186
11.7.3.1
11.7.3.2
Connettore della resistenza di frenatura su PSM 510 185
Connettore del sensore di temperatura del freno e del motore su SDM 511/SDM 512 185
Connettori Ethernet su PSM 510 e ACM 510 187
Connettori Ethernet su DAM 510 187
AQ262450196490it-000101/175R1170 | 13Danfoss A/S © 2019.10
Page 14
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
11.7.4
11.7.5
11.7.6
11.7.7
11.7.8
11.7.9
Contenuti
11.7.3.3
Connettori I/O 188
11.7.4.1
11.7.4.2
Connettore UAUX 189
11.7.5.1
Connettori LCP (M8, a 6 poli) 190
Connettore di rete CA 191
11.7.7.1
Connettore motore 191
11.7.8.1
11.7.8.2
Connettore per relè 192
11.7.9.1
Connettori Ethernet su SDM 511/SDM 512 187
Connettore I/O su PSM 510/ACM 510 188
Connettore I/O su SDM 511/SDM 512 188
Sezioni trasversali dei cavi da 24/48 V per PSM 510 190
Sezioni trasversali dei cavi di rete per PSM 510 191
Sezioni trasversali dei cavi motore per SDM 511 192
Sezioni trasversali dei cavi motore per SDM 512 192
Connettore per relè su PSM 510/ACM 510 193
11.7.9.2
11.7.10
Connettori STO 194
11.7.10.1
11.7.10.2
11.7.10.3
11.7.11
Connettore UDC 198
11.7.12
Connettore AUX 198
11.7.13
Connettori di retroazione del motore 199
11.7.14
Connettori per encoder esterno 201
11.7.15
Connettore del modulo di espansione 202
11.8
Speciche generali e condizioni ambientali per il sistema MSD 510 202
11.9
Conservazione 203
Connettori per relè su SDM 511/SDM 512 193
Connettori STO su SDM 511 ed SDM 512 194
Connettori STO su PSM 510 195
Connettori STO sul DAM 510 196
AQ262450196490it-000101/175R117014 | Danfoss A/S © 2019.10
Page 15
Manuale
Descrizione
Manuale di funzionamento del sistema VLT® Multiaxis
Servo Drive MSD 510 .
Informazioni sull'installazione, la messa in funzione e il funzionamento
del servosistema MSD 510 .
Guida alla Progettazione VLT® Servo Drive System
ISD 510, DSD 510, MSD 510
Informazioni sulla congurazione del servosistema MSD 510 e dati
tecnici dettagliati.
Guida alla programmazione VLT® Servo Drive System
ISD 510, DSD 510, MSD 510
Informazioni sulla programmazione del servosistema MSD 510 .
Certicazione
Descrizione
IEC/EN 61800-3
Azionamenti elettrici a velocità regolabile.
Parte 3: Norma di prodotto relativa alla compatibilità elettromagnetica ed ai metodi di prova specici.
IEC/EN 61800-5-1
Azionamenti elettrici a velocità regolabile.
Parte 5-1: Prescrizioni di sicurezza - Sicurezza elettrica, termica ed energetica.
IEC/EN 61800-5-2
Azionamenti elettrici a velocità regolabile.
Parte 5-2: Prescrizioni di sicurezza - Sicurezza funzionale.
IEC/EN 61508-1
Sicurezza funzionale dei sistemi di sicurezza elettrici/elettronici/elettronici programmabili.
Parte 1: Regole generali.
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Introduzione
1 Introduzione
1.1 Scopo della Guida operativa
Lo scopo della presente Guida operativa è la descrizione del sistema VLT® Multiaxis Servo Drive MSD 510 .
La presente Guida operativa contiene informazioni su:
•
Installazione
•
Messa in funzione
•
Programmazione
•
Funzionamento
•
Ricerca guasti
•
Assistenza e manutenzione
La presente Guida operativa è concepita per l'uso da parte di personale qualicato. Leggere l'intera Guida operativa per utilizzare il
servosistema in modo sicuro e professionale, e prestare particolare attenzione alle istruzioni di sicurezza e agli avvisi generali.
La presente Guida operativa è parte integrante del servosistema e contiene anche importanti informazioni di manutenzione. Pertanto, tenerla sempre a disposizione insieme al servosistema.
La conformità alle informazioni contenute nel manuale è un prerequisito essenziale per:
•
Funzionamento senza problemi
•
Riconoscimento delle responsabilità per danni causati dal prodotto
Pertanto, leggere questa Guida operativa prima di lavorare con il sistema MSD 510 .
1.2 Risorse aggiuntive
Tabella 1: Risorse aggiuntive
1.3 Copyright
VLT® è un Danfoss marchio registrato.
1.4 Omologazioni e certicazioni
Tabella 2: Omologazioni e certicazioni
AQ262450196490it-000101 / 175R1170 | 15Danfoss A/S © 2019.10
Page 16
Certicazione
Descrizione
IEC/EN 61508-2
Sicurezza funzionale dei sistemi di sicurezza elettrici/elettronici/elettronici programmabili.
Parte 2: Requisiti per dispositivi elettrici/elettronici/elettronici programmabili di sicurezza.
EN ISO 13849-1
Sicurezza del macchinario - Parti dei sistemi di comando legate alla sicurezza.
Parte 1: Principi generali per la progettazione.
EN ISO 13849-2
Sicurezza del macchinario - Parti dei sistemi di comando legate alla sicurezza.
Parte 2: Validazione.
IEC/EN 60204-1
Sicurezza del macchinario - Equipaggiamento elettrico delle macchine.
Parte 1: Regole generali.
IEC/EN 62061
Sicurezza del macchinario - Sicurezza funzionale dei sistemi di comando elettrici, elettronici ed elettronici
programmabili correlati alla sicurezza.
IEC/EN 61326-3-1
Apparecchi elettrici di misura, controllo e laboratorio - Prescrizioni di compatibilità elettromagnetica.
Parte 3-1: Prescrizioni di immunità per sistemi di sicurezza e per apparecchiature destinate ad eseguire fun-
zioni di sicurezza (sicurezza funzionale) - Applicazioni industriali generali.
IEC/EN 60529
Gradi di protezione dei contenitori (Codice IP).
UL 508C
Standard UL per la sicurezza delle apparecchiature di conversione di potenza.
(Si applica soltanto ai servoazionamenti ISD 510 dimensioni 1 e 2).
UL 61800-5-1
Azionamenti elettrici a velocità regolabile.
Parte 5-1: Prescrizioni di sicurezza - Sicurezza elettrica, termica ed energetica.
Servoazionamento ISD 510 dimensioni 3 e 4:
MSD 510:
CE
2014/30/UE
Direttiva sulla compatibilità elettromagnetica (EMC).
2014/35/UE
Direttiva bassa tensione (LVD).
(2011/65/UE) modicato (UE)
2015/863
Restrizione sull'uso di sostanze pericolose (RoHS).
2006/42/CE
Direttiva macchine (MD).
EtherCAT
®
Ethernet per la tecnologia di automazione di controllo. Sistema di bus di campo basato su Ethernet.
Ethernet POWERLINK
®
Sistema di bus di campo basato su Ethernet.
PROFINET RT/IRT
®
Sistema di bus di campo basato su Ethernet.
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Introduzione
AQ262450196490it-000101 / 175R117016 | Danfoss A/S © | 2019.10
Page 17

Certicazione
Descrizione
PLCopen
®
Speciche tecniche. Blocchi funzioni per il controllo del movimento (ex Parte 1 e Parte 2) versione 2.0 17
marzo 2011.
Termine
Descrizione
ACM 510
Auxiliary Capacitors Module
DAM 510
Modulo di accesso decentralizzato che collega i servoazionamenti decentralizzati Danfoss
(ISD 510 e DSD 510) al servosistema tramite un cavo ibrido.
DSD 510
Servoazionamento decentralizzato
Componenti del sistema
DSD 510
Include i servoazionamenti DSD 510, il PSM 510, il DAM 510 e l'ACM 510 opzionale.
EXM 510
Modulo di estensione
Cavo di alimentazione
Cavo ibrido per il collegamento dal DAM 510 al primo servoazionamento.
ISD 510
Integrated Servo Drive (Servoazionamento integrato)
Componenti del sistema
ISD 510
Include i servoazionamenti ISD 510, il PSM 510, il DAM 510 e l'ACM 510 opzionale.
LCP
Pannello di controllo locale
Cavo di loop
Cavo ibrido per il collegamento dei servoazionamenti in daisy-chain.
MSD 510
Servoazionamento multiasse
Componenti del sistema MSD
510
Include gli SDM 511/SDM 512, il PSM 510, il DAM 510 e l'ACM 510 opzionale.
PLC
Controllore logico programmabile (dispositivo esterno per il controllo del servosistema).
PSM 510
Modulo di alimentazione che genera un'alimentazione CC da 565–680 V.
SDM 511
Modulo di servoazionamento (singolo asse)
SDM 512
Modulo di servoazionamento (doppio asse)
Moduli di sistema
Include il PSM 510, il DAM 510 e l'ACM 510 opzionale.
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Introduzione
1.5 Aree di applicazione
Le potenziali aree di applicazione sono:
•
Macchine per il settore del Food and Beverage
•
Macchine confezionatrici
•
Macchine farmaceutiche
•
Applicazioni funzionanti con un gruppo di servoazionamenti
1.6 Software
Possono essere disponibili aggiornamenti per il rmware, il software VLT® Servo Toolbox e le librerie PLC. Quando gli aggiornamenti
sono disponibili, è possibile scaricarli dal sito web danfoss.com.
È possibile utilizzare il software VLT® Servo Toolbox e le librerie PLC per installare il rmware sui servoazionamenti o sui moduli di
sistema.
1.7 Terminologia
Tabella 3: Terminologia
AQ262450196490it-000101 / 175R1170 | 17Danfoss A/S © 2019.10
Page 18
Termine
Descrizione
VIN PSM
Ingresso del PSM 510 (V CA).
V
OUT
PSM
Uscita del PSM 510 (V CC).
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Introduzione
AQ262450196490it-000101 / 175R117018 | Danfoss A/S © | 2019.10
Page 19

Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Sicurezza
2 Sicurezza
2.1 Simboli di sicurezza
Nella presente guida vengono usati i seguenti simboli:
A V V I S O
Indica una situazione potenzialmente rischiosa che potrebbe causare morte o lesioni gravi.
A T T E N Z I O N E
Indica una situazione potenzialmente rischiosa che potrebbe causare lesioni leggere o moderate. Può anche essere usato per
mettere in guardia da pratiche non sicure.
N O T A
Indica informazioni importanti, incluse situazioni che possono causare danni alle apparecchiature o alla proprietà.
2.2 Istruzioni e precauzioni di sicurezza
Rispettare sempre le istruzioni e le precauzioni di sicurezza.
•
Un trasporto, uno stoccaggio, un montaggio e un'installazione ordinati e corretti, nonché un funzionamento e una manutenzione accurati sono essenziali per il funzionamento sicuro e senza problemi del servosistema e dei relativi componenti.
•
Unicamente il personale adeguatamente formato e qualicato può lavorare sul sistema MSD 510 e i relativi componenti oppure
in prossimità di esso.
•
Utilizzare esclusivamente accessori e parti di ricambio approvati da Danfoss .
•
Rispettare le condizioni ambientali specicate.
•
Le informazioni contenute nel presente manuale sull'uso dei componenti disponibili sono fornite esclusivamente mediante
esempi applicativi e suggerimenti.
•
Il tecnico dell'impianto o l'ingegnere di sistema sono personalmente responsabili della verica dell'idoneità dei componenti forniti e delle informazioni riportate nel presente manuale per la specica applicazione interessata:
-
Per la conformità alle norme e agli standard di sicurezza rilevanti per l'applicazione specica.
-
Per l'attuazione delle misure, delle modiche e delle estensioni necessarie.
•
La messa in funzione del servosistema o dei suoi componenti non è consentita no a quando non è stato accertato che la macchina, il sistema o l'impianto in cui sono installati sono conformi alle disposizioni di legge, alle norme di sicurezza e agli standard
previsti per l'applicazione nel paese di utilizzo.
•
Il funzionamento è consentito solamente in conformità alle norme nazionali EMC per l'applicazione in questione.
•
Il rispetto dei valori limite specicati dalle normative nazionali è responsabilità del produttore dell'impianto, del sistema o della
macchina.
•
È obbligatorio rispettare le speciche, le condizioni di collegamento e le condizioni di installazione contenute nel presente manuale.
•
È necessario rispettare le norme e le disposizioni di sicurezza del paese in cui viene utilizzata l'apparecchiatura.
•
Per proteggere l'utente dalle scosse elettriche e il servosistema dal sovraccarico è obbligatoria la messa a terra di protezione,
che deve essere eseguita in conformità alle normative locali e nazionali.
2.2.1 Sicurezza operativa
Sicurezza operativa
•
Le applicazioni correlate alla sicurezza sono consentite solamente se sono esplicitamente e inequivocabilmente menzionate nel
presente manuale.
•
Tutte le applicazioni che possono comportare pericoli per le persone o danni alle cose sono applicazioni correlate alla sicurezza.
•
Le funzioni di arresto implementate nel software del PLC non disinseriscono l'alimentazione di rete del modulo di alimentazione
(PSM 510). Pertanto, non devono essere utilizzate per la sicurezza elettrica del servosistema.
•
Il servosistema può essere arrestato con un comando software o con un setpoint a velocità zero; tuttavia, la tensione CC è ancora presente sui servoazionamenti e la tensione di rete è ancora presente nel modulo PSM 510. Inoltre, quando arrestato il
AQ262450196490it-000101 / 175R1170 | 19Danfoss A/S © 2019.10
Page 20
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
sistema viene può ripartire da solo se il circuito è difettoso o dopo l'eliminazione di un sovraccarico temporaneo oppure di un
problema relativo alla tensione di alimentazione o al sistema. Se ai ni della sicurezza personale (ad esempio per il rischio di
lesioni personali causate dal contatto con parti della macchina in movimento in seguito a un avvio involontario) risulta necessario garantire che non avvenga alcun avvio involontario, tali funzioni di arresto non sono sucienti. In questo caso, assicurarsi che
il servosistema sia staccato dalla rete elettrica ed evitare un avviamento involontario del motore, ad esempio utilizzando la funzione Safe Torque O.
•
Il servosistema può iniziare a funzionare involontariamente durante la congurazione dei parametri o la programmazione. Se
questo comporta un rischio per la sicurezza personale (ad esempio, rischio di lesioni personali a causa del contatto con parti
della macchina in movimento), impedire l'avviamento involontario del motore, ad esempio utilizzando la funzione Safe Torque
O o scollegando in modo sicuro i servoazionamenti.
•
Oltre agli ingressi di tensione di alimentazione L1, L2 ed L3 del PSM 510, il servosistema dispone di altri ingressi per la tensione
di alimentazione, come la tensione ausiliaria esterna. Prima di iniziare i lavori di riparazione, vericare che tutti gli ingressi della
tensione di alimentazione siano stati disattivati e che sia trascorso il tempo di scarica necessario per i condensatori del collegamento CC.
Sicurezza
2.3 Importanti avvisi di sicurezza
Le seguenti istruzioni e precauzioni di sicurezza si riferiscono al sistema VLT® Multiaxis Servo Drive MSD 510 . Leggere attentamente
le istruzioni di sicurezza prima di iniziare a lavorare con il servosistema o i suoi componenti. Prestare particolare attenzione alle istruzioni di sicurezza nelle relative sezioni del presente manuale.
A V V I S O
SITUAZIONE PERICOLOSA
Se il servoazionamento o le linee bus non sono collegati correttamente, sussiste il rischio di morte, lesioni gravi o danni all'unità.
Attenersi sempre alle istruzioni contenute nel presente manuale e alle norme di sicurezza nazionali e locali.
-
A V V I S O
ALTA TENSIONE
Il sistema MSD 510 contiene componenti che funzionano ad alta tensione quando sono collegati alla rete di alimentazione elettrica. Sui componenti non sono presenti indicatori che indicano la presenza di alimentazione di rete. Un'installazione, una messa in
funzione o una manutenzione non corrette possono causare morte o gravi lesioni.
L'installazione, la messa in funzione e la manutenzione devono essere eseguite esclusivamente da personale qualicato.
-
A V V I S O
PERICOLO DI CORRENTI DI DISPERSIONE/MESSA A TERRA
Le correnti di dispersione/messa a terra sono superiori a 3,5 mA. Una messa a terra non appropriata dei moduli di sistema MSD
510 può causare morte o lesioni gravi.
Per motivi di sicurezza dell'operatore, utilizzare un installatore elettrico certicato per la corretta messa a terra dell'impianto
-
in conformità alle norme e direttive elettriche locali e nazionali applicabili e alle istruzioni contenute nel presente manuale.
AQ262450196490it-000101 / 175R117020 | Danfoss A/S © | 2019.10
Page 21
Tempo di attesa minimo (minuti)
15
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Sicurezza
A V V I S O
TEMPO DI SCARICA
Il sistema MSD 510 contiene condensatori del collegamento CC che rimangono carichi per un determinato lasso di tempo dopo
che l'alimentazione di rete è stata disinserita dal modulo di alimentazione elettrica (PSM 510). Il mancato rispetto del tempo di
attesa indicato dopo aver disinserito l'alimentazione prima di eettuare lavori di manutenzione o riparazione potrebbe causare
lesioni gravi o mortali.
Per evitare scosse elettriche, scollegare completamente il modulo di alimentazione (PSM 510) dalla rete elettrica e attendere
-
che i condensatori si scarichino completamente prima di eseguire qualsiasi lavoro di manutenzione o di riparazione sul servosistema o sui relativi componenti.
P E R I C O L O
Risque du choc électrique. Une tension dangereuse peut être présentée jusqu’à 15 min après avoir coupé l’alimentation.
-
A V V I S O
AVVIO INVOLONTARIO
Il sistema MSD 510 contiene servoazionamenti, il PSM 510 e il DAM 510 che sono collegati alla rete di alimentazione elettrica e
possono iniziare a funzionare in qualsiasi momento per via di un comando del bus di campo, di un segnale di riferimento o
dell'eliminazione di una condizione di guasto. I servoazionamenti e tutti i dispositivi collegati devono essere in buone condizioni
di funzionamento, poiché quando l'unità è collegata alla rete di alimentazione elettrica condizioni di funzionamento carenti possono causare morte, lesioni gravi, danni alle apparecchiature o altri danni materiali.
Adottare misure adeguate per evitare avvii involontari.
-
A V V I S O
MOVIMENTO INVOLONTARIO
Un movimento involontario può vericarsi quando le modiche dei parametri vengono eettuate subito, con conseguente rischio di morte, lesioni gravi o danni all'apparecchiatura.
Quando si modicano i parametri, adottare misure adeguate per garantire che movimenti involontari non comportino alcun
-
pericolo.
A T T E N Z I O N E
PERICOLO DI USTIONI
La supercie dei servoazionamenti può raggiungere temperature superiori a 90 ˚C durante il funzionamento.
Non toccare i servoazionamenti nché non si sono rareddati.
-
N O T A
COMPATIBILITÀ RCD
Il sistema MSD 510 contiene componenti che possono determinare una corrente CC nel conduttore di messa a terra di protezione, che può provocare il malfunzionamento di qualsiasi dispositivo collegato al sistema.
Se viene usato un dispositivo di protezione a corrente residua (RCD) o di monitoraggio (RCM) per la protezione in caso di
-
contatto diretto o indiretto, usare un dispositivo RCD o RCM di tipo B sul lato di alimentazione dei componenti del sistema
MSD 510 .
AQ262450196490it-000101 / 175R1170 | 21Danfoss A/S © 2019.10
Page 22

Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Sicurezza
2.4 Personale qualicato
L'installazione, la messa in funzione e la manutenzione devono essere eseguite esclusivamente da personale qualicato. Ai ni del
presente manuale e delle istruzioni di sicurezza in esso contenute, con personale qualicato si intende personale formato che è
autorizzato a montare, installare, mettere in funzione, mettere a terra ed etichettare apparecchiature, sistemi e circuiti in conformità
alle norme per la tecnologia della sicurezza e che ha familiarità con i sistemi di sicurezza dell'ingegneria dell'automazione.
Inoltre, il personale deve conoscere tutte le istruzioni e le misure di sicurezza descritte nel presente manuale, deve disporre di un'apparecchiatura di sicurezza adeguata ed essere istruito in materia di interventi di primo soccorso.
2.5 Debita cura
L'operatore e/o il costruttore devono garantire che:
•
Il servosistema e i suoi componenti siano usati solamente come previsto.
•
I componenti vengano fatti funzionare soltanto in condizioni di funzionamento perfette.
•
Il manuale di funzionamento sia sempre disponibile nelle vicinanze del servosistema, in forma completa e leggibile.
•
Il servosistema venga montato, installato, messo in funzione e manutenuto esclusivamente da personale adeguatamente qualicato e autorizzato.
•
Il personale interessato riceva regolarmente istruzioni su tutte le questioni rilevanti in termini di sicurezza sul lavoro e protezione ambientale, sui contenuti del manuale di funzionamento e sulle istruzioni.
•
I simboli di identicazione e del prodotto applicati ai componenti, le istruzioni di sicurezza e gli avvisi non siano rimossi e siano
sempre chiaramente leggibili.
•
Vengano rispettate le norme nazionali e internazionali sul controllo dei macchinari e delle apparecchiature in vigore nel luogo
d'uso del servosistema.
•
Gli utenti dispongano sempre di tutte le informazioni più aggiornate relative ai rispettivi interessi sul servosistema e sul suo uso
e funzionamento.
2.6 Uso previsto
I componenti del sistema MSD 510 sono destinati all'installazione in macchine utilizzate in ambienti industriali in conformità alle
leggi e agli standard locali.
N O T A
In ambiente domestico questo prodotto può provocare disturbi radio; in tal caso, possono essere necessarie misure corret-
-
tive supplementari.
Per garantire che il prodotto venga utilizzato come previsto, prima dell'uso devono essere soddisfatte le seguenti condizioni:
•
Tutti coloro che utilizzano i prodotti Danfoss in qualsiasi modo devono leggere e comprendere le corrispondenti norme di sicurezza e la descrizione dell'uso previsto.
•
Non modicare lo stato originale dell'hardware.
•
Non invertire i prodotti software né modicarne il codice sorgente.
•
Non installare né far funzionare prodotti danneggiati o guasti.
•
Assicurarsi che i prodotti siano installati in conformità alle normative menzionate nella documentazione.
•
Osservare gli intervalli di manutenzione e di assistenza specicati.
•
Rispettare tutte le misure di protezione.
•
Montare o installare solamente i componenti descritti nella presente Guida operativa. I dispositivi e le apparecchiature di terzi
possono essere utilizzati soltanto previa consultazione di Danfoss
2.6.1 Aree di applicazione vietate
Il servosistema non può essere usato nelle seguenti aree di applicazione:
Aree con atmosfere potenzialmente esplosive.
•
Sistemi mobili o portatili.
•
Sistemi galleggianti o trasportati dall'aria.
•
Strutture abitate.
•
Siti in cui sono presenti materiali radioattivi.
•
AQ262450196490it-000101 / 175R117022 | Danfoss A/S © | 2019.10
Page 23

Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
••Aree con variazioni di temperatura estreme o in cui possono essere superate le temperature massime nominali.
Sott'acqua.
Sicurezza
2.7 Uso improprio prevedibile
Qualsiasi utilizzo non esplicitamente approvato da Danfoss costituisce uso improprio. Ciò vale anche per l'inosservanza delle condizioni di esercizio e delle applicazioni specicate. Danfoss declina ogni responsabilità per danni di qualunque natura imputabili
all'uso improprio.
2.8 Manutenzione e supporto
Contattare il rappresentante dell'assistenza locale per ricevere manutenzione e supporto.
AQ262450196490it-000101 / 175R1170 | 23Danfoss A/S © 2019.10
Page 24

e30bg579.10
PSM
SDM 511
FS2
SDM 511
FS1
SDM 512
FS1
DAM 510
ACM 510
EXM 510
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Descrizione del sistema
3 Descrizione del sistema
3.1 Panoramica del VLT® Multiaxis Servo Drive System MSD 510
Il VLT® Multiaxis Servo Drive System MSD 510 è una soluzione di servoazionamento centrale ad alte prestazioni. Il sistema aperto
supporta i protocolli Ethernet in tempo reale EtherCAT®, Ethernet POWERLINK® e PROFINET®.
Illustrazione 1: Moduli MSD
Il sistema comprende:
•
Il modulo di alimentazione (PSM 510)
•
I moduli convertitore:
-
Il modulo di servoazionamento a singolo asse (SDM 511)
-
Il modulo di servoazionamento a doppio asse (SDM 512)
•
Il modulo di accesso decentralizzato (DAM 510)
•
Il modulo di condensatori ausiliari (ACM 510)
AQ262450196490it-000101 / 175R117024 | Danfoss A/S © | 2019.10
Page 25

Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
•
Il modulo di espansione (EXM 510)
•
Software:
-
Il rmware per i moduli servoazionamento (SDM 511 ed SDM 512)
-
Il rmware per il modulo di alimentazione (PSM 510)
-
Il rmware per il modulo di accesso decentralizzato (DAM 510)
-
Il rmware per l'Auxiliary Capacitors Module (ACM 510)
-
VLT® Servo Toolbox
-
Librerie PLC per AutomationStudio©, TwinCAT®, SIMOTION Scout e TIA Portal.
Alcuni moduli sono disponibili in due dimensioni di contenitore (frame) con larghezza di 50 mm (FS1) o 100 mm (FS2) in funzione
della dimensione di potenza.
A seconda dell'applicazione, il sistema può essere utilizzato esclusivamente in un sistema centrale oppure insieme a servoazionamenti decentralizzati Danfoss (ISD 510 e DSD 510) in un sistema misto. È obbligatorio l'utilizzo di un'induttanza CA.
I moduli di sistema PSM 510, DAM 510, ACM 510 e i moduli convertitori SDM 511/SDM 512 sono montati su una piastra posteriore
situata nell'armadio di controllo. Il collegamento CC e l'alimentazione della tensione di controllo sono integrati nella piastra posteriore. Il sistema di piastra posteriore "click and lock" consente un montaggio e un'installazione facili.
Descrizione del sistema
N O T A
I moduli MSD 510 non possono essere usati nei servosistemi di altri produttori. I convertitori di frequenza di altri produttori
-
non possono essere usati nel sistema MSD 510 .
Contattare Danfoss per ulteriori informazioni.
-
N O T A
I moduli di sistema possiedono un grado di protezione IP20 secondo la norma IEC/EN 60529 (eccetto i connettori, che sono
-
IP00). Sono progettati per l'uso all'interno di un armadio di controllo. Possono subire danni se esposti ai uidi.
3.1.1 Esempi applicativi
Esistono numerose potenziali aree di applicazione per il sistema VLT® Multiaxis Servo Drive MSD 510 come nei seguenti esempi.
Macchine per il settore beverage
•
Riempitrici
•
Stampaggio a soatura di PET
Macchine confezionatrici per il settore del Food and Beverage
•
Avvolgitrici
•
Saldatrici automatiche per la produzione di sacchetti
•
Sigillatrici vaschette
•
Pellicolatrici
Macchine confezionatrici per il settore farmaceutico e industriale:
•
Pallettizzazione
•
Coperchiatrici
•
Incartonatrici
•
Riempitrici di tubetti
•
Confezionatrici di blister
•
Dosatrici di liquidi
•
Dosatrici di solidi
3.1.2 Numero massimo di moduli
Il numero massimo di moduli nel sistema MSD 510 è:
AQ262450196490it-000101 / 175R1170 | 25Danfoss A/S © 2019.10
Page 26

Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
•
PSM 510: due per sistema
•
DAM 510: tre per sistema (a seconda dell'architettura del sistema è possibile aggiungerne altri. Contattare Danfoss per ulteriori
informazioni).
•
SDM 511/SDM 512: dipende dalla corrente nominale e dalla potenza di uscita dei moduli di servoazionamento e dal consumo di
corrente AUX durante il funzionamento. Contattare Danfoss per ulteriori informazioni.
Descrizione del sistema
3.2 Modulo di alimentazione PSM 510
3.2.1 Panoramica
PSM è l'abbreviazione di Power Supply Module (Modulo di alimentazione) che fornisce l'alimentazione elettrica al servosistema. Il
PSM 510 fornisce una tensione di alimentazione CC e garantisce un'uscita ad alta densità. Il collegamento CC e la tensione 24/48 V
CC sono distribuiti attraverso il backlink nelle piastre posteriori a tutti i moduli di sistema. Il PSM 510 può essere controllato tramite
bus di campo basato su Ethernet.
I LED sul lato anteriore del PSM 510 mostrano lo stato operativo e gli avvisi.
N O T A
Il sistema MSD 510 è progettato per l'uso all'interno di un armadio di controllo. Se si utilizza la funzione STO, l'armadio deve
-
presentare almeno un grado di protezione IP54.
Il PSM 510 possiede un grado di protezione IP20 secondo la norma IEC/EN 60529 (eccetto i connettori, che sono IP00).
-
Il PSM 510 può essere danneggiato se esposto ai uidi.
-
Tutti i cavi di potenza sono collegati al PSM 510; pertanto, è necessario almeno un PSM 510 per ogni sistema.
Il PSM 510 svolge anche funzioni di manutenzione, come la misurazione della tensione, ed è rareddato da una ventola interna.
Il PSM 510 è disponibile in tre dimensioni di potenza e fornisce una potenza in uscita di 10 kW, 20 kW o 30 kW con una capacità di
sovraccarico del 200% per tre secondi. È possibile utilizzare due moduli PSM 510 in parallelo per ottenere una potenza di uscita no
a 60 kW.
Un esempio di codice tipo per il PSM 510 è: MSD510PSM510F2P10C0D6E20PLSXXXXXXXXXXXXX.
AQ262450196490it-000101 / 175R117026 | Danfoss A/S © | 2019.10
Page 27
2
1
3
4
5
6
7
8
9
e30bg581.11
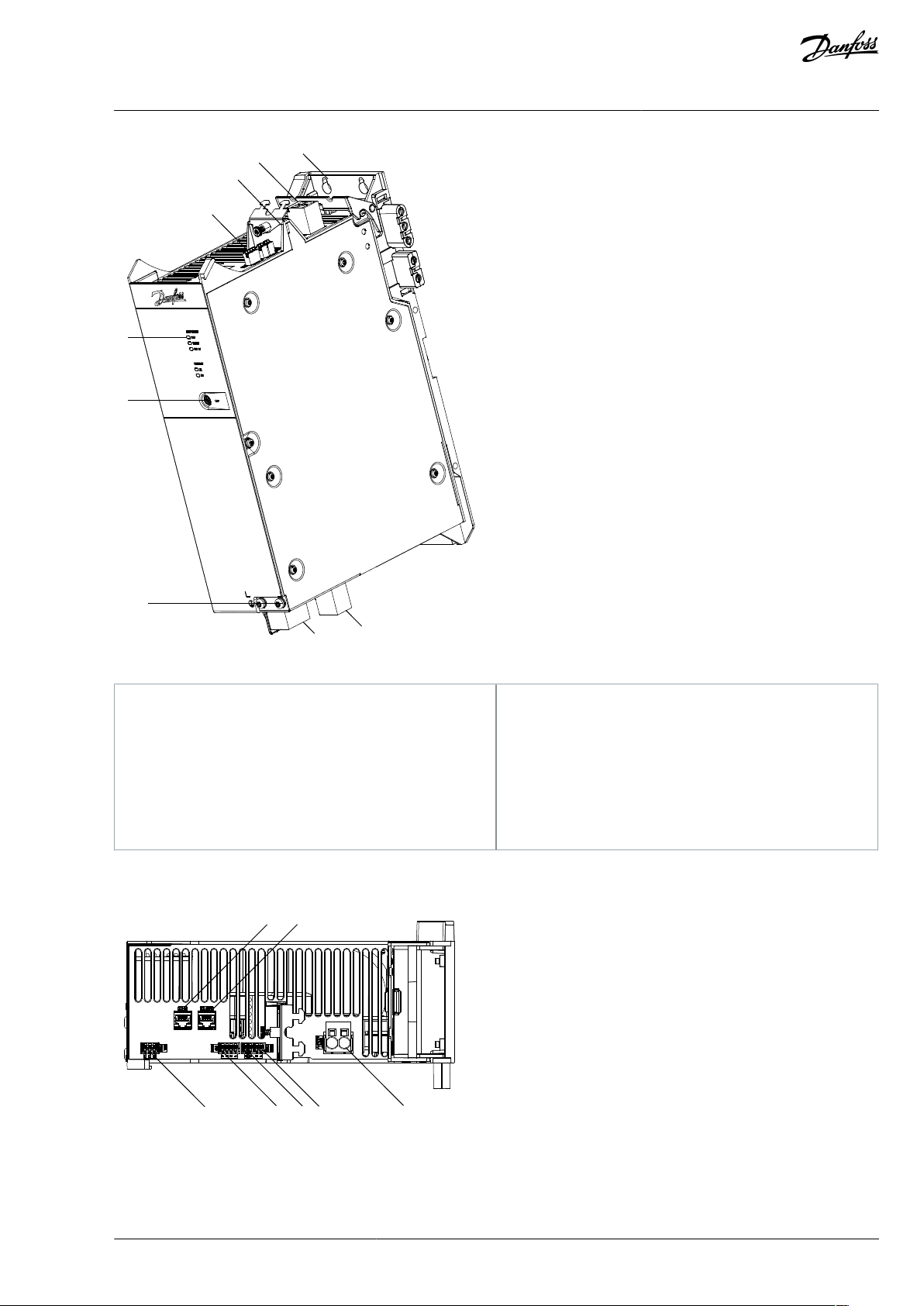
1
Piastra posteriore
2
Connettore di ingresso da 24/48 V
3
Fissacavo e schermatura
4
Connettori: I/O, STO, relè ed Ethernet
5
LED di funzionamento
6
Connettore LCP
7
Vite PE
8
Connettore di alimentazione di rete CA
9
Connettore per resistenza di frenatura interna/esterna
1 2
3
45
6
7
e30bg465.11
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Descrizione del sistema
Illustrazione 2: PSM 510
3.2.2 Connettori sulla parte superiore di PSM 510
Illustrazione 3: Connettori sulla parte superiore di PSM 510
AQ262450196490it-000101 / 175R1170 | 27Danfoss A/S © 2019.10
Page 28
1
Connettore Ethernet di ingresso
2
Connettore Ethernet di uscita
3
Connettore di ingresso da 24/48 V
4
Connettore STO di ingresso
5
Connettore STO di uscita
6
Connettore I/O
7
Connettore per relè
2
1
3
4
e30bg466.10
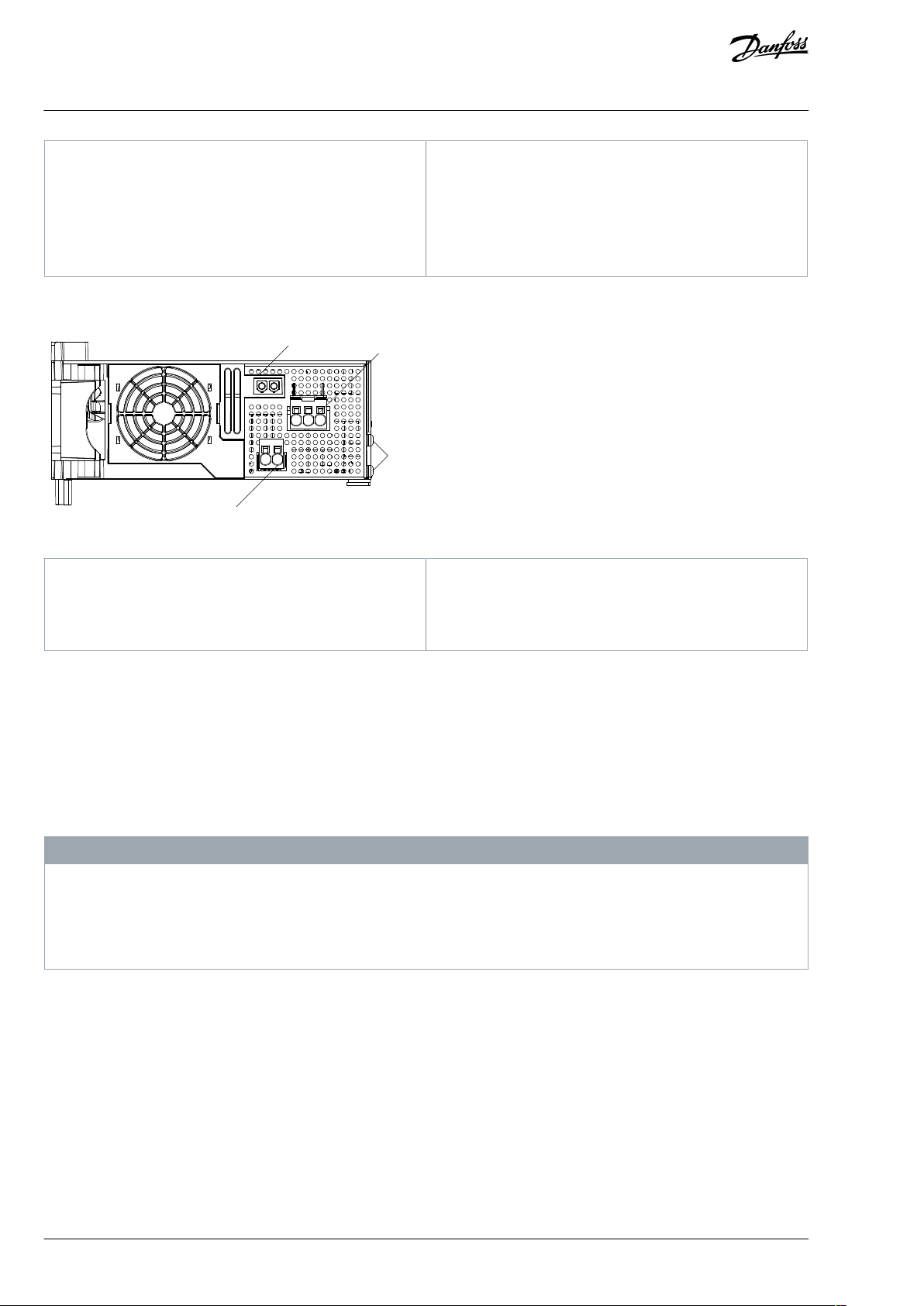
1
Supporto per il connettore della resistenza di frenatura interna quando non in uso
2
Connettore di alimentazione di rete CA
3
Viti PE
4
Connettore per resistenza di frenatura interna/esterna
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
3.2.3 Connettori sulla parte inferiore di PSM 510
Illustrazione 4: Connettori sulla parte inferiore di PSM 510
Descrizione del sistema
3.3 Modulo di servoazionamento SDM 511/SDM 512
3.3.1 Panoramica
SDM è l'abbreviazione di Servo Drive Module (Modulo di servoazionamento). L'SDM 511 è un servoazionamento monoasse disponibile in cinque dimensioni di potenza e due dimensioni dell'alloggiamento (FS1 da 50 mm ed FS2 da 100 mm). L'SDM 512 è un servoazionamento a doppio asse disponibile in tre dimensioni di potenza e una dimensione dell'alloggiamento (FS1, 50 mm). Un modulo a doppio asse aziona due servomotori in modo indipendente. Sono disponibili diverse opzioni di retroazione. Gli SDM sono dotati di I/O digitali e Safe Torque O (STO) e supportano diversi encoder di retroazione del motore.
N O T A
Il sistema MSD 510 è progettato per l'uso all'interno di un armadio di controllo. Se si utilizza la funzione STO, l'armadio deve
-
presentare almeno un grado di protezione IP54.
L'SDM possiede un grado di protezione IP20 secondo la norma IEC/EN 60529 (eccetto i connettori, che sono IP00).
-
L'SDM può essere danneggiato se esposto ai uidi.
-
AQ262450196490it-000101 / 175R117028 | Danfoss A/S © | 2019.10
Page 29
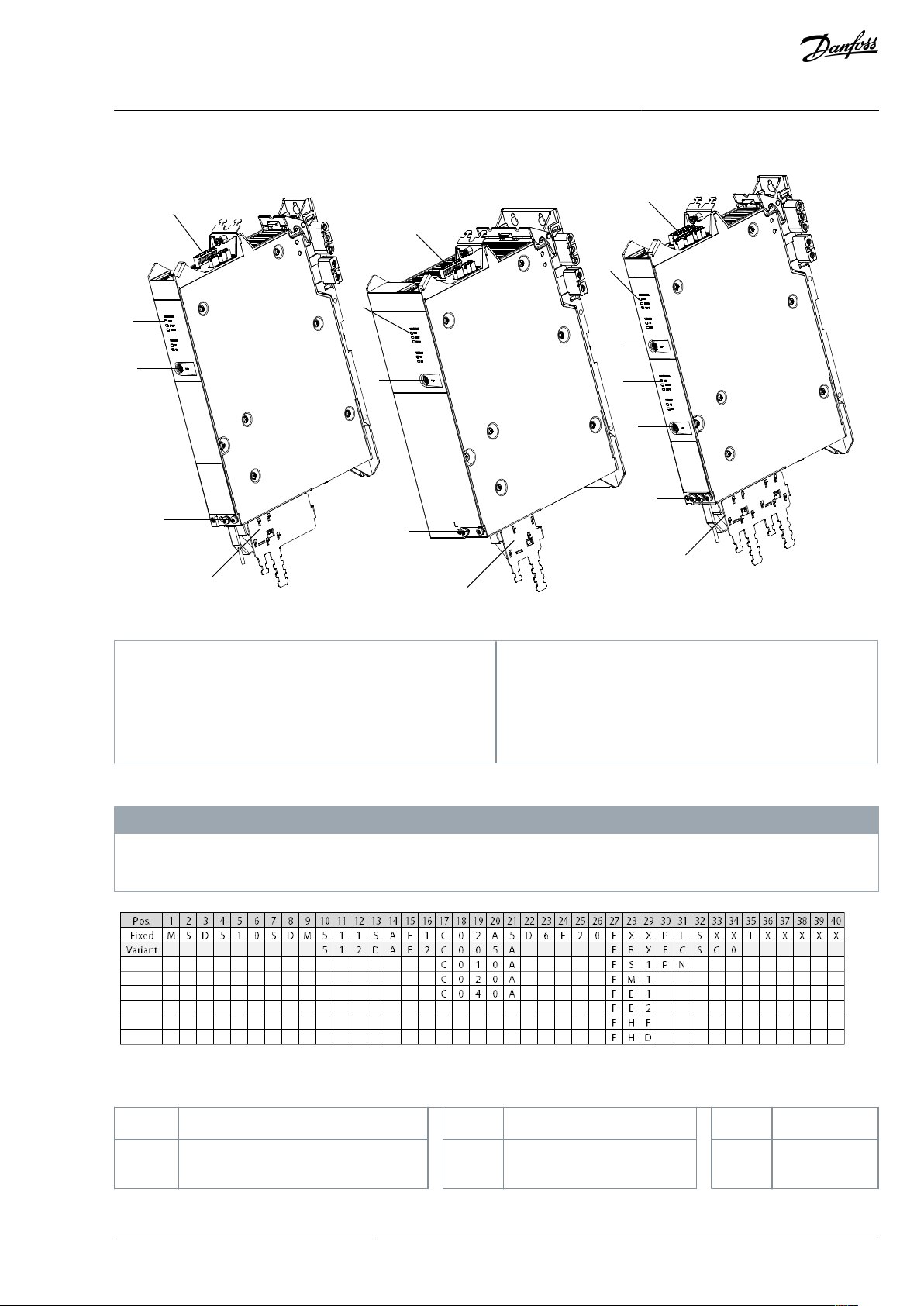
1
SDM 512 Frame Size 1
1
2
3
4
5
SDM 511 Frame Size 2
1
SDM 511 Frame Size 1
2
3
5
4
2
3
2
3
4
5
e30bg580.10
1
Connettori: I/O, STO, relè, Ethernet ed encoder esterno2LED di funzionamento
3
Connettore LCP
4
Viti PE
5
Connettori: Motore, retroazione del motore, termistore, freno, schermatura e ssacavo
e30bg570.10
[01–06]
Gruppo prodotti
[22–23]
Tensione CC
[32–34]
Firmware
MSD510
VLT® Multiaxis Servo Drive
D6
Tensione del collegamento CC
600 V
SXX
Standard
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Descrizione del sistema
Illustrazione 5: Moduli SDM 511/SDM 512
3.3.2 Tipi SDM 511/SDM 512
N O T A
Il Conguratore del convertitore di frequenza mostra la congurazione valida delle varianti di servoazionamenti. Vengono
-
mostrate unicamente le combinazioni valide. Pertanto, non tutte le varianti descritte nel codice tipo sono visibili.
Illustrazione 6: Codice tipo
Tabella 4: Legenda per codice tipo
AQ262450196490it-000101 / 175R1170 | 29Danfoss A/S © 2019.10
Page 30

[07–12]
Variante prodotto
[24–26]
Contenitore del convertitore
di frequenza
SC0
Personalizzato
SDM511
MSD 510 Servo Drive Module 511
E20
IP20
(1)
[35]
Sicurezza
SDM512
MSD 510 Servo Drive Module 512
[27–29]
Sistema bus
T
Safe torque o
(STO)
[13–14]
Variante del convertitore di frequenza
FXX
Senza retroazione
(2)
[36–40]
Riservato
SA
Servoazionamento ad asse singolo
FRX
Resolver
XXXXX
Riservato
DA
Servoazionamento ad asse doppio
FS1
BiSS ST retroazione, 17-bit
[15–16]
Dimensione del contenitore (frame)
FM1
BiSS MT retroazione, 17-bit
F1
Dimensione del contenitore (frame) 1,
50 mm
FE1
EnDat 2.1
F2
Dimensione del contenitore (frame) 2,
100 mm
FE2
EnDat 2.2
[17–21]
Corrente nominale
FHF
HIPERFACE®
(2)
C02A5
2,5 A
rms
FHD
HIPERFACE® DSL
(2)
C005A
5 A
rms
[30–31]
Sistema bus
C010A
10 A
rms
PL
POWERLINK
C020A
20 A
rms
EC
EtherCAT
C040A
40 A
rms
PN
PROFINET
1
243
657
e30bg443.10
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Descrizione del sistema
1
IP20 secondo la norma IEC/EN 60529 (eccetto i connettori, che sono IP00)
2
In fase di rilascio
3.3.3 Componenti
3.3.3.1 Rareddamento
I moduli di servoazionamento SDM 511 ed SDM 512 sono rareddati da una ventola interna a velocità controllata.
3.3.4 Connettori su SDM 511
In questa sezione sono descritti nel dettaglio tutti i connettori dell'SDM 511 nelle dimensioni dell'alloggiamento 1 (FS1, 50 mm) e 2
(FS2, 100 mm).
3.3.4.1 Connettori sulla parte superiore dell'SDM 511
Illustrazione 7: SDM 511, dimensione dell'alloggiamento 1 (FS1)
AQ262450196490it-000101 / 175R117030 | Danfoss A/S © | 2019.10
Page 31

1
Connettore per encoder esterno
2
Connettore Ethernet di ingresso
3
Connettore Ethernet di uscita
4
Connettore I/O
5
Connettore STO di ingresso
6
Connettore STO di uscita
7
Connettore per relè
1
2 3 4
6 5
7
e30bg444.10
1
Connettore per encoder esterno
2
Connettore Ethernet di ingresso
3
Connettore Ethernet di uscita
4
Connettore I/O
5
Connettore STO di ingresso
6
Connettore STO di uscita
7
Connettore per relè
1
3 2
e30bg446.10
1
Connettore di retroazione del motore
2
Connettore del freno motore e del termistore
3
Connettore motore
1
2
3
e30bg447.10
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Illustrazione 8: SDM 511, dimensione dell'alloggiamento 2 (FS2)
Descrizione del sistema
3.3.4.2 Connettori sulla parte inferiore dell'SDM 511
Illustrazione 9: SDM 511, dimensione dell'alloggiamento 1 (FS1)
Illustrazione 10: SDM 511, dimensione dell'alloggiamento 2 (FS2)
AQ262450196490it-000101 / 175R1170 | 31Danfoss A/S © 2019.10
Page 32

1
Connettore di retroazione del motore
2
Connettore del freno motore e del termistore
3
Connettore motore
e30bg445.10
1 2 3 4 5
67
89
10
11
12
13
14
1
Connettore per encoder esterno SDM1
2
Connettore Ethernet di ingresso SDM1
3
Connettore Ethernet di uscita SDM1
4
Connettore I/O SDM1
5
Connettore I/O SDM2
6
Connettore STO di ingresso SDM1
7
Connettore STO di ingresso SDM2
8
Connettore STO di uscita SDM1
9
Connettore STO di uscita SDM2
10
Connettore per relè SDM1
11
Connettore Ethernet di uscita SDM2
12
Connettore per relè SDM2
13
Connettore Ethernet di ingresso SDM2
14
Connettore per encoder esterno SDM2
e30bg448.10
1 2
3456
1
Connettore di retroazione del motore SDM2
2
Connettore di retroazione del motore SDM1
3
Connettore del freno motore e del termistore SDM1
4
Connettore motore SDM1
5
Connettore del freno motore e del termistore SDM2
6
Connettore motore SDM2
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Descrizione del sistema
3.3.5 Connettori su SDM 512
In questa sezione sono descritti nel dettaglio tutti i connettori presenti su SDM 512 nella dimensione dell'alloggiamento 1 (FS1, 50
mm).
3.3.5.1 Connettori sulla parte superiore dell'SDM 512
Illustrazione 11: SDM 512, Dimensione dell'alloggiamento 1 (FS1)
3.3.5.2 Connettori sulla parte inferiore dell'SDM 512
Illustrazione 12: SDM 512, Dimensione dell'alloggiamento 1 (FS1)
AQ262450196490it-000101 / 175R117032 | Danfoss A/S © | 2019.10
Page 33

1
2
3
4
5
e30bg582.11
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Descrizione del sistema
3.4 Modulo di accesso decentralizzato DAM 510
3.4.1 Panoramica
DAM è l'abbreviazione di Decentral Access Module (Modulo di accesso decentralizzato). Il DAM 510 è un'interfaccia/gateway centrale per il servosistema decentralizzato. Viene utilizzato per collegare il VLT® Integrated Servo Drives ISD 510 e il VLT® Decentral
Servo Drives DSD 510 di Danfoss ai servosistemi tramite un cavo di alimentazione ibrido.
Il DAM 510 fornisce i servoazionamenti decentralizzati con il collegamento CC, U
il cavo di alimentazione ibrido. Presenta funzioni come:
•
Protezione da sovracorrente del cavo ibrido
•
Protezione da sovratensione
•
Circuito di ricarica del collegamento CC
•
Collegamento dell'encoder esterno
•
Buer di capacità del collegamento CC per i servoazionamenti decentralizzati
Il DAM 510 può essere controllato tramite bus di campo basato su Ethernet.
I LED sul lato anteriore del DAM 510 mostrano lo stato operativo e gli avvisi.
, STO e bus di campo basato su Ethernet tramite
AUX
N O T A
Il sistema MSD 510 è progettato per l'uso all'interno di un armadio di controllo. Se si utilizza la funzione STO, l'armadio deve
-
presentare almeno un grado di protezione IP54.
Il DAM 510 possiede un grado di protezione IP20 secondo la norma IEC/EN 60529 (eccetto i connettori, che sono IP00).
-
Il DAM 510 può essere danneggiato se esposto a uidi.
-
Un esempio di codice tipo per il modulo DAM 510 è: MSD510DAM510F1C015AD6E20PLSXXXXXXXXXXXXX.
Illustrazione 13: DAM 510
AQ262450196490it-000101 / 175R1170 | 33Danfoss A/S © 2019.10
Page 34

1
Connettori: I/O, STO, relè ed Ethernet
2
LED di funzionamento
3
Connettore LCP
4
Vite PE
5
Connettori: UDC, AUX, STO out ed Ethernet
1 2
3
4
5
e30bg467.10
1
Connettore Ethernet di ingresso
2
Connettore Ethernet di uscita
3
Connettore STO di ingresso
4
Connettore STO di uscita
5
Connettore per encoder esterno
1
234
e30bg468.10
1
Connettore Ethernet
2
Connettore AUX
3
Connettore STO di uscita
4
Connettore UDC
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
3.4.2 Connettori sulla parte superiore di DAM 510
Illustrazione 14: Connettori sulla parte superiore di DAM 510
Descrizione del sistema
3.4.3 Connettori sulla parte inferiore di DAM 510
Illustrazione 15: Connettori sulla parte inferiore di DAM 510
3.5 Auxiliary Capacitors Module ACM 510
3.5.1 Panoramica
ACM è l'abbreviazione di Auxiliary Capacitors Module (Modulo di condensatori ausiliari). L'ACM 510 può essere collegato al sistema
MSD 510 per immagazzinare energia, consentendo un arresto controllato della macchina in situazioni di emergenza.
N O T A
Il sistema MSD 510 è progettato per l'uso all'interno di un armadio di controllo. Se si utilizza la funzione STO, l'armadio deve
-
presentare almeno un grado di protezione IP54.
L'ACM 510 possiede un grado di protezione IP20 secondo la norma IEC/EN 60529 (eccetto i connettori, che sono IP00).
-
L'ACM 510 può essere danneggiato se esposto a uidi.
-
Un esempio di codice tipo per il modulo ACM 510 è: MSD510ACM510F1E00C8D6E20PLSXXXXXXXXXXXXX.
AQ262450196490it-000101 / 175R117034 | Danfoss A/S © | 2019.10
Page 35

1
2
3
4
e30bg583.10
CAP ST
NET ST
X1
X2
LCP
LINK/ACT
DEV
STATUS ACM
1
Connettori: I/O, relè ed Ethernet
2
LED di funzionamento
3
Connettore LCP
4
Vite PE
e30bg469.11
1
2
4 3
1
Connettore Ethernet di ingresso
2
Connettore Ethernet di uscita
3
Connettore I/O
4
Connettore per relè
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Descrizione del sistema
Illustrazione 16: ACM 510
3.5.2 Connettori sulla parte superiore di ACM 510
Illustrazione 17: Connettori sulla parte superiore di ACM 510
AQ262450196490it-000101 / 175R1170 | 35Danfoss A/S © 2019.10
Page 36

e30bh660.10
2
3
4
1
1
Piastra di schermatura EMC
2
Piastra posteriore
3
Vite PE
4
Connettore di espansione
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
3.6 Modulo di espansione EXM 510
Descrizione del sistema
Illustrazione 18: EXM 510
Il sistema MSD 510 è progettato per l'uso all'interno di un armadio di controllo. Se si utilizza la funzione STO, l'armadio deve
-
presentare almeno un grado di protezione IP54.
L'EXM 510 possiede un grado di protezione IP20 secondo la norma IEC/EN 60529 (eccetto i connettori, che sono IP00).
-
L'EXM 510 può essere danneggiato se esposto a uidi.
-
Un esempio di codice tipo per l'EXM 510 è:
MSD510EXM510F1C062AD6E20XXXXXXXXXXXXXXXX
N O T A
AQ262450196490it-000101 / 175R117036 | Danfoss A/S © | 2019.10
Page 37

Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Descrizione del sistema
3.7 Pannello di Controllo Locale (LCP)
3.7.1 Panoramica del Pannello di controllo locale
L'LCP è l'interfaccia graca utente per scopi diagnostici e operativi. È disponibile in opzione e può essere collegato ai moduli di sistema mediante un cavo opzionale (cavo di estensione da M8 a LCP SUB-D).
Il display LCP ore all'operatore una rapida visualizzazione dello stato dei moduli di sistema, a seconda del dispositivo a cui è collegato, e mostra i parametri e gli allarmi/errori. Inoltre, può essere utilizzato per la messa in funzione e la ricerca guasti.
Può anche essere utile per eseguire semplici funzioni, ad esempio attivare e disattivare le linee di uscita del DAM 510 e aprire il freno
meccanico dell'SDM 511/512.
L'LCP può essere montato sul lato anteriore dell'armadio di controllo utilizzando un kit di montaggio (disponibile come accessorio) e
poi collegato ai moduli tramite cavi da M8 a SUB-D (disponibili come accessori). Vedere la Guida alla Progettazione VLT® Servo
Drive System ISD 510, DSD 510, MSD 510 per i numeri d'ordine degli accessori.
N O T A
Ulteriori informazioni sulle funzioni LCP sono disponibili nella Guida alla programmazione VLT® Servo Drive System
-
ISD 510, DSD 510, MSD 510.
3.7.2 Layout del Pannello di controllo locale
Il pannello di controllo locale è diviso in quattro gruppi funzionali:
•
A: Area di visualizzazione
•
B: Tasti del menu Display
•
C: Tasti di navigazione e spie luminose (LED)
•
D: Tasti di funzionamento e ripristino
Per regolare il contrasto del display, premere il tasto [Status] e i tasti [▵]/[▿].
3.7.2.1 A: Area di visualizzazione
I valori nell'area di visualizzazione variano a seconda del modulo a cui è collegato l'LCP.
L'area di visualizzazione si attiva quando il modulo è collegato all'alimentazione ricevuta da U
AUX
.
AQ262450196490it-000101 / 175R1170 | 37Danfoss A/S © 2019.10
Page 38

Auto
On
Reset
Hand
On
Off
Main
Menu
Quick
Menu
Alarm
Log
Back
Cancel
Info
OK
2.1 kW
On
Alarm
Warn.
A
38 °C
11.5 A
24 V
B
C
D
565V
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18 19
20
21
Status
e30bg799.10
1
Tensione della linea AUX
2
Temperatura della scheda di potenza
3
UDC eettivo (corrente)
4
Consumo di potenza
5
UDC eettivo (tensione)
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Descrizione del sistema
Illustrazione 19: Area di visualizzazione quando è collegato al modulo di alimentazione PSM 510 o al modulo di accesso decentralizzato DAM
510
AQ262450196490it-000101 / 175R117038 | Danfoss A/S © | 2019.10
Page 39

Auto
On
Reset
Hand
On
Off
Main
Menu
Quick
Menu
Alarm
Log
Back
Cancel
Info
OK
37 rpm
On
Alarm
Warn.
A
38 °C 750 deg0.10 A
B
C
D
1
2
3
4
6
7
8
9
10
11
12
13
14
15
16
17
18 19 20 21
Status
e30bh719.10
Velocity
Status
Enabled
1
Valore eettivo della corrente
2
Temperatura della scheda di potenza
3
Posizione del valore eettivo
4
Velocità eettiva
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Descrizione del sistema
Illustrazione 20: Area di visualizzazione quando è collegato ai moduli di servoazionamento SDM 511/SDM 512
AQ262450196490it-000101 / 175R1170 | 39Danfoss A/S © 2019.10
Page 40

Auto
On
Reset
Hand
On
Off
Main
Menu
Quick
Menu
Alarm
Log
Back
Cancel
Info
OK
24 V
On
Alarm
Warn.
A
38 °C
40 °C
39 °C
B
C
D
565V
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18 19
20
21
Status
e30bg798.10
1
Temperatura della scheda di potenza
2
Banco di condensatori di temperatura 1
3
Banco di condensatori di temperatura 2
4
Tensione della linea AUX
5
UDC eettivo (tensione)
Tasto
Funzione
6
Status
Mostra le informazioni sul funzionamento.
7
Quick Menu
Permette di accedere ai parametri.
8
Main Menu
Permette di accedere ai parametri.
9
Alarm Log
Mostra gli ultimi 10 allarmi.
Tasto
Funzione
10
Back
Consente di tornare al passaggio o all'elenco precedente nella struttura del menu.
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Descrizione del sistema
Illustrazione 21: Area di visualizzazione quando è collegato all'Auxiliary Capacitors Module ACM 510
3.7.2.2 B: Tasti del menu Display
I tasti menu sono utilizzati per l'accesso ai menu, per la programmazione parametri, per commutare tra le varie modalità visualizzazione dello stato durante il funzionamento normale e per la visualizzazione dei dati del log guasti.
Tabella 5: Tasti del menu Display
3.7.2.3 C: Tasti di navigazione e spie luminose (LED)
I tasti di navigazione vengono utilizzati per spostare il cursore dei display e fornire il controllo nel funzionamento in modalità locale.
In quest'area sono presenti anche tre LED di stato.
Tabella 6: Tasti di navigazione
AQ262450196490it-000101 / 175R117040 | Danfoss A/S © | 2019.10
Page 41

Tasto
Funzione
11
Cancel
Annulla l'ultima modica o l'ultimo comando, purché non venga modicata la modalità visualizzazione.
12
Info
Premere per una denizione della funzione visualizzata.
13
Tasti di navigazione
Usare i quattro tasti di navigazione per spostarsi tra le voci del menu.
14OKUtilizzare per accedere ai gruppi di parametri o per abilitare una selezione.
LED
Colore
Funzione
15
Acceso
Verde
Il LED On (Acceso) si accende quando il modulo a cui è collegato riceve l'alimentazione da U
AUX
.
16
Warn
Giallo
Quando sono soddisfatte le condizioni per l'avviso, si accende il LED giallo Warn (Avviso) e sul display
appare il testo che illustra il problema.
17
Alarm
Rosso
Una condizione di guasto provoca il lampeggiamento in rosso del LED Alarm (Allarme) e la visualizzazione di un testo relativo all'allarme.
Tasto
Funzione
18
Hand
on
Abilita i moduli MSD 510 collegati da controllare tramite l'LCP.
È possibile passare dalla modalità Hand On alla modalità Auto On e viceversa soltanto in alcuni stati (per maggiori
informazioni vedere la Guida alla programmazione VLT® Servo Drive System ISD 510, DSD 510, MSD 510).
19
O
Pone il modulo servoazionamento (SDM 511/512) nello stato Switch on Disabled (Attiva Disabilitato) e gli altri
moduli di sistema nello stato Standby (Standby).
Questo funziona solamente in modalità Hand On.
La modalità O (Spento) consente il passaggio dalla modalità Hand On alla modalità Auto On.
20
Auto On
Pone il sistema in modalità di funzionamento remoto.
In modalità Auto On, il dispositivo viene controllato dal bus di campo (PLC). È possibile passare dalla modalità
Auto On alla modalità Hand On e viceversa soltanto quando il modulo servoazionamento si trova nello stato
Switch on Disabled (Attiva Disabilitato) e/o il PSM 510, il DAM 510 o l'ACM 510 si trova nello stato Standby.
21
Reset
Ripristina il modulo di sistema MSD 510 dopo aver eliminato un guasto.
Il ripristino è possibile soltanto in modalità Hand On.
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Tabella 7: Spie luminose (LED)
Descrizione del sistema
3.7.2.4 D: Tasti di funzionamento e ripristino
I tasti di funzionamento si trovano nella parte inferiore dell'LCP.
Tabella 8: Tasti di funzionamento e ripristino
3.8 Cavi
3.8.1 Cavo ibrido
I cavi ibridi precongurati vengono utilizzati per collegare i servoazionamenti decentralizzati (se utilizzati) al modulo di accesso decentralizzato (DAM 510).
Esistono due tipi di cavi ibridi, disponibili con connettori M23 sia angolati che diritti:
AQ262450196490it-000101 / 175R1170 | 41Danfoss A/S © 2019.10
Page 42

Tipo di cavo
Schermati/Non
schermati
Note
Cavo di alimentazione
Schermati
Cavo ibrido (schermatura totale con bus di campo aggiuntivo e schermatura della
sezione di sicurezza).
Cavo di loop
Specica
Standard Ethernet
Ethernet standard (conformemente alla norma IEEE 802.3), 100Base-TX (Fast Ethernet)
Tipo di cavo
S/FTP (doppino intrecciato schermato rivestito con lamina di metallo), ISO (IEC 11801 oppure EN
50173), CAT 5e o 6
Smorzamento
23,2 dB (a 100 MHz e 100 m ciascuno)
Smorzamento di diafonia
24 dB (a 100 MHz e 100 m ciascuno)
Attenuazione di riessione
10 dB (100 m ciascuno)
Impedenza d'onda
100 Ω
Lunghezza massima del cavo
100 m tra gli interruttori o i dispositivi di rete
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
•
Cavo di alimentazione per il collegamento del primo servoazionamento ISD 510/DSD 510 di un gruppo al punto di collegamento sul modulo di accesso decentralizzato (DAM 510).
•
Cavo di loop per il collegamento dei servoazionamenti ISD 510/DSD 510 in daisy-chain nell'applicazione.
Entrambi questi cavi sono forniti da Danfoss e sono disponibili in varie lunghezze. Per maggiori informazioni vedere la Guida alla
Progettazione VLT© Servo Drive System ISD 510, DSD 510, MSD 510.
Entrambe le estremità del cavo di loop sono dotate di connettori M23.
Il cavo di alimentazione è dotato di un connettore M23 all'estremità di uscita per il collegamento al primo servoazionamento ISD
510/DSD 510. All'estremità d'ingresso presenta un capocorda; i connettori sono montati sui corrispondenti morsetti del modulo di
accesso decentralizzato (DAM 510).
Tabella 9: Cavi ibridi
Descrizione del sistema
N O T A
I cavi ibridi sono disponibili in due sezioni trasversali: 2,5 mm2 (15 A) e 4 mm2 (25 A). Per maggiori informazioni vedere la
-
Guida alla Progettazione VLT® Servo Drive System ISD 510, DSD 510, MSD 510.
N O T A
RAGGIO DI PIEGATURA MINIMO
Il numero massimo di cicli di piegatura è di 5 milioni a 7,5 x diametro del cavo (15,6 mm).
-
Permanentemente essibile: 12 x diametro del cavo.
-
Permanentemente installato: 5 x diametro del cavo.
-
3.8.2 Cavo Ethernet
Tabella 10: Raccomandazioni per i cavi Ethernet
N O T A
Collegare a terra il cavo Ethernet attraverso il connettore RJ45. Non collegare a terra il passacavo.
-
AQ262450196490it-000101 / 175R117042 | Danfoss A/S © | 2019.10
Page 43

Tipo di cavo
Specica
Lunghezza massima
Cavo ibrido
Alimentazione M23
40 m
Loop M23
25 m
Estensione bus di campo
Lunghezza: 2 m
Lunghezza massima no alla porta successiva: 100 m
Lunghezza massima del
cavo per linea
100 m
Cavo motore
–
Lunghezza massima senza ltro di uscita o induttanza supplementare: 30 m
Lunghezza massima con ltro di uscita o induttanza supplementare: 80 m
Cavo di retroazione
–
80 m
Cavo del modulo di espansione
–
5 m
SDM 511/
SDM 512
Output filter
MCC
U
V
W
PE
U
V
W
3
M
PE
U1
V1
W1
PE
U2
V2
W2
PE
e30bh656.10
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Descrizione del sistema
3.8.3 Cavo LCP
Il cavo LCP viene utilizzato per collegare un LCP a un modulo di sistema attraverso il connettore M8 sul lato anteriore di ogni modulo
di sistema.
È possibile acquistare il cavo LCP presso Danfoss (per maggiori informazioni vedere la Guida alla Progettazione VLT® Servo Drive
System ISD 510, DSD 510, MSD 510).
3.9 Disposizione e instradamento dei cavi
I moduli MSD 510 sono collegati tramite il connettore di backlink (vedere 11.7.1 Connettore di backlink).
Collegare il bus di campo Ethernet in tempo reale al primo modulo del sistema MSD 510 utilizzando un cavo Ethernet standard
(non in dotazione).
Utilizzare cavi di loop Ethernet forniti da Danfoss da collegare agli altri moduli in daisy-chain.
3.9.1 Massime lunghezze del cavo
Tabella 11: Massime lunghezze del cavo
3.9.2 Cablaggio del ltro di uscita
Illustrazione 22: Schema di cablaggio del ltro di uscita
3.9.3 Sistema di cablaggio standard per due moduli di accesso decentralizzati (DAM 510)
In questo esempio, un cavo di alimentazione ibrido con connettori a rilascio rapido consente di fornire la tensione di alimentazione
dal DAM 510 al primo servoazionamento ISD 510/DSD 510.
AQ262450196490it-000101 / 175R1170 | 43Danfoss A/S © 2019.10
Page 44

AC 400–480 V
. . .
ISD 510
DSD 510
. . .
Status
Hand
On
Off Reset
Auto
On
OK
Back
Cancel
Info
Quick
Menu
Main
Menu
Alarm
Log
LCP
PSM
510
DAM
510
DAM
510
STATUS PSM
LINK/ACT
DEV
STO
NET ST
X1
X2
STATUS DAM
LINK/ACT
DEV
STO
NET ST
AUX
X1
X2
X3
STATUS DAM
LINK/ACT
DEV
STO
NET ST
AUX
X1
X2
X3
PLC
1
2
e30bg794.10
UDC + Real-Time Ethernet Bus + STO + U
AUX
UDC + Real-Time Ethernet Bus + STO + U
AUX
3
24/48 V
STO
1
Cavo di alimentazione ibrido
2
Cavo di loop ibrido
3
Induttanza CA
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Descrizione del sistema
Illustrazione 23: Sistema di cablaggio standard per due moduli di accesso decentralizzati (DAM 510)
3.10 Software
Il software per il servosistema comprende:
•
Il rmware dei moduli di sistema già installato sui moduli.
•
Un pacchetto di librerie PLC per Automation Studio© per il funzionamento dei dispositivi MSD 510 (per maggiori informazioni
6.11.2 Creazione di progetti Automation Studio™).
•
Una libreria PLC per TwinCAT® 2 per il funzionamento dei dispositivi MSD 510 (per maggiori informazioni vedere 6.12.2 Crea-
zione di un progetto TwinCAT®).
•
Una libreria PLC per SIMOTION SCOUT per il funzionamento dei dispositivi MSD 510 (vedere 6.14.3 Creazione di un progetto
SIMOTION SCOUT®).
•
Una libreria PLC per il Portale TIA per il funzionamento dei dispositivi MSD 510 .
•
VLT® Servo Toolbox: Uno strumento software basato su PC Danfoss per la messa in funzione e il debugging dei dispositivi.
3.11 Bus di campo
Il servosistema presenta un'architettura di sistema aperta realizzata tramite comunicazione veloce basata su Ethernet (100BASE-T). Il
sistema supporta i bus di campo EtherCAT®, Ethernet POWERLINK® e PROFINET®. Per maggiori informazioni vedere la Guida alla
programmazione VLT© Servo Drive System ISD 510, DSD 510, MSD 510.
In ambienti produttivi la comunicazione con i dispositivi avviene sempre tramite un PLC che funge da master. I servoazionamenti
ISD 510/DSD 510, i moduli di servoazionamento SDM 511/SDM 512 e i moduli di sistema possono essere controllati con questi metodi di comunicazione:
AQ262450196490it-000101 / 175R117044 | Danfoss A/S © | 2019.10
Page 45

EtherCAT
Slave
Controller
(ESC)
OUT
LAN 1 (B)
OUT
2 (C)
IN
0
(A
)
X2
X
1
X3
e30be695.11
LAN
LAN
X1
Passacavo ibrido M23 per il modulo di accesso decentralizzato (DAM 510) o il servoazionamento precedente.
X2
Passacavo ibrido M23 per il servoazionamento successivo.
X3
Passacavo Ethernet M8 per altri slave EtherCAT®, ad
esempio encoder EtherCAT®.
Il connettore è disponibile soltanto sui servoazionamenti avanzati.
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
•
Utilizzando le librerie VLT® Servo Motion (disponibili per TwinCAT®, Automation Studio©, SIMOTION SCOUT® e TiA Portal).
•
Utilizzando la funzionalità dell'asse NC di TwinCAT® (soltanto 510/DSD 510 ed SDM 511/SDM 512).
•
Utilizzando lo standard CANopen® CiA DS 402 tramite lettura e scrittura su oggetti.
•
Utilizzando la classe di applicazione 1 (AC1), soltanto PROFINET®.
Descrizione del sistema
È possibile far funzionare i servoazionamenti ISD 510/DSD 510, i moduli di servoazionamento SDM 511/SDM 512 e i moduli di sistema con i seguenti tempi di ciclo.
•
Bus di campo EtherCAT® ed Ethernet POWERLINK®:
-
400 µs e relativi multipli (per esempio 800 µs e 1.200 µs).
-
500 µs e relativi multipli (per esempio 1 ms).
•
Bus di campo PROFINET
-
500 µs e relativi multipli (per esempio 1 ms).
®
Quando il tempo di ciclo è un multiplo di 400 µs e 500 µs, si utilizza la base temporale di 500 µs.
I servoazionamenti ISD 510/DSD 510, i moduli di servoazionamento SDM 511/SDM 512 e i moduli di sistema sono certicati per i
bus di campo secondo le regole e le normative corrispondenti. I servoazionamenti sono conformi al prolo del convertitore di frequenza CANopen® CiA DS 402.
3.11.1 EtherCAT®
I servoazionamenti ISD 510/DSD 510, i moduli di servoazionamento SDM 511/SDM 512 e i moduli di sistema supportano i seguenti
protocolli EtherCAT®:
•
CANopen over EtherCAT® (CoE)
•
File Access over EtherCAT® (FoE)
•
Ethernet over EtherCAT® (EoE)
I servoazionamenti ISD 510/DSD 510, i moduli di servoazionamento SDM 511/SDM 512 e i moduli di sistema supportano orologi
distribuiti. Per compensare il guasto di una sezione del cavo di comunicazione nel sistema, è disponibile una ridondanza del cavo
per tutti i bus di campo. Per maggiori informazioni vedere la Guida alla Progettazione VLT® Servo Drive System ISD 510, DSD 510,
MSD 510.
Illustrazione 24: Assegnazione della porta EtherCAT© per il servoazionamento ISD 510/DSD 510
AQ262450196490it-000101 / 175R1170 | 45Danfoss A/S © 2019.10
Page 46

X1
X2
X3
ESC DAM
EtherCAT®
slave
OUT
LAN 2
IN
LAN 1
OUT
LAN 3
e30be696.11
X1
Passacavo RJ45 per lo slave precedente.
X2
Cavo di alimentazione ibrido da RJ45 a M23 per il
primo servoazionamento ISD 510/DSD 510.
X3
Passacavo RJ45 per il PLC (ridondanza del cavo) o
slave successivo.
X1 X2
ESC
PSM/ACM/SDM
EtherCAT®
slave
IN
LAN 1
OUT
LAN 2
e30bg797.10
X1
Passacavo RJ45 per il PLC o slave precedente.
X2
Passacavo RJ45 per il PLC (ridondanza del cavo) o slave successivo.
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Illustrazione 25: Assegnazione della porta EtherCAT© per il modulo di accesso decentralizzato (DAM 510)
Descrizione del sistema
Illustrazione 26: Alimentazione elettrica porta EtherCAT© per il modulo di alimentazione (PSM 510), il modulo di servoazionamento SDM 511/
SDM 512 e il modulo di condensatori ausiliari (ACM 510)
3.11.2 Ethernet POWERLINK®
I servoazionamenti ISD 510/DSD 510, i moduli di servoazionamento SDM 511/SDM 512 e i moduli di sistema sono certicati secondo DS 301 V1.1.0 e supportano le seguenti caratteristiche:
•
Funge da nodo controllato.
•
Può essere utilizzato come stazione multiplexata.
•
Supporta la comunicazione incrociata.
•
È supportata la ridondanza ad anello per la ridondanza dei media.
Non sono assegnate porte speciche per Ethernet POWERLINK®.
3.11.3 PROFINET®
Il servoazionamento ISD 510/DSD 510, i moduli di servoazionamento SDM 511/SDM 512 e i moduli di sistema supportano PROFINET® classe di conformità C secondo le norme IEC 61158-5-10:2014, IEC 61158-6-10:2014, IEC 61784-2:2014 e IEC 61784-5-3:2013.
Tutti i componenti del sistema (servoazionamenti e moduli di sistema) fungono da dispositivi I/O nella rete PROFINET®.
Sono supportate le seguenti funzioni:
•
Dispositivo-I/O - Dispositivo controllato da un controllore I/O
•
Congurazione del modulo dinamico
•
Classe di carico netto III
•
Ridondanza ad anello (MRPD) come client
I dispositivi del bus di campo PROFINET® sono sempre collegati come componenti di rete tramite interruttori integrati nel dispositivo del bus di campo. Sono presenti due porte sui servoazionamenti ISD 510/DSD 510, sui moduli servoazionamento SDM 511/SDM
512: PSM 510 e ACM 510. Sono presenti tre porte su DAM 510.
AQ262450196490it-000101 / 175R117046 | Danfoss A/S © | 2019.10
Page 47

Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Installazione meccanica
4 Installazione meccanica
4.1 Elementi forniti
A seconda dell'applicazione, gli elementi forniti per il sistema MSD 510 sono:
•
VLT® Power Supply Module (PSM 510)
•
VLT® Single axis Servo Drive Module (SDM 511)
•
VLT® Single axis Servo Drive Module (SDM 512)
•
VLT® Decentral Access Module (DAM 510)
•
VLT® Auxiliary Capacitors Module (ACM 510)
•
VLT® Expansion Module (EXM 510)
•
Induttanza CA
•
La presente Guida operativa
•
Cavo di alimentazione (ibrido)
•
Cavo di loop (ibrido)
N O T A
I cavi di alimentazione e i cavi di loop ibridi sono necessari quando i servoazionamenti ISD510/DSD510 vengono utilizzati nel
-
servosistema.
L'unità di imballaggio dipende dal numero di moduli forniti. Conservare l'imballaggio da utilizzare in caso di restituzione del prodotto.
4.2 Trasporto
•
Utilizzare sempre mezzi di trasporto e mezzi di sollevamento con capacità di carico suciente per il trasporto dei componenti
del servosistema.
•
Evitare vibrazioni durante il trasporto.
•
Evitare urti e colpi violenti.
4.3 Ispezione alla consegna
Procedura
1.
Dopo aver ricevuto il prodotto, controllare immediatamente se gli elementi forniti corrispondono ai documenti di spedizione. Danfoss non accetta reclami per difetti segnalati successivamente.
2.
In caso di danno da trasporto visibile, presentare immediatamente un reclamo al vettore di consegna.
3.
In caso di difetti visibili o consegna incompleta, presentare immediatamente un reclamo al rappresentante Danfoss responsabile.
4.4 Misure di sicurezza durante l'installazione
Durante l'installazione attenersi sempre alle istruzioni di sicurezza contenute nel presente manuale. Prestare particolare attenzione a
garantire che i seguenti punti siano sempre rispettati:
•
L'installazione deve essere eseguita esclusivamente da personale qualicato.
•
L'installazione deve essere eseguita con la dovuta cura e attenzione.
•
Rispettare tutte le norme di sicurezza e le misure di protezione e tenere in considerazione le condizioni ambientali.
•
Leggere e comprendere il manuale.
4.5 Ambiente di installazione
4.5.1 Componenti del sistema
Le condizioni ambientali per i componenti del sistema MSD 510 sono:
AQ262450196490it-000101 / 175R1170 | 47Danfoss A/S © 2019.10
Page 48

(100 x number of FS2 + 50 x number of FS1) - 50
FS2 FS1
50 50
[1.97]
[0.42]
[14.45]
[1.97]
50 50
[1.97] [1.97]
M5
M5
367
UNF 10-32
UNF 10-32
Ø10,6
e30bg819.10
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
•
L'intervallo di temperatura ambiente consentito per il funzionamento e i livelli di vibrazione non devono essere superati (vedere
Installazione meccanica
11.8 Speciche generali e condizioni ambientali per il sistema MSD 510).
•
L'umidità relativa ammissibile è del 5-93%, senza condensa.
•
Lo spazio minimo necessario al di sopra e al di sotto dei moduli di sistema è descritto in 4.7.1 Requisiti di spazio per i moduli di
sistema.
4.6 Preparativi per l'installazione
4.6.1 Moduli di sistema
Eettuare i seguenti preparativi per garantire che il servosistema possa essere installato in modo adabile ed ecace.
Montare i moduli di sistema sempre in conformità alle norme locali.
Procedura
1.
Prevedere una disposizione di montaggio adatta per l'applicazione a seconda del tipo e del peso dei moduli.
2.
Per evitare disallineamenti, assicurarsi che le piastre posteriori siano perfettamente livellate.
3.
Per garantire un rareddamento suciente, prestare attenzione ai requisiti minimi di spazio specicati.
4.
Collegare a terra i moduli.
4.6.2 Schemi di perforazione
Illustrazione 27: Schemi di perforazione per moduli di sistema da 50 mm e 100 mm
4.7 Procedura di installazione
4.7.1 Requisiti di spazio per i moduli di sistema
I moduli possono essere montati uno accanto all'altro, ma richiedono uno spazio minimo nella parte superiore e inferiore per il
rareddamento.
AQ262450196490it-000101 / 175R117048 | Danfoss A/S © | 2019.10
Page 49

270
[10.63]
[3.94]
[3.3][15][6.1]
[0.24]
[14.4][0.28]
[1.18]
max. 100
min. 85
min. 30
[1.57]
min. 40
63677
max. 120
[4.72]
e30bg820.10
380min. 155
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Installazione meccanica
Illustrazione 28: Spazio minimo necessario nella parte superiore e inferiore
AQ262450196490it-000101 / 175R1170 | 49Danfoss A/S © 2019.10
Page 50

60
[2.36]
60
[2.36]
101
[3.98]
106
[4.17]
e30bg821.10
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Installazione meccanica
Illustrazione 29: Spazio minimo necessario sui lati
4.7.2 Supporti e utensili necessari per l'installazione
Per l'installazione dei moduli del sistema MSD 510 sono necessari utensili adatti alle viti di ssaggio (non in dotazione).
4.7.3 Istruzioni di installazione per i moduli di sistema
N O T A
Montare il componente del sistema MSD 510 con la massima potenza di uscita accanto al PSM 510. Montare i restanti com-
-
ponenti del sistema secondo un ordine decrescente della potenza di uscita.
Procedura
1.
Praticare i fori per il montaggio della piastra posteriore come da schema di foratura (vedere
2.
Collegare le piastre posteriore tramite il metodo "Click and Lock".
4.6.2 Schemi di perforazione).
AQ262450196490it-000101 / 175R117050 | Danfoss A/S © | 2019.10
Page 51

e30bg802.10
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Installazione meccanica
Illustrazione 30: Collegamento delle piastre posteriori
3.
Montare le piastre posteriori sulla piastra di montaggio nell'armadio di controllo con viti M5 con un diametro minimo della
testa o della rondella pari a 9,5 mm. La coppia di serraggio è 3 Nm.
AQ262450196490it-000101 / 175R1170 | 51Danfoss A/S © 2019.10
Page 52

e30bg803.10
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Installazione meccanica
Illustrazione 31: Montaggio delle piastre posteriori nell'armadio di controllo
4.
Far scorrere il modulo sul supporto posizionato sul fondo della piastra posteriore.
5.
Premere il primo modulo sul connettore di backlink nella parte superiore della piastra posteriore.
AQ262450196490it-000101 / 175R117052 | Danfoss A/S © | 2019.10
Page 53

e30bg804.10
STATUS PSM
DEV
SVS ST
NET ST
LINK/ACT
X2
LCP
LCP
X1
STATUS DAM
DEV
SVS ST
NET ST
AUX
LINK/ACT
X1
X2
X3
X2
LIN
S
X
X3
1
e30bg815.10
STATUS PSM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
STATUS DAM
DEV
SVS ST
NET ST
AUX
LINK/ACT
X1
X2
X3
STATUS DAM
DEV
SVS ST
NET ST
AUX
LINK/ACT
X1
X2
X3
LCP
LCP
LCP
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Installazione meccanica
Illustrazione 32: Pressione del modulo sul connettore di backlink
6.
Per ssare il modulo, tirare verso il basso il morsetto di ssaggio ([1] nell'Illustrazione 33) nella parte superiore della piastra
posteriore.
7.
Illustrazione 33: Tirare verso il basso il morsetto di ssaggio nella parte superiore della piastra posteriore
Ripetere i passaggi 4, 5 e 6 per i moduli rimanenti, assicurandosi che il labbro sul lato sinistro del secondo modulo sia all'interno della scanalatura di guida sul lato destro del primo modulo (([1] nell'Illustrazione 34).
AQ262450196490it-000101 / 175R1170 | 53Danfoss A/S © 2019.10
Page 54

1
e30bg822.10
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Illustrazione 34: Scanalatura di guida
Installazione meccanica
AQ262450196490it-000101 / 175R117054 | Danfoss A/S © | 2019.10
Page 55

Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Installazione elettrica
5 Installazione elettrica
5.1 Avvisi per l'installazione elettrica
Durante l'installazione elettrica, oltre alle informazioni contenute nel presente manuale, osservare le norme locali e nazionali pertinenti.
A V V I S O
PERICOLO DI CORRENTI DI DISPERSIONE/MESSA A TERRA
Le correnti di dispersione/messa a terra sono superiori a 3,5 mA. Una messa a terra non appropriata dei moduli di sistema MSD
510 può causare morte o lesioni gravi.
Per motivi di sicurezza dell'operatore, utilizzare un installatore elettrico certicato per la corretta messa a terra dell'impianto
-
in conformità alle norme e direttive elettriche locali e nazionali applicabili e alle istruzioni contenute nel presente manuale.
A V V I S O
ALTA TENSIONE
Il sistema MSD 510 contiene componenti che funzionano ad alta tensione quando sono collegati alla rete di alimentazione elettrica. Sui componenti non sono presenti indicatori che indicano la presenza di alimentazione di rete. Un'installazione, una messa in
funzione o una manutenzione non corrette possono causare morte o gravi lesioni.
L'installazione, la messa in funzione e la manutenzione devono essere eseguite esclusivamente da personale qualicato.
-
A V V I S O
ALTA TENSIONE
Sui connettori è presente una tensione potenzialmente letale che può provocare lesioni gravi o mortali.
Prima di lavorare sui connettori di alimentazione (scollegando o collegando il cavo), scollegare il PSM 510 dalla rete e attend-
-
ere la ne del tempo di scarica.
5.2 Condizioni ambientali elettriche
Per consentire un funzionamento sicuro ed ecace del servosistema è necessario rispettare le seguenti condizioni ambientali elettriche:
•
Solamente per l'impiego in impianti di messa a terra di alimentazione TN-S, TN-C, TN-CS, TT (non con messa a terra angolare)
•
Corrente di cortocircuito potenziale: 5 kA
•
Classe di protezione I
•
Rete di alimentazione trifase con messa a terra, 400-480 V CA ±10%
•
Frequenza trifase 44–66 Hz
•
Linee trifase e linea PE
•
Alimentazione esterna per tensione ausiliaria, 24-48 V CC (PELV)
•
Induttanza CA (vedere
•
Osservare le disposizioni di legge nazionali.
•
La corrente di dispersione è superiore a 3,5 mA.
5.9.1 Induttanza della linea CA)
N O T A
COMPATIBILITÀ RCD
Il sistema MSD 510 contiene componenti che possono determinare una corrente CC nel conduttore di messa a terra di protezione, che può provocare il malfunzionamento di qualsiasi dispositivo collegato al sistema.
Se viene usato un dispositivo di protezione a corrente residua (RCD) o di monitoraggio (RCM) per la protezione in caso di
-
contatto diretto o indiretto, usare un dispositivo RCD o RCM di tipo B sul lato di alimentazione dei componenti del sistema
MSD 510 .
AQ262450196490it-000101 / 175R1170 | 55Danfoss A/S © 2019.10
Page 56

e30bh391.10
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Tutti i moduli devono essere montati in un armadio di controllo.
-
5.3 Messa a terra
5.3.1 Messa a terra per la sicurezza elettrica
Installazione elettrica
N O T A
Illustrazione 35: Messa a terra per la sicurezza elettrica
•
Collegare a terra i servoazionamenti ISD 510/DSD 510 con il conduttore PE del cavo di alimentazione. Sulla parte anteriore e
posteriore del servoazionamento DSD 510 è presente una vite PE dedicata.
•
Assicurarsi che il frame della macchina disponga di un adeguato collegamento elettrico sulla angia del servoazionamento. Utilizzare la supercie della angia laterale anteriore per il collegamento PE.
•
Per soddisfare i requisiti CE, garantire una sezione trasversale minima del lo di terra di almeno 16 mm2 (minimo 70 °C, Cu).
Per soddisfare i requisiti UL, garantire una sezione trasversale minima del lo di terra di almeno 6 AWG (minimo 60 °C, Cu).
Se si utilizza un modulo PSM 510 con 10 kW è possibile ridurre la sezione trasversale dei cavi:
-
10 mm2 (minimo 70 °C, Cu) per soddisfare i requisiti CE
-
8 AWG (minimo 60 °C, Cu) per soddisfare i requisiti UL
•
Non collegare a terra i componenti del sistema MSD 510 in daisy-chain. Utilizzare il metodo di messa a terra mostrato nell'Illus-
trazione 35.
•
Tenere i li di terra quanto più corti possibile.
•
Attenersi ai requisiti di cablaggio contenuti nel presente manuale.
AQ262450196490it-000101 / 175R117056 | Danfoss A/S © | 2019.10
Page 57

1
2
3
e30bg805.10
1
Cavo2Pressacavo
3
Piastra di schermatura I/O
1
2
3
e30bh343.10
1
Pressacavo
2
Piastra di schermatura metallica EMC
3
Vite PE
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Installazione elettrica
5.3.2 Messa a terra per l'installazione conforme ai requisiti EMC
•
Stabilire il contatto elettrico tra lo schermo del cavo e il contenitore usando la piastra di schermatura I/O di ogni modulo.
Illustrazione 36: Schermatura del cavo sulla parte superiore dei componenti di sistema
Illustrazione 37: Schermatura del cavo sulla parte inferiore dei componenti di sistema
•
Utilizzare un cavo con una schermatura ad alta copertura per ridurre le oscillazioni transitorie da scoppio.
•
Non utilizzare schermi attorcigliati per collegare la schermatura. Si consiglia un collegamento dei li a 360°.
COLLEGAMENTO EQUIPOTENZIALE
Esiste il rischio di interferenze elettriche quando il potenziale di terra tra il servosistema e la macchina è diverso. Installare i
-
cavi di equalizzazione tra essi. La sezione trasversale dei cavi consigliata è 16 mm2.
N O T A
AQ262450196490it-000101 / 175R1170 | 57Danfoss A/S © 2019.10
Page 58

Modello e potenza nominale
Conformità CE (IEC 60364)
Conformità UL (NEC 2014)
Tipo di fusibile massimo
Tipo di fusibile massimo
PSM 510 (10 kW)
gG 25 A
30 A (soltanto classe T o J)
PSM 510 (20 kW)
gG 50 A
50 A (soltanto classe T o J)
PSM 510 (30 kW)
gG 63 A
80 A (soltanto classe T o J)
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Installazione elettrica
N O T A
INTERFERENZA EMC
Utilizzare cavi schermati per i cavi di controllo e cavi separati per i cavi di alimentazione e di controllo. Il mancato isolamento
-
dei cavi di alimentazione e di controllo può provocare un comportamento inatteso e prestazioni ridotte.
Assicurare una distanza minima di 200 mm tra i cavi di segnale e di potenza.
-
Soltanto cavi trasversali a 90°.
-
5.4 Requisiti dell'alimentazione di rete
Assicurarsi che l'alimentazione presenti le seguenti proprietà:
•
Impianto di messa a terra dell'alimentazione TN-S, TN-C, TN-CS, TT (non con messa a terra angolare).
•
Corrente di cortocircuito potenziale: 5 kA.
•
Classe di protezione I.
•
Rete di alimentazione trifase a terra, 400-480 V CA ±10%.
•
Linee trifase e linea PE.
•
Frequenza trifase: 44–66 Hz
•
Corrente di ingresso massima per un PSM 510 a 30 kW: 55 A
rms
5.4.1 Fusibili
N O T A
Utilizzare fusibili sul lato di alimentazione del modulo di alimentazione PSM 510 conformi ai requisiti CE e UL (vedere la
-
Tabella 12).
Quando si utilizzano due moduli PSM 510, ogni PSM 510 deve disporre di un proprio set di fusibili dedicati.
-
Tabella 12: Fusibili
5.4.2 Interruttori
Per soddisfare i requisiti CE utilizzare un interruttore di tipo B o C con una capacità pari a 1,5 volte la corrente nominale di PSM 510.
N O T A
Gli interruttori non sono consentiti negli impianti dove è richiesto il C-UL. Sono consentiti solamente i fusibili raccomandati
-
da UL.
5.5 Requisiti per l'alimentazione ausiliaria
Alimentare il PSM 510 con un'unità di alimentazione elettrica con un'uscita di 24/48 V CC ±10% (PELV) e massimo 50 A (la corrente
eettiva dipende dai moduli utilizzati). L'uscita richiesta dipende dalla topologia del sistema. L'ondulazione in uscita dell'unità di
alimentazione elettrica deve essere inferiore a 250 mVpp.
Consultare la Guida alla Progettazione VLT® Servo Drive System ISD 510, DSD 510, MSD 510 per gli schemi a chiocciola della
potenza nominale.
AQ262450196490it-000101 / 175R117058 | Danfoss A/S © | 2019.10
Page 59

Conformità CE (IEC 60364)
Conformità UL (NEC 2014)
Tipo di fusibile massimo
Tipo di fusibile massimo
50 A
(1)
63 A
(2)
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Installazione elettrica
N O T A
Utilizzare esclusivamente unità di alimentazione conformi alla specica PELV.
-
Utilizzare un'alimentazione con marchio CE secondo le norme EN 61000-6-2 ed EN 61000-6-4 o simili per uso industriale.
-
Il circuito secondario deve essere alimentato da una sorgente esterna isolata.
-
L'alimentazione esterna da 24/48 V CC per la tensione ausiliaria deve essere dedicata al sistema MSD 510 , ossia l'alimentazione è
utilizzata esclusivamente per alimentare il PSM 510. La lunghezza massima del cavo tra l'alimentazione e il PSM 510 è 3 m.
5.5.1 Fusibili
Per proteggere il cablaggio a 24-48 V CC si raccomanda l'uso di fusibili certicati UL.
Tabella 13: Fusibili
1
Se la corrente massima è inferiore, è possibile utilizzare un fusibile con corrente nominale inferiore. Grado dei fusibili IEC: secondo il 100% della
corrente massima. Utilizzare un fusibile a tempo di ritardo classicato in base alla tensione CC in uso.
2
Se la corrente massima è inferiore, è possibile utilizzare un fusibile con corrente nominale inferiore. Grado dei fusibili UL: secondo il 125% della
corrente massima. Utilizzare un fusibile a tempo di ritardo classicato in base alla tensione CC in uso.
5.6 Requisiti dell'alimentazione di sicurezza
Alimentare la linea STO con un'alimentazione a 24 V CC per uso industriale con le seguenti proprietà:
Intervallo di uscita: 24 V CC ±10%
•
Corrente massima: 1 A
•
Utilizzare un'unità di alimentazione a 24 V con marchio CE per uso industriale. Assicurarsi che l'alimentazione soddis le speciche
PELV e venga utilizzata soltanto per l'ingresso di sicurezza del sistema.
È possibile utilizzare un'alimentazione comune per l'alimentazione ausiliaria e di sicurezza, a condizione che l'unico punto di collegamento dei due circuiti sia vicino all'alimentazione, al ne di evitare interferenze dovute a una generale caduta di tensione. La
lunghezza massima del cavo tra l'unità di alimentazione da 24 V e il servosistema è di 3 m.
L'alimentazione di sicurezza può essere collegata in loop dal PSM 510 agli altri componenti del sistema MSD 510 , ad eccezione
dell'ACM 510 che non dispone di un collegamento STO. (cavo non in dotazione). Per ulteriori informazioni vedere il
8.6 Installazione.
N O T A
Garantire un isolamento rinforzato tra i segnali di sicurezza e gli altri segnali, le alimentazioni (alimentazione di rete) e le parti
-
conduttive esposte.
5.7 Requisiti UL
N O T A
La protezione da cortocircuito allo stato solido integrata non fornisce una protezione del circuito di derivazione, che deve
-
quindi essere assicurata in conformità al Codice Elettrico Nazionale/Codice Elettrico Canadese ed eventuali ulteriori codici
locali.
L'unità è adatta per l'uso su un circuito in grado di fornire non oltre 5.000 ampère rms simmetrici, 480 V massimo quando è
-
protetta da fusibili da 80 A di classe J o T.
Per soddisfare le normative UL (Underwriters Laboratories), utilizzare un cavo di rame omologato UL con una resistenza ter-
-
mica minima di 60 °C. Utilizzare esclusivamente li di classe 1. Per il PSM 510 da 30 kW utilizzare una resistenza termica massima di 75 °C.
È necessaria una protezione da sovraccorrente del circuito di comando.
-
AQ262450196490it-000101 / 175R1170 | 59Danfoss A/S © 2019.10
Page 60

1
2
3
4
5
e30bg808.10
40
Axis 2:170
Axis 1:120
10
60
12
1
Area schermata
2U3V4W5
PE
40
60
15
15
150
1
2
3
4
5
e30bh465.10
1
Area schermata
2U3V4W5
PE
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
5.8 Collegamento del modulo di servoazionamento SDM 511/SDM 512
5.8.1 Collegamento del cavo motore
Installazione elettrica
Illustrazione 38: Cavo motore per moduli di servoazionamento da 50 mm di larghezza
Illustrazione 39: Cavo motore per moduli di servoazionamento da 100 mm di larghezza
AQ262450196490it-000101 / 175R117060 | Danfoss A/S © | 2019.10
Page 61

1
2
e30bg809.10
1
2
e30bg810.10
1
55
8
2
3
4
e30bg811.10
1
Temperatura motore -
2
Temperatura motore +
3
Freno motore -
4
Freno motore +
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Illustrazione 40: Collegamento del cavo motore su moduli di servoazionamento di 50 mm di larghezza
Installazione elettrica
Illustrazione 41: Collegamento del cavo motore su moduli di servoazionamento di 100 mm di larghezza
Procedura
1.
Inserire i li nel connettore del motore.
2.
Inserire il connettore del motore [1].
3.
Fissare e schermare il cavo motore con il pressacavo [2].
5.8.2 Collegamento del cavo del freno/termistore
Illustrazione 42: Cavo del freno/termistore
AQ262450196490it-000101 / 175R1170 | 61Danfoss A/S © 2019.10
Page 62

1
3
2
4
5
e30bg812.10
1
Vite PE del motore
2
Connettore del freno/termistore
3
Pressacavo per cavo del freno/termistore
4
Piastra EMC
5
Vite per piastra EMC
1
2 3 4
6 5
7
e30bg444.10
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Illustrazione 43: Collegamento del cavo del freno/termistore
Installazione elettrica
N O T A
Utilizzare un motore con isolamento rinforzato tra il termistore e gli avvolgimenti del motore (testato con impulsi di
-
4300 V CC e 8000 V).
Procedura
1.
Inserire i li nel connettore del freno/termistore.
2.
Inserire il connettore del freno/termistore [2] nel modulo di servoazionamento SDM 511/SDM 512.
3.
Fissare il cavo del freno/termistore con il pressacavo [3].
4.
Serrare la vite della piastra EMC [5]. La coppia di serraggio è 3 Nm.
5.
Inserire il connettore di retroazione del motore (SUB-D, 26 poli) nel modulo di servoazionamento.
6.
Collegare il modulo di servoazionamento SDM 511/SDM 512 su PE collegando un lo PE alla vite PE sul lato anteriore del
modulo [1]. La coppia di serraggio è 3 Nm.
5.8.3 Collegamento dei cavi sulla parte superiore dei moduli di servoazionamento SDM 511/SDM
512
picco
da
Illustrazione 44: Connettori sulla parte superiore dell'SDM 511/SDM 512 (esempio)
AQ262450196490it-000101 / 175R117062 | Danfoss A/S © | 2019.10
Page 63

1
Connettore per encoder esterno (E SDM 511/512)
2
Connettore Ethernet di ingresso (X1 IN)
3
Connettore Ethernet di uscita (X2 OUT)
4
Connettore I/O (I/O SDM 511/512)
5
Connettore STO di ingresso (STO SDM 511/512)
6
Connettore STO di uscita (STO SDM 511/512)
7
Connettore per relè (REL SDM 511/512)
Modello
Minimo I
rms
[A]
U
rms
[V]
Induttanza [mH]
PSM 510 (10 kW)
20
500
Minimo: 0,47
Massimo: 1,47
PSM 510 (20 kW)
40
500
Minimo: 0,47
Massimo: 1,47
PSM 510 (30 kW)
60
500
0,47 ±10%
Modello
Minimo I
rms
[A]
U
rms
[V]
Induttanza [mH]
PSM 510 (2 x 30 kW)
125
500
0,24 ±10%
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Procedura
1.
Collegare il cavo Ethernet dall'uscita del modulo precedente al connettore di ingresso [2].
2.
Inserire i li dall'uscita STO del modulo precedente nel connettore di ingresso da 24 V (ingresso STO).
3.
Inserire il connettore di ingresso da 24 V (ingresso STO) [5] nell'SDM 511/SDM 512.
4.
Se necessario, inserire il connettore per encoder esterno [1].
5.
Se sono necessari ulteriori I/O, inserire i li nel connettore I/O, quindi inserire il connettore [4].
6.
Se è necessario un relè, inserire i li nel connettore per relè, quindi inserire il connettore [7].
Installazione elettrica
5.9 Collegamento al modulo di alimentazione PSM 510
5.9.1 Induttanza della linea CA
È obbligatorio l'utilizzo di un'induttanza della linea CA trifase (vedere 5.9.1.1 Collegamento di un PSM 510 all'induttanza CA e 5.9.1.2
Collegamento di due moduli PSM 510 all'induttanza CA).
Tabella 14: Caratteristiche dell'induttanza della linea per un PSM 510
Se vengono installati due moduli PSM 510 in parallelo, utilizzare un'induttanza CA come specicato nella Tabella 15. Vedere 5.9.1.2
Collegamento di due moduli PSM 510 all'induttanza CA per ulteriori informazioni.
Tabella 15: Caratteristiche dell'induttanza della linea per due PSM 510 installati in parallelo.
Danfoss consiglia di montare l'induttanza di linea CA vicino al PSM 510.
La lunghezza massima del cavo dipende dalla sezione trasversale e dalla tensione e corrente necessarie al collegamento CC.
Se le induttanze della linea CA sono montate lontano dal PSM 510, la distanza massima del cavo è di 5 m.
5.9.1.1 Collegamento di un PSM 510 all'induttanza CA
Collegare il PSM 510 al sistema di distribuzione con l'induttanza CA corretta per le dimensioni di potenza dello stesso.
AQ262450196490it-000101 / 175R1170 | 63Danfoss A/S © 2019.10
Page 64

STATUS PSM
DEV
STO
NET ST
LINK/ACT
X1
X2
LCP LCP LCP
STATUS SDM
DEV
STO
NET ST
LINK/ACT
X1
X2
STATUS SDM
DEV
STO
NET ST
LINK/ACT
X1
X2
LCP
STATUS DAM
DEV
STO
NET ST
AUX
LINK/ACT
X1
X2
X3
e30bh420.10
PSM 510
SDM 511
SDM 511/
SDM 512
DAM 510
STATUS PSM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
LCP
STATUS PSM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
LCP
LCP LCP
STATUS SDM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
STATUS SDM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
LCP
STATUS DAM
DEV
SVS ST
NET ST
AUX
LINK/ACT
X1
X2
X3
PSM 510
PSM 510
SDM 511
SDM 511/
SDM512
DAM 510
e30bh421.11
... ...
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Installazione elettrica
Illustrazione 45: Collegamento di un PSM 510 all'induttanza CA
5.9.1.2 Collegamento di due moduli PSM 510 all'induttanza CA
Collegare i moduli PSM 510 alla stessa induttanza CA come mostrato nell'Illustrazione 46.
Assicurarsi che l'induttanza impiegata sia della dimensione corretta in base alla potenza combinata dei moduli PSM 510.
Quando si utilizzano due moduli PSM 510, il cablaggio tra l'induttanza di linea CA e ciascun PSM 510 deve essere della stessa lun-
ghezza, con una tolleranza di 0,5 m.
Collegare ogni PSM 510 direttamente all'induttanza CA. Non è consentito il cablaggio in parallelo.
Illustrazione 46: Collegamento di due moduli PSM 510 all'induttanza CA
5.9.1.3 Collegamento di due moduli PSM 510 all'induttanza CA con ripartizione del sistema
Collegare i moduli PSM 510 alla stessa induttanza CA indipendentemente dalla posizione di carico (ad esempio, prima o dopo la
ripartizione del sistema) come mostrato nell'Illustrazione 47.
AQ262450196490it-000101 / 175R117064 | Danfoss A/S © | 2019.10
Page 65

STATUS PSM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
LCP LCP LCP LCP LCP LCP LCP LCP
STATUS PSM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
STATUS SDM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
STATUS SDM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
e30bh422.10
STATUS DAM
DEV
SVS ST
NET ST
AUX
LINK/ACT
X1
X2
X3
STATUS ACM
DEV
CAP ST
NET ST
LINK/ACT
X1
X2
STATUS SDM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
STATUS SDM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
PSM 510
PSM 510
SDM 511
SDM 511/
SDM512
SDM 511
SDM 511/
SDM512
ACM 510
DAM 510
EXM 510
...
1 2
3
45
6
7
e30bg465.11
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Installazione elettrica
Assicurarsi che l'induttanza impiegata sia della dimensione corretta in base alla potenza combinata dei moduli PSM 510.
Quando si utilizzano due moduli PSM 510, il cablaggio tra l'induttanza di linea CA e ciascun PSM 510 deve essere della stessa lun-
ghezza, con una tolleranza di 0,5 m.
Collegare ogni PSM 510 direttamente all'induttanza CA. Non è consentito il cablaggio in parallelo.
Illustrazione 47: Collegamento di due moduli PSM 510 all'induttanza CA con ripartizione del sistema
Se si utilizzano due induttanze CA (una per ciascun PSM 510) ed entrambi i moduli PSM 510 sono montati sullo stesso lato della
ripartizione del sistema, la congurazione è consentita con un declassamento pari alla tolleranza dell'induttanza CA rapportata a 60
kW. Ad esempio, il 10% di declassamento è pari a 54 kW.
Se si utilizzano due induttanze CA (una per ciascun PSM 510) e si monta un modulo PSM 510 prima e dopo la ripartizione, i carichi
devono essere bilanciati in modo uniforme. In caso contrario, il declassamento di entrambi i moduli PSM 510 è pari alla tolleranza
dell'induttanza CA. Ad esempio, una tolleranza 10% + 10% signica -20% di declassamento.
Se si utilizzano due induttanze CA (una per ciascun PSM 510) e si monta un modulo PSM 510 prima e dopo la ripartizione con metà
dei carichi impostati prima e metà dopo la ripartizione del sistema, l'impostazione è consentita con un declassamento pari alla tolleranza dell'induttanza CA rapportata a 60 kW. Ad esempio, il 10% di declassamento è pari a 54 kW.
N O T A
Ulteriori informazioni sul modulo EXM 510 e sul cablaggio sono disponibili in 11.7.15 Connettore del modulo di espansione.
-
5.9.2 Collegamento dei cavi sul modulo di alimentazione PSM 510
5.9.2.1 Collegamento dei cavi sulla parte superiore del modulo di alimentazione PSM 510
Illustrazione 48: Connettori sulla parte superiore di PSM 510
AQ262450196490it-000101 / 175R1170 | 65Danfoss A/S © 2019.10
Page 66

1
Connettore Ethernet di ingresso (X1 IN)
2
Connettore Ethernet di uscita (X2 OUT)
3
Connettore di ingresso da 24/48 V (INPUT 24/48 V)
4
Connettore STO di ingresso (STO PSM)
5
Connettore STO di uscita (STO PSM)
6
Connettore I/O (I/O PSM)
7
Connettore per relè (REL PSM)
2
1
3
4
e30bg466.10
1
Supporto per il connettore della resistenza di frenatura interna quando non in uso
2
Connettore di alimentazione di rete CA
3
Viti PE
4
Connettore per resistenza di frenatura interna/esterna
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Procedura
1.
Collegare il cavo Ethernet dal PLC al connettore di ingresso Ethernet [1].
2.
Collegare il cavo Ethernet dal connettore di uscita Ethernet [2] al modulo successivo.
3.
Inserire i li nel connettore di ingresso da 24/48 V.
4.
Inserire il connettore di ingresso da 24/48 V [3].
5.
Inserire i li nel connettore di ingresso STO.
6.
Inserire il connettore di ingresso STO (STO PSM) [4].
7.
Inserire i li nel connettore di uscita STO.
8.
Inserire il connettore di uscita STO (STO PSM) [5].
9.
Se sono necessari ulteriori I/O, inserire i li nel connettore I/O, quindi inserire il connettore (I/O PSM) [6].
10.
Se è necessario un relè, inserire i li nel connettore per relè, quindi inserire il connettore (REL PSM) [7].
Installazione elettrica
5.9.2.2 Collegamento dei cavi sulla parte inferiore del modulo di alimentazione PSM 510
Illustrazione 49: Connettori sulla parte inferiore di PSM 510
Procedura
1.
Inserire i li nel connettore di alimentazione di rete CA.
2.
Inserire il connettore di alimentazione di rete CA [2].
3.
Se è necessaria una resistenza di frenatura esterna:
a.
Scollegare il connettore della resistenza di frenatura interna [4] e al suo posto inserire il connettore del freno esterno.
b.
Collegare il connettore della resistenza di frenatura interna nel supporto del connettore del freno interno [1].
4.
Collegare il PSM 510 alla vite PE sul lato anteriore [3] con un conduttore PE. La coppia di serraggio è 3 Nm.
AQ262450196490it-000101 / 175R117066 | Danfoss A/S © | 2019.10
Page 67

1 2
3
4
5
e30bg467.10
1
Connettore Ethernet di ingresso (X1 IN)
2
Connettore Ethernet di uscita (X3 OUT)
3
Connettore STO di ingresso (STO DAM)
4
Connettore STO di uscita (STO DAM)
5
Connettore per encoder esterno (E DAM)
1
234
e30bg468.10
1
Connettore Ethernet
2
Connettore AUX
3
Connettore STO di uscita
4
Connettore UDC
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Installazione elettrica
5.10 Collegamento del modulo di accesso decentralizzato (DAM 510)
5.10.1 Collegamento dei cavi sulla parte superiore del modulo di accesso decentralizzato DAM 510
Illustrazione 50: Connettori sulla parte superiore di DAM 510
Procedura
1.
Collegare il cavo Ethernet dall'uscita del modulo precedente al connettore di ingresso [1].
2.
Inserire i li dell'uscita STO del modulo precedente nel connettore 24 V IN (ingresso STO), vedere 11.7.10.3.1 Connettori STO
sulla parte superiore di DAM 510.
3.
Inserire il connettore di ingresso da 24 V (connettore STO IN) [3] nel DAM 510.
4.
Se necessario, collegare il connettore per encoder esterno [5].
5.10.2 Collegamento del cavo di alimentazione
Illustrazione 51: Connettori sulla parte inferiore di DAM 510
AQ262450196490it-000101 / 175R1170 | 67Danfoss A/S © 2019.10
Page 68

1
26
117
80
10
20
87
18
10
7
2
3
4
5
6
7
8
9
e30bg806.10
1
Area schermata
2
UDC+ (nero, 2,5 mm2/4 mm2)
3
UDC– (grigio, 2,5 mm2/4 mm2)
4
STO+ (rosa, 0,5 mm2)
5
STO– (grigio, 0,5 mm2)
6
AUX+ (rosso, 2,5 mm2)
7
AUX– (blu, 2,5 mm2)
8
Ethernet/bus di campo (verde, connettore RJ45)
9
PE (giallo/verde, 2,5 mm2/4 mm2, capocorda a forcella)
1
2
3
4
5
6
e30bg807.10
1
Viti PE per cavo di alimentazione
2
Connettore bus
3
Pressacavo per cavo di alimentazione
4
Pressacavo per cavo STO
5
Piastra EMC
6
Vite per piastra EMC
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Illustrazione 52: Cavo di alimentazione
Installazione elettrica
Illustrazione 53: Collegamento del cavo di alimentazione
AQ262450196490it-000101 / 175R117068 | Danfoss A/S © | 2019.10
Page 69

e30bh350
.11
1
2
4 3
1
Connettore Ethernet di ingresso (X1 IN)
2
Connettore Ethernet di uscita (X2 OUT)
3
Connettore I/O (I/O ACM)
4
Connettore per relè (REL ACM)
12
5315
8
1
2
3
4
5
6
7
e30bh661.10
1
24/48 V
2
GND3Terra funzionale
4
CC-5CC-6CC+7CC+8Area schermata
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Procedura
1.
Inserire i li nei connettori UDC, AUX e STO.
2.
Fissare il cavo di alimentazione con i pressacavi [3], assicurandosi che la zona schermata sia posizionata esattamente sotto
questi ultimi.
3.
Fissare il cavo STO con il pressacavo [4], assicurandosi che la zona schermata sia posizionata esattamente sotto quest'ultimo.
4.
Inserire i connettori del cavo di alimentazione nella rispettiva morsettiera sul DAM 510.
5.
Serrare la vite sulla piastra EMC [6]. La coppia di serraggio è 3 Nm.
6.
Inserire il connettore bus RJ45 [2].
7.
Collegare il DAM 510 alla vite PE sul lato anteriore [1] con un conduttore PE. La coppia di serraggio è 3 Nm.
5.11 Collegamento dell'Auxiliary Capacitors Module ACM 510
Installazione elettrica
Illustrazione 54: Connettori sulla parte superiore di ACM 510
Procedura
1.
Collegare il cavo Ethernet dall'uscita del modulo di sistema precedente al connettore di ingresso (X1 IN) [1].
2.
Se sono necessari ulteriori I/O, inserire i li nel connettore I/O (I/O ACM), quindi inserire il connettore [3].
3.
Se è necessario un relè, inserire i li nel connettore per relè (REL ACM), quindi inserire il connettore [4].
4.
Collegare l'ACM 510 alla vite PE sul lato anteriore con un conduttore PE. La coppia di serraggio è 3 Nm.
5.12 Collegamento del modulo di espansione EXM 510
Illustrazione 55: Cavo del modulo di espansione
AQ262450196490it-000101 / 175R1170 | 69Danfoss A/S © 2019.10
Page 70

e30bh392.11
1
2
3
4
5
6
7
1
Vite per piastra di schermatura EMC
2
Vite PE
3
Cavi CC
4
Cavo di terra funzionale
5
Cavo GND
6
Cavo da 24/48 V
7
Pressacavo
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Illustrazione 56: Collegamento del modulo di espansione EXM 510
Installazione elettrica
N O T A
Se si utilizzano due connettori di backlink separati (collegati tramite una o due coppie di moduli EXM 510), le due barre di
-
messa a terra devono essere collegate anche insieme con una sezione trasversale dei cavi da 16 mm2 (6 AWG).
Procedura
1.
Inserire i li [3], [4], [5] e [6] nel connettore di espansione.
2.
Fissare i cavi CC [3] con il pressacavo [7], assicurandosi che l'area schermata sia posizionata esattamente sotto il pressacavo.
3.
Fissare i cavi [4], [5] e [6] con i pressacavi [7].
4.
Inserire i connettori nella piastra posteriore.
5.
Serrare la vite sulla piastra di schermatura EMC [1]. La coppia di serraggio è 3 Nm.
6.
Collegare a terra il modulo di espansione su PE con un lo PE e la vite PE [2]. La coppia di serraggio è 3 Nm.
5.13 Collegamento della resistenza di frenatura sul PSM 510
Il PSM 510 è collegato alla resistenza di frenatura interna come mostrato nella
In alternativa, il PSM 510 può essere collegato a una resistenza di frenatura esterna. In questo caso, la resistenza di frenatura interna
del PSM 510 deve rimanere scollegata e il connettore può essere posizionato nel supporto del connettore della stessa resistenza di
frenatura interna (vedere 3.2.3 Connettori sulla parte inferiore di PSM 510).
Non è consentito installare resistenze di frenatura in parallelo o in serie.
Illustrazione 57.
AQ262450196490it-000101 / 175R117070 | Danfoss A/S © | 2019.10
Page 71

STATUS PSM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
LCP
1
e30bh423.10
PSM 510
1
Resistenza di frenatura interna
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Installazione elettrica
Illustrazione 57: Collegamento della resistenza di frenatura interna su un PSM 510
Quando si utilizzano due moduli PSM 510, collegare ogni PSM 510 alla propria resistenza di frenatura interna come mostrato
nell'Illustrazione 58 (impostazioni di fabbrica).
Congurazioni alternative consentite per due moduli PSM 510:
•
Un PSM 510 è collegato alla resistenza di frenatura interna e l'altro è collegato a una resistenza di frenatura esterna.
•
Entrambi i moduli PSM 510 sono collegati a una resistenza di frenatura esterna. In questo caso, la resistenza di frenatura interna
del PSM 510 deve rimanere scollegata e il connettore può essere posizionato nel supporto del connettore della stessa resistenza
di frenatura interna (vedere 3.2.3 Connettori sulla parte inferiore di PSM 510).
Non è consentito installare resistenze di frenatura in parallelo o in serie.
AQ262450196490it-000101 / 175R1170 | 71Danfoss A/S © 2019.10
Page 72

STATUS PSM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
LCP
STATUS PSM
DEV
SVS ST
NET ST
LINK/ACT
X1
X2
LCP
1
1
e30bh424.10
PSM 510
PSM 510
1
Resistenza di frenatura interna
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Installazione elettrica
Illustrazione 58: Collegamento della resistenza di frenatura su due moduli PSM 510 in parallelo
AQ262450196490it-000101 / 175R117072 | Danfoss A/S © | 2019.10
Page 73

e30bh657.10
1 2 3
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Messa in funzione
6 Messa in funzione
6.1 Avvisi per la messa in funzione
A V V I S O
AVVIO INVOLONTARIO
Il sistema MSD 510 contiene servoazionamenti, il PSM 510 e il DAM 510 che sono collegati alla rete di alimentazione elettrica e
possono iniziare a funzionare in qualsiasi momento per via di un comando del bus di campo, di un segnale di riferimento o
dell'eliminazione di una condizione di guasto. I servoazionamenti e tutti i dispositivi collegati devono essere in buone condizioni
di funzionamento, poiché quando l'unità è collegata alla rete di alimentazione elettrica condizioni di funzionamento carenti possono causare morte, lesioni gravi, danni alle apparecchiature o altri danni materiali.
Adottare misure adeguate per evitare avvii involontari.
-
6.2 Lista di controllo prima della messa in funzione
Completare sempre questi controlli prima della prima messa in funzione e prima di avviare il funzionamento dopo lunghi tempi di
fermo o di stoccaggio.
Procedura
1.
Controllare se tutti i connettori lettati dei componenti meccanici ed elettrici sono serrati correttamente.
2.
Controllare se è assicurata la libera circolazione dell'aria di rareddamento (aspirazione e uscita).
3.
Controllare se i collegamenti elettrici sono corretti.
4.
Assicurarsi che siano presenti protezioni di contatto per le parti rotanti e le superci che possono surriscaldarsi.
5.
Se si utilizza la funzionalità STO, eseguire il test di messa in funzione del sistema di sicurezza funzionale (vedere 8.8 Test di
messa in funzione).
6.3 Parametri di congurazione SDM 511/SDM 512 e messa in funzione del convertitore di frequenza
6.3.1 Sottostrumento Conguration Parameter
Conguration Parameter (Parametro di congurazione) è il sottostrumento di VLT® Servo Toolbox per congurare:
•
Dati motore
•
Dati dell'applicazione
•
Dati di controllo
•
Congurazioni di ingresso/uscita
•
Encoder esterno
Illustrazione 59: Sottostrumento Conguration Parameter
AQ262450196490it-000101 / 175R1170 | 73Danfoss A/S © 2019.10
Page 74

1
Pulsante Salva/Salva come
2
Pulsante Read conguration from device (Leggi congurazione dal dispositivo)
3
Pulsante Write conguration to device (Scrivi cong-
urazione sul dispositivo)
e30bh658.10
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
I parametri di congurazione sono memorizzati in un le.
•
Fare clic sul pulsante Read conguration from device (Leggi la congurazione dal dispositivo) [2] per caricare il le.
•
Fare clic sul pulsante Save/Save as (Salva/Salva come) [1] per salvare il le localmente.
•
Fare clic sul pulsante Write conguration to device (Scrivi la congurazione sul dispositivo) [3] per trasferire il le su un dispositivo.
Spegnere e riaccendere il dispositivo per attivare la congurazione trasferita.
Messa in funzione
N O T A
Fare riferimento al sottostrumento per una descrizione dettagliata di ogni parametro.
-
6.3.2 Sottostrumento Drive Commissioning
Drive Commissioning (Messa in funzione del convertitore di frequenza) è il sottostrumento di VLT® Servo Toolbox per l'esecuzione di
operazioni di messa in funzione, come ad esempio:
Regolazione della retroazione del motore
•
•
Taratura dell'ampiezza del resolver
•
Misurazione dell'inerzia
Illustrazione 60: Sottostrumento Drive Commissioning
6.4 Assegnazione ID EtherCAT®
EtherCAT® non richiede alcuna assegnazione speciale dell'ID (indirizzo IP). L'assegnazione speciale dell'ID è necessaria solamente se
si utilizza la comunicazione indiretta tramite il software VLT® Servo Toolbox.
6.5 Assegnazione ID Ethernet POWERLINK®
6.5.1 Panoramica
La comunicazione con il master Ethernet POWERLINK® non deve essere attiva quando si utilizza il VLT® Servo Toolbox per assegnare
gli ID ai dispositivi. L'assegnazione ID tramite il VLT® Servo Toolbox è possibile solamente quando viene utilizzata la comunicazione
aciclica Ethernet POWERLINK®. Se la comunicazione aciclica Ethernet POWERLINK® è già iniziata, spegnere e riaccendere per arrestarla.
Scollegare il PLC, spegnere e riaccendere prima di impostare gli ID. In alternativa, nell'interfaccia POWERLINK®, riavviare il PLC in
Service Mode (Modalità manutenzione) mentre il parametro Basic Ethernet in Service Mode (Ethernet di base in modalità di funzionamento) è impostato su Basic Ethernet enabled (Ethernet di base abilitato).
6.5.2 Assegnazione ID al singolo dispositivo
Quando si assegna un ID a un singolo dispositivo, utilizzare la nestra Device Information (Informazioni sul dispositivo) in VLT® Servo
Toolbox (per maggiori informazioni vedere la Guida alla programmazione VLT® Servo Drive System ISD 510, DSD 510, MSD 510).
È possibile eettuare l'impostazione di un ID per un dispositivo solamente tramite l'LCP.
AQ262450196490it-000101 / 175R117074 | Danfoss A/S © | 2019.10
Page 75

Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Messa in funzione
6.5.2.1 Impostazione dell'ID del nodo direttamente su un servoazionamento o sui moduli di sistema
Tutti i parametri relativi all'IP si trovano nel gruppo di parametri 12-0* IP Settings (Impostazioni IP). In base allo standard Ethernet
POWERLINK®, l'indirizzo IP è impostato su 192.168.100.xxx. L'ultimo numero è il valore nel parametro 12-60 Node ID (ID nodo). Per il
parametro 12-02 Subnet Mask (Subnet mask), l'indirizzo IP è impostato su 255.255.255.0 e non può essere modicato.
Procedura
1.
Collegare l'LCP al servoazionamento o al modulo di sistema per il quale occorre modicare Node ID (ID Nodo).
2.
Premere il tasto Hand On per più di 1 s per utilizzare l'LCP come interfaccia di controllo.
3.
Premere il pulsante Main Menu, quindi scorrere no al sottomenu 12-** Ethernet e premere OK.
4.
Scorrere no al sottomenu 12-6* Ethernet POWERLINK e premere OK.
Modicare l'ID del nodo PSM 510/DAM 510 con il valore desiderato (1-239).
5.
6.
Premere OK per confermare la selezione e attendere il completamento della procedura di assegnazione dell'ID.
Spegnere e riaccendere per garantire che tutte le modiche dell'ID siano eettive e operative nel bus di campo.
7.
6.5.2.2 Impostazione dell'ID del nodo per un singolo servoazionamento tramite il modulo di alimentazione (PSM 510) o il modulo di accesso decentralizzato (DAM 510) tramite LCP
È inoltre possibile modicare il Node ID (ID nodo) di un servoazionamento quando l'LCP è collegato a PSM 510 o DAM 510. Questa
funzione si trova nel gruppo di parametri 54-** ID Assignment (Assegnazione ID) nel sottogruppo 54-1* Manual (Manuale).
Procedura
Collegare l'LCP al PSM 510/DAM 510, che è collegato ai servoazionamenti e ai moduli di sistema per i quali occorre modi-
1.
care il Node ID (ID nodo).
2.
Premere il tasto Hand On per più di 1 s per utilizzare l'LCP come interfaccia di controllo di PSM 510/DAM 510.
3.
Premere il pulsante Main Menu, quindi scorrere no al sottomenu 12-** Ethernet e premere OK.
4.
Scorrere no al sottomenu 12-6* Ethernet POWERLINK e premere OK.
5.
Modicare l'ID del nodo PSM 510/DAM 510 con il valore desiderato (1-239) premendo il tasto OK.
6.
Tornare in Main Menu e selezionare il parametro 54-** ID Assignment (Assegnazione ID).
7.
Selezionare il parametro 54-1* Manual (Manuale).
Soltanto PSM 510: nel parametro 54-01 Epl id assignment line (Linea di assegnazione dell'id Epl) selezionare la porta Ether-
8.
net X1 o X2. Il PSM 510 assegna gli ID al dispositivo selezionato tramite la porta selezionata e la rete di bus di campo. Sulla
porta DAM 510, X2 verrà utilizzato automaticamente.
9.
Selezionare il parametro 54-12 Epl ID assignment start id (ID iniziale per l'assegnazione dell'ID Epl), quindi selezionare un
valore valido (1–239). Il valore sarà assegnato al dispositivo nell'indice di posizione specicato. Il PSM 510/DAM 510 collega-
to all'LCP è in posizione 0 e il primo dispositivo raggiungibile sulla porta selezionata è l'indice di posizione 1 e così via.
10.
Selezionare il parametro 54-14 Manual Epl ID assignment start (Avvio assegnazione manuale dell'ID Epl) e cambiare lo stato
da [0] ready (pronto) a [1] start (avvio).
11.
Premere OK per confermare la selezione e attendere il completamento della procedura di assegnazione dell'ID.
Vericare che l'assegnazione dell'ID sia stata completata correttamente utilizzando i parametri:
12.
a.
Parametro 54-15 Epl ID assignment state (Stato dell'assegnazione dell'ID Epl)
b.
Parametro 54-16 Epl ID assignment error code (Codice di errore di assegnazione dell'ID Epl)
c.
Parametro 54-17 Epl ID assignment device count (Numero di dispositivi per l'assegnazione dell'ID Epl)
Spegnere e riaccendere per garantire che tutte le modiche dell'ID siano eettive e operative nel bus di campo.
13.
Se si verica un errore durante l'assegnazione dell'ID, l'errore rilevato viene visualizzato sull'LCP. Possono essere segnalati i seguenti
errori:
Stato NMT non valido
•
Commento non valido
•
Porta Ethernet non valida
•
ID nodo non valido
•
Assegnazione ID non riuscita
•
Indirizzo MAC duplicato
•
Versione SW non valida
•
AQ262450196490it-000101 / 175R1170 | 75Danfoss A/S © 2019.10
Page 76

Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
•
Assegnazione incompleta
•
Nessun dispositivo trovato
•
Errore interno
Messa in funzione
6.5.3 Assegnazione ID a più dispositivi
Quando si assegna un ID a più dispositivi (ad esempio, quando si imposta una nuova rete), utilizzare il sottostrumento VLT® Servo
Toolbox DAM ID assignment (Assegnazione ID DAM) (per maggiori informazioni vedere la Guida alla programmazione VLT® Servo
Drive System ISD 510, DSD 510, MSD 510).
L'impostazione contemporanea degli ID di tutti i servoazionamenti collegati a un modulo di accesso decentralizzato (DAM 510) o a
un modulo di alimentazione (PSM 510) può essere eettuata anche tramite l'LCP quando è collegato al DAM 510/PSM 510.
6.5.3.1 Impostazione degli ID del nodo di tutti i servoazionamenti e dei moduli di sistema su una
linea di modulo di accesso decentralizzato (DAM 510)/modulo di alimentazione (PSM 510)
L'assegnazione automatica dell'ID PSM 510/DAM 510 viene utilizzata per l'impostazione automatica degli Node IDs (ID nodo) su tutti
i servoazionamenti e moduli di sistema per una linea PSM 510/DAM 510 specicata. Questa funzionalità si trova nel gruppo di parametri 54- ** ID Assignment (Assegnazione ID) nel sottogruppo 54-0* Automatic (Automatica).
Procedura
Collegare l'LCP al PSM 510/DAM 510, che è collegato ai servoazionamenti e ai moduli di sistema per i quali occorre modi-
1.
care il Node ID (ID nodo).
2.
Premere il tasto Hand On per più di 1 s per utilizzare l'LCP come interfaccia di controllo di PSM 510/DAM 510.
3.
Premere il pulsante Main Menu, quindi scorrere no al sottomenu 12-** Ethernet e premere OK.
4.
Scorrere no al sottomenu 12-6* Ethernet POWERLINK e premere OK.
5.
Modicare l'ID del nodo PSM 510/DAM 510 con il valore desiderato (1-239) premendo il tasto OK.
6.
Tornare in Main Menu e selezionare il parametro 54-** ID Assignment (Assegnazione ID).
7.
Selezionare il parametro 54-0* Automatic (Automatica).
Soltanto PSM 510: nel parametro 54-01 Epl id assignment line (Linea di assegnazione dell'id Epl) selezionare la porta Ether-
8.
net X1 o X2. Il PSM 510 assegna gli ID al dispositivo selezionato tramite la porta selezionata e la rete di bus di campo. Sulla
porta DAM 510, X2 verrà utilizzato automaticamente.
9.
Selezionare il parametro 54-02 Epl ID assignment start id (ID iniziale per l'assegnazione dell'ID Epl), quindi selezionare un
valore valido (1–239). Il valore sarà assegnato al dispositivo nell'indice di posizione specicato. Il PSM 510/DAM 510 collega-
to all'LCP è in posizione 0 e il primo dispositivo raggiungibile sulla porta selezionata è l'indice di posizione 1 e così via.
10.
Selezionare il parametro 54-03 Automatic Epl ID assignment start (Avvio assegnazione ID Epl automatica) e cambiare lo stato
da [0] ready (pronto) a [1] start (avvio).
11.
Premere OK per confermare la selezione e attendere il completamento della procedura di assegnazione dell'ID.
Vericare che l'assegnazione dell'ID sia stata completata correttamente utilizzando i parametri:
12.
a.
Parametro 54-04 Epl ID assignment state (Stato dell'assegnazione dell'ID Epl)
b.
Parametro 54-05 Epl ID assignment error code (Codice di errore di assegnazione dell'ID Epl)
c.
Parametro 54-06 Epl ID assignment device count (Numero di dispositivi per l'assegnazione dell'ID Epl)
Spegnere e riaccendere per garantire che tutte le modiche dell'ID siano eettive e operative nel bus di campo.
13.
Se si verica un errore durante l'assegnazione dell'ID, l'errore rilevato viene visualizzato sull'LCP. Possono essere segnalati i seguenti
errori:
Stato NMT non valido
•
Commento non valido
•
Porta Ethernet non valida
•
ID nodo non valido
•
Assegnazione ID non riuscita
•
Indirizzo MAC duplicato
•
Versione SW non valida
•
Assegnazione incompleta
•
AQ262450196490it-000101 / 175R117076 | Danfoss A/S © | 2019.10
Page 77

Specica
Unità
PSM 510
DAM 510
ACM 510
Tempo di carica UDC
s
2,0
2,0
3,5
Specica
Unità
SDM 511
2,5 A
SDM 511
5 A
SDM 511
10 A
SDM 511
20 A
Tempo di carica UDC
s
2,0
Specica
Unità
SDM 512
2 x 2,5 A
SDM 512
2 x 5 A
SDM 512
2 x 10 A
Tempo di carica UDC
s
2,0
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
•
Nessun dispositivo trovato
•
Errore interno
Messa in funzione
6.6 Assegnazione ID PROFINET®
Ciascun dispositivo PROFINET® ha bisogno di un nome di dispositivo e un indirizzo IP. L'indirizzo IP e il nome del dispositivo sono
assegnati dal controllore I/O quando viene stabilita la connessione con il dispositivo I/O.
L'assegnazione dell'indirizzo IP è necessaria anche quando si utilizza la comunicazione indiretta tramite il software VLT® Servo Toolbox (per maggiori informazioni vedere la Guida alla programmazione VLT® Servo Drive System ISD 510, DSD 510, MSD 510).
L'indirizzo IP e il nome del dispositivo possono essere assegnati anche tramite PRONETA, uno strumento gratuito di supporto
nell'analisi e nella congurazione delle reti PROFINET®.
6.7 Tempo di accensione
Il tempo massimo di accensione dei componenti del sistema è pari a 15 s. Tale durata corrisponde al tempo che intercorre tra l'alimentazione del sistema con la tensione ausiliaria e la completa inizializzazione del modulo.
Il tempo di accensione riportato è indicativo. Lo stato esatto del modulo è visibile tramite la parola di stato.
N O T A
Non azionare alcun modulo di sistema nché non sono tutti accesi correttamente.
-
Se si montano due moduli PSM 510 in parallelo, accendere entrambi contemporaneamente (con un ritardo massimo di un
-
secondo).
6.8 Tempo di carica del modulo di sistema
Il tempo di carica del sistema è determinato dal tempo di carica più lungo di ogni singolo modulo di sistema.
Lo stato esatto di ciascun modulo è visibile tramite la parola di stato.
N O T A
Non azionare i moduli di sistema no a quando non sono completamente carichi e si trovano nello stato Operation enabled
-
(Funzionamento abilitato).
Tabella 16: Tempo di carica del collegamento CC (UDC) per PSM 510, DAM 510 e ACM 510
Tabella 17: Tempo di carica del collegamento CC (UDC) per SDM 511
Tabella 18: Tempo di carica del collegamento CC (UDC) per SDM 512
6.9 Accensione del sistema MSD 510
Completare il cablaggio del sistema MSD 510 prima di applicare la tensione ai moduli di servoazionamento (SDM 511/SDM 512).
Questo cablaggio fornisce la tensione di alimentazione e i segnali di comunicazione per il sistema MSD 510 : si tratta di un requisito
fondamentale per il funzionamento dei servoazionamenti.
AQ262450196490it-000101 / 175R1170 | 77Danfoss A/S © 2019.10
Page 78

Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Il sistema MSD 510 viene acceso alimentando il modulo di alimentazione (PSM 510) con U
messa automaticamente a tutti i moduli di sistema collegati, e sono messe in funzione solamente le unità di controllo dei moduli
collegati. Il sistema è pronto per l'uso quando rete elettrica e STO sono alimentati.
. Tale alimentazione viene quindi tras-
AUX
Messa in funzione
6.9.1 Procedura per l'accensione del sistema MSD 510
Procedura
1.
Inserire l'alimentazione U
2.
Accendere la rete.
3.
Impostare PSM 510 sullo stato Operation enabled (Funzionamento abilitato).
A questo punto il sistema è pronto per il funzionamento.
4.
Impostare DAM 510 sullo stato Operation enabled (Funzionamento abilitato).
per consentire la comunicazione con PSM 510, DAM 510 ed SDM.
AUX
6.10 Librerie
Le librerie fornite per il sistema MSD 510 possono essere utilizzate in:
TwinCAT® V2
•
SIMOTION SCOUT® V4.4 e V4.5:
•
C240 a partire da V4.4
-
D410-2 a partire da V4.4
-
D425-2 a partire da V4.4
-
D435-2 a partire da V4.4
-
D445-2 a partire da V4.4
-
D455-2 a partire da V4.4
-
P320 a partire da V4.4
-
Ambiente Automation Studio© (versione 3.0.90 e 4.x, piattaforma supportata SG4) per integrare facilmente la funzionalità senza
•
la necessità di uno speciale tempo di ciclo del movimento sul controllore.
TiA a partire da V13
•
I blocchi funzioni forniti sono conformi allo standard PLCopen®. Non è necessario conoscere la comunicazione del bus di campo
sottostante e/o il prolo CiA DS 402 CANopen®.
La libreria contiene:
Blocchi funzioni per il controllo e il monitoraggio dei servoazionamenti ISD 510/DSD 510, dei moduli di servoazionamento SDM
•
511/SDM 512 e dei moduli di sistema.
Blocchi funzioni per tutti i comandi di movimento disponibili dei servoazionamenti ISD 510/DSD 510 e dei moduli di servoazio-
•
namento SDM 511/SDM 512.
Blocchi funzioni per il controllo e il monitoraggio di PSM 510, DAM 510 e ACM 510.
•
•
Blocchi funzioni e strutture per la creazione di proli Basic CAM (CAM di base).
•
Blocchi funzioni e strutture per la creazione di proli Labeling CAM (CAM di etichettatura).
6.11 Programmazione con Automation Studio™
6.11.1 Requisiti per la programmazione con Automation Studio™
I seguenti le sono necessari per integrare i servoazionamenti ISD 510/DSD 510, i moduli di servoazionamento SDM 511/SDM 512 e
i moduli di sistema in un progetto Automation Studio©:
Pacchetto di librerie per il servosistema MSD 510 : Danfoss_VLT_ServoMotion_V_x_y_z.zip
•
XDD le (Descrizione del dispositivo XML) per il servoazionamento ISD 510 standard: 0x0300008D_ISD510_S.xdd
•
XDD le (Descrizione del dispositivo XML) per il servoazionamento ISD 510 avanzato: 0x0300008D_ISD510_A.xdd
•
XDD le (Descrizione del dispositivo XML) per il servoazionamento DSD 510 standard: 0x0300008D_DSD510_S.xdd
•
XDD le (Descrizione del dispositivo XML) per il servoazionamento DSD 510 avanzato: 0x0300008D_DSD510_A.xdd
•
XDD le (Descrizione del dispositivo XML) per il modulo di servoazionamento SDM 511/SDM 512: 0x0300008D_SDM510.xdd
•
XDD le (Descrizione del dispositivo XML) per il modulo di alimentazione (PSM 510): 0x0300008D_PSM.xdd
•
AQ262450196490it-000101 / 175R117078 | Danfoss A/S © | 2019.10
Page 79

Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
•
XDD le (Descrizione del dispositivo XML) per il modulo di accesso decentralizzato (DAM 510): 0x0300008D_DAM.xdd
•
XDD le (Descrizione del dispositivo XML) per l'Auxiliary Capacitors Module (ACM 510): 0x0300008D_ACM.xdd
Messa in funzione
6.11.2 Creazione di progetti Automation Studio™
Le procedure descritte in questo capitolo si applicano alle versioni 3.0.90 e V4.x di Automation Studio© se non diversamente speci-
cato.
Le informazioni su come installare Automation Studio© sono riportate nel dettaglio nella guida Automation Studio©. Aprire B&R
Help Explorer e passare a [Automation software → Software Installation → Automation Studio].
Le informazioni su come creare un progetto Automation Studio© sono riportate nel dettaglio nella guida Automation Studio©.
V3.0.90:
Aprire B&R Help Explorer e passare a [Automation Software → Getting Started → Creating programs with Automation Studio →
First project with X20 CPU].
V4.x:
Aprire B&R Help Explorer e passare a [Automation Software → Getting Started → Creating programs with Automation Studio →
Example project for a target system with CompactFlash].
6.11.3 Inclusione delle librerie di servoazionamento in un progetto Automation Studio™
Procedura
1.
In Logical View (Vista logica), aprire la voce di menu [File → Import...].
2.
Nella nestra successiva, selezionare il le Danfoss_VLT_ServoMotion_V_x_y_z.zip (in base alla posizione sul disco rigido).
3.
Fare clic su Open (Apri).
Assegnare le librerie alla CPU nella nestra successiva.
4.
5.
Fare clic su Finish (Fine). A questo punto le librerie sono integrate nel progetto Automation Studio©.
Durante l'integrazione viene creata una nuova cartella contenente le librerie ISD:
DDS_Drive
•
Contiene unità organizzative del programma (POU) denite da PLCopen® (nome che inizia con MC_) e POU de-
•
nite da Danfoss (nome che inizia con DD_). Le POU Danfoss forniscono funzionalità aggiuntive per l'asse.
È possibile combinare POU denite da PLCopen® con POU denite da Danfoss .
•
I nomi delle POU destinate al servoazionamento niscono tutti con _DDS.
•
DDS_PSM
•
Contiene POU denite da Danfoss (nome che inizia con DD_) e assicura la funzionalità per il modulo di alimenta-
•
zione (PSM).
I nomi delle POU destinate al PSM terminano tutti con _PSM.
•
DDS_DAM
•
Contiene POU denite da Danfoss (nome che inizia con DD_) e assicura la funzionalità per il modulo di accesso
•
decentralizzato (DAM).
I nomi delle POU destinate al DAM terminano tutti con _DAM.
•
DDS_ACM
•
Contiene POU denite da Danfoss (nome che inizia con DD_) e assicura la funzionalità per l'Auxiliary Capacitors
•
Module (ACM).
I nomi delle POU destinate all'ACM terminano tutti con _ACM.
•
DDS_BasCam
•
Contiene POU per la creazione di CAM di base.
•
DDS_LabCam
•
Contiene POU per la creazione di CAM di etichettatura.
•
DDS_Intern
•
Contiene POU che sono necessarie internamente per le librerie.
•
Non utilizzare queste POU nelle applicazioni.
•
Quando si integra il pacchetto DDS_Drive, alcune librerie standard vengono integrate automaticamente, a meno che non
facciano già parte del progetto.
AQ262450196490it-000101 / 175R1170 | 79Danfoss A/S © 2019.10
Page 80

Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
N O T A
Non rimuovere queste librerie, in caso contrario le librerie di servoazionamento Danfoss non funzioneranno.
-
6.11.4 Costanti all'interno della libreria DDS_Drive
All'interno della libreria sono deniti i seguenti elenchi di costanti:
•
Danfoss_VLT_ServoMotion
-
Contiene le informazioni sulla versione della libreria.
•
DDS_AxisErrorCodes
-
Costanti per i codici di errore dell'asse.
-
È possibile leggere i codici di errore usando il blocco funzioni MC_ReadAxisError_DDS e/o DD_ReadAxisWarning_DDS.
•
DDS_AxisTraceSignals
-
Costanti per i segnali di traccia dell'asse.
-
Da utilizzare con il blocco funzioni DD_Trace_DDS.
DDS_BasCam
•
Costanti per la creazione di CAM di base.
-
•
DDS_CamParsingErrors
-
Costanti per l'analisi dei problemi di un CAM.
-
Il motivo dell'errore viene fornito dal blocco funzioni MC_CamTableSelect_DDS.
DDS_FB_ErrorConstants
•
Costanti per gli errori all'interno delle POU.
-
-
Il motivo viene fornito in un output ErrorInfo.ErrorID disponibile in tutte le POU.
DDS_Intern
•
Costanti necessarie internamente per la libreria.
-
Non sono destinate all'uso in un'applicazione.
-
DDS_LabCam
•
Costanti per la creazione di CAM di etichettatura.
-
DDS_SdoAbortCodes
•
Costanti per errori di lettura e scrittura dei parametri.
-
-
Il motivo viene fornito in un output AbortCode (Codice di annullamento) disponibile in alcune POU.
PSM_ErrorCodes
•
Costanti per i codici di errore del modulo di alimentazione (PSM 510).
-
-
È possibile leggere i codici di errore usando il blocco funzioni DD_ReadPsmError_PSM e/o DD_ReadPsmWarning_PSM.
PSM_TraceSignals
•
Costanti per i segnali di traccia del modulo di alimentazione (PSM 510).
-
-
Da utilizzare con il blocco funzioni DD_Trace_PSM.
DAM_ErrorCodes
•
Costanti per i codici di errore del modulo di accesso decentralizzato (DAM 510).
-
-
È possibile leggere i codici di errore usando il blocco funzioni DD_ReadDamError_DAM e/o DD_ReadDamWarning_DAM.
DAM_TraceSignals
•
Costanti per i segnali di traccia del modulo di accesso decentralizzato (DAM 510).
-
-
Da utilizzare con il blocco funzioni DD_Trace_DAM.
ACM_ErrorCodes
•
Messa in funzione
AQ262450196490it-000101 / 175R117080 | Danfoss A/S © | 2019.10
Page 81

Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
-
Costanti per i codici di errore dell'Auxiliary Capacitors Module (ACM 510).
-
È possibile leggere i codici di errore usando il blocco funzioni DD_ReadAcmError_ACM e/o DD_ReadAcmWarning_ACM.
•
ACM_TraceSignals
-
Costanti per i segnali di traccia dell'Auxiliary Capacitors Module (ACM 510).
-
Da utilizzare con il blocco funzioni DD_Trace_ACM.
6.11.5 Creazione di un'istanza AXIS_REF_DDS in Automation Studio™
Procedura
1.
Creare un'istanza del blocco funzioni AXIS_REF_DDS (situato nella cartella DDS_Drive) per ogni modulo convertitore e servoazionamento SDM 511/SDM 512 da controllare o monitorare.
2.
Per creare un collegamento al servoazionamento sico, collegare ogni istanza di AXIS_REF_DDS a un servoazionamento
sico. In questo modo si ottiene la rappresentazione logica di un servoazionamento sico.
-
Aprire Logical View (Vista logica).
Inizializzare ogni istanza con il proprio numero di nodo e il nome dello slot a cui è collegata (per esempio, IF3).
-
-
Inizializzare ogni istanza di un convertitore di frequenza con il proprio DriveType (Tipo di dispositivo).
Esempio
Messa in funzione
Illustrazione 61: Creazione di un istanza di AXIS_REF_DDS e impostazione dei valori iniziali
6.11.6 Creazione di un'istanza PSM_REF in Automation Studio™
Procedura
1.
Creare un'istanza del blocco funzioni PSM_REF (situato nella cartella DDS_PSM) per ogni modulo di alimentazione da controllare o monitorare.
2.
Per creare un collegamento con il PSM sico, collegare ciascuna istanza di PSM_REF a un PSM sico. In questo modo si ot-
tiene la rappresentazione logica di un PSM sico.
-
Aprire Logical View (Vista logica).
Inizializzare ogni istanza con il proprio numero di nodo e il nome dello slot a cui è collegata (per esempio, IF3).
-
6.11.7 Creazione di un'istanza DAM_REF in Automation Studio™
Procedura
1.
Creare un'istanza del blocco funzioni DAM_REF (situato nella cartella DDS_DAM) per ogni modulo di accesso decentralizzato
(DAM) da controllare o monitorare.
2.
Per creare un collegamento con il DAM sico, collegare ciascuna istanza di DAM_REF a un DAM sico. In questo modo si
ottiene la rappresentazione logica di un DAM sico.
-
Aprire Logical View (Vista logica).
AQ262450196490it-000101 / 175R1170 | 81Danfoss A/S © 2019.10
Page 82

e30bh513.10
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
-
Inizializzare ogni istanza con il proprio numero di nodo e il nome dello slot a cui è collegata (per esempio, IF3).
6.11.8 Creazione di un'istanza ACM_REF in Automation Studio™
Procedura
1.
Creare un'istanza del blocco funzioni ACM_REF (situato nella cartella DDS_ACM) per ogni modulo di condensatori ausiliari
(ACM) da controllare o monitorare.
2.
Per creare un collegamento con l'ACM sico, collegare ciascuna istanza di ACM_REF a un ACM sico. In questo modo si ot-
tiene la rappresentazione logica di un ACM sico.
-
Aprire Logical View (Vista logica).
Inizializzare ogni istanza con il proprio numero di nodo e il nome dello slot a cui è collegata (per esempio, IF3).
-
6.11.9 Importazione di un servoazionamento in Automation Studio™
N O T A
Per ciascun servoazionamento sico, aggiungere una voce a Physical View (Vista sica) di Automation Studio©.
-
6.11.9.1 Versione V3.0.90
Procedura
Selezionare la voce di menu [Tools → Import Fieldbus Device...].
1.
2.
Selezionare il le XDD (ad esempio, 0x0300008D_ISD510_S.xdd o 0x0300008D_ISD510_A.xdd) nella propria posizione sul disco rigido. Questa importazione deve essere eettuata soltanto una volta per progetto. Il dispositivo diventa così noto per
Automation Studio©.
A questo punto aggiungere il modulo convertitore o servoazionamento SDM 511/SDM 512 all'interfaccia Ethernet POWER-
3.
LINK® del controllore in Physical View (Vista sica):
-
Fare clic con il tasto destro del mouse sul controllore in Physical View (Vista sica) e selezionare [Open POWERLINK].
-
Fare clic con il tasto destro del mouse sull'interfaccia e selezionare Insert (Inserisci).
-
Nella nestra Select controller module (Seleziona il modulo del controllore), selezionare il servoazionamento nel gruppo
POWERLINK Devices (Dispositivi POWERLINK).
-
Fare clic su Next (Avanti).
Nella nestra successiva, inserire il numero di nodo del servoazionamento.
-
Messa in funzione
Illustrazione 62: Aggiunta di un servoazionamento al progetto in V3.0.90
AQ262450196490it-000101 / 175R117082 | Danfoss A/S © | 2019.10
Page 83

e30bh514.10
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
6.11.9.2 Versione V4.x
Procedura
1.
Selezionare la voce di menu [Tools → Import Fieldbus Device...].
2.
Selezionare il le XDD (ad esempio, 0x0300008D_ISD510_S.xdd o 0x0300008D_ISD510_A.xdd) nella propria posizione sul disco rigido. Il dispositivo diventa così noto per Automation Studio©.
3.
A questo punto aggiungere il modulo convertitore o servoazionamento SDM 511/SDM 512 all'interfaccia Ethernet POWERLINK® del controllore in Physical View (Vista sica):
-
Selezionare la voce di menu [Open → System Designer] per mostrare il System Designer (Progettista del sistema).
-
Per aggiungere un modulo hardware a Physical View (Vista sica) o System Designer (Progettista del sistema), selezionare
il servoazionamento nel gruppo POWERLINK nella toolbox Hardware Catalog (Catalogo Hardware).
Trascinare il modulo selezionato nella posizione desiderata per collegarlo al modulo hardware, all'interfaccia di rete o
allo slot selezionato.
Per cambiare il numero di nodo, fare clic con il tasto destro del mouse sul dispositivo e selezionare [Node Number →
Change Node Number].
Messa in funzione
Illustrazione 63: Aggiunta di un servoazionamento al progetto in V4.x
6.11.10 Importazione di PSM 510, DAM 510 e ACM 510 in Automation Studio™
N O T A
Per ogni modulo di alimentazione (PSM 510), modulo di accesso decentralizzato (DAM 510) e modulo di condensatori ausi-
-
liari (ACM 510) sico aggiungere una voce a Physical View (Vista sica) di Automation Studio©.
6.11.10.1 Versione V3.0.90
Procedura
1.
Selezionare la voce di menu [Tools → Import Fieldbus Device...].
2.
Selezionare il le XDD per il PSM 510, DAM 510 o ACM 510 dalla propria posizione sul disco rigido. Questa importazione
deve essere eettuata soltanto una volta per progetto. Il dispositivo diventa così noto per Automation Studio©.
-
Modulo di alimentazione (PSM 510): 0x0300008D_PSM.xdd
-
Modulo di accesso decentralizzato (DAM 510): 0x0300008D_DAM.xdd
-
Auxiliary Capacitors Module (ACM 510): 0x0300008D_ACM.xdd
3.
A questo punto aggiungere il PSM 510, DAM 510 o ACM 510 all'interfaccia Ethernet POWERLINK® del controllore in Physical
View (Vista sica):
-
Fare clic con il tasto destro del mouse sul controllore in Physical View (Vista sica) e selezionare [Open POWERLINK].
-
Fare clic con il tasto destro del mouse sull'interfaccia e selezionare Insert... (Inserisci...).
-
Nella nestra Select controller module (Seleziona il modulo del controllore), selezionare il PSM 510, DAM 510 o ACM 510
nel gruppo POWERLINK Devices (Dispositivi POWERLINK).
AQ262450196490it-000101 / 175R1170 | 83Danfoss A/S © 2019.10
Page 84

e30bh515.10
e30bh516.10
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
-
Fare clic su Next (Avanti).
-
Nella nestra successiva, inserire il numero di nodo del PSM 510, DAM 510 o ACM 510.
Illustrazione 64: Un servoazionamento PSM 510, un servoazionamento DAM 510 e due servoazionamenti ISD 510 aggiunti
nell'interfaccia Ethernet POWERLINK® in V3.0.90
6.11.10.2 Versione V4.x
Procedura
1.
Selezionare la voce di menu [Tools → Import Fieldbus Device...].
2.
Selezionare il le XDD per il PSM 510, DAM 510 o ACM 510 dalla propria posizione sul disco rigido. Il dispositivo diventa così
noto per Automation Studio©.
-
Modulo di alimentazione (PSM 510): 0x0300008D_PSM.xdd
-
Modulo di accesso decentralizzato (DAM 510): 0x0300008D_DAM.xdd
-
Auxiliary Capacitors Module (ACM 510): 0x0300008D_ACM.xdd
3.
A questo punto aggiungere il PSM 510, DAM 510 o ACM 510 all'interfaccia Ethernet POWERLINK® del controllore in Physical
View (Vista sica):
-
Selezionare la voce di menu [Open → System Designer] per mostrare il System Designer (Progettista del sistema).
-
Per aggiungere un modulo hardware a Physical View (Vista sica) o System Designer (Progettista del sistema), selezionare
PSM 510, DAM 510, o ACM 510 nel gruppo POWERLINK nella toolbox Hardware Catalog (Catalogo Hardware).
Trascinare il modulo selezionato nella posizione desiderata per collegarlo al modulo hardware, all'interfaccia di rete o
allo slot selezionato.
Per cambiare il numero di nodo, fare clic con il tasto destro del mouse sul dispositivo e selezionare [Node Number →
Change Node Number].
PSM: Danfoss _VLT_R_PSM
DAM: Danfoss _VLT_R_DAM
ACM: Danfoss _VLT_R_ACM
Messa in funzione
Illustrazione 65: Un servoazionamento PSM 510, un servoazionamento DAM 510 e due servoazionamenti ISD 510 aggiunti
nell'interfaccia Ethernet POWERLINKK® in V4.x
6.11.11 Congurazione e mappatura I/O
Procedura
1.
Parametrizzare la congurazione I/O dei moduli convertitore o dei servoazionamenti SDM 511/SDM 512 in modo che la
libreria abbia accesso a tutti gli oggetti necessari.
-
Fare clic con il tasto destro del mouse sulla voce del modulo convertitore o del servoazionamento SDM 511/SDM 512 e
selezionare Open I/O Conguration (Apri la congurazione I/O) in V3.0.90 e Conguration (Congurazione) in V4.x.
-
Nella sezione Channels (Canali) modicare la Cyclic transmission (Trasmissione ciclica) dei seguenti oggetti:
AQ262450196490it-000101 / 175R117084 | Danfoss A/S © | 2019.10
Page 85

e30bg341.10
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Tutti i sottoindici dell'oggetto 0x5050 (Lib pdo rx_I5050 ARRAY[]) in Write (Scrivi).
Tutti i sottoindici dell'oggetto 0x5051 (Lib pdo tx_I5051 ARRAY[]) in Read (Leggi).
Parametrizzare la congurazione I/O del modulo di alimentazione (PSM 510), del modulo di accesso decentralizzato (DAM
2.
510) e del modulo di condensatori ausiliari (ACM 510) in modo che la libreria abbia accesso a tutti gli oggetti necessari.
-
Fare clic con il tasto destro del mouse sulla voce PSM/DAM/ACM e selezionare Open I/O Conguration (Apri la congura-
zione I/O) in V3.0.90 e Conguration (Congurazione) in V4.x.
-
Nella sezione Channels (Canali) modicare la Cyclic transmission (Trasmissione ciclica) dei seguenti oggetti:
Tutti i sottoindici dell'oggetto 0x5050 (Lib pdo rx_I5050 ARRAY[]) in Write (Scrivi).
Tutti i sottoindici dell'oggetto 0x5051 (Lib pdo tx_I5051 ARRAY[]) in Read (Leggi).
Queste impostazioni congurano la comunicazione ciclica con il dispositivo. Questi parametri sono necessari per il funzionamento della libreria.
È possibile usare la funzione copia e incolla per applicare la stessa congurazione di I/O a più dispositivi dello stes-
-
so tipo.
3.
Impostare Module supervised (Modulo supervisionato) su o (disattivato) per i servoazionamenti e il PSM/DAM/ACM. Il parametro si trova nella congurazione I/O del dispositivo.
Messa in funzione
N O T A
Illustrazione 66: Congurazione I/O di un dispositivo ISD 510
AQ262450196490it-000101 / 175R1170 | 85Danfoss A/S © 2019.10
Page 86

e30bg342.10
e30bg343.10
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Illustrazione 67: Mappatura I/O dopo una congurazione corretta
4.
Mappare gli ingressi e le uscite dell'istanza del blocco funzioni AXIS_REF_DDS e dei punti di dati sici del servoazionamento
ISD 510 (qui myAxis è un'istanza di AXIS_REF_DDS):
Messa in funzione
Illustrazione 68: Mappatura I/O di un servoazionamento ISD 510
5.
Mappare gli ingressi e le uscite dell'istanza dei blocchi funzioni PSM_REF, DAM_REF e ACM_REF e di conseguenza dei punti
di dati sici del PSM/DAM/ACM.
6.11.12 Impostazione del tempo di ciclo PLC
Il tempo di ciclo minimo è 400 µs. I dispositivi del servosistema possono eseguire tempi di ciclo Ethernet POWERLINK® in multipli di
400 µs e 500 µs. I dispositivi vengono parametrizzati automaticamente dal PLC all'avviamento, a seconda della congurazione Ethernet POWERLINK® dell'interfaccia sica. È possibile accedere alla congurazione Ethernet POWERLINK® facendo clic con il tasto destro del mouse su [CPU → Open IF3 POWERLINK Conguration] in Physical View (Vista sica) per V3.0.90 o su [PLK → Conguration]
per V4.x.
N O T A
Assicurarsi che i tempi di ciclo dell'attività del programma PLC ed Ethernet POWERLINK® siano gli stessi. In caso contrario, i
-
dati potrebbero andare persi e le prestazioni potrebbero risultare compromesse.
AQ262450196490it-000101 / 175R117086 | Danfoss A/S © | 2019.10
Page 87

e30bg344.10
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Illustrazione 69: Finestra di congurazione Ethernet POWERLINK<® per parametrizzare il tempo di ciclo Ethernet POWERLINK
Procedura per l'impostazione del tempo PLC in Automation Studio
1.
Fare clic con il tasto destro del mouse su [CPU → Open Software Conguration] per V3.0.90 e su [CPU → Conguration →
Timing] per V4.x in Physical View (Vista sica).
2.
Assicurarsi che il tempo di ciclo PLC sia lo stesso del tempo di ciclo Ethernet POWERLINK®.
©
Messa in funzione
®
6.11.13 Collegamento al PLC
Le informazioni su come collegarsi al PLC sono riportate nel dettaglio nella guida Automation Studio©.
Versione V3.0.90:
Aprire B&R Help Explorer (Guida Explorer B&R) e passare a [Automation Software → Getting Started → Creating programs with Automation Studio → First project with X20 CPU → Congure online connection].
Versione V4.x:
Aprire B&R Help Explorer (Guida Explorer B&R) e passare a [Automation Software → Getting Started → Creating programs in Automation Studio → Example project for a target system with CompactFlash].
6.12 Programmazione con TwinCAT®
6.12.1 Requisiti per la programmazione con TwinCAT®
Per integrare i servoazionamenti ISD 510/DSD 510, i moduli di servoazionamento SDM 511/SDM 512 e i PSM 510, DAM 510 o ACM
510 in un progetto TwinCAT® sono necessari i seguenti le:
•
Libreria del servosistema MSD 510 : Danfoss_VLT_ServoMotion_V_x_y_z.lib
File ESI (informazioni slave EtherCAT®) per il servoazionamento ISD 510 standard: Danfoss_ISD510_S.xml
•
File ESI (informazioni slave EtherCAT®) per il servoazionamento ISD 510 avanzato: Danfoss_ISD510_A.xml
•
File ESI (informazioni slave EtherCAT®) per il servoazionamento DSD 510 standard: Danfoss_DSD510_S.xml
•
File ESI (informazioni slave EtherCAT®) per il servoazionamento DSD 510 avanzato: Danfoss_DSD510_A.xml
•
File ESI (informazioni slave EtherCAT®) per il modulo di servoazionamento: Danfoss_SDM510.xml
•
File ESI (informazioni slave EtherCAT®) per il modulo di alimentazione: Danfoss_PSM510.xml
•
File ESI (informazioni slave EtherCAT®) per il modulo di accesso decentralizzato: Danfoss_DAM510.xml
•
File ESI (informazioni slave EtherCAT®) per l'Auxiliary Capacitor Module: Danfoss_ACM510.xml
•
6.12.2 Creazione di un progetto TwinCAT®
Le informazioni su come installare TwinCAT® sono disponibili nel Sistema informativo Beckho (
Aprire il sistema informativo e selezionare [TwinCAT 2 → TwinCAT Quick Start → Installation].
Le informazioni su come creare un progetto TwinCAT® sono disponibili nel Sistema informativo Beckho (https://infosys.beckh-
o.com/). Aprire il sistema informativo e selezionare [TwinCAT 2 → TwinCAT Quick Start oppure TwinCAT 2 → TX1200 TwinCAT PLC
→ TwinCAT PLC Control].
https://infosys.beckho.com/).
6.12.3 Inclusione di una libreria TwinCAT® in un progetto TwinCAT®
Procedura
1.
Nella scheda Resources (Risorse) di TwinCAT® PLC Control, aprire Library Manager (Manager libreria).
AQ262450196490it-000101 / 175R1170 | 87Danfoss A/S © 2019.10
Page 88

e30bh611.10
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
2.
Nell'area in alto a sinistra della nestra Library Manager (Manager libreria), fare clic con il tasto destro del mouse e selezionare Additional Library... (Libreria aggiuntiva...).
Selezionare il le Danfoss_VLT_ServoMotion_V_x_y_z (in base alla posizione nel disco rigido).
3.
4.
Fare clic su Open (Apri). A questo punto le librerie sono integrate nel progetto TwinCAT® PLC control.
Messa in funzione
Illustrazione 70: Library Manager dopo aver incluso la libreria ServoMotion
All'interno della libreria le POU sono organizzate in cartelle:
•
DDS_Drive
•
Contiene unità organizzative del programma (POU) denite da PLCopen® (nome che inizia con MC_) e POU de-
nite da Danfoss (nome che inizia con DD_). Le POU Danfoss forniscono funzionalità aggiuntive per l'asse.
•
È possibile combinare POU denite da PLCopen® con POU denite da Danfoss .
•
I nomi delle POU destinate ai moduli convertitore e ai servoazionamenti SDM 511/SDM 512 niscono tutti con
_DDS.
•
DDS_PSM
•
Contiene POU denite da Danfoss (nome che inizia con DD_) e assicura la funzionalità per il modulo di alimentazione (PSM 510).
•
I nomi delle POU destinate al PSM 510 terminano tutti con _PSM.
•
DDS_DAM
•
Contiene POU denite da Danfoss (nome che inizia con DD_) e assicura la funzionalità per il modulo di accesso
decentralizzato (DAM 510).
•
I nomi delle POU destinate al DAM 510 terminano tutti con _DAM.
•
DDS_ACM
•
Contiene POU denite da Danfoss (nome che inizia con DD_) e assicura la funzionalità per l'Auxiliary Capacitors
Module (ACM 510).
•
I nomi delle POU destinate all'ACM 510 terminano tutti con _ACM.
•
DDS_BasCam
•
Contiene POU per la creazione di CAM di base.
•
DDS_LabCam
•
•
DDS_Intern
•
•
Contiene POU per la creazione di CAM di etichettatura.
Contiene POU che sono necessarie internamente per le librerie.
Non utilizzare queste POU nelle applicazioni.
Quando si integra la libreria VLT® Multiaxis Servo Drive , alcune librerie standard vengono integrate automaticamente, a
meno che non facciano già parte del progetto.
AQ262450196490it-000101 / 175R117088 | Danfoss A/S © | 2019.10
Page 89

Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
N O T A
Non rimuovere queste librerie, in caso contrario le librerie DDS non funzioneranno.
-
6.12.4 Costanti all'interno della libreria DDS_Drive
All'interno della libreria sono deniti i seguenti elenchi di costanti:
•
Danfoss_VLT_ServoMotion
-
Contiene le informazioni sulla versione della libreria.
•
DDS_AxisErrorCodes
-
Costanti per i codici di errore dell'asse.
-
È possibile leggere i codici di errore usando il blocco funzioni MC_ReadAxisError_DDS e/o DD_ReadAxisWarning_DDS.
•
DDS_AxisTraceSignals
-
Costanti per i segnali di traccia dell'asse.
-
Da utilizzare con il blocco funzioni DD_Trace_DDS.
DDS_BasCam
•
Costanti per la creazione di CAM di base.
-
•
DDS_CamParsingErrors
-
Costanti per l'analisi dei problemi di un CAM.
-
Il motivo dell'errore viene fornito dal blocco funzioni MC_CamTableSelect_DDS.
DDS_FB_ErrorConstants
•
Costanti per gli errori all'interno delle POU.
-
-
Il motivo viene fornito in un output ErrorInfo.ErrorID disponibile in tutte le POU.
DDS_Intern
•
Costanti necessarie internamente per la libreria.
-
Non sono destinate all'uso in un'applicazione.
-
DDS_LabCam
•
Costanti per la creazione di CAM di etichettatura.
-
DDS_SdoAbortCodes
•
Costanti per errori di lettura e scrittura dei parametri.
-
-
Il motivo viene fornito in un output AbortCode (Codice di annullamento) disponibile in alcune POU.
PSM_ErrorCodes
•
Costanti per i codici di errore del modulo di alimentazione (PSM 510).
-
-
È possibile leggere i codici di errore usando il blocco funzioni DD_ReadPsmError_PSM e/o DD_ReadPsmWarning_PSM.
PSM_TraceSignals
•
Costanti per i segnali di traccia del modulo di alimentazione (PSM 510).
-
-
Da utilizzare con il blocco funzioni DD_Trace_PSM.
DAM_ErrorCodes
•
Costanti per i codici di errore del modulo di accesso decentralizzato (DAM 510).
-
-
È possibile leggere i codici di errore usando il blocco funzioni DD_ReadDamError_DAM e/o DD_ReadDamWarning_DAM.
DAM_TraceSignals
•
Costanti per i segnali di traccia del modulo di accesso decentralizzato (DAM 510).
-
-
Da utilizzare con il blocco funzioni DD_Trace_DAM.
ACM_ErrorCodes
•
Messa in funzione
AQ262450196490it-000101 / 175R1170 | 89Danfoss A/S © 2019.10
Page 90

e30bg349.10
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
-
Costanti per i codici di errore dell'Auxiliary Capacitors Module (ACM 510).
-
È possibile leggere i codici di errore usando il blocco funzioni DD_ReadAcmError_ACM e/o DD_ReadAcmWarning_ACM.
•
ACM_TraceSignals
-
Costanti per i segnali di traccia dell'Auxiliary Capacitors Module (ACM 510).
-
Da utilizzare con il blocco funzioni DD_Trace_ACM.
6.12.5 Creazione di un'istanza AXIS_REF_DDS in TwinCAT®
Procedura
1.
Creare un'istanza del blocco funzioni AXIS_REF_DDS (situato nella cartella DDS_Drive) per il modulo convertitore o servoazionamento SDM 511/SDM 512 da controllare o monitorare.
Ripetere il passaggio 1 per altri moduli convertitori o servoazionamenti SDM 511/SDM 512.
2.
Esempio
Messa in funzione
Illustrazione 71: Creazione di un'istanza di AXIS_REF_DDS
6.12.6 Creazione di un'istanza PSM_REF in TwinCAT®
Procedura
1.
Creare un'istanza del blocco funzioni PSM_REF (situato nella cartella DDS_PSM) per ogni modulo di alimentazione da controllare o monitorare.
2.
Ripetere il passaggio 1 per gli altri moduli di alimentazione.
6.12.7 Creazione di un'istanza DAM_REF in TwinCAT®
Procedura
1.
Creare un'istanza del blocco funzioni DAM_REF (situato nella cartella DDS_DAM) per ogni modulo di accesso decentralizzato
(DAM) da controllare o monitorare.
Ripetere il passaggio 1 per gli altri moduli di accesso decentralizzato.
2.
6.12.8 Creazione di un'istanza ACM_REF in TwinCAT®
Procedura
1.
Creare un'istanza del blocco funzioni ACM_REF (situato nella cartella DDS_ACM) per ogni Auxiliary Capacitors Module da
controllare o monitorare.
Ripetere il passaggio 1 per gli altri Auxiliary Capacitors Modules.
2.
AQ262450196490it-000101 / 175R117090 | Danfoss A/S © | 2019.10
Page 91

e30bg350.10
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Messa in funzione
6.12.9 Aggiunta di un progetto PLC a TwinCAT® System Manager
Per creare un collegamento tra il progetto TwinCAT® PLC Control e TwinCAT® System Manager, collegare il progetto salvato, soprattutto gli ingressi e le uscite, a TwinCAT® System Manager:
Procedura
1.
Per aggiungere informazioni sul progetto in TwinCAT® System Manager, fare doppio clic su PLC-Conguration (Congurazione-PLC) e selezionare Append PLC project... (Aggiungi progetto PLC...).
2.
Nella nestra Insert IEC 1131 Project (Inserisci il progetto IEC 1131), selezionare il le di informazioni sul progetto in base alla
posizione sul disco rigido. Il le ha lo stesso nome del progetto PLC, ma con l'estensione .tpy.
3.
Fare clic su Open (Apri).
6.12.10 Importazione dei dispositivi in TwinCAT®
La seguente procedura è un esempio di come importare un servoazionamento ISD 510 in TwinCAT®.
Procedura
1.
Copiare il le ESI Danfoss ISD 510 S.xml nella cartella TwinCAT Installation Folder\Io\EtherCAT (Cartella d'installazione di TwinCAT\Io\EtherCAT) sul disco rigido. Questa operazione deve essere eettuata soltanto una volta per progetto. Il TwinCAT
System Manager cerca automaticamente i le ESI in questa posizione sul disco rigido durante l'avviamento.
Per aggiungere un master EtherCAT®, fare clic con il tasto destro del mouse su [I/O-Conguration → I/O Devices] e selezio-
2.
nare Append Device... (Aggiungi dispositivo...).
3.
Nella seguente nestra, selezionare [EtherCAT → EtherCAT] e fare clic su OK.
®
Illustrazione 72: Aggiunta di un master EtherCAT al progetto
4.
Selezionare Device 1 (EtherCAT) (Dispositivo 1 (EtherCAT)) e selezionare il Network Adapter (Adattatore di rete) corretto a
destra della nestra nella scheda Adapter (Adattatore).
5.
Per aggiungere un modulo di alimentazione, fare clic con il tasto destro del mouse su Device1 (EtherCAT) (Dispositivo 1
(EtherCAT)) e selezionare Append Box... (Aggiungi casella...).
6.
Nella nestra Insert EtherCAT Device (Inserisci dispositivo EtherCAT), selezionare [Danfoss GmbH → VLT® FlexMotion →
VLT® Power Supply Module PSM 510] e fare clic su OK.
7.
Per aggiungere un modulo di accesso decentralizzato, fare clic con il tasto destro del mouse su Device1 (EtherCAT) (Dispositivo 1 (EtherCAT)) e selezionare Append Box... (Aggiungi casella...).
8.
Nella nestra Insert EtherCAT Device (Inserisci dispositivo EtherCAT), selezionare [Danfoss GmbH → VLT® FlexMotion →
VLT® Decentral Access Module] e fare clic su OK.
9.
Per aggiungere un Auxiliary Capacitors Module, fare clic con il tasto destro del mouse Device1 (EtherCAT) (Dispositivo 1
(EtherCAT)) e selezionare Append Box... (Aggiungi casella...).
AQ262450196490it-000101 / 175R1170 | 91Danfoss A/S © 2019.10
Page 92

e30bh517.10
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
10.
Nella nestra Insert EtherCAT Device (Inserisci dispositivo EtherCAT), selezionare [Danfoss GmbH → VLT® FlexMotion →
VLT® Auxiliary Capacitors Module] e fare clic su OK.
Per aggiungere un servoazionamento nel modulo di accesso decentralizzato DAM 510, fare clic con il tasto destro del
11.
mouse su Box 1 (VLT® Decentral Access Module) (Casella 1 (VLT® Decentral Access Module)) e selezionare Append Box... (Ag-
giungi casella...).
12.
Nella nestra Insert EtherCAT Device (Inserisci dispositivo EtherCAT), selezionare [Danfoss GmbH → VLT® FlexMotion →
VLT®MSD 510 Integrated Servo Drive Standard] e fare clic su OK.
Messa in funzione
Illustrazione 73: Aggiunta del servoazionamento al progetto
AQ262450196490it-000101 / 175R117092 | Danfoss A/S © | 2019.10
Page 93

e30bh518.10
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Messa in funzione
Illustrazione 74: TwinCAT System Manager dopo l'integrazione del progetto PLC e l'aggiunta di un modulo di accesso decentralizzato e di due servoazionamenti ISD 510
13.
Rispondere con No alla domanda se il servoazionamento viene utilizzato come asse NC. Se il servoazionamento deve invece
essere utilizzato come asse NC, vedere 6.12.15 Congurazione come asse NC TwinCAT®
N O T A
Aggiungere una voce nel master EtherCAT® del TwinCAT System Manager per ciascun servoazionamento sico,
-
PSM 510, DAM 510 e ACM 510. Aggiungere il servoazionamento alla linea DAM 510 corretta.
6.12.11 Congurazione e mappatura I/O
Quando si collegano più moduli convertitore o servoazionamenti SDM 511/SDM 512, collegare la porta C (X2) del precedente servoazionamento alla porta A (X1) del servoazionamento successivo. Eseguire anche l'assegnazione delle porte per il modulo di accesso decentralizzato (DAM 510).
Se la congurazione hardware è già presente, la funzione Scan devices (Scansiona i dispositivi) di TwinCAT® System Manager può
essere utilizzata per aggiungere automaticamente i dispositivi collegati per la congurazione nell'ordine corretto.
AQ262450196490it-000101 / 175R1170 | 93Danfoss A/S © 2019.10
Page 94

e30bg353.11
e30bh519.10
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Utilizzando TwinCAT® System Manager, congurare il modulo convertitore o servoazionamento SDM 511/SDM 512 in modo che la
mappatura PDO corrisponda ai requisiti della libreria.
Procedura (esempio per un servoazionamento ISD 510)
1.
Fare clic sulla voce del servoazionamento ISD 510.
2.
Selezionare la scheda Slots (Slot) a destra nella nestra.
3.
Rimuovere la congurazione PDO corrente selezionando la voce Module 1 (CSV PDO) (Modulo 1 (CSV PDO)) nella casella Slot.
4.
Fare clic su X.
5.
Selezionare Library PDO (Libreria DOP) nella casella Module (Modulo).
6.
Fare clic su <.
Messa in funzione
Illustrazione 75: Servoazionamento ISD 510 con la congurazione I/O corretta
6.12.12 Collegamento delle variabili di ingresso e di uscita ai punti di dati sici
Utilizzare TwinCAT® System Manager per collegare le variabili di ingresso e uscita del programma PLC a ingressi e uscite sici del
dispositivo. In questo modo si garantisce che la libreria abbia accesso a tutti gli oggetti necessari.
A V V I S O
Ripetere i passaggi 2-22 per Box 1 (VLT® Power Supply Module) e l'istanza myPSM.
-
Ripetere i passaggi 2-22 per Box 2 (VLT® Decentral Access Module) e l'istanza myDAM.
-
Procedura
1.
Selezionare Library TxPDO (Libreria TxPDO) tramite il menu [I/O-Conguration → I/O Devices → Device1 (EtherCAT) → Box
1 (VLT Decentral Access Module) → Drive 1 (VLT ISD 510 Integrated Servo Drive) → Module 1 (Library PDO) → Library
TxPDO].
2.
Selezionare tutte le voci da Lib pdo tx1 a Lib pdo tx9 a destra della nestra.
Illustrazione 76: Collegamento degli ingressi e delle uscite ai punti di dati sici
3.
Fare clic con il tasto destro del mouse e selezionare Change Multi Link... (Cambia il collegamento multiplo...).
AQ262450196490it-000101 / 175R117094 | Danfoss A/S © | 2019.10
Page 95

Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
4.
Nella nestra Attach Variable 36.0 Byte(s) (Input) (Associa la variabile 36,0 Byte (Ingresso)), selezionare [PLC-Conguration →
MyFirstFlexMotionProject → Standard → .myAxis.TPDO]. Assicurarsi che l'opzione Matching Size (Dimensione corrispondente) sia selezionata nella nestra Attach Variable (Associa variabile).
5.
Fare clic su OK.
6.
Fare clic sulla libreria RxPDO tramite il menu [I/O-Conguration → I/O Devices → Device1 (EtherCAT©) → Box1 (VLT© Decentral Access Module) → Drive2 (VLT© ISD 510 Integrated Servo Drive) → Module1 (Library PDO) → Library RxPDO].
7.
Selezionare tutte le voci da Lib pdo rx1 a Lib pdo rx9 a destra della nestra.
8.
Fare clic con il tasto destro del mouse e selezionare Change Multi Link... (Cambia il collegamento multiplo...).
9.
Nella nestra Attach Variable 36.0 Byte(s) (Output) (Associa la variabile 36,0 Byte (Uscita)), selezionare [PLC-Conguration →
MyFirstIsd510Project → Standard → .myAxis.RPDO].
10.
Fare clic su OK.
11.
Fare clic con il tasto destro del mouse su WcState (StatoWc) tramite il menu [I/O-Conguration → I/O Devices → Device1
(EtherCAT©) → Box1 (VLT© Decentral Access Module) → Drive2 (VLT© ISD 510 Integrated Servo Drive) → WcState] e selezionare Change Link... (Cambia collegamento...).
12.
Nella nestra Attach Variable State (Input) (Associa variabile di stato (Ingresso)), selezionare [PLC-Conguration → MyFirstIsd510Project → Standard → .myAxis.WcState].
13.
Fare clic su OK.
14.
Fare clic con il tasto destro del mouse su State (Stato) tramite il menu [I/O-Conguration → I/O Devices → Device1 (EtherCAT©) → Box1 (VLT© Decentral Access Module) → Drive2 (VLT© ISD 510 Integrated Servo Drive) → InfoData] e selezionare
Change Link...(Cambia collegamento...).
15.
Nella nestra Attach Variable State (Input) (Associa variabile di stato (Uscita)), selezionare [PLC-Conguration → MyFirstIsd510Project → Standard → .myAxis.State].
16.
Fare clic su OK.
17.
Fare clic con il tasto destro del mouse su netId tramite il menu [I/O-Conguration → I/O Devices Device1 (EtherCAT→) →
Box1 (VLT® Decentral Access Module) → Drive2 (VLT→ ISD 510 Integrated Servo Drive) → InfoData → AdsAddr] e selezionare Change Link... (Cambia collegamento...).
18.
Nella nestra Attach Variable netId (Input) (Associa variabile netId (Ingresso)), selezionare [PLC-Conguration → MyFirstIsd510Project → Standard → .myAxis.AmsNetId].
19.
Fare clic su OK.
20.
Fare clic con il tasto destro del mouse su Port (Porta) tramite [I/O-Conguration → I/O Devices → Device1 (EtherCAT→) →
Box1 (VLT→ Decentral Access Module) → Drive2 (VLT→ ISD 510 Integrated Servo Drive) → InfoData → AdsAddr] e selezionare Change Link... (Cambia collegamento...).
21.
Nella nestra Attach Variable port (Input) (Associa variabile porta (Ingresso)), selezionare [PLC-Conguration → MyFirstIsd510Project → Standard → .myAxis.NodeNumber].
22.
Fare clic su OK.
Messa in funzione
6.12.13 Ritrasferimento delle mappature nel programma PLC
Per ritrasferire le mappature nel programma PLC, selezionare Activate Conguration... (Attiva congurazione...) nella voce di menu
Actions (Azioni).
Dopo l'installazione in TwinCAT® PLC Control, la congurazione TwinCAT® avviene conformemente all'
mySecondAxis sono istanze di AXIS_REF_DDS, myPSM è un'istanza di PSM_REF e myDAM è un'istanza di DAM_REF). Gli indirizzi eetti-
vi possono essere diversi.
AQ262450196490it-000101 / 175R1170 | 95Danfoss A/S © 2019.10
Illustrazione 77 (qui myAxis e
Page 96

e30bh520.10
e30bg356.10
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Illustrazione 77: Congurazione di TwinCAT® Mappatura I/O di due servoazionamenti, un PSM 510 e un DAM 510
Messa in funzione
N O T A
Collegare i servoazionamenti PSM 510, DAM 510, ACM 510 e SDM 511/SDM 512 a un'unità SYNC e i servoazionamenti ISD
-
510/DSD 510 a un'altra unità. In questo modo la comunicazione con il PSM 510 e il DAM 510 è protetta contro le interruzioni
se l'alimentazione U
dei servoazionamenti decentralizzati viene disinserita a causa di un errore.
AUX
6.12.14 Impostazione del tempo di ciclo PLC in TwinCAT® PLC Control
Il tempo di ciclo minimo è 400 µs. I dispositivi MSD 510 possono eseguire tempi di ciclo EtherCAT® in multipli di 400 µs o 500 µs. I
dispositivi vengono parametrizzati automaticamente dal PLC all'avviamento, a seconda della congurazione EtherCAT® dell'interfaccia sica. Per accedere al tempo di base del sistema, selezionare [SYSTEM-Conguration → Real-Time Settings] in TwinCAT® System Manager. I multipli di questo tempo di base possono quindi essere utilizzati come tempi di ciclo EtherCAT®.
N O T A
Impostare il tempo di ciclo dell'attività del programma PLC in modo che sia lo stesso del tempo di ciclo EtherCAT®. In caso
-
contrario, i dati potrebbero andare persi e le prestazioni potrebbero risultare compromesse.
Procedura
1.
Fare doppio clic su Task conguration (Congurazione dell'attività) nella scheda Resources (Risorse).
2.
Assicurarsi che il tempo di ciclo PLC sia lo stesso del tempo di ciclo EtherCAT®.
Illustrazione 78: Congurazione dell'attività per parametrizzare il tempo di ciclo PLC
AQ262450196490it-000101 / 175R117096 | Danfoss A/S © | 2019.10
Page 97

Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Messa in funzione
N O T A
Dopo aver modicato il tempo di ciclo dell'attività in TwinCAT® PLC Control, eseguire un ReScan della cong-
-
urazione PLC all'interno del TwinCAT® System Manager per aggiornare le impostazioni. In seguito, attivare la
congurazione nel PLC.
6.12.15 Congurazione come asse NC TwinCAT®
I servoazionamenti possono essere utilizzati con la funzionalità NC integrata di TwinCAT®.
Ogni operazione relativa al PSM 510 e al DAM 510 deve essere eettuata come descritto in 6.12.2 Creazione di un progetto Twin-
CAT®.
Procedura
1.
Oltre al le Danfoss_VLT_ServoMotion_V_x_y_z.lib, comprende anche il le TcMC2.lib.
2.
Creare un'istanza di AXIS_REF (invece di AXIS_REF_DDS) per ogni servoazionamento ISD 510/DSD 510 utilizzato come asse
NC.
3.
Aggiungere il progetto PLC in TwinCAT® System Manager, importare i dispositivi e aggiungerli a TwinCAT®; tuttavia, nell'ultimo passaggio, alla domanda se il servoazionamento viene utilizzato come asse NC rispondere con Yes (Sì). A questo punto
viene creata automaticamente un'attività NC.
6.12.15.1 Congurazione I/O dei servoazionamenti utilizzati come assi NC
In TwinCAT® System Manager selezionare una congurazione I/O diversa per i servoazionamenti usati come assi NC.
Procedura
1.
In base al modo di funzionamento da utilizzare, selezionare lo slot CSP PDO o CSV PDO. Per impostazione predenita è mappato e preselezionato CSV PDO. Mappare le seguenti variabili se è necessario il servoazionamento VLT® Multiaxis Servo
Drive per lavorare con CSP PDO:
-
Nella scheda Settings (Impostazioni) dell'asse NC, selezionare [NC-Conguration → NC-Task 1 SAF → Axes → Axis 1].
Fare clic sul pulsante Link To (all Types)... (Collegamento a (tutti i tipi)) e selezionare il servoazionamento desiderato.
2.
Nella stessa scheda, selezionare la Unit (Unità) preferita.
3.
In base all'unità selezionata, regolare il Scaling Factor (Fattore di scala) per l'encoder dell'asse tramite il menu [NC-Conguration → NC-Task 1 SAF → Axes → Axis 1 → Axis 1_Enc] nella scheda Parameter (Parametro). Esempio: quando è selezionata
l'unità Degrees (Gradi), il fattore di scala è 360°/220 = 0,00034332275390625.
4.
Impostare Reference Velocity (Velocità di riferimento) nella scheda Parameter (Parametro) tramite il menu [NC-Conguration
→ NC-Task 1 SAF → Axes → Axis 1 → Axis 1_Enc].
5.
Impostare Output Scaling Factor (Fattore di scala di uscita) (Velocità) su 125.
6.
Testare la funzionalità e la congurazione nella scheda Online dell'asse.
6.12.16 Collegamento al PLC
Le informazioni su come collegarsi al PLC sono riportate nel dettaglio nel sistema informativo Beckho .
Aprire il sistema informativo e passare a [TwinCAT 2 → TwinCAT System Manager → Operation → Controls → Choose Target Sys-
tem].
6.13 Linee guida alla programmazione di Automation Studio™ e TwinCAT®
Raccomandazioni per l'implementazione:
Inizializzare una sola volta all'inizio del programma i parametri che di solito non cambiano. In Automation Studio© usare la se-
•
zione _INIT.
•
Richiedere i blocchi funzioni che forniscono informazioni di stato o di errore con Enable input (Abilita input) all'inizio del programma.
•
Utilizzare un'istanza del blocco funzioni MC_Power_DDS per ciascun asse al ne di controllarne lo stadio di potenza. Richiamare
questo blocco funzioni in ciascun ciclo PLC.
•
Utilizzare un'istanza del blocco funzioni DD_Power_PSM per ciascun modulo di alimentazione al ne di controllare la tensione
del collegamento CC in uscita. Richiamare questo blocco funzioni in ciascun ciclo PLC.
•
Utilizzare un'istanza del blocco funzioni DD_Power_DAM per ciascun modulo di accesso decentralizzato al ne di controllare la
tensione del collegamento CC in uscita. Richiamare questo blocco funzioni in ciascun ciclo PLC.
AQ262450196490it-000101 / 175R1170 | 97Danfoss A/S © 2019.10
Page 98

Modulo di sistema
File richiesto
Intero servosistema
Pacchetto di librerie per il servosistema MSD 510 : Danfoss_VLT_ServoMotion_V_x_y_z.zip
File di guida online (.chm): programmazione con SIMOTION SCOUT
®
Modulo di servoazionamento SDM 511/SDM 512
e servoazionamento ISD 510/DSD 510
File GSDML (descrizione stazione generale):
GSDML-V2.31-Danfoss-DDS-yyyymmdd.xml
Modulo di alimentazione PSM 510
File GSDML (descrizione stazione generale):
GSDML-V2.31-Danfoss-PSM-yyyymmdd.xml
Modulo di accesso decentralizzato DAM 510
File GSDML (descrizione stazione generale):
GSDML-V2.31-Danfoss-DAM-yyyymmdd.xml
Auxiliary Capacitors Module ACM 510
File GSDML (descrizione stazione generale):
GSDML-V2.31-Danfoss-ACM-yyyymmdd.xml
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
•
Utilizzare un'istanza del blocco funzioni DD_Power_ACM per ciascun Auxiliary Capacitors Module al ne di controllare la connes-
sione tra il collegamento CC e l'ACM 510. Richiamare questo blocco funzioni in ciascun ciclo PLC.
•
Richiamare i blocchi funzioni che eseguono i comandi (di movimento) alla ne del programma.
•
Non utilizzare le POU della libreria (cartella) DDS_Intern.
Non modicare il riferimento per l'asse su un blocco funzioni mentre è occupato.
•
Messa in funzione
N O T A
L'elenco completo dei parametri si trova nella Guida alla programmazione VLT® Servo Drive System ISD 510, DSD 510,
-
MSD 510.
6.14 Programmazione con SIMOTION SCOUT®
6.14.1 Requisiti per la programmazione con SIMOTION SCOUT®
I seguenti le sono necessari per integrare i moduli del servosistema in un progetto SIMOTION SCOUT®:
Tabella 19: File richiesti
6.14.2 Collegamento al PLC
Le informazioni su come collegarsi al PLC sono riportate in dettaglio nella guida® SIMOTION SCOUT.
Aprire SIMOTION SCOUT® e passare a [Help → Help Topics → Getting Started with SIMOTION SCOUT → Download the project to the
target system → Connect to selected target devices → Go online].
6.14.3 Creazione di un progetto SIMOTION SCOUT®
Le informazioni su come installare SIMOTION SCOUT®® sono disponibili nel Manuale di congurazione SIMOTION SCOUT®.
N O T A
Per creare un progetto installare SIMATIC STEP 7 V5.5 o superiore con HF11.
-
Le informazioni su come creare un progetto in SIMOTION SCOUT® sono disponibili in modo dettagliato nella guida online SIMOTION SCOUT®. Aprire SIMOTION SCOUT® e passare a [Help → Help Topics → Getting started with SIMOTION SCOUT → Create SIMOTION device and congure PG/PC communication connection].
6.14.4 Inclusione delle librerie di servoazionamenti in un progetto SIMOTION SCOUT®
La cartella LIBRARIES (LIBRERIE) nella scheda Project (Progetto) contiene le seguenti librerie:
AQ262450196490it-000101 / 175R117098 | Danfoss A/S © | 2019.10
Page 99

Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
•
DDS_Drive
-
Contiene unità organizzative del programma (POU) denite da PLCopen® (nome che inizia con MC_) e POU denite da
Danfoss (nome che inizia con DD_). Le POU Danfoss forniscono funzionalità aggiuntive per il servoazionamento.
-
È possibile combinare POU denite da PLCopen® con POU denite da Danfoss .
-
I nomi delle POU destinate ai moduli convertitore e ai servoazionamenti SDM 511/SDM 512 niscono tutti con _DDS.
•
DDS_PSM
-
Contiene POU denite da Danfoss (nome che inizia con DD_) e assicura la funzionalità per il modulo di alimentazione (PSM
510).
-
I nomi delle POU destinate al PSM 510 terminano tutti con _PSM.
•
DDS_DAM
-
Contiene POU denite da Danfoss (nome che inizia con DD_) e assicura la funzionalità per il modulo di accesso decentralizzato (DAM 510).
-
I nomi delle POU destinate al DAM 510 terminano tutti con _DAM.
•
DDS_ACM
-
Contiene POU denite da Danfoss (nome che inizia con DD_) e assicura la funzionalità per l'Auxiliary Capacitors Module
(ACM 510).
-
I nomi delle POU destinate all'ACM 510 terminano tutti con _ACM.
•
DDS_BasCam
-
Contiene POU per la creazione di CAM di base.
•
DDS_LabCam
-
Contiene POU per la creazione di CAM di etichettatura.
•
DDS_Intern
-
Contiene POU che sono necessarie internamente per le librerie.
-
Non utilizzare queste POU nelle applicazioni.
Quando si integra il pacchetto DDS_Drive, alcune librerie standard vengono integrate automaticamente, a meno che non facciano
già parte del progetto.
Messa in funzione
AQ262450196490it-000101 / 175R1170 | 99Danfoss A/S © 2019.10
Page 100

e30bg359.11
Sistema VLT® Multiaxis Servo Drive MSD 510
Guida operativa
Messa in funzione
Illustrazione 79: Albero del progetto dopo l'inclusione delle librerie del servoazionamento Danfoss
N O T A
Non rimuovere né rinominare queste librerie.
-
Procedura
1.
Estrarre i le dal le Danfoss_VLT_ServoMotion_V_x_y_z.zip (in base alla posizione sul disco rigido).
Per importare la libreria il le DDS_Xxxx.xml e la cartella XML_DDS_Xxxx devono trovarsi insieme nella stessa cartella.
2.
Nella scheda Project (Progetto), fare clic con il tasto destro su LIBRARIES (LIBRERIE) e selezionare [Export/import → Import
folders/objects].
AQ262450196490it-000101 / 175R1170100 | Danfoss A/S © | 2019.10
 Loading...
Loading...