

Page 1

操作ガイド
VLT® Soft Starter MCD 600
Page 2

Page 3
操作ガイド | VLT® Soft Starter MCD 600
内容
内容
1 はじめに 8
1.1 製品説明 8
1.2 ドキュメントバージョン 8
1.3 補助的リソース 8
1.4 承認および認証 8
2 安全性 9
2.1 安全記号 9
2.2 有資格技術者 9
2.3 安全予防措置 9
3 システム設計 12
3.1 機能リスト 12
3.2 タイプ・コード 13
3.3 ソフトスターターのサイズ選択 14
3.4 電流定格(IEC 定格) 14
3.5 寸法と重量 16
3.6 物理的な設置/冷却用空きスペース 17
3.7 アクセサリー 17
3.7.1 拡張カード 17
3.7.1.1 スマートカード 17
3.7.1.2 通信拡張カード 18
3.7.2 リモート LCP 601 18
3.7.3 フィンガーガードキット 18
3.7.4 ソフトスターター・マネジメントソフトウェア 18
3.8 主電源開閉器 19
3.9 遮断器 19
3.10 力率修正 19
3.11 短絡保護デバイス 20
3.11.1 タイプ 1 連携 20
3.11.2 タイプ 2 連携 20
3.12 短絡保護デバイスとの IEC 連携 20
3.13 短絡保護デバイスとの UK 連携 21
3.13.1 標準故障短絡電流定格 21
3.13.2 大事故短絡電流定格 22
3.14 タイプ 2 連携用ヒューズ選択 23
4 仕様 25
4.1 電源 25
4.2 短絡容量 25
AQ262141844215ja-000201 / | 3Danfoss A/S © 2018.10
Page 4
操作ガイド | VLT® Soft Starter MCD 600
4.3 電磁的容量(EU 指令 2014/35/EU に準拠) 25
4.4 入力 25
4.5 出力 25
4.6 環境 26
4.7 放熱 26
4.8 モーター過負荷保護 26
4.9 認証 26
4.10 動作寿命(内部バイパス接触) 26
内容
5 設置 27
5.1 安全指示 27
5.2 Command Source(コマンドソース) 27
5.3 ソフトスターターの設定 28
5.4 入力 28
5.4.1 入力端子 29
5.4.2 Motor Thermistor(モーター・サーミスター) 29
5.4.3 Start/Stop(スタート/ストップ) 30
5.4.4 リセット/スターター無効 30
5.4.5 プログラマブル入力 30
5.4.6 USB ポート 31
5.5 出力 31
5.5.1 出力端子 31
5.5.2 Analog Output(アナログ出力) 31
5.5.3 主電源開閉器出力 31
5.5.4 プログラマブル出力 32
5.6 コントロール電圧 32
5.6.1 コントロール電圧端子 32
5.6.2 UL 適合の導入 33
5.7 Power Terminations(電源終端) 33
5.7.1 配線接続 34
5.7.2 Motor Connection(モーター接続) 34
5.7.2.1 インライン導入 35
5.7.2.2 内部デルタ導入 36
5.8 一般的な設置 36
5.9 Quick Set-up(クイック設定) 38
6 Set-up Tools(設定ツール) 39
6.1 はじめに 39
6.2 日付と時間の設定 39
6.3 Command Source(コマンドソース) 39
6.4 設定 39
6.5 Run Simulation(実行シミュレーション) 39
AQ262141844215ja-000201 /4 | Danfoss A/S © 2018.10
Page 5
操作ガイド | VLT® Soft Starter MCD 600
6.6 設定を読み込み/保存 40
6.7 USB 保存と読み込み 41
6.7.1 保存と読み込みの手順 42
6.7.2 File Locations and Formats(ファイル位置と形式) 42
6.8 自動スタート/ストップ 43
6.9 Network Address(ネットワークアドレス) 43
6.9.1 Network Address(ネットワークアドレス)を設定 44
6.10 デジタル I/O 状態 44
6.11 アナログ I/O 状態 45
6.12 シリアル番号&定格 45
6.13 ソフトウェアバージョン 46
6.14 Thermistor Reset(サーミスターリセット) 46
6.15 リセット熱モデル 46
内容
7 ログ 47
7.1 はじめに 47
7.2 イベントログ 47
7.3 カウンター 47
7.3.1 カウンターを表示 47
8 LCP とフィードバック 48
8.1 ローカル LCP とフィードバック 48
8.2 リモート LCP 48
8.3 表示コントラストの調節 50
8.4 ソフトスタート ステータス LED 50
8.5 ディスプレイ 51
8.5.1 ソフトスターター情報 51
8.5.2 設定可能なフィードバック画面 51
8.5.3 操作フィードバック画面 52
8.5.4 パフォーマンスグラフ 52
9 運転 54
9.1 スタート、停止、リセットコマンド 54
9.2 コマンドオーバーライド 54
9.3 自動スタート/ストップ 54
9.3.1 Clock Mode(クロックモード) 54
9.3.2 Timer Mode(タイマーモード) 55
9.4 出力維持 55
9.5 Emergency Mode(緊急モード) 55
9.6 補助トリップ 56
9.7 一般的な制御方法 56
9.8 ソフトスタートメソッド 58
9.8.1 Constant Current(定電流) 58
AQ262141844215ja-000201 / | 5Danfoss A/S © 2018.10
Page 6
操作ガイド | VLT® Soft Starter MCD 600
9.8.2 定電流と電流ランプ 58
9.8.3 スタートの適応制御 59
9.8.3.1 適応制御の微調整 60
9.8.4 定電流とキックスタート 60
9.9 停止方法 61
9.9.1 Coast to Stop(フリーラン停止) 61
9.9.2 定時電圧ランプ 61
9.9.3 停止のための適応制御 61
9.9.4 DC Brake(直流ブレーキ) 62
9.9.5 外部ゼロ速度センサーを備えた直流ブレーキ 64
9.9.6 Soft Brake(ソフトブレーキ) 64
9.10 Pump Clean(ポンプ洗浄) 65
9.11 逆方向動作 66
9.12 ジョグ動作 67
9.13 内部デルタ動作 68
9.14 Secondary Motor Set(二次モーターセット) 69
内容
10 Programmable Parameters(プログラマブルパラメーター) 70
10.1 メインメニュー 70
10.2 パラメーター値の変更 70
10.3 Adjustment Lock(調整ロック) 70
10.4 Parameter List(パラメーター・リスト) 70
10.5 パラメーターグループ 1-** Motor Details(モーター詳細) 78
10.6 パラメーターグループ 2-** Motor Start/Stop(モータースタート/ストップ) 79
10.7 パラメーターグループ 3-** Motor Start/Stop-2(モータースタート/ストップ-2) 82
10.8 パラメーターグループ 4-** Auto-Start/Stop(自動スタート/ストップ) 85
10.9 パラメーターグループ 5-** Protection Levels(保護レベル) 89
10.10 パラメーターグループ 6-** Protection Action(保護アクション) 91
10.11 パラメーターグループ 7-** Inputs(入力) 97
10.12 パラメーターグループ 8-** Relay Outputs(リレー出力) 100
10.13 パラメーターグループ 9-** Analog Output(アナログ出力) 103
10.14 パラメーターグループ 10-** Display(ディスプレイ) 103
10.15 パラメーターグループ 11-** Pump Clean(ポンプ洗浄) 107
10.16 パラメーターグループ 12-** Communication Card(通信カード) 107
10.17 パラメーターグループ 20-** Advanced(アドバンスト) 111
10.18 パラメーターグループ 30-** Pump Input Configuration(ポンプ入力設定) 112
10.19 パラメーターグループ 31-** Flow Protection(流量保護) 114
10.20 パラメーターグループ 32-** Pressure Protection(圧力保護) 115
10.21 パラメーターグループ 33-** Pressure Control(圧力制御) 116
10.22 パラメーターグループ 34-** Depth Protection(深度保護) 117
10.23 パラメーターグループ 35-** Thermal Protection(熱保護) 117
10.24 パラメーターグループ 36-** Pump Trip Action(ポンプトリップアクション) 118
AQ262141844215ja-000201 /6 | Danfoss A/S © 2018.10
Page 7
操作ガイド | VLT® Soft Starter MCD 600
内容
11 アプリケーション例 122
11.1 スマートカード - ポンプの制御と保護 122
11.2 スマートカード - レベル制御ポンプの起動 123
12 トラブルシューティング 125
12.1 保護応答 125
12.2 トリップメッセージ 125
12.3 一般的な障害 139
13 付属資料 142
13.1 記号と略語 142
AQ262141844215ja-000201 / | 7Danfoss A/S © 2018.10
Page 8
操作ガイド | VLT® Soft Starter MCD 600
はじめに
1 はじめに
1.1 製品説明
VLT® Soft Starter MCD 600 は、11~315 kW モーター用の高度デジタルソフトスタートソリューションです。ソフトスターター
は、モーターおよびシステム保護機能の範囲を完全に網羅し、最も要求の厳しい設置状況で信頼性の高いパフォーマンスを実
現するために設計されています。
1.2 ドキュメントバージョン
この取扱説明書には、定期的な見直しと更新が行われます。改善のためにあらゆるご提案を受け付けています。
表 1: ドキュメントバージョン
エディション 注釈
AQ262141844215 モデルレンジ拡張。パラメーター番号変更済み。
1.3 補助的リソース
高度なソフトスターター機能やプログラミングを理解するために、様々な補助的リソースが利用できます。
• オプション機器の動作に関する操作ガイド。
• さまざまなアクセサリをインストールするための設置ガイド
• アプリケーション用の適切なソフトスターターを選択する際に役立つ WinStart デザインツール。
補足的な情報とマニュアルは、www.danfoss.com/en/search/?filter=type%3Adocumentation から入手可能です。
1.4 承認および認証
8 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 9
操作ガイド | VLT® Soft Starter MCD 600
2 安全性
2.1 安全記号
以下は、この説明書で使用されている記号です:
危険
回避できなかった場合に、死亡事故や深刻な人身事故を招く危険な状況を示します。
警告
回避できなかった場合に、死亡事故や深刻な人身事故を招く可能性のある危険な状況を示します。
注意
回避できなかった場合に、軽微あるいは中小程度の人身傷害を招く可能性のある危険な状況を示します。
安全性
注意
物的損害メッセージを示します。
2.2 有資格技術者
ソフトスターターが故障することなく安全に動作するためには、正確かつ信頼性の高い輸送、保管、設置、操作、メンテナン
スが必要です。機器の設置や操作は、有資格技術者のみが行うことができます。
有資格技術者とは、訓練を受けたスタッフであって、関連する法律と規則に従って設備、システム、回路の設置、設定、メン
テナンスを行うことを許された者のことをいいます。また有資格技術者は、この取扱説明書に記載する指示と安全措置を熟知
する必要があります。
2.3 安全予防措置
安全予防措置は機器の損傷を引き起こす潜在的な原因をすべて網羅することはできませんが、損傷の一般的な原因に焦点をあ
わせることはできます。設置担当者には以下の責任があります。
• 装置を設置、操作、保守する前に、本マニュアルの説明すべてに目を通し、理解してください。
• 適切な個人保護具の着用も含め、良しとされる電気的慣行に従います。
• このマニュアルに記載されている方法以外は、本装置の操作前にアドバイスをお求めください。
注意
VLT® Soft Starter MCD 600 はユーザーが修理することはできません。ユニットは、認定されたサービス担当者によっての
みサービスを受けてください。装置を許可なく変更した場合、製品保証は無効になります。
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 9
Page 10
操作ガイド | VLT® Soft Starter MCD 600
警告
適正な接地
ソフトスターターの設置担当者は、地元の電気安全コードに従って適切な接地と分岐回路保護を実施する責任がありま
す。適切な接地と分岐回路保護を実施しない場合、死亡事故、人身事故、装置の損傷を招くおそれがあります。
修理作業を行う前に、ソフトスターターを主電源電圧から切り離してください。
-
警告
予期しない始動
ソフトスターターが AC 主電源、直流電源、あるいはロードシェアに接続されている場合、モーターはいつでも始動で
きます。プログラミング、サービス、修理中の予期しない始動は、死亡事故、深刻な人身事故、物損事故を招くおそれ
があります。モーターは外部スイッチ、フィールドバスコマンド、LCP からの入力速度指令信号で、又は不具合状態の
クリア後にスタートします。
パラメーターのプログラミング前に、LCP 上の [Off/Reset] を押します。
-
ソフトスターターを主電源から切り離してください。
-
ソフトスターターを AC 主電源、直流電源、あるいはロードシェアに接続する前に、ソフトスターター、モーター、
-
運転機器は、配線及び組み立てが完了している必要があります。
電源を、外部安全システム(例:緊急停止または故障検出器)を通して制御可能な遮断スイッチおよび回路遮断装
-
置(例:電力開閉器)を備えたソフトスターターに接続します。
安全性
注意
力率修正
力率修正用キャパシターを出力側に接続すると、ソフトスターターに損傷を起こします
力率修正用キャパシターは、ソフトスターターの出力側に接続しないでください。静的力率修正を使用する場合は、
-
ソフトスターターの電源側に接続する必要があります。
注意
短絡
VLT® Soft Starter MCD 600 は回路保護ではありません。
深刻な過負荷または短絡の後、認定されたサービス担当者が MCD 600 の動作を完全にテストする必要があります。
-
注意
予期しない再スタートによる機械的損傷
モーターは、シャットダウンの原因解消後に再スタートする可能性があり、特定の機械や設備にとって危険となる場合
があります。
予期せずモーターが停止した場合は、再スタートするための適切な手配を必ずしてください。
-
10 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 11

操作ガイド | VLT® Soft Starter MCD 600
警告
人員の安全
ソフトスターターは安全装置ではありません。電源から電気的に絶縁したり、切り離したりすることはありません。
絶縁が必要な場合は、ソフトスターターに主電源開閉器を取り付ける必要があります。
-
人員の安全のため、スタート機能とストップ機能に依存しないでください。主電源、モーター接続、ソフトスター
-
ターの電子機器で発生する不具合は、モーターが始動したり停止したりする原因となる可能性があります。
ソフトスターターの電子機器に不具合が発生すると、停止したモーターが始動する場合があります。主電源の一時
-
的な不具合やモーター接続が失われたことにより、停止していたモーターがスタートする可能性があります。
人員や装置の安全のため、外部安全システムから隔離デバイスを制御してください。
-
注意
パラメーター設定を変更する前に、MCD PC ソフトウェアまたは Save User Set(ユーザーセットを保存)機能を使用
-
して、現在のパラメーターセットをファイルに保存してください。
安全性
注意
Auto-start(自動スタート)機能を慎重に使用します。操作前に自動スタートに関連する注意すべてに目を通してく
-
ださい。
免責条項
この取扱説明書には、説明するために例および図が含まれています。また、記載されている情報は、事前に通知することなく
いつでも変更されることがあります。本装置の使用または適用に起因する直接的、間接的、または結果的損害に対して一切責
任を負いません。
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 11
Page 12
操作ガイド | VLT® Soft Starter MCD 600
3 システム設計
3.1 機能リスト
合理化された設定プロセス
• 一般的なアプリケーションの設定プロファイル。
• 一体型計量と入力/出力。
使いやすいインターフェイス
• 多言語メニューと表示。
• 記述的なオプション名とフィードバックメッセージ。
• リアルタイム性能グラフ。
エネルギー効率サポート
• IE3 互換性。
• 動作中のエネルギー効率 99%
• 内部バイパス。
• 高調波の歪みを回避するソフトスタート テクノロジー
システム設計
広範囲のモデル
• 20–579 A (通常)。
• 200–525 V AC。
• 380–690 V AC。
• 内部デルタインストール。
幅広い入出力オプション
• 遠隔操作入力(2 x 固定, 2 x プログラマブル)。
• リレー出力(1 x 固定, 2 x プログラマブル)。
• アナログ出力
多様なスタートとストップオプション
• スケジュール済みスタート/ストップ。
• 適応制御。
• 定電流。
• 電流ランプ。
• ポンプ洗浄。
• 定時電圧ランプソフトストップ。
• フリーラン停止。
• 直流ブレーキ。
• ソフトブレーキ
• 逆方向。
12 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 13
0 014
B T 5
制御電圧
CV1 = 24 V AC/V DC
CV2 = 110~120 V AC または
220~240 V AC
保護
00 = IP00 (オープンフレーム)
20 = IP20 (閉鎖)
フレームサイズ
S1X = フレームサイズ 1
S2X = フレームサイズ 2
主電源
T5 = 200~525 V AC
T7 = 380~690 V AC
バイパス
B = 内部パイパス
公称電流定格
e77ha788.10
MCD6-
–– – –
操作ガイド | VLT® Soft Starter MCD 600
カストマイズ可能な保護
• モーター過負荷。
• 延長スタート時間。
• 電流低下/過電流。
• 電力低下/過電力。
• 電流アンバランス。
• 入力トリップ。
• モーター・サーミスター。
高度アプリケーション用オプション機能
• スマートカード。
• 通信オプション:
- DeviceNet。
- イーサネット/IP。
- Modbus RTU。
- Modbus TCP。
- プロフィバス
- プロフィネット。
システム設計
3.2 タイプ・コード
図 1: タイプ・コード文字列
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 13
Page 14
操作ガイド | VLT® Soft Starter MCD 600
システム設計
3.3 ソフトスターターのサイズ選択
ソフトスターターのサイズはモーターおよびアプリケーションと合致する必要があります。
スタート負荷時に、少なくともモーターの全負荷電流定格に等しい電流定格(モーターのネームプレートを参照)のあるソフ
トスターターを選択します。
ソフトスターターの電流定格は、使用可能な最大モーターサイズを決定します。ソフトスターターの定格は、1 時間当たりの
スタート回数、スタートの長さと電流レベル、ソフトスターターがスタート間でオフ(電流を流していない)である合計時間
に依存します。
ソフトスターターの電流定格は、AC53b コードで規定された条件で使用された場合にのみ有効です。動作条件が異なる場合、
ソフトスターターの電流定格が高くなったり低くなったりする可能性があります。
3.4 電流定格(IEC 定格)
注意
これらの定格チャートに記載されていない動作条件での定格については、最寄りの販売代理店までお問い合わせくださ
い。
図 2: AC53b 形式
注意
すべての定格は標高 1000 m (3280 ft)、周囲温度 40 °C (104 °F)で計算されます。
表 2: インライン設置、MCD6-0020B ~ MCD6-0042B
3.0-10:350 3.5-15:345 4.0-10:350 4.0-20:340 5.0-5:355
MCD6-0020B 24 20 19 16 17
MCD6-0034B 42 34 34 27 32
MCD6-0042B 52 42 39 35 34
表 3: インライン設置、MCD6-0063B ~ MCD6-0579B
3.0-10:590 3.5-15:585 4.0-10:590 4.0-20:580 5.0-5:595
MCD6-0063B 64 63 60 51 54
MCD6-0069B 69 69 69 62 65
14 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 15
操作ガイド | VLT® Soft Starter MCD 600
3.0-10:590 3.5-15:585 4.0-10:590 4.0-20:580 5.0-5:595
MCD6-0086B 105 86 84 69 77
MCD6-0108B 115 108 105 86 95
MCD6-0129B 135 129 126 103 115
MCD6-0144B 184 144 139 116 127
MCD6-0171B 200 171 165 138 150
MCD6-0194B 229 194 187 157 170
MCD6-0244B 250 244 230 200 202
MCD6-0287B 352 287 277 234 258
MCD6-0323B 397 323 311 263 289
MCD6-0410B 410 410 410 380 400
MCD6-0527B 550 527 506 427 464
MCD6-0579B 580 579 555 470 508
システム設計
表 4: 内部デルタ導入
3.0-10:350 3.5-15:345 4.0-10:350 4.0-20:340 5.0-5:355
MCD6-0020B 36 30 28 24 25
MCD6-0034B 63 51 51 40 48
MCD6-0042B 78 63 58 52 51
3.0-10:590 3.5-15:585 4.0-10:590 4.0-20:580 5.0-5:595
MCD6-0063B 96 94 90 76 81
MCD6-0069B 103 103 103 93 97
MCD6-0086B 157 129 126 103 115
MCD6-0108B 172 162 157 129 142
MCD6-0129B 202 193 189 154 172
MCD6-0144B 276 216 208 174 190
MCD6-0171B 300 256 247 207 225
MCD6-0194B 343 291 280 235 255
MCD6-0244B 375 366 345 300 303
MCD6-0287B 528 430 415 351 387
MCD6-0323B 595 484 466 394 433
MCD6-0410B 615 615 615 570 600
MCD6-0527B 825 790 759 640 696
MCD6-0579B 870 868 832 705 762
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 15
Page 16
4/T2
READY RUN
TRIP
LOCAL
Exit
Reset
Menu
Store
2/T1
6/T3
1/L1
3/L2
5/L3
READY RUN TRIP LOCAL
Exit
Reset
Menu
Store
VLT
®
Soft Starter
VLT
®
Soft Starter
A
B
C D
E
A
B
C
D
E
e77ha713.10
操作ガイド | VLT® Soft Starter MCD 600
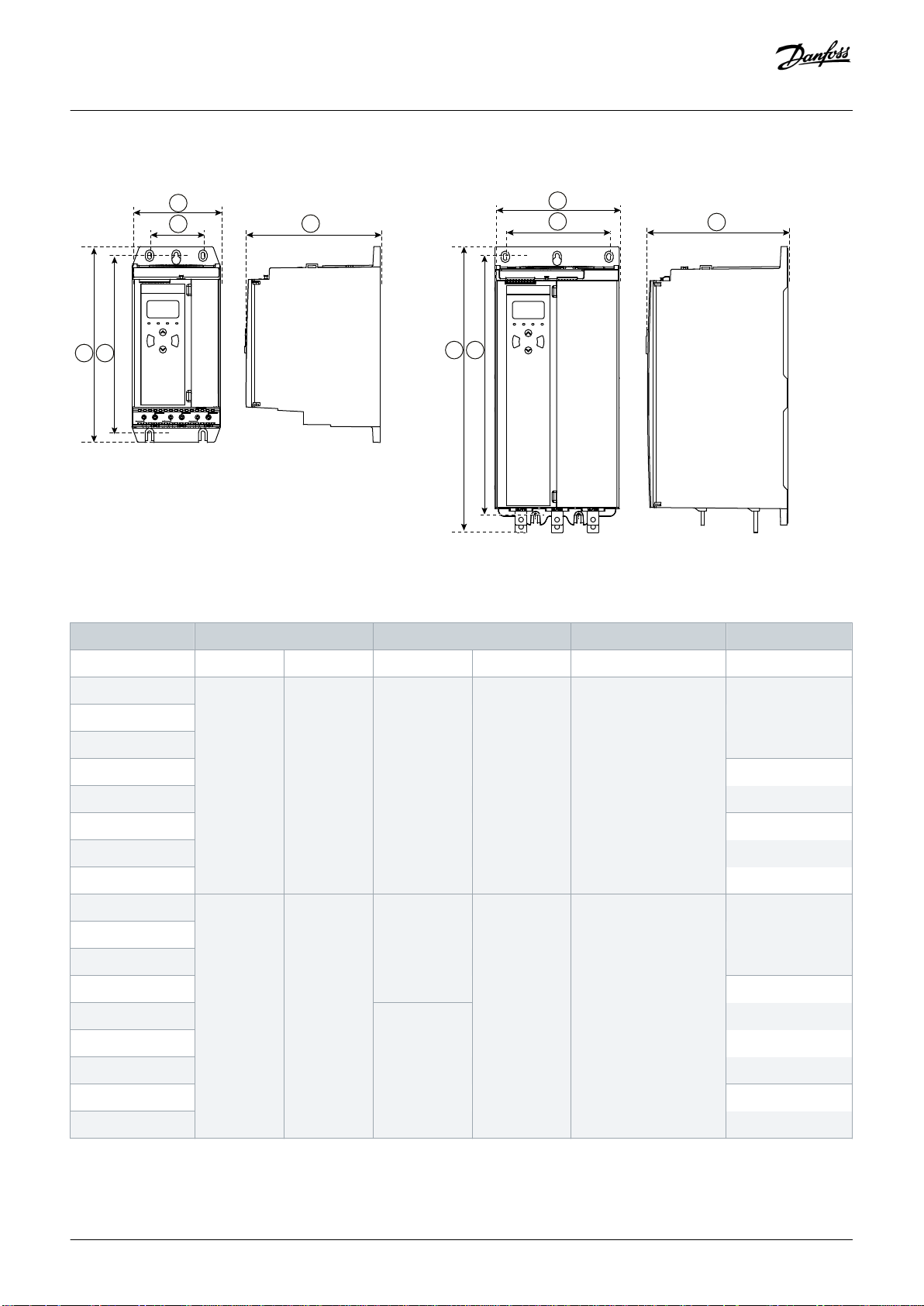
3.5 寸法と重量
システム設計
図 3: 寸法、フレームサイズ S1 (左) と S2 (右)
表 5: 寸法と重量
幅 [mm (in)] 高さ [mm (in)] 奥行き [mm (in)] 重量 [kg (lb)]
A B C D E
MCD6-0020B 152 (6.0) 92 (3.6) 336 (13.2) 307 (12.1) 231 (9.1) 4.8 (10.7)
MCD6-0034B
MCD6-0042B
MCD6-0063B 4.9 (10.9)
MCD6-0069B
MCD6-0086B 5.5 (12.1)
MCD6-0108B
MCD6-0129B
MCD6-0144B 216 (8.5) 180 (7.1) 495 (19.5) 450 (17.7) 243 (9.6) 12.7 (28)
MCD6-0171B
MCD6-0194B
MCD6-0244B 15.5 (34.2)
MCD6-0287B 523 (20.6)
MCD6-0323B
MCD6-0410B
MCD6-0527B 19 (41.9)
MCD6-0579B
16 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 17
4/T2
2/T1
6/T3
1/L1
3/L2
5/L3
4/T2
READY
RUN
TRIP
LOCAL
Exit
Reset
Menu
Store
2/T1
6/T3
1/L1
3/L2
5/L3
VLT
®
Soft Starter
4/T2
READY
RUN
TRIP
LOCAL
Exit
Reset
Menu
Store
2/T1 6/T3
1/L1 3/L2 5/L3
VLT
®
Soft Starter
4/T2
READY RUN TRIP
LOCAL
Exit
Reset
Menu
Store
2/T1 6/T3
1/L1
3/L2
5/L3
VLT
®
Soft Starter
4/T2
READY RUN TRIP LOCAL
Exit
Reset
Menu
Store
2/T1 6/T3
1/L1 3/L2 5/L3
VLT
®
Soft Starter
4/T2
READY RUN TRIP LOCAL
Exit
Reset
Menu
Store
2/T1 6/T3
1/L1 3/L2 5/L3
VLT
®
Soft Starter
177HA714.10
A
B
C
D D
C
操作ガイド | VLT® Soft Starter MCD 600
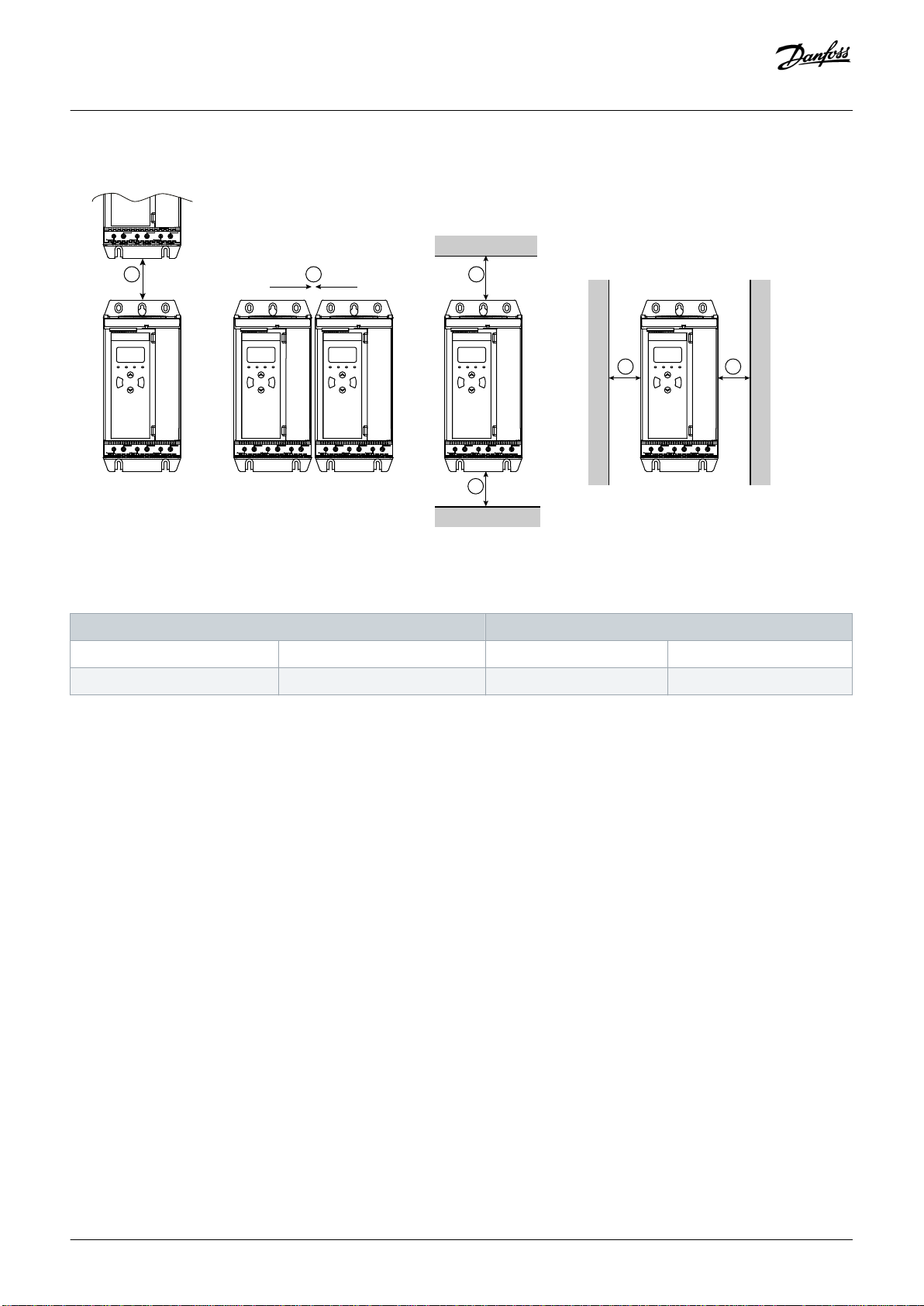
3.6 物理的な設置/冷却用空きスペース
システム設計
図 4: 空きスペース
表 6: 冷却用空きスペース
ソフトスターター間の空きスペース 硬い表面に対する空きスペース
A [mm (in)] B [mm (in)] C [mm (in)] D [mm (in)]
>100 (3.9) >10 (0.4) >100 (3.9) >10 (0.4)
3.7 アクセサリー
3.7.1 拡張カード
VLT® Soft Starter MCD 600 は、追加の入出力や高度な機能を必要とするユーザーのために拡張カードを提供します。各 MCD 600
は、最大 1 枚の拡張カードをサポートできます。
3.7.1.1 スマートカード
スマートカードは、ポンプアプリケーションとの統合をサポートするために設計され、以下の追加入出力を可能にします。
• 3 x デジタル入力。
• 3 x 4–20 mA 変換器入力。
• 1 x RTD 入力。
• 1 x USB-B ポート。
• リモート LCP コネクター。
注文番号: 175G0133
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 17
Page 18
操作ガイド | VLT® Soft Starter MCD 600
システム設計
3.7.1.2 通信拡張カード
VLT® Soft Starter MCD 600 は、インストールが簡単な通信拡張カードを経由してネットワーク通信をサポートします。各通信カ
ードは、リモート LCP 601 コネクタポートを含みます。
表 7: 注文番号付きフィールドバス拡張カード
オプションカード 注文番号
VLT® Soft Starter MCD 600Modbus RTU 175G0127
VLT® Soft Starter MCD 600 プロフィバス 175G0128
VLT® Soft Starter MCD 600DeviceNet 175G0129
VLT® Soft Starter MCD 600Modbus TCP 175G0130
VLT® Soft Starter MCD 600 イーサネット/IP 175G0131
VLT® Soft Starter MCD 600 プロフィネット 175G0132
VLT® Soft Starter MCD 600 ポンプアプリケーション 175G0133
3.7.2 リモート LCP 601
VLT® Soft Starter MCD 600 ソフトスターターは、ソフトスターターから最長 3 m (9.8 ft) 離れたところに取り付けられたリモート
LCP で使用できます。それぞれの拡張カードは LCP 接続ポートを含みます。また専用 LCP コネクタカードが使用可能です。
リモート LCP 601 拡張カード注文番号: 175G0134。
3.7.3 フィンガーガードキット
フィンガーガードは、個人の安全のために指定できます。フィンガーガードはソフトスターター端子にぴったりとはまり、通
電端子との偶発的な接触を防止します。直径 22 mm またはそれ以上のケーブルで使用する場合、フィンガーガードが IP20 を
保護します。
フィンガーガードはモデル MCD6-0144B ~ MCD6-0579B と互換性があります。
フィンガーガードキットの注文番号: 175G0186.
3.7.4 ソフトスターター・マネジメントソフトウェア
VLT® Soft Starter MCD 600 にはインストール済み USB フラッシュインターフェイスが搭載されています。USB フラッシュを
FAT32 書式にフォーマットする必要があります。フラッシュをフォーマットする場合は、標準フラッシュスティック(最小 4
MB)を USB ポートに接続する際の PC の指示に従います。VLT®動作コントロールツール MCT10 は、設定ファイルを USB フラ
ッシュスティックに転送します。設定ファイルをソフトスターターに読み込むには、 6.7.1 保存と読み込みの手順に記載された
ように LCP を使用します。
VLT®動作コントロールツール MCT 10 はソフトスターターを管理するのに役立ちます。詳細情報は、最寄りの販売代理店までお
問い合わせください。
VLT®動作コントロールツール MCT 10 に関する文書は、www.danfoss.com/en/search/?filter=type%3Adocumentation からダウンロー
ドできます。
18 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 19
K1
K1
1
2
4
3
e77ha794.10
操作ガイド | VLT® Soft Starter MCD 600
システム設計
3.8 主電源開閉器
停止中は、ソフトスターターをネットワーク上の電圧障害から保護するために、主電源開閉器が推奨されます。接続されたモ
ーターの FLC 定格と同等かそれ以上の AC3 定格を備えた開閉器を選択してください。
主電源開閉器の出力(13, 14) を使用して、開閉器を制御します。
主電源接触器の配線については、 5.8 一般的な設置の illustration 12 を参照してください。
警告
ショックの危険
ソフトスターターが内部デルタ構成で配線されると、モーター巻線の一部が常に(ソフトスターターがオフになってい
ても)ライン電力に接続される結果となります。この状況は、死亡事故や深刻な人身事故を招く原因となります。
ソフトスターターを内部デルタ構成に接続するときは、主電源接触器かシャントトリップ回路ブレーカーを常に取
-
り付けてください。
3.9 遮断器
ソフトスターターがトリップすると、主電源接触器の代わりにシャントトリップ回路ブレーカーを使用してモーター回路を絶
縁できます。シャントトリップ機構は、回路ブレーカーの電源側または別の制御電源から電気供給する必要があります。
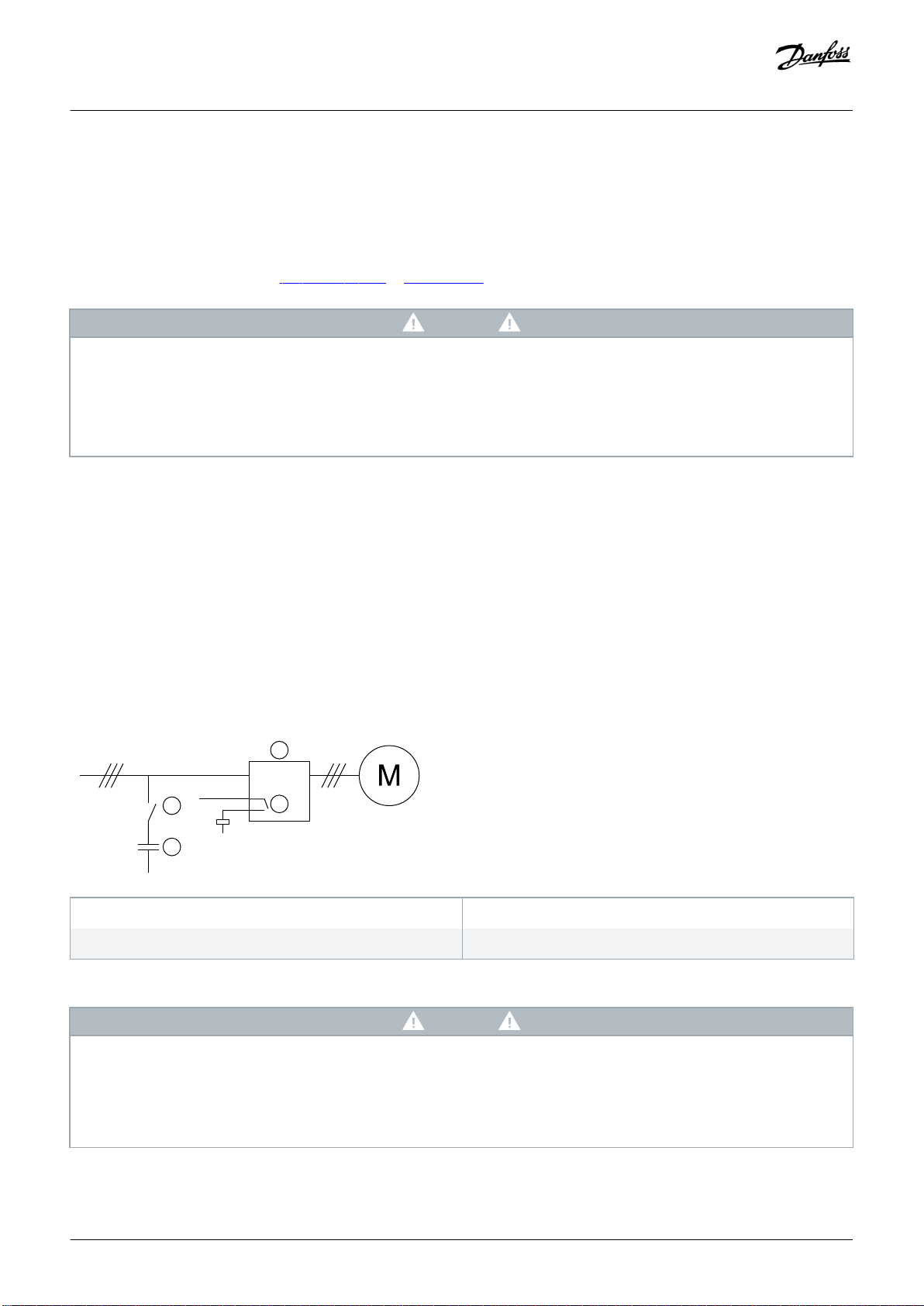
3.10 力率修正
力率修正を使用する場合は、専用開閉器を使用してキャパシターに切り替えます。
VLT® Soft Starter MCD 600 を使用して力率修正を制御する場合は、PFC 接触器をプログラマブルリレーに接続して実行を設定し
ます。モーターが最高速度に達すると、リレーが閉じ、力率修正が切り替わります。
1 ソフト・スターター
3 力率修正開閉器
図 5: 接続図
2 プログラマブル出力(設定=実行)
4 力率修正
注意
機器の損傷
力率修正用キャパシターを出力側に接続すると、ソフトスターターに損傷を起こします。
力率修正用キャパシターは、常にソフトスターターの入力側に接続してください。
-
力率修正を直接切り替えるために、ソフトスターターリレー出力を使用しないでください。
-
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 19
Page 20
操作ガイド | VLT® Soft Starter MCD 600
システム設計
3.11 短絡保護デバイス
モーター回路の保護スキームを設計する場合、ソフトスターターおよび開閉器の IEC 60947-4-1 規格が、ソフトスターターに関
する 2 種類の連携を定義しています。
• タイプ 1 連携。
• タイプ 2 連携。
3.11.1 タイプ 1 連携
タイプ 1 連携は、ソフトスターターの出力側に短絡がある場合に人身事故や設備損傷のリスクなしに不具合を解消する必要が
あります。ソフトスターターは故障後も動作し続ける必要はありません。ソフトスターターが再び動作可能になるためには、
修理と部品交換が必要です。
HRC ヒューズ(Ferraz / Mersen AJT ヒューズなど)は、IEC 60947-4-2 規格に従ってタイプ 1 連携に使用できます。
3.11.2 タイプ 2 連携
タイプ 2 連携は、ソフトスターターの出力側に短絡がある場合に人身事故やソフトスターターへの損傷のリスクなしに不具合
を解消する必要があります。
タイプ 2 連携には、障害解消後に許可された担当者が切れたヒューズを交換し、開閉器を確認して接続できるという利点があ
ります。ソフトスターターはそして再び動作可能になります
タイプ 2 回路保護用の半導体ヒューズは、モーター分岐回路保護の一部を形成する HRC ヒューズまたは MCCB の追加となりま
す。
注意
直流ブレーキ
高ブレーキトルク設定は、モーターが停止している間、ピーク電流をモーター DOL までの引き出すことになります。
モーター分岐回路に取り付けられた保護ヒューズが適切に選択されていることを確認します。
-
注意
分岐回路の保護なし
内蔵ソリッドステート短絡保護には分岐回路保護はありません。
国家電気規則およびその他の地方条例に従った分岐回路保護を用意してください。
-
3.12 短絡保護デバイスとの IEC 連携
これらのヒューズは、10 秒間の FLC300%のスタート電流に基づいて選択されました。
表 8: IEC ヒューズ
公称定格 [A]
MCD6-0020B 24 1150 40NHG000B 170M3010
20 | Danfoss A/S © 2018.10
SCR I2t (A2s)
タイプ 1 連携 480 V AC, 65 kA Bussmann
NH ヒューズリンク
タイプ 2 連携 690 V AC, 65 kA
Bussmann DIN 43 653
AQ262141844215ja-000201 / 175R1174
Page 21
操作ガイド | VLT® Soft Starter MCD 600
システム設計
公称定格 [A]
MCD6-0034B 42 7200 63NHG000B 170M3013
MCD6-0042B 52 80NHG000B
MCD6-0063B 64 15000 100NHG000B 170M3014
MCD6-0069B 69
MCD6-0086B 105 80000 160NHG00B 170M3015
MCD6-0108B 115
MCD6-0129B 135 125000 170M3016
MCD6-0144B 184 320000 250NHG2B 170M3020
MCD6-0171B 200
MCD6-0194B 229 315NHG2B
MCD6-0244B 250 170M3021
MCD6-0287B 352 202000 355NHG2B 170M6009
MCD6-0323B 397 400NHG2B
MCD6-0410B 410 320000 425NHG2B 170M6010
MCD6-0527B 550 781000 630NHG3B 170M6012
SCR I2t (A2s)
タイプ 1 連携 480 V AC, 65 kA Bussmann
NH ヒューズリンク
タイプ 2 連携 690 V AC, 65 kA
Bussmann DIN 43 653
MCD6-0579B 579
3.13 短絡保護デバイスとの UK 連携
3.13.1 標準故障短絡電流定格
規定されたレベルのアンペア(対称 rms)以下、最高 600V AC の電流を供給できる回路での使用に適しています。
表 9: 最大ヒューズ定格[A] - 標準故障短絡電流
モデル 公称定格 [A]
MCD6-0020B 24 5 kA
MCD6-0034B 42
MCD6-0042B 52 10 kA
MCD6-0063B 64
MCD6-0069B 69
MCD6-0086B 105
MCD6-0108B 120
MCD6-0129B 135
600 V AC での 3 サイクル短絡定格
(1)
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 21
Page 22
操作ガイド | VLT® Soft Starter MCD 600
システム設計
モデル 公称定格 [A]
600 V AC での 3 サイクル短絡定格
MCD6-0144B 184 18 kA
MCD6-0171B 225
MCD6-0194B 229
MCD6-0244B 250
MCD6-0287B 352
MCD6-0323B 397
MCD6-0410B 410 30 kA
MCD6-0527B 550
MCD6-0579B 580
1
リストに記載されているヒューズか
ます。
NEC
に従ったサイズの記載された回路ブレーカーで保護されている場合、注意する予想電流で回路に使用するのに適してい
3.13.2 大事故短絡電流定格
表 10: 最大ヒューズ定格[A] - 大事故短絡電流
モデル 公称定格 [A] 最高 480 V AC での短絡回路定格
(1)
一覧表示されたヒューズ定格[A]
(1)
ヒューズクラス
(1)
MCD6-0020B 24 65 kA 30 任意(J, T, K-1, RK1, RK5)
MCD6-0034B 42 50
MCD6-0042B 52 60
MCD6-0063B 64 80
MCD6-0069B 69 80
MCD6-0086B 105 125 J, T, K-1, RK1
MCD6-0108B 115 125
MCD6-0129B 135 150
MCD6-0144B 184 200 J, T
MCD6-0171B 200 225
MCD6-0194B 229 250
MCD6-0244B 250 300
MCD6-0287 352 400 任意(J, T, K-1, RK1, RK5)
MCD6-0323B 397 450
MCD6-0410B 410 450
MCD6-0527B 550 600
MCD6-0579B 580 600
1
指定されたクラスおよび定格ヒューズに保護されている場合、
22 | Danfoss A/S © 2018.10
65000 rms
対称アンペア以下を最高
480V AC
で供給できる回路での使用に適しています。
AQ262141844215ja-000201 / 175R1174
Page 23
操作ガイド | VLT® Soft Starter MCD 600
表 11: 回路ブレーカー - 大事故短絡電流
システム設計
モデル 公称定格
[A]
ブレーカー 1: Eaton (定格、
(1)
A)
ブレーカー 2: GE (定格、A)
(1)
ブレーカー 3: LS (定格、A)
MCD6-0020B 24 HFD3030 (30 A) SELA36AT0060 (60 A) UTS150H-xxU-040 (40 A)
MCD6-0034B 42 HFD3050 (50 A) UTS150H-xxU-050 (50 A)
MCD6-0042B 52 HFD3060 (60 A) UTS150H-xxU-060 (60 A)
MCD6-0063B 64 HFD3100 (100 A) SELA36AT0150 (150 A) UTS150H-xxU-100 (100 A)
MCD6-0069B 69
MCD6-0086B 105 HFD3125 (125 A) UTS150H-xxU-125 (125 A)
MCD6-0108B 115
MCD6-0129B 135 HFD3150 (150 A) UTS150H-xxU-150 (150 A)
MCD6-0144B 184 HFD3250 (250 A) SELA36AT0250 (250 A) UTS150H-xxU-250 (250 A)
MCD6-0171B 200
MCD6-0194B 229
MCD6-0244B 250 HFD3300 (300 A) SELA36AT0400 (400 A) UTS150H-xxU-300 (300 A)
MCDF6-0287B 352 HFD3400 (400 A) SELA36AT0600 (600 A) UTS150H-xxU-400 (400 A)
MCD6-0323B 397
MCD6-0410B 410 HFD3600 (600 A) UTS150H-xxU-600 (600 A)
(1) (2)
MCD6-0527B 550 UTS150H-xxU-800 (800 A)
MCD6-0579B 580 UTS150H-NG0-800
1
この表に掲載された回路ブレーカーモデルに保護されている場合、
2
LS
回路ブレーカーの場合、xxはFM、FT、ATのいずれかを意味します。
65000 rms
対称アンペア以下を最高
480V AC
で供給できる回路での使用に適しています。
3.14 タイプ 2 連携用ヒューズ選択
タイプ 2 連携は、半導体ヒューズを使用することで達成されます。これらのヒューズは、モータースタート電流を流すことが
でき、ソフトスターター SCR の I2t より小さいトータルクリーニング I2t を有する必要があります。
VLT® Soft Starter MCD 600 の半導体ヒューズを選択する場合は、table 12 の I2t 値を使用します。
半導体ヒューズの選択に関する詳細情報については、最寄りの取扱代理店までお問い合わせください。
表 12: 半導体ヒューズの SCR 値
モデル
MCD6-0020B 1150
MCD6-0034B 7200
MCD6-0042B
SCR I2t [A2s]
MCD6-0063B 15000
MCD6-0069B
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 23
Page 24
操作ガイド | VLT® Soft Starter MCD 600
システム設計
モデル
MCD6-0086B 80000
MCD6-0108B
MCD6-0129B 125000
MCD6-0144B 320000
MCD6-0171B
MCD6-0194B
MCD6-0244B
MCD6-0287B 202000
MCD6-0323B
MCD6-0410B 320000
MCD6-0527B 781000
MCD6-0579B
SCR I2t [A2s]
24 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 25
操作ガイド | VLT® Soft Starter MCD 600
仕様
4 仕様
4.1 電源
主電圧 (L1、L2、L3)
MCD6-xxxxB-T5 200–525 V AC (±10%)
MCD6-xxxxB-T7 380–690 V AC (±10%)
コントロール電圧 (A7、A8、A9)
MCD6-xxxxB-xx-CV2 (A8, A9) 110–120 V AC (+10%/-15%), 600 mA
MCD6-xxxxB-xx-CV2 (A7, A9) 220–240 V AC (+10%/-15%), 600 mA
MCD6-xxxxB-xx-CV1 (A8, A9) 24 V AC/V DC (±20%), 2.8 A
主電源周波数 50–60 Hz (±5 Hz)
定格絶縁電圧 690 V AC
定格インパルス耐電圧 6 kV
フォームの指定 バイパスまたは連続、半導体モータースターターフォーム 1
4.2 短絡容量
半導体ヒューズによる連携 タイプ 2
HRC ヒューズによる連携 タイプ 1
4.3 電磁的容量(EU 指令 2014/35/EU に準拠)
EMC 耐性 IEC 60947-4-2
EMC 放射 IEC 60947-4-2 クラス B
4.4 入力
入力定格 有効な 24 V DC、約 8 mA
モーター・サーミスター(TER-05、TER-06) トリップ >3.6 kΩ、リセット >1.6 kΩ
4.5 出力
リレー出力 10 A @ 250 V AC 抵抗 、5 A @ 250 V AC AC15 PF 0.3
主電源開閉器 (13, 14) 通常は開
リレー出力 A (21, 22, 23) 切り替え
リレー出力 B (33, 34) 通常は開
アナログ出力(AO-07, AO-08)
最大負荷 600 Ω (12 V DC @ 20 mA)
精度 ±5%
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 25
Page 26
操作ガイド | VLT® Soft Starter MCD 600
仕様
4.6 環境
超動作温度 -10 to +60 °C (14–140 °F)、 負荷軽減で 40 °C (104 °F)超
保管温度 -25~+60 °C (-13 to +140 °F)
動作高度 0–1000 m (0–3280 ft)、負荷軽減で 1000 m (3280 ft)超
湿度 相対湿度 5~95%
汚染度 汚染度 3
振動 IEC 60068-2-6
保護
MCD6-0020B~MCD6-0129B IP20
MCD6-0144B~MCD6-0579B IP00
4.7 放熱
スタート中 4.5 W/A
運転中
MCD6-0020B~MCD6-0042B 約≤ 35 W
MCD6-0063B~MCD6-0129B 約≤ 50 W
MCD6-0144B~MCD6-0244B 約≤ 120 W
MCD6-0287B~MCD6-0579B 約≤ 140 W
4.8 モーター過負荷保護
パラメーター
します。
1-4 から 1-6 のデフォルト設定は、モーター過負荷保護を提供
クラス 10、FLA(全負荷電流)トリップ電流 105%
または同等
4.9 認証
CE EN 60947-4-2
UL/C-UL UL 508
舶用 ロイド船級 No 1 仕様
ABS
DNV
4.10 動作寿命(内部バイパス接触)
予想動作寿命 100000 階の動作
26 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 27
操作ガイド | VLT® Soft Starter MCD 600
5 設置
5.1 安全指示
一般的な安全説明については、 2.3 安全予防措置を参照してください。
警告
誘導電圧
出力モーター・ケーブルからの誘導電圧は、共に機器のキャパシターを充電します。これは機器がオフの場合、ロック
アウトの場合でも同様です。出力ケーブルを別にせず動作させた場合、又はシールド・ケーブルを使用しなかった場
合、死亡事故又は深刻な傷害事故を招くことがあります。
出力モーター・ケーブルを別々に配線します。
-
シールド・ケーブルを使用します。
-
警告
予期しない始動
ソフトスターターが AC 主電源、直流電源、あるいはロードシェアに接続されている場合、モーターはいつでも始動で
きます。プログラミング、サービス、修理中の予期しない始動は、死亡事故、深刻な人身事故、物損事故を招くおそれ
があります。モーターは外部スイッチ、フィールドバスコマンド、LCP からの入力速度指令信号で、又は不具合状態の
クリア後にスタートします。
パラメーターのプログラミング前に、LCP 上の [Off/Reset] を押します。
-
ソフトスターターを主電源から切り離してください。
-
ソフトスターターを AC 主電源、直流電源、あるいはロードシェアに接続する前に、ソフトスターター、モーター、
-
運転機器は、配線及び組み立てが完了している必要があります。
電源を、外部安全システム(例:緊急停止または故障検出器)を通して制御可能な遮断スイッチおよび回路遮断装
-
置(例:電力開閉器)を備えたソフトスターターに接続します。
設置
5.2 Command Source(コマンドソース)
デジタル入力、リモート LCP 601、通信ネットワーク、スマートカード、スケジュールされた自動スタート/ストップを介して、
ソフトスターターをスタートおよび停止します。Set-up Tools
ドソース)
リモート LCP がインストールされている場合、[CMD/Menu]キーによって Set-up Tools
ンドソース)機能へのショートカットアクセスできます。
経由でコマンドソースを設定してください。
(設定ツール)
または
パラメーター
(設定ツール)
1-1 Command Source
の Command Source(コマ
(コマン
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 27
Page 28
操作ガイド | VLT® Soft Starter MCD 600
設置
5.3 ソフトスターターの設定
手順
1. ソフトスターターを取り付けます。 3.6 物理的な設置/冷却用空きスペースを参照してください。
2. コントロール配線を接続します。 5.4.1 入力端子を参照してください。
3. コントロール電圧をソフトスターターに適用します。
4. アプリケーション(Quick Set-up(クイック設定)にリスト表示)を設定します。
A [Menu]を押します。
B [Menu / Store]を押して Quick Set-up(クイック設定)メニューを開きます。
C リストをスクロールしてアプリケーションを探します。
D [Menu/Store]を押して設定プロセスを開始します。
5. Quick Set-up(クイック設定)のリストにはないアプリケーションを設定します。
A Menu(メニュー)に戻る場合は、[Back] を押します。
B [▿]を押して Main Menu(メインメニュー)までスクロールし、[Menu/Store]を押します。
C Motor Details
ーター全負荷電流)
D
パラメーター
す。
E [Menu/Store]を押して、設定を保存します。
6. [Back]を繰り返し押して、Main Menu(メインメニュー)を閉じます。
7. (オプション)一体型シミュレーションツールを使用して、制御配線が正しく接続されていることを確認します。 6.5 Run
Simulation(実行シミュレーション)を参照してください。
8. ソフトスターターの電源を切ります。
9. モーターケーブルをソフトスターター出力端子 2/T1、4/T2、6/T3 に接続します。
10. 主電源ケーブルをソフトスターター入力端子 1/L1、3/L2、5/L3 に接続します。
してください。
ソフトスターターはこれでモーターを制御する準備が整いました。
(モーター詳細)
を編集します。
1-2 Motor Full Load Current
までスクロールし、 [Menu/Store] を 2 回押し、
(モーター全負荷電流)
5.9 Quick Set-up(クイック設定)を参照してください。
パラメーター
をモーター全負荷電流 (FLC) に合わせるように設定しま
5.7 Power Terminations(電源終端)を参照
1-2 Motor Full Load Current
(モ
5.4 入力
注意
制御入力はソフトスターターから電力を供給します。外部電圧を制御入力端子に適用しないでください。
注意
制御入力へのケーブルは、主電源電圧とモーターのケーブル配線から分離する必要があります。
28 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 29
READY
RUN
TRIP
LOCAL
Exit
Reset
Menu
Store
VLT
®
Soft Starter
2/T1
4/T2
6/T3
1/L1 3/L2
5/L3
AO-08
AO-07
DI-B
DI-A
COM+
START
COM+
RESET
TER-06
TER-05
e77ha718.10
操作ガイド | VLT® Soft Starter MCD 600
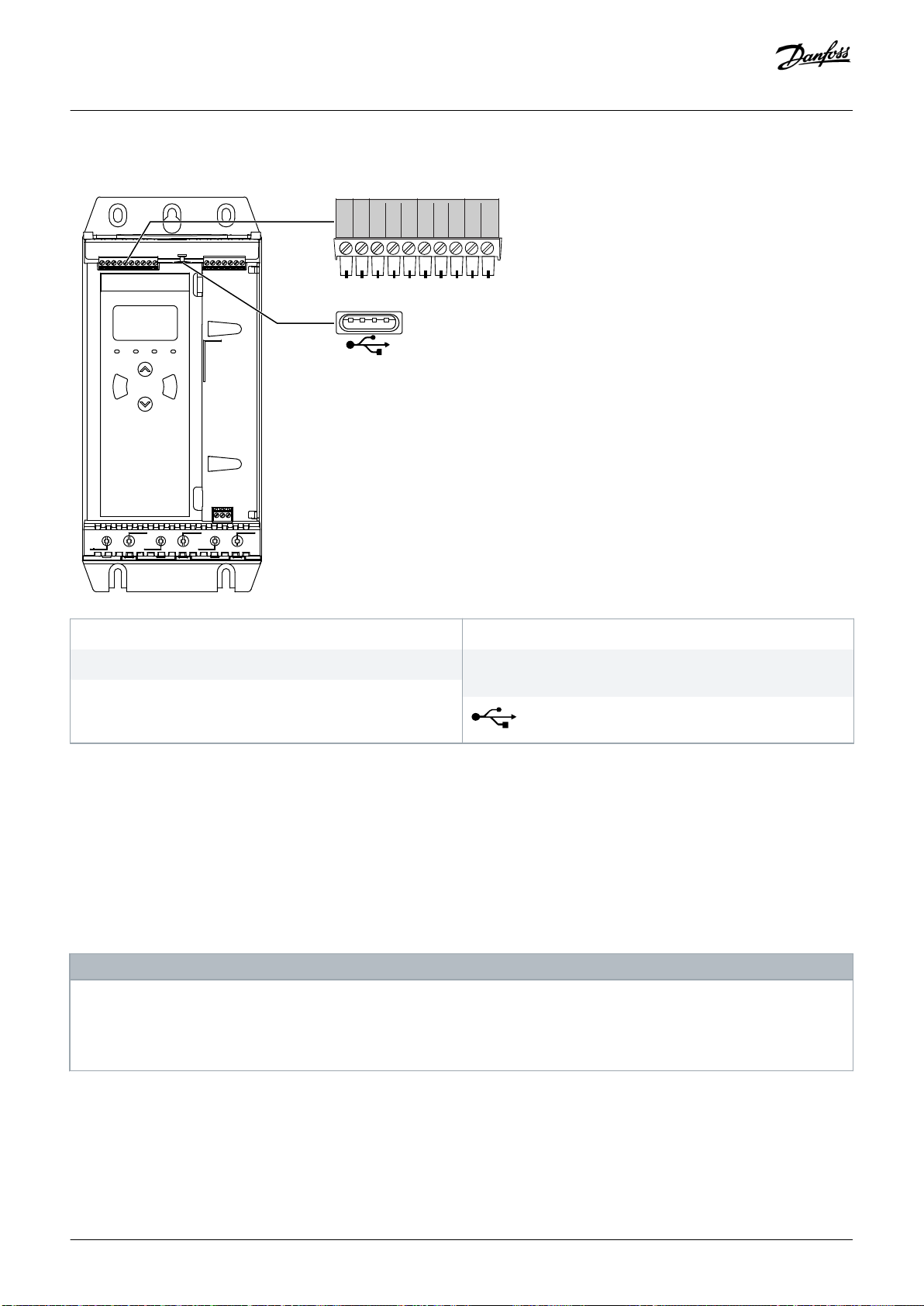
5.4.1 入力端子
設置
TER-05, TER-06 モーター・サーミスター入力
START, COM+ スタート/ストップ入力
RESET, COM+ リセット入力
DI-A, COM+ プログラマブル入力 A (デフォルト = 入力トリ
ップ (N/O))
DI-B, COM+ プログラマブル入力 B (デフォルト = 入力トリ
ップ (N/O))
図 6: 入力端子
USB ポート(点灯のため、PC 直接接続なし)
5.4.2 Motor Thermistor(モーター・サーミスター)
モーター・サーミスターは、VLT® Soft Starter MCD 600 に直接接続できます。ソフトスターターは、サーミスター回路の抵抗が
約 3.6kΩ を上回るか 20Ω を下回るとトリップします。
サーミスターは直列に配線する必要があります。サーミスター回路はシールドケーブルで動作し、接地と他のすべての電力お
よび制御回路から電気的に絶縁する必要があります。
サーミスター入力はデフォルトでは無効になっています。サーミスターが検出されると自動的に有効になります。サ
ーミスターが以前は MCD 600 に接続されていたにもかかわらず、もはや必要ではなくなった場合は、Thermistor Reset
(サーミスターリセット)機能を使用してサーミスターを無効にします。サーミスターのリセットは Set-up Tools
ツール)
経由でアクセスします。
注意
(設定
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 29
Page 30
RESET
COM+
START
A
B
e77ha721.10
操作ガイド | VLT® Soft Starter MCD 600
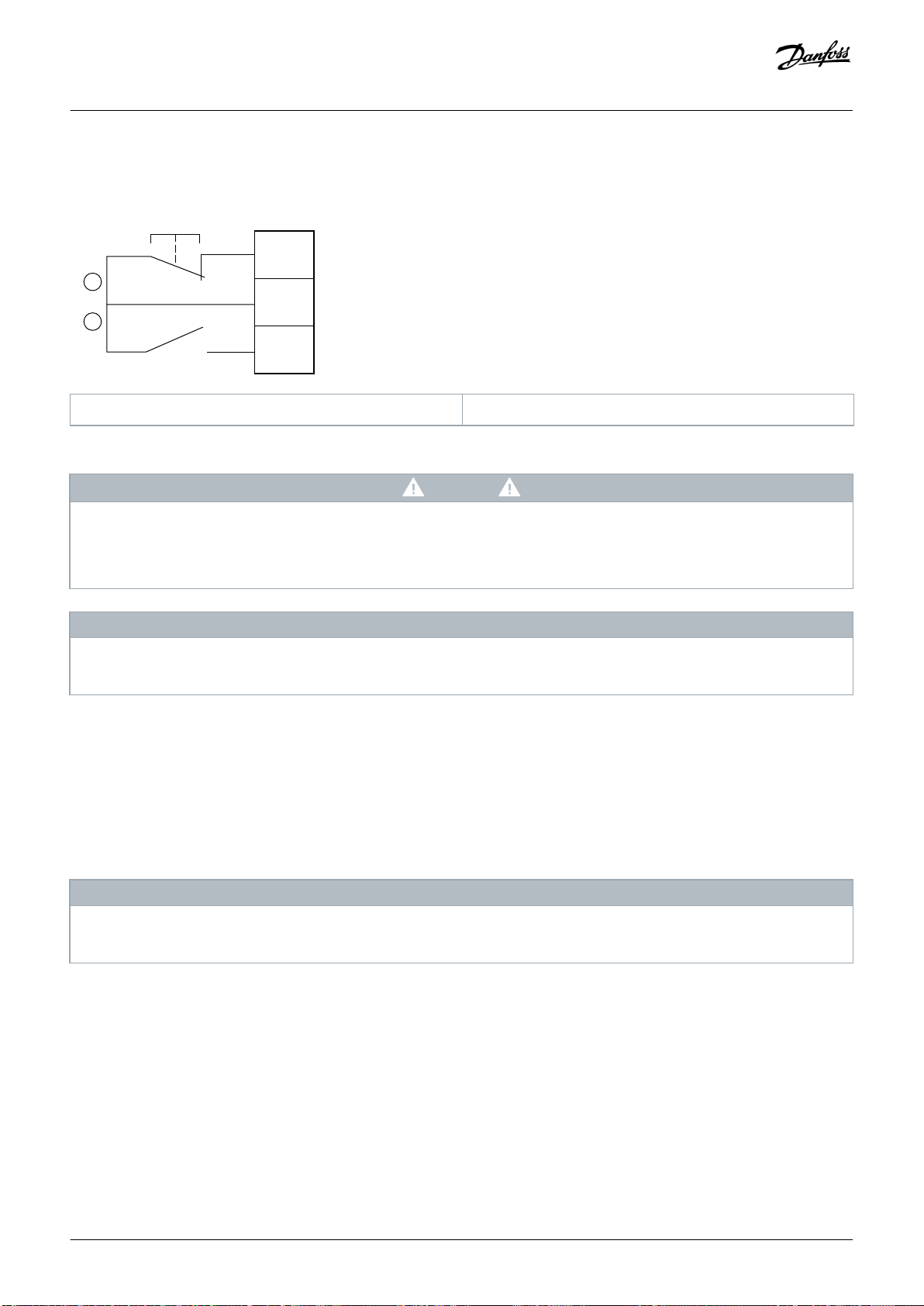
5.4.3 Start/Stop(スタート/ストップ)
VLT® Soft Starter MCD 600 は 2 つの配線制御を必要とします。
A リセット B スタート/ストップ
図 7: スタート/ストップ制御配線
注意
スタートの試行
コントロール電圧が適用されているときにスタート入力が閉じられると、ソフトスターターが起動を試みます。
コントロール電圧を適用する前に、スタート/ストップ入力が開いていることを確認してください。
-
設置
注意
MCD 600 は、
合にのみ、制御入力からのコマンドを受け入れます。
5.4.4 リセット/スターター無効
リセット入力 (RESET, COM+) は、通常デフォルトでは閉じられています。リセット入力が開いている場合、ソフトスターター
はスタートしません。ディスプレイは Not Ready
ソフトスターターが動作している間にリセットが開くと、ソフトスターターは電力を排除し、モーターはフリーラン停止が可
能となります。
パラメーター
1-1 Command Source
(準備中)
(コマンドソース)
を表示します。
が Digital Input
(デジタル入力)
に設定されている場
注意
リセット入力は、通常は開いた状態、または通常は閉じた状態に構成可能です。
セット/ロジック有効化)
で選択します。
5.4.5 プログラマブル入力
プログラマブル入力(DI-A, COM+および DI-V, COM+) が外部機器のソフトスターター制御を可能にします。プログラマブル入力
の動作は、
パラメーター
7-1 から 7-8 によって制御されます。
パラメーター
7-9 Reset/Enable Logic
(リ
30 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 31

READY
RUN
TRIP
LOCAL
Exit
Reset
Menu
Store
VLT
®
Soft Starter
2/T1
4/T2
6/T3
1/L1 3/L2
5/L3
AO-08
AO-07
DI-B
DI-A
COM+
START
COM+
RESET
TER-06
TER-05
34
33
23
22
21
14
13
e77ha719.10
操作ガイド | VLT® Soft Starter MCD 600
設置
5.4.6 USB ポート
USB ポートは、設定ファイルのアップロード、またはパラメーター設定とソフトスターターからのイベントログ情報のダウン
ロードに使用されます。詳細は、 6.7 USB 保存と読み込みを参照してください。
5.5 出力
5.5.1 出力端子
AO-07, AO-08 アナログ出力
21, 22, 23 リレー出力 A (デフォルト = 実行)
13, 14 主電源開閉器出力
33, 34 リレー出力 B (デフォルト = 実行)
図 8: 出力端子
5.5.2 Analog Output(アナログ出力)
VLT® Soft Starter MCD 600 にはアナログ出力があり、関連機器に接続してモーター性能をモニタリングできます。アナログ出力
の動作は、
5.5.3 主電源開閉器出力
主電源接触器の出力 (13, 14) はソフトスターターがスタートコマンドを受信するとすぐに出力が閉じ、ソフトスターターがモー
パラメーター
9-1 から 9-4 で制御されます。
ターを制御している間(モーターがフリーラン停止を開始するまで、またはソフトストップの終了まで)閉じたままです。ソ
フトスターターがトリップした場合、主電源開閉器の出力はまた開きます。
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 31
Page 32

READY RUN TRIP LOCAL
Exit
Reset
Menu
Store
VLT
®
Soft Starter
2/T1 4/T2 6/T3
1/L1 3/L2 5/L3
A9
A8
A7
e77ha720.10
操作ガイド | VLT® Soft Starter MCD 600
設置
注意
電子接触器コイルの中には、PCB マウントリレーを使用した直接切り替えに適していないものもあります。適合性を確
認する場合は、開閉器の製造元/販売代理店にご相談ください。
5.5.4 プログラマブル出力
プログラマブル出力(21、22、23 および 33、34) は、ソフトスターターのステータスを報告したり、関連機器を制御することが
できます。
プログラマブル出力の動作は、
パラメーター
5.6 コントロール電圧
5.6.1 コントロール電圧端子
8-1 から 8-6 で制御されます。
図 9: コントロール電圧端子
使用する供給電圧に従って制御電源を接続します。
• MCD6-xxxxB-xx-CV2 (110–120 V AC): A8, A9.
• MCD6-xxxxB-xx-CV2 (220–240 V AC): A7, A9.
• MCD6-xxxxB-xx-CV1 (24 V AC/V DC): A8, A9.
32 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 33

e77ha646.11
e77ha648.11
e77ha647.11
e77ha649.11
操作ガイド | VLT® Soft Starter MCD 600
設置
5.6.2 UL 適合の導入
UL 準拠の MCD6-0144B to MCD6-0579B の場合、設置場所に適用される電気コードに従って、補助回路または分岐回路の過電流
保護を制御回路電源(A7、A8、A9) に使用する必要があります。
5.7 Power Terminations(電源終端)
警告
ショックの危険
モデル MCD6-0144B ~ MCD6-0579B は IP00 です。端子に触れると感電する危険をもたらします。
ソフトスターターにフィンガーガードキットを取り付けます。
-
エンクロージャ内にソフトスターターを取り付けます。
-
VLT® Soft Starter MCD 600 の電源入出力端子は、装置ユニットの底面にあります。
• モデル MCD6-0020B~MCD6-0129B はケージクランプを使用します。75°C (167 °F)またはそれ以上に定格された銅導体か固体
導体を使用してください。
• モデル MCD6-0144B~MCD6-0579B はバスバーを使用します。60/75°C(140/167 °F)に定格された銅導体かアルミニウム導体を
使用してください。
注意
アルミバスバーを使用するユニットもあります。電源終端を接続する場合は、エメリーやステンレススチールのブラシ
を使用して表面の接触領域を完全に掃除し、適切な接合混合物を使用して腐食を防止します。
表 13: Power Terminations(電源終端)、MCD6-0020B~MCD6-0129B
MCD6-0020B~MCD6-0129B
ケーブル・サイ
ズ: 6–70 mm
(AWG 10–2/0)
トルク 4 Nm
(2.9 ft-lb)
14 mm (0.55 in)
2
トルクス T20 x
150
フラット
7 mm x 150
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 33
Page 34

6 mm
0.24 in
10 mm
0.4 in
20 mm
0.8 in
9 mm
(M8)
e77ha722.10
6 mm
0.24 in
17 mm
0.7 in
34 mm
1.7 in
13 mm
(M12)
e77ha723.10
操作ガイド | VLT® Soft Starter MCD 600
表 14: Power Terminations(電源終端)、MCD6-0144B~MCD6-0244B と MCD6-0287B~MCD6-0579B
MCD6-0144B~MCD6-0244B MCD6-0287B~MCD6-0579B
設置
19 Nm (14 ft-lb)
66 Nm (49 ft-lb)
注意
設置に大口径のケーブルが必要な場合は、バスバー両側に各 1 本、2 本の小さいケーブルで終端することが可能です。
5.7.1 配線接続
ワイヤサイズ、材質、アプリケーション要件に応じてコネクタを選択します。
モデル MCD6-0144B から MCD6-0579B には、圧縮コネクタが推奨されます。推奨圧着工具は TBM8-750 です。
表 15: 推奨ラグ
モデル コネクタ例 - アルミニウムケーブル コネクタ例 - 銅ケーブル
MCD6-0144B 61162 60150
MCD6-0171B 61165 60156
MCD6-0194B 61171 60165
MCD6-0244B
MCD6-0287B 61162 60150
MCD6-0352B 61165 60156
MCD6-0410B 60156
MCD6-0527B 61178 60171
MCD6-0579B
5.7.2 Motor Connection(モーター接続)
VLT® Soft Starter MCD 600 は、モーターインラインまたは内部デルタ(3 線式接続や 6 線式接続とも呼ばれます)に接続できま
す。内部デルタで接続する場合は、
600 は、モーターがインラインまたは内部デルタに接続されているかどうか自動的に検出し、正しい内部デルタ電流レベルを
計算します。
パラメーター
1-2 Motor Full Load Current
(モーター全負荷電流)
に FLC を入力します MCD
34 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 35

e77ha726.10
14
13
K1
K1F1
6/T3
2/T1
5/L3
3/L2
1/L1
4/T2
M
3
操作ガイド | VLT® Soft Starter MCD 600
設置
注意
ソフトスターターが正しくモーター接続を検出しない場合は、
用します。
5.7.2.1 インライン導入
パラメーター
20-6 Motor Connection
(モーター接続)
を使
K1 主電源開閉器(強く推奨)
13, 14 主電源開閉器出力
ヒューズや回路ブレーカを使用しない場合、保証は無効になります。
図 10: インライン導入の配線
F1
ヒューズや回路ブレーカー(オプション
()
)
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 35
Page 36

M
3
U1(1) U2(4)
V1(2)
V2(5)
W1(3) W2(6)
K1
F1
e77ha727.10
14
13
K1
6/T3
2/T1
5/L3
3/L2
1/L1
4/T2
操作ガイド | VLT® Soft Starter MCD 600
5.7.2.2 内部デルタ導入
設置
K1 主電源開閉器
F1
ヒューズや回路ブレーカー(オプション
()
)
13, 14 主電源開閉器出力
ヒューズや回路ブレーカを使用しない場合、保証は無効になります。
図 11: 内部デルタ導入の配線
5.8 一般的な設置
VLT® Soft Starter MCD 600 には主電源開閉器(AC3 定格)が取り付けられています。コントロール電圧は、開閉器の入力側から供
給する必要があります。
主電源開閉器は、主電源開閉器出力(13, 14) に制御されます
36 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 37

22
21
6/T3
2/T1
13
14
4/T2
44
33
23
AO-07
AO-08
TER-06
TER-05
START
COM+
DI-A
DI-B
COM+
A9
A8
A7
5/L3
3/L2
RESET
1/L1
F1
S1
S2
K1
K1
(L/+) (N/#)
A
#
+
M
7
6
5
3
2
1
10
4
9
8
e77ha728.10
操作ガイド | VLT® Soft Starter MCD 600
設置
1 三相電源
3 コントロール電圧(ソフトスターター)
5 モーター・サーミスター入力
7 アナログ出力
9 パイロットランプ
K1 主電源開閉器
RESET, COM+ (S1) リセット
DI-A, COM+ プログラマブル入力 A (デフォルト = 入力トリ
ップ (N/O))
TER-05, TER-06 モーター・サーミスター入力
21, 22, 23 リレー出力 A (デフォルト = 実行)
2 モーター
4 デジタル入力
6 リレー出力
8 コントロール電圧(外部装置)
10 通信/スマートカード拡張ポート
F1 半導体ヒューズ
START, COM+ (S2) スタート/ストップ
DI-B, COM+ プログラマブル入力 B (デフォルト = 入力トリ
ップ (N/O))
13, 14 主電源開閉器出力
33, 34 リレー出力 B (デフォルト = 実行)
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 37
Page 38

操作ガイド | VLT® Soft Starter MCD 600
AO-07, AO-08 アナログ出力
図 12: 設置例
設置
5.9 Quick Set-up(クイック設定)
Quick Set-up(クイック設定)によって、一般的なアプリケーションに対応するソフトスターターを簡単に設定できます。VLT®
Soft StarterMCD 600 は最も一般的な導入パラメーターを通じてガイドし、アプリケーションの一般的な設定を提案します。各
パラメーターを正確な要件に合わせてを調整します。
他のパラメーターをすべてデフォルト値のままにします。他のパラメータ値を変更したり、デフォルト設定を確認する場合は、
Main Menu(メインメニュー)を使用します(詳細は 10.4 Parameter List(パラメーター・リスト)を参照してください)。
常に
パラメーター
す。
表 16: 一般的なアプリケーションのために提案された設定
1-2 Motor Full Load Current
(モーター全負荷電流)
をモーターネームプレート FLC に合わせるように設定しま
アプリケーション スタートモードスター
ト立ち
上がり
時間 [秒]
ポンプ 遠心 適応制御 10 200 500 初期の加速適応制御 15 後期の減
ポンプ ボア 適応制御 3 200 500 初期の加速適応制御 3 後期の減
ポンプ 油圧 定電流 2 200 350 n/a フリーラン停止 n/a n/a
減衰ファン 定電流 2 200 350 n/a フリーラン停止 n/a n/a
非減衰ファン 定電流 2 200 450 n/a フリーラン停止 n/a n/a
コンプレッサース
クリュー
コンプレッサー往復定電流 2 200 450 n/a フリーラン停止 n/a n/a
コンベア 定電流 5 200 450 n/a フリーラン停止 n/a n/a
バウスラスター 定電流 5 100 400 n/a フリーラン停止 n/a n/a
バンドソー 定電流 2 200 450 n/a フリーラン停止 n/a n/a
定電流 2 200 400 n/a フリーラン停止 n/a n/a
初期電
流 [%]
電流制
限 [%]
適応スタ
ートプロ
ファイル
ストップモード 停止時
間 [秒]
適応停止
プロファ
イル
速
速
注意
適応スタート・停止プロファイル設定は、適応制御を使用する場合にのみ適用されます。設定は、他のスタート・スト
ップモードではすべて無視されます。
38 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 39

操作ガイド | VLT® Soft Starter MCD 600
6 Set-up Tools(設定ツール)
6.1 はじめに
Set-up Tools(設定ツール)
Set-up Tools
ドレス設定、入出力のステータス確認、熱モデルのリセット、Run Simulation
といったオプションがあります。
Set-up Tools
定ツール)
(設定ツール)
(設定ツール)
を選択します。
には、パラメーターをバックアップファイルに読み込み保存、ソフトスターターのネットワークア
(実行シミュレーション)
にアクセスするためには、 [Menu]を押して Main Menu(メインメニュー)を開き、 Set-up Tools
6.2 日付と時間の設定
手順
1. [Menu]を押してメニューを開けます。
2. Set-up Tools
3. Set Date & Time
4. [Main Menu]を押して編集モードに入ります。
5. [Menu/Store]と[Back]を押して日にちと時間のどの部分を編集するか選択します。
6. [▵]と[▿]を押して値を変更します。
7. 最後の桁の後で[Menu/Store]を押して、設定を保存します。
アクションが完了すると、画面は確認メッセージを素早く表示し、前のメニューレベルに戻ります。
(設定ツール)
(日時の設定)
を選択します。
までスクロールします。
6.3 Command Source(コマンドソース)
を使用した動作テスト
(設
デジタル入力、リモート LCP 601、通信ネットワーク、スマートカード、スケジュールされた自動スタート/ストップを介して、
ソフトスターターをスタートおよび停止します。Set-up Tools
ドソース)
リモート LCP がインストールされている場合、[CMD/Menu]キーによって Set-up Tools
ンドソース)機能へのショートカットアクセスできます。
経由でコマンドソースを設定してください。
(設定ツール)
または
パラメーター
(設定ツール)
1-1 Command Source
の Command Source(コマ
(コマン
6.4 設定
設定は、LCP 経由でソフトスターターをスタート、停止させます。[▵] [▿]を押して機能を選択し、[Menu/Store]を押して選択し
たコマンドをソフトスターターに送信します。利用可能な機能は:
• クイック停止(フリーラン停止)/リセット。
• スタート。
• 停止。
6.5 Run Simulation(実行シミュレーション)
Context:
Run Simulation(実行シミュレーション)はモーターのスタート、実行、停止をシミュレートし、ソフトスターターと関連機器
が正しく設置されたことを確認します。
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 39
Page 40

e77ha731.10
Run Simulation
Ready
Apply Start Signal
操作ガイド | VLT® Soft Starter MCD 600
注意
シミュレーションモードを使用するときは、ソフトスターターを主電源から切り離してください。
シミュレーションは、ソフトスターターが準備中のときのみ使用できます。
手順
1. [Menu] を押して、Set-up Tools
2. Run Simulation
3. 選択したコマンドソースからスタートコマンドを適用します。
(実行シミュレーション)
ソフトスターターはプリスタートチェックをシミュレートし、主電源接触器リレーを閉じます。Run LED が点滅し
ます。
(設定ツール)
をスクロールして [Menu/Store]を押します。
を選択します。
Set-up Tools(設定ツール)
注意
主電源電圧が接続されている場合、エラーメッセージが表示されます。
4. [Menu/Store]を押します。
ソフトスターターがスタートをシミュレートします。Run LED が点滅します。
5. Menu/Store を押します。
ソフトスターターは実行をシミュレートします。
6. 選択されたコマンドソースから停止コマンドを発します。
ソフトスターターが停止をシミュレートします。Run LED が点滅します。
7. [Menu/Store]を押します。
Ready LED が点灯し、主電源接触器リレーが開きます。
8. [Menu/Store]を押します。
ソフトスターターは各プログラマブル出力を有効にし、次に無効にします。
9. [Menu/Store]を押します。
ソフトスターターは、Set-up Tools
6.6 設定を読み込み/保存
Context:
読み込み/保存設定
• ソフトスターターのパラメーターをデフォルト値にリセット。
• パラメーター設定を内部ファイルから読み込み。
• 現行のパラメーター設定を内部ファイルに保存。
内部ファイルは、ユーザーファイルが保存されるまでのデフォルト値を含みます。
は以下を可能にします。
(設定ツール)
に戻ります。
40 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 41

e77ha732.10
Load/Save Settings
Load Defaults
Load User Set
Save User Set
操作ガイド | VLT® Soft Starter MCD 600
手順
1. [Menu] を押して、Set-up Tools
2. Load/Save Settings
3. 必要な機能までスクロールして [Menu/Store]を押します。
4. 確認プロンプトで、確定する場合は Yes
5. [Menu/Store] を押して続行します。
アクションが完了すると、画面は確認メッセージを素早く表示し、前のメニューレベルに戻ります。
(読み込み/設定を保存)
(設定ツール)
までスクロールして [Menu/Store]を押します。
(はい)
を選択します。
、取り消す場合は No
(いいえ)
を選択します。
Set-up Tools(設定ツール)
6.7 USB 保存と読み込み
USB
保存と読み込み
• パラメーター設定とすべてのイベントログエントリを外部ファイル(CSV フォーマット)に保存。
• パラメーター設定を外部ファイル(プロプラエタリ形式)に保存。
• 以前に保存した外部ファイルからパラメーター設定を読み込み。
• プログラマブル入力が有効なときに LCP に表示するカスタムメッセージを読み込み。
メニューにより以下が可能となります。
注意
VLT® Soft Starter MCD 600 は、FAT32 ファイルシステムに対応します。MCD 600USB 機能は NTFS ファイルシステムとの互
換性がありません。
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 41
Page 42

e77ha733.10
USB Save & Load
Save Params and Logs
Save Master Params
Load Master Params
操作ガイド | VLT® Soft Starter MCD 600
Set-up Tools(設定ツール)
6.7.1 保存と読み込みの手順
手順
1. 外部ドライブを USB ポートに接続します。
2. [Menu] を押して、Set-up Tools
3. USB
保存と読み込み
までスクロールして [Menu/Store]を押します。
4. 必要な機能までスクロールして [Menu/Store]を押します。
5. 確認プロンプトで、確定する場合は Yes
6. [Menu/Store] を押して続行します。
アクションが完了すると、画面は確認メッセージを素早く表示し、前のメニューレベルに戻ります。
(設定ツール)
(はい)
を選択します。
、取り消す場合は No
(いいえ)
を選択します。
6.7.2 File Locations and Formats(ファイル位置と形式)
パラメーターとログを保存
ソフトスターターは、ソフトスターターシリアル番号で命名されたディレクトリを、USB ドライブの最上位レベルで作成しま
す。イベントログとパラメーター設定は個別 CSV ファイルとして保存され、ソフトスターターのソフトウェアとシステム情報
はテキストファイルに保存されます。
マスターパラメーターの保存
ソフトスターターは Master_Parameters.par と呼ばれるファイルを作成し、USB ドライブに保存します。
マスターパラメーターの読み込み
ソフトスターターは、Master_Parameters.par ファイルを USB ドライブの最上位レベルから読み込みます。ファイルは、VLT® 動
作コントロールツール MCT 10 を使用して作成または編集できます。MCT 10 ツールを www.danfoss.com/en/service-and-
support/downloads/dds/vlt-motion-control-tool-mct-10/ からダウンロードしてください。
カスタムメッセージの読み込み
ソフトスターターは、Custom_Message_A.txt and Custom_Message_B.txt ファイルを USB ドライブの最上位レベルから読み込み
ます。
42 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 43

e77ha730.10
e77ha734.10
Auto-Start/Stop
Start/Stop Mode
Start/Stop Sunday
Start/Stop Monday
操作ガイド | VLT® Soft Starter MCD 600
図 13: USB ディレクトリ
Set-up Tools(設定ツール)
6.8 自動スタート/ストップ
Context:
ソフトスターターは、特定の時点で自動的にスタートおよび/または停止する、または特定の持続時間でサイクルを実行するよ
うに設定できます。
Set-up Tools
(設定ツール)
の Auto-Start/Stop
(自動スタート/ストップ)
機能により、自動スタート/ストップパラメーターにす
ばやくアクセスできます。
手順
1. [Menu] を押して、Set-up Tools
2. Auto-Start/Stop
(自動スタート/ストップ)
(設定ツール)
を選択します。
までスクロールして [Menu/Store]を押します。
3. 必要な機能までスクロールして [Menu/Store]を押します。
4. 必要に応じて設定を調整します。
A [Menu/Store]と[Back]を押して、編集する情報を選択します。
B [▵] [▿] を押して値を変更します。
[Store/Store]を押して変更を保存します。ソフトスターターが変更を確認します。
[Back]を押して、変更を取り消します。
6.9 Network Address(ネットワークアドレス)
VLT® Soft Starter MCD 600 をイーサネットネットワークで使用するためには、別のアドレスを以下のために設定する必要があり
ます。
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 43
Page 44

e77ha735.10
Set IP Address
192.168.000.002
e77ha711.10
Digital I/O State
Inputs: 0100
Outputs: 100
操作ガイド | VLT® Soft Starter MCD 600
• IP アドレス。
• ゲートウェイアドレス。
• サブネット・マスク。
6.9.1 Network Address(ネットワークアドレス)を設定
手順
1. [Menu] を押して、Set-up Tools
2. Network Address
3. 必要な機能までスクロールして [Menu/Store]を押します。
(ネットワークアドレス)
(設定ツール)
までスクロールして [Menu/Store]を押します。
を選択します。
Set-up Tools(設定ツール)
4. アドレスの第 1 桁目がハイライト表示されます。
5. [Back] と [Menu/Store]を押して、変更する桁を選択します。
6. [▵] [▿] を押して値を変更します。
7. 最後の桁の後で[Menu/Store]を押して、設定を保存します。
アクションが完了すると、画面は確認メッセージを素早く表示し、前のメニューレベルに戻ります。
注意
ネットワークアドレスはまた、
パラメーター
12-8 から 12-19 を使用して設定できます。
注意
ソフトスターターを他の通信プロトコルで使用するよう設定するには、
6.10 デジタル I/O 状態
パラメーター
12-1 から 12-7 を使用します。
図 14: デジタル I/O ステータス画面
44 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 45

AO-08
AO-07
DI-B
DI-A
COM+
START
COM+
RESET
TER-06
TER-05
3433232221
14
13
e77ha717.10
7
6
5
4
32
1
e77ha736.10
Analog I/O State
Thermistor: 0
4-20 mA Output: 04.0 mA
操作ガイド | VLT® Soft Starter MCD 600
Set-up Tools(設定ツール)
1 RESET, COM+: リセット入力
3 DI-A, COM+: プログラマブル入力 A
5 13, 14: 主電源開閉器出力
2 START, COM+: スタート/ストップ入力
4 DI-B, COM+: プログラマブル入力 B
6 21, 22, 23: リレー出力 A
7 33, 34: リレー出力 B
図 15: デジタル I/O の位置
6.11 アナログ I/O 状態
画面最上行には、モーター・サーミスター入力の状態が表示されます。画面最下行には、アナログ出力の値が表示されます。
図 16: アナログ I/O ステータス画面
サーミスター入力
S 短
H 温
C 冷
O 開く
6.12 シリアル番号&定格
画面の最上行は製品名を表示します。
中央行はユニットのシリアル番号を表示します。
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 45
Page 46

e77ha789.10
Serial Number & Rating
MCD 600
123456-123
0410-T5-S1-CV2
操作ガイド | VLT® Soft Starter MCD 600
画面の最下行はモデル番号を表示します。
図 17: シリアル番号&定格画面
Set-up Tools(設定ツール)
6.13 ソフトウェアバージョン
ソフトウェアバージョン画面は、ソフトスターターの各ソフトウェアコンポーネントバージョンを報告します。
• ユーザーインターフェイス。
• モーター制御。
• リモート LCP(接続されている場合)。
• パラメーター・リスト。
• ブートローダ。
• 拡張カード(取り付けられている場合)
注意
アップデートされたソフトウェアは、代替言語を含み、必要に応じて USB ポート経由でソフトスターターに読み込みで
きます。詳細は、最寄りの販売代理店までお問い合わせください。
6.14 Thermistor Reset(サーミスターリセット)
サーミスター入力はデフォルトでは無効になっています。サーミスターが検出されると自動的に有効になります。サーミスタ
ーが以前はソフトスターターに接続されていたにもかかわらず、もはや必要ではなくなった場合は、Thermistor Reset(サーミ
スターリセット)機能を使用してサーミスターを無効にします。
6.15 リセット熱モデル
ソフトスターターの熱モデリングソフトウェアは、モーターのパフォーマンスを絶えずモニタリングします。これによりソフ
トスターターは、正常にスタートするための温度と能力をいつでも計算できます。
熱モデルは必要に応じてリセットできます。
注意
モーター寿命の短縮化
モーターの熱モデルのリセットは、熱モデルの保護を損ない、モーターの寿命を短縮する可能性があります。
緊急時にのみ熱モデルをリセットしてください。
-
46 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 47

操作ガイド | VLT® Soft Starter MCD 600
ログ
7 ログ
7.1 はじめに
Logs Menu(ログメニュー)は、イベント、トリップ、ソフトスターター性能に関する情報を提供します。
ローカル LCP の Logs Menu(ログメニュー)にアクセスするためには、[Menu]を押してログを選択します リモート LCP では、
[Logs]を押します。
7.2 イベントログ
イベントログには、最も最近起きたトリップ、警告、動作(スタート、停止、設定変更を含む)の詳細が保存されます。
イベント 1 は最新のイベントで、イベント 384 は保存されている最も古いイベントです。
注意
イベントログはソフトスターターから外部ファイルにエクスポートして、離れた場所で分析できます。
6.7.2 File Locations and Formats(ファイル位置と形式)を参照してください。
7.3 カウンター
カウンターはソフトスターター動作の統計を保存します。
• 稼働時間((合計時間とカウンターが前回最後にリセットされてからの時間)
• スタート回数(合計数とカウンターが前回最後にリセットされてからの回数)。
• 熱モデルがリセットされた回数。
7.3.1 カウンターを表示
手順
1. Logs
2. Counters
3. カウンターをスクロールする場合は[▵] [▿]を押します。
4. 詳細を表示する場合は[Menu/Store]を押します。
5. カウンターをリセットする場合は、[Menu/Store]を押し、次に [▵]と[▿] を押して Reset
6. アクションを確定する場合は[Store]を押します。
7. カウンターを閉じ、Logs
(ログ)
しない)
を開き、 7.1 はじめにを参照します。
(カウンター)
を選択します。
までスクロールして [Menu/Store]を押します。
(ログ)
に戻る場合は、[Menu/Store]を押します。
(リセット)
/Do Not Reset
(リセット
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 47
Page 48

READY
RUN
TRIP LOCAL
Menu
Store
Back
Reset
1
2
3
e77ha715.10
操作ガイド | VLT® Soft Starter MCD 600
8 LCP とフィードバック
8.1 ローカル LCP とフィードバック
LCP とフィードバック
1 ステータスとプログラミング詳細の 4 行表示
3 メニ
ュー
ナビ
ゲー
ショ
ンキ
ー:
図 18: ローカル LCP
8.2 リモート LCP
パラメーター
はソフトスターターを制御するために使用できます。
[Back]: メニュ
ーやパラメー
ターを終了、
またはパラメ
ーターの変更
を取り消しま
す。このキー
はまたトリッ
プをリセット
します。
1-1 Command Source
[Menu/
Store]: メニ
ューやパラ
メーターを
入力、また
はパラメー
ターの変更
を保存しま
す。
[Arrows]: 次の、ま
たは前のメニュー
やパラメーターに
スクロールした
り、現在のパラメ
ーターの設定を変
更したり、ステー
タス画面をスクロ
ールしたりしま
す。
(コマンドソース)
を Remote Keypad
2 ステータス LED。
(リモートキーパッド)
に設定した場合、リモート LCP
48 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 49

READY RUN TRIP
LOCAL
RESET
LOGS
Alt
GRAPH
TOOLS
CMD
MENU
MENU
STORE
BACK
e77ha716.10
1
2
3
4
5
6
操作ガイド | VLT® Soft Starter MCD 600
LCP とフィードバック
• リモート LCP がコマンドソースとして選択されていない場合、[Start]、[Stop]、[Reset]は影響しません。
• メニューナビゲーションキーとリモート LCP のディスプレイは、常に有効です。
• キーがリモート LCP 上で押された場合、リモート LCP のディスプレイは更新され、一致します。
注意
ソフトスターターの動作中は、リモート LCP を安全に接続または取り外しができます。電源やコントロール電圧を除去
する必要はありません。
注意
パラメーター
1-1 Command Source
(コマンドソース)
ト LCP を取り外すとトリップの原因となります。
を Remote Keypad
(リモートキーパッド)
に設定した場合、リモー
1 ステータスとプログラミング詳細の 4 行表示
3 メニ
ュー
ナビ
ゲー
ショ
ンキ
ー:
[Back]: メニ
ューやパラ
メーターを
終了、または
パラメータ
ーの変更を
取り消しま
[Menu/Store]:
メニューやパ
ラメーターを
入力、または
パラメーター
の変更を保存
します。
す。
Danfoss A/S © 2018.10
矢印キー: 次の、
または前のメニ
ューやパラメー
ターにスクロー
ルしたり、現在の
パラメーターの
設定を変更した
り、ステータス画
面をスクロール
したりします。
2 ステータス LED。
4 SSet-up Tools
(設定ツール)
のショートカット。
6 一般的なタ
スクに素早
くアクセス
するショー
トカットキ
ー:
Logs(ロ
グ): Logs
Menu(ロ
グメニュ
ー)を開き
ます。
のコマンドソースメニューへ
Graph(グラフ):
表示するグラフを
選択、またはグラ
フを一時停止/再
スタートします
(0.5 秒以上押しま
Tools(ツ
ール):
Set-up
Tools
(設定
ツール)
を
開きます。
す)。
AQ262141844215ja-000201 / 175R1174| 49
Page 50

Ready Run Trip Local
e77ha724.10
操作ガイド | VLT® Soft Starter MCD 600
5 ローカル・コントロール・キー。
図 19: リモート LCP
8.3 表示コントラストの調節
Context:
注意
ローカルとリモートの LCP は独立して調整できます。
1. [Back]を押し続けます。
2. [▵]を押すとディスプレイが明るくなり、[▿]を押すとディスプレイは暗くなります。
8.4 ソフトスタート ステータス LED
LCP とフィードバック
図 20: LCP の LED ステータス
表 17: LED 詳細
LED 名 オン 点滅中
Ready(準備
完了)
Run(運転) モーターは動作状態です(全電圧を受け
Trip(トリップ)ソフトスターターがトリップしました。 ソフトスターターが警告状態です。
ローカル ソフトスターターはリモート LCP を介
LED がすべてオフの場合、ソフトスターターはコントロール電圧を受け取りません。
モーターは停止しています。ソフトス
ターターはスタートする準備が整って
います。
ています)。
して制御されます。
モーターは停止しています。ソフトスターターがスタートする
準備はできていません。
• 再スタート遅延時間が経過するのを待機中(
5-16 Restart Delay
• 熱モデルは、ソフトスターターおよび/またはモーターが加熱
しすぎて安全にスタートできないことを示しています。
• リセット入力(RESET, COM+) は開いています。
モーターはスタート中か停止中です。
–
(再スタート遅延)
パラメーター
)。
50 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 51

e77ha790.10
WELCOME
01.01/01.00/01.00
MCD6-0069B-T5-S1-CV2
1
2
e77ha791.10
69.0 A
Running
69.0 A 415 V
1
2
3
操作ガイド | VLT® Soft Starter MCD 600
LCP とフィードバック
8.5 ディスプレイ
8.5.1 ソフトスターター情報
電源投入時に、ソフトスターター情報画面がソフトスターター定格、ソフトウェアのバージョン、シリアル番号を表示します。
1 ソフトウェアバージョン: ユーザーインターフェース、
モーター制御、リモート LCP
2 モデルコード: 電流定格、主電源電圧、フレームサイズ、
コントロール電圧(リモート LCP ソフトウェアのバージョ
ンはリモート LCP が接続されている場合のみ表示されま
す)
図 21: ようこそ画面
8.5.2 設定可能なフィードバック画面
ディスプレイに表示する情報を選択します。設定可能な 2 画面を切り替える場合は、[▵] と [▿]を押します。
1 モーター運転電流
3
パラメーター
1)と
パラメーター
10-8 User Parameter 1
ーター 2)
(ユーザーパラメーター
10-9 User Parameter 2
(ユーザーパラメ
2 ソフトスタートのステータス
図 22: ソフトスターターのステータス画面
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 51
Page 52

e77ha792.10
Motor pf
Motor power
1
2
3
Mains Frequency 59.7 Hz
1.01
37.0 kW
4 Motor Temp 85%
e77ha793.10
69.0 A
Last start
350% FLC
1
2
3
010s
D Temp 5%
4
操作ガイド | VLT® Soft Starter MCD 600
1
パラメーター
ー 3)
(デフォルト: 主電源周波数)
3
パラメーター
ー 5)
(デフォルト: モーター運転電源)
図 23: ユーザーが設定可能な画面
10-10 User Parameter 3
10-12 User Parameter 5
(ユーザーパラメータ
(ユーザーパラメータ
2
パラメーター
ー 4)
(デフォルト: 力率)
4
パラメーター
ー 6)
(デフォルト: モーター温度)
10-11 User Parameter 4
10-13 User Parameter 6
LCP とフィードバック
(ユーザーパラメータ
(ユーザーパラメータ
8.5.3 操作フィードバック画面
操作フィードバック画面は、画面の上半分にモーター運転電流を表示します。下半分に表示する情報を選択する場合は、[▵] と
[▿]を押します。
• 各フェーズのリアルタイム・ライン電流
• 最後のスタート情報。
• 日付と時間。
1 モーター運転電流
3 最大スタート電流引き込み(モーター全負荷電流のパーセ
2 スタート持続時間(秒)
4 モーター温度の計算された上昇
ンテージ割合として)
図 24: 操作フィードバック画面
8.5.4 パフォーマンスグラフ
パフォーマンスグラフは、動作性能をリアルタイムで表示します。
トします。
パラメーター
10-2 から 10-5 を使用してグラフをフォーマッ
メイン LCP ディスプレイには、モーター電流に関する情報が表示されます。
52 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 53

e77ha757.10
000.0 A 0-400%
操作ガイド | VLT® Soft Starter MCD 600
LCP とフィードバック
リモート LCP が接続されている場合は、[Graph]を押してグラフデータを変更します。グラフは以下を示します。
• モーター電流。
• モーター温度。
• モーター力率。
• (インストールされている場合)スマートカードからのアナログ入力データ
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 53
Page 54

操作ガイド | VLT® Soft Starter MCD 600
運転
9 運転
9.1 スタート、停止、リセットコマンド
VLT® Soft Starter MCD 600 は、デジタル入力、リモート LCP、通信ネットワーク、スマートカード、スケジュールされた自動ス
タート/ストップを介して、スタートおよび停止できます。コマンドソースは、Set-up Tools
ーター
1-1 Command Source
• MCD 600 は、指定されたコマンドソースからのスタートコマンドとリセットコマンドのみを受け入れます。
• MCD 600 は指定されたコマンドソースからの停止コマンドを受け入れますが、リセット入力を開くか、自動スタート/スト
ップサイクル中にスタート/ストップ入力を開いて強制的に停止することができます。
• プログラマブル入力は、選択したコマンドソースを無効にするために使用できます(
力
A
機能)
を参照)。
(コマンドソース)
を使用して設定できます。
9.2 コマンドオーバーライド
プログラマブル入力(DI-A, COM+) は、通常の制御メカニズムが失われた状況において、コマンドソースを無効にするために使
用できます。
ンドオーバーライド: キーパッド)
パラメーター
7-1 Input A Function
)に設定します。
(入力
A
機能)
を代替コントロールソース(例 Command Override: Keypad
(設定ツール)
パラメーター
経由、または
7-1 Input A Function
(コマ
パラメ
(入
入力が有効である間は、ソフトスターターは選択されたオーバーライドソースからのコマンドのみを受け入れます。
ター
1-1 Command Source
(コマンドソース)
で選択したコマンドソースに制御を戻す場合は、入力を再度開きます。
パラメー
9.3 自動スタート/ストップ
ソフトスターターは、特定の時点で自動的にスタートおよび/または停止する、または特定の持続時間でサイクルを実行するよ
うに設定できます。
注意
スタート遅延、再スタート遅延、自動リセット遅延はすべて自動スタート動作に適用されます。
9.3.1 Clock Mode(クロックモード)
ソフトスターターは、一日に一回モーターを始動および/または停止できます。
クロックモード方法:
•
パラメーター
•
パラメーター
• リセット入力を閉じる必要があります。
• スタート入力(START, COM+)を有効にする必要があります。非常時にデジタル入力からソフトスターターを停止させること
ができます。
4-1 Auto-Start/Stop Mode
1-1 Command Source
(コマンドソース)
(自動スタート/ストップモード)
を Clock
(クロック)
は、Enable
(有効化)
に設定してください。
に設定します。
クロックモード動作は、
54 | Danfoss A/S © 2018.10
パラメーター
4-4 から 4-24 に制御されます。
AQ262141844215ja-000201 / 175R1174
Page 55

操作ガイド | VLT® Soft Starter MCD 600
運転
9.3.2 Timer Mode(タイマーモード)
ソフトスターターは、指定実行時間後にモーターを自動的に停止し、その後、指定オフ(停止)時間後に再スタートすること
ができます。スタート信号が有効である間、ソフトスターターはサイクルを繰り返します。
タイマーモード方法:
•
パラメーター
•
パラメーター
• リセット入力を閉じる必要があります。
• 最初のスタートは、スタート信号からコマンドが送られます。
4-1 Auto-Start/Stop Mode
1-1 Command Source
(コマンドソース)
(自動スタート/ストップモード)
は、Timer
(タイマー)
は、Enable
に設定します。
(有効化)
に設定します。
タイマーモード動作は、
パラメーター
4-2 から 4-3 によって制御されます。
9.4 出力維持
ソフトスターターが第 1 フェーズで損傷した場合、PowerThrough によってソフトスターターがモーターを制御が可能となりま
す。VLT® Soft StarterMCD 600 はニ相制御技術を使用して、モーターのソフトスタートおよびソフトストップを実行します。
注意
ソフトスターターは、制御電力が適用された後の最初のスタートの Lx-Tx Shorted(Lx-Tx
電力がスタート間にサイクルされると、PowerThrough は動作しません。
• PowerThrough は、インライン設置でのみ使用可能です。ソフトスターターがデルタ内に設置されている場合は、
PowerThrough は動作しません。
• PowerThrough は、Lx-Tx Shorted
トリップ LED が点滅し、ディスプレイは 2 Phase - Damaged SCR
• PowerThrough 動作は、適応制御ソフトスタートまたは適応制御ソフトストップに対応していません。PowerThrough では、
ソフトスターターは自動的に定電流ソフトスタートと定時電圧立ち上がりソフトストップを選択します。PowerThrough が
有効な場合、
パラメーター
(三相制御のみ)
2-3 と 2-4 を適切に設定する必要があります。
が再選択されるまで有効のままです。PowerThrough で動作している間、
(二相
- 損傷SCR)を表示します。
短絡)
でトリップします。制御
注意
PowerThrough はニ相のソフトスタート技術を使用しています。遮断機のサイジングと保護の際には特別な注意が必要
です。アシスタントが必要な場合は、お近くの販売代理店までご連絡ください。
9.5 Emergency Mode(緊急モード)
緊急モードによって、ソフトスターターがモータを動作させ、トリップ状態を無視します。
緊急モードはプログラマブル入力(入力 A DI-A, COM+または入力 B DI-B, COM+)を介して制御されます。
A Function
あります。DI-A, COM+を横断する閉回路は、緊急モードを有効にします。ソフトスターターがスタートコマンドを受信すると、
停止コマンドを受信するまですべてのトリップと警告を無視して、動作を続行します。
緊急モードは、任意のコマンドソースで使用できます。
Danfoss A/S © 2018.10
(入力
A
機能)/パラメーター
7-5 Input B Function
(入力
B
機能)
を、Emergency Mode
AQ262141844215ja-000201 / 175R1174| 55
(緊急モード)
パラメーター
に設定する必要が
7-1 Input
Page 56

操作ガイド | VLT® Soft Starter MCD 600
運転
注意
緊急モードの動作は火災モードの機能要件を満たしていますが、Danfoss は、テストおよび/または特定基準への準拠が
必要な状況での使用は認定されていないため、推奨しません。
注意
製品寿命の短縮化
緊急モードの継続的な使用は推奨されません。緊急モードでは保護とトリップがすべて無効となり、ソフトスターター
および/またはモーターの寿命を損なう可能性があります。緊急モードでソフトスターターを使用した場合、製品保証は
無効となります。
緊急モードで継続してソフトスターターを動作させないでください。
-
9.6 補助トリップ
外部トリップ回路(ポンプシステム用の低圧アラームスイッチなど)は、ソフトスターターをトリップさせてモーターを停止
するために使用されます。外部回路は、プログラマブル入力(入力 A DI-A, COM+または入力 B DI-B, COM+)に接続されていま
す。トリップの動作を制御するには、以下のパラメーターを設定します。
•
パラメーター
•
パラメーター
ーターが動作しているときのみに入力トリップを制限します。
•
パラメーター
します。
•
パラメーター
前の遅延を設定します 例えば、パイプライン圧力が上昇するための遅延が必要となる可能性があります。
パラメーター
•
ン)。
7-1 Input A Function
7-2 Input A Trip
7-3 Input A Trip Delay
7-4 Input A Initial Delay
7-10 Input A Name
(入力
(入力
(入力
A
機能)
: Input Trip (N/O)
A
トリップ)
(入力
A
(入力
A 名): 例えば、Input A Trip
: 必要に応じて設定します。例えば、Run Only
トリップ遅延)
A
初期遅延)
: ソフトスターターがスタート信号後の入力状態をモニタリングする
(入力トリップ
: 入力の有効化とソフトスタータートリップとの間の遅延を設定
(入力
(N/O))を選択。
A
トリップ)
(実行のみ)
のような名前を選択します(オプショ
は、ソフトスタ
9.7 一般的な制御方法
アプリケーションの要件はそれぞれの設置によって異なります。以下に一覧表示されている方法は、一般的なアプリケーショ
ンにとってお勧めできる出発点になることが多いです。
表 18: 一般的な制御方法
アプリケーション スタートモードスター
ト立ち
上がり
時間
[秒]
バウスラスター 定電流 5 100 400 フリーラン停止 n/a
遠心分離(分離機) 定電流 1 200 450 フリーラン停止 n/a
チッパー 定電流 1 200 450 フリーラン停止 n/a
圧縮機 - 往復 - 搭載済み 定電流 1 200 450 フリーラン停止 n/a
圧縮機 - 往復 - 未搭載 定電流 1 200 400 フリーラン停止 n/a
初期電流
(%FLC)
電流制限
(%FLC)
ストップモード 停止時間
[秒]
56 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 57

操作ガイド | VLT® Soft Starter MCD 600
運転
アプリケーション スタートモードスター
ト立ち
上がり
時間
[秒]
圧縮機 - スクリュー - 搭載
済み
圧縮機 - スクリュー - 未搭
載
コンベア - 水平負荷 定電流 5 200 400 TVR ソフトストップ 10
コンベア - 傾斜 定電流 2 200 450 フリーラン停止 n/a
コンベア - 垂直(バケツ) 定電流 2 200 450 フリーラン停止 n/a
クラッシャー - コーン 定電流 1 200 350 フリーラン停止 n/a
クラッシャー - ジョー 定電流 1 200 450 フリーラン停止 n/a
クラッシャー - ロータリー 定電流 1 200 400 フリーラン停止 n/a
皮剥機 定電流 1 200 350 フリーラン停止 n/a
ファン - 軸流(減衰) 定電流 1 200 350 フリーラン停止 n/a
ファン - 軸流(非減衰) 定電流 1 200 450 フリーラン停止 n/a
ファン - 遠心(減衰) 定電流 1 200 350 フリーラン停止 n/a
定電流 1 200 400 フリーラン停止 n/a
定電流 1 200 350 フリーラン停止 n/a
初期電流
(%FLC)
電流制限
(%FLC)
ストップモード 停止時間
[秒]
ファン - 遠心(非減衰) 定電流 1 200 450 フリーラン停止 n/a
ファン - 高圧 定電流 1 200 450 フリーラン停止 n/a
ミル - ボール 定電流 1 200 450 フリーラン停止 n/a
ミル - ハンマー 定電流 1 200 450 フリーラン停止 n/a
ポンプ - ボア 適応制御(初期
の加速)
ポンプ - 遠心 適応制御(初期
の加速)
ポンプ - 油圧 定電流 2 200 350 フリーラン停止 n/a
ポンプ - 容積式 適応制御(一定
の加速)
ポンプ - 潜水 適応制御(初期
の加速)
のこぎり - バンドソー 定電流 1 200 450 フリーラン停止 n/a
のこぎり - 丸 定電流 1 200 350 フリーラン停止 n/a
シュレッダー 定電流 1 200 450 フリーラン停止 n/a
3 n/a 500 適応制御(後期の減速) 3
10 n/a 500 適応制御(後期の減速) 15
10 n/a 400 適応制御(一定の減速) 10
5 n/a 500 適応制御(後期の減速) 5
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 57
Page 58

10 20 30 40 50 60 70 80 90
1
3
2
%
%
操作ガイド | VLT® Soft Starter MCD 600
運転
9.8 ソフトスタートメソッド
9.8.1 Constant Current(定電流)
定電流はソフトスタートの従来型の形式です。0 から指定レベルまで電流を上昇させ、モーターが加速するまでそのレベルで
電流を安定に保ちます。
定電流スタートは、スタート電流を特定のレベル以下に保つ必要があるアプリケーションに最適です。
1 初期電流(
設定)
3 全電圧電流
図 26: 定電流の例
パラメーター
2-3 Initial Current
(初期電流)
で
2 電流制限(
定)
パラメーター
2-4 Current Limit
(電流制限)
で設
9.8.2 定電流と電流ランプ
電流立ち上がりソフトスタートは、指定されたスタートレベル(1)から長期間(2)にわたって、最大限度(3) までの電流を上昇させ
ます。
電流ランプ始動は以下のアプリケーションの役に立ちます。
• 負荷は始動の間に変化する可能性があります(例えば、積載または積み下ろしを開始する可能性があるコンベア)。
2-3 Initial Current
ーター
Limit
(電流制限)
• 負荷は容易に外せますが、スタート時間を延長する必要があります(例えば、パイプライン圧力がゆっくり上昇する必要
のある遠心ポンプ)。
• 電力供給は制限され(例えばジェネレーターセット)、負荷の適用が遅くなると供給の応答時間が長くなります。
(初期電流)
を、モーターを重負荷で始動させるレベルに設定します。
を、モーターを軽負荷で始動させるレベルに設定します。次に
パラメーター
パラメ
2-4 Current
58 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 59

e77ha506.10
700
600
500
300
100
400
200
10 20 30 40
50
60 70 80 90 100
1
4
3
2
%
%
電流 (% モーター定格電流値)
時間
0
10
20
30
40
50
60
70
80
90
100
4
e77ha507.10
1
2
3
%
速度
時間
操作ガイド | VLT® Soft Starter MCD 600
1
パラメーター
3
パラメーター
2-3 Initial Current
2-4 Current Limit
(初期電流)
(電流制限)
2
パラメーター
間)
4 全電圧電流
2-2 Start Ramp Time
運転
(スタート立ち上がり時
図 27: 電流ランプソフトスタートの例
9.8.3 スタートの適応制御
適応制御ソフトスタートでは、ソフトスターターが電流を調整し、指定された時間と選択された加速プロファイルを使用して
モーターを始動します。
注意
ソフトスターターは、適応制御を含め、あらゆるソフトスタートに電流制限を適用します。電流制限が低すぎる、また
はスタート立ち上がり時間(
モーターが正常に始動しない可能性があります。
パラメーター
2-2 Start Ramp Time
(スタート立ち上がり時間)
で設定) が短すぎる場合、
1 初期の加速
3 後期の加速
Danfoss A/S © 2018.10
2 一定の加速
AQ262141844215ja-000201 / 175R1174| 59
Page 60

700
600
500
300
100
400
200
10 20 30 40 50 60 70 80 90 100
e77ha508.10
1
5
4
6
3
2
%
%
電流 (% モーター定格電流値)
ローター速度 (% 全速)
操作ガイド | VLT® Soft Starter MCD 600
4
パラメーター
2-2 Start Ramp Time
間)
図 28: 適応制御スタート(パラメーター 2-5 Adaptive Start Profile(適応スタートプロファイル))の例
9.8.3.1 適応制御の微調整
運転
(スタート立ち上がり時
モーターがスムーズに始動したり停止したりしない場合は、
パラメーター
2-12 Adaptive Control Gain
(適応制御ゲイン)
を調整
してください。ゲイン設定は、前回の始動からの情報に基づいて、ソフトスターターがどのくらい今後の適応制御開始および
停止を調整するかを決定します。ゲイン設定は始動および停止性能の両方に影響を及ぼします。
• スタートまたは停止が終了する時点でモーターが急激に加速または減速する場合は、ゲイン設定を 5〜10%増加します。
• スタートまたは停止中にモーター速度が変動する場合は、ゲイン設定を少し減少します。
注意
ソフトスターターは適応制御を調整し、モーターに合わせます。以下のパラメーターを変更すると適応制御がリセット
され、最初のスタート/ストップサイクルが定電流スタート/定時電圧ランプ停止を使用します。
Full Load Current
応ゲイン)
(モーター全負荷電流)、パラメーター
。
2-4 Current Limit
(電流制限)、パラメーター
9.8.4 定電流とキックスタート
キックスタートはスタートの初めに余分なトルクを短くブーストし、電流ランプまたは定電流スタートで使用することができ
ます。
キックスタートは、高始動トルクを必要とするが、その後容易に加速する(例えば、ヘリカルローターポンプ)負荷を始動さ
せるのに役立ちます。
パラメーター
1-2 Motor
2-12 Adaptive Gain
(適
1
3
5
60 | Danfoss A/S © 2018.10
パラメーター
パラメーター
パラメーター
2-7 Kickstart Level
2-3 Initial Current
2-4 Current Limit
(キックスタートレベル)
(初期電流)
(電流制限)
2
パラメーター
4
パラメーター
間)
2-6 Kickstart Time
(キックスタート時間)
2-2 Start Ramp Time
AQ262141844215ja-000201 / 175R1174
(スタート立ち上がり時
Page 61

70
60
50
30
10
40
20
80
90
100
e77ha509.10
1
%
電圧 (% フル電圧)
時間
操作ガイド | VLT® Soft Starter MCD 600
運転
6 全電圧電流
図 29: 定電流で使用されるキックスタートの例
9.9 停止方法
9.9.1 Coast to Stop(フリーラン停止)
フリーラン停止はソフトスターターから制御されることなく、モーターを自然な速度で減速します。停止するために必要な時
間は、負荷の種類によって異なります。
9.9.2 定時電圧ランプ
定時電圧ランプ(VTR) は、モーターへの電圧を設定時間にわたって徐々に減少させます。これでモーターが停止する時間が長く
なり、ジェネレーターセットの電源にトランジエントが発生するのを回避できます。
注意
負荷は、停止ランプ完了後も動作し続ける可能性があります。
1
パラメーター
図 30: TVR の例
2-10 Stop Time
(停止時間)
9.9.3 停止のための適応制御
適応制御ソフト停止では、ソフトスターターが電流を調整し、指定された時間と選択された減速プロファイルを使用してモー
ターを停止します。適応制御は、低慣性負荷の停止時間を延長するのに役立ちます。
適応制御が選択されている場合、最初のソフトストップは TVR を使用します ソフトスターターは接続されたモーターの特性を
知ることができます その後に続く適応制御停止中、ソフトスターターによってこのモーターデータが使用されます。
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 61
Page 62

0
10
20
30
40
50
60
70
80
90
100
e77ha510.10
1
2
4
3
速度
時間
操作ガイド | VLT® Soft Starter MCD 600
運転
注意
適応制御はモーターを積極的に減速することはなく、フリーラン停止より早くモーターを停止しません。高慣性負荷の
停止時間を短縮するためには、ブレーキを使用します。
注意
適応制御は、プログラムされた時間制限内でモーターの速度プロファイルを制御します。これにより、従来の制御方法
よりも高い電流レベルとなる可能性があります。
適応制御開始または停止のためにプログラムされたソフトスターターに接続されたモーターを交換する場合、ソフトスタータ
ーは新しいモーターの特性を知る必要があります。
ター
2-12 Adaptive Control Gain
(適応制御ゲイン)
用し、次の停止は TVR を使用します。
パラメーター
1-2 Motor Full Load Current
(モーター全負荷電流)かパラメー
の値を変更して、再学習プロセスを開始します。次のスタートは定電流を使
1 初期の減速
3 後期の減速
図 31: 適応制御停止(パラメーター 2-11 Adaptive Stop Profile(適応停止プロファイル))の例
2 一定の減速
4
パラメーター
2-10 Stop Time
(停止時間)
適応制御は、流体ハンマーの損傷効果を最小限に抑えることができるポンプ用途に最適です。3 つのプロファイルをテストし
て、アプリケーションの最適なプロファイルを特定します。
適応停止プロファイル アプリケーション
後期の減速 モーター/ポンプ速度の僅かな減少でさえ、順流と逆流との間に迅速な移行をもたらす高落差システ
ム。
一定の減速 流体の運動量が高い場合の低〜中ヘッド高流量用途。
初期の減速 ポンプを逆方向に駆動することなく流体がポンプから逆流するポンプシステムを開きます。
9.9.4 DC Brake(直流ブレーキ)
ブレーキはモーターを停止するのに必要な時間を短縮します。
ブレーキ制動中はモーターからの騒音レベルが増加し、聞き取れる場合があります。これはモーターブレーキ制動では通常で
す。
62 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 63

100
70
0
30
1
2
3
e77ha511.10
%
速度
時間
操作ガイド | VLT® Soft Starter MCD 600
注意
直流ブレーキを使用する場合、主電源はソフトスターター(入力端子 L1、L2、L3)に正相順で接続する必要がありま
す。
注意
モーター損傷
ブレーキトルクの設定値が高すぎると、モーターがブレーキ時間終了前に停止し、モーターが不必要な加熱を受けて損
傷する可能性があります。高ブレーキトルク設定はまた、モーターが停止している間、ピーク電流をモーター DOL まで
の引き出すことになります。
ソフトスターターとモーターを確実に安全に動作するためには、慎重な設定が必要です。
-
モーター分岐回路に取り付けられた保護ヒューズが適切に選択されていることを確認します。
-
注意
過熱の危険性
ブレーキ操作によって、モーターの熱モデルに計算された速度よりも速くモーターが加熱されます。
モーター・サーミスターを導入するか、十分な長さの再スタート遅延(
-
遅延)
で設定)を許容します。
パラメーター
5-16 Restart Delay
(再スタート
運転
1
パラメーター
3 フリーラン停止時間
図 32: ブレーキ時間の例
パラメーター設定:
Danfoss A/S © 2018.10
2-10 Stop Time
(停止時間)
2
パラメーター
2-16 Brake Time
AQ262141844215ja-000201 / 175R1174| 63
(ブレーキ時間)
Page 64

操作ガイド | VLT® Soft Starter MCD 600
•
パラメーター
•
パラメーター
間)
の)ブレーキ時間よりも十分長く設定し、ブレーキ前の段階でモーター速度を約 70%低下させる必要があります。停
止時間が短すぎる場合、ブレーキ制動が成功せず、モーターがフリーランで停止します。
•
パラメーター
設定するとモーターは完全に停止せず、ブレーキ制動時間が終了するとフリーランで停止します。
•
パラメーター
す。これは、フルブレーキ段階 (2) の時間を設定します。
2-9 Stop Mode
2-10 Stop Time
2-15 DC Brake Torque
2-16 DC Brake Time
(ストップモード)
(停止時間)
: DC Brake
: 総ブレーキ制動時間 (1) です。(
(直流ブレーキトルク)
(直流ブレーキ時間)
(直流ブレーキ)
: 負荷を軽減するため、必要に応じて設定します。あまりに低く
: このパラメーターをプログラムされた停止時間の約 1/4 に設定しま
に設定します。
パラメーター
2-16 DC Brake Time
(直流ブレーキ時
運転
9.9.5 外部ゼロ速度センサーを備えた直流ブレーキ
ブレーキ制動サイクル間で変化する可能性のある負荷については、外部ゼロ速度センサーを設置し、モーター停止時にソフト
スターターが必ず直流ブレーキを終了するようにします。センサーの使用によって、不要なモーター加熱を防止します。
直流ブレーキを必要な最長制動時間に設定し、また
ロ速度センサー)
フトスターターが停止を終了します。
も設定します。モーターが完全な停止状態に達すると、ゼロ速度センサーが DI-A、COM+の回路を開け、ソ
パラメーター
7-1 Input A Function
(入力
A
機能)
から Zero Speed Sensor
(ゼ
9.9.6 Soft Brake(ソフトブレーキ)
高い慣性および/または可能な最大ブレーキ力を必要とする可変負荷のアプリケーションの場合、ソフトスターターはソフトブ
レーキに対応するよう構成することができます。
ソフトスターターは切換リレーを使用して、前進走行およびブレーキ接触器を制御します。ブレーキをかけている間、ソフト
スターターはモーターへの相順を逆転させ、供給電流を減らし、負荷を緩やかに低下させます。
モーター速度が 0 に近づくと、ゼロ速度センサー(A2) がソフトスターターを停止し、ブレーキ接触器(K2)を開きます。
ソフトブレーキは一次と二次両方のモーターセットで使用できますが、それぞれ個別に設定する必要があります。
パラメーター設定:
•
パラメーター
•
パラメーター
•
パラメーター
動電流を供給し始めるまで待機する時間を制御します。K1 と K2 が切り替わる時間を設定します。
•
パラメーター
•
パラメーター
2-9 Stop Mode
2-17 Brake Current Limit
2-18 Soft Brake Delay
7-1 Input A Function
8-1 Relay A Function
(ストップモード)
(ソフトブレーキ遅延)
(入力
(リレー
: Soft Brake
(ソフトブレーキ)
(ブレーキ電流制限)
A
機能)
: Zero Speed Sensor
A
機能)
: Soft Brake Relay
に設定します。
: 負荷を軽減するため、必要に応じて設定します。
: ソフトスターターが、停止信号を受信してからモーターへの制
(ゼロ速度センサー)
(ソフトブレーキリレー)
に設定します。
に設定します。
64 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 65

M1
22 21
K2 K1
K2 K1
4/T2
6/T3
1/L1
3/L2
5/L3
2/T1
A7 A8 A9
COM+
DI-A
23
A2
e77ha729.10
1
2
3
5
4
操作ガイド | VLT® Soft Starter MCD 600
運転
1 三相電源
3 リレー A 出力
5 プログラマブル入力 A
K2 ライン接触器(ブレーキ)
図 33: ソフトブレーキ制動の配線例
2 モーター端子
4 K1/K2 コイル電源
K1 ライン接触器(実行)
A2 ゼロ速度センサー
9.10 Pump Clean(ポンプ洗浄)
ソフトスターターは、モーターをソフトスタートする前にポンプ洗浄機能を実行できます。インペラから異物を除去するのに
役立ちます。
ポンプ洗浄はモーターを逆方向、次に順方向に始動し、モーターを停止します。ポンプ洗浄は、プロセスを最大 5 回繰り返す
ように設定できます。指定された回数の洗浄サイクル後、ソフトスターターはプログラムされたソフトスタートを実行します。
ポンプ洗浄動作はスタート/ストップ入力(START, COM+)で制御されます。プログラマブル入力をポンプ洗浄に設定します(詳
細は
確認します。
パラメーター
7-1 Input A Function
(入力
A
機能)
を参照してください)。スタート信号が適用されると入力は閉じることを
注意
ポンプが逆方向に運転できない場合、ポンプ洗浄を有効にしないでください。
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 65
Page 66

300
200
100
400
50
25
0
e77ha787.10
2
4
8
6
1
7
5
3
Reverse torque/
Forward current (%FLC)
Current
Torque
Time
操作ガイド | VLT® Soft Starter MCD 600
1
パラメーター
3
パラメーター
5
パラメーター
11-1 Reverse Torque
(逆トルク)
11-3 Forward Current Limit
11-6 Pump Stop Time
(ポンプ停止時間)
(順方向電流制限)
2
パラメーター
4
パラメーター
6 洗浄サイクル
11-2 Reverse Time
11-4 Forward Time
運転
(逆方向時間)
(順方向時間)
7
パラメーター
11-7 Pump Clean Cycles
(ポンプ洗浄サイク
8 プログラムされたソフトスタート
ル)
図 34: Pump Clean(ポンプ洗浄)
9.11 逆方向動作
ソフトスターターは可逆接触器を制御して、モーターを逆方向に動作できます。逆動作が選択されると、ソフトスターターは
通常動作と逆相順を使用してソフトスタートを実行します。
逆動作はスタート/ストップ入力(START, COM+)で制御されます。プログラマブル入力を逆方向(
Function
(入力
A
機能)
) に設定し、出力を可逆接触器(
パラメーター
8-1 Relay A Function
(リレー
パラメーター
A
機能)
)に設定します。
7-1 Input A
スタート信号が適用されると入力は閉じるはずです。ソフトスターターによって、逆リレーがスタート/ストップサイクル終了
時まで同じ状態に保たれます。
注意
方向が変更された後の最初のスタートは、定電流になります。
注意
相順保護が必要な場合は、ソフトスターターの出力(モーター)側に可逆接触器を設置してください。
66 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 67

M
22
21
K2
K1
K2 K1
4/T2
6/T3
1/L1
3/L2
5/L3
2/T1
A1 A2
A3
COM+
DI-A
23
e77ha795.10
1
2
4
3
5
操作ガイド | VLT® Soft Starter MCD 600
運転
1 三相電源
3 プログラマブル入力 A(設定=逆方向)
5 K1/K2 コイル電源
2 モーター端子
4 リレー出力 A(設定=可逆開閉器)
K1 順方向動作の開閉器
K2 可逆開閉器
図 35: 接続図
9.12 ジョグ動作
ジョグは低速でモーターを動作し、負荷の整列や整備の補助を可能にします。モーターは正方向か逆方向いずれかにジョギン
グ運転できます。
ジョグは、ソフトスターターがデジタル入力(
入力)
定します(詳細は
閉じることを確認します。
パラメーター
に設定)を介して制御される場合にのみ使用できます。ジョグで操作するためには、プログラマブル入力をジョグに設
パラメーター
7-1 Input A Function
(入力
1-1 Command Source
A
機能)
を参照してください)。スタート信号が適用されると入力は
(コマンドソース)
が Digital Input
(デジタル
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 67
Page 68

e77ha512.12
3
2
1
70
60
50
30
10
40
20
80
90
100
0
%
Available torque
操作ガイド | VLT® Soft Starter MCD 600
運転
注意
簡易モーター冷却
低速運転は、モーターの冷却が低下している時の連続運転を意図したものではありません。ジョグ操作によって、モー
ターの熱モデルに計算された速度よりも速くモーターが加熱されます。
モーター・サーミスターを導入するか、十分な長さの再スタート遅延(
-
遅延)
)を許容します。
ジョグフォワードの最大許容トルクは、モーターによってそのモーター FLT の約 50〜75%です。モーターが逆方向にジョギン
グ運転される時、トルクは FLT の約 25〜50%です。
パラメーター
5-16 Restart Delay
(再スタート
パラメーター
2-8 Jog Torque
(ジョグトルク)とパラメーター
3-10 Jog Torque-2
(ジョグトルク-2)
ターに適用可能な最大ジョグトルク量を制御します。
注意
50%を超えるトルク設定値は、シャフト振動を増加する原因となる可能性があります。
は、ソフトスターターがモー
1 モーター FLT
2 ジョグ正最大トルク
3 ジョグ逆最大トルク
図 36: ジョグ動作で可能なトルク
9.13 内部デルタ動作
内部デルタで接続する場合は、
ターターは、モーターがインラインまたは内部デルタに接続されているかどうか自動的に検出し、正しい内部デルタ電流レベ
パラメーター
1-2 Motor Full Load Current
(モーター全負荷電流)
に FLC 値を入力します ソフトス
ルを計算します。
68 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 69

操作ガイド | VLT® Soft Starter MCD 600
適応制御、ジョグ、ブレーキ、PowerThrough 機能は、内部デルタ(6 線式)操作ではサポートされません。ソフトスターター
がデルタ内で接続されているときにこれらの機能がプログラムされると、以下のように動作します。
適応制御スタートソフトスターターは、定電流スタートを実行します。
運転
適応制御停止 ソフトスターターは、
プを実行します。
ーはフリーランで停止します。
ジョグ ソフトスターターは、エラーメッセージ Unsupported Option
します。
直流ブレーキ ソフトスターターはフリーランで停止します。
ソフトブレーキ ソフトスターターはフリーランで停止します。
出力維持 ソフトスタータートリップは、エラーメッセージ Lx-Tx Shorted(Lx-Tx
パラメーター
パラメーター
2-10 Stop Times
2-10 Stop Times
(停止時間)
(停止時間)
が 0 より大きい場合、TVR ソフトストッ
が 0 に設定されている場合、ソフトスタータ
(サポートされないオプション)
短絡)
注意
内部デルタで接続されている場合の運転中は、ソフトスターターは T2 の相損失を検出しません。
注意
ソフトスターターが正しくモーター接続を検出しない場合は、
します。
9.14 Secondary Motor Set(二次モーターセット)
パラメーター
20-6 Motor Connection
の警告を発
の警告を発します。
(モーター接続
を使用
ソフトスターターは、2 つのスタートプロファイルと停止プロファイルでそれぞれプログラムすることができます。このため、
ソフトスターターにとっては 2 つの異なるスタート構成と停止構成によるモーター制御が可能になります。二次モーターセッ
トは、二重巻き(Dahlander) モーター、マルチモーター用途、モーターが 2 つの異なる条件(積載済みコンベアまたはに降り沈
みコンベアなど)で始まる状況に理想的です。二次モーターセットは、デューティ/スタンバイ用途にも使用できます。
注意
デューティ/スタンバイ用途では、
を設定し、各モーターの設置温度保護を設定します。
二次モーターセットを使用する場合は、プログラマブル入力を Motor Set Select
マンドが与えられると、入力は閉じるはずです。
Function
イクル全体でそのモーターセットを使用します。
ソフトスターターは、プログラマブル入力経由で指示された場合、二次モーター設定を使用してスタートを制御します。(
メーター
(入力
B
機能)
を参照してください)。ソフトスターターが起動時に使用するモーターを確認し、スタート/ストップサ
7-1 Input A Function
(入力A機能)とパラメーター
パラメーター
パラメーター
6-17 Motor Overtemperature
7-1 Input A Function
7-5 Input B Function
(モーター過温度)
から Log Only
(モーターセット選択)
(入力
A
機能)とパラメーター
(入力B機能)
を参照してください)。
(ログのみ)
に設定します。開始コ
7-5 Input B
パラ
注意
ソフトスターターが 2 台の別々のモーターを制御する場合、モーターの熱モデルは正確度が下がります。
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 69
Page 70

操作ガイド | VLT® Soft Starter MCD 600
Programmable Parameters(プログラマブ
ルパラメーター)
10 Programmable Parameters(プログラマブルパラメーター)
10.1 メインメニュー
Main Menu(メインメニュー)を使用して、ソフトスターターの動作を制御するプログラム可能なパラメーターを表示変更し
ます。
Main Menu(メインメニュー)を開く場合は、モニタリング画面を見ながら[Main Menu] を押します。
10.2 パラメーター値の変更
手順
1. Main Menu(メインメニュー)でパラメーターまでスクロールします。
2. [Main Menu]を押して編集モードに入ります。
3. [▵]または[▿]を押して、パラメーター設定を変更します。
[▵]または[▿]を 1 回押すと、1 単位ずつ値が増減します。キーを 5 秒以上押し続けると、その値はより速い速度で増減しま
す。
[Store]を押して変更を保存します。ディスプレイに表示された設定が保存され、LCP はパラメーターリストに戻ります。
[Back]を押して、変更を取り消します。LCP が確認を求め、変更を保存することなくパラメーターリストに戻ります。
10.3 Adjustment Lock(調整ロック)
パラメーター
調整ロックが有効なときにユーザーがパラメーター値の変更を試みると、以下のエラーが表示されます。Access Denied.
セス拒否。)
10-7 Adjustment Lock
Adj Lock is On
(調整ロックオン)
(調整ロック)
。
を使用して、ユーザーがパラメーター設定を変更するのを防止します。
10.4 Parameter List(パラメーター・リスト)
表 19: Parameter List(パラメーター・リスト)
パラメーターグ
ループ番号
1 Motor Details(モーター詳細)
1-1 Command Source(コマンドソース) Digital Input(デジタル入力)
1-2 Motor Full Load Current(モーター全負荷電流) モデルに依存
1-3 Motor kW(モーター kW) 0 kW
1-4 Locked Rotor Time(回転子拘束時間) 00:10 (mm:ss)
パラメーター・グループ名 デフォルト設定
(アク
1-5 Locked Rotor Current(回転子拘束電流) 600%
1-6 Motor Service Factor(モーター安全率) 105%
1-7 Reserved(予約済み) –
2 Motor Start/Stop(モータースタート/ストップ)
2-1 Start Mode(スタートモード) Constant Current(定電流)
70 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 71

操作ガイド | VLT® Soft Starter MCD 600
Programmable Parameters(プログラマブ
ルパラメーター)
パラメーターグ
ループ番号
2-2 Start Ramp Time(スタート立ち上がり時間) 00:10 (mm:ss)
2-3 Initial Current(初期電流) 200%
2-4 Current Limit(電流制限) 350%
2-5 Adaptive Start Profile(適応スタートプロファイル) Constant Acceleration(一定の加速)
2-6 Kickstart Time(キックスタート時間) 000 ms
2-7 Kickstart Level(キックスタートレベル) 500%
2-8 Jog Torque(ジョグトルク) 50%
2-9 Stop Mode(ストップモード) TVR Soft Stop(TVR ソフトストップ)
2-10 Stop Time(停止時間) 00:00 (mm:ss)
2-11 Adaptive Stop Profile(適応停止プロファイル) Constant Deceleration(一定の減速)
2-12 Adaptive Control Gain(適応制御ゲイン) 75%
2-13 Multi Pump(マルチポンプ) Single Pump(単一ポンプ)
2-14 スタート遅延 00:00 (mm:ss)
2-15 DC Brake Torque(直流ブレーキトルク) 20%
2-16 DC Brake Time(直流ブレーキ時間) 00:01 (mm:ss)
パラメーター・グループ名 デフォルト設定
2-17 Brake Current Limit(ブレーキ電流制限) 250%
2-18 Soft Brake Delay(ソフトブレーキの遅延) 400 ms
3 Motor Start/Stop 2(モータースタート/ストップ 2)
3-1 Motor Full Load Current-2(モーター全負荷電流-2) モデルに依存
3-2 Motor kW-2(モーター kW-2) 0 kW
3-3 Start Mode-2(スタートモード-2) Constant Current(定電流)
3-4 Start Ramp Time-2(スタート立ち上がり時間-2) 00:10 (mm:ss)
3-5 Initial Current-2(初期電流-2) 200%
3-6 Current Limit-2(電流制限-2) 350%
3-7 Adaptive Start Profile-2(適応スタートプロファイル-2) Constant Acceleration(一定の加速)
3-8 Kickstart Time-2(キックスタート時間-2) 000 ms
3-9 Kickstart Time-2(キックスタートレベル-2) 500%
3-10 Jog Torque-2(ジョグトルク-2) 50%
3-11 Stop Mode-2(ストップモード-2) TVR Soft Stop(TVR ソフトストップ)
3-12 Stop Time-2(停止時間-2) 00:00 (mm:ss)
3-13 Adaptive Stop Profile-2(適応停止プロファイル-2) Constant Deceleration(一定の減速)
3-14 Adaptive Control Gain-2(適応制御ゲイン-2) 75%
3-15 Multi Pump-2(マルチポンプ-2) Single Pump(単一ポンプ)
3-16 Start Delay-2(スタート遅延-2) 00:00 (mm:ss)
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 71
Page 72

操作ガイド | VLT® Soft Starter MCD 600
Programmable Parameters(プログラマブ
ルパラメーター)
パラメーターグ
ループ番号
3-17 DC Brake Torque-2(直流ブレーキトルク-2) 20%
3-18 DC Brake Time-2(直流ブレーキ時間-2) 00:01 (mm:ss)
3-19 Brake Current Limit-2(ブレーキ電流制限-2) 250%
3-20 Soft Brake Delay-2(ソフトブレーキの遅延-2) 400 秒
4 Auto-Start/Stop(自動スタート/ストップ)
4-1 Auto-Start/Stop Mode(自動スタート/ストップモード) Disable(無効化)
4-2 Run Time(実行時間) 00:00 (hh:mm)
4-3 Stopped Time(停止している時間) 00:00 (hh:mm)
4-4 Sunday Mode(日曜日モード) Start/Stop Disable(スタート/ストップ無効化)
4-5 Sunday Start Time(日曜日スタート時間) 00:00 (hh:mm)
4-6 Sunday Stop Time(日曜日ストップ時間) 00:00 (hh:mm)
4-7 Monday Mode(月曜日モード) Start/Stop Disable(スタート/ストップ無効化)
4-8 Monday Start Time(月曜日スタート時間) 00:00 (hh:mm)
4-9 Monday Stop Time(月曜日ストップ時間) 00:00 (hh:mm)
4-10 Tuesday Mode(火曜日モード) Start/Stop Disable(スタート/ストップ無効化)
パラメーター・グループ名 デフォルト設定
4-11 Tuesday Start Time(火曜日スタート時間) 00:00 (hh:mm)
4-12 Tuesday Stop Time(火曜日ストップ時間) 00:00 (hh:mm)
4-13 Wednesday Mode(水曜日モード) Start/Stop Disable(スタート/ストップ無効化)
4-14 Wednesday Start Time(水曜日スタート時間) 00:00 (hh:mm)
4-15 Wednesday Stop Time(水曜日ストップ時間) 00:00 (hh:mm)
4-16 Thursday Mode(木曜日モード) Start/Stop Disable(スタート/ストップ無効化)
4-17 Thursday Start Time(木曜日スタート時間) 00:00 (hh:mm)
4-18 Thursday Stop Time(木曜日ストップ時間) 00:00 (hh:mm)
4-19 Friday Mode(金曜日モード) Start/Stop Disable(スタート/ストップ無効化)
4-20 Fridday Start Time(金曜日スタート時間) 00:00 (hh:mm)
4-21 Friday Stop Time(金曜日ストップ時間) 00:00 (hh:mm)
4-22 Saturday Mode(土曜日モード) Start/Stop Disable(スタート/ストップ無効化)
4-23 Saturday Start Time(土曜日スタート時間) 00:00 (hh:mm)
4-24 Saturday Stop Time(土曜日ストップ時間) 00:00 (hh:mm)
5 Protection Levels(保護レベル)
5-1 Current Imbalance(電流アンバランス) 30%
5-2 Current Imbalance Delay(電流アンバランス遅延) 00:03 (mm:ss)
5-3 Undercurrent(電流低下) 20%
5-4 Undercurrent Delay(電流低下遅延) 00:05 (mm:ss)
72 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 73

操作ガイド | VLT® Soft Starter MCD 600
Programmable Parameters(プログラマブ
ルパラメーター)
パラメーターグ
ループ番号
5-5 Overcurrent(過電流) 400%
5-6 Overcurrent Delay(過電流遅延) 00:00 (mm:ss)
5-7 Undervoltage(電圧低下) 350 V
5-8 Undervoltage Delay(電圧低下遅延) 00:01 (mm:ss)
5-9 Overvoltage(過電圧) 500V
5-10 Overvoltage Delay(過電圧遅延) 00:01 (mm:ss)
5-11 Underpower(電力低下) 10%
5-12 Underpower Delay(電力低下遅延) 00:01 (mm:ss)
5-13 Overpower(過電力) 150%
5-14 Overpower Delay(過電力遅延) 00:01 (mm:ss)
5-15 Excess Start Time(延長スタート時間) 00:20 (mm:ss)
5-16 Restart Delay(再スタート遅延) 00:10 (mm:ss)
5-17 Starts per Hour(1 時間あたりのスタート回数) 0
5-18 Phase Sequence(相順) Any Sequence(任意のシーケンス)
6 Protection Actions(保護アクション)
パラメーター・グループ名 デフォルト設定
6-1 Auto-Reset Count(自動リセットカウント) 0
6-2 Auto-Reset Delay(自動リセット遅延) 00:05 (mm:ss)
6-3 Current Imbalance(電流アンバランス) Soft Trip and Log(ソフトトリップ & ログ)
6-4 Undercurrent(電流低下) Soft Trip and Log(ソフトトリップ & ログ)
6-5 Overcurrent(過電流) Soft Trip and Log(ソフトトリップ & ログ)
6-6 Undervoltage(電圧低下) Soft Trip and Log(ソフトトリップ & ログ)
6-7 Overvoltage(過電圧) Soft Trip and Log(ソフトトリップ & ログ)
6-8 Underpower(電力低下) Log Only(ログのみ)
6-9 Overpower(過電力) Log Only(ログのみ)
6-10 Excess Start Time(延長スタート時間) Soft Trip and Log(ソフトトリップ & ログ)
6-11 Input A Trip(入力 A トリップ) Soft Trip and Log(ソフトトリップ & ログ)
6-12 Input B Trip(入力 B トリップ) Soft Trip and Log(ソフトトリップ & ログ)
6-13 Network Communications(ネットワーク通信) Soft Trip and Log(ソフトトリップ & ログ)
6-14 Remote Keypad Fault(リモートキーパッド不具合) Soft Trip and Log(ソフトトリップ & ログ)
6-15 Frequency(周波数) Soft Trip and Log(ソフトトリップ & ログ)
6-16 Phase Sequence(相順) Soft Trip and Log(ソフトトリップ & ログ)
6-17 Motor Overtemperature(モーター過温度) Soft Trip and Log(ソフトトリップ & ログ)
6-18 Motor Thermistor Circuit(モーター・サーミスター回路)Soft Trip and Log(ソフトトリップ & ログ)
6-19 Shorted SCR Action(短絡 SCR アクション) 3-Phase Control Only(三相制御のみ)
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 73
Page 74

操作ガイド | VLT® Soft Starter MCD 600
Programmable Parameters(プログラマブ
ルパラメーター)
パラメーターグ
ループ番号
6-20 Battery/Clock(バッテリー/クロック) Soft Trip and Log(ソフトトリップ & ログ)
7 入力
7-1 Input A Function(入力 A 機能) Input Trip (N/O)(入力トリップ (N/O))
7-2 Input A Trip(入力 A トリップ) Operating Only(動作のみ)
7-3 Input A Trip Delay(入力 A トリップ遅延) 00:00 (mm:ss)
7-4 Input A Initial Delay(入力 A 初期遅延) 00:00 (mm:ss)
7-5 Input B Function(入力 B 機能) Input Trip (N/O)(入力トリップ (N/O))
7-6 Input B Trip(入力 B トリップ) Operating Only(動作のみ)
7-7 Input B Trip Delay(入力 B トリップ遅延) 00:00 (mm:ss)
7-8 Input B Initial Delay(入力 B 初期遅延) 00:00 (mm:ss)
7-9 Reset/Enable Logic(リセット/ロジック有効化) Normally Closed (N/C)(通常は閉 (N/C))
7-10 Input A Name(入力 A 名) Input A Trip(入力 A トリップ)
7-11 Input B Name(入力 B 名) Input B Trip(入力 B トリップ)
8 Relay Outputs(リレー出力)
8-1 Relay A Function(リレー A 機能) Run(運転)
パラメーター・グループ名 デフォルト設定
8-2 Relay A On Delay(リレー A ON 遅延) 00:00 (mm:ss)
8-3 Relay A Off Delay(リレー A OFF 遅延) 00:00 (mm:ss)
8-4 Relay B Function(リレー B 機能) Run(運転)
8-5 Relay B On Delay(リレー B ON 遅延) 00:00 (mm:ss)
8-6 Relay B Off Delay(リレー B OFF 遅延) 00:00 (mm:ss)
8-7 Low Current Flag(低電流フラグ) 50%
8-8 High Current Flag(高電流フラグ) 100%
8-9 Motor Temperature Flag(モーター温度フラグ) 80%
8-10 Main Contactor Time(主電源接触器時間) 400 ms
9 Analog Output(アナログ出力)
9-1 Analog Output A(アナログ出力 A) Current (% FLC)(電流 (%FLC))
9-2 Analog A Scale(アナログ A スケール) 4–20 mA
9-3 Analog A Maximum Adjustment(アナログ A 最大調整) 100%
9-4 Analog A Minimum Adjustment(アナログ A 最少調整) 000%
10 ディスプレイ
10-1 Language(言語) English(英語)
10-2 Temperature Scale(温度スケール) Celsius(摂氏)
10-3 Graph Timebase(グラフタイムベース) 30 s
10-4 Graph Maximum Adjustment(グラフ最大調整) 400%
74 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 75

操作ガイド | VLT® Soft Starter MCD 600
Programmable Parameters(プログラマブ
ルパラメーター)
パラメーターグ
ループ番号
10-5 Graph Minimum Adjustment(グラフ最小調整) 0%
10-6 Current Calibration(電流の校正) 100%
10-7 Adjustment Lock(調整ロック) Read & Write(読み取り& 書き込み)
10-8 User Parameter 1(ユーザーパラメーター 1) Current(電流)
10-9 User Parameter 2(ユーザーパラメーター 2) Motor Voltage(モーター電圧)
10-10 User Parameter 3(ユーザーパラメーター 3) Mains Frequency(主電源周波数)
10-11 User Parameter 4(ユーザーパラメーター 4) Motor pf(モーター PF)
10-12 User Parameter 5(ユーザーパラメーター 5) Motor Power(モーター電力)
10-13 User Parameter 6(ユーザーパラメーター 6) Motor Temp (%)(モーター温度 (%))
11 Pump Clean(ポンプ洗浄)
11-1 Reverse Torque(逆トルク) 20%
11-2 Reverse Time(逆方向時間) 00:10 (mm:ss)
11-3 Forward Current Limit(順方向電流制限) 100%
11-4 Forward Time(順方向時間) 00:10 (mm:ss)
11-5 Pump Stop Mode(ポンプストップモード) Coast to Stop(フリーラン停止)
パラメーター・グループ名 デフォルト設定
11-6 Pump Stop Time(ポンプ停止時間) 00:10 (mm:ss)
11-7 Pump Clean Cycles(ポンプ洗浄サイクル) 1
12 Communication Card(通信カード)
12-1 Modbus Address(Modbus アドレス) 1
12-2 Modbus Baud Rate(Modbus ボーレート) 9600
12-3 Modbus Parity(Modbus パリティ) なし
12-4 Modbus Timeout(Modbus タイムアウト) Off(オフ)
12-5 DeviceNet Address(Devicenet アドレス) 0
12-6 DeviceNet Baud Rate(Devicenet ボーレート) 125 kB
12-7 PROFIBUS Address(プロフィバスアドレス) 1
12-8 Gateway Address(ゲートウェイアドレス) 192
12-9 Gateway Address 2(ゲートウェイアドレス 2) 168
12-10 Gateway Address 3(ゲートウェイアドレス 3) 0
12-11 Gateway Address 4(ゲートウェイアドレス 4) 100
12-12 IP Address(IP アドレス) 192
12-13 IP Address 2(IP アドレス 2) 168
12-14 IP Address 3(IP アドレス 3) 0
12-15 IP Address 4(IP アドレス 4) 2
12-16 Subnet Mask(サブネットマスク) 255
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 75
Page 76

操作ガイド | VLT® Soft Starter MCD 600
Programmable Parameters(プログラマブ
ルパラメーター)
パラメーターグ
ループ番号
12-17 Subnet Mask 2(サブネットマスク 2) 255
12-18 Subnet Mask 3(サブネットマスク 3) 255
12-19 Subnet Mask 4(サブネットマスク 4) 0
12-20 DHCP(DHCP) Disable(無効化)
12-21 Location ID(位置 ID) 0
20 Advanced(アドバンスト)
20-1 Tracking Gain(追跡ゲイン) 50%
20-2 Pedestal Detect(ペデスタル検出) 80%
20-3 Bypass Contactor Delay(バイパス接触器遅延) 150 ms
20-4 Model Rating(モデル定格) モデルに依存
20-5 Screen Timeout(画面タイムアウト) 1 分
20-6 Motor Connection(モーター接続) 自動検出
30 Pump Input Configuration(圧力入力設定)
30-1 Pressure Sensor Type(圧力センサータイプ) なし
30-2 Pressure Units(圧力単位) kPa
パラメーター・グループ名 デフォルト設定
30-3 Pressure at 4 mA(4 mA での圧力) 0
30-4 Pressure at 20 mA(20 mA での圧力) 0
30-5 Flow Sensor Type(流量センサータイプ) なし
30-6 Flow Units(流量単位) リットル/秒
30-7 Flow at 4 mA(4 mA での流量) 0
30-8 Flow at 20 mA(20 mA での流量) 0
30-9 Units per Minute at Max Flow(最大流量での毎分あたり
の単位)
30-10 Pulses per Minute at Max Flow(最大流量での毎分あた
りのパルス)
30-11 Units per Pulse(パルスあたりの単位) 0
30-12 Depth Sensor Type(深度センサータイプ) なし
30-13 Depth Units(深度単位) メートル
30-14 Depth at 4 mA(4 mA での深さ) 0
30-15 Depth at 20 mA(20 mA での深さ) 0
31 Flow Protection(流量保護)
31A High Flow Trip Level(高流量トリップレベル) 10
31B Low Flow Trip Level(低流量トリップレベル) 5
0
0
31C Flow Start Delay(流量スタート遅延) 00:00:500 (mm:ss:ms)
31D Flow Response Delay(流量応答遅延) 00:00:500 (mm:ss:ms)
76 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 77

操作ガイド | VLT® Soft Starter MCD 600
Programmable Parameters(プログラマブ
ルパラメーター)
パラメーターグ
ループ番号
32 Pressure Protection(圧力保護)
32-1 High Pressure Trip Level(高圧トリップレベル) 10
32-2 High Pressure Start Delay(高圧スタート遅延) 00:00:500 (mm:ss:ms)
32-3 High Pressure Response Delay(高圧応答遅延) 00:00:500 (mm:ss:ms)
32-4 Low Pressure Trip Level(低圧トリップレベル) 5
32-5 Low Pressure Start Delay(低圧スタート遅延) 00:00:500 (mm:ss:ms)
32-6 Low Pressure Response Delay(低圧応答遅延) 00:00:500 (mm:ss:ms)
33 Pressure Control(圧力制御)
33-1 Pressure Control Mode(圧力制御モード) Off(オフ)
33-2 Start Pressure Level(スタート圧力レベル) 5
33-3 Start Response Delay(スタート応答遅延) 00:00:500 (mm:ss:ms)
33-4 Stop Pressure Level(停止圧力レベル) 10
33-5 Stop Response Delay(停止応答遅延) 00:00:500 (mm:ss:ms)
34 Depth Protection(深度保護)
34-1 Depth Trip Level(深度トリップレベル) 5
パラメーター・グループ名 デフォルト設定
34-2 Depth Reset Level(深度リセットレベル) 10
34-3 Depth Start Delay(深度スタート遅延) 00:00:500 (mm:ss:ms)
34-4 Depth Response Delay(深度応答遅延) 00:00:500 (mm:ss:ms)
35 Thermal Protection(熱保護)
35-1 Temperature Sensor Type(温度センサータイプ) なし
35-2 Temperature Trip Level(温度トリップレベル) 40
36 Pump Trip Action(ポンプトリップアクション)
36-1 Pressure Sensor(圧力センサー) Soft Trip and Log(ソフトトリップ & ログ)
36-2 Flow Sensor(流量センサー) Soft Trip and Log(ソフトトリップ & ログ)
36-3 Depth Sensor(深度センサー) Soft Trip and Log(ソフトトリップ & ログ)
36-4 High Pressure(高圧) Soft Trip and Log(ソフトトリップ & ログ)
36-5 低圧 Soft Trip and Log(ソフトトリップ & ログ)
36-6 High Flow(高流量) Soft Trip and Log(ソフトトリップ & ログ)
36-7 Low Flow(低流量) Soft Trip and Log(ソフトトリップ & ログ)
36-8 Flow Switch(流量スイッチ) Soft Trip and Log(ソフトトリップ & ログ)
36-9 Well Depth(ウェル深度) Soft Trip and Log(ソフトトリップ & ログ)
36-10 RTD/PT100 B Soft Trip and Log(ソフトトリップ & ログ)
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 77
Page 78

操作ガイド | VLT® Soft Starter MCD 600
Programmable Parameters(プログラマブ
ルパラメーター)
10.5 パラメーターグループ 1-** Motor Details(モーター詳細)
表 20: 1-1 - Command Source (コマンドソ―ス)
オプション 機能
ソフトスターターを制御するコマンドソースを選択します。
* デジタル入力 ソフトスターターは、デジタル入力からのスタートコマンドと停止コマンドを受け入れます。
(コマンドオーバ
ーライド:ネット
ワーク)
リモート LCP ソフトスターターは、リモート LCP からのスタートコマンドと停止コマンドを受け入れます。
クロック ソフトスターターは、
スマートカード ソフトスターターは、スマートカードから送信されたスタートと停止を受け入れます。
スマートカード
+ クロック
タイマー ソフトスターターは、スタート信号の受信後、
表 21: 1-2 モーター全負荷電流
範囲 機能
モデルに依存 ソフトスターターをモーターの FLC に一致させます。モーターのネームプレートに表示されている FLC
表 22: 1-3 Motor kW (モーター kW)
ソフトスターターは、通信拡張カードからのスタートコマンドと停止コマンドを受け入れます。
パラメーター
入れます。
ソフトスターターは、スマートカードが
内にある場合、スマートカードから送信されるスタートコマンドを受け入れます。スマートカード
からの停止コマンドは、スケジュールに関係なく受け入れられます。
ー
4-3 Stopped Time
す。
定格に設定します。
(停止している時間)
4-1 から 4-24 でスケジュール設定されたスタートと停止を受け
パラメーター
パラメーター
で設定されたタイマーに従ってモーターを始動停止しま
4-1 から 4-24 で設定された動作スケジュール
4-2 Run Time
(実行時間)とパラメータ
範囲 機能
*0 0–9999 kW 接続されたモーターの動力を kW で設定します。この設定は電力報告と保護の基になります。
表 23: 1-4 Locked Rotor Time (回転子拘束時間)
範囲 機能
*10 s 0:01–2:00 (分:秒)回転子拘束電流を、最高温度に達する前に寒さから守ることができるモーターの最大時間を設定し
ます。モーターのデータシートに従って設定します。
表 24: 1-5 Locked Rotor Current (回転子拘束電流)
範囲 機能
*600% 400–1200%
FLC
全負荷電流のパーセンテージ割合として、接続されたモーターの回転子拘束電流を設定します モ
ーターのデータシートに従って設定します。
78 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 79

操作ガイド | VLT® Soft Starter MCD 600
表 25: 1-6 - Motor Service Factor (モーター安全率)
範囲 機能
Programmable Parameters(プログラマブ
ルパラメーター)
*105% 100–
130%
熱モデルで使用されるモーター安全率を設定します。モーターが全負荷電流で動作する場合、100%に達
します。モーターのデータシートに従って設定します。
注意
パラメーター
1-4 から 1-6 のデフォルト設定は、モーター過負荷保護を提供します。クラス 10、FLA(全負荷電
流)トリップ電流 105%または同等。
表 26: 1-7 Reserved (予約済み)
範囲 機能
このパラメーターは、将来使用するための予備です。
10.6 パラメーターグループ 2-** Motor Start/Stop(モータースタート/ストップ)
表 27: 2-1 - スタートモード
オプション 機能
ソフトスタートモードを選択します。
1-4 から 1-6 は、モーター過負荷保護のトリップ電流を決定します。
注意
パラメーター
VLT® Soft Starter MCD 600 は、適応制御を含めたあらゆるソフトスタートに電流制限を適用
します。電流制限が低すぎる、またはスタート立ち上がり時間(
Time
(スタート立ち上がり時間)
あります。
* Constant Current
(定電流)
Adaptive Control
(適応制御)
表 28: 2-2 - Start Ramp Time (スタート立ち上がり時間)
範囲 機能
* 10 s 0:01–3:00 (分:
秒)
表 29: 2-3 - Initial Current (初期電流)
範囲 機能
*200% 100–
600% FLC
適応制御スタートの合計スタート時間、または電流ランプスタートのランプ時間(初期電流から
電流制限まで)を設定します。
電流ランプスタートの初期スタート電流レベルを、モーターの全負荷電流パーセンテージとして設定
します。スタートが開始された直後にモーターが加速し始めるように設定します。電流ランプスター
トを必要としない場合は、初期電流を電流制限値に等しく設定します。
パラメーター
) が短すぎる場合、モーターが正常に始動しない可能性が
2-2 Start Ramp
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 79
Page 80

操作ガイド | VLT® Soft Starter MCD 600
表 30: 2-4 - Current Limit (電流制限)
範囲 機能
* 350% 100–600% FLC 定電流と電流ランプソフトスタートの電流制限を、モーターの全負荷電流パーセンテージとして
設定します
表 31: 2-5 - Adaptive Start Profile (適応スタートプロファイル)
オプション 機能
VLT® Soft Starter MCD 600 を適応制御ソフトスタートに使用するプロファイルを選択します。
Programmable Parameters(プログラマブ
ルパラメーター)
注意
MCD 600 は、適応制御を含めたあらゆるソフトスタートに電流制限を適用します。電
Early Acceleration(初期
の加速)
流制限が低すぎる、またはスタート立ち上がり時間(
(スタート立ち上がり時間)
あります。
) が短すぎる場合、モーターが正常に始動しない可能性が
パラメーター
2-2 Start Ramp Time
* Constant Acceleration(一
定の加速)
Late Acceleration(後期の
加速)
表 32: 2-6 - Kickstart Time (キックスタート時間)
範囲 機能
*0000 ms 0–2000 ms キックスタート時間の長さを設定します。ゼロに設定するとキックスタートが無効になります。
表 33: 2G - Kickstart Level (キックスタートレベル)
範囲 機能
* 500% 100–
700% FLC
キックスタート電流のレベルを設定します。
注意
キックスタートは機械的装置に対して、トルクレベルを増加させます。この機能を使用する前
に、モーター、負荷、カップリングが追加トルクに対応できることを確認します。
表 34: 2-8 - Jog Torque (ジョグトルク)
範囲 機能
* 50% 20–100% VLT® Soft Starter MCD 600 はモーターを低速でゆっくり回転し、ベルトとフライホイールの正確な位置決
めを可能にします。ジョグは、順方向操作、逆方向操作のいずれかに使用できます
ジョグ動作の電流制限を設定します。
80 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 81

操作ガイド | VLT® Soft Starter MCD 600
表 35: 2-9 - Stop Mode (ストップモード)
オプション 機能
Coast To Stop(フリーラン停止)
* TVR Soft Stop(TVR ソフトストップ)
Adaptive Control(適応制御)
DC Brake(直流ブレーキ)
Soft Brake(ソフトブレーキ)
表 36: 2-10 - Stop Time (停止時間)
範囲 機能
Programmable Parameters(プログラマブ
ルパラメーター)
ストップモードを選択します。
* 0 s 0:00–4:00
(分:秒)
TVR や適応制御を使用してモーターをソフトストップで停止する時間を設定します。主電源開閉器が
取り付けられている場合、接触器は停止時間の終了時点まで閉じたままである必要があります。主電源
開閉器の出力(13, 14) を使用して、主電源開閉器を制御します。
表 37: 2-11 - Adaptive Stop Profile (適応停止プロファイル)
オプション 機能
VLT® Soft Starter MCD 600 を適応制御ソフトストップに使用するプロファイルを
選択します。
Early Deceleration(初期の減速)
* Constant Deceleration(一定の減速)
Late Deceleration(後期の減速)
表 38: 2-12 - Adaptive Control Gain (適応制御ゲイン)
範囲 機能
* 75% 1–200% 適応制御のパフォーマンスを調整します。この設定は、スタート制御とストップ制御の両方に影響を与
えます。
表 39: 2-13 - Multi Pump (マルチポンプ)
オプション 機能
適応制御のパフォーマンスを調整し、共通出口マニホールドに接続された複数
のポンプを備えた設置に合わせます。
* Single Pump(単一ポンプ)
Manifold Pump(マニホールドポンプ)
表 40: 2-14 - Start Delay (スタート遅延)
範囲 機能
* 0 s 0:00–60:00 (分:秒) ソフトスターターがモーター始動前にスタートコマンドを受信した後の遅延を設定します。
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 81
Page 82

操作ガイド | VLT® Soft Starter MCD 600
表 41: 2-15 - DC Brake Torque (直流ブレーキトルク)
Programmable Parameters(プログラマブ
ルパラメーター)
範囲 機能
* 20% 20–100% ソフトスターターがモーターを減速させるために使用するブレーキトルクの量を設定します。
表 42: 2-16 - DC Brake Time (直流ブレーキ時間)
範囲 機能
* 1 s 0:01–0:30 (分:秒) ブレーキ制動停止中の直流注入時間を設定します。
表 43: 2-17- Brake Current Limit (ブレーキ電流制限)
範囲 機能
* 250% 100–600% FLC ソフトブレーキの電流制限を設定します。
表 44: 2-18 - Soft Brake Delay (ソフトブレーキの遅延)
範囲 機能
*400 ms 400–2000
ms
ソフトスターターが、停止信号を受信してからモーターへの制動電流を供給し始めるまで待機する
時間を設定します。K1 と K2 が切り替わる時間を設定します。
10.7 パラメーターグループ 3-** Motor Start/Stop-2(モータースタート/ストップ-2)
このグループのパラメーターは、モーターの二次設定の動作を制御します。プログラマブル入力を使用して、有効なモーター
セットを選択します。
詳細については、 9.14 Secondary Motor Set(二次モーターセット)を参照してください。
表 45: 3-1 - Motor Full Load Current-2 (モーター全負荷電流-2)
範囲 機能
モデルに依存 二次モーターの全負荷電流を設定します。
表 46: 3-2 - Motor kW-2 (モーター kW-2)
範囲 機能
* 0 0–9999 kW 二次モーターの動力を kW で設定します。
表 47: 3-3 - Start Mode-2 (スタートモード-2)
オプション 機能
* Constant Current(定電流)
Adaptive Control(適応制御)
82 | Danfoss A/S © 2018.10
ソフトスタートモードを選択します。
AQ262141844215ja-000201 / 175R1174
Page 83

操作ガイド | VLT® Soft Starter MCD 600
表 48: 3-4 - Start Ramp Time-2 (スタート立ち上がり時間-2)
範囲 機能
Programmable Parameters(プログラマブ
ルパラメーター)
*10 s 0:01–3:00 (分:
秒)
表 49: 3-5 - Initial Current-2 (初期電流-2)
範囲 機能
*200% 100–
600% FLC
表 50: 3-6 - Current Limit-2 (電流制限-2)
範囲 機能
*350% 100–
600%
FLC
表 51: 3-7 - Adaptive Start Profile-2 (適応スタートプロファイル-2)
適応制御スタートの合計スタート時間、または電流ランプスタートのランプ時間(初期電流から
電流制限まで)を設定します。
電流ランプスタートの初期スタート電流レベルを、モーターの全負荷電流パーセンテージとして設定
します。スタートが開始された直後にモーターが加速し始めるように設定します。電流ランプスター
トを必要としない場合は、初期電流を電流制限値に等しく設定します。
定電流と電流ランプソフトスタートの電流制限を、モーターの全負荷電流パーセンテージとして設定し
ます
VLT® Soft Starter MCD 600 は、適応制御を含めたあらゆるソフトスタートに電流制限を適用しま
す。電流制限が低すぎる、またはスタート立ち上がり時間(
タート立ち上がり時間)
) が短すぎる場合、モーターが正常に始動しない可能性があります。
注意
パラメーター
2-2 Start Ramp Time
(ス
オプション 機能
VLT® Soft Starter MCD 600 を適応制御ソフトスタートに使用するプロファイルを
選択します。
Early Acceleration(初期の加速)
* Constant Acceleration(一定の加速)
Late Acceleration(後期の加速)
表 52: 3-8 - Kickstart Time-2 (キックスタート時間-2)
範囲 機能
* 0000 ms 0–2000 ms キックスタート時間の長さを設定します。
ゼロに設定するとキックスタートが無効になります。
表 53: 3-9 - Kickstart Level-2 (キックスタートレベル-2)
範囲 機能
*500% 100–700% FLC キックスタート電流のレベルを設定します。
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 83
Page 84

操作ガイド | VLT® Soft Starter MCD 600
表 54: 3-10 - Jog Torque-2 (ジョグトルク-2)
範囲 機能
*50% 20–100% ジョグ動作の電流制限を設定します。
表 55: 3-11 - Stop Mode-2 (ストップモード-2)
オプション 機能
ストップモードを選択します。
Coast To Stop(フリーラン停止)
* TVR Soft Stop(TVR ソフトストップ)
Adaptive Control(適応制御)
DC Brake(直流ブレーキ)
Soft Brake(ソフトブレーキ)
表 56: 3-12 - Stop Time-2 (停止時間-2)
Programmable Parameters(プログラマブ
ルパラメーター)
範囲 機能
*0 s 0:00–4:00
(分:秒)
TVR や適応制御を使用してモーターをソフトストップで停止する時間を設定します。主電源開閉器が取
り付けられている場合、接触器は停止時間の終了時点まで閉じたままである必要があります。主電源開
閉器の出力(13, 14) を使用して、主電源開閉器を制御します。
表 57: 3-13 - Adaptive Stop Profile-2 (適応停止プロファイル-2)
オプション 機能
ソフトスターターを適応制御ソフトストップに使用するプロファイルを選択し
ます。
Early Deceleration(初期の減速)
* Constant Deceleration(一定の減速)
Late Deceleration(後期の減速)
表 58: 3-14 - Adaptive Control Gain-2 (適応制御ゲイン-2)
範囲 機能
*75% 1–200% 適応制御のパフォーマンスを調整します。
この設定は、スタート制御とストップ制御の両方に影響を与えます。
表 59: 3-15 - Multi Pump-2 (マルチポンプ-2)
オプション 機能
* Single Pump(単一ポンプ)
Manifold Pump(マニホールドポンプ)
84 | Danfoss A/S © 2018.10
適応制御のパフォーマンスを調整し、共通出口マニホールドに接続された複数
のポンプを備えた設置に合わせます。
AQ262141844215ja-000201 / 175R1174
Page 85

操作ガイド | VLT® Soft Starter MCD 600
表 60: 3-16 - Start Delay-2 (スタート遅延-2)
Programmable Parameters(プログラマブ
ルパラメーター)
範囲 機能
* 0 s 0:00–60:00 (分:秒) スターターがモーター始動前にスタートコマンドを受信した後の遅延を設定します。
表 61: 3-17 - DC Brake Torque-2 (直流ブレーキトルク-2)
範囲 機能
*20% 20–100% ソフトスターターがモーターを減速させるために使用するブレーキトルクの量を設定します。
表 62: 3-18 - DC Brake Time-2 (直流ブレーキ時間-2)
範囲 機能
*1 s 0:01–0:30 (分:秒) ブレーキ制動停止中の直流注入時間を設定します。
表 63: 3-19 - Brake Current Limit-2 (ブレーキ電流制限-2)
範囲 機能
*250% 100–600% FLC ソフトブレーキの電流制限を設定します。
表 64: 3-20 - Soft Brake Delay-2 (ソフトブレーキの遅延-2)
範囲 機能
*400 ms 400–2000
ms
ソフトスターターが、停止信号を受信してからモーターへの制動電流を供給し始めるまで待機する
時間を設定します。K1 と K2 が切り替わる時間を設定します。
10.8 パラメーターグループ 4-** Auto-Start/Stop(自動スタート/ストップ)
表 65: 4-1 - Auto-Start/Stop Mode (自動スタート/ストップモード)
オプション 機能
自動スタート/ストップ動作を有効化または無効化。
* Disable(無効化)
Clock Mode(クロックモード)を有効化
Timer Mode(タイマーモード)を有効化
表 66: 4-1 - Auto-Start/Stop Mode (自動スタート/ストップモード)
範囲 機能
*00:00 00:00–23:59 hh:mm タイマーモードによる自動スタート後にソフトスターターが動作する時間を設定します。
表 67: 4-3 - Stopped Time (停止している時間)
範囲 機能
*00:00 00:00–23:59 hh:mm タイマーモードで動作中にソフトスターターが停止したままになる時間を設定します。
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 85
Page 86

操作ガイド | VLT® Soft Starter MCD 600
表 68: 4-4 - Sunday Mode (日曜日モード)
オプション 機能
日曜日の自動スタート/ストップを有効または無効にします。
Programmable Parameters(プログラマブ
ルパラメーター)
* Start/Stop Disable(スター
ト/ストップ無効化)
自動スタート/ストップ制御を無効にします。
タート時間)
または
パラメーター
4-6 Sunday Stop Time
パラメーター
4-5 Sunday Start Time
(日曜日ストップ時間)
ル設定された時間は無視されます。
Start Only Enable(スター
トのみ有効)
Stop Only Enable(ストッ
プのみ有効)
Start/Stop Enable(スター
自動スタート制御を有効にします。
間)
でスケジュール設定された自動ストップ時間は無視されます。
自動ストップ制御を有効にします。
間)
でスケジュール設定された自動スタート時間は無視されます。
パラメーター
パラメーター
4-6 Sunday Stop Time
4-5 Sunday Start Time
自動スタートと自動ストップの制御を有効にします。
ト/ストップ有効化)
表 69: 4-5 - Sunday Start Time (日曜日スタート時間)
範囲 機能
*00:00 00:00–23:59 日曜日の自動スタート時間を設定します(24 時間フォーマット)。
表 70: 4-6 - Sunday Stop Time (日曜日ストップ時間)
範囲 機能
*00:00 00:00–23:59 日曜日の自動ストップ時間を設定します(24 時間フォーマット)。
表 71: 4-7 - Monday Mode (月曜日モード)
(日曜日ス
でスケジュー
(日曜日ストップ時
(日曜日スタート時
オプション 機能
月曜日の自動スタート/ストップを有効または無効にします。
* Start/Stop Disable(スタート/ストップ無効化) Stop Only Enable(ストップのみ有効)
Start Only Enable(スタートのみ有効) Start/Stop Enable(スタート/ストップ有効化)
表 72: 4-8 - Monday Start Time (月曜日スタート時間)
範囲 機能
*00:00 00:00–23:59 月曜日の自動スタート時間を設定します(24 時間フォーマット)。
表 73: 4-9 - Monday Stop Time (月曜日ストップ時間)
範囲 機能
*00:00 00:00–23:59 月曜日の自動ストップ時間を設定します(24 時間フォーマット)。
表 74: 4-10 - Tuesday Mode (火曜日モード)
オプション 機能
火曜日の自動スタート/ストップを有効または無効にします。
* Start/Stop Disable(スタート/ストップ無効化)
86 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 87

操作ガイド | VLT® Soft Starter MCD 600
Programmable Parameters(プログラマブ
オプション 機能
Start Only Enable(スタートのみ有効)
Stop Only Enable(ストップのみ有効)
Start/Stop Enable(スタート/ストップ有効化)
表 75: 4-11 - Tuesday Start Time (火曜日スタート時間)
範囲 機能
*00:00 00:00–23:59 火曜日の自動スタート時間を設定します(24 時間フォーマット)。
表 76: 4-13 - Wednesday Mode (水曜日モード)
オプション 機能
水曜日の自動スタート/ストップを有効または無効にします。
* Start/Stop Disable(スタート/ストップ無効化)
Start Only Enable(スタートのみ有効)
ルパラメーター)
Stop Only Enable(ストップのみ有効)
Start/Stop Enable(スタート/ストップ有効化)
表 77: 4-14 - Wednesday Start Time (水曜日スタート時間)
範囲 機能
*00:00 00:00–23:59 水曜日の自動スタート時間を設定します(24 時間フォーマット)。
表 78: 4-15 - Wednesday Stop Time (水曜日ストップ時間)
範囲 機能
*00:00 00:00–23:59 水曜日の自動ストップ時間を設定します(24 時間フォーマット)。
表 79: 4-16 - Thursday Mode (木曜日モード)
オプション 機能
木曜日の自動スタート/ストップを有効または無効にします。
* Start/Stop Disable(スタート/ストップ無効化)
Start Only Enable(スタートのみ有効)
Stop Only Enable(ストップのみ有効)
Start/Stop Enable(スタート/ストップ有効化)
表 80: 4-17 - hursday Start Time (木曜日スタート時間)
範囲 機能
*00:00 00:00–23:59 木曜日の自動スタート時間を設定します(24 時間フォーマット)。
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 87
Page 88

操作ガイド | VLT® Soft Starter MCD 600
表 81: 4-18 - Thursday Stop Time (木曜日ストップ時間)
Programmable Parameters(プログラマブ
範囲 機能
*00:00 00:00–23:59 木曜日の自動ストップ時間を設定します(24 時間フォーマット)。
表 82: 4-19 - Friday Mode (金曜日モード)
オプション 機能
金曜日の自動スタート/ストップを有効または無効にします。
* Start/Stop Disable(スタート/ストップ無効化)
Start Only Enable(スタートのみ有効)
Stop Only Enable(ストップのみ有効)
Start/Stop Enable(スタート/ストップ有効化)
表 83: 4-20 - Friday Start Time (金曜日スタート時間)
範囲 機能
ルパラメーター)
*00:00 00:00–23:59 金曜日の自動スタート時間を設定します(24 時間フォーマット)。
表 84: 4-21 - Friday Stop Time (金曜日ストップ時間)
範囲 機能
*00:00 00:00–23:59 金曜日の自動ストップ時間を設定します(24 時間フォーマット)。
表 85: 4-22 - Saturday Mode (土曜日モード)
オプション 機能
土曜日の自動スタート/ストップを有効または無効にします。
* Start/Stop Disable(スタート/ストップ無効化)
Start Only Enable(スタートのみ有効)
Stop Only Enable(ストップのみ有効)
Start/Stop Enable(スタート/ストップ有効化)
表 86: 4-23 - Saturday Start Time (土曜日スタート時間)
範囲 機能
*00:00 00:00–23:59 土曜日の自動スタート時間を設定します(24 時間フォーマット)。
表 87: 4-24 - Saturday Stop Time (土曜日ストップ時間)
範囲 機能
*00:00 00:00–23:59 土曜日の自動ストップ時間を設定します(24 時間フォーマット)。
88 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 89

操作ガイド | VLT® Soft Starter MCD 600
Programmable Parameters(プログラマブ
ルパラメーター)
10.9 パラメーターグループ 5-** Protection Levels(保護レベル)
表 88: 5-1 - Current Imbalance (電流アンバランス)
範囲 機能
*30% 10–50% 電流アンバランス保護のトリップポイントを設定します。
表 89: 5-2 - Current Imbalance Delay (電流アンバランス遅延)
範囲 機能
*3 s 0:00–4:00 (分:秒) ソフトスターターの現在の不均衡に対する応答を遅らせ、瞬間的な変動によるトリップを回避しま
す。
表 90: 5-3 - Undercurrent (電流低下)
範囲 機能
*20% 0–100% 電流低下保護のトリップポイントを、モーターの全負荷電流パーセンテージとして設定します モーター
の通常動作範囲とモーターの磁化(負荷なし)電流(一般的に FLC の 25–35%)との間のレベルに設定し
ます。ゼロ%に設定すると電流低下保護が無効になります。
表 91: 5-4 - Undercurrent Delay (電流低下遅延)
範囲 機能
* 5 秒 00–4:00 (分:秒) ソフトスターターの電流低下に対する応答を遅らせ、瞬間的な変動によるトリップを回避します。
表 92: 5-5 - Overcurrent (過電流)
範囲 機能
*400% 80–600% 過電流保護のトリップポイントを、モーターの全負荷電流パーセンテージとして設定します。
表 93: 5-6 - Overcurrent Delay (過電流遅延)
範囲 機能
* 0 s 0:00–1:00 (分:秒) ソフトスターターの過電流に対する応答を遅らせ、瞬間的な過電流イベントによるトリップを回
避します。
表 94: 5-7 - Undervoltage (電圧低下)
範囲 機能
*350 100–1000 V 電圧低下保護のトリップポイントを設定します。必要に応じて設定します。
注意
Danfoss A/S © 2018.10
ソフトスターターが実行モードになるまで、電圧保護は正しく動作しません。
AQ262141844215ja-000201 / 175R1174| 89
Page 90

操作ガイド | VLT® Soft Starter MCD 600
表 95: 5-8 - Undervoltage Delay (電圧低下遅延)
Programmable Parameters(プログラマブ
ルパラメーター)
範囲 機能
* 1 s 0:00–1:00 (分:秒) ソフトスターターの電圧低下に対する応答を遅らせ、瞬間的な変動によるトリップを回避します。
表 96: 5-9 - Overvoltage (過電圧)
範囲 機能
*500 100–1000 V 過電圧保護のトリップポイントを設定します。必要に応じて設定します。
表 97: 5-10 - Overvoltage Delay (過電圧遅延)
範囲 機能
* 1 s 0:00–1:00 (分:秒) ソフトスターターの過電圧に対する応答を遅らせ、瞬間的な変動によるトリップを回避します。
表 98: 5-11 - Underpower (電力低下)
範囲 機能
*10% 10–120% 電圧低下保護のトリップポイントを設定します。必要に応じて設定します。
表 99: 5-12 - Underpower Delay (電力低下遅延)
範囲 機能
*1 s 0:00–1:00 (分:秒) ソフトスターターの電力低下に対する応答を遅らせ、瞬間的な変動によるトリップを回避します。
表 100: 5-13 - Overpower (過電力)
範囲 機能
*150% 80–200% 過電力保護のトリップポイントを設定します。必要に応じて設定します。
表 101: 5-14 - Overpower Delay (過電力遅延)
範囲 機能
* 1 s 0:00–1:00 (分:秒) ソフトスターターの過電力に対する応答を遅らせ、瞬間的な変動によるトリップを回避します。
表 102: 5-15 - Excess Start Time (延長スタート時間)
範囲 機能
*20 s 0:00–4:00
延長スタート時間は、ソフトスターターがモーターの始動を試みる最大時間です。
(分:秒)
モーターがプログラムされた制限内で実行モードに移行しない場合、ソフトスターターはトリップしま
す。
90 | Danfoss A/S © 2018.10
通常の正常なスタートに必要な時間よりもわずかに長く設定します。ゼロに設定すると、延長スタート
時間保護が無効になります。
AQ262141844215ja-000201 / 175R1174
Page 91

操作ガイド | VLT® Soft Starter MCD 600
表 103: 5-16- Restart Delay (再スタート遅延)
範囲 機能
*10 s 00:01–60:00 (分:秒)ソフトスターターは、停止終了と次のスタート開始との間に遅延を強制する設定ができます。
再スタート遅延時間中、ディスプレイは次のスタートが試行されるまでの残り時間を示します。
表 104: 5-17 - Starts per Hour (時間あたりのスタート数)
範囲 機能
*0 0–10 ソフトスターターが 60 分間に試行する最大スタート回数を設定します。ゼロに設定するとこの保護が無効に
なります。
表 105: 5-18 - Phase Sequence (相順)
オプション 機能
ソフトスターターがスタート時に許容する相順を選択します。プリスタート確認中に実際のシ
ーケンスが選択オプションと一致しない場合は、ソフトスターターがその入力端子とトリップ
における位相シーケンスを検証します。
Programmable Parameters(プログラマブ
ルパラメーター)
* Any Sequence(任意
のシーケンス)
Positive only(正の
み)
Negative Only(負の
み)
直流ブレーキを使用する場合、主電源はソフトスターター(入力端子 L1、L2、L3)に正
相順に接続する必要があります。
(正のみ)
に設定します。
注意
パラメーター
2-1 Phase Sequence
10.10 パラメーターグループ 6-** Protection Action(保護アクション)
表 106: 6-1 - Auto-Reset Count (自動リセットカウント)
範囲 機能
*0 0–5 トリップし続ける場合にソフトスターターが自動リセットする回数を設定します。
ソフトスターターが自動リセットされるたびにリセットカウンターが 1 ずつ増え、起動成功後にリセットされま
す。
このパラメーターをゼロに設定すると、自動リセットが無効になります。
(相順)
は Positive Only
表 107: 6-2 - Auto-Reset Delay (自動リセット遅延)
範囲 機能
*5 s 0:05–15:00 (分:秒) ソフトスターターがトリップを自動リセットするまでの遅延を設定します。
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 91
Page 92

操作ガイド | VLT® Soft Starter MCD 600
表 108: 6-3 - Current Imbalance (電流アンバランス)
オプション 機能
ソフトスターターの応答をそれぞれの保護に選択します。
保護イベントはすべて、イベントログに書き込まれます。
Programmable Parameters(プログラマブ
ルパラメーター)
* Soft Trip and Log(ソ
フトトリップ & ロ
グ)
Soft Trip and Reset
(ソフトトリップ &
リセット)
Trip Starter(トリッ
プスターター)
Trip and Reset(トリ
ップ & リセット)
Warn and Log(警告
&ログ)
Log Only(ログのみ) 保護がイベントログに書き込まれますが、ソフトスターターは動作を継続します。
表 109: 6-4 - Undercurrent (電流低下)
オプション 機能
* Soft Trip and Log(ソフトトリップ & ログ)
Soft Trip and Reset(ソフトトリップ & リセット)
Trip Starter(トリップスターター)
ソフトスターターは
Mode
(ストップモード)
フトスターターの再スタート前にトリップをリセットしてください。
ソフトスターターは
Mode
(ストップモード)
リップは自動リセット遅延後にリセットします。
ソフトスターターは電力を除去し、モーターはフリーランで停止します。ソフトスターターの再
スタート前にトリップをリセットしてください。
ソフトスターターは電力を除去し、モーターはフリーランで停止します。トリップは自動リセッ
ト遅延後にリセットします。
保護がイベントログに書き込まれ、ディスプレイが警告メッセージを表示しますが、ソフトスタ
ーターは動作を継続します。
パラメーター
で選択されたようにモーターを停止し、トリップ状態に入ります。ソ
パラメーター
で選択されたようにモーターを停止し、トリップ状態に入ります。ト
2-9 Stop Mode
2-9 Stop Mode
ソフトスターターの応答を保護イベントに選択します。
(ストップモード)
(ストップモード)
または
または
パラメーター
パラメーター
3-11 Stop
3-11 Stop
Trip and Reset(トリップ & リセット)
Warn and Log(警告 &ログ)
Log Only(ログのみ)
表 110: 6-5 - Overcurrent (過電流)
オプション 機能
* Soft Trip and Log(ソフトトリップ & ログ)
Soft Trip and Reset(ソフトトリップ & リセット)
Trip Starter(トリップスターター)
Trip and Reset(トリップ & リセット)
Warn and Log(警告 &ログ)
Log Only(ログのみ)
ソフトスターターの応答を保護イベントに選択します。
92 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 93

操作ガイド | VLT® Soft Starter MCD 600
表 111: 6-6 - Undervoltage (電圧低下)
オプション 機能
* Soft Trip and Log(ソフトトリップ & ログ)
Soft Trip and Reset(ソフトトリップ & リセット)
Trip Starter(トリップスターター)
Trip and Reset(トリップ & リセット)
Warn and Log(警告 &ログ)
Log Only(ログのみ)
表 112: 6-7 - Overvoltage (過電圧)
オプション 機能
* Soft Trip and Log(ソフトトリップ & ログ)
Programmable Parameters(プログラマブ
ルパラメーター)
ソフトスターターの応答を保護イベントに選択します。
ソフトスターターの応答を保護イベントに選択します。
Soft Trip and Reset(ソフトトリップ & リセット)
Trip Starter(トリップスターター)
Trip and Reset(トリップ & リセット)
Warn and Log(警告 &ログ)
Log Only(ログのみ)
表 113: 6-8 - Underpower (電力低下)
オプション 機能
Soft Trip and Log(ソフトトリップ & ログ)
Soft Trip and Reset(ソフトトリップ & リセット)
Trip Starter(トリップスターター)
Trip and Reset(トリップ & リセット)
Warn and Log(警告 &ログ)
* Log Only(ログのみ)
表 114: 6-9 - Overpower (過電力)
ソフトスターターの応答を保護イベントに選択します。
オプション 機能
Soft Trip and Log(ソフトトリップ & ログ)
Soft Trip and Reset(ソフトトリップ & リセット)
Trip Starter(トリップスターター)
Danfoss A/S © 2018.10
ソフトスターターの応答を保護イベントに選択します。
AQ262141844215ja-000201 / 175R1174| 93
Page 94

操作ガイド | VLT® Soft Starter MCD 600
オプション 機能
Trip and Reset(トリップ & リセット)
Warn and Log(警告 &ログ)
* Log Only(ログのみ)
表 115: 6-10 - Excess Start Time (延長スタート時間)
オプション 機能
* Soft Trip and Log(ソフトトリップ & ログ)
Soft Trip and Reset(ソフトトリップ & リセット)
Trip Starter(トリップスターター)
Trip and Reset(トリップ & リセット)
Warn and Log(警告 &ログ)
Log Only(ログのみ)
Programmable Parameters(プログラマブ
ルパラメーター)
ソフトスターターの応答を保護イベントに選択します。
表 116: 6-11 - Input A Trip (入力 A トリップ)
オプション 機能
* Soft Trip and Log(ソフトトリップ & ログ)
Soft Trip and Reset(ソフトトリップ & リセット)
Trip Starter(トリップスターター)
Trip and Reset(トリップ & リセット)
Warn and Log(警告 &ログ)
Log Only(ログのみ)
表 117: 6-12 - Input B Trip (入力 B トリップ)
オプション 機能
* Soft Trip and Log(ソフトトリップ & ログ)
Soft Trip and Reset(ソフトトリップ & リセット)
Trip Starter(トリップスターター)
Trip and Reset(トリップ & リセット)
ソフトスターターの応答を保護イベントに選択します。
ソフトスターターの応答を保護イベントに選択します。
Warn and Log(警告 &ログ)
Log Only(ログのみ)
94 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 95

操作ガイド | VLT® Soft Starter MCD 600
表 118: 6-13 - Network Communications (ネットワーク通信)
オプション 機能
* Soft Trip and Log(ソフトトリップ & ログ)
Soft Trip and Reset(ソフトトリップ & リセット)
Trip Starter(トリップスターター)
Trip and Reset(トリップ & リセット)
Warn and Log(警告 &ログ)
Log Only(ログのみ)
停止
表 119: 6-14 - Remote Keypad Fault (リモートキーパッド不具合)
Programmable Parameters(プログラマブ
ルパラメーター)
ソフトスターターの応答を保護イベントに選択します。
Stop
(停止)
行し、リセットなしで再スタートできます。
に設定すると、ソフトスターターはソフトストップを実
オプション 機能
* Soft Trip and Log(ソフトトリップ & ログ)
Soft Trip and Reset(ソフトトリップ & リセット)
Trip Starter(トリップスターター)
Trip and Reset(トリップ & リセット)
Warn and Log(警告 &ログ)
Log Only(ログのみ)
表 120: 6-15 - Frequency (周波数)
オプション 機能
* Soft Trip and Log(ソフトトリップ & ログ)
Soft Trip and Reset(ソフトトリップ & リセット)
Trip Starter(トリップスターター)
Trip and Reset(トリップ & リセット)
Warn and Log(警告 &ログ)
ソフトスターターの応答を保護イベントに選択します。
ソフトスターターの応答を保護イベントに選択します。
Log Only(ログのみ)
表 121: 6-16 - Phase Sequence (相順)
オプション 機能
Danfoss A/S © 2018.10
ソフトスターターの応答を保護イベントに選択します。
AQ262141844215ja-000201 / 175R1174| 95
Page 96

操作ガイド | VLT® Soft Starter MCD 600
オプション 機能
* Soft Trip and Log(ソフトトリップ & ログ)
Soft Trip and Reset(ソフトトリップ & リセット)
Trip Starter(トリップスターター)
Trip and Reset(トリップ & リセット)
Warn and Log(警告 &ログ)
Log Only(ログのみ)
表 122: 6-17 - Motor Overtemperature (モーター過温度)
オプション 機能
* Soft Trip and Log(ソフトトリップ & ログ)
Soft Trip and Reset(ソフトトリップ & リセット)
Trip Starter(トリップスターター)
Programmable Parameters
(プログラマブ
ルパラメーター)
ソフトスターターの応答を保護イベントに選択します。
Trip and Reset(トリップ & リセット)
Warn and Log(警告 &ログ)
Log Only(ログのみ)
表 123: 6R - Motor Thermistor Circuit (モーター・サーミスター回路)
オプション 機能
* Soft Trip and Log(ソフトトリップ & ログ)
Soft Trip and Reset(ソフトトリップ & リセット)
Trip Starter(トリップスターター)
Trip and Reset(トリップ & リセット)
Warn and Log(警告 &ログ)
Log Only(ログのみ)
表 124: 6-19 - Shorted SCR Action (短絡 SCR アクション)
オプション 機能
ソフトスターターが単相で損傷した場合、ソフトスターターが PowerThrough の動作を許可するかどう
かを選択します。ソフトスターターはニ相制御を使用し、必要不可欠なアプリケーションでモーターの
動作を継続させます。
ソフトスターターの応答を保護イベントに選択します。
* 三相制御のみ
出力維持
PowerThrough 動作に関する詳細は、 9.4 出力維持を参照してください。
96 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
Page 97

操作ガイド | VLT® Soft Starter MCD 600
表 125: 6-20 - Battery/Clock (バッテリー/クロック)
オプション 機能
ソフトスターターの応答を保護イベントに選択します。
* Soft Trip and Log(ソフトトリップ & ログ)
Soft Trip and Reset(ソフトトリップ & リセット)
Trip Starter(トリップスターター)
Trip and Reset(トリップ & リセット)
Warn and Log(警告 &ログ)
Log Only(ログのみ)
10.11 パラメーターグループ 7-** Inputs(入力)
表 126: 7-1 - Input A Function(入力 A 機能)
オプション 機能
Programmable Parameters(プログラマブ
ルパラメーター)
Input A(入力 A)機能を選択します。
Command Override: Network (コ
マンドオーバーライド:ネット
ワーク)
Command Override: Digital (コ
マンドオーバーライド: デジタ
ル)
Command Override: Keypad (コ
マンドオーバーライド:キーパ
ッド)
* Input Trip (N/O)(入力トリップ
(N/O))
Input Trip (N/O)(入力トリップ
(N/O))
Emergency Mode(緊急モード) DI-A, COM+を横断する閉回路は、緊急モードを有効にします。ソフトスターターがス
Jog Forward(順方向にジョグ) 順方向のジョグ動作を有効にします。
Jog Reverse(逆方向にジョグ) 逆方向のジョグ動作を有効にします。
Zero Speed Sensor(ゼロ速度セ
ンサー)
パラメーター
ースを通信ネットワークに設定します。
パラメーター
ースをデジタル入力に設定します。
パラメーター
ースをリモート LCP に設定します。
DI-A, COM+を横断する閉回路は、ソフトスターターをトリップします。
DI-A, COM+を横断する開回路は、ソフトスターターをトリップします。
タートコマンドを受信すると、停止コマンドを受信するまですべてのトリップと警告
を無視して、動作を続行します。
DI-A, COM+を横断する開回路は、モーターが停止状態に達したことをソフトスタータ
ーに示します。ソフトスターターは、通常開いているゼロ速度センサーを必要としま
す。
1-1 Command Source
1-1 Command Source
1-1 Command Source
(コマンドソース)
(コマンドソース)
(コマンドソース)
の設定を無効にし、コマンドソ
の設定を無効にし、コマンドソ
の設定を無効にし、コマンドソ
Motor Set Select(モーターセッ
ト選択)
Reverse Direction(逆方向) DI-A, COM+を横断する閉回路は、次のスタートで相順を逆にするようソフトスタータ
Pump Clean(ポンプ洗浄) ポンプ洗浄機能を有効にします。
Danfoss A/S © 2018.10
DI-A, COM+を横断する閉回路は、次のスタート/ストップサイクルに二次モーター構
成を使用するようソフトスターターに指示します。
ーに指示します。
AQ262141844215ja-000201 / 175R1174| 97
Page 98

操作ガイド | VLT® Soft Starter MCD 600
表 127: 7-2 - Input A Trip (入力 A トリップ)
Programmable Parameters(プログラマブ
ルパラメーター)
オプション 機能
入力トリップが発生する時間を選択します。
Always Active(常に有効) ソフトスターターが電力を供給されたときは、常にトリップが発生する可能性があります。
* Operating Only(動作のみ)ソフトスターターが動作中、停止中、スタート中、トリップが発生する可能性があります。
Run Only(実行のみ) ソフトスターターが実行中にトリップが発生する可能性があります。
表 128: 7-3 - Input A Trip Delay (入力 A トリップ遅延)
範囲 機能
*0 s 0:00–4:00 (分:秒) 入力の有効化とソフトスタータートリップとの間の遅延を設定します。
表 129: 7-4 - Input A Initial Delay (入力 A 初期遅延)
範囲 機能
* 0 s 00:00–30:00 (分:秒) 入力トリップ発生前の遅延を設定します。
初期遅延は、スタート信号を受信した時間からカウントされます。
入力状態は、初期遅延が経過するまで無視されます。
表 130: 7-5 - Input B Function(入力 B 機能)
オプション 機能
Input B(入力 B) の機能を選択します。詳細は
(入力
A
機能)
を参照してください。
* Input Trip (N/O)(入力トリップ (N/O))
Input Trip (N/O)(入力トリップ (N/O))
Emergency Mode(緊急モード)
Jog Forward(順方向にジョグ)
Jog Reverse(逆方向にジョグ)
Zero Speed Sensor(ゼロ速度センサー)
Motor Set Select(モーターセット選択)
Reverse Direction(逆方向)
Pump Clean(ポンプ洗浄)
パラメーター
7-1 Input A Function
表 131: 7-6 - Input B Trip (入力 B トリップ)
オプション 機能
Always Active(常に有効)
* Operating Only(動作のみ)
98 | Danfoss A/S © 2018.10
入力トリップが発生する時間を選択します。
AQ262141844215ja-000201 / 175R1174
Page 99

操作ガイド | VLT® Soft Starter MCD 600
オプション 機能
Run Only(実行のみ)
表 132: 7-7 - Input B Trip Delay (入力 B トリップ遅延)
範囲 機能
* 0 s 0:00–4:00 (分:秒) 入力の有効化とソフトスタータートリップとの間の遅延を設定します。
表 133: 7-8 - Input B Initial Delay (入力 B 初期遅延)
範囲 機能
* 0 s 00:00–30:00 (分:秒) 入力トリップ発生前の遅延を設定します。
初期遅延は、スタート信号を受信した時間からカウントされます。
入力状態は、初期遅延が経過するまで無視されます。
表 134: 7-9 - Reset/Enable Logic (リセット/ロジック有効化)
Programmable Parameters(プログラマブ
ルパラメーター)
オプション 機能
リセット入力 (RESET, COM+) を、通常開くか、通常閉じるか選択します。
* Normally Closed(通常は閉)
Normally Open(通常は開)
リセット入力が有効な場合は、ソフトスターターが動作しません。
表 135: 7-10 - Input A Name (入力 A 名)
オプション 機能
* Input A Trip(入力 A トリップ)
Low Pressure (低圧)
High Pressure(高圧)
Pump Fault(ポンプ故障)
Low Level(低レベル)
High Level(高レベル)
注意
入力 A が有効であるときに LCP が表示するメッセージを選択します。
カスタムメッセージは、USB ポート経由で読み込みできます。
No Flow(無流量)
Starter Disable(スターター無効)
Controller(コントローラー)
PLC(PLC)
Vibration Alarm(振動アラーム)
Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174| 99
Page 100

操作ガイド | VLT® Soft Starter MCD 600
オプション 機能
Field Trip(フィールドトリップ)
Interlock Trip(インターロックトリップ)
Motor Temp(モーター温度)
Motor Prot(モーター保護)
Feeder Prot(フィーダー保護)
Custom Message(カスタムメッセージ)
表 136: 7-11 - Input B Name (入力 B 名)
オプション 機能
* Input B Trip(入力 B トリップ)
Low Pressure(低圧)
High Pressure(高圧)
Programmable Parameters(プログラマブ
ルパラメーター)
入力 B 有効であるときに LCP が表示するメッセージを選択します。
Pump Fault(ポンプ故障)
Low Level(低レベル)
High Level(高レベル)
No Flow(無流量)
Starter Disable(スターター無効)
Controller(コントローラー)
PLC(PLC)
Vibration Alarm(振動アラーム)
Field Trip(フィールドトリップ)
Interlock Trip(インターロックトリップ)
Motor Temp(モーター温度)
Motor Prot(モーター保護)
Feeder Prot(フィーダー保護)
Custom Message(カスタムメッセージ)
10.12 パラメーターグループ 8-** Relay Outputs(リレー出力)
表 137: 8-1 - Relay A Function(リレー A 機能)
オプション 機能
Relay A(リレー A) の機能を選択します。
リレー A は切り替えリレーです。
Off(オフ) リレー A は使用されません。
100 | Danfoss A/S © 2018.10
AQ262141844215ja-000201 / 175R1174
 Loading...
Loading...