

Page 1

Instrukcja obsługi
VLT® Soft Starter MCD 600
Page 2

Page 3
Instrukcja obsługi | VLT® Soft Starter MCD 600
Spis treści
Spis treści
1 Wprowadzenie 8
1.1 Opis produktu 8
1.2 Wersja dokumentu 8
1.3 Materiały dodatkowe 8
1.4 Zatwierdzenia i certyfikaty 8
2 Bezpieczeństwo 9
2.1 Symbole bezpieczeństwa 9
2.2 Wykwalifikowany personel 9
2.3 Środki ostrożności 9
3 Konstrukcja systemu 12
3.1 Lista funkcji 12
3.2 Kod typu 13
3.3 Wybór rozmiaru softstartera 14
3.4 Wartości znamionowe prądu (wartości znamionowe IEC) 14
3.5 Wymiary i ciężar 16
3.6 Odstępy montażowe/dla zapewnienia chłodzenia 17
3.7 Akcesoria 17
3.7.1 Karty rozszerzeń 17
3.7.1.1 Karta inteligentna 17
3.7.1.2 Karty rozszerzeń komunikacji 18
3.7.2 Zdalny panel LCP 601 18
3.7.3 Zestaw zabezpieczający przed dotknięciem 18
3.7.4 Oprogramowanie do zarządzania softstarterem 18
3.8 Główny stycznik 19
3.9 Wyłącznik 19
3.10 Korekcja współczynnika mocy 19
3.11 Urządzenia zabezpieczające przed zwarciem 20
3.11.1 Koordynacja typu 1 20
3.11.2 Koordynacja typu 2 20
3.12 Koordynacja IEC z urządzeniami zabezpieczającymi przed zwarciem 21
3.13 Koordynacja UL z urządzeniami zabezpieczającymi przed zwarciem 21
3.13.1 Standardowe wartości znamionowe prądu zwarciowego 21
3.13.2 Wysokie wartości znamionowe prądu zwarciowego 23
3.14 Wybór bezpieczników dla koordynacji typu 2 24
4 Dane techniczne 26
4.1 Zasilanie 26
4.2 Wytrzymałość zwarciowa 26
AQ262141844215pl-000201 / | 3Danfoss A/S © 2018.10
Page 4
Instrukcja obsługi | VLT® Soft Starter MCD 600
4.3 Kompatybilność elektromagnetyczna (zgodnie z dyrektywą 2014/35/UE) 26
4.4 Wejścia 26
4.5 Wyjścia 26
4.6 Środowisko 27
4.7 Rozpraszanie ciepła 27
4.8 Zabezpieczenie silnika przed przeciążeniem 27
4.9 Certyfikat 27
4.10 Okres eksploatacji (styczniki wewnętrznego obejścia) 27
Spis treści
5 Instalacja 28
5.1 Instrukcje bezpieczeństwa 28
5.2 Źródło polecenia 28
5.3 Konfigurowanie softstartera 29
5.4 Wejścia 29
5.4.1 Zaciski wejściowe 30
5.4.2 Termistor silnika 30
5.4.3 Start/Stop 31
5.4.4 Reset/dezaktywacja softstartera 31
5.4.5 Wejścia programowalne 31
5.4.6 Port USB 32
5.5 Wyjścia 32
5.5.1 Zaciski wyjściowe 32
5.5.2 Wyjście analogowe 32
5.5.3 Wyjście głównego stycznika 32
5.5.4 Wyjścia programowalne 33
5.6 Napięcie sterowania 33
5.6.1 Zaciski napięcia sterowania 33
5.6.2 Instalacja zgodna z normą UL 34
5.7 Zaciski zasilania 34
5.7.1 Zaciski okablowania 35
5.7.2 Podłączenie silnika 35
5.7.2.1 Instalacja w linii 36
5.7.2.2 Instalacja wewnątrz trójkąta 37
5.8 Typowa instalacja 37
5.9 Konfiguracja skrócona 39
6 Narzędzia zestawu parametrów 41
6.1 Wprowadzenie 41
6.2 Ustawianie daty i godziny 41
6.3 Źródło polecenia 41
6.4 Uruchomienie 41
6.5 Symulacja przebiegu 41
AQ262141844215pl-000201 /4 | Danfoss A/S © 2018.10
Page 5
Instrukcja obsługi | VLT® Soft Starter MCD 600
6.6 Ładowanie/zapisywanie ustawień 42
6.7 Zapis i ładowanie przez USB 43
6.7.1 Procedura zapisu i ładowania 44
6.7.2 Lokalizacje i formaty plików 44
6.8 Automatyczny rozruch/zatrzymanie 45
6.9 Adres sieciowy 45
6.9.1 Ustawianie adresu sieciowego 46
6.10 Stan We/Wy cyfrowych 46
6.11 Stan We/Wy analogowych 47
6.12 Numer seryjny i wartość znamionowa 48
6.13 Wersje oprogramowania 48
6.14 Reset termistora 48
6.15 Resetowanie modelu termicznego 48
Spis treści
7 Rejestry 50
7.1 Wprowadzenie 50
7.2 Rejestr zdarzeń 50
7.3 Liczniki 50
7.3.1 Wyświetlanie liczników 50
8 Panel LCP i sprzężenie zwrotne 51
8.1 Lokalny panel LCP i sprzężenie zwrotne 51
8.2 Zdalny panel LCP 51
8.3 Regulowanie kontrastu wyświetlacza 53
8.4 Lampki sygnalizacyjne softstartera 53
8.5 Wyświetlacze 54
8.5.1 Informacje o softstarterze 54
8.5.2 Konfigurowalne ekrany sprzężenia zwrotnego 54
8.5.3 Ekrany sprzężenia zwrotnego podczas pracy 55
8.5.4 Wykres wydajności 55
9 Praca 57
9.1 Polecenia Start, Stop i Reset 57
9.2 Kasowanie polecenia 57
9.3 Automatyczny rozruch/zatrzymanie 57
9.3.1 Tryb zegara 57
9.3.2 Tryb czasomierza 58
9.4 PowerThrough 58
9.5 Tryb awaryjny 58
9.6 Dodatkowe wyłączenie awaryjne 59
9.7 Typowe metody sterowania 59
9.8 Metody płynnego rozruchu 61
9.8.1 Stała wartość prądu 61
AQ262141844215pl-000201 / | 5Danfoss A/S © 2018.10
Page 6
Instrukcja obsługi | VLT® Soft Starter MCD 600
9.8.2 Stała wartość prądu z narastaniem prądu 62
9.8.3 Sterowanie adaptacyjne dla rozruchu 63
9.8.3.1 Dostrajanie sterowania adaptacyjnego 64
9.8.4 Stała wartość prądu z rozruchem ze zwiększonym momentem 64
9.9 Metody zatrzymania 65
9.9.1 Zatrzymanie z wybiegiem 65
9.9.2 Zsynchronizowane zmniejszanie napięcia 65
9.9.3 Sterowanie adaptacyjne dla zatrzymania 66
9.9.4 Hamowanie DC 67
9.9.5 Hamowanie DC z zewnętrznym czujnikiem prędkości zerowej 69
9.9.6 Płynne hamowanie 69
9.10 Pump Clean (Czyszczenie pompy) 70
9.11 Praca w kierunku wstecznym 71
9.12 Jog — praca manewrowa 73
9.13 Praca wewnątrz trójkąta 74
9.14 Drugorzędne ustawienia silnika 74
Spis treści
10 Programowalne parametry 76
10.1 Main Menu 76
10.2 Zmiana wartości parametrów 76
10.3 Blokada regulacji 76
10.4 Lista parametrów 76
10.5 Grupa parametrów 1-** Motor Details (Szczegóły silnika) 84
10.6 Grupa parametrów 2-** Motor Start/Stop (Rozruch/zatrzymanie silnika) 86
10.7 Grupa parametrów 3-** Motor Start/Stop-2 (Rozruch/zatrzymanie silnika-2) 89
10.8 Grupa parametrów 4-** Auto-Start/Stop (Automatyczny rozruch/zatrzymanie) 93
10.9 Grupa parametrów 5-** Protection Levels (Poziomy ochrony) 96
10.10 Grupa parametrów 6-** Protection Action (Działanie ochrony) 99
10.11 Grupa parametrów 7-** Inputs (Wejścia) 105
10.12 Grupa parametrów 8-** Relay Outputs (Wyjścia przekaźnikowe) 108
10.13 Grupa parametrów 9-** Analog Output (Wyjście analogowe) 110
10.14 Grupa parametrów 10-** Display (Wyświetlacz) 111
10.15 Grupa parametrów 11-** Pump Clean (Czyszczenie pompy) 114
10.16 Grupa parametrów 12-** Communication Card (Karta komunikacji) 115
10.17 Grupa parametrów 20-** Advanced (Zaawansowane) 119
10.18 Grupa parametrów 30-** Pump Input Configuration (Konfiguracja wejścia pompy) 120
10.19 Grupa parametrów 31-** Flow Protection (Zabezpieczenie przepływu) 122
10.20 Grupa parametrów 32-** Pressure Protection (Zabezpieczenie ciśnieniowe) 123
10.21 Grupa parametrów 33-** Pressure Control (Regulacja ciśnienia) 124
10.22 Grupa parametrów 34-** Depth Protection (Zabezpieczenie głębokościowe) 125
10.23 Grupa parametrów 35-** Thermal Protection (Zabezpieczenie termiczne) 125
10.24 Grupa parametrów 36-** Pump Trip Action (Działanie wyłączenia awaryjnego pompy) 126
AQ262141844215pl-000201 /6 | Danfoss A/S © 2018.10
Page 7
Instrukcja obsługi | VLT® Soft Starter MCD 600
Spis treści
11 Przykłady aplikacji 130
11.1 Karta inteligentna — sterowanie pompą i ochrona pompy 130
11.2 Karta inteligentna — aktywacja pompy sterowana poziomem 131
12 Wykrywanie i usuwanie usterek 134
12.1 Reakcje zabezpieczeń 134
12.2 Komunikaty wyłączenia awaryjnego 134
12.3 Ogólne błędy 148
13 Załącznik 151
13.1 Symbole i skróty 151
AQ262141844215pl-000201 / | 7Danfoss A/S © 2018.10
Page 8
Instrukcja obsługi | VLT® Soft Starter MCD 600
Wprowadzenie
1 Wprowadzenie
1.1 Opis produktu
VLT® Soft Starter MCD 600 to zaawansowane cyfrowe rozwiązanie do płynnego uruchamiania silników od 11 kW do 315 kW. Oferuje on
pełen zakres funkcji ochronnych dla silnika oraz układu i został zaprojektowany z myślą o niezawodnym działaniu w najbardziej
wymagających typach instalacji.
1.2 Wersja dokumentu
Niniejsza instrukcja jest regularnie przeglądana i aktualizowana. Wszelkie sugestie dotyczące ulepszania jej są mile widziane.
Tabela 1: Wersja dokumentu
Wersja Uwagi
AQ262141844215 Rozszerzono zakres modelu. Zmieniono numery parametrów.
1.3 Materiały dodatkowe
Dostępne są dodatkowe materiały opisujące zaawansowane funkcje i procedury programowania .
• Instrukcje obsługi do pracy ze sprzętem opcjonalnym.
• Podręczniki instalacji na potrzeby instalowania różnych akcesoriów.
• Narzędzie do projektowania WinStart, ułatwiające wybór odpowiedniego softstartera dla aplikacji.
Uzupełniające publikacje i podręczniki są dostępne na stronie www.danfoss.com/en/search/?filter=type%3Adocumentation.
1.4 Zatwierdzenia i certyfikaty
8 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 9
Instrukcja obsługi | VLT® Soft Starter MCD 600
Bezpieczeństwo
2 Bezpieczeństwo
2.1 Symbole bezpieczeństwa
W niniejszej instrukcji używane są następujące symbole:
NIEB EZ PI EC ZE ńS TW O
Oznacza niebezpieczną sytuację, która, jeśli się do niej dopuści, może skutkować śmiercią lub poważnymi obrażeniami.
OS TR ZE żE NI E
Oznacza niebezpieczną sytuację, która, jeśli się do niej dopuści, może skutkować śmiercią lub poważnymi obrażeniami.
OS TR ZE żE NI E
Oznacza niebezpieczną sytuację, która, jeśli się do niej dopuści, może skutkować niewielkimi lub umiarkowanymi obrażeniami.
UW AG A
Oznacza komunikat dotyczący uszkodzenia mienia.
2.2 Wykwalifikowany personel
Bezproblemowa i bezpieczna praca softstartera wymaga właściwego i niezawodnego transportu, magazynowania, instalacji, obsługi
oraz konserwacji. Tylko wykwalifikowany personel może instalować lub obsługiwać ten sprzęt.
Wykwalifikowany personel to przeszkolona obsługa upoważniona do instalacji, uruchomienia, a także do konserwacji sprzętu,
systemów i obwodów zgodnie ze stosownymi przepisami prawa. Ponadto wykwalifikowany personel musi znać instrukcje i środki
bezpieczeństwa opisane w niniejszej instrukcji.
2.3 Środki ostrożności
Środki ostrożności nie mogą objąć każdego potencjalnego uszkodzenia sprzętu, ale można uwzględnić typowe przyczyny uszkodzeń.
Instalator odpowiada za:
• Przeczytanie i rozumienie wszystkich instrukcji w niniejszej publikacji przed przystąpieniem do montażu, obsługi lub konserwacji
sprzętu.
• Przestrzeganie dobrych praktyk elektrycznych, w tym stosowanie odpowiedniego sprzętu BHP.
• Należy zasięgnąć porady przed rozpoczęciem eksploatacji tego sprzętu w sposób inny niż opisany w niniejszej instrukcji.
UW AG A
Softstarter VLT® Soft Starter MCD 600 nie może być serwisowany przez użytkownika. Jednostka może być serwisowana
wyłącznie przez autoryzowany personel serwisowy. Nieautoryzowane manipulowanie przy urządzeniu przez osoby
niepowołane unieważnia gwarancję na produkt.
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 9
Page 10
Instrukcja obsługi | VLT® Soft Starter MCD 600
Bezpieczeństwo
OS TR ZE żE NI E
ODPOWIEDNIE UZIEMIENIE
Do obowiązków instalatora softstartera należy zapewnienie odpowiedniego uziemienia oraz zabezpieczenia obwodów
odgałęzionych zgodnie z lokalnymi przepisami bezpieczeństwa dotyczącymi urządzeń elektrycznych. Niezapewnienie
odpowiedniego uziemienia oraz zabezpieczenia obwodów odgałęzionych może doprowadzić do śmierci lub poważnych
obrażeń i uszkodzenia sprzętu.
Odłączyć softstarter od napięcia zasilania przed wykonywaniem napraw.
-
OS TR ZE żE NI E
PRZYPADKOWY ROZRUCH
Jeśli softstarter jest podłączony do zasilania AC, zasilania DC lub podziału obciążenia, silnik może zostać uruchomiony w każdej
chwili. Przypadkowy rozruch podczas programowania, prac serwisowych lub naprawy może doprowadzić do śmierci,
poważnych obrażeń ciała lub uszkodzenia mienia. Silnik może zostać uruchomiony za pomocą przełącznika zewnętrznego,
polecenia przesłanego przez magistralę komunikacyjną, wejściowego sygnału wartości zadanej z LCP lub poprzez usunięcie
błędu.
Przed programowaniem parametrów nacisnąć przycisk [Off/Reset] na LCP.
-
Odłączyć softstarter od zasilania.
-
Przed podłączeniem softstartera do zasilania AC, zasilania DC lub podziału obciążenia należy w pełni oprzewodować i
-
zmontować softstarter, silnik oraz każdy napędzany sprzęt.
Zasilanie do softstartera należy zainstalować z odłącznikiem i wyłącznikiem (na przykład stycznikiem zasilania) sterowanym
-
za pomocą zewnętrznego układu bezpieczeństwa (na przykład zatrzymanie awaryjne lub wskaźnik błędów).
OS TR ZE żE NI E
KOREKCJA WSPÓŁCZYNNIKA MOCY
Podłączenie kondensatorów korekcji współczynnika mocy do strony wyjściowej spowoduje uszkodzenie softstartera.
Nie należy podłączać kondensatorów do korekcji współczynnika mocy do wyjścia softstartera. Jeśli używana jest
-
indywidualna korekcja współczynnika mocy, należy wykonać podłączenie po stronie zasilania softstartera.
OS TR ZE żE NI E
ZWARCIE
Softstarter VLT® Soft Starter MCD 600 nie jest odporny na zwarcia.
Po poważnym przeciążeniu lub zwarciu działanie softstartera MCD 600 powinno zostać w pełni przetestowane przez
-
autoryzowanego serwisanta.
OS TR ZE żE NI E
USZKODZENIE MECHANICZNE SPOWODOWANE NIEOCZEKIWANYM PONOWNYM URUCHOMIENIEM
Silnik może uruchomić się ponownie po usunięciu przyczyny nieplanowanego wyłączenia, co może być niebezpieczne dla
niektórych maszyn lub instalacji.
Należy się upewnić, że podjęto odpowiednie działania zabezpieczające przed ponownym uruchomieniem po
-
nieplanowanym zatrzymaniu silnika.
10 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 11
Instrukcja obsługi | VLT® Soft Starter MCD 600
Bezpieczeństwo
OS TR ZE żE NI E
BEZPIECZEŃSTWO PERSONELU
Softstarter nie jest urządzeniem zabezpieczającym i nie służy do odłączania obwodów elektrycznych ani odcinania instalacji od
zasilania.
Jeżeli instalacja wymaga urządzenia odcinającego, softstarter należy zainstalować z głównym stycznikiem.
-
Funkcje włączenia i wyłączenia (start i stop) softstartera nie zapewniają bezpieczeństwa personelu. Błędy występujące w
-
sieci zasilającej, podłączeniu silnika lub elektronice softstartera mogą spowodować rozruch lub zatrzymanie silnika.
Jeśli wystąpią błędy elektroniki softstartera, może nastąpić rozruch zatrzymanego silnika. Rozruch zatrzymanego silnika
-
może też spowodować tymczasowy błąd zasilania lub utrata podłączenia silnika.
Aby zagwarantować bezpieczeństwo urządzeń i personelu, urządzenie odcinające powinno być sterowane za pomocą
-
zewnętrznego (niezależnego) systemu bezpieczeństwa.
UW AG A
Przed zmianą jakichkolwiek ustawień parametrów należy zapisać bieżący zestaw parametrów w pliku przy użyciu
-
oprogramowania MCD na komputer PC lub funkcji Zapisz zestaw użytkownika.
UW AG A
Funkcji automatycznego rozruchu należy używać z rozwagą. Przeczytać wszystkie uwagi dotyczące funkcji automatycznego
-
rozruchu przed pracą.
Zrzeczenie odpowiedzialności
Przykłady i schematy w niniejszej instrukcji są podane jedynie w celach orientacyjnych. Informacje zawarte w niniejszej instrukcji mogą
podlegać zmianom w dowolnej chwili i bez wcześniejszego powiadomienia. W żadnym przypadku nie ponosi się odpowiedzialności za
uszkodzenia wynikające bezpośrednio, pośrednio lub będące konsekwencją używania lub stosowania opisanego sprzętu.
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 11
Page 12

Instrukcja obsługi | VLT® Soft Starter MCD 600
3 Konstrukcja systemu
3.1 Lista funkcji
Uproszczony proces konfiguracji
• Profile konfiguracji dla typowych aplikacji.
• Wbudowane systemy pomiarowe oraz wejścia/wyjścia.
Zrozumiały interfejs
• Wielojęzyczne menu i wyświetlacze.
• Opisowe nazwy opcji i komunikaty sprzężenia zwrotnego.
• Wykresy wydajności w czasie rzeczywistym.
Wsparcie efektywności energetycznej
• Zgodność z klasą IE3.
• Sprawność energetyczna 99% podczas pracy.
• Wewnętrzne obejście
• Technologia płynnego uruchamiania zapobiega zniekształceniom harmonicznymi.
Konstrukcja systemu
Szeroki wybór modeli
• 20–579 A (dane znamionowe).
• 200–525 V AC
• 380–690 V AC.
• Instalacja wewnątrz trójkąta
Wiele opcji wejść i wyjść
• Wejścia sterowania zdalnego (2 stałe, 2 programowalne).
• Wyjścia przekaźnikowe (1 stałe, 2 programowalne).
• Wyjście analogowe.
Wszechstronne opcje rozruchu i zatrzymywania
• Zaplanowany start/stop.
• Sterowanie adaptacyjne.
• Stała wartość prądu.
• Narastanie prądu.
• Czyszczenie pompy.
• Płynne zatrzymanie z zsynchronizowanym zmniejszaniem napięcia.
• Zatrzymanie z wybiegiem silnika.
• Hamowanie DC.
• Płynne hamowanie.
• Praca w kierunku przeciwnym.
12 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 13
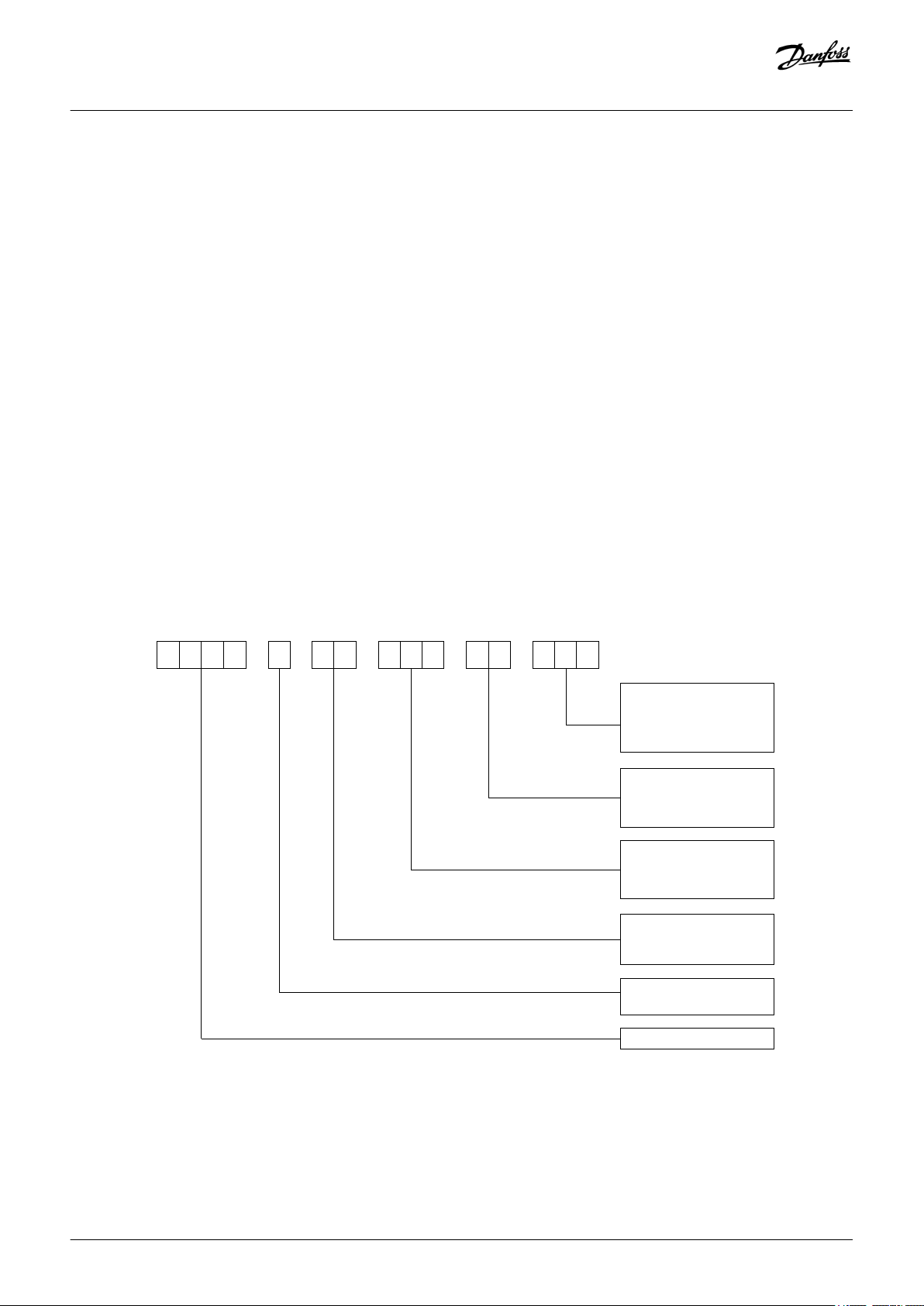
0 014
B T 5
Napięcie sterowania
CV1 = 24 V AC/V DC
CV2 = 110~120 V AC lub
220~240 V AC
Ochrona
00 = IP00 (otwarta obudowa)
20 = IP20 (zabudowane)
Rozmiar obudowy
S1X = Rozmiar obudowy 1
S2X = rozmiar obudowy 2
Napięcie zasilania
T5 = 200~525 V AC
T7 = 380~690 V AC
Obejście
B = Wewnętrzne obejście
Wartość znamionowa prądu
e77ha788.10
MCD6-
–– – –
Instrukcja obsługi | VLT® Soft Starter MCD 600
Dostosowywalne zabezpieczenia
• Przeciążenie silnika.
• Nadmierny czas rozruchu.
• Zbyt niski prąd/przetężenie.
• Zbyt mała moc/zbyt duża moc.
• Niezrównoważenie prądu.
• Wyłączenie awaryjne z wejścia.
• Termistor silnika.
Opcjonalne funkcje dla zaawansowanych aplikacji
• Karty inteligentne.
• Opcje komunikacji:
- DeviceNet.
- EtherNet/IP
- Modbus RTU.
- Modbus TCP.
- PROFIBUS.
- PROFINET
Konstrukcja systemu
3.2 Kod typu
Ilustracja 1: Ciąg kodu typu
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 13
Page 14
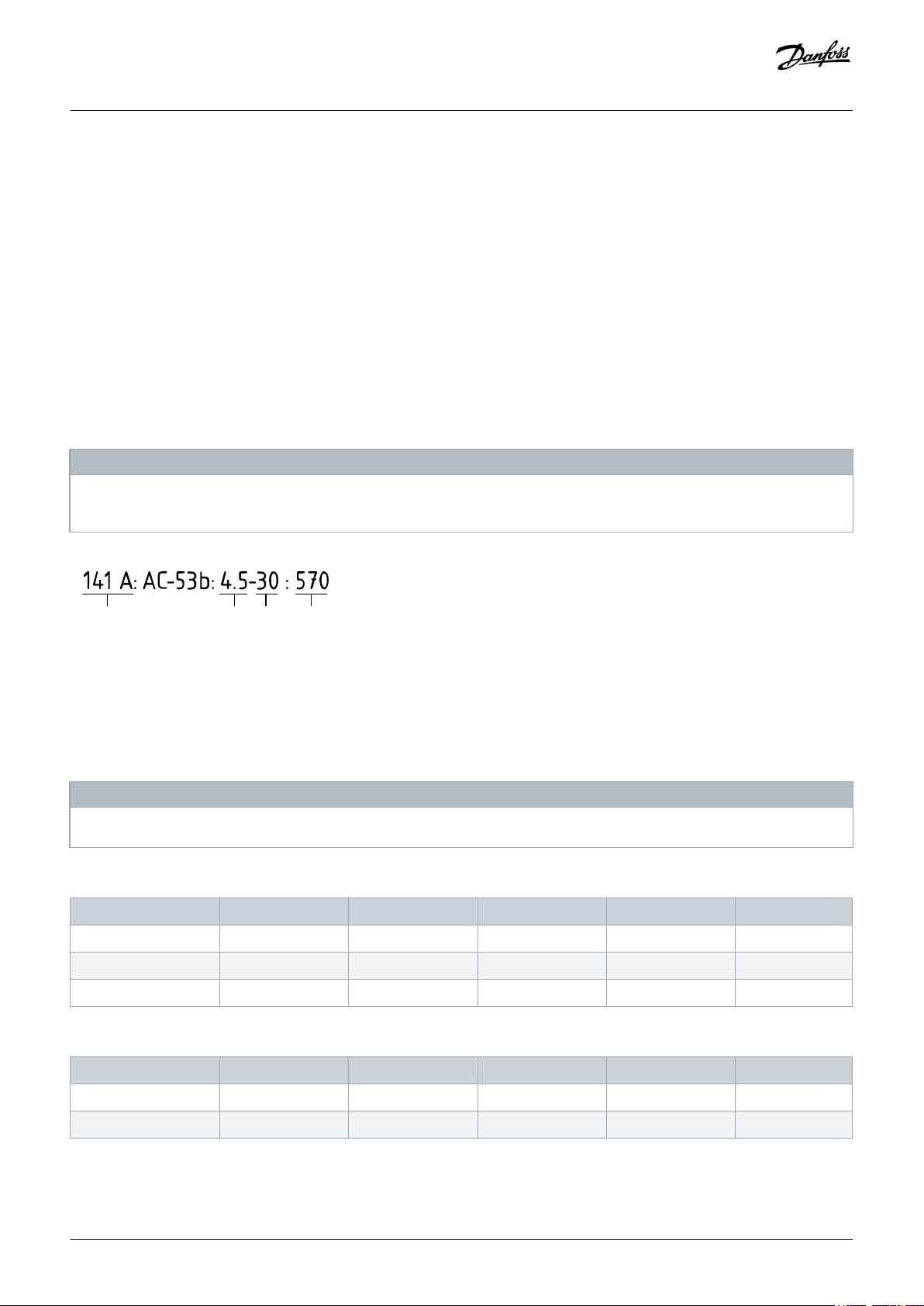
e77ha281.12
Prąd znamionowy startera
Prąd rozruchu
(wielokrotność FLC)
Czas rozruchu (sekundy)
Czas wyłączenia (sekundy)
Instrukcja obsługi | VLT® Soft Starter MCD 600
Konstrukcja systemu
3.3 Wybór rozmiaru softstartera
Rozmiar softstartera musi być dopasowany do silnika i aplikacji.
Należy wybrać softstarter o wartości znamionowej prądu co najmniej równej wartości znamionowej prądu pełnego obciążenia silnika
(zobacz tabliczkę znamionową silnika) przy obciążeniu rozruchowym.
Wartość znamionowa prądu softstartera określa maksymalny rozmiar silnika, z którym może być on używany. Typ softstartera zależy od
liczby rozruchów na godzinę, długości i poziomu prądu rozruchu oraz ilości czasu, przez jaki softstarter jest wyłączony (nie przepływa
przez niego prąd) między rozruchami.
Wartość znamionowa prądu softstartera obowiązuje tylko w przypadku użytkowania w warunkach określonych w kodzie AC53b.
Softstarter może mieć wyższą lub niższą wartość znamionową prądu w różnych warunkach pracy.
3.4 Wartości znamionowe prądu (wartości znamionowe IEC)
UW AG A
Aby uzyskać informacje o wartościach znamionowych w warunkach pracy nieuwzględnionych w poniższych tabelach wartości
znamionowych, należy skontaktować się z lokalnym dostawcą.
Ilustracja 2: Format AC53b
UW AG A
Wszystkie wartości znamionowe są wyliczone dla wysokości 1000 m (3280 stóp) n.p.m. i temperatury otoczenia 40°C (104°F).
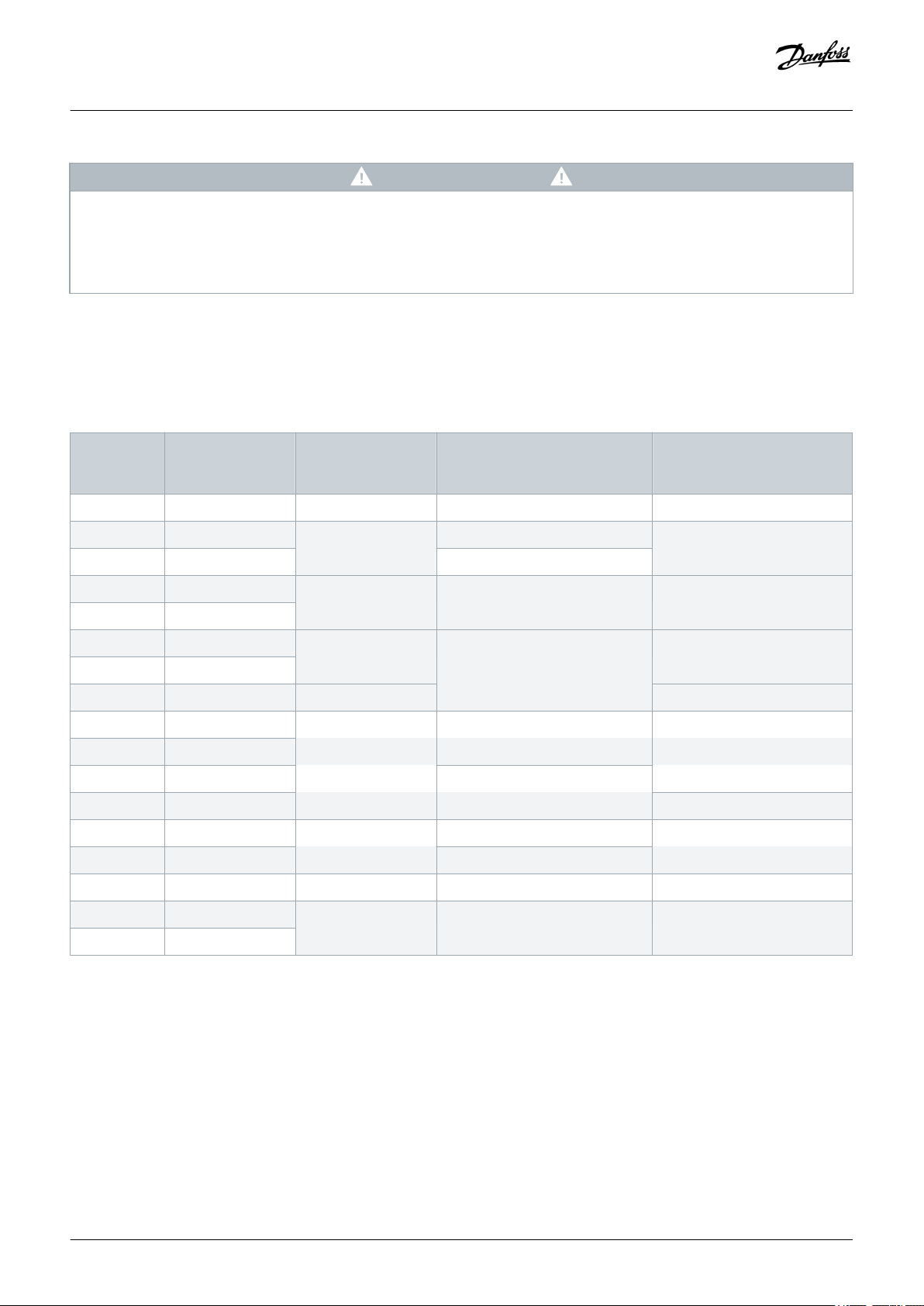
Tabela 2: Instalacja w linii, modele od MCD6-0020B do MCD6-0042B
3,0-10:350 3,5-15:345 4,0-10:350 4,0-20:340 5,0-5:355
MCD6-0020B 24 20 19 16 17
MCD6-0034B 42 34 34 27 32
MCD6-0042B 52 42 39 35 34
Tabela 3: Instalacja w linii, modele od MCD6-0063B do MCD6-0579B
3,0-10:590 3,5-15:585 4,0-10:590 4,0-20:580 5,0-5:595
MCD6-0063B 64 63 60 51 54
MCD6-0069B 69 69 69 62 65
14 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 15
Instrukcja obsługi | VLT® Soft Starter MCD 600
Konstrukcja systemu
3,0-10:590 3,5-15:585 4,0-10:590 4,0-20:580 5,0-5:595
MCD6-0086B 105 86 84 69 77
MCD6-0108B 115 108 105 86 95
MCD6-0129B 135 129 126 103 115
MCD6-0144B 184 144 139 116 127
MCD6-0171B 200 171 165 138 150
MCD6-0194B 229 194 187 157 170
MCD6-0244B 250 244 230 200 202
MCD6-0287B 352 287 277 234 258
MCD6-0323B 397 323 311 263 289
MCD6-0410B 410 410 410 380 400
MCD6-0527B 550 527 506 427 464
MCD6-0579B 580 579 555 470 508
Tabela 4: Instalacja wewnątrz trójkąta
3,0-10:350 3,5-15:345 4,0-10:350 4,0-20:340 5,0-5:355
MCD6-0020B 36 30 28 24 25
MCD6-0034B 63 51 51 40 48
MCD6-0042B 78 63 58 52 51
3,0-10:590 3,5-15:585 4,0-10:590 4,0-20:580 5,0-5:595
MCD6-0063B 96 94 90 76 81
MCD6-0069B 103 103 103 93 97
MCD6-0086B 157 129 126 103 115
MCD6-0108B 172 162 157 129 142
MCD6-0129B 202 193 189 154 172
MCD6-0144B 276 216 208 174 190
MCD6-0171B 300 256 247 207 225
MCD6-0194B 343 291 280 235 255
MCD6-0244B 375 366 345 300 303
MCD6-0287B 528 430 415 351 387
MCD6-0323B 595 484 466 394 433
MCD6-0410B 615 615 615 570 600
MCD6-0527B 825 790 759 640 696
MCD6-0579B 870 868 832 705 762
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 15
Page 16
4/T2
READY RUN
TRIP
LOCAL
Exit
Reset
Menu
Store
2/T1
6/T3
1/L1
3/L2
5/L3
READY RUN TRIP LOCAL
Exit
Reset
Menu
Store
VLT
®
Soft Starter
VLT
®
Soft Starter
A
B
C D
E
A
B
C
D
E
e77ha713.10
Instrukcja obsługi | VLT® Soft Starter MCD 600
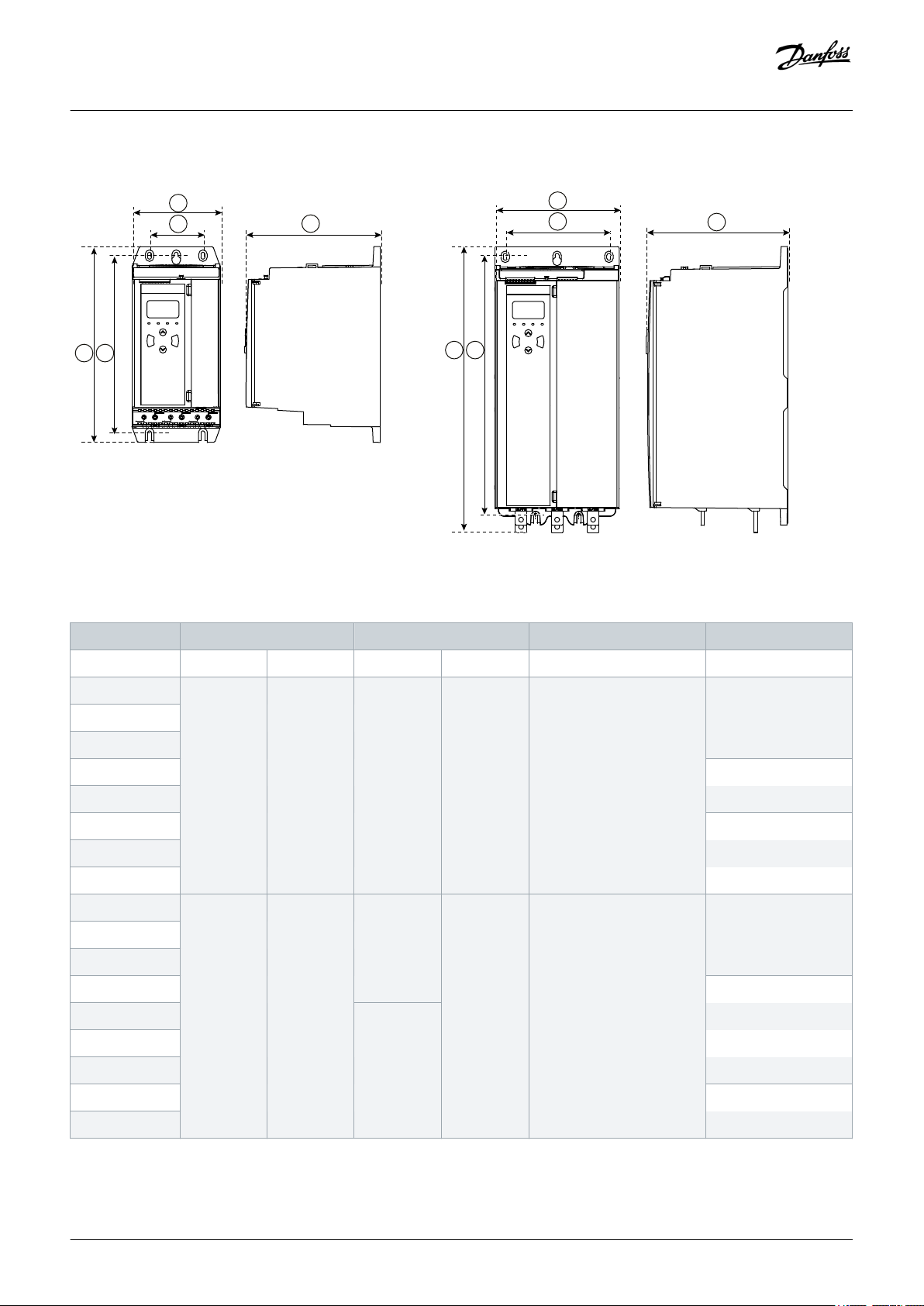
3.5 Wymiary i ciężar
Konstrukcja systemu
Ilustracja 3: Wymiary, rozmiary obudów S1 (po lewej) i S2 (po prawej)
Tabela 5: Wymiary i ciężar
Szerokość [mm (cale)] Wysokość [mm (cale)] Głębokość [mm (cale)] Ciężar [kg (funty)]
A B C D E
MCD6-0020B 152 (6,0) 92 (3,6) 336 (13,2) 307 (12,1) 231 (9,1) 4,8 (10,7)
MCD6-0034B
MCD6-0042B
MCD6-0063B 4,9 (10,9)
MCD6-0069B
MCD6-0086B 5,5 (12,1)
MCD6-0108B
MCD6-0129B
MCD6-0144B 216 (8,5) 180 (7,1) 495 (19,5) 450 (17,7) 243 (9,6) 12,7 (28)
MCD6-0171B
MCD6-0194B
MCD6-0244B 15,5 (34,2)
MCD6-0287B 523 (20,6)
MCD6-0323B
MCD6-0410B
MCD6-0527B 19 (41,9)
MCD6-0579B
16 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 17
4/T2
2/T1
6/T3
1/L1
3/L2
5/L3
4/T2
READY
RUN
TRIP
LOCAL
Exit
Reset
Menu
Store
2/T1
6/T3
1/L1
3/L2
5/L3
VLT
®
Soft Starter
4/T2
READY
RUN
TRIP
LOCAL
Exit
Reset
Menu
Store
2/T1 6/T3
1/L1 3/L2 5/L3
VLT
®
Soft Starter
4/T2
READY RUN TRIP
LOCAL
Exit
Reset
Menu
Store
2/T1 6/T3
1/L1
3/L2
5/L3
VLT
®
Soft Starter
4/T2
READY RUN TRIP LOCAL
Exit
Reset
Menu
Store
2/T1 6/T3
1/L1 3/L2 5/L3
VLT
®
Soft Starter
4/T2
READY RUN TRIP LOCAL
Exit
Reset
Menu
Store
2/T1 6/T3
1/L1 3/L2 5/L3
VLT
®
Soft Starter
177HA714.10
A
B
C
D D
C
Instrukcja obsługi | VLT® Soft Starter MCD 600
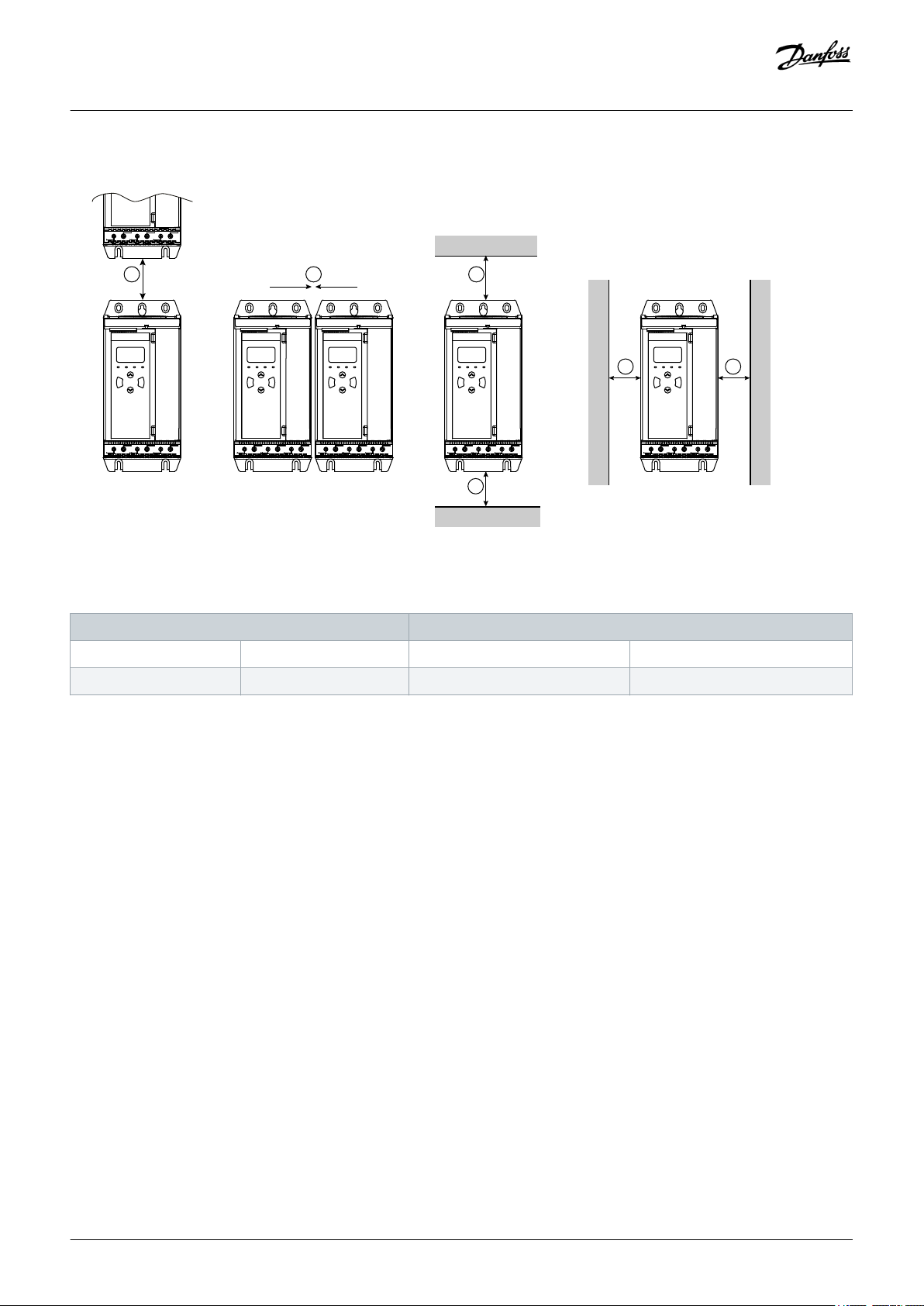
3.6 Odstępy montażowe/dla zapewnienia chłodzenia
Konstrukcja systemu
Ilustracja 4: Odstępy
Tabela 6: Odstępy dla zapewnienia chłodzenia
Odstęp między softstarterami Odstęp od powierzchni ograniczających
A [mm (cale)] B [mm (cale)] C [mm (cale)] D [mm (cale)]
> 100 (3,9) >10 (0,4) > 100 (3,9) >10 (0,4)
3.7 Akcesoria
3.7.1 Karty rozszerzeń
Softstarter VLT® Soft Starter MCD 600 oferuje karty rozszerzeń dla użytkowników, którzy potrzebują dodatkowych wejść i wyjść lub
zaawansowanych funkcji. Każdy softstarter MCD 600 może obsługiwać maksymalnie jedną kartę rozszerzeń.
3.7.1.1 Karta inteligentna
Karta inteligentna została zaprojektowana w celu ułatwienia integracji aplikacji pompowych i zapewnia następujące dodatkowe
wejścia i wyjścia:
• 3 wejścia cyfrowe.
• 3 wejścia przetwornika 4–20 mA
• 1 wejście termometru rezystancyjnego (RTD).
• 1 port USB-B.
• Złącze zdalnego panelu LCP.
Numer zamówieniowy: 175G0133
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 17
Page 18
Instrukcja obsługi | VLT® Soft Starter MCD 600
Konstrukcja systemu
3.7.1.2 Karty rozszerzeń komunikacji
Softstarter VLT® Soft Starter MCD 600 obsługuje komunikację sieciową przy użyciu łatwych w instalacji kart rozszerzeń komunikacji.
Każda karta komunikacji zawiera port złącza zdalnego panelu LCP 601.
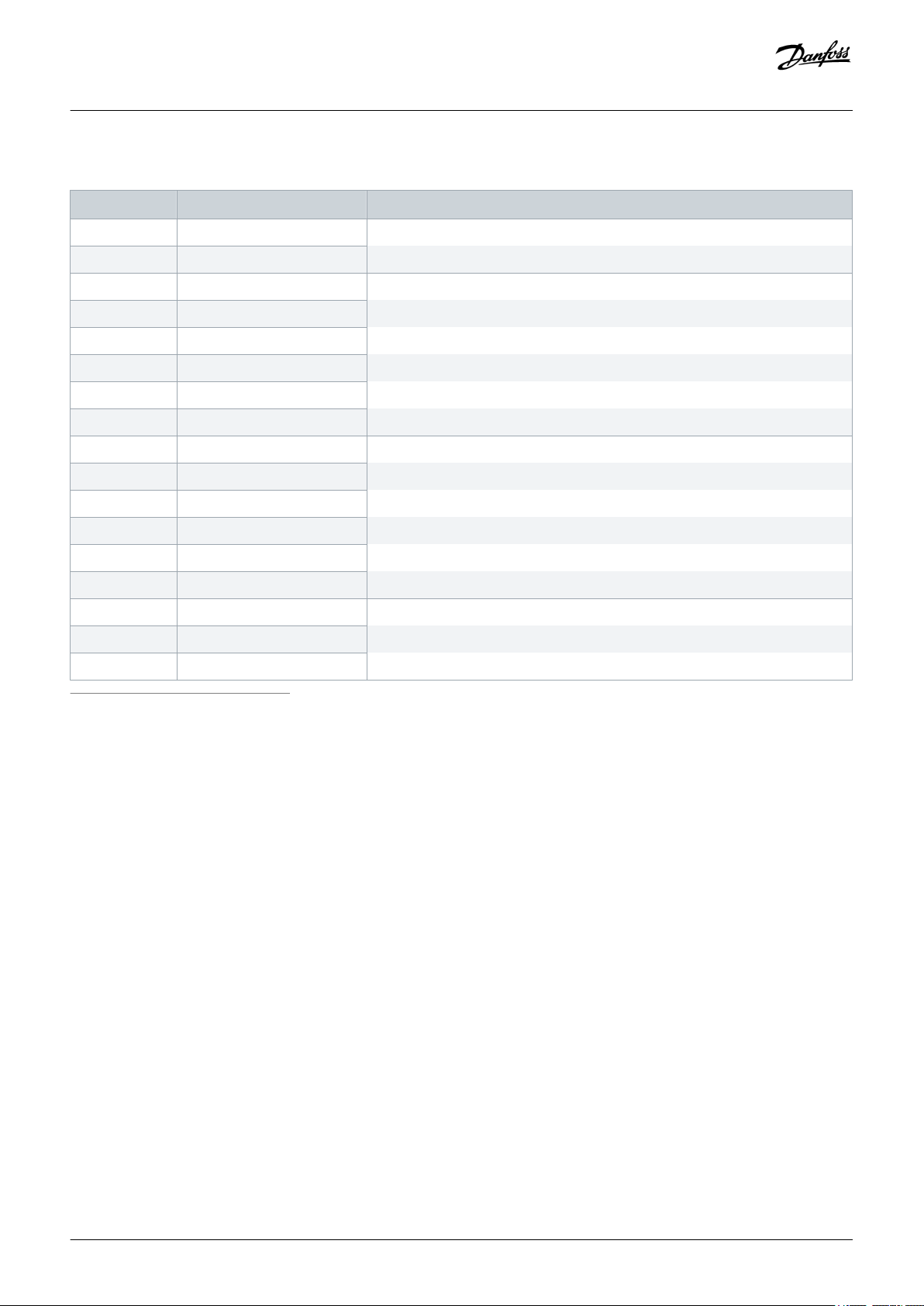
Tabela 7: Karty rozszerzeń magistral komunikacyjnych wraz z numerami zamówieniowymi
Karta opcji Numer zamówieniowy
VLT® Soft Starter MCD 600 Modbus RTU 175G0127
VLT® Soft Starter MCD 600 PROFIBUS 175G0128
VLT® Soft Starter MCD 600 DeviceNet 175G0129
VLT® Soft Starter MCD 600 Modbus TCP 175G0130
VLT® Soft Starter MCD 600 EtherNet/IP 175G0131
VLT® Soft Starter MCD 600 PROFINET 175G0132
VLT® Soft Starter MCD 600 Pump Application 175G0133
3.7.2 Zdalny panel LCP 601
Softstartery VLT® Soft Starter MCD 600 mogą być używane ze zdalnym LCP zamontowanym w odległości do 3 metrów (9,8 ft) od
softstartera. Każda karta rozszerzeń zawiera port złącza LCP lub dostępna jest dedykowana karta złącza LCP.
Numer zamówieniowy dla karty rozszerzeń zdalnego panelu LCP 601: 175G0134.
3.7.3 Zestaw zabezpieczający przed dotknięciem
Zestaw zabezpieczający przed dotknięciem może być używany w celu zapewnienia bezpieczeństwa osobistego. Zabezpieczenie to
montuje się na zaciskach softstartera w celu zabezpieczenia przed przypadkowym dotknięciem zacisków będących pod napięciem.
Zabezpieczenia przed dotknięciem zapewniają stopień ochrony IP20 w przypadku stosowania kabli o średnicy 22 mm lub większej.
Zabezpieczenia przed dotknięciem są kompatybilne z modelami od MCD6-0144B do MCD6-0579B.
Numer zamówieniowy dla zestawu zabezpieczającego przed dotknięciem: 175G0186.
3.7.4 Oprogramowanie do zarządzania softstarterem
Softstarter VLT® Soft Starter MCD 600 ma zainstalowany interfejs flash USB. Dysk flash USB musi być sformatowany w formacie FAT32.
Aby sformatować nośnik flash, należy postępować zgodnie z instrukcjami wyświetlanymi na komputerze PC po podłączeniu
standardowego dysku flash (co najmniej 4 MB) do portu USB. Oprogramowanie VLT® Motion Control Tool MCT 10 transferuje pliki
zestawu parametrów na dysk flash USB. Aby załadować pliki zestawu parametrów do softstartera, należy skorzystać z LCP w sposób
opisany w sekcji 6.7.1 Procedura zapisu i ładowania.
Oprogramowanie VLT® Motion Control Tool MCT 10 może ułatwić zarządzanie softstarterem. Aby uzyskać więcej informacji, należy
skontaktować się z lokalnym dostawcą.
Dokumentację oprogramowania VLT® Motion Control Tool MCT 10 można pobrać ze strony www.danfoss.com/en/search/?filter=type
%3Adocumentation.
18 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 19
K1
K1
1
2
4
3
e77ha794.10
Instrukcja obsługi | VLT® Soft Starter MCD 600
Konstrukcja systemu
3.8 Główny stycznik
Stycznik główny jest zalecany w celu ochrony softstartera przed zakłóceniami napięcia w sieci, kiedy jest zatrzymany. Należy wybrać
stycznik o wartości znamionowej AC3 większej niż wartość znamionowa prądu pełnego obciążenia (FLC) podłączonego silnika lub jej
równej.
Do sterowania stycznikiem służą wyjścia stycznika (13,14).
Okablowanie głównego stycznika przedstawia illustration 12 w części 5.8 Typowa instalacja.
OS TR ZE żE NI E
RYZYKO PORAŻENIA PRĄDEM
Jeśli softstarter jest podłączony w konfiguracji wewnątrz trójkąta, część uzwojeń silnika jest podłączona do sieci zasilającej
przez cały czas (nawet kiedy softstarter jest wyłączony). Ta sytuacja może spowodować poważne obrażenia lub śmierć.
Przy podłączaniu softstartera w konfiguracji wewnątrz trójkąta należy zawsze zainstalować główny stycznik lub wyłącznik
-
bocznikowy wyłączenia awaryjnego.
3.9 Wyłącznik
Wyłącznik bocznikowy wyłączenia awaryjnego może być użyty zamiast głównego stycznika w celu odizolowania obwodu silnika w
razie wyłączenia awaryjnego softstartera. Mechanizm bocznikowego wyłączenia awaryjnego musi być zasilany od strony zasilania
wyłącznika lub z osobnego zasilania sterowania.
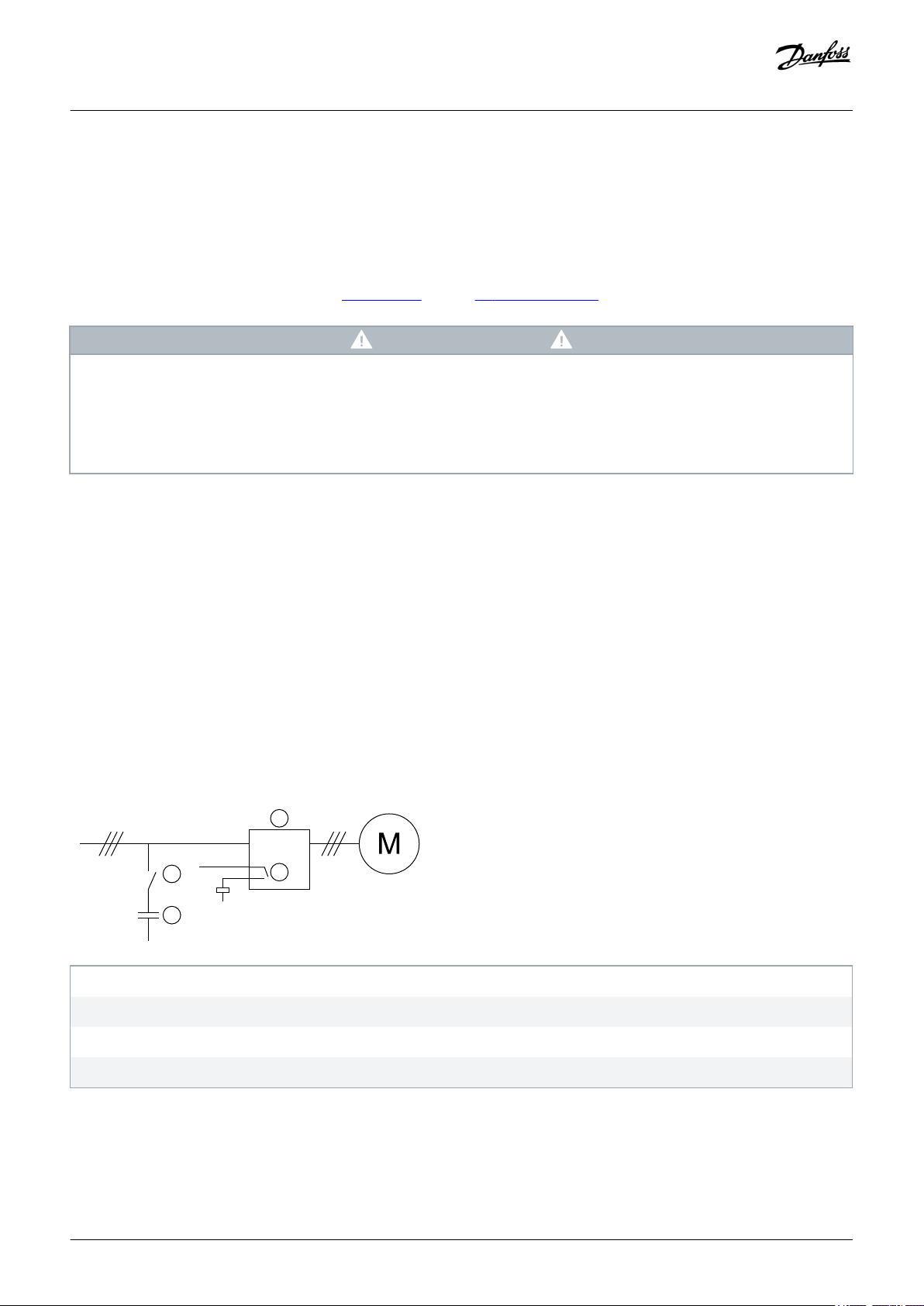
3.10 Korekcja współczynnika mocy
W przypadku korzystania z korekcji współczynnika mocy do przełączania kondensatorów powinno się używać dedykowanego
stycznika.
Aby używać softstartera VLT® Soft Starter MCD 600 do sterowania korekcją współczynnika mocy, należy podłączyć stycznik korekcji
współczynnika mocy (PFC) do programowalnego przekaźnika ustawionego na funkcję Praca. Kiedy silnik osiągnie pełną prędkość,
przekaźnik zamyka się i korekcja współczynnika mocy zostaje włączona.
1 Softstarter
2 Wyjście programowalne (ustawienie = Praca)
3 Stycznik korekcji współczynnika mocy
4 Korekcja współczynnika mocy
Ilustracja 5: Schemat połączeń
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 19
Page 20
Instrukcja obsługi | VLT® Soft Starter MCD 600
Konstrukcja systemu
OS TR ZE żE NI E
USZKODZENIE SPRZĘTU
Podłączenie kondensatorów korekcji współczynnika mocy po stronie wyjściowej spowoduje uszkodzenie softstartera.
Kondensatory do korekcji współczynnika mocy należy zawsze podłączać po stronie wejścia softstartera.
-
Nie należy używać wyjścia przekaźnikowego softstartera do bezpośredniego przełączania korekcji współczynnika mocy.
-
3.11 Urządzenia zabezpieczające przed zwarciem
W przypadku projektowania układów zabezpieczenia obwodów silnika norma IEC 60947-4-1 dla softstarterów i styczników określa dwa
typy koordynacji dotyczące softstarterów:
• Koordynacja typu 1.
• Koordynacja typu 2.
3.11.1 Koordynacja typu 1
Koordynacja typu 1 wymaga, aby w przypadku wystąpienia zwarcia po stronie wyjścia softstartera zwarcie zostało wyłączone bez
ryzyka obrażeń ciała i uszkodzenia instalacji. Nie jest wymagane, żeby softstarter pozostał zdolny do pracy po wyłączeniu zwarcia. Aby
softstarter mógł znowu pracować, wymagana jest naprawa i wymiana części.
Bezpieczniki wielkiej mocy (takie jak bezpieczniki Ferraz/Mersen AJT) mogą być używane na potrzeby koordynacji typu 1 zgodnie z
normą IEC 60947-4-2.
3.11.2 Koordynacja typu 2
Koordynacja typu 2 wymaga, aby w przypadku wystąpienia zwarcia po stronie wyjścia softstartera zwarcie zostało wyłączone bez
ryzyka obrażeń ciała i uszkodzenia softstartera.
Koordynacja typu 2 ma tę przewagę, że po wyłączeniu zwarcia autoryzowany personel może wymienić przepalone bezpieczniki i
sprawdzić styczniki pod kątem zespawania. Softstarter jest wtedy ponownie gotowy do pracy.
Bezpieczniki półprzewodnikowe dla zabezpieczenia obwodów typu 2 są uzupełnieniem bezpieczników wielkiej mocy lub wyłączników
MCCB, które stanowią część zabezpieczenia obwodów odgałęzionych silnika.
OS TR ZE żE NI E
HAMOWANIE DC
Ustawienie wysokiego momentu hamowania może skutkować prądami szczytowymi aż do wartości DOL pobieranej w czasie
zatrzymywania silnika.
Należy upewnić się, że w obwodzie odgałęzionym silnika zainstalowano prawidłowe bezpieczniki ochronne.
-
20 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 21
Instrukcja obsługi | VLT® Soft Starter MCD 600
OS TR ZE żE NI E
BRAK ZABEZPIECZENIA OBWODÓW ODGAŁĘZIONYCH
Zintegrowane stałe zabezpieczenie przed zwarciami nie zapewnia zabezpieczenia obwodów odgałęzionych.
Należy zapewnić zabezpieczenie obwodów odgałęzionych zgodnie z krajowymi przepisami elektrycznymi i wszelkimi
-
dodatkowymi lokalnymi regulacjami.
3.12 Koordynacja IEC z urządzeniami zabezpieczającymi przed zwarciem
Te bezpieczniki zostały wybrane na podstawie prądu rozruchu o wartości 300% FLC przez 10 s.
Tabela 8: Bezpieczniki zgodne z IEC
Konstrukcja systemu
Wartość znamionowa [A]
MCD6-0020B 24 1150 40NHG000B 170M3010
MCD6-0034B 42 7200 63NHG000B 170M3013
MCD6-0042B 52 80NHG000B
MCD6-0063B 64 15000 100NHG000B 170M3014
MCD6-0069B 69
MCD6-0086B 105 80000 160NHG00B 170M3015
MCD6-0108B 115
MCD6-0129B 135 125000 170M3016
MCD6-0144B 184 320000 250NHG2B 170M3020
MCD6-0171B 200
MCD6-0194B 229 315NHG2B
MCD6-0244B 250 170M3021
MCD6-0287B 352 202000 355NHG2B 170M6009
MCD6-0323B 397 400NHG2B
MCD6-0410B 410 320000 425NHG2B 170M6010
Tyrystor SCR I2t
(A2s)
Koordynacja typu 1 480 V AC,
bezpieczniki 65 kA Bussmann
NH fuse link
Koordynacja typu 2 690 V AC,
bezpieczniki 65 kA Bussmann
DIN 43 653
MCD6-0527B 550 781000 630NHG3B 170M6012
MCD6-0579B 579
3.13 Koordynacja UL z urządzeniami zabezpieczającymi przed zwarciem
3.13.1 Standardowe wartości znamionowe prądu zwarciowego
Można stosować w obwodzie zdolnym dostarczać nie więcej niż określony poziom prądu w amperach (symetrycznej wartości
skutecznej), maksymalnie 600 V AC.
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 21
Page 22
Instrukcja obsługi | VLT® Soft Starter MCD 600
Tabela 9: Maksymalna wartość znamionowa bezpiecznika [A] — standardowy prąd zwarciowy
Konstrukcja systemu
Model Wartość znamionowa [A]
Wartość znamionowa prądu zwarciowego dla 3 cykli przy 600 V AC
MCD6-0020B 24 5 kA
MCD6-0034B 42
MCD6-0042B 52 10 kA
MCD6-0063B 64
MCD6-0069B 69
MCD6-0086B 105
MCD6-0108B 120
MCD6-0129B 135
MCD6-0144B 184 18 kA
MCD6-0171B 225
MCD6-0194B 229
MCD6-0244B 250
MCD6-0287B 352
MCD6-0323B 397
MCD6-0410B 410 30 kA
MCD6-0527B 550
(1)
MCD6-0579B 580
1
Można stosować w obwodzie ze wskazanym prądem spodziewanym, gdy jest chroniony za pomocą dowolnych bezpieczników lub rozłączników zgodnych z UL zwymiarowanych
zgodnie z krajowymi przepisami elektrycznymi (NEC).
22 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 23
Instrukcja obsługi | VLT® Soft Starter MCD 600
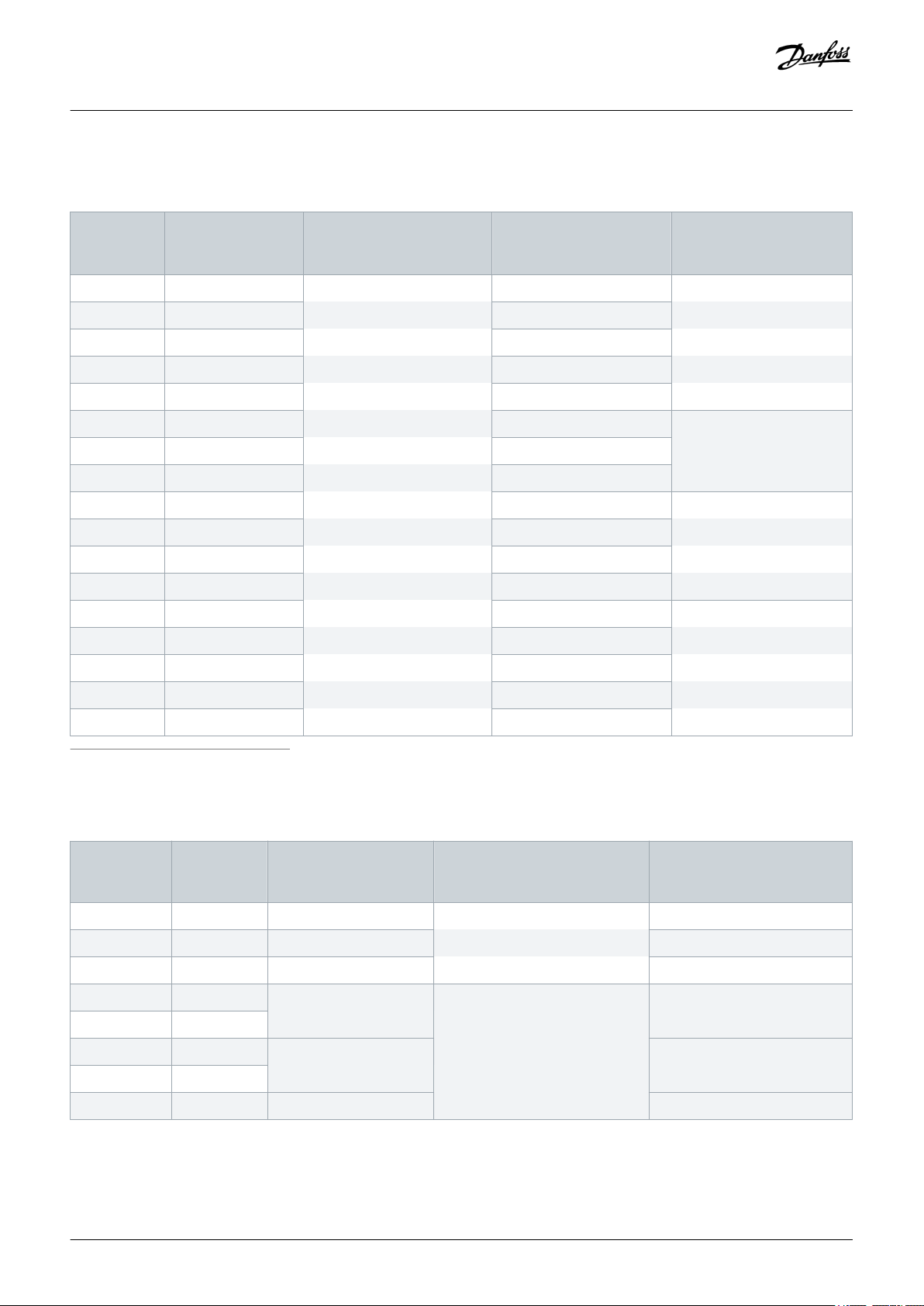
3.13.2 Wysokie wartości znamionowe prądu zwarciowego
Tabela 10: Maksymalna wartość znamionowa bezpiecznika [A] — wysoki prąd zwarciowy
Konstrukcja systemu
Model Wartość znamiono-
wa [A]
Wartość znamionowa prądu
zwarciowego przy maks.
480 V AC
Wartość znamionowa
wskazanego bezpiecznika
(1)
[A]
Klasa bezpiecznika
(1)
MCD6-0020B 24 65 kA 30 Dowolna (J, T, K-1, RK1, RK5)
MCD6-0034B 42 50
MCD6-0042B 52 60
MCD6-0063B 64 80
MCD6-0069B 69 80
MCD6-0086B 105 125 J, T, K-1, RK1
MCD6-0108B 115 125
MCD6-0129B 135 150
MCD6-0144B 184 200 J, T
MCD6-0171B 200 225
MCD6-0194B 229 250
MCD6-0244B 250 300
MCD6-0287 352 400 Dowolna (J, T, K-1, RK1, RK5)
MCD6-0323B 397 450
MCD6-0410B 410 450
MCD6-0527B 550 600
MCD6-0579B 580 600
1
Można stosować w obwodzie zdolnym dostarczać nie więcej niż 65000 amperów symetrycznej wartości skutecznej prądu, maksymalnie 480 V AC, kiedy jest on chroniony przez
bezpieczniki określonej klasy i wartości znamionowej.
Tabela 11: Wyłączniki — wysoki prąd zwarciowy
Model Wartość
znamiono-
Wyłącznik 1: Eaton (wartość znamionowa, A)
(1)
Wyłącznik 2: GE (wartość znamionowa, A)
(1)
Wyłącznik 3: LS (wartość znamionowa, A)
(1) (2)
wa [A]
MCD6-0020B 24 HFD3030 (30 A) SELA36AT0060 (60 A) UTS150H-xxU-040 (40 A)
MCD6-0034B 42 HFD3050 (50 A) UTS150H-xxU-050 (50 A)
MCD6-0042B 52 HFD3060 (60 A) UTS150H-xxU-060 (60 A)
MCD6-0063B 64 HFD3100 (100 A) SELA36AT0150 (150 A) UTS150H-xxU-100 (100 A)
MCD6-0069B 69
MCD6-0086B 105 HFD3125 (125 A) UTS150H-xxU-125 (125 A)
MCD6-0108B 115
MCD6-0129B 135 HFD3150 (150 A) UTS150H-xxU-150 (150 A)
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 23
Page 24
Instrukcja obsługi | VLT® Soft Starter MCD 600
Konstrukcja systemu
Model Wartość
znamiono-
Wyłącznik 1: Eaton (wartość znamionowa, A)
(1)
Wyłącznik 2: GE (wartość znamionowa, A)
(1)
Wyłącznik 3: LS (wartość znamionowa, A)
(1) (2)
wa [A]
MCD6-0144B 184 HFD3250 (250 A) SELA36AT0250 (250 A) UTS150H-xxU-250 (250 A)
MCD6-0171B 200
MCD6-0194B 229
MCD6-0244B 250 HFD3300 (300 A) SELA36AT0400 (400 A) UTS150H-xxU-300 (300 A)
MCDF6-0287B 352 HFD3400 (400 A) SELA36AT0600 (600 A) UTS150H-xxU-400 (400 A)
MCD6-0323B 397
MCD6-0410B 410 HFD3600 (600 A) UTS150H-xxU-600 (600 A)
MCD6-0527B 550 UTS150H-xxU-800 (800 A)
MCD6-0579B 580 UTS150H-NG0-800
1
Można stosować w obwodzie dostarczającym nie więcej niż 65000 amperów symetrycznej wartości skutecznej prądu, maksymalnie 480 V AC, kiedy jest on chroniony przez modele
wyłączników określone w tej tabeli.
2
Dla wyłącznika LS xx reprezentuje FM, FT lub AT.
3.14 Wybór bezpieczników dla koordynacji typu 2
Koordynację typu 2 osiąga się przez zastosowanie bezpieczników półprzewodnikowych. Te bezpieczniki muszą być w stanie przenosić
prąd rozruchowy silnika i charakteryzować się całkowitym I2t kasowania mniejszym niż I2t tyrystorów SCR softstartera.
Podczas wybierania bezpieczników półprzewodnikowych dla softstartera VLT® Soft Starter MCD 600 należy używać wartości I2t
podanych w tabeli table 12.
W celu uzyskania dalszych informacji na temat doboru bezpieczników należy skontaktować się z lokalnym dystrybutorem.
Tabela 12: Wartości SCR dla bezpieczników półprzewodnikowych
Model
SCR I2t [A2s]
MCD6-0020B 1150
MCD6-0034B 7200
MCD6-0042B
MCD6-0063B 15000
MCD6-0069B
MCD6-0086B 80000
MCD6-0108B
MCD6-0129B 125000
MCD6-0144B 320000
MCD6-0171B
MCD6-0194B
MCD6-0244B
24 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 25
Instrukcja obsługi | VLT® Soft Starter MCD 600
Konstrukcja systemu
Model
MCD6-0287B 202000
MCD6-0323B
MCD6-0410B 320000
MCD6-0527B 781000
MCD6-0579B
SCR I2t [A2s]
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 25
Page 26
Instrukcja obsługi | VLT® Soft Starter MCD 600
Dane techniczne
4 Dane techniczne
4.1 Zasilanie
Napięcie zasilania (L1, L2, L3)
MCD6-xxxxB-T5 200–525 V AC (±10%)
MCD6-xxxxB-T7 380–690 V AC (±10%)
Napięcie sterowania (A7, A8, A9)
MCD6-xxxxB-xx-CV2 (A8, A9) 110–120 V AC (+10%/-15%), 600 mA
MCD6-xxxxB-xx-CV2 (A7, A9) 220–240 V AC (+10%/-15%), 600 mA
MCD6-xxxxB-xx-CV1 (A8, A9) 24 V AC/V DC (±20%), 2,8 A
Częstotliwość zasilania 50–60 Hz (±5 Hz)
Znamionowe napięcie izolacji 690 V AC
Znamionowe napięcie udarowe wytrzymywane 6 kV
Oznaczenie formy Z obejściem lub ciągły, półprzewodnikowy starter silnika forma 1
4.2 Wytrzymałość zwarciowa
Koordynacja z bezpiecznikami do zabezpieczania urządzeń półprzewodnikowych Typ 2
Koordynacja z bezpiecznikami wielkiej mocy Typ 1
4.3 Kompatybilność elektromagnetyczna (zgodnie z dyrektywą 2014/35/UE)
Odporność EMC IEC 60947-4-2
Emisyjność EMC IEC 60947-4-2 klasa B
4.4 Wejścia
Wartość znamionowa wejścia Aktywne 24 V DC, około 8 mA
Termistor silnika (TER-05, TER-06) Wyłączenie awaryjne >3,6 kΩ, reset >1,6 kΩ
4.5 Wyjścia
Wyjścia przekaźnikowe 10 A przy 250 V AC rezystancyjne, 5 A przy 250 V AC AC15 współczynnik mocy 0,3
Główny stycznik (13, 14) Zwierny
Wyjście przekaźnikowe A (21, 22, 23) Przełączny
Wyjście przekaźnikowe B (33, 34) Zwierny
Wyjście analogowe (AO-07, AO-08)
Maksymalne obciążenie 600 Ω (12 V DC przy 20 mA)
Dokładność ±5%
26 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 27
Instrukcja obsługi | VLT® Soft Starter MCD 600
Dane techniczne
4.6 Środowisko
Temperatura robocza -10 do +60°C (14–140°F), powyżej 40°C (104°F) z obniżaniem wartości znamionowych
Temperatura magazynowania -25 do +60°C (-13 do +140°F)
Wysokość pracy n.p.m. 0–1000 m (0–3280 ft), powyżej 1000 m (3280 ft) z obniżaniem wartości znamionowych
Wilgotność Wilgotność względna 5–95%
Stopień zanieczyszczenia Stopień zanieczyszczenia 3
Drgania IEC 60068-2-6
Zabezpieczenie
MCD6-0020B~MCD6-0129B IP20
MCD6-0144B~MCD6-0579B IP00
4.7 Rozpraszanie ciepła
Podczas rozruchu 4,5 W na amper
Podczas pracy
MCD6-0020B~MCD6-0042B W przybliżeniu ≤ 35 W
MCD6-0063B~MCD6-0129B W przybliżeniu ≤ 50 W
MCD6-0144B~MCD6-0244B W przybliżeniu ≤ 120 W
MCD6-0287B~MCD6-0579B W przybliżeniu ≤ 140 W
4.8 Zabezpieczenie silnika przed przeciążeniem
Nastawy fabryczne parametrów od 1-4 do 1-6 zapewniają
zabezpieczenie silnika przed przeciążeniem.
klasa 10, prąd wyłączenia awaryjnego 105% wartości FLA (prądu w
amperach przy pełnym obciążeniu) lub jego odpowiednik
4.9 Certyfikat
CE EN 60947-4-2
UL/C-UL UL 508
Branża morska Specyfikacja Lloyds Marine nr 1
ABS
DNV
4.10 Okres eksploatacji (styczniki wewnętrznego obejścia)
Oczekiwana żywotność 100000 operacji
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 27
Page 28
Instrukcja obsługi | VLT® Soft Starter MCD 600
5 Instalacja
5.1 Instrukcje bezpieczeństwa
Ogólne instrukcje bezpieczeństwa — zobacz 2.3 Środki ostrożności.
OS TR ZE żE NI E
NAPIĘCIE INDUKOWANE
Napięcie indukowane z wyjściowych kabli silnika prowadzonych razem może spowodować naładowanie kondensatorów w
sprzęcie nawet wtedy, gdy jest on wyłączony i zabezpieczony przed włączeniem. Niepoprowadzenie wyjściowych kabli silnika
osobno lub nieużycie kabli ekranowanych może skutkować śmiercią lub poważnymi obrażeniami.
Wyjściowe kable silnika należy poprowadzić osobno.
-
Użyć kabli ekranowanych.
-
OS TR ZE żE NI E
PRZYPADKOWY ROZRUCH
Jeśli softstarter jest podłączony do zasilania AC, zasilania DC lub podziału obciążenia, silnik może zostać uruchomiony w każdej
chwili. Przypadkowy rozruch podczas programowania, prac serwisowych lub naprawy może doprowadzić do śmierci,
poważnych obrażeń ciała lub uszkodzenia mienia. Silnik może zostać uruchomiony za pomocą przełącznika zewnętrznego,
polecenia przesłanego przez magistralę komunikacyjną, wejściowego sygnału wartości zadanej z LCP lub poprzez usunięcie
błędu.
Przed programowaniem parametrów nacisnąć przycisk [Off/Reset] na LCP.
-
Odłączyć softstarter od zasilania.
-
Przed podłączeniem softstartera do zasilania AC, zasilania DC lub podziału obciążenia należy w pełni oprzewodować i
-
zmontować softstarter, silnik oraz każdy napędzany sprzęt.
Zasilanie do softstartera należy zainstalować z odłącznikiem i wyłącznikiem (na przykład stycznikiem zasilania) sterowanym
-
za pomocą zewnętrznego układu bezpieczeństwa (na przykład zatrzymanie awaryjne lub wskaźnik błędów).
Instalacja
5.2 Źródło polecenia
Softstarter może być uruchamiany i zatrzymywany za pomocą wejść cyfrowych, zdalnego panelu LCP 601, sieci komunikacyjnej, karty
inteligentnej lub zaplanowanego automatycznego rozruchu/zatrzymania. Źródło polecenia należy skonfigurować za pomocą narzędzi
zestawu parametrów (Set-up Tools) lub za pomocą parametru 1-1 Command Source (źródło polecenia).
Jeśli zainstalowano zdalny panel LCP, przycisk [CMD/Menu] zapewnia dostęp do funkcji Command Source (Źródło polecenia) w menu
Set-up Tools (Narzędzia zestawu parametrów).
28 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 29

Instrukcja obsługi | VLT® Soft Starter MCD 600
Instalacja
5.3 Konfigurowanie softstartera
Procedura
1. Zainstalować softstarter — patrz 3.6 Odstępy montażowe/dla zapewnienia chłodzenia.
2. Podłączyć okablowanie sterowania (patrz 5.4.1 Zaciski wejściowe).
3. Podłączyć napięcie sterowania do softstartera.
4. Skonfigurować aplikację (w menu Konfiguracja skrócona):
A Nacisnąć przycisk [Menu].
B Nacisnąć przycisk [Menu/Store], aby otworzyć menu konfiguracji skróconej.
C Przewinąć listę, aby znaleźć aplikację.
D Nacisnąć przycisk [Menu/Store], aby rozpocząć proces konfiguracji. Patrz
5. Skonfigurować aplikację (nieuwzględnioną w menu Konfiguracja skrócona):
A Nacisnąć przycisk [Back], aby powrócić do menu.
B Nacisnąć przycisk [▿], aby przewinąć do menu głównego, a następnie nacisnąć przycisk [Menu/Store].
C Przewinąć do grupy Motor Details (Szczegóły silnika), nacisnąć dwukrotnie przycisk [Menu/Store] i zmodyfikować ustawienie
parametru 1-2 Motor Full Load Current (Prąd pełnego obciążenia silnika).
D Ustawić parametr 1-2 Motor Full Load Current (Prąd pełnego obciążenia silnika) tak, aby odpowiadał prądowi pełnego obciążenia
(FLC) silnika.
E Nacisnąć przycisk [Menu/Store], aby zapisać ustawienia.
6. Nacisnąć kilka razy przycisk [Main Menu], aby zamknąć menu główne.
7. (Opcjonalnie) Użyć wbudowanych narzędzi symulacji, aby sprawdzić, czy okablowanie sterowania jest poprawnie podłączone.
6.5 Symulacja przebiegu.
Patrz
8. Wyłączyć zasilanie softstartera.
9. Podłączyć kable silnika do zacisków wyjściowych 2/T1, 4/T2, 6/T3 softstartera.
10. Podłączyć kable zasilania do zacisków wejściowych 1/L1, 3/L2, 5/L3 softstartera. Patrz
Softstarter jest teraz gotowy do sterowania silnikiem.
5.9 Konfiguracja skrócona.
5.7 Zaciski zasilania.
5.4 Wejścia
OS TR ZE żE NI E
Wejścia sterowania są zasilane przez softstarter. Nie należy doprowadzać zewnętrznego napięcia do zacisków wejściowych
sterowania.
UW AG A
Przewody do wejść sterowania muszą być oddzielone od napięcia zasilania i okablowania silnika.
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 29
Page 30
READY
RUN
TRIP
LOCAL
Exit
Reset
Menu
Store
VLT
®
Soft Starter
2/T1
4/T2
6/T3
1/L1 3/L2
5/L3
AO-08
AO-07
DI-B
DI-A
COM+
START
COM+
RESET
TER-06
TER-05
e77ha718.10
Instrukcja obsługi | VLT® Soft Starter MCD 600
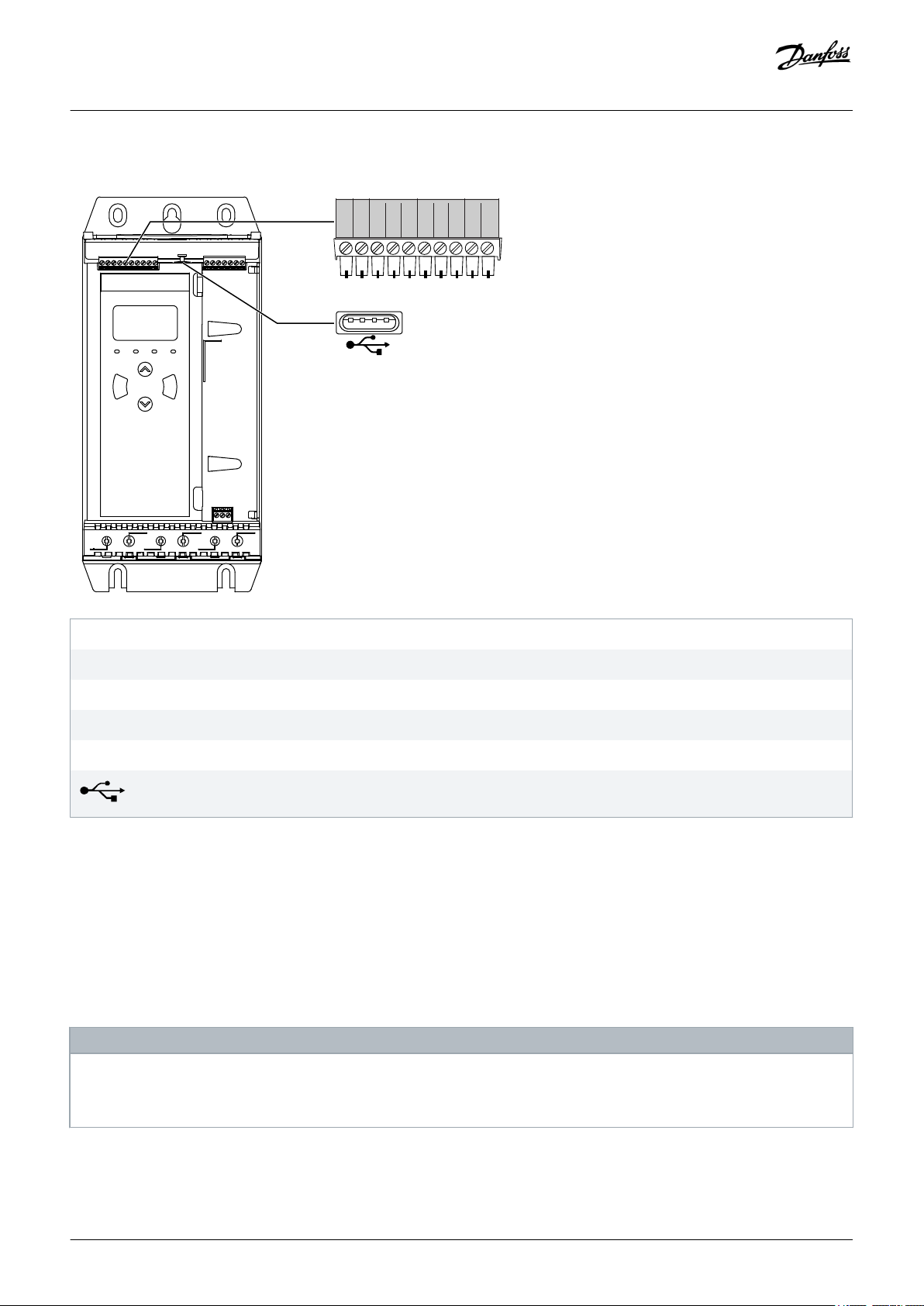
5.4.1 Zaciski wejściowe
Instalacja
TER-05, TER-06 Wejście termistora silnika
RESET, COM+ Wejście resetu
START, COM+ Wejście sygnału rozruchu/zatrzymania
DI-A, COM+ Wejście programowalne A (funkcja domyślna = Input trip (N/O) — Wyłączenie awaryjne z wejścia (zwierne))
DI-B, COM+ Wejście programowalne B (funkcja domyślna = Input trip (N/O) — Wyłączenie awaryjne z wejścia (zwierne))
Port USB (dla dysku flash, bez bezpośredniego podłączenia komputera PC)
Ilustracja 6: Zaciski wejściowe
5.4.2 Termistor silnika
Termistory silnika można podłączyć bezpośrednio do softstartera VLT® Soft Starter MCD 600. Softstarter wyłączy się awaryjnie, kiedy
rezystancja termistora przekroczy około 3,6 kΩ lub spadnie poniżej 20 Ω.
Termistory muszą być podłączone szeregowo. Obwód termistora powinien być poprowadzony w ekranowanym kablu i musi być
elektrycznie izolowany od uziemienia i wszystkich innych obwodów mocy i sterowania.
Wejście termistora jest domyślnie wyłączone, ale aktywuje się automatycznie po wykryciu termistora. Jeśli termistory zostały
wcześniej podłączone do softstartera MCD 600, ale nie są już wymagane, należy użyć funkcji kasowania (resetu) termistora, aby
UW AG A
dezaktywować termistor. Reset termistora jest dostępny za pomocą Narzędzi zestawu parametrów.
30 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 31

RESET
COM+
START
A
B
e77ha721.10
Instrukcja obsługi | VLT® Soft Starter MCD 600
5.4.3 Start/Stop
Softstarter VLT® Soft Starter MCD 600 wymaga sterowania 2-przewodowego.
A Reset
B Start/Stop
Ilustracja 7: Okablowanie sterowania rozruchem/zatrzymaniem
OS TR ZE żE NI E
Instalacja
PRÓBA ROZRUCHU
Jeśli podczas podłączania napięcia sterowania wejście rozruchu jest zamknięte, softstarter podejmie próbę rozruchu.
Przed podłączeniem napięcia sterowania należy upewnić się, że wejście rozruchu/zatrzymania jest otwarte.
-
UW AG A
Softstarter MCD 600 akceptuje polecenia z wejść sterowania tylko wtedy, gdy parametr 1-1 Command Source (Źródło polecenia)
jest ustawiony na Digital Input (Wejście cyfrowe).
5.4.4 Reset/dezaktywacja softstartera
Wejście resetu (RESET, COM+) jest domyślnie rozwierne. Softstarter nie uruchomi się, jeśli wejście resetu jest otwarte. Na wyświetlaczu
będzie wtedy wyświetlany komunikat Not ready (Brak gotowości).
Gdy obwód resetu otworzy się podczas pracy softstartera, softstarter odłączy zasilanie i pozwoli silnikowi zatrzymać się z wybiegiem.
UW AG A
Wejście resetu można skonfigurować do pracy jako zwierne lub rozwierne. Wyboru należy dokonać w parametrze 7-9 Reset/
Enable Logic (Logika resetu/aktywacji).
5.4.5 Wejścia programowalne
Wejścia programowalne (DI-A, COM+ i DI-V, COM+) umożliwiają sterowanie softstarterem przez zewnętrzne urządzenia. Pracą wejść
programowalnych sterują parametry od 7-1 do 7-8.
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 31
Page 32

READY
RUN
TRIP
LOCAL
Exit
Reset
Menu
Store
VLT
®
Soft Starter
2/T1
4/T2
6/T3
1/L1 3/L2
5/L3
AO-08
AO-07
DI-B
DI-A
COM+
START
COM+
RESET
TER-06
TER-05
34
33
23
22
21
14
13
e77ha719.10
Instrukcja obsługi | VLT® Soft Starter MCD 600
Instalacja
5.4.6 Port USB
Przy użyciu portu USB można załadować plik konfiguracji lub pobrać ustawienia parametrów oraz informacje o rejestrze zdarzeń z
softstartera. Szczegółowe informacje zawiera sekcja 6.7 Zapis i ładowanie przez USB.
5.5 Wyjścia
5.5.1 Zaciski wyjściowe
AO-07, AO-08 Wyjście analogowe
13, 14 Wyjście głównego stycznika
21, 22, 23 Wyjście przekaźnikowe A (ustawienie domyślne = Praca)
33, 34 Wyjście przekaźnikowe B (ustawienie domyślne = Praca)
Ilustracja 8: Zaciski wyjściowe
5.5.2 Wyjście analogowe
Softstarter VLT® Soft Starter MCD 600 posiada wyjście analogowe, które można podłączyć do odpowiednich urządzeń w celu
monitorowania działania silnika. Pracą wejścia analogowego sterują parametry od 9-1 do 9-4.
5.5.3 Wyjście głównego stycznika
Wyjście głównego stycznika (13, 14) zamyka się natychmiast po otrzymaniu polecenia rozruchu przez softstarter i pozostaje zamknięte,
gdy softstarter steruje silnikiem (dopóki silnik nie rozpocznie zatrzymania z wybiegiem lub do momentu zakończenia płynnego
zatrzymania). Wyjście głównego stycznika otwiera się również, jeśli softstarter wyłącza się awaryjnie.
32 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 33

READY RUN TRIP LOCAL
Exit
Reset
Menu
Store
VLT
®
Soft Starter
2/T1 4/T2 6/T3
1/L1 3/L2 5/L3
A9
A8
A7
e77ha720.10
Instrukcja obsługi | VLT® Soft Starter MCD 600
Instalacja
UW AG A
Niektóre cewki elektroniczne styczników nie są odpowiednie do bezpośredniego przełączania za pomocą przekaźników
zamontowanych na płytce drukowanej PCB. Aby potwierdzić ich przydatność, należy skontaktować się z producentem/
dostawcą.
5.5.4 Wyjścia programowalne
Wyjścia programowalne (21, 22, 23 i 33, 34) mogą służyć do raportowania statusu softstartera lub sterowania skojarzonym sprzętem.
Pracą wyjść programowalnych sterują parametry od 8-1 do 8-6.
5.6 Napięcie sterowania
5.6.1 Zaciski napięcia sterowania
Ilustracja 9: Zaciski napięcia sterowania
Należy podłączyć właściwe napięcie zasilania sterującego:
• MCD6-xxxxB-xx-CV2 (110–120 V AC): A8, A9.
• MCD6-xxxxB-xx-CV2 (220–240 V AC): A7, A9.
• MCD6-xxxxB-xx-CV1 (24 V AC/V DC): A8, A9.
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 33
Page 34

e77ha646.11
e77ha648.11
e77ha647.11
e77ha649.11
Instrukcja obsługi | VLT® Soft Starter MCD 600
Instalacja
5.6.2 Instalacja zgodna z normą UL
W przypadku modeli od MCD6-0144B do MCD6-0579B, aby zapewnić zgodność z UL, wymagane jest użycie dodatkowej ochrony przed
przetężeniem lub zabezpieczenia obwodów odgałęzionych na zasilaniu obwodu sterowania (A7, A8, A9) zgodnie z przepisami
elektrycznymi obowiązującymi w miejscu instalacji.
5.7 Zaciski zasilania
OS TR ZE żE NI E
RYZYKO PORAŻENIA PRĄDEM
Modele od MCD6-0144B do MCD6-0579B są urządzeniami IP00 i stwarzają ryzyko porażenia prądem elektrycznym w przypadku
dotknięcia zacisków.
Na softstarterze należy zamontować zestaw zabezpieczający przed dotknięciem.
-
Softstartery należy zainstalować wewnątrz obudowy.
-
Zaciski wyjściowe i wyjściowe zasilania dla softstartera VLT® Soft Starter MCD 600 znajdują się w dolnej części jednostki.
• W modelach od MCD6-0020B do MCD6-0129B używane są obejmy klatkowe. Należy używać przewodów miedzianych linkowych
lub drutowych o temperaturze znamionowej 75°C (167°F) lub wyższej.
• Modele od MCD6-0144B do MCD6-0579B używają szyn zbiorczych. Należy używać przewodów miedzianych lub aluminiowych,
linkowych lub drutowych, przystosowanych do pracy w temperaturze 60/75°C (140/167°F).
UW AG A
Niektóre jednostki używają aluminiowych szyn zbiorczych. Przed podłączeniem zacisków zasilania należy dokładnie oczyścić
powierzchnię styku (przy użyciu papieru ściernego lub szczotki ze stali nierdzewnej) i użyć odpowiedniego środka wiążącego,
aby nie dopuścić do korozji.
Tabela 13: Zaciski zasilania, modele MCD6-0020B~MCD6-0129B
MCD6-0020B~MCD6-0129B
Przekrój poprzeczny kabla:
6–70 mm
(AWG 10–2/0)
Moment: 4 Nm
(2,9 ft-lb)
14 mm
(0,55 cala)
2
Torx T20 x 150
Płaski 7 mm x
150
34 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 35

6 mm
0.24 in
10 mm
0.4 in
20 mm
0.8 in
9 mm
(M8)
e77ha722.10
6 mm
0.24 in
17 mm
0.7 in
34 mm
1.7 in
13 mm
(M12)
e77ha723.10
Instrukcja obsługi | VLT® Soft Starter MCD 600
Tabela 14: Zaciski zasilania, modele MCD6-0144B~MCD6-0244B i MCD6-0287B~MCD6-0579B
MCD6-0144B~MCD6-0244B MCD6-0287B~MCD6-0579B
Instalacja
19 Nm (14 ft-lb)
66 Nm (49 ft-lb)
UW AG A
Jeśli instalacja wymaga kabli o dużej średnicy, można wykonać każde zakończenie za pomocą dwóch kabli o mniejszej średnicy,
po jednym na każdym boku szyny zbiorczej.
5.7.1 Zaciski okablowania
Zacisk należy wybrać zgodnie z rozmiarem i materiałem przewodów oraz wymaganiami aplikacji.
W przypadku modeli od MCD6-0144B do MCD6-0579B zalecany jest zacisk kompresyjny. Zalecana zaciskarka to TBM8-750.
Tabela 15: Zalecane ucha
Model Przykładowy zacisk— kabel aluminiowy Przykładowy zacisk — kabel miedziany
MCD6-0144B 61162 60150
MCD6-0171B 61165 60156
MCD6-0194B 61171 60165
MCD6-0244B
MCD6-0287B 61162 60150
MCD6-0352B 61165 60156
MCD6-0410B 60156
MCD6-0527B 61178 60171
MCD6-0579B
5.7.2 Podłączenie silnika
Softstarter VLT® Soft Starter MCD 600 można podłączyć do silnika przy użyciu połączenia w linii lub wewnątrz trójkąta (połączenia te
zwane są również trójprzewodowymi i sześcioprzewodowymi). W przypadku podłączenia wewnątrz trójkąta należy wprowadzić
wartość FLC w parametrze 1-2 Motor Full Load Current (Prąd pełnego obciążenia silnika). Softstarter MCD 600 automatycznie wykrywa,
czy silnik jest podłączony w linii czy wewnątrz trójkąta, i oblicza prawidłowy poziom prądu wewnątrz trójkąta.
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 35
Page 36

e77ha726.10
14
13
K1
K1F1
6/T3
2/T1
5/L3
3/L2
1/L1
4/T2
M
3
Instrukcja obsługi | VLT® Soft Starter MCD 600
UW AG A
Jeśli softstarter nie wykrywa prawidłowo podłączenia silnika, należy użyć parametru 20-6 Motor Connection (Podłączenie silnika).
5.7.2.1 Instalacja w linii
Instalacja
K1 Główny stycznik (zdecydowanie zalecany)
F1
Bezpieczniki lub wyłącznik (opcjonalnie
()
)
13, 14 Wyjście głównego stycznika
Niezastosowanie bezpieczników lub wyłączników unieważnia gwarancję.
Ilustracja 10: Okablowanie instalacji w linii
36 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 37

M
3
U1(1) U2(4)
V1(2)
V2(5)
W1(3) W2(6)
K1
F1
e77ha727.10
14
13
K1
6/T3
2/T1
5/L3
3/L2
1/L1
4/T2
Instrukcja obsługi | VLT® Soft Starter MCD 600
5.7.2.2 Instalacja wewnątrz trójkąta
Instalacja
K1 Główny stycznik
F1
Bezpieczniki lub wyłącznik (opcjonalnie
()
)
13, 14 Wyjście głównego stycznika
Niezastosowanie bezpieczników lub wyłączników unieważnia gwarancję.
Ilustracja 11: Okablowanie instalacji wewnątrz trójkąta.
5.8 Typowa instalacja
Softstarter MCD 600 VLT® Soft Starter jest zainstalowany z głównym stycznikiem (AC3). Napięcie sterowania musi być dostarczane od
strony wejściowej stycznika.
Główny stycznik jest sterowany przez wyjście głównego stycznika (13, 14).
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 37
Page 38

22
21
6/T3
2/T1
13
14
4/T2
44
33
23
AO-07
AO-08
TER-06
TER-05
START
COM+
DI-A
DI-B
COM+
A9
A8
A7
5/L3
3/L2
RESET
1/L1
F1
S1
S2
K1
K1
(L/+) (N/# )
A
#
+
M
7
6
5
3
2
1
10
4
9
8
e77ha728.10
Instrukcja obsługi | VLT® Soft Starter MCD 600
Instalacja
1 Zasilanie trójfazowe
2 Silnik
3 Napięcie sterowania (softstarter)
4 Wejścia cyfrowe
5 Wejście termistora silnika
6 Wyjścia przekaźnikowe
7 Wyjście analogowe
8 Napięcie sterowania (urządzenia zewnętrzne)
9 Lampki kontrolne
10 Port rozszerzeń komunikacji/karty inteligentnej
K1 Główny stycznik
38 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 39

Instrukcja obsługi | VLT® Soft Starter MCD 600
F1 Bezpieczniki półprzewodnikowe
RESET, COM+ (S1) Reset
START, COM+ (S2) Start/Stop
DI-A, COM+ Wejście programowalne A (funkcja domyślna = Input trip (N/O) — Wyłączenie awaryjne z wejścia (zwierne))
DI-B, COM+ Wejście programowalne B (funkcja domyślna = Input trip (N/O) — Wyłączenie awaryjne z wejścia (zwierne))
TER-05, TER-06 Wejście termistora silnika
13, 14 Wyjście głównego stycznika
21, 22, 23 Wyjście przekaźnikowe A (ustawienie domyślne = Praca)
33, 34 Wyjście przekaźnikowe B (ustawienie domyślne = Praca)
AO-07, AO-08 Wyjście analogowe
Ilustracja 12: Przykład instalacji
5.9 Konfiguracja skrócona
Instalacja
Menu konfiguracji skróconej ułatwia konfigurowanie softstartera dla typowych aplikacji. Softstarter VLT® Soft Starter MCD 600
przeprowadza użytkownika przez najpopularniejsze parametry konfiguracji i sugeruje typowe ustawienia dla aplikacji. Należy
dostosować ustawienia poszczególnych parametrów do konkretnych potrzeb.
Wszystkie pozostałe parametry pozostają z wartościami domyślnymi. Aby zmienić wartości innych parametrów lub przejrzeć nastawy
domyślne, należy użyć menu głównego (patrz 10.4 Lista parametrów, aby uzyskać szczegóły).
Ustawić parametr 1-2 Motor Full Load Current (Prąd pełnego obciążenia silnika) tak, aby odpowiadał prądowi pełnego obciążenia (FLC)
silnika z tabliczki znamionowej.
Tabela 16: Sugerowane ustawienia dla typowych aplikacji
Aplikacja Tryb rozru-
chu
Pompa odśrodkowa
Pompa głębinowa
Sterowanie
adaptacyjne
Sterowanie
adaptacyjne
Czas
rozpędzania
przy
rozruchu [s]
10 200 500 Wczesne przy-
3 200 500 Wczesne przy-
Prąd
początkowy
[%]
Ograniczenie
prądu
[%]
Profil rozruchu adaptacyjnego
spieszanie
spieszanie
Tryb zatrzymania Czas
zatrzymania [s]
Sterowanie adaptacyjne
Sterowanie adaptacyjne
15 Późne
3 Późne
Profil zatrzymania adaptacyjnego
zmniejszanie
prędkości
zmniejszanie
prędkości
Pompa hydrauliczna
Wentylator
(wytłumiony)
Danfoss A/S © 2018.10
Stała wartość
prądu
Stała wartość
prądu
2 200 350 nie dotyczy Zatrzymanie z wy-
biegiem silnika
2 200 350 nie dotyczy Zatrzymanie z wy-
biegiem silnika
AQ262141844215pl-000201 / 175R1174| 39
nie dotyczy
nie dotyczy
nie dotyczy
nie dotyczy
Page 40

Instrukcja obsługi | VLT® Soft Starter MCD 600
Instalacja
Aplikacja Tryb rozru-
chu
Wentylator
(niewytłumiony)
Sprężarka
śrubowa
Sprężarka
post.-zwr.
Przenośnik Stała wartość
Pędnik
dziobowy
Piła taśmowa Stała wartość
Stała wartość
prądu
Stała wartość
prądu
Stała wartość
prądu
prądu
Stała wartość
prądu
prądu
Czas
rozpędzania
przy
rozruchu [s]
2 200 450 nie dotyczy Zatrzymanie z wy-
2 200 400 nie dotyczy Zatrzymanie z wy-
2 200 450 nie dotyczy Zatrzymanie z wy-
5 200 450 nie dotyczy Zatrzymanie z wy-
5 100 400 nie dotyczy Zatrzymanie z wy-
2 200 450 nie dotyczy Zatrzymanie z wy-
Prąd
początkowy
[%]
Ograniczenie
prądu
[%]
Profil rozruchu adaptacyjnego
Tryb zatrzymania Czas
biegiem silnika
biegiem silnika
biegiem silnika
biegiem silnika
biegiem silnika
biegiem silnika
UW AG A
zatrzymania [s]
nie dotyczy
nie dotyczy
nie dotyczy
nie dotyczy
nie dotyczy
nie dotyczy
Profil zatrzymania adaptacyjnego
nie dotyczy
nie dotyczy
nie dotyczy
nie dotyczy
nie dotyczy
nie dotyczy
Ustawienia profilu rozruchu i zatrzymania adaptacyjnego są stosowane tylko podczas używania sterowania adaptacyjnego.
Ustawienia te są ignorowane w przypadku wszystkich innych trybów rozruchu i zatrzymania.
40 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 41

Instrukcja obsługi | VLT® Soft Starter MCD 600
Narzędzia zestawu parametrów
6 Narzędzia zestawu parametrów
6.1 Wprowadzenie
Narzędzia zestawu parametrów (Set-up Tools) zawierają opcje służące do ładowania lub zapisywania parametrów w pliku kopii
zapasowej, ustawiania adresu sieciowego softstartera, sprawdzania stanu wejść i wyjść, resetowania modeli termicznych oraz
przeprowadzania testu pracy przy użyciu narzędzia Run Simulation (Symulacja przebiegu).
Aby uzyskać dostęp do Narzędzi zestawu parametrów, należy nacisnąć przycisk [Menu], aby otworzyć menu główne, a następnie
wybrać pozycję Set-up Tools (Narzędzia zestawu parametrów).
6.2 Ustawianie daty i godziny
Procedura
1. Nacisnąć przycisk [Menu], aby otworzyć menu.
2. Wybrać pozycję Set-up Tools (Narzędzia zestawu parametrów).
3. Przewinąć do pozycji Set Date & Time (Ustaw datę i czas).
4. Nacisnąć przycisk [Menu/Store], aby wejść do trybu edycji.
5. Nacisnąć przycisk [Menu/Store], aby wybrać element daty lub godziny do edycji.
6. Naciskać przyciski [▵] i [▿], aby zmienić wartości.
7. Po ostatniej cyfrze nacisnąć przycisk [Menu/Store], aby zapisać ustawienia.
Po zakończeniu czynności ekran na krótko wyświetli komunikat potwierdzający, a następnie powróci do poprzedniego poziomu
menu.
6.3 Źródło polecenia
Softstarter może być uruchamiany i zatrzymywany za pomocą wejść cyfrowych, zdalnego panelu LCP 601, sieci komunikacyjnej, karty
inteligentnej lub zaplanowanego automatycznego rozruchu/zatrzymania. Źródło polecenia należy skonfigurować za pomocą narzędzi
zestawu parametrów (Set-up Tools) lub za pomocą parametru 1-1 Command Source (źródło polecenia).
Jeśli zainstalowano zdalny panel LCP, przycisk [CMD/Menu] zapewnia dostęp do funkcji Command Source (Źródło polecenia) w menu
Set-up Tools (Narzędzia zestawu parametrów).
6.4 Uruchomienie
Uruchomienie umożliwia rozruch i zatrzymywanie softstartera za pomocą LCP. Należy wybrać funkcję za pomocą przycisków [▵] [▿], a
następnie nacisnąć przycisk [Menu/Store], aby wysłać wybrane polecenie do softstartera. Dostępne są następujące funkcje:
• Szybkie zatrzymanie (zatrzymanie z wybiegiem silnika)/reset
• Rozruch
• Zatrzymanie
6.5 Symulacja przebiegu
Context:
Symulacja przebiegu symuluje rozruch, pracę i zatrzymanie silnika w celu upewnienia się, że softstarter i powiązany sprzęt zostały
zainstalowane prawidłowo.
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 41
Page 42

e77ha731.10
Run Simulation
Ready
Apply Start Signal
Instrukcja obsługi | VLT® Soft Starter MCD 600
Narzędzia zestawu parametrów
UW AG A
Na czas korzystania z trybu symulacji należy odłączyć softstarter od napięcia zasilania.
Symulacja jest dostępna tylko wtedy, gdy softstarter jest w stanie gotowości.
Procedura
1. Nacisnąć przycisk [Menu] i wybrać pozycję Set-up Tools (Narzędzia zestawu parametrów).
2. Przewinąć ekran do pozycji Run Simulation (Symulacja przebiegu) i nacisnąć przycisk [Menu/Store].
3. Zastosować polecenie rozruchu z wybranego źródła polecenia.
Softstarter symuluje sprawdzenia przed rozruchem i zamyka przekaźnik głównego stycznika. Lampka sygnalizacyjna (LED)
pracy (Run) miga.
UW AG A
Jeśli napięcie zasilania jest podłączone, wyświetlany jest komunikat o błędzie.
4. Nacisnąć przycisk [Menu/Store].
Softstarter symuluje rozruch. Lampka sygnalizacyjna (LED) pracy (Run) miga.
5. Nacisnąć przycisk [Menu/Store].
Softstarter symuluje pracę.
6. Zastosować polecenie zatrzymania z wybranego źródła polecenia.
Softstarter symuluje zatrzymanie. Lampka sygnalizacyjna (LED) pracy (Run) miga.
7. Nacisnąć przycisk [Menu/Store].
Lampka sygnalizacyjna gotowości (Ready) pulsuje i przekaźnik głównego stycznika otwiera się.
8. Nacisnąć przycisk [Menu/Store].
Softstarter aktywuje, a następnie dezaktywuje każde wejście programowalne.
9. Nacisnąć przycisk [Menu/Store].
Softstarter powróci do menu Set-up Tools (Narzędzia zestawu parametrów).
6.6 Ładowanie/zapisywanie ustawień
Context:
Load/Save Settings (Ładowanie/zapisywanie ustawień) umożliwia:
• resetowanie parametrów softstartera do wartości domyślnych.
• ładowanie ustawień parametrów z wewnętrznego pliku.
• zapisywanie bieżących ustawień parametrów do wewnętrznego pliku.
Do momentu zapisania nowych wartości przez użytkownika plik wewnętrzny zawiera wartości domyślne.
42 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 43

e77ha732.10
Load/Save Settings
Load Defaults
Load User Set
Save User Set
Instrukcja obsługi | VLT® Soft Starter MCD 600
Narzędzia zestawu parametrów
Procedura
1. Nacisnąć przycisk [Menu] i wybrać pozycję Set-up Tools (Narzędzia zestawu parametrów).
2. Przewinąć do pozycji Load/Save Settings (Zapis/ładowanie ustawień) i nacisnąć przycisk [Menu/Store].
3. Przewinąć do żądanej funkcji i nacisnąć przycisk [Menu/Store].
4. Po wyświetleniu monitu o potwierdzenie wybrać opcję Yes (Tak), aby potwierdzić, lub opcję No (Nie), aby anulować.
5. Nacisnąć przycisk [Menu/Store], aby kontynuować.
Po zakończeniu czynności ekran na krótko wyświetli komunikat potwierdzający, a następnie powróci do poprzedniego poziomu
menu.
6.7 Zapis i ładowanie przez USB
Menu USB Save & Load (Zapis i ładowanie przez USB) umożliwia:
• Zapisywanie ustawień parametrów i wszystkich wpisów rejestru zdarzeń do zewnętrznego pliku (w formacie CSV).
• Zapisywanie ustawień parametrów do zewnętrznego pliku (we własnym formacie).
• Ładowanie ustawień parametrów z wcześniej zapisanego zewnętrznego pliku.
• Ładowanie niestandardowych komunikatów do wyświetlania na LCP, gdy wejście programowalne jest aktywne.
UW AG A
Softstarter VLT® Soft Starter MCD 600 obsługuje systemy plików FAT32. Funkcje USB softstartera MCD 600 nie są zgodne z
systemami plików NTFS.
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 43
Page 44

e77ha733.10
USB Save & Load
Save Params and Logs
Save Master Params
Load Master Params
Instrukcja obsługi | VLT® Soft Starter MCD 600
Narzędzia zestawu parametrów
6.7.1 Procedura zapisu i ładowania
Procedura
1. Podłączyć dysk zewnętrzny do portu USB.
2. Nacisnąć przycisk [Menu] i wybrać pozycję Set-up Tools (Narzędzia zestawu parametrów).
3. Przewinąć do pozycji USB Save & Load (Zapis i ładowanie przez USB) i nacisnąć przycisk [Menu/Store].
4. Przewinąć do żądanej funkcji i nacisnąć przycisk [Menu/Store].
5. Po wyświetleniu monitu o potwierdzenie wybrać opcję Yes (Tak), aby potwierdzić, lub opcję No (Nie), aby anulować.
6. Nacisnąć przycisk [Menu/Store], aby kontynuować.
Po zakończeniu czynności ekran na krótko wyświetli komunikat potwierdzający, a następnie powróci do poprzedniego poziomu
menu.
6.7.2 Lokalizacje i formaty plików
Zapisywanie parametrów i rejestrów
Softstarter tworzy katalog na najwyższym poziomie dysku USB, nadając mu nazwę odpowiadającą numerowi seryjnemu softstartera.
Rejestr zdarzeń i ustawienia parametrów są zapisywane w indywidualnych plikach CSV, a informacje o oprogramowaniu i systemie
softstartera są zapisywane w pliku tekstowym.
Zapisywanie parametrów mastera
Softstarter tworzy plik o nazwie Master_Parameters.par i zapisuje go na najwyższym poziomie dysku USB.
Ładowanie parametrów mastera
Softstarter ładuje plik Master_Parameters.par z najwyższego poziomu dysku USB. Pliki można utworzyć lub edytować za pomocą
oprogramowania VLT® Motion Control Tool MCT 10. Należy pobrać narzędzie MCT 10 ze strony www.danfoss.com/en/service-andsupport/downloads/dds/vlt-motion-control-tool-mct-10/.
Ładowanie niestandardowego komunikatu
Softstarter ładuje pliki Custom_Message_A.txt i Custom_Message_B.txt z najwyższego poziomu dysku USB.
44 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 45

e77ha730.10
e77ha734.10
Auto-Start/Stop
Start/Stop Mode
Start/Stop Sunday
Start/Stop Monday
Instrukcja obsługi | VLT® Soft Starter MCD 600
Ilustracja 13: Katalog USB
Narzędzia zestawu parametrów
6.8 Automatyczny rozruch/zatrzymanie
Context:
Softstarter można skonfigurować do automatycznego rozruchu i/lub zatrzymania silnika w określonym czasie lub uruchamiania go w
cyklach o określonym czasie trwania.
Funkcja Auto-Start/Stop (Automatyczny rozruch/zatrzymanie) w menu Set-up Tools (Narzędzia zestawu parametrów) zapewnia szybki
dostęp do parametrów automatycznego rozruchu/zatrzymania.
Procedura
1. Nacisnąć przycisk [Menu] i wybrać pozycję Set-up Tools (Narzędzia zestawu parametrów).
2. Przewinąć do pozycji Auto-Start/Stop (Automatyczny rozruch/zatrzymanie) i nacisnąć przycisk [Menu/Store].
3. Przewinąć do żądanej funkcji i nacisnąć przycisk [Menu/Store].
4. Zmodyfikować ustawienia odpowiednio do potrzeb:
A Nacisnąć przycisk [Menu/Store] i przycisk [Back], aby wybrać informacje do edycji.
B Naciskać przyciski [▵] i [▿], aby zmienić wartość.
Nacisnąć przycisk [Menu/Store], aby zapisać zmiany. Softstarter potwierdzi zmiany.
Nacisnąć przycisk [Back], aby anulować zmiany.
6.9 Adres sieciowy
Aby używać softstartera VLT® Soft Starter MCD 600 w sieci Ethernet, należy skonfigurować osobne adresy:
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 45
Page 46

e77ha735.10
Set IP Address
192.168.000.002
e77ha711.10
Digital I/O State
Inputs: 0100
Outputs: 100
Instrukcja obsługi | VLT® Soft Starter MCD 600
• Adres IP.
• Adres bramy.
• Maska podsieci.
6.9.1 Ustawianie adresu sieciowego
Procedura
1. Nacisnąć przycisk [Menu] i wybrać pozycję Set-up Tools (Narzędzia zestawu parametrów).
2. Przewinąć ekran do pozycji Network Address (Adres sieciowy) i nacisnąć przycisk [Menu/Store].
3. Przewinąć do żądanej funkcji i nacisnąć przycisk [Menu/Store].
Narzędzia zestawu parametrów
4. Pierwsza cyfra adresu zostanie podświetlona.
5. Naciskając przyciski [Back] i [Menu/Store], wybrać cyfrę do edycji.
6. Naciskać przyciski [▵] i [▿], aby zmienić wartość.
7. Po ostatniej cyfrze nacisnąć przycisk [Menu/Store], aby zapisać ustawienia.
Po zakończeniu czynności ekran na krótko wyświetli komunikat potwierdzający, a następnie powróci do poprzedniego poziomu
menu.
UW AG A
Adres sieciowy można również ustawić za pomocą parametrów od 12-8 do 12-19.
UW AG A
Aby skonfigurować softstarter do używania z innymi protokołami komunikacji, należy użyć parametrów od 12-1 do 12-7.
6.10 Stan We/Wy cyfrowych
Ilustracja 14: Ekran stanu We/Wy cyfrowych
46 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 47

AO-08
AO-07
DI-B
DI-A
COM+
START
COM+
RESET
TER-06
TER-05
3433232221
14
13
e77ha717.10
7
6
5
4
32
1
e77ha736.10
Analog I/O State
Thermistor: 0
4-20 mA Output: 04.0 mA
Instrukcja obsługi | VLT® Soft Starter MCD 600
1 RESET, COM+: Wejście resetu
2 START, COM+: Wejście sygnału rozruchu/zatrzymania
3 DI-A, COM+: Wejście programowalne A
4 DI-B, COM+: Wejście programowalne B
5 13, 14: Wyjście głównego stycznika
6 21, 22, 23: Wyjście przekaźnikowe A
Narzędzia zestawu parametrów
7 33, 34: Wyjście przekaźnikowe B
Ilustracja 15: Położenie we/wy cyfrowych
6.11 Stan We/Wy analogowych
W górnym wierszu wyświetlacza jest wyświetlany stan wejścia termistora silnika. W dolnym wierszu ekranu wyświetlana jest wartość
wyjścia analogowego.
Ilustracja 16: Ekran stanu We/Wy analogowego
Wejście termistora
S Short (Zwarte)
H Hot (Gorące)
C Cold (Zimne)
O Open (Otwarte)
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 47
Page 48

e77ha789.10
Serial Number & Rating
MCD 600
123456-123
0410-T5-S1-CV2
Instrukcja obsługi | VLT® Soft Starter MCD 600
6.12 Numer seryjny i wartość znamionowa
Górny wiersz ekranu zawiera nazwę produktu.
Środkowy wiersz ekranu zawiera numer seryjny jednostki.
Dolny wiersz ekranu zawiera numer modelu.
Ilustracja 17: Ekran numeru seryjnego i wartości znamionowej
6.13 Wersje oprogramowania
Narzędzia zestawu parametrów
Na ekranie wersji oprogramowania wyświetlana jest wersja każdego składnika oprogramowania softstartera:
• Interfejs użytkownika.
• Sterowanie silnikiem.
• Zdalny panel LCP (jeśli jest podłączony).
• Lista parametrów.
• Bootloader.
• Karta rozszerzeń (jeśli została zainstalowana).
UW AG A
W razie potrzeby zaktualizowane oprogramowanie, w tym alternatywne języki, można załadować do softstartera za
pośrednictwem portu USB. Należy skontaktować się z lokalnym dostawcą, aby uzyskać więcej informacji.
6.14 Reset termistora
Wejście termistora jest domyślnie wyłączone, ale aktywuje się automatycznie po wykryciu termistora. Jeśli termistory zostały wcześniej
podłączone do softstartera, ale nie są już wymagane, należy użyć funkcji kasowania (resetu) termistora, aby dezaktywować termistor.
6.15 Resetowanie modelu termicznego
Oprogramowanie do modelowania termicznego ciągle monitoruje działanie silnika. Dzięki temu softstarter może wyliczyć temperaturę
silnika i daje możliwość pomyślnego uruchamiania w dowolnym momencie.
Model termiczny można zresetować w razie potrzeby.
48 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 49

Instrukcja obsługi | VLT® Soft Starter MCD 600
Narzędzia zestawu parametrów
UW AG A
KRÓTSZA ŻYWOTNOŚĆ I OKRES EKSPLOATACJI SILNIKA
Zresetowanie modelu termicznego silnika ma negatywny wpływ na ochronę za pomocą modelu termicznego i może mieć
negatywny wpływ na okres eksploatacji silnika.
Model termiczny należy resetować tylko w sytuacji awaryjnej.
-
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 49
Page 50

Instrukcja obsługi | VLT® Soft Starter MCD 600
Rejestry
7 Rejestry
7.1 Wprowadzenie
Menu rejestrów udostępnia informacje dotyczące zdarzeń, wyłączeń awaryjnych i wydajności softstartera.
Aby uzyskać dostęp do menu rejestrów na lokalnym panelu LCP, należy nacisnąć przycisk [Menu] i wybrać pozycję Logs (Rejestry). Na
zdalnym panelu LCP nacisnąć przycisk [Logs].
7.2 Rejestr zdarzeń
W rejestrze zdarzeń przechowywane są informacje o ostatnich wyłączeniach awaryjnych, ostrzeżeniach i operacjach (w tym
rozruchach, zatrzymaniach i zmianach konfiguracji).
Zdarzenie 1 jest najnowszym, a zdarzenie 384 najstarszym przechowywanym zdarzeniem.
UW AG A
Rejestr zdarzeń można wyeksportować do zewnętrznego pliku na potrzeby analizy z dala od softstartera.
Patrz 6.7.2 Lokalizacje i formaty plików.
7.3 Liczniki
Liczniki przechowują statystyki dotyczące pracy softstartera:
• Godziny pracy (od początku i od ostatniego zresetowania licznika).
• Liczba rozruchów (od początku i od ostatniego zresetowania licznika).
• Liczba resetów modelu termicznego.
7.3.1 Wyświetlanie liczników
Procedura
1. Otwórz menu Logs (Rejestry). Patrz 7.1 Wprowadzenie.
2. Przewinąć ekran do pozycji Counters (Liczniki) i nacisnąć przycisk [Menu/Store].
3. Użyć przycisków [▵] i [▿], aby przeglądać liczniki.
4. Nacisnąć przycisk [Menu/Store], aby wyświetlić szczegóły.
5. Aby zresetować licznik, nacisnąć przycisk [Menu/Store], a następnie nacisnąć przyciski [▵] i [▿], aby wybrać opcję Reset/Do Not Reset
(Resetuj/Nie resetuj).
6. Nacisnąć przycisk [Store], aby potwierdzić działanie.
7. Nacisnąć przycisk [Menu/Store], aby zamknąć licznik i wrócić do menu Logs (Rejestry).
50 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 51

READY
RUN
TRIP LOCAL
Menu
Store
Back
Reset
1
2
3
e77ha715.10
Instrukcja obsługi | VLT® Soft Starter MCD 600
8 Panel LCP i sprzężenie zwrotne
8.1 Lokalny panel LCP i sprzężenie zwrotne
Panel LCP i sprzężenie zwrotne
1 Czterowierszowy wyświetlacz do pokazywania statusu i szczegółów programowania.
2 Lampki sygnalizacyjne statusu.
3 Przyciski
nawigacyjne
menu:
Ilustracja 18: Lokalny LCP
Back: Wyjście z menu lub parametru
albo anulowanie zmiany parametru.
Ten przycisk służy także do
resetowania wyłączenia awaryjnego.
Menu/Store: Wejście w
menu lub parametr albo
zapisanie zmiany
parametru.
Strzałki: Przejście do następnego lub
poprzedniego menu lub parametru,
zmiana ustawienia bieżącego
parametru lub przewijanie ekranów
statusu.
8.2 Zdalny panel LCP
Zdalny panel LCP może być używany do sterowania softstarterem, jeśli parametr 1-1 Command Source (Źródło polecenia) jest ustawiony
na wartość Remote Keypad (Klawiatura zdalna).
• Jeśli zdalny panel LCP nie został wybrany jako źródło polecenia, przyciski [Start], [Stop] i [Reset] są nieaktywne.
• Przyciski nawigacyjne menu i wyświetlacz na zdalnym panelu LCP są zawsze aktywne.
• Naciśnięcie przycisku na zdalnym panelu LCP powoduje odpowiednią aktualizację zdalnego panelu LCP.
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 51
Page 52

READY RUN TRIP
LOCAL
RESET
LOGS
Alt
GRAPH
TOOLS
CMD
MENU
MENU
STORE
BACK
e77ha716.10
1
2
3
4
5
6
Instrukcja obsługi | VLT® Soft Starter MCD 600
Panel LCP i sprzężenie zwrotne
UW AG A
Zdalny panel LCP można bezpiecznie podłączyć lub odłączyć podczas działania softstartera. Nie trzeba odłączać zasilania ani
napięcia sterowania.
UW AG A
Jeśli parametr 1-1 Command Source (Źródło polecenia) jest ustawione na opcję Remote Keypad (Klawiatura zdalna), odłączenie
zdalnego panelu LCP spowoduje wyłączenie awaryjne.
1 Czterowierszowy wyświetlacz do pokazywania statusu i szczegółów programowania.
2 Lampki sygnalizacyjne statusu.
Menu/Store: Wejście w menu
lub parametr albo zapisanie
zmiany parametru.
3 Przyciski
nawigacyjne
menu:
Back: Wyjście z menu lub
parametru albo anulowanie
zmiany parametru.
4 Skrót do menu źródła polecenia w narzędziach Set-up Tools (Narzędzia zestawu parametrów).
5 Przyciski sterowania lokalnego.
52 | Danfoss A/S © 2018.10
Przyciski ze strzałkami: Przejście do
następnego lub poprzedniego menu lub
parametru, zmiana ustawienia bieżącego
parametru lub przewijanie ekranów statusu.
AQ262141844215pl-000201 / 175R1174
Page 53

Ready Run Trip Local
e77ha724.10
Instrukcja obsługi | VLT® Soft Starter MCD 600
Panel LCP i sprzężenie zwrotne
6 Przyciski skrótu na
potrzeby szybkiego
dostępu do popularnych
zadań:
Ilustracja 19: Zdalny panel LCP
Logs: Otwiera
menu rejestrów.
Graph: Umożliwia wybranie wykresu do
wyświetlania lub zatrzymanie/zrestartowanie
wykresu (należy nacisnąć i przytrzymać
przycisk przez ponad 0,5 s)
Tools: Służy do otwierania
menu Set-up Tools (Narzędzia
zestawu parametrów).
8.3 Regulowanie kontrastu wyświetlacza
Context:
UW AG A
Ustawienia lokalnego i zdalnego panelu LCP można regulować niezależnie.
1. Nacisnąć i przytrzymać przycisk [Back].
2. Nacisnąć przycisk [▵], aby rozjaśnić wyświetlacz, lub nacisnąć przycisk [▿], aby przyciemnić wyświetlacz.
8.4 Lampki sygnalizacyjne softstartera
Ilustracja 20: Lampki sygnalizacyjne stanu na LCP
Tabela 17: Opisy lampek sygnalizacyjnych (LED)
Nazwa lampki
sygnalizacyjnej
Ready (Gotowy) Silnik jest zatrzymany i softstarter jest
Run (Praca) Silnik jest w stanie pracy (otrzymuje
Trip (Wyłączenie
awaryjne)
Lokalny Sterowanie softstarterem odbywa się
Jeśli wszystkie lampki sygnalizacyjne LED są wyłączone, softstarter nie otrzymuje napięcia zasilania.
On Pulsuje
Silnik jest zatrzymany i softstarter nie jest gotowy do rozruchu.
gotowy do rozruchu.
pełne napięcie).
Softstarter wyłączył się awaryjnie. Softstarter jest w stanie ostrzeżenia.
za pomocą zdalnego panelu LCP.
• Oczekiwanie na opóźnienie restartu (parametr 5-16 Restart Delay
(Opóźnienie restartu)).
• Modele termiczne wskazują, że softstarter i/lub silnik są zbyt
gorące, aby można było bezpiecznie wykonać rozruch.
• Wejście resetu (RESET, COM+) jest otwarte.
Silnik jest w trakcie rozruchu lub zatrzymywania.
–
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 53
Page 54

e77ha790.10
WELCOME
01.01/01.00/01.00
MCD6-0069B-T5-S1-CV2
1
2
e77ha791.10
69.0 A
Running
69.0 A 415 V
1
2
3
Instrukcja obsługi | VLT® Soft Starter MCD 600
Panel LCP i sprzężenie zwrotne
8.5 Wyświetlacze
8.5.1 Informacje o softstarterze
Podczas załączania zasilania na ekranie są wyświetlane szczegółowe informacje o danych znamionowych softstartera, wersji software'u
i numerze seryjnym.
1 Wersje oprogramowania: interfejs użytkownika, sterowanie silnikiem, zdalny panel LCP
2 Kod modelu: Wartość znamionowa prądu, napięcie zasilania, rozmiar obudowy, napięcie sterowania (wersja oprogramowania
zdalnego panelu LCP jest wyświetlana tylko w przypadku podłączenia zdalnego panelu LCP)
Ilustracja 21: Ekran powitalny
8.5.2 Konfigurowalne ekrany sprzężenia zwrotnego
Należy wybrać, które informacje mają być pokazywane na wyświetlaczu. Aby przełączyć się między dwoma konfigurowalnymi
ekranami, należy nacisnąć przyciski [▵] i [▿].
1 Prąd pracy silnika
2 Status softstartera
3 Parametr 10-8 User Parameter 1 (Parametr użytkownika 1) i parametr 10-9 User Parameter 2 (Parametr użytkownika 2)
Ilustracja 22: Ekran statusu softstartera
54 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 55

e77ha792.10
Motor pf
Motor power
1
2
3
Mains Frequency 59.7 Hz
1.01
37.0 kW
4 Motor Temp 85%
e77ha793.10
69.0 A
Last start
350% FLC
1
2
3
010s
D Temp 5%
4
Instrukcja obsługi | VLT® Soft Starter MCD 600
Panel LCP i sprzężenie zwrotne
1 Parametr 10-10 User Parameter 3 (Parametr użytkownika 3) (opcja domyślna: Mains frequency (Częstotliwość zasilania))
2 Parametr 10-11 User Parameter 4 (Parametr użytkownika 4) (opcja domyślna: Power factor (Współczynnik zasilania))
3 Parametr 10-12 User Parameter 5 (Parametr użytkownika 5) (opcja domyślna: Motor running power (Moc robocza silnika))
4 Parametr 10-13 User Parameter 6 (Parametr użytkownika 6) (opcja domyślna: Motor temperature (Temperatura silnika))
Ilustracja 23: Ekran konfigurowany przez użytkownika
8.5.3 Ekrany sprzężenia zwrotnego podczas pracy
Na ekranach sprzężenia zwrotnego na górnej połowie ekranu jest wyświetlany prąd roboczy silnika. Aby wybrać informacje
wyświetlane na dolnej połowie, nacisnąć przyciski [▵] i [▿].
• Prąd liniowy na każdej fazie w czasie rzeczywistym.
• Informacja o ostatnim rozruchu.
• Data i czas.
1 Prąd pracy silnika
2 Czas trwania rozruchu (sekundy)
3 Maksymalny pobrany prąd przy rozruchu (jako procent prądu pełnego obciążenia silnika)
4 Obliczony wzrost temperatury silnika
Ilustracja 24: Ekrany sprzężenia zwrotnego podczas pracy
8.5.4 Wykres wydajności
Wykres wydajności zapewnia wyświetlanie w czasie rzeczywistym wydajności roboczej. Za pomocą parametrów od 10-2 do 10-5 można
sformatować wykres.
Na wyświetlaczu głównego panelu LCP są pokazywane informacje o prądzie silnika.
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 55
Page 56

e77ha757.10
000.0 A 0-400%
Instrukcja obsługi | VLT® Soft Starter MCD 600
Panel LCP i sprzężenie zwrotne
Jeśli podłączono zdalny panel LCP, nacisnąć przycisk [Graph], aby zmienić dane wykresu. Na wykresie mogą być wyświetlane
następujące informacje:
• Prąd silnika.
• Temperatura silnika.
• Współczynnik mocy silnika.
• Dane wejścia analogowego z karty inteligentnej (jeśli jest zainstalowana).
56 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 57

Instrukcja obsługi | VLT® Soft Starter MCD 600
Praca
9 Praca
9.1 Polecenia Start, Stop i Reset
Softstarter VLT® Soft Starter MCD 600 może być uruchamiany i zatrzymywany za pomocą wejść cyfrowych, zdalnego panelu LCP, sieci
komunikacyjnej, karty inteligentnej lub zaplanowanego automatycznego rozruchu/zatrzymania. Źródło polecenia można ustawić za
pomocą narzędzi zestawu parametrów (Set-up Tools) lub przy użyciu parametru 1-1 Command Source (Źródło polecenia).
• Softstarter MCD 600 akceptuje polecenia start i reset tylko z określonego źródła polecenia.
• Softstarter MCD 600 akceptuje polecenia zatrzymania z wyznaczonego źródła polecenia, ale można wymusić jego zatrzymanie
przez otwarcie wejścia resetu lub przez otwarcie wejścia startu/stopu podczas cyklu automatycznego rozruchu/zatrzymania.
• Wejście programowalne może być używane do unieważnienia wybranego źródła polecenia (patrz parametr 7-1 Input A Function
(Funkcja wejścia A)).
9.2 Kasowanie polecenia
Za pomocą wejścia programowalnego (DI-A, COM+) można skasować źródło polecenia w sytuacjach, w których normalne mechanizmy
sterowania zostały utracone. Należy ustawić parametr 7-1 Input A Function (Funkcja wejścia A) na alternatywne źródło polecenia (na
przykład Command Override: Keypad (Kasowanie polecenia: Klawiatura)).
Kiedy wejście jest aktywne, softstarter akceptuje tylko polecenia z wybranego źródła kasowania. Aby przywrócić sterowanie przez
źródło polecenia wybrane w parametrze 1-1 Command Source (Źródło polecenia), należy ponownie otworzyć wejście.
9.3 Automatyczny rozruch/zatrzymanie
Softstarter można skonfigurować do automatycznego rozruchu i/lub zatrzymania silnika w określonym czasie lub uruchamiania go w
cyklach o określonym czasie trwania.
UW AG A
Opóźnienie startu, opóźnienie restartu i opóźnienie automatycznego resetu mają zastosowanie do operacji automatycznego
rozruchu.
9.3.1 Tryb zegara
Softstarter może wykonać rozruch i/lub zatrzymać silnik raz dziennie.
Aby tryb zegara działał:
• Parametr 4-1 Auto-Start/Stop Mode (Tryb automatycznego rozruchu/zatrzymania) musi być ustawiony na opcję Enable (Aktywne).
• Parametr 1-1 Command Source (Źródło polecenia) musi być ustawiony na opcję Clock (Zegar).
• Wejście resetu musi być zamknięte.
• Wejście rozruchu (START, COM+) musi być aktywne. Umożliwia to zatrzymanie softstartera za pomocą wejść cyfrowych w sytuacji
awaryjnej.
Pracą trybu zegara sterują parametry od 4-4 do 4-24.
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 57
Page 58

Instrukcja obsługi | VLT® Soft Starter MCD 600
Praca
9.3.2 Tryb czasomierza
Softstarter może automatycznie zatrzymać silnik po określonym czasie pracy, a następnie uruchomić go ponownie po określonym
czasie wyłączenia (zatrzymania). Softstarter powtarza cykl w czasie, gdy sygnał startu pozostaje aktywny.
Aby tryb czasomierza działał:
• Parametr 4-1 Auto-Start/Stop Mode (Tryb automatycznego rozruchu/zatrzymania) musi być ustawiony na opcję Enable (Aktywne).
• Parametr 1-1 Command Source (Źródło polecenia) musi być ustawiony na opcję Timer (Czasomierz).
• Wejście resetu musi być zamknięte.
• Pierwszy rozruch musi być zainicjowany przez sygnał rozruchu.
Działaniem trybu czasomierza sterują parametry od 4-2 do 4-3.
9.4 PowerThrough
Tryb PowerThrough umożliwia softstarterowi sterowanie silnikiem, nawet jeśli softstarter zostanie uszkodzony na 1 fazie. Softstarter
VLT® Soft Starter MCD 600 korzysta z technik sterowania 2-fazowego w celu wykonania płynnego rozruchu i płynnego zatrzymania
silnika.
UW AG A
Softstarter wyłączy się awaryjnie z komunikatem o błędzie Lx-Tx Shorted (Lx-Tx zwarte) przy pierwszej próbie rozruchu po
zastosowaniu zasilania sterowania. Funkcja PowerThrough nie będzie działać, jeśli między rozruchami nastąpi wyłączenie i
włączenie zasilania.
• Funkcja PowerThrough jest dostępna tylko w przypadku instalacji w linii. W przypadku instalacji softstartera wewnątrz trójkąta
funkcja PowerThrough nie będzie działać.
• Tryb PowerThrough pozostanie aktywny do czasu ponownego wybrania opcji 3-Phase Control Only (Tylko sterowanie 3-fazowe).
Podczas pracy w trybie PowerThrough lampka sygnalizacyjna wyłączenia awaryjnego błyska, a na wyświetlaczu pojawia się
informacja 2 Phase - Damaged SCR (2 fazy - uszkodzony tyrystor SCR).
• Praca w trybie PowerThrough nie obsługuje płynnego rozruchu ani płynnego zatrzymania ze sterowaniem adaptacyjnym. W trybie
PowerThrough softstarter automatycznie wybiera płynny rozruch ze stałą wartością prądu i płynne zatrzymanie z
zsynchronizowanym zmniejszaniem napięcia. Jeśli funkcja PowerThrough jest włączona, należy odpowiednio ustawić parametry
2-3 i 2-4.
UW AG A
Funkcja PowerThrough używa technologii sterowania dwufazowego, co wymaga dodatkowej uwagi przy dobieraniu rozmiaru
wyłączników i zabezpieczenia. Należy skontaktować się z lokalnym dostawcą, aby uzyskać pomoc.
9.5 Tryb awaryjny
Tryb awaryjny umożliwia podtrzymanie pracy silnika przez softstarter i ignorowanie warunków wyłączenia awaryjnego.
Sterowanie trybem awaryjnym odbywa się za pomocą wejścia programowalnego (wejścia A DI-A, COM+ lub wejścia B DI-B, COM+).
Parametr 7-1 Input A Function (Funkcja wejścia A)/parametr 7-5 Input B Function (Funkcja wejścia B) musi być ustawiony na funkcję
Emergency Mode (Tryb awaryjny). Obwód zamknięty na wejściu DI-A, COM+ aktywuje tryb awaryjny. Po otrzymaniu polecenia rozruchu
softstarter pracuje aż do otrzymania polecenia zatrzymania, ignorując wszystkie wyłączenia awaryjne i ostrzeżenia.
Tryb awaryjny może być używany z dowolnym źródłem polecenia.
58 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 59

Instrukcja obsługi | VLT® Soft Starter MCD 600
Praca
UW AG A
Chociaż tryb awaryjny spełnia wymagania funkcjonalne trybu pożarowego, firma Danfoss nie zaleca jego stosowania w
sytuacjach wymagających testowania i/lub zgodności z określonymi normami ze względu na brak odpowiedniego certyfikatu.
UW AG A
KRÓTSZA ŻYWOTNOŚĆ I OKRES EKSPLOATACJI SPRZĘTU
Ciągłe używanie trybu awaryjnego nie jest zalecane. Może to mieć negatywny wpływ na żywotność softstartera i/lub silnika,
ponieważ w trybie awaryjnym wszystkie zabezpieczenia i wyłączenia awaryjne są nieaktywne. Używanie softstartera w trybie
awaryjnym unieważnia gwarancję produktu.
Nie należy ciągle używać softstartera w trybie awaryjnym.
-
9.6 Dodatkowe wyłączenie awaryjne
Zewnętrzny obwód wyłączenia awaryjnego (na przykład przełącznik alarmowy niskiego ciśnienia dla układu pomp) może być używany
do wyłączenia awaryjnego softstartera i zatrzymania silnika. Zewnętrzny obwód jest podłączony do wejścia programowalnego (wejścia
A DI-A, COM+ lub wejścia B DI-B, COM+). Aby sterować zachowaniem wyłączenia awaryjnego, należy ustawić następujące parametry:
• Parametr 7-1 Input A Function (Funkcja wejścia A): Wybrać funkcję Input Trip (N/O) (Wyłączenie awaryjne z wejścia (zwierne)).
• Parametr 7-2 Input A Trip (Wyłączenie awaryjne z wejścia A): Ustawić zgodnie z wymogami. Na przykład ustawienie Run Only (Tylko
praca) ogranicza wyłączenie awaryjnego wejścia, umożliwiając je tylko wtedy, gdy softstarter pracuje.
• Parametr 7-3 Input A Trip Delay (Opóźnienie wyłączenia awaryjnego wejścia A): Ustawia opóźnienie między aktywacją wejścia a
wyłączeniem awaryjnym softstartera.
• Parametr 7-4 Input A Initial Delay (Opóźnienie początkowe wejścia A): Ustawia opóźnienie przed monitorowaniem stanu wejścia przez
softstarter po sygnale rozruchu. Na przykład opóźnienie może być wymagane, aby umożliwić zwiększenie ciśnienia w rurociągu.
• Parametr 7-10 Input A Name (Nazwa wejścia A): Należy wybrać nazwę, na przykład Wyłączenie awaryjne z wejścia A (opcjonalnie).
9.7 Typowe metody sterowania
Wymagania aplikacji są różne w przypadku każdej instalacji, ale metody wymienione poniżej są często dobrym punktem wyjścia dla
typowych aplikacji.
Tabela 18: Typowe metody sterowania
Aplikacja Tryb rozruchu Czas
rozpędzania
przy
rozruchu [s]
Pędnik dziobowy Stała wartość prądu 5 100 400 Zatrzymanie z wybiegiem silni-kanie dotyczy
Wirówka (separator) Stała wartość prądu 1 200 450 Zatrzymanie z wybiegiem silni-kanie dotyczy
Dłuto pneumatyczne
Stała wartość prądu 1 200 450 Zatrzymanie z wybiegiem silni-kanie dotyczy
Prąd
początkowy (%
FLC)
Ograniczenie prądu (%
FLC)
Tryb zatrzymania Czas zatrzy-
mania [s]
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 59
Page 60

Instrukcja obsługi | VLT® Soft Starter MCD 600
Praca
Aplikacja Tryb rozruchu Czas
rozpędzania
przy
rozruchu [s]
Sprężarka tłokowa
— obciążona
Sprężarka tłokowa
— nieobciążona
Sprężarka śrubowa
— obciążona
Sprężarka śrubowa
— nieobciążona
Przenośnik poziomy Stała wartość prądu 5 200 400 Płynne zatrzymanie TVR 10
Przenośnik pochyły Stała wartość prądu 2 200 450 Zatrzymanie z wybiegiem silni-kanie dotyczy
Przenośnik pionowy
(kubełkowy)
Kruszarka stożkowa Stała wartość prądu 1 200 350 Zatrzymanie z wybiegiem silni-kanie dotyczy
Stała wartość prądu 1 200 450 Zatrzymanie z wybiegiem silni-kanie dotyczy
Stała wartość prądu 1 200 400 Zatrzymanie z wybiegiem silni-kanie dotyczy
Stała wartość prądu 1 200 400 Zatrzymanie z wybiegiem silni-kanie dotyczy
Stała wartość prądu 1 200 350 Zatrzymanie z wybiegiem silni-kanie dotyczy
Stała wartość prądu 2 200 450 Zatrzymanie z wybiegiem silni-kanie dotyczy
Prąd
początkowy (%
FLC)
Ograniczenie prądu (%
FLC)
Tryb zatrzymania Czas zatrzy-
mania [s]
Kruszarka szczękowa Stała wartość prądu 1 200 450 Zatrzymanie z wybiegiem silni-kanie dotyczy
Kruszarka obrotowa Stała wartość prądu 1 200 400 Zatrzymanie z wybiegiem silni-kanie dotyczy
Okorowywacz Stała wartość prądu 1 200 350 Zatrzymanie z wybiegiem silni-kanie dotyczy
Wentylator osiowy
(wytłumiony)
Wentylator osiowy
(niewytłumiona)
Wentylator odśrodkowy (wytłumiony)
Wentylator odśrodkowy (niewytłumiony)
Wentylator wysokociśnieniowy
Młyn kulowy Stała wartość prądu 1 200 450 Zatrzymanie z wybiegiem silni-kanie dotyczy
Młyn młotkowy Stała wartość prądu 1 200 450 Zatrzymanie z wybiegiem silni-kanie dotyczy
Stała wartość prądu 1 200 350 Zatrzymanie z wybiegiem silni-kanie dotyczy
Stała wartość prądu 1 200 450 Zatrzymanie z wybiegiem silni-kanie dotyczy
Stała wartość prądu 1 200 350 Zatrzymanie z wybiegiem silni-kanie dotyczy
Stała wartość prądu 1 200 450 Zatrzymanie z wybiegiem silni-kanie dotyczy
Stała wartość prądu 1 200 450 Zatrzymanie z wybiegiem silni-kanie dotyczy
Pompa głębinowa Sterowanie adapta-
cyjne (wczesne przyspieszenie)
60 | Danfoss A/S © 2018.10
3 nie do-
tyczy
500 Sterowanie adaptacyjne (późne
zmniejszanie prędkości)
AQ262141844215pl-000201 / 175R1174
3
Page 61

Instrukcja obsługi | VLT® Soft Starter MCD 600
Praca
Aplikacja Tryb rozruchu Czas
rozpędzania
przy
rozruchu [s]
Pompa odśrodkowa Sterowanie adapta-
cyjne (wczesne przyspieszenie)
Pompa hydrauliczna Stała wartość prądu 2 200 350 Zatrzymanie z wybiegiem silni-kanie dotyczy
Pompa wyporowa Sterowanie adapta-
cyjne (stałe przyspieszenie)
Pompa głębinowa Sterowanie adapta-
cyjne (wczesne przyspieszenie)
Piła taśmowa Stała wartość prądu 1 200 450 Zatrzymanie z wybiegiem silni-kanie dotyczy
Piła tarczowa Stała wartość prądu 1 200 350 Zatrzymanie z wybiegiem silni-kanie dotyczy
Rozdrabniacz Stała wartość prądu 1 200 450 Zatrzymanie z wybiegiem silni-kanie dotyczy
10 nie do-
10 nie do-
5 nie do-
Prąd
początkowy (%
FLC)
tyczy
tyczy
tyczy
Ograniczenie prądu (%
FLC)
500 Sterowanie adaptacyjne (późne
400 Sterowanie adaptacyjne (stałe
500 Sterowanie adaptacyjne (późne
Tryb zatrzymania Czas zatrzy-
zmniejszanie prędkości)
zmniejszanie prędkości)
zmniejszanie prędkości)
mania [s]
15
10
5
9.8 Metody płynnego rozruchu
9.8.1 Stała wartość prądu
Prąd o stałej wartości to tradycyjna forma płynnego rozruchu, w której prąd jest zwiększany od 0 do określonego poziomu, a następnie
utrzymywany stabilnie na tym poziomie aż do przyspieszenia silnika.
Rozruch ze stałą wartością prądu jest idealny w aplikacjach, w których prąd przy rozruchu musi być utrzymywany poniżej pewnego
poziomu.
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 61
Page 62

700
600
500
300
100
400
200
10 20 30 40 50 60 70 80 90 100
e77ha505.10
1
3
2
%
%
Prąd (% prądu pełnego obciążenia silnika)
Prędkość wirnika (% pełnej prędkości)
Instrukcja obsługi | VLT® Soft Starter MCD 600
1 Prąd początkowy (ustawiony w parametrze 2-3 Initial Current (Prąd początkowy ))
2 Ograniczenie prądu (ustawione w parametrze 2-4 Current Limit (Ograniczenie prądu))
3 Prąd przy pełnym napięciu
Praca
Ilustracja 26: Przykład stałej wartości prądu
9.8.2 Stała wartość prądu z narastaniem prądu
Płynny rozruch z narastaniem prądu zwiększa prąd od określonego poziomu początkowego (1) do maksymalnego ograniczenia (3)
przez dany czas (2).
Rozruch z narastaniem prądu może być przydatny w poniższych aplikacjach:
• Obciążenie może się zmieniać pomiędzy rozruchami (na przykład w przypadku przenośnika, który można uruchomić z obciążeniem
lub bez). Należy ustawić parametr 2-3 Initial Current (Prąd początkowy) na poziom, który wykona rozruch silnika z małym
obciążeniem. Następnie ustawić parametr 2-4 Current Limit (Ograniczenie prądu) na poziom, który wykona rozruch silnika z dużym
obciążeniem.
• Obciążenie pozwala na łatwy rozruch, lecz czas rozruchu musi być wydłużony (na przykład dla pompy odśrodkowej, w przypadku
której ciśnienie w rurociągu musi być zwiększane powoli).
• Dostarczany prąd jest ograniczony (na przykład w przypadku zespołu prądnicowego), a wolniejsze podawanie obciążenia pozwoli
na zwiększenie czasu potrzebnego zasilaniu na reakcję.
62 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 63

e77ha506.10
700
600
500
300
100
400
200
10 20 30 40
50
60 70 80 90 100
1
4
3
2
%
%
Prąd (% prądu pełnego obciążenia silnika)
Czas
0
10
20
30
40
50
60
70
80
90
100
4
e77ha507.10
1
2
3
%
Prędkość
Czas
Instrukcja obsługi | VLT® Soft Starter MCD 600
1 Parametr 2-3 Initial Current (Prąd początkowy)
2 Parametr 2-2 Start Ramp Time (Czas rozpędzania przy rozruchu)
3 Parametr 2-4 Current Limit (Ograniczenie prądu)
Praca
4 Prąd przy pełnym napięciu
Ilustracja 27: Przykład płynnego rozruchu z narastaniem prądu
9.8.3 Sterowanie adaptacyjne dla rozruchu
Podczas łagodnego rozruchu ze sterowaniem adaptacyjnym softstarter dostosowuje prąd, aby wykonać rozruch silnika w określonym
czasie i przy użyciu wybranego profilu przyspieszania.
UW AG A
Softstarter stosuje ograniczenie prądu dla wszystkich płynnych rozruchów, uwzględniając sterowanie adaptacyjne. Jeśli
ograniczenie prądu jest zbyt niskie lub czas rozpędzania przy rozruchu (ustawiony w parametrze 2-2 Start Ramp Time (Czas
rozpędzania przy rozruchu)) jest zbyt krótki, rozruch silnika może się nie powieść.
1 Wczesne przyspieszanie
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 63
Page 64

Instrukcja obsługi | VLT® Soft Starter MCD 600
2 Stałe przyspieszanie
3 Późne przyspieszanie
4 Parametr 2-2 Start Ramp Time (Czas rozpędzania przy rozruchu)
Ilustracja 28: Przykład rozruchu ze sterowaniem adaptacyjnym (parametr 2-5 Adaptive Start Profile (Profil rozruchu adaptacyjnego))
Praca
9.8.3.1 Dostrajanie sterowania adaptacyjnego
Jeśli rozruch lub zatrzymanie silnika nie przebiega płynnie, należy dostosować parametr Adaptive Control Gain-2 (Wzmocnienie
sterowania adaptacyjnego). Ustawienie wzmocnienia określa, w jakim stopniu softstarter dostosuje przyszłe rozruchy i zatrzymania za
pomocą sterowania adaptacyjnego na podstawie informacji z poprzedniego rozruchu. Ustawienie to wpływa na działanie rozruchu i
zatrzymywania.
• Jeśli silnik zbyt szybko przyspiesza lub zwalnia na końcu rozruchu lub zatrzymania, należy zwiększyć ustawienie wzmocnienia o 5–
10%.
• Jeżeli prędkość silnika fluktuuje podczas rozruchu lub zatrzymania, należy lekko zmniejszyć ustawienie wzmocnienia.
UW AG A
Softstarter dostraja sterowanie adaptacyjne w celu dopasowania do silnika. Zmiana następujących parametrów powoduje reset
sterowania adaptacyjnego i pierwszy cykl rozruchu/zatrzymania używa rozruchu ze stałą wartością prądu/zatrzymania z
zsynchronizowanym zmniejszaniem napięcia: Parametr 1-2 Motor Full Load Current (Prąd pełnego obciążenia silnika), parametr
2-4 Current Limit (Ograniczenie prądu) i parametr 2-12 Adaptive Gain (Wzmocnienie sterowania adaptacyjnego).
9.8.4 Stała wartość prądu z rozruchem ze zwiększonym momentem
Rozruch ze zwiększonym momentem zapewnia krótkie podanie dodatkowego momentu obrotowego na początku rozruchu i może
być używany w połączeniu z rozruchem z narastaniem prądu lub stałą wartością prądu.
Rozruch ze zwiększonym momentem może być użyteczny przy rozruchu w przypadku obciążeń, które wymagają wysokiego momentu
rozruchowego, lecz później pozwalają na łatwe przyspieszenie (na przykład w przypadku pomp z wirnikiem śrubowym).
64 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 65

700
600
500
300
100
400
200
10 20 30 40 50 60 70 80 90 100
e77ha508.10
1
5
4
6
3
2
%
%
Prąd (% prądu pełnego obciążenia silnika)
Prędkość wirnika (% pełnej prędkości)
Instrukcja obsługi | VLT® Soft Starter MCD 600
1 Parametr 2-7 Kickstart Level (Poziom rozruchu ze zwiększonym momentem)
2 Parametr 2-6 Kickstart Time (Czas rozruchu ze zwiększonym momentem)
3 Parametr 2-3 Initial Current (Prąd początkowy)
Praca
4 Parametr 2-2 Start Ramp Time (Czas rozpędzania przy rozruchu)
5 Parametr 2-4 Current Limit (Ograniczenie prądu)
6 Prąd przy pełnym napięciu
Ilustracja 29: Przykład rozruchu ze zwiększonym momentem używanego w połączeniu z rozruchem ze stałą wartością prądu
9.9 Metody zatrzymania
9.9.1 Zatrzymanie z wybiegiem
Zatrzymanie z wybiegiem pozwala silnikowi zwolnić w naturalnym tempie bez żadnego sterowania przez softstarter. Czas zatrzymania
zależy od typu obciążenia.
9.9.2 Zsynchronizowane zmniejszanie napięcia
Zsynchronizowane zmniejszanie napięcia (timed voltage ramp, TVR) stopniowo zmniejsza napięcie dostarczane do silnika w
określonym czasie. Dzięki temu można wydłużyć czas zatrzymania silnika i uniknąć stanów nieustalonych przy zasilaniu z zespołu
prądnicowego.
UW AG A
Obciążenie może nadal pracować po zakończeniu zwalniania do zatrzymania.
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 65
Page 66

70
60
50
30
10
40
20
80
90
100
e77ha509.10
1
%
Napięcie (% pełnego napięcia)
Czas
Instrukcja obsługi | VLT® Soft Starter MCD 600
1 Parametr 2-10 Stop Time (Czas zatrzymania)
Ilustracja 30: Przykład zsynchronizowanego zmniejszania napięcia (TVR)
Praca
9.9.3 Sterowanie adaptacyjne dla zatrzymania
Podczas płynnego zatrzymania ze sterowaniem adaptacyjnym softstarter steruje prądem, aby wykonać zatrzymanie silnika w
określonym czasie i przy użyciu wybranego profilu zmniejszania prędkości. Sterowanie adaptacyjne może być przydatne do
wydłużania czasu zatrzymywania małych obciążeń bezwładnościowych.
Jeśli wybrano sterowanie adaptacyjne, pierwsze zatrzymanie używa zsynchronizowanego zmniejszania napięcia (TVR). Pozwala ono
softstarterowi na zebranie informacji o charakterystyce podłączonego silnika. Softstarter używa tych danych silnika podczas kolejnych
zatrzymań ze sterowaniem adaptacyjnym.
UW AG A
Sterowanie adaptacyjne nie spowalnia silnika aktywnie i nie zatrzymuje go w tempie szybszym niż tempo zatrzymania z
wybiegiem. Aby skrócić czas zatrzymywania wysokich obciążeń bezwładnościowych, należy użyć hamulca.
UW AG A
Sterowanie adaptacyjne kontroluje profil prędkości silnika w ramach zaprogramowanego ograniczenia czasowego. Może to
skutkować wyższym poziomem prądu niż w tradycyjnych metodach sterowania.
W przypadku wymiany silnika podłączonego do softstartera, w którym zaprogramowano rozruch lub zatrzymanie ze sterowaniem
adaptacyjnym, softstarter musi zebrać informacje o charakterystyce nowego silnika. Aby zainicjować ponowne zbieranie informacji o
charakterystyce silnika, należy zmienić parametr 1-2 Motor Full Load Current (Prąd pełnego obciążenia silnika) lub parameter 1-12
Adaptive Control Gain (Wzmocnienie sterowania adaptacyjnego). Następny rozruch będzie używał stałej wartości prądu, a następne
zatrzymanie będzie zatrzymaniem TVR.
66 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 67

0
10
20
30
40
50
60
70
80
90
100
e77ha510.10
1 2
4
3
Prędkość
Czas
Instrukcja obsługi | VLT® Soft Starter MCD 600
Praca
1 Wczesne zmniejszanie prędkości
2 Stałe zmniejszanie prędkości
3 Późne zmniejszanie prędkości
4 Parametr 2-10 Stop Time (Czas zatrzymania)
Ilustracja 31: Przykład zatrzymania ze sterowaniem adaptacyjnym (parametr 2-11Adaptive Stop Profile (Profil zatrzymania adaptacyjnego))
Sterowanie adaptacyjne jest idealnym rozwiązaniem dla aplikacji związanych z pompowaniem, w których może zminimalizować
negatywne skutki uderzeń cieczy. Należy przetestować trzy profile, aby określić najlepszy profil dla danej aplikacji.
Profil zatrzymania
Aplikacja
adaptacyjnego
Późne zmniejszanie prędkości Systemy o wysokim ciśnieniu, w przypadku których nawet mały spadek prędkości silnika/pompy
powoduje gwałtowne przejście między przepływem do przodu i przepływem do tyłu.
Stałe zmniejszanie prędkości Niskie do średniego ciśnienia, aplikacje o dużym przepływie, w których płyn osiąga dużą
prędkość.
Wczesne zmniejszanie
prędkości
Systemy z otwartą pompą, w przypadku których płyn musi zostać odprowadzony przez pompę
bez działania pompy w odwrotnym kierunku.
9.9.4 Hamowanie DC
Hamowanie skraca czas wymagany do zatrzymania silnika.
Podczas hamowania z silnika może dobiegać głośniejszy dźwięk. Jest to normalne zjawisko podczas hamowania.
UW AG A
W przypadku używania hamowania DC zasilanie musi być podłączone do softstartera (zacisków wejściowych L1, L2 i L3) w
dodatniej kolejności faz.
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 67
Page 68

100
70
0
30
1
2
3
e77ha511.10
%
Prędkość
Czas
Instrukcja obsługi | VLT® Soft Starter MCD 600
UW AG A
USZKODZENIE SILNIKA
W przypadku ustawienia zbyt wysokiego momentu hamowania silnik zatrzymuje się przed zakończeniem czasu hamowania, co
naraża go na niepotrzebne nagrzewanie, które może doprowadzić do uszkodzenia. Ustawienie wysokiego momentu
hamowania może także skutkować prądami szczytowymi aż do wartości DOL pobieranej w czasie zatrzymywania silnika.
Do zapewnienia bezpiecznego działania softstartera i silnika wymagana jest uważna konfiguracja.
-
Należy upewnić się, że w obwodzie odgałęzionym silnika zainstalowano prawidłowe bezpieczniki ochronne.
-
UW AG A
RYZYKO PRZEGRZANIA
Operacja hamowania powoduje, że silnik nagrzewa się szybciej niż wskazuje to tempo obliczone dla modelu termicznego
silnika.
Należy zainstalować termistor silnika lub zapewnić odpowiednie opóźnienie restartu (parametr 5-16 Restart Delay
-
(Opóźnienie restartu)).
Praca
1 Parametr 2-10 Stop Time (Czas zatrzymania)
2 Parametr 2-16 Brake Time (Czas hamowania)
3 Czas zatrzymana z wybiegiem
Ilustracja 32: Przykład czasu hamowania
Ustawienia parametrów:
68 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 69

Instrukcja obsługi | VLT® Soft Starter MCD 600
• Parametr 2-9 Stop Mode (Tryb zatrzymania): Ustawić na DC Brake (Hamowanie DC).
• Parametr 2-10 Stop Time (Czas zatrzymania): Czas zatrzymania to całkowity czas hamowania (1), który należy ustawić na wartość
odpowiednio większą niż czas hamowania (w parametrze 2-16 DC Brake Time (Czas hamowania DC)), aby na etapie hamowania
wstępnego prędkość silnika mogła być zmniejszona do około 70%. Jeżeli czas zatrzymania będzie zbyt krótki, hamowanie nie
zakończy się pomyślnie i silnik zatrzyma się z wybiegiem.
• Parametr 2-15 DC Brake Torque (Moment hamowania DC): Ustawić zgodnie z wymogami, aby spowolnić obciążenie. W przypadku
ustawienia zbyt niskiej wartości silnik nie zostaje zatrzymany całkowicie i zamiast tego zostaje przeprowadzone zatrzymanie z
wybiegiem przed końcem czasu hamowania.
• Parametr 2-16 DC Brake Time (Czas hamowania DC): Ustawić ten parametr na około jedną czwartą zaprogramowanego czasu
zatrzymania. Powoduje to ustawienie czasu dla etapu pełnego hamowania (2).
Praca
9.9.5 Hamowanie DC z zewnętrznym czujnikiem prędkości zerowej
W przypadku obciążeń, które mogą się różnić w poszczególnych cyklach hamowania, należy zainstalować czujnik prędkości zerowej,
który gwarantuje, że softstarter kończy hamowanie DC po całkowitym zatrzymaniu silnika. Zastosowanie czujnika zapobiega
niepotrzebnemu nagrzewaniu się silnika.
Należy skonfigurować hamowanie DC dla najdłuższego wymaganego czasu hamowania i ustawić parametr 7-1 Input A Function
(Funkcja wejścia A) na funkcję Zero Speed Sensor (Czujnik prędkości zerowej). Kiedy silnik osiągnie stan spoczynku, czujnik prędkości
zerowej otworzy obwód na wejściu DI-A, COM+ i softstarter zakończy zatrzymanie.
9.9.6 Płynne hamowanie
W przypadku obciążeń o dużej bezwładności i/lub zmiennym obciążeniu wymagających maksymalnej możliwej siły hamowania
softstarter można skonfigurować tak, aby zapewnić płynne hamowanie.
Softstarter używa przekaźnika przełącznego do sterowania stycznikami pracy do przodu i hamowania. Podczas hamowania softstarter
odwraca kolejność faz do silnika i dostarcza mniejszy prąd, łagodnie zmniejszając prędkość obciążenia.
Gdy prędkość silnika zbliża się do zera, czujnik prędkości zerowej (A2) zatrzymuje softstarter i otwiera stycznik hamowania (K2).
Płynnego hamowania można używać z podstawowymi i drugorzędnymi ustawieniami silnika i należy je skonfigurować osobno dla
jednych i drugich ustawień.
Ustawienia parametrów:
• Parametr 2-9 Stop Mode (Tryb zatrzymania): Ustawić na Soft Brake (Płynne hamowanie).
• Parametr 2-17 Brake Current Limit (Ograniczenie prądu hamowania): Ustawić zgodnie z wymogami, aby spowolnić obciążenie.
• Parametr 2-18 Soft Brake Delay (Opóźnienie płynnego hamowania): Określa czas, przez jaki softstarter czeka po otrzymaniu sygnału
zatrzymania, zanim zacznie podawać prąd hamowania do silnika. Należy ustawić czas umożliwiający przełączenie K1 i K2.
• Parametr 7-1 Input A Function (Funkcja wejścia A): Ustawić na funkcję Zero Speed Sensor (Czujnik prędkości zerowej).
• Parametr 8-1 Relay A Function (Funkcja przekaźnika A): Ustawić na Soft Brake (Płynne hamowanie).
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 69
Page 70

M1
22 21
K2 K1
K2 K1
4/T2
6/T3
1/L1
3/L2
5/L3
2/T1
A7 A8 A9
COM+
DI-A
23
A2
e77ha729.10
1
2
3
5
4
Instrukcja obsługi | VLT® Soft Starter MCD 600
Praca
1 Zasilanie trójfazowe
2 Zaciski silnika
3 Wyjście przekaźnika A
4 Zasilanie cewki K1/K2
5 Wejście programowalne A
K1 Stycznik liniowy (praca)
K2 Stycznik liniowy (hamowanie)
A2 Czujnik prędkości zerowej
Ilustracja 33: Przykład okablowania funkcji płynnego hamowania
9.10 Pump Clean (Czyszczenie pompy)
Softstarter może wykonać funkcję czyszczenia pompy przed płynnym rozruchem silnika. Może to ułatwić usunięcie pozostałości i
śmieci z wirnika.
Funkcja czyszczenia pompy uruchamia silnik w kierunku wstecznym, następnie w kierunku do przodu, po czym zatrzymuje silnik.
Pompę można skonfigurować tak, aby powtórzyć proces czyszczenia maksymalnie 5 razy. Po określonej liczbie cykli czyszczenia
softstarter wykona zaprogramowany płynny rozruch.
70 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 71

300
200
100
400
50
25
0
e77ha787.10
2
4
8
6
1
7
5
3
Reverse torque/
Forward current (%FLC)
Current
Torque
Time
Instrukcja obsługi | VLT® Soft Starter MCD 600
Praca
Praca czyszczenia pompy jest sterowana przez wejście start/stop (START, COM+). Należy ustawić wejście programowalne na funkcję
czyszczenia pompy (szczegóły zawiera opis parametru 7-1 Input A Function (Funkcja wejścia A)). Upewnić się, że wejście jest zamknięte
po zastosowaniu sygnału rozruchu.
UW AG A
Funkcji czyszczenia pompy nie należy aktywować na pompach, które nie mogą pracować w kierunku wstecznym.
1 Parametr 11-1 - Reverse Torque (Moment obrotowy dla pracy wstecz)
2 Parametr 11-2 Reverse Time (Czas pracy w kierunku wstecznym)
3 Parametr 11-3 Forward Current Limit (Ograniczenie prądu pracy w kierunku wstecznym)
4 Parametr 11-4 Forward Time (Czas do przodu)
5 Parametr 11-6 Pump Stop Time (Czas zatrzymania pompy)
6 Cykl czyszczenia
7 Parametr 11-7 Pump Clean Cycles (Cykle czyszczenia pompy)
8 Zaprogramowane płynne uruchomienie
Ilustracja 34: Pump Clean (Czyszczenie pompy)
9.11 Praca w kierunku wstecznym
Softstarter może sterować stycznikiem zmiany kierunku obrotów, aby uruchamiać silnik w kierunku wstecznym. Po wybraniu pracy w
kierunku wstecznym softstarter wykonuje płynny rozruch, używając odwrotnej kolejności faz niż w przypadku normalnej pracy.
Praca w kierunku wstecznym jest sterowana przez wejście start/stop (START, COM+). Należy ustawić wejście programowalne na zmianę
kierunku na wsteczny (parametr 7-1 Input A Function (Funkcja wejścia A)) i ustawić wyjście na stycznik zmiany kierunku obrotów
(parametr 8-1 Relay A Function (Funkcja przekaźnika A)).
Wejście musi być zamknięte po zastosowaniu sygnału rozruchu. Softstarter utrzymuje przekaźnik zmiany kierunku obrotów w tym
samym stanie aż do zakończenia cyklu rozruchu/zatrzymywania.
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 71
Page 72

M
22
21
K2
K1
K2 K1
4/T2
6/T3
1/L1
3/L2
5/L3
2/T1
A1 A2
A3
COM+
DI-A
23
e77ha795.10
1
2
4
3
5
Instrukcja obsługi | VLT® Soft Starter MCD 600
UW AG A
Pierwszy rozruch po zmianie kierunku będzie rozruchem ze stałą wartością prądu.
UW AG A
Jeśli wymagane jest zabezpieczenie kolejności faz, należy zainstalować stycznik zmiany kierunku obrotów po stronie wyjścia
(silnika) softstartera.
Praca
1 Zasilanie trójfazowe
2 Zaciski silnika
3 Wejście programowalne A (ustawienie = Reverse direction (Kierunek wsteczny))
4 Wyjście przekaźnikowe A (ustawienie = Reversing contactor (Stycznik zmiany kierunku obrotów))
5 Zasilanie cewki K1/K2
K1 Stycznik pracy do przodu
K2 Stycznik zmiany kierunku obrotów
Ilustracja 35: Schemat połączeń
72 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 73

e77ha512.12
3
2
1
70
60
50
30
10
40
20
80
90
100
0
%
Available torque
Instrukcja obsługi | VLT® Soft Starter MCD 600
Praca
9.12 Jog — praca manewrowa
Przy pracy manewrowej — Jog silnik działa ze zmniejszoną prędkością w celu wyrównania obciążenia i ułatwienia serwisowania. Silnik
może pracować manewrowo do przodu lub do tyłu.
Jog - praca manewrowa jest dostępna tylko w przypadku, jeśli sterowanie softstarterem odbywa się za pomocą wejść cyfrowych
(parametr 1-1 Command Source (Źródło polecenia) ustawiony na wartość Digital Input (Wejście cyfrowe)). Aby włączyć pracę manewrową
— Jog, należy użyć wejścia programowalnego (zobacz parametr 7-1 Input A Function (Funkcja wejścia A), aby uzyskać szczegółowe
informacje). Upewnić się, że wejście jest zamknięte po zastosowaniu sygnału rozruchu.
UW AG A
OGRANICZONE CHŁODZENIE SILNIKA
Bieg przy niskiej prędkości nie jest zalecany w przypadku pracy ciągłej z powodu ograniczonego chłodzenia silnika. Praca
manewrowa — Jog powoduje, że silnik nagrzewa się szybciej niż wskazuje to tempo obliczone dla modelu termicznego silnika.
Należy zainstalować termistor silnika lub zapewnić odpowiednie opóźnienie restartu (parametr 5-16 Restart Delay
-
(Opóźnienie restartu)).
W zależności od silnika maksymalne dostępne wartości momentu pracy manewrowej — Jog do przodu wynoszą około 50–75%
momentu przy pełnym obciążeniu (FLT) silnika. W przypadku pracy manewrowej — Jog silnika do tyłu moment wynosi około 25–50%
wartości FLT.
Parametr 2-8 Jog Torque (Moment pracy manewrowej) i parametr 3-10 Jog Torque-2 (Moment pracy manewrowej-2) określają, jak dużą
część maksymalnego dostępnego momentu pracy manewrowej — Jog softstarter stosuje do silnika.
UW AG A
Ustawienie momentu powyżej 50% może spowodować zwiększone wibracje wału.
1 Prąd pełnego obciążenia silnika
2 Maksymalny moment obrotowy jog - pracy manewrowej do przodu
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 73
Page 74

Instrukcja obsługi | VLT® Soft Starter MCD 600
3 Maksymalny moment obrotowy jog - pracy manewrowej w kierunku wstecznym
Ilustracja 36: Dostępny moment obrotowy podczas pracy manewrowej - Jog
Praca
9.13 Praca wewnątrz trójkąta
W przypadku połączenia wewnątrz trójkąta należy wprowadzić wartość FLC w parametrze 1-2 Motor Full Load Current (Prąd pełnego
obciążenia silnika). Softstarter automatycznie wykrywa, czy silnik jest podłączony w linii czy wewnątrz trójkąta, i oblicza prawidłowy
poziom prądu wewnątrz trójkąta.
Funkcje sterowania adaptacyjnego, pracy manewrowej Jog, hamowania i PowerThrough nie są obsługiwane przy pracy wewnątrz
trójkąta (połączenie sześcioprzewodowe). Jeżeli te funkcje są zaprogramowane, gdy softstarter jest podłączony wewnątrz trójkąta,
zachowanie jest następujące:
Rozruch ze sterowaniem
adaptacyjnym
Zatrzymanie ze sterowaniem
adaptacyjnym
Jog — praca manewrowa Softstarter generuje ostrzeżenie i komunikat o błędzie Unsupported option (Nieobsługiwana
Hamowanie DC Softstarter wykonuje zatrzymanie z wybiegiem.
Płynne hamowanie Softstarter wykonuje zatrzymanie z wybiegiem.
PowerThrough Softstarter wyłącza się awaryjnie z komunikatem o błędzie Lx-Tx Shorted (Lx-Tx zwarte).
Softstarter wykonuje rozruch ze stałą wartością prądu.
Softstarter wykonuje płynne zatrzymanie TVR, jeżeli parametr 2-10 Stop Times (Czasy zatrzymania)
jest > 0 s. Jeśli parametr 2-10 Stop Times (Czasy zatrzymania) jest ustawiony na 0 s, softstarter
wykonuje zatrzymanie z wybiegiem silnika.
opcja).
UW AG A
W przypadku podłączenia wewnątrz trójkąta softstarter nie wykrywa utraty fazy na zacisku T2 podczas pracy.
UW AG A
Jeśli softstarter nie wykrywa prawidłowo podłączenia silnika, należy użyć parametru 20-6 Motor Connection (Podłączenie silnika).
9.14 Drugorzędne ustawienia silnika
Softstarter można zaprogramować przy użyciu 2 oddzielnych profilów rozruchu i zatrzymywania. Umożliwia to softstarterowi
sterowanie silnikiem w dwóch różnych konfiguracji rozruchu i zatrzymywania. Drugorzędne ustawienia silnika są idealnym
rozwiązaniem w przypadku silników z podwójnym uzwojeniem (Dahlander), aplikacji z wieloma silnikami lub sytuacji, w których silnik
może wykonywać rozruch w dwóch różnych warunkach (na przykład w przypadku przenośników, które można uruchomić z
obciążeniem lub bez). Drugorzędne ustawienia silnika mogą być także używane w przypadku aplikacji z dużym obciążeniem/w trybie
gotowości.
74 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 75

Instrukcja obsługi | VLT® Soft Starter MCD 600
Praca
UW AG A
Dla aplikacji o dużym obciążeniu/w stanie gotowości należy ustawić parametr 6-17 Motor Overtemperature (Nadmierna
temperatura silnika) na Log Only (Tylko rejestr) i zainstalować zabezpieczenie przed przekroczeniem temperatury dla każdego
silnika.
Aby używać drugorzędnych ustawień silnika, należy ustawić wejście programowalne na Wybór ustawień silnika. Wejście musi zostać
zamknięte po wydaniu polecenia rozruchu (patrz parametr 7-1 Input A Function (Funkcja wejścia A) i parametr 7-5 Input B Function
(Funkcja wejścia B). Softstarter sprawdza, które ustawienia silnika mają zostać użyte przy rozruchu, i używa tych ustawień silnika dla
całego cyklu rozruchu/zatrzymania.
Softstarter użyje drugorzędnych ustawień silnika do sterowania rozruchem, gdy otrzyma taką instrukcję za pomocą wejścia
programowalnego (patrz parametr 7-1 Input A Function (Funkcja wejścia A) i parametr 7-5 Input B Function (Funkcja wejścia B).
UW AG A
Model termiczny silnika jest mniej dokładny, jeśli softstarter steruje dwoma oddzielnymi silnikami.
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 75
Page 76

Instrukcja obsługi | VLT® Soft Starter MCD 600
Programowalne parametry
10 Programowalne parametry
10.1 Main Menu
Menu główne pozwala przeglądać i zmieniać programowalne parametry, które sterują pracą softstartera.
Aby otworzyć menu główne, nacisnąć przycisk [Main Menu] podczas wyświetlania ekranu monitorowania.
10.2 Zmiana wartości parametrów
Procedura
1. Przejść do parametru w Menu głównym.
2. Nacisnąć przycisk [Menu/Store], aby wejść do trybu edycji.
3. Nacisnąć przycisk [▵] lub [▿], aby zmienić ustawienia parametru.
Jednokrotne naciśnięcie przycisku [▵] lub [▿] zwiększa lub zmniejsza wartość o jedną jednostkę. Przytrzymanie naciśniętego
przycisku dłużej niż 5 s powoduje szybsze zwiększanie lub zmniejszanie wartości.
Nacisnąć przycisk [Store], aby zapisać zmiany. Ustawienie pokazane na wyświetlaczu zostanie zapisane i panel LCP powróci do listy
parametrów.
Nacisnąć przycisk [Back], aby anulować zmiany. Panel LCP wyświetli prośbę o potwierdzenie, a następnie powróci do listy
parametrów bez zapisywania zmian.
10.3 Blokada regulacji
Parametru 10-7 Adjustment Lock (Blokada regulacji) można użyć, aby uniemożliwić użytkownikom zmianę ustawień parametrów.
Jeżeli użytkownik spróbuje zmienić wartość parametru, gdy blokada regulacji jest aktywna, zostanie wyświetlony następujący błąd:
Dostęp zabroniony. Wł. jest blokada reg.
10.4 Lista parametrów
Tabela 19: Lista parametrów
Numer grupy
parametrów
1 Motor Details (Szczegóły silnika)
1-1 Command Source (Źródło polecenia) Digital Input (Wejście cyfrowe)
1-2 Motor Full Load Current (Prąd pełnego obciążenia silnika) Model dependent (Zależy od modelu)
1-3 Motor kW (kW silnika) 0 kW
1-4 Locked Rotor Time (Czas blokowania wirnika) 00:10 (mm:ss)
1-5 Locked Rotor Current (Prąd zablokowanego wirnika). 600%
1-6 Motor Service Factor (Współczynnik przeciążalności silnika) 105%
Nazwa grupy parametrów Ustawienie domyślne
1-7 Reserved (Zarezerwowane) –
2 Motor Start/Stop (Rozruch/zatrzymanie silnika)
76 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 77

Instrukcja obsługi | VLT® Soft Starter MCD 600
Programowalne parametry
Numer grupy
parametrów
2-1 Start Mode (Tryb rozruchu) Constant Current (Stała wartość prądu)
2-2 Start Ramp Time (Czas rozpędzania przy rozruchu) 00:10 (mm:ss)
2-3 Initial Current (Prąd początkowy) 200%
2-4 Current Limit (Ograniczenie prądu) 350%
2-5 Adaptive Start Profile (Profil rozruchu adaptacyjnego) Constant Acceleration (Stałe przyspiesza-
2-6 Kickstart Time (Czas rozruchu ze zwiększonym momentem) 000 ms
2-7 Kickstart Level (Poziom rozruchu ze zwiększonym momentem) 500%
2-8 Jog Torque (Moment obrotowy pracy manewrowej — Jog) 50%
2-9 Stop Mode (Tryb zatrzymania) TVR Soft Stop (Płynne zatrzymanie TVR)
2-10 Stop Time (Czas zatrzymania) 00:00 (mm:ss)
2-11 Adaptive Stop Profile (Profil zatrzymania adaptacyjnego) Constant Deceleration (Stałe zmniejsza-
2-12 Adaptive Control Gain (Wzmocnienie sterowania adaptacyjnego) 75%
2-13 Multi Pump (Wiele pomp) Single Pump (Pojedyncza pompa)
2-14 Start Delay (Opóźnienie startu) 00:00 (mm:ss)
Nazwa grupy parametrów Ustawienie domyślne
nie)
nie prędkości)
2-15 DC Brake Torque (Moment hamowania DC) 20%
2-16 DC Brake Time (Czas hamowania DC) 00:01 (mm:ss)
2-17 Brake Current Limit (Ograniczenie prądu hamowania) 250%
2-18 Soft Brake Delay (Opóźnienie płynnego hamowania) 400 ms
3 Motor Start/Stop 2 (Rozruch/zatrzymanie silnika 2)
3-1 Motor Full Load Current-2 (Prąd pełnego obciążenia silnika-2) Model dependent (Zależy od modelu)
3-2 Motor kW-2 (kW silnika-2) 0 kW
3-3 Start Mode-2 (Tryb rozruchu-2) Constant Current (Stała wartość prądu)
3-4 Start Ramp Time-2 (Czas rozpędzania przy rozruchu-2) 00:10 (mm:ss)
3-5 Initial Current-2 (Prąd początkowy-2) 200%
3-6 Current Limit-2 (Ograniczenie prądu-2) 350%
3-7 Adaptive Start Profile-2 (Profil rozruchu adaptacyjnego-2) Constant Acceleration (Stałe przyspiesza-
nie)
3-8 Kickstart Time-2 (Czas rozruchu ze zw. momentem-2) 000 ms
3-9 Kickstart Level-2 (Poziom rozruchu ze zwiększonym momentem-2) 500%
3-10 Jog Torque-2 (Moment pracy manewrowej-2) 50%
3-11 Stop Mode-2 (Tryb zatrzymania-2) TVR Soft Stop (Płynne zatrzymanie TVR)
3-12 Stop Time-2 (Czas zatrzymania-2) 00:00 (mm:ss)
3-13 Adaptive Stop Profile-2 (Profil zatrzymania adaptacyjnego-2) Constant Deceleration (Stałe zmniejsza-
nie prędkości)
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 77
Page 78

Instrukcja obsługi | VLT® Soft Starter MCD 600
Programowalne parametry
Numer grupy
parametrów
3-14 Adaptive Control Gain-2 (Wzmocnienie sterowania adaptacyjnego-2) 75%
3-15 Multi Pump-2 (Wiele pomp-2) Single Pump (Pojedyncza pompa)
3-16 Start Delay-2 (Opóźnienie startu-2) 00:00 (mm:ss)
3-17 DC Brake Torque-2 (Moment hamowania DC-2) 20%
3-18 DC Brake Time-2 (Czas hamowania DC-2) 00:01 (mm:ss)
3-19 Brake Current Limit-2 (Ograniczenie prądu hamowania-2). 250%
3-20 Soft Brake Delay-2 (Opóźnienie płynnego hamowania-2) 400 s
4 Auto-Start/Stop (Automatyczny rozruch/zatrzymanie)
4-1 Auto-Start/Stop Mode (Tryb automatycznego rozruchu/zatrzymania) Disable (Nieaktywne)
4-2 Run Time (Czas pracy) 00:00 (gg:mm)
4-3 Stopped Time (Czas zatrzymania) 00:00 (gg:mm)
4-4 Sunday Mode (Tryb niedzieli) Start/Stop Disable (Start/stop nieak-
4-5 Sunday Start Time (Niedziela godzina rozruchu) 00:00 (gg:mm)
4-6 Sunday Stop Time (Niedziela godzina zatrzymania) 00:00 (gg:mm)
4-7 Monday Mode (Tryb poniedziałku) Start/Stop Disable (Start/stop nieak-
Nazwa grupy parametrów Ustawienie domyślne
tywne)
tywne)
4-8 Monday Start Time (Poniedziałek godzina rozruchu) 00:00 (gg:mm)
4-9 Monday Stop Time (Poniedziałek godzina zatrzymania) 00:00 (gg:mm)
4-10 Tuesday Mode (Tryb wtorku) Start/Stop Disable (Start/stop nieak-
tywne)
4-11 Tuesday Start Time (Wtorek godzina rozruchu) 00:00 (gg:mm)
4-12 Tuesday Stop Time (Wtorek godzina zatrzymania) 00:00 (gg:mm)
4-13 Wednesday Mode (Tryb środy) Start/Stop Disable (Start/stop nieak-
tywne)
4-14 Wednesday Start Time (Środa godzina rozruchu) 00:00 (gg:mm)
4-15 Wednesday Stop Time (Środa godzina zatrzymania) 00:00 (gg:mm)
4-16 Thursday Mode (Tryb czwartku) Start/Stop Disable (Start/stop nieak-
tywne)
4-17 Thursday Start Time (Czwartek godzina rozruchu) 00:00 (gg:mm)
4-18 Thursday Stop Time (Czwartek godzina zatrzymania) 00:00 (gg:mm)
4-19 Friday Mode (Tryb piątku) Start/Stop Disable (Start/stop nieak-
tywne)
4-20 Friday Start Time (Piątek godzina rozruchu) 00:00 (gg:mm)
4-21 Friday Stop Time (Piątek godzina zatrzymania) 00:00 (gg:mm)
4-22 Saturday Mode (Tryb soboty) Start/Stop Disable (Start/stop nieak-
tywne)
78 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 79

Instrukcja obsługi | VLT® Soft Starter MCD 600
Programowalne parametry
Numer grupy
parametrów
4-23 Saturday Start Time (Sobota godzina rozruchu) 00:00 (gg:mm)
4-24 Saturday Stop Time (Sobota godzina zatrzymania) 00:00 (gg:mm)
5 Protection Levels (Poziomy ochrony)
5-1 Current Imbalance (Niezrównoważenie prądu) 30%
5-2 Opóźnienie niezrównoważenia prądu 00:03 (mm:ss)
5-3 Undercurrent (Zbyt niski prąd) 20%
5-4 Undercurrent Delay (Opóźnienie zbyt niskiego prądu) 00:05 (mm:ss)
5-5 Overcurrent (Przetężenie) 400%
5-6 Overcurrent Delay (Opóźnienie przetężenia) 00:00 (mm:ss)
5-7 Undervoltage (Podnapięcie) 350 V
5-8 Undervoltage Delay (Opóźnienie zbyt niskiego napięcia) 00:01 (mm:ss)
5-9 Overvoltage (Przepięcie) 500 V
5-10 Overvoltage Delay (Opóźnienie przepięcia) 00:01 (mm:ss)
5-11 Underpower (Zbyt mała moc) 10%
5-12 Underpower delay (Opóźnienie zbyt małej mocy) 00:01 (mm:ss)
Nazwa grupy parametrów Ustawienie domyślne
5-13 Overpower (Zbyt duża moc) 150%
5-14 Overpower Delay (Opóźnienie zbyt dużej mocy) 00:01 (mm:ss)
5-15 Excess Start Time (Nadmierny czas rozruchu) 00:20 (mm:ss)
5-16 Restart Delay (Opóźnienie restartu) 00:10 (mm:ss)
5-17 Starts per Hour (Rozruchy na godzinę) 0
5-18 Phase Sequence (Kolejność faz) Any Sequence (Dowolna kolejność)
6 Protection Actions (Działania zabezpieczeń)
6-1 Auto-Reset Count (Liczba automatycznych resetów) 0
6-2 Auto-Reset Delay (Opóźnienie automatycznego resetowania) 00:05 (mm:ss)
6-3 Current Imbalance (Niezrównoważenie prądu) Soft Trip and Log (Płynne wył. awar. i re-
jestr)
6-4 Undercurrent (Zbyt niski prąd) Soft Trip and Log (Płynne wył. awar. i re-
jestr)
6-5 Overcurrent (Przetężenie) Soft Trip and Log (Płynne wył. awar. i re-
jestr)
6-6 Undervoltage (Podnapięcie) Soft Trip and Log (Płynne wył. awar. i re-
jestr)
6-7 Overvoltage (Przepięcie) Soft Trip and Log (Płynne wył. awar. i re-
jestr)
6-8 Underpower (Zbyt mała moc) Log Only (Tylko rejestr)
6-9 Overpower (Zbyt duża moc) Log Only (Tylko rejestr)
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 79
Page 80

Instrukcja obsługi | VLT® Soft Starter MCD 600
Programowalne parametry
Numer grupy
parametrów
6-10 Excess Start Time (Nadmierny czas rozruchu) Soft Trip and Log (Płynne wył. awar. i re-
6-11 Input A Trip (Wyłączenie awaryjne z wejścia A) Soft Trip and Log (Płynne wył. awar. i re-
6-12 Input B Trip (Wyłączenie awaryjne z wejścia B) Soft Trip and Log (Płynne wył. awar. i re-
6-13 Network Communications (Komunikacja sieciowa) Soft Trip and Log (Płynne wył. awar. i re-
6-14 Remote Keypad Fault (Błąd klawiatury zdalnej) Soft Trip and Log (Płynne wył. awar. i re-
6-15 Frequency (Częstotliwość) Soft Trip and Log (Płynne wył. awar. i re-
6-16 Phase Sequence (Kolejność faz) Soft Trip and Log (Płynne wył. awar. i re-
6-17 Motor Overtemperature (Nadmierna temperatura silnika) Soft Trip and Log (Płynne wył. awar. i re-
6-18 Motor Thermistor Circuit (Obwód termistora silnika) Soft Trip and Log (Płynne wył. awar. i re-
6-19 Shorted SCR Action (Działanie przy zwartym tyrystorze SCR) 3-phase Control Only (Tylko sterowanie
Nazwa grupy parametrów Ustawienie domyślne
jestr)
jestr)
jestr)
jestr)
jestr)
jestr)
jestr)
jestr)
jestr)
3-fazowe)
6-20 Battery/Clock (Bateria/zegar) Soft Trip and Log (Płynne wył. awar. i re-
jestr)
7 Inputs (Wejścia)
7-1 Input A Function (Funkcja wejścia A) Input Trip (N/O) (Wyłączenie awaryjne z
wejścia (zwierne))
7-2 Input A Trip (Wyłączenie awaryjne z wejścia A) Operating Only (Tylko obsługa)
7-3 Input A Trip Delay (Opóźnienie wyłączenia awaryjnego z wejścia A) 00:00 (mm:ss)
7-4 Input A Initial Delay (Opóźnienie początkowe z wejścia A) 00:00 (mm:ss)
7-5 Input B Function (Funkcja wejścia B) Input Trip (N/O) (Wyłączenie awaryjne z
wejścia (zwierne))
7-6 Input B Trip (Wyłączenie awaryjne z wejścia B) Operating Only (Tylko obsługa)
7-7 Input B Trip Delay (Opóźnienie wyłączenia awaryjnego z wejścia B) 00:00 (mm:ss)
7-8 Input B Initial Delay (Opóźnienie początkowe z wejścia B) 00:00 (mm:ss)
7-9 Reset/Enable Logic (Logika resetu/aktywacji) Normally Closed (N/C) (Rozwierne)
7-10 Input A Name (Nazwa wejścia A) Input A Trip (Wyłączenie awaryjne z wejś-
cia A)
7-11 Input B Name (Nazwa wejścia B) Input B Trip (Wyłączenie awaryjne z wejś-
cia B)
8 Relay Outputs (Wyjścia przekaźnikowe)
8-1 Relay A Function (Funkcja przekaźnika A) Run (Praca)
80 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 81

Instrukcja obsługi | VLT® Soft Starter MCD 600
Programowalne parametry
Numer grupy
parametrów
8-2 Relay A On Delay (Opóźnienie wł. przekaźnika A) 00:00 (mm:ss)
8-3 Relay A Off Delay (Opóźnienie wył. przekaźnika A) 00:00 (mm:ss)
8-4 Relay B Function (Funkcja przekaźnika B) Run (Praca)
8-5 Relay B On Delay (Opóźnienie włączenia przekaźnika B) 00:00 (mm:ss)
8-6 Relay A Off Delay (Opóźnienie wyłączenia przekaźnika B) 00:00 (mm:ss)
8-7 Low Current Flag (Flaga małego prądu) 50%
8-8 High Current Flag (Flaga dużego prądu) 100%
8-9 Motor Temperature Flag (Flaga temperatury silnika) 80%
8-10 Main Contactor Time (Czas głównego stycznika) 400 ms
9 Analog Output (Wyjście analogowe)
9-1 Analog Output A (Wyjście analogowe A) Current (% FLC) (Prąd (% FLC))
9-2 Analog A Scale (Skala analogowa A) 4–20 mA
9-3 Analog A Maximum Adjustment (Regulacja maks. analogowego A) 100%
9-4 Analog A Minimum Adjustment (Regulacja minimum analogowegoA)000%
10 Display (Wyświetlacz)
Nazwa grupy parametrów Ustawienie domyślne
10-1 Language (Język) English
10-2 Temperature Scale (Skala temperatury) Celsius (Stopnie Celsjusza)
10-3 Graph Timebase (Podstawa czasu wykresu) 30 s
10-4 Graph Maximum Adjustment (Maksymalna nastawa wykresu) 400%
10-5 Graph Minimum Adjustment (Minimalna nastawa wykresu) 0%
10-6 Current Calibration (Kalibracja prądu) 100%
10-7 Adjustment Lock (Blokada regulacji) Read & Write (Odczyt i zapis)
10-8 User Parameter 1 (Parametr użytkownika 1) Current (Prąd)
10-9 User Parameter 2 (Parametr użytkownika 2) Motor Voltage (Napięcie silnika)
10-10 User Parameter 3 (Parametr użytkownika 3) Mains Frequency (Częstotliwość zasila-
nia)
10-11 User Parameter 4 (Parametr użytkownika 4) Motor pf (Współczynnik mocy silnika)
10-12 User Parameter 5 (Parametr użytkownika 5) Motor Power (Moc silnika)
10-13 User Parameter 6 (Parametr użytkownika 6) Motor Temp (%) (Temp. silnika (%))
11 Pump Clean (Czyszczenie pompy)
11-1 Reverse Torque (Moment obrotowy dla pracy wstecz) 20%
11-2 Reverse Time (Czas pracy w kierunku wstecznym) 00:10 (mm:ss)
11-3 Forward Current Limit (Ograniczenie prądu pracy w kierunku wstecz-
nym)
Danfoss A/S © 2018.10
100%
AQ262141844215pl-000201 / 175R1174| 81
Page 82

Instrukcja obsługi | VLT® Soft Starter MCD 600
Programowalne parametry
Numer grupy
parametrów
11-4 Forward Time (Czas do przodu) 00:10 (mm:ss)
11-5 Pump Stop Mode (Tryb zatrzymania pompy) Coast To Stop (Zatrzymanie z wybiegiem)
11-6 Pump Stop Time (Czas zatrzymania pompy) 00:10 (mm:ss)
11-7 Pump Clean Cycles (Cykle czyszczenia pompy) 1
12 Communication Card (Karta komunikacji)
12-1 Modbus Address (Adres Modbus) 1
12-2 Modbus Baud Rate (Szybkość transmisji Modbus) 9600
12-3 Modbus Parity (Parzystość Modbus) None (Brak)
12-4 Modbus Timeout (Time-out komunikacji Modbus) Off (Wyłączony)
12-5 DeviceNet Address (Adres DeviceNet) 0
12-6 Devicenet Baud Rate (Szybkość transmisji DeviceNet) 125 kB
12-7 PROFIBUS Address (Adres PROFIBUS) 1
12-8 Gateway Address (Adres bramy) 192
12-9 Gateway Address 2 (Adres bramy 2) 168
12-10 Gateway Address 3 (Adres bramy 3) 0
Nazwa grupy parametrów Ustawienie domyślne
12-11 Gateway Address 4 (Adres bramy 4) 100
12-12 IP Address (Adres IP) 192
12-13 IP Address 2 (Adres IP 2) 168
12-14 IP Address 3 (Adres IP 3) 0
12-15 IP Address 4 (Adres IP 4) 2
12-16 Subnet Mask (Maska podsieci) 255
12-17 Subnet Mask 2 (Maska podsieci 2) 255
12-18 Subnet Mask 3 (Maska podsieci 3) 255
12-19 Subnet Mask 4 (Maska podsieci 4) 0
12-20 DHCP Disable (Nieaktywne)
12-21 Location ID (Identyfikator lokalizacji) 0
20 Advanced (Zaawansowane)
20-1 Tracking Gain (Wzmocn. śledzenia) 50%
20-2 Pedestal Detect (Wykrywanie podstawy) 80%
20-3 Bypass Contactor Delay (Opóźnienie stycznika obejścia) 150 ms
20-4 Model Rating (Wartość znamionowa modelu) Model dependent (Zależy od modelu)
20-5 Screen Timeout (Time out ekranu) 1 minuta
20-6 Motor Connection (Podłączenie silnika) Auto-detect (Automatyczne wykrywanie)
30 Pump Input Configuration (Konfiguracja wejścia pompy)
82 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 83

Instrukcja obsługi | VLT® Soft Starter MCD 600
Programowalne parametry
Numer grupy
parametrów
30-1 Pressure Sensor Type (Typ czujnika ciśnienia) None (Brak)
30-2 Pressure Units (Jednostki ciśnienia) kPa
30-3 Pressure at 4 mA (Ciśnienie przy 4 mA) 0
30-4 Pressure at 20 mA (Ciśnienie przy 20 mA) 0
30-5 Flow Sensor Type (Typ czujnika przepływu) None (Brak)
30-6 Flow Units (Jednostki przepływu) liters/second (litry na sekundę)
30-7 Flow at 4 mA (Przepływ przy 4 mA) 0
30-8 Flow at 20 mA (Przepływ przy 20 mA) 0
30-9 Units per Minute at Max Flow (Jednostki na minutę przy maksymal-
30-10 Pulses per Minute at Max Flow (Impulsy na minutę przy maksymal-
30-11 Units per Pulse (Liczba jednostek na impuls) 0
30-12 Typ czujnika głębokości None (Brak)
30-13 Depth Units (Jednostki głębokości) meters (metry)
30-14 Depth at 4 mA (Głębokość przy 4 mA) 0
Nazwa grupy parametrów Ustawienie domyślne
0
nym przepływie)
0
nym przepływie)
30-15 Depth at 20 mA (Głębokość przy 20 mA) 0
31 Flow Protection (Zabezpieczenie przepływu)
31A High Flow Trip Level (Poziom wyłączenia awaryjnego przy wysokim
przepływie)
31B Low Flow Trip Level (Poziom wyłączenia awaryjnego przy niskim
przepływie).
31C Flow Start Delay (Opóźnienie rozruchu przepływu) 00:00:500 (mm:ss:ms)
31D Flow Response Delay (Opóźnienie reakcji przepływu) 00:00:500 (mm:ss:ms)
32 Pressure Protection (Zabezpieczenie ciśnieniowe)
32-1 High Pressure Trip Level (Poziom wyłączenia awaryjnego przy wyso-
kim ciśnieniu)
32-2 High Pressure Start Delay (Opóźnienie startu przy wysokim ciśnieniu) 00:00:500 (mm:ss:ms)
32-3 High Pressure Response Delay (Opóźnienie reakcji na wysokie ciśnie-
nie)
32-4 Low Pressure Trip Level (Poziom wyłączenia awaryjnego przy niskim
ciśnieniu)
32-5 Low Pressure Start Delay (Opóźnienie startu przy niskim ciśnieniu) 00:00:500 (mm:ss:ms)
32-6 Low Pressure Response Delay (Opóźnienie reakcji na niskie ciśnienie) 00:00:500 (mm:ss:ms)
33 Pressure Control (Regulacja ciśnienia)
10
5
10
00:00:500 (mm:ss:ms)
5
33-1 Pressure Control Mode (Tryb regulacji ciśnienia) Off (Wyłączony)
33-2 Start Pressure Level (Poziom ciśnienia dla rozruchu) 5
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 83
Page 84

Instrukcja obsługi | VLT® Soft Starter MCD 600
Programowalne parametry
Numer grupy
parametrów
33-3 Start Response Delay (Opóźnienie reakcji rozruchu) 00:00:500 (mm:ss:ms)
33-4 Stop Pressure Level (Poziom ciśnienia dla zatrzymania) 10
33-5 Stop Response Delay (Opóźnienie reakcji zatrzymania) 00:00:500 (mm:ss:ms)
34 Depth Protection (Zabezpieczenie głębokościowe)
34-1 Depth Trip Level (Poziom wyłączenia awaryjnego głębokości) 5
34-2 Depth Reset Level (Poziom resetu dla głębokości) 10
34-3 Depth Start Delay (Opóźnienie rozruchu dla głębokości) 00:00:500 (mm:ss:ms)
34-4 Depth Response Delay (Opóźnienie reakcji głębokości) 00:00:500 (mm:ss:ms)
35 Thermal Protection (Zabezpieczenie termiczne)
35-1 Temperature Sensor Type (Typ czujnika temperatury) None (Brak)
35-2 Temperature Trip Level (Poziom wyłączenia awaryjnego dla tem-
36 Pump Trip Action (Działanie wyłączenia awaryjnego pompy)
36-1 Pressure Sensor (Czujnik ciśnienia) Soft Trip and Log (Płynne wył. awar. i re-
36-2 Flow Sensor (Czujnik przepływu) Soft Trip and Log (Płynne wył. awar. i re-
Nazwa grupy parametrów Ustawienie domyślne
40
peratury)
jestr)
jestr)
36-3 Depth Sensor (Czujnik głębokości) Soft Trip and Log (Płynne wył. awar. i re-
jestr)
36-4 High Pressure (Wysokie ciśnienie) Soft Trip and Log (Płynne wył. awar. i re-
jestr)
36-5 Low Pressure (Niskie ciśnienie) Soft Trip and Log (Płynne wył. awar. i re-
jestr)
36-6 High Flow (Wysoki przepływ) Soft Trip and Log (Płynne wył. awar. i re-
jestr)
36-7 Low Flow (Niski przepływ) Soft Trip and Log (Płynne wył. awar. i re-
jestr)
36-8 Flow Switch (Przełącznik przepływu) Soft Trip and Log (Płynne wył. awar. i re-
jestr)
36-9 Well Depth (Głębokość studni) Soft Trip and Log (Płynne wył. awar. i re-
jestr)
36-10 RTD/PT100 B Soft Trip and Log (Płynne wył. awar. i re-
jestr)
10.5 Grupa parametrów 1-** Motor Details (Szczegóły silnika)
Tabela 20: 1-1 - Command Source (Źródło polecenia)
Opcja Funkcja
Określa źródło poleceń do sterowania softstarterem.
84 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 85

Instrukcja obsługi | VLT® Soft Starter MCD 600
Opcja Funkcja
Programowalne parametry
* Digital input (Wejście
Softstarter akceptuje polecenia rozruchu i zatrzymania z wejść cyfrowych.
cyfrowe)
Network (Sieć) Softstarter akceptuje polecenia rozruchu i zatrzymania z karty rozszerzeń komunikacji.
Remote LCP (Zdalny
Softstarter akceptuje polecenia rozruchu i zatrzymania ze zdalnego panelu LCP.
panel LCP)
Clock (Zegar) Softstarter akceptuje rozruchy i zatrzymania zgodnie z harmonogramem ustawionym w parame-
trach od 4-1 do 4-24.
Smart card (Karta inteli-
Softstarter akceptuje polecenia rozruchu i zatrzymania z karty inteligentnej.
gentna)
Smart card + clock (Karta inteligentna +zegar)
Softstarter akceptuje polecenia rozruchu z karty inteligentnej, jeśli są w harmonogramie pracy ustawionym w parametrach od 4-1 do 4-24. Polecenie zatrzymania z karty inteligentnej jest akceptowane
bez względu na harmonogram.
Timer (Czasomierz) Po otrzymaniu sygnału startu softstarter uruchamia i zatrzymuje silnik zgodnie z czasomierzami us-
tawionymi w parametrze 4-2 Run Time (Czas pracy) i parametrze 4-3 Stopped Time (Czas zatrzymania).
Tabela 21: 1-2 - Motor Full Load Current (Prąd pełnego obciążenia silnika)
Zakres Funkcja
Model dependent (Zależy
od modelu)
Tabela 22: 1-3 - Motor kW (kW silnika)
Dopasowuje softstarter do prądu pełnego obciążenia silnika. Należy ustawić na wartość znamionową prądu pełnego obciążenia (FLC) podaną na tabliczce znamionowej silnika.
Zakres Funkcja
*0 0–9999 kW Ustawia moc mechaniczną podłączonego silnika w kW. To ustawienie jest podstawą dla określania mocy oraz
zabezpieczeń.
Tabela 23: 1-4 - Locked Rotor Time (Czas blokowania wirnika)
Zakres Funkcja
*10 s 0:01–2:00 (min-
uty:sekundy)
Ustawia maksymalny czas, przez jaki silnik może podtrzymywać prąd zablokowanego wirnika od stanu
zimnego do osiągnięcia temperatury maksymalnej. Należy ustawić zgodnie z danymi technicznymi silnika.
Tabela 24: 1-5 - Locked Rotor Current (Prąd zablokowanego wirnika)
Zakres Funkcja
*600% 400–1200% war-
tości FLC
Ustawia prąd zablokowanego wirnika podłączonego silnika jako procent prądu pełnego obciążenia
silnika. Należy ustawić zgodnie z danymi technicznymi silnika.
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 85
Page 86

Instrukcja obsługi | VLT® Soft Starter MCD 600
Tabela 25: 1-6 - Motor Service Factor (Współczynnik przeciążalności silnika)
Zakres Funkcja
Programowalne parametry
*105% 100–
130%
Ustawia współczynnik przeciążalności silnika używany przez model termiczny. Jeśli silnik pracuje z prądem pełnego obciążenia, osiąga on 100%. Należy ustawić zgodnie z danymi technicznymi silnika.
UW AG A
Parametry od 1-4 do 1-6 określają prąd wyłączenia awaryjnego na potrzeby zabezpieczenia silnika przed
przeciążeniem. Nastawy fabryczne parametrów od 1-4 do 1-6 zapewniają zabezpieczenie silnika przed
przeciążeniem: klasa 10, prąd wyłączenia awaryjnego 105% wartości FLA (prądu w amperach przy pełnym obciążeniu) lub jego odpowiednik.
Tabela 26: 1-7 - Reserved (Zarezerwowane)
Zakres Funkcja
Ten parametr jest zarezerwowany do użycia w przyszłości.
10.6 Grupa parametrów 2-** Motor Start/Stop (Rozruch/zatrzymanie silnika)
Tabela 27: 2-1 Start Mode (Tryb rozruchu)
Opcja Funkcja
Określa tryb płynnego rozruchu.
Softstarter VLT® Soft Starter MCD 600 stosuje ograniczenie prądu dla wszystkich płynnych
rozruchów, w tym dla rozruchu ze sterowaniem adaptacyjnym. Jeśli ograniczenie prądu jest
zbyt niskie lub czas rozpędzania przy rozruchu (parametr 2-2 Start Ramp Time (Czas rozpędza-
nia przy rozruchu)) jest zbyt krótki, rozruch silnika może się nie powieść.
* Constant Current (Stała
wartość prądu)
Adaptive Control (Sterowanie adaptacyjne)
Tabela 28: 2-2 - Start Ramp Time (Czas rozpędzania przy rozruchu)
Zakres Funkcja
* 10 s 0:01–3:00 (min-
uty:sekundy)
Ustawia łączny czas rozruchu dla rozruchu ze sterowaniem adaptacyjnym lub czas rozpędzania dla
rozruchu z narastaniem prądu (od prądu początkowego do ograniczenia prądu).
UW AG A
86 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 87

Instrukcja obsługi | VLT® Soft Starter MCD 600
Tabela 29: 2-3 - Initial Current (Prąd początkowy)
Zakres Funkcja
Programowalne parametry
*200% 100–600%
wartości
FLC
Tabela 30: 2-4 - Current Limit (Ograniczenie prądu)
Zakres Funkcja
* 350% 100–600% warto-
ści FLC
Tabela 31: 2-5 - Adaptive Start Profile (Profil rozruchu adaptacyjnego)
Opcja Funkcja
Ustawia początkowy poziom prądu rozruchu z narastaniem prądu jako procent prądu pełnego obciążenia
silnika. Należy wprowadzić takie ustawienia, aby silnik zaczynał przyspieszać natychmiast po rozpoczęciu
rozruchu. Jeżeli rozruch z narastaniem prądu nie jest wymagany, należy ustawić prąd początkowy jako
równy ograniczeniu prądu.
Ustawia ograniczenie prądu dla płynnego rozruchu ze stałą wartością prądu lub z narastaniem prądu jako procent prądu pełnego obciążenia silnika.
Określa profil, którego softstarter VLT® Soft Starter MCD 600 będzie używać do płynnego rozruchu ze sterowaniem adaptacyjnym.
Softstarter MCD 600 stosuje ograniczenie prądu dla wszystkich płynnych rozruchów, w
tym dla rozruchu ze sterowaniem adaptacyjnym. Jeśli ograniczenie prądu jest zbyt
niskie lub czas rozpędzania przy rozruchu (parametr 2-2 Start Ramp Time (Czas rozpęd-
zania przy rozruchu)) jest zbyt krótki, rozruch silnika może się nie powieść.
UW AG A
Early Acceleration (Wczesne
przyspieszanie)
* Constant Acceleration (Stałe
przyspieszanie)
Late Acceleration (Późne przyspieszanie)
Tabela 32: 2-6 - Kickstart Time (Czas rozruchu ze zwiększonym momentem)
Zakres Funkcja
*0000 ms 0–2000 ms Ustawia czas trwania rozruchu ze zwiększonym momentem. Ustawienie 0 wyłącza rozruch ze zwiększo-
nym momentem.
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 87
Page 88

Instrukcja obsługi | VLT® Soft Starter MCD 600
Tabela 33: 2G - Kickstart Level (Poziom rozruchu ze zwiększonym momentem)
Zakres Funkcja
Programowalne parametry
* 500% 100–700%
wartości
FLC
Tabela 34: 2-8 - Jog Torque (Moment pracy manewrowej)
Zakres Funkcja
* 50% 20–
100%
Tabela 35: 2-9 - Stop Mode (Tryb zatrzymania)
Opcja Funkcja
Coast To Stop (Zatrzymanie z wybiegiem)
Określa poziom prądu przy rozruchu ze zwiększonym momentem.
UW AG A
Tego typu rozruch powoduje narażenie elementów mechanicznych na zwiększony poziom momentu obrotowego. Przed użyciem tej funkcji należy upewnić się, że silnik, obciążenie i sprzęgła są
odpowiednie dla dodatkowego momentu obrotowego.
Softstarter VLT® Soft Starter MCD 600 może uruchamiać silnik z ograniczoną prędkością, co umożliwia precyzyjne pozycjonowanie pasów i kół zamachowych. Praca manewrowa - Jog może być używana do pracy w kierunku do przodu lub do tyłu (wstecz).
Ustawia ograniczenie prądu dla pracy manewrowej - Jog.
Określa tryb zatrzymania.
* TVR Soft Stop (Płynne zatrzymanie TVR)
Adaptive Control (Sterowanie adaptacyjne)
DC Brake (Hamowanie DC)
Soft Brake (Płynne hamowanie)
Tabela 36: 2-10 - Stop Time (Czas zatrzymania)
Zakres Funkcja
* 0 s 0:00–4:00
(minuty:sekundy)
Tabela 37: 2-11 - Adaptive Stop Profile (Profil zatrzymania adaptacyjnego)
Opcja Funkcja
Early Deceleration (Wczesne zmniejszanie prędkości)
* Constant Deceleration (Stałe zmniejszanie prędkości)
Late Deceleration (Późne zmniejszanie prędkości)
Ustawia czas dla płynnego zatrzymywania silnika przy użyciu zsynchronizowanego zmniejszania napięcia
(TVR) lub sterowania adaptacyjnego. Jeżeli zainstalowano główny stycznik, musi on pozostać zamknięty do
zakończenia czasu zatrzymania. Do sterowania głównym stycznikiem użyć wyjścia głównego stycznika (13,
14).
Określa profil, którego softstarter VLT® Soft Starter MCD 600 będzie
używać do płynnego zatrzymania ze sterowaniem adaptacyjnym.
88 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 89

Instrukcja obsługi | VLT® Soft Starter MCD 600
Tabela 38: 2-12 - Adaptive Control Gain (Wzmocnienie sterowania adaptacyjnego)
Programowalne parametry
Zakres Funkcja
* 75% 1–200% Reguluje działanie sterowania adaptacyjnego. Ustawienie to wpływa na sterowanie rozruchem i zatrzymywa-
niem.
Tabela 39: 2-13 - Multi Pump (Wiele pomp)
Opcja Funkcja
Reguluje działanie sterowania adaptacyjnego, aby dopasować je do instalacji z wieloma pompami podłączonymi do wspólnego kolektora wylotowego.
* Single Pump (Pojedyncza pompa)
Manifold Pump (Pompa kolektorowa)
Tabela 40: 2-14 Start Delay (Opóźnienie startu)
Zakres Funkcja
* 0 s 0:00–60:00 (minuty:se-
kundy)
Tabela 41: 2-15 - DC Brake Torque (Moment hamowania DC)
Ustawia opóźnienie między otrzymaniem przez softstarter polecenia rozruchu a wykonaniem rozruchu silnika przez softstarter.
Zakres Funkcja
* 20% 20–100% Ustawia poziom momentu hamowania używany przez softstarter do zwolnienia silnika.
Tabela 42: 2-16 - DC Brake Time (Czas hamowania DC)
Zakres Funkcja
* 1 s 0:01–0:30 (minuty:sekundy) Ustawia czas trwania impulsu DC podczas zatrzymywania z hamowaniem.
Tabela 43: 2-17 - Brake Current Limit (Ograniczenie prądu hamowania)
Zakres Funkcja
* 250% 100–600% wartości FLC Ustawia ograniczenie prądu dla płynnego hamowania.
Tabela 44: 2-18 - Soft Brake Delay (Opóźnienie płynnego hamowania)
Zakres Funkcja
*400 ms 400–2000msUstawia czas, przez jaki softstarter czeka po otrzymaniu sygnału zatrzymania, zanim zacznie dostarczać
prąd hamowania do silnika. Należy ustawić czas umożliwiający przełączenie K1 i K2.
10.7 Grupa parametrów 3-** Motor Start/Stop-2 (Rozruch/zatrzymanie silnika-2)
Parametry w tej grupie sterują pracą wyświetlają różne dane dotyczące pracy drugorzędnej konfiguracji silnika. Należy użyć wejścia
programowalnego, aby wybrać aktywny zestaw ustawień silnika.
Patrz 9.14 Drugorzędne ustawienia silnika, aby uzyskać więcej informacji.
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 89
Page 90

Instrukcja obsługi | VLT® Soft Starter MCD 600
Tabela 45: 3-1 - Motor Full Load Current-2 (Prąd pełnego obciążenia silnika-2)
Zakres Funkcja
Model dependent (Zależy od modelu) Ustawia drugi prąd pełnego obciążenia silnika.
Tabela 46: 3-2 - Motor kW-2 (kW silnika-2)
Zakres Funkcja
* 0 0–9999 kW Ustawia moc roboczą drugorzędnego silnika w kW.
Tabela 47: 3-3 - Start Mode-2 (Tryb rozruchu-2)
Opcja Funkcja
Określa tryb płynnego rozruchu.
* Constant Current (Stała wartość prądu)
Adaptive Control (Sterowanie adaptacyjne)
Tabela 48: 3-4 - Start Ramp Time-2 (Czas rozpędzania przy rozruchu-2)
Programowalne parametry
Zakres Funkcja
*10 s 0:01–3:00 (min-
uty:sekundy)
Tabela 49: 3-5 - Initial Current-2 (Prąd początkowy-2)
Ustawia łączny czas rozruchu dla rozruchu ze sterowaniem adaptacyjnym lub czas rozpędzania dla
rozruchu z narastaniem prądu (od prądu początkowego do ograniczenia prądu).
Zakres Funkcja
*200% 100–600%
wartości
FLC
Ustawia początkowy poziom prądu rozruchu z narastaniem prądu jako procent prądu pełnego obciążenia
silnika. Należy wprowadzić takie ustawienia, aby silnik zaczynał przyspieszać natychmiast po rozpoczęciu
rozruchu. Jeżeli rozruch z narastaniem prądu nie jest wymagany, należy ustawić prąd początkowy jako
równy ograniczeniu prądu.
Tabela 50: 3-6 - Current Limit-2 (Ograniczenie prądu-2)
Zakres Funkcja
*350% 100–
600%
Ustawia ograniczenie prądu dla płynnego rozruchu ze stałą wartością prądu lub z narastaniem prądu jako
procent prądu pełnego obciążenia silnika.
wartości
FLC
Softstarter VLT® Soft Starter MCD 600 stosuje ograniczenie prądu dla wszystkich płynnych rozruchów, w tym dla rozruchu ze sterowaniem adaptacyjnym. Jeśli ograniczenie prądu jest zbyt niskie
lub czas rozpędzania przy rozruchu (parametr 2-2 Start Ramp Time (Czas rozpędzania przy rozruchu))
jest zbyt krótki, rozruch silnika może się nie powieść.
UW AG A
90 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 91

Instrukcja obsługi | VLT® Soft Starter MCD 600
Tabela 51: 3-7 - Adaptive Start Profile-2 (Profil rozruchu adaptacyjnego-2)
Opcja Funkcja
Określa profil, którego softstarter VLT® Soft Starter MCD 600 będzie używać do
płynnego rozruchu ze sterowaniem adaptacyjnym.
Early Acceleration (Wczesne przyspieszanie)
* Constant Acceleration (Stałe przyspieszanie)
Late Acceleration (Późne przyspieszanie)
Tabela 52: 3-8 - Kickstart Time-2 (Czas rozruchu ze zwiększonym momentem-2)
Zakres Funkcja
* 0000 ms 0–2000 ms Ustawia czas trwania rozruchu ze zwiększonym momentem.
Ustawienie 0 wyłącza rozruch ze zwiększonym momentem.
Tabela 53: 3-9 - Kickstart Level-2 (Poziom rozruchu ze zwiększonym momentem-2)
Programowalne parametry
Zakres Funkcja
*500% 100–700% wartości FLC Określa poziom prądu przy rozruchu ze zwiększonym momentem.
Tabela 54: 3-10 - Jog Torque-2 (Moment pracy manewrowej-2)
Zakres Funkcja
*50% 20–100% Ustawia ograniczenie prądu dla pracy manewrowej - Jog.
Tabela 55: 3-11 - Stop Mode-2 (Tryb zatrzymania-2)
Opcja Funkcja
Określa tryb zatrzymania.
Coast To Stop (Zatrzymanie z wybiegiem)
* TVR Soft Stop (Płynne zatrzymanie TVR)
Adaptive Control (Sterowanie adaptacyjne)
DC Brake (Hamowanie DC)
Soft Brake (Płynne hamowanie)
Tabela 56: 3-12 - Stop Time-2 (Czas zatrzymania-2)
Zakres Funkcja
*0 s 0:00–4:00
(minuty:sekundy)
Danfoss A/S © 2018.10
Ustawia czas dla płynnego zatrzymywania silnika przy użyciu zsynchronizowanego zmniejszania napięcia
(TVR) lub sterowania adaptacyjnego. Jeżeli zainstalowano główny stycznik, musi on pozostać zamknięty do
zakończenia czasu zatrzymania. Do sterowania głównym stycznikiem użyć wyjścia głównego stycznika (13,
14).
AQ262141844215pl-000201 / 175R1174| 91
Page 92

Instrukcja obsługi | VLT® Soft Starter MCD 600
Tabela 57: 3-13 - Adaptive Stop Profile-2 (Profil zatrzymania adaptacyjnego-2)
Opcja Funkcja
Określa profil, którego softstarter będzie używać na potrzeby płynnego
zatrzymania ze sterowaniem adaptacyjnym.
Early Deceleration (Wczesne zmniejszanie prędkości)
* Constant Deceleration (Stałe zmniejszanie prędkości)
Late Deceleration (Późne zmniejszanie prędkości)
Tabela 58: 3-14 - Adaptive Control Gain-2 (Wzmocnienie sterowania adaptacyjnego-2)
Zakres Funkcja
*75% 1–200% Reguluje działanie sterowania adaptacyjnego.
Ustawienie to wpływa na sterowanie rozruchem i zatrzymywaniem.
Tabela 59: 3-15 - Multi Pump-2 (Wiele pomp-2)
Programowalne parametry
Opcja Funkcja
Reguluje działanie sterowania adaptacyjnego, aby dopasować je do instalacji z wieloma pompami podłączonymi do wspólnego kolektora wylotowego.
* Single Pump (Pojedyncza pompa)
Manifold Pump (Pompa kolektorowa)
Tabela 60: 3-16 - Start Delay-2 (Opóźnienie rozruchu-2)
Zakres Funkcja
* 0 s 0:00–60:00 (minuty:sekun-
dy)
Tabela 61: 3-17 - DC Brake Torque-2 (Moment hamowania DC-2)
Ustawia opóźnienie między otrzymaniem polecenia rozruchu a rozruchem silnika przez
softstarter.
Zakres Funkcja
*20% 20–100% Ustawia poziom momentu hamowania używany przez softstarter do zwolnienia silnika.
Tabela 62: 3-18 - DC Brake Time-2 (Czas hamowania DC-2)
Zakres Funkcja
*1 s 0:01–0:30 (minuty:sekundy) Ustawia czas trwania impulsu DC podczas zatrzymywania z hamowaniem.
Tabela 63: 3-19 - Brake Current Limit-2 (Ograniczenie prądu hamowania-2).
Zakres Funkcja
*250% 100–600% wartości FLC Ustawia ograniczenie prądu dla płynnego hamowania.
92 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 93

Instrukcja obsługi | VLT® Soft Starter MCD 600
Tabela 64: 3-20 - Soft Brake Delay-2 (Opóźnienie płynnego hamowania-2)
Programowalne parametry
Zakres Funkcja
*400 ms 400–2000msUstawia czas, przez jaki softstarter czeka po otrzymaniu sygnału zatrzymania, zanim zacznie dostarczać
prąd hamowania do silnika. Należy ustawić czas umożliwiający przełączenie K1 i K2.
10.8 Grupa parametrów 4-** Auto-Start/Stop (Automatyczny rozruch/zatrzymanie)
Tabela 65: 4-1 - Auto-Start/Stop Mode (Tryb automatycznego rozruchu/zatrzymania)
Opcja Funkcja
Aktywacja lub dezaktywacja pracy z automatycznym rozruchem/zatrzymaniem.
* Disable (Nieaktywne)
Enable Clock Mode (Włącz tryb zegara)
Enable Timer Mode (Włącz tryb czasomierza)
Tabela 66: 4-1 - Auto-Start/Stop Mode (Tryb automatycznego rozruchu/zatrzymania)
Zakres Funkcja
*00:00 00:00–23:59 gg:mm Ustawia czas trwania pracy softstartera po automatycznym rozruchu w trybie czasomierza.
Tabela 67: 4-3 - Stopped Time (Czas zatrzymania)
Zakres Funkcja
*00:00 00:00–23:59 gg:mm Ustawia czas, przez jaki softstarter pozostanie zatrzymany podczas pracy w trybie czasomierza.
Tabela 68: 4-4 - Sunday Mode (Tryb niedzieli)
Opcja Funkcja
Aktywuje lub dezaktywuje automatyczny rozruch/zatrzymanie dla niedzieli.
* Start/Stop Disable (Start/
stop nieaktywne)
Dezaktywuje sterowanie automatycznym rozruchem/zatrzymaniem. Wszelkie czasy zaplanowane
w parametrze 4-5 Sunday Start Time (Niedziela godzina rozruchu) lub parametrze 4-6 Sunday Stop
Time (Niedziela godzina zatrzymania) będą ignorowane.
Start Only Enable (Aktywny tylko rozruch)
Stop Only Enable (Aktywne tylko zatrzymanie)
Start/Stop Enable (Roz-
Aktywuje sterowanie automatycznym rozruchem. Wszelkie czasy automatycznego zatrzymania zaplanowane w parametrze 4-6 Sunday Stop Time (Niedziela godzina zatrzymania) będą ignorowane.
Aktywuje sterowanie automatycznym zatrzymaniem. Wszelkie czasy automatycznego zatrzymania
zaplanowane w parametrze 4-5 Sunday Stop Time (Niedziela godzina rozruchu) będą ignorowane.
Aktywuje sterowanie automatycznym rozruchem i automatycznym zatrzymaniem.
ruch/zatrzymanie aktywne)
Tabela 69: 4-5 - Sunday Start Time (Niedziela godzina rozruchu)
Zakres Funkcja
*00:00 00:00–23:59 Ustawia godzinę automatycznego rozruchu dla niedzieli (w formacie 24-godzinnym).
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 93
Page 94

Instrukcja obsługi | VLT® Soft Starter MCD 600
Tabela 70: 4-6 - Sunday Stop Time (Niedziela godzina zatrzymania)
Programowalne parametry
Zakres Funkcja
*00:00 00:00–23:59 Ustawia godzinę automatycznego zatrzymania dla niedzieli (w formacie 24-godzinnym).
Tabela 71: 4-7 - Monday Mode (Tryb poniedziałku)
Opcja Funkcja
Aktywuje lub dezaktywuje automatyczny rozruch/zatrzymanie dla poniedziałku.
* Start/Stop Disable (Start/stop nieaktywne) Stop Only Enable (Aktywne tylko zatrzymanie)
Start Only Enable (Aktywny tylko rozruch) Start/Stop Enable (Rozruch/zatrzymanie aktywne)
Tabela 72: 4-8 - Monday Start Time (Poniedziałek godzina rozruchu)
Zakres Funkcja
*00:00 00:00–23:59 Ustawia godzinę automatycznego rozruchu dla poniedziałku (w formacie 24-godzinnym).
Tabela 73: 4-9 - Monday Stop Time (Poniedziałek godzina zatrzymania)
Zakres Funkcja
*00:00 00:00–23:59 Ustawia godzinę automatycznego zatrzymania dla poniedziałku (w formacie 24-godzinnym).
Tabela 74: 4-10 - Tuesday Mode (Tryb wtorku)
Opcja Funkcja
Aktywuje lub dezaktywuje automatyczny rozruch/zatrzymanie dla wtorku.
* Start/Stop Disable (Start/stop nieaktywne)
Start Only Enable (Aktywny tylko rozruch)
Stop Only Enable (Aktywne tylko zatrzymanie)
Start/Stop Enable (Rozruch/zatrzymanie aktywne)
Tabela 75: 4-11 - Tuesday Start Time (Wtorek godzina rozruchu)
Zakres Funkcja
*00:00 00:00–23:59 Ustawia godzinę automatycznego rozruchu dla wtorku (w formacie 24-godzinnym).
Tabela 76: 4-13 - Wednesday Mode (Tryb środy)
Opcja Funkcja
Aktywuje lub dezaktywuje automatyczny rozruch/zatrzymanie dla środy.
* Start/Stop Disable (Start/stop nieaktywne)
Start Only Enable (Aktywny tylko rozruch)
Stop Only Enable (Aktywne tylko zatrzymanie)
Start/Stop Enable (Rozruch/zatrzymanie aktywne)
94 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 95

Instrukcja obsługi | VLT® Soft Starter MCD 600
Tabela 77: 4-14 - Wednesday Start Time (Środa godzina rozruchu)
Programowalne parametry
Zakres Funkcja
*00:00 00:00–23:59 Ustawia godzinę automatycznego rozruchu dla środy (w formacie 24-godzinnym).
Tabela 78: 4-15 - Wednesday Stop Time (Środa godzina zatrzymania)
Zakres Funkcja
*00:00 00:00–23:59 Ustawia godzinę automatycznego zatrzymania dla środy (w formacie 24-godzinnym).
Tabela 79: 4-16 - Thursday Mode (Tryb czwartku)
Opcja Funkcja
Aktywuje lub dezaktywuje automatyczny rozruch/zatrzymanie dla czwartku.
* Start/Stop Disable (Start/stop nieaktywne)
Start Only Enable (Aktywny tylko rozruch)
Stop Only Enable (Aktywne tylko zatrzymanie)
Start/Stop Enable (Rozruch/zatrzymanie aktywne)
Tabela 80: 4-17 - Thursday Start Time (Czwartek godzina rozruchu)
Zakres Funkcja
*00:00 00:00–23:59 Ustawia godzinę automatycznego rozruchu dla czwartku (w formacie 24-godzinnym).
Tabela 81: 4-18 - Thursday Stop Time (Czwartek godzina zatrzymania)
Zakres Funkcja
*00:00 00:00–23:59 Ustawia godzinę automatycznego zatrzymania dla czwartku (w formacie 24-godzinnym).
Tabela 82: 4-19 - Friday Mode (Tryb piątku)
Opcja Funkcja
Aktywuje lub dezaktywuje automatyczny rozruch/zatrzymanie dla piątku.
* Start/Stop Disable (Start/stop nieaktywne)
Start Only Enable (Aktywny tylko rozruch)
Stop Only Enable (Aktywne tylko zatrzymanie)
Start/Stop Enable (Rozruch/zatrzymanie aktywne)
Tabela 83: 4-20 - Friday Start Time (Piątek godzina rozruchu)
Zakres Funkcja
*00:00 00:00–23:59 Ustawia godzinę automatycznego rozruchu dla piątku (w formacie 24-godzinnym).
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 95
Page 96

Instrukcja obsługi | VLT® Soft Starter MCD 600
Tabela 84: 4-21 - Friday Stop Time (Piątek godzina zatrzymania)
Programowalne parametry
Zakres Funkcja
*00:00 00:00–23:59 Ustawia godzinę automatycznego zatrzymania dla piątku (w formacie 24-godzinnym).
Tabela 85: 4-22 - Saturday Mode (Tryb soboty)
Opcja Funkcja
Aktywuje lub dezaktywuje automatyczny rozruch/zatrzymanie dla soboty.
* Start/Stop Disable (Start/stop nieaktywne)
Start Only Enable (Aktywny tylko rozruch)
Stop Only Enable (Aktywne tylko zatrzymanie)
Start/Stop Enable (Rozruch/zatrzymanie aktywne)
Tabela 86: 4-23 - Saturday Start Time (Sobota godzina rozruchu)
Zakres Funkcja
*00:00 00:00–23:59 Ustawia godzinę automatycznego rozruchu dla soboty (w formacie 24-godzinnym).
Tabela 87: 4-24 - Saturday Stop Time (Sobota godzina zatrzymania)
Zakres Funkcja
*00:00 00:00–23:59 Ustawia godzinę automatycznego zatrzymania dla soboty (w formacie 24-godzinnym).
10.9 Grupa parametrów 5-** Protection Levels (Poziomy ochrony)
Tabela 88: 5-1 - Current Imbalance (Niezrównoważenie prądu)
Zakres Funkcja
*30% 10–50% Ustawia próg wyłączenia awaryjnego dla zabezpieczenia przed niezrównoważeniem prądu.
Tabela 89: 5-2 - Current Imbalance Delay (Opóźnienie niezrównoważenia prądu)
Zakres Funkcja
*3 s 0:00–4:00 (minuty:se-
kundy)
Tabela 90: 5-3 - Undercurrent (Zbyt niski prąd)
Spowalnia reakcję softstartera na niezrównoważenie prądu, co pozwala unikać wyłączeń awaryjnych w przypadku chwilowych fluktuacji.
Zakres Funkcja
*20% 0–100% Ustawia próg wyłączenia awaryjnego dla ochrony przed zbyt niskim prądem jako procent prądu pełnego obcią-
żenia silnika. Ten parametr należy ustawić na poziomie pomiędzy normalnym zakresem pracy silnika a prądem
magnesującym (bez obciążenia) silnika (zwykle 25–35% prądu pełnego obciążenia). Ustawienie 0% wyłącza zabezpieczenie przed zbyt niskim prądem.
96 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 97

Instrukcja obsługi | VLT® Soft Starter MCD 600
Tabela 91: 5-4 - Undercurrent Delay (Opóźnienie zbyt niskiego prądu)
Zakres Funkcja
Programowalne parametry
* 5 s 00–4:00 (minuty:sekun-
dy)
Tabela 92: 5-5 - Overcurrent (Przetężenie)
Spowalnia reakcję softstartera na zbyt niski prąd, co pozwala unikać wyłączeń awaryjnych w przypadku chwilowych fluktuacji.
Zakres Funkcja
*400% 80–600% Ustawia próg wyłączenia awaryjnego dla ochrony przed przetężeniem jako procent prądu pełnego obciąże-
nia silnika.
Tabela 93: 5-6 - Overcurrent Delay (Opóźnienie przetężenia)
Zakres Funkcja
* 0 s 0:00–1:00 (minuty:se-
kundy)
Tabela 94: 5-7 - Undervoltage (Podnapięcie)
Spowalnia reakcję softstartera na przetężenie, co pozwala unikać wyłączeń awaryjnych w przypadku chwilowych przetężeń.
Zakres Funkcja
*350 100–1000 V Ustawia próg wyłączenia awaryjnego dla zabezpieczenia podnapięciowego. Ustawić zgodnie z wymogami.
UW AG A
Zabezpieczenie napięciowe nie działa prawidłowo, dopóki softstarter nie jest w trybie Praca.
Tabela 95: 5-8 - Undervoltage Delay (Opóźnienie zbyt niskiego napięcia)
Zakres Funkcja
* 1 s 0:00–1:00 (minuty:se-
kundy)
Tabela 96: 5-9 - Overvoltage (Przepięcie)
Spowalnia reakcję softstartera na zbyt niskie napięcie zasilania, co pozwala unikać wyłączeń awaryjnych spowodowanych chwilowymi fluktuacjami.
Zakres Funkcja
*500 100–1000 V Ustawia próg wyłączenia awaryjnego dla zabezpieczenia nadnapięciowego. Ustawić zgodnie z wymogami.
Tabela 97: 5-10 - Overvoltage Delay (Opóźnienie przepięcia)
Zakres Funkcja
* 1 s 0:00–1:00 (minuty:se-
kundy)
Tabela 98: 5-11 - Underpower (Zbyt mała moc)
Spowalnia reakcję softstartera na przepięcie, co pozwala unikać wyłączeń awaryjnych spowodowanych chwilowymi fluktuacjami.
Zakres Funkcja
*10% 10–120% Ustawia próg wyłączenia awaryjnego dla zabezpieczenia przed zbyt małą mocą. Ustawić zgodnie z wymogami.
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 97
Page 98

Instrukcja obsługi | VLT® Soft Starter MCD 600
Tabela 99: 5-12 - Underpower delay (Opóźnienie zbyt małej mocy)
Zakres Funkcja
Programowalne parametry
*1 s 0:00–1:00 (minuty:se-
kundy)
Tabela 100: 5-13 - Overpower (Zbyt duża moc)
Spowalnia reakcję softstartera na zbyt małą moc, co pozwala unikać wyłączeń awaryjnych w przypadku chwilowych fluktuacji.
Zakres Funkcja
*150% 80–200% Ustawia próg wyłączenia awaryjnego dla zabezpieczenia przed zbyt dużą mocą. Ustawić zgodnie z wymoga-
mi.
Tabela 101: 5-14 - Overpower Delay (Opóźnienie zbyt dużej mocy)
Zakres Funkcja
* 1 s 0:00–1:00 (minuty:se-
kundy)
Tabela 102: 5-15 - Excess Start Time (Nadmierny czas rozruchu)
Spowalnia reakcję softstartera na zbyt dużą moc, co pozwala unikać wyłączeń awaryjnych w przypadku chwilowych fluktuacji.
Zakres Funkcja
*20 s 0:00–4:00
Nadmierny czas rozruchu to maksymalny czas, podczas którego softstarter próbuje wykonać rozruch silnika.
(minuty:sekundy)
Jeśli silnik nie przejdzie w tryb Praca przed upływem zaprogramowanego ograniczenia, nastąpi wyłączenie
awaryjne softstartera.
W tym parametrze należy ustawić okres nieco dłuższy niż wymagany dla normalnego rozruchu prawidłowo
działającego silnika. Ustawienie 0 wyłącza zabezpieczenie nadmiernego czasu rozruchu.
Tabela 103: 5-16 - Restart Delay (Opóźnienie restartu)
Zakres Funkcja
*10 s 00:01–60:00
(minuty:sekun-
Softstarter można tak skonfigurować, aby wymusić opóźnienie pomiędzy zakończeniem zatrzymania i
rozpoczęciem następnego rozruchu.
dy)
Podczas opóźnienia restartu wyświetlacz pokazuje czas, który pozostał do rozpoczęcia następnego rozruchu.
Tabela 104: 5-17 - Starts per Hour (Rozruchy na godzinę)
Zakres Funkcja
*0 0–10 Ustawia maksymalną liczbę rozruchów, które softstarter może próbować wykonać w okresie 60 minut. Ustawienie 0
dezaktywuje to zabezpieczenie.
Tabela 105: 5-18 - Phase Sequence (Kolejność faz)
Opcja Funkcja
Określa kolejność faz dozwoloną przez softstarter przy rozruchu. Podczas sprawdzania przed rozruchem softstarter bada kolejność faz na swoich zaciskach wejściowych i wyłącza się awaryjnie, jeśli
rzeczywista kolejność nie odpowiada wybranej opcji.
98 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
Page 99

Instrukcja obsługi | VLT® Soft Starter MCD 600
Opcja Funkcja
* Any Sequence (Dowol-
na kolejność)
Positive only (Tylko dodatnie)
Programowalne parametry
Negative Only (Tylko
ujemne)
W przypadku używania hamowania DC zasilanie musi być podłączone do softstartera (zacisków wejściowych L1, L2 i L3) w dodatniej kolejności faz. Parametr 2-1 Phase Sequence (Kolej-
ność faz) musi być ustawiony na wartość Positive Only (Tylko dodatnie).
UW AG A
10.10 Grupa parametrów 6-** Protection Action (Działanie ochrony)
Tabela 106: 6-1 - Auto-Reset Count (Liczba automatycznych resetów)
Zakres Funkcja
*0 0–5 Określa, ile razy softstarter będzie się automatycznie resetować, jeśli nadal będzie się wyłączać awaryjnie.
Licznik resetów zwiększa wartość o 1 za każdym razem, gdy softstarter wykona automatyczne resetowanie, i resetuje się
po pomyślnym rozruchu.
Ustawienie tego parametru na 0 dezaktywuje automatyczne resetowanie.
Tabela 107: 6-2 - Auto-Reset Delay (Opóźnienie automatycznego resetowania)
Zakres Funkcja
*5 s 0:05–15:00 (minuty:sekun-
dy)
Ustawia opóźnienie przed automatycznym resetowaniem wyłączenia awaryjnego przez
softstarter.
Tabela 108: 6-3 - Current Imbalance (Niezrównoważenie prądu)
Opcja Funkcja
Określa reakcję softstartera na aktywację każdego z zabezpieczeń.
Wszystkie zdarzenia są zapisywane w rejestrze zdarzeń.
* Soft Trip and Log
(Płynne wył. awar. i rejestr)
Soft Trip and Reset
(Płynne wył. awar. i reset)
Trip Starter (Wyłączenie awaryjne softstartera)
Trip and Reset (Wył.
awaryjne i reset)
Softstarter zatrzymuje silnik zgodnie z ustawieniem w parametrze 2-9 Stop Mode (Tryb zatrzymania)
lub parametrze 3-11 Stop Mode (Tryb zatrzymania), a następnie przechodzi do stanu wyłączenia awaryjnego. Wyłączenie awaryjne musi zostać zresetowane przed zrestartowaniem softstartera.
Softstarter zatrzymuje silnik zgodnie z ustawieniem w parametrze 2-9 Stop Mode (Tryb zatrzymania)
lub parametrze 3-11 Stop Mode (Tryb zatrzymania), a następnie przechodzi do stanu wyłączenia awaryjnego. Wyłączenie awaryjne jest resetowane po opóźnieniu automatycznego resetowania.
Softstarter odcina zasilanie i silnik wykonuje zatrzymanie z wybiegiem. Wyłączenie awaryjne musi
zostać zresetowane przed zrestartowaniem softstartera.
Softstarter odcina zasilanie i silnik wykonuje zatrzymanie z wybiegiem. Wyłączenie awaryjne jest resetowane po opóźnieniu automatycznego resetowania.
Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174| 99
Page 100

Instrukcja obsługi | VLT® Soft Starter MCD 600
Opcja Funkcja
Programowalne parametry
Warn and Log (Ostrzeż
i rejestr)
Zabezpieczenie jest zapisywane w rejestrze zdarzeń i na wyświetlaczu pokazywany jest komunikat
ostrzegawczy, ale softstarter nadal pracuje.
Log Only (Tylko rejestr) Zabezpieczenie jest zapisywane w rejestrze zdarzeń, ale softstarter nadal pracuje.
Tabela 109: 6-4 - Undercurrent (Zbyt niski prąd)
Opcja Funkcja
Określa reakcję softstartera na zdarzenie zabezpieczeń.
* Soft Trip and Log (Płynne wył. awar. i rejestr)
Soft Trip and Reset (Płynne wył. awar. i reset)
Trip Starter (Wyłączenie awaryjne softstartera)
Trip and Reset (Wył. awaryjne i reset)
Warn and Log (Ostrzeż i rejestr)
Log Only (Tylko rejestr)
Tabela 110: 6-5 - Overcurrent (Przetężenie)
Opcja Funkcja
Określa reakcję softstartera na zdarzenie zabezpieczeń.
* Soft Trip and Log (Płynne wył. awar. i rejestr)
Soft Trip and Reset (Płynne wył. awar. i reset)
Trip Starter (Wyłączenie awaryjne softstartera)
Trip and Reset (Wył. awaryjne i reset)
Warn and Log (Ostrzeż i rejestr)
Log Only (Tylko rejestr)
Tabela 111: 6-6 - Undervoltage (Podnapięcie)
Opcja Funkcja
Określa reakcję softstartera na zdarzenie zabezpieczeń.
* Soft Trip and Log (Płynne wył. awar. i rejestr)
Soft Trip and Reset (Płynne wył. awar. i reset)
Trip Starter (Wyłączenie awaryjne softstartera)
Trip and Reset (Wył. awaryjne i reset)
Warn and Log (Ostrzeż i rejestr)
Log Only (Tylko rejestr)
100 | Danfoss A/S © 2018.10
AQ262141844215pl-000201 / 175R1174
 Loading...
Loading...