

Page 1

Handbok
VLT® Soft Starter MCD 600
Page 2

Page 3
Handbok | VLT® Soft Starter MCD 600
Innehåll
Innehåll
1 Inledning 8
1.1 Produktbeskrivning 8
1.2 Dokumentversion 8
1.3 Ytterligare dokumentation 8
1.4 Godkännanden och certifieringar 8
2 Säkerhet 9
2.1 Säkerhetssymboler 9
2.2 Behörig personal 9
2.3 Säkerhetsåtgärder 9
3 Systemkonstruktion 12
3.1 Funktionslista 12
3.2 Typkod 13
3.3 Val av storlek på mjukstartare 14
3.4 Strömklassificeringar (IEC-klassificeringar) 14
3.5 Mått och vikt 16
3.6 Fysisk installation/kylningsavstånd 17
3.7 Tillbehör 17
3.7.1 Expansionskort 17
3.7.1.1 Smart card 17
3.7.1.2 Expansionskort för kommunikation 18
3.7.2 Fjärr-LCP 601 18
3.7.3 Fingerskyddssats 18
3.7.4 Programvara för hantering av mjukstartare 18
3.8 Huvudkontaktor 18
3.9 Maximalbrytare 19
3.10 Effektfaktorkorrigering 19
3.11 Kortslutningsskydd 20
3.11.1 Typ 1-koordinering 20
3.11.2 Typ 2-koordinering 20
3.12 IEC-koordinering med kortslutningsskydd 20
3.13 UL-koordinering med kortslutningsskydd 21
3.13.1 Standardkortslutningsvärde 21
3.13.2 Kortslutningsvärde som överstiger standardvärdet 22
3.14 Säkringsval för typ 2-koordinering 23
4 Specifikationer 25
4.1 Försörjning 25
4.2 Kortslutningskapacitet 25
AQ262141844215sv-000201 / | 3Danfoss A/S © 2018.10
Page 4
Handbok | VLT® Soft Starter MCD 600
4.3 Elektromagnetisk kapacitet (uppfyller EU-direktiv 2014/35/EU) 25
4.4 Ingångar 25
4.5 Utgångar 25
4.6 Driftmiljö 26
4.7 Värmeavgivning 26
4.8 Överbelastningsskydd för motor 26
4.9 Certifiering 26
4.10 Livslängd (interna förbikopplingskontakter) 26
Innehåll
5 Installation 27
5.1 Säkerhetsinstruktioner 27
5.2 Kommandokälla 27
5.3 Installation av mjukstartaren 28
5.4 Ingångar 28
5.4.1 Ingångsplintar 29
5.4.2 Motortermistor 29
5.4.3 Start/stopp 30
5.4.4 Återställning/inaktivering av startare 30
5.4.5 Programmerbara ingångar 30
5.4.6 USB-port 31
5.5 Utgångar 31
5.5.1 Utgångsplintar 31
5.5.2 Analog utgång 31
5.5.3 Huvudkontaktorutgång 31
5.5.4 Programmerbara utgångar 32
5.6 Styrspänning 32
5.6.1 Styrspänningsplintar 32
5.6.2 Installation enligt UL-krav 33
5.7 Kabelavslutningar 33
5.7.1 Kabelanslutningar 34
5.7.2 Motoranslutning 34
5.7.2.1 In-line-installation 35
5.7.2.2 Inside Delta-installation 36
5.8 Klassisk installation 36
5.9 Snabbinstallation 38
6 Inställningssverktyg 40
6.1 Inledning 40
6.2 Ange datum och tid 40
6.3 Kommandokälla 40
6.4 Idrifttagning 40
6.5 Körningssimulering 40
AQ262141844215sv-000201 /4 | Danfoss A/S © 2018.10
Page 5
Handbok | VLT® Soft Starter MCD 600
6.6 Hämta/spara inställningar 41
6.7 Spara och hämta via USB 42
6.7.1 Procedur för att spara och hämta 42
6.7.2 Filsökvägar och filformat 43
6.8 Auto-start/Stop (Autostart/-stopp) 43
6.9 Nätverksadress 44
6.9.1 Ange en nätverksadress 44
6.10 Digital I/O State (Status för digitala in- och utgångar) 45
6.11 Status för analoga in- och utgångar 46
6.12 Serial Number & Rating (Serienummer och klassificering) 46
6.13 Programversioner 46
6.14 Termistoråterställning 47
6.15 Återställ termisk modell 47
Innehåll
7 Loggar 48
7.1 Inledning 48
7.2 Händelselogg 48
7.3 Räknare 48
7.3.1 Visa räknarna 48
8 LCP och återkoppling 49
8.1 Lokal LCP och återkoppling 49
8.2 Fjärr-LCP 49
8.3 Justera displayens ljusstyrka 51
8.4 Mjukstartarens statusdioder 51
8.5 Displayer 52
8.5.1 Mjukstartarinformation 52
8.5.2 Konfigurerbara återkopplingsskärmar 52
8.5.3 Skärmar för driftåterkoppling 53
8.5.4 Prestandadiagram 53
9 Drift 55
9.1 Start-, stopp- och återställningskommandon 55
9.2 Åsidosättning av kommando 55
9.3 Autostart/-stopp 55
9.3.1 Klockläge 55
9.3.2 Timerläge 55
9.4 PowerThrough 56
9.5 Nödläge 56
9.6 Extern trippkrets 57
9.7 Vanliga styrmetoder 57
9.8 Mjukstartsmetoder 58
9.8.1 Konstant ström 58
AQ262141844215sv-000201 / | 5Danfoss A/S © 2018.10
Page 6
Handbok | VLT® Soft Starter MCD 600
9.8.2 Konstant ström med strömramp 59
9.8.3 Adaptiv styrning för start 60
9.8.3.1 Finjustera adaptiv styrning 61
9.8.4 Konstant ström med kickstart 61
9.9 Stoppmetoder 62
9.9.1 Utrullningsstopp 62
9.9.2 Tidsstyrd spänningsramp 62
9.9.3 Adaptiv styrning för stopp 62
9.9.4 DC-broms 64
9.9.5 DC-broms med extern nollhastighetsgivare 65
9.9.6 Mjukbroms 65
9.10 Pumprengöring 66
9.11 Drift i omvänd riktning 67
9.12 Joggdrift 68
9.13 Inside Delta-drift 69
9.14 Sekundär motorinställning 70
Innehåll
10 Programmerbara parametrar 71
10.1 Huvudmeny 71
10.2 Ändra parametervärden 71
10.3 Justeringslås 71
10.4 Parameterlista 71
10.5 Parametergrupp 1-** Motor Details (Motorinformation) 79
10.6 Parametergrupp 2-** Motor Start/Stop (Motorstart/-stopp) 80
10.7 Parametergrupp 3-** Motor Start/Stop-2 (Motorstart/-stopp-2) 83
10.8 Parametergrupp 4-** Auto-Start/Stop (Autostart/-stopp) 86
10.9 Parametergrupp 5-** Protection Levels (Skyddsnivåer) 90
10.10 Parametergrupp 6-** Protection Action (Skyddsåtgärd) 92
10.11 Parametergrupp 7-** Inputs (Ingångar) 98
10.12 Parametergrupp 8-** Relay Outputs (Reläutgångar) 101
10.13 Parametergrupp 9-** Analog Output (Analog utgång) 104
10.14 Parametergrupp 10-** Display 104
10.15 Parametergrupp 11-** Pump Clean (Pumprengöring) 107
10.16 Parametergrupp 12-** Communication Card (Kommunikationskort) 108
10.17 Parametergrupp 20-** Advanced (Avancerat) 112
10.18 Parametergrupp 30-** Pump Input Configuration (Konfiguration av pumpingång) 113
10.19 Parametergrupp 31-** Flow Protection (Flödesskydd) 115
10.20 Parametergrupp 32-** Pressure Protection (Tryckskydd) 116
10.21 Parametergrupp 33-** Pressure Control (Tryckstyrning) 117
10.22 Parametergrupp 34-** Depth Protection (Djupskydd) 118
10.23 Parametergrupp 35-** Thermal Protection (Termiskt skydd) 118
10.24 Parametergrupp 36-** Pump Trip Action (Åtgärd vid pumptripp) 119
AQ262141844215sv-000201 /6 | Danfoss A/S © 2018.10
Page 7
Handbok | VLT® Soft Starter MCD 600
Innehåll
11 Tillämpningsexempel 123
11.1 Smart card – pumpstyrning och -skydd 123
11.2 Smart card – nivåstyrd pumpaktivering 124
12 Felsökning 127
12.1 Skyddssvar 127
12.2 Trippmeddelanden 127
12.3 Allmänna fel 141
13 Bilaga 144
13.1 Symboler och förkortningar 144
AQ262141844215sv-000201 / | 7Danfoss A/S © 2018.10
Page 8
Handbok | VLT® Soft Starter MCD 600
Inledning
1 Inledning
1.1 Produktbeskrivning
VLT® Soft Starter MCD 600 är en avancerad digital mjukstartslösning för 11–315 kW motorer. Mjukstartaren erbjuder skyddsfunktioner
åt ett brett urval av motorer och system och är utformad för en pålitlig drift i de mest krävande installationssituationer.
1.2 Dokumentversion
Den här handboken granskas och uppdateras regelbundet. Alla förslag på förbättringar är välkomna.
Tabell 1: Dokumentversion
Utgåva Anmärkningar
AQ262141844215 Utökat modellintervall. Parameternumreringen har ändrats.
1.3 Ytterligare dokumentation
Tillgänglig dokumentation som hjälper dig att förstå mjukstartarens avancerade funktioner och programmering.
• Handböcker för drift med tillvalsutrustning.
• Installationsguider för installation av olika tillbehör.
• WinStart Design Tool för hjälp med att välja den bästa mjukstartaren för en tillämpning.
Kompletterande dokumentation och handböcker finns tillgängliga på www.danfoss.com/en/search/?filter=type%3Adocumentation.
1.4 Godkännanden och certifieringar
8 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 9
Handbok | VLT® Soft Starter MCD 600
2 Säkerhet
2.1 Säkerhetssymboler
Följande symboler används i handboken:
FARA
Indikerar en farlig situation som leder till dödsfall eller allvarliga personskador om den inte undviks.
VA RN IN G
Indikerar en farlig situation som kan leda till dödsfall eller allvarliga personskador om den inte undviks.
Fö RS IK TI GH ET
Indikerar en farlig situation som kan leda till lindriga eller måttliga personskador.
Säkerhet
OB S!
Indikerar ett meddelande om materiella skador.
2.2 Behörig personal
Korrekt och säker transport, lagring, installation, drift och underhåll krävs för problemfri och säker drift av mjukstartaren. Endast
behörig personal får installera och använda denna utrustning.
Behörig personal definieras som utbildade medarbetare med behörighet att installera, driftsätta och underhålla utrustning, system och
kretsar i enlighet med gällande lagar och bestämmelser. Behörig personal ska även vara införstådd med de instruktioner och
säkerhetsåtgärder som beskrivs i den här handboken.
2.3 Säkerhetsåtgärder
Säkerhetsåtgärderna kan inte innefatta alla potentiella orsaker till skador på utrustning, men kan belysa vanliga orsaker till skador. Det
är installatörens ansvar att:
• läsa och förstå alla instruktioner i den här handboken innan utrustningen installeras, används eller underhålls.
• följa korrekt praxis för arbete med elektricitet samt att använda lämplig skyddsutrustning.
• kontakta återförsäljaren innan utrustningen används på andra sätt än vad som beskrivs i den här handboken.
OB S!
VLT® Soft Starter MCD 600 kan inte repareras av användare. Enheten ska endast repareras av behörig servicepersonal. Obehörig
ändring av enheten upphäver produktgarantin.
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 9
Page 10
Handbok | VLT® Soft Starter MCD 600
VA RN IN G
KORREKT JORDNING
Det åligger den person som installerar mjukstartaren att sörja för ordentlig jordning och skydd för förgreningsenheterna i
enlighet med de lokala elsäkerhetsföreskrifterna. Om korrekt jordning och skydd för förgreningsenhet saknas kan det resultera i
att utrustningen inte fungerar som den ska, allvarliga personskador eller dödsfall.
Koppla från nätanslutningen innan du utför reparationsarbete på mjukstartaren.
-
VA RN IN G
OAVSIKTLIG START
När mjukstartaren är ansluten till växelströmsnät, DC-försörjning eller lastdelning kan motorn starta när som helst. Oavsiktlig
start vid programmering, underhåll eller reparationsarbete kan leda till dödsfall, allvarliga personskador eller materiella skador.
Motorn kan starta med hjälp av en extern brytare, ett fältbusskommando, en ingångsreferenssignal från LCP eller efter ett
uppklarat feltillstånd.
Tryck på [Off/Reset] på LCP:n innan du programmerar parametrar.
-
Koppla från nätanslutningen från mjukstartaren.
-
Mjukstartaren, motorn och all annan elektrisk utrustning måste vara driftklara när mjukstartaren ansluts till växelströmsnät,
-
DC-försörjning eller lastdelning.
Anslut strömförsörjningen till mjukstartaren med en isolerande brytare och en strömbrytarenhet (exempelvis en
-
strömkontakor) som är styrbara via ett externt säkerhetssystem (exempelvis ett nödstopp eller en feldetektor).
Säkerhet
Fö RS IK TI GH ET
EFFEKTFAKTORKORRIGERING
Mjukstartaren skadas om kondensatorerna för effektfaktorkorrigering ansluts till utgångssidan.
Anslut inte kondensatorerna för effektfaktorkorrigering till mjukstartarens utgång. Om du ska använda dig av statisk
-
effektfaktorkorrigering måste du ansluta kondensatorerna till mjukstartarens försörjningssida.
Fö RS IK TI GH ET
KORTSLUTNING
VLT® Soft Starter MCD 600 är inte kortslutningssäker.
Efter allvarlig överbelastning eller kortslutning ska MCD 600:s drift grundligt testas av behörig servicepersonal.
-
Fö RS IK TI GH ET
MEKANIKSKADOR PÅ GRUND AV OVÄNTAD OMSTART
Motorn kan starta om efter att orsakerna till en avstängning har åtgärdats, vilket kan vara skadligt för vissa maskiner och
installationer.
Säkerställ att lämpliga åtgärder vidtas mot omstarter efter oplanerade motorstopp.
-
10 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 11

Handbok | VLT® Soft Starter MCD 600
VA RN IN G
PERSONALSÄKERHET
Mjukstartaren är inte en säkerhetsenhet och ger inte elektrisk isolering eller frånkoppling från försörjningen.
Om isolering krävs ska mjukstartaren installeras med en huvudkontaktor.
-
Mjukstartarens start- och stoppfunktioner garanterar inte personalsäkerhet. Fel som uppstår i nätförsörjningen,
-
motoranslutningen eller mjukstartarens elektronik kan resultera i att motorn startar eller stoppar.
Om fel uppstår i mjukstartarens elektronik kan en stoppad motor starta. Ett tillfälligt nätspänningsfel eller förlorad
-
motoranslutning kan leda till att en stoppad motor startar.
Isoleringsenheten ska kontrolleras av ett externt säkerhetssystem för att säkerställa utrsutnings- och personalsäkerhet.
-
OB S!
Spara de befintliga parameterinställningarna till en fil med hjälp av MCD PC Software eller funktionen Save User Set (Spara
-
användarinställning) innan du ändrar några parameterinställningar
Säkerhet
OB S!
Använd autostart-funktionen med försiktighet. Läs igenom alla anmärkningar som har att göra med autostart före drift.
-
Ansvarsfriskrivning
Exemplen och diagrammen i den här handboken är endast till för förklarande ändamål. Informationen som finns i handboken kan
ändras när som helst och utan föregående meddelande. Danfoss kan under inga omständigheter hållas ansvarigt för direkta skador,
indirekta skador eller följdskador som användning eller tillämpning av utrustningen resulterar i.
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 11
Page 12

Handbok | VLT® Soft Starter MCD 600
3 Systemkonstruktion
3.1 Funktionslista
Effektiviserad inställningsprocess
• Konfigurationsprofiler för vanliga tillämpningar.
• Inbyggd mätning och ingångar/utgångar.
Gränssnitt som är lätt att använda
• Flerspråkiga menyer och displayer.
• Beskrivande namn på alternativ och återkopplingsmeddelanden.
• Prestandadiagram i realtid
Stöd för energieffektivitet
• IE3-kompatibel.
• 99 % energieffektiv vid drift.
• Intern förbikoppling.
• Mjukstartsteknik som förhindrar övertonsdistorsion
Systemkonstruktion
Omfattande utbud av modeller
• 20–579 A (nominell).
• 200–525 V AC.
• 380–690 V AC.
• Inside Delta-installation.
Omfattande ingångs- och utgångsalternativ
• Fjärrstyrningsingångar (2 x fasta, 2 x programmerbara).
• Reläutgångar (1 x fast, 2 x programmerbar).
• Analog utgång.
Mångsidiga alternativ för start och stopp
• Planerade starter/stopp.
• Adaptiv styrning.
• Konstant ström.
• Strömramp.
• Pumprengöring.
• Mjukstopp med tidsstyrd spänningsramp.
• Utrullningsstopp.
• DC-broms.
• Mjukbroms.
• Omvänd riktning.
12 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 13
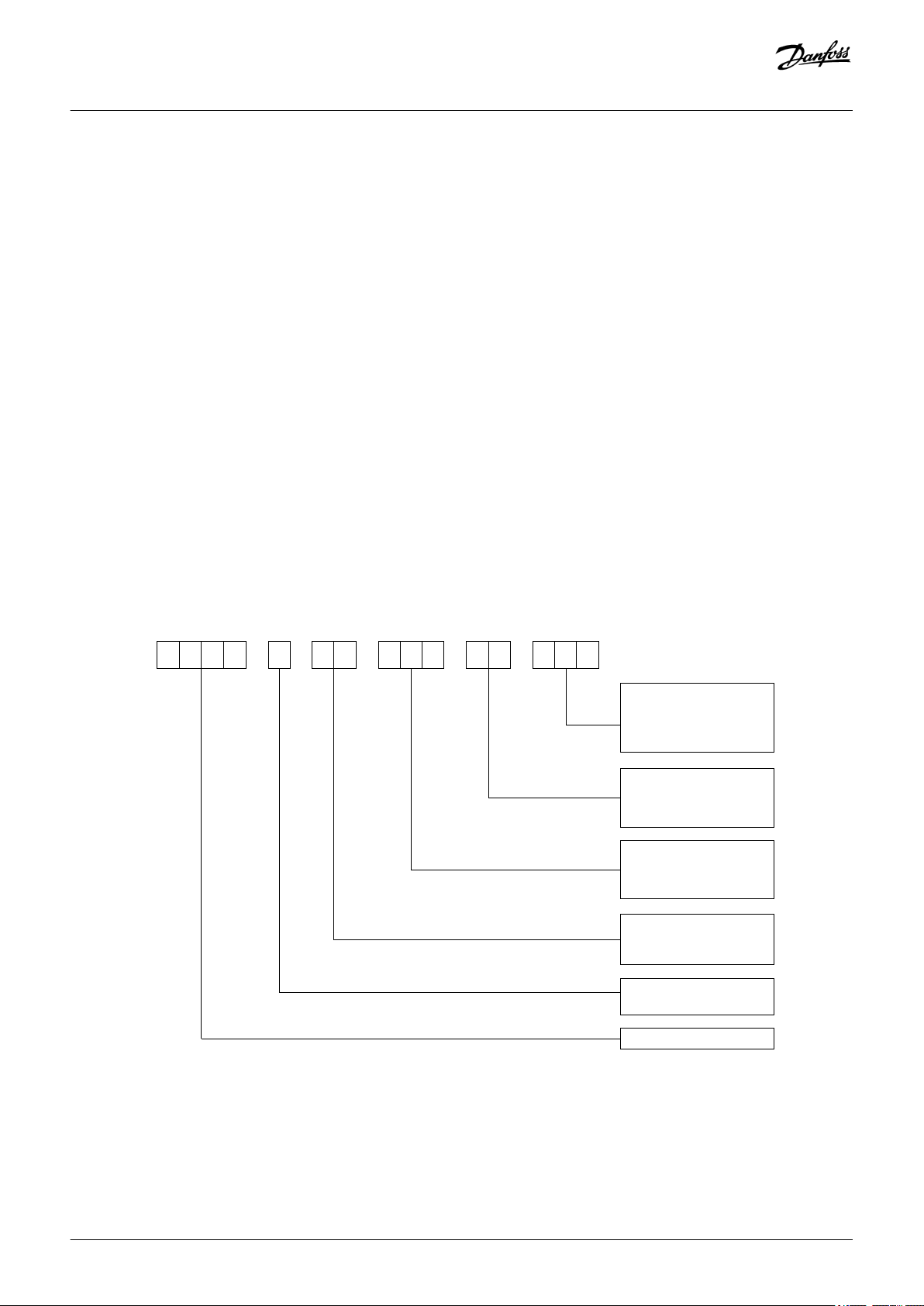
0 014
B T 5
Styrspänning
CV1 = 24 V AC/V DC
CV2 = 110~120 V AC or
220~240 V AC
Skydd
00 = IP00 (öppen typ)
20 = IP20 (kapsling)
Kapslingsstorlek
S1X = Kapslingsstorlek 1
S2X = Kapslingsstorlek 2
Nätspänning
T5 = 200~525 V AC
T7 = 380~690 V AC
Förbikoppling
B = Intern förbikoppling
Nominell strömmärkdata
e77ha788.10
MCD6-
–– – –
Handbok | VLT® Soft Starter MCD 600
Anpassningsbart skydd
• Överbelastning av motor.
• Överskjutande starttid.
• Underström/överström.
• För låg effekt/för hög effekt.
• Strömobalans.
• Ingångstripp.
• Motortermistor.
Tillvalsfunktioner för avancerade tillämpningar
• Smart cards.
• Kommunikationstillval:
- DeviceNet.
- Ethernet/IP.
- Modbus RTU.
- Modbus TCP.
- PROFIBUS.
- PROFINET.
Systemkonstruktion
3.2 Typkod
Bild 1: Typkodssträng
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 13
Page 14

Handbok | VLT® Soft Starter MCD 600
Systemkonstruktion
3.3 Val av storlek på mjukstartare
Mjukstartarens storlek måste passa motorn och tillämpningen.
Välj en mjukstartare med en strömklassificering som är minst lika stor som motorns märkström (se motorns märkskylt) vid
startbelastning.
Mjukstartarens strömklassificering avgör den maximala motorstorlek som mjukstartaren kan användas med. Mjukstartarens märkström
påverkas av antal starter per timme, startens längd och strömnivå samt hur länge mjukstartaren är avstängd (utan ström) mellan
starter.
Mjukstartarens strömklassificering är endast giltig när den används enligt villkoren i AC53b-koden. Mjukstartaren kan ha en högre eller
lägre strömklassificering med olika driftvillkor.
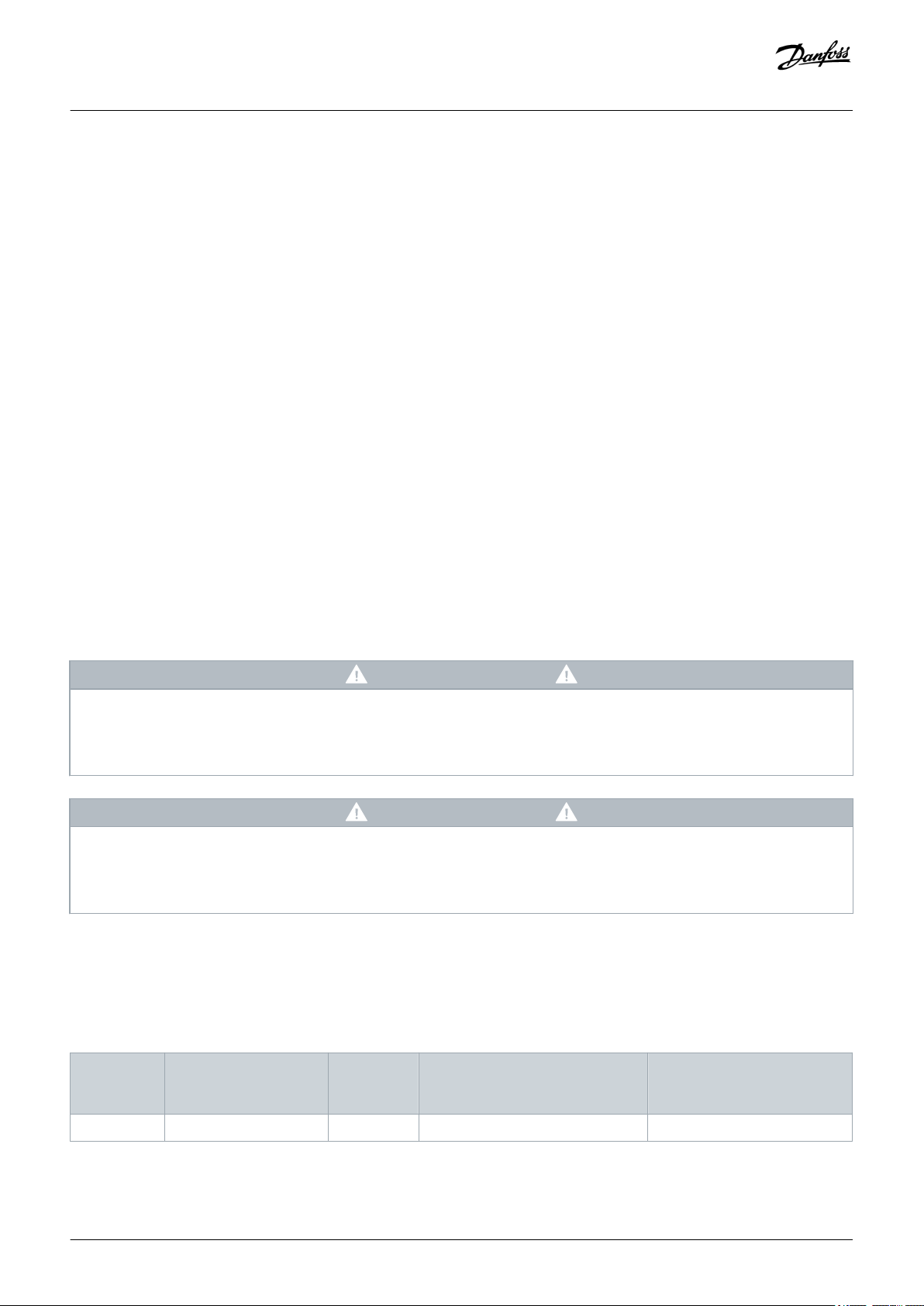
3.4 Strömklassificeringar (IEC-klassificeringar)
OB S!
Kontakta din lokala leverantör om du vill veta mer om olika klassificeringar i driftförhållanden som inte finns med i tabellerna
nedan.
Bild 2: AC53b-format
OB S!
Alla klassificeringar är beräknade utifrån en höjd på 1 000 meter (3280 ft) och omgivningstemperatur på 40° C (104 °F).
Tabell 2: In-line-installation, MCD6-0020B ~ MCD6-0042B
3.0-10:350 3.5-15:345 4.0-10:350 4.0-20:340 5.0-5:355
MCD6-0020B 24 20 19 16 17
MCD6-0034B 42 34 34 27 32
MCD6-0042B 52 42 39 35 34
Tabell 3: In-line-installation, MCD6-0063B ~ MCD6-0579B
3.0-10:590 3.5-15:585 4.0-10:590 4.0-20:580 5.0-5:595
MCD6-0063B 64 63 60 51 54
MCD6-0069B 69 69 69 62 65
14 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 15
Handbok | VLT® Soft Starter MCD 600
Systemkonstruktion
3.0-10:590 3.5-15:585 4.0-10:590 4.0-20:580 5.0-5:595
MCD6-0086B 105 86 84 69 77
MCD6-0108B 115 108 105 86 95
MCD6-0129B 135 129 126 103 115
MCD6-0144B 184 144 139 116 127
MCD6-0171B 200 171 165 138 150
MCD6-0194B 229 194 187 157 170
MCD6-0244B 250 244 230 200 202
MCD6-0287B 352 287 277 234 258
MCD6-0323B 397 323 311 263 289
MCD6-0410B 410 410 410 380 400
MCD6-0527B 550 527 506 427 464
MCD6-0579B 580 579 555 470 508
Tabell 4: Inside Delta-installation
3.0-10:350 3.5-15:345 4.0-10:350 4.0-20:340 5.0-5:355
MCD6-0020B 36 30 28 24 25
MCD6-0034B 63 51 51 40 48
MCD6-0042B 78 63 58 52 51
3.0-10:590 3.5-15:585 4.0-10:590 4.0-20:580 5.0-5:595
MCD6-0063B 96 94 90 76 81
MCD6-0069B 103 103 103 93 97
MCD6-0086B 157 129 126 103 115
MCD6-0108B 172 162 157 129 142
MCD6-0129B 202 193 189 154 172
MCD6-0144B 276 216 208 174 190
MCD6-0171B 300 256 247 207 225
MCD6-0194B 343 291 280 235 255
MCD6-0244B 375 366 345 300 303
MCD6-0287B 528 430 415 351 387
MCD6-0323B 595 484 466 394 433
MCD6-0410B 615 615 615 570 600
MCD6-0527B 825 790 759 640 696
MCD6-0579B 870 868 832 705 762
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 15
Page 16
4/T2
READY RUN
TRIP
LOCAL
Exit
Reset
Menu
Store
2/T1
6/T3
1/L1
3/L2
5/L3
READY RUN TRIP LOCAL
Exit
Reset
Menu
Store
VLT
®
Soft Starter
VLT
®
Soft Starter
A
B
C D
E
A
B
C
D
E
e77ha713.10
Handbok | VLT® Soft Starter MCD 600
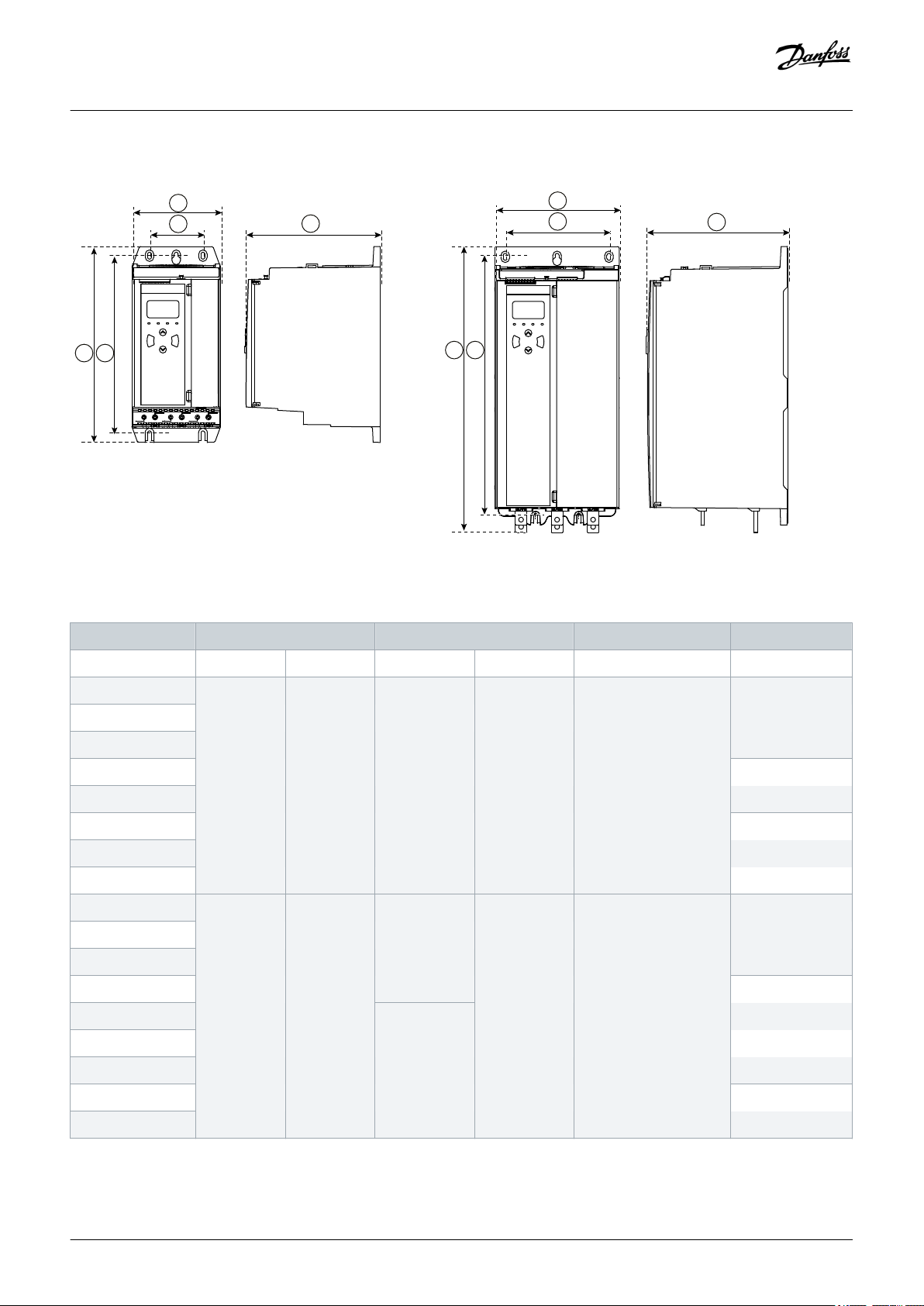
3.5 Mått och vikt
Systemkonstruktion
Bild 3: Dimensioner, kapsling S1 (vänster) och S2 (höger)
Tabell 5: Mått och vikt
Bredd [mm (tum)] Höjd [mm (tum)] Djup [mm (tum)] Vikt [kg (lb)]
A B C D E
MCD6-0020B 152 (6,0) 92 (3,6) 336 (13,2) 307 (12,1) 231 (9,1) 4,8 (10,7)
MCD6-0034B
MCD6-0042B
MCD6-0063B 4,9 (10,9)
MCD6-0069B
MCD6-0086B 5,5 (12,1)
MCD6-0108B
MCD6-0129B
MCD6-0144B 216 (8,5) 180 (7,1) 495 (19,5) 450 (17,7) 243 (9,6) 12,7 (28)
MCD6-0171B
MCD6-0194B
MCD6-0244B 15,5 (34,2)
MCD6-0287B 523 (20,6)
MCD6-0323B
MCD6-0410B
MCD6-0527B 19 (41,9)
MCD6-0579B
16 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 17
4/T2
2/T1
6/T3
1/L1
3/L2
5/L3
4/T2
READY
RUN
TRIP
LOCAL
Exit
Reset
Menu
Store
2/T1
6/T3
1/L1
3/L2
5/L3
VLT
®
Soft Starter
4/T2
READY
RUN
TRIP
LOCAL
Exit
Reset
Menu
Store
2/T1 6/T3
1/L1 3/L2 5/L3
VLT
®
Soft Starter
4/T2
READY RUN TRIP
LOCAL
Exit
Reset
Menu
Store
2/T1 6/T3
1/L1
3/L2
5/L3
VLT
®
Soft Starter
4/T2
READY RUN TRIP LOCAL
Exit
Reset
Menu
Store
2/T1 6/T3
1/L1 3/L2 5/L3
VLT
®
Soft Starter
4/T2
READY RUN TRIP LOCAL
Exit
Reset
Menu
Store
2/T1 6/T3
1/L1 3/L2 5/L3
VLT
®
Soft Starter
177HA714.10
A
B
C
D D
C
Handbok | VLT® Soft Starter MCD 600
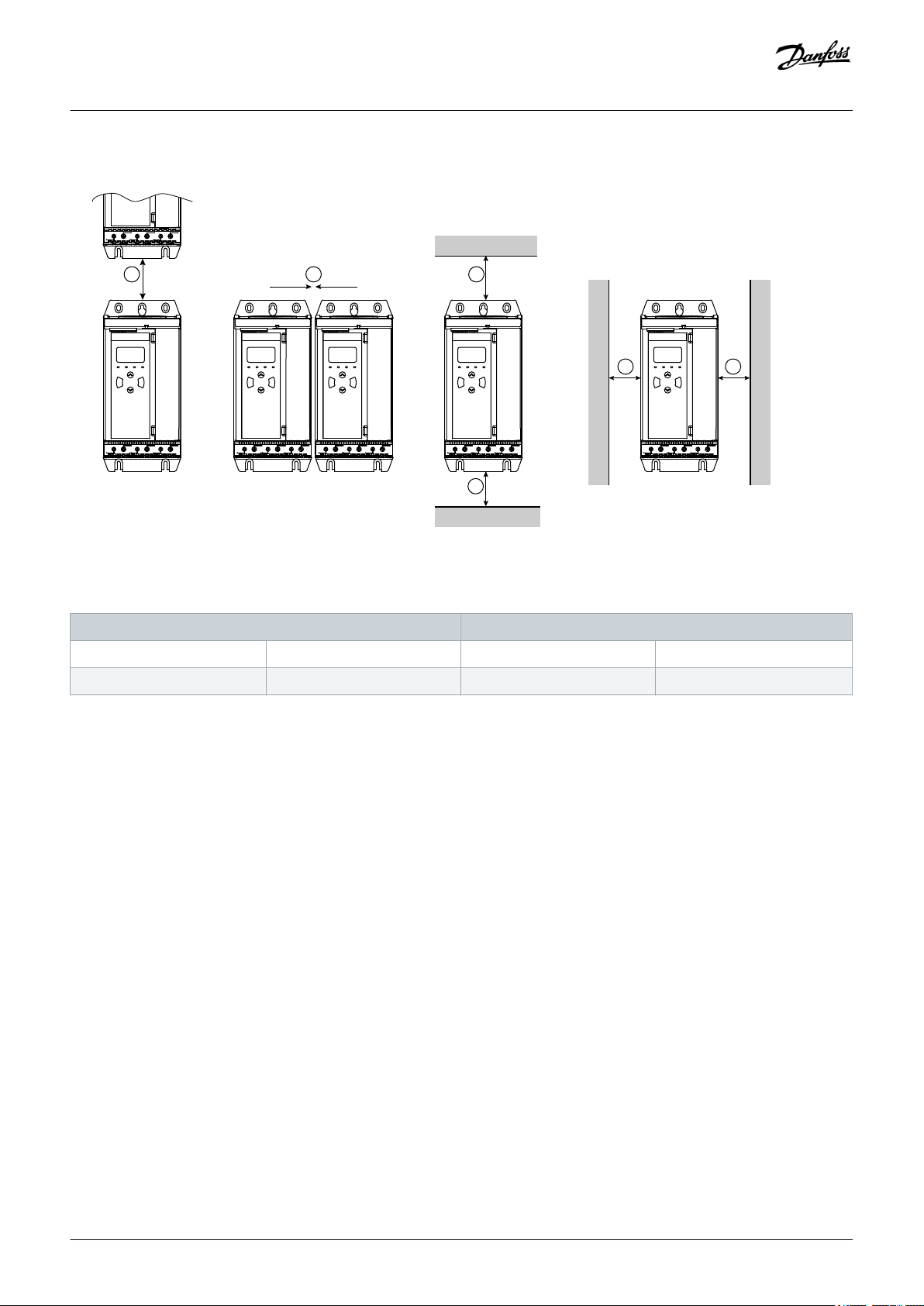
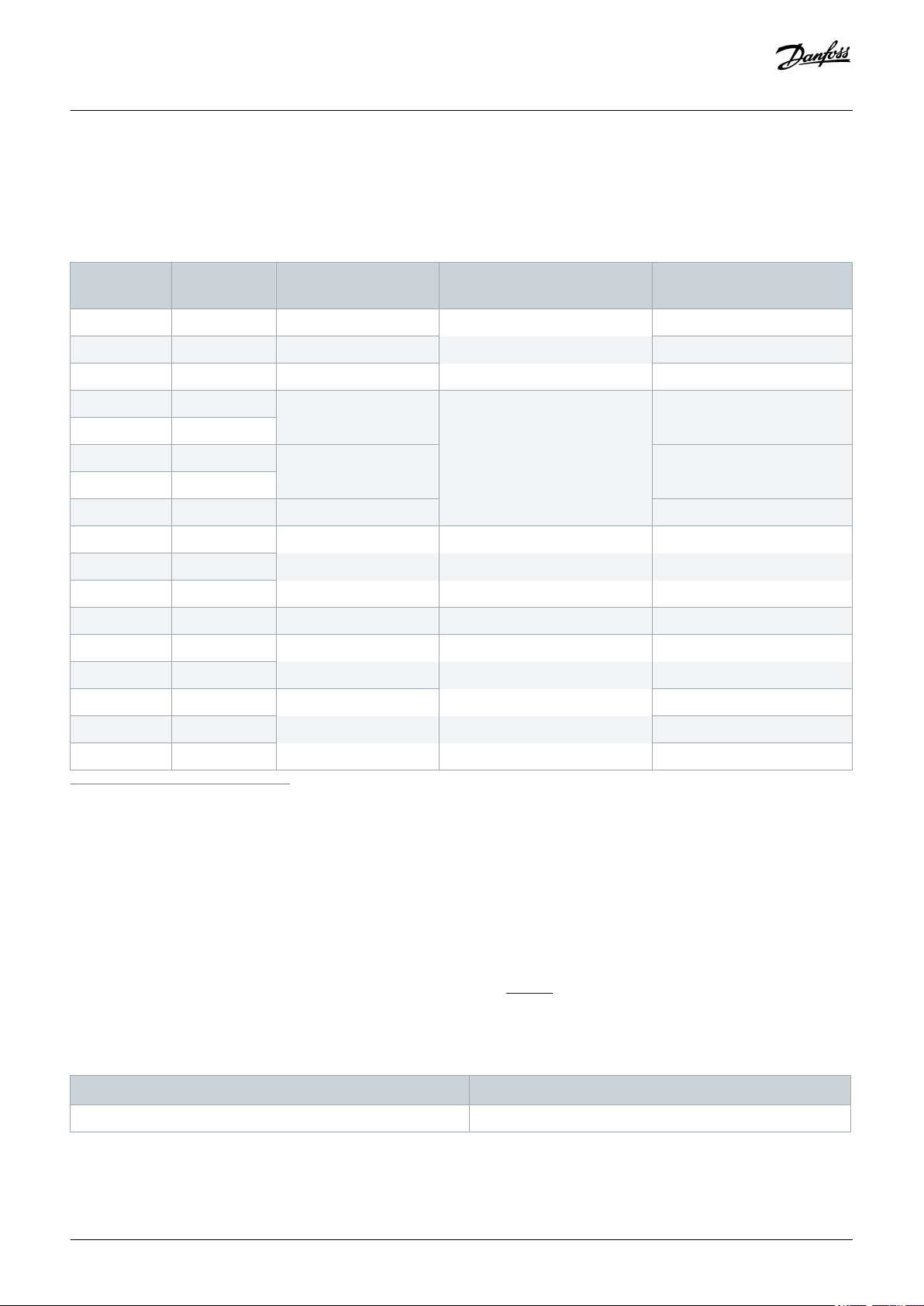
3.6 Fysisk installation/kylningsavstånd
Systemkonstruktion
Bild 4: Avstånd
Tabell 6: Kylningsavstånd
Avstånd mellan mjukstartare Avstånd till solida ytor
A [mm (tum)] B [mm (tum)] C [mm (tum)] D [mm (tum)]
> 100 (3,9) > 10 (0,4) > 100 (3,9) > 10 (0,4)
3.7 Tillbehör
3.7.1 Expansionskort
VLT® Soft Starter MCD 600 erbjuder expansionskort för användare som har behov av extra ingångar och utgångar eller avancerade
funktioner. Varje MCD 600 har stöd för högst 1 expansionskort.
3.7.1.1 Smart card
Smart card har utformats för att stöda integrering med pumptillämpningar och har följande extra ingångar och utgångar:
• 3 x digitala ingångar.
• 3 x 4–20 mA omvandlaringångar.
• 1 x RTD-ingång.
• 1 x USB-B-port.
• Anslutning för fjärr-LCP.
Beställningsnummer: 175G0133
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 17
Page 18
Handbok | VLT® Soft Starter MCD 600
Systemkonstruktion
3.7.1.2 Expansionskort för kommunikation
VLT® Soft Starter MCD 600 stöder nätverkskommunikation via lättinstallerade expansionskort för kommunikation. Varje
kommunikationskort har en port för fjärr-LCP 601-anslutning.
Tabell 7: Expansionskort för fältbuss med beställningsnummer
Tillvalskort Beställningsnummer
VLT® Soft Starter MCD 600 Modbus RTU 175G0127
VLT® Soft Starter MCD 600 PROFIBUS 175G0128
VLT® Soft Starter MCD 600 DeviceNet 175G0129
VLT® Soft Starter MCD 600 Modbus TCP 175G0130
VLT® Soft Starter MCD 600 EtherNet/IP 175G0131
VLT® Soft Starter MCD 600 PROFINET 175G0132
VLT® Soft Starter MCD 600 Pump Application 175G0133
3.7.2 Fjärr-LCP 601
VLT® Soft Starter MCD 600 kan användas med en fjärr-LCP som är monterad upp till 3 m (9.8 ft) från mjukstartaren. Varje
expansionskort har en port för LCP-anslutning eller ett kort avsett för LCP-anslutning.
Beställningsnummer för expansionskortet för fjärr-LCP 601: 175G0134.
3.7.3 Fingerskyddssats
Fingerskydd kan vara specificerade för personlig säkerhet. Fingerskydd sätts fast på mjukstartarens plintar för att förhindra oavsiktlig
kontakt med strömförande plintar. Fingerskydd har skyddsklassificering IP20 vid användning med kabel som är minst 22 mm i
diameter.
Fingerskydd är kompatibla med modellerna MCD6-0144B ~ MCD6-0579B.
Beställningsnummer för fingerskyddssatsen: 175G0186.
3.7.4 Programvara för hantering av mjukstartare
VLT® Soft Starter MCD 600 har ett USB-gränssnitt installerat. USB-minnet måste vara formaterat till FAT32-format. Följ instruktionerna
vid anslutning av ett vanligt USB-minne (minst 4 MB) till en PC för att formatera USB-minnet. VLT® Motion Control Tool MCT 10 för över
installationsfilerna till USB-minnet. Följ instruktionerna under 6.7.1 Procedur för att spara och hämta för att föra över installationsfilerna
till mjukstartaren.
VLT® Motion Control Tool MCT 10 kan underlätta hanteringen av mjukstartaren. Kontakta din lokala återförsäljare för mer information.
Dokumentation för VLT® Motion Control Tool MCT 10 kan laddas ner från www.danfoss.com/en/search/?filter=type%3Adocumentation.
3.8 Huvudkontaktor
En huvudkontaktor rekommenderas för att skydda mjukstartaren från spänningsstörningar i nätverket vid stopp. Välj en kontaktor med
en AC3-klassificering som är större än eller likvärdig den anslutna motorns märkström.
18 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 19
K1
K1
1
2
4
3
e77ha794.10
Handbok | VLT® Soft Starter MCD 600
Använd huvudkontaktorutgången (13, 14) för att styra kontaktorn.
Information om kabeldragning för huvudkontaktorn finns i illustration 12 i 5.8 Klassisk installation.
Systemkonstruktion
VA RN IN G
RISK FÖR STÖTAR
När mjukstartaren är kopplad i Inside Delta-konfiguration är en del av motorlindningarna ständigt är anslutna till nätströmmen
(även när mjukstartaren är avstängd). Detta kan leda till dödsfall eller allvarliga personskador.
Installera alltid en huvudkontaktor eller en shunttrippbrytare vid anslutning av mjukstartaren i Inside Delta-konfiguration.
-
3.9 Maximalbrytare
En shunttrippbrytare kan användas istället för en huvudkontaktor för att göra motorn helt spänningslös i händelse av en
mjukstarttripp. Shunttrippmekanismen måste matas från försörjningssidan av maximalbrytaren eller från en separat styrförsörjning.
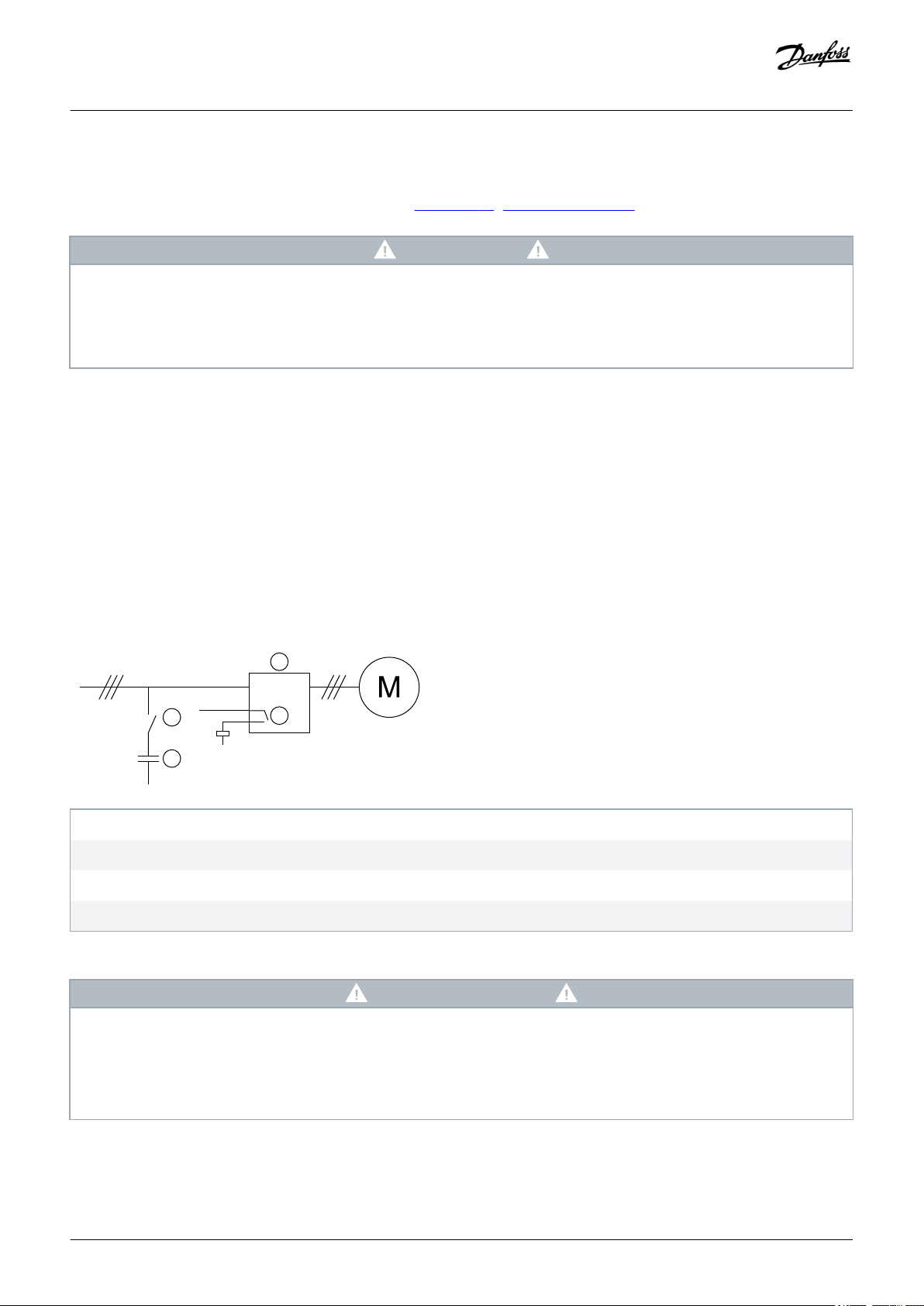
3.10 Effektfaktorkorrigering
Om effektfaktorkorrigering används ska en avsedd kontaktor användas för att aktivera kondensatorerna.
Anslut PFC-kontaktorn till ett programmerbart relä som är inställt på Run (Kör) för att styra effektfaktorkorrigeringen med VLT® Soft
Starter MCD 600. När motorn har uppnått fullt varvtal stängs reläet och effektfaktorkorrigeringen aktiveras.
1 Mjukstartare
2 Programmerbar utgång (inställning: Kör)
3 Kontaktor för effektfaktorkorrigering
4 Effektfaktorkorrigering
Bild 5: Anslutningsschema
Fö RS IK TI GH ET
SKADOR PÅ UTRUSTNING
Mjukstartaren skadas om kondensatorer för effektfaktorkorrigering ansluts på utgångssidan.
Anslut alltid kondensatorer för effektfaktorkorrigering på mjukstartarens ingångssida.
-
Använd inte mjukstartarens reläutgång för att aktivera effektfaktorkorrigering direkt.
-
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 19
Page 20
Handbok | VLT® Soft Starter MCD 600
Systemkonstruktion
3.11 Kortslutningsskydd
Vid utformning av kortslutningsskydd för motorer definierar standarden IEC 60947-4-1 för mjukstartare och kontaktorer två typer av
koordinering för mjukstartare:
• Typ 1-koordinering.
• Typ 2-koordinering.
3.11.1 Typ 1-koordinering
Typ 1-koordinering innebär att vid kortslutning på en mjukstartares utgångssida måste felet åtgärdas utan risk för personskador eller
skador på installationer. Det finns inga krav på att mjukstartaren ska fungera efter felet. Reparationer och byte av delar krävs för att
mjukstartaren ska fungera igen.
HRC-säkringar (t.ex. Ferraz/Mersen AJT-säkringar) kan användas för typ 1-koordinering enligt IEC 60947-4-2.
3.11.2 Typ 2-koordinering
Typ 2-koordinering innebär att vid kortslutning på en mjukstartares utgångssida måste felet åtgärdas utan risk för personskador eller
skador på mjukstartaren.
Fördelen med typ 2-koordinering är att behörig personal kan byta utlösta säkringar och kontrollera kontaktorerna efter att felet har
åtgärdats. Efter detta fungerar mjukstartaren igen.
Halvledarsäkringar för typ 2-kortslutningsskydd finns utöver de HRC-säkringar eller isolerkapslade effektbrytare som utgör en del av
skyddet för motorns förgreningsenhet.
Fö RS IK TI GH ET
DC-BROMS
En hög bromsmomentsinställning kan leda till toppströmmar upp till motorns direktstartström när motorn stoppas.
Säkerställ att lämpliga skyddsäkringar väljs till motorns förgreningsenhet.
-
Fö RS IK TI GH ET
INGET SKYDD FÖR FÖRGRENINGSENHET
Integrerat kortslutningsskydd ger inte skydd för förgreningsenheten.
Använd det skydd för förgreningsenheter som krävs enligt nationella bestämmelser.
-
3.12 IEC-koordinering med kortslutningsskydd
Dessa säkringar valdes baserat på en startström på 300 % märkström i 10 s.
Tabell 8: IEC-säkringar
Nominell klassificering
[A]
MCD6-0020B 24 1150 40NHG000B 170M3010
20 | Danfoss A/S © 2018.10
SCR I2t (A2s)
Typ 1-koordinering 480 V AC,
65 kA Bussmann NH säkringslänkar
Typ 2 koordinering 690 V AC,
65 kA Bussmann DIN 43 653
AQ262141844215sv-000201 / 175R1174
Page 21
Handbok | VLT® Soft Starter MCD 600
Systemkonstruktion
Nominell klassificering
[A]
MCD6-0034B 42 7200 63NHG000B 170M3013
MCD6-0042B 52 80NHG000B
MCD6-0063B 64 15000 100NHG000B 170M3014
MCD6-0069B 69
MCD6-0086B 105 80000 160NHG00B 170M3015
MCD6-0108B 115
MCD6-0129B 135 125000 170M3016
MCD6-0144B 184 320000 250NHG2B 170M3020
MCD6-0171B 200
MCD6-0194B 229 315NHG2B
MCD6-0244B 250 170M3021
MCD6-0287B 352 202000 355NHG2B 170M6009
MCD6-0323B 397 400NHG2B
MCD6-0410B 410 320000 425NHG2B 170M6010
MCD6-0527B 550 781000 630NHG3B 170M6012
SCR I2t (A2s)
Typ 1-koordinering 480 V AC,
65 kA Bussmann NH säkringslänkar
Typ 2 koordinering 690 V AC,
65 kA Bussmann DIN 43 653
MCD6-0579B 579
3.13 UL-koordinering med kortslutningsskydd
3.13.1 Standardkortslutningsvärde
Lämplig att använda på en krets som har kapacitet att som högst leverera den angivna nivån RMS (symmetriska ampere), maximalt
600 V AC.
Tabell 9: Maximal ström för säkring [A] – standardkortslutningsvärde
Modell Nominell klassificering [A]
MCD6-0020B 24 5 kA
MCD6-0034B 42
MCD6-0042B 52 10 kA
MCD6-0063B 64
MCD6-0069B 69
MCD6-0086B 105
MCD6-0108B 120
MCD6-0129B 135
3-cykliskt kortslutningsvärde vid 600 V AC
(1)
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 21
Page 22
Handbok | VLT® Soft Starter MCD 600
Systemkonstruktion
Modell Nominell klassificering [A]
3-cykliskt kortslutningsvärde vid 600 V AC
(1)
MCD6-0144B 184 18 kA
MCD6-0171B 225
MCD6-0194B 229
MCD6-0244B 250
MCD6-0287B 352
MCD6-0323B 397
MCD6-0410B 410 30 kA
MCD6-0527B 550
MCD6-0579B 580
1
Lämplig för användning i en krets där den anslutna strömmen finns indikerad när den skyddas av någon av de säkringar eller maximalbrytar som listas och som passar i enlighet
med NEC.
3.13.2 Kortslutningsvärde som överstiger standardvärdet
Tabell 10: Maximal ström för säkring [A] – kortslutningsvärde som överstiger standardvärdet
Modell Nominell klassificering
[A]
Kortslutningsvärde vid maximalt 480 V AC
Listad ström för säkring
(1)
[A]
Säkringsklass
(1)
MCD6-0020B 24 65 kA 30 Alla (J, T, K-1, RK1, RK5)
MCD6-0034B 42 50
MCD6-0042B 52 60
MCD6-0063B 64 80
MCD6-0069B 69 80
MCD6-0086B 105 125 J, T, K-1, RK1
MCD6-0108B 115 125
MCD6-0129B 135 150
MCD6-0144B 184 200 J, T
MCD6-0171B 200 225
MCD6-0194B 229 250
MCD6-0244B 250 300
MCD6-0287 352 400 Alla (J, T, K-1, RK1, RK5)
MCD6-0323B 397 450
MCD6-0410B 410 450
MCD6-0527B 550 600
MCD6-0579B 580 600
22 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 23
Handbok | VLT® Soft Starter MCD 600
1
Lämplig att använda på en krets som har kapacitet att leverera högst 65 000 RMS symmetriska ampere, maximalt 480 V AC, när den skyddas av säkringar med angiven klassificering
och värde.
Tabell 11: Maximalbrytare – kortslutningsvärde som överstiger standardvärdet
Systemkonstruktion
Modell Nominell klas-
sificering [A]
Brytare 1: Eaton (klassificering, A)
(1)
Brytare 2: GE (klassificering, A)
(1)
Brytare 3: LS (klassificering, A)
(1) (2)
MCD6-0020B 24 HFD3030 (30 A) SELA36AT0060 (60 A) UTS150H-xxU-040 (40 A)
MCD6-0034B 42 HFD3050 (50 A) UTS150H-xxU-050 (50 A)
MCD6-0042B 52 HFD3060 (60 A) UTS150H-xxU-060 (60 A)
MCD6-0063B 64 HFD3100 (100 A) SELA36AT0150 (150 A) UTS150H-xxU-100 (100 A)
MCD6-0069B 69
MCD6-0086B 105 HFD3125 (125 A) UTS150H-xxU-125 (125 A)
MCD6-0108B 115
MCD6-0129B 135 HFD3150 (150 A) UTS150H-xxU-150 (150 A)
MCD6-0144B 184 HFD3250 (250 A) SELA36AT0250 (250 A) UTS150H-xxU-250 (250 A)
MCD6-0171B 200
MCD6-0194B 229
MCD6-0244B 250 HFD3300 (300 A) SELA36AT0400 (400 A) UTS150H-xxU-300 (300 A)
MCDF6-0287B 352 HFD3400 (400 A) SELA36AT0600 (600 A) UTS150H-xxU-400 (400 A)
MCD6-0323B 397
MCD6-0410B 410 HFD3600 (600 A) UTS150H-xxU-600 (600 A)
MCD6-0527B 550 UTS150H-xxU-800 (800 A)
MCD6-0579B 580 UTS150H-NG0-800
1
Lämplig att använda på en krets som har kapacitet att leverera högst 65 000 RMS symmetriska ampere, maximalt 480 V AC, när den skyddas av maixmalbrytarmodellerna som
listas i tabellen.
2
För LS-maximalbrytare betyder xx antingen FM, FT eller AT.
3.14 Säkringsval för typ 2-koordinering
Typ 2-koordinering uppnås med halvledarsäkringar. De här säkringarna måste kunna hantera motorns startström och ett totalt l2tvärde som är mindre än mjukstartarens SCR-reläs I2t-värde.
Vid val av halvledarsäkringar till VLT® Soft Starter MCD 600 ska I2t-värdena i table 12 användas.
Kontakta din lokala leverantör för mer information om val av halvledarsäkringar.
Tabell 12: SCR-värden för halvledarsäkringar
Modell
MCD6-0020B 1150
SCR I2t [A2s]
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 23
Page 24
Handbok | VLT® Soft Starter MCD 600
Systemkonstruktion
Modell
MCD6-0034B 7200
MCD6-0042B
MCD6-0063B 15000
MCD6-0069B
MCD6-0086B 80000
MCD6-0108B
MCD6-0129B 125000
MCD6-0144B 320000
MCD6-0171B
MCD6-0194B
MCD6-0244B
MCD6-0287B 202000
MCD6-0323B
MCD6-0410B 320000
MCD6-0527B 781000
MCD6-0579B
SCR I2t [A2s]
24 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 25
Handbok | VLT® Soft Starter MCD 600
Specifikationer
4 Specifikationer
4.1 Försörjning
Nätspänning (L1, L2, L3)
MCD6-xxxxB-T5 200–525 V AC (±10 %)
MCD6-xxxxB-T7 380–690 V AC (±10 %)
Styrspänning (A7, A8, A9)
MCD6-xxxxB-xx-CV2 (A8, A9) 110–120 V AC (+10 %/–15 %), 600 mA
MCD6-xxxxB-xx-CV2 (A7, A9) 220–240 V AC (+10 %/–15 %), 600 mA
MCD6-xxxxB-xx-CV1 (A8, A9) 24 V AC/V DC (±20 %), 2,8 A
Nätfrekvens 50–60 Hz (±5 Hz)
Nominell isolationsspänning 690 V AC
Stötspänningstålighet 6 kV
Formbeteckning Förbikopplad eller kontinuerlig, halvledare motorstartarbeteckning 1
4.2 Kortslutningskapacitet
Koordinering med halvledarsäkringar Typ 2
Koordinering med HRC-säkringar Typ 1
4.3 Elektromagnetisk kapacitet (uppfyller EU-direktiv 2014/35/EU)
EMC-immunitet IEC 60947-4-2
EMC-emission IEC 60947-4-2 klass B
4.4 Ingångar
Ingångsklassificering Aktiv 24 V DC, cirka 8 mA
Motortermistor (TER-05, TER-06) Trpip > 3,6 kΩ, återställning > 1,6 kΩ
4.5 Utgångar
Reläutgångar 10 A @ 250 V AC resistiv, 5 A @ 250 V AC AC15 effektfaktor 0,3
Huvudkontaktor (13, 14) Normalt öppen
Reläutgång A (21, 22, 23) Växlande
Reläutgång B (33, 34) Normalt öppen
Analog utgång (AO-07, AO-08)
Maximal belastning 600 Ω (12 V DC @ 20 mA)
Noggrannhet ±5%
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 25
Page 26
Handbok | VLT® Soft Starter MCD 600
Specifikationer
4.6 Driftmiljö
Drifttemperatur –10 till +60 °C (14–140 °F), över 40 °C (104 °F) med nedstämpling
Lagringstemperatur –25 till +60 °C (–13 till +140 °F)
Drifthöjd 0–1 000 m (0–3 280 fot), över 1 000 m (3 280 fot) med nedstämpling
Fukt 5–95 % relativ fuktighet
Föroreningsgrad Föroreningsgrad 3
Vibration IEC 60068-2-6
Skydd
MCD6-0020B~MCD6-0129B IP20
MCD6-0144B~MCD6-0579B IP00
4.7 Värmeavgivning
Vid start 4,5 W per ampere
Vid drift
MCD6-0020B~MCD6-0042B Cirka ≤ 35 W
MCD6-0063B~MCD6-0129B Cirka ≤ 50 W
MCD6-0144B~MCD6-0244B Cirka ≤ 120 W
MCD6-0287B~MCD6-0579B Cirka ≤ 140 W
4.8 Överbelastningsskydd för motor
Standardinställningarna för parameter 1-4 till 1-6 har
överbelastningsskydd för motorn.
Klass 10, trippström 105 % av FLA (strömstyrka vid full
belastning) eller motsvarande
4.9 Certifiering
CE EN 60947-4-2
UL/C-UL UL 508
Marint Lloyds Marine No 1-specifikation
ABS
DNV
4.10 Livslängd (interna förbikopplingskontakter)
Förväntad livslängd 100 000 användningar
26 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 27
Handbok | VLT® Soft Starter MCD 600
5 Installation
5.1 Säkerhetsinstruktioner
Allmänna säkerhetsinstruktioner finns under 2.3 Säkerhetsåtgärder.
VA RN IN G
INDUCERAD SPÄNNING
Inducerad spänning från utgående motorkablar som är dragna tillsammans kan ladda upp utrustningens kondensatorer, även
om utrustningen är avstängd och låst. Om du inte använder skärmade motorkablar eller drar motorkablarna separat, kan det
leda till dödsfall eller allvarliga personskador.
Dra utgående motorkablar separat.
-
Använd skärmade kablar.
-
VA RN IN G
OAVSIKTLIG START
När mjukstartaren är ansluten till växelströmsnät, DC-försörjning eller lastdelning kan motorn starta när som helst. Oavsiktlig
start vid programmering, underhåll eller reparationsarbete kan leda till dödsfall, allvarliga personskador eller materiella skador.
Motorn kan starta med hjälp av en extern brytare, ett fältbusskommando, en ingångsreferenssignal från LCP eller efter ett
uppklarat feltillstånd.
Tryck på [Off/Reset] på LCP:n innan du programmerar parametrar.
-
Koppla från nätanslutningen från mjukstartaren.
-
Mjukstartaren, motorn och all annan elektrisk utrustning måste vara driftklara när mjukstartaren ansluts till växelströmsnät,
-
DC-försörjning eller lastdelning.
Anslut strömförsörjningen till mjukstartaren med en isolerande brytare och en strömbrytarenhet (exempelvis en
-
strömkontakor) som är styrbara via ett externt säkerhetssystem (exempelvis ett nödstopp eller en feldetektor).
Installation
5.2 Kommandokälla
Starta och stoppa mjukstartaren via de digitala ingångarna, fjärr-LCP 601, kommunikationsnätverk, smart card eller planerad
autostart/-stopp. Ställ in kommandokällan via Set-up Tools (Inställningsverktyg) eller via parameter 1-1 Command Source
(Kommandokälla).
Om fjärr-LCP:n är installerad fungerar knappen [CMD/Menu] som en genväg till funktionen Command Source (Kommandokälla) i Set-
up Tools (Inställningsverktyg).
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 27
Page 28

Handbok | VLT® Soft Starter MCD 600
5.3 Installation av mjukstartaren
Procedur
1. Montera mjukstartaren, se 3.6 Fysisk installation/kylningsavstånd.
2. Anslut kablar för styrning, se 5.4.1 Ingångsplintar.
3. Anslut styrspänningen till mjukstartaren.
4. Konfigurera tillämpningen (listas i Snabbinstallation):
A Tryck på [Menu].
B Tryck på [Menu/Store] för att öppna snabbinstallationsmenyn.
C Bläddra i listan för att hitta tillämpningen.
D Tryck på [Menu/Store] för att starta konfigurationsprocessen, se
5. Konfigurera tillämpningen (listas inte i Snabbinstallation):
A Tryck på [Back] för att gå tillbaka till menyn.
B Använd [▿] för att bläddra till huvudmenyn och tryck på [Menu/Store].
C Bläddra till Motor Details (Motorinformation), tryck på [Menu/Store] två gånger och redigera parameter 1-2 Motor Full Load
Current (Motorns märkström).
D Justera parameter 1-2 Motor Full Load Current (Motorns märkström) efter motorns märkström (FLC).
E Tryck på [Menu/Store] för att spara inställningen.
6. Tryck på [Back] flera gånger för att stänga huvudmenyn.
7. (Valfritt) Använd de inbyggda simuleringsverktygen för att kontrollera att styrkablarna är korrekt anslutna, se
Körningssimulering.
8. Stäng av mjukstartaren.
9. Anslut motorkablar till mjukstartarens utgångsplintar 2/T1, 4/T2, 6/T3.
10. Anslut nätförsörjningskablarna till mjukstartarens ingångsplintar 1/L1, 3/L2 och 5/L3, se
Mjukstartaren är nu redo att styra motorn.
5.9 Snabbinstallation.
6.5
5.7 Kabelavslutningar.
Installation
5.4 Ingångar
Fö RS IK TI GH ET
Styringångarna drivs av mjukstartaren. Anslut ingen extern spänning till styringångsplintarna.
OB S!
Kablarna till styringångarna måste separeras från nätspänning och motorkablage.
28 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 29
READY
RUN
TRIP
LOCAL
Exit
Reset
Menu
Store
VLT
®
Soft Starter
2/T1
4/T2
6/T3
1/L1 3/L2
5/L3
AO-08
AO-07
DI-B
DI-A
COM+
START
COM+
RESET
TER-06
TER-05
e77ha718.10
Handbok | VLT® Soft Starter MCD 600
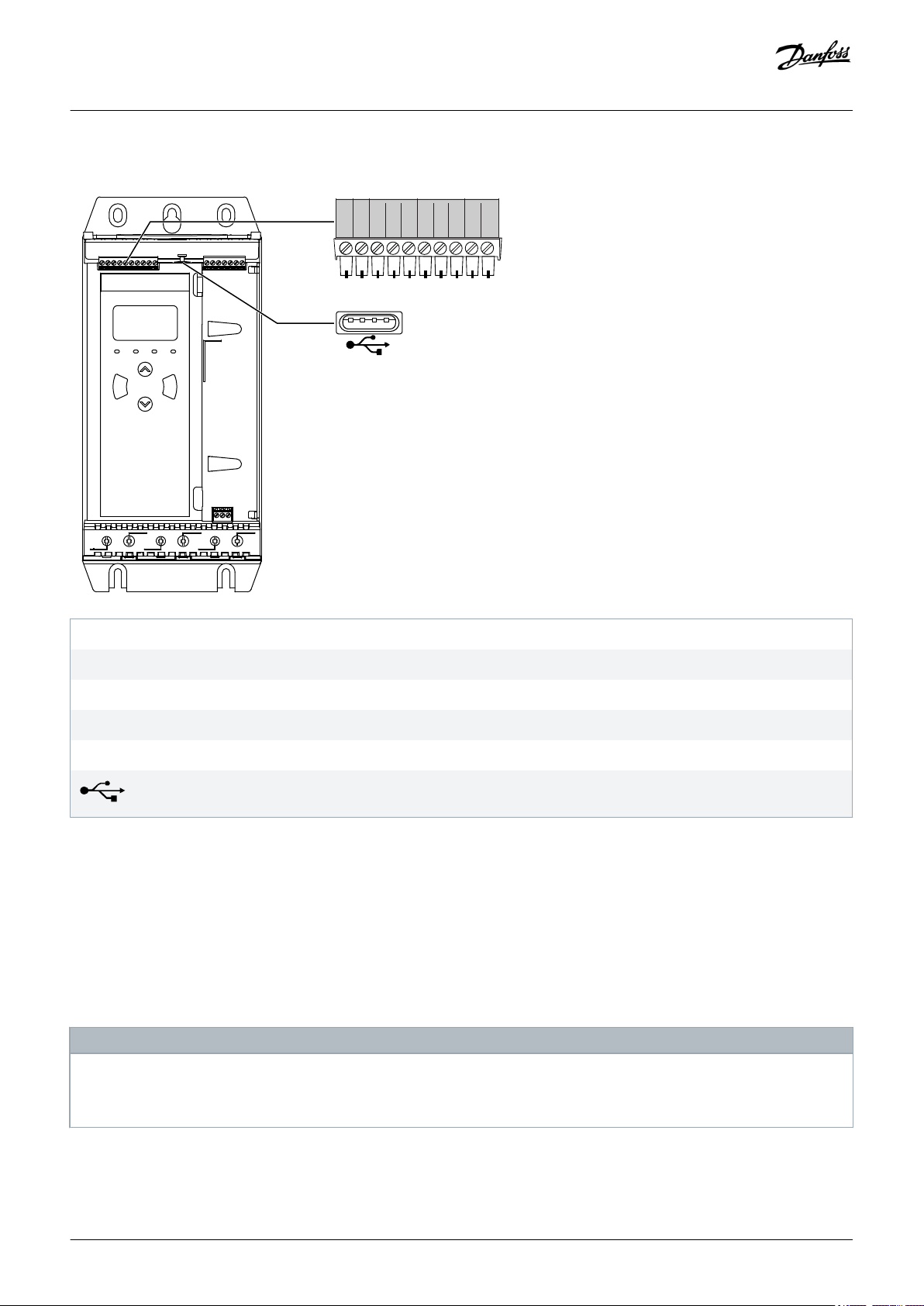
5.4.1 Ingångsplintar
Installation
TER-05, TER-06 Motortermistoringång
RESET, COM+ Återställningsingång
START, COM+ Start-/stoppingång
DI-A, COM+ Programmerbar ingång A (standardinställning: Ingångstripp (normalt öppen))
DI-B, COM+ Programmerbar ingång B (standardinställning: Ingångstripp (normalt öppen))
USB-port (för USB-minne, ingen direkt PC-anslutning)
Bild 6: Ingångsplintar
5.4.2 Motortermistor
Motortermistorer kan anslutas direkt till VLT® Soft Starter MCD 600. Mjukstartaren trippar när termistorkretsens motstånd överskrider
cirka 3,6 kΩ eller sjunker under 20 Ω.
Termistorerna måste vara seriekopplade. Termistorkretsen ska vara kopplad med skärmade kablar och måste vara elektriskt isolerad
från både jord och andra ström- och styrströmkretsar.
Termistoringången är inaktiverad som standard, men aktiveras automatiskt när en termistor registreras. Om termistorer har
anslutits till MCD 600 tidigare men inte längre behövs använder du funktionen Thermistor Reset (Termistoråterställning) för att
OB S!
inaktivera dem. Thermistor reset finns i Set-up Tools (Inställningsverktyg).
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 29
Page 30
RESET
COM+
START
A
B
e77ha721.10
Handbok | VLT® Soft Starter MCD 600
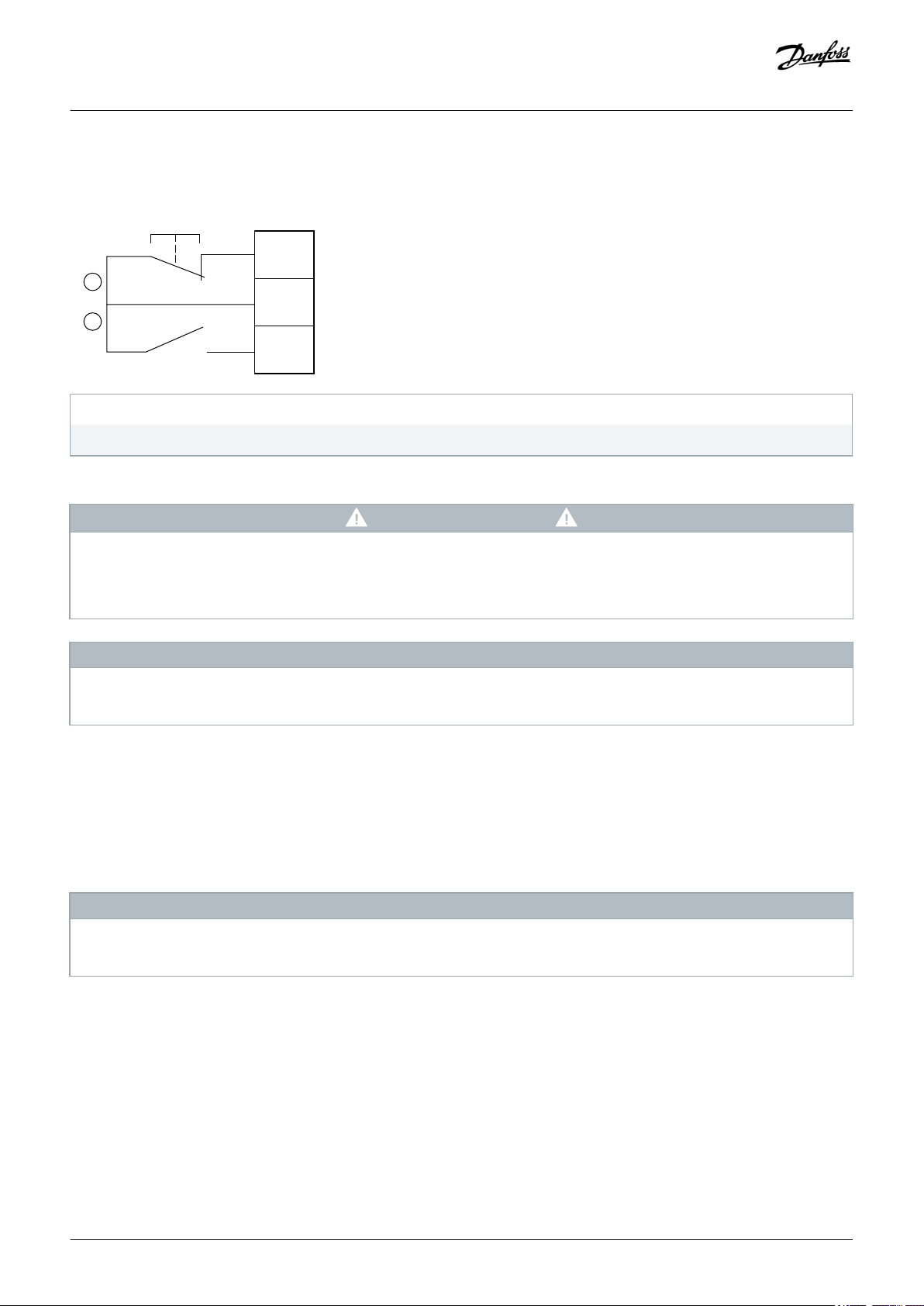
5.4.3 Start/stopp
VLT® Soft Starter MCD 600 kräver 2-ledningsstyrning.
A Återställning
B Start/stopp
Bild 7: Kabeldragning för styrning av start/stopp
Installation
Fö RS IK TI GH ET
STARTFÖRSÖK
Om startingången är stängd när styrspänning kopplas på försöker mjukstartaren att starta.
Kontrollera att start-/stoppingången är öppen innan styrspänning kopplas på.
-
OB S!
MCD 600 tar endast emot kommandon från styringångarna om parameter 1-1 Command Source (Kommandokälla) är inställd till
Digital Input (Digital ingång).
5.4.4 Återställning/inaktivering av startare
Återställningsingången (RESET, COM+) är normalt stängd. Mjukstartaren startar inte om återställningsingången är öppen. Sedan visas
Not ready (Inte klar) på skärmen.
Om återställningsingången öppnas när mjukstartaren körs kopplar mjukstartaren från strömmen och låter motorn rulla till stopp.
OB S!
Återställningsingången kan konfigureras att vara normalt öppen eller normalt stängd. Gör inställningen i parameter 7-9 Reset/
Enable Logic (Återställ/aktivera logik).
5.4.5 Programmerbara ingångar
De programmerbara ingångarna (DI-A, COM+ och DI-V, COM+) möjliggör att extern utrustning styr mjukstartaren. De
programmerabara ingångarnas funktion styrs av parameter 7-1 till 7-8.
30 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 31

READY
RUN
TRIP
LOCAL
Exit
Reset
Menu
Store
VLT
®
Soft Starter
2/T1
4/T2
6/T3
1/L1 3/L2
5/L3
AO-08
AO-07
DI-B
DI-A
COM+
START
COM+
RESET
TER-06
TER-05
34
33
23
22
21
14
13
e77ha719.10
Handbok | VLT® Soft Starter MCD 600
Installation
5.4.6 USB-port
USB-porten kan användas för att ladda upp konfigurationsfiler eller för att ladda ned parameterinställningar och information från
händelseloggar från mjukstartaren. Mer information finns under 6.7 Spara och hämta via USB.
5.5 Utgångar
5.5.1 Utgångsplintar
AO-07, AO-08 Analog utgång
13, 14 Huvudkontaktorutgång
21, 22, 23 Reläutgång A (standardinställning: Kör)
33, 34 Reläutgång B (standardinställning: Kör)
Bild 8: Utgångsplintar
5.5.2 Analog utgång
VLT® Soft Starter MCD 600 har en analog utgång som kan anslutas till utrustning för övervakning av motorprestanda.. De analoga
utgångarnas funktion styrs av parameter 9-1 till 9-4.
5.5.3 Huvudkontaktorutgång
Huvudkontaktorutgången (13, 14) stängs så fort mjukstartaren tar emot ett startkommando och förblir stängd under tiden
mjukstartaren styr motorn (fram tills att motorn startar ett utrullningsstopp eller tills mjukstoppet är slutfört).
Huvudkontaktorutgången öppnas även om mjukstartaren trippar.
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 31
Page 32

READY RUN TRIP LOCAL
Exit
Reset
Menu
Store
VLT
®
Soft Starter
2/T1 4/T2 6/T3
1/L1 3/L2 5/L3
A9
A8
A7
e77ha720.10
Handbok | VLT® Soft Starter MCD 600
Installation
OB S!
Vissa elektroniska kontaktorspolar är inte lämpliga för direkt koppling till kretskortsmonteringsreläer. Kontakta tillverkaren eller
leverantörer angående lämplighet.
5.5.4 Programmerbara utgångar
De programmerbara utgångarna (21, 22, 23 och 33, 34) kan rapportera mjukstartarens status eller styra tillhörande utrustning.
De programmerabara utgångarnas funktion styrs av parameter 8-1 till 8-6.
5.6 Styrspänning
5.6.1 Styrspänningsplintar
Bild 9: Styrspänningsplintar
Anslut styrförsörjningen i enlighet med nätspänningen som används.
• MCD6-xxxxB-xx-CV2 (110–120 V AC): A8, A9.
• MCD6-xxxxB-xx-CV2 (220–240 V AC): A7, A9.
• MCD6-xxxxB-xx-CV1 (24 V AC/V DC): A8, A9.
32 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 33

e77ha646.11
e77ha648.11
e77ha647.11
e77ha649.11
Handbok | VLT® Soft Starter MCD 600
Installation
5.6.2 Installation enligt UL-krav
För att MCD6-0144B till MCD6-0579B ska uppfylla UL-kraven måste överströmsskydd för förgreningsenhet eller kompletterande skydd
användas för styrströmkretsens försörjning (A7, A8, A9), i enlighet med lokal elföreskrifter.
5.7 Kabelavslutningar
VA RN IN G
RISK FÖR STÖTAR
Modellerna MCD6-0144B ~ MCD6-0579B är IP00 och medför en risk för elektriska stötar vid kontakt med plintarna.
Installera en fingerskyddssats på mjukstartaren.
-
Installera mjukstartaren inuti en kapsling.
-
VLT® Soft Starter MCD 600:s ingångs- och utgångsplintar finns längst ner på enheten.
• Modellerna MCD6-0020B~MCD6-0129B använder klämanslutningar. Använd tvinnade eller solida kopparledare, klassificerade för
75 °C (167 °F) eller högre.
• Modellerna MCD6-0144B~MCD6-0579B använder samlingsskenor. Använd tvinnade eller solida ledare av koppar eller aluminium,
klassificerade för 60/75 °C (140/167 °F).
OB S!
Vissa enheter använder samlingsskenor av aluminium. Vid anslutning av kabelavslutningar ska kontaktytan rengöras noggrant
(rengör med en smärgelduk eller en stålborste). Använd ett lämplig kopplingsmedel för att förhindra korrosion.
Tabell 13: Kabelavslutningar, MCD6-0020B~MCD6-0129B
MCD6-0020B~MCD6-0129B
Kabeldimension: 6–70 mm
(AWG 10–2/0)
Moment: 4 Nm
(2,9 ft-lb)
14 mm (0,55 in)
2
Torx T20 x 150
Platt 7 mm x
150
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 33
Page 34

6 mm
0.24 in
10 mm
0.4 in
20 mm
0.8 in
9 mm
(M8)
e77ha722.10
6 mm
0.24 in
17 mm
0.7 in
34 mm
1.7 in
13 mm
(M12)
e77ha723.10
Handbok | VLT® Soft Starter MCD 600
Tabell 14: Kabelavslutningar, MCD6-0144B~MCD6-0244B and MCD6-0287B~MCD6-0579B
MCD6-0144B~MCD6-0244B MCD6-0287B~MCD6-0579B
Installation
19 Nm (14 ft-lb)
66 Nm (49 ft-lb)
OB S!
Om installationen kräver kablar med stor diameter är det möjligt komplettera varje kabelavslutning med två mindre kablar, en
på varje sida om samlingsskenan.
5.7.1 Kabelanslutningar
Välj anslutning efter kabelstorlek, material och tillämpningskrav.
En kabelförskruvning rekommenderas för modell MCD6-0144B till MCD6-0579B. Rekommenderad crimptång är TBM8-750.
Tabell 15: Rekommenderade kabelskor
Modell Exempelanslutning – aluminumkabel Exempelanslutning – kopparkabel
MCD6-0144B 61162 60150
MCD6-0171B 61165 60156
MCD6-0194B 61171 60165
MCD6-0244B
MCD6-0287B 61162 60150
MCD6-0352B 61165 60156
MCD6-0410B 60156
MCD6-0527B 61178 60171
MCD6-0579B
5.7.2 Motoranslutning
VLT® Soft Starter MCD 600 kan anslutas till motorn in-line eller Inside Delta (kallas även 3-lednings- och 6-ledningsanslutning). Vid
anslutning i Inside Delta ska märkströmmen för parameter 1-2 Motor Full Load Current (Motorns märkström) anges. MCD 600 registrerar
automatiskt om motorn är ansluten in-line eller Inside Delta och beräknar korrekt strömnivå för Inside Delta.
34 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 35

e77ha726.10
14
13
K1
K1F1
6/T3
2/T1
5/L3
3/L2
1/L1
4/T2
M
3
Handbok | VLT® Soft Starter MCD 600
OB S!
Använd parameter 20-6 Motor Connection (Motoranslutning) om mjukstartaren inte registrerar korrekt motoranslutning.
5.7.2.1 In-line-installation
Installation
K1 Huvudkontaktor (rekommenderas starkt)
F1
Säkringar eller maximalbrytare (valfritt
()
)
13, 14 Huvudkontaktorutgång
Om säkringar eller maximalbrytare inte används upphävs garantin.
Bild 10: Kabeldragning för en in-line-installation
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 35
Page 36

M
3
U1(1) U2(4)
V1(2)
V2(5)
W1(3) W2(6)
K1
F1
e77ha727.10
14
13
K1
6/T3
2/T1
5/L3
3/L2
1/L1
4/T2
Handbok | VLT® Soft Starter MCD 600
5.7.2.2 Inside Delta-installation
Installation
K1 Huvudkontaktor
F1
Säkringar eller maximalbrytare (valfritt
()
)
13, 14 Huvudkontaktorutgång
Om säkringar eller maximalbrytare inte används upphävs garantin.
Bild 11: Kabeldragning för en Inside Delta-installation
5.8 Klassisk installation
VLT® Soft Starter MCD 600 installeras med en huvudkontaktor (AC3-klassificerad). Styrspänningen måste matas via ingångssidan på
kontaktorn.
Huvudkontaktorn styrs av huvudkontaktorutgången (13, 14).
36 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 37

22
21
6/T3
2/T1
13
14
4/T2
44
33
23
AO-07
AO-08
TER-06
TER-05
START
COM+
DI-A
DI-B
COM+
A9
A8
A7
5/L3
3/L2
RESET
1/L1
F1
S1
S2
K1
K1
(L/+) (N/# )
A
#
+
M
7
6
5
3
2
1
10
4
9
8
e77ha728.10
Handbok | VLT® Soft Starter MCD 600
Installation
1 Trefasförsörjning
2 Motor
3 Styrspänning (mjukstartare)
4 Digitala ingångar
5 Motortermistoringång
6 Reläutgångar
7 Analog utgång
8 Styrspänning (extern utrustning)
9 Kontrollampor
10 Expansionsport för kommunikation/smart card
K1 Huvudkontaktor
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 37
Page 38

Handbok | VLT® Soft Starter MCD 600
F1 Halvledarsäkringar
RESET, COM+ (S1) Återställning
START, COM+ (S2) Start/stopp
DI-A, COM+ Programmerbar ingång A (standardinställning: Ingångstripp (normalt öppen))
DI-B, COM+ Programmerbar ingång B (standardinställning: Ingångstripp (normalt öppen))
TER-05, TER-06 Motortermistoringång
13, 14 Huvudkontaktorutgång
21, 22, 23 Reläutgång A (standardinställning: Kör)
33, 34 Reläutgång B (standardinställning: Kör)
AO-07, AO-08 Analog utgång
Bild 12: Installationsexempel
5.9 Snabbinstallation
Installation
Snabbinstallationen gör det enkelt för vanliga tillämpningar att konfigurera mjukstartaren. VLT® Soft Starter MCD 600 beskriver de
vanligaste installationsparametrarna och föreslår en typisk inställning för tillämpningen. Justera parametrarna efter de specifika
kraven.
Alla andra parametrar behåller sina standardvärden. Använd huvudmenyn för att ändra parametervärden eller granska
standardinställningar (mer information finns i 10.4 Parameterlista).
Justera alltid parameter 1-2 Motor Full Load Current (Motorns märkström) enligt märkströmmen på motorns märkskylt.
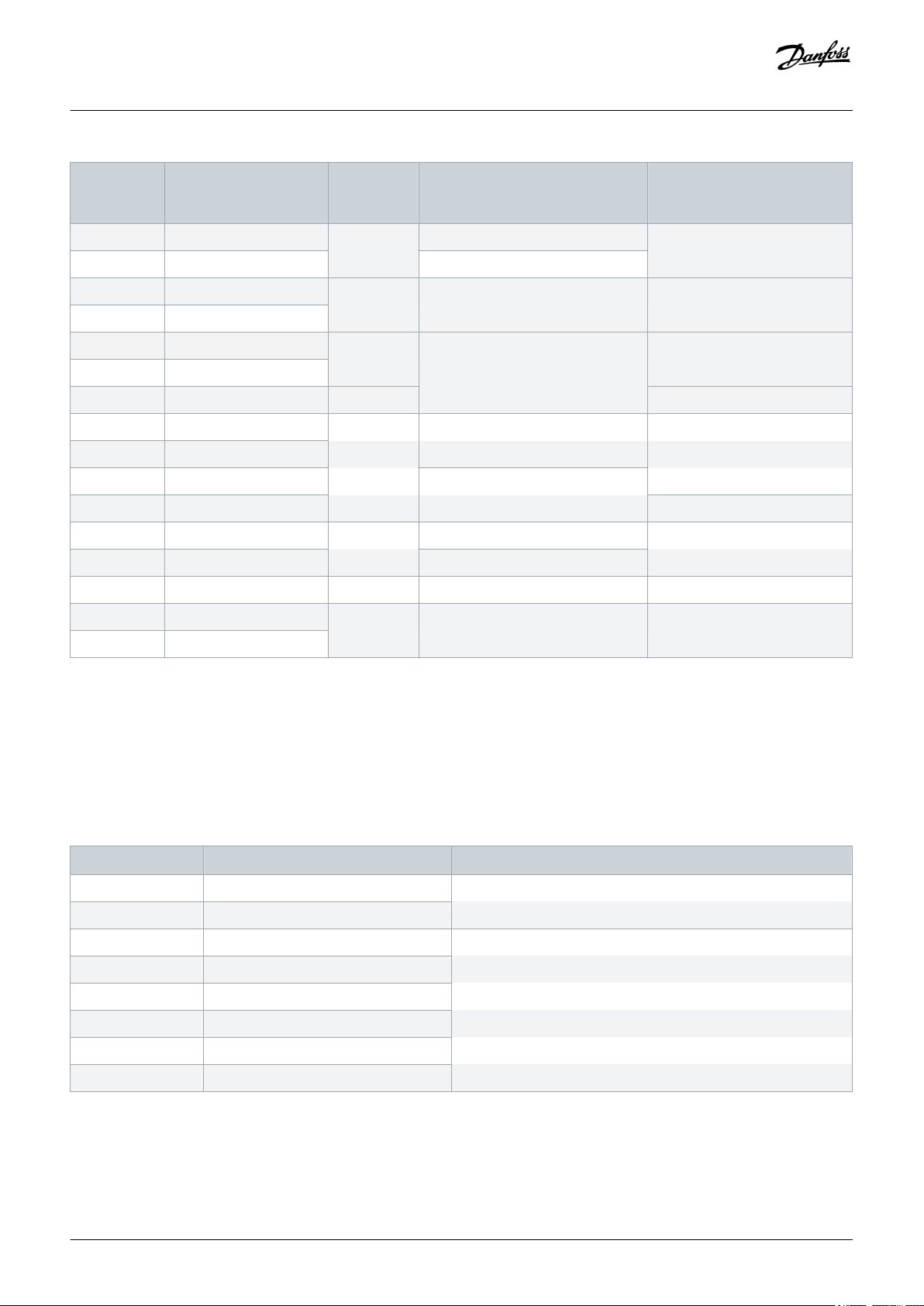
Tabell 16: Föreslagna inställningar för vanliga tillämpningar
Tillämpning Startläge Star-
tramptid
[s]
Centrifugalpump
Djupbrunnspump
Hydraulpump Konstant
Fläkt, strypt Konstant
Fläkt, ostrypt Konstant
Adaptiv
styrning
Adaptiv
styrning
ström
ström
ström
10 200 500 Tidig accel-
3 200 500 Tidig accel-
2 200 350 N/A Utrullnings-
2 200 350 N/A Utrullnings-
2 200 450 N/A Utrullnings-
Initial
ström
[%]
Strömgräns
[%]
Adaptiv
startprofil
eration
eration
Stoppläge Stopptid
[s]
Adaptiv
styrning
Adaptiv
styrning
stopp
stopp
stopp
15 Sen decel-
3 Sen decel-
N/A N/A
N/A N/A
N/A N/A
Adaptiv
stopprofil
eration
eration
Skruvkompressor
Kolvkompressor
38 | Danfoss A/S © 2018.10
Konstant
ström
Konstant
ström
2 200 400 N/A Utrullnings-
stopp
2 200 450 N/A Utrullnings-
stopp
AQ262141844215sv-000201 / 175R1174
N/A N/A
N/A N/A
Page 39

Handbok | VLT® Soft Starter MCD 600
Installation
Tillämpning Startläge Star-
tramptid
[s]
Transportbana Konstant
ström
Bogpropeller Konstant
ström
Bandsåg Konstant
ström
5 200 450 N/A Utrullnings-
5 100 400 N/A Utrullnings-
2 200 450 N/A Utrullnings-
Initial
ström
[%]
Strömgräns
[%]
Adaptiv
startprofil
Stoppläge Stopptid
[s]
N/A N/A
stopp
N/A N/A
stopp
N/A N/A
stopp
Adaptiv
stopprofil
OB S!
Inställningarna adaptiv start- och stopprofil tillämpas endast vid adaptiv styrning. Inställningarna ignoreras för alla andra startoch stopplägen.
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 39
Page 40

Handbok | VLT® Soft Starter MCD 600
Inställningssverktyg
6 Inställningssverktyg
6.1 Inledning
I Set-up Tools (Inställningsverktyg) kan du hämta eller spara parametrar till en säkerhetskopia, ange mjukstartarens
nätverksadress,kontrollera ingångarna och utgångarnas status, återställa termiska modeller eller utföra drifttester med hjälp av Run
Simulation (Körningssimulering).
Tryck på [Menu] för att öppna huvudmenyn och välj därefter Set-up Tools (Inställningsverktyg) för att komma till Set-up Tools
(Inställningsverktyg).
6.2 Ange datum och tid
Procedur
1. Tryck på [Menu] för att öppna menyn.
2. Välj Set-up Tools (Inställningsverktyg).
3. Bläddra till Set Date & Time (Ange datum och tid).
4. Tryck på [Menu/Store] för att växla till redigeringsläge.
5. Tryck på [Menu/Store] och [Back] för att välja vilken del av datum eller tid som du vill redigera.
6. Använd [▵] och [▿] för att ändra värdena.
7. Tryck på [Menu/Store] efter den sista siffran för att spara inställningarna.
När åtgärden har slutförts visar skärmen ett bekräftelsemeddelande och återgår därefter till den föregående menynivån.
6.3 Kommandokälla
Starta och stoppa mjukstartaren via de digitala ingångarna, fjärr-LCP 601, kommunikationsnätverk, smart card eller planerad
autostart/-stopp. Ställ in kommandokällan via Set-up Tools (Inställningsverktyg) eller via parameter 1-1 Command Source
(Kommandokälla).
Om fjärr-LCP:n är installerad fungerar knappen [CMD/Menu] som en genväg till funktionen Command Source (Kommandokälla) i Set-
up Tools (Inställningsverktyg).
6.4 Idrifttagning
Idrifttagning stöder start och stopp av mjukstartaren via LCP:n. Använd [▵] och [▿] för att välja en funktion och tryck sedan på [Menu/
Store] för att skicka det valda kommandot till mjukstartaren. Följande funktioner är tillgängliga.
• Snabbstopp (utrullningsstopp)/återställning
• Start.
• Stopp.
6.5 Körningssimulering
Context:
Funktionen Run Simulation (Körningssimulering) simulerar att en motor startas, är i drift och stoppas för att bekräfta att mjukstartaren
och tillhörande utrustning har installerats korrekt.
40 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 41

e77ha731.10
Run Simulation
Ready
Apply Start Signal
Handbok | VLT® Soft Starter MCD 600
OB S!
Koppla från nätspänning från mjukstartaren vid användning av simuleringsläget.
Simulering är endast tillgängligt när mjukstartaren är i läget Ready (Klar).
Procedur
1. Tryck på [Menu] och välj Set-up Tools (Inställningsverktyg).
2. Bläddra till Run Simulation (Körningssimulering) och tryck på [Menu/Store].
3. Tillämpa ett startkommando från den valda kommandokällan.
Mjukstartaren simulerar kontrollerna före start och stänger huvudkontaktorreläet. Dioden Run (Kör) blinkar.
Inställningssverktyg
OB S!
Om nätspänningen är ansluten visas ett felmedddelande.
4. Tryck på [Menu/Store].
Mjukstartaren simulerar en start. Dioden Run (Kör) blinkar.
5. Tryck på [Menu/Store].
Mjukstartaren simulerar att den är i drift.
6. Tillämpa ett stoppkommando från den valda kommandokällan.
Mjukstartaren simulerar ett stopp. Dioden Run (Kör) blinkar.
7. Tryck på [Menu/Store].
Dioden Ready (Klar) blinkar och huvudkontaktorreläet öppnas.
8. Tryck på [Menu/Store].
Mjukstartaren aktiverar för att sedan inaktivera alla programmerbara utgångar.
9. Tryck på [Menu/Store].
Mjukstartaren går tillbaka till Set-up Tools (Inställningsverktyg).
6.6 Hämta/spara inställningar
Context:
Med funktionen Load/Save Settings (Hämta/spara inställningar) kan du:
• återställa mjukstartarens parametrar till standardvärden
• hämta parameterinställningar från en intern fil
• spara de aktuella parameterinställningarna till en intern fil.
Den interna filen innehåller standardvärden tills en användarfil sparas.
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 41
Page 42

e77ha732.10
Load/Save Settings
Load Defaults
Load User Set
Save User Set
e77ha733.10
USB Save & Load
Save Params and Logs
Save Master Params
Load Master Params
Handbok | VLT® Soft Starter MCD 600
Inställningssverktyg
Procedur
1. Tryck på [Menu] och välj Set-up Tools (Inställningsverktyg).
2. Bläddra till Load/Save Settings (Hämta/spara inställningar) och tryck på [Menu/Store].
3. Bläddra till önskad funktion och tryck på [Menu/Store].
4. Välj Ja för att bekräfta eller Nej för att avbryta.
5. Tryck på [Menu/Store] för att fortsätta.
När åtgärden har slutförts visar skärmen ett bekräftelsemeddelande och återgår därefter till den föregående menynivån.
6.7 Spara och hämta via USB
Med menyn USB Save & Load (Spara och hämta via USB) kan du:
• spara parameterinställningar och alla händelseloggposter till en extern fil (CSV-format)
• spara parameterinställningar till en extern fil (tillverkarspecifikt format)
• hämta parameterinställningar från en tidigare sparad extern fil
• hämta anpassade meddelanden som visas på LCP:n när en programmerbar ingång är aktiv.
OB S!
VLT® Soft Starter MCD 600 har stöd för FAT32-filsystem. MCD 600:s USB-funktioner är inte kompatibla med NTFS-filsystem.
6.7.1 Procedur för att spara och hämta
Procedur
1. Anslut den externa enheten till USB-porten.
2. Tryck på [Menu] och välj Set-up Tools (Inställningsverktyg).
3. Bläddra till USB Save & Load (Spara och hämta via USB) och tryck på [Menu/Store].
4. Bläddra till önskad funktion och tryck på [Menu/Store].
5. Välj Ja för att bekräfta eller Nej för att avbryta.
6. Tryck på [Menu/Store] för att fortsätta.
42 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 43

e77ha730.10
Handbok | VLT® Soft Starter MCD 600
När åtgärden har slutförts visar skärmen ett bekräftelsemeddelande och återgår därefter till den föregående menynivån.
Inställningssverktyg
6.7.2 Filsökvägar och filformat
Spara parametrar och loggar
Mjukstartaren skapar en katalog i USB-minnets översta nivå och döper den till mjukstartarens serienummer. Händelseloggen och
parameterinställningarna sparas som separata CSV-filer och mjukstartarens programvara och systeminformation sparas till en textfil.
Spara masterparametrar
Mjukstartaren skapar en fil med namnet Master_Parameters.par och lagrar den på USB-minnet.
Hämta masterparametrar
Mjukstartarens hämtar filen Master_Parameters.par från USB-minnets översta nivå. Filerna kan skapas eller redigeras med hjälp av VLT®
Motion Control Tool MCT 10. Ladda ner verktyget MCT 10 från www.danfoss.com/en/service-and-support/downloads/dds/vlt-motioncontrol-tool-mct-10/.
Hämta anpassat meddelande
Mjukstartaren hämtar filerna Custom_Message_A.txt och Custom_Message_B.txt från USB-minnets överst nivå.
Bild 13: USB-minnets sökväg
6.8 Auto-start/Stop (Autostart/-stopp)
Context:
Mjukstartaren kan konfigureras att automatiskt starta och/eller stoppa motorn vid en viss tid eller att köra motorn i cykler under en
angiven tidsperiod.
Funktionen Auto-Start/Stop (Autostart/-stopp) i Set-up Tools (Inställningsverktyg) ger snabbåtkomst till parametrarna för automatisk
start och stopp.
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 43
Page 44

e77ha734.10
Auto-Start/Stop
Start/Stop Mode
Start/Stop Sunday
Start/Stop Monday
e77ha735.10
Set IP Address
192.168.000.002
Handbok | VLT® Soft Starter MCD 600
Procedur
1. Tryck på [Menu] och välj Set-up Tools (Inställningsverktyg).
2. Bläddra till Auto-Start/Stop (Autostart/-stopp) och tryck på [Menu/Store].
3. Bläddra till önskad funktion och tryck på [Menu/Store].
4. Justera inställningarna efter behov.
A Tryck på [Menu/Store] och [Back] för att välja vilken information som du vill redigera.
B Använd [▵] och [▿] för att ändra värdet.
Tryck på [Menu/Store] för att spara ändringarna. Mjukstartaren bekräftar ändringarna.
Tryck på [Back] för att avbryta ändringarna.
Inställningssverktyg
6.9 Nätverksadress
Om du vill använda VLT® Soft Starter MCD 600 på ett Ethernet-nätverk måste separata adresser konfigureras för:
• IP-adress
• Gateway-adress
• subsnätsmask.
6.9.1 Ange en nätverksadress
Procedur
1. Tryck på [Menu] och välj Set-up Tools (Inställningsverktyg).
2. Bläddra till Network Address (Nätverksadress) och tryck på [Menu/Store].
3. Bläddra till önskad funktion och tryck på [Menu/Store].
4. Den första siffran i adressen markeras.
5. Använd [Back] och [Menu/Store] för att välja den siffra du vill ändra.
6. Använd [▵] och [▿] för att ändra värdet.
7. Tryck på [Menu/Store] efter den sista siffran för att spara inställningarna.
44 | Danfoss A/S © 2018.10
När åtgärden har slutförts visar skärmen ett bekräftelsemeddelande och återgår därefter till den föregående menynivån.
AQ262141844215sv-000201 / 175R1174
Page 45

e77ha711.10
Digital I/O State
Inputs: 0100
Outputs: 100
AO-08
AO-07
DI-B
DI-A
COM+
START
COM+
RESET
TER-06
TER-05
3433232221
14
13
e77ha717.10
7
6
5
4
32
1
Handbok | VLT® Soft Starter MCD 600
OB S!
Nätverksadressen kan också anges via parameter 12-8 till 12-19.
OB S!
Använd parameter 12-1 till 12-7 för att konfigurera mjukstartaren för användning med andra kommunikationsprotokoll.
6.10 Digital I/O State (Status för digitala in- och utgångar)
Inställningssverktyg
Bild 14: Skärm med status för digitala in- och utgångar
1 RESET, COM+: Återställningsingång
2 START, COM+: Start-/stoppingång
3 DI-A, COM+: Programmerbar ingång A
4 DI-B, COM+: Programmerbar ingång B
5 13, 14: Huvudkontaktorutgång
6 21, 22, 23: Reläutgång A
7 33, 34: Reläutgång B
Bild 15: Placering av digitala in- och utgångar
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 45
Page 46

e77ha736.10
Analog I/O State
Thermistor: 0
4-20 mA Output: 04.0 mA
e77ha789.10
Serial Number & Rating
MCD 600
123456-123
0410-T5-S1-CV2
Handbok | VLT® Soft Starter MCD 600
Inställningssverktyg
6.11 Status för analoga in- och utgångar
På den övre delen av skärmen visas motortermistoringångens status. På den nedre delen av skärmen visas den analoga utgångens
värde.
Bild 16: Skärm med status för analoga in- och utgångar
Termistoringång
S Kort
H Varm
C Kall
O Öppen
6.12 Serial Number & Rating (Serienummer och klassificering)
Den översta raden visar produktnamnet.
Mittenraden visar enhetens serienummer.
Den nedersta raden visar modellnumret.
Bild 17: Skärm med serienummer och klassificering
6.13 Programversioner
På skärmen Software Version (Programversion) finns mjukstartarens programinformation:
46 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 47

Handbok | VLT® Soft Starter MCD 600
• Användargränssnitt
• Motorstyrning
• Fjärr-LCP (om ansluten)
• Parameterlista
• Bootloader
• Expansionskort (om monterat)
Inställningssverktyg
OB S!
Uppdaterad programvara, inklusive andra språk, kan vid behov föras över till mjukstartaren via USB-porten. Kontakta din lokala
återförsäljare för mer information.
6.14 Termistoråterställning
Termistoringången är inaktiverad som standard, men aktiveras automatiskt när en termistor registreras. Om termistorer har anslutits till
mjukstartaren tidigare men inte längre behövs använder du funktionen Thermistor Reset (Termistoråterställning) för att inaktivera
dem.
6.15 Återställ termisk modell
Mjukstartarens termiska programvara övervakar konstant motorns prestanda. Detta gör att mjukstartaren när som helst kan beräkna
motorns temperatur och möjlighet att göra lyckade starter.
Den termiska modellen kan återställas vid behov.
OB S!
FÖRKORTAD MOTORLIVSLÄNGD
Att återställa motorns termiska modell påverkar dess skydd och kan påverka motorns livslängd.
Återställ endast den termiska modellen i nödsituationer.
-
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 47
Page 48

Handbok | VLT® Soft Starter MCD 600
Loggar
7 Loggar
7.1 Inledning
Loggmenyn ger information om händelser, trippar och mjukstartarens prestanda.
Tryck på [Menu] och välj Logs (Loggar) för att komma till loggmenyn. Tryck på [Logs] på fjärr-LCP:n.
7.2 Händelselogg
Event Log (Händelseloggen) lagrar information om de senaste tripparna, varningarna och händelserna (inklusive starter, stopp och
ändringar i konfigurationer).
Händelse 1 är den senaste händelsen och händelse 384 är den äldsta lagrade händelsen.
OB S!
Händelseloggen kan exporteras till en extern fil för analys utanför mjukstartaren.
Se 6.7.2 Filsökvägar och filformat.
7.3 Räknare
Räknarna lagrar statistik om mjukstartarens drift:
• Drifttid (livslängd och tid sedan räknaren senast återställdes)
• Antal starter (livslängd och tid sedan räknaren senast återställdes)
• Antal gånger den termiska modellen har återställts.
7.3.1 Visa räknarna
Procedur
1. Öppna Logs (Loggar), se 7.1 Inledning.
2. Bläddra till Counters (Räknare) och tryck på [Menu/Store].
3. Använd [▵] och [▿] för att bläddra genom räknarna.
4. Tryck på [Menu/Store] för att visa information.
5. Om du vill återställa en räknare trycker du på [Menu/Store] och använder därefter [▵] och [▿] för att välja Reset (Återställ)/Do Not
Reset (Återställ inte).
6. Tryck på [Store] för att bekräfta.
7. Tryck på [Menu/Store] för att stänga räknaren och återgå till Logs (Loggar).
48 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 49

READY
RUN
TRIP LOCAL
Menu
Store
Back
Reset
1
2
3
e77ha715.10
Handbok | VLT® Soft Starter MCD 600
8 LCP och återkoppling
8.1 Lokal LCP och återkoppling
LCP och återkoppling
1 Fyra rader för status- och programmeringsinformation.
2 Statusdioder.
3 navigeringsknappar: Back: Stäng en meny eller parameter,
eller avbryt en parameterändring. Du
kan även återställa trippar med den
här knappen.
Bild 18: Lokal LCP
Menu/Store: Öppna en meny
eller parameter, eller spara
en parameterändring.
Pilar: Bläddra till nästa eller
föregående meny eller parameter,
ändra inställningarna av aktuell
parameter eller bläddra genom
statusskärmarna.
8.2 Fjärr-LCP
Fjärr-LCP:n kan användas till att styra mjukstartaren om parameter 1-1 Command Source (Kommandokälla) är inställd till Remote Keypad
(Fjärrknappsats).
• [Start], [Stop] och [Reset] fungerar endast om fjärr-LCP:n är vald som kommandokälla.
• Navigeringsknapparna och fjärr-LCP:ns display är alltid aktiva.
• Om en knapp trycks ner på fjärr-LCP:n uppdateras displayen därefter.
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 49
Page 50

READY RUN TRIP
LOCAL
RESET
LOGS
Alt
GRAPH
TOOLS
CMD
MENU
MENU
STORE
BACK
e77ha716.10
1
2
3
4
5
6
Handbok | VLT® Soft Starter MCD 600
LCP och återkoppling
OB S!
Fjärr-LCP:n kan säkert anslutas och kopplas från när mjukstartaren är i drift. Du behöver inte koppla från nät- eller
styrspänningen.
OB S!
Mjukstartaren trippar om du kopplar från fjärr-LCP:n när parameter 1-1 Command Source (Kommandokälla) är inställd till Remote
Keypad (Fjärrknappsats).
1 Fyra rader för status- och programmeringsinformation.
2 Statusdioder.
3 Navigeringsknappar: Back: Stäng en meny eller
parameter, eller avbryt en
4 Genväg till menyn för kommandokälla i Set-up Tools (Inställningsverktyg).
5 Knappar för lokal styrning.
parameterändring.
Menu/Store: Öppna en meny
eller parameter, eller spara en
parameterändring.
50 | Danfoss A/S © 2018.10
Pilar: Bläddra till nästa eller
föregående meny eller parameter,
ändra inställningarna av aktuell
parameter eller bläddra genom
statusskärmarna.
AQ262141844215sv-000201 / 175R1174
Page 51

Ready Run Trip Local
e77ha724.10
Handbok | VLT® Soft Starter MCD 600
LCP och återkoppling
6 Kortkommandoknappar för snabb
åtkomst till vanliga åtgärder:
Bild 19: Fjärr-LCP
Logs: Öppnar
loggmenyn.
Graph: Välj vilket diagram du vill visa
eller pausa/starta om diagram (håll
nedtryck längre än 0,5 sekunder).
8.3 Justera displayens ljusstyrka
Context:
OB S!
Lokala LCP:er och fjärr-LCP:er kan justeras oberoende av varandra.
1. Håll [Back] intryckt.
2. Tryck på [▵] för att öka displayens ljusstyrka eller tryck på [▿] för att sänka displayens ljusstyrka.
8.4 Mjukstartarens statusdioder
Tools: Öppnar Set-up Tools
(Inställningsverktyg).
Bild 20: Statusdioder på LCP:n
Tabell 17: Beskrivning av dioderna
Diodnamn På Blinkande
Ready Motorn är stoppad och mjukstar-
taren är redo att starta.
Run Motorn är i körläge (tar emot full
spänning).
Trip Mjukstartaren har trippat. Mjukstartaren är i varningsläge.
Local Mjukstartaren styrs via en fjärr-
LCP.
Om ingen av dioderna lyser får mjukstartaren ingen styrspänning.
Motorn är stoppad och mjukstartaren är inte redo att starta:
• Väntar på omstartsfördröjningen (parameter 5-16 Restart Delay (Omstartsfördröjning)).
• De termiska modellerna indikerar att mjukstartaren och/eller motorn är för
varma för att kunna starta säkert.
• Återställningsingången (RESET, COM+) är öppen.
Motorn startar eller stoppar.
–
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 51
Page 52

e77ha790.10
WELCOME
01.01/01.00/01.00
MCD6-0069B-T5-S1-CV2
1
2
e77ha791.10
69.0 A
Running
69.0 A 415 V
1
2
3
Handbok | VLT® Soft Starter MCD 600
LCP och återkoppling
8.5 Displayer
8.5.1 Mjukstartarinformation
Vid start visar skärmen information om mjukstartarens klassificering, progamversioner och serienummer.
1 Programversioner: Användargränssnitt, motorstyrning, fjärr-LCP
2 Modellkod: Strömklassificering, nätspänning, kapsling, styrspänning (fjärr-LCP:ns programversion visas endast när en fjärr-LCP är
ansluten)
Bild 21: Välkomstskärm
8.5.2 Konfigurerbara återkopplingsskärmar
Välj vilken information som ska visas på displayen. Använd [▵] och [▿] för att växla mellan de två konfigurerbara skärmarna.
1 Motorström vid drift
2 Mjukstartarens status
3 Parameter 10-8 User Parameter 1 (Användarparameter 1) och parameter 10-9 User Parameter 2 (Användarparameter 2)
Bild 22: Mjukstartarens statusskärm
52 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 53

e77ha792.10
Motor pf
Motor power
1
2
3
Mains Frequency 59.7 Hz
1.01
37.0 kW
4 Motor Temp 85%
e77ha793.10
69.0 A
Last start
350% FLC
1
2
3
010s
D Temp 5%
4
Handbok | VLT® Soft Starter MCD 600
1 Parameter 10-10 User Parameter 3 (Användarparameter 3) (standardinställning: Nätfrekvens)
2 Parameter 10-11 User Parameter 4 (Användarparameter 4) (standardinställning: Effektfaktor)
3 Parameter 10-12 User Parameter 5 (Användarparameter 5) (standardinställning: Motorström)
4 Parameter 10-13 User Parameter 6 (Användarparameter 6) (standardinställning: Motortemperatur)
Bild 23: Användarkonfigurerbar skärm
8.5.3 Skärmar för driftåterkoppling
LCP och återkoppling
På den övre delen av skärmarna för driftåterkoppling visas motorströmmen vid drift. Använd [▵] och [▿] för att välja vilken information
som ska visas på den nedre delen av skärmen.
• Realtidsström på varje fas.
• Senaste startinformationen.
• Datum och tid.
1 Motorström vid drift
2 Startlängd (sekunder)
3 Maximal ström vid start (som en procentsats av motorns märkström)
4 Beräknad höjning av motortemperatur
Bild 24: Skärmar för driftåterkoppling
8.5.4 Prestandadiagram
Prestandadiagrammet visar driftprestandan i realtid. Använd parameter 10-2 till 10-5 för att formatera diagrammet.
Huvud-LCP:ns display visar information om motorströmmen.
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 53
Page 54

e77ha757.10
000.0 A 0-400%
Handbok | VLT® Soft Starter MCD 600
Om en fjärr-LCP är ansluten trycker du på [Graph] för att ändra data i diagrammet. Diagrammet kan visa:
• motorström
• motortemperatur
• motoreffektfaktor
• analog ingångsdata från smart card (om installerat)
LCP och återkoppling
54 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 55

Handbok | VLT® Soft Starter MCD 600
Drift
9 Drift
9.1 Start-, stopp- och återställningskommandon
VLT® Soft Starter MCD 600 kan startas och stoppas via de digitala ingångarna, fjärr-LCP, kommunikationsnätverk, smart card eller
planerad autostart/-stopp. Kommandokällan kan anges via Set-up Tools (Inställningsverktyg) eller via parameter 1-1 Command Source
(Kommandokälla).
• MCD 600 tar endast emot start- och återställningskommandon från den angivna kommandokällan.
• MCD 600 tar emot stoppkommandon från den angivna kommandokällan, men kan tvingas att stoppa om återställningsingången
öppnas eller om start-/stoppingången öppnas under en cykel av autostart/-stopp.
• Den programmerbara ingången kan användas för att åsidosätta den angivna kommandokällan (se parameter 7-1 Input A Function
(Ingång A, funktion)).
9.2 Åsidosättning av kommando
De programmerbara ingångarna (DI-A, COM+) kan användas för att åsidosätta kommandokällan i situationer där den normala
styrmekanismen har avbrutits. Ställ in parameter 7-1 Input A Function (Ingång A, funktion) till den alternativa styrkällan (exempelvis
Command Override: Keypad (Åsidosätt kommando: Knappsats)).
När ingång är aktiv tar mjukstartaren endast emot kommandon från den angivna källan. Öppna ingången igen för att återställa
styrningen till kommandokällan som angetts i parameter 1-1 Command Source (Kommandokälla).
9.3 Autostart/-stopp
Mjukstartaren kan konfigureras att automatiskt starta och/eller stoppa motorn vid en viss tid eller att köra motorn i cykler under en
angiven tidsperiod.
OB S!
Startfördröjning, omstartsfördröjning och fördröjning av automatisk återställning fungerar vid autostart.
9.3.1 Klockläge
Mjukstartaren kan starta och/eller stoppa motorn en gång per dag.
För att klockläget ska fungera måste:
• parameter 4-1 Auto-Start/Stop Mode (Läge för autostart/-stopp) vara inställd till Enable (Aktivera)
• parameter 1-1 Command Source (Kommandokälla) vara inställd till Clock (Klocka)
• återställningsingången vara stängd
• startingången (START, COM+) vara aktiv. Detta gör att mjukstartaren kan stoppas via de digitala ingångarna i en nödsituation.
Klockläget styrs av parameter 4-4 till 4-24.
9.3.2 Timerläge
Mjukstartaren kan stoppa motorn automatiskt efter en angiven drifttid och sedan starta om den efter en angiven stopptid.
Mjukstartaren upprepar cykeln så länge startsignalen förblir aktiv.
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 55
Page 56

Handbok | VLT® Soft Starter MCD 600
För att timerläget ska fungera måste:
• parameter 4-1 Auto-Start/Stop Mode (Läge för autostart/-stopp) vara inställd till Enable (Aktivera)
• parameter 1-1 Command Source (Kommandokälla) vara inställd till Timer.
• återställningsingången vara stängd
• den första starten styras av en startsignal.
Timerläget styrs av parameter 4-2 till 4-3.
Drift
9.4 PowerThrough
Med PowerThrough kan mjukstartaren styra motorn även om mjukstartaren är skadad på en fas. VLT® Soft Starter MCD 600 använder
tvåfasstyrning för att mjukstarta och mjukstoppa motorn.
OB S!
Mjukstartaren trippar på Lx-Tx Shorted (Lx-Tx kortslutning) vid det första startförsöket efter att styrström har kopplats på.
PowerThrough fungerar inte om styrströmmen kopplas av/på mellan starter.
• PowerThrough är endast tillgängligt med in-line-installationer. PowerThrough fungerar inte om mjukstartaren har en Inside Deltainstallation.
• PowerThrough förblir aktivt tills 3-Phase Control Only (Endast trefasstyrning) väljs igen. Vid drift i PowerThrough blinkar trippdioden
och displayen visar 2 Phase - Damaged SCR (Tvåfas – skadat SCR-relä).
• PowerThrough-drift har inte stöd för mjukstart eller mjukstopp med adaptiv styrning. I PowerThrough väljer mjukstartaren
automatiskt mjukstart med konstant ström och mjukstopp med tidsstyrd spänningsramp. Om PowerThrough är aktiverat måste
parameter 2-3 och 2-4 anges på lämpligt sätt.
OB S!
PowerThrough använder en tvåfasig mjukstartarteknik och särskild försiktighet krävs vid dimensionering av maximalbrytare
och skydd. Kontakta din lokala återförsäljare för hjälp.
9.5 Nödläge
I nödläge kan mjukstartaren köra motorn och ignorera trippvillkor.
Nödläget styrs via en programmerbar ingång (ingång A, DI-A, COM+ eller ingång B, DI-B, COM+). Parameter 7-1 Input A Function
(Ingång A, funktion)/parameter 7-5 Input B Function (Ingång B, funktion) måste vara inställda till Emergency Mode (Nödläge). En stängd
krets över DI-A, COM+ aktiverar nödläget. När mjukstartaren tar emot ett startkommando fortsätter den att köra och ignorerar alla
trippar och varningar fram tills att ett stoppkommando tas emot.
Nödläget kan användas med alla kommandokällor.
OB S!
Även om nödläget uppfyller alla krav på funktionalitet rekommenderar Danfoss att det inte används i situationer som kräver
testning och/eller överensstämmelse med specifika standarder eftersom läget inte är certifierat.
56 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 57

Handbok | VLT® Soft Starter MCD 600
Drift
OB S!
FÖRKORTAD LIVSLÄNGD FÖR UTRUSTNING
Fortsatt användning av nödläget rekommenderas inte. Nödläget kan påverka mjukstartarens och/eller motorns livslängd
eftersom alla skydd och trippar är inaktiverade. Användning av mjukstartaren i nödläge upphäver produktgarantin.
Kör inte mjukstartaren i nödläget kontinuerligt.
-
9.6 Extern trippkrets
En extern trippkrets (som en lågtryckslarmbrytare för ett pumpsystem) kan användas för att trippa mjukstartaren och stoppa motor.
Den externa kretsen ansluts till en programmerbar ingång (ingång A, DI-A, COM+ eller ingång B, DI-B, COM+). Ställa in följande
parametrar för att styra trippens beteende:
• Parameter 7-1 Input A Function (Ingång A, funktion): Välj Input Trip (N/O) (Ingångstrupp (normalt öppen)).
• Parameter 7-2 Input A Trip (Ingång A; tripp): Ställ in lämpligt värde. Exempelvis begränsar Endast kör ingångstrippen till att endast
inträffa när mjukstartaren körs.
• Parameter 7-3 Input A Trip Delay (Ingång A, trippfördröjning): Skapar en fördröjning mellan att ingången aktiveras och att
mjukstartaren trippar.
• Parameter 7-4 Input A Initial Delay (Ingång A, initial fördröjning): Skapar en fördröjning innan mjukstartaren börjar övervaka
ingångens status efter startsignalen. En fördröjning kan exempelvis behövas för att tryck ska hinna byggas upp.
• Parameter 7-10 Input A Name (Ingång A, namn): Välj ett namn, exempelvis Ingång A, tripp (valfritt).
9.7 Vanliga styrmetoder
Applikationskrav varierar mellan varje installation men metoderna nedan kan vara bra utgångspunkter för vanliga tillämpningar.
Tabell 18: Vanliga styrmetoder
Tillämpning Startläge Star-
tramptid
[s]
Bogpropeller Konstant ström 5 100 400 Utrullningsstopp N/A
Centrifug (separator) Konstant ström 1 200 450 Utrullningsstopp N/A
Flistugg Konstant ström 1 200 450 Utrullningsstopp N/A
Kolvkompressor, belastad
Kolvkompressor, avlastad
Skruvkompressor, belastad
Skruvkompressor, avlastad
Transportbana, horisontell
Konstant ström 1 200 450 Utrullningsstopp N/A
Konstant ström 1 200 400 Utrullningsstopp N/A
Konstant ström 1 200 400 Utrullningsstopp N/A
Konstant ström 1 200 350 Utrullningsstopp N/A
Konstant ström 5 200 400 TVR-mjukstopp 10
Initial ström
(% märkström)
Strömgräns
(% märkström)
Stoppläge Stopptid [s]
Transportbana, lutande
Danfoss A/S © 2018.10
Konstant ström 2 200 450 Utrullningsstopp N/A
AQ262141844215sv-000201 / 175R1174| 57
Page 58

Handbok | VLT® Soft Starter MCD 600
Drift
Tillämpning Startläge Star-
tramptid
[s]
Transportband, vertikalt
Konkross Konstant ström 1 200 350 Utrullningsstopp N/A
Käftkross Konstant ström 1 200 450 Utrullningsstopp N/A
Roterande kross Konstant ström 1 200 400 Utrullningsstopp N/A
Barkningsmaskin Konstant ström 1 200 350 Utrullningsstopp N/A
Axialfläkt (strypt) Konstant ström 1 200 350 Utrullningsstopp N/A
Axialfläkt (ostrypt) Konstant ström 1 200 450 Utrullningsstopp N/A
Radialfläkt (strypt) Konstant ström 1 200 350 Utrullningsstopp N/A
Radialfläkt (ostrypt) Konstant ström 1 200 450 Utrullningsstopp N/A
Högtrycksfläkt Konstant ström 1 200 450 Utrullningsstopp N/A
Kulkvarn Konstant ström 1 200 450 Utrullningsstopp N/A
Hammarkvarn Konstant ström 1 200 450 Utrullningsstopp N/A
Djupbrunnspump Adaptiv styrning
Centrifugalpump Adaptiv styrning
Konstant ström 2 200 450 Utrullningsstopp N/A
3 N/A 500 Adaptiv styrning
(tidig acceleration)
10 N/A 500 Adaptiv styrning
(tidig acceleration)
Initial ström
(% märkström)
Strömgräns
(% märkström)
Stoppläge Stopptid [s]
3
(sen deceleration)
15
(sen deceleration)
Hydraulpump Konstant ström 2 200 350 Utrullningsstopp N/A
Deplacementpump Adaptiv styrning
(konstant acceleration)
Dränkbar pump Adaptiv styrning
(tidig acceleration)
Bandsåg Konstant ström 1 200 450 Utrullningsstopp N/A
Cirkelsåg Konstant ström 1 200 350 Utrullningsstopp N/A
Rivare Konstant ström 1 200 450 Utrullningsstopp N/A
10 N/A 400 Adaptiv styrning
(konstant deceleration)
5 N/A 500 Adaptiv styrning
(sen deceleration)
10
5
9.8 Mjukstartsmetoder
9.8.1 Konstant ström
Konstant ström är den traditionella formen av mjukstart där strömmen höjs från 0 till en angiven nivå och håller strömmen stabil på
den nivån tills motorn har accelererat.
Konstant strömstart är ideal för tillämpningar där startströmmen måste hållas under en viss nivå.
58 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 59

10 20 30 40 50 60 70 80 90
1
3
2
%
%
Handbok | VLT® Soft Starter MCD 600
1 Initial ström (anges i parameter 2-3 Initial Current (Initial ström))
2 Strömgräns (anges i parameter 2-4 Current Limit (Strömgräns))
3 Ström vid full spänning
Drift
Bild 26: Exampel på konstant strömstart
9.8.2 Konstant ström med strömramp
Strömrampsmjukstart höjer strömmen från en angiven startnivå (1) till en maximal gräns (3) över en viss tidsperiod (2).
Strömrampstart är lämplig för tillämpningar där:
• lasten varierar mellan starter (till exempel en transportbana som kan starta med och utan last). Ställ in parameter 2-3 Initial Current
(Initial ström) till en nivå där motorn startas med en lätt last. Ställ därefter in parameter 2-4 Current Limit (Strömgräns) till en nivå där
motorn startas med en tung last.
• lasten snabbt kan lätta, men starttiden måste förlängas (till exempel en centrifugalpump där trycket måste byggas upp långsamt).
• den elektriska försörjningen är begränsad (till exempel en generator) och en långsammare belastning ger ett större tidsutrymme
för försörjningen att svara.
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 59
Page 60

10 20 30 40
50
60 70 80 90
1
4
3
2
%
%
0
10
20
30
40
50
60
70
80
90
4
1
2
3
%
Handbok | VLT® Soft Starter MCD 600
1 Parameter 2-3 Initial Current (Initial ström)
2 Parameter 2-2 Start Ramp Time (Startramptid)
3 Parameter 2-4 Current Limit (Strömgräns)
Drift
4 Ström vid full spänning
Bild 27: Exempel på strömrampstart
9.8.3 Adaptiv styrning för start
Vid mjukstart med adaptiv styrning justerar mjukstartaren strömmen för att starta motorn inom en angiven tid och använder en vald
accelerationsprofil.
OB S!
Mjukstartaren tillämpar strömgränsen för alla mjukstarter, inklusive adaptiv styrning. Motorn kanske inte kan starta om
strömgränsen är för låg eller om startramptiden (anges i parameter 2-2 Start Ramp Time (Startramptid)) är för kort.
1 Tidig acceleration
2 Konstant acceleration
60 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 61

10 20 30 40 50 60 70 80 90
1
5
4
6
3
2
%
%
Handbok | VLT® Soft Starter MCD 600
3 Sen acceleration
4 Parameter 2-2 Start Ramp Time (Startramptid)
Bild 28: Exempel på start med adaptiv styrning (parameter 2-5 Adaptive Start Profile (Adaptiv startprofil))
Drift
9.8.3.1 Finjustera adaptiv styrning
Justera parameter 2-12 Adaptive Control Gain (Adaptiv styrförstärkning) om motorn inte startar och stoppar mjukt.
Förstärkningsinställningen fastställer till vilken grad mjukstartaren justerar framtida starter och stopp med adaptiv styrning, baserat på
information från den senaste starten. Forstärkningsinställningen påverkar både start- och stoppegenskaper.
• Om motorn accelererar eller decelererar för snabbt i slutet av en start eller ett stopp, ökar du förstärkningen med 5–10 %.
• Om motorvarvtalet fluktuerar vid start eller stopp, minskar du lite på förstärkningsinställningen.
OB S!
Mjukstartaren justerar den adaptiva styrningen efter motorn. Om du ändrar följande parametrar återställs den adaptiva
styrningen och den första start/stopp-cykeln använder konstant strömstart/tidsstyrt spänningsrampstopp: Parameter 1-2 Motor
Full Load Current (Motorns märkström), parameter 2-4 Current Limit (Strömgräns) och parameter 2-12 Adaptive Gain (Adaptiv
förstärkning).
9.8.4 Konstant ström med kickstart
Kickstart ger extra vridmoment i början av starten och kan användas tillsammans med strömrampstart eller konstant strömstart.
Kickstart kan hjälpa till att starta laster som kräver högt vridmoment men sedan accelererar lätt (till exempel spiralformade
rotorpumpar).
1 Parameter 2-7 Kickstart Level (Kickstartnivå)
2 Parameter 2-6 Kickstart Time (Kickstarttid)
3 Parameter 2-3 Initial Current (Initial ström)
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 61
Page 62

70
60
50
30
10
40
20
80
90
1
%
Handbok | VLT® Soft Starter MCD 600
Drift
4 Parameter 2-2 Start Ramp Time (Startramptid)
5 Parameter 2-4 Current Limit (Strömgräns)
6 Ström vid full spänning
Bild 29: Exempel på kickstart som används med konstant strömstart
9.9 Stoppmetoder
9.9.1 Utrullningsstopp
Utrullningsstopp låter motorn sakta ned av sig själv utan att mjukstartaren styr. Tiden som behövs för att stanna beror på belastningen.
9.9.2 Tidsstyrd spänningsramp
Tidsstyrd spänningsramp (TVR) minskar spänningen till motorn gradvis under en angiven tidsperiod. Detta kan förlänga motorns
stoppstid och undvika transienter på generatorförsörjningen.
Lasten kan fortsätta köras efter stopprampen är slutförd.
1 Parameter 2-10 Stop Time (Stopptid)
Bild 30: Exempel på tidsstyrd spänningsramp
OB S!
9.9.3 Adaptiv styrning för stopp
Vid mjukstopp med adaptiv styrning justerar mjukstartaren strömmen för att stoppa motorn inom en angiven tid och använder en
vald decelerationsprofil. Adaptiv styrning kan vara användbart för att förlänga stopptiden för laster med låg tröghet.
Om adaptiv styrning väljs använder det första stoppet tidsstyrd spänningsramp. Det innebär att mjukstartaren kan ”lära sig” den
anslutna motorns egenskaper. Motorinformationen används av mjukstartaren vid följande stopp med adaptiv styrning.
62 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 63

0
10
20
30
40
50
60
70
80
90
1 2
4
3
Handbok | VLT® Soft Starter MCD 600
Drift
OB S!
Adaptiv styrning saktar inte ned motorn aktivt och stannar inte motorn snabbare än ett utrullningsstopp. Använd bromsen för
att förkorta stopptiden för tröga laster.
OB S!
Adaptiv styrning styr motorns hastighetsprofil inom den programmerade tidsgränsen. Detta kan resultera i en högre strömnivå
än med traditionella styrmetoder.
Om du byter ut en motor som är ansluten till en mjukstartare som är programmerad för start och stopp med adaptiv styrning måste
mjukstartaren ”lära sig” den nya motorns egenskaper. Ändra värdet i parameter 1-2 Motor Full Load Current (Motorns märkström) eller
parameter 2-12 Adaptive Control Gain (Adaptiv styrförstärkning) för att initiera omlärningsprocessen. Nästa start kommer att använda
konstant ström och nästa stopp kommer att använda tidsstyrd spänningsramp.
1 Tidig deceleration
2 Konstant deceleration
3 Sen deceleration
4 Parameter 2-10 Stop Time (Stopptid)
Bild 31: Exempel på stopp med adaptiv styrning (parameter 2-11 Adaptive Stop Profile (Adaptiv stopprofil))
Adaptiv styrning är idealt för pumptillämpningar där det kan minimera skador från tryckslag. Testa de tre profilerna för att avgöra
vilken profil som passar tillämpningen bäst.
Adaptiv stopprofil Tillämpning
Sen deceleration System där bara en liten minskning i motor-/pumphastighet resulterar i snabb övergång mellan flöde
framåt och i omvänd riktning.
Konstant deceleration Tillämpningar med högt flöde där vätskan har en hög rörelsemängd.
Tidig deceleration Öppna pumpsystem där vätska måste rinna tillbaka genom pumpen utan att driva pumpen i omvänd
riktning.
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 63
Page 64

70
0
30
1
2
3
%
Handbok | VLT® Soft Starter MCD 600
9.9.4 DC-broms
En broms minskar tiden det tar att stoppa motorn.
Under bromsning kan motorns ljudnivå öka. Detta är ett normalt inslag vid motorbromsning.
OB S!
Vid användning av DC-broms måste mjukstartarens nätförsörjning vara ansluten (ingångsplint L1, L2 och L3) med positiva
fassekvenser.
OB S!
MOTORSKADA
Om bromsmomentet är för högt inställt stannar motorn innan bromstidens slut och motorn blir onödigt varm som i sin tur kan
resultera i skador. En hög bromsmomentsinställning kan även leda till toppströmmar upp till motorns direktstartström när
motorn stoppas.
Konfigurationen måste göras ordentligt för att säkerställa säker drift av mjukstartaren och motorn.
-
Säkerställ att lämpliga skyddssäkringar väljs till motorns förgreningsenhet.
-
Drift
RISK FÖR ÖVERHETTNING
Bromsning gör att motorn värms upp snabbare än den hastighet som beräknas i den termiska motormodellen.
Installera en motortermistor eller tillåt tillräcklig omstartsfördröjning (anges i parameter 5-16 Restart Delay
-
(Omstartsfördröjning)).
1 Parameter 2-10 Stop Time (Stopptid)
2 Parameter 2-16 Brake Time (Bromstid)
OB S!
3 Utrullningsstopp
Bild 32: Exempel på bromstid
64 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 65

Handbok | VLT® Soft Starter MCD 600
Parameterinställningar:
• Parameter 2-9 Stop Mode (Stoppläge): Ställ in till DC Brake (DC-broms).
• Parameter 2-10 Stop Time (Stopptid): Det här är den totala bromstiden (1) och måste anges så att den är längre än bromstiden (i
parameter 2-16 DC Brake Time (DC-bromstid)) för att förbromsningsteget ska kunna minska motorvarvtalet till cirka 70 %. Om
stopptiden är för kort kommer bromsningen inte att lyckas och motorn rullar till stopp.
• Parameter 2-15 DC Brake Torque (DC-bromsvridmoment): Ställ in lämpligt värde för att bromsa lasten. Om den ställs in för lågt
kommer motorn inte att stanna helt och kommer rulla till stopp i slutet av bromsperioden.
• Parameter 2-16 DC Brake Time (DC-bromstid): Ställ in den här parametern till cirka en fjärdedel av den programmerade stopptiden.
Detta anger tiden för full bromsning (2).
Drift
9.9.5 DC-broms med extern nollhastighetsgivare
För laster som varierar mellan bromscyklerna ska en extern nollhastighetsgivare som säkerställer att mjukstartaren avslutar DCbromsning när motorn stannar installeras. Att använda en givare förhindrar onödig uppvärmning av motorn.
Konfigurera DC-bromsen för den längsta bromstiden som behövs och ställ in parameter 7-1 Input A Function (Ingång A, funktion) till
Zero Speed Sensor (Nollhastighetsgivare). När motorn stannar öppnar nollhastighetsgivaren kretsen över DI-A, COM+ och mjukstartaren
avslutar stoppet.
9.9.6 Mjukbroms
Mjukstartaren kan konfigureras för mjukbromsning för att passa tillämpningar med hög tröghet och/eller varierad belastning som
kräver högsta möjliga bromseffekt.
Mjukstartaren använder ett växlande relä för att styra framåtkontaktorer och bromskontaktorer. Vid bromsning vänder mjukstartaren
fassekvensen till motorn och tillhandahåller reducerad ström, vilket bromsar belastningen mjukt.
När motorvarvtalet närmar sig noll, stoppar den externa nollhastighetsgivaren (A2) mjukstartaren och öppnar bromskontaktorn (K2).
Mjukbromsning kan användas med både primära och sekundära motorinställningar och måste konfigureras för båda.
Parameterinställningar:
• Parameter 2-9 Stop Mode (Stoppläge): Ställ in till Soft Brake (Mjukbroms).
• Parameter 2-17 Brake Current Limit (Strömgräns för broms): Ställ in lämpligt värde för att bromsa lasten.
• Parameter 2-18 Soft Brake Delay (Mjukbromsfördröjning): Styr hur länge mjukstartaren väntar innan den försörjer motorn med
bromsström efter att en stoppsignal har tagits emot. Ställ in så att K1 och K2 får tid att växla.
• Parameter 7-1 Input A Function (Ingång A, funktion): Ställ in till Zero Speed Sensor (Nollhastighetsgivare).
• Parameter 8-1 Relay A Function (Relä A, funktion): Ställ in till Soft Brake Relay (Mjukbromsrelä).
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 65
Page 66

M1
22 21
K2 K1
K2 K1
4/T2
6/T3
1/L1
3/L2
5/L3
2/T1
A7 A8 A9
COM+
DI-A
23
A2
e77ha729.10
1
2
3
5
4
Handbok | VLT® Soft Starter MCD 600
Drift
1 Trefasförsörjning
2 Motorplintar
3 Reläutgång A
4 Försörjning via K1-/K2-spole
5 Programmerbar ingång A
K1 Nätkontaktor (kör)
K2 Nätkontaktor (broms)
A2 Nollhastighetsgivare
Bild 33: Exempel på kabeldragning för mjukbromsning
9.10 Pumprengöring
Mjukstartaren kan utgöra en pumprengöring innan den mjukstartar motorn. Det kan hjälpa till att ta bort smuts från impellern.
Pumprengöringen kör först motorn i omvänd riktning, därefter i framåtriktning och stoppar till sist motorn. Pumprengöringen kan
konfigureras till att upprepa processen upp till fem gånger. När det angivna antalet rengöringscykler är slutförda utför mjukstartaren
den programmerade mjukstarten.
Pumprengöringen styrs av start-/stoppingången (START, COM+). Ställ in en programmerbar ingång till pumprengöring (mer
information finns under parameter 7-1 Input A Function (Ingång A, funktion)). Säkerställ att ingången är stängd när startsignalen skickas.
66 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 67

300
200
100
400
50
25
0
e77ha787.10
2
4
8
6
1
7
5
3
Reverse torque/
Forward current (%FLC)
Current
Torque
Time
Handbok | VLT® Soft Starter MCD 600
OB S!
Aktivera inte pumprengöring för pumpar som inte kan köras i omvänd riktning.
Drift
1 Parameter 11-1 Reverse Torque (Moment för omvänd drift)
2 Parameter 11-2 Reverse Time (Tid för omvänd drift)
3 Parameter 11-3 Forward Current Limit (Strömgräns för framåtdrift)
4 Parameter 11-4 Forward Time (Tid för framåtdrift)
5 Parameter 11-6 Pump Stop Time (Tid för pumpstopp)
6 Rengöringscykel
7 Parameter 11-7 Pump Clean Cycles (Pumprengöringscykler)
8 Programmerad mjukstart
Bild 34: Pumprengöring
9.11 Drift i omvänd riktning
Mjukstartaren kan styra en kontaktor för omvänd drift för att driva motorn i omvänd riktning. När drift i omvänd riktning är valt utför
mjukstartaren en mjukstart med omvänd fassekvens.
Omvänd drift styrs av start-/stoppingången (START, COM+). Ställ in en programmerbar ingång till omvänd riktning (parameter 7-1 Input
A Function (Ingång A, funktion)) och ställ in en utgång till kontaktor för omvänd drift (parameter 8-1 Relay A Function (Relä A, funktion)).
Ingången måste vara stängd när startsignalen skickas. Mjukstartaren håller det omvända reläet i samma läge tills slutet på start/stoppcykeln.
Den första starten efter omriktningen kommer att vara konstant ström.
Danfoss A/S © 2018.10
OB S!
AQ262141844215sv-000201 / 175R1174| 67
Page 68

M
22
21
K2
K1
K2 K1
4/T2
6/T3
1/L1
3/L2
5/L3
2/T1
A1 A2
A3
COM+
DI-A
23
e77ha795.10
1
2
4
3
5
Handbok | VLT® Soft Starter MCD 600
OB S!
Om fassekvensskydd behövs ska kontaktorn för omvänd drift installeras på mjukstartaren utgångssida (motor).
Drift
1 Trefasförsörjning
2 Motorplintar
3 Programmerbar ingång A (inställning: Omvänd riktning)
4 Reläutgång A (inställning: Kontaktor för omvänd drift)
5 Försörjning via K1-/K2-spole
K1 Framåtkontaktor
K2 Kontaktor för omvänd drift
Bild 35: Anslutningsschema
9.12 Joggdrift
Jogg kör motorn med reducerad hastighet för att tillåta uppriktning av lasten eller för service. Motorn kan joggas i framåtriktning eller i
omvänd riktning.
Jogg är endast tillgängligt när mjukstartaren styrs via de digitala ingångarna (parameter 1-1 Command Source (Kommandokälla) som är
inställda till Digital Input (Digital ingång)). Ställ in en programmerbar ingång till Jog (Jogg) för joggdrift (mer information finns under
parameter 7-1 Input A Function (Ingång A, funktion)). Säkerställ att ingången är stängd när startsignalen skickas.
68 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 69

e77ha512.12
3
2
1
70
60
50
30
10
40
20
80
90
100
0
%
Available torque
Handbok | VLT® Soft Starter MCD 600
Drift
OB S!
REDUCERADD MOTORKYLNING
Körning med lågt varvtal är inte avsett för kontinuerlig drift på grund av reducerad motorkylning. Joggning gör att motorn
värms upp snabbare än den hastighet som beräknas i den termiska motormodellen.
Installera en motortermistor eller tillåt tillräcklig omstartsfördröjning (parameter 5-16 Restart Delay (Omstartsfördröjning)).
-
Maximalt tillgängligt vridmoment för jogg i framåtriktning är cirka 50–75 % av motorns hela belastningsmoment, beroende på motor.
När motorn joggas i omvänd riktning är vridmomentet cirka 25–50 % av hela belastningsmomentet.
Parameter 2-8 Jog Torque (Joggvridmoment) och parameter 3-10 Jog Torque-2 (Joggvridmoment-2) styr hur mycket av det tillgängliga
joggvridmomentet som mjukstartaren tillämpar mot motorn.
OB S!
Vridmomentsinställningar över 50 % kan orsaka ökad axelvibration.
1 Motorns hela belastningsmomentet
2 Jogg i framåtriktning, maximalt vridmoment
3 Jogg i omvänd riktning, maximalt vridmoment
Bild 36: Tillgängligt vridmoment i joggdrift
9.13 Inside Delta-drift
Vid anslutning i Inside Delta ska märkströmmen anges i parameter 1-2 Motor Full Load Current (Motorns märkström). Mjukstartaren
registrerar automatiskt om motorn är ansluten in-line eller Inside Delta och beräknar korrekt strömnivå för Inside Delta.
Funktionerna adaptiv styrning, jogg, broms och PowerThrough stöds inte med Inside Delta-drift (6 ledare). Om dessa funktioner är
programmerade när mjukstartaren är ansluten Inside Delta är egenskaperna enligt nedan.
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 69
Page 70

Handbok | VLT® Soft Starter MCD 600
Start med adaptiv styrning Mjukstartaren utför en konstant strömstart.
Stopp med adaptiv styrning Mjukstartaren utför ett TVR-mjukstopp om parameter 2-10 Stop Time (Stopptid) är > 0 s. Om parameter
2-10 Stop Time (Stopptid) är inställd till 0 s utför mjukstartaren ett utrullningsstopp.
Jogg Mjukstartaren utfärdar en varning med felmeddelandet Unsupported option (Alternativet stöds inte).
DC-broms Mjukstartaren utför ett utrullningsstopp.
Mjukbroms Mjukstartaren utför ett utrullningsstopp.
PowerThrough Mjukstartaren trippar med felmeddelandet Lx-Tx Shorted (Lx-Tx kortslutning).
OB S!
Vid anslutning i Inside Delta registrerar mjukstartaren inte fasbortfall på T2 vid drift.
OB S!
Använd parameter 20-6 Motor Connection (Motoranslutning) om mjukstartaren inte registrerar motoranslutningen korrekt.
Drift
9.14 Sekundär motorinställning
Mjukstartaren kan programmeras med två separata start- och stopprofiler. Detta gör att mjukstartaren kan styra motorn i två olika
start- och stoppkonfigurationer. Den sekundära motorinställningen är ideal för motorer med dubbel lindning (Dahlander) eller
situationer där motorn kan starta i två olika förhållanden (som lastade och olastade transportbanor). Den sekundära
motorinställningen kan också användas för drift- eller standby-tillämpningar.
OB S!
För drift- eller standby-tillämpningar ställer du in parameter 6-17 Motor Overtemperature (Överhettning av motor) till Log Only
(Endast logg) och installerar temperaturskydd för varje motor.
Ställ in en programmerbar ingång till Motor Set Select (Val av motorinställning) för att använda den sekundära motorinställningen.
Ingången måste vara stängd när ett startkommando skickas (se parameter 7-1 Input A Function (Ingång A, funktion) och parameter 7-5
Input B Function (Ingång B, funktion)). Mjukstartaren kontrollerar vilken motorinställning som ska användas vid start och använder den
motorinställningen under hela start/stopp-cykeln.
Mjukstartaren använder den sekundära motorinställningen till att styra en start när det meddelas via en programmerbar ingång (se
parameter 7-1 Input A Function (Ingång A, funktion) och parameter 7-5 Input B Function (Ingång B, funktion)).
OB S!
Motorns termiska modell är inte lika korrekt om mjukstartaren styr två separata motorer.
70 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 71

Handbok | VLT® Soft Starter MCD 600
Programmerbara parametrar
10 Programmerbara parametrar
10.1 Huvudmeny
Med huvudmenyn kan du läsa av och ändra programmerbara parametrar som styr hur mjukstartaren fungerar.
Tryck på [Main Menu] för att öppna huvudmenyn.
10.2 Ändra parametervärden
Procedur
1. Bläddra till parametern i huvudmenyn.
2. Tryck på [Menu/Store] för att växla till redigeringsläge.
3. Använd [▵] och [▿] för att ändra parameterinställningar.
För varje gång du trycker på [▵] eller [▿] ökar eller minskar värdet med 1 enhet. Om du håller knappen intryckt i mer än 5 sekunder
ökar eller minskar värdet snabbare.
Tryck på [Store] för att spara ändringarna. Inställningen som visas på displayen sparas och LCP:n återgår till parameterlistan.
Tryck på [Back] för att avbryta ändringarna. LCP:n ber dig bekräfta och återgår sedan till parameterlistan utan att spara ändringarna.
10.3 Justeringslås
Använd parameter 10-7 Adjustment Lock (Justeringslås) för att hindra användare från att ändra parameterinställningar.
Om en användare försöker ändra ett parametervärde när justeringslåset är aktivt visas felmeddelandet Access Denied. Adj Lock is On
(Åtkomst nekad. Aktivt justeringslås.).
10.4 Parameterlista
Tabell 19: Parameterlista
Parametergruppnumer
1 Motor Details (Motorinformation)
1-1 Command Source (Kommandokälla) Digital Input (Digital ingång)
1-2 Motor Full Load Current (Motorns märkström) Modellberoende
1-3 Motor kW (Motoreffekt (kW)) 0 kW
1-4 Locked Rotor Time (Låst rotortid) 00:10 (mm:ss)
1-5 Locked Rotor Current (Låst rotorström) 600%
1-6 Motor Service Factor (Motorns servicefaktor) 105%
Parametergruppnamn Standardinställning
1-7 Reserved (Reserverad) –
2 Motor Start/Stop (Motorstart/-stopp)
2-1 Start Mode (Startläge) Constant Current (Konstant ström)
2-2 Start Ramp Time (Startramptid) 00:10 (mm:ss)
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 71
Page 72

Handbok | VLT® Soft Starter MCD 600
Programmerbara parametrar
Parametergruppnumer
2-3 Initial Current (Initial ström) 200%
2-4 Current Limit (Strömgräns) 350%
2-5 Adaptive Start Profile (Adaptiv startprofil) Konstant acceleration
2-6 Kickstart Time (Kickstarttid) 000 ms
2-7 Kickstart Level (Kickstartnivå) 500%
2-8 Jog Torque (Joggvridmoment) 50%
2-9 Stop Mode (Stoppläge) TVR-mjukstopp
2-10 Stop Time (Stopptid) 00:00 (mm:ss)
2-11 Adaptive Stop Profile (Adaptiv stopprofil) Constant Deceleration (Konstant deceleration)
2-12 Adaptiv styrförstärkning (Adaptiv styrförstärkning) 75%
2-13 Multi Pump (Flera pumpar) Single Pump (En pump)
2-14 Start Delay (Startfördröjning) 00:00 (mm:ss)
2-15 DC Brake Torque (DC-bromsvridmoment) 20%
2-16 DC Brake Time (DC-bromstid) 00:01 (mm:ss)
2-17 Brake Current Limit (Strömgräns för broms) 250%
Parametergruppnamn Standardinställning
2-18 Soft Brake Delay (Mjukbromsfördröjning) 400 ms
3 Motor Start/Stop 2 (Motorstart/-stopp 2)
3-1 Motor Full Load Current-2 (Motorns märkström-2) Modellberoende
3-2 Motor kW-2 (Motoreffekt-2 (kW)) 0 kW
3-3 Start Mode-2 (Startläge-2) Constant Current (Konstant ström)
3-4 Start Ramp Time-2 (Startramptid-2) 00:10 (mm:ss)
3-5 Initial Current-2 (Initial ström-2) 200%
3-6 Current Limit-2 (Strömgräns-2) 350%
3-7 Adaptive Start Profile-2 (Adaptiv startprofil-2) Constant Acceleration (Konstant acceleration)
3-8 Kickstart Time-2 (Kickstarttid-2) 000 ms
3-9 Kickstart Level-2 (Kickstartnivå-2) 500%
3-10 Jog Torque-2 (Joggvridmoment-2) 50%
3-11 Stop Mode-2 (Stoppläge-2) TVR Soft Stop (TVR-mjukstopp)
3-12 Stopptid-2 (Stopptid-2) 00:00 (mm:ss)
3-13 Adaptiv stopprofil-2 (Adaptiv stopprofil-2) Constant Deceleration (Konstant deceleration)
3-14 Adaptive Control Gain-2 (Adaptiv styrförstärkning-2) 75%
3-15 Multi Pump-2 (Flera pumpar-2) Single Pump (En pump)
3-16 Start Delay-2 (Startfördröjning-2) 00:00 (mm:ss)
3-17 DC Brake Torque-2 (DC-bromsvridmoment-2) 20%
72 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 73

Handbok | VLT® Soft Starter MCD 600
Programmerbara parametrar
Parametergruppnumer
3-18 DC Brake Time-2 (DC-bromstid-2) 00:01 (mm:ss)
3-19 Brake Current Limit-2 (Strömgräns för broms-2) 250%
3-20 Soft Brake Delay-2 (Mjukbromsfördröjning-2) 400 s
4 Auto-Start/Stop (Autostart/-stopp)
4-1 Auto-Start/Stop Mode (Läge för autostart/-stopp) Disable (Inaktivera)
4-2 Run Time (Körtid) 00:00 (hh:mm)
4-3 Stopped Time (Tid i stopp) 00:00 (hh:mm)
4-4 Sunday Mode (Söndagsläge) Start/Stop Disable (Inaktivera start/stopp)
4-5 Sunday Start Time (Starttid på söndagar) 00:00 (hh:mm)
4-6 Sunday Stop Time (Stopptid på söndagar) 00:00 (hh:mm)
4-7 Monday Mode (Måndagsläge) Start/Stop Disable (Inaktivera start/stopp)
4-8 Monday Start Time (Starttid på måndagar) 00:00 (hh:mm)
4-9 Monday Stop Time (Stopptid på måndagar) 00:00 (hh:mm)
4-10 Tuesday Mode (Tisdagsläge) Start/Stop Disable (Inaktivera start/stopp)
4-11 Tuesday Start Time (Starttid på tisdagar) 00:00 (hh:mm)
Parametergruppnamn Standardinställning
4-12 Tuesday Stop Time (Stopptid på tisdagar) 00:00 (hh:mm)
4-13 Wednesday Mode (Onsdagsläge) Start/Stop Disable (Inaktivera start/stopp)
4-14 Wednesday Start Time (Starttid på onsdagar) 00:00 (hh:mm)
4-15 Wednesday Stop Time (Stopptid på onsdagar) 00:00 (hh:mm)
4-16 Thursday Mode (Torsdagsläge) Start/Stop Disable (Inaktivera start/stopp)
4-17 Thursday Start Time (Starttid på torsdagar) 00:00 (hh:mm)
4-18 Thursday Stop Time (Stopptid på torsdagar) 00:00 (hh:mm)
4-19 Friday Mode (Fredagsläge) Start/Stop Disable (Inaktivera start/stopp)
4-20 Fridday Start Time (Starttid på fredagar) 00:00 (hh:mm)
4-21 Friday Stop Time (Stopptid på fredagar) 00:00 (hh:mm)
4-22 Saturday Mode (Lördagsläge) Start/Stop Disable (Inaktivera start/stopp)
4-23 Saturday Start Time (Starttid på lördagar) 00:00 (hh:mm)
4-24 Saturday Stop Time (Stopptid på lördagar) 00:00 (hh:mm)
5 Protection Levels (Skyddsnivåer)
5-1 Strömobalans 30%
5-2 Current Imbalance Delay (Fördröjning vid strömobalans) 00:03 (mm:ss)
5-3 Undercurrent (Underström) 20%
5-4 Undercurrent Delay (Fördröjning vid underström) 00:05 (mm:ss)
5-5 Overcurrent (Överström) 400%
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 73
Page 74

Handbok | VLT® Soft Starter MCD 600
Programmerbara parametrar
Parametergruppnumer
5-6 Overcurrent Delay (Fördröjning vid överström) 00:00 (mm:ss)
5-7 Undervoltage (Underspänning) 350 V
5-8 Undervoltage Delay (Fördröjning vid underspänning) 00:01 (mm:ss)
5-9 Overvoltage (Överspänning) 500 V
5-10 Overvoltage Delay (Fördröjning vid överspänning) 00:01 (mm:ss)
5-11 Underpower (För låg effekt) 10%
5-12 Underpower Delay (Fördröjning vid för låg effekt) 00:01 (mm:ss)
5-13 Overpower (För hög effekt) 150%
5-14 Overpower Delay (Fördröjning vid för hög effekt) 00:01 (mm:ss)
5-15 Excess Start Time (Överskjutande starttid) 00:20 (mm:ss)
5-16 Restart Delay (Omstartsfördröjning) 00:10 (mm:ss)
5-17 Starts per Hour (Starter per timme) 0
5-18 Phase Sequence (Fassekvens) Any Sequence (Alla sekvenser)
6 Alla sekvenser (Skyddsåtgärder)
6-1 Auto-Reset Count (Antal automatiska återställningar) 0
Parametergruppnamn Standardinställning
6-2 Auto-Reset Delay (Fördröjning av automatisk återställning) 00:05 (mm:ss)
6-3 Strömobalans Soft Trip and Log (Mjuktripp och logg)
6-4 Undercurrent (Underström) Soft Trip and Log (Mjuktripp och logg)
6-5 Overcurrent (Överström) Soft Trip and Log (Mjuktripp och logg)
6-6 Undervoltage (Underspänning) Soft Trip and Log (Mjuktripp och logg)
6-7 Overvoltage (Överspänning) Soft Trip and Log (Mjuktripp och logg)
6-8 Underpower (För låg effekt) Log Only (Endast logg)
6-9 Overpower (För hög effekt) Log Only (Endast logg)
6-10 Excess Start Time (Överskjutande starttid) Soft Trip and Log (Mjuktripp och logg)
6-11 Input A Trip (Ingång A, tripp) Soft Trip and Log (Mjuktripp och logg)
6-12 Input B Trip (Ingång B, tripp) Soft Trip and Log (Mjuktripp och logg)
6-13 Network Communications (Nätverkskommunikation) Soft Trip and Log (Mjuktripp och logg)
6-14 Remote Keypad Fault (Fel på fjärrknappsats) Soft Trip and Log (Mjuktripp och logg)
6-15 Frequency (Frekvens) Soft Trip and Log (Mjuktripp och logg)
6-16 Phase Sequence (Fassekvens) Soft Trip and Log (Mjuktripp och logg)
6-17 Motor Overtemperature (Överhettning av motor) Soft Trip and Log (Mjuktripp och logg)
6-18 Motor Thermistor Circuit (Motorns termistorkrets) Soft Trip and Log (Mjuktripp och logg)
6-19 Shorted SCR Action (Åtgärd vid kortslutet SCR-relä) 3-phase Control Only (Endast trefasstyrning)
6-20 Battery/Clock (Batteri/klocka) Soft Trip and Log (Mjuktripp och logg)
74 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 75

Handbok | VLT® Soft Starter MCD 600
Programmerbara parametrar
Parametergruppnumer
7 Inputs (Ingångar)
7-1 Input A Function (Ingång A, funktion) Input Trip (N/O) (Ingångstripp (normalt öp-
7-2 Input A Trip (Ingång A, tripp) Operating Only (Endast drift)
7-3 Input A Trip Delay (Ingång A, trippfördröjning) 00:00 (mm:ss)
7-4 Input A Initial Delay (Ingång A, initial fördröjning) 00:00 (mm:ss)
7-5 Input B Function (Ingång B, funktion) Input Trip (N/O) (Ingångstripp (normalt öp-
7-6 Input B Trip (Ingång B, tripp) Operating Only (Endast drift)
7-7 Input B Trip Delay (Ingång B, trippfördröjning) 00:00 (mm:ss)
7-8 Input B Initial Delay (Ingång B, initial fördröjning) 00:00 (mm:ss)
7-9 Reset/Enable Logic (Återställ/aktivera logik) Normalt stängd (N/C)
7-10 Input A Name (Ingång A, namn) Input A Trip (Ingång A, tripp)
7-11 Input B Name (Ingång B, namn) Input B Trip (Ingång B, tripp)
8 Relay Outputs (Reläutgångar)
8-1 Relay A Function (Relä A, funktion) Run (Kör)
Parametergruppnamn Standardinställning
pen))
pen))
8-2 Relay A On Delay (Relä A, Till-fördröjning) 00:00 (mm:ss)
8-3 Relay A Off Delay (Relä A, Från-fördröjning) 00:00 (mm:ss)
8-4 Relay B Function (Relä B, funktion) Run (Kör)
8-5 Relay B On Delay (Relä B, Till-fördröjning) 00:00 (mm:ss)
8-6 Relay B Off Delay (Relä B, Från-fördröjning) 00:00 (mm:ss)
8-7 Low Current Flag (Indikering av låg ström) 50%
8-8 High Current Flag (Indikering av hög ström) 100%
8-9 Motor Temperature Flag (Indikering av motortemperatur) 80%
8-10 Main Contactor Time (Huvudkontaktortid) 400 ms
9 Analog Output (Analog utgång)
9-1 Analog Output A (Analog utgång A) Current (% FLC) (Ström (% märkström))
9-2 Analog A Scale (Analog A, skala) 4–20 mA
9-3 Analog A Maximum Adjustment (Analog A, maximal jus-
tering)
9-4 Analog A Minimum Adjustment (Analog A, minimal juster-
ing)
10 Display
10-1 Language (Språk) English (Engelska)
100%
000%
10-2 Temperature Scale (Temperaturskala) Celsius
10-3 Graph Timebase (Diagramuppdatering) 30 s
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 75
Page 76

Handbok | VLT® Soft Starter MCD 600
Programmerbara parametrar
Parametergruppnumer
10-4 Graph Maximum Adjustment (Diagram, maximal justering) 400%
10-5 Graph Minimum Adjustment (Diagram, minimal justering) 0%
10-6 Current Calibration (Strömkalibrering) 100%
10-7 Adjustment Lock (Justeringslås) Read & Write (Läs och skriv)
10-8 User Parameter 1 (Användarparameter 1) Current (Ström)
10-9 User Parameter 2 (Användarparameter 2) Motor Voltage (Motorspänning)
10-10 User Parameter 3 (Användarparameter 3) Mains Frequency (Nätfrekvens)
10-11 User Parameter 4 (Användarparameter 4) Motor pf (Motorns effektfaktor)
10-12 User Parameter 5 (Användarparameter 5) Motor Power (Motoreffekt)
10-13 User Parameter 6 (Användarparameter 6) Motor Temp (%) (Motortemperatur (%))
11 Pump Clean (Pumprengöring)
11-1 Reverse Torque (Moment för omvänd drift) 20%
11-2 Reverse Time (Tid för omvänd drift) 00:10 (mm:ss)
11-3 Forward Current Limit (Strömgräns för framåtdrift) 100%
11-4 Forward Time (Tid för framåtdrift) 00:10 (mm:ss)
Parametergruppnamn Standardinställning
11-5 Pump Stop Mode (Läge för pumpstopp) Coast to Stop (Utrullningsstopp)
11-6 Pump Stop Time (Tid för pumpstopp) 00:10 (mm:ss)
11-7 Pump Clean Cycles (Pumprengöringscykler) 1
12 Communication Card (Kommunikationskort)
12-1 Modbus Address (Modbus-adress) 1
12-2 Modbus Baud Rate (Modbus baudhastighet) 9600
12-3 Modbus Parity (Modbus paritet) None (Ingen)
12-4 Modbus Timeout (Tidsgräns för Modbus) Off (Av)
12-5 Devicenet Address (DeviceNet-adress) 0
12-6 Devicenet Baud Rate (DeviceNet baudhastighet) 125 kB
12-7 PROFIBUS Address (PROFIBUS-adress) 1
12-8 Gateway Address (Gateway-adress) 192
12-9 Gateway Address 2 (Gateway-adress 2) 168
12-10 Gateway Address 3 (Gateway-adress 3) 0
12-11 Gateway Address 4 (Gateway-adress 4) 100
12-12 IP Address (IP-adress) 192
12-13 IP Address 2 (IP-adress 2) 168
12-14 IP Address 3 (IP-adress 3) 0
12-15 IP Address 4 (IP-adress 4) 2
76 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 77

Handbok | VLT® Soft Starter MCD 600
Programmerbara parametrar
Parametergruppnumer
12-16 Subnet Mask (Subnätsmask) 255
12-17 Subnet Mask 2 (Subnätsmask 2) 255
12-18 Subnet Mask 3 (Subnätsmask 3) 255
12-19 Subnet Mask 4 (Subnätsmask 4) 0
12-20 DHCP Disable (Inaktivera)
12-21 Location ID (Plats-ID) 0
20 Advanced (Avancerat)
20-1 Tracking Gain (Spårningsförstärkning) 50%
20-2 Pedestal Detect (Piedestaldetektering) 80%
20-3 Bypass Contactor Delay (Fördröjning av förbikoppling-
20-4 Model Rating (Modellklassificering) Modellberoende
20-5 Screen Timeout (Tidsgräns för skärm) 1 minut
20-6 Motor Connection (Motoranslutning) Automatisk detektering
30 Pump Input Configuration (Konfiguration av pumpin-
Parametergruppnamn Standardinställning
150 ms
skontaktor)
gång)
30-1 Pressure Sensor Type (Tryckgivartyp) None (Ingen)
30-2 Pressure Units (Enhet för tryck) kPa
30-3 Pressure at 4 mA (Tryck vid 4 mA) 0
30-4 Pressure at 20 mA (Tryck vid 20 mA) 0
30-5 Flow Sensor Type (Flödesgivartyp) None (Ingen)
30-6 Flow Units (Enhet för flöde) liter/sekund
30-7 Flow at 4 mA (Flöde vid 4 mA) 0
30-8 Flow at 20 mA (Flöde vid 20 mA) 0
30-9 Units per Minute at Max Flow (Enheter per minut vid maxi-
malt flöde)
30-10 Pulses per Minute at Max Flow (Pulser per minut vid maxi-
malt flöde)
30-11 Units per Pulse (Enheter per puls) 0
30-12 Depth Sensor Type (Djupgivartyp) None (Ingen)
30-13 Depth Units (Enheter för djup) meter
30-14 Depth at 4 mA (Djup vid 4 mA) 0
30-15 Depth at 20 mA (Djup vid 20 mA) 0
31 Flow Protection (Flödesskydd)
0
0
31A High Flow Trip Level (Trippnivå för högt flöde) 10
31B Low Flow Trip Level (Trippnivå för lågt flöde) 5
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 77
Page 78

Handbok | VLT® Soft Starter MCD 600
Programmerbara parametrar
Parametergruppnumer
31C Flow Start Delay (Startfördröjning vid flöde) 00:00:500 (mm:ss:ms)
31D Flow Response Delay (Svarsfördröjning vid flöde) 00:00:500 (mm:ss:ms)
32 Pressure Protection (Tryckskydd)
32-1 High Pressure Trip Level (Trippnivå för högt tryck) 10
32-2 High Pressure Start Delay (Startfördröjning vid högt tryck) 00:00:500 (mm:ss:ms)
32-3 High Pressure Response Delay (Svarsfördröjning vid högt
32-4 Low Pressure Trip Level (Trippnivå för lågt tryck) 5
32-5 Low Pressure Start Delay (Startfördröjning vid lågt tryck) 00:00:500 (mm:ss:ms)
32-6 Low Pressure Response Delay (Svarsfördröjning vid lågt
33 Pressure Control (Tryckstyrning)
33-1 Pressure Control Mode (Läge för tryckstyrning) Off (Av)
33-2 Start Pressure Level (Trycknivå vid start) 5
33-3 Start Response Delay (Startfördröjning) 00:00:500 (mm:ss:ms)
33-4 Stop Pressure Level (Trycknivå vid stopp) 10
Parametergruppnamn Standardinställning
00:00:500 (mm:ss:ms)
tryck)
00:00:500 (mm:ss:ms)
tryck)
33-5 Stop Response Delay (Stoppfördröjning) 00:00:500 (mm:ss:ms)
34 Depth Protection (Djupskydd)
34-1 Depth Trip Level (Trippnivå för djup) 5
34-2 Depth Reset Level (Djupnivå vid återställning) 10
34-3 Depth Start Delay (Startfördröjning vid djup) 00:00:500 (mm:ss:ms)
34-4 Depth Response Delay (Svarsfördröjning vid djup) 00:00:500 (mm:ss:ms)
35 Thermal Protection (Termiskt skydd)
35-1 Temperature Sensor Type (Temperaturgivartyp) None (Ingen)
35-2 Temperature Trip Level (Trippnivå för temperatur) 40
36 Pump Trip Action (Åtgärd vid pumptripp)
36-1 Pressure Sensor (Tryckgivare) Soft Trip and Log (Mjuktripp och logg)
36-2 Flow Sensor (Flödesgivare) Soft Trip and Log (Mjuktripp och logg)
36-3 Depth Sensor (Djupgivare) Soft Trip and Log (Mjuktripp och logg)
36-4 High Pressure (Högt tryck) Soft Trip and Log (Mjuktripp och logg)
36-5 Low Pressure (Lågt tryck) Soft Trip and Log (Mjuktripp och logg)
36-6 High Flow (Högt flöde) Soft Trip and Log (Mjuktripp och logg)
36-7 Low Flow (Lågt flöde) Soft Trip and Log (Mjuktripp och logg)
36-8 Flow Switch (Flödesbrytare) Soft Trip and Log (Mjuktripp och logg)
36-9 Well Depth (Brunnsdjup) Soft Trip and Log (Mjuktripp och logg)
78 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 79

Handbok | VLT® Soft Starter MCD 600
Programmerbara parametrar
Parametergrupp-
Parametergruppnamn Standardinställning
numer
36-10 RTD/PT100 B Soft Trip and Log (Mjuktripp och logg)
10.5 Parametergrupp 1-** Motor Details (Motorinformation)
Tabell 20: 1-1 - Command Source (Kommandokälla)
Alternativ Funktion
Anger vilken kommandokälla som används för att styra mjukstartaren.
* Digital ingång Mjukstartaren tar emot start- och stoppkommandon från de digitala ingångarna.
Network (Åsidosätt
kommando: Nätverk)
Remote LCP (Fjärr-LCP) Mjukstartaren tar emot start- och stoppkommandon från fjärr-LCP:n.
Clock (Klocka) Mjukstartaren tar emot starter och stopp enligt schemat i parameter 4-1 till 4-24.
Smart card Mjukstartaren tar emot start- och stoppkommandon från ett smart card.
Smart card + clock
(Smart card + klocka)
Timer När en startsignal tas emot startar och stoppar mjukstartaren motorn i enlighet med timerna som
Mjukstartaren tar emot start- och stoppkommandon från expansionskortet för kommunikation.
Mjukstartaren tar emot startkommandon från ett smart card om de ligger inom driftschemat i pa-
rameter 4-1 till 4-24. Ett stoppkommando från ett smart card tas emot oberoende av schemat.
ställts in i parameter 4-2 Run Time (Körtid) och parameter 4-3 Stopped Time (Tid i stopp).
Tabell 21: 1-2 Motor Full Load Current (Motorns märkström)
Område Funktion
Modellberoende Matchar mjukstartaren med motorns märkström. Ställ in efter märkströmmen som visas på motorns märks-
kylt.
Tabell 22: 1-3 Motor kW (Motoreffekt (kW))
Område Funktion
*0 0–9 999 kW Anger den anslutna motorns effekt i kW. Den här inställningen ligger som grund för effektrapportering och -
skydd.
Tabell 23: 1-4 Locked Rotor Time (Låst rotortid)
Område Funktion
*10 s 0:01–2:00 (minuter:sekun-
der)
Tabell 24: 1-5 Locked Rotor Current (Låst rotorström)
Anger hur länge som motorn som längst kan köras på låst rotorström (från kall) innan den når
maximal temperatur. Ställ in enligt motorns datablad.
Område Funktion
*600% 400–1 200 % märks-
tröm
Anger den anslutna motorns låsta rotoström som en procentsats av motorns märkström. Ställ
in enligt motorns datablad.
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 79
Page 80

Handbok | VLT® Soft Starter MCD 600
Tabell 25: 1-6 Motor Service Factor (Motorns servicefaktor)
Område Funktion
Programmerbara parametrar
*105% 100–
130%
Anger motorns servicefaktor som används av den termiska modellen. Om motorn körs med märkström är faktorn 100 %. Ställ in enligt motorns datablad.
OB S!
Parameter 1-4 till 1-6 fastställer trippströmmen för överbelastningsskydd för motor. Standardinställningarna i parameter 1-4 till 1-6 har överbelastningsskydd för motor: klass 10, trippström 105 % av FLA
(strömstyrka vid full belastning) eller motsvarande.
Tabell 26: 1-7 Reserved (Reserverad)
Område Funktion
Den här parametern är reserverad för framtida användning.
10.6 Parametergrupp 2-** Motor Start/Stop (Motorstart/-stopp)
Tabell 27: 2-1 - (Start Mode) Startläge
Alternativ Funktion
Anger mjukstartsläge.
OB S!
VLT® Soft Starter MCD 600 tillämpar strömgränsen för alla mjukstarter, inklusive adaptiv styrning.
Motorn kanske inte kan starta om strömgränsen är för låg eller om startramptiden (parameter 2-2
Start Ramp Time Startramptid)) är för kort.
* Konstant ström
Adaptiv styrning
Tabell 28: 2-2 - Start Ramp Time (Startramptid)
Område Funktion
* 10 s 0:01–3:00 (minuter:sekunder) Anger den totala starttiden för adaptiv styrning eller ramptid för strömrampstart (från ini-
tial ström tilll strömgräns).
Tabell 29: 2-3 - Initial Current (Initial ström)
Område Funktion
*200% 100–600 %
märkström
Anger initialstartströmmen för strömrampstart som en procentsats av motorns märkström. Ställ in så
att motorn accelererar direkt efter det att starten har initierats. Om det inte krävs en strömrampstart
ställs initialströmmen in på samma värde som strömgränsen.
80 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 81

Handbok | VLT® Soft Starter MCD 600
Tabell 30: 2-4 - Current Limit (Strömgräns)
Område Funktion
* 350% 100–600 % märkström Anger strömgränsen för konstant ström och strömrampmjukstart, som en procentsats av mo-
torns märkström.
Tabell 31: 2-5 - Adaptive Start Profile (Adaptiv startprofil)
Alternativ Funktion
Anger vilken profil VLT® Soft Starter MCD 600 använder för en mjukstart med adaptiv styrning.
Programmerbara parametrar
OB S!
MCD 600 tillämpar strömgränsen för alla mjukstarter, inklusive adaptiv styrning. Motorn kanske
inte kan starta om strömgränsen är för låg eller om startramptiden (parameter 2-2 Start Ramp
Time Startramptid)) är för kort.
Tidig acceleration
* Konstant acceleration
Sen acceleration
Tabell 32: 2-6 - Kickstart Time (Kickstarttid)
Område Funktion
*0000 ms 0–2 000 ms Anger kickstartens längd En inställning på 0 inaktiverar kickstarten.
Tabell 33: 2G - Kickstart Level (Kickstartnivå)
Område Funktion
* 500% 100–700 %
märkström
Anger nivån på kickstartströmmen.
OB S!
Kickstart tvingar den mekaniska utrustning av öka momentnivån. Kontrollera att motorn, last
och kopplingar kan hantera det extra vridmomentet innan den här funktionen används.
Tabell 34: 2-8 - Jog Torque (Joggvridmoment)
Område Funktion
* 50% 20–100% VLT® Soft Starter MCD 600 kan jogga motorn till ett reducerat varvtal, vilket möjliggör exakt positionering av
remmar och svänghjul. Motorn kan joggas i framåriktning elleri omvänd riktning.
Anger strömgränsen för joggdrift.
Tabell 35: 2-9 - Stop Mode (Stoppläge)
Alternativ Funktion
Anger stoppläge.
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 81
Page 82

Handbok | VLT® Soft Starter MCD 600
Alternativ Funktion
Utrullningsstopp
* TVR-mjukstopp
Adaptiv styrning
DC-broms
Mjukbroms
Tabell 36: 2-10 - Stop Time (Stopptid)
Område Funktion
Programmerbara parametrar
* 0 s 0:00–4:00 (mi-
nuter:sekunder)
Anger tiden för mjukstopp av motorn med tidsstyrd spänningsramp (TVR) eller adaptiv styrning. Om
en huvudkontaktor används måste den hållas stängd tills slutet av stopptiden. Använd huvudkontaktorutgången (13, 14) för att styra huvudkontaktorn.
Tabell 37: 2-11 - Adaptive Stop Profile (Adaptiv stopprofil)
Alternativ Funktion
Anger vilken profil VLT® Soft Starter MCD 600 använder för en mjukstart med adaptiv styrning.
Tidig deceleration
* Konstant deceleration
Sen deceleration
Tabell 38: 2-12 - Adaptiv styrförstärkning (Adaptiv styrförstärkning)
Område Funktion
* 75% 1–200% Justerar adaptiv styrning. Den här inställningen påverkar styrningen av både start och stopp.
Tabell 39: 2-13 - Multi Pump (Flera pumpar)
Alternativ Funktion
Justerar adaptiv styrning för att passa installationer där flera pumpar är anslutna till en
gemensam utgång med ett grenrör.
* Single Pump (En pump)
Manifold Pump (Pump med grenrör)
Tabell 40: 2-14 - Start Delay (Startfördröjning)
Område Funktion
* 0 s 0:00–60:00 (minuter:sekunder) Skapar en fördröjning mellan att mjukstartaren tar emot ett startkommando och att mo-
torn startas.
82 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 83

Handbok | VLT® Soft Starter MCD 600
Tabell 41: 2-15 - DC Brake Torque (DC-bromsvridmoment)
Programmerbara parametrar
Område Funktion
* 20% 20–100% Anger bromsvridmomentet som mjukstartaren använder för att sakta ned motorn.
Tabell 42: 2-16 - DC Brake Time (DC-bromstid)
Område Funktion
* 1 s 0:01–0:30 (minuter:sekunder) Anger längden på DC-injektionen vid ett bromsstopp.
Tabell 43: 2-17- Brake Current Limit (Strömgräns för broms)
Område Funktion
* 250% 100–600 % märkström Anger strömgränsen för mjukbroms.
Tabell 44: 2-18 - Soft Brake Delay (Mjukbromsfördröjning)
Område Funktion
*400 ms 400–2 000 ms Anger hur länge mjukstartaren väntar innan den försörjer motorn med bromsström efter att en stop-
psignal har tagits emot. Ställ in så att K1 och K2 får tid att växla.
10.7 Parametergrupp 3-** Motor Start/Stop-2 (Motorstart/-stopp-2)
Parametrarna i den här gruppen styr den sekundära motorkonfigurationens drift. Använd den programmerbara ingången för att välja
aktiv motorinställning.
Mer information finns under 9.14 Sekundär motorinställning.
Tabell 45: 3-1 - Motor Full Load Current-2 (Motorns märkström-2)
Område Funktion
Modellberoende Anger den sekundära motormärkströmmen.
Tabell 46: 3-2 - Motor kW-2 (Motoreffekt-2 (kW))
Område Funktion
* 0 0–9 999 kW Anger den sekundära motoreffekten i kW.
Tabell 47: 3-3 - Start Mode-2 (Startläge-2)
Alternativ Funktion
Anger mjukstartsläge.
* Konstant ström
Adaptiv styrning
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 83
Page 84

Handbok | VLT® Soft Starter MCD 600
Tabell 48: 3-4 - Start Ramp Time-2 (Startramptid-2)
Programmerbara parametrar
Område Funktion
*10 s 0:01–3:00 (minuter:sekunder) Anger den totala starttiden för adaptiv styrning eller ramptid för strömrampstart (från ini-
tial ström tilll strömgräns).
Tabell 49: 3-5 - Initial Current-2 (Initial ström-2)
Område Funktion
*200% 100–600 %
märkström
Anger initialstartströmmen för strömrampstart som en procentsats av motorns märkström. Ställ in så
att motorn accelererar direkt efter det att starten har initierats. Om det inte krävs en strömrampstart
ställs initialströmmen in på samma värde som strömgränsen.
Tabell 50: 3-6 - Current Limit-2 (Strömgräns-2)
Område Funktion
*350% 100–600 %
märkström
Anger strömgränsen för konstant ström och strömrampmjukstart, som en procentsats av motorns märkström.
VLT® Soft Starter MCD 600 tillämpar strömgränsen för alla mjukstarter, inklusive adaptiv styrning.
Motorn kanske inte kan starta om strömgränsen är för låg eller om startramptiden (parameter 2-2
Start Ramp Time Startramptid)) är för kort.
Tabell 51: 3-7 - Adaptive Start Profile-2 (Adaptiv startprofil-2)
Alternativ Funktion
Anger vilken profil VLT® Soft Starter MCD 600 använder för en mjukstart med adaptiv styrning.
Tidig acceleration
* Konstant acceleration
OB S!
Sen acceleration
Tabell 52: 3-8 - Kickstart Time-2 (Kickstarttid-2)
Område Funktion
* 0000 ms 0–2 000 ms Anger kickstartens längd
En inställning på 0 inaktiverar kickstarten.
Tabell 53: 3-9 - Kickstart Level-2 (Kickstartnivå-2)
Område Funktion
*500% 100–700 % märkström Anger nivån på kickstartströmmen.
84 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 85

Handbok | VLT® Soft Starter MCD 600
Tabell 54: 3-10 - Jog Torque-2 (Joggvridmoment-2)
Område Funktion
*50% 20–100% Anger strömgränsen för joggdrift.
Tabell 55: 3-11 - Stop Mode-2 (Stoppläge-2)
Alternativ Funktion
Anger stoppläge.
Utrullningsstopp
* TVR-mjukstopp
Adaptiv styrning
DC-broms
Mjukbroms
Tabell 56: 3-12 - Stop Time-2 (Stopptid-2)
Programmerbara parametrar
Område Funktion
*0 s 0:00–4:00 (mi-
nuter:sekunder)
Anger tiden för mjukstopp av motorn med tidsstyrd spänningsramp (TVR) eller adaptiv styrning. Om
en huvudkontaktor används måste den hållas stängd tills slutet av stopptiden. Använd huvudkontaktorutgången (13, 14) för att styra huvudkontaktorn.
Tabell 57: 3-13 - Adaptive Stop Profile-2 (Adaptiv stopprofil-2)
Alternativ Funktion
Anger vilken profil mjukstartaren använder för en mjukstart med adaptiv styrning.
Tidig deceleration
* Konstant deceleration
Sen deceleration
Tabell 58: 3-14 - Adaptive Control Gain-2 (Adaptiv styrförstärkning-2)
Område Funktion
*75% 1–200% Justerar adaptiv styrning.
Den här inställningen påverkar styrningen av både start och stopp.
Tabell 59: 3-15 - Multi Pump-2 (Flera pumpar-2)
Alternativ Funktion
Justerar adaptiv styrning för att passa installationer där flera pumpar är anslutna till en
gemensam utgång med ett grenrör.
* Single Pump (En pump)
Manifold Pump (Pump med grenrör)
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 85
Page 86

Handbok | VLT® Soft Starter MCD 600
Tabell 60: 3-16 - Start Delay-2 (Startfördröjning-2)
Programmerbara parametrar
Område Funktion
* 0 s 0:00–60:00 (minuter:sekunder) Skapar en fördröjning mellan att startaren tar emot ett startkommando och att motorn
startas.
Tabell 61: 3-17 - DC Brake Torque-2 (DC-bromsvridmoment-2)
Område Funktion
*20% 20–100% Anger bromsvridmomentet som mjukstartaren använder för att sakta ned motorn.
Tabell 62: 3-18 - DC Brake Time-2 (DC-bromstid-2)
Område Funktion
*1 s 0:01–0:30 (minuter:sekunder) Anger längden på DC-injektionen vid ett bromsstopp.
Tabell 63: 3-19 - Brake Current Limit-2 (Strömgräns för broms-2)
Område Funktion
*250% 100–600 % märkström Anger strömgränsen för mjukbroms.
Tabell 64: 3-20 - Soft Brake Delay-2 (Mjukbromsfördröjning-2)
Område Funktion
*400 ms 400–2 000 ms Anger hur länge mjukstartaren väntar innan den försörjer motorn med bromsström efter att en stop-
psignal har tagits emot. Ställ in så att K1 och K2 får tid att växla.
10.8 Parametergrupp 4-** Auto-Start/Stop (Autostart/-stopp)
Tabell 65: 4-1 - Auto-Start/Stop Mode (Läge för autostart/-stopp)
Alternativ Funktion
Aktivera eller inaktivera autostart/-stopp.
* Inaktivera
Enable Clock Mode (Aktivera klockläge)
Enable Timer Mode (Aktivera timerläge)
Tabell 66: 4-1 - Auto-Start/Stop Mode (Läge för autostart/-stopp)
Område Funktion
*00:00 00:00–23:59 hh:mm Anger hur länge mjukstartaren kör efter en automatisk start i timerläge.
Tabell 67: 4-3 - Stopped Time (Tid i stopp)
Område Funktion
*00:00 00:00–23:59 hh:mm Anger hur länge mjukstartaren förblir stoppad när den körs i timerläge.
86 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 87

Handbok | VLT® Soft Starter MCD 600
Tabell 68: 4-4 - Sunday Mode (Söndagsläge)
Alternativ Funktion
Aktiverar eller inaktiverar autostart/-stopp på söndagar.
Programmerbara parametrar
* Start/Stop Disable (Inaktivera
start/stopp)
Inaktiverar styrning av autostart/-stopp. Planerade tider i parameter 4-5 Sunday Start Time
(Starttid på söndagar) eller parameter 4-6 Sunday Stop Time (Stopptid på söndagar) ignoreras.
Start Only Enable (Aktivera endast start)
Stop Only Enable (Aktivera endast stopp)
Start/Stop Enable (Aktivera start/
Aktiverar styrning av autostart. Planerade stopptider i parameter 4-6 Sunday Stop Time
(Stopptid på söndagar) ignoreras.
Aktiverar styrning av autostopp. Planerade starttider i parameter 4-5 Sunday Start Time
(Starttid på söndagar) ignoreras.
Aktiverar styrning av autostart och autostopp.
stopp)
Tabell 69: 4-5 - Sunday Start Time (Starttid på söndagar)
Område Funktion
*00:00 00:00–23:59 Anger tidpunkten för autostart på söndagar (24-timmarsformat).
Tabell 70: 4-6 - Sunday Stop Time (Stopptid på söndagar)
Område Funktion
*00:00 00:00–23:59 Anger tidpunkten för autostopp på söndagar (24-timmarsformat).
Tabell 71: 4-7 - Monday Mode (Måndagsläge)
Alternativ Funktion
Aktiverar eller inaktiverar autostart/-stopp på måndagar.
* Start/Stop Disable (Inaktivera start/stopp) Stop Only Enable (Aktivera endast stopp)
Start Only Enable (Aktivera endast start) Start/Stop Enable (Aktivera start/stopp)
Tabell 72: 4-8 - Monday Start Time (Starttid på måndagar)
Område Funktion
*00:00 00:00–23:59 Anger tidpunkten för autostart på måndagar (24-timmarsformat).
Tabell 73: 4-9 - Monday Stop Time (Stopptid på måndagar)
Område Funktion
*00:00 00:00–23:59 Anger tidpunkten för autostopp på måndagar (24-timmarsformat).
Tabell 74: 4-10 - Tuesday Mode (Tisdagsläge)
Alternativ Funktion
Aktiverar eller inaktiverar autostart/-stopp på tisdagar.
* Start/Stop Disable (Inaktivera start/stopp)
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 87
Page 88

Handbok | VLT® Soft Starter MCD 600
Alternativ Funktion
Start Only Enable (Aktivera endast start)
Stop Only Enable (Aktivera endast stopp)
Start/Stop Enable (Aktivera start/stopp)
Tabell 75: 4-11 - Tuesday Start Time (Starttid på tisdagar)
Område Funktion
*00:00 00:00–23:59 Anger tidpunkten för autostart på tisdagar (24-timmarsformat).
Tabell 76: 4-13 - Wednesday Mode (Onsdagsläge)
Alternativ Funktion
Aktiverar eller inaktiverar autostart/-stopp på onsdagar.
* Start/Stop Disable (Inaktivera start/stopp)
Start Only Enable (Aktivera endast start)
Programmerbara parametrar
Stop Only Enable (Aktivera endast stopp)
Start/Stop Enable (Aktivera start/stopp)
Tabell 77: 4-14 - Wednesday Start Time (Starttid på onsdagar)
Område Funktion
*00:00 00:00–23:59 Anger tidpunkten för autostart på onsdagar (24-timmarsformat).
Tabell 78: 4-15 - Wednesday Stop Time (Stopptid på onsdagar)
Område Funktion
*00:00 00:00–23:59 Anger tidpunkten för autostopp på onsdagar (24-timmarsformat).
Tabell 79: 4-16 - Thursday Mode (Torsdagsläge)
Alternativ Funktion
Aktiverar eller inaktiverar autostart/-stopp på torsdagar.
* Start/Stop Disable (Inaktivera start/stopp)
Start Only Enable (Aktivera endast start)
Stop Only Enable (Aktivera endast stopp)
Start/Stop Enable (Aktivera start/stopp)
Tabell 80: 4-17 - Thursday Start Time (Starttid på torsdagar)
Område Funktion
*00:00 00:00–23:59 Anger tidpunkten för autostart på torsdagar (24-timmarsformat).
88 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 89

Handbok | VLT® Soft Starter MCD 600
Tabell 81: 4-18 - Thursday Stop Time (Stopptid på torsdagar)
Område Funktion
*00:00 00:00–23:59 Anger tidpunkten för autostopp på torsdagar (24-timmarsformat).
Tabell 82: 4-19 - Friday Mode (Fredagsläge)
Alternativ Funktion
Aktiverar eller inaktiverar autostart/-stopp på fredagar.
* Start/Stop Disable (Inaktivera start/stopp)
Start Only Enable (Aktivera endast start)
Stop Only Enable (Aktivera endast stopp)
Start/Stop Enable (Aktivera start/stopp)
Tabell 83: 4-20 - Friday Start Time (Starttid på fredagar)
Område Funktion
Programmerbara parametrar
*00:00 00:00–23:59 Anger tidpunkten för autostart på fredagar (24-timmarsformat).
Tabell 84: 4-21 - Friday Stop Time (Stopptid på fredagar)
Område Funktion
*00:00 00:00–23:59 Anger tidpunkten för autostopp på fredagar (24-timmarsformat).
Tabell 85: 4-22 - Saturday Mode (Lördagsläge)
Alternativ Funktion
Aktiverar eller inaktiverar autostart/-stopp på lördagar.
* Start/Stop Disable (Inaktivera start/stopp)
Start Only Enable (Aktivera endast start)
Stop Only Enable (Aktivera endast stopp)
Start/Stop Enable (Aktivera start/stopp)
Tabell 86: 4-23 - Saturday Start Time (Starttid på lördagar)
Område Funktion
*00:00 00:00–23:59 Anger tidpunkten för autostart på lördagar (24-timmarsformat).
Tabell 87: 4-24 - Saturday Stop Time (Stopptid på lördagar)
Område Funktion
*00:00 00:00–23:59 Anger tidpunkten för autostopp på lördagar (24-timmarsformat).
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 89
Page 90

Handbok | VLT® Soft Starter MCD 600
Programmerbara parametrar
10.9 Parametergrupp 5-** Protection Levels (Skyddsnivåer)
Tabell 88: 5-1 - Current Imbalance (Strömobalans)
Område Funktion
*30% 10–50% Anger trippunkten för strömobalansskyddet.
Tabell 89: 5-2 - Current Imbalance Delay (Fördröjning vid strömobalans)
Område Funktion
*3 s 0:00–4:00 (minuter:sekunder) Visar mjukstartarens svar på strömobalans och undviker tripp på grund av tillfälliga varia-
tioner.
Tabell 90: 5-3 - Undercurrent (Underström)
Område Funktion
*20% 0–100% Anger trippunkten för underströmsskydd som en procentsats av motorns märkström. Inställd på en nivå mellan
motorns normala arbetsområde och motorns magnetström (ingen last) (vanligtvis 25 % till 35 % av motorns
märkström). En inställning på 0 % inaktiverar underströmsskyddet.
Tabell 91: 5-4 - Undercurrent Delay (Fördröjning vid underström)
Område Funktion
* 5 s 00–4:00 (minuter:sekunder) Visar mjukstartarens svar på för underström och undviker tripp på grund av tillfälliga varia-
tioner.
Tabell 92: 5-5 - Overcurrent (Överström)
Område Funktion
*400% 80–600% Anger trippunkten för överströmsskydd som en procentsats av motorns märkström.
Tabell 93: 5-6 - Overcurrent Delay (Fördröjning vid överström)
Område Funktion
* 0 s 0:00–1:00 (minuter:sekunder) Visar mjukstartarens svar på överström och undviker tripp på grund av tillfälliga överström-
shändelser.
Tabell 94: 5-7 - Undervoltage (Underspänning)
Område Funktion
*350 100–1 000 V Anger trippunkten för underspänningsskyddet. Ställ in lämpligt värde.
90 | Danfoss A/S © 2018.10
OB S!
Spänningsskyddet fungerar inte korrekt om inte mjukstartaren är i körläge.
AQ262141844215sv-000201 / 175R1174
Page 91

Handbok | VLT® Soft Starter MCD 600
Tabell 95: 5-8 - Undervoltage Delay (Fördröjning vid underspänning)
Programmerbara parametrar
Område Funktion
* 1 s 0:00–1:00 (minuter:sekunder) Visar mjukstartarens svar på underspänning och undviker tripp på grund av tillfälliga varia-
tioner.
Tabell 96: 5-9 - Overvoltage (Överspänning)
Område Funktion
*500 100–1 000 V Anger trippunkten för överspänningsskyddet. Ställ in lämpligt värde.
Tabell 97: 5-10 - Overvoltage Delay (Fördröjning vid överspänning)
Område Funktion
* 1 s 0:00–1:00 (minuter:sekunder) Visar mjukstartarens svar på överspänning och undviker tripp på grund av tillfälliga varia-
tioner.
Tabell 98: 5-11 - Underpower (För låg effekt)
Område Funktion
*10% 10–120% Anger trippunkten för skyddet vid för låg effekt. Ställ in lämpligt värde.
Tabell 99: 5-12 - Underpower Delay (Fördröjning vid för låg effekt)
Område Funktion
*1 s 0:00–1:00 (minuter:sekunder) Visar mjukstartarens svar på för låg effekt och undviker tripp på grund av tillfälliga variation-
er.
Tabell 100: 5-13 - Overpower (För hög effekt)
Område Funktion
*150% 80–200% Anger trippunkten för skyddet vid för hög effekt. Ställ in lämpligt värde.
Tabell 101: 5-14 - Overpower Delay (Fördröjning vid för hög effekt)
Område Funktion
* 1 s 0:00–1:00 (minuter:sekunder) Visar mjukstartarens svar på för hög effekt och undviker tripp på grund av tillfälliga varia-
tioner.
Tabell 102: 5-15 - Excess Start Time (Överskjutande starttid)
Område Funktion
*20 s 0:00–4:00 (mi-
Överskjutande starttid är den maximal tid som mjukstartaren försöker starta motorn.
nuter:sekunder)
Om motorn inte växlar till körläge inom den programmerade gränsen trippar mjukstartaren.
Ställ in en något längre tid än den normala tiden för ett startförlopp. En inställning på 0 inaktiverar skyddet vid överskjutande starttid.
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 91
Page 92

Handbok | VLT® Soft Starter MCD 600
Tabell 103: 5-16- Restart Delay (Omstartsfördröjning)
Område Funktion
Programmerbara parametrar
*10 s 00:01–60:00 (mi-
nuter:sekunder)
Tabell 104: 5-17 - Starts per Hour (Starter per timme)
Område Funktion
*0 0–10 Anger det maximala antal starter mjukstartaren försöker göra under en period på 60 minuter. En inställning på 0 inak-
tiverar det här skyddet.
Tabell 105: 5-18 - Phase Sequence (Fassekvens)
Alternativ Funktion
Anger vilken fassekvens som mjukstartaren tillåter vid en start. Vid kontroller innan start undersöker mjukstartaren fassekvenserna vid ingångsplintarna och trippar om den faktiska sekvensen inte matchar det valda alternativet.
* Alla sekvenser
Endast positiv
Endast negativ
Mjukstartaren kan konfigureras att tvinga en fördröjning mellan slutet av ett stoppförlopp och början av nästa startförlopp.
Vid fördröjningen av omstarten visar displayen tiden som återstår innan ett nytt startförsök kan göras.
OB S!
Vid användning av DC-broms måste mjukstartarens nätförsörjning vara ansluten (ingångsplint L1, L2,
L3) med positiva fassekvenser. Parameter 2-1 Phase Sequence (Fassekvens) måste vara inställd till Posi-
tive Only (Endast positiv).
10.10 Parametergrupp 6-** Protection Action (Skyddsåtgärd)
Tabell 106: 6-1 - Auto-Reset Count (Antal automatiska återställningar)
Område Funktion
*0 0–5 Anger hur många gånger mjukstartaren återställs automatiskt om den fortsätter att trippa.
Återställningsräknarens värde ökar med 1 varje gång mjukstartaren återställs automatiskt och återställs efter en lyckad
start.
En inställning på 0 inaktiverar automatisk återställning.
Tabell 107: 6-2 - Auto-Reset Delay (Fördröjning av automatisk återställning)
Område Funktion
*5 s 0:05–15:00 (minuter:sekunder) Skapar en fördröjning innan mjukstartaren automatisk återställer en tripp.
92 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 93

Handbok | VLT® Soft Starter MCD 600
Tabell 108: 6-3 - Current Imbalance (Strömobalans)
Alternativ Funktion
Anger mjukstartarens svar på varje skydd.
Alla skyddshändelser registreras i händelseloggen.
Programmerbara parametrar
* Soft Trip and Log
(Mjuktripp och logg)
Mjukstartaren stoppar motorn enligt inställningarna i parameter 2-9 Stop Mode (Stoppläge) eller param-
eter 3-11 Stop Mode (Stoppläge) och går därefter in i trippläge. Trippen måste återställas innan mjukstartaren kan starta igen.
Soft Trip and Reset
(Mjuktripp och återställning)
Mjukstartaren stoppar motorn enligt inställningarna i parameter 2-9 Stop Mode (Stoppläge) eller param-
eter 3-11 Stop Mode (Stoppläge) och går därefter in i trippläge. Trippen återställs efter fördröjningen av
automatisk återställning.
Trippstartare Mjukstartaren kopplar från strömmen och rullar ut motorn till stopp. Trippen måste återställas innan
mjukstartaren kan starta igen.
Trip and Reset
(Tripp och åter-
Mjukstartaren kopplar från strömmen och rullar ut motorn till stopp. Trippen återställs efter fördröjningen av automatisk återställning.
ställning)
Varning och logg Skyddet registreras i händelseloggen och displayen visar ett varningsmeddelande, men mjukstartaren
fortsätter att fungera.
Endast logg SkSkyddet registreras i händelseloggen men mjukstartaren fortsätter att fungera.
Tabell 109: 6-4 - Undercurrent (Underström)
Alternativ Funktion
Anger mjukstartarens svar på skyddshändelsen.
* Soft Trip and Log (Mjuktripp och logg)
Soft Trip and Reset (Mjuktripp och återställning)
Trippstartare
Trip and Reset (Tripp och återställning)
Varning och logg
Endast logg
Tabell 110: 6-5 - Overcurrent (Överström)
Alternativ Funktion
Anger mjukstartarens svar på skyddshändelsen.
* Soft Trip and Log (Mjuktripp och logg)
Soft Trip and Reset (Mjuktripp och återställning)
Trippstartare
Trip and Reset (Tripp och återställning)
Varning och logg
Endast logg
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 93
Page 94

Handbok | VLT® Soft Starter MCD 600
Tabell 111: 6-6 - Undervoltage (Underspänning)
Alternativ Funktion
Anger mjukstartarens svar på skyddshändelsen.
* Soft Trip and Log (Mjuktripp och logg)
Soft Trip and Reset (Mjuktripp och återställning)
Trippstartare
Trip and Reset (Tripp och återställning)
Varning och logg
Endast logg
Tabell 112: 6-7 - Overvoltage (Överspänning)
Alternativ Funktion
Anger mjukstartarens svar på skyddshändelsen.
* Soft Trip and Log (Mjuktripp och logg)
Programmerbara parametrar
Soft Trip and Reset (Mjuktripp och återställning)
Trippstartare
Trip and Reset (Tripp och återställning)
Varning och logg
Endast logg
Tabell 113: 6-8 - Underpower (För låg effekt)
Alternativ Funktion
Anger mjukstartarens svar på skyddshändelsen.
Soft Trip and Log (Mjuktripp och logg)
Soft Trip and Reset (Mjuktripp och återställning)
Trippstartare
Trip and Reset (Tripp och återställning)
Varning och logg
* Endast logg
Tabell 114: 6-9 - Overpower (För hög effekt)
Alternativ Funktion
Anger mjukstartarens svar på skyddshändelsen.
Soft Trip and Log (Mjuktripp och logg)
Soft Trip and Reset (Mjuktripp och återställning)
Trippstartare
94 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 95

Handbok | VLT® Soft Starter MCD 600
Alternativ Funktion
Trip and Reset (Tripp och återställning)
Varning och logg
* Endast logg
Tabell 115: 6-10 - Excess Start Time (Överskjutande starttid)
Alternativ Funktion
Anger mjukstartarens svar på skyddshändelsen.
* Soft Trip and Log (Mjuktripp och logg)
Soft Trip and Reset (Mjuktripp och återställning)
Trippstartare
Trip and Reset (Tripp och återställning)
Varning och logg
Endast logg
Programmerbara parametrar
Tabell 116: 6-11 - Input A Trip (Ingång A, tripp)
Alternativ Funktion
Anger mjukstartarens svar på skyddshändelsen.
* Soft Trip and Log (Mjuktripp och logg)
Soft Trip and Reset (Mjuktripp och återställning)
Trippstartare
Trip and Reset (Tripp och återställning)
Varning och logg
Endast logg
Tabell 117: 6-12 - Input B Trip (Ingång B, tripp)
Alternativ Funktion
Anger mjukstartarens svar på skyddshändelsen.
* Soft Trip and Log (Mjuktripp och logg)
Soft Trip and Reset (Mjuktripp och återställning)
Trippstartare
Trip and Reset (Tripp och återställning)
Varning och logg
Endast logg
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 95
Page 96

Handbok | VLT® Soft Starter MCD 600
Tabell 118: 6-13 - Network Communications (Nätverkskommunikation)
Alternativ Funktion
Anger mjukstartarens svar på skyddshändelsen.
Om parametern är inställd till Stopp utför mjukstartaren ett mjukstopp och
startar sedan om utan återställning.
* Soft Trip and Log (Mjuktripp och logg)
Soft Trip and Reset (Mjuktripp och återställning)
Trippstartare
Trip and Reset (Tripp och återställning)
Varning och logg
Endast logg
Stopp
Tabell 119: 6-14 - Remote Keypad Fault (Fel på fjärrknappsats)
Programmerbara parametrar
Alternativ Funktion
Anger mjukstartarens svar på skyddshändelsen.
* Soft Trip and Log (Mjuktripp och logg)
Soft Trip and Reset (Mjuktripp och återställning)
Trippstartare
Trip and Reset (Tripp och återställning)
Varning och logg
Endast logg
Tabell 120: 6-15 - Frequency (Frekvens)
Alternativ Funktion
Anger mjukstartarens svar på skyddshändelsen.
* Soft Trip and Log (Mjuktripp och logg)
Soft Trip and Reset (Mjuktripp och återställning)
Trippstartare
Trip and Reset (Tripp och återställning)
Varning och logg
Endast logg
Tabell 121: 6-16 - Phase Sequence (Fassekvens)
Alternativ Funktion
Anger mjukstartarens svar på skyddshändelsen.
96 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
Page 97

Handbok | VLT® Soft Starter MCD 600
Alternativ Funktion
* Soft Trip and Log (Mjuktripp och logg)
Soft Trip and Reset (Mjuktripp och återställning)
Trippstartare
Trip and Reset (Tripp och återställning)
Varning och logg
Endast logg
Tabell 122: 6-17 - Motor Overtemperature (Överhettning av motor)
Alternativ Funktion
Anger mjukstartarens svar på skyddshändelsen.
* Soft Trip and Log (Mjuktripp och logg)
Soft Trip and Reset (Mjuktripp och återställning)
Trippstartare
Programmerbara parametrar
Trip and Reset (Tripp och återställning)
Varning och logg
Endast logg
Tabell 123: 6R - Motor Thermistor Circuit (Motorns termistorkrets)
Alternativ Funktion
Anger mjukstartarens svar på skyddshändelsen.
* Soft Trip and Log (Mjuktripp och logg)
Soft Trip and Reset (Mjuktripp och återställning)
Trippstartare
Trip and Reset (Tripp och återställning)
Varning och logg
Endast logg
Tabell 124: 6-19 - Shorted SCR Action (Åtgärd vid kortslutet SCR-relä)
Alternativ Funktion
Anger om mjukstartaren tillåter PowerThrough-drift om mjukstartaren är skadad i enfas.
Mjukstartaren använder tvåfasstyrning, vilket gör att motorn kan fortsätta fungera i viktiga tillämpningar.
* 3-phase Control Only (Endast tre-
fasstyrning)
PowerThrough
Mer information om PowerThrough finns under 9.4 PowerThrough.
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 97
Page 98

Handbok | VLT® Soft Starter MCD 600
Tabell 125: 6-20 - Batteri/klocka
Alternativ Funktion
Anger mjukstartarens svar på skyddshändelsen.
* Soft Trip and Log (Mjuktripp och logg)
Soft Trip and Reset (Mjuktripp och återställning)
Trippstartare
Trip and Reset (Tripp och återställning)
Varning och logg
Endast logg
10.11 Parametergrupp 7-** Inputs (Ingångar)
Tabell 126: 7-1 - Input A Function (Ingång A, funktion)
Alternativ Funktion
Programmerbara parametrar
Anger funktionen för ingång A.
Command Override: Network (Åsidosätt kommando: Nätverk)
Command Override: Digital (Åsidosätt kommando: Digitalt)
Command Override: Keypad (Åsidosätt kommando: Knappsats)
* Input Trip (N/O) (Ingångstripp
(normalt öppen))
Input Trip (N/C) (Ingångstripp (normalt stängd))
Emergency Mode (Nödläge) En stängd krets över DI-A, COM+ aktiverar nödläget. När mjukstartaren tar emot ett start-
Jogg framåt Aktiverar joggdrift i framåtriktning.
Jogg bakåt Aktiverar joggdrift i omvänd riktning.
Nollhastighetsgivare En öppen krets över DI-A, COM+ meddelar mjukstartaren att motorn har stannat. Mjuk-
Motor Set Select (Val av motorinställning)
Åsidosätter inställningarna för parameter 1-1 Command Source (Kommandokälla) och ställer in kommandokällan till kommunikationsnätverket.
Åsidosätter inställningarna för parameter 1-1 Command Source (Kommandokälla) och ställer in kommandokällan till de digitala ingångarna.
Åsidosätter inställningarna för parameter 1-1 Command Source (Kommandokälla) och ställer in kommandokällan till fjärr-LCP:n.
En stängd krets över DI-A, COM+ trippar mjukstartaren.
En öppen krets över DI-A, COM+ trippar mjukstartaren.
kommando fortsätter den att köra och ignorerar alla trippar och varningar fram tills att
ett stoppkommando tas emot.
startaren behöver en nollhastighetsgivare som normalt är öppen.
En stängd krets över DI-A, COM+ instruerar mjukstartaren att använda den sekundära
motorkonfigurationen för nästa start/stopp-cykel.
Reverse Direction (Omvänd riktning)
Pump Clean (Pumprengöring) Aktiverar pumprengöringsfunktionen.
98 | Danfoss A/S © 2018.10
En stängd krets över DI-A, COM+ instruerar mjukstartaren att vända fassekvensen för nästa start.
AQ262141844215sv-000201 / 175R1174
Page 99

Handbok | VLT® Soft Starter MCD 600
Tabell 127: 7-2 - Input A Trip (Ingång A, tripp)
Programmerbara parametrar
Alternativ Funktion
Anger när en ingångstripp kan inträffa.
Alltid aktiv En tripp kan inträffa när som helst när mjukstartaren tar emot ström.
* Endast drift En tripp kan inträffa när mjukstartaren körs, stoppar eller startar.
Endast kör En tripp kan endast inträffa när mjukstartaren körs.
Tabell 128: 7-3 - Input A Trip Delay (Ingång A, trippfördröjning)
Område Funktion
*0 s 0:00–4:00 (minuter:sekunder) Skapar en fördröjning mellan att ingången aktiveras och att mjukstartaren trippar.
Tabell 129: 7-4 - Input A Initial Delay (Ingång A, initial fördröjning)
Område Funktion
* 0 s 00:00–30:00 (minuter:sekunder) Skapar en fördröjning innan en ingångstripp kan ske.
Initial fördröjning beräknas från tidpunkten då startsignalen tas emot.
Ingångens status ignoreras tills den initiala fördröjningen är klar.
Tabell 130: 7-5 - Input B Function (Ingång B, funktion)
Alternativ Funktion
Anger funktionen för ingång B. Mer information finns under parameter 7-1
Input A Function (Ingång A, funktion).
* Input Trip (N/O) (Ingångstripp (normalt öppen))
Input Trip (N/C) (Ingångstripp (normalt stängd))
Emergency Mode (Nödläge)
Jogg framåt
Jogg bakåt
Nollhastighetsgivare
Motor Set Select (Val av motorinställning)
Reverse Direction (Omvänd riktning)
Pump Clean (Pumprengöring)
Tabell 131: 7-6 - Input B Trip (Ingång B, tripp)
Alternativ Funktion
Anger när en ingångstripp kan inträffa.
Alltid aktiv
* Endast drift
Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174| 99
Page 100

Handbok | VLT® Soft Starter MCD 600
Alternativ Funktion
Endast kör
Tabell 132: 7-7 - Input B Trip Delay (Ingång B, trippfördröjning)
Område Funktion
* 0 s 0:00–4:00 (minuter:sekunder) Skapar en fördröjning mellan att ingången aktiveras och att mjukstartaren trippar.
Tabell 133: 7-8 - Input B Initial Delay (Ingång B, initial fördröjning)
Område Funktion
* 0 s 00:00–30:00 (minuter:sekunder) Skapar en fördröjning innan en ingångstripp kan ske.
Initial fördröjning beräknas från tidpunkten då startsignalen tas emot.
Ingångens status ignoreras tills den initiala fördröjningen är klar.
Tabell 134: 7-9 - Reset/Enable Logic (Återställ/aktivera logik)
Programmerbara parametrar
Alternativ Funktion
Anger om återställningsingången (RESET, COM+) är normalt öppen eller normalt stängd.
* Normalt stängd
Normalt öppen
Mjukstartaren fungerar inte om återställningsingången är aktiv.
Tabell 135: 7-10 - Input A Name (Ingång A, namn)
Alternativ Funktion
Anger ett meddelande som LCP:n visar när ingång A är aktiv.
Det anpassade meddelandet kan hämtas via USB-porten.
* Input A Trip (Ingång A, tripp)
Lågt tryck
Högt tryck
Pumpfel
Låg nivå
Hög nivå
OB S!
Inget flöde
Starter Disable (Inaktiverad startare)
Controller (Regulator)
PLC
Vibrationslarm
100 | Danfoss A/S © 2018.10
AQ262141844215sv-000201 / 175R1174
 Loading...
Loading...