

Page 1

ENGINEERING TOMORROW
Guía de funcionamiento
VLT® Soft Starter MCD 500
vlt-drives.danfoss.com
Page 2

Page 3
Page 4

Page 5
Índice Guía de funcionamiento
Índice
1 Introducción
2 Seguridad
2.1 Seguridad
3 Instalación
3.1 Instalación mecánica
3.2 Dimensiones y peso
4 Instalación eléctrica
4.1 Cableado de control
4.1.1 Formas de controlar el arrancador suave 15
4.1.2 Terminales de control 15
4.1.3 Entradas remotas 15
4.1.4 Comunicación serie 16
4.1.5 Terminales de tierra 16
4.1.6 Terminales de potencia 16
4.1.7 Kit de protección para dedos 17
6
10
10
12
12
13
15
15
4.2 Conguraciones de entrada y salida de alimentación
4.2.1 Modelos con bypass interno (de MCD5-0021B a MCD5-0961B) 17
4.2.2 MCD5-0245C 18
4.2.3 De MCD5-0360C a MCD5-1600C 19
4.3 Conexión del motor
4.3.1 Comprobación de la instalación 19
4.3.2 Instalación en línea 20
4.3.2.1 Con bypass interno 20
4.3.2.2 Sin bypass 20
4.3.2.3 Con bypass externo 20
4.3.3 Instalación en triángulo interno 21
4.3.3.1 Con bypass interno 21
4.3.3.2 Sin bypass 21
4.3.3.3 Con bypass externo 22
4.4 Intensidad nominal
4.4.1 Conexión en línea (con bypass) 23
4.4.2 Conexión en línea (sin bypass / continua) 24
17
19
22
4.4.3 Conexión en triángulo interno (con bypass) 25
4.4.4 Conexión en triángulo interno (sin bypass / continua) 26
4.5 Ajustes de intensidad máxima y mínima
4.6 Interruptor de bypass
4.7 Interruptor principal
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 1
27
28
28
Page 6
Índice
VLT® Soft Starter MCD 500
4.8 Magnetotérmico
4.9 Corrección del factor de potencia
4.10 Fusibles
4.10.1 Fusibles de la fuente de alimentación 28
4.10.2 Fusibles Bussmann 30
4.10.3 Fusibles Ferraz 32
4.10.4 Selección de fusibles UL y clasicación de protección contra cortocircuitos 34
4.11 Diagramas esquemáticos
5 Funciones del producto
5.1 Protección de sobrecarga del motor
5.2 Control adaptativo
5.3 Modos de arranque
5.3.1 Corr constante 40
5.3.2 Rampa de corriente 40
5.3.3 Control adaptativo 41
5.3.4 Pulso de inercia 42
5.4 Modos de parada
28
28
28
37
39
39
40
40
42
5.4.1 Parada en inercia 42
5.4.2 Parad suave TVR 42
5.4.3 Control adaptativo 42
5.4.4 Parada de bomba 43
5.4.5 Freno 43
5.5 Funcionamiento a velocidad ja
5.6 Funcionamiento en triángulo interno
5.7 Intensidades de arranque típicas
5.8 Instalación con contactor principal
5.9 Instalación con contactor de bypass
5.10 Funcionamiento de emergencia
5.11 Circuito auxiliar de desconexión
5.12 Freno de CC con sensor de velocidad cero externo
5.13 Frenado suave
5.14 Motor de dos velocidades
6 Funcionamiento
6.1 Métodos de control
45
45
46
47
48
49
50
52
53
54
57
57
6.2 Funcionamiento y LCP
6.2.1 Modos de funcionamiento 58
6.3 LCP de montaje remoto
6.3.1 Sincronización del LCP y el arrancador suave 59
6.4 Pantalla de bienvenida
2 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
58
59
59
Page 7
Índice Guía de funcionamiento
6.5 Teclas de control local
6.6 Pantallas
6.6.1 Pantalla de supervisión de temperatura (S1) 60
6.6.2 Pantalla programable (S2) 60
6.6.3 Corriente media (S3) 60
6.6.4 Pantalla de supervisión de la corriente (S4) 60
6.6.5 Pantalla de supervisión de frecuencia (S5) 60
6.6.6 Pantalla de potencia del motor (S6) 60
6.6.7 Información del último arranque (S7) 60
6.6.8 Fecha y hora (S8) 61
6.6.9 Gráco de barras de conducción SCR 61
6.6.10 Grácos de rendimiento 61
7 Programación
7.1 Control de acceso
7.2 Menú rápido
7.2.1 Conguración rápida 62
7.2.2 Ejemplos de conguración de la aplicación 63
59
59
62
62
62
7.2.3 Registros 64
7.3 Menú principal
7.3.1 Parámetros 64
7.3.2 Acceso directo a los parámetros 64
7.3.3 Lista de parámetros 65
8 Descripciones de parámetros
8.1 Ajustes del motor primario
8.1.1 Freno 68
8.2 Protección
8.2.1 Desequil corr 69
8.2.2 Baja corriente 69
8.2.3 Sobrecorriente instantánea 69
8.2.4 Desconex frec 69
8.3 Entradas
8.4 Salidas
8.4.1 Rets relé A 72
8.4.2 Relays B and C (Relés B y C) 72
64
67
67
69
70
72
8.4.3 Aviso de intensidad baja y aviso de intensidad alta 73
8.4.4 Aviso de temperatura del motor 73
8.4.5 Analog Output A (Salida analógica A) 73
8.5 Temporizadores de arranque / parada
8.6 Reinicio automático
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 3
74
75
Page 8
Índice
VLT® Soft Starter MCD 500
8.6.1 Ret reinic autom 75
8.7 Conjunto de motor secundario
8.8 Display
8.8.1 Pantalla programable por el usuario 77
8.8.2 Grácos de rendimiento 78
8.9 Parámetros restringidos
8.10 Acción protectora
8.11 Parámetros de fábrica
9 Herramientas
9.1 Ajustar fecha y hora
9.2 Cargar/guardar conguración
9.3 Reset del modelo térmico
9.4 Simulación de protección
9.5 Simulación de señal de salida
9.6 Estado E/S digital
9.7 Estado sensores temp
9.8 Reg. alarma
9.8.1 Registro de desconexiones 83
75
77
78
80
80
81
81
81
81
82
82
82
83
83
9.8.2 Registro de eventos 83
9.8.3 Contadores 83
10 Localización de averías
10.1 Mensajes de desconexión
10.2 fallos Generales
11 Especicaciones
11.1 Instalación conforme a UL
11.1.1 Modelos de MCD5-0021B a MCD5-0105B 94
11.1.2 Modelos de MCD5-0131B a MCD5-0215B 94
11.1.3 Modelos de MCD5-0245B a MCD5-0396B 95
11.1.4 Modelos MCD5-0245C 95
11.1.5 Modelos de MCD5-0360C a MCD5-1600C 95
11.1.6 Modelos de MCD5-0469B a MCD5-0961B 95
11.1.7 Terminal de presión / kits de conector 95
11.2 Accesorios
11.2.1 Kit de montaje remoto para LCP 95
84
84
89
93
94
95
11.2.2 Módulos de comunicación 95
11.2.3 Software para PC 96
11.2.4 Kit de protección para dedos 96
11.2.5 Kit de protección contra sobretensiones (protección frente a rayos) 96
4 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 9
Índice Guía de funcionamiento
12 Procedimiento de ajuste de la barra conductora (de MCD5-0360C a
MCD5-1600C)
97
13 Anexo
13.1 Símbolos, abreviaturas y convenciones
Índice
99
99
100
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 5
Page 10
Introducción
VLT® Soft Starter MCD 500
11
1 Introducción
El VLT® Soft Starter MCD 500 es una solución digital
avanzada de arranque suave para motores de 11 kW a
850 kW (15-1150 CV). Los arrancadores suaves proporcionan una completa gama de funciones de protección del
motor y del sistema y han sido diseñados para proporcionar un rendimiento able en las situaciones de
instalación más exigentes.
1.1.1 Versión del documento
Esta guía de funcionamiento se revisa y actualiza de forma
periódica. Le agradecemos cualquier sugerencia de
mejoras. En la Tabla 1.1 se muestra la versión del
documento.
Edición Comentarios
MG17K8xx Instrucciones sobre el uso de kits de protección para
dedos para instalaciones IP00 añadidas al
capétulo 4 Instalación eléctrica.
Tabla 1.1 Versión del documento
1.1.2 Lista de características
Modelos para todas las necesidades de conexión
21-1600 A (conexión en línea).
•
Conexión en línea o en triángulo interno.
•
Con bypass interno hasta 961 A.
•
Tensión de red: 200-525 V CA o 380-690 V CA.
•
Tensión de control: 24 V CA / V CC, 110-120 V CA
•
o 220-240 V CA.
LCP de fácil uso
Registros.
•
Grácas en tiempo real.
•
Gráca de barras de conducción SCR.
•
Herramientas
Ajustes de la aplicación.
•
Registro de eventos con fecha y hora con 99
•
entradas.
Las 8 alarmas más recientes.
•
Contadores.
•
Simulación de protección.
•
Simulación de señal de salida.
•
Entradas y salidas
Opciones de entradas de control local o remoto.
•
(3 jas y 1 programable).
Salidas de relé (3 programables).
•
Salida analógica programable.
•
Salida de alimentación de 24 V CC 200 mA
•
Modos de arranque y marcha
Control adaptativo.
•
Corriente constante.
•
Rampa de corriente.
•
Pulso de inercia.
•
Velocidad ja.
•
Funcionamiento de emergencia.
•
Modos de parada
Control de desaceleración adaptativo.
•
Parada suave con rampa de tensión temporizada.
•
Freno de CC.
•
Freno suave.
•
Desactivar arrancador.
•
Otras características
Temporizador de parada / arranque automático.
•
Modelo térmico de segundo orden.
•
Batería de emergencia para el reloj y el modelo
•
térmico.
Módulos opcionales de comunicación DeviceNet,
•
Modbus, Ethernet o PROFIBUS.
Protección completa
Cableado / conexión / fuente de alimentación.
•
- Conexión del motor.
- Secuencia de fase.
- Pérdida de potencia.
- Pérdida de fase individual.
- Frecuencia de red.
Corriente
•
- Exceso de tiempo de arranque.
- Desequilibrio de intensidad.
- Baja corriente.
- Sobrecorriente instantánea.
Térmico
•
- Termistor del motor.
- Sobrecarga del motor.
- Sobrecarga del contactor de bypass.
- Temperatura del disipador.
6 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 11
MCD 5
- -
-
-
0021 = 21 A, AC53b 3-30:330
0037 = 37 A, AC53b 3-30:330
0043 = 43 A, AC53b 3-30:330
0053 = 53 A, AC53b 3-30:330
0068 = 68 A, AC53b 3-30:570
0084 = 84 A, AC53b 3-30:570
0089 = 89 A, AC53b 3-30:570
0105 = 105 A, AC53b 3-30:570
0131 = 131 A, AC53b 3-30:570
0141 = 141 A, AC53b 3-30:570
0195 = 195 A, AC53b 3-30:570
0215 = 215 A, AC53b 3-30:570
0245 = 245 A, AC53b 3-30:570
0331 = 331 A, AC53b 3-30:570
0396 = 396 A, AC53b 3-30:570
0469 = 469 A, AC53b 3-30:570
0525 = 525 A, AC53b 3-30:570
0632 = 632 A, AC53b 3-30:570
0744 = 744 A, AC53b 3-30:570
0826 = 826 A, AC53b 3-30:570
0961 = 961 A, AC53b 3-30:570
00 = IP00
20 = IP20
G1 = 0021 ~ 0105 A
G2 = 0131 ~ 0215 A
G3 = 0245 ~ 0396 A
G4 = 0360 ~ 0961 A
G5 = 1200 ~ 1600 A
0245 = 245 A, AC53a 3-30:50-6
0360 = 360 A, AC53a 3-30:50-6
0380 = 380 A, AC53a 3-30:50-6
0428 = 428 A, AC53a 3-30:50-6
0595 = 595 A, AC53a 3-30:50-6
0619 = 619 A, AC53a 3-30:50-6
0790 = 790 A, AC53a 3-30:50-6
0927 = 927 A,AC53a 3-30:50-6
1200 = 1200 A, AC53a 3-30:50-6
1410 = 1410 A, AC53a 3-30:50-6
1600 = 1600 A, AC53a 3-30:50-6
177HA382.11
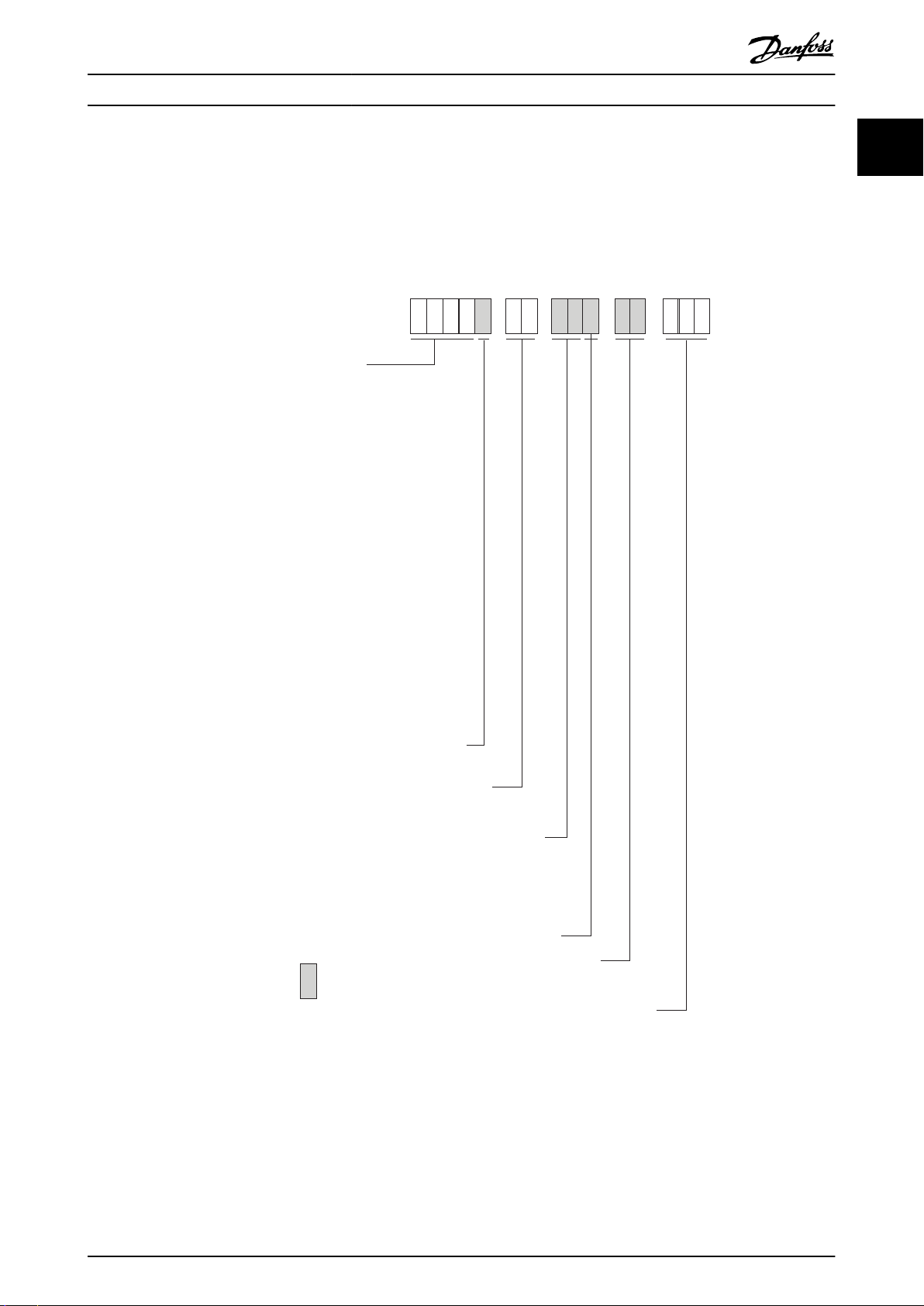
Clasicación de intensidad
B = Con bypass
C = Sin bypass
Tensión de red
T5 = 200–525 VCA
T7 = 380–390 VCA
Tamaño de bastidor
Sin uso
Clasicación IP
Tensión de control
CV1 = 24 VCA/VCC
CV2 = 110–120 VCA o 220–240 VCA
= No seleccionable
Introducción Guía de funcionamiento
Comunicación
•
- Comunicaciones de red.
- Comunicaciones del arrancador.
Externa
•
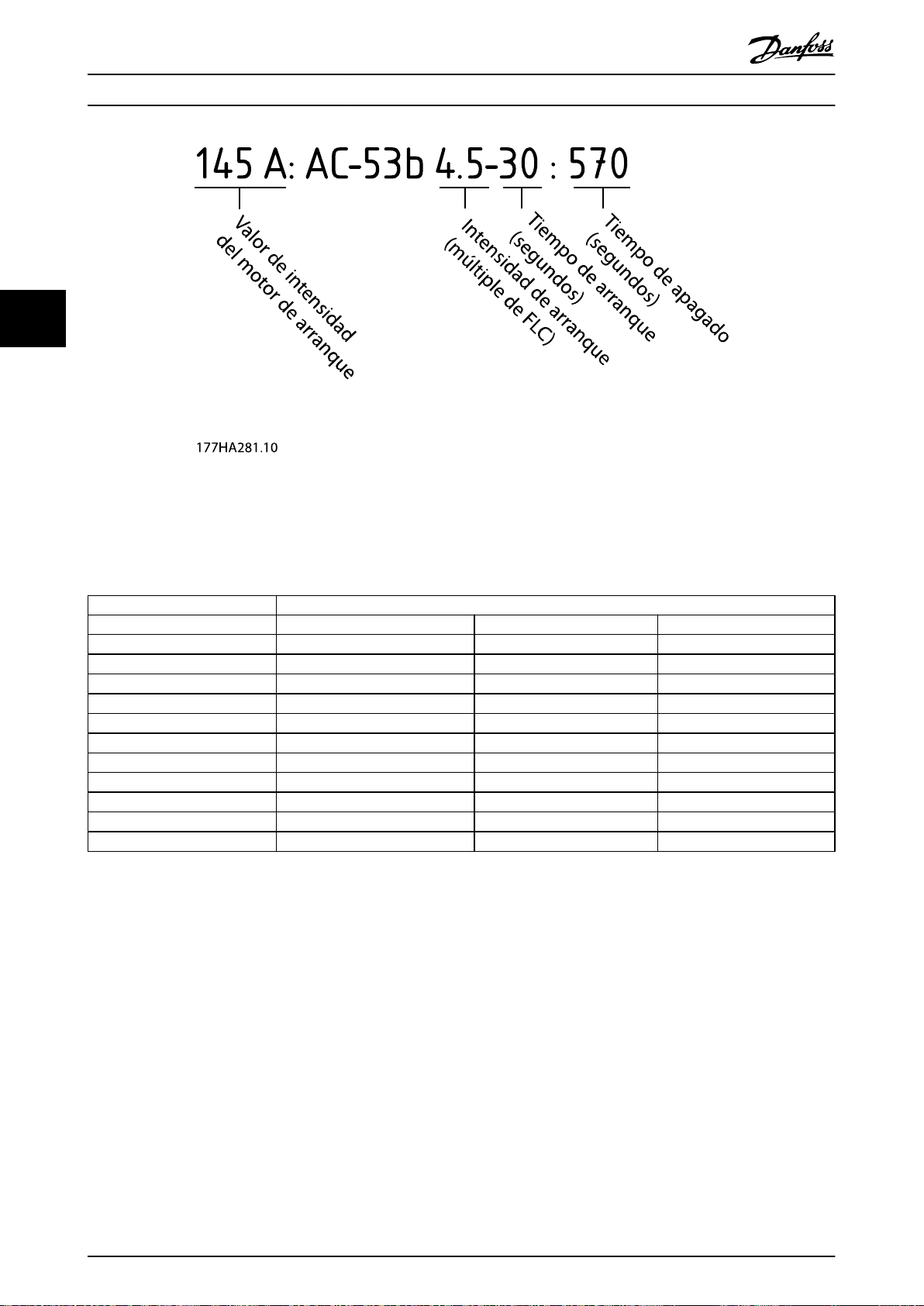
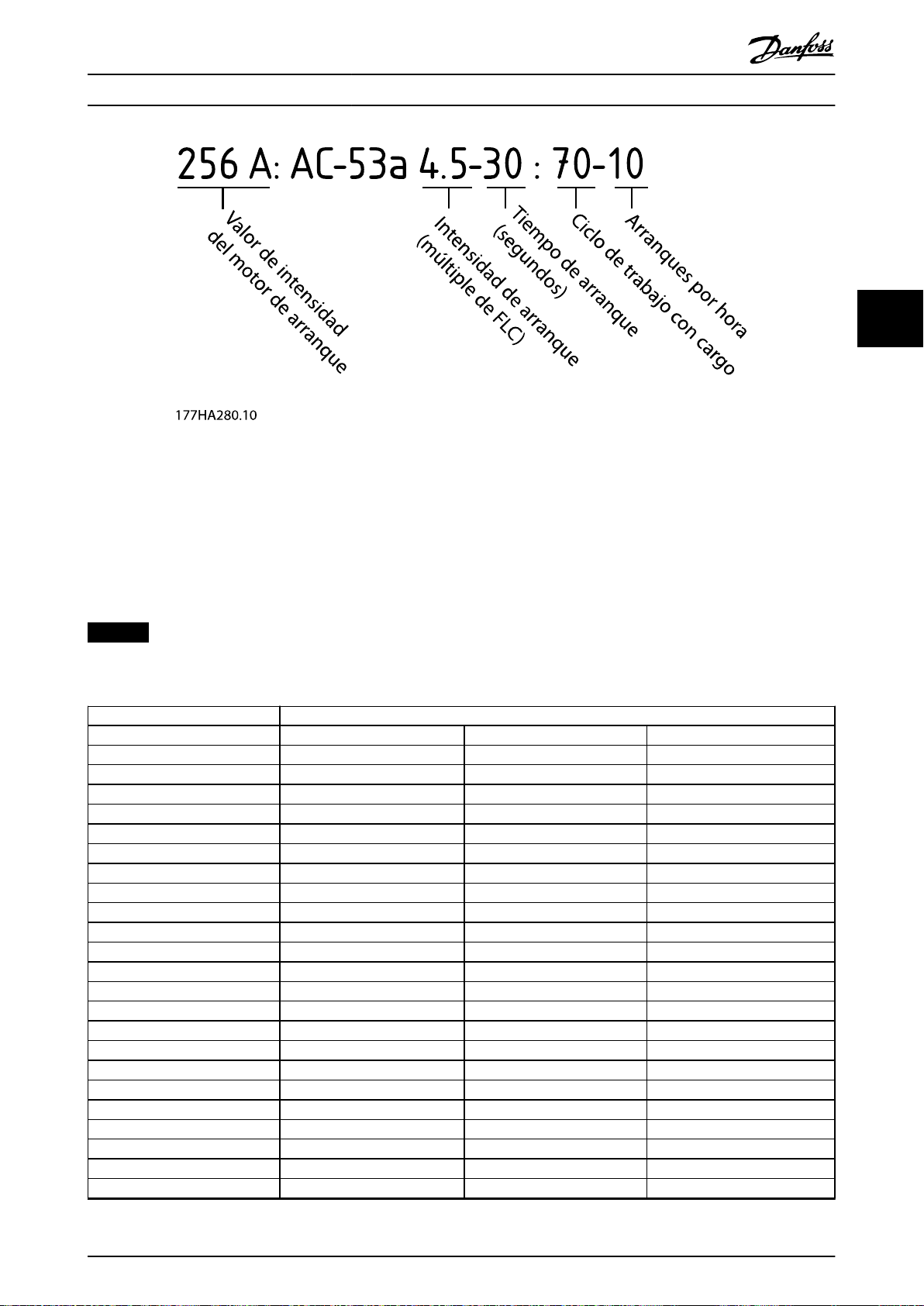
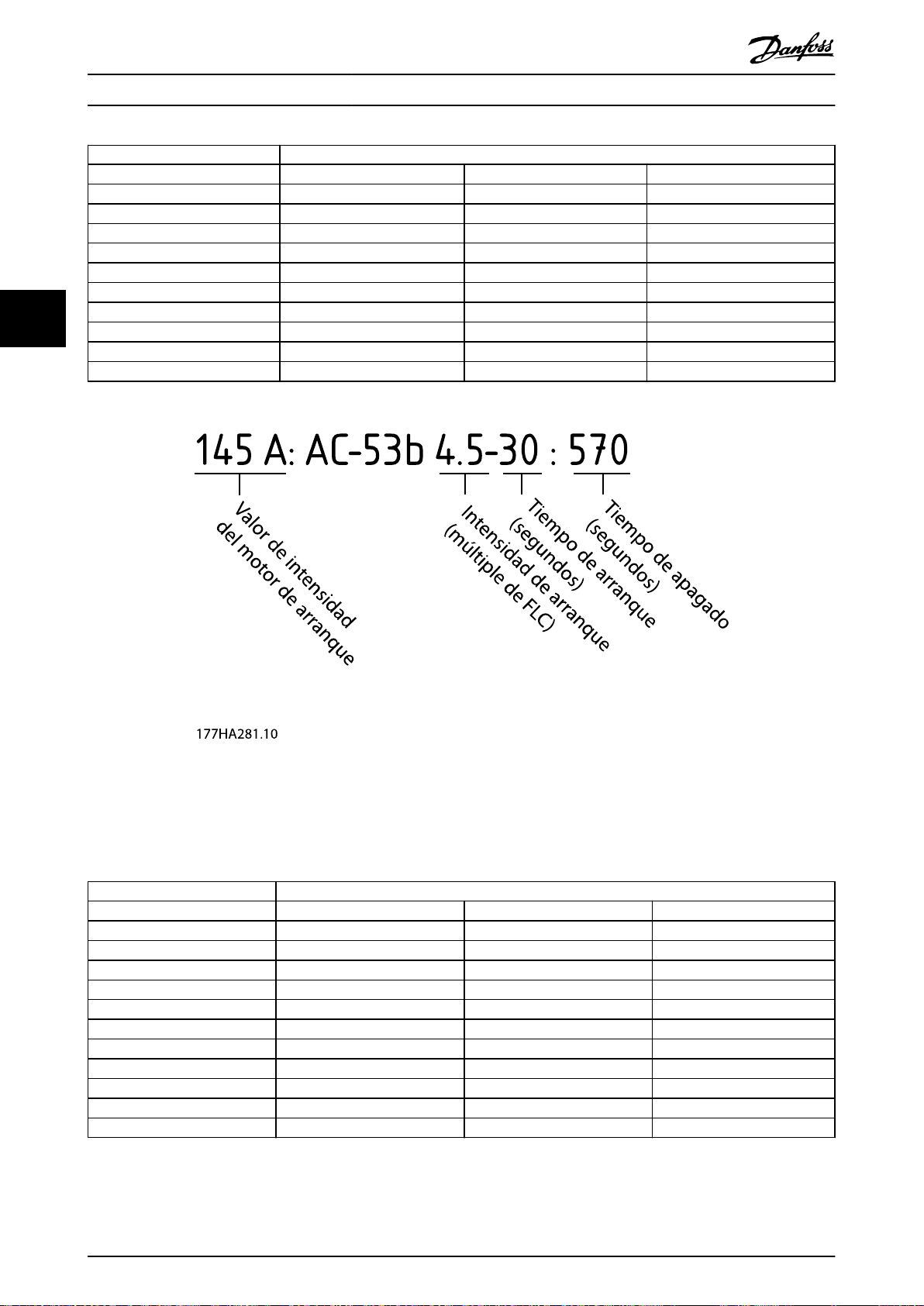
1.1.3 Código descriptivo
1 1
•
- Desconexión de entrada.
Arrancador
- SCR cortocircuitados individualmente.
- Batería/reloj.
Ilustración 1.1 Código descriptivo, formulario de pedido
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 7
Page 12
Introducción
VLT® Soft Starter MCD 500
11
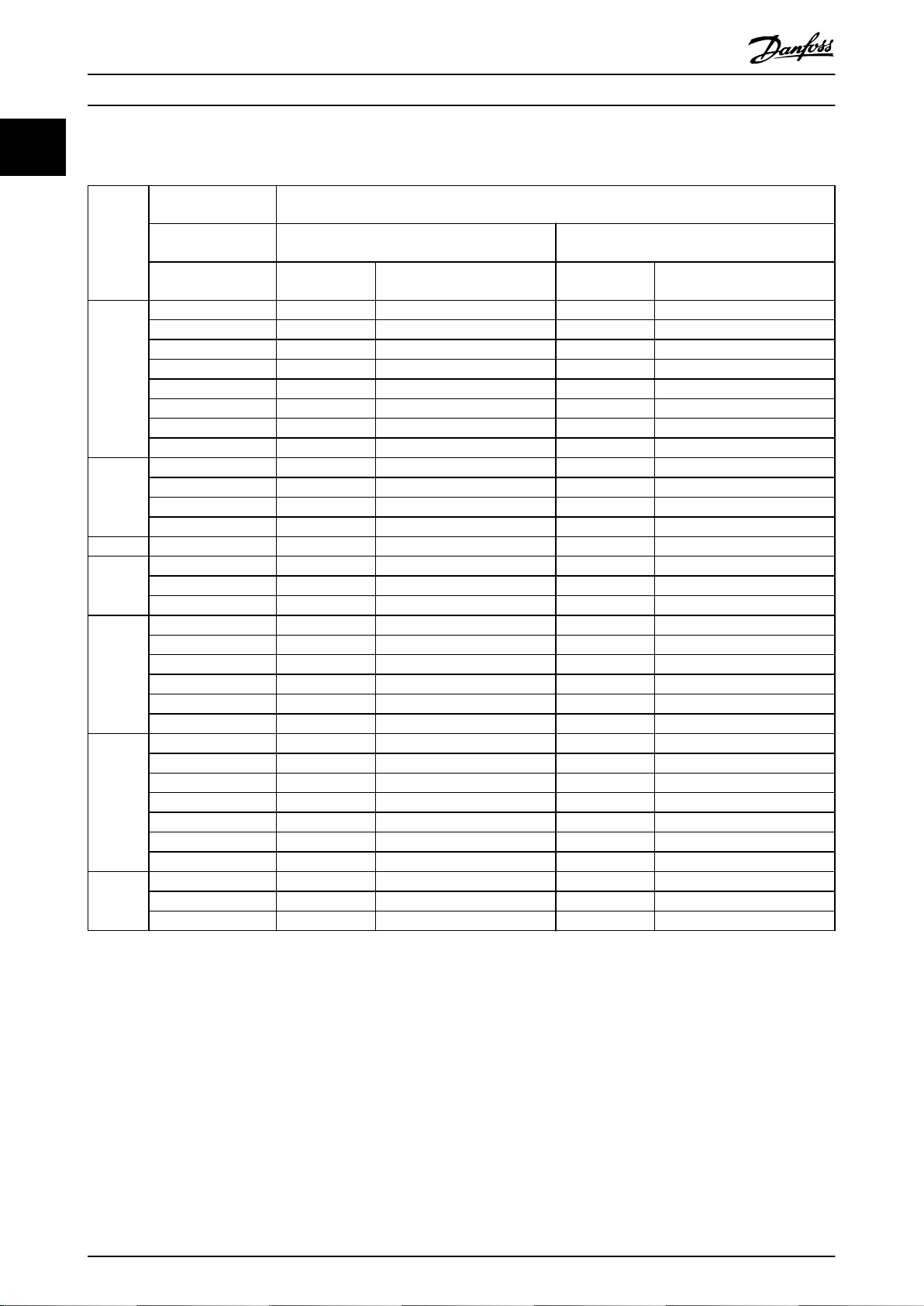
1.1.4 Números de pedido
Tensión de alimen-
tación T5, 200-525 V CA
Alimentación de
control
Clasicación de
G1B
G2B
G3C MCD5-0245C 175G5512 MCD5-0245C-T5-G3X-00-CV1 175G5537 MCD5-0245C-T5-G3X-00-CV2
G3B
G4B
G4C
G5C
amperios
MCD5-0021B 175G5500 MCD5-0021B-T5-G1X-20-CV1 175G5525 MCD5-0021B-T5-G1X-20-CV2
MCD5-0037B 175G5501 MCD5-0037B-T5-G1X-20-CV1 175G5526 MCD5-0037B-T5-G1X-20-CV2
MCD5-0043B 175G5502 MCD5-0043B-T5-G1X-20-CV1 175G5527 MCD5-0043B-T5-G1X-20-CV2
MCD5-0053B 175G5503 MCD5-0053B-T5-G1X-20-CV1 175G5528 MCD5-0053B-T5-G1X-20-CV2
MCD5-0068B 175G5504 MCD5-0068B-T5-G1X-20-CV1 175G5529 MCD5-0068B-T5-G1X-20-CV2
MCD5-0084B 175G5505 MCD5-0084B-T5-G1X-20-CV1 175G5530 MCD5-0084B-T5-G1X-20-CV2
MCD5-0089B 175G5506 MCD5-0089B-T5-G1X-20-CV1 175G5531 MCD5-0089B-T5-G1X-20-CV2
MCD5-0105B 175G5507 MCD5-0105B-T5-G1X-20-CV1 175G5532 MCD5-0105B-T5-G1X-20-CV2
MCD5-0131B 175G5508 MCD5-0131B-T5-G2X-00-CV1 175G5533 MCD5-0131B-T5-G2X-00-CV2
MCD5-0141B 175G5509 MCD5-0141B-T5-G2X-00-CV1 175G5534 MCD5-0141B-T5-G2X-00-CV2
MCD5-0195B 175G5510 MCD5-0195B-T5-G2X-00-CV1 175G5535 MCD5-0195B-T5-G2X-00-CV2
MCD5-0215B 175G5511 MCD5-0215B-T5-G2X-00-CV1 175G5536 MCD5-0215B-T5-G2X-00-CV2
MCD5-0245B 134N9344 MCD5-0245B-T5-G3X-00-CV1 134N9345 MCD5-0245B-T5-G3X-00-CV2
MCD5-0331B 134N9348 MCD5-0331B-T5-G3X-00-CV1 134N9349 MCD5-0331B-T5-G3X-00-CV2
MCD5-0396B 134N9352 MCD5-0396B-T5-G3X-00-CV1 134N9353 MCD5-0396B-T5-G3X-00-CV2
MCD5-0469B 134N9356 MCD5-0469B-T5-G4X-00-CV1 134N9357 MCD5-0469B-T5-G4X-00-CV2
MCD5-0525B 134N9360 MCD5-0525B-T5-G4X-00-CV1 134N9361 MCD5-0525B-T5-G4X-00-CV2
MCD5-0632B 134N9364 MCD5-0632B-T5-G4X-00-CV1 134N9365 MCD5-0632B-T5-G4X-00-CV2
MCD5-0744B 134N9368 MCD5-0744B-T5-G4X-00-CV1 134N9369 MCD5-0744B-T5-G4X-00-CV2
MCD5-0826B 134N9372 MCD5-0826B-T5-G4X-00-CV1 134N9373 MCD5-0826B-T5-G4X-00-CV2
MCD5-0961B 134N9376 MCD5-0961B-T5-G4X-00-CV1 134N9377 MCD5-0961B-T5-G4X-00-CV2
MCD5-0360C 175G5513 MCD5-0360C-T5-G4X-00-CV1 175G5538 MCD5-0360C-T5-G4X-00-CV2
MCD5-0380C 175G5514 MCD5-0380C-T5-G4X-00-CV1 175G5539 MCD5-0380C-T5-G4X-00-CV2
MCD5-0428C 175G5515 MCD5-0428C-T5-G4X-00-CV1 175G5540 MCD5-0428C-T5-G4X-00-CV2
MCD5-0595C 175G5516 MCD5-0595C-T5-G4X-00-CV1 175G5541 MCD5-0595C-T5-G4X-00-CV2
MCD5-0619C 175G5517 MCD5-0619C-T5-G4X-00-CV1 175G5542 MCD5-0619C-T5-G4X-00-CV2
MCD5-0790C 175G5518 MCD5-0790C-T5-G4X-00-CV1 175G5543 MCD5-0790C-T5-G4X-00-CV2
MCD5-0927C 175G5519 MCD5-0927C-T5-G4X-00-CV1 175G5544 MCD5-0927C-T5-G4X-00-CV2
MCD5-1200C 175G5520 MCD5-1200C-T5-G5X-00-CV1 175G5545 MCD5-1200C-T5-G5X-00-CV2
MCD5-1410C 175G5523 MCD5-1410C-T5-G5X-00-CV1 175G5546 MCD5-1410C-T5-G5X-00-CV2
MCD5-1600C 175G5524 MCD5-1600C-T5-G5X-00-CV1 175G5547 MCD5-1600C-T5-G5X-00-CV2
Número de
pedido Código descriptivo
CV1, 24 V CA / V CC CV2, 110-120 o 220-240 V CA
Número de
pedido Código descriptivo
Tabla 1.2 Números de pedido, T5, 200-525 V CA
8 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 13
Introducción Guía de funcionamiento
Tensión de alimen-
tación T7, 380-690 V CA
Alimentación de
control
Clasicación de
G1B
G2B
G3C MCD5-0245C 175G5560 MCD5-0245C-T7-G3X-00-CV1 175G5583 MCD5-0245C-T7-G3X-00-CV2
G3B
G4B
G4C
G5C
amperios
MCD5-0021B 175G5548 MCD5-0021B-T7-G1X-20-CV1 175G5571 MCD5-0021B-T7-G1X-20-CV2
MCD5-0037B 175G5549 MCD5-0037B-T7-G1X-20-CV1 175G5572 MCD5-0037B-T7-G1X-20-CV2
MCD5-0043B 175G5550 MCD5-0043B-T7-G1X-20-CV1 175G5573 MCD5-0043B-T7-G1X-20-CV2
MCD5-0053B 175G5551 MCD5-0053B-T7-G1X-20-CV1 175G5574 MCD5-0053B-T7-G1X-20-CV2
MCD5-0068B 175G5552 MCD5-0068B-T7-G1X-20-CV1 175G5575 MCD5-0068B-T7-G1X-20-CV2
MCD5-0084B 175G5553 MCD5-0084B-T7-G1X-20-CV1 175G5576 MCD5-0084B-T7-G1X-20-CV2
MCD5-0089B 175G5554 MCD5-0089B-T7-G1X-20-CV1 175G5577 MCD5-0089B-T7-G1X-20-CV2
MCD5-0105B 175G5555 MCD5-0105B-T7-G1X-20-CV1 175G5578 MCD5-0105B-T7-G1X-20-CV2
MCD5-0131B 175G5556 MCD5-0131B-T7-G2X-00-CV1 175G5579 MCD5-0131B-T7-G2X-00-CV2
MCD5-0141B 175G5557 MCD5-0141B-T7-G2X-00-CV1 175G5580 MCD5-0141B-T7-G2X-00-CV2
MCD5-0195B 175G5558 MCD5-0195B-T7-G2X-00-CV1 175G5581 MCD5-0195B-T7-G2X-00-CV2
MCD5-0215B 175G5559 MCD5-0215B-T7-G2X-00-CV1 175G5582 MCD5-0215B-T7-G2X-00-CV2
MCD5-0245B 134N9346 MCD5-0245B-T7-G3X-00-CV1 134N9347 MCD5-0245B-T7-G3X-00-CV2
MCD5-0331B 134N9350 MCD5-0331B-T7-G3X-00-CV1 134N9351 MCD5-0331B-T7-G3X-00-CV2
MCD5-0396B 134N9354 MCD5-0396B-T7-G3X-00-CV1 134N9355 MCD5-0396B-T7-G3X-00-CV2
MCD5-0469B 134N9358 MCD5-0469B-T7-G4X-00-CV1 134N9359 MCD5-0469B-T7-G4X-00-CV2
MCD5-0525B 134N9362 MCD5-0525B-T7-G4X-00-CV1 134N9363 MCD5-0525B-T7-G4X-00-CV2
MCD5-0632B 134N9366 MCD5-0632B-T7-G4X-00-CV1 134N9367 MCD5-0632B-T7-G4X-00-CV2
MCD5-0744B 134N9370 MCD5-0744B-T7-G4X-00-CV1 134N9371 MCD5-0744B-T7-G4X-00-CV2
MCD5-0826B 134N9374 MCD5-0826B-T7-G4X-00-CV1 134N9375 MCD5-0826B-T7-G4X-00-CV2
MCD5-0961B 134N9378 MCD5-0961B-T7-G4X-00-CV1 134N9379 MCD5-0961B-T7-G4X-00-CV2
MCD5-0360C 175G5561 MCD5-0360C-T7-G4X-00-CV1 175G5584 MCD5-0360C-T7-G4X-00-CV2
MCD5-0380C 175G5562 MCD5-0380C-T7-G4X-00-CV1 175G5585 MCD5-0380C-T7-G4X-00-CV2
MCD5-0428C 175G5563 MCD5-0428C-T7-G4X-00-CV1 175G5586 MCD5-0428C-T7-G4X-00-CV2
MCD5-0595C 175G5564 MCD5-0595C-T7-G4X-00-CV1 175G5587 MCD5-0595C-T7-G4X-00-CV2
MCD5-0619C 175G5565 MCD5-0619C-T7-G4X-00-CV1 175G5588 MCD5-0619C-T7-G4X-00-CV2
MCD5-0790C 175G5566 MCD5-0790C-T7-G4X-00-CV1 175G5589 MCD5-0790C-T7-G4X-00-CV2
MCD5-0927C 175G5567 MCD5-0927C-T7-G4X-00-CV1 175G5590 MCD5-0927C-T7-G4X-00-CV2
MCD5-1200C 175G5568 MCD5-1200C-T7-G5X-00-CV1 175G5591 MCD5-1200C-T7-G5X-00-CV2
MCD5-1410C 175G5569 MCD5-1410C-T7-G5X-00-CV1 175G5592 MCD5-1410C-T7-G5X-00-CV2
MCD5-1600C 175G5570 MCD5-1600C-T7-G5X-00-CV1 175G5593 MCD5-1600C-T7-G5X-00-CV2
Número de
pedido Código descriptivo
CV1, 24 V CA / V CC CV2, 110-120 o 220-240 V CA
Número de
pedido Código descriptivo
1 1
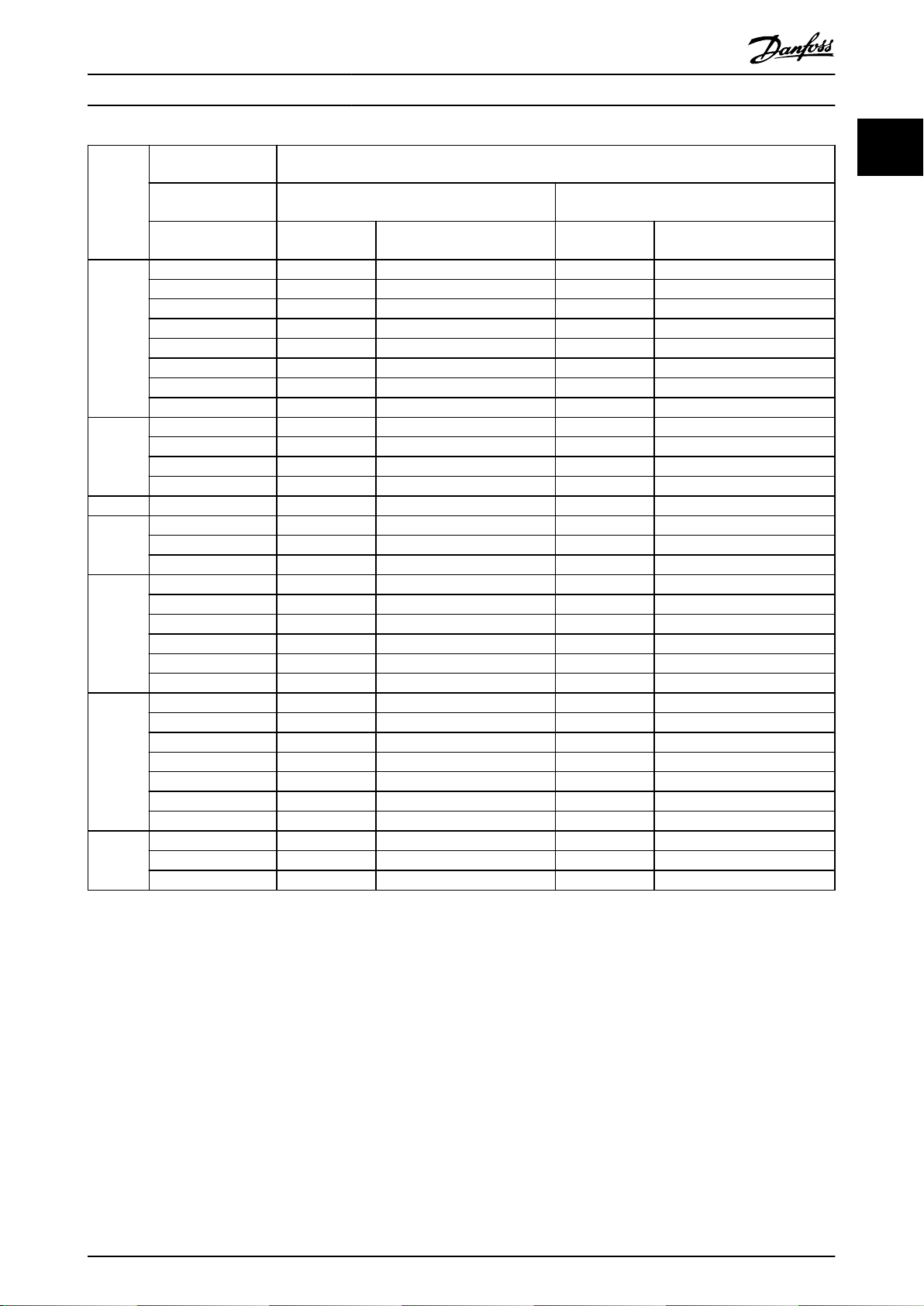
Tabla 1.3 Números de pedido, T7, 380-690 V CA
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 9
Page 14
Seguridad
VLT® Soft Starter MCD 500
2 Seguridad
22
2.1 Seguridad
En esta guía se han utilizado los siguientes símbolos:
ADVERTENCIA
Indica situaciones potencialmente peligrosas que pueden
producir lesiones graves o incluso la muerte.
PRECAUCIÓN
Indica una situación potencialmente peligrosa que puede
producir lesiones leves o moderadas. También puede
utilizarse para alertar contra prácticas no seguras.
ADVERTENCIA
CONEXIÓN A TIERRA ADECUADA
Desconecte el arrancador suave de la tensión de red
antes de realizar trabajos de reparación.
Es responsabilidad de la persona que instala el
arrancador suave proporcionar la conexión a tierra y la
protección de circuito derivado adecuadas de acuerdo
con las normas locales de seguridad eléctrica.
No conecte condensadores de corrección del factor de
potencia a la salida del VLT® Soft Starter MCD 500. Si se
usa una corrección estática del factor de potencia, tiene
que conectarse a la fuente de alimentación del
arrancador suave.
AVISO!
Indica información importante, entre la que se incluyen
situaciones que pueden producir daños en el equipo u
otros bienes.
2.1.1 Personal cualicado
Se precisan un transporte, un almacenamiento, una
instalación, un funcionamiento y un mantenimiento
correctos y ables para que el arrancador suave funcione
de un modo seguro y sin ningún tipo de problemas. Este
equipo únicamente puede ser manejado o instalado por
personal cualicado.
El personal cualicado es aquel personal formado que está
autorizado para realizar la instalación, la puesta en marcha
y el mantenimiento de los equipos, sistemas y circuitos
conforme a la legislación y la regulación vigentes.
Asimismo, el personal debe estar familiarizado con las
instrucciones y medidas de seguridad descritas en este
manual.
ADVERTENCIA
RIESGO DE DESCARGA ELÉCTRICA
El arrancador suave VLT® Soft Starter MCD 500 contiene
tensiones peligrosas cuando está conectado a la red. La
instalación eléctrica debe correr a cargo de un
electricista cualicado. Una instalación incorrecta del
motor o del arrancador suave puede provocar fallos en
el equipo, lesiones graves o incluso la muerte. Siga las
instrucciones de este manual y las normas locales de
seguridad eléctrica.
Modelos MCD5-0360C ~ MCD5-1600C:
Trate la barra conductora y el disipador como piezas
bajo tensión siempre que la unidad esté conectada a la
tensión de red (incluso cuando el arrancador suave esté
desconectado o esperando una orden).
ADVERTENCIA
ARRANQUE INMEDIATO
En modo automático, el motor puede controlarse de
forma remota (mediante entradas remotas), mientras el
arrancador suave está conectado a la alimentación.
MCD5-0021B ~ MCD5-0961B:
El transporte, un golpe mecánico o un manejo brusco
pueden hacer que el contactor de bypass se conecte.
Para evitar que el motor arranque inmediatamente en la
primera puesta en servicio o el primer funcionamiento
tras el transporte:
Asegúrese siempre de aplicar la alimentación de
•
control antes de la potencia.
Aplicando la alimentación de control antes de la
•
potencia asegura que el contactor esté inicializado.
10 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 15
Seguridad Guía de funcionamiento
ADVERTENCIA
ARRANQUE ACCIDENTAL
Cuando el arrancador suave se conecta a una red de CA,
a un suministro de CC o a una carga compartida, el
motor puede arrancar en cualquier momento. Un
arranque accidental durante la programación, el
mantenimiento o los trabajos de reparación puede
causar la muerte, lesiones graves o daños materiales. El
motor puede arrancar mediante un interruptor externo,
una orden de eldbus, una señal de referencia de
entrada desde el LCP o el LOP, por funcionamiento
remoto con el software para PC del MCD o por la
eliminación de una condición de fallo.
Para evitar un arranque accidental del motor:
Pulse [O]/[Reset] en el LCP antes de programar
•
cualquier parámetro.
Desconecte el arrancador suave de la red de
•
alimentación.
Debe cablear y montar completamente el
•
arrancador suave, el motor y cualquier equipo
accionado antes de conectar el arrancador
suave a la red de CA, al suministro de CC o a
una carga compartida.
AVISO!
Antes de cambiar cualquier ajuste de parámetro, guarde
el parámetro actual en un archivo utilizando el software
para PC del MCD o la función Save User Set (Guardar
conjunto de usuario).
AVISO!
Utilice con precaución la función de autostart (arranque
automático). Lea todas las notas relacionadas con el
arranque automático antes de que el equipo comience a
funcionar.
Los ejemplos y diagramas incluidos en este manual tienen
únicamente un propósito ilustrativo. La información
contenida en este manual está sujeta a cambios en
cualquier momento y sin previo aviso. No se aceptará
responsabilidad alguna por daños directos, indirectos o
consecuentes como resultado del uso o la aplicación de
este equipo.
2 2
ADVERTENCIA
SEGURIDAD DEL PERSONAL
Un arrancador suave no es un dispositivo de seguridad y
no proporciona aislamiento eléctrico ni la desconexión
de la fuente de alimentación.
Si se necesita aislamiento, el arrancador suave
•
deberá instalarse con un contactor principal.
No confíe en las funciones de arranque y
•
parada para la seguridad del personal. La
presencia de fallos en la alimentación de red, en
la conexión del motor o en los componentes
electrónicos del arrancador suave puede hacer
que un motor arranque o se detenga de forma
inesperada.
Si se producen fallos en los componentes
•
electrónicos del arrancador suave, un motor
puede arrancar de forma inesperada. Un fallo
temporal en la fuente de alimentación de red o
un corte de la conexión del motor también
puede hacer que arranque un motor de forma
inesperada.
Para garantizar la seguridad del personal y de los
equipos, controle el dispositivo de aislamiento mediante
un sistema de seguridad externo.
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 11
Page 16
177HA427.10
1
2
3
4
Instalación
VLT® Soft Starter MCD 500
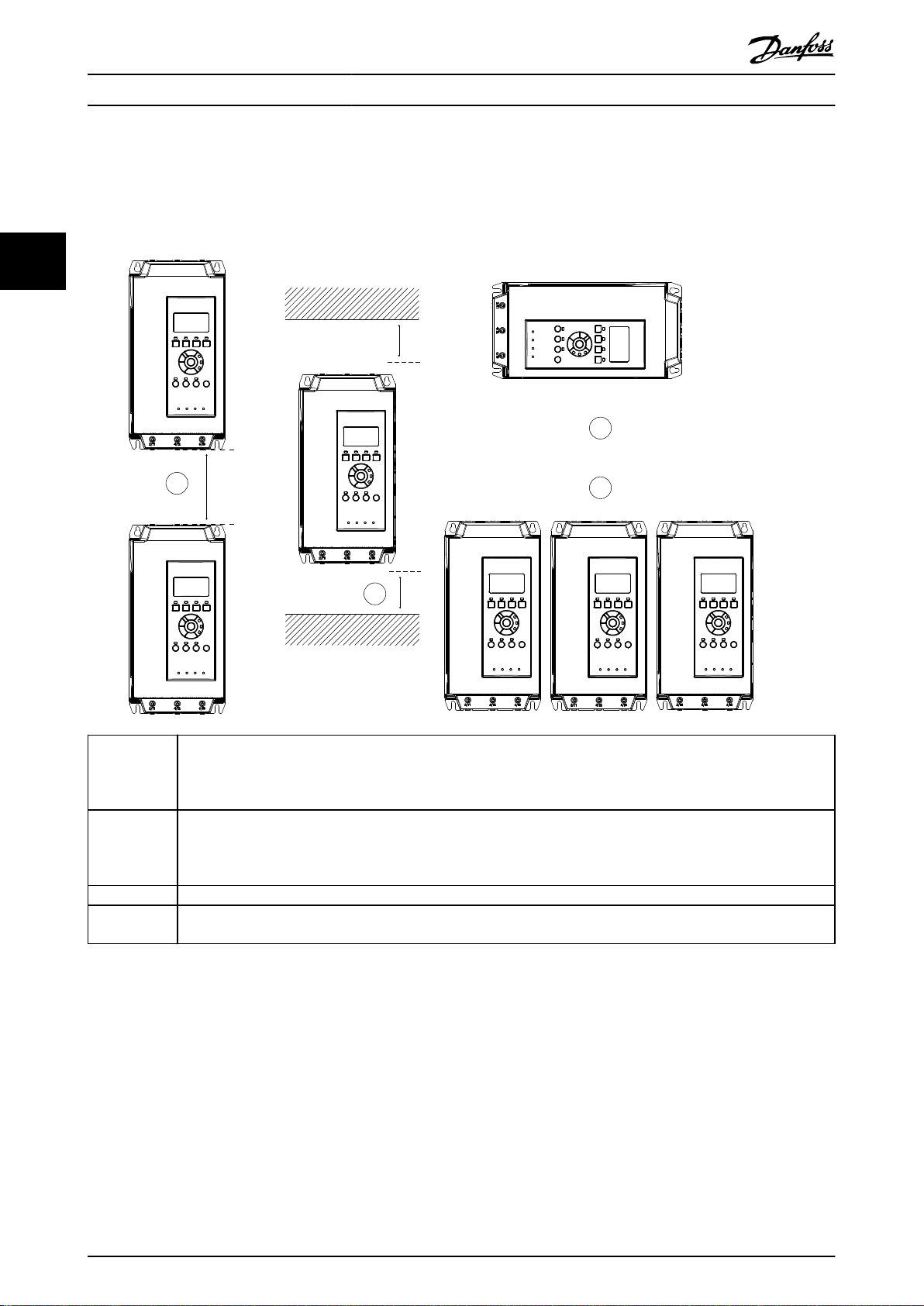
3 Instalación
3.1 Instalación mecánica
33
1 De MCD5-0021B a MCD5-0215B: dejar un espacio de 100 mm (3,94 in) entre los arrancadores suaves.
De MCD5-0245B a MCD5-0961B: dejar un espacio de 200 mm (7,88 in) entre los arrancadores suaves.
MCD5-0245C: dejar un espacio de 100 mm (3,94 in) entre los arrancadores suaves.
De MCD5-0360C a MCD5-1600C: dejar un espacio de 200 mm (7,88 in) entre los arrancadores suaves.
2 De MCD5-0021B a MCD5-0215B: dejar un espacio de 50 mm (1,97 in) entre el arrancador suave y las supercies sólidas.
De MCD5-0245B a MCD5-0961B: dejar un espacio de 200 mm (7,88 in) entre los arrancadores suaves.
MCD5-0245C: dejar un espacio de 100 mm (3,94 in) entre el arrancador suave y las supercies sólidas.
De MCD5-0360C a MCD5-1600C: dejar un espacio de 200 mm (7,88 in) entre el arrancador suave y las supercies sólidas.
3 Es posible montar el arrancador suave de lado. Reduzca la corriente nominal del arrancador suave en un 15 %.
4 Si se instalan sin módulos de comunicación, los arrancadores suaves pueden montarse lado a lado sin espacio
intermedio.
Ilustración 3.1 Separaciones y valores de reducción de potencia durante la instalación
12 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 17
A
B
D
C
E
A
B
C
D
E
177HA514.10
Instalación Guía de funcionamiento
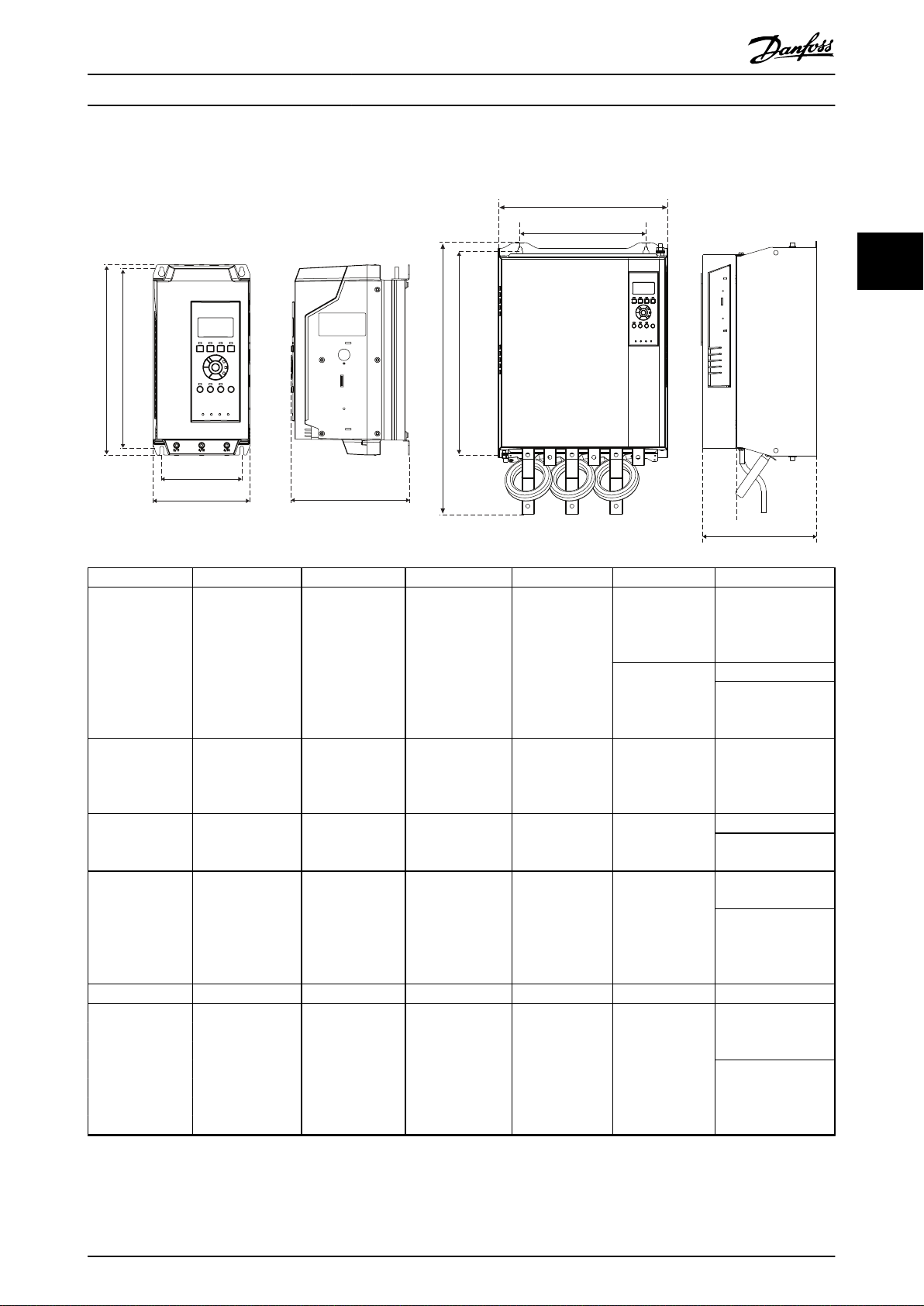
3.2 Dimensiones y peso
3 3
Modelo A [mm] (in) B [mm] (in) C [mm] (in) D [mm] (in) E [mm] (in) Peso [kg] (lb)
MCD5-0021B
MCD5-0037B
MCD5-0043B
MCD5-0053B
MCD5-0068B
MCD5-0084B
MCD5-0089B
MCD5-0105B
MCD5-0131B
MCD5-0141B
MCD5-0195B
MCD5-0215B
MCD5-0245B
MCD5-0331B
MCD5-0396B
MCD5-0469B
MCD5-0525B
MCD5-0632B
MCD5-0744B
MCD5-0826B
MCD5-0961B
MCD5-0245C 460 (18,1) 400 (15,0) 390 (15,4) 320 (12,6) 279 (11,0) 23,9 (52,7)
MCD5-0360C
MCD5-0380C
MCD5-0428C
MCD5-0595C
MCD5-0619C
MCD5-0790C
MCD5-0927C
295 (11,6) 278 (10,9) 150 (5,9) 124 (4,9)
438 (17,2) 380 (15,0) 275 (10,8) 248 (9,8) 250 (9,8) 14,9 (32,8)
440 (17,3) 392 (15,4) 424 (16,7) 376 (14,8) 296 (11,7)
640 (25,2) 600 (23,6) 433 (17,0) 320 (12,6) 295 (11,6)
689 (27,1) 522 (20,5) 430 (16,9) 320 (12,6) 300 (11,8)
183 (7,2) 4,2 (9,3)
4,5 (9,9)
213 (8,14)
4,9 (10,8)
26 (57,2)
30,2 (66,6)
49,5 (109,1)
60,0 (132,3)
35 (77,2)
45 (99,2)
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 13
Page 18
Instalación
Modelo A [mm] (in) B [mm] (in) C [mm] (in) D [mm] (in) E [mm] (in) Peso [kg] (lb)
MCD5-1200C
856 (33,7) 727 (28,6) 585 (23,0) 500 (19,7) 364 (14,3) 120 (264,6)MCD5-1410C
MCD5-1600C
VLT® Soft Starter MCD 500
33
Ilustración 3.2 Dimensiones y peso
14 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 19
Relé
prog. A
Relé
prog. B
Relé
prog. C
Salida
analógica
Entrada
prog.
Tensión de control
(depende del modelo)
24 V CC sal.
Arranque
Parada
Termistor
del motor
1 7 7 H A 5 0 4 . 1 0
S t a r t / s t o p
R e s e t
S t a r t
S t o p
R e s e t
S t a r t
S t o p
R e s e t
1 5
1 6
1 7
1 8
2 5
1 8
1 5
1 6
1 7
1 8
2 5
1 8
1 5
1 6
1 7
1 8
2 5
1 8
2
3
1
Instalación eléctrica Guía de funcionamiento
4 Instalación eléctrica
4.1 Cableado de control
4.1.1 Formas de controlar el arrancador
suave
El VLT® Soft Starter MCD 500 puede controlarse de tres
maneras:
Pulsando las teclas del LCP.
•
A través de entradas remotas.
•
A través de un enlace de comunicación serie.
•
El arrancador suave responde siempre a una orden de
arranque o parada local (mediante las teclas [Hand On] y
[O] del LCP). Al pulsar la tecla [Auto On] se selecciona el
control remoto (el arrancador suave acepta órdenes desde
las entradas remotas). En modo remoto, el LED Auto On
estará encendido. En modo manual, estará encendido el
LED Hand On cuando el arrancador suave arranque o esté
en funcionamiento. El LED O estará encendido cuando el
arrancador suave esté parado o se detenga.
4.1.2 Terminales de control
Los terminales de control utilizan bloques de conexiones
de 2,5 mm2 (14 AWG). Distintos modelos requieren una
tensión de control en diferentes terminales:
CV1 (24 V CA / V CC): A5 y A6.
•
CV2 (110-120 V CA): A5 y A6.
•
CV2 (220-240 V CA): A4 y A6.
•
Para mantener el estado SELV, todas las conexiones
realizadas con los terminales de control deben ser PELV
(por ejemplo, el termistor debe disponer de un aislamiento
del motor reforzado/doble).
AVISO!
SELV ofrece protección mediante una tensión muy baja.
Se considera garantizada la protección contra descargas
eléctricas cuando el suministro eléctrico es de tipo SELV
y la instalación se realiza de acuerdo con las reglamentaciones locales o nacionales sobre equipos SELV.
AVISO!
El aislamiento galvánico (garantizado) se consigue
cumpliendo los requisitos relativos a un mayor
aislamiento y proporcionando las distancias necesarias
en los circuitos. Estos requisitos se describen en la norma
CEI 61140.
Los componentes que constituyen el aislamiento
eléctrico también se ajustan a los requisitos de
aislamiento superior y a las pruebas descritas en la
norma CEI 61140.
4.1.3 Entradas remotas
El arrancador suave tiene tres entradas jas para control
remoto. Controle estas entradas mediante contactos
calicados para tensión baja y funcionamiento a intensidad
baja (chapado en oro o similar).
4 4
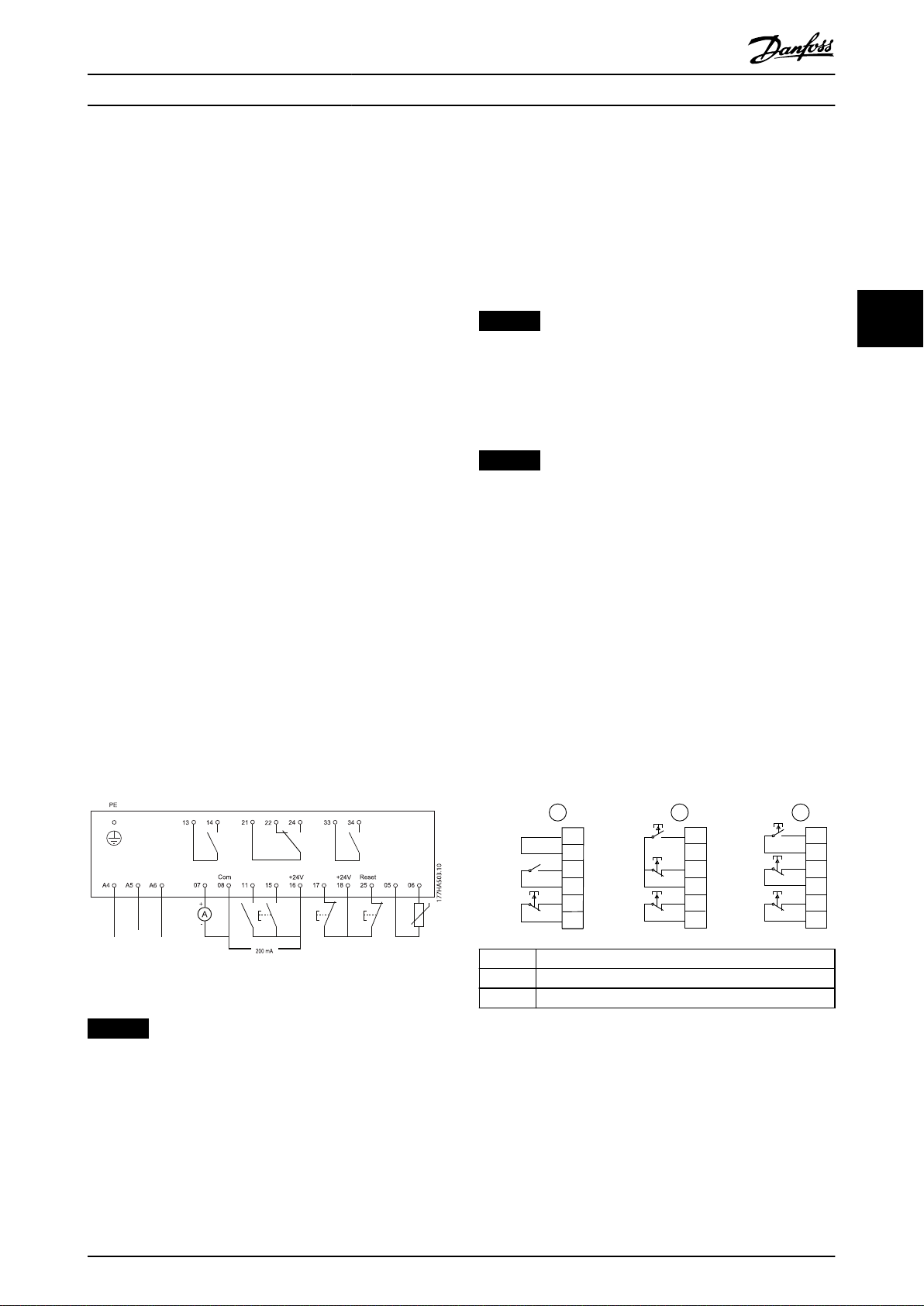
Ilustración 4.1 Cableado a los terminales de control
AVISO!
1 Control de 2 cables
2 Control de 3 cables
3 Control de 4 cables
Ilustración 4.2 Control de 2, 3 y 4 cables
No cortocircuite los terminales 05 y 06 sin usar un
termistor.
La entrada de reinicio puede estar normalmente abierta o
Todos los terminales de control y de relé cumplen con
SELV (tensión muy baja de seguridad). Esta protección no
es aplicable a la conexión a tierra en triángulo por encima
normalmente cerrada. Para seleccionar la conguración,
utilice el parámetro 3-8 Lóg reinic remoto.
de 400 V.
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 15
Page 20
Instalación eléctrica
VLT® Soft Starter MCD 500
ADVERTENCIA
terminales: uno en el lado de entrada (superior) y
otro en el lado de salida (inferior).
RIESGO DE DESCARGA ELÉCTRICA
No aplique tensión a los terminales de control de
entrada. Estos terminales son entradas activas de 24 V
CC y se tienen que controlar con circuitos sin potencial.
Separe los cables a las entradas de control de
•
los de tensión de red y de los cables del motor.
44
4.1.4 Comunicación serie
El control a través de la red de comunicación serie siempre
está activado en el modo de control manual y puede
activarse o desactivarse en el modo de control remoto
(consulte el parámetro 3-2 Coms en remoto). El control a
través del puerto de comunicación serie requiere un
módulo de comunicación opcional.
4.1.6 Terminales de potencia
AVISO!
Por seguridad del personal, los terminales de potencia
de todos los modelos hasta el MCD5-0105B están
protegidos con lengüetas retráctiles. Cuando se utilicen
cables largos, puede ser necesario romper estas
lengüetas.
AVISO!
Algunas unidades utilizan barras conductoras de
aluminio. Cuando conecte terminaciones de potencia,
limpie bien la zona de la supercie de contacto (con un
cepillo de acero inoxidable o de esmeril) y utilice un
compuesto para juntas adecuado para evitar la corrosión.
4.1.5 Terminales de tierra
Los terminales de conexión toma a tierra se encuentran en
la parte trasera del arrancador suave.
Utilice únicamente conductores de cobre trenzado o
macizos, adecuados para 75 °C (167 °F) o más.
Del MCD5-0021B al MCD5-0105B tienen un
•
terminal en el lado de entrada (superior).
Del MCD5-0131B al MCD5-0961B y del
•
MCD5-0245C al MCD5-1600C tienen dos
16 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 21
177HA646.10
177HA647.10
177HA648.10
177HA649.10
5 mm
15 mm
28 mm
11 mm
(M10)
177HA643.10
6 mm
15 mm
28 mm
11 mm
(M10)
177HA644.10
13 mm
12 mm
32 mm
11 mm
(M10)
177HA645.10
Instalación eléctrica Guía de funcionamiento
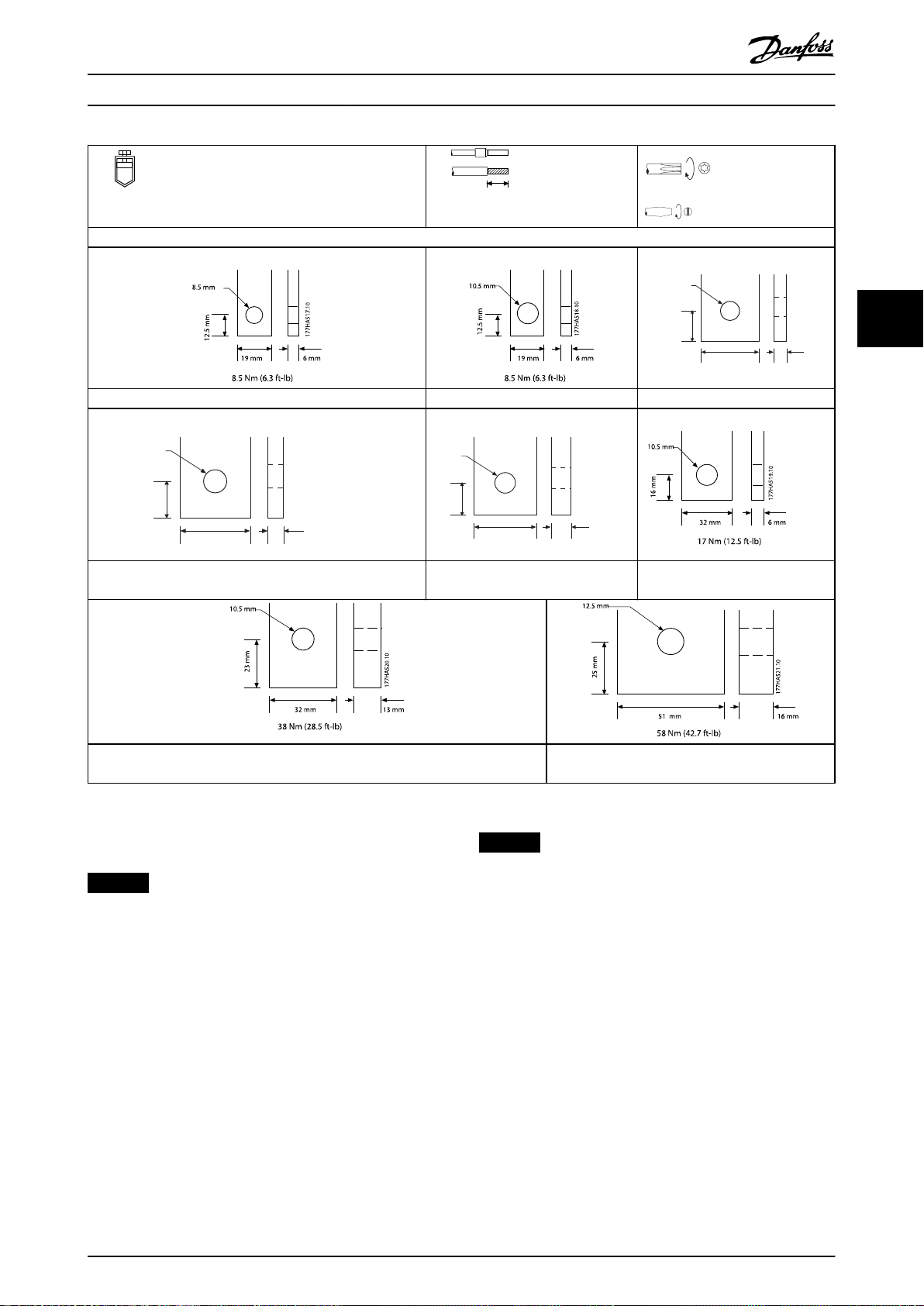
Dimensión del cable: 6-50 mm2 (AWG
10-1/0)
Par: 4 Nm (35,4 in-lb)
De MCD5-0021B a MCD5-0105B
38 Nm (336,3 in-lb)
MCD5-0131B De MCD5-0141B a MCD5-0215B MCD5-0245B
38 Nm (336,3 in-lb) 38 Nm (336 in-lb)
De MCD5-0331B a MCD5-0396B De MCD5-0469B a MCD5-0961B MCD5-0245C
14 mm (0,55 in)
Torx T20 × 150
Plano 7 mm × 150
4 4
De MCD5-0360C a MCD5-0927C De MCD5-1200C a MCD5-1600C
Tabla 4.1 Medidas y pares para terminales de potencia
4.1.7 Kit de protección para dedos
AVISO!
Al instalar los arrancadores suaves IP00 (MCB5-131B y
superiores), se usarán protecciones para dedos para la
seguridad del personal. Los kits de protección para
dedos se ajustan sobre los terminales del arrancador
suave para evitar el contacto accidental con los
terminales bajo tensión. Las protecciones de los dedos
proporcionan protección IP20 si están correctamente
instaladas.
De MCD5-0131B a MCD5-0215B: 175G5662.
•
De MCD5-0245B a MCD5-0396B: 175G5730.
•
De MCD5-0469B a MCD5-0961B: 175G5731.
•
MCD5-245C: 175G5663.
•
De MCD5-0360C a MCD5-0927C: 175G5664.
•
De MCD5-1200C a MCD5-1600C: 175G5665.
•
AVISO!
Para ser conformes a las normas UL, los modelos de
MCD5-0131B a MCD5-0396B requieren protecciones para
los dedos.
4.2 Conguraciones de entrada y salida de
alimentación
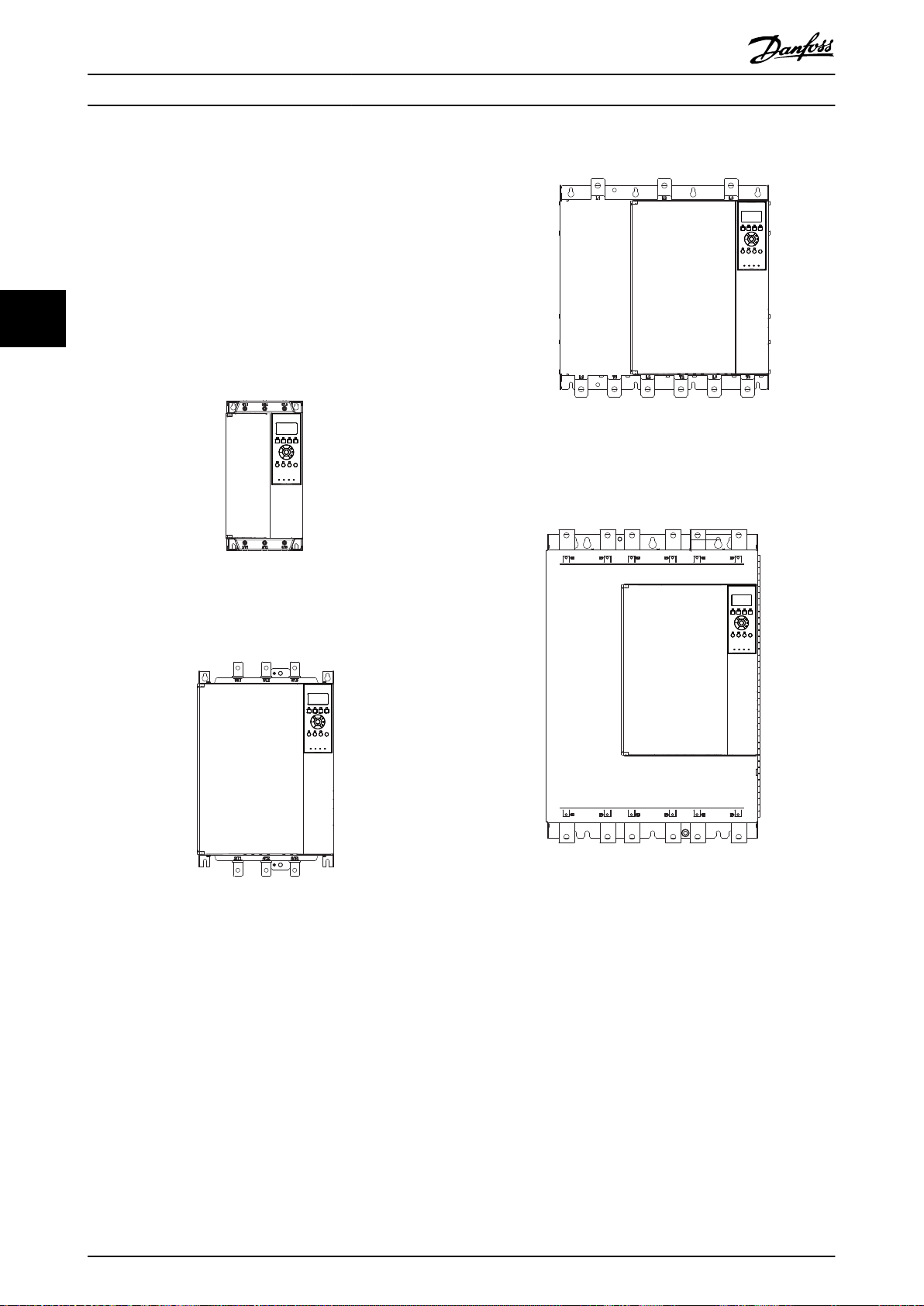
4.2.1 Modelos con bypass interno (de
MCD5-0021B a MCD5-0961B)
Los modelos de MCD5-0021B a MCD5-0215B tienen
entradas de alimentación en la parte superior de la unidad
y salidas en la parte inferior de la unidad.
Los modelos con bypass interno de MCD5-0245B a
MCD5-0396B tienen barras conductoras de salida en la
parte inferior de la unidad y barras conductoras de entrada
tanto en la parte superior como en la parte inferior. La
fuente de alimentación de CA puede conectarse:
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 17
Page 22
1/L1, 3/L2, 5/L3
2/T1, 4/T2, 6/T3
177HA686.10
1/L1 3/L2 5/L3
2/T1 4/T2 6/T3
177HA687.10
2/T1 4/T2 6/T3
1/L1 3/L2 5/L3
1/L1 3/L2 5/L3
177HA688.10
20.0
2/T1 4/T2 6/T3
1/L1 3/L2 5/L3
2/T1 4/T2 6/T3
1/L1 3/L2 5/L3
177HA650.11
Instalación eléctrica
Entrada superior / salida inferior.
•
Entrada inferior / salida inferior
•
Los modelos con bypass interno de MCD5-0469B a
MCD5-0961B tienen barras conductoras de entrada y salida
en la parte superior y en la parte inferior de la unidad. La
fuente de alimentación de CA puede conectarse:
Entrada superior / salida inferior.
•
Entrada superior / salida superior.
•
44
Entrada inferior / salida inferior.
•
Entrada inferior / salida superior.
•
VLT® Soft Starter MCD 500
Ilustración 4.5 De MCD5-0245B a MCD5-0396B, 245-396 A
Ilustración 4.3 De MCD5-0021B a MCD5-0105B, 21-105 A
Ilustración 4.4 De MCD5-0131B a MCD5-0215B, 131-215 A
Ilustración 4.6 De MCD5-0469B a MCD5-0961B, 469-961 A
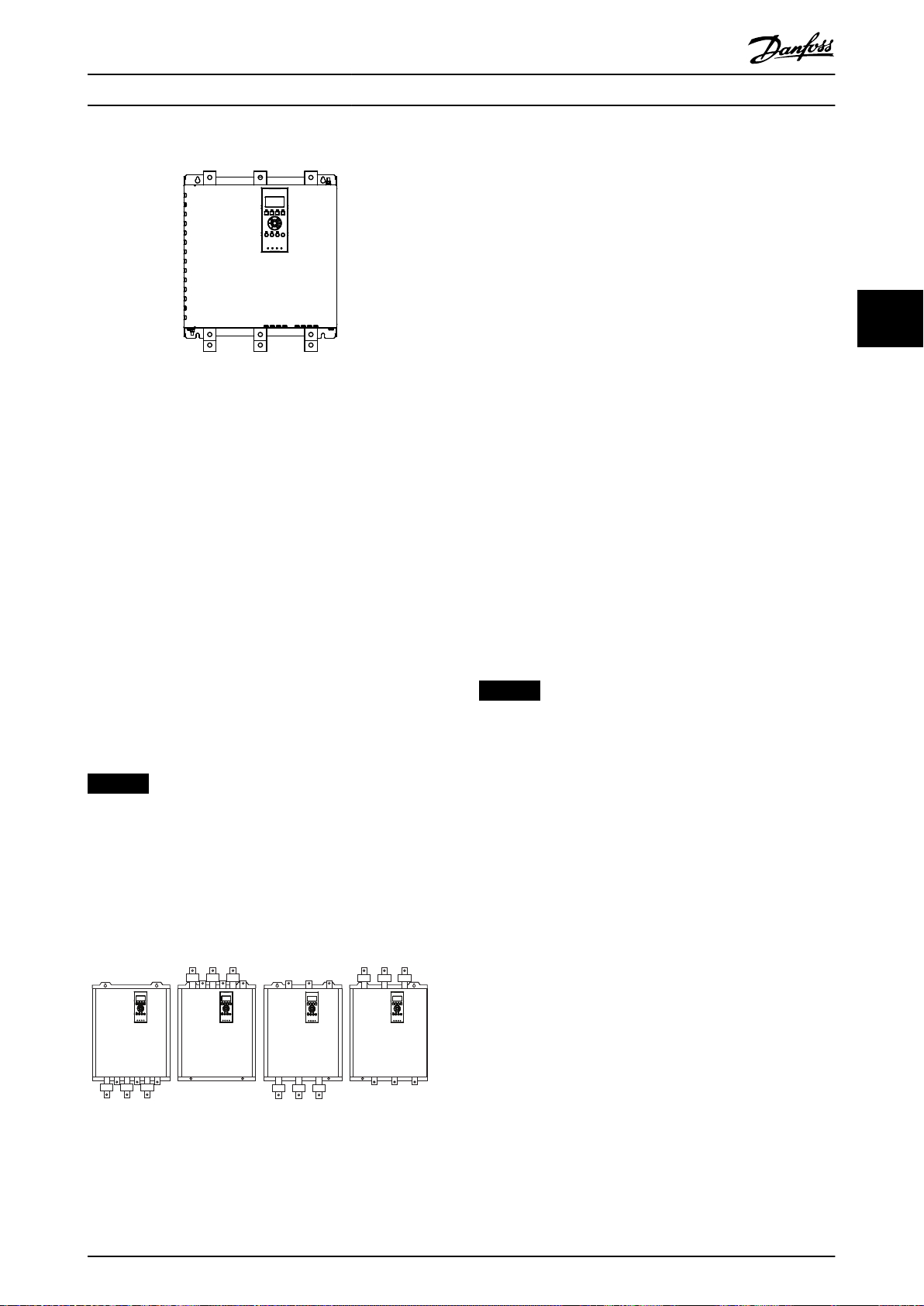
4.2.2 MCD5-0245C
El modelo MCD5-0245C tiene terminales de bypass
especícos en la parte inferior de la unidad. Los terminales
de bypass son:
T1B.
•
T2B.
•
T3B.
•
18 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 23
177HA651.10
1/L1 3/L2 5/L3
T1B T2B T3B
2/T1 4/T2 6/T3
(L1B L2B L3B)
1/L1 3/L2 5/L3
2/T1 4/T2 6/T3
1/L1 3/L2 5/L3
(L1B L2B L3B)
2/T1 4/T2 6/T3
(L1B L2B L3B)
1/L1 3/L2 5/L3
2/T1 4/T2 6/T3
1/L1 3/L2 5/L3
(L1B L2B L3B)
2/T1 4/T2 6/T3
177HA652.10
Instalación eléctrica Guía de funcionamiento
4.3 Conexión del motor
Los VLT® Soft Starter MCD 500 pueden conectarse al motor
en línea o en triángulo interno (conexiones también
denominadas de tres cables y de seis cables). Al conectar
en triángulo interno, introduzca la corriente a plena carga
del motor (FLC) en el parámetro 1-1 Motor Full Load Current
(Corriente a plena carga del motor). El MCD 500 calcula
automáticamente la corriente en triángulo interno según
estos datos. El parámetro 15-7 Motor Connection (Conexión
del motor) está ajustado por defecto en Auto Detect
(Detección automática) y puede ajustarse para forzar al
arrancador suave a funcionar en triángulo interno o en
Ilustración 4.7 Terminales de bypass del MCD5-0245C, 245 A
línea.
4.3.1 Comprobación de la instalación
4.2.3 De MCD5-0360C a MCD5-1600C
Para probarlo, el VLT® Soft Starter MCD 500 puede
Los modelos de MCD5-0360C a MCD5-1600C tienen
terminales de bypass especícos en las barras conductoras
de entrada. Los terminales de bypass son:
L1B.
•
L2B.
•
L3B.
•
Las barras conductoras de los modelos sin bypass de
MCD5-0360C a MCD5-1600C pueden ajustarse para entrada
y salida superior o inferior, según sea necesario. Consulte
las instrucciones paso a paso en el capétulo 12 Procedi-
miento de ajuste de la barra conductora (de MCD5-0360C a
MCD5-1600C). Los arrancadores suaves se fabrican con
entrada superior / salida inferior.
AVISO!
Para que los modelos de MCD5-0360C a MCD5-1600C
cumplan las normas UL, móntelos con entrada
superior / salida inferior o salida superior / entrada
inferior. Consulte el capétulo 11.1 Instalación conforme a
UL para conocer más información.
conectarse a un motor pequeño. Durante esta prueba, se
pueden comprobar los ajustes de protección de la entrada
de control y de la salida de relé. Este modo de prueba no
es adecuado para comprobar el comportamiento del
arranque y la parada suaves.
La FLC mínima del motor de pruebas es del 2 % de la FLC
mínima del arrancador suave (consulte el
capétulo 4.5 Ajustes de intensidad máxima y mínima).
AVISO!
Si se comprueba el arrancador suave con un motor
pequeño, se debe ajustar el parámetro 1-1 FLC motor al
valor mínimo permitido.
Los modelos con bypass interno no requieren un
contactor de bypass externo.
4 4
Ilustración 4.8 Ubicación de los terminales de bypass, de
MCD5-0360C a MCD5-1600C, 360-1600 A
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 19
Page 24
177HA430.12
M
3
6/T3
2/T1
5/L3
3/L2
1/L1
13
14
4/T2
E
K1
K1 F1
177HA429.12
6/T3
2/T1
5/L3
3/L2
1/L1
13
14
4/T2
E
K1
K1 F1
M
3
177HA617.11
M
3
F1
6/T3
2/T1
5/L3
3/L2
1/L1
13
14
4/T2
E
K1
K1
T1B
T2B
T3B
K2
34
33
K2
Instalación eléctrica
VLT® Soft Starter MCD 500
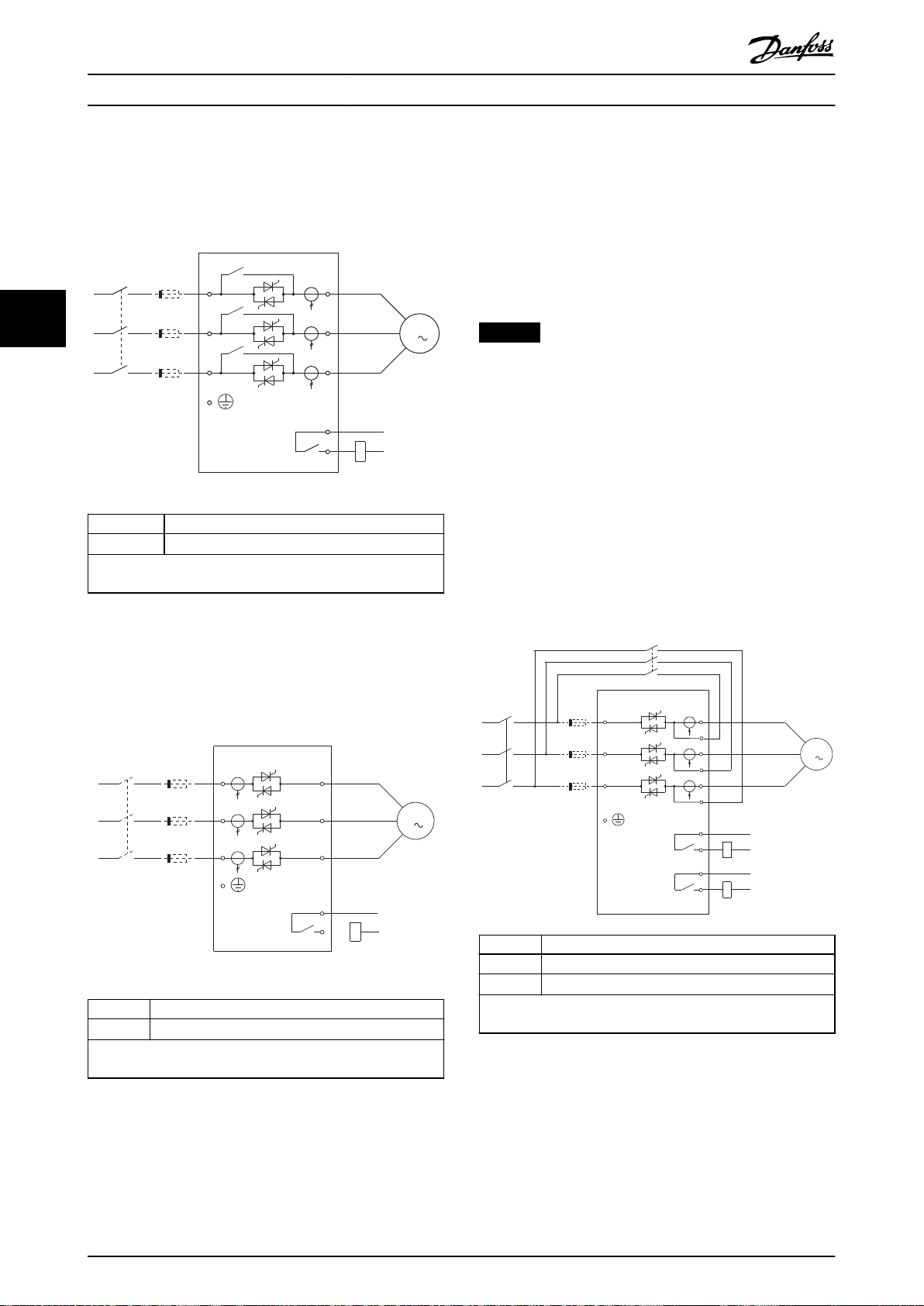
4.3.2 Instalación en línea
4.3.2.1 Con bypass interno
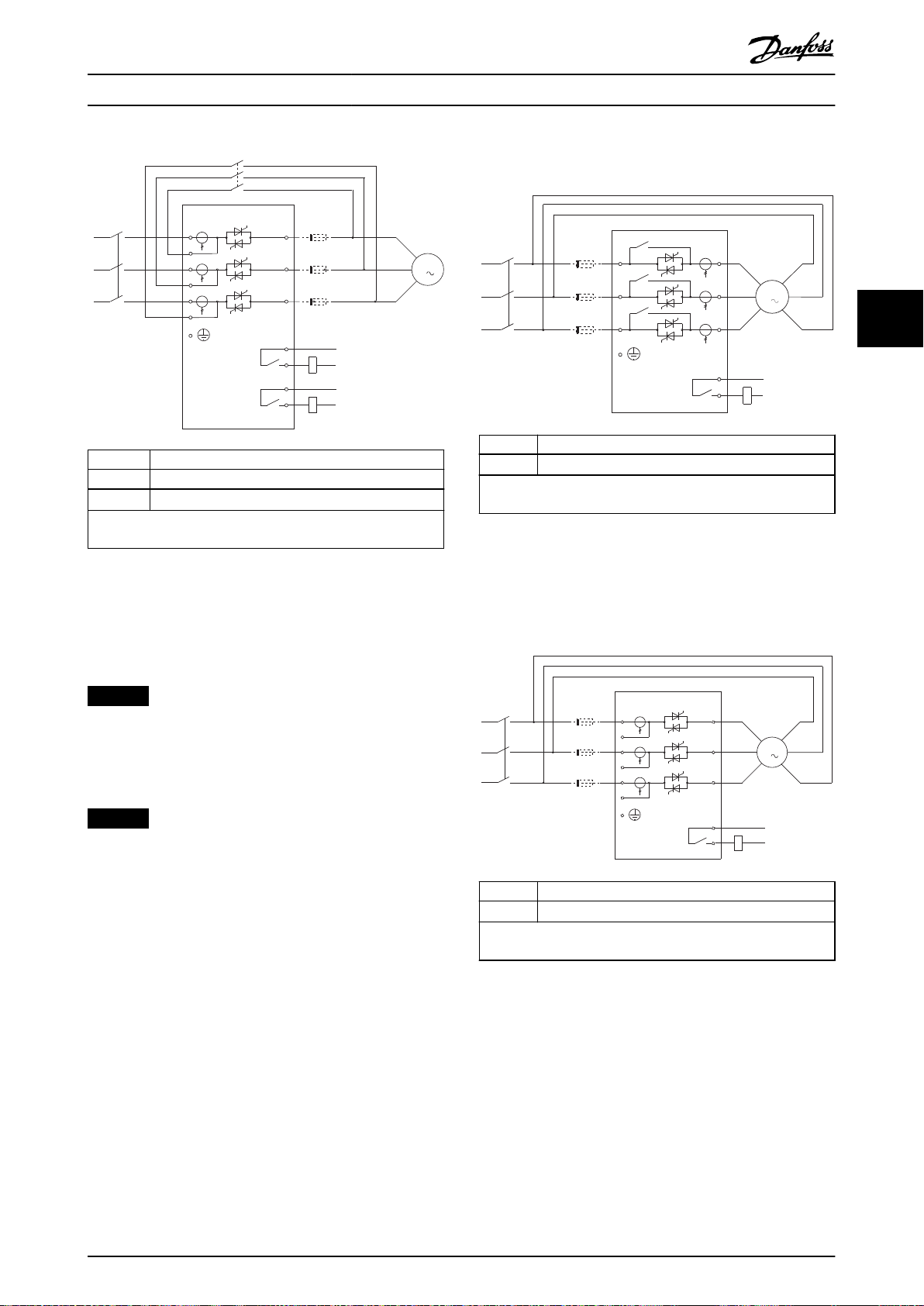
4.3.2.3 Con bypass externo
Los modelos sin bypass tienen terminales de bypass
especícos, que permiten al arrancador suave seguir
proporcionando funciones de control y protección incluso
estando puenteado por un contactor externo. Conecte el
contactor de bypass a los terminales de bypass y
contrólelo mediante una salida programable congurada
como En marcha (consulte los parámetros de 4-1 a 4-9).
44
AVISO!
Los terminales de bypass del MCD5-0245C son:
T1B.
•
T2B.
•
T3B.
•
Los terminales de bypass de los modelos de
MCD5-0360C a MCD5-1600C son:
L1B.
•
K1 Contactor principal (opcional)
F1
Fusibles de semiconductor (opcionales)
1)
1) Para mantener la garantía de los SCR, utilice fusibles de semicon-
ductor.
Ilustración 4.9 Instalación en línea, con bypass interno
Si es necesario, los fusibles pueden instalarse en el lado
de la entrada.
L2B.
•
L3B.
•
4.3.2.2 Sin bypass
K1 Contactor principal
K2 Contactor de bypass (externo)
1)
K1 Contactor principal (opcional)
F1
Fusibles de semiconductor (opcionales)
F1
1) Para mantener la garantía de los SCR, utilice fusibles de semicon-
1)
ductor.
Fusibles de semiconductor (opcionales)
1) Para mantener la garantía de los SCR, utilice fusibles de semicon-
ductor.
Ilustración 4.10 Instalación en línea, sin bypass
20 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Ilustración 4.11 Instalación en línea, con bypass externo,
MCD5-0245C
Page 25
177HA431.12
M
3
F1
6/T3
2/T1
5/L3
3/L2
1/L1
13
14
4/T2
E
K1
K1
L1B
L2B
L3B
K2
34
33
K2
6/T
2/T
13
14
4/T
K1
U1(1) U2(4)
V1(2)
V2(5)
W1(3) W2(6)
5/L3
3/L2
1/L1
E
K1 F1
M
3
177HA501.11
177HA500.12
M
3
6/T
2/T
5/L
3/L
1/L
1
1
4/T
K1
K1 F
U1(1 U2(4
V1(2
V2(5
W1( W2(
L2
L1
L3
E
Instalación eléctrica Guía de funcionamiento
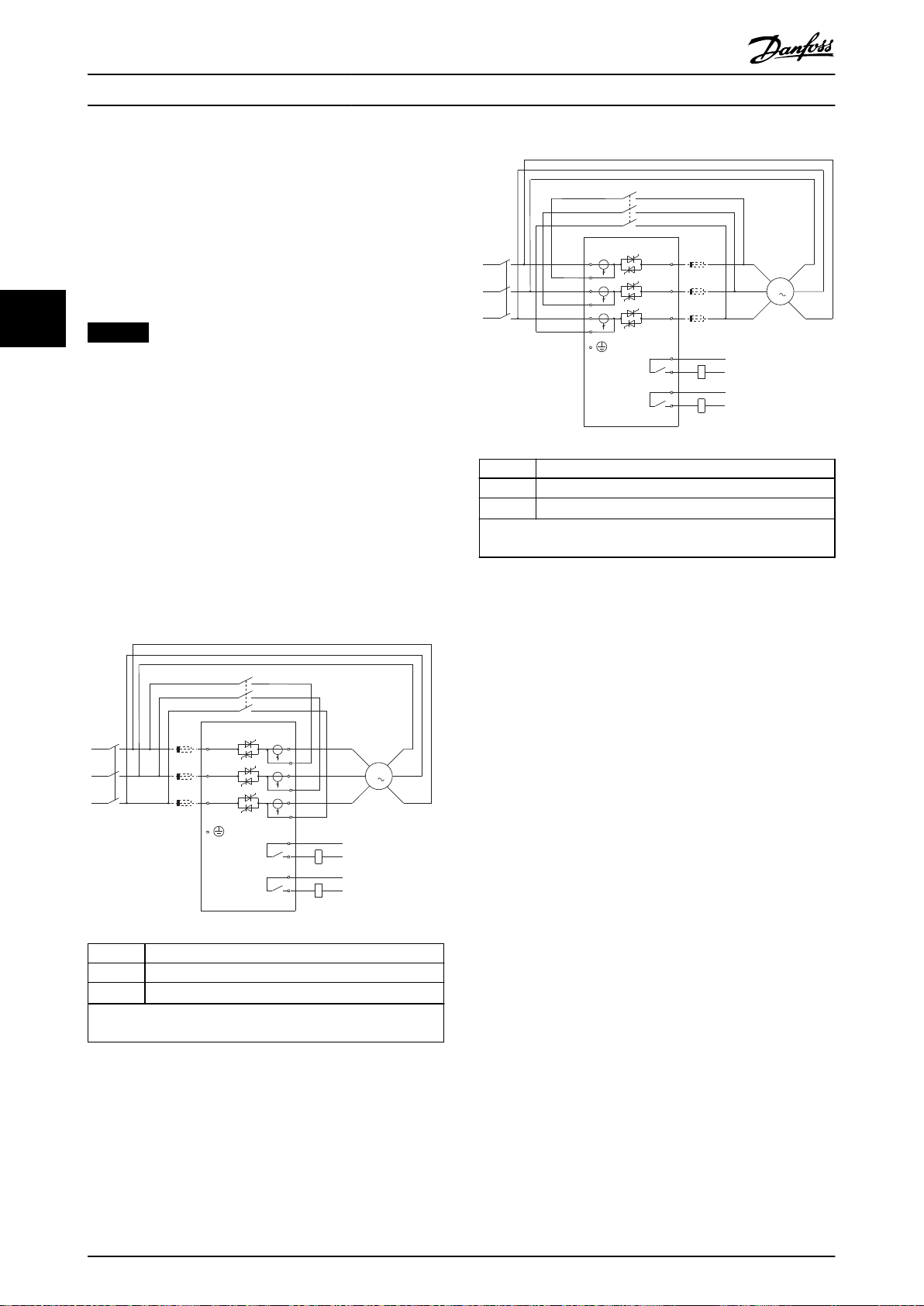
4.3.3.1 Con bypass interno
4 4
K1 Contactor principal
K2 Contactor de bypass (externo)
F1
Fusibles de semiconductor (opcionales)
1)
1) Para mantener la garantía de los SCR, utilice fusibles de semicon-
ductor.
Ilustración 4.12 Instalación en línea, con bypass externo, del
MCD5-0360C al MCD5-1600C
4.3.3 Instalación en triángulo interno
AVISO!
Cuando conecte el VLT® Soft Starter MCD 500 en
conguración de triángulo interno, instale siempre un
contactor principal o un magnetotérmico de
desconexión.
AVISO!
Al conectar en triángulo interno, introduzca la corriente a
plena carga del motor (FLC) en el parámetro 1-1 Motor
FLC (FLC motor). El MCD 500 calcula automáticamente las
corrientes en triángulo interno según estos datos. El
parámetro 15-7 Motor Connection (Conexión del motor)
está ajustado por defecto en Auto detect (Detección
automática) y puede ajustarse para forzar al arrancador
suave a funcionar en triángulo interno o en línea.
K1 Contactor principal
F1
Fusibles de semiconductor (opcionales)
1)
1) Para mantener la garantía de los SCR, utilice fusibles de semicon-
ductor.
Ilustración 4.13 Instalación en triángulo interno, con bypass
interno
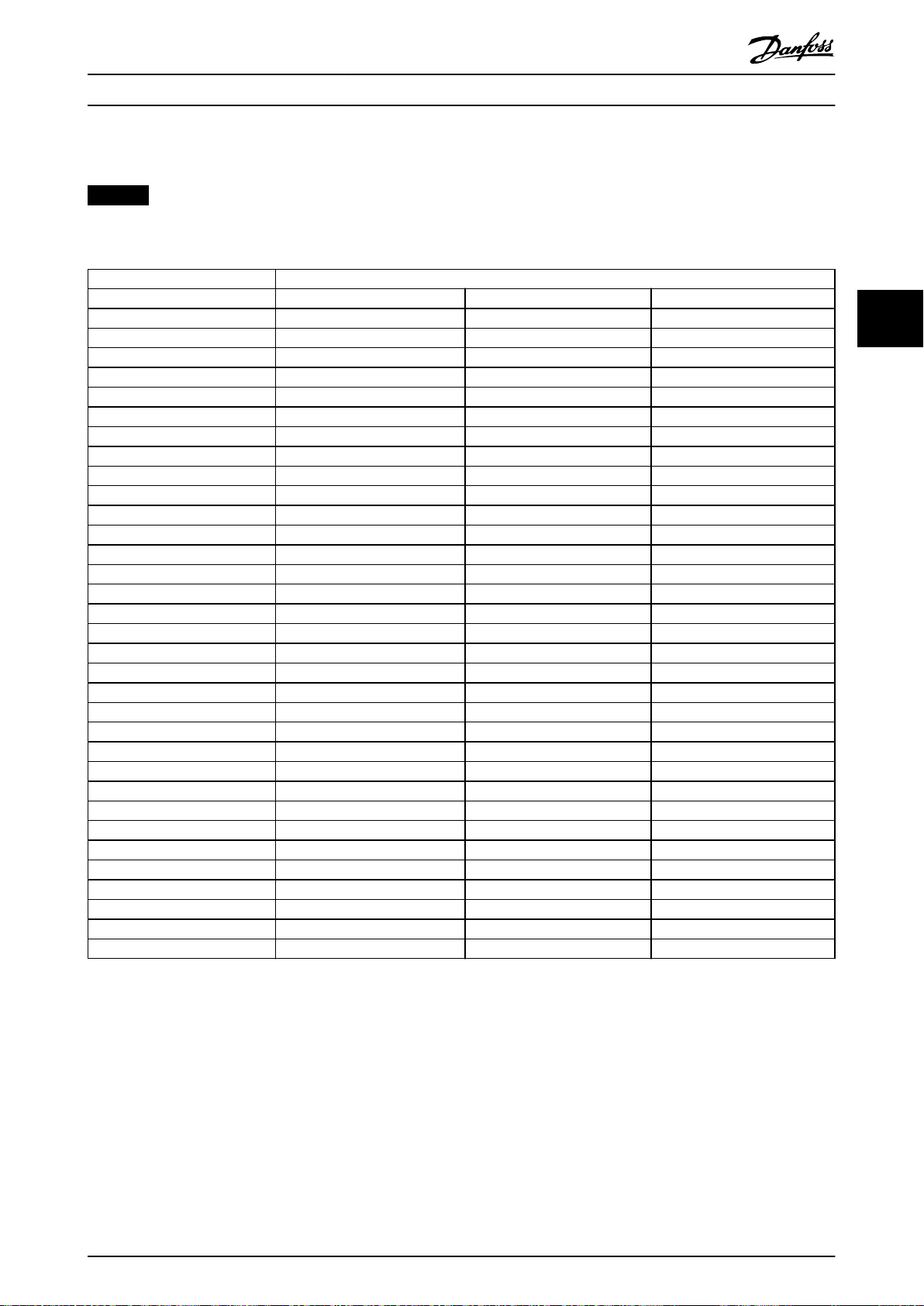
4.3.3.2 Sin bypass
K1 Contactor principal
F1
Fusibles de semiconductor (opcionales)
1) Para mantener la garantía de los SCR, utilice fusibles de semicon-
ductor.
Ilustración 4.14 Instalación en triángulo interno, sin bypass
1)
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 21
Page 26
177HA618.11
M
3
6/T
2/T
5/L3
3/L2
1/L1
13
14
4/T
E
K1
K1
U1(1) U2(4)
V1(2)
V2(5)
W1(3) W2(6)
T2B
T1B
T3B
K2
34
33
K2
F1
177HA502.12
M
3
6/T
2/T
5/L3
3/L2
1/L1
13
14
4/T
E
K1
K1 F1
U1(1) U2(4)
V1(2)
V2(5)
W1(3) W2(6)
L2B
L1B
L3B
K2
34
33
K2
Instalación eléctrica
VLT® Soft Starter MCD 500
4.3.3.3 Con bypass externo
Los modelos sin bypass tienen terminales de bypass
especícos, que permiten al arrancador suave seguir
proporcionando funciones de control y protección incluso
estando puenteado por un contactor de bypass externo.
Conecte el contactor de bypass a los terminales de bypass
y contrólelo mediante una salida programable congurada
como En marcha (consulte los parámetros del 4-1 al 4-9).
44
AVISO!
Los terminales de bypass del MCD5-0245C son:
T1B.
•
T2B.
•
T3B.
•
Los terminales de bypass de los modelos de
MCD5-0360C a MCD5-1600C son:
L1B.
•
L2B.
•
L3B.
•
Si es necesario, los fusibles pueden instalarse en el lado
de la entrada.
K1 Contactor principal
K2 Contactor de bypass (externo)
F1
Fusibles de semiconductor (opcionales)
1)
1) Para mantener la garantía de los SCR, utilice fusibles de semicon-
ductor.
Ilustración 4.16 Instalación en triángulo interno, con bypass
externo, de MCD5-0360C a MCD5-1600C
K1 Contactor principal
K2 Contactor de bypass (externo)
F1
Fusibles de semiconductor (opcionales)
1)
1) Para mantener la garantía de los SCR, utilice fusibles de semicon-
ductor.
Ilustración 4.15 Instalación en triángulo interno, con bypass
externo, MCD5-0245C
Intensidad nominal
4.4
Póngase en contacto con el distribuidor local para obtener
información sobre clasicaciones en condiciones de funcio-
namiento no cubiertas por estos cuadros de clasicaciones.
Todas las clasicaciones se calculan a una altitud de
1000 m (3281 ft), con una temperatura ambiente de 40 °C
(104 °F).
22 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 27
Instalación eléctrica Guía de funcionamiento
4.4.1 Conexión en línea (con bypass)
AVISO!
Los modelos de MCD5-0021B a MCD5-0961B tienen bypass interno. Los modelos de MCD5-0245C a MCD5-1600C
requieren un contactor de bypass externo.
Código descriptivo Clasicación de amperios [A]
AC-53b 3-30:330 AC-53b 4-20:340 AC-53b 4,5-30:330
MCD5-0021B 21 17 15
MCD5-0037B 37 31 26
MCD5-0043B 43 37 30
MCD5-0053B 53 46 37
AC-53b 3-30:570 AC-53b 4-20:580 AC-53b 4,5-30:570
MCD5-0068B 68 55 47
MCD5-0084B 84 69 58
MCD5-0089B 89 74 61
MCD5-0105B 105 95 78
MCD5-0131B 131 106 90
MCD5-0141B 141 121 97
MCD5-0195B 195 160 134
MCD5-0215B 215 178 148
MCD5-0245B 245 194 169
MCD5-0245C 255 201 176
MCD5-0331B 331 266 229
MCD5-0360C 360 310 263
MCD5-0380C 380 359 299
MCD5-0396B 396 318 273
MCD5-0428C 430 368 309
MCD5-0469B 496 383 326
MCD5-0525B 525 425 364
MCD5-0595C 620 540 434
MCD5-0619C 650 561 455
MCD5-0632B 632 512 438
MCD5-0790C 790 714 579
MCD5-0744B 744 606 516
MCD5-0826B 826 684 571
MCD5-0927C 930 829 661
MCD5-0961B 961 796 664
MCD5-1200C 1200 1200 1071
MCD5-1410C 1410 1319 1114
MCD5-1600C 1600 1600 1353
4 4
Tabla 4.2 Modelos con bypass interno
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 23
Page 28
Instalación eléctrica
VLT® Soft Starter MCD 500
44
Ilustración 4.17 Clasicación AC-53 para funcionamiento en bypass
Todas las clasicaciones se calculan a una altitud de 1000 m (3281 ft), con una temperatura ambiente de 40 °C (104 °F).
4.4.2 Conexión en línea (sin bypass / continua)
Código descriptivo Clasicaciones de amperios [A]
AC-53a 3-30:50-6 AC-53a 4-20:50-6 AC-53a 4,5-30:50-6
MCD5-0245C 245 195 171
MCD5-0360C 360 303 259
MCD5-0380C 380 348 292
MCD5-0428C 428 355 300
MCD5-0595C 595 515 419
MCD5-0619C 619 532 437
MCD5-0790C 790 694 567
MCD5-0927C 927 800 644
MCD5-1200C 1200 1135 983
MCD5-1410C 1410 1187 1023
MCD5-1600C 1600 1433 1227
Tabla 4.3 Modelos sin bypass
24 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 29
Instalación eléctrica Guía de funcionamiento
Ilustración 4.18 Clasicación AC-53 para funcionamiento continuo
Todas las clasicaciones se calculan a una altitud de 1000 m (3281 ft), con una temperatura ambiente de 40 °C (104 °F).
Póngase en contacto con un distribuidor local para obtener información sobre clasicaciones en condiciones de funcionamiento no cubiertas por estos cuadros de
clasicaciones.
4 4
4.4.3 Conexión en triángulo interno (con bypass)
AVISO!
Los modelos de MCD5-0021B a MCD5-0961B tienen bypass interno. Los modelos de MCD5-0245C a MCD5-1600C
requieren un contactor de bypass externo.
Código descriptivo Clasicaciones de amperios [A]
AC-53b 3-30:330 AC-53b 4,20-:340 AC-53b 4,5-30:330
MCD5-0021B 32 26 22
MCD5-0037B 56 47 39
MCD5-0043B 65 56 45
MCD5-0053B 80 69 55
AC-53b 3-30:570 AC-53b 4-20:580 AC-53b 4,5-30:570
MCD5-0068B 102 83 71
MCD5-0084B 126 104 87
MCD5-0089B 134 112 92
MCD5-0105B 158 143 117
MCD5-0131B 197 159 136
MCD5-0141B 212 181 146
MCD5-0195B 293 241 201
MCD5-0215B 323 268 223
MCD5-0245B 368 291 254
MCD5-0245C 383 302 264
MCD5-0331B 497 400 343
MCD5-0360C 540 465 395
MCD5-0380C 570 539 449
MCD5-0396B 594 478 410
MCD5-0428C 645 552 463
MCD5-0469B 704 575 490
MCD5-0525B 787 637 546
MCD5-0595C 930 810 651
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 25
Page 30
Instalación eléctrica
Código descriptivo Clasicaciones de amperios [A]
AC-53b 3-30:330 AC-53b 4,20-:340 AC-53b 4,5-30:330
MCD5-0619C 975 842 683
MCD5-0632B 948 768 658
MCD5-0790C 1185 1072 869
MCD5-0744B 1116 910 774
MCD5-0826B 1239 1026 857
MCD5-0927C 1395 1244 992
44
Tabla 4.4 Modelos con bypass
MCD5-0961B 1441 1194 997
MCD5-1200C 1800 1800 1607
MCD5-1410C 2115 1979 1671
MCD5-1600C 2400 2400 2030
VLT® Soft Starter MCD 500
Ilustración 4.19 Clasicación AC-53 para funcionamiento en bypass
Todas las clasicaciones se calculan a una altitud de 1000 m (3281 ft), con una temperatura ambiente de 40 °C (104 °F).
4.4.4 Conexión en triángulo interno (sin bypass / continua)
Código descriptivo Clasicaciones de amperios [A]
AC-53a 3-30:50-6 AC-53a 4-20:50-6 AC-53a 4,5-30:50-6
MCD5-0245C 368 293 257
MCD5-0360C 540 455 389
MCD5-0380C 570 522 438
MCD5-0428C 643 533 451
MCD5-0595C 893 773 629
MCD5-0619C 929 798 656
MCD5-0790C 1185 1042 851
MCD5-0927C 1391 1200 966
MCD5-1200C 1800 1702 1474
MCD5-1410C 2115 1780 1535
MCD5-1600C 2400 2149 1841
Tabla 4.5 Modelos sin bypass
26 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 31

Instalación eléctrica Guía de funcionamiento
Ilustración 4.20 Clasicación AC-53 para funcionamiento continuo
Todas las clasicaciones se calculan a una altitud de 1000 m (3281 ft), con una temperatura ambiente de 40 °C (104 °F).
Póngase en contacto con un distribuidor local para obtener información sobre clasicaciones en condiciones de funcionamiento no cubiertas por estos cuadros de
clasicaciones.
4 4
4.5 Ajustes de intensidad máxima y mínima
Los ajustes de corriente máxima y mínima a plena carga dependen del modelo:
Conexión en línea Conexión en triángulo interno
Modelo Mínima [A] Máxima [A] Mínima [A] Máxima [A]
MCD5-0021B 5 23 7 34
MCD5-0037B 9 43 13 64
MCD5-0043B 10 50 15 75
MCD5-0053B 11 53 16 79
MCD5-0068B 15 76 23 114
MCD5-0084B 19 97 29 145
MCD5-0089B 20 100 30 150
MCD5-0105B 21 105 32 157
MCD5-0131B 29 145 44 217
MCD5-0141B 34 170 51 255
MCD5-0195B 40 200 60 300
MCD5-0215B 44 220 66 330
MCD5-0331B 70 350 70 525
MCD5-0396B 85 425 85 638
MCD5-0469B 100 500 100 750
MCD5-0525B 116 580 116 870
MCD5-0632B 140 700 140 1050
MCD5-0744B 164 820 164 1230
MCD5-0825B 184 920 184 1380
MCD5-0961B 200 1000 200 1500
MCD5-0245C 51 255 77 382
MCD5-0360C 72 360 108 540
MCD5-0380C 76 380 114 570
MCD5-0428C 86 430 129 645
MCD5-0595C 124 620 186 930
MCD5-0619C 130 650 195 975
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 27
Page 32

Instalación eléctrica
Conexión en línea Conexión en triángulo interno
Modelo Mínima [A] Máxima [A] Mínima [A] Máxima [A]
MCD5-0790C 158 790 237 1185
MCD5-0927C 186 930 279 1395
MCD5-1200C 240 1200 360 1800
MCD5-1410C 282 1410 423 2115
MCD5-1600C 320 1600 480 2400
Tabla 4.6 Corriente mínima y máxima a plena carga
VLT® Soft Starter MCD 500
44
4.6 Interruptor de bypass
4.10
Fusibles
Algunos de los VLT® Soft Starters MCD 500 tienen bypass
interno y no necesitan un contactor de bypass externo.
Los arrancadores suaves sin bypass pueden instalarse con
un contactor de bypass externo. Seleccione un contactor
con una clasicación AC1 mayor o igual a la clasicación
de corriente a plena carga del motor conectado.
4.7 Interruptor principal
Deberá instalar un contactor principal si el VLT® Soft
Starter MCD 500 está conectado al motor en formato de
triángulo interno, y es opcional en caso de conexión en
línea. Seleccione un contactor con una clasicación AC3
mayor o igual a la clasicación de corriente a plena carga
del motor conectado.
4.8 Magnetotérmico
Debe utilizarse un magnetotérmico de desconexión en
lugar de un contactor principal para aislar el circuito del
motor en caso de una desconexión del arrancador suave.
El mecanismo de desconexión debe estar alimentado
desde el lado del magnetotérmico o desde una alimentación de control separada.
Corrección del factor de potencia
4.9
PRECAUCIÓN
DAÑOS MATERIALES
La conexión de los condensadores de corrección del
factor de potencia al lado de salida del arrancador suave
provocará una avería en este.
Conecte los condensadores de corrección del
•
factor de potencia en el lado de entrada del
arrancador suave.
Si se utiliza la corrección del factor de potencia, utilice un
contactor especíco para conectar los condensadores.
4.10.1 Fusibles de la fuente de
alimentación
AVISO!
GARANTÍA
Para mantener la garantía de los SCR, todos los fusibles
utilizados deben ser de semiconductor.
AVISO!
Utilice fusibles de semiconductor para obtener una
coordinación de tipo 2 (conforme a la norma CEI
60947-4-2) a n de evitar daños en los SCR. El VLT® Soft
Starter MCD 500 posee protección integrada de SCR
contra corrientes de sobrecarga transitorias, pero en caso
de cortocircuito (por ejemplo, a causa de fallos en el
bobinado del motor) dicha protección no será suciente.
Se pueden utilizar fusibles HRC (como los Ferraz AJT) para
obtener una coordinación de tipo 1 según la norma CEI
60947-4-2.
AVISO!
El control adaptativo regula el perl de velocidad del
motor dentro del límite de tiempo programado. Este
control puede producir un mayor nivel de corriente que
los métodos de control convencionales.
Para aplicaciones que utilicen el control adaptativo para la
parada suave del motor con tiempos de parada superiores
a 30 s, seleccione la siguiente protección de la bifurcación
del motor:
Fusibles de red HRC estándar: mínimo del 150 %
•
de la corriente a plena carga del motor.
Fusibles de red nominales del motor: clasicación
•
mínima del 100/150 % de la corriente a plena
carga del motor.
Ajuste del tiempo largo mínimo del magneto-
•
térmico del motor: un 150 % de la corriente a
plena carga del motor.
Ajuste del tiempo corto mínimo del magneto-
•
térmico del motor: un 400 % de la corriente a
plena carga del motor durante 30 s.
28 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 33

Instalación eléctrica Guía de funcionamiento
Las recomendaciones de fusibles están calculadas para
40 °C (104 °F), y a una altitud de hasta 1000 m (3281 ft).
AVISO!
La selección de fusibles se basa en un 400 % del
arranque a plena carga del motor durante 20 s con:
Arranques por hora determinados por la norma.
•
Ciclo de trabajo.
•
40 °C (104 °F) de temperatura ambiente.
•
Hasta 1000 m (3281 ft) de altitud.
•
Para instalaciones que funcionen fuera de estas
condiciones, consulte con un distribuidor local de
Danfoss.
De la Tabla 4.7 a la Tabla 4.13 solo contienen recomendaciones. Para conrmar la selección para una aplicación
especíca, consulte siempre a un distribuidor local.
4 4
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 29
Page 34

Instalación eléctrica
4.10.2 Fusibles Bussmann
VLT® Soft Starter MCD 500
Modelo
MCD5-0021B 1150 170M1314 170M1314 170M1314
MCD5-0037B 8000 170M1316 170M1316 170M1316
MCD5-0043B 10500 170M1318 170M1318 170M1318
MCD5-0053B 15000 170M1318 170M1318 170M1318
44
MCD5-0068B 15000 170M1319 170M1319 170M1318
MCD5-0084B 512000 170M1321 170M1321 170M1319
MCD5-0089B 80000 170M1321 170M1321 170M1321
MCD5-0105B 125000 170M1321 170M1321 170M1321
MCD5-0131B 125000 170M1321 170M1321 170M1321
MCD5-0141B 320000 170M2621 170M2621 170M2621
MCD5-0195B 320000 170M2621 170M2621 170M2621
MCD5-0215B 320000 170M2621 170M2621 170M2621
MCD5-0245B 320000 170M2621 170M2621 170M2621
MCD5-0331B 202000 170M5011 170M5011 –
MCD5-0396B 320000 170M6011 – –
MCD5-0469B 320000
MCD5-0525B 781000 170M6013 170M6013 170M6013
MCD5-0632B 781000 170M5015 170M5015 –
MCD5-0744B 1200000 170M5017 170M6017 –
MCD5-0826B 2530000 170M6017 170M6017 –
MCD5-0961B 2530000 170M6018
MCD5-0245C 320000 170M2621 170M2621 170M2621
MCD5-0360C 320000 170M6010 170M6010 170M6010
MCD5-0380C 320000 170M6011 170M6011 –
MCD5-0428C 320000 170M6011 170M6011 –
MCD5-0595C 1200000 170M6015 170M6015 170M6014
MCD5-0619C 1200000 170M6015 170M6015 170M6014
MCD5-0790C 2530000 170M6017 170M6017 170M6016
MCD5-0927C 4500000 170M6019 170M6019 170M6019
MCD5-1200C 4500000 170M6021 – –
MCD5-1410C 6480000 – – –
MCD5-1600C 12500000
SCR I2t (A2s)
Tensión de alimentación
(≤440 V CA)
170M6008
170M6019
1)
1)
Tensión de alimentación
(≤575 V CA)
– –
170M6013
1)
– –
Tensión de alimentación
(≤690 V CA)
–
Tabla 4.7 Cuerpo cuadrado (170M)
1) Se requieren dos fusibles conectados en paralelo por fase.
30 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 35

Instalación eléctrica Guía de funcionamiento
Modelo
SCR I2t (A2s)
Tensión de alimentación
(<440 V CA)
Tensión de alimentación
(<575 V CA)
Tensión de alimentación
(<690 V CA)
MCD5-0021B 1150 63FE 63FE 63FE
MCD5-0037B 8000 120FEE 120FEE 120FEE
MCD5-0043B 10500 120FEE 120FEE 120FEE
MCD5-0053B 15000 200FEE 200FEE 200FEE
MCD5-0068B 15000 200FEE 200FEE 200FEE
MCD5-0084B 512000 200FEE 200FEE 200FEE
MCD5-0089B 80000 280FM 280FM 280FM
MCD5-0105B 125000 280FM 280FM 280FM
MCD5-0131B 125000 280FM 280FM 280FM
MCD5-0141B 320000 450FMM 450FMM 450FMM
MCD5-0195B 320000 450FMM 450FMM 450FMM
MCD5-0215B 320000 450FMM 450FMM 450FMM
MCD5-0245B 320000 450FMM 450FMM 450FMM
MCD5-0331B 202000
MCD5-0396B 320000
MCD5-0469B 320000
MCD5-0525B 781000
MCD5-0632B 781000
315FM
400FMM
450FMM
500FMM
630FMM
1)
1)
1)
1)
1)
– –
– –
– –
1)
500FMM
– –
500FMM
MCD5-0744B 1200000 – – –
MCD5-0826B 2530000 – – –
MCD5-0961B 2530000 – – –
MCD5-0245C 320000 450FMM 450FMM 450FMM
MCD5-0360C 320000 – – –
MCD5-0380C 320000
400FMM
1)
400FMM
400FMM
MCD5-0428C 320000 – – –
MCD5-0595C 1200000
MCD5-0619C 1200000
630FMM
630FMM
1)
1)
630FMM
630FMM
1)
1)
–
–
MCD5-0790C 2530000 – – –
MCD5-0927C 4500000 – – –
MCD5-1200C 4500000 – – –
MCD5-1410C 6480000 – – –
MCD5-1600C 12500000 – – –
4 4
1)
1)
Tabla 4.8 Estilo británico (BS88)
1) Se requieren dos fusibles conectados en paralelo por fase.
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 31
Page 36

Instalación eléctrica
4.10.3 Fusibles Ferraz
VLT® Soft Starter MCD 500
Modelo
SCR I2t (A2s)
MCD5-0021B 1150
MCD5-0037B 8000
MCD5-0043B 10500
MCD5-0053B 15000
44
MCD5-0068B 15000
MCD5-0084B 51200 HSJ175
Tensión de alimentación
(<440 V CA)
1)
HSJ40
1)
HSJ80
1)
HSJ90
1)
HSJ110
1)
HSJ125
Tensión de alimentación
(<575 V CA)
1)
HSJ40
1)
HSJ80
1)
HSJ90
1)
HSJ110
1)
HSJ125
1)
HSJ175
Tensión de alimentación
(<690 V CA)
MCD5-0089B 80000 HSJ175 HSJ175
MCD5-0105B 125000 HSJ225 HSJ225
MCD5-0131B 125000 HSJ250
HSJ250
1)
MCD5-0141B 320000 HSJ300 HSJ300
MCD5-0195B 320000 HSJ350 HSJ350
MCD5-0215B 320000
MCD5-0245B 320000
MCD5-0331B 202000
HSJ400
HSJ450
HSJ500
1)
1)
1)
HSJ400
HSJ450
1)
1)
MCD5-0396B 320000
MCD5-0469B 320000
MCD5-0525B 781000
MCD5-0632B 781000
No aplicable
No aplicable
No aplicable
MCD5-0744B 1200000
MCD5-0826B 2530000
MCD5-0961B 2530000
MCD5-0245C 320000
HSJ450
1)
HSJ450
1)
MCD5-0360C 320000
MCD5-0380C 320000
MCD5-0428C 320000
MCD5-0595C 1200000
MCD5-0619C 1200000
MCD5-0790C 2530000
No aplicable No aplicable
MCD5-0927C 4500000
MCD5-1200C 4500000
MCD5-1410C 6480000
MCD5-1600C 12500000
Tabla 4.9 HSJ
1) Dos fusibles conectados en serie por fase.
32 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 37

Instalación eléctrica Guía de funcionamiento
Modelo
MCD5-0021B 1150 A070URD30XXX0063 A070URD30XXX0063 –
MCD5-0037B 8000 A070URD30XXX0125 A070URD30XXX0125 A070URD30XXX0125
MCD5-0043B 10500 A070URD30XXX0125 A070URD30XXX0125 A070URD30XXX0125
MCD5-0053B 15000 A070URD30XXX0125 A070URD30XXX0125 A070URD30XXX0125
MCD5-0068B 15000 A070URD30XXX0160 A070URD30XXX0160 A070URD30XXX0160
MCD5-0084B 51200 A070URD30XXX0200 A070URD30XXX0200 A070URD30XXX0200
MCD5-0089B 80000 A070URD30XXX0200 A070URD30XXX0200 A070URD30XXX0200
MCD5-0105B 125000 A070URD30XXX0315 A070URD30XXX0315 A070URD30XXX0315
MCD5-0131B 125000 A070URD30XXX0315 A070URD30XXX0315 A070URD30XXX0315
MCD5-0141B 320000 A070URD30XXX0315 A070URD30XXX0315 A070URD30XXX0315
MCD5-0195B 320000 A070URD30XXX0450 A070URD30XXX0450 A070URD30XXX0450
MCD5-0215B 320000 A070URD30XXX0450 A070URD30XXX0450 A070URD30XXX0450
MCD5-0245B 32000 A070URD30XXX0450 A070URD30XXX0450 A070URD30XXX0450
MCD5-0331B 202000 A070URD31XXX0550 – –
MCD5-0396B 238000 A070URD32XXX0630 – –
MCD5-0469B 320000 A070URD32XXX0700 – –
MCD5-0525B 781000 A070URD32XXX0800 – –
MCD5-0632B 781000 A070URD33XXX0900 – –
MCD5-0744B 1200000 A070URD33XXX1100 – –
MCD5-0826B 2530000 A070URD33XXX1250 – –
MCD5-0961B 2530000 A070URD33XXX1400 – –
MCD5-0245C 320000 A070URD30XXX0450 A070URD30XXX0450 A070URD30XXX0450
MCD5-0360C 320000 A070URD33XXX0630 A070URD33XXX0630 A070URD33XXX0630
MCD5-0380C 320000 A070URD33XXX0700 A070URD33XXX0700 –
MCD5-0428C 320000 A070URD33XXX0700 A070URD33XXX0700 –
MCD5-0595C 1200000 A070URD33XXX1000 A070URD33XXX1000 A070URD33XXX1000
MCD5-0619C 1200000 A070URD33XXX1000 A070URD33XXX1000 A070URD33XXX1000
MCD5-0790C 2530000 A070URD33XXX1400 A070URD33XXX1400 A070URD33XXX1400
MCD5-0927C 4500000 A070URD33XXX1400 A070URD33XXX1400 A070URD33XXX1400
MCD5-1200C 4500000 A055URD33XXX2250 – –
MCD5-1410C 6480000 A055URD33XXX2250 – –
MCD5-1600C 12500000 - – –
SCR I2t (A2s)
Tensión de alimentación
(<440 V CA)
Tensión de alimentación
(<575 V CA)
Tensión de alimentación
(<690 V CA)
4 4
Tabla 4.10 Estilo norteamericano (PSC 690)
Modelo
MCD5-0021B 1150 6.9URD30D11A0050 6.9URD30D11A0050 6.9URD30D11A0050
MCD5-0037B 8000 6.9URD30D11A0125 6.9URD30D11A0125 6.9URD30D11A0125
MCD5-0043B 10500 6.9URD30D11A0125 6.9URD30D11A0125 6.9URD30D11A0125
MCD5-0053B 15000 6.9URD30D11A0125 6.9URD30D11A0125 6.9URD30D11A0125
MCD5-0068B 15000 6.9URD30D11A0160 6.9URD30D11A0160 6.9URD30D11A0160
MCD5-0084B 51200 6.9URD30D11A0200 6.9URD30D11A0200 6.9URD30D11A0200
MCD5-0089B 80000 6.9URD30D11A0200 6.9URD30D11A0200 6.9URD30D11A0200
MCD5-0105B 125000 6.9URD30D11A0315 6.9URD30D11A0315 6.9URD30D11A0315
MCD5-0131B 125000 6.9URD30D11A0315 6.9URD30D11A0315 6.9URD30D11A0315
MCD5-0141B 320000 6.9URD30D11A0315 6.9URD30D11A0315 6.9URD30D11A0315
MCD5-0195B 320000 6.9URD31D11A0450 6.9URD31D11A0450 6.9URD31D11A0450
MCD5-0215B 320000 6.9URD31D11A0450 6.9URD31D11A0450 6.9URD31D11A0450
MCD5-0245B 320000 6.9URD31D11A0450 6.9URD31D11A0450 6.9URD31D11A0450
MCD5-0331B 202000 6.9URD31D11A0550 – –
MCD5-0396B 320000 6.9URD32D11A0630 – –
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 33
SCR I2t (A2s)
Tensión de alimentación
(<440 V CA)
Tensión de alimentación
(<575 V CA)
Tensión de alimentación
(<690 V CA)
Page 38

Instalación eléctrica
VLT® Soft Starter MCD 500
Modelo
MCD5-0469B 320000 6.9URD32D11A0700 – –
MCD5-0525B 781000 6.9URD32D11A0800 – –
MCD5-0632B 781000 6.9URD33D11A0900 – –
MCD5-0744B 1200000 6.9URD33D11A1100 – –
MCD5-0826B 2530000 6.9URD33D11A1250 – –
MCD5-0961B 2530000 6.9URD33D11A1400 – –
44
MCD5-0245C 320000 6.9URD31D11A0450 6.9URD31D11A0450 6.9URD31D11A0450
MCD5-0360C 320000 6.9URD33D11A0630 6.9URD33D11A0630 6.9URD33D11A0630
MCD5-0380C 320000 6.9URD33D11A0700 6.9URD33D11A0700 6.9URD33D11A0700
MCD5-0428C 320000 6.9URD33D11A0700 6.9URD33D11A0700 6.9URD33D11A0700
MCD5-0595C 1200000 6.9URD33D11A1000 6.9URD33D11A1000 6.9URD33D11A1000
MCD5-0619C 1200000 6.9URD33D11A1000 6.9URD33D11A1000 6.9URD33D11A1000
MCD5-0790C 2530000 6.6URD33D11A1400 6.6URD33D11A1400 –
MCD5-0927C 4500000 6.6URD33D11A1400 6.6URD33D11A1400 –
MCD5-1200C 4500000 6URD233PLAF2200 6URD233PLAF2200 –
MCD5-1410C 6480000 6URD233PLAF2200 6URD233PLAF2200 –
MCD5-1600C 12500000 6URD233PLAF2800 6URD233PLAF2800 –
Tabla 4.11 Estilo europeo (PSC 690)
SCR I2t (A2s)
Tensión de alimentación
(<440 V CA)
Tensión de alimentación
(<575 V CA)
Tensión de alimentación
(<690 V CA)
4.10.4 Selección de fusibles UL y clasicación de protección contra cortocircuitos
Dos intensidades nominales de cortocircuito (SCCR) están disponibles para aplicaciones UL.
Corrientes de fallo estándar (en circuitos de 600 V CA)
Las corrientes de fallo estándar se determinan conforme a la tabla 51.2 del apartado 1 de la norma UL 508. Esta norma
especica la corriente de cortocircuito que debe soportar el arrancador suave conforme a la potencia de salida en caballos
(o la clasicación de corriente a plena carga [FLC] o los amperios de rotor bloqueado [LRA], en función del modelo).
Si se utilizan las intensidades nominales de fallo estándar, debe elegirse un fusible conforme a la información de la
Tabla 4.12 (especíco para el modelo y fabricante).
Corrientes de fallo de alta disponibilidad (en circuitos de 480 V CA)
Es posible especicar intensidades nominales de cortocircuito que superen las clasicaciones mínimas establecidas por las
corrientes de fallo estándar cuando el arrancador suave pueda soportar la corriente de cortocircuito de alta disponibilidad
conforme a la prueba de la norma UL 508.
Si se utilizan las intensidades nominales de fallo de alta disponibilidad, seleccione un fusible adecuado en función del
amperaje y de la clase de fusible (J o L según corresponda)
34 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 39

Instalación eléctrica Guía de funcionamiento
Modelo Clasicación
nominal [A]
MCD5-0021B 23 65 25 (J) 10 AJT25 A070URD30XXX
MCD5-0037B 43 65 50 (J) 10 AJT50 A070URD30XXX
MCD5-0043B 50 65 50 (J) 10 AJT50 A070URD30XXX
MCD5-0053B 53 65 60 (J) 10 AJT60 A070URD30XXX
MCD5-0068B 76 65 80 (J) 10 AJT80 A070URD30XXX
MCD5-0084B 97 65 100 (J) 10 AJT100 A070URD30XXX
MCD5-0089B 100 65 100 (J) 10 AJT100 A070URD30XXX
MCD5-0105B 105 65 125 (J) 10 AJT125 A070URD30XXX
MCD5-0131B 145 65 150 (J) 18 AJT150/RK5 200 A070URD30XXX
MCD5-0141B 170 65 175 (J) 18 AJT175/RK5 200 A070URD30XXX
MCD5-0195B 200 65 200 (J) 18 AJT200/RK5 300 A070URD30XXX
MCD5-0215B 220 65 250 (J) 18 AJT250/RK5 300 A070URD30XXX
MCD5-0245B 255 65 350 (RK1/J) 18
MCD5-0331B 350 65 400 (J) 18
MCD5-0396B 425 65 450 (J) 30
MCD5-0469B 500 65 600 (J) 30 600, clase J A070URD33XXX
MCD5-0525B 580 65 800 (L) 30 800, clase L –
MCD5-0632B 700 65 800 (L) 42 800, clase L –
MCD5-0744B 820 65 1200 (L) 42 1200, clase L A070URD33XXX
MCD5-0826B 920 65 1200 (L) 85 1200, clase L A070URD33XXX
MCD5-0961B 1000 65 1200 (L) 85 1200, clase L A070URD33XXX
De alta disponibilidad Corriente de fallo estándar
A un máximo
de 480 V CA
[kA]
Clasicaciones de cortocircuito Intensidad
Clasicación
máxima del
fusible [A]
(clase de
fusible)
A 600 V CA [kA] Fusible Ferraz/
Mersen,
indicada clase
de fusible J, L
o RK5
1)
1)
1)
Fusible Ferraz/
Mersen,
fusibles de
semiconductor
R/C
0063
0125
0125
0125
0200
0200
0200
0315
0315
0315
0450
0450
–
–
A070URD33XXX
0630
0700
1000
1400
1400
nominal de
cortocircuito a
600 V [kA]
1)
3 ciclos
N.D.
18
3 ciclos
30
3 ciclos
42
3 ciclos
4 4
Tabla 4.12 Clasicaciones de cortocircuito, modelos con bypass
XXX = tipo álabe: consulte los detalles en el catálogo Ferraz/Mersen.
1) Cuando estén protegidos por cualquier fusible o magnetotérmico listados como UL y calibrados conforme a la normativa NEC, los modelos con
clasicación de tres ciclos serán aptos para su uso en circuitos con la corriente posible indicada.
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 35
Page 40

Instalación eléctrica
VLT® Soft Starter MCD 500
Modelo Clasicación
nominal [A]
MCD5-0245C 255 65 350 (RK1/J) 18 AJT300 A070URD30XXX
44
MCD5-0360C 360 65 400 (J) 18 AJT400/RK5 500 A070URD33XXX
MCD5-0380C 380 65 450 (J) 18 AJT450/RK5 500 A070URD33XXX
MCD5-0428C 430 65 450 (J) 30 AJT450 A070URD33XXX
MCD5-0595C 620 65 800 (L) 42 A4BQ800 A070URD33XXX
MCD5-0619C 650 65 800 (L) 42 A4BQ800 A070URD33XXX
MCD5-0790C 790 65 1200 (L) 42 A4BQ1200 070URD33XXX1
MCD5-0927C 930 65 1200 (L) 42 A4BQ1200 A070URD33XXX
MCD5-1200C 1200 65 1600 (L) 85 A4BQ1600 A065URD33XXX
MCD5-1410C 1410 65 2000 (L) 85 A4BQ2000 A055URD33XXX
MCD5-1600C 1600 65 2000 (L) 85 A4BQ2500 A055URD33XXX
De alta disponibilidad Corriente de fallo estándar
A un máximo
de 480 V CA
[kA]
Clasicaciones de cortocircuito Intensidad
Clasicación
máxima del
fusible [A]
(clase de
fusible)
A 600 V CA [kA] Fusible Ferraz/
Mersen,
indicada clase
de fusible J, L
o RK5
Fusible Ferraz/
Mersen,
fusibles de
semiconductor
R/C
0450
0630
0700
0700
1000
1000
400
1400
1800
2250
2500
nominal de
cortocircuito a
600 V [kA]
1)
3 ciclos
N.D.
Tabla 4.13 Clasicaciones de cortocircuito, modelos sin bypass
XXX = tipo álabe: consulte los detalles en el catálogo Ferraz/Mersen.
1) Cuando estén protegidos por cualquier fusible o magnetotérmico listados como UL y calibrados conforme a la normativa NEC, los modelos con
clasicación de tres ciclos serán aptos para su uso en circuitos con la corriente posible indicada.
36 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 41

22
21
6/T3
2/T1
13
14
4/T2
24
33
34
06
05
08
07
17
18
25
11
16
A6
A5
A4
5/L3
3/L2
15
E
1/L1
+
24
V DC
5
4
2
A
3
1
177HA425.10
Instalación eléctrica Guía de funcionamiento
4.11 Diagramas esquemáticos
4 4
1 Tensión de control (depende del
11, 16 Entrada programable
modelo)
2 Salidas 15, 16 Arranque
3 Entradas de control remoto 17, 18 Parada
4 Entrada de termistor del motor (solo
5 Salidas de relé 13, 14 Salida de relé A
07, 08 Salida analógica programable 21, 22, 24 Salida de relé B
16, 08 Salida de 24 V CC 33, 34 Salida de relé C
Ilustración 4.21 Modelos con bypass interno
PTC)
25, 18 Reinicio
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 37
Page 42

177HA426.12
E
6/T3
2/T1
4/T2
5/L3
3/L2
1/L1
L3B
L2B
L1B
22
21
13
1)
1)
1)
14
24
33
34
06
05
08
07
17
18
25
11
16
A6
A5
A4
15
+
+
5
4
2
A
3
1
24
V DC
Instalación eléctrica
VLT® Soft Starter MCD 500
44
1 Alimentación de control (depende del
modelo)
2 Salidas 15, 16 Arranque
3 Entradas de control remoto 17, 18 Parada
4 Entrada de termistor del motor (solo PTC) 25, 18 Reset (Reiniciar)
11, 16 Entrada programable
5 Salidas de relé 13, 14 Salida de relé A
07, 08 Salida analógica programable 21, 22, 24 Salida de relé B
16, 08 Salida de 24 V CC 33, 34 Salida de relé C
Ilustración 4.22 Modelos sin bypass
1) En el modelo MCD5-0245C, los transformadores de corriente están situados en la salida. Los terminales de bypass están
etiquetados como T1B, T2B y T3B.
38 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 43

100 200 300
1
10
100
1000
10000
177HA596.10
Time in seconds to reach 100% of thermal model
Current (%motor full load current)
3
1
2
400 500
600 700
800 900 1000
Funciones del producto Guía de funcionamiento
5 Funciones del producto
5.1 Protección de sobrecarga del motor
El modelo térmico utilizado para la sobrecarga del motor
en el arrancador suave tiene dos componentes:
Bobinados del motor: tienen una capacidad
•
térmica reducida y afectan al comportamiento
térmico a corto plazo del motor. Los bobinados
son la parte del motor en que la corriente genera
calor.
Cuerpo del motor: tiene una gran capacidad
•
térmica y afecta al comportamiento a largo plazo
del motor. El modelo térmico también tiene en
cuenta lo siguiente:
- Intensidad del motor.
- Pérdidas de hierro.
- Pérdidas de la resistencia de bobinado.
- Capacidades térmicas del cuerpo del
motor y del bobinado.
- Refrigeración durante el funcionamiento
y refrigeración en parada.
- El porcentaje de la capacidad nominal
del motor. Fija el valor mostrado en
pantalla para el modelo de bobinado y
se ve afectado por el ajuste de FLC del
motor, entre otros.
con una temperatura de funcionamiento próxima
al valor máximo estando al mismo tiempo
protegido de posibles daños térmicos.
El porcentaje de capacidad térmica del motor
•
utilizado durante cada arranque se guarda en la
memoria. El arrancador suave puede congurarse
para que calcule automáticamente si el motor
tiene o no suciente capacidad térmica para
completar con éxito otro arranque.
La función de memoria del modelo garantiza que
•
el motor esté totalmente protegido en situaciones
de arranque en caliente. El modelo utiliza los
datos del reloj en tiempo real para tener en
cuenta el tiempo de refrigeración transcurrido,
aun cuando se haya retirado la alimentación de
control.
La función de protección de sobrecarga proporcionada por
este modelo cumple la curva 10 de NEMA, pero ofrece una
protección superior con niveles bajos de sobrecarga gracias
a la separación del modelo térmico de bobinados.
5 5
AVISO!
Ajuste el parámetro 1-1 Motor FLC (FLC motor) a la FLC
nominal del motor. No añada la clasicación de
sobrecarga ya que el arrancador suave se encarga de
calcular dicha clasicación.
La protección de sobrecarga térmica utilizada en el
arrancador suave aporta una serie de ventajas en
comparación con los relés térmicos.
El efecto de la refrigeración del ventilador se
•
tiene en cuenta durante el funcionamiento del
motor.
Se pueden utilizar la corriente a plena carga del
•
motor y el tiempo de rotor bloqueado para
realizar un ajuste más preciso del modelo. Las
características térmicas de los bobinados son
tratadas de forma independiente al resto del
motor (es decir, el modelo detecta que los
bobinados tienen masa térmica baja y resistencia
térmica alta).
La parte del bobinado del modelo térmico
•
responde rápidamente en comparación con la
parte del cuerpo. Así, el motor puede funcionar
1
2
3
1) MSTC es la constante de tiempo de arranque del motor. Se dene
como el tiempo de rotor bloqueado (en el parámetro 1-2 Locked
Rotor Time [ Tiempo de rotor bloqueado]), cuando la corriente del
rotor bloqueado alcanza el 600 % de la FLC.
Ilustración 5.1 Grado de protección respecto a sobrecarga
MSTC1)=5
MSTC1)=10
MSTC1)=20
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 39
Page 44

Funciones del producto
VLT® Soft Starter MCD 500
5.2 Control adaptativo
El control adaptativo es el control del motor en función de
las características de rendimiento del motor. Con control
adaptativo, seleccione el perl de arranque o parada que
mejor corresponda al tipo de carga. El arrancador suave
controla automáticamente el motor para ajustarse al perl.
El VLT® Soft Starter MCD 500 presenta tres perles:
Aceleración y desaceleración tempranas.
•
Aceleración y desaceleración constantes.
•
Aceleración y desaceleración tardías.
•
55
El control adaptativo utiliza dos algoritmos: uno para medir
las características del motor y otro para controlar el motor.
El arrancador suave utiliza el primer arranque para
determinar las características del motor a velocidad cero y
a velocidad máxima. Durante cada arranque y parada
subsiguientes, el arrancador suave ajusta dinámicamente
su control para asegurarse de que el rendimiento real del
motor coincide con el perl seleccionado durante el
arranque. Si la velocidad real es demasiado baja para el
perl, el arrancador suave aumenta la potencia al motor. Si
la velocidad es demasiado alta, el arrancador suave reduce
la potencia.
Modos de arranque
5.3
5.3.1 Corr constante
La corriente constante es el modo tradicional de arranque
suave. Se aumenta la corriente desde cero hasta un nivel
especíco y se mantiene la corriente estable a ese nivel
hasta que el motor haya acelerado.
El arranque de corriente constante es ideal para aplicaciones en las que la corriente de arranque debe
mantenerse por debajo de un nivel concreto.
1 Parámetro 1-5 Corr inicial
2 Parámetro 1-4 Límite corr
3 Corriente a tensión máxima
Ilustración 5.2 Ejemplo de corriente constante
5.3.2 Rampa de corriente
La rampa de corriente de arranque suave aumenta la
corriente desde un nivel de arranque especicado (1) hasta
un límite máximo (3) durante un periodo prolongado (2).
Consulte la Ilustración 5.3.
El arranque por rampa de corriente puede ser útil para
aplicaciones en las que:
La carga puede variar entre arranques (por
•
ejemplo, una cinta transportadora puede arrancar
con o sin carga).
- Ajuste el parámetro 1-5 Initial Current
(Corriente inicial) a un nivel que
arranque el motor con una carga ligera.
- Ajuste el parámetro 1-4 Current Limit
(Límite de intensidad) a un nivel que
arranque el motor con una carga
pesada.
La carga se pone en marcha fácilmente, pero el
•
tiempo de arranque debe ser largo (por ejemplo,
una bomba centrífuga en la que la presión de la
tubería debe ir aumentando lentamente).
La fuente de alimentación eléctrica es limitada
•
(por ejemplo, un generador) y un aumento más
lento de la carga permite un mayor tiempo para
que la fuente de alimentación responda.
40 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 45

0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
4
177HA507.10
1
2
3
Velocidad
Tiempo
Funciones del producto Guía de funcionamiento
El primer arranque con control adaptativo es un arranque
de corriente constante. Este tipo de arranque permite que
el arrancador suave asimile las características del motor
conectado. El arrancador suave utiliza estos datos del
motor durante los siguientes arranques con control
adaptativo.
1 Parámetro 1-5 Initial current (Corriente inicial)
2 Parámetro 1-6 Start ramp time ( Tiempo de rampa de arranque)
3 Parámetro 1-4 Current limit (Límite de intensidad)
4 Corriente a tensión máxima
Ilustración 5.3 Ejemplo de un tiempo de rampa de corriente
de 10 s
3. Seleccione el perl deseado en el parámetro 1-13
Adaptive Start Prole (Perl de arranque
adaptativo).
4. Ajuste el parámetro 1-4 Current Limit (Límite de
intensidad) a un nivel sucientemente alto para
que el arranque se realice con éxito.
5 5
5.3.3 Control adaptativo
En un arranque suave con control adaptativo, el arrancador
suave ajusta la corriente para arrancar el motor dentro de
un periodo de tiempo especíco y mediante un perl de
aceleración seleccionado.
AVISO!
El control adaptativo no puede arrancar el motor más
deprisa que un arranque en línea directo (DOL). Si el
tiempo ajustado en el parámetro 1-6 Start ramp time
(Tiempo de rampa de arranque) es más corto que el
tiempo de arranque DOL, la corriente de arranque puede
alcanzar los niveles DOL.
Cada aplicación tiene un determinado perl de arranque
basado en las características de la carga y del motor. Para
cumplir los requisitos de diferentes aplicaciones, el control
adaptativo ofrece tres perles de arranque diferentes.
Seleccionar un perl que coincida con el perl inherente
de la aplicación puede ayudar a suavizar la aceleración
durante todo el tiempo de arranque. Seleccionar un perl
de control adaptativo diferente puede neutralizar en cierto
modo el perl inherente.
Para utilizar el control adaptativo para controlar el
rendimiento del arranque:
1. Seleccione Adaptive control (Control adaptativo) en
el parámetro 1-3 Start Mode (Modo de arranque).
2. Ajuste el parámetro 1-6 Start Ramp Time ( Tiempo
de rampa de arranque).
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 41
1 Aceleración temprana
2 Aceleración constante
3 Aceleración tardía
4 Parámetro 1-16 Start Ramp Time ( Tiempo de rampa de
arranque)
Ilustración 5.4 Parámetro 1-13 Adaptive Start Prole (Perl de
arranque adaptativo)
AVISO!
El control adaptativo regula la carga conforme al perl
programado. La corriente de arranque varía según el
perl de aceleración seleccionado y el tiempo de
arranque programado.
El arrancador suave tiene que asimilar las características
del nuevo motor:
Si se sustituye un motor conectado a un
•
arrancador suave programado para arranque o
parada mediante control adaptativo.
Si el arrancador suave ha sido probado con un
•
motor diferente antes de la instalación real.
Si se cambian el parámetro 1-1 Motor Full Load Current
(Corriente a plena carga del motor) o el parámetro 1-12
Adaptive Control Gain (Ganancia control adaptativo), el
arrancador suave reasimilará automáticamente las
características del motor.
Page 46

700%
600%
500%
300%
100%
400%
200%
10% 20% 30% 40% 50% 60% 70% 80% 90% 100%
177HA508.10
1
5
4
6
3
2
Intensidad (% intensidad a carga plena del motor)
Velocidad del rotor (% de velocidad máxima)
70
60
50
30
10
40
20
80
90
100
177HA509.10
1
Tensión (% tensión máxima)
Tiempo
Funciones del producto
VLT® Soft Starter MCD 500
5.3.4 Pulso de inercia
ampliarse o para evitar transitorios en la alimentación por
generador.
El pulso de inercia proporciona un corto refuerzo de par
adicional al principio del arranque y puede utilizarse junto
con la rampa de corriente o con el arranque de corriente
constante.
El pulso de inercia puede ser útil para ayudar a arrancar
cargas que requieren un par de arranque alto pero luego
aceleran con facilidad tras el arranque (por ejemplo,
volantes de inercia, como prensas).
55
1 Parámetro 1-11 Tiemp parad
Ilustración 5.6 Parad suave TVR
5.4.3 Control adaptativo
1 Parámetro 1-7 Kick-start Level (Nivel de pulso de inercia)
2 Parámetro 1-8 Kick-start Time (Tiempo de pulso de inercia)
3 Parámetro 1-5 Initial Current (Corriente inicial)
4 Parámetro 1-6 Start Ramp Time ( Tiempo de rampa de arranque)
5 Parámetro 1-4 Current Limit (Límite de intensidad)
6 Corriente a tensión máxima
Ilustración 5.5 Ejemplo de velocidad del rotor al usar el pulso
de inercia
Modos de parada
5.4
Para utilizar el control adaptativo para controlar el
rendimiento de parada:
1. Seleccione Adaptive control (Control adaptativo) en
el menú Stop Mode (Modo de parada).
2. Ajuste el parámetro 1-11 Stop Time (Tiempo de
parada).
3. Seleccione el perl requerido en el parámetro
1-14 Adaptive Stop Prole (Perl de parada
adaptativo).
5.4.1 Parada en inercia
Parada en inercia deja que el motor desacelere a su ritmo
natural, sin control del arrancador suave. El tiempo
requerido para parar depende del tipo de carga.
5.4.2 Parad suave TVR
La rampa de tensión temporizada reduce gradualmente,
durante un tiempo denido, la tensión suministrada al
motor. La carga puede continuar en marcha después de
completarse la rampa de parada.
La parada por rampa de tensión temporizada puede ser
útil para aplicaciones en las que el tiempo de parada debe
42 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 47

0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
177HA510.10
1 2
4
3
Velocidad
Tiempo
Funciones del producto Guía de funcionamiento
5.4.4 Parada de bomba
Las características hidráulicas de los sistemas de bomba
varían considerablemente. Esta variación implica que el
perl de desaceleración y el tiempo de parada ideales
variarán de una aplicación a otra. La Tabla 5.1 proporciona
instrucciones sobre la selección entre perles de control
adaptativo. Para la identicación del mejor perl para la
aplicación, pruebe los tres perles.
1 Desaceleración temprana
2 Desaceleración constante
3 Desaceleración tardía
4 Parámetro 1-10 Stop Time (Tiempo de parada)
Ilustración 5.7 Parámetro 1-14 Adaptive Stop Prole (Perl de
parada adaptativo)
AVISO!
El control adaptativo no desacelera el motor activamente
ni lo detiene más rápidamente que una parada por
inercia. Para reducir el tiempo de parada de las cargas
con inercia alta, utilice la función de freno. Consulte el
capétulo 5.4.5 Freno.
La primera parada con control adaptativo es una parada
suave normal. Este tipo de parada permite que el
arrancador suave asimile las características del motor
conectado. El arrancador suave utilizará estos datos del
motor durante las siguientes paradas con control
adaptativo.
Perl parada
adaptat
Desaceleración
tardía
Desaceleración
constante
Desaceleración
temprana
Tabla 5.1 Selección de perles de desaceleración de control
adaptativo
Aplicación
Sistemas de caída alta, en los que incluso
una pequeña reducción de la velocidad del
motor / de la bomba produce una rápida
transición entre el ujo de avance y el ujo
inverso.
Aplicaciones de caída baja a media y caudal
alto, en las que el líquido tiene un ritmo
alto.
Sistemas de bomba abierta, en los que el
líquido debe retornar a través de la bomba
sin invertirla.
5.4.5 Freno
El freno reduce el tiempo que el motor necesita para
detenerse.
Es posible que se oiga un aumento del nivel de interferencias del motor durante la frenada. Este ruido es normal
durante la frenada del motor.
5 5
AVISO!
El control adaptativo regula la carga conforme al perl
programado. La corriente de parada varía según el perl
de desaceleración y el tiempo de parada seleccionados.
El arrancador suave tiene que asimilar las características
del nuevo motor:
Si se sustituye un motor conectado a un
•
arrancador suave programado para arranque o
parada mediante control adaptativo.
Si el arrancador suave ha sido probado con un
•
motor diferente antes de la instalación real.
Si se cambian el parámetro 1-1 Motor Full Load Current
(Corriente a plena carga del motor) o el parámetro 1-12
Adaptive Control Gain (Ganancia control adaptativo), el
arrancador suave reasimilará automáticamente las
características del motor.
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 43
Page 48

Vel ocidad
Tie mpo
Funciones del producto
VLT® Soft Starter MCD 500
PRECAUCIÓN
DAÑOS MATERIALES
Si el par de freno se ajusta demasiado alto, el motor se
detendrá antes del nal del tiempo de frenado. El motor
sufre un calentamiento innecesario, que puede causar
daños. La conguración debe realizarse con mucho
cuidado para garantizar un funcionamiento seguro del
arrancador suave y del motor.
Un ajuste del par de freno alto puede hacer que se
consuman picos de corriente de hasta el DOL del motor
mientras este está parando. Asegúrese de que los
55
fusibles de protección instalados en el circuito derivado
del motor se seleccionen correctamente.
es demasiado corto, el frenado no será correcto y
el motor quedará en inercia hasta pararse.
2. Ajuste el parámetro 1-16 Brake Time (Tiempo de
freno) aproximadamente al 25 % del tiempo de
parada programado. El tiempo de freno ajusta el
tiempo para la etapa de frenado total (2).
Consulte la Ilustración 5.8.
3. Ajuste el parámetro 1-15 Brake Torque (Par de
freno) de forma que se consiga el rendimiento de
parada deseado. Si se ajusta demasiado bajo, el
motor no se parará por completo y girará en
inercia hasta la parada al nal del periodo de
frenado.
PRECAUCIÓN
RIESGO DE SOBRECALENTAMIENTO
El funcionamiento del freno hace que el motor se
caliente a una velocidad superior a la calculada por el
modelo térmico del motor. Si utiliza la función de freno,
instale un termistor de motor o ajuste un retardo de
arranque sucientemente amplio: parámetro 2-11 Restart
Delay (Retardo de reinicio).
Con el freno seleccionado, el arrancador suave usa
inyección de CC para ralentizar el motor.
Frenado
No requiere el uso de un contactor de freno de
•
CC.
Controla las tres fases, de forma que las
•
corrientes de frenado y el calor asociado se
distribuyen uniformemente por el motor.
El frenado tiene dos fases:
1. Previa al frenado: proporciona un nivel de
frenado intermedio para reducir la velocidad del
motor hasta un punto en el que pueda funcionar
ecazmente el frenado total (aproximadamente el
70 % de la velocidad).
2. Frenado total: proporciona el máximo par de
frenado, pero no es ecaz a velocidades
superiores al 70 %, aproximadamente.
Para congurar el VLT® Soft Starter MCD 500 para el
funcionamiento del freno:
1. Ajuste el parámetro 1-11 Stop Time (Tiempo de
parada) con la duración del tiempo de parada
deseado (1). Consulte la Ilustración 5.8. El tiempo
de parada es el tiempo total de frenado. Ajústelo
con una duración superior a la del tiempo de
freno (parámetro 1-16 Brake Time [Tiempo de
freno]), suciente para permitir que la etapa de
frenado previo reduzca la velocidad del motor
aproximadamente al 70 %. Si el tiempo de parada
1 Parámetro 1-11 Stop Time ( Tiempo de parada)
2 Parámetro 1-16 Brake Time (Tiempo de freno)
3 Tiempo de parada en inercia
Ilustración 5.8 Tiempo de freno
AVISO!
Al usar el freno de CC:
1. Conecte la fuente de alimentación de red al
arrancador suave (terminales de entrada L1, L2
y L3) en secuencia de fase positiva.
2. Ajuste el parámetro 2-1 Phase Sequence
(Secuencia de fase) a Positive only (Solo positiva).
AVISO!
Si las cargas pueden variar entre los ciclos de frenado,
instale un sensor de velocidad cero para garantizar que
el arrancador suave detenga el frenado de CC cuando el
motor se pare. Esta instalación evita un calentamiento
innecesario del motor.
Para más información sobre el uso del MCD 500 con un
sensor externo de velocidad (por ejemplo, para aplicaciones que tengan una carga variable durante el ciclo de
frenado), consulte el capétulo 5.12 Freno de CC con sensor
de velocidad cero externo.
44 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 49

7 0 %
6 0 %
5 0 %
3 0 %
1 0 %
4 0 %
2 0 %
8 0 %
9 0 %
1 0 0 %
3 0 %
4 0 %
5 0 %
2 0 %
1 0 %
0 %
1 7 7 H A 5 1 2 . 1 1
3
1
2
3
Funciones del producto Guía de funcionamiento
5.5 Funcionamiento a velocidad ja
La velocidad ja hace funcionar el motor a una velocidad
reducida para permitir la alineación de la carga o ayudar
en el mantenimiento. El motor puede ponerse en
velocidad ja en ambos sentidos de giro.
El par máximo disponible para la velocidad
es de un 50-75 % del par a plena carga del motor (FLT),
según el tipo de motor. Cuando el motor está en velocidad
ja inversa, el par es de aproximadamente el 25-50 % del
FLT. El parámetro 15-8 Jog Torque (Par de velocidad ja)
controla qué proporción del par de velocidad ja máximo
disponible aplicará el arrancador suave al motor.
ja de avance
AVISO!
Ajustar el parámetro 15-8 Jog Torque (Par de velocidad
ja) por encima del 50 % puede provocar un aumento
de las vibraciones del eje.
Si la orden de velocidad ja aún está presente, se aplica
nuevamente la velocidad ja al nal de un retardo de
reinicio. Todas las demás órdenes, excepto las indicadas, se
ignoran durante el funcionamiento a velocidad ja.
AVISO!
El arranque y la parada suaves no están disponibles
durante el funcionamiento a velocidad ja. La velocidad
ja solo está disponible para el motor primario.
PRECAUCIÓN
REFRIGERACIÓN REDUCIDA DEL MOTOR
No se recomienda el funcionamiento a baja velocidad
para un funcionamiento continuo debido a la reducción
de la refrigeración del motor. El funcionamiento a
velocidad ja hace que el motor se caliente a una
velocidad superior a la calculada por el modelo térmico
del motor.
Si utiliza la velocidad ja, instale un termistor
•
de motor o ajuste un retardo de arranque
sucientemente amplio: parámetro 2-11 Restart
Delay (Retardo de reinicio).
5 5
5.6 Funcionamiento en triángulo interno
Las funciones de control adaptativo, velocidad ja y freno
no se admiten en el funcionamiento en triángulo interno
(seis cables). Si estas funciones están programadas cuando
el arrancador suave se conecta en triángulo interno, el
comportamiento será el indicado en la Tabla 5.2:
Arranque
con
control
adaptativ
o
Parada
1 Velocidad ja avance
2 Velocidad ja retroceso
3 Funcionamiento normal
Ilustración 5.9 Funcionamiento a velocidad ja
Para activar el funcionamiento a velocidad ja, utilice una
entrada programable: parámetro 3-3 Input A Function
(Funcionamiento entrada A).
Para detener un funcionamiento a velocidad ja, realice
uno de los siguientes procedimientos:
•
•
•
Elimine la orden de velocidad ja.
Pulse [O] en el LCP.
Active Starter disable (Desactivar arrancador)
mediante las entradas programables del LCP.
con
control
adaptativ
o
Velocidad
ja
Freno El arrancador realiza una parada por inercia.
Tabla 5.2 Comportamiento en triángulo interno con control
adaptativo, velocidad ja y freno
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 45
El arrancador suave realiza un arranque de corriente
constante.
Si el tiempo de parada es >0 s, el arrancador realiza
una parada suave TVR. Si el tiempo de parada se
ajusta a 9 s, el arrancador realiza una parada por
inercia.
El arrancador suave emite una advertencia junto con
el mensaje de error Unsupported Option (Opción
incompatible).
Page 50

Funciones del producto
VLT® Soft Starter MCD 500
AVISO!
Cuando está conectado en triángulo interno, el desequilibrio de intensidad es la única protección de pérdida de
fase que está activa durante el funcionamiento. No
desactive el parámetro 2-2 Current Imbalance (Desequi-
librio de intensidad) durante el funcionamiento en
triángulo interno.
AVISO!
El funcionamiento en triángulo interno solo es posible
con una tensión de red ≤600 V CA.
Procesado de alimentos
Lavadora de envases 3,0 × FLC
Centrifugador 4,0 × FLC
Secador 4,5 × FLC
Molino 4,5 × FLC
Paletizador 4,5 × FLC
Separador 4,5 × FLC
Máquina de cortar 3,0 × FLC
Tabla 5.5 Corrientes de arranque típicas para aplicaciones de
procesado de alimentos
55
5.7 Intensidades de arranque típicas
Para determinar la corriente de arranque típica para una
aplicación, utilice esta información.
AVISO!
Estos requisitos de corriente de arranque son los
adecuados y habituales en la mayoría de circunstancias.
Sin embargo, el rendimiento y los requisitos de par de
arranque de los motores y máquinas sí que son
variables. Para conseguir más ayuda, póngase en
contacto con su distribuidor local de Danfoss.
General y agua
Pulpa y papel
Secador 4,5 × FLC
Repulpeador 4,5 × FLC
Trituradora 4,5 × FLC
Tabla 5.6 Corrientes de arranque típicas para aplicaciones de
pulpa y papel
Petroquímica
Molino de bola 4,5 × FLC
Centrifugador 4,0 × FLC
Extrusora 5,0 × FLC
Transportadora de tornillo 4,0 × FLC
Agitador 4,0 × FLC
Bomba centrífuga 3,5 × FLC
Compresor (tornillo, descargado) 3,0 × FLC
Compresor (oscilante, descargado) 4,0 × FLC
Cinta transportadora 4,0 × FLC
Ventilador (amortiguado) 3,5 × FLC
Ventilador (no amortiguado) 4,5 × FLC
Mezclador 4,5 × FLC
Bomba de desplazamiento positivo 4,0 × FLC
Bomba sumergible 3,0 × FLC
Tabla 5.3 Corrientes de arranque típicas para aplicaciones
generales y de agua
Metales y minería
Cinta transportadora 4,5 × FLC
Colector de polvo 3,5 × FLC
Picadora 3,0 × FLC
Martillo mecánico 4,5 × FLC
Trituradora de piedras 4,0 × FLC
Cinta transportadora de rodillo 3,5 × FLC
Molino de rodillo 4,5 × FLC
Tambor 4,0 × FLC
Treladora 5,0 × FLC
Tabla 5.7 Corrientes de arranque típicas para aplicaciones
petroquímicas
Transporte y máquinas herramienta
Molino de bola 4,5 × FLC
Picadora 3,5 × FLC
Transportadora de material 4,0 × FLC
Paletizador 4,5 × FLC
Prensa 3,5 × FLC
Molino de rodillo 4,5 × FLC
Mesa giratoria 4,0 × FLC
Tabla 5.8 Corrientes de arranque habituales para aplicaciones
de transporte y máquinas herramienta
Madera y productos derivados
Sierra continua 4,5 × FLC
Cincelador 4,5 × FLC
Sierra circular 3,5 × FLC
Descortezador 3,5 × FLC
Canteadora 3,5 × FLC
Equipo de energía hidráulica 3,5 × FLC
Aplanador 3,5 × FLC
Lijadora 4,0 × FLC
Tabla 5.4 Corrientes de arranque típicas para aplicaciones de
metales y minería
46 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Tabla 5.9 Corrientes de arranque habituales para aplicaciones
de madera y productos derivados
Page 51

K1
K1
F
22
21
6/T3
2/T1
13
14
4/T2
24
33
34
06
05
08
07
17
18
25
11
16
A6
A5
A4
5/L3
3/L2
15
S1
S2
E
1/L1
+
+
5
6 7
4
2
A
3
1
177HA522.1
24
VD
Funciones del producto Guía de funcionamiento
5.8 Instalación con contactor principal
El VLT® Soft Starter MCD 500 se instala con un contactor principal (clasicación AC3). Suministre la tensión de control desde
el lado de entrada del contactor.
La salida del contactor principal del arrancador suave controla el contactor principal. La salida del contactor principal está
asignada de forma predeterminada al relé de salida A (terminales 13 y 14)
5 5
1 Tensión de control (dependiente del modelo) K1 Contactor principal
2 Salida de 24 V CC F1 Fusibles de semiconductor (opcional)
3 Entradas de control remoto S1 Arranque/parada
4 Entrada de termistor del motor (solo PTC) S2 Contacto de reinicio
5 Salidas de relé 13, 14 Salida de relé A
6 Alimentación trifásica 21, 22, 24 Salida de relé B
7 Terminales de motor 33, 34 Salida de relé C
Ilustración 5.10 Instalación con contactor principal
Ajustes de parámetros:
Parámetro 4-1 Función relé A
•
- Al seleccionar Contactor ppal, se asigna la función de contactor principal a la salida de relé A (valor
predeterminado).
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 47
Page 52

K1
24
VD
22
21
13
14
24
33
34
06
05
08
07
17
18
25
11
16
A6
A5
A4
15
S1
S2
S3
E
+
+
6/T3
2/T1
4/T2
5/L3
3/L2
1/L1
L3B
L1B
L2B
K1
F1
5
6 7
4
2
A
3
1
177HA523.1
Funciones del producto
VLT® Soft Starter MCD 500
5.9 Instalación con contactor de bypass
El VLT® Soft Starter MCD 500 se instala con un contactor de bypass (clasicación AC1). La salida en marcha del arrancador
suave controla el contactor de bypass. La salida en marcha está asignada de forma predeterminada al relé de salida B
(terminales 21, 22 y 24).
55
1 Tensión de control (dependiente del modelo) K1 Contactor bypass
2 Salida de 24 V CC F1 Fusibles de semiconductor (opcional)
3 Entradas de control remoto S1 Contacto de arranque
4 Entrada de termistor del motor (solo PTC) S2 Contacto de parada
5 Salidas de relé S3 Contacto de reinicio
6 Alimentación trifásica 13, 14 Salida de relé A
7 Terminales de motor 21, 22, 24 Salida de relé B
33, 34 Salida de relé C
Ilustración 5.11 Instalación con contactor de bypass
Ajustes de parámetros:
•
Parámetro 4-4 Función relé B.
- Seleccionar En marcha asigna la función de salida en marcha a la salida de relé B (valor predeterminado).
48 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 53

K1
F
24
VD
22
21
6/T3
2/T1
13
14
4/T2
24
33
34
06
05
08
07
17
18
25
11
16
A6
A5
A4
5/L3
3/L2
15
S3
S1
S2
E
1/L1
+
+
5
6 7
4
2
A
3
1
177HA524.1
Funciones del producto Guía de funcionamiento
5.10 Funcionamiento de emergencia
Durante el funcionamiento normal, el VLT® Soft Starter MCD 500 está controlado mediante una señal remota de dos cables
(terminales 17 y 18).
Un circuito de dos cables conectado a la entrada A (terminales 11 y 16) controla el funcionamiento de emergencia. El cierre
de la entrada A hace que el arrancador suave haga funcionar el motor e ignore cualquier condición de desconexión.
5 5
1 Tensión de control (depende del modelo) S1 Contacto de arranque/parada
2 Salida de 24 V CC S2 Contacto de reinicio
3 Entradas de control remoto S3 Contacto de funcionamiento de emergencia
4 Entrada de termistor del motor (solo PTC) 13, 14 Salida de relé A
5 Salidas de relé 21, 22, 24 Salida de relé B
6 Alimentación trifásica 33, 34 Salida de relé C
7 Terminales de motor
Ilustración 5.12 Funcionamiento de emergencia
Ajustes de parámetros:
•
Parámetro 3-3 Input A Function (Funcionamiento entrada A).
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 49
Page 54

Funciones del producto
- Al seleccionar Emergency Run (Funcionamiento de emergencia), se asigna la entrada A al funcionamiento
de emergencia.
Parámetro 15-3 Emergency Run (Funcionamiento de emergencia).
•
- Seleccionar Enable (Activar) activa el modo de funcionamiento de emergencia.
VLT® Soft Starter MCD 500
AVISO!
Aunque Emergency run (Funcionamiento de emergencia) cumple los requisitos de funcionalidad del modo incendio,
Danfoss no recomienda usarlo en situaciones que requieran pruebas y/o conformidad con normas especícas, ya que no
está certicado.
55
5.11 Circuito auxiliar de desconexión
Durante el funcionamiento normal, el VLT® Soft Starter MCD 500 está controlado mediante una señal remota de dos cables
(terminales 17 y 18).
La entrada A (terminales 11 y 16) está conectada a un circuito externo de desconexión (similar a un conmutador de alarma
de baja presión en un sistema de bombeo). Cuando el circuito externo se activa, el arrancador suave se desconecta y
detiene el motor.
50 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 55

K1
F
24
VD
22
21
6/T3
2/T1
13
14
4/T2
24
33
34
06
05
08
07
17
18
25
11
16
A6
A5
A4
5/L3
3/L2
15
S3
S1
S2
E
1/L1
+
+
5
6 7
4
2
A
3
1
177HA525.1
Funciones del producto Guía de funcionamiento
5 5
1 Tensión de control (dependiente del modelo) S1 Contacto de arranque/parada
2 Salida de 24 V CC S2 Contacto de reinicio
3 Entradas de control remoto S3 Contacto de desconexión auxiliar
4 Entrada de termistor del motor (solo PTC) 13, 14 Salida de relé A
5 Salidas de relé 21, 22, 24 Salida de relé B
6 Alimentación trifásica 33, 34 Salida de relé C
7 Terminales de motor
Ilustración 5.13 Circuito auxiliar de desconexión
Ajustes de parámetros:
Parámetro 3-3 Func entrada A.
•
•
•
- Al seleccionar Descon entr (N/O), se asigna la entrada A a la función de desconexión auxiliar (N/O).
Parámetro 3-4 Nombr entr A.
- Seleccionar un nombre, por ejemplo, Baja presión, asigna un nombre a la entrada A.
Parámetro 3-8 Lógica reinic remot.
- Seleccionar según se requiera, por ejemplo, Norm. cerrado; la entrada se comporta como un contacto
normalmente cerrado.
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 51
Page 56

-F1
L3L2L1 N E
-K10
L1 L2 L3
E
T1 T2 T3
A5A4 A6
15 16 17 18 25
11 16
-K10
-K11
-K10
-K11
T3T2T1
M
3
-K11-K10
-A2
177HA619.20
1
2
3
4
A
5
6
4
B
D
E
C
Funciones del producto
VLT® Soft Starter MCD 500
5.12 Freno de CC con sensor de velocidad
cero externo
Para aquellas cargas que pueden variar entre los ciclos de
frenado, resulta benecioso usar un sensor de velocidad
cero externo para interactuar con el VLT® Soft Starter MCD
500 al cortar el freno. Este método de control garantiza
que el frenado del MCD 500 cese siempre cuando el motor
se haya parado, evitando de esta forma un calentamiento
innecesario del motor.
55
velocidad cero externo con el MCD 500 para desactivar la
función de freno cuando se para el motor. Es frecuente
que el sensor de velocidad cero (-A2) se denomine
detector de velocidad baja. Su contacto interno está
abierto cuando la velocidad es cero y cerrado a cualquier
velocidad por encima de cero. Una vez que el motor se
La Ilustración 5.14 indica cómo se puede usar un sensor de
haya parado, se abren los terminales 11 y 16 y se desactiva
el arrancador suave. Cuando se da la siguiente orden de
arranque, es decir, en la siguiente aplicación de K10, los
terminales 11 y 16 se cierran y se activa el arrancador
suave.
Haga funcionar el MCD 500 en modo automático y ajuste
el parámetro 3-3 Input A Function (Funcionamiento entrada
A) como Starter disable (Desactivar arrancador).
1 Tensión de control 15, 16 Arranque
2 Terminales de
17, 18 Parada
motor
3 Alimentación
25, 18 Reset (Reiniciar)
trifásica
4 Desactivar
A Desactivado (listo)
arrancador (en el
display del
arrancador suave)
5 Señal de arranque
B Arranque
(2, 3 o 4 cables)
6 Detección de
C En funcionamiento
velocidad cero
7 Sensor de velocidad
D Parada
cero
E Velocidad cero
Ilustración 5.14 Apagar función de freno en parada con sensor
de velocidad cero
Si desea más información sobre la conguración del freno
de CC, consulte el capétulo 5.4.5 Freno.
AVISO!
52 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Al usar el freno de CC, conecte la fuente de alimentación
al arrancador suave (terminales de entrada L1, L2 y L3)
en secuencia de fase positiva. A continuación, ajuste el
parámetro 2-1 Phase Sequence (Secuencia de fase) a
Positive only (Solo positiva).
Page 57

3
177HA526.12
6
5
6
4
2
3
1
K3T
K2
K10 K11 K12 K13K1
M1
54 55 585756
F1
K2 K1
K12
S2 K13
A2
K1T
K1T K2T K3T
K1 K2
K1 K2S1 K10 K10
Y1
Y2
Y1
Y2
K10
K2T
4/T2
6/T3
E
1/L1
3/L2
5/L3
2/T1
33
34
A4 A5 A6
05
06
K12
K11 S3
53
Funciones del producto Guía de funcionamiento
5.13 Frenado suave
Con cargas de inercia elevada, el VLT® Soft Starter MCD 500 puede congurarse para frenado suave.
En esta aplicación, el MCD 500 se emplea con contactores de frenado y avance. Cuando el arrancador suave recibe una
señal de arranque (pulsador S1), cierra el contactor de avance (K1) y controla el motor según los ajustes programados del
motor primario.
Cuando el arrancador suave recibe una señal de parada (pulsador S2), abre el contactor de avance (K1) y cierra el contactor
de frenado (K2) tras un retardo de aproximadamente 2-3 s (KT1). El K12 también se cierra para activar los ajustes del motor
secundario, que son programados por el usuario en función de las características deseadas de rendimiento de parada.
Cuando la velocidad del motor se acerca a cero, el sensor externo de velocidad cero (A2) detiene el arrancador suave y abre
el contactor de frenado (K2).
1 Tensión de control (depende del modelo) K10 Relé de funcionamiento
2 Entradas de control remoto K11 Relé de arranque
3 Entrada de termistor del motor (solo PTC) K12 Relé de freno
4 Salidas de relé K13 Relé de detección de velocidad cero
5 Alimentación trifásica K1 Contactor de línea (en marcha)
6 Terminales de motor K2 Contactor de línea (freno)
A2 Sensor de velocidad cero K1T Temporizador de retardo de funcionamiento
S1 Contacto de arranque K2T Temporizador de retardo de freno
S2 Contacto de parada K3T Temporizador de retardo del detector de velocidad cero
S3 Contacto de reinicio
5 5
Ilustración 5.15 Conguración de frenado suave
Ajustes de parámetros:
•
Parámetro 3-3 Input A Function (Funcionamiento entrada A).
- Seleccionar Motor Set Select (Selección conjunto de motor) asigna la entrada A para selección de conjunto
- Ajuste las características de rendimiento de arranque utilizando el conjunto de motor primario: grupo de
motor.
parámetros 1 Primary Motor Settings (Ajustes motor primario).
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 53
Page 58

Funciones del producto
- Ajuste las características de rendimiento de frenado utilizando los ajustes del motor secundario: grupo de
parámetros 7 Secondary Motor Set (Conjunto de motor secundario).
Parámetro 4-7 Relay C Function (Función relé C).
•
- Seleccionar Trip (Desconexión) asigna la función de desconexión al relé de salida C.
VLT® Soft Starter MCD 500
AVISO!
Si el arrancador suave se desconecta por frecuencia de alimentación (parámetro 16-5 Frequency `[Frecuencia]), cuando el
contactor de frenado K2 se abre, modique los ajustes de los parámetros de 2-8 a 2-10.
5.14 Motor de dos velocidades
55
El VLT® Soft Starter MCD 500 puede congurarse para controlar motores tipo Dahlander de dos velocidades, utilizando un
contactor de alta velocidad (K1), un contactor de baja velocidad (K2) y un contactor de estrella (K3).
AVISO!
Los motores de modulación de amplitud de polo (PAM) alteran la velocidad cambiando efectivamente la frecuencia del
estátor utilizando una conguración de bobinado externo. Los arrancadores suaves no son adecuados para su uso con
este tipo de motor de dos velocidades.
Cuando el arrancador suave recibe una señal de arranque de alta velocidad, cierra el contactor de alta velocidad (K1) y el
contactor de estrella (K3). Entonces controla el motor según los ajustes del motor primario (parámetros de 1-1 a 1-16).
Cuando el arrancador suave recibe una señal de arranque de baja velocidad, cierra el contactor de baja velocidad (K2). Esto
cierra la entrada A y el arrancador suave controla el motor según los ajustes del motor secundario (parámetros de 7-1 a
7-16).
AVISO!
Si el arrancador suave se desconecta por frecuencia de alimentación (16-5 Frequency [Frecuencia]) cuando se elimina la
señal de arranque de alta velocidad (7), modique los ajustes de los parámetros de 2-8 a 2-10.
54 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 59

177HA527.1
2/T1
4/T2
6/T3
E
T4
T5
T6
T1
T2
T3
A6
A4
A5
1/L1
3/L2
5/L3
24
22
21
K10
K11
K10
K11
K3
K10
K2K11
K1
K2
K3
K1
K3
K1
K3
K2
S1
K2
K1
K10
F1
17
18
25
11
16
15
3
6
7
5
4
2
1
Funciones del producto Guía de funcionamiento
5 5
1 Tensión de control 6 Entrada de arranque remoto de
K2 Contactor de línea (baja velocidad)
baja velocidad
2 Entradas de control
remoto
3 Salidas de relé K10 Relé de arranque remoto (baja
7 Entrada de arranque remoto de
alta velocidad
K3 Contactor de arranque (alta velocidad)
S1 Contacto de reinicio
velocidad)
4 Alimentación trifásica K11 Relé de arranque remoto (alta
21, 22, 24 Salida de relé B
velocidad)
5 Terminales de motor K1 Contactor de línea (alta
velocidad)
Ilustración 5.16 Conguración de motor de dos velocidades
AVISO!
Los contactores K2 y K3 deben estar bloqueados entre sí de forma mecánica.
Ajustes de parámetros:
•
•
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 55
Parámetro 3-3 Input A Function (Funcionamiento entrada A).
- Seleccionar Motor Set Select (Selección conjunto de motor) asigna la entrada A para selección de conjunto
motor.
- Ajuste las características de rendimiento de alta velocidad usando los parámetros de 1-1 a 2-9.
- Ajuste las características de rendimiento de baja velocidad usando los parámetros de 7-1 a 7-16.
Parámetro 4-4 Relay B Function (Función relé B).
- Seleccionar Trip (Desconexión) asigna la función de desconexión a la salida de relé B.
Page 60

Funciones del producto
VLT® Soft Starter MCD 500
AVISO!
Si el arrancador suave se desconecta por frecuencia de alimentación (parámetro 16-5 Frequency [Frecuencia]) cuando se
elimina la señal de arranque de alta velocidad (7), modique los ajustes de los parámetros de 2-9 a 2-10.
55
56 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 61

Funcionamiento Guía de funcionamiento
6 Funcionamiento
6.1 Métodos de control
El VLT® Soft Starter MCD 500 puede controlarse:
Mediante las teclas de control del LCP (control local).
•
Mediante las entradas remotas (control remoto).
•
Mediante la red de comunicación serie.
•
Funciones de control
El control local solo está disponible en modo manual.
•
El control remoto solo está disponible en modo automático.
•
El control mediante la red de comunicación serie siempre está desactivado en modo manual. Active o desactive las
•
órdenes de arranque y parada mediante la red serie en modo automático cambiando el ajuste del parámetro 3-2
Comms in Remote (Comunicaciones en remoto).
El MCD 500 también puede congurarse para arrancar o parar automáticamente. El funcionamiento de arranque y parada
automáticos solo está disponible en modo automático. En modo manual, el arrancador suave ignora cualquier ajuste de
arranque o parada automáticos. Para congurar el funcionamiento de arranque y parada automáticos, ajuste los de
parámetros 5-1 a 5-4.
6
6
Para cambiar entre los modos manual y automático, pulse las teclas del LCP.
[Hand On]: arrancar el motor y entrar en modo manual.
•
[O]: parar el motor y entrar en modo manual.
•
[Auto On]: ajustar el arrancador suave al modo automático.
•
[Reset]: reiniciar una desconexión (solo en modo manual).
•
El MCD 500 también se puede ajustar para que permita únicamente un control local o remoto mediante el parámetro 3-1
Local/Remote (Local/Remoto).
Si el parámetro 3-1 Local/Remote (Local/Remoto) se
el motor por control remoto o mediante la red de comunicación serie.
Modo manual Modo automático
Para el arranque suave del motor. Pulse [Hand On] en el LCP. Active la entrada de Start remote (Arranque
Para parar el motor. Pulse [O] en el LCP. Active la entrada de Stop remote (Parada
Para reiniciar una desconexión en el
arrancador suave.
Funcionamiento de arranque y parada
automáticos.
Tabla 6.1 Arranque, parada y reinicio en modo manual y modo automático
Pulse [Reset] en el LCP. Active la entrada de Reset remote (Reinicio
Desactivado. Activado.
congura como Solo control remoto, la tecla [O] se desactivará. Detenga
remoto).
remota).
remoto).
Para hacer que el motor se detenga por inercia, independientemente del ajuste del parámetro 1-10 Stop Mode (Modo de
parada), pulse
y el motor frena por inercia hasta detenerse.
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 57
[O] y [Reset] al mismo tiempo. El arrancador suave corta la potencia del motor y abre el contactor principal,
Page 62

177HA383.10
®
1
2
3
4
5
Funcionamiento
VLT® Soft Starter MCD 500
6
AVISO!
Las funciones de freno y velocidad ja solo funcionan
con motores conectados en línea (consulte el
capétulo 5.6 Funcionamiento en triángulo interno)
6.2 Funcionamiento y LCP
6.2.1 Modos de funcionamiento
En modo manual:
Para realizar un arranque suave del motor, pulse
•
[Hand On] en el LCP.
Para parar el motor, pulse [O] en el LCP.
•
Para reiniciar una desconexión en el arrancador
•
suave, pulse [Reset] en el LCP.
Para hacer que el motor se detenga por inercia,
•
independientemente del ajuste del parámetro
1-10 Modo parad, pulse [O] y [Reset] al mismo
tiempo. El arrancador suave corta la potencia del
motor y abre el contactor principal, y entonces el
motor frena por inercia hasta detenerse.
En modo automático:
Para el arranque suave del motor, active la
•
entrada remota de Arrnq.
Para detener el motor, active la entrada remota
•
de Parad.
Para reiniciar una desconexión en el arrancador
•
suave, active la entrada remota de Reinic.
AVISO!
Las funciones de freno y velocidad ja solo funcionan
con motores conectados en línea (consulte el
capétulo 4.3.3 Instalación en triángulo interno)
6.2.2 El LCP
1 Display de cuatro líneas para detalles de estado y
programación.
2 Teclas de control del display:
[Status]: regresa a las pantallas de estado.
[Quick Menu]: abre el menú rápido.
[Main Menu]: abre el menú principal.
[Alarm Log]: abre el registro de alarmas.
3 Teclas de navegación del menú:
[Back]: sale del menú o parámetro o cancela un
cambio de parámetro.
[OK]: entra en un menú o parámetro o guarda un
cambio de parámetro.
[▲]/[▼]:
Avanzan hasta el menú o parámetro
siguiente o anterior.
Cambian el ajuste del parámetro actual.
Avanzan por las pantallas de estado.
4 Teclas de control local del arrancador suave:
[Hand On]: arranca el motor y entra en modo de
58 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
5 Indicadores de estado de la entrada remota.
Ilustración 6.1 Diseño del LCP
control local.
[O]: detiene el motor (solo activo en modo
manual).
[Auto On]: ajusta el arrancador suave al modo
automático.
[Reset]: reinicia una desconexión (solo en modo
manual).
Page 63

Funcionamiento Guía de funcionamiento
6.3 LCP de montaje remoto
Con el VLT® Soft Starter MCD 500, puede montarse un LCP
de montaje remoto. El panel de control LCP 501 se puede
instalar a una distancia de hasta 3 m (9,8 ft) del arrancador
suave, para realizar el control y la supervisión.
El arrancador suave puede controlarse y programarse tanto
desde el LCP remoto como desde el LCP del arrancador
suave. Ambos displays muestran la misma información.
El LCP remoto también hace posible copiar los ajustes de
parámetros entre arrancadores suaves.
6.3.1 Sincronización del LCP y el arrancador
suave
El cable DB9 se puede conectar/desconectar desde el LCP
con el arrancador suave en marcha.
La primera vez que se conecta un LCP a un arrancador
suave, el arrancador suave copia sus ajustes de parámetros
al LCP.
AVISO!
Mientras el LCP se sincroniza, solo están activadas las
teclas [▲], [▼], [OK] y [O].
AVISO!
El LCP puede desmontarse o sustituirse con el arrancador
suave en marcha. No es necesario desconectar la tensión
de red ni la tensión de control.
6.4 Pantalla de bienvenida
Cuando se aplica la tensión de control, la pantalla de
bienvenida aparece en el arrancador suave.
Listo S1
Bienvenido
1.05/2.0/1.13
MCD5-0053-T5-G1-
-CV2
Tercera línea de display: versiones del software del LCP remoto, del
software de control y del software del modelo.
Cuarta línea de display: número de modelo del producto.
6
6
Nuevo display
detectado
Si el LCP se ha utilizado previamente con un VLT® Soft
Starter MCD 500, seleccione si desea copiar los parámetros
del LCP al arrancador suave o del arrancador suave al LCP.
Para seleccionar la opción requerida:
1.
Pulse las teclas [▲] y [▼].
Una línea de puntos rodea la opción seleccionada.
2. Pulse [OK] para proseguir con la selección Copy
Parameters (Copiar parámetros).
2a Del display al arrancador suave.
2b Del arrancador suave al display.
Copiar parámetros
Del display al
arrancador suave
Del arrancador suave
al display
AVISO!
Si la versión del software de parámetros del LCP es
diferente a la versión de software del arrancador suave,
solo está disponible Starter to Display (Del arrancador al
display).
AVISO!
La versión del LCP solo se muestra si hay conectado un
LCP 501 remoto al aplicar la tensión de control. Si no hay
un LCP remoto, solo se muestran las versiones del
software de control y el software del modelo.
6.5 Teclas de control local
Si el parámetro 3-1 Local/Remoto está ajustado a LCL/RMT
siempre o LCL/RMT si desact, las teclas [Hand On] y [Auto
On] siempre están activas. Si el arrancador suave está en
modo automático, al pulsar la tecla [Hand On] pasa a
modo manual y arranca el motor.
Si el parámetro 3-1 Local/Remoto se congura como Solo
control remoto, la tecla [O] se desactivará. Detenga el
motor por control remoto o mediante la red de comunicación serie.
Pantallas
6.6
El LCP muestra una amplia variedad de información sobre
el rendimiento del arrancador suave. Pulse la tecla [Status]
para acceder a las pantallas de visualización de estado y a
continuación utilice las teclas [▲] y [▼] para seleccionar la
información que se desea mostrar. Para volver a las
pantallas de estado desde un menú, pulse la tecla [Back]
varias veces o pulse [Status]. Información de estado
disponible:
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 59
Page 64

Funcionamiento
VLT® Soft Starter MCD 500
6
Supervisión de la temperatura.
•
Pantalla programable (consulte los parámetros de
•
8-2 a 8-5)
Corriente.
•
Frecuencia.
•
Potencia del motor.
•
Información del último arranque.
•
Fecha y hora.
•
Gráca de barras de conducción SCR.
•
Grácos de rendimiento.
•
AVISO!
Las pantallas aquí mostradas reejan los ajustes
predeterminados.
6.6.1 Pantalla de supervisión de
temperatura (S1)
La pantalla de temperatura muestra la temperatura del
motor como un porcentaje de la capacidad térmica total.
También muestra qué conjunto de datos del motor se está
usando.
La pantalla de supervisión de temperatura es la pantalla de
estado predeterminada.
Listo S1
MS1 000.0A 000,0 kW
Conjunto de motor
primario
M1 000%
6.6.2 Pantalla programable (S2)
6.6.3 Corriente media (S3)
La pantalla de corriente media muestra la intensidad media
de las tres fases.
Listo S3
MS1 000.0A 000,0 kW
0.0A
6.6.4 Pantalla de supervisión de la corriente
(S4)
La pantalla de corriente muestra en tiempo real la
corriente de línea en cada fase.
Listo S4
MS1 000.0A 000,0 kW
Corrientes de fase
000.0A 000.0A 000.0A
6.6.5 Pantalla de supervisión de frecuencia
(S5)
La pantalla de frecuencia muestra la frecuencia de red
medida por el arrancador suave.
Listo S5
MS1 000.0A 000,0 kW
00,0 Hz
6.6.6 Pantalla de potencia del motor (S6)
La pantalla de potencia del motor muestra la potencia del
motor (kW, CV y kVA) y el factor de potencia.
La pantalla programable por el usuario del arrancador
suave puede congurarse para mostrar la información más
importante de una aplicación en particular. Utilice los
parámetros del 8-2 al 8-5 para seleccionar qué información
se desea mostrar.
Listo S6
MS1 000.0A 000,0 kW
000,0 kW 0000HP
0000 kVA -. - - pf
6.6.7 Información del último arranque (S7)
Listo S2
MS1 000.0A 000,0 kW
-.-- pf
00000 h
60 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
La pantalla de información del último arranque muestra
información del último arranque con éxito:
Duración del arranque (s).
•
Corriente máxima consumida en el arranque
•
(como porcentaje de la corriente a plena carga
del motor).
Aumento calculado de la temperatura del motor.
•
Listo S7
MS1 000.0A 000,0 kW
Último arranque 000 s
000 % FLC
ΔTemp. 0 %
Page 65

177HA513.10
L1 Cond
L2 Cond
L3 Cond
Funcionamiento Guía de funcionamiento
6.6.8 Fecha y hora (S8)
La pantalla de fecha y hora muestra la fecha y hora
actuales del sistema (en formato de 24 horas). Para ver en
detalle cómo ajustar la fecha y la hora, consulte el
capétulo 9.1 Ajustar fecha y hora.
Listo S8
MS1 000.0A 000,0 kW
AAAA MMM DD
HH:MM:SS
6.6.9 Gráco de barras de conducción SCR
El gráco de barras de conducción SCR muestra el nivel de
conducción de cada fase.
Ilustración 6.2 Gráco de barras
6.6.10 Grácos de rendimiento
El VLT® Soft Starter MCD 500 puede mostrar información
de rendimiento en tiempo real con relación a:
Corriente.
•
Temperatura del motor.
•
kW del motor.
•
kVa del motor.
•
Factor de potencia del motor.
•
La información más actualizada aparece en el borde
derecho de la pantalla. Los datos más antiguos no se
almacenan. Para analizar el rendimiento anterior, es posible
detener el gráco. Para detener o reiniciar el gráco,
mantenga pulsada la tecla [OK] durante más de 0,5 s.
6
6
AVISO!
El arrancador suave no registra datos mientras el gráco
está detenido. Una vez reiniciado el gráco, se muestra
una pequeña separación entre los datos antiguos y los
nuevos.
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 61
Page 66

Programación
7 Programación
VLT® Soft Starter MCD 500
Puede acceder a los menús de programación en cualquier
momento, incluso mientras el arrancador suave está
funcionando. Todos los cambios surten efecto inmedia-
Si se intenta cambiar un valor de parámetro o acceder al
Menú principal cuando el bloqueo de ajuste está activado,
se muestra un mensaje de error:
tamente.
7.1 Control de acceso
Acceso denegado
Bloqueo de ajuste activado
Un código de acceso de seguridad de cuatro dígitos
protege los parámetros críticos (grupo de parámetros 15
7.2 Menú rápido
Restricted Parameters [Parámetros restringidos] y posteriores),
evitando así el acceso de usuarios no autorizados a la
visualización o modicación de los ajustes de parámetros.
Si se intenta acceder a un grupo de parámetros restringido,
[Quick Menu] proporciona acceso a los menús para
congurar el arrancador suave para aplicaciones sencillas.
7.2.1 Conguración rápida
el LCP pide un código de acceso. Este código de acceso se
77
solicita una vez durante la sesión de programación, y la
autorización continúa vigente hasta que se cierra el menú.
La conguración rápida proporciona acceso a los
parámetros más habituales, lo que permite congurar el
arrancador suave a la medida de la aplicación. Para ver
Para introducir el código de acceso:
1. Pulse [Back] y [OK] para seleccionar un dígito.
2.
Pulse [▲] y [▼] para cambiar el valor.
3. Cuando los cuatro dígitos coincidan con el código
de acceso, pulse [OK].
El LCP muestra un mensaje de
conrmación antes de
continuar.
Introducir código de acceso
####
OK
Acceso permitido
SUPERVISOR
Para cambiar el código de acceso, utilice el parámetro 15-1
Access Code (Código de acceso).
AVISO!
El código de acceso de seguridad también protege las
simulaciones de protección y de salida. Los contadores y
el reinicio del modelo térmico pueden visualizarse sin
introducir un código de acceso, pero este sí debe
introducirse para reiniciarlos.
El código de acceso por defecto es 0000.
Para evitar que los usuarios modiquen los ajustes de
parámetros, bloquee los menús. El bloqueo de ajuste
puede congurarse para permitir Read & Write (Lectura y
escritura), Read Only (Solo lectura) o No Access (Sin acceso),
utilizando el parámetro 15-2 Adjustment Lock (Bloqueo de
ajuste).
detalles de los parámetros individuales, consulte el
capétulo 8 Descripciones de parámetros.
1 Primary Mtr Set (Conjunto de motor primario)
1-1 FLC motor
1-3 Modo de arranque
1-4 Límite de intensidad
1-5 Corriente inicial
1-6 Tiempo de rampa de arranque
1-9 Exceso de tiempo de arranque
1-10 Modo de parada
1-11 Tiempo de parada
2 Protección
2-1 Secuencia de fase
2-4 Baja corriente
2-5 Retardo de baja corriente
2-6 Sobrecorriente instantánea
2-7 Retardo de sobrecorriente instantánea
3 Entradas
3-3 Funcionamiento entrada A
3-4 Nombre entrada A
3-5 Desconexión de entrada A
3-6 Retardo de desconexión de entrada A
3-7 Retardo inicial de entrada A
4 Salidas
4-1 Función relé A
4-2 Retardo activación relé A
4-3 Retardo desactivación relé A
4-4 Función relé B
4-5 Retardo activación relé B
4-6 Retardo desactivación relé B
4-7 Función relé C
4-8 Retardo activación relé C
62 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 67

Programación Guía de funcionamiento
1 Primary Mtr Set (Conjunto de motor primario)
4-9 Retardo desactivación relé C
4-10 Aviso intensidad baja
4-11 Aviso intensidad alta
4-12 Aviso temperatura motor
5 Temporizadores de arranque/parada
5-1 Tipo arranque automático
5-2 Duración arranque automático
5-3 Tipo parada automática
5-4 Duración parada automática
8 Pantalla
8-1 Idioma
8-2 Pantalla usuario sup. I
8-3 Pantalla usuario sup. D
8-4 Pantalla usuario inf. I
8-5 Pantalla usuario inf. D
Tabla 7.1 Parámetros del menú de conguración rápida
7.2.2 Ejemplos de conguración de la
aplicación
El menú de ajustes de la aplicación facilita la conguración
del arrancador suave para las aplicaciones comunes. El
arrancador suave selecciona los parámetros pertinentes
para la aplicación y sugiere unos ajustes típicos. Cada
parámetro puede ajustarse para adecuarlo a los requisitos
exactos.
En el display, los valores resaltados son los valores
sugeridos. Los valores indicados mediante el símbolo ▶ son
los valores cargados.
Ajuste siempre el parámetro 1-1 FLC motor para que
coincida con la corriente a plena carga de la placa de
características del motor. El valor sugerido para la FLC del
motor es el valor mínimo de FLC del arrancador suave.
Bomba centrífuga
Corriente a plena carga del
motor
Modo de arranque Control adaptativo
Perl arrnq adaptat Aceleración temprana
Tiemp ramp arrnq 10 s
Modo parad Control adaptativo
Perl parada adaptat Desaceleración tardía
Tiempo de parada 15 s
Tabla 7.2 Valores sugeridos para aplicaciones de bomba
centrífuga
Bomba sumergible
Corriente a plena carga del
motor
Modo de arranque Control adaptativo
Perl arrnq adaptat Aceleración temprana
Tiemp ramp arrnq 5 s
Modo parad Control adaptativo
Perl parada adaptat Desaceleración tardía
Tiempo de parada 5 s
Tabla 7.3 Valores sugeridos para aplicaciones de bomba
sumergible
Ventilador amortiguado
Corriente a plena carga del
motor
Modo de arranque Corriente constante
Límite intensidad 350%
Tabla 7.4 Valores sugeridos para aplicaciones de ventilador
amortiguado
Ventilador no amortiguado
Corriente a plena carga del
motor
Modo de arranque Control adaptativo
Perl arrnq adaptat Aceleración constante
Tiemp ramp arrnq 20 s
Exceso de tiempo de arranque 30 s
Tiempo de rotor bloqueado 20 s
Tabla 7.5 Valores sugeridos para aplicaciones de ventilador no
amortiguado
Compresor de tornillo
Corriente a plena carga del
motor
Modo de arranque Corriente constante
Tiemp ramp arrnq 5 s
Límite intensidad 400%
Tabla 7.6 Valores sugeridos para aplicaciones de compresor de
tornillo
Compresor alternativo
Corriente a plena carga del
motor
Modo de arranque Corriente constante
Tiemp ramp arrnq 10 s
Límite intensidad 450%
7 7
Tabla 7.7 Valores sugeridos para aplicaciones de compresor
alternativo
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 63
Page 68

Programación
VLT® Soft Starter MCD 500
Cinta transportadora
Corriente a plena carga del
motor
Modo de arranque Corriente constante
Tiemp ramp arrnq 5 s
Límite intensidad 400%
Modo parad Control adaptativo
Perl parada adaptat Desaceleración constante
Tiempo de parada 10 s
Tabla 7.8 Valores sugeridos para aplicaciones de cinta
transportadora
Trituradora rotativa
Corriente a plena carga del
motor
77
Modo de arranque Corriente constante
Tiemp ramp arrnq 10 s
Límite intensidad 400%
Exceso de tiempo de arranque 30 s
Tiempo de rotor bloqueado 20 s
Tabla 7.9 Valores sugeridos para aplicaciones de trituradora
rotativa
Trituradora de mandíbula
Corriente a plena carga del
motor
Modo de arranque Corriente constante
Tiemp ramp arrnq 10 s
Límite intensidad 450%
Exceso de tiempo de arranque 40 s
Tiempo de rotor bloqueado 30 s
Menú principal
7.3
La tecla [Main Menu] proporciona acceso a los menús para
congurar el arrancador suave para aplicaciones avanzadas
y para controlar el rendimiento.
7.3.1 Parámetros
En Parámetros, puede ver y cambiar todos los parámetros
programables que controlan el modo de funcionamiento
del arrancador suave.
Para abrir Parámetros, pulse la tecla [Main Menu] y
seleccione Parámetros.
Desplazarse por los parámetros
Para desplazarse por los grupos de parámetros,
•
pulse la tecla [▲] o [▼].
Para ver los parámetros de un grupo, pulse [OK].
•
Para volver al nivel anterior, pulse [Back].
•
Para cerrar Parámetros, pulse [Back].
•
Cambio de un valor de parámetros
Desplácese hasta el parámetro correspondiente y
•
pulse [OK] para entrar en el modo de edición.
Para modicar el ajuste de parámetros, pulse [▲]
•
y [▼].
Para guardar los cambios, pulse [OK]. El ajuste
•
que se muestra en pantalla se guarda y el LCP
vuelve a la lista de parámetros.
Para cancelar los cambios, pulse [Back]. El LCP
•
vuelve a la lista de parámetros sin guardar los
cambios.
Tabla 7.10 Valores sugeridos para aplicaciones de trituradora
de mandíbula
7.2.3 Registros
Para ver en tiempo real información gráca del
rendimiento, acceda al menú Registros.
Corriente (% FLC).
•
Temp motor (%).
•
kW Motor (%).
•
kVA Motor (%).
•
fp Motor.
•
La información más actualizada aparece en el borde
derecho de la pantalla. Se puede detener el gráco para
analizar los datos manteniendo pulsada la tecla [OK]. Para
reiniciar el gráco, mantenga pulsado [OK].
64 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
7.3.2 Acceso directo a los parámetros
El VLT® Soft Starter MCD 500 incluye también un acceso
directo a los parámetros, que permite acceder
directamente a un parámetro del menú Parameters
(Parámetros).
Para acceder al acceso directo a parámetros, pulse
•
[Main Menu] durante tres segundos.
Pulse [▲] o [▼] para seleccionar un grupo de
•
parámetros.
Pulse [OK] o [Back] para mover el cursor.
•
Pulse [▲] o [▼] para seleccionar un número de
•
parámetro.
Acceso directo a los parámetros
Introduzca un
número de parámetro
01-01
Page 69

Programación Guía de funcionamiento
7.3.3 Lista de parámetros
1 Primary Mtr Set (Conjunto
de motor primario)
1-1 Motor FLC (FLC motor) 4-1 Relay A Function (Función
1-2 Locked Rotor Time (Tiempo
rotor bloqueado)
1-3 Start Mode (Modo de
arranque)
1-4 Current Limit (Límite de
intensidad)
1-5 Initial Current (Corriente
inicial)
1-6 Start Ramp Time (Tiempo de
rampa de arranque)
1-7 Kick-start Level (Nivel de
pulso de inercia)
1-8 Kick-start Time (Tiempo de
pulso de inercia)
1-9 Excess Start Time (Exceso de
tiempo de arranque)
1-10 Stop Mode (Modo de parada) 4-10 Low Current Flag (Aviso
1-11 Stop Time (Tiempo de
parada)
1-12 Adaptv Control Gain
(Ganancia control adaptativo)
1-13 Adaptv Start Prole (Perl
arranque adaptativo)
1-14 Adaptv Stop Prole (Perl
parada adaptativo)
1-15 Brake Torque (Par de freno) 4-15 Analog A Max Adj (Ajuste
1-16 Brake Time (Tiempo de freno) 4-16 Analog A Min Adj (Ajuste
2 Protection (Protección) 5 Start/Stop Timers (Tempori-
2-1 Phase Sequence (Secuencia
de fase)
2-2 Current Imbalance (Desequi-
librio de intensidad)
2-3 Current Imbal Dly (Retardo
desequilibrio intensidad)
2-4 Undercurrent (Baja corriente) 5-4 Auto-Stop Time (Duración
2-5 Undercurrent Dly (Retardo de
baja corriente)
2-6 Inst Overcurrent (Sobreco-
rriente instantánea)
2-7 Inst Ocrnt Dly (Retardo de
sobrecorriente instantánea)
4 Outputs (Salidas) 7-12 Adaptv Ctrl Gain-2 (Ganancia control
relé A)
4-2 Relay A On Delay (Retardo
activación relé A)
4-3 Relay A O Delay (Retardo
desactivación relé A)
4-4 Relay B Function (Función
relé B)
4-5 Relay B On Delay (Retardo
activación relé B)
4-6 Relay B O Delay (Retardo
desactivación relé B)
4-7 Relay C Function (Función
relé C)
4-8 Relay C On Delay (Retardo
activación relé C)
4-9 Relay C O Delay (Retardo
desactivación relé C)
intensidad baja)
4-11 High Current Flag (Aviso
intensidad alta)
4-12 Motor Temp Flag (Aviso
temperatura motor)
4-13 Analog Output A (Salida
analógica A)
4-14 Analog A Scale (Escala
analógica A)
máximo analógico A)
mínimo analógico A)
zadores de arranque/
parada)
5-1 Auto-Start Type (Tipo
arranque automático)
5-2 Auto-Start Time (Duración
arranque automático)
5-3 Auto-Stop Type (Tipo parada
automática)
parada automática)
6 Auto-Reset (Reinicio
automático)
6-1 Auto-Reset Action (Acción
reinicio automático)
6-2 Maximum Resets (Reinicios
máximos)
adapt-2)
7-13 Adaptv Start Prof-2 (Perl arranque adapt-2)
7-14 Adaptv Stop Prof-2 (Perl parada adapt-2)
7-15 Brake Torque-2 (Par freno-2)
7-16 Brake Time-2 (Tiempo freno-2)
8 Display (Pantalla)
8-1 Language (Idioma)
8-2 User Scrn Top L (Pantalla usuario sup. I)
8-3 User Scrn Top R (Pantalla usuario sup. D)
8-4 User Scrn Btm L (Pantalla usuario inf. I)
8-5 User Scrn Btm R (Pantalla usuario inf. D)
8-6 Graph Timebase (Unidad tiempo de gráco)
8-7 Graph Max Adj (Ajuste máximo de gráco)
8-8 Graph Min Adj (Ajuste mínimo de gráco)
8-9 Mains Ref Volt (Tensión referencia red)
15 Restrict Paramtr (Parámetros restringidos)
15-1 Access Code (Código acceso)
15-2 Adjustment Lock (Bloqueo ajuste)
15-3 Emergency Run (Funcionamiento de
emergencia)
15-4 Current Calibrat (Calibración corriente)
15-5 Main Cont Time (Tiempo contactor
principal)
15-6 Bypass Cont Time (Tiempo contactor
bypass)
15-7 Motor Connection (Conexión del motor)
15-8 Jog Torque (Par velocidad ja)
16 Protection Action (Acción protección)
7 7
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 65
Page 70

Programación
VLT® Soft Starter MCD 500
2-8 Frequency Check (Compro-
bación frecuencia)
2-9 Freq Variation (Variación
frecuencia)
2-10 Frequency Delay (Retardo
frecuencia)
2-11 Restart Delay (Retardo de
arranque)
2-12 Motor Temp Check (Compro-
bación de temperatura del
motor)
3 Inputs (Entradas) 7-3 Start Mode-2 (Modo
3-1 Local/Remote (Local/Remoto) 7-4 Current Limit-2 (Límite de
3-2 Comms in Remote (Comuni-
77
3-3 Input A Function (Funciona-
3-4 Input A Name (Nombre
3-5 Input A Trip (Desconexión de
3-6 Input A Trip Dly (Retardo de
3-7 Input A Initial Dly (Retardo
3-8 Remote Reset Logic (Lógica
caciones en remoto)
miento entrada A)
entrada A)
entrada A)
desconexión de entrada A)
inicial de entrada A)
de reinicio remoto)
6-3 Reset Dly Grp A & B
(Reinicio retardo grupos A y
B)
6-4 Reset Delay Grp C (Reinicio
retardo grupo C)
7 Secondary Mtr Set
(Conjunto de motor
secundario)
7-1 Motor FLC-2 (FLC-2 motor) 16-4 Inst Overcurrent (Sobrecorriente
7-2 Lock Rotor Time-2 (Tiempo
rotor bloqueado-2)
arranque-2)
intensidad-2)
7-5 Initial Crnt-2 (Intensidad
inicial-2)
7-6 Start Ramp-2 (Rampa de
arranque-2)
7-7 Kick-start Lvl-2 (Nivel de
pulso de inercia-2)
7-8 Kick-start Time-2 (Tiempo de
pulso de inercia-2)
7-9 Excess Strt Time-2 (Exceso
de tiempo de arranque-2)
7-10 Stop Mode-2 (Modo de
parada-2)
7-11 Stop Time-2 (Tiempo de
parada-2)
16-1 Motor Overload (Sobrecarga del motor)
16-2 Current Imbalance (Desequilibrio de
intensidad)
16-3 Undercurrent (Baja corriente)
instantánea)
16-5 Frequency (Frecuencia)
16-6 Heat sink Overtemp (Sobretemperatura de
disipador)
16-7 Excess Start Time (Exceso de tiempo de
arranque)
16-8 Input A Trip (Desconexión de entrada A)
16-9 Motor Thermistor (Termistor del motor)
16-10 Starter Comms (Comunicaciones de
arrancador)
16-11 Network Comms (Comunicaciones red)
16-12 Battery/Clock (Batería/Reloj)
16-13 Low Control Volts (Tensiones de control
bajas)
– –
66 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 71

Descripciones de parámetros Guía de funcionamiento
8 Descripciones de parámetros
8.1 Ajustes del motor primario
AVISO!
Los ajustes predeterminados están marcados con un *.
Los parámetros incluidos en los Ajustes del motor principal
conguran el arrancador suave para que se corresponda
con el motor conectado. Estos parámetros describen las
características de funcionamiento del motor y permiten al
arrancador suave modelar la temperatura del motor.
AVISO!
El parámetro 1-2 Tiempo rotor bloq determina la corriente
de desconexión para la protección de sobrecarga del
motor. Su ajuste predeterminado proporciona protección
de sobrecarga del motor:
Clase 10.
•
Corriente de desconexión 105 % de FLA o
•
equivalente.
1-1 FLC motor
Option: Función:
Dependiente
del modelo
Iguala el arrancador suave con la corriente a
plena carga del motor conectado. Ajústelo a
la clasicación de corriente a plena carga
(FLC) que aparece en la placa de características del motor.
AVISO!
El ajuste de este parámetro determina
la base para el cálculo de todos los
ajustes de protección basados en la
corriente.
1-2 Locked Rotor Time (Tiempo rotor bloqueado)
Range: Función:
10 s* [0:01-2:00
(min:s)]
1-3 Modo arrnq
Option: Función:
Corriente
constante*
Control adaptativo
Ajusta el tiempo máximo que el motor
puede mantener la intensidad de rotor
bloqueado, desde frío hasta alcanzar su
máxima temperatura. Ajústelo conforme
a la hoja de datos del motor.
Selecciona el modo de arranque suave.
Consulte la capétulo 5.3 Modos de arranque
para ver más detalles.
1-4 Current Limit (Límite de intensidad)
Range: Función:
350%* [100-600 %
FLC]
1-5 Initial Current (Corriente inicial)
Range: Función:
350%*
[100-600 %
FLC]
1-6 Start Ramp Time (Tiempo de rampa de arranque)
Range: Función:
10 s* [1-180 s] Ajusta el tiempo total de arranque para un
1-7 Kick-start Level (Nivel de pulso de inercia)
Range: Función:
500%*
[100-700 %
FLC]
Ajusta el límite de intensidad para
arranque suave en rampa de corriente y
en corriente constante, como un
porcentaje de la corriente a plena carga
del motor. Consulte el capétulo 5.3 Modos
de arranque para ver más detalles.
Ajusta el nivel de corriente inicial de
arranque para arranques de rampa de
corriente como un porcentaje de la
corriente a plena carga del motor. Ajuste el
valor de manera que el motor empiece a
acelerar en cuanto se inicie un arranque.
Si no se requiere arrancar en rampa de
corriente, ajuste la intensidad inicial igual al
límite de intensidad. Consulte el
capétulo 5.3 Modos de arranque para ver
más detalles.
arranque con control adaptativo o el tiempo de
rampa para el arranque en rampa actual (desde
la corriente inicial hasta el límite de intensidad).
Consulte el capétulo 5.3 Modos de arranque para
ver más detalles.
PRECAUCIÓN
NIVEL DE PAR AUMENTADO
El pulso de inercia somete el equipo
mecánico a niveles de par
aumentados.
Antes de utilizar esta
•
función, asegúrese de que el
motor, la carga y los acoplamientos pueden soportar el
par adicional.
Ajusta el nivel de la corriente del pulso de
inercia.
8 8
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 67
Page 72

Descripciones de parámetros
VLT® Soft Starter MCD 500
1-8 Kick-start Time (Tiempo de pulso de inercia)
Range: Función:
0000 ms*
[0-2000 ms]
PRECAUCIÓN
NIVEL DE PAR AUMENTADO
El pulso de inercia somete el
equipo mecánico a niveles de par
aumentados.
Antes de utilizar esta
•
función, asegúrese de
que el motor, la carga y
los acoplamientos pueden
soportar el par adicional.
Ajusta la duración del pulso de inercia.
Un ajuste de 0 desactiva el pulso de
inercia. Consulte el capétulo 5.3 Modos
de arranque para ver más detalles.
1-9 Excess Start Time (Exceso de tiempo de arranque)
Range: Función:
88
20 s* [0:00-4:00
(min:s)]
1-10 Modo parada
Option: Función:
Parada por inercia*
Parada suave TVR
Control adaptativo
Freno
1-11 Tiemp parada
Range: Función:
0 s* [0:00-4:00
(min:s)]
El exceso de tiempo de arranque es el
tiempo máximo durante el cual el
arrancador suave intenta arrancar el motor.
Si el motor no alcanza la velocidad máxima
dentro del límite programado, el arrancador
suave se desconecta. Ajuste un periodo
ligeramente más largo que el tiempo
requerido para un arranque normal. Un
ajuste de 0 desactiva la protección de
exceso de tiempo de arranque.
Prográmelo según corresponda.
Selecciona el modo de parada. Consulte la
capétulo 5.4 Modos de parada para ver más
detalles.
Ajusta el tiempo de parada suave del motor
usando una rampa de tensión temporizada o
control adaptativo. Si hay instalado un
contactor principal, este debe permanecer
cerrado hasta el nal de la parada. Para
controlar el contactor principal, utilice una
salida programable congurada como En
marcha. Ajusta el tiempo total de parada
cuando se utiliza el freno. Consulte la
capétulo 5.4 Modos de parada para ver más
detalles.
1-12 Adaptive Control Gain (Ganancia de control
adaptativo)
Range: Función:
75%* [1–200%] Ajusta el rendimiento del control adaptativo.
Este ajuste afecta tanto al control de arranque
como al de parada.
AVISO!
Deje el ajuste de ganancia en su valor
predeterminado a menos que el
rendimiento del control adaptativo no
sea satisfactorio. Si el motor acelera o
desacelera demasiado rápidamente al
nal de un arranque o parada, aumente
el ajuste de ganancia entre un 5 y un
10 %. Si la velocidad del motor uctúa
durante el arranque o la parada,
disminuya ligeramente el ajuste de
ganancia.
1-13 Adaptive Start Prole (Perl de arranque
adaptativo)
Option: Función:
Selecciona el perl que el arrancador
suave utiliza para un arranque suave
con control adaptativo. Consulte el
capétulo 5.4 Modos de parada para ver
más detalles.
Early acceleration
(Aceleración temprana)
Constant acceleration
(Aceleración
constante)*
Late acceleration
(Aceleración tardía)
1-14 Adaptive Stop Prole (Perl de parada adaptativo)
Option: Función:
Selecciona el perl que el arrancador
suave utiliza para una parada suave
con control adaptativo. Consulte el
capétulo 5.4 Modos de parada para ver
más detalles.
Early deceleration
(Desaceleración
temprana)
Constant deceleration*
(Desaceleración
constante*)
Late acceleration
(Aceleración tardía)
8.1.1 Freno
El freno utiliza una inyección de CC para ralentizar de
forma activa el motor. Consulte el capétulo 5.4 Modos de
parada para ver más detalles.
68 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 73

Descripciones de parámetros Guía de funcionamiento
1-15 Par freno
Range: Función:
20%* [20–100%] Ajusta la cantidad de par de freno que el
arrancador suave utiliza para frenar el motor.
1-16 Tiemp freno
Range: Función:
1 s* [1-30 s] Ajusta la duración de la inyección de CC durante
una parada de frenado.
AVISO!
Este parámetro se usa junto con el
parámetro 1-11 Tiemp parada. Consulte
capétulo 5.4 Modos de parada para obtener
más información.
8.2 Protección
2-1 Secuencia fase
Option: Función:
Selecciona las secuencias de fase que el
arrancador suave permite en un arranque.
Durante sus comprobaciones previas al
arranque, el arrancador suave examina la
secuencia de las fases en sus terminales de
entrada. Si la secuencia real no coincide con la
opción seleccionada, el arrancador suave se
desconecta.
Cualquier
secuencia*
Solo positiva
Solo negativa
8.2.1 Desequil corr
Si las corrientes de las tres fases varían en más de una
cantidad especicada, puede congurarse el arrancador
suave para desconectarse. El desequilibrio se calcula como
la diferencia entre las corrientes más alta y más baja de las
tres fases, como un porcentaje de la corriente más alta.
La detección del desequilibrio de corriente está desensibilizada en un 50 % durante el arranque y la parada suave.
2-2 Current Imbalance (Desequilibrio de intensidad)
Range: Función:
30%* [10–50%] Ajusta el punto de desconexión de la
protección de desequilibrio de intensidad.
2-3 Current Imbalance Delay (Retardo de desequilibrio
de intensidad)
Range: Función:
3 s* [0:00-4:00 (min:s)] Ralentiza la respuesta del arrancador
suave al desequilibrio de intensidad,
evitando desconexiones debidas a
uctuaciones momentáneas.
8.2.2 Baja corriente
Si la corriente media de las tres fases cae por debajo de un
nivel especicado mientras el motor está funcionando, el
arrancador suave puede congurarse para desconectarse.
2-4 Baja corriente
Range: Función:
20%* [0–
100%]
Ajusta el punto de desconexión de la protección
de baja corriente, como porcentaje de la
corriente a plena carga del motor. Ajústelo a un
nivel situado entre el intervalo normal de trabajo
del motor y su corriente (sin carga) de magnetización (habitualmente del 25 al 35 % de la
corriente a plena carga). Un ajuste del 0%
desactiva la protección de baja corriente.
2-5 Undercurrent Delay (Retardo de baja corriente)
Range: Función:
5 s* [0:00-4:00 (min:s)] Ralentiza la respuesta del arrancador
suave a la intensidad baja, evitando
desconexiones debidas a uctuaciones
momentáneas.
8.2.3 Sobrecorriente instantánea
Si la corriente media de las tres fases excede un nivel
especicado mientras el motor está funcionando, el
arrancador suave puede congurarse para desconectarse.
2-6 Instant Overcurrent (Sobrecorriente instantánea)
Range: Función:
400%* [80-600 %
FLC]
Ajusta el punto de desconexión de la
protección de sobrecorriente instantánea
como un porcentaje de la corriente a
plena carga del motor.
2-7 Instantaneous Overcurrent Delay (Retardo sobrecorriente instantánea)
Range: Función:
0 s* [0:00-1:00 (min:s)] Ralentiza la respuesta del arrancador
suave a la sobrecorriente, evitando
desconexiones debidas a eventos de
sobrecorriente momentáneos.
8.2.4 Desconex frec
El arrancador suave supervisa la frecuencia de red durante
el funcionamiento y puede congurarse para
desconectarse si la frecuencia varía más allá de la
tolerancia especicada.
8 8
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 69
Page 74

Descripciones de parámetros
VLT® Soft Starter MCD 500
2-8 Frequency Check (Comprobación frecuencia)
Option: Función:
Determina cuándo el
arrancador suave comprueba
si existe una desconexión por
frecuencia.
Do not check (No comprobar)
Start only (Solo arranque)
Start/run* (Arranque/En
marcha*)
Run only (Solo en marcha)
2-9 Frequency Variation (Variación frecuencia)
Option: Función:
Selecciona la tolerancia del arrancador suave a la
variación de frecuencia.
±2 Hz
±5 Hz*
±10 Hz
±15 Hz
88
2-10 Frequency Delay (Retardo frecuencia)
Range: Función:
1 s* [0:01-4:00
(min:s)]
Ralentiza la respuesta del arrancador suave
a las alteraciones de frecuencia, evitando
desconexiones debidas a uctuaciones
momentáneas.
AVISO!
Si la frecuencia de red cae por
debajo de 35 Hz o sube por encima
de 75 Hz, el arrancador suave se
desconecta inmediatamente.
2-11 Restart Delay (Retardo de arranque)
Range: Función:
10 s* [00:01-60:00
(min:s)]
El arrancador suave puede congurarse
para forzar un retardo entre el nal de
una parada y el comienzo del siguiente
arranque. Durante el retardo de arranque,
la pantalla muestra el tiempo restante
para que se intente otro arranque.
AVISO!
El retardo de arranque se mide
desde el nal de cada parada. Los
cambios en el ajuste del retardo de
arranque tienen efecto después de
la siguiente parada.
2-12 Motor Temperature Check (Comprobación de
temperatura del motor)
Option: Función:
Selecciona si el arrancador suave verica si
el motor tiene suciente capacidad
térmica para un arranque correcto. El
arrancador suave compara la temperatura
2-12 Motor Temperature Check (Comprobación de
temperatura del motor)
Option: Función:
calculada del motor con el aumento de
temperatura desde el último arranque del
mismo. Solo funciona si el motor está lo
sucientemente frío para arrancar correc-
tamente.
Do not check* (No
comprobar*)
Check (Comprobar)
8.3 Entradas
3-1 Local/Remote
Option: Función:
Selecciona cuándo pueden utilizarse las teclas
[Auto On] y [Hand On] para cambiar a los
modos manual o automático.
Lcl/Rmt
siempre*
Solo control
local
Solo control
remoto
3-2 Comms in Remote (Comunicaciones en remoto)
Option: Función:
Disable ctrl in RMT
(Desactivar control
en remoto)
Enable ctrl in RMT*
(Activar control en
remoto*)
3-3 Input A Function (Funcionamiento entrada A)
Option: Función:
Motor set select*
(Selección
conjunto de
motor*)
Cambiar entre control local y remoto en
cualquier momento.
Todas las entradas remotas están desactivadas.
[Hand On] y [Auto On] están desactivados.
Selecciona si el arrancador suave acepta
las órdenes de arranque y parada desde la
red de comunicación serie cuando está en
modo Remote (Remoto).
Órdenes que siempre están activadas:
Force comms trip (Forzar
•
desconexión comunicaciones).
Local/remote control (Control
•
remoto/local).
Test start (Arranque de prueba).
•
Reset (Reinicio).
•
Selecciona la función de entrada A.
El arrancador suave puede congurarse con
dos conjuntos separados de datos del motor.
Los datos del motor primario se programan
con los parámetros de 1-1 a 1-16. Los datos
del motor secundario se programan con los
parámetros de 7-1 a 7-16.
70 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 75

Descripciones de parámetros Guía de funcionamiento
3-3 Input A Function (Funcionamiento entrada A)
Option: Función:
Para utilizar los datos del motor secundario,
ajuste este parámetro en Motor Set Select
(Selección conjunto de motor) y cierre los
terminales 11 y 16 antes de dar una orden
de arranque. El arrancador suave comprueba
qué datos de motor debe usar en el
arranque y utiliza esos datos de motor para
todo el ciclo de arranque/parada.
Input trip (N/O)
(Desconexión
entrada [N/O])
Input trip (N/C)
(Desconexión
entrada [N/C])
Local/remote
select (Selección
local/remoto)
Emergency run
(Funcionamiento
de emergencia)
Starter disable
(Desactivar
arrancador)
La entrada A puede utilizarse para
desconectar el arrancador suave. Cuando este
parámetro está ajustado en Input Trip (N/O)
(Desconexión entrada [N/O]), un circuito
cerrado entre los terminales 11 y 16
desconecta el arrancador suave (parámetros
de 3-5 a 3-7).
Cuando este parámetro está ajustado en
Input Trip (N/C) (Desconexión entrada [N/C]),
un circuito abierto entre los terminales 11 y
16 desconecta el arrancador suave
(parámetros de 3-5 a 3-7).
La entrada A puede utilizarse para
seleccionar entre control local y remoto, en
lugar de utilizar las teclas del LCP. Cuando la
entrada está abierta, el arrancador suave está
en modo manual y puede controlarse
mediante el LCP. Cuando la entrada está
cerrada, el arrancador suave está en modo
remoto. Las teclas [Hand On] y [Auto On]
están desactivadas y el arrancador suave
ignora cualquier orden de selección local/
remota desde la red de comunicaciones serie.
Para utilizar la entrada A para seleccionar
entre control local y remoto, ajuste el
parámetro 3-1 Local/Remote (Local/Remoto) a
LCL/RMT Anytime (LCL/RMT siempre).
En funcionamiento de emergencia, el
arrancador suave continúa funcionando hasta
pararse, ignorando todas las desconexiones y
advertencias (ver parámetro 15-3 Emergency
Run [Funcionamiento de emergencia] para
obtener más información).
Cerrar el circuito entre los terminales 11 y 16
activa el funcionamiento de emergencia.
La apertura del circuito naliza el funciona-
miento de emergencia y el arrancador suave
detiene el motor.
El arrancador suave puede desactivarse
mediante las entradas de control. Un circuito
abierto entre los terminales 11 y 16 desactiva
el arrancador suave. El arrancador suave no
responde a las órdenes de arranque. Si está
en funcionamiento, el arrancador suave
permite que el motor se detenga por inercia,
ignorando el modo de parada suave ajustado
3-3 Input A Function (Funcionamiento entrada A)
Option: Función:
en el parámetro 1-10 Stop Mode (Modo de
parada).
Cuando se abre el circuito entre los
terminales 11 y 16, el arrancador suave deja
el motor en inercia hasta pararse.
Jog forward
(Velocidad ja
avance)
Jog reverse
(Velocidad ja
retroceso)
Activa el funcionamiento a velocidad ja en
dirección de avance (solo funciona en modo
remoto).
Activa el funcionamiento a velocidad ja en
dirección inversa (solo funciona en modo
remoto).
3-4 Input A Name (Nombre entrada A)
Option: Función:
Selecciona un mensaje
para que el LCP lo
muestre cuando la
entrada A esté activa.
Input trip* (Desconexión de entrada*)
Low pressure (Presión baja)
High pressure (Presión alta)
Pump fault (Fallo bomba)
Low level (Nivel bajo)
High level (Nivel alto)
No ow (Falta de caudal)
Starter disable (Desactivar arrancador)
Controller (Controlador)
PLC (PLC)
Vibration alarm (Alarma vibración)
3-5 Input A Trip (Desconexión de entrada A)
Option: Función:
Selecciona cuando puede producirse una
desconexión de entrada.
Always active*
(Siempre activa*)
Operating only
(Solo en funcionamiento)
Run only (Solo en
marcha)
Una desconexión se puede producir en
cualquier momento en que el arrancador
suave esté recibiendo potencia.
Una desconexión se puede producir
mientras el arrancador suave está en
marcha, parando o arrancando.
Una desconexión solo se puede producir
cuando el arrancador suave está en
marcha.
3-6 Input A Trip Delay (Retardo de desconexión entrada
A)
Range: Función:
0 s* [0:00-4:00 (min:s)] Ajusta un retardo entre la activación de
la entrada y la desconexión del
arrancador suave.
8 8
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 71
Page 76

Descripciones de parámetros
VLT® Soft Starter MCD 500
3-7 Input A Initial Delay (Retardo inicial entrada A)
Range: Función:
0 s* [00:00-30:00
(min:s)]
Ajusta un retardo antes de que se
produzca una desconexión de entrada.
El retardo inicial se cuenta desde el
momento en que se recibe una señal de
arranque. El estado de la entrada se
ignora hasta que transcurra el retardo
inicial.
4-2 Relay A On Delay (Retardo activación relé A)
Range: Función:
0 s* [0:00-5:00 (min:s)] Ajusta el retardo para el cierre del relé
A.
4-3 Relay A O Delay (Retardo desactivación relé A)
Range: Función:
0 s* [0:00-5:00 (min:s)] Ajusta el retardo para la reapertura del
relé A.
3-8 Remote Reset Logic (Lógica de reinicio remoto)
Option: Función:
Selecciona si la entrada de reinicio
remoto del arrancador suave
(terminales 25 y 18) está
normalmente abierta o cerrada.
Normally closed*
(Normalmente cerrado*)
Normally open
(Normalmente abierto)
88
8.4 Salidas
4-1 Relay A Function (Función relé A)
Option: Función:
Selecciona la función del relé A
(normalmente abierto).
O (Desactivado) El relé A no se utiliza
Main contactor*
(Contactor principal*)
Run (En funcionamiento)
Trip (Desconexión) El relé cierra cuando el arrancador se
Warning
(Advertencia)
Low current ag
(Aviso intensidad
baja)
High current ag
(Aviso intensidad
alta)
Motor temp ag
(Aviso temperatura
motor)
El relé cierra cuando el arrancador suave
recibe una orden de arranque y
permanece cerrado mientras el motor
recibe tensión.
El relé cierra cuando el arrancador
cambia a estado de funcionamiento.
desconecta.
El relé cierra cuando el arrancador emite
una advertencia.
El relé cierra cuando se activa el aviso de
corriente baja (parámetro 4-10 Low
Current Flag [Aviso intensidad baja]).
El relé cierra cuando el aviso de corriente
alta se activa (parámetro 4-11 High
Current Flag [Aviso intensidad alta]).
El relé cierra cuando el aviso de
temperatura del motor se activa
(parámetro 4-12 Motor Temperature Flag
[Aviso temperatura motor]).
8.4.2 Relays B and C (Relés B y C)
Los parámetros del 4-4 al 4-9 conguran el funcionamiento
de los relés B y C, de la misma forma que los parámetros
del 4-1 al 4-3 conguran el relé A. Consulte el parámetro
4-2 Relay A On Delay (Retardo activación relé A) y el
parámetro 4-3 Relay A O Delay (Retardo desactivación relé
B) para obtener más información.
El relé B es un relé de conmutación.
•
El relé C está normalmente abierto.
•
4-4 Relay B Function (Función relé B)
Option: Función:
Selecciona la función del relé B
(conmutación).
O (Desactivado) El relé B no se utiliza.
Main contactor
(Contactor principal)
Run* (En marcha*) El relé cierra cuando el arrancador suave
Trip (Desconexión) El relé cierra cuando el arrancador suave
Warning
(Advertencia)
Low current ag
(Aviso intensidad
baja)
High current ag
(Aviso intensidad
alta)
Motor temp ag
(Aviso temperatura
motor)
El relé cierra cuando el arrancador suave
recibe una orden de arranque y
permanecerá cerrado mientras el motor
reciba tensión.
cambia a estado de funcionamiento.
se desconecta.
El relé cierra cuando el arrancador suave
emite una advertencia.
El relé cierra cuando se activa el aviso de
corriente baja (parámetro 4-10 Low
Current Flag [Aviso intensidad baja]).
El relé cierra cuando el aviso de corriente
alta se activa (parámetro 4-11 High
Current Flag [Aviso intensidad alta]).
El relé cierra cuando el aviso de
temperatura del motor se activa
(parámetro 4-12 Motor Temperature Flag
[Aviso temperatura motor]).
4-5 Relay B On Delay (Retardo activación relé B)
8.4.1 Rets relé A
El arrancador suave puede congurarse para esperar antes
de abrir o cerrar el relé A.
72 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Range: Función:
0 s* [0:00-5:00 (min:s)] Ajusta el retardo para el cierre del relé
B.
Page 77

Descripciones de parámetros Guía de funcionamiento
4-6 Relay B O Delay (Retardo desactivación relé B)
Range: Función:
0 s* [0:00-5:00 (min:s)] Ajusta el retardo para la reapertura del
relé B.
4-7 Relay C Function (Función relé C)
Option: Función:
Selecciona la función del relé C
(normalmente abierto).
O (Desactivado) El relé C no se utiliza.
Main contactor
(Contactor principal)
Run (En funcionamiento)
Trip* (Desconexión*) El relé cierra cuando el arrancador suave
Warning
(Advertencia)
Low current ag
(Aviso intensidad
baja)
High current ag
(Aviso intensidad alta)
Motor temp ag
(Aviso temperatura
motor)
El relé cierra cuando el arrancador suave
recibe una orden de arranque y
permanecerá cerrado mientras el motor
reciba tensión.
El relé cierra cuando el arrancador suave
cambia a estado de funcionamiento.
se desconecta.
El relé cierra cuando el arrancador suave
emite una advertencia.
El relé cierra cuando se activa el aviso
de corriente baja (parámetro 4-10 Low
Current Flag [Aviso intensidad baja]).
El relé cierra cuando el aviso de
corriente alta se activa (parámetro 4-11
High Current Flag [Aviso intensidad alta]).
El relé cierra cuando el aviso de
temperatura del motor se activa
(parámetro 4-12 Motor Temperature Flag
[Aviso temperatura motor]).
4-10 Low Current Flag (Aviso intensidad baja)
Range: Función:
50%* [1-100 % FLC] Ajusta el nivel al que funciona el aviso de
intensidad baja, como un porcentaje de la
corriente a plena carga del motor.
4-11 High Current Flag (Aviso intensidad alta)
Range: Función:
100%* [50-600 % FLC] Ajusta el nivel al que funciona el aviso
de intensidad alta, como un porcentaje
de la corriente a plena carga del motor.
8.4.4 Aviso de temperatura del motor
El arrancador suave tiene un aviso de temperatura del
motor para proporcionar una advertencia temprana de un
funcionamiento anormal. El aviso puede indicar que el
motor está funcionando por encima de su temperatura
normal de funcionamiento, pero por debajo del límite de
sobrecarga. El aviso puede indicar la situación a equipos
externos a través de una de las salidas programables.
4-12 Motor Temperature Flag (Aviso de temperatura del
motor)
Range: Función:
80%* [0–160%] Ajusta el nivel al que funciona el aviso de
temperatura del motor como un porcentaje de
la capacidad térmica del motor.
8.4.5 Analog Output A (Salida analógica A)
8 8
4-8 Relay C On Delay (Retardo activación relé C)
Range: Función:
0 s* [0:00-5:00 (min:s)] Ajusta el retardo para el cierre del relé
C.
4-9 Relay C O Delay (Retardo desactivación relé C)
Range: Función:
0 s* [0:00-5:00 (min:s)] Ajusta el retardo para la reapertura del
relé C.
8.4.3 Aviso de intensidad baja y aviso de
intensidad alta
El arrancador suave cuenta con avisos de intensidad baja y
alta para proporcionar una advertencia temprana de un
funcionamiento anómalo. Los avisos de corriente pueden
congurarse para indicar un nivel anormal de corriente
durante el funcionamiento, entre el nivel normal de funcionamiento y los niveles de desconexión de sobrecorriente
instantánea o de baja corriente. Los avisos pueden indicar
la situación a equipos externos a través de una de las
salidas programables. Los avisos se borran cuando la
corriente vuelve al intervalo de funcionamiento normal a
un 10 % del valor de aviso programado.
El arrancador suave tiene una salida analógica que puede
conectarse a un equipo asociado para supervisar el
rendimiento del motor.
4-13 Analog Output A (Salida analógica A)
Option: Función:
Selecciona la información que se enviará a
través de la salida analógica A.
Current (% FLC)*
(Corriente [%
FLC]*)
Motor temp (%)
(Temperatura
motor [%])
Motor kW (%) (kW
motor [%])
Motor kVA (%)
(kVA motor [%])
Motor pf (Fp
motor)
Intensidad como un porcentaje de la
corriente a plena carga del motor.
Temperatura del motor como porcentaje
de la capacidad térmica del motor.
Medida de los kW del motor como
porcentaje de los kW máximos.
Medida de los kilovoltiamperios del motor
como porcentaje de los kVA máximos.
Factor de potencia del motor, medido por
el arrancador suave.
Medida de los kW del motor: √3
•
× corriente media × tensión de
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 73
Page 78

Descripciones de parámetros
VLT® Soft Starter MCD 500
4-13 Analog Output A (Salida analógica A)
Option: Función:
referencia de red × medida del
factor de potencia.
kW máximos del motor: √3 × FLC
•
del motor × tensión de referencia
de red. Se supone que el factor
de potencia es 1.
Medida de kVa del motor: √3 ×
•
corriente media × tensión de
referencia de red.
kVa máximos del motor: √3 × FLC
•
del motor × tensión de referencia
de red.
5-1 Auto-Start Type (Tipo arranque automático)
Option: Función:
parámetro 5-2 Auto-start Time (Duración
arranque automático).
Clock (Reloj) El arrancador suave arranca automáti-
camente a la hora programada en el
parámetro 5-2 Auto-start Time (Duración
arranque automático).
5-2 Auto-Start Time (Duración arranque automático)
Range: Función:
1 min* [00:01-24:00
(hrs:min)]
Ajusta el tiempo para el reinicio
automático del arrancador suave,
en formato de 24 horas.
5-3 Auto-Stop Type (Tipo parada automática)
4-14 Analog A Scale (Escala analógica A)
Option: Función:
Selecciona el intervalo de la salida.
0-20 mA
88
4-20 mA*
4-15 Analog A Maximum Adjustment (Ajuste máximo
analógico A)
Range: Función:
100%* [0–600%] Calibra el límite superior de la salida
analógica para igualar la señal medida en un
dispositivo externo de medida de intensidad.
4-16 Analog A Minimum Adjustment (Ajuste mínimo
analógico A)
Range: Función:
0%* [0–600%] Calibra el límite inferior de la salida analógica
para coincidir con la señal medida en un
dispositivo externo de medida de intensidad.
8.5 Temporizadores de arranque / parada
Option: Función:
Selecciona si el arrancador suave arranca
automáticamente tras un retardo especi-
cado o a una cierta hora del día.
O*
(Desactivado*)
Time (Tiempo) El arrancador suave se para automáti-
Clock (Reloj) El arrancador suave se detiene automáti-
El arrancador suave no se para automáticamente.
camente tras un retardo desde el siguiente
arranque, según se especica en el
parámetro 5-4 Auto-stop Time (Duración
parada automática).
camente a la hora programada en el
parámetro 5-4 Auto-stop Time (Duración
parada automática).
5-4 Auto-Stop Time (Duración parada automática)
Range: Función:
1 min* [00:01-24:00
(hrs:min)]
Ajusta la hora para que el arrancador
suave se pare automáticamente, en
formato de reloj de 24 horas.
AVISO!
PRECAUCIÓN
ARRANQUE ACCIDENTAL
El temporizador de arranque automático anula cualquier
otra forma de control. El motor puede arrancar sin
advertencia previa.
5-1 Auto-Start Type (Tipo arranque automático)
Option: Función:
Selecciona si el arrancador suave arranca
automáticamente tras un retardo especi-
cado o a una cierta hora del día.
O* (Desactivado*) El arrancador suave no arranca automáti-
camente.
Timer
(Temporizador)
El arrancador suave arranca automáti-
camente tras un retardo desde la siguiente
parada, según se especica en el
No utilice esta función con control
remoto de dos cables. El
arrancador suave sigue aceptando
las órdenes de arranque y parada
desde las entradas remotas o la
red de comunicación serie. Para
desactivar el control local o
remoto, utilice el parámetro 3-1
Local/Remote (Local/Remoto). Si el
arranque automático está
activado y el usuario se encuentra
en el sistema de menús, el
arranque automático se activa si
se excede el tiempo de espera del
menú (si no se detecta actividad
en el LCP durante cinco minutos).
74 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 79

Descripciones de parámetros Guía de funcionamiento
8.6 Reinicio automático
El arrancador suave puede programarse para reiniciar
automáticamente algunas desconexiones, lo que puede
ayudar a minimizar el tiempo de inactividad. Las desconexiones se dividen en tres categorías de reinicio automático,
dependiendo del riesgo para el arrancador suave:
Grupo
Desequilibrio de corriente
Pérdida de fase
A
Pérdida de potencia
Frecuencia
Baja corriente
B
Sobrecorriente instantánea
Descon entr A
Sobrecarga mot
C
Termistor motor
Sobretemperatura
Tabla 8.1 Categorías de desconexión de reinicio automático
Otras desconexiones no pueden reiniciarse automáticamente.
Esta función es ideal para instalaciones remotas con
control de dos cables en modo automático. Si la señal de
arranque de 2 cables está presente tras un reinicio
automático, el arrancador suave vuelve a arrancar.
6-1 Auto-Reset Action (Acción reinicio automático)
Option: Función:
Selecciona las
desconexiones que
se pueden reiniciar
automáticamente.
Do not Auto-Reset* (No reiniciar automáticamente*)
Reset group A (Reiniciar grupo A)
Reset group A & B (Reiniciar grupos A y
B)
Reset group A, B & C (Reiniciar grupos A,
B y C)
6-2 Maximum Resets (Reinicios máximos)
Range: Función:
1* [1–5] Ajusta el número de veces que el arrancador suave se
reinicia automáticamente, si continúa desconectándose. El contador de reinicios aumenta en uno
cada vez que el arrancador suave se reinicia automáticamente y disminuye en uno después de cada ciclo
de arranque/parada correcto.
AVISO!
Si el arrancador se reinicia manualmente, el contador de
reinicios vuelve a cero.
8.6.1 Ret reinic autom
El arrancador suave puede congurarse para esperar antes
de reiniciar automáticamente una desconexión. Se pueden
ajustar retardos diferentes para las desconexiones de los
grupos A, B y C.
6-3 Reset Delay Groups A & B (Reinicio retardo grupos A
y B)
Range: Función:
5 s* [00:05-15:00 (min:s)] Ajusta el retardo antes de reiniciar las
desconexiones de los grupos A y B.
6-4 Reset Delay Group C (Reinicio retardo grupo C)
Range: Función:
5 minutos* [5-60 (minutos)] Ajusta el retardo antes de reiniciar
las desconexiones del grupo C.
8.7 Conjunto de motor secundario
Consulte los parámetros de 1-1 a 1-16 para obtener más
detalles.
7-1 FLC-2 motor
Range: Función:
[Dependiente del motor] Ajusta la corriente a plena carga del
motor secundario.
7-2 Locked Rotor Time-2 (Tiempo rotor bloqueado-2)
Range: Función:
10 s* [0:01-2:00
(min:s)]
7-3 Modo arrnq-2
Option: Función:
Corriente constante*
Control adaptativo
7-4 Current Limit-2 (Límite de intensidad-2)
Range: Función:
350%* [100-600 %
FLC]
7-5 Initial Current-2 (Corriente inicial-2)
Range: Función:
350%*
[100-600 %
FLC]
Ajusta el tiempo máximo que el motor
puede funcionar a la corriente de rotor
bloqueado, desde frío hasta alcanzar su
máxima temperatura. Ajústelo conforme a
la hoja de datos del motor.
Si esta información no está disponible,
ajuste el valor a <20 s.
Selecciona el modo de arranque suave.
Ajusta el límite de intensidad para
arranque suave en rampa de corriente y
en corriente constante, como un
porcentaje de la corriente a plena carga
del motor.
Ajusta el nivel de intensidad inicial de
arranque para arranques de rampa de
corriente, como un porcentaje de la
corriente a plena carga del motor. Ajuste el
8 8
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 75
Page 80

Descripciones de parámetros
VLT® Soft Starter MCD 500
7-5 Initial Current-2 (Corriente inicial-2)
Range: Función:
valor de manera que el motor empiece a
acelerar en cuanto se inicie un arranque.
Si no se requiere arrancar en rampa de
corriente, ajuste la intensidad inicial igual al
límite de intensidad.
7-6 Start Ramp Time-2 (Tiempo de rampa de
arranque-2)
Range: Función:
10 s* [1-180 s] Ajusta el tiempo total de arranque para un
arranque con control adaptativo o el tiempo de
rampa para el arranque en rampa actual (desde
la corriente inicial hasta el límite de intensidad).
7-7 Kick-start Level-2 (Nivel de pulso de inercia-2)
Range: Función:
500%* [100-700 % FLC] Ajusta el nivel de la corriente del
pulso de inercia.
88
7-8 Kick-start Time-2 (Tiempo de pulso de inercia-2)
Range: Función:
0000 ms* [0-2000 ms] Ajusta la duración del pulso de inercia.
Un ajuste de 0 desactiva el pulso de
inercia.
7-9 Excess Start Time-2 (Exceso de tiempo de
arranque-2)
Range: Función:
El exceso de tiempo de arranque es el
tiempo máximo durante el cual el
arrancador suave intenta arrancar el motor.
Si el motor no alcanza la velocidad máxima
dentro del límite programado, el arrancador
suave se desconecta. Ajuste un periodo
ligeramente más largo que el tiempo
requerido para un arranque normal. Un
ajuste de 0 desactiva la protección de
exceso de tiempo de arranque.
20 s* [0:00-4:00
(min:s)]
Prográmelo según corresponda.
7-10 Modo parad-2
Option: Función:
Selecciona el modo de parada.
Parada por inercia*
Parada suave TVR
Control adaptativo
Freno
7-11 Tiemp parad-2
7-12 Adaptive Control Gain-2 (Ganancia de control
adaptativo-2)
Range: Función:
75%* [1–200%] Ajusta el rendimiento del control adaptativo.
Este ajuste afecta tanto al control de arranque
como al de parada.
AVISO!
Deje el ajuste de ganancia en su valor
predeterminado a menos que el
rendimiento del control adaptativo no
sea satisfactorio.
Si el motor acelera o desacelera
rápidamente al nal de un arranque o
parada, aumente el ajuste de ganancia
entre un 5 y un 10 %. Si la velocidad del
motor uctúa durante el arranque o la
parada, disminuya ligeramente el ajuste
de ganancia.
7-13 Adaptive Start Prole-2 (Perl de arranque
adaptativo-2)
Option: Función:
Selecciona el perl que el
arrancador suave utiliza para un
arranque suave con control
adaptativo.
Early acceleration
(Aceleración temprana)
Constant acceleration*
(Aceleración constante*)
Late acceleration (Aceleración
tardía)
7-14 Adaptive Stop Prole-2 (Perl de parada
adaptativo-2)
Option: Función:
Selecciona el perl que el
arrancador suave utiliza para
una parada suave con control
adaptativo.
Early deceleration (Desaceleración temprana)
Constant deceleration*
(Desaceleración constante*)
Late acceleration (Aceleración
tardía)
7-15 Par freno-2
Range: Función:
20%* [20–100%] Ajusta la cantidad de par de freno que el
arrancador suave utiliza para frenar el motor.
Range: Función:
0 s* [0:00-4:00 (min:s)] Ajusta el tiempo de parada.
76 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 81

Descripciones de parámetros Guía de funcionamiento
7-16 Tiemp freno-2
Range: Función:
1 s* [1-30 s]
AVISO!
Este parámetro se usa junto con el
parámetro 7-11 Tiemp parad-2.
Ajusta la duración de la inyección de CC durante
una parada de frenado.
8.8 Display
8-1 Idioma
Option: Función:
Selecciona el idioma que utiliza el LCP
para mostrar mensajes y realimentación.
Inglés*
Chino (中丈)
Español
Alemán (Deutsch)
Portugués (Português)
Francés (Français)
Italiano (Italiano)
Ruso (Русский)
8.8.1 Pantalla programable por el usuario
Selecciona los cuatro elementos que se mostrarán en la
pantalla de control programable.
8-2 User Screen - Top Left (Pantalla usuario superior
izquierda)
Option: Función:
Selecciona el elemento mostrado en la
parte superior izquierda de la pantalla.
Blank (En blanco) No muestra ningún dato en el área
seleccionada, permitiendo que los
mensajes largos se muestren sin
superposiciones.
Starter state (Estado
del arrancador)
Motor current
(Intensidad motor)
Motor pf* (Fp
motor*)
Mains frequency
(Frecuencia de red)
Motor kW (kW motor) La potencia de funcionamiento del
Motor hp (CV motor) Potencia de funcionamiento del motor
Motor temp
(Temperatura motor)
Estado de funcionamiento del
arrancador suave (arrancando, en
marcha, parando o desconectado). Solo
disponible para Sup. I e Inf. I.
La corriente media medida en las tres
fases.
El factor de potencia del motor, medido
por el arrancador suave.
La frecuencia media medida en las tres
fases.
motor en kW.
en caballos de vapor.
Temperatura del motor, calculada por el
modelo térmico.
8-2 User Screen - Top Left (Pantalla usuario superior
izquierda)
Option: Función:
kWh (kWh) El número de kWh que el motor ha
funcionado a través del arrancador
suave.
Hours run (Horas de
funcionamiento)
El número de horas que el motor ha
funcionado a través del arrancador
suave.
8-3 User Screen - Top Right (Pantalla usuario superior
derecha)
Option: Función:
Selecciona el elemento mostrado en la
parte superior derecha de la pantalla.
Blank* (En blanco*) No muestra ningún dato en el área
seleccionada, permitiendo que los
mensajes largos se muestren sin
superposiciones.
Starter state (Estado
del arrancador)
Motor current
(Intensidad motor)
Motor pf (Fp motor) El factor de potencia del motor, medido
Mains frequency
(Frecuencia de red)
Motor kW (kW motor) La potencia de funcionamiento del
Motor hp (CV motor) Potencia de funcionamiento del motor
Motor temp
(Temperatura motor)
kWh (kWh) El número de kWh que el motor ha
Hours run (Horas de
funcionamiento)
Estado de funcionamiento del
arrancador suave (arrancando, en
marcha, parando o desconectado). Solo
disponible para Sup. I e Inf. I.
La corriente media medida en las tres
fases.
por el arrancador suave.
La frecuencia media medida en las tres
fases.
motor en kW.
en caballos de vapor.
Temperatura del motor, calculada por el
modelo térmico.
funcionado a través del arrancador
suave.
El número de horas que el motor ha
funcionado a través del arrancador
suave.
8-4 User Screen - Bottom Left (Pantalla usuario inferior
izquierda)
Option: Función:
Selecciona el elemento mostrado en la
parte inferior izquierda de la pantalla.
Blank (En blanco) No muestra ningún dato en el área
seleccionada, permitiendo que los
mensajes largos se muestren sin
superposiciones.
Starter state (Estado
del arrancador)
Estado de funcionamiento del
arrancador suave (arrancando, en
marcha, parando o desconectado). Solo
disponible para Sup. I e Inf. I.
8 8
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 77
Page 82

Descripciones de parámetros
VLT® Soft Starter MCD 500
8-4 User Screen - Bottom Left (Pantalla usuario inferior
8.8.2 Grácos de rendimiento
izquierda)
Option: Función:
Motor current
(Intensidad motor)
Motor pf (Fp motor) El factor de potencia del motor, medido
Mains frequency
(Frecuencia de red)
Motor kW (kW motor) La potencia de funcionamiento del
Motor hp (CV motor) Potencia de funcionamiento del motor
Motor temp
(Temperatura motor)
kWh (kWh) El número de kWh que el motor ha
Hours run* (Horas de
funcionamiento*)
88
La corriente media medida en las tres
fases.
por el arrancador suave.
La frecuencia media medida en las tres
fases.
motor en kW.
en caballos de vapor.
Temperatura del motor, calculada por el
modelo térmico.
funcionado a través del arrancador
suave.
El número de horas que el motor ha
funcionado a través del arrancador
suave.
El menú de registros permite ver información del
rendimiento en grácos en tiempo real.
La información más actualizada aparece en el borde
derecho de la pantalla. Se puede detener el gráco para
analizar los datos manteniendo pulsada la tecla [OK]. Para
reiniciar el gráco, mantenga pulsado [OK].
8-6 Ud tiemp gráf
Option: Función:
Ajusta la escala de tiempo del gráco. El gráco
reemplaza progresivamente los datos antiguos con
los nuevos.
10 s*
30 s
1 minuto
5 minutos
10 minutos
30 minutos
1 hora
8-5 User Screen - Bottom Right (Pantalla usuario inferior
derecha)
Option: Función:
Selecciona el elemento mostrado en la
parte inferior derecha de la pantalla.
Blank* (En blanco*) No muestra ningún dato en el área
seleccionada, permitiendo que los
mensajes largos se muestren sin
superposiciones.
Starter state (Estado
del arrancador)
Motor current
(Intensidad motor)
Motor pf (Fp motor) El factor de potencia del motor, medido
Mains frequency
(Frecuencia de red)
Motor kW (kW motor) La potencia de funcionamiento del
Motor hp (CV motor) Potencia de funcionamiento del motor
Motor temp
(Temperatura motor)
kWh (kWh) El número de kWh que el motor ha
Hours run (Horas de
funcionamiento)
Estado de funcionamiento del
arrancador suave (arrancando, en
marcha, parando o desconectado). Solo
disponible para Sup. I e Inf. I.
La corriente media medida en las tres
fases.
por el arrancador suave.
La frecuencia media medida en las tres
fases.
motor en kW.
en caballos de vapor.
Temperatura del motor, calculada por el
modelo térmico.
funcionado a través del arrancador
suave.
El número de horas que el motor ha
funcionado a través del arrancador
suave.
8-7 Graph Maximum Adjustment (Ajuste máximo de
gráco)
Range: Función:
400%* [0–600%] Ajusta el límite superior del gráco de
rendimiento.
8-8 Graph Minimum Adjustment (Ajuste mínimo de
gráco)
Range: Función:
0%* [0–600%] Ajusta el límite inferior del gráco de
rendimiento.
8-9 Mains Reference Voltage (Tensión de referencia de
red)
Range: Función:
400 V* [100-690 V] Ajusta la tensión nominal para las
funciones de supervisión del LCP. Esta
tensión se utiliza para calcular los KW del
motor y los kilovatio amperios (kVA), pero
no afecta a la protección de control del
motor del arrancador suave.
Introduzca la tensión de red medida.
8.9 Parámetros restringidos
15-1 Access Code (Código acceso)
Range: Función:
0000* [0000–
9999]
Ajusta el código de acceso para entrar a las
herramientas de simulación y a reiniciar los
contadores o a la sección restringida del menú
de programación (grupo de parámetros 15
Restricted Parameters [Parámetros restringidos] y
posteriores).
78 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 83

Descripciones de parámetros Guía de funcionamiento
15-1 Access Code (Código acceso)
Range: Función:
Pulse los botones [Back] y [OK] para
seleccionar los dígitos que se desean modicar
y utilice los botones [▲] y [▼] para cambiar el
valor.
AVISO!
Si se pierde el código de acceso,
póngase en contacto con el proveedor
local de Danfoss para que le
proporcione un código de acceso
maestro que permita volver a programar
un código de acceso.
15-2 Adjustment Lock (Bloqueo ajuste)
Option: Función:
Selecciona si el LCP permite que los
parámetros sean modicados mediante el
menú de programación.
Read & write*
(Lectura y
escritura*)
Read only (Solo
lectura)
No access (Sin
acceso)
Permite modicar los valores de los
parámetros en el menú de programación.
Impide que los usuarios modiquen los
valores de los parámetros en el menú de
programación. Los parámetros se pueden
seguir viendo.
Impide que los usuarios ajusten los
parámetros en el menú de programación, a
menos que se introduzca un código de
acceso.
AVISO!
Los cambios realizados en el bloqueo
de ajuste solo tendrán efecto después
de cerrar el menú de programación.
15-3 Emergency Run (Funcionamiento de emergencia)
Option: Función:
PRECAUCIÓN
DAÑOS MATERIALES
No se recomienda un uso continuado del
funcionamiento de emergencia. El funcionamiento de emergencia puede afectar a la vida
útil del arrancador suave, ya que todas las
protecciones y desconexiones estarán
desactivadas.
El uso del arrancador suave en modo de funcionamiento de emergencia invalida la garantía del
producto.
Selecciona si el arrancador suave permite el funcionamiento en modo de emergencia. En funcionamiento de
emergencia, el arrancador suave arranca (si no está ya
en funcionamiento) y continúa funcionando hasta que
termina el funcionamiento de emergencia, ignorando
las órdenes de parada o desconexiones.
15-3 Emergency Run (Funcionamiento de emergencia)
Option: Función:
El funcionamiento de emergencia se controla utilizando
una entrada programable.
Cuando el funcionamiento de emergencia está activado
en modelos con bypass interno que no están
funcionando, el arrancador suave intenta realizar un
arranque normal e ignora todas las desconexiones. Si
no es posible arrancar de forma normal, se intenta
realizar un arranque DOL a través de los contactores del
bypass interno. En los modelos sin bypass se puede
utilizar un contactor de bypass externo de funcionamiento de emergencia.
15-4 Calibración corr
Range: Función:
100%* [85–
La calibración de la intensidad del motor calibra
115%]
los circuitos de supervisión de corriente del
arrancador suave para igualarlos a un dispositivo
externo de medición de la corriente.
Utilice la siguiente fórmula para determinar el
ajuste necesario:
Calibración( % ) =
e . g . 102 % =
Corrientemostradaenla pantalla500del MCD
Corrientemedidapordispos.externo
66A
65A
AVISO!
Este ajuste afecta a todas las funciones
basadas en la corriente.
15-5 Main Contactor Time (Tiempo contactor principal)
Range: Función:
400 ms* [100-2000 ms] Ajusta el periodo de retardo desde
que el arrancador suave conmuta la
salida del contactor principal
(terminales 13 y 14) hasta que
comienzan las comprobaciones previas
al arranque (antes del arranque) o
entra en estado no listo (tras una
parada). Ajustar conforme a las especicaciones del contactor principal
utilizado.
15-6 Bypass Contactor Time (Tiempo contactor bypass)
Range: Función:
150 ms* [100-2000 ms] Ajusta el arrancador suave para que
coincida con el tiempo de cierre o
apertura del contactor de bypass.
Ajuste conforme a las especicaciones
del contactor de bypass utilizado. Si el
tiempo es demasiado corto, el
arrancador suave se desconecta.
15-7 Conexión del motor
Option: Función:
El arrancador suave detecta automáticamente
el formato de la conexión con el motor.
8 8
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 79
Page 84

Descripciones de parámetros
VLT® Soft Starter MCD 500
15-7 Conexión del motor
Option: Función:
Detecc auto*
En línea
Triángulo interno
15-8 Jog Torque (Par velocidad ja)
Range: Función:
50%* [20–100%]
AVISO!
Ajustar este parámetro por encima del
50 % puede provocar un aumento de
las vibraciones del eje.
Ajusta el nivel de par para el funcionamiento
de velocidad
capétulo 5.5 Funcionamiento a velocidad ja
para ver más detalles.
ja. Consulte el
De 16-1 a 16-13 Protection Action (Acción protección)
Option: Función:
Warn and log
(Advertencia y
registro)
Log only (Solo
registro)
8.11 Parámetros de fábrica
Estos parámetros están restringidos para su uso por el
fabricante y no están disponibles para el usuario.
8.10 Acción protectora
De 16-1 a 16-13 Protection Action (Acción protección)
88
Option: Función:
Selecciona la respuesta del arrancador
suave a cada protección.
•
•
•
•
•
•
•
•
•
•
•
•
•
Trip starter*
(Disparo
arrancador*)
Parámetro 16-1 Motor Overload
(Sobrecarga motor).
Parámetro 16-2 Current Imbalance
(Desequilibrio de intensidad).
Parámetro 16-3 Undercurrent (Baja
corriente).
Parámetro 16-4 Inst Overcurrent
(Sobrecorriente instantánea).
Parámetro 16-5 Frequency
(Frecuencia).
Parámetro 16-6 Heat sink Overtemp
(Sobretemperatura de disipador).
Parámetro 16-7 Excess Start Time
(Exceso de tiempo de arranque).
Parámetro 16-8 Input A Trip
(Desconexión entrada A).
Parámetro 16-9 Motor Thermistor
(Termistor del motor).
Parámetro 16-10 Starter/Comms
(Arrancador/Comunicaciones).
Parámetro 16-11 Network/Comms
(Red/Comunicaciones).
Parámetro 16-12 Battery/Clock
(Batería/Reloj).
Parámetro 16-13 Low Control Volts
(Tensiones de control bajas).
80 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 85

Herramientas Guía de funcionamiento
9 Herramientas
Para acceder a Herrams:
1. Abra el Menú principal.
2. Desplácese hasta Herrams.
3. Pulse [OK].
AVISO!
El código de acceso de seguridad también protege las
herramientas de simulación y los reinicios del contador.
El código de acceso por defecto es 0000.
9.1 Ajustar fecha y hora
Para ajustar la fecha y la hora:
1. Abra el menú de herramientas.
2. Desplácese hasta Set Date & Time (Ajuste de fecha
y hora).
3. Pulse la tecla [OK] para entrar en el modo de
edición.
4. Pulse la tecla [OK] para seleccionar la parte de la
fecha o la hora que desea editar.
5.
Utilice los botones [▲] and [▼] para cambiar el
valor.
Para guardar los cambios, pulse la tecla [OK] varias veces.
El arrancador suave conrma los cambios. Para cancelar los
cambios, pulse la tecla [Back] varias veces.
Cargar/guardar conguración
9.2
El VLT® Soft Starter MCD 500 incluye opciones para:
Cargar predeterminados: cargar los parámetros
•
del arrancador suave con valores predeterminados.
Cargar conjunto de usuario 1: volver a cargar,
•
desde un archivo interno, los ajustes de
parámetros guardados anteriormente.
Guardar conjunto de usuario 1: guardar los
•
ajustes de parámetros actuales en un archivo
interno
Además del archivo de valores predeterminados en fábrica,
el arrancador suave puede guardar un archivo de
parámetros denidos por el usuario. Este archivo contiene
los valores predeterminados hasta que se guarda un
archivo de usuario.
Para cargar o guardar ajustes de parámetros:
1. Abra el menú de herramientas.
2.
Utilice la tecla [▼] para seleccionar la función
requerida y pulse la tecla [OK].
3. En la ventana de
para conrmar o No (No) para cancelar.
conrmación, seleccione Yes (Sí)
4. Pulse [OK] para cargar/guardar la selección o salir
de la pantalla.
Herramientas
Load Defaults (Cargar predeterminados)
Load User Set 1 (Cargar conjunto de usuario 1)
Save User Set 1 (Guardar conjunto de usuario 1)
Tabla 9.1 Menú de herramientas
Load Defaults (Cargar predeterminados)
No
Sí
Tabla 9.2 Menú Cargar predeterminados
Cuando se haya completado la acción, la pantalla mostrará
brevemente un mensaje de conrmación y volverá a las
pantallas de estado.
9.3 Reset del modelo térmico
AVISO!
El código de acceso de seguridad protege el reinicio del
modelo térmico.
El avanzado software de modelo térmico del arrancador
suave controla constantemente el rendimiento del motor.
Este control permite que el arrancador suave calcule la
temperatura del motor y la capacidad de arrancar correctamente en cualquier momento.
Si es necesario, reinicie el modelo térmico.
AVISO!
Reiniciar el modelo térmico del motor puede afectar a la
vida útil del mismo y solo debe hacerse en caso de
emergencia.
1. Abra Tools (Herramientas).
2. Desplácese hasta Reset Thermal Model (Reiniciar
modelo térmico) y pulse [OK].
3. En la ventana de conrmación, pulse [OK] para
conrmar e introduzca el código de acceso, o
pulse [Back] para cancelar la acción.
4. Seleccione Reset (Reiniciar) o Do Not Reset (No
reiniciar) y pulse [OK]. Una vez que el modelo
térmico se haya reiniciado, el arrancador suave
vuelve a la pantalla anterior.
9 9
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 81
Page 86

Herramientas
VLT® Soft Starter MCD 500
Reset Thermal Model (Reiniciar modelo térmico)
M1 X% (M1 X%)
OK to Reset (OK para reiniciar)
Tabla 9.3 Aceptar para reiniciar el modelo térmico
Reset Thermal Model (Reiniciar modelo térmico)
Do Not Reset (No reiniciar)
Reset (Reiniciar)
Tabla 9.4 Menú de reinicio del modelo térmico
AVISO!
Si la protección desconecta el arrancador suave,
reinícielo antes de simular otra protección. Si la acción
de protección está ajustada en Adv o Reg, no es
necesario reiniciar.
Si la protección está ajustada en Adv y reg, el mensaje de
advertencia puede verse únicamente mientras
permanezca pulsada la tecla [OK].
Si la protección está ajustada en Solo reg, no aparece
nada en pantalla, pero aparece una entrada en el
registro.
9.4 Simulación de protección
9.5 Simulación de señal de salida
AVISO!
La simulación de protección está protegida por el código
de acceso de seguridad.
Para probar el funcionamiento y los circuitos de control del
arrancador suave sin conectarlo a la tensión de red, utilice
las funciones de simulación por software.
La función de simulación de protección permite al
arrancador suave conrmar que responde correctamente e
99
informa de la situación tanto en pantalla como a través de
la red de comunicación.
Para utilizar la simulación de protección:
1. Abra el Menú principal.
2. Desplácese hasta Sim protección y pulse [OK].
3. Para seleccionar la protección que se desea
simular, pulse [▲] y [▼].
4. Para simular la protección seleccionada, pulse
[OK].
5. La pantalla se muestra mientras [OK] permanece
pulsado. La respuesta del arrancador suave
depende del ajuste de acción de protección
(grupo de parámetros 16 Acciones protecc).
6. Para volver a la lista de simulaciones, pulse [Back].
7.
Pulse [▲] o [▼] para seleccionar otra simulación o
pulse [Back] para volver al Menú principal.
MS1 000.0A 0000,0 kW
Descon
Protección selecc
AVISO!
El código de acceso de seguridad protege la simulación
de señal de salida.
El LCP permite la simulación de señales de salida para
conrmar que los relés de salida funcionen correctamente.
AVISO!
Para comprobar el funcionamiento de los avisos
(temperatura del motor e corriente alta/baja), ajuste un
relé de salida para la función adecuada y controle el
comportamiento del mismo.
Para utilizar la simulación de señal de salida:
1. Abra el Menú principal.
2. Desplácese hasta Sim señal salida y pulse [OK]; a
continuación, introduzca el código de acceso.
3.
Para seleccionar una simulación, pulse [▲] y [▼] y
luego pulse [OK].
4.
Para activar y desactivar la señal, pulse [▲] y [▼].
Para conrmar el correcto funcionamiento,
controle el estado de la salida.
5. Para volver a la lista de simulaciones, pulse [Back].
Relé prog A
O
On
Tabla 9.6 Menú de simulación de la señal de salida
Tabla 9.5 Menú de simulación de protección
82 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Estado E/S digital
9.6
Esta pantalla muestra el estado de las E/S digitales en
orden.
La línea superior de la pantalla muestra:
Arranque.
•
Parada.
•
Reinicio
•
Page 87

Herramientas Guía de funcionamiento
Entrada programable.
•
La línea inferior de la pantalla muestra las salidas programables A, B y C.
Estado E/S digital
Entradas: 0100
Salidas: 100
Tabla 9.7 Pantalla de estado de E/S digital
9.7 Estado sensores temp
Esta pantalla muestra el estado del termistor del motor.
Esta pantalla muestra el estado del termistor como O
(abierto).
Temp Sensors State (Estado sensores temperatura)
Termistor: O (Termistor: O)
S = shrt H=hot C=cld O=opn (S = corto H = caliente C = cerrado
O = abierto)
Tabla 9.8 Pantalla de estado del termistor del motor
9.8 Reg. alarma
La tecla [Alarm Log] abre los registros de alarmas, que
contienen:
Registro de desconexiones.
•
Registro de eventos.
•
Contadores que almacenan información del
•
historial de funcionamiento del arrancador suave.
9.8.1 Registro de desconexiones
El registro de desconexiones almacena detalles de las ocho
desconexiones más recientes, incluidas la fecha y hora en
que estas sucedieron. La desconexión 1 es la más reciente
y la 8, la más antigua guardada.
Para abrir el registro de desconexiones:
1. Pulse [Alarm Log].
2. Desplácese hasta Reg descon y pulse [OK].
3. Para seleccionar la visualización de una
desconexión, pulse [▲] y [▼], y luego pulse [OK]
para mostrar los detalles.
Para cerrar el registro y volver a la pantalla principal, pulse
[Back].
del evento. El evento 1 es el más reciente y el evento 99,
el más antiguo guardado.
Para abrir el registro de eventos:
1. Pulse [Alarm Log].
2. Desplácese hasta Reg events y pulse [OK].
3. Para seleccionar la visualización de un evento,
pulse [▲] y [▼], y luego pulse [OK] para mostrar
los detalles.
Para cerrar el registro y volver a la pantalla principal, pulse
[Back].
9.8.3 Contadores
AVISO!
El código de acceso de seguridad protege el funcionamiento de los contadores.
Los contadores de rendimiento guardan estadísticas del
funcionamiento del arrancador suave:
Horas de funcionamiento (en toda la vida útil y
•
desde el último reinicio del contador).
Número de arranques (en toda la vida útil y
•
desde el último reinicio del contador).
kWh del motor (en toda la vida útil y desde el
•
último reinicio del contador).
Número de veces que se ha reiniciado el modelo
•
térmico.
Los contadores reiniciables (horas de funcionamiento,
arranques y kWh del motor) solo se pueden reiniciar si se
introduce el código de acceso correcto.
Para ver los contadores:
1. Pulse [Alarm Log].
2. Desplácese hasta Counters (Contadores) y pulse
[OK].
3.
Para desplazarse por los contadores, pulse [▲] y
[▼]. Pulse [OK] para ver los detalles.
4. Para reiniciar un contador, pulse [OK] e introduzca
el código de acceso. Seleccione Reset (Reiniciar) y
pulse [OK] para conrmar.
Para cerrar el contador y volver a los registros de alarmas,
pulse [Back].
9 9
9.8.2 Registro de eventos
El registro de eventos guarda detalles con registro de
tiempo de los 99 eventos más recientes (acciones,
advertencias y desconexiones), incluidas la fecha y la hora
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 83
Page 88

Localización de averías
VLT® Soft Starter MCD 500
10 Localización de averías
Cuando se detecta una situación de protección, el VLT® Soft Starter MCD 500 anota dicha situación en el registro de eventos
y también es posible que se desconecte o emita una advertencia. La respuesta del arrancador suave depende de los ajustes
de accciones de protección (grupo de parámetros 16 Acciones protecc).
Algunas respuestas de protección no pueden ajustarse. Normalmente, estas desconexiones son causadas por eventos
externos (por ejemplo, una pérdida de fase) o por un fallo dentro del arrancador suave. Estas desconexiones no tienen
parámetros asociados y no pueden ajustarse como Adv o Reg.
Si el arrancador suave se desconecta:
1. Identique y elimine la condición que ha producido la desconexión.
2. Reinicie el arrancador suave.
3. Reinicie el arrancador suave.
Para reiniciar el arrancador suave, pulse [Reset] o active la entrada de Reinic remoto.
Si el arrancador suave ha emitido una advertencia, se reiniciará él mismo una vez que la causa de la advertencia se haya
resuelto.
10.1 Mensajes de desconexión
La Tabla 10.1 recoge los mecanismos de protección del arrancador suave y la causa probable de la desconexión. Algunos de
estos mecanismos pueden ajustarse mediante los grupos de parámetros 2 Protection (Protección) y 16 Protection Action (Acción
protección). Los otros ajustes son protecciones integradas del sistema y no se pueden modicar ni ajustar.
1010
Pantalla Posible causa / solución sugerida
Awaiting data (Esperando datos) El LCP no recibe datos desde el control PCB. Compruebe el cable de conexión y la colocación de la
pantalla en el arrancador suave.
Battery/Clock (Batería/Reloj) Se ha producido un error de vericación en el reloj en tiempo real o la tensión de la batería de
seguridad es baja. Si la batería está baja y se desconecta la potencia, se pierden los ajustes de
fecha y hora. Reprograme la fecha y la hora.
Parámetro relacionado:
Parámetro 16-12 Battery/Clock (Batería/Reloj).
•
Controller (Controlador) Nombre seleccionado para una entrada programable. Consulte Input A trip (Desconexión entrada A).
Desequilibrio de intensidad Problemas con el motor, el entorno o la instalación pueden causar un desequilibrio de intensidad,
como, por ejemplo:
Un desequilibrio en la tensión de red entrante.
•
Un problema con los bobinados del motor.
•
Una carga ligera en el motor.
•
Una pérdida de fase en los terminales de red L1, L2 o L3 durante el modo de ejecución.
•
Un SCR que no ha abierto un circuito. Un SCR averiado solo puede diagnosticarse con precisión
sustituyéndolo y comprobando el rendimiento del arrancador suave.
Parámetros relacionados:
Parámetro 2-2 Current Imbalance (Desequilibrio de intensidad).
•
Parámetro 2-3 Current Imbalance Delay (Retardo de desequilibrio de intensidad).
•
Parámetro 16-2 Current Imbalance (Desequilibrio de intensidad).
•
84 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 89

Localización de averías Guía de funcionamiento
Pantalla Posible causa / solución sugerida
Current read err lx (Error lect corr Ix) Donde X es 1, 2 o 3.
Fallo interno (fallo de PCB). La salida del circuito del transformador de corriente no está lo sucien-
temente próxima a cero cuando los SCR están desconectados. Póngase en contacto con el
distribuidor local de Danfoss para que le aconseje.
Esta desconexión no se puede ajustar.
Parámetros relacionados: ninguno.
Exceso de tiempo de arranque La desconexión por exceso de tiempo de arranque puede producirse en las siguientes condiciones:
El parámetro 1-1 Motor FLC (FLC motor) no es adecuado para el motor.
•
El parámetro 1-4 Current Limit (Límite de intensidad) se ha ajustado demasiado bajo.
•
El parámetro 1-6 Start Ramp Time (Tiempo de rampa de arranque) se ha ajustado más alto que el
•
parámetro 1-9 Excess Start Time Setting (Ajuste de exceso de tiempo de arranque).
El parámetro 1-6 Start Ramp Time (Tiempo de rampa de arranque) se ha ajustado demasiado
•
corto para una carga de inercia elevada al utilizar el control adaptativo.
Parámetros relacionados:
Parámetro 1-1 Motor FLC (FLC motor).
•
Parámetro 1-4 Current Limit (Límite de intensidad).
•
Parámetro 1-6 Start Ramp Time ( Tiempo de rampa de arranque).
•
Parámetro 1-9 Excess Start Time (Exceso de tiempo de arranque).
•
Parámetro 7-1 Motor FLC-2 (FLC motor-2).
•
Parámetro 7-4 Current Limit-2 (Límite de intensidad-2).
•
Parámetro 7-6 Start Ramp-2 (Rampa de arranque-2).
•
Parámetro 7-9 Excess Strt Time-2 (Exceso de tiempo de arranque-2).
•
Parámetro 16-7 Excess Start Time (Exceso de tiempo de arranque).
•
Firing fail px (Fallo disparo px) Donde X es la fase 1, 2 o 3.
El SCR no se ha disparado según lo previsto. Compruebe si algún SCR está averiado o si hay fallos
en el cableado interno.
Esta desconexión no se puede ajustar.
Parámetros relacionados: ninguno.
FLC too high (FLC demasiado alta) El arrancador suave admite valores superiores de corriente a plena carga del motor cuando está
conectado al mismo utilizando la conguración interior en triángulo en lugar de la conexión en
línea. Si el arrancador suave está conectado en línea, pero el ajuste programado del parámetro 1-1
Motor FLC (FLC motor) supera el máximo en línea; el arrancador suave se desconecta al arrancar
(consulte el capétulo 4.5 Ajustes de intensidad máxima y mínima).
Si el arrancador suave está conectado al motor mediante la conguración interior en triángulo,
compruebe que el arrancador suave detecta correctamente la conexión. Póngase en contacto con
el distribuidor local de Danfoss para que le aconseje.
Parámetros relacionados:
Parámetro 1-1 Motor FLC (FLC motor).
•
Parámetro 7-1 Motor FLC-2 (FLC motor-2).
•
Frequency (Frecuencia) La frecuencia de red está fuera del intervalo especicado.
Compruebe si existen otros equipos en la zona que puedan afectar a la alimentación de red, en
particular convertidores de frecuencia y fuentes de alimentación de modo conmutado (SMPS).
Si la alimentación del arrancador suave la proporciona un generador, tal vez este sea demasiado
pequeño o tenga un problema de control de la velocidad.
Parámetros relacionados:
Parámetro 2-8 Frequency Check (Comprobación frecuencia).
•
Parámetro 2-9 Frequency Variation (Variación frecuencia).
•
Parámetro 2-10 Frequency Delay (Retardo frecuencia).
•
Parámetro 16-5 Frequency (Frecuencia).
•
10 10
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 85
Page 90

Localización de averías
Pantalla Posible causa / solución sugerida
Heat sink overtemp (Sobretemperatura de disipador)
Compruebe que los ventiladores de refrigeración funcionen. Si están montados en una protección,
compruebe si la ventilación es adecuada.
Los ventiladores funcionan durante el arranque, el funcionamiento y durante 10 minutos desde que
el arrancador suave sale del estado de parada.
VLT® Soft Starter MCD 500
AVISO!
Los modelos de MCD5-0021B a MCD4-0053B y MCD5-0141B no disponen de
ventilador de refrigeración. Los modelos con ventiladores hacen funcionar los
ventiladores de refrigeración desde un arranque hasta 10 minutos después de una
parada.
Parámetro relacionado:
Parámetro 16-6 Heat sink Overtemp (Sobretemperatura de disipador).
•
High level (Nivel alto) Nombre seleccionado para una entrada programable. Consulte Input A trip (Desconexión entrada A).
High pressure (Presión alta) Nombre seleccionado para una entrada programable. Consulte Input A trip (Desconexión entrada A).
Input A trip (Desconexión entrada A) La entrada programable está ajustada para una función de desconexión y se ha activado. Resuelva
la situación de disparo.
Parámetros relacionados:
Parámetro 3-3 Input A Function (Funcionamiento entrada A).
•
Parámetro 3-4 Input A Name (Nombre entrada A).
•
Parámetro 3-5 Input A Trip (Desconexión entrada A).
•
Parámetro 3-6 Input A Trip Delay (Retardo de desconexión entrada A).
•
Parámetro 3-7 Input A Initial Delay (Retardo inicial entrada A).
•
Parámetro 16-8 Input A Trip (Desconexión entrada A).
•
1010
Instantaneous overcurrent (Sobrecorriente instantánea)
Internal fault X (Fallo interno X) El arrancador suave se ha desconectado por un fallo interno. Póngase en contacto con el distri-
L1 phase loss (Pérdida de fase L1)
L2 phase loss (Pérdida de fase L2)
L3 phase loss (Pérdida de fase L3)
L1-T1 shorted (L1-T1 cortocircuitado)
L2-T2 shorted (L2-T2 cortocircuitado)
L3-T3 shorted (L3-T3 cortocircuitado)
Se ha producido una subida brusca de la intensidad del motor, probablemente debida a que el
rotor está bloqueado (pasador de seguridad) durante el funcionamiento. Compruebe si existe una
carga atascada.
Parámetros relacionados:
Parámetro 2-6 Instantaneous Overcurrent (Sobrecorriente instantánea).
•
Parámetro 2-7 Instantaneous Overcurrent Delay (Retardo sobrecorriente instantánea).
•
Parámetro 16-4 Inst Overcurrent (Sobrecorriente instantánea).
•
buidor local de Danfoss indicando el código de fallo (X).
Parámetros relacionados: ninguno.
Durante el prearranque, compruebe que el arrancador suave ha detectado una pérdida de fase,
como se indica.
En estado de funcionamiento, el arrancador suave ha detectado que la corriente de la fase afectada
ha caído por debajo del 3,3 % de la FLC programada para el motor durante más de 1 s. Esta caída
de la corriente indica que la fase entrante o la conexión con el motor se han perdido.
Para el arrancador suave y el motor, compruebe:
Las conexiones de alimentación.
•
Las conexiones de entrada.
•
Las conexiones de salida.
•
Un SCR averiado también puede causar una pérdida de fase, en particular, un SCR que no haya
abierto un circuito. Un SCR averiado solo puede diagnosticarse con precisión sustituyéndolo y
comprobando el rendimiento del arrancador suave.
Parámetros relacionados: ninguno.
Durante las comprobaciones del prearranque, el arrancador suave ha detectado un SCR cortocircuitado o un cortocircuito dentro del contactor de bypass, como se indica.
Parámetros relacionados: ninguno.
86 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 91

Localización de averías Guía de funcionamiento
Pantalla Posible causa / solución sugerida
Low control volts (Tensiones de
control bajas)
Low level (Nivel bajo) Nombre seleccionado para una entrada programable. Consulte Input A trip (Desconexión entrada A).
Low pressure (Presión baja) Nombre seleccionado para una entrada programable. Consulte Input A trip (Desconexión entrada A).
Motor overload/
Motor 2 overload (Sobrecarga
motor / sobrecarga motor 2)
Motor connection tx (Conexión
motor tx)
El arrancador suave ha detectado una caída en la tensión de control.
Compruebe la fuente de alimentación de tensión de control externa (terminales A4, A5 y A6) y
•
reinicie el arrancador suave.
Si la fuente de alimentación de tensión de control externa es estable:
compruebe si la fuente de alimentación de 24 V del circuito impreso del control principal tiene
•
una avería o
compruebe si el circuito impreso del controlador de bypass tiene una avería (solo para modelos
•
con bypass interno).
Esta protección no está activa en el estado Listo para funcionar.
Parámetro relacionado:
Parámetro 16-13 Low Control Volts (Tensiones de control bajas).
•
El motor ha alcanzado su máxima capacidad térmica.
Las siguientes causas pueden producir sobrecarga:
Los ajustes de protección del arrancador suave no se corresponden con la capacidad térmica
•
del motor.
Número excesivo de arranques por hora.
•
Rendimiento excesivo.
•
Daños en los bobinados del motor.
•
Resuelva la causa de la sobrecarga y deje que el motor se enfríe.
Parámetros relacionados:
Parámetro 1-1 Motor FLC (FLC motor).
•
Parámetro 1-2 Locked Rotor Time (Tiempo de rotor bloqueado).
•
Parámetro 1-3 Start Mode (Modo de arranque).
•
Parámetro 1-4 Current Limit (Límite de intensidad).
•
Parámetro 7-1 Motor FLC-2 (FLC motor-2).
•
Parámetro 7-2 Locked Rotor Time-2 (Tiempo de rotor bloqueado-2).
•
Parámetro 7-3 Start Mode-2 (Modo de arranque-2).
•
Parámetro 7-4 Current Limit-2 (Límite de intensidad-2).
•
Parámetro 16-1 Motor Overload (Sobrecarga motor).
•
Donde X es 1, 2 o 3.
El motor no está conectado correctamente al arrancador suave para su uso en línea o en triángulo
interno.
Compruebe las conexiones individuales del motor al arrancador suave para vericar la
•
continuidad del circuito de potencia.
Compruebe las conexiones en la caja de terminales del motor.
•
Esta desconexión no se puede ajustar.
Parámetro relacionado:
Parámetro 15-7 Motor Connection (Conexión del motor).
•
10 10
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 87
Page 92

Localización de averías
Pantalla Posible causa / solución sugerida
Motor thermistor (Termistor del
motor)
La entrada del termistor del motor ha sido activada y:
•
•
•
VLT® Soft Starter MCD 500
La resistencia en la entrada del termistor ha sobrepasado los 3,6 kΩ durante más de un
segundo.
El bobinado del motor se ha sobrecalentado. Identique la causa del sobrecalentamiento y deje
que el motor se enfríe antes de volverlo a arrancar.
Se ha abierto la entrada del termistor del motor.
AVISO!
Si ya no se utiliza un termistor del motor válido, instale una resistencia de 1,2 kΩ
entre los terminales 05 y 06.
Parámetro relacionado:
Parámetro 16-9 Motor Thermistor (Termistor del motor).
•
Network communication (between
module and network) (Comunicación
de red [entre módulo y red])
No ow (Falta de caudal) Nombre seleccionado para una entrada programable. Consulte Input A trip (Desconexión entrada A).
Not ready (No listo) Compruebe si la función de desactivación del arrancador suave está activa. Si el parámetro 3-3 Input
Parameter out of range (Parámetro
fuera de rango)
1010
Phase sequence (Secuencia de fase) La secuencia de fase en los terminales de red (L1, L2 y L3) del arrancador suave no es válida.
PLC (PLC) Nombre seleccionado para una entrada programable. Consulte Input A trip (Desconexión entrada A).
Pérdida de potencia El arrancador suave no está recibiendo alimentación de red en una o más fases cuando se emite
Pump fault (Fallo bomba) Nombre seleccionado para una entrada programable. Consulte Input A trip (Desconexión entrada A).
Starter/communication (between
module and soft starter)
(Arrancador/comunicaciones [entre
módulo y arrancador suave])
Desactivar arrancador Nombre seleccionado para una entrada programable. Consulte Input A trip (Desconexión entrada A).
El maestro de red ha enviado una orden de desconexión al arrancador suave, o tal vez existe un
problema de comunicación en la red.
Compruebe la red en busca de causas de inactividad en las comunicaciones.
Parámetro relacionado:
Parámetro 16-11 Network/Comms (Red/Comunicaciones).
•
A Function (Funcionamiento entrada A) se congura como Star ter disable (Desactivar arrancador) y
existe un circuito abierto en los terminales 11 y 16, el arrancador suave no arrancará.
El valor de un parámetro está fuera del intervalo válido.
•
El arrancador suave carga el valor predeterminado para todos los parámetros afectados. Para ir al
primer parámetro inválido y cambiar el ajuste, pulse [Main Menu].
Parámetros relacionados: ninguno.
Compruebe la secuencia de fase en L1, L2 y L3 y asegúrese de que el ajuste del parámetro 2-1
Phase Sequence (Secuencia de fase) sea adecuado para la instalación.
Parámetro relacionado:
Parámetro 2-1 Phase Sequence (Secuencia de fase).
•
una orden de arranque.
Compruebe que el contactor principal se cierra cuando se emite una orden de arranque y que
permanece cerrado hasta el nal de una parada suave.
Si se comprueba el arrancador suave con un motor pequeño, debe consumir al menos un 2 % de
su FLC mínima en cada fase.
Parámetros relacionados: ninguno.
Hay un problema con la conexión entre el arrancador suave y el módulo de comunicaciones
•
opcional. Retire y vuelva a instalar el módulo. Si el problema subsiste, póngase en contacto con
su distribuidor local.
Existe un error de comunicación interna dentro del arrancador suave. Póngase en contacto con
•
su distribuidor local.
Parámetro relacionado:
Parámetro 16-10 Starter/Comms (Arrancador/Comunicaciones).
•
88 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 93

Localización de averías Guía de funcionamiento
Pantalla Posible causa / solución sugerida
Thermistor cct (thermistor circuit)
(Cto. termistor [circuito termistor])
Time - overcurrent (Tiempo sobrecorriente)
Baja corriente El motor ha sufrido una caída brusca de corriente debido a la pérdida de carga. Entre las causas,
Unsupported option (function not
available in inside delta) (Opción
incompatible [función no disponible
en triángulo interno])
Vibration (Vibración) Nombre seleccionado para una entrada programable. Consulte Input A trip (Desconexión entrada A).
VZC fails px (Fallo VZC px) Donde X es 1, 2 o 3.
La entrada del termistor se ha activado y:
La resistencia en la entrada ha caído por debajo de 20 Ω (la resistencia fría de la mayoría de los
•
termistores está por encima de este valor) o
se ha producido un cortocircuito. Compruebe y resuelva esta circunstancia.
•
Compruebe que no haya un PT100 (RTD) conectado a los terminales 05 y 06.
Parámetros relacionados: ninguno.
El arrancador suave tiene un bypass interno y ha consumido una corriente alta durante su funcionamiento (se ha alcanzado la desconexión de la curva de protección de 10 A o la intensidad del
motor ha subido hasta el 600 % del ajuste de FLC del motor).
Parámetros relacionados: ninguno.
pueden estar la rotura de componentes (ejes, correas o acoplamientos) o una bomba que funcione
en seco.
Parámetros relacionados:
Parámetro 2-4 Undercurrent (Baja corriente).
•
Parámetro 2-5 Undercurrent Delay (Retardo de baja corriente).
•
Parámetro 16-3 Undercurrent (Baja corriente).
•
La función seleccionada no está disponible (por ejemplo, la velocidad ja no se admite en la
conguración en triángulo interna).
Parámetros relacionados: ninguno.
Fallo interno (fallo de PCB). Póngase en contacto con el distribuidor local de Danfoss para que le
aconseje.
Esta desconexión no se puede ajustar.
Parámetros relacionados: ninguno.
10 10
Tabla 10.1 Mensajes de desconexión
fallos Generales
10.2
La Tabla 10.2 describe situaciones en las que el arrancador suave no funciona como se espera, pero no se desconecta ni
emite una advertencia.
Síntoma Causa probable
El arrancador suave no está listo. Compruebe la entrada A (11 y 16). Compruebe si el arrancador suave está
desactivado mediante una entrada programable. Si el parámetro 3-3 Input A Function
(Funcionamiento entrada A) se congura como Starter disable (Desactivar arrancador) y
existe un circuito abierto en la entrada correspondiente, el arrancador suave no
arrancará.
El arrancador suave no responde a las teclas [Hand
On] y [Reset].
Compruebe si el arrancador suave está en modo automático. Cuando el arrancador
suave esté en modo automático, se apagará el LED de modo manual del arrancador
suave. Pulse [Auto On] una vez para cambiar a control local.
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 89
Page 94

Localización de averías
Síntoma Causa probable
VLT® Soft Starter MCD 500
El arrancador suave no responde a las órdenes
desde las entradas de control.
El arrancador suave está esperando a que transcurra el retardo de reinicio. El
•
parámetro 2-11 Restart delay (Retardo de reinicio) controla la duración del retardo
de arranque.
Es posible que el motor esté demasiado caliente para permitir un arranque. Si el
•
parámetro 2-12 Motor temperature check (Comprobación de temperatura del motor)
está ajustado en Check (Comprobar), el arrancador suave solo permite un
arranque cuando calcula que el motor tiene suciente capacidad térmica para
completar el arranque con éxito. Espere a que el motor se enfríe antes de
intentar otro arranque.
Compruebe si el arrancador suave está desactivado mediante una entrada
•
programable. Si el parámetro 3-3 Input A Function (Funcionamiento entrada A) se
congura como Star ter disable (Desactivar arrancador) y existe un circuito abierto
en los terminales 11 y 16, el arrancador suave no arrancará. Si no existe más
necesidad de desactivar el arrancador suave, cierre el circuito en la entrada.
AVISO!
El parámetro 3-1 Local/remote (Local/Remoto) controla cuándo está
activado [Auto On].
El arrancador suave no responde a una orden de
arranque, ya sea desde los controles locales o
remotos.
1010
El arrancador suave puede estar esperando a que transcurra el retardo de
•
arranque. El parámetro 2-11 Restart delay (Retardo de reinicio) controla la duración
del retardo de arranque.
Es posible que el motor esté demasiado caliente para permitir un arranque. Si el
•
parámetro 2-12 Motor temperature check (Comprobación de temperatura del motor)
está ajustado en Check (Comprobar), el arrancador suave solo permite un
arranque cuando calcula que el motor tiene suciente capacidad térmica para
completar el arranque con éxito.
Compruebe si el arrancador suave está desactivado mediante una entrada
•
programable. Si el parámetro 3-3 Input A Function (Funcionamiento entrada A) se
congura como Star ter disable (Desactivar arrancador) y existe un circuito abierto
en los terminales 11 y 16, el arrancador suave no arrancará. Si no existe más
necesidad de desactivar el arrancador suave, cierre el circuito en la entrada.
El arrancador suave no controla el motor correctamente durante el arranque.
AVISO!
El parámetro 3-1 Local/remote (Local/Remoto) controla cuándo está
activado [Auto On].
El rendimiento de arranque puede ser inestable cuando se utiliza un ajuste bajo
•
del ajuste de FLC (parámetro 1-1 Motor FLC [FLC motor]). Esto puede afectar al uso
en un motor de prueba pequeño con una corriente a plena carga de entre 5 y 50
A.
Instale condensadores con corrección del factor de potencia (PFC) en el lado de
•
alimentación del arrancador suave. Para controlar un contactor de condensador
PFC especíco, conecte el contactor para hacer funcionar los terminales de relé.
90 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 95

Localización de averías Guía de funcionamiento
Síntoma Causa probable
El motor no alcanza la velocidad máxima.
Si la corriente de arranque es demasiado baja, el motor no produce suciente par
•
para acelerar hasta la velocidad máxima. El arrancador suave puede
desconectarse por el excesivo tiempo de arranque.
AVISO!
Asegúrese de que los parámetros de arranque del motor sean adecuados
para la aplicación y que se esté utilizando el perl de arranque del motor
deseado. Si el parámetro 3-3 Input A Function (Funcionamiento entrada A)
está ajustado en Motor Set Select (Selección conjunto de motor),
compruebe que la entrada correspondiente esté en el estado esperado.
Compruebe si la carga se ha atascado. Compruebe la carga para ver si existe una
•
sobrecarga grave o se ha producido un bloqueo del rotor.
Funcionamiento irregular del motor.
Funcionamiento irregular y ruidoso del motor. Si el arrancador suave está conectado al motor mediante la conguración interior en
La parada suave termina demasiado rápido.
Las funciones de control adaptativo, freno de CC y
velocidad ja no funcionan.
No se produce un reinicio después de un reinicio
automático cuando se utiliza un control remoto de
dos cables.
La orden de arranque/parada remota anula los
ajustes de arranque/parada automáticos cuando se
utiliza un control remoto de dos cables.
Después de seleccionar el control adaptativo, el
motor utilizó un arranque corriente y/o el segundo
arranque fue distinto del primero.
Desconexión del Thermistor Cct (Cto. termistor) no
reiniciable, cuando existe un enlace entre las
entradas de termistor 05 y 06 o cuando el
termistor del motor conectado entre 05 y 06 se
retira de forma permanente.
Los SCR del arrancador suave requieren al menos 5 A de corriente para actuar. Si
•
está probando el arrancador suave en un motor con una corriente a plena carga
inferior a 5 A, los SCR podrían no funcionar correctamente.
triángulo, el arrancador suave podría no detectar correctamente la conexión. Póngase
en contacto con el distribuidor local de Danfoss para que le aconseje.
Es posible que los ajustes de parada suave no sean adecuados para el motor y la
•
carga. Revise los ajustes de:
- Parámetro 1-10 Stop Mode (Modo de parada).
- Parámetro 1-11 Stop Time (Tiempo de parada).
- Parámetro 7-10 Stop Mode-2 (Modo de parada-2).
- Parámetro 7-11 Stop Time-2 ( Tiempo de parada-2).
Si el motor está ligeramente cargado, la parada suave tiene un efecto limitado.
•
Estas funciones solo están disponibles con una instalación en línea. Si el
•
arrancador suave está instalado en triángulo interno, estas funciones no
funcionarán.
Elimine y vuelva a aplicar la señal de arranque remota de dos cables para
•
conseguir un reinicio.
Utilice únicamente el arranque/parada automático en modo automático con
•
control de tres o cuatro cables.
El primer arranque con control adaptativo es con Current limit (Límite de
•
intensidad). El arrancador suave asimila así las características del motor. Los
arranques siguientes utilizan control adaptativo.
La entrada de termistor se activa una vez que se instala un enlace y se activa la
•
protección contra cortocircuitos.
Elimine el enlace y cargue el conjunto de parámetros predeterminados. Esto
desactiva la entrada de termistor y borra la desconexión.
Coloque una resistencia de 1,2 kΩ en la entrada de termistor.
Ponga la protección del termistor en Log Only (Solo registro) (parámetro 16-9 Motor
Thermistor [Termistor del motor]).
10 10
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 91
Page 96

Localización de averías
Síntoma Causa probable
VLT® Soft Starter MCD 500
Los ajustes de parámetros no se pueden guardar.
El LCP muestra el mensaje Awaiting data
(Esperando datos).
Tabla 10.2 Mensajes de fallo general
Asegúrese de que guarda el nuevo valor pulsando la tecla [OK] después de
•
cambiar el ajuste de un parámetro. Si pulsa [Back], el cambio no se guardará.
Compruebe que el bloqueo de ajuste (parámetro 15-2 Adjustment Lock [Bloqueo
•
ajuste]) esté en Read/Write (Lectura/escritura). Si el bloqueo de ajuste está
activado, los ajustes pueden verse, pero no cambiarse. Es necesario conocer el
código de acceso de seguridad para cambiar el ajuste del bloqueo de ajuste.
La EEPROM puede tener una avería en el circuito impreso del control principal.
•
Una EEPROM defectuosa también desconectará el arrancador suave, y el LCP
mostrará el mensaje Par. Out of Range (Parámetro fuera de rango). Póngase en
contacto con el distribuidor local de Danfoss para que le aconseje.
El LCP no recibe datos desde el control PCB. Compruebe la conexión del cable.
1010
92 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 97

Especicaciones Guía de funcionamiento
11 Especicaciones
Fuente de alimentación
Tensión de red (L1, L2 y L3)
MCD5-xxxx-T5 200-525 V CA (±10 %)
MCD5-xxxx-T7 380-690 V CA (±10 %) (conexión en línea)
MCD5-xxxx-T7 380-690 V CA (±10 %) (conexión en triángulo interno)
Tensión de control (A4, A5 y A6)
CV1 (A5 y A6) 24 V CA / V CC (±20 %)
CV2 (A5 y A6) 110-120 V CA (+10 %/-15 %)
CV2 (A4 y A6) 220-240 V CA (+10 %/-15 %)
Consumo de corriente (máximo)
CV1 2,8 A
CV2 (110-120 V CA) 1 A
CV2 (220-240 V CA) 500 mA
Mains frequency (Frecuencia de red) 45-66 Hz
Tensión de aislamiento nominal a tierra 690 V CA
Tensión de impulso no disruptiva nominal 4 kV
Designación de forma Arrancador de motor de semiconductores con bypass o continuo, forma 1
Capacidad de cortocircuito (CEI)
Coordinación con fusibles de semiconductor Tipo 2
Coordinación con fusibles HRC Tipo 1
De MCD5-0021B a MCD5-0215B Corriente posible 65 kA
De MCD5-0245B a MCD5-0961B Corriente posible 85 kA
De MCD5-0245C a MCD5-0927B Corriente posible 85 kA
De MCD5-1200C a MCD5-1600C Corriente posible 100 kA
Para conocer las intensidades nominales de cortocircuito conformes con UL, consulte la Tabla 4.12.
Capacidad electromagnética (conforme a la Directiva europea 2014/30/UE)
Emisiones CEM Especicaciones CEI 60947-4-2 clase B y Lloyds Marine n.º 1
Inmunidad CEM CEI 60947-4-2
Entradas
Clasicación de entrada 24 V CC activos, aproximadamente 8 mA
Arranque (15 y 16) Normally open (Normalmente abierto)
Parada (17 y 18) Normalmente cerrado
Reinicio (25 y 18) Normalmente cerrado
Entrada programable (11 y 16) Normally open (Normalmente abierto)
Termistor del motor (05 y 06) Desconexión >3,6 kΩ, reinicio <1,6 kΩ
Salidas
Salidas de relé 10 A a 250 V CA resistiva, 5 A a 250 V CA CA15 fp 0,3
Salidas programables
Relé A (13 y 14) Normally open (Normalmente abierto)
Relé B (21, 22 y 24) Conmutación
Relé C (33 y 34) Normally open (Normalmente abierto)
Salida analógica (07 y 08) 0-20 mA o 4-20 mA (seleccionable)
Carga máxima 600 Ω (12 V CC a 20 mA)
Precisión ±5%
Salida de 24 V CC (16 y 08) con carga máxima 200 mA
Precisión ±10%
11 11
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 93
Page 98

Especicaciones
Entorno
Protección
De MCD5-0021B a MCD5-0105B IP20 y NEMA, UL tipo interior 1
De MCD5-0131B a MCD5-1600C IP00, UL tipo interior abierto
Temperatura de funcionamiento De –10 °C (14 °F) a 60 °C (140 °F), por encima de 40 °C (104 °F) con reducción de potencia
Temperatura de almacenamiento De –25 °C (–13 °F) a 60 °C
Altitud de funcionamiento (utilizando el software
MCD para PC)
Humedad 5-95 % de humedad relativa
Grado de contaminación Grado de contaminación 3
Vibration (Vibración) CEI 60068-2-6
Disipación de calor
Durante el arranque 4,5 W por amperio
Durante el funcionamiento
De MCD5-0021B a MCD5-0053B ≤39 W aproximadamente
De MCD5-0068B a MCD5-0105B ≤51 W aproximadamente
De MCD5-0131B a MCD5-0215B ≤120 W aproximadamente
De MCD5-0245B a MCD5-0469B ≤140 W aproximadamente
De MCD5-0525B a MCD5-0961B ≤357 W aproximadamente
De MCD5-0245C a MCD5-0927C 4,5 W por amperio aproximadamente
De MCD5-1200C a MCD5-1600C 4,5 W por amperio aproximadamente
VLT® Soft Starter MCD 500
0-1000 m (0-3281 ft), por encima de 1000 m (3281 ft) con reducción de
potencia
Certicación
C✓ CEI 60947-4-2
UL/C-UL
De MCD5-0021B a MCD5-0396B, de MCD5-0245C a
MCD5-1600C
De MCD5-0469B a MCD5-0961B
1111
De MCD5-0021B a MCD5-105B
De MCD5-0131B a MCD5-1600C
CE CEI 60947-4-2
CCC GB 14048-6
Marine
(de MCD5-0021B a MCD5-0961B) Especicación de Lloyds Marine n.º 1
RoHS Conforme con la Directiva europea 2002/95/CE
1) Para la certicación UL, pueden aplicarse requisitos adicionales, en función de los modelos. Para obtener más información,
consulte el capétulo 11.1 Instalación conforme a UL.
Instalación conforme a UL
11.1
IP20, si se ha instalado con kit opcional de protección de
11.1.2 Modelos de MCD5-0131B a
Listado como UL
Reconocido por UL
UL 508
dedos
1)
MCD5-0215B
En este apartado se detallan más requisitos y ajustes de
conguración necesarios para que el VLT® Soft Starter MCD
500 sea conforme a las normas UL. Consulte también el
Tabla 4.12.
11.1.1 Modelos de MCD5-0021B a
Uso con kit de protección para dedos, número de
•
pedido 175G5662.
Utilice el terminal de presión / kit de conector
•
recomendados. Consulte la Tabla 11.1 para
conocer más información.
MCD5-0105B
No hay requisitos adicionales para estos modelos.
94 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
Page 99

Especicaciones Guía de funcionamiento
11.1.3 Modelos de MCD5-0245B a
MCD5-0396B
Uso con kit de protección para dedos, número de
•
pedido 175G5730.
Utilice el terminal de presión / kit de conector
•
recomendados. Consulte la Tabla 11.1 para
conocer más información.
11.1.4 Modelos MCD5-0245C
Utilice el terminal de presión / kit de conector
•
recomendados. Consulte la Tabla 11.1 para
conocer más información.
11.1.5 Modelos de MCD5-0360C a
MCD5-1600C
Congure las barras conductoras para terminales
•
de línea/carga en los extremos opuestos del
arrancador suave (es decir, entrada superior /
salida inferior o salida superior / entrada inferior).
Utilice el terminal de presión / kit de conector
•
recomendados. Consulte la Tabla 11.1 para
conocer más información.
11.1.6 Modelos de MCD5-0469B a
MCD5-0961B
Números de
Modelo FLC (A)
MCD5-0245C 255 1 OPHD 240-20
MCD5-0360C 360
MCD5-0380C 380
MCD5-0428C 430
MCD5-0595C 620
MCD5-0619C 650
MCD5-0790C 790 4 2 × 600T-2
MCD5-0927C 930 3 2 × 600T-2
MCD5-1200C 1200
MCD5-1410C 1410
MCD5-1600C 1600 5
Tabla 11.1 Terminal de presión / kits de conector
Número de
cables
2 1 × 600T-2
4 1 × 750T-4
pedido de los
terminales
recomendados
1 × 750T-4 y
1 × 600T-3
11.2 Accesorios
11.2.1 Kit de montaje remoto para LCP
El LCP del VLT® Soft Starter MCD 500 puede montarse a
hasta 3 m (9,8 ft) de distancia del arrancador suave,
haciendo posible el control y la supervisión remotos. El LCP
remoto también hace posible copiar los ajustes de
parámetros entre arrancadores suaves.
Estos modelos son componentes con reconocimiento UL.
Pueden requerirse diferentes barras conductoras para
recepción de cables en el alojamiento eléctrico cuando se
terminen los cables conforme a las normas NEC (National
Wiring Code, de Estados Unidos).
11.1.7 Terminal de presión / kits de
conector
Para que los modelos de MCD50131B a MCD5-0396B y de
MCD5-0245C a MCD5-1600C sean conformes a las normas
UL, utilice el terminal de presión / conector recomendados
según se indica en la Tabla 11.1.
Números de
Modelo FLC (A)
MCD5-0131B 145 1 OPHD 95-16
MCD5-0141B 170 1 OPHD 120-16
MCD5-0195B 200 1 OPHD 150-16
MCD5-0215B 220 1 OPHD 185-16
MCD5-0245B 255 1 OPHD 240-20
MCD5-0331B 350 1 OPHD 400-16
MCD5-0396B 425 2 OPHD 185-16
Número de
cables
pedido de los
terminales
recomendados
Panel de control LCP 501 - 175G0096.
•
11.2.2 Módulos de comunicación
El VLT® Soft Starter MCD 500 admite la comunicación de
red mediante módulos de comunicación fáciles de instalar.
Cada arrancador suave puede admitir un único módulo de
comunicación a la vez.
Protocolos disponibles:
Ethernet (PROFINET, Modbus TCP y Ethernet/IP).
•
PROFIBUS.
•
DeviceNet.
•
Modbus RTU.
•
USB.
•
Números de pedido para módulos de comunicación
175G9000 Módulo Modbus.
•
175G9001 Módulo PROFIBUS.
•
175G9002 Módulo DeviceNet.
•
175G9009 Módulo MCD USB.
•
175G9904 Módulo Modbus TCP.
•
175G9905 Módulo PROFINET
•
11 11
MG17K805 Danfoss A/S © 03/2018 Reservados todos los derechos. 95
Page 100

M
3
~
1/L1
2/T1
1/L1
1/L1
2/T1
2/T1
E
13
14
K1
177RA001.11
Especicaciones
175G9906 Módulo Ethernet/IP.
•
VLT® Soft Starter MCD 500
11.2.3 Software para PC
El software para PC WinMaster ofrece:
Seguimiento.
•
Programación.
•
Control de hasta 99 arrancadores suaves.
•
Se requiere un módulo de comunicación Modbus o USB
para que cada arrancador suave utilice el WinMaster.
11.2.4 Kit de protección para dedos
Pueden indicarse protecciones de dedos por seguridad del
personal. Los kits de protección para dedos se ajustan
sobre los terminales del arrancador suave para evitar el
contacto accidental con los terminales bajo tensión. Las
protecciones de los dedos proporcionan protección IP20 si
están correctamente instaladas.
De MCD5-0131B a MCD5-0215B: 175G5662.
•
De MCD5-0245B a MCD5-0396B: 175G5730.
•
De MCD5-0469B a MCD5-0961B: 175G5731.
•
MCD5-245C: 175G5663.
•
De MCD5-0360C a MCD5-0927C: 175G5664.
•
De MCD5-1200C a MCD5-1600C: 175G5665.
•
1111
AVISO!
Para ser conformes a las normas UL, los modelos de
MCD5-0131B a MCD5-0396B requieren protecciones para
los dedos.
Ilustración 11.1 Sistema con kit de protección contra sobretensiones
11.2.5 Kit de protección contra
sobretensiones (protección frente a
rayos)
De serie, la tensión no disruptiva de impulso nominal del
VLT® Soft Starter MCD 500 está limitada a 4 kV. Los kits de
protección contra sobretensiones protegen el sistema e
inmunizan el arrancador suave ante los impulsos de
tensión alta.
6 kV
Kit de protección contra sobretensiones para G1 -
•
175G0100 SPD
Kit de protección contra sobretensiones, G2-G5 -
•
175G0101 SPD
12 kV
Kit de protección contra sobretensiones para G1 -
•
175G0102 SPD
Kit de protección contra sobretensiones, G1-G5 -
•
175G0103 SPD
96 Danfoss A/S © 03/2018 Reservados todos los derechos. MG17K805
 Loading...
Loading...