

Page 1

ENGINEERING TOMORROW
Guida operativa
VLT® Soft Starter MCD 500
www.danfoss.it/vlt-drives
Page 2
Page 3
Page 4

Page 5
Sommario Guida operativa
Sommario
1 Introduzione
2 Sicurezza
2.1 Sicurezza
3 Installazione
3.1 Installazione meccanica
3.2 Dimensioni e peso
4 Installazione elettrica
4.1 Cavi di controllo
4.1.1 Modi di controllare l'avviatore statico 15
4.1.2 Morsetti di controllo 15
4.1.3 Ingressi remoti 15
4.1.4 Comunicazione seriale 16
4.1.5 Morsetto di terra 16
4.1.6 Terminazioni di potenza 16
4.1.7 Kit di protezione salvadita 17
6
10
10
12
12
13
15
15
4.2 Congurazioni dell'ingresso e dell'uscita di potenza
4.2.1 Modelli con bypass interno (da MCD5-0021B a MCD5-0961B) 17
4.2.2 MCD5-0245C 18
4.2.3 MCD5-0360C - MCD5-1600C 19
4.3 Collegamento del motore
4.3.1 Test dell'impianto 19
4.3.2 Installazione in linea 20
4.3.2.1 Con bypass interno 20
4.3.2.2 Senza bypass 20
4.3.2.3 Con bypass esterno 20
4.3.3 Installazione con connessione a triangolo interna 21
4.3.3.1 Con bypass interno 21
4.3.3.2 Senza bypass 21
4.3.3.3 Con bypass esterno 22
4.4 Correnti nominali
4.4.1 Collegamento in linea (con bypass) 23
4.4.2 Collegamento in linea (senza bypass/continuo) 24
17
19
22
4.4.3 Collegamento a triangolo interno (con bypass) 25
4.4.4 Collegamento a triangolo interno (senza bypass/continuo) 26
4.5 Impostazioni di corrente minima e massima
4.6 Contattore di bypass
4.7 Contattore di Rete
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 1
27
28
28
Page 6
Sommario
VLT® Soft Starter MCD 500
4.8 Interruttore
4.9 Correzione del fattore di potenza
4.10 Fusibili
4.10.1 Fusibili di alimentazione 28
4.10.2 Fusibili Bussmann 29
4.10.3 Fusibili Ferraz 31
4.10.4 Selezione fusibili UL e caratteristiche di cortocircuito 33
4.11 Diagrammi schematici
5 Caratteristiche del prodotto
5.1 Protezione da sovraccarico motore
5.2 Controllo adattivo
5.3 Modalità di avviamento
5.3.1 Corrente costante 39
5.3.2 Rampa di corrente 39
5.3.3 Controllo adattivo 40
5.3.4 Kick start 41
5.4 Modalità di arresto
28
28
28
36
38
38
39
39
41
5.4.1 Arresto in rotazione libera 41
5.4.2 Arresto dolce TVR 41
5.4.3 Controllo adattivo 41
5.4.4 Arresto della pompa 42
5.4.5 Freno 42
5.5 Funzionamento marcia jog
5.6 Funzionamento a triangolo interno
5.7 Correnti di spunto tipiche
5.8 Installazione con contattore di rete
5.9 Installazione con contattore di bypass
5.10 Funzion. emergenza
5.11 Circuito di scatto ausiliario
5.12 Freno CC con sensore di velocità zero esterno
5.13 Frenatura dolce
5.14 Motore a due velocità
6 Funzionamento
6.1 Metodi di controllo
44
44
45
46
47
48
49
51
52
53
56
56
6.2 Funzionamento e LCP
6.2.1 Modi di funzionamento 57
6.3 LCP montato a distanza
6.3.1 Sincronizzazione dell'LCP e dell'avviatore statico 58
6.4 Schermata iniziale
2 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
57
58
58
Page 7
Sommario Guida operativa
6.5 Tasti di comando locale
6.6 Display
6.6.1 Schermata monitoraggio temperatura (S1) 59
6.6.2 Schermata programmabile (S2) 59
6.6.3 Corrente media (S3) 59
6.6.4 Schermata di monitoraggio corrente (S4) 59
6.6.5 Schermata monitoraggio frequenza (S5) 59
6.6.6 Schermata potenza motore (S6) 59
6.6.7 Informazioni ultimo avviamento (S7) 59
6.6.8 Data e ora (S8) 60
6.6.9 Graco a barre conduzione SCR 60
6.6.10 Graci delle prestazioni 60
7 Programmazione
7.1 Controllo degli accessi
7.2 Menu rapido
7.2.1 Setup rapido 61
7.2.2 Esempi di setup dell'applicazione 62
58
59
61
61
61
7.2.3 Registrazioni 63
7.3 Menu principale
7.3.1 Parametri 63
7.3.2 Scelta rapida parametro 63
7.3.3 Elenco dei parametri 64
8 Descrizioni dei parametri
8.1 Impostazioni del motore principale
8.1.1 Freno 66
8.2 Protezione
8.2.1 Sbilanciamento corrente 67
8.2.2 Sottocorrente 67
8.2.3 Sovracorrente istantanea 67
8.2.4 Scatto frequenza 67
8.3 Ingressi
8.4 Uscite
8.4.1 Ritardi relè A 70
8.4.2 Relè B e C 70
63
65
65
67
68
69
8.4.3 Avviso corrente bassa e avviso corrente alta 71
8.4.4 Avviso temperatura motore 71
8.4.5 Uscita analogica A 71
8.5 Timer Avvio/Arresto
8.6 Ripristino automatico
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 3
72
72
Page 8
Sommario
VLT® Soft Starter MCD 500
8.6.1 Ritardo ripristino automatico 73
8.7 Gruppo motore secondario
8.8 Display
8.8.1 Schermo programmabile dall'utente 74
8.8.2 Graci delle prestazioni 75
8.9 Parametri con restrizioni
8.10 Azione protezione
8.11 Parametri di fabbrica
9 Strumenti
9.1 Impostare data e ora
9.2 Carica/Salva impostazioni
9.3 Riprist. modello termico
9.4 Simulazione protezione
9.5 Simulazione segnale in uscita
9.6 Stato I/O digitali
9.7 Stato sensore temp.
9.8 Log allarme
9.8.1 Registro scatti 80
73
74
76
77
77
78
78
78
78
79
79
80
80
80
9.8.2 Registro eventi 80
9.8.3 Contatori 80
10 Ricerca guasti
10.1 Messaggi di scatto
10.2 Guasti generali
11 Speciche
11.1 Installazione conforme UL
11.1.1 Modelli da MCD5-0021B a MCD5-0105B 92
11.1.2 Modelli da MCD5-0131B a MCD5-0215B 92
11.1.3 Modelli da MCD5-0245B a MCD5-0396B 92
11.1.4 Modelli MCD5-0245C 92
11.1.5 Modelli da MCD5-0360C a MCD5-1600C 92
11.1.6 Modelli da MCD5-0469B a MCD5-0961B 92
11.1.7 Kit morsetti/connettori a pressione 92
11.2 Accessori
11.2.1 Kit di montaggio remoto LCP 92
81
81
86
90
92
92
11.2.2 Moduli di comunicazione 92
11.2.3 Software PC 93
11.2.4 Kit di protezione salvadita 93
11.2.5 Kit di protezione dalle sovracorrenti (protezione dai fulmini) 93
4 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 9
Sommario Guida operativa
12 Procedura di regolazione della barra collettrice (da MCD5-0360C a
MCD5-1600C)
94
13 Appendice
13.1 Simboli, abbreviazioni e convenzioni
Indice
96
96
97
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 5
Page 10
Introduzione
VLT® Soft Starter MCD 500
11
1 Introduzione
Il VLT® Soft Starter MCD 500 è una soluzione di
avviamento statico avanzata per motori 11–850 kW. Gli
avviatori statici forniscono una gamma completa di
caratteristiche di protezione del motore e del sistema e
sono concepiti per prestazioni adabili nelle realtà impiantistiche più esigenti.
1.1.1 Versione del documento
La presente guida operativa viene revisionata e aggiornata
regolarmente. Qualsiasi suggerimento in merito a migliorie
da apportare è ben accetto. Tabella 1.1 mostra la versione
del documento.
Edizione Osservazioni
MG17K8xx Istruzioni sull'utilizzo dei kit di protezione salvadita
per impianti IP00 aggiunte al capitolo 4 Installazione
elettrica.
Tabella 1.1 Versione del documento
1.1.2 Elenco caratteristiche
Modelli per tutti i tipi di collegamento
21–1600 A (collegamento in linea).
•
Collegamento in linea o a triangolo interno.
•
Bypass interno no a 961 A.
•
Tensione di rete: 200–525 V CA o 380–690 V CA.
•
Tensione di controllo: 24 V CA/V CC, 110–120 V
•
CA o 220–240 V CA.
LCP facile da usare
Registrazioni.
•
Graci in tempo reale.
•
Graco a barre conduzione SCR.
•
Attrezzi
Setup dell'applicazione.
•
Registro eventi corredato di data e ora con 99
•
voci.
8 scatti più recenti.
•
Contatori.
•
Simulazione della protezione.
•
Simulazione del segnale in uscita.
•
Ingressi e uscite
Opzioni ingresso di controllo locale o remoto
•
(3 ssi, 1 programmabile).
Uscite a relè (3 programmabili).
•
Uscita analogica programmabile.
•
Uscita di alimentazione a 24 V CC 200 mA.
•
Modalità avviamento e arresto
Controllo adattivo.
•
Corrente costante.
•
Rampa di corrente.
•
Kick start.
•
Jog.
•
Modalità funzionamento di emergenza.
•
Modalità di arresto
Controllo adattivo della decelerazione.
•
Arresto dolce rampa di tensione temporizzata.
•
Freno CC.
•
Frenatura dolce.
•
Disabilitazione avviatore.
•
Altre caratteristiche
Timer avviamento/arresto automatico.
•
Modello termico di secondo grado.
•
Backup di batteria per l'orologio e il modello
•
termico.
Moduli di comunicazione opzionali DeviceNet,
•
Modbus, Ethernet o PROFIBUS.
Protezione completa
Cablaggio/collegamento/alimentazione.
•
- Collegamento del motore.
- Sequenza di fase.
- Perdita di potenza.
- Perdita di fase individuale.
- Frequenza di rete.
Corrente
•
- Tempo di avviamento eccessivo.
- Sbilanciamento corrente.
- Sottocorrente.
- Sovracorrente istantanea.
Termico
•
- Termistore del motore.
- Sovraccarico motore.
- Sovraccarico del contattore di bypass.
- Temperatura del dissipatore di calore.
Comunicazione
•
- Comunicazione di rete.
- Comunicazione dell'avviatore.
6 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 11
MCD 5
- -
-
-
0021 = 21 A, AC53b 3-30:330
0037 = 37 A, AC53b 3-30:330
0043 = 43 A, AC53b 3-30:330
0053 = 53 A, AC53b 3-30:330
0068 = 68 A, AC53b 3-30:570
0084 = 84 A, AC53b 3-30:570
0089 = 89 A, AC53b 3-30:570
0105 = 105 A, AC53b 3-30:570
0131 = 131 A, AC53b 3-30:570
0141 = 141 A, AC53b 3-30:570
0195 = 195 A, AC53b 3-30:570
0215 = 215 A, AC53b 3-30:570
0245 = 245 A, AC53b 3-30:570
0331 = 331 A, AC53b 3-30:570
0396 = 396 A, AC53b 3-30:570
0469 = 469 A, AC53b 3-30:570
0525 = 525 A, AC53b 3-30:570
0632 = 632 A, AC53b 3-30:570
0744 = 744 A, AC53b 3-30:570
0826 = 826 A, AC53b 3-30:570
0961 = 961 A, AC53b 3-30:570
00 = IP00
20 = IP20
G1 = 0021 ~ 0105 A
G2 = 0131 ~ 0215 A
G3 = 0245 ~ 0396 A
G4 = 0360 ~ 0961 A
G5 = 1200 ~ 1600 A
0245 = 245 A, AC53a 3-30:50-6
0360 = 360 A, AC53a 3-30:50-6
0380 = 380 A, AC53a 3-30:50-6
0428 = 428 A, AC53a 3-30:50-6
0595 = 595 A, AC53a 3-30:50-6
0619 = 619 A, AC53a 3-30:50-6
0790 = 790 A, AC53a 3-30:50-6
0927 = 927 A,AC53a 3-30:50-6
1200 = 1200 A, AC53a 3-30:50-6
1410 = 1410 A, AC53a 3-30:50-6
1600 = 1600 A, AC53a 3-30:50-6
177HA382.11
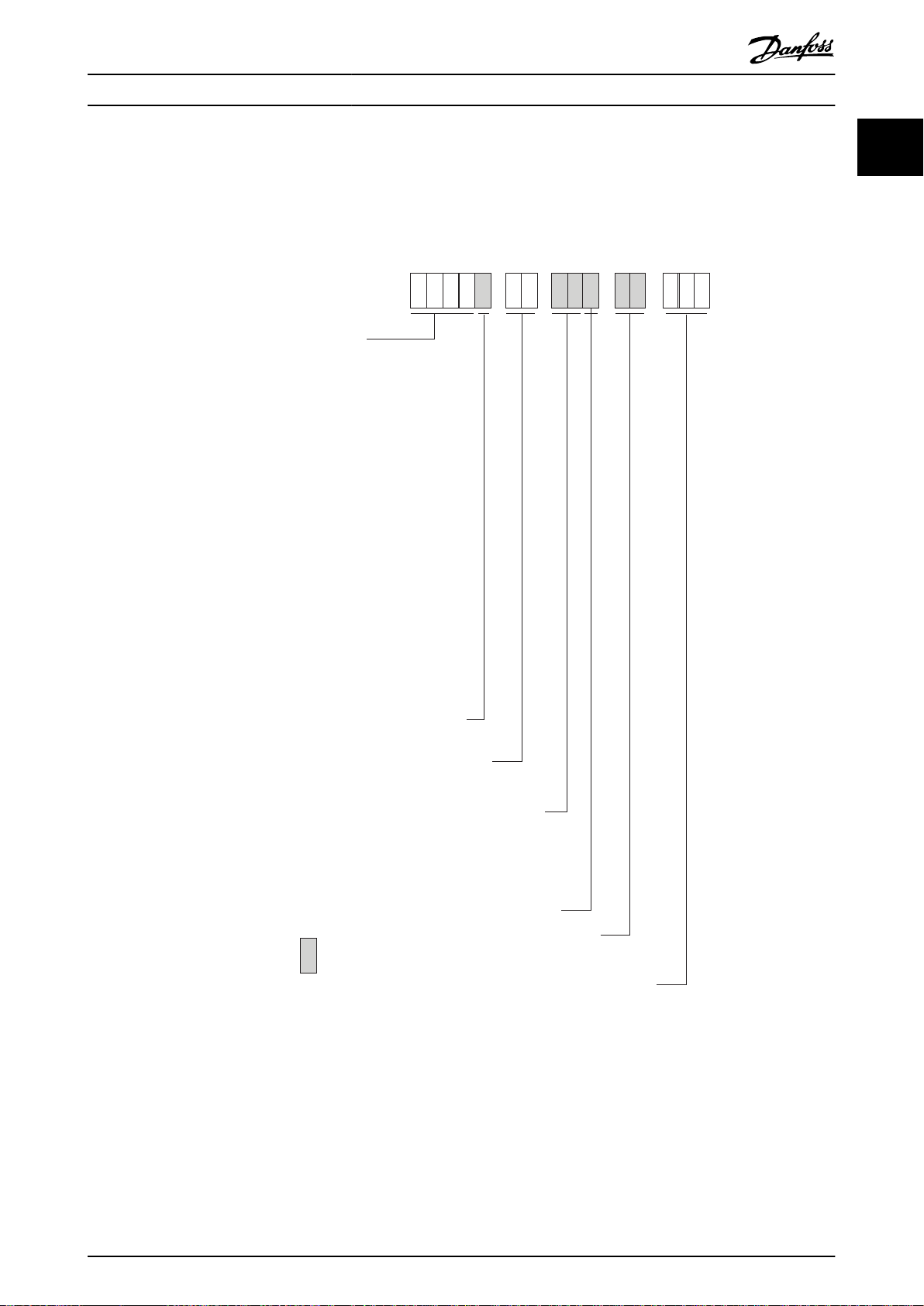
Corrente nominale
B = Bypassato
C = Non bypassato
Tensione di rete
T5 = 200–525 VCA
T7 = 380–690 VCA
Dimensioni del telaio
Non utilizzato
Grado IP
Tensione di controllo
CV1 = 24 VCA/VCC
CV2 = 110–120 VCA o 220–240 VCA
= Non selezionabile
Introduzione Guida operativa
Esterno
•
- Scatto ingresso.
Avviatore
•
1.1.3 Codice identicativo
- SCR cortocircuitato individualmente.
1 1
- Batteria/orologio.
Disegno 1.1 Codice identicativo modulo d'ordine
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 7
Page 12
Introduzione
VLT® Soft Starter MCD 500
11
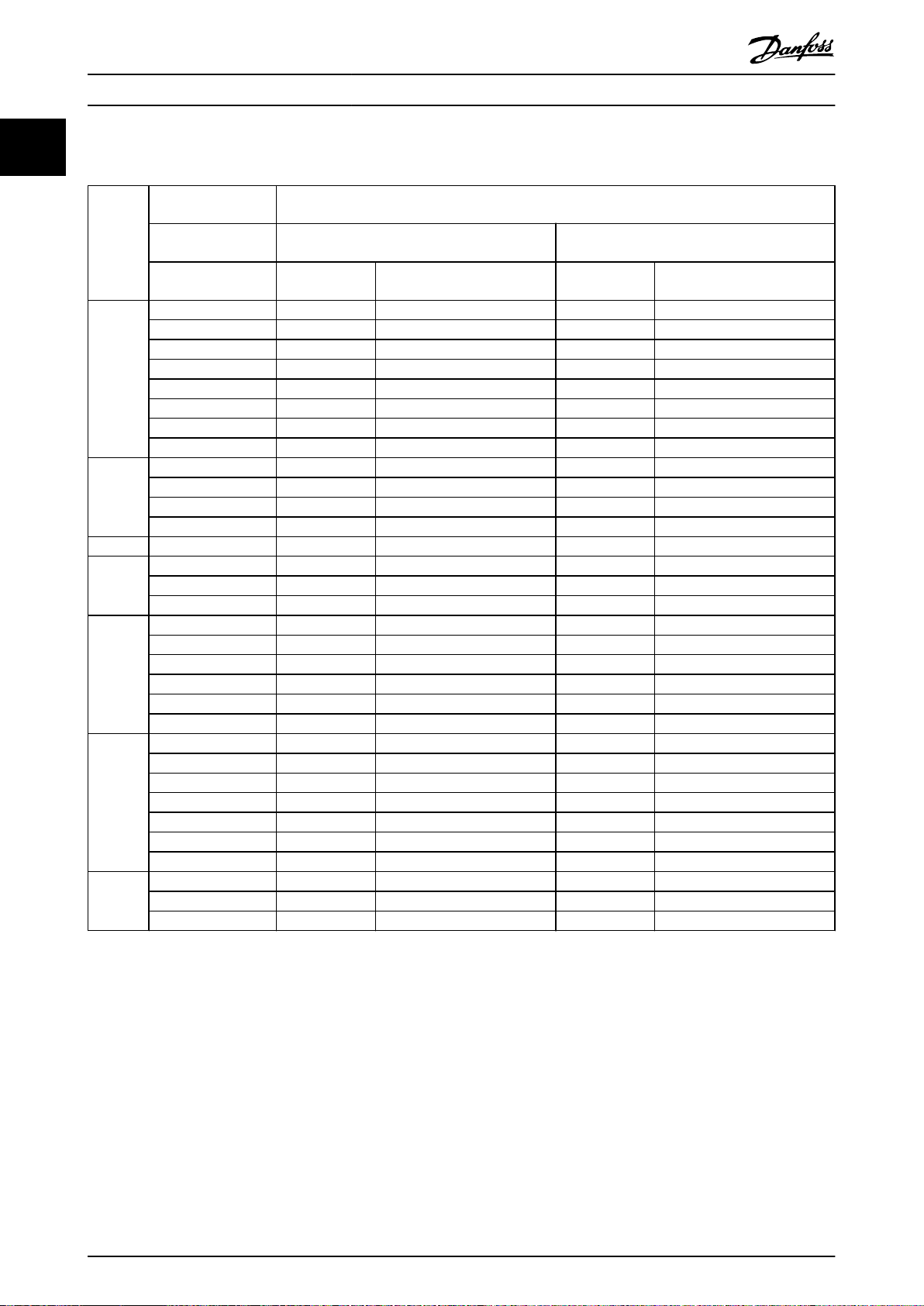
1.1.4 Numeri d'ordine
Tensione di alimen-
tazione T5, 200–525 V CA
Alimentazione di
controllo
Numero
G1B
G2B
G3C MCD5-0245C 175G5512 MCD5-0245C-T5-G3X-00-CV1 175G5537 MCD5-0245C-T5-G3X-00-CV2
G3B
G4B
G4C
G5C
Amperaggio
MCD5-0021B 175G5500 MCD5-0021B-T5-G1X-20-CV1 175G5525 MCD5-0021B-T5-G1X-20-CV2
MCD5-0037B 175G5501 MCD5-0037B-T5-G1X-20-CV1 175G5526 MCD5-0037B-T5-G1X-20-CV2
MCD5-0043B 175G5502 MCD5-0043B-T5-G1X-20-CV1 175G5527 MCD5-0043B-T5-G1X-20-CV2
MCD5-0053B 175G5503 MCD5-0053B-T5-G1X-20-CV1 175G5528 MCD5-0053B-T5-G1X-20-CV2
MCD5-0068B 175G5504 MCD5-0068B-T5-G1X-20-CV1 175G5529 MCD5-0068B-T5-G1X-20-CV2
MCD5-0084B 175G5505 MCD5-0084B-T5-G1X-20-CV1 175G5530 MCD5-0084B-T5-G1X-20-CV2
MCD5-0089B 175G5506 MCD5-0089B-T5-G1X-20-CV1 175G5531 MCD5-0089B-T5-G1X-20-CV2
MCD5-0105B 175G5507 MCD5-0105B-T5-G1X-20-CV1 175G5532 MCD5-0105B-T5-G1X-20-CV2
MCD5-0131B 175G5508 MCD5-0131B-T5-G2X-00-CV1 175G5533 MCD5-0131B-T5-G2X-00-CV2
MCD5-0141B 175G5509 MCD5-0141B-T5-G2X-00-CV1 175G5534 MCD5-0141B-T5-G2X-00-CV2
MCD5-0195B 175G5510 MCD5-0195B-T5-G2X-00-CV1 175G5535 MCD5-0195B-T5-G2X-00-CV2
MCD5-0215B 175G5511 MCD5-0215B-T5-G2X-00-CV1 175G5536 MCD5-0215B-T5-G2X-00-CV2
MCD5-0245B 134N9344 MCD5-0245B-T5-G3X-00-CV1 134N9345 MCD5-0245B-T5-G3X-00-CV2
MCD5-0331B 134N9348 MCD5-0331B-T5-G3X-00-CV1 134N9349 MCD5-0331B-T5-G3X-00-CV2
MCD5-0396B 134N9352 MCD5-0396B-T5-G3X-00-CV1 134N9353 MCD5-0396B-T5-G3X-00-CV2
MCD5-0469B 134N9356 MCD5-0469B-T5-G4X-00-CV1 134N9357 MCD5-0469B-T5-G4X-00-CV2
MCD5-0525B 134N9360 MCD5-0525B-T5-G4X-00-CV1 134N9361 MCD5-0525B-T5-G4X-00-CV2
MCD5-0632B 134N9364 MCD5-0632B-T5-G4X-00-CV1 134N9365 MCD5-0632B-T5-G4X-00-CV2
MCD5-0744B 134N9368 MCD5-0744B-T5-G4X-00-CV1 134N9369 MCD5-0744B-T5-G4X-00-CV2
MCD5-0826B 134N9372 MCD5-0826B-T5-G4X-00-CV1 134N9373 MCD5-0826B-T5-G4X-00-CV2
MCD5-0961B 134N9376 MCD5-0961B-T5-G4X-00-CV1 134N9377 MCD5-0961B-T5-G4X-00-CV2
MCD5-0360C 175G5513 MCD5-0360C-T5-G4X-00-CV1 175G5538 MCD5-0360C-T5-G4X-00-CV2
MCD5-0380C 175G5514 MCD5-0380C-T5-G4X-00-CV1 175G5539 MCD5-0380C-T5-G4X-00-CV2
MCD5-0428C 175G5515 MCD5-0428C-T5-G4X-00-CV1 175G5540 MCD5-0428C-T5-G4X-00-CV2
MCD5-0595C 175G5516 MCD5-0595C-T5-G4X-00-CV1 175G5541 MCD5-0595C-T5-G4X-00-CV2
MCD5-0619C 175G5517 MCD5-0619C-T5-G4X-00-CV1 175G5542 MCD5-0619C-T5-G4X-00-CV2
MCD5-0790C 175G5518 MCD5-0790C-T5-G4X-00-CV1 175G5543 MCD5-0790C-T5-G4X-00-CV2
MCD5-0927C 175G5519 MCD5-0927C-T5-G4X-00-CV1 175G5544 MCD5-0927C-T5-G4X-00-CV2
MCD5-1200C 175G5520 MCD5-1200C-T5-G5X-00-CV1 175G5545 MCD5-1200C-T5-G5X-00-CV2
MCD5-1410C 175G5523 MCD5-1410C-T5-G5X-00-CV1 175G5546 MCD5-1410C-T5-G5X-00-CV2
MCD5-1600C 175G5524 MCD5-1600C-T5-G5X-00-CV1 175G5547 MCD5-1600C-T5-G5X-00-CV2
d'ordine Codice identicativo
CV1, 24 V CA/V CC CV2, 110–120 o 220–240 V CA
Numero
d'ordine Codice identicativo
Tabella 1.2 Numeri d'ordine, T5, 200–525 V CA
8 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 13
Introduzione Guida operativa
Tensione di alimen-
tazione T7, 380–690 V CA
Alimentazione di
controllo
Numero
G1B
G2B
G3C MCD5-0245C 175G5560 MCD5-0245C-T7-G3X-00-CV1 175G5583 MCD5-0245C-T7-G3X-00-CV2
G3B
G4B
G4C
G5C
Amperaggio
MCD5-0021B 175G5548 MCD5-0021B-T7-G1X-20-CV1 175G5571 MCD5-0021B-T7-G1X-20-CV2
MCD5-0037B 175G5549 MCD5-0037B-T7-G1X-20-CV1 175G5572 MCD5-0037B-T7-G1X-20-CV2
MCD5-0043B 175G5550 MCD5-0043B-T7-G1X-20-CV1 175G5573 MCD5-0043B-T7-G1X-20-CV2
MCD5-0053B 175G5551 MCD5-0053B-T7-G1X-20-CV1 175G5574 MCD5-0053B-T7-G1X-20-CV2
MCD5-0068B 175G5552 MCD5-0068B-T7-G1X-20-CV1 175G5575 MCD5-0068B-T7-G1X-20-CV2
MCD5-0084B 175G5553 MCD5-0084B-T7-G1X-20-CV1 175G5576 MCD5-0084B-T7-G1X-20-CV2
MCD5-0089B 175G5554 MCD5-0089B-T7-G1X-20-CV1 175G5577 MCD5-0089B-T7-G1X-20-CV2
MCD5-0105B 175G5555 MCD5-0105B-T7-G1X-20-CV1 175G5578 MCD5-0105B-T7-G1X-20-CV2
MCD5-0131B 175G5556 MCD5-0131B-T7-G2X-00-CV1 175G5579 MCD5-0131B-T7-G2X-00-CV2
MCD5-0141B 175G5557 MCD5-0141B-T7-G2X-00-CV1 175G5580 MCD5-0141B-T7-G2X-00-CV2
MCD5-0195B 175G5558 MCD5-0195B-T7-G2X-00-CV1 175G5581 MCD5-0195B-T7-G2X-00-CV2
MCD5-0215B 175G5559 MCD5-0215B-T7-G2X-00-CV1 175G5582 MCD5-0215B-T7-G2X-00-CV2
MCD5-0245B 134N9346 MCD5-0245B-T7-G3X-00-CV1 134N9347 MCD5-0245B-T7-G3X-00-CV2
MCD5-0331B 134N9350 MCD5-0331B-T7-G3X-00-CV1 134N9351 MCD5-0331B-T7-G3X-00-CV2
MCD5-0396B 134N9354 MCD5-0396B-T7-G3X-00-CV1 134N9355 MCD5-0396B-T7-G3X-00-CV2
MCD5-0469B 134N9358 MCD5-0469B-T7-G4X-00-CV1 134N9359 MCD5-0469B-T7-G4X-00-CV2
MCD5-0525B 134N9362 MCD5-0525B-T7-G4X-00-CV1 134N9363 MCD5-0525B-T7-G4X-00-CV2
MCD5-0632B 134N9366 MCD5-0632B-T7-G4X-00-CV1 134N9367 MCD5-0632B-T7-G4X-00-CV2
MCD5-0744B 134N9370 MCD5-0744B-T7-G4X-00-CV1 134N9371 MCD5-0744B-T7-G4X-00-CV2
MCD5-0826B 134N9374 MCD5-0826B-T7-G4X-00-CV1 134N9375 MCD5-0826B-T7-G4X-00-CV2
MCD5-0961B 134N9378 MCD5-0961B-T7-G4X-00-CV1 134N9379 MCD5-0961B-T7-G4X-00-CV2
MCD5-0360C 175G5561 MCD5-0360C-T7-G4X-00-CV1 175G5584 MCD5-0360C-T7-G4X-00-CV2
MCD5-0380C 175G5562 MCD5-0380C-T7-G4X-00-CV1 175G5585 MCD5-0380C-T7-G4X-00-CV2
MCD5-0428C 175G5563 MCD5-0428C-T7-G4X-00-CV1 175G5586 MCD5-0428C-T7-G4X-00-CV2
MCD5-0595C 175G5564 MCD5-0595C-T7-G4X-00-CV1 175G5587 MCD5-0595C-T7-G4X-00-CV2
MCD5-0619C 175G5565 MCD5-0619C-T7-G4X-00-CV1 175G5588 MCD5-0619C-T7-G4X-00-CV2
MCD5-0790C 175G5566 MCD5-0790C-T7-G4X-00-CV1 175G5589 MCD5-0790C-T7-G4X-00-CV2
MCD5-0927C 175G5567 MCD5-0927C-T7-G4X-00-CV1 175G5590 MCD5-0927C-T7-G4X-00-CV2
MCD5-1200C 175G5568 MCD5-1200C-T7-G5X-00-CV1 175G5591 MCD5-1200C-T7-G5X-00-CV2
MCD5-1410C 175G5569 MCD5-1410C-T7-G5X-00-CV1 175G5592 MCD5-1410C-T7-G5X-00-CV2
MCD5-1600C 175G5570 MCD5-1600C-T7-G5X-00-CV1 175G5593 MCD5-1600C-T7-G5X-00-CV2
d'ordine Codice identicativo
CV1, 24 V CA/V CC CV2, 110–120 o 220–240 V CA
Numero
d'ordine Codice identicativo
1 1
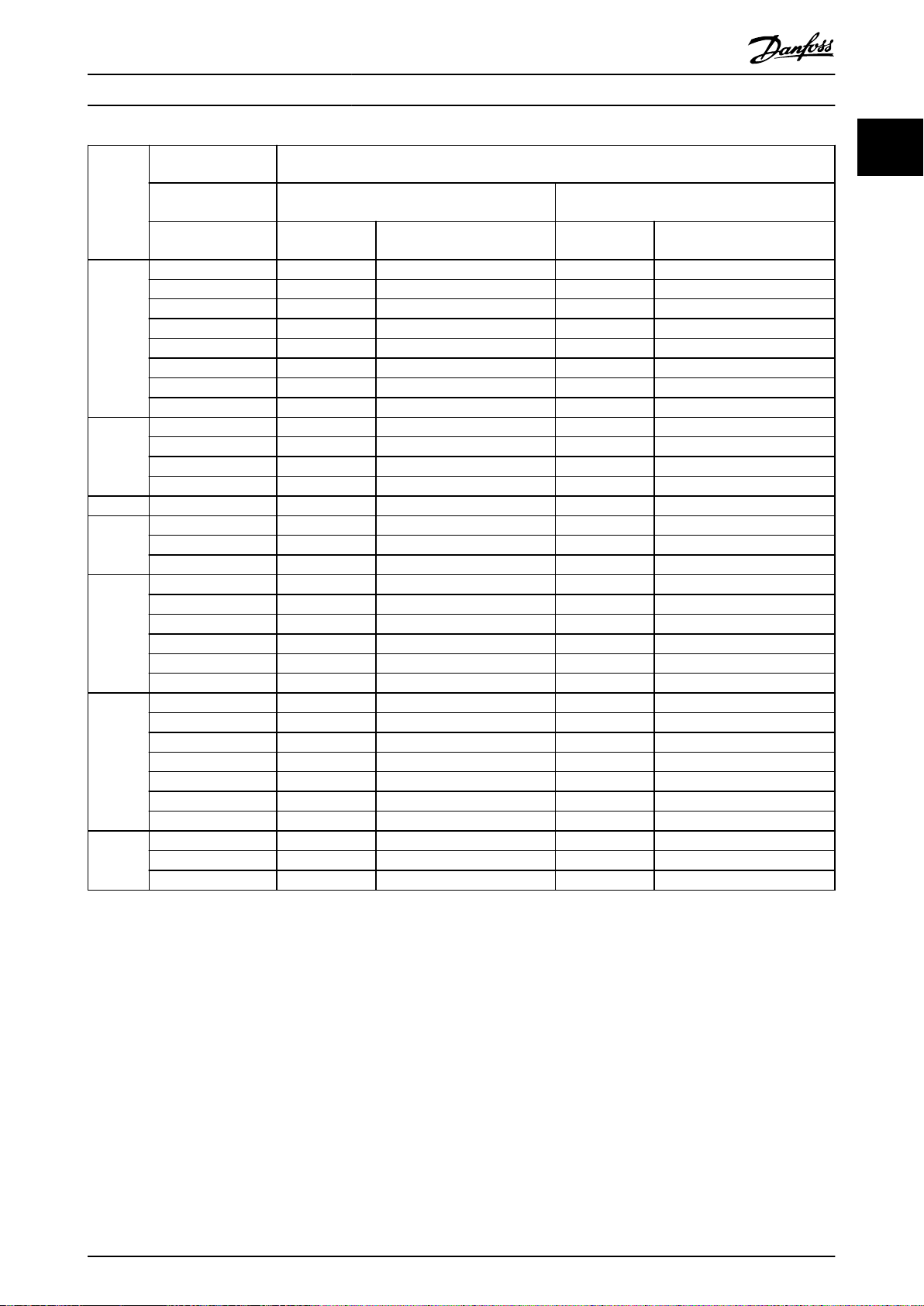
Tabella 1.3 Numeri d'ordine, T7, 380–690 V CA
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 9
Page 14
Sicurezza
VLT® Soft Starter MCD 500
2 Sicurezza
22
2.1 Sicurezza
Nella presente guida vengono usati i seguenti simboli:
AVVISO
Indica una situazione potenzialmente rischiosa che
potrebbe causare morte o lesioni gravi.
ATTENZIONE
Indica una situazione potenzialmente rischiosa che
potrebbe causare lesioni leggere o moderate. Può anche
essere usato per mettere in guardia da pratiche non
sicure.
AVVISO!
Indica informazioni importanti, incluse situazioni che
possono causare danni alle apparecchiature o alla
proprietà.
2.1.1 Personale qualicato
Il trasporto, l'immagazzinamento, l'installazione, l'uso e la
manutenzione eettuati in modo corretto e adabile sono
essenziali per un funzionamento senza problemi e sicuro
dell'avviatore statico. Solo il personale qualicato è
autorizzato a installare o a far funzionare questa apparecchiatura.
Per personale qualicato si intendono i dipendenti adeguatamente formati, autorizzati a installare, mettere in
funzione ed eettuare la manutenzione su apparecchiature,
sistemi e circuiti in conformità alle leggi e ai regolamenti
pertinenti. Inoltre, il personale deve avere dimestichezza
con tutte le istruzioni e le misure di sicurezza descritte in
questo manuale.
AVVISO
PERICOLO SCOSSE ELETTRICHE
Se collegato alla tensione di rete, VLT® Soft Starter MCD
500 è soggetto a tensioni pericolose. L’installazione
elettrica deve essere eseguita soltanto da un elettricista
qualicato. Un'installazione errata del motore o dell'avviatore statico può causare danni alle apparecchiature,
lesioni gravi o morte. Osservare le istruzioni fornite in
questo manuale e le norme locali vigenti in materia di
sicurezza elettrica.
Modelli MCD5-0360C ~ MCD5-1600C:
Tenere presente che la barra collettrice e il dissipatore
sono sotto tensione ogniqualvolta l'unità è collegata alla
tensione di rete (anche quando l'avviatore statico è
scattato o in attesa di un comando).
AVVISO
MESSA A TERRA CORRETTA
Scollegare l'avviatore statico dalla tensione di rete prima
di eseguire lavori di riparazione.
È responsabilità della persona che installa l'avviatore
statico di assicurare una messa a terra corretta e una
protezione del circuito di derivazione in conformità alle
norme locali vigenti in materia sicurezza elettrica.
Non collegare i condensatori per correzione del fattore di
potenza all'uscita del VLT® Soft Starter MCD 500. La
correzione del fattore di potenza statica, se usata, deve
essere collegata sul lato di alimentazione dell'avviatore
statico.
AVVISO
AVVIAMENTO IMMEDIATO
In modalità Auto-on, mentre l'avviatore statico è
collegato alla rete, il motore può essere controllato a
distanza (mediante gli ingressi remoti).
MCD5-0021B ~ MCD5-0961B:
Il trasporto, urti meccanici o manipolazioni brusche
possono far sì che il contattore di bypass commuti allo
stato di accensione.
Per impedire che il motore si avvii immediatamente al
momento della prima messa in funzione o del primo
utilizzo dopo il trasporto:
assicurarsi sempre che l'alimentazione di
•
controllo venga applicata prima dell'alimentazione.
L'applicazione dell'alimentazione di controllo
•
prima della corrente di alimentazione assicura
che lo stato del contattore sia inizializzato.
10 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 15
Sicurezza Guida operativa
AVVISO
AVVIO INVOLONTARIO
Quando l'avviatore statico è collegato alla rete CA, all'alimentazione CC o alla condivisione del carico, il motore
può avviarsi in qualsiasi momento. L'avvio involontario
durante le operazioni di programmazione o i lavori di
manutenzione o riparazione può causare morte, lesioni
gravi o danni alle cose. Il motore può essere avviato
tramite un interruttore esterno, un comando bus di
campo, un segnale di riferimento in ingresso dall'LCP o
dall'LOP, da remoto utilizzando il software PC MCD
oppure a seguito del ripristino di una condizione di
guasto.
Per prevenire un avviamento involontario del motore,
procedere come segue:
Premere [O]/[Reset] sull'LCP prima di
•
programmare i parametri.
Scollegare l'avviatore statico dalla rete.
•
Cablare e montare completamente l'avviatore
•
statico, il motore e qualsiasi apparecchiatura
azionata prima di collegare l'avviatore statico
alla rete CA, all'alimentazione CC o con la
condivisione del carico.
AVVISO!
Prima della modica delle impostazioni parametri salvare
il parametro attuale in un le usando il software PC MCD
o la funzione Salva gruppo utente.
AVVISO!
Utilizzare la funzione di avviamento automatico con
cautela. Leggere tutte le note relative all'avviamento
automatico prima dell'utilizzo.
Gli esempi e gli schemi presentati nel manuale hanno
scopi meramente illustrativi. Le informazioni contenute in
questo manuale possono essere modicate in qualsiasi
momento, anche senza preavviso. Non ci assumiamo mai la
responsabilità per danni diretti, indiretti o consequenziali
risultanti dall'uso o dall'applicazione di questa apparecchiatura.
2 2
AVVISO
SICUREZZA DEL PERSONALE
L'avviatore statico non è un dispositivo di sicurezza e
non assicura un isolamento elettrico o un disinserimento
dall'alimentazione.
Se è necessario un isolamento, l'avviatore
•
statico deve essere installato con un contattore
principale.
Non fare adamento sulle funzioni di
•
avviamento e di arresto per garantire la
sicurezza del personale. I guasti che si vericano
nell'alimentazione di rete, nel collegamento del
motore o nell'elettronica dell'avviatore statico
possono provocare avviamenti o arresti
accidentali del motore.
Se si vericano guasti nell'elettronica dell'av-
•
viatore statico, è possibile che un motore si
avvii. Anche un guasto temporaneo nella rete di
alimentazione o la perdita di collegamento del
motore possono provocare l'avviamento del
motore arrestato.
Per garantire la sicurezza del personale e dell'apparecchiatura, controllare il dispositivo di isolamento
attraverso un sistema di sicurezza esterno.
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 11
Page 16
177HA427.10
1
2
3
4
Installazione
VLT® Soft Starter MCD 500
3 Installazione
3.1 Installazione meccanica
33
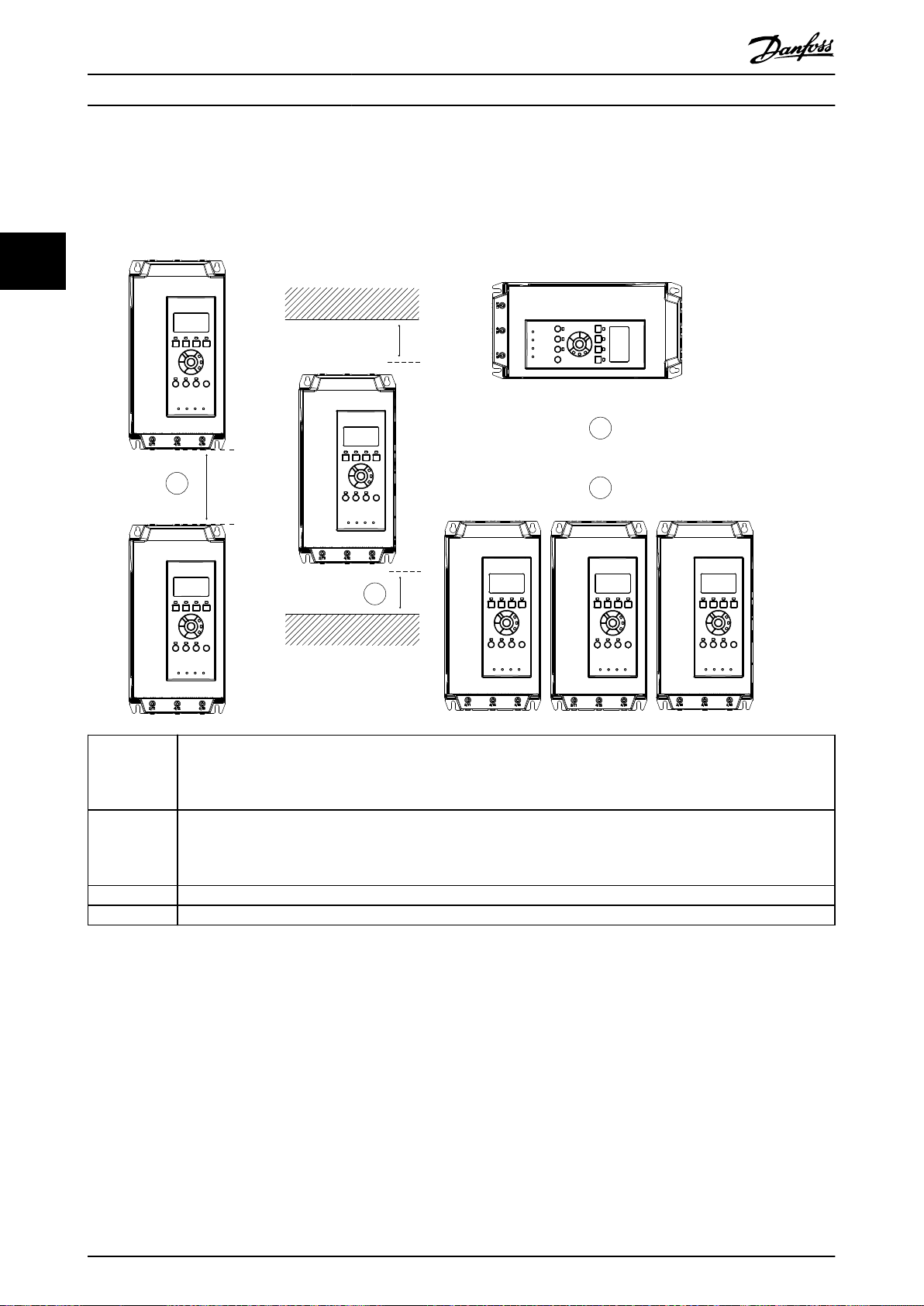
1 Da MCD5-0021B a MCD5-0215B: lasciare uno spazio di 100 mm (3,94 piedi) tra gli avviatori statici.
Da MCD5-0245B a MCD5-0961B: lasciare uno spazio di 200 mm (7,88 piedi) tra gli avviatori statici.
MCD5-0245C: lasciare uno spazio di 100 mm (3,94 piedi) tra gli avviatori statici.
Da MCD5-0360C a MCD5-1600C: lasciare uno spazio di 200 mm (7,88 piedi) tra gli avviatori statici.
2 Da MCD5-0021B a MCD5-0215B: lasciare uno spazio di 50 mm (1,97 piedi) tra l'avviatore statico e le superci solide.
Da MCD5-0245B a MCD5-0961B: lasciare uno spazio di 200 mm (7,88 piedi) tra gli avviatori statici.
MCD5-0245C: lasciare 100 mm (3,94 piedi) tra l'avviatore statico e le superci solide.
Da MCD5-0360C a MCD5-1600C: lasciare 200 mm (7,88 piedi) tra l'avviatore statico e le superci solide.
3 È possibile montare l'avviatore statico sul lato. Ridurre la corrente nominale dell'avviatore statico del 15%.
4 Senza i moduli di comunicazione, gli avviatori statici possono essere montati anco a anco senza spazio libero.
Disegno 3.1 Spazi intermedi e valori di declassamento in occasione dell'installazione
12 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 17
A
B
D
C
E
A
B
C
D
E
177HA514.10
Installazione Guida operativa
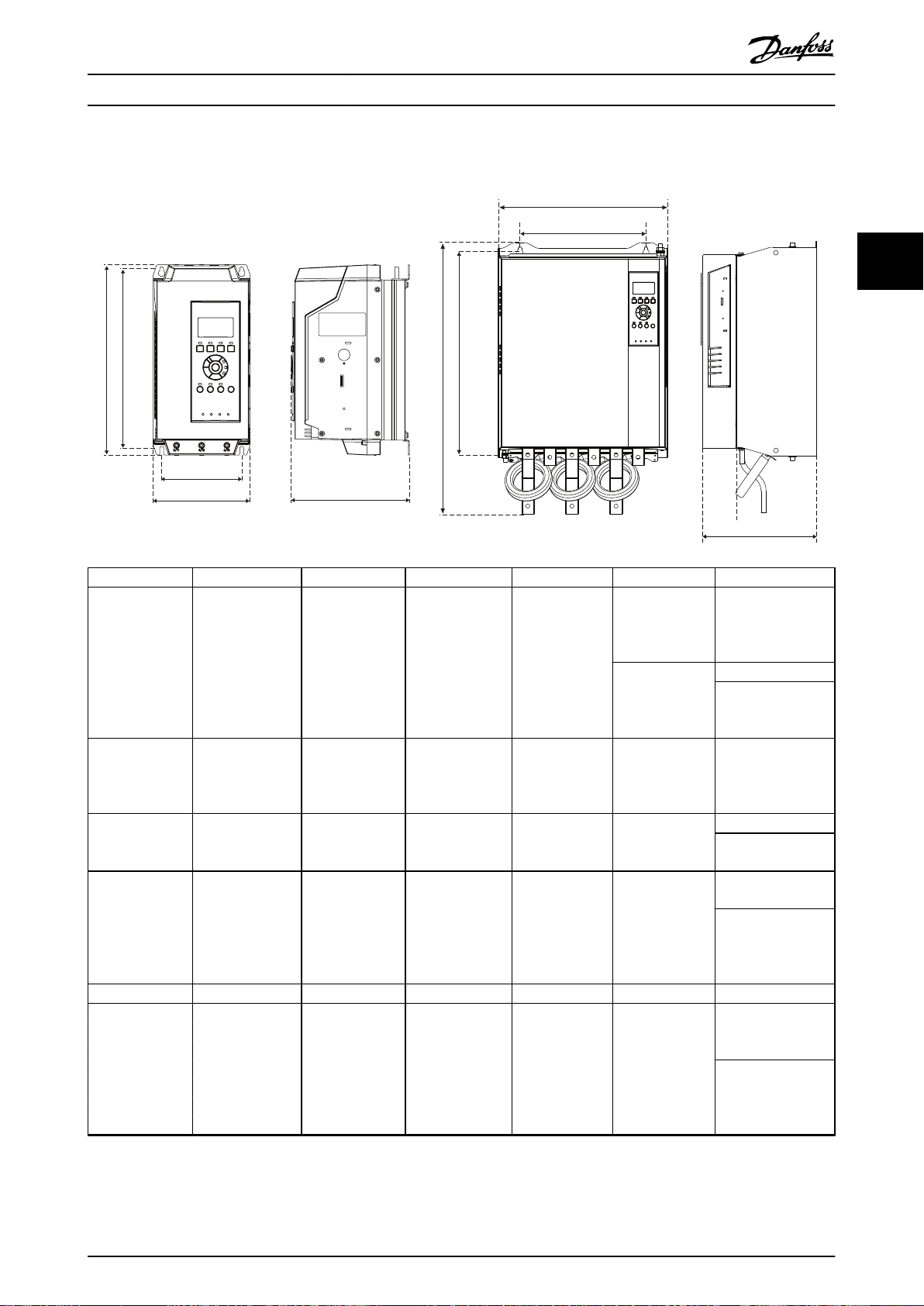
3.2 Dimensioni e peso
3 3
Modello A [mm] B [mm] C [mm] D [mm] E [mm] Peso [kg]
MCD5-0021B
MCD5-0037B
MCD5-0043B
MCD5-0053B
MCD5-0068B
MCD5-0084B
MCD5-0089B
MCD5-0105B
MCD5-0131B
MCD5-0141B
MCD5-0195B
MCD5-0215B
MCD5-0245B
MCD5-0331B
MCD5-0396B
MCD5-0469B
MCD5-0525B
MCD5-0632B
MCD5-0744B
MCD5-0826B
MCD5-0961B
MCD5-0245C 460 400 390 320 279 23,9
MCD5-0360C
MCD5-0380C
MCD5-0428C
MCD5-0595C
MCD5-0619C
MCD5-0790C
MCD5-0927C
295 278 150 124
438 380 275 248 250 14,9
440 392 424 376 296
640 600 433 320 295
689 522 430 320 300
183 4,2
4,5
213
4,9
26
30,2
49,5
60,0
35
45
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 13
Page 18
Installazione
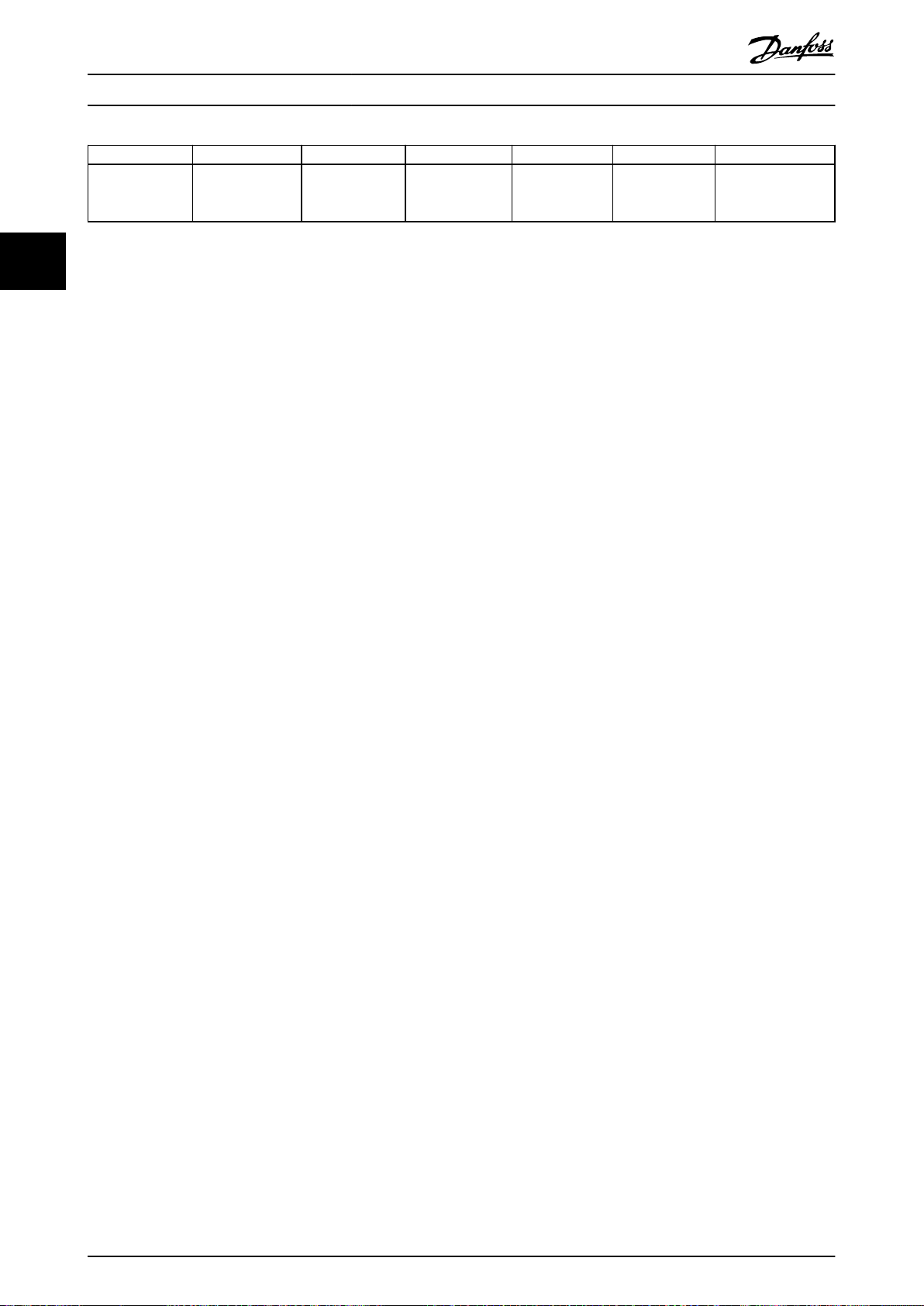
Modello A [mm] B [mm] C [mm] D [mm] E [mm] Peso [kg]
MCD5-1200C
856 727 585 500 364 120MCD5-1410C
MCD5-1600C
VLT® Soft Starter MCD 500
33
Disegno 3.2 Dimensioni e peso
14 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 19
177HA503.10
13
07
08 11
15 17 18 25 05 06
14 22 24 33 3421
A4 A5 A6
A
Relè
prog. A
Relè
prog B
Relè
prog C
Uscita
analogica
Ingresso
prog.
Uscita 24 VCC
Avvia-
mento
Arresto
Ripristino
Termistore
motore
Tensione di comando
(in funzione del modello)
1 7 7 H A 5 0 4 . 1 0
S t a r t / s t o p
R e s e t
S t a r t
S t o p
R e s e t
S t a r t
S t o p
R e s e t
1 5
1 6
1 7
1 8
2 5
1 8
1 5
1 6
1 7
1 8
2 5
1 8
1 5
1 6
1 7
1 8
2 5
1 8
2
3
1
Installazione elettrica Guida operativa
4 Installazione elettrica
4.1 Cavi di controllo
4.1.1 Modi di controllare l'avviatore statico
Il VLT® Soft Starter MCD 500 può essere controllato in 3
modi:
Premere i tasti sull'LCP.
•
Tramite ingressi remoti.
•
Tramite un collegamento di comunicazione
•
seriale.
L'avviatore statico risponde sempre a un comando di
avviamento o di arresto locale (mediante i tasti [Hand On]
e [O] sull'LCP). Premendo il tasto [Auto On] viene
selezionato il controllo remoto (l'avviatore statico accetta
comandi dagli ingressi remoti). Nella modalità remota, il
LED Auto-on è illuminato. Nella modalità Hand-on, il
relativo LED è acceso se l'avviatore statico si avvia o è in
funzione. Il LED O è acceso se l'avviatore statico viene
arrestato o si arresta.
4.1.2 Morsetti di controllo
I morsetti di controllo utilizzano morsettiere plug-in da 2,5
mm2 (14 AWG). Modelli diversi richiedono una tensione di
comando a morsetti diversi:
CV1 (24 V CA/V CC): A5, A6.
•
CV2 (110–120 V CA): A5, A6.
•
CV2 (220–240 V CA): A4, A6.
•
Al ne di soddisfare i requisiti SELV, tutte le connessioni
con i morsetti di controllo devono essere PELV (ad esempio
il termistore deve essere rinforzato/a doppio isolamento
dal motore).
AVVISO!
La SELV ore protezione mediante una bassissima
tensione. La protezione contro le scosse elettriche è
assicurata quando l'alimentazione elettrica è del tipo
SELV e l'installazione segue le norme locali/nazionali
relative alle alimentazioni SELV.
AVVISO!
L'isolamento galvanico (garantito) si ottiene
ottemperando ai requisiti relativi a un isolamento
superiore e garantendo le corrispondenti distanze di
creapage (distanza minima sulla supercie del materiale
isolante fra due parti conduttrici)/clearance (la distanza
minima in aria per la creazione potenziale di un arco tra
le due parti conduttive). Tali requisiti sono descritti nella
norma IEC 61140.
I componenti che costituiscono l'isolamento elettrico
sono inoltre conformi ai requisiti relativi all'isolamento di
classe superiore e al test pertinente descritto in IEC
61140.
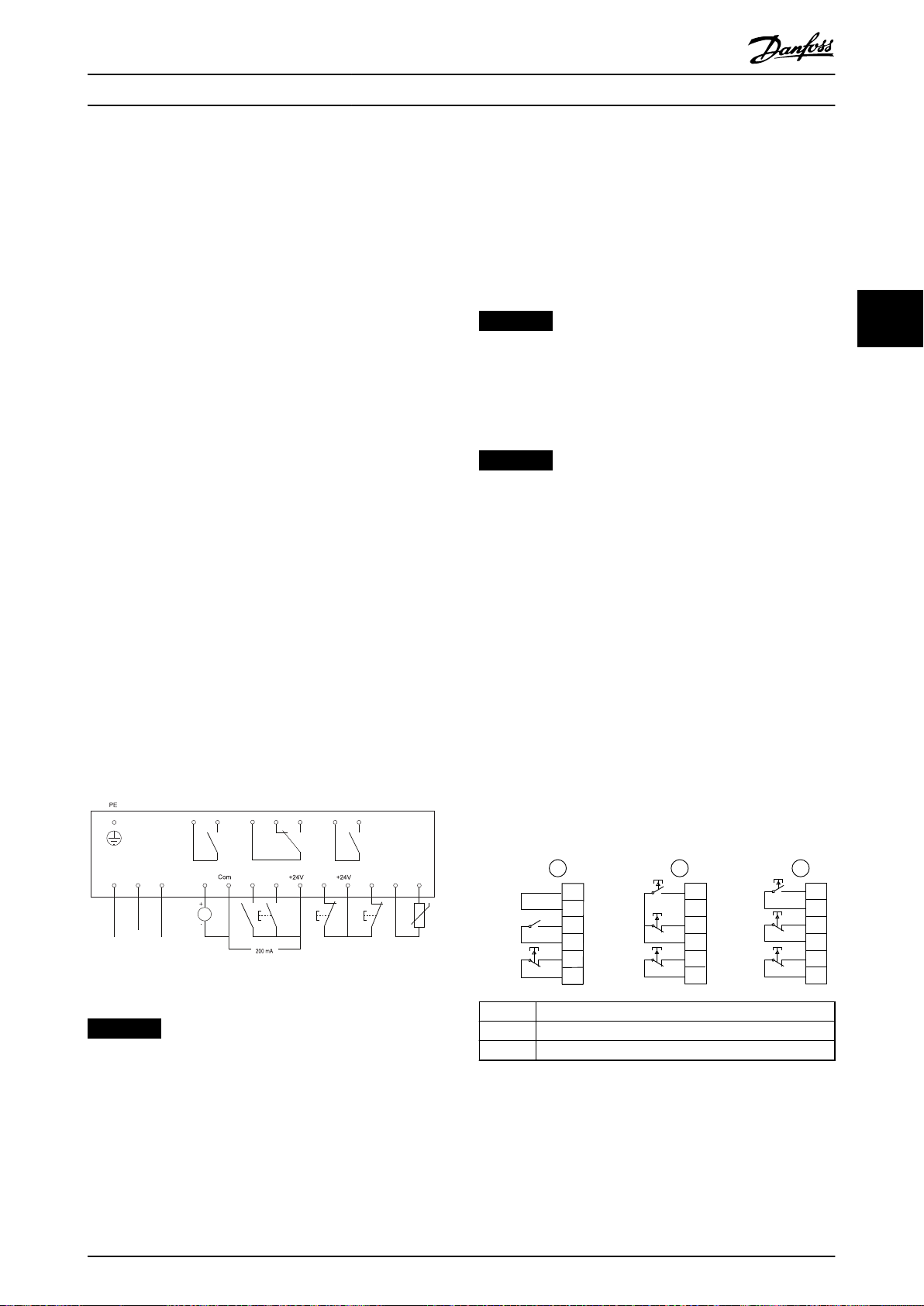
4.1.3 Ingressi remoti
L'avviatore statico possiede 3 ingressi ssi per il controllo
remoto. Controllare questi ingressi tramite contatti
predisposti per il funzionamento a bassa tensione e bassa
corrente (con doratura o simile).
4 4
Disegno 4.1 Collegamento ai morsetti di controllo
1 Controllo a due li
AVVISO!
Non cortocircuitare i morsetti 05 e 06 senza usare un
2 Controllo a tre li
3 Controllo a quattro li
termistore.
Disegno 4.2 Controllo a due, tre e quattro li
Tutti i morsetti di controllo e i morsetti relè sono conformi
allo standard SELV (Safety Extra Low Voltage). Questa
protezione non si applica al collegamento a triangolo a
terra sopra i 400 V.
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 15
L'ingresso di ripristino può essere normalmente aperto o
normalmente chiuso. Per selezionare la congurazione,
usare il parametro 3-8 Remote Reset Logic (Logica ripristino
remoto).
Page 20
Installazione elettrica
VLT® Soft Starter MCD 500
AVVISO
morsetti, uno sul lato di lato di ingresso (lato
superiore) e uno sul lato di uscita (lato inferiore).
PERICOLO SCOSSE ELETTRICHE
Non applicare tensione ai morsetti di ingresso di
controllo. Questi morsetti sono ingressi attivi 24 V CC e
devono essere controllati con contatti senza potenziale.
Separare i cavi verso gli ingressi di comando
•
dalla tensione di rete e dal cablaggio del
motore.
44
4.1.6 Terminazioni di potenza
AVVISO!
Per la sicurezza del personale, i morsetti di potenza sui
modelli no a MCD5-0105B sono protetti da linguette a
scatto. Quando si utilizzano cavi di grandi dimensioni,
può essere necessario staccare queste linguette.
4.1.4 Comunicazione seriale
AVVISO!
Il comando tramite la rete di comunicazione seriale è
sempre abilitato nella modalità di Hand-on e può essere
abilitato o disabilitato nella modalità di controllo remoto
(vedere il parametro 3-2 Comms in Remote, Comunicazioni
da remoto). Il comando tramite la rete di comunicazione
seriale richiede un modulo di comunicazione opzionale.
4.1.5 Morsetto di terra
I morsetti di terra si trovano sul retro dell'avviatore statico.
Alcune unità utilizzano barre collettrici di alluminio.
Quando si collegano le terminazioni di potenza, pulire
completamente l'area di contatto (utilizzando uno
smeriglio o una spazzola di acciaio inox) e usare un
mastice per giunzioni appropriato per evitare la
corrosione.
Utilizzare soltanto conduttori di rame a lo unico o a trefoli
certicati per un utilizzo a 75 °C (167°F) o a temperature
più elevate.
I modelli da MCD5-0021B a MCD5-0105B
•
dispongono di un morsetto sul lato di ingresso
(lato superiore).
I modelli da MCD5-0131B a MCD5-0961B e da
•
MCD5-0245C a MCD5-1600C dispongono di due
16 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 21
177HA646.10
177HA647.10
177HA648.10
177HA649.10
5 mm
15 mm
28 mm
11 mm
(M10)
177HA643.10
6 mm
15 mm
28 mm
11 mm
(M10)
177HA644.10
13 mm
12 mm
32 mm
11 mm
(M10)
177HA645.10
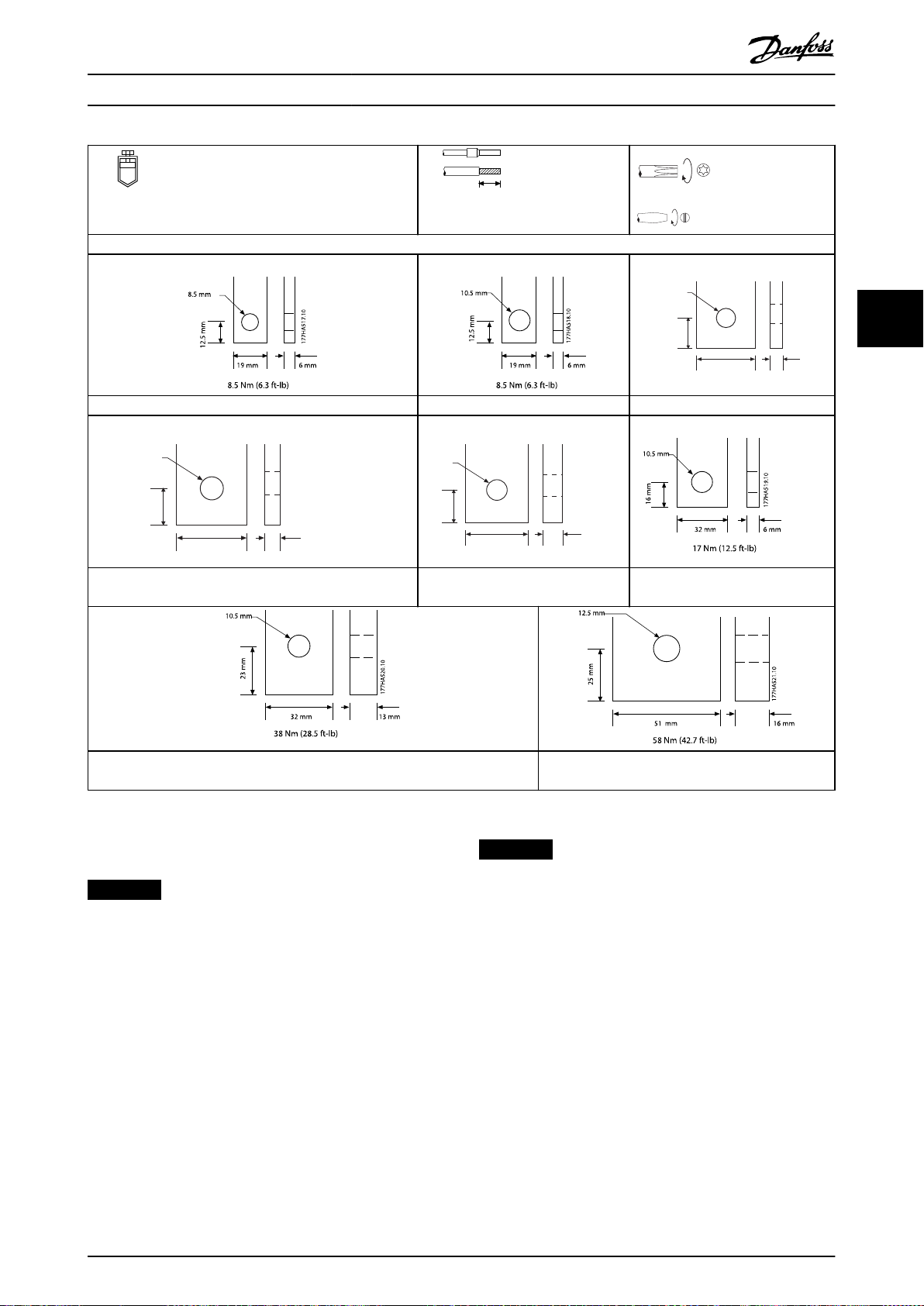
Installazione elettrica Guida operativa
Dimensione cavo: 6–50 mm2 (AWG 10-1/0)
Coppia: 4 Nm (35,4 pollici-lb)
MCD5-0021B - MCD5-0105B
38 Nm (336,3 pollici-lb)
MCD5-0131B MCD5-0141B - MCD5-0215B MCD5-0245B
38 Nm (336,3 pollici-lb) 38 Nm (336 pollici-lb)
MCD5-0331B - MCD5-0396B MCD5-0469B - MCD5-0961B MCD5-0245C
14 mm (0,55 in)
Torx T20 x 150
Piatta 7 mm x 150
4 4
MCD5-0360C - MCD5-0927C MCD5-1200C - MCD5-1600C
Tabella 4.1 Misurazioni e coppie per terminazioni di potenza
4.1.7 Kit di protezione salvadita
AVVISO!
Durante l'installazione degli avviatori statici IP00
(MCB5-131B e superiori) le protezioni salvadita sono
obbligatorie per la sicurezza del personale. Le protezioni
salvadita si montano sui morsetti dell'avviatore statico
per evitare il contatto accidentale con i morsetti in
tensione. Se installate correttamente, le protezioni
salvadita forniscono una protezione IP20.
Da MCD5-0131B a MCD5-0215B: 175G5662.
•
Da MCD5-0245B a MCD5-0396B: 175G5730.
•
Da MCD5-0469B a MCD5-0961B: 175G5731.
•
MCD5-245C: 175G5663.
•
Da MCD5-0360C a MCD5-0927C: 175G5664.
•
Da MCD5-1200C a MCD5-1600C: 175G5665.
•
AVVISO!
Per essere conformi alle norme UL, i modelli da
MCD5-0131B a MCD5-0396B devono essere utilizzati con
protezioni salvadita.
4.2 Congurazioni dell'ingresso e dell'uscita
di potenza
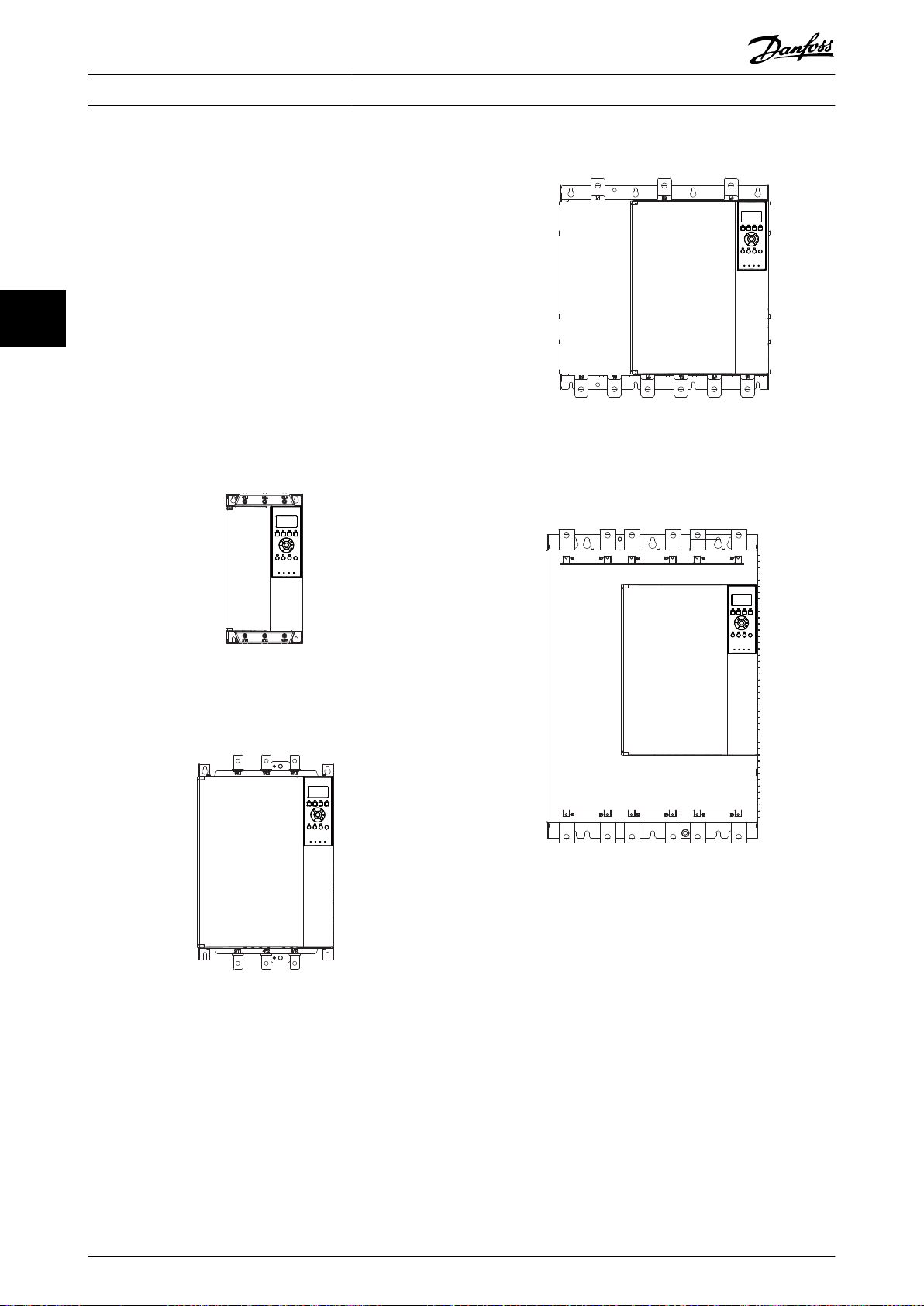
4.2.1 Modelli con bypass interno (da
MCD5-0021B a MCD5-0961B)
I modelli da MCD5-0021B a MCD5-0215B possiedono
ingressi di potenza sul lato superiore dell'unità e uscite sul
lato inferiore dell'unità.
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 17
Page 22
1/L1, 3/L2, 5/L3
2/T1, 4/T2, 6/T3
177HA686.10
1/L1 3/L2 5/L3
2/T1 4/T2 6/T3
177HA687.10
2/T1 4/T2 6/T3
1/L1 3/L2 5/L3
1/L1 3/L2 5/L3
177HA688.10
20.0
2/T1 4/T2 6/T3
1/L1 3/L2 5/L3
2/T1 4/T2 6/T3
1/L1 3/L2 5/L3
177HA650.11
Installazione elettrica
I modelli con bypass interno da MCD5-0245B a
MCD5-0396B possiedono barre collettrici di uscita sul lato
inferiore dell'unità e barre collettrici di ingresso sia sul lato
superiore che su quello inferiore. È possibile collegare
l'alimentazione CA:
Ingresso superiore/uscita inferiore.
•
Ingresso inferiore/uscita inferiore
•
I modelli con bypass interno da MCD5-0469B a
44
MCD5-0961B possiedono barre collettrici di ingresso e di
uscita sul lato superiore e inferiore dell'unità. È possibile
collegare l'alimentazione CA:
Ingresso superiore/uscita inferiore.
•
Ingresso superiore/uscita superiore.
•
Ingresso inferiore/uscita inferiore.
•
Ingresso inferiore/uscita superiore,
•
VLT® Soft Starter MCD 500
Disegno 4.5 Da MCD5-0245B a MCD5-0396B, 245–396 A
Disegno 4.3 Da MCD5-0021B a MCD5-0105B, 21–105 A
Disegno 4.4 Da MCD5-0131B a MCD5-0215B, 131–215 A
Disegno 4.6 Da MCD5-0469B a MCD5-0961B, 469–961 A
4.2.2 MCD5-0245C
L'MCD5-0245C possiede morsetti di bypass dedicati sul
fondo dell'unità. I morsetti di bypass sono:
T1B.
•
T2B.
•
T3B.
•
18 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 23
177HA651.10
1/L1 3/L2 5/L3
T1B T2B T3B
2/T1 4/T2 6/T3
(L1B L2B L3B)
1/L1 3/L2 5/L3
2/T1 4/T2 6/T3
1/L1 3/L2 5/L3
(L1B L2B L3B)
2/T1 4/T2 6/T3
(L1B L2B L3B)
1/L1 3/L2 5/L3
2/T1 4/T2 6/T3
1/L1 3/L2 5/L3
(L1B L2B L3B)
2/T1 4/T2 6/T3
177HA652.10
Installazione elettrica Guida operativa
Disegno 4.7 Morsetti di bypass sull'MCD5-0245C, 245 A
4.2.3 MCD5-0360C - MCD5-1600C
I modelli da MCD5-0360C a MCD5-1600C possiedono
morsetti di bypass dedicati sulle barre collettrici di
ingresso. I morsetti di bypass sono:
L1B.
•
L2B.
•
L3B.
•
Le barre collettrici sui modelli senza bypass da
MCD5-0360C a MCD5-1600C possono essere regolate per
l'ingresso e l'uscita superiori e inferiori. Vedere
capitolo 12 Procedura di regolazione della barra collettrice (da
MCD5-0360C a MCD5-1600C) per istruzioni passo dopo
passo. Gli avviatori statici sono costruiti con ingresso
superiore/uscita inferiore.
AVVISO!
Perché i modelli da MCD5-0360C a MCD5-1600C siano
conformi a UL, montarli con ingresso superiore/uscita
inferiore oppure con uscita superiore/ingresso inferiore.
Vedere la capitolo 11.1 Installazione conforme UL per
maggiori informazioni.
4.3 Collegamento del motore
I VLT® Soft Starter MCD 500 possono essere collegati al
motore in linea o a triangolo interno (denominati anche
collegamenti a tre e a sei li). Quando viene eettuato un
collegamento a triangolo interno, immettere la corrente a
pieno carico del motore (FLC) come valore del parametro
1-1 Motor Full Load Current (Corrente motore a pieno carico).
L'MCD 500 calcola automaticamente la corrente per la
connessione a triangolo interno sulla base di questi dati. Il
parametro 15-7 Motor Connection (Collegamento del motore)
è impostato per default su Auto Detect (Rilevamento
automatico) e può essere impostato per forzare l'avviatore
statico a triangolo interno o in linea.
4.3.1 Test dell'impianto
Per scopi di prova è possibile collegare il VLT® Soft Starter
MCD 500 a un piccolo motore. Durante questa prova è
possibile testare le impostazioni di protezione dell'ingresso
di controllo e dell'uscita a relè. Questa modalità di test non
è adatta per testare le prestazioni di avviamento dolce o di
arresto dolce.
La FLC minima del motore di prova è il 2% della FLC
minima dell'avviatore statico (vedere
capitolo 4.5 Impostazioni di corrente minima e massima).
AVVISO!
Quando si testa l'avviatore statico con un motore piccolo,
impostare il parametro 1-1 Motor FLC (FLC motore) al
minino valore consentito.
I modelli con bypass interno non necessitano di un
contattore di bypass esterno.
4 4
Disegno 4.8 Ubicazione dei morsetti di bypass, da
MCD5-0360C a MCD5-1600C, 360–1600 A
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 19
Page 24
177HA430.12
M
3
6/T3
2/T1
5/L3
3/L2
1/L1
13
14
4/T2
E
K1
K1 F1
177HA429.12
6/T3
2/T1
5/L3
3/L2
1/L1
13
14
4/T2
E
K1
K1 F1
M
3
177HA617.11
M
3
F1
6/T3
2/T1
5/L3
3/L2
1/L1
13
14
4/T2
E
K1
K1
T1B
T2B
T3B
K2
34
33
K2
Installazione elettrica
VLT® Soft Starter MCD 500
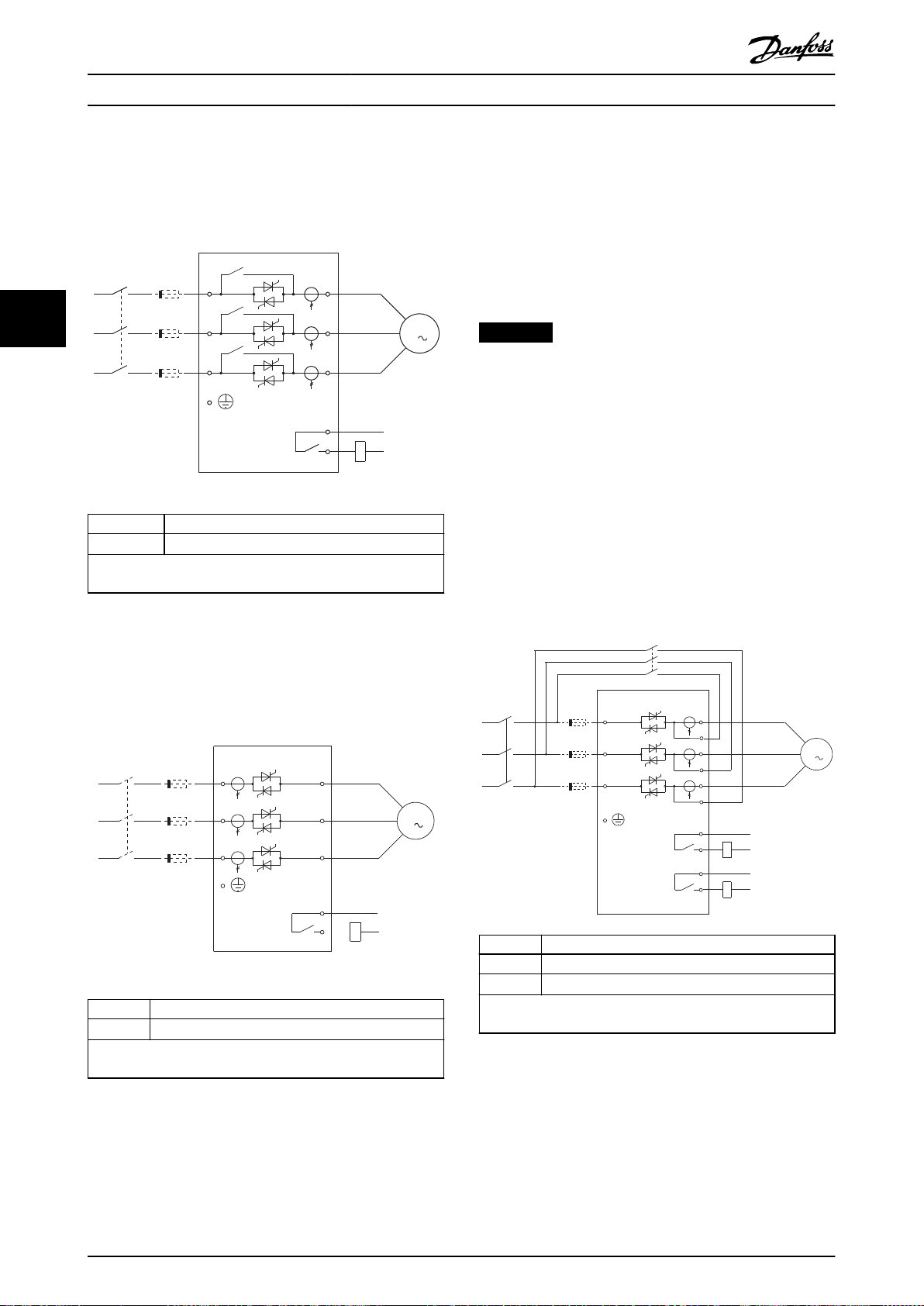
4.3.2 Installazione in linea
4.3.2.1 Con bypass interno
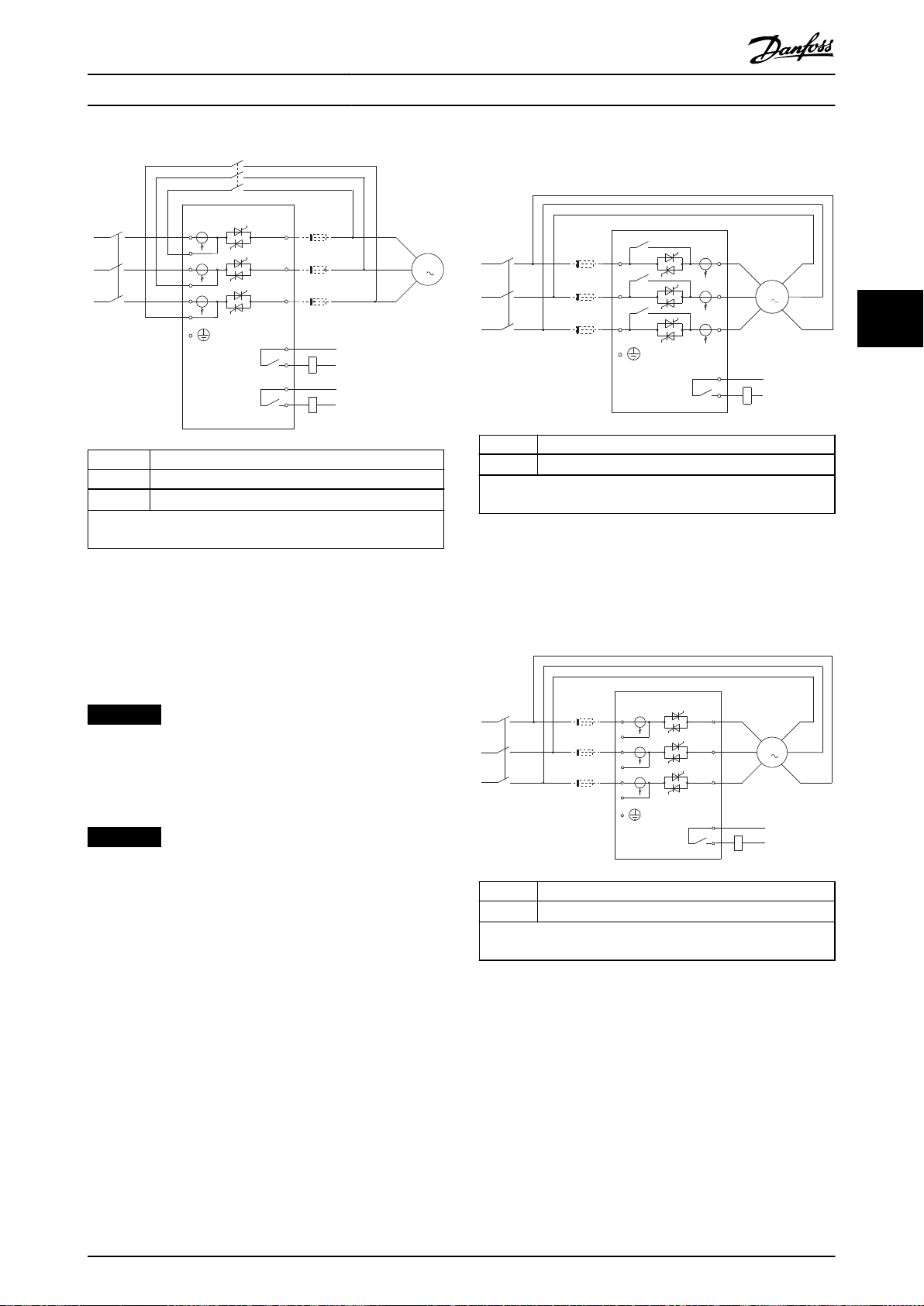
4.3.2.3 Con bypass esterno
I modelli senza bypass dispongono di morsetti di bypass
dedicati che consentono all'avviatore statico di continuare
a fornire funzioni di protezione e di monitoraggio anche
quando il bypass avviene tramite un contattore esterno.
Collegare il contattore di bypass ai morsetti di bypass e
controllarlo con un'uscita programmabile congurata su
Run (Funzionamento) (vedere i parametri da 4-1 no a 4-9).
44
AVVISO!
I morsetti di bypass sul MCD5-0245C sono:
T1B.
•
T2B.
•
T3B.
•
I morsetti di bypass sul MCD5-0360C no al MCD5-1600C
sono:
L1B.
•
K1 Contattore principale (opzionale)
F1
Fusibili a semiconduttori (opzionali)
1)
1) Per mantenere valida la garanzia sugli SCR, utilizzare fusibili a
semiconduttori.
Disegno 4.9 Installazione in linea, con bypass interno
Se necessario, i fusibili possono essere installati sul lato
di ingresso.
L2B.
•
L3B.
•
4.3.2.2 Senza bypass
K1 Contattore principale
K2 Contattore di bypass (esterno)
1)
K1 Contattore principale (opzionale)
F1
Fusibili a semiconduttori (opzionali)
F1
1) Per mantenere valida la garanzia sugli SCR, utilizzare fusibili a
1)
semiconduttori.
Fusibili a semiconduttori (opzionali)
1) Per mantenere valida la garanzia sugli SCR, utilizzare fusibili a
semiconduttori.
Disegno 4.10 Installazione in linea, senza bypass
20 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Disegno 4.11 Installazione in linea, con bypass esterno,
MCD5-0245C
Page 25
177HA431.12
M
3
F1
6/T3
2/T1
5/L3
3/L2
1/L1
13
14
4/T2
E
K1
K1
L1B
L2B
L3B
K2
34
33
K2
6/T
2/T
13
14
4/T
K1
U1(1) U2(4)
V1(2)
V2(5)
W1(3) W2(6)
5/L3
3/L2
1/L1
E
K1 F1
M
3
177HA501.11
177HA500.12
M
3
6/T
2/T
5/L
3/L
1/L
1
1
4/T
K1
K1 F
U1(1 U2(4
V1(2
V2(5
W1( W2(
L2
L1
L3
E
Installazione elettrica Guida operativa
4.3.3.1 Con bypass interno
4 4
K1 Contattore principale
K2 Contattore di bypass (esterno)
F1
Fusibili a semiconduttori (opzionali)
1)
1) Per mantenere valida la garanzia sugli SCR, utilizzare fusibili a
semiconduttori.
Disegno 4.12 Installazione in linea, con bypass esterno, da
MCD5-0360C no a MCD5-1600C
4.3.3 Installazione con connessione a
triangolo interna
AVVISO!
Quando si collega il VLT® Soft Starter MCD 500 con una
congurazione a triangolo interna, installare sempre un
contattore principale o un interruttore con bobina di
sgancio.
AVVISO!
Quando viene eettuato un collegamento a triangolo
interno, immettere la corrente a pieno carico del motore
(FLC) come valore del parametro 1-1 Motor FLC (FLC
motore). L'MCD 500 calcola automaticamente le correnti
per il collegamento a triangolo interno sulla base di
questi dati. Il parametro 15-7 Motor Connection
(Collegamento del motore) è impostato per default su
Auto Detect e può essere impostato per forzare
l'avviatore statico a triangolo interno o in linea.
K1 Contattore principale
F1
Fusibili a semiconduttori (opzionali)
1)
1) Per mantenere valida la garanzia sugli SCR, utilizzare fusibili a
semiconduttori.
Disegno 4.13 Installazione a triangolo interno, con bypass
interno
4.3.3.2 Senza bypass
K1 Contattore principale
F1
Fusibili a semiconduttori (opzionali)
1) Per mantenere valida la garanzia sugli SCR, utilizzare fusibili a
semiconduttori.
Disegno 4.14 Installazione a triangolo interno, senza bypass
1)
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 21
Page 26
177HA618.11
M
3
6/T
2/T
5/L3
3/L2
1/L1
13
14
4/T
E
K1
K1
U1(1) U2(4)
V1(2)
V2(5)
W1(3) W2(6)
T2B
T1B
T3B
K2
34
33
K2
F1
177HA502.12
M
3
6/T
2/T
5/L3
3/L2
1/L1
13
14
4/T
E
K1
K1 F1
U1(1) U2(4)
V1(2)
V2(5)
W1(3) W2(6)
L2B
L1B
L3B
K2
34
33
K2
Installazione elettrica
VLT® Soft Starter MCD 500
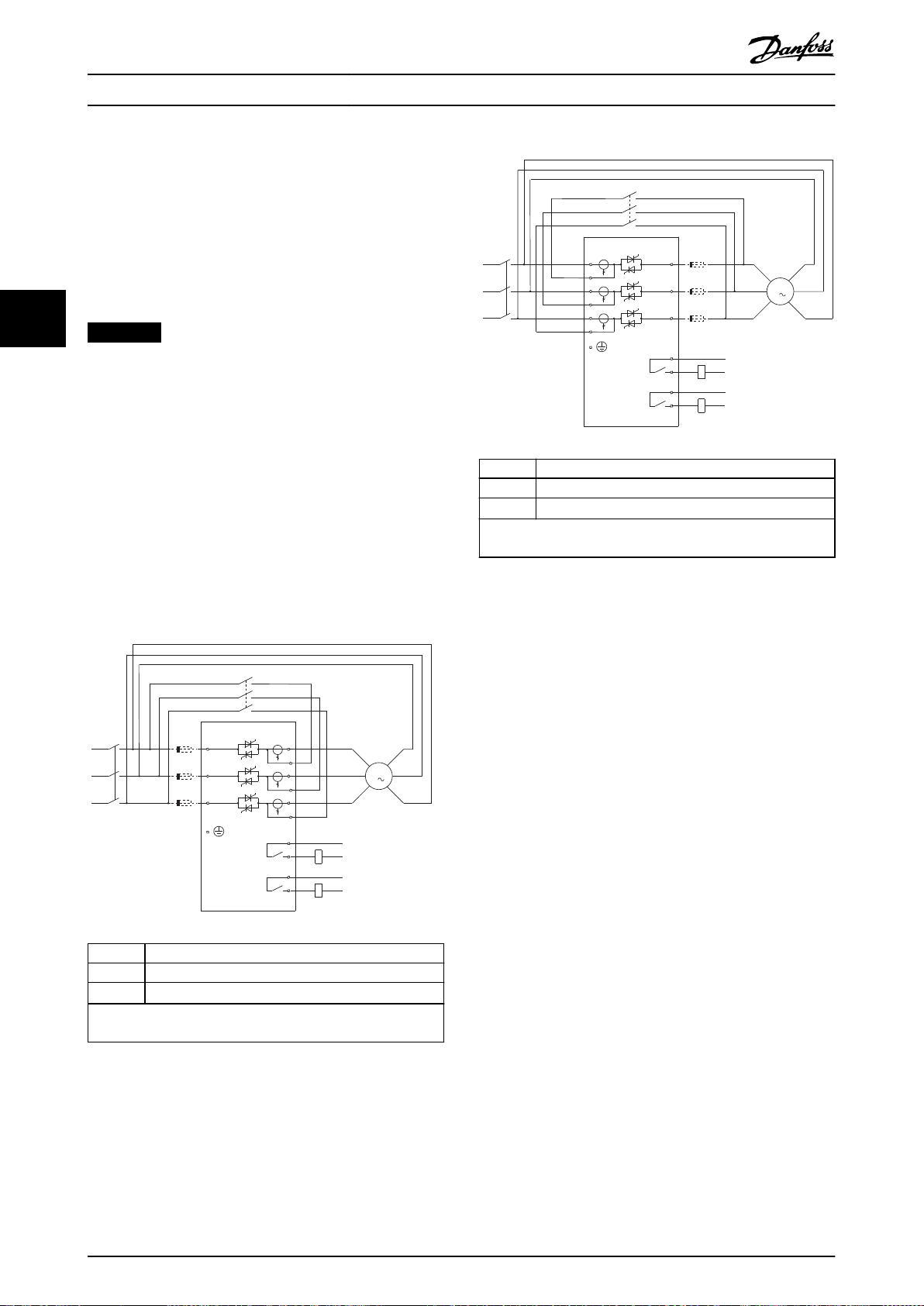
4.3.3.3 Con bypass esterno
I modelli senza bypass dispongono di morsetti di bypass
dedicati che consentono all'avviatore statico di continuare
a fornire funzioni di protezione e di monitoraggio anche
quando il bypass avviene tramite un contattore esterno.
Collegare il contattore di bypass ai morsetti di bypass e
controllarlo con un'uscita programmabile congurata su
Run (Funzionamento) (vedere i parametri da 4-1 no a 4-9).
44
AVVISO!
I morsetti di bypass sul MCD5-0245C sono:
T1B.
•
T2B.
•
T3B.
•
I morsetti di bypass sul MCD5-0360C no al MCD5-1600C
sono:
L1B.
•
L2B.
•
L3B.
•
Se necessario, i fusibili possono essere installati sul lato
di ingresso.
K1 Contattore principale
K2 Contattore di bypass (esterno)
F1
Fusibili a semiconduttori (opzionali)
1)
1) Per mantenere valida la garanzia sugli SCR, utilizzare fusibili a
semiconduttori.
Disegno 4.16 Installazione a triangolo interno, con bypass
esterno, da MCD5-0360C a MCD5-1600C
K1 Contattore principale
K2 Contattore di bypass (esterno)
F1
Fusibili a semiconduttori (opzionali)
1)
1) Per mantenere valida la garanzia sugli SCR, utilizzare fusibili a
semiconduttori.
Disegno 4.15 Installazione a triangolo interno, con bypass
esterno, MCD5-0245C
Correnti nominali
4.4
Contattare il fornitore locale per conoscere le prestazioni in
condizioni di funzionamento non riportate in questi graci.
Tutti i gradi sono calcolati a un'altitudine di 1.000 m e a
una temperatura ambiente pari a 40 °C.
22 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 27
Installazione elettrica Guida operativa
4.4.1 Collegamento in linea (con bypass)
AVVISO!
I modelli da MCD5-0021B a MCD5-0961B sono dotati di bypass interno. I modelli da MCD5-0245C a MCD5-1600C
richiedono un contattore di bypass esterno.
Codice identicativo Amperaggio [A]
AC-53b 3-30:330 AC-53b 4-20:340 AC-53b 4.5-30:330
MCD5-0021B 21 17 15
MCD5-0037B 37 31 26
MCD5-0043B 43 37 30
MCD5-0053B 53 46 37
AC-53b 3-30:570 AC-53b 4-20:580 AC-53b 4.5-30:570
MCD5-0068B 68 55 47
MCD5-0084B 84 69 58
MCD5-0089B 89 74 61
MCD5-0105B 105 95 78
MCD5-0131B 131 106 90
MCD5-0141B 141 121 97
MCD5-0195B 195 160 134
MCD5-0215B 215 178 148
MCD5-0245B 245 194 169
MCD5-0245C 255 201 176
MCD5-0331B 331 266 229
MCD5-0360C 360 310 263
MCD5-0380C 380 359 299
MCD5-0396B 396 318 273
MCD5-0428C 430 368 309
MCD5-0469B 496 383 326
MCD5-0525B 525 425 364
MCD5-0595C 620 540 434
MCD5-0619C 650 561 455
MCD5-0632B 632 512 438
MCD5-0790C 790 714 579
MCD5-0744B 744 606 516
MCD5-0826B 826 684 571
MCD5-0927C 930 829 661
MCD5-0961B 961 796 664
MCD5-1200C 1200 1200 1071
MCD5-1410C 1410 1319 1114
MCD5-1600C 1600 1600 1353
4 4
Tabella 4.2 Modelli con bypass interno
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 23
Page 28
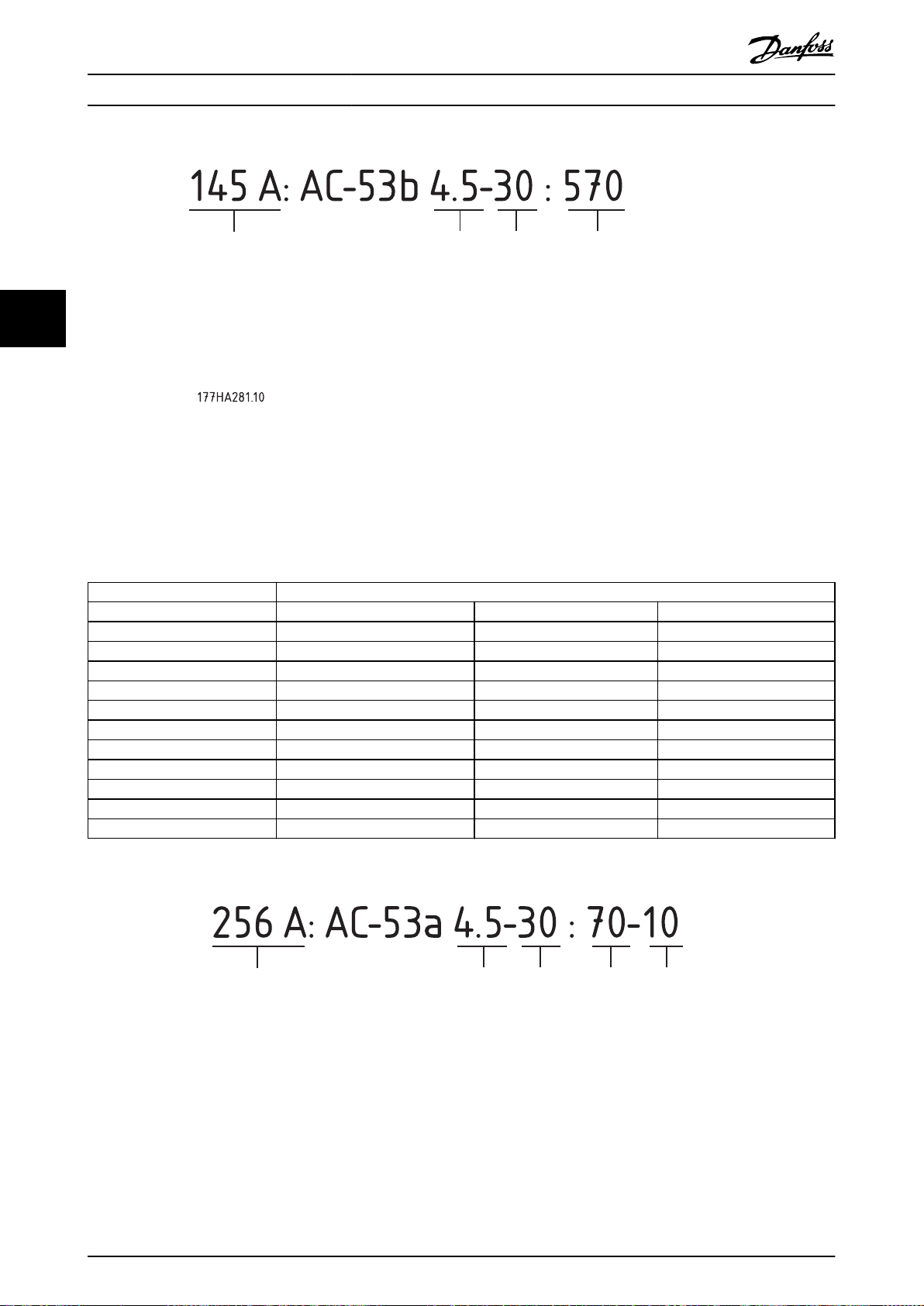
Corrente nominale
dell'avviatore
Corrente di avvia
(multiplo del FLC)
Tempo di avvia (secondi)
Tempo inattivo (secondi)
Corrente nominale
dell'avviatore
Corrente di avvia
(multiplo del FLC)
Tempo di avvia (secondi)
Cicla di funzionamento
in carica
Avvii all'ora
177HA280.10
Installazione elettrica
VLT® Soft Starter MCD 500
44
Disegno 4.17 Prestazioni di esercizio AC-53 per funzionamento con bypass
Tutti i gradi sono calcolati a un'altitudine di 1.000 m (3281 piedi) e a una temperatura ambiente di 40 °C (104 °F).
4.4.2 Collegamento in linea (senza bypass/continuo)
Codice identicativo Amperaggi [A]
AC-53a 3-30:50-6 AC-53a 4-20:50-6 AC-53a 4.5-30:50-6
MCD5-0245C 245 195 171
MCD5-0360C 360 303 259
MCD5-0380C 380 348 292
MCD5-0428C 428 355 300
MCD5-0595C 595 515 419
MCD5-0619C 619 532 437
MCD5-0790C 790 694 567
MCD5-0927C 927 800 644
MCD5-1200C 1200 1135 983
MCD5-1410C 1410 1187 1023
MCD5-1600C 1600 1433 1227
Tabella 4.3 Modelli senza bypass
Disegno 4.18 Prestazioni di esercizio AC-53 per funzionamento continuo
24 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 29
Installazione elettrica Guida operativa
Tutti i gradi sono calcolati a un'altitudine di 1.000 m (3281 piedi) e a una temperatura ambiente di 40 °C (104 °F).
Contattare un fornitore locale per conoscere le prestazioni di esercizio nelle condizioni operative non riportate in questi
graci.
4.4.3 Collegamento a triangolo interno (con bypass)
AVVISO!
I modelli da MCD5-0021B a MCD5-0961B sono dotati di bypass interno. I modelli da MCD5-0245C a MCD5-1600C
richiedono un contattore di bypass esterno.
Codice identicativo Amperaggi [A]
AC-53b 3-30:330 AC-53b 4.20-:340 AC-53b 4.5-30:330
MCD5-0021B 32 26 22
MCD5-0037B 56 47 39
MCD5-0043B 65 56 45
MCD5-0053B 80 69 55
AC-53b 3-30:570 AC-53b 4-20:580 AC-53b 4.5-30:570
MCD5-0068B 102 83 71
MCD5-0084B 126 104 87
MCD5-0089B 134 112 92
MCD5-0105B 158 143 117
MCD5-0131B 197 159 136
MCD5-0141B 212 181 146
MCD5-0195B 293 241 201
MCD5-0215B 323 268 223
MCD5-0245B 368 291 254
MCD5-0245C 383 302 264
MCD5-0331B 497 400 343
MCD5-0360C 540 465 395
MCD5-0380C 570 539 449
MCD5-0396B 594 478 410
MCD5-0428C 645 552 463
MCD5-0469B 704 575 490
MCD5-0525B 787 637 546
MCD5-0595C 930 810 651
MCD5-0619C 975 842 683
MCD5-0632B 948 768 658
MCD5-0790C 1185 1072 869
MCD5-0744B 1116 910 774
MCD5-0826B 1239 1026 857
MCD5-0927C 1395 1244 992
MCD5-0961B 1441 1194 997
MCD5-1200C 1800 1800 1607
MCD5-1410C 2115 1979 1671
MCD5-1600C 2400 2400 2030
4 4
Tabella 4.4 Modelli con bypass
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 25
Page 30
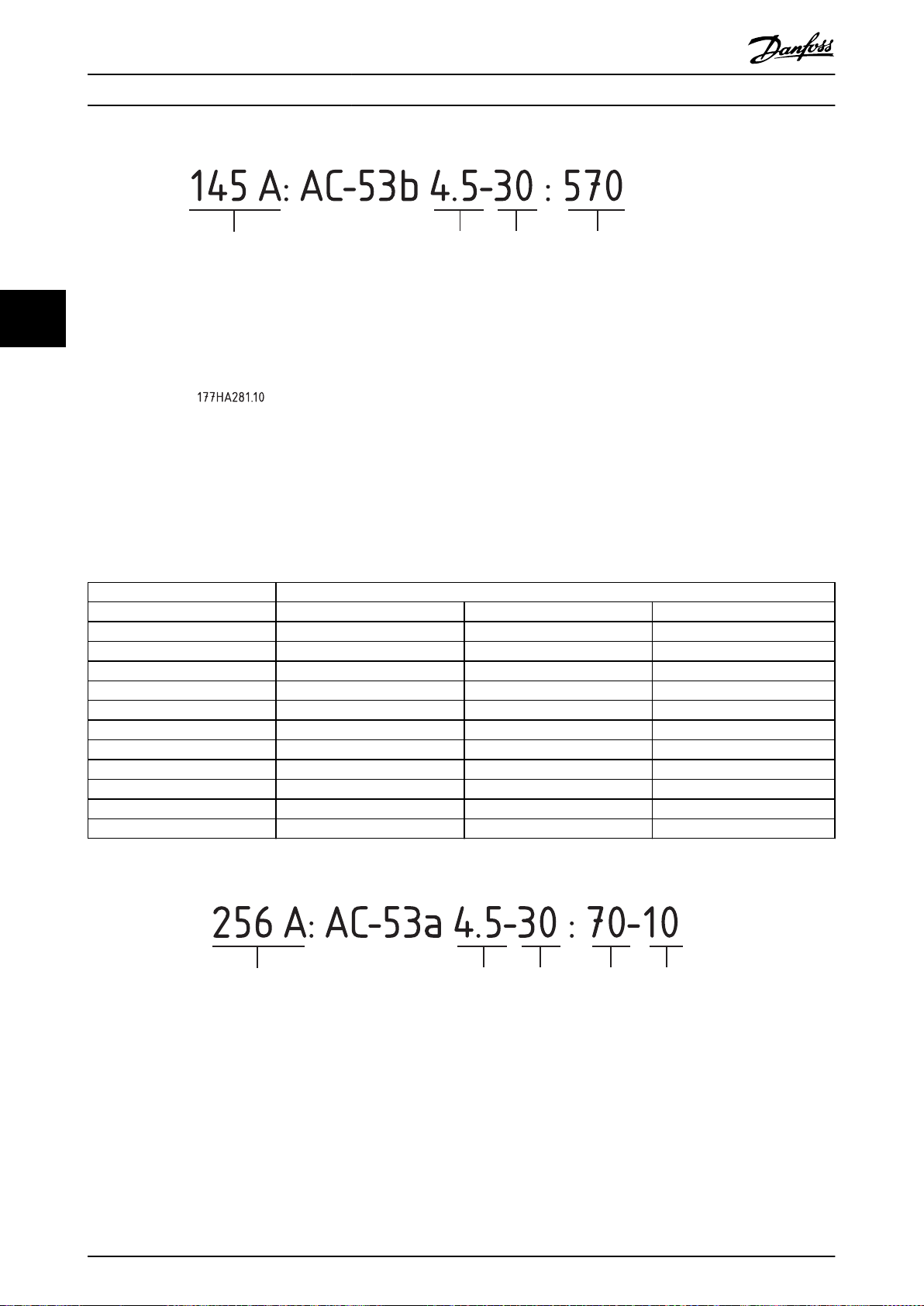
Corrente nominale
dell'avviatore
Corrente di avvia
(multiplo del FLC)
Tempo di avvia (secondi)
Tempo inattivo (secondi)
Corrente nominale
dell'avviatore
Corrente di avvia
(multiplo del FLC)
Tempo di avvia (secondi)
Cicla di funzionamento
in carica
Avvii all'ora
177HA280.10
Installazione elettrica
VLT® Soft Starter MCD 500
44
Disegno 4.19 Prestazioni di esercizio AC-53 per funzionamento con bypass
Tutti i gradi sono calcolati a un'altitudine di 1.000 m (3281 piedi) e a una temperatura ambiente di 40 °C (104 °F).
4.4.4 Collegamento a triangolo interno (senza bypass/continuo)
Codice identicativo Amperaggi [A]
AC-53a 3-30:50-6 AC-53a 4-20:50-6 AC-53a 4.5-30:50-6
MCD5-0245C 368 293 257
MCD5-0360C 540 455 389
MCD5-0380C 570 522 438
MCD5-0428C 643 533 451
MCD5-0595C 893 773 629
MCD5-0619C 929 798 656
MCD5-0790C 1185 1042 851
MCD5-0927C 1391 1200 966
MCD5-1200C 1800 1702 1474
MCD5-1410C 2115 1780 1535
MCD5-1600C 2400 2149 1841
Tabella 4.5 Modelli senza bypass
Disegno 4.20 Prestazioni di esercizio AC-53 per funzionamento continuo
26 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 31

Installazione elettrica Guida operativa
Tutti i gradi sono calcolati a un'altitudine di 1.000 m (3281 piedi) e a una temperatura ambiente di 40 °C (104 °F).
Contattare un fornitore locale per conoscere le prestazioni di esercizio nelle condizioni operative non riportate in questi
graci.
4.5 Impostazioni di corrente minima e massima
Le impostazioni di corrente minima e massima a pieno carico dipendono dal modello:
Collegamento in linea Collegamento a triangolo interno
Modello Minimo [A] Massimo [A] Minimo [A] Massimo [A]
MCD5-0021B 5 23 7 34
MCD5-0037B 9 43 13 64
MCD5-0043B 10 50 15 75
MCD5-0053B 11 53 16 79
MCD5-0068B 15 76 23 114
MCD5-0084B 19 97 29 145
MCD5-0089B 20 100 30 150
MCD5-0105B 21 105 32 157
MCD5-0131B 29 145 44 217
MCD5-0141B 34 170 51 255
MCD5-0195B 40 200 60 300
MCD5-0215B 44 220 66 330
MCD5-0331B 70 350 70 525
MCD5-0396B 85 425 85 638
MCD5-0469B 100 500 100 750
MCD5-0525B 116 580 116 870
MCD5-0632B 140 700 140 1050
MCD5-0744B 164 820 164 1230
MCD5-0825B 184 920 184 1380
MCD5-0961B 200 1000 200 1500
MCD5-0245C 51 255 77 382
MCD5-0360C 72 360 108 540
MCD5-0380C 76 380 114 570
MCD5-0428C 86 430 129 645
MCD5-0595C 124 620 186 930
MCD5-0619C 130 650 195 975
MCD5-0790C 158 790 237 1185
MCD5-0927C 186 930 279 1395
MCD5-1200C 240 1200 360 1800
MCD5-1410C 282 1410 423 2115
MCD5-1600C 320 1600 480 2400
4 4
Tabella 4.6 Corrente minima e massima a pieno carico
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 27
Page 32

Installazione elettrica
VLT® Soft Starter MCD 500
4.6 Contattore di bypass
Alcuni VLT® Soft Starter MCD 500 possiedono un bypass
interno e non necessitano di un contattore di bypass
esterno.
Gli avviatori statici senza bypass possono essere installati
con un contattore di bypass esterno. Selezionare un
contattore con una categoria di utilizzo AC1 maggiore o
44
uguale alla corrente nominale a pieno carico del motore
collegato.
4.7 Contattore di Rete
Installare un contattore principale se il VLT® Soft Starter
MCD 500 è collegato al motore nel formato a triangolo
interno; l'installazione è opzionale per il collegamento in
linea. Selezionare un contattore con una categoria di
utilizzo AC3 maggiore o uguale alla corrente nominale a
pieno carico del motore collegato.
4.8 Interruttore
Nel caso in cui l'avviatore statico scatti, per isolare il
circuito motore è possibile usare un interruttore con
bobina di sgancio al posto di un contattore principale. Il
meccanismo di derivazione deve essere alimentato dal lato
di alimentazione dell'interruttore o da un'alimentazione di
controllo separata.
Correzione del fattore di potenza
4.9
ATTENZIONE
DANNI ALL'APPARECCHIATURA
Il collegamento di condensatori per correzione del
fattore di potenza al lato di uscita danneggia l'avviatore
statico.
Collegare i condensatori per la correzione del
•
fattore di potenza al lato di ingresso dell'avviatore statico.
AVVISO!
Utilizzare fusibili a semiconduttori per il coordinamento
di tipo 2 (in conformità con lo standard IEC 60947-4-2)
onde evitare di danneggiare gli SCR. Il VLT® Soft Starter
MCD 500 dispone di una protezione integrata degli SCR
dalle correnti transitorie di sovraccarico, ma in caso di
cortocircuito (ad es. dovuto a un avvolgimento motore
difettoso) detta protezione non è suciente.
I fusibili HRC (come i fusibili Ferraz AJT) possono essere
utilizzati per un coordinamento di tipo 1 in conformità con
lo standard IEC 60947-4-2.
AVVISO!
Il controllo adattivo regola il prolo di velocità del
motore entro il limite di tempo programmato. Questo
controllo può determinare un livello più alto di corrente
rispetto ai metodi di controllo tradizionali.
Per le applicazioni che utilizzano il controllo adattivo per
arrestare dolcemente il motore con tempi di arresto
superiori ai 30 secondi, selezionare la protezione della
derivazione del motore nel modo seguente:
Fusibili di rete HRC standard: almeno il 150%
•
della corrente a pieno carico del motore.
Fusibili di rete nominali del motore: prestazioni di
•
esercizio minime pari al 100/150% della corrente
a pieno carico del motore.
Impostazione minima di lunga durata dell'inter-
•
ruttore di comando motore: 150% della corrente
a pieno carico del motore.
Impostazione minima di breve durata dell'inter-
•
ruttore di controllo motore: 400% della corrente a
pieno carico del motore per 30 s.
Le raccomandazioni per i fusibili sono calcolate per una
temperatura di 40 °C (104 °F) e un'altitudine massima di
1.000 m (3281 piedi).
Se viene usata la correzione del fattore di potenza, usare
un contattore dedicato per attivare i condensatori.
Fusibili
4.10
4.10.1 Fusibili di alimentazione
AVVISO!
GARANZIA
Per mantenere valida la garanzia sugli SCR, tutti i fusibili
dovrebbero essere di tipo a semiconduttori.
28 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
AVVISO!
La selezione dei fusibili è basata su un avviamento a FLC
del 400% per 20 s con:
Avviamenti standard per ora.
•
Duty cycle.
•
Temperatura ambiente 40 °C (104 °F).
•
Fino a 1.000 m (3281 piedi) di altitudine.
•
Per installazioni che funzionano in condizioni diverse da
quelle elencate, consultare un fornitore Danfoss locale.
Le tabelle da Tabella 4.7 no a Tabella 4.13 contengono
solo raccomandazioni. Per confermare la scelta in merito
a un'applicazione specica, consultare sempre un
fornitore locale.
Page 33

Installazione elettrica Guida operativa
4.10.2 Fusibili Bussmann
Modello
MCD5-0021B 1150 170M1314 170M1314 170M1314
MCD5-0037B 8000 170M1316 170M1316 170M1316
MCD5-0043B 10500 170M1318 170M1318 170M1318
MCD5-0053B 15000 170M1318 170M1318 170M1318
MCD5-0068B 15000 170M1319 170M1319 170M1318
MCD5-0084B 512000 170M1321 170M1321 170M1319
MCD5-0089B 80000 170M1321 170M1321 170M1321
MCD5-0105B 125000 170M1321 170M1321 170M1321
MCD5-0131B 125000 170M1321 170M1321 170M1321
MCD5-0141B 320000 170M2621 170M2621 170M2621
MCD5-0195B 320000 170M2621 170M2621 170M2621
MCD5-0215B 320000 170M2621 170M2621 170M2621
MCD5-0245B 320000 170M2621 170M2621 170M2621
MCD5-0331B 202000 170M5011 170M5011 –
MCD5-0396B 320000 170M6011 – –
MCD5-0469B 320000
MCD5-0525B 781000 170M6013 170M6013 170M6013
MCD5-0632B 781000 170M5015 170M5015 –
MCD5-0744B 1200000 170M5017 170M6017 –
MCD5-0826B 2530000 170M6017 170M6017 –
MCD5-0961B 2530000 170M6018
MCD5-0245C 320000 170M2621 170M2621 170M2621
MCD5-0360C 320000 170M6010 170M6010 170M6010
MCD5-0380C 320000 170M6011 170M6011 –
MCD5-0428C 320000 170M6011 170M6011 –
MCD5-0595C 1200000 170M6015 170M6015 170M6014
MCD5-0619C 1200000 170M6015 170M6015 170M6014
MCD5-0790C 2530000 170M6017 170M6017 170M6016
MCD5-0927C 4500000 170M6019 170M6019 170M6019
MCD5-1200C 4500000 170M6021 – –
MCD5-1410C 6480000 – – –
MCD5-1600C 12500000
SCR I2t (A2s)
Tensione di alimen-
tazione
(≤440 V CA)
170M6008
170M6019
1)
1)
Tensione di alimentazione
(≤575 V CA)
– –
170M6013
1)
– –
Tensione di alimen-
tazione
(≤690 V CA)
–
4 4
Tabella 4.7 Corpo quadrato (170M)
1) Sono necessari due fusibili collegati in parallelo per fase.
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 29
Page 34

Installazione elettrica
VLT® Soft Starter MCD 500
Modello
SCR I2t (A2s)
Tensione di alimentazione
(<440 V CA)
Tensione di alimen-
tazione
(<575 V CA)
Tensione di alimen-
tazione
(<690 V CA)
MCD5-0021B 1150 63FE 63FE 63FE
MCD5-0037B 8000 120FEE 120FEE 120FEE
MCD5-0043B 10500 120FEE 120FEE 120FEE
MCD5-0053B 15000 200FEE 200FEE 200FEE
MCD5-0068B 15000 200FEE 200FEE 200FEE
MCD5-0084B 512000 200FEE 200FEE 200FEE
44
MCD5-0089B 80000 280FM 280FM 280FM
MCD5-0105B 125000 280FM 280FM 280FM
MCD5-0131B 125000 280FM 280FM 280FM
MCD5-0141B 320000 450FMM 450FMM 450FMM
MCD5-0195B 320000 450FMM 450FMM 450FMM
MCD5-0215B 320000 450FMM 450FMM 450FMM
MCD5-0245B 320000 450FMM 450FMM 450FMM
MCD5-0331B 202000
MCD5-0396B 320000
MCD5-0469B 320000
MCD5-0525B 781000
MCD5-0632B 781000
315FM
400FMM
450FMM
500FMM
630FMM
1)
1)
1)
1)
1)
– –
– –
– –
1)
500FMM
– –
500FMM
1)
MCD5-0744B 1200000 – – –
MCD5-0826B 2530000 – – –
MCD5-0961B 2530000 – – –
MCD5-0245C 320000 450FMM 450FMM 450FMM
MCD5-0360C 320000 – – –
MCD5-0380C 320000
400FMM
1)
400FMM
400FMM
1)
MCD5-0428C 320000 – – –
MCD5-0595C 1200000
MCD5-0619C 1200000
630FMM
630FMM
1)
1)
630FMM
630FMM
1)
1)
–
–
MCD5-0790C 2530000 – – –
MCD5-0927C 4500000 – – –
MCD5-1200C 4500000 – – –
MCD5-1410C 6480000 – – –
MCD5-1600C 12500000 – – –
Tabella 4.8 Stile inglese (BS88)
1) Sono necessari due fusibili collegati in parallelo per fase.
30 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 35

Installazione elettrica Guida operativa
4.10.3 Fusibili Ferraz
Modello
SCR I2t (A2s)
Tensione di alimentazione
Tensione di alimentazione
(<575 V CA)
(<440 V CA)
MCD5-0021B 1150
MCD5-0037B 8000
MCD5-0043B 10500
MCD5-0053B 15000
MCD5-0068B 15000
MCD5-0084B 51200 HSJ175
HSJ40
HSJ80
HSJ90
HSJ110
HSJ125
1)
1)
1)
1)
1)
HSJ40
HSJ80
HSJ90
HSJ110
HSJ125
HSJ175
MCD5-0089B 80000 HSJ175 HSJ175
MCD5-0105B 125000 HSJ225 HSJ225
MCD5-0131B 125000 HSJ250
HSJ250
MCD5-0141B 320000 HSJ300 HSJ300
MCD5-0195B 320000 HSJ350 HSJ350
MCD5-0215B 320000
MCD5-0245B 320000
MCD5-0331B 202000
HSJ400
HSJ450
HSJ500
1)
1)
1)
HSJ400
HSJ450
MCD5-0396B 320000
MCD5-0469B 320000
MCD5-0525B 781000
MCD5-0632B 781000
Non applicabile
Non applicabile
MCD5-0744B 1200000
MCD5-0826B 2530000
MCD5-0961B 2530000
MCD5-0245C 320000
HSJ450
1)
HSJ450
MCD5-0360C 320000
MCD5-0380C 320000
MCD5-0428C 320000
MCD5-0595C 1200000
MCD5-0619C 1200000
MCD5-0790C 2530000
Non applicabile Non applicabile
MCD5-0927C 4500000
MCD5-1200C 4500000
MCD5-1410C 6480000
MCD5-1600C 12500000
Tensione di alimen-
tazione
(<690 V CA)
1)
1)
1)
1)
1)
1)
1)
1)
1)
4 4
Non applicabile
1)
Tabella 4.9 HSJ
1) Sono necessari due fusibili in serie per ogni fase.
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 31
Page 36

Installazione elettrica
VLT® Soft Starter MCD 500
Modello
MCD5-0021B 1150 A070URD30XXX0063 A070URD30XXX0063 –
MCD5-0037B 8000 A070URD30XXX0125 A070URD30XXX0125 A070URD30XXX0125
MCD5-0043B 10500 A070URD30XXX0125 A070URD30XXX0125 A070URD30XXX0125
MCD5-0053B 15000 A070URD30XXX0125 A070URD30XXX0125 A070URD30XXX0125
MCD5-0068B 15000 A070URD30XXX0160 A070URD30XXX0160 A070URD30XXX0160
44
MCD5-0084B 51200 A070URD30XXX0200 A070URD30XXX0200 A070URD30XXX0200
MCD5-0089B 80000 A070URD30XXX0200 A070URD30XXX0200 A070URD30XXX0200
MCD5-0105B 125000 A070URD30XXX0315 A070URD30XXX0315 A070URD30XXX0315
MCD5-0131B 125000 A070URD30XXX0315 A070URD30XXX0315 A070URD30XXX0315
MCD5-0141B 320000 A070URD30XXX0315 A070URD30XXX0315 A070URD30XXX0315
MCD5-0195B 320000 A070URD30XXX0450 A070URD30XXX0450 A070URD30XXX0450
MCD5-0215B 320000 A070URD30XXX0450 A070URD30XXX0450 A070URD30XXX0450
MCD5-0245B 32000 A070URD30XXX0450 A070URD30XXX0450 A070URD30XXX0450
MCD5-0331B 202000 A070URD31XXX0550 – –
MCD5-0396B 238000 A070URD32XXX0630 – –
MCD5-0469B 320000 A070URD32XXX0700 – –
MCD5-0525B 781000 A070URD32XXX0800 – –
MCD5-0632B 781000 A070URD33XXX0900 – –
MCD5-0744B 1200000 A070URD33XXX1100 – –
MCD5-0826B 2530000 A070URD33XXX1250 – –
MCD5-0961B 2530000 A070URD33XXX1400 – –
MCD5-0245C 320000 A070URD30XXX0450 A070URD30XXX0450 A070URD30XXX0450
MCD5-0360C 320000 A070URD33XXX0630 A070URD33XXX0630 A070URD33XXX0630
MCD5-0380C 320000 A070URD33XXX0700 A070URD33XXX0700 –
MCD5-0428C 320000 A070URD33XXX0700 A070URD33XXX0700 –
MCD5-0595C 1200000 A070URD33XXX1000 A070URD33XXX1000 A070URD33XXX1000
MCD5-0619C 1200000 A070URD33XXX1000 A070URD33XXX1000 A070URD33XXX1000
MCD5-0790C 2530000 A070URD33XXX1400 A070URD33XXX1400 A070URD33XXX1400
MCD5-0927C 4500000 A070URD33XXX1400 A070URD33XXX1400 A070URD33XXX1400
MCD5-1200C 4500000 A055URD33XXX2250 – –
MCD5-1410C 6480000 A055URD33XXX2250 – –
MCD5-1600C 12500000 - – –
SCR I2t (A2s)
Tensione di alimen-
tazione
(<440 V CA)
Tensione di alimen-
tazione
(<575 V CA)
Tensione di alimen-
tazione
(<690 V CA)
Tabella 4.10 Stile nordamericano (PSC 690)
Tensione di alimen-
Modello
MCD5-0021B 1150 6.9URD30D11A0050 6.9URD30D11A0050 6.9URD30D11A0050
MCD5-0037B 8000 6.9URD30D11A0125 6.9URD30D11A0125 6.9URD30D11A0125
MCD5-0043B 10500 6.9URD30D11A0125 6.9URD30D11A0125 6.9URD30D11A0125
MCD5-0053B 15000 6.9URD30D11A0125 6.9URD30D11A0125 6.9URD30D11A0125
MCD5-0068B 15000 6.9URD30D11A0160 6.9URD30D11A0160 6.9URD30D11A0160
MCD5-0084B 51200 6.9URD30D11A0200 6.9URD30D11A0200 6.9URD30D11A0200
MCD5-0089B 80000 6.9URD30D11A0200 6.9URD30D11A0200 6.9URD30D11A0200
MCD5-0105B 125000 6.9URD30D11A0315 6.9URD30D11A0315 6.9URD30D11A0315
MCD5-0131B 125000 6.9URD30D11A0315 6.9URD30D11A0315 6.9URD30D11A0315
MCD5-0141B 320000 6.9URD30D11A0315 6.9URD30D11A0315 6.9URD30D11A0315
MCD5-0195B 320000 6.9URD31D11A0450 6.9URD31D11A0450 6.9URD31D11A0450
MCD5-0215B 320000 6.9URD31D11A0450 6.9URD31D11A0450 6.9URD31D11A0450
MCD5-0245B 320000 6.9URD31D11A0450 6.9URD31D11A0450 6.9URD31D11A0450
32 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
SCR I2t (A2s)
tazione
(<440 V CA)
Tensione di alimentazione
(<575 V CA)
Tensione di alimentazione
(<690 V CA)
Page 37

Installazione elettrica Guida operativa
Tensione di alimen-
Modello
MCD5-0331B 202000 6.9URD31D11A0550 – –
MCD5-0396B 320000 6.9URD32D11A0630 – –
MCD5-0469B 320000 6.9URD32D11A0700 – –
MCD5-0525B 781000 6.9URD32D11A0800 – –
MCD5-0632B 781000 6.9URD33D11A0900 – –
MCD5-0744B 1200000 6.9URD33D11A1100 – –
MCD5-0826B 2530000 6.9URD33D11A1250 – –
MCD5-0961B 2530000 6.9URD33D11A1400 – –
MCD5-0245C 320000 6.9URD31D11A0450 6.9URD31D11A0450 6.9URD31D11A0450
MCD5-0360C 320000 6.9URD33D11A0630 6.9URD33D11A0630 6.9URD33D11A0630
MCD5-0380C 320000 6.9URD33D11A0700 6.9URD33D11A0700 6.9URD33D11A0700
MCD5-0428C 320000 6.9URD33D11A0700 6.9URD33D11A0700 6.9URD33D11A0700
MCD5-0595C 1200000 6.9URD33D11A1000 6.9URD33D11A1000 6.9URD33D11A1000
MCD5-0619C 1200000 6.9URD33D11A1000 6.9URD33D11A1000 6.9URD33D11A1000
MCD5-0790C 2530000 6.6URD33D11A1400 6.6URD33D11A1400 –
MCD5-0927C 4500000 6.6URD33D11A1400 6.6URD33D11A1400 –
MCD5-1200C 4500000 6URD233PLAF2200 6URD233PLAF2200 –
MCD5-1410C 6480000 6URD233PLAF2200 6URD233PLAF2200 –
MCD5-1600C 12500000 6URD233PLAF2800 6URD233PLAF2800 –
Tabella 4.11 Stile europeo (PSC 690)
SCR I2t (A2s)
tazione
(<440 V CA)
Tensione di alimentazione
(<575 V CA)
Tensione di alimentazione
(<690 V CA)
4 4
4.10.4 Selezione fusibili UL e caratteristiche di cortocircuito
Sono disponibili due caratteristiche delle correnti nominali di cortocircuito (SCCR) per applicazioni conformi a UL.
Correnti di guasto standard (con circuiti 600 V CA)
Le correnti di guasto standard sono determinate facendo riferimento a UL 508, sezione 1, tabella 51.2. Questa norma
specica la corrente di cortocircuito alla quale l'avviatore statico deve resistere sulla base della potenza nominale in cavalli
vapore (oppure la corrente nominale a pieno carico (FLC) o ampere a rotore bloccato (LRA) in funzione del modello).
Se si utilizzano le correnti nominali di guasto standard, il fusibile deve essere conforme alle informazioni nella Tabella 4.12
(specico del modello e del produttore).
Alte correnti di guasto disponibili (con circuiti 480 V CA)
È possibile specicare caratteristiche delle correnti nominali di cortocircuito che superano i valori nominali minimi impostati
dalle correnti di guasto standard quando l'avviatore statico è in grado di resistere all'alta corrente di cortocircuito disponibile
con il test UL 508.
Se si utilizzano le alte correnti di guasto nominali disponibili, selezionare un fusibile adatto sulla base dell'amperaggio e
della classe di fusibile (J o L, come appropriato).
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 33
Page 38

Installazione elettrica
VLT® Soft Starter MCD 500
Modello Potenza
nominale [A]
MCD5-0021B 23 65 25 (J) 10 AJT25 A070URD30XXX
Alta disponibile Corrente di guasto standard
con massimo
480 V CA [kA]
massimo del
44
MCD5-0037B 43 65 50 (J) 10 AJT50 A070URD30XXX
MCD5-0043B 50 65 50 (J) 10 AJT50 A070URD30XXX
MCD5-0053B 53 65 60 (J) 10 AJT60 A070URD30XXX
MCD5-0068B 76 65 80 (J) 10 AJT80 A070URD30XXX
MCD5-0084B 97 65 100 (J) 10 AJT100 A070URD30XXX
MCD5-0089B 100 65 100 (J) 10 AJT100 A070URD30XXX
MCD5-0105B 105 65 125 (J) 10 AJT125 A070URD30XXX
MCD5-0131B 145 65 150 (J) 18 AJT150/RK5 200 A070URD30XXX
MCD5-0141B 170 65 175 (J) 18 AJT175/RK5 200 A070URD30XXX
MCD5-0195B 200 65 200 (J) 18 AJT200/RK5 300 A070URD30XXX
MCD5-0215B 220 65 250 (J) 18 AJT250/RK5 300 A070URD30XXX
MCD5-0245B 255 65 350 (RK1/J) 18
MCD5-0331B 350 65 400 (J) 18
MCD5-0396B 425 65 450 (J) 30
MCD5-0469B 500 65 600 (J) 30 600, classe J A070URD33XXX
MCD5-0525B 580 65 800 (L) 30 800, classe L –
MCD5-0632B 700 65 800 (L) 42 800, classe L –
MCD5-0744B 820 65 1200 (L) 42 1200, classe L A070URD33XXX
MCD5-0826B 920 65 1200 (L) 85 1200, classe L A070URD33XXX
MCD5-0961B 1000 65 1200 (L) 85 1200, classe L A070URD33XXX
Caratteristiche di cortocircuito Caratteristiche
Valore
nominale
fusibile [A]
(classe del
fusibile)
con 600 V CA
[kA]
Fusibile Ferraz/
Mersen, fusibile
di classe J, L o
RK5
1)
1)
1)
Fusibile Ferraz/
Mersen, fusibili
a semicon-
duttore R/C
0063
0125
0125
0125
0200
0200
0200
0315
0315
0315
0450
0450
–
–
A070URD33XXX
0630
0700
1000
1400
1400
delle correnti
nominali di
cortocircuito
600 V [kA]
1)
3 cicli
N/A
18
3 cicli
30
3 cicli
42
3 cicli
Tabella 4.12 Caratteristiche delle correnti di cortocircuito, modelli con bypass
XXX = tipo di lama: fare riferimento al catalogo Ferraz/Mersen per i dettagli.
1) Quando sono protetti con qualsiasi fusibile certicato UL o interruttore certicato UL in base a NEC, i modelli con prestazioni di esercizio a tre
cicli sono adatti per l'uso in un circuito con la corrente potenziale indicata.
34 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 39

Installazione elettrica Guida operativa
Modello Potenza
nominale [A]
MCD5-0245C 255 65 350 (RK1/J) 18 AJT300 A070URD30XXX
MCD5-0360C 360 65 400 (J) 18 AJT400/RK5 500 A070URD33XXX
MCD5-0380C 380 65 450 (J) 18 AJT450/RK5 500 A070URD33XXX
MCD5-0428C 430 65 450 (J) 30 AJT450 A070URD33XXX
MCD5-0595C 620 65 800 (L) 42 A4BQ800 A070URD33XXX
MCD5-0619C 650 65 800 (L) 42 A4BQ800 A070URD33XXX
MCD5-0790C 790 65 1200 (L) 42 A4BQ1200 070URD33XXX1
MCD5-0927C 930 65 1200 (L) 42 A4BQ1200 A070URD33XXX
MCD5-1200C 1200 65 1600 (L) 85 A4BQ1600 A065URD33XXX
MCD5-1410C 1410 65 2000 (L) 85 A4BQ2000 A055URD33XXX
MCD5-1600C 1600 65 2000 (L) 85 A4BQ2500 A055URD33XXX
Alta disponibile Corrente di guasto standard
con massimo
480 V CA [kA]
massimo del
Caratteristiche di cortocircuito Caratteristiche
Valore
nominale
fusibile [A]
(classe del
fusibile)
con 600 V CA
[kA]
Fusibile Ferraz/
Mersen, fusibile
di classe J, L o
RK5
Fusibile Ferraz/
Mersen, fusibili
a semicon-
duttore R/C
0450
0630
0700
0700
1000
1000
400
1400
1800
2250
2500
delle correnti
nominali di
cortocircuito
600 V [kA]
1)
3 cicli
N/A
4 4
Tabella 4.13 Caratteristiche delle correnti di cortocircuito, modelli senza bypass
XXX = tipo di lama: fare riferimento al catalogo Ferraz/Mersen per i dettagli.
1) Quando sono protetti con qualsiasi fusibile certicato UL o interruttore certicato UL in base a NEC, i modelli con prestazioni di esercizio a tre
cicli sono adatti per l'uso in un circuito con la corrente potenziale indicata.
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 35
Page 40

22
21
6/T3
2/T1
13
14
4/T2
24
33
34
06
05
08
07
17
18
25
11
16
A6
A5
A4
5/L3
3/L2
15
E
1/L1
+
24
V DC
5
4
2
A
3
1
177HA425.10
Installazione elettrica
VLT® Soft Starter MCD 500
4.11 Diagrammi schematici
44
1 Alimentazione di controllo (in funzione
11, 16 Ingresso programmabile
del modello)
2 Uscite 15, 16 Avviamento
3 Ingressi di controllo remoto 17, 18 Arresto
4 Ingresso termistore motore (solo PTC) 25, 18 Ripristino
5 Uscite a relè 13, 14 Uscita a relè A
07, 08 Uscita analogica programmabile 21, 22, 24 Uscita a relè B
16, 08 Tensione di uscita a 24 V CC 33, 34 Uscita a relè C
Disegno 4.21 Modelli con bypass interno
36 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 41

177HA426.12
E
6/T3
2/T1
4/T2
5/L3
3/L2
1/L1
L3B
L2B
L1B
22
21
13
1)
1)
1)
14
24
33
34
06
05
08
07
17
18
25
11
16
A6
A5
A4
15
+
+
5
4
2
A
3
1
24
V DC
Installazione elettrica Guida operativa
4 4
1 Alimentazione di controllo (in funzione del
modello)
2 Uscite 15, 16 avviamento;
3 Ingressi di controllo remoto 17, 18 Arresto
4 Ingresso termistore motore (solo PTC) 25, 18 Ripristino
11, 16 Ingresso programmabile
5 Uscite a relè 13, 14 Uscita a relè A
07, 08 Uscita analogica programmabile 21, 22, 24 Uscita a relè B
16, 08 Tensione di uscita a 24 V CC 33, 34 Uscita a relè C
Disegno 4.22 Modelli senza bypass
1) I trasformatori di corrente MCD5-0245C sono posizionati sull'uscita. I morsetti di bypass sono contrassegnati con le etichette
T1B, T2B e T3B.
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 37
Page 42

100 200 300
1
10
100
1000
10000
177HA596.10
Time in seconds to reach 100% of thermal model
Current (%motor full load current)
3
1
2
400 500
600 700
800 900 1000
Caratteristiche del prodott...
VLT® Soft Starter MCD 500
5 Caratteristiche del prodotto
La percentuale di capacità termica del motore
5.1 Protezione da sovraccarico motore
Il modello termico utilizzato per il sovraccarico motore
nell'avviatore statico presenta due componenti:
Avvolgimenti motore: gli avvolgimenti motore
•
possiedono una bassa capacità termica e
inuenzano il comportamento termico a breve
termine del motore. Gli avvolgimenti motore sono
55
il punto in cui la corrente genera calore.
Corpo motore: il corpo motore possiede un'ampia
•
capacità termica e inuenza il comportamento a
lungo termine del motore. Il modello termico
tiene conto anche degli aspetti seguenti:
- Corrente motore.
- Perdite del ferro.
- Perdite di resistenza degli avvolgimenti.
- Corpo del motore e capacità termiche
degli avvolgimenti.
- Rareddamento durante la marcia e
rareddamento durante l'arresto.
- La percentuale della capacità nominale
del motore. Imposta il valore mostrato
per il modello di avvolgimento ed è
inuenzata, tra l'altro, dall'impostazione
FLC del motore.
•
utilizzata a ogni avvio viene memorizzata. È
possibile congurare l'avviatore statico anché
stabilisca automaticamente se il motore dispone
di una capacità termica suciente per completare
correttamente un altro avviamento.
La funzione di memorizzazione del modello
•
garantisce che il motore sia completamente
protetto nelle situazioni di avviamento a caldo. Il
modello utilizza i dati del real time clock per
tenere conto del tempo di rareddamento
trascorso, anche se l'alimentazione di controllo è
stata rimossa.
La funzione di protezione da sovraccarico fornita da questo
modello è conforme a una curva NEMA 10, ma ore
maggiore protezione ai bassi livelli di sovraccarico grazie
alla separazione del modello termico di avvolgimento.
AVVISO!
Impostare il parametro 1-1 Motor FLC (FLC del motore) alla
FLC nominale del motore. Non aggiungere il grado di
sovraccarico poiché viene calcolato dall'avviatore statico.
La protezione da sovraccarico termico nell'avviatore statico
presenta numerosi vantaggi rispetto ai relè termici.
L'eetto del rareddamento con ventola viene
•
gestito quando il motore è in funzione.
La corrente a pieno carico e il tempo a rotore
•
bloccato eettivi possono essere utilizzati per
regolare con più precisione il modello. Le caratteristiche termiche degli avvolgimenti vengono
trattate separatamente dal resto del motore (ossia
il modello riconosce che gli avvolgimenti
possiedono una ridotta massa termica e
un'elevata resistenza termica).
La parte dell'avvolgimento del modello termico
•
risponde rapidamente rispetto alla parte del
corpo. Pertanto il motore può essere fatto
funzionare più vicino alla temperatura di esercizio
massima di sicurezza rimanendo sempre protetto
da danni termici.
1
2
3
1) La MSTC è la costante di tempo di avviamento del motore. Si
denisce come il tempo a rotore bloccato (nel parametro 1-2 Locked
Rotor Time ( Tempo a rotore bloccato)) quando la corrente del rotore
bloccato è il 600% della FLC.
Disegno 5.1 Grado di protezione rispetto al sovraccarico
MSTC1)=5
MSTC1)=10
MSTC1)=20
38 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 43

Corrente (% della Corrente a pieno carico del motore
Corrente statore di tensione massima
Limite di Corrente (ad es. Par. 2 = 400% x FLC)
Velocitàrotore (% Velocità Massima)
177HA289.10
100%
200%
300%
400%
500%
600%
700%
10% 20% 30% 40% 50% 60% 70% 80% 90% 100%
Caratteristiche del prodott... Guida operativa
5.2 Controllo adattivo
Il controllo adattivo è il controllo del motore sulla base
delle sue caratteristiche prestazionali. Con il controllo
adattivo, selezionare il prolo di avviamento o di arresto
che corrisponde meglio al tipo di carico. L'avviatore statico
controlla automaticamente il motore per abbinarlo al
prolo. Il VLT® Soft Starter MCD 500 ore tre proli:
Accelerazione e decelerazione anticipate.
•
Accelerazione e decelerazione costanti.
•
Accelerazione e decelerazione ritardate.
•
Il controllo adattivo si avvale di due algoritmi; uno per
misurare le caratteristiche del motore e uno per controllare
il motore. L'avviatore statico usa il primo avviamento per
determinare le caratteristiche del motore a velocità zero e
a velocità massima. Durante ogni avviamento e arresto
successivo, l'avviatore statico regola dinamicamente il
controllo per garantire che le prestazioni eettive del
motore si adattino al prolo selezionato durante l'intera
fase di avviamento. Se la velocità eettiva è troppo bassa
per il prolo, l'avviatore statico aumenta la potenza
erogata al motore. Se la velocità è troppo elevata,
l'avviatore statico riduce la potenza.
5 5
1 Parametro 1-5 Initial current (Corrente iniziale)
2 Parametro 1-4 Current limit (Limite di corrente)
3 Corrente di tensione massima
Disegno 5.2 Esempio di corrente costante
Modalità di avviamento
5.3
5.3.1 Corrente costante
La corrente costante è la forma tradizionale dell'avviamento dolce, che aumenta la corrente da zero a un
livello specico, mantenendola stabile nché il motore non
ha accelerato.
L'avviamento con corrente costante è ideale per le
applicazioni dove la corrente di avviamento deve essere
mantenuta al di sotto di un livello specico.
5.3.2 Rampa di corrente
L'avviamento dolce con rampa di corrente aumenta la
corrente da un livello di avviamento specicato (1) a un
limite massimo (3) per un periodo prolungato di tempo (2),
vedere Disegno 5.3.
L'avviamento con rampa di corrente può essere utile nelle
applicazioni dove:
il carico può variare tra un avviamento e l'altro
•
(ad esempio un trasportatore che può avviarsi
con o senza carico).
- Impostare il parametro 1-5 Initial Current
(Corrente iniziale) a un livello che avvia il
motore con un carico leggero.
- Impostare il parametro 1-4 Current Limit
(Limite di corrente) a un livello che avvia
il motore con un carico pesante.
Il carico si allontana facilmente, ma occorre
•
prolungare il tempo di avviamento (ad esempio
una pompa centrifuga in cui la pressione della
tubazione deve aumentare lentamente).
L'alimentazione elettrica è limitata (ad esempio un
•
gruppo elettrogeno) e un aumento del carico più
lento concede un tempo di risposta dell'alimentazione maggiore.
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 39
Page 44

Corrente (% della Corrente a pieno carico del motore
Corrente statore di tensione massima
VELOCITÀROTORE (% Velocità Massima)
Tempo di rampa
(ad es. Par. 2 = 10 sec.)
Corrente iniziale (ad es. Par. 3 = 250% x FLC100%
200%
300%
400%
500%
600%
700%
10% 20% 30% 40% 50% 60% 70% 80% 90% 100%
177HA290.10
0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
4
177HA507.10
1
2
3
Tempo
max
Caratteristiche del prodott...
VLT® Soft Starter MCD 500
Utilizzo del controllo adattivo per controllare le prestazioni
di avviamento:
1. Selezionare Adaptive control (Controllo adattivo)
nel parametro 1-3 Start Mode (Modalità di
avviamento).
2. Impostare il parametro 1-6 Start Ramp Time
(Tempo di rampa di avviamento).
3. Selezionare il prolo desiderato nel parametro
1-13 Adaptive Start Prole (Prolo avviamento
adattivo).
4. Impostare il parametro 1-4 Current Limit (Limite di
55
corrente) a un valore sucientemente alto per
assicurare un avviamento corretto.
Il primo avviamento del controllo adattivo è un
avviamento a corrente costante. Questo tipo di avviamento
consente all'avviatore statico di apprendere le caratteri-
1 Parametro 1-5 Initial current (Corrente iniziale)
2 Parametro 1-6 Start ramp time ( Tempo di rampa di avviamento)
3 Parametro 1-4 Current limit (Limite di corrente)
4 Corrente di tensione massima
stiche del motore collegato. L'avviatore statico usa questi
dati del motore durante i successivi avviamenti con
controllo adattivo.
Disegno 5.3 Esempio di un tempo di rampa di corrente di 10 s
5.3.3 Controllo adattivo
Nell'avviamento dolce con controllo adattivo l'avviatore
statico regola la corrente per avviare il motore entro un
tempo specico e usa un prolo di accelerazione
selezionato.
AVVISO!
Il controllo adattivo non è in grado di avviare il motore
più rapidamente di un avviamento diretto (DOL). Se il
tempo impostato nel parametro 1-6 Start ramp time
(Tempo di rampa di avviamento) è più breve del tempo di
avviamento DOL, la corrente di avviamento può
raggiungere livelli DOL.
Ciascuna applicazione presenta un prolo di avviamento
specico in base alle caratteristiche del carico e del
motore. Il controllo adattivo ore tre proli di avviamento
dierenti al ne di soddisfare i requisiti previsti dalle
diverse applicazioni. La scelta di un prolo adatto al prolo
intrinseco dell'applicazione può favorire una maggiore
uniformità dell'accelerazione durante tutto il tempo di
avviamento. La scelta di un prolo di controllo adattivo
diverso può invece annullare in qualche modo il prolo
intrinseco.
40 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
1 Accelerazione anticipata
2 Accelerazione costante
3 Accelerazione ritardata
4 Parametro 1-16 Start ramp time ( Tempo di rampa di
avviamento)
Disegno 5.4 Parametro 1-13 Adaptive Start Prole (Prolo
avviamento adattivo)
Page 45

700%
600%
500%
300%
100%
400%
200%
10% 20% 30% 40% 50% 60% 70% 80% 90% 100%
177HA508.10
1
5
4
6
3
2
Corrente (% della corrente a pieno carico del motore)
Velocità rotore (% velocità massima)
70
60
50
30
10
40
20
80
90
100
177HA509.10
1
Tempo
Tensione (% della tensione massima)
Caratteristiche del prodott... Guida operativa
AVVISO!
Il controllo adattivo regola il carico in base al prolo
programmato. La corrente di avviamento varia in base al
prolo di accelerazione selezionato e al tempo di
avviamento programmato.
L'avviatore statico deve apprendere le caratteristiche del
nuovo motore:
Se si sostituisce un motore collegato a un
•
avviatore statico programmato per controllo
adattativo avviamento o all'arresto.
Se l'avviatore statico è stato testato su un
•
motore diverso prima dell'installazione eettiva.
Se il parametro 1-1 Motor Full Load Current (Corrente a
pieno carico motore) o il parametro 1-12 Adaptive Control
Gain (Controllo guadagno adattivo) vengono modicati,
l'avviatore statico riapprende automaticamente le
caratteristiche del motore.
5.3.4 Kick start
Modalità di arresto
5.4
5.4.1 Arresto in rotazione libera
L'arresto in rotazione libera consente al motore di rallentare
alla velocità naturale, senza alcun controllo dell'avviatore
statico. Il tempo necessario per l'arresto dipende dal tipo di
carico.
5.4.2 Arresto dolce TVR
La rampa di tensione programmabile riduce gradualmente
la tensione al motore in un tempo denito. Il carico può
continuare la marcia dopo che l'arresto della rampa è
completo.
L'arresto con rampa di tensione programmabile può essere
utile per le applicazioni in cui occorre prolungare il tempo
di arresto, o per evitare oscillazioni transitorie sulle alimentazioni dei gruppi elettrogeni.
5 5
La funzione Kick start ore un breve aumento di coppia
supplementare all'inizio di un avviamento e può essere
utilizzata con l'avviamento a rampa di corrente o a
corrente costante.
La funzione Kick start può essere utile per aiutare ad
avviare i carichi che richiedono un'alta coppia di spunto
ma che in seguito accelerano facilmente (ad esempio i
carichi del volano come le presse).
1 Parametro 1-11 Stop Time (Tempo di arresto)
Disegno 5.6 Arresto dolce TVR
5.4.3 Controllo adattivo
1 Parametro 1-7 Kick-start Level (Livello Kick start)
2 Parametro 1-8 Kick-start Time (Tempo Kick start)
3 Parametro 1-5 Initial Current (Corrente iniziale)
4 Parametro 1-6 Start Ramp Time ( Tempo di rampa di
avviamento)
5 Parametro 1-4 Current Limit (Limite di corrente)
6 Corrente di tensione massima
Disegno 5.5 Esempio della velocità del rotore quando si usa
Kick start
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 41
Per utilizzare il controllo adattivo per controllare le
prestazioni di arresto:
1. Selezionare Adaptive control (Controllo adattativo)
dal menu Stop Mode (Modalità di arresto).
2. Impostare il parametro 1-11 Stop Time (Tempo di
arresto).
3. Selezionare il prolo richiesto nel parametro 1-14
Adaptive Stop Prole (Prolo arresto adattivo).
Page 46

0
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
177HA510.10
1 2
4
3
Tempo
max
Caratteristiche del prodott...
VLT® Soft Starter MCD 500
5.4.4 Arresto della pompa
Le caratteristiche idrauliche dei sistemi di pompaggio
variano notevolmente. Questa variazione signica che il
prolo di decelerazione ideale e il tempo di arresto variano
da applicazione ad applicazione. Tabella 5.1 fornisce
direttive sulla scelta dei proli di controllo adattivi. Per
l'identicazione del migliore prolo per l'applicazione,
testare tutti e 3 i proli.
Prolo di arresto
55
1 Decelerazione anticipata
2 Decelerazione costante
3 Decelerazione ritardata
4 Parametro 1-10 Stop Time (Tempo di arresto)
Disegno 5.7 Parametro 1-14 Adaptive Stop Prole (Prolo
arresto adattivo)
adattivo
Decelerazione
ritardata
Decelerazione
costante
Decelerazione
anticipata
AVVISO!
Il controllo adattivo non rallenta il motore in modo
attivo e non arresta il motore più velocemente di un
arresto a ruota libera. Per abbreviare il tempo di arresto
di elevati carichi inerziali, utilizzare una funzione freno,
Tabella 5.1 Selezione dei proli di decelerazione con controllo
adattivo
Applicazione
Sistemi ad alta prevalenza, nei quali anche
un piccolo aumento della velocità del
motore/della pompa provoca una rapida
transizione tra usso diretto e usso inverso.
Prevalenza da bassa a media, applicazioni
ad alta portata in cui il uido possiede
un'alta velocità.
Sistemi di pompaggio aperti in cui il uido
deve essere nuovamente scaricato attraverso
la pompa senza invertire il funzionamento
della pompa.
vedere il capitolo 5.4.5 Freno.
5.4.5 Freno
Il primo arresto con controllo adattivo è un normale
arresto dolce. Questo tipo di arresto consente all'avviatore
statico di apprendere le caratteristiche del motore
collegato. L'avviatore statico usa questi dati del motore
durante i successivi arresti con controllo adattivo.
Un freno riduce il tempo di arresto necessario del motore.
Durante la frenatura può essere udibile un maggiore livello
di rumore dal motore. È un elemento normale della
frenatura del motore.
AVVISO!
Il controllo adattivo regola il carico in base al prolo
programmato. La corrente di arresto varia in base al
prolo di decelerazione e al tempo di arresto selezionati.
L'avviatore statico deve apprendere le caratteristiche del
nuovo motore:
Se si sostituisce un motore collegato a un
•
avviatore statico programmato per controllo
adattativo avviamento o all'arresto.
Se l'avviatore statico è stato testato su un
•
motore diverso prima dell'installazione eettiva.
Se il parametro 1-1 Motor Full Load Current (Corrente a
pieno carico motore) o il parametro 1-12 Adaptive Control
Gain (Controllo guadagno adattivo) vengono modicati,
l'avviatore statico riapprende automaticamente le
caratteristiche del motore.
42 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 47

100
70
0
30
1
2
3
177HA511.10
Velocidad
Tiempo
Caratteristiche del prodott... Guida operativa
ATTENZIONE
DANNI ALL'APPARECCHIATURA
Se la coppia di frenatura è impostata a un livello troppo
alto il motore si arresta prima del termine del tempo di
frenatura. Il motore pertanto subisce un inutile riscaldamento che potrebbe arrecare danni. È necessaria una
congurazione attenta per assicurare un funzionamento
sicuro dell'avviatore statico e del motore.
L'impostazione di un'elevata coppia di frenatura può
causare correnti di picco e perno un DOL del motore
mentre il motore è in fase di arresto. Assicurarsi che i
fusibili di protezione installati nel circuito di derivazione
del motore siano selezionati in modo adeguato.
ATTENZIONE
RISCHIO DI SURRISCALDAMENTO
Il funzionamento del freno provoca un riscaldamento del
motore più rapido rispetto al tasso calcolato dal modello
termico del motore. Se si usa la funzionalità di frenatura
installare un termistore motore o consentire un
suciente ritardo di riavvio (parametro 2-11 Restart Delay
(Ritardo di riavvio)).
tempo di arresto è troppo breve, la frenatura non
ha successo e il motore funziona a ruota libera
no all'arresto.
2. Impostare il parametro 1-16 Brake Time (Tempo di
frenatura) a circa il 25% del tempo di arresto
programmato. Il tempo di frenatura imposta il
tempo per lo stadio di frenata completa (2),
vedere la Disegno 5.8.
3. Regolare il parametro 1-15 Brake Torque (Coppia di
frenatura) in modo da ottenere le prestazioni di
arresto desiderate. Se l'impostazione è troppo
bassa il motore non si arresta completamente e
funziona a ruota libera no alla ne del periodo
di frenatura.
5 5
Quando viene selezionato il freno, l'avviatore statico usa
l'iniezione CC per rallentare il motore.
Frenatura
Non richiede l'uso di un contattore di frenatura
•
CC.
Controlla tutte le tre fasi in modo che le correnti
•
di frenatura e il riscaldamento associato siano
distribuiti in modo uniforme in tutto il motore.
La frenatura si divide in due stadi:
1. Pre-frenatura: ore un livello intermedio di
frenatura per rallentare la velocità del motore a
un punto in cui è possibile azionare correttamente il freno completo (circa il 70% della
velocità).
2. Frenatura completa: fornisce la coppia di frenata
massima, ma non è ecace a velocità superiori al
70% circa.
Per congurare il VLT® Soft Starter MCD 500 per il funzionamento del freno:
1. Impostare il parametro 1-11 Stop Time (Tempo di
arresto) per la durata del tempo di arresto
desiderata (1), vedere la Disegno 5.8. Il tempo di
arresto corrisponde al tempo di frenatura totale.
Impostare il tempo di arresto a un valore
sucientemente maggiore rispetto al tempo di
frenatura (parametro 1-16 Brake Time, Tempo di
frenatura) anché lo stadio di pre-frenatura possa
ridurre la velocità del motore a circa il 70%. Se il
1 Parametro 1-11 Stop Time (Tempo di arresto)
2 Parametro 1-16 Brake Time ( Tempo di frenatura)
3 Tempo di arresto a ruota libera
Disegno 5.8 Tempo di frenatura
AVVISO!
Quando si usa il freno CC:
1. Collegare l'alimentazione di rete all'avviatore
statico (morsetti di ingresso L1, L2, L3) nella
sequenza di fase positiva.
2. Impostare il parametro 2-1 Phase Sequence
(Sequenza di fase) su Positive only (Soltanto
positivo).
AVVISO!
Per carichi variabili tra i cicli di frenatura installare un
sensore di velocità zero per assicurare che l'avviatore
statico termini la frenatura in CC quando si arresta il
motore. Quest'installazione evita un inutile riscaldamento
del motore.
Per maggiori informazioni sull'uso dell'MCD 500 con un
sensore di velocità esterno (ad esempio per applicazioni
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 43
Page 48

7 0 %
6 0 %
5 0 %
3 0 %
1 0 %
4 0 %
2 0 %
8 0 %
9 0 %
1 0 0 %
3 0 %
4 0 %
5 0 %
2 0 %
1 0 %
0 %
1 7 7 H A 5 1 2 . 1 1
3
1
2
3
Caratteristiche del prodott...
VLT® Soft Starter MCD 500
con un carico variabile durante il ciclo di frenatura), vedere
il capitolo 5.12 Freno CC con sensore di velocità zero esterno.
5.5 Funzionamento marcia jog
Il jog fa funzionare il motore a velocità ridotta per
consentire l'allineamento del carico o per eseguire
operazioni di manutenzione. Il motore può essere fatto
funzionare in jog in direzione avanti o indietro.
La coppia massima disponibile per il jog in avanti è pari a
circa il 50%–75% della coppia a pieno carico del motore
55
(FLT ) in funzione del motore. Quando il motore
jog all'indietro, la coppia è pari a circa il 25–50% della FLT.
Il Parametro 15-8 Jog Torque (Coppia jog) controlla quanto
la coppia jog massima disponibile dell'avviatore statico
venga applicata sul motore.
eettua un
AVVISO!
L'impostazione del parametro 15-8 Jog Torque (Coppia
jog) oltre il 50% può provocare una maggiore vibrazione
dell'albero.
Per interrompere un funzionamento in jog, eettuare una
delle seguente operazioni:
Togliere il comando di jog.
•
Premere [O] sull'LCP.
•
Attivare Disabilitazione avviatore usando gli
•
ingressi programmabili LCP.
Se il comando di jog è ancora presente, il jog inizia
nuovamente al termine del ritardo di riavvio. Tutti gli altri
comandi, a eccezione di quelli elencati, vengono ignorati
durante il funzionamento in jog.
AVVISO!
L'avviamento dolce e l'arresto dolce non sono disponibili
durante il funzionamento in jog. Il jog è disponibile solo
per il motore principale.
ATTENZIONE
RAFFREDDAMENTO MOTORE RIDOTTO
Il funzionamento a velocità ridotta non è concepito per il
funzionamento continuo a causa del rareddamento
ridotto del motore. Il funzionamento in jog provoca un
riscaldamento del motore più rapido rispetto al modello
termico.
Se si usa il jog installare un termistore del
•
motore o consentire un ritardo di riavvio
suciente (parametro 2-11 Restart Delay (Ritardo
di riavvio)).
5.6 Funzionamento a triangolo interno
Le funzioni controllo adattivo, jog e freno non sono
supportate nel funzionamento a triangolo interno (a 6 li).
Se queste funzioni vengono programmate quando
l'avviatore statico è collegato a triangolo interno, il
comportamento è come nella Tabella 5.2:
Avviamen
to del
controllo
1 Jog avanti
2 Jog inverso
3 Funzionamento normale
Disegno 5.9 Funzionamento jog
Per attivare il funzionamento in jog utilizzare un ingresso
programmabile (parametro 3-3 Input A Function (Funzione
ingresso A)).
adattivo
Arresto
del
controllo
adattivo
Jog L'avviatore statico emette un avviso con il messaggio
Freno L'avviatore esegue un arresto a ruota libera.
Tabella 5.2 Comportamento a triangolo interno con controllo
adattivo, jog, e freno
44 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
L'avviatore statico esegue un avviamento con
corrente costante.
Se il tempo di arresto è >0 s, l'avviatore eettua un
arresto dolce TVR. Se il tempo di arresto è impostato
su 9 s, l'avviatore esegue un arresto a ruota libera.
di errore Opzione non supportata.
Page 49

Caratteristiche del prodott... Guida operativa
AVVISO!
Quando è collegato a triangolo interno, lo sbilanciamento di corrente è l'unica protezione contro la
perdita di fase attiva durante la marcia. Non disabilitare
il parametro 2-2 Current Imbalance (Sbilanciamento
corrente) durante il funzionamento a triangolo interno.
AVVISO!
Il funzionamento a triangolo interno è possibile solo con
una tensione di rete ≤600 V CA.
5.7 Correnti di spunto tipiche
Per determinare la corrente di avviamento tipica per
un'applicazione, usare questa informazione.
AVVISO!
Questi requisiti della corrente di avviamento sono idonei
e standard per la maggior parte delle circostanze.
Tuttavia, le prestazioni e i requisiti di coppia dei motori e
delle macchine possono variare. Per ulteriore assistenza,
contattare il fornitore Danfoss locale.
Generale e acqua
Agitatore 4,0 x FLC
Pompa centrifuga 3,5 x FLC
Compressore (vite, senza carico) 3,0 x FLC
Compressore (alternativo, senza carico) 4,0 x FLC
Trasportatore 4,0 x FLC
Ventola (smorzata) 3,5 x FLC
Ventola (non smorzata) 4,5 x FLC
Miscelatore 4,5 x FLC
Pompa volumetrica positiva 4,0 x FLC
Pompa sommersa 3,0 x FLC
Tabella 5.3 Correnti di avviamento tipiche per applicazioni
Generale e Acqua Applicazioni
Lavorazione di generi alimentari
Lavabottiglie 3,0 x FLC
Centrifuga 4,0 x FLC
Essiccatore 4,5 x FLC
Mulino 4,5 x FLC
Palletizzatore 4,5 x FLC
Separatore 4,5 x FLC
Aettatrice 3,0 x FLC
Tabella 5.5 Correnti di avviamento tipiche per applicazioni
Lavorazione di generi alimentari Applicazioni
5 5
Pasta e carta
Essiccatore 4,5 x FLC
Spappolatore 4,5 x FLC
Trinciatrice 4,5 x FLC
Tabella 5.6 Correnti di spunto tipiche per applicazioni nelle
industrie della pasta di legno e della carta
Petrolchimica
Mulino a sfere 4,5 x FLC
Centrifuga 4,0 x FLC
Estrusore 5,0 x FLC
Coclea per trasporto 4,0 x FLC
Tabella 5.7 Correnti di spunto tipiche per applicazioni
petrolchimiche
Trasporto e macchina utensile
Mulino a sfere 4,5 x FLC
Retticatrice 3,5 x FLC
Trasportatore di materiale 4,0 x FLC
Palletizzatore 4,5 x FLC
Premere 3,5 x FLC
Mulino a rulli 4,5 x FLC
Tavola di rotazione 4,0 x FLC
Metalli e industria mineraria
Nastro trasportatore 4,5 x FLC
Filtro polvere 3,5 x FLC
Retticatrice 3,0 x FLC
Mulino a martelli 4,5 x FLC
Frantumatore di rocce 4,0 x FLC
Trasportatore a rulli 3,5 x FLC
Mulino a rulli 4,5 x FLC
Tamburo 4,0 x FLC
Macchina tralatrice 5,0 x FLC
Tabella 5.4 Correnti di avviamento tipiche per applicazioni
Metalli e industria mineraria Applicazioni
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 45
Tabella 5.8 Correnti di avviamento tipiche per applicazioni
Trasporto e macchina utensile Applicazioni strumenti
Legname e prodotti in legno
Sega a nastro 4,5 x FLC
Macchina sminuzzatrice 4,5 x FLC
Sega circolare 3,5 x FLC
Scortecciatrice 3,5 x FLC
Tagliolo 3,5 x FLC
Compressore idraulico 3,5 x FLC
Piallatrice 3,5 x FLC
Sabbiatrice 4,0 x FLC
Tabella 5.9 Correnti di avviamento tipiche per applicazioni
Legname e prodotti in legno Applicazioni prodotti
Page 50

K1
K1
F
22
21
6/T3
2/T1
13
14
4/T2
24
33
34
06
05
08
07
17
18
25
11
16
A6
A5
A4
5/L3
3/L2
15
S1
S2
E
1/L1
+
+
5
6 7
4
2
A
3
1
177HA522.1
24
VD
Caratteristiche del prodott...
VLT® Soft Starter MCD 500
5.8 Installazione con contattore di rete
Il VLT® Soft Starter MCD 500 è installato con un contattore principale (adatto a AC3). La tensione di controllo è fornita dal
lato di ingresso del contattore.
L'uscita del contattore principale dell'avviatore statico controlla il contattore principale. L'uscita del contattore principale
viene assegnata per default al relè di uscita A (morsetti 13, 14).
55
1 Tensione di controllo (in funzione del modello) K1 Contattore principale
2 Tensione di uscita a 24 V CC F1 Fusibili a semiconduttori (opzionali)
3 Ingressi di controllo remoto S1 Avviamento/arresto
4 Ingresso termistore motore (solo PTC) S2 Contatto di ripristino
5 Uscite a relè 13, 14 Uscita a relè A
6 Alimentazione trifase 21, 22, 24 Uscita a relè B
7 Morsetti del motore 33, 34 Uscita a relè C
Disegno 5.10 Installazione con contattore principale
Impostazioni parametriche:
Parametro 4-1 Relay A Function (Funzione relè A)
•
- Selezionando Main contactor si assegna la funzione contattore principale all'uscita a relè A (valore di
fabbrica).
46 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 51

K1
24
VD
22
21
13
14
24
33
34
06
05
08
07
17
18
25
11
16
A6
A5
A4
15
S1
S2
S3
E
+
+
6/T3
2/T1
4/T2
5/L3
3/L2
1/L1
L3B
L1B
L2B
K1
F1
5
6 7
4
2
A
3
1
177HA523.1
Caratteristiche del prodott... Guida operativa
5.9 Installazione con contattore di bypass
Il VLT® Soft Starter MCD 500 è installato con un contattore di bypass (adatto a AC1). L'uscita Run Output dell'avviatore
statico controlla il contattore di bypass. L'uscita Run Output è assegnata per default al relè di uscita B (morsetti 21, 22, 24).
5 5
1 Tensione di controllo (in funzione del modello) K1 Contattore di bypass
2 Tensione di uscita a 24 V CC F1 Fusibili a semiconduttori (opzionali)
3 Ingressi di controllo remoto S1 Contatto di avviamento
4 Ingresso termistore motore (solo PTC) S2 Contatto di arresto
5 Uscite a relè S3 Contatto di ripristino
6 Alimentazione trifase 13, 14 Uscita a relè A
7 Morsetti del motore 21, 22, 24 Uscita a relè B
33, 34 Uscita a relè C
Disegno 5.11 Installazione con contattore di bypass
Impostazioni parametriche:
•
Parametro 4-4 Relay B Function (Funzione relè B)
- Selezionando Run si assegna la funzione Run Output al relè di uscita B (valore di fabbrica).
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 47
Page 52

K1
F
24
VD
22
21
6/T3
2/T1
13
14
4/T2
24
33
34
06
05
08
07
17
18
25
11
16
A6
A5
A4
5/L3
3/L2
15
S3
S1
S2
E
1/L1
+
+
5
6 7
4
2
A
3
1
177HA524.1
Caratteristiche del prodott...
VLT® Soft Starter MCD 500
5.10 Funzion. emergenza
Durante il funzionamento normale il VLT® Soft Starter MCD 500 è controllato mediante un segnale remoto a due li
(morsetti 17, 18).
Un circuito a due li collegato all'ingresso A (morsetti 11, 16) controlla il funzionamento di emergenza. Chiudendo l'ingresso
A, l'avviatore statico mette in funzione il motore e ignora tutte le condizioni di scatto.
55
1 Tensione di controllo (in funzione del modello) S1 Contatto avvio/arresto
2 Tensione di uscita a 24 V CC S2 Contatto di ripristino
3 Ingressi di controllo remoto S3 Contatto funzionamento emergenza
4 Ingresso termistore motore (solo PTC) 13, 14 Uscita a relè A
5 Uscite a relè 21, 22, 24 Uscita a relè B
6 Alimentazione trifase 33, 34 Uscita a relè C
7 Morsetti del motore
Disegno 5.12 Modalità funzionamento di emergenza
Impostazioni parametri:
•
Parametro 3-3 Input A Function (Funzione ingresso A).
48 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 53

Caratteristiche del prodott... Guida operativa
- Selezionando Emergency Run (Funzionamento di emergenza) si assegna l'ingresso A al funzionamento di
emergenza.
Parametro 15-3 Emergency Run (Funzionamento di emergenza).
•
- Selezionando Enable (Abilitare) si abilita la modalità funzionamento di emergenza.
AVVISO!
Anche se Emergency run (Funzionamento di emergenza) soddisfa i requisiti di funzionalità della modalità incendio,
Danfoss non ne consiglia l'uso in situazioni che richiedono prove e/o la conformità a determinate norme in quanto tale
modalità di funzionamento non è certicata.
5.11 Circuito di scatto ausiliario
Durante il funzionamento normale il VLT® Soft Starter MCD 500 è controllato mediante un segnale remoto a due li
(morsetti 17, 18).
L'ingresso A (morsetti 11, 16) è collegato a un circuito di scatto esterno (come un interruttore di allarme bassa pressione di
un sistema di pompaggio). Quando il circuito esterno si attiva, l'avviatore statico scatta e arresta il motore.
5 5
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 49
Page 54

K1
F
24
VD
22
21
6/T3
2/T1
13
14
4/T2
24
33
34
06
05
08
07
17
18
25
11
16
A6
A5
A4
5/L3
3/L2
15
S3
S1
S2
E
1/L1
+
+
5
6 7
4
2
A
3
1
177HA525.1
Caratteristiche del prodott...
VLT® Soft Starter MCD 500
55
1 Tensione di controllo (in funzione del modello) S1 Contatto avvio/arresto
2 Tensione di uscita a 24 V CC S2 Contatto di ripristino
3 Ingressi di controllo remoto S3 Contatto di scatto ausiliario
4 Ingresso termistore motore (solo PTC) 13, 14 Uscita a relè A
5 Uscite a relè 21, 22, 24 Uscita a relè B
6 Alimentazione trifase 33, 34 Uscita a relè C
7 Morsetti del motore
Disegno 5.13 Circuito di scatto ausiliario
Impostazioni parametriche:
Parametro 3-3 Input A Function (Funzione ingresso A).
•
•
•
- Selezionando Input Trip (N/O) si assegna l'ingresso A alla funzione di scatto ausiliario (N/O).
Parametro 3-4 Input A Name (Nome ingresso A).
- La selezione di un nome, ad es. Bassa pressione, assegna un nome all'ingresso A.
Parametro 3-8 Remote Reset Logic (Logica ripristino remoto).
- Selezionare come necessario, ad es. Normalmente chiuso, l'ingresso si comporta come un contatto
normalmente chiuso.
50 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 55

-F1
L3L2L1 N E
-K10
L1 L2 L3
E
T1 T2 T3
A5A4 A6
15 16 17 18 25
11 16
-K10
-K11
-K10
-K11
T3T2T1
M
3
-K11-K10
-A2
177HA619.20
1
2
3
4
A
5
6
4
B
D
E
C
Caratteristiche del prodott... Guida operativa
5.12 Freno CC con sensore di velocità zero esterno
Per carichi che variano tra i cicli di frenatura esistono vantaggi nell'uso di un sensore di velocità zero esterno, se questo
viene interfacciato con il VLT® Soft Starter MCD 500 per l'arresto del freno. Questo metodo di controllo fa in modo che
l'impianto di frenatura MCD 500 si arresti ogni volta che il motore è fermo, evitandone in questo modo un inutile surriscaldamento.
Disegno 5.14 mostra come usare un sensore di velocità zero con l'MCD 500 per disattivare la funzione freno in occasione
dell'arresto del motore. Il sensore di velocità zero (-A2) viene spesso denominato rilevatore di controllo sottovelocità. Il suo
contatto interno è aperto a velocità zero e chiuso a qualsiasi velocità superiore a zero. Una volta che il motore si è arrestato,
i morsetti 11 e 16 sono aperti e l'avviatore statico è disabilitato. Quando viene dato il seguente comando di avviamento,
vale a dire alla successiva applicazione di K10, i morsetti 11 e 16 si chiudono e l'avviatore statico viene abilitato.
Far funzionare l'MCD 500 in modalità Auto-on e impostare il parametro 3-3 Input A Function (Funzione ingresso A) su Starter
disable (Disabilitazione avviatore).
5 5
1 Tensione ausiliaria 15, 16 Avviamento
2 Morsetti del motore 17, 18 Arresto
3 Alimentazione trifase 25, 18 Ripristino
4 Disabilitazione avviatore (mostrata sul
A O (pronto)
display dell'avviatore statico)
5 Segnale di avviamento (2, 3 o 4 li) B Avviamento
6 Rilevamento velocità zero C Funzionamento
7 Sensore di velocità zero D Arresto
E Velocità zero
Disegno 5.14 Disinserimento della funzione freno da fermo con il rilevatore velocità zero.
Per dettagli sulla congurazione del freno CC vedere il capitolo 5.4.5 Freno.
AVVISO!
Quando si usa il freno CC, collegare l'alimentazione di rete all'avviatore statico (morsetti di ingresso L1, L2, L3) in
sequenza di fase positiva. Impostare quindi il parametro 2-1 Phase Sequence (Sequenza di fase) su Positive only (Soltanto
positivo).
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 51
Page 56

3
177HA526.12
6
5
6
4
2
3
1
K3T
K2
K10 K11 K12 K13K1
M1
54 55 585756
F1
K2 K1
K12
S2 K13
A2
K1T
K1T K2T K3T
K1 K2
K1 K2S1 K10 K10
Y1
Y2
Y1
Y2
K10
K2T
4/T2
6/T3
E
1/L1
3/L2
5/L3
2/T1
33
34
A4 A5 A6
05
06
K12
K11 S3
53
Caratteristiche del prodott...
VLT® Soft Starter MCD 500
5.13 Frenatura dolce
Per elevati carichi inerziali il VLT® Soft Starter MCD 500 può essere congurato per la frenatura dolce.
In quest'applicazione l'MCD 500 è utilizzato con contattori di marcia in avanti e di frenatura. Quando l'avviatore statico
riceve un segnale di avviamento (pulsante S1), chiude il contattore di marcia in avanti (K1) e controlla il motore in base alle
impostazioni principali del motore programmate.
Quando l'avviatore statico riceve un segnale di arresto (pulsante S2), apre il contattore di marcia in avanti (K1) e chiude il
contattore di frenatura (K2) dopo un ritardo di circa 2–3 s (KT1). K12 è anche chiuso per attivare le impostazioni secondarie
del motore che sono programmate dall'utente per le caratteristiche di arresto desiderate.
55
Quando la velocità del motore si avvicina a zero, il rilevatore velocità zero esterno (A2) arresta l'avviatore statico e apre il
contattore di frenatura (K2).
1 Tensione di controllo (in funzione del modello) K10 Relè di funzionamento
2 Ingressi di controllo remoto K11 Relè avviamento
3 Ingresso termistore motore (solo PTC) K12 Relè del freno
4 Uscite a relè K13 Relè rilevatore velocità zero
5 Alimentazione trifase K1 Contattore di linea (marcia)
6 Morsetti del motore K2 Contattore di linea (freno)
A2 Sensore di velocità zero K1T Timer di ritardo marcia
S1 Contatto di avviamento K2T Timer di ritardo freno
S2 Contatto di arresto K3T Timer di ritardo rilevatore velocità zero
S3 Contatto di ripristino
Disegno 5.15 Congurazione della frenatura dolce
Impostazioni parametri:
•
Parametro 3-3 Input A Function (Funzione ingresso A).
- Selezionando Motor Set Select (Selezione impostazione motore) si assegna l'ingresso A per la selezione
dell'impostazione motore.
- Impostare le caratteristiche di avviamento mediante il gruppo motore principale (gruppo di parametri 1
Primary Motor Settings (Impostazioni del motore principale)).
52 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 57

Caratteristiche del prodott... Guida operativa
- Impostare le caratteristiche di frenatura mediante le impostazioni secondarie del motore (gruppo di
parametri 7 Secondary Motor Set (Gruppo motore secondario)).
Parametro 4-7 Relay C Function (Funzione relè C).
•
- Selezionando Trip (Scatto) si assegna la funzione di scatto all'uscita relè C.
AVVISO!
Se l'avviatore statico scatta alla frequenza di alimentazione (parametro 16-5 Frequency (Frequenza)) quando il contattore
di frenatura K2 si apre, modicare l'impostazione dei parametri da 2-8 a 2-10.
5.14 Motore a due velocità
Il VLT® Soft Starter MCD 500 può essere congurato per il controllo di motori del tipo Dahlander a due velocità, utilizzando
un contattore ad alta velocità (K1), un contattore a bassa velocità (K2) e un contattore a stella (K3).
AVVISO!
I motori PAM (Pole Amplitude Modulation, modulazione ampiezza di polo) modicano la velocità cambiando ecacemente la frequenza dello statore mediante la congurazione dell'avvolgimento esterno. Gli avviatori statici non sono
adatti per questo tipo di motore a due velocità.
Quando l'avviatore statico riceve un segnale di avviamento ad alta velocità, chiude il contattore ad alta velocità (K1) e il
contattore a stella (K3). Quindi controlla il motore in base alle impostazioni del motore principale (parametri da 1-1 a 1-16).
Quando l'avviatore statico riceve un segnale di avviamento a bassa velocità, chiude il contattore a bassa velocità (K2).
Questa azione chiude l'ingresso A e l'avviatore statico controlla il motore in base alle impostazioni del motore secondario
(parametri da 7-1 a 7-16).
AVVISO!
Se l'avviatore statico scatta alla frequenza di alimentazione (16-5 Frequency (Frequenza)) quando il segnale di
avviamento ad alta velocità (7) viene rimosso, modicare le impostazioni dei parametri da 2-8 a 2-10.
5 5
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 53
Page 58

177HA527.1
2/T1
4/T2
6/T3
E
T4
T5
T6
T1
T2
T3
A6
A4
A5
1/L1
3/L2
5/L3
24
22
21
K10
K11
K10
K11
K3
K10
K2K11
K1
K2
K3
K1
K3
K1
K3
K2
S1
K2
K1
K10
F1
17
18
25
11
16
15
3
6
7
5
4
2
1
Caratteristiche del prodott...
VLT® Soft Starter MCD 500
55
1 Tensione ausiliaria 6 Ingresso avviamento remoto a
K2 Contattore di linea (bassa velocità)
bassa velocità
2 Ingressi di controllo
remoto
3 Uscite a relè K10 Relè di avviamento remoto
7 Ingresso avviamento remoto ad
alta velocità
K3 Contattore di avviamento (alta velocità)
S1 Contatto di ripristino
(bassa velocità)
4 Alimentazione trifase K11 Relè di avviamento remoto (alta
21, 22, 24 Uscita a relè B
velocità)
5 Morsetti del motore K1 Contattore di linea (alta velocità)
Disegno 5.16 Congurazione del motore a due velocità
AVVISO!
I contattori K2 e K3 devono essere interbloccati meccanicamente.
Impostazioni parametri:
•
•
Parametro 3-3 Input A Function (Funzione ingresso A).
- Selezionando Motor Set Select (Selezione impostazione motore) si assegna l'ingresso A per la selezione
dell'impostazione motore.
- Impostare le caratteristiche di alta velocità mediante i parametri da 1-1 a 2-9.
- Impostare le caratteristiche di bassa velocità mediante i parametri da 7-1 a 7-16.
Parametro 4-4 Relay B Function (Funzione relè B)
- Selezionando Trip (Scatto) si assegna la funzione di scatto all'uscita a relè B.
54 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 59

Caratteristiche del prodott... Guida operativa
AVVISO!
Se l'avviatore statico scatta alla frequenza di alimentazione (parametro 16-5 Frequency (Frequenza)) quando il segnale di
alta velocità (7) viene rimosso, modicare le impostazioni dei parametri da 2-9 a 2-10.
5 5
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 55
Page 60

6
Funzionamento
VLT® Soft Starter MCD 500
6 Funzionamento
6.1 Metodi di controllo
Il VLT® Soft Starter MCD 500 può essere controllato:
Tramite i tasti di comando sull'LCP (comando locale).
•
Tramite gli ingressi remoti (controllo remoto).
•
Mediante la rete di comunicazione seriale.
•
Funzioni di controllo
Il comando locale è disponibile soltanto in modalità Hand-on.
•
Il controllo remoto è disponibile soltanto in modalità Auto-on.
•
Il controllo tramite una rete di comunicazione seriale è sempre disabilitato nella modalità Hand-on. Abilitare/disabi-
•
litare i comandi di avviamento/arresto tramite la rete seriale in modalità Auto-on cambiando l'impostazione del
parametro 3-2 Comms in Remote (Comunicazioni da remoto).
L'MCD 500 può essere inoltre congurato per l'avviamento automatico o l'arresto automatico. Il funzionamento avviamento/
arresto automatico è disponibile soltanto in modalità Auto-on. In modalità Hand-on l'avviatore statico ignora qualsiasi
impostazione di avviamento/arresto automatico. Per congurare il funzionamento di avviamento/arresto automatico,
impostare i parametri da 5-1 a 5-4.
Per commutare tra le modalità Hand-on e Auto-on premere i tasti sull'LCP.
[Hand On]: avvia il motore e accede alla modalità Hand-on.
•
[O]: arresta il motore e accede alla modalità Hand-on.
•
[Auto On]: imposta l'avviatore statico sulla modalità Auto-on.
•
[Reset] ripristina uno scatto (soltanto modalità Hand-on).
•
L'MCD 500 può essere anche impostato per consentire soltanto il comando locale o il controllo remoto usando il parametro
3-1 Local/Remote (Locale/Remoto).
Se il parametro 3-1 Local/Remote (Locale/Remoto) è impostato su Remote Control Only (Soltanto controllo remoto), il tasto
è disabilitato. Arrestare il motore tramite il controllo remoto o tramite la rete di comunicazione seriale.
Modalità Hand-on Modalità Auto-on
Per avviare dolcemente il motore. Premere [Hand On] sull'LCP. Attivare l'ingresso Start remote (Avviamento
remoto).
Per arrestare il motore. Premere [O] sull'LCP. Attivare l'ingresso Stop remote (Arresto
remoto).
Per ripristinare uno scatto sull'avviatore
statico.
Funzionamento avviamento/arresto
automatico.
Tabella 6.1 Avviamento, arresto e ripristino nelle modalità Hand-on e Auto-on.
Premere [Reset] sull'LCP. Attivare l'ingresso Reset remote (Ripristino
remoto).
Disabilitato. Abilitato.
[O]
Per arrestare il motore a ruota libera indipendentemente dall'impostazione nel parametro 1-10 Stop Mode (Modalità di
arresto) premere contemporaneamente
contattore principale, e il motore funziona a ruota libera no all'arresto.
56 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
[O] e [Reset]. L'avviatore statico disinserisce l'alimentazione dal motore e apre il
Page 61

177HA383.10
®
1
2
3
4
5
Funzionamento Guida operativa
AVVISO!
Le funzioni freno e jog funzionano solo con i motori
collegati in linea (vedere il capitolo 5.6 Funzionamento a
triangolo interno)
6.2 Funzionamento e LCP
6.2.1 Modi di funzionamento
In modalità Hand-on:
Per avviare dolcemente il motore, premere [Hand
•
On] sull'LCP.
Per arrestare il motore, premere [O] sull'LCP.
•
Per ripristinare uno scatto sull'avviatore statico,
•
premere [Reset] sull'LCP.
Per arrestare il motore in rotazione libera indipen-
•
dentemente dall'impostazione nel parametro 1-10
Stop Mode (Modalità di arresto), premere contem-
poraneamente [O] e [Reset]. L'avviatore statico
disinserisce l'alimentazione dal motore e apre il
contattore principale, e il motore funziona in
rotazione libera no all'arresto.
In modalità Auto-on:
Per avviare dolcemente il motore, attivare
•
l'ingresso remoto Avviamento.
Per arrestare il motore, attivare l'ingresso remoto
•
Arresto.
Per ripristinare uno scatto sull'avviatore statico,
•
attivare l'ingresso remoto Ripristino.
AVVISO!
Le funzioni freno e jog funzionano solo con i motori
collegati in linea (vedere capitolo 4.3.3 Installazione con
connessione a triangolo interna)
6.2.2 L'LCP
1 Display a 4 righe con dettagli di stato e program-
mazione.
2 Tasti di comando sul display:
[Status]: torna alle visualizzazioni di stato.
[Quick Menu]: apre il menu rapido.
[Main Menu]: apre il menu principale.
[Alarm Log]: apre il registro allarmi.
3 Tasti di navigazione menu:
[Back]: esce dal menu o dal parametro oppure
annulla la modica di un parametro.
[OK]: accede a un menu o a un parametro oppure
salva la modica di un parametro.
[▲]/[▼]:
Passa al menu o al parametro successivo
o precedente.
Modica l'impostazione del parametro
attuale.
Scorre le schermate di stato.
4 Tasti di comando locale avviatore statico:
[Hand On]: avvia il motore e accede alla modalità
di comando locale.
[O]: arresta il motore (attivo soltanto in modalità
Hand-on).
[Auto On]: imposta l'avviatore statico sulla modalità
Auto-on.
[Reset] ripristina uno scatto (soltanto modalità
Hand-on).
5 Indicatori di stato ingresso remoto.
6
6
Disegno 6.1 Layout LCP
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 57
Page 62

Funzionamento
VLT® Soft Starter MCD 500
6
6.3 LCP montato a distanza
È possibile installare un LCP montato a distanza con il VLT
Soft Starter MCD 500. Il quadro di comando LCP 501 può
essere montato a una distanza massima di 3 metri dall'avviatore statico, per assolvere funzioni di controllo e
monitoraggio.
L'avviatore statico può essere controllato e programmato
dall'LCP remoto o dall'LCP sull'avviatore statico. Entrambi i
display mostrano le stesse informazioni.
L'LCP remoto consente anche la copia delle impostazioni
dei parametri tra gli avviatori statici.
6.3.1 Sincronizzazione dell'LCP e
dell'avviatore statico
Il cavo DB9 può essere collegato/scollegato dall'LCP mentre
l'avviatore statico è in funzione.
La prima volta che un LCP viene collegato a un avviatore
statico, l'avviatore statico copia le proprie impostazioni dei
parametri sull'LCP.
Rilevato nuovo
display
AVVISO!
Se la versione software dei parametri nell'LCP è diversa
®
dalla versione software dell'avviatore statico, è
disponibile soltanto Starter to Display (Da avviatore
statico a display).
AVVISO!
Mentre l'LCP si sincronizza, sono abilitati soltanto i tasti
[▲], [▼], [OK] e [O].
AVVISO!
L'LCP può essere rimosso o sostituito mentre l'avviatore
statico è in funzione. Non è necessario rimuovere la
tensione di rete o di controllo.
6.4 Schermata iniziale
Quando si applica la corrente di controllo l'avviatore statico
visualizza la schermata iniziale.
Pronto S1
Benvenuti
1.05/2.0/1.13
MCD5-0053-T5-G1-
CV2
Terza linea di visualizzazione: versioni software dell'LCP remoto, del
software di controllo e del software del modello.
Quarta linea di visualizzazione: numero di modello del prodotto.
Se l'LCP è stato precedentemente usato con un VLT® Soft
Starter MCD 500, selezionare se copiare i parametri dall'LCP
all'avviatore statico o dall'avviatore statico all'LCP.
Per selezionare l'opzione richiesta:
1.
Premere i tasti [▲] e [▼].
Una linea tratteggiata circonda l'opzione selezionata.
2. Premere [OK] per procedere con la selezione di
Copy Parameters (Copia parametri).
2a Da display ad avviatore statico.
2b Da avviatore statico a display.
Copia parametri
Da display ad
avviatore statico
Da avviatore statico a
display
AVVISO!
La versione LCP viene visualizzata soltanto se viene
collegato un LCP 501 remoto quando è applicata la
corrente di controllo. Se non è presente alcun LCP
remoto, vengono visualizzati soltanto il software di
controllo e le versioni software del modello.
6.5 Tasti di comando locale
Se il parametro 3-1 Local/Remote (Locale/Remoto) è
impostato su LCL/RMT Anytime o su LCL/RMT When OFF, i
tasti [Hand On] e [Auto On] sono sempre attivi. Se
l'avviatore statico è in modalità Auto-on, premendo [Hand
On] si accede alla modalità Hand-on e il motore viene
avviato.
Se il parametro 3-1 Local/Remote (Locale/Remoto) è
impostato su Remote Control Only, il tasto [O] è
disattivato. Arrestare il motore tramite il controllo remoto o
tramite la rete di comunicazione seriale.
58 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 63

Funzionamento Guida operativa
6.6 Display
L'LCP visualizza un'ampia gamma di dati sulle prestazioni
relative all'avviatore statico. Premere [Status] per accedere
alle schermate del display di stato, quindi premere [▲] e
[▼] per selezionare le informazioni da visualizzare. Per
tornare alle schermate di stato all'interno di un menu,
premere ripetutamente [Back] o premere [Status].
Informazioni di stato disponibili:
Monitoraggio della temperatura.
•
Schermata programmabile (vedere i parametri da
•
8-2 a 8-5).
Corrente.
•
Frequenza.
•
Potenza motore.
•
Informazioni sull'ultimo avviamento.
•
Data e ora.
•
Graco a barre conduzione SCR.
•
Graci delle prestazioni.
•
AVVISO!
Le schermate illustrate presentano le impostazioni di
fabbrica.
6.6.1 Schermata monitoraggio temperatura
(S1)
La schermata della temperatura mostra la temperatura del
motore come percentuale della capacità termica totale.
Mostra anche quale gruppo di dati motore è in uso.
La schermata di monitoraggio temperatura è la schermata
di stato predenita.
Pronto S1
MS1 000.0A 000,0 kW
Gruppo motore
primario
M1 000%
6.6.2 Schermata programmabile (S2)
Pronto S2
MS1 000.0A 000,0 kW
-.-- pf
00000 ore
6.6.3 Corrente media (S3)
La schermata della corrente media mostra la corrente
media di tutte le tre fasi.
Pronto S3
MS1 000.0A 000,0 kW
0.0A
6.6.4 Schermata di monitoraggio corrente
(S4)
La schermata della corrente mostra la corrente di linea in
tempo reale su ogni fase.
Pronto S4
MS1 000.0A 000,0 kW
Correnti di fase
000.0A 000.0A 000.0A
6.6.5 Schermata monitoraggio frequenza
(S5)
La schermata della frequenza mostra la frequenza di rete
misurata dall'avviatore statico.
Pronto S5
MS1 000.0A 000,0 kW
00,0 Hz
6.6.6 Schermata potenza motore (S6)
La schermata della potenza motore mostra la potenza del
motore (kW, cv e kVA) e il fattore di potenza.
Pronto S6
MS1 000.0A 000,0 kW
000,0 kW 0000HP
0000 kVA -. - - pf
6
6
La schermata dell'avviatore statico programmabile
dall'utente può essere congurata per mostrare le
informazioni più importanti per l'applicazione specica.
Utilizzare i parametri da 8-2 a 8-5 per selezionare le
informazioni da visualizzare.
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 59
6.6.7 Informazioni ultimo avviamento (S7)
La schermata delle informazioni sull'ultimo avviamento
mostra i dettagli dell'ultimo avviamento avvenuto con
successo:
Durata dell'avviamento, (s).
•
Massima corrente di avviamento assorbita (come
•
percentuale della corrente a pieno carico del
motore).
Page 64

177HA513.10
L1 Cond
L2 Cond
L3 Cond
6
Funzionamento
Aumento calcolato della temperatura del motore.
•
Pronto S7
MS1 000.0A 000,0 kW
Ultimo avviamento 000 s
000% FLC
VLT® Soft Starter MCD 500
ΔTemp 0%
6.6.8 Data e ora (S8)
La schermata data e ora indica la data e l'ora attuali del
sistema (formato 24 ore). Per i dettagli dell'impostazione di
data e ora, consultare capitolo 9.1 Impostare data e ora.
Pronto S8
MS1 000.0A 000,0 kW
AAAA MMM GG
HH:MM:SS
6.6.9 Graco a barre conduzione SCR
Il graco a barre conduzione SCR mostra il livello di
conduzione su ogni fase.
Disegno 6.2
Graco a barre
6.6.10 Graci delle prestazioni
Il VLT® Soft Starter MCD 500 può visualizzare informazioni
sulle prestazioni in tempo reale relative a:
Corrente.
•
Temperatura motore.
•
kW motore.
•
kVA motore.
•
Fattore di potenza motore.
•
Le informazioni più recenti sono visualizzate sul lato destro
dello schermo. I dati precedenti non vengono memorizzati.
Per consentire l'analisi delle prestazioni passate, è anche
possibile arrestare il graco. Per attivare o disattivare
l'interruzione del graco, tenere premuto [OK] per almeno
0,5 s.
AVVISO!
L'avviatore statico non raccoglie dati mentre il graco è
in pausa. Alla ripresa del graco, viene mostrato un
piccolo spazio tra i dati precedenti e quelli nuovi.
60 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 65

Programmazione Guida operativa
7 Programmazione
È possibile accedere ai menu di programmazione in
qualsiasi momento, compreso mentre l'avviatore statico è
in funzione. Tutte le modiche hanno eetto immediatamente.
7.1 Controllo degli accessi
Un codice di accesso di sicurezza a quattro cifre protegge i
parametri critici (gruppo di parametri 15 Restricted
Parameters (Parametri con restrizioni) e successivi),
impedendo agli utenti non autorizzati di visualizzare o
modicare le impostazioni parametri.
Quando si tenta di accedere a un gruppo di parametri con
restrizioni, l'LCP chiede un codice di accesso. Il codice di
accesso viene chiesto una volta per la sessione di programmazione e l'autorizzazione permane no alla chiusura del
menu.
Per inserire il codice di accesso:
1. Premere [Back] e [OK] per selezionare una cifra.
2.
Premere [▲] e [▼] per
modicare il valore.
3. Quando tutte le quattro cifre corrispondono al
codice di accesso, premere [OK].
L'LCP mostra un messaggio di conferma prima di
proseguire.
Inserire il codice di accesso
####
OK
Accesso consentito
SUPERVISORE
Per modicare il codice di accesso, usare il parametro 15-1
Access Code (Codice di accesso).
AVVISO!
Il codice di accesso di sicurezza protegge anche la
simulazione della protezione e la simulazione dell'uscita.
I contatori e il ripristino del modello termico possono
essere visualizzati senza immettere un codice di accesso,
ma il codice di accesso è indispensabile per eettuare il
ripristino.
Il codice di accesso predenito è 0000.
Per impedire che gli utenti alterino le impostazioni
parametri, bloccare i menu. Il blocco delle modiche può
essere impostato su Read & Write (Lettura e scrittura), Read
Only (Sola lettura), o No Access (Accesso negato) nel
parametro 15-2 Adjustment Lock (Blocco della regolazione).
Se si tenta di modicare il valore di un parametro o di
accedere al Menu principale quando il blocco della
regolazione è attivo, verrà visualizzato un messaggio di
errore:
Accesso negato
Blocco regol. attivo
7.2 Menu rapido
[Quick Menu] fornisce l'accesso ai menu per impostare
l'avviatore statico per applicazioni semplici.
7.2.1 Setup rapido
7 7
Il setup rapido dà accesso ai parametri più comuni,
permettendo di congurare l'avviatore statico in base
all'applicazione. Per i dettagli sui singoli parametri, vedere
il capitolo 8 Descrizioni dei parametri.
1 Gruppo mot primario
1-1 FLC motore
1-3 Modalità di avviamento
1-4 Limite di corrente
1-5 Corrente di avviamento
1-6 Tempo di rampa di avviamento
1-9 Tempo di avviamento eccessivo
1-10 Modalità di arresto
1-11 Tempo di arresto
2 Protezione
2-1 Sequenza di fase
2-4 Sottocorrente
2-5 Rit. sottocorrente
2-6 Sovracorrente istant.
2-7 Rit. sovracorr. istant.
3 Ingressi
3-3 Funzione ingresso A
3-4 Nome ingresso A
3-5 Scatto ingresso A
3-6 Rit. scatto ing. A
3-7 Rit. iniziale ing. A
4 Uscite
4-1 Funzione relè A
4-2 Ritardo attivazione relè A
4-3 Ritardo disattivazione relè A
4-4 Funzione relè B
4-5 Ritardo attivazione relè B
4-6 Ritardo disattivazione relè B
4-7 Funzione relè C
4-8 Ritardo attivazione relè C
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 61
Page 66

Programmazione
VLT® Soft Starter MCD 500
1 Gruppo mot primario
4-9 Ritardo disattivazione relè C
4-10 Avviso corrente bassa
4-11 Avviso corrente alta
4-12 Avviso temp. motore
5 Timer avvio/arresto
5-1 Tipo avvio automatico
5-2 Tempo avvio automatico
5-3 Tipo arresto automatico
5-4 Tempo arresto automatico
8 Display
8-1 Lingua
8-2 Schermo alto-sin.
8-3 Schermo alto-dest.
8-4 Schermo basso-sin.
8-5 Schermo basso-dest.
77
Tabella 7.1 Parametri nel menu setup rapido
7.2.2 Esempi di setup dell'applicazione
Il menu dei setup dell'applicazione semplica la congu-
razione dell'avviatore statico per le applicazioni comuni.
Pompa sommersa
Corrente a pieno carico del
motore
Modalità di avviamento Controllo adattivo
Prolo avviamento adattivo Accelerazione anticipata
Tempo di rampa d'avviamento 5 s
Modalità di arresto Controllo adattivo
Prolo di arresto adattivo Decelerazione ritardata
Tempo di arresto 5 s
Tabella 7.3 Valori suggeriti per le applicazioni con pompa
sommersa
Ventilatore smorzato
Corrente a pieno carico del
motore
Modalità di avviamento Corrente costante
Lim.corrente 350%
Tabella 7.4 Valori suggeriti per le applicazioni con ventilatori
smorzati
Ventilatore non smorzato
L'avviatore statico seleziona i parametri pertinenti per
l'applicazione e suggerisce un'impostazione standard.
Ciascun parametro può essere regolato per soddisfare i
requisiti esatti.
Sul display, i valori consigliati sono evidenziati. I valori
caricati sono invece indicati da un ▶.
Corrente a pieno carico del
motore
Modalità di avviamento Controllo adattivo
Prolo avviamento adattivo Accelerazione costante
Tempo di rampa d'avviamento 20 s
Tempo di avviamento eccessivo 30 s
Impostare sempre il parametro 1-1 Motor FLC (FLC motore)
in modo che corrisponda alla corrente a pieno carico
riportata sulla targa del motore. Il valore consigliato per la
FLC motore è la FLC minima dell'avviatore statico.
Pompa centrifuga
Corrente a pieno carico del
motore
Modalità di avviamento Controllo adattivo
Prolo avviamento adattivo Accelerazione anticipata
Tempo di rampa d'avviamento 10 s
Modalità di arresto Controllo adattivo
Prolo di arresto adattivo Decelerazione ritardata
Tempo di arresto 15 s
Tabella 7.2 I valori suggeriti per le applicazioni con pompa
centrifuga
Tempo a rotore bloccato 20 s
Tabella 7.5 Valori suggeriti per le applicazioni con ventilatori
non smorzati
Compressore a vite
Corrente a pieno carico del
motore
Modalità di avviamento Corrente costante
Tempo di rampa d'avviamento 5 s
Lim.corrente 400%
Tabella 7.6 Valori suggeriti per applicazioni con compressori a
vite
Compressore alternativo
Corrente a pieno carico del
motore
Modalità di avviamento Corrente costante
Tempo di rampa d'avviamento 10 s
Lim.corrente 450%
Tabella 7.7 Valori suggeriti per applicazioni con compressori
alternativi
62 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 67

Programmazione Guida operativa
Trasportatore
Corrente a pieno carico del
motore
Modalità di avviamento Corrente costante
Tempo di rampa d'avviamento 5 s
Lim.corrente 400%
Modalità di arresto Controllo adattivo
Prolo di arresto adattivo Decelerazione costante
Tempo di arresto 10 s
Tabella 7.8 Valori suggeriti per applicazioni con trasportatore
Frantoio rotativo
Corrente a pieno carico del
motore
Modalità di avviamento Corrente costante
Tempo di rampa d'avviamento 10 s
Lim.corrente 400%
Tempo di avviamento eccessivo 30 s
Tempo a rotore bloccato 20 s
Tabella 7.9 Valori suggeriti per applicazioni con frantoi rotativi
Frantoio a ganasce
Corrente a pieno carico del
motore
Modalità di avviamento Corrente costante
Tempo di rampa d'avviamento 10 s
Lim.corrente 450%
Tempo di avviamento eccessivo 40 s
Tempo a rotore bloccato 30 s
Tabella 7.10 Valori suggeriti per applicazioni con frantoio a
ganasce
Menu principale
7.3
Il [Main Menu] dà accesso ai menu per impostare
l'avviatore statico per le applicazioni avanzate e per
monitorarne le prestazioni.
7.3.1 Parametri
I parametri consentono di visualizzare e modicare tutti i
parametri programmabili che controllano il funzionamento
dell'avviatore statico.
Per aprire Parametri, premere [Main Menu] e quindi
selezionare Parametri.
Per navigare nei parametri
Per scorrere tra i gruppi di parametri, premere [▲]
•
o [▼].
Per visualizzare i parametri in un gruppo, premere
•
[OK].
Per tornare al livello precedente, premere [Back].
•
Per chiudere i Parametri, premere [Back].
•
Modica di un valore parametrico
Scorrere no al parametro appropriato e premere
•
[OK] per accedere alla modalità di modica.
Per modicare l'impostazione dei parametri
•
premere [▲] e [▼].
Per salvare le modiche, premere [OK]. L'impo-
•
stazione mostrata sul display viene salvata e l'LCP
mostra nuovamente l'elenco dei parametri.
Per annullare le modiche, premere [Back]. L'LCP
•
mostra nuovamente l'elenco dei parametri senza
salvare le modiche.
7 7
7.2.3 Registrazioni
Per visualizzare le informazioni sulle prestazioni in graci in
tempo reale, accedere al menu Registrazioni.
Corrente (% FLC).
•
Temperatura motore (%).
•
kW motore (%).
•
kVA motore (%).
•
Pf motore.
•
Le informazioni più recenti sono visualizzate sul lato destro
dello schermo. Il graco può essere interrotto per
analizzare i dati tenendo premuto il tasto [OK]. Per
riavviare il graco, tenere premuto [OK].
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 63
7.3.2 Scelta rapida parametro
Il VLT® Soft Starter MCD 500 include anche una scelta
rapida per i parametri che consente di accedere
direttamente a un parametro nel menu Parametri.
Per accedere alla scelta rapida parametro,
•
premere [Main Menu] per 3 s.
Premere [▲] o [▼] per selezionare il gruppo di
•
parametri.
Premere [OK] o [Back] per spostare il cursore.
•
Premere [▲] o [▼] per selezionare il numero del
•
parametro.
Scelta rapida parametro
Immettere un
numero di parametro
01-01
Page 68

Programmazione
VLT® Soft Starter MCD 500
7.3.3 Elenco dei parametri
1 Gruppo mot primario 4 Uscite 7-12 Contr adatt guadagno-2
1-1 FLC motore 4-1 Funzione relè A 7-13 Prolo avviamento adatt.-2
1-2 Tempo a rotore bloccato 4-2 Ritardo attivazione relè A 7-14 Prof. arresto adattivo 2
1-3 Modalità di avviamento 4-3 Ritardo disattivazione relè A 7-15 Coppia di frenatura-2
1-4 Limite di corrente 4-4 Funzione relè B 7-16 Tempo di frenatura-2
1-5 Corrente di avviamento 4-5 Ritardo attivazione relè B 8 Display
1-6 Tempo di rampa di
avviamento
1-7 Livello Kick start 4-7 Funzione relè C 8-2 Schermo alto-sin.
1-8 Tempo Kick start 4-8 Ritardo attivazione relè C 8-3 Schermo alto-dest.
1-9 Tempo di avviamento
eccessivo
1-10 Modalità di arresto 4-10 Avviso corrente bassa 8-5 Schermo basso-dest.
1-11 Tempo di arresto 4-11 Avviso corrente alta 8-6 Base tempi graco
1-12 Guadagno controllo adatt. 4-12 Avviso temp. motore 8-7 Regol. max graco
77
1-13 Prolo avviamento adatt. 4-13 Uscita analogica A 8-8 Regol. min. graco
1-14 Prolo arresto adatt. 4-14 Scala analogica A 8-9 Tensione rif. rete
1-15 Coppia di frenatura 4-15 Reg. max uscita anal. A 15 Parametro limitato
1-16 Tempo di frenatura 4-16 Reg. min uscita anal. A 15-1 Codice di accesso
2 Protezione 5 Timer avvio/arresto 15-2 Blocco della regolazione
2-1 Sequenza di fase 5-1 Tipo avvio automatico 15-3 Funzionamento di emergenza
2-2 Sbilanciamento corrente 5-2 Tempo avvio automatico 15-4 Calib. corrente
2-3 Rit. sbilanc. corrente 5-3 Tipo arresto automatico 15-5 Tempo contr. princ.
2-4 Sottocorrente 5-4 Tempo arresto automatico 15-6 Tempo contr. bypass
2-5 Rit. sottocorrente 6 Ripristino automatico 15-7 Collegamento del motore
2-6 Sovracorrente istant. 6-1 Azione ripristino automatico 15-8 Coppia jog
2-7 Rit. sovracorr. istant. 6-2 Ripristini massimi 16 Azione protezione
2-8 Controllo frequenza 6-3 Rit. ripr. auto gr. A&B 16-1 Sovraccarico motore
2-9 Variazione frequenza 6-4 Rit. ripr. auto gr. C 16-2 Sbilanciamento corrente
2-10 Ritardo frequenza 7 Gruppo motore second. 16-3 Sottocorrente
2-11 Ritardo riavvio 7-1 FLC motore-2 16-4 Sovracorrente istant.
2-12 Contr. temp. motore 7-2 Tempo a rotore bloccato 2 16-5 Frequenza
3 Ingressi 7-3 Modalità di avviamento-2 16-6 Sovratemp. dissipatore
3-1 Locale/Remoto 7-4 Limite di corrente-2 16-7 Tempo di avviamento eccessivo
3-2 Comunicazione da remoto 7-5 Contr. iniziale-2 16-8 Scatto ingresso A
3-3 Funzione ingresso A 7-6 Rampa avviamento-2 16-9 Termistore motore
3-4 Nome ingresso A 7-7 Livello Kick start-2 16-10 Comunicazione dell'avviatore
3-5 Scatto ingresso A 7-8 Tempo Kick start-2 16-11 Comunicazione di rete
3-6 Rit. scatto ing. A 7-9 Tempo avviamento eccess.-2 16-12 Batteria/orologio
3-7 Rit. iniziale ing. A 7-10 Modalità di arresto-2 16-13 Tensione controllo bassa
3-8 Logica ripristino remoto 7-11 Tempo di arresto-2 – –
4-6 Ritardo disattivazione relè B 8-1 Lingua
4-9 Ritardo disattivazione relè C 8-4 Schermo basso-sin.
64 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 69

Descrizioni dei parametri Guida operativa
8 Descrizioni dei parametri
8.1 Impostazioni del motore principale
AVVISO!
Le impostazioni di fabbrica sono contrassegnate da *.
I parametri nelle Impostazioni del motore principale
congurano l'avviatore statico in modo da adattarsi al
motore collegato. Questi parametri descrivono le caratteristiche operative del motore e permettono all'avviatore
statico di adattare la temperatura del motore.
AVVISO!
Il Parametro 1-2 Locked Rotor Time (Tempo a rotore
bloccato) determina la corrente di scatto per la
protezione da sovraccarico motore. La sua impostazione
di fabbrica fornisce una protezione da sovraccarico
motore:
Classe 10.
•
Corrente di scatto 105% della FLA o
•
equivalente.
1-1 FLC motore
Option: Funzione:
In funzione
del modello
Abbina l'avviatore statico alla corrente a pieno
carico del motore collegato. Impostarla al grado
di corrente a pieno carico (FLC) mostrato sulla
targa del motore.
AVVISO!
L'impostazione per questo parametro crea
la base per il calcolo di tutte le
impostazioni di protezione dipendenti
dalla corrente.
1-4 Limite di corrente
Range: Funzione:
350%* [100–
600%
FLC]
1-5 Corrente di avviamento
Range: Funzione:
350%* [100–
600%
FLC]
1-6 Tempo di rampa di avviamento
Range: Funzione:
10 s* [1–
180 s]
Imposta il limite di corrente per l'avviamento
dolce con rampa di corrente e corrente
costante come percentuale della corrente a
pieno carico del motore. Per maggiori dettagli
vedere il capitolo 5.3 Modalità di avviamento.
Imposta il livello di corrente di avviamento
iniziale per l'avviamento con rampa di corrente
come percentuale della corrente a pieno carico
del motore. Impostarlo in modo che il motore
cominci ad accelerare appena viene azionato
l'avviamento.
Se l'avviamento con rampa di corrente non è
necessario, impostare la corrente di avviamento
al limite di corrente. Per maggiori dettagli
vedere il capitolo 5.3 Modalità di avviamento.
Imposta il tempo di avviamento totale per un
avviamento con controllo adattivo o il tempo
di rampa per l'avviamento con rampa di
corrente (dalla corrente iniziale al limite di
corrente). Per maggiori dettagli vedere il
capitolo 5.3 Modalità di avviamento.
8 8
1-2 Tempo a rotore bloccato
Range: Funzione:
10 s* [0:01–2:00
(min:s)]
1-3 Modalità di avviamento
Option: Funzione:
Corrente
costante*
Controllo adattivo
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 65
Imposta la durata massima in cui il motore
può sostenere la corrente a rotore bloccato
a freddo prima di raggiungere la sua
temperatura massima. Impostarla in base
alla scheda tecnica del motore.
Consente di selezionare la modalità di
avviamento dolce. Per maggiori dettagli
vedere capitolo 5.3 Modalità di avviamento.
1-7 Livello Kick start
Range: Funzione:
500%* [100–
700%
FLC]
ATTENZIONE
LIVELLO DI COPPIA MAGGIORE
Il Kick start sottopone le attrezzature
meccaniche a livelli di coppia maggiori.
•
Imposta il livello della corrente di Kick start.
Prima di utilizzare questa
funzione assicurarsi che il
motore, il carico e gli
accoppiamenti riescano a
gestire la coppia supplementare.
Page 70

Descrizioni dei parametri
VLT® Soft Starter MCD 500
1-8 Tempo Kick start
Range: Funzione:
0000 ms* [0–
2000 ms]
ATTENZIONE
1-11 Tempo di arresto
Range: Funzione:
il freno. Per maggiori dettagli vedere
capitolo 5.4 Modalità di arresto.
LIVELLO DI COPPIA MAGGIORE
Il Kick start sottopone le attrezzature
meccaniche a livelli di coppia
maggiori.
Prima di utilizzare questa
•
funzione assicurarsi che il
motore, il carico e gli
accoppiamenti riescano a
gestire la coppia supplementare.
Imposta la durata del Kick start.
Impostandolo su 0 si disabilita il Kick start.
Per maggiori dettagli vedere il
capitolo 5.3 Modalità di avviamento.
1-9 Tempo di avviamento eccessivo
88
Range: Funzione:
Il tempo di avviamento eccessivo è il tempo
massimo per cui l'avviatore statico tenta di
avviare il motore. Se il motore non raggiunge
la massima velocità entro il limite
programmato, l'avviatore statico scatta.
Impostarlo su un periodo leggermente più
lungo di un normale avviamento.
Impostandolo su 0 si disabilita la protezione
da tempo di avviamento eccessivo.
20 s* [0:00–
4:00
(min:s)]
Impostare come richiesto.
1-10 Modalità di arresto
Option: Funzione:
Consente di selezionare la modalità di
arresto. Per maggiori dettagli vedere
capitolo 5.4 Modalità di arresto.
Arresto in rotazione
libera*
Arresto dolce TVR
Controllo adattivo
Freno
1-11 Tempo di arresto
Range: Funzione:
0 s* [0:00–
4:00
(min:s)]
Imposta il tempo per l'arresto dolce del motore
utilizzando la rampa di tensione programmata o
il controllo adattivo. Se è installato un
contattore principale, il contattore deve restare
chiuso no alla ne del tempo di arresto. Per
controllare il contattore principale, usare
un'uscita programmabile congurata su Marcia.
Imposta il tempo di arresto totale quando si usa
1-12 Controllo guadagno adattivo
Range: Funzione:
75%* [1–
200%]
Regola le prestazioni del controllo adattivo.
Questa impostazione inuenza il controllo di
avviamento e di arresto.
AVVISO!
Lasciare l'impostazione del guadagno al
livello predenito a meno che le
prestazioni del controllo adattivo non si
rivelino insoddisfacenti. Se il motore
accelera o decelera troppo rapidamente
alla ne di un avviamento o di un
arresto, aumentare l'impostazione del
guadagno del 5–10%. Se la velocità del
motore uttua durante l'avviamento o
l'arresto, aumentare leggermente l'impostazione del guadagno.
1-13 Prolo avviamento adattivo
Option: Funzione:
Consente di selezionare il prolo che
l'avviatore statico utilizzerà per un
avviamento dolce con controllo adattativo.
Per maggiori dettagli vedere il
capitolo 5.4 Modalità di arresto.
Accelerazione
anticipata
Accelerazione
costante*
Accelerazione
ritardata
1-14 Prolo arresto adattivo
Option: Funzione:
Consente di selezionare il prolo che
l'avviatore statico utilizzerà per un arresto
dolce con controllo adattivo. Per maggiori
dettagli vedere il capitolo 5.4 Modalità di
arresto.
Decelerazione
anticipata
Decelerazione
costante*
Accelerazione
ritardata
8.1.1 Freno
Il freno utilizza l'iniezione CC per rallentare in modo attivo
il motore. Vedere capitolo 5.4 Modalità di arresto per
maggiori dettagli.
66 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 71

Descrizioni dei parametri Guida operativa
1-15 Coppia frenante
Range: Funzione:
20%* [20–100%] Imposta la coppia frenante che l'avviatore
statico utilizzerà per rallentare il motore.
1-16 Tempo di frenatura
Range: Funzione:
1 s* [1–30 s] Imposta la durata dell'iniezione CC durante un
arresto con frenata.
AVVISO!
Questo parametro viene usato insieme al
parametro 1-11 Stop Time (Tempo di
arresto). Vedere capitolo 5.4 Modalità di
arresto per dettagli.
8.2 Protezione
2-1 Sequenza di fase
Option: Funzione:
Consente di selezionare le sequenze di fase
che l'avviatore statico controllerà in fase di
avviamento. Durante i controlli di pre-avvio,
l'avviatore statico controllerà la sequenza delle
fasi in corrispondenza dei morsetti di ingresso.
Se la sequenza eettiva non corrisponde
all'opzione selezionata, l'avviatore statico
scatta.
Qualsiasi
sequenza*
Solo positiva
Solo negativa
8.2.1 Sbilanciamento corrente
È possibile congurare l'avviatore statico anché scatti
qualora le correnti nelle 3 fasi varino più di una quantità
specicata. Lo sbilanciamento è calcolato come dierenza
tra le correnti più elevate e più basse su tutte le tre fasi,
come percentuale della corrente più elevata.
Il rilevamento dello sbilanciamento di corrente è ridotto
del 50% durante l'avviamento e l'arresto dolce.
8.2.2 Sottocorrente
È possibile congurare l'avviatore statico anché scatti
qualora la corrente media delle 3 fasi scenda sotto un
livello specicato mentre il motore è in marcia.
2-4 Sottocorrente
Range: Funzione:
20%* [0–
100%]
Imposta il punto di scatto per la protezione da
sottocorrente come percentuale della corrente a
pieno carico del motore. Impostarlo a un livello
compreso tra l'intervallo operativo normale del
motore e la corrente di magnetizzazione (senza
carico) del motore (tipicamente dal 25% al 35%
della corrente a pieno carico). Impostandolo su 0
si disattiva la protezione da sottocorrente.
2-5 Ritardo sottocorrente
Range: Funzione:
5 s* [0:00–4:00
(min:s)]
Rallenta la risposta dell'avviatore statico
alla sottocorrente, evitando scatti dovuti a
uttuazioni temporanee.
8.2.3 Sovracorrente istantanea
È possibile congurare l'avviatore statico anché scatti
qualora la corrente media delle 3 fasi superi un livello
specicato mentre il motore è in marcia.
2-6 Sovracorrente istantanea
Range: Funzione:
400%* [80–600%
FLC]
Imposta il punto di scatto per la protezione
da sovracorrente istantanea come
percentuale della corrente a pieno carico
del motore.
2-7 Ritardo sovracorrente istantanea
Range: Funzione:
0 s* [0:00–1:00
(min:s)]
Rallenta la risposta dell'avviatore statico
alla sovracorrente, evitando scatti dovuti
a sovracorrenti temporanee.
8.2.4 Scatto frequenza
8 8
2-2 Sbilanciamento corrente
Range: Funzione:
30%* [10–50%] Imposta il punto di scatto per la protezione da
sbilanciamento corrente.
2-3 Ritardo sbilanciamento corrente
Range: Funzione:
3 s* [0:00–4:00
(min:s)]
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 67
Rallenta la risposta dell'avviatore statico
allo sbilanciamento di corrente, evitando
scatti dovuti a uttuazioni temporanee.
L'avviatore statico monitora la frequenza di rete durante il
funzionamento e può essere congurato in modo da
scattare se la frequenza varia oltre una tolleranza
specicata.
2-8 Controllo frequenza
Option: Funzione:
Stabilisce quando l'avviatore statico
deve vericare la presenza di uno
scatto di frequenza.
Non controllare
Soltanto avviamento
Page 72

Descrizioni dei parametri
VLT® Soft Starter MCD 500
2-8 Controllo frequenza
8.3 Ingressi
Option: Funzione:
Avviamento/funzionamento*
Soltanto marcia
2-9 Variazione di frequenza
Option: Funzione:
Consente di selezionare la tolleranza dell'avviatore
statico per la variazione di frequenza.
±2 Hz
±5 Hz*
±10 Hz
±15 Hz
2-10 Ritardo frequenza
Range: Funzione:
1 s* [0:01–4:00
(min:s)]
88
Rallenta la risposta dell'avviatore statico ai
disturbi di frequenza, evitando scatti dovuti a
uttuazioni temporanee.
AVVISO!
Se la frequenza di rete diminuisce al di
sotto di 35 Hz o aumenta al di sopra di
75 Hz, l’avviatore statico scatta
immediatamente.
2-11 Ritardo riavvio
Range: Funzione:
10s* [00:01–
60:00
(min:s)]
L'avviatore statico può essere congurato
anché forzi un ritardo tra la ne di un
arresto e l’inizio dell’avviamento successivo.
Durante il ritardo riavvio, il display mostra il
tempo residuo prima di poter tentare un altro
avviamento.
AVVISO!
Il ritardo riavvio è misurato dalla ne di
ogni arresto. Le modiche al ritardo
riavvio diventano eettive dopo
l'arresto successivo.
2-12 Controllo temperatura motore
Option: Funzione:
L'avviatore statico può essere congurato per
vericare che il motore disponga di una
capacità termica suciente per eseguire un
avviamento. L'avviatore statico confronta la
temperatura calcolata del motore con
l'aumento di temperatura dall'ultimo
avviamento del motore. L'avviatore statico
funziona solo se il motore è sucientemente
freddo da avviarsi.
Non
controllare*
Controllare
3-1 Locale/Remoto
Option: Funzione:
Consente di selezionare quando è possibile
utilizzare [Auto On] e [Hand On] per passare
alle modalità Hand-on o Auto-on.
Lcl/rmt sempre* Alternare fra comando locale e controllo
remoto in qualsiasi momento.
Soltanto
comando locale
Soltanto
controllo
remoto
Tutti gli ingressi remoti sono disattivati.
[Hand On] e [Auto On] sono disattivati.
3-2 Comunicazione da remoto
Option: Funzione:
Consente di selezionare se l'avviatore statico
accetta i comandi di avviamento e di arresto
dalla rete di comunicazione seriale quando in
modalità Remota.
Comandi che sono sempre abilitati:
Scatto forzato delle comunicazioni.
•
Controllo locale/remoto.
•
Avviamento di prova.
•
ripristino;
•
Disabilitare
controllo in
RMT
Abilitare
controllo in
RMT*
3-3 Funzione ingresso A
Option: Funzione:
Consente di selezionare la funzione dell'in-
gresso A.
Selezione
impostazione
motore*
Scatto ingresso
(N/O)
L'avviatore statico può essere congurato con
due gruppi di dati motore. I dati del motore
principale vengono programmati tramite i
parametri da 1-1 a 1-16. I dati del motore
secondario vengono programmati con i
parametri da 7-1 a 7-16.
Per utilizzare i dati motore secondari,
impostare questo parametro su Motor Set Select
(Selezione impostazione motore) e chiudere i
morsetti 11 e 16 prima di impartire un
comando di avviamento. L'avviatore statico
controlla i dati motore da utilizzare all'av-
viamento e li usa per l'intero ciclo di
avviamento/arresto.
L'ingresso A può essere utilizzato per far
scattare l'avviatore statico. Quando questo
parametro è impostato su Input Trip (N/O)
(Scatto ingresso (N/O)), un circuito chiuso sui
68 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 73

Descrizioni dei parametri Guida operativa
3-3 Funzione ingresso A
Option: Funzione:
morsetti 11 e 16 fa scattare l'avviatore statico
(parametri da 3-5 a 3-7).
Scatto ingresso
(N/C)
Selezione
locale/remoto
Funzionamento di
emergenza
Disabilitazione
avviatore
Jog avanti Attiva il funzionamento in jog in direzione
Jog inverso Attiva il funzionamento in jog in direzione
Quando questo parametro è impostato su
Input Trip (N/C) (Scatto ingresso (N/C)), un
circuito chiuso sui morsetti 11 e 16 fa scattare
l'avviatore statico (parametri da 3-5 a 3-7).
L'ingresso A può essere utilizzato per scegliere
tra il controllo locale e remoto, anziché
utilizzare i tasti sull'LCP. Quando l'ingresso è
aperto, l'avviatore statico è in modalità Hand-
on e può essere comandato tramite l'LCP.
Quando l'ingresso è chiuso, l'avviatore statico è
in modalità remota. I tasti [Hand-On] e [Auto-
On] sono disabilitati e l'avviatore statico ignora
qualsiasi comando di selezione locale/remoto
dalla rete di comunicazione seriale.
Per utilizzare l'ingresso A per selezionare tra il
controllo locale e remoto, impostare il
parametro 3-1 Local/Remote (Locale/Remoto) su
LCL/RMT Anytime (LCL/RMT sempre).
In funzionamento di emergenza l'avviatore
statico continua a funzionare no all'arresto,
ignorando tutti gli scatti e gli avvisi (vedere il
parametro 15-3 Emergency Run (Funzionamento
di emergenza) per dettagli).
Chiudendo il circuito sui morsetti 11 e 16 si
attiva il funzionamento di emergenza.
Aprendo il circuito si interrompe il funzio-
namento di emergenza e l'avviatore statico
arresta il motore.
L'avviatore statico può essere disabilitato
utilizzando gli ingressi di comando. Un circuito
aperto attraverso i morsetti 11 e 16 disabilita
l'avviatore statico. L'avviatore statico non
risponde ai comandi di avviamento. Se in
funzione, l'avviatore statico consente al motore
di funzionare a ruota libera no all'arresto,
ignorando la modalità arresto dolce impostata
nel parametro 1-10 Stop Mode (Modalità di
arresto).
Quando il circuito tra i morsetti 11 e 16 è
aperto, l'avviatore statico consente al motore di
arrestarsi a ruota libera.
avanti (funziona solo in modalità Remoto).
inversa (funziona solo in modalità Remoto).
3-4 Nome ingresso A
Option: Funzione:
Consente di selezionare un
messaggio per l'LCP da visualizzare
quando l'ingresso A è attivo.
Scatto ingresso*
Pressione bassa
3-4 Nome ingresso A
Option: Funzione:
Pressione alta
Guasto pompa
Livello basso
Livello alto
Portata nulla
Disabilitazione avviatore
Controllore
PLC
Allarme vibrazione
3-5 Scatto ingresso A
Option: Funzione:
Consente di selezionare quando potrebbe
vericarsi uno scatto di ingresso.
Sempre
attivo*
Soltanto in
funzionamento
Soltanto
marcia
Uno scatto può vericarsi in qualsiasi momento
in cui l'avviatore statico è alimentato.
Uno scatto può vericarsi mentre l'avviatore
statico è in fase di marcia,di arresto o di
avviamento.
Uno scatto può vericarsi solo mentre
l'avviatore statico è in marcia.
3-6 Ritardo scatto in ingresso A
Range: Funzione:
0 s* [0:00–4:00 (min:s)] Imposta il ritardo tra l'attivazione
dell'ingresso e lo scatto dell'avviatore
statico.
3-7 Ritardo iniziale ingresso A
Range: Funzione:
0 s* [00:00–
30:00
(min:s)]
Imposta un ritardo prima che possa vericarsi
uno scatto in ingresso. Il ritardo iniziale viene
calcolato dal momento in cui viene ricevuto
un segnale di avviamento. Lo stato dell'ingresso viene ignorato nché il ritardo iniziale
non è trascorso.
3-8 Logica ripristino remoto
Option: Funzione:
Consente di selezionare se l'ingresso di
ripristino remoto dell'avviatore statico
(morsetti 25 e 18) è normalmente aperto
o normalmente chiuso.
Normalmente
chiuso*
Normalmente aperto
8.4 Uscite
4-1 Funzione relè A
Option: Funzione:
Seleziona la funzione del relè A (normalmente
aperto).
Disattivato Il relè A non è utilizzato
8 8
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 69
Page 74

Descrizioni dei parametri
VLT® Soft Starter MCD 500
4-1 Funzione relè A
Option: Funzione:
Contattore
principale*
Funzionamento Il relè si chiude quando l'avviatore passa allo
Scatto Il relè si chiude quando l’avviatore scatta.
Warning Il relè si chiude quando l'avviatore invia un
Avviso corrente
bassa
Avviso corrente
alta
Avviso
temperatura
motore
Il relè si chiude quando l'avviatore statico
riceve un comando di avviamento e rimane
chiuso nché il motore riceve tensione.
stato di marcia.
avviso.
Il relè si chiude quando si attiva l'avviso di
corrente bassa (parametro 4-10 Low Current
Flag (Avviso corrente bassa)).
Il relè si chiude quando si attiva l'avviso di
corrente alta (parametro 4-11 High Current Flag
(Avviso corrente alta)).
Il relè si chiude quando si attiva l'avviso di
temperatura motore (parametro 4-12 Motor
Temperature Flag (Avviso temperatura motore)).
4-4 Funzione relè B
Option: Funzione:
Funzionamento*
Scatto Il relè si chiude quando l’avviatore statico
Warning Il relè si chiude quando l'avviatore statico
Avviso corrente
bassa
Avviso corrente
alta
Avviso
temperatura
motore
Il relè si chiude quando l'avviatore statico
passa allo stato di marcia.
scatta.
emette un avviso.
Il relè si chiude quando si attiva l'avviso di
corrente bassa (parametro 4-10 Low Current
Flag (Avviso corrente bassa)).
Il relè si chiude quando si attiva l'avviso di
corrente alta (parametro 4-11 High Current Flag
(Avviso corrente alta)).
Il relè si chiude quando si attiva l'avviso di
temperatura motore (parametro 4-12 Motor
Temperature Flag (Avviso temperatura motore)).
4-5 Ritardo attivazione relè B
Range: Funzione:
88
8.4.1 Ritardi relè A
L'avviatore statico può essere congurato anché attenda
prima di aprire o chiudere il relè A.
4-2 Ritardo attivazione relè A
Range: Funzione:
0 s* [0:00–5:00 (min:s)] Imposta il ritardo per la chiusura del
relè A.
4-3 Ritardo disattivazione relè A
Range: Funzione:
0 s* [0:00–5:00 (min:s)] Imposta il ritardo per la riapertura del
relè A.
8.4.2 Relè B e C
I parametri da 4-4 a 4-9 congurano il funzionamento dei
relè B e C allo stesso modo in cui i parametri da 4-1 a 4-3
permettono di congurare il relè A. Vedere il parametro 4-2
Relay A On Delay (Ritardo attivazione relè A) e il parametro
4-3 Relay A O Delay (Ritardo disattivazione relè) per i
dettagli.
Il relè B è di tipo a commutazione.
•
Il relè C è normalmente aperto.
•
4-4 Funzione relè B
Option: Funzione:
Seleziona la funzione del relè B
(commutazione).
Disattivato Il relè B non è utilizzato.
Contattore
principale
Il relè si chiude quando l'avviatore statico
riceve un comando di avviamento e rimane
chiuso nché il motore riceve tensione.
0 s* [0:00–5:00 (min:s)] Imposta il ritardo per la chiusura del
relè B.
4-6 Ritardo disattivazione relè B
Range: Funzione:
0 s* [0:00–5:00 (min:s)] Imposta il ritardo per la riapertura del
relè B.
4-7 Funzione relè C
Option: Funzione:
Consente di selezionare la funzione del relè C
(normalmente aperto).
Disattivato Il relè C non è utilizzato.
Contattore
principale
Funzionamento Il relè si chiude quando l'avviatore statico
Scatto* Il relè si chiude quando l’avviatore statico
Warning Il relè si chiude quando l'avviatore statico
Avviso corrente
bassa
Avviso corrente
alta
Avviso
temperatura
motore
Il relè si chiude quando l'avviatore statico
riceve un comando di avviamento e rimane
chiuso nché il motore riceve tensione.
passa allo stato di marcia.
scatta.
emette un avviso.
Il relè si chiude quando si attiva l'avviso di
corrente bassa (parametro 4-10 Low Current
Flag (Avviso corrente bassa)).
Il relè si chiude quando si attiva l'avviso di
corrente alta (parametro 4-11 High Current Flag
(Avviso corrente alta)).
Il relè si chiude quando si attiva l'avviso di
temperatura motore (parametro 4-12 Motor
Temperature Flag (Avviso temperatura motore)).
4-8 Ritardo attivazione relè C
Range: Funzione:
0 s* [0:00–5:00 (min:s)] Imposta il ritardo per la chiusura del
relè C.
70 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 75

Descrizioni dei parametri Guida operativa
4-9 Ritardo disattivazione relè C
Range: Funzione:
0 s* [0:00–5:00 (min:s)] Imposta il ritardo per la riapertura del
relè C.
8.4.3 Avviso corrente bassa e avviso
corrente alta
L'avviatore statico è dotato di avvisi di corrente bassa e
alta che forniscono un avviso anticipato in caso di funzionamento anomalo. Gli avvisi di corrente possono essere
congurati per indicare un livello di corrente anomala
durante il funzionamento, compreso tra il normale livello di
funzionamento e i livelli di scatto da sottocorrente o
sovracorrente istantanea. Gli avvisi possono segnalare la
situazione alle apparecchiature esterne mediante una delle
uscite programmabili. Gli avvisi si disattivano quando la
corrente torna nell'intervallo operativo normale del 10%
del valore di avviso programmato.
4-10 Avviso corrente bassa
Range: Funzione:
50%* [1–100%
FLC]
Imposta il livello a cui si attiva l'avviso di
corrente bassa come percentuale della
corrente a pieno carico del motore.
4-11 Avviso corrente alta
Range: Funzione:
100%* [50–600%
FLC]
Imposta il livello a cui si attiva l'avviso di
corrente alta come percentuale della
corrente a pieno carico del motore.
8.4.4 Avviso temperatura motore
L'avviatore statico è dotato di un avviso temperatura
motore che informa tempestivamente in caso di funzionamento anomalo. L'avviso può indicare che il motore
funziona al di sopra della normale temperatura operativa,
ma al di sotto del limite di sovraccarico. L'avviso può
segnalare la situazione alle apparecchiature esterne
mediante una delle uscite programmabili.
4-12 Avviso temperatura motore
Range: Funzione:
80%* [0–160%] Imposta il livello al quale si attiva l'avviso
temperatura motore come percentuale della
capacità termica del motore.
8.4.5 Uscita analogica A
L'avviatore statico è dotato di un'uscita analogica che può
essere collegata alle apparecchiature associate per
monitorare le prestazioni del motore.
4-13 Uscita analogica A
Option: Funzione:
Consente di selezionare quali informazioni
debbano essere riportate mediante l'uscita
analogica A.
Corrente (%
FLC)*
Temperatura
motore (%)
kW motore (%) kW motore misurati come una percentuale dei
kVA motore (%) Kilovolt-ampere motore misurati come una
Pf motore Fattore di potenza motore, misurato dall'av-
4-14 Scala analogica A
Option: Funzione:
0–20 mA
4–20 mA*
4-15 Regolazione massima uscita analogica A
Range: Funzione:
100%* [0–600%] Calibra il limite superiore dell'uscita analogica
Corrente come percentuale della corrente a
pieno carico del motore.
Temperatura motore come percentuale della
capacità termica del motore.
kW massimi.
percentuale dei kVA massimi.
viatore statico.
Misurare i kW del motore: √3 x
•
corrente media x tensione di
riferimento rete x misura fattore di
potenza.
kW massimi motore: √3 x FLC motore
•
x tensione di rete di riferimento. Il
calcolo si basa su un fattore di
potenza di 1.
Misurare i kVA del motore: √3 x
•
corrente media x tensione di
riferimento rete.
kVA massimi motore: √3 x FLC
•
motore x tensione di rete di
riferimento.
Consente di selezionare la scala dell'uscita.
anché corrisponda al segnale misurato su
un dispositivo di misurazione corrente
esterno.
8 8
4-16 Regolazione minima uscita analogica A
Range: Funzione:
0%* [0–600%] Calibra il limite inferiore dell'uscita analogica
anché corrisponda al segnale misurato su un
dispositivo di misurazione corrente esterno.
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 71
Page 76

Descrizioni dei parametri
VLT® Soft Starter MCD 500
8.5 Timer Avvio/Arresto
5-4 Tempo arresto automatico
Range: Funzione:
ATTENZIONE
AVVIO INVOLONTARIO
Il temporizzatore di avviamento automatico annulla
qualsiasi altra forma di controllo. Il motore può avviarsi
senza avviso.
AVVISO!
Non usare questa funzione con
controllo remoto a due li.
L'avviatore statico continua ad
accettare i comandi di avviamento e
arresto dagli ingressi remoti o dalla
5-1 Tipo avvio automatico
Option: Funzione:
Consente di selezionare se l'avviatore statico deve
avviarsi automaticamente dopo un ritardo specicato
o a una certa ora del giorno.
O* L'avviatore statico non si avvia automaticamente.
Timer L'avviatore statico eettua un avviamento automatico
dopo un ritardo dall'arresto successivo, come
specicato nel parametro 5-2 Auto-start Time (Tempo
avvio automatico).
Orologio L'avviatore statico si avvia automaticamente all'ora
88
programmata nel parametro 5-2 Auto-star t Time
(Tempo avvio automatico).
8.6 Ripristino automatico
L'avviatore statico può essere programmato in modo da
rete di comunicazione seriale. Per
disabilitare il controllo locale o
remoto utilizzare il parametro 3-1
Local/Remote (Locale/Remoto). Se
l'avviamento automatico è abilitato
e l'utente è nel sistema menu,
l'avviamento automatico diventa
attivo in caso di timeout del menu
(se non viene rilevata alcuna attività
dell'LCP per 5 minuti).
ripristinare automaticamente determinati scatti,
5-2 Tempo avvio automatico
Range: Funzione:
1 min* [00:01–24:00
(ore:min)]
Imposta l'ora in cui l'avviatore statico
si avvia automaticamente, nel
formato orario 24 ore.
5-3 Tipo arresto automatico
Option: Funzione:
Consente di selezionare se l'avviatore statico deve
arrestarsi automaticamente dopo un ritardo
specicato o a una certa ora del giorno.
O* L'avviatore statico non si arresta automaticamente.
Tempo L'avviatore statico si arresta automaticamente dopo
un ritardo dall'avviamento successivo come
specicato nel parametro 5-4 Auto-stop Time (Tempo
arresto automatico).
Orologio L'avviatore statico si arresta automaticamente all'ora
programmata nel parametro 5-4 Auto-stop Time
(Tempo arresto automatico).
5-4 Tempo arresto automatico
Range: Funzione:
1 min* [00:01–
24:00
(ore:min)]
Imposta l'ora in cui l'avviatore statico si
arresta automaticamente, in formato orario
24 ore.
permettendo di ridurre i tempi di fermo. Gli scatti sono
divisi in tre categorie per il ripristino automatico, a seconda
del rischio per l'avviatore statico:
Gruppo
Sbilanciamento corrente
Perdita di fase
A
Perdita di potenza
Frequenza
Sottocorrente
B
Sovracorrente istantanea
Scatto ingresso A
Sovraccarico motore
C
Termistore motore
Sovratemperatura calore
Tabella 8.1 Categorie di scatto per il ripristino automatico
Gli altri scatti non possono essere ripristinati automaticamente.
Questa funzione è ideale per le installazioni remote che
utilizzano il controllo a due li in modalità Auto-on.
L'avviatore statico si riavvia se il segnale di avviamento a
due li è presente dopo un ripristino automatico.
6-1 Azione ripristino automatico
Option: Funzione:
Consente di selezionare quali scatti
possono essere ripristinati automati-
camente.
Non autoripristino*
Ripristino gruppo A
72 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 77

Descrizioni dei parametri Guida operativa
6-1 Azione ripristino automatico
Option: Funzione:
Ripristino gruppo A & B
Ripristino gruppo A, B & C
6-2 Ripristini massimi
Range: Funzione:
1* [1–5] Imposta il numero di volte in cui l'avviatore statico
eettua un ripristino automatico in caso di scatto
continuo. Il contatore dei ripristini aumenta di
un'unità ogni volta che l'avviatore statico esegue un
ripristino automatico, e riduce di un'unità dopo ogni
ciclo di avviamento/arresto riuscito.
AVVISO!
Se l'avviatore viene ripristinato manualmente, il
contatore dei ripristini ritorna a 0.
8.6.1 Ritardo ripristino automatico
L'avviatore statico può essere congurato anché attenda
prima di ripristinare automaticamente uno scatto. È
possibile impostare ritardi separati per gli scatti dei gruppi
A e B o del gruppo C.
6-3 Ritardo ripristino gruppi A & B
Range: Funzione:
5 s* [00:05–15:00
(min:s)]
6-4 Ritardo ripristino gruppo C
Range: Funzione:
5 minuti* [5–60 (minuti)] Imposta il ritardo prima di ripristinare
8.7 Gruppo motore secondario
Vedere i parametri da 1-1 a 1-16 per dettagli.
7-1 FLC motore-2
Range: Funzione:
[In funzione del
modello]
7-2 Tempo a rotore bloccato-2
Range: Funzione:
10 s* [0:01–2:00
(min:s)]
Imposta il ritardo prima di ripristinare
gli scatti del gruppo A e del gruppo B.
gli scatti del gruppo C.
Imposta la corrente a pieno carico del
motore secondario
Imposta la durata massima in cui il motore
può essere in funzione con corrente a rotore
bloccato a freddo prima di raggiungere la
sua temperatura massima. Impostarla in base
alla scheda tecnica del motore.
Se queste informazioni non sono disponibili,
impostare il valore su <20 s.
7-3 Modalità di avviamento-2
Option: Funzione:
Consente di selezionare la modalità di
avviamento dolce.
Corrente costante*
Controllo adattivo
7-4 Limite di corrente-2
Range: Funzione:
350%* [100–600%
FLC]
Imposta il limite di corrente per
l'avviamento dolce con rampa di corrente e
corrente costante come percentuale della
corrente a pieno carico del motore.
7-5 Corrente iniziale-2
Range: Funzione:
350%* [100–
600%
FLC]
Imposta il livello di corrente di avviamento per
l'avviamento con rampa di corrente come
percentuale della corrente a pieno carico del
motore. Impostarlo in modo che il motore
cominci ad accelerare appena viene azionato
l'avviamento.
Se l'avviamento con rampa di corrente non è
necessario, impostare la corrente di avviamento
al limite di corrente.
7-6 Tempo di rampa di avviamento-2
Range: Funzione:
10 s* [1–180 s] Imposta il tempo di avviamento totale per un
avviamento con controllo adattivo o il tempo
di rampa per l'avviamento con rampa di
corrente (dalla corrente iniziale al limite di
corrente).
7-7 Livello Kick-start-2
Range: Funzione:
500%* [100–700% FLC] Imposta il livello della corrente di Kick
start.
7-8 Tempo Kick start-2
Range: Funzione:
0000 ms* [0–2000 ms] Imposta la durata del Kick start.
Impostandolo su 0 si disabilita il Kick
start.
7-9 Tempo di avviamento eccessivo-2
Range: Funzione:
Il tempo di avviamento eccessivo è il tempo
massimo per cui l'avviatore statico tenta di
avviare il motore. Se il motore non raggiunge
la massima velocità entro il limite
programmato, l'avviatore statico scatta.
Impostarlo su un periodo leggermente più
lungo di un normale avviamento.
Impostandolo su 0 si disabilita la protezione
da tempo di avviamento eccessivo.
8 8
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 73
Page 78

Descrizioni dei parametri
VLT® Soft Starter MCD 500
7-9 Tempo di avviamento eccessivo-2
Range: Funzione:
20 s* [0:00–
4:00
(min:s)]
Impostare come richiesto.
7-10 Modalità di arresto-2
7-14 Prolo arresto adattivo-2
Option: Funzione:
Decelerazione
anticipata
Decelerazione
costante*
Accelerazione ritardata
Option: Funzione:
Consente di selezionare la modalità
di arresto.
Arresto in rotazione libera*
Arresto dolce TVR
Controllo adattivo
Freno
7-15 Coppia frenante-2
Range: Funzione:
20%* [20–100%] Imposta la coppia frenante che l'avviatore
statico utilizzerà per rallentare il motore.
7-16 Tempo di frenatura-2
Range: Funzione:
7-11 Tempo di arresto-2
Range: Funzione:
0 s* [0:00–4:00 (min:s)] Imposta il tempo di arresto.
7-12 Controllo guadagno adattivo-2
88
Range: Funzione:
75%* [1–
200%]
Regola le prestazioni del controllo adattivo.
L'impostazione inuenza sia il controllo di
avviamento sia quello di arresto.
AVVISO!
Lasciare l'impostazione del guadagno al
livello predenito a meno che le
prestazioni del controllo adattivo non si
rivelino insoddisfacenti.
Se il motore accelera o decelera
rapidamente alla ne di un avviamento
o di un arresto, aumentare l'impostazione del guadagno del 5–10%. Se la
velocità del motore uttua durante
l'avviamento o l'arresto, aumentare
leggermente l'impostazione del
guadagno.
1 s* [1–30 s]
AVVISO!
Questo parametro viene usato insieme al
parametro 7-11 Stop Time-2 (Tempo di
arresto-2).
Imposta la durata dell'iniezione CC durante un
arresto con frenata.
8.8 Display
8-1 Lingua
Option: Funzione:
Consente di selezionare la lingua in cui
l'LCP visualizza i messaggi e la
retroazione.
Inglese*
Cinese (中丈)
Spagnolo (Español)
Tedesco (Deutsch)
Portoghese (Português)
Francese (Français)
Italiano
Russo (Русский)
7-13 Prolo avviamento adattivo-2
Option: Funzione:
Consente di selezionare il prolo che
l'avviatore statico utilizzerà per un
avviamento dolce con controllo
adattativo.
Accelerazione
anticipata
Accelerazione
costante*
Accelerazione ritardata
7-14 Prolo arresto adattivo-2
Option: Funzione:
Consente di selezionare il prolo che
l'avviatore statico utilizzerà per un
arresto dolce con controllo adattivo.
8.8.1 Schermo programmabile dall'utente
Consente di selezionare i quattro elementi da visualizzare
sullo schermo di monitoraggio programmabile.
8-2 Schermo - alto-sinistra
Option: Funzione:
Consente di selezionare l'elemento da
visualizzare in alto a sinistra nello schermo.
Vuoto Non visualizza dati nell'area selezionata,
permettendo di mostrare messaggi lunghi
senza sovrapposizioni.
Stato avviatore Stato operativo dell'avviatore statico (se in
fase di avviamento, marcia, arresto o scatto).
Disponibile solo per Alto sin e Basso sin.
Corrente motore La corrente media misurata sulle tre fasi.
74 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 79

Descrizioni dei parametri Guida operativa
8-2 Schermo - alto-sinistra
Option: Funzione:
PF motore* Il fattore di potenza motore misurato dall'av-
viatore statico.
Frequenza di rete La frequenza media misurata sulle tre fasi.
kW motore La potenza operativa del motore in kW.
Cv motore La potenza operativa del motore in cavalli
vapore.
Temperatura
motore
kWh Numero di ore di funzionamento del motore
Ore di esercizio Numero di ore di funzionamento del motore
La temperatura del motore calcolata
mediante modello termico.
attraverso l'avviatore statico.
attraverso l'avviatore statico.
8-3 Schermo - alto destra
Option: Funzione:
Consente di selezionare l'elemento da
visualizzare in alto a destra nello schermo.
Vuoto* Non visualizza dati nell'area selezionata,
permettendo di mostrare messaggi lunghi
senza sovrapposizioni.
Stato avviatore Stato operativo dell'avviatore statico (se in
fase di avviamento, marcia, arresto o scatto).
Disponibile solo per Alto sin e Basso sin.
Corrente motore La corrente media misurata sulle tre fasi.
Pf motore Il fattore di potenza motore misurato dall'av-
viatore statico.
Frequenza di rete La frequenza media misurata sulle tre fasi.
kW motore La potenza operativa del motore in kW.
Cv motore La potenza operativa del motore in cavalli
vapore.
Temperatura
motore
kWh Numero di ore di funzionamento del motore
Ore di esercizio Numero di ore di funzionamento del motore
La temperatura del motore calcolata
mediante modello termico.
attraverso l'avviatore statico.
attraverso l'avviatore statico.
8-4 Schermo - basso sinistra
Option: Funzione:
Temperatura
motore
kWh Numero di ore di funzionamento del motore
Ore di esercizio* Numero di ore di funzionamento del motore
La temperatura del motore calcolata
mediante modello termico.
attraverso l'avviatore statico.
attraverso l'avviatore statico.
8-5 Schermo - basso destra
Option: Funzione:
Consente di selezionare l'elemento da
visualizzare in basso a destra nello schermo.
Vuoto* Non visualizza dati nell'area selezionata,
permettendo di mostrare messaggi lunghi
senza sovrapposizioni.
Stato avviatore Stato operativo dell'avviatore statico (se in
fase di avviamento, marcia, arresto o scatto).
Disponibile solo per Alto sin e Basso sin.
Corrente motore La corrente media misurata sulle tre fasi.
Pf motore Il fattore di potenza motore misurato dall'av-
viatore statico.
Frequenza di rete La frequenza media misurata sulle tre fasi.
kW motore La potenza operativa del motore in kW.
Cv motore La potenza operativa del motore in cavalli
vapore.
Temperatura
motore
kWh Numero di ore di funzionamento del motore
Ore di esercizio Numero di ore di funzionamento del motore
La temperatura del motore calcolata
mediante modello termico.
attraverso l'avviatore statico.
attraverso l'avviatore statico.
8.8.2 Graci delle prestazioni
Il menu delle registrazioni consente di visualizzare le
informazioni relative alle prestazioni su graci in tempo
reale.
8 8
8-4 Schermo - basso sinistra
Option: Funzione:
Consente di selezionare l'elemento da
visualizzare in basso a sinistra nello schermo.
Vuoto Non visualizza dati nell'area selezionata,
permettendo di mostrare messaggi lunghi
senza sovrapposizioni.
Stato avviatore Stato operativo dell'avviatore statico (se in
fase di avviamento, marcia, arresto o scatto).
Disponibile solo per Alto sin e Basso sin.
Corrente motore La corrente media misurata sulle tre fasi.
Pf motore Il fattore di potenza motore misurato dall'av-
viatore statico.
Frequenza di rete La frequenza media misurata sulle tre fasi.
kW motore La potenza operativa del motore in kW.
Cv motore La potenza operativa del motore in cavalli
vapore.
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 75
Le informazioni più recenti sono visualizzate sul lato destro
dello schermo. Il graco può essere interrotto per
analizzare i dati tenendo premuto [OK]. Per riavviare il
graco, tenere premuto [OK].
8-6 Base tempi graco
Option: Funzione:
Imposta la scala temporale del graco. Il graco
sostituisce progressivamente i dati vecchi con quelli
nuovi.
10 s*
30 s
1 minuto
5 minuti
10 minuti
30 minuti
Page 80

Descrizioni dei parametri
VLT® Soft Starter MCD 500
8-6 Base tempi graco
Option: Funzione:
1 ora
8-7 Regolazione massima graco
Range: Funzione:
400%* [0–600%] Regola il limite superiore del graco delle
prestazioni.
8-8 Regolazione minima graco
Range: Funzione:
0%* [0–600%] Regola il limite inferiore del graco delle
prestazioni
8-9 Tensione di rete di riferimento
Range: Funzione:
400 V* [100–
690 V]
88
Imposta la tensione nominale per le funzioni
di monitoraggio dell'LCP. La tensione
nominale viene utilizzata per calcolare i kW
e i kilovolt-ampere (kVa) del motore, ma
non inuisce sulla protezione del controllo
del motore dell'avviatore statico.
Immettere la tensione di rete misurata.
8.9 Parametri con restrizioni
15-1 Codice di accesso
Range: Funzione:
0000* [0000–
9999]
Imposta il codice di accesso per accedere agli
strumenti di simulazione e ai ripristini dei
contatori oppure alla sezione limitata del menu
di Programmazione (gruppo di parametri 15
Restricted Parameters (Parametri con restrizioni e
successivi)).
Premere [Back] e [OK] per selezionare la cifra da
modicare e usare [▲] e [▼] per cambiarne il
valore.
AVVISO!
Se si perde il codice di accesso,
contattare il fornitore Danfoss locale per
15-2 Blocco della regolazione
Option: Funzione:
Nessun
accesso
Impedisce agli utenti di regolare i parametri nel
menu di programmazione a meno che non venga
immesso un codice di accesso.
AVVISO!
Le modiche all'impostazione del blocco
della regolazione diventano eettive dopo
la chiusura del menu di programmazione.
15-3 Funzionamento di emergenza
Option: Funzione:
ATTENZIONE
DANNI ALL'APPARECCHIATURA
Si sconsiglia di tenere costantemente attiva la
modalità di funzionamento di emergenza. Il
funzionamento di emergenza può compromettere la durata dell'avviatore statico, poiché
disabilita le protezioni e gli scatti.
L'uso dell'avviatore statico in modalità Funzionamento di emergenza fa decadere la garanzia
del prodotto.
Consente di selezionare se l'avviatore statico debba
consentire o meno il funzionamento di emergenza. Nel
Funzionamento di emergenza l'avviatore statico si avvia
(se non è già in funzione) e continua a funzionare no
al termine del funzionamento di emergenza, ignorando
i comandi di arresto e gli scatti.
Il funzionamento di emergenza è controllato mediante
un ingresso programmabile.
Quando il funzionamento di emergenza viene attivato
nei modelli con bypass interno non in funzione,
l'avviatore statico tenta di
normale ignorando tutti gli scatti. Se non è possibile un
avviamento normale, viene tentato un avviamento DOL
mediante i contattori di bypass interni. Per i modelli
senza bypass interno, può essere utilizzato un
contattore di bypass per il funzionamento di emergenza
esterno.
eettuare un avviamento
ottenere il codice di accesso master che
consente di riprogrammare un nuovo
codice di accesso.
15-2 Blocco della regolazione
Option: Funzione:
Consente di stabilire se l'LCP debba o meno
consentire la modica dei parametri mediante il
menu di programmazione.
Lettura &
scrittura*
Sola lettura Impedisce agli utenti di modicare i valori dei
Consente di modicare i valori dei parametri nel
menu di programmazione.
parametri nel menu di programmazione. I valori
possono tuttavia essere visualizzati.
15-4 Taratura corrente
Range: Funzione:
100%* [85–
La taratura della corrente motore calibra i circuiti
115%]
di monitoraggio corrente dell'avviatore statico in
modo che corrispondano a quelli di un
dispositivo di misurazione corrente esterno.
Utilizzare la formula seguente per stabilire la
regolazione necessaria:
Taratura( % ) =
e . g . 102 % =
AVVISO!
Questa regolazione inuenza tutte le
Correntemostrataneldisplay500MDC
Correntemisuratadadispositivoesterno
66A
65A
funzioni dipendenti dalla corrente.
76 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 81

Descrizioni dei parametri Guida operativa
15-5 Tempo contattore principale
Range: Funzione:
400 ms* [100–
2000 ms]
Imposta il periodo di ritardo tra la
commutazione dell'uscita del contattore
principale da parte dell'avviatore statico
(morsetti 13 e 14) e l'inizio dei controlli di
pre-avviamento (prima dell'avviamento) o
l'accesso allo stato "non pronto" (dopo un
arresto). Impostarlo secondo le speciche
del contattore principale utilizzato.
15-6 Tempo contattore bypass
Range: Funzione:
150
ms*
[100–
2000 ms]
Imposta l'avviatore statico in modo che
corrisponda al tempo di chiusura/
apertura del contattore di bypass.
Impostarlo secondo le speciche del
contattore di bypass utilizzato. Se il
tempo è troppo breve, l'avviatore statico
scatta.
15-7 Collegamento del motore
Option: Funzione:
L'avviatore statico rileva automaticamente il formato del collegamento
al motore.
Rilevamento automatico*
In linea
Triangolo interno
15-8 Coppia jog
Range: Funzione:
50%* [20–
100%]
AVVISO!
Un'impostazione di questo parametro al
di sopra del 50% può causare una
maggiore vibrazione dell'albero.
Imposta il livello di coppia per il funzionamento jog. Per maggiori dettagli vedere il
capitolo 5.5 Funzionamento marcia jog.
Da 16-1 a 16-13 Azione protezione
Option: Funzione:
Parametro 16-5 Frequency (Frequenza).
•
Parametro 16-6 Heat sink Overtemp
•
(Sovratemp. dissipatore).
Parametro 16-7 Excess Start Time
•
(Tempo di avviamento eccessivo).
Parametro 16-8 Input A Trip (Scatto
•
ingresso A).
Parametro 16-9 Motor Thermistor
•
(Termistore motore).
Parametro 16-10 Starter/Comms
•
(Avviatore/Com.).
Parametro 16-11 Network/Comms (Rete/
•
Com.).
Parametro 16-12 Battery/Clock (Batteria/
•
orologio).
Parametro 16-13 Low Control Volts
•
(Tensione controllo bassa).
Scatto
avviatore*
Avviso e log
Soltanto log
8.11 Parametri di fabbrica
Questi parametri sono limitati all'uso in fabbrica e non
sono disponibili per l'utente.
8 8
8.10 Azione protezione
Da 16-1 a 16-13 Azione protezione
Option: Funzione:
Consente di selezionare la risposta dell'avviatore
statico a ogni protezione.
Parametro 16-1 Motor Overload (Sovrac-
•
carico motore).
Parametro 16-2 Current Imbalance
•
(Sbilanciamento corrente).
Parametro 16-3 Undercurrent
•
(Sottocorrente).
Parametro 16-4 Inst Overcurrent
•
(Sovracorrente ist.).
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 77
Page 82

Strumenti
9 Strumenti
VLT® Soft Starter MCD 500
Per accedere a Strumenti:
1. Aprire il Menu principale.
2. Scorrere a Strumenti.
3. Premere [OK].
AVVISO!
Il codice di accesso di sicurezza protegge anche gli
strumenti di simulazione e i ripristini del contatore. Il
codice di accesso predenito è 0000.
9.1 Impostare data e ora
Per impostare data e ora:
1. Aprire il menu Strumenti.
2. Scorrere no a Imposta data e ora.
3. Premere [OK] per accedere alla modalità di
modica.
4. Premere [OK] per selezionare la parte della data o
dell'ora da modicare.
99
5.
Utilizzare [▲] e [▼] per
Per salvare le
statico conferma le modiche. Per annullare le modiche,
premere più volte [Back].
9.2
modiche, premere più volte [OK]. L'avviatore
Carica/Salva impostazioni
modicare il valore.
Attrezzi
Carica i valori predeniti
Carica il gruppo di parametri dell'utente 1
Salva il gruppo di parametri dell'utente 1
Tabella 9.1 Menu Strumenti
Carica i valori predeniti
No
Sì
Tabella 9.2 Carica il menu con i valori predeniti
Quando l'azione è stata completata, la schermata visualizza
brevemente un messaggio di conferma e poi torna alle
schermate di stato.
9.3 Riprist. modello termico
AVVISO!
Il codice per l'accesso di sicurezza protegge il ripristino
del modello termico.
L'avanzato software di modellazione termica nell'avviatore
statico monitora costantemente le prestazioni del motore.
Questo monitoraggio consente all'avviatore statico di
calcolare la temperatura del motore e la sua capacità di
avviarsi con successo in qualsiasi momento.
Il VLT® Soft Starter MCD 500 comprende due opzioni per:
Caricare i valori predeniti: carica i parametri
•
dell'avviatore statico con i valori predeniti,
Caricare il gruppo di parametri dell'utente 1:
•
ricarica le impostazioni dei parametri precedentemente salvate da un le interno.
Salvare il gruppo di parametri dell'utente 1: salva
•
le impostazioni parametri attuali su un le
interno.
Oltre al le con i valori deniti in fabbrica, l'avviatore
statico può memorizzare un le di parametri denito
dall'utente. Questo le contiene i valori predeniti nché
non viene salvato un le dell'utente.
Per caricare o salvare le impostazioni dei parametri:
1. Aprire il menu Strumenti.
2.
Utilizzare [▼] per selezionare la funzione
necessaria e quindi premere [OK].
3. Quando viene chiesto di confermare, selezionare
Sì per confermare o No per annullare.
4. Premere [OK] per caricare/salvare la selezione o
uscire dalla schermata.
Se necessario, ripristinare il modello termico.
AVVISO!
Il ripristino del modello termico del motore può compromettere la durata del motore e dovrebbe essere
eettuato solo in caso di emergenza.
1. Aprire Strumenti.
2. Scorrere no a Ripristina modello termico e
premere [OK].
3. Quando viene chiesto di confermare, premere
[OK] per confermare e immettere il codice di
accesso oppure premere [Back] per annullare
l'azione.
4. Selezionare Ripristina o Non ripristinare e premere
[OK]. Quando il modello termico è stato
ripristinato, l'avviatore statico torna alla schermata
precedente.
Ripristino modello termico
M1 X%
OK per ripristinare
Tabella 9.3 Accettare per ripristinare il modello termico
78 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 83

Strumenti Guida operativa
Ripristino modello termico
Non ripristinare
Ripristino
Tabella 9.4 Menu Ripristino modello termico
9.4 Simulazione protezione
AVVISO!
La simulazione di protezione è protetta dal codice per
l'accesso di sicurezza.
Per testare i circuiti di funzionamento e di comando
dell'avviatore statico senza collegarlo alla tensione di rete,
usare le funzioni di simulazione software.
La funzione di simulazione di protezione consente all'avviatore statico di confermare che esso risponde
correttamente e riporta la situazione sul display e nella
rete di comunicazione.
Per utilizzare la simulazione di protezione:
1. Aprire il Menu principale.
2. Scorrere a Sim. protezione e premere [OK].
3.
Premere [▲] e [▼] per selezionare la protezione da
simulare.
4. Premere [OK] per simulare la protezione
selezionata.
5. La schermata è visualizzata mentre viene premuto
[OK]. La risposta dell'avviatore statico dipende
dall'impostazione dell'azione di protezione
(gruppo di parametri 16 Protection Actions (Azioni
di protezione)).
6. Per tornare all'elenco delle simulazioni, premere
[Back].
7.
Per selezionare un'altra simulazione, premere [▲]
o [▼], oppure premere [Back] per tornare al Menu
principale.
AVVISO!
Se la protezione fa scattare l'avviatore statico,
ripristinarlo prima di simulare un'altra protezione. Se
l'azione di protezione è impostata su Avviso o Log, non
occorre eseguire il ripristino.
Se la protezione è impostata su Avviso e Log, il
messaggio di avviso può essere visualizzato solo mentre
viene premuto [OK].
Se la protezione è impostata su Soltanto log, non appare
nulla nella schermata ma viene visualizzata una voce nel
registro.
9.5 Simulazione segnale in uscita
AVVISO!
Il codice di accesso di sicurezza protegge la simulazione
del segnale in uscita.
L'LCP consente la simulazione della segnalazione in uscita
per vericare che i relè di uscita funzionino correttamente.
AVVISO!
Per provare il funzionamento degli indicatori
(temperatura motore e corrente bassa/alta), impostare un
relè di uscita sulla funzione appropriata e monitorarne il
comportamento.
Per utilizzare la simulazione del segnale di uscita:
1. Aprire il Menu principale.
2. Scorrere a Sim. segnale in uscita e premere [OK],
quindi immettere il codice di accesso.
3.
Premere [▲] e [▼] per selezionare una
simulazione, quindi premere [OK].
4.
Utilizzare [▲] e [▼] per attivare e disattivare il
segnale. Per vericare che funzioni correttamente,
monitorare lo stato dell'uscita.
5. Per tornare all'elenco delle simulazioni, premere
[Back].
9 9
MS1 000.0A 0000,0kW
Scatto
Protezione selezionata
Tabella 9.5 Menu Simulazione della protezione
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 79
O
On
Tabella 9.6 Menu Simulazione del segnale in uscita
Relè prog. A
Page 84

Strumenti
VLT® Soft Starter MCD 500
9.6 Stato I/O digitali
Questa schermata mostra, nell'ordine, lo stato degli I/O
digitali.
La riga superiore della schermata visualizza:
Avviamento.
•
Arresto.
•
Ripristino.
•
Ingresso programmabile.
•
La riga inferiore dello schermo mostra le uscite programmabili A, B e C.
Stato I/O digitali
Ingressi: 0100
Uscite: 100
Tabella 9.7 Schermata di stato I/O digitali
9.7 Stato sensore temp.
Questa schermata mostra lo stato del termistore del
motore.
99
La schermata mostra lo stato del termistore come O
(aperto).
Per chiudere il log e tornare al display principale, premere
[Back].
9.8.2 Registro eventi
Il registro eventi memorizza i dati con marcatura oraria
degli ultimi 99 eventi più recenti (azioni, avvisi e scatti),
inclusa la data e l'ora dell'evento. L'evento 1 è il più
recente, l'evento 99 il meno recente.
Per aprire il registro eventi:
1. Premere [Alarm Log].
2. Scorrere
3.
Premere [▲] e [▼] per selezionare un evento da
visualizzare e quindi premere [OK] per visualizzare
i dettagli.
Per chiudere il log e tornare al display principale, premere
[Back].
no a Log eventi e premere [OK].
9.8.3 Contatori
AVVISO!
La funzione contatori è protetta dal codice per l'accesso
di sicurezza.
Stato sensori temp.
Termistore: O
S = cortocircuito (short) H=caldo (hot) C=freddo (cold) O=aperto
(open)
Tabella 9.8 Schermata stato termistore motore
Log allarme
9.8
Il tasto [Alarm Log] apre il registro allarmi, che contiene:
Registro scatti.
•
Registro eventi.
•
Contatori che memorizzano le informazioni sulla
•
cronologia del funzionamento dell'avviatore
statico.
9.8.1 Registro scatti
Il registro scatti memorizza i dettagli degli otto scatti più
recenti, inclusa la data e l'ora in cui si sono vericati. Lo
scatto 1 è il più recente e lo scatto 8 è il meno recente.
Per aprire il registro scatti:
1. Premere [Alarm Log].
2. Scorrere
3.
Premere [▲] e [▼] per selezionare uno scatto da
visualizzare e quindi premere [OK] per visualizzare
i dettagli.
no a Log scatti e premere [OK].
I contatori di prestazioni memorizzano le statistiche sul
funzionamento dell'avviatore statico:
Ore di esercizio (vita utile e tempo trascorso
•
dall'ultimo ripristino del contatore).
Numero di avviamenti (vita utile e tempo
•
trascorso dall'ultimo ripristino del contatore).
kWh del motore (vita utile e tempo trascorso
•
dall'ultimo ripristino del contatore).
Numero di ripristini del modello termico.
•
I contatori ripristinabili (ore di esercizio, avviamenti e kWh
motore) possono essere ripristinati solo se viene immesso il
codice di accesso corretto.
Per visualizzare i contatori:
1. Premere [Alarm Log].
2. Scorrere no a Contatori e premere [OK].
3.
Per scorrere i contatori, premere [▲] e [▼].
Premere [OK] per visualizzare i dettagli.
4. Per ripristinare un contatore, premere [OK] e
immettere il codice di accesso. Selezionare
Ripristina e premere [OK] per confermare.
Per chiudere il contatore e tornare al registro allarmi,
premere [Back].
80 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 85

Ricerca guasti Guida operativa
10 Ricerca guasti
Quando viene rilevata una condizione di protezione, il VLT® Soft Starter MCD 500 scrive tale condizione nel registro eventi e
può anche scattare o emettere un avviso. La risposta dell'avviatore statico dipende dalle impostazioni dell'azione protezione
(gruppo di parametri 16 Protection Actions (Azioni di protezione)).
Alcune risposte di protezione non possono essere regolate. Generalmente questi scatti sono provocati da eventi esterni (ad
esempio la perdita di fase) o da un guasto all'interno dell'avviatore statico. Questi scatti non sono associati a dei parametri e
non possono essere impostati su Avviso o Log.
Se l'avviatore statico scatta:
1. Identicare e cancellare la condizione che ha provocato lo scatto.
2. Ripristinare l'avviatore statico,
3. Riavviare l'avviatore statico.
Per ripristinare l'avviatore statico, premere [Reset] o attivare l'ingresso Ripristino remoto.
Se l'avviatore statico ha emesso un avviso, si ripristina automaticamente una volta eliminata la causa dell'avviso.
10.1 Messaggi di scatto
Tabella 10.1 elenca i meccanismi di protezione nell'avviatore statico e la causa probabile dello scatto. Alcuni di questi
meccanismi di protezione possono essere regolati usando il gruppo di parametri 2 Protection (Protezione) e il gruppo di
parametri 16 Protection Action (Azione protezione). Altre impostazioni sono protezioni integrate del sistema che non possono
essere né congurate né regolate.
Display Possibile causa/soluzione consigliata
In attesa di dati L'LCP non riceve i dati dal circuito stampato di controllo. Controllare il collegamento del cavo e il
montaggio del display sull'avviatore statico.
Batteria/orologio Si è vericato un errore di verica sul real time clock, oppure la tensione della batteria di backup è
bassa. Se la batteria è scarica e la potenza viene disinserita, le impostazioni di data/ora vanno
perse. Riprogrammare la data e l'ora.
Parametro connesso:
Parametro 16-12 Battery/Clock (Batteria/orologio).
•
Controllore Nome selezionato per un ingresso programmabile. Consultare Scatto ingresso A.
Sbilanciamento corrente Tra i problemi con il motore, l'ambiente o l'impianto che possono provocare uno sbilanciamento di
corrente vi sono:
Uno sbilanciamento della tensione di rete in ingresso.
•
Un problema con gli avvolgimenti del motore.
•
Un carico leggero sul motore.
•
Una perdita di fase sui morsetti di rete L1, L2 o L3 durante la modalità di marcia.
•
Un SCR in cui il circuito aperto non funziona. Un SCR guasto può essere diagnosticato accuratamente solo sostituendo l'SCR e controllando le prestazioni dell'avviatore statico.
Parametri connessi:
Parametro 2-2 Current Imbalance (Sbilanciamento corrente).
•
Parametro 2-3 Current Imbalance Delay (Ritardo sbilanciamento corrente).
•
Parametro 16-2 Current Imbalance (Sbilanciamento corrente).
•
10 10
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 81
Page 86

Ricerca guasti
Display Possibile causa/soluzione consigliata
Errore lettura corrente lx Dove X è 1, 2 o 3.
Guasto interno (guasto PCB). L'uscita dal circuito del trasformatore di corrente non è abbastanza
vicina a zero quando gli SCR vengono disinseriti. Contattare il fornitore Danfoss locale per ricevere
assistenza.
Questo scatto non è regolabile.
Parametri connessi: nessuno.
Tempo di avviamento eccessivo Uno scatto per tempo di avviamento eccessivo può vericarsi nelle seguenti condizioni:
•
•
•
•
Parametri connessi:
•
•
•
•
•
•
•
1010
•
•
Mancata accensione px Dove X è la fase 1, 2 o 3.
L'SCR non si è acceso come previsto. Controllare che l'SCR non sia guasto e che non vi siano guasti
al cablaggio interno.
Questo scatto non è regolabile.
Parametri connessi: nessuno.
FLC troppo alta L'avviatore statico può supportare valori di corrente a pieno carico del motore più elevati se
collegato al motore mediante la congurazione a triangolo interno anziché con collegamento in
linea. Se l'avviatore statico è collegato in linea ma l'impostazione programmata per il parametro 1-1
Motor FLC (FLC motore) supera la corrente massima in linea, l'avviatore statico scatta all'avviamento
(vedere il capitolo 4.5 Impostazioni di corrente minima e massima).
Se l'avviatore statico è collegato al motore usando la congurazione a triangolo interno, controllare
che rilevi correttamente il collegamento. Contattare il fornitore Danfoss locale per ricevere
assistenza.
Parametri connessi:
•
•
VLT® Soft Starter MCD 500
Il parametro 1-1 Motor FLC (FLC motore) non è adatto per il motore.
Il parametro 1-4 Current Limit (Limite di corrente) è stato impostato su un valore troppo basso.
Il parametro 1-6 Star t Ramp Time (Tempo di rampa di avviamento) è stato impostato su un livello
superiore all'impostazione per il parametro 1-9 Excess Start Time Setting (Impostazione tempo di
avviamento eccessivo).
Il parametro 1-6 Start Ramp Time (Tempo di rampa di avviamento) è stato impostato su un valore
troppo breve per un elevato carico inerziale con il controllo adattivo in uso.
Parametro 1-1 Motor FLC (FLC motore).
Parametro 1-4 Current Limit (Limite di corrente).
Parametro 1-6 Start Ramp Time ( Tempo di rampa di avviamento).
Parametro 1-9 Excess Start Time (Tempo di avviamento eccessivo).
Parametro 7-1 Motor FLC-2 (FLC motore-2).
Parametro 7-4 Current Limit-2 (Limite di corrente-2).
Parametro 7-6 Start Ramp-2 (Rampa avviamento-2).
Parametro 7-9 Excess Strt Time-2 (Tempo di avviamento eccess.-2).
Parametro 16-7 Excess Start Time (Tempo di avviamento eccessivo).
Parametro 1-1 Motor FLC (FLC motore).
Parametro 7-1 Motor FLC-2 (FLC motore-2).
82 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 87

Ricerca guasti Guida operativa
Display Possibile causa/soluzione consigliata
Frequenza La frequenza di rete è al di fuori dell'intervallo specicato.
Controllare la presenza nell'area di altre apparecchiature che potrebbero inuire sull'alimentazione
di rete, in particolare convertitori di frequenza e alimentatori a commutazione (SMPS).
Se l'avviatore statico è collegato a un'alimentazione di gruppo elettrogeno, il generatore potrebbe
essere troppo piccolo o potrebbe avere un problema di controllo della velocità.
Parametri connessi:
Parametro 2-8 Frequency Check (Controllo frequenza).
•
Parametro 2-9 Frequency Variation (Variazione di frequenza).
•
Parametro 2-10 Frequency Delay (Ritardo di frequenza).
•
Parametro 16-5 Frequency (Frequenza).
•
Sovratemperatura del dissipatore Controllare che le ventole di rareddamento siano in funzione. Se sono montate in un frame,
controllare che la ventilazione sia adeguata.
Le ventole restano in funzione durante l'avviamento, la marcia e per 10 minuti dopo che l'avviatore
statico è in stato di arresto.
AVVISO!
I modelli da MCD5-0021B a MCD4-0053B e MCD5-0141B non dispongono di una
ventola di rareddamento. I modelli con ventole mettono in funzione le ventole di
rareddamento a partire da un avviamento no a 10 minuti dopo un arresto.
Parametro connesso:
Parametro 16-6 Heat sink Overtemp (Sovratemp. dissipatore).
•
Livello alto Nome selezionato per un ingresso programmabile. Consultare Scatto ingresso A.
Pressione alta Nome selezionato per un ingresso programmabile. Consultare Scatto ingresso A.
Scatto ingresso A L'ingresso programmabile è impostato su una funzione di scatto e si è attivato. Risolvere la
condizione di attivazione.
Parametri connessi:
Parametro 3-3 Input A Function (Funzione ingresso A).
•
Parametro 3-4 Input A Name (Nome ingresso A).
•
Parametro 3-5 Input A Trip (Scatto ingresso A).
•
Parametro 3-6 Input A Trip Delay (Ritardo scatto ingresso A).
•
Parametro 3-7 Input A Initial Delay (Ritardo iniziale ingresso A).
•
Parametro 16-8 Input A Trip (Scatto ingresso A).
•
Sovracorrente istantanea Si è vericato un forte incremento della corrente motore, probabilmente causato da una condizione
di rotore bloccato (spina di sicurezza) durante il funzionamento. Controllare la presenza di
eventuale carico inceppato.
Parametri connessi:
Parametro 2-6 Instantaneous Overcurrent (Sovracorrente istantanea).
•
Parametro 2-7 Instantaneous Overcurrent Delay (Ritardo sovracorrente istantanea).
•
Parametro 16-4 Inst Overcurrent (Sovracorrente ist.).
•
Guasto interno X L'avviatore statico è scattato in presenza di un guasto interno. Contattare il rivenditore Danfoss
locale indicando il codice di guasto (X).
Parametri connessi: nessuno.
10 10
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 83
Page 88

Ricerca guasti
Display Possibile causa/soluzione consigliata
Perdita di fase L1
Perdita di fase L2
Perdita di fase L3
Durante il pre-avviamento, controllare che l'avviatore statico abbia rilevato una perdita di fase come
indicato.
Nello stato di marcia, l'avviatore statico ha rilevato che la corrente sulla fase interessata è scesa al di
sotto del 3,3% della FLC motore programmata per più di 1 secondo. Questo calo di corrente indica
che sono andati persi la fase in ingresso oppure il collegamento al motore.
Per l'avviatore statico e il motore controllare:
•
•
•
Anche un SCR guasto può provocare una perdita di fase, in particolare se ha un circuito aperto
guasto. Un SCR guasto può essere diagnosticato accuratamente solo sostituendo l'SCR e
controllando le prestazioni dell'avviatore statico.
Parametri connessi: nessuno.
L1-T1 in cortocircuito
L2-T2 in cortocircuito
L3-T3 in cortocircuito
Tensione controllo bassa L'avviatore statico ha rilevato un calo nella tensione di controllo.
Durante i controlli di pre-avviamento, l'avviatore statico ha rilevato un SCR cortocircuitato o un
cortocircuito all'interno del contattore di bypass come indicato.
Parametri connessi: nessuno.
•
Se l'alimentazione di controllo esterna è stabile:
•
•
Questa protezione non è attiva nello stato Pronto.
Parametro connesso:
1010
Livello basso Nome selezionato per un ingresso programmabile. Consultare Scatto ingresso A.
Pressione bassa Nome selezionato per un ingresso programmabile. Consultare Scatto ingresso A.
Sovraccarico motore/
Sovraccarico motore 2
•
Il motore ha raggiunto la sua capacità termica massima.
I seguenti fattori possono causare il sovraccarico:
•
•
•
•
Risolvere la causa del sovraccarico e far rareddare il motore.
Parametri connessi:
•
•
•
•
•
•
•
•
•
VLT® Soft Starter MCD 500
I collegamenti di alimentazione.
I collegamenti di ingresso.
Le connessioni di uscita.
Controllare l'alimentazione di controllo esterna (morsetti A4, A5, A6) e ripristinare l'avviatore
statico.
Controllare se l'alimentazione a 24 V sulla scheda di comando principale è difettosa o
Controllare se la scheda di comando bypass è difettosa (soltanto modelli con bypass interno).
Parametro 16-13 Low Control Volts (Tensione controllo bassa).
Le impostazioni di protezione dell'avviatore statico non corrispondono alla capacità termica del
motore.
Avviamenti eccessivi all'ora.
Portata eccessiva.
Danni agli avvolgimenti del motore.
Parametro 1-1 Motor FLC (FLC motore).
Parametro 1-2 Locked Rotor Time (Tempo a rotore bloccato).
Parametro 1-3 Start Mode (Modalità di avviamento).
Parametro 1-4 Current Limit (Limite di corrente).
Parametro 7-1 Motor FLC-2 (FLC motore-2).
Parametro 7-2 Locked Rotor Time-2 (Tempo a rotore bloccato-2).
Parametro 7-3 Start Mode-2 (Modalità di avviamento-2).
Parametro 7-4 Current Limit-2 (Limite di corrente-2).
Parametro 16-1 Motor Overload (Sovraccarico motore).
84 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 89

Ricerca guasti Guida operativa
Display Possibile causa/soluzione consigliata
Collegamento del motore tx Dove X è 1, 2 o 3.
Il motore non è collegato correttamente all'avviatore statico per l'uso di un collegamento in linea o
a triangolo interno.
Controllare i singoli collegamenti del motore all'avviatore statico per vericare la continuità del
•
circuito di potenza.
Controllare i collegamenti alla morsettiera del motore.
•
Questo scatto non è regolabile.
Parametro connesso:
Parametro 15-7 Motor Connection (Collegamento del motore).
•
Termistore motore L'ingresso del termistore motore è stato abilitato e:
La resistenza in ingresso del termistore ha superato i 3,6 kΩ per più di un secondo.
•
L'avvolgimento del motore si è surriscaldato. Identicare la causa del surriscaldamento e far
•
rareddare il motore prima di riavviarlo.
L'ingresso del termistore motore è stato aperto.
•
AVVISO!
Se un termistore motore valido non viene più utilizzato, installare un resistore da 1,2
kΩ sui morsetti 05 e 06.
Parametro connesso:
Parametro 16-9 Motor Thermistor (Termistore motore).
•
Guasto alla rete (tra modulo e rete) Il master di rete ha inviato un comando di scatto all'avviatore statico o potrebbe essersi vericato
un problema di comunicazione di rete.
Controllare la rete per individuare le cause dell'assenza di comunicazione.
Parametro connesso:
Parametro 16-11 Network/Comms (Rete/Com.).
•
Portata nulla Nome selezionato per un ingresso programmabile. Consultare Scatto ingresso A.
Non pronto Controllare se è attiva la funzione di disabilitazione dell'avviatore statico. Se il Parametro 3-3 Input A
Function (Funzione ingresso A) è impostato su Starter disable (Disabilitazione avviatore) ed è presente
un circuito aperto sui morsetti 11 e 16, l'avviatore statico non si avvia.
Parametro fuori intervallo
Sequenza di fase La sequenza di fase sui morsetti di rete dell'avviatore statico (L1, L2, L3) non è valida.
PLC Nome selezionato per un ingresso programmabile. Consultare Scatto ingresso A.
Perdita di potenza L'avviatore statico non riceve l'alimentazione di rete su una o più fasi quando viene dato un
Guasto pompa Nome selezionato per un ingresso programmabile. Consultare Scatto ingresso A.
Un valore del parametro non rientra nell'intervallo valido.
•
L'avviatore statico carica i valori predeniti per tutti i parametri interessati. Per andare al primo
parametro non valido e regolarne l'impostazione, premere [Main Menu].
Parametri connessi: nessuno.
Controllare la sequenza di fase su L1, L2 ed L3 e garantire che l'impostazione nel parametro 2-1
Phase Sequence (Sequenza di fase) sia adatta per l'installazione.
Parametro connesso:
Parametro 2-1 Phase Sequence (Sequenza di fase).
•
comando di avviamento.
Controllare che il contattore principale si chiuda quando viene impartito un comando di
avviamento e che rimanga chiuso no al termine di un arresto dolce.
Se l'avviatore statico viene testato con un motore piccolo, deve assorbire almeno il 2% della FLC
impostata in ogni fase.
Parametri connessi: nessuno.
10 10
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 85
Page 90

Ricerca guasti
Display Possibile causa/soluzione consigliata
Avviatore/comunicazione (tra il
modulo e l'avviatore statico)
•
•
Parametro connesso:
•
Disabilitazione avviatore Nome selezionato per un ingresso programmabile. Consultare Scatto ingresso A.
Cct termistore (circuito termistore) L'ingresso del termistore è stato abilitato e:
•
•
Vericare che un PT100 (RTD) non sia collegato ai morsetti 05 e 06.
Parametri connessi: nessuno.
Tempo - sovracorrente L'avviatore statico presenta un bypass interno e ha assorbito una corrente elevata durante il funzio-
namento (è stato raggiunto lo scatto della curva di protezione 10 A o la corrente motore è salita al
600% dell'impostazione FLC motore).
Parametri connessi: nessuno.
Sottocorrente Il motore ha subito un forte calo di corrente causato da una perdita di carico. Tra le cause possono
esservi componenti rotti (alberi, cinghie o accoppiamenti) o una pompa che funziona a secco.
Parametri connessi:
•
•
•
1010
Opzione non supportata (funzione
non disponibile nel collegamento a
triangolo interno)
Vibrazioni Nome selezionato per un ingresso programmabile. Consultare Scatto ingresso A.
Errori VZC px Dove X è 1, 2 o 3.
La funzione selezionata non è disponibile (ad esempio, la funzione jog non viene supportata nella
congurazione a triangolo interno).
Parametri connessi: nessuno.
Guasto interno (guasto PCB). Contattare il fornitore Danfoss locale per ricevere assistenza.
Questo scatto non è regolabile.
Parametri connessi: nessuno.
VLT® Soft Starter MCD 500
Si è vericato un problema al collegamento tra l'avviatore statico e il modulo di comunicazione
opzionale. Rimuovere e reinstallare il modulo. Se il problema persiste, contattare il distributore
locale.
Si è vericato un errore di comunicazione interna nell'avviatore statico. Contattare il distributore
locale.
Parametro 16-10 Starter/Comms (Avviatore/Com.).
La resistenza in ingresso è scesa al di sotto di 20 Ω (la resistenza a freddo della maggior parte
dei termistori è superiore a questo valore) oppure
si è vericato un cortocircuito. Controllare e correggere questa condizione.
Parametro 2-4 Undercurrent (Sottocorrente).
Parametro 2-5 Undercurrent Delay (Ritardo sottocorrente).
Parametro 16-3 Undercurrent (Sottocorrente).
Tabella 10.1 Messaggi di scatto
Guasti generali
10.2
Tabella 10.2 descrive le situazioni in cui l'avviatore statico non funziona come previsto, ma non scatta né emette un avviso.
Sintomo Causa probabile
L'avviatore statico non è pronto. Controllare l'ingresso A (11, 16). Controllare se l'avviatore statico viene disabilitato
mediante un ingresso programmabile. Se il parametro 3-3 Input A Function (Funzione
ingresso A) è impostato su Starter disable (Disabilitazione avviatore) ed è presente un
circuito aperto sull'ingresso corrispondente, l'avviatore statico non si avvia.
L'avviatore statico non risponde ai tasti [Hand On]
e [Reset].
86 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Controllare se l'avviatore statico è in modalità Auto-on. Quando l'avviatore statico è
in modalità di Auto-on, il LED Hand-on sull'avviatore statico è spento. Premere [Auto
On] una volta per passare al comando locale.
Page 91

Ricerca guasti Guida operativa
Sintomo Causa probabile
L'avviatore statico non risponde ai comandi dagli
ingressi di comando.
L'avviatore statico non risponde a un comando di
avviamento proveniente dal comando locale o dal
controllo remoto.
L'avviatore statico è in attesa che il ritardo riavvio si concluda. Il Parametro 2-11
•
Restart delay (Ritardo riavvio) controlla la lunghezza del ritardo di riavvio.
Il motore potrebbe essere troppo caldo per consentire un avviamento. Se il
•
parametro 2-12 Motor temperature check (Controllo temperatura motore) è
impostato su Check (Controllo), l'avviatore statico consente un avviamento
soltanto quando ha calcolato che il motore dispone di suciente capacità termica
per completarlo correttamente. Attendere che il motore sia freddo prima di
tentare un nuovo avviamento.
Controllare se l'avviatore statico viene disabilitato mediante un ingresso program-
•
mabile. Se il parametro 3-3 Input A Function (Funzione ingresso A) è impostato su
Starter disable (Disabilitazione avviatore) ed è presente un circuito aperto sui
morsetti 11 e 16, l'avviatore statico non si avvia. Se non esiste alcuna ulteriore
necessità di disabilitare l'avviatore statico, chiudere il circuito sull'ingresso.
AVVISO!
Il parametro 3-1 Local/remote (Locale/remoto) controlla quando viene
abilitato il tasto [Auto On].
L'avviatore statico potrebbe essere in attesa che il ritardo riavvio si concluda. Il
•
Parametro 2-11 Restart delay (Ritardo riavvio) controlla la lunghezza del ritardo di
riavvio.
Il motore potrebbe essere troppo caldo per consentire un avviamento. Se il
•
parametro 2-12 Motor temperature check (Controllo temperatura motore) è
impostato su Check (Controllo), l'avviatore statico consente un avviamento
soltanto quando ha calcolato che il motore dispone di suciente capacità termica
per completarlo correttamente.
Controllare se l'avviatore statico viene disabilitato mediante un ingresso program-
•
mabile. Se il parametro 3-3 Input A Function (Funzione ingresso A) è impostato su
Starter disable (Disabilitazione avviatore) ed è presente un circuito aperto sui
morsetti 11 e 16, l'avviatore statico non si avvia. Se non esiste alcuna ulteriore
necessità di disabilitare l'avviatore statico, chiudere il circuito sull'ingresso.
10 10
L'avviatore statico non controlla correttamente il
motore durante l'avviamento.
AVVISO!
Il parametro 3-1 Local/remote (Locale/remoto) controlla quando viene
abilitato [Auto On].
Le prestazioni all'avviamento potrebbero essere instabili quando si utilizza
•
un'impostazione con FLC motore bassa (parametro 1-1 Motor FLC (FLC motore)).
Ciò può inuenzare l'utilizzo su un motore di prova piccolo con una corrente a
pieno carico compresa tra 5 e 50 A.
Installare condensatori di correzione del fattore di potenza (PFC) sul lato di
•
alimentazione dell'avviatore statico. Per controllare un contattore del condensatore PFC dedicato, collegare il contattore ai morsetti del relè di funzionamento.
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 87
Page 92

Ricerca guasti
Sintomo Causa probabile
VLT® Soft Starter MCD 500
Il motore non raggiunge la massima velocità.
Se la corrente di avviamento è troppo bassa, il motore non produce suciente
•
coppia per accelerare alla massima velocità. L'avviatore statico può scattare in
caso di tempo di avvio eccessivo.
AVVISO!
Assicurarsi che i parametri di avviamento del motore siano adeguati per
l'applicazione e che venga utilizzato il prolo di avviamento del motore
desiderato. Se il parametro 3-3 Input A Function (Funzione ingresso A) è
impostato su Motor Set Select (Selezione impostazione motore), controllare
che l'ingresso corrispondente si trovi allo stato previsto.
Controllare se il carico è bloccato. Controllare che non vi sia un grave sovrac-
•
carico o un rotore bloccato.
Funzionamento non regolare del motore.
Funzionamento non regolare e rumoroso del
motore.
L'arresto dolce termina troppo rapidamente.
1010
Le funzioni controllo adattivo, freno CC e jog non
funzionano.
Quando si utilizza un controllo remoto a 2 li, non
si verica alcun ripristino dopo un ripristino
automatico.
Quando si utilizza un controllo remoto a 2 li, il
comando di avviamento/arresto remoto esclude le
impostazioni di avviamento/arresto automatico.
Dopo aver selezionato il controllo adattivo, il
motore ha impiegato un avviamento ordinario e/o
il secondo avviamento è stato diverso dal primo.
Scatto Cct termistore non ripristinabile, quando c'è
un collegamento tra gli ingressi termistore 05 e 06
oppure quando il termistore motore collegato tra
05 e 06 viene rimosso in modo permanente.
Gli SCR nell'avviatore statico richiedono almeno 5 A di corrente per agganciarsi.
•
Se si sta testando l'avviatore statico su un motore con corrente a pieno carico
inferiore a 5 A, gli SCR potrebbero non agganciarsi correttamente.
Se l'avviatore statico è collegato al motore usando la congurazione a triangolo
interno, l'avviatore statico potrebbe non rilevare correttamente il collegamento.
Contattare il fornitore Danfoss locale per ricevere assistenza.
Le impostazioni dell'arresto dolce potrebbero essere inadeguate per il motore e il
•
carico. Vericare le impostazioni di:
- Parametro 1-10 Stop Mode (Modalità di arresto).
- Parametro 1-11 Stop Time (Tempo di arresto).
- Parametro 7-10 Stop Mode-2 (Modalità di arresto-2).
- Parametro 7-11 Stop Time-2 ( Tempo di arresto-2).
Se il motore presenta un carico leggero, l'arresto dolce ha un eetto limitato.
•
Queste caratteristiche sono disponibili solo con l'installazione in linea. Se
•
l'avviatore statico è installato con collegamento a triangolo interno, queste
caratteristiche non funzionano.
Rimuovere e riapplicare il segnale di avviamento remoto a 2 li per un riavvio.
•
Usare soltanto avviamento/arresto automatico in modalità Auto-on con controllo
•
a 3 li o a 4 li.
Il primo avviamento del controllo adattivo è Limite di corrente. Quindi l'avviatore
•
statico apprende dalle caratteristiche del motore. Gli avviamenti successivi usano
il controllo adattivo.
L'ingresso termistore viene abilitato quando è predisposto un collegamento ed è
•
stata attivata la protezione da cortocircuito.
Rimuovere il collegamento e poi caricare il gruppo di parametri predenito. Ciò
disabilita l'ingresso termistore e rimuove lo scatto.
Posizionare un resistore da 1,2 kΩ sull'ingresso termistore.
Commutare la protezione termistore su Log only (Soltanto log) (parametro 16-9 Motor
Thermistor (Termistore motore).
88 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 93

Ricerca guasti Guida operativa
Sintomo Causa probabile
Non è possibile memorizzare le impostazioni
parametri.
L'LCP mostra il messaggio In attesa di dati. L'LCP non riceve i dati dal circuito stampato di controllo. Controllare il collegamento
Tabella 10.2 Messaggi di guasto generico
Assicurarsi di salvare il nuovo valore premendo [OK] dopo aver regolato un'impo-
•
stazione parametri. Se si preme [BACK] la modica non viene salvata.
Controllare che il blocco della regolazione (parametro 15-2 Adjustment Lock (Blocco
•
della regolazione)) sia impostato su Read/Write (Lettura/scrittura). Se il blocco della
regolazione è attivo, le impostazioni possono essere visualizzate ma non
modicate. È necessario conoscere il codice per l'accesso di sicurezza per poter
modicare l'impostazione del blocco della regolazione.
La EEPROM sulla scheda di circuito del controllo principale potrebbe essere
•
guasta. Una EEPROM difettosa fa scattare l'avviatore statico e l'LCP visualizza il
messaggio Par. fuori campo. Contattare il fornitore Danfoss locale per ricevere
assistenza.
del cavo.
10 10
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 89
Page 94

Speciche
VLT® Soft Starter MCD 500
11 Speciche
Alimentazione
Tensione di rete (L1, L2, L3)
MCD5-xxxx-T5 200–525 V CA (±10%)
MCD5-xxxx-T7 380–690 V CA (±10%) (collegamento in linea)
MCD5-xxxx-T7 380–690 V CA (±10%) (collegamento a triangolo interno)
Tensione di controllo (A4, A5, A6)
CV1 (A5, A6) 24 V CA/V CC (±20%)
CV2 (A5, A6) 110–120 V CA (+10%/-15%)
CV2 (A4, A6) 220–240 V CA (+10%/-15%)
Consumo di corrente (massimo)
CV1 2,8 A
CV2 (110–120 V CA) 1 A
CV2 (220–240 V CA) 500 mA
Frequenza di rete 45–66 Hz
Tensione di isolamento a terra nominale 690 V CA
Tensione impulsiva “sopportabile” 4 kV
Designazione forma Con bypass o continua, avviatore motore semiconduttore forma 1
Capacità di cortocircuito (IEC)
Coordinamento con fusibili a semiconduttori Tipo 2
Coordinamento con fusibili HRC Tipo 1
Da MCD5-0021B a MCD5-0215B Corrente potenziale 65 kA
Da MCD5-0245B a MCD5-0961B Corrente potenziale 85 kA
Da MCD5-0245C a MCD5-0927B Corrente potenziale 85 kA
MCD5-1200C - MCD5-1600C Corrente potenziale 100 kA
Per le caratteristiche delle correnti nominali di cortocircuito UL vedere la Tabella 4.12.
1111
Compatibilità elettromagnetica (conformità alla direttiva UE 2014/30/UE)
Emissioni EMC IEC 60947-4-2 Classe B e specica n. 1 Lloyds Marine
Immunità EMC IEC 60947-4-2
Ingressi
Potenza nominale in ingresso Attiva 24 V CC, circa 8 mA
Avviamento (15, 16) Normalmente aperto
Arresto (17, 18) Normalmente chiuso
Ripristino (25, 18) Normalmente chiuso
Ingresso programmabile (11, 16) Normalmente aperto
Termistore motore (05, 06) Scatto >3,6 kΩ, ripristino <1,6 kΩ
Uscite
Uscite a relè 10 A con 250 V CA carico resistivo, 5 A con 250 V CA AC15 pf 0,3
Uscite programmabili
Relè A (13, 14) Normalmente aperto
Relè B (21, 22, 24) Commutazione
Relè C (33, 34) Normalmente aperto
Uscita analogica (07, 08) 0–20 mA o 4–20 mA (selezionabile)
Carico massimo 600 Ω (12 V CC con 20 mA)
Precisione ±5%
Tensione di uscita a 24 V CC (16, 08), carico massimo 200 mA
Precisione ±10%
90 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 95

Speciche Guida operativa
Ambiente
Protezione
Da MCD5-0021B a MCD5-0105B IP20 & NEMA, UL per interno tipo 1
Da MCD5-0131B a MCD5-1600C IP00, UL per interno tipo aperto
Temperatura d'esercizio Da -10 °C (14 °F) a +60 °C (140 °F), oltre 40 °C (104 °F) con declassamento
Temperatura di immagazzinamento Da -25 °C (-13 °F) a +60 °C
0–1.000 m (0–3281 piedi), oltre 1.000 m (3281 piedi) con declasAltitudine di funzionamento (usando il software PC MCD)
Umidità Umidità relativa 5–95%
Livello di inquinamento Livello di inquinamento 3
Vibrazioni IEC 60068-2-6
Dissipazione di calore
In fase di avviamento 4,5 W per ampere
Durante il funzionamento
Da MCD5-0021B a MCD5-0053B ≤39 W approssimativi
Da MCD5-0068B a MCD5-0105B ≤51 W approssimativi
Da MCD5-0131B a MCD5-0215B ≤120 W approssimativi
Da MCD5-0245B a MCD5-0469B ≤140 W approssimativi
Da MCD5-0525B a MCD5-0961B ≤357 W approssimativi
Da MCD5-0245C a MCD5-0927C 4,5 W approssimativi per ampere
Da MCD5-1200C a MCD5-1600C 4,5 W approssimativi per ampere
samento
Certicazione
C✓ IEC 60947-4-2
UL/C-UL
Da MCD5-0021B a MCD5-0396B, da MCD5-0245C a MCD5-1600C
MCD5-0469B - MCD5-0961B
Da MCD5-0021B a MCD5-105B
Da MCD5-0131B a MCD5-1600C
CE IEC 60947-4-2
CCC GB 14048-6
Marine
(da MCD5-0021B a MCD5-0961B) Specica Lloyds Marine N.1
RoHS Conforme alla direttiva UE 2002/95/CE
1) Per il certicato UL possono essere validi requisiti supplementari in funzione dei modelli. Vedere il capitolo 11.1 Installazione
conforme UL per dettagli.
IP20, se montato con kit opzionale di protezione salvadita
UL 508
Certicato UL
Riconosciuto UL
1)
11 11
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 91
Page 96

Speciche
VLT® Soft Starter MCD 500
11.1 Installazione conforme UL
Questa sezione indica ulteriori requisiti e impostazioni di
congurazione per il VLT® Soft Starter MCD 500 anché
sia conforme alle norme UL. Vedere anche Tabella 4.12.
11.1.7 Kit morsetti/connettori a pressione
Perché i modelli da MCD50131B a MCD5-0396B e da
MCD5-0245C a MCD5-1600C siano conformi alle norme UL,
usare il morsetto/connettore a pressione raccomandato
come indicato in Tabella 11.1.
11.1.1 Modelli da MCD5-0021B a
MCD5-0105B
Non esistono requisiti supplementari per questi modelli.
11.1.2 Modelli da MCD5-0131B a
MCD5-0215B
Usare con kit di protezione salvadita, numero
•
d'ordine 175G5662.
Usare il kit morsetti/connettori a pressione
•
consigliato. Vedere Tabella 11.1 per maggiori
informazioni.
11.1.3 Modelli da MCD5-0245B a
MCD5-0396B
Usare con kit di protezione salvadita, numero
•
d'ordine 175G5730.
Usare il kit morsetti/connettori a pressione
•
consigliato. Vedere Tabella 11.1 per maggiori
informazioni.
1111
11.1.4 Modelli MCD5-0245C
Modello FLC (A) Numero di li
MCD5-0131B 145 1 OPHD 95-16
MCD5-0141B 170 1 OPHD 120-16
MCD5-0195B 200 1 OPHD 150-16
MCD5-0215B 220 1 OPHD 185-16
MCD5-0245B 255 1 OPHD 240-20
MCD5-0331B 350 1 OPHD 400-16
MCD5-0396B 425 2 OPHD 185-16
MCD5-0245C 255 1 OPHD 240-20
MCD5-0360C 360
MCD5-0380C 380
MCD5-0428C 430
MCD5-0595C 620
MCD5-0619C 650
MCD5-0790C 790 4 2 x 600T-2
MCD5-0927C 930 3 2 x 600T-2
MCD5-1200C 1200
MCD5-1410C 1410
MCD5-1600C 1600 5
2 1 x 600T-2
4 1 x 750T-4
Numeri
d'ordine dei
capicorda
raccomandati
1 x 750T-4 e
1 x 600T-3
Usare il kit morsetti/connettori a pressione
•
consigliato. Vedere Tabella 11.1 per maggiori
informazioni.
11.1.5 Modelli da MCD5-0360C a
MCD5-1600C
Congurare le barre collettrici per morsetti di
•
linea/carico nelle estremità opposte dell'avviatore
statico (vale a dire Ingresso superiore/Uscita
inferiore, oppure Uscita superiore/Ingresso inferiore).
Usare il kit morsetti/connettori a pressione
•
consigliato. Vedere Tabella 11.1 per maggiori
informazioni.
11.1.6 Modelli da MCD5-0469B a
MCD5-0961B
Questi modelli sono componenti riconosciuti UL. Possono
essere necessarie barre collettrici dei cavi all'interno
dell'armadio elettrico quando si collegano cavi
dimensionati secondo le norme della National Wiring Code
(NEC).
Tabella 11.1 Kit morsetti/connettori a pressione
Accessori
11.2
11.2.1 Kit di montaggio remoto LCP
L'LCP del VLT® Soft Starter MCD 500 può essere montato a
una distanza massima di 3 metri dall'avviatore statico,
consentendo il controllo e il monitoraggio remoto. L'LCP
remoto consente anche la copia delle impostazioni dei
parametri tra gli avviatori statici.
Quadro di comando LCP 501 175G0096.
•
11.2.2 Moduli di comunicazione
Il VLT® Soft Starter MCD 500 supporta la comunicazione di
rete tramite moduli di comunicazione di facile installazione.
Ciascun avviatore statico può supportare 1 modulo di
comunicazione alla volta.
Protocolli disponibili:
92 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 97

M
3
~
1/L1
2/T1
1/L1
1/L1
2/T1
2/T1
E
13
14
K1
177RA001.11
Speciche Guida operativa
Ethernet (PROFINET, Modbus TCP, Ethernet/IP).
•
PROFIBUS;
•
DeviceNet;
•
Modbus RTU.
•
USB.
•
Numeri d'ordine per moduli di comunicazione
Modulo Modbus 175G9000.
•
Modulo PROFIBUS 175G9001.
•
Modulo DeviceNet 175G9002.
•
Modulo USB MCD 175G9009.
•
Modulo TCP Modbus 175G9904.
•
Modulo PROFINET 175G9905.
•
Modulo Ethernet/IP 175G9906.
•
11.2.3 Software PC
Il software PC WinMaster fornisce:
Monitoraggio.
•
Programmazione.
•
Controllo di no a 99 avviatori statici.
•
Per usare WinMaster è richiesto un modulo di comunicazione Modbus o USB per ciascun avviatore statico.
11.2.5 Kit di protezione dalle sovracorrenti
(protezione dai fulmini)
Come standard, la tensione nominale di tenuta a impulsi
del VLT® Soft Starter MCD 500 è limitata a 4 kV. I kit di
protezione dalle sovracorrenti proteggono il sistema e
rendono l'avviatore statico immune agli impulsi ad alta
tensione.
6 kV
Kit di protezione dalle sovracorrenti 175G0100
•
SPD per G1.
Kit di protezione dalle sovracorrenti 175G0101
•
SPD, G2-G5.
12 kV
Kit di protezione dalle sovracorrenti 175G0102
•
SPD per G1.
Kit di protezione dalle sovracorrenti 175G0103
•
SPD, G1-G5.
11.2.4 Kit di protezione salvadita
Le protezioni salvadita possono essere necessarie per la
sicurezza del personale. Le protezioni salvadita si montano
sui morsetti dell'avviatore statico per evitare il contatto
accidentale con i morsetti in tensione. Se installate correttamente, le protezioni salvadita forniscono una protezione
IP20.
Da MCD5-0131B a MCD5-0215B: 175G5662.
•
Da MCD5-0245B a MCD5-0396B: 175G5730.
•
Da MCD5-0469B a MCD5-0961B: 175G5731.
•
MCD5-245C: 175G5663.
•
Da MCD5-0360C a MCD5-0927C: 175G5664.
•
Da MCD5-1200C a MCD5-1600C: 175G5665.
•
AVVISO!
Per essere conformi alle norme UL, i modelli da
MCD5-0131B a MCD5-0396B devono essere utilizzati con
protezioni salvadita.
11 11
Disegno 11.1 Sistema con kit di protezione dalle sovracorrenti
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 93
Page 98

Procedura di regolazione de...
VLT® Soft Starter MCD 500
12 Procedura di regolazione della barra collettrice (da MCD5-0360C a
MCD5-1600C)
Le barre collettrici sui modelli senza bypass da
MCD5-0360C a MCD5-1600C possono essere regolate per
l'ingresso e l'uscita superiori e inferiori.
AVVISO!
Molti componenti elettronici sono sensibili all'elettricità
statica. Tensioni anche tanto basse da non poter essere
percepite, possono comunque ridurre la vita, compromettere le prestazioni o anche distruggere
completamente i componenti elettronici sensibili.
Quando si eseguono lavori di manutenzione, utilizzare
apparecchiature di protezione da scariche elettrostatiche
adatte per evitare la possibilità di danni.
Tutte le unità sono realizzate con barre collettrici in
ingresso e in uscita sulla parte inferiore dell'unità. Se
necessario, le barre collettrici di ingresso e/o di uscita
possono essere spostate nella parte superiore dell'unità.
1. Togliere tutti i cavi e collegamenti dall'avviatore
statico prima di smontare l'unità.
2. Rimuovere il coperchio dell'unità (4 viti).
3. Rimuovere il coperchio anteriore dell'LCP, quindi
rimuovere delicatamente l'LCP (2 viti).
4. Rimuovere le spine dei morsetti della scheda di
controllo.
1212
5. Togliere delicatamente il pezzo principale in
plastica dall'avviatore statico (12 viti).
6. Scollegare il fascio di cablaggio LCP da CON 1
(vedere Nota).
7. Etichettare ogni fascio di innesco SCR con il
numero del morsetto corrispondente sulla scheda
di comando principale, quindi scollegare i fasci.
8. Scollegare il termistore, la ventola e i li del
trasformatore di corrente dalla PCB di comando
principale.
9. Rimuovere il vassoio di plastica dall'avviatore
statico (4 viti).
Disegno 12.1 Rimozione del coperchio anteriore e dell'LCP
10. Svitare e rimuovere le piastre magnetiche di
bypass (soltanto modelli da MCD5-0620C a
MCD5-1600C).
11. Rimuovere il gruppo trasformatore di corrente (3
viti).
12. Identicare le barre collettrici da rimuovere.
Rimuovere i bulloni che tengono in posizione
queste barre collettrici e quindi farle scivolare sul
fondo dell'avviatore statico (quattro bulloni per
barra collettrice).
AVVISO!
Rimuovere lentamente il pezzo principale per evitare di
danneggiare il fascio di cablaggio (cablaggio) dell'LCP
che si trova tra il pezzo principale e la PCB backplane.
94 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
Page 99

Procedura di regolazione de... Guida operativa
Disegno 12.2 Barre collettrici
13. Introdurre le barre collettrici attraverso la parte
superiore dell'avviatore statico. Per le barre
collettrici in ingresso, posizionare l'estremità corta
e curvata all'esterno dell'avviatore statico. Per le
barre collettrici in uscita, posizionare il foro non
lettato all'esterno dell'avviatore statico.
14. Sostituire le rondelle del coperchio con la
supercie piatta rivolta verso la barra collettrice.
15. Stringere i bulloni che tengono in posizione le
barre collettrici con una forza di serraggio di 20
Nm (177 piedi-lb).
16. Posizionare il gruppo trasformatore di corrente
sopra le barre collettrici di ingresso e avvitarlo al
corpo dell'avviatore statico (vedere Nota).
17. Far passare tutto il cablaggio sul lato dell'avviatore statico e ssarlo con fascette serracavi.
Disegno 12.3 Barre collettrici con fascette serracavi
AVVISO!
Se vengono spostate le barre collettrici in ingresso, è
necessario ricongurare anche i trasformatori di corrente.
1. Etichettare i trasformatori di corrente L1, L2 ed
L3 (L1 è quello più a sinistra nella vista frontale
dell'avviatore statico). Togliere le fascette
serracavi e svitare i trasformatori di corrente
dalla staa.
2. Spostare la staa del trasformatore di corrente
sul lato superiore dell'avviatore statico.
Posizionare i trasformatori di corrente per le fasi
corrette, quindi avvitare i trasformatori di
corrente alla staa. Per i modelli da
MCD5-0360C a MCD5-0930, posizionare i
trasformatori di corrente ad angolo. I piedini
sulla sinistra di ciascun trasformatore di
corrente si trovano sulla la superiore di fori e i
piedini sulla destra si trovano sulle linguette
inferiori.
12 12
MG17K806 Danfoss A/S © 03/2018 Tutti i diritti riservati. 95
Page 100

Appendice
VLT® Soft Starter MCD 500
13 Appendice
13.1 Simboli, abbreviazioni e convenzioni
°C
°F
CA Corrente alternata
CC Corrente continua
DOL Avviamento diretto
EMC Compatibilità elettromagnetica
FLA Amperaggio a pieno carico
FLC Corrente a pieno carico
FLT Coppia a pieno carico
IP Classe di protezione IP
LCP Pannello di controllo locale
LRA Ampere a rotore bloccato
MSTC
PAM Modulazione di ampiezza dei poli
PCB Scheda di circuito stampato
PELV Tensione di protezione bassissima
PFC Correzione del fattore di potenza
SCCR Corrente nominale di cortocircuito
SELV Bassissima tensione di sicurezza
TVR Rampa di tensione temporizzata
Tabella 13.1 Simboli e abbreviazioni
Gradi Celsius
Gradi Fahrenheit
Costante di tempo avviamento del
motore
Convenzioni
Gli elenchi numerati indicano le procedure.
Gli elenchi puntati indicano altre informazioni.
Il testo in corsivo indica:
riferimenti incrociati;
•
collegamento;
1313
•
nomi di parametri;
•
Tutte le dimensioni espresse nei disegni sono in [mm].
96 Danfoss A/S © 03/2018 Tutti i diritti riservati. MG17K806
 Loading...
Loading...