

Page 1

Installationshandbuch
VLT® Safety Option MCB 150/151
Page 2

Page 3
Page 4

Page 5
Installationshandbuch | VLT® Safety Option MCB 150/151
Inhalt
Inhalt
1 Einführung 7
1.1 Zweck dieser Installationsanleitung 7
1.2 Verfügbare Ressourcen 7
1.3 Dokumentversion 8
1.4 Typzulassungen und Zertifizierungen 8
2 Rechtliche Informationen und Sicherheit 9
2.1 Rechtliche Informationen 9
2.2 Garantie und Haftung 9
2.3 Sicherheitssymbole 9
2.4 Qualifiziertes Personal 9
2.5 Zuständigkeiten von Benutzern von PDS(SR) 10
2.6 Sicherheitsmaßnahmen 10
2.7 Risikobeurteilung 12
3 Funktions- und Systemübersicht 13
3.1 Systemüberblick 13
3.1.1 Verhalten der Haltebremse 14
3.1.2 Sicherheitszertifizierung 14
3.1.3 Implementierung in Steuerungssystemen 15
3.2 Funktionen 15
3.2.1 Spezifikation der Sicherheits-Subfunktionen 15
3.2.2 Bestätigung des Performance Level 15
3.2.3 Aktivierung von Sicherheits-Subfunktionen 16
3.2.4 Gleichzeitige Aktivierung von Sicherheits-Subfunktionen 16
3.2.5 Funktionale Wiederholungsprüfungen 17
3.2.6 PFD- und PFH-Definitionen 18
3.2.7 Bestimmungsgemäße Verwendung der Sicherheitsoption 18
3.2.8 MCT 10 Konfigurationssoftware mit Sicherheits-Plug-in 18
3.3 Gerätefunktionen 19
3.4 Vorderansicht 19
3.5 Kategorien für sicheren Stopp 20
3.5.1 Betrieb und Anforderungen 20
3.5.2 Sicherheits-Subfunktionen 21
3.5.3 Safe Torque Off (STO) 21
3.5.4 Sicherer Stopp 1 - SS1 22
3.5.5 Safely Limited Speed (Sicher begrenzte Drehzahl) 28
3.5.6 Sichere Höchstgeschwindigkeit – Safe Maximum Speed, SMS 32
3.6 Eingänge und Ausgänge 33
3.6.1 Eingänge 33
AQ279747441421de-000201 / | 3Danfoss A/S © 2019.01
Page 6
Installationshandbuch | VLT® Safety Option MCB 150/151
3.6.2 Reset-Eingang (DI2) 33
3.6.3 Ausgang 34
3.6.4 Zugelassene Sensortypen an Digitaleingängen 34
3.6.5 Reset 34
3.6.6 Signalfilterung 35
3.6.7 Stabile Signalzeit von Sicherheitsausgängen 35
3.6.8 Fehlererkennung des Zero Speed-Timers 36
3.6.9 Jährliche Prüfung 37
3.6.10 Sicherheitsparametereinstellungen 37
3.6.11 Drehgeberschnittstelle 37
3.7 Beschränkungen 38
3.7.1 Überschrittener Grenzwert und interne Fehler 38
3.7.2 Einschränkungen bei Verwendung von Funktionen zur Überwachung auf sichere Drehzahl 38
3.7.3 Kompatibilität zwischen Sicherheits- und Frequenzumrichterfunktion 38
Inhalt
4 Installation 40
4.1 Installieren der Option 40
4.1.1 Sicherheitshinweise 40
4.1.2 Anforderung für sicheren Einsatz 40
4.1.3 Geschützte Kabelverlegung 41
4.1.4 Installieren der Option 41
4.1.5 Allgemeine Verdrahtungsrichtlinien 44
4.1.6 Steckerbelegung 46
4.2 Drehgeber 47
4.2.1 Zulässige Kabellänge des Gebers 47
4.2.2 Verdrahtungsbeispiele für Drehgeber 48
4.2.3 Näherungsschalter 49
4.2.4 VLT® Sensorless Safety MCB 159 50
4.3 Anwendungsbeispiele 52
4.3.1 Anschluss der sicheren Digitaleingänge 52
5 Inbetriebnahme 55
5.1 Vor der Inbetriebnahme 55
5.1.1 Sicherheitsrichtlinien 55
5.1.2 Voraussetzungen zur Inbetriebnahme 55
5.2 Erste Inbetriebnahme 56
5.2.1 Einschaltvorgang/Selbsttest 56
5.2.2 Starten der Inbetriebnahme 57
5.2.3 Anpassung der Sicherheitsoption 57
5.2.4 Einrichtung des Drehgebers 58
5.2.5 Inbetriebnahmeprüfung 59
5.3 Betrieb 60
AQ279747441421de-000201 /4 | Danfoss A/S © 2019.01
Page 7
Installationshandbuch | VLT® Safety Option MCB 150/151
Inhalt
6 Allgemeine Parametereinstellung 61
6.1 Konfiguration 61
6.1.1 Allgemeine Parametereinstellung 61
6.1.2 Konfiguration der Sicherheits-Subfunktionen 61
6.1.3 Passwortschutz 62
6.2 Reset und Status über Feldbus 63
6.2.1 Reset der Sicherheitsoption und der anstehenden Sicherheitsfunktion 63
6.2.2 Abruf des Status der Sicherheitsoption 63
6.3 Parameterliste 67
7 Wartung und Reparatur 72
7.1 Updates, Wartung und Änderungen 72
7.2 Reparatur 72
7.3 Austausch der Sicherheitsoption 73
7.3.1 Vor dem Ausbau der Sicherheitsoption 73
7.3.2 Ausbau der Sicherheitsoption 73
7.3.3 Austauschen der Sicherheitsoption 73
7.3.4 Kopieren der sicheren Parametereinstellung 75
7.4 Inbetriebnahmeprüfung 79
7.4.1 Sicherheitsrichtlinien 79
7.4.2 Vor der Durchführung der Inbetriebnahmeprüfung 80
7.4.3 Sicherheits-Subfunktionen des Frequenzumrichters 80
8 Warnungen und Alarmmeldungen 86
8.1 Fehlertypen und -meldungen 86
8.1.1 Meldungen 86
8.2 Warnungen und Alarmmeldungen 87
9 Technische Daten 99
9.1 Verbrauch 99
9.2 Eingänge 99
9.2.1 Digitaleingänge 99
9.2.2 TTL-Drehgebereingang (VLT® Safety Option MCB 150) 99
9.2.3 HTL-Drehgebereingang (VLT® Safety Option MCB 151) 99
9.3 Ausgänge 100
9.3.1 Digitalausgang (sicherer Ausgang) 100
9.3.2 24 V-Stromversorgung 100
9.4 Andere Spezifikationen 100
9.4.1 Masse E/A-Teil 100
9.4.2 Kabelquerschnitte 100
9.4.3 Reset-Eigenschaften 101
9.4.4 Antwortzeit 101
AQ279747441421de-000201 / | 5Danfoss A/S © 2019.01
Page 8

Installationshandbuch | VLT® Safety Option MCB 150/151
9.4.5 Sicherheitsbezogene Kenndaten 101
Inhalt
10 Anhang 103
10.1 Abkürzungen 103
10.2 Konventionen 104
AQ279747441421de-000201 /6 | Danfoss A/S © 2019.01
Page 9

2
3
MCT 10
1
e30bc961.13
+
+
Installationshandbuch | VLT® Safety Option MCB 150/151
Einführung
1 Einführung
1.1 Zweck dieser Installationsanleitung
Diese Installationsanleitung enthält Informationen zur sicheren Installation und Inbetriebnahme der Sicherheitsoption. Sie richtet sich
ausschließlich an qualifiziertes Personal. Lesen und befolgen Sie die Anweisungen zur Verwendung der sicheren und professionellen
Option. Beachten Sie insbesondere die Sicherheitshinweise und allgemeinen Warnungen. Bewahren Sie diese Installationsanleitung
immer zusammen mit der Option auf.
1.2 Verfügbare Ressourcen
In dieser Anleitungen sind Querverweise zu anderen Handbüchern vorhanden, die Hilfestellungen zur Installation der VLT® Safety
Option MCB 150/151 geben.
1 Installationsphase: Verwenden Sie diese
Installationsanleitung und ziehen Sie die VLT
2 Parametrierungsphase: Siehe Bedienungsanleitung der VLT®
Motion Control Tool MCT 10 Konfigurationssoftware.
AutomationDrive FC 301/FC 302-Bedienungsanleitung
zurate.
3 Prüfphase: Verwenden Sie den Inbetriebnahmebericht, der
über das MCT 10 Sicherheits-Plug-in erzeugt wurde.
Abbildung 1: Systemüberblick
Siehe auch www.danfoss.com/en/search/?filter=type%3Adocumentation%2Csegment%3Adds für weitere Informationen.
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 7
Page 10

089
Installationshandbuch | VLT® Safety Option MCB 150/151
1.3 Dokumentversion
Dieses Handbuch wird regelmäßig geprüft und aktualisiert. Verbesserungsvorschläge sind jederzeit willkommen. Siehe
Dokumentversion und Änderungen in Tabelle 1.
Tabelle 1: Version und Änderungen angewendet in
Ausgabe Anmerkungen
MG34W4xx Redaktionelle Änderungen. Installation von VLT® Sensorless Safety MCB 159 hinzugefügt.
1.4 Typzulassungen und Zertifizierungen
Die folgende Liste ist eine Auswahl von möglichen Typzulassungen und Zertifizierungen für Danfoss-Frequenzumrichter:
HINW EI S
Frequenzumrichter der Baugröße T7 (525-690 V) sind nicht nach UL-Anforderungen zertifiziert.
Einführung
HI NW EI S
Die jeweiligen Zulassungen und Zertifizierungen für den Frequenzumrichter befinden sich auf dem Typenschild des
Frequenzumrichters. Weitere Informationen erhalten Sie von Ihrer örtlichen Danfoss-Vertretung oder einem Partner.
Weitere Informationen zu den thermischen Speicheranforderungen des UL 508C finden Sie im Abschnitt Thermischer Motorschutz im
produktspezifischen Projektierungshandbuch.
Informationen zur Übereinstimmung mit dem Europäischen Übereinkommen über die internationale Beförderung gefährlicher Güter
auf Binnenwasserstraßen (ADN) finden Sie im Abschnitt ADN-konforme Installation im produktspezifischen Projektierungshandbuch.
8 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 11
Installationshandbuch | VLT® Safety Option MCB 150/151
Rechtliche Informationen und Sicherheit
2 Rechtliche Informationen und Sicherheit
2.1 Rechtliche Informationen
Entsprechend den Anforderungen der Maschinenrichtlinie wird hierbei angegeben, dass die Originalsprache dieser
Bedienungsanleitung US-Englisch ist.
2.2 Garantie und Haftung
Alle Ansprüche auf Gewährleistung und Haftung erlöschen, wenn:
• das Produkt nicht bestimmungsgemäß verwendet wurde.
• Schäden auf Verstöße gegen die Leitlinien im Handbuch zurückzuführen sind.
• Bedienungspersonal nicht entsprechend qualifiziert ist.
• Veränderungen irgendeiner Art vorgenommen wurden (z. B. Austausch von Komponenten auf den Leiterplatten, Lötarbeiten usw.).
2.3 Sicherheitssymbole
In diesem Handbuch werden folgende Symbole verwendet:
GE FA HR
Kennzeichnet eine gefährliche Situation, die, wenn sie nicht vermieden wird, zum Tod oder zu schweren Verletzungen führen
wird!
WA RN UN G
Kennzeichnet eine gefährliche Situation, die, wenn sie nicht vermieden wird, zum Tod oder zu schweren Verletzungen führen
kann!
VO RS IC HT
Kennzeichnet eine gefährliche Situation, die, wenn sie nicht vermieden wird, zu geringfügigen bis mittelschweren
Verletzungen führen kann!
HI NW EI S
Zeigt Informationen als wichtig, jedoch nicht gefahrenbezogen an (zum Beispiel Meldungen hinsichtlich
Sachbeschädigungen).
2.4 Qualifiziertes Personal
Nur Personen mit nachgewiesener Qualifikation dürfen die Produkte montieren, installieren, programmieren, in Betrieb nehmen,
warten und außer Betrieb nehmen. Personen mit nachgewiesener Qualifikation:
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 9
Page 12
Installationshandbuch | VLT® Safety Option MCB 150/151
• sind Elektrofachkräfte, die entsprechende Erfahrung in der Bedienung von Geräten, Systemen, Maschinen und Anlagen gemäß den
allgemein gültigen Normen und Richtlinien zur Sicherheitstechnik haben.
• kennen die grundlegenden Bestimmungen bezüglich Gesundheit und Sicherheit/Unfallschutz.
• haben die Sicherheitshinweise in diesem Handbuch sowie die Anweisungen in der Bedienungsanleitung des Frequenzumrichters
gelesen und verstanden.
• verfügen über gute Kenntnisse der Fachgrund- und Produktnormen für die jeweilige Anwendung.
Rechtliche Informationen und Sicherheit
2.5 Zuständigkeiten von Benutzern von PDS(SR)
Context:
In EN ISO 12100 ist die Risikobeurteilung definiert als Gesamtprozess, der eine Risikoanalyse und eine Risikobeurteilung umfasst.
Vorgehensweise
1. Führen Sie eine Gefährdungs- und Risikoanalyse der Anwendung gemäß EN ISO 12100 durch.
2. Stellen Sie sicher, dass das qualifizierte Personal Erfahrung mit der Durchführung von Arbeiten in explosionsgefährdeten Bereichen
gemäß Richtlinie 99/92/EG hat (auch bekannt als ATEX Betriebsrichtlinie).
3. Bestimmen Sie Sicherheits-Subfunktionen und weisen Sie SIL zu jeder der Funktionen hinzu.
4. Bestimmen Sie andere Teilsysteme und validieren Sie die Signale und Befehle von diesen Teilsystemen.
5. Für die Entwicklung geeigneter sicherheitsbezogener Steuerungssysteme (Hardware, Software, Parametrierung usw.).
2.6 Sicherheitsmaßnahmen
WA RN UN G
HOCHSPANNUNG
Bei Anschluss ans Versorgungsnetz, DC-Versorgung oder Zwischenkreiskopplung führen Frequenzumrichter Hochspannung.
Erfolgen Installation, Inbetriebnahme und Wartung nicht durch qualifiziertes Personal, kann dies zu schweren Verletzungen
oder sogar zum Tod führen!
Installation, Inbetriebnahme und Wartung dürfen ausschließlich von qualifiziertem Personal durchgeführt werden.
-
WA RN UN G
UNERWARTETER ANLAUF
Wenn der Frequenzumrichter an das Versorgungsnetz, die DC-Versorgung oder die Zwischenkreiskopplung angeschlossen ist,
kann der Motor jederzeit anlaufen, was zum Tod oder zu schweren Verletzungen sowie zu Geräte- oder Sachschäden führen
kann! Der Motor kann über einen externen Schalter, einen Feldbus-Befehl, ein Sollwerteingangssignal, über einen Tastendruck
an LCP oder LOP, eine Fernbedienung per MCT 10 Konfigurationssoftware oder nach einem quittierten Fehlerzustand anlaufen.
Drücken Sie vor der Programmierung von Parametern die Taste [Off] am LCP.
-
Ist ein unerwarteter Anlauf des Motors gemäß den Bestimmungen zur Personensicherheit unzulässig, trennen Sie den
-
Frequenzumrichter vom Netz.
Prüfen Sie, ob der Frequenzumrichter, der Motor und alle angetriebenen Geräte betriebsbereit sind.
-
10 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 13
Installationshandbuch | VLT® Safety Option MCB 150/151
Rechtliche Informationen und Sicherheit
WA RN UN G
ENTLADEZEIT
Der Frequenzumrichter enthält Zwischenkreiskondensatoren, die auch bei abgeschaltetem Frequenzumrichter geladen sein
können. Auch wenn die Warn-Anzeigeleuchte nicht leuchten, kann Hochspannung vorliegen.
Das Nichteinhalten der vorgesehenen Entladungszeit nach dem Trennen der Spannungsversorgung vor Wartungs- oder
Reparaturarbeiten kann zu schweren oder tödlichen Verletzungen führen.
Stoppen Sie den Motor.
-
Trennen Sie das Versorgungsnetz, Permanentmagnet-Motoren und externe Zwischenkreisversorgungen, einschließlich
-
externer Batterie-, USV- und Zwischenkreisverbindungen zu anderen Frequenzumrichtern.
Warten Sie, damit die Kondensatoren vollständig entladen können. Die notwendige Wartezeit finden Sie in der Tabelle
-
Entladezeit sowie auf dem Typenschild an der Oberseite des Frequenzumrichters.
Verwenden Sie vor der Durchführung von Wartungs- oder Reparaturarbeiten ein geeignetes Spannungsmessgerät, um
-
sicherzustellen, dass die Kondensatoren vollständig entladen sind.
Tabelle 2: Entladezeit
Spannung
[V]
200–240 0,25–3,7 kW
380–500 0,25–7,5 kW
400 – – – 90–315 kW (125–450
500 – – – 110–355 kW (150–
525 – – – 55–315 kW (75–400
525–600 0,75–7,5 kW (1–
525–690 – 1,5–7,5 kW
690 – – – 55–315 kW (75–400
Mindestwartezeit (Minuten)
4 7 15 20 30 40
(0,34–5 HP)
(0,34–10 HP)
10 HP)
– 5,5–37 kW (7,5–
50 HP)
– 11–75 kW (15–
100 HP)
– 11–75 kW (15–
100 HP)
11–75 kW (15–
(2–10 HP)
100 HP)
– – –
90–200 kW (150–350
HP)
HP)
450 HP)
HP)
– – –
37–315 kW (50–450
HP)
HP)
250–500 kW
(450–750 HP)
– –
– –
– –
355–1200 kW
(450–1550 HP)
– –
250–800 kW (450–
1350 HP) 315–500
(500–750 HP)
355–2000 kW
(450–2050 HP)
355–710 kW (400–
950 HP)
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 11
Page 14
Installationshandbuch | VLT® Safety Option MCB 150/151
Rechtliche Informationen und Sicherheit
WA RN UN G
KEINE ELEKTRISCHE SICHERHEIT
Diese Option eignet sich allein für mechanische Arbeiten am Frequenzumrichtersystem oder an den betroffenen Bereichen
einer Maschine. Dadurch entsteht KEINE elektrische Sicherheit. Die Verwendung der Option zum Starten oder Stoppen des
Frequenzumrichters kann zu Körperverletzung führen.
Verwenden Sie die Option NICHT zum Starten oder Stoppen des Frequenzumrichters.
-
Siehe ISO 12100 für weitere Informationen zu den Anwendungsanforderungen.
-
WA RN UN G
LEAKAGE CURRENT HAZARD
Leakage currents exceed 3.5 mA. Failure to ground the drive properly can result in death or serious injury.
Ensure the correct grounding of the equipment by a certified electrical installer.
-
HI NW EI S
Der Frequenzumrichter hat außer den Spannungseingängen L1, L2 und L3 noch weitere Spannungseingänge, wenn DCZwischenkreiskopplung bzw. externe 24 V DC-Versorgung installiert sind.
2.7 Risikobeurteilung
HI NW EI S
Die Sicherheitsoption ist als Teil des sicherheitsbezogenen Steuerungssystems einer Maschine bestimmt. Vor der Installation
müssen Sie eine Risikobeurteilung durchführen, um festzustellen, ob die technischen Daten dieser Sicherheitsoption für alle
vorhersehbaren betrieblichen und umweltbezogenen Eigenschaften des Systems, in dem sie zum Einsatz kommt, geeignet
sind.
Der Systembenutzer ist verantwortlich für:
• die Einrichtung, Sicherheitseinstufung und Prüfung von Stellgliedern, die mit dem System verbunden sind.
• Durchführung einer Risikobeurteilung auf Systemebene und Neubewertung des Systems, wenn eine Änderung vorgenommen
wird.
• Erbringung des Nachweises (wie für die Anwendung notwendig), dass das System die angeforderte Sicherheitseinstufung erfüllt.
• Projektmanagement und Wiederholungsprüfungen.
• Programmierung der Anwendungssoftware und der Sicherheitsoption-Konfigurationen gemäß den Informationen in diesem
Handbuch.
• Zugang zum Steuerungssystem.
• Analyse aller Konfigurationseinstellungen und Auswahl der richtigen Einstellung, um die erforderliche Sicherheitseinstufung zu
erreichen.
12 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 15
e30bc308.12
Feldbusschnittstelle
MCB150/151
Sicherheitsoption
Option A
Option B
μ
C
Steuerkarte
Interner Bus1
Interner Bus2
IGBT
STO
37
E
M
SPS
STOPP
RT
Aktive
Sensoren
Passive
Sensoren
Installationshandbuch | VLT® Safety Option MCB 150/151
3 Funktions- und Systemübersicht
3.1 Systemüberblick
Funktions- und Systemübersicht
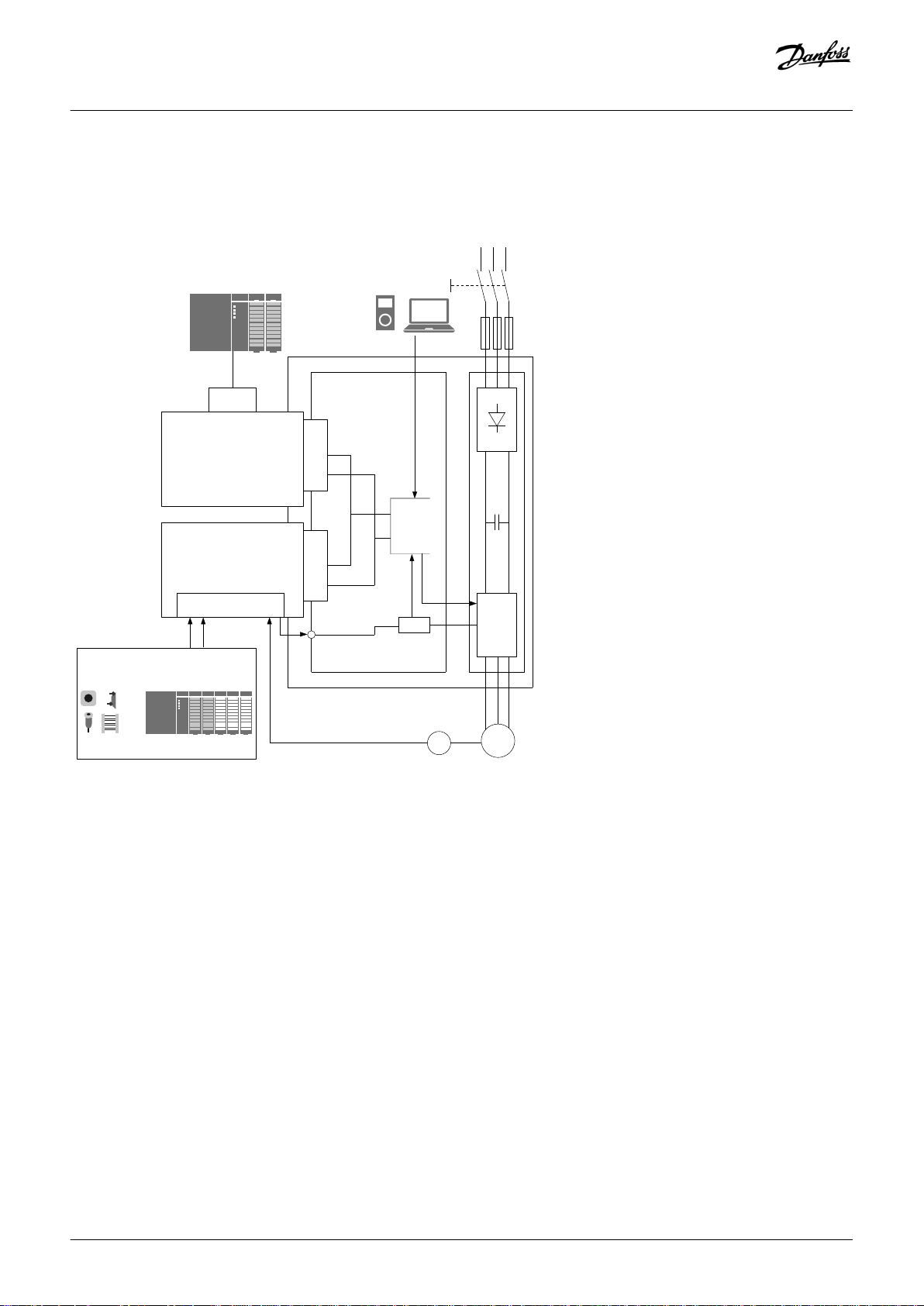
Abbildung 2: Frequenzumrichter mit Sicherheitsoption und Feldbus-Option
Die Sicherheitsoption führt Sicherheits-Subfunktionen nach EN IEC 61800-5-2 durch. Sie überwacht sichere Bewegungsabläufe an
Frequenzumrichtern, die sicher zum Stillstand gebracht und im Falle eines Fehlers abgeschaltet werden.
Die Sicherheitsoption:
• Aktiviert Sicherheits-Subfunktionen.
• Überwacht sichere Bewegungsabläufe.
• Meldet den Status der Sicherheits-Subfunktionen über optional angeschlossenen Feldbus an das sicherheitsbezogene
Steuerungssystem.
• Aktiviert die gewählte Fehlerreaktion „Safe Torque Off“ oder „Sicherer Stopp 1“ im Falle eines Fehlers.
Es gibt 2 Varianten der Sicherheitsoption:
• Mit HTL-Drehgeberschnittstelle (MCB 151).
• Mit TTL-Drehgeberschnittstelle (MCB 150).
Die Sicherheitsoption ist als Standardoption für den VLT AutomationDrive FC 302 konstruiert und wird nach der Installation
automatisch erkannt.
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 13
Page 16
Installationshandbuch | VLT® Safety Option MCB 150/151
Sie können die Sicherheitsoption verwenden, um das Stoppen, Starten oder die Geschwindigkeit/Drehzahl eines drehenden oder sich
seitwärts bewegenden Geräts zu überwachen. Zur Drehzahlüberwachung wird die Option oft in Kombination mit festen
Schutzeinrichtungen, Zugangstüren und Schutztüren mit Magnetverschluss-Sicherheitsschaltern verwendet. Wenn die
Geschwindigkeit des überwachten Geräts unter den eingestellten Sollwert sinkt (die Geschwindigkeit nicht mehr als gefährlich
eingestuft wird), deaktiviert die Sicherheitsoption den Ausgang S37 sofort. So kann der Bediener das Schutztor öffnen. Bei
Drehzahlüberwachungsanwendungen ist der Sicherheitsausgang S37 während des Betriebs aktiv (wenn die Motordrehzahl des
überwachten Geräts unter dem eingestellten Schaltpunkt liegt). Wenn die Drehzahl den eingestellten Wert überschreitet, was eine zu
hohe (gefährliche) Drehzahl anzeigt, ist der Sicherheitsausgang inaktiv.
Der Frequenzumrichter:
• Hat die Stromversorgung zum Motor unterbrochen.
• Schaltet den Motor drehmomentfrei, wenn „Safe Torque Off“ aktiviert ist.
Das sichere Steuerungssystem:
• Aktiviert die Sicherheits-Subfunktionen über die Eingänge an der Sicherheitsoption.
• Wertet Signale von Sicherungseinrichtungen aus, wie beispielsweise:
- Not-Aus-Taster.
- Berührungslose Magnetschalter.
- Verriegelungsschalter.
- Lichtvorhänge.
• Verarbeitet die Zustandsfunktion der Sicherheitsoption.
• Stellt eine sichere Verbindung zwischen der Sicherheitsoption und dem sicherheitsbezogenen Steuerungssystem bereit.
• Bietet eine Fehlererkennung bei der Aktivierung von Sicherheits-Subfunktionen (Querschluss an den Kontakten, Kurzschluss) bei
Signal zwischen dem sicherheitsbezogenen Steuerungssystem und der Sicherheitsoption.
Funktions- und Systemübersicht
3.1.1 Verhalten der Haltebremse
HI NW EI S
GEFAHR
Äußere Kräfte, die auf den Motor wirken (vertikale Achse), und ungewollte Bewegung, zum Beispiel durch Schwerkraft, können
eine Gefahr darstellen, die zum Tod und zu schweren Verletzungen führen kann!
Ergreifen Sie Maßnahmen für den Absturzschutz, bevor Sie den Motor betreiben.
-
Das Auslösen der Sicherheits-Subfunktion „Safe Torque Off“ bedeutet, dass die Verzögerungszeit für Motoren mit Haltebremse nicht
wirksam ist. Der Motor kann kein Haltemoment erzeugen, um die Zeit bis zur Anwendung der Haltebremse zu überbrücken. Prüfen Sie,
ob weitere Maßnahmen ergriffen werden müssen, da dies zum Beispiel zur Folge haben kann, dass sich die Last der Vertikalachse
absenkt.
3.1.2 Sicherheitszertifizierung
Die Sicherheitsoption ist für den Einsatz in Sicherheitsanwendungen bis einschließlich SIL 2 nach EN IEC 61508 und EN IEC 62061,
Performance Level PL d und Kategorie 3 nach EN ISO 13849-1 zertifiziert. Sicherheitsanforderungen basieren auf den zum Zeitpunkt
der Zertifizierung geltenden Normen. Das IFA (Institut für Arbeitsschutz) hat die Sicherheitsoption zum Einsatz in
sicherheitsbezogenen Anwendungen zugelassen, in denen der spannungsfrei geschaltete Zustand als der sichere Zustand betrachtet
wird. Alle in diesem Handbuch enthaltenen Beispiele zu E/A setzen ein Erreichen der Spannungsfreiheit als sicheren Zustand voraus.
14 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 17
e30bc962.11
Erkennung
Sensor
Prozess Schalter
Logik
Aktor
Zum Beispiel Lichtvorhang Zum Beispiel MCB 15x Zum Beispiel FC 302
Installationshandbuch | VLT® Safety Option MCB 150/151
Funktions- und Systemübersicht
3.1.3 Implementierung in Steuerungssystemen
Häufig reichen Konstruktionsmaßnahmen nicht aus und es werden Schutzeinrichtungen benötigt, um das Risiko zu mindern. In
diesem Zusammenhang werden Sicherheits-Subfunktionen definiert, die von SRP/CS (sicherheitsbezogene Teile von
Steuerungssystemen) ausgeführt werden. SRP/CS schließen die gesamte Sicherheitskette mit Sensor (Erkennung), Logik (Verarbeitung)
und Stellglied (Schalter) ein.
Sicherheits-Subfunktionen werden auf Grundlage der Anwendung sowie der Gefährdung definiert. Sie werden häufig in einer Norm
des Typs C (eine Produktnorm) festgelegt, die genaue Angaben für spezielle Maschinen enthält. Wenn keine C-Norm zur Verfügung
steht, definiert der Maschinenkonstrukteur die Sicherheits-Subfunktionen. Typische Sicherheits-Subfunktionen werden genauer in EN
ISO 13849-1, Abschnitt 5, Spezifikation der Sicherheitsfunktionen, beschrieben. Die Sicherheits-Subfunktionen für
Frequenzumrichtersysteme werden in IEC 61800-5-2 beschrieben.
Abbildung 3: Sicherheitskette Sensor-Logik-Aktor
3.2 Funktionen
3.2.1 Spezifikation der Sicherheits-Subfunktionen
Die Normen fordern eine Spezifikation der funktionalen Anforderungen. Die Spezifikation muss nähere Angaben über jede SicherheitsSubfunktion enthalten, die ausgeführt werden sollte. Sie definieren auch:
• notwendige Schnittstellen mit anderen Steuerungsfunktionen.
• Erforderliche Fehlerreaktionen.
• Erforderlicher Performance Level PLr oder erreichbarer SIL.
3.2.1.1 Performance Level (PL) und Safety Integrity Level (SIL)
Für sicherheitsbezogene Steuerungssysteme schließen der Performance Level (PL) nach EN ISO 13849-1 und die SIL nach EN IEC 61508
und EN IEC 62061 eine Einstufung der Fähigkeit des Systems ein, seine Sicherheits-Subfunktionen zu erfüllen.
Alle sicherheitsbezogenen Teile des Steuerungssystems müssen in einer Risikobeurteilung und der Bestimmung der erreichten Level
eingeschlossen werden. Vollständige Angaben zu Anforderungen bei der Bestimmung von PL und SIL enthalten die Normen EN ISO
13849-1, EN IEC 61508 oder EN IEC 62061.
3.2.2 Bestätigung des Performance Level
Überprüfen Sie, ob das erforderliche Performance Level „PLr“, ermittelt in der Risikobeurteilung, durch das ausgewählte System für
jede verwendete Sicherheits-Subfunktion erreicht wird. Überprüfen Sie die Berechnung mithilfe des Software-Assistenten SISTEMA des
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 15
Page 18

Installationshandbuch | VLT® Safety Option MCB 150/151
IFA (Institut für Arbeitsschutz). Danfoss stellt eine Komponentenbibliothek zur Verfügung, die für die Berechnung verwendet werden
kann. Danfoss bietet entsprechende Dienstleistungen an, um die Systemprüfung durch Berechnung zu unterstützen. Die Bibliothek
steht zum Download unter www.dguv.de/ifa/en/pra/softwa/sistema zur Verfügung.
Verwenden Sie bei Verwendung einer anderen Prüfmethode für das Performance Level die angegebenen charakteristischen
Sicherheitswerte.
Funktions- und Systemübersicht
3.2.3 Aktivierung von Sicherheits-Subfunktionen
• Die Sicherheits-Subfunktionen werden über die zweipoligen Sicherheitseingänge an der Sicherheitsoption aktiviert.
• Diese Eingänge arbeiten nach dem fehlersicheren Prinzip (bei Abschalten). Das sicherheitsbezogene Steuerungssystem aktiviert
die Sicherheits-Subfunktionen durch einen 1/0 Übergang.
• Deaktivieren Sie die Sicherheits-Subfunktionen, bevor Sie Änderungen an ihnen vornehmen.
3.2.4 Gleichzeitige Aktivierung von Sicherheits-Subfunktionen
Alle Sicherheits-Subfunktionen können gleichzeitig aktiv sein. Allerdings hat „Safe Torque Off“ Vorrang vor allen anderen SicherheitsSubfunktionen. Funktionen, die bereits gestartet wurden (z. B. Sicherer Stopp 1 oder Sicher begrenzte Geschwindigkeit) werden
abgebrochen und der Frequenzumrichter geht in den Freilauf.
• Safe Torque Off hat die höchste Priorität. Wenn die Funktion „Safe Torque Off“ ausgelöst wird, wird die Funktion „Safe Torque
Off“ unabhängig davon weiter durchgeführt, ob andere Funktionen aktiv sind.
• Sicherer Stopp 1 hat eine mittlere Priorität zu den anderen Sicherheitsfunktionen.
• Sicher begrenzte Geschwindigkeit und Sichere Höchstgeschwindigkeit haben die geringste Priorität.
Wenn 2 „Sicherer Stopp 1“-Funktionen zur gleichen Zeit aktiv sind, hat die Funktion mit der steilsten Rampe eine höhere Priorität als
die Funktion mit der weniger steilen Rampe.
Wenn 2 „Sicher begrenzte Geschwindigkeit“-Funktionen zur gleichen Zeit aktiv sind, hat die Funktion mit der niedrigsten
Drehzahlgrenze höhere Priorität als die Funktion mit der höheren Drehzahlgrenze.
Wenn die „Sicher begrenzte Geschwindigkeit“-Funktion und 1 bzw. 2 „Sicher begrenzte Geschwindigkeit“-Funktionen zur gleichen Zeit
aktiv sind, hat die Funktion mit der niedrigsten Drehzahlgrenze höhere Priorität als die Funktion mit der höheren Drehzahlgrenze.
Wenn 2 gleiche Sicherheits-Subfunktionen zu konfigurieren sind, müssen sie als SS1-a und SS1-b oder SLS-a und SLS-b parametriert
werden.
16 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 19
e30bc373.11
t
f
t
f
A
B
C
Installationshandbuch | VLT® Safety Option MCB 150/151
Funktions- und Systemübersicht
A Rampenstoppfunktion 1
B Rampenstoppfunktion 2
C Tatsächliche Rampenstoppfunktion
Abbildung 4: „Sicherer Stopp 1“-Sicherheits-Subfunktionen aktiv
Siehe Abbildung 4 für ein Beispiel, in dem zuerst eine „Sicherer Stopp 1“-Funktion mit einer gegebenen Rampe und danach eine zweite
„Sicherer Stopp 1“-Funktion mit einer steileren Rampe aktiviert wird. Das untere Diagramm zeigt die tatsächliche Rampenfunktion.
3.2.5 Funktionale Wiederholungsprüfungen
Die Normen für funktionale Sicherheit fordern, dass funktionale Wiederholungsprüfungen an den Geräten durchgeführt werden, die
im System zum Einsatz kommen. Wiederholungsprüfungen werden in benutzerdefinierten Intervallen durchgeführt und hängen von
PFD- und PFH-Werten ab.
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 17
Page 20
Installationshandbuch | VLT® Safety Option MCB 150/151
Funktions- und Systemübersicht
3.2.6 PFD- und PFH-Definitionen
Sicherheitsbezogene Systeme lassen sich in Systeme in Betriebsart mit niedriger Anforderungsrate oder in Betriebsart mit hoher
Anforderungsrate bzw. kontinuierlicher Anforderung einstufen.
Betriebsart mit niedriger Anforderungsrate
Die Anforderung an das sicherheitsbezogene System erfolgt mehr als einmal pro Jahr oder ist größer als die doppelte Frequenz der
Wiederholungsprüfung.
Betriebsart mit hoher Anforderungsrate/kontinuierlicher Anforderungsrate
Der SIL-Wert für ein sicherheitsbezogenes System mit niedriger Anforderungsrate steht in direkter Beziehung zu
Größenordnungsbereichen seiner mittleren Ausfallwahrscheinlichkeit im Anforderungsfall (PFD). Der SIL-Wert für ein
sicherheitsbezogenes System mit hoher/kontinuierlicher Anforderungsrate steht in direkter Beziehung zu der Wahrscheinlichkeit eines
gefährlichen Ausfalls pro Stunde (PFH).
3.2.7 Bestimmungsgemäße Verwendung der Sicherheitsoption
WA RN UN G
GEFAHR VON PERSONENSCHÄDEN UND SACHSCHÄDEN
Die Verwendung der Sicherheitsoption für andere Zwecke als vorgesehen kann zu Personenschäden und Sachschäden führen.
Folgendes gilt als nicht bestimmungsgemäßer Gebrauch:
Jede Veränderung von Komponenten und jede technische oder elektrische Veränderung am Frequenzumrichter.
Die Verwendung des Frequenzumrichters außerhalb der in der VLT® AutomationDrive FC 301/FC302-Bedienungsanleitung
angegebenen zulässigen elektrischen Daten und Umgebungsbedingungen.
Verwenden Sie die Sicherheitsoption ausschließlich für ihren bestimmungsgemäßen Zweck.
-
Die Sicherheitsoption ist für sicherheitsbezogene Anwendungen konzipiert. Sie erfüllt die Anforderungen an SicherheitsSubfunktionen nach IEC 61800-5-2 zur sicheren Bewegungsüberwachung.
3.2.8 MCT 10 Konfigurationssoftware mit Sicherheits-Plug-in
Verwenden Sie die MCT 10 Konfigurationssoftware zur Konfiguration der Sicherheits-Subfunktionen in der Sicherheitsoption.
• Die Konfiguration der Sicherheits-Subfunktionen ist für sichere Bewegungsabläufe erforderlich. Bei einem Fehler oder einer
Störung schalten diese Funktionen das Leistungsteil des Frequenzumrichters sicher und kontrolliert ab.
• Einstellung von Grenzwerten, Bremsrampen für die Sicherheitsfunktionen, Überwachung von Bewegungsabläufen.
Die Software:
• Läuft als Vollversion mit Lizenzschlüssel. Grundlegende Funktionen stehen ab MCT 10 Konfigurationssoftware Version 3.18 und alle
Funktionen stehen ab MCT 10 Konfigurationssoftware Version 4.40 zur Verfügung.
• Unterstützt die Konfiguration von Anwendungen mit bis zu maximal 256 Sicherheitsoptionen pro Projekt.
• Hat eine einfache Spracheinstellung für die Benutzerschnittstelle.
Eine PDF-Datei und ein Inbetriebnahmebericht können zur Dokumentation des Projekts und aller seiner Einstellungen erzeugt werden.
18 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 21
e30bc325.12
MCB 150
Safe Option
SW. ver. xx. xx
Option B
130B3280
LED:
1
2
3 4
TTL Enc.
interface
Y30/
DI1 A
GND
DI1 B
ENC A
DI2 A
ENC nA
ENC B
DI2 B
ENC nB
24V
GND
S37
1
2
3
4
5 6
7
8910
11 12
Installationshandbuch | VLT® Safety Option MCB 150/151
Funktions- und Systemübersicht
3.3 Gerätefunktionen
Die Sicherheitsoption hat folgende Merkmale:
• 2 zweipolige Digitaleingänge zur Aktivierung der Sicherheitsfunktionen nach EN IEC 61800-5-2:
- Safe Torque Off (STO).
- Sicherer Stopp 1 (SS1).
- Sicher begrenzte Geschwindigkeit (SLS).
• Überwachung der sicheren Drehzahl:
- Safe Maximum Speed (SMS) kann aktiviert werden (unabhängig von Digitaleingängen).
• Quittierfunktion:
- Der Digitaleingang 2 kann zum Zurücksetzen (Quittieren) der Sicherheitsoption nach einem Fehler oder nach der
Deaktivierung einer Sicherheits-Subfunktion verwendet werden.
• Statusanzeigen:
- Zustand Sicherheitseingang (LED 1 und LED 2).
- Zustand Sicherheitsausgang (LED 4).
- LED 3 ist eine Anzeige für SMS.
- Bei Fehler oder Warnung zeigen die LED einen Fehler durch ein Blinkmuster an, siehe
• Versorgungsspannung:
- Intern vom Frequenzumrichter versorgt.
- 24 V DC Ausgang für Sicherheitssensoren und Drehgeber verfügbar.
Tabelle 26.
3.4 Vorderansicht
Abbildung 5: VLT® Safety Option MCB 150
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 19
Page 22
e30bc326.12
MCB 151
Safe Option
SW. ver. xx. xx
Option B
130B3290
LED:
1
2
3
4
HTL Enc.
interface
Y31/
DI1 A
GND
DI1 B
ENC A
DI2 A
ENC B
DI2 B
24V
GND
S37
1
2
3
4
5 6
7
8910
11 12
GND
GND
Installationshandbuch | VLT® Safety Option MCB 150/151
Abbildung 6: VLT® Safety Option MCB 151
Funktions- und Systemübersicht
3.5 Kategorien für sicheren Stopp
Die internationale Norm EN/ISO 13850 legt die funktionalen Anforderungen und Gestaltungsleitsätze für Not-Aus-Schaltgeräte fest.
Sie gilt für alle Maschinen, unabhängig von der Art der Energie, die zur Steuerung dieser Funktion verwendet wird.
Die Norm lässt 2 Arten von Stopp zu:
• Stopp der Kategorie 0: Stopp mittels sofortiger Stromabschaltung oder mechanischem Trennen der gefährlichen Komponente.
• Stopp der Kategorie 1: Kontrollierter Stopp, wobei die Stromzufuhr zum Aktor aufrecht erhalten wird, um das Stoppen zu
ermöglichen (z. B.: Bremsen), gefolgt von der Stromabschaltung nach Erreichen des Stillstandes.
Während eines Stopps der Kategorie 0 läuft der Motor unkontrolliert im Freilauf aus. Wenn Zugang zu der frei auslaufenden Maschine
eine Gefährdung bedeutet (Ergebnisse der Gefährdungs- und Risikoanalyse), ergreifen Sie notwendige Schutzmaßnahmen, um die
Gefährdung zu vermeiden.
Eine Definition der Funktion „Safe Torque Off“ (STO) finden Sie in EN IEC 61800-5-2:2016 (4.2.3.2).
Ein Stopp der Kategorie 1 löst einen kontrollierten Stopp aus. Die Sicherheitsoption überwacht den kontrollierten Stopp. Wenn ein
Stromausfall oder ein Fehler auf tritt, ist ein kontrollierter Stopp unmöglich. Lösen Sie die Sicherheits-Subfunktion „Safe Torque
Off“ nach dem Stopp aus, um das Motordrehmoment abzuschalten.
Eine Definition der Funktion „Sicherer Stopp 1“ (SS1) finden Sie in EN IEC 61800-5-2:2016 (4.2.3.3).
Eine Bewertung der maschinenbezogenen Risiken bestimmt, welches der 2 Stoppmethoden verwendet wird.
HI NW EI S
Bei Gestaltung der Maschinenanwendung müssen Sie Zeit und Entfernung für einen Freilauf bis zum Stopp berücksichtigen
(Stoppkategorie 0 oder Safe Torque Off). Weitere Informationen im Hinblick auf Stoppkategorien finden Sie in EN IEC 60204-1.
3.5.1 Betrieb und Anforderungen
Die Sicherheitsoption ist redundant und selbstprüfend. Sie benötigt digitale Eingangssignale von einem Eingangssensor (z. B. PNPNäherungsschalter) oder TTL- oder HTL-Drehgeber höherer Auflösung, um entweder auf sichere Stopp- oder Drehzahlbedingungen zu
überwachen.
20 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 23

Installationshandbuch | VLT® Safety Option MCB 150/151
Funktions- und Systemübersicht
3.5.2 Sicherheits-Subfunktionen
Sicherheits-Subfunktionen wahren einen sicheren Zustand oder verhindern die Entstehung gefährlicher Zustände. Die SicherheitsSubfunktionen für Frequenzumrichtersysteme werden in IEC 61800-5-2 definiert.
Die Sicherheitsoption implementiert die folgenden Sicherheits-Subfunktionen:
• Safe Torque Off (STO)
- Dem Motor wird keine Energie zugeführt, die eine Drehung erzeugen kann. Stoppkategorie 0 nach EN IEC 60204-1.
• Sicherer Stopp 1 (SS1)
- Der Motor verzögert. Überwachung der Verzögerungsrampe und Safe Torque Off nach Stillstand oder Safe Torque Off am Ende
einer Verzögerungszeit. Stoppkategorie 1 nach EN IEC 60204-1.
• Sicher begrenzte Geschwindigkeit (SLS)
- Verhindert ein Überschreiten eines definierten Geschwindigkeitswerts.
• Sichere Höchstgeschwindigkeit (Safe Maximum Speed, SMS)
- Verhindert ein kontinuierliches Überschreiten eines definierten Geschwindigkeitswerts.
3.5.3 Safe Torque Off (STO)
Die Sicherheits-Subfunktion „Safe Torque Off“ trennt die Stromversorgung zum Motor. Sie wird über den Abschaltweg des
Frequenzumrichters und die Sicherheitsausgänge der Sicherheitsoption implementiert.
Funktionsmerkmale der Sicherheits-Subfunktion
• Sie schaltet den Motor drehmomentfrei geschaltet und der Motor erzeugt keine gefährlichen Bewegungen mehr.
• Dies dient zur Vermeidung eines unkontrollierten Abschaltens des Frequenzumrichters. Aktivieren Sie im Normalbetrieb die
Sicherheits-Subfunktion „Safe Torque Off“ über die Sicherheitsfunktion „Sicherer Stopp 1“.
• Safe Torque Off wird nur direkt aktiviert, wenn:
- In der Sicherheitsoption ein interner Fehler vorliegt.
- die Verzögerungszeit von Sicherer Stopp 1 auf 0 eingestellt ist.
- einer der Digitaleingänge 1 oder 2 als Funktion „Safe Torque Off“ ausgewählt worden ist.
• Die Sicherheits-Subfunktion „Safe Torque Off“ entspricht einem Stopp der Kategorie 0 (unkontrollierter Stopp) nach EN 60204-1.
Voraussetzungen für Normalbetrieb
• Digitaleingang 1 oder 2: „1“ Signal (+24 V DC).
• S37-Ausgang: „1“ Signal (+24 V DC).
Sicherheits-Subfunktion wird aktiviert
• Durch einen Fehler, nachdem Grenzwerte für Sicherer Stopp 1 und sicher begrenzte Geschwindigkeit überschritten wurden.
• Durch einen internen Fehler an der Sicherheitsoption oder am Frequenzumrichter, wenn der Frequenzumrichter nicht mehr
kontrolliert werden kann.
• Durch Ausführen der Sicherheits-Subfunktion Sicherer Stopp 1 (1/0 Übergang). In diesem Fall wird der Frequenzumrichter
überwacht, bevor er drehmomentfrei geschaltet wird.
• Durch Einlesen von Parametrierung über das MCT 10 Sicherheits-Plug-in, wenn der aktuelle Frequenzumrichter läuft.
• Durch Ausführen der Sicherheits-Subfunktion „Safe Torque Off“ (1/0 Übergang). Diese Funktion stellt sicher, dass keine
drehmomenterzeugende Energie weiter auf einen Motor wirken kann und verhindert unerwartetes Anlaufen.
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 21
Page 24
f
e30bc318.11
t
1
2
A
Installationshandbuch | VLT® Safety Option MCB 150/151
Funktions- und Systemübersicht
HI NW EI S
GEFAHR
Äußere Kräfte, die auf den Motor wirken (vertikale Achse), und ungewollte Bewegung, zum Beispiel durch Schwerkraft, können
eine Gefahr darstellen, die zum Tod und zu schweren Verletzungen führen kann!
Ergreifen Sie Maßnahmen für den Absturzschutz, bevor Sie den Motor betreiben.
-
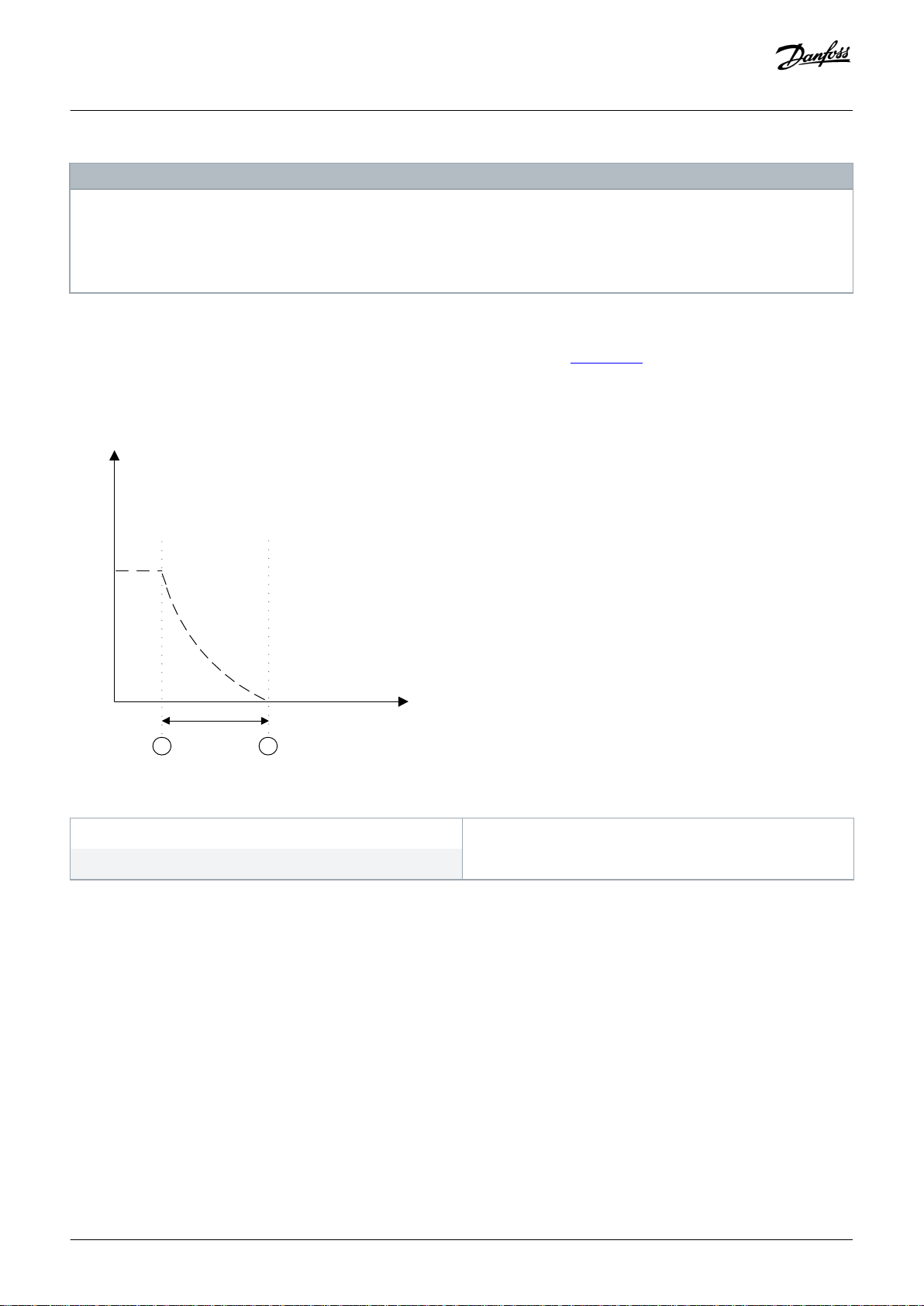
Safe Torque Off (STO) kann angewendet werden, wenn ein Entfernen der Stromversorgung notwendig ist, um unerwarteten Anlauf zu
verhindern. Die Funktion schaltet die Steuerspannung in der Ausgangsstufe des Frequenzumrichters ab. Damit verhindert sie, dass der
Frequenzumrichter die Spannung, die der Motor zum Drehen benötigt, erzeugt (siehe Abbildung 7). Die Funktion ermöglicht
Wartungsarbeiten an nicht elektrischen Teilen der Maschinen, ohne die Stromversorgung zum Frequenzumrichter auszuschalten.
A Tatsächliche Frequenz
1 Aktivierung von STO
2 Motorstillstand
Abbildung 7: Safe Torque Off
3.5.4 Sicherer Stopp 1 - SS1
Die Sicherheits-Subfunktion „Sicherer Stopp 1“ überwacht die kontrollierte Verzögerung auf Nulldrehzahl und aktiviert die Funktion
„Safe Torque Off“ nach Erkennung eines Stopps. Sicherer Stopp 1 kann als SS1 Verzögerung oder als SS1 Rampe konfiguriert werden.
Funktionsmerkmale der Sicherheits-Subfunktion
• Die Sicherheits-Subfunktion „Sicherer Stopp 1“ entspricht einem Stopp der Kategorie 1 (kontrollierter Stopp) nach EN IEC 60204-1.
• Die Überwachung der Drehzahlverzögerung, wonach die Energiezufuhr zum Motor sicher unterbrochen wird.
• Der Motor wird drehmomentfrei und gefährliche Bewegungen werden abgeschaltet.
22 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 25
e30bc321.11
1
2
t
f
3
4
A
Installationshandbuch | VLT® Safety Option MCB 150/151
Funktions- und Systemübersicht
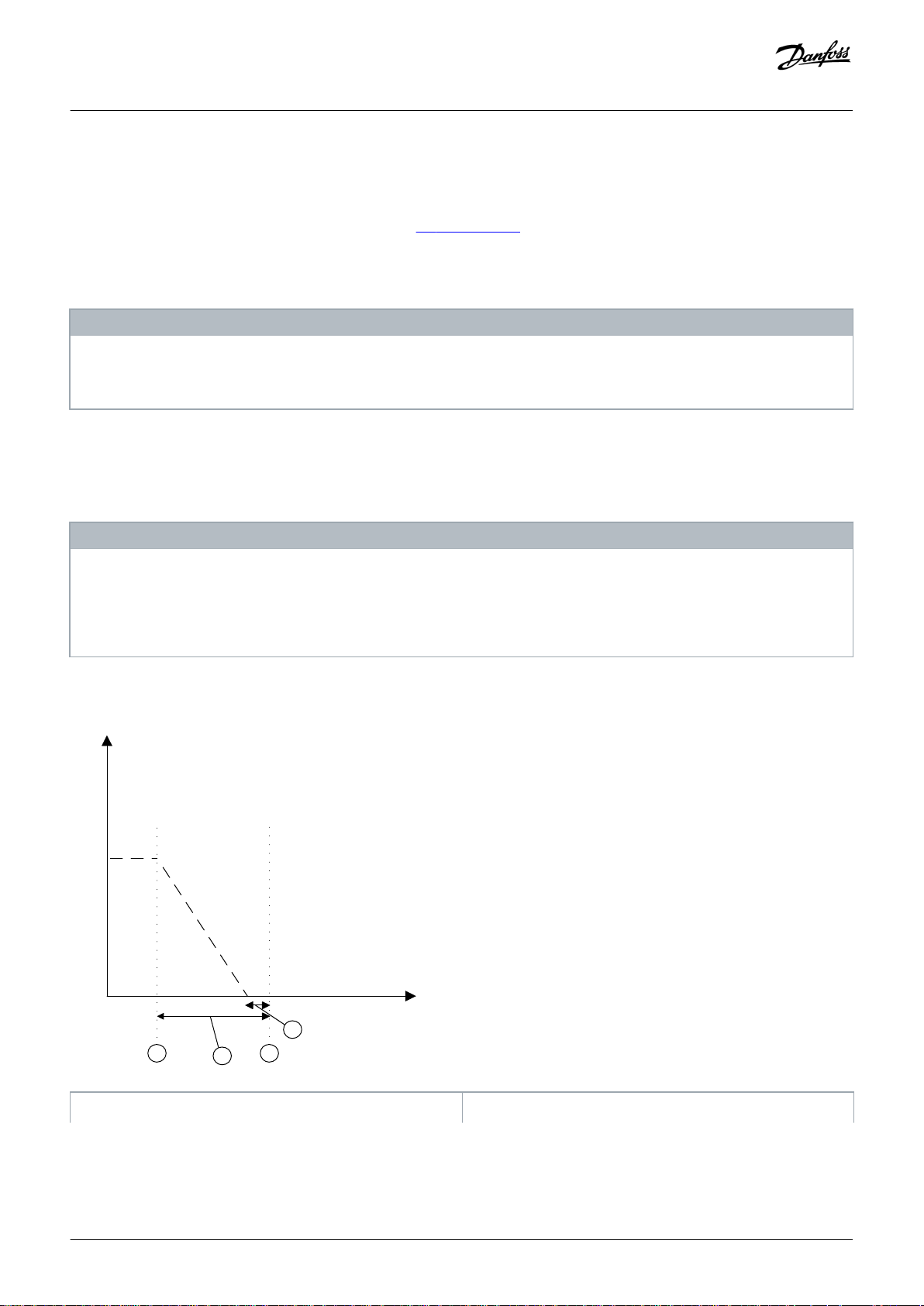
3.5.4.1 SS1 Verzögerung
Wählen Sie SS1 Verzögerung, um die Funktion Sicherer Stopp 1 zu aktivieren, während ein parametrierter
Sicherheitsverzögerungstimer abläuft. STO wird sofort aktiviert, wenn die konfigurierte Stoppverzögerung abgelaufen ist, unabhängig
von der Drehzahl. Die Parametereinstellungen finden Sie in 6.3 Parameterliste.
Bei Verwendung der SS1 Verzögerung versucht der Frequenzumrichter, der ausgewählten Rampe zu folgen. Nach einer festgelegten
Verzögerung wird STO aktiviert und der Motor drehmomentfrei geschaltet.
HI NW EI S
Verwendung der SS1 Verzögerung kann dazu führen, dass der Motor weiter dreht, wenn das Safe Torque Off aktiviert wird. Die
Risikoanalyse für die Maschine muss angeben, dass dieses Verhalten toleriert werden kann. Eine Verriegelung kann erforderlich
sein.
Werkseinstellung in Parameter 42-40 Typ ist [0] Delay (Verzögerung). Wenn dieser Wert ausgewählt wird, aktiviert die Funktion Sicherer
Stopp 1 eine Bremsrampe, definiert ab einer ausgewählten Zeitverzögerung in Parameter 42-42 Verzögerungszeit. Dies bedeutet, dass
die Bremsrampe linear ist. Wählen Sie den Wert für Parameter 42-43 Delta T aus (% der Verzögerungszeit). Dies ist eine angemessene
Toleranz nach Ablauf der SS1 Verzögerung.
HI NW EI S
Die Funktion „SS1 Verzögerung“ überwacht nicht das Stoppen des Frequenzumrichters. Die sicherheitsrelevante Zeit, Dreieck T,
ermöglicht dem Frequenzumrichter, zum Stillstand zu kommen, bevor Safe Torque Off aktiviert wird. Damit wird sichergestellt,
dass das System ebenfalls gestoppt wird, bevor Safe Torque Off aktiviert wird. Wenn ein Fehler auftritt, kommt der
Frequenzumrichter nicht zum Stillstand. Er läuft nach der Zeitverzögerung unabhängig von der Frequenzumrichterdrehzahl im
Freilauf.
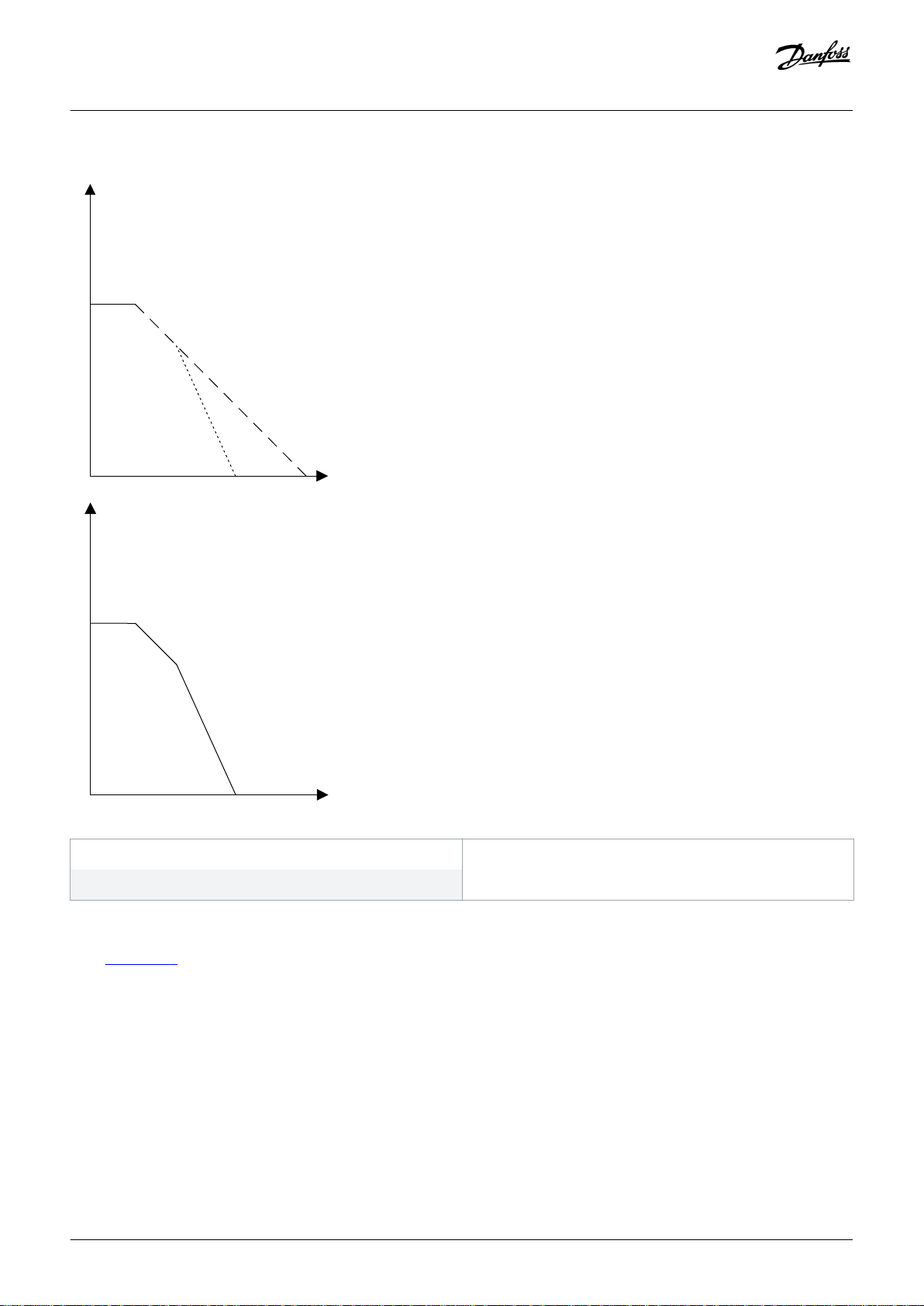
A Tatsächliche Frequenz 1 Aktivierung des SS1 Verzögerungstimers
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 23
Page 26
Installationshandbuch | VLT® Safety Option MCB 150/151
Funktions- und Systemübersicht
2 Aktivierung von STO
4 Parameter 42-43 Delta T
Abbildung 8: SS1 Verzögerung
Wenn die Funktion Sicherer Stopp 1 aktiv ist, bringt der Frequenzumrichter den Motor auf Nulldrehzahl. Die Funktion „Safe Torque
Off“ wird nach einer festgelegten, sicherheitsrelevanten Zeit ausgelöst. Diese Sicherheits-Subfunktion entspricht einem kontrollierten
Stopp des Frequenzumrichters nach EN IEC 60204-1, Stoppkategorie 1.
3 Parameter 42-42 Verzögerungszeit
3.5.4.1.1 Auswahl der SS1-Einstellungen
Vorgehensweise
1. Öffnen Sie Parameter 42-41 Rampenprofil.
Auswahl:
[0] Linear, wenn die Rampe einer linearen Kurve folgen muss.
[2] S-Rampe konst. Zeit, wenn die Rampe einer S-Rampe folgen soll.
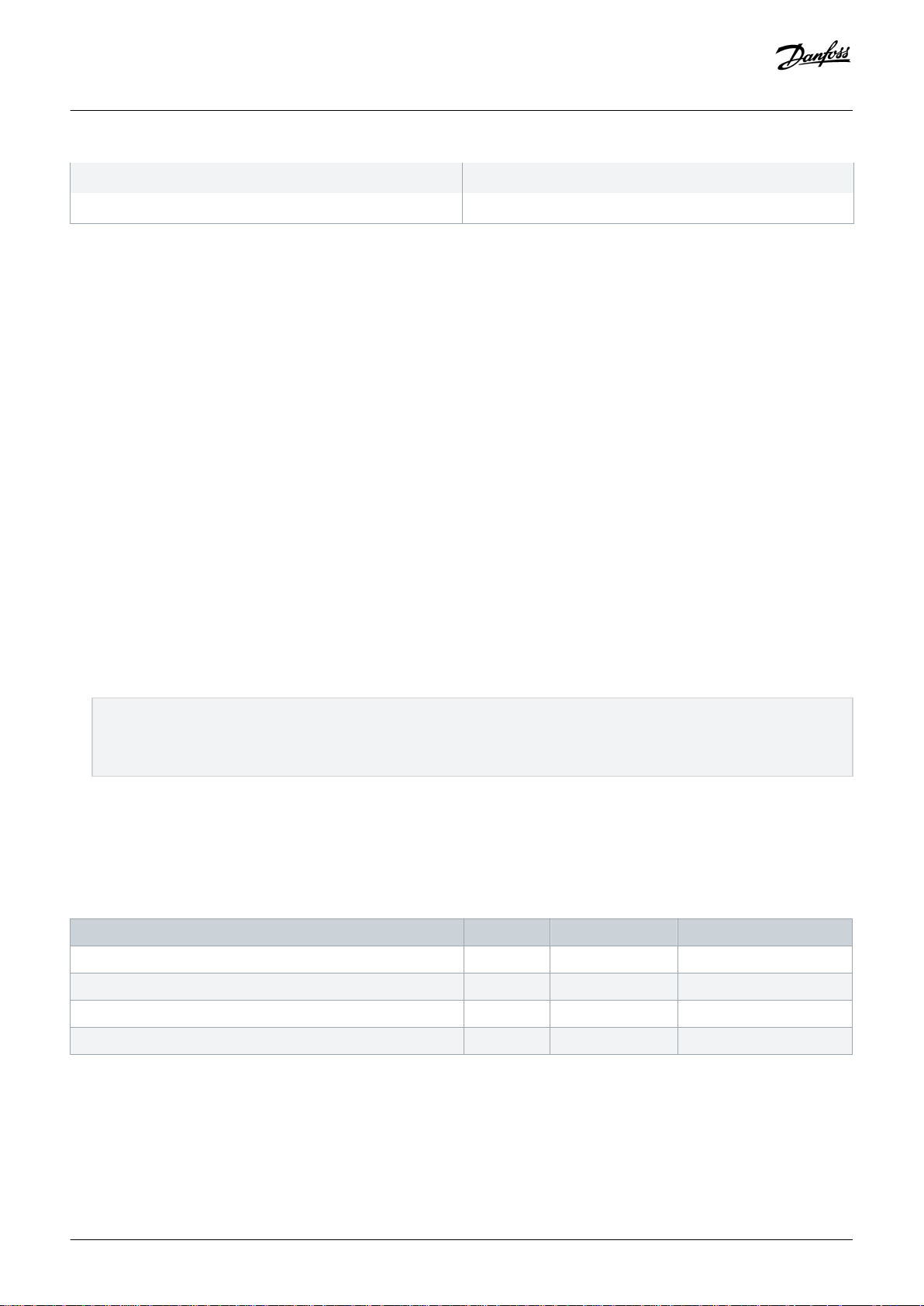
3.5.4.2 SS1 Verzögerung mit S-Rampen-Stopp-Profil
Context:
Eine S-Rampe ergibt eine nicht lineare Verzögerung und gleicht Erschütterungen in der Anwendung aus.
Vorgehensweise
1. Definieren Sie ein Drehzahlprofil über eine Verzögerung (eine Verzögerung für den schlimmsten Fall von der Istfrequenz zur
Nulldrehzahl) und eine Verzögerungstoleranz.
Die sicherheitsrelevante Zeit, Dreieck T, ermöglicht dem Frequenzumrichter, zum Stillstand zu kommen, bevor STO aktiviert wird.
Damit wird sichergestellt, dass das System ebenfalls gestoppt wird, bevor STO aktiviert wird. Wenn ein Fehler auftritt, kommt der
Frequenzumrichter nicht zum Stillstand. Er läuft nach der Zeitverzögerung unabhängig von der Frequenzumrichterdrehzahl im
Freilauf.
2. Definieren und speichern Sie eine S-Rampenkonfiguration, die die Nulldrehzahl innerhalb der Verzögerung erreicht.
3. Konfigurieren Sie das S-Rampenverhältnis am Anfang der Verzögerung in Parameter 42-48 S-Form Ende bei Verzög. Start und stellen
Sie Parameter 42-49 S-Form Ende bei Verzög. Ende für die S-Form am Ende der Verzögerung ein.
Beispiel:
Tabelle 3: Parameter für SS1 Verzögerung mit S-Rampen-Stopp-Profil
Parameter Einheit Bereich Werkseinstellung
Parameter 42-42 Verzögerungszeit s 0,1–3600,0 s 1,0 s
Parameter 42-43 Delta T % 0–50% 5%
Parameter 42-48 S-Form Ende bei Verzög. Start % 1–99 50
42-49 S-Form Ende bei Verzög. Ende % 1–99 50
24 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 27
e30bc322.11
1
2
t
f
3
4
Istfrequenz
5
6
Installationshandbuch | VLT® Safety Option MCB 150/151
Funktions- und Systemübersicht
A Tatsächliche Frequenz
2 Aktivierung von STO
4 Parameter 42-43 Delta T
1 Aktivierung von SS1 Rampenverzögerung
3 Parameter 42-42 Verzögerungszeit
5 Parameter 42-48 S-Form Ende bei Verzög. Start
6 Parameter 42-49 S-Form Ende bei Verzög. Ende
Abbildung 9: SS1 Verzögerung mit S-Rampen-Stopp-Profil
3.5.4.3 SS1 Rampe
HI NW EI S
Die Funktion SS1 Rampe kann nur verwendet werden, wenn ein Drehgeber oder eine VLT® Sensorless Safety MCB 159-Option
mit der Sicherheitsoption verbunden ist.
Diese Art von sicherem Stopp ermöglicht sofortigen Zugang zum Gefahrenbereich, nachdem Stoppen der Bewegung erkannt worden
ist, statt zu warten, bis eine bestimmte Zeit vergangen ist.
Die Sicherheitsoption überwacht die folgenden Funktionen
• Bremsrampe:
- Im Sicherheits-Plug-in der MCT 10 Konfigurationssoftware wird die Bremsrampe festgelegt und Überwachung aktiviert. Die
Bremsdauer hängt von der Drehzahl des Motors zu Beginn der Bremsung ab. Die Bremsrampe kann über einen maximalen
Drehzahlfehler überwacht werden, der in der MCT 10 Konfigurationssoftware in Parameter 42-45 Delta V festgelegt wird.
• Bremsrampe bei Normalbetrieb:
- Der Frequenzumrichter startet mit der konfigurierten Bremsrampe, wenn die Sicherheits-Subfunktion Sicherer Stopp 1 aktiviert
worden ist. Sobald die Drehzahl an der Nulldrehzahlgrenze ist, wird STO aktiviert.
• Die Sicherheits-Subfunktion STO wird aktiviert, wenn der konfigurierte Grenzwert für den Positionsfehler überschritten ist.
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 25
Page 28
e30bc319.11
6
4
3
7
1 2
5
t
f
6
A
B
Installationshandbuch | VLT® Safety Option MCB 150/151
Funktions- und Systemübersicht
Eine Nulldrehzahl (parameter 42-46 Zero Speed) an der Stillstandsschwelle zur Aktivierung der Sicherheits-Subfunktion STO kann in der
MCT 10 Konfigurationssoftware festgelegt werden.
Die Sicherheits-Subfunktion STO wird aktiviert, wenn Nulldrehzahl erreicht ist.
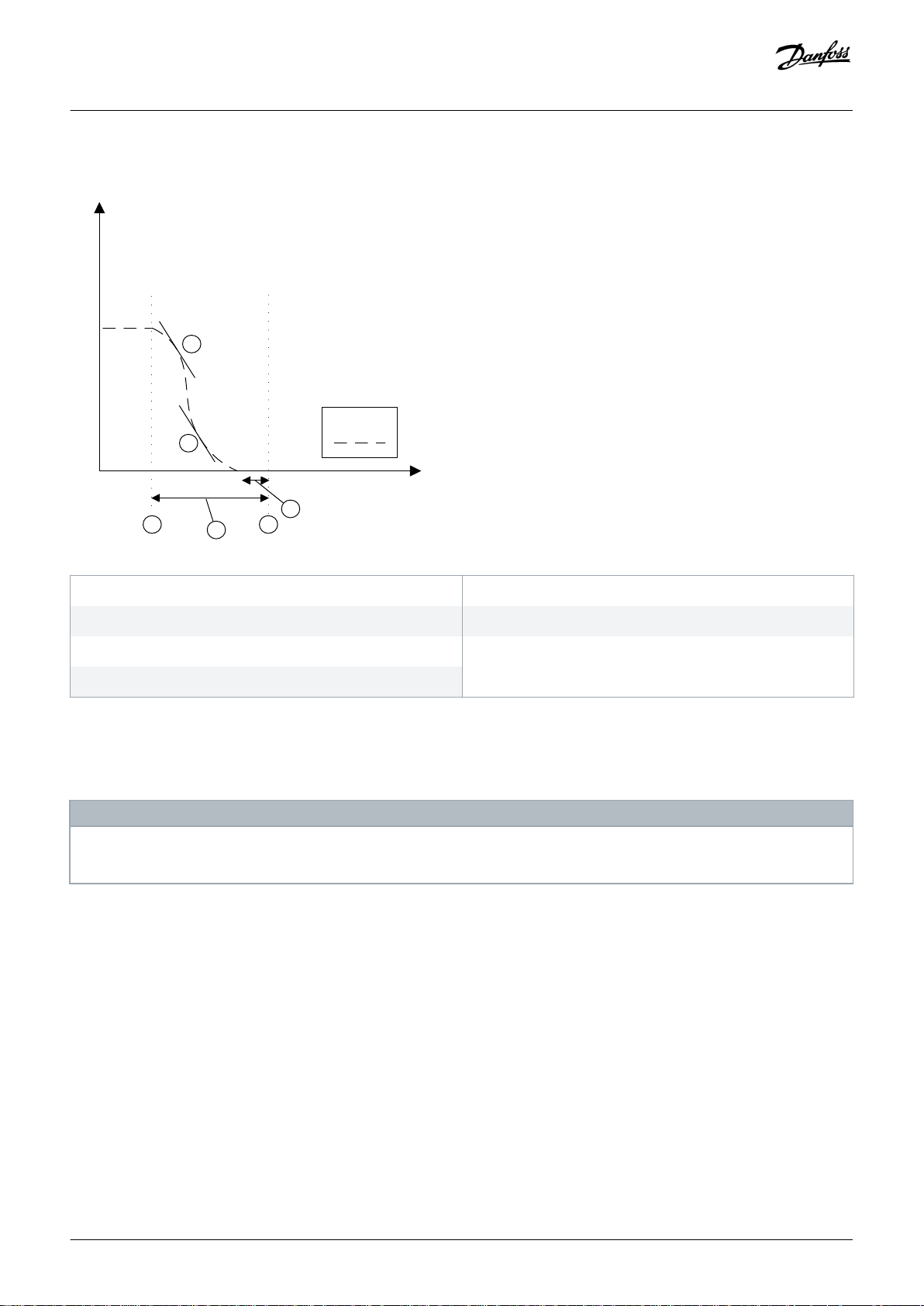
3.5.4.4 Steigung der SS1 Rampe
Für den Stoppvorgang initiiert die Sicherheitsoption ein Stoppsignal zum Frequenzumrichter und überwacht die kontrollierte
Bremsung durch Überwachung der Bremsrampe. Die zulässige Verzögerungsrampe wird in Parameter 42-44 Verzögerungsrate
festgelegt. Wenn die Sicherheitsoption einen Sicheren Stopp 1 anfordert, muss der Frequenzumrichter mindestens mit der Steilheit
dieser Verzögerungsrampe verzögern, selbst mit schwerer Last. Wenn der Frequenzumrichter die zulässige Verzögerungsrampe
während eines sicheren Stopps 1, der von der Sicherheitsoption angefordert wurde, nicht erfüllt, wird sofort ein STO ausgelöst. Der
Motor führt dann einen unkontrollierten Stopp aus. Diese Aktion verhindert, dass der Frequenzumrichter weiter läuft oder bei einem
Fehler sogar beschleunigt.
Tabelle 4: Parameter für Steigung der SS1 Rampe
Parameter Einheit Bereich Werkseinstellung
Parameter 42-44 Verzögerungsrate UPM/s 1–30000 UPM/s 1500 UPM/s
Parameter 42-45 Delta V U/min 1–10000 U/min 120 U/min
Parameter 42-46 Zero Speed U/min 1–600 U/min 10 U/min
A Tatsächliche Frequenz
1 Aktivierung der Steigung der SS1 Rampe
B SS1 Rampe
2 Aktivierung von STO
3 Parameter 42-44 Verzögerungsrate
5 Parameter 42-46 Zero Speed
7 Aktivierung der Ausfallfunktion
Abbildung 10: Steigung der SS1 Rampe
26 | Danfoss A/S © 2019.01
4 Parameter 42-45 Delta V
6 Sicherheits-Subfunktion überwacht
AQ279747441421de-000201 / 130R0292
Page 29
e30bc320.11
6
4
7
1
2
5
t
f
6
3
A
B
Installationshandbuch | VLT® Safety Option MCB 150/151
Funktions- und Systemübersicht
Wenn die Funktion Sicherer Stopp 1 aktiv ist, bringt der Frequenzumrichter den Motor auf Nulldrehzahl. Die Verzögerung wird
überwacht. Wenn die überwachte Verzögerung langsamer als erwartet ist oder bei Nulldrehzahl, wird STO ausgelöst.
Diese Sicherheits-Subfunktion entspricht einem kontrollierten Stopp des Frequenzumrichters nach EN IEC 60204-1, Stoppkategorie.
3.5.4.5 SS1 Rampenzeit
Definiert ein Drehzahlüberwachungsprofil mit Verzögerungszeit und tolerierbarer Drehzahl (Dreieck V).
Tabelle 5: Parameter für SS1 Rampenzeit
Parameter Einheit Bereich Werkseinstellung
Parameter 42-47 Digitalpoti Rampenzeit s 0,1–3600,0 s 1,0 s
Parameter 42-45 Delta V U/min 1–10000 U/min 120 U/min
Parameter 42-46 Zero Speed U/min 1–600 U/min 10 U/min
A Tatsächliche Frequenz
1 Aktivierung der SS1 Rampenzeit
3 Parameter 42-47 Digitalpoti Rampenzeit
5 Parameter 42-46 Zero Speed
7 Aktivierung der Ausfallfunktion STO
Abbildung 11: SS1 Rampenzeit
Danfoss A/S © 2019.01
B SS1 Rampe
2 Aktivierung von STO
4 Parameter 42-45 Delta V
6 Sicherheits-Subfunktion überwacht
AQ279747441421de-000201 / 130R0292| 27
Page 30
Installationshandbuch | VLT® Safety Option MCB 150/151
Funktions- und Systemübersicht
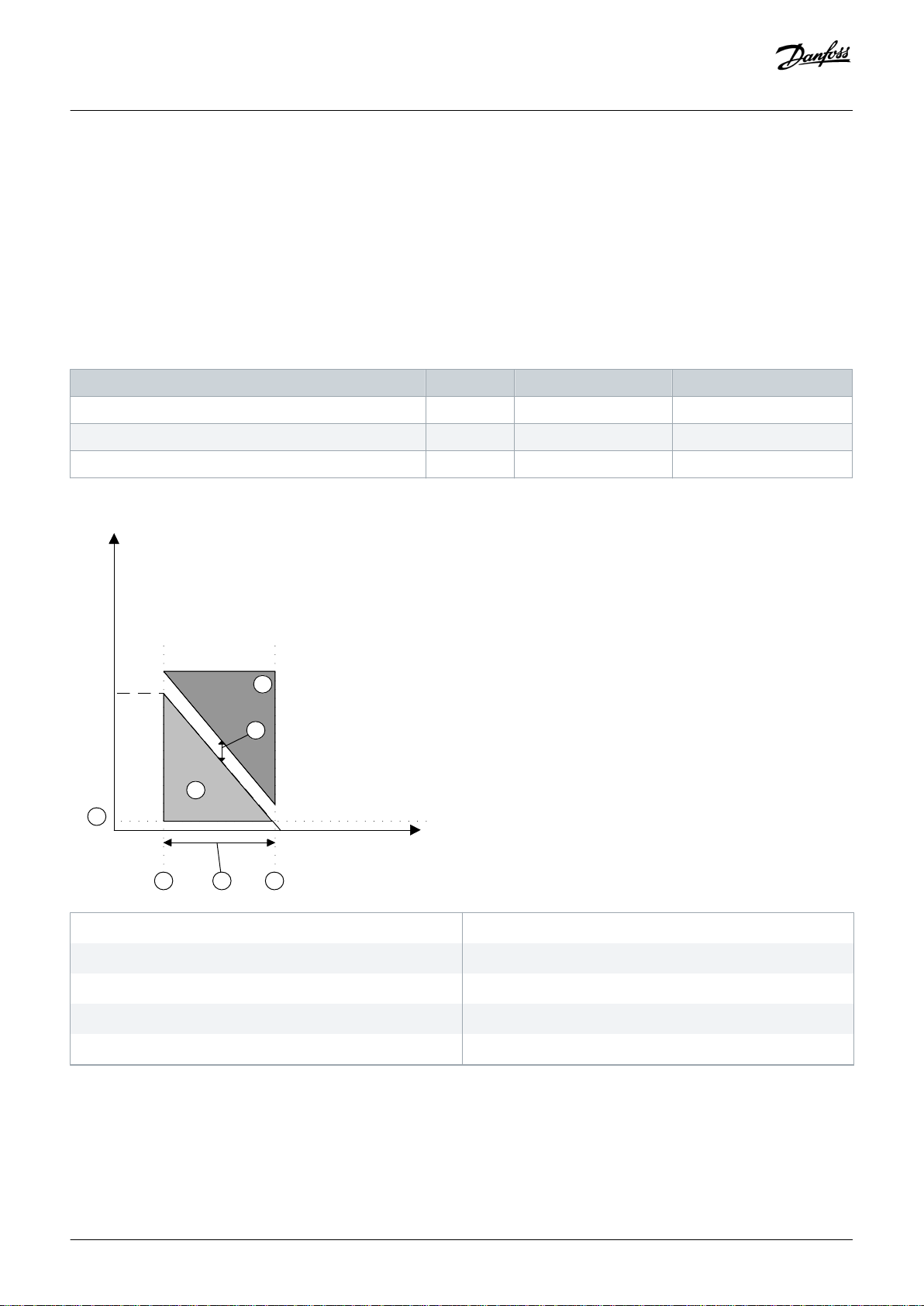
3.5.5 Safely Limited Speed (Sicher begrenzte Drehzahl)
HI NW EI S
Die Funktion Safely Limited Speed kann nur verwendet werden, wenn ein Drehgeber oder eine VLT® Sensorless Safety MCB
159-Option mit der Sicherheitsoption verbunden ist.
Diese Funktion wird verwendet, um eine Maschinendrehzahl zu begrenzen. Hauptziel ist die Überwachung der Motordrehzahl und die
Anpassung der Drehzahl an einen Sollwert. Es gibt 2 Arten der Funktion „Sicher begrenzte Geschwindigkeit“:
• SLS ohne Rampe: Überwacht die Motordrehzahl und löst abhängig von der Einstellung in Parameter 42-52 Fehlersichere Reaktion
die Funktion „Safe Torque Off“ oder „Sicherer Stopp 1“ aus, wenn eine Überdrehzahl auftritt.
• SLS mit Rampe: Begrenzt die Motordrehzahl auf einen Sollwert und löst abhängig von der Einstellung in Parameter 42-52
Fehlersichere Reaktion die Funktion „STO“ oder „Sicherer Stopp 1“ aus, wenn eine Überdrehzahl auftritt.
Die sicher begrenzte Geschwindigkeit wird als Drehzahlgrenze in Parameter 42-51 Drehzahlgrenze angegeben. Der Wert der
Abschaltdrehzahl hängt teilweise vom verwendeten Motor ab. Ein vorgeschlagener Wert von der MCT 10 Konfigurationssoftware
berechnet einen Wert, für den Danfoss die Funktionalität garantieren kann. Dieser Wert wird als Delta-Drehzahlgrenze bezeichnet und
zur ausgewählten Drehzahlgrenze addiert und als Wert in Parameter 42-50 Abschaltdrehzahl vorgeschlagen.
3.5.5.1 SLS ohne Rampe
Die Sicherheits-Subfunktion „Sicher begrenzte Geschwindigkeit“ überwacht, ob ein festgelegter Geschwindigkeitswert überschritten
wurde, seit sie über Digitaleingang 1 oder 2 aktiviert wurde. Die Funktion ist aktiv, bis der ausgewählte Eingang wieder auf
„Hoch“ gestellt wurde.
Wenn 2 sichere Drehzahlgrenzen überwacht werden müssen, stellen Sie einen der 2 sicheren Digitaleingänge 1 oder 2 in Parameter
42-20 Sicherheitsfunktion auf SLS-a oder SLS-b ein. Wählen Sie dann den Eingangstyp in Parameter 42-21 Typ aus.
Die Abschaltdrehzahl stellt die maximal zulässige Frequenz der tatsächlichen Motorfrequenz dar. Wenn die Motorfrequenz über diesen
Wert beschleunigt, geht die Sicherheitsoption auf „External Fault Selected“ (STO oder SS1 Rampe) und es wird eine Fehlermeldung
gesendet oder angezeigt. Der Frequenzwert, bei dem eine Abschaltung erfolgt, sollte in Parameter 42-50 Abschaltdrehzahl parametriert
werden.
Tabelle 6: Parameter für SLS ohne Rampe
Parameter Einheit Bereich Werkseinstellung
Parameter 42-50 Abschaltdrehzahl U/min 120–10000 U/min 270 U/min
Parameter 42-51 Drehzahlgrenze U/min 1–9999 150 U/min
Parameter 42-52 Fehlersichere Reaktion k. A. STO/SS1 STO
28 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 31

t
1
2
4
5
3
6
f
e30bc324.11
A
B
Installationshandbuch | VLT® Safety Option MCB 150/151
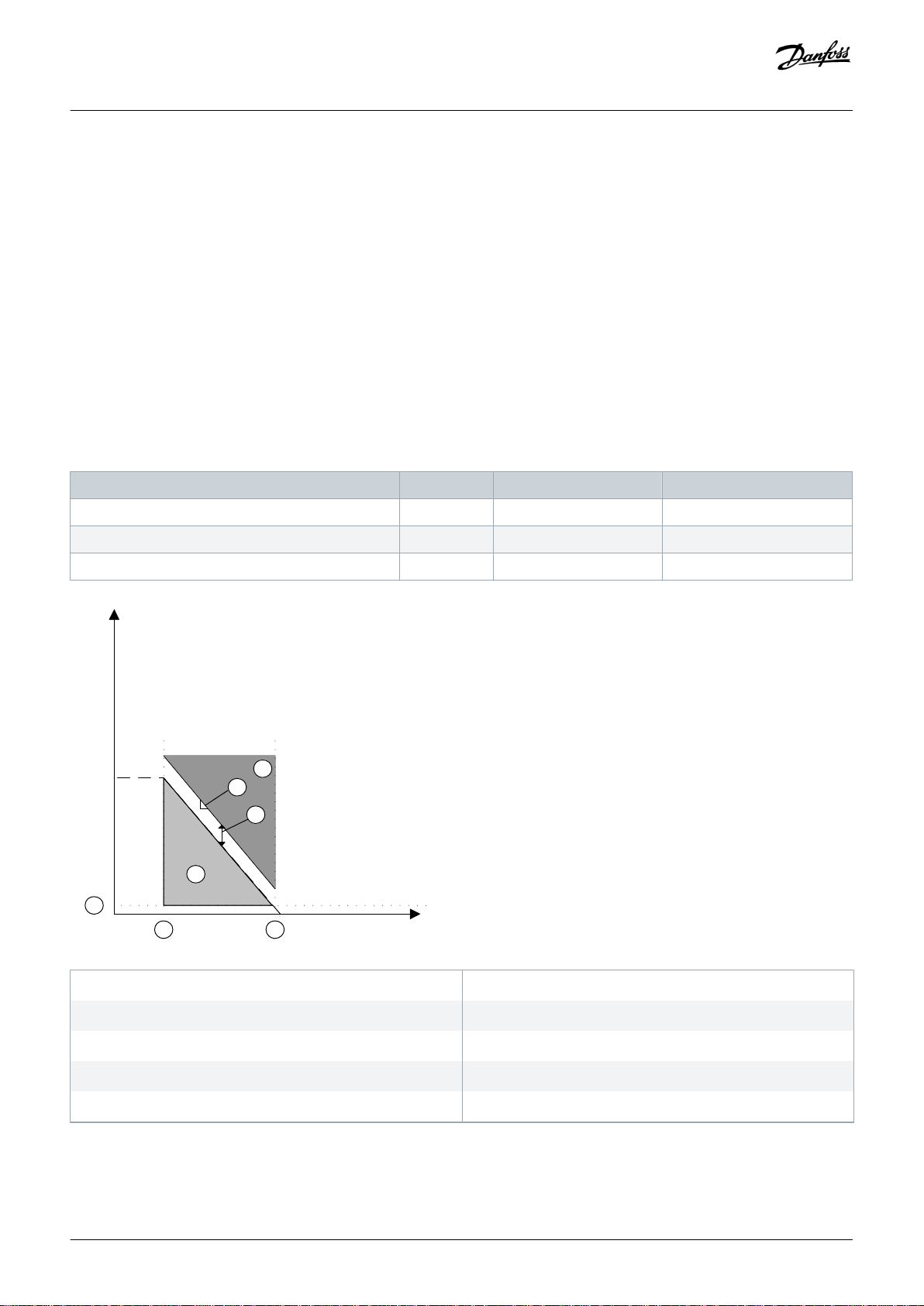
Funktions- und Systemübersicht
A Tatsächliche Frequenz
1 SLS ist aktiviert
3 Parameter 42-50 Abschaltdrehzahl
5 Aktivierung der in Parameter 42-52 Fehlersichere Reaktion
eingestellten Ausfallfunktion
Abbildung 12: SLS ohne Rampe
B SLS-Grenze
2 Parameter 42-51 Drehzahlgrenze
4 Delta-Drehzahlgrenze
6 Fester Wert von 120 U/min in Parameter 42-19 Zero Speed
Limit
Wenn die Drehzahl die Grenze überschreitet, wird Parameter 42-52 Fehlersichere Reaktion aktiviert. Die Sicherheits-Subfunktion kann
entweder STO oder SS1 Rampenzeit sein. Sicherer Stopp 1 kann nur als Fehlerreaktion ausgelöst werden, wenn eine Funktion „Sicherer
Stopp 1“ als Sicherer Stopp 1 mit Rampenzeitfunktion eingestellt worden ist, programmiert in Parameter 42-40 Typ.
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 29
Page 32

e30bc959.11
4
2
3
6
1
5
f
t
A
B
Installationshandbuch | VLT® Safety Option MCB 150/151
Sichere Festdrehzahl JOG mit SLS
Funktions- und Systemübersicht
A Tatsächliche Frequenz
1 SLS ist aktiviert
3 Parameter 42-50 Abschaltdrehzahl
5 Aktivierung der in Parameter 42-52 Fehlersichere Reaktion
eingestellten Ausfallfunktion
Abbildung 13: Sichere Festdrehzahl JOG
B SLS-Grenze
2 Parameter 42-51 Drehzahlgrenze
4 Delta-Drehzahlgrenze
6 Fester Wert von 120 U/min in Parameter 42-19 Zero Speed
Limit
Zugang unter bestimmten reduzierten Risikobedingungen
Unter bestimmten reduzierten Risikobedingungen erlaubt sichere Festdrehzahl JOG Zugang zu Bereichen zur Fehlersuche,
Inbetriebnahme usw. Bei Maschinen, bei denen sichere Festdrehzahl JOG (Tipp- oder Rangierbetrieb) notwendig ist, ist dies auch vom
Sollwert der Nulldrehzahl aus möglich. Durch Aktivierung der SLS-Funktion kann der Motor mit sicherer Festdrehzahl JOG bewegt
werden. Dies ergibt eine Reihe von Zyklen mit sicher überwachten Bewegungen. Der Motor kann kontinuierlich gestartet und
gestoppt werden, auch von Nulldrehzahl.
3.5.5.2 SLS mit Rampe
Wenn diese Sicherheits-Subfunktion nicht benötigt wird, konfigurieren Sie die Sicherheitsoption auf „Sicher begrenzte
Geschwindigkeit“ (SLS). Wenn die Digitaleingänge 1 oder 2 als SLS ausgewählt werden, ist der Eingang AUS, die
Istwertgeschwindigkeit wird überwacht und mit einer konfigurierbaren sicheren Drehzahlgrenze verglichen.
Wählen Sie Parameter 42-53 Startrampe aus, um eine SLS-Überwachungsrampe zu konfigurieren. Das Rampen beginnt, wenn SLSÜberwachung vom ausgewählten Eingang bei SLS-Übergang von EIN auf AUS angefordert wird. Die Sicherheitsoption beginnt die
Überwachung auf sicher begrenzte Geschwindigkeit nach Ablauf der Rampe-ab-Zeit. Wenn die Systemgeschwindigkeit die sicher
begrenzte Geschwindigkeit während der Überwachung „Sicher begrenzte Geschwindigkeit“ überschreitet oder gleich dieser ist, tritt
ein Fehler „Sicher begrenzte Geschwindigkeit“ auf. Die Sicherheitsoption initiiert anschließend den konfigurierten Typ „Sicherer
Stopp“ in Parameter 42-52 Fehlersichere Reaktion.
Die Rampe beginnt beim Absolutwert der Istdrehzahl. Falls die Istdrehzahl bereits unter dem Grenzwert für die sicher begrenzte
Geschwindigkeit ist, wird die Grenze sofort ohne Rampe wirksam. Wenn die Funktion „Sicher begrenzte Geschwindigkeit“ deaktiviert
ist, wird eine Rampe auf der Drehzahlgrenzen zurück zu den in Parametergruppe 3-1* Sollwerteinstellung Werten durchgeführt. Die
Istgeschwindigkeit kehrt dann zu dem Sollwert zurück, falls sie durch diese Funktion beschränkt wurde.
30 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 33

e30bc323.11
1
2
f
3
5
6
4
t
4
7
A
B
Installationshandbuch | VLT® Safety Option MCB 150/151
Funktions- und Systemübersicht
3.5.5.2.1 Konfigurieren des SLS-Betriebs
Vorgehensweise
1. Wenn eine sichere Drehzahlgrenze überwacht werden muss, stellen Sie einen der 2 sicheren Digitaleingänge 1 oder 2 auf [1] SLS-a
oder [2] SLS-b (in Parameter 42-20 Sicherheitsfunktion).
2. Wählen Sie den Eingangstyp in Parameter 42-21 Typ aus.
3. Wählen Sie Parameter 42-53 Startrampe aus, um „Sicher begrenzte Geschwindigkeit“ mit überwachter Bremsrampe auszuführen.
Die Werkseinstellung ist [0] Nein bei Anwendungen ohne SLS-Rampensteuerung.
4. Stellen Sie die zulässige Zeit zum Erreichen der sicher begrenzten Geschwindigkeit in Parameter 42-54 Rampenzeit ab ein.
Wenn die Sicherheitsoption „Sicher begrenzte Geschwindigkeit“ aktiv überwacht und die Motordrehzahl an oder unter der
konfigurierten sicheren Drehzahlgrenze ist, überwacht die Funktion die Drehzahl, bis die Funktion deaktiviert wird.
5. Stellen Sie den Wert in Parameter 42-50 Abschaltdrehzahl fest.
Beispiel:
A Tatsächliche Frequenz
1 SLS wird mit SS1 Rampe aktiviert
3 Rampe-ab-Zeit
5 Nulldrehzahlgrenze, Festwert von 120 U/min
7 Aktivierung der in Parameter 42-52 Fehlersichere Reaktion
eingestellten Ausfallfunktion
Abbildung 14: SLS mit Rampe
Tabelle 7: Parameter für SLS mit Rampe
Parameter Einheit Bereich Werkseinstellung
B SLS-Grenze
2 SLS-Drehzahlgrenze erreicht
4 Delta-Drehzahlgrenze
6 Abschaltdrehzahl
Parameter 42-50 Abschaltdrehzahl U/min 120–10000 U/min 270 U/min
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 31
Page 34

t
v
e30bg950.10
1
2
3
Installationshandbuch | VLT® Safety Option MCB 150/151
Funktions- und Systemübersicht
Parameter Einheit Bereich Werkseinstellung
Parameter 42-51 Drehzahlgrenze U/min 1–9999 U/min 150 U/min
Parameter 42-52 Fehlersichere Reaktion k. A. Safe Torque Off/Sicherer Stopp 1 Safe Torque Off
Parameter 42-53 Startrampe k. A. Nein/Ja Nein
Parameter 42-54 Rampenzeit ab s 0,1–3600,0 s 1,0 s
Wenn die Drehzahl die Grenze überschreitet, wird Parameter 42-52 Fehlersichere Reaktion aktiviert. Die Sicherheits-Subfunktion kann
entweder STO oder SS1 Rampenzeit sein. Sicherer Stopp 1 kann nur als Fehlerreaktion ausgelöst werden, wenn ein Digitaleingang als
Sicherer Stopp 1 mit Rampenzeitfunktion eingestellt worden ist, programmiert in Parameter 42-40 Typ.
3.5.6 Sichere Höchstgeschwindigkeit – Safe Maximum Speed, SMS
Verwenden Sie die SMS-Funktion zur Überwachung der Maschinendrehzahl. Wenn die maximale zulässige Drehzahl überschritten
wird, wird STO als ausfallsichere Reaktion aktiviert.
Safe Maximum Speed wird als SMS Cut Off Speed Limit in Parameter 42-71 Cut Off Speed angegeben.
1 Abschaltdrehzahl
2 Zero Speed Limit
3 Aktivierung von STO
Abbildung 15: Safe Maximum Speed
Tabelle 8: Parameter für SMS
Parameter Einheit Bereich Werkseinstellung
Parameter 42-70 Activation (Aktivierung) k. A. Inaktiv/aktiv Inaktiv
Parameter 42-71 Cut Off Speed U/min 120–20000 1500
32 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 35

Installationshandbuch | VLT® Safety Option MCB 150/151
Funktions- und Systemübersicht
3.6 Eingänge und Ausgänge
Eine interne Diagnosefunktion in der Sicherheitsoption prüft den Ausgang zyklisch auf korrekte Funktion. Ein erkannter Fehler versetzt
die Sicherheitsoption in einen Alarmzustand. Gleichzeitig wird der Optionsausgang S37 deaktiviert.
Kurzschlüsse zwischen den 2 Leitungen eines Zweikanaleingangs werden nicht erkannt. Daher müssen die Leitungen der Kanäle
getrennt verlegt werden, um Kurzschlüsse auszuschließen.
HI NW EI S
Schirmen Sie alle Sensor-/Drehgeberleitungen des Näherungsschalters ab. Verbinden Sie die Abschirmung an beiden Enden
mit Masse.
3.6.1 Eingänge
Die zweipoligen Digitaleingänge werden verwendet, um die Sicherheits-Subfunktionen zu aktivieren. Digitaleingang 1 kann Folgendes
sein:
• STO: Safe Torque Off.
• SS1: Sicherer Stopp 1.
• SLS: Safely Limited Speed (Sicher begrenzte Drehzahl).
Signale bei Digitaleingang 1:
• 1/0 Übergang am Eingang: Aktiviert die Sicherheits-Subfunktion.
• 0 Signal (0 V) am Eingang: Aktiviert die Sicherheits-Subfunktion.
• 1 Signal (+24 V) am Eingang: Aktiviert nicht die Sicherheits-Subfunktion.
Digitaleingang 2 kann Folgendes sein:
• STO: Safe Torque Off.
• SS1: Sicherer Stopp 1.
• SLS: Safely Limited Speed (Sicher begrenzte Drehzahl).
• Reset: Zusätzlicher sicherer Eingang zum Zurücksetzen der Sicherheitsoption nach einem Fehler oder nach dem Deaktivieren einer
Sicherheits-Subfunktion.
Signale bei Digitaleingang 2:
• 1/0 Übergang am Eingang: Aktiviert die Sicherheits-Subfunktion.
• 0 Signal (0 V) am Eingang: Aktiviert die Sicherheits-Subfunktion.
• 1 Signal (+24 V) am Eingang: Aktiviert nicht die Sicherheits-Subfunktion.
• 0/1 Übergang am Digitaleingang 2, wenn er auf Reset konfiguriert ist: Setzt die Sicherheitsoption zurück.
3.6.2 Reset-Eingang (DI2)
Der Reset-Eingang dient zum Zurücksetzen der Sicherheitsschaltung, die an Digitaleingang 1 ausgewählt ist. Konfigurieren Sie den
Reset-Eingang für automatische oder manuelle Quittierfunktionen. Wenn ein manuelles Quittieren konfiguriert ist, verdrahten Sie die
DI2A Reset-Eingangsklemme mit 24 V DC über einen Schließer-Schalter.
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 33
Page 36

Installationshandbuch | VLT® Safety Option MCB 150/151
3.6.3 Ausgang
Einpoliger Sicherheitsausgang
S37 ist der Ausgang, der zum STO-Eingang des Frequenzumrichters geht.
• STO-Bestätigung
- Interner Fehler am Frequenzumrichter oder an der Sicherheitsoption.
- Grenzwerte überschritten.
- Über SS1 aktiviert.
- PUST (Power Up Self Test, Selbsttest beim Einschaltvorgang).
- Externer Fehler.
3.6.4 Zugelassene Sensortypen an Digitaleingängen
Folgende Sensortypen sind geeignet:
• Sensoren mit 2 Öffnerschaltern.
• Antivalente Schalter (1 Schließer und 1 Öffner).
• Sensorausgang vom Typ 2xPNP.
Funktions- und Systemübersicht
Sensoren mit 2 Schließerschaltern sind nicht geeignet.
Die Digitaleingänge sind sowohl zur direkten Verbindung von Sicherheitssensoren konfiguriert, z. B. Not-Aus-Steuervorrichtungen
oder Lichtvorhänge, sowie zur Verbindung von vorverarbeitenden Sicherheitsrelais, z. B. Sicherheitssteuerungen. Beispiele für den
Anschluss des sicheren Digitaleingangs gemäß EN ISO 13849-1 und EN IEC 62061 finden Sie in 4.3.1 Anschluss der sicheren
Digitaleingänge.
3.6.5 Reset
HI NW EI S
Beide Sicherheitseingänge müssen nach einem Eingangsfehler oder PUST ausgeschaltet sein, bevor ein Reset akzeptiert wird,
um zu einer sicheren Überwachung zurückzukehren. Dieses Reset darf nur an der Stelle möglich sein, an der der
Sicherheitsbefehl initiiert wurde.
Um die Sicherheitsoption zu betätigen, muss die Anwendung ein Reset-Signal entweder über das LCP, über einen dedizierten
Digitaleingang oder über ein Steuerwort senden. Wenn eine Sicherheits-Subfunktion aktiviert wurde oder ein externer Fehler einen
Fehlerzustand verursacht hat, ist ein Reset notwendig, um die Sicherheitsoption erneut zu aktivieren. Wenn der an Digitaleingang 1
oder Digitaleingang 2 (oder beide) angeschlossene Sensor über einen Reset aktiviert wird, kann die Sicherheitsoption wieder
eingeschaltet werden. Dies deaktiviert aktive Sicherheits-Subfunktionen oder Fehler.
HI NW EI S
Zunächst müssen Abschaltalarme, die auf dem Frequenzumrichter angezeigt werden, quittiert werden, danach kann eine
anstehende Sicherheits-Subfunktion quittiert werden. Ein einzelner Reset für den Alarmmodus und ein zweiter Reset zur
Quittierung der aktiven Sicherheits-Subfunktion. Durch den Frequenzumrichter verursachte Alarme müssen quittiert werden,
bevor ein Alarm an der Sicherheitsoption quittiert werden kann.
34 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 37

e30bc316.11
Input signal
DI1/DI2
D1 x A
D1 x B
Discrepancy time
Safety function
Active
Inactive
Installationshandbuch | VLT® Safety Option MCB 150/151
Funktions- und Systemübersicht
3.6.6 Signalfilterung
Wenn ein Sensor mit 2 Öffnungskontakten oder 1 Öffnungskontakt/Schließkontakt ausgewählt wird, prüft die Sicherheitsoption die
Signale des sicheren Digitaleingangs auf Widerspruchsfreiheit. Widerspruchsfreie Signale an beiden Eingängen nehmen immer den
gleichen Signalzustand (hoch oder niedrig) an. Wenn 1 Öffnungskontakt/1 Schließkontakt ausgewählt wird, prüft er den richtigen
Zustand jedes Eingangs.
Bei elektromechanischen Sensoren (z. B. Not-Aus-Tastern oder Türschaltern) schalten die 2 Sensorschalter niemals gleichzeitig
(Diskrepanz). Eine langfristige Diskrepanz weist auf eine Störung in der Verdrahtung eines sicheren Eingangs hin, z. B. einen
Drahtbruch. Ein einstellbarer Filter in der Sicherheitsoption verhindert Störungen, die durch kurzzeitige Diskrepanz verursacht werden.
Innerhalb der Filtertoleranzzeit (Parameter 42-22 Diskrepanzzeit) unterdrückt die Sicherheitsoption die Diskrepanzüberwachung der
sicheren Eingänge.
Abbildung 16: Diskrepanzzeit
Parametrieren Sie die Diskrepanzzeit der Schaltelemente, die mit den Digitaleingängen verbunden sind. Die Werkseinstellung ist 10
ms.
HI NW EI S
Die Diskrepanzzeit verlängert nicht die Antwortzeit der Sicherheitsoption. Die Sicherheitsoption aktiviert ihre SicherheitsSubfunktion, sobald eines der 2 Digitaleingangssignale von ein auf aus wechselt.
3.6.7 Stabile Signalzeit von Sicherheitsausgängen
Die Sicherheitsoption reagiert normalerweise auf Signaländerungen an ihren sicheren Digitaleingängen 1 oder 2 sofort. Diese Reaktion
ist in den folgenden Fällen nicht erforderlich:
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 35
Page 38

Eingangssignal
e30bc317.12
DI1/DI2
Sicherheits-Subfunktion
Aktiviert
Inaktiv
Testimpulsmuster
Stabile Signalzeit Stabile Signalzeit
Installationshandbuch | VLT® Safety Option MCB 150/151
Funktions- und Systemübersicht
• Bei Verbindung des sicheren Eingangs der Option mit einem elektromechanischen Sensor kann Kontaktprellen dazu führen, dass
Signaländerungen auftreten, auf welche die Option reagieren könnte.
• Mehrere Steuermodule testen ihre sicheren Ausgänge über Testimpulsmuster (Ein/Aus-Tests), um Störungen durch Kurz- oder
Querschlüsse zu identifizieren. Bei Verbindung des sicheren Eingangs der Option mit einem sicheren Ausgang eines Steuermoduls
könnte die Option auf diese Testsignale reagieren.
Eine Signaländerung während eines Testimpulsmusters dauert in der Regel 1 ms.
Bei stabiler Signalzeit können kurze Impulse, die zu falscher Aktivierung von Sicherheits-Subfunktionen führen können, gefiltert
werden.
HI NW EI S
Die stabile Signalzeit verlängert die Antwortzeit der Sicherheitsoption. Die Sicherheitsoption aktiviert die SicherheitsSubfunktion erst, nachdem die Antwortzeit abgelaufen ist.
Wenn das Signal zum Eingang der Sicherheitsoption nicht stabil ist, reagiert die Option mit einem Fehler.
Definition eines stabilen Signals
Nach einer Änderung der Digitaleingangssignale löst die Option eine interne Überwachungszeit aus. Wählen Sie mit Parameter 42-23
Stabile Signalzeit eine geeignete stabile Signalzeit auszuwählen. Ein konstanter Signalpegel ist ein hoher oder niedriger Zustand über
eine in Parameter 42-23 Stabile Signalzeit festgelegte Mindestzeit.
Abbildung 17: Filter zur Unterdrückung kurzzeitiger Signaländerungen
3.6.8 Fehlererkennung des Zero Speed-Timers
Der Zero Speed-Timer überwacht, ob der Frequenzumrichter während der sicher begrenzten Geschwindigkeit unter 120 U/min
betrieben wird.
Parameter 42-18 Zero Speed Timer enthält die Restzeit, bis die Überwachung anspricht. Die Sicherheitsoption signalisiert nach Ablauf
der Überwachungszeit Alarm Ext Fail Prec Thresh Timer Elapsed (Alarm). Definieren Sie die Überwachungszeit während der
Inbetriebnahme des Systems abhängig von der jeweiligen Anwendung.
36 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 39

Installationshandbuch | VLT® Safety Option MCB 150/151
Funktions- und Systemübersicht
3.6.9 Jährliche Prüfung
Nach EN ISO 13849-1, EN IEC 62061 und EN IEC 61508 muss die Sicherheitsoption ihre sicherheitsbezogenen Schaltungen regelmäßig
prüfen, um einwandfreie Funktion sicherzustellen. Diese Prüfung muss mindestens einmal jährlich erfolgen. Nachdem die
Stromversorgung angeschlossen worden ist, überprüft die Sicherheitsoption ihre Schaltungen, um das Drehmoment bei jeder
Auswahl der STO-Funktion abzuschalten. Die Sicherheitsoption überwacht die regelmäßige Prüfung ihrer sicherheitsbezogenen
Schaltungen über ein Zeitmodul.
Nach einem Jahr Betrieb zeigt der Frequenzumrichter eine Meldung an, dass die jährliche Prüfung durchgeführt werden muss. Sie
müssen einen Aus-/Einschaltzyklus des Frequenzumrichters durchführen, indem Sie ihn von der Versorgungsspannung trennen und
dann wieder anschließen. Aktivieren Sie die verwendeten Eingänge an der Sicherheitsoption und überprüfen Sie, ob sie einwandfrei
funktionieren.
3.6.10 Sicherheitsparametereinstellungen
Die Werkseinstellung für beide Digitaleingänge ist „Safe Torque Off“. Dies heißt, dass der Sicherheitsausgang S37 inaktiv ist.
Beim ersten Einschaltvorgang zeigt die Option „Blank Initial State“.
Eigenschaften der Sicherheitsparameter
• Sie werden für jeden Überwachungskanal getrennt.
• Beim Start wird eine Prüfsumme (Zyklische Redundanzprüfung, CRC) über die Sicherheitsparameter gebildet und überprüft. Die
Parameter werden im nicht flüchtigen Speicher der Option gespeichert.
Ein Zurücksetzen der Sicherheitsparameter auf Werkseinstellung kann über die MCT 10 Konfigurationssoftware durchgeführt werden.
HI NW EI S
Wenn die Sicherheitsoption in einem anderen Frequenzumrichter neu installiert wird, können alle Parameter der
Sicherheitsoption entweder von der Sicherheitsoption oder über die Parameter im Frequenzumrichter, in dem die Option nun
installiert ist, ausgewählt werden. Führen Sie immer eine Inbetriebnahmeprüfung durch, um die korrekte Funktion zu
gewährleisten.
3.6.11 Drehgeberschnittstelle
HI NW EI S
Einige Diagnosen der Drehgebersignale erfordern Bewegung, um Fehler zu erkennen. Stellen Sie sicher, dass eine Bewegung
mindestens einmal alle 12 Monate stattfindet.
Um den Stillstand oder die Motordrehzahl zu erfassen, wird die Drehzahl (Frequenz) mit einem TTL-Drehgeber (MCB 150), einem HTLDrehgeber (MCB 151), einem PNP-Näherungsschalter (MCB 151) oder einer VLT® Sensorless Safety MCB 159-Option (MCB 151)
gemessen. Der HTL-Drehgeber verwendet 2 Signalleitungen, A und B. TTL-Drehgeber verwenden vier Signalleitungen A, B und deren
invertierte Leitungen nA, nB.
Verwenden Sie einzeln abgeschirmte Twisted-Pair-Kabel, um Drehgeber mit der Sicherheitsoption zu verbinden.
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 37
Page 40

Installationshandbuch | VLT® Safety Option MCB 150/151
Funktions- und Systemübersicht
3.7 Beschränkungen
3.7.1 Überschrittener Grenzwert und interne Fehler
• Überschreiten der eingestellten Grenzwerte aktiviert die Stoppbremsrampe.
• Ein interner Fehler an der Sicherheitsoption oder am Frequenzumrichter aktiviert die Sicherheits-Subfunktion STO. Der
Frequenzumrichter führt einen Motorfreilauf durch.
Interne Fehler führen immer zu einer Störung, die einen Aus-/Einschaltzyklus des Frequenzumrichters erforderlich macht, um den
Fehler zu quittieren. Starten Sie alternativ die Sicherheitsoption nach einem internen Fehler mit Parameter 42-90 Sicherheitsoption neu
starten neu, ohne einen Aus-/Einschaltzyklus des Frequenzumrichters durchzuführen.
3.7.2 Einschränkungen bei Verwendung von Funktionen zur Überwachung auf sichere Drehzahl
Vorgänge mit Zuglasten
WA RN UN G
UNERWARTETE LASTBESCHLEUNIGUNG MIT ZUGLASTEN
Die geberlose Istwertmessung erkennt nicht alle Fehler wie bei einer Motorsteuerung mit Rückführung. Folglich können die
sensorlosen Sicherheits-Subfunktionen nicht bestimmen, ob eine Zuglast den Motor unbeabsichtigt beschleunigt.
Verwenden Sie Sicherheits-Subfunktionen mit geberloser Drehzahlüberwachung niemals bei Frequenzumrichtern mit
-
Zuglasten.
Implementieren Sie die Drehzahlüberwachung in Maschinen mit Zuglasten durch Verwendung eines Drehgebers, der an
-
der Motorwelle oder innerhalb der Anwendung montiert und mit der VLT® Safety Option MCB 150/151 verbunden ist.
3.7.3 Kompatibilität zwischen Sicherheits- und Frequenzumrichterfunktion
Die Sicherheitsoption ist mit allen VLT AutomationDrive FC 302 Frequenzumrichtern kompatibel.
MCB150/151 kann mit den folgenden A-Optionen kombiniert werden:
• VLT® PROFIBUS DP-V1 MCA101
• VLT® DeviceNet MCA 104
• VLT® CanOpenMCA 105
• VLT® PROFINET MCA 120
• VLT® EtherNet/IP MCA 121
• VLT® Modbus TCP MCA 122
• VLT® POWERLINK MCA 123
• VLT® EtherCAT MCA 124
MCB 151 kann mit den folgenden C-Optionen kombiniert werden:
• VLT® Sensorless Safety MCB 159
Die Sicherheitsoption ist mit asynchronen und synchronen (PM-) Motoren kompatibel. Beide Motortypen können in U/f und VVC+ mit
und ohne Rückführung sowie bei FLUX-Regelung ohne Rückführung eingesetzt werden. Eine Konformität mit weiteren Motortypen
und Steuerungsmodi wird künftig umgesetzt. Kontaktieren Sie den örtlichen Händler für aktuelle Informationen.
Die folgenden Softwareversionen sind zur Verwendung von MCB150/151 als Minimum erforderlich:
38 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 41

Installationshandbuch | VLT® Safety Option MCB 150/151
• LCP-Softwareversion 7.0.
• VLT AutomationDrive FC 302 Firmwareversion 6.64.
Die folgenden Softwareversionen sind für den vollen Funktionsumfang zur Verwendung von MCB150/151 als Minimum erforderlich:
• LCP-Softwareversion 7.0.
• VLT AutomationDrive FC 302 Firmwareversion 8.30.
Alle nicht oben aufgeführten Frequenzumrichter, Optionen und Steuerungsmodus-Kombinationen sind nicht zulässig.
Funktions- und Systemübersicht
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 39
Page 42

Installationshandbuch | VLT® Safety Option MCB 150/151
Installation
4 Installation
4.1 Installieren der Option
4.1.1 Sicherheitshinweise
WA RN UN G
LEBENSGEFAHR UND GEFAHR SCHWERER VERLETZUNGEN
Bei Anschluss an das Versorgungsnetz, DC-Versorgung oder Zwischenkreiskopplung führen Frequenzumrichter
Hochspannung. Die Nichtbeachtung der Anleitungen in dieser Warnung kann zum Tod oder zu schweren Verletzungen führen!
Trennen Sie vor der Installation die Versorgungsspannung zum Frequenzumrichter.
-
Trennen Sie alle gefährlichen Spannungen von externen Steuerkreisen zu den Ein- und Ausgängen des
-
Frequenzumrichters.
Installieren Sie niemals während des Betriebs eine Optionskarte im Frequenzumrichter.
-
Zusätzlich zu herkömmlichen Installationswerkzeugen halten Sie die VLT AutomationDrive FC 302 Bedienungsanleitung
-
sowie die VLT® Motion Control Tools MCT 10-Bedienungsanleitung bereit, da sie wichtige Informationen enthalten, die in
diesem Handbuch nicht zu finden sind.
WA RN UN G
ELEKTRISCHE GEFAHR
Durch die Aktivierung von STO entsteht keine elektrische Sicherheit. Die Sicherungseinrichtung, die an den Doppelpoleingang
der Sicherheitsoption angeschlossen ist, muss die erforderliche Sicherheitsstufe für die Anwendung erfüllen, um Spannung/
Strom zur Sicherheitsoption zu unterbrechen. Dies gilt auch für die Verbindungen zwischen dem sicheren Ausgang S37 der
Sicherheitsoption und Klemme 37 am Frequenzumrichter.
Lesen und befolgen Sie die Anweisungen zum sicheren Anschluss der Sicherungseinrichtung an die Sicherheitsoption in
-
diesem Handbuch.
HI NW EI S
Die Sicherheitsoption ist ausschließlich für den Einsatz in Erweiterungssteckplatz B vorgesehen.
4.1.2 Anforderung für sicheren Einsatz
VO RS IC HT
EMV-GERECHTE INSTALLATION
Eine nicht EMV-konforme Installation kann zu Verletzungen und Geräteschäden führen.
Stellen Sie sicher, dass Installation und Verdrahtung EMV-konform sind.
-
Lesen Sie die Richtlinien in diesem Handbuch. Achten Sie ebenfalls auf Übereinstimmung mit:
• VLT AutomationDrive FC 301/FC 302-Bedienungsanleitung.
• Quickinfo-Hilfe für die Konfigurationssoftware MCT 10 Sicherheits-Plug-in.
40 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 43

e30ba206.12
1
A
B
D
Installationshandbuch | VLT® Safety Option MCB 150/151
Verwenden Sie die Sicherheitsoption ausschließlich mit den folgenden Frequenzumrichtern:
• VLT AutomationDrive FC 302 ab Softwareversion 6.64.
Installation
4.1.3 Geschützte Kabelverlegung
Wenn Kurzschlüsse und Querschlüsse bei sicherheitsbezogenen Signalen erwartet werden können und wenn sie nicht durch
vorgeschaltete Geräte erkannt werden, ist eine geschützte Verlegung nach EN ISO 13849-2 erforderlich.
4.1.4 Installieren der Option
Context:
HI NW EI S
Platzieren Sie den VLT AutomationDrive FC 302 mit Sicherheitsoption (einschließlich der Verbindung zwischen S37 (Y30/12
oder Y31/12) an VLT® Safety Option MCB150/151 und X44/12 auf der Steuerkarte) in ein IP54-Gehäuse nach IEC 60529.
A A-Optionssteckplatz
D D-Optionssteckplatz
Abbildung 18: Einbau der Sicherheitsoption
Danfoss A/S © 2019.01
B B-Optionssteckplatz
1 LCP-Gehäuse
AQ279747441421de-000201 / 130R0292| 41
Page 44

12/13
37
e30ba874.11
Installationshandbuch | VLT® Safety Option MCB 150/151
Vorgehensweise
1. Trennen Sie die Stromversorgung zum Frequenzumrichter.
2. Entfernen Sie das LCP, die Klemmenabdeckung und die LCP-Frontabdeckung vom Frequenzumrichter.
3. Schieben Sie die Sicherheitsoption in Steckplatz B ein.
4. Entfernen Sie die Drahtbrücke zwischen den Steuerklemmen 31 und 12 oder 13.
Ein Durchschneiden oder Brechen der Drahtbrücke reicht zur Vermeidung von Kurzschlüssen nicht aus.
Installation
Abbildung 19: Drahtbrücke zwischen den Klemmen 12/13 und 37
5. Verbinden Sie den sicheren Ausgang S37 an der Sicherheitsoption mit Klemme 37 auf der Steuerkarte (maximale Länge dieses
Drahts ist 100 mm (3,9 in)).
6. Verbinden Sie die Steuerleitungen mit der Sicherheitsoption und entlasten Sie das Kabel über die mitgelieferten Kabelbänder.
Befolgen Sie die allgemeinen Verdrahtungsrichtlinien in 4.1.5 Allgemeine Verdrahtungsrichtlinien.
42 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 45

e30bt340.12
1
2
Installationshandbuch | VLT® Safety Option MCB 150/151
Installation
Abbildung 20: Anschluss des abgeschirmten Kabels
7. Entfernen Sie die Aussparung in der tieferen Frontabdeckung des LCP, damit die Option unter die Frontabdeckung passt.
8. Bringen Sie die tiefere Frontabdeckung des LCP und die Klemmenabdeckung an.
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 43
Page 46

1
2
10 mm
e30bd009.11
1
2
3
4
7
6
5
10
8
9
11
12
Installationshandbuch | VLT® Safety Option MCB 150/151
Installation
Abbildung 21: Anschluss der Steuerleitungen
HI NW EI S
Die Anschlüsse sind nicht ab Werk vorverdrahtet.
9. Bringen Sie das LCP oder die Blindabdeckung an der Frontabdeckung des LCP an.
Schließen Sie die Netzversorgung am Frequenzumrichter an.
Richten Sie die Ein-/Ausgangsfunktionen in den entsprechenden Parametern ein, wie im Kapitel Sicherheits-Plug-in in der VLT®
Motion Control Tool MCT 10-Bedienungsanleitung beschrieben.
Der Inbetriebnahmeprüfbericht wird nach Einlesen der Parameter in der Sicherheitsoption automatisch über das Sicherheits-Plugin in MCT 10 erzeugt.
WA RN UN G
ORDNUNGSGEMÄSSE ERDUNG
Qualifiziertes Personal, in diesem Fall der Bediener bzw. der Elektroinstallateur, ist für eine ordnungsgemäße Erdung und
die Einhaltung der jeweils gültigen nationalen und örtlichen Sicherheitsvorschriften verantwortlich. Erfolgt die Installation
der Verkabelung nicht durch qualifiziertes Personal, kann dies zum Tod oder zu schweren Verletzungen führen!
Nur qualifiziertes Personal darf die Verkabelung dieses Geräts installieren.
-
4.1.5 Allgemeine Verdrahtungsrichtlinien
Eingänge
Verwenden Sie entsprechende Verdrahtung, um Kurzschlüsse zwischen den Eingängen oder zu einer Versorgungsleitung
auszuschließen.
44 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 47

Installationshandbuch | VLT® Safety Option MCB 150/151
Ausgang
Verwenden Sie getrennte mehradrige Kabel für Versorgungsspannungen, um Kurzschlüsse zwischen Kabeln vom Ausgang (S37) zur 24
V DC-Versorgungsleitung zu vermeiden.
Installation
HI NW EI S
Bei Kurzschlüssen ist es nicht mehr möglich, die Klemme 37 des Frequenzumrichters abzuschalten.
HI NW EI S
Steuerleitungen müssen abgeschirmt/bewehrt sein.
Siehe Kapitel Erdung abgeschirmter Steuerleitungen im VLT AutomationDrive FC 302-Projektierungshandbuch zu genauen Angaben.
Nur abgeschirmte Kabel sind zum Anschluss von Drehgebern geeignet.
HI NW EI S
Alle Signale zur Sicherheitsoption müssen mit PELV (Schutzkleinspannung - Protective extra low voltage) versorgt werden und
EN IEC 60204 erfüllen.
• Verlegen Sie empfindliche Steuerleitungen - wie Drehgeberkabel und Kabel aktiver Sicherheitskomponenten - ohne
Unterbrechung mit optimaler Abschirmung an beiden Enden.
• Schließen Sie Abschirmungen beidseitig über eine gute elektrische Verbindung und großflächig an geerdete Gehäuse an.
• Schließen Sie Kabelschirme so nah wie möglich an der Kabeleinführung des Schaltschranks an.
• Sofern möglich, sollten Kabelschirme nicht unterbrochen werden.
• Fixieren Sie Kabelschirme für Leistungskabel sowie für Signal- und Datenkabel mit den entsprechenden EMV-Schellen. Die
Schirmbügel müssen den Schirm mit der EMV-Schirmleiste oder dem Schirmstützelement für Steuerleitungen großflächig über
eine niedrig induktive Verbindung verbinden.
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 45
Page 48

1 2 3 4 5 6 7 8 9 10 11 12
e30bc315.11
e30bc325.12
MCB 150
Safe Option
SW. ver. xx. xx
Option B
130B3280
LED:
1
2
3 4
TTL Enc.
interface
Y30/
DI1 A
GND
DI1 B
ENC A
DI2 A
ENC nA
ENC B
DI2 B
ENC nB
24V
GND
S37
1
2
3
4
5 6
7
8910
11 12
Installationshandbuch | VLT® Safety Option MCB 150/151
4.1.6 Steckerbelegung
Tabelle 9: Steckerbelegung, VLT® Safety Option MCB 150
Y30 Pol Name Beschreibung
1 DI1 A Digitaleingang 1 Kanal A
2 GND Digitale GND
3 DI1 B Digitaleingang 1 Kanal B
4 ENC A Drehgeberkanal A
5 DI2 A Digitaleingang 2 Kanal A
6 ENC nA Drehgeberkanal A invertiert
7 ENC B Drehgeberkanal B
8 DI2 B Digitaleingang 2 Kanal B
9 ENC nB Drehgeberkanal B invertiert
10 24 V Stromversorgungsausgang
11 GND Versorgungsmasse
Installation
Abbildung 23: Typenschild MCB 150
12 S37 STO enable
46 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 49

1 2 3 4 5 6 7 8 9 10 11 12
e30bc315.11
e30bc326.12
MCB 151
Safe Option
SW. ver. xx. xx
Option B
130B3290
LED:
1
2
3
4
HTL Enc.
interface
Y31/
DI1 A
GND
DI1 B
ENC A
DI2 A
ENC B
DI2 B
24V
GND
S37
1
2
3
4
5 6
7
8910
11 12
GND
GND
Installationshandbuch | VLT® Safety Option MCB 150/151
Tabelle 10: Steckerbelegung, VLT® Safety Option MCB 151
Y31 Pol Name Beschreibung
1 DI1 A Digitaleingang 1 Kanal A
2 GND Digitale GND
3 DI1 B Digitaleingang 1 Kanal B
4 ENC A Drehgeberkanal A/VLT® Sensorless Safety MCB
159
5 DI2 A Digitaleingang 2 Kanal A
6 GND Digitale GND
7 ENC B Drehgeberkanal B
8 DI2 B Digitaleingang 2 Kanal B
9 GND Digitale GND
10 24 V Stromversorgungsausgang
11 GND Versorgungsmasse
Installation
12 S37 STO enable
Abbildung 25: Typenschild MCB 151
4.2 Drehgeber
4.2.1 Zulässige Kabellänge des Gebers
Die zulässige Kabellänge hängt vom ausgewählten Drehgeber ab. Das längste Kabel kann bei Verwendung bipolarer TTL-Drehgeber
erreicht werden. Einpolige HTL-Drehgeber lassen nur eine kürzere Länge zu. In diesem Fall spielt die Drehgeber-Versorgungsspannung
eine entscheidende Rolle. Die maximale Kabellänge für HTL-Drehgeber, die als einpolige Drehgeber verwendet werden (in diesem Fall
wird nur ein Signal ausgewertet) beträgt 100 m (328 ft).
Die maximale Kabellänge für TTL-Drehgeber, die als bipolare Drehgeber verwendet werden (in diesem Fall beide Signal A/nA oder
B/nB) beträgt 150 m (492 ft).
Der minimale Querschnitt des Stromversorgungsleiters ist 0,75 mm2 (18 AWG).
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 47
Page 50

e30bc374.12
A
B
24 V
GND
4
7
10
11
FC 302
MCB 151
Installationshandbuch | VLT® Safety Option MCB 150/151
Installation
HI NW EI S
Schirmen Sie alle Sensor-/Drehgeberleitungen des Näherungsschalters ab. Verbinden Sie die Abschirmung an beiden Enden
mit Masse. Schließen Sie die Masse des Drehgebers immer an die Masse des Frequenzumrichters an.
HI NW EI S
SACHSCHÄDEN
Das Einstecken oder Abziehen von Sensorverbindungen während des Betriebs kann die elektrischen Bauteile des Drehgebers
beschädigen.
Schalten Sie angeschlossene Drehgeber und die Sicherheitsoption vor Aus- oder Einstecken von Drehgeberverbindungen
-
immer spannungsfrei.
Verwenden Sie für Datensignale oder Spur A und Spur B paarig verdrillte Leitungen zur Signalübertragung gemäß RS485.
-
Wählen Sie den Kabelquerschnitt in jedem einzelnen Fall in Übereinstimmung mit dem Stromverbrauch des Drehgebers
-
und der für die Installation erforderlichen Kabellänge.
An den Drehgebereingangssignalen erfolgt eine Diagnose. Wenn die Diagnoseprüfungen des Drehgebers scheitern, tritt Fehler 99
(Sicherer Zustandsfehler) auf.
4.2.2 Verdrahtungsbeispiele für Drehgeber
Siehe Beispiele für den Anschluss von Drehgeberstromversorgung und Drehgebersignalen in Abbildung 26 und Abbildung 27.
Abbildung 26: Y31/Anschluss von Stromversorgung und Drehgebersignalen am HTL-Drehgeber (VLT® Safety Option MCB 151)
48 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 51

e30bc375.12
A
B
24 V
GND
4
7
10
11
nA
6
nB 9
FC 302
MCB 150
e30bc376.12
A
24 V
4
10
11GND
FC 302
MCB 151
Installationshandbuch | VLT® Safety Option MCB 150/151
Abbildung 27: Y30/Anschluss von Stromversorgung und differenziellen Drehgebersignalen am TTL-Drehgeber (VLT® Safety Option MCB 150)
Installation
Der TTL-Drehgeber in
Abbildung 27 wird mit 24-V-Versorgung und TTL-Ausgang angezeigt. Wenn ein Drehgeber für 5-V-Versorgung
angeschlossen werden muss, verwenden Sie eine externe 5-V-Versorgung.
4.2.3 Näherungsschalter
Ein induktiver Näherungsschalter, der bereits vorhandene mechanische Teile, z. B. ein Zahnrad, erkennt, ist eine häufig eingesetzte
Alternative zu Standarddrehgebern. Die erforderliche Mindestzahl der Impulse pro Umdrehung (PPR) ist 2 an der Motorwelle unter
Berücksichtigung der Getriebeübersetzung.
Abbildung 28: Y/31 Anschluss der VLT® Safety Option MCB 151 an den Näherungsschalter (nur HTL)
HI NW EI S
Das Kabel des Näherungsschalters muss abgeschirmt und beidseitig auf Masse gelegt sein (auf der Näherungsschalterseite und
auf der Optionsmodulseite).
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 49
Page 52

>2x S
1
2
3
n
S /2
n
e30bc314.11
Installationshandbuch | VLT® Safety Option MCB 150/151
Installation
1 Messplatte
2 Näherungsschalter
3 Scheibe (nicht leitfähiges Material)
Abbildung 29: Zahnrad für Näherungsschalter
Der Schaltabstand S, auf den halben Nennschaltabstand Sn gesetzt, entspricht ungefähr den optimalen Bedingungen im Hinblick auf
Auflösung und Taktfrequenz.
HI NW EI S
Wenn Sie einen PNP-Näherungsschalter als Drehgeberrückführung verwenden, stellen Sie Parameter 42-14 Istwerttyp auf [1]
Without direction info (Ohne Richtungsinfo) ein.
4.2.4 VLT® Sensorless Safety MCB 159
Die VLT® Sensorless Safety MCB 159-Option bietet Funktionen zur sicheren Geschwindigkeitsüberwachung (SLS, SMS) an eine VLT®
Safety Option MCB 151, ohne dass ein externes Drehzahlsignal erforderlich ist. Sie kann problemlos als Ersatz für einen Drehzahlsensor
in Anwendungen eingesetzt werden, in denen Näherungsschalter in der Regel als Drehzahlrückführung verwendet werden. Die MCB
159-Option wird mit nur einem Kabel an die MCB 151 angeschlossen.
50 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 53

e30bg831.10
e30bg837.10
A
24 V
4
10
11GND
FC 302
MCB 151
MCB 159
Installationshandbuch | VLT® Safety Option MCB 150/151
Installation
Abbildung 30: Die installierte MCB 159
4.2.4.1 Anschluss einer VLT® Sensorless Safety MCB 159 (nur MCB 151)
Vorgehensweise
1. Schließen Sie das Kabel mit TER4:ENC A markierte Kabel an der MCB 159 an Klemme 4 der MCB 151 an.
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 51
Page 54

e30bc309.12
A
B
1
10
3
12
11
12
37
20
MCB15x
e30bc310.12
1
24 V DC
3
12
11
12
37
20
MCB15x
0 V
OSSD 2
OSSD 1
Tx
Rx
A
B
1
3
12
11
12
37
20
MCB15x
e30bc311.12
10
C
B
A
Installationshandbuch | VLT® Safety Option MCB 150/151
Installation
4.3 Anwendungsbeispiele
4.3.1 Anschluss der sicheren Digitaleingänge
Dieser Abschnitt enthält Beispiele für den Anschluss des ausfallsicheren Digitaleingangs nach EN ISO 13849-1 und EN IEC 62061. Die
Beispiele gelten in Fällen, in denen alle Komponenten in einem Schaltschrank installiert sind.
A 2-Kanal-Not-Aus-Taster B Frequenzumrichter
Abbildung 32: Anschluss eines Sensors, z. B. 2-Kanal-Not-Aus-Taster oder Endschalter
A Frequenzumrichter
Abbildung 33: Anschluss eines elektronischen Sensors, z. B. Sicherheits-Lichtvorhang
A Aktor
B Schalter
C Frequenzumrichter
Abbildung 34: Anschluss eines Schließer-/Öffner-Sensors, z. B. Magnetschalter
52 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 55

1
12
11
12
37
20
MCB15x
e30bc312.12
3
24 V DC
A
b
c
0 V
D
A
10
1
3
12
11
12
37
20
MCB15x
e30bc313.12
B
Installationshandbuch | VLT® Safety Option MCB 150/151
Installation
A Sicherheits-SPS
C GND
Abbildung 35: Anschluss eines Digitalausgangsmoduls, z. B. Sicherheits-SPS
Abbildung 36: Anschluss eines Sensors, z. B. 1-Kanal-Not-Aus-Taster oder Endschalter
B Sicherheitsausgang
D Frequenzumrichter
HI NW EI S
Alle verwendeten Geräte müssen für die gewählte Kategorie/das gewählte PL oder SIL geeignet sein.
HI NW EI S
Die Verwendung eines 1-Kanal-Not-Aus-Tasters bietet keine Eingangsredundanz und keine Möglichkeit für die
Sicherheitsoption, auf Eingangskurzschlüsse zu überwachen. Ein-Kanal-Not-Aus-Taster, die mit einer Sicherheitsoption
verwendet werden, sind nur für Kategorie-2-Anwendungen nach EN ISO 13849-1 PL c oder SIL1 geeignet.
Wenn ein 1-Kanal-Not-Aus-Taster verwendet wird, müssen Vorkehrungen gegen Fehlermöglichkeiten getroffen werden, die zu einem
unsicheren Zustand führen können. Ein Beispiel für einen unsicheren Zustand könnte der Ausfall des Kontakts in einen
Kurzschlusszustand sein. Es sollte ein Schalter mit Zwangsöffnung verwendet werden, um das Risiko zu verringern, dass der Schalter
sich nicht öffnet. Ein Kurzschlussfehler verursacht einen Schaltfunktionsverlust. Dieser Fehler kann durch einen Kurzschluss zwischen
den Schalterkontakten, einen Kurzschluss zwischen den mit dem Schalter und der Sicherheitsoption verbundenen Leitungen oder
einen Kurzschluss an einer sekundären Energiequelle auftreten. Um diese Risiken zu verringern, trennen Sie die Leitungen physisch
voneinander und von anderen Energiequellen (z. B. in separaten Kabelkanälen). Gemäß der Definition der Europäischen Norm EN ISO
13849-1 könnte ein 1-Kanal-Not-Aus bei Anwendungen eingesetzt werden, bei denen PL c oder weniger (b oder a) über eine
Risikobeurteilung ermittelt wurde.
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 53
Page 56

e30bc960.11
E-Stop
MCB15x
1
10
3
12
11
12
37
20
FC
12
37
20
FC
12
37
20
FC
Installationshandbuch | VLT® Safety Option MCB 150/151
Installation
Abbildung 37: Beispiel für mehrere Frequenzumrichter in Reihe hintereinander
Bis zu 3 Frequenzumrichter können in Reihe hintereinander geschaltet werden. Die gesamte Kabellänge darf 30 m (98,4 ft) nicht
überschreiten.
54 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 57

Installationshandbuch | VLT® Safety Option MCB 150/151
Inbetriebnahme
5 Inbetriebnahme
5.1 Vor der Inbetriebnahme
5.1.1 Sicherheitsrichtlinien
Bei Inbetriebnahme/Außerbetriebnahme:
• Sichern Sie den Standort vorschriftsmäßig ab (Abschrankung, Warnhinweise, Schilder usw.). Nur qualifiziertes Personal darf das
System erstmalig oder erneut in Betrieb nehmen.
• Beziehen Sie sich auf die Richtlinien, Informationen und technischen Daten in der Bedienungsanleitung des entsprechenden
programmierbaren Steuerungssystems.
• Stellen Sie sicher, dass keine Personenschäden und/oder Sachschäden auftreten können, auch wenn sich die Anlage/Maschine
unerwartet bewegt.
VO RS IC HT
ELEKTROSTATISCHE ENTLADUNG
Elektrostatische Entladung kann Bauteile beschädigen.
Stellen Sie vor Berühren der Sicherheitsoption Entladung sicher, indem Sie z. B. eine geerdete, leitfähige Oberfläche
-
berühren oder ein Erdungsarmband tragen.
WA RN UN G
STROMSCHLAGGEFAHR
Eine Verdrahtung der elektrischen Anschlüsse am Frequenzumrichter, während Spannung angelegt ist, kann zum Tod oder zu
schweren Verletzungen führen!
Schalten Sie die Stromversorgung ab.
-
Stellen Sie sicher, dass der Schaltschrank über ein Verriegelungsschloss oder Warnschilder verfügt.
-
Schalten Sie die Spannung ERST ein, wenn das System in Betrieb genommen ist.
-
Weitere Informationen finden Sie in der VLT® AutomationDrive FC 301/FC 302-Bedienungsanleitung. Weitere Informationen zum
Sicherheits-Plug-in finden Sie in der VLT® Motion Control Tool MCT 10-Bedienungsanleitung.
5.1.2 Voraussetzungen zur Inbetriebnahme
Context:
Beachten Sie Folgendes:
• Wenn Sie die Option zum ersten Mal einrichten, stellen Sie sicher, dass Sie einen Inbetriebnahmebericht zur Hand haben. Weitere
Informationen finden Sie in der VLT® Motion Control Tool MCT 10-Bedienungsanleitung.
HI NW EI S
Es wird nur LCP SW-Version 7.0 oder aktueller unterstützt.
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 55
Page 58

Installationshandbuch | VLT® Safety Option MCB 150/151
Prerequisites:
Die folgenden Komponenten sind erforderlich, um die notwendigen Schritte zur Inbetriebnahme der Sicherheitsoption
durchzuführen:
• Installation der MCT 10 Konfigurationssoftware ab Version 4.40.
• Erfolgreicher Anschluss an VLT AutomationDrive FC 302 mit integrierter Sicherheitsoption.
• USB- oder Feldbusverbindung oder RS485-Schnittstellenadapter zur Verbindung der Steuerkarte des Frequenzumrichters mit dem
PC.
Inbetriebnahme
HI NW EI S
Stellen Sie bei Verwendung des RS485 das Protokoll für die serielle Kommunikation auf [0] FC-Profil in Parameter 8-30 FCProtokoll ein (nur über das LCP zugreifbar).
Vorgehensweise
1. Konfigurieren Sie die Sicherheitsoption im MCT 10 mit Sicherheits-Plug-in. Konfigurieren Sie nur die Sicherheits-Subfunktionen, die
mit den Eingängen der Sicherheitsoption verdrahtet sind.
2. Stellen Sie sicher, dass die Gerätenummer (Seriennummer und Bestellnummer) der Sicherheitsoption am Frequenzumrichter der
Gerätenummer der Sicherheitsoption im MCT 10 Sicherheits-Plug-in entspricht.
Stellen Sie sicher, dass der Frequenzumrichter für die Inbetriebnahme bereit ist (siehe VLT AutomationDrive FC 302
Bedienungsanleitung).
5.2 Erste Inbetriebnahme
5.2.1 Einschaltvorgang/Selbsttest
Sobald die Stromversorgung an den Frequenzumrichter angelegt worden ist, führt die Sicherheitsoption einen Selbsttest durch.
Während der Selbsttestphase leuchten alle LED auf (Lampentest) und die Meldung Safe Opt. initialized - SO RESET requested oder SO in
Self-test wird angezeigt. Nach dem Einschaltvorgang leuchten die LED entsprechend dem Gerätestatus auf.
HI NW EI S
Wenn die Versorgungsspannung der Sicherheitsoption den zulässigen Bereich überschreitet, wird die Sicherheits-Subfunktion
STO ausgelöst. Der sicherheitsbezogene Ausgang S37 wird ausgeschaltet.
56 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 59

Installationshandbuch | VLT® Safety Option MCB 150/151
Inbetriebnahme
5.2.2 Starten der Inbetriebnahme
1. Schließen Sie den Konfigurations-PC an den Frequenzumrichter oder das Motion Control-System an.
A Öffnen Sie das Sicherheits-Plug-in in MCT 10 (siehe das Kapitel Konfiguration des Plug-in für funktionale Sicherheit in der VLT®
Motion Control Tool MCT 10-Bedienungsanleitung und die Quickinfo zu weiteren Informationen).
2. Schalten Sie die Versorgungsspannungen ein.
A Schalten Sie alle Versorgungsspannungen für den Frequenzumrichter und die Sicherheitsoption ein.
Die Displays des Frequenzumrichters und der Sicherheitsoption zeigen ihre Betriebsbereitschaft an. Das Display
der Sicherheitsoption wird in 5.3 Betrieb beschrieben.
3. Einlesen der Konfigurationsdatei.
A Wählen Sie Zum Frequenzumrichter schreiben im MCT 10 Sicherheits-Plug-in aus, um die Kommunikation zwischen dem PC und
dem Frequenzumrichter herzustellen.
B Stellen Sie sicher, dass kein anderes System auf die Schnittstelle zugreift.
C Wenden Sie ein Passwort an, das ungleich dem Standardpasswort sein muss.
D Bei Mehrachsensystemen kann die Sicherheitsoption einzeln zum Einlesen ausgewählt werden. Die Konfiguration wird über die
MCT 10-Konfigurationssoftware zu den Sicherheitsoptionen verteilt.
Wenn die Konfiguration eingelesen ist, zeigt das LCP SO Custom. completed. Während des Einlesevorgangs wird Folgendes in der
Konfiguration überprüft:
• Gültigkeit der Konfigurationsdaten.
• Richtige Verdrahtung.
• Korrekte Gerätenummer (Bestellnummer). Wenn der Selbsttest erfolgreich ist, wird das Leistungsteil des Frequenzumrichters
aktiviert.
HI NW EI S
Bis zu 10 Sekunden können vergehen, bevor die Sicherheitsoption betriebsbereit ist.
5.2.3 Anpassung der Sicherheitsoption
Die folgenden LCP-Meldungen dienen zur Anzeige der verschiedenen Zustände des Anpassungsprozesses.
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 57
Page 60

e30bd125.11
Status
SO C us tom. requested
!1(1)
0 R PM None 0.00 KW
!Safe Stop [W68]
e30bd124.11
Status
SO Custom. aborted
SO RESET required!
!1(1)
0 RPM None 0.00KW
!Safe Stop [W68]
Off Remote SO Req.RESET
e30bd122.11
Status
SO Custom. completed
SO RESET required!
!1(1)
0 RPM None 0.00KW
!Safe Stop [W68]
Off Remote SO Req.RESET
Installationshandbuch | VLT® Safety Option MCB 150/151
LCP-Meldung Beschreibung
MCT 10-Anpassung der Sicherheitsoption ist angefordert.
MCT 10-Anpassung der Sicherheitsoption wurde abgebrochen.
MCT 10-Anpassung der Sicherheitsoption wurde abgeschlossen.
Inbetriebnahme
5.2.4 Einrichtung des Drehgebers
Context:
HI NW EI S
Wenn die ausgewählte Drehgeberauflösung bei HTL/TTL-Drehgebern unter 150 PPR liegt, stellen Sie einen Istwertfilterwert in
Parameter 42-15 Istwertfilter ein. Das System berechnet dann einen zulässigen Wert. Dies ist auch der Fall, wenn ein
Näherungsschalteristwert verwendet wird, bei dem die Drehgeberauflösung unter 600 PPR liegt.
HI NW EI S
Abhängig vom System kann eine Bewegung verschiedene Richtungen für den Motordrehgeber bedeuten.
HI NW EI S
Abhängig von der Anwendung kann der Motordrehgeber über ein Getriebe angeschlossen sein.
58 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 61

Installationshandbuch | VLT® Safety Option MCB 150/151
Vorgehensweise
1. Wählen Sie die Art der Rückführvorrichtung, entweder [1] Sicherheitsoption oder [0] Ohne in Parameter 42-10 Quelle gemessene
Drehzahl. Für die SS1-Zeitverzögerungsfunktion wird kein Istwertanschluss benötigt.
2. Stellen Sie die Istwertparameter für die Sicherheitsoption ein.
Stellen Sie in Anwendungen mit Rückführung oder bei Verwendung der VLT® Sensorless Safety MCB 159-Option Parameter 7-00
Drehgeberrückführung auf [11] MCB 15X ein.
3. Stellen Sie Montageart auf Motorwellenmontiert oder Anwendungsmontiert ein.
Wählen Sie eine Getriebeübersetzung zwischen 0,0001 - 32,0000 (Werkseinstellung 1) in Parameter 42-13 Getriebeübersetzung.
Stellen Sie die Getriebeübersetzung bei Verwendung der MCB 159-Option auf 1 ein.
Bei der MCT 10 Konfigurationssoftware ab Version 4.40: Falls MCB 159 vorhanden ist und verwendet wird, stellen Sie die
Montageart auf Ohne Geber ein. Überspringen Sie die Schritte 5 und 6, da automatisch korrekte Werte eingestellt werden.
4. Stellen Sie den korrekten Drehgeberwert (1-4096 PPR) in Parameter 42-11 Drehgeberauflösung ein.
Stellen Sie bei Verwendung der MCB 159-Option den korrekten Drehgeberwert auf die Hälfte der Anzahl der Motorpolpaare ein.
5. Stellen Sie Parameter 42-12 Drehgeberrichtung auf [0] Rechtslauf (Werkseinstellung) oder [1] Linkslauf ein.
Wählen Sie bei Verwendung der MCB 159-Option Rechtslauf aus.
Inbetriebnahme
6. Stellen Sie Parameter 42-14 Istwerttyp auf [0] With direction info (Mit Richtungsinfo) oder [1] Without direction info (Ohne
Richtungsinfo) ein.
Wählen Sie [1] Ohne Richtungsinfo, wenn eine VLT® Sensorless Safety MCB 159-Option oder ein Sensor des Näherungsschalters zur
Drehzahlerkennung verwendet wird.
5.2.5 Inbetriebnahmeprüfung
Das MCT 10 Sicherheits-Plug-in erstellt einen Inbetriebnahmebericht basierend auf dem Ergebnis der Inbetriebnahmeprüfung. Es
erzeugt die Sicherheitssignatur des Frequenzumrichters. Diese Funktion stellt einen Endbericht zur Verfügung, wenn die
Sicherheitsoption konfiguriert worden ist. Dieser Bericht dient als Hilfsmittel bei der sicheren Inbetriebnahme und bestätigt, dass alle
Sicherheits-Subfunktionen betriebsfähig sind. Der Inbetriebnahmebericht kann entweder gedruckt oder in eine PDF-Datei konvertiert
werden.
Ziel der Prüfung ist der Nachweis der ordnungsgemäßen Implementierung (Erkennungsmaßnahmen für forcierte inaktive Fehler) und
die Untersuchung der Reaktion bestimmter Überwachungsfunktionen auf die explizite Eingabe von Werten außerhalb der
Toleranzgrenzen.
WA RN UN G
UNERWARTETES VERHALTEN
Ein Modifizieren oder Ändern von Hardware- bzw. Softwarekomponenten kann zu einem unerwarteten Verhalten des
Frequenzumrichters führen. Dieses Verhalten kann zum Tod oder zu schweren Verletzungen führen!
Stellen Sie sicher, dass alle Schutzvorrichtungen vor der Inbetriebnahme des Systems und der Aktivierung des
-
Frequenzumrichters geschlossen sind.
Halten Sie Personal aus dem Gefahrenbereich fern.
-
Führen Sie eine Teil- oder vollständige Inbetriebnahmeprüfung durch (obligatorisch).
-
Bevor Personal erlaubt wird, den Gefahrenbereich wieder zu betreten, müssen Sie die stetige Steuerungsreaktion auf kurze
-
Bewegung der Frequenzumrichter in Vorwärts- und Rückwärtsrichtung prüfen.
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 59
Page 62

Installationshandbuch | VLT® Safety Option MCB 150/151
EN IEC 61508, EN IEC 62061 und EN ISO 13849 verlangen, dass der Endmonteur der Maschine den Betrieb der Sicherheitsfunktion mit
einer Inbetriebnahmeprüfung bestätigt. Die Inbetriebnahmeprüfungen für die Standardsicherheits-Subfunktionen Sicherer Stopp des
Frequenzumrichters werden in den Handbüchern des Frequenzumrichters beschrieben. Die Prüfungen für die optionalen SicherheitsSubfunktionen werden im Inbetriebnahmebericht beschrieben, die vom MCT 10 Sicherheits-Plug-in erzeugt wird. Die
Inbetriebnahmeprüfung muss durchgeführt werden:
• beim ersten Start der Sicherheits-Subfunktion.
• nach Änderungen, die die Sicherheits-Subfunktion betreffen (Verdrahtung, Bauteile, Einstellungen usw.)
• nach Wartungsarbeiten, die die Sicherheits-Subfunktion betreffen.
Inbetriebnahme
5.3 Betrieb
WA RN UN G
UNERWARTETES VERHALTEN
Zahlreiche gespeicherte Daten oder Einstellungen bestimmen das Verhalten des Frequenzumrichtersystems. Ungeeignete
Einstellungen oder Daten können unerwartete Bewegungen oder Reaktionen auf Signale auslösen und
Überwachungsfunktionen deaktivieren. Befolgen Sie die nachstehenden Anweisungen, um die Gefahr von Tod, schweren
Verletzungen oder Schäden am Gerät zu vermeiden!
Betreiben Sie das Frequenzumrichtersystem NICHT mit unbekannten Einstellungen oder Daten.
-
Überprüfen Sie, ob die gespeicherten Daten und Einstellungen korrekt sind.
-
Führen Sie bei der Inbetriebnahme sorgfältig Tests aller Betriebszustände und potenziellen Fehlersituationen durch.
-
Überprüfen Sie die Funktionen nach Austausch des Produkts sowie auch nach Änderung der Einstellungen oder Daten.
-
Starten Sie das System nur, wenn sich keine Personen oder Hindernisse im Gefahrenbereich befinden.
-
Voraussetzungen für den Normalbetrieb sind:
• Inbetriebnahme ist abgeschlossen.
• Die Sicherheitsoption enthält die Konfigurationsdaten.
• Die Sicherheits-Subfunktionen wurden getestet.
• LED1, LED2 und LED4 leuchten.
Während des Betriebs:
• wird jede Pulsflankenänderung am sicheren Eingang der Sicherheitsoption überwacht.
• werden die Sicherheits-Subfunktionen entsprechend der Konfiguration ausgeführt.
60 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 63

Installationshandbuch | VLT® Safety Option MCB 150/151
Allgemeine Parametereinstellung
6 Allgemeine Parametereinstellung
6.1 Konfiguration
6.1.1 Allgemeine Parametereinstellung
Siehe 6.3 Parameterliste zur Konfiguration eines Betriebsvorgangs der Sicherheitsoption. Die Einrichtung erfolgt über das MCT 10
Sicherheits-Plug-in.
Drehzahlüberwachung durch die Sicherheitsoption
Wenn ein externer Drehgeber mit der Sicherheitsoption verbunden und in Parameter 42-10 Quelle gemessene Drehzahl ausgewählt ist,
ist die Drehzahlüberwachung jederzeit aktiv, unabhängig davon, ob eine Sicherheitsfunktion angefordert wird oder nicht. Wenn
jedoch ein STO ausgelöst wird (entweder direkt oder als Folge eines sicheren Stopp 1), unterbricht sie die Drehzahlüberwachung.
Drehgeberkonfiguration
Zur Festlegung der Art der Rückführung, die von der Sicherheitsoption verwendet wird, wählen Sie [1] Safe option (Sicherheitsoption)
in Parameter 42-10 Quelle gemessene Drehzahl.
6.1.2 Konfiguration der Sicherheits-Subfunktionen
Die Sicherheits-Subfunktionen, die von der Sicherheitsoption ausgeführt werden, werden im MCT 10 Sicherheits-Plug-in definiert:
• Konfigurationen der Sicherheits-Subfunktionen.
• Einstellung von Grenzwerten, Bremsrampen für die Sicherheitsfunktionen, Überwachung von Bewegungsabläufen.
HI NW EI S
Führen Sie immer die erforderliche Inbetriebnahmeprüfung durch. Der Inbetriebnahmeprüfbericht wird nach Einlesen der
Parameter in der Sicherheitsoption automatisch über das Sicherheits-Plug-in in MCT 10 erzeugt.
Einlesen der Konfiguration in der Sicherheitsoption:
• Bei Systemen mit nur einem Frequenzumrichter über die RS486/USB-Schnittstelle des Frequenzumrichters.
• Bei vernetzten Systemen über die RS485- oder Feldbus-Schnittstelle des MCT 10 Sicherheits-Plug-in; das Steuerungssystem gibt die
Konfiguration an die jeweilige Sicherheitsoption weiter.
• Die Gültigkeit der Konfiguration wird überprüft, wenn sie eingelesen wird.
Weitere Informationen zu Konfiguration und Einstellparametern für die Sicherheits-Subfunktionen sind in der Online-Hilfe des MCT 10
Sicherheits-Plug-in und in der VLT® Motion Control Tool MCT 10-Bedienungsanleitung verfügbar.
Die Sicherheitsoption wird mit der Inbetriebnahmesoftware MCT 10 Konfigurationssoftware über ein Sicherheits-Plug-in konfiguriert.
Das Sicherheits-Plug-in in der Inbetriebnahmesoftware ist ab Version 3.18 standardmäßig enthalten und alle Funktionen stehen ab
MCT 10 Konfigurationssoftware Version 4.40 zur Verfügung.
Die Inbetriebnahmesoftware enthält die folgenden Menüoptionen für die Sicherheitsoption:
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 61
Page 64

Installationshandbuch | VLT® Safety Option MCB 150/151
• Allgemeine Drehzahlüberwachung.
• Sicherer Eingang.
• Sicherer Stopp 1.
• Safely Limited Speed (Sicher begrenzte Drehzahl).
• Safe Maximum Speed.
• Parameter.
• Status.
Die Menüoptionen werden näher in der VLT® Motion Control Tool MCT 10-Bedienungsanleitung beschrieben.
Die Menüoption Status zeigt Folgendes:
• Aktuelle Signalzustände der Ein- und Ausgänge.
• Betriebsmodus der Option
• Aktive Sicherheits-Subfunktion.
Die Zustände der Ein- und Ausgänge können über die Inbetriebnahmesoftware nicht geändert werden.
Allgemeine Parametereinstellung
6.1.3 Passwortschutz
Schützen Sie die Systemkonfiguration mit einem Passwort. Ein Passwort muss nur beim Ändern von Parametern der Sicherheitsoption
(Schreiben zur Option) eingegeben werden.
Das Standardpasswort ist 12345678.
Ändern Sie das Standardpasswort der Sicherheitsoption vor dem Einlesen der Parameterwerte einer Sicherheitsoption mit
Werkseinstellungen. Nur Personen, die das Passwort kennen, können die Parameterwerte der Sicherheitsoption ändern.
HI NW EI S
Jeglicher Missbrauch des Passworts kann zu großen Sicherheitsproblemen führen.
HI NW EI S
Zum Zugriff auf die Inbetriebnahmeparameter der Sicherheitsoption wird kein Passwort benötigt. Das Passwort ist erforderlich,
wenn die Parameter über In Frequenzumrichter schreiben in die Option eingelesen werden.
Das Passwort muss 8 Zeichen lang sein und es sind Groß- und Kleinschreibung zu beachten. Alphanumerische Zeichen und Symbole
sind für das Passwort zulässig.
Die Sicherheitsoption prüft das eingegebene Parameterpasswort. Ändern Sie das Parameterpasswort der Sicherheitsoption über die
Menüoption Passwort ändern. Ändern Sie das Passwort der Sicherheitsoption, wenn es Anzeichen von Manipulation gibt.
62 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 65

Installationshandbuch | VLT® Safety Option MCB 150/151
Allgemeine Parametereinstellung
6.1.3.1 Zurücksetzen des Passworts
Context:
HI NW EI S
Durch das Zurücksetzen des Passworts werden alle Optionsparameter auf ihre jeweilige Werkseinstellung zurückgesetzt.
Vorgehensweise
1. Wählen Sie im Menü Administration Reset aus.
2. Wählen Sie Ja, ich möchte die Konfiguration der Sicherheitsoption im Frequenzumrichter quittieren.
3. Geben Sie das Standardpasswort ein (12345678).
4. Klicken Sie auf Reset.
5. Klicken Sie bei der sich öffnenden Aufforderung auf Ja.
6. Ändern Sie das Passwort der Sicherheitsoption.
6.2 Reset und Status über Feldbus
6.2.1 Reset der Sicherheitsoption und der anstehenden Sicherheitsfunktion
Es gibt 2 verschiedene Methoden, ein Reset der Sicherheitsoption und der anstehenden Sicherheitsfunktion durchzuführen. Die
Konfiguration von Parameter 42-31 Reset-Quelle ist dafür entscheidend, welche Methode zu verwenden ist.
Wenn Parameter 42-31 Reset-Quelle auf [0] Drive Reset (FU-Reset) eingestellt ist, ist ein Reset entsprechend dem ausgewählten
Steuerwortprofil erforderlich.
HI NW EI S
Auch die frequenzumrichterspezifischen Alarme werden quittiert.
Wenn Parameter 42-31 Reset-Quelle auf [1] Drive Safe Reset (Sicherer FU-Reset) eingestellt ist, konfigurieren Sie [3] Safe Option Reset (Reset
Sicherheitsoption) in Parameter 8-14 Konfigurierbares Steuerwort STW.
HI NW EI S
Die frequenzumrichterspezifischen Alarme werden nicht quittiert und das Steuerwortprofil wird überschrieben.
6.2.2 Abruf des Status der Sicherheitsoption
Eine Untermenge des Status der Sicherheitsoption kann als Teil des Zustandsworts abgerufen werden. Dies ändert das Verhalten, das
als Steuerwortprofil ausgewählt ist.
Konfigurieren Sie [91] Sichere Opt. Reset. erford. und [90] Sicherheitsfunktion aktiv in Parameter 8-13 Zustandswort Konfiguration auf:
• anzugeben, dass ein Reset der Sicherheitsoption erforderlich ist.
• anzugeben, dass eine Sicherheitsfunktion aktiv ist.
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 63
Page 66

Installationshandbuch | VLT® Safety Option MCB 150/151
Parameter 42-80 Status der Sicherheitsoption gibt den aktuellen Status (aktive Sicherheitsfunktion, Anforderungen und Fehlernummer)
der Sicherheitsoption an und ist als Anzeigeparameter über eine Schnittstelle zugänglich oder als Leseprozessdaten für einen
bestimmten Feldbus konfigurierbar.
Allgemeine Parametereinstellung
HI NW EI S
Nur die aktive Sicherheitsfunktion wird im Status der Sicherheitsoption angegeben.
Tabelle 11: Erläuterung der Zustandsbits für den Status der Sicherheitsoption
Bit Beschreibung
0 Normalbetrieb
1 PUST
2 STO aktiv
3 SS1-a aktiv
4 SS1-b aktiv
5 SLS-a aktiv
6 SLS-b aktiv
7 Safe Maximum Speed aktiv
8 Reserviert für weitere SP
9 Reserviert für weitere SP
10 Reserviert für weitere SP
11 Int_Fehler
12 Reset erforderlich
13 Anstehender ausfallsicherer Zustand
14 Ext_Fehler
15 Sicherheitsfunktion anstehend
16 Allgemeiner Reset
17 Anpassung_bestätigt
18 Anpassung_abgebrochen
19 Anpassung_angefordert
20 Aufhebung der Drehzahlüberwachung
21 PUST-Warnung
22 DI_1_Offline_Warnung
23 DI_2_Offline_Warnung
24 Fehlercode
25 Fehlercode
26 Fehlercode
27 Fehlercode
64 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 67

Installationshandbuch | VLT® Safety Option MCB 150/151
Allgemeine Parametereinstellung
Bit Beschreibung
28 Fehlercode
29 Fehlercode
30 Fehlercode
31 Fehlercode
Tabelle 12: Bitfunktionen
Bitanzahl Bitname Wert Funktion
00 Sicherheits-Subfunktion inaktiv/aktiv 0 Sicherheits-Subfunktion, ausfallsichere Reaktion ist aktiv
oder anstehend oder Warnung ist aktiv.
1 Normalbetrieb.
01 Selbsttest bei Netz-Einschaltung 1 Sicherheitsoption ist im PUST-Zustand.
02 Safe Torque Off 0 Safe Torque Off ist nicht aktiv.
1 Safe Torque Off ist aktiv.
03 Sicherer Stopp 1 a 0 Sicherer Stopp 1 a ist nicht aktiv.
1 Sicherer Stopp 1 a ist aktiv.
04 Sicherer Stopp 1 b 0 Sicherer Stopp 1 b ist nicht aktiv.
1 Sicherer Stopp 1 b ist aktiv.
05 Sicher begrenzte Geschwindigkeit a 0 Sicher begrenzte Geschwindigkeit-a ist nicht aktiv.
1 Sicher begrenzte Geschwindigkeit-a ist aktiv.
06 Sicher begrenzte Geschwindigkeit b 0 Sicher begrenzte Geschwindigkeit-b ist nicht aktiv.
1 Sicher begrenzte Geschwindigkeit-b ist aktiv.
07 Safe Maximum Speed 0 Safe Maximum Speed ist inaktiv.
1 Safe Maximum Speed ist aktiv
08–10 Reserviert für zukünftige Sicherheits-Subfunk-
– –
tionen.
11 Interner Fehler 0 Kein interner Fehler ist aktiv.
1 Interner Fehler ist aktiv.
12 Reset 0 Kein Reset der Sicherheitsoption ist erforderlich.
1 Reset der Sicherheitsoption ist erforderlich.
13 Anstehender ausfallsicherer Zustand 0 Kein anstehender ausfallsicherer Zustand.
1 Sicherheitsoption ist bei jedem Einschaltvorgang in diesem
Zustand.
14 Externer Fehler 0 Kein externer Fehler ist aktiv.
1 Externer Fehler ist aktiv.
15 Sicherheitsfunktion anstehend 0 Keine Sicherheitsfunktion anstehend.
1 Sicherheitsfunktion anstehend.
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 65
Page 68

Installationshandbuch | VLT® Safety Option MCB 150/151
Bitanzahl Bitname Wert Funktion
16 Allgemeiner Reset 0 Es erfolgt keine Zustandsänderung.
1 Ein allgemeiner Reset erfolgt.
17 Anpassung bestätigt 0 Es erfolgt keine Zustandsänderung.
1 Anpassung bestätigt.
18 Anpassung abgebrochen 0 Es erfolgt keine Zustandsänderung.
1 Anpassung abgebrochen.
19 Anpassung angefordert 0 Es erfolgt keine Zustandsänderung.
1 Anpassung wird angefordert.
20 Aufhebung der Drehzahlüberwachung 0 Es erfolgt keine Zustandsänderung.
1 Drehzahlüberwachung wurde aufgehoben – siehe Fehler-
code.
21 Warnung zum Selbsttest bei Netz-Einschaltung 0 Es erfolgt keine Zustandsänderung.
1 Warnung wird zum Selbsttest bei Netz-Einschaltung ausge-
geben.
Allgemeine Parametereinstellung
22 Digitaleingang 1 Offline-Test Warnung 0 Es erfolgt keine Zustandsänderung.
1 Digitaleingang 1 Offline-Test Warnung.
23 Digitaleingang 2 Offline-Test Warnung 0 Es erfolgt keine Zustandsänderung.
1 Digitaleingang 2 Offline-Test Warnung.
24–31 Ursachen für interne oder externe Fehler. Siehe Fehlercode.
HI NW EI S
Parameter 42-81 Status 2 der Sicherheitsoption gibt an, welcher Digitaleingang der Sicherheitsoption entweder aktiviert oder im
Zustand „Pending“ bzw. „Blank Initial State“ ist.
Tabelle 13: Erläuterung der Zustandsbits für den Status 2 der Sicherheitsoption
Bit Beschreibung Zustand
0 Sicherheitsstatus Digitaleingang 1 00 - inaktiv
1
2 Sicherheitsstatus Digitaleingang 2 00 - inaktiv
3
01 - aktiv
10 - Pending
01 - aktiv
10 - Pending
4 „Blank Initial State“ 0 (inaktiv)/1 (aktiv)
5 Nicht verwendet
31
66 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 69

Installationshandbuch | VLT® Safety Option MCB 150/151
Tabelle 14: Bitfunktionen, Status 2
Bitanzahl Bitname Wert Funktion
00-01 Sicherheitsstatus Digitaleingang 1 00 Inaktiv.
01 Aktiv.
10 Anstehend.
02-03 Sicherheitsstatus Digitaleingang 2 00 Inaktiv.
01 Aktiv.
10 Anstehend.
04 „Blank Initial State“ 0 Sicherheitsoption ist konfiguriert.
1 Sicherheitsoption ist im „Blank Initial State“.
05–31 Reserviert für zukünftige Verwendung
Allgemeine Parametereinstellung
6.3 Parameterliste
Tabelle 15: Parameter der Sicherheitsoption
Parameter Wertbereich/
verfügbare Optionen
42-0* Drehzahlleistung
42-00 Speed Deviation Timer
(Drehzahlabweichungs-Timer)
42-01 Fast Ramp
(Schnelle
Rampe)
42-1* Drehzahlüberwachung
42-10 Quelle gemessene Drehzahl
42-11 Drehgeberauflösung
10–5000 ms 10 ms Zur Eingabe der Zeit, für die eine Drehzahlabwei-
[0] Nein [0] Nein Wählen Sie [1] Ja, wenn eine schnelle Rampe mit
[1] Ja
[0] Keine [1] Sicher-
[1] Sicherheitsoption
1–4096 PPR (als
Option bei HTLDrehgeber)
1–10000 PPR (als
Option bei TTLDrehgeber)
Werkseinstellung
heitsoption
1024 PPR Auflösung des Drehgebers oder Näherungsschal-
Beschreibung Umrech-
chung über 120 U/min zwischen der geschätzten
und der gemessenen Drehzahl zulässig ist.
geringer Auflösung der gemessenen Drehzahl erforderlich ist.
Die Quelle der Drehzahlrückführung. 0 u_int8
ters der mit der MCB150 TTL oder MCB151 HTL
verbunden ist.
Datennungsindex
1 u_int16
– u_int8
0 u_int16
typ
42-12 Drehgeberrichtung
42-13 Getriebeübersetzung
Danfoss A/S © 2019.01
[0] Nur Rechts [0] Nur
[1] Linkslauf
0.0001–32.0000 1 Übersetzung zwischen Motordrehzahl und Dreh-
Rechts
Mit diesem Parameter kann die Logik der GeberDrehrichtung invertiert werden, ohne dass die
Verkabelung des Gebers geändert werden muss.
geberdrehzahl. Anmerkung: Nur bei Getriebemontage verwendet.
AQ279747441421de-000201 / 130R0292| 67
– u_int8
-4 u_int32
Page 70

Installationshandbuch | VLT® Safety Option MCB 150/151
Allgemeine Parametereinstellung
Parameter Wertbereich/
verfügbare Optionen
42-14 Istwerttyp [0] Mit Richtung-
sinfo
[1] Ohne Richtungsinfo
42-15 Istwertfilter
42-16 Mounting
Type (Montageart)
0,01–200,00 Hz 200 Hz Frequenz des Istwertfilters. Die Werkseinstellung
[0] Motor Shaft
Mounted (An Motorwelle montiert)
[1] Application
Mounted (An der
Anwendung
montiert)
Werkseinstellung
[0] Mit
Richtungsinfo
[0] Motor
Shaft
Mounted
(An Motorwelle montiert)
Beschreibung Umrech-
nungsindex
Die Rückführung kann mit oder ohne Richtungsinformationen übermittelt werden. Für TTL/HTLDrehgeber sind Richtungsinformationen verfügbar. Für Näherungsschalter wählen Sie [1] Ohne
Richtungsinfo.
ist 200 Hz (Aus), wenn die Drehgeberauflösung
höher als 150 PPR ist. Ein Filterwert von 200 Hz
bedeutet, dass das Filter ausgeschaltet ist. Basierend auf der gegebenen Drehgeberauflösung, Getriebeübersetzung und dem gegebenen Rückführungstyp wird empfohlen, ob das Filter verwendet werden soll oder nicht.
Montageort, an dem die gemessene Drehzahlquelle installiert ist.
– u_int8
-2 u_int16
– u_int8
Daten-
typ
[2] Ohne Geber
42-18 Zero
Speed-Timer
42-19 Zero
Speed Limit
42-2* Sicherer Eingang
42-20 Sicherheitsfunktion
42-21 Typ [0] NCNC [0] NCNC NCNC (Öffner/Öffner), antivalent (Öffner/
42-22 Diskrepanzzeit
42-23 Stabile
Signalzeit
0–10000 h 8760 h Der Zeitraum, in dem die Option unter
120 U/min liegen darf, wenn SLS aktiv ist, bevor
STO aktiviert wird.
Fest 120 U/min 67 u_int16
[0] STO [0] STO Dies kann eine der Sicherheits-Subfunktionen
[1] SS1-a
[2] SS1-b
[3] SLS-a
[4] SLS-b
[5] Deaktiviert
[1] Antivalent
[2] KM
0–5000 ms 10 ms Eine einstellbare Filterzeit verhindert Fehler, die
0–5000 ms 10 ms Ein einstellbares Signalfilter in der Sicherheitsop-
oder deaktiviert sein. Anmerkung: Beide sicheren
Eingänge können NICHT gleichzeitig deaktiviert
sein.
Schließer) oder 1NC (Öffner).
durch temporäre Diskrepanz verursacht werden.
tion unterdrückt temporäre Signaländerungen
über das Testimpulsmuster.
74 u_int16
– u_int8
– u_int8
-3 u_int16
-3 u_int16
68 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 71

Installationshandbuch | VLT® Safety Option MCB 150/151
Allgemeine Parametereinstellung
Parameter Wertbereich/
verfügbare Optionen
42-24 Wiederanlauf
42-3* Allgemeines
42-30 Reaktion
auf externe Fehler
42-31 ResetQuelle
42-33 Parametersatzname
[0] Manuell [0] Manuell Bei einer aktivierten Sicherheits-Subfunktion
[1] Automatisch
[0] STO [0] STO Sicherheits-Subfunktion, die bei einem externen
[1] SS1-a
[2] SS1-b
[0] Drive Reset
(FU-Reset)
[1] Drive Safe Reset (Sicherer FUReset)
[2] Safe Option
DI1_A (Sicherheitsoption DI1_A)
Sichtbarer String,
Länge: 8
Werkseinstellung
[0] Drive
Reset (FUReset)
SafeSet1 Name des sicheren Parametersatzes (muss 8 Zei-
Beschreibung Umrech-
kann die Sicherheitsoption automatisch neu
starten oder auf ein RESET-Signal vom Benutzer
warten.
Fehler ausgeführt wird.
Quelle für den RESET der Sicherheitsoption. Kann
entweder am Optionseingang Digitaleingang 2,
über Feldbus oder Digitaleingang am Frequenzumrichter oder über das LCP ausgeführt werden. Durch Auswahl von Sicherer FU-Reset wird
nur die Sicherheitsoption quittiert.
chen lang sein, um den Fehler „Bad Customization data“ zu vermeiden).
Datennungsindex
– u_int8
– u_int8
– u_int8
typ
42-4* SS1
42-40 Typ [0] Delay (Verzö-
gerung)
[1] Ramp (slope)
(Rampe (Steigung))
[2] Ramp (time)
(Rampe (Zeit))
42-41 Rampenprofil
42-42 Verzögerungszeit
42-43 Delta T 0–99% 2% Δ T wird von der Zeit in Parameter 42-42 Verzö-
42-44 Verzögerungsrate
42-45 Delta V 1–10000 U/min 120 U/min Toleranz zwischen berechneter und tatsächlicher
42-46 Zero
Speed
[0] Linear [0] S-
[2] S-Rampe
konst. Zeit
0,1–3600,0 s 1,0 s Zeit, bis STO aktiviert wird. -1 u_int16
1–30000 UPM/s 1500
1–600 U/min 10 U/min Wenn diese Drehzahl erreicht wird, aktiviert die
[0] Delay
(Verzögerung)
Rampe
konst. Zeit
UPM/s
Die Art der SS1 Sicherheits-Subfunktion. – u_int8
Das Rampenprofil für eine SS1-Verzögerung kann
entweder als linear oder S-Rampe angegeben
werden.
gerungszeit subtrahiert, um den Motor zum
Stopp zu bringen, bevor der Timer abläuft.
Verzögerungsrate für den SS1-steigungsbasierten Rampentyp.
Drehzahl, die die Sicherheitsoption zulässt.
Sicherheitsoption die STO.
– u_int8
0 u_int8
0 u_int16
67 u_int16
67 u_int16
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 69
Page 72

Installationshandbuch | VLT® Safety Option MCB 150/151
Allgemeine Parametereinstellung
Parameter Wertbereich/
verfügbare Optionen
42-47 Digitalpoti
Rampenzeit
42-48 S-Form
Ende bei Verzög.
Start
42-49 S-Form
Ende bei Verzög.
Ende
42-5* SLS
42-50 Abschaltdrehzahl
42-51 Drehzahlgrenze
0,1–3600,0 s 1,0 s Zeit zur Rampe auf 0 U/min. -1 u_int16
1 bis (100 - 42-49
S-Form Ende bei
Verzög. Ende)%
1 bis (100 42-48)%
(42-51 + 1) bis
10000 U/min
0 bis (42-50 - 1)
U/min
Werkseinstellung
50% Der Anteil der gesamten Rampe-ab-Zeit (Parame-
50% Der Anteil der gesamten Rampe-ab-Zeit (Parame-
270 U/min Die Drehzahl, bei der die fehlersichere Reaktion
150 U/min Maximal zulässige Drehzahl, wenn die SLS-Funk-
Beschreibung Umrech-
ter 42-42 Verzögerungszeit), wenn das Verzögerungsmoment zunimmt. Ein hoher Prozentsatz
minimiert ruckartige Drehmomentänderungen
in der Anwendung, da hierbei der Erschütterungsausgleich höher ist.
ter 42-42 Verzögerungszeit), wenn das Verzögerungsmoment abnimmt. Ein hoher Prozentsatz
minimiert ruckartige Drehmomentänderungen
in der Anwendung, da hierbei der Erschütterungsausgleich höher ist.
aktiviert wird. Dies sollte der Wert aus Parameter
42-51 Drehzahlgrenze plus eine Toleranz sein.
tion aktiv ist.
Datennungsindex
0 u_int8
0 u_int8
67 u_int16
67 u_int16
typ
42-52 Fehlersichere Reaktion
42-53 Startrampe
42-54 Rampenzeit ab
42-7* SMS
42-70 Activation
(Aktivierung)
42-71 Cut Off
Speed (Abschaltdrehzahl)
42-8* Status
42-80 Status der
Sicherheitsoption
42-81 Status 2
der Sicherheitsoption
[0] STO [0] STO Sicherheits-Subfunktion, die aktiviert wird, wenn
[1] SS1-a
[2] SS1-b
[0] Nein [0] Nein Wenn die Drehzahl bei Aktivierung von SLS höh-
[1] Ja
0,1–3600,0 s 1,0 s Rampe-ab-Zeit für Startrampe. -1 u_int16
[0] Inaktiv [0] Inaktiv Aktivieren oder Deaktivieren von SMS (Safe Maxi-
[1] Aktiviert
120–20000 U/min 1500
U/min
0–4294967295 0 Zeigt das Zustandswort der Sicherheitsoption als
0–2147483647 0 Zeigt Status 2 der Sicherheitsoption als hexadezi-
die Drehzahl die Grenze überschreitet. Nur bei
SLS.
er als die Drehzahlgrenze ist, erfolgt eine Rampeab zur Drehzahlgrenze (Ja) oder eine Aktivierung
eines STO (Nein).
mum Speed).
Maximal zulässige Drehzahl – u_int16
hexadezimaler Wert.
malen Wert. Zum Beispiel enthält er DI1, DI2 und
den Status „Blank Initial State“.
– u_int8
– u_int8
67 u_int8
0 u_int32
0 u_int32
70 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 73

Installationshandbuch | VLT® Safety Option MCB 150/151
Allgemeine Parametereinstellung
Parameter Wertbereich/
verfügbare Optionen
42-85 Aktive Sicherheitsfunkt.
42-86 Safe Option Info
42-89 Version
der Anpassungsdatei
42-9* Spezial
[0] STO Keine Zeigt die zur Zeit aktive sichere Funktion. Kann
[1] SS1-a
[2] SS1-b
[3] SLS-a
[4] SLS-b
0 - Ohne, wenn
keine sichere
Funktion aktiv ist
0.00–99.99 1.00 Speichert die Anpassungsdateiversion. -2 u_int16
Werkseinstellung
Beschreibung Umrech-
am LCP verwendet werden.
HI NW EI S
Kann nur in Parametern 0-20 bis 0-22 ausgewählt werden.
0 Zeigt Informationen über die Sicherheitsoption.
Kann am LCP verwendet werden.
HI NW EI S
Kann nur in Parameter 0-23 Displayzeile 2
und Parameter 0-24 Displayzeile 3 ausgewählt werden.
Datennungsindex
– u_int8
0
typ
42-90 Sicherheitsoption neu
starten
Eine umfassende Parameterliste enthält die VLT AutomationDrive FC 302 Bedienungsanleitung.
[0] Nein [0] Nein Möglichkeit, die Option nach einem internen
[1] Ja
Fehler neu zu starten, ohne einen Aus-/Einschaltzyklus des Frequenzumrichters durchzuführen.
– u_int8
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 71
Page 74

Installationshandbuch | VLT® Safety Option MCB 150/151
Wartung und Reparatur
7 Wartung und Reparatur
7.1 Updates, Wartung und Änderungen
HI NW EI S
UPDATES DER FIRMWARE
Wenden Sie sich an Danfoss, um ein Update der Firmware zu erhalten.
VO RS IC HT
FIRMWARE-ÄNDERUNGEN
Nicht autorisierte Änderungen an der Firmware können zu Verletzungen und Geräteschäden führen und haben zudem ein
Erlöschen der Garantie zur Folge. Darüber hinaus übernimmt Danfoss keine Haftung für eventuelle Folgen, die Änderungen auf
die funktionale Sicherheit haben können.
Nur Danfoss ist befugt, die Firmware zu ändern.
-
VO RS IC HT
ÄNDERUNGEN AM GERÄT
Nicht autorisierte Änderungen am Gerät können zu Verletzungen und Geräteschäden führen und haben zudem ein Erlöschen
der Garantie zur Folge. Darüber hinaus übernimmt Danfoss keine Haftung für eventuelle Folgen, die Änderungen auf die
funktionale Sicherheit haben können.
Nur Danfoss darf Hardware-Änderungen an der Sicherheitsoption vornehmen.
-
WA RN UN G
JÄHRLICHE PRÜFUNG
Die Funktionen der Sicherheitsoption müssen jährlich getestet werden, um die Gefahr von Tod oder Verletzungen zu
vermeiden.
Testen Sie die Sicherheits-Subfunktion.
-
Schalten Sie die in der Sicherheitskette verwendeten Optionen ab.
-
7.2 Reparatur
WA RN UN G
STROMSCHLAGGEFAHR
Der Anschluss oder das Entfernen der Sicherheitsoption bei an die Netzspannung angeschlossenem Softstarter kann zu
Körperverletzung führen.
Trennen Sie vor dem Anschluss oder Entfernen der Sicherheitsoption den Frequenzumrichter von der Netzspannung.
-
72 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 75

Installationshandbuch | VLT® Safety Option MCB 150/151
Wartung und Reparatur
HI NW EI S
Ausschließlich Danfoss ist autorisiert, Reparaturen an der Sicherheitsoption vorzunehmen. Eine defekte Optionskarte muss an
Danfoss zurückgesendet werden.
7.3 Austausch der Sicherheitsoption
7.3.1 Vor dem Ausbau der Sicherheitsoption
Vorgehensweise
1. Speichern Sie alle Parameter der Sicherheitsoption, siehe VLT® Motion Control Tool MCT 10-Bedienungsanleitung.
2. Kopieren Sie die vorhandene Geräteeinstellung.
7.3.2 Ausbau der Sicherheitsoption
Context:
HI NW EI S
Der Frequenzumrichter erzeugt nach Ausbau der Sicherheitsoption eine Fehlermeldung.
HI NW EI S
Wenn die ausgebaute Sicherheitsoption in einem anderen Frequenzumrichter eingebaut wird, gibt der Frequenzumrichter
eine Warnung aus und zeigt die Parameterauswahl der Sicherheitsoption an. Wählen Sie die Sicherheitskonfiguration entweder
vom Frequenzumrichter oder von der Sicherheitsoption.
Vorgehensweise
1. Trennen Sie vor Einstecken oder Ausbau der Option alle Stromversorgungen (Versorgungsspannung der Leistungsstufe und
Reglerversorgung).
2. Stellen Sie sicher, dass keine Spannung vorhanden ist.
3. Bauen Sie die Sicherheitsoption entsprechend den Anweisungen im Kapitel Installation in der VLT AutomationDrive FC 302-
Bedienungsanleitung aus.
7.3.3 Austauschen der Sicherheitsoption
Context:
WA RN UN G
STROMSCHLAGGEFAHR
Der Anschluss oder das Entfernen der Sicherheitsoption bei an die Netzspannung angeschlossenem Softstarter kann zu
Körperverletzung führen.
Trennen Sie vor dem Anschluss oder Entfernen der Sicherheitsoption den Frequenzumrichter von der Netzspannung.
-
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 73
Page 76

Installationshandbuch | VLT® Safety Option MCB 150/151
Wartung und Reparatur
HI NW EI S
Alarm 67, Optionen neu informiert, dass eine Änderung der Hardwarekonfiguration des Frequenzumrichters nach einem
Einschaltvorgang aufgetreten ist. Diese Situation kann nach Installation/Entfernen einer Option oder bei Defekt einer Option
auftreten. Wenn sich die Konfiguration ändert, speichert der Frequenzumrichter die Hardwarekonfiguration, schaltet ab und
verweigert das Starten.
Somit werden alle unbeabsichtigten Parameteränderungen vermieden.
-
Beachten Sie beim Austausch der Sicherheitsoption Folgendes:
• Wenn sich die Firmwareversion geändert hat, können konfigurierte Funktionen und genannte Parameter ggf. nicht mehr
unterstützt werden oder können geändert worden sein. Passen Sie die Konfiguration in der MCT 10 Konfigurationssoftware an.
• Lesen Sie die Konfiguration erneut in die Sicherheitsoption ein.
Kopieren Sie alternativ die sicheren Parameter über ein grafisches LCP (siehe
Prerequisites:
Setzen Sie alle Optionsparameter auf Werkseinstellungen zurück, um Abschaltungen zu vermeiden, die durch den Austausch der
Sicherheitsoption verursacht werden.
Bestellen Sie eine neue Sicherheitsoption bei Danfoss.
Vorgehensweise
1. Tauschen Sie die defekte Option aus, siehe 4.1 Installieren der Option.
Beim ersten Einschaltvorgang erkennt der Frequenzumrichter verschiedene Konfigurationen zwischen der Sicherheitsoption und
dem Frequenzumrichter, wenn die Sicherheitsparameter nicht als Werkseinstellung eingerichtet sind.
2. Wählen Sie Frequenzumrichter.
3. Falls konfiguriert, geben Sie das Passwort für die kopierte Sicherheitsoption-Konfiguration des LCP ein.
4. Bestätigen Sie, um die sicheren Parameter zum Frequenzumrichter/zur Sicherheitsoption zu übertragen.
5. Wählen Sie OK.
6. Starten Sie den Frequenzumrichter neu.
7. Lesen Sie die Konfigurationsdaten erneut ein, entweder:
vom MCT 10 Sicherheits-Plug-in zur Sicherheitsoption über RS485 oder USB oder
von einem LCP im Frequenzumrichter zur Sicherheitsoption.
Eine Prüfsumme wird zusammen mit der Daten gespeichert, um Identifizierung der duplizierten Parameter der Sicherheitsoption
zu ermöglichen. Befolgen Sie die Hinweise am LCP-Display, um die Parameter der Sicherheitsoption in eine Sicherheitsoption zu
übertragen.
7.3.4 Kopieren der sicheren Parametereinstellung).
Stellen Sie sicher, dass die korrekte Parameterdatei der Sicherheitsoption zur Sicherheitsoption übertragen wird. Führen Sie eine
Inbetriebnahmeprüfung durch, siehe 5.2.5 Inbetriebnahmeprüfung.
74 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 77

e30bd114.11
Password
0-69 Password Protection
of safety Parameter
1(1)
0 RPM None
[1] Enabled
([0] Disabled)
e30bd116.11
Copy/Save
0-50 LCP Copy
1(1)
0 RPM None
Safety Par. from LCP
0-5
*
9
[ ]
e30bd117.11
Safety Par. from LCP
1(1)
0 RPM None
Copying...
00%
Installationshandbuch | VLT® Safety Option MCB 150/151
Wartung und Reparatur
7.3.4 Kopieren der sicheren Parametereinstellung
Vorgehensweise
1. Erstellen Sie einen Inbetriebnahmebericht.
2. Wählen Sie [1] Speichern in LCP in Parameter 0-50 LCP-Kopie aus. Überwachen Sie die Übertragung in der Statusleiste.
3. Montieren Sie das LCP mit allen kopierten Parametern am Frequenzumrichter, der aktualisiert werden muss.
4. Wählen Sie [2] Lade von LCP, Alle in Parameter 0-50 LCP-Kopie aus. Der normale Passwortschutz kann in Parameter 0-60 Hauptmenü
Passwort angewendet werden.
5. Geben Sie das Passwort für die kopierte SO-Konfiguration (= sichere Parameter) des LCP ein.
6. Bestätigen Sie das Übertragen der sicheren Parameter zum Frequenzumrichter, dem jetzt eine neue Konfiguration zugeordnet
wurde.
7. Führen Sie ein Reset des Frequenzumrichters durch, um die neue Konfiguration zu aktivieren.
7.3.4.1 Passwortschutz Nichtübereinstimmung zwischen Bedienfeldkopie und Parameter der
Sicherheitsoption
Optional kann ein Passwortschutz für die Funktion „Bedienfeldkopie“ verwendet werden (siehe Tabelle 16) und falls eine
Nichtübereinstimmung der Parameter vorhanden ist (siehe Tabelle 17). Der Passwortschutz kann in Parameter 0-69 Password Protection
of Safety Parameters (Passwortschutz der Sicherheitsparameter) aktiviert/deaktiviert werden. Das Passwort wird in Parameter 0-68 Safety
Parameters Password (Sicherheitsparameter Passwort) eingestellt. Das Standardpasswort ist 300.
Tabelle 16: Bedienfeldkopie-Meldungen
Meldung Beschreibung
Der Passwortschutz der Sicherheitsparameter ist aktiviert.
Kopieren der Sicherheitsparameter vom LCP in den Frequenzumrichter wurde ausgewählt.
Die Sicherheitsparameter werden vom LCP in den Frequenzumrichter kopiert.
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 75
Page 78

e30bd118.11
Safety Password
Please enter the safety
Password
1(1)
0 RPM None
00000000
e30bd119.11
1(1)
0 RPM None
Password accepted
Pa
0[0
([1] Enabled)
e30bd123.11
1(1)
0 RPM None
Password rejected
Pa
0[0
([1] Enabled)
e30bd120.11
SO Data Confirmation
Are you sure that you want
to overwrite the safety
parameters including the
level 1 password?
!1(1)
0 RPM 0.00A
e30bd121.11
SO Data Confirmation
Press [OK] to confirm
(commissioning test must be
performed) or [CANCEL] to
abort
!1(1)
0 RPM 0.00A
e30bd122.11
Status
SO Custom. completed
SO RESET required!
!1(1)
0 RPM None 0.00KW
!Safe Stop [W68]
Off Remote SO Req.RESET
Installationshandbuch | VLT® Safety Option MCB 150/151
Meldung Beschreibung
Wenn der Passwortschutz in Parameter 0-69 Password Protection of Safety Parameters (Passwortschutz der Sicherheitsparameter) aktiviert ist, geben Sie die korrekte Bedienfeldkopie/das abweichende Parameterpasswort (Parameter 0-68 Safety Parameters Password (Sicherheitsparameter
Passwort)) ein.
Wenn das eingegebene Passwort richtig ist, wird einige Sekunden lang diese Meldung angezeigt.
Wenn das eingegebene Passwort falsch ist, wird einige Sekunden lang diese Meldung angezeigt.
Danach kann das Passwort erneut eingegeben werden.
Wartung und Reparatur
Dialogfeld, um die vorhandenen Daten weiter zu überschreiben oder den Vorgang abzubrechen.
Drücken Sie [OK], um die Anpassung der Sicherheitsoption abzuschließen. Zum Abschluss dieses
Verfahrens ist ein Reset notwendig.
76 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 79

e30bd124.11
Status
SO Custom. aborted
SO RESET required!
!1(1)
0 RPM None 0.00KW
!Safe Stop [W68]
Off Remote SO Req.RESET
e30bd115.11
SO Param. Selection
Mismatch of SO param.set
detected. Please choose:
!1(1)
0 RPM 0.00 A
SO : Test1234_ 1.00
VLT : SafeSet1_ 1.00
e30bd122.11
Status
SO Custom. completed
SO RESET required!
!1(1)
0 RPM None 0.00KW
!Safe Stop [W68]
Off Remote SO Req.RESET
e30bd118.11
Safety Password
Please enter the safety
Password
1(1)
0 RPM None
00000000
e30bd119.11
1(1)
0 RPM None
Password accepted
Pa
0[0
([1] Enabled)
Installationshandbuch | VLT® Safety Option MCB 150/151
Wartung und Reparatur
Meldung Beschreibung
Drücken Sie [Cancel], um die Anpassung der Sicherheitsoption abzubrechen. Zum Abschluss dieses Verfahrens ist ein Reset notwendig.
Tabelle 17: Nichtübereinstimmung zwischen Sicherheitsparametern in der Sicherheitsoption und im Frequenzumrichter
Meldung Beschreibung
Wenn Sicherheitsparameter in der Sicherheitsoption und im Frequenzumrichter nicht übereinstimmen, wird dieses Auswahlformular auf dem LCP angezeigt. Wählen Sie zwischen den „Sicherheitsdaten auf Sicherheitsoption“ oder den „Sicherheitsdaten in Frequenzumrichter“ als gültige
Daten.
Bei Auswahl von [SO:...], wird die Anpassung der Sicherheitsoption abgeschlossen und ein Reset
ist erforderlich, um dieses Verfahren abzuschließen.
Wenn [VLT:…] ausgewählt und der Passwortschutz in Parameter 0-69 Password Protection of Safe-
ty Parameters (Passwortschutz der Sicherheitsparameter) aktiviert ist, geben Sie die korrekte Bedienfeldkopie/das abweichende Parameterpasswort ((Parameter 0-68 Safety Parameters Password
(Sicherheitsparameter Passwort)) ein.
Wenn das eingegebene Passwort richtig ist, wird einige Sekunden lang diese Meldung angezeigt.
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 77
Page 80

e30bd123.11
1(1)
0 RPM None
Password rejected
Pa
0[0
([1] Enabled)
e30bd120.11
SO Data Confirmation
Are you sure that you want
to overwrite the safety
parameters including the
level 1 password?
!1(1)
0 RPM 0.00A
e30bd121.11
SO Data Confirmation
Press [OK] to confirm
(commissioning test must be
performed) or [CANCEL] to
abort
!1(1)
0 RPM 0.00A
e30bd122.11
Status
SO Custom. completed
SO RESET required!
!1(1)
0 RPM None 0.00KW
!Safe Stop [W68]
Off Remote SO Req.RESET
e30bd124.11
Status
SO Custom. aborted
SO RESET required!
!1(1)
0 RPM None 0.00KW
!Safe Stop [W68]
Off Remote SO Req.RESET
Installationshandbuch | VLT® Safety Option MCB 150/151
Meldung Beschreibung
Wenn das eingegebene Passwort falsch ist, wird einige Sekunden lang diese Meldung angezeigt.
Danach kann das Passwort erneut eingegeben werden.
Dialogfeld, um die vorhandenen Daten weiter zu überschreiben oder den Vorgang abzubrechen.
Wartung und Reparatur
Drücken Sie [OK], um die Anpassung der Sicherheitsoption abzuschließen. Zum Abschluss dieses
Verfahrens ist ein Reset notwendig.
Drücken Sie [Cancel], um die Anpassung der Sicherheitsoption abzubrechen. Zum Abschluss dieses Verfahrens ist ein Reset notwendig.
78 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 81

e30bc327.11
FC 302 1
FC 302 1
FC 302 1
FC 302 2
FC302 3
FC 302 2
MCT 10
RS485
MCB 15x
MCB 15x
MCB 15x
MCB 15x
MCB 15x
MCB15x
MCT 10
1 2 3
2
1
1
RS485
USB
LCP
A
B
C
PROFIBUS
Installationshandbuch | VLT® Safety Option MCB 150/151
Wartung und Reparatur
Abbildung 41: Mögliche Parametereinstellung
7.4 Inbetriebnahmeprüfung
Die Inbetriebnahmeprüfung für Systeme mit Sicherheits-Subfunktionen konzentriert sich auf die Validierung der Funktionalität von
Sicherheitsüberwachung und Stoppfunktionen, die im Frequenzumrichtersystem konfiguriert sind.
Das Ziel der Prüfung ist der Nachweis einer ordnungsgemäßen Konfiguration der definierten Sicherheits-Subfunktionen und von
Prüfmechanismen, sowie die Untersuchung der Reaktion bestimmter Überwachungsfunktionen auf die explizite Eingabe von Werten
außerhalb der Toleranzgrenzen. Die Prüfung deckt alle sicherheitskonfigurierten Überwachungsfunktionen ab, die in der endgültigen
Konfiguration ausgeführt werden.
7.4.1 Sicherheitsrichtlinien
Bei Inbetriebnahme/erneuter Inbetriebnahme ist Folgendes zu beachten:
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 79
Page 82

Installationshandbuch | VLT® Safety Option MCB 150/151
• Sichern Sie den Standort vorschriftsmäßig ab (Abschrankung, Warnschilder usw.). Nur qualifiziertes Personal darf das System in
Betrieb nehmen/erneut in Betrieb nehmen.
• Beziehen Sie sich auf die Informationen und technischen Daten in der Bedienungsanleitung des entsprechenden
programmierbaren Steuerungssystems.
• Stellen Sie während der Inbetriebnahme/erneuten Inbetriebnahme sicher, dass keine Personenschäden und/oder Sachschäden
auftreten können, selbst wenn sich die Anlage/Maschine unerwartet bewegt.
• Lesen Sie bei Inbetriebnahme der Sicherheitsoption die Sicherheitsrichtlinien in der Bedienungsanleitung des Frequenzumrichters
durch.
Wartung und Reparatur
7.4.2 Vor der Durchführung der Inbetriebnahmeprüfung
Der Systemintegrator/Maschinenhersteller führt eine Inbetriebnahmeprüfung der Sicherheitsoption durch, um die richtige Auswahl
der Parameterwerte der Sicherheitsoption zu prüfen und zu dokumentieren. Der Systemintegrator/Maschinenhersteller weist hiermit
nach, dass er die Wirksamkeit der verwendeten Sicherheits-Subfunktionen geprüft hat. Führen Sie die Inbetriebnahmeprüfung auf
Grundlage der Risikoanalyse durch. Alle geltenden Normen und Vorschriften müssen eingehalten werden.
Stellen Sie Folgendes sicher:
• Die Maschine ist ordnungsgemäß verdrahtet.
• Die Wirksamkeit aller Sicherheitskomponenten, die in der Anwendung zum Einsatz kommen, erfüllt die Anforderungen.
• Alle Sicherheitseinrichtungen wie Schutztürüberwachungsgeräte, Lichtschranken oder Not-Aus-Schalter sind angeschlossen und
betriebsbereit.
• Alle Motorparameter und Befehlsparameter müssen richtig am Frequenzumrichter eingestellt sein.
Führen Sie in den folgenden Situationen eine Inbetriebnahmeprüfung der Sicherheitsoption durch:
• Nach der Konfiguration jeder Maschine.
• Nach der Änderung der Parameter der Sicherheitsoption.
• Nach Durchführung von Änderungen an der Maschine (gemäß geltenden Normen und Vorschriften).
7.4.2.1 Überprüfung der Wirksamkeit der Sicherheits-Subfunktionen
Vorgehensweise
1. Dokumentieren Sie jeden einzelnen Schritt der Prüfung.
2. Notieren Sie die Prüfsumme der Sicherheitsoptions-Parameter in den Unterlagen.
3. Geben Sie das System NUR frei, wenn es alle einzelnen Schritte der Prüfung erfolgreich bestanden hat.
4. Starten Sie den Frequenzumrichter neu und prüfen Sie, ob der Motor normal läuft.
7.4.3 Sicherheits-Subfunktionen des Frequenzumrichters
Nach Durchführen z. B. einer Bedienfeldkopie der sicheren Parameter ist eine Inbetriebnahmeprüfung erforderlich. Verwenden Sie
diese Kurzversionen des Inbetriebnahmeprüfberichts zur Abarbeitung und Bestätigung der einzelnen Schritte des Prüfablaufs.
80 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 83

Installationshandbuch | VLT® Safety Option MCB 150/151
Tabelle 18: Inbetriebnahmeprüfbericht, Safe Torque Off
Wartung und Reparatur
Prüfablauf Bestätigt ✓
1. Deaktivieren Sie die STO-Funktion:
• über Digitaleingang 1.
• über Digitaleingang 2.
• Überprüfen Sie die Anschlüsse der STO-Schaltung im Hinblick auf den Schaltplan.
2. Keine Sicherheitsfehler und Alarme.
3. Betreiben Sie den Frequenzumrichter.
4. Stellen Sie sicher, dass der richtige Frequenzumrichter läuft.
5. Wählen Sie STO, während der Frequenzumrichter läuft.
6. Überprüfen Sie Folgendes:
• Der Freilauf geht im Freilauf auf Nulldrehzahl.
• Der Motor wird von der mechanischen Bremse (wenn verfügbar und konfiguriert) gebremst und gestoppt.
• Warnung/Alarm 68, Sicherer Stopp wird angezeigt.
7. Heben Sie die Auswahl der Funktion STO auf.
8. Überprüfen Sie Folgendes:
• Abhängig von der Konfiguration wird Sicherheitsfunk. Anstehend angezeigt.
9. Starten Sie den Frequenzumrichter neu und prüfen Sie, ob der Motor normal läuft.
10. Stellen Sie sicher, dass die Funktion STO sicher und betriebsbereit ist.
11. Dokumentieren Sie und unterschreiben Sie den Inbetriebnahmeprüfbericht.
Tabelle 19: Inbetriebnahmeprüfbericht, Sicherer Stopp 1 zeitbasiert
Prüfablauf Bes-
1. Deaktivieren der Funktion „Sicherer Stopp 1“:
• über Digitaleingang 1.
• über Digitaleingang 2.
• Überprüfen Sie die Anschlüsse der SS1-Schaltung im Hinblick auf den Schaltplan.
2. Keine Sicherheitsfehler und Alarme.
3. Betreiben Sie den Frequenzumrichter.
4. Stellen Sie sicher, dass der richtige Frequenzumrichter läuft.
5. Wählen Sie SS1, während der Frequenzumrichter läuft.
6. Überprüfen Sie Folgendes:
• Der Frequenzumrichter fährt den Motor über Rampe auf Nulldrehzahl. Stellen Sie sicher, dass er innerhalb der vorgegebenen Verzögerungszeit stoppt.
• Der Motor wird von der mechanischen Bremse (wenn verfügbar und konfiguriert) gebremst und gestoppt.
• Der SS1 endet mit einer STO-Warnung oder einem STO-Alarm, abhängig von der Konfiguration.
tätigt
✓
7. Heben Sie die Auswahl der Funktion SS1 auf.
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 81
Page 84

Installationshandbuch | VLT® Safety Option MCB 150/151
Wartung und Reparatur
Prüfablauf Bes-
8. Überprüfen Sie Folgendes:
• „Sicherheitsfunk. Anstehend angezeigt.
• SS1 nicht gewählt und inaktiv.
9. Starten Sie den Frequenzumrichter neu und prüfen Sie, ob der Motor normal läuft.
10. Stellen Sie sicher, dass die SS1-Funktion betriebsbereit ist.
11. Dokumentieren Sie und unterschreiben Sie den Inbetriebnahmeprüfbericht.
Tabelle 20: Inbetriebnahmeprüfbericht, Sicherer Stopp 1 Verzögerung
Prüfablauf Bes-
1. Deaktivieren der Funktion „Sicherer Stopp 1“:
• über Digitaleingang 1.
• über Digitaleingang 2.
• Überprüfen Sie die Anschlüsse der SS1-Schaltung im Hinblick auf den Schaltplan.
tätigt
✓
tätigt
✓
2. Keine Sicherheitsfehler und Alarme.
3. Betreiben Sie den Frequenzumrichter.
4. Stellen Sie sicher, dass der richtige Frequenzumrichter läuft.
5. Wählen Sie „SS1 Verzögerung“, während der Frequenzumrichter läuft.
6. Überprüfen Sie Folgendes:
• Der Frequenzumrichter fährt den Motor über Rampe auf Nulldrehzahl. Stellen Sie sicher, dass er innerhalb der vorgegebenen Verzögerungszeit stoppt.
• Der Motor wird von der mechanischen Bremse (wenn verfügbar und konfiguriert) gebremst und gestoppt.
• Der SS1 endet mit einer STO-Warnung oder einem STO-Alarm, abhängig von der Konfiguration.
7. Heben Sie die Auswahl der Funktion „SS1 Verzögerung“ auf.
8. Überprüfen Sie Folgendes:
• „Sicherheitsfunk. Anstehend angezeigt.
• „SS1 Verzögerung“ nicht gewählt und inaktiv.
9. Starten Sie den Frequenzumrichter neu und prüfen Sie, ob der Motor normal läuft.
10. Stellen Sie sicher, dass die SS1-Funktion betriebsbereit ist.
11. Dokumentieren Sie und unterschreiben Sie den Inbetriebnahmeprüfbericht.
82 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 85

Installationshandbuch | VLT® Safety Option MCB 150/151
Tabelle 21: Inbetriebnahmeprüfbericht, Sicherer Stopp 1 rampenbasiert
Wartung und Reparatur
Prüfablauf Bestätigt ✓
1. Deaktivieren der Funktion „Sicherer Stopp 1“:
• über Digitaleingang 1.
• über Digitaleingang 2.
• Überprüfen Sie die Anschlüsse der SS1-Schaltung im Hinblick auf den Schaltplan.
2. Keine Sicherheitsfehler und Alarme.
3. Betreiben Sie den Frequenzumrichter.
4. Stellen Sie sicher, dass der richtige Frequenzumrichter läuft.
5. Wählen Sie SS1, während der Frequenzumrichter läuft.
6. Überprüfen Sie Folgendes:
• Der Frequenzumrichter fährt den Motor über Rampe auf Nulldrehzahl.
• Der Motor wird von der mechanischen Bremse (wenn verfügbar und konfiguriert) gebremst und gestoppt.
• Der SS1 endet mit einer STO-Warnung oder einem STO-Alarm, abhängig von der Konfiguration.
7. Heben Sie die Auswahl der Funktion SS1 auf.
8. Überprüfen Sie Folgendes:
• „Sicherheitsfunk. Anstehend angezeigt.
• „SS1 Verzögerung“ nicht gewählt und inaktiv.
9. Starten Sie den Frequenzumrichter neu und prüfen Sie, ob der Motor normal läuft.
10. Stellen Sie sicher, dass die SS1-Funktion betriebsbereit ist.
11. Dokumentieren Sie und unterschreiben Sie den Inbetriebnahmeprüfbericht.
Tabelle 22: Inbetriebnahmeprüfbericht, Sicher begrenzte Geschwindigkeit ohne Rampe
Prüfablauf Bestätigt ✓
1. Deaktivieren Sie die SLS-Funktion:
• über Digitaleingang 1.
• über Digitaleingang 2.
• Überprüfen Sie die Anschlüsse der SS1-Schaltung im Hinblick auf den Schaltplan.
2. Keine Sicherheitsfehler und Alarme.
3. Betreiben Sie den Frequenzumrichter.
• Rampe auf oder Rampe ab kann bei Betrieb mit Festdrehzahl JOG (JOG-Modus) separat eingegeben werden.
Dies kann als Teil des Quick-Menüs parametriert werden.
• Die Motordrehzahl muss höher als die gewählte SLS sein, wenn die Maschine dies zulässt.
4. Stellen Sie sicher, dass der richtige Frequenzumrichter läuft.
5. Wählen Sie SLS, während der Frequenzumrichter läuft.
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 83
Page 86

Installationshandbuch | VLT® Safety Option MCB 150/151
Wartung und Reparatur
Prüfablauf Bestätigt ✓
6. Überprüfen Sie Folgendes:
• Der Frequenzumrichter läuft im Freilauf auf Nulldrehzahl, wenn STO als Fehlerreaktion ausgewählt ist.
• Führen Sie Sicherer Stopp 1 durch, wenn dies als Fehlerreaktion ausgewählt ist.
• Der Motor wird von der mechanischen Bremse (wenn verfügbar und konfiguriert) gebremst und gestoppt.
• Stellen Sie sicher, dass Fehler 70, Int. Fehler Drehzahlgrenze SLSa: Reaktion STO angezeigt wird.
7. Heben Sie die Auswahl der Funktion SLS auf.
8. Überprüfen Sie Folgendes:
• „Sicherheitsfunk. Anstehend angezeigt.
• SLS nicht gewählt und inaktiv.
9. Starten Sie den Frequenzumrichter neu und prüfen Sie, ob der Motor normal läuft.
10. Stellen Sie sicher, dass die SLS-Funktion betriebsbereit ist:
• Lassen Sie den Motor unter der SLS-Grenze laufen.
• Aktivieren Sie SLS.
• Erhöhen Sie den Sollwert über die SLS-Grenze.
• Stellen Sie sicher, dass die SLS-Grenze nicht überschritten wird.
11. Dokumentieren Sie und unterschreiben Sie den Inbetriebnahmeprüfbericht.
Tabelle 23: Inbetriebnahmeprüfbericht, Sicher begrenzte Geschwindigkeit mit Rampe
Prüfablauf Bestätigt ✓
1. Deaktivieren Sie die SLS-Funktion:
• über Digitaleingang 1.
• über Digitaleingang 2.
• Überprüfen Sie die Anschlüsse der SS1-Schaltung im Hinblick auf den Schaltplan.
2. Keine Sicherheitsfehler und Alarme.
3. Betreiben Sie den Frequenzumrichter.
• Die Motordrehzahl muss höher als die gewählte SLS sein, wenn die Maschine dies zulässt.
4. Stellen Sie sicher, dass der richtige Frequenzumrichter läuft.
5. Wählen Sie SLS, während der Frequenzumrichter läuft.
6. Überprüfen Sie Folgendes:
• Die Drehzahl fährt über Rampe ab gemäß der gewählten Rampenzeit/-steigung auf den SLS-Sollwert.
7. Heben Sie die Auswahl der Funktion SLS auf.
8. „Sicherheitsfunk. Anstehend angezeigt.
9. Betreiben Sie den Frequenzumrichter.
• Die Motordrehzahl muss höher als die gewählte SLS sein, wenn die Maschine dies zulässt.
10. Stellen Sie sicher, dass der richtige Frequenzumrichter läuft.
11. Wählen Sie SLS, während der Frequenzumrichter läuft.
12. Überprüfen Sie Folgendes:
• Der Frequenzumrichter fährt den Motor über Rampe auf SLS.
84 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 87

Tester/Approver
Date:
Signature:
Installationshandbuch | VLT® Safety Option MCB 150/151
Wartung und Reparatur
Prüfablauf Bestätigt ✓
13. Heben Sie die Auswahl der Funktion SLS auf.
14. Überprüfen Sie Folgendes:
• Keine Sicherheitsfehler.
• „Sicherheitsfunk. Anstehend angezeigt.
15. Setzen Sie den Frequenzumrichter zurück und prüfen Sie, ob der Motor normal läuft.
16. Stellen Sie sicher, dass die SLS-Funktion betriebsbereit ist.
17. Dokumentieren Sie und unterschreiben Sie den Inbetriebnahmebericht.
Tabelle 24: Inbetriebnahmeprüfbericht, Safe Maximum Speed
Prüfablauf Bestä-
tigt
✓
1. Deaktivieren Sie sämtliche Sicherheits-Subfunktionen, die über die Digitaleingänge 1 und 2 aktiviert werden können,
und vergewissern Sie sich, dass keine Alarme und Warnungen angezeigt werden.
2. SMS aktivieren.
3. Lassen Sie den Motor unter der SMS-Abschaltdrehzahl laufen (~100 U/min darunter wird empfohlen).
4. Erhöhen Sie die Motordrehzahl, bis die SMS-Abschaltdrehzahl erreicht ist.
5. Vergewissern Sie sich, dass der Frequenzumrichter austrudelt und die Warnung 68, Sicherer Stopp anzeigt.
6. Stellen Sie den Motordrehzahlwert unter der SMS-Abschaltdrehzahl ein.
7. Führen Sie einen Reset durch.
8. Vergewissern Sie sich, dass der Motor startet. Dies kann ein separates Anlaufsignal des Steuersystems erfordern.
Dokumentieren Sie und unterschreiben Sie den Inbetriebnahmebericht.
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 85
Page 88

Installationshandbuch | VLT® Safety Option MCB 150/151
Warnungen und Alarmmeldungen
8 Warnungen und Alarmmeldungen
8.1 Fehlertypen und -meldungen
Dieses Kapitel enthält Tabellen zur Fehlersuche und -behebung, die bei der Diagnose von Fehlerbedingungen im Zusammenhang mit
der Sicherheitsoption helfen.
Die Sicherheitsoption unterscheidet zwischen schwerem Fehler und Alarm.
Tabelle 25: Fehlertypen
Fehlertyp Beschreibung Wirkung auf
das System
Schwerer
Fehler
Fehler Funktionaler Fehler, verursacht durch einen externen
Tabelle 26: LED-Statusanzeigen
Farbe Modus Beschreibung
Grün Blinkt System OK, Konfiguration bestätigt.
Grün Permanent System OK, Eingang oder Ausgang aktiviert.
Gelb Blinkt System OK, Konfiguration noch nicht bestätigt.
Rot Blinkt Alarm.
Rot Permanent Schwerer Fehler.
Schwerwiegender Ausnahmefehler, verursacht durch
das Programm, das in der Sicherheitsoption ausgeführt
wird. Ein zyklischer Programmablauf ist aus Sicherheitsgründen nicht mehr möglich. Die zuletzt aktive Funktion wird angezeigt. Das System ist im Stopp-Modus.
Prozess. Beide Systeme laufen weiter zyklisch und verarbeiten alle Anforderungen von den Kommunikationsschnittstellen. Auch der externe Prozess wird weiter erfasst.
Ausgang S37
wird ausgeschaltet
Ausgang S37
wird ausgeschaltet
Reset-Bedingung
Reset mittels Durchführung eines Aus-/
Einschaltzyklus des Frequenzumrichters
oder Neustarten der Sicherheitsoption
über Parameter 42-90 Sicherheitsoption
neu starten möglich.
Reset über parametrierbaren Digitaleingang 2, Reset an LCP/Digitaleingang
oder über Feldbus oder über Parameter
42-90 Sicherheitsoption neu starten möglich.
Alle externen Fehler können durch Senden eines Reset-Signals (über LCP, Digitaleingang 2a und Digitaleingänge auf der Steuerkarte
oder über Feldbus, abhängig von der Konfiguration) entfernt werden. Alle internen Fehler können durch einen Aus-/Einschaltzyklus,
Parameter 42-90 Sicherheitsoption neu starten und Konfiguration quittiert werden.
8.1.1 Meldungen
Alle Fehler an der Sicherheitsoption werden am Display des Frequenzumrichters mit verschiedenen Meldungen angezeigt.
Die folgenden Optionen stehen zur detaillierten Diagnose und Fehlererkennung zur Verfügung:
• LED an der Vorderseite der Sicherheitsoption liefern Informationen zu Betriebszuständen. Die LED dienen zur Anzeige des Status
der Option, d. h. aktive Sicherheits-Subfunktionen, Fehler und Warnungen, wenn vorhanden.
• LCP-Text oder Informationen über Bus zeigen den Status der Sicherheits-Subfunktionen (z. B. SS1a) an.
Folgendes wird in der MCT 10-Konfigurationssoftware im Online-Modus angezeigt:
• Status der Eingangs- und Ausgangsfehler der Sicherheitsoption, Meldungen und die entsprechenden Abhilfen werden im
erweiterten Diagnosesystem der MCT 10 Konfigurationssoftware angezeigt.
86 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 89

Installationshandbuch | VLT® Safety Option MCB 150/151
8.2 Warnungen und Alarmmeldungen
HI NW EI S
Die Fehler werden numerisch aufgelistet.
Tabelle 27: LED-Anzeigen, Fehler 1–68
Warnungen und Alarmmeldungen
Fehlernummer
1 Diagnose
67 Int. Fehler
Beschreibung Interner
Fehler
findet statt
Toleranzfehler
überschritten: Reaktion STO
Grund Aktion LED 1 LED 2 LED 4
• Überprüfen Sie, dass die
Daten für Rückführung
(PPR, Art der Rückführung und Getriebeübersetzung) richtig eingegeben wurden.
• Richtung der Rückführung ist falsch.
• Durch die Verwendung
eines Istwertfilters stimmt
die Dynamik des Systems
nicht mit der Dynamik
des Istwertfilters überein
(Parameter 42-15 Istwert-
filter). Das System fährt zu
schnell hoch.
• Es werden keine Istwertsignale empfangen.
• Keine ordnungsgemäße
Abschirmung der Rückführungskabel.
• Führen Sie bei Bedarf
eine erneute Anpassung
mit korrekten Daten
durch.
• Stellen Sie Parameter
42-12 Drehgeberrichtung
auf den Gegenwert ein.
• Verringern Sie die Rampenzeit des Frequenzumrichters.
• Versuchen Sie das System z. B. mit 60 U/min
laufen zu lassen. Falls
Fehler 99, Int. Fehler Istwertfehler jetzt auftritt, ist
dies der Grund.
• Verbessern Sie die Abschirmung von Rückführungskabel und Motorkabeln.
Status von LED 1 und LED 2
hängt vom Sicherheits-Subfunktionszustand ab, der Digitaleingang 1 bzw. Digitaleingang 2 zugeordnet ist.
Leuchtet
grün
Leuchtet rot
68 Int. Fehler
Drehzahlgrenze
SS1a
Rampe:
Reaktion
STO
Danfoss A/S © 2019.01
• Der Wert von Dreieck V
ist zu klein. Bei einem
System mit Rückführung
muss er häufig größer als
der empfohlene Wert
sein.
• Durch die Verwendung
eines Istwertfilters stimmt
die Dynamik des Systems
nicht mit der Dynamik
des Istwertfilters überein
(Parameter 42-15 Istwert-
filter).
• Bei der Rampe findet eine
Laständerung statt.
• Versuchen Sie bei Betrieb
mit Rückführung die PIDEinstellung anzupassen
und erhöhen Sie ggf. die
SS1 Rampenzeit.
• Versuchen Sie, Parameter
42-15 Istwertfilter zu erhöhen, dies könnte jedoch
Fehler 67, Int. Fehler Toleranzfehler überschritten:
Reaktion STO verursa-
chen.
• Erhöhen Sie andernfalls
Parameter 42-45 Delta V.
Leuchtet rot
AQ279747441421de-000201 / 130R0292| 87
Page 90

Installationshandbuch | VLT® Safety Option MCB 150/151
Tabelle 28: LED-Anzeigen, Fehler 69–72
Feh
lernu
mm
er
Beschreibung Interner Fehler
Grund Aktion LED 1 LED 2 LED 4
Warnungen und Alarmmeldungen
69 Int. Fehler
Drehzahlgrenze
SS1b
Rampe: Reaktion STO
70 Int. Fehler
Drehzahlgrenze
SLSa: Reaktion STO
71 Int. Fehler
Drehzahlgrenze
SLSb: Reaktion STO
Siehe Fehler 68. Siehe Fehler 68. Status von LED 1 und
LED 2 hängt vom Zu-
Leuchtet
rot
stand der SicherheitsSubfunktion ab, der
Digitaleingang 1 bzw.
Digitaleingang 2 zu-
Geschieht während der Rampe
auf die SLS-Grenze, siehe 68.
• Ändern Sie Parameter 42-53
Startrampe zu Ja und stellen
geordnet ist.
Leuchtet
rot
Sie Parameter 42-54 Ram-
Geschieht während Drehzahl
unter SLS-Grenze:
• Liegt die Drehzahl am Aktivierungspunkt über der Abschaltdrehzahl und ist Pa-
rameter 42-53 Startrampe
penzeit ab entsprechend ein.
• Erhöhen Sie Parameter 42-50
Abschaltdrehzahl oder redu-
zieren Sie Parameter 42-51
Drehzahlgrenze, um eine hö-
here Toleranz zu erhalten.
auf Nein eingestellt, tritt dieser Fehler auf.
• Störungen im Istwertsignal
(einschl. Quantisierungsrauschen) sind größer als erwartet.
• Laständerung findet statt,
wie im obigen Punkt vorgehen.
Siehe Fehler 70. Siehe Fehler 70. Leuchtet
rot
72 Interner
Fehler MCB
150/151
88 | Danfoss A/S © 2019.01
• Führen Sie zunächst einen
Aus-/Einschaltzyklus des
Frequenzumrichters durch
oder starten Sie die Sicherheitsoption über Parameter
42-90 Sicherheitsoption neu
starten neu. Versuchen Sie
zweitens, einen allgemeinen
Reset der Sicherheitsoption
mit der Schaltfläche Admin-
istration durchzuführen (Sicherheitsoption geht zurück
auf den „Blank Initial State“).
• Wenn das Problem weiterhin besteht, wenden Sie sich
an Danfoss.
Leuchtet
rot
AQ279747441421de-000201 / 130R0292
Page 91

Installationshandbuch | VLT® Safety Option MCB 150/151
Tabelle 29: LED-Anzeigen, Fehler 73–77
Warnungen und Alarmmeldungen
Fehlernum-
Beschreibung Interner Fehler
mer
73 Interner
Fehler MCB
150/151
74 Interner
Fehler MCB
150/151
75 Int. Fehler
DI2 in PUST:
Reaktion
STO
Grund Aktion LED 1 LED 2 LED 4
• Führen Sie zunächst einen Aus-/
Einschaltzyklus des Frequenzumrichters durch oder starten
Sie die Sicherheitsoption über
Status von LED 1 und LED 2 hängt
vom Zustand der Sicherheits-Subfunktion ab, der Digitaleingang 1
bzw. Digitaleingang 2 zugeordnet ist.
Leuchtet rot
Parameter 42-90 Sicherheitsoption neu starten neu.
• Wenn das Problem weiterhin
besteht, wenden Sie sich an
Danfoss.
• Führen Sie zunächst einen Aus-/
Einschaltzyklus des Frequen-
Leuch-
tet rot
zumrichters durch oder starten
Sie die Sicherheitsoption über
Parameter 42-90 Sicherheitsoption neu starten neu.
• Wenn das Problem weiterhin
besteht, wenden Sie sich an
Danfoss.
• Mit Digitaleingang 2
verbundenes Signal hat unzulässigen
Signalpegel.
• Sensor ist
defekt.
• Überprüfen Sie, ob die Konfiguration von Digitaleingang 2 Pa-
rameter 42-21 Typ richtig eingestellt ist oder ob der angeschlossene Sensor vorschriftsgemäß installiert ist.
• Erweitern Sie die Diskrepanzzeit
auf der Registerkarte „Sicherer
Eingang“ im Sicherheits-Plug-in
MCT 10 mittels Parameter 14-22
Leuchtet rot
Betriebsart.
76 Int. Fehler
DI1 in PUST:
Reaktion
STO
77 Int. Fehler
Ausfallsichere Daten
CRC-Unterschied:
Reaktion
STO
Danfoss A/S © 2019.01
• Mit Digitaleingang 1
verbundenes Signal hat unzulässigen
Signalpegel.
• Sensor ist
defekt.
Die CRC der Sicherheitsoption stimmt
nicht mit dem
im Frequenzumrichter
gespeicherten
CRC-Wert überein.
• Überprüfen Sie, ob die Konfiguration von Digitaleingang 1 Pa-
rameter 42-21 Typ, [0] NCNC,
richtig eingestellt ist oder ob
der angeschlossene Sensor
vorschriftsgemäß installiert ist.
• Erweitern Sie die Diskrepanzzeit
auf der Registerkarte „Sicherer
Eingang“ im Sicherheits-Plug-in
MCT 10 mittels Parameter 14-22
Betriebsart.
Konfigurieren Sie die Sicherheitsoption mit MCT 10 Sicherheits-Plug-in
oder durch CRC-Auswahl/Bedienfeldkopie.
Leuchtet rot
Leuchtet rot
AQ279747441421de-000201 / 130R0292| 89
Page 92

Installationshandbuch | VLT® Safety Option MCB 150/151
Tabelle 30: LED-Anzeigen, Fehler 78–85
Feh
lernu
mm
er
Beschreibung Interner Fehler
Grund Aktion LED 1 LED 2 LED 4
Warnungen und Alarmmeldungen
78 Interner
Fehler der
Sicherheitsoption
79 Interner
Fehler der
Sicherheitsoption
80 Interner
Fehler der
Sicherheitsoption
81 Interner
Fehler der
Sicherheitsoption
81 Interner
Fehler der
Sicherheitsoption
• Führen Sie zunächst einen Aus-/Einschaltzyklus des Frequenzumrichters durch oder
starten Sie die Sicherheitsoption über Pa-
rameter 42-90 Sicherheitsoption neu starten
neu.
• Wenn das Problem weiterhin besteht, wenden Sie sich an Danfoss.
Status von LED 1 und
LED 2 hängt vom Zustand der SicherheitsSubfunktion ab, der
Digitaleingang 1 bzw.
Digitaleingang 2 zugeordnet ist.
Leuchtet
rot
Wenden Sie sich an Danfoss. Leuchtet
rot
Wenden Sie sich an Danfoss. Leuchtet
rot
• Führen Sie zuerst einen Aus-/Einschaltzyklus des Frequenzumrichters durch.
Leuchtet
rot
• Wenn das Problem weiterhin besteht, wenden Sie sich an Danfoss.
• Führen Sie zuerst einen Aus-/Einschaltzyklus des Frequenzumrichters durch.
Leuchtet
rot
• Wenn das Problem weiterhin besteht, wenden Sie sich an Danfoss.
82 Interner
Fehler der
Sicherheitsoption
83 Interner
Fehler der
Sicherheitsoption
84 Interner
Fehler der
Sicherheitsoption
85 Interner
Fehler der
Sicherheitsoption
• Führen Sie zuerst einen Aus-/Einschaltzyklus des Frequenzumrichters durch.
• Wenn das Problem weiterhin besteht, wenden Sie sich an Danfoss.
• Führen Sie zuerst einen Aus-/Einschaltzyklus des Frequenzumrichters durch.
• Wenn das Problem weiterhin besteht, wenden Sie sich an Danfoss.
• Führen Sie zuerst einen Aus-/Einschaltzyklus des Frequenzumrichters durch.
• Wenn das Problem weiterhin besteht, wenden Sie sich an Danfoss.
• Führen Sie zuerst einen Aus-/Einschaltzyklus des Frequenzumrichters durch.
• Wenn das Problem weiterhin besteht, wenden Sie sich an Danfoss.
Leuchtet
rot
Leuchtet
rot
Leuchtet
rot
Leuchtet
rot
90 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 93

Installationshandbuch | VLT® Safety Option MCB 150/151
Tabelle 31: LED-Anzeigen, Fehler 86–93
Feh
lernu
mm
er
Beschreibung Interner Fehler
Grund Aktion LED 1 LED 2 LED 4
Warnungen und Alarmmeldungen
86 Interner
Fehler der
Sicherheitsoption
87 Interner
Fehler der
Sicherheitsoption
88 Interner
Fehler der
Sicherheitsoption
89 Interner
Fehler der
Sicherheitsoption
90 Interner
Fehler der
Sicherheitsoption
• Führen Sie zuerst einen Aus-/Einschaltzyklus des Frequenzumrichters durch.
• Wenn das Problem weiterhin besteht, wenden Sie sich an Danfoss.
• Führen Sie zuerst einen Aus-/Einschaltzyklus des Frequenzumrichters durch.
• Wenn das Problem weiterhin besteht, wenden Sie sich an Danfoss.
• Führen Sie zuerst einen Aus-/Einschaltzyklus des Frequenzumrichters durch.
• Wenn das Problem weiterhin besteht, wenden Sie sich an Danfoss.
• Führen Sie ein allgemeines Reset der Sicherheitsoption über die Schaltfläche Ad-
ministration durch.
• Wenn das Problem weiterhin besteht, wenden Sie sich an Danfoss.
• Führen Sie ein allgemeines Reset der Sicherheitsoption über die Schaltfläche Ad-
ministration durch.
• Wenn das Problem weiterhin besteht, wenden Sie sich an Danfoss.
Status von LED 1 und
LED 2 hängt vom Zustand der SicherheitsSubfunktion ab, der
Digitaleingang 1 bzw.
Digitaleingang 2 zugeordnet ist.
Leuchtet
rot
Leuchtet
rot
Leuchtet
rot
Leuchtet
rot
Leuchtet
rot
91 Interner
Fehler der
Sicherheitsoption
92 Interner
Fehler der
Sicherheitsoption
93 Interner
Fehler der
Sicherheitsoption
• Führen Sie zuerst einen Aus-/Einschaltzyklus des Frequenzumrichters durch.
• Wenn das Problem weiterhin besteht, wenden Sie sich an Danfoss.
• Führen Sie zuerst einen Aus-/Einschaltzyklus des Frequenzumrichters durch.
• Wenn das Problem weiterhin besteht, wenden Sie sich an Danfoss.
• Führen Sie zuerst einen Aus-/Einschaltzyklus des Frequenzumrichters durch.
• Wenn das Problem weiterhin besteht, wenden Sie sich an Danfoss.
Leuchtet
rot
Leuchtet
rot
Leuchtet
rot
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 91
Page 94

Installationshandbuch | VLT® Safety Option MCB 150/151
Tabelle 32: LED-Anzeigen, Fehler 94–102
Feh
lernu
mm
er
Beschreibung Interner Fehler
Grund Aktion LED 1 LED 2 LED 4
Warnungen und Alarmmeldungen
94 Interner
Fehler der
Sicherheitsoption
95 Interner
Fehler der
Sicherheitsoption
96 Interner
Fehler der
Sicherheitsoption
97 Interner
Fehler der
Sicherheitsoption
98 Int. Fehler
Ungültige
Kundendateiversion
Die Version der im EEPROM gespeicherten Anpassungsdatei
der Sicherheitsoption stimmt
nicht mit der Anpassungsdatei
überein, die von der SW-Version
der Sicherheitsoption unterstützt wird.
• Führen Sie zuerst einen
Aus-/Einschaltzyklus des
Frequenzumrichters durch.
• Wenn das Problem weiterhin besteht, wenden Sie sich
an Danfoss.
• Führen Sie zuerst einen
Aus-/Einschaltzyklus des
Status von LED 1 und
LED 2 hängt vom Zustand der SicherheitsSubfunktion ab, der
Digitaleingang 1 bzw.
Digitaleingang 2 zugeordnet ist.
Leuchtet
rot
Leuchtet
rot
Frequenzumrichters durch.
• Wenn das Problem weiterhin besteht, wenden Sie sich
an Danfoss.
• Führen Sie zuerst einen
Aus-/Einschaltzyklus des
Leuchtet
rot
Frequenzumrichters durch.
• Wenn das Problem weiterhin besteht, wenden Sie sich
an Danfoss.
Wenden Sie sich an Danfoss. Leuchtet
rot
Führen Sie eine neue Konfiguration mit MCT 10 SicherheitsPlug-in durch, die die SW-Version der Sicherheitsoption unterstützt.
99 Int. Fehler
Istwertfehler
102 Int. Fehler
Drehzahlgrenze
SMS: Reaktion STO
92 | Danfoss A/S © 2019.01
Der angeschlossene Istwertanschluss sendet kein Signal.
• Die Drehzahl liegt über der
Abschaltdrehzahl.
• Störungen im Istwertsignal
(einschl. Quantisierungsrauschen) sind größer als erwartet.
Prüfen Sie, ob die Verbindung
entsprechend den Vorgaben erfolgt ist oder ob der Istwertanschluss defekt ist.
Überprüfen Sie den Wert von
Parameter 42-71 Cut Off Speed.
Rot
Leuchtet
rot
AQ279747441421de-000201 / 130R0292
Page 95

Installationshandbuch | VLT® Safety Option MCB 150/151
Tabelle 33: LED-Anzeigen, Fehler 113–135
Warnungen und Alarmmeldungen
Fehlernum-
Beschreibung Interner Fehler
mer
113 Ext. Fehler
DI1: Reaktion
STO
114 Ext. Fehler
DI2: Reaktion
STO
Grund Aktion LED 1 LED 2 LED 4
• Mit Digitalein-
gang 1 verbundenes Signal
hat unzulässigen Signalpegel.
• Sensor ist de-
fekt.
• Mit Digitalein-
gang 2 verbundenes Signal
hat unzulässigen Signalpegel.
• Sensor ist de-
fekt.
• Überprüfen Sie, ob
die Konfiguration
von Digitaleingang
1 Parameter 42-21
Typ richtig eingestellt ist oder ob der
angeschlossene
Sensor vorschriftsgemäß installiert ist.
• Überprüfen Sie, ob
die Konfiguration
von Digitaleingang
2 Parameter 42-21
Typ richtig eingestellt ist oder ob der
angeschlossene
Sensor vorschriftsgemäß installiert ist.
Leuchtet rot. Der Status hängt
vom Zustand der
Sicherheits-Subfunktion ab, der
Digitaleingang 2
zugeordnet ist.
Der Status hängt
Leuchtet rot. Blinkt rot,
vom Zustand der
Sicherheits-Subfunktion ab, der
Digitaleingang 1
zugeordnet ist.
Blinkt rot,
im Takt
(500 ms
ein, 500
ms aus)
im Takt
(500 ms
ein, 500
ms aus)
• Erweitern Sie die
Diskrepanzzeit auf
der Registerkarte
„Sicherer Eingang“ im Sicherheits-Plug-in MCT
10 mittels Parame-
ter 14-22 Betriebsart.
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 93
Page 96

Installationshandbuch | VLT® Safety Option MCB 150/151
Warnungen und Alarmmeldungen
Fehlernum-
Beschreibung Interner Fehler
mer
115 Externer Feh-
ler Prec
Thresh Timer
Elapsed: Reaktion STO
116 Ext. Fehler
SF-Aktivierung Drehzahl
aufgehoben:
Reaktion STO
134 Int. Fehler
Drehzahlgrenze SLSa:
Reaktion
SS1a
Grund Aktion LED 1 LED 2 LED 4
Der Frequenzumrichter läuft länger
als die in Parameter
42-18 Zero SpeedTimer eingegebene
Erhöhen Sie die Drehzahl auf über 120 U/
min.
Status von LED 1 und LED 2 hängt vom
Zustand der Sicherheits-Subfunktion ab,
der Digitaleingang 1 bzw. Digitaleingang
2 zugeordnet ist.
Blinkt rot,
im Takt
(500 ms
ein, 500
ms aus)
Zeit unter 120 U/
min, während die
sichere Funktion
SLS aktiv ist.
Der Frequenzumrichter läuft länger
als 1 Jahr unter
120 U/min und
eine Sicherheits-
Erhöhen Sie die Drehzahl auf über 120 U/
min.
Blinkt rot,
im Takt
(500 ms
ein, 500
ms aus)
Subfunktion, die
Drehzahlrückführung erfordert, ist
aktiviert.
Siehe Fehler 70. Siehe Fehler 70. Leuchtet
rot
135 Int. Fehler
Siehe Fehler 70. Siehe Fehler 70. Leuchtet
Drehzahlgrenze SLSb:
Reaktion
SS1a
Tabelle 34: LED-Anzeigen, Fehler 177–252
Fehler-
Beschreibung Interner Fehler
Grund Aktion LED 1 LED 2 LED 4
nummer
177 Ext. Fehler DI1: Re-
aktion SS1a
Siehe
Fehler
113.
178 Ext. Fehler DI2: Re-
aktion SS1a
Siehe
Fehler
114.
Siehe Fehler
113.
Siehe Fehler
114.
Leuchtet rot. Der Status hängt vom
Zustand der Sicherheits-Subfunktion ab,
der Digitaleingang 2 zugeordnet ist.
Der Status hängt vom
Leuchtet rot. Blinkt rot, im
Zustand der Sicherheits-Subfunktion ab,
der Digitaleingang 1 zugeordnet ist.
rot
Blinkt rot, im
Takt (500 ms
ein, 500 ms
aus)
Takt (500 ms
ein, 500 ms
aus)
94 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
Page 97

Installationshandbuch | VLT® Safety Option MCB 150/151
Warnungen und Alarmmeldungen
Fehlernummer
179 Externer Fehler
180 Ext. Fehler SF-Akti-
198 Int. Fehler Dreh-
199 Int. Fehler Dreh-
241 Ext. Fehler DI1: Re-
Beschreibung Interner Fehler
Prec Thresh Timer
Elapsed: Reaktion
SS1a
vierung Drehzahl
aufgehoben: Reaktion SS1a
zahlgrenze SLSa:
Reaktion SS1b
zahlgrenze SLSb:
Reaktion SS1b
aktion SS1b
Grund Aktion LED 1 LED 2 LED 4
Siehe
Fehler
115.
Siehe
Fehler
116.
Siehe
Fehler 70.
Siehe
Fehler 70.
Siehe
Fehler
113.
Siehe Fehler
115.
Siehe Fehler
116.
Siehe Fehler
70.
Siehe Fehler
70.
Siehe Fehler
113.
Status von LED 1 und LED 2 hängt vom Zustand
der Sicherheits-Subfunktion ab, der Digitaleingang
1 bzw. Digitaleingang 2 zugeordnet ist.
Leuchtet rot. Der Status hängt vom
Zustand der Sicher-
heits-Subfunktion ab,
der Digitaleingang 2 zu-
geordnet ist.
Blinkt rot, im
Takt (500 ms
ein, 500 ms
aus)
Blinkt rot, im
Takt (500 ms
ein, 500 ms
aus)
Leuchtet rot
Leuchtet rot
Blinkt rot, im
Takt (500 ms
ein, 500 ms
aus)
242 Ext. Fehler DI2: Re-
aktion SS1b
243 Externer Fehler
Prec Thresh Timer
Elapsed: Reaktion
SS1b
244 Ext. Fehler SF-Akti-
vierung Drehzahl
aufgehoben: Reaktion SS1b
252 Interner Fehler der
Sicherheitsoption
Siehe
Fehler
114.
Siehe
Fehler
115.
Siehe
Fehler
116.
Siehe Fehler
114.
Siehe Fehler
115.
Siehe Fehler
116.
Führen Sie
einen Aus-/
Einschaltzyklus des Frequenzumrichters
durch. Wenn
das Problem
weiterhin
besteht,
wenden Sie
sich an Danfoss.
Der Status hängt vom
Zustand der Sicherheits-Subfunktion ab,
der Digitaleingang 1 zugeordnet ist.
Leuchtet rot. Blinkt rot, im
Takt (500 ms
ein, 500 ms
aus)
Blinkt rot, im
Takt (500 ms
ein, 500 ms
aus)
Blinkt rot, im
Takt (500 ms
ein, 500 ms
aus)
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 95
Page 98

e30bd126.11
S tatus
SO Reset required!
!1(1)
0 R PM None 0.00 KW
!Safe S top [W68]
e30bd127.11
S tatus
SO in Self-test
!1(1)
0 R PM None 0.00 KW
!Safe S top [W68]
e30bd127.11
S tatus
SO in Self-test
!1(1)
0 R PM None 0.00 KW
!Safe S top [W68]
Installationshandbuch | VLT® Safety Option MCB 150/151
Warnungen und Alarmmeldungen
8.2.1 Sicherheitsoption – Warnung
Eine Warnmeldung gibt an, dass ein Problem mit der Sicherheitsoption vorliegt. Es wird nicht als interner oder externer Fehler
gehandhabt. Diese Meldungen werden definiert, um anzuzeigen, dass ein Benutzereingriff notwendig ist.
HI NW EI S
Bei einem möglichen Fehler oder einer Warnung von der Sicherheitsoption zeigt das LCP mindestens die Warnung „!Fehler
Sicherheitsoption [W252] an.
8.2.2 Sicherheitsoption – Reset-Meldung
Bei einigen Meldungen erfordert die Sicherheitsoption eine Bestätigung einer laufenden Aktion oder eines Fehlers der
Sicherheitsoption. Die Sicherheitsoption verwendet RESET Sicherheitsoption als Neustart- und Fehlerbestätigung.
Tabelle 35: LCP Reset-Meldungen
LCP-Meldung Beschreibung
In den folgenden Fällen fordert die Sicherheitsoption ein „Neustart- und Fehlerbestätigung“-Signal an:
• Die Sicherheitsoption befindet sich im Zustand „Sicherheits-Subfunktion anstehend“ (Hinweis: dies tritt nur auf, wenn das Reset-Verhalten auf Manuell eingestellt/konfiguriert ist).
• Nach einem Aus-/Einschaltzyklus des Frequenzumrichters mit einer „Sicherheits-Subfunktion“.
• Beim PUST (Selbsttest bei Netz-Einschaltung), wenn vor dem Aus-/Einschaltzyklus ein externer Fehler aufgetreten ist.
• Wenn ein externer Fehler aufgetreten ist.
• Wenn die Anpassung abgebrochen oder abgeschlossen wurde.
• Bei Empfang eines allgemeinen Reset-Signals (erforderlich nach „Blank Initial State“ oder im
„Customization State“).
96 | Danfoss A/S © 2019.01
Die Sicherheitsoption zeigt an, dass sie im PUST-Zustand ist (Selbsttest bei Netz-Einschaltung).
• Stellen Sie sicher, dass nach einem Aus-/Einschaltzyklus des Frequenzumrichters keine Sicherheitsfunktion aktiv ist.
Eine Sicherheits-Subfunktion steht beim Starten an, wenn der Frequenzumrichter abgeschaltet
wurde, während eine Sicherheitsfunktion aktiv war. Sie steht auch an, wenn der Frequenzumrichter abgeschaltet wurde, während die Sicherheitsoption während einer aktiven SicherheitsSubfunktion einen Fehler erkannt hat.
AQ279747441421de-000201 / 130R0292
Page 99

e30bd129.11
S tatus
SafeOpt. initialised
!1(1)
0 R PM None 0.00 KW
!Safe S top [W68]
e30bd130.11
S tatus
SO General Reset
!1(1)
0 R PM None 0.00 KW
!Safe S top [W68]
e30bd131.11
S tatus
SO Suspend-SpeedMon
!1(1)
0 R PM None 0.00 KW
!Safe S top [W68]
e30bd132.11
S tatus
SO Warning PUST
!1(1)
0 R PM None 0.00 KW
!Safe S top [W68]
e30bd133.11
S tatus
SO Warning DI1
!1(1)
0 R PM None 0.00 KW
!Safe S top [W68]
e30bd134.11
S tatus
SO Warning DI2
!1(1)
0 R PM None 0.00 KW
!Safe S top [W68]
Installationshandbuch | VLT® Safety Option MCB 150/151
LCP-Meldung Beschreibung
Die Sicherheitsoption fordert ein „Neustart- und Fehlerbestätigungssignal“ an, das immer nach
einem PUST erforderlich ist und wenn eine Sicherheitsfunktion freigegeben wird und konfiguriert
ist, bestätigt zu werden, damit der Motor laufen kann.
Tritt nur auf, wenn ein allgemeiner Reset durch die MCT 10 durchgeführt wird. Es ist eine Anzeige
für den Benutzer. Die Sicherheitsoption wird auf „Blank Initial State“ gesetzt und sichere Parameter werden auf Werkseinstellung gesetzt.
Der Nulldrehzahl-Timer enthält die verbleibende Zeit bis zum Ablauf des „Fail Prec Thresh“Timers nach Ablauf der Überwachungszeit. Die Sicherheitsoption signalisiert eine Warnung.
Warnungen und Alarmmeldungen
PUST-Warnung ist aufgetreten. Ursache der Warnung: Ablauf des PUST-Timers. Speichertest erforderlich, Aus-/Einschaltzyklus durchführen.
DI1-Offline-Warnung ist aufgetreten. Ursache der Warnung: Ablauf des Offline-Timers für Digitaleingang 1.
DI2-Offline-Warnung ist aufgetreten. Ursache der Warnung: Ablauf des Offline-Timers für Digitaleingang 2.
Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292| 97
Page 100

e30bd131.11
S tatus
SO Suspend-SpeedMon
!1(1)
0 R PM None 0.00 KW
!Safe S top [W68]
Installationshandbuch | VLT® Safety Option MCB 150/151
LCP-Meldung Beschreibung
Warnung über Aufhebung der Drehzahlüberwachung ist aufgetreten. Ursache der Warnung: Aufhebung der Drehzahlüberwachung für eine bestimmte Zeit.
Warnungen und Alarmmeldungen
98 | Danfoss A/S © 2019.01
AQ279747441421de-000201 / 130R0292
 Loading...
Loading...