

Page 1

Bedienungsanleitung
VLT® Extended Relay Card MCB 113
VLT® HVAC Drive FC 102, VLT® Refrigeration Drive FC 103, VLT® AQUA
Drive FC 202, VLT® AutomationDrive FC 301/FC 302
Page 2

Page 3
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Inhalt
1
Einführung 5
1.1
Zweck dieser Bedienungsanleitung 5
Marken 5
1.2
Dokumentversion 5
1.3
1.4
Zusätzliche Materialien 5
1.5
Produktübersicht 5
1.5.1
Bestimmungsgemäße Verwendung 5
1.6
Typzulassungen und Zertifizierungen 6
Sicherheit 7
2
Sicherheitsmaßnahmen 7
2.1
Installation 9
3
3.1
Mechanische Installation 9
Inhalt
3.1.1
Installation in Baugrößen A5–C4 9
3.2
Elektrische Installation 9
3.2.1
Sicherheitshinweise 9
3.2.2
Anschlussdiagramm 10
3.2.3
Anschlussdiagramm – Einhaltung von NAMUR 11
3.2.4
Galvanische Trennung 11
4
Parametereinstellung 12
4.1
Einführung in Parametereinstellung 12
4.2
5-** Digit. Ein-/Ausgänge 12
4.2.1
Parametergruppe 5-1* Digitaleingänge 12
4.2.2
Parametergruppe 5-2* Digital Inputs (Digitaleingänge) 28
4.2.3
Parametergruppe 5-3* Digitalausgänge 29
4.2.4
Parametergruppe 5-4* Relais 35
4.3
6-** Analoge Ein-/Ausg. 40
4.3.1
6-7* Analogausgang 3 MCB 113 40
4.3.2
6-8* Analogausgang 4 MCB 113 43
4.4
14-** Sonderfunktionen 44
4.4.1
14-8* Optionen 44
4.5
16-** Datenanzeigen 44
4.5.1
16-6* Anzeig. Ein-/Ausg. 44
5
Spezifikationen 47
5.1
Relais 47
AQ322553864968de-000101/130R0353 | 3Danfoss A/S © 2020.01
Page 4
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
5.2
Digitaleingänge 47
5.3
Analogausgänge 47
5.4
EMV 47
6
Anhang 48
6.1
Abkürzungen 48
6.2
Konventionen 48
Inhalt
AQ322553864968de-000101/130R03534 | Danfoss A/S © 2020.01
Page 5
Dokumentversion
Anmerkungen
AQ322553864968, Version 0101
Die Option ist jetzt auch für VLT® HVAC Drive FC 102, VLT® Refrigeration Drive FC 103 und VLT®
AQUA Drive FC 202 verfügbar.
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Einführung
1 Einführung
1.1 Zweck dieser Bedienungsanleitung
Diese Bedienungsanleitung enthält Informationen zur sicheren Installation und Inbetriebnahme einer VLT® Extended Relay
CardMCB 113-Option zur Verwendung in einem Frequenzumrichter der VLT®-Serie.
Die Bedienungsanleitung richtet sich ausschließlich an qualifiziertes Personal. Das Personal muss mit der VLT®-Frequenzumrichterserie vertraut sein.
Lesen Sie vor der Installation und Inbetriebnahme die Anweisungen, befolgen Sie diese und stellen Sie sicher, dass die Anweisungen zur sicheren Installation eingehalten werden. Bewahren Sie diese Anleitung immer zusammen mit dem Frequenzumrichter auf.
1.2 Marken
VLT® ist eine eingetragene Marke von Danfoss A/S.
1.3 Dokumentversion
Diese Bedienungsanleitung wird regelmäßig geprüft und aktualisiert. Verbesserungsvorschläge sind jederzeit willkommen. Siehe
Dokumentversion und Änderungen in Version und Änderungen angewendet in.
Die Originalsprache dieses Handbuchs ist Englisch.
1.4 Zusätzliche Materialien
Es stehen weitere Ressourcen zur Verfügung, die Ihnen helfen, erweiterte Funktionen und Programmierungen der Frequenzumrichter zu verstehen.
•
Die Bedienungsanleitung für die VLT®-Frequenzumrichterserie enthält Informationen zur Installation und Inbetriebnahme des
Frequenzumrichters für bestimmte Anwendungen.
•
Die VLT® Programmierhandbücher enthalten umfassendere Informationen über das Arbeiten mit Parametern.
•
Die VLT®-Projektierungshandbücher enthalten detaillierte Beschreibungen der Fähigkeiten und Funktionen zur Auslegung von
Steuerungssystemen für Motoren, die in verschiedenen Anwendungen eingesetzt werden.
Die technische Dokumentation für andere Produktoptionen ist verfügbar unter
www.danfoss.com.
1.5 Produktübersicht
1.5.1 Bestimmungsgemäße Verwendung
Die VLT® Extended Relay CardMCB 113 ist ausschließlich zur Verwendung in Erweiterungssteckplatz C1 bestimmt. Die Option ist als
C1-Standardoption für folgende Frequenzumrichter der VLT®-Serie konstruiert:
•
VLT® HVAC Drive FC 102
•
VLT® Refrigeration Drive FC 103
•
VLT® AQUA Drive FC 202
•
VLT® AutomationDrive FC 301/FC 302.
Der MCB 113 verfügt zusätzlich zum Standard-E/A des Frequenzumrichters über 7 Digitaleingänge, 2 Analogausgänge und 4 SPDTRelais. Diese Ergänzungen ermöglichen die Übereinstimmung mit den deutschen NAMUR NE37-Empfehlungen.
Bei Bestellung mit dem Frequenzumrichter wird die Option werkseitig installiert. Geben Sie zur Bestellung die folgenden Bestellnummern an:
•
130B1164 (unbeschichtet)
•
130B1264 (beschichtet)
Bestellen Sie zur Nachrüstung einen Einbausatz. Der Einbausatz enthält einen Lüfter für VLT® Motion Control MCO 305, der nur
montiert werden muss, wenn MCO 305 verwendet wird.
AQ322553864968de-000101 / 130R0353 | 5Danfoss A/S © 2020.01
Page 6
Baugrößen
Bestellnummer
A2 und A3 (40 mm für eine C-Option)
130B7530
A2 und A3 (60 mm für C0- und C1-Option)
130B7531
B3 (40 mm für eine C-Option)
130B1413
B3 (60 mm für C0- und C1-Option)
130B1414
Baugröße
Bestellnummer
A5
130B7532
B (außer B3), C, D, E und F
130B7533
089
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Tabelle 1: Einbausätze für Bookstyle-Gehäuse
Tabelle 2: Einbausätze für kompakte Gehäuse
1.6 Typzulassungen und Zertifizierungen
Die folgende Liste ist eine Auswahl von möglichen Typzulassungen und Zertifizierungen für Danfoss-Frequenzumrichter:
Einführung
H I N W E I S
Die jeweiligen Zulassungen und Zertifizierungen für den Frequenzumrichter befinden sich auf dem Typenschild des Frequenzumrichters. Weitere Informationen erhalten Sie von Ihrer örtlichen Danfoss-Vertretung oder einem Partner.
AQ322553864968de-000101 / 130R03536 | Danfoss A/S © 2020.01
Page 7
Spannung [V]
Mindestwartezeit (Minuten)
4715
200–240
1,1–3,7 kW (1,5–5 HP)
–
5,5–45 kW (7,5–60 HP)
380–480
1,1-7,5 kW
–
11–90 kW (15–125 HP)
525–600
1,1-7,5 kW
–
11–90 kW (15–125 HP)
525–690
–
1,1–7,5 kW (1,5–10 HP) (nur FC 102)
11–90 kW (15–125 HP) (nur FC 102)
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Sicherheit
2 Sicherheit
2.1 Sicherheitsmaßnahmen
W A R N U N G
HOCHSPANNUNG
Bei Anschluss ans Versorgungsnetz, die DC-Versorgung oder Zwischenkreiskopplung führen Frequenzumrichter Hochspannung.
Erfolgen Installation, Inbetriebnahme und Wartung nicht durch qualifiziertes Personal, kann dies zum Tod oder zu schweren Verletzungen führen.
Installation, Inbetriebnahme und Wartung dürfen ausschließlich von qualifiziertem Personal durchgeführt werden.
-
W A R N U N G
UNERWARTETER ANLAUF
Wenn der Frequenzumrichter an das Versorgungsnetz, die DC-Versorgung oder die Zwischenkreiskopplung angeschlossen ist,
kann der Motor jederzeit anlaufen, was zum Tod oder zu schweren Verletzungen sowie zu Geräte- oder Sachschäden führen
kann! Der Motor kann über einen externen Schalter, einen Feldbus-Befehl, ein Sollwerteingangssignal, über einen Tastendruck an
LCP oder LOP, eine Fernbedienung per MCT 10 Konfigurationssoftware oder nach einem quittierten Fehlerzustand anlaufen.
Drücken Sie vor der Programmierung von Parametern die Taste [Off] am LCP.
-
Ist ein unerwarteter Anlauf des Motors gemäß den Bestimmungen zur Personensicherheit unzulässig, trennen Sie den Fre-
-
quenzumrichter vom Netz.
Prüfen Sie, ob der Frequenzumrichter, der Motor und alle angetriebenen Geräte betriebsbereit sind.
-
W A R N U N G
ENTLADEZEIT
Der Frequenzumrichter enthält Zwischenkreiskondensatoren, die auch bei abgeschaltetem Frequenzumrichter geladen sein können. Auch wenn die Warn-Anzeigeleuchte nicht leuchten, kann Hochspannung vorliegen.
Das Nichteinhalten der vorgesehenen Entladungszeit nach dem Trennen der Spannungsversorgung vor Wartungs- oder Reparaturarbeiten kann zu schweren oder tödlichen Verletzungen führen.
Stoppen Sie den Motor.
-
Trennen Sie das Versorgungsnetz, Permanentmagnet-Motoren und externe Zwischenkreisversorgungen, einschließlich ex-
-
terner Batterie-, USV- und Zwischenkreisverbindungen zu anderen Frequenzumrichtern.
Warten Sie, damit die Kondensatoren vollständig entladen können. Die notwendige Wartezeit finden Sie in der Tabelle Entla-
-
dezeit sowie auf dem Typenschild an der Oberseite des Frequenzumrichters.
Verwenden Sie vor der Durchführung von Wartungs- oder Reparaturarbeiten ein geeignetes Spannungsmessgerät, um si-
-
cherzustellen, dass die Kondensatoren vollständig entladen sind.
Tabelle 3: Entladezeit, VLT® HVAC Drive FC 102 und VLT® Refrigeration Drive FC 103
AQ322553864968de-000101 / 130R0353 | 7Danfoss A/S © 2020.01
Page 8
Spannung [V]
Mindestwartezeit (Minuten)
4715
200–240
0,25–3,7 kW (0,34–5 HP)
–
5,5–45 kW (7,5–60 HP)
380–480
0,37–7,5 kW (0,5–10 HP)
–
11–90 kW (15–125 HP)
525–600
0,75–7,5 kW (1,0–10 HP)
–
11–90 kW (15–125 HP)
525–690
–
1,1-7,5 kW
11–90 kW (15–125 HP)
Spannung [V]
Mindestwartezeit (Minuten)
4715
200–240
0,25–3,7 kW (0,34–5 HP)
–
5,5–37 kW (7,5–50 HP)
380–500
0,25–7,5 kW (0,34–10 HP)
–
11–75 kW (15–100 HP)
525–600
0,75–7,5 kW (1–10 HP)
–
11–75 kW (15–100 HP)
525–690
–
1,5–7,5 kW (2–10 HP)
11–75 kW (15–100 HP)
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Tabelle 4: Entladezeit, VLT® AQUA Drive FC 202
Tabelle 5: Entladezeit, VLT® AutomationDrive FC 301/FC 302
Sicherheit
W A R N U N G
GEFAHR DURCH ABLEITSTRÖME
Die Ableitströme überschreiten 3,5 mA. Eine nicht vorschriftsgemäße Erdung des Frequenzumrichters kann zum Tod oder zu
schweren Verletzungen führen!
Lassen Sie die ordnungsgemäße Erdung der Geräte durch einen zertifizierten Elektroinstallateur überprüfen.
-
W A R N U N G
DREHENDE WELLEN
Ein Kontakt mit drehenden Wellen und elektrischen Betriebsmitteln kann zum Tod oder zu schweren Verletzungen führen!
Stellen Sie sicher, dass Installations-, Inbetriebnahme- und Wartungsarbeiten ausschließlich von geschultem und qualifizier-
-
tem Personal durchgeführt werden.
Alle Elektroarbeiten müssen den VDE-Vorschriften und anderen lokal geltenden Elektroinstallationsvorschriften entsprechen.
-
Befolgen Sie die Verfahren in diesem Handbuch.
-
AQ322553864968de-000101 / 130R03538 | Danfoss A/S © 2020.01
Page 9
RemoveJumper to activate Safe Stop
12 13 18 19 27 29 32 33 20
1
2
130bb457.11
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Installation
3 Installation
3.1 Mechanische Installation
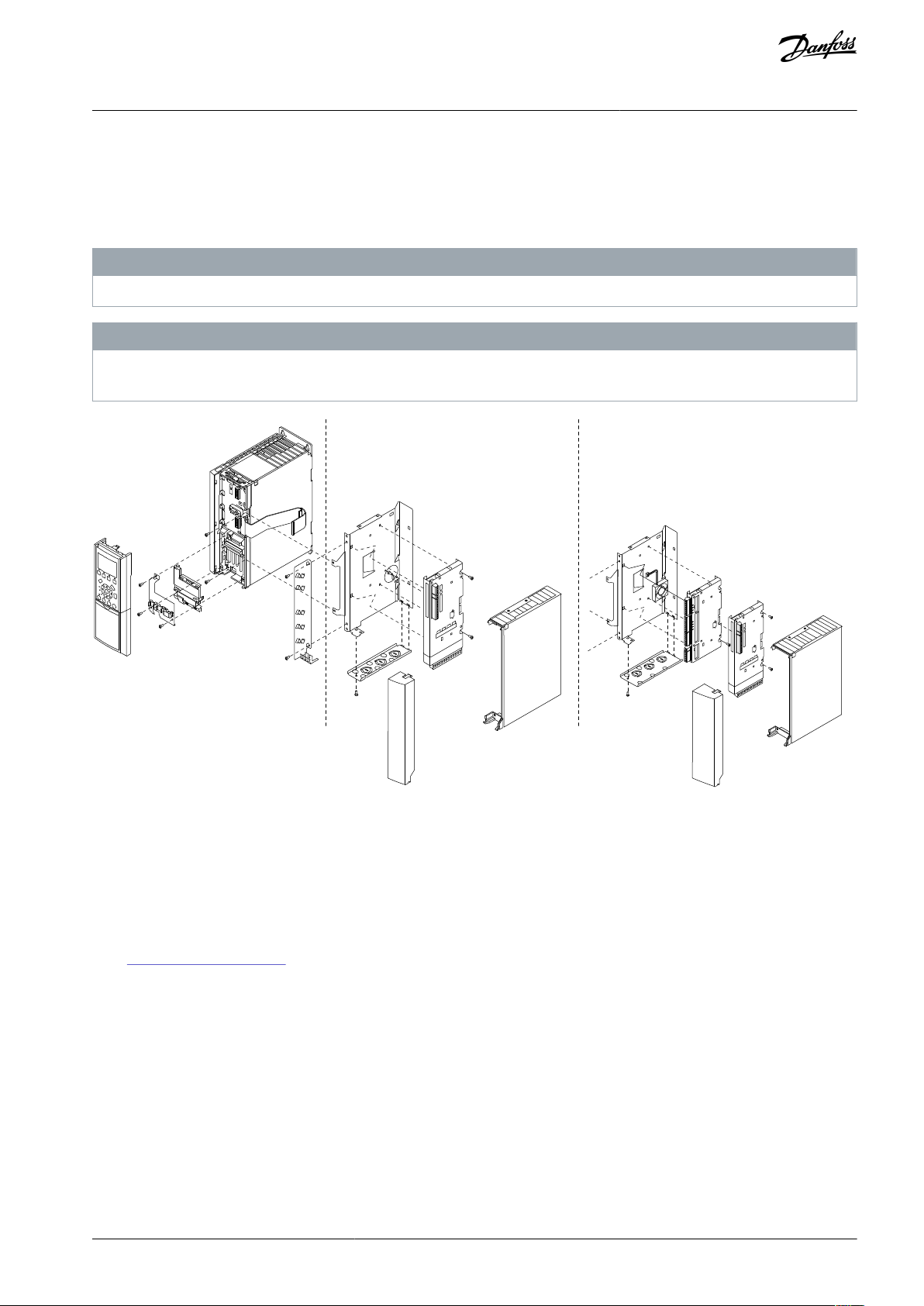
3.1.1 Installation in Baugrößen A5–C4
H I N W E I S
Für die Baugrößen A5–C4 kann nur eine C-Option gleichzeitig installiert werden.
H I N W E I S
Installieren Sie den kleinen Lüfter für VLT® Extended Relay CardMCB 113, VLT® A/B nicht in C-Option des Adapters MCF 106 oder
in den Baugrößen B4, C3, C4, D, E und F.
Abbildung 1: Installation der VLT® Extended Relay Card MCB 113 – Explosionszeichnung
•
Wenn nur eine C-Option verwendet wird, verwenden Sie den 40-mm-Einbausatz.
•
Wird der MCB 113 in Kombination mit dem VLT® Motion Control MCO 305 verwendet, verwenden Sie den 60-mm-Einbausatz.
3.2 Elektrische Installation
3.2.1 Sicherheitshinweise
Siehe 2.1 Sicherheitsmaßnahmen für allgemeine Sicherheitshinweise.
AQ322553864968de-000101 / 130R0353 | 9Danfoss A/S © 2020.01
Page 10
3
2
1 876
54 11
10
9
13
12 142
1
4
3
1
2
1 32 4 65 7 98 1 0 1211
7
2
GND
24 V DC
Par. 5-00
24 V (NPN)
0 V (PNP)*
e30ba765.11
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
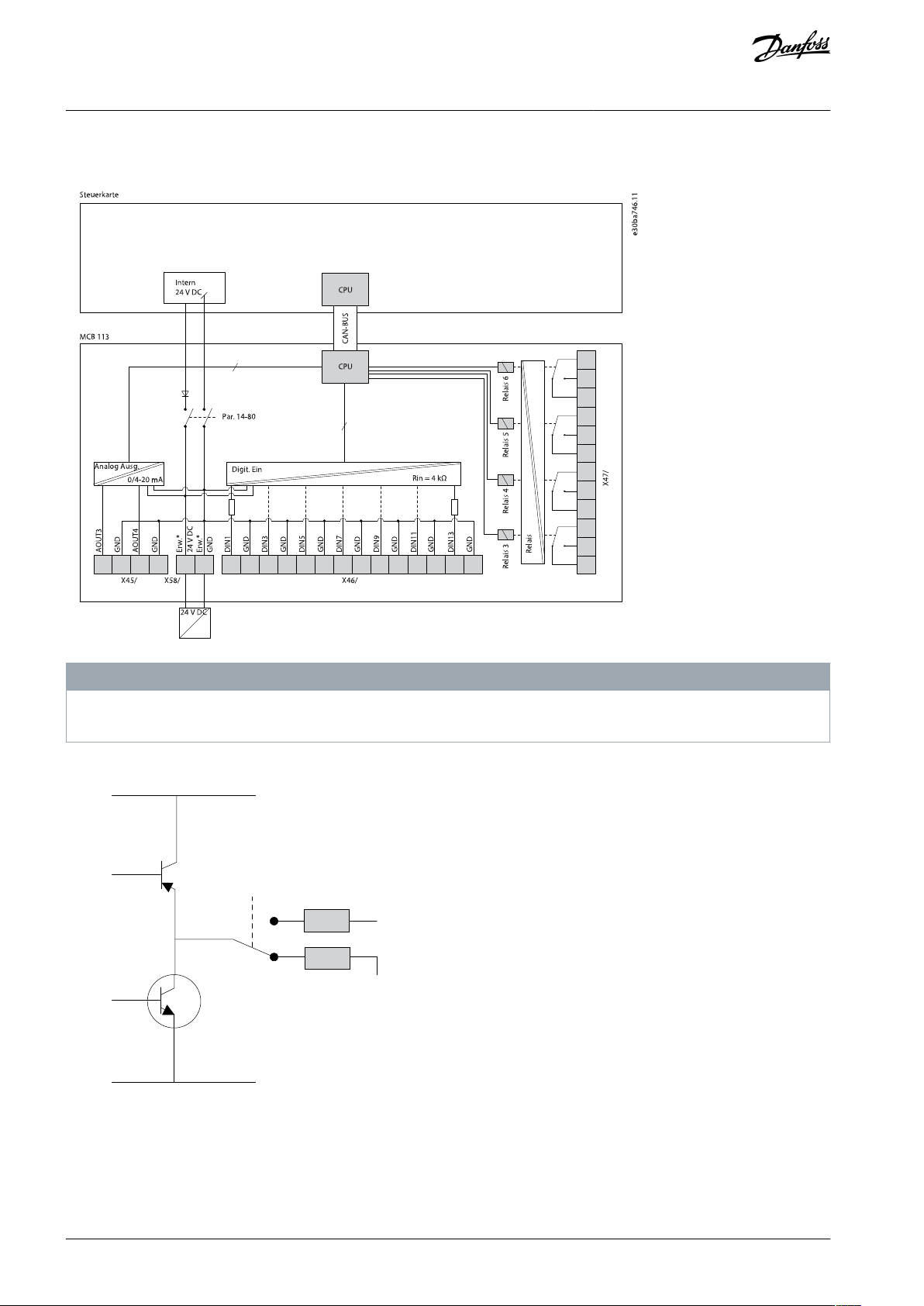
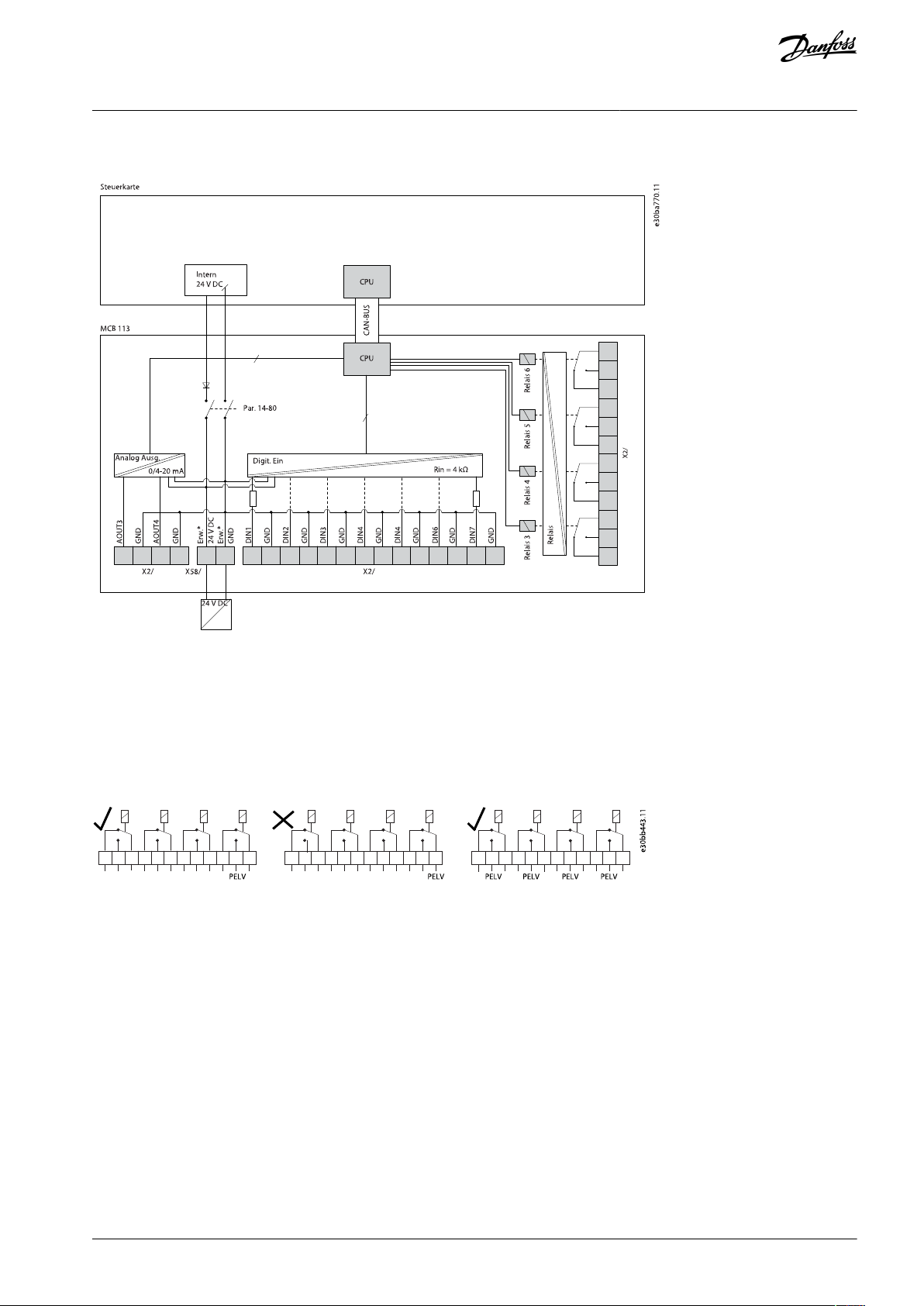
3.2.2 Anschlussdiagramm
Installation
H I N W E I S
Die Anschlüsse dieser Relais unterscheiden sich von den Standardrelais der Frequenzumrichter. Die Spule befindet sich zwischen
T2 und T3 und nicht zwischen T1 und T2.
Die Digitaleingänge werden für PNP oder NPN in Parameter 5-00 Schaltlogik programmiert.
Abbildung 2: Programmierung der Digitaleingänge
AQ322553864968de-000101 / 130R035310 | Danfoss A/S © 2020.01
Page 11
7
2
606162
63
1
2
10 -
11-12
- 13 - 14 - 15 - 16
-
31
30
-
33
32
34
35
37
39 38
-
36
123
45678 9 10 11
12
1 2 3
4 5 678 9
10 11 12
1 2 345 6 7 8 9 10 11 12
Spannungs-
führendes
Teil
Spannungs-
führendes
Teil
Spannungs-
führendes
Teil
Spannungs-
führendes
Teil
Spannungs-
führendes
Teil
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
3.2.3 Anschlussdiagramm – Einhaltung von NAMUR
Installation
3.2.4 Galvanische Trennung
Die VLT® Extended Relay CardMCB 113 kann an Klemme X58/ an eine externe 24-V-Versorgung angeschlossen werden, um die galvanische Trennung zwischen dem Frequenzumrichter und der Optionskarte sicherzustellen. Wenn keine galvanische Trennung erforderlich ist, kann die Optionskarte an die interne 24-V-Versorgung des Frequenzumrichters angeschlossen werden. Die interne 24V-Versorgung ist an X58 verfügbar, wenn Parameter 14-80 Ext. 24 VDC für Option auf [0] Nein eingestellt ist.
Die Relais unterstützen eine Kombination aus 24-V- und 250-V-Signalen, so lange sich zwischen ihnen ein nicht verwendetes Relais
befindet.
Abbildung 3: Gültige Anschlüsse für galvanische Trennung
AQ322553864968de-000101 / 130R0353 | 11Danfoss A/S © 2020.01
Page 12
Gruppe 1
Reset, Freilaufstopp, Reset und Freilaufstopp, Schnellstopp, DC-Bremse, Stopp und [Off]-Taste.
Gruppe 2
Start, Puls-Start, Reversierung, Start Rücklauf, Festdrehzahl JOG und Ausgangsfrequenz speichern.
Funktion des Digitaleingangs
Auswahl
Klemmen
Ohne Funktion
[0]
Alle, Klemme 32, 33
Reset
[1]
Alle
Motorfreilauf (inv.)
[2]
Alle, Klemme 27
Mot.freil./Res. inv.
[3]
Alle
Schnellst.rampe (inv)
[4]
Alle
DC Bremse (invers)
[5]
Alle
Stopp (invers)
[6]
Alle
Start
[8]
Alle, Klemme 18
Puls-Start
[9]
Alle
Reversierung
[10]
Alle, Klemme 19
Start + Reversierung
[11]
Alle
Start nur Rechts
[12]
Alle
Start nur Links
[13]
Alle
Festdrz. (JOG)
[14]
Alle, Klemme 29
Festsollwert ein
[15]
Alle
Festsollwert Bit 0
[16]
Alle
Festsollwert Bit 1
[17]
Alle
Festsollwert Bit 2
[18]
Alle
Sollw. speich.
[19]
Alle
Drehz. speich.
[20]
Alle
Drehzahl speichern
[21]
Alle
Drehzahl ab
[22]
Alle
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Parametereinstellung
4 Parametereinstellung
4.1 Einführung in Parametereinstellung
Die in dieser Bedienungsanleitung enthaltenen Parameter sind Auszüge aus den Frequenzumrichter-spezifischen Programmierhandbüchern. Vollständige Parameterbeschreibungen finden Sie in diesen Programmierhandbüchern.
4.2 5-** Digit. Ein-/Ausgänge
4.2.1 Parametergruppe 5-1* Digitaleingänge
Die Digitaleingänge dienen zur Auswahl verschiedener Funktionen im Frequenzumrichter. Tabelle 6 zeigt, welche Funktionen Digitaleingängen zugeordnet werden können.
Funktionen in Gruppe 1 haben eine höhere Priorität als Funktionen in Gruppe 2.
Tabelle 6: Digitaleingangsfunktionen
AQ322553864968de-000101 / 130R035312 | Danfoss A/S © 2020.01
Page 13
Funktion des Digitaleingangs
Auswahl
Klemmen
Satzanwahl Bit 0
[23]
Alle
Satzanwahl Bit 1
[24]
Alle
Präz. Stopp inv.
[26]
18, 19
Präz. Start, Stopp
[17]
18, 19
Freq.korr. Auf
[28]
Alle
Freq.korr. Ab
[29]
Alle
Zählereingang
[30]
29, 33
Pulseingang flankengesteuert
[31]
29, 33
Pulseingang zeitbasiert
[32]
29, 33
Rampe Bit 0
[34]
Alle
Rampe Bit 1
[35]
Alle
Präziser Puls-Start
[40]
18, 19
Präz. Puls-Stopp inv.
[41]
18, 19
Externe Verriegelung
[51]–DigiPot Auf
[55]
Alle
DigiPot Ab
[56]
Alle
DigiPot löschen
[57]
Alle
DigiPot Heben
[58]
Alle
Zähler A (+1)
[60]
29, 33
Zähler A (-1)
[61]
29, 33
Reset Zähler A
[62]
Alle
Zähler B (+1)
[63]
29, 33
Zähler B (-1)
[64]
29, 33
Reset Zähler B
[65]
Alle
Mech. Bremse Signal
[70]
Alle
Mech. Bremse Sign.inv.
[71]
Alle
PID-Fehler inv.
[72]
Alle
PID-Reset I-Anteil
[73]
Alle
PID aktiviert
[74]
Alle
MCO-spezifisch
[75]
Alle
PTC-Karte 1
[80]
Alle
PROFIdrive OFF2
[91]
Alle
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Parametereinstellung
AQ322553864968de-000101 / 130R0353 | 13Danfoss A/S © 2020.01
Page 14
Funktion des Digitaleingangs
Auswahl
Klemmen
PROFIdrive OFF3
[92]
Alle
Erkennung von leichter Last
[94]
Alle
Evakuierung
[95]
Alle
Netzausfall
[96]
32, 33
Netzausfall invers
[97]
32, 33
Start flankengesteuert
[98]
Alle
Sicherheitsoption – Reset
[100]–Master-Versatz aktivieren
[108]
Alle
Virtuellen Master starten
[109]
Alle
Referenzfahrt starten
[110]
Alle
Touch aktivieren
[111]
Alle
Relative Position
[112]
Alle
Sollwert aktivieren
[113]
Alle
Sync. zu Pos. Modus
[114]
Alle
Referenzfahrt-Sensor
[115]
18, 32, 33
Referenzfahrt-Sensor invers
[116]
18, 32, 33
Touch-Sensor
[117]
18, 32, 33
Touch-Sensor invers
[118]
18, 32, 33
Drehzahlmodus
[119]
Alle
Power Limit Motorisch
[231]
Alle
Power Limit Generatorisch
[232]
Alle
Power Limit Beides
[233]
Alle
Geringe Last + Evacuation
[234]
Alle
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Parametereinstellung
Die Standardklemmen des Frequenzumrichters sind:
•
18
•
19
•
27
•
29
•
32
•
33
Bei allen Frequenzumrichterserien mit Ausnahme des VLT® AutomationDrive FC 301 funktionieren die Klemmen 27 und 29 auch als
Ausgang.
Die VLT® Extended Relay CardMCB 113-Option verfügt über die folgenden Klemmen:
Analogausgang
AQ322553864968de-000101 / 130R035314 | Danfoss A/S © 2020.01
Page 15
•
•
•
•
Option
Funktion
[0]
Ohne Funktion
Keine Reaktion auf Signale, die an die Klemme übertragen werden.
[1]
Reset
Setzt den Frequenzumrichter nach dem Ausschalten/nach einem Alarm zurück. Sie können nicht
alle Alarme quittieren.
[2]
Motorfreilauf (inv.)
(Werkseinstellung Digitaleingang 27): Freilaufstopp, invertierter Eingang (NC). Der Frequenzumrichter belässt den Motor im Motorfreilauf. Logisch „0“⇒Freilaufstopp.
[3]
Mot.freil./Res. inv.
Reset und Freilaufstopp, invertierter Eingang (NC). Motor bleibt im Motorfreilauf und Frequenzumrichter wird quittiert. Logisch „0“⇒Motorfreilaufstopp und Reset.
[4]
Schnellst.rampe (inv)
Invertierter Eingang (NC). Wenn das Signal an der zugewiesenen Klemme „0“ ist, wird ein Stopp
gemäß Parameter 3-81 Rampenzeit Schnellstopp ausgeführt. Nach Anhalten des Motors dreht die
Motorwelle im Motorfreilauf. Logisch „0“⇒Schnellstopp.
[5]
DC Bremse (invers)
Invertierter Eingang für DC-Bremse (NC). Hält den Motor durch Anlegen einer DC-Spannung für einen bestimmten Zeitraum an. Siehe Parameter 2-01 DC-Bremsstrom bis Parameter 2-03 DC-Bremse
Ein [UPM]. Die Funktion ist nur aktiv, wenn der Wert in Parameter 2-02 DC-Bremszeit ungleich 0 ist.
Logisch „0“ ⇒DC-Bremse.
[6]
Stopp (invers)
Stopp, invertierte Funktion. Erzeugt eine Stoppfunktion, wenn die ausgewählte Klemme von einer
logischen 1 zu einer logischen 0 wechselt.
Das Stoppen erfolgt entsprechend der gewählten Rampenzeit:
Parameter 3-42 Rampenzeit Ab 1,
Parameter 3-52 Rampenzeit Ab 2,
Parameter 3-62 Rampenzeit Ab 3 und
Parameter 3-72 Rampenzeit Ab 4.
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
•
X45/1
•
X45/3
Digitaleingänge
•
X46/1
•
X46/3
•
X46/5
•
X46/7
•
X46/9
•
X46/11
•
X46/13
Relais
•
X47/3
•
X47/4
•
X47/5
•
X47/6
Nur für einen speziellen Digitaleingang vorgesehene Funktionen werden im zugehörigen Parameter angegeben.
Sie können alle Digitaleingänge auf die folgenden Funktionen programmieren:
Parametereinstellung
Tabelle 7: 5-10 Klemme 18 Digitaleingang - 1
AQ322553864968de-000101 / 130R0353 | 15Danfoss A/S © 2020.01
Page 16

Option
Funktion
H I N W E I S
Befindet sich der Frequenzumrichter während eines Stopp-Befehls an der Drehmomentgrenze,
kann dieser aufgrund der internen Regelung eventuell nicht ausgeführt werden. Konfigurieren
Sie einen Digitalausgang für [27] Mom.grenze u. Stopp, um eine Abschaltung des Frequenzumrichters auch in der Drehmomentgrenze sicherzustellen. Schließen Sie diesen Digitalausgang an
einen Digitaleingang an, der als Motorfreilauf konfiguriert ist.
[8]
Start
(Werkseinstellung Digitaleingang 18): Wählen Sie Start, um die ausgewählte Klemme für einen
Start/Stopp-Befehl zu konfigurieren. Logisch „1“ = Start, logisch „0“ = Stopp.
[9]
Puls-Start
Wenn ein Puls für mindestens 2 ms aktiviert wird, startet der Motor. Bei Aktivierung von Stopp (invers) wird der Motor gestoppt oder ein Reset-Befehl (per DI) wird ausgegeben.
[10]
Reversierung
(Werkseinstellung Digitaleingang 19). Ändert die Drehrichtung der Motorwelle. Wählen Sie zum
Umkehren logisch „1“. Das Reversierungssignal ändert nur die Drehrichtung. Die Startfunktion wird
nicht aktiviert. Wählen Sie beide Richtungen in Parameter 4-10 Motor Drehrichtung. Die Funktion ist
bei Prozessregelung mit Rückführung nicht aktiv.
[11]
Start + Reversierung
Aktiviert einen Start-/Stoppbefehl bei gleichzeitiger Reversierung. Signale beim Start sind nicht
gleichzeitig möglich.
[12]
Start nur Rechts
Beendet den Linkslauf und ermöglicht einen Rechtslauf.
[13]
Start nur Links
Beendet den Rechtslauf und ermöglicht einen Linkslauf.
[14]
Festdrz. (JOG)
(Werkseinstellung Digitaleingang 29): Zur Aktivierung der Festdrehzahl JOG. Siehe Parameter 3-11
Festdrehzahl Jog [Hz].
[15]
Festsollwert ein
Dient zum Wechsel zwischen externem Sollwert und Festsollwert. Voraussetzung ist die Auswahl
von [1] Externe Anwahl in Parameter 3-04 Sollwertfunktion. Logisch „0“ = externer Sollwert aktiv;
Logisch „1“ = einer der acht Festsollwerte ist aktiv.
[16]
Festsollwert Bit 0
Festsollwert-Bit 0, 1 und 2 erlaubt die Wahl zwischen einem der acht Festsollwerte wie in Tabelle 8
angegeben.
[17]
Festsollwert Bit 1
Wie [16] Festsollwert Bit 0.
[18]
Festsollwert Bit 2
Wie [16] Festsollwert Bit 0.
Festsollwert-Bit
210
Festsollwert 0
000
Festsollwert 1
001
Festsollwert 2
010
Festsollwert 3
011
Festsollwert 4
100
Festsollwert 5
101
Festsollwert 6
110
Festsollwert 7
111
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Parametereinstellung
Tabelle 8: Festsollwert-Bit
AQ322553864968de-000101 / 130R035316 | Danfoss A/S © 2020.01
Page 17

Option
Funktion
[19]
Sollw.
speich.
Speichert den Istwert, der jetzt der Ausgangspunkt bzw. die Bedingung für [21] Drehzahl auf und [22] Drehzahl
ab ist. Wird Drehzahl auf/ab benutzt, so richtet sich die Drehzahländerung immer nach Rampe 2 (Parameter
3-51 Rampenzeit Auf 2 und Parameter 3-52 Rampenzeit Ab 2) im Intervall 0–Parameter 3-03 Maximaler Sollwert.
[20]
Drehz.
speich.
Speichert die Motor-Istfrequenz (Hz), die jetzt der Ausgangspunkt bzw. die Bedingung für [21] Drehzahl auf
und [22] Drehzahl ab ist. Wird Drehzahl auf/ab benutzt, so richtet sich die Drehzahländerung immer nach
Rampe 2 (Parameter 3-51 Rampenzeit Auf 2 und Parameter 3-52 Rampenzeit Ab 2) im Intervall 0–Parameter 1-23
Motornennfrequenz.
H I N W E I S
Wenn Ausgangsfrequenz speichern aktiv ist, kann der Frequenzumrichter nicht über ein niedriges [8] StartSignal angehalten werden. Stoppen Sie den Frequenzumrichter über eine auf [2] Freilauf invers oder [3] Motorfreilauf/Reset, invers programmierte Klemme.
[21]
Drehzahl
speichern
Wählen Sie [21] Drehzahl auf und [22] Drehzahl ab, wenn eine digitale Steuerung der Drehzahl auf/ab (Motorpotentiometer) erfolgen soll. Aktivieren Sie diese Funktion durch Auswahl von [19] Sollwert speichern oder [20]
Ausgangsfrequenz speichern. Wird Drehzahl auf/ab weniger als 400 ms aktiviert, erhöht bzw. reduziert sich der
resultierende Sollwert um 0,1 %. Wird Drehzahl auf/ab mehr als 400 ms aktiviert, folgt der resultierende Sollwert der Einstellung von Parameter 3-x1/ 3-x2 für Rampe auf/ab.
Abschaltung
Freq.korr. Auf
Unveränderte Drehzahl
00Reduziert um %-Wert
10Erhöht um %-Wert
01Reduziert um %-Wert
1
1
Option
Funktion
[22]
Drehzahl ab
Wie [21] Drehzahl auf.
[23]
Satzanwahl Bit
0
Wählen Sie [23] Satzanwahl Bit 0 oder [24] Satzanwahl Bit 1 aus, um eine der vier Konfigurationen zu wählen. Stellen Sie Parameter 0-10 Aktiver Satz auf [9] Externe Anwahl ein.
[24]
Satzanwahl Bit
1
(Werkseinstellung Digitaleingang 32): Wie [23] Satzanwahl Bit 0.
[26]
Präz. Stopp
inv.
Sendet ein inverses Stopp-Signal, wenn die Funktion Präziser Stopp in Parameter 1-83 Präziser Stopp-
Funktion aktiviert ist. Die Funktion Präziser Stopp invers ist für die Klemmen 18 oder 19 verfügbar.
[27]
Präz. Start,
Stopp
Bei Auswahl von [0] Präz. Rampenstopp in Parameter 1-83 Präziser Stopp-Funktion verwenden. Präziser
Start, Stopp ist für die Klemmen 18 und 19 verfügbar. Ein präziser Start stellt sicher, dass der Rotordrehwinkel vom Stillstand zum Sollwert bei jedem Start gleich ist (für dieselbe Rampenzeit und denselben
Sollwert). Diese Funktion ist das Äquivalent zum präzisen Stopp, bei dem der Rotordrehwinkel, in dem
der Rotor vom Sollwert zum Stillstand dreht, bei jedem Stopp gleich ist. Bei Auswahl von Parameter 1-83
Präziser Stopp-Funktion, [1] ZStopp m.Reset oder [2] ZStopp o.Reset: Der Frequenzumrichter benötigt ein
Signal Präziser Stopp, bevor der Wert von Parameter 1-84 Präziser Stopp-Wert erreicht ist. Wenn dieses
Signal nicht vorhanden ist, stoppt der Frequenzumrichter nicht, wenn der Wert in Parameter 1-84 Präziser
Stopp-Wert erreicht wird. Sie müssen Präziser Start, Stopp von einem Digitaleingang auslösen. Die Funktion ist für die Klemmen 18 und 19 verfügbar.
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Tabelle 9: 5-10 Klemme 18 Digitaleingang - 2
Parametereinstellung
Tabelle 10: Abschaltung/Drehzahl auf
Tabelle 11: 5-10 Klemme 18 Digitaleingang - 3
AQ322553864968de-000101 / 130R0353 | 17Danfoss A/S © 2020.01
Page 18

Option
Funktion
[28]
Freq.korr. Auf
Erhöht den Sollwert durch den in Parameter 3-12 Frequenzkorrektur Auf/Ab festgelegten Prozentwert (relativ).
[29]
Freq.korr. Ab
Reduziert den Sollwert durch den in Parameter 3-12 Frequenzkorrektur Auf/Ab festgelegten Prozentwert
(relativ).
[30]
Zählereingang
Die Funktion Präziser Stopp in Parameter 1-83 Präziser Stopp-Funktion funktioniert als Zähler-Stopp oder
als Zähler-Stopp mit Drehzahlausgleich mit oder ohne Reset. Stellen Sie den Zählerwert in Parameter 1-84
Präziser Stopp-Wert ein.
[31]
Puls flankengesteuert
Zählt die Anzahl der Pulsflanken pro Abtastzeit. Hierdurch steht eine höhere Auflösung bei Hochfrequenzen zur Verfügung, jedoch ist diese nicht so genau wie bei niedrigeren Frequenzen. Verwenden Sie dieses Pulsprinzip für Drehgeber mit geringer Auflösung (z. B. 30 PPR).
Puls
Abtastzeit
e30bb463.10
Abbildung 4: Pulsflanken pro Abtastzeit
[32]
Pulszeitbasiert
Misst die Dauer zwischen Pulsflanken. Hierdurch steht eine höhere Auflösung bei niedrigeren Frequenzen zur Verfügung, jedoch ist diese nicht so genau wie bei Hochfrequenzen. Dieses Prinzip weist eine
Grenzfrequenz auf, durch die es für Drehgeber mit geringer Auflösung (z. B. 30 PPR) bei niedrigen Drehzahlen nicht geeignet ist.
Drehzahl [UP M] Drehzahl [UP M]
Zeit [Sek]
Zeit [Sek]
a
b
e30bb462.10
Lese-Timer:
20 Taktzeiten
Lese-Timer:
20 Taktzeiten
Startzeit
Zeitzähler
Abtastzeit
Timer
Puls
e30bb464.10
Abbildung 5: Dauer zwischen Pulsflanken
[34]
Rampe Bit 0
Ermöglicht eine Wahl zwischen einer der 4 verfügbaren Rampen gemäß Tabelle 12.
[35]
Rampe Bit 1
Wie [34] Rampe Bit 0.
Festes Rampenbit
10Rampe 1
00Rampe 2
01Rampe 3
10Rampe 4
1
1
Option
Funktion
[40]
Präziser PulsStart
Für einen präzisen Puls-Start ist lediglich ein Puls von 3 ms an Klemme 18 oder 19 erforderlich. Bei Verwendung für Parameter 1-83 Präziser Stopp-Funktion[1] ZStopp m.Reset oder [2] ZStopp o.Reset: Wenn
der Sollwert erreicht wird, aktiviert der Frequenzumrichter intern das Signal Präziser Stopp. Das bedeutet, dass der Frequenzumrichter den präzisen Stopp ausführt, wenn der Zählerwert von Parameter 1-84
Präziser Stopp-Wert erreicht ist.
[41]
Präz. PulsStopp inv.
Sendet ein präzises Stopp-Signal, wenn die Funktion Präziser Stopp in Parameter 1-83 Präziser Stopp-
Funktion aktiviert ist. Die Funktion Präziser Puls-Stopp invers ist für die Klemmen 18 oder 19 verfügbar.
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Parametereinstellung
Tabelle 12: Festes Rampenbit
Tabelle 13: 5-10 Klemme 18 Digitaleingang - 4
AQ322553864968de-000101 / 130R035318 | Danfoss A/S © 2020.01
Page 19

Option
Funktion
[51]
Externe Verriegelung
Diese Funktion ermöglicht die Übermittlung eines externen Fehlers an den Frequenzumrichter. Dieser
Fehler wird wie ein intern generierter Alarm behandelt.
[55]
DigiPot Auf
DigiPot Auf-Signal für die in Parametergruppe 3-9* Digitalpoti beschriebene DigitalpotentiometerFunktion.
[56]
DigiPot Ab
DigiPot Ab-Signal für die in Parametergruppe 3-9* Digitalpoti beschriebene Digitalpotentiometer-Funktion.
[57]
DigiPot löschen
Löscht den in Parametergruppe 3-9* Digitalpoti beschriebenen Digitalpotenziometer-Sollwert.
[60]
Zähler A
(Nur Klemme 29 oder 33). Eingang zum Erhöhen der Zählung im SLC-Zähler.
[61]
Zähler A
(Nur Klemme 29 oder 33). Eingang zum Verringern der Zählung im SLC-Zähler.
[62]
Reset Zähler A
Eingang zum Reset von Zähler A.
[63]
Zähler B
(Nur Klemme 29 oder 33). Eingang zum Erhöhen der Zählung im SLC-Zähler.
[64]
Zähler B
(Nur Klemme 29 oder 33). Eingang zum Verringern der Zählung im SLC-Zähler.
[65]
Reset Zähler B
Eingang zum Reset von Zähler B.
[70]
Mech. Bremse
Signal
Bremsenistwert für Hubanwendungen: Stellen Sie Parameter 1-01 Steuerprinzip auf [3] Fluxvektor mit
Geber ein; stellen Sie Parameter 1-72 Startfunktion auf [6] Mech. Bremse ein.
[71]
Mech. Bremse
Sign. inv.
Invertierter Bremsenistwert für Hubanwendungen.
[72]
PID error inverse
Die Aktivierung dieser Option kehrt den resultierenden Fehler vom PID-Prozessregler um. Nur verfügbar, wenn Parameter 1-00 Regelverfahren auf [6] Flächenwickler, [7] Erw.PID-Drehz.o.Rück. oder [8]
Erw.PID-Drehz.m.Rück.. eingestellt ist.
[73]
PID-Reset I-Anteil
Die Aktivierung dieser Option setzt den I-Anteil des PID-Prozessreglers zurück. Dies entspricht Parame-
ter 7-40 PID-Prozess Reset I-Teil. Nur verfügbar, wenn Parameter 1-00 Regelverfahren auf [6] Flächenwickler, [7] Erw.PID-Drehz.o.Rück. oder [8] Erw.PID-Drehz.m.Rück. eingestellt ist.
[74]
PID aktiviert
Aktiviert den erweiterten PID-Prozessregler. Dies entspricht Parameter 7-50 PID-Prozess erw. PID. Nur
verfügbar, wenn Parameter 1-00 Regelverfahren auf [7] Erw.PID-Drehz.o.Rück. oder [8] Erw.PID-
Drehz.m.Rück. eingestellt ist.
[80]
PTC-Karte 1
Sie können alle Digitaleingänge auf [80] PTC-Karte 1 einstellen. Es darf aber nur jeweils ein Digitaleingang auf diese Option eingestellt sein.
[91]
PROFIdrive
OFF2
Die Funktionalität ist dieselbe wie beim entsprechenden Steuerwort-Bit der PROFIBUS/PROFINET-Option.
[92]
PROFIdrive
OFF3
Die Funktionalität ist dieselbe wie beim entsprechenden Steuerwort-Bit der PROFIBUS/PROFINET-Option.
[94]
Erkennung von
leichter Last
Die Erkennung von leichter Last ist eine Funktion für die Aufzugsanwendung, mit der sichergestellt
wird, dass der Aufzug im Notfall in Evakuierungsrichtung läuft, die die geringste Energie (USV-Kapazität) benötigt. Siehe Parameter 30-25 Light Load Delay [s] (Verzögerung bei leichter Last [s]), Parameter
30-26 Delay Before Measurements (Verzögerung vor Messungen), Parameter 30-27 Light Load Speed [%]
(Drehzahl bei leichter Last [%]), Parameter 30-28 Evacuation Speed [%] (Evakuierungsdrehzahl [%]) und
Parameter 30-29 Ramp Time (Rampenzeit) für Konfigurationen zur Erkennung von leichter Last.
H I N W E I S
Die Motorfangschaltung setzt die Erkennung von geringer Last außer Kraft.
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Parametereinstellung
AQ322553864968de-000101 / 130R0353 | 19Danfoss A/S © 2020.01
Page 20

Option
Funktion
[95]
Evakuierung
Der Evakuierungsmodus ist eine Funktion für Aufzugsanwendungen, die einen Betrieb bei reduzierter
Zwischenkreisspannung zur Evakuierung von Personen bei einem Stromausfall ermöglicht. Bei Aktivierung dieser Funktion werden Unterspannungsgrenzen und Aktivierungsspannungsgrenzen reduziert, sodass der Frequenzumrichter mit einer einphasigen USV-Versorgungsspannung von 230 V betrieben werden kann.
[96]
Netzausfall
Auswahl zur Verbesserung des kinetischen Speichers. Wenn die Netzspannung auf einen Wert zurückkehrt, der nahe, jedoch immer noch unterhalb des Erkennungswerts liegt, erhöht der Frequenzumrichter die Ausgangsdrehzahl und der kinetische Speicher bleibt aktiv. Um diesen Fall zu vermeiden,
senden Sie ein Statussignal an den Frequenzumrichter. Wenn das Signal am Digitaleingang niedrig (0)
ist, führt der Frequenzumrichter eine Zwangsabschaltung des kinetischen Speichers durch.
H I N W E I S
Nur für Pulseingänge an den Klemmen 32/33 verfügbar.
[97]
Netzausfall invers
Wenn das Signal am Digitaleingang hoch (1) ist, führt der Frequenzumrichter eine Zwangsabschaltung
des kinetischen Speichers durch. Weitere Details finden Sie in der Beschreibung von [96] Netzverlust.
H I N W E I S
Nur für Pulseingänge an den Klemmen 32/33 verfügbar.
[98]
Start flankengesteuert
Flankengesteuerter Startbefehl. Hält den Startbefehl aktiv. Sie können die Funktion für eine StartDrucktaste verwenden.
[100]
Reset Safe-Option
Setzt die Sicherheitsoption zurück. Nur bei installierter Sicherheitsoption verfügbar.
[106]
Set Master
Home (MasterHome einstellen)
H I N W E I S
Diese Option ist nur in IMC-Software-Version 48.XX verfügbar.
Zur Einstellung der tatsächlichen Master-Position auf den Wert von Parameter 17-88 Master Home Posi-
tion (Master-Home-Position).
[107]
Ziel invers
H I N W E I S
Diese Option ist nur in IMC-Software-Version 48.XX verfügbar.
Ändert das Vorzeichen der eingestellten Zielposition. Wenn beispielsweise das Ziel 1000 beträgt, wird
der Wert durch Aktivierung dieser Option auf -1000 geändert.
[108]
Master-Versatz
aktivieren
H I N W E I S
Diese Option ist nur in IMC-Software-Version 48.XX verfügbar.
Aktiviert den in Parameter 3-26 Master Offset (Master-Versatz) ausgewählten Master-Versatz, wenn Pa-
rameter 17-93 Master Offset Selection (Auswahl Master-Versatz) eine Auswahl von [1] Absolute (Absolut)
bis [5] Relative Touch Sensor (Relativer Berührungssensor) hat.
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Parametereinstellung
AQ322553864968de-000101 / 130R035320 | Danfoss A/S © 2020.01
Page 21
Option
Funktion
[109]
Enable Vir.Master (Vir. Master
aktivieren)
H I N W E I S
Diese Option ist nur in IMC-Software-Version 48.XX verfügbar.
Signal für die virtuelle Master-Funktion aktivieren. Dies ist nur möglich, wenn Sie Option [10] Synchro-
nisierung in Parameter 1-00 Regelverfahren auswählen.
[110]
Referenzfahrt
starten
H I N W E I S
Diese Option ist nur in IMC-Software-Version 48.XX verfügbar.
Startet die in Parameter 17-80 Homing Function (Referenzfahrtfunktion) ausgewählte Referenzfahrtfunktion. Muss aktiviert bleiben, bis die Referenzfahrt abgeschlossen ist, da diese ansonsten abgebrochen wird.
[111]
Touch aktivieren
H I N W E I S
Diese Option ist nur in IMC-Software-Version 48.XX verfügbar.
Aktiviert die Überwachung des Touch-Sensor-Eingangs.
[112]
Relative Position
H I N W E I S
Diese Option ist nur in IMC-Software-Version 48.XX verfügbar.
Diese Option ermöglicht die Auswahl zwischen absoluter und relativer Positionierung. Die Option ist
für den nächsten Positionierungsbefehl gültig.
[113]
Sollwert aktivieren
H I N W E I S
Diese Option ist nur in IMC-Software-Version 48.XX verfügbar.
Positionierungsmodus: Der Frequenzumrichter aktiviert den ausgewählten Positionierungstyp sowie
das Positionierungsziel und beginnt mit der Bewegung in Richtung des neuen Ziels. Die Bewegung
beginnt sofort oder nach Abschluss der aktiven Positionierung, je nach den Einstellungen von Parame-
ter 17-90 Absolute Position Mode (Absoluter Positionsmodus) und Parameter 17-91 Relative Position
Mode (Relativer Positionsmodus). Synchronisierungsmodus: Ein hohes Signal sperrt die Follower-Istpo-
sition an der Master-Istposition. Der Follower startet und holt den Master ein. Ein niedriges Signal
stoppt die Synchronisierung, und der Follower führt einen kontrollierten Stopp durch.
[114]
Sync. an Pos.
Modus
H I N W E I S
Diese Option ist nur in IMC-Software-Version 48.XX verfügbar.
Wählen Sie die Positionierung im Synchronisierungsmodus.
[115]
ReferenzfahrtSensor
H I N W E I S
Diese Option ist nur in IMC-Software-Version 48.XX verfügbar.
Schließerkontakt zur Definition der Referenzfahrtposition. Die Funktion wird in Parameter 17-80 Hom-
ing Function (Referenzfahrtfunktion) definiert.
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Parametereinstellung
AQ322553864968de-000101 / 130R0353 | 21Danfoss A/S © 2020.01
Page 22

•
•
•
Option
Funktion
[116]
ReferenzfahrtSensor inv.
H I N W E I S
Diese Option ist nur in IMC-Software-Version 48.XX verfügbar.
Öffnerkontakt zur Definition der Referenzfahrtposition. Die Funktion wird in Parameter 17-80 Homing
Function (Referenzfahrtfunktion) definiert.
[117]
Touch-Sensor
H I N W E I S
Diese Option ist nur in IMC-Software-Version 48.XX verfügbar.
Schließerkontakt. Dient als Sollwert für die Touch-Probe-Positionierung.
[118]
Touch Sensor
Inv (Touch-Sensor inv.)
H I N W E I S
Diese Option ist nur in IMC-Software-Version 48.XX verfügbar.
Öffnerkontakt. Dient als Sollwert für die Touch-Probe-Positionierung.
[119]
Drehzahlmodus
H I N W E I S
Diese Option ist nur in IMC-Software-Version 48.XX verfügbar.
Wählen Sie den Drehzahlmodus, wenn [9] Positionierung oder [10] Synchronisierung in Parameter 1-00
Regelverfahren ausgewählt ist. Der Drehzahlsollwert wird durch den variablen Sollwert 1 oder FeldbusREF1 relativ zu Parameter 3-03 Maximaler Sollwert eingestellt.
[122]
Position Virtueller Master
H I N W E I S
Diese Option ist nur in IMC-Software-Version 48.XX verfügbar.
Zur Aktivierung des positionsgesteuerten virtuellen Masters wenn [10] Synchronisierung in Parameter
1-00 Regelverfahren ausgewählt ist. Wenn die Option ausgewählt ist, tritt Folgendes auf:
Die Zielposition wird von „Fieldbus Pos Ref“ (Feldbus Pos Sollw) festgelegt oder das voreingestellte
Ziel ist wie in Parameter 3-20 Preset Target (Voreingestelltes Ziel) definiert.
Die Drehzahl wird in Bezug zu Parameter 3-27 Virtual Master Max Ref (Viruteller Master Max. Sollw.)
durch die in Parameter 3-15 Variabler Sollwert 1 ausgewählte Quelle oder Feldbus REF1 eingestellt.
Beschleunigung und Verzögerung werden wie in Parametergruppe 3-6* Rampenzeit 3 definiert eingestellt.
[123]
Master Marker
(Master-Marker)
H I N W E I S
Diese Option ist nur in IMC-Software-Version 48.XX verfügbar.
Schließerkontakt. Dient als Eingang für das Master-Marker-Signal während der Marker-Synchronisierung basierend auf der in Parameter 3-33 Sync. Mode & Start Behavior (Sync. Modus & Startverhalten)
ausgewählten Option.
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Parametereinstellung
AQ322553864968de-000101 / 130R035322 | Danfoss A/S © 2020.01
Page 23
Option
Funktion
[124]
Master Marker
Inv. (MasterMarker inv.)
H I N W E I S
Diese Option ist nur in IMC-Software-Version 48.XX verfügbar.
Öffnerkontakt. Zur Aktivierung des Master-Marker-Signals während der Marker-Synchronisierung basierend auf der in Parameter 3-33 Sync. Mode & Start Behavior (Sync. Modus & Startverhalten) ausgewählten Option.
[125]
Follower Marker (FollowerMarker)
H I N W E I S
Diese Option ist nur in IMC-Software-Version 48.XX verfügbar.
Schließerkontakt. Dient als Eingang für das Follower-Marker-Signal während der Marker-Synchronisierung basierend auf der in Parameter 3-33 Sync. Mode & Start Behavior (Sync. Modus & Startverhalten)
ausgewählten Option.
[126]
Follower Marker Inv (Follower-Marker inv.)
H I N W E I S
Diese Option ist nur in IMC-Software-Version 48.XX verfügbar.
Öffnerkontakt. Dient als Eingang für das Follower-Marker-Signal während der Marker-Synchronisierung basierend auf der in Parameter 3-33 Sync. Mode & Start Behavior (Sync. Modus & Startverhalten)
ausgewählten Option.
[231]
Power Limit
Motorisch
Dient als Eingang zur Aktivierung der Leistungsbegrenzungsfunktion im Motorbetrieb. Siehe Parame-
tergruppe 4-8* Power Limit (Leistungsgrenze).
[232]
Power Limit
Generatorisch
Dient als Eingang zur Aktivierung der Leistungsbegrenzungsfunktion im Generatorbetrieb. Siehe Pa-
rametergruppe 4-8* Power Limit (Leistungsgrenze).
[233]
Power Limit
Beides
Dient als Eingang zur Aktivierung der Leistungsbegrenzungsfunktion im Motor- sowie Generatorbetrieb. Siehe Parametergruppe 4-8* Power Limit (Leistungsgrenze).
[234]
Geringe Last +
Evacuation
Dient als Eingang zur Aktivierung der Leistungsbegrenzungsfunktion im Motor- sowie Generatorbetrieb. Siehe Parametergruppe 4-8* Power Limit (Leistungsgrenze).
Option
Funktion
Die Funktionen werden in Parametergruppe 5-1* Digitaleingänge beschrieben.
[0]
Ohne Funktion
[1]
Reset
[2]
Motorfreilauf (inv.)
[3]
Mot.freil./Res. inv.
[4]
Schnellst.rampe (inv)
[5]
DC Bremse (invers)
[6]
Stopp (invers)
[8]
Start
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Parametereinstellung
Tabelle 14: 5-12 Klemme 27 Digitaleingang
AQ322553864968de-000101 / 130R0353 | 23Danfoss A/S © 2020.01
Page 24

Option
Funktion
[9]
Puls-Start
[10]
Reversierung
[11]
Start + Reversierung
[12]
Start nur Rechts
[13]
Start nur Links
[14]
Festdrz. (JOG)
[15]
Festsollwert ein
[16]
Festsollwert Bit 0
[17]
Festsollwert Bit 1
[18]
Festsollwert 2
[19]
Sollw. speich.
[20]
Drehz. speich.
[21]
Drehzahl speichern
[22]
Drehzahl ab
[23]
Satzanwahl Bit 0
[24]
Satzanwahl Bit 1
[28]
Freq.korr. Auf
[29]
Freq.korr. Ab
[34]
Rampe Bit 0
[35]
Rampe Bit 1
[44]
Frequenzumrichter neu starten
[51]
Externe Verriegelung
[55]
DigiPot Auf
[56]
DigiPot Ab
[57]
DigiPot löschen
[58]
DigiPot Heben
[62]
Reset Zähler A
[65]
Reset Zähler B
[70]
Mech. Bremse Signal
[71]
Mech. Bremse Sign.inv.
[72]
PID error inverse
[73]
PID reset I part
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Parametereinstellung
AQ322553864968de-000101 / 130R035324 | Danfoss A/S © 2020.01
Page 25

Option
Funktion
[74]
PID aktiviert
[75]
MCO-spezifisch
[78]
Wartungswort quittieren
[80]
PTC-Karte 1
[91]
PROFIdrive OFF2
[92]
PROFIdrive OFF3
[94]
Erkennung von leichter Last
[96]
Netzausfall
[97]
Netzausfall invers
[98]
Start flankengesteuert
[100]
Reset Safe-Option
[107]
Ziel invers
[108]
Master-Versatz aktivieren
[109]
Virtuellen Master starten
[110]
Referenzfahrt starten
[111]
Touch aktivieren
[112]
Relative Position
[113]
Sollwert aktivieren
[114]
Sync. an Pos. Modus
[115]
Referenzfahrt-Sensor
[116]
Referenzfahrt-Sensor inv.
[117]
Touch-Sensor
[118]
Touch Sensor Inv (Touch-Sensor inv.)
[119]
Drehzahlmodus
[231]
Power Limit Motorisch
[232]
Power Limit Generatorisch
[233]
Power Limit Beides
Option
Funktion
H I N W E I S
Dieser Parameter ist nicht für FC 301 verfügbar.
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Parametereinstellung
Tabelle 15: 5-13 Klemme 29 Digitaleingang
AQ322553864968de-000101 / 130R0353 | 25Danfoss A/S © 2020.01
Page 26
Option
Funktion
Wählen Sie die Funktion aus der Reihe verfügbarer Digitaleingänge sowie aus den
zusätzlichen Optionen [60] Zähler A, [61] Zähler A, [63] Zähler B und [64] Zähler B. In
den Smart Logic Control-Funktionen werden Zähler verwendet.
Die Funktionen werden in Parametergruppe 5-1* Digitaleingänge beschrieben.
[0]
Ohne Funktion
[1]
Reset
[2]
Motorfreilauf (inv.)
[3]
Mot.freil./Res. inv.
[4]
Schnellst.rampe (inv)
[5]
DC Bremse (invers)
[6]
Stopp (invers)
[8]
Start
[9]
Puls-Start
[10]
Reversierung
[11]
Start + Reversierung
[12]
Start nur Rechts
[13]
Start nur Links
[14]
Festdrz. (JOG)
[15]
Festsollwert ein
[16]
Festsollwert Bit 0
[17]
Festsollwert Bit 1
[18]
Festsollwert Bit 2
[19]
Sollw. speich.
[20]
Drehz. speich.
[21]
Drehzahl speichern
[22]
Drehzahl ab
[23]
Satzanwahl Bit 0
[24]
Satzanwahl Bit 1
[28]
Freq.korr. Auf
[29]
Freq.korr. Ab
[30]
Zählereingang
[31]
Puls flankengesteuert
[32]
Pulszeitbasiert
[34]
Rampe Bit 0
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Parametereinstellung
AQ322553864968de-000101 / 130R035326 | Danfoss A/S © 2020.01
Page 27

Option
Funktion
[35]
Rampe Bit 1
[44]
Frequenzumrichter neu starten
[51]
Externe Verriegelung
[55]
DigiPot Auf
[56]
DigiPot Ab
[57]
DigiPot löschen
[58]
DigiPot Heben
[60]
Zähler A (+1)
[61]
Zähler A (-1)
[62]
Reset Zähler A
[63]
Zähler B (+1)
[64]
Zähler B (-1)
[65]
Reset Zähler B
[70]
Mech. Bremse Signal
[71]
Mech. Bremse Sign.inv.
[72]
PID error inverse
[73]
PID-Reset I-Anteil
[74]
PID aktiviert
[75]
MCO-spezifisch
[78]
Wartungswort quittieren
[80]
PTC-Karte 1
[91]
PROFIdrive OFF2
[92]
PROFIdrive OFF3
[94]
Erkennung von leichter Last
[96]
Netzausfall
[97]
Netzausfall invers
[98]
Start flankengesteuert
[100]
Reset Safe-Option
[107]
Ziel invers
[108]
Master-Versatz aktivieren
[109]
Virtuellen Master starten
[110]
Referenzfahrt starten
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Parametereinstellung
AQ322553864968de-000101 / 130R0353 | 27Danfoss A/S © 2020.01
Page 28

Option
Funktion
[111]
Touch aktivieren
[112]
Relative Position
[113]
Sollwert aktivieren
[114]
Sync. zu Pos. Modus
[115]
Referenzfahrt-Sensor
[116]
Referenzfahrt-Sensor inv.
[117]
Touch-Sensor
[118]
Touch Sensor Inv (Touch-Sensor inv.)
[119]
Drehzahlmodus
[231]
Power Limit Motorisch
[232]
Power Limit Generatorisch
[233]
Power Limit Beides
Optionen
Funktion
[0]*
Ohne Funktion
Dieser Parameter ist aktiv, wenn das Optionsmodul VLT® Extended Relay MCB 113 im Frequenzumrichter
installiert ist. Die Funktionen werden in Parametergruppe 5-1* Digitaleingänge beschrieben.
Option
Funktion
[0]*
Ohne Funktion
Dieser Parameter ist aktiv, wenn das Optionsmodul VLT® Extended Relay Card MCB 113 im Frequenzumrichter installiert ist. Die Funktionen werden in Parametergruppe 5-1* Digitaleingänge beschrieben.
Option
Funktion
[0]*
Ohne Funktion
Dieser Parameter ist aktiv, wenn das Optionsmodul VLT® Extended Relay Card MCB 113 im Frequenzumrichter installiert ist. Die Funktionen werden in Parametergruppe 5-1* Digitaleingänge beschrieben.
Option
Funktion
[0]*
Ohne Funktion
Dieser Parameter ist aktiv, wenn das Optionsmodul VLT® Extended Relay Card MCB 113 im Frequenzumrichter installiert ist. Die Funktionen werden in Parametergruppe 5-1* Digitaleingänge beschrieben.
Option
Funktion
[0]*
Ohne Funktion
Dieser Parameter ist aktiv, wenn das Optionsmodul VLT® Extended Relay Card MCB 113 im Frequenzumrichter installiert ist. Die Funktionen werden in Parametergruppe 5-1* Digitaleingänge beschrieben.
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Parametereinstellung
4.2.2 Parametergruppe 5-2* Digital Inputs (Digitaleingänge)
Tabelle 16: Parameter 5-20 Klemme X46/1 Digitaleingang
Tabelle 17: Parameter 5-21 Klemme X46/3 Digitaleingang
Tabelle 18: Parameter 5-22 Klemme X46/5 Digitaleingang
Tabelle 19: Parameter 5-23 Klemme X46/7 Digitaleingang
Tabelle 20: Parameter 5-24 Klemme X46/9 Digitaleingang
AQ322553864968de-000101 / 130R035328 | Danfoss A/S © 2020.01
Page 29

Option
Funktion
[0]*
Ohne Funktion
Dieser Parameter ist aktiv, wenn das Optionsmodul VLT® Extended Relay Card MCB 113 im Frequenzumrichter installiert ist. Die Funktionen werden in Parametergruppe 5-1* Digitaleingänge beschrieben.
Option
Funktion
[0]*
Ohne Funktion
Dieser Parameter ist aktiv, wenn das Optionsmodul VLT® Extended Relay Card MCB 113 im Frequenzumrichter installiert ist. Die Funktionen werden in Parametergruppe 5-1* Digitaleingänge beschrieben.
Option
Funktion
[0]
Ohne Funktion
Werkseinstellung für alle Digitalausgänge und Relaisausgänge.
[1]
Steuer. bereit
Die Steuerkarte ist bereit, zum Beispiel: Rückführung von einem Frequenzumrichter, bei dem
die Steuerung extern mit 24 V (VLT® 24 V DC Supply MCB 107) versorgt wird und der Netzstrom für die Einheit nicht erkannt wurde.
[2]
Motor ein
Der Frequenzumrichter ist betriebsbereit und legt ein Versorgungssignal an der Steuerkarte
an.
[3]
Bereit/Fern-Betrieb
Der Frequenzumrichter ist betriebsbereit und läuft in der Betriebsart Auto.
[4]
Freigabe/k. Warnung
Betriebsbereit. Es wurde kein Start-/Stoppbefehl angelegt (Start/Deaktivieren). Es sind keine
Warnungen aktiv.
[5]
Motor ein
Der Motor läuft und ein Wellendrehmoment ist vorhanden.
[6]
Motor ein/k. Warnung
Die Ausgangsdrehzahl ist höher als die unter Parameter 1-81 Ein.-Drehzahl für Stoppfunktion
[UPM] eingestellte Drehzahl. Der Motor läuft und es liegen keine Warnungen vor.
[7]
Grenzen OK/k. Warn.
Der Motor läuft innerhalb der in Parameter 4-50 Warnung Strom niedrig bis Parameter 4-53
Warnung Drehz. hoch eingestellten Strom- und Drehzahlbereiche. Es liegen keine Warnungen
vor.
[8]
Ist=Sollw./k. Warn.
Die Motordrehzahl entspricht dem Sollwert. Es liegen keine Warnungen vor.
[9]
Alarm
Ein Alarm aktiviert den Ausgang. Es liegen keine Warnungen vor.
[10]
Alarm oder Warnung
Ein Alarm oder eine Warnung aktiviert den Ausgang.
[11]
Moment.grenze
Das Drehmoment überschreitet den in Parameter 4-16 Momentengrenze motorisch oder Pa-
rameter 4-17 Momentengrenze generatorisch festgelegten Wert.
[12]
Außerh.Stromber.
Der Motorstrom liegt außerhalb des in Parameter 4-18 Stromgrenze definierten Bereichs.
[13]
Unter Min.-Strom
Der Motorstrom liegt unter dem in Parameter 4-50 Warnung Strom niedrig eingestellten Wert.
[14]
Über Max.-Strom
Der Motorstrom liegt über dem in Parameter 4-51 Warnung Strom hoch eingestellten Wert.
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Tabelle 21: Parameter 5-25 Klemme X46/11 Digitaleingang
Tabelle 22: Parameter 5-26 Klemme X46/13 Digitaleingang
Parametereinstellung
4.2.3 Parametergruppe 5-3* Digitalausgänge
Die 2 elektronischen Digitalausgänge sind für die Klemmen 27 und 29 gleich. Stellen Sie die E/A-Funktion für Klemme 27 in Parame-
ter 5-01 Klemme 27 Funktion ein, und stellen Sie die E/A-Funktion für Klemme 29 in Parameter 5-02 Klemme 29 Funktion ein.
H I N W E I S
Sie können diese Parameter bei laufendem Motor nicht einstellen.
Tabelle 23: 5-30 Klemme 27 Digitalausgang – 1
AQ322553864968de-000101 / 130R0353 | 29Danfoss A/S © 2020.01
Page 30
Option
Funktion
[15]
Außerh.Drehzahlber.
Die Ausgangsfrequenz liegt außerhalb des in Parameter 4-52 Warnung Drehz. niedrig und Pa-
rameter 4-53 Warnung Drehz. hoch festgelegten Frequenzbereichs.
[16]
Unter Min.-Drehzahl
Die Ausgangsdrehzahl liegt unter dem in Parameter 4-52 Warnung Drehz. niedrig eingestellten
Wert.
[17]
Über Max.-Drehzahl
Die Ausgangsdrehzahl liegt über dem in Parameter 4-53 Warnung Drehz. hoch eingestellten
Wert.
[18]
Außerh.Istwertber.
Der Istwert liegt unter dem in Parameter 4-56 Warnung Istwert niedr. und Parameter 4-57 War-
nung Istwert hoch festgelegten Bereichs.
19
Unter Min.-Istwert
Der Istwert liegt unter dem in Parameter 4-56 Warnung Istwert niedr. festgelegten Grenzwert.
[20]
Über Max.-Istwert
Der Istwert liegt über dem in Parameter 4-57 Warnung Istwert hoch festgelegten Grenzwert.
[21]
Warnung Übertemp
Der Frequenzumrichter aktiviert die Übertemperaturwarnung, wenn die Temperatur den
Grenzwert für Motor, Frequenzumrichter, Bremswiderstand oder Thermistor überschreitet.
[22]
Bereit, k.therm.Warn.
Der Frequenzumrichter ist betriebsbereit, und es liegt keine Übertemperaturwarnung vor.
[23]
Fern, Ber., k. therm.
Der Frequenzumrichter ist betriebsbereit und läuft in der Betriebsart Auto. Es liegt keine
Übertemperaturwarnung vor.
[24]
Bereit, k.Über-/Untersp.
Der Frequenzumrichter ist betriebsbereit, und die Netzspannung liegt innerhalb des festgelegten Spannungsbereichs.
[25]
Rückwärts
Der Motor läuft bzw. ist bereit, im Rechtslauf zu drehen, wenn logisch = 0 und im Linkslauf
bei logisch = 1. Der Ausgang ändert sich, wenn das Reversierungssignal angelegt wird.
[26]
Bus OK
Aktive Kommunikation (kein Timeout) über die serielle Kommunikationsschnittstelle.
[27]
Mom.grenze u. Stopp
Dient zur Durchführung eines Motorfreilaufstopps in Verbindung mit einer Drehmomentgrenzenbedingung. Wenn der Frequenzumrichter ein Stoppsignal erhalten hat und sich an
der Drehmomentgrenze befindet, ist das Signal logisch „0“.
[28]
Bremse, k. Warnung
Die Bremse ist aktiv und es liegen keine Warnungen vor.
[29]
Bremse OK, k. Alarm
Die Bremse ist betriebsbereit, es liegen keine Fehler vor.
[30]
Stör.Bremse (IGBT)
Der Ausgang ist logisch „1“, wenn der Brems-IGBT einen Kurzschluss hat. Die Funktion dient
zum Schutz des Frequenzumrichters im Falle eines Fehlers in den Bremsmodulen. Verwenden Sie den Ausgang/das Relais, um die Netzspannung zum Frequenzumrichter abzuschalten.
[31]
Relais 123
Das Relais wird aktiviert, wenn [0] Steuerwort in der Parametergruppe 8-** Opt./Schnittstellen
ausgewählt ist.
[32]
Mechanische Bremse
Ermöglicht die Steuerung einer externen mechanischen Bremse. Weitere Informationen zur
mechanischen Bremssteuerung finden Sie im Projektierungshandbuch des Frequenzumrichters.
[33]
Sich. Stopp aktiv
Zeigt an, dass Safe Torque Off an Klemme 37 aktiviert wurde.
[35]
Externe Verriegelung
[38]
Motor-Istwertfehler
[40]
Außerh. Sollw.-Ber.
Aktiv, wenn die Istdrehzahl außerhalb der Einstellungen in Parameter 4-52 Warnung Drehz.
niedrig bis Parameter 4-55 Warnung Sollwert hoch liegen.
[41]
Unter Min.-Sollwert
Aktiv, wenn die Istdrehzahl unter der Drehzahlsollwerteinstellung liegt.
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Parametereinstellung
AQ322553864968de-000101 / 130R035330 | Danfoss A/S © 2020.01
Page 31

Option
Funktion
[42]
Über Max.-Sollwert
Aktiv, wenn die Istdrehzahl über der Einstellung für den Drehzahlsollwert liegt.
[43]
Erweiterte PID-Grenze
[45]
Bussteuerung
Regelt die Ausgabe über den Bus. Der Zustand des Ausgangs wird in Parameter 5-90 Dig./
Relais Ausg. Bussteuerung eingestellt. Für den Fall eines Bus-Timeouts wird der Ausgangszustand festgehalten.
[46]
Bus-Strg. 1 bei TO
Regelt die Ausgabe über den Bus. Der Zustand des Ausgangs wird in Parameter 5-90 Dig./
Relais Ausg. Bussteuerung eingestellt. Bei einem Bus-Timeout wird der Zustand des Ausgangs
auf hoch gesetzt (ein).
[47]
Bus-Steuerung, 0 bei
TimeOut
Regelt die Ausgabe über den Bus. Der Zustand des Ausgangs wird in Parameter 5-90 Dig./
Relais Ausg. Bussteuerung eingestellt. Bei einem Bus-Timeout wird der Zustand des Ausgangs
auf niedrig gesetzt (aus).
[50]
Ist=Sollwert
Aktiv, wenn ein VLT® Cascade Controller MCO 102 oder eine VLT® Motion Control MCO 305
angeschlossen ist. Der Ausgang wird über die Option gesteuert.
[51]
MCO-gesteuert
Aktiv, wenn ein VLT® Advanced Cascade Controller MCO 102 oder eine VLT® Motion Control
MCO 305 angeschlossen ist. Der Ausgang wird über die Option gesteuert.
[54]
24V-Drehgeber Simulation
Die Digitalausgänge 27 und 29 simulieren einen HTL-Drehgeber mit Einzelsignal. Wählen Sie
die Quelle für die Signalerzeugung in Parameter 5-78 Term 27/29 Encoder Sim (Kl. 27/29 Drehgebersim.).
H I N W E I S
Option [54] 24V encoder sim (24V-Drehgeber-Sim) muss in Parameter 5-30 Klemme 27 Digitalausgang und Parameter 5-31 Klemme 29 Digitalausgang ausgewählt werden. Diese Op-
tion ist nur in Software-Version 48.xx für den VLT® AutomationDrive FC 302 verfügbar.
[55]
Pulsausgang
[58]
Istposition
[59]
Istposition 4–20 mA
[60]
Vergleicher 0
Siehe Parametergruppe 13-1* Vergleicher. Wird der Vergleicherwert 0 als wahr ausgewertet,
wird der Ausgang aktiviert. Andernfalls ist er AUS.
[61]
Vergleicher 1
Siehe Parametergruppe 13-1* Vergleicher. Wird der Vergleicherwert 1 als wahr ausgewertet,
wird der Ausgang aktiviert. Andernfalls ist er AUS.
[62]
Vergleicher 2
Siehe Parametergruppe 13-1* Vergleicher. Wird der Vergleicherwert 2 als wahr ausgewertet,
wird der Ausgang aktiviert. Andernfalls ist er AUS.
[63]
Vergleicher 3
Siehe Parametergruppe 13-1* Vergleicher. Wird der Vergleicherwert 3 als wahr ausgewertet,
wird der Ausgang aktiviert. Andernfalls ist er AUS.
[64]
Vergleicher 4
Siehe Parametergruppe 13-1* Vergleicher. Wird der Vergleicherwert 4 als wahr ausgewertet,
wird der Ausgang aktiviert. Andernfalls ist er AUS.
[65]
Vergleicher 5
Siehe Parametergruppe 13-1* Vergleicher. Wird der Vergleicherwert 5 als wahr ausgewertet,
wird der Ausgang aktiviert. Andernfalls ist er AUS.
[70]
Logikregel 0
Siehe Parametergruppe 13-4* Logikregeln. Ergibt Logikregel 0 wahr, aktiviert sie den Ausgang.
Andernfalls ist er AUS.
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Parametereinstellung
AQ322553864968de-000101 / 130R0353 | 31Danfoss A/S © 2020.01
Page 32

Option
Funktion
[71]
Logikregel 1
Siehe Parametergruppe 13-4* Logikregeln. Ergibt Logikregel 1 wahr, aktiviert sie den Ausgang.
Andernfalls ist er AUS.
[72]
Logikregel 2
Siehe Parametergruppe 13-4* Logikregeln. Ergibt Logikregel 2 wahr, aktiviert sie den Ausgang.
Andernfalls ist er AUS.
[73]
Logikregel 3
Siehe Parametergruppe 13-4* Logikregeln. Ergibt Logikregel 3 wahr, aktiviert sie den Ausgang.
Andernfalls ist er AUS.
[74]
Logikregel 4
Siehe Parametergruppe 13-4* Logikregeln. Ergibt Logikregel 4 wahr, aktiviert sie den Ausgang.
Andernfalls ist er AUS.
[75]
Logikregel 5
Siehe Parametergruppe 13-4* Logikregeln. Ergibt Logikregel 5 wahr, aktiviert sie den Ausgang.
Andernfalls ist er AUS.
[80]
SL-Digitalausgang A
Siehe Parameter 13-52 SL-Controller Aktion. Der Ausgang ist EIN, wenn die Smart Logic Action
[38] Digitalausgang A-EIN ausgeführt wird. Der Ausgang ist AUS, wenn die Smart Logic Action
[32] Digitalausgang A-AUS ausgeführt wird.
[81]
SL-Digitalausgang B
Siehe Parameter 13-52 SL-Controller Aktion. Der Ausgang ist EIN, wenn die Smart Logic Action
[39] Digitalausgang B-EIN ausgeführt wird. Der Ausgang ist AUS, wenn die Smart Logic Action
[33] Digitalausgang B-AUS ausgeführt wird.
[82]
SL-Digitalausgang C
Siehe Parameter 13-52 SL-Controller Aktion. Der Ausgang ist EIN, wenn die Smart Logic Action
[40] Digitalausgang C-EIN ausgeführt wird. Der Ausgang ist AUS, wenn die Smart Logic Action
[34] Digitalausgang C-AUS ausgeführt wird.
[83]
SL-Digitalausgang D
Siehe Parameter 13-52 SL-Controller Aktion. Der Ausgang ist EIN, wenn die Smart Logic Action
[41] Digitalausgang D-EIN ausgeführt wird. Der Ausgang ist AUS, wenn die Smart Logic Action
[35] Digitalausgang D-AUS ausgeführt wird.
[84]
SL-Digitalausgang E
Siehe Parameter 13-52 SL-Controller Aktion. Der Ausgang ist EIN, wenn die Smart Logic Action
[42] Digitalausgang E-EIN ausgeführt wird. Der Ausgang ist AUS, wenn die Smart Logic Action
[36] Digitalausgang E-AUS ausgeführt wird.
[85]
SL-Digitalausgang F
Siehe Parameter 13-52 SL-Controller Aktion. Der Ausgang ist EIN, wenn die Smart Logic Action
[43] Digitalausgang F-EIN ausgeführt wird. Der Ausgang ist AUS, wenn die Smart Logic Action
[37] Digitalausgang F-AUS ausgeführt wird.
[90]
kWh-Zähler Puls
Sendet einen Puls (Pulsbreite 200 ms) an die Ausgangsklemme, wenn sich der kWh-Zähler
ändert (Parameter 15-02 Zähler-kWh).
[98]
Virtual Master Dir. (Rich.
virtueller Master)
H I N W E I S
Diese Option ist nur in Software-Version 48.xx für den VLT® AutomationDrive FC 302 verfügbar.
Ein virtuelles Master-Signal steuert die Drehrichtung von Followern.
[120]
Hand-Sollwert aktiv
Der Ausgang ist aktiv, wenn Parameter 3-13 Sollwertvorgabe = [2] Ort ist.
Überprüfen Sie die in Parameter 3-13 Sollwertvorgabe eingestellte Vorgabe.
Hand-Sollwert aktiv
[120]
Fern-Sollwert aktiv
[121]
Sollwertvorgabe: Ort Parameter 3-13 Sollwertvorgabe [2] Ort
1
0
Sollwertvorgabe: Fern Parameter 3-13 Sollwertvorgabe, [1] Fern
0
1
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Parametereinstellung
Tabelle 24: Ortsollwert aktiv
AQ322553864968de-000101 / 130R035332 | Danfoss A/S © 2020.01
Page 33
Überprüfen Sie die in Parameter 3-13 Sollwertvorgabe eingestellte Vorgabe.
Hand-Sollwert aktiv
[120]
Fern-Sollwert aktiv
[121]
Sollwertvorgabe: Umschalt. Hand/Auto
––Hand
10Hand⇒Aus
10Auto⇒Aus
00Remote
0
1
Option
Funktion
[121]
Fernsollwert aktiv
Der Ausgang ist aktiv, wenn Parameter 3-13 Sollwertvorgabe = [1] Fern oder [0] Umschalt. Hand/
Auto, während das LCP gleichzeitig in der Betriebsart Auto ist. Siehe
Tabelle 24.
[122]
Kein Alarm
Der Ausgang ist aktiv, wenn kein Alarm vorliegt.
[123]
Startbefehl aktiv
Der Ausgang ist aktiv, wenn ein Startbefehl ausgeführt wird (d. h. über einen Digitaleingang-Busanschluss oder [Hand On] oder [Auto On]) und kein Stopp- oder Startbefehl aktiv ist.
[124]
Reversierung aktiv
Der Ausgang ist aktiv, wenn der Frequenzumrichter den Motor im Linkslauf betreibt (das logische
Produkt der Statusbits Betrieb UND Reversierung).
[125]
Handbetrieb
Der Ausgang ist aktiv, wenn der Frequenzumrichter im Handbetrieb ist (angezeigt durch LED über
[Hand On]).
[126]
Autobetrieb
Der Ausgang ist aktiv, wenn der Frequenzumrichter in der Betriebsart Auto ist (angezeigt durch
LED über [Auto On]).
[151]
ATEX ETR I-Alarm
Nur auswählbar, wenn Parameter 1-90 Thermischer Motorschutz auf [20] ATEX ETR oder [21] Ad-
vanced ETR eingestellt ist. Wenn Alarm 164 ATEX ETR I-Grenze Alarm aktiv ist, ist der Ausgang 1.
[152]
ATEX ETR f-Alarm
Nur auswählbar, wenn Parameter 1-90 Thermischer Motorschutz auf [20] ATEX ETR oder [21] Ad-
vanced ETR eingestellt ist. Wenn Alarm 166 ATEX ETR f-Grenze Alarm aktiv ist, ist der Ausgang 1.
[153]
ATEX ETR I-Warnung
[154]
ATEX ETR f-Warnung
Nur auswählbar, wenn Parameter 1-90 Thermischer Motorschutz auf [20] ATEX ETR oder [21] Ad-
vanced ETR eingestellt ist. Wenn Warnung 165, ATEX ETR f-Grenze Warnung aktiv ist, ist der Ausgang
1.
[180]
Uhr Fehler
[181]
Vorb. Instandhaltung
[188]
AHF Capacitor Connect (AHF-Kondensatoranschluss)
Die Kondensatoren werden bei 20 % eingeschaltet (Hysterese von 50 % führt zu einem Intervall
von 10 – 30 %). Die Kondensatoren werden unter 10 % getrennt. Die Ausschaltverzögerung beträgt 10 s und startet erneut, wenn die Nennleistung während der Verzögerung über 10 % steigt.
Parameter 5-80 AHF-Kondens. Verzög. wird verwendet, um eine Mindestausschaltzeit für die Kondensatoren zu garantieren.
[189]
Ext. Lüftersteuerung
Die internen Logiken für die interne Lüftersteuerung werden an diesen Ausgang übertragen, um
die Steuerung eines externen Lüfters zu ermöglichen (relevant für HP-Kanalkühlung).
[190]
Safe Function active
(Sicherheitsfunktion
aktiv)
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Tabelle 25: 5-30 Klemme 27 Digitalausgang – 2
Parametereinstellung
AQ322553864968de-000101 / 130R0353 | 33Danfoss A/S © 2020.01
Page 34

Option
Funktion
[191]
Safe Opt. Reset req.
(Reset sichere Option erford.)
[192]
RS Flipflop 0
Siehe Parametergruppe 13-1* Vergleicher.
[193]
RS Flipflop 1
Siehe Parametergruppe 13-1* Vergleicher.
[194]
RS Flipflop 2
Siehe Parametergruppe 13-1* Vergleicher.
[195]
RS Flipflop 3
Siehe Parametergruppe 13-1* Vergleicher.
[196]
RS Flipflop 4
Siehe Parametergruppe 13-1* Vergleicher.
[197]
RS Flipflop 5
Siehe Parametergruppe 13-1* Vergleicher.
[198]
RS Flipflop 6
Siehe Parametergruppe 13-1* Vergleicher.
[199]
RS Flipflop 7
Siehe Parametergruppe 13-1* Vergleicher.
[221]
IGBT-Kühlung
Verwenden Sie diese Option zur Handhabung von Überstromabschaltungen. Wenn der Frequenzumrichter einen Überstromzustand erkennt, zeigt er Alarm 13, Überstrom an und löst einen Reset
aus. Falls der Überstromzustand dreimal in Folge auftritt, zeigt der Frequenzumrichter Alarm 13,
Überstrom an und leitet eine dreiminütige Verzögerung vor dem nächsten Reset ein.
[222]
Referenzfahrt OK
H I N W E I S
Diese Option ist nur in Software-Version 48.xx für den VLT® AutomationDrive FC 302 verfügbar.
Die Referenzfahrt ist mit der in Parameter 17-80 Homing Function (Referenzfahrtfunktion) ausgewählten Referenzfahrtfunktion abgeschlossen.
[223]
On Target (In Ziel)
H I N W E I S
Diese Option ist nur in Software-Version 48.xx für den VLT® AutomationDrive FC 302 verfügbar.
Die Positionierung ist abgeschlossen und das In-Ziel-Signal wird gesendet, wenn die Istposition
innerhalb von Parameter 3-05 On Reference Window (In Referenzfenster) liegt (für die Dauer von
Parameter 3-09 On Target Time (In-Ziel-Zeit)) und die Istdrehzahl Parameter 3-05 On Reference Window (In Referenzfenster) nicht überschreitet.
[224]
Positionsbegrenzung
H I N W E I S
Diese Option ist nur in Software-Version 48.xx für den VLT® AutomationDrive FC 302 verfügbar.
Der Positionsfehler überschreitet den Wert in Parameter 4-71 Maximum Position Error (Maximaler
Positionsfehler) für die in Parameter 4-72 Position Error Timeout (Positionsfehler-Timeout) eingestellte Zeit.
[225]
Positionsfehler
H I N W E I S
Diese Option ist nur in Software-Version 48.xx für den VLT® AutomationDrive FC 302 verfügbar.
Die Position liegt außerhalb der in Parameter 3-06 Minimum Position (Minimale Position) und Pa-
rameter 3-07 Maximum Position (Maximale Position) definierten Grenzen.
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Parametereinstellung
AQ322553864968de-000101 / 130R035334 | Danfoss A/S © 2020.01
Page 35
Option
Funktion
[226]
Touch on Target
(Berührung in Ziel)
H I N W E I S
Diese Option ist nur in Software-Version 48.xx für den VLT® AutomationDrive FC 302 verfügbar.
Touch-Probe-Positionierung aktiv. Der Frequenzumrichter überwacht den Touch-Probe-Sensoreingang.
[231]
In Power Lim. Mot.
[232]
In Power Lim. Gen.
[233]
In Power Limit
Option
Funktion
Relais 1 [0], Relais 2 [1]
(1)
.
VLT® Extended Relay MCB 113: X47/Relais 3 [2], X47/Relais 4 [3], X47/Relais 5 [4], X47/Relais 6
[5].
VLT® Relay Card MCB 105: Relais 7 [6], Relais 8 [7], Relais 9 [8].
[0]
Ohne Funktion
Werkseinstellung für alle Digital- und Relaisausgänge.
[1]
Steuer. bereit
Die Steuerkarte ist bereit, zum Beispiel: Rückführung von einem Frequenzumrichter, wo die
Stromversorgung der Regelung durch eine externe 24 V-Versorgungsspannung (VLT® 24 V DC
Supply MCB 107) erfolgt und die Netzversorgung des Frequenzumrichters nicht erkannt wurde.
[2]
Motor ein
Der Frequenzumrichter ist betriebsbereit. Die Netzversorgung sowie die Stromversorgung der
Regler sind OK.
[3]
Bereit/Fern-Betrieb
Der Frequenzumrichter ist betriebsbereit und läuft in der Betriebsart Auto.
[4]
Freigabe/k. Warnung
Betriebsbereit. Es wurden keine Start- oder Stoppbefehle angelegt (Starten/Deaktivieren). Es
sind keine Warnungen aktiv.
[5]
Motor ein
Der Motor läuft und ein Wellendrehmoment ist vorhanden.
[6]
Motor ein/k. Warnung
Die Ausgangsdrehzahl ist höher als die unter Parameter 1-81 Ein.-Drehzahl für Stoppfunktion
[UPM] eingestellte Drehzahl. Der Motor läuft und es liegen keine Warnungen vor.
[7]
Grenzen OK/k. Warn.
Die Motordrehzahl entspricht dem Sollwert. Keine Warnungen.
[8]
Ist=Sollw./k. Warn.
Die Motordrehzahl entspricht dem Sollwert. Keine Warnungen.
[9]
Alarm
Ein Alarm aktiviert den Ausgang. Keine Warnungen.
[10]
Alarm oder Warnung
Ein Alarm oder eine Warnung aktiviert den Ausgang.
[11]
Moment.grenze
Das Drehmoment überschreitet den in Parameter 4-16 Momentengrenze motorisch oder Param-
eter 4-17 Momentengrenze generatorisch festgelegten Wert.
[12]
Außerh.Stromber.
Der Motorstrom liegt außerhalb des in Parameter 4-18 Stromgrenze definierten Bereichs.
[13]
Unter Min.-Strom
Der Motorstrom liegt unter dem in Parameter 4-50 Warnung Strom niedrig eingestellten Wert.
[14]
Über Max.-Strom
Der Motorstrom liegt über dem in Parameter 4-51 Warnung Strom hoch eingestellten Wert.
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
4.2.4 Parametergruppe 5-4* Relais
Tabelle 26: Parameter 5-40 Relaisfunktion - 1
Parametereinstellung
AQ322553864968de-000101 / 130R0353 | 35Danfoss A/S © 2020.01
Page 36

Option
Funktion
[15]
Außerh.Drehzahlber.
Ausgangsdrehzahl/-frequenz liegt außerhalb des in Parameter 4-52 Warnung Drehz. niedrig und
Parameter 4-53 Warnung Drehz. hoch festgelegten Frequenzbereichs.
[16]
Unter Min.-Drehzahl
Die Ausgangsdrehzahl liegt unter dem in Parameter 4-52 Warnung Drehz. niedrig eingestellten
Wert.
[17]
Über Max.-Drehzahl
Die Ausgangsdrehzahl liegt über dem in Parameter 4-53 Warnung Drehz. hoch eingestellten
Wert.
[18]
Außerh.Istwertber.
Der Istwert liegt außerhalb des in Parameter 4-56 Warnung Istwert niedr. und Parameter 4-57
Warnung Istwert hoch festgelegten Bereichs.
[19]
Unter Min.-Istwert
Der Istwert liegt unter dem in Parameter 4-56 Warnung Istwert niedr. festgelegten Grenzwert.
[20]
Über Max.-Istwert
Der Istwert liegt über dem in Parameter 4-57 Warnung Istwert hoch festgelegten Grenzwert.
[21]
Warnung Übertemp
Die Übertemperaturwarnung wird aktiviert, wenn die Temperatur den Grenzwert entweder im
Motor, im Frequenzumrichter, im Bremswiderstand oder im angeschlossenen Thermistor übersteigt.
[22]
Bereit, k.therm.Warn.
Der Frequenzumrichter ist betriebsbereit, und es liegt keine Übertemperaturwarnung vor.
[23]
Fern, Ber., k. therm.
Der Frequenzumrichter ist betriebsbereit und läuft in der Betriebsart Auto. Es liegt keine Übertemperaturwarnung vor.
[24]
Bereit, k.Über-/Untersp.
Der Frequenzumrichter ist betriebsbereit, und die Netzspannung liegt innerhalb des festgelegten Spannungsbereichs.
[25]
Rückwärts
Der Motor läuft bzw. ist bereit, im Rechtslauf zu drehen, wenn logisch = 0 und im Linkslauf bei
logisch = 1. Der Ausgang ändert sich, wenn das Reversierungssignal angelegt wird.
[26]
Bus OK
Aktive Kommunikation (kein Timeout) über die serielle Kommunikationsschnittstelle.
[27]
Mom.grenze u. Stopp
Dient zur Durchführung eines Motorfreilaufstopps in Verbindung mit einer Drehmomentgrenzenbedingung. Wenn der Frequenzumrichter ein Stoppsignal erhalten hat und sich an der
Drehmomentgrenze befindet, ist das Signal logisch „0“.
[28]
Bremse, k. Warnung
Die Bremse ist aktiv und es liegen keine Warnungen vor.
[29]
Bremse OK, k. Alarm
Die Bremse ist betriebsbereit, und es liegen keine Fehler vor.
[30]
Stör.Bremse (IGBT)
Der Ausgang ist logisch „1“, wenn der Brems-IGBT einen Kurzschluss hat. Die Funktion dient
zum Schutz des Frequenzumrichters im Falle eines Fehlers im Bremsmodul. Verwenden Sie den
Digitalausgang/das Relais, um die Netzspannung zum Frequenzumrichter abzuschalten.
[31]
Relais 123
Der Digitalausgang/das Relais wird aktiviert, wenn Sie [0] Steuerwort in Parametergruppe 8-**
Opt./Schnittstellen auswählen.
[32]
Mechanische Bremse
Auswahl der mechanischen Bremssteuerung. Wenn die in Parametergruppe 2-2* Mech. Bremse
ausgewählten Parameter aktiv sind, verstärken Sie den Ausgang (Koppelrellais), damit dieses
den benötigten Bremsstrom schalten kann. Dies wird in der Regel durch das Anschließen eines
externen Relais an den ausgewählten Digitalausgang gelöst.
[33]
Sich. Stopp aktiv
Zeigt an, dass Safe Torque Off an Klemme 37 aktiviert wurde.
[36]
Steuerwort Bit 11
Aktivieren von Relais 1 durch das Steuerwort vom Feldbus. Keine weiteren funktionalen Auswirkungen auf den Frequenzumrichter. Typische Anwendung: Steuerung eines Zusatzgeräts
vom Feldbus aus. Diese Funktion steht zur Verfügung, wenn Sie [0] FC-Profil unter Parameter
8-10 Steuerwortprofil ausgewählt haben.
[37]
Steuerwort Bit 12
Aktivieren von Relais 2 durch das Steuerwort vom Feldbus. Keine weiteren funktionalen Auswirkungen auf den Frequenzumrichter. Typische Anwendung: Steuerung eines Zusatzgeräts
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Parametereinstellung
AQ322553864968de-000101 / 130R035336 | Danfoss A/S © 2020.01
Page 37

Option
Funktion
vom Feldbus aus. Diese Funktion steht zur Verfügung, wenn Sie [0] FC-Profil unter Parameter
8-10 Steuerwortprofil ausgewählt haben.
[38]
Motor-Istwertfehler
Fehler in der Drehzahl-Istwertschleife vom Motor, der in Regelung mit Rückführung läuft. Die
Ausgabe kann verwendet werden, um den Frequenzumrichter bei einem Notfall in den Betrieb
ohne Geber-Rückführung zu schalten.
[39]
Drehg. Abw.
Wenn die Differenz zwischen berechneter Drehzahl und der tatsächlichen Drehzahl in Parame-
ter 4-35 Drehgeber-Fehler größer als angegeben ist, wird der Ausgang/das Relais aktiv.
[40]
Außerh. Sollw.-Ber.
Aktiv, wenn die Istdrehzahl außerhalb der Einstellungen in Parameter 4-52 Warnung Drehz. nie-
drig bis Parameter 4-55 Warnung Sollwert hoch liegen.
[41]
Unter Min.-Sollwert
Aktiv, wenn die Istdrehzahl unter der Drehzahlsollwerteinstellung liegt.
[42]
Über Max.-Sollwert
Aktiv, wenn die Istdrehzahl über der Einstellung für den Drehzahlsollwert liegt.
[43]
Erweiterte PID-Grenze
[45]
Bussteuerung
Regelt den Digitalausgang/das Relais über den Bus. Der Zustand des Ausgangs wird in Parame-
ter 5-90 Dig./Relais Ausg. Bussteuerung eingestellt. Für den Fall eines Bus-Timeouts wird der Ausgangszustand festgehalten.
[46]
Bus-Strg. 1 bei TO
Regelt die Ausgabe über den Bus. Der Zustand des Ausgangs wird in Parameter 5-90 Dig./Relais
Ausg. Bussteuerung eingestellt. Bei einem Bus-Timeout wird der Zustand des Ausgangs auf
hoch gesetzt (ein).
[47]
Bus-Strg. 0 bei TO
Regelt die Ausgabe über den Bus. Der Zustand des Ausgangs wird in Parameter 5-90 Dig./Relais
Ausg. Bussteuerung eingestellt. Bei einem Bus-Timeout wird der Zustand des Ausgangs auf niedrig gesetzt (aus).
[51]
MCO-gesteuert
Aktiv, wenn ein VLT® Advanced Cascade Controller MCO 102 oder eine VLT® Motion Control
MCO 305 angeschlossen ist. Der Ausgang wird über die Option gesteuert.
[60]
Vergleicher 0
Siehe Parametergruppe 13-1* Vergleicher. Wird der Vergleicher 0 in der SLC als WAHR ausgewertet, wird der Ausgang aktiviert. Andernfalls ist er AUS.
[61]
Vergleicher 1
Siehe Parametergruppe 13-1* Vergleicher. Wird der Vergleicher 1 in der SLC als WAHR ausgewertet, wird der Ausgang aktiviert. Andernfalls ist er AUS.
[62]
Vergleicher 2
Siehe Parametergruppe 13-1* Vergleicher. Wird der Vergleicher 2 in der SLC als WAHR ausgewertet, wird der Ausgang aktiviert. Andernfalls ist er AUS.
[63]
Vergleicher 3
Siehe Parametergruppe 13-1* Vergleicher. Wird der Vergleicher 3 in der SLC als WAHR ausgewertet, wird der Ausgang aktiviert. Andernfalls ist er AUS.
[64]
Vergleicher 4
Siehe Parametergruppe 13-1* Vergleicher. Wird der Vergleicher 4 in der SLC als WAHR ausgewertet, wird der Ausgang aktiviert. Andernfalls ist er AUS.
[65]
Vergleicher 5
Siehe Parametergruppe 13-1* Vergleicher. Wird der Vergleicher 5 in der SLC als WAHR ausgewertet, wird der Ausgang aktiviert. Andernfalls ist er AUS.
[70]
Logikregel 0
Siehe Parametergruppe 13-4* Logikregeln. Wird Logikregel 0 in der SLC als WAHR ausgewertet,
wird der Ausgang aktiviert. Andernfalls ist er AUS.
[71]
Logikregel 1
Siehe Parametergruppe 13-4* Logikregeln. Wird Logikregel 1 in der SLC als WAHR ausgewertet,
wird der Ausgang aktiviert. Andernfalls ist er AUS.
[72]
Logikregel 2
Siehe Parametergruppe 13-4* Logikregeln. Wird Logikregel 2 in der SLC als WAHR ausgewertet,
wird der Ausgang aktiviert. Andernfalls ist er AUS.
[73]
Logikregel 3
Siehe Parametergruppe 13-4* Logikregeln. Wird Logikregel 3 in der SLC als WAHR ausgewertet,
wird der Ausgang aktiviert. Andernfalls ist er AUS.
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Parametereinstellung
AQ322553864968de-000101 / 130R0353 | 37Danfoss A/S © 2020.01
Page 38
Option
Funktion
[74]
Logikregel 4
Siehe Parametergruppe 13-4* Logikregeln. Wird Logikregel 4 in der SLC als WAHR ausgewertet,
wird der Ausgang aktiviert. Andernfalls ist er AUS.
[75]
Logikregel 5
Siehe Parametergruppe 13-4* Logikregeln. Wird Logikregel 5 in der SLC als WAHR ausgewertet,
wird der Ausgang aktiviert. Andernfalls ist er AUS.
[80]
SL-Digitalausgang A
Siehe Parameter 13-52 SL-Controller Aktion. Der Ausgang ist EIN, wenn die Smart Logic Action
[38] Digitalausgang A-EIN ausgeführt wird. Der Ausgang ist AUS, wenn die Smart Logic Action
[32] Digitalausgang A-AUS ausgeführt wird.
[81]
SL-Digitalausgang B
Siehe Parameter 13-52 SL-Controller Aktion. Der Ausgang ist EIN, wenn die Smart Logic Action
[39] Digitalausgang A-EIN ausgeführt wird. Der Ausgang ist AUS, wenn die Smart Logic Action
[33] Digitalausgang A-AUS ausgeführt wird.
[82]
SL-Digitalausgang C
Siehe Parameter 13-52 SL-Controller Aktion. Der Ausgang ist EIN, wenn die Smart Logic Action
[40] Digitalausgang A-EIN ausgeführt wird. Der Ausgang ist AUS, wenn die Smart Logic Action
[34] Digitalausgang A-AUS ausgeführt wird.
[83]
SL-Digitalausgang D
Siehe Parameter 13-52 SL-Controller Aktion. Der Ausgang ist EIN, wenn die Smart Logic Action
[41] Digitalausgang A-EIN ausgeführt wird. Der Ausgang ist AUS, wenn die Smart Logic Action
[35] Digitalausgang A-AUS ausgeführt wird.
[84]
SL-Digitalausgang E
Siehe Parameter 13-52 SL-Controller Aktion. Der Ausgang ist EIN, wenn die Smart Logic Action
[42] Digitalausgang A-EIN ausgeführt wird. Der Ausgang ist AUS, wenn die Smart Logic Action
[36] Digitalausgang A-AUS ausgeführt wird.
[85]
SL-Digitalausgang F
Siehe Parameter 13-52 SL-Controller Aktion. Der Ausgang ist EIN, wenn die Smart Logic Action
[43] Digitalausgang A-EIN ausgeführt wird. Der Ausgang ist AUS, wenn die Smart Logic Action
[37] Digitalausgang A-AUS ausgeführt wird.
[120]
Hand-Sollwert aktiv
Der Ausgang ist aktiv, wenn Parameter 3-13 Sollwertvorgabe = [2] Ort oder wenn Parameter 3-13
Sollwertvorgabe = 0 [0] Umschalt. Hand/Auto, während das LCP gleichzeitig im Handbetrieb ist.
Überprüfen Sie Parameter 3-13 Sollwertvorgabe
Hand-Sollwert aktiv [120]
Fern-Sollwert aktiv [121]
Sollwertvorgabe: Lokal
Parameter 3-13 Sollwertvorgabe, [2] Ort
1
0
Sollwertvorgabe: Fern
Parameter 3-13 Sollwertvorgabe, [1] Fern
0
1
Sollwertvorgabe: Umschalt. Hand/Auto
Hand
10Hand⇒off
10Auto⇒off
00Remote
0
1
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Parametereinstellung
1
Die Ziffern in [ ] hinter den Relaisnummern sind die Indexwerte im Parameter.
Tabelle 27: Ortsollwert aktiv
AQ322553864968de-000101 / 130R035338 | Danfoss A/S © 2020.01
Page 39

Option
Funktion
[121]
Fernsollwert aktiv
Der Ausgang ist aktiv, wenn Parameter 3-13 Sollwertvorgabe = [1] Fern oder [0] Umschalt.
Hand/Auto, während das LCP gleichzeitig in der Betriebsart Auto ist. Siehe
Tabelle 27.
[122]
Kein Alarm
Der Ausgang ist aktiv, wenn kein Alarm vorliegt.
[123]
Startbefehl aktiv
Der Ausgang ist aktiv, wenn ein Startbefehl aktiv ist (d. h. über Digitaleingang, Busanschluss,
[Hand On] oder [Auto On]) und der letzte Befehl ein Stopp gewesen ist.
[124]
Reversierung aktiv
Der Ausgang ist aktiv, wenn der Frequenzumrichter den Motor im Linkslauf betreibt (das
logische Produkt der Statusbits Betrieb UND Reversierung).
[125]
Handbetrieb
Der Ausgang ist aktiv, wenn der Frequenzumrichter im Handbetrieb ist (angezeigt durch
LED über [Hand On]).
[126]
Autobetrieb
Der Ausgang ist aktiv, wenn der Frequenzumrichter in der Betriebsart Auto ist (angezeigt
durch LED über [Auto On]).
[151]
ATEX ETR I-Alarm
Nur auswählbar, wenn Parameter 1-90 Thermischer Motorschutz auf [20] ATEX ETR oder [21]
Advanced ETR eingestellt ist. Wenn Alarm 164 ATEX ETR I-Grenze Alarm aktiv ist, ist der Ausgang 1.
[152]
ATEX ETR f-Alarm
Nur auswählbar, wenn Parameter 1-90 Thermischer Motorschutz auf [20] ATEX ETR oder [21]
Advanced ETR eingestellt ist. Wenn Alarm 166 ATEX ETR f-Grenze Alarm aktiv ist, ist der Ausgang 1.
[153]
ATEX ETR I-Warnung
Nur auswählbar, wenn Parameter 1-90 Thermischer Motorschutz auf [20] ATEX ETR oder [21]
Advanced ETR eingestellt ist. Wenn Alarm 163 ATEX ETR I-Grenze Warnung aktiv ist, ist der
Ausgang 1.
[154]
ATEX ETR f-Warnung
Nur auswählbar, wenn Parameter 1-90 Thermischer Motorschutz auf [20] ATEX ETR oder [21]
Advanced ETR eingestellt ist. Wenn Alarm 165, ATEX ETR f-Grenze Warnung aktiv ist, ist der
Ausgang 1
[188]
AHF Capacitor Connect
(AHF-Kondensatoranschluss)
[189]
Ext. Lüftersteuerung
Die internen Logiken für die interne Lüftersteuerung werden an diesen Ausgang übertragen, um die Steuerung eines externen Lüfters zu ermöglichen (relevant für Kanalluftkühlung
bei High-Power-Geräten).
[190]
Safe Function active (Sicherheitsfunktion aktiv)
[191]
Safe Opt. Reset req. (Reset
sichere Option erford.)
[192]
RS Flipflop 0
Siehe Parametergruppe 13-1* Vergleicher.
[193]
RS Flipflop 1
Siehe Parametergruppe 13-1* Vergleicher.
[194]
RS Flipflop 2
Siehe Parametergruppe 13-1* Vergleicher.
[195]
RS Flipflop 3
Siehe Parametergruppe 13-1* Vergleicher.
[196]
RS Flipflop 4
Siehe Parametergruppe 13-1* Vergleicher.
[197]
RS Flipflop 5
Siehe Parametergruppe 13-1* Vergleicher.
[198]
RS Flipflop 6
Siehe Parametergruppe 13-1* Vergleicher.
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Tabelle 28: Parameter 5-40 Relaisfunktion - 2
Parametereinstellung
AQ322553864968de-000101 / 130R0353 | 39Danfoss A/S © 2020.01
Page 40
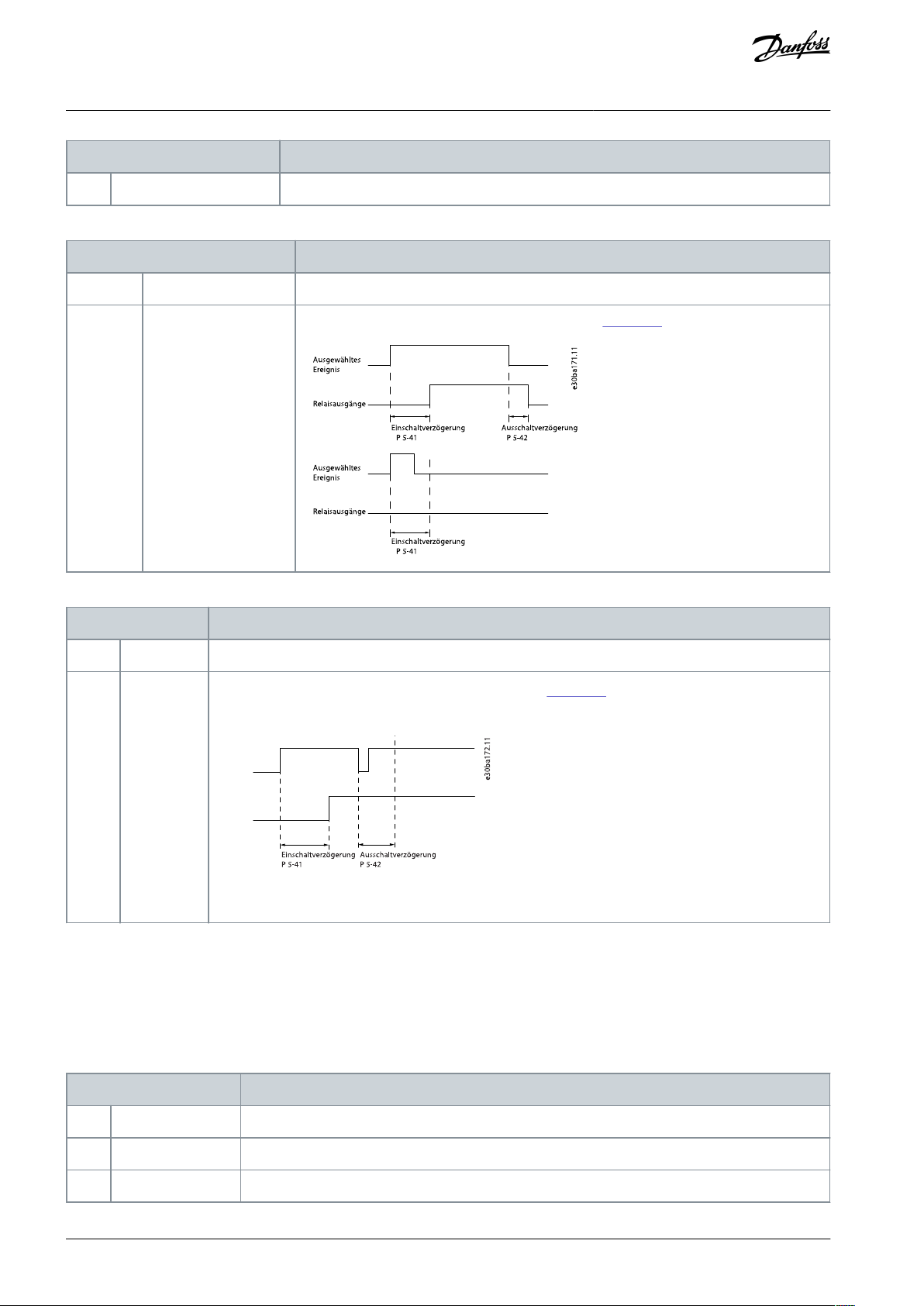
Option
Funktion
[199]
RS Flipflop 7
Siehe Parametergruppe 13-1* Vergleicher.
Bereich
Funktion
Array [9]
0.01 s*
[0.01 - 600.00 s]
Eingabe der Einschaltverzögerung des Relais. Siehe Tabelle 26.
Bereich
Funktion
Array [9]
0.01 s*
[0.01–
600.00 s]
Geben Sie die Einschaltverzögerung des Relais ein. Siehe Tabelle 26
.
Ausgewähltes
Ereignis
Relaisausgänge
Ändert sich die ausgewählte Ereignisbedingung vor Ablauf der Ein-/Ausschaltverzögerung, bleibt der
Relaisausgang unverändert.
Option
Funktion
Dieser Parameter definiert die Funktion des Analogausgangs, Klemme X45/1.
[0]
Ohne Funktion
Wenn kein Signal am Analogausgang anliegt.
[52]
MCO 305 0–20 mA
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Tabelle 29: Parameter 5-41 Ein Verzög., Relais
Parametereinstellung
Tabelle 30: Parameter 5-42 Aus Verzög., Relais
4.3 6-** Analoge Ein-/Ausg.
4.3.1 6-7* Analogausgang 3 MCB 113
Parameter zur Skalierung und zum Konfigurieren der Grenzwerte für den Analogausgang, Klemmen X45/1 und X45/2. Analogausgänge sind Stromausgänge: 0/4–20 mA. Die Auflösung am Analogausgang ist 11 Bit.
Tabelle 31: Parameter 6-70 Kl. X45/1 Ausgang
AQ322553864968de-000101 / 130R035340 | Danfoss A/S © 2020.01
Page 41

Option
Funktion
[53]
MCO 305 4–20 mA
[100]
Ausgangsfrequenz
0-20 mA
0 Hz = 0 mA; 100 Hz = 20 mA
[101]
Sollwert 0-20 mA
Parameter 3-00 Sollwertbereich [0] Min.–Max. 0% = 0 mA; 100 % = 20 mA. Parameter 3-00 Sollwertbereich [1] -Max.–+Max. -100 % = 0 mA; 0 % = 10 mA; +100 % = 20 mA.
[102]
Rückmeldung
[103]
Motorstrom
0-20 mA
Der Wert stammt aus Parameter 16-37 Max.-WR-Strom . Der Maximalstrom des Wechselrichters
(160 % Stromstärke) entspricht 20 mA. Beispiel: Normalstrom des Wechselrichters (11 kW) = 24 A.
160 % = 38,4 A. Normalstrom des Motors = 22 A, Anzeige 11,46 mA.
20mA × 22A
38. 4A
= 11 .46mA
Falls der Normalstrom des Motors 20 mA entspricht, lautet die Ausgangseinstellung von Parameter
6-52 Kl. 42, Ausgang max. Skalierung:
IVLT,Max. × 100
IMotor,Normal
=
38. 4 × 100
22
= 175 %
[104]
Mom.relativ zu
Max. 0-20 mA
Die Drehmomenteinstellung steht in Bezug zu der Einstellung in Parameter 4-16 Momentengrenze
motorisch.
[105]
Drehmoment relativ zu Nenn-Motordrehmoment
0-20 mA
Das Drehmoment bezieht sich auf die Einstellung des Motor-Drehmoments.
[106]
Leistung 0-20 mA
Stammt aus Parameter 1-20 Motornennleistung [kW].
[107]
Drehzahl 0-20 mA
Stammt aus Parameter 3-03 Maximaler Sollwert. 20 mA = Wert in Parameter 3-03 Maximaler Sollwert.
[108]
Drehmomentsollw.
0-20 mA
Der Drehmoment-Sollwert bezieht sich auf 160 % Drehmoment.
[109]
Max.Ausgangsfreq.
0-20 mA
In Bezug auf Parameter 4-19 Max. Ausgangsfrequenz.
[130]
Ausg.freq. 4-20 mA
0 Hz = 4 mA, 100 Hz = 20 mA.
[131]
Sollwert 4-20 mA
Parameter 3-00 Sollwertbereich [0] Min.–Max. 0 % = 4 mA; 100 % = 20 mA. Parameter 3-00 Sollwertbereich [1] -Max.–+Max. -100 % = 4 mA; 0 % = 12 mA; +100 % = 20 mA.
[132]
Istwert 4–20 mA
[133]
Motorstrom
4-20 mA
Der Wert stammt aus Parameter 16-37 Max.-WR-Strom . Der Maximalstrom des Wechselrichters
(160 % Stromstärke) entspricht 20 mA. Beispiel: Normalstrom des Wechselrichters (11 kW) = 24 A.
160 % = 38,4 A. Normalstrom des Motors = 22 A, Anzeige 11,46 mA.
16mAx22A
38. 4A
= 9 .17mA
Falls der Normalstrom des Motors 20 mA entspricht, lautet die Ausgangseinstellung von Parameter
6-52 Kl. 42, Ausgang max. Skalierung:
IVLT,Max. × 100
IMotor,Normal
=
38. 4 × 100
22
= 175 %
[134]
Drehm.% max.
4-20 mA
Die Drehmomenteinstellung steht in Bezug zu der Einstellung in Parameter 4-16 Momentengrenze
motorisch.
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Parametereinstellung
AQ322553864968de-000101 / 130R0353 | 41Danfoss A/S © 2020.01
Page 42
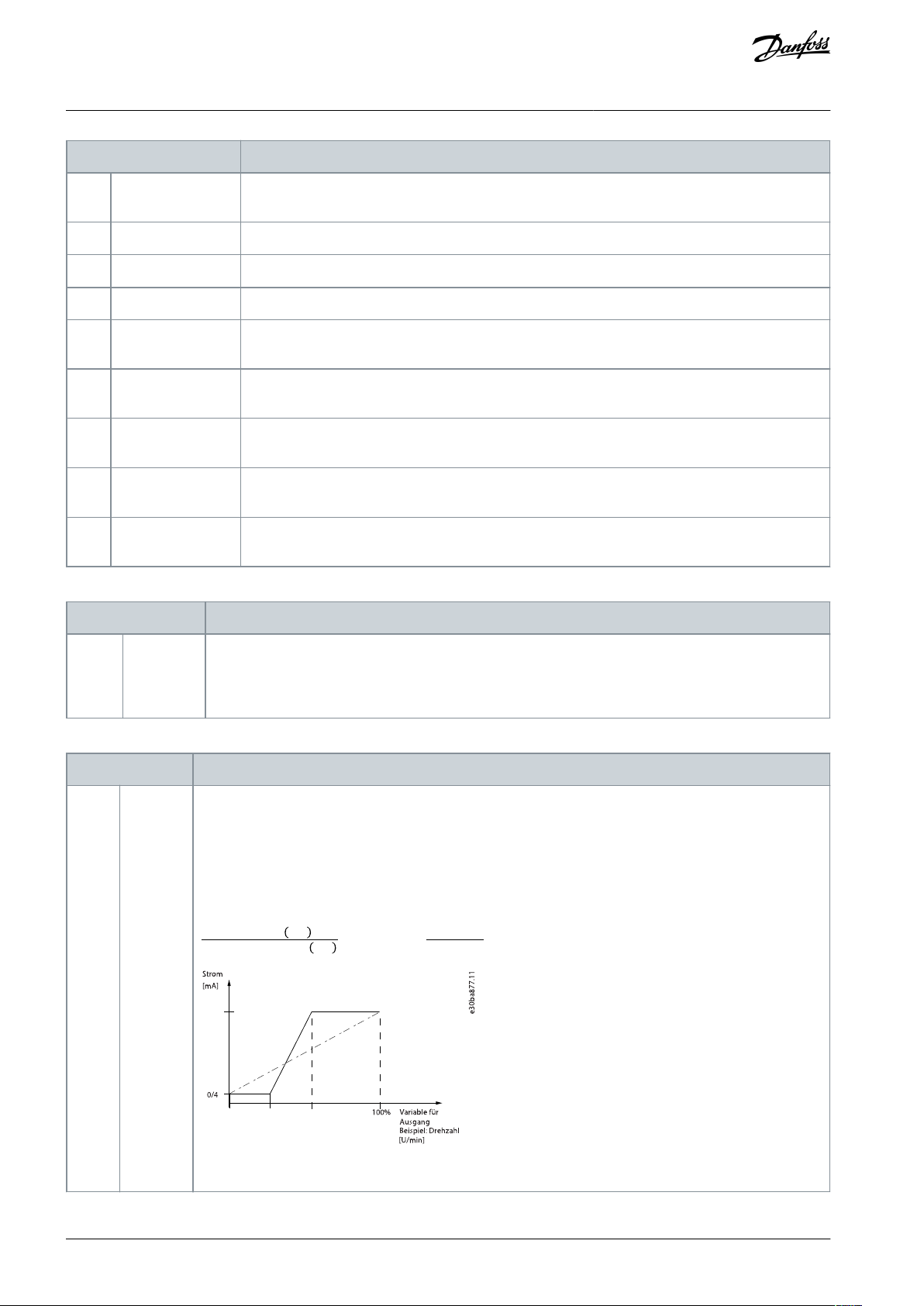
Option
Funktion
[135]
Drehm.% nom.
4-20 mA
Die Drehmoment-Einstellung bezieht sich auf die Einstellung des Motor-Drehmoments.
[136]
Leistung 4-20 mA
Stammt aus Parameter 1-20 Motornennleistung [kW].
[137]
Drehzahl 4-20 mA
Stammt aus Parameter 3-03 Maximaler Sollwert. 20 mA = Wert in Parameter 3-03 Maximaler Sollwert.
[138]
Drehm. 4-20 mA
Der Drehmoment-Sollwert bezieht sich auf 160 % Drehmoment.
[139]
Bussteuerung 0–
20 mA
Ein Ausgangswert, der über Feldbus-Prozessdaten eingestellt wird. Der Ausgang funktioniert unabhängig von den internen Funktionen im Frequenzumrichter.
[140]
Bussteuerung 4–20
mA
Ein Ausgangswert, der über Feldbus-Prozessdaten eingestellt wird. Der Ausgang funktioniert unabhängig von den internen Funktionen im Frequenzumrichter.
[141]
Bus-Steuerung 0 20 mA Timeout
Parameter 4-54 Warnung Sollwert niedr. definiert das Verhalten des Analogausgangs bei einem
Feldbus-Timeout.
[142]
Bus-Steuerung 4 20 mA Timeout
Parameter 4-54 Warnung Sollwert niedr. definiert das Verhalten des Analogausgangs bei einem
Feldbus-Timeout.
[150]
Max.Ausgangsfreq.
4-20 mA
In Bezug auf Parameter 4-19 Max. Ausgangsfrequenz.
Bereich
Funktion
0.00%*
[0.00–
2000%]
Dieser Parameter skaliert das Min.-Analogsignal an Ausgangsklemme X45/1 in Prozent des max. Signalpegels. Ist beispielsweise 0 mA (oder 0 Hz) bei 25 % des maximalen Ausgangswerts erforderlich, programmieren Sie 25 %. Skalierungswerte bis zu 100 % können nie höher sein als die entsprechende Einstellung in Parameter 6-72 Klemme X45/1 Max. Skalierung.
Bereich
Funktion
100%*
[0.00–
200.00%]
Dieser Parameter skaliert das Max.-Analogsignal an Ausgangsklemme X45/1 in Prozent des max. Signalpegels. Setzen Sie den Wert auf den Maximalwert der aktuellen Signalausgabe. Sie können den Ausgang so
skalieren, dass beim Skalenendwert ein Strom unter 20 mA bzw. bei einem Ausgang von unter 100 % des
maximalen Signalwerts 20 mA erzielt werden. Sollen die 20 mA bereits bei 0 – 100 % des Signalwertes erreicht werden, so geben Sie den prozentualen Wert direkt ein, z. B. 50 % = 20 mA. Wenn bei maximalem
Signal (100 %) ein kleinerer Strom zwischen 4 und 20 mA erforderlich ist, berechnen Sie den Prozentwert
wie folgt (Beispiel mit erforderlichem max. Ausgangssignal von 10 mA):
IBEREICH mA
IGEWÜNSCHTMAX mA
× 100 % =
20 − 4mA
10mA
× 100 % = 160%
0%
20
Analogausgang min.
Skalierung
Par. 6-71
Analogausgang max.
Skalierung
Par. 6-72
Abbildung 6: Ausgang max. Skalierung
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Parametereinstellung
Tabelle 32: Parameter 6-71 Klemme X45/1 Min. Skalierung
Tabelle 33: Parameter 6-72 Klemme X45/1 Max. Skalierung
AQ322553864968de-000101 / 130R035342 | Danfoss A/S © 2020.01
Page 43

Bereich
Funktion
0.00%*
[0.00–100.00%]
Hält den Strom an Analogausgang 3 (Klemme X45/1) auf konstantem Niveau, sofern er busgesteuert
ist.
Bereich
Funktion
0.00%*
[0.00–100.00%]
Hält das voreingestellte Stromniveau von Analogausgang 3 (Klemme X45/1). Wenn Sie in Parameter
6-70 Kl. X45/1 Ausgang eine Timeout-Funktion wählen, wird der Ausgang bei einem Feldbus-Timeout
auf dieses Niveau voreingestellt.
Option
Funktion
Dieser Parameter definiert die Funktion des Analogausgangs, Klemme X45/3.
[0]*
Ohne Funktion
Es sind die gleichen Optionen verfügbar wie für Parameter 6-70 Kl. X45/1 Ausgang.
Bereich
Funktion
[0.00%]*
0.00–
200.00%
Skaliert den min. Ausgang des ausgewählten Analogsignals an Klemme X45/3. Dieser Parameter skaliert
das Min.-Signal in Prozent des max. Signalpegels. Wenn z. B. 0 mA (oder 0 Hz) bei 25 % des max. Ausgangswerts benötigt werden, programmieren Sie 25 %. Der Wert darf nie die höher sein als die entsprechende Einstellung in Parameter 6-82 Klemme X45/3 Max. Skalierung, wenn der Wert unter 100 % liegt.
Dieser Parameter ist aktiv, wenn VLT® Extended Relay CardMCB 113 im Frequenzumrichter installiert ist.
Bereich
Funktion
[0.00%]*
0.00–
200.00%
Skaliert den max. Ausgang des ausgewählten Analogsignals an Klemme X45/3. Stellen Sie den Wert auf
Maximalwert des Stromsignalausgangs ein. Sie können den Ausgang so skalieren, dass beim Skalenendwert ein Strom unter 20 mA bzw. bei einem Ausgang von unter 100 % des maximalen Signalwerts 20 mA
erzielt werden. Sollen die 20 mA bereits bei 0 – 100 % des Signalwertes erreicht werden, so geben Sie den
prozentualen Wert direkt ein, z. B. 50 % = 20 mA. Wenn bei maximalem Signal (100 %) ein kleinerer Strom
zwischen 4 und 20 mA erforderlich ist, berechnen Sie den Prozentwert wie folgt (Beispiel mit erforderlichem max. Ausgangssignal von 10 mA):
IBEREICH mA
IGEWÜNSCHTMAX mA
× 100 % =
20 − 4mA
10mA
× 100 % = 160%
Bereich
Funktion
[0.00%]*
0.00–100.00%
Hält das Niveau von Ausgang 4 (X45/3), sofern er busgesteuert ist.
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Tabelle 34: Parameter 6-73 Klemme X45/1, Wert bei Bussteuerung
Tabelle 35: Parameter 6-74 Kl. X45/1, Wert bei Bus-Timeout
Parametereinstellung
4.3.2 6-8* Analogausgang 4 MCB 113
Parameter zur Skalierung und zum Konfigurieren der Grenzwerte für Analogausgang 4, Klemmen X45/3 und X45/4. Analogausgänge sind Stromausgänge: 0/4 bis 20 mA. Die Auflösung am Analogausgang ist 11 Bit.
Tabelle 36: Parameter 6-80 Kl. X45/3 Ausgang
Tabelle 37: Parameter 6-81 Terminal X45/3 Output Min. Scale (Klemme X45/3 Ausgang min. Skalierung)
Tabelle 38: Parameter 6-82 Klemme X45/3 Max. Skalierung
Tabelle 39: Parameter 6-83 Klemme X45/3, Wert bei Bussteuerung
AQ322553864968de-000101 / 130R0353 | 43Danfoss A/S © 2020.01
Page 44

Bereich
Funktion
[0.00%]*
0.00–100.00%
Hält das voreingestellte Niveau von Ausgang 4 (X45/3). Wenn Sie in Parameter 6-80 Kl. X45/3 Ausgang
eine Timeout-Funktion wählen, wird der Ausgang bei einem Feldbus-Timeout auf dieses Niveau voreingestellt.
Option
Funktion
H I N W E I S
Eine Funktionsänderung dieses Parameters wird nur bei einem Aus- und Einschaltzyklus wirksam.
[0]
Nein
Wählen Sie [0] Nein, um die 24-V-DC-Versorgung des Frequenzumrichters zu verwenden.
[1]*
Ja
Wählen Sie [1] Ja, wenn für die Option eine externe 24-V-DC-Versorgung verwendet werden soll. Bei Versorgung
mit einer ext. Spannungsquelle werden die Ein-/Ausgänge galvanisch vom FU getrennt.
Bereich
Funktion
0*
[0–63]
Zeigt die Signalzustände der aktiven Digitaleingänge. Beispiel: Eingang 18 entspricht Bit 5; 0 = Kein Signal; 1 = Verbundenes Signal. Bit 6 funktioniert in umgekehrter Weise; 0 = Ein; 1 = Aus (Safe-Stop-Eingang).
Bit 0
Digitaleingangskl. 33
Bit 1
Digitaleingangskl. 32
Bit 2
Digitaleingang Kl. 29
Bit 3
Digitaleingang Kl. 27
Bit 4
Digitaleingang Kl. 19
Bit 5
Digitaleingang Kl. 18
Bit 6
Digitaleingangskl. 37
Bit 7
Digitaleingang GP I/O-Kl. X30/4
Bit 8
Digitaleingang GP I/O-Kl. X30/3
Bit 9
Digitaleingang GP I/O-Kl. C30/2
Bits 10–63
Zukünftigen Klemmen vorbehalten.
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Tabelle 40: Parameter 6-84 Kl. X45/3, Wert bei Bus-Timeout
4.4 14-** Sonderfunktionen
4.4.1 14-8* Optionen
Tabelle 41: Parameter 14-80 Ext. 24 VDC für Option
Parametereinstellung
4.5 16-** Datenanzeigen
4.5.1 16-6* Anzeig. Ein-/Ausg.
Tabelle 42: Parameter 16-60 Digitaleingänge
AQ322553864968de-000101 / 130R035344 | Danfoss A/S © 2020.01
Page 45
DI T -33
DI T -32
DI T -29
DI T -27
DI T -19
DI T -18
DI T -37
DI X30/4
DI X30/3
DI X30/2
DI X46/13
DI X46/11
DI X46/9
DI X46/7
DI X46/5
DI X46/3
DI X46/1
e30ba894.11
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00
Bereich
Funktion
0.000 N/A*
[0–511 N/A]
Zeigt die Einstellungen aller Relais an.
Bit 0
Relais 9
Bit 1
Relais 8
Bit 2
Relais 7
Bit 3
Relais 2
Bit 4
Relais 1
Bit 5
Relais 6
Bit 6
Relais 5
Bit 7
Relais 4
Bit 8
Relais 3
Bit 9–15
Reserviert für zukünftige Relais
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Parametereinstellung
Tabelle 43: Parameter 16-71 Relaisausgänge [bin]
AQ322553864968de-000101 / 130R0353 | 45Danfoss A/S © 2020.01
Page 46
e30ba689.11
0 0 0 0 0 0 0 0 0
Relay 9
Relay 8
Relay 7
Relay 2
Relay 1
Relay 6
Relay 5
Relay 4
Relay 3
Bereich
Funktion
0*
[0–30]
Zeigt den Istwert am Ausgang von Klemme X45/1 an. Der angezeigte Wert gibt die Auswahl in Parameter 6-70 Kl.
X45/1 Ausgang an.
Bereich
Funktion
0*
[0–30]
Zeigt den Istwert am Ausgang von Klemme X45/3 an. Der angezeigte Wert gibt die Auswahl in Parameter 6-80 Kl.
X45/3 Ausgang an.
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Parametereinstellung
Abbildung 7: Relaisausgänge
Tabelle 44: Parameter 16-78 Analogausgang X45/1 [mA]
Tabelle 45: Parameter 16-79 Analog Out X45/3 [mA] (Analogausg. X45/3 [mA])
AQ322553864968de-000101 / 130R035346 | Danfoss A/S © 2020.01
Page 47
Nummer
4 einpolige Lastrelais (Wechslerkontakte)
Last bei 250 V AC/30 V DC
8 A
Last bei 250 V AC/30 V DC mit cosφ = 0,4
3,5 A
Überspannungskategorie (Kontakt-Erde)
III
Überspannungskategorie (Kontakt-Kontakt)
II
Kombination aus 250-V- und 24-V-Signalen
Zulässig mit einem ungenutzten Relais dazwischen
Nummer
7
Bereich
0/24 V
Modus
PNP/NPN
Eingangsimpedanz
4 kΩ
Niedriger Auslösepegel
6,4 V
Hoher Auslösepegel
17 V
Nummer
2
Bereich
0/4–20 mA
Auflösung
11 Bit
Linearität
<0.2%
EMV
IEC 61000-6-2 und IEC 61800-3 hinsichtlich Störfestigkeit von
Burst, ESD, Surge und leitungsgeführte Störgrößen.
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
5 Spezifikationen
5.1 Relais
5.2 Digitaleingänge
Spezifikationen
5.3 Analogausgänge
5.4 EMV
AQ322553864968de-000101 / 130R0353 | 47Danfoss A/S © 2020.01
Page 48

A
Ampere
AC
Wechselstrom
DC
Gleichstrom
EMV
Electromagnetic Compatibility (Elektromagnetische Verträglichkeit)
Hz
Hertz
V
Volt
NAMUR NE37
Deutsche Empfehlungen, die in der Chemieindustrie allgemein verwendet werden: „Ausführung von Frequenzumrichtern – Standard-Klemmleiste für drehzahlveränderbare Antriebe“.
SPDT Single Pole, Double Throw
(Einpoliges Lastrelais, Wechslerkontakt)
Einpoliges Lastrelais (Wechslerkontakte).
VLT® Extended Relay Card MCB 113
Bedienungsanleitung
6 Anhang
6.1 Abkürzungen
Anhang
6.2 Konventionen
•
Nummerierte Listen zeigen Vorgehensweisen.
•
Aufzählungen kennzeichnen Auflistungen zusätzlicher Informationen, bei denen die Reihenfolge der Informationen nicht relevant ist.
•
Fettgedruckter Text enthält Hervorhebungen und Abschnittsüberschriften.
•
Kursivschrift bedeutet Folgendes:
-
Querverweise.
-
Link.
-
Fußnoten.
-
Parametername.
-
Parameteroption.
-
Parametergruppenname.
-
Alarm-/Warnmeldungen.
•
Alle Maße in den Zeichnungen sind in metrischen Einheiten (zoll-basierende Einheiten in Klammern dahinter) angegeben.
•
Ein Sternchen (*) kennzeichnet die Werkseinstellung eines Parameters.
AQ322553864968de-000101 / 130R035348 | Danfoss A/S © 2020.01
Page 49

VLT® Extended Relay Card MCB 113
Bedienungsanleitung
Index
A
Ableitstrom....................................................................................................... 8
B
Bestellnummern..............................................................................................5
D
Digitalausgang..............................................................................................29
Digitaleingang...............................................................................................12
E
Einbausatz......................................................................................................... 5
G
Galvanische Trennung................................................................................11
K
Konventionen................................................................................................48
N
Nachrüstung.....................................................................................................5
Index
NAMUR.............................................................................................................11
Q
Qualifiziertes Personal...................................................................................5
S
Schalter
Trennschalter.......................................................................................... 7
Sicherheitshinweise.......................................................................................9
Spannung
Sicherheitswarnung..............................................................................7
U
UL-Zertifizierung.............................................................................................6
Unerwarteter Anlauf......................................................................................7
V
Verdrahtung............................................................................................10, 11
Z
Zielsetzung des Handbuchs........................................................................5
Zulassungen und Zertifizierungen...........................................................6
AQ322553864968de-000101/130R0353 | 49Danfoss A/S © 2020.01
Page 50

Danfoss A/S
Nordborgvej 81
DK-6430 Nordborg
www.danfoss.com
Danfoss can accept no responsibility for possible errors in catalogues, brochures and other printed material. Danfoss reserves the right to alter its products without notice.
This also applies to products already on order provided that such alterations can be made without subsequential changes being necessary in specifications already agreed.
All trademarks in this material are property of the respective companies. Danfoss and the Danfoss logotype are trademarks of Danfoss A/S. All rights reserved.
*130R0353*
Danfoss A/S © 2020.01
AQ322553864968de-000101 / 130R0353
*M0020602*
 Loading...
Loading...