

Page 1

Guía de funcionamiento
VLT® Extended Relay Card MCB 113
VLT® HVAC Drive FC 102, VLT® Refrigeration Drive FC 103, VLT® AQUA
Drive FC 202, VLT® AutomationDrive FC 301/FC 302
Page 2

Page 3

VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Contenido
Contenido
1
Introducción 5
1.1
Finalidad de esta guía de funcionamiento 5
Marcas comerciales 5
1.2
Versión del documento 5
1.3
1.4
Recursos adicionales 5
1.5
Vista general de producto 5
1.5.1
Uso previsto 5
1.6
Homologaciones y certificaciones 6
Seguridad 7
2
Medidas de seguridad 7
2.1
Instalación 9
3
3.1
Instalación mecánica 9
3.1.1
Instalación de los tamaños de alojamiento A5-C4 9
3.2
Instalación eléctrica 9
3.2.1
Instrucciones de seguridad 9
3.2.2
Esquema de cableado 10
3.2.3
Esquema de cableado: conforme a las especificaciones NAMUR 11
3.2.4
Aislamiento galvánico 11
4
Ajuste de parámetros 12
4.1
Introducción al ajuste de parámetros 12
4.2
5-** E/S digital 12
4.2.1
Grupo de parámetros 5-1* Entradas digitales 12
4.2.2
Grupo de parámetros 5-1* Entradas digitales 28
4.2.3
Grupo de parámetros 5-3* Salidas digitales 29
4.2.4
Grupo de parámetros 5-4* Relés 35
4.3
6-** Salidas analógicas 40
4.3.1
6-7* Salida analógica 3 MCB 113 40
4.3.2
6-8* Salida analógica 4 MCB 113 43
4.4
14-** Alimentación externa de 24 V CC 44
4.4.1
14-8* Opciones 44
4.5
16-** Lecturas de datos 44
4.5.1
16-6* Entradas y salidas 44
5
Especificaciones 47
5.1
Relés 47
AQ322553864968es-000101/130R0353 | 3Danfoss A/S © 2020.01
Page 4

VLT® Extended Relay Card MCB 113
Guía de funcionamiento
5.2
Entradas digitales 47
5.3
Salidas analógicas 47
5.4
EMC 47
6
Anexo 48
6.1
Abreviaturas 48
6.2
Convenciones 48
Contenido
AQ322553864968es-000101/130R03534 | Danfoss A/S © 2020.01
Page 5

Versión del documento
Comentarios
AQ322553864968, versión 0101
Ahora la opción también puede aplicarse a los modelos VLT® HVAC Drive FC 102, VLT® Refrigeration Drive FC 103 y VLT® AQUA Drive FC 202.
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Introducción
1 Introducción
1.1 Finalidad de esta guía de funcionamiento
Esta guía de funcionamiento proporciona información para la instalación y configuración seguras de la tarjeta de opción VLT® Extended Relay CardMCB 113 utilizada en la serie de convertidores de frecuencia VLT® FC.
La guía de funcionamiento está diseñada para su utilización por parte de personal cualificado. El personal debe estar familiarizado
con los convertidores de frecuencia de la serie VLT ® FC.
Lea las instrucciones antes de efectuar la instalación y la configuración, y asegúrese de que se cumplan para garantizar la seguridad
del proceso. Conserve estas instrucciones cerca del convertidor de frecuencia en todo momento.
1.2 Marcas comerciales
VLT® es una marca registrada de Danfoss A/S.
1.3 Versión del documento
Esta guía de funcionamiento se revisa y actualiza de forma periódica. Le agradecemos cualquier sugerencia de mejoras. Consulte la
versión del documento y los cambios aplicados en Versión y cambios aplicados.
La versión original de este manual está redactada en inglés.
1.4 Recursos adicionales
Tiene a su disposición más recursos informativos para comprender la programación y las funciones avanzadas del convertidor.
•
Las guías de funcionamiento de los convertidores de la serie VLT® proporcionan información necesaria para la instalación y
puesta en marcha del convertidor para determinadas aplicaciones.
•
Las guías de programación de los convertidores de la serie VLT® FC proporcionan información detallada sobre cómo trabajar
con parámetros.
•
Las guías de diseño de la serie VLT® FC proporcionan información detallada sobre capacidades y funcionalidades para diseñar
sistemas de control de motores para diversas aplicaciones.
Disponible documentación técnica para otras opciones de productos en
www.danfoss.com.
1.5 Vista general de producto
1.5.1 Uso previsto
La tarjeta de opción VLT® Extended Relay CardMCB 113 solo puede utilizarse en la ranura de opciones C1. Esta opción está fabricada
como una opción C1 estándar compatible con los siguientes convertidores de la serie VLT® FC:
•
VLT® HVAC Drive FC 102
•
VLT® Refrigeration Drive FC 103
•
VLT® AQUA Drive FC 202
•
VLT® AutomationDrive FC 301/FC 302.
La tarjeta MCB 113 incluye 7 entradas digitales, 2 salidas analógicas y 4 relés SPDT a la E/S estándar del convertidor. Estas adiciones
permiten cumplir con las especificaciones alemanas NAMUR NE37.
Si se realiza el pedido junto con el convertidor, la opción se instalará de fábrica. Para ello, utilice los siguientes números de pedido:
•
130B1164 (sin barnizado)
•
130B1264 (barnizado)
Para efectuar una actualización, deberá adquirirse el kit de montaje, que incluye un ventilador para la tarjeta de opción VLT® Motion
Control MCO 305 y solo deberá instalarse si esta se utiliza.
AQ322553864968es-000101 / 130R0353 | 5Danfoss A/S © 2020.01
Page 6

Tamaños de las protecciones
Número de pedido
A2 y A3 (40 mm para una opción C)
130B7530
A2 y A3 (60 mm para la opción C0 + C1)
130B7531
B3 (40 mm para una opción C)
130B1413
B3 (60 mm para una opción C0 + C1)
130B1414
Tamaño del alojamiento
Número de pedido
A5
130B7532
B (excepto B3), C, D, E y F
130B7533
089
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Tabla 1: Kits de montaje para protecciones tipo libro
Tabla 2: Kits de montaje para protecciones compactas
1.6 Homologaciones y certificaciones
La siguiente lista es una selección de posibles homologaciones y certificaciones de los convertidores de Danfoss:
Introducción
A V I S O
Las homologaciones y certificaciones específicas del convertidor se indican en su placa de características. Si desea obtener más
información, póngase en contacto con la oficina local o el distribuidor de Danfoss.
AQ322553864968es-000101 / 130R03536 | Danfoss A/S © 2020.01
Page 7

Tensión [V]
Tiempo de espera mínimo (minutos)
4715
200-240
1,1-3,7 kW (1,5-5 CV)
–
5,5-45 kW (7,5-60 CV)
380-480
1,1-7,5 kW (1,5-10 CV)
–
11-90 kW (15-125 CV)
525-600
1,1-7,5 kW (1,5-10 CV)
–
11-90 kW (15-125 CV)
525-690
–
1,1-7,5 kW (1,5-10 CV) (únicamente FC 102)
11-90 kW (15-125 CV) (únicamente FC 102)
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Seguridad
2 Seguridad
2.1 Medidas de seguridad
A D V E R T E N C I A
TENSIÓN ALTA
Los convertidores de frecuencia contienen tensión alta cuando están conectados a una entrada de red de CA, a un suministro de
CC o a una carga compartida. Si la instalación, la puesta en marcha y el mantenimiento no son efectuados por personal cualifica-
do, pueden causarse lesiones graves o incluso la muerte.
La instalación, el arranque y el mantenimiento deben ser realizados exclusivamente por personal cualificado.
-
A D V E R T E N C I A
ARRANQUE ACCIDENTAL
Cuando el convertidor de frecuencia se conecta a la red de CA, al suministro de CC o a una carga compartida, el motor puede
arrancar en cualquier momento, lo que crea el riesgo de sufrir lesiones graves o incluso mortales, así como daños al equipo u
otros objetos. El motor puede arrancar mediante la activación de un conmutador externo, una orden de bus de campo, una señal
de referencia de entrada desde el LCP o el LOP, por funcionamiento remoto con el software de configuración MCT 10 o por la
eliminación de una condición de fallo.
Pulse [Off] en el LCP antes de programar los parámetros.
-
Desconecte el convertidor de la red de alimentación siempre que las consideraciones de seguridad personal lo requieran,
-
para evitar un arranque accidental del motor.
Compruebe que el convertidor, el motor y cualquier equipo accionado estén listos para funcionar.
-
A D V E R T E N C I A
TIEMPO DE DESCARGA
El convertidor contiene condensadores de enlace de CC que podrán seguir cargados aunque el convertidor esté apagado. Puede
haber tensión alta presente aunque las luces del indicador de advertencia estén apagadas.
Si después de desconectar la alimentación no espera el tiempo especificado antes de realizar cualquier trabajo de reparación o
tarea de mantenimiento, pueden producirse lesiones graves o incluso la muerte.
Pare el motor.
-
Desconecte la red de CA, los motores de magnetización permanente y las fuentes de alimentación de enlace de CC remotas,
-
entre las que se incluyen las baterías de emergencia, los SAI y las conexiones de enlace de CC a otros convertidores de frecuencia.
Espere a que los condensadores se descarguen por completo. El tiempo de espera mínimo se especifica en la tabla de tiempo
-
de descarga y en la placa de características localizada en la parte superior del convertidor.
Antes de realizar cualquier trabajo de reparación o mantenimiento, utilice un dispositivo de medición de tensión adecuado
-
para asegurarse de que los condensadores se han descargado por completo.
Tabla 3: Tiempo de descarga, convertidores VLT® HVAC Drive FC 102 y VLT® Refrigeration Drive FC 103
AQ322553864968es-000101 / 130R0353 | 7Danfoss A/S © 2020.01
Page 8

Tensión [V]
Tiempo de espera mínimo (minutos)
4715
200-240
0,25-3,7 kW (0,34-5 CV)
–
5,5-45 kW (7,5-60 CV)
380-480
0,37-7,5 kW (0,5-10 CV)
–
11-90 kW (15-125 CV)
525-600
0,75–7,5 kW (1,0-10 CV)
–
11-90 kW (15-125 CV)
525-690
–
1,1-7,5 kW (1,5-10 CV)
11-90 kW (15-125 CV)
Tensión [V]
Tiempo de espera mínimo (minutos)
4715
200-240
0,25-3,7 kW (0,34-5 CV)
–
5,5-37 kW (7,5-50 CV)
380-500
0,25-7,5 kW (0,34-10 CV)
–
11-75 kW (15-100 CV)
525-600
0,75-7,5 kW (1-10 CV)
–
11-75 kW (15-100 CV)
525-690
–
1,5-7,5 kW (2-10 CV)
11-75 kW (15-100 CV)
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Tabla 4: Tiempo de descarga, convertidor VLT® AQUA Drive FC 202
Tabla 5: Tiempo de descarga, convertidor VLT® AutomationDrive FC 301/FC 302
Seguridad
A D V E R T E N C I A
PELIGRO DE CORRIENTE DE FUGA
Las corrientes de fuga superan los 3,5 mA. No realizar la conexión toma a tierra adecuada del convertidor de frecuencia puede ser
causa de lesiones graves e incluso de muerte.
La correcta conexión a tierra del equipo debe estar garantizada por un instalador eléctrico certificado.
-
A D V E R T E N C I A
EJES DE ROTACIÓN
El contacto con ejes en movimiento y equipos eléctricos puede provocar lesiones graves o la muerte.
Asegúrese de que la instalación, el arranque y el mantenimiento sean realizados únicamente por personal formado y cualifi-
-
cado.
Asegúrese de que los trabajos eléctricos respeten las normativas eléctricas locales y nacionales.
-
Siga los procedimientos indicados en esta guía.
-
AQ322553864968es-000101 / 130R03538 | Danfoss A/S © 2020.01
Page 9
RemoveJumper to activate Safe Stop
12 13 18 19 27 29 32 33 20
1
2
130bb457.11
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Instalación
3 Instalación
3.1 Instalación mecánica
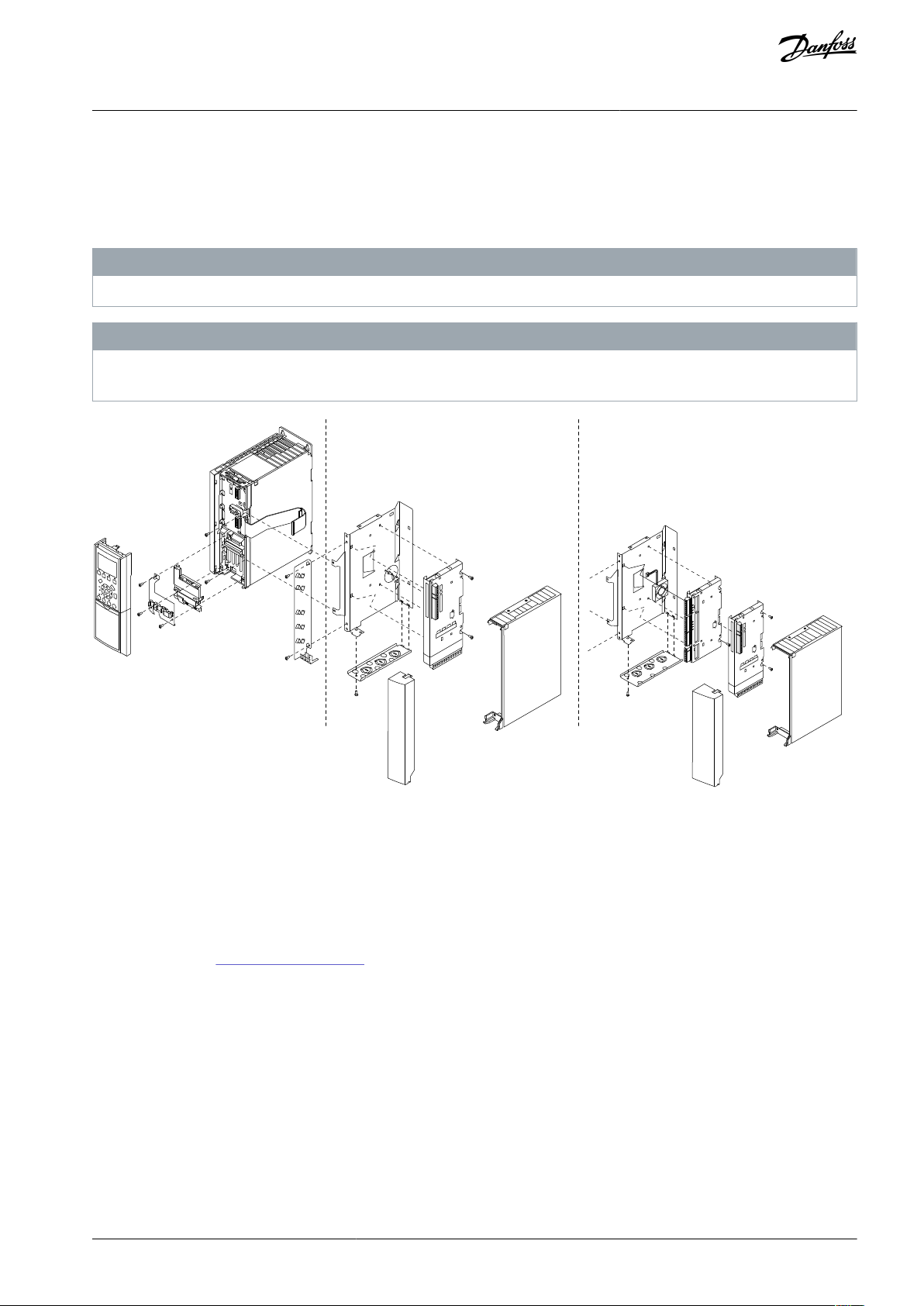
3.1.1 Instalación de los tamaños de alojamiento A5-C4
A V I S O
En los tamaños de alojamiento A5-C4, solo podrá instalarse una opción C en cada momento.
A V I S O
No instale el ventilador pequeño para VLT® Extended Relay CardMCB 113, VLT® A/B en el adaptador de opciones C Option Adapt-
er MCF 106 ni en los tamaños de alojamiento B4, C3, C4, D, E y F.
Ilustración 1: Instalación de la tarjeta de opción VLT® Extended Relay Card MCB 113: despiece
•
Si solo se utiliza una opción C, utilice el kit de montaje de 40 mm.
•
Si se utiliza la tarjeta MCB 113 con el control de movimiento VLT® Motion Control MCO 305, utilice el kit de montaje de 60 mm.
3.2 Instalación eléctrica
3.2.1 Instrucciones de seguridad
Consulte el apartado 2.1 Medidas de seguridad para conocer las instrucciones generales de seguridad.
AQ322553864968es-000101 / 130R0353 | 9Danfoss A/S © 2020.01
Page 10

3
2
1 876
54 11
10
9
13
12 142
1
4
3
1
2
1 32 4 65 7 98 1 0 1211
7
2
GND
24 V DC
Par. 5-00
24 V (NPN)
0 V (PNP)*
e30ba765.11
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
3.2.2 Esquema de cableado
Instalación
A V I S O
Las conexiones de estos relés difieren de las de los relés estándar de los convertidores. La bobina se sitúa entre T2 y T3, y no entre
T1 y T2.
Las entradas digitales se programan para PNP o NPN en el parámetro 5-00 Modo E/S digital.
Ilustración 2: Entradas digitales de programación
AQ322553864968es-000101 / 130R035310 | Danfoss A/S © 2020.01
Page 11

7
2
606162
63
1
2
10 -
11-12
- 13 - 14 - 15 - 16
-
31
30
-
33
32
34
35
37
39 38
-
36
123
45678 9 10 11
12
1 2 3
4 5 678 9
10 11 12
1 2 345 6 7 8 9 10 11 12
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
3.2.3 Esquema de cableado: conforme a las especificaciones NAMUR
Instalación
3.2.4 Aislamiento galvánico
La tarjeta de relé VLT® Extended Relay CardMCB 113 puede conectarse a una alimentación externa de 24 V en el terminal X58, a fin
de garantizar el aislamiento galvánico entre el convertidor y la tarjeta de opción. Si no se necesita aislamiento galvánico, la tarjeta
de opción puede alimentarse a 24 V internamente desde el convertidor. El suministro interno de 24 V estará disponible en el terminal X58 si el parámetro 14-80 Opción sumin. por 24 V CC ext. se ajusta como [0] No.
Los relés serán compatibles con una combinación de señales de 24 V y 250 V siempre que exista un relé intermedio no utilizado.
Ilustración 3: Conexiones válidas para aislamiento galvánico
AQ322553864968es-000101 / 130R0353 | 11Danfoss A/S © 2020.01
Page 12

Grupo 1
Reinicio, paro por inercia, reinicio y paro por inercia, parada rápida, freno de CC, parada y tecla [Off].
Grupo 2
Arranque, arranque de pulsos, cambio de sentido, velocidad fija y mantener salida.
Función de entrada digital
Seleccione
Terminal
Sin función
[0]
Todos, terminales 32 y 33
Reinicio
[1]
Todos
Inercia
[2]
Todos, terminal 27
Inercia y reinicio
[3]
Todos
Parada rápida
[4]
Todos
Freno CC
[5]
Todos
Parada
[6]
Todos
Arranque
[8]
Todos, terminal 18
Arranque por pulsos
[9]
Todos
Cambio de sentido
[10]
Todos, terminal 19
Arranque e inversión
[11]
Todos
Act. arranque adelante
[12]
Todos
Act. arranque inverso
[13]
Todos
Velocidad fija
[14]
Todos, terminal 29
Ref. interna, sí
[15]
Todos
Ref.interna LSB
[16]
Todos
Ref.interna MSB
[17]
Todos
Ref.interna EXB
[18]
Todos
Mantener referencia
[19]
Todos
Mantener salida
[20]
Todos
Aceleración
[21]
Todos
Deceleración
[22]
Todos
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Ajuste de parámetros
4 Ajuste de parámetros
4.1 Introducción al ajuste de parámetros
Los parámetros incluidos en esta guía de funcionamiento se han extraído de las guías de funcionamiento específicas de cada convertidor. Consulte dichas guías de programación para obtener las descripciones completas de los parámetros.
4.2 5-** E/S digital
4.2.1 Grupo de parámetros 5-1* Entradas digitales
Las entradas digitales se usan para seleccionar varias funciones del convertidor. Consulte el Tabla 6 para comprobar qué funciones
pueden asignarse a las entradas digitales.
Las funciones del grupo 1 tienen mayor prioridad que las funciones del grupo 2.
Tabla 6: Funciones de entrada digital
AQ322553864968es-000101 / 130R035312 | Danfoss A/S © 2020.01
Page 13

Función de entrada digital
Seleccione
Terminal
Selec.ajuste LSB
[23]
Todos
Selec. ajuste MSB
[24]
Todos
Parada precisa
[26]
18, 19
Arranq./parada prec.
[17]
18, 19
Enganche arriba
[28]
Todos
Enganche abajo
[29]
Todos
Entrada del contador
[30]
29, 33
Activ. flanco pulsos
[31]
29, 33
Entrada de pulsos
[32]
29, 33
Bit rampa 0
[34]
Todos
Bit rampa 1
[35]
Todos
Inic. preciso pulsos
[40]
18, 19
Det. precisa pulsos
[41]
18, 19
Parada seguridad
[51]–Increm. DigiPot
[55]
Todos
Dismin. DigiPot
[56]
Todos
Borrar DigiPot
[57]
Todos
Elevador DigiPot
[58]
Todos
Contador A (ascend)
[60]
29, 33
Contador A (descend)
[61]
29, 33
Reset del contador A
[62]
Todos
Contador B (ascend)
[63]
29, 33
Contador B (descend)
[64]
29, 33
Reset del contador B
[65]
Todos
Realim. freno mecán.
[70]
Todos
Realim freno mec. inv.
[71]
Todos
Error de PID inverso
[72]
Todos
Reinicio PID parte I
[73]
Todos
Activar PID
[74]
Todos
Específico de MCO
[75]
Todos
Tarjeta PTC 1
[80]
Todos
PROFIdrive OFF2
[91]
Todos
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Ajuste de parámetros
AQ322553864968es-000101 / 130R0353 | 13Danfoss A/S © 2020.01
Page 14
Función de entrada digital
Seleccione
Terminal
PROFIdrive OFF3
[92]
Todos
Light-load detection
[94]
Todos
Evacuation
[95]
Todos
Mains loss
[96]
32, 33
Mains loss inverse
[97]
32, 33
Activ. flanco arranq.
[98]
Todos
Safety option reset
[100]–Enable master offset
[108]
Todos
Start virtual master
[109]
Todos
Start homing
[110]
Todos
Activate touch
[111]
Todos
Relative position
[112]
Todos
Enable reference
[113]
Todos
Sync. to Pos. mode
[114]
Todos
Home sensor
[115]
18, 32, 33
Home sensor inverse
[116]
18, 32, 33
Touch sensor
[117]
18, 32, 33
Touch sensor inverse
[118]
18, 32, 33
Speed mode
[119]
Todos
Power limit mot.
[231]
Todos
Power limit gen.
[232]
Todos
Power limit both
[233]
Todos
Light load + evacuation
[234]
Todos
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Ajuste de parámetros
Los terminales estándar del convertidor son:
•
18
•
19
•
27
•
29
•
32
•
33
En toda la serie de convertidores, excepto en el VLT® AutomationDrive FC 301, los terminales 27 y 29 también funcionan como salida.
La opción VLT® Extended Relay CardMCB 113 tiene los siguientes terminales:
Salidas analógicas
AQ322553864968es-000101 / 130R035314 | Danfoss A/S © 2020.01
Page 15

•
•
•
•
Opción
Función
[0]
Sin función
No hay reacción a las señales que llegan al terminal.
[1]
Reinicio
Reinicia el convertidor tras una alarma. No todas las alarmas pueden reiniciarse.
[2]
Inercia
(Entrada digital 27 predeterminada): Entrada invertida y paro por inercia (NC). El convertidor deja el motor
en modo libre. «0» lógico⇒paro por inercia.
[3]
Inercia y reinicio
Entrada invertida de reinicio y paro por inercia (NC). Deja el motor en modo libre y reinicia el convertidor.
«0» lógico⇒paro por inercia y reinicio.
[4]
Parada rápida
Entrada invertida (NC). Genera una parada de acuerdo con el tiempo de rampa de parada rápida ajustado
en el parámetro 3-81 Tiempo rampa parada rápida. Cuando el motor se para, el eje está en modo libre. «0»
lógico⇒paro por inercia.
[5]
Freno CC
Entrada invertida para freno de CC (NC). Detiene el motor alimentándolo con CC durante un periodo de
tiempo determinado. Consulte los ajustes del parámetro 2-01 Intens. freno CC al parámetro 2-03 Velocidad
activación freno CC [RPM]. La función solo estará activada cuando el valor del parámetro 2-02 Tiempo de
frenado CC no sea 0. 0 lógico⇒freno de CC.
[6]
Parada
Función de parada invertida. Genera una función de parada cuando el terminal seleccionado pasa del nivel lógico «1» al «0».
La parada se efectúa de acuerdo con el tiempo de rampa seleccionado:
parámetro 3-42 Rampa 1 tiempo desacel. rampa,
parámetro 3-52 Rampa 2 tiempo desacel. rampa,
parámetro 3-62 Rampa 3 tiempo desacel. rampa y
parámetro 3-72 Rampa 4 tiempo desacel. rampa.
A V I S O
Cuando el convertidor está en el límite de par y ha recibido un comando de parada, es posible que no
se detenga por sí mismo. Para garantizar que el convertidor se detenga, configure una salida digital
para [27] Límite par y parada. Conecte esta salida digital a una entrada digital configurada como inercia.
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
•
X45/1
•
X45/3
Entradas digitales
•
X46/1
•
X46/3
•
X46/5
•
X46/7
•
X46/9
•
X46/11
•
X46/13
Relés
•
X47/3
•
X47/4
•
X47/5
•
X47/6
Las funciones dedicadas a una sola entrada digital se definen en el parámetro asociado.
Todas las entradas digitales pueden programarse para las siguientes funciones:
Ajuste de parámetros
Tabla 7: 5-10 Entradas digitales - 1
AQ322553864968es-000101 / 130R0353 | 15Danfoss A/S © 2020.01
Page 16

Opción
Función
[8]
Arranque
(Entrada digital 18 predeterminada): Seleccione el arranque para una orden de arranque/parada. 1 lógico
= arranque, 0 lógico = parada.
[9]
Arranque por
pulsos
Si se aplica un pulso durante 2 ms como mínimo, el motor arranca. El motor se detiene cuando la parada
inversa se activa o cuando se emite una orden de reinicio (a través de DI).
[10]
Cambio de
sentido
(Entrada digital predeterminada 19). Cambie el sentido de rotación del eje del motor. Seleccione «1» lógico para cambiar de sentido. La señal de cambio de sentido solo cambia el sentido de giro. No activa la
función de arranque. Seleccione ambas direcciones en el parámetro 4-10 Dirección veloc. motor. La función
no está activa en lazo cerrado de proceso.
[11]
Arranque e
inversión
Se utiliza para el arranque/parada y para el cambio de sentido en el mismo cable. No permite ninguna
señal de arranque al mismo tiempo.
[12]
Act. arranque
adelante
Libera el movimiento en sentido antihorario y permite el movimiento en sentido horario.
[13]
Act. arranque
inverso
Libera el movimiento en sentido horario y permite el movimiento en sentido antihorario.
[14]
Velocidad fija
(Entrada digital 29 predeterminada): active la velocidad fija. Consulte el parámetro 3-11 Velocidad fija [Hz].
[15]
Ref. interna, sí
Cambia entre referencia externa y referencia interna. Se presupone que está seleccionada [1] Externa sí/no
en el parámetro 3-04 Función de referencia. «0» lógico = referencia externa activa; «1» lógico = una de las
ocho referencias internas está activa.
[16]
Ref.interna
LSB
Referencia interna LSB, MSB y EXB permiten realizar una selección entre una de las ocho referencias internas de acuerdo con el Tabla 8.
[17]
Ref.interna
MSB
Igual que [16] Ref. interna LSB.
[18]
Ref.interna
EXB
Igual que [16] Ref. interna LSB.
Bit de ref. interna
210
Ref. interna 0
000
Ref. interna 1
001
Ref. interna 2
010
Ref. interna 3
011
Ref. interna 4
100
Ref. interna 5
101
Ref. interna 6
110
Ref. interna 7
111
Opción
Función
[19]
Mantener referencia
Mantiene la referencia real, que es ahora el punto de activación o condición que se utilizará para [21] Acelera-
ción y [22] Deceleración. Si se utiliza aceleración/desaceleración, el cambio de velocidad siempre se lleva a cabo
mediante la rampa 2 (parámetro 3-51 Rampa 2 tiempo acel. rampa y parámetro 3-52 Rampa 2 tiempo desacel.
rampa) en el rango 0-parámetro 3-03 Referencia máxima.
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Ajuste de parámetros
Tabla 8: Bit de referencia interna
Tabla 9: 5-10 Entradas digitales - 2
AQ322553864968es-000101 / 130R035316 | Danfoss A/S © 2020.01
Page 17

Opción
Función
[20]
Mantener salida
Mantiene la frecuencia real del motor (Hz), que es ahora el punto de activación o condición que se utilizará
para [21] Aceleración y [22] Deceleración. Si se utiliza aceleración/desaceleración, el cambio de velocidad
siempre se lleva a cabo mediante la rampa 2 (parámetro 3-51 Rampa 2 tiempo acel. rampa y parámetro 3-52
Rampa 2 tiempo desacel. rampa) en el rango 0-parámetro 1-23 Frecuencia motor.
A V I S O
Cuando está activada la opción Mantener salida, el convertidor no puede pararse mediante una señal de
Arranque [8] baja. Detenga el convertidor mediante un terminal programado para [2] Inercia o [3] Inercia y
reinicio.
[21]
Aceleración
Seleccione [21] Aceleración y [22] Deceleración si desea un control digital de la aceleración/deceleración (potenciómetro del motor). Active esta función seleccionando [19] Mantener referencia o [20] Mantener salida. Si se
activa la aceleración/desaceleración durante menos de 400 ms, la referencia resultante aumentará/disminuirá
en un 0,1 %. Si se activa la aceleración/deceleración durante más de 400 ms, la referencia resultante seguirá el
ajuste de aceleración/deceleración 3-x1/3-x2.
Apagado
Enganche arriba
Sin cambio de velocidad
00Reducción porcentual
10Aumento porcentual
01Reducción porcentual
1
1
Opción
Función
[22]
Deceleración
Igual que [21] Aceleración.
[23]
Selec.ajuste
LSB
Seleccione [23] Selec.ajuste LSB o [24] Selec.ajuste MSB para elegir uno de los cuatro ajustes. Ajuste el pará-
metro 0-10 Ajuste activo como [9] Ajuste múltiple.
[24]
Selec. ajuste
MSB
(Entrada digital 32 predeterminada): Igual que [23] Selec.ajuste LSB.
[26]
Parada precisa
Envía una señal de paro invertido cuando se activa la función de parada precisa del parámetro 1-83 Fun-
ción de parada precisa. La función de parada precisa está disponible para los terminales 18 o 19.
[27]
Arranq./parada prec.
Utilizar cuando se seleccione [0] Det. precisa rampa en el parámetro 1-83 Función de parada precisa. La
función de arranque/parada precisos está disponible para los terminales 18 y 19. El arranque preciso garantiza que el ángulo de giro del rotor desde el estado inmóvil hasta la referencia sea el mismo en cada
arranque (con el mismo tiempo de rampa y el mismo valor de consigna). Esta función es el equivalente a
la parada precisa en la que el ángulo de giro del rotor desde la referencia hasta la parada es el mismo en
cada parada. Cuando, en el parámetro 1-83 Función de parada precisa se utiliza la opción [1] Par. cont. c/
reinicio o [2] Par. cont. s/reinicio: el convertidor necesita una señal de parada precisa antes de alcanzar el
valor del parámetro 1-84 Valor de contador para parada precisa. Si no se proporciona esta señal, el convertidor no se detendrá cuando se alcance el valor del parámetro 1-84 Valor de contador para parada precisa.
Accione la función de arranque/parada precisos mediante una entrada digital. Esta función está disponible para los terminales 18 y 19.
[28]
Enganche arriba
Aumenta el valor de referencia en porcentaje (relativo) ajustado en el parámetro 3-12 Valor de enganche/
arriba-abajo.
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Tabla 10: Apagado / enganche arriba
Ajuste de parámetros
Tabla 11: 5-10 Entradas digitales - 3
AQ322553864968es-000101 / 130R0353 | 17Danfoss A/S © 2020.01
Page 18

Opción
Función
[29]
Enganche abajo
Reduce el valor de referencia en porcentaje (relativo) ajustado en el parámetro 3-12 Valor de enganche/
arriba-abajo.
[30]
Entrada del
contador
La Función de parada precisa del parámetro 1-83 Función de parada precisa actúa como parada del contador o como parada del contador compensada por velocidad, con o sin reinicio. Ajuste el valor del contador en el parámetro 1-84 Valor de contador para parada precisa.
[31]
Activ. flanco
pulsos
Cuenta el número de flancos por tiempo de muestra. Ello proporciona una resolución mayor en frecuencias altas, pero no es tan preciso en frecuencias bajas. Utilice este principio de pulsos para encoders con
resolución baja (por ejemplo, 30 PPR).
De pulsos
Tiempo de
muestra
e30bb463.10
Ilustración 4: Flancos por tiempo de muestra
[32]
Entrada de
pulsos
Mide la duración entre flancos por pulso. Ello proporciona una resolución mayor en frecuencias bajas,
pero no es tan preciso en frecuencias altas. Este principio tiene una frecuencia de desconexión que lo
hace inadecuado para encoders con resoluciones bajas (por ejemplo, 30 PPR) a velocidades bajas.
Vel ocidad [rpm] Velo cidad [rpm]
Tiempo [s]
Tiempo [s]
a
b
e30bb462.10
Temporizador de lectura:
20 ciclos de temporizador
Temporizador de lectura:
20 ciclos de temporizador
Hora inicial
Tiempo de contador
Tiempo de muestra
Temporizador
De pulsos
e30bb464.10
Ilustración 5: Duración entre flancos por pulso
[34]
Bit rampa 0
Permite seleccionar una de las cuatro rampas disponibles, conforme al Tabla 12.
[35]
Bit rampa 1
Igual que [34] Bit rampa 0.
Ajuste de bit de rampa
10Rampa 1
00Rampa 2
01Rampa 3
10Rampa 4
1
1
Opción
Función
[40]
Inic. preciso
pulsos
El arranque preciso de pulsos solo requiere un pulso de 3 ms en los terminales 18 o 19. Cuando se usan
en el parámetro 1-83 Función de parada precisa las opciones [1] Par. cont. c/reinicio o [2] Par. cont. s/reini-
cio: al alcanzar la referencia, el convertidor de frecuencia activa internamente la señal de parada precisa.
Esto significa que el convertidor efectúa la parada precisa cuando se alcanza el valor del contador del
parámetro 1-84 Valor de contador para parada precisa.
[41]
Det. precisa
pulsos
Envía una señal de parada por pulsos cuando se activa la función de parada precisa del parámetro 1-83
Función de parada precisa. La función parada inversa precisa de pulsos está disponible para los terminales 18 o 19.
[51]
Parada seguridad
Esta función permite dar un fallo externo al convertidor de frecuencia. Este fallo se trata del mismo
modo que una alarma generada internamente.
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Ajuste de parámetros
Tabla 12: Ajuste de bit de rampa
Tabla 13: 5-10 Entradas digitales - 4
AQ322553864968es-000101 / 130R035318 | Danfoss A/S © 2020.01
Page 19

Opción
Función
[55]
Increm. DigiPot
Señal de incremento para la función de potenciómetro digital descrita en el grupo de parámetros 3-9*
Potencióm. digital.
[56]
Dismin. DigiPot
Señal de disminución para la función de potenciómetro digital descrita en el grupo de parámetros 3-9*
Potencióm. digital.
[57]
Borrar DigiPot
Borra la referencia de potenciómetro digital descrita en el grupo de parámetros 3-9* Potencióm. digital.
[60]
Contador A
(Sólo terminales 29 o 33). Entrada para cuenta creciente en el contador SLC.
[61]
Contador A
(Sólo terminales 29 o 33). Entrada para cuenta decreciente en el contador SLC.
[62]
Reset del contador A
Entrada para reiniciar el contador A.
[63]
Contador B
(Sólo terminales 29 o 33). Entrada para cuenta creciente en el contador SLC.
[64]
Contador B
(Sólo terminales 29 o 33). Entrada para cuenta decreciente en el contador SLC.
[65]
Reset del contador B
Entrada para reiniciar el contador B.
[70]
Realim. freno
mecán.
Realimentación de freno para aplicaciones de elevación: ajuste el parámetro 1-01 Principio control motor
como [3] Lazo Cerrado Flux; ajuste el parámetro 1-72 Función de arranque como [6] Lib. freno elev. mec.
[71]
Realim. freno
mec. inv.
Realimentación de freno inverso para aplicaciones de elevación.
[72]
Error de PID
inverso
Cuando está activada, esta opción invierte el error resultante del controlador del PID de proceso. Disponible solo si el parámetro 1-00 Modo Configuración está ajustado como [6] Bobinadora superf., [7] Vel.
lazo a. PID ampl. o [8] Vel. lazo c. PID ampl.
[73]
Reinicio PID
parte I
Cuando está activada, esta opción reinicia la parte I del controlador del PID de proceso. Equivalente al
parámetro 7-40 Reinicio parte I de PID proc. Disponible solo si el parámetro 1-00 Modo Configuración está
ajustado como [6] Bobinadora superf., [7] Vel. lazo a. PID ampl. u [8] Vel. lazo c. PID ampl.
[74]
Activar PID
Habilita el controlador del PID de proceso. Equivalente al parámetro 7-50 PID de proceso PID ampliado.
Disponible solo si el parámetro 1-00 Modo Configuración está ajustado como [7] Vel. lazo a. PID ampl. u [8]
Vel. lazo c. PID ampl.
[80]
Tarjeta PTC 1
Todas las entradas digitales pueden asignarse a [80] Tarjeta PTC 1. Sin embargo, solo se puede asignar
una entrada digital a esta opción.
[91]
PROFIdrive
OFF2
La funcionalidad es la misma del bit de código de control correspondiente de la opción Profibus/Profinet.
[92]
PROFIdrive
OFF3
La funcionalidad es la misma del bit de código de control correspondiente de la opción Profibus/Profinet.
[94]
Light Load
Detection
La detección de carga ligera es un función para aplicaciones de elevación que permite asegurar el movimiento de la carga en el sentido de evacuación que requiera un menor uso de energía (capacidad del
SAI) durante una emergencia. Consulte las configuraciones de detección de carga ligera en el parámetro
30-25 Light Load Delay [s], el parámetro 30-26 Delay Before Measurements, el parámetro 30-27 Light Load
Speed [%], el parámetro 30-28 Evacuation Speed [%] y el parámetro 30-29 Ramp Time.
A V I S O
La opción Flying start anula la opción Light load detection.
[95]
Evacuation
El modo de evacuación es una función para aplicaciones de elevación que permite a los convertidores
funcionar con una tensión de CC reducida para la evacuación de personas en caso de fallo de alimenta-
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Ajuste de parámetros
AQ322553864968es-000101 / 130R0353 | 19Danfoss A/S © 2020.01
Page 20

Opción
Función
ción. Cuando se activa esta función, se reducen los límites de baja tensión y de tensión de activación, de
manera que el convertidor pueda funcionar con el suministro monofásico de 230 V del SAI.
[96]
Mains loss
Seleccionar para aumentar la energía regenerativa. Cuando la tensión de red vuelve a un nivel cercano
(pero todavía inferior) al nivel de detección, aumenta la velocidad de salida y la energía regenerativa
permanece activa. Para evitar esta situación, envíe una señal de estado al convertidor. Cuando la señal
de la entrada digital es baja (0), el convertidor fuerza la desconexión de la energía regenerativa.
A V I S O
Solo disponible para entradas de pulsos en los terminales 32/33.
[97]
Mains loss inverse
Cuando la señal de la entrada digital es alta (1), el convertidor fuerza la desconexión de la energía regenerativa. Para obtener más detalles, consulte la descripción de la opción [96] Mains loss.
A V I S O
Solo disponible para entradas de pulsos en los terminales 32/33.
[98]
Activ. flanco
arranq.
Orden de arranque activada por flanco. Mantiene activa la orden de arranque. Se puede utilizar como
tecla de arranque.
[100]
Safe option
reset
Reinicia la opción de seguridad. Solo disponible cuando la opción de seguridad esté instalada.
[106]
Set master
home
A V I S O
Esta opción solo está disponible con la versión de software 48.XX del IMC.
Ajusta la posición real del maestro en el valor indicado en el parámetro 17-88 Master Home Position.
[107]
Target Inverse
A V I S O
Esta opción solo está disponible con la versión de software 48.XX del IMC.
Cambia el signo de la posición de destino ajustada. Por ejemplo, si el destino ajustado es 1000, la activación de esta opción cambia el valor a –1000.
[108]
Enable Master
Offset
A V I S O
Esta opción solo está disponible con la versión de software 48.XX del IMC.
Activa el desplazamiento del maestro seleccionado en el parámetro 3-26 Master Offset cuando el paráme-
tro 17-93 Master Offset Selection presenta una selección entre [1] Absolute y [5] Relative Touch Sensor.
[109]
Enable
Vir.Master
A V I S O
Esta opción solo está disponible con la versión de software 48.XX del IMC.
Activa la señal de la función de maestro virtual. Solo es aplicable cuando se selecciona la opción [10]
Synchronization en el parámetro 1-00 Modo Configuración.
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Ajuste de parámetros
AQ322553864968es-000101 / 130R035320 | Danfoss A/S © 2020.01
Page 21

Opción
Función
[110]
Start homing
A V I S O
Esta opción solo está disponible con la versión de software 48.XX del IMC.
Activa la función de retorno al inicio seleccionada en el parámetro 17-80 Homing Function. Debe permanecer alta hasta que se efectúe el retorno al inicio. De lo contrario, se cancelará el retorno.
[111]
Activate
touch
A V I S O
Esta opción solo está disponible con la versión de software 48.XX del IMC.
Activa el seguimiento de la entrada de sensor táctil.
[112]
Relative position
A V I S O
Esta opción solo está disponible con la versión de software 48.XX del IMC.
Esta opción selecciona entre posicionamiento absoluto y relativo. Es válida para la siguiente orden de
posicionamiento.
[113]
Enable reference
A V I S O
Esta opción solo está disponible con la versión de software 48.XX del IMC.
Modo posicionam.: el convertidor activa el tipo de posicionamiento y el destino seleccionados e inicia el
movimiento hacia el nuevo destino. El movimiento se iniciará inmediatamente o cuando se complete el
posicionamiento activo, en función de los ajustes del parámetro 17-90 Absolute Position Mode y el pará-
metro 17-91 Relative Position Mode. Modo de sincronización: una señal alta bloquea la posición real del
auxiliar respecto a la posición real del maestro. El auxiliar arranca y atrapa al maestro. Una señal baja
detiene la sincronización y el auxiliar hace una parada controlada.
[114]
Sync. to Pos.
Mode
A V I S O
Esta opción solo está disponible con la versión de software 48.XX del IMC.
Seleccione el posicionamiento en el modo de sincronización.
[115]
Home sensor
A V I S O
Esta opción solo está disponible con la versión de software 48.XX del IMC.
Contacto normalmente abierto para definir la posición de inicio. La función está definida en el paráme-
tro 17-80 Homing Function.
[116]
Home sensor
inv.
A V I S O
Esta opción solo está disponible con la versión de software 48.XX del IMC.
Contacto normalmente cerrado para definir la posición de inicio. La función está definida en el paráme-
tro 17-80 Homing Function.
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Ajuste de parámetros
AQ322553864968es-000101 / 130R0353 | 21Danfoss A/S © 2020.01
Page 22

•
•
•
Opción
Función
[117]
Touch sensor
A V I S O
Esta opción solo está disponible con la versión de software 48.XX del IMC.
Contacto normalmente abierto. Sirve como referencia para posicionamiento de sonda de contacto.
[118]
Touch sensor
inv.
A V I S O
Esta opción solo está disponible con la versión de software 48.XX del IMC.
Contacto normalmente cerrado. Sirve como referencia para posicionamiento de sonda de contacto.
[119]
Speed mode
A V I S O
Esta opción solo está disponible con la versión de software 48.XX del IMC.
Escoja el modo de velocidad cuando se selecciona la opción [9] Positioning o la opción [10] Synchroniza-
tion en el parámetro 1-00 Modo Configuración. La velocidad de referencia se ajusta mediante el recurso
de referencia 1 o la REF1 de bus de campo con relación al parámetro 3-03 Referencia máxima.
[122]
Position vir.
master
A V I S O
Esta opción solo está disponible con la versión de software 48.XX del IMC.
Activa el maestro virtual controlado por posición cuando se selecciona la opción [10] Synchronization en
el parámetro 1-00 Modo Configuración. Al seleccionar la opción, ocurre lo siguiente:
La posición de destino se ajusta mediante la referencia de posición de bus de campo o el destino
predefinido se indica en el parámetro 3-20 Preset Target.
La velocidad se ajusta con relación al parámetro 3-27 Virtual Master Max Ref, mediante la fuente seleccionada en el parámetro 3-15 Recurso de referencia 1 o la REF1 de bus de campo.
La aceleración y la desaceleración se ajustan según la definición del grupo de parámetros 3-6* Rampa
3.
[123]
Master marker
A V I S O
Esta opción solo está disponible con la versión de software 48.XX del IMC.
Contacto normalmente abierto. Sirve como entrada para la señal de marcador maestro durante la sincronización del marcador a partir de la opción seleccionada en el parámetro 3-33 Sync. Mode & Start Be-
havior.
[124]
Master marker inv.
A V I S O
Esta opción solo está disponible con la versión de software 48.XX del IMC.
Contacto normalmente cerrado. Activa la señal de marcador maestro durante la sincronización del marcador a partir de la opción seleccionada en el parámetro 3-33 Sync. Mode & Start Behavior.
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Ajuste de parámetros
AQ322553864968es-000101 / 130R035322 | Danfoss A/S © 2020.01
Page 23

Opción
Función
[125]
Follower
marker
A V I S O
Esta opción solo está disponible con la versión de software 48.XX del IMC.
Contacto normalmente abierto. Sirve como entrada para la señal de marcador auxiliar durante la sincronización del marcador a partir de la opción seleccionada en el parámetro 3-33 Sync. Mode & Start Behav-
ior.
[126]
Follower
marker inv.
A V I S O
Esta opción solo está disponible con la versión de software 48.XX del IMC.
Contacto normalmente cerrado. Sirve como entrada para la señal de marcador auxiliar durante la sincronización del marcador a partir de la opción seleccionada en el parámetro 3-33 Sync. Mode & Start Behav-
ior.
[231]
Power limit
mot.
Sirve como entrada para activar la función de límite de potencia del modo de motor. Consulte el grupo
de parámetros 4-8* Power Limit.
[232]
Power limit
gen.
Sirve como entrada para activar la función de límite de potencia del modo de generación. Consulte el
grupo de parámetros 4-8* Power Limit.
[233]
Power limit
both
Sirve como entrada para activar la función de límite de potencia en el modo de motor y en el modo de
generación. Consulte el grupo de parámetros 4-8* Power Limit.
[234]
Light load +
evacuation
Sirve como entrada para activar la función de límite de potencia en el modo de motor y en el modo de
generación. Consulte el grupo de parámetros 4-8* Power Limit.
Opción
Función
Las funciones se describen en el grupo de parámetros 5-1* Entradas digitales.
[0]
Sin función
[1]
Reinicio
[2]
Inercia
[3]
Coast and reset inv. (Inercia y reinic. inv.)
[4]
Parada rápida
[5]
Freno CC
[6]
Parada
[8]
Arranque
[9]
Arranque por pulsos
[10]
Cambio de sentido
[11]
Arranque e inversión
[12]
Act. arranque adelante
[13]
Act. arranque inverso
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Ajuste de parámetros
Tabla 14: 5-12 Terminal 27 Entrada digital
AQ322553864968es-000101 / 130R0353 | 23Danfoss A/S © 2020.01
Page 24

Opción
Función
[14]
Velocidad fija
[15]
Ref. interna, sí
[16]
Ref.interna LSB
[17]
Ref.interna MSB
[18]
Ref.interna EXB
[19]
Mantener referencia
[20]
Mantener salida
[21]
Aceleración
[22]
Deceleración
[23]
Selec.ajuste LSB
[24]
Selec. ajuste MSB
[28]
Enganche arriba
[29]
Enganche abajo
[34]
Bit rampa 0
[35]
Bit rampa 1
[44]
Restart drive
[51]
Parada seguridad
[55]
Increm. DigiPot
[56]
Dismin. DigiPot
[57]
Borrar DigiPot
[58]
Elevador DigiPot
[62]
Reset del contador A
[65]
Reset del contador B
[70]
Realim. freno mecán.
[71]
Realim freno mec. inv.
[72]
Error de PID inverso
[73]
Reinicio PID parte I
[74]
Activar PID
[75]
Específico de MCO
[78]
Código reinicio mantenim. preventivo
[80]
Tarjeta PTC 1
[91]
PROFIdrive OFF2
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Ajuste de parámetros
AQ322553864968es-000101 / 130R035324 | Danfoss A/S © 2020.01
Page 25

Opción
Función
[92]
PROFIdrive OFF3
[94]
Light load detection
[96]
Mains loss
[97]
Mains loss inverse
[98]
Activ. flanco arranq.
[100]
Safe option reset
[107]
Target inverse
[108]
Enable master offset
[109]
Start virtual master
[110]
Start homing
[111]
Activate touch
[112]
Relative position
[113]
Enable reference
[114]
Sync. to pos. mode
[115]
Home sensor
[116]
Home sensor inv.
[117]
Touch sensor
[118]
Touch sensor inv.
[119]
Speed mode
[231]
Power limit mot.
[232]
Power limit gen.
[233]
Power limit both
Opción
Función
A V I S O
Este parámetro no está disponible para el modelo FC 301.
Seleccione la función entre el rango de entradas digitales disponibles y las opciones adicionales [60] Contador A (ascend), [61] Contador A (descend), [63] Con-
tador B (ascend) y [64] Contador B (descend). Se usan contadores en funciones
de Smart Logic Control.
Las funciones se describen en el grupo de parámetros 5-1* Entradas digitales.
[0]
Sin función
[1]
Reinicio
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Ajuste de parámetros
Tabla 15: 5-13 Terminal 29 Entrada digital
AQ322553864968es-000101 / 130R0353 | 25Danfoss A/S © 2020.01
Page 26

Opción
Función
[2]
Inercia
[3]
Coast and reset inv. (Inercia y reinic. inv.)
[4]
Parada rápida
[5]
Freno CC
[6]
Parada
[8]
Arranque
[9]
Arranque por pulsos
[10]
Cambio de sentido
[11]
Arranque e inversión
[12]
Act. arranque adelante
[13]
Act. arranque inverso
[14]
Velocidad fija
[15]
Ref. interna, sí
[16]
Ref.interna LSB
[17]
Ref.interna MSB
[18]
Ref.interna EXB
[19]
Mantener referencia
[20]
Mantener salida
[21]
Aceleración
[22]
Deceleración
[23]
Selec.ajuste LSB
[24]
Selec. ajuste MSB
[28]
Enganche arriba
[29]
Enganche abajo
[30]
Entrada del contador
[31]
Activ. flanco pulsos
[32]
Entrada de pulsos
[34]
Bit rampa 0
[35]
Bit rampa 1
[44]
Restart drive
[51]
Parada seguridad
[55]
Increm. DigiPot
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Ajuste de parámetros
AQ322553864968es-000101 / 130R035326 | Danfoss A/S © 2020.01
Page 27

Opción
Función
[56]
Dismin. DigiPot
[57]
Borrar DigiPot
[58]
Elevador DigiPot
[60]
Contador A (ascend)
[61]
Contador A (descend)
[62]
Reset del contador A
[63]
Contador B (ascend)
[64]
Contador B (descend)
[65]
Reset del contador B
[70]
Realim. freno mecán.
[71]
Realim freno mec. inv.
[72]
Error de PID inverso
[73]
Reinicio PID parte I
[74]
Activar PID
[75]
Específico de MCO
[78]
Código reinicio mantenim. preventivo
[80]
Tarjeta PTC 1
[91]
PROFIdrive OFF2
[92]
PROFIdrive OFF3
[94]
Light load detection
[96]
Mains loss
[97]
Mains loss inverse
[98]
Activ. flanco arranq.
[100]
Safe option reset
[107]
Target inverse
[108]
Enable master offset
[109]
Start virtual master
[110]
Start homing
[111]
Activate touch
[112]
Relative position
[113]
Enable reference
[114]
Sync. to Pos. mode
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Ajuste de parámetros
AQ322553864968es-000101 / 130R0353 | 27Danfoss A/S © 2020.01
Page 28

Opción
Función
[115]
Home sensor
[116]
Home sensor inv.
[117]
Touch sensor
[118]
Touch sensor inv.
[119]
Speed mode
[231]
Power limit mot.
[232]
Power limit gen.
[233]
Power limit both
Opciones
Función
[0]*
Sin función
Este parámetro estará activo cuando el módulo de opción VLT® Extended Relay MCB 113 esté instalado en el
convertidor. Las funciones se describen en el grupo de parámetros 5-1* Entradas digitales.
Opción
Función
[0]*
Sin función
Este parámetro estará activo cuando el módulo de opción VLT® Extended Relay Card MCB 113 esté instalado
en el convertidor. Las funciones se describen en el grupo de parámetros 5-1* Entradas digitales.
Opción
Función
[0]*
Sin función
Este parámetro estará activo cuando el módulo de opción VLT® Extended Relay Card MCB 113 esté instalado
en el convertidor. Las funciones se describen en el grupo de parámetros 5-1* Entradas digitales.
Opción
Función
[0]*
Sin función
Este parámetro estará activo cuando el módulo de opción VLT® Extended Relay Card MCB 113 esté instalado
en el convertidor. Las funciones se describen en el grupo de parámetros 5-1* Entradas digitales.
Opción
Función
[0]*
Sin función
Este parámetro estará activo cuando el módulo de opción VLT® Extended Relay Card MCB 113 esté instalado
en el convertidor. Las funciones se describen en el grupo de parámetros 5-1* Entradas digitales.
Opción
Función
[0]*
Sin función
Este parámetro estará activo cuando el módulo de opción VLT® Extended Relay Card MCB 113 esté instalado
en el convertidor. Las funciones se describen en el grupo de parámetros 5-1* Entradas digitales.
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
4.2.2 Grupo de parámetros 5-1* Entradas digitales
Tabla 16: Parámetro 5-20 Terminal X46/1 Entrada digital
Ajuste de parámetros
Tabla 17: Parámetro 5-21 Terminal X46/3 Entrada digital
Tabla 18: Parámetro 5-22 Terminal X46/5 Entrada digital
Tabla 19: Parámetro 5-23 Terminal X46/7 Entrada digital
Tabla 20: Parámetro 5-24 Terminal X46/9 Entrada digital
Tabla 21: Parámetro 5-25 Terminal X46/11 Entrada digital
AQ322553864968es-000101 / 130R035328 | Danfoss A/S © 2020.01
Page 29

Opción
Función
[0]*
Sin función
Este parámetro estará activo cuando el módulo de opción VLT® Extended Relay Card MCB 113 esté instalado
en el convertidor. Las funciones se describen en el grupo de parámetros 5-1* Entradas digitales.
Opción
Función
[0]
Sin función
Valor predeterminado para todas las salidas digitales y salidas de relé.
[1]
Ctrl prep.
La tarjeta de control está preparada, por ejemplo: realimentación desde un convertidor controlado
mediante una fuente de alimentación externa de 24 V (VLT® 24 V DC Supply MCB 107) y no se detecta la potencia principal a la unidad.
[2]
Unidad lista
El convertidor está preparado para el funcionamiento y aplica una señal de suministro en la tarjeta
de control.
[3]
Unid. lista/remoto
El convertidor está listo para funcionar y en modo automático.
[4]
Activar / sin advert.
Preparado para funcionar. No se ha dado orden de arranque o de parada (arrancar/desactivar). No
hay advertencias activas.
[5]
Funcionamiento
El motor funciona y hay par de eje.
[6]
Func./sin advert.
La velocidad de salida es mayor que la velocidad definida en el parámetro 1-81 Vel. mín. para func.
parada [RPM]. El motor está en marcha y no hay advertencias.
[7]
Func. en ran./sin
adv.
El motor funciona dentro de los rangos de intensidad y velocidad ajustados en los parámetros 4-50
Advert. Intens. baja a 4-53 Advert. Veloc. alta. no hay advertencias.
[8]
Func. en ref./sin
adv.
El motor funciona a la velocidad de referencia. no hay advertencias.
[9]
Alarma
Una alarma activa la salida. no hay advertencias.
[10]
Alarma o advertencia
Una alarma o una advertencia activan la salida.
[11]
En límite par
Se ha superado el límite de par establecido en el parámetro 4-16 Modo motor límite de par o en el
parámetro 4-17 Modo generador límite de par.
[12]
Fuera ran. intensidad
La intensidad del motor está fuera del rango ajustado en el parámetro 4-18 Límite intensidad.
[13]
Corriente posterior,
baja
La intensidad del motor es inferior al valor ajustado en el parámetro 4-50 Advert. Intens. baja.
[14]
Corriente anterior,
alta
La intensidad del motor es superior al valor ajustado en el parámetro 4-51 Advert. Intens. alta.
[15]
Fuera del rango de
velocidad
La frecuencia de salida está fuera del rango especificado en el parámetro 4-52 Advert. Veloc. baja y
en el parámetro 4-53 Advert. Veloc. alta.
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Tabla 22: Parámetro 5-26 Terminal X46/13 Entrada digital
Ajuste de parámetros
4.2.3 Grupo de parámetros 5-3* Salidas digitales
Las 2 salidas digitales de estado sólido son comunes para los terminales 27 y 29. Ajuste la función de E/S para el terminal 27 en el
parámetro 5-01 Terminal 27 modo E/S, y la función de E/S para el terminal 29 en el parámetro 5-02 Terminal 29 modo E/S.
A V I S O
Estos parámetros no se pueden ajustar con el motor en marcha.
Tabla 23: 5-30 Salidas digitales - 1
AQ322553864968es-000101 / 130R0353 | 29Danfoss A/S © 2020.01
Page 30

Opción
Función
[16]
Velocidad posterior, baja
La velocidad de salida es inferior al valor ajustado en el parámetro 4-52 Advert. Veloc. baja.
[17]
Velocidad anterior,
alta
La velocidad de salida es superior al valor ajustado en el parámetro 4-53 Advert. Veloc. alta.
[18]
Fuera rango realim.
La realimentación está por debajo del límite especificado en el parámetro 4-56 Advertencia reali-
mentación baja y en el parámetro 4-57 Advertencia realimentación alta.
19
< que realim. alta
La realimentación se encuentra por debajo del límite establecido en el parámetro 4-56 Advertencia
realimentación baja.
[20]
> que realim. baja
La realimentación está por encima del límite ajustado en el parámetro 4-57 Advertencia realimenta-
ción alta.
[21]
Advertencia térmica
La advertencia térmica se activa cuando la temperatura sobrepasa el límite en el motor, en el convertidor, en la resistencia de freno o en el termistor.
[22]
Listo, sin adv. térm.
El convertidor está listo para funcionar y no existe ninguna advertencia de sobretemperatura.
[23]
Rem list sin adv tér
El convertidor está listo para funcionar y en modo automático. No hay advertencia de sobretemperatura.
[24]
Listo, tensión OK
El convertidor está listo para funcionar y la tensión de red está dentro del rango de tensión especificado.
[25]
Cambio sentido
El motor funciona (o está listo para funcionar) en sentido horario cuando el valor lógico es igual a 0
y en sentido antihorario cuando el valor lógico es igual a 1. La salida cambia cuando se aplica la
señal de cambio de sentido.
[26]
Bus OK
Comunicación activa (sin tiempo límite) a través del puerto de comunicación serie.
[27]
Límite par y parada
Se usa al realizar un paro por inercia y en condiciones de límite de par. Si el convertidor ha recibido
una señal de parada y está en el límite de par, la señal es «0» lógico.
[28]
Freno, sin advert.
El freno está activado y no existen advertencias.
[29]
Fren. prep. sin fallos
El freno está preparado para el funcionamiento y no presenta ningún fallo.
[30]
Fallo freno (IGBT)
La salida es «1» lógico cuando el IGBT del freno se ha cortocircuitado. Utilice esta función para proteger el convertidor en caso de fallo de los módulos de freno. Utilice la salida/relé para desconectar
la tensión de alimentación del convertidor de frecuencia.
[31]
Relé 123
El relé se activa al seleccionar [0] Código de control en el grupo de parámetros 8-** Comunic. y op-
ciones.
[32]
Ctrl. freno mec.
Permite controlar un freno mecánico externo. Para obtener más información sobre el control de
freno mecánico, consulte la guía de diseño del convertidor de frecuencia específico.
[33]
Parada segura activa
Indica que se ha activado la Safe Torque Off en el terminal 37.
[35]
Parada seguridad
[38]
Error realim. motor
[40]
Fuera rango de ref.
Activado cuando la velocidad real está fuera del rango de ajuste del parámetro 4-52 Advert. Veloc.
bajay del parámetro 4-55 Advertencia referencia alta.
[41]
Bajo ref., alta
Activado cuando la velocidad real es inferior al ajuste de velocidad de referencia.
[42]
Sobre ref., alta
Activado cuando la velocidad real es superior al ajuste de velocidad de referencia.
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Ajuste de parámetros
AQ322553864968es-000101 / 130R035330 | Danfoss A/S © 2020.01
Page 31

Opción
Función
[43]
Límite PID ampliado
[45]
Contr. bus
Controla la salida mediante bus. El estado de la salida se ajusta en el parámetro 5-90 Control de bus
digital y de relé. En caso de tiempo límite de bus, se retiene el estado de la salida.
[46]
Ctrl. bus, 1 si t. lím.
Controla la salida mediante bus. El estado de la salida se ajusta en el parámetro 5-90 Control de bus
digital y de relé. En caso de tiempo límite de bus, el estado de salida se ajusta alto (Sí).
[47]
Ctrl. bus, 0 si t. lím.
Controla la salida mediante bus. El estado de la salida se ajusta en el parámetro 5-90 Control de bus
digital y de relé. En caso de tiempo límite de bus, el estado de salida se ajusta bajo (No).
[50]
On reference
Activado cuando está conectado un controlador de cascada VLT® Cascade Controller MCO 102 o
un control de movimiento VLT® Motion Control MCO 305. La salida se controla a partir de la opción.
[51]
Controlado por
MCO
Activado cuando está conectado un controlador de cascada VLT® Advanced Cascade Controller
MCO 102 o un control de movimiento VLT® Motion Control MCO 305. La salida se controla a partir
de la opción.
[54]
24V encoder sim
Las salidas digitales 27 y 29 simulan un encoder HTL de señal simple. Seleccione la fuente de generación de señales en el parámetro 5-78 Term 27/29 Encoder Sim.
A V I S O
Debe seleccionarse la opción [54] 24V encoder sim tanto en el parámetro 5-30 Terminal 27 salida
digital como en el parámetro 5-31 Terminal 29 salida digital. Esta opción solo está disponible para
la versión de software 48.xx del convertidor VLT® AutomationDrive FC 302.
[55]
Salida de pulsos
[58]
Actual position
[59]
Posición real
4-20 mA
[60]
Comparador 0
Consulte el grupo de parámetros 13-1* Comparadores. Si el comparador 0 se evalúa como verdadero, la salida será alta. De lo contrario, será baja.
[61]
Comparador 1
Consulte el grupo de parámetros 13-1* Comparadores. Si el comparador 1 se evalúa como verdadero, la salida será alta. De lo contrario, será baja.
[62]
Comparador 2
Consulte el grupo de parámetros 13-1* Comparadores. Si el comparador 2 se evalúa como verdadero, la salida será alta. De lo contrario, será baja.
[63]
Comparador 3
Consulte el grupo de parámetros 13-1* Comparadores. Si el comparador 3 se evalúa como verdadero, la salida será alta. De lo contrario, será baja.
[64]
Comparador 4
Consulte el grupo de parámetros 13-1* Comparadores. Si el comparador 4 se evalúa como verdadero, la salida será alta. De lo contrario, será baja.
[65]
Comparador 5
Consulte el grupo de parámetros 13-1* Comparadores. Si el comparador 5 se evalúa como verdadero, la salida será alta. De lo contrario, será baja.
[70]
Regla lógica 0
Consulte el grupo de parámetros 13-4* Reglas lógicas. Si la regla lógica 0 se evalúa como verdadera,
la salida será alta. De lo contrario, será baja.
[71]
Regla lógica 1
Consulte el grupo de parámetros 13-4* Reglas lógicas. Si la regla lógica 1 se evalúa como verdadera,
la salida será alta. De lo contrario, será baja.
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Ajuste de parámetros
AQ322553864968es-000101 / 130R0353 | 31Danfoss A/S © 2020.01
Page 32

Opción
Función
[72]
Regla lógica 2
Consulte el grupo de parámetros 13-4* Reglas lógicas. Si la regla lógica 2 se evalúa como verdadera,
la salida será alta. De lo contrario, será baja.
[73]
Regla lógica 3
Consulte el grupo de parámetros 13-4* Reglas lógicas. Si la regla lógica 3 se evalúa como verdadera,
la salida será alta. De lo contrario, será baja.
[74]
Regla lógica 4
Consulte el grupo de parámetros 13-4* Reglas lógicas. Si la regla lógica 4 se evalúa como verdadera,
la salida será alta. De lo contrario, será baja.
[75]
Regla lógica 5
Consulte el grupo de parámetros 13-4* Reglas lógicas. Si la regla lógica 5 se evalúa como verdadera,
la salida será alta. De lo contrario, será baja.
[80]
Salida digital SL A
Consulte el parámetro 13-52 Acción Controlador SL. La salida será alta cuando se ejecute la acción
de lógica inteligente [38] Aj. sal. dig. A alta . La salida será baja cuando se ejecute la acción de lógica
inteligente [32] Aj. sal. dig. A baja.
[81]
Salida digital SL B
Consulte el parámetro 13-52 Acción Controlador SL. La salida será alta cuando se ejecute la acción
de lógica inteligente [39] Aj. sal.dig. B alta. La salida será baja cuando se ejecute la acción de lógica
inteligente [33] Aj. sal.dig. B baja.
[82]
Salida digital SL C
Consulte el parámetro 13-52 Acción Controlador SL. La salida será alta cuando se ejecute la acción
de lógica inteligente [40] Aj. sal.dig. C alta. La salida será baja cuando se ejecute la acción de lógica
inteligente [34] Aj. sal.dig. C baja.
[83]
Salida digital SL D
Consulte el parámetro 13-52 Acción Controlador SL. La salida será alta cuando se ejecute la acción
de lógica inteligente [41] Aj. sal.dig. D alta. La salida será baja cuando se ejecute la acción de lógica
inteligente [35] Aj. sal.dig. D baja.
[84]
Salida digital SL E
Consulte el parámetro 13-52 Acción Controlador SL. La salida será alta cuando se ejecute la acción
de lógica inteligente [42] Aj. sal.dig. E alta. La salida será baja cuando se ejecute la acción de lógica
inteligente [36] Aj. sal.dig. E baja.
[85]
Salida digital SL F
Consulte el parámetro 13-52 Acción Controlador SL. La salida será alta cuando se ejecute la acción
de lógica inteligente [43] Aj. sal. dig. F alta. La salida será baja cuando se ejecute la acción de lógica
inteligente [37] Aj. sal.dig. F baja.
[90]
Pulsos contador
kWh
Envía un impulso (anchura de impulsos de 200 ms) al terminal de salida siempre que se altere el
contador de kWh (parámetro 15-02 Contador kWh).
[98]
Virtual master dir.
A V I S O
Esta opción solo está disponible con la versión de software 48.xx del convertidor VLT® Automa-
tionDrive FC 302.
Una señal de maestro virtual que controla la dirección de rotación de los esclavos.
[120]
Ref. local activa
La salida es alta cuando el parámetro 3-13 Lugar de referencia = [2] Local.
Origen de referencia ajustado en el parámetro 3-13 Lugar de referencia
Ref. local activa [120]
Ref. remota activa [121]
Origen de referencia: local parámetro 3-13 Lugar de referencia [2] Local
1
0
Origen de referencia: remoto parámetro 3-13 Lugar de referencia [1] Remoto
0
1
Origen de referencia: Conex. a manual/auto
––Manual
1
0
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Ajuste de parámetros
Tabla 24: Ref. local activa
AQ322553864968es-000101 / 130R035332 | Danfoss A/S © 2020.01
Page 33

Origen de referencia ajustado en el parámetro 3-13 Lugar de referencia
Ref. local activa [120]
Ref. remota activa [121]
Manual⇒desact.
10Autom.⇒desact.
00Auto01
Opción
Función
[121]
Ref. remota activa
La salida es alta cuando el parámetro 3-13 Lugar de referencia se ajusta como [1] Remoto o [0] Conex. a
manual/auto mientras el LCP está en modo automático. Consulte el
Tabla 24.
[122]
Sin alarma
El valor de la salida es alto si no hay ninguna alarma presente.
[123]
Coman. arranque activo
El valor de la salida es alto si hay activa una orden de marcha (es decir, a través de una conexión de
bus de entrada digital, en manual o en automático) y no hay activa ninguna orden de parada o arranque.
[124]
Func. inverso
La salida es alta cuando el convertidor de frecuencia funciona en sentido antihorario (producto lógico
de los bits de estado «en funcionamiento» e «inverso»).
[125]
Drive modo
manual
La salida es alta cuando el convertidor de frecuencia está en modo manual (según la indicación del
LED superior [Hand on]).
[126]
Dispos. en
modo auto.
La salida es alta cuando el convertidor está en modo automático (según la indicación del LED superior
[Auto On]).
[151]
ATEX ETR cur.
alarm
Se puede seleccionar si el parámetro 1-90 Protección térmica motor está ajustado en [20] ATEX ETR o [21]
Advanced ETR. Si la alarma 164 ATEX ETR cur.lim.alarm está activa, la salida es 1.
[152]
ATEX ETR freq.
alarm
Se puede seleccionar si el parámetro 1-90 Protección térmica motor está ajustado en [20] ATEX ETR o [21]
Advanced ETR. Si la alarma 166 ATEX ETR freq.lim.alarm está activa, la salida es 1.
[153]
ATEX ETR cur.
warning
[154]
ATEX ETR freq.
warning
Se puede seleccionar si el parámetro 1-90 Protección térmica motor está ajustado en [20] ATEX ETR o [21]
Advanced ETR. Si la alarma 165 ATEX ETR freq.lim.warning está activa, la salida es 1
[180]
Fallo de reloj
[181]
Manten. previo
[188]
Conect. condens. AHF
Los condensadores se encienden al 20 % (la histéresis del 50 % ofrece un intervalo del 10-30 %). Los
condensadores se desconectan por debajo del 10 %. El retardo de desconexión es de 10 s y se reinicia
si la potencia nominal aumenta por encima del 10 % durante dicho retardo. El parámetro 5-80 Retardo
de reconexión de condensador AHF se utiliza para garantizar un tiempo de desconexión mínimo de los
condensadores.
[189]
Control de vent.
ext.
La lógica interna para el control de ventilador interno se transfiere a esta salida para permitir el control
de un ventilador externo (relevante para la refrigeración de conductos CV).
[190]
Safe function
active
[191]
Safe opt. reset
req.
[192]
RS Flipflop 0
Consulte el grupo de parámetros 13-1* Comparadores.
[193]
RS Flipflop 1
Consulte el grupo de parámetros 13-1* Comparadores.
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Tabla 25: 5-30 Salidas digitales - 2
Ajuste de parámetros
AQ322553864968es-000101 / 130R0353 | 33Danfoss A/S © 2020.01
Page 34

Opción
Función
[194]
RS Flipflop 2
Consulte el grupo de parámetros 13-1* Comparadores.
[195]
RS Flipflop 3
Consulte el grupo de parámetros 13-1* Comparadores.
[196]
RS Flipflop 4
Consulte el grupo de parámetros 13-1* Comparadores.
[197]
RS Flipflop 5
Consulte el grupo de parámetros 13-1* Comparadores.
[198]
RS Flipflop 6
Consulte el grupo de parámetros 13-1* Comparadores.
[199]
RS Flipflop 7
Consulte el grupo de parámetros 13-1* Comparadores.
[221]
IGBT cooling
Utilice esta opción para manejar las desconexiones por sobreintensidad. Cuando el convertidor detecta una situación de sobreintensidad, emite la alarma 13 Sobrecorriente y activa un reinicio. Si la situación de sobreintensidad se produce por 3.a vez consecutiva, el convertidor de frecuencia emite la alar-
ma 13 Sobrecorriente e inicia un retardo de tres minutos antes del siguiente reinicio.
[222]
Homing OK
A V I S O
Esta opción solo está disponible con la versión de software 48.xx del convertidor VLT® Automation-
Drive FC 302.
El retorno al inicio se efectúa con la función de retorno al inicio seleccionada en el parámetro 17-80
Homing Function.
[223]
On target
A V I S O
Esta opción solo está disponible con la versión de software 48.xx del convertidor VLT® Automation-
Drive FC 302.
El posicionamiento habrá finalizado y se enviará la señal de destino alcanzado cuando la posición real
se encuentre en el intervalo del parámetro 3-05 On Reference Window durante el tiempo definido por el
parámetro 3-09 On Target Time y la velocidad real no supere la del parámetro 3-05 On Reference Window.
[224]
Position limit
A V I S O
Esta opción solo está disponible con la versión de software 48.xx del convertidor VLT® Automation-
Drive FC 302.
El error de posición supera el valor ajustado en el parámetro 4-71 Maximum Position Error durante el
tiempo ajustado en el parámetro 4-72 Position Error Timeout.
[225]
Position error
A V I S O
Esta opción solo está disponible con la versión de software 48.xx del convertidor VLT® Automation-
Drive FC 302.
La posición se encuentra fuera de los límites definidos en el parámetro 3-06 Minimum Position y en el
parámetro 3-07 Maximum Position.
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Ajuste de parámetros
AQ322553864968es-000101 / 130R035334 | Danfoss A/S © 2020.01
Page 35

Opción
Función
[226]
Touch on target
A V I S O
Esta opción solo está disponible con la versión de software 48.xx del convertidor VLT® Automation-
Drive FC 302.
Activado el posicionamiento de sonda de contacto. El convertidor controla la entrada del sensor de la
sonda de contacto.
[231]
In power lim.
mot.
[232]
In power lim.
gen.
[233]
In power limit
Opción
Función
Relé 1 [0], relé 2 [1]
(1)
.
VLT® Extended Relay MCB 113: X47 / Relé 3 [2], X47 / Relé 4 [3], X47 / Relé 5 [4], X47 / Relé 6 [5].
VLT® Relay Card MCB 105: Relé 7 [6], relé 8 [7] y relé 9 [8].
[0]
Sin función
Ajustes predeterminados de todas las salidas digitales y de relé.
[1]
Ctrl prep.
La tarjeta de control está preparada, por ejemplo: realimentación desde un convertidor cuyo control
se suministra a través de una fuente de alimentación externa de 24 V (VLT® 24 V CC Supply MCB 107) y
no se detecta la potencia principal hacia la unidad.
[2]
Unidad lista
El convertidor está listo para funcionar. La alimentación y los suministros de control están OK.
[3]
Unid. lista/remoto
El convertidor está listo para funcionar y en modo automático.
[4]
Activar / sin advert.
Preparado para funcionar. No se han dado órdenes de arranque ni de parada (arrancar/desactivar). No
hay advertencias activas.
[5]
Funcionamiento
El motor funciona con un par de eje.
[6]
Func./sin advert.
La velocidad de salida es mayor que la velocidad definida en el parámetro 1-81 Vel. mín. para func.
parada [RPM]. El motor está en marcha y no hay advertencias.
[7]
Func. en ran./sin
adv.
El motor funciona a la velocidad de referencia. No hay advertencias.
[8]
Func. en ref./sin
adv.
El motor funciona a la velocidad de referencia. No hay advertencias.
[9]
Alarma
Una alarma activa la salida. No hay advertencias.
[10]
Alarma o advertencia
Una alarma o una advertencia activa la salida.
[11]
En límite par
Se ha superado el límite de par establecido en el parámetro 4-16 Modo motor límite de par o en el
parámetro 4-17 Modo generador límite de par.
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
4.2.4 Grupo de parámetros 5-4* Relés
Tabla 26: Parámetro 5-40 Relé de función - 1
Ajuste de parámetros
AQ322553864968es-000101 / 130R0353 | 35Danfoss A/S © 2020.01
Page 36

Opción
Función
[12]
Fuera ran. intensidad
La intensidad del motor está fuera del rango ajustado en el parámetro 4-18 Límite intensidad.
[13]
Corriente posterior, baja
La intensidad del motor es inferior al valor ajustado en el parámetro 4-50 Advert. Intens. baja.
[14]
Corriente anterior, alta
La intensidad del motor es superior al valor ajustado en el parámetro 4-51 Advert. Intens. alta.
[15]
Fuera del rango
de velocidad
La velocidad/frecuencia de salida está fuera del rango especificado en el parámetro 4-52 Advert. Veloc.
baja y en el parámetro 4-53 Advert. Veloc. alta.
[16]
Velocidad posterior, baja
La velocidad de salida es inferior al valor ajustado en el parámetro 4-52 Advert. Veloc. baja.
[17]
Velocidad anterior, alta
La velocidad de salida es superior al valor ajustado en el parámetro 4-53 Advert. Veloc. alta.
[18]
Fuera rango realim.
La realimentación está fuera del rango especificado en el parámetro 4-56 Advertencia realimentación
baja y en el parámetro 4-57 Advertencia realimentación alta.
[19]
< que realim. alta
La realimentación se encuentra por debajo del límite establecido en el parámetro 4-56 Advertencia re-
alimentación baja.
[20]
> que realim. baja
La realimentación está por encima del límite ajustado en el parámetro 4-57 Advertencia realimentación
alta.
[21]
Advertencia térmica
La advertencia térmica se activa cuando la temperatura sobrepasa el límite en el motor, en el convertidor, en la resistencia de freno o en el termistor conectado.
[22]
Listo, sin adv.
térm.
El convertidor está listo para funcionar y no existe ninguna advertencia de sobretemperatura.
[23]
Rem list sin adv
tér
El convertidor está listo para funcionar y en modo automático. No hay advertencia de sobretemperatura.
[24]
Listo, tensión OK
El convertidor está listo para funcionar y la tensión de red está dentro del rango de tensión especificado.
[25]
Cambio sentido
El motor está en marcha (o listo para funcionar) en sentido horario cuando el valor lógico = 0 y en
sentido antihorario cuando el valor lógico = 1. La salida cambia cuando se aplica la señal de cambio
de sentido.
[26]
Bus OK
Comunicación activa (sin tiempo límite) a través del puerto de comunicación en serie.
[27]
Límite par y parada
Se usa al realizar un paro por inercia y en condiciones de límite de par. Si el convertidor ha recibido
una señal de parada y está en el límite de par, la señal es «0» lógico.
[28]
Freno, sin advert.
El freno está activado y no hay advertencias.
[29]
Fren. prep. sin
fallos
El freno está preparado para el funcionamiento y no presenta ningún fallo.
[30]
Fallo freno
(IGBT)
La salida es «1» lógico cuando el IGBT del freno se ha cortocircuitado. Utilice esta función para proteger el convertidor en caso de que haya un fallo en el módulo de freno. Utilice la salida o relé digital para
desconectar la tensión de alimentación del convertidor.
[31]
Relé 123
La salida o relé digital se activa cuando se selecciona [0] Código de control en el grupo de parámetros 8-
** Comunic. y opciones.
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Ajuste de parámetros
AQ322553864968es-000101 / 130R035336 | Danfoss A/S © 2020.01
Page 37

Opción
Función
[32]
Ctrl. freno mec.
Control de freno mecánico ampliado. Cuando se activan los parámetros seleccionados en el grupo de
parámetros 2-2* Freno mecánico, debe reforzarse la salida para conducir la corriente para la bobina del
freno. A menudo, se resuelve conectando un relé externo a la salida digital seleccionada.
[33]
Parada segura
activa
Indica que se ha activado la opción Safe Torque Off en el terminal 37.
[36]
Bit código control 11
Activar el relé 1 mediante el código de control a partir del bus de campo. Sin otro impacto funcional
en el convertidor. Aplicación típica: control del dispositivo auxiliar a partir del bus de campo. La función es válida cuando se selecciona [0] Protocolo FC en el parámetro 8-10 Trama Cód. Control.
[37]
Bit código control 12
Activación del relé 2 mediante el código de control a partir del bus de campo. Sin otro impacto funcional en el convertidor. Aplicación típica: control del dispositivo auxiliar a partir del bus de campo. La
función es válida cuando se selecciona [0] Protocolo FC en el parámetro 8-10 Trama Cód. Control.
[38]
Error realim. motor
Un fallo en el lazo de realimentación de velocidad debido al funcionamiento del motor en lazo cerrado. La salida puede, eventualmente, usarse para preparar la conmutación del convertidor en lazo
abierto en casos de emergencia.
[39]
Error seguim.
Cuando la diferencia entre la velocidad calculada y la velocidad real en el parámetro 4-35 Error de se-
guimiento es superior a la seleccionada, se activa la salida o relé.
[40]
Fuera rango de
ref.
Activado cuando la velocidad real está fuera del rango de ajuste del parámetro 4-52 Advert. Veloc. baja
y del parámetro 4-55 Advertencia referencia alta.
[41]
Bajo ref., alta
Activado cuando la velocidad real sea inferior al ajuste de velocidad de referencia.
[42]
Sobre ref., alta
Activado cuando la velocidad real sea superior al ajuste de velocidad de referencia.
[43]
Límite PID ampliado
[45]
Contr. bus
Controla la salida digital/relé mediante bus. El estado de la salida se ajusta en el parámetro 5-90 Con-
trol de bus digital y de relé. El estado de la salida se mantiene en caso de tiempo límite de bus.
[46]
Ctrl. bus, 1 si t.
lím.
Controla la salida mediante bus. El estado de la salida se ajusta en el parámetro 5-90 Control de bus
digital y de relé. En caso de tiempo límite de bus, el estado de salida se ajusta alto (Sí).
[47]
Ctrl. bus, 0 si t.
lím.
Controla la salida mediante bus. El estado de la salida se ajusta en el parámetro 5-90 Control de bus
digital y de relé. En caso de tiempo límite de bus, el estado de salida se ajusta bajo (No).
[51]
Controlado por
MCO
Activado cuando está conectado un controlador de cascada VLT® Advanced Cascade Controller MCO
102 o un control de movimiento VLT® Motion Control MCO 305. La salida se controla a partir de la
opción.
[60]
Comparador 0
Consulte el grupo de parámetros 13-1* Comparadores. Si el comparador 0 del SLC se evalúa como verdadero, la salida será alta. De lo contrario, será baja.
[61]
Comparador 1
Consulte el grupo de parámetros 13-1* Comparadores. Si el comparador 1 del SLC se evalúa como verdadero, la salida será alta. De lo contrario, será baja.
[62]
Comparador 2
Consulte el grupo de parámetros 13-1* Comparadores. Si el comparador 2 del SLC se evalúa como verdadero, la salida será alta. De lo contrario, será baja.
[63]
Comparador 3
Consulte el grupo de parámetros 13-1* Comparadores. Si el comparador 3 del SLC se evalúa como verdadero, la salida será alta. De lo contrario, será baja.
[64]
Comparador 4
Consulte el grupo de parámetros 13-1* Comparadores. Si el comparador 4 del SLC se evalúa como verdadero, la salida será alta. De lo contrario, será baja.
[65]
Comparador 5
Consulte el grupo de parámetros 13-1* Comparadores. Si el comparador 5 del SLC se evalúa como verdadero, la salida será alta. De lo contrario, será baja.
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Ajuste de parámetros
AQ322553864968es-000101 / 130R0353 | 37Danfoss A/S © 2020.01
Page 38

Opción
Función
[70]
Regla lógica 0
Consulte el grupo de parámetros 13-4* Reglas lógicas. Si la regla lógica 0 del SLC se evalúa como verdadera, la salida será alta. De lo contrario, será baja.
[71]
Regla lógica 1
Consulte el grupo de parámetros 13-4* Reglas lógicas. Si la regla lógica 1 del SLC se evalúa como verdadera, la salida será alta. De lo contrario, será baja.
[72]
Regla lógica 2
Consulte el grupo de parámetros 13-4* Reglas lógicas. Si la regla lógica 2 del SLC se evalúa como verdadera, la salida será alta. De lo contrario, será baja.
[73]
Regla lógica 3
Consulte el grupo de parámetros 13-4* Reglas lógicas. Si la regla lógica 3 del SLC se evalúa como verdadera, la salida será alta. De lo contrario, será baja.
[74]
Regla lógica 4
Consulte el grupo de parámetros 13-4* Reglas lógicas. Si la regla lógica 4 del SLC se evalúa como verdadera, la salida será alta. De lo contrario, será baja.
[75]
Regla lógica 5
Consulte el grupo de parámetros 13-4* Reglas lógicas. Si la regla lógica 5 del SLC se evalúa como verdadera, la salida será alta. De lo contrario, será baja.
[80]
Salida digital SL
A
Consulte el parámetro 13-52 Acción Controlador SL. La salida será alta cuando se ejecute la acción de
lógica inteligente [38] Aj. sal. dig. A alta . La salida será baja cuando se ejecute la acción de lógica inteligente [32] Aj. sal. dig. A baja.
[81]
Salida digital SL
B
Consulte el parámetro 13-52 Acción Controlador SL. La salida será alta cuando se ejecute la acción de
lógica inteligente [39] Aj. sal.dig. B alta. La salida será baja cuando se ejecute la acción de lógica inteligente [33] Aj. sal.dig. B baja.
[82]
Salida digital SL
C
Consulte el parámetro 13-52 Acción Controlador SL. La salida será alta cuando se ejecute la acción de
lógica inteligente [40] Aj. sal.dig. C alta. La salida será baja cuando se ejecute la acción de lógica inteligente [34] Aj. sal.dig. C baja.
[83]
Salida digital SL
D
Consulte el parámetro 13-52 Acción Controlador SL. La salida será alta cuando se ejecute la acción de
lógica inteligente [41] Aj. sal.dig. D alta. La salida será baja cuando se ejecute la acción de lógica inteligente [35] Aj. sal.dig. D baja.
[84]
Salida digital SL
E
Consulte el parámetro 13-52 Acción Controlador SL. La salida será alta cuando se ejecute la acción de
lógica inteligente [42] Aj. sal.dig. E alta. La salida será baja cuando se ejecute la acción de lógica inteligente [36] Aj. sal.dig. E baja.
[85]
Salida digital SL
F
Consulte el parámetro 13-52 Acción Controlador SL. La salida será alta cuando se ejecute la acción de
lógica inteligente [43] Aj. sal. dig. F alta. La salida será baja cuando se ejecute la acción de lógica inteligente [37] Aj. sal.dig. F baja.
[120]
Ref. local activa
La salida es alta cuando el parámetro 3-13 Lugar de referencia se ajusta como [2] Local o cuando el
parámetro 3-13 Lugar de referencia se ajusta como [0] Conex. a manual/auto mientras que el LCP está
en modo manual.
Origen de referencia disponible en el parámetro 3-13 Lugar de referencia
Ref. local activa [120]
Ref. remota activa [121]
Origen de referencia: Local
parámetro 3-13 Lugar de referencia, [2] Local
1
0
Origen de referencia: Remoto
Parámetro 3-13 Lugar de referencia, [1] Remoto
0
1
Origen de referencia: Conex. a manual/auto
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Ajuste de parámetros
1
Los números entre corchetes ubicados tras los números de relé son los valores de índice del parámetro.
Tabla 27: Ref. local activa
AQ322553864968es-000101 / 130R035338 | Danfoss A/S © 2020.01
Page 39

Origen de referencia disponible en el parámetro 3-13 Lugar de referencia
Ref. local activa [120]
Ref. remota activa [121]
Manual
10Manual y flecha derecha doble; desconexión
10Automático y flecha derecha doble; desconexión
00Auto01
Opción
Función
[121]
Ref. remota activa
La salida es alta cuando el parámetro 3-13 Lugar de referencia se ajusta como [1] Remoto o [0] Conex.
a manual/auto mientras el LCP está en modo automático. Consulte el parámetro
Tabla 27.
[122]
Sin alarma
El valor de la salida es alto si no hay presente ninguna alarma.
[123]
Coman. arranque
activo
La salida es alta cuando la orden de arranque es alta (es decir, a través de la entrada digital, la conexión de bus, [Hand On] o [Auto On]) y la última orden ha sido una parada.
[124]
Func. inverso
La salida es alta cuando el convertidor funciona en sentido antihorario (producto lógico de los bits
de estado en funcionamiento E inverso).
[125]
Drive modo manual
La salida es alta cuando el convertidor de frecuencia está en modo manual (según la indicación del
LED superior [Hand on]).
[126]
Dispos. en modo
auto.
La salida es alta cuando el convertidor está en modo automático (según la indicación del LED superior [Auto On]).
[151]
ATEX ETR cur. alarm
Se puede seleccionar si el parámetro 1-90 Protección térmica motor está ajustado en [20] ATEX ETR o
[21] Advanced ETR. Si la alarma 164 ATEX ETR cur.lim.alarm está activada, la salida será 1.
[152]
ATEX ETR freq.
alarm
Se puede seleccionar si el parámetro 1-90 Protección térmica motor está ajustado en [20] ATEX ETR o
[21] Advanced ETR. Si la alarma 166 ATEX ETR freq.lim.alarm está activada, la salida es 1.
[153]
ATEX ETR cur.
warning
Se puede seleccionar si el parámetro 1-90 Protección térmica motor está ajustado en [20] ATEX ETR o
[21] Advanced ETR. Si la alarma 163 ATEX ETR cur.lim.warning está activada, la salida es 1.
[154]
ATEX ETR freq.
warning
Se puede seleccionar si el parámetro 1-90 Protección térmica motor está ajustado en [20] ATEX ETR o
[21] Advanced ETR. Si la alarma 165 ATEX ETR cur.lim.warning está activada, la salida es 1.
[188]
Conect. condens.
AHF
[189]
Control de vent.
ext.
La lógica interna para el control del ventilador interno se transfiere a esta salida para permitir el
control de un ventilador externo (relevante para la refrigeración de conductos de alta potencia).
[190]
Safe function active
[191]
Safe opt. reset req.
[192]
RS Flipflop 0
Consulte el grupo de parámetros 13-1* Comparadores.
[193]
RS Flipflop 1
Consulte el grupo de parámetros 13-1* Comparadores.
[194]
RS Flipflop 2
Consulte el grupo de parámetros 13-1* Comparadores.
[195]
RS Flipflop 3
Consulte el grupo de parámetros 13-1* Comparadores.
[196]
RS Flipflop 4
Consulte el grupo de parámetros 13-1* Comparadores.
[197]
RS Flipflop 5
Consulte el grupo de parámetros 13-1* Comparadores.
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Tabla 28: Parámetro 5-40 Relés - 2
Ajuste de parámetros
AQ322553864968es-000101 / 130R0353 | 39Danfoss A/S © 2020.01
Page 40

Opción
Función
[198]
RS Flipflop 6
Consulte el grupo de parámetros 13-1* Comparadores.
[199]
RS Flipflop 7
Consulte el grupo de parámetros 13-1* Comparadores.
Rango
Función
Matriz [9]
0,01 s*
[0,01 600,00 s]
Introduzca el retardo del tiempo de conexión del relé. Consulte el Tabla 26.
Rango
Función
Matriz [9]
0,01 s*
[0,01-600,00 s]
Introduzca el retardo del tiempo de desconexión del relé. Consulte el Tabla 26.
.
Si la condición de evento seleccionada cambia antes de que expire el temporizador de retardo de conexión o desconexión, la salida de relé no se verá afectada.
Opción
Función
Seleccione la función del terminal X45/1 como una salida analógica de intensidad.
[0]
Sin función
Cuando no hay señal en la salida analógica.
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Tabla 29: Parámetro 5-41 Retardo conex, relé
Ajuste de parámetros
Tabla 30: Parámetro 5-42 Retardo desconex, relé
4.3 6-** Salidas analógicas
4.3.1 6-7* Salida analógica 3 MCB 113
Parámetros para configurar el escalado y los límites de la salida analógica, los terminales X45/1 y X45/2. Las salidas analógicas son
salidas de intensidad: 0/4-20 mA. La resolución de la salida analógica es de 11 bits.
Tabla 31: Parámetro 6-70 Terminal X45/1 salida
AQ322553864968es-000101 / 130R035340 | Danfoss A/S © 2020.01
Page 41

Opción
Función
[52]
MCO 305
0-20 mA
[53]
MCO 305
4-20 mA
[100]
Frecuencia de
salida 0-20 mA
0 Hz = 0 mA; 100 Hz = 20 mA
[101]
Referencia
0-20 mA
Parámetro 3-00 Rango de referencia [0] Mín - Máx 0 % = 0 mA; 100 % = 20 mA. Parámetro 3-00 Rango de
referencia [1] =–Máx - +Máx –100 % = 0 mA; 0 % = 10 mA; +100 % = 20 mA.
[102]
Realimentación
[103]
Intensidad motor
0-20 mA
El valor se toma del parámetro 16-37 Máx. Int. Inv.. La intensidad máxima del inversor (160 % de intensidad) es igual a 20 mA. Ejemplo: intensidad normal del inversor (11 kW) = 24 A. 160 % = 38,4 A. Intensidad normal del motor = 22 A, lectura de datos = 11,46 mA.
20mA × 22A
38. 4A
= 11 .46mA
En caso de que la intensidad normal del motor sea 20 mA, el ajuste de salida del parámetro 6-52 Terminal 42 salida esc. máx. será:
IVLT,Máx. × 100
IMotor,Norm
=
38. 4 × 100
22
= 175 %
[104]
Par relat. al límite
0-20 mA
El ajuste del par está relacionado con el ajuste del parámetro 4-16 Modo motor límite de par.
[105]
Par rel. a nominal
del motor 0-20
mA
El par está relacionado con el ajuste del par del motor.
[106]
Potencia 0-20 mA
Extraída del parámetro 1-20 Potencia motor [kW].
[107]
Velocidad
0-20 mA
Extraída del parámetro 3-03 Referencia máxima. 20 mA = valor del parámetro 3-03 Referencia máxima.
[108]
Ref. par 0-20 mA
Referencia de par relativa al 160 % del par.
[109]
Frec. máx. de salida 0-20 mA
Con relación al parámetro 4-19 Frecuencia salida máx.
[130]
Frec. salida
4-20 mA
0 Hz = 4 mA, 100 Hz = 20 mA.
[131]
Referencia 4-20
mA
Parámetro 3-00 Rango de referencia [0] Mín - Máx 0 % = 4 mA; 100 % = 20 mA. Parámetro 3-00 Rango de
referencia [1] =–Máx - +Máx –100 % = 4 mA; 0 % = 12 mA; +100 % = 20 mA.
[132]
Realim. 4-20 mA
[133]
Int. motor 4-20
mA
El valor se toma del parámetro 16-37 Máx. Int. Inv.. La intensidad máxima del inversor (160 % de intensidad) es igual a 20 mA. Ejemplo: intensidad normal del inversor (11 kW) = 24 A. 160 % = 38,4 A. Intensidad normal del motor = 22 A, lectura de datos = 11,46 mA.
16mAx22A
38. 4A
= 9 .17mA
En caso de que la intensidad normal del motor sea 20 mA, el ajuste de salida del parámetro 6-52 Terminal 42 salida esc. máx. será:
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Ajuste de parámetros
AQ322553864968es-000101 / 130R0353 | 41Danfoss A/S © 2020.01
Page 42

Opción
Función
IVLT,Máx. × 100
IMotor,Norm
=
38. 4 × 100
22
= 175 %
[134]
Lím. par %
4-20 mA
El ajuste del par está relacionado con el ajuste del parámetro 4-16 Modo motor límite de par.
[135]
Par % nom
4-20 mA
El ajuste del par está relacionado con el ajuste del par del motor.
[136]
Potencia 4-20 mA
Extraída del parámetro 1-20 Potencia motor [kW].
[137]
Velocidad 4-20
mA
Extraída del parámetro 3-03 Referencia máxima. 20 mA = valor del parámetro 3-03 Referencia máxima.
[138]
Par 4-20 mA
Referencia de par relativa al 160 % del par.
[139]
Contr. bus 0-20
mA
Un valor de salida tomado de los datos de proceso de bus de campo. La salida funciona con independencia de las funciones internas del convertidor.
[140]
Contr. bus 4-20
mA
Un valor de salida tomado de los datos de proceso de bus de campo. La salida funciona con independencia de las funciones internas del convertidor.
[141]
C.bus 0-20mA t.
lím.
El parámetro 4-54 Advertencia referencia baja define el comportamiento de la salida analógica en caso
de tiempo límite de bus de campo.
[142]
C.bus 4-20mA t.
lím.
El parámetro 4-54 Advertencia referencia baja define el comportamiento de la salida analógica en caso
de tiempo límite de bus de campo.
[150]
Fr. máx. sal.
4-20mA
Con relación al parámetro 4-19 Frecuencia salida máx.
Rango
Función
0,00 %*
[0,00-2000 %]
Escale la salida mínima de la señal analógica seleccionada en el terminal X45/1 como porcentaje del
valor de señal máximo. Por ejemplo, si se necesitan 0 mA (o 0 Hz) al 25 % del valor de salida máximo,
programe el 25 %. Los valores de escalado de hasta el 100 % nunca pueden ser mayores que el ajuste
correspondiente del parámetro 6-72 Terminal X45/1 Escala máx.
Rango
Función
100%*
[0,00-200,00 %]
Escale la salida máxima de la señal analógica seleccionada en el terminal X45/1. Ajuste el valor al valor
máximo de la salida de señal de intensidad actual. Escalar la salida para obtener una intensidad inferior a los 20 mA a escala completa o 20 mA a una salida inferior al 100 % del valor máximo de la señal. Si
20 mA es la intensidad de salida requerida a un valor situado entre el 0 y el 100 % de la salida a escala
completa, programe el valor porcentual en el parámetro; por ejemplo, 50 % = 20 mA. Si se requiere
una intensidad entre 4 y 20 mA a la salida máxima (100 %), calcule el valor porcentual del siguiente
modo (ejemplo donde la salida máxima requerida es 10 mA):
IRANGO mA
IDESEADAMÁX. mA
× 100 % =
20 − 4mA
10mA
× 100 % = 160 %
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Ajuste de parámetros
Tabla 32: Parámetro 6-71 Terminal X45/1 Escala mín.
Tabla 33: Parámetro 6-72 Terminal X45/1 Escala máx.
AQ322553864968es-000101 / 130R035342 | Danfoss A/S © 2020.01
Page 43

Rango
Función
0%
20
Ilustración 6: Escala máxima de salida
Rango
Función
0,00 %*
[0,00-100,00 %]
Mantiene el nivel de la salida analógica 3 (terminal X45/1) si se controla mediante bus.
Rango
Función
0,00 %*
[0,00-100,00 %]
Mantiene el nivel predefinido de la salida analógica 3 (terminal X45/1). En caso de que se alcance el
tiempo límite del bus de campo y se seleccione una función de tiempo límite en el parámetro 6-70
Terminal X45/1 salida, la salida se ajustará a este nivel.
Opción
Función
Seleccione la función del terminal X45/3 como una salida analógica de intensidad.
[0]*
Sin función
Las mismas opciones están disponibles para el parámetro 6-70 Terminal X45/1 salida.
Rango
Función
[0,00 %]*
0,00-200,00 %
Escala la salida mínima de la señal analógica seleccionada en el terminal X45/3. Escale el valor mínimo como un porcentaje del valor de señal máximo; por ejemplo, si se requieren 0 mA (o 0 Hz) al 25
% del valor de salida máximo, se programa el 25 %. El valor nunca puede superar el ajuste correspondiente del parámetro 6-82 Terminal X45/3 Escala máx. si es inferior al 100 %. Este parámetro está activo cuando el VLT® Extended Relay CardMCB 113 está montado en el convertidor.
Rango
Función
[0,00 %]*
0,00-200,00 %
Escala la salida máxima de la señal analógica seleccionada en el terminal X45/3. Escale el valor hasta
el valor máximo requerido de la salida de la señal de intensidad. Escale la salida para obtener una
corriente inferior a 20 mA a escala completa o 20 mA a una salida inferior al 100 % del valor máximo
de la señal. Si 20 mA es la intensidad de salida requerida a un valor situado entre el 0 y el 100 % de la
salida a escala completa, programe el valor porcentual en el parámetro; por ejemplo, 50 % = 20 mA.
Si se requiere una intensidad entre 4 y 20 mA a la salida máxima (100 %), calcule el valor porcentual
del siguiente modo (ejemplo donde la salida máxima requerida es 10 mA):
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Tabla 34: Parámetro 6-73 Terminal X45/1 Control bus salida
Tabla 35: Parámetro 6-74 T. X45/1 Tiempo lím. sal. predet.
Ajuste de parámetros
4.3.2 6-8* Salida analógica 4 MCB 113
Parámetros para configurar el escalado y los límites para la salida analógica 4, terminales X45/3 y X45/4. Las salidas analógicas son
salidas de intensidad: de 0/4 a 20 mA. La resolución en salida analógica es 11 bits.
Tabla 36: Parámetro 6-80 Terminal X45/3 salida
Tabla 37: Parámetro 6-81 Terminal X45/3 Escala mín.
Tabla 38: Parámetro 6-82 Terminal X45/3 Escala máx.
AQ322553864968es-000101 / 130R0353 | 43Danfoss A/S © 2020.01
Page 44

Rango
Función
IRANGO mA
IDESEADAMÁX. mA
× 100 % =
20 − 4mA
10mA
× 100 % = 160 %
Rango
Función
[0,00 %]*
0,00-100,00 %
Mantiene el nivel de la salida 4 (X45/3) si es controlada por el bus.
Rango
Función
[0,00 %]*
0,00-100,00 %
Mantiene el nivel preajustado de la salida 4 (X45/3). En caso de que se alcance el tiempo límite del
bus de campo y se seleccione una función de tiempo límite en el parámetro 6-80 Terminal X45/3 sali-
da, la salida se ajustará a este nivel.
Opción
Función
A V I S O
Este parámetro solo cambia la función al efectuar un ciclo de potencia.
[0]
No
Seleccione [0] No para utilizar el suministro externo de 24 V CC del convertidor.
[1]*
Sí
Seleccione [1] Sí si se utiliza alimentación externa de 24 V CC para alimentar la opción. Las entradas/salidas estarán
aisladas galvánicamente del convertidor cuando funcionen con alimentación externa.
Rango
Función
0*
[0–63]
Muestra el estado de la señal de las entradas digitales activas. Ejemplo: la entrada 18 corresponde al bit número 5; 0
= Sin señal; 1 = Señal conectada. El bit 6 funciona en el sentido contrario; 0 = activado; 1 = desactivado (entrada de
parada de seguridad).
Bit 0
Entrada digital, term. 33
Bit 1
Entrada digital, term. 32
Bit 2
Entrada digital, term. 29
Bit 3
Entrada digital, term. 27
Bit 4
Entrada digital, term. 19
Bit 5
Entrada digital, term. 18
Bit 6
Entrada digital, term. 37
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Tabla 39: Parámetro 6-83 Terminal X45/3 Control bus de salida
Tabla 40: Parámetro 6-84 T. X45/3 Tiempo lím. sal. predet.
4.4 14-** Alimentación externa de 24 V CC
4.4.1 14-8* Opciones
Tabla 41: Parámetro 14-80 Opción sumin. por 24 V CC ext.
Ajuste de parámetros
4.5 16-** Lecturas de datos
4.5.1 16-6* Entradas y salidas
Tabla 42: Parámetro 16-60 Entrada digital
AQ322553864968es-000101 / 130R035344 | Danfoss A/S © 2020.01
Page 45

Bit 7
Entrada digital GP E/S term. X30/4
Bit 8
Entrada digital GP E/S term. X30/3
Bit 9
Entrada digital GP E/S term. C30/2
Bits 10-63
Reservado para futuros terminales.
DI T -33
DI T -32
DI T -29
DI T -27
DI T -19
DI T -18
DI T -37
DI X30/4
DI X30/3
DI X30/2
DI X46/13
DI X46/11
DI X46/9
DI X46/7
DI X46/5
DI X46/3
DI X46/1
e30ba894.11
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 00
Rango
Función
0,000 N/A*
[0-511 N/A]
Ver los ajustes de todos los relés.
Bit 0
Relé 9
Bit 1
Relé 8
Bit 2
Relé 7
Bit 3
Relé 2
Bit 4
Relé 1
Bit 5
Relay 6
Bit 6
Relay 5
Bit 7
Relay 4
Bit 8
Relay 3
Bit 9-15
Reservado para futuros relés
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Ajuste de parámetros
Tabla 43: Parámetro 16-71 Salida Relé [bin]
AQ322553864968es-000101 / 130R0353 | 45Danfoss A/S © 2020.01
Page 46

e30ba689.11
0 0 0 0 0 0 0 0 0
Relay 9
Relay 8
Relay 7
Relay 2
Relay 1
Relay 6
Relay 5
Relay 4
Relay 3
Rango
Función
0*
[0-30]
Muestra el valor de salida real en el terminal X45/1. El valor mostrado refleja la selección del parámetro 6-70 Terminal
X45/1 salida.
Rango
Función
0*
[0-30]
Muestra el valor de salida real en el terminal X45/3. El valor mostrado refleja la selección del parámetro 6-80 Terminal
X45/3 salida.
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Ajuste de parámetros
Ilustración 7: Salidas de relé
Tabla 44: Parámetro 16-78 Salida analógica X45/1 [mA]
Tabla 45: Parámetro 16-79 Salida analógica X45/3 [mA]
AQ322553864968es-000101 / 130R035346 | Danfoss A/S © 2020.01
Page 47

Número
4 SPDT
Carga a 250 V CA/30 V CC
8 A
Carga a 250 V CA / 30 V CC con cos φ = 0,4
3,5 A
Categoría de sobretensión (contacto-tierra)
III
Categoría de sobretensión (contacto-contacto)
II
Combinación de señales de 250 V y 24 V
Posible con un relé intermedio no utilizado
Número
7
Rango
0/24 V
Modo
PNP/NPN
Impedancia de entrada
4 kΩ
Nivel bajo disparo
6,4 V
Nivel alto disparo
17 V
Número
2
Rango
0/4-20 mA
Resolución
11 bits
Linealidad
<0,2 %
EMC
IEC 61000-6-2 e IEC 61800-3 en relación con la inmunidad de
BURST, ESD, SURGE e inmunidad conducida
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
5 Especificaciones
5.1 Relés
5.2 Entradas digitales
Especificaciones
5.3 Salidas analógicas
5.4 EMC
AQ322553864968es-000101 / 130R0353 | 47Danfoss A/S © 2020.01
Page 48

A
Amperio
CA
Corriente alterna
CC
Corriente continua
EMC
Compatibilidad electromagnética
Hz
Hercio
V
Voltios
NAMUR NE37
Recomendaciones alemanas utilizadas habitualmente en el ámbito de la industria química («Realización de convertidores de frecuencia: banda de terminales estándar para convertidores de frecuencia de velocidad variable»).
SPDT
Unipolar de dos vías (relé)
VLT® Extended Relay Card MCB 113
Guía de funcionamiento
6 Anexo
6.1 Abreviaturas
6.2 Convenciones
•
Las listas numeradas indican procedimientos.
•
Las listas de viñetas y guiones indican otro tipo de información para el cual el orden no es relevante.
•
La negrita se aplica a textos destacados y encabezados.
•
El texto en cursiva indica lo siguiente:
-
Referencia cruzada.
-
Vínculo.
-
Nota al pie.
-
Nombre del parámetro.
-
Opción de parámetro.
-
Nombre del grupo de parámetros.
-
Alarmas/advertencias.
•
Todas las dimensiones de los gráficos están en valores métricos (con valores imperiales entre paréntesis).
•
Un asterisco (*) indica los ajustes predeterminados de un parámetro.
Anexo
AQ322553864968es-000101 / 130R035348 | Danfoss A/S © 2020.01
Page 49

VLT® Extended Relay Card MCB 113
Guía de funcionamiento
Índice
A
Actualización.................................................................................................... 5
Aislamiento galvánico................................................................................ 11
Arranque accidental...................................................................................... 7
C
Cableado...................................................................................................10, 11
Certificación UL............................................................................................... 6
Conmutadores
Seccionador............................................................................................. 7
Convenciones................................................................................................ 48
Corriente de fuga............................................................................................8
E
Entrada digital............................................................................................... 12
F
Finalidad del Manual..................................................................................... 5
H
Homologaciones y certificaciones............................................................6
Índice
I
Instrucciones de seguridad.........................................................................9
K
Kit de montaje..................................................................................................5
N
NAMUR.............................................................................................................11
Números de pedido.......................................................................................5
P
Personal cualificado.......................................................................................5
S
Salida digital...................................................................................................29
T
Tensión
Advertencia de seguridad.................................................................. 7
AQ322553864968es-000101/130R0353 | 49Danfoss A/S © 2020.01
Page 50

Danfoss A/S
Nordborgvej 81
DK-6430 Nordborg
www.danfoss.com
Danfoss can accept no responsibility for possible errors in catalogues, brochures and other printed material. Danfoss reserves the right to alter its products without notice.
This also applies to products already on order provided that such alterations can be made without subsequential changes being necessary in specifications already agreed.
All trademarks in this material are property of the respective companies. Danfoss and the Danfoss logotype are trademarks of Danfoss A/S. All rights reserved.
*130R0353*
Danfoss A/S © 2020.01
AQ322553864968es-000101 / 130R0353
*M0020604*
 Loading...
Loading...