

Danfoss MCA 101 Programming guide [de]
MAKING MODERN LIVING POSSIBLE
Programmierhandbuch
VLT® PROFIBUS DP MCA 101
VLT® Frequenzumrichter-Serie FC 102 • FC 103 • FC 202
FC 301/302 • FCD 302 • FCP 106 • FCM 106
www.danfoss.de/vlt

Inhaltsverzeichnis Programmierhandbuch
Inhaltsverzeichnis
1 Einführung
1.1 Zielsetzung des Handbuchs
1.2 Zusätzliche Materialien
1.3 Dokument- und Softwareversion
1.4 Produktübersicht
1.5 Zulassungen und Zertifizierungen
1.6 Symbole, Abkürzungen und Konventionen
2 Sicherheit
2.1 Sicherheitssymbole
2.2 Qualifiziertes Personal
2.3 Sicherheitsmaßnahmen
3 Konfiguration
3.1 Konfigurieren des PROFIBUS-Netzwerks
3.2 Konfigurieren des Master
3.2.1 GSD-Datei 9
3.3 Konfigurieren des Frequenzumrichters
3
3
3
3
3
4
5
6
6
6
6
8
8
9
11
3.3.1 Frequenzumrichterparameter 11
3.3.2 LED 12
4 Steuerung/Regelung
4.1 PPO-Typen
4.2 Prozessdaten
4.2.1 Prozessregelungsdaten 14
4.2.2 Prozessstatusdaten 14
4.2.3 Sollwertverarbeitung 15
4.2.4 Prozessregelungsbetrieb 16
4.2.5 Einfluss der Digitaleingangsklemmen auf den FU-Regelungsmodus 16
4.3 Steuerprofil
4.4 PROFIdrive-Steuerprofil
4.4.1 Steuerwort gemäß PROFIdrive-Profil (CTW) 16
4.4.2 Zustandswort gemäß PROFIdrive-Profil (STW) 18
4.4.3 Übergangsdiagramm PROFIdrive-Zustand 20
4.5 Danfoss FC-Steuerprofil
4.5.1 Steuerwort gemäß FU-Profil (CTW) 21
13
13
14
16
16
21
4.5.2 Steuerwort gemäß FU-Profil (STW) 22
4.6 Synchronisieren und Speichern
4.6.1 SYNC/UNSYNC 24
4.6.2 FREEZE/UNFREEZE 24
MG37G203 Danfoss A/S © 01/2016 Alle Rechte vorbehalten. 1
24
Inhaltsverzeichnis
VLT® PROFIBUS DP MCA 101
5 Parameterzugriff
5.1 Allgemeine Informationen zum Parameterzugriff
5.2 DP-V1 Parameterzugriff
5.3 PCV-Parameterzugriff
5.4 PROFIBUS DP-Parameter und Datentyp
6 Parameter
6.1 8-** PROFIBUS Parameter
6.2 9-** und 16-** PROFIBUS-Parameter
6.3 PROFIBUS - Spezifische Parameterliste
7 Anwendungsbeispiele
7.1 Beispiel 1: Prozessdaten mit PPO-Typ 6
7.2 Beispiel 2: Steuerworttelegramm unter Verwendung des PPO-Typs
7.3 Beispiel 3: Zustandsworttelegramm unter Verwendung des PPO-Typs
7.4 Beispiel 4: SPS-Programmierung
8 Fehlersuche und -behebung
25
25
25
31
33
35
35
38
45
47
47
48
49
50
52
8.1 Diagnose
8.2 Keine Reaktion auf Steuersignale
8.3 Warnungen und Alarmmeldungen
8.4 Fehlermeldungen über DP-Diagnose
8.5 Erweiterte Diagnose
Index
52
52
55
58
58
59
2 Danfoss A/S © 01/2016 Alle Rechte vorbehalten. MG37G203
Einführung Programmierhandbuch
1 Einführung
1.1 Zielsetzung des Handbuchs
Das VLT® PROFIBUS DP MCA 101-Programmierhandbuch
enthält Informationen zu:
Konfiguration des Systems
•
Steuerung des Frequenzumrichters
•
Parameterzugriff
•
Programmierung
•
Fehlersuche- und behebung
•
Typische Anwendungsbeispiele
•
Das Programmierhandbuch ist zur Verwendung durch
qualifiziertes Personal vorgesehen, das mit dem VLT
Frequenzumrichter, der PROFIBUS-Technologie und mit
dem PC oder der SPS vertraut ist, der/die als Master im
System eingesetzt wird.
Lesen Sie die Anweisungen, bevor Sie mit der Programmierung beginnen, und befolgen Sie die Anweisungen in
diesem Handbuch.
®
Dokument- und Softwareversion
1.3
Dieses Handbuch wird regelmäßig geprüft und aktualisiert.
Alle Verbesserungsvorschläge sind willkommen. Tabelle 1.1
zeigt die Dokumentenversion und die entsprechende
Softwareversion an.
Ausgabe Anmerkungen Software-
version
MG37G2xx
Tabelle 1.1 Dokument- und Softwareversion
Informationen zu VLT® DriveMotor
•
FCP 106/FCM 106 hinzugefügt.
Neue Funktion für eine schnelle PCD-
•
Kommunikation für MCO 305.
5.20
1.4 Produktübersicht
1.4.1 Funktionsmerkmale des PROFIBUS
DP-V1
1 1
VLT® ist eine eingetragene Marke.
Zusätzliche Materialien
1.2
Für die Frequenzumrichter und optionale Geräte
verfügbare Materialien:
Das VLT® Produkthandbuch enthält die erforder-
•
lichen Informationen für Inbetriebnahme und
Betrieb des Frequenzumrichters.
Das VLT® Projektierungshandbuch enthält
•
umfassende Informationen zu Möglichkeiten und
Funktionen sowie zur Auslegung von Steuerungssystemen für Motoren.
Das VLT® Programmierhandbuch enthält
•
umfassendere Informationen über das Arbeiten
mit Parametern sowie viele Anwendungsbeispiele.
®
Die VLT
•
leitung enthält Informationen zur Installation des
PROFIBUS sowie zur Fehlersuche und -behebung.
Das VLT® PROFIBUS DP MCA 101-Programmier-
•
handbuch enthält Informationen zur Konfiguration
des Systems, zur Regelung des Frequenzumrichters, zum Parameterzugriff, zur
Programmierung, zur Fehlersuche und -behebung
sowie einige typische Anwendungsbeispiele.
Zusätzliche Veröffentlichungen und Handbücher sind
verfügbar auf Danfoss. Siehe vlt-drives.danfoss.com/Support/
Technical-Documentation/ für Auflistungen.
PROFIBUS DP MCA 101-Installationsan-
Sie können Maschinen in 2 verschiedenen
•
Zuständen auswählen: PROFIdrive-Profil oder
Danfoss FU-Profil.
Kommunikation mittels PROFIBUS DP-V1, Master-
•
Klasse 1 und Master-Klasse 2.
Abwärtskompatibilität: Neue Protokollerweite-
•
rungen behalten alle Funktionen der vorherigen
Versionen.
Intelligente Basis für künftige Technologien wie
•
OPC, FDT/DTM, PROFINET.
Bus-Timeout-Reaktion.
•
SPS/CPU-Stoppreaktion.
•
8 PPO-Typen verfügbar.
•
Zahlreiche relevante Prozessdaten-Typen (PCD)
•
verfügbar.
Automatische Erkennung der Baudrate und des
•
PPO-Typs.
Erweiterte Diagnose verfügbar.
•
Als Textmeldungen in der SPS verfügbare Alarme
•
und Warnungen.
Konfiguration über MCT 10
•
Konfigurationssoftware.
Abstandsgetreue Buszykluszeit im SPS-System
•
konfigurierbar.
Höhere Netzwerkeffizienz, da der zyklische
•
Parameterkanal nicht mehr erforderlich ist.
MG37G203 Danfoss A/S © 01/2016 Alle Rechte vorbehalten. 3
Einführung
VLT® PROFIBUS DP MCA 101
11
1.4.2 Technische Übersicht
PROFIBUS
PROFIBUS ist ein internationaler Standard für Feldbuskommunikation in Automationstechnologie (IEC 61158 und IEC
61784). Der Standard wird von den Mitgliedsunternehmen
der internationalen PROFIBUS-Nutzerorganisation
unterstützt.
Informationen zu PROFIBUS und Downloads für PROFIBUS
DP und das PROFIdrive-Profil finden Sie unter
www.Profibus.com.
PROFIBUS DP-V1
Das PROFIBUS DP-Protokoll ermöglicht die Kommunikation
zwischen PROFIBUS-Mastern und -Followern.
Konfigurieren Sie die Kommunikaton über MCT 10
Konfigurationssoftware.
Zyklische/Azyklische Kommunikation
Sehr kurze Buszykluszeiten im Vergleich zum
•
industriellen Ethernet.
Abwärtskompatibilität mit DP.
•
Die SPS kommuniziert mit Telegrammen von
•
konstanter Länge.
Erfüllt zeitkritische Anforderungen.
•
Zyklische Übertragung über PPO-Typen.
•
Erweiterte Diagnose.
•
Erweiterte Diagnose.
•
Die azyklische Verbindung ist fest und kann während des
Betriebs nicht geändert werden.
Merkmale einer Verbindung der Master-Klasse 2:
Azyklische Verbindung einleiten/abbrechen
•
Azyklisches Lesen/Schreiben in Parametern.
•
Die azyklische Verbindung kann dynamisch (eingeleitet)
oder entfernt (abgebrochen) hergestellt werden, auch
wenn eine Master-Klasse 1 im Netzwerk aktiv ist. Die
azyklische Verbindung DP-V1 kann als Alternative zum
PCV-Parameterkanal für einen allgemeinen Parameterzugriff
verwendet werden.
Abbildung 1.1 PROFIBUS DP-V0
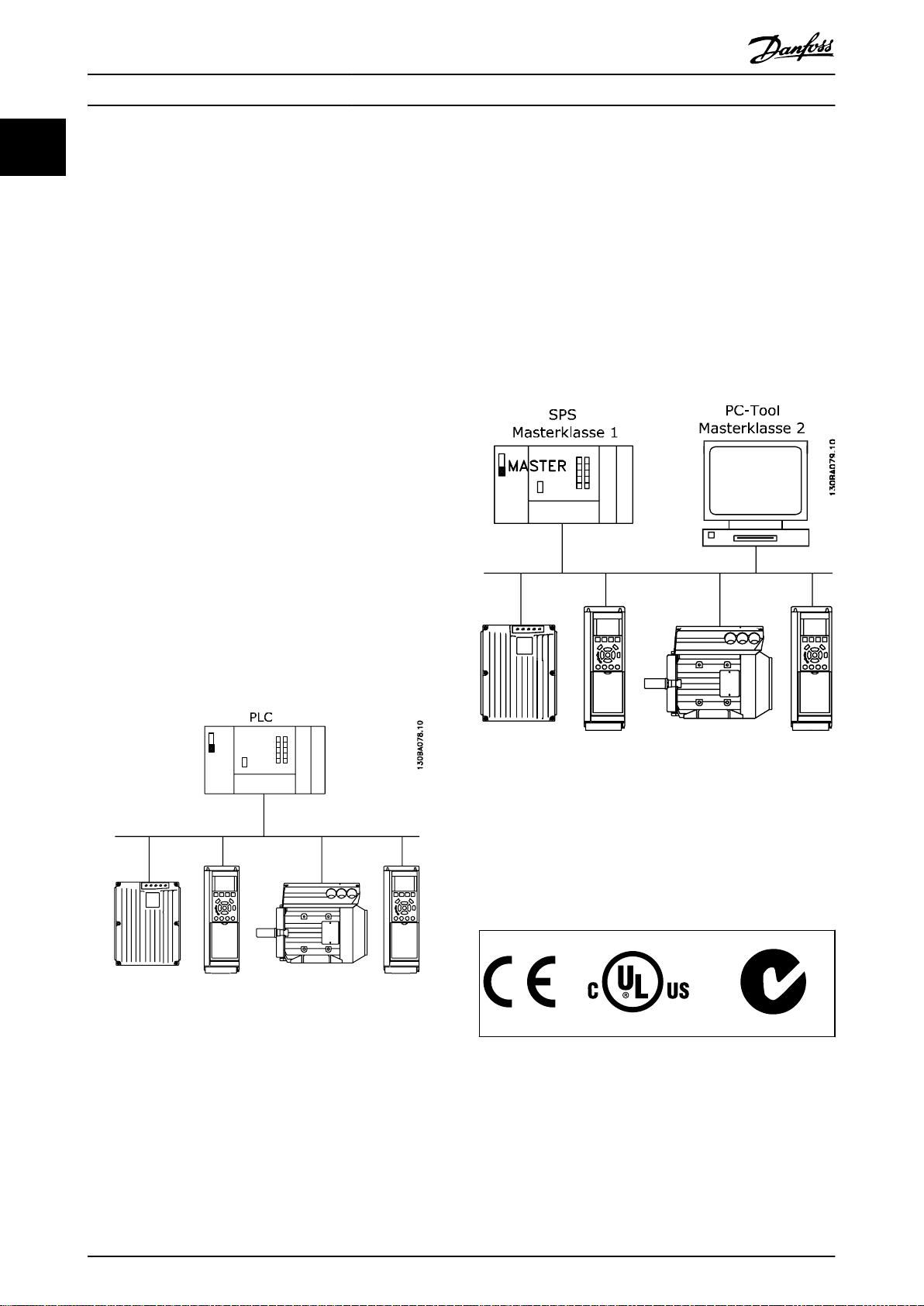
Merkmale einer Verbindung der Master-Klasse 1:
Zyklischer Datenaustausch (DP-V0).
•
Azyklisches Lesen/Schreiben in Parametern.
•
Abbildung 1.2 PROFIBUS DP-V1
Die PROFIBUS DP-Erweiterung DP-V1 ermöglicht die
azyklische sowie zyklische Datenkommunikation. Dieses
Funktionsmerkmal kann von einer DP der Master-Klasse 1
(zum Beispiel SPS) sowie von einer DP der Master-Klasse 2
(zum Beispiel ein PC-Tool) verwendet werden.
Zulassungen und Zertifizierungen
1.5
Weitere Zulassungen und Zertifizierungen sind verfügbar.
Wenden Sie sich für weitere Informationen an einen
lokalen Danfoss-Partner.
4 Danfoss A/S © 01/2016 Alle Rechte vorbehalten. MG37G203
Einführung Programmierhandbuch
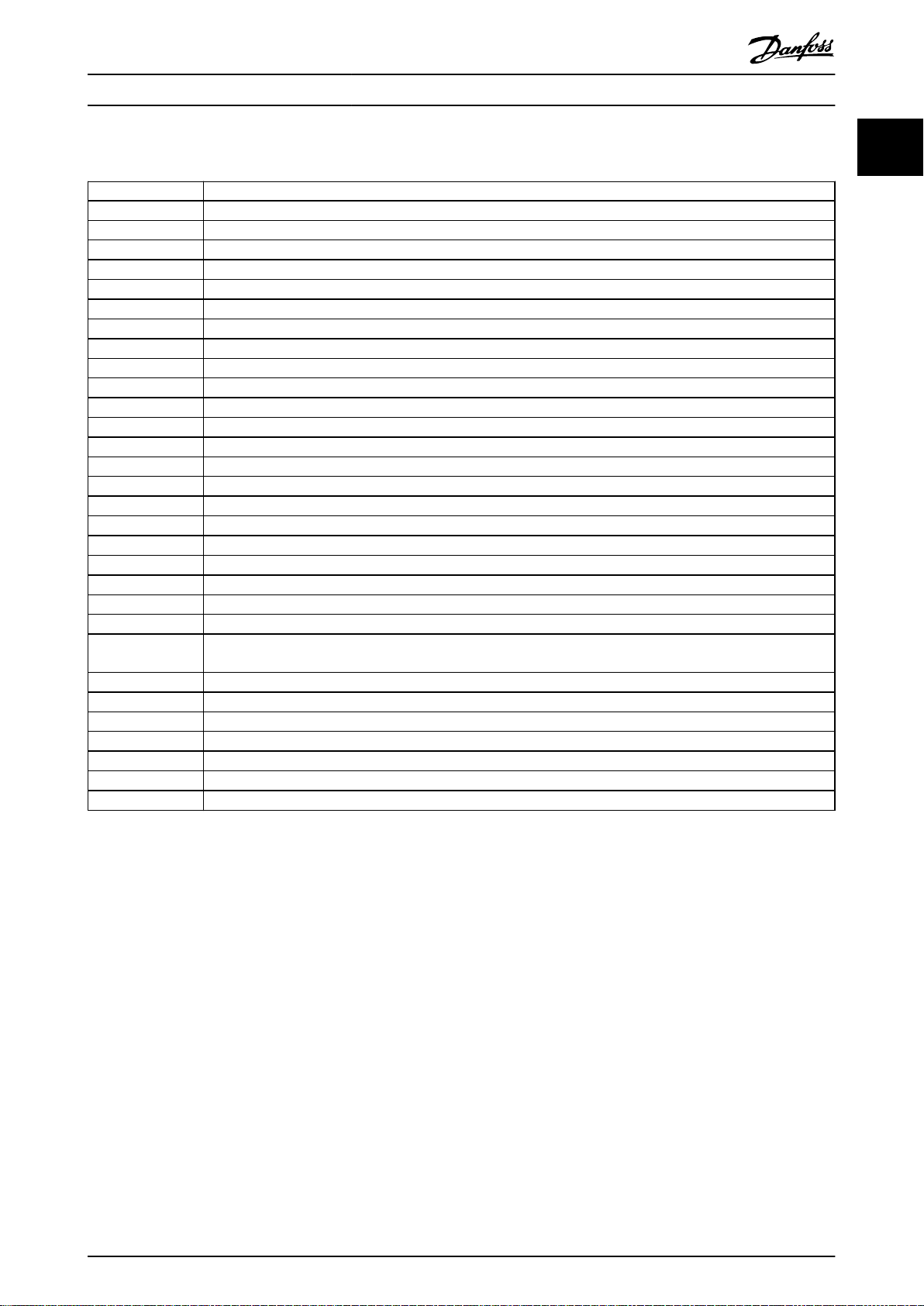
1.6 Symbole, Abkürzungen und Konventionen
CAN Controller Area Network
CTW Steuerwort
DP Distributed Periphery
DTM
DU Dateneinheit
EEPROM Electrical Erasable Programmable Read Only Memory
EMV Elektromagnetische Verträglichkeit
FDT Field Device Tool
HMI
IND Sub-Index
LCD Liquid Crystal Display
LCP Local Control Panel (LCP Bedieneinheit)
LED Light Emitting Diode
HIW Hauptistwert
MC1 Master-Klasse 1
MC2 Master-Klasse 2
MRV Main Reference Value (Hauptsollwert)
OPC
PC Personal Computer
PCD Process Data (Prozessdaten)
PCA Parameter Characteristics (Parametereigenschaften)
PCV Parameter Characteristics Value (Parametereigenschaftenwert)
PDU Protocol Data Unit
Übergeordnete
Steuerung (SPS)
PNU Parameternummer
PPO Parameter-Prozessdaten
PVA Parameter Value (Parameterwert)
RC Request/Response Characteristics (Anfrage-/Antwort-Eigenschaften)
SAP Service Access Point (Dienstzugriffspunkt)
SMP Spontaneous Message (Spontanmeldung)
STW (ZSW) Zustandswort
Speicherprogrammierbare Steuerung
1 1
Tabelle 1.2 Symbole und Abkürzungen
Konventionen
Nummerierte Listen zeigen Vorgehensweisen.
Aufzählungslisten zeigen weitere Informationen und Beschreibung der Abbildungen.
Kursivschrift bedeutet:
Querverweise.
•
Link.
•
Fußnoten.
•
Parametername
•
Parametergruppenname.
•
Parameteroption.
•
* kennzeichnet die Werkseinstellung eines Parameters.
MG37G203 Danfoss A/S © 01/2016 Alle Rechte vorbehalten. 5
Sicherheit
VLT® PROFIBUS DP MCA 101
2 Sicherheit
22
2.1 Sicherheitssymbole
Dieses Handbuch verwendet folgende Symbole:
WARNUNG
Weist auf eine potenziell gefährliche Situation hin, die zu
schweren oder tödlichen Verletzungen führen kann.
VORSICHT
Weist auf eine potenziell gefährliche Situation hin, die zu
leichten oder mittleren Verletzungen führen kann. Die
Kennzeichnung kann ebenfalls als Warnung vor
unsicheren Verfahren dienen.
HINWEIS
Weist auf eine wichtige Information hin, z. B. eine
Situation, die zu Geräte- oder sonstigen Sachschäden
führen kann.
2.2 Qualifiziertes Personal
Der einwandfreie und sichere Betrieb des Frequenzumrichters setzt fachgerechten und zuverlässigen Transport
voraus. Lagerung, Installation, Bedienung und Instandhaltung müssen diese Anforderungen ebenfalls erfüllen.
Nur qualifiziertes Fachpersonal darf dieses Gerät installieren
oder bedienen.
WARNUNG
UNERWARTETER ANLAUF
Bei Anschluss des Frequenzumrichters an Versorgungsnetz, DC-Versorgung oder Zwischenkreiskopplung
kann der angeschlossene Motor jederzeit unerwartet
anlaufen. Ein unerwarteter Anlauf im Rahmen von
Programmierungs-, Service- oder Reparaturarbeiten kann
zu schweren bzw. tödlichen Verletzungen oder zu
Sachschäden führen. Der Motor kann über einen
externen Schalter, einen Feldbus-Befehl, ein Sollwerteingangssignal, über ein LCP oder LOP, eine Fernbedienung
per MCT 10 Konfigurationssoftware oder nach einem
quittierten Fehlerzustand anlaufen.
So verhindern Sie ein unerwartetes Starten des Motors:
Drücken Sie [Off/Reset] am LCP, bevor Sie
•
Parameter programmieren.
Trennen Sie den Frequenzumrichter vom Netz.
•
Verkabeln und montieren Sie Frequenzum-
•
richter, Motor und alle angetriebenen Geräte
vollständig, bevor Sie den Frequenzumrichter an
Netzversorgung, DC-Versorgung oder Zwischenkreiskopplung anschließen.
Qualifiziertes Fachpersonal sind per Definition geschulte
Mitarbeiter, die gemäß den einschlägigen Gesetzen und
Vorschriften zur Installation, Inbetriebnahme und Instandhaltung von Betriebsmitteln, Systemen und Schaltungen
berechtigt sind. Ferner muss das qualifizierte Personal mit
allen Anweisungen und Sicherheitsmaßnahmen gemäß
diesem Produkthandbuch vertraut sein.
Sicherheitsmaßnahmen
2.3
WARNUNG
HOCHSPANNUNG
Bei Anschluss an Versorgungsnetzeingang, DCVersorgung oder Zwischenkreiskopplung führen
Frequenzumrichter Hochspannung. Erfolgen Installation,
Inbetriebnahme und Wartung nicht durch qualifiziertes
Personal, kann dies zum Tod oder zu schweren Verletzungen führen.
Installation, Inbetriebnahme und Wartung
•
dürfen ausschließlich von qualifiziertem
Personal durchgeführt werden.
6 Danfoss A/S © 01/2016 Alle Rechte vorbehalten. MG37G203
Sicherheit Programmierhandbuch
WARNUNG
ENTLADEZEIT
Der Frequenzumrichter enthält Zwischenkreiskondensatoren, die auch bei abgeschaltetem Frequenzumrichter
geladen sein können. Auch wenn die Warn-LED nicht
leuchten, kann Hochspannung anliegen. Das Nichteinhalten der angegebenen Wartezeit nach dem Trennen
der Stromversorgung vor Wartungs- oder Reparaturarbeiten kann zum Tod oder zu schweren Verletzungen
führen.
Stoppen Sie den Motor.
•
Trennen Sie das Versorgungsnetz und alle
•
externen DC-Zwischenkreisversorgungen,
einschließlich externer Batterie-, USV- und DCZwischenkreisverbindungen mit anderen
Frequenzumrichtern.
Trennen oder verriegeln Sie den PM-Motor.
•
Warten Sie, damit die Kondensatoren
•
vollständig entladen können. Die notwendige
Wartezeit finden Sie im entsprechenden Produkthandbuch, Kapitel Sicherheit des jeweiligen
Frequenzumrichters.
Verwenden Sie vor der Durchführung von
•
Wartungs- oder Reparaturarbeiten ein
geeignetes Spannungsmessgerät, um sicherzustellen, dass die Kondensatoren vollständig
entladen sind.
WARNUNG
GEFAHR DURCH ANLAGENKOMPONENTEN!
Ein Kontakt mit drehenden Wellen und elektrischen
Betriebsmitteln kann zu schweren Personenschäden oder
sogar tödlichen Verletzungen führen.
Stellen Sie sicher, dass Installations-,
•
Inbetriebnahme- und Wartungsarbeiten
ausschließlich von geschultem und qualifiziertem Personal durchgeführt werden.
Alle Elektroarbeiten müssen den VDE-
•
Vorschriften und anderen lokal geltenden
Elektroinstallationsvorschriften entsprechen.
Befolgen Sie die Verfahren in dieser Anleitung.
•
VORSICHT
GEFAHR BEI EINEM INTERNEN FEHLER
Ein interner Fehler im Frequenzumrichter kann zu
schweren Verletzungen führen, wenn der Frequenzumrichter nicht ordnungsgemäß geschlossen wird.
Stellen Sie vor dem Anlegen von Netzspannung
•
sicher, dass alle Sicherheitsabdeckungen
angebracht und ordnungsgemäß befestigt sind.
2 2
WARNUNG
GEFAHR DURCH ABLEITSTRÖME
Die Ableitströme überschreiten 3,5 mA. Eine nicht
vorschriftsmäßige Erdung des Frequenzumrichters kann
zum Tod oder zu schweren Verletzungen führen.
Lassen Sie die ordnungsgemäße Erdung der
•
Geräte durch einen zertifizierten Elektroinstallateur überprüfen.
MG37G203 Danfoss A/S © 01/2016 Alle Rechte vorbehalten. 7
130BD878.10
ON
1 2
SW. ver. XX.XX
MS
NS
ON
OFF
Code No. 130B1100
Termination
SN
SW
Address
ON
OFF
S600
S300
LD202 LD200
LD201 LD203
ON ON
8 7 6 5 4 3 2 1
PROFIBUS Option A
1
2
130BB708.10
1
2
4
3
5
Konfiguration
VLT® PROFIBUS DP MCA 101
3 Konfiguration
3.1 Konfigurieren des PROFIBUS-Netzwerks
33
Stellen Sie sicher, dass alle PROFIBUS-Stationen, die mit
demselben Bus-Netzwerk verbunden sind, über eine
eindeutige Stationsadresse verfügen müssen.
Wählen Sie die PROFIBUS-Adresse des Frequenzumrichters
über:
Hardware-Schalter
•
Parameter 9-18 Teilnehmeradresse.
•
Der PROFIBUS-Befehl SSA (Set Station Address,
•
Stationsadresse einstellen).
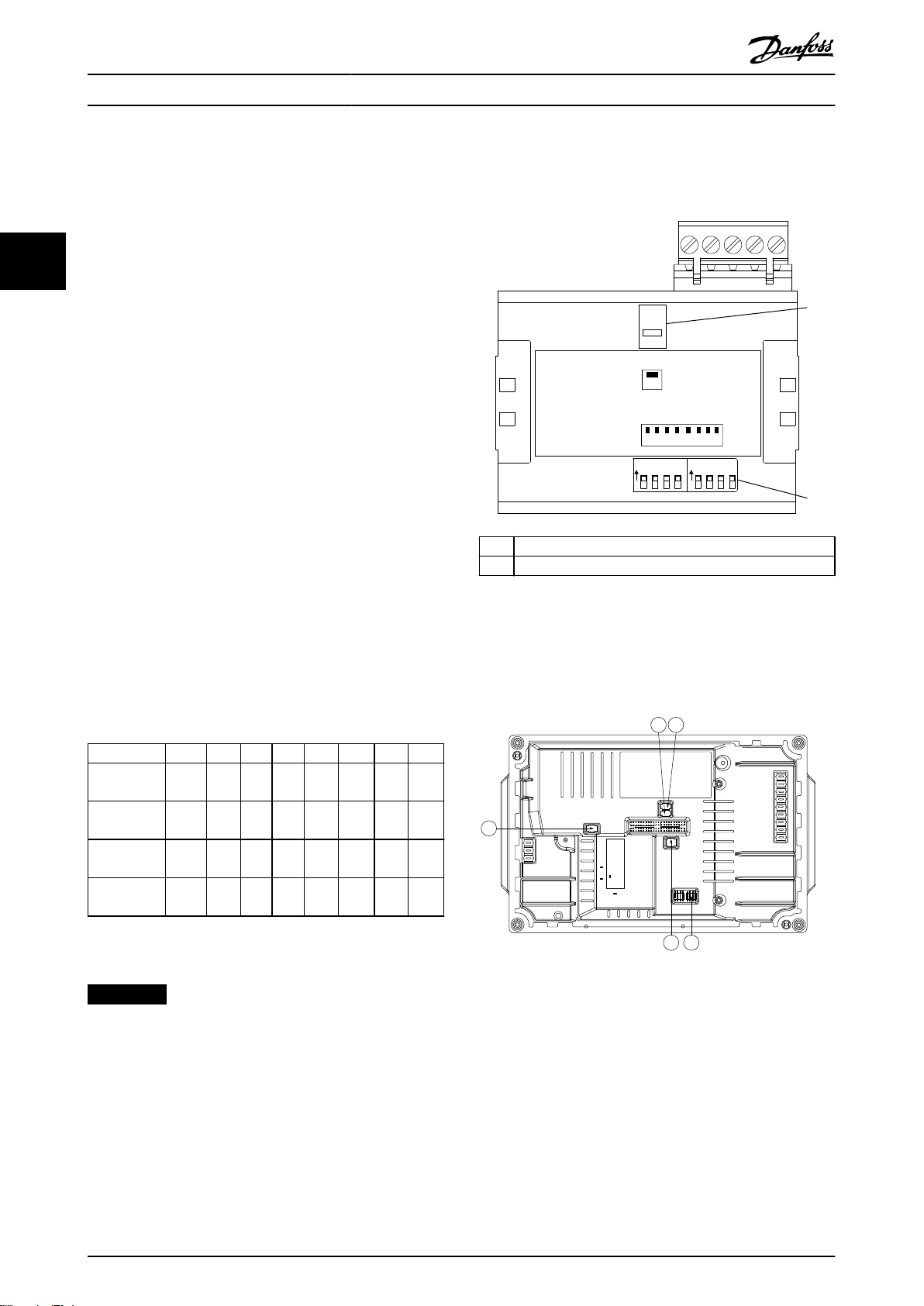
3.1.1 Einstellung der PROFIBUS-Adresse
mittels DIP-Schaltern
So stellen Sie die PROFIBUS-Adresse über die DIP-Schalter
ein:
1. Schalten Sie die Stromversorgung aus.
2. Wählen Sie eine Adresse im Bereich von 0 bis 125
aus. Die Werkseinstellung ist 127.
3. Die Position der DIP-Schalter entnehmen Sie
Abbildung 3.1 und Abbildung 3.2.
4. Stellen Sie die Schalter gemäß der Adresse ein,
siehe Tabelle 3.1.
1 Terminierungsschalter
2 DIP-Schalter
Abbildung 3.1 Position und Sequenz der DIP-Schalter
Der DIP-Schalter im FCD 302 wird unterhalb des Wechselrichterschalters positioniert, siehe Abbildung 3.2.
Schalter 8 7 6 5 4 3 2 1
AdressenwertUnbe
5 Unbe
35 Unbe
82 Unbe
Tabelle 3.1 Beispiele: Einstellung der PROFIBUS-Adresse
mithilfe der DIP-Schalter
+64 +32 +16 +8 +4 +2 +1
nutzt
OFF OFF OFF OFF ON OFF ON
nutzt
OFF ON OFF OFF OFF ON ON
nutzt
ON OFF ON OFF OFF ON OFF
nutzt
Abbildung 3.2 FCD 302 DIP-Schalter
HINWEIS
Schalten Sie die Stromversorgung ab, bevor Sie die DIPSchalter auswechseln.
8 Danfoss A/S © 01/2016 Alle Rechte vorbehalten. MG37G203
Einstellung der PROFIBUS-Adresse per
Parameter 9-18 Teilnehmeradresse
1. Schalten Sie die Stromversorgung aus.
2. Stellen Sie den DIP-Schalter auf 126 oder 127
(werkseitige Schaltereinstellung).
3. Stellen Sie die Adresse per Parameter 9-18 Teilneh-
meradresse oder den PROFIBUS SSA-Befehl ein.
4. Die Adressänderung wird beim nächsten
Einschalten aktiv.
130BC915.10
130BC913.11
Konfiguration Programmierhandbuch
Einstellung der PROFIBUS-Adresse mit dem Befehl
„Stationsadresse einstellen“
1. Schalten Sie die Stromversorgung aus.
2. Stellen Sie den DIP-Schalter auf 126 oder 127
(werkseitige Schaltereinstellung).
3. Stellen Sie die Adresse über den Befehl „Stationsadresse einstellen“ ein. Verwenden Sie den Befehl
„Stationsadresse einstellen“ zum Sperren der
programmierten Adresse und zur Änderung der
Adresse. Entsperren Sie die Adresseinstellung
durch Änderung von Parameter 9-18 Teilnehmer-
adresse oder des Adressschalters, gefolgt vom
Leistungszyklus. Eine neue Adresse ist nach dem
Befehl „Stationsadresse einstellen“ sofort aktiv.
3.2 Konfigurieren des Master
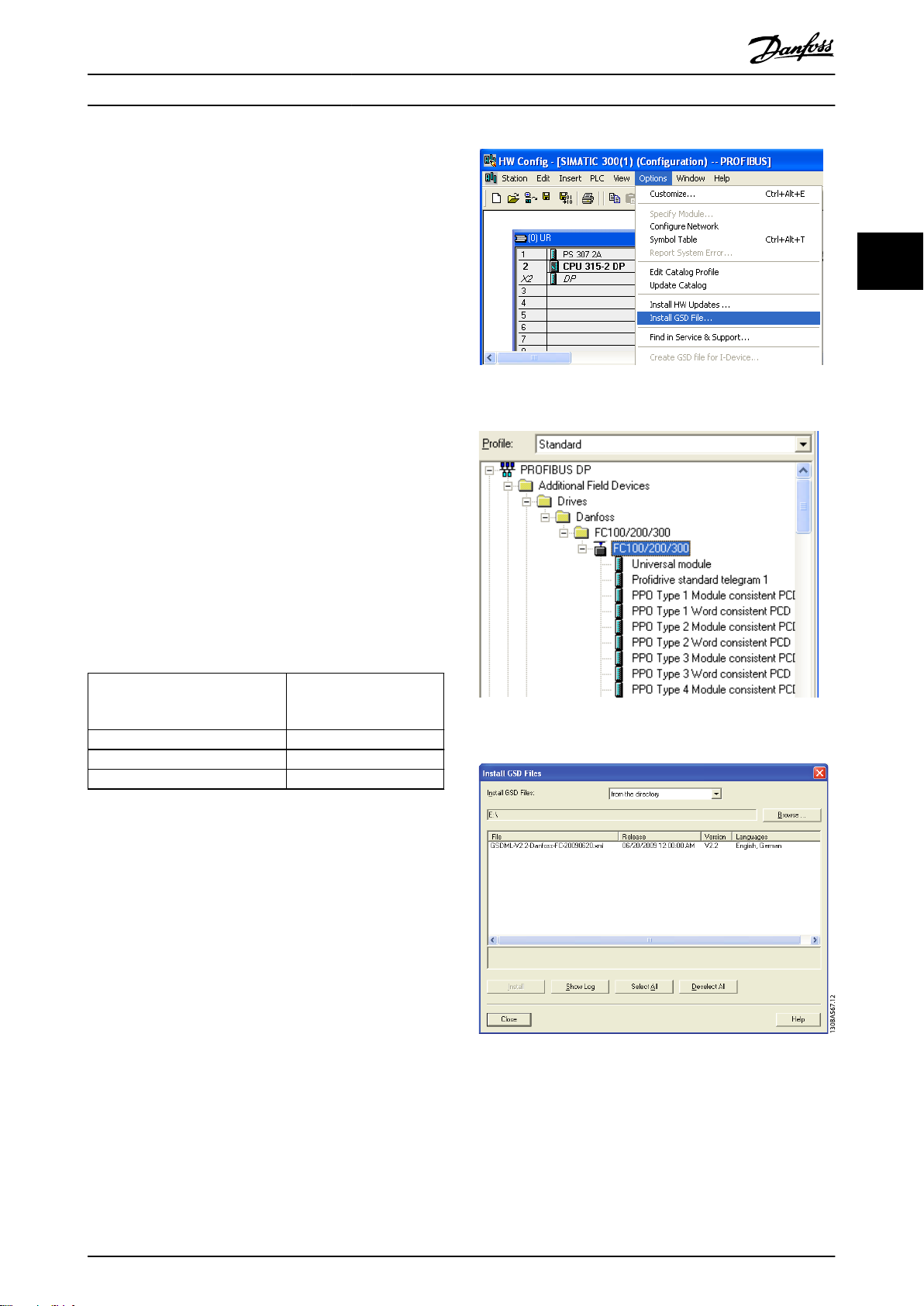
3.2.1 GSD-Datei
Zur Konfiguration eines PROFIBUS-Master benötigt das
Konfigurations-Tool eine GSD-Datei für jeden Follower-Typ
im Netzwerk. Die GSD-Datei ist eine PROFIBUS DPStandardtextdatei, die die erforderlichen
Kommunikationskonfigurationsdaten für einen Follower
enthält. Laden Sie die GSD-Datei der entsprechenden
Frequenzumrichter-Serie herunter. vlt-drives.danfoss.com/
products/engineering-software/software-download/fieldbus/.
3 3
Abbildung 3.3 Installieren der GSD-Datei
PROFIBUS SW-Version
(Parameter 15-61 SW-Version
Option)
1.x da01040A.GSD
2.x da02040A.GSD
FCD 302 da01040B.GSD
Tabelle 3.2 GSD-Datei
Das nachstehende Beispiel zeigt das Verfahren zur Konfiguration eines PROFIBUS-Master für FC 301/FC 302, das
Verfahren gilt jedoch auch für andere FrequenzumrichterSerien.
1. Importieren Sie die GSD-Datei im KonfigurationsTool.
2. Importieren Sie die GSD-Datei in das Simatic
Manager-Software-Tool. Importieren Sie eine GSDDatei für jede Frequenzumrichter-Baureihe nur
einmal entsprechend der erstmaligen Installation
des Software-Tools. Siehe Abbildung 3.3.
3. Verwenden Sie den Browser für die GSD-Datei,
installieren Sie alle Dateien und importieren Sie
eine GSD-Datei sowie eine Bitmap für das Gerät
in den Hardware-Katalog. Siehe Abbildung 3.4 und
Abbildung 3.5.
GSD-Datei
Abbildung 3.4 Importieren einer GSD-Datei und einer Bitmap
Abbildung 3.5 Hinzufügen einer GSD-Datei
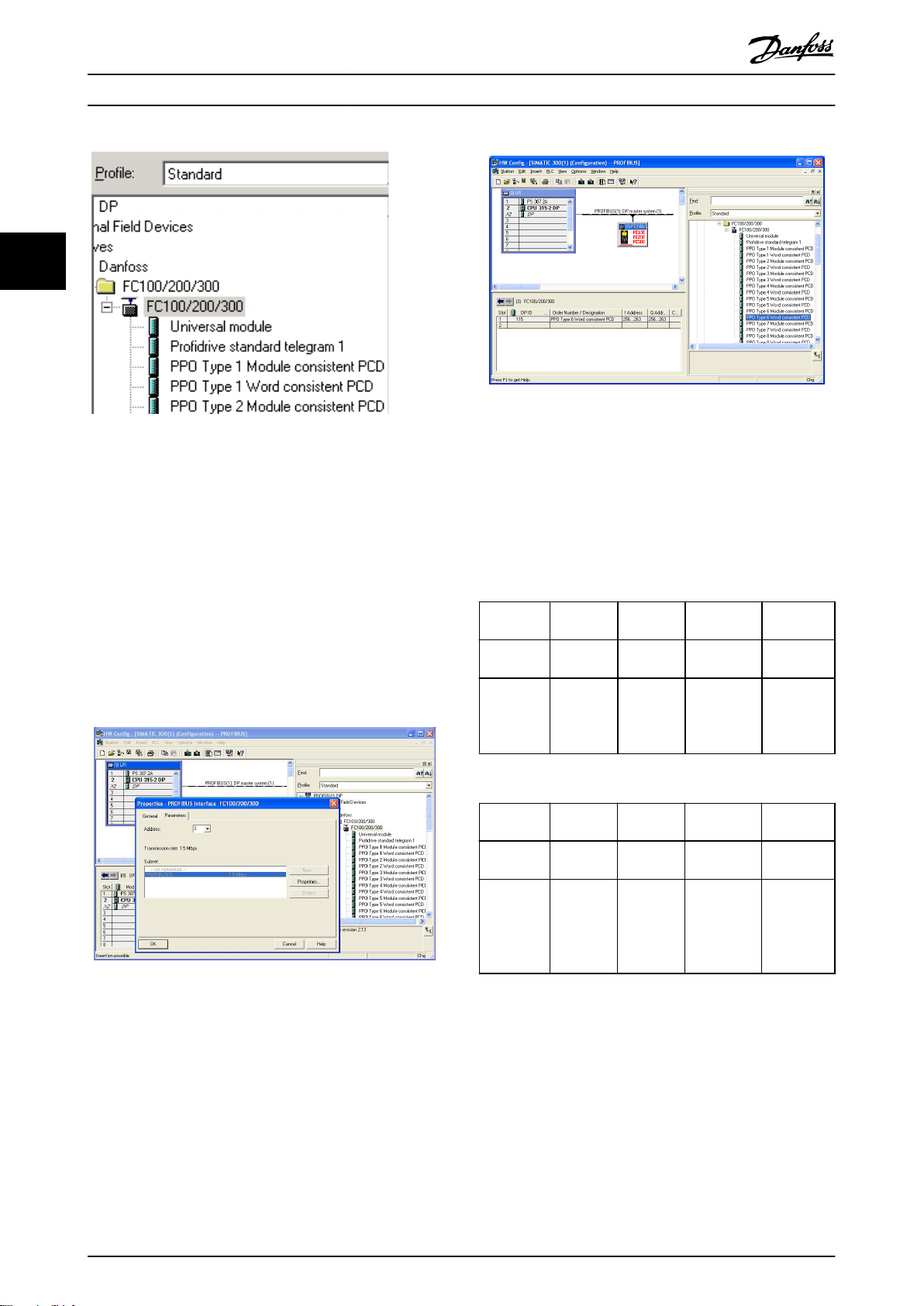
4. Importieren und öffnen Sie die FC 301/FC 302GSD-Datei über den Pfad im Hardware-Katalog,
siehe Abbildung 3.6.
MG37G203 Danfoss A/S © 01/2016 Alle Rechte vorbehalten. 9
130BA564.11
130BC912.11
130BC911.11
Konfiguration
VLT® PROFIBUS DP MCA 101
33
Abbildung 3.8 Fügen Sie ein PPO-Typ-6-Wort, das mit dem
Abbildung 3.6 Import von und Zugriff auf die GSD-Datei
ersten Steckplatz konsistent ist, per Drag und Drop ein
5. Öffnen Sie ein Projekt, richten Sie die Hardware
ein und fügen Sie das PROFIBUS-Mastersystem
hinzu.
6. Wählen Sie FC 300 und ziehen Sie diesen per
Drag und Drop auf den PROFIBUS im HardwareDiagramm.
7. Ein Fenster für die Adresse des FC 300 wird
geöffnet. Wählen Sie die Adresse aus der ScrollDown-Liste aus. Stellen Sie sicher, dass die
Adresseinstellung der vorherigen Adresseinstellung in Parameter 9-18 Teilnehmeradresse
entspricht. Siehe Abbildung 3.7.
Abbildung 3.7 Auswahl der Adresse
Das Konfigurationswerkzeug weist automatisch Adressen
im peripheren Adressenbereich hinzu. In diesem Beispiel
haben Eingangs- und Ausgangsbereich die folgenden
Konfigurationen:
PPO-Typ 6
PCDWortzahl
Eingangsadresse
Parametersatz
Tabelle 3.3 PCD lesen (Frequenzumrichter an SPS)
PCDWortzahl
Ausgangsadresse
Parametersatz
Tabelle 3.4 PCD schreiben (SPS an Frequenzumrichter)
1 2 3 4
256–257 258–259 260–261 262–263
STW (ZSW) HIW Parameter 9-
16 PCD-
Konfiguration
Lesen.2
1 2 3 4
256–257 258–259 260–261 262–263
CTW MRV Parameter 9-
15 PCD-
Konfiguration
Schreiben.2
Parameter 9-
16 PCD-
Konfiguratio
n Lesen.3
Parameter 9-
15 PCD-
Konfiguratio
n Schreiben.
3
8. Stellen Sie die peripheren Eingangs- und
Ausgangsdaten ein. Die Dateneinrichtung im
peripheren Bereich wird zyklisch über PPO-Typen
übertragen. Fügen Sie ein PPO-Typ-6-Wort, das
mit dem ersten Steckplatz konsistent ist, per Drag
und Drop ein, siehe Abbildung 3.8. Siehe die PPOTypen in Kapitel 4 Steuerung/Regelung für weitere
Informationen.
10 Danfoss A/S © 01/2016 Alle Rechte vorbehalten. MG37G203
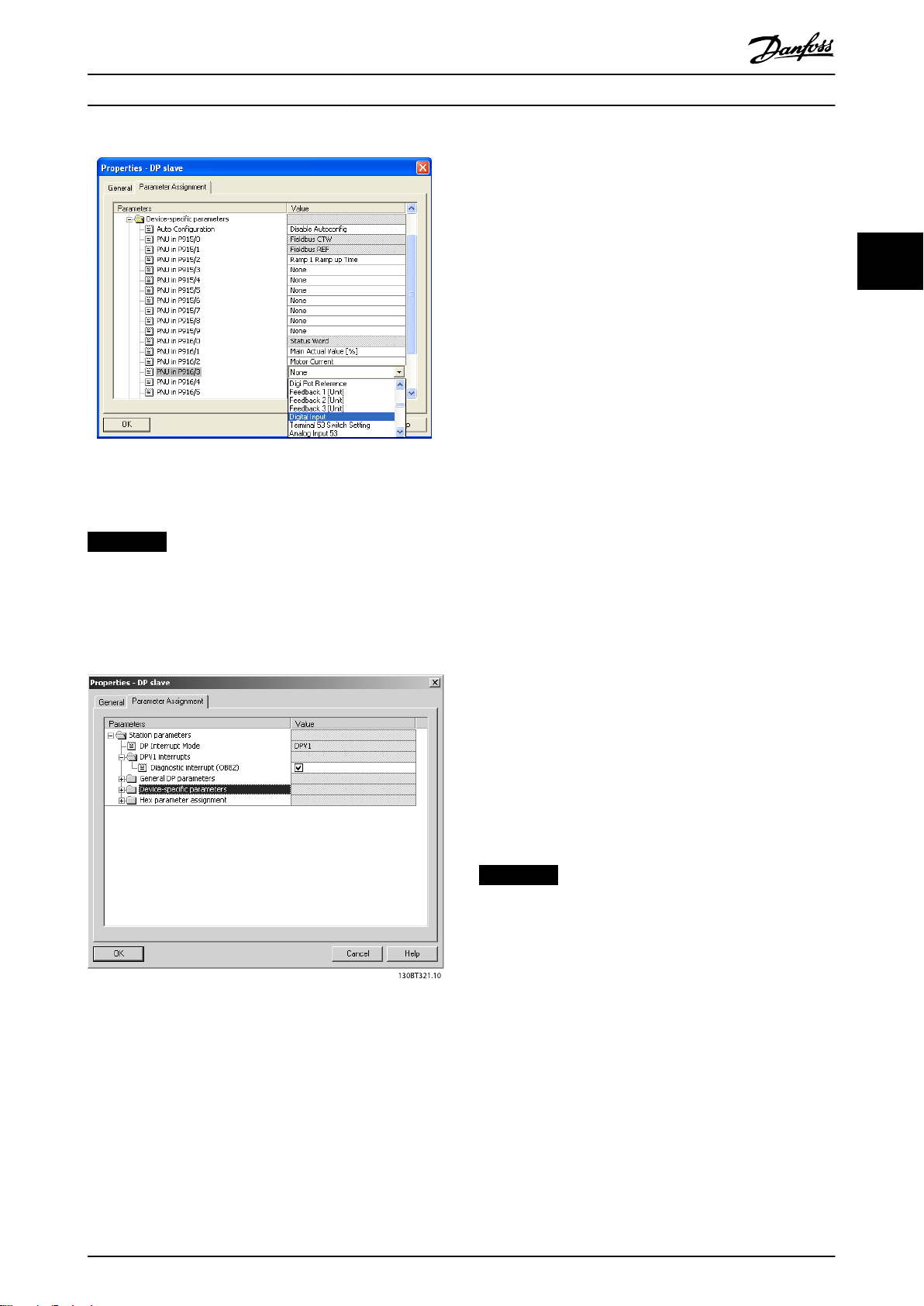
Alternative: Bei PROFIBUS, SW-Version 2.x und höher wird
die Autokonfiguration von Prozessdaten unterstützt. Dieses
Merkmal ermöglicht die Konfiguration der Prozessdaten
(Parameter 9-15 PCD-Konfiguration Schreiben und
Parameter 9-16 PCD-Konfiguration Lesen) von der SPS/dem
Master. Stellen Sie zur Verwendung der Autokonfiguration
sicher, dass die Funktion unter DP Follower-Eigenschaften
aktiviert ist. Siehe Abbildung 3.9.
130BT322.11
Konfiguration Programmierhandbuch
3.3
3.3.1 Frequenzumrichterparameter
Bei der Konfiguration des Frequenzumrichters mit einer
PROFIBUS-Schnittstelle sind die folgenden Parameter
wichtig:
Abbildung 3.9 Aktivierung der Funktion unter den DP
Follower-Eigenschaften
HINWEIS
Die DP V1-Diagnose wird bei der PROFIBUS SW-Version
2.x und höher unterstützt. Die Standardeinstellung der
VLT® PROFIBUS DP MCA 101-Option ist DP-V1-Diagnose.
Wird die DP V0-Diagnose benötigt, muss die Einstellung
unter DP-Follower-Eigenschaften geändert werden.
Konfigurieren des Frequenzumrichters
Parameter 0-40 [Hand On]-LCP Taste. Durch
•
Drücken von [Hand on] deaktivieren Sie die
Steuerung des Frequenzumrichters über den
PROFIBUS.
Parameter 8-02 Aktives Steuerwort. Nach
•
erstmaligem Einschalten erkennt der Frequenzumrichter automatisch, ob eine Feldbus-Option in
Steckplatz A installiert ist. Daraufhin stellt er
Parameter 8-02 Aktives Steuerwort auf [3] [Option
A].Wenn eine Option in einem bereits in Betrieb
genommenen Frequenzumrichter hinzugefügt,
geändert oder entfernt wird, ändert sich
hierdurch Parameter 8-02 Aktives Steuerwort nicht..
Stattdessen wechselt der Frequenzumrichter in
den Alarmmodus und zeit einen Fehler an.
Parameter 8-10 Steuerwortprofil. Wählen Sie
•
zwischen dem Danfoss Frequenzumrichter-Profil
und dem PROFIdrive-Profil.
Parameter 8-50 Motorfreilauf bis
•
Parameter 8-56 Festsollwertanwahl. Wählen Sie aus,
wie PROFIBUS-Steuerbefehle mit Digitaleingangsbefehlen der Steuerkarte per Gate zugewiesen
werden.
Parameter 8-03 Steuerwort Timeout-Zeit bis
•
Parameter 8-05 Steuerwort Timeout-Ende. Legen
Sie die Reaktion bei einem Bus-Timeout mittels
dieser Parameter fest.
Parameter 9-18 Teilnehmeradresse.
•
Parameter 8-07 Diagnose Trigger.
•
3 3
HINWEIS
Die Einstellung in Parameter 8-01 Führungshoheit umgeht
die Einstellungen in Parameter 8-50 Motorfreilauf bis
Parameter 8-56 Festsollwertanwahl, und alle Einstellungen
beziehen sich auf die Bussteuerung.
Abbildung 3.10 DP V1-Diagnose
Einlesen der Konfigurationsdatei in die SPS. Das PROFIBUSSystem ist in der Lage, eine Online-Verbindung
herzustellen, und es beginnt mit dem Austausch von
Daten, wenn die SPS auf den Modus Betrieb eingestellt ist.
MG37G203 Danfoss A/S © 01/2016 Alle Rechte vorbehalten. 11
A
130BC259.10
Konfiguration
VLT® PROFIBUS DP MCA 101
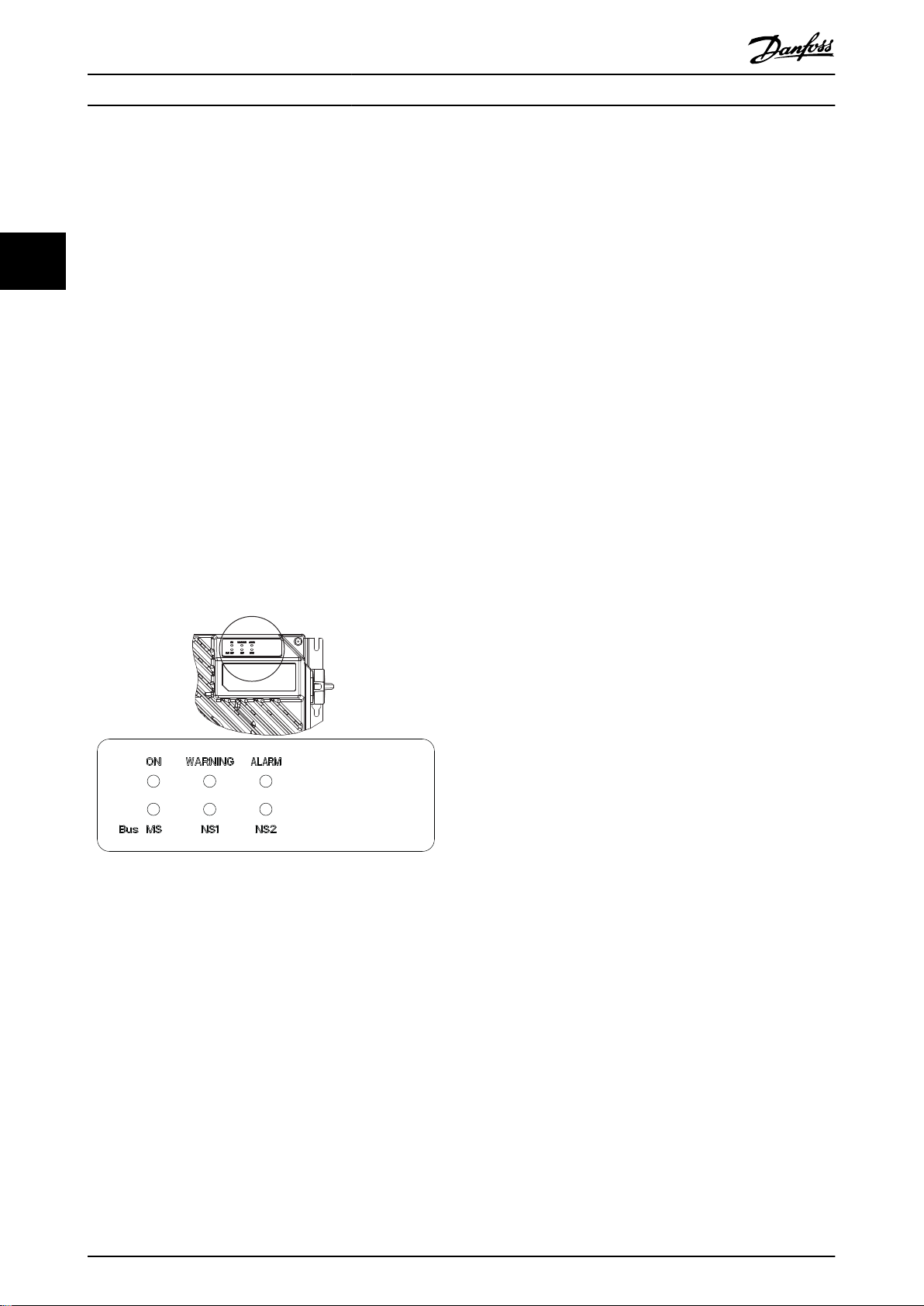
3.3.2 LED
Die beiden zweifarbigen LED in der VLT® PROFIBUS DP
MCA 101-Karte zeigen den Status der PROFIBUS-Kommunikation an.
33
Die LED mit der Kennzeichnung NS (FCD 302: NS2) zeigt
den Netzwerkstatus an, d. h. die zyklische Kommunikation
zum PROFIBUS-Master. Wenn diese Leuchte durchgehend
grün leuchtet, ist der Datenaustausch zwischen dem
Master und dem Frequenzumrichter aktiv.
Die LED mit der Kennzeichnung MS (FCD 302: BUS MS)
zeigt den Modulstatus an, d. h. die azyklische DP V1Kommunikation von einem PROFIBUS-Master der Klasse 1
(SPS) oder einem Master der Klasse 2 (MCT 10
Konfigurationssoftware, FDT-Tool). Wenn diese Leuchte
durchgehend grün leuchtet, ist die DP V1-Kommunikation
von den Master-Klassen 1 und 2 aktiv.
Einzelheiten zu den Anzeigen des Kommunikationszustands durch die LED finden Sie im Kapitel
Kapitel 8 Fehlersuche und -behebung.
Abbildung 3.11 FCD 302 LED-Panel
12 Danfoss A/S © 01/2016 Alle Rechte vorbehalten. MG37G203
Steuerung/Regelung Programmierhandbuch
4 Steuerung/Regelung
4.1 PPO-Typen
Das PROFIBUS-Profil für Frequenzumrichter spezifiziert eine
Reihe von Kommunikationsobjekten (Parameter-Prozessdatenobjekte, PPO). Das PROFIBUS-Profil für
Frequenzumrichter ist für einen Datenaustausch zwischen
einem Prozessregler (zum Beispiel SPS) und einem
Frequenzumrichter geeignet. Alle PPOs arbeiten über
zyklische Datenübertragung (d. h. DP-V0), sodass
Prozessdaten (PCD) und Parameter (PCA) vom Master zum
Follower übertragen werden können und umgekehrt.
Reine Prozessdatenobjekte
Die PPO-Typen 3, 4, 6, 7 und 8 sind reine Prozessdatenobjekte für Anwendungen, die keinen zyklischen
Parameterzugriff erfordern. Die SPS sendet Prozessregelungsdaten, und der Frequenzumrichter antwortet dann
mit einem PPO derselben Länge, das Prozesszustandsdaten
enthält.
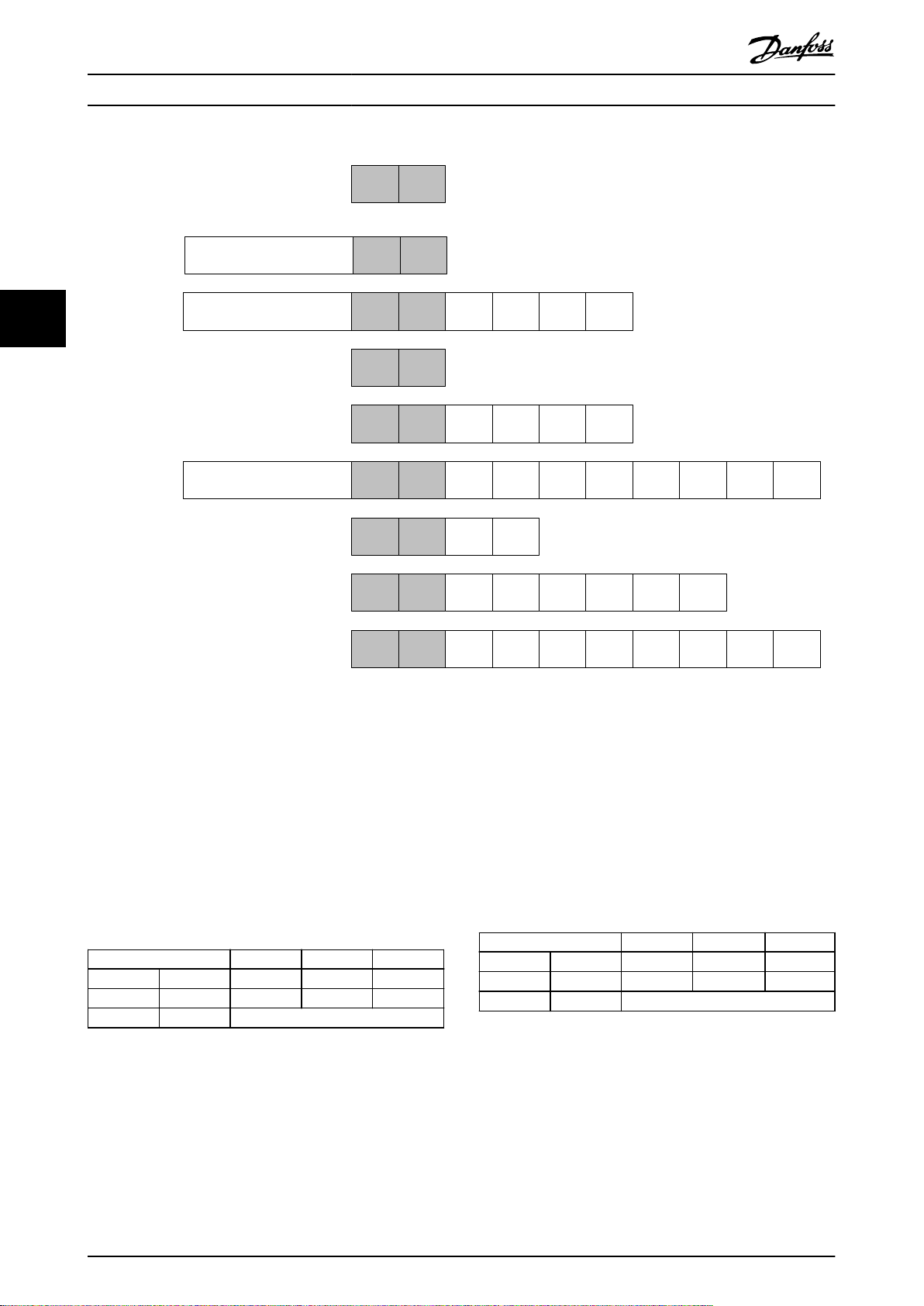
Abbildung 4.1 zeigt die verfügbaren PPO-Typen:
PCD 1: Die ersten zwei Byte des Prozessdatenbe-
•
reichs (PCD 1) umfassen einen in allen PPO-Typen
vorhandenen festen Teil.
PCD 2: Die nächsten zwei Byte (PCD 2) sind für
•
PCD Schreiben-Einträge fixiert (siehe
Parameter 9-15 PCD-Konfiguration Schreiben [1]),
jedoch für PCD Lesen-Einträge (siehe
Parameter 9-16 PCD-Konfiguration Lesen [1])
konfigurierbar.
PCD 3–10: In den restlichen Byte können die
•
Prozessdaten mit Prozesssignalen parametriert
werden, siehe Parameter 9-23 Signal-Parameter.
Die Einstellung in Parameter 9-15 PCD-Konfiguration
Schreiben bestimmt die Signale für die Übertragung
(Anfrage) vom Master zum Frequenzumrichter.
Die Einstellung in Parameter 9-16 PCD-Konfiguration Lesen
bestimmt die Signale für die Übertragung (Antwort) vom
Frequenzumrichter zum Master.
Parameterkanal und Prozessdaten
Die PPO-Typen 1, 2 und 5 bestehen aus einem Parameterkanal und Prozessdaten. Verwenden Sie den
Parameterkanal zum Lesen und/oder Aktualisieren von
Parametern (nacheinander). Alternativ können Sie für eine
bessere Nutzung von E/A und folglich der SPS-Kapazität
den Parameterzugriff über DP V1 durchführen. Um über
DP-V1 darauf zuzugreifen, müssen Sie ein reines Prozessdatenobjekt auswählen (PPO-Typ 3, 4, 6, 7 oder 8).
Die Wahl des PPO-Typs erfolgt in der Masterkonfiguration
und wird dann automatisch im Frequenzumrichter
registriert. Im Frequenzumrichter ist keine manuelle
Einstellung der PPO-Typen erforderlich. Sie können den
aktuellen PPO-Typ in Parameter 9-22 Telegrammtyp lesen.
Die Einstellung [1] Standardtelegramm 1 entspricht PPO-Typ
3.
Außerdem können Sie alle PPO-Typen als wortkonsistent
oder modulkonsistent einstellen. Der Prozessdatenbereich
kann wort- oder modulkonsistent sein, wohingegen der
Parameterkanal immer modulkonsistent sein muss.
Wortkonsistente Daten werden als einzelne,
•
unabhängige Worte zwischen SPS und Frequenzumrichter übertragen.
Modulkonsistente Daten werden als eine Reihe
•
verwandter Worte gesendet, die gleichzeitig
zwischen SPS-Programm und Frequenzumrichter
übertragen werden.
4 4
MG37G203 Danfoss A/S © 01/2016 Alle Rechte vorbehalten. 13
CTW/STW
REF/MAV
PCD 2
Read/
Write
PCD 3
Read/
Write
Standard telegram
1
PCD 4
Read/
Write
PCD 5
Read/
Write
PPO 5
PPO 6
PPO 7
PPO 8
Danfoss telegram
(The old PPO type 3)
PCV
CTW/STW
REF/MAV
PCD 2
Read/
Write
PCD 3
Read/
Write
PCD 4
Read/
Write
PCD 5
Read/
Write
PPO 4
CTW/STW REF/MAV
PCD 2
Read/
Write
PCD 3
Read/
Write
PCD 4
Read/
Write
PCD 5
Read/
Write
CTW/STW
REF/MAV
PCD 2
Read/
Write
PCD 3
Read/
Write
PCD 4
Read/
Write
PCD 5
Read/
Write
PCD 6
Read/
Write
PCD 7
Read/
Write
PCD 8
Read/
Write
PCD 9
Read/
Write
CTW/STW REF/MAV
PCD 2
Read/
Write
PCD 3
Read/
Write
PCD 4
Read/
Write
PCD 5
Read/
Write
PCD 6
Read/
Write
PCD 7
Read/
Write
PCD 8
Read/
Write
PCD 9
Read/
Write
PCD 6
Read/
Write
PCD 7
Read/
Write
CTW/STW REF/MAV
CTW/STW REF/MAV
PPO 3
CTW/STW REF/MAV
PCD 2
Read/
Write
PCD 3
Read/
Write
PPO 2
PCV
CTW/STW
REF/MAV
PPO 1
PCV
130BD911.11
Steuerung/Regelung
VLT® PROFIBUS DP MCA 101
44
Abbildung 4.1 Verfügbare PPO-Typen
Prozessdaten
4.2
Verwenden Sie den Prozessdatenteil des PPO zur
Steuerung und Überwachung des Frequenzumrichters per
PROFIBUS.
4.2.1 Prozessregelungsdaten
Prozessregelungsdaten (PCD) sind die Prozessdaten, die
von der SPS zum Frequenzumrichter gesendet werden.
Master/Follower
1 2 3 ....... 10
CTW MRV PCD ....... PCD
PCD schreiben
Tabelle 4.1 Prozessregelungsdaten
PCD 1 enthält ein 16-Bit-Steuerwort, bei dem jedes Bit eine
bestimmte Funktion des Frequenzumrichters regelt, siehe
Kapitel 4.3 Steuerprofil.
PCD 2 enthält einen Geschwindigkeitssollwert von 16 Bit
im Prozentformat. Siehe Kapitel 4.2.3 Sollwertverarbeitung.
Die Einstellungen in Parameter 9-15 PCD-Konfiguration
Schreiben und Parameter 9-16 PCD-Konfiguration Lesen
definieren die Inhalte von PCD 3 bis PCD 10.
4.2.2 Prozessstatusdaten
Prozessstatusdaten sind die vom Frequenzumrichter
gesendeten Prozessdaten, die Informationen über den
aktuellen Zustand enthalten.
Follower/Master
1 2 3 ...... 10
STW (ZSW) HIW PCD ...... PCD
PCD lesen
Tabelle 4.2 Prozessstatusdaten
PCD 1 enthält ein 16-Bit-Zustandswort, bei dem jedes Bit
Informationen zu einem möglichen Zustand des Frequenzumrichters enthält.
PCD 2 enthält standardmäßig den Wert der aktuellen
Drehzahl des Frequenzumrichters im Prozentformat (siehe
Kapitel 4.2.3 Sollwertverarbeitung). PCD 2 kann konfiguriert
werden, um andere Prozesssignale zu enthalten.
14 Danfoss A/S © 01/2016 Alle Rechte vorbehalten. MG37G203
Steuerung/Regelung Programmierhandbuch
Die Einstellungen in Parameter 9-16 PCD-Konfiguration Lesen
definieren die Inhalte von PCD 3 bis PCD 10.
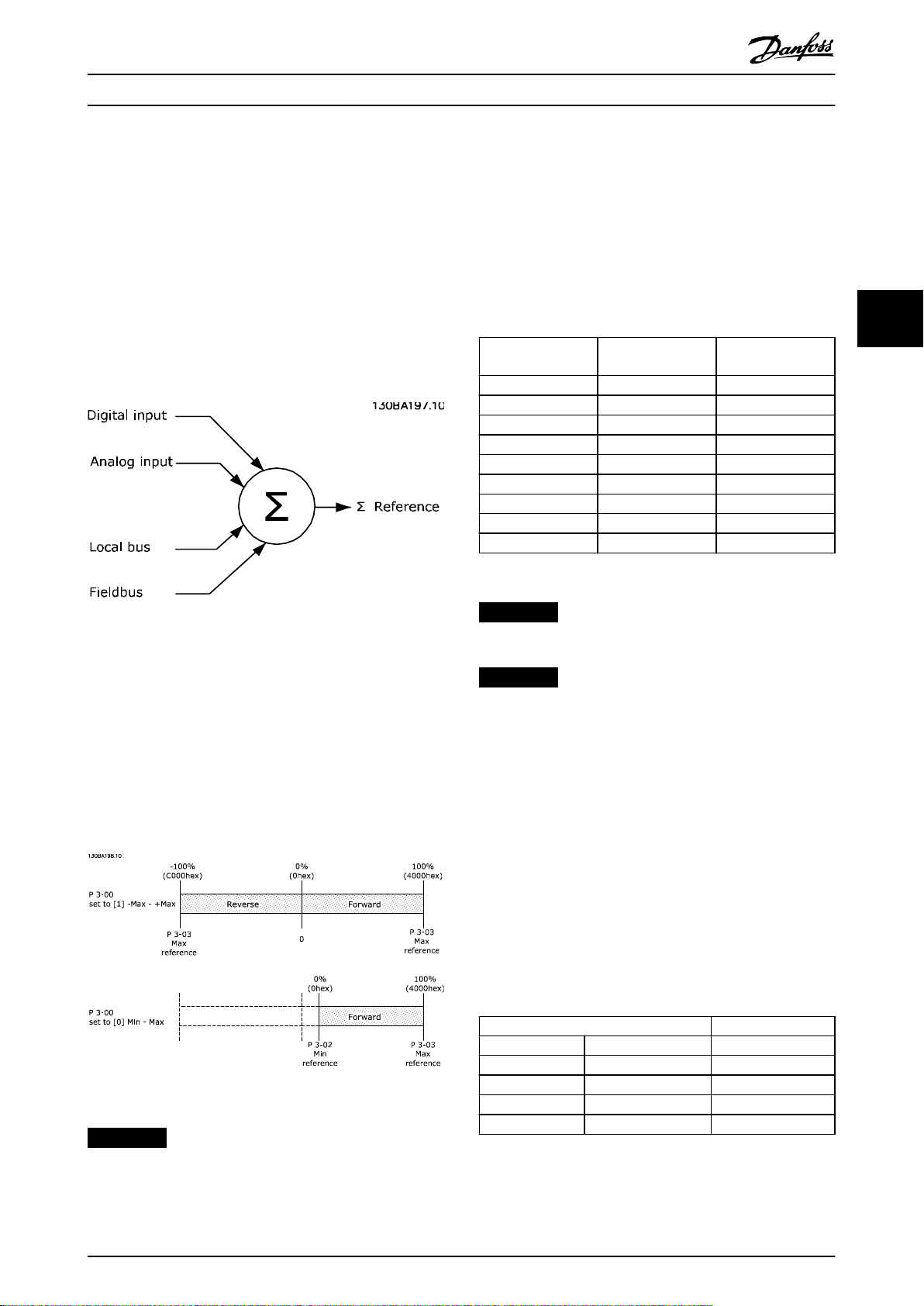
4.2.3 Sollwertverarbeitung
Die Sollwertverarbeitung ist ein erweiterter Mechanismus,
der Sollwerte aus verschiedenen Quellen summiert, wie in
Abbildung 4.2 gezeigt.
Weitere Informationen zur Sollwertverarbeitung finden Sie
im Projektierungshandbuch des jeweiligen Frequenzumrichters.
Der tatsächliche Ausgang des Frequenzumrichters wird
durch die Drehzahlgrenzenparameter Min./Max.Drehzahl-
grenze des Motors [UPM/Hz] in Parameter 4-11 Min. Drehzahl
[UPM] bis Parameter 4-14 Max Frequenz [Hz].
Die finale Drehzahlgrenze wird in Parameter 4-19 Max.
Ausgangsfrequenz festgelegt.
Tabelle 4.3 listet die Istwert- (MRV) und Sollwertformate
(MAV) auf.
4 4
MRV/HIW Ganzzahl in Hex Ganzzahl in
Dezimal
100% 4000 16384
75% 3000 12288
50% 2000 8192
25% 1000 4096
0% 0 0
-25% F000 -4096
-50% E000 -8192
-75% D000 -12288
-100% C000 -16384
Tabelle 4.3 Sollwert/Istwert (MRV/HIW)-Format
Abbildung 4.2 Sollwert
Der Sollwert oder Drehzahlsollwert wird per PROFIBUS
gesendet, und wird immer im Prozentformat als
ganzzahliger Wert zum Frequenzumrichter übertragen,
angezeigt im Hexadezimalformat (0-4000 Hex).
Sollwert (MRV) und Istwert (HIW) werden stets gleich
skaliert. Der Einstellung von Parameter 3-00 Sollwertbereich
bestimmt die Skalierung von Sollwert und Istwert (HIW),
siehe Abbildung 4.3.
Abbildung 4.3 Sollwert (MRV) und Istwert (HIW), Skaliert
HINWEIS
Wenn Parameter 3-00 Sollwertbereich auf [0] Min - Max
eingestellt ist, wird ein negativer Sollwert als 0 %
behandelt.
HINWEIS
Negative Zahlen werden als Zweierkomplement gebildet.
HINWEIS
Der Datentyp für MRV und HIW ist ein standardisierter
N2 16-Bit-Wert, der einen Bereich von -200 % bis +200 %
(8001 bis 7FFF) ausdrücken kann.
Beispiel
Die folgenden Einstellungen bestimmen die Drehzahl, wie
in Tabelle 4.4 gezeigt:
Parameter 1-00 Regelverfahren eingestellt auf [0]
•
Drehzahlregelung ohne Rückführung.
Parameter 3-00 Sollwertbereich eingestellt auf [0]
•
Min-Max.
Parameter 3-02 Minimaler Sollwert eingestellt auf
•
100 UPM.
Parameter 3-03 Maximaler Sollwert eingestellt auf
•
3000 UPM.
MRV/HIW Istdrehzahl [UPM]
0% 0 Hex 100
25% 1000 Hex 825
50% 2000 Hex 1550
75% 3000 Hex 2275
100% 4000 Hex 3000
Tabelle 4.4 Istdrehzahl für MRV/HIW
MG37G203 Danfoss A/S © 01/2016 Alle Rechte vorbehalten. 15
Steuerung/Regelung
VLT® PROFIBUS DP MCA 101
4.2.4 Prozessregelungsbetrieb
Im Prozessregelungsbetrieb ist Parameter 1-00 Regelver-
fahren auf [3] Prozess eingestellt.
Der Sollwertbereich in Parameter 3-00 Sollwertbereich ist
immer [0] Min-Max.
MRV gibt den Prozesssollwert an.
•
HIW drückt den tatsächlichen Prozessistwert aus
•
44
(Bereich ±200 %).
4.2.5 Einfluss der Digitaleingangsklemmen
auf den FU-Regelungsmodus
Programmieren Sie den Einfluss der Digitaleingangsklemmen auf die Steuerung des Frequenzumrichters in
Parameter 8-50 Motorfreilauf bis Parameter 8-56 Festsollwertanwahl.
Steuerprofil
4.3
Steuern des Frequenzumrichters gemäß:
PROFIdrive-Profil, siehe Kapitel 4.4 PROFIdrive-
•
Steuerprofil, oder
des Danfoss FU-Steuerprofils, siehe
•
Kapitel 4.5 Danfoss FC-Steuerprofil.
Wählen Sie das gewünschte Steuerprofil in
Parameter 8-10 Steuerwortprofil. Die Auswahl des Profils
beeinflusst nur Steuerwort und Zustandswort.
Kapitel 4.4 PROFIdrive-Steuerprofil und Kapitel 4.5 Danfoss
FC-Steuerprofil enthalten eine detaillierte Beschreibung der
Steuerungs- und Zustandsdaten.
4.4 PROFIdrive-Steuerprofil
Dieser Abschnitt beschreibt die Funktionalität des
Steuerworts und des Zustandsworts im PROFIdrive-Profil.
HINWEIS
Die Einstellung von Parameter 8-01 Führungshoheit
umgeht die Einstellungen in Parameter 8-50 Motorfreilauf
bis Parameter 8-56 Festsollwertanwahl. Die Einstellung
von Klemme 37 Freilaufstopp (sicher) hebt alle anderen
Parameter auf.
4.4.1 Steuerwort gemäß PROFIdrive-Profil
(CTW)
Das Steuerwort dient zum Senden von Befehlen vom
Master (z. B. einem PC) an einen Follower.
Sie können jedes Digitaleingangssignal auf Bus UND
Klemme oder Bus ODER Klemme programmieren oder
keine Beziehung zu dem entsprechenden Bit im
Steuerwort festlegen. Auf diese Weise initiieren die
folgenden Signalquellen einen spezifischen Steuerbefehl,
zum Beispiel Stopp/Freilauf:
Nur Feldbus
•
Feldbus UND Digitaleingang
•
Entweder Feldbus ODER Digitaleingangsklemme.
•
HINWEIS
Stellen Sie zur Steuerung des Frequenzumrichters per
PROFIBUS Parameter 8-50 Motorfreilauf auf [1] Bus oder
[2] Logisch UND. Stellen Sie dann
Parameter 8-01 Führungshoheit auf [0] Klemme und
Steuerw. oder [2] Nur Steuerwort.
Detaillierte Informationen und Beispiele zu logischen
Verhältnisoptionen siehe Kapitel 8 Fehlersuche und -
behebung.
Bit Bit=0 Bit = 1
00 OFF 1 ON 1
01 OFF 2 ON 2
02 OFF 3 ON 3
03 Motorfreilauf Kein Motorfreilauf
04 Schnellstopp Rampe
05 Pulsausgang halten Rampe verwenden
06 Rampenstopp Start
07 Ohne Funktion Reset
08 Festdrehzahl JOG 1 AUS Festdrehzahl JOG 1 EIN
09 Festdrehzahl JOG 2 AUS Festdrehzahl JOG 2 EIN
10 Daten ungültig Daten gültig
11 Ohne Funktion Frequenzkorrektur Ab
12 Ohne Funktion Frequenzkorrektur Auf
13 Parametersatz (lsb)
14 Parametersatz (msb)
15 Ohne Funktion Reversierung
Tabelle 4.5 Steuerwort-Bits
Erläuterung der Steuerbits
Bit 00, AUS 1/EIN 1
Normale Rampenstopps mit den Rampenzeiten der
tatsächlich ausgewählten Rampe.
Bit 00=0 stoppt und aktiviert das Ausgangsrelais 1 oder 2,
wenn die Ausgangsfrequenz 0 Hz beträgt, und in
Parameter 5-40 Relaisfunktion [31] Relais 123 ausgewählt ist.
Wenn Bit 0 = 1 ist, befindet sich der Frequenzumrichter in
Zustand 1, Einschalten gesperrt.
Siehe Abbildung 4.4.
16 Danfoss A/S © 01/2016 Alle Rechte vorbehalten. MG37G203
Steuerung/Regelung Programmierhandbuch
Bit 01, AUS 2/EIN 2
Freilaufstopp
Bit 01=0 stoppt und aktiviert das Ausgangsrelais 1 oder 2,
wenn die Ausgangsfrequenz 0 Hz beträgt, und in
Parameter 5-40 Relaisfunktion [31] Relais 123 ausgewählt ist.
Wenn Bit 01 = 1 ist, befindet sich der Frequenzumrichter in
Zustand 1, Einschalten gesperrt. Siehe Abbildung 4.4.
Bit 02, AUS 3/EIN 3
Schnellstopp unter Verwendung der Rampenzeit von
Parameter 3-81 Rampenzeit Schnellstopp.
Bit 00=0 stoppt und aktiviert das Ausgangsrelais 1 oder 2,
wenn die Ausgangsfrequenz 0 Hz beträgt, und in
Parameter 5-40 Relaisfunktion [31] Relais 123 ausgewählt ist.
Wenn Bit 0 = 1 ist, befindet sich der Frequenzumrichter in
Zustand 1, Einschalten gesperrt.
Siehe Abbildung 4.4.
Bit 03, Motorfreilauf/Kein Motorfreilauf
Bit 03=0 führt zu einem Freilaufstopp.
Wenn Bit 03=1 und die anderen Startbedingungen erfüllt
sind, kann der Frequenzumrichter starten.
HINWEIS
Die Auswahl in Parameter 8-50 Motorfreilauf legt fest, wie
Bit 03 mit der entsprechenden Funktion der Digitaleingänge verknüpft ist.
Bit 04, Schnellstopp/Rampe
Schnellstopp unter Verwendung der Rampenzeit von
Parameter 3-81 Rampenzeit Schnellstopp.
Wenn Bit 04 = 0 ist, wird ein Schnellstopp durchgeführt.
Wenn Bit 04=1 und die anderen Startbedingungen erfüllt
sind, kann der Frequenzumrichter starten.
HINWEIS
Die Auswahl in Parameter 8-51 Schnellstopp legt fest, wie
Bit 04 mit der entsprechenden Funktion der Digitaleingänge verknüpft ist.
Bit 05, Pulsausgang halten/Rampe verwenden
Wenn Bit 05 = 0 ist, wird die aktuelle Ausgangsfrequenz
beibehalten, auch wenn der Sollwert geändert wird.
Wenn Bit 05 = 1 ist, kann der Frequenzumrichter wieder
seine Regelung ausführen; der Betrieb erfolgt gemäß dem
jeweiligen Sollwert.
Bit 06, Rampe Stopp/Start
Normaler Rampenstopp unter Verwendung der Rampenzeiten der tatsächlich gewählten Rampe. Wenn Sie zudem
[31] Relais 123 in Parameter 5-40 Relaisfunktion auswählen
und die Ausgangsfrequenz 0 Hz beträgt, aktiviert dieses Bit
das Ausgangsrelais 01 oder 04.
Bit 06=0 stoppt den Frequenzumrichter.
Wenn Bit 06=1 und die anderen Startbedingungen erfüllt
sind, kann der Frequenzumrichter starten.
HINWEIS
Die Auswahl in Parameter 8-53 Start legt fest, wie Bit 06
mit der entsprechenden Funktion der Digitaleingänge
verknüpft ist.
Bit 07, keine Funktion/Reset
Reset nach einem Abschalten. Bestätigt das Ereignis im
Fehlerpuffer.
Wenn Bit 07 = 0 ist, wird kein Reset durchgeführt.
Bei einem Flankenwechsel von Bit 07 auf „1“ wird nach
dem Ausschalten ein Reset durchgeführt.
Bit 08, Festdrehzahl JOG 1 AUS/EIN
Aktivierung der vorprogrammierten Drehzahl in
Parameter 8-90 Bus-Festdrehzahl 1. JOG 1 ist nur möglich,
wenn Bit 04=0 und Bit 00-03=1.
Bit 09, Festdrehzahl JOG 2 AUS/EIN
ktivierung der vorprogrammierten Drehzahl in
Parameter 8-91 Bus-Festdrehzahl 2. JOG 2 ist nur möglich,
wenn Bit 04=0 und Bit 00-03=1.
Bit 10, Daten nicht gültig/Daten gültig
Teilt dem Frequenzumrichter mit, ob das Steuerwort
benutzt oder ignoriert wird.
Bit 10=0 führt dazu, dass das Steuerwort ignoriert wird,
wodurch die Möglichkeit besteht, dass das Steuerwort
beim Aktualisieren/Lesen von Parametern deaktiviert wird.
Bit 10 = 1 führt dazu, dass das Steuerwort verwendet wird.
Diese Funktion ist relevant, weil das Telegramm
unabhängig vom Telegrammtyp stets das Steuerwort
enthält.
Bit 11, Keine Funktion/Frequenzkorrektur ab
Reduziert den Drehzahlsollwert um den in
Parameter 3-12 Frequenzkorrektur Auf/Ab angegebenen
Wert.
Wenn Bit 11 = 0, wird keine Änderung des Sollwerts
durchgeführt.
Wenn Bitt 11 = 1, wird der Sollwert herabgesetzt.
Bit 12, Keine Funktion/Frequenzkorrektur Auf
Wird zur Reduzierung des Sollwerts um den in
Parameter 3-12 Frequenzkorrektur Auf/Ab gegebenen Betrag
verwendet.
Wenn Bit 12 = 0, wird keine Änderung des Sollwerts
durchgeführt.
Wenn Bit 12 = 1, wird der Sollwert erhöht.
Wenn sowohl Verlangsamung als auch Beschleunigung
aktiviert sind (Bit 11 und 12=1), hat die Verlangsamung
Priorität, und der Drehzahl-Sollwert wird verringert.
Bits 13/14, Satzanwahl
Mit Bit 13 und 14 können die 4 Parametersätze
entsprechend Tabelle 4.6 gewählt werden.
Die Funktion ist nur dann möglich, wenn [9] Externe
Anwahl in Parameter 0-10 Aktiver Satz ausgewählt ist. Die
Auswahl in Parameter 8-55 Satzanwahl legt fest, wie Bit 13
und 14 mit der entsprechenden Funktion der Digitaleingänge verknüpft sind. Ein Umschalten zwischen den
4 4
MG37G203 Danfoss A/S © 01/2016 Alle Rechte vorbehalten. 17
Steuerung/Regelung
VLT® PROFIBUS DP MCA 101
Parametersätzen bei laufendem Motor ist nur möglich,
wenn diese in Parameter 0-12 Satz verknüpfen mit verknüpft
wurden.
Erläuterung der Zustandsbits
Bit 00, Steuerung nicht bereit/bereit
Wenn Bit 00 = 0, ist Bit 00, 01 oder 02 des Steuerworts 0
(AUS 1, AUS 2 oder AUS 3) – andernfalls wird der Frequen-
Parametersatz Bit 13 Bit 14
1 0 0
2 1 0
3 0 1
44
Tabelle 4.6 Parametersätze
4 1 1
Bit 15, Keine Funktion/Reversierung
Bit 15 = 0 verursacht keine Reversierung.
Bit 15 = 1 verursacht Reversierung.
zumrichter ausgeschaltet (Abschaltung).
Wenn Bit 00 = 1, ist die Frequenzumrichtersteuerung
bereit, es gibt jedoch möglicherweise keine Spannungsversorgung für die vorhandene Einheit (im Fall einer externen
24 V DC-Versorgung des Steuerungssystems).
Bit 01, VLT® nicht bereit/bereit
Gleiche Bedeutung wie Bit 00, es liegt jedoch eine
Stromversorgung der Leistungseinheit vor. Der Frequenzumrichter ist bereit, wenn er die erforderlichen
Startsignale empfängt.
Bit 02, Motorfreilauf/aktivieren
HINWEIS
In der Werkseinstellung ist Reversierung in
Parameter 8-54 Reversierung auf [0] digital eingestellt.
Wenn Bit 02 = 0, ist Bit 00, 01 oder 02 des Steuerworts 0
(AUS 1, AUS 2 oder AUS 3 oder Motorfreilauf) – andernfalls
wird der Frequenzumrichter ausgeschaltet (Abschaltung).
Wenn Bit 02 = 1, ist Bit 00, 01 oder 02 des Steuerworts 1
HINWEIS
Bit 15 bewirkt eine Reversierung nur dann, wenn
entweder Bus, Bus und Klemme oder Bus oder Klemme
gewählt ist.
und der Frequenzumrichter wurde nicht ausgeschaltet.
Bit 03, Kein Fehler/keine Abschaltung
Wenn Bit 03 = 0, liegt keine Fehlerbedingung für den
Frequenzumrichter vor.
Wenn Bit 03 = 1, wurde der Frequenzumrichter
4.4.2 Zustandswort gemäß PROFIdriveProfil (STW)
abgeschaltet und kann erst nach einem Reset wieder
starten.
Bit 04, EIN 2/AUS 2
Das Zustandswort wird verwendet, um den Master (zum
Beispiel einen PC) über den Betriebsmodus eines Followers
zu informieren.
Wenn Bit 01 des Steuerworts 0 ist, lautet Bit 04=0.
Wenn Bit 01 des Steuerworts 1 ist, lautet Bit 04=1
Bit 05, EIN 3/AUS 3
Wenn Bit 02 des Steuerworts 0 ist, lautet Bit 05=0
Bit Bit=0 Bit = 1
00 Steuerung nicht bereit Steuer. bereit
01 FU nicht bereit Bereit
02 Motorfreilauf Aktivieren
03 Kein Fehler Abschaltung
04 OFF 2 ON 2
05 OFF 3 ON 3
06 Start möglich Start nicht möglich
07 Keine Warnung Warnung
08
09 Ortbetrieb Bussteuerung
10 Außerhalb Frequenz-
11 Ohne Funktion In Betrieb
12 FU OK Gestoppt, Auto Start
13 Spannung OK Spannung überschritten
14 Moment OK Moment überschritten
15 Timer OK Timer überschritten
Drehzahl ≠ Sollwert
grenze
Drehzahl = Sollwert
Frequenzgrenze OK
Wenn Bit 02 des Steuerworts 1 ist, lautet Bit 05=1.
Bit 06, Start möglich/Start nicht möglich
Wenn PROFIdrive in Parameter 8-10 Steuerwortprofil
ausgewählt wurde, ist Bit 06 „1“ nach einer Abschaltungsbestätigung, nach der Aktivierung von AUS2 oder AUS3,
und nach dem Anschalten der Netzspannung. Setzen Sie
Bit 00 des Steuerworts auf 0, und Bit 01, 02 und 10 auf 1,
um Start nicht möglich zurückzusetzen.
Bit 07, Keine Warnung/Warnung
Bit 07 = 0 bedeutet, dass keine Warnungen vorliegen.
Bit 07 = 1 bedeutet, dass eine Warnung vorliegt.
Bit 08, Drehzahl≠ Sollwert/Drehzahl = Sollwert
Wenn Bit 08 = 0, weicht die aktuelle Motordrehzahl vom
eingerichteten Drehzahlsollwert ab. Dies kann
beispielsweise der Fall sein, wenn die Drehzahl beim
Starten/Stoppen durch Rampe auf/ab geändert wird.
Wenn Bit 08 = 1, entspricht die aktuelle Motordrehzahl
dem eingerichteten Drehzahlsollwert.
Tabelle 4.7 Zustandswort-Bits
18 Danfoss A/S © 01/2016 Alle Rechte vorbehalten. MG37G203
 Loading...
Loading...