

Page 1

järjestelmäkäyttösovellus
(apfiff10)
nx-taajuusmuuttajat
Page 2

2 • vacon järjestelmäkäyttösovellus
Järjestelmäkäyttösovellus
HAKEMISTO
Document code: ud01123
Software code: APFIFF10V105
Date: 9.6.2006
Yleistä ................................................................................................................................4
1.
2. Ohjausliityntä .....................................................................................................................5
3. JÄRJESTELMÄKÄYTTÖSOVELLUS – PARAMETRILUETTELOT ............................................6
3.1 Valvonta-arvot (Ohjauspaneeli: valikko M1)..............................................................................................6
3.2 Perusparametrit (Ohjauspaneeli: Valikko M2 Æ G2.1)...........................................................................12
3.3 Tulosignaalit (Ohjauspaneeli: Valikko M2 Æ G2.2).................................................................................13
3.4 Lähtösignaalit (Ohjauspaneeli: Valikko M2 Æ G2.3)...............................................................................15
3.5 Ohjearvojen käsittely (Ohjauspaneeli: Valikko M2 Æ G2.4) ....................................................................17
3.6 Ramppitoiminnot (Ohjauspaneeli: Valikko M2 Æ G2.5) ..........................................................................18
3.7 Käytön ohjaus (Ohjauspaneeli: Valikko M2 Æ G2.6) ...............................................................................19
3.8 Moottorin ohjaus (Ohjauspaneeli: Valikko M2 Æ G2.7)...........................................................................22
3.9 Raja-arvojen asetukset (Ohjauspaneeli: Valikko M2 Æ G2.8) ................................................................24
3.10 Nopeussäätö (Ohjauspaneeli: Valikko M2 Æ G2.9).................................................................................25
3.11 Värinänvaimennus (Ohjauspaneeli: Valikko M2 Æ G2.10)......................................................................26
3.12 Jarrujen ja puhaltimen ohjaus (Ohjauspaneeli: Valikko M2 Æ G2.11) ...................................................26
3.13 Isäntä–seuraaja (Ohjauspaneeli: Valikko M2 Æ G2.12) ..........................................................................27
3.14 Suojaukset (Ohjauspaneeli: Valikko M2 Æ G2.13) ..................................................................................28
3.15 Vuon ohjearvon säätäminen (Ohjauspaneeli: Valikko M2 Æ G2.14).......................................................30
3.16 Käynnistysmomentti (Ohjauspaneeli: Valikko M2 Æ G2.15)...................................................................30
3.17 Monitorointi asetukset (Ohjauspaneeli: Valikko M2 Æ G2.16)................................................................30
3.18 Kenttäväyläasetukset (Ohjauspaneeli: Valikko M2 Æ G2.17).................................................................31
3.19 Paneeliohjaus (Ohjauspaneeli: Valikko M3 Æ R3.1)...............................................................................31
3.20 Laajennuskortit (Ohjauspaneeli: Valikko M7) .........................................................................................31
4. PARAMETRIEN KUVAUS ................................................................................................... 32
4.1 Perusparametrit......................................................................................................................................32
4.2 Tulosignaalit ............................................................................................................................................34
4.3 Lähtösignaalit..........................................................................................................................................41
4.4 Ohjearvojen asettelu................................................................................................................................42
4.5 Ramppitoiminnot.....................................................................................................................................45
4.6 Käytön ohjaus ..........................................................................................................................................46
4.7 Moottorin ohjaus......................................................................................................................................51
4.8 Kestomagneettimoottorin ohjaus ...........................................................................................................54
4.9 Raja-arvojen asetukset ...........................................................................................................................55
4.10 Nopeussäätö............................................................................................................................................57
4.11 Värinänvaimennus...................................................................................................................................61
4.12 Jarrun ja puhaltimen ohjaus ...................................................................................................................62
4.13 Isäntä–seuraaja .......................................................................................................................................63
4.14 Suojaukset ...............................................................................................................................................65
4.15 Vuon ohjearvot.........................................................................................................................................71
4.16 Käynnistysmomentti................................................................................................................................72
4.17 Valvonta-asetukset..................................................................................................................................73
4.18 Kenttäväyläasetukset ..............................................................................................................................74
5. KENTTÄVÄYLÄPROFIILI.................................................................................................... 75
5.1 Prosessivalvontasignaalit ohjausjärjestelmästä Vacon-taajuusmuuttajaan.........................................75
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 3

5.2 Prosessivalvontasignaalit Vacon-taajuusmuuttajasta ohjausjärjestelmään.........................................75
5.3 Pääsana-ohjaus.......................................................................................................................................76
5.4 Tila-pääsana............................................................................................................................................77
5.5 Ohjaus-lisäsana.......................................................................................................................................78
5.6 Vika-sana 1 ..............................................................................................................................................79
5.7 Vika-sana 2 ..............................................................................................................................................79
5.8 Hälytys-sana 1 .........................................................................................................................................80
5.9 Digitaalitulon Tila-sana 1 ........................................................................................................................81
5.10 Digitaalitulon Tila-sana 2 ........................................................................................................................81
6. YLEISKAAVIOT .................................................................................................................. 82
7. VIANMÄÄRITYS................................................................................................................. 87
Page 4

4 • vacon Yleistä
Järjestelmäkäyttösovellus
1. YLEISTÄ
Järjestelmäkäyttösovelluksen tyypillisiä käyttökohteita ovat koordinoidut taajuusmuuttajat, jotka on
varustettu ohjausjärjestelmällä. Järjestelmän ohjausrajapinnaksi suositellaan kenttäväyläkommunikaatiota, mutta myös I/O ohjaus, paneeli- ja PC-ohjaus ovat mahdollisia.
Järjestelmäkäyttösovelluksessa hyödynnetään NXP-moottorisäädön kehittyneimpiä toimintoja, ja se
soveltuu vaativiin käyttökohteisiin, kuten paperikoneisiin sekä metalliteollisuudessa ja prosessointilinjoilla käytettäviin laitteistoihin. Sitä voidaan käyttää myös kaikkien muiden perussovellusten
yhteydessä. Seuraavat käyttökohteet ovat yhteensopivia järjestelmäkäyttösovelluksen kanssa:
• sellu- ja paperikoneisiin liittyvät laitteet, kuten kuivattimet, puristinosat, viiraosat,
poperullaimet, rullaimet ja aukirullaimet
• metalliteollisuudessa käytettävät laitteet
• peruslaitteet, kuten pumput, puhaltimet, hissit, nosturit, kuljetushihnat jne.
Toiminnot:
• joustavat nopeus- ja momenttiohjeketjut
• kehittynyt laiteohjausprofiili kenttäväyläkommunikaatiota varten
• joustavat kenttäväyläasetukset
• mukautuva nopeussäätäjä
• hitausmassan kompensointi ja vakiotaajuisen resonanssin vaimennus
• SystemBus-tuki isäntä–seuraaja-sovelluksiin, joissa nopeus-/momenttiseuraajalaite
• nopea ja useita laitteita kattava valvonta (NCDrive-työkalu)
• ohjelmoitava U/f-käyrä ja vuokäyrä
• nopeus-/momenttivalitsinvaihtoehdot, ikkunaohjaus
• automaattinen identifiointiajo
• tuki kestomagneettimoottoreille ja monikäämimoottoreille
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 5
Ohjausliityntä vacon • 5
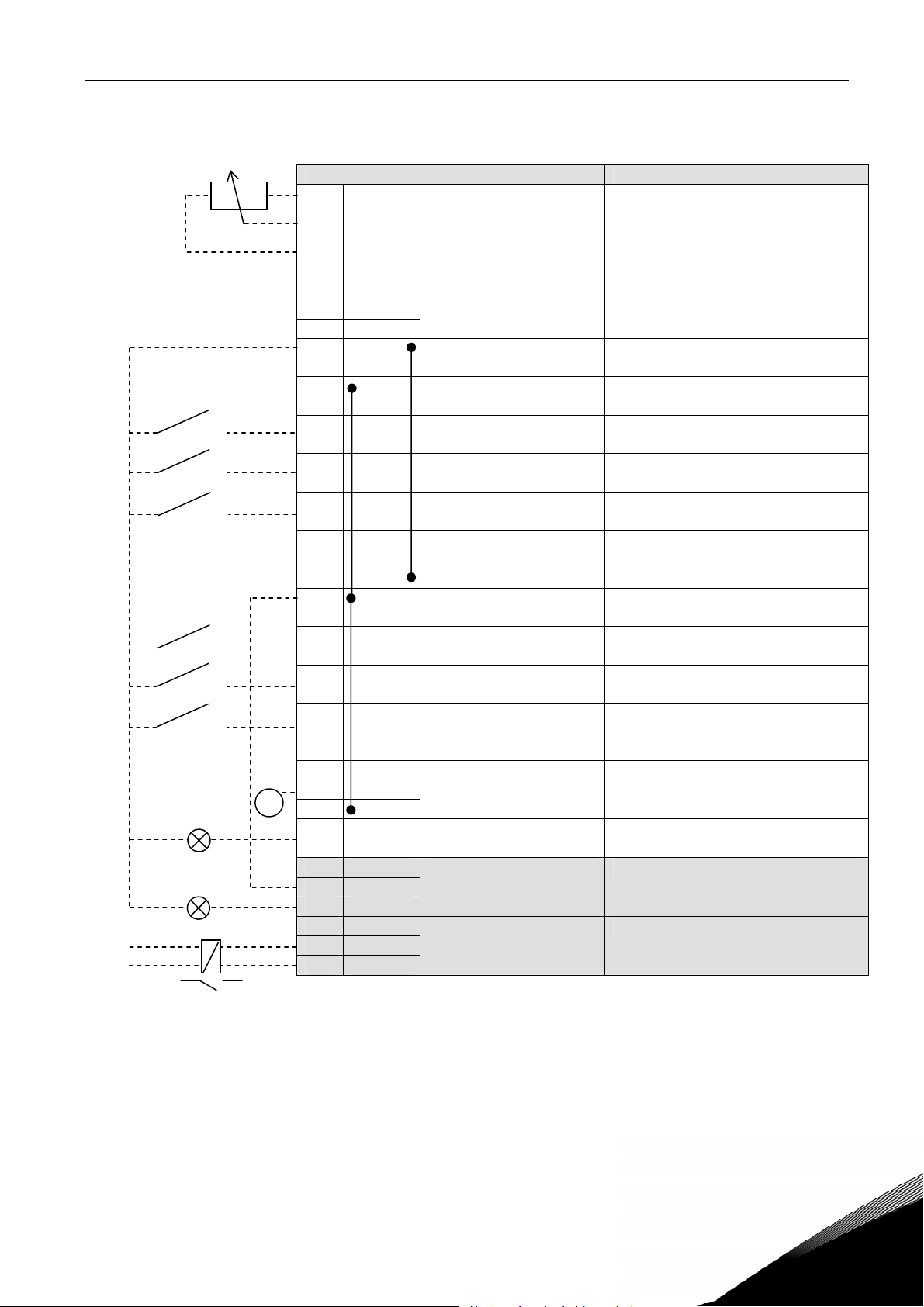
2. OHJAUSLIITYNTÄ
Liitin Signaali Kuvaus
1 +10 V Ohjearvojännite Jännite ohjearvopotentiometrille
tms.
2 AI1+ Analogiatulo,
jännitealue 0–10 V DC
3 AI1- I/O maa Jänniteohjearvon ja ohjaustulojen
4 AI2+
5 AI2-
6 +24 V Ohjausjännitelähtö Apujännite esim. kytkimille, maks.
7 GND I/O maa Jänniteohjearvon ja ohjaustulojen
8 DIN1 KÄY eteenpäin
9 DIN2 KÄY taaksepäin
10 DIN3 Ulkoinen vikasignaali
11 CMA Yhteinen DIN1–DIN3 Kytke GND tai +24 V
Analogiatulo, virta-alue
0–20 mA
(ohjelmoitavissa)
(ohjelmoitavissa)
(ohjelmoitavissa)
Jännitetulon taajuusohje
maa
Virtatulon taajuusohje
0,1 A
maa
Kosketin kiinni = käy eteenpäin
Kosketin kiinni = käy taaksepäin
Kosketin auki = ei vikaa
Kosketin kiinni = vika
12 +24 V Ohjausjännitelähtö Apujännite kytkimille (katso #6)
13 GND I/O maa Jänniteohjearvon ja ohjaustulojen
maa
14 DIN4 Käy valmis Kosketin kiinni = käy valmis
Kosketin auki = käynnin esto
220
Valmis
KÄY
15 DIN5 Pääkytkimen tunnistus
(ohjelmoitavissa)
16 DIN6 Hätäseis
17 CMB Yhteinen DIN4–DIN6 Kytke GND tai +24 V
18 AOA1+
mA
19 AOA1-
20 DOA1 Digitaalilähtö
21 RO1
22 RO1
23 RO1
24 RO2
25 RO2
26 RO2
Ohjelmoitavissa
U tai I
VALMIS
DC-välipiiri latautunut
Relelähtö 1
Relelähtö 2
(pulssi)
Kosketin kiinni = kytkin on kiinni
Kosketin auki = kytkin on auki
Kosketin auki = hätäseis aktiivinen
Kosketin kiinni = hätäseis ei
aktiivinen
Ohjelmoitavissa
Alue 0–20 mA/R
Ohjelmoitavissa
Avokollektori, I ≤ 50 mA, U ≤ 48 VDC
Ohjelmoitavissa
KÄY
Ohjelmoitavissa
, maks. 500 Ω
L
Taulukko 1. Järjestelmäkäyttösovelluksen ohjausliityntä tehdasasetuksin.
HUOM: Yllä oleva ohjausliityntä on esimerkki. Useimmat riviliittimet ovat ohjelmoitavissa.
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 6

6 • vacon JÄRJESTELMÄKÄYTTÖSOVELLUS – PARAMETRILUETTELOT
3. JÄRJESTELMÄKÄYTTÖSOVELLUS – PARAMETRILUETTELOT
Seuraavilla sivuilla on lueteltu valvontasignaalit ja parametrit. Parametrit on selitetty sivuilla 32–74.
Sarakkeiden selitykset:
Koodi = Sijaintia ilmaiseva symboli paneelilla, ilmaisee käyttäjälle parametrin numeron
Parametri = Parametrin nimi
Min = Parametrin minimiarvo
Max = Parametrin maksimiarvo
Yks. = Parametriarvon yksikkö; ilmoitettu, mikäli mahdollista
Askel = Pienimmän mahdollisen muutosarvon tarkkuus
Oletus = Tehtaalla asetettu arvo
ID = Parametrin ID-numero
3.1 Valvonta-arvot (Ohjauspaneeli: valikko M1)
Valvonta-arvot ovat parametrien ja signaalien varsinaisia arvoja sekä tiloja ja mittausarvoja. Lisätietoja on tuotteen käyttöohjeessa.
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 7
JÄRJESTELMÄKÄYTTÖSOVELLUS – PARAMETRILUETTELOT vacon • 7
3.1.1
M1>V1.1 Valvontasivu 1
Koodi Parametri Yks. ID Kuvaus
V1.1.1 Lähtötaajuus Hz 1 Lähtötaajuus taajuusmuuttajasta moottoriin
Moottorin nopeus kierrosta/min. Open Loop -ohjausmuodossa
V1.1.2 Nopeus rpm 2
V1.1.3 Taajuusohje Hz 25 Taajuusohje ramppigeneraattorille
V1.1.4 Virta A 3 Suodatettu moottorivirta
V1.1.5 Momentti % 4
V1.1.6 Teho % 5 Teho prosentteina moottorin nimellistehosta
V1.1.7 Moottorijännite V 6 Moottorin napajännite
V1.1.8 DC-jännite V 7 DC-välipiirin jännite
V1.1.9 Lämpötila °C 8 Jäähdytyselementin lämpötila
V1.1.10 DIN Tila-sana 1 15
V1.1.11 DIN Tila-sana 2 16
V1.1.12 Moott. lask. lämpöt. % 9
V1.1.13 PT100(1)Lämpötila °C 50
V1.1.14 PT100(2)Lämpötila °C 51
V1.1.15 PT100(3)Lämpötila 52
V1.1.16 Yksikön nim.jännite V 1117 Taajuusmuuttajayksikön nimellisjännitearvo
V1.1.17 Yksikön nim.virta A 1118
tämä on moottorin laskennallinen nopeus ja Closed Loop -ohjausmuodossa enkooderista mitatun nopeuden suodatettu arvo.
Suodatettu moottorin momentti prosentteina moottorin nimellismomentista
Digitaalitulojen tila biteittäin
Bit0 = DIN1
Bit1 = DIN2
Bit2 = DIN3
Bit3 = DIN4
Bit4 = DIN5
Bit5 = DIN6
Bit6 =TIB(A3) Termistoritila
Bit7 = DIN7
Bit8 = DIN8
Bit9 = DIN9
Bit10 = DIN10
Bit11 = DIN11
Bit12 = DIN12
Bit13 = DIN13
Bit14 = DIN14
Bit15 = DIN15
HUOM: Tilat Bit7–15 päivittyvät vain, jos DI-optiokortti on
asennettu.
Digitaalitulojen tila biteittäin. Laajennettu.
Bit0 = DIN16
Bit1 = DIN17
Bit2 = DIN18
Bit3 = DIN19
Bit4 = DIN20
Bit5 = DIN21
Bit6 = DIN22
Bit7 = DIN23
Bit8 = DIN24
Bit9 = DIN25
Bit10 = DIN26
Bit11 = DIN27
Bit12 = DIN28
Bit13 = DIN29
Bit14 = DIN30
Bit15 = ei käytössä.
HUOM: Tilat Bit0–15 päivittyvät vain, jos DI-optiokortti on
asennettu.
Moottorin laskennallinen lämpötila
100,0 % = moottorin nimellislämpötila
Analogiatuloon kytketyn PT100-tyyppisen lämpötila-anturin 1
lämpötila
Analogiatuloon kytketyn PT100-tyyppisen lämpötila-anturin 2
lämpötila
Taajuusmuuttajayksikön nimellisvirta-arvo. Arvo on sama kuin
yksikön IL-virta-arvo.
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 8
8 • vacon JÄRJESTELMÄKÄYTTÖSOVELLUS – PARAMETRILUETTELOT
V1.1.18 DC-nimellisjännite V 1120 Taajuusmuuttajayksikön DC-välipiirin nimellisjännite
Identifioinnin tila identifiointiajon jälkeen.
B0 = staattoriresistanssi ja U/f-käyrä
V1.1.19 ID-ajon tila 49
B1 = varattu
B2 = magnetointivirta
B3 = vuon linearisointikäyrä.
Taulukko 2. Valvontasivu 1
3.1.2
M1>V1.2 Valvontasivu 2
Koodi Parametri Yks. ID Kuvaus
V1.2.1 Mitattu nopeus rpm 1124 Enkooderista mitattu nopeus
V1.2.2
V1.2.3
V1.2.4 Nopeusohje 1 rpm 1126 Ohjauspaikan valinnan mukaan valittu nopeuden ohjearvo
V1.2.5 Nopeusohje 2 rpm 1127 Nopeuden ohjearvo nopeuden jakologiikan mukaan
V1.2.6 Nopeusohje 3 rpm 1128 Nopeuden ohjearvo ramppigeneraattorin tulossa
V1.2.7 Nop.rampin lähtö rpm 1129 Nopeusohje (ramppigeneraattorin ulostulo)
V1.2.8 Nopeusohje 4 rpm 1130
V1.2.9 Käytetty nopeusohje rpm 1131 Lopullinen nopeusohje nopeusaskellogiikan mukaan 1)
V1.2.10 Nopeusero rpm 1132 Nopeusero = nopeuden oloarvo – nopeuden ohjearvo 1)
V1.2.11 SPC OUT % 1134 Iq-ohje nopeussäätäjän lähdöstä 1)
V1.2.12 Nop.raj. pos. rpm 1135 Positiivinen nopeusraja ohjenopeudessa
V1.2.13 Nop.raj. neg. rpm 1136 Negatiivinen nopeusraja ohjenopeudessa
V1.2.14 TC nop.raj. pos. rpm 1137
V1.2.15 TC nop.raj. neg. rpm 1138
V1.2.16
V1.2.17
V1.2.18 I/O-mom.ohje % 1141
V1.2.19 Momenttiohje 1 % 1142
V1.2.20 Momenttiohje 2 % 1143 Skaalattu momenttiohje
V1.2.21 Momenttiohje 3 % 1144 Momenttiohje kuormanjaon jälkeen
V1.2.22 Käyt. momenttiohje % 1145
V1.2.23
V1.2.24 Joustonopeus RPM rpm 1147 Totetunut joustonopeus (rpm)
V1.2.25 Käyt. käynn.mom. A 1148
V1.2.26 Iq-virtarajoitus + % 1152
V1.2.27 Iq-virtarajoitus - % 1153
V1.2.28 Iq ohje % 1154 Lopullinen Iq-ohje. 100,0 % = moottorin nimellisvirta.
V1.2.29 Iq olo % 1155 Mitattu Iq. 100,0 % = moottorin nimellisvirta.
V1.2.30 Id ohje % 1156 Lopullinen Id-ohje. 100,0 % = moottorin nimellisvirta.
V1.2.31 Id olo % 1157 Mitattu vuo. 100,0 % = moottorin nimellisvirta.
V1.2.32 Vuo % 1158 Vuo prosentteina moottorin nimellisvuosta
V1.2.33 Roott.aikavakio ms 1159 Roottoriaikavakio millisekunteina
Suodattamaton
momentti
Suodattamaton
virta
Isäntälaitteen
momenttiohje
Kenttäväylän
mom.ohje
Kiihtyvyyden kompensoinnin lähtö
% 1125
% 1113 Moottorin suodattamaton virta ampeereina
% 1139
% 1140
% 1146
Taajuusmuuttajan laskema suodattamaton momentti. 100 % =
moottorin nimellismomentti.
Nopeuden ohjearvo nopeuskorjauksen jälkeen lisätään rampin
lähdön nopeuteen 1)
Positiivinen nopeusraja, kun momenttivalinta on 2/3/4/5 ja
moottorin ohjausmuoto = 3
Negatiivinen nopeusraja, kun momenttivalinta on 2/3/4/5 ja
moottorin ohjausmuoto = 3
Momenttiohje isäntälaitteesta, kun käytetään isäntä–seuraajaohjausta
-300,0 – +300,0 % moottorin nimellismomentista.
Momenttiohje kenttäväylästä
-300,0–300,0 % moottorin nimellismomentista.
Momenttiohje analogiatulosta.
-300,0–300,0 % moottorin nimellismomentista.
Momenttiohje momenttiohjevalitsimen mukaan (isäntä, kenttäväylä, analoginen I/P)
Lopullinen, rajoitettu momenttiohje nopeus-/ momenttisäätäjää varten
Iq-ohjeeeseen lisätty kiihdytyksen kompensointi. 100,0 % =
moottorin nimellisvirta. 1)
Käytössä oleva käynnistysmomentti. 100,0 % = moottorin
nimellismomentti.
Positiivisen momentin virtaraja
100,0 % = moottorin nimellisvirta.
Negatiivisen momentin virtaraja
100,0 % = moottorin nimellisvirta.
Bit0 On V1.2.34 Ohjaus-pääsana 1160
Vapaa pysäytys, 0 = Vapaasti pyörien
Bit1
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 9
JÄRJESTELMÄKÄYTTÖSOVELLUS – PARAMETRILUETTELOT vacon • 9
Koodi Parametri Yks. ID Kuvaus
Bit2 Hätäseis, 0 = Hätäseis
Bit3 Käy
Bit4 Rampin lähdön nollaus, 0 = Rampin lähtö nolla
Bit5 Rampin pito, 0 = Rampin pito
Bit6 Rampin tulon nollaus, 0 = Rampin tulo nolla
Bit7 Vian kuittaus 0 > 1
Bit8 Askellus 1
Bit9 Askellus 2
Bit10 Salli kenttäväyläohjaus
Bit11 Valvonta, 1 sek. kanttiaalto
Bit12 Vapaa
Bit13 Vapaa
Bit14 Vapaa
Bit15 Varattu
Bit0 Dataloggerin uudelleen aktivointi
Bit1 Dataloggerin triggaus -käsky
Bit2 Rampin ohitus
Bit3
Bit4 DC-jarrutus aktiivinen
Bit5 Vapaa
Bit6 Vapaa
V1.2.35 Ohjaus-lisäsana 1161
V1.2.36 Tila-pääsana 1162
V1.2.37 Tila-lisäsana
1163
Bit7 Mekaanisen jarrun ohjaus
Bit8 Vapaa
Bit9 Akselin asento ja kierrosten nollaus
Bit10 Vapaa
Bit11 Vapaa
Bit12 Salli askellus
Bit13 DO1-ohjaus
Bit14 DO2-ohjaus
Bit15
DO3-ohjaus
Bit0 Valmis
Bit1 Valmis käyntiin
Bit2 Käynnissä
Bit3 Vika
Bit4
Bit5 Hätäseis, 0 = aktiivinen
Bit6 Laite ei valmis käynnistykseen.
Bit7 Hälytys/varoitus
Bit8 Nopeus nopeusohjeessa
Bit9 Kenttäväyläohjaus aktiivinen.
Bit10 Nopeus on ylittänyt Parametrin P2.4.16 arvon.
Bit11 Vapaa
Bit12 Vapaa
Bit13 Vapaa
Bit14 Vapaa
Bit15
Valvonta Ohjaus-pääsanasta bit 11
Bit0 Datalogger trigannut
Bit1
Bit2 Virta-/momenttiraja aktiivinen
Bit3 Alijännite- tai ylijännitesäätäjä aktiivinen
Bit4 Suunta: 0 = eteen, 1 = taakse
Bit5 Riviliitinohjaus aktiivinen
Bit6 Moottorin puhallin PÄÄLLÄ
Bit7 Mekaaninen jarru vapautettu
Bit8 DC-välipiirin lataus OK (pulssit)
Bit9 DC- välipiirin lataus OK (jatkuva)
Bit10 Momenttiohjaus aktiivinen
Ohje riviliittimestä, kun ohjauspaikka =
kenttäväylä
Coast Stop. Pysäytys vapaasti pyörien
0 = aktiivinen
Ikkunaohjaus aktiivinen ja nopeus ikkunan
ulkopuolella
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 10
10 • vacon JÄRJESTELMÄKÄYTTÖSOVELLUS – PARAMETRILUETTELOT
Koodi Parametri Yks. ID Kuvaus
Bit11 Nollanopeus. 1 = nollanopeudessa.
Bit12 Vapaa
Bit13 Vapaa
Bit14 Vapaa
Bit15 Vapaa
Bit0 Ylivirta
Bit1 Ylijännite
Bit2 Alijännite
Bit3 Moottorin jumitila
Bit4 Maasulku
Bit5 Moottorin alikuormitus
Bit6 Yksikön ylilämpö
V1.2.38 Vika-sana 1 1172
V1.2.39 Vika-sana 2 1173
V1.2.40 Hälytys-sana 1 1174
V1.2.41 Maks.jarruramppi 1168
V1.2.42 Akselin asento 1169 Moottorin akselin asento, 0–360 astetta
V1.2.43 Akselin kierrokset 1170 Moottorin akselin kierrosmäärä
Bit7
Bit8 Tulovaihe puuttuu
Bit9 Jarruvastuksen ylilämpö
Bit10 Laite (muutettu/lisätty/poistettu/tuntematon)
Bit11 Paneelikommunikaatio
Bit12 Kenttäväyläkommunikaatio
Bit13 Isäntä–seuraaja-kommunikaatio
Bit14 Korttipaikkakommunikaatio
Bit15
Analogiatulon ohjevika
Bit0 Lähtövaihe puuttuu
Bit1 Latauskytkinvika
Bit2 Enkooderivika
Bit3
Bit4 Vapaa
Bit5 EEPROM-/Tarkistussummavika
Bit6 Ulkoinen vika
Bit7 Jarrukatkojavika
Bit8 Sisäinen kommunikaatiovika
Bit9 IGBT-lämpötila (ohjelmisto/laitteisto)
Bit10 Mekaanisen jarrun vika (ulkoinen)
Bit11 Jäähdytyspuhallin (ulkoinen)
Bit12 Sovellusvika
Bit13 Taajuusmuuttajan sisäinen vika
Bit14 Pääkytkin auki
Vapaa
Bit15
Bit0 Moottorin jumitila
Bit1 Moottorin ylilämpö
Bit2 Moottorin alikuorma
Bit3 Tulovaihe puuttuu
Bit4 Lähtövaihe puuttuu
Bit5
Bit6 Vapaa
Bit7 Vapaa
Bit8 Yksikön ylilämpö
Bit9 Analogiatulon ohjevaroitus
Bit10 Moottorin puhallin ei käynnissä
Bit11 Hätäseis aktiivinen
Bit12 Käynti estetty (kenttäväylä/IO)
Bit13 Askellus
Bit14 Moottorin jarru ei auki
Bit15
Paneelikommunikaatio
Laskennallinen ramppiaika vakiotehoisessa hätäseistoiminnossa
Moottorin ylikuumeneminen (laskennallinen/
mitattu/termistori)
Taajuusmuuttajan laitevika
(IGBT- tai saturaatiovika)
Vahinkokäynnistyksen esto / Käynnin esto
riviliittimestä
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 11

JÄRJESTELMÄKÄYTTÖSOVELLUS – PARAMETRILUETTELOT vacon • 11
Koodi Parametri Yks. ID Kuvaus
V1.2.43 Napaparien määrä 58 Moottorin napaparien määrä moottoritietojen perusteella
Taulukko 3. Valvontasivu 2
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 12
12 • vacon JÄRJESTELMÄKÄYTTÖSOVELLUS – PARAMETRILUETTELOT
3.2 Perusparametrit (Ohjauspaneeli: Valikko M2 Æ G2.1)
Koodi Parametri Min Max Yks. Askel Oletus ID Huomautuksia
Syöttöjännite voltteina.
P2.1.1 Syöttöjännite 0 1000 V 1 500 1201
P2.1.2 Moott. nim.jännite 180 690 V 1 400 110
P2.1.3
P2.1.4 Moott.nim.virta
P2.1.5 Moott.nim.nopeus 300
P2.1.6 Moott. cos fii 0,30 1,00 0,01 0,85 120
P2.1.7 Prosessinopeus 0,0 3 200,0 rpm 0,1 14 400 1203
P2.1.8 Magn.virta 0,0
P2.1.9 Kentänheik.piste 8,00 320,00 Hz 0,01 50,00 602
P2.1.10
P2.1.11 ID-ajo 0 2 1 0 631
P2.1.12 Moott. tyyppi 0 3 1 0 650
Moott.
nim.taajuus
Jännite kentän-
heik.pisteessä
30,00 320,00 Hz 0,01 50,00 111
Moottorin
min. virta
5,00 200,00 % 0,01 100,00 603
Moott.
maks.
Moott.
nim. nop.
Moott.
nim. virta
virta
max
A 0,1 113
rpm 1 1440 112
A 0,1 0,5 612
Jos ei tiedossa, parametrin oltava nolla.
Arvokilven mukainen
moottorin nimellisjännite
voltteina
Arvokilven mukainen
moottorin nimellistaajuus hertseinä
Moottorin nimellisvirta
ampeereina
Arvokilven mukainen
moottorin nim.nopeus
Arvokilven mukainen cos
fiin nimellisarvo
Prosessin nim.nopeus
rpm-skaalauksessa
Moottorin nimellismagn.
virta ampeereina
Taajuus, jossa kentänheikennyksen on alettava.
Moottorijännitteen raja
kentänheikennyksessä.
Moottorin automaattinen
identifiointiajo.
0=Ei mitään
1=Identifiointi ilman
moottorin käyntiä. Identifioi staattoriresistanssin
ja U/f-käyrän.
2=Identifiointi moottorin
käydessä. Identifioi staattoriresistanssin, U/f-käyrän, magnetointivirran ja
vuon linearisointikäyrän.
Moottorin tyyppi
0=Oikosulkumoottori
1=Monikääminen
oikosulkumoottori
2=Kestomagneettimoottori
3=Monikääminen kestomagneettimoottori
Taulukko 4. Perusparametrit G2.1
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 13
JÄRJESTELMÄKÄYTTÖSOVELLUS – PARAMETRILUETTELOT vacon • 13
3.3 Tulosignaalit (Ohjauspaneeli: Valikko M2 Æ G2.2)
3.3.1
Digitaalitulo (Ohjauspaneeli: valikko M2 Æ G2.2.1)
Koodi Parametri Min Max Yks. Askel Oletus ID Huomautuksia
Asenn.
P2.2.1.1 Käy eteenpäin 0
P2.2.1.2 Käy taaksepäin 0
P2.2.1.3 IO-ohjaus 0
P2.2.1.4 Vian kuittaus 0
P2.2.1.5 Jarru auki 0
P2.2.1.6 Jarr.vap.log. 0 1 1 0 1379
P2.2.1.7 Moott. puhalt. tila 0
P2.2.1.8 Tulokytk. tila 0
P2.2.1.9 Käy valmis 0
P2.2.1.10
P2.2.1.11
P2.2.1.12 Hätäseis 0
P2.2.1.13 Ulkoinen vika 0
Käy valmis
-logiikka
Vahinkokäynnis-
tyksen esto
0 1 1 0 1380
0 1 1 0 1420
DINien
max
määrä
Asenn.
DINien
max
määrä
Asenn.
DINien
max
määrä
Asenn.
DINien
max
määrä
Asenn.
DINien
max
määrä
Asenn.
DINien
max
määrä
Asenn.
DINien
max
määrä
Asenn.
DINien
max
määrä
Asenn.
DINien
max
määrä
Asenn.
DINien
max
määrä
1 0 1206
1 0 1207
1 0 1404
1 0 1208
1 0 1210
1 0 1211
1 5 1209
1 4 1212
1 6 1213
1 0 1214
Digitaalitulon valinta Käy
eteenpäin -komentoa varten,
kun ohjauspaikkana on riviliitinohjaus.
Digitaalitulon valinta Käy
taaksepäin -komentoa varten, kun ohjauspaikkana on
riviliitinohjaus.
Digitaalitulon valinta
riviliitinohjauksen
aktivoimiseksi.
Digitaalitulon valinta vikakuittausta varten. Pulssin
nouseva reuna kuittaa vian,
jos vika on poistunut.
Digitaalitulon valinta moottorin mekaanisen jarrun tilatiedolle
0=Jarru kiinni
1=Jarru auki
Vapautusviive P2.11.1
Vika/varoituskoodi F58
Jarru auki –tilan kääntö
0=Normaalisti auki
1=Normaalisti kiinni
Moottorin puhaltimen tilatiedon valinta.
Kiinteä 5 s viive takaisinkytkennässä. Viiveen jälkeen
vika/hälytys F56
Tulokytkimen tilatiedon
valinta
0=Auki
1=OK
Jos ei tunnistusta: vika F64
'Käynti sallittu' -tilatiedon
valinta.
0=Estetty
1=Sallittu
Jos estetty: varoitus A62
Käy valmis –tilan kääntö
0=Normaalisti auki
1=Normaalisti kiinni
Käytetään katkaistaessa
kortin ohjausjännite
0=Estä
1=Salli
Jos estetty: varoitus A26
Hätäseis –tilatiedon valinta
0 = Hätäseis aktiivinen ”A63”
1 = OK
Digitaalitulon valinta Ulkoiselle vialle/hälytykselle F51
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 14
14 • vacon JÄRJESTELMÄKÄYTTÖSOVELLUS – PARAMETRILUETTELOT
Ulkoinen vika –tilan kääntö
P2.2.1.14 Ulk. vikalogiikka 0 0 1 0 1381
Asenn.
P2.2.1.15
Moott. 1 tai 2
valinta
0
DINien
max
määrä
1 0 1215
0=Normaalisti auki
1=Normaalisti kiinni
Valitse moottori 1:lle tai 2:lle
määritelty parametriryhmä
valitulla digitaalitulolla.
0=Moottori 1
1=Moottori 2
Taulukko 5. Digitaalitulon parametrit, G2.2.1
3.3.2
Analogiatulo (Ohjauspaneeli: valikko M2 Æ G2.2.2)
Koodi Parametri Min Max Yks. Askel Oletus ID Huomautuksia
Analogiatulon valinta
P2.2.2.1 I/O-nop.ohj. val. 0 5 1 0 1219
P2.2.2.2
P2.2.2.3
P2.2.2.4 PT100 (1) valinta 0 2 1 0 1222
P2.2.2.6 PT100 (2) valinta 0 2 1 0 1224
P2.2.2.7 AI1-ohje min -30 000 30 000 1 0 1226
P2.2.2.8 AI1-ohje max -30 000 30 000 1 1440 1225
P2.2.2.9 AI1-minimi 0 1 1 0 1227
P2.2.2.10
P2.2.2.11 AI2-ohje min -30 000 30 000 1 0 1230 Sama kuin P2.2.2.7
P2.2.2.12 AI2-ohje max -30 000 30 000 1 1 000 1229 Sama kuin P2.2.2.8
P2.2.2.13 AI2-minimi 0 1 1 0 1231 Sama kuin P2.2.2.9
P2.2.2.14
I/O-mom.ohj.
val.
PT100(1) AI-
valinta
AI1-
suodatusaika
AI2-
suodatusaika
0 3 1 0 1220
0 2 1 0 1221
0,01 10,00 s 0,01 1 1228
0,01 10,00 s 0,01 1 1232 Sama kuin P2.2.2.10
nopeusohjetta varten, kun
ohjauspaikka = 1
(riviliitinohjaus)
Analogiatulon valinta momenttiohjetta varten, kun
ohjauspaikka = 1 (paikallinen riviliitinohjaus).
Analogiatulon 1 valinta
PT100-lämpötila-anturia
1 varten.
PT100-elementtien
määrä sarjassa
0=1*PT100
1=2*PT100
2=3*PT100
PT100-elementtien
määrä sarjassa
0=1*PT100
1=2*PT100
2=3*PT100
Analogiatulolle 1 valitun
signaalin minimiarvo.
Tämä vastaa arvoa +0 V /
0 / 4 mA.
Analogiatulolle 1 valitun
signaalin maksimiarvo.
Tämä vastaa arvoa +10 V /
0 / 20 mA.
Minimijännite tai -virta
analogiatulossa 1.
0=0 V / 0 mA
1=4 mA
Analogiatulon 1 suodatusaika sekunteina.
Taulukko 6. Analogiatulon parametrit, G2.2.2
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 15
JÄRJESTELMÄKÄYTTÖSOVELLUS – PARAMETRILUETTELOT vacon • 15
3.4 Lähtösignaalit (Ohjauspaneeli: Valikko M2 Æ G2.3)
3.4.1
Digitaalilähtö (Ohjauspaneeli: valikko M2 Æ G2.3.1)
Koodi Parametri Min Max Yks. Askel Oletus ID Huomautuksia
Digitaalilähtö valitaan jonkin tilasanan ID-numerolla
(xxxx) ja sanan BitNro:lla
P2.3.1.1 DO1 (ID.BitNro) 0,00 2000.15 0,01 1163.00 1216
P2.3.1.2 DO2 (ID.BitNro) 0,00 2000.15 0,01 1163.00 1217
P2.3.1.3 DO3 (ID.BitNro) 0,00 2000.15 0,01 1163.00 1218
P2.3.1.4 DO4 (ID.BitNro) 0,00 2000.15 0,01 0000.00 1385
P2.3.1.5 DO5 (ID.BitNro) 0,00 2000.15 0,01 0000.00 1386
P2.3.1.6 DO6 (ID.BitNro) 0,00 2000.15 0,01 0000.00 1390
P2.3.1.7 DO7 (ID.BitNro) 0,00 2000.15 0,01 0000.00 1391
P2.3.1.8 DO8 (ID.BitNro) 0,00 2000.15 0,01 0000.00 1395
P2.3.1.9 DO9 (ID.BitNro) 0,00 2000.15 0,01 0000.00 1396
P2.3.1.10 DO10 (ID.BitNro) 0,00 2000.15 0,01 0000.00 1423
P2.3.1.11 DO11 (ID.BitNro) 0,00 2000.15 0,01 0000.00 1427
P2.3.1.12 DO12 (ID.BitNro) 0,00 2000.15 0,01 0000.00 1428
P2.3.1.13 DO13 (ID.BitNro) 0,00 2000.15 0,01 0000.00 1429
(yy)
Esim: Oletusarvo =1162.00
Päätilasanan Bit 0 =valmis
(Ready)
Sama kuin P2.3.1.1
Oletusarvo =1162.02
Käynnissä (Run)
Sama kuin P2.3.1.1
Oletusarvo =1163.08
DC:välipiirin lataus OK
(pulssi)
Digitaalilähdön valinta
(lisäkortilla)
Sama kuin P2.3.1.1
Digitaalilähdön valinta
(lisäkortilla)
Sama kuin P2.3.1.1
Digitaalilähdön valinta
(lisäkortilla)
Sama kuin P2.3.1.1
Digitaalilähdön valinta
(lisäkortilla)
Sama kuin P2.3.1.1
Digitaalilähdön valinta
(lisäkortilla)
Sama kuin P2.3.1.1
Digitaalilähdön valinta
(lisäkortilla)
Sama kuin P2.3.1.1
Digitaalilähdön valinta
(lisäkortilla)
Sama kuin P2.3.1.1
Digitaalilähdön valinta
(lisäkortilla)
Sama kuin P2.3.1.1
Digitaalilähdön valinta
(lisäkortilla)
Sama kuin P2.3.1.1
Digitaalilähdön valinta
(lisäkortilla)
Sama kuin P2.3.1.1
Taulukko 7. Digitaalilähdön parametrit, G2.3.1
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 16
16 • vacon JÄRJESTELMÄKÄYTTÖSOVELLUS – PARAMETRILUETTELOT
3.4.2
Analogialähtö (Ohjauspaneeli: valikko M2 Æ G2.3.2)
Koodi Parametri Min Max Yks. Askel Oletus ID Huomautuksia
Aseta analogialähtöön 1
P2.3.2.1 AO1 signaali-ID 0 2000 1 0 1233
P2.3.2.2 AO1 Offset 0 1 1 0 1234
P2.3.2.3 AO1-suodatus 0,02 10,00 S 0,01 10,00 1235
P2.3.2.4 AO1-maksimiarvo -30 000 30 000 1 1 500 1236
P2.3.2.5 AO1-minimiarvo -30 000 30 000 1 0 1237
yhdistettävän signaalin IDnumero.
Minimijännite tai -virta
analogialähdössä.
0=0 V / 0 mA
1=2 V / 4 mA
Analogialähdön 1
suodatusaika
Analogialähtöä 1 varten
valitun signaalin maksimiarvo. Tämä vastaa arvoa
+10 V / 20 mA.
Analogialähtöä 1 varten
valitun signaalin minimiarvo. Tämä vastaa arvoa
0 V / 0 mA tai 2 V / 4 mA
riippuen analogialähdön 1
ohjearvosta.
Taulukko 8. Analogialähdön parametrit, G2.3.2
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 17
JÄRJESTELMÄKÄYTTÖSOVELLUS – PARAMETRILUETTELOT vacon • 17
3.5 Ohjearvojen käsittely (Ohjauspaneeli: Valikko M2 Æ G2.4)
Koodi Parametri Min Max Yks. Askel Oletus ID Huomautuksia
P2.4.1
P2.4.2 Vakio-ohje 1
P2.4.3 Vakio-ohje 2
P2.4.4 Kriitt. alanopeus 0
P2.4.5 Kriitt. ylänopeus 0
P2.4.6 Nopeuden jako -300,00 300,00 % 0,01 100,00 1241
P2.4.7
P2.4.8
P2.4.9 Mom.ohjeen suod. 0 5 000 ms 1 0 1244
P2.4.10
P2.4.11
P2.4.12
P2.4.13 Kuorman jako 0,0 400,0 % 0,1 100,0 1248
P2.4.14
P2.4.15 Vuo-ohje 10,0 150,0 % 0,1 100,0 1250
P2.4.16 Nop.rajan yli 0
P2.4.17 Nopeusaskel -2 000 2 000 1 0 1252
P2.4.18 Momenttiaskel -300,0 300,0 % 0,1 0,0 1253
Nopeusohjeen
suodatus
Kenttäväyläohjeen
skaalaus
Mom.ohjelähteen
Mom.ohjeen
hystereesi
Mom.ohjeen
kuollut alue
Mom.ohjeen
skaalaus
Mom.ohj.
ramppiaika
val.
0 5 000 ms 1 0 324
Nopeus
_min
Nopeus
_min
10 30 000 1 20 000 1242
0 3 1 0 641
-300,0 300,0 % 0,1 0,0 1245
-300,0 300,0 % 0,1 0,0 1246
0 1 1 0 1247
0,0 30 000 ms 1 0 1249
Nopeus_
max
Nopeus_
max
Max
nopeus
Max
nopeus
Nopeus_
max
rpm 1 0 1239
rpm 1 0 1240
rpm 1 0 509
rpm 1 0 510
rpm 1 0 1251
Nopeusohjeen suodatusaika
millisekunteina
Vakionopeusohje 1. Käytetään yleensä eteenpäin suuntautuvassa askelluksessa
Vakionopeusohje 2. Käytetään yleensä taaksep. suuntautuvassa askelluksessa
Kriittisen nopeusalueen
alaraja
Kriittisen nopeusalueen
yläraja
Nopeuden jako prosentteina
nopeusohjeesta
Tämä vastaa parametria
G2.1.7 Prosessinopeus.
Momenttiohjeen lähde.
0=Ei käytössä
1=Isäntä
2=Kenttäväylä
3=I/O P2.2.2.2
Momenttiohjeen suodatusaika millisekunteina
Momenttiohjeen hystereesi
prosentteina. 100 % ~
moottorin nimellismomentti
Kuollut alue prosentteina;
momenttiohje katsotaan tällä
alueella nollaksi. 100,0 % ~
moottorin nimellismomentti.
Momenttiohjeketjun ja kaikkien momenttiin liittyvien
signaalien skaala.
0=1000 vastaa moottorin
nimellismomenttia.
1=10000 vastaa moottorin
nimellismomenttia.
Momenttiohjeen kuorman
jako prosentteina. Esim. 50 %
tarkoittaa, että momenttiohjeketju käyttää 50 % annetusta momenttiohjeesta.
Momentin ohjearvon vaihtoa
koskeva ramppiaika millisekunteina (0–100%)
Vuo-ohje prosentteina. 100 %
= moottorin nimellisvuo
Nopeusraja, jonka yläpuolella Tila-sanan bit10 on TOSI
Käyttää samaa skaalausta
kuin kenttäväyläohje.
P2.4.7 KV-ohjeen skaalaus
20000=100%nopeusaskel
200=1% nopeusaskel.
Momenttiaskel prosentteina
moott. nimellismomentista
Taulukko 9. Ohjearvon säätöparametrit, G2.4
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 18
18 • vacon JÄRJESTELMÄKÄYTTÖSOVELLUS – PARAMETRILUETTELOT
3.6 Ramppitoiminnot (Ohjauspaneeli: Valikko M2 Æ G2.5)
Koodi Parametri Min Max Yks. Askel Oletus ID Huomautuksia
P2.5.1 Kiihdytysaika 1 0,0 3 000,0 s 0,1 10,0 103 Kiihdytysaika sekunteina
P2.5.2 Hidastuvuusaika 1 0,0 3 000,0 s 0,1 10,0 104
P2.5.3
P2.5.4 Hätäseis-ramppi 0,0 3 000,0 s 0,1 10,0 1256
P2.5.5 Hätäseis-viive 0,00 320,00 s 0,01 0 1254
P2.5.6
P2.5.7 Vak.nop. hid.aika 0,0 3 000,0 s 0,1 5.0 1258
P2.5.8
S-rampin
hid./kiihd.
Vak.nop.
kiihd.aika
S-rampin
vakionop.
0 100 % 1 0 500
0,0 3 000,0 s 0,1 5.0 1257
0 100 % 1 0 1259
Hidastuvuusaika
sekunteina
Kiihdytys-/hidastusrampin S-käyrien pyöristyssuhde.
0 = Lineaariset rampit
Hidastuvuusaika
hätäseis-toiminnossa
Hätäseis-rampin aktivoitumisen viive hätäseistoiminnon aktivoinnin
jälkeen
Vakionopeuden 1 ja 2
kiihdytysaika
Vakionopeuden 1 ja 2
hidastuvuusaika
Vakionopeusrampin Skäyrien pyöristyssuhde.
0 = Lineaariset rampit
Taulukko 10. Ramppitoimintojen parametrit, G2.5
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 19
JÄRJESTELMÄKÄYTTÖSOVELLUS – PARAMETRILUETTELOT vacon • 19
3.7 Käytön ohjaus (Ohjauspaneeli: Valikko M2 Æ G2.6)
Koodi Parametri Min Max Yks. Askel Oletus ID Huomautuksia
Paikka, josta taajuusmuuttajan toimintaa
P2.6.1 Ohjauspaikka 0 2 1 1 2 125
P2.6.2 Jarrukatkoja 0 3 1 0 504
1,15 *
P2.6.3 Jarrukatk.taso 0 1500 V 1
P2.6.4
P2.6.7
P2.6.8 PWM-synkr. 0 1 1 0 1399 PWM-synkronoinnin valinta
Jarruvastuksen
kuormitusraja
Jälleen-
käynnistysviive
0,0 300,0 % 0,1 5.0 1268
0,000 60,000 s 0,001 1424
nim. DC-
jännite
1267
ohjataan.
0=Kenttäväylä
1=Riviliitin
2=Paneeli/PC-työkalu
Jarrukatkojan toimintataso
voltteina
Generaattoripuolen momenttiraja jarrukatkojan
ylikuumenemisen välttämiseksi jatkuvan jarrutuksen aikana. Toiminto on
aktiivinen, kun jarrukatkoja
on valittuna, hätäseistoiminto ei ole aktiivinen ja
taajuusmuuttaja ei hidasta.
Taajuusmuuttajan uudelleenkäynnistysviive vapaan
pysäytyksen jälkeen
Taulukko 11. Käytön ohjausparametrit, G2.6
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 20
20 • vacon JÄRJESTELMÄKÄYTTÖSOVELLUS – PARAMETRILUETTELOT
3.7.1
Käytön ohjaus / Open Loop -ohjaus (Ohjauspaneeli: valikko M2 Æ G2.6.5)
Koodi Parametri Min Max Yks. Askel Oletus ID Huomautuksia
U/f-suhteen valinta
P2.6.5.1
P2.6.5.2 U/f-nollapiste V 0,00 105,00 % 0,01 0,00 606
P2.6.5.3 U/f-keskipiste V 0,00 105,00 % 0,01 100,00 605
P2.6.5.4 U/f-keskip.taaj. 0,00 320,00 Hz 0,01 50,00 604
P2.6.5.5 U/f-optimointi 0 1 1 0 109
P2.6.5.6
P2.6.5.7
P2.6.5.8
P2.6.5.9 Vuojarru 0 1 1 0 520
P2.6.5.10 Vuojarr.virta 0
P2.6.5.11 Mom.stab. Kp 0 1 000 1 1412
P2.6.5.12
P2.6.5.13
P2.6.5.14 Vuostab. Kp 0 32 000 1 1410 Vuostabilaattorin vahvistus
P2.6.5.15 Vuostab. suod. 0 32 000 1 1411
P2.6.5.16
P2.6.5.17
P2.6.5.18 Mit. jänn.pud. 0 65535 1 0 662
U/f-suhteen
valinta
DC-
jarrutusnopeus
DC-
jarrutusvirta
DC-
jarrutusaika
Mom.stab.
vaim. aikavakio
Mom.stab. Kp
FWP
Vuonmuodos-
tusaika
Vuonmuodos-
tusjännite
0 3 1 0 108
0
0
0 20 000 ms 1 0 508
0 1 000 1 1413
0 1 000 1 1414
0,000 60,000 s 0,001 0.200 660 Aika moott. magnetointiin
0,00 120,00 % 0,01 2.01 661
Moottorin
nim.nopeus
Moottorin
virta, max
Moottorin
virta, max
rpm 1 0
A
A 0 519 Vuojarrutusvirta
0=Lineaarinen
1=Neliöllinen
2=Ohjelmoitava
Määrittää moottorin
jänniteen nollanopeudella
Määrittää moottorin keskipisteen jännitteen. Vain
ohjelmoitavalla suhteella
Ohjelmoitava U/f-käyrän
keskipisteen taajus.
U/f-käyrän optimointi
0= Ei optimointia
1= Momentin maximointi.
Tämän nopeuden
alapuolella DC-jarrutus on
515
aktiivinen.
DC-jarrutusvirta
507
Vuojarrutuksen ohjaus
0=Ei käytössä
1=Käytössä
Momenttistabilaattorin
vahvistus
Momenttistabilaattorin
vaimennuksen aikavakio
Momenttistabilaattorin
vahvistus kentänheikennyspisteessä
Vuostabilaattorin suodattimen aikavakio
Magnetointijännite prosentteina moottorin
nimellisjännitteestä
Mitattu jännitteen pudotus
staattoriresistanssissa 2
vaiheen välillä käytettäessä moottoria nimellisvirrassa. Tämä arvioidaan
identifiointiajon aikana.
Taulukko 12. Käytönohjausparametrit / Open Loop -ohjausparametrit, G2.6.5
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 21
JÄRJESTELMÄKÄYTTÖSOVELLUS – PARAMETRILUETTELOT vacon • 21
3.7.2
Käytön ohjaus / alijännite-/ylijänniteohjaus, stab. (Ohjauspaneeli: valikko M2 Æ G2.6.6)
Koodi Parametri Min Max Yks. Askel Oletus ID Huomautuksia
Alijännitesäätäjä
0=Päällä
P2.6.6.1 Alijänn.säät. 0 1 1 0 608
P2.6.6.2
P2.6.6.3 Alijänn. Kp 0 32 767 1 1415
P2.6.6.4 Alijänn. Ti 0 32 767 1 1416
P2.6.6.5 Ylijänn.säät. 0 2 1 0 607
P2.6.6.6 Ylijänn.ohje val. 0 2 1 1 1262
P2.6.6.7 Ylijännite Kp 0 32767 1 1468
P2.6.6.8 Ylijänn. Kp, lisä 0 32767 1 1425
P2.6.6.9 Ylijännite Ti 0 32767 1 1409
P2.6.6.10 Jänn.stab. Kp 0 1000 1 1417
P2.6.6.11 Jänn.stab. TC 0 1000 1 1418
Alijänn.ohjeen
val.
0 1 1 1 1260
1=Pois
Käytettävissä OpenLoop- ja
ClosedLoop-ohjauksessa
Alijänniteohjeen valinta
alijännitesäätäjää varten
1=Alijänniteohje = 0,8 *
arvioitu DC-nimellisjännite.
Alijännitesäätäjän P-osan
vahvistus
Alijännitesäätäjän I-osan
vahvistus
Ylijännitesäätäjä
0=Pois
1=Päällä ilman ramppia
2=Päällä rampin kanssa
Käytettävissä Open Loop- ja
Closed Loop -ohjauksessa.
Ylijännitesäätäjän P-osan
vahvistus
Ylijännitesäätäjän P-osan
lisävahvistus kentänheikennyspisteeseen asti
Ylijännitesäätäjän I-osan
vahvistus
Jännitestabilaattorin
vahvistus
Jännitestabilaattorin
aikavakio
Taulukko 13. Käytön ohjaus / alijännite-/ylijänniteohjaus, stab.parametrit, G2.6.6
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 22
22 • vacon JÄRJESTELMÄKÄYTTÖSOVELLUS – PARAMETRILUETTELOT
3.8 Moottorin ohjaus (Ohjauspaneeli: Valikko M2 Æ G2.7)
Koodi Parametri Min Max Yks. Askel Oletus ID Huomautuksia
0=Käynnistyy nolla-
P2.7.1 Käynnistystoiminto 0 1 1 0 505
P2.7.2 Pysäytystoiminto 0 1 1 0 506
P2.7.3 Hätäseis-valitsin 0 3 1 1 1276
P2.7.4 Moott. ohjausmuoto 0 5 1 0 600
P2.7.5 Mom. valinta 1 5 1 1 1278
P2.7.6 Virtasäät. Kp 1 10 000 1 4 000 617
P2.7.7 Virtasäät. Ti 0,1 100,0 ms 0,1 1,5 1400
Kytkentä-
P2.7.8 Kytkentätaajuus 1,0
P2.7.9 Dyn. vaim. Kp 0,00 100,00 % 0,01 0 1406
P2.7.10 Dyn. vaim. aikavak. 0 32 000 ms 1 0 1407
P2.7.11 DC-magnetointivirta 0,0
P2.7.12 DC-magnetointiaika 0 10 000 ms 1 0 628
P2.7.13 0-nop.aika käynn. 0 32 000 ms 1 100 615
taajuus
max
Moott.
nim.virta
kHz 0,1 601 Kytkentätaajuus
A 627
nopeudesta
1=Vauhtikäynnistys
0=Vapaa pysäytys
1=Hidastaen
Pysäytystoiminto
hätäseis-tilanteessa
0= Vapaasti pyörien
1=Rrampilla (P2.5.4)
2=Momenttiraja (P2.8.14)
3=Tehoraja (P2.8.13)
0=OpenLoop-taaj.ohjaus
1=OpenLoop-nop.ohjaus
2=OpenLoop-mom.ohjaus
3=ClosedLoop -nopeus-/
momenttiohjaus P2.7.5:n
mukaan
4=Advanced Open Loop
-nopeusohjaus
5=Advanced Open Loop
-momenttiohjaus
1=Nopeusohjaus
2=Momenttiohjaus
3=Momenttiohjeen ja
nopeussäätäjän lähdön
minimi
4=Momenttiohjeen ja
nopeussäätäjän lähdön
maksimi
5=Ikkunaohjaus
Virtasäätäjän P-vahvistus
(0–10 000)
Virtasäätäjän integrointiaikavakio (0–1000) = 0–
100,0 ms
Dynaamisen vaimennuksen vahvistus, kun parametri 2.7.5 Momentin
valinta on suurempi kuin
1. 1,00 tarkoittaa nimellisnopeuden eron nimellismomenttia.
Kaistanpäästösuodattimen aikavakio dynaamista vaimennusta varten. 0
tarkoittaa taajuusvirheeseen verrannollista staattista vaimennusta.
Nollanopeusohjeen aika
käynnistyksessä millisekunteina (0–32000)
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 23
JÄRJESTELMÄKÄYTTÖSOVELLUS – PARAMETRILUETTELOT vacon • 23
Koodi Parametri Min Max Yks. Askel Oletus ID Huomautuksia
Nollanopeusohjeen aika
P2.7.14 0-nop.aika pys. 0 32 000 ms 1 100 616
P2.7.15 Pysäytystilan vuo 0 150,0 % 1 100,0 1401
P2.7.16
Vuon
sammutusviive
-1 32000 s 1 0 1402
hidastuspysäytyksessä
millisekunteina (0–32000)
Moottorivuon % pysäytyksen jälkeen
Moottorivuon pitoaika
pysäytyksen jälkeen.
Jos arvoksi asetetaan -1,
vuo pysyy aina päällä.
Taulukko 14. Moottorin ohjausparametrit, G2.7
3.8.1
Kestomagneettimoottorin ohjaus (Ohjauspaneeli: valikko M2 Æ G2.7.17)
Koodi Parametri Min Max Yks. Askel Oletus ID Huomautuksia
P2.7.17.1 Vuosäät. Kp 0,00 320,00 % 0,01 5.00 651
P2.7.17.2 Vuosäät. Ti 0,0 100,0 ms 0,1 5.0 652
P2.7.17.3 RS-identifiointi 0 1 1 0 654
P2.7.17.4 Mod.indeksi 0 200 % 1 100 655
P2.7.17.5
Enkooderikulman
nolla-asento
0 65535 1 0 649
Vuovirtasäätäjän vahvistus prosentteina
Vuovirtasäätäjän
integrointiaikavakio
millisekunteina
Staattoriresistanssin
identifiointi jokaisen
käynnistyksen aikana.
0=Estetty
1=Sallittu
Closed Loop -toiminnon
modulaatioindeksi
prosentteina
Identifioitu absoluuttianturin nollakulma.
Taulukko 15. Kestomagneettimoottorin ohjausparametrit, G2.7.17
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 24
24 • vacon JÄRJESTELMÄKÄYTTÖSOVELLUS – PARAMETRILUETTELOT
3.9 Raja-arvojen asetukset (Ohjauspaneeli: Valikko M2 Æ G2.8)
Koodi Parametri Min Max Yks. Askel Oletus ID Huomautuksia
P2.8.1 0-nopeusraja 0
P2.8.2 0-nop. valvonta 0 1 1 1 1284
P2.8.3 Maks.nopeus -10000 10000 rpm 1 1440 1285
P2.8.4 Min.nopeus -10000 10000 rpm 1 0 1286
Moottorin
virta, min
0,0 300,0 % 0,1 300,0 1382
0 30 000 kgm
P2.8.5 Virtaraja
P2.8.6 Moott. mom.raja 0,0 300,0 % 0,1 300,0 1287
P2.8.7 Gen. mom.raja 0,0 300,0 % 0,1 300,0 1288
P2.8.8
P2.8.9 Moott. tehoraja 0,0 300,0 % 0,1 300,0 1289 Moottoripuolen tehoraja
P2.8.10 Gen. tehoraja 0,0 300,0 % 0,1 300,0 1290 Generaattorin tehoraja
P2.8.11 Kippimomentti 0,0 1 000,0 % 0,1 250,0 1291
P2.8.12
P2.8.13 Maks.jarrut.teho 0,000 30,000 kW 0,001 0,000 1293
P2.8.14 Maks.jarrut.mom. 1 30 000 Nm 1 1 1294
Nopeussäätäjän
lähdön maks.raja
Järjestelmän
hitausmassa
Moottorin
nim.nopeus
Moottorin
virta, max
rpm 1 15 1283
A 0,1 107 Kokonaisvirran maks.raja
2
1 0 1292
Nopeus, jonka alapuolella
Tila-lisäsanan Bit11 = 1
Nollanopeuden valvonnan
perustana on 0 = Nopeuden ohjearvo, 1 = Nopeuden oloarvo.
Moottoripuolen
momenttiraja
Generaattoripuolen
momenttiraja
Nopeussäätäjän lähdön
absoluuttinen maksimiraja Closed Loop -ohjauksessa prosentteina moottorin nimellismomentista
Moottorin kippimomenttiraja
Järjestelmän
hitausmassa (kgm
Maksimijarrutustehon
raja vakiotehoisessa
hätäseis-toiminnossa
Moottorin maksimijarrutusmomentti vakiotehoisessa hätäseistoiminnossa
2
)
Taulukko 16. Raja-arvojen asetusparametrit, G2.8
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 25
JÄRJESTELMÄKÄYTTÖSOVELLUS – PARAMETRILUETTELOT vacon • 25
3.10 Nopeussäätö (Ohjauspaneeli: Valikko M2 Æ G2.9)
Koodi Parametri Min Max
P2.9.1 SPC Kp 1 1000 1 30 613
P2.9.2 SPC Ti 0 32000 ms 1 300 614
P2.9.3 Kp minimi 0 100 % 1 100 1295
P2.9.4 Min.piste 0 100,0 % 0,1 0,0 1296
P2.9.5 Min.suodatus 0 1000 ms 1 0 1297
P2.9.6 SPC Kp FWP 1 200 % 1 100 1298
P2.9.7 SPC Kp N0 0 100 % 1 100 1299
P2.9.8 N0-piste
P2.9.9 N1-piste
P2.9.10
P2.9.11 Kiihd. komp. suod. 0 1000 ms 1 0 1303
P2.9.12 Kuormitusjousto 0,00 100,00 % 0,01 0,00 620
P2.9.13 Joustoaika 0,00 327,67 s 0,01 0,00 656
P2.9.14 Ikkuna RPM pos. 0
P2.9.15 Ikkuna RPM neg. 0
P2.9.16 Ikkuna hyst. pos. 0
P2.9.17 Ikkuna hyst. neg. 0
P2.9.18
P2.9.19
P2.9.20
P2.9.21
Mek. kiihd. komp.
aikavakio
Nim.jättämän
viritys
Lämp. moott.
nim.jättämä
Nopeuseron
suodatusaika
Mitatun nopeuden
suodatusaika
Nop_
min
Nopeus
_min
0,00 300,00 s
0 500 % 1 100 619
0 500 % 1 100 1405
0 1 000 ms 1 0 1311
0,0 250,0 ms 0,1 0,0 1308
Nopeus_
max
Nopeus_
max
Moottorin
nim.nopeus
Moottorin
nim.nopeus
Ikkuna lev.
positiivinen
Ikkuna lev.
negatiivinen
Yks.
Askel Oletus ID Huomautuksia
rpm 1 0 1300
rpm 1 0 1301
0,01 0,00 1302
rpm 1 0 1304
rpm 1 0 1305
rpm 1 0 1306
rpm 1 0 1307
Nopeussäätäjän P-vahvistus
(0–1000)
Nopeussäätäjän integrointiaikavakio 0-32000 ms
Nopeussäätäjän vahvistuksen suhteell. vahvistus (%),
jos momentti on alle G2.9:n
Mukautuvan nopeussäätäjän
vahvistuksen momenttiraja
(1 000 = nimellisarvo)
Nopeussäätäjän vahvistuksen suodatusaikavakio
Nopeussäätäjän suhteellinen
vahvistus kentänheikennysalueella.
Suhteellinen vahvistus (%)
nopeussäätäjän vahvistuksen
N0-pisteen alapuolella.
Oletus = 100.
Nopeuden N0 alapuolella
nopeussäätäjän vahvistus on
SPC Kp N0
Nopeuden N1 yläpuolella
nopeussäätäjän vahvistus on
SPC Kp
Kiihdytyksen kompensoinnin
mekaaninen aikavakio
sekunteina (0–300 s)
Kiihdytyksen kompensoinnin
suodatusaikavakio millisekunteina
Kuormitusjousto % nimellisnopeudesta nim.momentilla
Kuormitusjoustoaika millisekunteina. Arvo 0 tarkoittaa
staatt. tai jatkuvaa joustoa.
Positiivisen suunnan
ikkunaleveys (rpm)
Negatiivisen suunnan
ikkunaleveys (rpm)
Hystereesi-ikkunaohjaus,
positiivinen suunta
Hystereesi-ikkunaohjaus,
negatiivinen suunta
Moottorin nimellisjättämän
viritys 0–500 %
Moottorin suhteellisen
nimellisjättämän säätö
nimellislämpötilassa
Enkooderista mitatun
nopeuden suodatusaika
Taulukko 17. Nopeussäätöparametrit, G2,9
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 26
26 • vacon JÄRJESTELMÄKÄYTTÖSOVELLUS – PARAMETRILUETTELOT
3.11 Värinänvaimennus (Ohjauspaneeli: Valikko M2 Æ G2.10)
Koodi Parametri Min Max Yks. Askel Oletus ID Huomautuksia
0=Ei käytössä
1=KaistanpäästöKaistanpä
Resonanssi-
P2.10.1
P2.10.2
P2.10.3
P2.10.4 Vaiheensiirto 0 360 º 1 0 1315
vaimennuksen
valinta
Resonanssi-
taajuus
Resonanssi-
vaimennuksen
lisäys
0 2 1 0 1310
0,0 450,0 Hz 0,1 0,0 1313
0,0 100,0 % 0,1 0,0 1314
ästö
2=Kaistanesto
+Kaistanesto +
kaistanpäästökaistanpääst
ö
Resonanssivaimentimen
luonnollinen taajuus
0=Ei käytössä
1=0–450,0 Hz
Resonanssivaimennuksen
lisäys kaistanestotaajuudessa 0–100,0%
Resonanssivaimentimen
vaiheensiirto kaistanestotaajuudessa 0–360º
Taulukko 18. Värinänvaimentimen parametrit, G2.10
3.12 Jarrujen ja puhaltimen ohjaus (Ohjauspaneeli: Valikko M2 Æ G2.11)
Koodi Parametri Min Max Yks. Askel Oletus ID Huomautuksia
Mekaanisen jarrun vapautuksen tunnistamiseen
kuluva viive
Hätäpysäytyksessä sulkeutuvien mekaanisten
jarrujen valinta
0=Jarrut sulkeutuvat 0nopeudessa (par. 3.8.1)
1=Jarrut sulkeutuvat
välittömästi hätäseiskomennon jälkeen
Taajuusmuuttajan vioittuessa sulkeutuvien mekaanisten jarrujen valinta
0=Jarrut sulkeutuvat 0nopeudessa (par. 3.8.1)
1=Jarrut sulkeutuvat välittömästi vian ilmaantuessa
Moottorin puhaltimen
pysäytysviive sekunteina
P2.11.1
P2.11.2
P2.11.3
P2.11.4
Mek. jarrun
vapautusviive
Mekaaninen
jarrutus
hätäpysäytyksessä
Mekaaninen
jarrutus
vikatilanteessa
Moott. puh.
pys.viive
0 1000 ms 1 100 352
0 1 1 0 1318
0 1 1 0 1319
0,00 300,00 s 0,01 20,00 1320
Taulukko 19. Jarrujen ja puhaltimen ohjausparametrit, G2.11
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 27
JÄRJESTELMÄKÄYTTÖSOVELLUS – PARAMETRILUETTELOT vacon • 27
3.13 Isäntä–seuraaja (Ohjauspaneeli: Valikko M2 Æ G2.12)
Koodi Parametri Min Max Yks. Askel Oletus ID Huomautuksia
0=Ei mitään
1=Isäntä
2=Seuraaja (nopeus-/
P2.12.1 I/S-tila 0 2 1 0 1324
P2.12.2
P2.12.3
Seuraajan
nop.ohje
Seuraajan
käynn.viive
0 2 1 0 1327
0,00 327,67 s 0,10 0,00 1398
momenttiseuraajatila
voidaan valita käyttämällä
parametria P2.7.5
Momentin valinta.)
Laitteen nopeusohjeen
lähde, jos par. 3.1.4.1 = 2
Seuraaja.
0=Laitteen oma ohje
1=Isäntälaitteen nopeusohje ennen ramppia
2=Isäntälaitteen nopeusohje rampin jälkeen (tässä
tapauksessa seuraajalaitteen ramppi ohitetaan)
Viive, joka kuluu monikäämisen seuraajalaitteen
käynnistykseen isäntälaitteen käynnistämisen
jälkeen
Taulukko 20. Isäntä–seuraaja-parametrit, G2.12
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 28
28 • vacon JÄRJESTELMÄKÄYTTÖSOVELLUS – PARAMETRILUETTELOT
3.14 Suojaukset (Ohjauspaneeli: Valikko M2 Æ G2.13)
Koodi Parametri Min Max Yks. Askel Oletus ID Huomautuksia
Toiminto, jos analogiatulo
on < 4mA / 2V
P2.13.1 AI < 4 mA 0 2 1 0 700
P2.13.2
P2.13.3 Ulkoinen vika 0 2 1 2 701
P2.13.4 Tulovaihevalvonta 0 1 1 0 730
P2.13.5
P2.13.6 Maasulku 0 1 1 0 703
P2.13.7 Maasulkuvirta 0,0 100,0 % 0,1 50,0 1333
P2.13.8 Maasulkuviive 0 5000 ms 1 800 1334
P2.13.9 Moottorin jumitila 0 2 1 1 709
P2.13.10 Jumivirtaraja 0,0
P2.13.11 Jumitaajuusraja 0,00
P2.13.12 Jumiaikaraja 1,00 120,00 s 0,01 15.00 711
P2.13.13 Termistori 0 2 1 0 732
P2.13.14 Enkooderivika 0 2 1 0 1353
P2.13.15 Mek. jarruvika 1 2 1 2 1316
Paneelikommuni-
kaatio
Lähtövaihe-
valvonta
1 2 1 1 1329
0 2 1 0 702
Moottorin
nim.virta
Moottorin
nim.taaj.
A 0,1 10,0 710
Hz 0,01 25.00 712
0=Ei käytössä
1=Varoitus
2=Vika
Käytössä vain
paneeliohjauksessa
1=Varoitus
2=Vika
Ulkoisen vian vaste
0=Ei käytössä
1=Varoitus
2=Vika
Toiminto, jos tulovaihe
häviää
0=Ei käytössä
1=Vika
Toiminto, jos moottorin
vaihe häviää
0=Ei käytössä
1=Varoitus
2=Vika
Toiminto maasulun
ilmetessä
0=Ei käytössä
1=Vika
Maavirran maksimitaso
prosentteina yksikön
virrasta
Maasulun viive
millisekunteina
Toiminto moottorin
jumitilassa
0=Ei käytössä
1=Varoitus
2=Vika
Moottorin jumisuojan
virtaraja
Jumisuojan maksimitaajuus, f[Hz] = Jumitaajuus/Taajuusskaala
Jumisuojan maksimitoiminta-aika sekunteina
Toiminto termistorin
vioittuessa
0=Ei käytössä
1=Varoitus
2=Vika
Enkooderivika
0=Ei käytössä
1=Varoitus
2=Vika
Mek. jarruvian vaste. Tämä
vika on mahdollinen vain,
jos mekaanisen jarrun
digitaalitulo on valittuna.
1=Varoitus
2=Vika
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 29

JÄRJESTELMÄKÄYTTÖSOVELLUS – PARAMETRILUETTELOT vacon • 29
P2.13.16
P2.13.17
P2.13.18
P2.13.19 PT100-hälytysraja -30 200
P2.13.20 PT100-vikaraja
P2.13.21
P2.13.22
P2.13.23 Lämpöaikavakio 1 200 min. 1 45 707
P2.13.24
P2.13.25
P2.13.26 Alikuormitussuoja 0 2 1 0 713
P2.13.27 0-nopeuskuorma 0,0 300,0 % 0,1 0,0 714
P2.13.28
P2.13.29
Seur.laitteen
time-out
Kenttäväylän
valvontaviive
Käyt. PT100-
tulojen määrä
Moott. lämpötila-
kompensointi
Moott. laskenn.
lämpösuoja
0-nopeus-
jäähdytys
Moottorin
toimintajakso
Nimellisnopeuden
kuorma
Nim.alikuorm.
nopeus
0,10 5,00 s 0,01 0,10 1352
0 2,00 s 0,01 0,05 1354
0 3 1 0 739
1 110 1347
°C
PT100hälytys
raja
0 1 1 0 1426
0 2 1 0 704
0,0 100,0 % 0,1 40,0 706
0 300 % 1 100 708
0,0 300,0 % 0,1 0,0 1341
0
200
Moottorin
maks.nim.
nopeus
1 120 1348
°C
rpm 1 1440 1342
Isäntä–seuraaja-kommunikaatiovian viiveaika
Profibus-valvontaviive. Jos
valintana on 0, valvontatoiminto on estetty
Valitse OPTB8-kortin käyttämien PT100-kanavien
määrä (1-3).
Valitse PT100-anturia varten lämpötilaraja, jonka
ylittyessä PT100-hälytys
generoituu.
Valitse PT100-anturia varten lämpötilaraja, jonka
ylittyessä PT100-lämpötilavika generoituu.
Moottorin lämpötilakompensointi.
0=Estetty
1=TS1-lämpötilasta
Vaste moottorin lämpösuojan aktivoituessa
0=Ei käytössä
1=Varoitus
2=Vika
Moottorin lämpöaikavakio
minuutteina (1–200)
Moottorin jäähdytyskyky
prosentteina nollanopeudessa
Moottorin toimintajakso
prosentteina
Alikuormitusvian vaste
0=Ei käytössä
1=Varoitus
2=Vika
Alikuormitussuojan minimi
momenttiraja nollanopeudella.
Alikuormitussuojan
minimimomenttiraja
nimellisnopeudella
Alikuormitussuojan
nimellisnopeus
Taulukko 21. Suojausparametrit, G2.13
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 30
30 • vacon JÄRJESTELMÄKÄYTTÖSOVELLUS – PARAMETRILUETTELOT
3.15 Vuon ohjearvon säätäminen (Ohjauspaneeli: Valikko M2 Æ G2.14)
Koodi Parametri Min Max Yks. Askel Oletus ID Huomautuksia
P2.14.1 Vuokäyrä 10 % 0,0 200,0 % 0,1 10,0 1355 Vuon linearisointipiste 1
P2.14.2 Vuokäyrä 20 % 0,0 200,0 % 0,1 20,0 1356 Vuon linearisointipiste 2
P2.14.3 Vuokäyrä 30 % 0,0 200,0 % 0,1 30,0 1357 Vuon linearisointipiste 3
P2.14.4 Vuokäyrä 40 % 0,0 200,0 % 0,1 40,0 1358 Vuon linearisointipiste 4
P2.14.5 Vuokäyrä 50 % 0,0 200,0 % 0,1 50,0 1359 Vuon linearisointipiste 5
P2.14.6 Vuokäyrä 60 % 0,0 200,0 % 0,1 60,0 1360 Vuon linearisointipiste 6
P2.14.7 Vuokäyrä 70 % 0,0 200,0 % 0,1 70,0 1361 Vuon linearisointipiste 7
P2.14.8 Vuokäyrä 80 % 0,0 200,0 % 0,1 80,0 1362 Vuon linearisointipiste 8
P2.14.9 Vuokäyrä 90 % 0,0 200,0 % 0,1 90,0 1363 Vuon linearisointipiste 9
P2.14.10 Vuokäyrä 100 % 0,0 200,0 % 0,1 100,0 1364 Vuon linearisointipiste 10
P2.14.11 Vuokäyrä 110 % 0,0 200,0 % 0,1 110,0 1365 Vuon linearisointipiste 11
P2.14.12 Vuokäyrä 120 % 0,0 200,0 % 0,1 120,0 1366 Vuon linearisointipiste 12
P2.14.13 Vuokäyrä 130 % 0,0 200,0 % 0,1 130,0 1367 Vuon linearisointipiste 13
P2.14.14 Vuokäyrä 140 % 0,0 200,0 % 0,1 140,0 1368 Vuon linearisointipiste 14
P2.14.15 Vuokäyrä 150 % 0,0 200,0 % 0,1 150,0 1369 Vuon linearisointipiste 15
Taulukko 22. Vuon ohjearvon säätöparametrit, G2.14
3.16 Käynnistysmomentti (Ohjauspaneeli: Valikko M2 Æ G2.15)
Koodi Parametri Min Max Yks. Askel Oletus ID Huomautuksia
0=Ei käytössä
1=Momenttimuisti
P2.15.1 Käynn.mom. val. 0 3 1 0 621
P2.15.2 Käynn.mom.aika 0 10000 ms 1 0 1371
P2.15.3
P2.15.4
P2.15.5
P2.15.6 Mom.muistiohje -300,0 300,0 % 0,1 0,0 1375
Käynn.mom.
eteen
Käynn.mom.
taakse
Mom.muistin
lähde
-300,0 300,0 % 0,1 0,0 633
-300,0 300,0 % 0,1 0,0 634
0 2 1 1 1374
2=Momenttiohje
3=Käynnistysmomentti
ETEEN/TAAKSE
Käynnistysmomentin
maksimiaika millisekunteina (0–10000)
Käynnistysmomentin ohjearvo eteenpäin -300,0–
300,0 % moottorin nimellismomentista
Käynnistysmomentin
ohjearvo taaksepäin 300,0–300,0 %
Momenttimuistin lähde.
Seuraavassa käynnistyksessä käytetään samaa
käynnistysmomentin
ohjearvoa.
Momenttimuistin kiinteä
ohje
Taulukko 23. Käynnistysmomenttiparametrit, G2.15
3.17 Monitorointi asetukset (Ohjauspaneeli: Valikko M2 Æ G2.16)
Koodi Parametri Min Max Yks. Askel Oletus ID Huomautuksia
V1.1.2 Nopeus-valvontasignaalin suodatus millisekunteina
V1.1.4 Virta-valvontasignaalin suodatus millisekunteina
V1.1.5 Momentti-valvontasignaalin suodatus millisekunteina
P2.16.1
P2.16.2
P2.16.3
Nopeuden-
valvonnan suod.
Virranvalvonnan
suod.
Momentin-
valvonnan suod.
20 2000 ms 1 20 1376
20 2000 ms 1 20 1377
20 2000 ms 1 20 1378
Taulukko 24.Digitaali-analogiaohjauksen parametrit, PG.16
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 31
JÄRJESTELMÄKÄYTTÖSOVELLUS – PARAMETRILUETTELOT vacon • 31
3.18 Kenttäväyläasetukset (Ohjauspaneeli: Valikko M2 Æ G2.17)
Koodi Parametri Min Max Yks. Askel Oletus ID Huomautuksia
P2.17.1 PD IN1 ID 0 65535 1 0 876
P2.17.2 PD IN2 ID 0 65535 1 0 877
P2.17.3 PD IN3 ID 0 65535 1 0 878
P2.17.4 PD IN4 ID 0 65535 1 0 879
P2.17.5 PD IN5 ID 0 65535 1 0 880
P2.17.6 PD IN6 ID 0 65535 1 0 881
P2.17.7 PD IN7 ID 0 65535 1 0 882
P2.17.8 PD IN8 ID 0 65535 1 0 883
P2.17.9 PD OUT1 ID 0 65535 1 1105 852
P2.17.10 PD OUT2 ID 0 65535 1 1163 853
P2.17.11 PD OUT3 ID 0 65535 1 1172 854
P2.17.12 PD OUT4 ID 0 65535 1 1173 855
P2.17.13 PD OUT5 ID 0 65535 1 1171 856
P2.17.14 PD OUT6 ID 0 65535 1 1174 857
P2.17.15 PD OUT7 ID 0 65535 1 1170 858
P2.17.16 PD OUT8 ID 0 65535 1 1169 859
Taulukko 25. Kenttäväyläasetusparametrit, G2.17
3.19 Paneeliohjaus (Ohjauspaneeli: Valikko M3 Æ R3.1)
Alla on eritelty paneelista annettava ohjearvo, kun ohjauspaikaksi on valittu paneeli. Katso tuotteen
käyttöohjeesta kohta Paneeliohjausvalikko.
Koodi Parametri Min Max Yks. Askel Oletus ID Huomautuksia
Paikallinen nopeusohje
(rpm), kun ohjauspaikkana
on paneeli
R2.1 Paneeliohjearvo
P2.8.4
Min.nop.
P2.8.3
Maks.nop.
rpm 1
Taulukko 26. Paneeliohjauksen parametrit, M3
3.20 Laajennuskortit (Ohjauspaneeli: Valikko M7)
Valikossa M7 näytetään ohjauskorttiin liitetyt laajennus- ja lisäkortit sekä muuta kortteihin liittyvää
tietoa. Lisätietoja on tuotteen käyttöohjeessa.
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 32

32 • vacon PARAMETRIEN KUVAUS
4. PARAMETRIEN KUVAUS
4.1 Perusparametrit
2.1.1 Syöttöjännite
Syöttöverkon jännitteen nimellisarvo voltteina.
2.1.2 Moottorin nimellisjännite
Moottorin jännitteen nimellisarvo voltteina moottorin arvokilven mukaan.
2.1.3 Moottorin nimellistaajuus
Moottorin taajuuden nimellisarvo hertseinä moottorin arvokilven mukaan.
2.1.4 Moottorin nimellisvirta
Moottorin virran nimellisarvo ampeereina moottorin arvokilven mukaan.
2.1.5 Moottorin nimellisnopeus
Moottorin nopeuden nimellisarvo kierroksina minuutissa moottorin arvokilven mukaan.
2.1.6 Moottorin cos fii
Cos fiin nimellisarvo moottorin arvokilven mukaan.
2.1.7 Prosessin nopeus
Tätä parametria käytetään nopeusohjeen/oloarvon skaalaukseen prosessinopeuden
osalta. Tämä nopeusarvo vastaa kenttäväylästä määritettyä nopeusohjetta koskevan
parametrin P2.4.7 Kenttäväyläohjeen skaalausarvoa. Jos esimerkiksi P2.4.5
Kenttäväyläohjeen skaalaus = 20 000 ja P2.1.7 Prosessinopeus = 1 600, taajuusmuuttaja
käy nopeusohjeella 1 600 rpm, kun kenttäväylästä määritetty nopeusohje on 20 000.
2.1.8 Magnetointivirta
Määrittää moottorin nimellisen magnetointivirran, joka vastaa 100-prosenttista vuota.
Parametrin arvo (ellei tiedossa) saadaan selville suorittamalla moottorilla seuraava
testi.
Huomaa, että testin ajaksi moottori on kytkettävä irti vaihdelaatikosta ja kuormituksesta.
• Aseta moottorin kaikki arvokilven mukaiset parametrit P2.1.2–P2.1.6.
• Aseta P2.7.4 Moottorin ohjausmuoto = 0 (Open Loop -taajuusohjaus)
• Käytä moottoria ilman akselikuormaa noin 0,66-kertaisella nimellistaajuudella
(33Hz, kun moottorin taajuus on 50Hz).
• Odota 10 sekuntia ja kirjaa V1.1.5 Moottorin virta -signaalin arvo.
• Aseta tämä lukema parametrin P2.1.8 arvoksi.
2.1.9 Kentänheikennyspiste
Kentänheikennyspiste on lähtötaajuus, jossa moottorin jännite saavuttaa parametrin
P2.1.10
samaksi kuin moottorin taajuus.
Jännite kentänheikennyspisteessä
arvon. Yleensä tämä parametri asetetaan
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 33

PARAMETRIEN KUVAUS vacon • 33
2.1.10 Jännite kentänheikennyspisteessä
Parametrin 2.1.9 määrittämä moottorin jännitteen prosenttiarvo kentänheikennyspisteessä. Kentänheikennyspistetaajuuden yläpuolella jännite pysyy tämän parametrin
määrittämässä arvossa. Yleensä tämä parametri asetetaan 100,00 prosenttiin moottorin
nimellisjännitteestä.
2.1.11 Identifiointiajo
Tämä parametri määrittää moottorin automaattisen identifiointiajon eri tilat. Aseta parametri ja käynnistä identifiointiajo 20 sekunnin kuluessa antamalla Käy-käsky. Identifioinnin tulos näkyy signaalissa V1.1.19
rin arvo palautuu nollaan. Virheen tapahtuessa laite antaa vian 57
0 Ei mitään
1 Identifiointi ilman moottorin pyöritystä
Tällä valinnalla identifioidaan moottorin staattoriresistanssi ja U/f-käyrän parametrit.
Identifioinnin päätteeksi parametrin P2.6.5.1 U/f-suhteen valinta-arvoksi asettuu 2
(ohjelmoitavissa). Tätä identifiointitilaa käytetään, kun moottoria ei voida kytkeä irti
vaihdelaatikosta ja kuormituksesta. Identifioinnin avulla optimoidaan suorituskyky
Open Loop –ohjausmuodossa, esim. P2.7.4 = 0/1/2.
Onnistuneen identifioinnin jälkeen ID-ajon tila – B0 asetetaan ykköseksi.
ID-ajon tila
. Kun identifiointi on suoritettu, paramet-
ID-ajon vika
.
2 Identifiointi moottorin käydessä
Identifiointi suoritetaan moottori käydessä noin 33 Hz:n taajuudella. On suositeltavaa
kytkeä moottori irti vaihdelaatikosta ja kuormituksesta. Moottorin Open Loop
-ohjausparametrien lisäksi identifioidaan magnetointivirta (P2.1.8) ja vuon linearisointikäyrä (P2.14.1–P2.14.15).
Onnistuneen identifioinnin jälkeen asetetaan
B3 asetetaan ykköseksi.
3 Enkooderin identifiointi
Moottorin on voitava pyöriä identifioinnin aikana. Toimintoa käytetään ensisijaisesti
kestomagneettimoottorin akselin nolla-asennon identifioimiseksi käytettäessä
absoluuttienkooderia.
4 Magnetointivirran laskenta
Identifiointi laskee moottorin magnetointivirran annetuista moottoriparametreistä
(P2.1.2–P2.1.6).
HUOM: Moottoriin ei johdeta jännitettä eikä Käy-käskyä tarvitse antaa.
2.1.12 Moottorin tyyppi
Tämä parametri määrittää taajuusmuuttajaan kytketyn moottorin tyypin. Vacon
NXP-taajuusmuuttajiin voidaan kytkeä seuraavia moottorityyppejä:
0 Tavallinen oikosulkumoottori
ID-ajon tila
-muuttujan arvot B0, B2 ja
1 Monikääminen oikosulkumoottori
Moottorit, joissa on useita galvaanisesti eristettyjä vaihekäämejä.
2 Kestomagneettioikosulkumoottori
3 Monikääminen kestomagneettioikosulkumoottori.
HUOM: Pyydä tarvittaessa Vaconin tekniseltä tuelta ohjeita vaihtoehtojen 1–3
käyttöön.
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 34

34 • vacon PARAMETRIEN KUVAUS
4.2 Tulosignaalit
4.2.1
Digitaalitulot
2.2.1.1 Käy eteenpäin
Valitse digitaalitulo moottorin käynnistämiselle, kun P2.6.1 Ohjauspaikka = 1 (I/O).
Taajuusmuuttaja käynnistyy, kun digitaalitulo on ylhäällä (1) ja pysähtyy, kun se on
alhaalla (0).
0 Ei valittu
1 DIN1
2 DIN2
.
.
n = DINn, missä n on asennettujen DINien maksimimäärä.
2.2.1.2 Käy taaksepäin
Valitse digitaalitulo moottorin suunnan vaihtamiselle, kun P2.6.1 Ohjauspaikka = 1 (I/O).
Moottori käy positiivisella nopeusohjeella (esim. eteen), kun valittu digitaalitulo on
alhaalla (0) ja negatiivisella ohjeella (esim. taakse), kun digitaalitulo on ylhäällä (1).
0 Ei valittu
1 DIN1
2 DIN2
.
.
n = DINn, missä n on asennettujen DINien maksimimäärä.
2.2.1.3 Riviliitinohjaus
Valitse ehto voidaksesi ohjata taajuusmuuttajaa riviliittimistä, esim. P2.6.1 Ohjauspaikka
= 1 (I/O).
0 Ei valittu
1 DIN1
2 DIN2
.
.
n = DINn, missä n on asennettujen DINien maksimimäärä.
2.2.1.4 Vian kuittaus
Valitse digitaalitulo laitevian kuittausta varten. Digitaalitulon nouseva reuna kuittaa vian,
jos vian syy on hävinnyt.
0 Ei valittu
1 DIN1
2 DIN2
.
.
n = DINn, missä n on asennettujen DINien maksimimäärä.
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 35

PARAMETRIEN KUVAUS vacon • 35
2.2.1.5 Jarru auki takaisinkytkentä
Taajuusmuuttaja voi käyttää tätä parametria valitakseen digitaalitulon, jonka kautta se
tunnistaa moottorin mekaanisen jarrun (jos käytössä) tilan. Taajuusmuuttaja voi ohjata
jarrua relelähdön (ohjelmoitavissa) ja ulkoisen laitteen avulla. Jarrun tila välittyy edellä
mainitun parametrin määrittämään digitaalituloon. Kun moottorille annetaan Käy-käsky,
taajuusmuuttaja avaa ensin jarrun digitaalilähdön kautta ja pitää ohjeen nollassa. Kun
Jarru auki -tunnistus tulee, taajuusmuuttaja antaa ohjeen. Kun moottorille annettu Käykäsky poistuu, taajuusmuuttaja sulkee jarrut nollanopeudessa. Hätäseis-toiminnossa ja
vikatilanteessa jarrut sulkeutuvat parametrien P2.11.2 ja P2.11.3 mukaisesti. Jos tunnistusta ei saada digitaalituloon parametrin P2.11.1 määrittämässä ajassa Käy-käskyn jälkeen, taajuusmuuttaja pysähtyy vian/hälytyksen F57
Mekaaninen jarru
vuoksi. Toiminto
määritellään parametrilla P2.13.15.
0 Ei valittu
1 DIN1
2 DIN2
.
.
n = DINn, missä n on asennettujen DINien maksimimäärä.
2.2.1.6 Jarru auki -logiikka
Tämän parametrin avulla Jarru auki -tunnistus voidaan määrittää Normaalisti auki- tai
Normaalisti kiinni -tyyppiseksi.
0 Normaalisti auki
1 Normaalisti kiinni
Normaalisti auki
+V DIN
Huom: Sulkeutuu kun jarru avataan tai vapautetaan
Normaalisti kiinni
+V DIN
Huom: Avautuu kun jarru avataa n tai vapautetaan
ud10 36k1.fh8
Kuva 1.
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 36

36 • vacon PARAMETRIEN KUVAUS
2.2.1.7 Moottorin puhaltimen takaisinkytkentä
Valitse digitaalitulo, jolla moottorin ulkoisen puhaltimen (jos käytössä) tila tunnistetaan.
Taajuusmuuttaja voi käynnistää/pysäyttää moottorin puhaltimen käyttämällä yhtä ohjelmoitavissa olevista relelähdöistä. Puhaltimen tila (PÄÄLLÄ/POIS) välittyy digitaalituloon.
Kun Käy-käsky annetaan, moottorin puhallin käynnistyy, ja jos tunnistusta ei saada 5
sekunnin kuluessa Käy-käskystä, taajuusmuuttaja antaa varoituksen 56
puhallin
pysäytysviive
0 Ei valittu
1 DIN1
2 DIN2
.
.
n = DINn, missä n on asennettujen DINien maksimimäärä.
. Kun Käy-käsky poistetaan, puhallin pysähtyy P2.11.4
-parametrin määrittämän viiveen jälkeen.
Moottorin puhaltimen
Moottorin
2.2.1.8 Tulokytkimen takaisinkytkentä
Valitse digitaalitulo, johon tulee tieto tulokytkimen tilasta. Tulokytkin on tavallisesti
kytkinvaroke tai pääkytkin, jonka kautta virta syötetään taajuusmuuttajaan. Jos tulokytkimen tunnistusta ei tule, seuraa vika F64
0 Ei valittu
1 DIN1
2 DIN2
.
.
n = DINn, missä n on asennettujen DINien maksimimäärä.
Tulokytkin auki
.
2.2.1.9 Käy valmis
Valitse digitaalitulo aktivoidaksesi Käy valmis -tulon laitteeseen. Kun Käy valmis on
alhaalla (0), laite pysähtyy vapaasti pyörien, paneelissa näkyy OFF-symboli ja järjestelmä
antaa varoituksen F26
rin turvakytkimen tai vahinkokäynnistyksen esto –releentila tietoa.
0 Ei valittu
1 DIN1
2 DIN2
.
.
n = DINn, missä n on asennettujen DINien maksimimäärä.
2.2.1.10 Käy valmis -logiikka
Tämän parametrin avulla Käy valmis -tunnistus voidaan määrittää Normaalisti auki- tai
Normaalisti kiinni -tyyppiseksi.
0 Normaalisti auki
1 Normaalisti kiinni
Käynnin esto
. Yleensä Käy valmis -toimintona käytetään mootto-
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 37

PARAMETRIEN KUVAUS vacon • 37
Normaalisti auki
+V DIN
Huom: Käy valmis kytkimen sulkeutuessa
Normaalisti kiinni
+V DIN
Huom: Käy valmis kytkimen avautuessa
Kuva 2.
2.2.1.11 Vahinkokäynnistyksen esto
Tämä parametri on tarpeen, jos SPU-024:n kaltaista ulkoista laitetta käytetään porttilaitteen ja/tai ASIC-kortin tehosyötön katkaisemiseen virhekäynnistyksenestopiirin aktivoimiseksi. Kyseessä on turvatoiminto, jota käytetään huoltohenkilöstön turvallisuuden
varmistamiseksi. Huomaa, että päätehonsyöttö on katkaistava taajuusmuuttajan
huollon ajaksi.
0 Salli
1 Estä
Kun tämä toiminto on aktiivinen ja käynnistyksen esto (P2.2.1.9) on nolla (0), hälytys F26
Vahinkokäynnistyksen esto
aktivoituu. Hälytyksen poistuttua laite voidaan uudelleen
käynnistää ilman kuittausta.
HUOM: DC-jännitteen ja yksikön lämpötilan mittaukset eivät ole aktiivisia virhekäynnistyksen eston aikana. Myöskään analogiatuloa koskevat mittaukset eivät ole aktiivisia.
2.2.1.12 Hätäseis
Hätäseis-toiminto aktivoituu, kun tämä parametri yhdistetään johonkin digitaalituloon.
Kun valittu digitaalitulo on alhaalla, taajuusmuuttaja pysähtyy parametrin P2.7.3
seis
mukaisesti.
0 Ei valittu
1 DIN1
2 DIN2
.
.
n = DINn, missä n on asennettujen DINien maksimimäärä.
Varoituksen poistuttua laite ei vaadi erillistä kuittausta uudelleenkäynnistykseen
I/O-, paneeli- tai PC-ohjauksessa.
Järjestelmästä käynnistettäessä laite vaatii nousevan reunan pääsanan bitti 0:n
(ID1160.00 pääohjaussana).
ud10 36k2.fh8
Hätä-
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 38

38 • vacon PARAMETRIEN KUVAUS
2.2.1.13 Ulkoinen vika/hälytys
Ulkoinen vika/hälytys -toiminto aktivoituu, kun tämä parametri yhdistetään johonkin
digitaalituloon. Kun valittu digitaalitulo on ylhäällä (1), seuraa F51
Ulkoinen vika
ja laite
pysähtyy vapaasti pyörien tai ilmoittaa hälytyksestä.
0 Ei valittu
1 DIN1
2 DIN2
.
.
n = DINn, missä n on asennettujen DINien maksimimäärä.
2.2.1.14 Ulkoinen vika -logiikka
Tämän parametrin avulla ulkoisen vian/hälytyksen tunnistus voidaan määrittää Normaalisti auki- tai Normaalisti kiinni -tyyppiseksi.
0 Normaalisti auki
1 Normaalisti kiinni
Normaalisti auki
+V DIN
Huom : Ulkoinen vika kytk ime n sulkeutuessa
Normaalisti kiinni
+V DIN
Huom : Ulkoinen vika kytkime n avautuessa
Kuva 3.
2.2.1.15 Moottorin 1 tai 2 valinta
Valitse digitaalitulo ladataksesi parametriasetukset 1 tai 2.
0 = Parametriasetukset 1
1 = Parametriasetukset 2
0 Ei valittu
1 DIN1
2 DIN2
.
.
n = DINn, missä n on asennettujen DINien maksimimäärä.
Paneelin systeemivalikon S6.3.1 avulla voidaan ennalta tallentaa kaksi parametriasetusta (1 ja 2). Tämän ominaisuuden ansiosta yhdellä taajuusmuuttajalla voidaan
käyttää vuorotellen kahta erilaista moottoria.
ud10 36k3.fh8
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 39

PARAMETRIEN KUVAUS vacon • 39
4.2.2
Analogiatulot
2.2.2.1 I/O-nopeusohjeen valinta
Valitsee analogiatulon, jonka kautta laitteelle annetaan nopeusohje, kun laite on riviliitinohjauksessa eli ohjauspaikka = 2 Riviliitinohjaus.
0 Ei käytössä
1 AI1
2 AI2
3 AI1-sauvaohjaus. Sisäinen logiikka simuloi sauvaohjauksen ohjearvon.
4 Vakio-ohje 1,2R. Parametria P2.4.2
eteenpäin -tulo on aktiivinen. Parametria P2.4.3
nopeusohjeena, kun Käy taaksepäin -tulo on aktiivinen.
5 Kenttäväylä. Kenttäväylästä tulevaa nopeusohjetta käytetään nopeusohjeena
riviliitinohjauksessa.
Vakio-ohje 1
käytetään nopeusohjeena, kun Käy
Vakio-ohje 2
käytetään
2.2.2.2 I/O-momenttiohjeen valinta
Valitsee analogiatulon, jonka kautta laitteelle annetaan momenttiohje, kun parametri
P2.4.6
Momenttiohjeen lähteen valinta
= 3 (Analoginen I/P).
0 Ei käytössä
1 AI1
2 AI2
3 Kenttäväylä. Käytetään momenttiohjetta kenttäväylästä V1.2.17
momenttiohje
.
2.2.2.3 PT100 (1) AI-valinta
Valitsee analogiatulon, jota käytetään lämpötilan mittaamiseen valvontapaikassa 1.
Sovellus aktivoi automaattisesti AO1:n syöttämään virtaa PT100-anturille.
0 Ei käytössä
1 AI1
2 AI2
2.2.2.4 PT100 (1) valinta
Valitse PT100-elementtien määrä.
0 1 PT100
1 2 PT100
2 3 PT100
Kenttäväylän
AO1
AO1
123
AI1
ud1036k5.fh8
Kuva 4. Esimerkki kolmesta PT100-elementitstä sarjassa
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
AI1
Page 40

40 • vacon PARAMETRIEN KUVAUS
Analogiatulo on aseteltava mittaamaan 0-10 V:n jännitettä (pistikeryhmä X1).
A B C D
AI1-tila: Jännitetulo; 0...10V (differentiaalinen)
2.2.2.7, 2.2.2.11 AI1-ohje min, AI2-ohje min
Näillä parametreilla määritellään ohjeen minimiarvo tulosignaalin minimitasolle.
Katso parameterit P2.2.2.9 ja P2.2.2.13.
Kun analogiatuloa käytetään lämpötilan mittaukseen PT100 anturilla käytetyn tulon
skaalausparametrit eivät ole käytössä.
2.2.2.8, 2.2.2.12 AI1-ohje max, AI2-ohje max
Näillä parametreilla määritellään ohjeen maksimiarvo tulosignaalin maksimitasolle (10
V / 20 mA).
Kun analogiatuloa käytetään lämpötilan mittaukseen PT100 anturilla käytetyn tulon
skaalausparametrit eivät ole käytössä.
2.2.2.9, 2.2.2.13 AI1-minimi, AI2-minimi
OPT-A1-kortin AI1 (tai AI2) -liittimen minimijännite/-virta.
0 0 V / 0 mA
1 2 V / 4 mA
2.2.2.10, 2.2.2.14 AI1-suodatusaika, AI2-suodatusaika
AI1 (tai AI2) -tuloon yhdistetyn signaalin suodatusaika sekunteina. Valittavana oleva
aika-alue on 0,01–10,00 s.
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 41

PARAMETRIEN KUVAUS vacon • 41
4.3 Lähtösignaalit
4.3.1
Digitaalilähtö
2.3.1.1 DO1 (ID.bittinro)
Valitse digitaalilähdön 1 ohjaussignaali. Parametri asetetaan muodossa xxxx.yy, missä
xxxx on signaalin ID-numero ja yy bittinumero. Esim. DO1-ohjauksen oletusarvo on
1162.00 (
Tila-pääsanan (nollabitti) mikä ilmaisee Valmis-tilan
=1.
Taajuusmuuttaja valmis
), missä 1162 on Tila-pääsanan ID-numero ja 00 on
Taajuusmuuttaja valmis
(nollabitti)
2.3.1.1–2.3.1.13 DO2 (ID.bittinro) – DO13 (ID.bittinro)
Kts. P2.3.1.1 edellä.
4.3.2
Analogialähtö
2.3.2.1 AO1-signaali-ID
AO1-lähtöön yhdistettävän signaalin ID-numero. Voit valita sovelluksesta minkä tahansa
analogiasignaalin, jolle on määritetty ID-numero.
Huomaa, että jos PT100-antureiden avulla tapahtuvaa lämpötilan mittausta varten on
valittu analogiatuloja, AO1 on pakotettu sisäisesti generoimaan 10 mA, jolloin AO1:een
liittyvien parametrien asetukset eivät päde.
2.3.2.2 AO1-offset
Minimijännite/-virta AO1-riviliittimessä.
0 0 V / 0 mA
1 2 V / 4 mA
2.3.2.3 AO1-suodatus
AO1-lähtöön yhdistetyn signaalin suodatusaika. Valittavana oleva aika-alue on 0,02–
10,00 s.
2.3.2.4 AO1-maksimiarvo
AO1-lähtöön yhdistetyn signaalin maksimiarvo. Tämä arvo vastaa maksimijännitettä/
-virtaa (10 V / 4 mA).
2.3.2.5 AO1-minimiarvo
AO1-lähtöön yhdistetyn signaalin minimiarvo. Tämä arvo vastaa AO1:n minimijännitettä/
-virtaa riippuen parametrin P2.3.16 asetuksesta. Kun käytetään optiokorttia, joka tukee
+/-10 volttia AO1:ssä, tämä arvo on -10 V.
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 42

42 • vacon PARAMETRIEN KUVAUS
4.4 Ohjearvojen asettelu
2.4.1 Nopeusohjeen suodatus
Nopeusohjeen suodatusaika välillä 0–5000 ms. Tämä suodattaa nopeusohjeen V1.2.6
Nopeusohje 3
.
2.4.2 Vakio-ohje 1
Vakionopeusohje alueella P2.8.4
askellustoiminnossa 1 kenttäväylän kautta, kun V1.2.34 Ohjaus-pääsana.bit8 on asetettu. Samaa ohjetta voidaan käyttää kiinteänä nopeusohjeena, kun laite on riviliitinohjauksessa.
2.4.3 Vakio-ohje 2
Vakionopeusohje askellustoiminnon alueelle P2.8.4
nopeus
pääsana.bit9 on asetettu. Samaa ohjetta voidaan käyttää kiinteänä nopeusohjeena, kun
laite on riviliitinohjauksessa.
. Tätä käytetään askellustoiminnossa 2 kenttäväylän kautta, kun V1.2.34 Ohjaus-
2.4.4 Kriittinen alanopeus
Nopeusohjeen kriittisen nopeuden ikkunan alaraja. Ohjeen tarkoituksena on välttää
laitteen ajamista kriittisen nopeuden ikkunaan mekaanisen resonanssin yhteydessä.
2.4.5 Kriittinen ylänopeus
Nopeusohjeen kriittisen nopeuden ikkunan yläraja. Ohjeen tarkoituksena on välttää
laitteen ajamista kriittisen nopeuden ikkunassa mekaanisen resonanssin yhteydessä.
2.4.6 Nopeuden jako
Miniminopeus
– P2.8.3
Miniminopeus
Maksiminopeus
– P2.8.3
. Tätä käytetään
Maksimi-
Parametrin V1.2.4
ohjeketjussa. Valittu nopeusohje näkyy parametrina V1.2.5 Nopeusohje 2. Parametrin
ansiosta kahdella laitteella, joilla on erilainen vaihteiston välityssuhde, voi olla sama
nopeusohje. Parametrin avulla voidaan suorittaa myös nopeusohjeen yksilöllinen
skaalaus.
Nopeusohje 1
prosenttiosuus, joka otetaan nopeusohjeeksi nopeus-
2.4.7 Kenttäväyläohjeen skaalaus
Kenttäväylästä saatava nopeusohje sijoittuu alueelle –32767...32767. Se voidaan skaalata
tämän parametrin avulla parametriin P2.1.7
vastaa parametrin P2.1.7 rpm-arvoa. Oletusarvo on 20000. Näin kenttäväylästä saatu
nopeusohje 20000 vastaa parametrin P2.1.7
2.4.8 Momenttiohjelähteen valinta
Tällä parametrilla voit valita laitteen momenttiohjeen lähteen.
0 Ei käytössä
1 Isäntä. Momenttiohje tulee isäntälaitteen nopeussäätäjälähdöstä SystemBusin
kautta. Tämä momenttiohje näkyy seuraajalaitteessa signaalina V1.2.16
momenttiohje
2 Kenttäväylä
3 I/O momenttiohjeen valitsin P2.2.2.2
.
Prosessinopeus
Prosessinopeus
. Tämän parametrin arvo
rpm-ohjetta.
Isäntälaitteen
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 43

PARAMETRIEN KUVAUS vacon • 43
2.4.9 Momenttiohjeen suodatus
Momenttiohjeen suodatusaika 0–5000 ms.
2.4.10 Momenttiohjeen hystereesi
Momenttiohjeen hystereesi prosentteina moottorin nimellisvirrasta.
2.4.11 Momenttiohjeen kuollut alue
Momenttiohjeen kuollut alue prosentteina moottorin nimellisvirrasta. Momenttiohje
tämän arvon alapuolella molempiin suuntiin (+ve ja -ve) käsitetään nollamomenttiohjeeksi.
2.4.12 Momenttiohjeen skaalaus
Tällä parametrilla momenttiohjeen oletusresoluutio 1000 = moottorin nimellismomentti
voidaan muuttaa arvoon 10000 = moottorin nimellismomentti.
0 1000
1 10000
Kaikki momenttiin liittyvät signaalit ja parametrit muutetaan ja näytetään automaattisesti samassa suhteessa.
2.4.13 Kuorman jako
Määrittää ulkoisen momenttiohjeen prosenttiosuuden, joka otetaan laitteen momenttiohjeeksi. Yleensä tätä parametria käyttää seuraajalaite tapauksissa, joissa isäntä–
seuraaja-kokoonpano jakaa kuormitusmomentin. Esimerkiksi:
100,0 % = Momenttiohje on sama kuin ulkoinen momenttiohje.
50,0 % = Momenttiohje on 50 % ulkoisesta momenttiohjeesta.
2.4.14 Momenttiohjeen ramppiaika
Nimellismomentin ohjearvon vaihtoa koskeva ramppiaika millisekunteina.
2.4.15 Vuo-ohje
Vuon ohjearvo prosentteina moottorin nimellisvuosta Closed Loop -ohjauksessa.
2.4.16 Nopeusraja yli
V1.2.36 Tila-pääsana.bit10 asetetaan, kun moottorin nopeus ylittää tämän nopeusrajan.
2.4.17 Nopeusaskel
Nopeusaskel käyttää samaa skaalausta kuin kenttäväylä.
Katso parametrit P2.4.7
Tätä askelohjetta käytetään yleensä nopeusaskelten määrittämiseen nopeussäätäjän
virityksen aikana Closed Loop -ohjauksessa. Sitä voidaan käyttää myös pikanopeuskorjauksena kenttäväylältä.
Kenttäväyläohjeen skaalaus
ja P2.1.7
Prosessinopeus
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 44

44 • vacon PARAMETRIEN KUVAUS
2.4.18 Momenttiaskel
Momenttiohjeen askel prosentteina moottorin nimellismomentista. Tämä ohje lisätään
momenttiohjeeseen V1.2.21
Tätä askelohjetta käytetään yleensä kenttäväyläohjauksessa laitejärjestelmän hitausmassan/kitkan kompensointiin kenttäväylän kautta. Esimerkiksi rullaimen tai aukirullaimen hitausmassan kompensointi voidaan kirjoittaa kenttäväylältä tähän parametriin.
Momenttiohje 3
.
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 45

PARAMETRIEN KUVAUS vacon • 45
4.5 Ramppitoiminnot
2.5.1 Kiihdytysaika
Nopeusramppigeneraattorin kiihdytysramppiaika. Laite kiihdyttää tässä ajassa nollasta
maksiminopeuteen.
2.5.2 Hidastuvuusaika
Nopeusramppigeneraattorin hidastuvuusaika. Laite hidastaa tässä ajassa maksiminopeudesta nollaan.
2.5.3 S-rampin kiihtyvyys/hidastuvuus
S-käyrän suhde nopeusohjeen pyöristämiseksi kiihdytyksen ja hidastuksen aikana.
2.5.4 Hätäseis-ramppi
Hidastusramppiaika hätäpysäytyksessä. Laite hidastaa maksiminopeudesta nollanopeuteen, jos P2.7.3
Hätäseis-valitsin
= 1 Hidastuspysäytys.
2.5.5 Hätäseis-viive
Viive (s), joka kuluu laitteen hätäseis-toiminnon aktivointiin, kun toiminto aktivoituu
DIN6:sta. Jos laite on kenttäväyläohjauksessa, se valvoo nopeusohjetta kenttäväylästä.
Jos nopeusohje ei ala hidastaa 500 ms:n kuluessa hätäseis-toiminnon aktivoimisesta,
laite pysähtyy oman hätäpysäytyssekvenssinsä mukaisesti. Tätä sekvenssiä määrittävät
parametrit P2.5.4
Hätäseis-ramppi
ja P2.7.3
2.5.6 Vakionopeuden kiihdytysaika
Nopeusramppigeneraattorin kiihdytysramppiaika. Tätä kiihdytysaikaa käytetään, kun
askellustoimintoa käytetään kenttäväylältä tai kun riviliitinohjauksessa käytetään vakionopeustoimintoa. Laite kiihdyttää tässä ajassa nollasta maksiminopeuteen.
2.5.7 Vakionopeuden hidastuvuusaika
Nopeusramppigeneraattorin hidastuvuusaika. Tätä hidastuvuusaikaa käytetään, kun
askellustoimintoa käytetään kenttäväylältä tai kun riviliitinohjauksessa käytetään vakionopeustoimintoa. Laite hidastaa tässä ajassa maksiminopeudesta nollanopeuteen.
2.5.8 S-rampin vakionopeus
S-käyrän suhde nopeusohjeen pyöristämiseksi kiihdytyksen ja hidastuksen aikana. Tätä
parametria käytetään, kun askellustoimintoa käytetään kenttäväylältä tai kun riviliitinohjauksessa käytetään vakionopeustoimintoa.
Hätäseis-valitsin
.
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 46

46 • vacon PARAMETRIEN KUVAUS
4.6 Käytön ohjaus
2.6.1 Ohjauspaikka
Valitse ohjauspaikka taajuusmuuttajan ohjaamiseksi.
0 Kenttäväylä
1 I/O
2 Paikallinen (paneeli)
Taajuusmuuttajaa voidaan ohjata myös PC:ltä NCDrive-työkalun avulla, kun käyttöikkunan PC-valintaruutu on valittuna. Jotta taajuusmuuttajaa voidaan ohjata PC-työkalun avulla, taajuusmuuttajan on oltava paneeliohjauksessa. Tällöin ohjauspaikka =
Paikallinen.
2.6.2 Jarrukatkoja
Valitse jarrukatkojatoiminnon tila. Tämä parametri asetetaan vain, jos sisäinen jarrukatkoja on käytössä.
0 Ei käytössä
1 Päällä. Sisäinen jarrukatkoja on käytössä.
2.6.3 Jarrukatkojataso
Jarrukatkojaohjauksen käynnistystaso voltteina.
400 voltin syöttö: 400 * 1,35 * 1,18 = 638 V
500 voltin syöttö: 500 * 1,35 * 1,18 = 808 V
690 voltin syöttö: 690 * 1,35 * 1,18 = 1 100 V
Huomaa, että jarrukatkojaa käytettäessä ylijännitesäätäjä voidaan kytkeä POIS tai ylijännitesäätäjän taso voidaan asettaa jarrukatkojatasoa korkeammaksi.
2.6.4 Jarruvastuksen kuormitusraja
Raja on sama kuin generaattoripuolen momenttiraja jarrukatkojan ylikuumenemisen
välttämiseksi jatkuvan jarrutuksen aikana. Raja on aktiivinen vain, kun parametri P2.6.2
Jarrukatkoja
hidasta. Jarruttaminen tavallisessa hidastuksessa tai hätäpysäytyksessä tapahtuu parametrin P2.8.7
moottorin closed loop -ohjauksessa.
on valittuna, hätäseis-toiminto ei ole aktiivinen ja taajuusmuuttaja ei
Generaattoripuolen momenttiraja
2.6.7 Jälleenkäynnistysviive
Vapaan pysäytyksen jälkeen taajuusmuuttajan jälleenkäynnistys on mahdollista vasta
tällä parametrilla asetetun viiveen jälkeen. Aika voidaan asettaa enimmillään 60,000
sekuntiin.
2.6.8 PWM-synkronointi
avulla. Tätä parametria käytetään vain
Tämä parametri sallii tai estää monikäämisen isäntä–seuraaja-järjestelmän PWMsynkronoinnin. Parametri näkyy paneelissa vain, jos moottorin tyyppinä on monikäämimoottori.
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 47

PARAMETRIEN KUVAUS vacon • 47
4.6.1
Open Loop -ohjaus
2.6.5.1 U/f-suhteen valinta
Valitse U/f-suhde Open Loop -ohjausta varten.
0 Lineaarinen
1 Neliöllinen
2 Ohjelmoitavissa. Tässä valinnassa on säädettävä parametrit P2.6.5.2
nollapistejännite
ID-ajo suoritetaan onnistuneesti, laite optimoi nämä parametrit ja asettaa tämän
parametrin arvoksi 2 = Ohjelmoitavissa.
, P2.6.5.3
U/f-keskipistejännite
ja P2.6.5.4
U/f-keskipistetaajuus
U/f-
. Jos
2.6.5.2 U/f-nollapistejännite
Moottorin jännite prosentteina moottorin nimellisjännitteestä nollataajuusohjeella.
Tämä parametri voidaan asettaa siten, että tuotettava moottorin virta on 80–100 %
nimellismagnetointivirrasta nollataajuusohjeella.
2.6.5.3 U/f-keskipistejännite
Moottorin jännite prosentteina moottorin nimellisjännitteestä taajuusohjeella, joka
vastaa parametria P2.6.5.4
asettaa 1,41 * P2.6.5.2
U/f-keskipistetaajuus
U/f-nollapistejännite
. Tämän parametrin arvoksi voidaan
.
2.6.5.4 U/f-keskipistetaajuus
Keskipistetaajuusohje, jos U/f-käyrä on ohjelmoitavissa. Tämän parametrin arvoksi
voidaan asettaa (P2.6.5.2
U/f-nollapistejännite
2.6.5.5 U/f-käyrän optimointi
Tällä parametrilla voidaan sallia automaattinen momentin maksimointi Open Loop
-ohjauksessa.
0 Ei mitään
1 Automaattinen momentin maksimointi (automaattinen momentin maksimointi on
sallittu).
On suositeltavaa sallia automaattinen momentin maksimointi vain, jos käyttöönoton
yhteydessä on suoritettu onnistunut ID-ajo.
2.6.5.6 DC-jarrutusnopeus
Nopeusraja, jonka alapuolella DC-jarrutus aktivoituu Open Loop -ohjauksessa.
2.6.5.7 DC-jarrutusvirta
Moottoriin syötettävän virran määrä DC-jarrutuksen ollessa aktiivinen.
2.6.5.8 DC-jarrutusaika
Aika (ms), jonka DC-jarrutus on aktiivinen, kun nopeus on alle parametrin P2.6.5.6
jarrutusnopeus
.
* P2.1.3
Moottorin nimellistaajuus
) / 100.
DC-
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 48

48 • vacon PARAMETRIEN KUVAUS
2.6.5.9 Vuojarrutus
Vuojarrutus voidaan aktivoida tällä parametrilla.
0 Ei käytössä
1 Käytössä
2.6.5.10 Vuojarrutusvirta
Vuojarrutusvirran määrä, kun vuojarrutus on aktiivinen.
2.6.5.11 Momenttistabilaattorin Kp
Momenttistabilaattorin vahvistus Open Loop -ohjauksessa. Vahvistuksen arvoalue on 0–
1000.
2.6.5.12 Momenttistabilaattorin vaimennuksen aikavakio
Momenttistabilaattorin vaimennusaste Open Loop -ohjauksessa. Arvoalue on 0–1000.
2.6.5.13 Momenttistabilaattorin Kp kentänheikennyspisteessä
Momenttistabilaattorin vahvistus kentänheikennyspisteessä Open Loop -ohjauksessa.
Arvoalue on 0–1000.
2.6.5.14 Vuostabilaattorin Kp
Vuostabilaattorin vahvistus Open Loop -ohjauksessa. Arvoalue on 0–32000.
2.6.5.15 Vuostabilaattorin suodatusaika
Vuostabilaattorin suodatusaika millisekunteina Open Loop -ohjauksessa. Arvoalue on 0–
32000.
2.6.5.16 Vuonmuodostusaika
Aseta moottorin magnetointiaika niin, että vuota on käytössä riittävästi, kun moottorin
käyntiä aloitetaan.
2.6.5.17 Vuonmuodostusjännite
Magnetointijännite prosentteina moottorin nimellisjännitteestä.
2.6.5.18 Mitattu jännitteen pudotus
Mitattu jännite staattoriresistanssissa kahden vaiheen välillä käytettäessä moottoria
nimellisvirrassa. Tämä mitataan syöttämällä virtaa moottoriin sen ollessa lepotilassa
identifiointiajon aikana.
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 49

PARAMETRIEN KUVAUS vacon • 49
4.6.2
Alijännite-/ylijännitesäätö, stabilaattori
2.6.6.1 Alijännitesäätäjä
Alijännitesäätäjä voidaan aktivoida tällä parametrilla.
0 Pois
1 Päällä
Taajuusmuuttaja korjaa taajuusohjeen sisäisesti, kun DC-välipiirin jännite laskee alle
alijänniteohjetason, jota määrittää parametri P2.6.6.2
ohjeen korjaus näkyy signaalissa V1.1.1
Lähtötaajuus
Alijänniteohjeen valinta
, kun alijännitesäätäjä on aktiivinen
. Taajuus-
ja DC-välipiirin jännite on pienempi kuin alijänniteohje.
2.6.6.2 Alijänniteohjeen valinta
Valitsee alijänniteohjeen alijännitesäätäjää varten.
0 Alijänniteohje min. Alijänniteohjeena käytetään taajuusmuuttajan sisäisesti laskemaa
minimialijänniteohjetta.
1 0,8 * arvioitu DC-nimellisjännite. Alijännitesäätäjän alijänniteohjeena käytetään 80:aa
prosenttia arvioidusta DC-nimellisjännitteestä.
2.6.6.3 Alijännitteen Kp
PI-tyyppisen alijännitesäätäjän P-osan vahvistus.
2.6.6.4 Alijännitteen Ti
PI-tyyppisen alijännitesäätäjän I-osan vahvistus.
2.6.6.5 Ylijännitesäätäjä
Ylijännitesäätäjä voidaan aktivoida tällä parametrilla.
0 Pois
1 Päällä ilman ramppia. (Ylijännitesäätäjä on P-tyyppinen säätäjä)
2 Päällä rampin kanssa. (Ylijännitesäätäjä on PI-tyyppinen säätäjä)
Taajuusmuuttaja korjaa taajuusohjeen sisäisesti, kun DC-välipiirin jännite nousee yli
ylijänniteohjetason, jota määrittää parametri P2.6.6.6
ohjeen korjaus näkyy signaalissa V1.1.1
ja DC-välipiirin jännite on suurempi kuin ylijänniteohje.
2.6.6.6 Ylijänniteohjeen valinta
Ylijänniteohjetaso riippuu jarrukatkojan tilasta.
P2.6.6.6 Ylijänniteohjeen valinta Jarrukatkoja käytössä Jarrukatkoja ei käytössä
0 Taajuusmuuttajan sisäi-
1 1,25 * arvioitu DC-
2 1,07 * jarrukatkojataso Jarrukatkojataso
Taulukko 27. Ylijänniteohjeen säätäminen
Lähtötaajuus
sesti laskema maksimiylijänniteohje
nimellisjännite
, kun ylijännitesäätäjä on aktiivinen
Ylijänniteohjeen valinta
Taajuusmuuttajan sisäisesti
laskema maks. jarrukatkojataso
1,18 * arvioitu DC-nimellisjännite
. Taajuus-
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 50

50 • vacon PARAMETRIEN KUVAUS
2.6.6.7 Ylijännitteen Kp
PI-tyyppisen ylijännitesäätäjän P-osan vahvistus. Arvoalue on 0–32767.
2.6.6.8 Ylijännitteen Kp, lisävahvistus
PI-tyyppisen ylijännitesäätäjän P-osan lisävahvistus kentänheikennyspisteessä.
2.6.6.9 Ylijännitteen Ti
PI-tyyppisen ylijännitesäätäjän I-osan vahvistus.
2.6.6.10 Jännitestabilaattorin vahvistus
Jännitestabilaattorin vahvistus. Arvoalue on 0–1000.
Jännitestabilaattorin tarkoituksena on stabiloida DC-välipiirin jännitevaihtelut, jotka
aiheutuvat vaihteluista kuormituksessa tai syöttöjännitteessä.
2.6.6.11 Jännitestabilaattorin aikavakio
Jännitestabilaattorin vaimennusaste. Arvoalue on 0–1000.
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 51

PARAMETRIEN KUVAUS vacon • 51
4.7 Moottorin ohjaus
2.7.1 Käynnistystoiminto
Valitsee moottorin käynnistysmuodon.
0 Normaali ramppi. Taajuusmuuttaja käynnistetään nollaohjeesta kiihdytysramppi-
ajoilla.
1 Vauhtikäynnistys. Taajuusmuuttaja etsii moottorin pyörimisnopeuden ja lähtee
säätämään normaalilla rampilla löydetystä nopeudesta.
Huomaa, että Closed Loop -ohjauksessa moottorin käynnistys on aina vauhtikäynnistyksen kaltainen riippumatta parametriasetuksista.
2.7.2 Pysäytystoiminto
Valitsee moottorin pysäytysmuodon lukuun ottamatta hätäpysäytystä.
0 Vapaasti pyörien. Moottorin annetaan pysähtyä omalla hitausmassallaan. Taajuus-
muuttajan ohjaus lopetetaan ja taajuusmuuttajan virta on nolla heti, kun Käy-komento on poistettu.
1 Hidastaen. Moottori pysähtyy valitussa hidastusramppiajassa.
2.7.3 Hätäseis-valitsin
Valitsee taajuusmuuttajan pysäytysmuodon, kun hätäseis-toiminto on aktiivinen.
0 Vapaasti pyörien. Moottorin annetaan pysähtyä omalla hitausmassallaan.
1 Hidastaen. Moottori pysähtyy parametrin P2.5.4
hidastusramppiajassa.
2 Momenttirajapysäytys. Nopeusrampin generaattorilähtö pakotetaan nollaan ja
taajuusmuuttajan annetaan pysähtyä omia momenttirajojaan vastaan.
3 Vakioteho pysäytys. Moottori pysäytetään vakioteholla, jos järjestelmän parametrit
P2.8.12
P2.8.14
käytetään, jotta taajuusmuuttaja voidaan pysäyttää mahdollisimman nopeasti hätäpysäytystilanteessa, jossa jarrutus tapahtuu rajallisella jarrutusteholla. Sitä voidaan
käyttää myös yhdistettyjen DC-väylälaitteiden koordinoituun hätäpysäytykseen.
Järjestelmän hitausmassa
Maksimijarrutusmomentti
2.7.4 Moottorin ohjausmuoto
Valitsee moottorin ohjausmuodon.
0 OL-taajuus. Tämä on normaali U/f-ohjausmuoto ilman enkooderia.
1 OL-nopeus. Tämä on normaali U/f-ohjausmuoto ilman enkooderia. Tässä ohjaus-
tilassa hyödynnetään moottorin laskennalliseen momenttiin V1.1.5
tuvaa jättämän kompensointia.
2 OL-momentti. Tämä on virtavektoriohjausmuoto U- ja f-ohjeilla ilman enkooderia.
3 CL-nopeus/momentti. Tämä on roottorivuovektoriohjausmuoto, joka edellyttää digi-
taalisen enkooderin yhdistämistä moottorin akseliin.
Hätäseis-ramppi
(kgm2), P2.8.13
(Nm) on asetettu asianmukaisesti. Pysäytysmuotoa
Maksimijarrutusteho
määrittämässä
(kW) ja
Momentti
perus-
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 52

52 • vacon PARAMETRIEN KUVAUS
2.7.5 Momentin valinta
Valitsee erilaiset mahdolliset kokoonpanot nopeus- ja momenttiohjausta varten, kun
P2.7.4
1 Nopeus. Closed Loop -nopeussäätö. Hitausmassan/kitkan kompensointi voidaan
2 Momentti. Tämä on Closed Loop -momenttiohjaus. Momenttiohjelähteen määrittää
Moottorin ohjausmuoto
määrittää parametriin P2.4.18
lähteen valinta
momenttiohjeet.
parametri P.2.4.8
asetetaan sisäisesti nollaan (Ei mitään), jotta vältetään kaikki ulkoiset
Momenttiohjelähteen valinta
Isäntälaitteen momenttiohje
Kenttäväylän momenttiohje
tulosta.
= 3.
, jos kyse on isäntä–seuraaja-sovelluksesta, V1.2.17
kenttäväylästä tai V1.2.18
Momenttiaskel
. Parametri P.2.4.8
. Momenttiohjeena voi olla V1.2.16
I/O-momenttiohje
Momenttiohje-
analogia-
3 Min. Tässä tilassa nopeussäätäjän lähdön V1.2.11
ohjeen minimi valitaan lopulliseksi momenttiohjeeksi V1.2.22
Tätä käytetään tyypillisesti rullainten ohjaussovelluksissa. Ulkoinen momenttiohje
lasketaan vaadituista kireys- ja järjestelmäparametreista, kuten rullan läpimitasta,
vaihteiston välityssuhteesta, radan leveydestä ja moottoritiedoista. Lisäopeusohje
lisätään normaaliin radan nopeusohjeeseen.
4 Max. Tässä tilassa nopeussäätäjän lähdön V1.2.11
ohjeen maksimi valitaan lopulliseksi momenttiohjeeksi V1.2.22
ohje
. Tätä käytetään tyypillisesti aukirullainten ohjaussovelluksissa. Ulkoinen
momenttiohje lasketaan vaadituista kireys- ja järjestelmäparametreista, kuten rullan
läpimitasta, vaihdelaatikkosuhteesta, radan leveydestä ja moottorin tiedoista. Negatiivinen nopeusohje lisätään normaaliin radan nopeusohjeeseen.
5 Ikkuna. Taajuusmuuttajan annetaan käydä momenttiohjauksessa niin kauan kuin
nopeus on nopeusohjeen nopeusikkunan sisällä. Nopeusikkuna kielletään parametreilla P2.9.14
ulkopuolella, taajuusmuuttaja siirtyy nopeusohjaukseen korjatakseen virheen signaalien V1.2.9
pysyy nopeusohjauksessa, kunnes mitattu nopeus laskee nopeusohjeen ikkunaan.
Ikkunan hystereesin määrittävät parametrit P2.9.16
Ikkuna hyst. neg
Ikkuna RPM pos.
Käytetty nopeusohje
.
2.7.6 Virtasäätäjän Kp
ja P2.9.15
ja V1.2.1
SPC OUT
ja ulkoisen momentti-
Käytetty momenttiohje
SPC OUT
Ikkuna RPM neg
ja ulkoisen momentti-
. Kun nopeus on ikkunan
Mitattu nopeus välillä
Ikkuna hyst. pos.
.
Käytetty momentti-
. Taajuusmuuttaja
ja P2.9.17
Virtasäätäjän vahvistus Closed Loop -ohjauksessa. Arvoalue 1–10000. Huomaa, että
normaalitapauksessa oletusarvo on riittävä eikä tätä parametria ei tarvitse muuttaa.
2.7.7 Virtasäätäjän Ti
Virtasäätäjän integrointiaikavakio Closed Loop -ohjauksessa. Arvoalue 0–100,0 ms.
Huomaa, että normaalitapauksessa oletusarvo on riittävä eikä tätä parametria ei tarvitse
muuttaa.
2.7.8 Kytkentätaajuus
Moottorin ohjauksen IGBT:ien kytkentätaajuus (kHz). Huomaa, että taajuusmuuttaja
määrittää oletusarvon tehonsa perusteella. Kytkentätaajuutta voidaan pienentää esim.
jos moottorikaapelit ovat pitkät (100 m).
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 53

PARAMETRIEN KUVAUS vacon • 53
2.7.9 Dynaamisen vaimennuksen vahvistus
Dynaamisen vaimennuksen vahvistus, kun P2.7.5 Momentin valinta on Momentti/Min/
Max/Ikkuna. Arvo 1,00 tarkoittaa nimellisnopeuseron nimellismomenttia. Dynaamisen
vaimennuksen tarkoituksena on vähentää mekaanista resonanssia lisäämällä nopeusvirheeseen suhteutettua vaimennusmomenttia.
2.7.10 Dynaamisen vaimennuksen aikavakio
Kaistanpäästösuodattimen aikavakio (ms) dynaamista vaimennusta varten.
0 Taajuusvirheeseen verrannollinen staattinen vaimennus
2.7.11 DC-magnetointivirta
Tämä parametri voidaan asettaa magnetoimaan moottori nopeasti käynnistyksen aikana.
Tämän parametrin määrittämä DC-virtamäärä syötetään moottorin käämityksiin.
2.7.12 DC-magnetointiaika
Aika, jona parametrin P2.7.11
moottoriin. Tämän jälkeen ramppigeneraattorin nopeusohje vapautuu.
DC-magnetointivirta
2.7.13 Nollanopeusaika käynnistyksessä
Aikaviive, joka kuluu Käy-käskyn antamisesta ramppigeneraattorin nopeusohjeen
vapauttamiseen.
2.7.14 Nollanopeusaika pysäytyksessä
Aika, jona nollanopeusohjetta sovelletaan taajuusmuuttajaan hidastuspysäytyksen
jälkeen.
2.7.15 Pysäytystilan vuo
Taajuusmuuttajan pysäytyksen jälkeinen vuon määrä prosentteina moottorissa ylläpidettävästä moottorin nimellisvuosta. Vuota ylläpidetään parametrin 2.7.16
sammutusviive
Loop -ohjaustilassa.
määrittämä aika. Tätä parametria voidaan käyttää ainoastaan Closed
2.7.16 Vuon pitoviive
Parametrilla P2.7.15
asetettu aika taajuusmuuttajan pysäytyksen jälkeen.
Pysäytystilan vuo
määritettyä vuota ylläpidetään tällä parametrilla
määrittämä virtamäärä syötetään
Vuon
0 Ei vuota pysäytyksen jälkeen. Normaali pysäytys.
>0 Vuon sammutusviive sekunteina.
<0 Vuo ylläpidetään moottorissa pysäytyksen jälkeen aina seuraavaan Käy-käskyyn
saakka. Käy-käskyn jälkeen vuo on sama kuin P2.4.15
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Vuo-ohje
.
Page 54

54 • vacon PARAMETRIEN KUVAUS
4.8 Kestomagneettimoottorin ohjaus
HUOM! Tämän ryhmän parametreja voidaan säätää vain, kun käytössä on kestomagneettimoottori.
2.7.17.1 Vuovirtasäätäjän Kp
Vuovirtasäätäjän vahvistus prosentteina. Parametria voidaan säätää, jos havaitaan epävakautta lähellä tai kentänheikennysalueella.
2.7.17.2 Vuovirtasäätäjän Ti
Vuovirtasäätäjän integrointiaikavakio millisekunteina.
2.7.17.3 Resistanssin identifiointi
Staattoriresistanssin identifiointi voidaan suorittaa jokaisen käynnistyksen aikana
sallimalla tämä parametri.
2.7.17.4 Modulaatioindeksi
Closed Loop -toiminnon modulaatioindeksi prosentteina. Tämän parametrin arvoa
nostamalla voidaan saavuttaa suurempia moottorin napajännitteen arvoja.
2.7.17.5
Enkooderikulman nolla-asento
Identifioitu absoluutti anturin nolla kulma asento kestimagneettimoottorilla.
Parametri identifioidaan ID-ajon 3 aikana, kun absoluuttienkooderia käytetään
kestomagneettimoottorin yhteydessä.
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 55

PARAMETRIEN KUVAUS vacon • 55
4.9 Raja-arvojen asetukset
2.8.1 Nollanopeusraja
Absoluuttinen nopeus, jonka alapuolella Tila-lisäsanan Bit 11 asetetaan.
2.8.2 Nollanopeuden valvonta
Nollanopeutta voidaan valvoa joko signaalista V1.2.7
V1.1.2
0 Nopeusrampin lähtö
1 Nopeuden oloarvo. Open Loop -ohjauksessa arvo on moottorin laskennallinen nopeus
Nopeus
ja Closed Loop -ohjauksessa enkooderista mitattu nopeus.
.
2.8.3 Maksiminopeus
Taajuusmuuttajan maksiminopeusraja.
2.8.4 Miniminopeus
Taajuusmuuttajan miniminopeusraja.
2.8.5 Virtaraja
Taajuusmuuttajan virtaraja. Tämän parametrin oletusarvo riippuu taajuusmuuttajan
tehosta.
2.8.6 Moottoripuolen momenttiraja
Taajuusmuuttajan moottoripuolen momenttiraja prosentteina moottorin nimellismomentista.
2.8.7 Generaattoripuolen momenttiraja
Nopeusrampin lähtö
tai signaalista
Taajuusmuuttajan generaattoripuolen momenttiraja prosentteina moottorin nimellismomentista.
2.8.8 Nopeussäätäjän lähdön maksimiraja
Nopeussäätäjän lähdön maksimimomenttiraja prosentteina moottorin nimellismomentista.
2.8.9 Moottoripuolen tehoraja
Moottoripuolen tehoraja prosentteina moottorin nimellistehosta.
2.8.10 Generaattoripuolen tehoraja
Generaattoripuolen tehoraja prosentteina moottorin nimellistehosta.
2.8.11 Kippimomentti
Moottorin tuottaman momentin maksimimäärä (lähtömomentti). Arvo voidaan asettaa
prosentteina moottorin nimellismomentista.
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 56

56 • vacon PARAMETRIEN KUVAUS
2.8.12 Järjestelmän hitausmassa
Koko järjestelmän hitausmassa (kg*m2), jossa huomioidaan myös moottorin, vaihteiston
välityssuhteen ja kiinteän kuormituksen hitausmassa. Tämä parametri asetetaan, kun
P2.7.3
Hätäseis-valitsin
= 3 Vakiotehoinen pysäytys.
2.8.13 Maksimijarrutusteho
Jarrutustehon maksimiraja (kW) hätäpysäytystilanteessa, kun P2.7.3
3 Vakiotehoinen pysäytys.
2.8.14 Maksimijarrutusmomentti
Jarrutusmomentin maksimiraja hätäpysäytystilanteessa, kun P2.7.3
3 Vakiotehoinen pysäytys.
Hätäseis-valitsin
Hätäseis-valitsin
=
=
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 57

PARAMETRIEN KUVAUS vacon • 57
4.10 Nopeussäätö
Gain -%
W SPC Kp FWP
W SpeedControl_Kp
W SpeedControl_Kp_N0
W N0 point
W N1 point
ud1036k4.fh8
W Motor Nom Speed
f
Kuva 1. Nopeussäätäjän mukautuva vahvistus
Muutostoiminto nopeussäätäjästä on kuvattu seuraavassa:
SPC OUT(k) = SPC OUT(k-1) + SPC Kp*[Nopeusvirhe(k) – Nopeusvirhe(k-1)] + Ki*Nopeusvirhe(k),
missä Ki = SPC Kp*Ts/SPC Ti.
2.9.1 Nopeussäätäjän Kp
Nopeussäätäjän vahvistus. Vahvistusarvo 100 tarkoittaa, että 1 Hz:n nopeusvirheellä
nopeussäätäjä tuottaa nimellisen momenttiohjeen.
2.9.2 Nopeussäätäjän Ti
Nopeussäätäjän integrointiaikavakio.
2.9.3 Kp minimi
Suhteellinen vahvistus prosentteina parametrista P2.9.1
momenttiohje tai nopeussäätäjän lähtö V1.2.11
Minimipiste
. Tätä parametria käytetään yleensä nopeussäätäjän stabiloimiseen taajuus-
SPC OUT
Nopeussäätäjän Kp
on pienempi kuin P2.9.4
muuttajakäytössä, jossa on välyksellinen vaihteisto.
2.9.4 Minimipiste
Momenttiohjeen tai nopeussäätäjän lähdön V1.2.11
nopeussäätäjän vahvistus vaihdetaan parametriin P2.9.3
määrittää parametri P2.9.5
Minimisuodatusaika
SPC OUT
Kp minimi
. Arvo ilmaistaan prosentteina moottorin
nimellismomentista.
2.9.5 Minimisuodatusaika
Suodatusaika (ms), jota käytetään, kun nopeussäätäjän vahvistus vaihdetaan parametrista P2.9.1
Nopeussäätäjän Kp
parametriin P2.9.3
Kp minimi
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
, kun
taso, jonka alapuolella
suodatuksella, jota
.
Page 58

58 • vacon PARAMETRIEN KUVAUS
(
2.9.6 Nopeussäätäjän Kp kentänheikennyspisteessä
Nopeussäätäjän suhteellinen vahvistus kentänheikennysalueella prosentteina parametrista P2.9.1
Nopeussäätäjän Kp
.
2.9.7 Nopeussäätäjän Kp N0
Nopeussäätäjän suhteellinen vahvistus prosentteina parametrista P2.9.1
jän Kp
, kun nopeus on alle parametrin 2.9.8
N0-piste
määrittämän tason.
2.9.8 N0-piste
Nopeustaso (rpm), jonka alapuolella nopeussäätäjän vahvistus on P2.9.7
jän Kp N0
.
2.9.9 N1-piste
Nopeustaso (rpm), jonka yläpuolella nopeussäätäjän vahvistus on P2.9.1
Kp
. Siirryttäessä parametrin P2.9.8
P2.9.9
sesti parametrista P2.9.7
N1-piste
määrittämään nopeuteen nopeussäätäjän vahvistus muuttuu lineaari-
Nopeussäätäjän Kp N0
N0-piste
määrittämästä nopeudesta parametrin
parametriin P2.9.1
ja päinvastoin.
2.9.10 Mekaanisen kiihdytyksen kompensoinnin aikavakio
Kiinteän hitausmassan kiihdytyksen kompensoinnin aikavakio taajuusmuuttajajärjestelmän Closed Loop -ohjauksessa. Arvo voidaan laskea seuraavasti:
2
f
⋅
JnsationTCAccelCompe
⋅=
nom
T
nom
22
ππ
J
⋅=
)
f
⋅
nom
P
nom
missä
2
J = järjestelmän hitausmassa yhteensä (kg*m
f
= moottorin nimellistaajuus (Hz)
nom
T
= moottorin nimellismomentti
nom
P
= moottorin nimellisteho (kW).
nom
)
Lopulliseen Iq ohjeeseen lisätään kiihtyvyyden kompensoinnin Iq ohje (V1.2.23
Kiihtyvyyden kompensointi).
Kiinteä hitausmassa, kuten ∑ (moottorin hitausmassa, vaihdelaatikon hitausmassa,
rullan perushitausmassa), voidaan kompensoida tällä parametrilla. Muuttuva
hitausmassa, kuten rullaimen tai aukirullaimen, voidaan kompensoida
ohjausjärjestelmästä kenttäväylän kautta.
2.9.11 Kiihdytyksen kompensoinnin suodatusaika
Nopeussäätä-
Nopeussäätä-
Nopeussäätäjän
Nopeussäätäjän Kp
,
Mekaanisen hitausmassan kompensoinnin suodatusaikavakio (ms).
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 59
PARAMETRIEN KUVAUS vacon • 59
2.9.12 Kuormitusjousto
Kuormitusjousto prosentteina nimellisnopeudesta nimellismomentissa. Kuormitusjousto mahdollistaa staattisen nopeusvirheen kuormitusmomentin funktiona. Jos
kuormitusjousto on asetettu 10 %:iin moottorilla, jonka synkroninopeus on 1 500 rpm
ja kuormitus nimellinen (100 %), nopeuden pudotus 150 rpm ohjenopeudesta sallitaan.
Joustoa voidaan käyttää pehmentämään kuormitusmomentin vaihtelua tai jakamaan
kuormitusmomenttia kahden tai useamman mekaanisesti yhdessä olevan taajuusmuuttajajärjestelmän kanssa.
2.9.13 Joustoaika
Kuormitusjoustoaika (ms). Kun aika-arvoksi asetetaan nolla, joustoa käytetään staattisena tai jatkuvana joustona. Kaikki muut arvot aktivoivat dynaamisen jouston, joka on
aktiivinen arvon määrittämän ajan.
2.9.14 Ikkuna RPM positiivinen
Tämä parametri on asetettava, kun P2.7.5
ohjeen yläpuolisen ikkuna-alueen (rpm). Taajuusmuuttaja pysyy momenttiohjauksessa
niin kauan kuin nopeus on ikkuna-alueella. Kun nopeus on ikkunan ulkopuolella,
taajuusmuuttaja siirtyy nopeusohjaukseen korjatakseen virheen nopeusohjeen ja mitatun nopeuden välillä.
2.9.15 Ikkuna RPM negatiivinen
Tämä parametri on asetettava, kun P2.7.5
ohjeen alapuolisen ikkuna-alueen (rpm). Taajuusmuuttaja pysyy momenttiohjauksessa
niin kauan kuin nopeus on ikkuna-alueella. Kun nopeus on ikkunan ulkopuolella,
taajuusmuuttaja siirtyy nopeusohjaukseen korjatakseen virheen nopeusohjeen ja mitatun nopeuden välillä.
2.9.16 Ikkunahystereesi positiivinen
Tämä parametri on asetettava, kun P2.7.5
metrilla P2.9.14
reesin.
Ikkuna RPM positiivinen
2.9.17 Ikkunahystereesi negatiivinen
Tämä parametri on asetettava, kun P2.7.5
metrilla P2.9.15
reesin.
Ikkuna RPM negatiivinen
2.9.18 Moottorin jättämän viritys
Momentin valinta
Momentin valinta
Momentin valinta
määritetyn ikkunan ylemmän puoliskon hyste-
Momentin valinta
määritetyn ikkunan alemman puoliskon hyste-
= 5. Se määrittää nopeus-
= 5. Se määrittää nopeus-
= 5. Se määrittää para-
= 5. Se määrittää para-
Tämä parametri voidaan virittää kompensoimaan moottorin arvokilvessä annettujen
moottorin nimellisnopeustietojen epätarkkuudet. Tällä parametrilla voidaan säätää
myös moottorin malliin perustuva signaali V1.2.33
muuttuu moottorin lämpötilan mukaan. Roottoriaikavakion kompensointi TS1:llä tai
TS2:lla (PT100-lämpötila-anturi) mitatun moottorilämpötilan funktiona voidaan määrittää asettamalla parametri P2.13.29
parametri P2.9.18
moottorin lämpötilan funktiona.
Moottorin nimellisjättämän viritys
Moottorin lämpötilan kompensointi
Roottoriaikavakio
muutetaan sisäisesti mitatun
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
. Roottoriaikavakio
. Tämän jälkeen
Page 60

60 • vacon PARAMETRIEN KUVAUS
2.9.19 Lämpimän moottorin jättämä
Suhteellinen jättämä prosentteina lämpimän moottorin parametrista P2.9.18
jättämän viritys
käytetään sisäistä lämpömallia. Moottorin laskennallinen lämpötila näkyy signaalissa
V1.1.12
Moottorin laskennallinen lämpötila
. Tämä parametri asetetaan, kun moottorin lämpötilan laskennassa
2.9.20 Nopeuseron suodatusaika
Signaalien V1.2.9
suodatusaika (ms). Suodatettu ero syötetään nopeussäätäjään.
Käytetty nopeusohje
2.9.21 Mitatun nopeuden suodatusaika
Enkooderista mitatun nopeuden suodatusaika (ms). Suodatettua nopeutta käytetään
parametrin V1.2.10
Nopeusero
laskemiseen. Saatu arvo syötetään nopeussäätäjään.
prosentteina moottorin nimellislämpötilasta.
ja V1.2.1
Mitattu nopeus
välisen nopeuseron
Moottorin
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 61

PARAMETRIEN KUVAUS vacon • 61
4.11 Värinänvaimennus
2.10.1 Mekaanisen resonanssin vaimennuksen valinta
Taajuusmuuttajan vaimennusominaisuus voidaan sallia tällä parametrilla. Tätä ominaisuutta voidaan käyttää vakiotaajuuksisten momenttivärinöiden vaimentamiseen.
0 Ei käytössä
1 Kaistanpäästö. Vaimennus kaistanpäästösuodattimella.
2 Kaistanesto + kaistanpäästö. Värinänvaimennus kaistanesto- ja kaistanpäästösuodat-
timella.
2.10.2 Resonanssitaajuus
Vaimennettavien momenttivärinöiden taajuus (Hz).
2.10.3 Vaimennuksen lisäys
Tämä muuttaa vaimennuksessa käytettävän kompensointisignaalin amplitudia.
2.10.4 Vaiheensiirto
Vaimennuksessa käytettävän kompensointisignaalin vaihetta voidaan siirtää tällä parametrilla 0–360 astetta.
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 62

62 • vacon PARAMETRIEN KUVAUS
4.12 Jarrun ja puhaltimen ohjaus
2.11.1 Jarrun takaisinkytkentäviive
Takaisinkytkentäviive mekaaniselta jarrulta, kun jarrun vapautuskäsky on annettu digitaali-/relelähdöstä. Nopeusohjetta ei anneta, ennen kuin jarrun vapautus on tunnistettu.
Jos jarrun vapautuksen tunnistus ei tule jarrun viiveen kuluessa, taajuusmuuttaja
pysähtyy vian F57
Mekaaninen jarru
vuoksi.
2.11.2 Jarrutus hätäpysäytyksessä
Määrittää taajuusmuuttajan ohjaamien jarrujen toiminnan hätäpysäytystilanteessa.
0 Nollanopeudessa. Mekaaninen jarru sulkeutuu nollanopeudessa, kun hätäseis-
toiminto on aktivoitu.
1 Välittömästi. Jarru sulkeutuu välittömästi, kun hätäseis-toiminto on aktivoitu.
2.11.3 Jarrutus vikatilanteessa
Määrittää taajuusmuuttajan ohjaamien jarrujen toiminnan taajuusmuuttajan vioittuessa.
0 Nollanopeudessa. Mekaaninen jarru sulkeutuu nollanopeudessa, kun vika on ilmen-
nyt taajuusmuuttajassa.
1 Välittömästi. Jarru sulkeutuu välittömästi, kun vika on ilmennyt taajuusmuuttajassa.
2.11.4 Moottorin puhaltimen pysäytysviive
Ulkoista puhallinta voidaan ohjata asettamalla digitaali-/relelähdön parametrit. Puhallin
käynnistyy Käy-käskyllä ja pysähtyy, kun moottori on pysäytetty ja moottorin puhaltimen
pysäytysviive kulunut.
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 63
PARAMETRIEN KUVAUS vacon • 63
4.13 Isäntä–seuraaja
Isäntä–seuraaja-sovellus on toteutettu Vacon NXP -taajuusmuuttajissa lisäämällä OPTD1/OPT-D2-kortti korttipaikkaan D tai E. Isäntä- ja seuraajalaitteet yhdistetään käyttämällä optista kuitua. NXP:ssä OPT-D2-korttiin on yhdistetty optinen kuitulinkki, ja se
käyttää Vaconin SystemBusia nopeaan taajuusmuuttajien väliseen kommunikaatioon.
2.12.1 I/S-tila
Tämä parametri voidaan asettaa, kun taajuusmuuttaja on konfiguroitava isäntä–
seuraaja-sovellusta varten.
0 Ei mitään. Taajuusmuuttaja toimii itsenäisenä laitteena.
1 Isäntä. Taajuusmuuttaja toimii isäntälaitteena.
2 Seuraaja. Taajuusmuuttaja toimii seuraajalaitteena ja jakaa isäntälaitteen nopeuden
tai momentin tai molemmat. Kun taajuusmuuttajaa ohjataan kenttäväylästä eli P2.6.1
Ohjauspaikka
V1.2.34
(paneeli) tai 3 = PC-ohjaus, seuraajalaitetta ohjaa isäntälaitteen sisäinen ohjaussana
SystemBusissa. Seuraajalaite käynnistyy yhdessä isäntälaitteen kanssa.
= 0, taajuusmuuttajan ohjaukseen käytetään kenttäväyläparametria
Ohjaus-pääsana
. Kun P2.6.1
Ohjauspaikka
on 1 = Riviliitin tai 2 = Paikallinen
2.12.2 Seuraajalaitteen nopeusohje
Parametrilla asetetaan seuraajalaitteen nopeusohjeen lähde. Tämä parametri asetetaan
ainoastaan seuraajalaitteessa.
0 Seuraaja. Nopeusohje generoidaan seuraajalaitteessa itsessään riippuen parametrin
P2.6.1 määrittämästä aktiivisesta ohjauspaikasta.
1 Isäntälaitteen ohje. Nopeusohje otetaan isäntälaitteen signaalista V1.2.4
1
.
2 Isäntälaitteen ramppi. Nopeusohje otetaan isäntälaitteen signaalista V1.2.9
nopeusohje
Isäntä- ja seuraajalaitteen parametriasetukset määritetään alla olevan taulukon
mukaisesti.
. Seuraajalaitteen ramppigeneraattori ohitetaan tämän jälkeen sisäisesti.
2.12.3 Seuraajan käynnistysviive
Tällä parametrilla määritellään viive isäntälaitteen käynistymisestä siihen, kun
seuraajalaite käynnistyy.
Nopeusohje
Käytetty
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 64

64 • vacon PARAMETRIEN KUVAUS
Parametri Isäntälaite Seuraajalaite Huomioita
P2.12.1 I/S-tila 1 Isäntä 2 Seuraaja Määrittää isäntä–seuraaja-
V1.2.4
.
V1.2.9
. Seuraa-
P2.7.4 Moott. ohjausmuoto = 0 Open Loop -taajuusohjaus
= 1 Open Loop -nopeusohjaus
= 3 Closed Loop –nop.-/ mom.ohjaus
P2.7.5 Mom. valinta 0 = Ei mitään
1 = Nopeus
2 = Momentti
3 = Min
4 = Max
5 = Ikkuna
P2.4.8 Mom.ohjeval.
P2.12.2 Seur. nop.ohje
P2.12.2 SB-ID P7.4.1.2.3
SystemBus ID
P2.12.3 Seur. SB-ID P7.4.1.2.4
SystemBus seur. ID
P7.4.1.2.1 Käytettävä
SystemBus = 1
P7.4.1.2.2
SystemBusin nopeus
0 = Ei mitään Ei ulkoista momenttiohjetta.
1 = Isäntä Momenttiohje isäntälaitteesta.
2 = Kenttäväylä Momenttiohje kenttäväylästä.
3 = Analoginen I/P Momenttiohje analogisesta
Tämä parametri asetetaan
0 = Seuraaja Nopeusohje generoidaan seu-
1 = Isäntälaitteen ohje Nopeusohje otetaan isäntä-
2 = Isäntälaitteen ramppi Nopeusohje otetaan isäntä-
Isäntälaitteen ID-numero.
Seuraavan taajuusmuuttajan
Jos järjestelmäohjelmisto on
muodon
Jos asetuksena on 0 tai 1, vain
nopeusseuraaja on mahdollinen.
Asetetaan sovellusvaatimusten mukaan.
I/P:stä 1 tai 2.
ainoastaan seuraajalaitteessa.
raajalaitteessa itsessään riippuen par. P2.6.1 määrittämästä aktiivisesta ohjauspaikasta.
laitteen signaalista
Nopeusohje 1
laitteen signaalista
Käytetty nopeusohje
jalaitteen ramppigeneraattori
ohitetaan tämän jälkeen sisäisesti.
Mahdollisia arvoja ovat 1–63.
ID-numero isäntä–seuraajakommunikoinnissa.
Mahdollisia arvoja ovat 1–63.
pienempi kuin NXP00002V134,
tämä signaali asetetaan sisäisesti arvoon 1, mikäli parametrien P2.12.2 ja P2.12.3
arvo ei ole nolla.
Taulukko 28. Isäntä–seuraaja-parametrit
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 65

PARAMETRIEN KUVAUS vacon • 65
4.14 Suojaukset
2.13.1 AI < 4mA
Toiminto analogiatulon vikatilanteessa. Jos jännite tai virta analogiatulon riviliittimessä
2.13.2
on pienempi kuin parametrien P2.2.2.9
seuraa analogiatulovika.
0 Ei vastetta.
1 Varoitus. Taajuusmuuttajan toiminta jatkuu, järjestelmä antaa vikailmoituksen F50.
Parametriin V1.2.40
2 Vika. Taajuusmuuttaja pysähtyy vian F50 vuoksi, ja parametriin V1.2.38
Bit15 asetetaan.
Paneelikommunikaatio
Toiminto, mikäli taajuusmuuttajan ohjausyksikön ja paneelin välinen kommunikaatioyhteys häviää.
1 Varoitus. Taajuusmuuttajan toiminta jatkuu, järjestelmä antaa varoituksen F52
Paneelikommunikaatio
asetetaan.
2 Vika. Taajuusmuuttaja pysähtyy, jos P2.6.1 Ohjauspaikka = 2 (Paikallinen) eli jos
taajuusmuuttajaa ohjataan paneelista, ja parametriin V1.2.38
asetetaan.
Hälytys-sana 1
ja parametriin V1.2.40
AI1 minimi
kuuluva Bit9 asetetaan.
ja P2.2.2.13
Hälytys-sana 1
AI2 minimi
minimiarvo,
Vika-sana 1.
kuuluva Bit15
Vika-sana 1
. Bit11
2.13.3 Ulkoinen vika
Toiminto, mikäli digitaalitulo aktivoi ulkoisen vian.
1 Varoitus. Taajuusmuuttajan toiminta jatkuu ja järjestelmä antaa varoituksen F51
Ulkoinen vika
2 Vika. Taajuusmuuttaja pysähtyy vian F51
sana 2. Bit6 asetetaan.
.
2.13.4 Tulovaihevalvonta
Toiminto, mikäli yksi tai useampia taajuusmuuttajan tulovaiheista häviää. Parametrin
arvo määritetään nollaksi vaihtosuuntajassa (ei tulosiltaa).
0 Ei vastetta. Taajuusmuuttajan toiminta jatkuu ilman varoitusta tai vikailmoitusta.
1 Vika. Taajuusmuuttaja pysähtyy vikaan F10
sana 1.
Bit8 asetetaan.
2.13.5 Lähtövaihevalvonta
Toiminto, mikäli yksi tai useampia taajuusmuuttajan lähdön ja moottorin välisistä lähtövaiheista häviää.
0 Ei vastetta.
1 Varoitus. Taajuusmuuttajan toiminta jatkuu, järjestelmä antaa varoituksen F11
Lähtövaihe
2 Vika. Taajuusmuuttaja pysähtyy vian F11
Vika-sana 2
ja parametriin V1.2.40
. Bit0 asetetaan.
Ulkoinen vika
Tulovaihe
Hälytys-sana 1
Lähtövaihe
vuoksi ja parametriin Vika-
, ja parametriin V1.2.38
. Bit4 asetetaan.
vuoksi ja parametriin V1.2.39
Vika-
Huomaa, ettei tämä suojaus pysty määrittämään yksittäisen moottoriliitännän häviötä,
jos yhteen taajuusmuuttajalähtöön on yhdistetty useita moottoreita.
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 66

66 • vacon PARAMETRIEN KUVAUS
2.13.6 Maasulku
Toiminto, mikäli moottorissa tai sen kaapeleissa ilmenee maasulku.
0 Ei vastetta.
1 Vika. Taajuusmuuttaja pysähtyy vian F3
sana 1. Bit4 asetetaan.
Maasulku
vuoksi ja parametriin V1.2.38 Vika-
2.13.7 Maasulkuvirta
Jos moottorin vaihevirtojen summa on suurempi kuin tämän parametrin määrittämä
arvo, tulee ilmoitus F3
Maasulku
valvonnassa käytetty arvo on 5 % taajuusmuuttajan nimellisvirrasta (V1.1.17
nimellisvirta
ja P2.13.8
).
Maasulku
ja taajuusmuuttaja toimii parametrien P2.13.6
Maasulkuviive
määrittämällä tavalla. Tyypillinen maasulkuvirran
Yksikön
2.13.8 Maasulkuviive
Maasulku-ilmoitus annetaan, jos moottorin vaihevirtojen summa pysyy tämän parametrin määrittämän ajan suurempana kuin parametrin P2.13.7
tämä arvo.
Maasulkuvirta
määrit-
2.13.9 Moottorin jumitila
Toiminto moottorin jumitilassa. Moottorin sanotaan olevan jumitilassa, jos moottorin
virta on suurempi kuin P2.13.10
Jumitaajuusraja
Jumiaikaraja
0 Ei vastetta. Taajuusmuuttajan toiminta jatkuu ilman varoitusta tai vikailmoitusta.
1 Varoitus. Taajuusmuuttajan toiminta jatkuu, järjestelmä antaa varoituksen F15
ja moottori pysyy tässä tilassa pidempään kuin parametrin P2.13.12
arvo sekunteina.
Moottorin jumitila
2 Vika. Taajuusmuuttaja pysähtyy vian F15
V1.2.38
Vika-sana 1
2.13.10 Jumivirtaraja
Virtataso ampeereina moottorin jumitilan valvontaa varten.
2.13.11 Jumitaajuusraja
Lähtötaajuustaso, jonka alapuolella moottorin jumitilan valvonta on aktiivinen.
2.13.12 Jumiaikaraja
Jos moottori pysyy parametrien P2.13.10
määrittämässä jumitilassa pidempään kuin tämän parametrin määrittämä aika, seuraa
moottorin jumitilavika.
Jumivirtaraja
ja parametriin V1.2.40
. Bit3 asetetaan.
Jumivirtaraja
ja lähtötaajuus pienempi kuin P2.13.11
Hälytys-sana 1.
Moottorin jumitila
Bit0 asetetaan.
vuoksi ja parametriin
ja P2.13.11
Jumitaajuusraja
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 67

PARAMETRIEN KUVAUS vacon • 67
2.13.13 Termistori
Jos taajuusmuuttajan korttipaikassa B on OPT-A3 -kortti, yksi termistori voidaan yhdistää sen kautta taajuusmuuttajaan, jolloin tieto moottorin ylikuumenemisesta välittyy
taajuusmuuttajaan.
Tämä parametri määrittää taajuusmuuttajan toiminnan, kun tieto moottorin ylikuumenemisesta tulee termistorin kautta.
0 Ei vastetta.
1 Varoitus. Taajuusmuuttajan toiminta jatkuu, järjestelmä antaa varoituksen F61
Termistori
2 Vika. Taajuusmuuttaja pysähtyy vian F61
Vika-sana 1.
ja parametriin V1.2.40
Bit7 asetetaan.
Hälytys-sana 1.
Termistori
Bit1 asetetaan.
vuoksi ja parametriin V1.2.38
2.13.14 Enkooderivika
Parametri määrittää encoderi vika vasteen, mikäli enkooderisignaali häviää
taajuusmuuttajan käydessä Closed Loop -ohjauksessa. Taajuusmuuttaja antaa
vikailmoituksen tai hälytyksen F43
Enkooderi
.
V1.2.39
0 Ei vastetta
1 Varoitus
2 Vika
Seuraavat ovat alakoodeja, jotka vian myötä generoituvat eri vikatilanteissa.
Alakoodi 1. Kanava A puuttuu
Alakoodi 2. Kanava B puuttuu
Alakoodi 3. Molemmat kanavat puuttuvat
Alakoodi 4. Enkooderin suunta vaihdettu
Alakoodi 5. Kortti puuttuu
Vika-sana 2,
Bit2 asetetaan kun vika on aktiivinen.
2.13.15 Mekaaninen jarruvika
Mekaanisen jarruvian valvonta on automaattinen, jos P2.2.1.5
arvoksi on asetettu 1–8 (ei nolla) eli jos joko DIN1–4 tai käännetty DIN1–4 on valittu
tunnistamaan jarrun tila.
Jarrut vapautetaan digitaali-/relelähdön kautta, kun Käy-käsky on annettu ja 70 %
moottorin vuosta on generoitu (vain Closed Loop -ohjauksessa). Jos vapautuksen tunnistus ei saavu valittuun digitaalituloon parametrin P2.11.1
män ajan kuluessa, seuraa mekaaninen jarruvika ja taajuusmuuttaja toimii tämän parametrin määrittämällä tavalla.
Jarru auki
-parametrin
Jarrun vapautusviive
määrittä-
1 Varoitus. Taajuusmuuttajan toiminta jatkuu, järjestelmä antaa varoituksen F57
Mekaaninen jarru
2 Vika. Taajuusmuuttaja pysähtyy vian F57
V1.2.39
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Vika-sana 2.
ja parametriin V1.2.40
Bit10 asetetaan.
Hälytys-sana 1.
Bit14 asetetaan.
Mekaaninen jarru
vuoksi ja parametriin
Page 68

68 • vacon PARAMETRIEN KUVAUS
2.13.16 Seuraajalaitteen valvontaviive
Tämä parametri asetetaan isäntä–seuraaja-sovelluksessa. Parametri asetetaan ainoastaan seuraajalaitteissa. Isäntälaite lähettää valvontasignaalin (1 sek. PÄÄLLE/POISkanttiaalto) seuraajalaitteeseen. Jos seuraajalaite ei vastaanota valvontasignaalia
ajassa, joka on pidempi kuin tämän parametrin määrittämä aika, taajuusmuuttaja
pysähtyy vian F55
Bit13 asetetaan. Tämä merkitsee, että seuraajalaite on menettänyt yhteyden isäntälaitteeseen.
Huomaa, että tämä vika voidaan havaita vain seuraajalaitteessa.
Seuraajakommunikaatio
vuoksi ja parametriin V1.2.38
Vika-sana 1.
2.13.17 Kenttäväylän valvontaviive
Viiveaika, joka ilmaisee kenttäväylätietojen häviötä ohjausjärjestelmästä. Ohjausjärjestelmä lähettää valvontasignaalin (1 sekunnin mittainen kanttiaalto) parametriin
V1.2.34
signaalia ajassa, joka on pidempi kuin tämän parametrin määrittämä aika, taajuusmuuttaja pysähtyy vian F53
Vika-sana 1.
väylä) eli jos taajuusmuuttajaa ohjataan kenttäväylästä.
Sama valvontasignaali lähetetään takaisin ohitusjärjestelmään parametriin V1.2.36 Bit
15:n kautta.
Jos tämän parametrin arvoksi asetetaan nolla, valvontatoiminto estyy. Tämän lisäksi
kenttäväylän optiokortti valvoo kommunikaatiota kenttäväylän isäntälaitteeseen ja on
aina aktiivinen. Jos yhteys isäntälaitteeseen häviää, taajuusmuuttaja pysähtyy vian F53
Kenttäväyläkommunikaatio
Ohjaus-pääsanan
Bit11:n kautta. Jos seuraajalaite ei vastaanota valvonta-
Kenttäväyläkommunikaatio
Bit12 asetetaan. Vika ilmenee vain, jos P2.6.1
vuoksi.
vuoksi ja parametriin V1.2.38
Ohjauspaikka
= 0 (Kenttä-
2.13.18 Käytettyjen PT100-tulojen määrä
PT100-anturit voidaan yhdistää Vacon-taajuusmuuttajaan lämpötilan mittausta varten
käyttämällä OPT-B8 -korttia. Yhteyttä varten on käytössä yhteensä kolme kanavaa. Tällä
parametrilla voidaan määrittää PT100-antureiden käytettävien tulokanavien määrä.
2.13.19 PT100-hälytysraja
Kaksi PT100-anturia voidaan yhdistää taajuusmuuttajaan käyttämällä analogiatuloja AI1
ja AI2 sekä analogialähtöä AO1 (10 mA). Näihin antureihin viitataan lyhenteillä PT100 (1)
ja PT100 (2). PT100-anturit voidaan yhdistää myös käyttämällä OPTB8-korttia.
Tämä parametri määrittää lämpötilarajan (°C), jonka ylittyessä taajuusmuuttaja antaa
varoituksen F56
V1.2.40 Hälytys-sana 1 kuuluva Bit1 asetetaan. Huomaa, että hälytysraja on yhteinen
kaikille järjestelmään yhdistetyille PT100-antureille.
PT100-lämpötila
. Taajuusmuuttajan toiminta jatkuu ja parametriin
2.13.20 PT100-vikaraja
Tämä parametri määrittää lämpötilarajan (°C), jonka ylittyessä taajuusmuuttaja pysähtyy
vian F56
PT100-lämpötila
vuoksi ja parametriin V1.2.38
2.13.21 Moottorin lämpötilan kompensointi
Kaksi PT100-anturia voidaan yhdistää taajuusmuuttajaan käyttämällä analogiatuloja AI1
ja AI2 sekä analogialähtöä AO1 (10 mA). Näihin antureihin viitataan lyhenteillä PT100 (1)
ja PT100 (2). Yhtä antureista käytetään yleensä moottorin käämityksen lämpötilan
mittaamiseen. Tätä mitattua lämpötilaa voidaan käyttää moottorin nimellisjättämän
Vika-sana 1.
Bit7 asetetaan.
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 69

PARAMETRIEN KUVAUS vacon • 69
virityksen (P2.9.18). Tämä on tarpeen moottorimallin tarkentamiseksi kun roottoriaikavakio vaihtelee lämpötilan funktiona ja tarvitaan hyvää momenttitarkkuutta.
Tämä parametri määrittää tarkennuksen käytettävän lämpötila-anturin.
0 Moottorin nimellisjättämän virityksen tasausta ei käytetä.
1 Moottorin lämpötila luetaan moottorin nimellisjättämän virityksen tasausta varten
anturista PT100 (1).
2 Moottorin lämpötila luetaan moottorin nimellisjättämän virityksen tasausta varten
anturista PT100 (2).
Toiminto etenee seuraavasti:
Jos esimerkiksi parametrin P2.9.18
asetettu 100 % ja tämän parametrin P2.13.21
(Tasaus anturista PT100 (1)), moottorin nimellisjättämän sisäinen viritys =
[(PT100(1)Lämpötila (°C) * 40)/100+60] * P2.9.18
Lämpötilan vaihdellessa välillä 25–100 °C moottorin nimellisjättämän viritys vaihtelee
sisäisesti välillä 70–100 %.
Moottorin nimellisjättämän viritys
arvoksi on
Moottorin lämpötilan kompensointi
Moottorin nimellisjättämän viritys
= 1
/100.
2.13.22 Moottorin laskennallinen lämpösuoja
Taajuusmuuttajassa on moottorin sisäinen lämpötilalaskentaominaisuus, joka perustuu
moottoritietoihin sekä parametrien P2.13.23
jäähdytys
lämpötila näkyy parametrissa V1.1.12
moottorin nimellislämpötilasta. Tällä toiminnolla valvotaan moottorin ylikuumenemista.
Tämä parametri määrittää toiminnon, jos moottori ylikuumenee ja moottorin laskennallinen lämpötila ylittää ohjearvon.
0 Ei vastetta.
1 Varoitus. Taajuusmuuttajan toiminta jatkuu, järjestelmä antaa varoituksen F16
Moottorin ylilämpö
2 Vika. Taajuusmuuttaja pysähtyy vian F16
V1.2.38
ja P2.13.25
Vika-sana 1.
Moottorin toimintajakso
ja parametriin V1.2.40
Bit7 asetetaan.
2.13.23 Lämpöaikavakio
Lämpöaikavakio minuutteina moottorin sisäistä lämpötilalaskentaa varten.
2.13.24 Nollanopeusjäähdytys
Moottorin jäähdytyskyky nollanopeudessa prosentteina jäähdytyskyvystä täydessä
nopeudessa tai nimellisjäähdytyskyvystä. Tätä parametria käytetään moottorin
sisäisessä lämpötilalaskennassa.
2.13.25 Moottorin toimintajakso
Lämpöaikavakio
asetuksiin. Moottorin laskennallinen
, P2.13.24
Nollanopeus-
Moottorin laskennallinen lämpötila
Hälytys-sana 1.
Moottorin ylilämpö
Bit1 asetetaan.
vuoksi ja parametriin
prosentteina
Moottorin toimintajakso moottorin sisäistä lämpötilalaskentaa varten.
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 70

70 • vacon PARAMETRIEN KUVAUS
2.13.26 Alikuormitussuoja
Toiminto alikuormitustilassa. Taajuusmuuttaja on alikuormitustilassa, jos kuormitus on
pienempi kuin minimikuormitus, jota määrittää parametrien P2.13.27
kuorma
määrittämä alikuormituskäyrä.
0 Ei vastetta.
1 Varoitus. Taajuusmuuttajan toiminta jatkuu, järjestelmä antaa varoituksen F17
2 Vika. Taajuusmuuttaja pysähtyy vian F17
, P2.13.28
Nimellisnopeuskuorma
Moottorin alikuormitus
V1.2.38
Vika-sana 1.
Bit5 asetetaan.
ja P2.13.29
ja parametriin V1.2.40
Moottorin alikuormitus
Nimellisalikuormitusnopeus
Hälytys-sana 1.
Nollanopeus-
Bit2 asetetaan.
vuoksi ja parametriin
2.13.27 Nollanopeuskuorma
Kuormitustaso alikuormituksen valvontaa varten nollanopeudessa prosentteina
moottorin nimellismomentista.
2.13.28 Nimellisnopeuskuorma
Kuormitustaso alikuormituksen valvontaa varten parametrin P2.13.29
alikuormitusnopeus
määrittämään nimellisnopeuteen saakka.
2.13.29 Nimellinen alikuormitusnopeus
Nopeusraja, jonka alapuolella alikuormitustoiminto aktivoituu.
Nimellis-
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 71

PARAMETRIEN KUVAUS vacon • 71
4.15 Vuon ohjearvot
Tätä parametriryhmää käytetään Closed Loop -ohjauksessa moottorin vuon linearisointikäyrän asettamiseksi. Kun parametri P2.1.11
moottorin käydessä), tämän ryhmän parametrit asetetaan automaattisesti. Nämä
parametrit voidaan asettaa myös, kun moottorin vuon linearisointikäyrä määritetään
manuaalisesti alla kuvatulla tavalla.
HUOM: Tätä testiä suoritettaessa taajuusmuuttajaan, mukaan lukien vaihdelaatikko, ei
saa olla yhdistettynä kuormitusta.
• Aseta P2.7.5 Momentin valinta = 1 Nopeusohjaus.
• Aseta P.2.4.15 Vuo-ohje = 100 %.
• Valvo signaaleja V1.1.4 Virta, V1.1.7 Moottorijännite ja V1.1.1 Lähtötaajuus.
• Käytä moottoria 50 %:lla moottorin nimellisnopeudesta.
• Pane merkille signaalin V1.1.7 Moottorijännite (V100) arvo.
• Pidä nopeusohje vakiona, muuta P2.4.16 Vuo-ohje 90,0 %:iin ja pane merkille
signaalin V1.1.7 Moottorijännite arvo (V90). Aseta P2.14.9 Vuokäyrä 9 = (V90/V100)
* 100.
• Pienennä parametria P2.4.15 Vuo-ohje 10 %:n askelin arvoihin 80 %, 70 % … 30 % ja
pane vastaavasti merkille signaalin V1.1.7 Moottorijännite arvo V80, V70 … V30.
Aseta parametrien P2.14.8 Vuokäyrä 8, P2.14.7 Vuokäyrä 7 … P2.14.3 Vuokäyrä 3
arvot laskien samalla tavoin kuin vaiheessa f. Toista tämä vaihe muuttamalla
parametrin P2.4.15 Vuo-ohje arvoiksi 110 %, 120 % ja 130 % ja pane vastaavasti
merkille signaalin V1.1.7 Moottorijännite arvo V110, V120 ja V130. Aseta
parametrien P2.14.11 Vuokäyrä 11, P2.14.12 Vuokäyrä 12 ja P2.14.13 Vuokäyrä
13 arvot laskien samalla tavoin kuin vaiheessa f.
• Interpoloi arvot 140–150 %:lle asettaaksesi parametrit P2.14.14 ja P2.14.15.
Identifiointiajo
= 2 (Identifiointi
2.14.1–2.14.15 Vuokäyrä 10 % ... Vuokäyrä 150 %
Moottorijännite, joka vastaa 10 % – 150 % vuosta (prosenttia nimellisestä vuojännitteestä).
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 72

72 • vacon PARAMETRIEN KUVAUS
4.16 Käynnistysmomentti
Tämän ryhmän parametreja voidaan käyttää Closed Loop -ohjauksessa. Niiden avulla
taajuusmuuttaja voi tuottaa ohjelmoitavan käynnistysmomentin heti, kun Käy-käsky on
sille annettu.
2.15.1 Käynnistysmomentin valinta
Valitse lähde käynnistysmomentin tuottamista varten.
0 Ei mitään. Ohjelmoitavaa käynnistysmomenttia ei käytetä.
1 Momenttimuisti. Taajuusmuuttaja muistaa edellisestä pysäytyksestä signaalin V1.1.5
Momentti
2 Momenttiohje. Käynnistysmomentin momenttiohje johdetaan ulkoisesta momentti-
ohjeesta, jonka määrittää parametri P2.4.8
3 ETEEN/TAAKSE. Käynnistysmomentin momenttiohje johdetaan parametrista P2.15.3
Käynnistysmomentti ETEEN
päin, ja parametrista P2.15.4
tiivinen eli suuntautuu taaksepäin.
ja tuottaa saman momentin seuraavan Käy-käskyn yhteydessä.
Momenttiohjelähteen valinta
, kun nopeusohje on positiivinen eli suuntautuu eteen-
Käynnistysmomentti TAAKSE
, kun nopeusohje on nega-
.
2.15.2 Käynnistysmomenttiaika
Käynnistysmomenttia ylläpidetään Käy-käskyn jälkeen tämän parametrin määrittämä
aika (0–10 000 ms).
2.15.3 Käynnistysmomentti ETEEN
Käy-käskyn yhteydessä tuotettavan käynnistysmomentin määrä prosentteina moottorin
nimellismomentista, kun taajuusmuuttajaa ajetaan positiivisella nopeusohjeella eli
eteenpäin. Parametria sovelletaan vain, jos P2.15.1
(ETEEN/TAAKSE).
2.15.4 Käynnistysmomentti TAAKSE
Käy-käskyn yhteydessä tuotettavan käynnistysmomentin määrä prosentteina moottorin
nimellismomentista, kun taajuusmuuttajaa ajetaan negatiivisella nopeusohjeella eli
taaksepäin. Parametria sovelletaan vain, jos P2.15.1
(ETEEN/TAAKSE).
2.15.5 Momenttimuistin lähde
Kun P2.15.1
määrittää muistilähteen, jonka mukaisen momentin taajuusmuuttaja tuottaa seuraavan
Käy-käskyn yhteydessä.
0 Todellinen momentti. Käynnistysmomenttiohjeen muistilähteenä käytetään
seuraavan käynnistyksen yhteydessä parametria V1.1.5
1 Momenttiohje. Tämä vaihtoehto on varattu tulevaa kehitystyötä varten, eikä sitä
käytetä tässä sovelluksessa.
2 Ulkoinen momenttiohje. Käynnistysmomenttiohjeen muistilähteenä käytetään
seuraavan käynnistyksen yhteydessä parametrin P2.15.6
Käynnistysmomentin valinta
2.15.6 Momenttimuistiohje
Käynnistysmomentin valinta
Käynnistysmomentin valinta
= 1 (Momenttimuisti), tämä parametri
Momentti
.
Momenttimuistiohje
= 3
= 3
arvoa.
Kun P2.15.5
(prosenttia moottorin nimellismomentista), jota käytetään käynnistysmomenttiohjeen
muistilähteenä seuraavan käynnistyksen yhteydessä.
Momenttimuistin lähde
= 2, tämä parametri määrittää momenttimäärän
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 73

PARAMETRIEN KUVAUS vacon • 73
4.17 Valvonta-asetukset
Tämän ryhmän parametreja käytetään taajuusmuuttajien testaukseen. Nämä parametrit
on tarkoitettu käytettäviksi ainoastaan tehtaalla, eikä niitä tarvitse muuttaa käyttöympäristössä.
2.16.1 Nopeudenvalvonnan suodatus
V1.1.2
Nopeus
-signaalin suodatus millisekunteina.
2.16.2 Virranvalvonnan suodatus
V1.1.4
Virta
-signaalin suodatus millisekunteina.
2.16.3 Momentinvalvonnan suodatus
V1.1.5
Momentti
-signaalin suodatus millisekunteina.
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 74

74 • vacon PARAMETRIEN KUVAUS
4.18 Kenttäväyläasetukset
Tämän ryhmän parametreja käytetään, kun taajuusmuuttaja kommunikoi ohitusjärjestelmän kanssa. Tässä sovelluksessa määritetyt ID-numerolliset parametrit tai
signaalit voidaan yhdistää ohjausjärjestelmään meneviin tai siitä tuleviin signaaleihin
luku- tai kirjoitustarkoituksessa.
2.17.1–2.17.8 PD IN1 ID ... PD IN8 ID
Minkä tahansa sovelluksessa määritetyn signaalin tai parametrin ID-numero. Tällä IDnumerolla varustettu signaali tai parametri yhdistetään prosessitietoihin IN1–IN10, jotka
kirjoitetaan ohjausjärjestelmästä taajuusmuuttajaan.
2.17.9–2.17.16 PD OUT1 ID ... PD OUT8 ID
Minkä tahansa sovelluksessa määritetyn signaalin tai parametrin ID-numero. Tällä IDnumerolla varustettu signaali tai parametri yhdistetään prosessitietoihin OUT1–OUT10,
jotka ohjausjärjestelmä lukee taajuusmuuttajasta.
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 75
KENTTÄVÄYLÄPROFIILI vacon • 75
5. KENTTÄVÄYLÄPROFIILI
HUOM: Prosessitiedot voidaan konfiguroida ID-numeroiden avulla vapaasti mihin tahansa parametriin tai signaaliin sovelluksessa. Alla esitetty prosessitietokonfiguraatio on vain esimerkki.
5.1 Prosessivalvontasignaalit ohjausjärjestelmästä Vacon-taajuusmuuttajaan
FB-
Profibus-tiedon nimi Signaalin nimi Min max Määr.
Ohjaus-
Pääsana-ohjaussana
Nopeusohje
Prosessitieto IN1
Prosessitieto IN2
Prosessitieto IN3
Prosessitieto IN4
Prosessitieto IN5
Prosessitieto IN6
Prosessitieto IN7
Prosessitieto IN8
pääsana
Nopeusohje
Momenttiohje
Ohjaus-
lisäsana 1
Ohjaus-
lisäsana 2
Kuorman jako
Momenttiaskel
Momentin
Isäntä–
seuraaja-tila
valinta
0 5 0
-32000 32000 0
-3000 3000 0 10 = 1 %
-4000 4000 1000 10 = 1 %
-3000 3000 0 10 = 1 %
0 2 0
skaala Skaalauksen kuvaus
Katso jäljempänä esitetty biteittäinen
kuvaus
20000 vastaa Prosessinopeus-parametrin määrittämää nopeutta
100 % = moottorin nimellismomentti
Katso jäljempänä esitetty biteittäinen
kuvaus
Katso jäljempänä esitetty biteittäinen
kuvaus
Tämä skaalaa prosenttiosuuden momenttiohjeesta seuraajalaitteeseen
100 % = moottorin nimellismomentti
0 = ei mitään, 1 = nopeus, 2 =
momentti, 3 = min, 4 = max, 5 = ikkuna
Paikannus lisätään tuleviin laiteversioihin
0 = ei mitään, 1 = isäntä, 2 = seuraaja
Taulukko 29.
5.2 Prosessivalvontasignaalit Vacon-taajuusmuuttajasta ohjausjärjestelmään
FB-
Profibus-tiedon nimi Signaalin nimi Min max
Tila-pääsana Tila-pääsana
Moottorin nopeus Moottorin nopeus
Moottorin
Prosessitietolähtö 1
Prosessitietolähtö 2 Tila-lisäsana Katso bittisanat alla
Prosessitietolähtö 3 Vika-sana 1 Katso bittimääritelmät alla
Prosessitietolähtö 4 Vika-sana 2 Katso bittimääritelmät alla
Prosessitietolähtö 5
Prosessitietolähtö 6 Hälytys-sana Katso bittimääritelmät alla
Prosessitietolähtö 7
Prosessitietolähtö 8
momentti
Digitaalitulon Tila-
Moottorin akselin
kierrokset
Moottorin akselin
asento
10 = 1 %
sana
Katso bittimääritelmät alla
0 360
-32768 32767
skaala
Skaalauksen kuvaus
Katso jäljempänä esitetty biteittäinen kuvaus
20000 vastaa P2.1.7
-parametrin määrittä-
nopeus
mää nopeutta
100 % = moottorin nimellismomentti
Moottorin akselin kierrosmäärä
asennon nollauksen jälkeen
Moottorin akselin asento
asteina
Taulukko 30.
Prosessi-
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 76

76 • vacon KENTTÄVÄYLÄPROFIILI
5.3 Pääsana-ohjaus
0 > 1 nollaa Ei Valmis käynnistykseen -tilan ja saattaa taajuusmuuttajan Valmis käy -tilaan. Nollattava vian ja hätäpysäytyk-
Bit 0 Päällä
Bit 1 Pysäytys vapaasti pyörien
Bit 2 Hätäseis
Bit 3 Käy
Bit 4 Rampin lähtö nolla
Bit 5 Rampin pito
Bit 6 Rampin tulo nolla
Bit 7 Vian kuittaus 0 > 1 Vian kuittaus
Bit 8 Askellus 1
Bit 9 Askellus 2
Bit 10 Salli kenttäväyläohjaus
Bit 11 Valvonta
Bit 12 Pieni Ei käytössä
Bit 13 Pieni Ei käytössä
Bit 14 Pieni Ei käytössä
Bit 15 Pieni Ei käytössä
sen jälkeen.
0 = Pysäytys vapaasti pyörien aktiivinen
1 = Pysäytys vapaasti pyörien ei aktiivinen
0 = Hätäseis aktiivinen
1 = Hätäseis ei aktiivinen
Hätäseis-toiminnon määrittää parametri P2.7.3
0 = Pysäyttää taajuusmuuttajan parametrin P.2.7.2 määrittämällä pysäytystoiminnolla
1 = Käy
0 = Rampin lähtö pakotetaan nollaan
1 = Rampin lähtö vapautetaan
0 = Rampin pito
1 = Rampin vapautus
0 = Rampin tulo pakotetaan nollaan. Pysäytys hidastaen
1 = Rampin tulo vapautetaan
0 = Ei vastetta
1 = Käy eteenpäin parametrin P2.4.2 määrittämällä vakionopeudella
0 = Ei vastetta
1 = Käy taaksepäin parametrin P2.4.3 määrittämällä vakionopeudella
0 = Kenttäväyläohjaus ei mahdollinen
1 = Taajuusmuuttajan ohjaus Profibusista, jos 2.6.1 = 0
(Kenttäväylä)
0 > 1 > 0 > 1 … 1 sek. kanttiaaltokello. Tätä käytetään Profibusisäntälaitteen ja taajuusmuuttajan välisen kommunikaation
tarkistamiseen. Käytetään kenttäväyläkommunikaation generoimiseen. Vika. Tämä valvonta voidaan kytkeä pois asettamalla
P2.13.17 Profibus-valvontaviive = 0. Kenttäväylän sisäinen
kommunikaation valvonta on edelleen aktiivinen tänä aikana.
Taulukko 31.
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 77
KENTTÄVÄYLÄPROFIILI vacon • 77
5.4 Tila-pääsana
0 = Käyttö ei valmis päällekytkentään
Bit 0 Päällä valmis
Bit 1 Käy valmis
Bit 2 Ohje valmis
Bit 3 Vika
Bit 4 Pois2-tila
Bit 5 Pois3-tila
Taajuusmuuttaja ei valmis
Bit 6
Bit 7 Hälytys
Bit 8 Asetetussa pisteessä 0 = Nopeusohje ja todellinen nopeus eivät ole samoja
Bit 9 Kenttäväyläohjaus aktiivinen
Bit 10 Rajan yli
Bit 11 Varattu
Bit 12 Varattu
Bit 13 Varattu
Bit 14 Varattu
Bit 15 Valvonta Sama kuin annettu Ohjaus-pääsanan bitissä 11
päällekytkentään
1 = Taajuusmuuttaja valmis päällekytkentään (ON)
0 = Taajuusmuuttaja ei valmis käyntiin
1 = Taajuusmuuttaja valmis käyntiin
0 = Taajuusmuuttaja ei käynnissä
1 = Taajuusmuuttaja käynnissä ja valmis vapauttamaan
ohjeen
0 = Ei aktiivista vikaa
1 = Vika on aktiivinen
0 = Pysäytys vapaasti pyörien aktiivinen
1 = Pysäytys vapaasti pyörien ei aktiivinen
0 = Hätäseis aktiivinen
1 = Hätäseis ei aktiivinen
0 = Ei estoa
1 = Taajuusmuuttaja on poissa vika- tai hätäpysäytystilasta. Ohjaus-pääsanan PÄÄLLÄ-bitti on nollattava.
0 = Ei hälytystä
1 = Hälytys aktiivinen
0 = Kenttäväyläohjaus ei aktiivinen
1 = Kenttäväyläohjaus aktiivinen. P2.6.1 Ohjauspaikka =
0 (Kenttäväylä) ja Ohjaus-pääsanan bit10 on asetettu.
0 = Nopeus on alle par. 2.4.14 määrittämän rajan
1 = Taajuusmuuttajan todellinen nopeus ylittää P2.4.16
Nopeusrajan yli -parametrin määrittämän arvon
Taulukko 32.
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 78
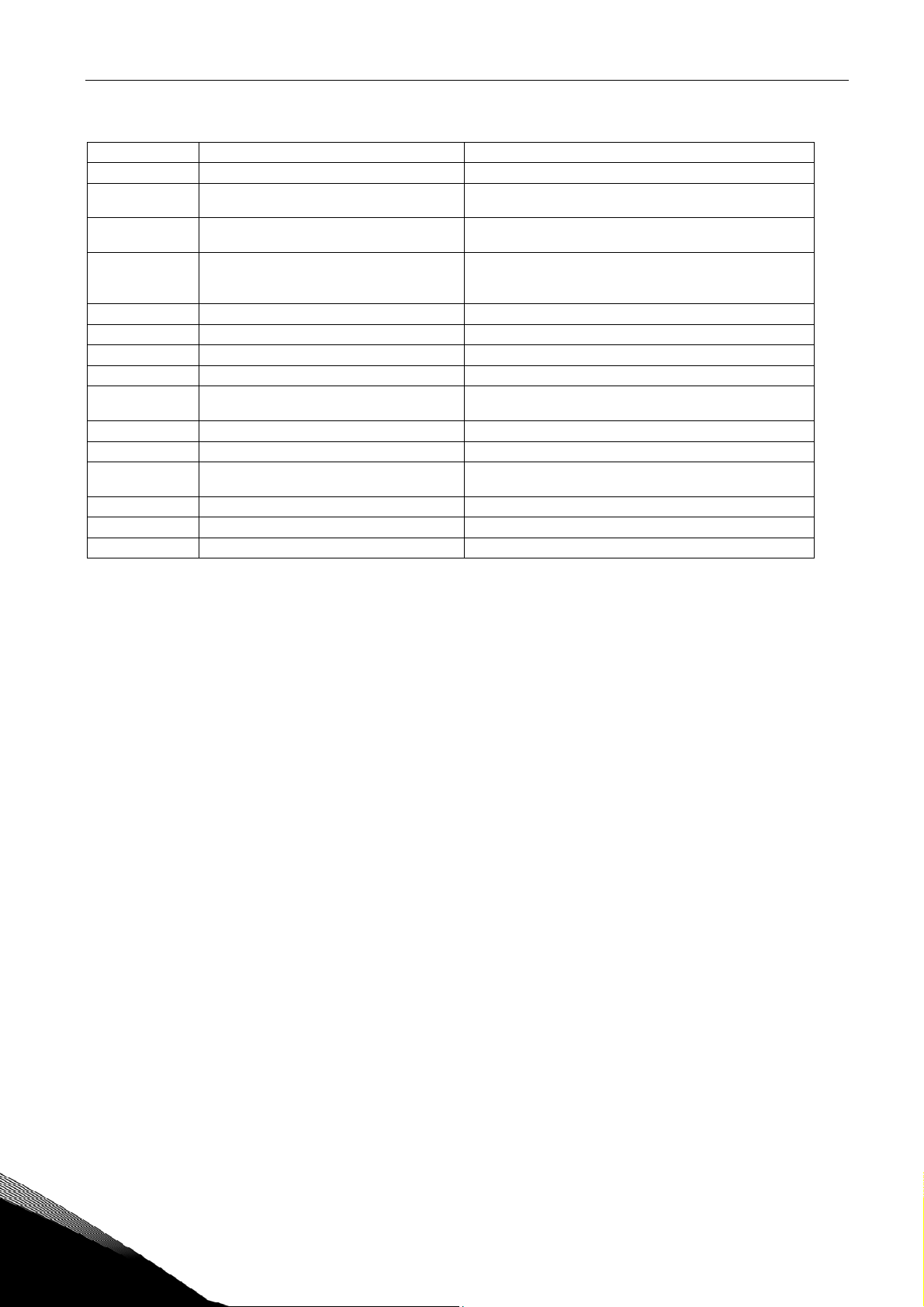
78 • vacon KENTTÄVÄYLÄPROFIILI
5.5 Ohjaus-lisäsana
Bit 0 Dataloggerin uudelleen aktivointi
Bit 1 Dataloggerin triggauskäsky
Taajuusmuuttajan ramppigeneraattori ohitetaan, jos
Bit 2 Rampin ohitus
Ohje riviliittimestä, kun ohjauspaikkana on
Bit 3
Bit 4 DC-jarrutus aktiivinen
Bit 5 Vapaa
Bit 6 Vapaa
Bit 7 Mekaanisen jarrun ohjaus Mekaanisen jarrun ohjaus kenttäväylän kautta
Bit 8 Vapaa
Bit 9 Nollaa asento
Bit 10 Vapaa
Bit 11 Vapaa
Bit 12 Salli askellus
Bit 13 DO1-ohjaus Aktivoi digitaalilähdön 1, jos parametri CO1 = 1161.13.
Bit 14 DO2-ohjaus Aktivoi relelähdön 1, jos parametri DO2 = 1161.14.
Bit 15 DO3-ohjaus Aktivoi relelähdön 2, jos parametri DO3 = 1161.15.
kenttäväylä
tämä bitti on ylhäällä.
Kun ramppigeneraattorin lähtö alittaa parametrin
P2.8.1 Nollanopeusraja, DC-jarrutus on aktiivinen, jos
tämä bitti on ylhäällä.
Nollaa signaalit V1.2.42 Akselin asento ja V1.2.43
Akselin kierrokset.
Kun tämä asetetaan suureksi, vakionopeusaskellus/-ajo
voidaan suorittaa Ohjaus-pääsanan biteillä 8 ja 9.
Taulukko 33.
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 79
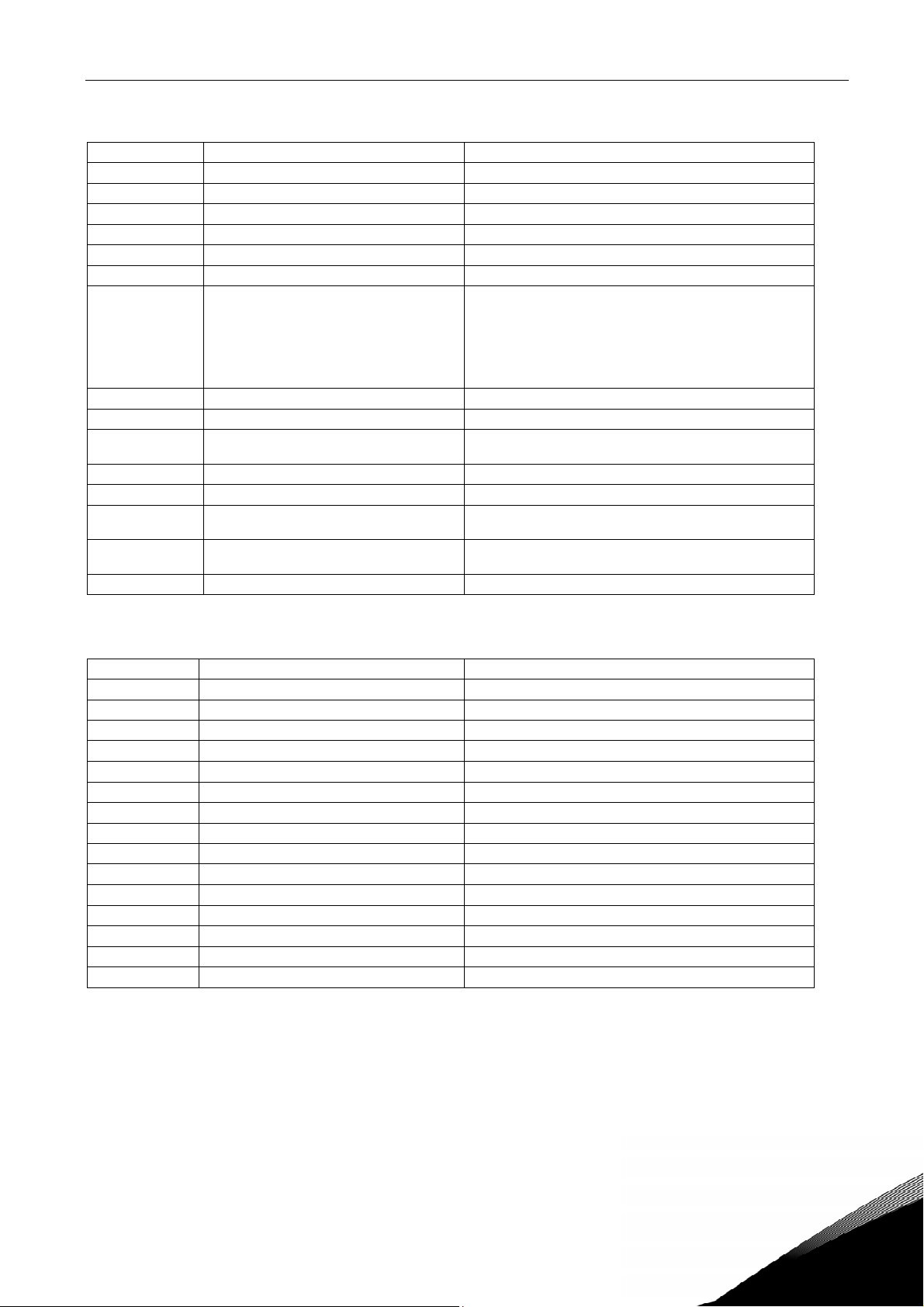
KENTTÄVÄYLÄPROFIILI vacon • 79
5.6 Vika-sana 1
Bit 0 Ylivirta
Bit 1 Ylijännite
Bit 2 Alijännite
Bit 3 Moottorin jumitila Ks. parametrit P2.13.9, P2.13.10, P2.13.11, P2.13.12
Bit 4 Maasulku Ks. parametrit P2.13.6, P2.13.7, P2.13.8
Bit 5 Alikuormitus Ks. parametrit P2.13.26, P2.13.27, P2.13.28, P2.13.29
Bit 6 Yksikön ylikuumeneminen
Tämä voi tulla kyseeseen seuraavista syistä:
Termistori, jota määrittää parametri P2.13.13 (lämpötilamittaus PT100-tyyppisen anturin avulla). Ks.
parametrit P2.2.2.3 – P2.2.2.6, P2.13.18 – P2.13.20.
Laskennallinen ylikuumeneminen, jota määrittävät
Bit 7 Moottorin lämpötila
Bit 8 Tulovaihe puuttuu Ks. parametri P2.13.4 Tulovaihevalvonta
Bit 9 Sisäinen jarrukatkojasuoja
Bit 10 Laitevika
Bit 11 Paneelikommunikaatiovika Ks. parametri P2.13.2
Bit 12 Kenttäväyläkommunikaatiovika
Bit 13 Seuraajakommunikaatio
Bit 14 Korttipaikkakommunikaatio
Bit 15 Analogiatulovika Ks. parametri P2.13.1.
parametrit P2.13.22 – P2.13.24
Laite (korttipaikkakortit) poistettu, lisätty, muutettu,
tuntematon
Isäntä–seuraaja-kommunikaatio.
Ks. parametrit P2.12.1, P2.12.2, P2.12.3.
Korttipaikkakommunikaatiovika. Yksi korttipaikkakorteista on viallinen.
Taulukko 34.
5.7 Vika-sana 2
Bit 0 Lähtövaihevika Ks. parametri P2.13.5
Bit 1 Latauskytkinvika
Bit 2 Enkooderivika Ks. parametri P2.13.14
Bit 3 Taajuusmuuttajan laitevika
Bit 4 Yksikön alilämpötila
Bit 5 EEPROM-/Tarkistussummavika
Bit 6 Ulkoinen vika Ks. parametri P2.2.1.13
Bit 7 Jarrukatkojavika
Bit 8 Sisäinen kommunikaatio
Bit 9 IGBT-lämpötila
Bit 10 Moottorin jarruvika Ks. parametrit P2.13.15, P2.11.1
Bit 11 Varattu
Bit 12 Sovellusvika
Bit 13 Taajuusmuuttajan sisäinen vika
Bit 14 Pääkytkin auki DIN5 ei ole ylhäällä. Tunnistus pääkytkimestä.
Bit 15 Ei käytössä
Taulukko 35.
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 80

80 • vacon KENTTÄVÄYLÄPROFIILI
5.8 Hälytys-sana 1
Bit 0 Moottorin jumitila
Bit 1 Moottorin ylikuumeneminen
Bit 2 Moottorin alikuormitus
Bit 3 Tulovaihe puuttuu Ks. parametri P2.13.4 Tulovaihevalvonta
Bit 4 Lähtövaihe puuttuu Ks. parametri P2.13.5
Bit 5 Käynnistyksen esto
Bit 6 Pääkytkin auki
Bit 7 Ei käytössä
Bit 8 Vacon-yksikön ylikuumeneminen
Bit 9 Analogiatulo < 4 mA
Bit 10 Moottoripuhallinvaroitus
Bit 11 Hätäseis
Bit 12 Käynti estetty
Bit 13 Askellus estetty
Bit 14 Moottorin jarru Ks. parametrit P2.2.6, P2.11.1
Bit 15 Paneelikommunikaatiohälytys
Ks. parametrit P2.13.9, P2.13.10, P2.13.11, P2.13.12
Tämä voi tulla kyseeseen seuraavista syistä:
Termistori, jota määrittää parametri P2.13.13 (lämpötilamittaus) PT100-tyyppisen anturin avulla. Ks. parametrit P2.2.2.3–P2.2.2.6, P2.13.18–P2.13.20.
Laskennallinen ylikuumeneminen, jota määrittävät
parametrit P2.13.22–P2.13.24.
Ks. parametrit P2.13.26, P2.13.27, P2.13.28, P2.13.29
F26 Käynnistyksen esto. Tämä varoitus annetaan, kun
Käy valmis -tulo DI = 0 ja P2.2.1.11 Käynnistyksen esto
on sallittu. Normaalisti esto on sallittu, kun käytetään
ulkoista laitetta virhekäynnistyksen estämiseksi.
Ks. parametri P2.2.8 Käy valmis -ohjaus. Tämä hälytys
annetaan, jos parametrin arvo on 5 tai 6 ja DI5 on
alhaalla.
Ks. parametri P2.13.1
Ks. parametri P2.2.7
Ks. parametri P2.2.9. Tämä hälytys annetaan, jos
parametrin arvo = 1 DI6 ja DI6 on alhaalla.
Ks. parametri P2.14.2
Taulukko 36.
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 81

KENTTÄVÄYLÄPROFIILI vacon • 81
5.9 Digitaalitulon Tila-sana 1
Bit 0 DIN1
Bit 1 DIN2
Bit 2 DIN3
Bit 3 DIN4
Bit 4 DIN5
Bit 5 DIN6
Bit 6 TIB (A3)
Bit 7 DIN7
Bit 8 DIN8
Bit 9 DIN9
Bit 10 DIN10
Bit 11 DIN11
Bit 12 DIN12
Bit 13 DIN13
Bit 14 DIN14
Bit 15 DIN15
Taulukko 37.
5.10 Digitaalitulon Tila-sana 2
Bit 0 DIN16
Bit 1 DIN17
Bit 2 DIN18
Bit 3 DIN19
Bit 4 DIN20
Bit 5 DIN21
Bit 6 DIN22
Bit 7 DIN23
Bit 8 DIN24
Bit 9 DIN25
Bit 10 DIN26
Bit 11 DIN27
Bit 12 DIN28
Bit 13 DIN29
Bit 14 DIN30
Bit 15
Taulukko 38.
Digitaalitulon 1 tila
Digitaalitulon 2 tila
Digitaalitulon 3 tila
Digitaalitulon 4 tila
Digitaalitulon 5 tila
Digitaalitulon 6 tila
Termistoritulon tila
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 82

82 • vacon YLEISKAAVIOT
6. YLEISKAAVIOT
TITLE
Speed Reference Chain
V1.2.10Speed Error
V1.2.7Speed Ramp Out
DRAWN BY
SK
DATE
17.12.2003
PAGE
1OF5
+
V1.2.1Speed Actual
G2.5Accel Time1
G2.5Decel Time1
G2.5Ramp AccDec
G2.5EmStop Ramp
G2.5ConstSpd Acc Time
RAMP
GENERATOR
G2.5ConstSpd Dec Time
G2.5Ramp Const Spd
G2.5Start Functioh
Ramp Input Zero
Ramp Hold
Ramp Out Zero
Ramp Bypas
G2.4Speed Step
V1.2.6Speed Reference3
V1.2.12Speed Limit Pos
G2.8Speed Maximum
V1.2.5Speed Reference2
V1.2.4Speed Reference1
X
G2.4 SpdRef Filter
G2.8Speed Minimum
V1.2.13Speed Limit Neg
Speed Share
SEL
Scaling
FBRef in Counts
G2.4FB Ref Scale
Master Speed Ref
Local Speed Ref
G2.4Const Ref1
G2.4Const Ref2
State Machine
Ramp Options in
MCW from FB Interface
G2.12Follower Speed Ref
G2.7Emstop Mode
G2.7Stop Function
Logic
Speed
Selection
Reference
G2.6Control Place
FB Interface
G2.12M/F Mode
G2.12Follower Sp Ref
Filt
Kuva 5.
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 83

YLEISKAAVIOT vacon • 83
TITLE
Torque Reference Chain
V1.2.22 Used Torque Ref
+
DRAWN BY
SK
G2.4Torque Step
G2.4 TRef Filter
G2.4 TRef Hysterisis
G2.4 TRef Dead Zone
DATE
17.12.2003
PAGE
1OF5
+
From FB
Load Compensation
V1.2.21 Torque Ref3
V1.2.20 Torque Ref2
V1.2.19 Torque Ref1
None
X
G2.4 Load Share
Scaling
SEL
G2.4Tref Source Sel
V1.2.17 FB Torque Ref
V1.2.16Master TorqueRef
V1.2.18 Remote Torque Ref
V1.2.33 Id Reference
X
Rate Limiter
X
G2.1 Magn. Current
G2.4 Flux Reference
Rate Limiter
Output
Limiter
Voltage
Kuva 6.
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 84

84 • vacon YLEISKAAVIOT
TITLE
Speed Controller
SPEED
CONTROLLER
DAMPING
DRAWN BY
SK
V1.2.11 SPC OUT
G2.9 SPC Kp
G2.9 SPC Ti
G2.9 SPC Kp Min
G2.9 SPC Kp Min Point
G2.9 SPC Kp Min Filt
G2.9 SPC Kp FWP
G2.9 SPC Kp N0
G2.9 SPC Kp N0 Point
G2.9 SPC Kp N1 Point
G2.9 Slip Adjust
G2.9 Warm Motor Slip
DATE
17.12.2003
V1.2.31 Iq Reference
V1.2.29 Iq Current Lim+
V1.2.23 Acc Comp Out
V1.2.30 Iq Current Lim-
+
PAGE
1OF5
FILT
G2.9 Accel Comp Filt
X
G2.10 Oscill Freq
G2.10 Oscill Damp Gain
G2.10 Phase Shift
G2.10 Oscill Damp Sel
V1.2.10 Speed Error
d/dt
G2.9 Mech AccComp TC
V1.2.7 Speed Ramp Out
SEL
V1.2.9 Used Speed Ref
V1.2.24 Droop Speed RPM
X
V1.2.1 Speed Actual
FILT
G2.9 Speed Act Filt
0
Min
Add
Max
G2.9 Window Pos RPM
G2.9 Window Neg RPM
G2.9 Window Off Pos
G2.9 Window Off Neg
G2.7 Torque Select
G2.7 Motor Ctrl Mode
+
is internally set to zero.
Kuva 7.
V1.2.11 SPC OUT
G2.9 Load Drooping
Note:When Torque Select=1 Then P2.4.6Tref Source Sel
Iq Ref (Tref)
V1.2.11 SPC OUT
Note:Iq Ref is an internal reference
V1.2.22 Used Torque Ref
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 85

YLEISKAAVIOT vacon • 85
TITLE
Fieldbus Interface
DRAWN BY
SK
Motor Speed
Motor Torque
Main Status Word
Process Data Out1
Fault Word 1
Fault Word 2
Auxilliary Status Word1
Process Data Out2
Process Data Out3
Process Data Out4
DATE
17.12.2003
Alarm Word 1
DI Status Word
Process Data Out5
Process Data Out6
None
Process Data Out7
Process Data Out8
PAGE
1OF5
Fieldbus Interface
Process Data In1
Process Data In2
Process Data In3
Process Data In4
Process Data In5
Process Data In6
Process Data In7
Process Data In8
None
Load Share
Main Control Word
20000=Speed scaling
Speed Reference counts
Auxilliary Control Word1
Torque Reference Counts
1000=Motor Nominal Torque
Torque Step
None None
Torque Select
Master Follower Mode
Kuva 8.
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 86

86 • vacon YLEISKAAVIOT
TITLE
DRAWN BY
Matster Follower
SLAVE2
G2.12 SB Node Id=(21)
G2.12 SB Next Node
Id=(10)
G2.12 M/F Mode=2
G2.4 Tref So urce Sel
G2.12 Follower Spd Ref
MasterSpeed Ref
Master Tref
SK
DATE
17.12.2003
PAGE
1 OF 5
SLAVE1
MASTER
G2.12 SB Node Id=(10)
Kuva 9.
System Bus
G2.12 SB Node Id=(11)
G2.12 SB Next Node Id=(21)
G2 12 M/F Mode=2
G2.4 Tref Source Sel
G2.12 Follower Spd Ref
G2.12 SB Next Node
Id=(11)
G2.12 M/F Mode=1
MasterSpeed Ref
Master Tref
System Bus System Bus
SpeedRampOut
MainControlWord
Torque Reference
Speed Reference2
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 87

VIANMÄÄRITYS vacon • 87
7. VIANMÄÄRITYS
Kun taajuusmuuttajan valvontaelektroniikka havaitsee vian, laite pysähtyy ja näyttöön tulee näkyviin
symboli F, vian järjestysnumero, vikakoodi sekä vian lyhyt kuvaus. Vika voidaan kuitata
painikkeella
ohjauspaneelilta tai riviliittimiltä. Viat tallennetaan vikahistoriavalikkoon (M5), jota
Reset-
voidaan selata.
Vikakoodit, vikojen aiheuttajat ja korjaavat toimenpiteet on esitetty allaolevassa taulukossa. Varjostetut viat ovat ainoastaan A-vikoja. Valkoisella mustalle pohjalle kuvattujen vikojen vaste on määriteltävissä parametrein, kts. parametriryhmä Suojaukset.
Huom! Ottaessasi yhteyttä jälleenmyyjään tai tehtaaseen ilmenneen vian johdosta on hyvä kirjoittaa
ylös kaikki ohjauspaneelille ilmestynyt vikatekstit ja koodit.
Vikakoodi
1 Ylivirta Taajuusmuuttaja on havainnut moottori-
2 Ylijännite DC-välipiirin jännite on ylittänyt mainitut
3 Maasulku Virranmittauksessa on havaittu, että
5 Latauskytkin Latauskytkin on auki, kun KÄY-komento
7 Saturaatiovika Useita mahdollisia syitä:
8 Järjestelmävika - viallinen komponentti
9 Alijännite DC-välipiirin jännite on alle määriteltyjen
Vika Mahdollinen syy Korjaavat toimenpiteet
kaapelissa liian suuren virran (>4*I
− äkillinen voimakas kuormituksen lisäys
− oikosulku moottorikaapeleissa
− sopimaton moottori
rajat
− hidastuvuusaika on liian lyhyt
− syöttöjännitteessä suuria jännite-
piikkejä
moottorilähdön vaihevirtojen summa ei
ole nolla.
− eristevika kaapeleissa tai moottorissa
on annettu.
− viallinen toiminta
− komponenttivika
− viallinen komponentti
− oikosulku tai ylikuorma jarruvastuk-
sessa
- häiriötoiminta
Huomaa poikkeukselliset vikatiedot. Kts.
rajojen.
− todennäköisin syy: liian alhainen
syöttöjännite
− taajuusmuuttajassa sisäinen vika
n
):
Tarkista kuormitus.
Tarkista moottori.
Tarkista kaapelit.
Säädä hidastuvuusaika pidemmäksi.
Lisää jarrukatkoja tai jarruvastus
(lisävaruste).
Tarkista moottorikaapeli ja moottori.
Kuittaa vika ja käynnistä laite uudelleen.
Jos vika ilmenee uudelleen, ota yhteys
lähimpään jälleenmyyjään.
Käy kotisivuillamme:
http://www.vacon.com/wwcontacts.html
Ei voi kuitata paneelilla.
Katkaise virta.
ÄLÄ KYTKE VIRTAA UUDELLEEN!
Ota yhteyttä valmistajaan.
Mikäli tämä vika ilmenee samanaikaisesti F1-vian kanssa, tarkista moottorikaapeli ja moottori
Kuittaa vika ja käynnistä uudelleen.
Jos vika ilmenee uudelleen, ota yhteys
lähimpään jälleenmyyjään.
Käy kotisivuillamme:
http://www.vacon.com/wwcontacts.html
Tilapäisen syöttöjännitekatkoksen sattuessa kuittaa vika ja käynnistä taajuusmuuttaja uudelleen. Tarkista syöttöjännite. Jos se on riittävä, kyseessä on
sisäinen vika.
Ota yhteys lähimpään jälleenmyyjään.
Käy kotisivuillamme:
http://www.vacon.com/wwcontacts.html
10 Syöttövaihe- Syöttövaihe puuttuu. Tarkista syöttöjännite ja –kaapeli.
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 88

88 • vacon VIANMÄÄRITYS
Vikakoodi
11 Lähtövaihe-
12 Jarrukatkojan
13 Taajuusmuutta-
14 Taajuusmuutta-
15 Moottori
16 Moottorin
17 Moottorin
25 Mikro-
26 Käynnistys
31 IGBT lämpötila
32 Jäähdytys Taajuusmuuttajan puhallin ei käynnisty,
34 CAN-väylävika Lähetettyyn viestiin ei ole saatu kuittausta
35 Sovellus Sovelluksen tai prosessorin ylikuormitus. Katkaise ja kytke uudelleen virta ohjaus-
36 Ohjausyksikkö NXS-laitteen ohjausyksikköä ei voida
37 Laite vaihdettu
38 Laite lisätty
39 Laite poistettu Lisäkortti poistettu.
Vika Mahdollinen syy Korjaavat toimenpiteet
valvonta
valvonta
valvonta
jan alilämpötla
jan ylilämpötla
jumissa
ylilämpötila
alikuormitus
prosessorin
watchdog-vika
estetty
(hardware)
(sama tyyppi)
(sama tyyppi)
Virranmittauksessa on havaittu, että
yhdessä lähtövaiheessa ei ole virtaa.
− jarruvastusta ei ole kytketty
− jarruvastus on poikki
− jarrukatkojassa on vika
Jäähdytyselementin lämpötila alle –10°C
Jäähdytyselementin lämpötila yli 90°C tai
77ºC (NX_6, FR6).
Ylilämpötilan varoitus annetaan, kun jäähdytyselementin lämpötila ylittää 85°C
(72ºC).
Moottorin jumisuoja on lauennut Tarkista moottori.
Laitteen moottorin lämpötilavalvonta on
havainnut ylilämpötilan moottorissa.
Moottorin ylikuormitus.
Moottorin alikuormitussuoja on lauennut.
− häiriötoiminta
− komponenttivika
Taajuusmuuttajan käynnistys on estetty. Peru käynnistyksen esto.
IGBT-ylilämpösuoja on havainnut liian
korkean lyhytkestoisen ylivirran.
kun KÄY-komento annetaan.
väylästä.
käyttää NXP-laitteessa eikä päinvastoin
Lisäkortti tai ohjausosa vaihdettu.
Samantyyppinen kortti tai laitteessa
samat tehoarvot.
Laajennuskortti tai laite lisätty.
Samantyyppinen kortti tai laite, jolla on
samat tehoarvot, on lisätty.
Laite poistettu.
Tarkista moottorikaapeli ja moottori.
Tarkista jarruvastus.
Jos vastus on kunnossa, katkoja on viallinen. Ota yhteys lähimpään jälleenmyyjään.jälleenmyyjään
Käy kotisivuillamme:
http://www.vacon.com/wwcontacts.html
Tarkista jäähdytysilman virtaus.
Tarkista, ettei jäähdytyselementti ole
pölyinen.
Tarkista ympäristön lämpötila.
Varmista, ettei kytkentätaajuus ole liian
suuri ympäristön lämpötilaan ja moottorin kuormitukseen nähden.
Vähennä moottorin kuormitusta.
Jos moottori ei ole ylikuormittunut,
tarkista lämpötilanvalvontaparametrit.
Kuittaa vika ja käynnistä uudelleen.
Jos vika ilmenee uudelleen, ota yhteys
lähimpään jälleenmyyjään.
Käy kotisivuillamme:
http://www.vacon.com/wwcontacts.html
Tarkista kuorma.
Tarkista moottorin koko.
Ota yhteys lähimpään jälleenmyyjään.
Käy kotisivuillamme:
http://www.vacon.com/wwcontacts.html
Varmista, että väylässä on toinen,
samoin konfiguroitu laite.
yksikköön
Vaihda ohjausyksikköä.
Kuittaa.
Huom: Vikahetken tietoja ei saatavilla!
Kuittaa.
Huom: Vikahetken tietoja ei saatavilla!
Kuittaa.
Huom: Vikahetken tietoja ei saatavilla!
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 89

VIANMÄÄRITYS vacon • 89
Vikakoodi
40 Tuntematon
41 IGBT lämpötila IGBT-ylilämpösuoja on havainnut liian
42 Jarruvastuksen
43 Enkooderivika Huomaa poikkeukselliset vikatiedot. Kts.
44 Laite vaihdettu
45 Laite lisätty
50 Analogiatulo Iin <
51 Ulkoinen vika Digitaalitulovika
52 Ohjauspaneelin
53 Kenttäväylävika Tietoliikenneyhteys Master-laitteen ja
54 Korttipaikkavika Optiokortti tai korttipaikka on viallinen Tarkista kortti ja korttipaikka.
55 Seuraajan
56 PT100-kortin
57 Epäonnistunut
58 Mekaaninen
Vika Mahdollinen syy Korjaavat toimenpiteet
Tuntematon lisäkortti tai laite Ota yhteys lähimpään jälleenmyyjään.
laite
ylilämpö
(eri tyyppi)
(eri tyyppi)
4mA (valittu
signaalialue 4 –
20 mA)
kommunikaatiovika
kommunikaatio
lämpötilavika
identifiointiajo
jarru
korkean lyhytkestoisen ylivirran.
Liian voimakas jarrutus. Säädä hidastuvuusaika pidemmäksi.
Lisäkoodit:
1 = Enkooderi 1:n kanavaa A ei löydy
2 = Enkooderi 1:n kanavaa B ei löydy
3 = Kumpaakaan enk.kanavaa ei löydy
4 = Kanavat A ja B ristissä
Laajennuskortti tai ohjausosa vaihdettu.
Erityyppinen laajennuskortti tai laitteessa
eri tehoarvot.
Laajennuskortti tai laite lisätty.
Erityyppinen laajennuskortti tai laite, jolla
on eri tehoarvot, on lisätty.
Analogiatulon virta on < 4mA.
− ohjauskaapeli on irti tai vioittunut
− signaalilähde on vioittunut
Yhteys ohjauspaneelin ja
taajuusmuuttajan välillä on katkennut
kenttäväyläkortin välillä on katkennut
Tämä vika voi ilmetä vain
seuraajalaitteessa (P2.12.1 I/S-tila =2
(Seuraaja).
Seuraajalaite ei saa tietoa isäntälaitteelta
SystemBusia myöten.
PT100-kortille asetettu lämpötilaraja on
ylittynyt
Identifiointiajo epäonnistui. Tarkista valvontasignaali V1.1.19
Mekaanisen jarrun vapautuksesta ilmoittava signaali ei ole saapunut perille parametrilla P2.11.1 määritettynä aikana Käy-
Käy kotisivuillamme:
http://www.vacon.com/wwcontacts.html
Tarkista kuorma.
Tarkista moottorin koko.
Käytä ulkoista jarruvastusta.
Tarkista enkooderin kytkennät.
Tarkista enkooderikortti.
Kuittaa.
Huom: Vikahetken tietoja ei saatavilla!
Huom: Sovellusparametrit saavat
oletusarvot
Kuittaa.
Huom: Vikahetken tietoja ei saatavilla!
Huom: Sovellusparametrit saavat
oletusarvot
Tarkista ohjearvopiirin ohjearvolähetin.
Tarkista paneelin liitäntä ja mahdollinen
liitäntäkaapeli.
Tarkista asennus.
Mikäli asennus on kunnossa, ota yhteys
lähimpään jälleenmyyjään.
Käy kotisivuillamme:
http://www.vacon.com/wwcontacts.html
Ota yhteys lähimpään jälleenmyyjään.
Käy kotisivuillamme:
http://www.vacon.com/wwcontacts.html
Tarkista parametrin P2.13.17 SB-väylän
valvontaviive. Oletusasetus on 0.10 s.
Tarkista isäntä- ja seuraajalaitteen
välinen optinen kytkentä sekä OPT-D2 –
kortin pistikeasetukset Vaconin
optiokorttikäsikirjasta. OPT-D2 –kortti
voidaan asettaa vain korttipaikkaan D tai
E.
Etsi lämpötilan nousun syy.
. Sieltä selviää, mikä osa ajosta on
tila
epäonnistunut. Toista identifiointiajo.
Tarkista parametrit
P2.13.15
P2.2.1.5
Mekaaninen jarruvika
Jarru auki
ID-ajon
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
Page 90
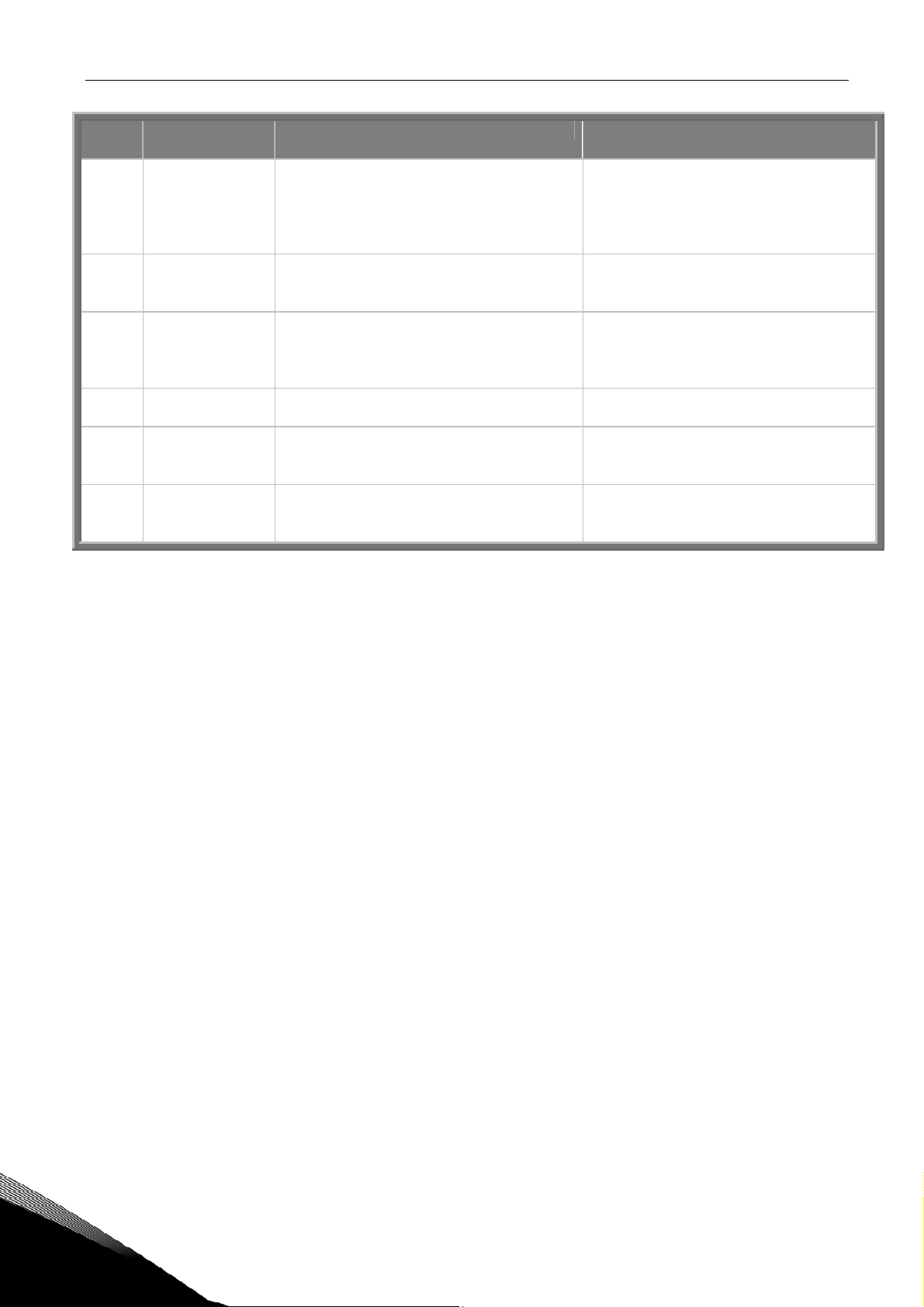
90 • vacon VIANMÄÄRITYS
Vikakoodi
59 Moottorin
61 Termistori Termistorin ylilämpö.
62 Käy estetty Käy valmis –digitaalitulo on alhaalla. Tarkista parametrit P2.2.1.9 ja P2.2.1.10.
63 Hätäseis DIN6 aktiivinen / = 0. Tarkista DIN6-tuloon kytketty Hätäseis-
64 Tulokytkin auki Laitteen päävirta on katkaistu ja digitaali-
Vika Mahdollinen syy Korjaavat toimenpiteet
puhallin
komennon antamisen jälkeen. Digitaalitulo signaalia varten valitaan joko parametrilla P2.2.1.5
vapautus tunnistetaan, kun Käy-käskyä ei
ole annettu.
Moottorin puhaltimen tunnistussignaali ei
ole saapunut 5 sekunnissa Käy-käskyn
antamisesta.
Termistori on OPT-A3 –kortilla
korttipaikassa B.
tulo DIN5 on aktiivinen / = 0.
Jarru auki
TAI jarrun
P2.11.1
Tarkista moottorin jarrutuspiiri.
Tarkista parametri P2.2.1.7.
Tarkista moottorin puhaltimen kytkentä.
Tarkista sen paikan lämpötila, jonne
termistori on asennettu.
Tarkista termistorin kytkentä kortilla
OPT-A3.
Resetoi Käy valmis –tulo.
nappi.
Tarkista parametri P2.2.1.12
Tarkista laitteen päävirtakytkin.
Tarkista parametri P2.2.1.9
käsikirjan kuvauksen mukaan.
Jarrun vapautusviive
Hätäseis
Käy valmis
Taulukko 39. Vikakoodi
.
Puh. +358 (0)201 2121 • Fax +358 (0)201 212 205
Page 91

Vaasa
Vacon Plc (Head office and production)
Runsorintie 7
65380 Vaasa
firstname.lastname@vacon.com
telephone: +358 (0)201 2121
fax: +358 (0)201 212 205
sales companies and representative offices:
Austria
Vacon AT Antriebssysteme GmbH
Aumühlweg 21
2544 Leobersdorf
telephone: +43 2256 651 66
fax: +43 2256 651 66 66
Belgium
Vacon Benelux NV/SA
Interleuvenlaan 62
3001 Heverlee (Leuven)
telephone: +32 (0)16 394 825
fax: +32 (0)16 394 827
France
Vacon France
ZAC du Fresne
1 Rue Jacquard – BP72
91280 Saint Pierre du Perray CDIS
telephone: +33 (0)1 69 89 60 30
fax: +33 (0)1 69 89 60 40
Germany
Vacon GmbH
Gladbecker Strasse 425
45329 Essen
telephone: +49 (0)201 806 700
fax: +49 (0)201 806 7099
Great Britain
Vacon Drives (UK) Ltd.
18, Maizefield
Hinckley Fields Industrial Estate
Hinckley
LE10 1YF Leicestershire
telephone: +44 (0)1455 611 515
fax: +44 (0)1455 611 517
Helsinki
Vacon Plc
Äyritie 12
01510 Vantaa
telephone: +358 (0)201 212 600
fax: +358 (0)201 212 699
Tampere
Vacon Plc
Vehnämyllynkatu 18
33580 Tampere
telephone: +358 (0)201 2121
fax: +358 (0)201 212 750
Italy
Vacon S.p.A.
Via F.lli Guerra, 35
42100 Reggio Emilia
telephone: +39 0522 276811
fax: +39 0522 276890
The Netherlands
Vacon Benelux BV
Weide 40
4206 CJ Gorinchem
telephone: +31 (0)183 642 970
fax: +31 (0)183 642 971
Norway
Vacon AS
Langgata 2
3080 Holmestrand
telephone: +47 330 96120
fax: +47 330 96130
PR China
Vacon Suzhou Drives Co. Ltd.
Building 13CD
428 Xinglong Street
Suchun Industrial Square
Suzhou 215126
telephone: +86 512 6283 6630
fax: +86 512 6283 6618
Vacon Suzhou Drives Co. Ltd.
Beijing Office
A205, Grand Pacific Garden Mansion
8A Guanhua Road
Beijing 100026
telephone: +86 10 6581 3734
fax: +86 10 6581 3754
Vacon Traction Oy
Vehnämyllynkatu 18
33580 Tampere
telephone: +358 (0)201 2121
fax: +358 (0)201 212 710
Russia
ZAO Vacon Drives
Bolshaja Jakimanka 31,
stroenie 18
109180 Moscow
telephone: +7 (095) 974 14 47
fax: +7 (095) 974 15 54
ZAO Vacon Drives
2ya Sovetskaya 7, office 210A
191036 St. Petersburg
telephone: +7 (812) 332 1114
fax: +7 (812) 279 9053
Singapore
Vacon Plc
Singapore Representative Office
102F Pasir Panjang Road
#02-06 Citilink Warehouse Complex
Singapore 118530
telephone: +65 6278 8533
fax: +65 6278 1066
Spain
Vacon Drives Ibérica S.A.
Miquel Servet, 2. P.I. Bufalvent
08243 Manresa
telephone: +34 93 877 45 06
fax: +34 93 877 00 09
Sweden
Vacon AB
Torget 1
172 67 Sundbyberg
telephone: +46 (0)8 293 055
fax: +46 (0)8 290 755
Vacon distributor:
Ympärivuorokautinen tuki: +358 (0)40 837 1150 • Sähköposti: vacon@vacon.com
 Loading...
Loading...