

Page 1
User Manual
PLUS+1 ® Compliant
JS1 CANopen CANplus Joystick Function
Blocks
www.danfoss.com
Page 2
User Manual
PLUS+1® Compliant JS1 CANopen CANplus Joystick Function Block
Revision history Table of revisions
Date Changed Rev
February 2020 First Edition 0101
2 | © Danfoss | February 2020 AQ309185946321en-000101
Page 3

User Manual
PLUS+1® Compliant JS1 CANopen CANplus Joystick Function Block
Contents
JS1 CANopen CANplus Function Block
Overview..............................................................................................................................................................................................4
Inputs....................................................................................................................................................................................................5
Parameters.....................................................................................................................................................................................5
Outputs................................................................................................................................................................................................ 6
Status and Fault Logic..................................................................................................................................................................11
Boolean Output Signals..........................................................................................................................................................11
Proportional Output Signals.................................................................................................................................................11
Configuration of the PLUS+1 GUIDE Template...................................................................................................................12
JS1 CANplus Service Screens
JS1 CANplus 18 Pin Service Screens........................................................................................................................................13
JS1 CANplus 24 Pin Service Screens........................................................................................................................................15
©
Danfoss | February 2020 AQ309185946321en-000101 | 3
Page 4
User Manual
PLUS+1® Compliant JS1 CANopen CANplus Joystick Function Block
JS1 CANopen CANplus Function Block
Overview
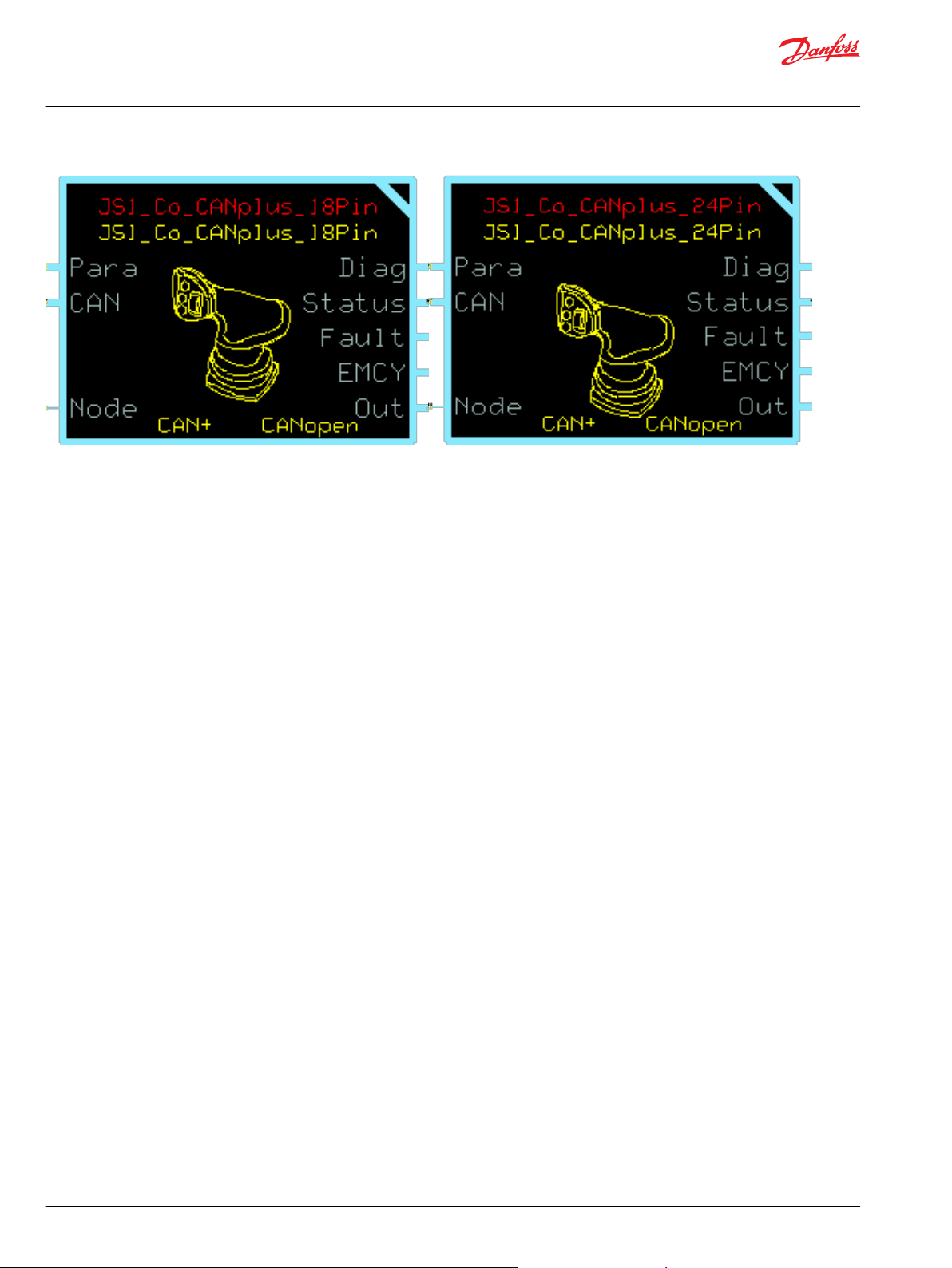
The JS1 function block configures the output of a Danfoss JS1 CANopen CANplus joystick.
•
The JS1_Co_CANplus_18Pin function block configures the output of a Danfoss JS1 18 Pin CANplus
joystick.
•
JS1_Co_CANplus_24Pin function block configures the output of a Danfoss JS1 24 Pin CANplus
joystick.
In addition to grip and handle inputs, the JS1 CANplus joystick also has 11 external inputs. Four of these
inputs can be configured as analog inputs.
The JS1 CANplus joystick broadcasts these CANopen messages that report joystick inputs:
•
CANopen HEARTBEAT Message - Reports the operational state of the joystick.
•
CANopen EMCY message - In the event of a fault, this message reports the details of the fault.
•
CANopen PDO1 Message - The state of buttons 1 to 12. The state of digital inputs external to the
joystick.
•
CANopen PDO2 Message - The position of the x and y axis position of the joystick
•
CANopen PDO3 Message - The position of the proportional (analog) inputs on the joystick grip.
•
CANopen PDO4 Message - The value of other analog inputs that are external to the joystick.
The JS1 function block receives these messages and parses them into meaningful signals that can be
used in an application.
4 | © Danfoss | February 2020 AQ309185946321en-000101
Page 5
User Manual
PLUS+1® Compliant JS1 CANopen CANplus Joystick Function Block
JS1 CANopen CANplus Function Block
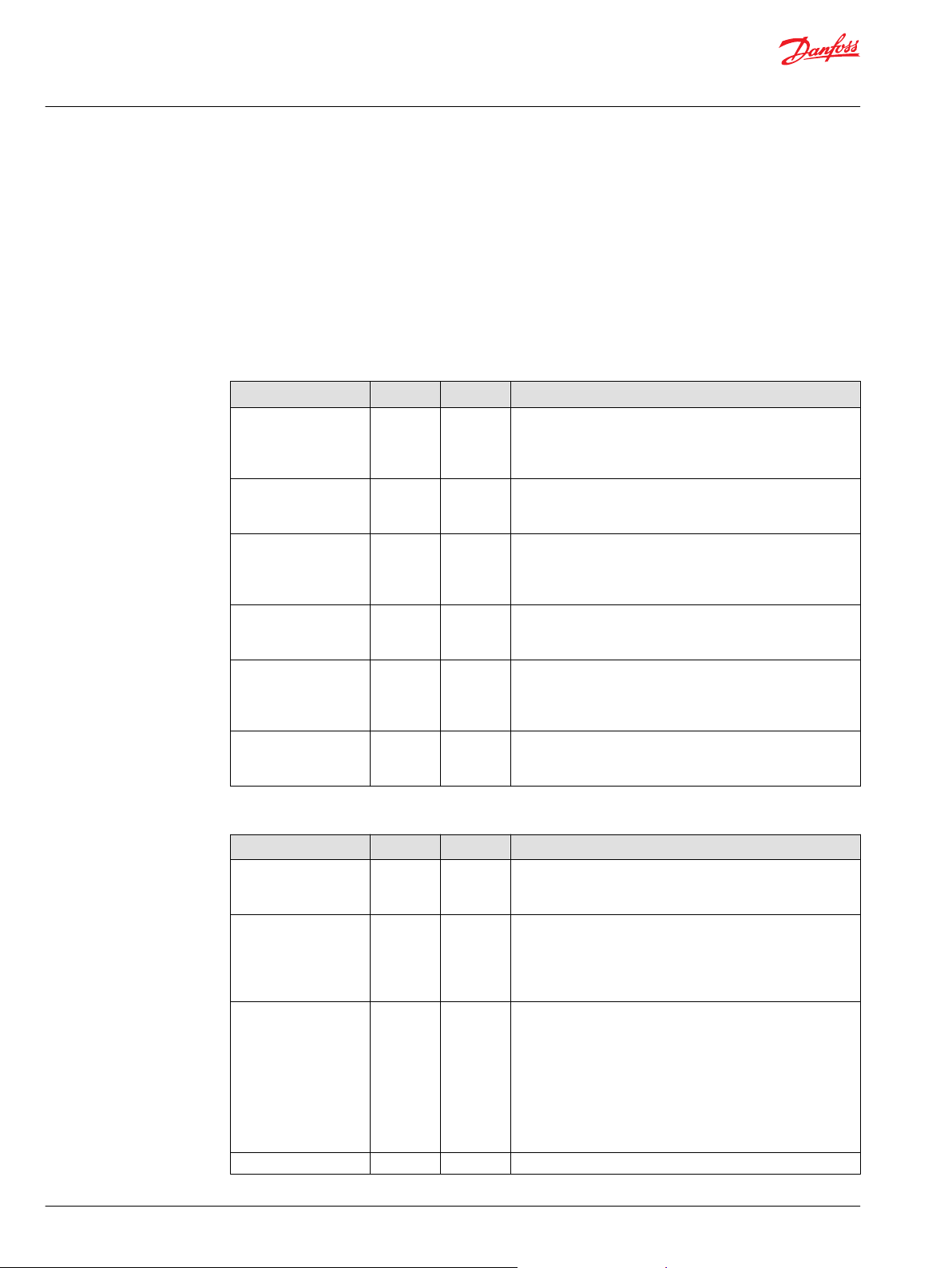
Inputs
JS1_CANplus function block inputs
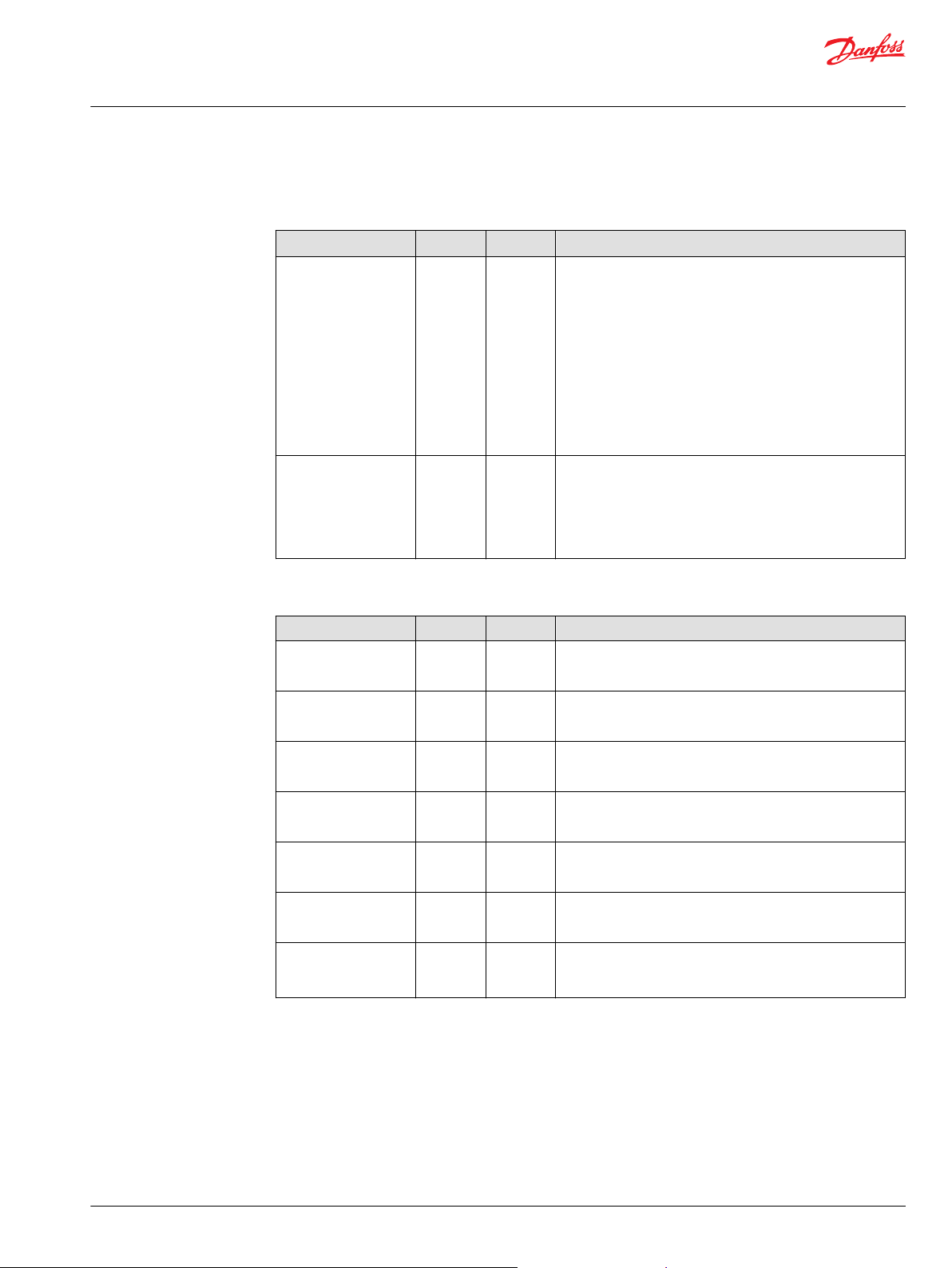
Input Type Range Description
Node —— —— Specifies the CANopen address of the joystick.
All Node addresses on the same CANopen bus must be
different. Do not use the same address twice.
The Type code on the joystick label identifies the source
address. Typical addresses are C33 (right), C34 (left),
C35 (center), and C36 (auxiliary).
Enter the source address in hexadecimal format as shown in the
following examples:
C33 (right) = 0x33
C34 (left) = 0x34
C35 (center) = 0x35
C36 (auxiliary) = 0x36
CAN —— —— In the GUIDE template, identify the CAN bus that inputs CAN
messages from the joystick. Route this bus to the CAN input on
this function block.
CAN messages sent from the joystick to the function block
contain information about the availability and state of joystick
inputs, joystick input faults, and joystick commands.
Parameters
Signal Type Range Description
Heartbeat_Timeout
PDO1_Timeout
PDO2_Timeout
PDO3_Timeout
PDO4_Timeout
NMT_Strt BOOL T/F Enables the function block to transmit a request to the joystick
Ext BOOL T/F
U16 0 to 1000 How many milliseconds to wait for a response before timing
out. A value less than twenty for this parameter disables
timeout checking.
U16 0 to 1000 How many milliseconds to wait for a response before timing
out. A value less than twenty for this parameter disables
timeout checking.
U16 0 to 1000 How many milliseconds to wait for a response before timing
out. A value less than twenty for this parameter disables
timeout checking.
U16 0 to 1000 How many milliseconds to wait for a response before timing
out. A value less than twenty for this parameter disables
timeout checking.
U16 0 to 1000 How many milliseconds to wait for a response before timing
out. A value less than twenty for this parameter disables
timeout checking.
to enter the operational state when the joystick is in Boot up or
Pre-operational state.
Determines whether the messages use 11 or 29 bit identifiers.
T = 29 bit identifier
F = 11 bit identifier
©
Danfoss | February 2020 AQ309185946321en-000101 | 5
Page 6
User Manual
PLUS+1® Compliant JS1 CANopen CANplus Joystick Function Block
JS1 CANopen CANplus Function Block
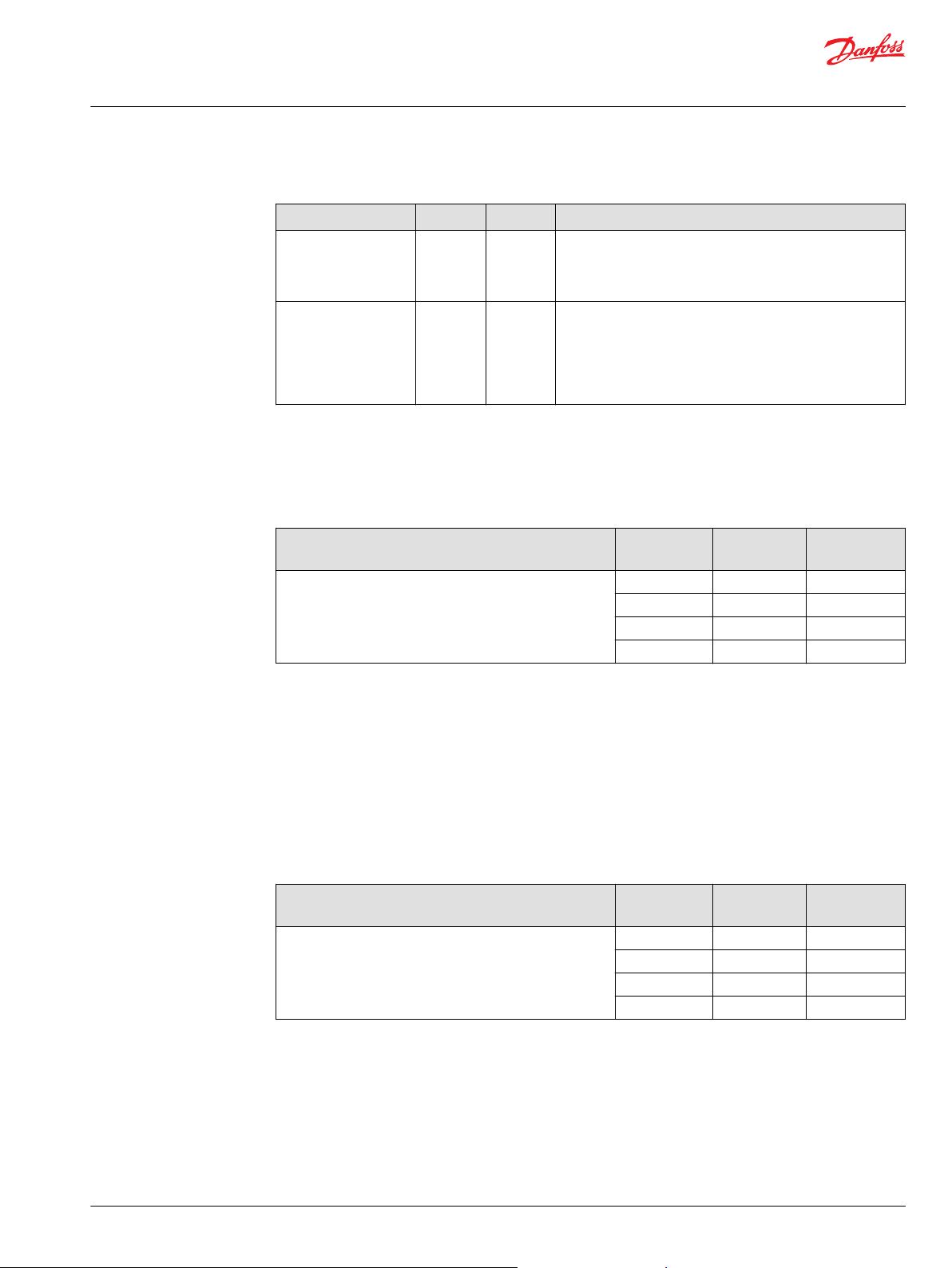
Outputs
The JS1 CANplus function block has Status, EMCY, Fault, and Out outputs.
Status outputs a bus with signals that report on the status of the joystick. See the following table for
•
a description of these signals.
EMCY outputs a bus with signals that indicate error and failure information from the joystick.
•
Fault outputs a bus with signals that report joystick faults. See the table for a description of these
•
signals.
Out outputs a bus with command signals. See the table for a description of these signals.
•
JS1 CANplus function block Status output
Signal Type Range Description
Btn1_NA–Btn12_NA BOOL —— Indicates if an input is available from a grip-mounted push
button switch.
T = Not available
F = Available
T_NA BOOL —— Indicates if an input from a rotational (theta) axis is available.
T = Not available
F = Available
XGrp_NA BOOL —— Indicates if an input from a grip-mounted, x-axis, proportional
switch is available.
T = Not available
F = Available
X_NA BOOL —— Indicates if an input from the joystick’s x axis is available.
T = Not available
F = Available
YGrp_NA BOOL —— Indicates if an input from a grip-mounted, y-axis, proportional
switch is available.
T = Not available
F = Available
Y_NA BOOL —— Indicates if an input from the joystick’s y axis is available.
T = Not available
F = Available
JS1 CANplus function block EMCY output
Signal Type Range Description
EMCY —— ——
Error_Code U16 0 to 0xFFFF
Error_Register U8 0 to 10000
OccurrenceCounter U8 0 to 127 Indicates number of recorded instances of the error.
Outputs a bus that contains the following status signals. These
signals indicate errors and failure information reported by the
joystick.
Indicates the specific error condition reported for the joystick.
• 0x3110 = Voltage high
• 0x3120 = Voltage low
• 0xFF10 = Not calibrated
• 0xFF20 = Redundancy failure
Indicates what type of error is reported by the joystick.
• Bit 0 : Generic
• Bit 1 : Current
• Bit 2 : Voltage
• Bit 3 : Temperature
• Bit 4 : Communication
• Bit 5 : Device
• Bit 6 : Reserved
• Bit 7 : Manufacturer Specific
6 | © Danfoss | February 2020 AQ309185946321en-000101
Page 7

User Manual
PLUS+1® Compliant JS1 CANopen CANplus Joystick Function Block
JS1 CANopen CANplus Function Block
JS1 CANplus function block EMCY output (continued)
Signal Type Range Description
SensorIdentifier U8 0 to 255
Rx_EMCY BOOL ——
Fault outputs a bus with signals that report joystick faults. The following table describes these signals.
JS1 CANplus function block Fault output
Signal Type Range Description
Btn1_Flt–Btn12_Flt BOOL —— Indicates if the input from a grip-mounted push-button switch
T_Flt BOOL —— Indicates if the input from the joystick’s rotational (theta) axis
TimeOut_Heartbeat BOOL —— Indicates if the function block receives a CAN Rx_HEARTBEAT
TimeOut_PDO1 BOOL —— Indicates if the function block receives a CAN Rx_PDO1 (Process
TimeOut_PDO2 BOOL —— Indicates if the function block receives a CAN Rx_PDO2 (Process
Indicates the source of the error reported by the joystick.
• 0x80 = X
• 0x81 = Y
• 0x82 = Grip X
• 0x83 = Grip Y
• 0x84 = Grip Theta
Indicates when the function block receives a CANopen EMCY
message. This message reports joystick detected failures and
fault conditions.
T = Message received.
F = Message not received.
has a fault.
T = Fault
F = No fault
has a fault.
T = Fault
F = No fault
(Receive HEARTBEAT Message) within a defined timeout limit.
This message reports the NMT state of the joystick.
T = Message not received within Heartbeat_Timeout limit
F = Message received within Heartbeat_Timeout limit
Data Object 1) within a defined timeout limit.
This message reports the status of buttons and digital inputs.
When this signal is T, the function block sets all Out signals
associated with the Rx_PDO1 message to either 0 or F. It sets all
Fault signals associated with the Rx_PDO1 message to T.
When this signal becomes F again, the function block enables
all Out signals associated with the Rx_PDO1 message. It resets
all Fault signals associated with the Rx_PDO1 message to F.
T = Message not received within a PDO1_Timeout limit
F = Message received within a PDO1_Timeout limit
Data Object 2) within a defined timeout limit.
When this signal is T, the function block sets all Out signals
associated with the Rx_PDO2 message to either 0 or F. It sets all
Fault signals associated with the Rx_PDO2 message to T.
When this signal becomes F again, the function block enables
all Out signals associated with the Rx_PDO2 message. It resets
all Fault signals associated with the Rx_PDO2 message to F.
T = Message not received within PDO2_Timeout limit
F = Message received within PDO2_Timeout limit
©
Danfoss | February 2020 AQ309185946321en-000101 | 7
Page 8

User Manual
PLUS+1® Compliant JS1 CANopen CANplus Joystick Function Block
JS1 CANopen CANplus Function Block
JS1 CANplus function block Fault output (continued)
Signal Type Range Description
TimeOut_PDO3 BOOL —— Indicates if the function block receives a CAN Rx_PDO3 (Process
Data Object 3) within a defined timeout limit.
When this signal is T, the function block sets all Out signals
associated with the Rx_PDO3 message to either 0 or F. It sets all
Fault signals associated with the Rx_PDO3 message to T.
When this signal becomes F again, the function block enables
all Out signals associated with the Rx_PDO3 message. It resets
all Fault signals associated with the Rx_PDO3 message to F.
T = Message not received within PDO3_Timeout limit
F = Message received within PDO3_Timeout limit
TimeOut_PDO4 BOOL —— Indicates if the function block receives a CAN Rx_PDO4 (Process
Data Object 4) within a defined timeout limit.
This message reports the sensor power of the joystick.
When this signal is T, the function block sets all Out signals
associated with the Rx_PDO4 message to either 0 or F. It sets all
Fault signals associated with the Rx_PDO4 message to T.
When this signal becomes F again, the function block enables
all Out signals associated with the Rx_PDO4 message. It resets
all Fault signals associated with the Rx_PDO4 message to F.
T = Message not received within PDO4_Timeout limit
F = Message received within PDO4_Timeout limit
NoMsgReceived_Heart
beat
NoMsgReceived_PDO1 BOOL —— No PDO1 received from the device.
NoMsgReceived_PDO2 BOOL —— No PDO2 received from the device.
NoMsgReceived_PDO3 BOOL —— No PDO3 received from the device.
NoMsgReceived_PDO4 BOOL —— No PDO4 received from the device.
XGrp_Flt BOOL —— Indicates if the input from a grip-mounted, x-axis proportional
X_Flt BOOL —— Indicates if the input from the joystick’s x axis has a fault.
YGrp_Flt BOOL —— Indicates if the input from a grip-mounted, y-axis proportional
Y_Flt BOOL —— Indicates if the input from the joystick’s y axis has a fault.
BOOL —— No Heartbeat received from the device.
T = No message received since power on.
F = At least one message has been received.
T = No message received since power on.
F = At least one message has been received.
T = No message received since power on.
F = At least one message has been received.
T = No message received since power on.
F = At least one message has been received.
T = No message received since power on.
F = At least one message has been received.
switch has a fault.
T = Fault
F = No fault
T = Fault
F = No fault
switch has a fault.
T = Fault
F = No fault
T = Fault
F = No fault
Out on the JS1_CAN plus function block outputs a bus with command signals.
These command signals originate from the:
8 | © Danfoss | February 2020 AQ309185946321en-000101
Page 9

User Manual
PLUS+1® Compliant JS1 CANopen CANplus Joystick Function Block
JS1 CANopen CANplus Function Block
Joystick and its grip mounted buttons and switches.
•
Inputs on the joystick’s connector(s).
•
The following table describes the joystick signals.
(See the table for a description of the signals that originate from the 18 and 24 pin variants.)
JS1 CANplus function block Out output—joystick signals
Signal Type Range Description
Btn1–Btn12 BOOL —— Indicates the states of grip-mounted push-button switches.
T = Closed
F = Open
Rx_PDO1 BOOL —— Indicates when the function block receives a CAN Rx_PDO1
(Process Data Object 1).
T = Message received
F = Message not received
Rx_PDO2 BOOL —— Indicates when the function block receives a CAN Rx_PDO2
(Process Data Object 2).
T = Message received
F = Message not received
Rx_PDO3 BOOL
T_Axis_Psn S16 ±10000 Indicates the position of the joystick’s rotational (theta) axis.
XGrp_Psn S16 ±10000 Indicates the position of a grip-mounted, x-axis proportional
X_Axis_Psn S16 ±10000 Indicates the position of the joystick’s x axis.
YGrp_Psn S16 ±10000 Indicates the position of a grip-mounted, y-axis proportional
Y_Axis_Psn S16 ±10000 Indicates the position of the joystick’s y axis.
Curr_NMT_State U8 0 to 0xFF
Rx_Heartbeat BOOL
Status U16 0, 0x8008 This signal indicates if a parameter fault is declared. It’s a bitwise
—— Indicates when the function block receives a CAN Rx_PDO3
(Process Data Object 3).
T = Message received
F = Message not received
-10000 = -100%
+10000 = +100%
switch.
-10000 = -100%
+10000 = +100%
-10000 = -100%
+10000 = +100%
switch.
-10000 = -100%
+10000 = +100%
-10000 = -100%
+10000 = +100%
The current NMT state of the joystick.
0x00 = Boot Up
0x04 = Stopped
0x05 = Operational
0x7F = Preoperational
—— Indicates when the function block receives a CAN Rx_Heartbeat.
This message reports the joystick's NMT state.
T = Message received
F = Message not received
code, so multiple items can be reported at a time. The following
status codes are provided:
0x0000: No fault
0x8008: At least one parameter is out of range
The following table describes the signals that originate from inputs on the18 pin joystick.
©
Danfoss | February 2020 AQ309185946321en-000101 | 9
Page 10

User Manual
PLUS+1® Compliant JS1 CANopen CANplus Joystick Function Block
JS1 CANopen CANplus Function Block
JS1 CANplus function block Out output—18 pin joystick signals
Signal Type Range Description
C1p06_DigIn —— —— The C1p06_DigIn bus contains a DigIn signal.
DigIn BOOL Indicates the state of the input on joystick connector pin
C1p06.
T = Active
F = Inactive
C1p09_DigAn—
C1P12_DigAn
Voltage U16 0–5000 Indicates the voltage applied to joystick connector pins C1p09,
C1p13_DigIn—
C1p18_DigIn
Rx_PDO4 BOOL
—— —— The C1p09, C1p10, C1p11, and C1p12 buses each contain a
DigIn and a Voltage signal.
DigIn BOOL —— Indicates the state of the inputs on joystick connector pins
C1p09, C1p10, C1p11, and C1p12.
T = Active
F = Inactive
C1p10, C1p11, and C1p12.
—— —— The C1p13, C1p14, C1p15, C1p16, C1p17, and C1p18 buses
each contain a DigIn signal.
DigIn BOOL —— Indicates the state of the inputs on joystick connector pins
C1p13, C1p14, C1p15, C1p16, C1p17, and C1p18.
T = Active
F = Inactive
—— Is true for the first cycle that new data is received.
Indicates that the following signals updated -
C1P09_DigAn.Voltage, C1p10_DigAn.Voltage,
C1p11_DigAn.Voltage, C1p12_DigAn.Voltage.
T = A PDO4 message was received this cycle.
F = A PDO4 message was not received this cycle.
The following table describes the signals that originate from inputs on the 24 pin joystick.
JS1 CANplus function block Out output—24 pin joystick signals
Signal Type Range Description
C2p01_DigIn —— —— The C2p01_DigIn bus contains a DigIn signal.
DigIn BOOL Indicates the state of the input on joystick connector pin
C2p01.
T = Active
F = Inactive
C1p07_DigAn, ,C1p08_
DigAn, C1p11_DigAn,
C1p12_DigAn
Voltage U16 0–5000 Indicates the voltage applied to joystick connector pins C1p07,
C2p07_DigIn—
C2p12_DigIn
—— —— The C1p07, C1p08, C1p11, and C1p12 buses each contain a
DigIn and a Voltage signal.
DigIn BOOL —— Indicates the state of the inputs on joystick connector pins
C1p07, C1p08, C1p11, and C1p12.
T = Active
F = Inactive
C1p08, C1p11, and C1p12.
—— —— The C2p07, C2p08, C2p09, C2p10, C2p11, and C2p12 buses
each contain a DigIn signal.
10 | © Danfoss | February 2020 AQ309185946321en-000101
Page 11
User Manual
PLUS+1® Compliant JS1 CANopen CANplus Joystick Function Block
JS1 CANopen CANplus Function Block
JS1 CANplus function block Out output—24 pin joystick signals (continued)
Signal Type Range Description
DigIn BOOL —— Indicates the state of the inputs on joystick connector pins
C2p07, C2p08, C2p09, C2p10, C2p11, and C2p12.
T = Active
F = Inactive
Rx_PDO4 BOOL
Status and Fault Logic
Boolean Output Signals
The changing states of the Status and Fault signals affect the value of Boolean output signals.
—— Is true for the first cycle that new data is received.
Indicates that the following signals updated -
C1p08_DigAn.Voltage, C1p11_DigAn.Voltage,
C1p12_DigAn.Voltage.
T = A PDO4 message was received this cycle.
F = A PDO4 message was not received this cycle.
Output Signal
Btn1–Btn12, T_Axis_Det, XGrp_Det, X_Axis_Det,
YGrp_Det, Y_Axis_Det
Status Signal
State
F F T or F
T T F
T F F
F T F
Fault Signal
State
Output Signal
Value
For example:
As long as the Status signal and the Fault signal for the Btn1 input are both F, the Btn1 output signal
•
can be either T or F.
As soon as either the Status signal or the Fault signal for the Btn1 input becomes T, the Btn1 output
•
signal goes to and stays F.
When the Status signal and the Fault signal for the Btn1 input are again both F, the Btn1 output
•
signal returns to its normal T or F operation.
Proportional Output Signals The states of the Status and Fault signals can change and affect the value of proportional output signals.
Status Signal
Output Signal
T_Axis_Psn, XGrp_Psn, X_Axis_Psn, YGrp_Psn, Y_Axis_Psn F F ±10000
State
T T 0
T F 0
F T 0
Fault Signal
State
Output Signal
Value
For example:
As long as the Status signal and the Fault signal for the T_Axis_Psn input are both F, the
•
T_Axis_Psn output signal ranges ±10000.
As soon as either the Status signal or the Fault signal for the T_Axis_Psn input becomes T, the
•
T_Axis_Psn output signal goes to and stays at 0.
When the Status signal and the Fault signal for the T_Axis_Psn input are again both F, the
•
T_Axis_Psn output signal returns to its normal ±10000 operation.
©
Danfoss | February 2020 AQ309185946321en-000101 | 11
Page 12

User Manual
PLUS+1® Compliant JS1 CANopen CANplus Joystick Function Block
JS1 CANopen CANplus Function Block
Configuration of the PLUS+1 GUIDE Template
You do not have to change the configuration of either inputs or outputs in the PLUS+1 GUIDE template
to use the function block.
12 | © Danfoss | February 2020 AQ309185946321en-000101
Page 13

User Manual
PLUS+1® Compliant JS1 CANopen CANplus Joystick Function Block
JS1 CANplus Service Screens
JS1 CANplus 18 Pin Service Screens
JS1_CANplus_18Pin Reusable Panel Screen
JS1_CANplus_18Pin Reusable Panel External Inputs screen description
Name Unit Description
C1p09_DigAn mV
C1p10_DigAn mV
C1p11_DigAn mV
C1p12_DigAN mV
Digitals –
C1p06, C1p13-C1p18
Heartbeat - Timed Out --
Heartbeat NoMsgRcvd
Indicates the voltage applied to the associated joystick connector pin. This signal
also has a digital input that is indicated here.
On = Active
Off = Inactive
Indicates the voltage applied to the associated joystick connector pin. This signal
also has a digital input that is indicated here.
On = Active
Off = Inactive
Indicates the voltage applied to the associated joystick connector pin. This signal
also has a digital input that is indicated here.
On = Active
Off = Inactive
Indicates the voltage applied to the associated joystick connector pin. This signal
also has a digital input that is indicated here.
On = Active
Off = Inactive
--
Indicates the state of the associated digital input on the joystick connector.
On = Active
Off = Inactive
Indicates if the function block receives a CAN Rx_HEARTBEAT (Receive HEARTBEAT
Message) within a defined timeout limit.
This message reports the NMT state of the joystick.
T = Message not received within Heartbeat_Timeout limit
F = Message received within Heartbeat_Timeout limit
--
No Heartbeat message received from the device.
Flt = No message received since power on.
OK = At least one message has been received.
©
Danfoss | February 2020 AQ309185946321en-000101 | 13
Page 14

User Manual
PLUS+1® Compliant JS1 CANopen CANplus Joystick Function Block
JS1 CANplus Service Screens
JS1_CANplus_18Pin Reusable Panel External Inputs screen description (continued)
Name Unit Description
PDO1 - Timed Out --
PDO1 - NoMsgRcvd --
PDO4 - Timed Out --
PDO4 - NoMsgRcvd --
Indicates if the function block receives a CAN Rx_PDO1 (Process Data Object 1)
within a defined timeout limit.
This message reports the status of buttons and digital inputs.
When this signal is T, the function block sets all Out signals associated with the
Rx_PDO1 message to either 0 or F. It sets all Fault signals associated with the
Rx_PDO1 message to T.
When this signal becomes F again, the function block enables all Out signals
associated with the Rx_PDO1 message. It resets all Fault signals associated with the
Rx_PDO1 message to F.
T = Message not received within a PDO1_Timeout limit
F = Message received within a PDO1_Timeout limit
No PDO1 message received from the device.
Flt = No message received since power on.
OK = At least one message has been received.
Indicates if the function block receives a CAN Rx_PDO4 (Process Data Object 4)
within a 2500 ms timeout limit.
This message reports the sensor power of the joystick.
When this signal is T, the function block sets all Out signals associated with the
Rx_PDO4 message to either 0 or F. It sets all Fault signals associated with the
Rx_PDO4 message to T.
When this signal becomes F again, the function block enables all Out signals
associated with the Rx_PDO4 message. It resets all Fault signals associated with the
Rx_PDO4 message to F.
T = Message not received within PDO4_Timeout limit
F = Message received within PDO4_Timeout limit
No PDO4 message received from the device.
Flt = No message received since power on.
OK = At least one message has been received.
JS1_CANplus_18Pin Reusable Panel Joystick Signals screen description
Item Unit Description
Buttons - Btn (1 to 12) --
Node Address --
Positions – X Axis %
Positions – Y Axis %
Positions – T Axis %
Indicates the states of grip-mounted push-button switches.
On = Closed
Off = Open
If the NA is active, then the signal is not available. The associated signal is set to
false.
If the Flt is active, then a fault condition currently exists for the signal. The
associated signal is set to false.
Specifies the factory-set node address of the joystick.
The Type code on the joystick label identifies the node address.
Indicates the position of the joystick’s X-axis.
If the NA is active, then the signal is not available. The associated signal is set to
false.
If the Flt is active, then a fault condition currently exists for the signal. The
associated signal is set to false.
Indicates the position of the joystick’s Y-axis.
If the NA is active, then the signal is not available. The associated signal is set to
false.
If the Flt is active, then a fault condition currently exists for the signal. The
associated signal is set to false.
Indicates the position of the joystick’s T-axis.
If the NA is active, then the signal is not available. The associated signal is set to
false.
If the Flt is active, then a fault condition currently exists for the signal. The
associated signal is set to false.
14 | © Danfoss | February 2020 AQ309185946321en-000101
Page 15

User Manual
PLUS+1® Compliant JS1 CANopen CANplus Joystick Function Block
JS1 CANplus Service Screens
JS1_CANplus_18Pin Reusable Panel Joystick Signals screen description (continued)
Item Unit Description
Positions – X Grp Axis %
Positions – Y Grp Axis %
PDO1 - Timed Out --
PDO1 - NoMsgRcvd --
PDO2 - Timed Out --
PDO2 - NoMsgRcvd --
PDO3 - Timed Out --
PDO3 - NoMsgRcvd --
Status --
Indicates the position of the joystick’s X-axis proportional switch.
If the NA is active, then the signal is not available. The associated signal is set to
false.
If the Flt is active, then a fault condition currently exists for the signal. The
associated signal is set to false.
Indicates the position of the joystick’s Y-axis proportional switch.
If the NA is active, then the signal is not available. The associated signal is set to
false.
If the Flt is active, then a fault condition currently exists for the signal. The
associated signal is set to false.
How many milliseconds to wait for a response before timing out. A value less than
twenty for this parameter disables timeout checking.
No PDO1 message received from the device.
Flt = No message received since power on.
OK = At least one message has been received.
How many milliseconds to wait for a response before timing out. A value less than
twenty for this parameter disables timeout checking.
No PDO2 message received from the device.
Flt = No message received since power on.
OK = At least one message has been received.
How many milliseconds to wait for a response before timing out. A value less than
twenty for this parameter disables timeout checking.
No PDO3 message received from the device.
Flt = No message received since power on.
OK = At least one message has been received.
This signal indicates if a parameter fault is declared. It’s a bitwise code, so multiple
items can be reported at a time. The following status codes are provided:
0x0000: No fault
0x8008: At least one parameter is out of range
JS1 CANplus 24 Pin Service Screens
This screen shows two panels for the JS1_CANplus_24Pin Function Block. These panels can be reused in
other diagnostic applications.
JS1_CANplus_24Pin Reusable Panel Screen
©
Danfoss | February 2020 AQ309185946321en-000101 | 15
Page 16

User Manual
PLUS+1® Compliant JS1 CANopen CANplus Joystick Function Block
JS1 CANplus Service Screens
JS1_CANplus_24Pin Reusable Panel External Inputs screen description
Item Unit Description
C1p07_DigAn mV
C1p08_DigAn mV
C1p11_DigAn mV
C1p12_DigAN mV
Digitals –
C2p01, C2p07-C2p12
Heartbeat - Timed Out --
Heartbeat NoMsgRcvd
PDO1 - Timed Out --
PDO1 - NoMsgRcvd --
PDO4 - Timed Out --
PDO4 - NoMsgRcvd --
Indicates the voltage applied to the associated joystick connector pin. This signal
also has a digital input that is indicated here.
On = Active
Off = Inactive
Indicates the voltage applied to the associated joystick connector pin. This signal
also has a digital input that is indicated here.
On = Active
Off = Inactive
Indicates the voltage applied to the associated joystick connector pin. This signal
also has a digital input that is indicated here.
On = Active
Off = Inactive
Indicates the voltage applied to the associated joystick connector pin. This signal
also has a digital input that is indicated here.
On = Active
Off = Inactive
--
Indicates the state of the associated digital input on the joystick connector.
On = Active
Off = Inactive
Indicates if the function block receives a CAN Rx_HEARTBEAT (Receive HEARTBEAT
Message) within a defined timeout limit.
This message reports the NMT state of the joystick.
T = Message not received within Heartbeat_Timeout limit
F = Message received within Heartbeat_Timeout limit
--
No Heartbeat message received from the device.
Flt = No message received since power on.
OK = At least one message has been received.
Indicates if the function block receives a CAN Rx_PDO1 (Process Data Object 1)
within a defined timeout limit.
This message reports the status of buttons and digital inputs.
When this signal is T, the function block sets all Out signals associated with the
Rx_PDO1 message to either 0 or F. It sets all Fault signals associated with the
Rx_PDO1 message to T.
When this signal becomes F again, the function block enables all Out signals
associated with the Rx_PDO1 message. It resets all Fault signals associated with the
Rx_PDO1 message to F.
T = Message not received within a PDO1_Timeout limit
F = Message received within a PDO1_Timeout limit
No PDO1 message received from the device.
Flt = No message received since power on.
OK = At least one message has been received.
Indicates if the function block receives a CAN Rx_PDO4 (Process Data Object 4)
within a 2500 ms timeout limit.
This message reports the sensor power of the joystick.
When this signal is T, the function block sets all Out signals associated with the
Rx_PDO4 message to either 0 or F. It sets all Fault signals associated with the
Rx_PDO4 message to T.
When this signal becomes F again, the function block enables all Out signals
associated with the Rx_PDO4 message. It resets all Fault signals associated with the
Rx_PDO4 message to F.
T = Message not received within PDO4_Timeout limit
F = Message received within PDO4_Timeout limit
No PDO4 message received from the device.
Flt = No message received since power on.
OK = At least one message has been received.
16 | © Danfoss | February 2020 AQ309185946321en-000101
Page 17

User Manual
PLUS+1® Compliant JS1 CANopen CANplus Joystick Function Block
JS1 CANplus Service Screens
JS1 CANplus_24Pin Reusable Panel Joystick Signals screen description
Item Unit Description
Buttons - Btn (1 to 12) --
Node Address --
PDO1 - Timed Out --
PDO1 - NoMsgRcvd --
PDO2 - Timed Out --
PDO2 - NoMsgRcvd --
PDO3 - Timed Out --
PDO3 - NoMsgRcvd --
Positions – X Axis %
Indicates the states of grip-mounted push-button switches.
On = Closed
Off = Open
If the NA is active, then the signal is not available. The associated signal is set to
false.
If the Flt is active, then a fault condition currently exists for the signal. The
associated signal is set to false.
Specifies the factory-set node address of the joystick.
The Type code on the joystick label identifies the node address.
Indicates if the function block receives a CAN Rx_PDO1 (Process Data Object 1)
within a defined timeout limit.
This message reports the status of buttons and digital inputs.
When this signal is T, the function block sets all Out signals associated with the
Rx_PDO1 message to either 0 or F. It sets all Fault signals associated with the
Rx_PDO1 message to T.
When this signal becomes F again, the function block enables all Out signals
associated with the Rx_PDO1 message. It resets all Fault signals associated with the
Rx_PDO1 message to F.
T = Message not received within a PDO1_Timeout limit
F = Message received within a PDO1_Timeout limit
No PDO1 message received from the device.
Flt = No message received since power on.
OK = At least one message has been received.
dicates if the function block receives a CAN Rx_PDO2 (Process Data Object 2) within
a defined timeout limit.
When this signal is T, the function block sets all Out signals associated with the
Rx_PDO2 message to either 0 or F. It sets all Fault signals associated with the
Rx_PDO2 message to T.
When this signal becomes F again, the function block enables all Out signals
associated with the Rx_PDO2 message. It resets all Fault signals associated with the
Rx_PDO2 message to F.
T = Message not received within PDO2_Timeout limit
F = Message received within PDO2_Timeout limit
No PDO2 message received from the device.
Flt = No message received since power on.
OK = At least one message has been received.
Indicates if the function block receives a CAN Rx_PDO3 (Process Data Object 3)
within a defined timeout limit.
When this signal is T, the function block sets all Out signals associated with the
Rx_PDO3 message to either 0 or F. It sets all Fault signals associated with the
Rx_PDO3 message to T.
When this signal becomes F again, the function block enables all Out signals
associated with the Rx_PDO3 message. It resets all Fault signals associated with the
Rx_PDO3 message to F.
T = Message not received within PDO3_Timeout limit
F = Message received within PDO3_Timeout limit
No PDO3 message received from the device.
Flt = No message received since power on.
OK = At least one message has been received.
Indicates the position of the joystick’s X-axis.
If the NA is active, then the signal is not available. The associated signal is set to
false.
If the Flt is active, then a fault condition currently exists for the signal. The
associated signal is set to false.
©
Danfoss | February 2020 AQ309185946321en-000101 | 17
Page 18

User Manual
PLUS+1® Compliant JS1 CANopen CANplus Joystick Function Block
JS1 CANplus Service Screens
JS1 CANplus_24Pin Reusable Panel Joystick Signals screen description (continued)
Item Unit Description
Positions – Y Axis %
Positions – T Axis %
Positions – X Grp Axis %
Positions – Y Grp Axis %
Status --
Indicates the position of the joystick’s Y-axis.
If the NA is active, then the signal is not available. The associated signal is set to
false.
If the Flt is active, then a fault condition currently exists for the signal. The
associated signal is set to false.
Indicates the position of the joystick’s T-axis.
If the NA is active, then the signal is not available. The associated signal is set to
false.
If the Flt is active, then a fault condition currently exists for the signal. The
associated signal is set to false.
Indicates the position of the joystick’s X-axis proportional switch.
If the NA is active, then the signal is not available. The associated signal is set to
false.
If the Flt is active, then a fault condition currently exists for the signal. The
associated signal is set to false.
Indicates the position of the joystick’s Y-axis proportional switch.
If the NA is active, then the signal is not available. The associated signal is set to
false.
If the Flt is active, then a fault condition currently exists for the signal. The
associated signal is set to false.
This signal indicates if a parameter fault is declared. It’s a bitwise code, so multiple
items can be reported at a time. The following status codes are provided:
0x0000: No fault
0x8008: At least one parameter is out of range
18 | © Danfoss | February 2020 AQ309185946321en-000101
Page 19

Danfoss
Power Solutions GmbH & Co. OHG
Krokamp 35
D-24539 Neumünster, Germany
Phone: +49 4321 871 0
Danfoss
Power Solutions ApS
Nordborgvej 81
DK-6430 Nordborg, Denmark
Phone: +45 7488 2222
Danfoss
Power Solutions (US) Company
2800 East 13th Street
Ames, IA 50010, USA
Phone: +1 515 239 6000
Danfoss
Power Solutions Trading
(Shanghai) Co., Ltd.
Building #22, No. 1000 Jin Hai Rd
Jin Qiao, Pudong New District
Shanghai, China 201206
Phone: +86 21 2080 6201
Products we offer:
Hydro-Gear
www.hydro-gear.com
Daikin-Sauer-Danfoss
www.daikin-sauer-danfoss.com
DCV directional control
•
valves
Electric converters
•
Electric machines
•
Electric motors
•
Gear motors
•
Gear pumps
•
Hydrostatic motors
•
Hydrostatic pumps
•
Orbital motors
•
PLUS+1® controllers
•
PLUS+1® displays
•
PLUS+1® joysticks and
•
pedals
PLUS+1® operator
•
interfaces
PLUS+1® sensors
•
PLUS+1® software
•
PLUS+1® software services,
•
support and training
Position controls and
•
sensors
PVG proportional valves
•
Steering components and
•
systems
Telematics
•
Danfoss Power Solutions is a global manufacturer and supplier of high-quality hydraulic and
electric components. We specialize in providing state-of-the-art technology and solutions
that excel in the harsh operating conditions of the mobile off-highway market as well as the
marine sector. Building on our extensive applications expertise, we work closely with you to
ensure exceptional performance for a broad range of applications. We help you and other
customers around the world speed up system development, reduce costs and bring vehicles
and vessels to market faster.
Danfoss Power Solutions – your strongest partner in mobile hydraulics and mobile
electrification.
Go to www.danfoss.com for further product information.
We offer you expert worldwide support for ensuring the best possible solutions for
outstanding performance. And with an extensive network of Global Service Partners, we also
provide you with comprehensive global service for all of our components.
Local address:
Danfoss can accept no responsibility for possible errors in catalogues, brochures and other printed material. Danfoss reserves the right to alter its products without notice. This also applies to products
already on order provided that such alterations can be made without subsequent changes being necessary in specifications already agreed.
All trademarks in this material are property of the respective companies. Danfoss and the Danfoss logotype are trademarks of Danfoss A/S. All rights reserved.
©
Danfoss | February 2020 AQ309185946321en-000101
 Loading...
Loading...