

Page 1

产品样本
JS1000
手柄底座
www.danfoss.com
Page 2
产品样本
JS1000 手柄底座
修改历史记录 修订表
日期 更改 版本
2020 年 3 月 文档编号从 '520L0826' 和 'BC00000071' 更改为 'BC152886484104'
2017 年 5 月 少量版式更正
2016 年 4 月 更新为 Engineering Tomorrow 设计
2014 年 3 月 更正了 SAE J1939 扩展手柄的报文传输速率; 丹佛斯布局 - DITA CMS
2010 年 11 月 PRO 型把手仅适用于顶部安装配置; 电源电压为 9 至 32 Vdc
2010 年 3 月 把手选项; SAE J1939 CAN 报文规范; 电气和环境特征
2010 年 3 月 特性; 型号代码; 尺寸图
2007 年 9 月 增加了标准 CAN 选项信息; 修订了 CAN 报文协议部分; 并对各种规范进行了修订
2005 年 12 月 Pro 型把手侧开关颜色表; “维修”部分
2005 年 11 月 特性更新
2005 年 7 月 第一版于 2004 年 12 月发布; 2005 年 7 月对内容进行了修订
0804
0703
0702
HA
GA
FA
EA
DA
CC
BB
AA
2 | © Danfoss | 2020 年 3 月
BC152886484104zh-000804
Page 3

产品样本
JS1000 手柄底座
内容
产品概述
JS1000 手柄底座.............................................................................................................................................................................. 4
JS1000 特征与选项..........................................................................................................................................................................4
JS1000 工作原理.............................................................................................................................................................................. 5
产品配置
JS1000 手柄配置型号代码...........................................................................................................................................................6
JS1000 底座型号代码.....................................................................................................................................................................6
JS1000 把手型号代码 ....................................................................................................................................................................7
JS1000 CAN 报文和 CAN 报文协议
SAE J1939 CAN 选项..................................................................................................................................................................... 11
SAE J1939 CAN 报文规范............................................................................................................................................................11
SAE J1939 基本手柄报文.......................................................................................................................................................11
SAE J1939 数据位.....................................................................................................................................................................11
基本手柄报文数据位描述....................................................................................................................................................11
SAE J1939 扩展手柄报文.......................................................................................................................................................15
SAE J1939 错误 (DM1) 报文..................................................................................................................................................16
PRO 型把手按钮和比例控制滚轮 CAN 命名规则.............................................................................................................17
手柄 CANopen 对象词典............................................................................................................................................................18
产品安装
规格
带翘板开关的把手的尺寸和安装...........................................................................................................................................19
带翘板开关的把手接头针脚分配..................................................................................................................................... 19
带香蕉形开关的把手的尺寸和安装......................................................................................................................................20
带香蕉形开关的把手接头针脚分配.................................................................................................................................20
Pro 型把手的尺寸和安装 ..........................................................................................................................................................21
Pro 型把手接头针脚分配......................................................................................................................................................21
球形把手的尺寸和安装..............................................................................................................................................................22
Pro 型把手接头针脚分配......................................................................................................................................................22
配合接头详情................................................................................................................................................................................. 23
Deutsch® DTM06-6S 配合接头...........................................................................................................................................23
机器接线指南................................................................................................................................................................................. 23
手柄主要安全功能........................................................................................................................................................................24
Prof1 底座机械规格......................................................................................................................................................................25
手柄底座电气规格........................................................................................................................................................................25
手柄底座环境................................................................................................................................................................................. 25
手柄需要维修................................................................................................................................................................................. 26
©
Danfoss | 2020 年 3 月
BC152886484104zh-000804 | 3
Page 4

产品样本
JS1000 手柄底座
产品概述
JS1000 手柄底座
JS1000 手柄底座是高可靠性操作输入装置,与其相关把手系列一起使用,用于控制行走机械的操
作。该手柄有两种配置:单轴弹簧回中和双轴弹簧回中。两种配置型号都可用于标准型符合人体工
程学的 PRO 型把手、球形把手、带一体化霍尔效应传感器翘板开关的把手、带一体化霍尔效应香蕉
形开关的把手。JS1000 非常适用于较小的空间和扶手安装,可满足高强度的行走机械应用。
高可靠性是 JS1000 的产品设计目标。它能够满足极端的温度、冲击、振动以及行走机械工作环境中
所存在的 EMI/RFI。非接触式霍尔效应技术和降低零部件的数量,减少许多与传统手柄技术相关的故
障模式。JS1000 的设计每轴经过 1000 万次循环的测试,轴承或底座无磨损迹象,且电气性能未降
低。
本技术手册介绍了用户可选择的手柄特性,以便根据应用配置适合的产品。
JS1000 特征与选项
带球形把手的
非接触式霍尔效应传感
•
CAN 输出配置的每个轴均配备冗余传感
•
单轴或双轴
•
X-Y 轴导向
•
弹簧复位回中
•
两种弹簧回中选项
•
每轴使用寿命超过 1000 万次循环
•
三种电气输出选项:
•
‒
‒
‒
面板上方可达到 IP-67 防护等级,具体取决于把手类型。安装通气孔塞时面板下可达到 IP-67
•
EMI/RFI 防护,可达 100 V/m
•
中位稳定
•
输出范围出厂校准
•
低功耗
•
多种把手可选:
•
JS1000
CAN 2.0B,SAE J1939 报文协议
5 至 4.5 Vdc(额定)
CAN 2.0B, CANopen 协议
4 | © Danfoss | 2020 年 3 月
BC152886484104zh-000804
Page 5

产品样本
JS1000 手柄底座
产品概述
JS1000 工作原理
普通球形把手
‒
带翘板开关的把手
‒
带香蕉形开关的把手
‒
PRO 型把手
‒
JS1000 底座使用非接触式霍尔效应传感器技术来检测和传输把手位置。JS1000 轴的底座连接有一个
球形永久磁铁。此磁球会产生与 Z 轴对齐的磁场。两个可编程的温度补偿霍尔效应传感器分别位于
该磁球的 X 和 Y 轴上,相互之间呈 90º。它们相互垂直,同时都与 Z 轴垂直。移动手柄把手和连接的
磁球可更改霍尔效应传感器感测到的磁场,导致它们的电气输出发生变化。输出变化与轴移动导致
的磁场变化成比例。此电子设计可使手柄轴位置与信号输出构成线性关系,无滞后,在轴位移的整
个范围内保持稳定中位。
利用可编程的霍尔效应传感器,可对设备中位、增益、温度系数和输出电压范围进行出厂校准。手
柄模拟输出值控制在 0.5 Vdc 至 4.5 Vdc 的范围。超出该范围的任何电压都可被视作无效信号。
JS1000 底座有两种带开关把手可供选择,其特点是带有复位回中霍尔效应传感器翘板开关。输出范
围为电源电压的 23% 至 77%。翘板开关的输出可用于状态检测(开-关)或用作比例输出。
©
Danfoss | 2020 年 3 月
BC152886484104zh-000804 | 5
Page 6
J S 1 0 0 0 X Y A J 3 3 1 T P R O R 3 R L R Y Y N R N G N
J S 1 0 0 0 X Y A J 3 3 1
A B C D E F G H J
1 2 3 1 2
产品样本
JS1000 手柄底座
产品配置
JS1000 手柄配置型号代码
订购 JS1000 手柄时,可使用 JS1000 产品配置型号代码来指定特定功能。型号代码以产品系列名开
头: JS1000。填写其余位可配置具有所需功能的产品。
产品配置型号代码示例
其中:
XY
A
J331
J33B
TPRO
R3RL
RY
YNRNG
N
双轴运动
标准弹簧
SAE J1939 报文协议的 CAN 输出,33(十六进制)源地址,输出值为 1000
SAE J1939 报文协议的 CAN 输出,33(十六进制)源地址,输出值为 1000,冗余传感器
顶部安装,PRO 型把手
右手把手,3 按钮,左侧 1 个滚轮
右手把手,带黄色侧开关
按钮 1 = 黄色
按钮 2 = 无
按钮 3 = 红色
按钮 4 = 无
按钮 5 = 灰色
无操作员在位开关
JS1000 底座型号代码
JS1000
产品配置型号代码示例 — 底座部件 — A、B、C 和
产品系列
A
代码 描述
JS1000
带有 Deutsch® 接头的 JS1000 手柄底座,弹簧复位回中
B 单轴或双轴
代码 描述
XY
NY
双轴功能,轴导向在前进,后退,向左和向右
(在转角处力度增加)
单轴功能,前进和后退
C 弹簧回中
代码 描述
A
B
标准弹簧
重型弹簧
6 | © Danfoss | 2020 年 3 月
D
BC152886484104zh-000804
Page 7
1 2 1 2 3 4
J S 1 0 0 0 X Y A J 3 3 1 T P R O R 3 R L
A B C D E F G H J
产品样本
JS1000 手柄底座
产品配置
D1 电气接口选项
代码 描述
J
P
S
CAN 2.0B,SAE J1939 报文协议
CAN 2.0B, CANopen 协议
模拟电压输出
D2 CAN 源地址*
代码 描述
NN
33
34
35
36
无 — 与模拟输出一起使用(D1 = S 时)
源地址 = 0x 33
源地址 = 0x 34
源地址 = 0x 35
源地址 = 0x 36
* 可使用 PLUS+1® 服务工具更改出厂设置 CAN 源地址和节点 ID
JS1000 把手型号代码
D3 手柄输出类型
代码 描述
N
1
B
JS1000
无 — 与模拟输出一起使用(D1=S 时)
CAN 满量程输出 = 1000
CAN 满量程输出 = 1000,冗余传感器
产品配置型号代码示例 — 底座部件 —
PRO 型把手仅适用于顶部安装配置。
把手安装选项
E1
代码 描述
B
C
T
U
带有 IP-67 通气孔塞的底部安装(从面板下,不包括底座固定器,底座卡在面板与外壳之间)*
不带 IP-67 通气孔塞的底部安装(从面板下,不包括底座固定器,底座卡在面板与外壳之间)*
带有 IP-67 通气孔塞的顶部安装(从面板上,包括底座固定器,用于将底座连接到手柄外壳)*
不带 IP-67 通气孔塞的顶部安装(从面板上,包括底座固定器,用于将底座连接到手柄外壳)*
E
*IP-67 通气孔塞是 Gor-Tex® 防潮装置。如果不带孔塞,底座下的防护等级将降低。
©
Danfoss | 2020 年 3 月
BC152886484104zh-000804 | 7
Page 8
1 2 1 2 3 4
J S 1 0 0 0 X Y A J 3 3 1 T P R O R 3 R L
A B C D E F G H J
产品样本
JS1000 手柄底座
产品配置
E2 把手安装和选项
代码 描述
PRO
PR1
K01
LSW
LSB
PSW
PSB
JS1000
PRO 型把手,CAN 输出。完成填写 F、G、H、J 部分
PRO 型把手,无开关或比例控制功能,CAN 输出
球形把手,不填写 F、G、H、J 部分
带翘板开关的把手,电压范围为 1.15 至 3.85 Vdc(模拟手柄)或带有 On/Off 开关(CAN 手柄)。不
填写 F、G、H、J 部分
带香蕉形开关的把手,电压范围为 1.15 至 3.75 Vdc(模拟手柄)或带有 On/Off 开关(CAN 手柄)。
不填写 F、G、H、J 部分
带翘板开关的把手。仅限 CAN。比例输出代表电压: 0 至 1000 CAN
计数 = 0 至 5 Vdc。故障检查功能未启用。
带香蕉形开关的把手。仅限 CAN。比例输出代表电压: 0 至 1000 CAN
计数 = 0 至 5 Vdc。故障检查功能未启用。
产品配置型号代码示例 — 底座部件 —
F
PRO 型把手仅对 CAN 手柄可用。模拟输出型或 CAN 输出型手柄都具有普通把手和带开关把手可供选
择。
PRO 型把手功能布局
F1
代码 描述
R...
L...
右手把手
左手把手
F2 PRO 型把手功能布局
代码 前板上的开关数
.0..
.1..
.2..
.3..
.4..
.5..
无开关
1 个开关
2 个开关
3 个开关
4 个开关
5 个开关
F3 PRO 型把手功能布局
代码 比例控制功能类型
..R.
..P.
..N.
滚轮,未密封
比例控制把手功能,密封
无
8 | © Danfoss | 2020 年 3 月
BC152886484104zh-000804
Page 9
A B C D E F G H J
1 2
J S 1 0 0 0 X Y A J 3 3 1 T P R O R 3 R L R Y Y N R N G N
产品样本
JS1000 手柄底座
产品配置
F4 PRO 型把手功能布局
代码 比例控制功能位置
...N
...R
...L
...B
...D
...S
...T
F 把手功能布局示例
代码 描述 代码 描述
R0NN
R1NN
R2NN
R3NN
R4NN
R5NN
R0RR
R1RR
R2RR
R3RR
R0RL
R1RL
右手,无开关,无滚轮,无位置
右手,1 个开关,无滚轮,无位置
右手,2 个开关,无滚轮,无位置
右手,3 个开关,无滚轮,无位置
右手,4 个开关,无滚轮,无位置
右手,5 个开关,无滚轮,无位置
右手,无开关,滚轮,右侧
右手,1 个开关,滚轮,右侧
右手,2 个开关,滚轮,右侧
右手,3 个开关,滚轮,右侧
右手,无开关,滚轮,左侧
右手,1 个开关,滚轮,左侧
无比例控制功能
右把手侧面垂直比例控制功能
左把手侧面垂直比例控制功能
底部水平比例控制功能
双垂直比例控制功能(左手侧和右手侧均提供)
在顶部和底部进行双重设置时堆叠水平比例控制功能
顶部提供水平比例控制功能
R2RL
R3RL
R0RB
R1RB
R2RB
R3RT
R0RD
R1RD
R0RS
R1RS
R2NR
R2NL
右手,2 个开关,滚轮,左侧
右手,3 个开关,滚轮,左侧
右手,无开关,滚轮,底部
右手,1 个开关,滚轮,底部
右手,2 个开关,滚轮,底部
右手,3 个开关,滚轮,顶部
右手,无开关,2 个滚轮,双侧
右手,1 个开关,2 个滚轮,双侧
右手,无开关,2 个滚轮,堆叠
右手,1 个开关,2 个滚轮,堆叠
右手,2 个开关,无滚轮,右侧
右手,2 个开关,无滚轮,左侧
JS1000
产品配置型号代码示例 — 底座部件 — G、H 和
PRO 把手侧开关方向
G1
代码 描述
R.
L
右手 PRO 型把手
左手 PRO 型把手
G2 PRO 把手侧开关颜色
代码 描述
.R
.Y
.B
红色侧开关
黄色侧开关
黑色侧开关
©
Danfoss | 2020 年 3 月
J
BC152886484104zh-000804 | 9
Page 10

产品样本
JS1000 手柄底座
产品配置
G2 PRO 把手侧开关颜色 (续)
代码 描述
.G
.N
灰色侧开关
无侧开关
H PRO 型把手前板开关颜色选择示例
代码 描述
NNNNN
RYBGR
YYYYY
RNNRB
YRNNN
无开关(图示为 0NN*)
位置 1 红色开关,位置 2 黄色开关,位置 3 黑色开关,位置 4 灰色开关,位置 5 红色开关(图示为
5NN*)
5 个黄色开关(图示为 5NN*)
位置 1 红色开关,位置 2 无开关,位置 3 无开关,位置 4 红色开关,位置 5 黑色开关(图示为
3NN*)
位置 1 黄色开关,位置 2 红色开关,位置 3 无开关,位置 4 无开关,位置 5 无开关(图示为 2RL*)
* 请参阅 PRO
型把手按钮和比例控制滚轮
置数量。为每个开关选择一个颜色代码。
J 操作员在位开关选项(不可用)
代码 描述
N
无: 未选择操作员在位开关选项
CAN
命名规则
页 17。数字指的是把手前面板上的按钮位
10 | © Danfoss | 2020 年 3 月
BC152886484104zh-000804
Page 11

The resulting SAE J1939 basic joystick message PGN on the CAN bus is: 0xCFDD6 __ __
* = joystick source address (hex)
*
产品样本
JS1000 手柄底座
JS1000 CAN 报文和 CAN 报文协议
SAE J1939 CAN 选项
SAE J1939 CAN 输出选项的手柄,被指定为型号代码 CAN,广播两个 J1939 报文以传达设备信息。基
本手柄报文 1 (BJM1) 和扩展手柄报文 1 (EJM1)。
SAE J1939 CAN 报文规范
SAE J1939 基本手柄报文
此手柄使用 SAE J1939 基本手柄报文来传输有关手柄 X 和 Y 轴上的位置、手柄把手上的开关状态以及
外部数字输入的状态的信息。
手柄基本报文结构
基本报文数 优先级 底座参数
编号组
(PGN)
Dec hex Dec hex Dec hex Dec hex
1 3 64982 FDD6 253 FD 214 D6 * *
协议数据单元 (PDU) 格式PDU 特定 源地址 数据位
8 个字节
* 取决于在主型号代码中指定的位置。由于此手柄的源地址采用固定编码(静态),因此不支持 SAE
J1939 动态寻址。但是,此手柄遵守 SAE J1939 地址申明协议(在极少数情况下,如果 SAE J1939 总
线上的其他节点向此手柄申报一个相同的源地址,此手柄将根据其他节点上的报文优先级来停止总
线上的通信)。
报文传输率: 20 ms
CAN 总线波特率: 250kbps
可选择 CANopen 总线波特率,默认值为: 125kbps
SAE J1939 数据位
数据位包含手柄的输出信息。SAE J1939 数据位包含 8 字节数据。
数据位中的信息
字节编号
Bit# 1 2 3 4 5 6 7 8 1 2 3 4 5 6 7 8 1 2 3 4 5 6 7 8
0 1
2 等等
基本手柄报文数据位描述
基本手柄报文参数和数据位定位
起始位置
(字节/位)
0/1 2
0/3 2
0/5 2
0/7 至 1/1-8
2/1 2
长度(位数)参数名称
手柄 X 轴中位状态
手柄 X 轴操作杆左负位置状态
手柄 X 轴操纵杆右正位置状态
10
手柄 X 轴位置(字节 0 位 7 为 LSB*。字节 1 位 8 为 MSB**)
手柄 Y 轴中位状态
©
Danfoss | 2020 年 3 月
BC152886484104zh-000804 | 11
Page 12
产品样本
JS1000 手柄底座
JS1000 CAN 报文和 CAN 报文协议
基本手柄报文参数和数据位定位 (续)
起始位置
(字节/位)
2/3 2
2/5 2
2/7 至 3/1-8
4/5 2
4/7 2
5/1 2
5/3 2
5/5 2
5/7 2
6/1 2
6/3 2
6/5 2
6/7 2
7/1 2
7/3 2
7/5 2
7/7 2
长度(位数)参数名称
手柄 Y 轴操纵杆后负位置
手柄 Y 轴操纵杆前正位置
10
手柄 Y 轴位置(字节 2 位 7 为 LSB*。字节 3 位 8 为 MSB**)
手柄 Y 轴制动位置状态
手柄 X 轴制动位置状态
把手按钮 4 按下状态
把手按钮 3 按下状态
把手按钮 2 按下状态
把手按钮 1 按下状态
把手按钮 8 按下状态
把手按钮 7 按下状态
把手按钮 6 按下状态
把手按钮 5 按下状态
把手按钮 12 按下状态
把手按钮 11 按下状态
把手按钮 10 按下状态
把手按钮 9 按下状态
*Least Significant Bit(最低有效位)**Most Significant Bit(最高有效位)
按钮命名约定: 请参阅图示命名约定,了解按钮和比例输入定义。
数据位示例
字节
位
0
8 7 6 5 4 3 2 1
X 轴位置的 2 个 LSB* X 轴操纵杆右正位置状态X 轴操纵杆左负位置状态X 轴中位
*Least Significant Bit(最低有效位)
字节
位
1
8 7 6 5 4 3 2 1
MSB** X 轴位置
**Most Significant Bit(最高有效位)
字节
位
2
8 7 6 5 4 3 2 1
Y 轴位置状态的 2 个
LSB*
X 轴操纵杆前正位置状态Y 轴操纵杆后负位置状态 Y 轴中位
*Least Significant Bit(最低有效位)
状态
状态
12 | © Danfoss | 2020 年 3 月
BC152886484104zh-000804
Page 13

W
W
产品样本
JS1000 手柄底座
JS1000 CAN 报文和 CAN 报文协议
手柄
X
当前手柄位置处于 X 轴中位时发出报告。
数据位中的信息
位状态 备注
00
01
10
11
手柄
X
一旦当前手柄处于相对 X 轴中位的反方向时(后位、左位、逆时针方向、下位)发出报告。
数据位中的信息
位状态 备注
00
01
10
11
轴中位状态
:
轴把手左负位置状态:
不在中位
在中位
错误指示
无效
不在中位的负方向侧
在中位的负方向侧
错误指示
无效
手柄
X
轴把手右正位置状态:
一旦当前手柄处于相对 X 轴中位的正方向时(前位、右位、顺时针方向、上位)发出报告。
数据位中的信息
位状态 备注
00
01
10
11
手柄
X
轴位置状态:
不在中位的正方向侧
在中位的正方向侧
错误指示
无效
手柄位置是相对于中位的位置状态。中位的位置值为 0。手柄的输出值范围由工厂设定,工厂根据选
型代码的电气接口选项进行定制。
选型代码规定,每个线性区域全程输出值为 1000。
警告
潜在的非指令机械运动。根据 SAE J1939-71 标准,如果 JS1000 手柄内部诊断检测到轴位置测量错
误,则无论轴的位置在何处,手柄输出都会被设置为值 1022。确保应用软件识别此错误条件,以避
免可能的意外机械动作。
警告
©
Danfoss | 2020 年 3 月
潜在的非指令机械运动。根据 SAE J1939-71 标准,如果某一特定的手柄轴无效,则该无效轴的基本
手柄报文将会指示输出值为 1023。确保应用软件识别此条件,以避免可能的意外机械动作。
手柄
Y
轴中位状态:
BC152886484104zh-000804 | 13
Page 14

W
W
产品样本
JS1000 手柄底座
JS1000 CAN 报文和 CAN 报文协议
当前手柄位置位于 Y 轴中位时,发出报告。
数据位中的信息
位状态 备注
00
01
10
11
手柄
Y
当手柄位置在相对于 Y 轴中位的反方向侧(后位、左位、逆时针、下降)时发出报告。
数据位中的信息
位状态 备注
00
01
10
11
不在中位
在中位
错误指示
无效
轴把手后负位置状态:
不在中位的负方向侧
在中位的负方向侧
错误指示
无效
手柄
Y
轴把手前正位置状态:
当手柄位置在相对于 Y 轴中位的正方向时(前位、右位、顺时针、向上)时发出报告。
数据位中的信息
位状态 备注
00
01
10
11
手柄
Y
轴位置状态:
不在中位的正方向侧
在中位的正方向侧
错误指示
无效
手柄位置是相对于中位的位置状态。中位的位置值为 0。手柄的输出值范围由工厂设定,工厂根据选
型代码的电气接口选项进行定制。
主型号代码指定了每个线性区域的满量程输出值为 1000。
警告
潜在的非指令机械运动。根据 SAE J1939-71 标准,如果手柄内部诊断功能检测到轴位置测量错误,
则无论轴的位置在何处,手柄输出都会被设置为值 1022。确保应用软件识别此错误条件,以避免可
能的意外机械动作。
14 | © Danfoss | 2020 年 3 月
警告
潜在的非指令机械运动。根据 SAE J1939-71 标准,如果某一特定的手柄轴无效,则该无效轴的基本
手柄报文将会指示输出值为 1023。确保应用软件识别此条件,以避免可能的意外机械动作。
BC152886484104zh-000804
Page 15

The resulting SAE J1939 basic joystick message PGN on the CAN bus is: 0xCFDD7 __ __
* = joystick source address (hex)
*
产品样本
JS1000 手柄底座
JS1000 CAN 报文和 CAN 报文协议
手柄按钮 1-8 按下状态
位状态 备注
00
01
10
11
SAE J1939 扩展手柄报文
此手柄使用 SAE J1939 扩展手柄报文来传输有关在手柄把手上测得的两个额外比例输入功能的状态信
息。手柄底座 X 和 Y 轴信息于基本手柄报文中可读取。扩展手柄报文结构如下所示:
扩展手柄报文结构
扩展报文数优先级 底座 PGN PDU 格式 PDU 特定 源地址 数据位
1 3 64983 FDD7 253 FD 215 D7 * *
按钮未按下
按钮已按下
错误指示
无效(未安装按钮)
Dec hex Dec hex Dec hex Dec hex
8 个字节
* 取决于在主型号代码中指定的位置。由于此手柄的源地址采用固定编码(静态),因此不支持 SAE
J1939 动态寻址。但是,此手柄遵守 SAE J1939 地址申明协议(在极少数情况下,如果 SAE J1939 总
线上的其他节点向此手柄申报一个相同的源地址,此手柄将根据其他节点上的报文优先级来停止总
线上的通信)。
报文传输率: 20 ms
CAN 总线波特率: 250kbps
扩展手柄报文参数和数据位位置
起始位置
(字节/位)
1/1 2
1/3 2
1/5 2
1/7 至 2/1-8
3/1 2
3/3 2
3/5 2
3/7 至 4/1-8
7/5 2
7/7 2
长度(位数)参数名称
把手 X 轴中位状态
把手 X 轴操纵杆左负位置状态
把手 X 轴操纵杆右正位置状态
10
10
把手 X 轴位置
把手 Y 轴中位状态
把手 Y 轴操纵杆后负位置
把手 Y 轴操纵杆前正位置
把手 Y 轴位置
把手 Y 轴制动位状态 — 无效
把手 X 轴制动位状态 — 无效
扩展手柄报文的数据位描述和输出范围与底座 X 轴和 Y 轴的基本手柄报文相似。
©
Danfoss | 2020 年 3 月
BC152886484104zh-000804 | 15
Page 16

产品样本
JS1000 手柄底座
JS1000 CAN 报文和 CAN 报文协议
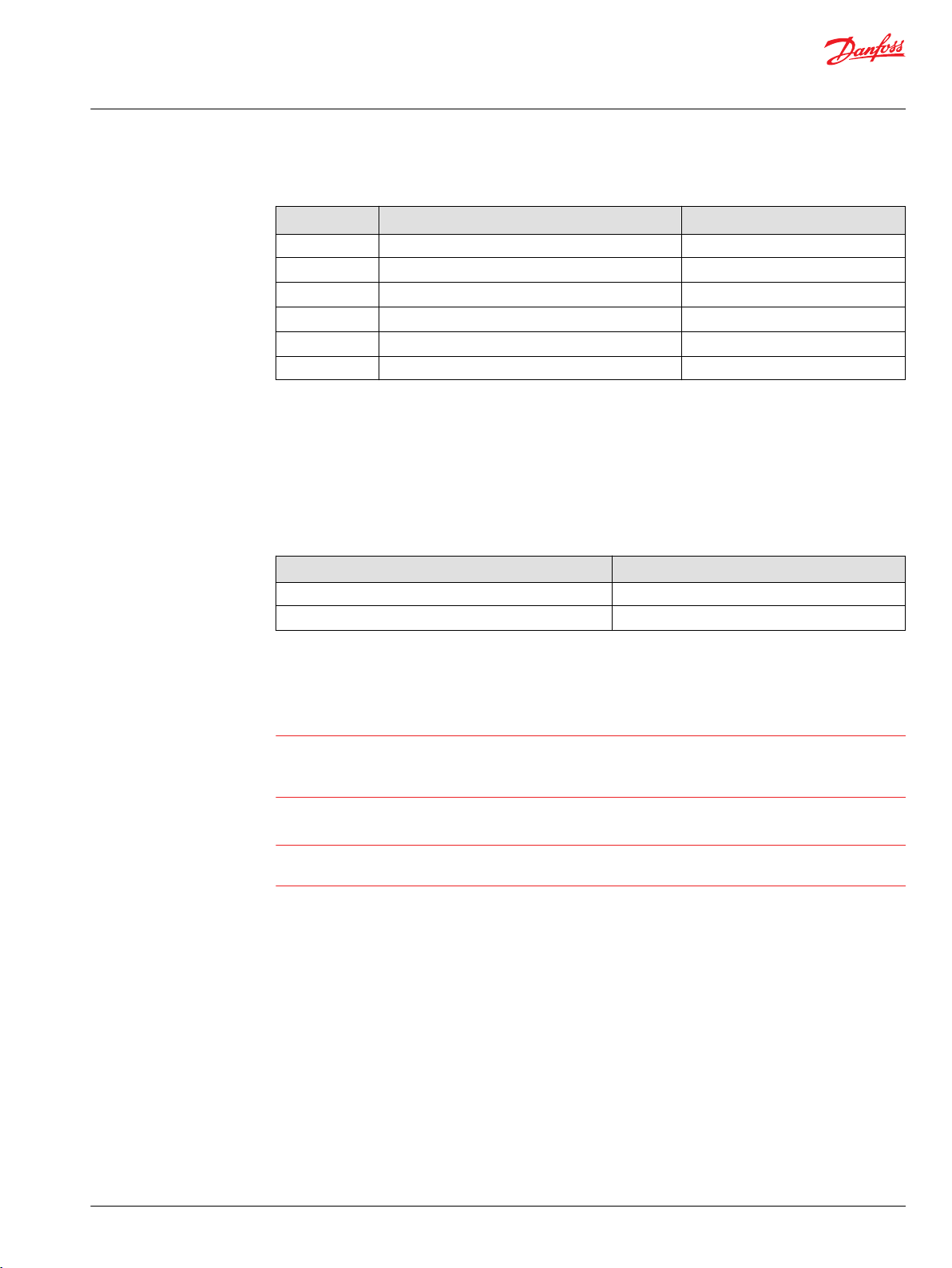
PRO 型把手比例输入命名规则
比例输入位置 扩展手柄报文指示
水平方向,顶部 X 轴
水平方向,底部 Y 轴
垂直方向,左侧 X 轴
垂直方向,右侧 Y 轴
带开关把手命名约定: 顶部开关在 SAE J1939 扩展手柄报文中被指定为把手 X 轴。从中位向任一方
向移动开关,立即获得 CAN 输出值 1000。
SAE J1939 错误 (DM1) 报文
支持 SAE J1939 DM1 错误报文。可疑参数编号 (SPN) 和失效模式标识符 (FMI) 信息位于下表中。
故障: 电压过高
消息 轴
BJM1 X 2660 3
BJM1 Y 2661 3
BJM1
BJM1
BJM1
把手 X
把手 Y
把手 Theta
SPN FMI
2662 3
2663 3
2664 3
故障: 电压太低
消息 轴
BJM1 X 2660 4
BJM1 Y 2661 4
BJM1
BJM1
BJM1
把手 X
把手 Y
把手 Theta
SPN FMI
2662 4
2663 4
2664 4
故障: 输入未校准
消息 轴
BJM1 X 2660 13
BJM1 Y 2661 13
BJM1
BJM1
BJM1
把手 X
把手 Y
把手 Theta
SPN FMI
2662 13
2663 13
2664 13
故障: 冗余输入失效
消息 轴
BJM1 X 2660 14
BJM1 Y 2661 14
SPN FMI
16 | © Danfoss | 2020 年 3 月
BC152886484104zh-000804
Page 17

2
1
3
4
3
4
2
3
4 1
X
2 1
X
3 2
Y
4 1
X
X
Y
2
1
Y
3
4
4 1
X
X
2
1
Y
X
3
4
X
2
1
Y
3
4
X
2
1
Y
2
3
2
1
2
1
3
4
X
2
1
3
4
3
4
1
4
1
4
4
1
1
3
2 1
X
3
3 2
Y
5
4
5
5
5
1
4
5
2
3
1
4
2
1
Y
3
4
5
5
Side Switch
Position 6
P005301F
0 Prop Right Prop Left Prop Bottom/Top Prop Dual Prop
Stacked Prop
0 switches
1 switch
2 switches
3 switches
4 switches
5 switches
产品样本
JS1000 手柄底座
JS1000 CAN 报文和 CAN 报文协议
故障: 冗余输入失效 (续)
消息 轴
BJM1
BJM1
BJM1
不支持 SAE J1939 动态寻址,因为此手柄的源地址为固定编码(静态)。但是,遵守 SAE J1939 地址
申明协议。在极少数情况下,如果 SAE J1939 总线上的其他节点向此手柄申报一个相同的源地址,此
手柄将根据其他节点上的报文优先级来停止总线上的通信。
PRO 型把手按钮和比例控制滚轮 CAN 命名规则
图示命名约定
把手 X
把手 Y
把手 Theta
SPN FMI
2662 14
2663 14
2664 14
©
Danfoss | 2020 年 3 月
BC152886484104zh-000804 | 17
Page 18

产品样本
JS1000 手柄底座
JS1000 CAN 报文和 CAN 报文协议
手柄 CANopen 对象词典
CANopen 对象词典可在线查阅:http://www.powersolutions.danfoss.com
在手柄下的 CANopen EDS 中,可访问 PDF 格式的词典。
18 | © Danfoss | 2020 年 3 月
BC152886484104zh-000804
Page 19

69.85 ± 0.50
[2.75 ± 0.02]
Decreasing
Y
Decreasing
X
Increasing
Y
Increasing
X
4X Ø 4.57 ± 0.05
[0.180 ± 0.002]
Ø 59.4 ± 0.50
[2.34 ± 0.02]
R2.03 ± 0.50
[0.08 ± 0.02]
69.85 ± 0.50
[2.75 ± 0.02]
Decreasing
Y
Increasing
Y
110.63 ± 0.50
[4.35 ± 0.02]
3.80 [0.15] Max panel
Feed-through mounting
59.60 ± 0.50
[2.35 ± 0.02]
6.35 ± 0.50
[.25 ± 0.02]
18˚ REF 18˚ REF
Decreasing
Y
Increasing
Y
18˚ REF 18˚ REF
2234A
4x Ø 5.50
[0.218]
57.20
[2.25]
57.20
[2.25]
Ø 60.50
[2.38]
4x M4 - 0,7
(#8 THREAD)
57.20
[2.25]
57.20
[2.25]
Ø 60.50
[2.38]
Drop-in Mounting Pattern
Pin 6
Pin 1
2242
产品样本
JS1000 手柄底座
产品安装
带翘板开关的把手的尺寸和安装
毫米 [英寸
]
带翘板开关的把手接头针脚分配
6
针脚接头
带翘板开关的把手接头针脚分配
针脚 模拟选项 CAN 选项
1
2
3
4
5
6
接地‒ 接地
5 Vdc 电源 + 电源
X 输出信号
Y 输出信号
翘板开关 CAN 屏蔽
无连接 无连接
CAN +
CAN -
©
Danfoss | 2020 年 3 月
BC152886484104zh-000804 | 19
Page 20

Decreasing switch
Increasing switch
Increasing
switch
Decreasing
switch
69.85 ± 0.50
[2.75 ± 0.02]
Decreasing
Y
Decreasing
X
Increasing
Y
Increasing
X
4X Ø 4.57 ± 0.05
[0.180 ± 0.002]
Ø 59.4 ± 0.50
[2.34 ± 0.02]
R2.03 ± 0.50
[0.08 ± 0.02]
69.85 ± 0.50
[2.75 ± 0.02]
Decreasing
Y
Increasing
Y
Increasing
X
Decreasing
X
115.43 ± 0.50
[4.54 ± 0.02]
3.80 [0.15] Max panel
feed-through mounting
59.60 ± 0.50
[2.35 ± 0.02]
6.35 ± 0.50
[.25 ± 0.02]
18° REF 18° REF
18° REF 18° REF
2235A
4x Ø 5.50
[0.218]
57.20
[2.25]
57.20
[2.25]
Ø 60.50
[2.38]
4x M4 - 0,7
(#8 THREAD)
57.20
[2.25]
57.20
[2.25]
Ø 60.50
[2.38]
Drop-in Mounting Pattern
Pin 6
Pin 1
2242
产品样本
JS1000 手柄底座
产品安装
带香蕉形开关的把手的尺寸和安装
毫米 [英寸
]
20 | © Danfoss | 2020 年 3 月
带香蕉形开关的把手接头针脚分配
6
针脚接头
带香蕉形开关的把手接头针脚分配
针脚 模拟选项 CAN 选项
1
2
3
4
5
6
接地‒ 接地
5 Vdc 电源 + 电源
X 输出信号
Y 输出信号
翘板开关 CAN 屏蔽
无连接 无连接
CAN +
CAN -
BC152886484104zh-000804
Page 21

4 x Ø4.57
± 0.05
[0.180
±0.002]
Ø59.4
± 0.5
[2.34
± 0.02]
74.2
± 0.5
DIA
[2.92 ± 0.02]
9.4
± 0.5
[0.37 ± 0.02]
53.46
± 0.5
[2.1 ± 0.02]
6.35
± 0.5
[0.25 ± 0.02]
Pin 6
Pin 1
166.0
± 1
[6.55
± 0.04
]
18° REF 18° REF
18° REF 18° REF
28.58
± 0.12
[1.125 ± 0.005]
28.58 ± 0.12
[1.125 ± 0.005]
34.92
± 0.5
[1.38 ± 0.02]
34.92 ± 0.5
[1.38 ± 0.02]
69.85
± 0.5
[2.75 ± 0.02]
69.85
± 0.5
[2.75 ± 0.02]
57.15
± 0.12
[2.25 ± 0.005]
R2.0
± 0.5
[0.08 ± 0.02]
57.15
± 0.12
[2.25 ± 0.005]
P005 244F
Decreasing
X
Decreasing
X
Increasing
X
Increasing
X
Increasing
Y
Increasing
Y
Decreasing
Y
Decreasing
Y
4x Ø 5.50
[0.218]
57.20
[2.25]
57.20
[2.25]
Ø 60.50
[2.38]
4x M4 - 0,7
(#8 THREAD)
57.20
[2.25]
57.20
[2.25]
Ø 60.50
[2.38]
Drop-in Mounting Pattern
Pin 6
Pin 1
2242
产品样本
JS1000 手柄底座
产品安装
Pro 型把手的尺寸和安装
毫米 [英寸
]
©
Danfoss | 2020 年 3 月
Pro 型把手接头针脚分配
6
针脚接头
BC152886484104zh-000804 | 21
Page 22

18o REF
3.8 [0.15]
Max panel
feed through mounting
18o REF
69.85
± 0.5
[2.75
± 0.02
]
69.85
± 0.5
[2.75
± 0.02
]
Decreasing
X
Decreasing
X
Increasing
X
Increasing
X
Increasing
Y
Increasing
Y
Decreasing
Y
Decreasing
Y
18o REF
18o REF
P005 243F
4 x Ø4.57
± 0.05
[0.180
± 0.002]
Ø59.4
± 0.05
[2.34
± 0.002]
59.6
± 0.5
[2.35 ± 0.02]
6.35
± 0.5
[0.25 ± 0.02]
86.61
± 0.5
[3.41 ± 0.02]
R2.03
± 0.5
[0.08 ± 0.02]
4x Ø 5.50
[0.218]
57.20
[2.25]
57.20
[2.25]
Ø 60.50
[2.38]
4x M4 - 0,7
(#8 THREAD)
57.20
[2.25]
57.20
[2.25]
Ø 60.50
[2.38]
Drop-in Mounting Pattern
Pin 6
Pin 1
2242
产品样本
JS1000 手柄底座
产品安装
球形把手的尺寸和安装
毫米 [英寸
]
Pro 型把手接头针脚分配
针脚 CAN 选项
1
2
3
4
5
6
接地
电源
CAN 高位
CAN 低位
CAN 屏蔽
无连接
22 | © Danfoss | 2020 年 3 月
Pro 型把手接头针脚分配
6
针脚接头
BC152886484104zh-000804
Page 23
W
C
产品样本
JS1000 手柄底座
产品安装
配合接头详情
Pro 型把手接头针脚分配
针脚 模拟选项 CAN 选项
1
2
3
4
5
6
Deutsch® DTM06-6S 配合接头
丹佛斯为 JS1000 手柄提供配合接头套件(袋组件)。袋组件中包含必须组装的零散部件。带状电缆
的接头的特点是带有未端接线束的全装配式接头。
接地‒ 接地
5 Vdc 电源 + 电源
X 输出信号
Y 输出信号
无连接 CAN 屏蔽
无连接 无连接
CAN +
CAN -
机器接线指南
配合接头组件
类型 丹佛斯订货号
接头组件包
带 400 mm [15.75 in] 线束的接头
警告
机器或机械意外移动可能会对技术员或旁观者造成伤害。
防止电源输入线发生过电流现象的方法不当可能导致硬件损坏。正确防止所有电源输入线发生过电
流现象。为了防止意外移动,请将机器固定。
警告
配合接头上未使用的针脚可能导致产品性能不稳定或过早发生故障。
插接配合接头上的所有针脚。
•
防止机械滥用电线,并在柔性金属或塑料导管中布线。
•
使用耐磨绝缘的 85° C (185° F) 电线,高温表面附近应考虑使用 105° C (221° F) 电线。
•
使用适合模块接头的线缆规格。
•
将大电流电线(例如,电磁线圈、电灯、交流发电机或燃油泵等)与传感器和其他噪音敏感输入
线分开。
•
如果可能的话,沿金属机器表面内部或附近布线,这么做相当于形成屏蔽,最大限度减少
EMI/RFI 辐射的影响。
•
请勿在锋利金属的转弯处布线,在拐角处应考虑套上线管。
•
请勿在发热的机器零件附近布线。
•
对所有电线采取应力释放措施。
•
避免在运动或震动部件附近布线。
•
避免较长的无支撑跨距布线。
•
将接地的电子组件连接到尺寸足够大、且与电池 (-)连接的专用导体上。
10101551
10101557
©
Danfoss | 2020 年 3 月
BC152886484104zh-000804 | 23
Page 24

产品样本
JS1000 手柄底座
产品安装
手柄主要安全功能
•
通过专用的有线电源和接地回路为传感器和阀驱动电路提供电源。
•
每隔 10 cm (4 in) 将传感器连接线绕转一次。
•
使用带有软导线的接插线束,使得导线可以在机箱内自由移动。避免使用硬介质接插件接线盘。
系统必须能够区分命令和非命令输入,才能安全运行。采取措施检测和应对可能导致错误输出的手
柄和系统故障。
对于主要安全功能, 丹佛斯 建议您使用独立的瞬时作用系统使能开关。您可以将此开关配置到手柄
作为操作员在位开关,或独立的脚或手操作的瞬时开关。释放此开关时,应禁用手柄控制的所有功
能。
将手柄移离其中位之前,确保控制系统已接受合适的系统使能输入信号。只有在收到该输入后才启
用功能。
使用 CAN 手柄的应用应定期持续监测是否存在 CAN 报文。应经常检查报文,以便系统或操作员能够
对 CAN 报文失去优先级或不再接收报文的情况做出反应。
24 | © Danfoss | 2020 年 3 月
BC152886484104zh-000804
Page 25

产品样本
JS1000 手柄底座
规格
Prof1 底座机械规格
手柄底座电气规格
底座机械规格
使用寿命
把手行程
弹簧对中力
轴力
重量(底座,无把手)
每轴 1000 万次循环
轴上: 18°
拐角: 24.7°
标准弹簧: 启动: 12 N [2.69 lbf] / 轴上行程末端: 18 N [4.0 lbf] / 拐角行程末
端: 20 N [4.49 lbf]
重型弹簧: 启动: 20 N [4.49 lbf] / 轴上行程末端: 29 N [6.51 lbf] / 拐角行程末
端:32 N [7.19 lbf]
弯曲轴的力: 97.8 N.m [866 lbf.in](55 mm [2.165 in] 时)
最大轴扭矩: 25.42 N.m [255 lbf.in]
最大向下力: > 4.45 kN [1000 lbf]
0.38 kg [0.838 lbf]
手柄底座环境
模拟选项
电源电压
最大电流消耗
输出参数,手柄底座
输出参数。
翘板开关
5.0 ± 0.5 Vdc
无把手的底座: 15 mA
带翘板开关把手的底座: 25 mA
超过额定温度时中位漂移: 电源电压的 2%
超过额定温度时满量程漂移: 电源电压的 2%
线性: 轴间角对应电压的最大偏移量为 1%
最大位置的输出: 电源电压的 92% ± 4%
中位输出: 电源电压的 50% ± 2%
最小位置的输出: 电源电压的 8% ± 4%
每个轴通道的最大输出电流: 2 mA
每个开关的最大输出电流: 2 mA
最大位置的输出: 电源电压的 77% ± 7%
中位输出: 电源电压的 50% ± 8%
最小位置的输出: 电源电压的 23% ± 7%
CAN 选项
支持使用 SAE J1939 报文协议的 CAN 2.0B
电源电压 9 至 32 Vdc
最大电流消耗 150 mA—带 PRO 型把手的底座
©
Danfoss | 2020 年 3 月
环境特性
底座工作温度
底座存储温度
防护等级
面板上(取决于把手和底座选项):
面板下(取决于把手和底座选项):
-40°C 至 +80°C [-40°F 至 +175°F]
-55°C 至 +85°C [-67°F 至 +180°F]
IP-67
IP-67
BC152886484104zh-000804 | 25
Page 26

产品样本
JS1000 手柄底座
规格
手柄需要维修
环境特性 (续)
PRO 型把手:
带比例控制滚轮功能的 PRO 型把手:
EMI/RFI 等级
振动
冲击
将手柄连同介绍产品故障的信息送回至:
MPS CQAR Administrator
Danfoss Power Solutions
3500 Annapolis Lane North,
Minneapolis, Minnesota 55447-5312, USA
IP-43
IP-40
100 V/m
符合 IEC 60068-2-64 标准
IEC 60068-2-27 试验方法 Ea
26 | © Danfoss | 2020 年 3 月
BC152886484104zh-000804
Page 27

Danfoss
Power Solutions GmbH & Co. OHG
Krokamp 35
D-24539 Neumünster, Germany
Phone: +49 4321 871 0
Danfoss
Power Solutions ApS
Nordborgvej 81
DK-6430 Nordborg, Denmark
Phone: +45 7488 2222
Danfoss
Power Solutions (US) Company
2800 East 13th Street
Ames, IA 50010, USA
Phone: +1 515 239 6000
Danfoss
Power Solutions Trading
(Shanghai) Co., Ltd.
Building #22, No. 1000 Jin Hai Rd
Jin Qiao, Pudong New District
Shanghai, China 201206
Phone: +86 21 2080 6201
Products we offer:
Hydro-Gear
www.hydro-gear.com
Daikin-Sauer-Danfoss
www.daikin-sauer-danfoss.com
Cartridge valves
•
DCV directional control
•
valves
Electric converters
•
Electric machines
•
Electric motors
•
Gear motors
•
Gear pumps
•
Hydraulic integrated
•
circuits (HICs)
Hydrostatic motors
•
Hydrostatic pumps
•
Orbital motors
•
PLUS+1 controllers
•
PLUS+1 displays
•
PLUS+1 joysticks and
•
pedals
PLUS+1 operator
•
interfaces
PLUS+1 sensors
•
PLUS+1 software
•
PLUS+1 software services,
•
support and training
Position controls and
•
sensors
PVG proportional valves
•
Steering components and
•
systems
Telematics
•
丹佛斯动力系统 是一家全球化的制造商和供应商,生产并提供高品质的液压及电子元
件。我们为客户提供前沿的技术及解决方案,尤其专注于工况恶劣的非公路行走设备以及
海事领域。基于我们丰富成熟的应用经验,我们和客户紧密合作,确保采用我们产品的诸
多应用具备卓越的性能。在全球范围内,我们帮助您和其他客户加速系统的研发、降低成
本并使机器能更快的推向市场。
丹佛斯动力系统 ‒ 行走液压和行走机械电子产品领域强有力的合作伙伴。
更多产品信息,请登录 www.danfoss.com。
在全球范围内,我们为客户提供专业的技术支持,最佳解决方案以实现卓越的机器性能。
通过遍布世界的授权服务商,针对所有丹佛斯动力系统的产品,我们为客户提供综合的全
球化服务。
请联系:
丹佛斯对目录、产品手册和其他印刷材料中可能存在的错误不承担任何责任。丹佛斯有权不预先通知就更改其产品。这也适用于已订购的产品,但前提是在不影响既定规格的情况下才能做出此类
更改。
All trademarks in this material are property of the respective companies. Danfoss and the Danfoss logotype are trademarks of Danfoss A/S. All rights reserved.
©
Danfoss | 2020 年 3 月
BC152886484104zh-000804
 Loading...
Loading...