

Page 1
PLUS+1™ GUIDE
Software
PLUS+1 Compliant H1B K, M Motor Function Block User Manual
142.0 mm
[5.59]
97.0 mm
[3.82]
144.5 mm
5.69
158.2 mm
6.23
PIN #1
INDICATED
2x 25.2 mm
[1.0]
2x ∅7.0
[.28]
MOUNTING
DIRECTION
#2
LED INDICATOR
LIGHTS
TM
COMPLIANT
CONNECTOR MATES
WITH DEUTCH
CONNECTOR #DTM-06-125A
51.6 mm
47.1 mm
[1.85]
[2.03]
1
12
6
7
1
12
6
7
CONNECTOR MATES
WITH DEUTCH
CONNECTOR #DTM-06-125A
Page 2
PLUS+1 Compliant H1B K, M Motor Function Block
T
User Manual
About this Manual
Organization
and Headings
o help you quickly find information in this manual, the material is divided into sections,
topics, subtopics, and details, with descriptive headings set in red type. Section titles
appear at the top of every page in large red type.
In the PDF version of this document, clicking an item underlined in blue italic type
you to the referenced page in the document.
Special Text Formatting Controls and indicators are set in bold black type.
Table of Contents
A Table of Contents (TOC) appears on the next page. In the PDF version of this document,
the TOC entries are hyperlinked.
Revision History
Revision Date Comment
Rev CA October 2011
jumps
©2011 Sauer-Danfoss. All rights reserved.
Sauer-Danfoss accepts no responsibility for possible errors in catalogs, brochures and other printed material.
Sauer-Danfoss reserves the right to alter its products without prior notice. This also applies to products already
ordered provided that such alterations can be made without affecting agreed specifications.
All trademarks in this material are properties of their respective owners.
PLUS+1, GUIDE, and Sauer-Danfoss are trademarks of the Sauer-Danfoss Group. The PLUS+1 GUIDE, PLUS+1
2
Compliant, and Sauer-Danfoss logotypes are trademarks of the Sauer-Danfoss Group.
11063629 · CA · October 2011
Page 3

PLUS+1 Compliant H1B K, M Motor Function Block
User Manual
Contents
H1B_12V_KM and H1B_24V_KM Function Blocks ................................................................................ 4
Overview .................................................................................................................................................... 4
Inputs ........................................................................................................................................................... 4
Function Block Parameters .................................................................................................................. 5
About the Function Block Parameters ..................................................................................... 6
Outputs ....................................................................................................................................................... 7
About Function Block Connections .................................................................................................. 8
Status and Fault Logic............................................................................................................................ 9
Configuration Values ............................................................................................................................ 11
About the Relationship between the Function Block’s Input and Output Signals ......... 14
MC Controller—Output Configuration .......................................................................................... 15
How to Configure an MFOut ..................................................................................................... 15
SC Controller—Output Configuration ........................................................................................... 17
How to Configure an MFOut ..................................................................................................... 17
About Modifying the Config_Data Page ....................................................................................... 18
How to Calibrate the Function Block .............................................................................................. 20
How to Calibrate an Individual Parameter .................................................................................... 21
About Manual Calibration with the Service Tool Program...................................................... 22
About the Name Space Feature ....................................................................................................... 23
How to Enter a Name Space Value .......................................................................................... 23
11063629 ● Rev CA ● October 2011
3
Page 4
Overview
PLUS+1 Compliant H1B K, M Motor Function Block
User Manual
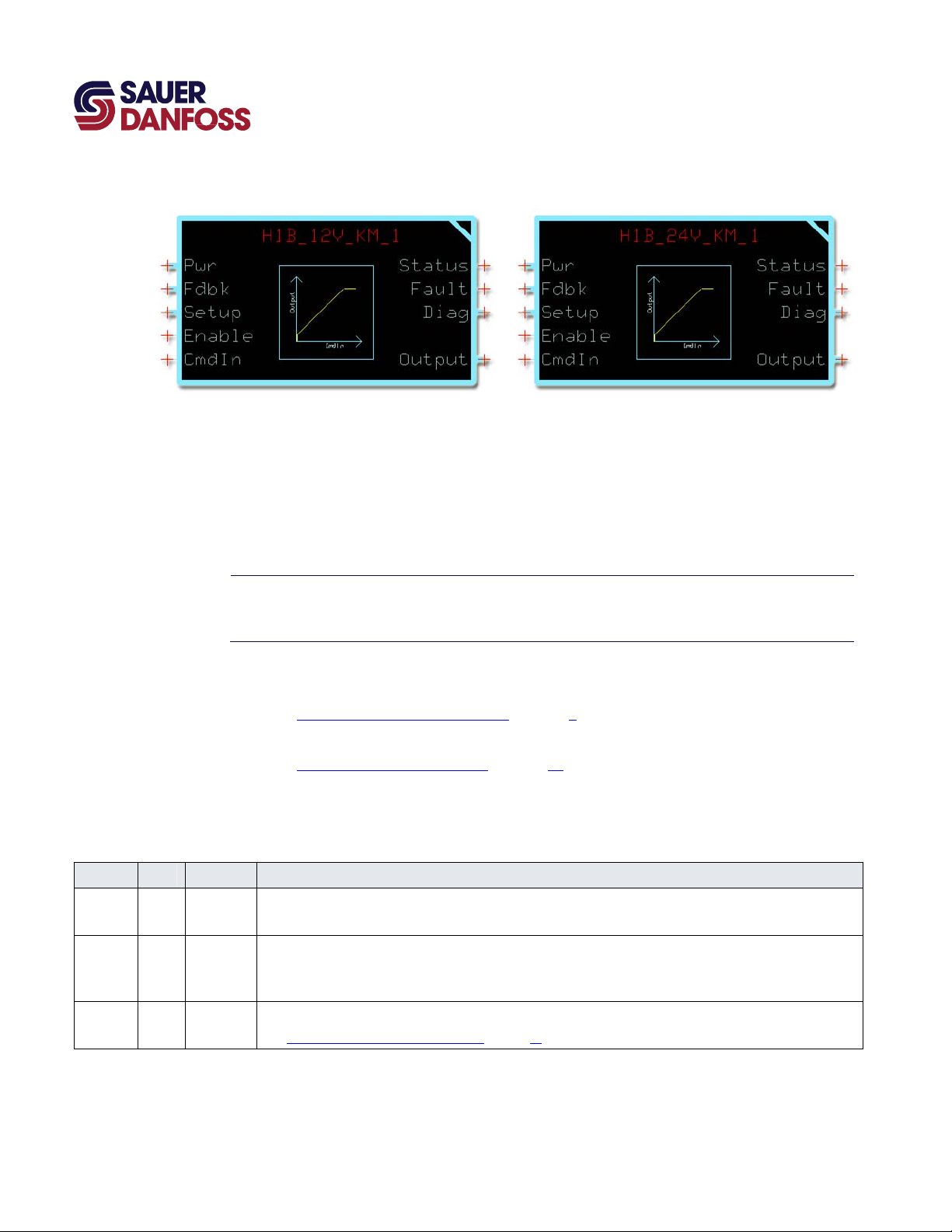
H1B_12V_KM and H1B_24V_KM Function Blocks
• The output of an H1B_12V_KM function block controls the 12V options of a K*or an
M* type H1B motor control.
• The output of an H1B_24V_KM function block is designed to control the 24V options
of the K*or M* type H1B motor controls.
These function blocks only differ in their operating voltages and configuration values.
T PLUS+1 I/O modules do not have the fault-checking feedback signals that are needed
by these function blocks. An application that uses these function blocks to control an
I/O module will fail to compile.
See:
• About Function Block Connections on page 8 for an overview of these function blocks’
connections and signals.
• About the Name Space Feature on page 23 if you are using more than one of these
function blocks in your application.
Inputs
H1B_12V_KM and H1B_24V_KM Function Block Inputs
Input Type Range Description
Pwr —— —— Reports controller supply voltage.
The function block uses this voltage to calculate the measured resistance of the control circuit.
Fdbk —— —— Reports the status of the MFOut (Multifunction Output) block that receives the function block’s Output bus.
Each MFOut block in the Outputs page has a corresponding MFOut block in the Inputs page that reports on its
status through a Status bus.
Setup —— —— Allows common configuration values to be applied to multiple function blocks.
See About Modifying the Config_Data Page on page 18 for more information.
4
11063629 ● Rev CA ● October 2011
Page 5
PLUS+1 Compliant H1B K, M Motor Function Block
User Manual
H1B_12V_KM and H1B_24V_KM Function Blocks
H1B_12V_KM and H1B_24V_KM Function Block Inputs
Input Type Range Description
Enable BOOL —— Enables the OutputValue signal in the Output bus.
– T = The OutputValue signal follows the CmdIn signal.
– F = Holds the OutputValue signal at zero.
– F/T = Clears latched faults if CmdIn is zero.
CmdIn S16 0–10000 Specifies the requested displacement.
– 0 = Requests minimum displacement.
– 10000 = Requests maximum displacement.
Function Block Parameters
Warning
Using the PLUS+1 Service Tool program to download new parameter values can result
in unexpected and sudden machine movements.
Unexpected and sudden machine movements can result in personal injury and
equipment damage.
Always secure your machine against unexpected and sudden movements before you
use the Service Tool program to download new parameter values values.
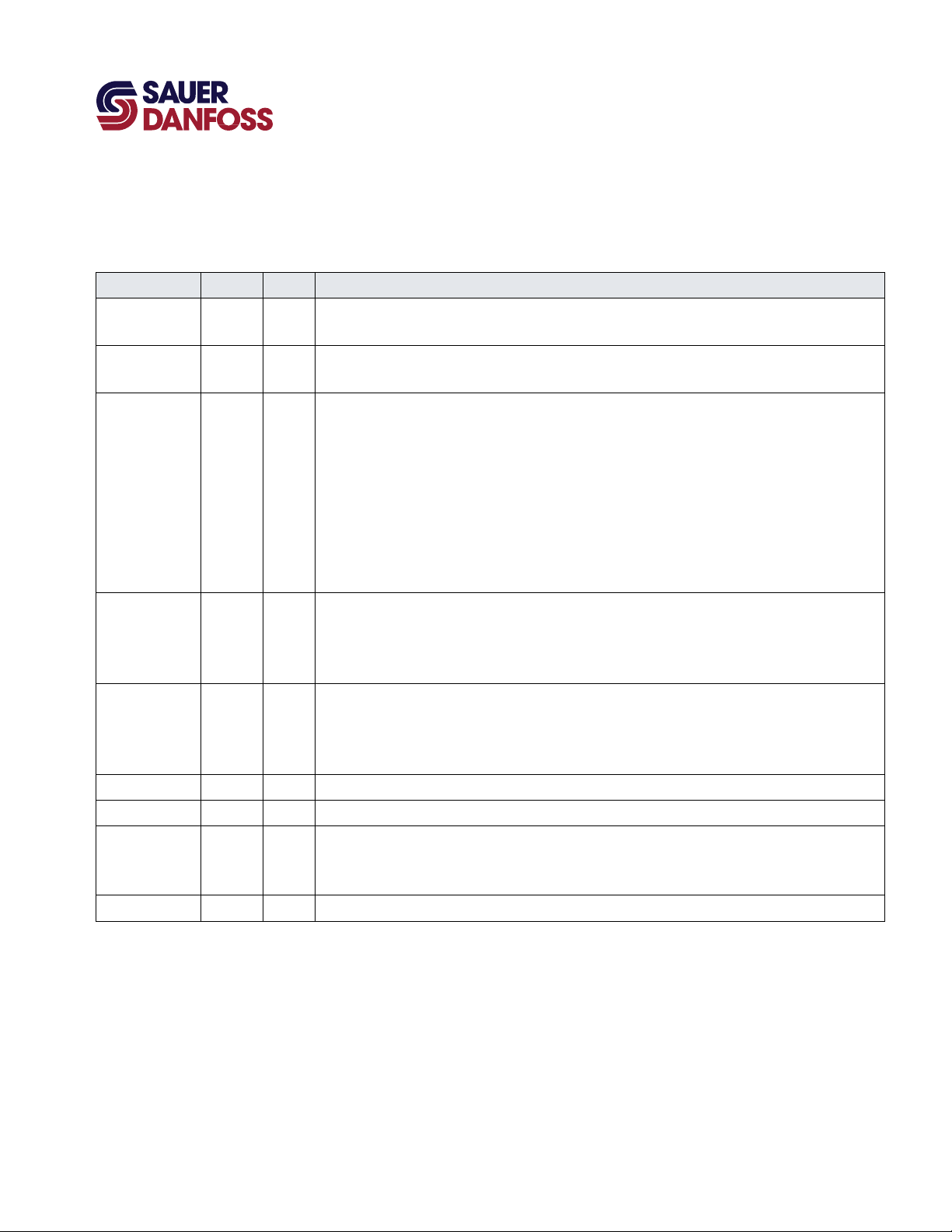
The following table lists the function block parameters that are stored in the controller’s
non-volatile memory.
You can change these values by:
• Execution of the calibration process.
• Direct access to serial EE memory using the PLUS+1 Service Tool.
• Recalling default values.
H1B_12V_KM and H1B_24V_KM Function Block Parameters
Parameter Type Range Description
EE_Thld U16 CalThldMin to CalThldMax The calibrated threshold value.
EE_EndCrnt U16 Thld + 1 to MaxCrnt The calibrated end-current value.
MaxCrnt exists as a signal only in locked levels of the block.
EE_CalFlg U8 —— Calibration flags:
– Bit 1 = 1 (0x0001)—Threshold is not calibrated.
– Bit 2 = 1 (0x0002)—End current is not calibrated.
The CalFlg signal in the Diag bus has both flags.
11063629 ● Rev CA ● October 2011
5
Page 6

PLUS+1 Compliant H1B K, M Motor Function Block
User Manual
H1B_12V_KM and H1B_24V_KM Function Blocks
About the Function Block Parameters
The function block parameters set the values used for threshold and end current for each
direction during normal operation.
However, the values that actually apply might be different because the:
• Thld and EndCrnt values are both subject to range limits.
• ThldMult value modifies the Thld value.
The following values represent the values that are actually applied:
• EndCrntApplied = MIN(EE_EndCrnt, MaxCrnt).
• ThldApplied = MIN((EE_Thld × ThldMult), EndCrntApplied)).
This assures that the:
• EndCrntApplied never exceeds MaxCrnt.
• ThldApplied never exceeds EndCrntApplied.
Also note that when the CalTask value is set to select a calibration task, the:
• EndCrntApplied = MaxCrnt.
• ThldApplied = 1.
The applied values are available in the Diag bus as Thld and EndCrnt.
6
11063629 ● Rev CA ● October 2011
Page 7
PLUS+1 Compliant H1B K, M Motor Function Block
User Manual
H1B_12V_KM and H1B_24V_KM Function Blocks
Outputs
H1B_12V_KM and H1B_24V_KM Function Block Outputs
Output Type Range Description
Status U16 —— Reports the function block’s status conditions.
This output uses the standard bitwise scheme described in the Basic Function Blocks Library User’s Manual.
Fault U16 —— Reports the function block’s fault conditions.
This output uses the standard bitwise scheme described in the Basic Function Blocks Library User’s Manual.
Diag —— —— Outputs a bus with these signals:
– CalFlg (Calibration Flag).
– EndCrnt (End Current).
– FltTmr (Fault Timer).
– MeasOhm (Measured Ohm).
– Thld (Threshold).
Also outputs Config and Define buses. The:
– Config bus has configuration signals from the Config_Data block.
– Define bus has constant signals used within the block.
CalFlg U8 —— Reports the state of calibration values.
– Bit 1 = 1 (0x0001)—Threshold is not calibrated.
– Bit 2 = 1 (0x0002)—End current is not calibrated.
Use these flags to manage the calibration process.
EndCrnt U16 —— Reports the active end current value.
During normal operation, the end current value equals EE_EndCrnt.
During calibration, the end current value equals MaxCrnt.
MaxCrnt exists as a signal only in locked levels of the block.
FltTmr U16 —— Reports the value of the fault delay timer.
MeasOhm U16 —— Reports the measured resistance of the control circuits that drive the H1B coil.
Thld U16 —— Reports the active threshold value for OutputValue.
– During normal operation, the threshold value equals EE_Thld x ThldMult.
– During calibration, the threshold value equals 1.
Output
—— —— Has an OutputValue signal that drives an H1B coil.
11063629 ● Rev CA ● October 2011
7
Page 8
PLUS+1 Compliant H1B K, M Motor Function Block
User Manual
H1B_12V_KM and H1B_24V_KM Function Blocks
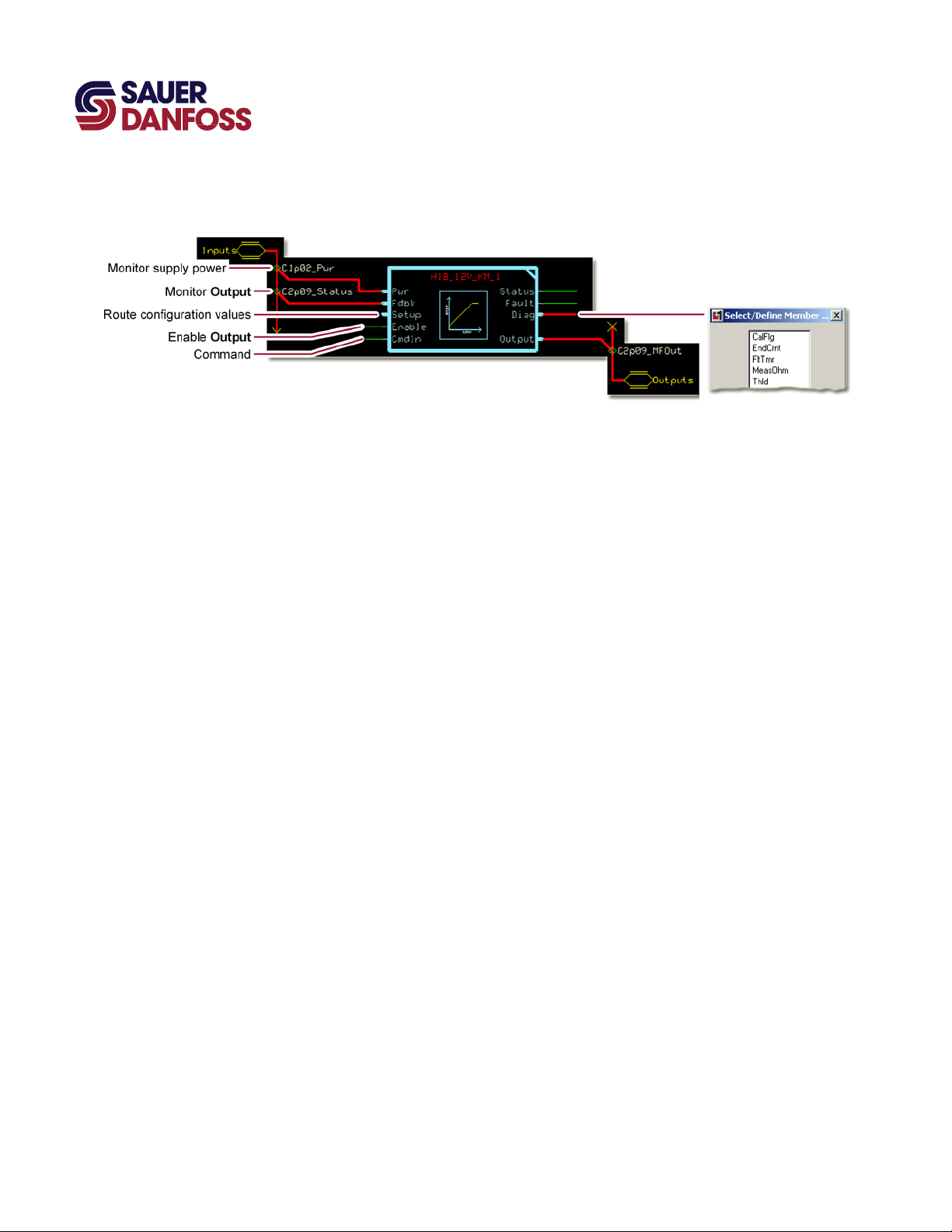
About Function Block Connections
Connections for both function blocks are the same. These function blocks only differ in
their operating voltages and configuration values.
8
11063629 ● Rev CA ● October 2011
Page 9

PLUS+1 Compliant H1B K, M Motor Function Block
User Manual
H1B_12V_KM and H1B_24V_KM Function Blocks
Status and Fault Logic
Status Logic
Status Bit* Reported While
Block is not calibrated. 1 Any CalFlag bit is set to 1.
Calibration active. 2 Enable is T and the CalTask = 1 or 2.
EE_EndCrnt > MaxCrnt or (EE_Thld × ThldMult) > EndCrntApplied) for either direction A or direction B.
The function block applies these tests:
Parameters are corrupt. 3
Invalid setup/calibration. 4
– EndCrntApplied ≠ EE_EndCrnt—this happens when EE_EndCrnt > MaxCrnt, which means that
EndCrntApplied = MaxCrnt.
– ThldApplied = EndCrntApplied—this happens when (EE_Thld × ThldMult) ≥ EndCrntApplied.
PinStatus reports a configuration error (value =1) or one or more of these values are invalid:
– CalThldMin.
– CalThldMax.
– ThldMult.
– FltDetectTm.
– CalTask.
Value too low. 7 Threshold calibration is active and the OutputValue < CalThldMin.
Value too high. 8 Threshold calibration is active and the OutputValue > CalThldMax.
*Position of set bit in a 16- bit fault or status code. Bit 1 is the least significant bit. Bit 16 set to 1 identifies a standard Sauer-Danfoss status code or
fault code.
11063629 ● Rev CA ● October 2011
9
Page 10

PLUS+1 Compliant H1B K, M Motor Function Block
User Manual
H1B_12V_KM and H1B_24V_KM Function Blocks
Each function block has an Output bus with an OutputValue signal that drives a coil. The
following table lists function block faults and how they affect the OutputValue signal.
Fault Logic
Fault Cause Bit* Response Delay† Latch‡ Correction
Input value too low. CmdIn < 0. 1
Input value too high. CmdIn > 10000. 2
Open circuit. Measured Ω > (Nominal Ω x 3). 3
Short circuit. Measured Ω < (Nominal Ω ÷ 3). 4
Hardware.
*Position of set bit in a 16 bit status or fault code. Bit 1 is the least significant bit. Bit 16 set to 1 identifies a standard Sauer-Danfoss status code or
fault code.
†
A delayed fault gets reported if the detected fault condition persists for a specified delay time. A delayed fault cannot be cleared until the fault
condition remains undetected for the delay time.
‡
A latched fault report holds until the latch releases. A release is attempted each time that the Enable input becomes T while CmdIn is 0.
Current exceeds continuous or
peak rating.
OutputValue
held at 0.
6 Correct cause of overload.
No. No. Fix CmdIn.
Check for open circuit or high resistance
between output pin and ground.
Yes. Yes.
Check for short circuit or low resistance
between output pin and ground.
10
11063629 ● Rev CA ● October 2011
Page 11

Configuration Values
PLUS+1 Compliant H1B K, M Motor Function Block
User Manual
H1B_12V_KM and H1B_24V_KM Function Blocks
The Config_Data page has values that configure the function block’s operating
characteristics. Typically, you do not have to change any of these values for the correct
operation of the function block.
11063629 ● Rev CA ● October 2011
11
Page 12

PLUS+1 Compliant H1B K, M Motor Function Block
User Manual
H1B_12V_KM and H1B_24V_KM Function Blocks
H1B_12V_KM and H1B_24V_KM Function Block Configuration Values
Input Type 12V Range 24V Range Description
CalTask S16 0–3 0–3 Selects a calibration process:
StoreCalVal BOOL —— —— While calibration is active, a StoreCalVal transition of F/T writes the selected calibration
SetCalReqd BOOL —— —— A SetCalReqd (Set Calibration Required) transition of F/T sets all CalFlg bits to 1 to mark
ClrCalReqd BOOL —— —— A ClrCalReqd (Clear Calibration Required transition of F/T clears all CalFlg bits to 0 to
CalThldMin U16 2500–6192 1000–3123 Sets the lower limit of the valid range for EE_Thld.
CalThldMax U16 6193–8256 3124–4164 The CalThldMax (Calibration Threshold Maximum) sets the upper limit for of the valid
ThldMult U16 0–10000 0–10000 Gets multiplied by the EE_Thld value to calculate the applied threshold.
DfltThld U16 CalThldMin
to
CalThldMax
DfltEndCrnt U16 DfltThld + 1
to 18000
Optionally, you can:
• Change the constant values on this page.
• Replace some or all the constant values on this page with signals imported into the
page through the Setup bus, which connects to the function block’s Setup input. See
About Modifying the Config_Data Page on page 18 for more information.
– 0 = Allow normal operation.
– 1 = Calibrate the threshold.
– 2 = Calibrate the end current.
– 3 = Apply the default calibration values on a transition to 3. The 3 default value
applies default values each time that the controller powers up. It allows normal
operation.
value to memory and sets the CalFlg to indicate this value as calibrated.
The threshold parameter is captured only if it is within its valid range.
– T = Not calibrated.
– F = Calibrated.
all calibration values as uncalibrated.
mark all calibration values as calibrated.
10000 = 1000 mA.
range for EE_Thld.
10000 = 1000 mA.
Values > 10000 reduce the applied threshold. For example, a value of 7500 reduces the
threshold by 25%.
10000 = 100.00%.
CalThldMin to
CalThldMax
DfltThld + 1
to 9200
When the CalTask becomes 3, EE_Thld is reset to equal DfltThld (Default Threshold).
10000 = 1000 mA.
When the CalTask becomes 3, EE_EndCrnt is reset to equal DfltEndCrnt (Default End
Current).
10000 = 1000 mA.
12
11063629 ● Rev CA ● October 2011
Page 13

PLUS+1 Compliant H1B K, M Motor Function Block
User Manual
H1B_12V_KM and H1B_24V_KM Function Blocks
H1B_12V_KM and H1B_24V_KM Function Block Configuration Values
Input Type 12V Range 24V Range Description
FltDet BOOL —— —— Enables detection of open and short conditions based on the measured resistance of
the control circuit.
– T = Enable fault detection.
– F = Disable fault detection.
FltDetectTm T 100–2000 100–2000 Sets the time before the fault detection logic reports or clears a fault conditions.
1000 = 1000 ms.
FltDetThld U16 —— —— Sets the threshold that the OutputValue must exceed before the function block detects
open and short faults.
Typically, set this value below the threshold value.
Too low a value produces nuisance faults. Too high a value turns off fault detection for
some or all of the output range.
Input = mA x 10.
11063629 ● Rev CA ● October 2011
13
Page 14

PLUS+1 Compliant H1B K, M Motor Function Block
User Manual
H1B_12V_KM and H1B_24V_KM Function Blocks
About the Relationship between the Function Block’s Input and Output Signals
The function block’s Output bus contains an OutputValue signal.
The following figure plots the relationship between the function block’s CmdIn and
OutputValue signals.
• The Thld value sets the OutputValue of the block when it receives a CmdIn of +1.
• The EndCrnt value sets the Output Value of the block when it receives a Camden of
+10000.
14
11063629 ● Rev CA ● October 2011
Page 15

PLUS+1 Compliant H1B K, M Motor Function Block
User Manual
H1B_12V_KM and H1B_24V_KM Function Blocks
MC Controller—Output Configuration
If you have an SC controller, see SC Controller—Output Configuration on page 17.
You route the function block’s Output bus to an MFOut.
How to Configure an MFOut
You must configure the MFOut to receive the signals in the Output bus.
1. In the GUIDE template, enter the Outputs block.
2. In the Group that receives the signals in the Output bus, make the changes that are
shown in the preceding figure.
11063629 ● Rev CA ● October 2011
15
Page 16

PLUS+1 Compliant H1B K, M Motor Function Block
User Manual
H1B_12V_KM and H1B_24V_KM Function Blocks
3. In the individual MFOut that receives the signals in the Output bus, make the changes
that are shown in the preceding figure.
16
11063629 ● Rev CA ● October 2011
Page 17

PLUS+1 Compliant H1B K, M Motor Function Block
User Manual
H1B_12V_KM and H1B_24V_KM Function Blocks
SC Controller—Output Configuration
If you have an MC controller, see MC Controller—Output Configuration on page 15.
You route the function block’s Output bus to an MFOut.
How to Configure an MFOut
You must configure the MFOut to receive the signals in the Output bus.
1. In the GUIDE template, enter the Outputs block.
2. In the MFOut that receives the signals in the Output bus, make the changes that are
shown in the preceding figure.
11063629 ● Rev CA ● October 2011
17
Page 18

PLUS+1 Compliant H1B K, M Motor Function Block
User Manual
H1B_12V_KM and H1B_24V_KM Function Blocks
About Modifying the Config_Data Page
Modify the Config_Data page to control the configuration process with signals routed
into the function block from an application.
The preceding figure shows an unmodified Config_Data page. This Config_Data page
has all the values that are needed to configure the function block.
18
11063629 ● Rev CA ● October 2011
Page 19

PLUS+1 Compliant H1B K, M Motor Function Block
User Manual
H1B_12V_KM and H1B_24V_KM Function Blocks
The preceding figure shows the changes made to a Config_Data page to allow an
application to control the configuration process using signals routed via the Setup bus.
11063629 ● Rev CA ● October 2011
19
Page 20

PLUS+1 Compliant H1B K, M Motor Function Block
User Manual
H1B_12V_KM and H1B_24V_KM Function Blocks
How to Calibrate the Function Block
See About Modifying the Config_Data Page on page 18 for an example of a Config_Data
page that has been modified to allow an application to control the calibration process.
1. Prepare to calibrate.
A. Set the SetCalReqd signal to F.
B. Set the ClrCalReqd signal to F.
C. Set the StoreCalVal signal to F.
D. Toggle the SetCalReqd signal from F to T.
2. Set the Enable signal to T.
3. Calibrate the threshold parameter (EE_Thld).
Toggling sets the “not calibrated” bits in the CalFlg signal to 1.
A. Set the CalTask signal to 1.
B. Gradually modify the CmdIn signal to find the minimum command that causes
increased motor speed.
In the Status signal, monitor bit 7—Value too low and bit 8—Value too high to
make sure that the OutputValue signal is within the valid threshold range.
C. Toggle the StoreCalVal signal from F to T to write the OutputValue to memory.
In the CalFlg signal, check that bit 1 clears to 0, to verify that the controller has
written the threshold parameter to memory.
4. Calibrate the end-current parameter (EE_EndCrnt).
A. Set the CalTask signal to 2.
B. Gradually modify the CmdIn signal to find the command that produces the
desired maximum motor speed.
C. Toggle the StoreCalVal signal from F to T to write the OutputValue to memory.
In the CalFlg signal, check that bit 2 clears to 0, to verify that the controller has
written the end-current parameter to memory.
5. End the calibration process.
A. Set the CalTask signal to 0.
20
B. In the CalFlg signal, verify that all bits are now 0.
C. Verify that no Status or Fault conditions are reported.
D. If you have made it available in the Setup bus, set the ThldMult signal to the
desired value.
11063629 ● Rev CA ● October 2011
Page 21

PLUS+1 Compliant H1B K, M Motor Function Block
User Manual
H1B_12V_KM and H1B_24V_KM Function Blocks
How to Calibrate an Individual Parameter
Partial calibration lets you calibrate an individual parameter while leaving other
parameters unchanged.
1. Prepare to calibrate.
A. Set the SetCalReqd signal to F.
B. Set the ClrCalReqd signal to F.
C. Set the StoreCalVal signal to F.
D. Toggle the SetCalReqd signal from F to T.
Toggling sets all of the “not calibrated” bits in the CalFlg signal to 1.
2. Set the Enable signal to T.
3. Use the CalTask signal to select the parameter to be calibrated.
4. Calibrate the parameter.
A. Toggle the StoreCalVal signal from F to T to write the OutputValue to memory.
B. In the CalFlg signal, check that the calibration bit for the selected parameter
clears to 0, to verify that the controller has written the parameter to memory.
5. End the calibration process.
A. Set the CalTask signal to 0.
B. Toggle the ClrCalReqd signal from F to T.
Toggling sets all of the “not calibrated” bits in the CalFlg signal to 0.
C. In the CalFlg signal, verify that all bits are now 0.
D. Verify that no Status or Fault conditions are reported.
11063629 ● Rev CA ● October 2011
21
Page 22

PLUS+1 Compliant H1B K, M Motor Function Block
User Manual
H1B_12V_KM and H1B_24V_KM Function Blocks
About Manual Calibration with the Service Tool Program
You can manually calibrate the function block using the PLUS+1 Service Tool to download
calibration parameters.
Warning
Using the PLUS+1 Service Tool program to download new parameter values can result
in unexpected and sudden machine movements.
Unexpected and sudden machine movements can result in personal injury and
equipment damage.
Always secure your machine against unexpected and sudden movements before you
use the Service Tool program to download new parameter values.
When you manually calibrate, make sure that the:
• Calibration parameters are valid.
If the values are out of range, the function block will limit the values of ThldApplied or
EndCrntApplied.
The “Parameters are corrupt” status indicates this condition and the condition can
produce unintended output commands.
• Status signal indicates normal status conditions.
22
11063629 ● Rev CA ● October 2011
Page 23

PLUS+1 Compliant H1B K, M Motor Function Block
User Manual
H1B_12V_KM and H1B_24V_KM Function Blocks
About the Name Space Feature
If you use this function block more than once in an application, you must change each
function block’s Name Space value to avoid compiler errors.
These function blocks allocate memory using memory names (“aliases”). Identical function
blocks have identical memory names. Identical memory names will cause a compiler error.
The Name Space value adds a unique prefix to each memory name to avoid memory
allocation errors. Keep Name Space values short to save controller memory.
How to Enter a Name Space Value
1. In the PLUS+1 GUIDE menu bar, click the Query/Change button.
2. Click the function block’s page name to display the Edit Page window.
3. In the Edit Page window, enter a meaningful Name Space value.
4. Press /.
5. Repeat these steps to enter unique Name Space values for other identical function
blocks.
11063629 ● Rev CA ● October 2011
23
Page 24

p
Products we offer:
• Bent Axis Motors
• Closed Circuit Axial Piston Pumps
and Motors
• Displays
• Electrohydraulic Power Steering
• Electrohydraulics
• Hydraulic Power Steering
• Integrated Systems
• Joysticks and Control Handles
• Microcontrollers and Software
• Open Circuit Axial Piston Pumps
• Orbital Motors
• PLUS+1™ GUIDE
• Proportional Valves
• Sensors
• Steering
Sauer-Danfoss is a global manufacturer and supplier of highquality hydraulic and electronic components. We specialize in
providing state-of-the-art technology and solutions that excel in
the harsh operating conditions of the mobile off-highway market.
Building on our extensive applications expertise, we work closely
with our customers to ensure exceptional performance for a broad
range of off-highway vehicles.
We help OEMs around the world speed up system development,
reduce costs and bring vehicles to market faster.
Sauer-Danfoss—Your Strongest Partner in Mobile Hydraulics.
Go to www.sauer-danfoss.com for further product information.
Wherever off-highway vehicles are at work, so is Sauer-Danfoss.
We offer expert worldwide support for our customers, ensuring the
best possible solutions for outstanding performance. And with an
extensive network of Global Service Partners, we also provide
comprehensive global service for all of our components.
Transit Mixer Drives
•
Members of the Sauer-Danfoss Group:
Comatrol
www.comatrol.com
Schwarzmüller-Inverter
www.schwarzmueller-inverter.com
Turolla
www.turollaocg.com
Hydro-Gear
www.hydro-gear.com
Sauer-Danfoss-Daikin
www.sauer-danfoss-daikin.com
Please contact the Sauer-Danfoss re
Local address:
Sauer-Danfoss Inc.
3500 Annapolis Lane North
Minneapolis, MN 55447, USA
Phone: +1 763 509-2000
Fax: +1 763 559-5769
Sauer-Danfoss (US) Company
2800 East 13th Street
Ames, IA 50010, USA
Phone: +1 515 239-6000
Fax: +1 515 239-6618
Sauer-Danfoss GmbH & Co. OHG
Postfach 2460, D-24531 Neumünster
Krokamp 35, D-24539 Neumünster,
Germany
Phone: +49 4321 871-0
Fax: +49 4321 871 122
resentative nearest you.
Sauer-Danfoss ApS
DK-6430 Nordborg, Denmark
Phone: +45 7488 4444
Fax: +45 7488 4400
Sauer-Danfoss-Daikin LTD
Shin-Osaka TERASAKI 3rd Bldg. 6F
1-5-28 Nishimiyahara, Yodogawa-ku
Osaka 532-0004, Japan
Phone: +81 6 6395 6066
Fax: +81 6 6395 8585
11063629 ● Rev CA ● October 2011
www.sauer-danfoss.com
 Loading...
Loading...