

Page 1

MAKING MODERN LIVING POSSIBLE
产品样本
H1 轴向柱塞泵
排量 089/100, 单泵,
带AC控制器与发动机转速相关控制(AC)
powersolutions.danfoss.com
Page 2

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
版本说明
版本历史
修订记录表
日期 页码 修改项目 版本
2010年1月 —
2010年5月 10-12 添加 AC 控制 AB
2010年6月 39 G3变到G9 AC
2010年7月 32-36 EC 指令更新 BA
2011年10月 32
2011年4月 38-39
2011年7月
2011年6月 44
多页 图纸和其它
第一版
表格更新
选型代码更新
油口说明
AA
BB
BC
CA
CB
其它可供参考样本
描述 查询号
概述, H1 轴向柱塞泵, 单泵和串泵 L1012919
基本信息, H1 轴向柱塞泵, 单泵和串泵 11062168
产品样本 标准控制 AC 控制
H1 轴向柱塞泵, 排量 045/053, 单泵 11063344 11076185
H1 轴向柱塞泵, 排量 045/053, 串泵 11063345 H1 轴向柱塞泵, 排量 060/068, 单泵 11071685 L1003703
H1 轴向柱塞泵, 排量 078, 单泵 11062169 11068353
H1 轴向柱塞泵, 排量 089/100, 单泵 11069970 11071849
H1 轴向柱塞泵, 排量 115/130, 单泵 11063346 11071850
H1 轴向柱塞泵, 排量 147/165, 单泵 11063347 -
附件
外部远程补油压油过滤器
转速和温度传感器
压力传感器
液压油技术样本
液压油与润滑
可降解液压油使用经验
液压油清洁度设计指南
应用信息
应用手册, 第 1 章, 动力系统组件选择 BLN-9885
应用手册, 第 2 章, 液压元件的压力与速度限制范围 BLN-9884
应用手册, 第 4 章, 传递回路推荐 BLN-9886
PLUS+1 兼容 (电气安装)
H1 电气排量控制 (EDC) 11022744
H1 3-位 (FNR) 电控 11025001
H1 电比例无反馈 (NFPE) 控制 11025002
服务手册
H1 轴向柱塞泵, 排量 045/053, 单泵 520L0958
H1 轴向柱塞泵, 排量 045/053, 串泵 520L0928
H1 轴向柱塞泵, 排量 078/115/130/147/165, 单泵 520L0848
11064579
11046759
L1007019
520L0463
520L0465
520L0467
L1108283 • Rev CB • Aug 20122
Page 3

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
目录
概括信息
技术规格
概括信息, 电气与电子设备 ....................................................................................................................... 5
与发动机转速相关控制 (AC-1 和 AC-2) 系统说明.......................................................................5
与发动机转速相关控制 (AC-1 和 AC-2) 高级功能.......................................................................5
模式类型 ........................................................................................................................................................... 6
与发动机转速相关控制 (AC-1 和 AC-2) 静液压驱动方法 ........................................................ 6
模式类型: 与发动机转速相关模式 ................................................................................................... 6
模式类型: 与发动机转速无关模式 ................................................................................................... 7
模式类型: 比例调节与发动机转速相关模式 ................................................................................ 7
系统模式和选择 ...........................................................................................................................................10
功能选项包 ....................................................................................................................................................10
应用功能 .........................................................................................................................................................11
SIL 2 系统要求 ...............................................................................................................................................15
用户传感器的一般要求 ............................................................................................................................15
驱动踏板/比例调节踏板/控制手柄/双向踏板 & 寸进踏板 ........................................................15
压力寸进传感器 ...........................................................................................................................................16
模式开关 A .....................................................................................................................................................17
模式开关 B ......................................................................................................................................................17
静液压驱动马达速度传感器 (PPU) 可选带旋向指示 ....................................................................17
马达排量控制和制动压力失效 (BPD) .................................................................................................18
用户驱动器的一般要求 ............................................................................................................................18
数字输出 A1/A2 和 B1/B2 .........................................................................................................................18
与发动机转速相关控制接线图 ..............................................................................................................19
输入信号 .........................................................................................................................................................20
供电电源 [电源 (+) 和 电源 (-)] ..........................................................................................................20
前进-停止-后退 (FNR) 开关.................................................................................................................21
模式开关 A 和 B ......................................................................................................................................22
寸进踏板 ....................................................................................................................................................23
驱动踏板/比例调节踏板,控制手柄和双向踏板 ....................................................................24
马达转速传感器 ....................................................................................................................................25
频率输入 (马达转速) .......................................................................................................................25
模拟输入 (马达旋向) .......................................................................................................................25
输出信号 .........................................................................................................................................................26
马达排量控制和制动压力失效 (BPD) ...........................................................................................26
数字输出 A1 和 A2 .................................................................................................................................27
数字输出 B1 和 B2 ..................................................................................................................................28
CAN 通信 .........................................................................................................................................................29
CAN 输入和输出信号 ...........................................................................................................................29
配合插头 .........................................................................................................................................................30
客户配合插头 1 (CC1) 和 2 (CC2) ......................................................................................................30
客户配合插头 3 (CC3) ...........................................................................................................................30
CAN 总线适配器 ..........................................................................................................................................31
CAN 插头 (CAN) .......................................................................................................................................31
CAN 总线适配器连接线 ......................................................................................................................31
AC 电气参数 & 特性 ....................................................................................................................................32
电源特性 ....................................................................................................................................................32
输入/输出特性 ........................................................................................................................................32
工作特性 ....................................................................................................................................................33
环境和防护特性 .....................................................................................................................................33
技术规格 .........................................................................................................................................................34
L1108283 • Rev CB • Aug 2012 3
Page 4

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
目录
常规技术规格
安装图纸
与发动机转速相关控制 (AC) 选项 AC-1: A7(12 V)/C2 (24 V)
AC-2: B7(12 V)/C3 (24 V) ............................................................................................................................. 36
手动越权 (MOR) ............................................................................................................................................38
选型代码 .........................................................................................................................................................40
油口说明 .........................................................................................................................................................44
电气连接说明 .....................................................................................................................................45
尺寸 ...................................................................................................................................................................46
L1108283 • Rev CB • Aug 20124
Page 5

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
概括信息
概括信息
电气与电子设备
与发动机转速相关控制 AC-1 和 AC-2, 系统说明
与发动机转速相关控制是为控制一泵一马达式单回路静液压驱动系统而设计。
静液压泵配有 2 个比例阀。
与发动机转速相关控制分为 2 种系统, AC-1 和 AC-2。 AC-2 是 AC-1 的扩展,它带一
个集成的斜盘摆角传感器,并通过软件实现斜盘摆角控制和流量控制功能。
AC 控制最适合用于马达为比例控制或带压力补偿越权(PCOR)功能的情况,来控制压
力和马达排量。此外,当车辆减速时,通过数字信号控制的制动压力失效(BPD)阀将
使压力补偿越权(PCOR)功能失效。
驻车制动阀,倒车蜂鸣器,前进/后退指示灯和减震阀可以通过一额外的数字输出信
号来控制。所有功能不能同时进行。
H1 AC 控制器可以读操作者输入的、系统需要的和机器状态输入的多种模拟、数字、
和频率信号。
CAN 通信界面除了用来作为诊断,其他操作人员如工程师,萨澳操作人员或用户操
作人员也可以通过此界面进行信息交换。
与发动机转速相关控制 (AC-1 和 AC-2) 高级功能
与发动机转速相关控制控制车辆基本驱动特性和性能 (如:加速,减速和车辆平均速
度控制)。驾驶员选择驱动模式,行驶方向,并通过油门或比例调节/驱动踏板来给定
基本驱动指令 。一额外的输入信号,寸进踏板指令,可以越权于基本驱动指令。
一系列高级功能可以被自由地配置和实现,取决于应用。
下面列举了主要的高级功能:
• 发动机和马达超速保护
• 防发动机熄火
• 恒速控制
• 车辆速度限制和流量限制
• 驾驶员在位智能检测
• 电子斜盘摆角控制
• 温度补偿和过热保护
• 车辆启动时马达最大扭矩
• 车辆启动时马达扭矩越权 (只有 AC-2)
L1108283 • Rev CB • Aug 2012 5
Page 6

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
概括信息
模式类型
与发动机转速相关控制 (AC-1 和 AC-2) 静液压驱动方法
应用软件提供了3种不同的静液压驱动方法,定义为模式类型,可以分别标定。
• 与发动机转速相关 泵比例排量控制阀和马达排量控制阀或 PCOR 控制
阀输入电流由与发动机转速相关曲线确定。
• 与发动机转速无关 驱动踏板控制泵比例排量控制阀和马达排量控制阀
或PCOR 控制阀输入电流,而与发动机转速无关。
• 比例调节与发动机转速相关 类似于与发动机转速相关模式,但与发动机转速相
关曲线受比例调节电位计限制。
与发动机转速相关模式类型和比例调节与发动机转速相关模式类型主要应用于轮式
装载机和伸缩臂叉车;与发动机转速无关模式类型主要应用于清扫机、林业机械、
和叉车。
作为基本应用(硬件和软件) ,配置了所有的模式类型。如果只需要模式类型中的一种
的话,可以通过软件和硬件的高级设置进行单独配置。
每一种可选的系统模式可配置为下面 3 种模式类型之中的一种(静液压驱动方法):
• 与发动机转速相关模式
• 与发动机转速无关模式
• 比例调节与发动机转速相关模式(以上两种模式的组合)
L1108283 • Rev CB • Aug 20126
Page 7

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
0
1
2
3
电流 (mA)
怠速
最大
4
5
6
7
发动机转速 (rpm)
实际电流由与发动机转速相关控制曲线确定
因此与发动机转速相关
P003 532E
概括信息
模式类型
(续)
模式类型: 与发动机转速相关模式
在与发动机转速相关模式下,供给泵和马达比例控制阀的输入电流直接受控于检测
到的发动机转速。在每一种模式下,供给泵和马达控制阀的电流是分开配置的。由
于是与负载有关的控制,与发动机转速相关模式提供了良好的发动机防熄火特性。
与发动机转速相关模式的驱动曲线 (点 0-7) 依照发动机有效扭矩特性设定,可提供额
外的辅助动力。
泵驱动曲线 马达驱动曲线
恒定电流
车辆停止
断电 (无电流) = 马达在最小排量
H1B 马达控制方式 M1, M2, K1, K2, T1,T2, P1, P2
实际电流由与发动机转速相关控制曲线确定
因此与发动机转速相关
0
1
马达在最大排量
2
3
4
5
电流 (mA)
马达在最小排量
怠速
发动机转速 (rpm)
6
7
P003 561E
32˚
6˚ (0˚)
断电 (无电流) = 马达在最大排量
H1B 马达控制方式 L1, L2, D1, D2, E1, E2
实际电流由与发动机转速相关控制曲线确定
因此与发动机转速相关
马达在最小排量
6
5
6˚ (0˚)
7
4
3
2
恒定电流
电流 (mA)
0
马达在最大排量
1
32˚
车辆停止
怠速
L1108283 • Rev CB • Aug 2012 7
发动机转速 (rpm)
P301 338E
Page 8

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
) =
概括信息
模式类型
(续)
模式类型: 与发动机转速无关模式
与发动机转速无关模式使用由驱动踏板电位计供给的模拟输入信号来控制车辆速
度。泵和马达控制阀输入电流由系统模式曲线确定,与发动机转速无关。
泵驱动曲线 马达驱动曲线
断电 (无电流) = 马达在最小排量
H1B 马达控制方式 M1, M2, K1, K2, T1,T2, P1, P2
恒定电流
车辆停止
电流 (mA)
最大
电流 (mA)
7
6
5
4
1
0
2
驱动踏板位置 (%)
3
100
P003 533E
0
1
2
马达在最小排量
断电 (无电流
H1B 马达控制方式 L1, L2, D1, D2, E1, E2
马达在最大排量
马达在最大排量
3
4
驱动踏板位置 (%)
32˚
5
6
7
6˚ (0˚)
100
P003 562E
恒定电流
车辆停止
电流 (mA)
0
马达在最小排量
4
3
2
马达在最大排量
1
驱动踏板位置 (%)
5
6
7
100
P301 337E
6˚ (0˚)
32˚
L1108283 • Rev CB • Aug 20128
Page 9

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
实际电流由与发动机转速相关控制曲线确定
概括信息
模式类型
(续)
模式类型: 比例调节与发动机转速相关模式
“比例调节与发动机转速相关模式”是“与发动机转速相关模式”和“与发动机转
速无关模式”的组合。这种模式下,泵控制阀输入电流除了与由驱动/比例调节电位
计供给的模拟输入信号有关外,还要受这种模式类型下的与发动机转速相关曲线限
制,也就是说,泵控制阀的实际输入电流由“实际发动机转速”“设定好的与发动
机转速相关曲线”和“实际驱动/比例调节电位计输入百分比”共同决定。“比例调
节与发动机转速相关模式”在用户设定的“比例调节起始点转速”之上起作用,低
于此转速驱动模式为“与发动机转速相关模式”。比例调节与发动机转速相关模式
下,“马达”控制阀输入电流仅由“与发动机转速相关曲线”设定。
举例:
实际发动机转速 = 1800 min-1 => I
实际踏板值 = 40%;
比例调节起始点转速 = 1050 min-1 => I
I
= [(1500-I
控制阀
比例调节起始点
泵驱动曲线 马达驱动曲线
因此与发动机转速相关
电流 (mA)
最大
1095
825
FNR 停止= 无电流
FNR 前进或后退 = 电流值在
比例调节起始点转速 1050 rpm
2
1
0
1050 min
怠速
4
3
-1
比例调节踏板控制
在任意发动机转速下电流
从而控制车辆速度
点 5: 1500 - 825 = 675 mA
5
6
7
点划线
表示 x %
驱动踏板行程
举例约为 40 %
发动机转速
P003 534E
恒定电流
车辆停止
与发动机转速相关曲线
比例调节起始点
) * 40 / 100] + I
断电 (无电流) = 马达在最小排量
H1B 马达控制方式 M1, M2, K1, K2, T1,T2, P1, P2
实际电流由与发动机转速相关控制曲线确定
0
马达在最小排量
电流 (mA)
= 1500 mA;
= 825 mA;
比例调节起始点
因此与发动机转速相关
1
2
3
怠速
发动机转速 (rpm)
= 1095 mA
马达在最大排量
4
5
32˚
6
7
6˚ (0˚)
P003 561E
L1108283 • Rev CB • Aug 2012 9
恒定电流
车辆停止
断电 (无电流) = 马达在最大排量
H1B 马达控制方式 L1, L2, D1, D2, E1, E2
实际电流由与发动机转速相关控制曲线确定
电流 (mA)
0
因此与发动机转速相关
马达在最小排量
2
1
怠速
5
4
3
马达在最大排量
发动机转速 (rpm)
6˚ (0˚)
7
6
32˚
P301 338E
Page 10

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
概括信息
系统模式和选择
功能选项包
应用软件能同时支持多达 4 种系统模式。系统模式确定驱动的基本特性,操作人员
可通过 2 个开关量输入(模式开关 A 和模式开关 B )选择系统模式。每一种系统模式都
可以通过泵和马达分开设定的驱动曲线和这种模式下泵和马达的斜坡曲线使驱动性
能最优化。
每一种系统模式可以配置为 3 种模式类型之中的一种 (静液压驱动方法) 。
下面这张表格说明了模式开关与系统模式的选择关系。
模式和选择
系统模式
模式 1 模式 2 模式 3 模式 4
模式开关 A
模式开关 B
常用 低 高 低 高
冗余 高 低 高 低
低 低 高 高
T000 208E
AC-1 和 AC-2 有 6 种功能选项包可选
基本功能
A
基本功能 马达转速传感器
B
基本功能
C
基本功能 马达转速传感器
F
基本功能
G
基本功能 马达转速传感器
H
CAN J1939 入/出
SIL2 认证
CAN J1939 入/出
CAN J1939 出 SIL2 认证
T301029
L1108283 • Rev CB • Aug 201210
Page 11

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
概括信息
应用功能
应用功能说明
说明
1.
独立的泵/马达驱动曲线 & 斜坡
车辆前进和后退时,泵和马达控制阀输入电流信号是分开的。应用软件基于发动机
转速或驱动踏板输入生成泵和马达独立的驱动曲线 (8 点) 。此外车辆加速时间 (1 个
斜坡) 和减速时间 (3 个斜坡+ 1 个出错斜坡) 也是独立配置的。
2.
4 种可选的系统模式
应用软件支持 4 种可选择的系统模式,这 4 种系统模式通过 (为开关量输入的) 模式
开关 A 和模式开关 B 进行选择。每一种系统模式能独立配置成模式类型 (与发动机转
速相关,比例调节与发动机转速相关,与发动机转速无关) 中的一种并实现所有高级
功能 (如:匀速行驶,防发动机熄火,超速保护等等) 。
3.
可配置的系统模式转换 & 方向改变
在应用中,这种功能允许系统模式之间的相互转换。系统模式转换条件取决于多个
因素,包括实际的 FNR 方向、驱动踏板输入和车辆对地速度。车辆行驶方向改变可
以与车辆速度和/或实测的泵斜盘摆角进行相关配置。
如果 FNR 开关信号突然变化,当车辆速度高于预先设定的速度时,行驶方向改变要
求被拒绝。
4.
可配置驾驶员在位检测
共有两级需要进行配置,第一级为座位开关,第二级为驾驶员在位条件,这两级之
间是“或”的关系,并且都可以配置“带”或者“不带”延时功能。如果驾驶员完
全不在座位上(座位开关断开,并且也没有在位条件输入),这时车辆将制动;如果
在位条件有输入,如踩下驱动踏板,即使此时座位开关断开(驾驶员起身,不坐在座
位上,但在踩驱动踏板),车辆也可以行走。
5.
通过泵斜盘摆角传感器控制系统流量
通过泵斜盘摆角传感器反馈信息控制泵的摆角大小从而控制泵输出给定量马达 (车
辆为定量马达配置) 的流量来控制车辆速度 (AC-2 选项) 。软件基于实测的斜盘摆
角、实际泵转速、定量马达排量、减速比和车轮直径来计算车辆速度。如果计算出
来的车辆速度高于预先设定的车辆速度,软件的比例积分控制功能将减少供给泵控
制阀的输入电流直到车辆速度满足要求。这种功能可以在任一种系统模式和行驶方
向下独立启用。系统流量控制功能不能对泵和马达的容积损失进行补偿。
6.
温度补偿 (调节驱动曲线)
集成在电路板上的温度传感器测量印刷电路板 (PCB) 的温度。泵壳体内油温和油液
粘度设定为与测量的 PCB 温度成比例关系。这种功能通过冷启动时减小泵控制阀输
入电流指令和高工作温度时增加泵控制阀输入电流指令来补偿油液粘度变化产生的
影响。
7.
通过限制泵输出流量实现液压系统过热和低温保护
此功能是通过集成在电路板上的并测量印刷电路板 (PCB) 温度的温度传感器实现
的。这种功能按照用户设定的与温度相关的限制曲线 (在此曲线的基础上,对应不同
温度,会设定不同的≤1的乘积因子,进而调节泵控制阀的输入电流),通过在高温或
低温时减少泵输出流量 (减少泵控制阀输入电流) 来保护整个静液压系统。
8.
寸进时发动机超速保护 (EOP)
这种保护功能只有在寸进且实际泵 (发动机) 转速高于设定的“超速保护起始点转速”
时才启用。如果超过设定起始点转速,随着发动机转速增加,寸进指令将成比例地
减至 0 ,直到发动机转速达到设定的 “超速保护目标转速” 。一旦寸进指令减至 0 ,
进一步的发动机转速增加将不受控制。
为了防止下坡时 (超过发动机制动性能) 发动机超速,必须配备机械式制动来保护发
动机。
功能包含于
AC-1 AC-2
X X
X X
X X
X X
X
X X
X X
X X
功能包
A, B,
C, F,
G, H
A, B,
C, F,
G, H
A,
B,
C*,
F,
G*,
H
A,
B,
C,
F
A,
B,
C,
F,
G,
H
A,
B,
C,
F,
G,
H
A,
B,
C,
F,
G,
H
A,
B,
C,
F,
G,
H
* A 和 G 选项不支持基于马达转速基础上实现的功能
T301 039-1
L1108283 • Rev CB • Aug 2012 11
Page 12

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
概括信息
应用功能
(续)
应用功能说明
说明
9.
与负载无关的泵斜盘摆角控制,通过泵斜盘摆角传感器实现 (AC-2 选项)
通过泵斜盘摆角传感器电子反馈功能使斜盘摆角保持在输入指令要求的位置,斜盘
摆角位置不受负载大小影响 (EDC 特性) 。每一种系统模式都可以独立地配置这种
功能。斜盘处于中位, -18°, 和 +18° 时对应的斜盘摆角传感器反馈信号由工厂标
定。
10.
泵斜盘摆角磁滞补偿
在控制泵斜盘摆角由小变大到由大变小过程中,泵控制阀线圈会产生磁滞。
线圈 C
和 C2 的磁滞电流由工厂测量得出,并将其平均值储存于控制器内,用于补
1
偿磁滞对泵变量产生的影响。
11.
马达排量控制: 比例控制,可调PCOR 或双位控制
软件使马达的几种排量控制方式:比例控制,可调PCOR 或双位控制变得更容易实
现。马达控制指令可以是一个定值,也可以是由与发动机转速相关的 (与发动机转速
相关模式,比例调节与发动机转速相关模式) 或与驱动踏板输入相关的 (与发动机转
速无关模式) 驱动曲线设定。马达控制阀输入电流变化 (响应时间) 由车辆初始设定时
设定的斜坡确定。
12.
车辆启动时马达扭矩越权 (仅 AC-2)
车辆启动时马达扭矩越权功能指在车辆启动时克服液压马达的初始扭矩。为了克服
这个扭矩,泵比例控制阀被输入一个电流尖峰脉冲,这将导致马达进口压力产生一
个峰值,从而克服马达初始扭矩。电流尖峰脉冲大小由泵斜盘摆角范围决定,所有
系统模式里都可以独立配置这种功能。
13.
驻车制动扭矩测试模式
驻车制动扭矩测试模式允许静液压驱动系统在采用驻车制动时驱动车辆,目的是为
了测试机械制动能力是否足够。每一种系统模式里都可以独立配置。
注意: 驻车制动测试模式不能在正常工作时使用。
14.
驻车制动控制
驻车制动控制功能通过数字信号来激活 (启用或释放) 驻车制动。驻车制动被启用除
了体现在车辆速度减慢上,还体现在以下方面:
• 软件机器状态为停止 (STOP) 模式
• 实际泵控制阀电流低于用户设定值
• 实际寸进踏板指令超过用户设定值
驻车制动启用延迟时间和驻车制动释放延迟时间独立配置
注意: 在功能选项包 C 和 F 下,驻车制动可以由 CAN 激活。
15.
倒车蜂鸣输出
倒车蜂鸣输出功能通过控制一个蜂鸣器来进行倒车报警。输出逻辑可以直接由 FNR
状态控制也可以由实际行驶方向控制。
16.
前进和后退 LED 输出
前进和后退 LED 输出功能通过数字信号驱动装在仪表板/显示器上的 LED 灯,作为
行驶方向指示,直接与 FNR 状态相关。
17.
故障状态输出 (红灯-LED)
故障状态输出功能通过数字信号驱动一个 LED 红灯作为输出信号来指示内部错误状
态/错误代码。
18.
刹车灯输出
当寸进踏板指令大于用户预先设定值时 (寸进功能起作用) ,数字输出信号驱动指示
灯亮起 (在规定的硬件输出范围内),来指示此时在进行刹车。
19.
马达制动压力失效 (BPD) 控制
马达制动压力失效控制功能是为了防止在减速时马达压力补偿越权 (PCOR) 功能起
作用。马达 BPD 控制功能可以在前进和后退方向上进行独立配置。对于行驶方向
改变, BPD 控制延迟时间可以配置为与系统状态变化有关或与实际马达旋转方向有
关。
功能包含于
AC-1 AC-2
X
X X
X X
X
X X
X X
X X
X X
X X
X X
X X
功能包
A, B,
C, F,
G, H
A, B,
C, F,
G, H
A,
B,
C,
F,
G,
H
A,
B,
C,
F,
G,
H
A, B,
C, F,
G, H
A,
B,
C,
F,
G,
H
A, B,
C, F,
G, H
A, B,
C, F,
G, H
A, B,
C, F,
G, H
A, B,
C, F,
G, H
A,
B,
C,
F,
G,
H
T301 039-2
L1108283 • Rev CB • Aug 201212
Page 13

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
概括信息
应用功能
(续)
应用功能说明
说明
20.
车辆安全控制-起步保护功能
若要解除起步保护功能,下面信号将被检查:
• 发动机转速
• 电源电压
• 错误状态
• 寸进踏板是否成功标定
• FNR 是否处于停止位
21.
与发动机转速无关控制特有的发动机防熄火功能 (任意 & 恒定发动机转速)
发动机防熄火功能是为了防止驱动系统过载情况下发动机熄火。有两种独立的防发
动机熄火模式:发动机转速恒定模式和发动机转速任意模式。
发动机转速恒定:发动机转速恒定防熄火功能用在需要发动机转速恒定的应用中。
如果实际发动机转速掉到规定的转速以下,软件比例积分控制功能将减小泵控制阀
输入电流来达到或维持规定的发动机转速。
发动机转速任意:发动机转速输入指令与实际泵(发动机)转速反馈指令作比较计算
出发动机掉速多少。如果掉速大于用户允许的发动机掉速值,软件比例积分控制功
能将减小泵控制阀输入电流从而减少发动机载荷以防止发动机进一步掉速。
每一种系统模式都可以独立配置发动机防熄火功能。
22.
通过驱动踏板指令和马达转速传感器实现车辆匀速行驶 (CSD)
(仅针对于与发动机转速无关控制)
这种 CSD 功能 (驱动踏板指令实现的CSD) 比较驱动踏板指令要求的车辆速度与实际
车辆速度。实际车辆速度由这些因素计算得来:实测的马达转速、减速比和车轮直
径。无论是对于前进还是对于后退,100 % 踏板位置对应车辆最大速度。如果实际
车辆速度与指令速度存在差异,软件比例积分控制功能将调节泵控制阀输入电流来
补偿这种速度差异。
每一种系统模式都可以独立配置并启用这种功能。
注意:这种功能需要马达或车辆带速度传感器。
功能包含于
AC-1 AC-2
X X
X X
X X
功能包
A,
B,
C,
F,
G,
H
A,
B,
C,
F,
G,
H
A,
B,
C,
F,
G,
H
23.
通过测量泵转速 (计算流量) 和马达转速传感器实现车辆匀速行驶 (CSD)
(针对于与发动机转速相关控制 & 比例调节与发动机转速相关控制)
这种 CSD 功能 (通过泵输出流量实现的CSD) 通过测量泵转速和已知的泵斜盘角度计
算出泵输出流量。斜盘角度是基于工厂标定的泵控制阀输入电流与斜盘角度对应关
系得来的 (例如: 800 mA = 0°, 1200 mA = 18°)。软件将基于泵斜盘角度、实测泵转
速和马达最大排量来计算出马达期望转速。
如果实际车辆速度与期望速度不符,软件比例积分控制功能将调节泵控制阀输入电
流来补偿这种速度差异。
注意:这种功能需要马达或车辆带速度传感器,在没有驱动踏板情况下也可使用。
24.
通过马达转速传感器实现车辆速度限制
通过马达转速传感器实现车辆速度限制功能是常规的车辆速度限制方法,它补偿泵
和马达的容积损失。每一种系统模式和不同行驶方向上都可以独立启用这种功能。
如果实际车辆速度超过规定的车辆速度,软件比例积分控制功能将减少泵控制阀输
入电流值直到车辆速度合适。
注意:这种功能需要马达或车辆带速度传感器。
25.
马达超速保护 (MOP)
马达超速保护功能 (MOP) 可以通过减小泵排量实现,也可以通过增加马达排量(仅针
对于电比例排量控制马达)实现。基于软件比例积分算法的马达转速限制,是由用户
设定的,如果启用,对于四种系统模式都是普遍一致的。
注意:寸进时发动机超速保护 (EOP) (见 第 8 项) 具有优先权,越权于马达超速保护
(MOP).
L1108283 • Rev CB • Aug 2012 13
X XB,F,
H
X XB,F,
H
X XB,F,
H
T301 039-3
Page 14

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
概括信息
应用功能
(续)
应用功能说明
说明
26.
车辆起步和低速时马达最大排量 (扭矩)
马达最大排量功能是指在车辆初始加速时和在减速速度快要为零时通过使马达斜盘
摆角增至或保持在最大来提供最大系统扭矩。
27.
车辆速度相关输出信号
车辆速度相关输出信号功能是当实际车辆速度超过用户设定速度时输出一个数字信
号,每一种系统模式都可以独立配置这种功能。
28.
J1939-CAN 发动机界面
应用软件可以发送符合 SAE J1939 协议的 CAN 指令至发动机控制器,也可以从发动
机控制器接收这些指令。支持下面几种标准指令: TSC1 (扭矩/速度控制), EEC1 (泵/
发动机转速) 和 EEC2 (驱动踏板)
所有指令都可以独立启用和指定。
注意: H 选项下 CAN 接收功能不可用。
29.
J1939-CAN 子系统数据界面
应用软件可以发送 CAN 指令至车辆系统,也可以从车辆系统接收 CAN 指令。支持
下面几种标准指令: TSC1 (扭矩/速度控制), EEC1 (泵/发动机转速), EEC2 (驱动踏板),
EBC1 (寸进踏板), ETC5 (FNR), VH (车辆运行时间), RC I (刹车遥控), OPS (驾驶员在位),
CCVS (车辆速度), VEP1 (电源电压), TRF1 (油温)。
此外,一些专属 (萨澳-丹佛斯所有权) 指令,可用来实现模式开关,液压马达转速,
驱动状态和错误指令的信息共享。所有这些指令都可以独立启用和指定。
注意: H 选项下 CAN 接收功能不可用。
30
J1939-CAN 发动机转速控制和共享发动机转速安全监测
a.
H1-AC 控制器基于输入指令(如驱动踏板指令)生成相应的发动机期望转速。这种功
能使,在指定的驱动条件下,应用一个外部控制器来调整 H1-AC 期望发动机转速成
为可能。
AC 控制器发送带有目标地址的期望发动机转速指令 (TSC1) 或调整过的 PGN至外部
控制器,这个外部控制器或传送 H1-AC 发出的期望发动机转速指令或传送调整过的
发动机转速指令至发动机控制器,同时 H1-AC 控制器监测外部控制器发出的发动机
转速指令用以核对,如果这个发动机转速指令被调整过并且超出了设定范围,而且
此时 H1-AC 控制器又不在停止模式, H1-AC 控制器将缓慢降至安全模式。
在前进或倒退模式下,外部控制器不允许直接调整 AC 控制器发出的发动机转速指
令。
30
J1939-CAN 启用踏板标定
b.
标准的功能为半自动标定。不需要 Plus+1 Service Tool。可选择的寸进和驱动踏板标
定可以通过一个外部 CAN 界面 (如仪表板) 启动。
30
J1939-CAN 发动机转速限制
c.
发动机转速限制 (TSC1) 功能限制低温状态下发动机转速从而保护发动机和泵。
31.
SIL 2 认证
H1-AC 硬件和软件满足 IEC 61508, SIL 2 ( 电气 / 电子 / 与安全有关的可编程电子系统
的功能安全 (1998-2000)) 指导原则要求。
电子硬件和硬件开发过程满足 IEC 61508-1 (版本 1998-12) 要求,硬件子集满足 IEC
61508-2 (版本 2000-05), SIL 2 要求。
软件和系统开发过程满足 IEC 61508-1 (版本 1998-12) 要求,软件和系统子集满足 IEC
61508-3 (版本 2000-05), SIL 2 要求。
这个认证将支持和加快客户车辆系统级别认证过程,因为 H1-AC 是认证过的控制,
所以没必要投入额外的精力和资金去认证。所有客户自己连接的线缆、传感器或驱
动器由客户负责,并且不得不在车辆系统等级认证过程中进行评估。
功能包含于
AC-1 AC-2
X XB,F,
X XB,F,
X XC,F,
X XC,F,
X XC,F,
X XC,F,
X XC,F,
X X G,
功能包
H
H
H
H
H
H
H
H
T301 039-4
L1108283 • Rev CB • Aug 201214
Page 15

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
概括信息
SIL 2 系统要求
用户传感器的一般要求
通过系统和子系统 FMEA 分析 (失效模式与效应分析) ,萨澳丹佛斯指出客户传感器和
客户驱动器必须满足以下要求以达到车辆系统等级 SIL 2 认证标准。
H1-AC 泵控制阀、泵转速传感器和集成斜盘摆角传感器的集成连接线束是 SIL 2 认证
的一部分。
为了确保 SIL 2 符合 IEC 61508, 任何参数的设定、修改及参数或应用软件的上传和下
载都必须通过使用认证版本为 4.3.7.2 的Service Tool来完成。
PLUS+1™ GUIDE Service Tool (IEC 61508 SIL 2 认证)
版本: 4.3.7.2
©2003-2008 丹佛斯版权所有
CAN 输入选项没有按照 IEC 61508 SIL 2 进行认证。
萨澳丹佛斯对连接到 AC 的第三方传感器和驱动器的功能和安全不负有责任。
FNR:
CC1p06
CC1p07
CC1p12
A
B
CNT
FNR
开关
P301 226
驱动踏板/比例调节踏板/
控制手柄/双向踏板 & 寸
进踏板:
• 3层连续信号开关
• AC 的 CC1p06, CC1p07 和 CC1p12 针脚是前进、后退和停止的输入针脚,不能同时
激活
• 电源电压供电
• 开关需满足数字输入的输入电阻要求
• 不能并联载荷 (如:电子管)
• 建议使用镀金接头
• 通过输入选择 (Input Selector) 进行配置 (见软件参数设置):
o FNR-信号源: FNR 信号源为数字输入,参数 [807]
o FNR-信号译码: F 或 R 或 N 保持 (连续信号),参数 [897]
o 其它配置未认证
传感器供电
常用
Rv
Rv
Rv
冗余
接地
L1108283 • Rev CB • Aug 2012 15
Rv
P301 227
Page 16

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
概括信息
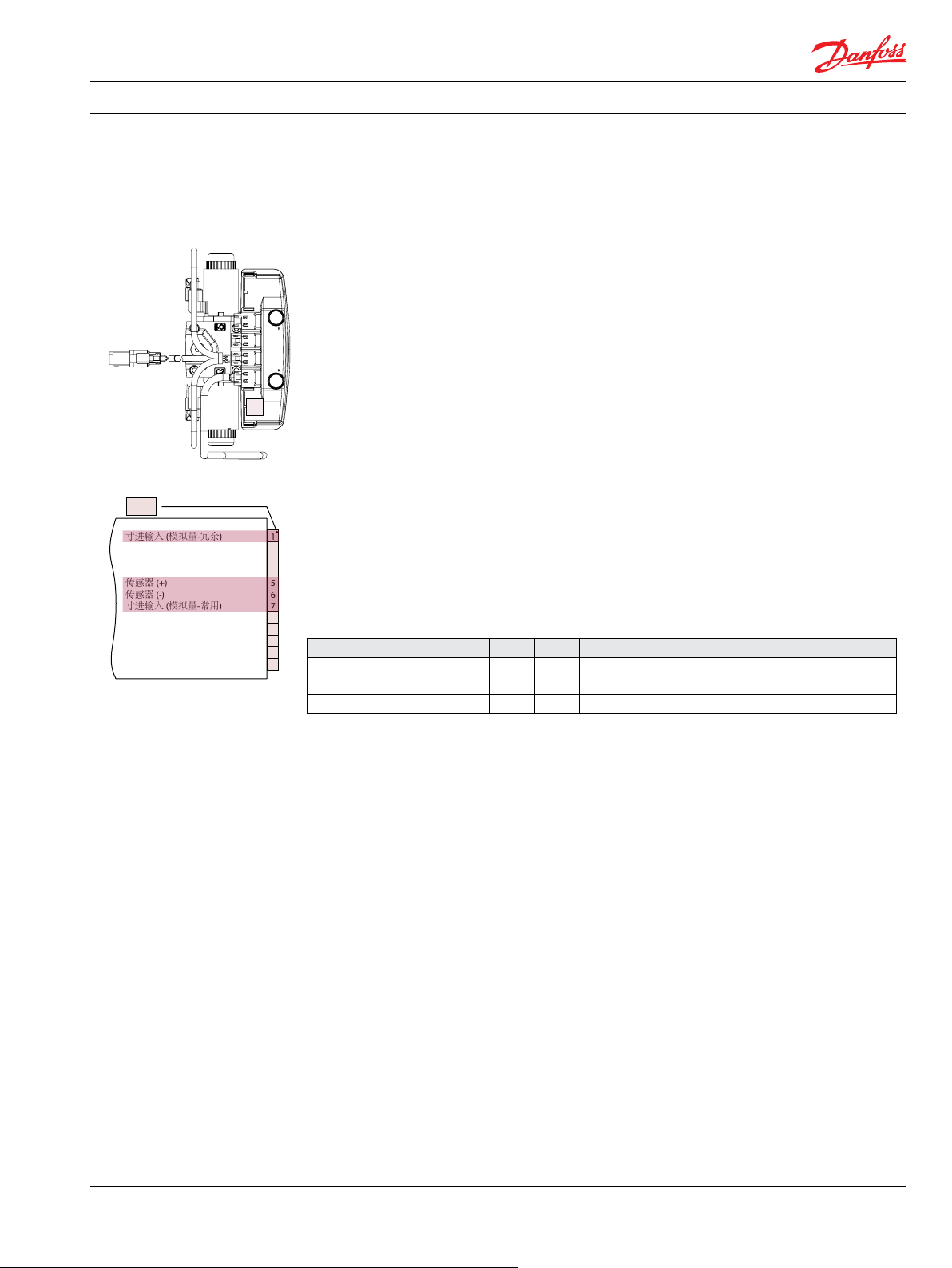
• 踏板传感器 (图中方框部分) 必须由 AC 传感器电源电压供电并且一定不要超过最
大允许输出电流 (过载) 。
• 踏板 (模拟) 传感器 (图中方框部分) 必须双通道输出 (如:两个独立的电位计) 。
• 踏板传感器必须输出两个不直接相关的独立的电输出信号。
• 第一个输出信号为踏板位置信号 (常用) ,第二个输出信号出于诊断目的用来核实
第一个输出信号 (冗余)。
o 如果出现内部检测错误,模拟传感器的输出信号将变成 AC 传感器电源电
压,这种特性使 AC 应用软件能识别这种故障。
o 输出信号电压范围不能低于传感器电源电压的 5% 也不能高于传感器电源电
压的 95% 。
o 线路故障检测需要更高和更低的输出信号电压,但这个电压不能高于传感器
电源电压。
o 定值电阻 (Rv) 电阻值大约需要为电位计电阻 (可变电阻) 值的 7% 。当踏板被
驱动输出电压必须相应增加。
压力寸进传感器:
电位计电阻
1 kΩ 68 Ω
5 kΩ 330 Ω
10 kΩ 680 Ω
Rv
o 推荐踏板传感器:
摇杆踏板: #11065874
CC2p05
CC2p07
CC2p06
可选的制动压力
寸进传感器
P301 228
• 对于压力寸进传感器来说,不需要冗余寸进信号。单一的输出信号已经足够,因
为这里的冗余由液压制动系统和直接测量液压制动压力提供。寸进功能只是支持
车辆制动系统,避免车辆在制动时行驶。
• 输出信号电压范围不能低于传感器电源电压的 5% 也不能高于传感器电源电压的
95% 。
• 线路故障检测需要更高和更低的输出信号电压,但这个电压不能高于传感器电源
电压。
• 如果出现内部检测错误,模拟传感器的输出信号将变成 AC 传感器电源电压,这
种特性使 AC 应用软件能识别这种故障。
• 传感器必须由 AC 传感器电源电压供电并且一定不要超过最大允许输出电流 (过
载) 。
L1108283 • Rev CB • Aug 201216
Page 17
产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
概括信息
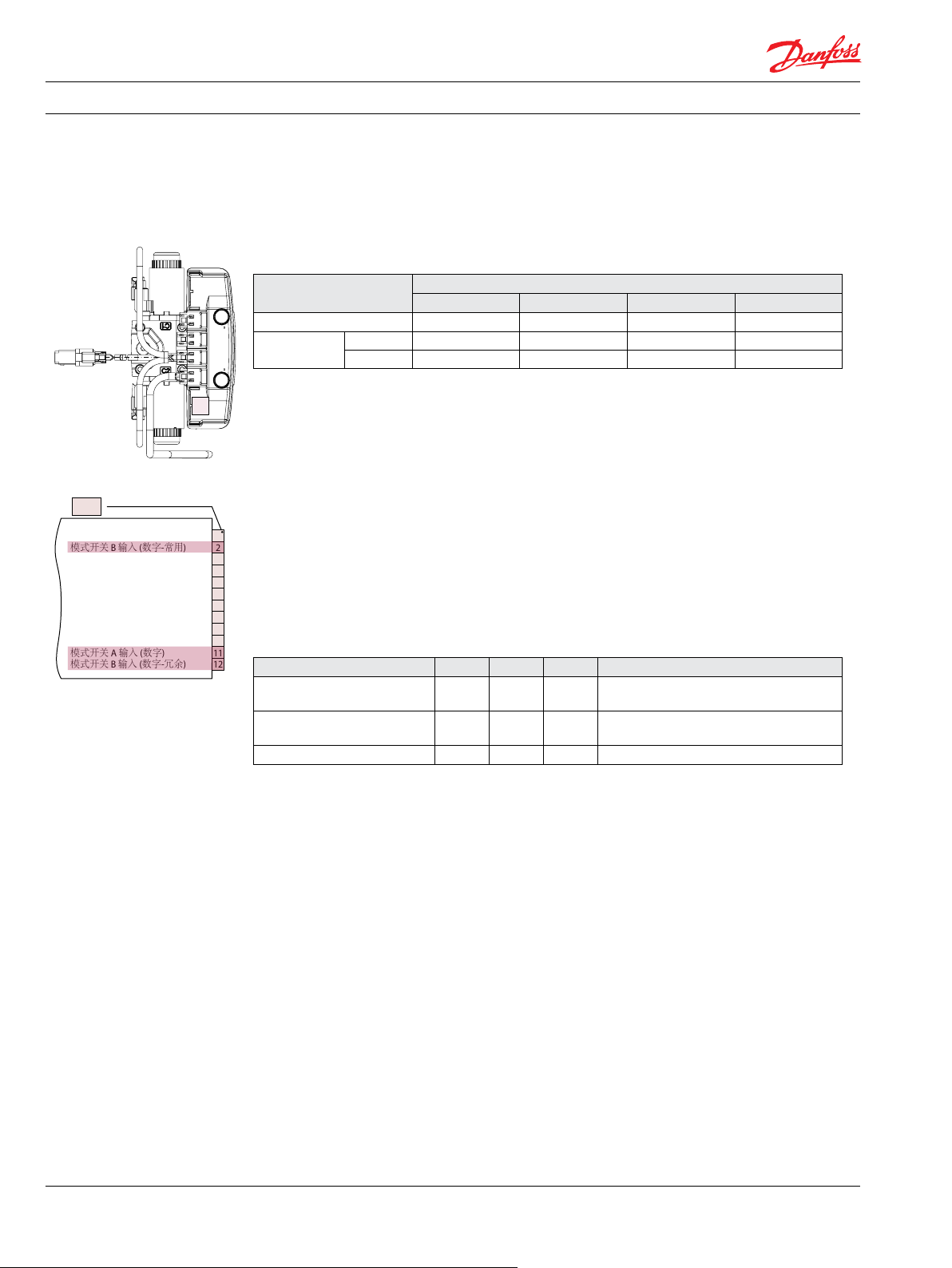
模式开关 A:
模式开关 B:
模式开关 A
P301 229
• 由电源电压供电
• 开关需满足数字输入的输入电阻要求
• 不能并联载荷 (如:电子管)
• 建议使用镀金接头
常用
模式开关 B
冗余
P301 230
• 常用和冗余不能相同 (并联,若其中一个通则另一个必须为断)
• 由电源电压供电
• 开关需满足数字输入的输入电阻要求
• 不能并联载荷 (如:电子管)
• 建议使用镀金接头
• 通过输入选择 (Input Selector) 进行配置 (见软件参数设置):
o 对于所有从“与发动机转速相关”和“比例调节与发动机转速相关”到“与发动机
转速无关”或者情况相反的系统模式转换,“模式开关 B 冗余” 必须设定为 [1]
= “冗余”
对于从“与发动机转速相关”到“比例调节与发动机转速相关”或者情况相反的模
式转换则不需要。
静液压驱动马达
速度传感器 (PPU)
可选带方向指示:
• 传感器必须由 AC 传感器电源电压供电并且输出不能过载。
• 线路故障检测需要更高和更低的输出信号电压,但这个电压不能高于传感器电源
电压。
• 输出信号电压范围不能低于传感器电源电压的 6% ,也不能高于传感器电源电压
的 94% 。
• PPU需满足转速和模拟量输入的输入电阻要求。
• 推荐速度和方向传感器: #11046759
L1108283 • Rev CB • Aug 2012 17
Page 18
产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
概括信息
马达排量控制和
制动压力失效 (BPD)
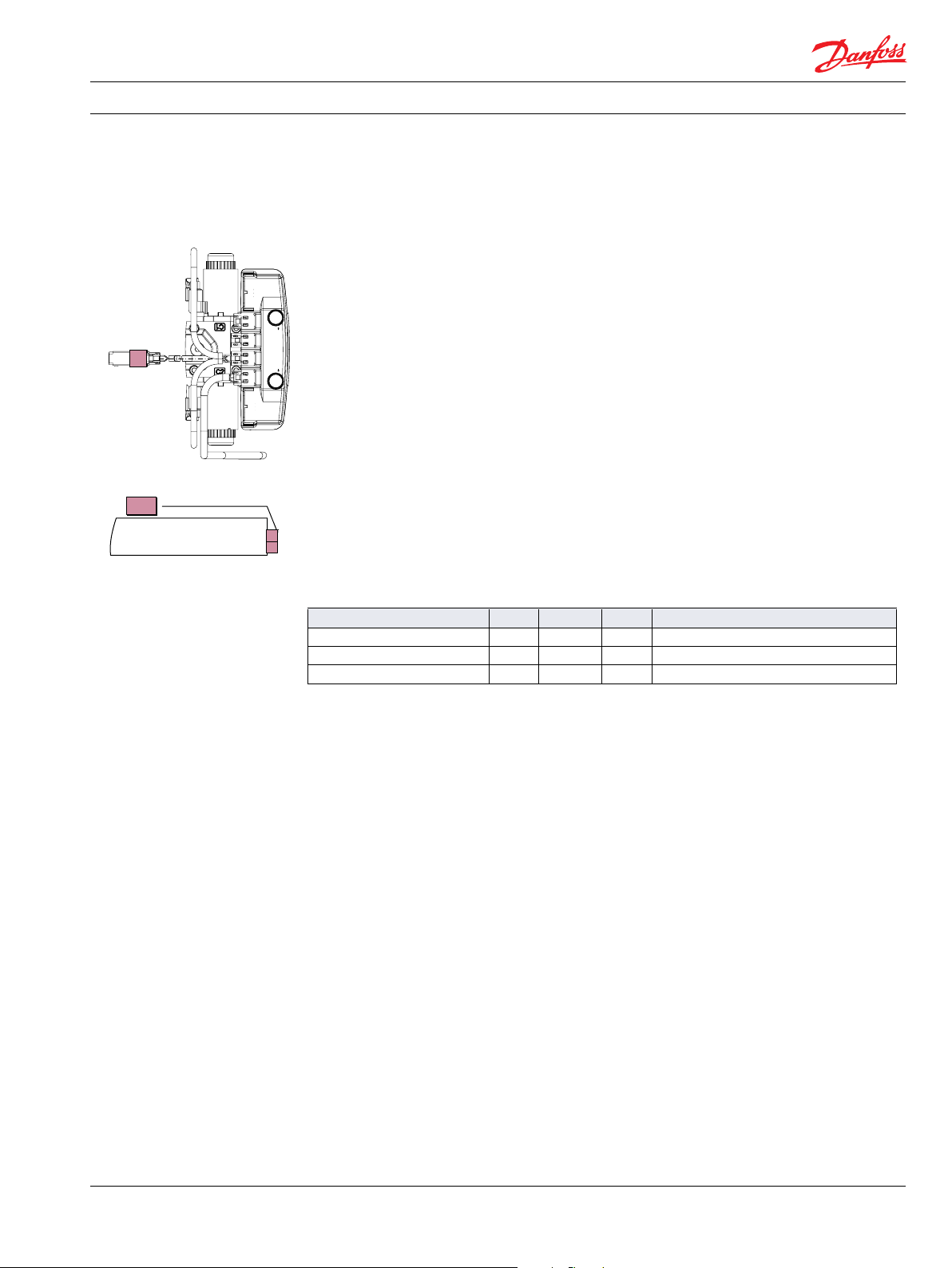
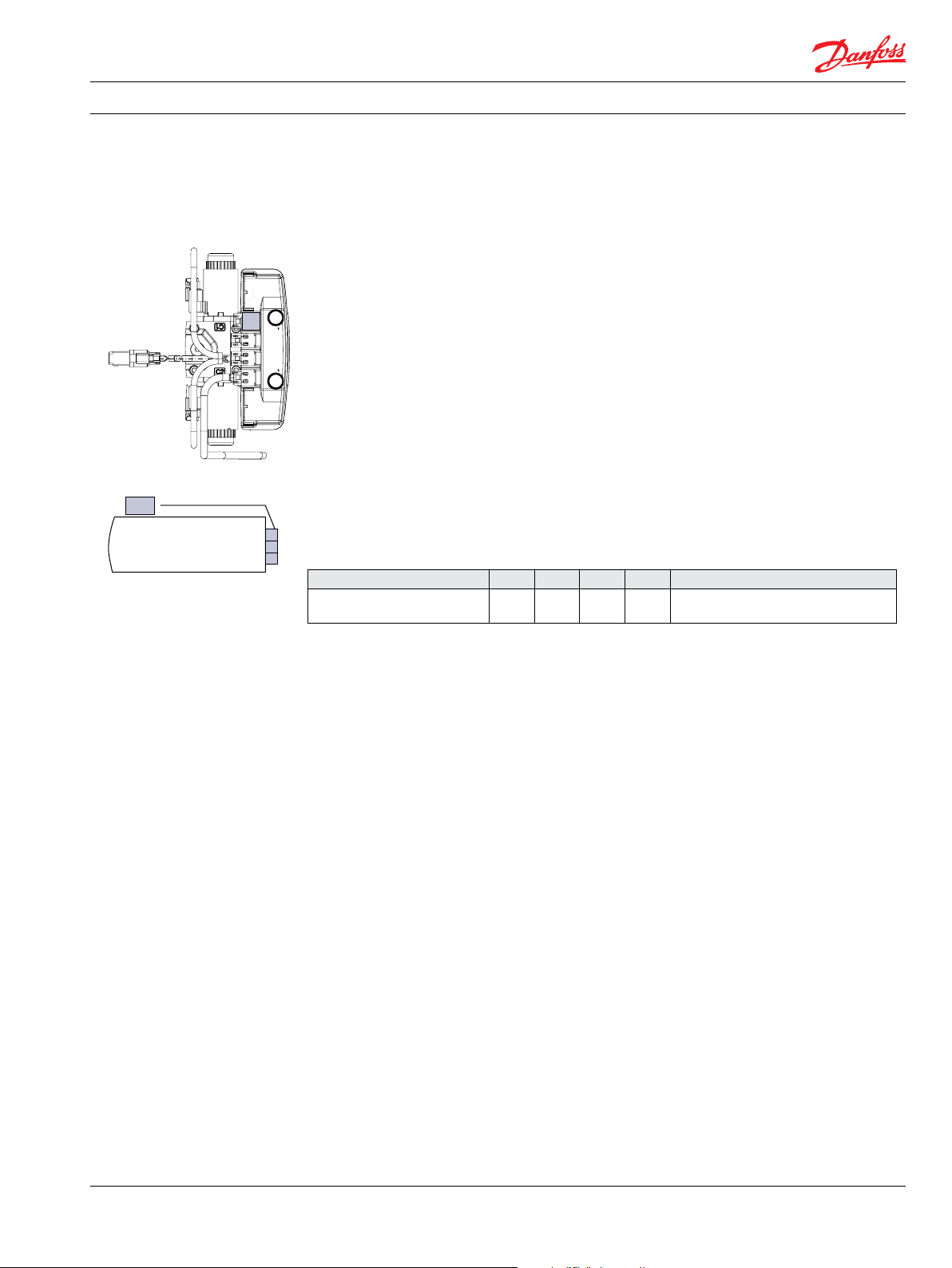
用户驱动器的一般要求:
数字输出 A1/A2 和 B1/B2
• 马达 (BPD) 输出 (数字) 和马达 PROP/PCOR 输出 (PWM) 由电源电压供电并且一定不
要超过最大允许输出电流 (过载) 。
• 通常有两种不同电路设计可用。
开环
LED
+ -
电源
12V
DC
• 和安全相关的功能 {如刹车灯,闭环, FNR 在后退位 (FNR 后退状态信号)和倒车(车
闭环
+ -
电源
12V
DC
LED
P301 231
辆为倒车报警状态信号)} 必须连接成闭环。电流反馈 A2 (-) 和 B2 (-) 被时时监测,
如果检测到错误将进入安全 (Safe) 模式。
• 数字输出由电源电压供电并且一定不要超过最大允许输出电流 (过载) 。
• 按照 IEC 61508 SIL 2 ,开环选项不被认证。
L1108283 • Rev CB • Aug 201218
Page 19
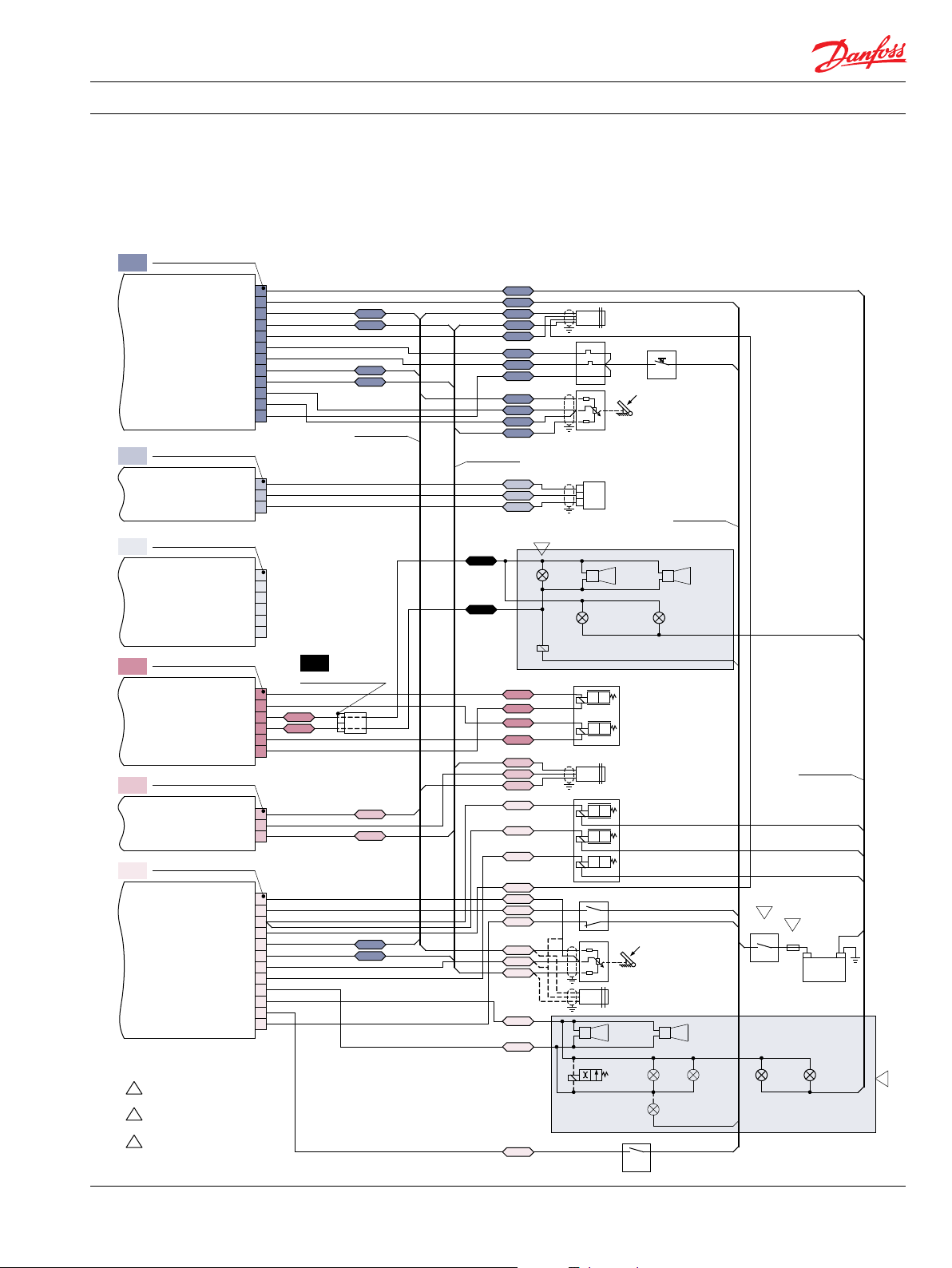
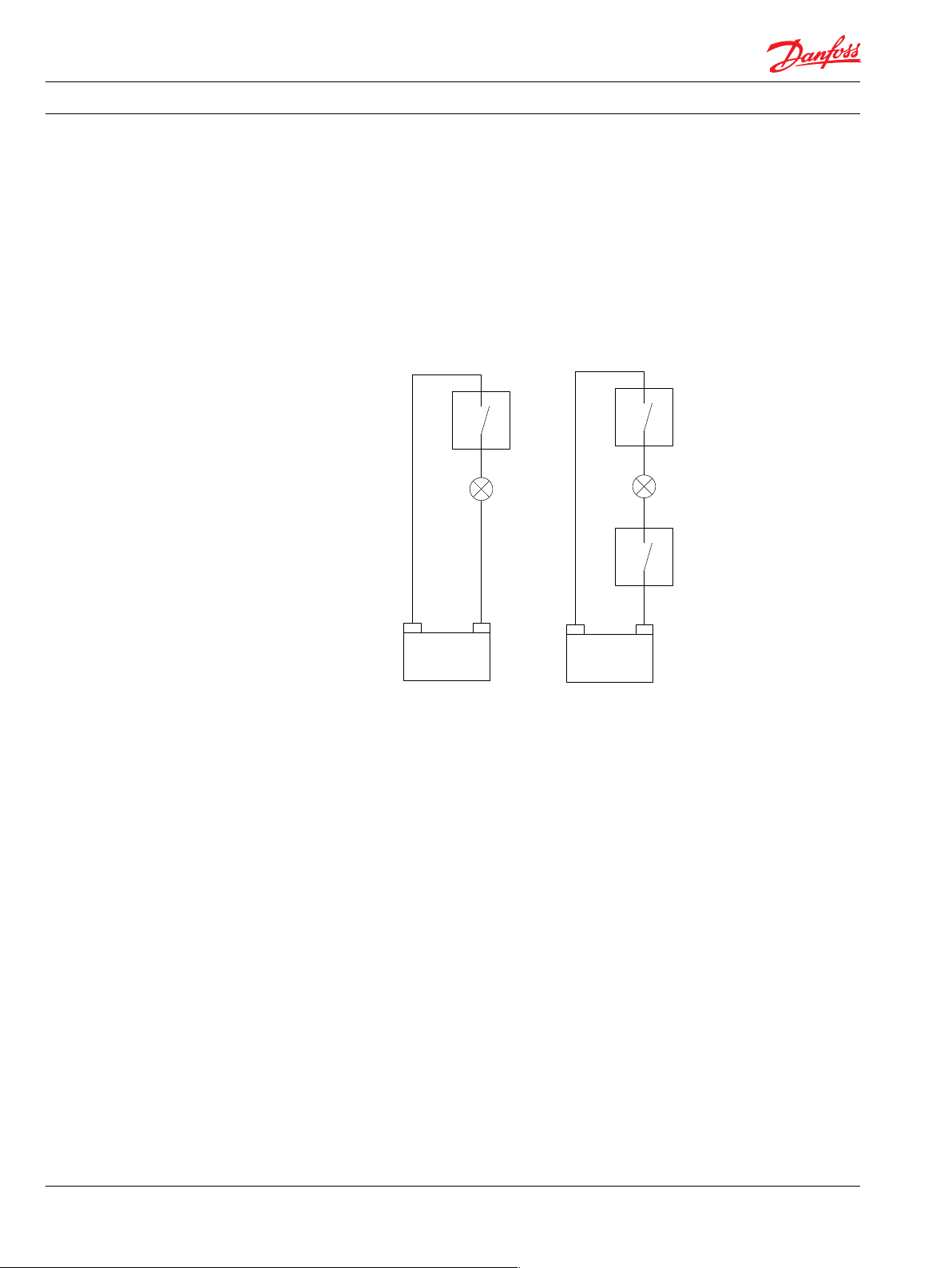
产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
技术规格
与发动机转速相关控制
接线图
DEUTSCH 插座
CC1
DTM/12 针
接线端子
传感器 (-)
CC3p01
CC3p02
CC1p01
CC1p02
CC1p03
CC1p04
CC1p05
CC1p06
CC1p07
CC1p12
CC1p08
CC1p10
CC1p11
CC1p09
CANp01
CANp02
CANp03
PSCp01
PSCp06
PSCp02
PSCp05
PPUp03
PPUp02
PPUp01
CC2p03
CC2p03
CC2p08
CC2p04
CC2p01
CC2p02
CC2p12
CC2p05
CC2p07
CC2p06
CC2p10
CC2p09
CC2p11
3
刹车
灯
车辆速度相关
输出信号
A
B
CNT
Rv
Rv
常用
冗余
Rv
Rv
故障灯
LED
C1
C2
2-P
PROP
BPD
马达 转速/方向
FNR
开关
驱动/比例调节踏板
/控制手柄/双向踏板
CAN 总线
倒车
蜂鸣
泵电比例排量控制阀
泵转速
马达电排量控制阀
模式开关 B
寸进踏板
可选制动压力
寸进传感器
倒车
蜂鸣
驻车
制动阀
刹车灯FNR
刹车
灯
模式开关 A
举例
手刹
座位开关
接线端子
电源 (+)
倒车灯
LED
FNR 后退
报警
FNR 后退
报警
后退灯
S 1
1
故障灯
LED
2
F 1
接线端子
电源 (-)
+ -
电源
12/24V
前进灯
LED
DC
P700 12 798E
电源 (-)
电源 (+)
传感器 (+)
传感器 (-)
马达转速输入 (频率)
前进输入 (数字)
后退输入 (数字)
传感器 (+)
传感器 (-)
驱动踏板输入 (模拟量-常用)
驱动踏板输入 (模拟量-冗余)
停止输入 (数字)
DEUTSCH 插座
CAN
DTM/3 针
CAN 高
CAN 低
CAN 屏蔽
DEUTSCH 插座
PPC
DTM/6 针
传感器 A (+)
模拟量输入 A
传感器 A (-)
传感器 B (-)
模拟量输入 B
传感器 B (+)
DEUTSCH 插座
PSC
DTM/6 针
PWM C1 (+)
PWM C2 (+)
数字输出 A1 (+)
数字输出 A2 (-)
PWM C2 (-)
PWM C1 (-)
DEUTSCH 插座
PPU
DTM/3 针
传感器 (+)
泵转速输入 (频率)
传感器 (-)
DEUTSCH 插座
CC2
DTM/12 针
寸进输入 (模拟量-冗余)
模式开关 B 输入 (数字-常用)
马达 PROP/PCOR 输出 (PWM)
马达方向输入 (模拟量)
传感器 (+)
传感器 (-)
寸进输入 (模拟量-常用)
马达 BPD 输出 (数字)
数字输出 B2 (-)
数字输出 B1 (+)
模式开关 A 输入 (数字)
模式开关 B 输入 (数字-冗余)
1
承载最小电流 10A
2
保险熔断电流 16A
3
功能选项
1
2
3
4
5
6
7
8
9
10
11
12
1
2
3
1
2
3
4
5
6
CC1p03
CC1p04
CC1p08
CC1p09
接线端子
传感器 (+)
CC3
DEUTSCH 插座
DT/2 针
1
2
PSCp03
3
PSCp04
4
5
6
1
2
3
1
2
3
4
5
6
7
8
9
10
11
12
1
2
PPUp01
PPUp03
CC2p05
CC2p06
3
L1108283 • Rev CB • Aug 2012 19
Page 20
产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
技术规格
输入信号
CC3
Deutsch 插座
CC1
DTM/12 针
电源 (-) 1
2
电源 (+)
传感器 (+) 3
传感器 (-) 4
马达转速输入 (频率) 5
前进输入 (数字) 6
后退输入 (数字) 7
传感器 (+) 8
传感器 (-) 9
驱动踏板输入 (模拟量-常用) 10
驱动踏板输入 (模拟量-冗余)
停止输入 (数字)
12
CC1
CC1
CAN PPC
PSC
PPU
CC2
P003 544
11
P003 545
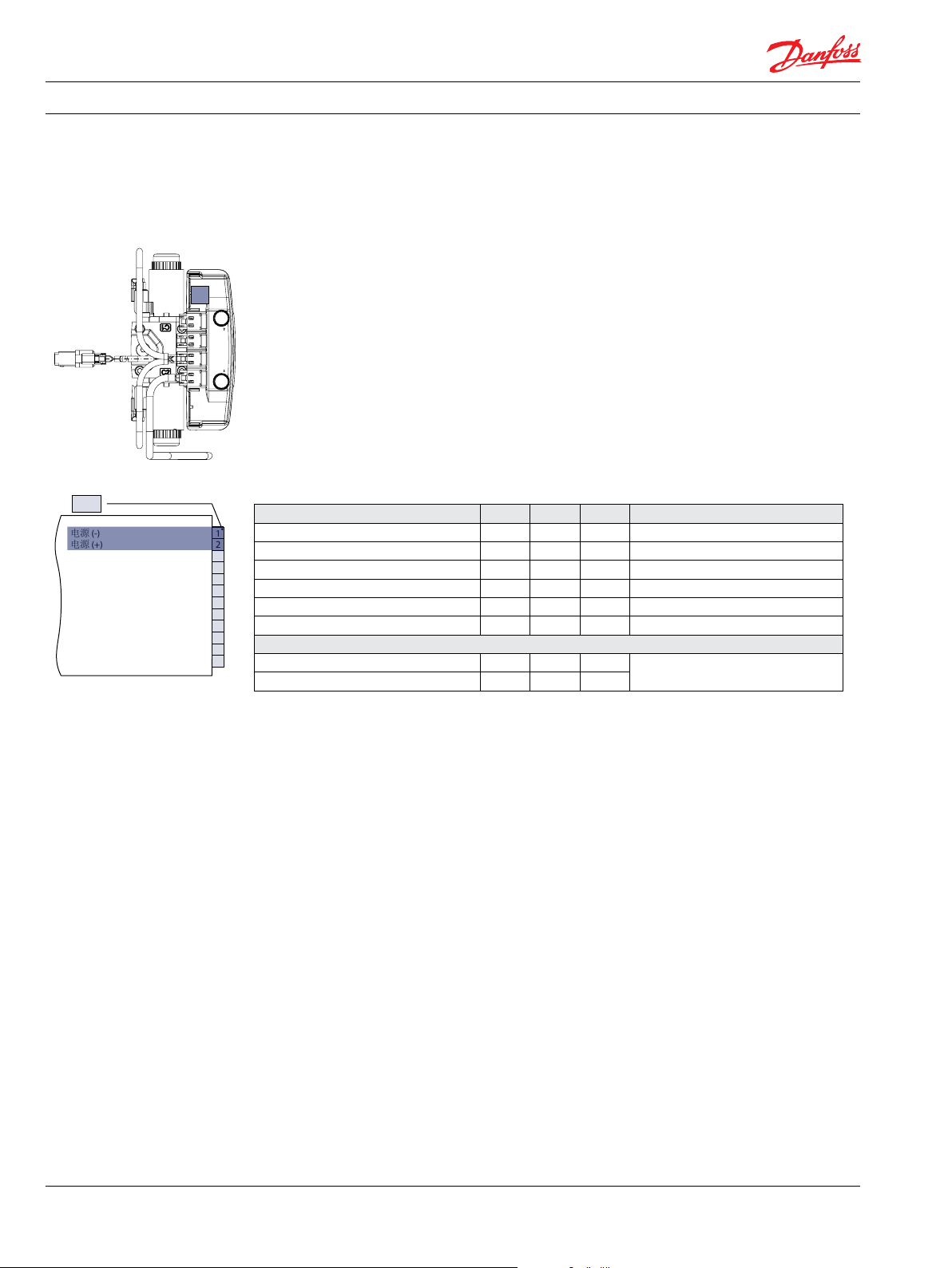
供电电源 [电源 (+) 和 电源 (-)]
AC 供电电压可以为 12 V 或 24 V
CC1: 01-电源 (-)
• 供电由电源 (-) 输入
CC1: 02-电源 (+)
• 供电由电源 (+) 输入
WARRANTY VOID IF REMOVED
5V 传感器供电由内部产生,
最大供电电流为 1A。
传感器供电电流不能过载
并且不能将极性接反。
参数 最小 最大 单位 备注
电源供电电流
推荐保险丝规格
恒定供电电压范围
额定12V-范围 9 16 V
额定24V-范围 18 32 V
恒定反向电压保护
传感器供电电压范围 (内部) 4.825 5.075 V
传感器供电电流
- 12 A
- 16 A
9 36 V
- -36 V
- 1 A
DC
DC
DC
DC
DC
所有传感器加在一起最大 1A
丹佛斯提供配合插头
详细信息见 配合插头 章节
T000 226E
L1108283 • Rev CB • Aug 201220
Page 21

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
技术规格
输入信号
(续)
CC3
Deutsch 插座
CC1
DTM/12 针
电源 (-) 1
2
电源 (+)
传感器 (+) 3
传感器 (-) 4
马达转速输入 (频率) 5
前进输入 (数字) 6
后退输入 (数字) 7
传感器 (+) 8
传感器 (-) 9
驱动踏板输入 (模拟量-常用) 10
驱动踏板输入 (模拟量-冗余)
停止输入 (数字)
12
CC1
CC1
CAN PPC
PSC
PPU
CC2
P003 544
11
P003 545
前进-停止-后退 (FNR) 开关
FNR-开关决定行驶方向。按照 SIL 2 认证,开关对应 3 个针脚,输入信号需要为连续
信号,每次只能一个针脚有数字输入。
停止输入 CC1:12 还能被用作座位开关或手刹功能。
CC1:06-前进输入
• 前进的数字输入
WARRANTY VOID IF REMOVED
– 接电源电压 (12/24 V)
CC1:07-后退输入
• 后退的数字输入
– 接电源电压 (12/24 V)
CC1:12-停止输入
• 停止的数字输入
– 接电源电压 (12/24 V)
参数 最小 最大 单位 备注
电压上升极限
电压下降极限
输入阻抗
- 7.00 Vdc
1.66 - Vdc
13.4 13.8 kΩ
电压高于 7.00V,数字输入肯定被视为高
电平。
电压低于 1.66V,数字输入肯定被视为低
电平。
丹佛斯提供配合插头
详细信息见 配合插头 章节
T000 217E
L1108283 • Rev CB • Aug 2012 21
Page 22
产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
技术规格
输入信号
CC3
Deutsch 插座
CC2
DTM/12 针
寸进输入 (模拟量-冗余) 1
模式开关 B 输入 (数字-常用) 2
马达 PROP/PCOR 输出 (PWM) 3
马达方向输入 (模拟量) 4
传感器 (+) 5
传感器 (-) 6
寸进输入 (模拟量-常用) 7
马达 BPD 输出 (数字) 8
数字输出 B2 (-) 9
数字输出 B1 (+) 10
模式开关 A 输入 (数字) 11
模式开关 B 输入 (数字-冗余) 12
CC1
CAN PPC
PSC
PPU
CC2
CC2
P003 544
P301 309
模式开关 A 和 B
根据下表,模式开关对 4 种系统模式进行选择:
模式和选择
系统模式
模式 1 模式 2 模式 3 模式 4
WARRANTY VOID IF REMOVED
模式开关 A
模式开关 B
常用 低 高 低 高
冗余 高 低 高 低
低 低 高 高
根据 SIL 2 认证,模式开关 B 必须提供一个常用和一个冗余信号。
CC2:11-模式开关 A 输入
• 模式开关 A 的数字输入
– 接电源电压 (12/24V)
CC2:02-模式开关 B 输入 (常用)
• 模式开关 B 的数字输入(常用)
– 接电源电压 (12/24 V)
CC2:12-模式开关 B 输入 (冗余)
• 模式开关 B 的数字输入(冗余)
– 接电源电压 (12/24 V)
参数 最小 最大 单位 备注
电压上升极限
电压下降极限
输入阻抗
- 7.00 Vdc
1.66 - Vdc
13.4 13.8 kΩ
电压高于 7.00V,数字输入肯定被视为高
电平。
电压低于 1.66V,数字输入肯定被视为低
电平。
T000 208E
T000 217E
丹佛斯提供配合插头
详细信息见 配合插头 章节
L1108283 • Rev CB • Aug 201222
Page 23
产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
T000 218E
技术规格
输入信号
(续)
CC3
Deutsch 插座
CC2
DTM/12 针
寸进输入 (模拟量-冗余) 1
模式开关 B 输入 (数字-常用) 2
马达 PROP/PCOR 输出 (PWM) 3
马达方向输入 (模拟量) 4
传感器 (+) 5
传感器 (-) 6
寸进输入 (模拟量-常用) 7
马达 BPD 输出 (数字) 8
数字输出 B2 (-) 9
数字输出 B1 (+) 10
模式开关 A 输入 (数字) 11
模式开关 B 输入 (数字-冗余) 12
CC1
CAN PPC
PSC
PPU
CC2
CC2
P003 544
P301 309
寸进踏板
操作者可以通过寸进踏板来降低车辆行驶速度、停车或者当保持发动机高转速用以
满足辅助动作所需流量时,使车辆维持在低的行驶速度。
寸进踏板指令增加将减小泵排量,从而降低车辆速度。此外,马达排量可以同时地
被增至最大。100 % 寸进踏板指令将使车辆完全停止。
WARRANTY VOID IF REMOVED
CC2:01-寸进输入 (模拟量-冗余)
• 寸进电位计的冗余模拟量输入
CC2:05-传感器 (+)
• 传感器-电源 (+)
– 传感器供电电压 4.825 到 5.075 V
– 最大输出电流 200mA.
CC2:06-传感器 (-)
• 传感器-电源 (-)
– 直接接地
CC2:07-寸进输入 (模拟量-常用)
• 寸进电位计的常用模拟量输入
参数 最小 最大 单位 备注
输入电压范围
分辨率
输入阻抗
0.08 5.26 Vdc
- 12 Bit 4096 步
230 236 kΩ
丹佛斯提供配合插头
详细信息见 配合插头 章节
L1108283 • Rev CB • Aug 2012 23
Page 24

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
T000 218E
技术规格
输入信号
CC3
Deutsch 插座
CC1
DTM/12 针
电源 (-) 1
2
电源 (+)
传感器 (+) 3
传感器 (-) 4
马达转速输入 (频率) 5
前进输入 (数字) 6
后退输入 (数字) 7
传感器 (+) 8
传感器 (-) 9
驱动踏板输入 (模拟量-常用) 10
驱动踏板输入 (模拟量-冗余)
停止输入 (数字)
12
CC1
CC1
CAN PPC
PSC
PPU
CC2
P003 544
11
P003 545
驱动踏板/比例调节踏板, 控制手柄和双向踏板
驾驶员可以通过驱动踏板/比例调节踏板和双向踏板设定泵和马达排量来控制车辆速
度。对于以下 2 种模式类型来说,排量设定值由配置的曲线和斜坡确定。
与发动机转速无关模式:
• 泵排量直接控制
WARRANTY VOID IF REMOVED
• 马达排量:
– 对于双位和比例控制的马达来说,排量直接控制。
– 对于 PCOR 控制的马达来说,排量通过压力信号间接控制。
比例调节与发动机转速相关模式:
• 只有泵排量控制。
所有高级功能,例如:防发动机熄火, 恒速 (CSD) , 超速保护可以越权于这种控
制。
驱动踏板/比例调节踏板,控制手柄只控制行驶速度,行驶方向由 FNR 输入确定。
双向踏板既可以控制行驶速度又可以控制行驶方向。
参数配置将决定具体是使用驱动踏板/比例调节踏板,控制手柄,还是使用双向踏
板。
所有踏板输出信号都可以配置成发动机转速指令,通过 AC 控制器传送给发动机控制
器,对于 J1939-CAN 指令为 TSC1 。(对于 SIL 2 不适用)。
CC1:08-传感器 (+)
• 传感器-供电 (+)
• 传感器供电电压: 4.825 到 5.075 V
最大输出电流: 200mA.
CC1:09-传感器 (-)
• 传感器-供电 (-)
– 直接接地
CC1:10-驱动踏板输入 (模拟量-常用)
• 驱动踏板/比例调节踏板,控制手柄或双向
踏板电位计常用模拟量输入
CC1:11-驱动踏板输入 (模拟量-冗余)
• 驱动踏板/比例调节踏板,控制手柄或双向
踏板电位计冗余模拟量输入
参数 最小 最大 单位 备注
输入电压范围
分辨率
输入阻抗
0.08 5.26 Vdc
- 12 Bit 4096 步
230 236 kΩ
丹佛斯提供配合插头
详细信息见 配合插头 章节
L1108283 • Rev CB • Aug 201224
Page 25

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
T301 031E
技术规格
输入信号
(续)
CC3
Deutsch 插座
CC1
DTM/12 针
电源 (-) 1
2
电源 (+)
传感器 (+) 3
传感器 (-) 4
马达转速输入 (频率) 5
前进输入 (数字) 6
后退输入 (数字) 7
传感器 (+) 8
传感器 (-) 9
驱动踏板输入 (模拟量-常用) 10
驱动踏板输入 (模拟量-冗余)
停止输入 (数字)
CC2
寸进输入 (模拟量-冗余) 1
模式开关 B 输入 (数字-常用) 2
马达 PROP/PCOR 输出 (PWM) 3
马达方向输入 (模拟量) 4
传感器 (+) 5
传感器 (-) 6
寸进输入 (模拟量-常用) 7
马达 BPD 输出 (数字) 8
数字输出 B2 (-) 9
数字输出 B1 (+) 10
模式开关 A 输入 (数字) 11
模式开关 B 输入 (数字-冗余) 12
12
Deutsch 插座
DTM/12 针
CC1
CC1 CC2
CAN PPC
PSC
PPU
CC2
P003 544
11
P003 545
P301 309
马达转速传感器
AC 控制器读取马达转速传感器信号,并通过配置的终端减速比计算出车辆速度。车
辆速度可计算使匀速行驶和车辆最高速度限制这些高级功能得以实现。
WARRANTY VOID IF REMOVED
CC1:03-传感器 (+)
• 传感器-供电 (+)
• 传感器供电电压:4.825 到 5.075 V
• 最大输出电流:200mA.
CC1:04-传感器 (-)
• 传感器-供电 (-)
• 直接接地
CC1:05-马达转速输入 (频率)
• 静液压马达速度传感器频率输入
CC2:04-马达方向输入 (模拟量)
• 静液压马达方向模拟量输入
频率输入 (马达转速)
参数 最小 最大 单位 备注
电压上升极限
(中间范围)
电压下降极限
(中间范围)
输入阻抗
频率范围
2 3.5 Vdc 电压高于3.5V ,频率输入肯定被视为高电平。
0.74 - Vdc 电压低于0.74V ,频率输入肯定被视为低电平。
7.00 7.21 kΩ 15kΩ 到传感器供电 / 13.5 kΩ 到接地
0 10 000 Hz 每步为 1 Hz
模拟量输入 (马达方向)
参数 最小 最大 单位 备注
输入电压范围
分辨率
输入阻抗
0.08 5.26 Vdc
- 12 Bit 4096 步
- - kΩ 15kΩ 到传感器供电 / 14.1 kΩ 到接地
丹佛斯提供配合插头
详细信息见 配合插头 章节
T000 220E
L1108283 • Rev CB • Aug 2012 25
Page 26

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
T000 223E
技术规格
输出信号
CC3
Deutsch 插座
CC2
DTM/12 针
寸进输入 (模拟量-冗余) 1
模式开关 B 输入 (数字-常用) 2
马达 PROP/PCOR 输出 (PWM) 3
马达方向输入 (模拟量) 4
传感器 (+) 5
传感器 (-) 6
寸进输入 (模拟量-常用) 7
马达 BPD 输出 (数字) 8
数字输出 B2 (-) 9
数字输出 B1 (+) 10
模式开关 A 输入 (数字) 11
模式开关 B 输入 (数字-冗余) 12
CC1
CAN PPC
PSC
PPU
CC2
CC2
P003 544
P301 309
马达排量和制动压力失效 (BPD) 控制
对于双位和比例控制的马达来说,排量直接控制。
输出信号可能由泵 (发动机) 转速或由驱动踏板位置决定。
对于车辆制动情况,制动压力失效 (BPD) 阀的控制取决于行驶方向。
WARRANTY VOID IF REMOVED
CC2:03-马达 PROP/PCOR 驱动信号
• 比例输出 (+) ,输出至比例排量控制阀或
压力补偿越权阀。
– PWM 信号由电源供电 (12/24V)
CCC2:08-马达 BPD 驱动信号
• 数字输出,输出至制动压力失效 (BPD) 阀
– 接到电源 (+) (12/24V)
PWM 输出控制马达排量
参数 最小 最大 单位 备注
比例电流
输出电压
PWM 频率 33 200 Hz
0 3.0 A
电源电压 输出电压是电源电压!
-
数字输出
参数 最小 最大 单位 备注
输出电流
0 3.0 A
丹佛斯提供配合插头
详细信息见 配合插头 章节
T000 224E
L1108283 • Rev CB • Aug 201226
Page 27
产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
技术规格
输出信号
(续)
CC3
CC3
Deutsch 插座
CC3
DT/2 针
数字输出 A1 (+) 1
数字输出 A2 (-) 2
CC1
CAN PPC
PSC
PPU
CC2
P003 544
P301 235
数字输出 A1 和 A2
数字输出 A1 和 A2 在开环中可用作单输出 (接电源或接地) ,或应用在闭环中。为了
安全起见,不同的闭环必须达到 SIL 2 等级。
每个输出可以单独配置用作下列用途:
• 刹车灯
• 车辆速度相关信号
WARRANTY VOID IF REMOVED
• 故障灯
• 倒车灯
CC3:01-A1 (+)
• 数字输出
– 接电源 (+)
CC3:02-A2 (-)
• 数字输出
– 接地 (-)
参数 最小 最大 单位 备注
输出电流
输出电压 A1(+) / B1(+) -
输出电压 A2(-) / B2(-) -
0 3.0 A
电源 输出电压为电源电压!
接地
输出电压接地 (GND)
丹佛斯提供配合插头
详细信息见 配合插头 章节
T301 030E
L1108283 • Rev CB • Aug 2012 27
Page 28

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
T301 030E
技术规格
输出信号
CC3
Deutsch 插座
CC2
DTM/12 针
寸进输入 (模拟量-冗余) 1
模式开关 B 输入 (数字-常用) 2
马达 PROP/PCOR 输出 (PWM) 3
马达方向输入 (模拟量) 4
传感器 (+) 5
传感器 (-) 6
寸进输入 (模拟量-常用) 7
马达 BPD 输出 (数字) 8
数字输出 B2 (-) 9
数字输出 B1 (+) 10
模式开关 A 输入 (数字) 11
模式开关 B 输入 (数字-冗余) 12
CC1
CAN PPC
PSC
PPU
CC2
CC2
P003 544
P301 309
数字输出 B1 和 B2
数字输出 B1 和 B2 在开环中可用作单输出 (接电源或接地) ,或应用在闭环中。为了
安全起见,不同的闭环必须达到 SIL 2 等级。
每个输出可以单独配置用作下列用途:
• 倒车蜂鸣
• FNR 后退位报警
WARRANTY VOID IF REMOVED
• 驻车制动阀
• 带反馈信号的刹车灯
• 刹车灯
• FNR 后退位灯
• 故障灯
• 前进灯
CC2:09-数字输出 B2 (-)
• 数字输出
– 接地 (-)
CC2:10-数字输出 B1 (+)
• 数字输出
– 接电源 (+)
参数 最小 最大 单位 备注
输出电流
输出电压 A1(+) / B1(+) -
输出电压 A2(-) / B2(-) -
0 3.0 A
电源 输出电压为电源电压!
接地
输出电压接地 (GND)
丹佛斯提供配合插头
详细信息见 配合插头 章节
L1108283 • Rev CB • Aug 201228
Page 29
产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
技术规格
CAN 通信
CC3
Deutsch 插座
CAN
DTM/3 针
CAN 高 1
CAN 低 2
CAN 屏蔽 3
CC1
CAN
CAN PPC
PSC
PPU
CC2
P003 544
P003 547
CAN 输入和输出信号
CAN 通信通过 CAN 插座实现。物理 (硬件) 层按照 CAN 2.0B 协议或者与 PLUS+1
Service Tool 进行通信,或者与其它外部装置进行通信。如果功能选项包里指定 J1939
协议,那么与其它外部装置通信按照 J1939 协议进行 (见功能选项包章节)。
WARRANTY VOID IF REMOVED
CAN:01-CAN 高
• 通信与 CAN 高线连接
CAN:02-CAN 低
• 通信与 CAN 低线连接
CAN:03-CAN 屏蔽
• 通信与 CAN-接地连接
CAN 通信
参数 最小 正常 最大 单位 备注
CAN 波特率 250 kBaud
物理层遵循 ISO11898-2
高速
丹佛斯提供配合插头
详细信息见 配合插头 章节
T000 237E
L1108283 • Rev CB • Aug 2012 29
Page 30

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
技术规格
配合插头
CC3
CC1
CAN PPC
PSC
PPU
CC1 CC2
CC2
P003 544
客户配合插头 1 (CC1) 和 2 (CC2)
Deutsch 插座
CC2
DTM/12 针
寸进输入 (模拟量-冗余) 1
模式开关 B 输入 (数字-常用) 2
马达 PROP/PCOR 输出 (PWM) 3
马达方向输入 (模拟量) 4
传感器 (+) 5
传感器 (-) 6
寸进输入 (模拟量-常用) 7
马达 BPD 输出 (数字) 8
数字输出 B2 (-) 9
数字输出 B1 (+) 10
模式开关 A 输入 (数字) 11
模式开关 B 输入 (数字-冗余) 12
WARRANTY VOID IF REMOVED
Deutsch 插座
CC1
DTM/12 针
电源 (-) 1
2
电源 (+)
传感器 (+) 3
传感器 (-) 4
马达转速输入 (频率) 5
前进输入 (数字) 6
后退输入 (数字) 7
传感器 (+) 8
传感器 (-) 9
驱动踏板输入 (模拟量-常用) 10
驱动踏板输入 (模拟量-冗余)
停止输入 (数字)
12
11
P003 545
根据不同的客户引线直径有 2 种套件可选, 包含 CC1 和 CC2 的配合插头。
插头 引线直径 物料号 名称 备注
包装袋内包含:
2 DEUTSCH 插头 DTM06 12-插槽
黑/灰和镀金针脚
包装袋内包含:
2 DEUTSCH 插头 DTM06 12-插槽
黑/灰和镀金针脚
客户配合插头
1 (CC1) 和 2 (CC2)
0.5-1.0 mm
(16-20 AWG)
0.2-0.5 mm
(20-24 AWG)
2
/
2 /
10102023
10100945
P301 309
推荐
T000 227E
客户配合插头 3 (CC3)
CC1
CAN PPC
WARRANTY VOID IF REMOVED
CC3
PSC
PPU
CC2
P003 544
插头 引线直径 物料号 名称 备注
客户配合插头
3 (CC3)
0.5-2.0 mm
(14-20 AWG)
2 /
11070531
包装袋内包含 :
1 DEUTSCH 插头 DT04 2-插槽
灰和镀金针脚
T301 032E
L1108283 • Rev CB • Aug 201230
Page 31

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
技术规格
配合插头
(续)
CC3
Deutsch 插座
CAN
DTM/3 针
CAN 高 1
CAN 低 2
CAN 屏蔽 3
CAN 总线适配器
CAN
CC1
CAN PPC
PSC
PPU
CC2
P003 544
P003 547
CAN 插头 (CAN)
插头 引线直径 物料号 名称 备注
包装袋内包含:
1 DEUTSCH 插头 DTM06 3-插槽
灰和镀金针脚
包装袋内包含:
1 DEUTSCH 插头 DTM06 3-插槽
灰和镀金针脚
推荐
CAN 插头 (CAN)
WARRANTY VOID IF REMOVED
0.5 – 1.0 mm² /
(16-20 AWG)
0.2 – 0.5 mm² /
(20-24 AWG)
11072736
11033864
CAN 总线适配器连接线
需要如下一额外的适配器接线来连接 CG150 CAN USB 网关到 AC 控制器。连接线实现
Deutsch 头到 DSUB 头的转换,并且包含终端电阻用来启用 CAN 通信。
物料号 名称 备注
11069593 适配器连接线 H1P AC CAN 指南
额外连接线
H1 AC 控制器 CG 150 CAN USB 网关
DEUTSCH 插座
DTM/3 针
CAN 高
CAN 低
CAN 屏蔽
120 ohm
1
2
3
D-SUB 插头(母)
9 pin
CAN 高
7
2
CAN 低
3
CAN 屏蔽
T000 228E
P003 551E
物料清单:
• CAN Deutsch 头 DTM06 3-SKT 灰色堵头
物料号 11033864
• 9 针 D-SUB 带壳母头
• 120 ohm 电阻 1/4W ± 5% 或更好
• 1 m 线缆内 3 根接线, 直径 0.2 至 1.0 mm² (推荐 0.5 mm² )
如果所用线缆长度超过 1 m, 则需要屏蔽线。更多信息参考 J1939 协议。
L1108283 • Rev CB • Aug 2012 31
Page 32
产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
T000 220E
技术规格
AC 电气参数 & 特性
电源特性
参数 最小 最大 单位 备注
电源供电电流
推荐保险丝规格
恒定供电电压范围
额定12V-范围 9 16 V
额定24V-范围 18 32 V
恒定反向电压保护
传感器供电电压范围 (内部) 4.825 5.075 V
传感器供电电流
- 12 A
- 16 A
9 36 V
- -36 V
- 1 A
DC
DC
DC
DC
DC
所有传感器加在一起最大 1A
输入/输出特性
数字输入
参数 最小 最大 单位 备注
电压上升极限
电压下降极限
输入阻抗
- 7.00 Vdc
1.66 - Vdc
13.4 13.8 kΩ
电压高于 7.00V,数字输入肯定被视为高
电平。
电压低于 1.66V,数字输入肯定被视为低
电平。
模拟量输入
参数 最小 最大 单位 备注
输入电压范围
分辨率
输入阻抗
0.08 5.26 Vdc
- 12 Bit 4096 步
230 236 kΩ
频率输入
参数 最小 最大 单位 备注
输入电压范围
分辨率
输入阻抗
0.08 5.26 Vdc
- 12 Bit 4096 步
- - kΩ 15kΩ 到传感器供电 / 14.1 kΩ 到接地
模拟量输入 (马达方向)
参数 最小 最大 单位 备注
电压上升极限
(中间范围)
电压下降极限
(中间范围)
输入阻抗
频率范围
2 3.5 Vdc 电压高于3.5V ,频率输入肯定被视为高电平。
0.74 - Vdc 电压低于0.74V ,频率输入肯定被视为低电平。
7.00 7.21 kΩ 15kΩ 到传感器供电 / 13.5 kΩ 到接地
0 10 000 Hz 每步为 1 Hz
T000 226E
T000 217E
T000 218E
T301 031E
数字/PWM-输出和电流反馈
参数 最小 最大 单位 备注
比例电流
输出电压
0 3.0 A
电源电压 输出电压是电源电压!
-
PWM 频率 33 200 Hz
数字输出
参数 最小 最大 单位 备注
输出电流
L1108283 • Rev CB • Aug 201232
0 3.0 A
T000 223E
T000 224E
Page 33
产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
技术规格
AC 电气参数 & 特性
(续)
工作特性
温度范围
参数 最小 最大 单位 备注
应用软件下载
参数下载
0 70 °C
-40 104 °C
见液压油规格温度范围章节
CAN 通信
参数 最小 正常 最大 单位 备注
CAN 波特率 250 kBaud
物理层遵循 ISO11898-2
高速
转速传感器
速度环齿数
更多信息请参考 技术资料, 速度与温度传感器, 11046759
环境和防护特性
参数 注解
短路
EMC-抗干扰 (EMI)
EMC-辐射 (RFI)
ESD
电瞬变
温度/电压/湿度 IEC 60068-2-38
低温测试
干热
冰水冲击
盐雾
IP67 & IPX9K* IEC 60529 & DIN 40050 第 9 章(只对控制器有效!)
* 带安装堵头
所有输入输出连到其它引线时都能承受持续短路,当短路消除,元件功
能恢复正常。
按照 EN 61000-6-2
EMC 常规抗干扰标准,工业环境
- incl. 1kHz w/ AM 80%
EN 61000-6-3
EMC 常规辐射标准, 居住与工业环境
EN 12895 对于工业卡车
EN 61 000-4-2
抗静电放电干扰,测试等级 4
直接放电到控制器针脚
ISO 7637 / 1-3
IEC 60068-2-1 AD
IEC 60068-2-2 BD
ISO 16750-4
IEC 60068-2-11 试验 Ka
T000 236E
T000 237E
数量
92
T301 045E
T000 216E
L1108283 • Rev CB • Aug 2012 33
Page 34
产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
技术规格
技术规格
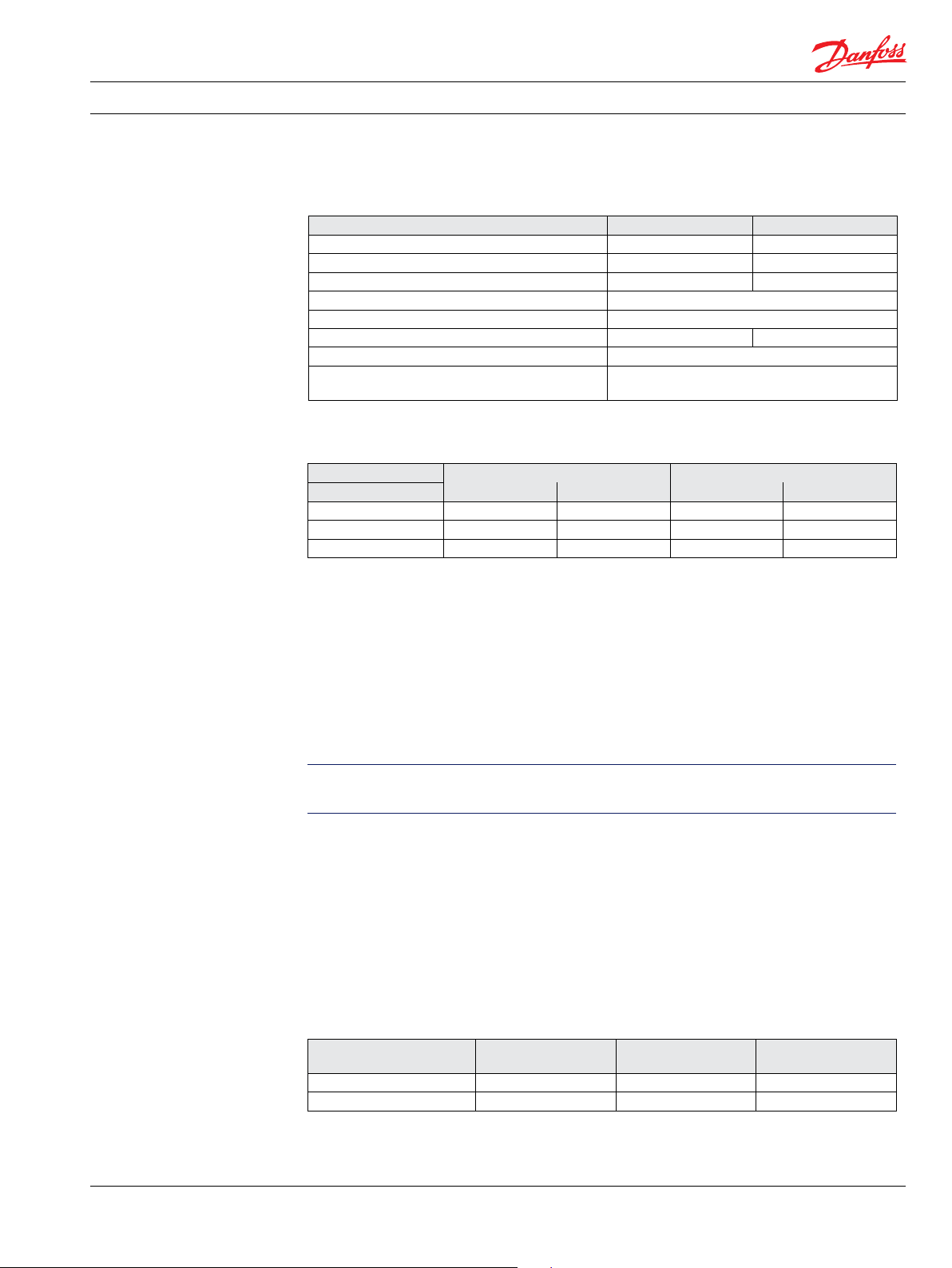
若要详细了解以下规格,见 基础信息 11062168 ,工作参数。
常规规格
设计
旋转方向
油口
推荐安装方位
辅助法兰容腔压力
斜盘式设计,轴向变量柱塞泵。
顺时针,逆时针。
主油口: ISO 分体式法兰
其它油口: SAE 直螺纹 O-型圈
泵的安装方位不是随意的,建议安装时控制器在上部或在侧面,最好是在上
部,不能在下部。
输入轴朝上的垂直安装是允许的,但要保证工作过程中壳体压力保持在 1 bar
,壳体必须始终充满液压油。
多泵串联安装时,确保功率最高的泵在前,与发动机相连。
其它特殊安装方位请咨询萨澳丹佛斯公司。
如果为内置补油泵,则容腔压力为主泵吸油口压力。参考下页工作参数。
如果为外置补油泵,则容腔压力为主泵壳体压力。请核实补油泵轴封能承受
的压力范围。
技术参数
性能 单位
排量
3
[in3] 89.2 [5.44] 101.7 [6.21]
cm
额定速度 (持续) 下流量 l/min [US gal/min] 294 [77.7] 335 [885]
最大排量时扭矩 (理论值) N•m/bar
旋转组件质量惯性矩
重量
(无辅助安装法兰和过滤器)
kg•m
kg [lb] 62 [137]
壳体容积 升
安装法兰
[lbf•in/
1000psi]
2
[slug•ft2] 0.0116 [0.0086]
[US gal] 2.6 [0.67]
ISO 3019-1 法兰 127-4 (SAE C)
ISO 3019-1, 外径 32 mm - 4 (SAE C, 14 齿)
输入轴外径
花键轴和锥轴
ISO 3019-1, 外径 35 mm - 4 (SAE C, 21 齿)
ISO 3019-1, 外径 38 mm - 4 (SAE C-C, 23 齿)
带键锥轴轴端同 ISO 3019-1 代码 38-3, 锥度 1:8
ISO 3019-1, 法兰 82 - 2, 外径 16 mm - 4 (SAE A, 9 齿)
辅助安装法兰,公制螺纹
轴外径和花键套
ISO 3019-1, 法兰 82 - 2, 外径 19 mm - 4 (SAE A, 11 齿)
ISO 3019-1, 法兰 101 - 2, 外径 22 mm - 4 (SAE B, 13 齿)
ISO 3019-1, 法兰 101 - 2, 外径 25 mm - 4 (SAE B-B, 15 齿)
ISO 3019-1, 法兰 127 - 4, 外径 32 mm - 4 (SAE C, 14 齿)
吸油口
主油口
泄油口 L2, L4
(SAE O-型圈,螺纹油口)
其它油口
油口 ISO 11926-1 – 1
∅25.4 - 450 bar 分体式法兰,标准 ISO 6162, M12x1.75
油口 ISO 11926-1 – 1
SAE O-型圈,螺纹油口。见样本后面的安装图纸。
油口螺纹 公制
排量089 排量100
1.42 [870] 1.62 [990]
5
/8 -12 (SAE O-型圈,螺纹油口)
1
/16 -12 (SAE O-型圈,螺纹油口)
T301 037E
T301 009E
L1108283 • Rev CB • Aug 201234
Page 35
产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
技术规格
技术规格
若要详细了解以下规格,见 基础信息 11062168 ,工作参数。
(续)
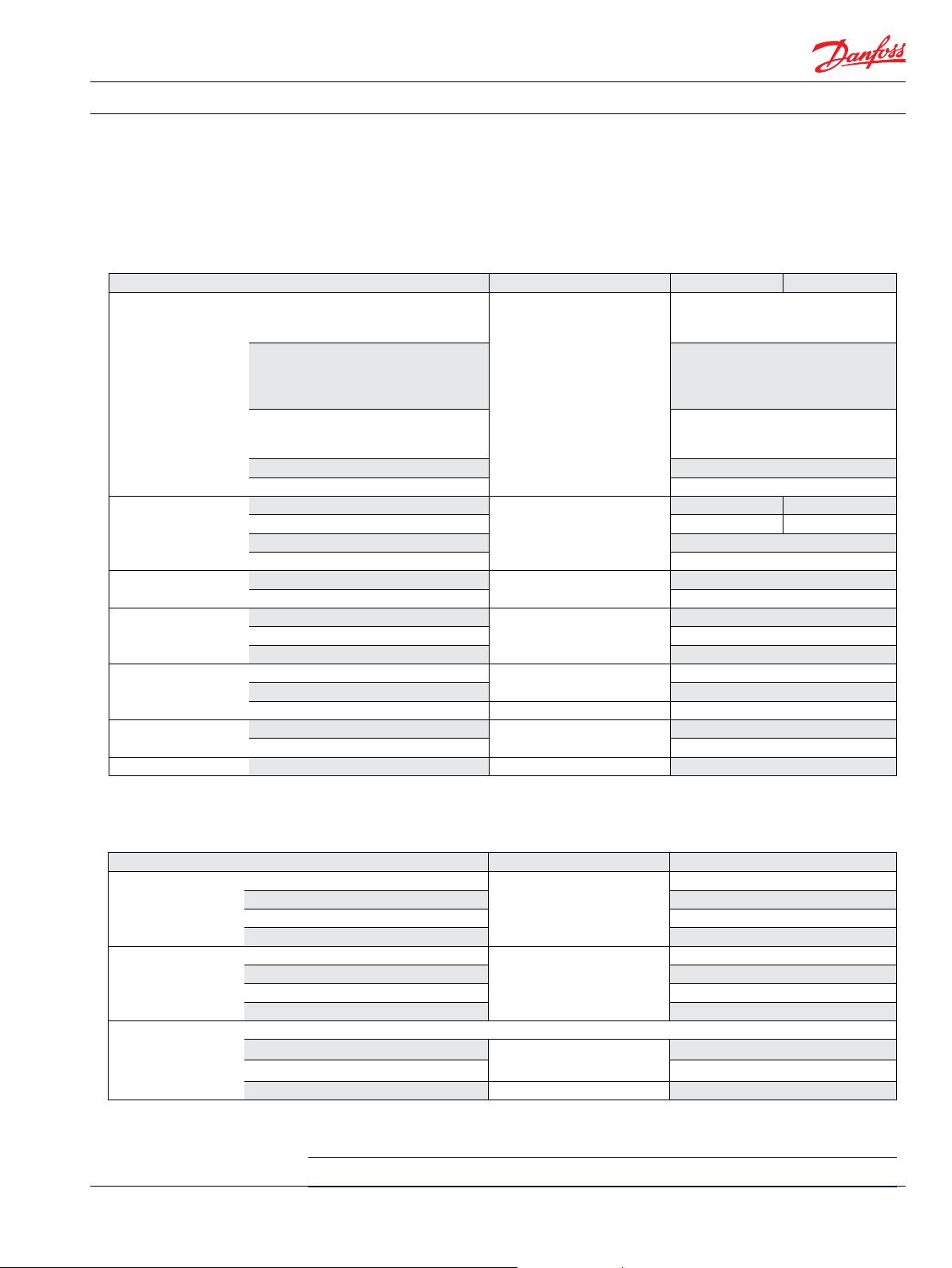
工作参数
性能 单位 排量 089 排量 100
补油泵内置且补油压力最低时泵的最低输
输入速度
系统压力
补油压力
控制压力
补油泵吸油口压力
壳体压力
轴封外部压力
入速度。泵性能 (压力和排量) 可能会因为
控制压力低而受限制。
补油泵外置且补油压力最低时泵的最低输
入速度。泵全部性能 (压力和排量) 在最小
补油压力和最小控制压力时得以实现的最
低输入速度。
min
-1
(rpm)
补油泵内置且补油压力和控制压力最低
时,泵全部性能 (压力和排量) 得以实现的
最低输入速度。
额定
最大
最高工作压力
最高压力
低压侧最高压力
bar [psi]
低压侧最低压力
最低
最高
bar [psi]
最低 (EDC 和 FNR 角功率下 )
最低 (NFPE 角功率下) 20 [290]
bar [psi]
最高
额定
最低 (冷启动) 0.2 [24]
最高
额定
最高
最高
bar (绝对) [in Hg 真空]
bar [psi] 4.0 [58]
bar [psi]
bar [psi] 0.4 [5.8}
450 [6525] 420 [6090]
480 [6960] 450 [6525]
45 [650]
10 [145]
16 [232]
34 [493]
17 [247]
40 [580]
0.7 [9]
3.0 [44]
5.0 [73]
500
500
1200
3300
3800
T301 010E
液压油规格
性能 单位
粘度
温度范围
2)
过滤 (最低推荐)
1)
间歇 = 短时 t < 1min /事件,且不要超过基于负载-寿命的工作周期的 2 %
2)
油温最高点往往出现在壳体泄油口处
3)
冷启动 = 短时 t < 3min, p ≤ 50 bar [725 psi], n ≤ 1000 min-1(rpm) T000 129E
1)
间歇
最低
推荐范围
最高
最低 (冷启动)
推荐范围
额定
最高间歇
1)
mm2/s [SUS]
3)
°C [°F]
5 [42]
7 [49]
12-80 [66-370]
1600 [7500]
-40 [-40]
60-85 [140-185]
104 [220]
115 [240]
清洁度 标准 ISO 4406 22/18/13
效率 (补油压油过滤)
效率 (吸油和回油过滤)
推荐吸油口滤网网眼规格
β-ratio
µm 100 – 125
= 75 (β
β
15-20
= 75 (β
β
35-45
10
10
≥ 10)
≥ 2)
见软件及参数下载的温度范围。
L1108283 • Rev CB • Aug 2012 35
Page 36
产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
T301 018E
常规技术规格
与发动机转速相关控制
(AC)
选项
AC-1: A7(12 V)/C2 (24 V)
AC-2: B7(12 V)/C3 (24 V)
AC-1 与 AC-2 静液压驱动系统由一台H1
变量泵、嵌入式控制器及可完全客户化
自设定参数的 PLUS+1 service tool 软件
构成。嵌入式控制器输出一个电信号驱
动电磁阀两个线圈之中的一个,从而将
补油压力油引到对应的伺服腔。AC没
有机械式斜盘位置反馈连杆机构,但
AC-2 可以通过斜盘角度位置传感器的
CC3
输出实现电控斜盘位置反馈的功能。
泵的排量与电磁阀输入电流信号成比
例,但同时随泵输入转速及系统压力变
化而改变。这种随系统压力升高,排量
自动减小的特性使得泵具备了功率限制
及防止发动机熄火功能。典型的响应特
性曲线会在后面的章节中给出。
某些条件下,例如污染物进入油液中
时,控制阀芯被卡住后,会导致泵停滞在某个排量下不能正常的变量。
需要让液压油进入控制模块之前先经过一个可更换维修的125μm的滤网。
CC1
CAN PPC
WARRANTY VOID IF REMOVED
PSC
PPU
CC2
P003 544
泵排量 vs. 输入信号
NFPE 控制
信号电流
mA(DC)
c
b
∆p = 300 bar
∆p = 0 bar
L1108283 • Rev CB • Aug 201236
100 %
a
"0"
abc
排量
100 %
∆p = 0 bar
∆p = 300 bar
P003 187E
与发动机转速相关控制 (AC) 原理图
C2C1
F00A T PF00B
P301 236
控制信号要求
控制电流
电压
12 V 870 1290 1550
24 V 440 670 795
* 出厂设定电流,实际应用中,由于车辆运动可
能会导致启动电流高于或低于此值。
a*
mAbmAcmA
针脚连接
任意顺序
Page 37
产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
常规技术规格
与发动机转速相关控制
(AC)
选项
AC-1: A7(12 V)/C2 (24 V)
AC-2: B7(12 V)/C3 (24 V)
(续)
电磁线圈参数
电压
最大电流
线圈电阻 @ 20 °C [70 °F] 3.66 Ω 14.20 Ω
线圈电阻 @ 80 °C [176 °F] 4.52 Ω 17.52 Ω
PWM 范围 70-200 Hz
PWM 频率 (推荐)* 100 Hz
电感
IP 等级 (IEC 60 529) + DIN 40 050, 第 9 章 IP 67
IP 等级 (IEC 60 529) + DIN 40 050, 第 9 章
带配合接头
* 获得最优的控制性能所需PWM 频率。
12V 24V
1800 mA 920 mA
33 mH 140 mH
IP 69K
T000 135E
泵输出流量方向 vs. 控制信号
旋转方向 右旋 左旋
激活线圈*
油口 A
油口 B
伺服压力作用油口
* 线圈位置请见安装图纸。
C1 C2 C1 C2
进 出 出 进
出 进 进 出
M5 M4 M5 M4
T000 140E
控制响应时间
H1系列泵控制油路可选配不同通径大小的阻尼孔,以满足不同应用场合下对泵排量
变大/变小的响应时间的要求(如电气发生故障时)。正常工况下,车辆的控制性能由
软件斜坡或比率限制决定。泵输出流量从零变为最大(加速)或从最大变为零 (减速)
的响应时间与控制模块的比例阀芯开口度、阻尼孔大小、补油压力相关。针对不同
排量的泵给出了相应的斜盘响应时间表。推荐通过现场试验来验证软件和阻尼孔是
否满足系统响应时间的需求。
H1 泵的机械式阻尼孔可选项有限。正常工作模式下,推荐采用软件控制斜盘响应时
间。机械式阻尼孔的作用是在电控失效时,使泵能缓慢安全回中位。
典型响应时间基于下面试验条件给出:
∆p = 250 bar [3626 psi]
粘度和温度 = 30 mm2/s (50 °C) [141 SUS (122 °F)]
补油压力 = 20 bar [290 psi]
转速 = 1800 min-1 (rpm)
响应时间
变量方向
中位至最大排量
最大排量回中位
L1108283 • Rev CB • Aug 2012 37
0.8 mm [0.03 in]
节流孔
3.1 s 1.4 s 0.8 s
2.0 s 0.9 s 0.4 s
1.3 mm [0.05 in]
节流孔
无节流孔
T000 144E
Page 38
产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
常规技术规格
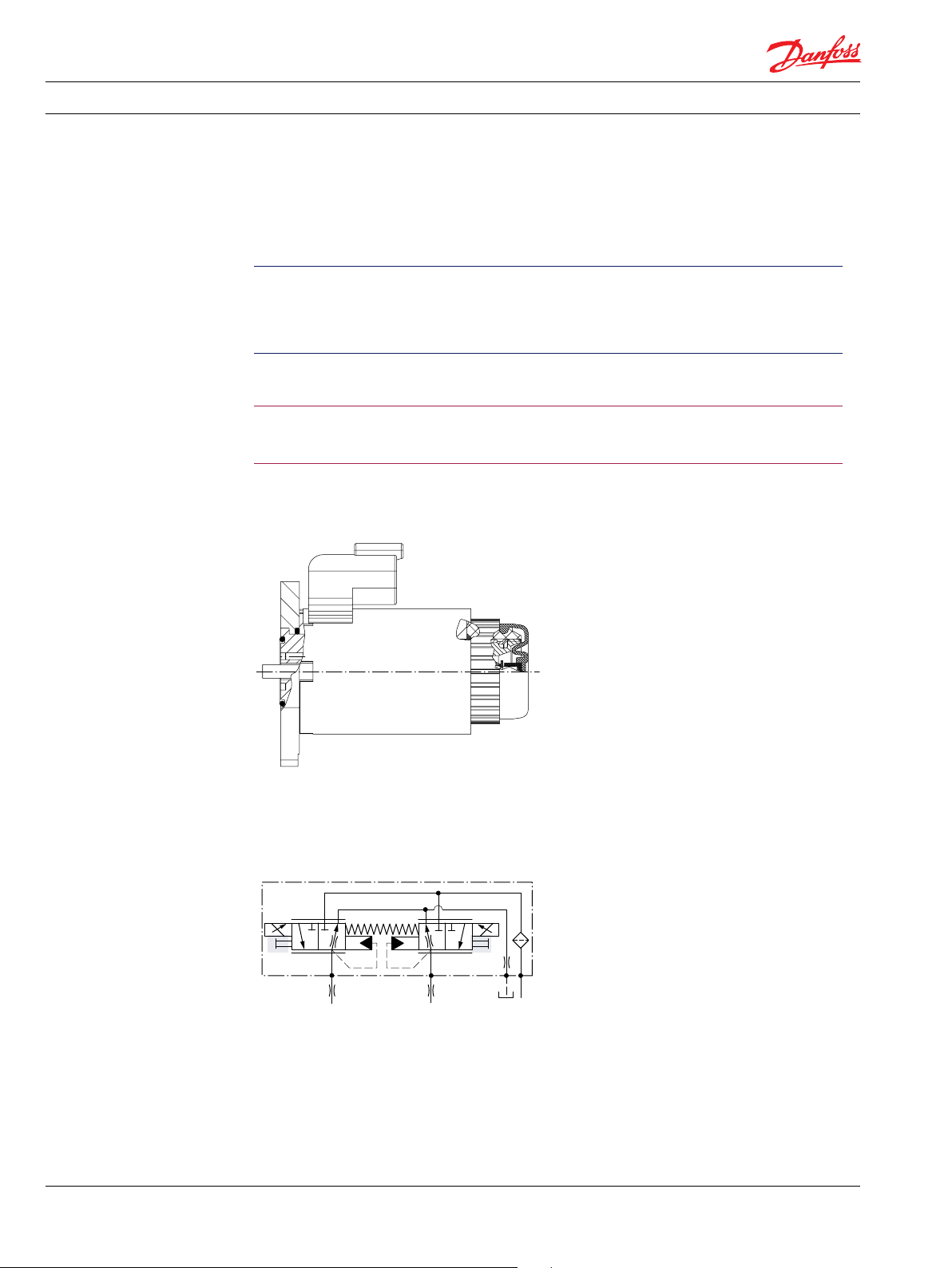
手动越权 (MOR)
所有AC-1和AC-2都配有手动越权功能(MOR),用于诊断时临时推动排量控制阀
芯。
触发手动越权功能时泵会有流量输出。当使用手动越权功能时需确保机器或车辆处
于“安全”状态下(例如将车辆支离地面)。手动越权推杆直径4mm,需要人为按
压以触发越权功能。按压推杆将机械式移动阀芯使泵输出排量,需持续向里按压以
使泵输出排量达到最大。
警告
手动越权推杆处安装一个O型圈以防止泄漏。触发手动越权功能需要45牛顿力以克服
O型圈静摩擦力实现推杆运动。MOR推杆运动后所需要的控制力小于此值。不能通过
手动越权功能实现泵的排量比例变化。
具体电磁阀与泵流量输出方向关系详见每个排量的产品样本中的控制流量方向表。
MOR-原理图 (以 AC 控制模块为例)
F00A T PF00B
L1108283 • Rev CB • Aug 201238
P003 204
C2C1
P301 236
Page 39

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
L1108283 • Rev CB • Aug 2012 39
Page 40
产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
常规技术规格
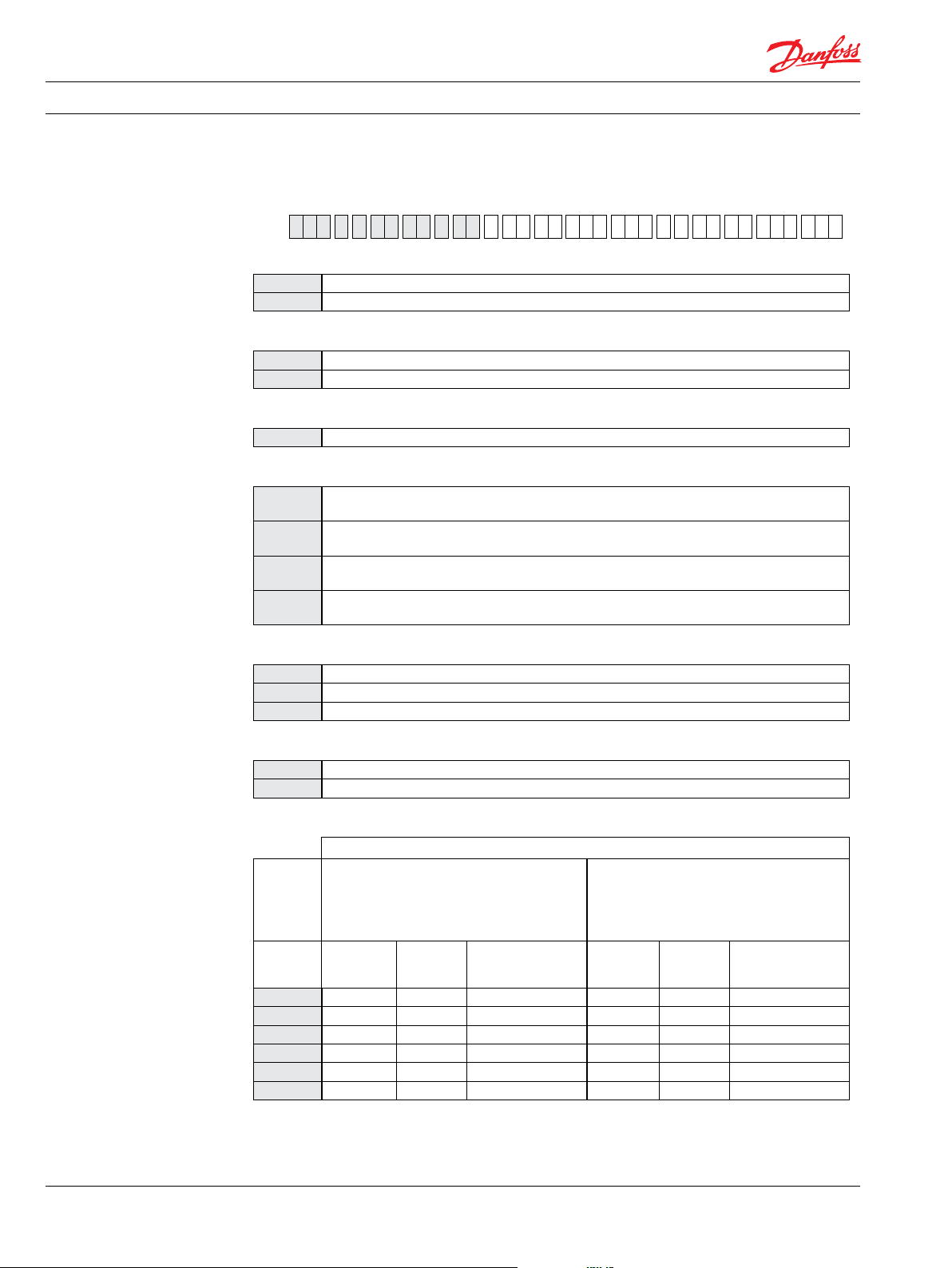
选型代码
A B D F E G H J K M N S T V W X
H1 P A H
排量
089 89.2 cm³ [4.77 in³]
100 101.7 cm³ [6.21 in³]
旋向
A
L 左旋 (逆时针)
R 右旋 (顺时针)
产品版本
B
版本号
A
控制
D
AC-1, 与发动机转速相关控制 12 V, Deutsch 接头, 手动越权
A7
(匹配选项 E: 排量限制器 & 选项 K: 安装法兰, W: 特殊硬件)
AC-1, 与发动机转速相关控制 24 V, Deutsch 接头, 手动越权
C2
(匹配选项 E: 排量限制器 & 选项 K: 安装法兰, W: 特殊硬件)
AC-2, 与发动机转速相关控制 12 V, Deutsch 接头, 手动越权, 斜盘角度传感器
B7
(匹配选项 E: 排量限制器 & 选项 K: 安装法兰, W: 特殊硬件)
AC-2, 与发动机转速相关控制 24 V, Deutsch 接头, 手动越权, 斜盘角度传感器
C3
(匹配选项 E: 排量限制器 & 选项 K: 安装法兰, W: 特殊硬件)
节流孔
F
C1 节流孔, 0.8 mm 伺服通道 1 和 2, 推荐用于行走工况
C2 节流孔, 1.3 mm 伺服通道 1 和 2 (标准), 推荐用于行走工况
无节流孔,推荐用于非行走工况
C3
Y
排量限制器
E
C 无排量限制器, 伺服活塞带嵌套弹簧
D 外部可调排量限制器 伺服活塞带嵌套弹簧 (匹配选项 Y: 特殊设置)
后端盖选项
G
同侧油口, ISO 6162 分体式法兰油口
辅助安装法兰
过滤
无
远程和外置补油泵
全流量压油过滤
ISO 3019-1, 法兰 127 - 4 (SAE C, 14 齿)
吸油过滤
匹配下列
选项 (K)
匹配下列
选项 (T)
D3 X
D4 X
D6 X
D5 X
D8 X
D6 X
L1108283 • Rev CB • Aug 201240
ISO 3019-1, 法兰 82 - 2 (SAE A, 9 和 11 齿)
ISO 3019-1, 法兰 101 - 2 (SAE B, 13 齿)
ISO 3019-1, 法兰 101 - 2 (SAE B-B, 15 齿)
吸油过滤
集成补油泵
全流量压油
辅助安装法兰
集成补油泵
全流量压油
过滤
远程和外置补油泵
全流量压油过滤
Page 41
产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
常规技术规格
选型代码
(续)
A B D F E G H J K M N S T V W X Y
H1 P
安装法兰
H
K ISO 3019-1, 法兰 127 - 4 (SAE C), 带转速传感器安装口
输入轴
J
G1 ISO 3019-1, 外径 32 mm - 4 (SAE C, 14 齿花键轴 12/24 径节)
F1 ISO 3019-1, 外径 35 mm - 4 (SAE C, 21 齿花键轴
G9 ISO 3019-1, 外径 38 mm - 4 (SAE C, 23 齿花键轴
F4 带键锥轴轴端同 ISO 3019-1 代码 38-3, 锥度 1:8(键不在供货范围内)
16
/32 径节)
16
/32 径节)
K 辅助安装法兰 (匹配选项 G: 后端盖选项)
NN
H2 ISO 3019-1, 法兰 82 - 2, 外径 16 mm - 4 (SAE A, 9 齿
H1 ISO 3019-1, 法兰 82 - 2, 外径 19 mm - 4 (SAE A, 11 齿
H3 ISO 3019-1, 法兰 101 - 2, 外径 22 mm - 4 (SAE B, 13 齿
H5 ISO 3019-1,
H6 ISO 3019-1, 法兰 127 - 4, 外径 32 mm - 4 (SAE C, 14 齿 12/24 花键套)
无
法兰
101 - 2,
外径 25 mm - 4 (SAE B-B, 15 齿 16/32 花键套)
16
/32 花键套)
16
/32 花键套)
16
/32 花键套)
M 过载保护形式和设定,油口 “A” **
N 过载保护形式和设定,油口 “B” **
**油口 “A” 侧和 “B”侧过载保护形式必须一致
L
L15 K15 150 bar [2175 psi]
L18 K18 180 bar [2610 psi]
L20 K20 200 bar [2900 psi]
L23 K23 230 bar [3336 psi]
L25 K25 250 bar [3630 psi]
L28 K28 280 bar [4061 psi]
L30 K30 300 bar [4350 psi]
L33 K33 330 bar [4786 psi]
L35 K35 350 bar [5080 psi]
L38 K38 380 bar [5510 psi]
L40 K40 400 bar [5800 psi]
L42 K42 420 bar [6090 psi]
L43 —
L44 —
L45 K45
如果设定压力不在上表内或超过额定压力请联系工厂 (见系统压力 第 35 页)
高压溢流阀 + 压力限制阀 + 旁通阀
高压溢流阀 + 旁通阀
K
(无压力限制阀)
430 bar [6237 psi] (仅089 cm
440 bar [6382 psi] (仅089 cm
450 bar [6960 psi] (仅089 cm
“A” 和 “B” 侧可选的设定压力
3
)
3
)
3
)
运输盖板
补油泵
S
D 20cm³/rev [1.22 in³/rev]
M 24 cm³/rev [1.46 in³/rev]
N 无集成补油泵, 外置补油泵补油,(匹配选项T:过滤选项,选项E)
L1108283 • Rev CB • Aug 2012 41
Page 42

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
常规技术规格
选型代码
(续)
A B D F E G H J K M N S T V W X Y
H1 P N N N
T 过滤选项 (匹配选项 G: 后端盖选项)
L 吸油过滤 (见基本图纸)
集成补油全流量压油过滤带旁通阀+堵塞报警传感器,
M
中等长度过滤器, 订货号 11004918
P 远程补油全流量压油过滤 (见后端盖图纸)
外置补油泵全流量压油过滤 (见后端盖图纸), (匹配选项 S: 补油泵, 选项 N)
E
补油溢流阀压力设定
V
20 20 bar [290 psi]
24 24 bar [348 psi]
30 30 bar [435 psi]
特殊硬件特性
W
P2 AC 配油盘,带速度传感器 (匹配选项 D: 控制选项,选项 E: 排量限制器)
喷漆和标志
X
NNN
黑漆,萨澳丹佛斯标志
Y 特殊设置 (匹配选项 D: 控制选项)
D3A
D3B 基本功能, 马达转速传感器
D3C 基本功能, CAN J1939 入/出
D3F 基本功能, 马达转速传感器, CAN J1939 入/出
D3G 基本功能, SIL 2 认证
D3H 基本功能, 马达转速传感器, CAN J1939 出, SIL 2 认证
D4A
D4B 基本功能, 马达转速传感器
D4C 基本功能, CAN J1939 入/出
D4F 基本功能, 马达转速传感器, CAN J1939 入/出
D4G 基本功能, SIL 2 认证
D4H 基本功能, 马达转速传感器, CAN J1939 出, SIL 2 认证
基本功能
基本功能
12V
24V
L1108283 • Rev CB • Aug 201242
Page 43

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
L1108283 • Rev CB • Aug 2012 43
Page 44

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
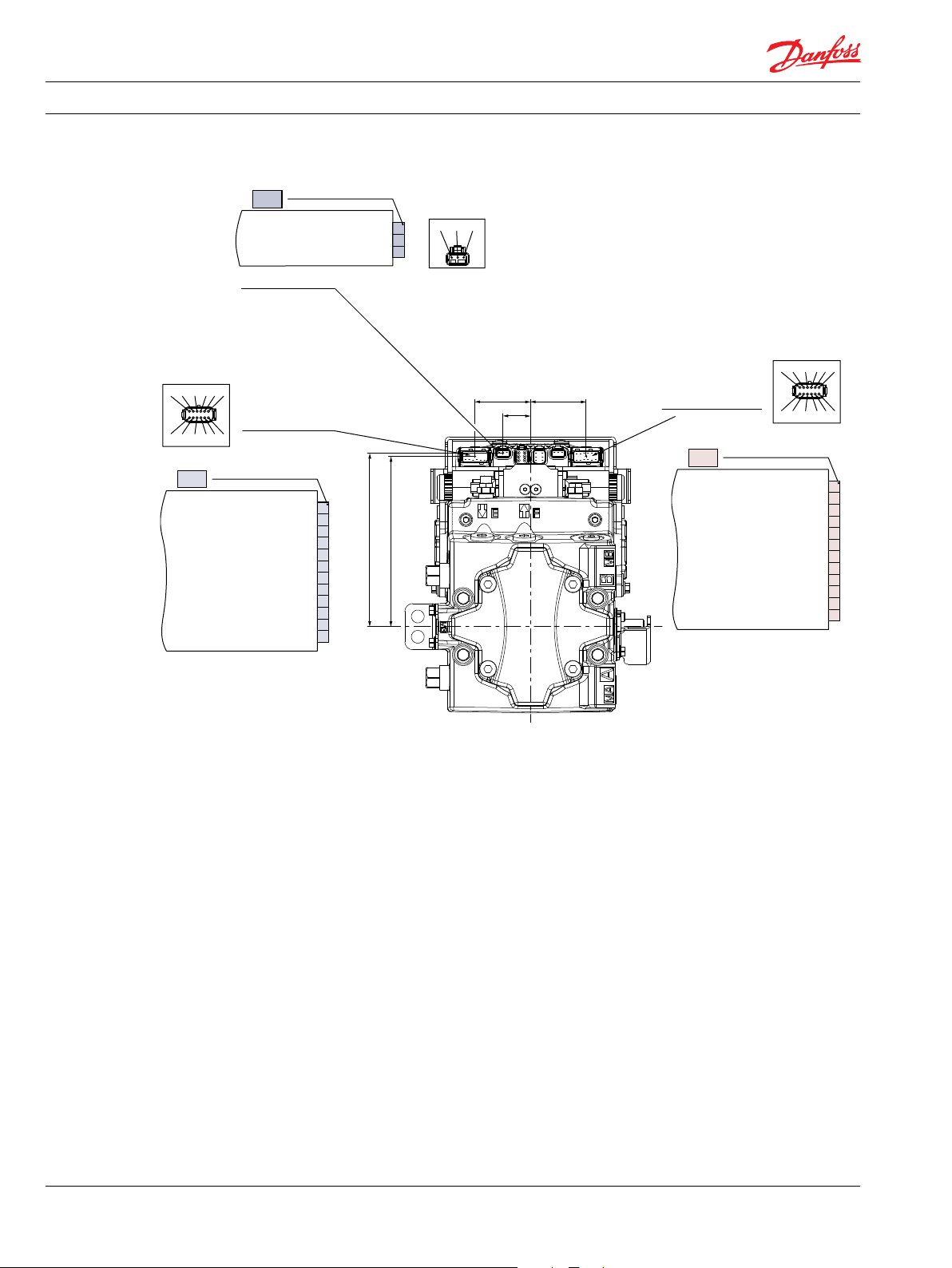
安装图纸
油口说明
伺服测压口 "M4"
ISO 11926-1 -7/16-20
最大沉孔直径 ∅21
系统油口 "B"
∅25.4 - 450bar
分体式法兰
标准 ISO 6162
M12 x 1.75
最小全螺纹深度 20
推荐螺栓拧进深度
1.5 x 螺纹直径
系统油口 "A"
∅25.4 - 450bar
分体式法兰
标准 ISO 6162
M12 x 1.75
最小全螺纹深度 20
推荐螺栓拧进深度
1.5 x 螺纹直径
系统油口 A 测压口 "MA"
ISO 11926-1 -9/16-18
沉孔直径直径 ∅28
壳体泄油口 "L4"
ISO 11926-1 -1 1/16-12
沉孔直径直径 ∅48
补油泵吸油口 "S"
ISO 11926-1 -1 5/16-12
沉孔直径直径 ∅69
壳体压力油口
ISO 11926-1 -11/16-12
最大沉孔直径 ∅48
P700 04 327 7F1
对于特殊安装图纸,请联系丹佛斯公司。
L1108283 • Rev CB • Aug 201244
油口说明
油口 说明 尺寸
A 系统油口 “A” ∅25.4
B 系统油口 “B” ∅25.4
E 补油过滤油口, 来自过滤器
F 补油过滤油口, 至过滤器
壳体泄油口
L2
壳体泄油口
L4
MA 系统油口 A 测压口
MB 系统油口 B 测压口
M3 补油测压口, 过滤器后
伺服测压口
M4
伺服测压口
M5
补油吸油口
S
7
/8 -14
7
/8 -14
1
/
1
16
1
/
1
16
9
/
16
9
/
16
9
/
16
7
/
16
7
/
16
5
/
1
16
T301 086E
-12
-12
-18
-18
-18
-20
-20
-12
Page 45

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
P301 309
Deutsch 插座
P003 545
安装图纸
油口说明
(续)
系统油口 B 测压口 "MB"
控制器插座 "CC2"
Deutsch DTM04-12P -B-
免喷漆
控制器插座 "CAN"
Deutsch DTM04-3P
免喷漆
连接时堵头可能需要拆掉
控制器插座 "CC1"
Deutsch DTM04-12P -A-
免喷漆
壳体压力油口
ISO 11926-1 -1 1/16-12
最大沉孔直径 ∅41
补油压力工艺口
ISO 11926-1 -5/16-24
ISO 11926-1 -9/16-18
最大沉孔直径 ∅28
伺服测压口 "M5"
ISO 11926-1 -7/16-20
最大沉孔直径 ∅21
控制器插座 "CC3"
Deutsch DT06-2S
免喷漆
连接时堵头可能需要拆掉
补油过滤油口 "F"
ISO 11926-1 -7/8-14
到过滤器 最大沉孔直径 ∅42
补油过滤油口 "E"
ISO 11926-1 -7/8-14
来自过滤器 最大沉孔直径 ∅42
壳体泄油口 "L2"
ISO 11926-1 -1 1/16-12
最大沉孔直径 ∅48
电气连接说明
Deutsch 插座
CC1
DTM/12 针
电源 (-) 1
2
电源 (+)
传感器 (+) 3
传感器 (-) 4
马达转速输入 (频率) 5
前进输入 (数字) 6
后退输入 (数字) 7
传感器 (+) 8
传感器 (-) 9
驱动踏板输入 (模拟量-常用) 10
驱动踏板输入 (模拟量-冗余)
停止输入 (数字)
12
补油压力工艺口
ISO 11926-1 -5/16-24
补油压力测压口 "M3"
ISO 11926-1 -9/16-18
最大沉孔直径 ∅28
11
CC2
DTM/12 针
寸进输入 (模拟量-冗余) 1
模式开关 B 输入 (数字-常用) 2
马达 PROP/PCOR 输出 (PWM) 3
马达方向输入 (模拟量) 4
传感器 (+) 5
传感器 (-) 6
寸进输入 (模拟量-常用) 7
马达 BPD 输出 (数字) 8
数字输出 B2 (-) 9
数字输出 B1 (+) 10
模式开关 A 输入 (数字) 11
模式开关 B 输入 (数字-冗余) 12
P700 04 327 7F2
Deutsch 插座
CC3
DT/2 针
数字输出 A1 (+) 1
数字输出 A2 (-) 2
Deutsch 插座
CAN
DTM/3 针
CAN 高 1
CAN 低 2
CAN 屏蔽 3
P301 235
P003 547
L1108283 • Rev CB • Aug 2012 45
Page 46

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
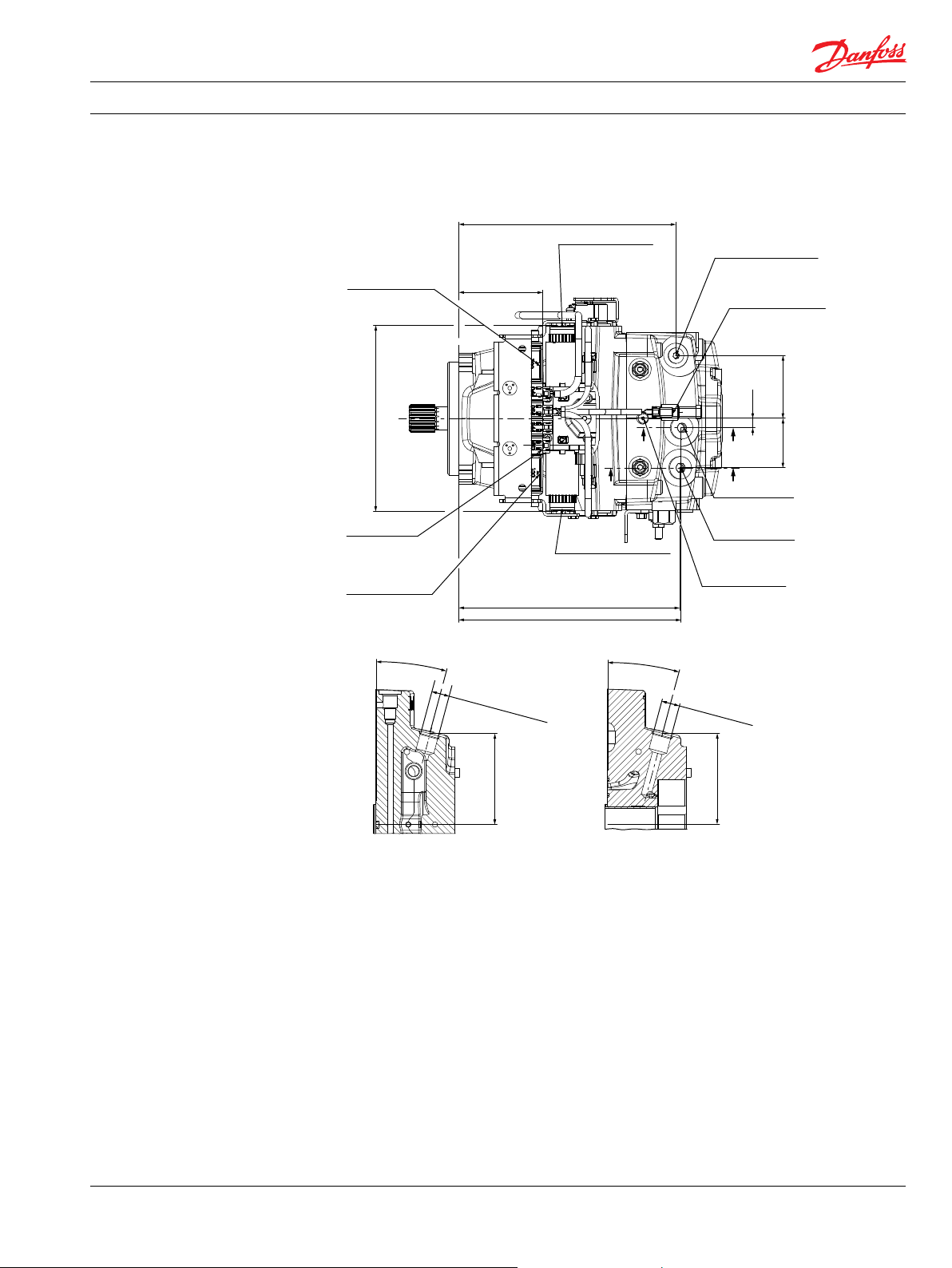
安装图纸
尺寸
伺服测压口 "M4"
ISO 11926-1 -7/16-20
最大沉孔直径 ∅21
系统油口 "B"
∅25.4 - 450bar
分体式法兰油口
标准 ISO 6162
M12 x 1.75
最小全螺纹深度 20
推荐螺栓拧进深度
1.5 x 螺纹直径
补油泵吸油口 "S"
134.53 ±1
ISO 11926-1 -1 5/8-12
112.6 ±1
+0.1
-0.2
最大沉孔直径 ∅69
69
+0.1
-0.2
69
71.6 ±1
Z
4x 27.8
系统油口 "A"
∅25.4 - 450bar
分体式法兰油口
标准 ISO 6162
M12 x 1.75
最小全螺纹深度 20
推荐螺栓拧进深度
1.5 x 螺纹直径
±0.25
8x 13.9
±0.25
8x 28.6 ±0.25
C
C
4x 57.2 ±0.25
295.243 ±2
228.515
228.015
+0.6
-0.5
+0.6
-0.5
162.7 ±1
41.7 ±1
法兰安装面
法兰 127 - 4 标准 ISO 3019-1
未喷漆
壳体压力油口
ISO 11926-1 -1 1/16-12
最大沉孔直径 ∅48
B-B
B
12.45 ±0.25
B
1.5 ±0.5 X45°\5°
R0.8 最大
花键数据齿数 : 14
径节 : 12/24
压力角 : 30°
节圆-∅ : ∅29.633 [∅1.167]
配合形式 : 圆弧齿根, 齿侧定位
标准 : ansi b92.1-1996 等级 6h
28.8 ±1
D
30,38 ±1
+0
-0.05
未喷漆
∅127
26 ±0.13
31.14 ±0.08
壳体泄油口 "L4"
ISO 11926-1 -1 1/16-12
最大沉孔直径 ∅48
D
W
15 ±0.2
147.7 ±1
158.35 ±1
48.1 ±1
联轴器不得超过此面
7.94 ±0.8
50 ±0.2
轴中心线
C-C
95.9 ±0.2
轴中心线
D-D
轴中心线
92 ±0.2
P700 04 327 8F
L1108283 • Rev CB • Aug 201246
Page 47

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
(2:1)
P301 312
安装图纸
尺寸
(续)
壳体压力油口
ISO 11926-1 -1 1/16-12
最大沉孔直径 ∅41
41.7 ±1
162.7 ±1
Y
拆掉堵头
伺服测压口 "M5"
ISO 11926-1 -7/16-20
最大沉孔直径 ∅21
补油压力工艺口
ISO 11926-1 -5/16-24
将造成污染
217.29 ±2.599 ±2
Deutsch 插座
CC3
DT/2 针
数字输出 A1 (+) 1
数字输出 A2 (-) 2
139.176 ±2
0.47
P301 235
控制器插座 "CC3"
Deutsch DT06-2S
免喷漆
Z
2
135.55 ±2
1
X
134.53 ±1
112.6 ±1
111.7 ±1
153.2
28.4
G
G
近似重心位置
壳体泄油口 "L2"
iso 11926-1 -1 1/16-12
最大沉孔直径 ∅48
补油压力测口 "M3"
ISO 11926-1 -9/16-18
最大沉孔直径 ∅28
过滤器之后
G-G
91.5 ±0.2
轴中心线
近似重心位置
P700 04 327 9F
L1108283 • Rev CB • Aug 2012 47
Page 48
产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
P003 545
Deutsch 插座
P301 309
Deutsch 插座
P301 340
P301 342
安装图纸
尺寸
(续)
Deutsch 插座
CAN
DTM/3 针
CAN 高 1
CAN 低 2
CAN 屏蔽 3
控制器插座 "CAN"
Deutsch DTM04-3P
免喷漆
连接时可能要拆掉堵头
1 2 3 4 5 6
控制器插座 "CC1"
Deutsch DTM04-12P -A-
789101112
P301 341
CC1
电源 (-) 1
电源 (+)
传感器 (+) 3
传感器 (-) 4
马达转速输入 (频率) 5
前进输入 (数字) 6
后退输入 (数字) 7
传感器 (+) 8
传感器 (-) 9
驱动踏板输入 (模拟量-常用) 10
驱动踏板输入 (模拟量-冗余)
停止输入 (数字)
免喷漆
DTM/12 针
2
12
11
P003 547
198.97 ±1
195.47 ±1
1
2
3
61.21 ±1 61.21 ±1
30.2 ±1
V
控制器插座 "CC2"
Deutsch DTM04-12P -B-
免喷漆
CC2
DTM/12 针
寸进输入 (模拟量-冗余) 1
模式开关 B 输入 (数字-常用) 2
马达 PROP/PCOR 输出 (PWM) 3
马达方向输入 (模拟量) 4
传感器 (+) 5
传感器 (-) 6
寸进输入 (模拟量-常用) 7
马达 BPD 输出 (数字) 8
数字输出 B2 (-) 9
数字输出 B1 (+) 10
模式开关 A 输入 (数字) 11
模式开关 B 输入 (数字-冗余) 12
1 2 3 4 5 6
789101112
P700 52 604 - 11
L1108283 • Rev CB • Aug 201248
Page 49
产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
安装图纸
尺寸
(续)
控制器插座 "CC2"
Deutsch DTM04-12P -B-
免喷漆
209 最大
控制器插座 "CAN"
Deutsch DTM04-3P
免喷漆
连接时可能要拆掉堵头
控制器插座 "CC1"
Deutsch DTM04-12P -A-
免喷漆
15°
E-E
94.18 ±1
243.664 ±1
手动控制越权 "C2"
向里顶顶杆来移动阀芯 , 可以
使泵排量变到最大 , 如同激活
同侧线圈作用一样
手动控制越权 "C1"
向里顶顶杆来移动阀芯 , 可以
使泵排量变到最大 , 如同激活
同侧线圈作用一样
248.015 ±1
249.515 ±1
Y
系统油口 B 测压口 "MB"
ISO 11926-1 -9/16-18
最大沉孔直径 ∅28
E E
15°
补油过滤油口 "F"
ISO 11926-1 -7/8-14
至过滤器
最大沉孔直径 ∅42
补油过滤油口 "E"
ISO 11926-1 -7/8-14
来自过滤器
最大沉孔直径 ∅42
补油压力工艺口
ISO 11926-1 -5/16-24
F-F
控制器插座 "CC3"
Deutsch DT06-2S
免喷漆
连接时堵头可能要拆掉
70.5 ±1
10.5 ±1
FF
55.5 ±1
补油过滤油口 "E"
ISO 11926-1 -7/8-14
最大沉孔直径 ∅42
来自过滤器
102.1 ±1
补油过滤油口 "F"
iso 11926-1 -7/8-14
最大沉孔直径 ∅42
至过滤器
101.9 ±1
P700 04 327 11F
L1108283 • Rev CB • Aug 2012 49
Page 50
产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
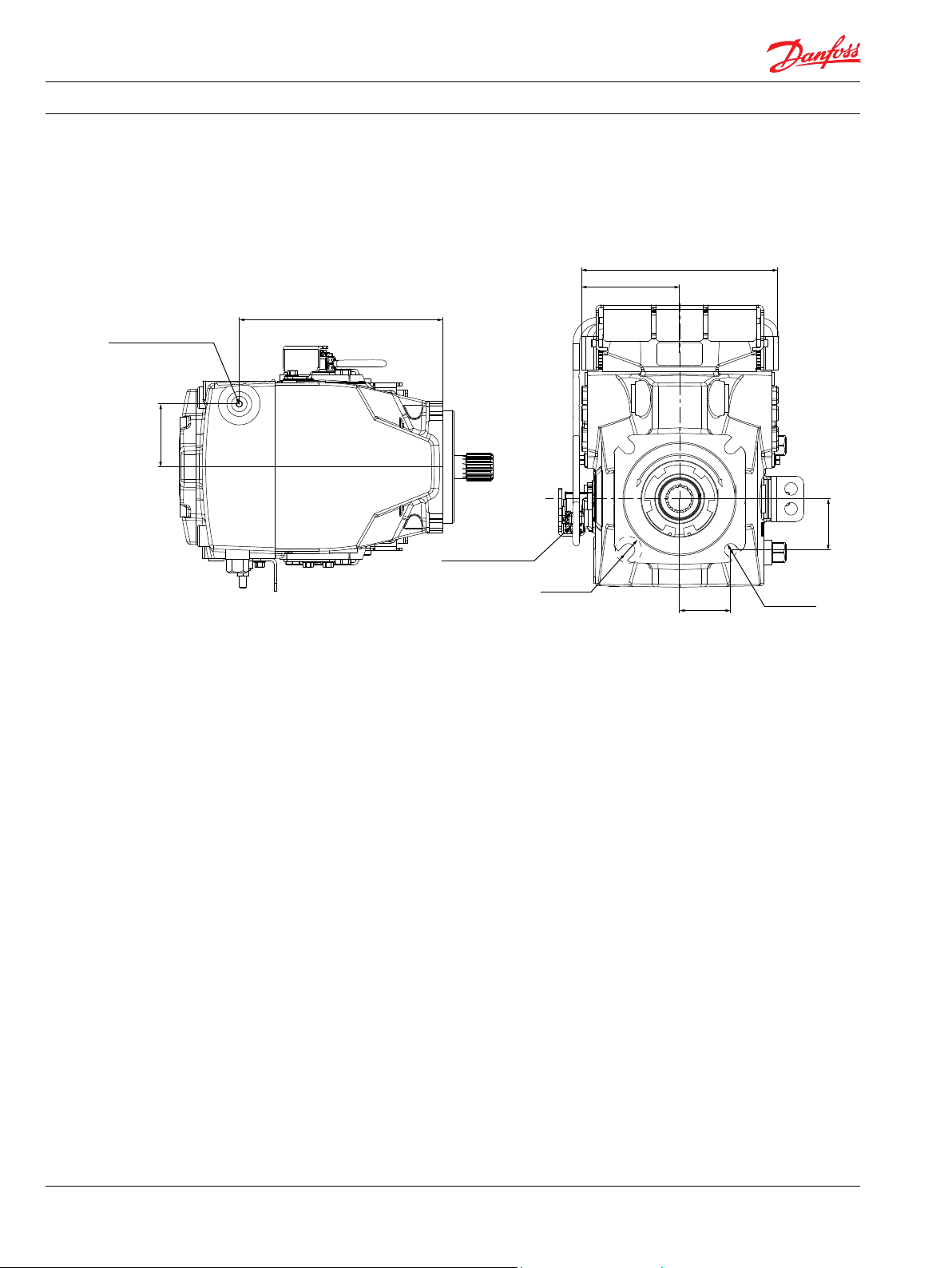
安装图纸
尺寸
(续)
X
220 ±2.5
系统油口A 测压口 "MA"
ISO 11926-1 -9/16-18
最大沉孔直径 ∅28
70.5 ±1
W
228.015 ±1
110 ±1.25
转速传感器插座
Deutsch DTM04-6P
免喷漆
CCW
Rotation
4x ∅30 ±0.25
另一侧螺栓帽(螺母)安装空间
4x 57.25
±0.25
CW
Rotation
4x ∅14.34
+0.3
-0.1
±0.25
4x 57.25
L1108283 • Rev CB • Aug 201250
Page 51

产品样本 H1轴向柱塞泵排量089/100,单泵,带AC控制器与发动机转速相关控制(AC)
L1108283 • Rev CB • Aug 2012 51
Page 52

产品系列:
• 闭式柱塞泵及马达
• 开式柱塞泵
• 弯轴马达
• 静液传动单元
• 摆线马达
• 液压转向器
• 电液转向器
丹佛斯动力系统作为一家全球化的制造商和供应商,生产并提供高质量的液压及电子元
件。我们为客户提供前沿的技术及解决方案,尤其专注于工况恶劣的非公路移动设备领
域。基于我们丰富成熟的应用经验,我们和客户紧密合作,确保采用我们产品的诸多非
公路车辆具备卓越的性能。在全球范围内,我们帮助主机厂加速系统的研发、降低成本
并使机器能更快地进入市场。
丹佛斯动力系统,行走液压领域强有力的合作伙伴。
更多信息,请访问丹佛斯动力系统网站:
powersolutions.danfoss.com
• 比例阀
• 微控制器及软件
• PLUS+1® GUIDE
(图形用户集成开发环境)
• 电手柄及脚踏板
• 显示器
• 传感器
• 搅拌车驱动系统
Comatrol
www.comatrol.com
Schwarzmüller-Inverter
www.schwarzmuellerinverter.com
Turolla
www.turollaocg.com
Valmova
www.valmova.com
Hydro-Gear
www.hydro-gear.com
Daikin-Sauer-Danfoss
www.daikin-sauer-danfoss.com
有非公路车辆作业的地方,就有丹佛斯动力系统。
丹佛斯动力系统是丹佛斯集团的一员。在全球范围内,我们为客户提供专业的技术支持,
最佳解决方案以实现最优的机器性能。通过遍布世界的授权服务网络,针对所有丹佛斯
动力系统的产品,我们为客户提供真正意义上的全球化服务。
请联系:
丹佛斯动力系统(上海)有限公司
中国 上海 浦东新区 金桥出口加工区 金海路1000号, 22号楼
邮政编码:200233
电话:021-3418 5200 传真:021-6495 2622
Danfoss
Danfoss
Power Solutions US Company
2800 East 13th Street
Ames, IA 50010, USA
Phone: +1 515 239 6000
丹佛斯对目录、产品手册和其他出版物中可能存在的错误不承担任何责任。丹佛斯有权不预先通知就更改其产品。这同时也适用于已订购产品,尽管此类更改随后没有任何已认同的说明书中认为是必要
的变化。此类资料中的所有商标都归各自公司。丹佛斯和丹佛斯标志都是丹佛斯集团的商标。归丹佛斯版权所有。
L1108283 • Rev CB • Aug 2012 www.danfoss.com © Danfoss A/S, 2013
Danfoss
Power Solutions GmbH & Co. OHG
Krokamp 35
D-24539 Neumünster, Germany
Phone: +49 4321 871 0
Danfoss
Power Solutions ApS
Nordborgvej 81
DK-6430 Nordborg, Denmark
Phone: +45 7488 2222
Power Solutions
(Shanghai) Co. Ltd.
Building #22, No. 1000 Jin Hai Rd
Jin Qiao, Pudong New District
Shanghai, China 201206
Phone: +86 21 3418 5200
 Loading...
Loading...