

Page 1

■ Contents
AKD 5000
Safety
Safety regulations .................................................................................................... 4
Warning against unintended start ............................................................................. 4
...................................................................................................................... 3
Quick Setup ......................................................................................................... 6
AKD Lon card .......................................................................................................... 8
Introduction ....................................................................................................... 10
Ordering form AKD 5000 Series - Typecode ......................................................... 11
Technical data .................................................................................................. 12
General technical data ........................................................................................... 12
Electrical data ......................................................................................................... 16
Fuses ..................................................................................................................... 22
Mechanical dimensions .......................................................................................... 24
Installation ......................................................................................................... 26
Mechanical installation ........................................................................................... 26
Electrical installation - EMC precautions ................................................................ 33
Electrical installation, selection of EMC-correct cables ........................................... 35
Electrical installation - earthing of control cables .................................................... 36
Electrical installation - mains supply ...................................................................... 37
Safety earthing ....................................................................................................... 37
Extra protection (RCD) ........................................................................................... 37
RFI switch .............................................................................................................. 37
Electrical installation - motor cables ...................................................................... 40
Connection of motor .............................................................................................. 40
Direction of motor rotation ..................................................................................... 40
Electrical installation - brake cable ........................................................................ 41
Electrical installation - relay outputs ...................................................................... 41
Electrical installation - bus connection .................................................................. 42
Electrical installation - control cables ...................................................................... 42
Operation of the AKD ................................................................................... 45
Control panel (LCP) ................................................................................................ 45
Control panel - display ........................................................................................... 45
Control panel - LEDs ............................................................................................. 45
Control panel - control keys ................................................................................... 46
Quick Setup ........................................................................................................... 48
Parameter selection ............................................................................................... 48
Menu mode ........................................................................................................... 49
Initialisation to factory setting .................................................................................. 50
Application configuration .......................................................................... 53
Setting of parameters ............................................................................................ 53
Special functions ............................................................................................ 54
Automatic Motor Adaptation, AMA ........................................................................ 54
MG.50.R4.02 - VLT is a registered Danfoss trademark
1
Page 2

AKD 5000
PID for process control .......................................................................................... 56
Quick discharge ..................................................................................................... 57
Flying start ............................................................................................................. 58
Normal/high overload torque control, open loop .................................................... 59
Programming of Torque limit and stop .................................................................. 60
Programming .................................................................................................... 61
Operation and Display ............................................................................................ 61
Parameters — Load and motor ............................................................................. 67
Parameters — References and limits .................................................................... 76
Parameters — Inputs and outputs ......................................................................... 82
Parameters — Special functions ............................................................................ 92
Parameters — Serial communication ..................................................................... 99
Parameters — Technical functions and ................................................................ 103
Miscellaneous ................................................................................................ 108
Trouble-shooting .................................................................................................. 108
Display - Status messages ................................................................................... 109
Warnings and alarms ........................................................................................... 112
Warnings .............................................................................................................. 113
Index .................................................................................................................... 128
2
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 3
AKD 5000
AKD 5000 Series
Operating instructions
Software version: 1.7x
These operating instructions can be used for all AKD 5000
Series frequency converters with software version 1.7x.
The software version number can be seen from parameter 624.
175ZA871.13
Safety
MG.50.R4.02 - VLT is a registered Danfoss trademark
3
Page 4
The voltage of the frequency converter
is dangerous whenever the equipment
is connected to mains. Incorrect
installation of the motor or the frequency converter
may cause damage to the equipment, serious
personal injury or death.
Consequently, the instructions in this manual,
as well as national and local rules and safety
regulations, must be complied with.
■Safety regulations
1. The frequency converter must be disconnected
from mains if repair work is to be carried out. Check
that the mains supply has been disconnected
and that the necessary time has passed before
removing motor and mains plugs.
2. The [STOP/RESET] key on the control panel of
the frequency converter does not disconnect
the equipment from mains and is thus n
to be used as a safety switch.
3. Correct protective earthing of the equipment
must be established, the user must be protected
against supply voltage, and the motor must be
protected against overload in accordance with
applicable national and local regulations.
4. The earth leakage currents are higher than 3.5 mA.
5. Protection against motor overload is not included
in the factory setting. If this function is desired,
set parameter 128 to data value ETR trip
or data value ETR warning.
ote: The function is initialised at 1.16 x rated
N
motor current and rated motor frequency. For
the North American market: The ETR functions
provide class 20 motor overload protection
in accordance with NEC.
6. Do n
7. Please note that the frequency converter has
ot remove the plugs for the motor and main
supply while the frequency converter is connected
to mains. Check that the mains supply has been
disconnected and that the necessary time has
expired before removing motor and mains plugs.
more voltage inputs than L1, L2 and L3, when
loadsharing (linking of DC intermediate circuit) and
external 24 V DC have been installed. Check
that all voltage inputs have been disconnected
and that the necessary time has passed before
repair work is commenced.
ot
AKD 5000
■Warning against unintended start
1. The motor can be brought to a stop by
means of digital commands, bus commands,
references or a local stop, while the frequency
converter is connected to mains.
If personal safety considerations make it necessary
to ensure that no unintended start occurs, t
stop functions are not sufficient.
2. While parameters are being changed, the
motor may start. Consequently, t
[STOP/RESET] must always be activated, following
which data can be modified.
3. A motor that has been stopped may start if faults
occur in the electronics of the frequency converter,
or if a temporary overload or a fault in the supply
mains or the motor connection ceases.
he stop key
hese
4
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 5

AKD 5000
Warning:
It can be extremely dangerous to touch the electrical parts
even when the mains supply has been disconnected.
Also ensure that other voltage inputs are disconnected
from load sharing through the DC bus.
Wait at least 4 minutes after the input power has been
removed before servicing the drive.
195NA300.10
Safety
MG.50.R4.02 - VLT is a registered Danfoss trademark
5
Page 6

AKD 5000
■Quick Setup
■Introduction to Quick Setup
This Quick Setup will guide you through EMC correct
installation of the frequency converter by connecting
power, motor and control wiring (fig. 1). Start/stop
of motor is to be done with the switch.
Fig. 1
■1. Mechanical Installation
AKD 5000 frequency converters allow side-by-side mounting. The necessary cooling demands a free air
passage of 1
0 cm above and below the frequency converter (5016-5
200-240 V must have 20 cm).
Drill all holes by using the measurements stated in the table. Please note the difference in unit voltage.
Place the frequency converter on the wall. Tighten up all four s
All the below listed measurements are in mm
062 380-500 V and 5008-5027
crews.
AKD type A B C a b
Compact IP 20, 200–240 V (Fig. 4)
5001 - 5003 395 220 160 384 200
5004 - 5006 395 220 200 384 200
5008 560 242 260 540 200
5011 - 5016 700 242 260 680 200
5022 - 5027 800 308 296 780 270
Compact IP 20, 380–500 V (Fig. 4)
5001 - 5005 395 220 160 384 200
5006 - 5011 395 220 200 384 200
5016 - 5022 560 242 260 540 200
5027 - 5032 700 242 260 680 200
Compact IP 54, 200–240 V (Fig. 3)
5001 - 5003 460 282 195 260 258
5004 - 5006 530 282 195 330 258
5008 - 5011 810 350 280 560 326
5016 - 5027 940 400 280 690 375
Compact IP 54, 380–500 V (Fig. 3)
5001 - 5005 460 282 195 260 258
5006 - 5011 530 282 195 330 258
5016 - 5027 810 350 280 560 326
5032 - 5062 940 400 280 690 375
5042 - 5062 800 308 296 780 270
Fig. 2
Fig. 3
Fig. 4
6
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 7
AKD 5000
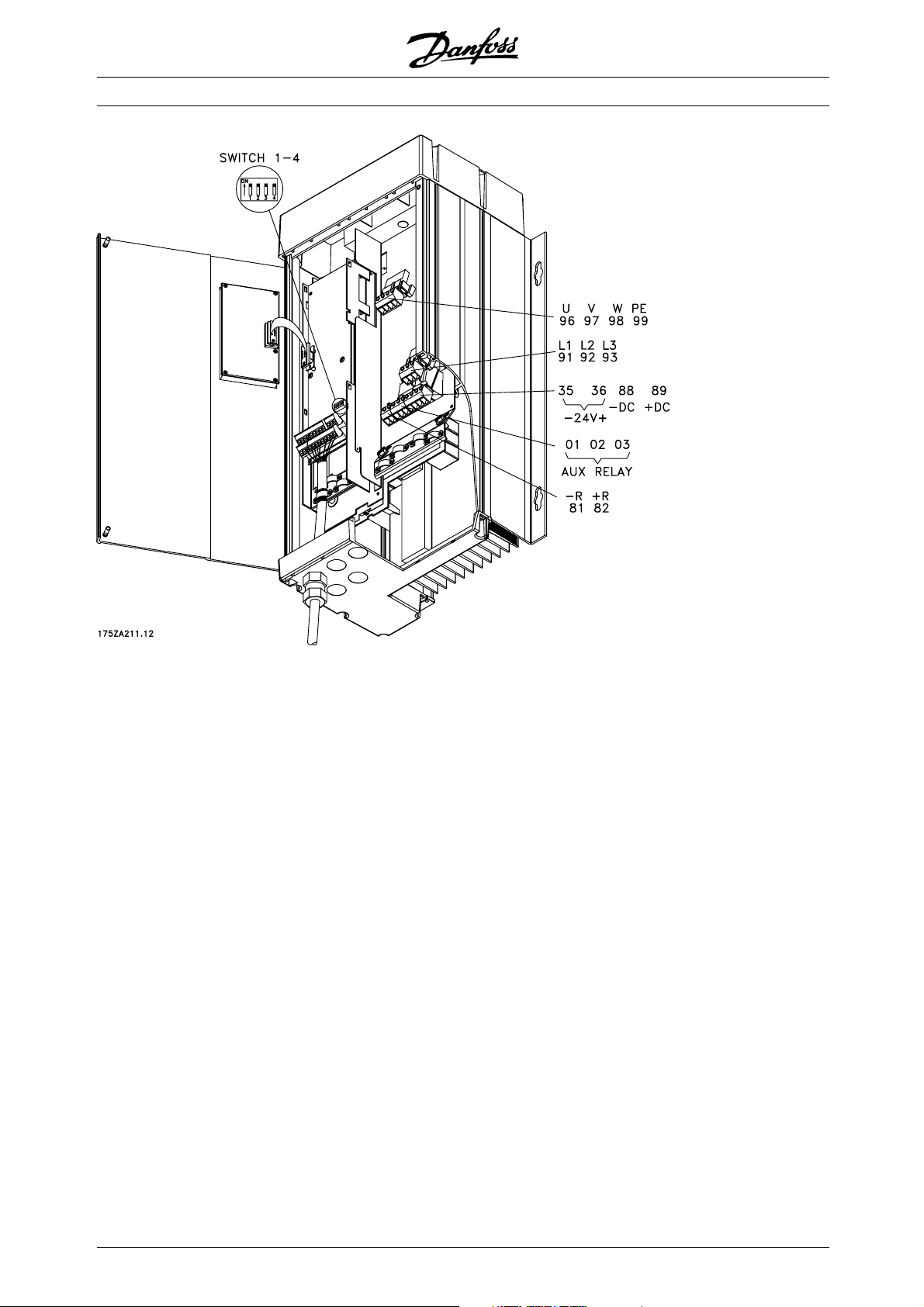
■2. Electrical Installation, power
NOTE: The terminals are detachable on AKD 5001-5006, 200-240 V and AKD 5001-5011, 380-500 V
Connect the mains supply to the mains terminals L1, L2, L3 of the frequency converter and to the earth
connection (fig. 5-8). Cable relief fitting is placed on the wall for Bookstyle units. Mount screened motor
cable to the motor terminals U, V, W, PE of the frequency converter. Make sure, the screen is connected
electrically to the drive.
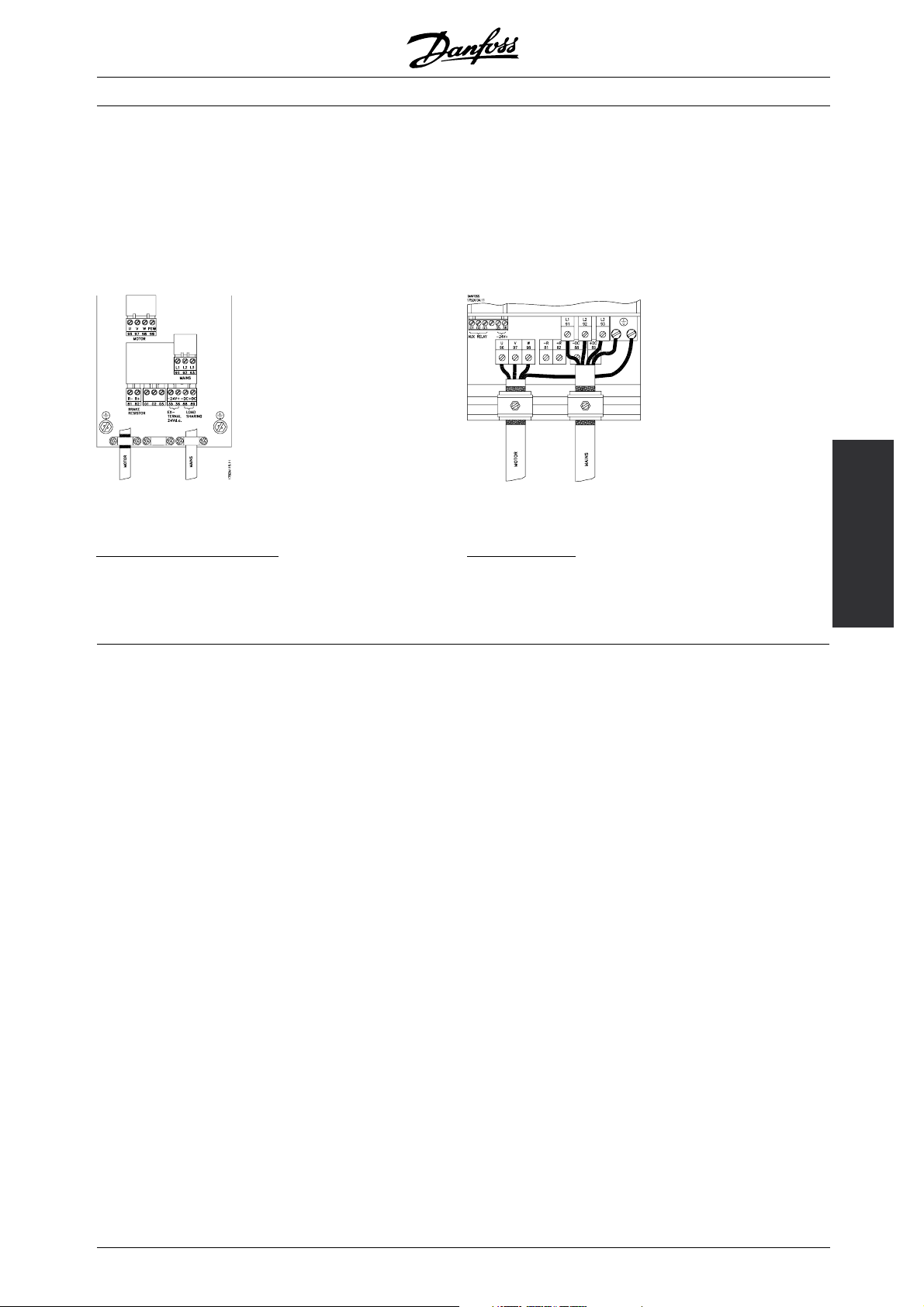
Fig. 6
ompact IP 20 and IP 54
C
5001 - 5011 380 - 500 V
5001 - 5006 200 - 240 V
Fig. 7
ompact IP 20
C
5016 - 5062 380 - 500 V
5008 - 5027 200 - 240 V
Quick
Setup
MG.50.R4.02 - VLT is a registered Danfoss trademark
7
Page 8
■3. Electrical installation, control leads
Use a screw driver to remove the front cover
under the control panel.
NOTE: The terminals are detachable. Connect a
jumber between terminals 12 and 27 (Fig. 10)
Mount screened cable to external start/stop of
control terminals 12 and 18.
AKD 5000
Fig. 10
■4. Programming
The frequency converter is programmed
over the control panel.
Press the QUICK MENU button. The Quick Menu
appears in the display. You choose parameters by
means of arrow up and arrow down. Press the
CHANGE DATA button to change parameter value.
Data values are changed using the up and down
arrows. Press the left or right buttons to move the
cursor. Press OK to save your parameter setting.
Set the desired language in parameter 001. You
have six possibilities: English, German, French,
Danish, Spanish and Italian.
Set the motor parameters according to the motorplate:
Motor power
Motor voltage
Motor frequency
Motor current
Rated motor speed
Parameter 102
Parameter 103
Parameter 104
Parameter 105
Parameter 106
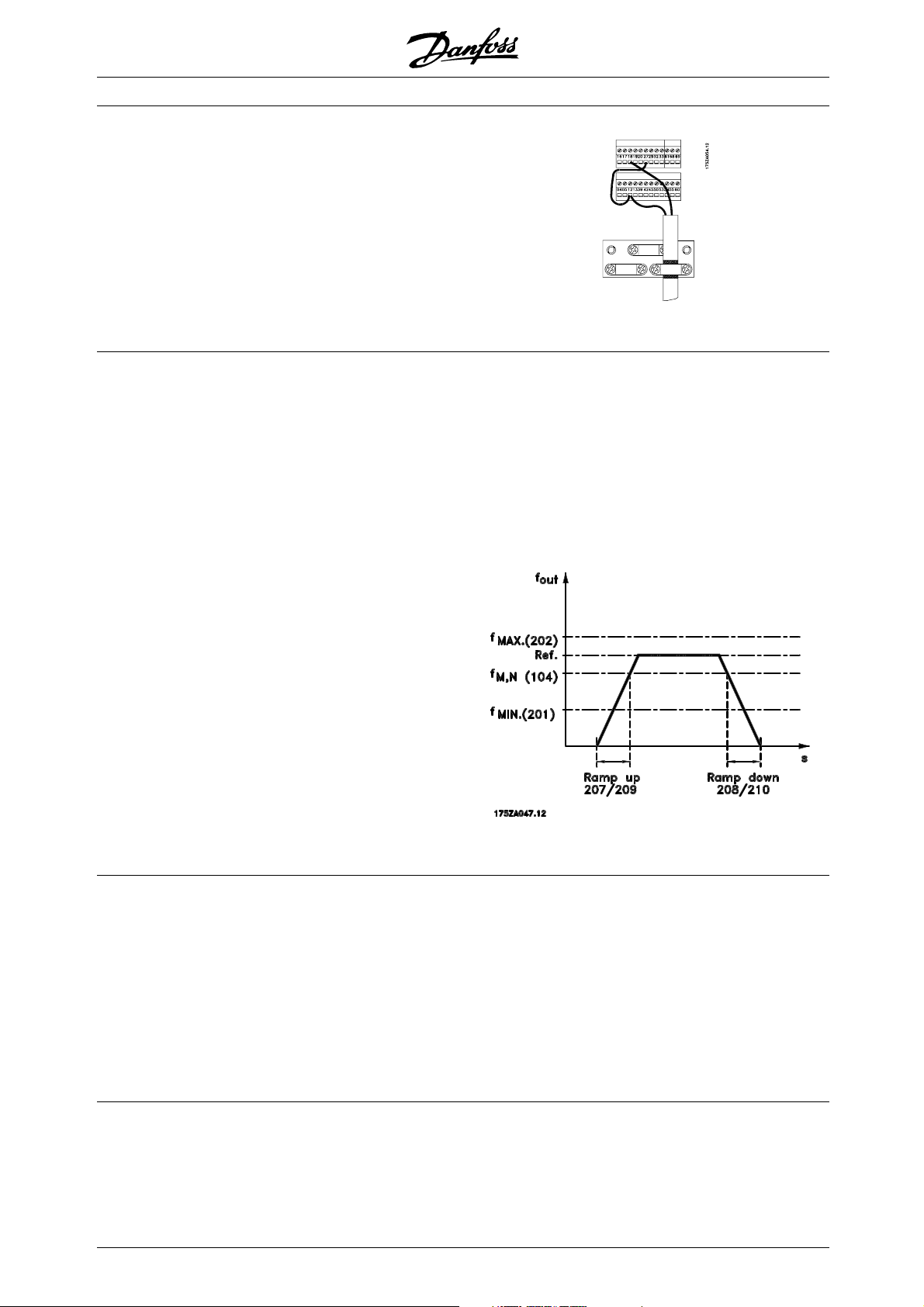
Set frequency interval and ramp times (Fig. 11)
Min. reference
Max. reference
Ramp up time
Ramp down time
Set Operation site, Parameter 002 for Local.
Parameter 204
Parameter 205
Parameter 207
Parameter 208
■5. Motor Start
Press the START button to start the motor. Set motor
speed in Parameter 003. Check if the direction of
rotations is as shown in the display. It can be changed
by swapping two phases of the motor cable.
Press the STOP button to stop the motor.
■AKD Lon card
Requirements:
AKD 2800 must have software version (par
624) 1.32 or higher
AKD 5000 must have software version (par
624) 1.52 or higher
8
Fig. 11
Select total or reduced Automatic Motor Adaption
(AMA) in Parameter 107. For further description of
AMA, see section Automatic Motor Adaption, AMA.
Press the START button to start the Automatic
Motor Adaption (AMA).
Press the DISPLAY/STATUS button to leave
the Quick Menu.
The AKD Lon card is RS485 based and must connect
to an RS485 Adap-Kool Lon network.
The card can be ordered as build-in with the AKD5000
and comes in an external box for the AKD2800.
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 9

AKD 5000
AKD Lon connections:
The Lon card has two connections.
AKD-Connections:
Lon card terminals 1
(Red +24V)
(White or Yellow
A 6-pole connector (only 1-4 is used) that connects
to the AKD. Connections are as follows:
2
3
(Black Com)
(Green TX+, RX+)
TX-, RX-)
AKD terminals 12 69 39 or 20 68
The 3-pole connector for the Lon Communication:
Lon card terminals A(1) B(2) Shield (3)
Adap-Kool Lon A B Shield
Connect the Adap-Kool Lon network to the removable
3-position connector. Be careful to route the network
wires away from the AC power and motor wires.
Commissioning
Upon power up the lower red LED of the double LED’s,
next to the Lon connectors will initially be flashing red.
1. Set AKD address in parameter 500 in
the AKD (1 to 60)
2. Wait for about 1 minute until the red LED
goes off. (card initialisation)
3. Press one of the service pin buttons
4. Wait for about 2 minutes (upload of
parameters to gateway)
5. Perform a "Net configuration" upload in AKM
and you should now find the AKD. Perform an
"AKC description" upload in AKM
6. Go to menu AKC -> Controllers in AKM and
you should find the AKD
4
Quick
Setup
MG.50.R4.02 - VLT is a registered Danfoss trademark
9
Page 10

AKD 5000
■Introduction
These Operating Instructions are a tool intended for persons who are to install, operate and program
the AKD 5000 Series.
When reading these Operating Instructions, you will come across different symbols that require special
attention.
The symbols used are the following:
Indicates a general warning
NB!:
Indicates something to be noted by the reader
Indicates a high-voltage warning
10
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 11

■Ordering form AKD 5000 Series - Typecode
AKD 5000
Introduction
MG.50.R4.02 - VLT is a registered Danfoss trademark
11
Page 12
AKD 5000
■General technical data
Mains supply (L1, L2, L3):
Supply voltage 200-240 V units ....................................................................... 3 x 200/208/220/230/240 V ±10%
Supply voltage 380-500 V units ................................................................ 3 x 380/400/415/440/460/500 V ±10%
Supply frequency ......................................................................................................................... 48/62 Hz +/- 1%
AKD 5001-5011, 380-500 V and AKD 5001-5006, 200-240 V ............................. ±2.0% of rated supply voltage
AKD 5016-5062, 380-500 V and AKD 5008-5027, 200-240 V ............................. ±1.5% of rated supply voltage
True Power factor (λ) .................................................................................................... 0.90 nominal at rated load
Displacement Power Factor (cos ϕ) ............................................................................................ near unity (>0.98)
No. of switchings on supply input L1, L2, L3 ........................................................................ approx. 1 time/min.
See the section on special conditions in the Design Guide
AKD output data (U, V, W):
Output voltage ................................................................................................................ 0-100% of supply voltage
Output frequency .................................................................................................................. 0-132 Hz, 0-1000 Hz
Rated motor voltage, 200-240 V units ............................................................................. 200/208/220/230/240 V
Rated motor voltage, 380-500 V units ............................................................... 380/400/415/440/460/480/500 V
Rated motor frequency ............................................................................................................................ 50/60 Hz
Switching on output ................................................................................................................................ Unlimited
Ramp times .................................................................................................................................... 0.05-3600 sec.
Torque characteristics:
Starting torque, AKD 5001-5027, 200-240 V and AKD 5001-5062, 380-500 V .......................... 160% for 1 min.
Starting torque ............................................................................................................................ 180% for 0.5 sec.
Acceleration torque ........................................................................................................................................ 100%
Overload torque, AKD 5001-5027, 200-240 V and AKD 5001-5062, 380-500 V .......................................... 160%
Arresting torque at 0 rpm (closed loop) ......................................................................................................... 100%
The torque characteristics given are for the frequency converter at the high overload torque level
(160%). At the normal overload torque (110%), the values are lower.
Control card, digital inputs:
Number of programmable digital inputs ................................................................................................................ 8
Terminal nos. .......................................................................................................... 16, 17, 18, 19, 27, 29, 32, 33
Voltage level ......................................................................................................... 0-24 V DC (PNP positive logics)
Voltage level, logical ’0’ ............................................................................................................................ < 5 V DC
Voltage level, logical ’1’ ........................................................................................................................... >10 V DC
Maximum voltage on input ....................................................................................................................... 28 V DC
Input resistance, R
........................................................................................................................................ 2 k
i
Scanning time per input ............................................................................................................................ 3 msec.
Reliable galvanic isolation: All digital inputs are galvanically isolated from the supply voltage (PELV).
In addition, the digital inputs can be isolated from the other terminals on the control card by
connecting an external 24 V DC supply and opening switch 4.
Control card, analogue inputs:
No. of programmable analogue voltage inputs/thermistor inputs .......................................................................... 2
Terminal nos. ............................................................................................................................................... 53, 54
Voltage level ..................................................................................................................... 0 - ±10 V DC (scalable)
Input resistance, R
...................................................................................................................................... 10 k
i
No. of programmable analogue current inputs ................................................................................................... 1
Terminal no. ....................................................................................................................................................... 60
Current range .................................................................................................................... 0/4 - ±20 mA (scalable)
Input resistance, R
...................................................................................................................................... 200
i
Resolution ........................................................................................................................................... 10 bit + sign
12
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 13
AKD 5000
Accuracy on input ........................................................................................................ Max. error 1% of full scale
Scanning time per input ............................................................................................................................ 3 msec.
Terminal no. ground ........................................................................................................................................... 55
Reliable galvanic isolation: All analogue inputs are galvanically isolated from the supply
voltage (PELV) as well as other inputs and outputs.
Control card, pulse/encoder input:
No. of programmable pulse/encoder inputs ......................................................................................................... 4
Terminal nos. ................................................................................................................................... 17, 29, 32, 33
Max. frequency on terminal 17 ...................................................................................................................... 5 kHz
Max. frequency on terminals 29, 32, 33 .................................................................... 20 kHz (PNP open collector)
Max. frequency on terminals 29, 32, 33 .................................................................................... 65 kHz (Push-pull)
Voltage level ......................................................................................................... 0-24 V DC (PNP positive logics)
Voltage level, logical ’0’ ............................................................................................................................ < 5 V DC
Voltage level, logical ’1’ ........................................................................................................................... >10 V DC
Maximum voltage on input ....................................................................................................................... 28 V DC
Input resistance, R
Scanning time per input ............................................................................................................................ 3 msec.
Resolution ........................................................................................................................................... 10 bit + sign
Accuracy (100-1 kHz), terminals 17, 29, 33 ............................................................. Max. error: 0.5% of full scale
Accuracy (1-5 kHz), terminal 17 ............................................................................... Max. error: 0.1% of full scale
Accuracy (1-65 kHz), terminals 29, 33 ..................................................................... Max. error: 0.1% of full scale
Reliable galvanic isolation: All pulse/encoder inputs are galvanically isolated from the supply voltage
(PELV). In addition, pulse and encoder inputs can be isolated from the other terminals on the control
card by connecting an external 24 V DC supply and opening switch 4.
See section on Control cables.
........................................................................................................................................ 2 k
i
Control card, digital/pulse and analogue outputs:
No. of programmable digital and analogue outputs ........................................................................................... 2
Terminal nos. ............................................................................................................................................... 42, 45
Voltage level at digital/pulse output ..................................................................................................... 0 - 24 V DC
Minimum load to ground (terminal 39) at digital/pulse output ...................................................................... 600
Frequency ranges (digital output used as pulse output) ........................................................................... 0-32 kHz
Current range at analogue output ...................................................................................................... 0/4 - 20 mA
Maximum load to ground (terminal 39) at analogue output ......................................................................... 500
Accuracy of analogue output .................................................................................... Max. error: 1.5% of full scale
Resolution on analogue output. ....................................................................................................................... 8 bit
Reliable galvanic isolation: All digital and analogue outputs are galvanically isolated from the
supply voltage (PELV), as well as other inputs and outputs.
Control card, 24 V DC supply:
Terminal nos. ............................................................................................................................................... 12, 13
Max. load (short-circuit protection) ............................................................................................................ 200 mA
Terminal nos. ground .................................................................................................................................. 20, 39
Reliable galvanic isolation: The 24 V DC supply is galvanically isolated from the supply voltage
(PELV), but has the same potential as the analogue outputs.
Control card, RS 485 serial communication:
Terminal nos. ............................................................................................................. 68 (TX+, RX+), 69 (TX-, RX-)
Reliable galvanic isolation: Full galvanic isolation.
data
Technical
MG.50.R4.02 - VLT is a registered Danfoss trademark
13
Page 14

AKD 5000
Relay outputs:
1)
No. of programmable relay outputs ..................................................................................................................... 2
Terminal nos., control card (resistive load only) ...................................................................................... 4-5 (make)
Max. terminal load (AC1) on 4-5, control card ..................................................................... 50 V AC, 1 A, 50 VA
Max. terminal load (DC1 (IEC 947)) on 4-5, control card ............................. 25 V DC, 2 A / 50 V DC, 1 A, 50 W
Max. terminal load (DC1) on 4-5, control card for UL/cUL applications ................ 30 V AC, 1 A / 42.5 V DC, 1A
Terminal nos., power card (resistive and inductive load) ..................................................... 1-3 (break), 1-2 (make)
Max. terminal load (AC1) on 1-3, 1-2, power card .......................................................... 250 V AC, 2 A, 500 VA
Max. terminal load (DC1 (IEC 947)) on 1-3, 1-2, power card ......................... 25 V DC, 2 A / 50 V DC, 1A, 50 W
Min. terminal load (AC/DC) on 1-3, 1-2, power card ................................... 24 V DC, 10 mA / 24 V AC, 100 mA
1) Rated values for up to 300,000 operations.
Atinductiveloadsthenumberofoperationsarereducedby50%,alternativelythecurrentcanbereducedby
50%, thus the 300,000 operations are maintained.
External 24 Volt DC supply:
Terminal nos. ............................................................................................................................................... 35, 36
Voltage range ..................................................................................... 24 V DC ±15% (max. 37 V DC for 10 sec.)
Max. voltage ripple ..................................................................................................................................... 2 V DC
Power consumption ........................................................................... 15 W - 50 W (50 W for start-up, 20 msec.)
Min. pre-fuse ............................................................................................................................................... 6 Amp
Reliable galvanic isolation: Full galvanic isolation if the external 24 V DC supply is also of the PELV type.
Cable lengths, cross-sections and connectors:
Max. motor cable length, screened cable ................................................................................................... 150 m
Max. motor cable length, unscreened cable ............................................................................................... 30
0m
Max. motor cable length, screened cable AKD 5011 380-500 V ................................................................ 100 m
Max. brake cable length, screened cable ...................................................................................................... 20 m
Max. loadsharing cable length, screened c
able .................................. 25 m from frequency converter to DC bar.
Max. cable cross-section for motor, brake and loadsharing, see next section
2
Max. cable cross-section for 24 V external DC supply ............................................................ 4.0 mm
Max. cross-section for control cables ..................................................................................... 1.5 mm
Max. cross-section for serial communication .......................................................................... 1.5 mm
/10 AWG
2
/16 AWG
2
/16 AWG
If UL/cUL is to be complied with, cable with temperature class 60/75°C must be used
(AKD 5001-5062 380-500 V and AKD 5001-5027 2
Accuracy of display readout (parameters 00
9-012):
Motor current [6] 0-140% load ............................................................. Max. error: ±2.0%
00-240 V).
of rated output current
Torque % [7], -100 - 140% load .................................................................... Max. error: ±5% of rated motor size
Output [8], power HP [9], 0-90% load ................................................................. Max. error: ±5% of rated output
14
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 15

AKD 5000
Control characteristics:
Frequency range .................................................................................................................................. 0 - 1000 Hz
Resolution on output frequency ............................................................................................................. ±0.003 Hz
System response time ............................................................................................................................... 3 msec.
Speed, control range (open loop) .................................................................................... 1:100 of synchro. speed
Speed, control range (closed loop) ................................................................................ 1:1000 of synchro. speed
Speed, accuracy (open loop) .......................................................................... < 1500 rpm: max. error ± 7.5 rpm
................................................................................................... >1500 rpm: max. error of 0.5% of actual speed
Speed, accuracy (closed loop) ........................................................................ < 1500 rpm: max. error ± 1.5 rpm
................................................................................................... >1500 rpm: max. error of 0.1% of actual speed
Torque control accuracy (open loop) .............................................. 0- 150 rpm: max. error ±20% of rated torque
.................................................................................................. 150-1500 rpm: max. error ±10% of rated torque
........................................................................................................ >1500 rpm: max. error ±20% of rated torque
Torque control accuracy (speed feedback) ............................................................ Max. error ±5% of rated torque
All control characteristics are based on a 4-pole asynchronous motor
Externals:
Enclosure ............................................................................................................................................. IP 20, IP 54
Vibration test ................................ 0.7 g RMS 18-1000 Hz random. 3 directions for 2 hours (IEC 68-2-34/35/36)
Max. relative humidity ............................................................................... 93 % (IEC 68-2-3) for storage/transport
Max. relative humidity ............................................. 95 % non condensing (IEC 721-3-3; class 3K3) for operation
Aggresive environment (IEC 721 - 3 - 3) ................................................................................. Uncoated class 3C2
Aggresive environment (IEC 721 - 3 - 3) .................................................................................... Coated class 3C3
Ambient temperature IP 20 (high overload torque 160%) ..................... Max. 45°C (24-hour average max. 40°C)
Ambient temperature IP 20 (normal overload torque 110%) .................. Max. 40°C (24-hour average max. 35°C)
Ambient temperature IP 54 (high overload torque 160%) ..................... Max. 40°C (24-hour average max. 35°C)
Ambient temperature IP 54 (normal overload torque 110%) .................. Max. 40°C (24-hour average max. 35°C)
Ambient temperature IP 20/54 AKD 5011 500 V ................................. Max. 40°C (24-hour average max. 35°C)
Derating for high ambient temperature, see the Design Guide
Min. ambient temperature in full operation ....................................................................................................... 0°C
Min. ambient temperature at reduced performance .................................................................................... -10°C
Temperature during storage/transport ........................................................................................... -25 - +65/70°C
Max. altitude above sea level .................................................................................................................... 1000 m
Derating for high air altitude, see the Design Guide
EMC standards applied, Emission ............................................................ EN 50081-1/2, EN 61800-3, EN 55011
EMC standards applied, Immunity ......................... EN 61000-6-2, EN 61000-4-2, EN 61000-4-3, EN 61000-4-4
EN 61000-4-5, EN 61000-4-6, VDE 0160/1990.12
See section on special conditions in the Design Guide.
AKD 5000 Series protection:
• Electronic motor thermal protection against overload.
• Temperature monitoring of heat-sink ensures that the frequency converter cuts out if the temperature
reaches 90°C for IP 20. For IP 54, the cut-out temperature is 80°C. An overtemperature can only
be reset when the temperature of the heat-sink has fallen below 60°C.
• The frequency converter is protected against short-circuiting on motor terminals U, V, W.
• The frequency converter is protected against earth fault on motor terminals U, V, W.
• Monitoring of the intermediate circuit voltage ensures that the frequency converter cuts out if
the intermediate circuit voltage gets too high or too low.
• If a motor phase is missing, the frequency converter cuts out.
• If there is a mains fault, the frequency converter is able to carry out a controlled decelleration.
• If a mains phase is missing, the frequency converter will cut out when a load is placed on the motor.
data
Technical
MG.50.R4.02 - VLT is a registered Danfoss trademark
15
Page 16
AKD 5000
■Electrical data
■Compact, Mains supply 3 x 200 - 240 V
According to international requirements AKD type 5001 5002 5003 5004 5005 5006
Output current IN[A] 3.7 5.4 7.8 10.6 12.5 15.2
I
(60 s) [A] 5.9 8.6 12.5 17 20 24.3
MAX
Output (240 V) SN[kVA] 1.5 2.2 3.2 4.4 5.2 6.3
Typical shaft output PN[kW] 0.75 1.1 1.5 2.2 3.0 3.7
Typical shaft output PN[HP] 1 1.5 2 3 4 5
Max. cable cross-section to motor,
2
brake and loadsharing [mm
]/[AWG]2)
Rated input current (200 V)I
Max. cable
2
cross-section power [mm
]/[AWG]2)
L,N
4/10 4/10 4/10 4/10 4/10 4/10
[A] 3.4 4.8 7.1 9.5 11.5 14.5
4/10 4/10 4/10 4/10 4/10 4/10
Max. pre-fuses [-]/UL1)[A] 16/10 16/10 16/15 25/20 25/25 35/30
Efficiency
Weight IP 20 EB
Compact
3)
0.95 0.95 0.95 0.95 0.95 0.95
[kg] 8 8 8 10 10 10
Weight IP 54 Compact [kg] 11.5 11.5 11.5 13.5 13.5 13.5
Power loss at
max. load.
Enclosure
[W] 58 76 95 126 172 194
IP 20/
IP54
IP 20/
IP54
1. For type of fuse see section Fuses.
2. American Wire Gauge.
3. Measured using 30 m screened motor cables at rated load and rated frequency.
IP 20/
IP54
IP 20/
IP54
IP 20/
IP54
IP 20/
IP54
16
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 17

AKD 5000
■Compact, Mains supply 3 x 200 - 240 V
According to international requirements AKD type 5008 5011 5016 5022 5027
Normal overload torque (110 %):
Output current IN[A] 324661.27388
I
(60 s) [A] 35.2 50.6 67.3 80.3 96.8
MAX
Output (240 V) SN[kVA] 13.3 19.1 25.4 30.3 36.6
Typical shaft output PN[kW] 7.5 11 15 18.5 22
Typical shaft output PN[HP] 10 15 20 25 30
High overload torque (160 %):
Output current IN[A] 25324661.273
I
(60 s) [A] 40 51.2 73.6 97.9 116.8
MAX
Output (240 V) SN[kVA] 1013192530
Typical shaft output PN[kW] 5.5 7.5 11 15 18.5
Typical shaft output PN[HP] 7.5 10 15 20 25
Max. cable cross-section to motor, IP 54 16/6 16/6 35/2 35/2 50/0
brake and loadsharing [mm
Min. cable cross-section to motor,
brake and loadsharing
2
/AWG]
4)
[mm2/AWG]
2)5)
IP 20 16/6 35/2 35/2 35/2 50/0
2)
10/8 10/8 10/8 10/8 16/6
Rated input current (200 V) I
[A] 3246617388
L,N
Max. cable cross-section, IP 54 16/6 16/6 35/2 35/2 50/0
power [mm
2
]/[AWG]
2)5)
IP 20 16/6 35/2 35/2 35/2 50/0
Max. pre-fuses [-]/UL1)[A] 50 60 80 125 125
Pre-fuse SMPS [-]/UL6)) [A] 4.0/4.0 4.0/4.0 4.0/4.0 4.0/4.0 4.0/4.0
Efficiency
3)
0.95 0.95 0.95 0.95 0.95
Weight IP 20 EB [kg] 21 25 27 34 36
Weight IP 54 [kg] 38 40 53 55 56
Power loss at max. load.
- high overload torque
(160 %)
- normal overload
torque (110 %)
Enclosure
[W]
[W]
340 426 626 833 994
426 545 783 1042 1243
IP 20/
IP 54
IP 20/
IP 54
1. For type of fuse see section Fuses
2. American Wire Gauge.
3. Measured using 30 m screened motor cables at rated load and rated frequency.
4. Min. cable cross-section is the smallest cable cross-section allowed to be fitted on the te
20. Always comply with national and local regulations on min. cable cross-section.
2
5. Aluminium cables with cross-section above 35 mm
must be connected by use of a AI-Cu connector.
6. If UL/cUL is to be complied with, Ferraz Shawmut type Y85443, Danfoss ordering no. 6
IP 20/
IP 54
IP 20/
IP 54
IP 20/
IP 54
rminals to comply with IP
12Z1182 must be used.
data
Technical
MG.50.R4.02 - VLT is a registered Danfoss trademark
17
Page 18
AKD 5000
■Compact, Mains supply 3 x 380 - 500 V
According to international requirements AKD type 5001 5002 5003 5004
Output current IN[A] (380-440 V) 2.2 2.8 4.1 5.6
I
(60 s) [A] (380-440 V) 3.5 4.5 6.5 9
MAX
IN[A] (441-500 V) 1.9 2.6 3.4 4.8
I
(60 s) [A] (441-500 V) 3 4.2 5.5 7.7
MAX
Output SN[kVA] (380-440 V) 1.7 2.1 3.1 4.3
SN[kVA] (441-500 V) 1.6 2.3 2.9 4.2
Typical shaft output PN[kW] 0.75 1.1 1.5 2.2
Typical shaft output PN[HP] 1 1.5 2 3
Max. cable cross-section to motor,
2
brake and loadsharing [mm
]/[AWG]2)
4/10 4/10 4/10 4/10
Rated input current I
Max. cable cross-section, power [mm2]/[AWG]
[A] (380 V) 2.3 2.6 3.8 5.3
L,N
I
[A] (460 V) 1.9 2.5 3.4 4.8
L,N
2)
Max. pre-fuses [-]/UL1)[A] 16/6 16/6 16/10 16/10
Efficiency
3)
Weight IP 20 EB Compact [kg] 8 8 8 8.5
Weight IP 54 Compact [kg] 11.5 11.5 11.5 12
Power loss at max. load [W] 55 67 92 110
Enclosure
1. For type of fuse see section Fuses.
2. American Wire Gauge.
3. Measured using 30 m screened motor cables at rated load and rated frequency.
4/10 4/10 4/10 4/10
0.96 0.96 0.96 0.96
IP 20
IP 54
IP 20
IP 54
IP 20
IP 54
IP 20
IP 54
18
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 19

AKD 5000
Compact, Mains supply 3 x 380 - 500 V
According to international requirements AKD type 5005 5006 5008 5011
Output current IN[A] (380-440 V) 7.2 10 13 16
I
(60 s) [A] (380-440 V) 11.5 16 20.8 25.6
MAX
IN[A] (441-500 V) 6.3 8.2 11 14.5
I
(60 s) [A] (441-500 V) 10.1 13.1 17.6 23.2
MAX
Output SN[kVA] (380-440 V) 5.5 7.6 9.9 12.2
SN[kVA] (441-500 V) 5.5 7.1 9.5 12.6
Typical shaft output PN[kW] 3.0 4.0 5.5 7.5
Typical shaft output PN[HP] 4 5 7.5 10
Max. cable cross-section to motor,
2
brake and loadsharing [mm
]/[AWG]2)
4/10 4/10 4/10 4/10
Rated input current I
Max. cable cross-section power [mm2]/[AWG]
[A] (380 V) 7 9.1 12.2 15.0
L,N
I
[A] (460 V) 6 8.3 10.6 14.0
L,N
2)
4/10 4/10 4/10 4/10
Max. pre-fuses [-]/UL1)[A] 16/15 25/20 25/25 35/30
Efficiency
3)
0.96 0.96 0.96 0.96
Weight IP 20 EB Compact [kg] 8.5 10.5 10.5 10.5
Weight IP 54 EB Compact [kg] 12 14 14 14
Power loss at max.
load.
Enclosure
[W]
139 198 250 295
IP 20/
IP 54
1. For type of fuse see section Fuses.
2. American Wire Gauge.
3. Measured using 30 m screened motor cables at rated load and rated frequency.
IP 20/
IP 54
IP 20/
IP 54
IP 20/
IP 54
MG.50.R4.02 - VLT is a registered Danfoss trademark
data
Technical
19
Page 20
AKD 5000
■Compact, Mains supply 3 x 380 - 500 V
According to international requirements AKD type 5016 5022 5027
Normal overload torque (110 %):
Output current IN[A] (380-440 V) 32 37.5 44
I
(60 s) [A] (380-440 V) 35.2 41.3 48.4
MAX
IN[A] (441-500 V) 27.9 34 41.4
I
(60 s) [A] (441-500 V) 30.7 37.4 45.5
MAX
Output SN[kVA] (380-440 V) 24.4 28.6 33.5
SN[kVA] (441-500 V) 24.2 29.4 35.8
Typical shaft output PN[kW] 15 18.5 22
Typical shaft output PN[HP] 20 25 30
High overload torque (160 %):
Output current IN[A] (380-440 V) 24 32 37.5
I
(60 s) [A] (380-440 V) 38.4 51.2 60
MAX
IN[A] (441-500 V) 21.7 27.9 34
I
(60 s) [A] (441-500 V) 34.7 44.6 54.4
MAX
Output SN[kVA] (380-440 V) 18.3 24.4 28.6
SN[kVA] (441-500 V) 18.8 24.2 29.4
Typical shaft output PN[kW] 11 15 18.5
Typical shaft output PN[HP] 15 20 25
Max. cable cross-section to motor, IP 54 16/6 16/6 16/6
brake and loadsharing [mm
Min. cable cross-section to motor,
brake and loadsharing [mm2]/[AWG] 10/8 10/8 10/8
Rated input current I
Max. cable cross-section, IP 54 16/6 16/6 16/6
power [mm
2
]/[AWG] IP 20 16/6 16/6 35/2
Max. pre-fuses [-]/UL1)[A] 63/40 63/50 63/60
Pre-fuse SMPS [-]/UL5)[A] 4.0/4.0 4.0/4.0 4.0/4.0
Efficiency 0.96 0.96 0.96
Weight IP 20 EB [kg] 21 22 27
Weight IP 54 [kg] 41 41 42
Power loss at max. load.
-highoverloadtorque
(160 %)
- normal overload
torque (110 %)
Enclosure
2
]/[AWG]
2) 4)
[A] (380 V) 32 37.5 44
L,N
I
[A] (460 V) 27.6 34 41
L,N
IP 20 16/6 16/6 35/2
[W]
[W]
419 559 655
559 655 768
IP
20/IP54IP20/IP54IP20/IP54
1. For type of fuse see section Fuses.
2. American Wire Gauge.
3. Measured using 30 m screened motor cables at rated load and rated frequency.
4. Min. cable cross-section is the smallest cable cross-section allowed to be fitted on the terminals to comply with IP
20. Always comply with national and local regulations on min. cable cross-section.
5. If UL/cUL is to be complied with, Ferraz shawmut type FA Y85443, Danfoss ordering no. 612Z1182 must be used.
20
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 21
AKD 5000
Compact, Mains supply 3 x 380 - 500 V
According to international requirements AKD type 5032 5042 5052 5062 5072 5102
Normal overload torque (110 %):
Output current IN[A] (380-440 V) 61 73 90 106 147 177
I
(60 s) [A] (380-440 V) 67.1 80.3 99 117 162 195
MAX
IN[A] (441-500 V) 54 65 78 106 130 160
I
(60 s) [A] (441-500 V) 59.4 71.5 85.8 117 143 176
2) 5)
MAX
SN[kVA] (441-500 V) 46.8 56.3 67.5 91.8 113 139
I
(60 s) [A] (380-440 V) 70.7 97.6 116.8 135 159 221
MAX
IN[A] (441-500 V) 41.4 54 65 80 106 130
I
(60 s) [A] (441-500 V) 66.2 86 104 120 159 195
MAX
SN[kVA] (441-500 V) 35.9 46.8 56.3 69.3 92.0 113
150/300
mcm
2
]/[AWG]
2)5)
[A](380V) 607289104145174
L,N
I
[A](460V) 536477104128158
L,N
IP20 35/2 35/2 50/0 50/0
IP20 35/2 35/2 50/0 50/0
[W]
[W]
768 1065 1275 1571 1122 1467
1065 1275 1571 1851 1322 1766
120/250
mcm
150/300
mcm
120/250
mcm
150/300
mcm
120/250
mcm
150/300
mcm
120/250
mcm
Output SN[kVA] (380-440 V) 46.5 55.6 68.6 80.8 102 123
Typical shaft output PN[kW] (500 V) 30 37 45 55 75 90
Typical shaft output PN[HP] (500 V) 40 50 60 75 90 110
High overload torque (160 %):
Output current IN[A] (380-440 V) 44 61 73 90 106 147
Output SN[kVA] (380-440 V) 33.5 46.5 55.6 68.6 73.0 102
Typical shaft output PN[kW] (500 V) 22 30 37 45 75 90
Typical shaft output PN[HP] (500 V) 30 40 50 75 100 120
Max. cable cross-section to motor, IP54 35/2 35/2 50/0 50/0
brake and loadsharing [mm
Min. cable cross-section to motor,
brake and loadsharing [mm2]/[AWG] 10/8 10/8 16/6 16/6 25/4 25/4
Rated input current I
Max. cable cross-section IP54 35/2 35/2 50/0 50/0
2
power[mm
Max. pre-fuses [-]/UL1)[A] 80/80 100/100 125/125 160/150 225/225 250/250
Pre-fuse SMPS [-]/UL6)[A] 4.0/4.0
Efficiency 0.97
WeightIP20EB [kg] 284142 435454
WeightIP54 [kg] 545656 607777
Power loss at max. load.
- high overload torque
(160 %)
- normal overload
torque (110 %)
Enclosure IP 20/IP54
]/[AWG]
1. For type of fuse see section Fuses.
2. American Wire Gauge.
3. Measured using 30 m screened motor cables at rated load and rated frequency.
4. Min. cable cross-section is the smallest cable cross-section allowed to be fitted on the terminals to comply with IP
20. Always comply with national and local regulations on min. cable cross-section.
2
5. Aluminium cables with cross-section above 35 mm
must be connected by use of a AI-Cu connector.
6. If UL/cUL is to be complied with, Ferraz shawmut type FA Y85443, Danfoss ordering no. 612Z1182 must be used.
MG.50.R4.02 - VLT is a registered Danfoss trademark
data
Technical
21
Page 22

AKD 5000
■Fuses
UL compliance
To comply with UL/cUL approvals, pre-fuses according to the table below must be used.
200-240 V
AKD Bussmann SIBA Littel fuse Ferraz-Shawmut
5001 KTN-R10 5017906-010 KLN-R10 ATM-R10 or A2K-10R
5002 KTN-R10 5017906-010 KLN-R10 ATM-R10 or A2K-10R
5003 KTN-R25 5017906-016 KLN-R15 ATM-R15 or A2K-15R
5004 KTN-R20 5017906-020 KLN-R20 ATM-R20 or A2K-20R
5005 KTN-R25 5017906-025 KLN-R25 ATM-R25 or A2K-25R
5006 KTN-R30 5012406-032 KLN-R30 ATM-R30 or A2K-30R
5008 KTN-R50 5014006-050 KLN-R50 A2K-50R
5011 KTN-R60 5014006-063 KLN-R60 A2K-60R
5016 KTN-R85 5014006-080 KLN-R80 A2K-80R
5022 KTN-R125 2028220-125 KLN-R125 A2K-125R
5027 KTN-R125 2028220-125 KLN-R125 A2K-125R
5032 KTN-R150 2028220-160 L25S-150 A25X-150
5042 KTN-R200 2028220-200 L25S-200 A25X-200
5052 KTN-R250 2028220-250 L25S-250 A25X-250
380-500 V
Bussmann SIBA Littel fuse Ferraz-Shawmut
5001 KTS-R6 5017906-006 KLS-R6 ATM -R6 or A6K-6R
5002 KTS-R6 5017906-006 KLS-R6 ATM -R6 or A6K-6R
5003 KTS-R10 5017906-010 KLS-R10 ATM-R10 or A6K-10R
5004 KTS-R10 5017906-010 KLS-R10 ATM-R10 or A6K-10R
5005 KTS-R15 5017906-016 KLS-R16 ATM-R16 or A6K-16R
5006 KTS-R20 5017906-020 KLS-R20 ATM-R20 or A6K-20R
5008 KTS-R25 5017906-025 KLS-R25 ATM-R25 or A6K-25R
5011 KTS-R30 5012406-032 KLS-R30 A6K-30R
5016 KTS-R40 5012406-040 KLS-R40 A6K-40R
5022 KTS-R50 5014006-050 KLS-R50 A6K-50R
5027 KTS-R60 5014006-063 KLS-R60 A6K-60R
5032 KTS-R80 2028220-100 KLS-R80 A6K-180R
5042 KTS-R100 2028220-125 KLS-R100 A6K-100R
5052 KTS-R125 2028220-125 KLS-R125 A6K-125R
5062 KTS-R150 2028220-160 KLS-R150 A6K-150R
5072 FWH-220 2028220-200 L50S-225 A50-P225
5102 FWH-250 2028220-250 L50S-250 A50-P250
KTS-fuses from Bussmann may substitute KTN for 240 V drives.
FWH-fuses from Bussmann may substitute FWX for 240 V drives.
KLSR fuses from LITTEL FUSE may substitute KLNR fuses for 240 V drives.
L50S fuses from LITTEL FUSE may substitute L50S fuses for 240 V drives.
A6KR fuses from FERRAZ SHAWMUT may substitute A2KR for 240 V drives.
A50X fuses from FERRAZ SHAWMUT may substitute A25X for 240 V drives.
NonULcompliance
If UL/cUL is not to be complied with, we recommend the above mentioned fuses or:
22
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 23
AKD 5000
AKD 5001-5027 200-240 V type gG
AKD 5001-5062 380-500 V type gG
AKD 5032-5052 200-240 V type gR
AKD 5072-5102 380-500 V type gR
Not following the recommendation may result
in unnecessary damage of the drive in cas
malfunction. Fuses must be designed for protection
in a circuit capable of supplying a maximum of
100000 A
(symmetrical), 500 V m
rms
eof
aximum.
MG.50.R4.02 - VLT is a registered Danfoss trademark
data
Technical
23
Page 24
AKD 5000
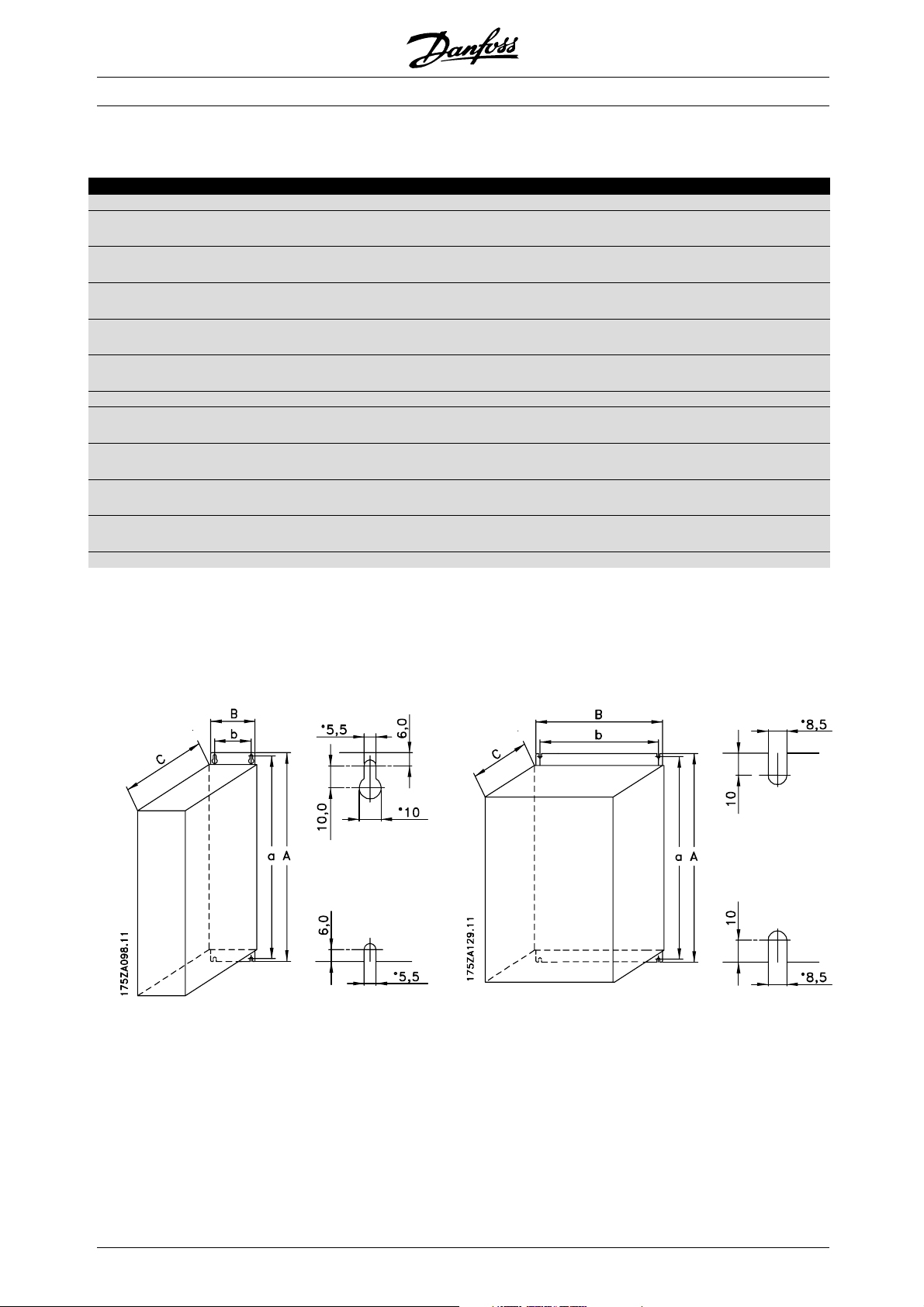
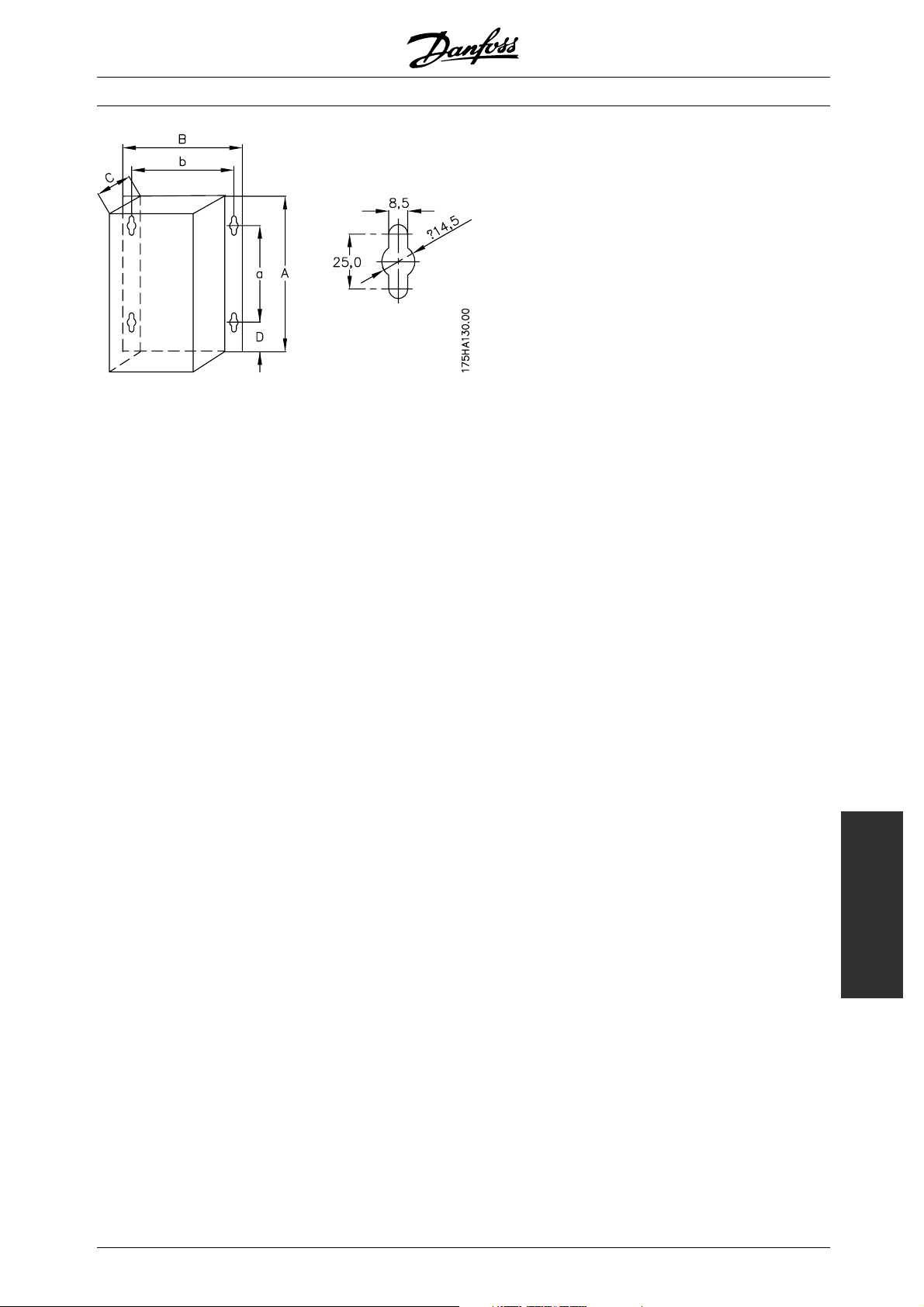
■Mechanical dimensions
All the below listed measurements are in mm.
ABCDabab/beType
Compact IP 20
5001 - 5003 200 - 240 V
5001 - 5005 380 - 500 V
5004 - 5006 200 - 240 V
5006 - 5011 380 - 500 V
5008 200 - 240 V
5016 - 5022 380 - 500 V
5011 - 5016 200 - 240 V
5027 - 5032 380 - 500 V
5022 - 5027 200 - 240 V
5042 - 5062 380 - 500 V
Compact IP 54
5001 - 5003 200 - 240 V
5001 - 5005 380 - 500 V
5004 - 5006 200 - 240 V
5006 - 5011 380 - 500 V
5008 - 5011 200 - 240 V
5016 - 5027 380 - 500 V
5016 - 5027 200 - 240 V
5032 - 5062 380 - 500 V
5072 - 5102 380 - 500 V 800 370 335 780 330 225 D
395 220 160 384 200 100 C
395 220 200 384 200 100 C
560 242 260 540 200 200 D
700 242 260 680 200 200 D
800 308 296 780 270 200 D
460 282 195 85 260 258 100 F
530 282 195 85 330 258 100 F
810 350 280 70 560 326 200 F
940 400 280 70 690 375 200 F
ab: Minimum space above enclosure
be: Minimum space below enclosure
1: Only above enclosure (ab) IP 00 when built in a Rittal cabinet.
■Mechanical dimensions, cont.
Type C, IP20 Type D, IP20
24
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 25
Type F, IP54
AKD 5000
MG.50.R4.02 - VLT is a registered Danfoss trademark
data
Technical
25
Page 26
■Mechanical installation
AKD 5000
Please pay attention to the requirements
that apply to integration and field mounting
kit, see the below list. The information given
in the list must be observed to avoid serious damage
or injury, especially when installing large units.
The frequency converter must be installed vertically.
The frequency converter is cooled by means of air
circulation. For the unit to be able to release its cooling
air, the minimum distance over and below the unit
must be as shown in the illustration below.
To protect the unit from overheating, it must be
ensured that the ambient temperature does not rise
above the max. temperature stated for the frequency
converter and that the 24-hour average temperature is
not exceeded . The max. temperature and 24-hour
average can be seen from the General Technical Data.
If the ambient temperature is in the range of 45°C -55°
C, derating of the frequency converter will become
relevant, see Derating for ambient temperature.
The service life of the frequency converter will
be reduced if derating for ambient temperature
is not taken into account.
■Enclosure type
IP 20/Nema 1 IP 54
Compact OK OK
■Field mounting
IP 20 IP 54
Compact No OK
Compact w/IP 4x top cover
AKD 5001-5006 200 V OK OK
AKD 5001-5011 500 V OK OK
AKD 5001-5011 575 V OK -
Compact w/IP 20 terminal
cover
AKD 5008-5027 200 V OK OK
AKD 5016-5052 500 V OK OK
AKD 5016-5062 575 V OK -
26
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 27
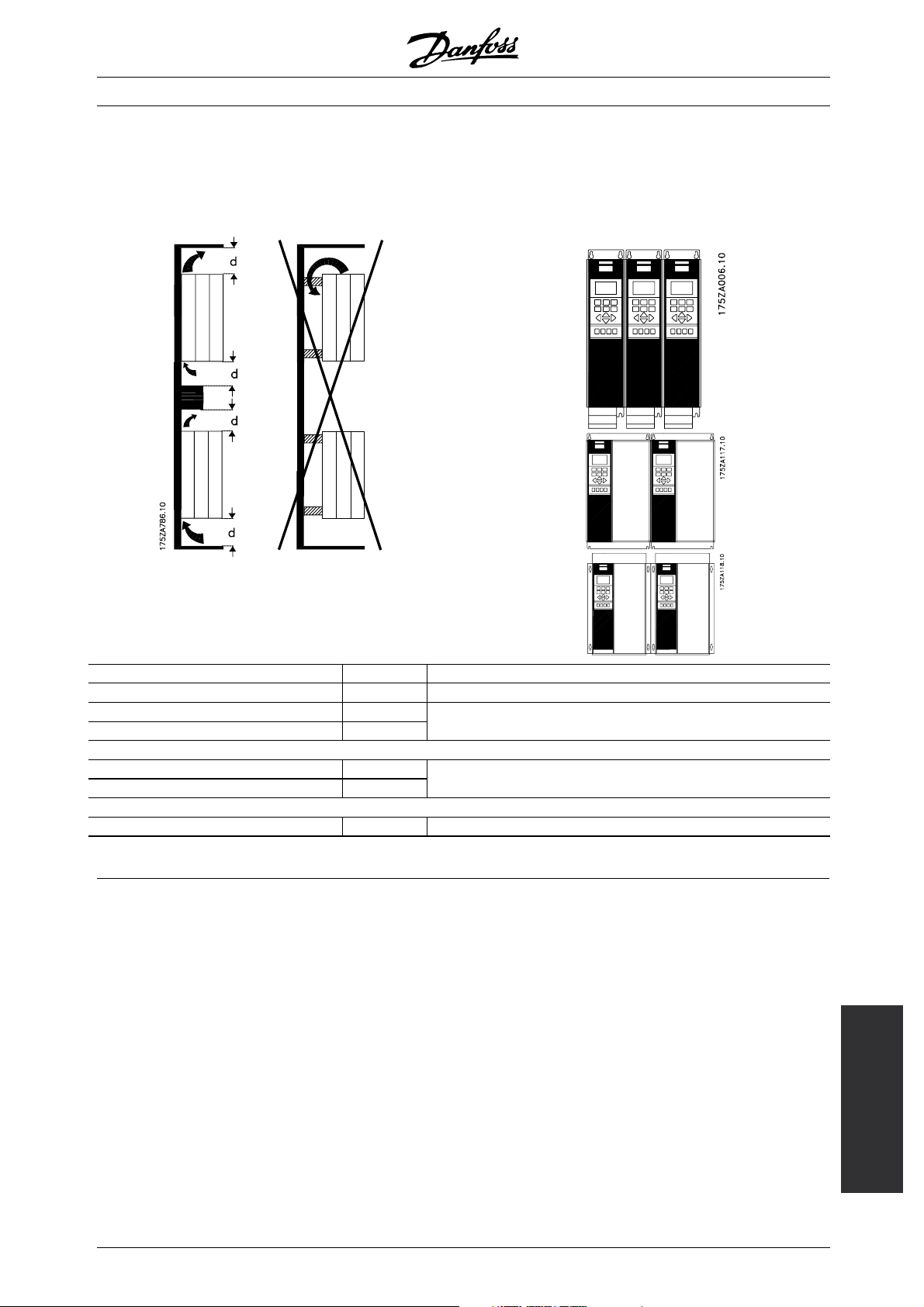
■Installation of AKD 5001-5062
All frequency converters must be installed in a
way that ensures proper cooling.
Cooling
AKD 5000
Side by side/flange by flange
All frequency converters can be mounted side
by side/flange by flange.
All units require a minimum space above and
below the enclosure.
d [mm] Comments
Compact (all enclosure types)
AKD 5001-5006, 200-240 V 100
AKD 5001-5011, 380-500 V 100
AKD 5008-5027, 200-240 V 200
AKD 5016-5062, 380-500 V 200
Installation on a plane, vertical surface (no spacers)
Installation on a plane, vertical surface (no spacers)
AKD 5032-5052, 200-240 V 225 Installation on a plane, vertical surface (no spacers)
MG.50.R4.02 - VLT is a registered Danfoss trademark
Installation
27
Page 28

■Electrical installation
The voltage on the frequency converter is
dangerous when the unit is connected to
mains. Incorrect installation of the motor or
the frequency converter may lead to material damage
or serious injury or it may be fatal. Consequently, the
instructions in this manual as well as national and local
rules and safety regulations must be complied with.
Touching the electrical parts may be fatal, even after
the mains supply has been disconnected.
Using AKD 5001-5006, 200-240 V and 380-500
V: wait at least 4 minutes.
Using AKD 5008-5052, 200-240 V: wait
at least 15 minutes.
Using AKD 5008-5500, 380-500 V: wait
at least 15 minutes.
NB!:
It is the user’s or certified electrician’s
responsibility to ensure correct earthing and
protection in accordance with applicable
national and local norms and standards.
AKD 5000
28
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 29
■Electrical installation, power cables
AKD 5000
Compact IP 20
AKD 5001-5006, 200-240 V
AKD 5001-5011, 380-500 V
AKD 5001-5011, 550-600 V
MG.50.R4.02 - VLT is a registered Danfoss trademark
Installation
29
Page 30
AKD 5000
Compact IP 54
AKD 5001-5006, 200-240 V
AKD 5001-5011, 380-500 V
30
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 31

AKD 5000
Compact IP 20 / IP 54
AKD 5001-5006 200-240 V
AKD 5001-5011 380-500 V
Compact IP 20
AKD 5008-5027 200-240 V
AKD 5016-5062 380-500 V
MG.50.R4.02 - VLT is a registered Danfoss trademark
Installation
31
Page 32

Compact IP 20
AKD 5008-5027 200-240 V
AKD 5016-5062 380-500 V
AKD 5000
Compact IP 54
AKD 5008-5027 200-240 V
AKD 5016-5062 380-500 V
Compact IP 54
AKD 5008-5027 200-240 V
AKD 5016-5062 380-500 V
32
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 33

AKD 5000
■Electrical installation - EMC precautions
The following is a guideline to good engineering
practice, when installing drives. Following these
guidelines is advised, where compliance with EN
50081, EN 55011 or EN 61800-3 First environment
is required. If the installation is in EN 61800-3
Second environment, then it is acceptable to
deviate from these guidelines. It is however not
recommended. See also CE labelling, Emission
and EMC test results under special conditions in
the Design Guide for further details.
ood engineering practice to ensure EMC-correct
G
electrical installation:
• Use only braided screened/armoured motor
cables and braided screened/armoured control
cables. The screen should provide a minimum
coverage of 80%. The screen material must
be metal, not limited to but typically copper,
aluminium, steel or lead. There are no special
requirements for the mains cable.
• Installations using rigid metal conduits are not
required to use screened cable, but the motor
cable must be installed in conduit separate from
the control and mains cables. Full connection
of the conduit from the drive to the motor is
required. The EMC performance of flexible
conduits varies a lot and information from the
manufacturer must be obtained.
• Connect the screen/armour/conduit to earth
atbothendsformotorcablesaswellasfor
control cables. See also Earthing of braided
screened/armoured control cables.
• Avoid terminating the screen/armour with
twisted ends (pigtails). Such a termination
increases the high frequency impedance of the
screen, which reduces its effectiveness at high
frequencies. Use low impedance cable clamps
or EMC cable glands instead.
• It is important to ensure good electrical contact
between the mounting plate on which the frequency
converter is installed and the metal chassis of
the frequency converter. This however does not
apply to IP54 units as they are designed for
wall mounting and AKD 5032-5052, 200-240
VAC in IP20/Nema1 enclosure.
• Use starwashers and galvanically conductive
installation plates to secure good electrical
connections for IP00 and IP20 installations.
• Avoid using unscreened/unarmoured motor
or control cables inside cabinets housing the
drive(s), whenever this can be avoided.
• An uninterrupted high frequency connection
between the frequency converter and the motor
units is required for IP54 units.
The illustration shows an example of an EMC-correct
electrical installation of an IP 20 frequency converter;
the frequency converter has been fitted in an
installation cabinet with an output contactor and
connected to a PLC, which in this example is installed
in a separate cabinet. In AKD 5032-5052, 200-240
VAC in Nema 1/IP20 enclosure screened cables
are connected by using EMC conduits to ensure
proper EMC performance. See illustration. Other
ways of making the installation may have as good
an EMC performance, provided the above guide
lines to engineering practice are followed.
Please note, that when the installation is not carried
through according to the guideline as well as when
unscreened cables and control wires are used, some
emission requirements are not complied with, although
the immunity requirements are fulfilled. See the section
EMC test results in the Design Guide for further details.
Installation
MG.50.R4.02 - VLT is a registered Danfoss trademark
33
Page 34

AKD 5000
34
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 35

■Electrical installation, selection of EMC-
correct cables
Braided screened/armoured cables are recommended
to optimise EMC immunity of the control cables and
the EMC emission from the motor cables.
The ability of a cable to reduce the in- and outgoing
radiation of electric noise depends on the transfer
impedance (Z
). The screen of a cable is normally
T
designed to reduce the transfer of electric noise;
however, a screen with a lower transfer impedance
) value is more effective than a screen with
(Z
T
a higher transfer impedance (Z
).
T
AKD 5000
Transfer impedance (Z
the basis of the following factors:
- The conductibility of the screen material.
- The contact resistance between the individual
screen conductors.
- The screen coverage, i.e. the physical area
of the cable covered by the screen - often
stated as a percentage value.
- Screen type, i.e. braided or twisted pattern.
Aluminium-clad with copper wire.
Twisted copper wire or armoured steel wire cable.
Single-layer braided copper wire with varying
percentage screen coverage.
This is the typical Danfoss reference cable.
Double-layer braided copper wire.
Twin layer of braided copper wire with a magnetic,
screened/armoured intermediate layer.
) can be assessed on
T
Transfer impedance (ZT) is rarely stated by
cable manufacturers, but it is often possible to
estimate transfer impedance (Z
)byassessing
T
the physical design of the cable.
Cablethatrunsincoppertubeorsteeltube.
Lead cable with 1.1 mm wall thickness.
MG.50.R4.02 - VLT is a registered Danfoss trademark
Installation
35
Page 36

■Electrical installation - earthing of control cables
Generally speaking, control cables must be braided
screened/armoured and the screen must be
connected by means of a cable clamp at both
ends to the metal cabinet of the unit.
AKD 5000
Correct earthing
Control cables and cables for serial communication
must be fitted with cable clamps at both ends to
ensure the best possible electrical contact
The drawing below indicates how correct earthing is
carried out and what to be done if in doubt.
Wrong earthing
Do not use twisted cable ends (pigtails), since these
increase the screen impedance at high frequencies.
Protection with respect to earth potential between
PLC and frequency converter
If the earth potential between the frequency converter
and the PLC (etc.) is different, electric noise may
occur that will disturb the whole system. This
problem can be solved by fitting an equalising
cable, to be placed next to the control cable.
2
Minimum cable cross-section: 16 mm
.
For 50/60 Hz earth loops
If very long control cables are used, 50/60 Hz earth
loops may occur. This problem can be solved by
connecting one end of the screen to earth via a
100nF capacitor (keeping leads short).
Cables for serial communication
Low-frequency noise currents between two frequency
converters can be eliminated by connecting one end
of the screen to terminal 61. This terminal is connected
to earth via an internal RC link. It is recommended
to use twisted-pair cables to reduce the differential
mode interference between the conductors.
36
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 37
AKD 5000
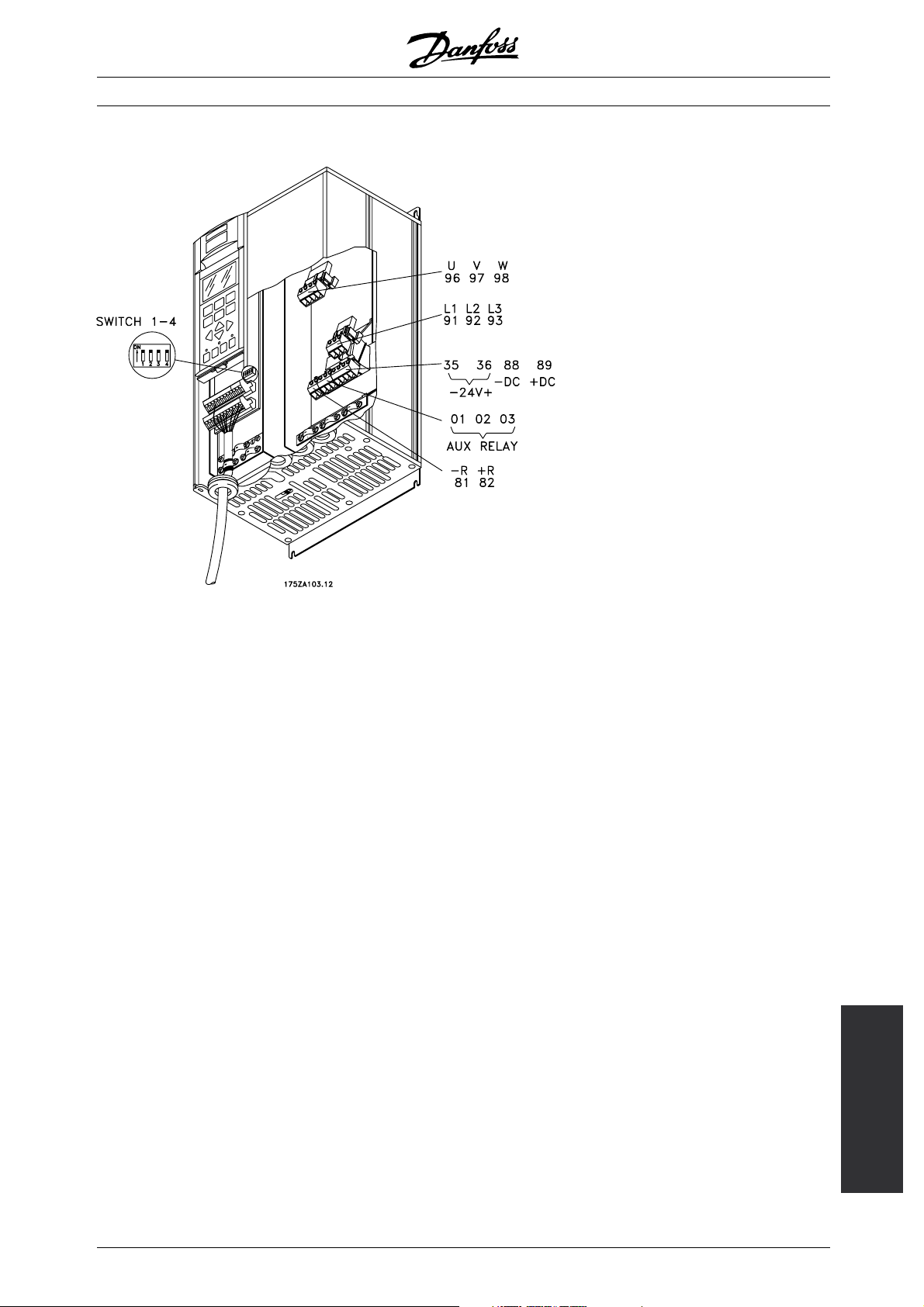
■Tightening-up torques and screw sizes
The table shows the torque required when fitting
terminals to the frequency converter. For AKD
5001-5027 200-240 V, AKD 5001-5102 380-500
V the cables must be fastened with screws.
These figures apply to the following terminals:
Mains terminals Nos 91, 92, 93
L1, L2, L3
Motor terminals Nos 96, 97, 98
U, V, W
Earth terminal No 94, 95, 99
Brake resistor terminals 81, 82
Loadsharing 88, 89
AKD type
3 x 200-240 V
AKD 5001-5006 0.5 - 0.6 Nm M3
AKD 5008-5011 1.8 Nm M4
AKD 5016-5022 3.0 Nm M5
AKD 5027 6.0 Nm M6
AKD 5032-5052 11.3 Nm M8
Tightening-up
torque
■Safety earthing
NB!:
The frequency converter has a high leakage
current and must be earthed appropriately
for safety reasons. Use earth terminal
(see section Electrical installation, power cables),
which enables reinforced earthing.
Apply national safety regulations.
■Motor thermal protection
The electronic thermal relay in UL-approved frequency
converters has received the UL-approval for single
motor protection when parameter 128 has been set for
ETR Trip and parameter 105 has been programmed
to the rated motor current (see motor nameplate).
Screw
size
■Extra protection (RCD)
ELCB relays, multiple protective earthing or earthing
can be used as extra protection, provided that local
safety regulations are complied with.
AKD type
3 x 380-500 V
AKD 5001-5011 0.5 - 0.6 Nm M3
AKD 5016-5027 1.8 Nm M4
AKD 5032-5042 3.0 Nm M5
AKD 5052-5062 4.0 Nm M6
AKD 5072-5102 15 Nm M8
Tightening-up
torque
Screw
Bolt size
■Electrical installation - mains supply
Connect the three mains phases to terminals L
■High voltage test
A high voltage test can be carried out by shortcircuiting terminals U, V, W, L
1,L2
and L3and
energizing by max. 2.15 kV DC for one second
between this short-circuit and the chassis.
NB!:
The RFI switch must be closed (position
ON) when high voltage tests are carried
out (see section RFI Switch).
The mains and motor connection must be interrupted
in the case of high voltage tests of the total installation
if the leakage currents are too high.
1,L2,L3
In the case of an earth fault, a DC content may
develop in the faulty current.
If ELCB relays are used, local regulations must be
observed. Relays must be suitable for protection
of3-phaseequipmentwithabridgerectifierand
for a brief discharge on power-up.
See also the section Special Conditions in
the Design Guide.
.
■RFI switch
ains supply isolated from earth:
M
If the frequency converter is supplied from an isolated
mains source ( IT mains), the RFI switch can be
turned off (OFF). In OFF position, the internal RFI
capacities (filter capacitors) between the chassis and
the intermediate circuit are cut off to avoid damage
to the intermediate circuit and to reduce the earth
capacity currents (according to IEC 61800-3).
NB!:
TheRFIswitchisnottobeoperatedwith
mains connected to the unit. Check that
the mains supply has been disconnected
before operating the RFI switch.
NB!:
Open RFI switch is only allowed at factory
set switching frequencies.
Installation
MG.50.R4.02 - VLT is a registered Danfoss trademark
37
Page 38

NB!:
The RFI switch disconnects the capacitors
galvanically to ground.
The red switches are operated by means of e.g. a
screwdriver. They are set in the OFF position when
they are pulled out and in ON position when they are
pushed in (see drawing below). Factory setting is ON.
Mains supply connected to earth:
The RFI switch must be in ON position in order for the
frequency converter to comply with the EMC-standard.
osition of RFI switches
P
AKD 5000
Compact IP 20/NEMA 1
AKD 5008 200 - 240 V
AKD 5016 - 5022 380 - 500 V
Compact IP 20/NEMA 1
AKD 5001 - 5006 200 - 240 V
AKD 5001 - 5011 380 - 500 V
Compact IP 20/NEMA 1
AKD 5011 - 5016 200 - 240 V
AKD 5027 - 5032 380 - 500 V
38
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 39

AKD 5000
Compact IP 54
AKD 5008 - 5011 200 - 240 V
AKD 5016 - 5027 380 - 500 V
Compact IP 20/NEMA 1
AKD 5022 - 5027 200 - 240 V
AKD 5042 - 5062 380 - 500 V
Compact IP 54
AKD 5001 - 5006 200 - 240 V
AKD 5001 - 5011 380 - 500 V
Compact IP 54
AKD 5016 - 5027 200 - 240 V
AKD 5032 - 5062 380 - 500 V
MG.50.R4.02 - VLT is a registered Danfoss trademark
Installation
39
Page 40

AKD 5000
- and thus the leakage current - increases, and the
cable length must be reduced correspondingly.
■Connection of motor
All types of 3-phased asynchronous standard motors
can be used with the AKD 5000 Series.
Normally, small motors are star-connected
(200/400 V,
Large motors are delta-connected (400/690 V,
/Y).
/Y).
Compact IP 54
AKD 5072 - 5102 380 - 500 V
■Electrical installation - motor cables
NB!:
If an unscreened cable is used, some
EMC requirements are not complied with,
see the Design Guide.
If the EMC specifications regarding emission are
to be complied with, the motor cable must be
screened, unless otherwise stated for the R
in question. It is important to keep the motor cable
as short as possible so as to reduce the noise level
and leakage currents to a minimum.
The motor cable screen must be connected to the
metal cabinet of the frequency converter and to the
metal cabinet of the motor. The scre
are to be made with the biggest possible surface
(cable clamp). This is enabled by different installation
devices in the different freq
Installation with twisted sc
to be avoided, since these spoil the screening
effect at higher frequencies.
If it is necessary to break
motor isolator or motor contactor, the screen must be
continued at the lowest possible HF impedance.
uency converters.
reen ends (pigtails) is
the screen to install a
FI filter
en connections
■Direction of motor rotation
The factory setting is for clockwise rotation with the
frequency transformer output connected as follows.
Terminal 96 connected to U-phase
Terminal 97 connected to V-phase
Terminal 98 connected to W-phase
The direction of motor rotation can be changed by
switching two phases in the motor cable.
The frequency converter has been tested with a given
length of cable and a g
If the cross-section is increased, the cable capacitance
40
iven cross-section of that cable.
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 41

AKD 5000
■Parallel coupling of motors
Frequency converters are able to control several
motors connected in parallel. If the motors are to
have different rpm values, the motors must have
different rated rpm values. Motor rpm is changed
simultaneously, which means that the ratio between
the rated rpm values is maintained across the range.
The total current consumption of the motors is
not to exceed the maximum rated output current
for the frequency converter.
I
N
MI.90.FX.YY and MI.50.SX.YY for further information
regarding safe installation.
NB!:
Please note that voltages up to 1099 V
DC, depending on the supply voltage,
may occur on the terminals.
■Electrical installation - relay outputs
Torque: 0.5 - 0.6 Nm
Screw size: M3
No. Function
1-3 Relay output, 1+3 break, 1+2 make
See parameter 323 of the Operating
Instructions. See also General
technical data.
4, 5 Relay output, 4+5 make See
parameter 326 of the Operating
Instructions.
See also General technical data.
Problems may arise at the start and at low rpm values
if the motor sizes are widely different. This is because
the relatively high ohmic resistance in small motors calls
for a higher voltage at the start and at low rpm values.
In systems with motors connected in parallel, the
electronic thermal relay (ETR) of the frequency
converter cannot be used as motor protection
for the individual motor. Consequently, a
motor protection is required, such as thermistors
in each motor (or individual thermal relays) suitable
for frequency converter use.
Please note that the individual mot
motor must be summed and is not to exceed the
total motor cable length permitted.
■Electrical installation - b rake cable
(Only standard with brake and e
brake. Typecode: SB, EB, DE, PB).
xtended with
dditional
or cable for each
No. Function
81, 82 Brake resistor terminals
The connection cable to the brake resistor must be
screened. Connect the screen by means of cable
clamps to the conductive back plate at the frequency
converter and to the metal cabinet of the brake resistor.
Size the brake cable cross-section to match
the brake torque. See also Brake instructions,
MG.50.R4.02 - VLT is a registered Danfoss trademark
Installation
41
Page 42

■Electrical installation - external fan supply
Torque 0,5-0,6 Nm
Screwsize: M3
Only for IP54 units in the power range AKD 5016-5102,
380-500 V and AKD 5008-5027, 200-240 V AC. If
the drive is supplied by the DC bus (loadsharing), the
internal fans are not supplied with AC power. In this
case they must be supplied with an external AC supply.
AKD 5000
■DIP Switches 1-4
The dipswitch is located on the control card.
It is used for serial communication, terminals 68 and 69.
The switching position shown is the factory setting.
Switch 1 has no function.
Switches 2 and 3 are used for terminating an RS
485 interface, serial communication.
Switch 4 is used for separating the common potential
for the internal 24 V DC supply from the common
potential of the external 24 V DC supply.
NB!:
PleasenotethatwhenSwitch4isinposition
"OFF", the external 24 V DC supply is galvanically
isolated from the frequency converter.
■Electrical installation - bus connection
The serial bus connection in accordance with the RS
485 (2-conductor) norm is connected to terminals
68/69 of the frequency converter (signals P and N).
Signal P is the positive potential (TX+,RX+), while
signal N is the negative potential (TX-,RX-).
If more than one frequency converter is to be
connected to a given master, use parallel connections.
In order to avoid potential equalizing currents in the
screen, the cable screen can be earthed via terminal
61, which is connected to the frame via an RC-link.
■Electrical installation - control cables
All terminals for the control cables are located under
the protective cover of the frequency converter. The
protective cover (see drawing) can be removed by
means of a pointed object - a screwdriver or similar.
us termination
B
The bus must be terminated by a resistor network
at both ends. For this purpose, set switches 2
and 3 on the control card for "ON".
42
Once the protective cover has been removed,
the actual EMC-correct installation can start. See
drawings in the section, EMC correct installation.
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 43

Tightening-up torque: 0.5-0.6 Nm
Screw size: M3
See section earthing of braided screened/armoured
control cables.
AKD 5000
No. Function
12, 13 Voltage supply to digital inputs
For the 24 V DC to be usable
for the digital inputs, switch 4 on
the control card must be closed.
position "ON".
16-33 Digital inputs/encoder inputs
20 Ground for digital inputs
39 Ground for analogue/digital
outputs
42, 45 Analogue/digital outputs for
indicating frequency, reference,
current and torque
50 Supply voltage to potentiometer
and thermistor 10 V DC
53, 54 Analogue reference input, voltage
0-±10V
55 Ground for analogue reference
inputs
60 Analogue reference input, current
0/4-20 mA
61 Termination for serial
communication. See section
Bus connection. This terminal is
normally not to be used.
68, 69 RS 485 interface, serial
communication. Where the
frequency converter is connected
to a bus, switches 2 and 3
(switches 1- 4) must be closed
on the first and the last frequency
converter. On the remaining
frequency converters, switches 2
and 3 must be open. The factory
setting is closed (position "ON").
MG.50.R4.02 - VLT is a registered Danfoss trademark
Installation
43
Page 44
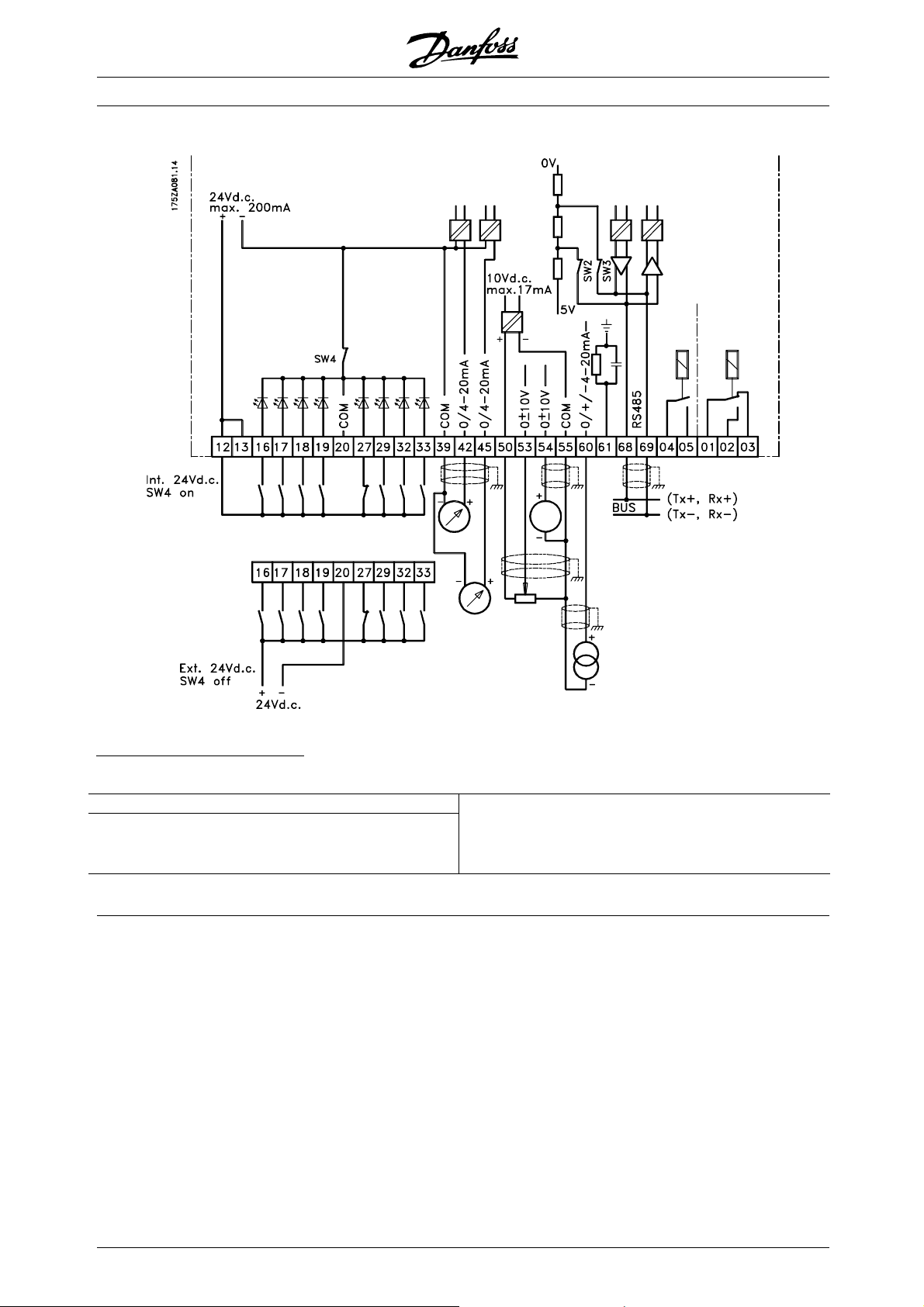
■Electrical installation
AKD 5000
Conversion of analogue
inputs
Current input signal to voltage input
0-20 mA ⇒ 0-10 V
4-20 mA ⇒ 2-10 V
Connect 510 ohms resist
or between input terminal
53 and 55 (terminal 54 and 55) and adjust minimum
and maximum values in parameters 309 and 310
(parameters 312 a
nd 313).
44
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 45

■Control panel (LCP)
The front of the frequency converter features a
control panel - LCP (Local Control Panel), which
makes up a complete interface for operation and
monitoring of the AKD 5000 Series.
The control panel is detachable and can - as an
alternative - be installed up to 3 metres away from
the frequency converter, e.g. on a front panel,
by means of a mounting kit option.
The functions of the control panel can be
divided into three groups:
AKD 5000
AKD
• display
• keys for changing program parameters
• keys for local operation
All data are indicated by means of a 4-line
alpha-numeric display, which in normal operation
is able to show 4 measurements and 3 operating
conditions continuously. During programming, all the
information required for quick, effective parameter
Setup of the frequency converter will be displayed. As
a supplement to the display, there are three LEDs for
voltage (power or 24 V external), warning and alarm.
All program parameters of the frequency converter can
be changed immediately from the control panel, unless
this function has been blocked via parameter 018.
■Control panel - display
The LCD-display has rear lighting and a total of 4
alpha-numeric lines together with a box that shows
the direction of rotation (arrow) and the chosen
Setup as well as the Setup in which programming
is taking place if that is the case.
1st line
2nd line
3rd line
4th line
12345678901234567890
SETUP
12345678
1
12345678901234567890
12345678901234567890
3rd line is normally blank and is used in the menu
mode to show the selected parameter number or
parameter group number and name.
4th line is used in operating status for showing a
status text or in data change mode for showing the
175ZA443.10
mode or value of the selected parameter.
An arrow indicates the direction of rotation of the
motor. Furthermore, the Setup which has been
selected as the Active Setup in parameter 004 is
shown. When programming another Setup than
the Active Setup, the number of the Setup which
is being programmed will appear to the right. This
second Setup number will flash.
Operation of the
1st line shows up to 3 measurements continuously
in normal operating status or a text which
explains the 2 nd line.
2nd line shows a measurement with related
unit continuously, regardless of status (except
in the case of alarm/warning).
MG.50.R4.02 - VLT is a registered Danfoss trademark
■Control panel - LEDs
At the bottom of the control panel is a red
alarm LED and a yellow warning LED, as well
as a green voltage LED.
If certain threshold values are exceeded, the alarm
and/or warning LED lights up together with a status
and alarm text on the control panel.
45
Page 46

The voltage LED is activated when the frequency
converter receives voltage, or 24 V external supply; at
thesametimetherearlightingofthedisplaywillbeon.
■Control panel - control keys
The control keys are divided into functions. This
means that the keys between display and indicator
lamps are used for parameter Setup, including choice
of display indication during normal operation.
Keys for local control are found under the
indicator LEDs.
AKD 5000
[OK] is used for confirming a change of
the parameter selected.
[+/-] is used for selecting parameter and
for changing the chosen parameter or for
changing the read out in line 2.
[<>] is used for selecting group and to
move the cursor when changing numerical
parameters.
[STOP / RESET] is used for stopping
the motor connected or for resetting the
frequency converter after a drop-out (trip).
Can be selected via parameter 014 to be
active or inactive. If stop is activated, line 2
will flash, and [START] must be activated.
[JOG] overrides the output frequency to
a preset frequency while the key is kept
down. Can be selected via parameter 015
to be active or inactive.
[FWD / REV] changes the direction of
rotation of the motor, which is indicated
by means of the arrow on the display
although only in Local. Can be selected
via parameter 016 to be active or inactive.
■Control key functions
[DISPLAY /STATUS] is used for selecting
the mode of display or for changing back
to Display mode from either the Quick
menu mode or the Menu mode.
[QUICK MENU] is used for programming
the parameters that belong under the
Quick menu mode. It is possible to switch
directly between Quick menu mode and
Menu mode.
[MENU] is used for programming all
parameters. It is possible to switch directly
between Menu mode and Quick menu
mode.
[CHANGE DATA ] is used for changing
the parameter selected either in the Menu
mode or the Quick menu mode.
[CANCEL] is used if a change of the
selected parameter is not to be carried
out.
[START] is used for starting the frequency
converter after stop via the "Stop" key. Is
always active, but cannot override a stop
command given via the terminal strip.
B!:
N
If the keys for local control have been
selected as active, they will remain active
both when the frequency has been set for
Local Control and for Remote Control via parameter
002, although with the exception of [Fwd/rev],
which is only active in Local operation.
NB!:
If no external stop function has been selected
and the [Stop] key has been selected as
inactive, the motor can be started and can only
be stopped by disconnecting the voltage to the motor.
■Control panel - display read-outs
The display read-out state can be varied - see the list
below - depending on whether the frequency converter
is in normal operation or is being programmed.
46
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 47

AKD 5000
■Display mode
In normal operation, up to 4 different operating
variables can be indicated continuously: 1.1 and 1.2
and 1.3 and 2, and in line 4 the present operating
status or alarms and warnings that have arisen.
195NA113.10
VAR 1.1 VAR 1.2 VAR 1.3
SETUP
VAR 2
1
STATUS
■Display mode - selection of read-outstate
There are three options in connection with the
choice of read-out state in the Display mode - I, II
and III. The choice of read-out state determines the
number of operating variables read out.
Read-out state: I: II: III:
Line 1 Description
for operating
variable in line
2
Data value for
3operating
variables in line
1
Description for
3operating
variables in line
1
The table below gives the units linked to the variables
in the first and second line of the display.
Operating variable: Unit:
Reference [%]
Reference [unit]
Feedback [unit]
Frequency [Hz]
Frequency x scaling [-]
Motor current [A]
Torque [%]
Power [kW]
Power [HP]
Output energy [kWh]
Motor voltage [V]
DC-link voltage [V]
Motor thermal load [%]
AKD thermal load [%]
Hours run [Hours]
Input status, dig. Input [Binary code]
Input status, analogue terminal 53 [V]
Input status, analogue terminal 54 [V]
Input status, analogue terminal 60 [mA]
Pulse reference [Hz]
External reference [%]
Status word [Hex]
Brake effect/2 min. [kW]
Brake effect/sec. [kW]
Heat sink temp. [ºC]
Alarm word [Hex]
Control word [Hex]
Warning word 1 [Hex]
Extended status word [Hex]
Communication option card warning [Hex]
RPM [min
RPM x scaling [ - ]
-1
]
AKD
Operation of the
Operating variables 1.1 and 1.2 and 1.3 in the first
line, and operating variable 2 in the second line are
selected via parameter 009, 010, 011 and 012.
• Read-out state I:
This read-out state is standard after starting
up or after initialisation.
FREQUENCY
50.0 Hz
MOTOR IS RUNNING
Line 2 gives the data value of an operating variable with
related unit, and line 1 provides a text which explains
line 2, cf. table. In the example, Frequency has
been selected as variable via parameter 009. During
normal operation another variable can immediately
be read out by using the [+/-] keys.
• Read-out state II:
Switching between read-out states I and II is effected
by pressing the [DISPLAY / STATUS] key.
MG.50.R4.02 - VLT is a registered Danfoss trademark
47
Page 48

24.3% 30.2% 13.8A
50.0 Hz
MOTOR IS RUNNING
In this state, data values for four operating values
are shown at the same time, giving the related
unit, cf. table. In the example, Reference, Torque,
Current and Frequency are selected as variables
in the first and second line.
• Read-out state III:
This read-out state can be held as long as the
[DISPLAY/STATUS] key is pressed. When the
key is released, the system switches back to
Read-out state II, unless the key is pressed for
less that approx. 1 sec., in which case the system
always reverts to Read-out state I.
REF% TORQUE CURR A
50.0 Hz
MOTOR IS RUNNING
This is where parameter names and units for operating
variables in the first and second line are given operating variable 2 remains unchanged.
SETUP
1
AKD 5000
a choice between two programming modes - a
Menu mode and a Quick menu mode.
The former provides access to all parameters. The
latter takes the user through a few parameters
which make it possible in most cases to start
operating the frequency converter.
Regardless of the mode of programming, a change
of a parameter will take effect and be visible both in
the Menu mode and in the Quick menu mode.
■Structure for the Quick menu mode versus
the Menu mode
In addition to having a name, each parameter is linked
up with a number which is the same regardless of
the programming mode. In the Menu mode, the
parameters are divided into groups, with the first digit
of the parameter number (from the left) indicating the
group number of the parameter in question.
• The quick menu takes the user through a number
of parameters that may be enough to get the
motor to run nearly optimally, if the factory setting
for the other parameters takes the desired control
functions into account, as well as the configuration
of signal inputs/outputs (control terminals).
• The Menu mode makes it possible to select
and change all parameters at the user’s
option. However, some parameters will
be "missing", depending on the choice of
configuration (parameter 100), e.g. open loop
hides all the P.I.D. parameters.
• Display state IV:
This display state can be produced during operation
if another setup is to be changed without stopping
the frequency converter. This function is activated
in parameter 005, Programming Setup.
24.3% 30.2% 13.8A
50.0 Hz
MOTOR IS RUNNING
The selected programming setup number will flash
to the right of the active setup.
■Parameter Setup
The AKD 5000 Series can be used for practically
all assignments, which is why the number of
parameters is quite large. Also, this series offers
■Quick Setup
The Quick Setup starts with pressing the [QUICK
MENU] key, which brings out the following
read-out on the display:
QUICK MENU 1 OF 13
50.0 HZ
001 LANGUAGE
ENGLISH
At the bottom of the display, the parameter number
and name are given together with the status/value
of the first parameter under Quick Setup. The
first time the [Quick Menu] key is pressed after the
unit has been switched on, the read-outs always
startatpos. 1-seetablebelow.
48
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 49

AKD 5000
■Parameter selection
The selection of parameter is effected by means of the
[+/-] keys. The following parameters are accessible:
Pos.: No.: Parameter: Unit:
1 001 Language
2102Motoroutput [kW]]
3 103 Motor voltage [V]
4 104 Motor frequency [Hz]
5 105 Motor current [A]
6 106 Rated motor speed [rpm]
7 107 Automatic motor adaptation,
AMA
8 204 Minimum reference [Hz]
9 205 Maximum reference [Hz]
10 207 Ramp-up time 1 [sec.]
11 208 Ramp-down time 1 [sec.]
12 002 Local/remote control
13 003 Local reference
■Menu mode
The Menu mode is started by pressing the [MENU
which produces the following read-out on the display:
FREQUENCY
]key,
Group no. Parameter group:
0 Operation & Display
1Load&Motor
2 References & Limits
3 Inputs & Outputs
4 Special functions
5 Serial communication
6 Technical functions
7 Application Options
8 Fieldbus Profile
9 Fieldbus Communication
When the desired parameter group has been
selected, each parameter can be chosen by
means of the [+/-] keys:
FREQUENCY
50.0 Hz
001 LANGUAGE
ENGLISH
The 3rd line of the display shows the parameter
number and name, while the status/value of the
selected parameter are shown in line 4.
AKD
Operation of the
50.0 Hz
0 KEYB.&DISPLAY
Line 3 on the display shows the parameter
group number and name.
■Parameter selection
In the Menu mode the parameters are divided
into groups. Selection of parameter group is
effected by means of the [<>] keys.
The following parameter groups are accessible:
■Changing data
Regardless of whether a parameter has been selected
under the Quick menu or the Menu mode, the
procedure for changing data is the same.
Pressing the [CHANGE DATA] key gives access to
changing the selected parameter, following which the
underlining in line 4 will flash on the display.
The procedure for changing data depends on
whether the selected parameter represents a
numerical data value or a text value.
■Changing a text value
If the selected parameter is a text value, the text
value is changed by means of the [+/-] keys.
FREQUENCY
50.0 Hz
001 LANGUAGE
ENGLISH
MG.50.R4.02 - VLT is a registered Danfoss trademark
49
Page 50

AKD 5000
The bottom display line shows the text value that will be
entered (saved) when acknowledgement is given [OK].
■Change of group of numeric data values
If the chosen parameter represents a numeric
data value, the chosen data value is changed
by means of the [+/-] keys.
FREQUENCY
SETUP
50.0 HZ
102 MOTOR POWER
0.37 KW
FREQUENCY
50.0 HZ
102 MOTOR POWER
0.55 KW
The chosen data value is indicated by the digit flashing.
The bottom display line shows the data value that will
be entered (saved) when signing off with [OK].
1
SETUP
1
SETUP
1
■Changing of data value, step-by-step
Certain parameters can be changed step by step
or infinitely variably. This applies to Motor power
(parameter 102), Motor voltage (parameter 103)
and Motor frequency (parameter 104).
The parameters are changed both as a group
of numeric data values and as numeric data
values infinitely variably.
■Read out and programming of indexed parameters
Parameters are indexed when placed in a rolling stack.
Parameter 615 - 617 contain a historical log which
can be read out. Choose the actual parameter,
press the [CHANGE DATA] key and use the [+] and
[-] keys to scroll through the log of values. During
the read out line 4 of the display will flash.
If a bus option is mounted in the drive, the
programming of parameter 915 - 916 needs to be
carried through in the following way:
Choose the actual parameter, press the [CHANGE
DATA] key and use the [+] and [-] keys to scroll
through the different indexed values. To change the
value of the parameter, select the indexed value and
press the [CHANGE DATA] key. Using the [+] and [-]
keys the value to be changed will flash. To accept the
new setting, press [OK], to abort, press [CANCEL].
■Infinitely variable change of numericdata value
If the chosen parameter represents a numeric data
value, a digit is first selected by means of the [<>] keys.
FREQUENCY
50.0 Hz
130 START FREQUENCY
09.0 HZ
Then the chosen digit is changed infinitely variably
by means of the [+/-] keys:
FREQUENCY
50.0 Hz
130 START FREQUENCY
10.0 HZ
The chosen digit is indicated by the digit flashing. The
bottomdisplaylineshowsthedatavaluethatwillbe
entered (saved) when signing off with [OK].
SETUP
1
SETUP
1
■Initialisation to factory setting
The frequency converter can be initialised to
factory settings in two ways.
nitialisation by parameter 620
I
- Recommended initialisation
• Select parameter 620
• Press [CHANGE]
• Select "Initialisation"
• Press the [OK] key
• Cut off the mains supply and wait until
the display turns off.
• Reconnect the mains supply - the frequency
converter is now reset.
This parameter initialises all except:
500 Serial communication address
501 Baud rate for serial communication
601-605 Operating data
615-617 Fault logs
Manual initialisation
50
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 51

• Disconnect from mains and wait until the
display turns off.
• Press the following keys at the same time:
[Display/status]
[Change data]
[OK]
• Reconnecting the mains supply while
pressing the keys.
• Release the keys
• The frequency converter has now been
programmed for the factory setting.
AKD 5000
AKD
This parameter initialise s all except:
600-605 Operating data
NB!:
Settings for serial communication an
fault logs are reset.
Operation of the
d
MG.50.R4.02 - VLT is a registered Danfoss trademark
51
Page 52

■Menu structure
DISPLAY MODE
VAR 1.1 VAR 1.2 VAR 1.3
▲
VAR 2
STATUS
AKD 5000
▲
▲
MENU MODE
FREQUENCY
50.0 HZ
0 KEYB.&DISPLAY
Choice of
parameter
DATA MODE
FREQUENCY
50.0 HZ
001 LANGUAGE
ENGLISH
▲
Choice of
group
▲
QUICK MENU MODE
QUICK MENU 1 OF 13
▲
▲
▲
50.0 HZ
001 LANGUAGE
ENGLISH
52
DATA CHANGE MODE
FREQUENCY
50.0 HZ
001 LANGUAGE
ENGLISH
175ZA446.11
Choice of
data value
▲
DATA CHANGE MODE
QUICK MENU 1 OF 13
50.0 HZ
001 LANGUAGE
ENGLISH
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 53

AKD 5000
■Application configuration
There is a choice of the following configurations:
Using this parameter enables the choice of a
configuration (setting) of the frequency converter
that fits the application in which the frequency
converter is to be active.
- Speed control, open loop
- Speed control, closed loop
- Process control, closed loop
- Torque control, open loop
NB!:
First,themotornameplatedatemustbe
set in parameters 102-106.
■Setting of parameters
Select Speed control, open loop if a normal
speed adjustment without external feedback
Speed control, open loop:
Parameter:
100 Configuration Speed control, open loop [0]
201 Output frequency low limit Only if [0] or [2] in par. 200
202 Output frequency high limit
203 Reference/feedback range
204 Minimum reference Only if [0] in par. 203
205 Maximum reference
Setting: Data value:
- Torque control, speed feedback
The selection of special motor characteristics can be
combined with any application configuration.
signals is required (the internal slip compensation
is operating) from motor or unit.
Set the following parameters in order shown:
Application
configuration
Select Process control, closed loop if the application
has a feedback signal that is not directly related to
as temperature, pressure, etc. Set the following
parameters in the order shown:
motor speed (rpm/Hz), but some other unit, such
Process control, closed loop (Process PID):
Parameter:
100 Configuration Process control, closed loop [3]
201 Output frequency low limit
202 Output frequency high limit
203 Reference/feedback range
414 Minimum feedback Only if [0] or [2] in par. 200
415 Maximum feedback
204 Minimum reference Only if [0] in par. 203
205 Maximum reference
416 Process units
437 Process PID normal/inverse
439 Process PID start frequency
440 Process PID proportional gain
441 Process PID integration time
444 Process PID lowpass filter
Setting: Data value:
MG.50.R4.02 - VLT is a registered Danfoss trademark
53
Page 54

■Automatic Motor Adaptation, AMA
Automatic motor adaptation is a test algorithm
that measures the electrical motor parameters at
a motor standstill. This means that AMA itself
does not supply any torque.
AMA is useful when commissioning systems, where
the user wants to optimise the adjustment of the
frequency converter to the motor applied. This feature
is used in particular where the factory setting does
not adequately cover the motor in question.
There are two motor parameters that are of primary
significance in automatic motor adaptation: the
stator resistance, Rs, and the reactance at normal
magnetising level, Xs. Parameter 107 allows a choice
of automatic motor adaptation, with determination
of both Rs and Xs, or reduced automatic motor
adaptation with determination of only Rs.
The duration of a total automatic motor adaptation
varies from a few minutes on small motors to more
than 10 minutes on large motors.
Limitations and preconditions:
• For AMA to be able to determine the motor
parameters optimally, the correct nameplate data
for the motor connected to the frequency converter
must be entered in parameters 102 to 106.
• For the best adjustment of the frequency converter,
it is recommended to carry out AMA on a
cold motor. Repeated AMA runs may lead to
a heating of the motor that will result in an
increase of the stator resistance, Rs.
• AMA can only be carried out if the rated motor
current is minimum 35% of the rated output
current of the frequency converter. AMA can be
carried out up to one oversize motor.
• If a LC filter is inserted between the frequency
converter and the motor, it will only be possible
to carry out a reduced test. If an overall
setting is required, remove the LC filter while
running a total AMA. After completion of the
AMA reinsert the LC filter.
• If motors are coupled in parallel only use
reduced AMA if any.
• When using synchronous motors it is only
possible to make a reduced AMA.
• Long motor cables can have an effect on
the implementation of the AMA function
if their resistance is bigger than the stator
resistance of the motor.
AKD 5000
How to perform an AMA
1. Press the [STOP/RESET] key
2. Set motor nameplate data in parameters 102 to 106
3. Select whether a total [ENABLE (RS,XS)]or
a reduced [ENABLE RS] AMA is required
in parameter 107
4. Connect terminal 12 (24 VDC) to terminal
27 on the control card
5. Press the [START] key or connect terminal
18(start)toterminal12(24VDC)tostartthe
automatic motor adaptation.
Now the automatic motor adaptation goes through
four tests (for reduced AMA only the first two tests).
The different tests can be followed in the display as
dots after the text WORKING in parameter 107:
1. Initial error check where nameplate data
and physical errors are checked. Display
shows WORKING.
2. DC test where the stator resistance is estimated.
Display shows WORKING..
3. Transient test where the leakage inductance is
estimated. Display shows WORKING...
4. .AC test where the stator reactance is estimated.
Display shows WORKING....
NB!:
AMA can only be carried out if there are
o alarms during tuning.
n
Discontinue AMA
If the automatic motor adaptation is to be
discontinued, press the [STOP/RESET] key or
disconnect terminal 18 from terminal 12.
The automatic motor adaptation ends up with one
of the following messages after the test:
Warnings and alarm messages
ALARM 21
Auto-optimisation OK
Press the [STOP/RESET] key or disconnect terminal 18
from terminal 12. This alarm indicates that the AMA is
OK and that the drive is correctly adapted to the motor.
ALARM 22
Auto-optimisation not OK
[AUTO MOTOR ADAPT OK]
A fault has been found during automatic motor
adaptation. Press the [STOP/RESET] key or disconnect
terminal 18 from terminal 12. Check the possible
cause to the fault related to the alarm message given.
The figure after the text is the error code, which can be
seen in the fault log in parameter 615. Automatic motor
54
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 55

adaptation does not update parameters. You may
choose to run a reduced automatic motor adaptation.
CHECK P.103,105 [0]
[AUTO MOT ADAPT FAIL] Parameter 102,
103 or 105 has a wrong setting. Correct the
setting and start AMA all over.
LOW P.105 [1]
The motor is too small for AMA to be carried out.
If AMA is to be enabled, the rated motor current
(parameter 105) must be higher than 35% of the
rated output current of the frequency converter.
ASYMMETRICAL IMPEDANCE [2]
AMA has detected an asymmetrical impedance
in the motor connected to the system. The
motor could be defective.
MOTOR TOO BIG [3]
The motor connected to the system is too big for
AMA to be carried out. The setting in parameter
102 does not match the motor used.
MOTOR TOO SMALL [4]
The motor connected to the system is too small for
AMA to be carried out. The setting in parameter
102 does not match the motor used.
TIME OUT [5]
AMA fails because of noisy measuring signals. Try to
start AMA all over a number of times, until AMA is
carried out. Please note that repeated AMA runs may
heat the motor to a level where the stator resistance RS
is increased. In most cases, however, this is not critical.
INTERRUPTED BY USER [6]
AMA has been interrupted by the user.
AKD 5000
WARNING 39 - 42
A fault have been encountered during automatic
motor adaptation. Check the possible fault causes
in accordance with the warning message. Press
the [CHANGE DATA key and select "CONTINUE"
if AMA is to continue despite the warning or press
the [STOP/RESET] key or disconnect terminal 18
from terminal 12 to discontinue AMA.
WARNING: 39
CHECK P.104,106
The setting of parameter 102, 104 or 106
is probably wrong. Check the setting and
choose ‘Continue’ or ‘Stop’.
WARNING: 40
CHECK P.103,105
The setting of parameter 102, 103 or 105
is probably wrong. Check the setting and
choose ‘Continue’ or ‘Stop’.
WARNING: 41
MOTOR TOO BIG
The motor used is probably too big for AMA to
be carried out. The setting in parameter 102
may not match the motor. Check the motor
and choose ‘Continue’ or ‘Stop’.
WARNING: 42
MOTOR TOO SMALL
The motor used is probably too small for AMA
to be carried out. The setting in parameter 102
may not match the motor. Check the motor
and choose ‘Continue’ or ‘Stop’.
Special
functions
INTERNAL FAULT [7]
An internal fault has occurred in the frequency
converter. Contact your Danfoss supplier.
LIMIT VALUE FAULT [8]
The parameter values found for the motor are
outside the acceptable range within which the
frequency converter is able to work.
MOTOR ROTATES [9]
The motor shaft rotates. Make sure that the
load is not able to make the motor shaft rotate.
Then start AMA all over.
MG.50.R4.02 - VLT is a registered Danfoss trademark
55
Page 56

AKD 5000
■PID for process control
eedback
F
The feedback signal must be connected to a terminal
on the frequency converter. Use the list below to
decide which terminal is to be used and which
parameters are to be programmed.
Feedback type Terminal Parameters
Pulse 33 307
Voltage 53 308, 309, 310
Current 60 314, 315, 316
Furthermore, the minimum and maximum feedback
(parameters 414 and 415) must
the process unit that corresponds to the minimum
and maximum value on the terminal.
Select process unit in param
eference
R
A minimum and a maximum reference can be set (204
and 205), which limit the sum of all references. The
reference range cann
If one or several setpoint references are required,
the simplest way is to set such reference directly
in parameters 215
preset references by connecting terminals 16, 17,
29, 32 and/or 33 to terminal 12. Which terminals
that are used
parameters of the various terminals (parameters
300, 301, 305, 306 and/or 307). Use the table
below wh
en selecting preset references.
ot exceed the feedback range.
to 218. Select between the
depends on the choice made in the
be set to a value in
eter 416.
Preset ref. msb Preset ref. lsb
Preset ref. 1
00
(par. 215)
Preset ref. 2
01
(par. 216)
Preset ref. 3
10
(par. 217)
Preset ref. 4
11
(par. 218)
If an external reference is required, this can either
be an analogue or a pulse reference. If current
is used as a feedback signal, only voltage can
be used as an analogue reference. Use the
following list to decide which terminal to use and
which parameters to program.
Reference type Terminal Parameters
Pulse 17 or 29 301 or 305
Voltage 53 or 54 308, 309, 310 or
311, 312, 313
Current 60 314, 315, 316
Relative references can be programmed. A relative
referenceisapercentagevalue(Y)ofthesumof
the external references (X). This percentage value
is added to the sum of the external references,
which produces the active reference (X + XY). See
section Handling of multi references.
If relative references are to be used, parameter 214
is to be se t to Relative [1]. This makes the preset
references relative. Furthermore, Relative reference [4]
can be programmed on terminal 54 and/or 60. If an
external relative reference is selected, the signal on the
input will be a percentage value of the full range of the
terminal. The relative references are added with signs.
NB!:
Terminals that are not in use should preferably
be set to No function [0].
nverse control
I
If the drive has to react with increasing speed on
and increasing feedback, Inverse must be selected in
parameter 437. Normal control means that the motor
speed decreases when the feedback signal increases.
nti Windup
A
The process controller comes with the anti windup
function in active position. This function ensures
that when either a frequency limit or a torque limit
isreached,theintegratorwillbesettoagainthat
corresponds to the actual frequency. This avoids
integrating on an error that cannot in any case be
compensated for by means of a speed change.
tart-up conditions
S
In some applications, optimum setting of the process
controller will mean that it takes an excessive time
for the desired process value to be reached. In
such applications it might be an advantage to fix a
motor frequency to which the frequency converter is
to bring the motor before the process controller is
activated. This is done by programming a Process
PID start frequency in parameter 439.
owpass filter
L
If there are oscillations of the current/voltage feedback
signal, these can be dampened by means of a lowpass
filter. Set a suitable lowpass filter time constant.
This time constant represents the limitfrequency of
the ripples occurring on the feedback signal. If the
lowpass filter has been set to 0.1s, the limit frequency
will be 10 RAD/sec., corresponding to (10/2 x π)=
1.6 Hz. This will mean that all currents/voltages that
vary by more than 1.6 oscillations per second will be
removed by the filter. In other words, control will only
be carried out on a feedback signal that varies by a
56
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 57
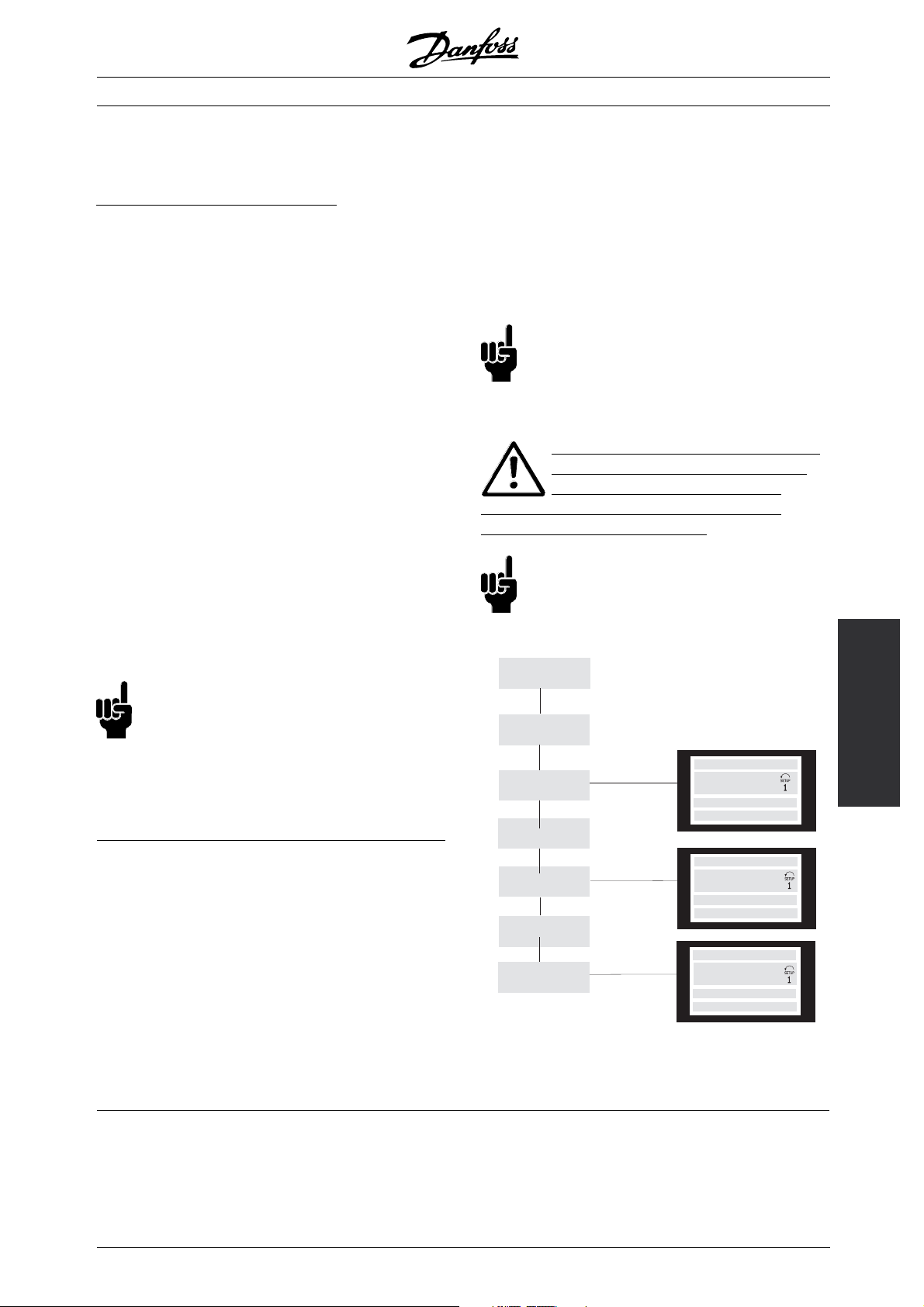
AKD 5000
frequency of less than 1.6 Hz. Choose a suitable time
constant in parameter 444, Process PID Lowpass filter.
O
ptimisation of the process controller
The basic settings have now been made; all that
needstobedoneistooptimisetheproportional
gain, the integration time and the differentiation time
(parameters 440, 441, 442). In most processes, this
can be done by following the guidelines given below.
1. Start the motor
2. Set parameter 440 (proportional gain) to 0.3 and
increase it until the feedback signal again begins
to vary continuously. Then reduce the value until
the feedback signal has stabilised. Now lower
the proportional gain by 40-60%.
3. Set parameter 441 (integration time) to 20s
and reduce the value until the feedback signal
again begins to vary continuously. Increase the
integration time until the feedback signal stabilises,
followed by an increase of 15-50%.
4. Only use parameter 442 for very fast-acting
systems only (differentiation time). The typical
value is four times the set integration time. The
differentiator should only be used when the
setting of the proportional gain and the integration
time has been fully optimised.
NB!:
If necessary, start/stop can be activated
a number of times in order to provoke a
variation of the feedback signal.
See also the examples of connection given
in the Design Guide.
■Quick discharge
This function calls for a frequency converter of type
EB. This function is used for discharging the capacitors
in the intermediate circuit after the mains supply
has been interrupted. This is a useful function for
servicing the frequency converter and/or the motor
installation. The motor must be stopped before
quick discharge is activated. If the motor acts as a
generator, quick discharge is not possible.
intermediate circuit voltage has dropped to a given
value and the rectifier has stopped.
In order to obtain the possibility of a quick discharge,
the frequency converter requires an external 24 V DC
supply to terminals 35 and 36, as well as a suitable
brake resistor on terminals 81 and 82.
For sizing of the discharge resistor for quick discharge,
see Brake Instructions MI.50.DX.XX.
NB!:
Quick discharge is only possible if the
frequency converter has 24 Volts external
DC supply and if an external brake/discharge
resistor has been connected.
Before servicing the installation (frequency
converter + motor), it must be checked
that the intermediate circuit voltage
is below 60 V DC. This is done by measuring
terminals 88 and 89, load-sharing.
NB!:
The power dissipation during quick discharge
does not form part of the power monitoring
function, parameter 403. When sizing resistors,
this fact should be taken into consideration.
Parameter 408 = [1]
Quick discharge
activated
Check 24 Volts
external DC supply
24 Volts external
DC supply OK
Start
Quick discharge
Discharge
Discharge completed
175ZA447.10
No 24 Volts external
DC supply
Timeout
TRIP (RESET)
ALARM:33
Q.DISCHARGING FAILED
TRIP (RESET)
ALARM:33
Q.DISCHARGING FAILED
POWER IS DISCHARGED
Special
functions
The quick discharge function can be selected via
parameter 408. The function starts when the
■Mains failure/quick discharge with mains
failure inverse
The first column in the table shows Mains failure ,
which is selected in parameter 407. If no function
MG.50.R4.02 - VLT is a registered Danfoss trademark
is selected, the mains failure procedure will not be
carried out. If Controlled ramp-down [1] is selected,
the frequency converter will take the motor down to 0
Hz. If Enable [1] has been selected in parameter 408,
57
Page 58

AKD 5000
a quick discharge of the intermediate circuit voltage
will be carried out after the motor has stopped.
Using a digital input, it is possible to activate mains
failure and/or quick discharge. This is done by
selecting Mains failure inverse on one of the control
NB!:
The frequency converter can be completely
damaged if the Quick-discharge function
is repeated, using the digital input
while mains voltage is on.
terminals (16, 17, 29, 32, 33). Mains failure inverse
is active in the logical ’0’ situation.
Mains failure par.
407
No function [0] Disable [0] Logical ’0’ 1
No function [0] Disable [0] Logical ’1’ 2
No function [0] Enable [1] Logical ’0’ 3
No function [0] Enable [1] Logical ’1’ 4
[1]-[4] Disable [0] Logical ’0’ 5
[1]-[4] Disable [0] Logical ’1’ 6
[1]-[4] Enable [1] Logical ’0’ 7
[1]-[4] Enable [1] Logical ’1’ 8
Function no. 1
Mains failure and quick discharge are not active.
F
unction no. 2
Mains failure and qu
Quick discharge par. 408 Mains failure inverse digital
input
Quick discharge and mains failure function are activated
when the intermediate circuit level drops to a given level.
First the mains fai
subsequently there will be a quick discharge.
ick discharge are not active.
lure function will be active;
Function
F
unction no. 3
The digital input activates the quick discharge function,
regardless of the intermediate circuit voltage level and
regardless of w
unction no.
F
hether the motor is running.
4
Quick discharge is activated when the intermediate
circuit voltage has dropped to a given value and
the inverte
rs have stopped. See procedure
on previous page.
unction no. 5
F
The digital input activates the mains failure function,
ess of whether the unit receives any supply
regardl
voltage. See the different functions in parameter 407.
unction no. 6
F
The mains failure function is activated when the
mediate circuit voltage has dropped to a given
inter
value. The selected function in case of mains
failure is selected in parameter 407.
unction no. 7
F
igital input activates both the quick discharge
The d
and the mains failure function, regardless of the
intermediate circuit voltage level and regardless
f whether the motor is running. First the mains
o
failure function will be active; subsequently there
will be a quick discharge.
■Flying start
This function makes it possible to "catch" a motor that
is spinning fr
eely and for the frequency converter to
take control of the motor speed. This function can
be enabled or disabled via parameter 445.
If flying start has been selected, there will be four
ons in which the function is activated:
situati
1. After a c
oast has been given via terminal 27.
2. After power-up.
3. If the frequency converter is in a trip state and
aresets
ignal has been given.
4. If the frequency converter releases the motor
because of a fault state and the fault disappears
a trip, the frequency converter will catch
before
the motor and go back to the reference.
1. Flying start is active.
unction no. 8
F
58
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 59

2. Flying start is active.
The search sequence for the spinning motor depends
on Rotation, frequency/direction (parameter 200). If
only clockwise is selected, the frequency converter will
start looking from Maximum frequency (parameter 202)
down to 0 Hz. If the frequency converter does not find
the spinning motor during the search sequence, it will
carryoutaDCbrakingsoastotrytobringthespeed
of the spinning motor down to 0 rpm. This requires that
the DC brake is active via parameters 125 and 126. If
Both directions is selected, the frequency converter will
first find out in which direction the motor rotates and
then search for the frequency. If the motor is not found,
the system assumes that the motor is at a standstill or
is rotating at a low speed, and the frequency converter
will start the motor in the normal way after searching.
3. The frequency converter trips and Flying
start is active.
AKD 5000
■Normal/high overload torque control, open loop
This function enables the frequency converter
to perform a constant 100% torque, using
an oversize motor.
The choice between a normal or a high overload
torque characteristic is made in parameter 101.
This is also where to choose between a high/normal
constant torque characteristic (CT) or a high/normal
VT torque characteristic
If a high torque characteristic is chosen, a rated
motor with the frequency converter obtains up to
160% torque for 1 min. in both CT and VT. If a
normal torque characteristic is chosen, an oversize
motor allows up to 110% torque performance for up
to 1 min. in both CT and VT. This function is used
mainly for pumps and fans, since these applications
do not require an overload torque.
The advantage of choosing a normal torque
characteristic for an oversize motor is that the frequency
converter will be able constantly to yield 100% torque,
without derating as a result of a bigger motor.
Special
functions
4. The frequency converter momentarily
releases the motor. F
and catches the motor again.
MG.50.R4.02 - VLT is a registered Danfoss trademark
lying start is activated
NB!:
This function c
5001-5006, 200-240 Volts, and AKD
5001-5011, 380-500 Volts.
■Internal current regulator
The AKD 5000 features an integral current limit
regulator which is activated when the motor current,
and thus the torque, is higher than the torque
limits set in parameter 221 and 222.
When AKD 5000 Series is at the current limit
during motor operation or regenerative operation,
the frequency converter will try to get below
the preset torque limits as quickly as possible
without losing control of the motor.
While the current regulator is active, the frequency
converter can only be stopped by means of terminal
annot be chosen for AKD
59
Page 60

27 if set to Coasting stop, inverse [0] or Reset and
coasting stop, inverse [1]. A signal on terminals
16-33 will not be active until the frequency converter
has moved away from the current limit.
Please note that the motor will not use the
ramp-down time, since terminal 27 must be
programmed for Coasting stop, inverse [0] or
Reset and coasting stop, inverse [1].
■Programming of Torque limit and stop
In applications with an external electro-mechanical
brake, such as hoisting applications, it is possible
to stop the frequency converter via a ‘standard’
stop command, while at the same time activating
the external electro-mechanical brake.
The example given below illustrates the programming
of frequency converter connections.
The external brake can be connected to relay 01 or
04, see Control of mechanical brake on page 66.
Program terminal 27 to Coasting stop, inverse [0]
or Reset and coasting stop, inverse [1], as well as
terminal 42 to Torque limit and stop [27].
AKD 5000
escription:
D
If a stop command is active via terminal 18 and
the frequency converter is not at the torque limit,
the motor will ramp down to 0 Hz.
If the frequency converter is at the torque limit and
a stop command is activated, terminal 42 Output
(programmed to Torque limit and stop [27]) will be
activated. The signal to terminal 27 will change from
’logic 1’ to ’logic 0’ and the motor will start coasting.
- Start/stop via terminal 18.
Parameter 302 = Start [1].
- Quickstop via terminal 27.
Parameter 304 = Coasting stop, inverse [0].
- Terminal 42 Output
Parameter 319 = Torque limit and stop [27].
- Terminal 01 Relay output
Parameter 323 = Mechanical brake control [32].
60
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 61

AKD 5000
■Operation and Display
001 Language
(LANGUAGE)
Value:
✭English (ENGLISH)
German (DEUTSCH)
French (FRANCAIS)
Danish (DANSK)
Spanish (ESPAÑOL)
Italian (ITALIANO)
Function:
The choice in this parameter defines the language
to be used on the display.
Description of choice:
There is a choice of English [0], German [1], French
[2], Danish [3], Spanish [4] and Italian [5].
002 Local/remote control
(OPERATION SITE)
Value:
✭Remote control (REMOTE)
Local control (LOCAL)
[0]
[1]
[2]
[3]
[4]
[5]
[0]
[1]
5. An external control command that can be
connected to terminal 16, 17, 19, 27, 29,
32 or 33. However, [2] or [4] must be
selected in parameter 013.
See also section Shift between local and
remote control.
003 Local reference
(LOCAL REFERENCE)
Value:
Par 013 set for [1] or [2]:
0-f
MAX
✭ 50 Hz
Par 013 set for [3] or [4] and par. 203 = [0] set for:
Ref
MIN
-Ref
MAX
✭ 0.0
Function:
This parameter allows manual setting of the
desired reference value (speed or reference for
the selected configuration, depending on the
choice made in parameter 013).
The unit follows the configuration selected in parameter
100, provided Process control, closed loop [3] or
Torque control, open loop [4] has been selected.
Function:
There is a choice of two methods of controlling
the frequency converter.
Description of choice:
If Remote control [0] is selected, the frequency
converter can be controlled via:
1. The control terminals or the serial
communication port.
2. The [START] key. However, this cannot overrule
Stop commands (also start-disable) entered via the
digital inputs or the serial communication port.
3. The [STOP], [JOG] and [RESET] keys, provided that
these are active (see parameter 014, 015 and 017).
If Local control [1] is selected, the frequency
converter can be controlled via:
1. The [START] key. However, this cannot override
Stop commands on the digital terminals (if [2] or
[4] has been selected in parameter 013).
2. The [STOP], [JOG] and [RESET] keys, provided that
these are active (see parameter 014, 015 and 017).
3. The [FWD/REV] key, provided that this has been
activated in parameter 016 and that in parameter
013 a choice of [1] or [3] has been made.
4. Via P003 the local reference can be controlled by
means of the "Arrow up" and "Arrow down" keys.
Description of choice:
Local [1] must be selected in parameter 002
for this parameter to be used.
The set value is saved in the case of a voltage
drop-out, see parameter 019.
In this parameter Data Change Mode is not exited
automatically (after time out).
Local reference cannot be set via the serial
communication port.
Warning: Since the value set is
remembered after the power has been
cut, the motor may start without warning
when the power is reinstated; if parameter 019 is
changed to Auto restart, use saved ref. [0].
004 Active Setup
(ACTIVE SETUP)
Value:
Factory Setup (FACTORY SETUP)
✭Setup 1 (SETUP 1)
Setup 2 (SETUP 2)
Setup 3 (SETUP 3)
Setup 4 (SETUP 4)
Programming
[0]
[1]
[2]
[3]
[4]
= factory setting. () = display text [] = value for use in communication via serial communication port
✭
MG.50.R4.02 - VLT is a registered Danfoss trademark
61
Page 62

AKD 5000
MultiSetup (MULTI SETUP)
Function:
This parameter defines the Setup number to control
the functions of the frequency converter.
All parameters can be programmed in four individual
parameter Setups, Setup 1 - Setup 4. In addition,
there is a Factory Setup, which cannot be modified.
Description of choice:
Factory Setup [0] contains the data set at the works.
Can be used as a data source if the other Setups
aretobereturnedtoaknownstate.
Parameter 005 and 006 allow copying from one
Setup to one or all the other Setups.
Setups 1-4 [1]-[4] are four individual Setups
that can be selected individually.
Multi-Setup [5] is used by remote-switching
between Setups. Terminals 16/17/29/32/33 as
well as the serial communication port can be
used for switching between Setups.
005 Programming Setup
(EDIT SETUP)
Value:
Factory Setup (FACTORY SETUP)
Setup 1 (SETUP 1)
Setup 2 (SETUP 2)
Setup 3 (SETUP 3)
Setup 4 (SETUP 4)
✭Active Setup (ACTIVE SETUP)
[5]
[0]
[1]
[2]
[3]
[4]
[5]
NB!:
If a general change of data or a copying to
the active Setup is effected, this immediately
affects the functioning of the unit.
006 Copying of Setups
(SETUP COPY)
Value:
✭No copying (NO COPY)
Copy to Setup 1 from # (COPY TO SETUP 1)
Copy to Setup 2 from # (COPY TO SETUP 2)
Copy to Setup 3 from # (COPY TO SETUP 3)
Copy to Setup 4 from # (COPY TO SETUP 4)
Copy to Setup all from # (COPY TO ALL)
# = the Setup selected in parameter 005
Function:
A copy is made from the Setup selected in parameter
005 to one of the other Setups or to all the other
Setups simultaneously. The setup copying function
does not copy parameter 001, 004, 005, 500 and 501.
Copying is only possible in Stop Mode (motor
stopped on a Stop command).
Description of choice:
The copying starts when the desired copying
function has been entered and confirmed by
pressing the [OK] key.
The display indicates when copying is in progress.
[0]
[1]
[2]
[3]
[4]
[5]
Function:
The choice is of the Setup in which programming
(change of data) is to occur during operation
(applies both via the control panel and via the
serial communication port). The 4 Setups can be
programmed independently of the Setup selected as
the active Setup (selected in parameter 004).
Description of choice:
The Factory Setup [0] contains the data set at the
worksandcanbeusedasadatasourceiftheother
Setupsaretobereturnedtoaknownstate.
Setups 1-4 [1]-[4] are individual Setups which can
be used as required. They can be programmed
freely, regardless of the Setup selected as the
active Setup and thus controlling the functions
of the frequency converter.
= factory setting. () = display text [] = value for use in communication via serial communication port
✭
007 LCP copy
(LCP COPY)
Value:
✭No copying (NO COPY)
Upload all parameters (UPLOAD ALL PARAM)
Download all parameters (DOWNLOAD ALL)
Download power-independent par.
(DOWNLOAD SIZE INDEP.)
Function:
Parameter 007 is used if it is desired to use the
integrated copying function of the control panel. The
control panel is detachable. You can therefore easily
copy parameter value(s) from one to another.
Description of choice:
Select Upload all parameters [1] if all parameter values
aretobetransmittedtothecontrolpanel.
Select Download all parameters [2] if all
transmitted parameter values are to be copied
[0]
[1]
[2]
[3]
62
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 63

AKD 5000
to the frequency converter on which the control
panel has been mounted.
Select Download power-independent par. [3] if only the
power-independent parameters are to be downloaded.
This is used if downloading to a frequency converter
that has a different rated power that the one from
where the parameter Setup originates.
Please note that the power-dependent parameter
102-106 must be programmed after copying.
NB!:
Uploading/Downloading can only be carried
out in the Stop mode.
008 Display scaling of motor frequency
(FREQUENCY SCALE)
Value:
0.01 - 500.00
✭ 1
Function:
This parameter chooses the factor to be multiplied
by the motor frequency, f
, for presentation in
M
the display, when parameters 009-012 have been
set for Frequency x Scaling [5].
Description of choice:
Set the desired scaling factor.
009 Display line 2 (DISPLAY LINE 2)
Value:
Reference [%] (REFERENCE [%])
Reference [unit] (REFERENCE [UNIT])
Feedback [unit] (FEEDBACK [UNIT])
✭Frequency [Hz] (FREQUENCY [HZ])
Frequency x Scaling [-]
(FREQUENCY X SCALE)
Motor current [A] (MOTOR CURRENT [A])
Torque [%] (TORQUE [%])
Power [kW] (POWER [KW])
Power [HP] (POWER [HP] [US])
Output energy [kWh]
(OUTPUT ENERGY [KWH])
Motor voltage [V] (MOTOR VOLTAGE [V])
DC link voltage [V] (DC LINK VOLTAGE [V])
[10]
[11]
[12]
Thermal load, motor [%]
(MOTOR THERMAL [%])
Thermal load, AKD [%] (FC THERMAL [%])
Hours run [Hours] (RUNNING HOURS)
[13]
[14]
[15]
Digital input [Binary code]
(DIGITAL INPUT [BIN])
Analogue input 53 [V] (ANALOG INPUT 53 [V])
[16]
[17]
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
Analogue input 54 [V] (ANALOG INPUT 54 [V])
[18]
Analogue input 60 [mA]
(ANALOG INPUT 60 [MA])
Pulse reference [Hz] (PULSE REF. [HZ])
External reference [%] (EXTERNAL REF [%])
Status word [Hex] (STATUS WORD [HEX])
[19]
[20]
[21]
[22]
Brake effect/2 min. [KW]
(BRAKE ENERGY/2 MIN)
Brake effect/sec. [kW] (BRAKE ENERGY/S)
Heat sink temp. [°C] (HEATSINK TEMP [°C])
Alarm word [Hex] (ALARM WORD [HEX])
[23]
[24]
[25]
[26]
Control word [Hex]
(CONTROL WORD [HEX])
[27]
Warning word 1 [Hex]
(WARNING WORD 1 [HEX])
[28]
Warning word 2 [Hex]
(WARNING WORD 2 [HEX])
[29]
Communication option card warning
(COMM OPT WARN [HEX])
-1
RPM [min
RPM x scaling [
] (MOTOR RPM [RPM])
-
](MOTOR RPMX SCALE)
[30]
[31]
[32]
Function:
This parameter allows a choice of the data value
to be displayed in line 2 of the display.
Parameters 010-012 enable the use of three additional
data values to be displayed in line 1.
Description of choice:
Reference [%] corresponds to the total reference
(sum of digital/analogue/preset/bus/freeze
ref./catch-up and slow-down).
Reference [unit] gives the status value of terminals
17/29/53/54/60 using the unit stated on the basis of
configuration in parameter 100 (Hz, Hz and rpm).
Feedback [unit] gives the status value of
terminal 33/53/60 using the unit/scale selected
in parameter 414, 415 and 416.
Frequency [Hz] gives the motor frequency, i.e. the
output frequency from the frequency converter.
Frequency x Scaling [-] corresponds to the present
motor frequency f
(without resonance dampening)
M
multiplied by a factor (scaling) set in parameter 008.
Motor current [A] states the phase current of
the motor measured as effective value.
Torque [%] gives the current motor load in
relation to the rated motor torque.
Power [kW] states the actual power consumed
by the motor in kW.
Power [HP] states the actual power consumed
by the motor in HP.
Output energy [kWh] states the energy
consumed by the motor since the latest reset
was made in parameter 618.
Programming
= factory setting. () = display text [] = value for use in communication via serial communication port
✭
MG.50.R4.02 - VLT is a registered Danfoss trademark
63
Page 64

AKD 5000
Motor voltage [V] states the voltage supplied
to the motor.
DC link voltage [V] states the intermediate circuit
voltage in the frequency converter.
Thermal load, motor [%] states the
calculated/estimated thermal load on the
motor. 100% is the cut-out limit.
Thermal load, AKD [%] states the
calculated/estimated thermal load on the
frequency converter. 100% is the cut-out limit.
Hoursrun [Hours] states the number of hours that the
motor has run since the latest reset in parameter 619.
Digital input [Binary code] states the signal states
from the 8 digital terminals (16, 17, 18, 19, 27, 29,
32 and 33) Input 16 corresponds to the bit at the
far left. ’0’ = no signal, ’1’ = connected signal.
Analogue input 53 [V] states the signal
value on terminal 53.
Analogue input 54 [V] states the signal
value on terminal 54.
Analogue input 60 [V] states the signal
value on terminal 60.
Pulse reference [Hz] states the possible frequency
in Hz connected to the terminals 17 or 29.
External reference [%] gives the sum of the
external reference as a percentage (the sum
of analogue/pulse/bus).
Status word [Hex] gives the status word sent
via the serial communication port in Hex code
from the frequency converter.
Brake power/2 min. [KW] states the brake
power transferred to an external brake resistor.
The mean power is calculated continuously
for the latest 120 seconds.
It is assumed that a resistor value has been
entered in parameter 401.
Brake power/sec. [kW] states the present brake
power transferred to an external brake resistor.
Stated as an instantaneous value.
It is assumed that a resistor value has been
entered in parameter 401.
Heat sink temp. [°C] states the present heat sink
temperature of the frequency converter. The cut-out
limit is 90 ± 5°C; cutting back in occurs at 60 ± 5°C.
Alarm word [Hex] indicates one or several alarms in
a Hex code. See page 160 for further information.
Control word. [Hex] indicates the control
word for the frequency converter. See Serial
communication in the Design Guide.
Warning word 1. [Hex] indicates one or
more warnings in a Hex code. See page
160 for further information.
Warningword2. [Hex]indicates one or
more status states in a Hex code. See page
160 for further information.
Communication option card warning [Hex]
gives a warning word if there is a fault on the
communication bus. Is only active if communication
options have been installed. Without communication
options, 0 Hex is displayed.
-1
RPM [min
] indicates the motor speed. In speed
closed loop, the value is measured. In other modes
the value is calculated based on the motor slip.
RPM x scaling [-] indicates the motor RPM multiplied
by a factor set in parameter 008.
010 Display line 1.1 (DISPLAY LINE 1.1)
011 Display line 1.2 (DISPLAY LINE 1.2)
012 Display line 1.3 (DISPLAY LINE 1.3)
Value:
See parameter 009.
Function:
Parameter 010 - 012 enable a choice of three different
data values to be shown on the display, line 1 position
1, line 1 position 2 and line 1 position 3, respectively.
For display read-outs, press the [DISPLAY/STATUS] button.
The reading can be switched off.
Description of choice:
The factory setting for each parameter is the following:
Par. 010 Reference [%]
Par. 011 Motor current [A]
Par. 012 Power [kW]
013 Local Control/Configuration as
parameter 100
(LOCAL CTRL/CONFIG.)
Value:
Local not active (DISABLE)
LCP control and open loop.
(LCP CTRL/OPEN LOOP)
LCP digital control and open loop.
(LCP+DIG CTRL/OP.LOOP)
LCP control/as parameter 100.
(LCP CTRL/AS P100)
✭LCP digital control/as parameter 100.
(LCP+DIG CTRL/AS P100)
[0]
[1]
[2]
[3]
[4]
= factory setting. () = display text [] = value for use in communication via serial communication port
✭
64
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 65

AKD 5000
Function:
This is where the desired funct ion is to be selected if
Local control has been chosen in parameter 002.
See also the description of parameter 100.
Description of choice:
If Local not active [0] is selected, a possible setting of
Local reference via parameter 003 is blocked.
It is only possible to change to Local not active [0]
from one of the other setting options in parameter
013, when the frequency converter has been set
to Remote control [0] in parameter 002.
LCP control and open loop [1] is used when the
speed is to be adjustable (in Hz) via parameter
003, when the frequency converter has been set
to Local control [1] in parameter 002.
If parameter 100 has not been set to Speed control
open loop [0], switch to Speed control open loop [0]
LCP digital control and open loop [2] functions as
LCP control and open loop [1], the only difference
being that when parameter 002 has been set to
Local operation [1], the motor is controlled via the
digital inputs, according to the list in section Shift
between local and remote control.
LCP control/as parameter 100 [3] is selected if the
reference is to be set via parameter 003.
The present reference will be maintained. If
the reference signal is negative, the local
reference will be set at 0.
hift from LCP control/as parameter 100 or LCP
S
remote control as parameter 100 to Remote control.
The reference will be replaced by the active reference
signal from the remote control.
014 Local stop
(LOCAL STOP)
Value:
Disable (DISABLE)
✭Enable (ENABLE)
Function:
This parameter disables/enables the local stop
function from the LCP.
This key is used when parameter 002 has been
set for Remote control [0] or Local [1].
Description of choice:
If Disable [0] is selected, the [STOP] key will be inactive.
NB!:
If Enable is selected, the [STOP] key
overrules all Start commands.
[0]
[1]
LCP digital control/as parameter 100 [4] functions as
LCP control/as parameter 100 [3], although, when
parameter 002 has been set to Local operation
[1], the motor may be controlled via the digital
inputs in accordance with the list in section Shift
between local and remote control .
NB!:
hift from Remote control to LCP digital
S
control and open loop:
The present motor frequency and direction of rotation
must be maintained. If the present d
irection of rotation
does not correspond to the reversing signal (negative
reference), the motor frequency f
S
hift from LCP digital control and open loop
will be set at 0 Hz.
M
to Remote control:
The selected configuration (parameter 100)
will be active. Shifts are effected without
any abrupt movement.
hift from Remote control to
S
LCP control/as parameter
100 or LCP digital control/as parameter 100.
017 Local reset of trip (LOCAL RESET)
Value:
Not possible (DISABLE)
✭Possible (ENABLE)
Function:
In this parameter, the reset function can be
selected/removed from the keyboard.
This key can be used when parameter 002 has been
set for Remote control [0] or Local control [1].
Description of choice:
If Disable [0] is selected in this parameter, the
[RESET] key will be inactive.
NB!:
Only select Disable [0] if an external reset signal
has been connected via the digital inputs.
[0]
[1]
Programming
✭ = factory setting. () = display text [] = value for use in communication via serial communication port
MG.50.R4.02 - VLT is a registered Danfoss trademark
65
Page 66

018 Lock for data change
(DATA CHANGE LOCK)
Value:
✭Not locked (NOT LOCKED)
Locked (LOCKED)
Function:
In this parameter, the software can "lock" the
control, which means that data changes cannot
be made via LCP (however, this is still possible
via the serial communication port).
Description of choice:
If Locked [1] is selected, data changes cannot be made.
019 Operating state at Power up, local control
(POWER UP ACTION)
Value:
Auto restart, use saved ref. (AUTO RESTART)
✭Forced stop, use saved ref. (LOCAL=STOP)
Forced stop, set ref. to 0
(LOCAL=STOP, REF=0)
AKD 5000
[0]
[1]
[0]
[1]
[2]
Function:
Setting of the operating mode when the mains
voltage is reconnected.
This function can only be active in connection with
Local control [1] in parameter 002.
Description of choice:
Auto restart, use saved ref. [0] is selected if the unit
is to start up with the same local reference (set in
parameter 003) and the same start/stop conditions
(given via the [START/STOP] keys) that the frequency
converter had before it was switched off.
Forced stop, use saved ref. [1] is used if the
unit is to remain stopped when the mains voltage
is connected, until the [START] key is pressed.
After the start command, the local reference
used is set in parameter 003.
Forced stop, set ref. to 0 [2] is selected if the unit is to
remain stopped when the mains voltage is connected.
Local reference (parameter 003) is reset.
NB!:
In remote controlled operation (parameter
002), the start/stop condition at power up
will depend on the external control signals.
If Pulse start [2] is selected in parameter 302, the
motor will remain stopped at power-up.
✭ = factory setting. () = display text [] = value for use in communication via serial communication port
66
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 67

■Parameters — Load a nd motor
100 Configuration
(CONFIG. MODE)
Value:
✭Speed control, open loop
(SPEED OPEN LOOP)
Process control, closed loop
(PROCESS CLOSED LOOP)
Function:
This parameter is used for selecting the configuration
to which the frequency converter is to be adapted.
This makes adaptation to a given application simple,
because the parameters that are not used in the given
configuration are covered up (not active). By changing
between the different application configurations,
bumpless transfer (frequency only) is ensured.
[0]
[1]
AKD 5000
101 Torque characteristics
(TORQUE CHARACT)
Value:
✭Compressor H-CT
(H-CONSTANT TORQUE)
Fan/Pump H-VT
(H-VAR.TORQ.: HIGH)
High-variable torque with high starting torque
(H-VT HIGH W. CT-START)
High-special motor characteristics
(H-SPEC.MOTOR CHARACT)
Compressor N-CT
(N-CONSTANT TORQUE)
Normal-special motor characteristics
(N-SPEC.MOTOR CHARACT)
Fan/Pump N-VT
(N-VT HIGH W. CT-START)
[1]
[2]
[3]
[4]
[5]
[6]
[7]
Description of choice:
If Speed control, open loop [0] is selected, a normal
speed control (without feedback signal) is obtained,
but with automatic slip compensation, ensuring a
nearly constant speed at varying loads.
Compensations are active, but may be disabled
as required in parameter group 100.
If Process control, closed loop [1] is selected, the
internal process regulator will be activated, thereby
enabling accurate control of a process with respect to
a given process signal. The process signal can be set
using the actual process unit or as a percentage. A
feedback signal must be supplied from the process,
and the process setpoint must be adjusted.
Parameter 205 Maximum reference and parameter
415 Maximum feedback must be adapted to
the application if [1] is selected.
Function:
In this parameter, the principle for adjusting the U/f
characteristics of the frequency converter to the
torque characteristics of the load is selected. By
changing between the different torque characteristics,
bumpless transfer (voltage only) is ensured.
Description of choice:
If a high torque characteristic [1]-[4] is selected, the
frequency converter is able to provide 160% torque.
The normal mode is used for oversize motors. Please
note that the torque can be limited in parameter 221.
If Constant torque is selected, a load-dependent U/f
characteristic is obtained in which the output voltage is
increased in the case of an increasing load (current) so
as to maintain constant magnetisation of the motor.
Select High-variable torque with high [3]
starting torque if a higher breakaway torque
is required than that obtainable with the three
first-mentioned characteristics.
Select High-constant torque [1] for use with
compressors. Select High-variable torque high [2] for
use with condenser fans or pumps. Use Special motor
mode [3] if several fans are connected in parallel. Use
normal torque characteristics [5]-[7] (110%) to run
with one oversize motor (only 5011 and up).
Programming
Choose the torque characteristics giving the most
reliable operation, the lowest possible energy
consumption and the lowest acoustic noise.
Select Special motor characteristics if a special U/f
setting is required to match the motor in question.
Set the break points in parameters 422-432.
= factory setting. () = display text [] = value for use in communication via serial communication port
✭
MG.50.R4.02 - VLT is a registered Danfoss trademark
67
Page 68

AKD 5000
NB!:
Slip compensation is not active if a variable
torque or special motor characteristics are used.
102 Motor power (MOTOR POWER)
Value:
0.18 kW (0.18 KW)
0.25 kW (0.25 KW)
0.37 kW (0.37 KW)
0.55 kW (0.55 KW)
0.75 kW (0.75 KW)
1.1 kW (1.10 KW)
1.5 kW (1.50 KW)
2.2 kW (2.20 KW)
3 kW (3.00 KW)
4 kW (4.00 KW)
5.5 kW (5.50 KW)
7.5 kW (7.50 KW)
11 kW (11.00 KW)
15 kW (15.00 KW)
18.5 kW (18.50 KW)
22 kW (22.00 KW)
30 kW (30.00 KW)
37 kW (37.00 KW)
45 kW (45.00 KW)
Depends on the unit
Function:
Selects the kW value that corresponds to the
rated power of the motor.
A rated kW value has been selected from the
factory that depends on the unit size.
Description of choice:
Select a value that equals the nameplate data on
the motor. There are 4 possible undersizes or 1
oversize in comparison with the factory setting.
Also, alternatively it is possible to set the value for
motor power as an i
The set value automatically changes the values of
the motor parameters in parameter 108-118.
NB!:
If the setting in parameter 102-109 is changed,
parameter 110-118 will return to factory setting.
If using special motor characteristics a change
in parameter 102-109 affects parameter 422.
nfinitely variable value.
[1100]
[1500]
[1850]
[2200]
[3000]
[3700]
[4500]
[18]
[25]
[37]
[55]
[75]
[110]
[150]
[220]
[300]
[400]
[550]
[750]
103 Motor voltage (MOTOR VOLTAGE)
Value:
200 V
208 V
220 V
230 V
240 V
380 V
400 V
415 V
440 V
460 V
480 V
500 V
550 V
575 V
660 V
690 V
Depends on the unit.
Function:
Select a value that equals the nameplate
data on the motor.
NB!:
The motor will always see the peak voltage,
corresponding to the connected supply
voltage, in case of regenerative operation,
the voltage can be higher.
Description of choice:
Select a value that equals the nameplate data on the
motor, regardless of the mains voltage of the frequency
converter. Furthermore, alternatively it is possible to set
the value of the motor voltage i
The value set automatically changes values for the
motor parameters in parameters 108-118.
For 87 Hz operation with 230/400 V motors, set
the nameplate data for 230 V. Adapt parameter
202 Output frequency high limit and parameter 205
Maximum reference to the 87 Hz application.
NB!:
If a delta connection is used, the rated
motor frequency for the delta connection
must be selected.
NB!:
If the setting in parameter 102-109 is changed,
the parameters 110-118 will return to factory
setting. If using special motor characteristics a
change in parameter 102-109 affects parameter 422.
nfinitely variable.
[200]
[208]
[220]
[230]
[240]
[380]
[400]
[415]
[440]
[460]
[480]
[500]
[550]
[575]
[660]
[690]
✭ = factory setting. () = display text [] = value for use in communication via serial communication port
68
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 69

AKD 5000
104 Motor frequency
(MOTOR FREQUENCY)
Value:
✭50 Hz(50 HZ)
60 Hz(60 HZ)
[50]
[60]
Max. motor frequency 1000 Hz.
Function:
This is where the rated motor frequency f
M,N
is selected (nameplate data).
Description of choice:
Select a value that equals the nameplate
data on the motor.
Alternatively it is also possible to set the value for motor
frequency i
nfinitely variably , see procedure on page 53.
If a value different from 50 Hz or 60 Hz is selected, it
is necessary to correct parameters 108 and 109.
For 87 Hz operation with 230/400 V motors, set
the nameplate data for 230 V. Adapt parameter
202 Output frequency high limit and parameter 205
Maximum reference to the 87 Hz application.
NB!:
If a delta connection is used, the rated
motor frequency for the delta connected
must be selected.
NB!:
If the setting in parameter 102-109 is changed,
the parameters 110-118 will return to factory
setting. If using special motor characteristics a
change in parameter 102-109 affects parameter 422.
106 Rated motor speed
(MOTOR NOM. SPEED)
Value:
100 - 60000 rpm (RPM)
[100 - 60000]
Depends on the choice of motor.
Function:
Thisiswherethevalueisselectedthatcorresponds
to the rated motor speed n
, which can be
M,N
seen from the nameplate data.
Description of choice:
The rated motor speed n
is used i.a. for
M,N
calculating the optimal slip compensation.
NB!:
It is important to enter the correct value,
plus
since this forms part of the VVC
feature. The max. value equals f
60. Set f
in parameter 104.
M,N
control
M,N
x
NB!:
If the setting in parameter 102-109 is changed,
the parameters 110-118 will return to factory
setting. If using special motor characteristics a
change in parameter 102-109 affects parameter 422.
105 Motor current (MOTOR CURRENT)
Value:
0.01 - I
AKD,MAX
[0.01 - XXX.X]
Depends on the choice of motor.
Function:
The rated motor current I
forms part of the
M,N
frequency converter calculations i.a. of torque
and motor thermal protection.
Description of choice:
Select a value that equals the nameplate
data on the motor.
Enter the value in Ampere.
NB!:
It is important to enter the correct value, since
plus
this forms part of the VVC
control feature.
NB!:
If the setting in parameter 102-109 is changed,
the parameters 110-118 will return to factory
setting. If using special motor characteristics a
change in parameter 102-109 affects parameter 422.
107 Automatic motor adaptation, AMA
(AUTO MOTOR ADAPT)
Value:
✭Adaptation off (OFF)
Adaptation on, R
Adaptation on, R
and XS(ENABLE (RS,XS))
S
(ENABLE (RS))
S
Function:
If this function is used, the frequency converter
automatically sets the necessary control
parameters (parameters 108/109) with the motor
stationary. Automatic motor adaptation ensures
optimum use of the motor.
For the best possible adaptation of the
frequency converter, it is recommended to
run AMA on a cold motor.
The AMA function is activated by pressing the
[START] key after selecting [1] or [2].
[0]
[1]
[2]
Programming
= factory setting. () = display text [] = value for use in communication via serial communication port
✭
MG.50.R4.02 - VLT is a registered Danfoss trademark
69
Page 70

AKD 5000
See also section Automatic motor adaptation.
The section Automatic motor adaption, AMA, via
AKD software dialog shows how automatic motor
adaptation can be activated by means of AKD
Software Dialog. After a normal sequence, the display
will read "ALARM 21". Press the [STOP/RESET] key.
The frequency converter is now ready for operation.
Description of choice:
Select Enable, R
and XS[1] if the frequency
S
converter is to be able to carry out automatic
motor adaptation of both the stator resistance
and the stator reactance XS.
R
S
Select Optimisation on, R
[2] if a reduced test
S
is to be carried out, in which only the ohmic
resistance in the system is determined.
NB!:
It is important to set motor parameters
102-106 correctly, since these form part of
the AMA algorithm. In most applications,
correct entering of motor parameters 102-106 is
sufficient. For optimum dynamic motor adaptation,
an AMA must be carried out.
Motor adaptation may take up to 10 minutes,
depending on the output of the motor in question.
NB!:
There must not be any externally generating
torque during automatic motor adaptation.
NB!:
If the setting in parameter 102-109 is changed,
the parameters 110-118 will return to factory
setting. If using special motor characteristics a
change in parameter 102-109 affects parameter 422.
108 Stator resistor (STATOR RESIST)
Value:
✭Depends on the choice of motor
Function:
After setting motor data in parameters 102-106, a
number of adjustments of various parameters are
made automatically, including the stator resistance
. A manually entered RSmust apply to a cold
R
S
motor. The shaft performance can be improved by
fine-tuning R
and XS, see procedure below.
S
2. The values are stated by the motor supplier.
3. The values are obtained by means of
manual measurements:
can be calculated by measuring the
-R
S
resistance R
terminals. If R
PHASE-to-PHASE
PHASE-to-PHASE
between two phase
is lower than 1-2 ohm
(typically motors >4-5.5 kW, 400 V), a special
ohm-meter should be used (Thomson bridge or
similar). R
=0.5xR
S
PHASE-to-PHASE
4. The factory settings of RS, selected by the
frequency converter itself on the basis of the
motor nameplate data, are used.
NB!:
If the setting in parameter 102-109 is changed,
the parameters 110-118 will return to factory
setting. If using special motor characteristics a
change in parameter 102-109 affects parameter 422.
109 Stator reactance
(STATOR REACT.)
Value:
✭depends on the choice of motor
Function:
After setting motor data in parameters 102-106, a
number of adjustments of various parameters are
made automatically, including the stator reactance
. The shaft performance can be improved by
X
S
fine-tuning R
and XS, see procedure below.
S
Description of choice:
can be set as follows:
X
S
1. Automatic motor adaptation, where the frequency
converter measures on the motor to determine the
value. All compensations are reset to 100%.
2. The values are stated by the motor supplier.
3. These values are obtained by means of
manual measurements:
can be calculated by connecting a motor
-X
S
to mains and measuring the phase-to-phase
voltage U
as well as the idling current I.
L
Alternatively, these values can be recorded
during operation in idle running state at the
rated motor frequency f
, slip compensation
M,N
(par. 115) = 0% and load compensation at
high speed (par. 114) = 100%.
Description of choice:
can be set as follows:
R
S
1. Automatic motor adaptation, where the frequency
converter measures on the motor to determine the
value. All compensations are reset to 100%.
✭ = factory setting. () = display text [] = value for use in communication via serial communication port
70
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 71

AKD 5000
4. The factory settings of XS, selected by the
frequency converter itself on the basis of the
motor nameplate data, are used.
NB!:
If the setting in parameter 102-109 is changed,
the parameters 110-118 will return to factory
setting. If using special motor characteristics a
change in parameter 102-109 affects parameter 422.
113 Load compensation at low speed
(LO SPD LOAD COMP)
Value:
0 - 300 %
Function:
This parameter enables compensation of voltage in
relation to load when the motor is running at low speed.
Description of choice:
Optimum U/f characteristics are obtained, i.e.
compensation for the load at low speed. The
frequency range within which Load compensation at
low speed is active, depends on the motor size.
This function is active for:
✭ 100 %
Motor size Change-over
0.5kW-7.5kW <10Hz
11 kW - 45 kW < 5 Hz
55 kW - 355 kW < 3-4 Hz
Description of choice:
In Load compensation at high speed it is possible
to compensate for the load from the frequency
where Load compensation at low speed stopped
workingtomax. frequency.
This function is active for:
Motor size Change-over
0.5 kW - 7.5 kW >10 Hz
11 kW - 45 kW >5 Hz
55 kW - 355 kW >3-4 Hz
115 Slip compensation
(SLIP COMPENSAT.)
Value:
-500 - 500 %
Function:
Slip compensation is calculated automatically, i.e. on
the basis of the rated motor speed n
In parameter 115, slip compensation can be
adjusted in detail, which compensates for
tolerances in the value of n
This function is not active together with Variable
torque (parameter 101 - variable torque graphs),
Torque control, Speed feedback and Special
motor characteristics.
M,N
.
M,N
✭ 100 %
.
114 Load compensation at high speed
(HI SPD LOAD COMP)
Value:
0 - 300 %
Function:
This parameter enables compensation of voltage in
relation to load when the motor is running at high speed.
✭ 100 %
Description of choice:
Enter a %-value of the ra
(parameter 104).
116 Slip compensation time constant
(SLIPTIMECONST.)
Value:
0.05 - 5.00 sec.
Function:
This parameter determines the slip compensation
reaction speed.
Description of choice:
A high value results in slow reaction. Conversely,
a low value results in quick reaction.
If low-frequency resonance problems are encountered,
the time set must be longer.
ted motor frequency
✭ 0.50 sec.
Programming
✭ = factory setting. () = display text [] = value for use in communication via serial communication port
MG.50.R4.02 - VLT is a registered Danfoss trademark
71
Page 72
AKD 5000
117 Resonance dampening
(RESONANCE DAMP.)
Value:
0 - 500 %
✭ 100 %
Function:
High-frequency resonance problems can be eliminated
by setting parameters 117 and 118.
Description of choice:
For less resonance oscillation, the value of
parameter 118 must be increased.
118 Resonance dampening time constant
(DAMP.TIME CONST.)
Value:
5-50ms
✭ 5ms
Function:
High-frequency resonance problems can be eliminated
by setting parameters 117 and 118.
Description of choice:
Choose the time constant that provides
the best dampening.
120 Star t delay (START DELAY)
Value:
0.0 - 10.0 sec.
✭ 0.0 sec.
Function:
This parameter enables a delay of the starting time.
The frequency converter begins with the start
function selected in parameter 121.
Description of choice:
Set the desired time until acceleration is to begin.
121 Start function (START FUNCTION)
Value:
DC hold in start delay time
(DC HOLD/DELAY TIME)
DC brake in start delay time
(DC BRAKE/DELAY TIME)
✭Coasting in start delay time
(COAST/DELAY TIME)
Start frequency/voltage clockwise.
(CLOCKWISE OPERATION)
Start frequency/voltage in reference direction
(HORIZONTAL OPERATION)
[0]
[1]
[2]
[3]
[4]
plus
VVC
(VVC+ CLOCKWISE)
clockwise
[5]
Function:
This is where the desired state during start delay
(parameter 120) is selected.
Description of choice:
Select DC hold in the start delay time [0] so as
to energize the motor with a DC holding current
(parameter 124) in the start delay time.
Select DC brake in the start delay time [1] so as
to energize the motor with a DC braking current
(parameter 125) in the start delay time.
Select Coasting in the start delay time [2] and the
motor will not be controlled by the frequency converter
during the start delay time (inverter off).
Start frequency/voltage clockwise [3] and VVC
plus
clockwise [5] is typically used in hoisting applications.
Start frequency/voltage in reference direction [4] is
used especially in applications with counterweight.
Select Start frequency/voltage clockwise [3] so
as to have the function described in parameter
130 and 131 in the start delay time.
The output frequency will equal the setting of the
start frequency in parameter 130, and the output
voltage will equal the setting of the start voltage in
parameter 131. Regardless of the value assumed
by the reference signal, the output frequency will
equal the setting of the start frequency in parameter
130 and the output voltage will correspond to the
setting of the start voltage in parameter 131.
This functionality is used typically in hoisting
applications.
This is used especially in applications with a cone
armature motor, where the start is to be clockwi
se,
followed by rotation in the reference direction.
Select Start frequency/voltage in reference direction [4]
in order to obtain the function described in parameters
130 and 131 during the start delay time.
The motor
will always rotate in the reference direction.
If the reference signal equals zero (0) parameter
130 Start frequency will be ignored an
d the output
frequency will equal zero (0). The output voltage
will correspond to the setting of the start voltage
in parameter 131 Start voltage.
Select VVC
plus
clockwise [5] so
as to have only the
function described in parameter 130 Start frequency
in the start delay time. The start voltage will be
calculated automatic. Notic
e that this function only
uses the start frequency in the start delay time.
= factory setting. () = display text [] = value for use in communication via serial communication port
✭
72
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 73

AKD 5000
Regardless of the value assumed by the reference
signal, the output frequency will equal the setting
of the start frequency in parameter 130.
122 Function at stop
(FUNCTION AT STOP)
Value:
✭Coasting (COAST)
DC hold (DC-HOLD)
Motor check (MOTOR CHECK)
Pre-magnetizing (PREMAGNETIZING)
Function:
Here it is possible to select the function of the frequency
converter after a stop command or when the frequency
has been ramped down to 0 Hz. See parameter 123
with respect to activation of this parameter regardless
of whether the stop command is active.
Description of choice:
Select Coasting [0] if the frequency converter is to
’let go’ of the motor (inverter closed).
Select DC hold [1] when a DC holding current set
in parameter 124 is to be activated.
Select Motor check [2] if the frequency converter is to
check whether or not a motor has been connected.
Select Pre-magnetizing [3]. The magnetic field
is built up in the motor while it remains stopped.
This ensures that the motor can produce torque
as quickly as possible on starting.
[0]
[1]
[2]
[3]
NB!:
If parameter 123 is set too high, and DC
hold has been chosen in parameter 122,
the output frequency will jump to the value
in parameter 123 without ramping up. This may
cause an overcurrent warning/alarm.
124 DC holding current
(DC-HOLD CURREN T)
Value:
✭ 0%
Function:
This parameter is used to uphold the motor function
(holding torque) or to pre-heat the motor.
NB!:
The maximum value depends on the rated
motor current. If the DC holding current
is active, the frequency converter has a
switching frequency of 4 kHz.
Description of choice:
This parameter can only be used if DC hold [1]
has been selected in parameter 121 or 122. Set
it as a percentage value in relation to the rated
motor current I
100% DC holding current corresponds to I
set in parameter 105.
M,N
M,N.
Warning: 100 % supply for too long
may damage the motor.
123 Min. frequency for activating
function at stop
(MIN.F. FUNC.STOP)
125 DC braking current
(DC BRAKE CURRENT)
Value:
Value:
0.0 - 10.0 Hz
✭ 0.0 Hz
Function:
Function:
This parameter sets the frequency at which the
function selected in parameter 122 is to be activated.
Description of choice:
Enter the desired frequency.
NB!:
If parameter 123 is set higher than parameter
130, the start delay function (parameters
120 and 121) will be skipped.
This parameter is used for setting the DC brake
current that is activated upon a stop when the DC
brake frequency set in parameter 127 has been
reached, or if the DC brake inverse is active via digital
terminal 27 or via a serial communication port. The
DC braking current will be active for the duration of
the DC braking time set in parameter 126.
NB!:
The maximum value depends on the rated
motor current. If the DC braking current
is active, the frequency converter has a
switching frequency of 4.5 kHz.
= factory setting. () = display text [] = value for use in communication via serial communication port
✭
MG.50.R4.02 - VLT is a registered Danfoss trademark
✭ 50 %
Programming
73
Page 74

AKD 5000
Description of choice:
To be set as a percentage value of the rated motor
current I
100% DC braking current corresponds to I
set in parameter 105.
M,N
M,N
.
Warning: 100 % supply for too long
may damage the motor.
126 DC braking time
(DC BRAK ING TIME)
Value:
0.0 (OFF) - 60.0 sec.
✭ 10.0 sec.
Function:
This parameter is for setting the DC braking time
for which the DC braking current (parameter
125) is to be active.
Description of choice:
Set the desired time.
127 DC brake cut-in frequency
(DC BRAKE CUT-IN)
Value:
0.0 - parameter 202
✭ 0.0 Hz (OFF)
Function:
This parameter is for setting the DC brake cut-in
frequency at which the DC braking current (parameter
125) is to be active, in connection with a stop command.
Description of choice:
Set the desired frequency.
128 Motor thermal protection
(MOT.THERM PROTEC)
Value:
✭No protection (NO PROTECTION)
Thermistor warning (THERMISTOR WARN)
Thermistor trip (THERMISTOR TRIP)
ETR Warning 1 (ETR WARNING1)
ETR Trip 1 (ETR TRIP1)
ETR Warning 2 (ETR WARNING2)
ETR Trip 2 (ETR TRIP2)
ETR Warning 3 (ETR WARNING3)
ETR Trip 3 (ETR TRIP3)
ETR Warning 4 (ETR WARNING 4)
ETR Trip 4 (ETR TRIP4)
[10]
[0]
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
Function:
The frequency converter is able to monitor the motor
temperature in two different ways:
- Via a thermistor sensor connected to one
of the analogue inputs, terminals 53 and 54
(parameters 308 and 311).
- Calculation of the thermal load, based on the
current load and the time. This is compared with
the rated motor current I
frequency f
. The calculations made take into
M,N
andtheratedmotor
M,N
account the need for a lower load at lower speeds
because of less cooling from the fan.
ETR functions 1-4 do not start calculating the load
until there is a switch-over to the Setup in which
they were selected. This enables the use of the
ETR function, even where two or several motors
alternate. For the North American market: The ETR
functions provide class 10 or 20 motor overload
protection in accordance with NEC.
Description of choice:
Select No protection if no warning or tripping is
required when the motor is overloaded.
Select Thermistor warning if a warning is desired when
the connected thermistor - and thus the motor
-getstoohot.
Select Thermistor trip if cutting out (trip) is desired
when the connected thermistor - and thus the motor
- overheats.
Select ETR Warning 1-4,ifawarningistocome
up on the display when the motor is overloaded
according to the calculations.
Select ETR Trip 1-4 if tripping is desired when the
motor is overloaded according to the calculations.
The frequency converter can also be programmed
to give off a warning signal via one of the digita
l
outputs, in which case the signal is given both for
warning and for trip (thermal warning).
✭ = factory setting. () = display text [] = value for use in communication via serial communication port
74
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 75

130 Star t frequency (START FREQUENCY)
Value:
0.0 - 10.0 Hz
Function:
This parameter allows setting of the output frequency
at which the motor is to start.
The output frequency ’leaps’ to the set value.
This parameter can be used e.g. for hoist
applications (cone rotor motors).
Description of choice:
Set the desired start frequency.
It is assumed that the start function in parameter
121 has been set to [3] or [4] and that a start
delay time has been set in parameter 120; also,
a reference signal must be present.
NB!:
If parameter 123 is set higher than parameter
130, the start delay function (parameters
120 and 121) will be skipped.
✭ 0.0 Hz
AKD 5000
131 Initial voltage (INITIAL VOLTAGE)
Value:
0.0 - parameter 103
Function:
Some motors, such as cone rotor motors, need
extra voltage/starting frequency (boost) when starting,
so as to disengage the mechanical brake.
For this purpose use parameters 130/131.
Description of choice:
Set the desired value required to disengage
the mechanical brake.
It is assumed that the start function in parameter
121 has been set to [3] or [4] and that a start
delay time has been set in parameter 120; also,
a reference signal must be present.
✭ 0.0 Volt
Programming
✭ = factory setting. () = display text [] = value for use in communication via serial communication port
MG.50.R4.02 - VLT is a registered Danfoss trademark
75
Page 76

AKD 5000
■Parameters — References and limits
201 Output frequency low limit (F
MIN
)
(OUT FREQ LOW LIM)
Value:
0.0 - f
MAX
✭ 30.0 Hz
Function:
In this parameter, a minimum motor frequency limit
can be selected that corresponds to the minimum
frequency at which the motor is to run.
The minimum frequency can never be higher than
the maximum frequency, f
MAX
.
If Both directions has been selected in parameter 200,
the minimum frequency is of no significance.
Description of choice:
A value from 0.0 Hz to the max. frequency selected
in parameter 202 (f
) can be chosen.
MAX
202 Output frequency high limit (FMAX)
(OUT FR EQ HI LIM)
Value:
f
MIN
- 132
✭ 60 Hz
Function:
In this parameter, a maximum motor frequency can be
selected that corresponds to the highest frequency at
which the motor is to run. The factory setting is 60
Hz for AKD 5001-5062 380-500 V, AKD 5001-5062
550-600 V and 5001-5027 200-240 V.
See also parameter 205.
NB!:
The output frequency of the frequency converter
can never assume a value higher than 1/10
of the switching frequency.
Description of choice:
Set the desired value.
The unit follows the choice of configuration
in parameter 100.
Speed control, open loop: Hz
Speed control, closed loop: rpm
Torque control, open loop: Nm
Torque control, speed feedback: Nm
Process control, closed loop: Process units
(par. 416)
Special motor characteristics, activated in parameter
101, use the unit selected in parameter 100.
205 Maximum reference
(MAX. REFERENCE)
Value:
Ref
- 100,000.000
MIN
✭ 60.0 Hz
Function:
The Maximum reference gives the highest value that
can be assumed by the sum of all reference
s. If
closed loop has been selected in parameter 100,
the maximum reference cannot be set higher than
the maximum feedback (parameter 41
5).
Description of choice:
Set the desired value.
The unit follows the choice of configuration
in parameter 100.
Speed control, open loop: Hz
Speed control, closed loop: rpm
Torque control, open loop: Nm
Torque control, speed feedback: Nm
Process control, closed loop: Process units
(par. 416)
Special motor characteristics, activated in parameter
204 Minimum reference
101, use the unit selected in parameter 100.
(MIN. REFERENCE)
Value:
-100,000.000 - Ref
MAX
Depends on parameter 100.
✭ 60 Hz
207 Ramp-up time 1
(RAMPUPTIME1)
Value:
Function:
0.05 - 3600 sec.
The Minimum reference gives the minimum value
that can be assumed by the sum of all references.
Minimum reference is always active in Process
control, closed loop (parameter 100).
= factory setting. () = display text [] = value for use in communication via serial communication port
✭
76
Function:
The ramp-up time is the acceleration time from 0 Hz
to the rated motor frequency f
MG.50.R4.02 - VLT is a registered Danfoss trademark
(parameter 104)
M,N
✭ 0.7 sec
Page 77

AKD 5000
or the rated motor speed n
(if Speed control,
M,N
closed loop has been selected in parameter 100). This
presupposes that the output current does not reach
the torque limit (to be set in parameter 221).
Description of choice:
Program the desired ramp-up time.
208 Ramp-down time 1
(RAMPDOWNTIME1)
Value:
0.05 - 3600 sec.
✭ 1.0 sec.
210 Ramp-down time 2
(RAMPDOWNTIME2)
Value:
0.05 - 3600 sec.
✭ 1sec.
Function:
See description of parameter 208.
Description of choice:
Program the desired ramp-down time.
Switching from ramp 1 to ramp 2 is effected via a
signal on digital input terminal 16, 17, 29, 32 or 33.
211 Jog ramp time (JOG RAMP TIME)
Value:
0.05 - 3600 sec.
✭ 1. sec.
Function:
The jog ramp time is the acceleration/deceleration time
from 0 Hz to the rated motor frequency f
(parameter
M,N
104). It is assumed that the output current is not
higher than the torque limit (set in parameter 221).
Function:
The ramp-down time is the deceleration timefrom
the rated motor frequency f
0 Hz or from the rated motor speed n
(parameter 104) to
M,N
M,N
,provided
there is no over-voltage in the inverter because
of regenerative operation of the motor, or if the
generated current reaches the torque limit.
Description of choice:
Program the desired ramp-down time.
209 Ramp-up time 2
(RAMPUPTIME2)
Value:
0.05 - 3600 sec.
✭ 30 sec.
Function:
See description of parameter 207.
Description of choice:
Program the desired ramp-up time.
Switching from ramp 1 to ramp 2 is effected via a
signal on digital input terminal 16, 17, 29, 32 or 33.
The jog ramp time starts if a jog signal is given
via the control panel, the digital inputs or the
serial communication port.
Description of choice:
Setthedesiredramptime.
213 Jog frequency (JOG FREQUENCY)
Value:
0.0 - parameter 202
✭ 0.1 Hz
Function:
The jog frequency f
is the fixed output frequency
JOG
at which the frequency converter is running when
the jog function is activated.
Programming
Description of choice:
Set the desired frequency.
✭ = factory setting. () = display text [] = value for use in communication via serial communication port
MG.50.R4.02 - VLT is a registered Danfoss trademark
77
Page 78

AKD 5000
214 Reference function
(REF FUNCTION)
Value:
✭Sum. (SUM)
Relative (RELATIVE)
External/preset (EXTERNAL/PRESET)
Function:
It is possible to define how the preset references
are to be added to the other references. For
this purpose, Sum or Relative is used. It is al so
possible - by using the External/preset function - to
select whether a shift between external references
and preset references is desired.
Description of choice:
If Sum [0] is selected, one of the adjusted preset
references (parameters 215-218) is added as a
percentage of the maximum possible reference.
If Relative [1] is selected, one of the adjusted
preset references (parameters 215-218) is added
to the external references as a percentage
of the actual reference.
[0]
[1]
[2]
In addition, it is possible to use parameter 308 to
select whether the signals on terminals 54 and 60 are
to be added to the sum of the active references.
If External/preset [2] is selected, it is possible to shift
between external references or preset references
via terminal 16, 17, 29, 32 or 33 (parameter 300,
301, 305, 306 or 307). Preset references will be
apercentagevalueofthereferencerange.
External reference is the sum of the analogue
references, pulses and bus references. See also
drawings in section Handling of multi-references .
NB!:
If Sum or Relative is selected, one of the preset
references will always be active. If the preset
references are to be without influence, they
should be set to 0 % (as in the factory setting).
The example shows how to calculate the output
frequency if using Preset references together with
Sum and Relative in parameter 214.
Parameter 205 Maximum reference has
been set to 50 Hz.
Par. 204
Min.
Increase
[Hz/V]
Frequency
by 4.0 V
Par. 215
Preset ref.
Par. 214 Reference
type = Sum [0]
Par. 214 Reference
type = Relative [1]
reference
Output frequency Output frequency1) 0 5 20 Hz 15 %
00+20+7.5 = 27.5 Hz 00+20+3 = 23.0 Hz
2) 10 4 16 Hz 15 % 10+16+6.0 = 32.0 Hz 10+16+2.4 = 28.4 Hz
3) 20 3 12 Hz 15 % 20+12+4.5 = 36.5 Hz 20+12+1.8 = 33.8 Hz
4) 30 2 8Hz 15 % 30+8+3.0 = 41.0 Hz 30+8+1.2 = 39.2 Hz
5) 40 1 4Hz 15 % 40+4+1.5 = 45.5 Hz 40+4+0.6 = 44.6 Hz
215 Preset reference 1 (PRESET REF. 1)
216 Preset reference 2 (PRESET REF. 2)
217 Preset reference 3 (PRESET REF. 3)
218 Preset reference 4 (PRESET REF. 4)
Value:
-100.00 % - +100.00 %
✭ 0.00%
of the reference range/external reference
Function:
Four different preset references can be programmed
in parameters 215-218.
The preset reference is stated as a percentage of
the value Ref
or as a percentage of the other
MAX
external references, depending on the choice made in
parameter 214. If a Ref
≠ 0 has been programmed,
MIN
the preset reference as a percentage will be calculated
on the basis of the difference between Ref
, following which the value is added to Ref
Ref
MIN
MAX
and
MIN
.
✭
= factory setting. () = display text [] = value for use in communication via serial communication port
78
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 79

Description of choice:
Set the fixed reference(s) that is/are to be the options.
To use the fixed references, it is necessary to
have selected Preset ref. enable on terminal
16, 17, 29, 32 or 33.
Choices between fixed references can be
made by activating terminal 16, 17, 29, 32
or 33 - see the table below.
AKD 5000
Terminals 17/29/33
preset ref. msb
Terminals 16/29/32
preset ref. lsb
00Presetref.1
01Presetref.2
10Presetref.3
11Presetref.4
Description of choice:
See also parameter 409 for further details.
In order to protect the motor from reaching
pull-out torque, the factory setting is 1.6 x the
rated motor torque (calculated value).
See drawings in section Handling of multi-references.
Ifasynchronousmotorisused,thetorquelimitmust
be increased in relation to the factory setting.
If a setting in parameters 101-106 is changed,
221 Torque limit for motor mode
(TORQ LIMIT MOTOR)
parameter 221 is not automatically reversed
to the factory setting.
Value:
0.0 % - xxx.x % of T
M,N
✭ 160 % of T
M,N
223 Warning: Low current
Function:
This function is relevant for all application
configurations; speed, process and torque control.
This is where to set the torque limit for motor operation.
The torque limiter is active in the frequency range up
to the rated motor frequency (parameter 104).
In the oversynchronous range, where the frequency
is higher than the rated motor frequency, this
function acts as a current limiter.
See fig. below.
(WARN. CURRENT LO)
Value:
0.0 - parameter 224
Function:
When the motor current is below the limit,
I
, programmed in this parameter, the display
LOW
indicates CURRENT LOW.
The signal outputs can be programmed to transmit a
status signal via terminal 42 or 45 as well as via relay
output 01 or 04 (parameter 319, 321, 323 or 326).
✭ 0.2 A
Description of choice:
The lower signal limit I
LOW
must be programmed within the normal working
range of the frequency converter.
= factory setting. () = display text [] = value for use in communication via serial communication port
✭
MG.50.R4.02 - VLT is a registered Danfoss trademark
of the motor current
Programming
79
Page 80

224 Warning: High current
(WARN. CURRENT HI)
Value:
Parameter 223 - I
AKD,MAX
✭ I
AKD,MAX
Function:
f the motor current gets above the limit
programmed in this parameter, I
,thedisplay
HIGH
will indicate CURRENT HIGH.
The signal outputs can be programmed to transmit a
status signal via terminal 42 or 45 and via relay output
01 or 04 (parameter 319, 321, 323 or 326).
Description of choice:
The upper signal limit of the motor current, I
HIGH
,must
be programmed within the normal working range of the
frequency converter. See drawing at parameter 223.
AKD 5000
226 Warning: High frequency
(WARN. FREQ. HIGH)
Value:
parameter 225 - parameter 202
Function:
When the motor frequency is above the limit
programmed in this parameter, f
,thedisplay
HIGH
will indicate FREQUENCY HIGH.
The signal outputs can be programmed to transmit a
status signal via terminal 42 or 45 and via relay output
01 or 04 (parameter 319, 321, 323 or 326).
Description of choice:
The upper signal limit of the motor frequency, f
must be programmed within the normal working
range of the frequency converter.
227 Warning: Low feedback
(WARN. FEEDB. LOW)
Value:
-100,000.000 - parameter 228.
Function:
If the connected feedback signal gets below the
value set in this parameter, the signal outputs can
be programmed to transmit a status signal via
terminal 42 or 45 and via relay output 01 or 04
(parameter 319, 321, 323 or 326).
Description of choice:
Set the desired value.
✭ 95 Hz
,
HIGH
✭ -4000.000
225 Warning: Low frequency
(WARN. FREQ. LOW)
Value:
0.0 - parameter 226
✭ 0.0 Hz
228 Warning: High feedback
(WARN. FEEDB HIGH)
Value:
parameter 227 - 100,000.000
Function:
When the motor frequency is below the limit
programmed in this parameter, f
,thedisplay
LOW
indicates FREQUENCY LOW.
The signal outputs can be programmed to transmit a
status signal via terminal 42 or 45 and via relay output
01 or 04 (parameter 319, 321, 323 or 326).
Description of choice:
The lower signal limit of the motor frequency, f
LOW
,
Function:
If the connected feedback signal gets above the
value set in this parameter, the signal outputs can
be programmed to transmit a status signal via
terminal 42 or 45 and via relay output 01 or 04
(parameter 319, 321, 323 or 326).
Description of choice:
Set the desired value.
is to be programmed within the normal working
range of the frequency converter.
✭ = factory setting. () = display text [] = value for use in communication via serial communication port
80
MG.50.R4.02 - VLT is a registered Danfoss trademark
✭ 4000.000
Page 81

AKD 5000
229 Frequency bypass, bandwidth
(FREQ BY PASS B.W.)
Value:
0 (OFF) - 100%
Function:
Some systems call for some output frequencies to be
avoided because of resonance problems in the system.
In parameters 230-233 these output frequencies can
be programmed for bypassing (Frequency bypass).
In this parameter (229), a bandwidth can be defined
on either side of these frequency bypasses.
The frequency bypass function is not active if par.
002 is set to Local and par. 013 is set to LCP
ctrl/Open loop or LCP+dig ctrl/Open loop.
Description of choice:
The bypass bandwidth is set as a percentage
of the bypass frequency which is selected
in parameter 230-233.
The bypass bandwidth indicates max. variation
of the bypass frequency.
✭ 0 (OFF) %
Function:
Inthisparameteritispossibletoselectmonitoring
of the motor phases.
Description of choice:
If Enable is selected, the frequency converter
will react on a missing motor phase which will
result in alarm 30, 31 or 32.
If Disable is selected, no alarm is given if a motor phase
is missing. The motor can be damaged/overheated if it
runs on only two phases. It is therefore recommended
to keep the missing motor phase function ENABLED.
Example: A bypass frequency of 100 Hz and a
bypass bandwidth of 1% are selected. In this case
the bypass frequency can vary between 99.5 Hz
and 100.5 Hz i.e. 1% of 100 Hz.
230 Frequency bypass 1 (FREQ. BYPASS 1)
231 Frequency bypass 2 (FREQ. BYPASS 2)
232 Frequency bypass 3 (FREQ. BYPASS 3)
233 Frequency bypass 4 (FREQ. BYPASS 4)
Value:
0.0 - 132 Hz
Function:
Some systems call for some output frequencies to be
avoided because of resonance problems in the system.
Description of choice:
Enter the frequencies to be avoided.
See also parameter 229.
✭ 0.0 Hz
Programming
234 Motor phase monitor
(MOTOR PHASE MON)
Value:
✭Enable (ENABLE)
Disable (DISABLE)
✭ = factory setting. () = display text [] = value for use in communication via serial communication port
MG.50.R4.02 - VLT is a registered Danfoss trademark
[0]
[1]
81
Page 82

AKD 5000
■Parameters — Inputs and outputs
Digital inputs Terminal no. 16 17 18 19 27 29 32 33
parameter 300 301 302 303 304 305 306 307
Value:
No function (NO OPERATION) [0]* [0]* [0] [0]* [0] [0] [0]
Reset (RESET) [1] [1] [1] [1] [1]*
Coasting stop, inverse (COAST INVERSE) [0]
Reset and coasting stop, inverse (COAST & RESET INVERS) [1]
Quick-stop, inverse (QSTOP INVERSE) [2]
DC-braking, inverse (DCBRAKE INVERSE) [3]
Stop inverse (STOP INVERSE) [2] [2] [4]* [2] [2] [2]
Start (START) [1]*
Latched start (LATCHED START) [2]
Reversing (REVERSING) [1]
Start reversing (START REVERSE) [2]
Only start clockwise, on (ENABLE START FWD.) [3] [3] [3] [3]
Only start anti-clockwise, on (ENABLE START REV) [3] [3] [4] [3]
Jog (JOGGING) [4] [4] [5] [4]* [4]
Preset reference, on (PRESET REF. ON) [5] [5] [5] [5] [5]
Preset reference, lsb (PRESET REF. SEL. LSB) [5] [7] [6]
Preset reference, msb (PRESET REF. MSB) [6] [8] [6]
Freeze reference (FREEZE REFERENCE) [7] [7] [9] [7] [7]
Freeze output (FREEZE OUTPUT) [8] [8] [10] [8] [8]
Speed up (SPEED UP) [9] [11] [9]
Speed down (SPEED DOWN) [9] [12] [9]
Choice of Setup, lsb (SETUP SELECT LSB) [10] [13] [10]
Choice of Setup, msb (SETUP SELECT MSB) [10] [14] [10]
Choice of Setup, msb/speed up (SETUP MSB/SPEED UP) [11]
Choice of Setup, lsb/speed down (SETUP LSB/SPEED DOWN) [11]
Catch-up (CATCH UP) [11] [15] [12]
Slow-down (SLOW DOWN) [11] [16] [12]
Ramp 2 (RAMP 2) [12] [12] [17]* [13] [13]
Mains failure inverted (MAINS FAILURE INVERSE) [13] [13] [18] [14] [14]
Pulse reference (PULSE REFERENCE) [23] [28]
Pulse feedback (PULSE FEEDBACK) [24]
Encoder feedback input, A (ENCODER INPUT 2A) [25]
Encoder feedback input, B (ENCODER INPUT 2B) [24]
Safety interlock (SAFETY INTERLOCK) [24] [5]
Data change lock (PROGRAMMING LOCK) [29] [29] [29] [29] [29]
1
1) If this function is selected for terminal 29, the same function for terminal 17 will not be valid, even if it has been
selected to be active.
✭ = factory setting. () = display text [] = value for use in communication via serial communication port
82
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 83

AKD 5000
300 Terminal 16, input
(DIGITAL INPUT 16)
Function:
In this and the following parameters it is possible
to choose between the different possible functions
related to the inputs on terminals 16-33.
The function options are shown in the table on
page 111. The maximum frequency for terminal 16,
17, 18 and 19 is 5 kHz. The maximum frequency
for terminals 29, 32 and 33 is 65 kHz.
Description of choice:
No function is selected if the frequency converter is
not to react to signals transmitted to the terminal.
Reset zeroes the frequency converter after an alarm;
however, not all alarms can be reset.
Coasting stop inverse is used for making the frequency
converter let go of the motor to make it coast freely to
stop. Logic ’0’ leads to coasting stop and reset.
Reset and coasting stop inverse,isusedfor
activating coasting stop at the same time as reset.
Logic ‘0’ leadstocoastingstopandreset
Quick-stop inverse is used for stopping the motor
in accordance with the quick-stop ramp (depends
on unit). Logic ’0’ leads to a quick-stop.
DC braking inverse is used for stopping the
motor by energizing it with a DC voltage for a
given time, see parameters 125-127.
Please note that this function is only active if the
value of parameters 126-127 is different from
0. Logic ’0’ leads to DC braking.
Stop inverse is activated by interrupting the
voltage to the terminal. This means that if th
e
terminal has no voltage, the motor cannot run.
The stop will be effected in accordance with the
selected ramp (parameters 207/208).
None of the above-mentioned stop
commands (start-disable) are to be used
as disconnection switch in connection
with repairs. Cut mains instead.
NB!:
It must be noted that when the frequency
converter is at the torque limit and has received
a stop command, it will only
stop if terminal
42, 45, 01 or 04 has been connected to terminal
27. The data choice on terminal 42, 45, 01 or
04 must be Torque limit an
d stop [27].
Start, is selected if a start/stop (operating
command, group 2) command is desired. Logic
’1’ = start, logic ’0’ =stop.
Latched start - if a pulse is applied for min. 3 ms,
the motor will start, provided no stop command
(operating command, group 2). The motor stops
if Stop inverse is activated briefly.
Reversing: Not used in AKD.
Start reversing: Not used in AKD.
Start clockwise only, on is used if the motor shaft is
only to be able to rotate clockwise when starting.
ShouldnotbeusedwithProcess control, closed loop.
Start anti-clockwise only ,isusedifthemotor
shaft is to rotate anti-clockwise when started.
ShouldnotbeusedwithProcess control, closed loop.
Jog is used for overriding the output frequency to
the jog frequency set to 10 Hz. Jog is not active if
a stop command has been given (start-disable). Jog
overrides stop (operating command, group 2).
Preset reference, on is used for shifting between
external reference and preset reference. It is assumed
that External/preset [2] has been selected in parameter
214. Logic ’0’ = external references active; logic
’1’ = one of the four preset references is active
in accordance with the table below.
Preset reference, lsb and Preset reference, msb
enables a choice of one of the four preset references,
in accordance with the table below.
Preset ref. msb Preset ref. lsb
Preset ref. 1 0 0
Preset ref. 2 0 1
Preset ref. 3 1 0
Preset ref. 4 1 1
Freeze reference - freezes the actual reference. The
frozen reference is now the point of enable/condition
for Speed up and Speed down to be used.
Programming
= factory setting. () = display text [] = value for use in communication via serial communication port
✭
MG.50.R4.02 - VLT is a registered Danfoss trademark
83
Page 84

If speed up/down is used, the speed change
always follows ramp 2 (depends on unit) in
the range 0 - Ref
MAX
.
Freeze output - freezes the actual motor
frequency (Hz). The frozen motor frequency is
now the point of enable/condition for Speed up
and Speed down to be used.
If speed up/down is used, the speed change
always follows ramp 2 (parameters 209/210)
in the range 0 - f
M,N
.
NB!:
If Freeze output is active, the frequency
converter cannot be stopped via terminals
18 and 19, but only via terminal 27 (to
be programmed for Coasting stop, inverse [0] or
Reset and coasting stop, inverse [1]).
After Freeze output, the PID integrators are reset.
Speed up and Speed down are selected if digital
control of the up/down speed is desired (motor
potentiometer). This function is only active if Freeze
reference or Freeze output has been selected. As long
as there is a logic ‘1‘ on the terminal selected for speed
up, the reference or the output frequency will increase.
Follow ramp 2 (depends on unit) in the range 0 - f
MIN
As long as there is a logic ‘1‘ on the terminal
selected for speed down, the reference or the
output frequency will be reduced. Follow ramp 2
(depends on unit) in the range 0 - f
MIN
.
Pulses (logic ‘1‘ minimum high for 3 ms and a
minimum pause of 3 ms) will lead to a change of
speed of 0.1% (reference) or 0.1 Hz (output frequency).
AKD 5000
Example:
Terminal Freeze ref./
(16) (17) Freeze output
No speed change 0 0 1
Speed down 0 1 1
Speed up 1 0 1
Speed down 1 1 1
The speed reference frozen via the control panel
can be changed even if the frequency converter has
stopped. The frozen reference will be remembered
in case of a mains drop-out.
Selection of Setup, lsb and Selection of Setup,
msb enables a choice of one of the four Setups;
however, this presupposes that parameter 004
has been set at Multi Setup.
Selection of Setup, msb/Speed up and Selection
of Setup, lsb/Speed down - together with
the use of Freeze reference or Freeze output enable up/down speed change.
The selection of Setup occurs in accordance
with the below verification table:
.
Selection of Setup Freeze ref/
(32)msb (33)lsb Freeze output
Setup 1 0 0 0
Setup 2 0 1 0
Setup 3 1 0 0
Setup 4 1 1 0
No speed change 0 0 1
Speed down 0 1 1
Speed up 1 0 1
Speed down 1 1 1
Catch-up/Slow-down: Not used in AKD.
Ramp 2 is selected if a change between ramp
1 (parameters 207-208) and ramp 2 (depends
on unit) is desired. Logic ’0’ leads to ramp 1,
while logic ’1’ leads to ramp 2.
Mains failure inverted: Not used in AKD.
Pulse reference: Not used in AKD.
Pulse feedback: Not used in AKD.
Select Encoderfeedback, input A: Not used in AKD.
Select Encoder feedback, inputB: Not used in AKD.
Safety interlock has the same function as Coasting
stop, inverse, but Safety interlock generates the
✭
= factory setting. () = display text [] = value for use in communication via serial communication port
84
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 85
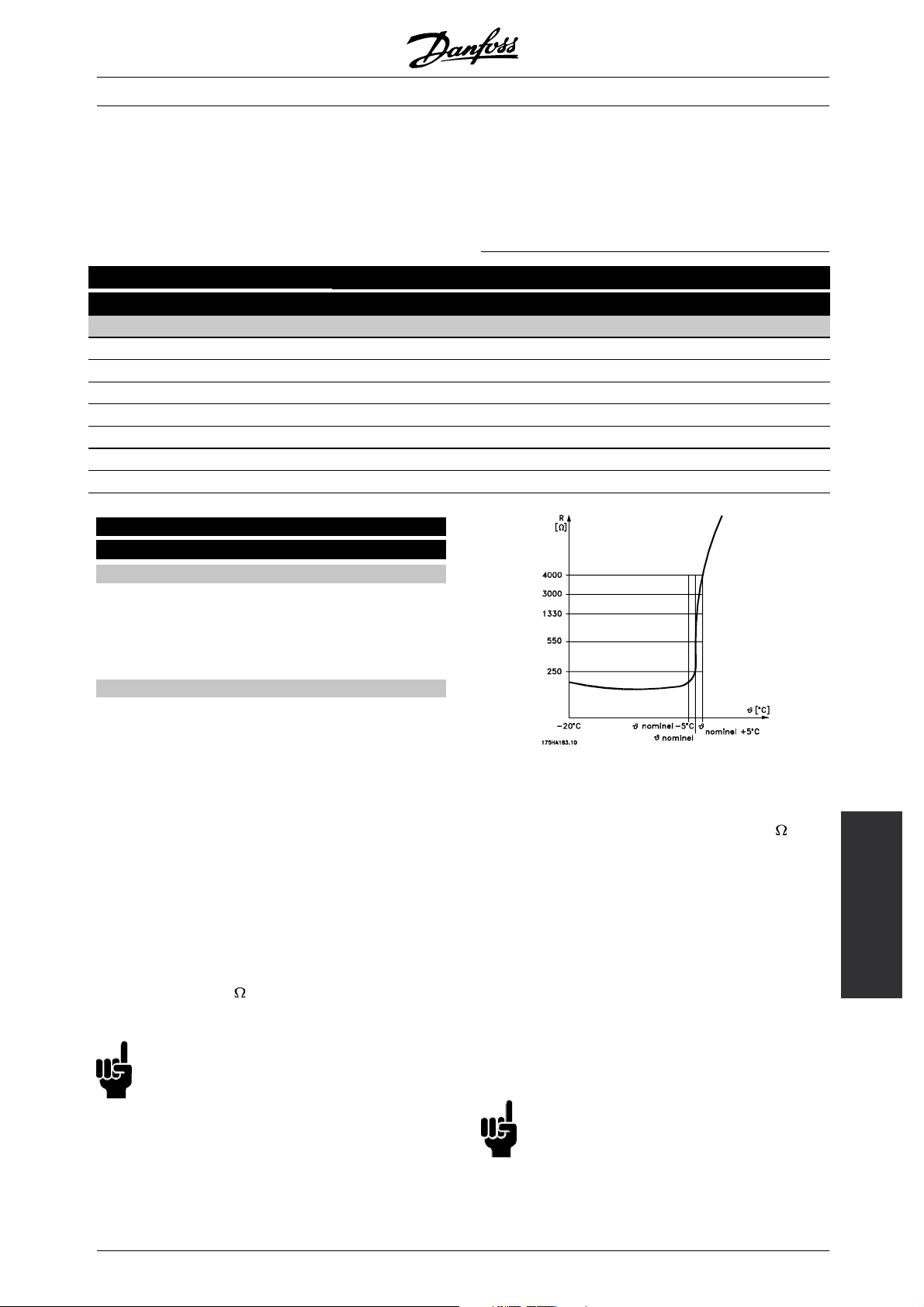
AKD 5000
alarm message "external fault" on the display
when the selected terminal is logic "0". The alarm
message will also be active via digital outputs
42/45 and relay outputs 01/04 if programmed for
Safety interlock. The alarm can be reset using a
Data change lock is selected if data changes to
parameters are not to be made via the control
unit; however, it will still be possible to carry
out data changes via the bus.
digital input or the [OFF/STOP] key.
Analogue inputs terminal no. 53(voltage) 54(voltage) 60(current)
parameter 308 311 314
Value:
No operation (NO OPERATION) [0] [0]✭ [0]
Reference (REFERENCE) [1] ✭ [1] [1] ✭
Feedback signal (FEEDBACK) [2] [2]
Torque limit (TORQUE LIMIT CTRL) [3] [2] [3]
Thermistor (THERMISTOR INPUT) [4] [3]
Relative reference (RELATIVE REFERENCE) [4] [4]
Max. torque frequency (MAX. TORQUE FREQ.) [5]
308 Terminal 53, analog input voltage
(AI [V ] 53 FUNCT.)
Function:
This parameter allows a choice of the desired
option on terminal 53.
Scaling of the input signal is effected in
parameters 309 and 310.
Description of choice:
No operation. Is selected if the frequency converter is
not to react to signals connected to the terminal.
Reference. Is selected to enable change of reference
by means of an analogue reference signal.
If other inputs are connected, these are added
up, taking account of their signs.
Feedback-signal. Is selected if closed loop control
with an analogue signal is used.
Torque limit. Is used if the torque limit value
set in parameter 221 is to be changed by
means of an analogue signal.
Thermistor. Is selected if a motor-integrated thermistor
(according to DIN44080/81) should stop the frequency
converter in case of motor overtemperature. The
cut-out value is > 3 k
. The thermistor is connected
to terminal 50 and the actual input selected (53 or 54).
NB!:
If the temperature of the motor is utilized
through a thermistor via the frequency conv
erter,
the following most be noted:
In case of short circuits between motorwinding
and thermistor, PELV is not complied with.
In order to comply with PELV, the thermistor
must be utilized externally.
If a motor features a thermal switch instead, this
can also be connected to the input. If motors run
in parallel, the thermistors/thermal switches can
be connected in series (total resistance < 3 k
).
Parameter 128 must be programmed for Thermistor
warning [1] or Thermistor trip [2].
Relative reference is selected if a relative adjustment
of the reference sum is required.
This func tion is o nly act ive if Relative has been selected
(parameter 214). The relative reference on terminal
54/60 is a percentage of the full range of the terminal
in question. This will be added to the sum of the other
references. If several relative references have been
selected (preset reference 215-218, 311 and 314),
these will be added first, following which this sum will
be added to the sum of the active references.
NB!:
If Reference or Feedback signal has been
selected on more than one terminal, these
signals will be added with signs.
Programming
= factory setting. () = display text [] = value for use in communication via serial communication port
✭
MG.50.R4.02 - VLT is a registered Danfoss trademark
85
Page 86

AKD 5000
Max. torque frequency. This is only used in Torque
control, open loop (parameter 100) for limiting the
output frequency. Selected if the max. output
frequency is to be controlled by an analogue input
signal. The frequency range goes from Output
frequency low limit (parameter 201) to Output
frequency high limit (parameter 202).
309 Terminal 53, min. scaling
(AI 53 SCALE LOW)
Value:
0.0 - 10.0 Volt
Function:
This parameter is used for setting the signal value
that corresponds to the maximum reference
value set in parameter 204.
Description of choice:
Set the desired voltage value.
See also section Handling of single references.
310 Terminal 53, max. scaling
(AI 53 SCALE H IGH)
Value:
0.0 - 10.0 Volt
Function:
This parameter is used for setting the signal value
that corresponds to the maximum reference
value set in parameter 205.
Description of choice:
Set the desired voltage value.
See also section Handling of single references.
311 Terminal 54, analogue input voltage
(AI [V] 54 FUNC T.)
Value:
✭No operation (NO OPERATION)
Reference (REFERENCE)
Torque limit (TORQUE LIMIT CTRL)
Thermistor (THERMISTOR INPUT)
Relative reference (RELATIVE REFERENCE)
Max. torque frequency (MAX. TORQUE FREQ.)
Function:
This parameter chooses between the different
functions available for the input, terminal 54.
✭ 0.0 Volt
✭ 10.0 Volt
[0]
[1]
[2]
[3]
[4]
[5]
Scaling of the input signal is effected in
parameters 312 and 313.
Description of choice:
See description of parameter 308.
312 Terminal 54, min. scaling
(AI 54 SCALE LOW)
Value:
0.0 - 10.0 Volt
Function:
This parameter is used for setting the scaling
value that corresponds to the minimum reference
value set in parameter 204.
Description of choice:
Set the desired voltage value.
See also section Handling of single references.
313 Terminal 54, max. scaling
(AI 54 SCALE HIGH)
Value:
0.0 - 10.0 Volt
Function:
This parameter is used for setting the signal value
that corresponds to the maximum reference
value set in parameter 205.
Description of choice:
Set the desired voltage value.
See also section Handling of single references.
314 Terminal 60, analogue input current
(AI [MA] 60 FUNCT)
Value:
See description of parameter 308
Function:
This parameter allows a choice between the different
functions available for the input, terminal 60.
Scaling of the input signal is effected in
parameters 315 and 316.
Description of choice:
See description of parameter 308.
✭ 0.0 Volt
✭ 10.0 Volt
✭ = factory setting. () = display text [] = value for use in communication via serial communication port
86
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 87

AKD 5000
315 Terminal 60, min. scaling
(AI 60 SCALE LOW)
Value:
0.0 - 20.0 mA
Function:
This parameter determines the value of the reference
signal that is to correspond to the minimum
reference value set in parameter 204.
If the Time-out function of parameter 317 is used,
the value must be set at >2 mA.
Description of choice:
Set the desired current value.
See also section Handling of single references.
316 Terminal 60, max. scaling
(AI 60 SCALE H IGH)
Value:
0.0 - 20.0 mA
Function:
This parameter sets the value of the reference
signal that is to correspond to the maximum
reference value set in parameter 205.
✭ 4mA
✭ 20.0 mA
Stop (STOP)
Jog (JOGGING)
Max. speed (MAX SPEED)
Stop and trip (STOP AND TRIP)
Function:
This parameter allows a choice of the function to
be activated if the input signal on terminal 60 drops
below 2 mA, provided parameter 315 has been
set higher than 2 mA and that the preset time for
time-out (parameter 317) has been exceeded.
If more time-outs occur at the same time the
frequency converter will give the following priority
tothetime-outfunction:
1. Parameter 318 Function after time out
2. Parameter 514 Bus time interval function
Description of choice:
The output frequency of the frequency converter can be:
- frozenatthepresentvalue
-overruledtostop
- overruled to jog frequency (10 Hz)
- overruled to max. frequency
- overruled to stop with subsequent trip.
[2]
[3]
[4]
[5]
Description of choice:
Set the desired current value.
See also section Handling of single references .
317 Time out
(LIVE ZE RO TIME O)
Value:
0 - 99 sec.
Function:
If the signal value of the reference signal connected
to the input, terminal 60, falls below 50% of the
value set in parameter 315 for a period longer than
the time set in parameter 317, the function selected
in parameter 318 will be activated.
Description of choice:
Set the desired time.
318 Function after time out
(LIVE ZERO FUNCT.)
Value:
✭Off (OFF)
Freeze output frequency (FREEZE OUTPUT FREQ.)
✭ = factory setting. () = display text [] = value for use in communication via serial communication port
✭ 10 sec.
[0]
[1]
Programming
MG.50.R4.02 - VLT is a registered Danfoss trademark
87
Page 88

AKD 5000
Outputs terminal no. 42 45 01(re-
lay)
parameter 319 321 323 326
Value:
No function (NO OPERATION) [0] [0] [0] [0]
Control ready (CONTROL READY) [1] [1] [1] [1]
Ready signal (UNIT READY) [2] ✭ [2] [2] [2]
Ready - remote control (UNIT READY/REM CTRL) [3] [3] [3] [3]
Enable, no warning (ENABLE/NO WARNING) [4] [4] [4] [4]
Running (VLT RUNNING) [5] [5] [5] [5]
Running, no warning (RUNNING/NO WARNING) [6] [6] [6] [6]
Running within range, no warning (RUN IN RANGE/NO WARN) [7] [7] [7] [7]
Running at reference value, no warning (RUNONREF/NOWARN) [8] [8] [8] [8]
Fault (ALARM) [9] [9] ✭ [9] [9]
Fault or warning (ALARM OR WARNING) [10] [10] [10] [10]
Torque limit (TORQUE LIMIT) [11] [11] [11] [11]
Out of current range (OUT OF CURRENT RANGE) [12] [12] [12] [12]
Over I low (ABOVE CURRENT,LOW) [13] [13] [13] [13]
Under I high (BELOW CURRENT,HIGH) [14] [14] [14] [14]
Out of frequency range (OUT OF FREQ RANGE) [15] [15] [15] [15]
Over f low (ABOVE FREQUENCY LOW) [16] [16] [16] [16] ✭
Under f high (BELOW FREQUENCY HIGH) [17] [17] [17] [17]
Out of feedback range (OUT OF FDBK RANGE) [18] [18] [18] [18]
Over feedback low (ABOVE FDBK, LOW) [19] [19] [19] [19]
Under feedback high (BELOW FDBK, HIGH) [20] [20] [20] [20]
Thermal warning (THERMAL WARNING) [21] [21] [21] [21]
Ready - no thermal warning (READY & NOTHERM WARN) [22] [22] [22] ✭ [22]
Ready - remote control - no therm.
warn.
Ready - mains voltage within range (RDY NO OVER/UNDERVOL) [24] [24] [24] [24]
Reversing (REVERSE) [25] [25] [25] [25]
Bus ok (BUS OK) [26] [26] [26] [26]
Torque limit and stop (TORQUE LIMIT AND STOP) [27] [27] [27] [27]
Brake, no brake warning (BRAKE NO BRAKE WARNING) [28] [28] [28] [28]
Brake ready, no fault (BRAKE RDY (NO FAULT)) [29] [29] [29] [29]
Brake fault (BRAKE FAULT (IGBT)) [30] [30] [30] [30]
Relay 123 (RELAY 123) [31] [31] [31] [31]
Mechanical brake control (MECH. BRAKE CONTROL) [32] [32] [32] [32]
Control word bit 11/12 (CTRL WORD BIT 11/12) [33] [33]
Extended mechanical brake control (EXT. MECH. BRAKE) [34] [34] [34] [34]
Safety interlock (SAFETY INTERLOCK) [35] [35] [35] [35]
(REM RDY & NO THERMWAR) [23] [23] [23] [23]
04
(relay)
✭ = factory setting. () = display text [] = value for use in communication via serial communication port
88
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 89

AKD 5000
Outputs terminal no. 42 45 01(relay) 04
(relay)
parameter 319 321 323 326
Value:
0-100 Hz ⇒ 0-20 mA (0-100 Hz = 0-20 mA) [36] [36]
0-100 Hz ⇒ 4-20 mA (0-100 Hz = 4-20 mA) [37] [37]
0-100 Hz ⇒ 0-32000 p (0-100 Hz = 0-32000P) [38] [38]
0-f
0-f
0-f
Ref
Ref
Ref
FB
FB
FB
0-I
0-I
0-I
0-T
0-T
0-T
0-T
0-T
0-T
0-P
0-P
0-P
0-SyncRPM⇒ 0-20 mA (0-SYNCRPM = 0-20 mA) [60] [60]
⇒ 0-20 mA (0-FMAX = 0-20 mA) [39] [39]
MAX
⇒ 4-20 mA (0-FMAX = 4-20 mA) [40] [40]
MAX
⇒ 0-32000 p (0-FMAX = 0-32000P) [41] [41]
MAX
-Ref
MIN
-Ref
MIN
-Ref
MIN
-FB
MIN
-FB
MIN
-FB
MIN
⇒ 0-20 mA (0-IMAX = 0-20 mA) [48] [48]
MAX
⇒ 4-20 mA (0-IMAX = 4-20 mA) [49] [49]
MAX
⇒ 0-32000 p (0-IMAX = 0-32000P) [50] [50]
MAX
⇒ 0-20 mA (0-TLIM = 0-20 mA) [51] [51]
LIM
⇒ 4-20 mA (0-TLIM = 4-20 mA) [52] [52]
LIM
⇒ 0-32000 p (0-TLIM = 0-32000P) [53] [53]
LIM
NOM
NOM
NOM
NOM
NOM
NOM
⇒ 0-20 mA (REF MIN-MAX = 0-20 mA) [42] [42]
MAX
⇒ 4-20 mA (REF MIN-MAX = 4-20 mA) [43] [43]
MAX
⇒ 0-32000 p (REF MIN-MAX = 0-32000P) [44] [44]
MAX
⇒ 0-20 mA (FB MIN-MAX = 0-20 mA) [45] [45]
MAX
⇒ 4-20 mA (FB MIN-MAX = 4-20 mA) [46] [46]
MAX
⇒ 0-32000 p (FB MIN-MAX = 0-32000P) [47] [47]
MAX
⇒ 0-20 mA (0-TNOM = 0-20 mA) [54] [54]
⇒ 4-20 mA (0-TNOM = 4-20 mA) [55] [55]
⇒ 0-32000 p (0-TNOM = 0-32000P) [56] [56]
⇒ 0-20 mA (0-PNOM = 0-20 mA) [57] [57]
⇒ 4-20 mA (0-PNOM = 4-20 mA) [58] [58]
⇒ 0-32000 p (0-PNOM = 0-32000P) [59] [59]
0-SyncRPM⇒ 4-20 mA (0-SYNCRPM = 4-20 mA) [61] [61]
0-SyncRPM⇒ 0-32000 p (0-0-SYNCRPM = 0-32000 p) [62] [62]
0-RPMatFMAX⇒ 0-20 mA (0-RPMFMAX = 0-20 mA) [63] [63]
0-RPMatFMAX⇒ 4-20 mA (0-RPMFMAX = 4-20 mA) [64] [64]
0-RPMatFMAX⇒ 0-32000 p (0-RPMFMAX = 0-32000 p) [65] [65]
Programming
✭ = factory setting. () = display text [] = value for use in communication via serial communication port
MG.50.R4.02 - VLT is a registered Danfoss trademark
89
Page 90

AKD 5000
Function:
This output can act both as a digital and an analogue
output. If used as a digital output (data value
[0]-[65]), a 24 V DC signal is transmitted; if used as
an analogue output either a 0-20 mA signal, a 4-20
mA signal or a pulse output is transmitted.
Description of choice:
Control ready, the frequency converter is ready for
use; the control card receives supply voltage.
Ready signal, the frequency converter control card
is receiving a supply signal and the frequency
converter is ready for operation.
Ready, remote control, the frequency converter control
card is receiving a supply signal and parameter
002 has been set to remote control.
Enable, no warning, the frequency converter is
ready for use; no start or stop command has been
given (start/disable). No warning.
Running, a start command has been given.
Running, no warning , the output frequency
is higher than 0 Hz. A start command has
been given. No warning.
Runs in range, no warning, runs within the programmed
current/frequency ranges set in parameters 223-226.
Runs on reference, no warning, speed according
to reference. No warning.
Fault, output is activated by alarm.
Fault or warning, the output is activated
by alarm or warning.
Torque limit, the torque limit in paramet
221 has been exceeded.
Out of current range, the motor current is outside the
range programmed in parameters 223 and 224.
Over I low, the motor current is higher than
set in parameter 223.
er
Under f high, the output frequency is lower than
the value set in parameter 226.
Out of feedback range, the feedback signal is outside
the range programmed in parameters 227 and 228.
Over feedback low, the feedback signal is higher
than the value set in parameter 227.
Under feedback high, the feedback signal is lower
that the value set in parameter 228.
Thermal warning, above the temperature limit
in either the motor, the frequency converter, the
brake resistor or the thermistor.
Ready - no thermal warning, the frequency converter
is ready for use, the control card receives supply
voltage and there are no control signals on the
inputs. No over-temperature.
Ready - remote control - no thermal warning
, the frequency converter is ready for use and
set at remote control, the control card receives
supply voltage. No over-temperature.
Ready - mains voltage within range, the frequency
converter is ready for use, the control card receives
supply voltage and there are no control signals
on the inputs. The mains voltage is within the
permitted voltage range (see chapter 8).
Reversing. Logic ’1’:NotusedinAKD.
Bus-ok, active communication (no time-out) via
the serial communication port.
Torque limit and stop is used in connection with
coasting stop (terminal 27), where it is possible to
give a stop even if the frequency converter is at
the torque limit. The signal is inverted, i.e. a logic
‘0’ when the frequency converter has received a
stop signal and is at the torque limit.
Brake, no brake warning:NotusedinAKD.
Brake ready, no fault:NotusedinAKD.
Under I high, the motor current is
set in parameter 224.
Out of frequency range, the output frequency
is outside the frequency range programmed
in parameters 225 and 226.
Over f low, the output freq
the value set in parameter 225.
= factory setting. () = display text [] = value for use in communication via serial communication port
✭
90
uency is higher than
lower than
Brake fault:NotusedinAKD.
Relay 123:NotusedinAKD.
Mechanical brake control:NotusedinAKD.
Control word bits 11/12, relay controlled via bits 11/12
in serial control word. Bit 11 relates to relay 01 and
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 91

AKD 5000
bit 12 to relay 04. If parameter 514 Bus time interval
function is active, relays 01 and 04 will be voltage-free.
Extended mechanical brake control:NotusedinAKD.
Safety interlock Theoutputisactivewhen
Safety interlock has been selected on an input
and the input is a logic "1".
0-100 Hz⇒0-20 mA and
⇒
0-100 Hz
0-100 Hz
4-20 mA and
⇒
0-32000 p, a pulse output
signal proportional to the output frequency
in the range 0-100 Hz.
⇒
0-f
0-f
0-f
MAX
MAX
MAX
0-20 mA and
⇒
4-20 mA and
⇒
0-32000 p, an output signal proportional
to the output frequency range in the range
0-f
Ref
Ref
Ref
(parameter 202).
MAX
-Ref
MIN
-Ref
MIN
-Ref
MIN
MAX
MAX
MAX
⇒
0-20 mA and
⇒
4-20 mA and
⇒
0-32000 p, an output signal
proportional to the reference value in the interval
Ref
MIN
-Ref
(parameters 204/205) is obtained.
MAX
0-P
NOM
0-32000 p, 0 - P
NOM
⇒
0-32000
⇒
p, an output signal proportional to the rated
motor output is obtained. 20 mA corresponds
to the value set in parameter 102.
⇒
0-SyncRPM
0-SyncRPM
0-SyncRPM
0-20 mA and
⇒
4-20 mA and
⇒
0-32000 p, an output
signal proportional to the synchronous motor
RPM is obtained.
⇒
0-RPMatF
0-RPMatF
0-RPMatF
MAX
MAX
MAX
0-20 mA and
⇒
4-20 mA and
⇒
0-32000 p, n output signal
proportional to the synchronous motor RPM at
(parameter 202) is obtained.
F
MAX
B
-FB
MIN
FB
MIN
FB
MIN
proportional to the feedback value in the interval FB
-FB
MAX
0-I
VLT, MAX
0-I
VLT, MAX
0-I
VLT, MAX
⇒
MAX
MAX
⇒
0-20 mA and
⇒
4-20 mA and
0-32000 p, an output signal
MAX
-FB
-FB
(parameters 414/415) is obtained.
⇒
0-20 mA or
⇒
4-20 mA and
⇒
0-32000 p, an output signal
MIN
proportional to the output current in the interval
0-I
VLT,MAX
is obtain ed. I
VLT,MAX
depends on the
settings in parameter 101 and 103 and can be seen
from the Technical data (I
0-M
0-M
0-M
⇒
0-20 mA and
LIM
⇒
4-20 mA and
LIM
⇒
0-32000 p, an output proportional
LIM
VLT,MAX
totheoutputtorqueintheinterval0-T
(60 s).
LIM
(parameter 221) is obtained. 20 mA corresponds
to the value set in parameter 221.
⇒
0-M
0-M
0-M
NOM
NOM
NOM
0-20 mA and
⇒
4-20 mA and
⇒
0-32000 p, an output signal proportional
totheoutputtorqueofthemotor. 20mAcorresponds
to the rated torque for the motor.
Programming
⇒
0-P
0-P
NOM
NOM
0-20 mA and
⇒
4-20 mA and
✭ = factory setting. () = display text [] = value for use in communication via serial communication port
MG.50.R4.02 - VLT is a registered Danfoss trademark
91
Page 92

AKD 5000
■Parameters — Special functions
405 Reset function (RESET MODE)
Value:
Manual reset (MANUAL RESET)
Automatic reset x 1 (AUTOMATIC X 1)
✭Automatic reset x 2 (AUTOMATIC X 2)
Automatic reset x 3 (AUTOMATIC X 3)
Automatic reset x 4 (AUTOMATIC X 4)
Automatic reset x 5 (AUTOMATIC X 5)
Automatic reset x 6 (AUTOMATIC X 6)
Automatic reset x 7 (AUTOMATIC X 7)
Automatic reset x 8 (AUTOMATIC X 8)
Automatic reset x 9 (AUTOMATIC X 9)
Automatic reset x 10 (AUTOMATIC X 10)
Function:
This parameter makes it possible to select the
reset function desired after tripping.
After reset, the frequency converter can be restarted.
Description of choice:
If Manual reset [0] is selected, reset must be effected
via the [RESET] key or via the digital inputs.
If the frequency converter is to carry out an
automatic reset (1-10 times) after tripping,
select data value [1]-[10].
NB!:
The internal AUTOMATIC RESET counter is
reset 10 minutes after the first AUTOMATIC
RESET has occurred.
Warning: The motor may start
without warning.
406 Automatic restart time
(AUT RESTART T IME)
Value:
0-10min.
Function:
This parameter allows setting of the time from tripping
until the automatic reset function begins.
It is assumed that automatic reset has been
selected in parameter 405.
Description of choice:
Set the desired time.
✭ 5min.
[0]
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
407 Mains failure
(MAINS FAILURE)
Value:
✭No function (NO FUNCTION)
Controlled ramp-down
(CONTROL RAMP DOWN)
Controlled ramp-down and trip
(CTRL. RAMP DOWN-TRIP)
Coasting (COASTING)
Kinetic back-up (KINETIC BACKUP)
Controlled alarm suppression
(CTRL ALARM SUPP)
Function:
Using the mains failure function, it is possible to
ramp down the load to 0 Hz if the mains supply
to the frequency converter fails.
This function can also be activated by selecting
Mains failure inverted on a digital input.
When Kinetic backup [4] is selected, the ramp function
in parameter 207-211 is deactivated.
Controlled ramp down and kinetic back up have
limited performance above 70% load.
Description of choice:
Select No function [0] if this function is not required.
If Controlled ramp-down [1] is selected, the motor
will ramp via the quick-stop ramp. If the supply
voltage is re-established during ramp-down, the
frequency converter will start up again. If Controlled
ramp-down and trip [2] is selected, the motor
will ramp via the quick-stop ramp.
At 0 Hz the frequency converter will trip (ALARM 36,
mains failure). If the supply voltage is re-established
during ramp-down, the frequency converter will
continue the quick-stop ramp and trip. If Coasting
[3] is selected, the frequency converter will turn off
the inverters and the motor will start coasting.
Parameter 445 Flying motor must be active,
so that if the supply voltage is re-established,
the frequency converter will be able to catch
the motor and start up again.
If Kinetic back-up [4] is selected, the frequency
converter will try to utilise the energy from the
load to maintain a constant intermediate circuit
voltage. If the supply voltage is re-established, the
frequency converter will start up again.
If Controlled alarm suppression [5] is selected, the
frequency converter will trip if there is a mains failure.
[0]
[1]
[2]
[3]
[4]
[5]
✭ = factory setting. () = display text [] = value for use in communication via serial communication port
92
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 93

AKD 5000
409 Trip delay torque
(TRIP DELAY TORQ.)
Value:
0 - 60 sec. (OFF)
Function:
When the frequency converter registers that the
output torque has increased up to the torque limits
(parameter 221) in the set time, cutting out is
effected when that time has passed.
Description of choice:
Select how long the frequency converter is to be
able to run at the torque limit before cutting out. 60
sec. = OFF means that the time is infinite; however,
the thermal monitoring will still be active.
411 Switching frequency
(SWITCH FREQ.)
Value:
✭Depends on the unit output.
Function:
The set value determines the switching frequency of
the frequency converter. If the switching frequency
is changed, this may help to minimise possible
acoustic noise from the motor.
NB!:
The output frequency of the frequency converter
can never assume a value higher than 1/10
of the switching frequency.
Description of choice:
When the motor is running, the switching frequency is
adjusted in parameter 411 until the frequency has been
obtained at which the motor is as low-noise as possible.
NB!:
Switching frequencies higher than 3.0 kHz (4.5
kHz for 60°C AVM) lead to automatic derating of
the maximum output of the frequency converter.
412 Output frequency dependent switching
frequency
(VAR CARRIER FREQ)
Value:
✭Not possible (DISABLE)
Possible (ENABLE)
✭ OFF
[0]
[1]
Function:
This function makes it possible to increase the
switching frequency at a falling output frequency.
Used in applications with square torque characteristics
(centrifugal pumps and fans) in which the load
declines depending on the output frequency. However,
the maximum switching frequency is determined
by the value set in parameter 411.
Description of choice:
Select Not possible [0] if a permanent switching
frequency is desired.
Set the switching frequency in parameter 411. If
Possible [1] is selected the switching frequency will
decline at an increasing output frequency.
414 Minimum feedback
(MIN. FEEDBACK)
Value:
-100,000.000 - Max. feedback
Function:
Parameters 414 and 415 are used to scale the display
text to make it show the feedback signal as the actual
unit proportional to the signal on the input. This value
will be displayed if Feedback [unit] [3] has been selected
in one of parameters 009-012 and in the display mode.
Choose the feedback signal unit in parameter 416.
Used together with Speed control, closed loop;
Process control, closed loop and Torque control
speed feedback, (parameter 100).
Description of choice:
Is only active when parameter 203 has been
set to Min-Max [0].
Set the value to be shown on the display when
Minimum feedback is obtained on the selected
feedback input (parameter 308 or 314).
The minimum value can be limited by the
choice of configuration (parameter 100) and
reference/feedback range (parameter 203).
If Speed control, closed loop [1] has been
selected in parameter 100, minimum feedback
cannot be set under 0.
✭ 0.000
Programming
✭ = factory setting. () = display text [] = value for use in communication via serial communication port
MG.50.R4.02 - VLT is a registered Danfoss trademark
93
Page 94

AKD 5000
415 Maximum feedback
(MAX. FEEDBACK)
Value:
Min. feedback - 100,000.000
✭ 1,500.000
Function:
This value should be 10% higher than par. 205
Maximum reference, to keep the frequency converter
from integrating as a response to a possible offset fault.
For further description, see parameter 414.
Description of choice:
Setthevaluetobeshownonthedisplaywhen
Maximum feedback is obtained on the selected
feedback input (parameter 308 or 314).The
maximum value can be limited by the choice
of configuration (parameter 100).
416 Reference/feedback unit
(REF/FEEDB. UNIT)
Value:
NO UNIT
%
PPM
RPM
✭bar
CYCLE/min
PULSE/s
UNITS/s
UNITS/min
UNITS/h
°C
Pa
l/s
3
/s
m
l/min
3
/min
m
l/h
3
/h
m
kg/s
kg/min
kg/h
t/min
t/h
m
Nm
m/s
m/min
°F
in wg
gal/s
3
/s
ft
[10]
[11]
[12]
[13]
[14]
[15]
[16]
[17]
[18]
[19]
[20]
[21]
[22]
[23]
[24]
[25]
[26]
[27]
[28]
[29]
[30]
[0]
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
gal/min
3
ft
/min
gal/h
3
/h
ft
lb/s
lb/min
lb/h
lb ft
ft/s
ft/min
[31]
[32]
[33]
[34]
[35]
[36]
[37]
[38]
[39]
[40]
Function:
Choose among different units to be shown
on the display.
This unit is also used directly in Process control,
closed loop as a unit for Minimum/Maximum
reference (parameters 204/205) and i.
The possibility of choosing a unit in parameter
416 will depend on the choices made in
the following parameters:
Par. 002 Local/remote control.
Par. 013 Local control/config. as par. 100.
Par. 100 Configuration.
elect parameter 002 as Remote control
S
If parameter 100 is selected as Speed control, open
loop or Torque control, open loop , the unit selected in
parameter 416 can be used in displays (par. 009-12
Feedback [unit]) of process parameters.
The process parameter to be displayed can be
connected in the form of an external analogue
signal to terminal 53 (par. 308: Feedback signal)
or terminal 60 (par. 314: Feedback signal).
Note: The reference can only be shown in Hz (Speed
control, open loop)orNm(Torque control, open loop).
If par. 100 is selected as Speed control, closed loop
, parameter 416 is not active, since both reference
and feedback are always shown as RPM.
If parameter 100 is selected as Process control,
closed loop, the unit selected in parameter 416
will be used when displaying both reference
(par. 009-12: Reference [unit]) and feedbac k
(par. 009-12: Feedback [unit]).
Scaling of the display indication as a function of
the selected range (par. 309/310, 312/313, 315
and 316) for a connected, external signal is effected
for a reference in parameters 204 and 205 and for
feedback in parameters 414 and 415.
elect parameter 002 as Local control
S
If parameter 013 is chosen as LCP control and
open loop or LCP digital control and open loop
, the reference will be given in Hz, regardless of
the choice made in parameter 416. A feedback or
= factory setting. () = display text [] = value for use in communication via serial communication port
✭
94
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 95
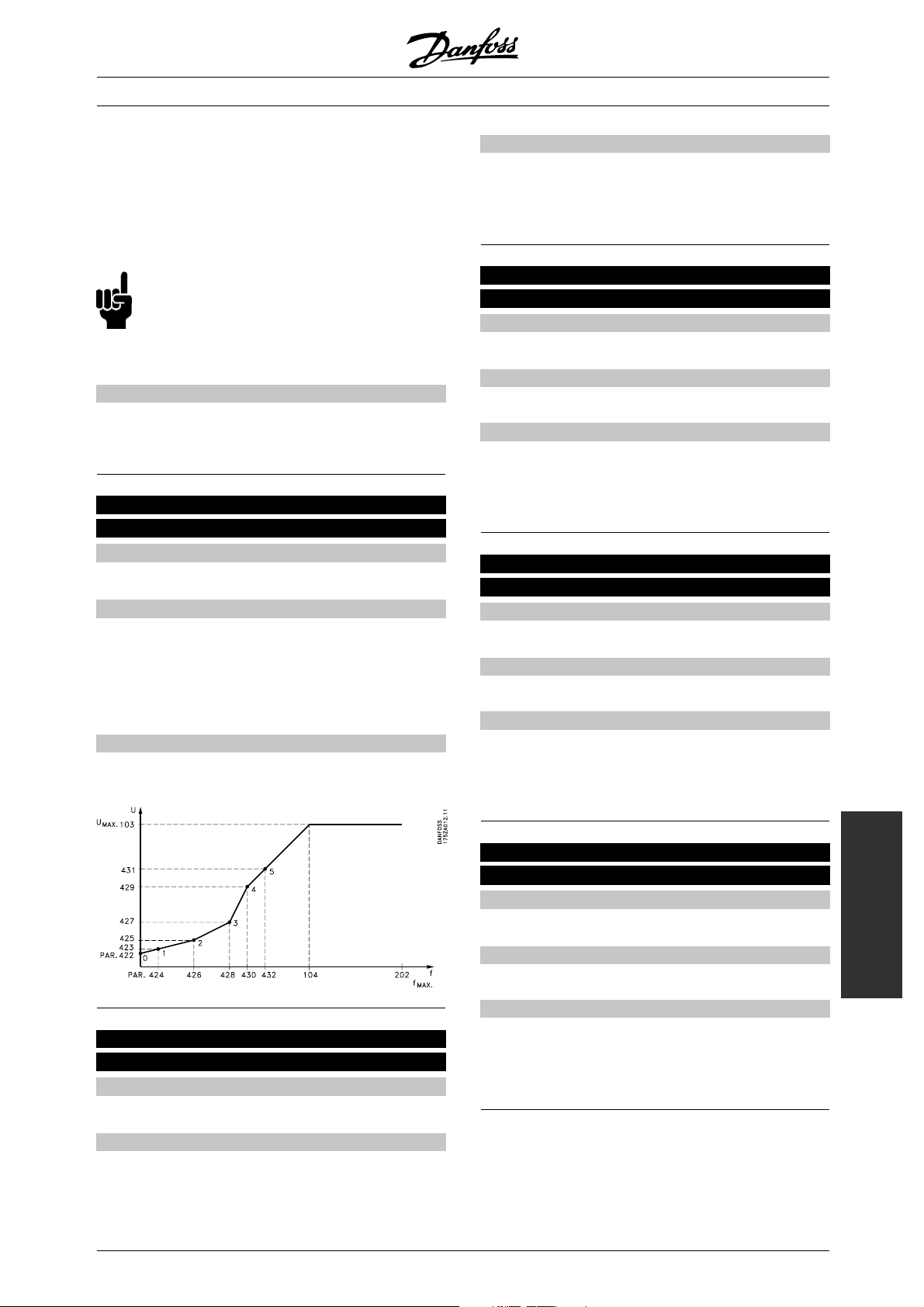
AKD 5000
process signal connected to terminal 53, 60 or 33
(pulse), will, however, be displayed in the form of the
unit selected in parameter 416. If parameter 013 is
chosen as LCP control/as par. 100 or LCP digital
control/as par. 100, the unit will be as described
above under parameter 002, Remote-control.
NB!:
The above applies to display of Reference
[unit] and Feedback [unit].IfReference [%] or
Feedback [%] is selected, the value displayed will
be in the form of a percentage of the selected range.
Description of choice:
Select the desired unit for the reference/feedback signal.
422 U0voltageat0Hz
(U0 VOLTAGE (0HZ))
Value:
0.0 - parameter 103
✭ 20.0 volt
Function:
Parameters 422-432 can be used together with Special
motor characteristics (par. 101). It is possible to
make a U/f characteristic on the basis of six definable
voltages and frequencies. Change of motor nameplate
data (parameter 102 - 106) affects parameter 422.
Description of choice:
Set the desired voltage at 0 Hz.
See the below drawing.
Description of choice:
Set the voltage desired at the F1 frequency
set in parameter 424.
See drawing for parameter 422.
424 F 1 frequency
(F1 FREQUENCY)
Value:
0.0 - par. 426 Factory setting of par. 104
Function:
This parameter sets the X-value of the 1st break point.
Description of choice:
Set the frequency desired at the U1 voltage
set in parameter 423.
See drawing for parameter 422.
425 U 2 voltage
(U2 VOLTAGE)
Value:
0.0 - U
AKD, MAX
Factory setting of par. 103
Function:
This parameter sets the Y-value of the 2nd break point.
Description of choice:
Set the voltage desired at the F2 frequency
set in parameter 426.
See drawing for parameter 422.
426 F 2 frequency
(F2 FREQUENCY)
Value:
par. 424 - par. 428 Factory setting of par. 104
Function:
This parameter sets the X-value of the 2nd break point.
Description of choice:
423 U 1 voltage
(U1 VOLTAGE)
Set the frequency desired at the U2 voltage
set in parameter 425.
See drawing for parameter 422.
Value:
0.0 - U
AKD,MAX
Factory setting of par. 103
Function:
This parameter sets the Y-value of the 1st break point.
✭ = factory setting. () = display text [] = value for use in communication via serial communication port
MG.50.R4.02 - VLT is a registered Danfoss trademark
Programming
95
Page 96

AKD 5000
427 U 3 voltage
(U3 VOLTAGE)
Value:
0.0 - U
AKD,MAX
Factory setting of par. 103
Function:
This parameter sets the Y-value of the 3rd break point.
Description of choice:
Set the voltage desired at the F3 frequency
set in parameter 428.
See drawing for parameter 422.
428 F 3 frequency
(F3 FREQUENCY)
Value:
par. 426 - par. 430 Factory setting of par. 104
Function:
This parameter sets the X-value of the 3rd break point.
Description of choice:
Set the frequency desired at the U3 voltage
set in parameter 427.
See drawing for parameter 422.
429 U 4 voltage
(U4 VOLTAGE)
Value:
0.0 - U
AKD,MAX
Factory setting of par. 103
Function:
This parameter sets the Y-value of the 4th break point.
Description of choice:
Set the voltage desired at the F4 frequency
set in parameter 430.
See drawing for parameter 422.
430 F 4 frequency
(F4 FREQUENCY)
Value:
par. 428 - par. 432 Factory setting of par. 104
Function:
This parameter sets the X-value of the 4th break point
See drawing for parameter 422.
431 U 5 voltage
(U5 VOLTAGE)
Value:
0.0 - U
AKD, MAX
Factory setting of par. 103
Function:
This parameter sets the Y-value of the 5th break point.
Description of choice:
Set the voltage desired at the F5 frequency
set in parameter 432.
432 F 5 frequency
(F5 FREQUENCY)
Value:
par. 430 - 1000 Hz Factory setting of par. 104
Function:
This parameter sets the X-value of the 5th break point.
This parameter is not limited by parameter 200.
Description of choice:
Set the frequency desired at the U5 voltage
set in parameter 431.
See drawing for parameter 422.
437 Process PID Normal/inverse control
(PROC NO/INV CTRL)
Value:
Normal (NORMAL)
✭Inverse (INVERSE)
Function:
It is possible to choose whether the process regulator
is to increase/reduce the output frequency. This is
done by having a difference between the reference
signal and the feedback signal.
Used together with Process control, closed
loop (parameter 100).
Description of choice:
If the frequency converter is to reduce the
output frequency in case the feedback signal
increases, select Normal [0].
[0]
[1]
Description of choice:
Set the frequency desired at the U4 voltage
set in parameter 429.
= factory setting. () = display text [] = value for use in communication via serial communication port
✭
96
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 97

AKD 5000
If the frequency converter is to increase the
output frequency in case the feedback signal
increases, select Inverse [1].
438 Process PID anti windup
(PROC ANTI WINDUP)
Value:
Off (DISABLE)
✭On (ENABLE)
Function:
It is possible to select whether the process regulator
is to continue regulating on an error even if it is not
possible to increase/reduce the output frequency.
Used together with Process control, closed
loop (parameter 100).
Description of choice:
The factory setting is Enable [1], which means that
the integration link is adjusted in relation to the
actual output frequency if either the current limit or
the max./min. frequency has been reached. The
process regulator will not engage again until either
the error is zero or its sign has changed.
Select Disable [0] if the integrator is to continue
integrating on an error, even if it is not possible
to remove the fault by such control.
[0]
[1]
Description of choice:
Set the required start frequency.
NB!:
If the frequency converter is running at the
current limit before the desired start frequency
is obtained, the process regulator will not be
activated. For the regulator to be activated anyway,
the start frequency must be lowered to the required
output frequency. This can be done during operation.
440 Process PID proportional gain
(PROC. PROP. GAIN)
Value:
0.00 - 10.00
✭ 0.01
Function:
The proportional gain indicates the number of
times the error between the set point and the
feedback signal is to be applied.
Used together with Process control, closed
loop (parameter 100).
Description of choice:
Quick control is obtained by a high gain, but if the gain
is too high, the process may become unstable.
NB!:
If Disable [0] is selected, it will mean that when
the error changes its sign, the integrator will
firsthavetointegratedownfromthelevel
obtained as a result of the former error, before any
change to the output frequency occurs.
439 Process PID start frequency
(PROC START VALUE)
Value:
f
MIN-fMAX
(parameter 201 and 202)
✭ parameter 201
Function:
When the start signal comes, the frequency converter
will react in the form of Speed control, open loop
following the ramp. Only when the programmed start
frequency has been obtained, will it change over to
Process control, closed loop. In addition, it is possible
to set a frequency that corresponds to the speed at
which the process normally runs, which will enable the
required process conditions to be reached sooner.
Used together with Process control, closed
loop (parameter 100).
441 Process PID integral time
(PROC. INTEGR. T.)
Value:
0.01 - 9999.99 sec. (OFF)
✭ OFF
Function:
The integrator provides an increasing gain at a constant
error between the set point and the feedback signal.
The greater the error, the quicker the gain will increase.
The integral time is the time needed by the integrator
to reach the same gain as the proportional gain.
The gain is proportional to the speed at
which the error changes.
Used together with Process control, closed
loop (parameter 100).
Description of choice:
Quick control is obtained at a short integral time.
However, this time may become too short, which
can make the process unstable.
If the integral time is long, major deviations
from the required set point may occur, since
Programming
= factory setting. () = display text [] = value for use in communication via serial communication port
✭
MG.50.R4.02 - VLT is a registered Danfoss trademark
97
Page 98
AKD 5000
the process regulator will take a long time to
regulate in relation to a given error.
444 Process PID lowpass filter time
(PROCFILTERTIME)
Value:
0.01 - 10.00
✭ 0.01
Function:
Oscillations on the feedback signal are dampened
by the lowpass filter in order to reduce their impact
on the process control. This can be an advantage
e.g. if there is a lot of noise on the signal.
Used together with Process control, closed
loop (parameter 100).
Description of choice:
Select the desired time constant (τ). Ifatimeconstant
(τ) of 100 ms is programmed, the break frequency
for the lowpass filter will be 1/0.1 = 10 RAD/sec.,
corresponding to (10/2 x π)=1.6Hz.
The process regulator will thus o
nly regulate a feedback
signal that varies by a frequency lower than 1.6 Hz.
If the feedback signal varies by a higher frequency
than 1.6 Hz, the Process regulator will not react.
Description of choice:
Select 60° AVM if the option of using a switching
frequency up to 14/10 kHz is required. Derating
of the rated output current I
is effected from
VLT.N
a switching frequency of 4.5 kHz.
SelectSFAVM if the option of using a switching
frequency up to 5/10 kHz is required. Derating
of the rated output current I
is effected from
VLT.N
a switching frequency of 3.0 kHz.
445 Flying start
(FLYING START)
Value:
✭Off (DISABLE)
On (ENABLE)
Function:
This function makes it possible to catch spinning motor,
which is spinning freely because of a mains drop-out.
Description of choice:
Select Disable if this function is not required. Select
Enable if the frequency converter is to be able to
‘catch’ and control a spinning motor.
446 Switching pattern
(SWITCH PATTERN)
Value:
60° AVM (60° AVM)
✭SFAVM (SFAVM)
[0]
[1]
[0]
[1]
Function:
Choose between two different switching patterns:
60° AVM and SFAVM.
✭ = factory setting. () = display text [] = value for use in communication via serial communication port
98
MG.50.R4.02 - VLT is a registered Danfoss trademark
Page 99

AKD 5000
■Parameters — Serial communication
500 Address
(BUS A DDRESS)
Value:
1 - 126
Function:
This parameter allows specification of the address
of each frequency converter. This feature is used
in connection with PLC/PC connection.
Description of choice:
The individual frequency converters can be given an
address between 1 and 126. The address 0 is used
if a master (PLC or PC) wishes to send a telegram
that is to be received by all frequency converters
connected to the serial communication port at the
same time. In this case, the frequency converter
will not acknowledge receipt. If the number of units
connected (frequency converters + master) exceeds
31, a repeater is required. Parameter 500 cannot be
selected via the serial communication port.
✭ 1
is transmitted (active signal = 1) via both a
control word and a digital input.
Logic or [3] is selected if the control command in
question is to be activated when a signal is given (active
signal = 1) either via a control word or via a digital input.
513 Bus time interval
(BUS TIMEOUT TIME)
Value:
1-99sec.
Function:
This parameter sets the maximum time expected
to pass between the receipt of two consecutive
telegrams. If this time is exceeded, the serial
communication is assumed to have stopped and
the desired reaction is set in parameter 514.
Description of choice:
Set the desired time.
✭ 1sec.
507 Selection of Setup
(SETUP SELECT)
Value:
Digital input (DIGITAL INPUT)
Bus (SERIAL PORT)
Logic and (LOGIC AND)
✭Logic or (LOGIC OR)
Function:
Parameter 507 allows a choice between controlling
the frequency converter via the terminals (digital
input) and/or via the bus.
If Logic and or Bus is selected, the command
in question can only be activated if transmitted
via the serial communication port. In the case
of Logic and, the command must additionally be
activated via one of the digital inputs.
Description of choice:
Digital input [0] is selected if the control command in
question is only to be activated via a digital input.
Bus [1] is selected if the control command in
question is only to be activated via a bit in the
control word (serial communication).
Logic and [2] is selected if the control command
in question is only to be activated when a signal
[0]
[1]
[2]
[3]
514 Bus time interval function
(BUS TIMEOUT FUNC)
Value:
Off (OFF)
Freeze output (FREEZE OUTPUT)
Stop (STOP)
Jogging (JOGGING)
Max. speed (MAX SPEED)
Stop and trip (STOP AND TRIP)
Function:
This parameter selects the desired reaction of the
frequency converter when the set time for bus timeout
(parameter 513) has been exceeded.
If choices [1] to [5] are activated, relay 01 and
relay 04 will be de-activated.
If more time-outs occur at the same time the
frequency converter will give the following priority
tothetime-outfunction:
1. Parameter 318 Function after time out
2. Parameter 346 Function after encoder loss
3. Parameter 514 Bus time interval function.
Description of choice:
The output frequency of the frequency converter
can: be frozen at the present value, be frozen at
the reference, go to stop, go to jogging frequency
[0]
[1]
[2]
[3]
[4]
[5]
Programming
= factory setting. () = display text [] = value for use in communication via serial communication port
✭
MG.50.R4.02 - VLT is a registered Danfoss trademark
99
Page 100

(parameter 213), go to max. output frequency
(parameter 202) or stop and activate a trip.
AKD 5000
Parameter
no.
Description Display
text
Unit Updating
515 Reference % (REFERENCE) % 80 msec.
516 Reference Unit (REFERENCE [UNIT]) Hz, Nm or rpm 80 msec.
517 Feedback (FEEDBACK) To be selected
80 msec.
via par. 416
518 Frequency (FREQUENCY) Hz 80 msec.
520 Current (MOTOR CURRENT) Amp x 100 80 msec.
522 Power, kW (POWER (KW) kW 80 msec.
523 Power, HP (POWER (HP) HP (US) 80 msec.
524 Motor voltage (MOTOR VOLTAGE) V 80 msec.
525 DC link voltage (DC LNK VOLTAGE) V 80 msec.
526 Motor temp. (MOTOR THERMAL) % 80 msec.
527 AKD temp. (AKD THERMAL) % 80 msec.
528 Digital input (DIGITAL INPUT) Binary code 2 msec.
529 Terminal 53, analogue
(ANALOG INPUT 53) V 20 msec.
input
530 Terminal 54, analogue
(ANALOG INPUT 54) V 20 msec.
input
531 Terminal 60, analogue
(ANALOG INPUT 60) mA 20 msec.
input
532 Pulse reference (PULSE REFERENCE) Hz 20 msec.
533 External reference % (EXT. REFERENCE) 20 msec.
534 Status word (STATUS WORD [HEX]) Hex code 20 msec.
537 Heat sink temperature (HEATSINK TEMP.) °C 1.2 sec.
538 Alarm word (ALARM WORD [HEX]) Hex code 20 msec.
539 AKD control word (CONTROLWORD [HEX]) Hex code 2 msec.
540 Warning word, 1 (WARN. WORD 1) Hex code 20 msec.
541 Extended status word
(EXT. STATUS WORD) Hex code 20 msec.
Hex
557 Motor RPM (MOTOR RPM) RPM 80 msec.
558 Motor RPM x scaling (MOTOR RPM X SCALE) - 80 msec.
interval
Function:
These parameters can be read out via the serial
communication port and via the display in Display
mode, see also parameters 009 - 012.
Description of choice:
Reference %, parameter 515:
The value shown corresponds to rhe total
reference (sum of digital/analogue/preset/bus/freeze
ref./catch-up and slow-do
Reference Unit, parameter
Gives the present value of terminals 17/29/53/54/60
in the unit resulting from the choice of configuration in
parameter 100 (Hz, Nm or
See also parameters 205 and 416, if required.
= factory setting. () = display text [] = value for use in communication via serial communication port
✭
100
wn).
516:
rpm) or in parameter 416.
Feedback, parameter 517:
Indicates the status value of terminals 33/53/60 at the
unit/scale selected in parameters 414, 416 and 416.
Frequency, parameter 518:
The value shown corresponds to the actual motor
frequency f
Motor current, parameter 520:
The value shown corresponds to the given motor
current measured as a mean value I
The value is filtered, which means that approx. 1.3
seconds may pass from an input value changes
until the data read-out changes values.
MG.50.R4.02 - VLT is a registered Danfoss trademark
(without resonance dampening).
M
RMS
.
 Loading...
Loading...