

Page 1
ADAP-KOOL® Drive AKD 102 High Power Inhaltsverzeichnis
Inhaltsverzeichnis
1 Lesen des Produkthandbuchs
Urheberrechte, Haftungsbeschränkungen und Änderungsvorbehalte 5
2 Sicherheit
Warnung vor Hochspannung 7
Sicherheitshinweise 7
Allgemeine Warnung 8
Bevor Sie Reparaturarbeiten ausführen 8
Besondere Betriebsbedingungen 9
Unerwarteten Anlauf vermeiden 10
Sicherer Stopp des Frequenzumrichters 10
IT-Netz 11
3 Mechanische Installation
Erste Schritte 13
Vor der Installation 14
Planung des Installationsortes 14
Empfang des Frequenzumrichters 14
5
7
13
Transport und Auspacken 14
Heben 15
Abmessungen 16
Nennleistung 18
Mechanische Installation 19
Klemmenpositionen - Baugröße D 21
Kühlung und Luftströmung 23
Einbau vor Ort von Optionen 28
Installation von Lüftungs-Einbausätzen in Rittal- Schaltschränken 28
Außeninstallation/ NEMA 3R-Einbausatz für Rittal- Schaltschränke 29
Montage auf Sockel 30
Installation von Netzoptionen 31
Montage einer Netzabschirmung für Frequenzumrichter 31
4 Elektrische Installation
Elektrische Installation 33
Leistungsanschlüsse 33
Netzanschluss 40
33
Sicherungen 41
Motorisolation 42
Motorlagerströme 42
Steuerkabelführung 43
Elektrische Installation, Steueranschlüsse 45
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
1
Page 2
Inhaltsverzeichnis ADAP-KOOL® Drive AKD 102 High Power
Anschlussbeispiele 46
Start/Stopp 46
Puls-Start/Stopp 46
Elektrische Installation - Zusätzliches 48
Elektrische Installation, Steuerkabel 48
Schalter S201, S202 und S801 50
Erste Inbetriebnahme und Test 51
Zusätzliche Verbindungen 53
Mechanische Bremssteuerung 53
Thermischer Motorschutz 53
5 Betrieb des Frequenzumrichters
Bedienung der grafischen Bedieneinheit LCP 102Bedienung der grafischen Bedieneinheit LCP
Tipps und Tricks 63
6 Programmieren des Frequenzumrichters
Programmieren 65
Parameterliste 99
0-** Betrieb/Display 100
1-** Motor/Last 101
2-** Bremsfunktionen 102
3-** Sollwert/Rampen 102
4-** Grenzen/Warnungen 103
5-** Digit. Ein-/Ausgänge 104
6-** Analoge Ein-/Ausg. 105
8-** Opt./Schnittstellen 106
11-** ADAP-KOOL LON 106
13-**Smart Logic 107
55
55
65
14-** Sonderfunktionen 107
15-** Info/Wartung 108
16-** Datenanzeigen 109
18-** Info/Anzeigen 110
20-** FU PID-Regler 110
21-** Erw. PID-Regler 111
22-** Anwendungsfunktionen 112
23-** Zeitfunktionen 113
25-** Verbundregler 114
26-** Grundeinstellungen 115
28-** Kompressorfunktionen 116
7 Allgemeine technische Daten
2
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
117
Page 3
ADAP-KOOL® Drive AKD 102 High Power Inhaltsverzeichnis
8 Fehlersuche und -behebung
Alarm- und Warnmeldungen 123
Liste der Warn- und Alarmmeldungen 126
Index
123
129
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
3
Page 4

1
1 Lesen des Produkthandbuchs ADAP-KOOL® Drive AKD 102 High Power
4
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 5
ADAP-KOOL® Drive AKD 102 High Power 1 Lesen des Produkthandbuchs
1 Lesen des Produkthandbuchs
1
1.1.1 Urheberrechte, Haftungsbeschränkungen und Änderungsvorbehalte
Diese Druckschrift enthält Informationen, die Eigentum von Danfoss sind. Durch die Übernahme und den Gebrauch dieses Handbuchs erklärt sich der
Benutzer damit einverstanden, die darin enthaltenen Informationen ausschließlich für Geräte von Danfoss oder solche anderer Hersteller zu verwenden,
die ausdrücklich für die Kommunikation mit Danfoss-Geräten über serielle Kommunikationsverbindung bestimmt sind. Diese Druckschrift unterliegt den
in Dänemark und den meisten anderen Ländern geltenden Urheberrechtsgesetzen.
Danfoss übernimmt keine Gewährleistung dafür, dass die nach den im vorliegenden Handbuch enthaltenen Richtlinien erstellten Softwareprogramme in
jedem physikalischen Umfeld bzw. jeder Hard- oder Softwareumgebung einwandfrei laufen.
Obwohl die im Umfang dieses Handbuchs enthaltene Dokumentation von Danfoss überprüft und revidiert wurde, leistet Danfoss in Bezug auf die Dokumentation einschließlich Beschaffenheit, Leistung oder Eignung für einen bestimmten Zweck keine vertragliche oder gesetzliche Gewähr.
Danfoss übernimmt keinerlei Haftung für unmittelbare, mittelbare oder beiläufig entstandene Schäden, Folgeschäden oder sonstige Schäden aufgrund
der Nutzung oder Unfähigkeit zur Nutzung der in diesem Handbuch enthaltenen Informationen. Dies gilt auch dann, wenn auf die Möglichkeit solcher
Schäden hingewiesen wurde. Danfoss haftet insbesondere nicht für irgendwelche Kosten, einschließlich aber nicht beschränkt auf entgangenen Gewinn
oder Umsatz, Verlust oder Beschädigung von Ausrüstung, Verlust von Computerprogrammen, Datenverlust, Kosten für deren Ersatz oder Ansprüche
jedweder Art durch Dritte
Danfoss behält sich das Recht vor, jederzeit Überarbeitungen oder inhaltliche Änderungen an dieser Druckschrift ohne Vorankündigung oder eine verbindliche Mitteilungspflicht vorzunehmen.
1.1.2 Symbole
In dieser Bedienungsanleitung verwendete Symbole:
ACHTUNG!
Kennzeichnet einen wichtigen Hinweis.
Kennzeichnet eine allgemeine Warnung.
Kennzeichnet eine Warnung vor Hochspannung.
✮ Markiert in der Auswahl die Werkseinstellung.
1.1.3 Weitere Literatur für ADAP-KOOL Drive AKD 102
Die technische Literatur von Danfoss ist von Ihrer Danfoss-Vertretung oder auch online unter
http://portal.danfoss.net/RA/Marketing/Product%20Information/AKD102/Pages/default.aspx
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
5
Page 6

1 Lesen des Produkthandbuchs ADAP-KOOL® Drive AKD 102 High Power
1.1.4 Abkürzungen und Normen
1
Abkürzungen: Begriffe: SI-Einheiten: I-P-Einheiten:
a Beschleunigung
Automatische Anpassung Automatische Motoranpassung
AWG American Wire Gauge = Amerikanisches Drahtmaß
°C
I Strom A Ampere
I
LIM
Joule Energie J = N∙m ft-lb, Btu
°F Fahrenheit
FC Frequenzumrichter
fFrequenz HzHz
kHz Kilohertz kHz kHz
LCP LCP Bedieneinheit
mA Milliampere
ms Millisekunde
min. Minute
MCT Motion Control Tool
M-TYPE Abhängig vom Motortyp
Nm Newtonmeter in-lbs
I
M,N
f
M,N
P
M,N
U
M,N
Par. Parameter
PELV Schutzkleinspannung
Watt Leistung W Btu/h, PS
Pascal Druck Pa = N/m² psi, psf, Fuß Wasser
I
INV
UPM Umdrehungen pro Minute
SR Größenabhängig
TTemperatur CF
t Zeit s s,h
T
LIM
U Max. Spannung V V
Celsius
Stromgrenze
Motornennstrom
Motornennfrequenz
Motornennleistung
Motornennspannung
Wechselrichter-Ausgangsnennstrom
Moment.grenze
m/s
2
Fuß/s2
Tabelle 1.1: Abkürzungs- und Normentabelle.
6
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 7
ADAP-KOOL® Drive AKD 102 High Power 2 Sicherheit
2Sicherheit
2.1.1 Warnung vor Hochspannung
Der Frequenzumrichter und die MCO 101-Optionskarte stehen bei Netzanschluss unter lebensgefährlicher Spannung. Unsachgemäße
Installation des Motors oder des Frequenzumrichters kann eine Beschädigung der Geräte sowie schwere oder sogar tödliche Verletzungen zur Folge haben. Halten Sie daher unbedingt die Anweisungen in diesem Handbuch sowie die lokalen und nationalen
Sicherheitsvorschriften ein.
2.1.2 Sicherheitshinweise
Vor Verwendung von Funktionen, die die Personensicherheit direkt oder indirekt beeinflussen (z. B. Sicherer Stopp, Notfallbetrieb oder andere Funktionen, die den Motor zum Anhalten zwingen oder versuchen, ihn in Betrieb zu halten), muss eine gründliche
Risikoanalyse und eine Systemprüfung durchgeführt werden. Die Systemprüfungen müssen die Prüfung von Fehlermodi im Hin-
blick auf Steuersignale (analoge und digitale Signale und serielle Kommunikation) einschließen.
ACHTUNG!
Setzen Sie sich vor Verwendung des Notfallbetriebs mit Danfoss in Verbindung.
• Stellen Sie sicher, dass der Frequenzumrichter korrekt geerdet ist.
• Die Stecker für die Motor- und Netzversorgung dürfen nicht entfernt werden, während der Frequenzumrichter an die Netzversorgung angeschlossen ist.
• Schützen Sie Benutzer gegen Versorgungsspannung.
• Schützen Sie den Motor gegen Überlastung gemäß nationalen und lokalen Vorschriften.
• Der Erdableitstrom liegt höher als 3,5 mA.
• Die [OFF]-Taste ist kein Sicherheitsschalter. Sie trennt den Frequenzumrichter nicht vom Netz.
2
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
7
Page 8
2
2 Sicherheit ADAP-KOOL® Drive AKD 102 High Power
2.1.3 Allgemeine Warnung
Warnung:
Das Berühren spannungsführender Teile – auch nach der Trennung vom Netz – ist lebensgefährlich.
Achten Sie darauf, dass alle Leistungsanschlüsse, (Zusammenschalten von Gleichstrom-Zwischenkreisen) sowie der Motoranschluss (z.
B. bei kinetischem Speicher), galvanisch getrennt sind.
Vor dem Berühren von elektrischen Teilen des VLT AQUA Drive FC 200 Frequenzumrichters mindestens wie folgt warten:
380 - 480 V, 110 - 450 kW: mindestens 15 Minuten warten.
525 - 690 V, 132 - 630 kW, mindestens 20 Minuten warten.
Eine kürzere Wartezeit ist nur möglich, wenn dies auf dem Typenschild des jeweiligen Geräts entsprechend vermerkt ist.
Erhöhter Erdableitstrom
Da der Erdableitstrom vom VLT AQUA Drive FC 200 3,5 mA übersteigt, muss ein verstärkter Schutzleiteranschluss (PE) angeschlossen
werden. Gemäß den Anforderungen von IEC 61800-5-1 muss dies wie folgt sichergestellt werden: ein PE-Leiter, 10 mm² Cu oder 16
mm² Al, oder ein zusätzlicher PE-Leiter - mit dem gleichen Kabelquerschnitt wie die Netzverdrahtung - muss getrennt abgeschlossen
werden.
Fehlerstromschutzschalter
Dieses Gerät kann einen Fehler-Gleichstrom im Schutzleiter verursachen. Als Fehlerstromschutzschalter (RCD) darf netzseitig nur ein
RCD vom Typ B (zeitverzögert) auf der Versorgungsseite dieses Produkts verwendet werden. Siehe auch den RCD-Anwendungshinweis
MN.90.GX.02.
Die Schutzerdung des VLT AQUA Drive FC 200 und die Verwendung von Fehlerstromschutzeinrichtungen müssen stets in Übereinstimmung mit den nationalen und lokalen Vorschriften erfolgen.
2.1.4 Bevor Sie Reparaturarbeiten ausführen
1. Trennen Sie den Frequenzumrichter vom Netz.
2. Trennen Sie die DC-Zwischenkreisklemmen 88 und 89.
3. Warten Sie mindestens die im Abschnitt Allgemeine Warnung oben angegebene Zeit ab.
4. Entfernen Sie das Motorkabel.
8
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 9
ADAP-KOOL® Drive AKD 102 High Power 2 Sicherheit
2.1.5 Besondere Betriebsbedingungen
Elektrische Nennwerte:
Die auf dem Typenschild des Frequenzumrichters angegebenen Nennwerte basieren auf einer typischen 3-phasigen Netzversorgung, innerhalb des angegebenen Spannungs-, Strom- und Temperaturbereichs, die erwartungsgemäß in den meisten Anwendungen verwendet wird.
Die Frequenzumrichter unterstützen ebenfalls weitere Sonderanwendungen, welche die elektrischen Nennwerte des Frequenzumrichters beeinflussen.
Besondere Betriebsbedingungen, die sich auf die elektrischen Nennwerte auswirken, können wie folgt sein:
• Einphasige Anwendungen
• Hochtemperaturanwendungen, die Leistungsreduzierung der elektrischen Nennwerte erfordern
• Schifffahrtsanwendungen mit schwierigeren Umweltbedingungen.
Andere Anwendungen könnten ebenfalls die elektrischen Nennwerte beeinflussen.
Entnehmen Sie die Informationen zu den elektrischen Nennwerten diesem Produkthandbuch und den entsprechenden Abschnitten im .
Installationsanforderungen:
Die elektrische Gesamtsicherheit des Frequenzumrichters verlangt die Berücksichtigung besonderer Installationsaspekte im Hinblick auf:
• Sicherungen und Trennschalter für Überstrom- und Kurzschlussschutz
• Auswahl von Leistungskabeln (Netz, Motor, Bremse, Zwischenkreiskopplung und Relais)
• Netzkonfiguration (geerdeter Dreieck-Transformatorzweig, IT, TN usw.)
• Sicherheit von Niederspannungsanschlüssen (PELV-Bedingungen).
Entnehmen Sie die Informationen zu den Installationsanforderungen diesem Produkthandbuch und den entsprechenden Abschnitten im .
Die Zwischenkreiskondensatoren des Frequenzumrichters bleiben auch nach Abschalten der Netzversorgung eine gewisse Zeit geladen.
Zum Schutz vor elektrischem Schlag ist der Frequenzumrichter vor allen Wartungsarbeiten vom Netz zu trennen. Vor der Durchführung
von Wartungsarbeiten müssen unbedingt die folgenden Wartezeiten eingehalten werden:
2
Spannung Leistungsgröße Min. Wartezeit
380 - 480 V 110 - 250 kW 20 Minuten
Achtung! Auch wenn die Betriebs-LEDs nicht mehr leuchten, kann eine gefährlich hohe Spannung im Zwischenkreis vorhanden sein.
2.1.6 Installation in großen Höhenlagen (PELV)
Installation in großen Höhenlagen:
380 - 480 V: Bei Höhen von über 3 km über NN ziehen Sie bitte Danfoss zu PELV (Schutzkleinspannung) zurate.
525 - 690 V: Bei Höhen von über 2 km über NN ziehen Sie bitte Danfoss zu PELV (Schutzkleinspannung) zurate.
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
9
Page 10
2
2 Sicherheit ADAP-KOOL® Drive AKD 102 High Power
2.1.7 Unerwarteten Anlauf vermeiden
Während der Frequenzumrichter an die Netzversorgung angeschlossen ist, kann der Motor über digitale Befehle, Busbefehle, Sollwerte
oder über die LCP Bedieneinheit am Frequenzumrichter gestartet/gestoppt werden.
• Trennen Sie den Frequenzumrichter vom Stromnetz, wenn ein unerwarteter Anlauf aus Gründen des Personenschutzes verhindert werden soll.
• Um einen unerwarteten Anlauf zu vermeiden, betätigen Sie stets die [OFF]-Taste, bevor Sie Parameter ändern.
• Sofern Klemme 37 nicht abgeschaltet ist, kann ein elektronischer Fehler, eine vorübergehende Überlast, ein Fehler in der
Netzversorgung oder ein Verlust des Motoranschlusses bewirken, dass ein gestoppter Motor startet.
2.1.8 Sicherer Stopp des Frequenzumrichters
Bei Versionen mit einem Eingang Sicherer Stopp über Klemme 37 ist der Frequenzumrichter für Installationen mit der Sicherheitsfunktion
schaltung Motormoment
Er ist für die Anforderungen der Sicherheitskategorie 3 in EN 954-1 ausgelegt und als dafür geeignet zugelassen. Diese Funktion wird als „Sicherer Stopp“
bezeichnet. Vor der Integration und Benutzung der Funktion „Sicherer Stopp“ des Frequenzumrichters in einer Anlage muss eine gründliche Risikoanalyse
der Anlage erfolgen, um zu ermitteln, ob die Funktion „Sicherer Stopp“ und die Sicherheitskategorie des Frequenzumrichters angemessen und ausreichend
sind. Zur Installation und zum Gebrauch der Funktion „Sicherer Stopp“ gemäß den Anforderungen von Sicherheitskategorie 3 in EN 954-1 müssen die
zugehörigen Informationen und Anweisungen des befolgt werden! Die Informationen und Anweisungen des Produkthandbuchs reichen zum richtigen
und sicheren Gebrauch der Funktion „Sicherer Stopp“ nicht aus!
(wie definiert durch Entwurf IEC 61800-5-2) oder
Stoppkategorie 0
(wie definiert in EN 60204-1) geeignet.
Sichere Ab-
10
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 11
ADAP-KOOL® Drive AKD 102 High Power 2 Sicherheit
2
2.1.9 IT-Netz
IT-Netz
Schließen Sie Frequenzumrichter mit EMV-Filtern nicht an ein Stromnetz mit einer Spannung zwischen Phase und Erde von mehr als
440 V bei 400-V--Umrichtern und 760 V bei 690-V-Umrichtern an.
Bei 400-V-Umrichtern in IT-Netzen und Dreieck-Erde-Netzen (geerdeter Zweig) darf die Netzspannung 440 V zwischen Phase und Erde
überschreiten.
Bei 690-V-Umrichtern in IT-Netzen und Dreieck-Erde-Netzen (geerdeter Zweig) darf die Netzspannung 760 V zwischen Phase und Erde
überschreiten.
Par. 14-50
RFI Filter
130BA491
kann benutzt werden, um die internen Hochfrequenzkapazitäten vom Zwischenkreis zu trennen.
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
11
Page 12
2
2 Sicherheit ADAP-KOOL® Drive AKD 102 High Power
2.1.10 Software-Version und Zulassungen: ADAP-KOOL Drive AKD 102
ADAP-KOOL Drive AKD 102
Dieses Handbuch gilt für alle ADAP-KOOL Drive AKD 102-Frequenzumrichter mit Software-Version 3.1x.
Software-Versionsnummer siehe Par. 15-43
Software Version
2.1.11 Entsorgungshinweise
Geräte mit elektronischen Bauteilen dürfen nicht im normalen Hausmüll entsorgt werden.
Sie sind mit elektrischem und elektronischem Abfall zu sammeln und gemäß der gültigen lokalen gesetzlichen
Auflagen zu entsorgen.
Software-Version: 3.1.x
.
12
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 13
ADAP-KOOL® Drive AKD 102 High Power 3 Mechanische Installation
3 Mechanische Installation
3.1 Erste Schritte
3.1.1 Vorgehensweise bei der Installation
In diesem Kapitel wird die mechanische und elektrische Installation an den Leistungsklemmen und Steuerkartenklemmen beschrieben.
Die elektrische Installation von
Optionen
ist im entsprechenden Profihandbuch und Projektierungshandbuch beschrieben.
3.1.2 Erste Schritte
Führen Sie die unten beschriebenen Schritt-für-Schritt-Anweisungen aus, um den FC 200 schnell und EMV-gerecht zu installieren.
Lesen Sie die Sicherheitshinweise, bevor Sie das Gerät installieren.
3
Mechanische Installation
• Mechanische Installation
Elektrische Installation
• Netzanschluss und Erdung
• Motoranschluss und Verkabelung
• Sicherungen und Trennschalter
• Steuerklemmen - Kabel
Kurzinbetriebnahme
• LCP Bedieneinheit
• Automatische Motoranpassung, AMA
•Programmierung
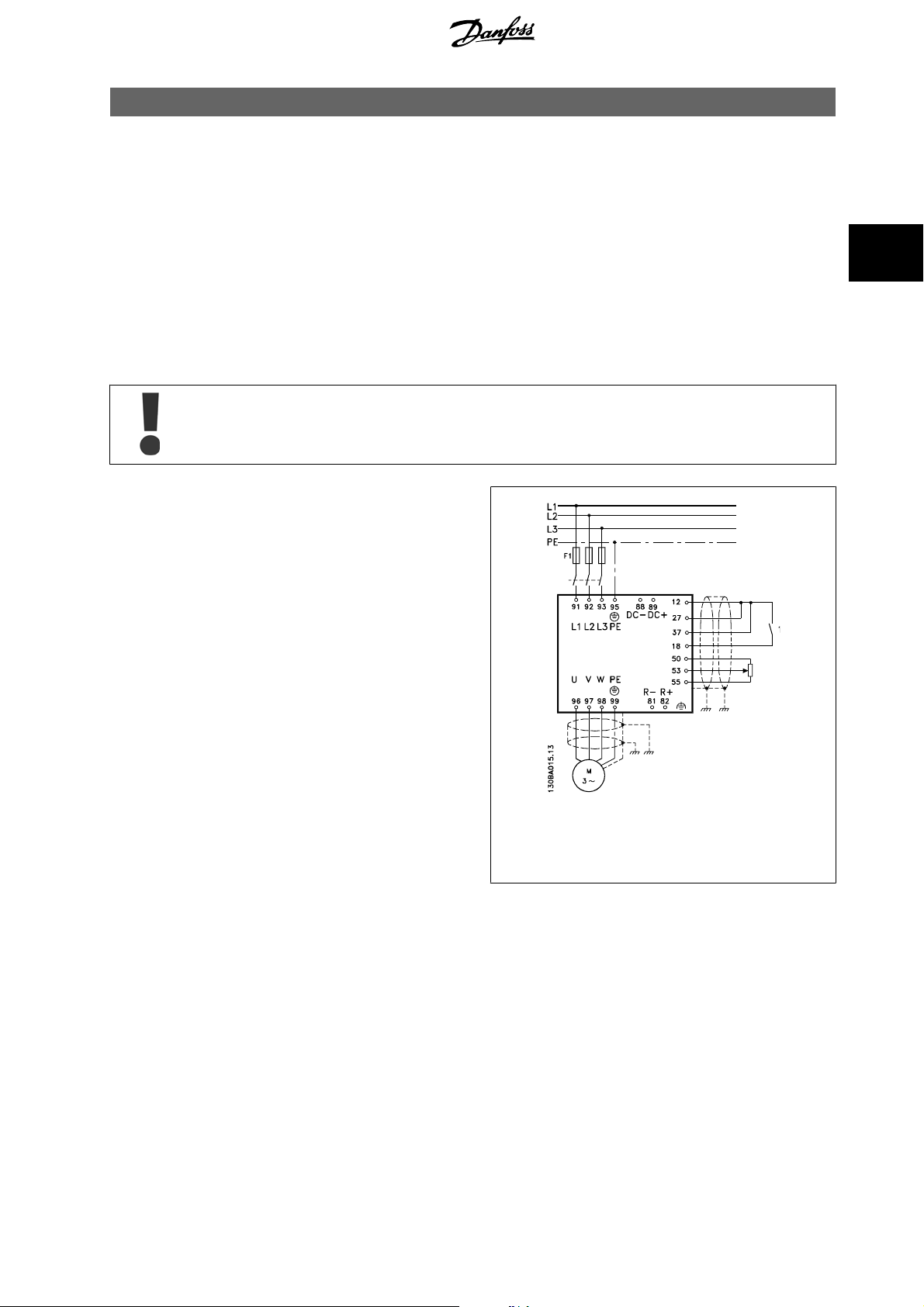
Die Baugröße hängt vom Gehäusetyp, der Leistung und der Netzspannung ab.
Abbildung 3.1: Die Grafik zeigt die grundlegende Installationskonfiguration, einschließlich Stromnetz, Motor, Start/
Stopp-Taste und Potentiometer für die Drehzahleinstellung.
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
13
Page 14
3
3 Mechanische Installation ADAP-KOOL® Drive AKD 102 High Power
3.2 Vor der Installation
3.2.1 Planung des Installationsortes
ACHTUNG!
Vor Beginn der Installation ist es wichtig, die Installation des Frequenzumrichters zu planen. Wird dies vernachlässigt, kann dies zu
zusätzlicher Arbeit während und nach der Installation führen.
Wählen Sie den bestmöglichen Betriebsort, indem Sie folgende Aspekte berücksichtigen (siehe Details auf den folgenden Seiten und
in den jeweiligen Projektierungshandbüchern):
• Umgebungstemperatur während des Betriebs
• Einbaumethode
• Kühlung des Geräts
• Position des Frequenzumrichters
• Kabelführung
• Sicherstellen, dass die Stromversorgung die richtige Spannung und den notwendigen Strom liefert
• Sicherstellen, dass die Motornennleistung innerhalb des maximalen Stroms vom Frequenzumrichter liegt
• Falls der Frequenzumrichter keine integrierten Sicherungen hat, sicherstellen, dass die externen Sicherungen die richtige Nennleistung besitzen
3.2.2 Empfang des Frequenzumrichters
Vergewissern Sie sich bei Entgegennahme des Frequenzumrichters bitte, dass die Verpackung unversehrt ist und achten Sie auf eventuelle Beschädigungen, die während des Transports am Gerät aufgetreten sind. Falls Beschädigung gefunden wird, setzen Sie sich unverzüglich mit dem Transportunternehmen in Verbindung, um Schadensersatz zu erhalten.
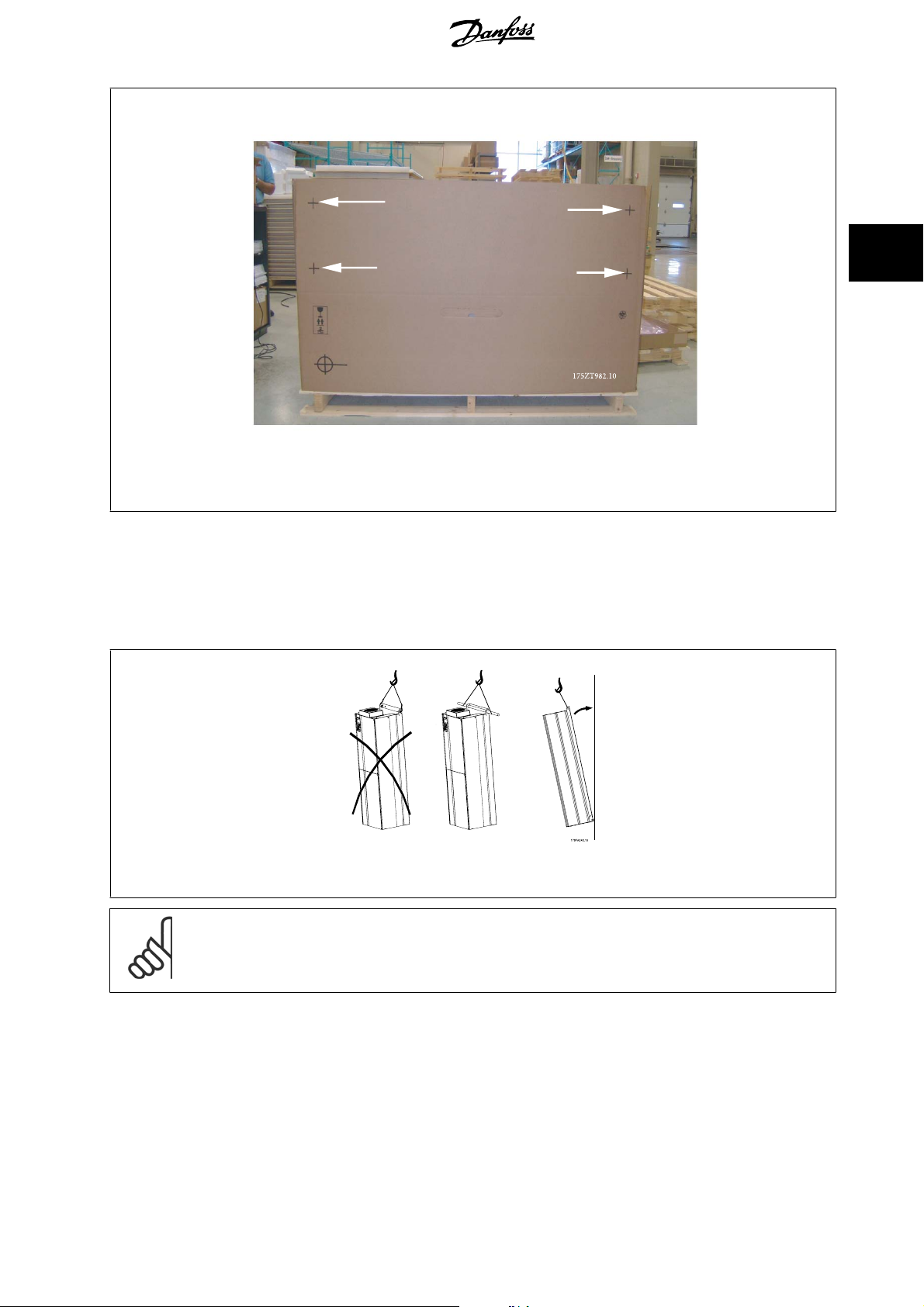
3.2.3 Transport und Auspacken
Vor dem Auspacken des Frequenzumrichters wird empfohlen, ihn so nah wie möglich am endgültigen Installationsort aufzustellen.
Den Karton entfernen und den Frequenzumrichter so lange wie möglich auf der Palette lassen.
ACHTUNG!
Der Kartondeckel enthält eine Bohrschablone für die Montagelöcher der Gehäuse D.
14
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 15
ADAP-KOOL® Drive AKD 102 High Power 3 Mechanische Installation
3
Abbildung 3.2: Bohrschablone
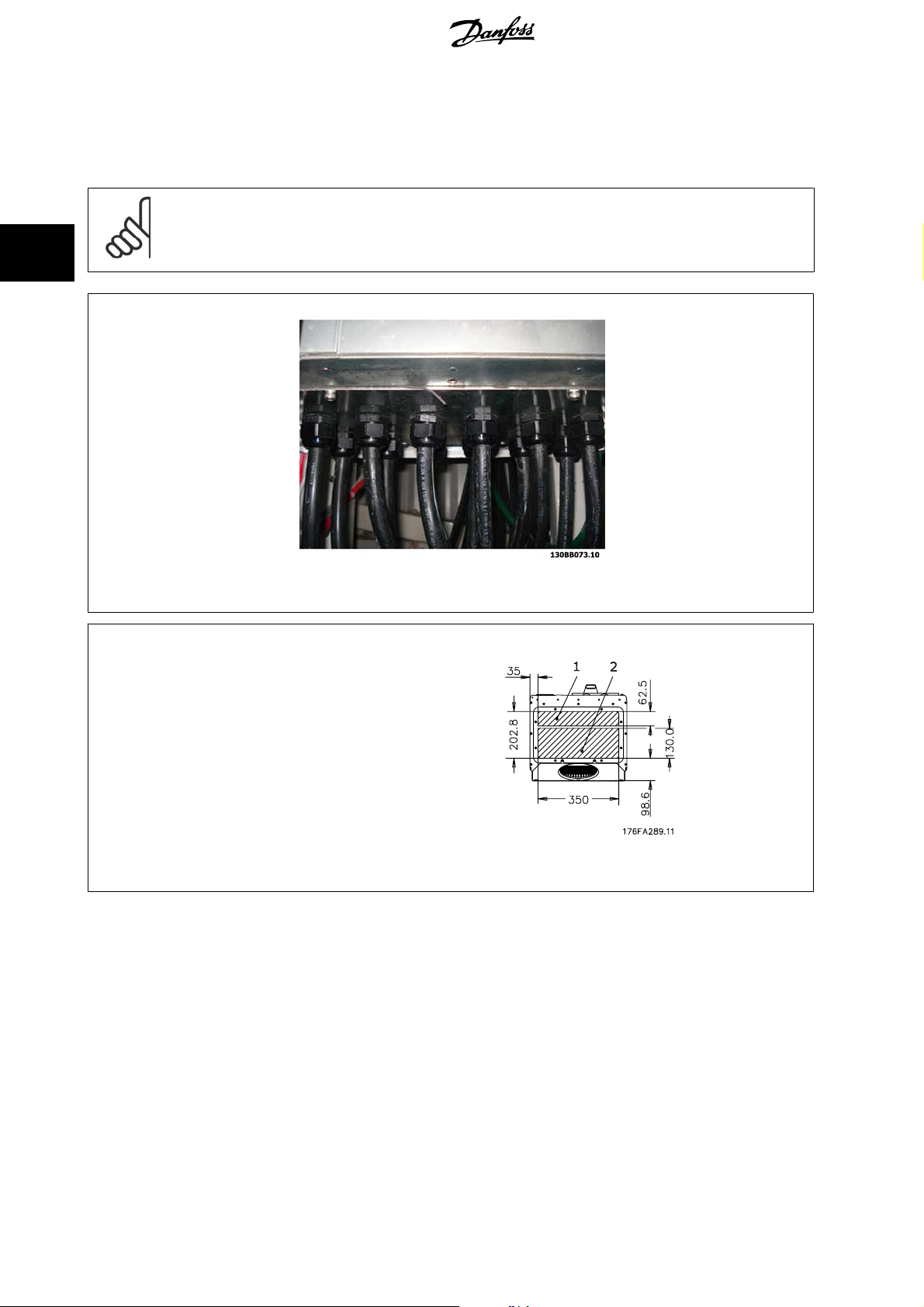
3.2.4 Heben
Der Frequenzumrichter muss immer mit speziell dafür vorgesehenen Hebeösen gehoben werden. Für alle Baugrößen D und E2 (IP00) eine Hebetraverse
verwenden, um die Hebebohrungen des Frequenzumrichters nicht zu verbiegen.
Abbildung 3.3: Empfohlenes Hebeverfahren, -Größe D.
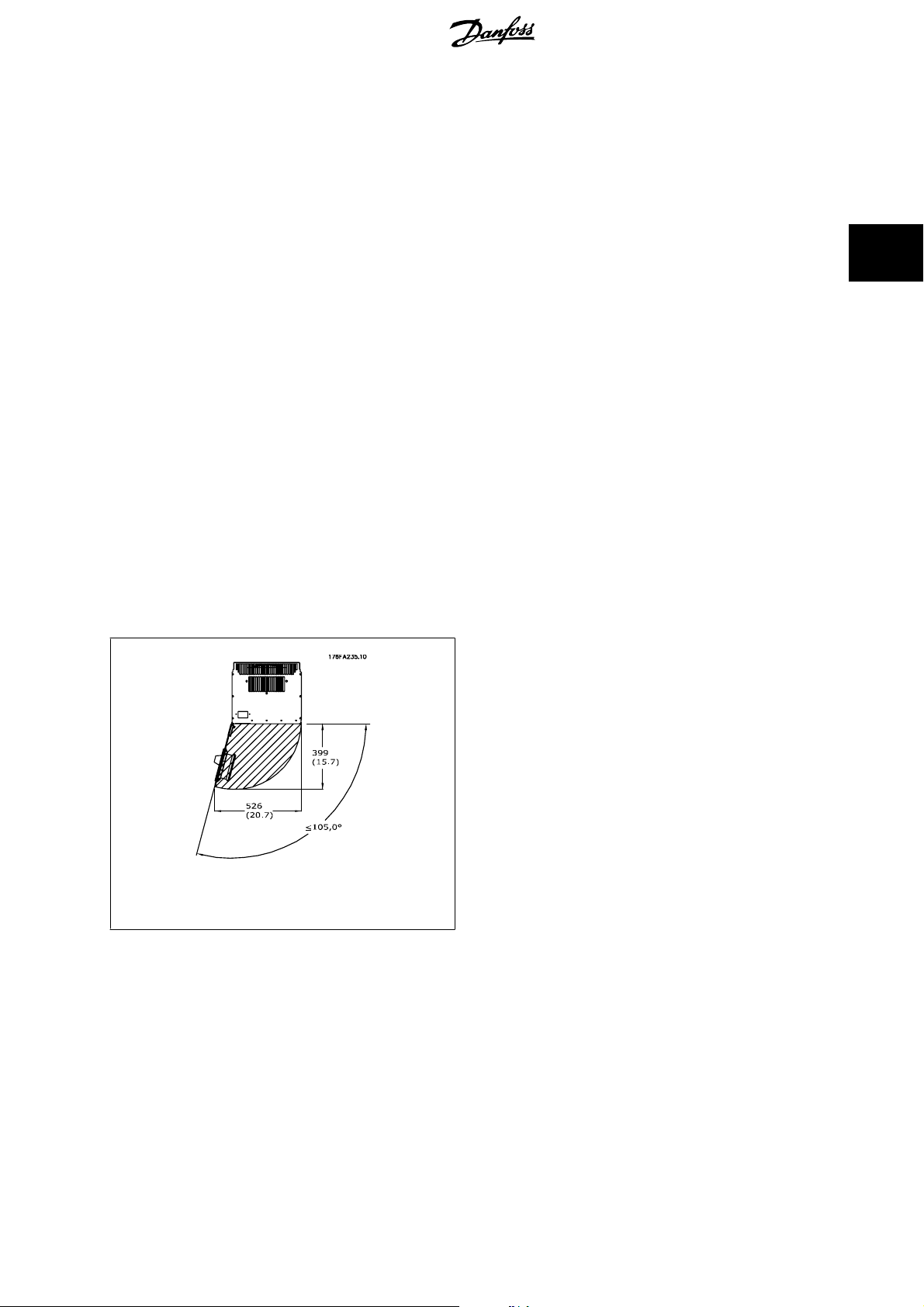
ACHTUNG!
Die Hebetraverse muss für das Gewicht des Frequenzumrichters ausgelegt sein. Siehe
Baugrößen. Der Maximaldurchmesser der Stange beträgt 2,5 cm. Der Winkel zwischen Oberseite des Frequenzumrichters und dem
Hubseil muss mindestens 60° betragen.
Abmessungen
für das Gewicht der jeweiligen
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
15
Page 16
3
3 Mechanische Installation ADAP-KOOL® Drive AKD 102 High Power
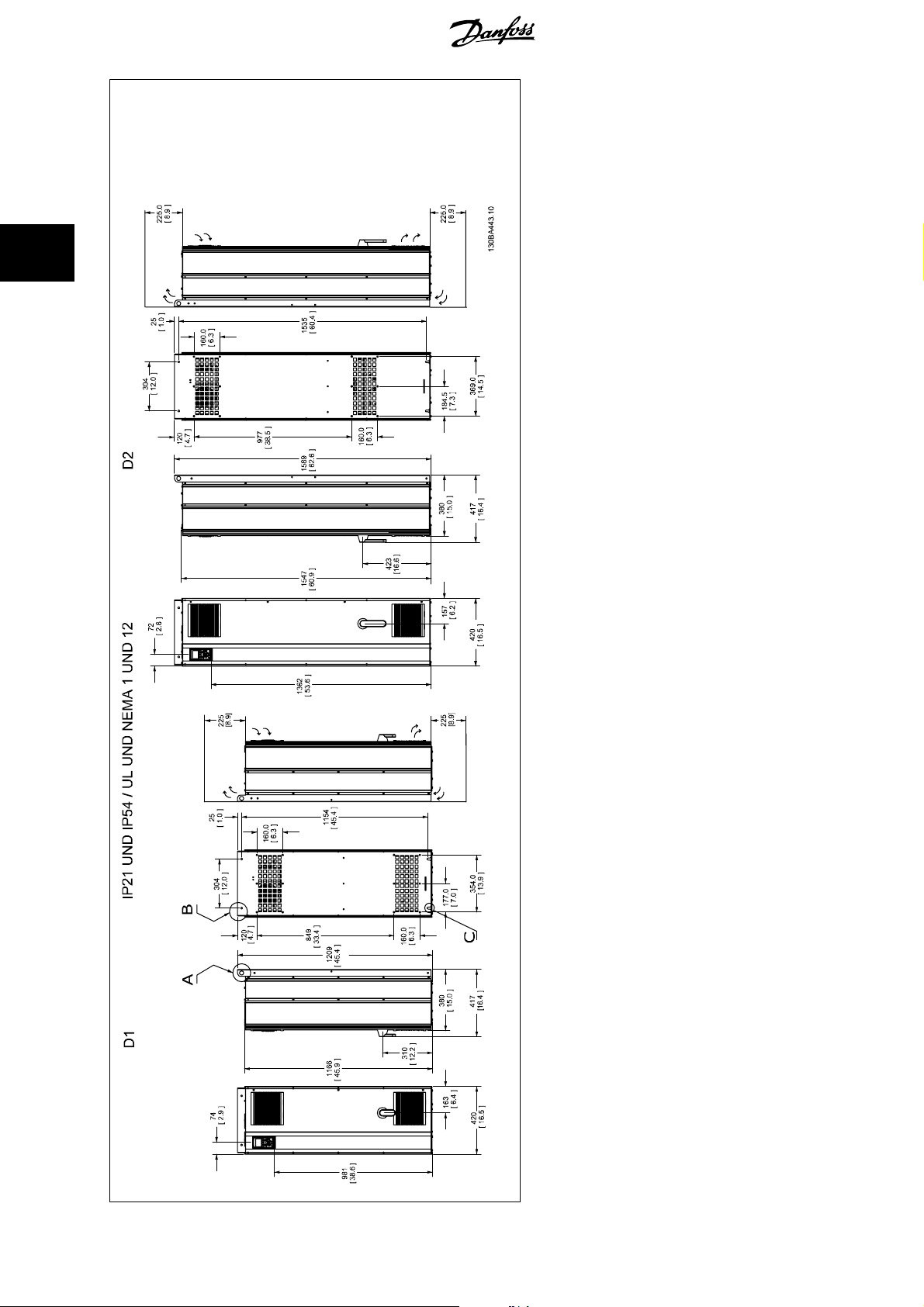
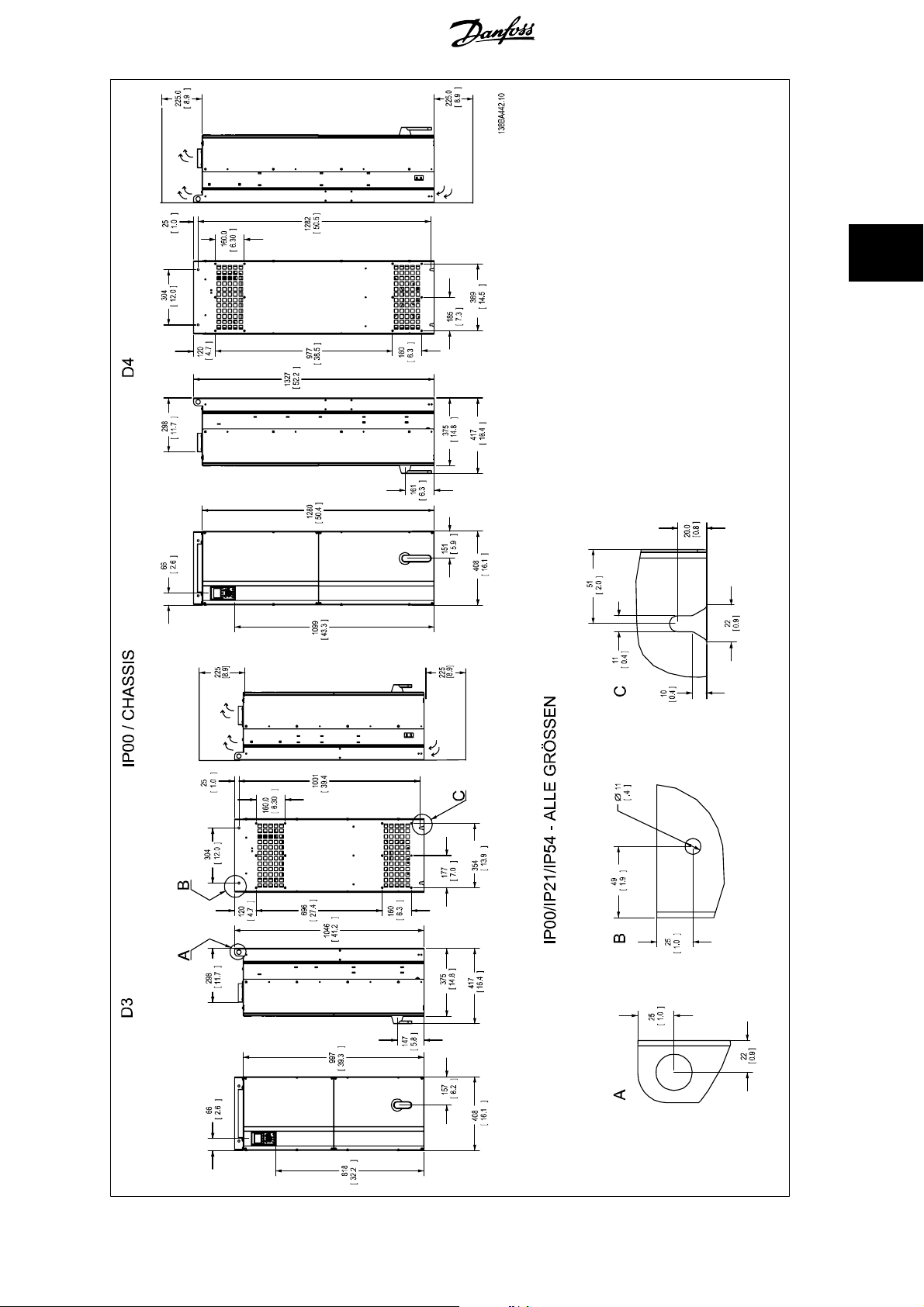
3.2.5 Abmessungen
16
Strömungsrichtungen der Luft beachten
*
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 17
ADAP-KOOL® Drive AKD 102 High Power 3 Mechanische Installation
3
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Strömungsrichtungen der Luft beachten
*
17
Page 18
3 Mechanische Installation ADAP-KOOL® Drive AKD 102 High Power
3
Baugröße D1 D2 D3 D4
110 - 132 kW bei 400 V
(380 - 480 V)
IP
NEMA
Transportmaße
FU-Abmessungen
Höhe
Breite 1730 mm 1730 mm 1730 mm 1730 mm 1220 mm 1490 mm
Tiefe 570 mm 570 mm 570 mm 570 mm 570 mm 570 mm
Höhe 1209 mm 1209 mm 1589 mm 1589 mm 1046 mm 1327 mm
Breite 420 mm 420 mm 420 mm 420 mm 408 mm 408 mm
Tiefe 380 mm 380 mm 380 mm 380 mm 375 mm 375 mm
Max. Gewicht 104 kg 104 kg 151 kg 151 kg 91 kg 138 kg
21
NEMA 154NEMA 1221NEMA 154NEMA 12
650 mm 650 mm 650 mm 650 mm 650 mm 650 mm
Abmessungen, Baugröße D
160 - 250 kW bei 400 V
(380 - 480 V)
110 - 132 kW bei 400
V
(380 - 480 V)
00
Chassis
160 - 250 kW bei 400
(380 - 480 V)
3.2.6 Nennleistung
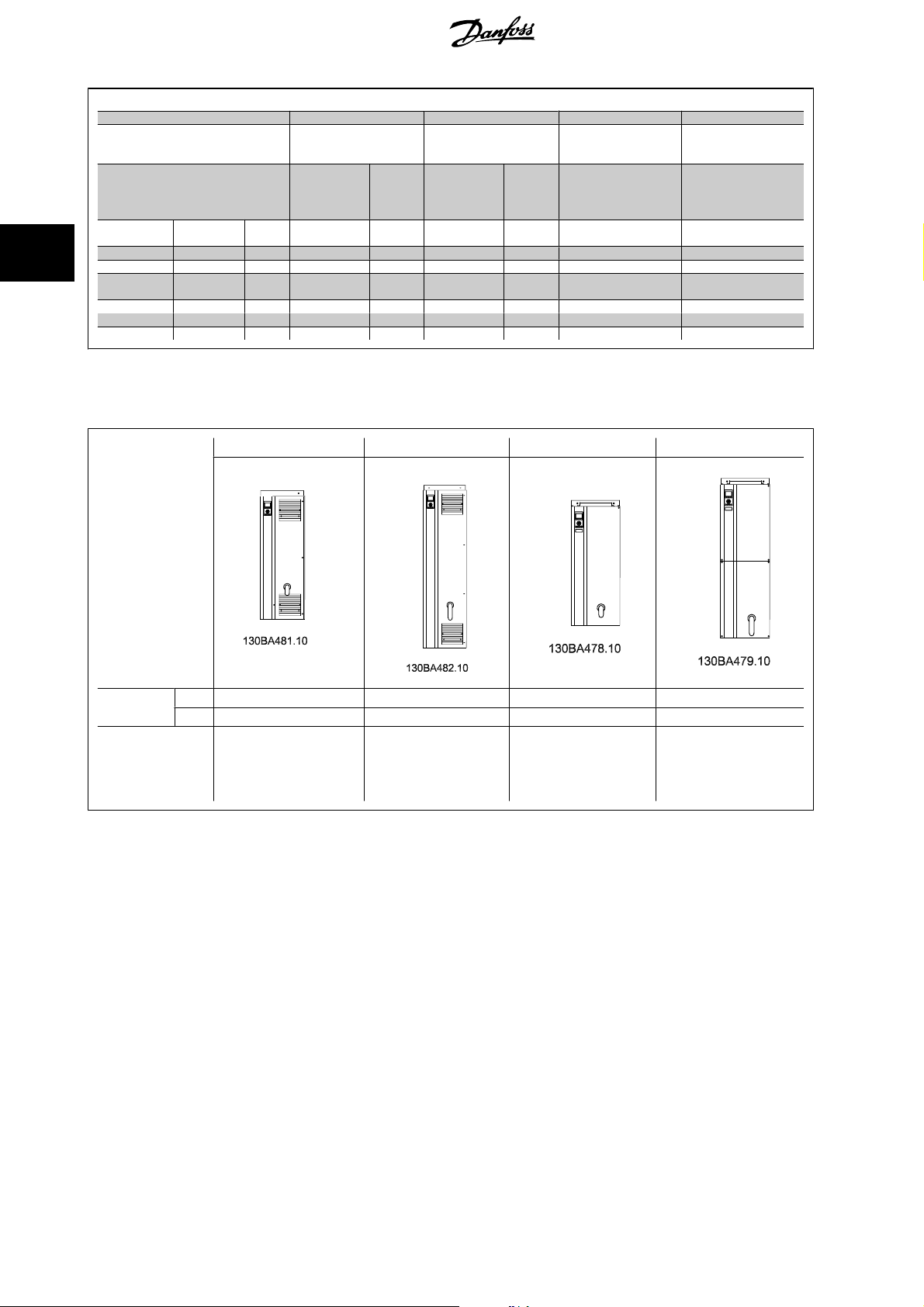
Baugröße D1 D2 D3 D4
V
00
Chassis
Schutzart
Normale Überlast
Nennleistung - 110
% Überlastmoment
IP 21/54 21/54 00 00
NEMA NEMA 1/NEMA 12 NEMA 1/NEMA 12 Chassis Chassis
110 - 132 kW bei 400 V
(380 - 480 V)
45 - 160 kW bei 690 V
(525-690 V)
150 - 250 kW bei 400 V
(380 - 480 V)
200 - 400 kW bei 690 V
(525-690 V)
110 - 132 kW bei 400 V
(380 - 480 V)
45 - 160 kW bei 690 V
(525-690 V)
150 - 250 kW bei 400 V
(380 - 480 V)
200 - 400 kW bei 690 V
(525-690 V)
18
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 19
ADAP-KOOL® Drive AKD 102 High Power 3 Mechanische Installation
3.3 Mechanische Installation
Die mechanische Installation des Frequenzumrichters muss sorgfältig vorbereitet werden, um ein ordnungsgemäßes Ergebnis sicherzustellen und zusätzliche Arbeit während der Installation zu vermeiden. Sehen Sie sich zu Beginn die mechanischen Zeichnungen am Ende dieser Anleitung an, um sich
mit Platzanforderungen vertraut zu machen.
3.3.1 Benötigte Werkzeuge
Für die mechanische Installation werden die folgenden Werkzeuge benötigt:
• Bohrer mit 10 oder 12 mm Bohrereinsatz
•Maßband
• Schraubenschlüssel mit Stecknüssen 7-17 mm
• Schlüsselverlängerungen
• Blechstanze für Durchführungen oder Kabelverschraubungen in IP21/NEMA 1- und IP54-Geräten
• Hebetraverse zum Heben des Geräts (Stange oder Rohr mit Ø 25 mm) mit einer Hebekapazität von mindestens 400 kg.
• Kran oder anderes Hebezeug, um den Frequenzumrichter an seine Position zu setzen
• Ein Torxschraubendreher T50 zum Einbau der Geräte E1 in Ausführungen mit Schutzart IP21 und IP54.
3.3.2 Allgemeine Aspekte
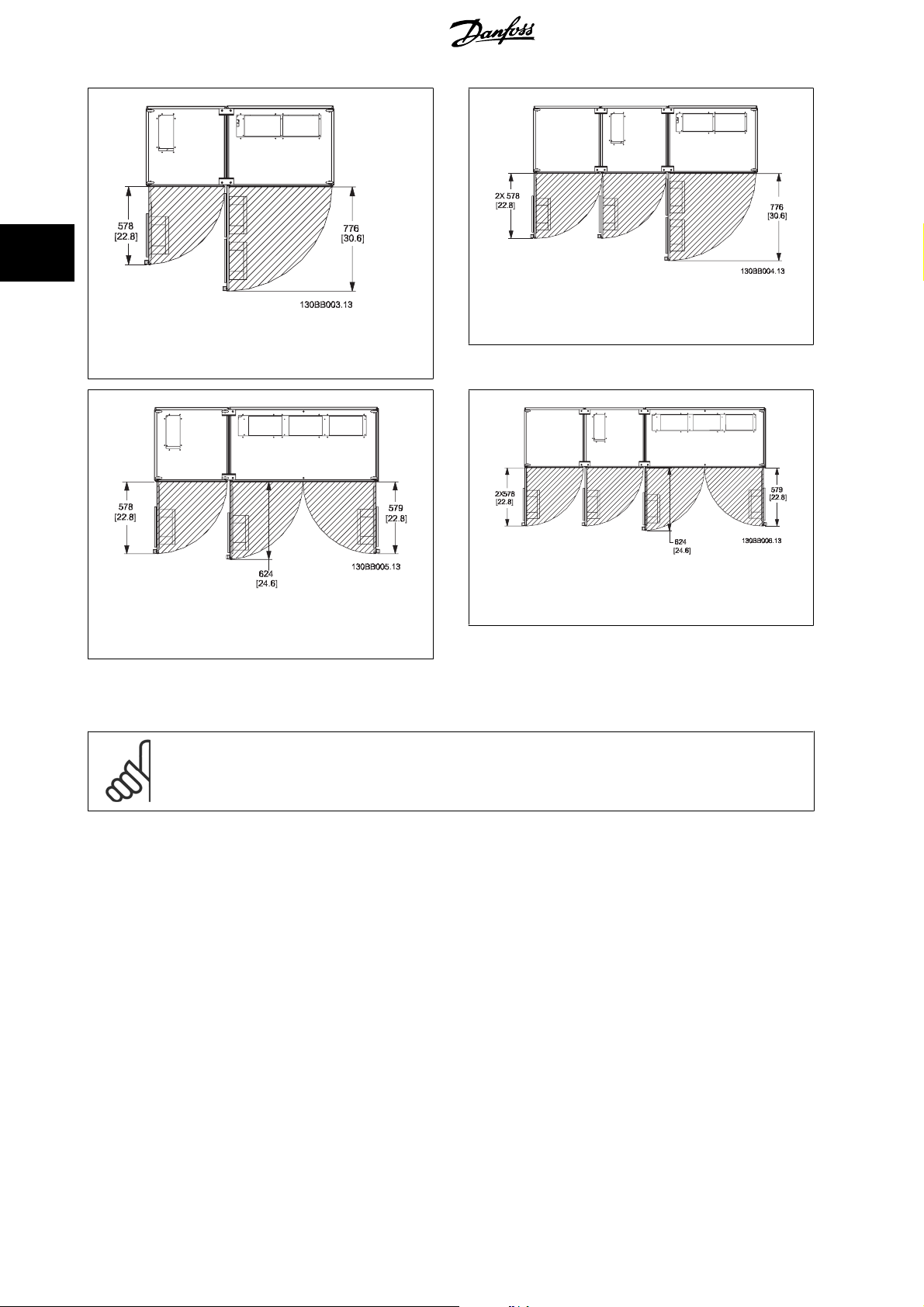
Freiraum
Lassen Sie ausreichend Freiraum über und unter dem Frequenzumrichter für Luftzirkulation und Kabelzugang. Darüber hinaus muss Platz vor dem Gerät
sein, um die Tür des Schaltschranks öffnen zu können.
3
Abbildung 3.4: Freiraum vor IP21/IP54-Gehäuse, Baugröße
D1 und D2.
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
19
Page 20
3
3 Mechanische Installation ADAP-KOOL® Drive AKD 102 High Power
Abbildung 3.6: Freiraum vor IP21/IP54-Gehäusetyp, Baugröße F3.
Abbildung 3.5: Freiraum vor IP21/IP54-Gehäusetyp, Baugröße F1.
Abbildung 3.8: Freiraum vor IP21/IP54-Gehäusetyp, Bau-
Abbildung 3.7: Freiraum vor IP21/IP54-Gehäusetyp, Baugröße F2.
Drahtzugang
Es muss einwandfreier Kabelzugang vorhanden sein, dazu gehört auch die notwendige Biegetoleranz. Da das IP00-Gehäuse nach unten offen ist, müssen
Kabel an der Rückwand des Gehäuses, in dem der Frequenzumrichter eingebaut ist, befestigt werden, d. h. über Schirmbügel.
ACHTUNG!
Die Kabelschuhe müssen auf der Klemmenleiste montiert werden.
größe F4.
20
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 21
ADAP-KOOL® Drive AKD 102 High Power 3 Mechanische Installation
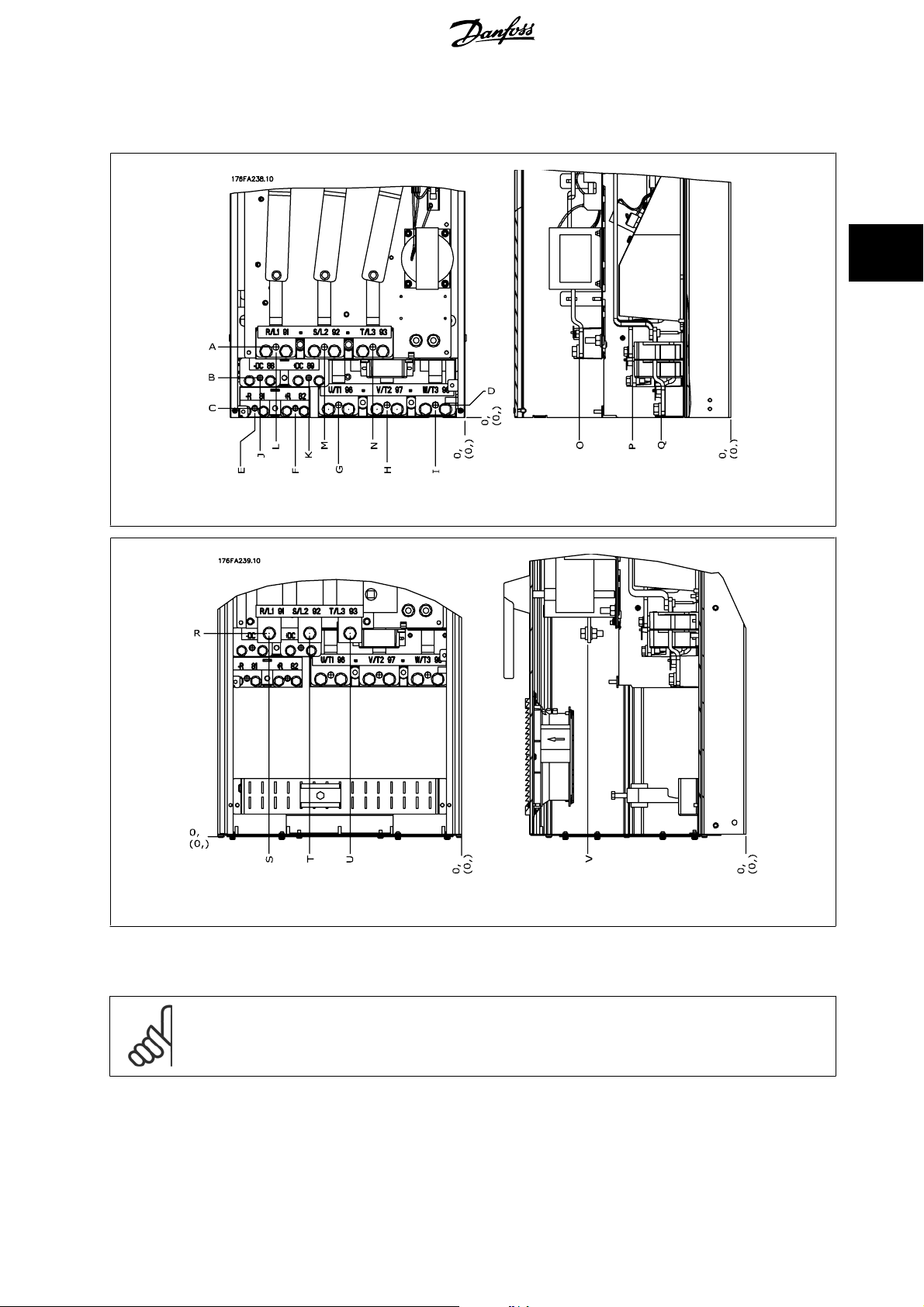
3.3.3 Klemmenpositionen - Baugröße D
Berücksichtigen Sie die folgende Position der Klemmen bei der Auslegung des Kabelzugangs.
3
Abbildung 3.9: Positionen der Leistungsanschlüsse, Baugröße D3 und D4
Abbildung 3.10: Positionen der Leistungsanschlüsse mit Trennschalter, Baugröße D1 und D2
Beachten Sie, dass die Leistungskabel schwer und schwierig zu biegen sind. Achten Sie auf optimale Positionierung des Frequenzumrichters, um einfache
Installation der Kabel sicherzustellen.
ACHTUNG!
Alle D-Gehäuse sind mit Standardeingangsklemmen oder Trennschalter verfügbar. Die Klemmenabmessungen sind in der folgenden
Tabelle enthalten.
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
21
Page 22

3
3 Mechanische Installation ADAP-KOOL® Drive AKD 102 High Power
IP21 (NEMA 1) / IP54 (NEMA 12) IP00/Chassis
Baugröße D1 Baugröße D2 Baugröße D3 Baugröße D4
A 277 379 119 122
B 227 326 68 68
C 173 273 15 16
D 179 279 20,7 22
E 370 370 363 363
F 300 300 293 293
G 222 226 215 218
H 139 142 131 135
I 55594851
J 354 361 347 354
K 284 277 277 270
L 334 334 326 326
M 250 250 243 243
N 167 167 159 159
O 261 260 261 261
P 170 169 170 170
Q 120 120 120 120
R 256 350 98 93
S 308 332 301 324
T 252 262 245 255
U 196 192 189 185
V 260 273 260 273
Tabelle 3.1: Kabelpositionen entsprechen den obigen Zeichnungen: Abmessungen in mm
22
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 23
ADAP-KOOL® Drive AKD 102 High Power 3 Mechanische Installation
3.3.4 Kühlung und Luftströmung
Kühlung
Für Kühlung kann auf unterschiedliche Weise gesorgt werden: Über die Kühlkanäle unten und oben im Gerät, über Luftein- und -auslass hinten im Gerät
oder durch Kombination der Kühlmöglichkeiten.
Lüftungsbaugruppe
Es wurde eine spezielle Option entwickelt, um den Einbau von Frequenzumrichtern mit IP00/Chassis in Rittal TS8-Schaltschränken mit Nutzung des
Kühllüfters zur Zwangskühlung des rückseitigen Kühlkanals zu optimieren. Die Luft aus dem oberen Bereich des Schaltschranks kann nach außen geleitet
werden, sodass die ausgetretene Wärme aus dem rückseitigen Kanal nicht in den Schaltraum gelangt und eine geringere Klimaanlagenleistung erforderlich
ist.
Für weitere Informationen siehe
Rückseitige Kühlung
Die Luft aus dem rückseitigen Kanal kann auch über die Rückseite eines Rittal TS8-Schaltschranks entlüftet werden. In diesem Fall kann über den
rückseitigen Kanal Luft aus dem Außenbereich transportiert und die ausgetretene Wärme nach außen abgegeben werden, sodass eine geringere Klimaanlagenleistung erforderlich ist.
ACHTUNG!
Ein Türlüfter wird im Gehäuse benötigt, um die Wärmeverluste abzuführen, die nicht im rückseitigen Kühlkanal des Frequenzumrichters
eingedämmt werden, sowie alle zusätzlichen Verluste, die von anderen Bauteilen erzeugt werden, die im Gehäuse eingebaut sind. Der
insgesamt benötigte Luftstrom muss so berechnet werden, dass die passenden Kühllüfter ausgewählt werden können. Einige Gehäusehersteller bieten Software an, die diese Berechnungen durchführt (z. B. Rittal Therm-Software). Falls der Frequenzumrichter das
einzige Wärme erzeugende Bauteil im Gehäuse ist, beträgt der minimale Luftstrom, der bei einer Umgebungstemperatur von 45 °C bei
den Frequenzumrichtern D3 und D4 benötigt wird 391 m
Installation von Lüftungsbaugruppen in Rittal-Schaltschränken
3
/h.
.
3
Luftströmung
Es muss für notwendige Luftströmung über den Kühlkörper gesorgt werden. Die Strömungsgeschwindigkeit wird nachstehend gezeigt.
Schutzart
IP21 / NEMA 1 D1 und D2
IP00/Chassis D3 und D4
Tabelle 3.2: Luftströmung über Kühlkörper
ACHTUNG!
Ursachen für Lüfteraktivierung:
1. AMA
2. DC-Halten
3. Vormagnetis.
4. DC-Stopp
5. Überschreitung von 60 % des Nennstroms
6. Spezifische Kühlkörpertemperatur überschritten (leistungsgrößenabhängig).
Sobald der Lüfter aktiviert wurde, läuft er mindestens 10 Minuten lang.
Baugröße
Luftströmung Türlüfter/oberer
Lüfter
170 m3/h 765 m3/h
3
/h 765 m3/h
255 m
Luftströmung über Kühlkörper
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
23
Page 24
3
3 Mechanische Installation ADAP-KOOL® Drive AKD 102 High Power
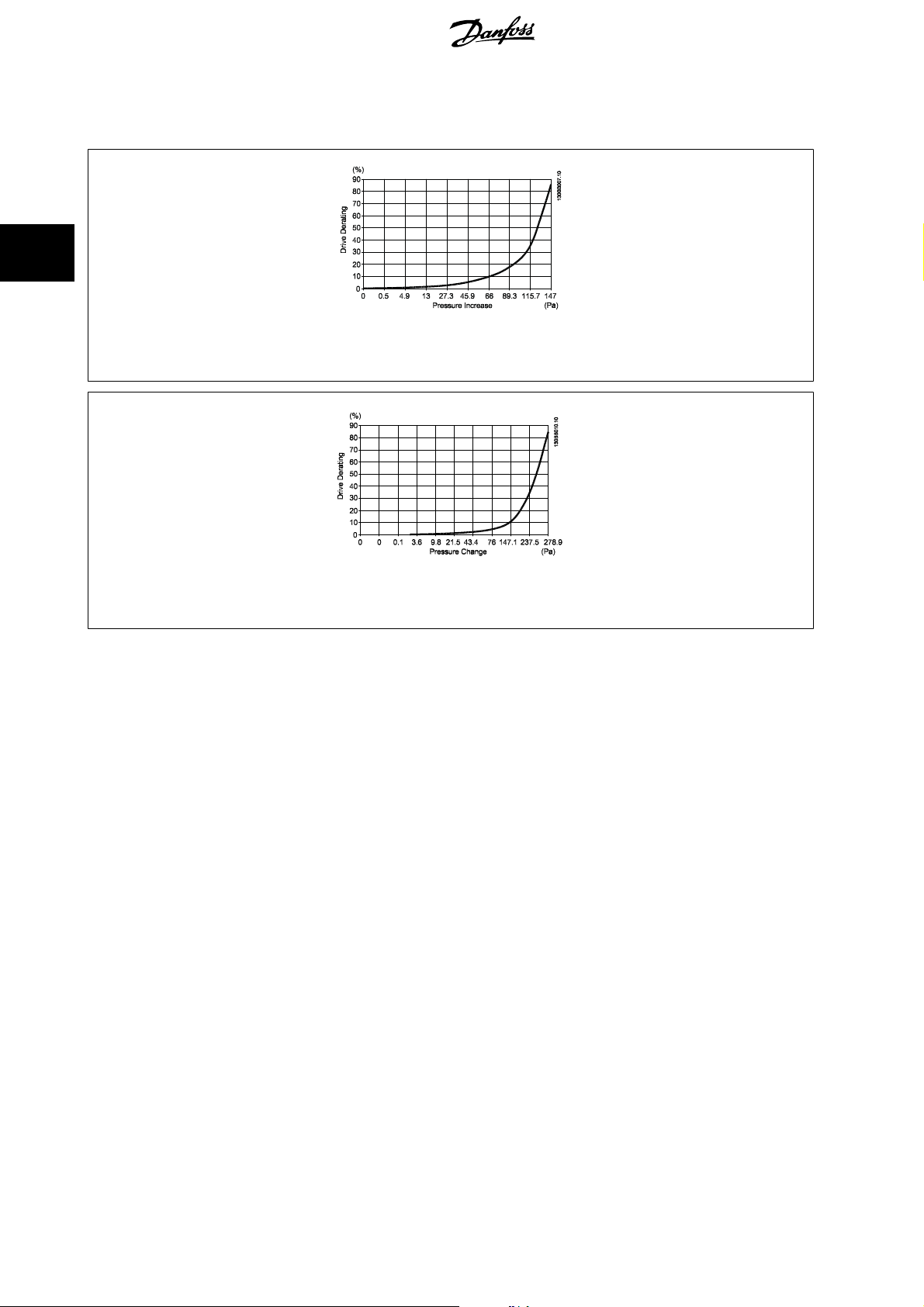
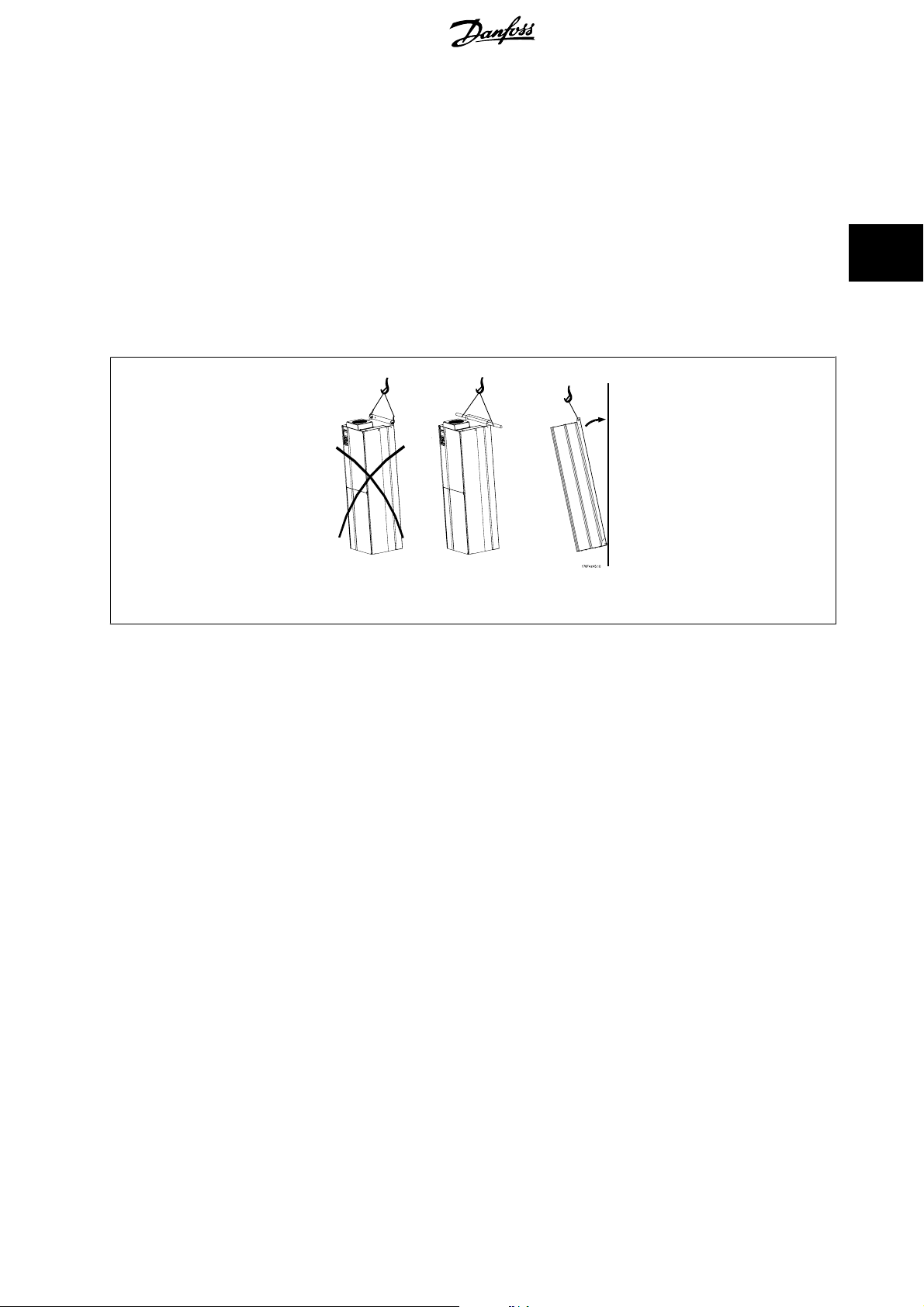
Externe Lüftungskanäle
Wenn zusätzliche Lüftungskanäle extern zum Rittal-Schaltschrank angebracht werden, muss der Druckabfall in den Kanälen berechnet werden. Nehmen
Sie eine Leistungsreduzierung des Frequenzumrichters anhand der nachstehenden Tabellen entsprechend dem Druckabfall vor.
Abbildung 3.11: Baugröße D Leistungsreduzierung gegenüber Druckänderung
Frequenzumrichterluftströmung: 765 m
3
/h
Abbildung 3.12: Baugröße E Leistungsreduzierung gegenüber Druckänderung (kleiner Lüfter), P250T5 und P355T7-P400T7
3
Frequenzumrichterluftströmung: 1105 m
/h
24
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 25
ADAP-KOOL® Drive AKD 102 High Power 3 Mechanische Installation
3.3.5 Wandmontage - Geräte mit Schutzart IP21 (NEMA 1) und IP54 (NEMA 12)
Dies gilt nur für Baugrößen D1 und D2 Der Aufstellungsort des Geräts muss sorgfältig überlegt werden.
Vor Auswahl des endgültigen Installationsorts sind alle relevanten Punkte zu berücksichtigen:
• Freier Platz für Kühlung
• Zugang zum Öffnen der Tür
• Kabeleinführung von unten
Markieren Sie die Montagelöcher sorgfältig über die Bohrschablone an der Wand und bohren Sie die Löcher wie angegeben. Stellen Sie richtigen Abstand
zum Boden und zur Decke zur Kühlung sicher. Für ausreichende Luftzirkulation zur Kühlung muss unter dem Frequenzumrichter mindestens 225 mm
Platz gehalten werden. Die Schrauben am Boden eindrehen und den Frequenzumrichter auf die Schrauben hängen. Den Frequenzumrichter gegen die
Wand kippen und die oberen Schrauben eindrehen. Alle vier Schrauben anziehen, um den Frequenzumrichter an der Wand zu befestigen.
3
Abbildung 3.13: Hebeverfahren zur Befestigung des Frequenzumrichters an Wand
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
25
Page 26
3
3 Mechanische Installation ADAP-KOOL® Drive AKD 102 High Power
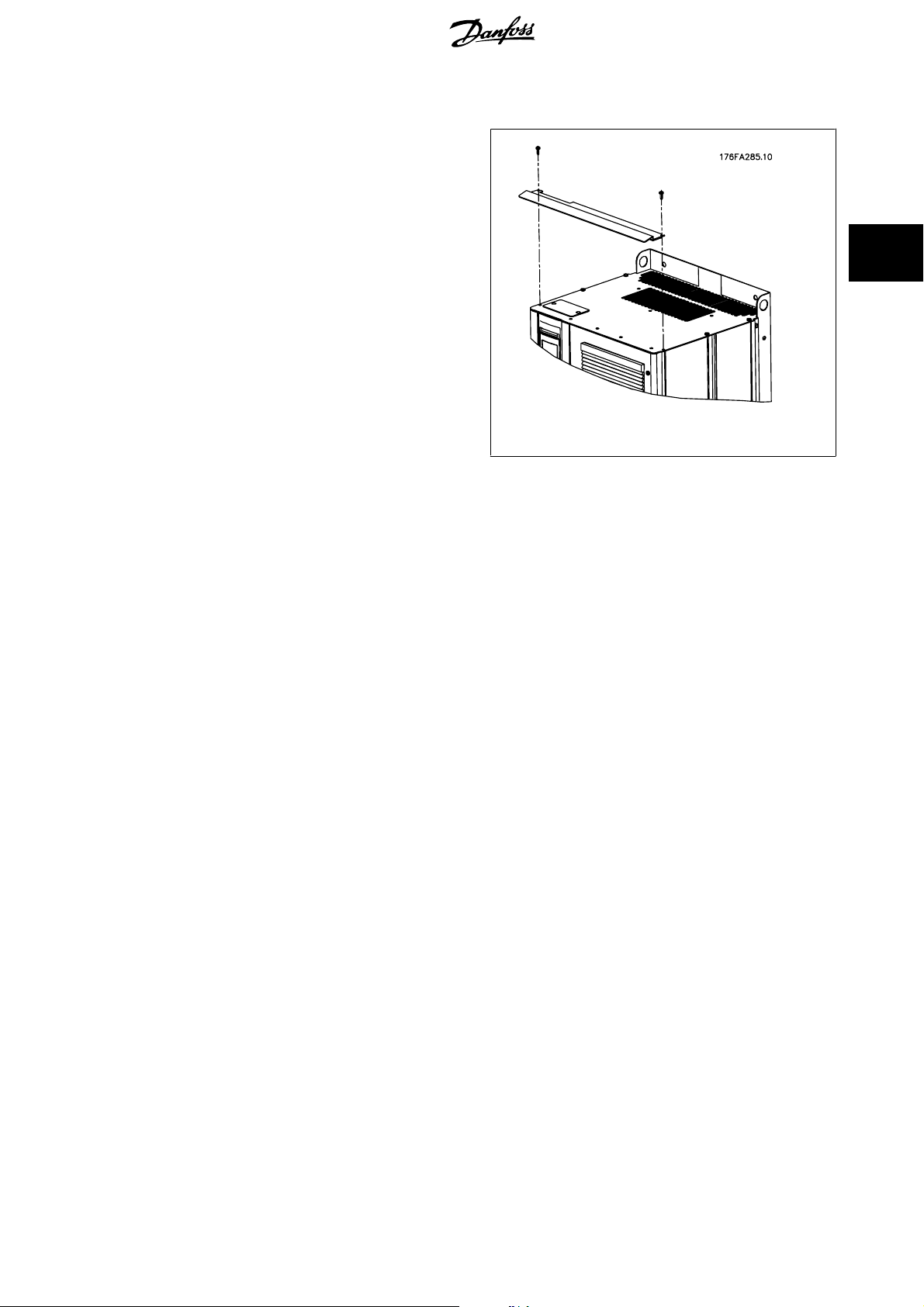
3.3.6 Verschraubung/Kabeleinführung - IP21 (NEMA 1) und IP54 (NEMA 12)
Kabel werden über das Bodenblech angeschlossen. Das Blech abnehmen und die Anbringungen der Einführung der Verschraubungen oder Kabeldurchführungen planen. Löcher im markierten Bereich auf der Zeichnung vorsehen.
ACHTUNG!
Das Bodenblech für Kabeleinführung muss am Frequenzumrichter befestigt werden, um den angegebenen Schutzgrad einzuhalten und
richtige Kühlung des Geräts sicherzustellen. Wird das Bodenblech nicht befestigt, kann das Gerät abschalten und zeigt den Alarm 69
Umr. Übertemp.
Abbildung 3.14: Beispiel für richtige Befestigung des Bodenblechs.
Baugröße D1 + D2
Ansicht der Kabeleinführungen von der Unterseite des Frequenzumrichters – 1) Netzseite 2) Motorseite
26
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 27
ADAP-KOOL® Drive AKD 102 High Power 3 Mechanische Installation
3.3.7 IP21-Tropfschutzinstallation (Baugröße D1 und D2)
Um Schutzart IP21 einzuhalten, muss ein getrenntes Tropfschutzblech wie unten erklärt montiert werden.
• Die beiden vorderen Schrauben herausdrehen.
• Das Tropfschutzblech einsetzen und Schrauben wieder eindrehen.
• Schrauben auf 5,6 Nm anziehen.
3
Abbildung 3.15: Montage des Tropfschutzbleches
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
27
Page 28
3
3 Mechanische Installation ADAP-KOOL® Drive AKD 102 High Power
3.4 Einbau vor Ort von Optionen
3.4.1 Installation von Lüftungs-Einbausätzen in Rittal- Schaltschränken
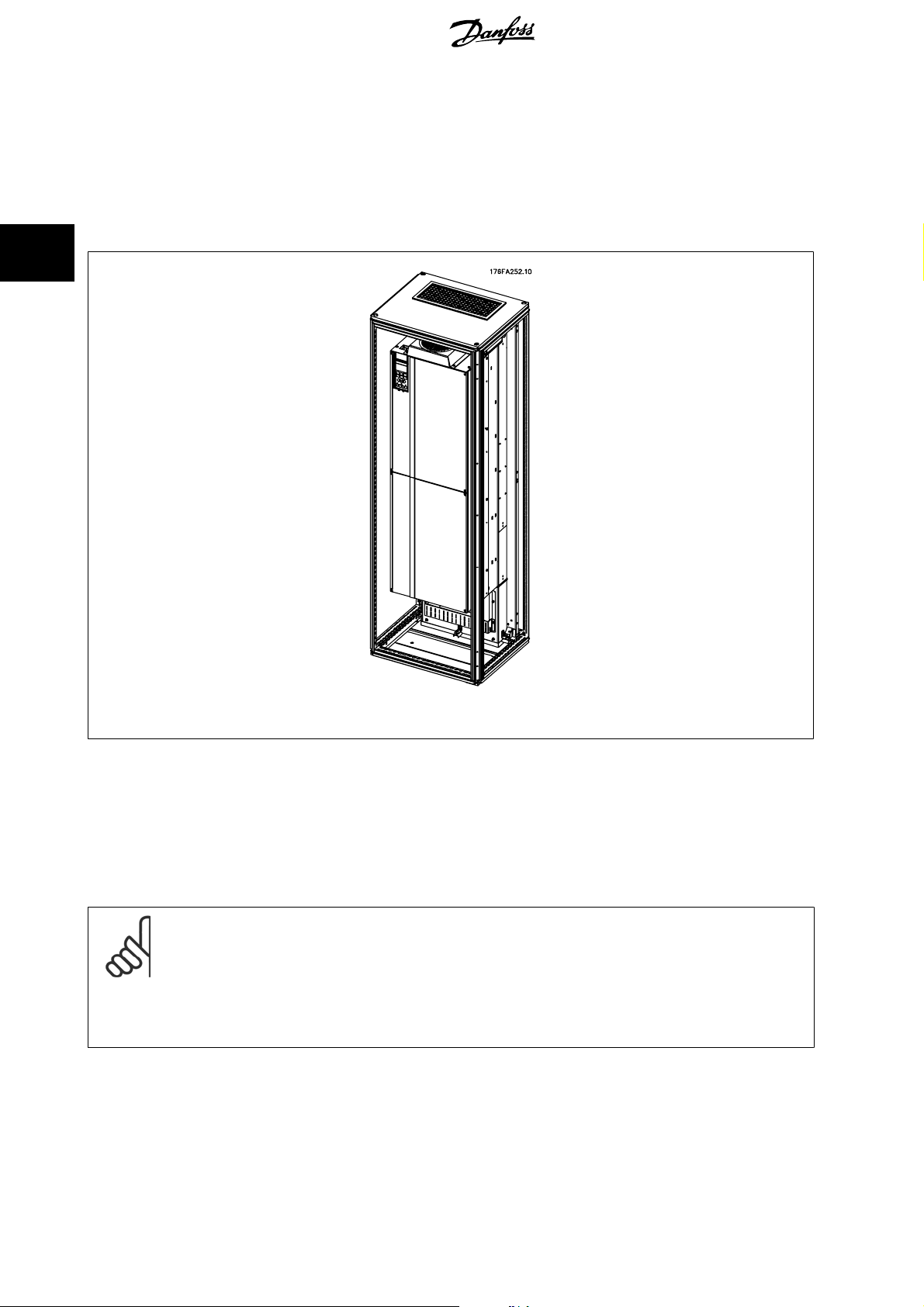
Dieser Abschnitt befasst sich mit der Installation von Frequenzumrichtern mit IP00/Chassis-Gehäuse mit Lüftungs-Einbausätzen in Rittal-Schaltschränken.
Zusätzlich zum Schaltschrank ist ein 200-mm-Sockel erforderlich.
Abbildung 3.16: Einbau von in Rittal TS8-Schaltschrank.
Die minimalen Abmessungen des Schaltschranks sind:
• Baugröße D3 und D4: Tiefe 500 mm, Breite 600 mm.
Die maximale Tiefe und Breite entsprechen den Anforderungen der Installation. Bei Verwendung mehrerer Frequenzumrichter in einem Schaltschrank
wird empfohlen, jeden Frequenzumrichter an seiner eigenen Rückwand zu befestigen und im mittleren Bereich der Wand zu lagern. Diese LüftungsEinbausätze unterstützen nicht die Einbaumontage (nähere Informationen siehe Rittal TS8-Katalog). Die Lüftungs-Einbausätze in der nachstehenden
Tabelle sind nur zur Verwendung mit IP00/Chassis-Frequenzumrichtern in den Rittal TS8-Schaltschränken mit IP20 und UL sowie NEMA 1 und IP54 und
UL sowie NEMA 12 geeignet.
ACHTUNG!
Ein Türlüfter wird im Gehäuse benötigt, um die Wärmeverluste abzuführen, die nicht im rückseitigen Kühlkanal des Frequenzumrichters
eingedämmt werden, sowie alle zusätzlichen Verluste, die von anderen Bauteilen erzeugt werden, die im Gehäuse eingebaut sind. Der
insgesamt benötigte Luftstrom muss so berechnet werden, dass die passenden Kühllüfter ausgewählt werden können. Einige Gehäusehersteller bieten Software an, die diese Berechnungen durchführt (z. B. Rittal Therm-Software). Falls der Frequenzumrichter das
einzige Wärme erzeugende Bauteil im Gehäuse ist, beträgt der minimale Luftstrom, der bei einer Umgebungstemperatur von 45 °C bei
3
den Frequenzumrichtern D3 und D4 benötigt wird, 391 m
/h.
28
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 29
ADAP-KOOL® Drive AKD 102 High Power 3 Mechanische Installation
Bestellinformationen
Rittal TS8-Schaltschrank
1800 mm 176F1824 176F1823
2000 mm 176F1826 176F1825
ACHTUNG!
Nähere Informationen finden Sie in der
Externe Lüftungskanäle
Wenn zusätzliche Lüftungskanäle extern zum Rittal-Schaltschrank angebracht werden, muss der Druckabfall in den Kanälen berechnet werden. Weitere
Informationen siehe Abschnitt
Einbausatz-Teilenr. BaugrößeD3Einbausatz-Teilenr. Baugröße
D4
Anleitung für die Lüftungsbaugruppe, 175R5640
Kühlung und Luftstrom
.
.
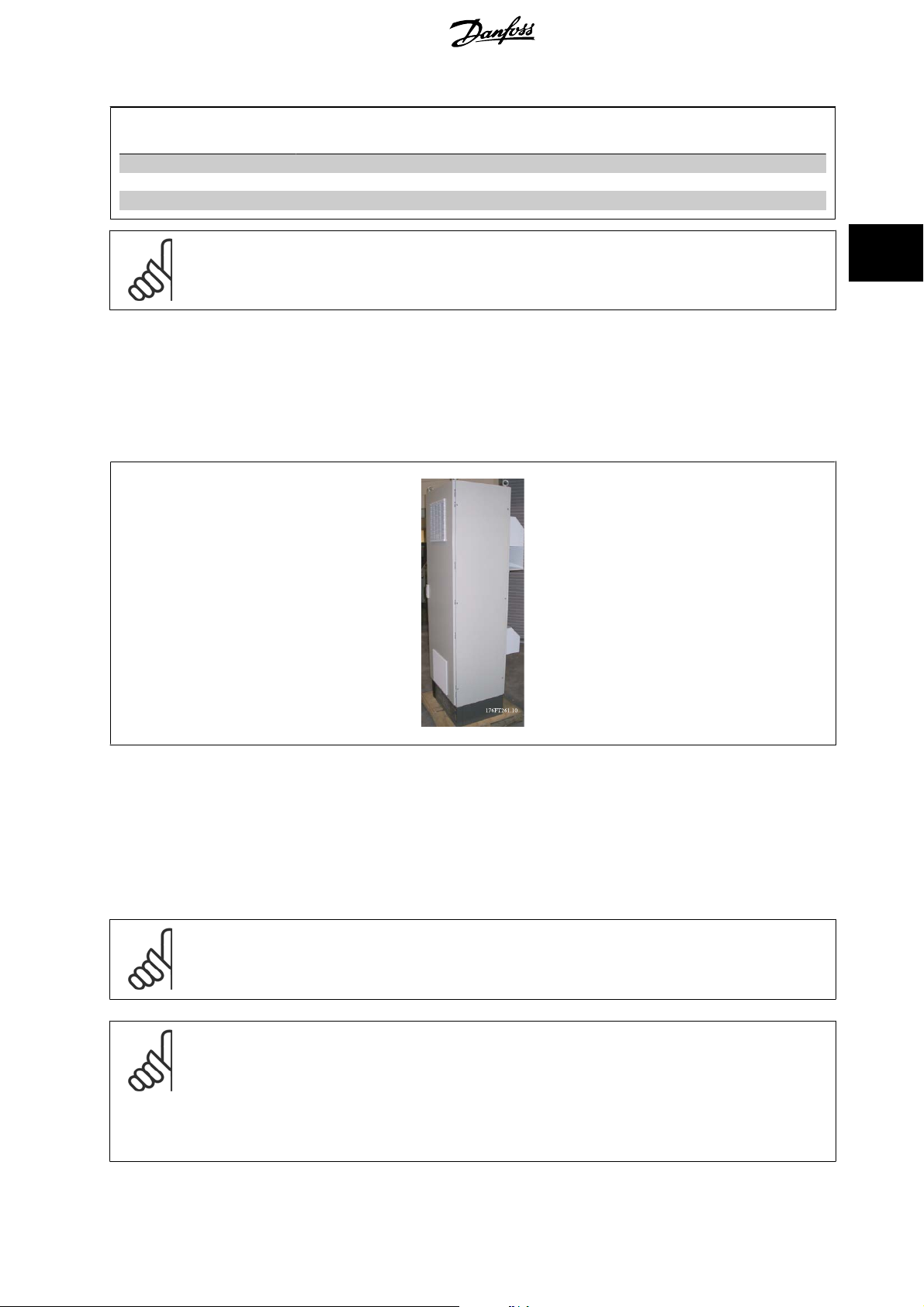
3.4.2 Außeninstallation/ NEMA 3R-Einbausatz für Rittal- Schaltschränke
3
Dieser Abschnitt beschreibt die Installation von NEMA 3R-Einbausätzen für Frequenzumrichter mit den Baugrößen D3 undD4 . Diese Einbausätze sind für
die Installation mit IP00/Chassis-Versionen dieser Baugrößen in Rittal TS8 NEMA 3R- oder NEMA 4-Gehäusen ausgelegt und getestet. Das NEMA-3RGehäuse ist ein Außengehäuse, das einen gewissen Schutz gegen Regen und Eis bietet. Das NEMA-4-Gehäuse ist ein Außengehäuse, das einen größeren
Schutz gegen Wetter und Strahlwasser bietet.
Die Mindestschaltschranktiefe beträgt 500 mm (600 mm für Baugröße E2). Der Einbausatz ist für ein 600 mm breites Gehäuse (800 mm für Baugröße
E2) ausgelegt. Weitere Gehäusebreiten sind möglich, dafür ist jedoch zusätzliche Rittal-Hardware erforderlich. Die maximale Tiefe und Breite entsprechen
den Anforderungen der Installation.
ACHTUNG!
Bei Verwendung des NEMA 3R-Einbausatzes wird die Nennleistung der Frequenzumrichter in den Baugrößen D3 und D4 um 3 %
reduziert. Für Frequenzumrichter in Baugröße E2 ist keine Reduzierung der Nennleistung erforderlich.
ACHTUNG!
Ein Türlüfter wird im Gehäuse benötigt, um die Wärmeverluste abzuführen, die nicht im rückseitigen Kühlkanal des Frequenzumrichters
eingedämmt werden, sowie alle zusätzlichen Verluste, die von anderen Bauteilen erzeugt werden, die im Gehäuse eingebaut sind. Der
insgesamt benötigte Luftstrom muss so berechnet werden, dass die passenden Kühllüfter ausgewählt werden können. Einige Gehäusehersteller bieten Software an, die diese Berechnungen durchgeführt (z. B. Rittal Therm-Software). Falls der Frequenzumrichter das
einzige Wärme erzeugende Bauteil im Gehäuse ist, beträgt der minimale Luftstrom, der bei einer Umgebungstemperatur von 45 °C bei
den Frequenzumrichtern D3 und D4 benötigt wird 391 m
3
/h.
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
29
Page 30
3
3 Mechanische Installation ADAP-KOOL® Drive AKD 102 High Power
Bestellinformationen
Baugröße D3: 176F4600
Baugröße D4: 176F4601
Baugröße E2: 176F1852
ACHTUNG!
Weitere Informationen finden Sie in der Anleitung
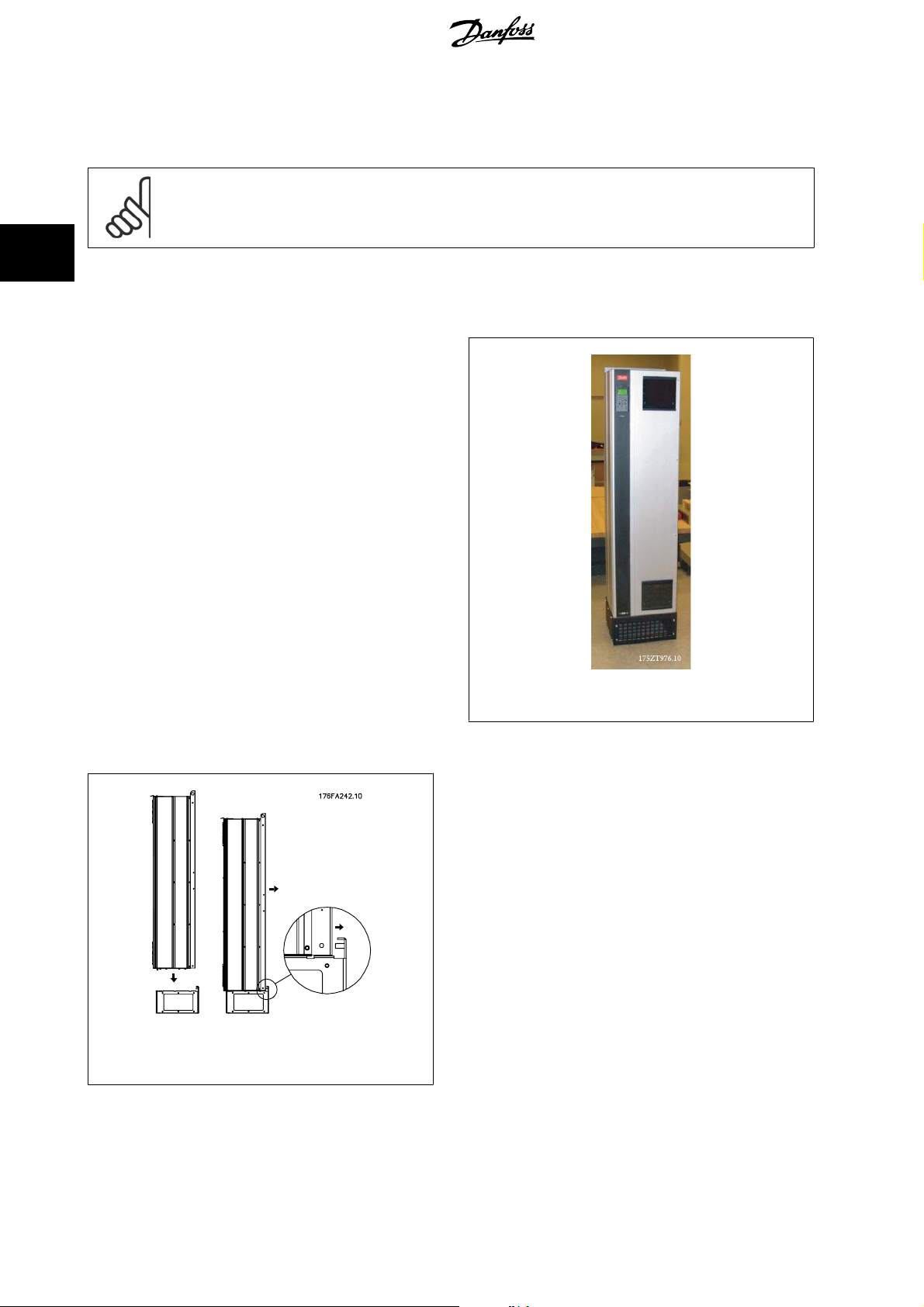
3.4.3 Montage auf Sockel
Dieser Abschnitt beschreibt die Montage einer Sockeleinheit, die für die
Frequenzumrichter in Baugrößen D1 und D2 erhältlich ist. Dies ist ein 200
mm hoher Sockel, mit dem diese Gehäuse am Boden montiert werden
können. Die Vorderseite des Sockels hat Öffnungen für Luftzuführung zu
den Leistungsbauteilen.
Das Bodenblech zur Kabeleinführung des Frequenzumrichters muss montiert werden, um die Steuerbauteile des Frequenzumrichters über den
Türlüfter mit ausreichend Kühlluft zu versorgen und die Schutzart IP21/
NEMA 1 oder IP54/NEMA 12 des Gehäuses beizubehalten.
175R5922
.
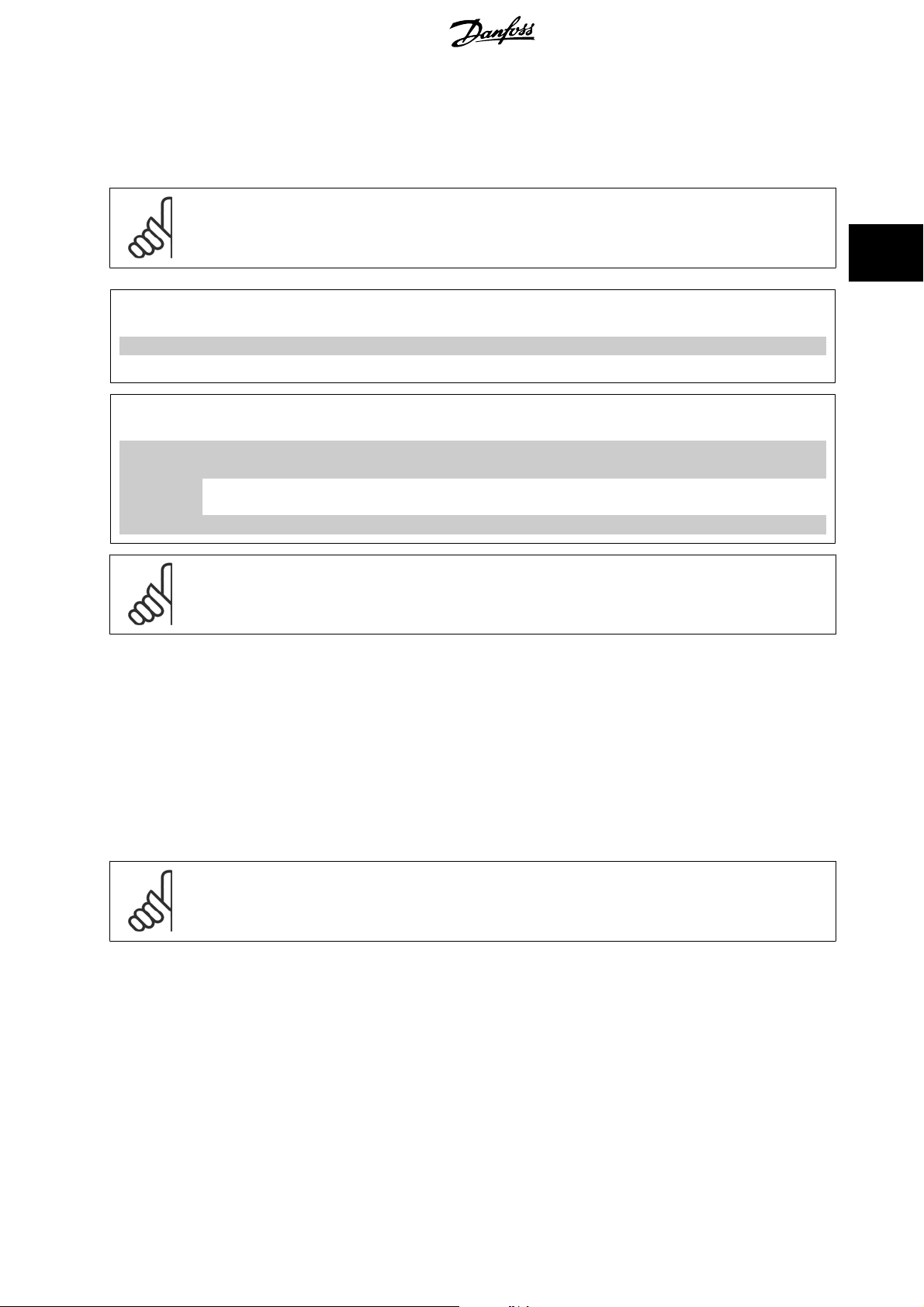
Abbildung 3.17: Frequenzumrichter auf Sockel
Es gibt einen Sockel passend für Baugrößen D1 und D2. Seine Bestellnummer lautet 176F1827. Der Sockel ist für die Baugröße E1 Standard.
Abbildung 3.18: Befestigung des Frequenzumrichters auf
Sockel
30
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 31
ADAP-KOOL® Drive AKD 102 High Power 3 Mechanische Installation
3.4.4 Installation von Netzoptionen
Dieser Abschnitt beschreibt die Installation (vor Ort) von Netzoptionssätzen, die für Frequenzumrichter in allen Baugrößen D und E erhältlich sind.
Versuchen Sie nicht, EMV-Filter von den Eingangsplatten zu entfernen. Die EMV-Filter können dabei beschädigt werden.
ACHTUNG!
Wenn EMV-Filter verfügbar sind, gibt es abhängig von der Eingangsplattenkombination zwei verschiedene EMV-Filter. Diese sind austauschbar. In bestimmten Fällen sind die Optionssätze für die Installation vor Ort für alle Spannungen gleich.
3
380 - 480 V
380 - 500 V
D1 Alle Leistungsgrößen D1 176F8442 176F8450 176F8444 176F8448 176F8446
D2 Alle Leistungsgrößen D2 176F8443 176F8441 176F8445 176F8449 176F8447
525 - 690 V Sicherungen Trennsicherungen EMV EMV-Sicherungen EMV-Trennsiche-
D1 AKD 102/ : 45-90 kW
: 37-75 kW
AKD 102/ : 110-160 kW
: 90-132 kW
D2 Alle Leistungsgrößen D2 175L8827 175L8826 175L8825 – –
ACHTUNG!
Weitere Informationen siehe Montageanleitung 175R5795.
Sicherungen Trennsicherungen EMV EMV-Sicherungen EMV-Trennsiche-
rungen
rungen
175L8829 175L8828 175L8777 – –
175L8442 175L8445 175L8777 – –
3.4.5 Montage einer Netzabschirmung für Frequenzumrichter
Dieser Abschnitt beschreibt die Montage einer Netzabschirmung für die Frequenzumrichter in Baugrößen D1, D2 und E1. Bei den IP00/Chassis-Versionen
ist die Montage einer Netzabschirmung nicht möglich, da diese Versionen standardmäßig über eine Metallabdeckung verfügen. Diese Abschirmungen
entsprechen den Unfallverhütungsvorschriften VBG-4.
Bestellnummern:
Baugrößen D1 und D2: 176F0799
ACHTUNG!
Weitere Informationen siehe Montageanleitung
175R5923
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
.
31
Page 32

4
4 Elektrische Installation ADAP-KOOL® Drive AKD 102 High Power
32
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 33

ADAP-KOOL® Drive AKD 102 High Power 4 Elektrische Installation
4 Elektrische Installation
4.1 Elektrische Installation
4.1.1 Leistungsanschlüsse
Kabel und Sicherungen
ACHTUNG!
Allgemeiner Hinweis zu Kabeln
Befolgen Sie stets die nationalen und örtlichen Vorschriften zum Kabelquerschnitt und zur Umgebungstemperatur. Verwenden Sie nach
Möglichkeit Kupferleiter. Diese müssen in UL-Anwendungen für 75 °C ausgelegt sein, bei Nicht-UL-Anwendungen sind 75 und 90 °C
akzeptabel.
Die Leistungskabelanschlüsse sind wie nachstehend abgebildet angeordnet. Die Dimensionierung des Kabelquerschnitts muss gemäß örtlichen und nationalen Vorschriften und Nennströmen erfolgen. Näheres siehe unter
Zum Schutz des Frequenzumrichters müssen die empfohlenen Sicherungen verwendet werden, oder das Gerät muss über integrierte Sicherungen verfügen. Empfohlene Sicherungen können den Tabellen im Abschnitt Sicherungen entnommen werden. Der Einsatz der richtigen Sicherungen gemäß
örtlichen und nationalen Vorschriften muss sichergestellt werden.
Technische Daten
.
4
Bei Varianten mit Hauptschalter ist dieser auf der Netzseite vorverdrahtet.
ACHTUNG!
Das Motorkabel muss abgeschirmt sein. Bei Verwendung eines nicht abgeschirmten Kabels sind einige EMV-Anforderungen nicht erfüllt.
Verwenden Sie ein abgeschirmtes Motorkabel, um die Anforderungen der EMV-Richtlinie einzuhalten. Nähere Informationen hierzu
unter
EMV-Spezifikationen
Hinweise zu korrekten Maßen von Motorkabelquerschnitt und -länge finden Sie im Kapitel
Abschirmung von Kabeln:
Vermeiden Sie verdrillte Schirmenden (Pigtails), die hochfrequent nicht ausreichend wirksam sind. Wenn der Kabelschirm unterbrochen werden muss (z.
B. um ein Motorschütz oder einen Reparaturschalter zu installieren), muss die Abschirmung an der Unterbrechung mit der geringstmöglichen HF-Impedanz
fortgeführt werden (großflächige Schirmauflage).
Schließen Sie den Motorkabelschirm am Schirmblech des Frequenzumrichters und am Metallgehäuse des Motors an.
Stellen Sie die Schirmungsverbindungen mit einer möglichst großen Kontaktfläche (Schirmbügel) her. Dies kann unter Verwendung des im Lieferumfang
des Frequenzumrichters enthaltenen Zubehörs erfolgen.
Kabellänge und -querschnitt:
Der Frequenzumrichter ist mit einer bestimmten Kabellänge auf EMV getestet worden. Das Motorkabel muss möglichst kurz sein, um Störungen und
Ableitströme auf ein Minimum zu beschränken.
Taktfrequenz:
Wenn der Frequenzumrichter zusammen mit einem Sinusfilter verwendet wird, um z. B. die Störgeräusche des Motors zu reduzieren, muss die Taktfrequenz in Par. 14-01
Taktfrequenz
entsprechend der Angabe zu dem verwendeten Sinusfilter eingestellt werden.
im
Projektierungshandbuch
.
Allgemeine technische Daten
.
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
33
Page 34

4 Elektrische Installation ADAP-KOOL® Drive AKD 102 High Power
4
Klemme Nr. 96 97 98 99
U1 V1 W1
U1 V1 W1
1)
Schutzleiteranschluss
U V W
W2 U2 V2 6 Drähte aus Motor
1)
Motorspannung 0-100 % der Netzspannung
PE
Dreieckschaltung
1)
PE
1)
Sternschaltung (U2, V2, W2)
PE
Anschlussklemmen am FU
U2, V2, W2 sind miteinander zu verbinden.
ACHTUNG!
Bei Motoren ohne Phasentrennpapier oder einer geeigneten Isolation, welche für den Betrieb an einem
Zwischenkreisumrichter benötigt wird, muss ein Sinusfilter am Ausgang des Frequenzumrichters vorgesehen
werden.
Abbildung 4.1: Kompaktgeräte IP21 (NEMA 1) und IP54 (NEMA 12), Baugröße D1
Abbildung 4.2: Kompaktgeräte IP21 (NEMA 1) und IP54 (NEMA 12) mit Trennschalter, Sicherung und EMV-Filter, Baugröße D2
34
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 35

ADAP-KOOL® Drive AKD 102 High Power 4 Elektrische Installation
1) AUX-Relais 5) Bremswiderstand
01 02 03 -R +R
04 05 06 81 82
2) Temp.-Schalter 6) Schaltnetzteil-Sicherung (Teilenummer siehe Sicherungstabellen)
106 104 105 7) AUX-Lüfter
3) Netz 100 101 102 103
R S T L1 L2 L1 L2
91 92 93 8) Lüftersicherung (Teilenummer siehe Sicherungstabellen)
L1 L2 L3 9) Schutzleiter
4) Zwischenkreis-
kopplung
-DC +DC U V W
88 89 96 97 98
T1 T2 T3
10) Motor
4
Abbildung 4.3: Kompaktgeräte IP00 (Chassis), Baugröße D3
Abbildung 4.4: Kompaktgeräte IP00 (Chassis) mit Trennschalter, Sicherung und EMV-Filter, Baugröße D4
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
35
Page 36

4 Elektrische Installation ADAP-KOOL® Drive AKD 102 High Power
1) AUX-Relais 5) Bremswiderstand
01 02 03 -R +R
04 05 06 81 82
2) Temp.-Schalter 6) Schaltnetzteil-Sicherung (Teilenummer siehe Sicherungstabellen)
106 104 105 7) AUX-Lüfter
3) Netz 100 101 102 103
R S T L1 L2 L1 L2
91 92 93 8) Lüftersicherung (Teilenummer siehe Sicherungstabellen)
L1 L2 L3 9) Schutzleiter
4
4) Zwischenkreiskopplung
-DC +DC U V W
88 89 96 97 98
T1 T2 T3
Abbildung 4.5: Position der Erdungsklemmen, IP00, Baugrößen D
10) Motor
ACHTUNG!
D2 und D4 sind als Beispiel dargestellt. D1 und D3 sind gleichwertig.
Abbildung 4.6: Position der Erdungsklemmen IP21 (NEMA
1) und IP54 (NEMA 12)
36
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 37

ADAP-KOOL® Drive AKD 102 High Power 4 Elektrische Installation
4.1.2 Erdung
Folgende grundlegenden Punkte müssen bei der Installation eines Frequenzumrichters beachtet werden, um die elektromagnetische
Verträglichkeit (EMV) sicherzustellen.
• Schutzerdung: Beachten Sie bitte, dass der Frequenzumrichter einen hohen Ableitstrom aufweist und deshalb aus Sicherheitsgründen vor-
schriftsmäßig zu erden ist. Beachten Sie die örtlichen Sicherheitsvorschriften.
• Hochfrequenzerdung: Halten Sie die Erdungskabelverbindungen so kurz wie möglich.
Schließen Sie die verschiedenen Erdungssysteme mit geringstmöglicher Kabelimpedanz an. Die geringstmögliche Leiterimpedanz ergibt sich bei Verwendung möglichst kurzer Motorkabel mit möglichst großer Leiteroberfläche.
Die Metallgehäuse der verschiedenen Geräte werden mit geringstmöglicher HF-Impedanz an der Schrankrückwand montiert. Dadurch werden unterschiedliche HF-Spannungen für die einzelnen Geräte sowie das Risiko von Funkstörungsströmen in Verbindungskabeln vermieden, die möglicherweise
zwischen den Geräten verwendet werden. Funkstörungen werden so reduziert.
Verwenden Sie zum Erreichen einer niedrigen HF-Impedanz die Befestigungsschrauben der Geräte als HF-Verbindungen zur Rückwand. Es ist dabei
notwendig, den isolierenden Lack oder Sonstiges von den Befestigungspunkten zu entfernen.
4.1.3 Zusätzlicher Schutz (RCD)
Fehlerstromschutzschalter, zusätzliche Schutzerdung oder Erdung können ein zusätzlicher Schutz sein, vorausgesetzt, die örtlichen Sicherheitsvorschriften
werden eingehalten.
4
Bei Erdungsfehlern können Gleichspannungsanteile im Fehlerstrom entstehen.
Fehlerstromschutzschalter sind ggf. gemäß den örtlichen Vorschriften anzuwenden. Die Schutzschalter müssen zum Schutz von dreiphasigen Geräten mit
Gleichrichterbrücke und für kurzzeitiges Ableiten von Impulsstromspitzen im Einschaltmoment geeignet sein.
Siehe auch Abschnitt
Besondere Bedingungen
im Projektierungshandbuch.
4.1.4 EMV-Schalter
Ungeerdete Netzversorgung
Wird der Frequenzumrichter von einer isolierten Netzstromquelle (, potentialfreie Dreieckschaltung und geerdete Dreieckschaltung) oder TT/TN-S Netz
mit geerdetem Zweig versorgt, so wird empfohlen, den EMV-Schalter über Par. 14-50
optimale EMV-Leistung benötigt wird, parallele Motoren angeschlossen werden oder das Motorkabel länger als 25 m ist, wird empfohlen, Par. 14-50
auf [Ein] zu stellen.
Filter
In der AUS-Stellung sind die internen EMV-Kapazitäten (Filterkondensatoren) zwischen Chassis und Zwischenkreis abgeschaltet, um Schäden am Zwischenkreis zu vermeiden und die Erdkapazitätsströme (gemäß IEC 61800-3) zu verringern.
Bitte lesen Sie dazu auch den Anwendungshinweis
der Leistungselektronik einsetzbar sind (IEC 61557-8).
VLT am IT-Netz , MN.90.CX.02
EMV-Filter
. Es ist wichtig, Isolationsmonitore zu verwenden, die zusammen mit
auf OFF (AUS) zu stellen. Siehe dazu IEC 364-3. Falls
EMV-
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
37
Page 38

4
4 Elektrische Installation ADAP-KOOL® Drive AKD 102 High Power
4.1.5 Drehmoment
Beim Anziehen aller elektrischen Anschlüsse ist es sehr wichtig, diese mit
dem richtigen Drehmoment anzuziehen. Ein zu hohes oder niedriges
Drehmoment ergibt einen schlechten elektrischen Anschluss. Stellen Sie
das richtige Drehmoment mit einem Drehmomentschlüssel sicher.
Abbildung 4.7: Ziehen Sie die Schrauben immer mit einem
Drehmomentschlüssel an.
Baugröße Klemme Drehm. 0-20 mA Schraubengröße
D1, D2, D3 und D4 Netz
Motor
Zwischenkreiskopplung
Bremse
19 Nm M10
9,5 Nm M8
4.1.6 Abgeschirmte Kabel
Der richtige Anschluss abgeschirmter Kabel ist wichtig, um hohe EMV-Immunität und niedrige Störstrahlungen sicherzustellen.
Der Anschluss kann über Kabelverschraubungen oder Kabelbügel erfolgen:
• EMV-Kabelverschraubungen: Allgemein erhältliche Kabelverschraubungen können verwendet werden, um optimalen EMV-Anschluss sicherzustellen.
• EMV-Kabelbügel: Kabelbügel für einfachen Anschluss sind im Lieferumfang des Frequenzumrichters enthalten.
38
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 39

ADAP-KOOL® Drive AKD 102 High Power 4 Elektrische Installation
4.1.7 Motorkabel
Der Motor muss an die Klemmen U/T1/96, V/T2/97, W/T3/98 angeschlossen werden, Erde an Klemme 99. Mit dem Frequenzumrichter können alle
dreiphasigen Standardmotoren eingesetzt werden. Die Werkseinstellung ist Rechtsdrehung, wobei der Ausgang des Frequenzumrichters folgendermaßen
geschaltet ist:
Klemmennummer
96, 97, 98, 99 Mains U/T1, V/T2, W/T3
• Klemme U/T1/96 an U-Phase
• Klemme V/T2/97 an V-Phase
• Klemme W/T3/98 an W-Phase
Die Drehrichtung kann durch Vertauschen zweier Phasen des Motorkabels oder durch Ändern der Einstellung in Par. 4-10
werden.
Die Motordrehrichtungsprüfung wird mithilfe von Par. 1-28
Funktion
Masse
Motor Rotation Check
durchgeführt. Die jeweiligen Schritte im Display sind zu befolgen.
Motor Drehrichtung
4
umgekehrt
4.1.8 Zwischenkreiskopplung
Klemmennummer Funktion
88, 89 Zwischenkreiskopplung
Das Anschlusskabel muss abgeschirmt sein. Die max. Länge zwischen Frequenzumrichter und DC-Sammelschiene beträgt 25 m.
Die Zwischenkreiskopplung ermöglicht einen Lastausgleich beim Zusammenschalten mehrerer Frequenzumrichter über die DC-Zwischenkreise.
Beachten Sie, dass die Spannung an den Klemmen bis zu 1099 V DC betragen kann.
Die Zwischenkreiskopplung ist nur mit Sonderzubehör möglich und erfordert besondere Sicherheitsüberlegungen. Nähere Informationen finden Sie in der Anleitung zur Zwischenkreiskopplung MI.50.NX.YY.
Beachten Sie, dass Netzunterbrechung den Frequenzumrichter aufgrund der DC-Zwischenkreisverbindung ggf. nicht spannungslos
schaltet.
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
39
Page 40

4
4 Elektrische Installation ADAP-KOOL® Drive AKD 102 High Power
4.1.9 Abschirmung gegen elektrisches Rauschen
Montieren Sie vor dem Anschluss des Netzstromkabels die EMV-Metallabdeckung, um optimalen EMV-Schutz sicherzustellen.
HINWEIS: Die EMV-Metallabdeckung wird nur bei Geräten mit EMV-Filter mitgeliefert.
Abbildung 4.8: Montage der EMV-Abschirmung.
4.1.10 Netzanschluss
Die Netzversorgung muss an den Klemmen 91, 92, 93 angeschlossen sein. Masse wird an die Klemme rechts von Klemme 93 angeschlossen.
Klemmennummer
91, 92, 93
94
Prüfen Sie, ob die Netzspannung Ihrer Anlage der auf dem Typenschild des Frequenzumrichters angegebenen Netzspannung entspricht.
Stellen Sie sicher, dass die Stromversorgung den notwendigen Strom zum Frequenzumrichter liefern kann.
Hat das Gerät keine integrierten Sicherungen, muss sichergestellt werden, dass die entsprechenden Sicherungen den richtigen Nennstrom besitzen.
Funktion
Netz R/L1, S/L2, T/L3
Masse
4.1.11 Externe Lüfterversorgung
Baugröße D-E-F
Bei einer DC-Versorgung des Frequenzumrichters oder falls der Kühllüfter unabhängig von der Stromversorgung betrieben werden muss, kann eine
externe Stromversorgung eingesetzt werden. Der Anschluss erfolgt am Leistungsteil.
Klemmennummer
100, 101
102, 103
Der Steckanschluss auf der Leistungskarte dient zum Anschluss der Netzspannung für die Kühllüfter. Die Lüfter werden ab Werk für die Versorgung über
eine gemeinsame Wechselstromleitung angeschlossen (Brücken zwischen 100-102 und 101-103). Falls eine externe Versorgung benötigt wird, werden
die Brücken entfernt und die Versorgung an Klemmen 100 und 101 angeschlossen. Eine 5-A-Sicherung sollte zur Absicherung verwendet werden. Bei ULAnwendungen sollte dies eine LittleFuse KLK-5 oder eine vergleichbare Sicherung sein.
40
Funktion
Zusatzversorgung S, T
Interne Versorgung S, T
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 41

ADAP-KOOL® Drive AKD 102 High Power 4 Elektrische Installation
4.1.12 Sicherungen
Abzweigschutz:
Zum Schutz der Anlage vor elektrischen Gefahren und Bränden müssen alle Abzweige in einer Installation, Schaltvorrichtungen, Maschinen usw. in
Übereinstimmung mit den nationalen/internationalen Vorschriften mit einem Kurzschluss- und Überstromschutz versehen sein.
Kurzschluss-Schutz:
Der Frequenzumrichter muss gegen Kurzschluss abgesichert werden, um elektrische Gefahren und ein Brandrisiko zu vermeiden. Danfoss empfiehlt die
unten aufgeführten Sicherungen, um das Bedienpersonal und die Installation im Fall einer internen Funktionsstörung im Frequenzumrichter zu schützen.
Der Frequenzumrichter selbst gewährleistet einen vollständigen Kurzschluss-Schutz am Motorausgang.
Überstromschutz
Für einen Überlastschutz ist zu sorgen, um eine Brandgefahr wegen Überhitzung der Kabel in der Anlage auszuschließen. Der Frequenzumrichter verfügt
über einen internen Überstromschutz, der als Überlastschutz zwischen Frequenzumrichter und Motor verwendet werden kann (nicht UL/cUL-zugelassen).
Siehe Par. 4-18
schutz muss stets gemäß den nationalen Vorschriften ausgeführt werden.
Stromgrenze
. Darüber hinaus können Sicherungen oder Trennschalter als Überstromschutz in der Anlage verwendet werden. Überstrom-
Keine UL-Konformität
Wenn keine Übereinstimmung mit der UL/cUL-Zulassung bestehen muss, können folgende Sicherungen in Übereinstimmung mit EN 50178 gewählt
werden:
P110 - P250 380 - 480 V Typ gG
P315 - P450 380 - 480 V Typ gR
4
380-480 V, Baugröße D
Die nachstehenden Sicherungen sind für die Verwendung in einer Schaltung geeignet, die maximal 100.000 Aeff (symmetrisch) bei 240 V, 480 V, oder
500 V oder 600 V (abhängig von der Nennspannung des Frequenzumrichters) liefern können. Bei Verwendung der richtigen Sicherungen ist das Short
Circuit Current Rating (SCCR) des Frequenzumrichters 100.000 Aeff.
Größe/
Typ
P110 FWH-
P132 FWH-
P160 FWH-
P200 FWH-
P250 FWH-
Tabelle 4.1: Baugröße D, Netzsicherungen, 380-480 V
Bussmann
E1958
JFHR2**
300
350
400
500
600
Bussmann
E4273
T/JDDZ**
JJS300
JJS350
JJS400
JJS500
JJS600
SIBA
E180276
JFHR2
2061032.315 L50S-300 A50-P300 NOS-
2061032.35 L50S-350 A50-P350 NOS-
2061032.40 L50S-400 A50-P400 NOS-
2061032.50 L50S-500 A50-P500 NOS-
2062032.63 L50S-600 A50-P600 NOS-
LittelFuse
E71611
JFHR2**
Ferraz-
Shawmut
E60314
JFHR2**
Bussmann
E4274
H/JDDZ**
300
350
400
500
600
Bussmann
E125085
JFHR2*
170M3017 170M3018
170M3018 170M3018
170M4012 170M4016
170M4014 170M4016
170M4016 170M4016
Interne
Option
Bussmann
4.1.13 Netztrennschalter - Baugrößen D
Baugröße Leistung & Spannung Typ
D1/D3 P110-P132 380-480 V und P110-P160 525-690 V ABB OETL-NF200A
D2/D4 P160-P250 380-480 V und P200-P400 525-690 V ABB OETL-NF400A
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
41
Page 42

4 Elektrische Installation ADAP-KOOL® Drive AKD 102 High Power
4.1.14 Motorisolation
4
Bei Motorkabellängen ≤ der maximalen Kabellänge laut Angabe in den
Tabellen mit allgemeinen technischen Daten werden die folgenden Motorisolationswerte empfohlen, da die Spitzenspannung aufgrund von
Übertragungsleitungswirkungen im Motorkabel bis zu maximal das Doppelte der DC-Zwischenkreisspannung, das 2,8-Fache der Netzspannung,
betragen kann. Bei einem geringeren Isolationswert eines Motors wird
die Verwendung eines dU/dt- oder Sinusfilters empfohlen.
Netznennspannung Motorisolation
UN ≤ 420 V Standard ULL = 1300 V
420 V < U
500 V < UN ≤ 600 V Verstärkte ULL = 1800 V
600 V < U
≤ 500 V Verstärkte ULL = 1600 V
N
≤ 690 V Verstärkte ULL = 2000 V
N
4.1.15 Motorlagerströme
Bei allen mit Frequenzumrichtern mit 110 kW oder höheren Leistungen installierten Motoren müssen B-seitig (gegenantriebseitig) isolierte Lager eingebaut
werden, um Lagerströme zu beseitigen. Um A-seitige (antriebsseitige) Lager- und Wellenströme auf ein Minimum zu beschränken, ist richtige Erdung von
Frequenzumrichter, Motor, angetriebener Maschine und Motor zur angetriebenen Maschine erforderlich.
Standardstrategien zur Minimierung:
1. Isoliertes Lager verwenden.
2. Strenge Installationsverfahren anwenden.
- Die EMV-Installationsrichtlinie streng befolgen
- Eine gute hochfrequent wirksame Verbindung zwischen dem Motor und dem Frequenzumrichter herstellen, zum Beispiel über ein
abgeschirmtes Kabel mit einer 360°-Verbindung im Motor und im Frequenzumrichter
- Für einen Pfad niedriger Impedanz vom Frequenzumrichter zur Gebäudeerdung und vom Motor zur Gebäudeerdung sorgen; dies kann
bei Pumpen schwierig sein
- Eine direkte Erdverbindung zwischen Motor und Last herstellen
- Den Schutzleiter (PE) verstärken, sodass die hochfrequent wirksame Impedanz im PE niedriger ist
- Sicherstellen, dass Motor und Lastmotor aufeinander abgestimmt sind
3. IGBT-Taktfrequenz absenken.
4. Wechselrichtersignalform ändern, 60° AVM gegenüber SFAVM.
5. Ein Wellenerdungssystem installieren oder eine Trennkupplung zwischen Motor und Last verwenden.
6. Leitfähiges Schmierfett auftragen.
7. Wenn die Anwendung dies zulässt, Betrieb bei niedrigen Motordrehzahlen durch Verwendung der minimalen Drehzahleinstellungen des Frequenzumrichters vermeiden.
8. Sicherzustellen versuchen, dass die Netzspannung zur Erde symmetrisch ist. Dies kann bei IT-, TT-, TN-CS-Netzen oder Systemen mit geerdetem
Zweig schwierig sein.
9. Ein dU/dt- oder Sinusfilter verwenden.
42
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 43

ADAP-KOOL® Drive AKD 102 High Power 4 Elektrische Installation
4.1.16 Steuerkabelführung
Alle Steuerleitungen mit der festgelegten Steuerkabelführung befestigen (siehe Abbildung). Denken Sie daran, die Abschirmungen ordnungsgemäß anzuschließen, um optimale elektrische Störfestigkeit sicherzustellen.
Feldbus-Anschluss
Anschlüsse werden an die entsprechenden Optionen auf der Steuerkarte hergestellt. Nähere Informationen siehe das entsprechende Feldbus-Produkthandbuch. Das Kabel muss an der linken Innenseite des Frequenzumrichters verlegt und zusammen mit anderen Steuerleitungen befestigt werden (siehe
Abbildung).
4
Steuerkartenverdrahtungsführung für D3. Steuerkartenverdrahtungsführung für D1, D2 und D4 ist gleich verlegt.
Bei den Geräten mit IP00 (Chassis) und IP21 (NEMA 1) kann der Feldbus
ebenfalls wie rechts abgebildet von der Oberseite des Geräts angeschlossen werden. Beim IP21-Gerät (NEMA 1) muss eine Abdeckplatte entfernt
werden.
Nummer des Einbausatzes für Feldbus-Anschluss von oben: 176F1742
Steuerkartenverdrahtungsführung für F1/F3. Steuerkartenverdrahtungsführung für F2/F4 ist gleich verlegt.
Abbildung 4.9: Anschluss von oben für Feldbus
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
43
Page 44
4 Elektrische Installation ADAP-KOOL® Drive AKD 102 High Power
Installation der externen 24 V DC-Versorgung
Drehmoment: 0,5 - 0,6 Nm
Schraubengröße: M3
4
Nr.
35 (-), 36 (+) Externe 24 V DC-Versorgung
Die externe 24 V DC-Versorgung dient als Niederspannungsversorgung der Steuerkarte sowie etwaiger eingebauter Optionskarten. Dies ermöglicht den
Betrieb der LCP Bedieneinheit (einschließlich Parametereinstellung) ohne Netzanschluss. Beachten Sie, dass eine Spannungswarnung erfolgt, wenn die
24 V DC angeschlossen wurden; es erfolgt jedoch keine Abschaltung.
Zur ordnungsgemäßen galvanischen Trennung (gemäß PELV) an den Steuerklemmen des Frequenzumrichters ist eine 24 V DC-Versorgung vom Typ PELV zu verwenden.
Funktion
4.1.17 Zugang zu den Steuerklemmen
Alle Klemmen zu den Steuerkabeln befinden sich unter der LCP Bedieneinheit. Zum Zugriff die Tür der IP21/54-Version öffnen oder bei der IP00-Version
die Abdeckungen abnehmen.
44
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 45

ADAP-KOOL® Drive AKD 102 High Power 4 Elektrische Installation
4.1.18 Elektrische Installation, Steueranschlüsse
Kabel an Klemme anschließen:
1. Kabel 9-10 mm abisolieren.
2.
Führen Sie einen Schraubendreher
3. Führen Sie das Kabel in die runde Klemmöffnung ein.
4. Entfernen Sie den Schraubendreher. Das Kabel ist nun an der Klemme befestigt.
Kabel aus der Klemme entfernen:
1.
Führen Sie einen Schraubendreher
2. Ziehen Sie das Kabel heraus.
1)
Max. 0,4 x 2,5 mm
1)
in die rechteckige Öffnung ein.
1)
in die rechteckige Öffnung ein.
4
1.
2.
3.
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
45
Page 46

4 Elektrische Installation ADAP-KOOL® Drive AKD 102 High Power
4.2 Anschlussbeispiele
4.2.1 Start/Stopp
4
Klemme 18 = Par. 5-10
Klemme 27 = Par. 5-12
(Standardeinstellung
Klemme 37 = Sicherer Stopp
Klemme 18 Digitaleingang
Klemme 27 Digitaleingang
Motorfreilauf (inv.)
4.2.2 Puls-Start/Stopp
Klemme 18 = Par. 5-10
Klemme 27= Par. 5-12
Klemme 37 = Sicherer Stopp
Klemme 18 Digitaleingang
Klemme 27 Digitaleingang
[8]
Start
[0]
Ohne Funktion
)
[9]
Puls-Start
[6]
Stopp (invers)
46
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 47

ADAP-KOOL® Drive AKD 102 High Power 4 Elektrische Installation
4.2.3 Drehzahl auf/ab
Klemmen 29/32 = Drehzahl auf/ab:
Klemme 18 = Par. 5-10
(Standard)
Klemme 27 = Par. 5-12
chern [19]
Klemme 29 = Par. 5-13
[21]
Klemme 32 = Par. 5-14
[22]
Hinweis: Klemme 29 nur bei FC x02 (x=Serie).
4.2.4 Potentiometer-Sollwert
Spannungssollwert über Potentiometer:
Variabler Sollwert 1 = [1]
Klemme 53 Skal. Min. Spannung = 0 Volt
Klemme 53 Skal. Max. Spannung = 10 Volt
Klemme 53, Skal. Min.-Soll/Istwert = 0 UPM
Klemme 53, Skal. Max.-Soll/Istwert = 1500 UPM
Schalter S201 = AUS (U)
Klemme 18 Digitaleingang
Klemme 27 Digitaleingang
Klemme 29 Digitaleingang
Klemme 32 Digitaleingang
Analogeingang 53
(Werkseinstellung)
Start [9]
Sollwert spei-
Drehzahl auf
Drehzahl ab
4
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
47
Page 48

(
%
4 Elektrische Installation ADAP-KOOL® Drive AKD 102 High Power
4.3 Elektrische Installation - Zusätzliches
4.3.1 Elektrische Installation, Steuerkabel
)(142+01.()
')-
1&.+&.
4
/0
!
!
!
!
!
%
<
<
%
6
776
%!2+,'&('3'(1,
!
!
%
$%
&'()*+!(
6+:.(0!2,-00(&
776-**(&
%
$%"
"
#
$
$
$(,+10
$(,+10
<
$%"
$%"
)(0
;1 ()0'+&
"
+!5
&+,-.+/0.+&.
68/(,,(
6%1&9
-'-)
+!5
+!5
$%
Abbildung 4.10: Übersicht über sämtliche Klemmen (ohne Optionen).
Klemme 37 wird als Eingang für die Funktion „Sicherer Stopp“ verwendet. Der Abschnitt
Sicheren Stopp installieren
im Projektierungshandbuch des Frequenzumrichters enthält Anweisungen zu dieser Installation. Siehe auch die Abschnitte Sicherer Stopp und Sicheren Stopp
installieren.
Sehr lange Steuerkabel und Analogsignale können in seltenen Fällen und je nach Installation infolge von Rauschen von den Netzstromkabeln zu 50/60
Hz-Brummschleifen führen.
In diesem Fall kann man versuchen, ob durch einseitiges Auflegen des Kabelschirms bzw. durch Verbinden des Kabelschirms über einen 100-nF-Kondensator mit Masse eine Besserung herbeigeführt werden kann.
Die Digital- und Analogein- und -ausgänge müssen getrennt an die Gleichtakteingänge des Frequenzumrichters (Klemme 20, 55, 39) angeschlossen
werden, damit Erdströme von beiden Gruppen die anderen Gruppen nicht beeinträchtigen. Beispielsweise kann das Schalten eines Digitaleingangs das
Analogeingangssignal stören.
48
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 49

ADAP-KOOL® Drive AKD 102 High Power 4 Elektrische Installation
Eingangspolarität der Steuerklemmen
4
ACHTUNG!
Steuerkabel müssen abgeschirmt sein.
Schließen Sie die Leitungen wie im Produkthandbuch des Frequenzumrichters beschrieben an. Denken Sie daran, die Abschirmungen ordnungsgemäß
anzuschließen, um optimale elektrische Störfestigkeit sicherzustellen.
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
49
Page 50
4 Elektrische Installation ADAP-KOOL® Drive AKD 102 High Power
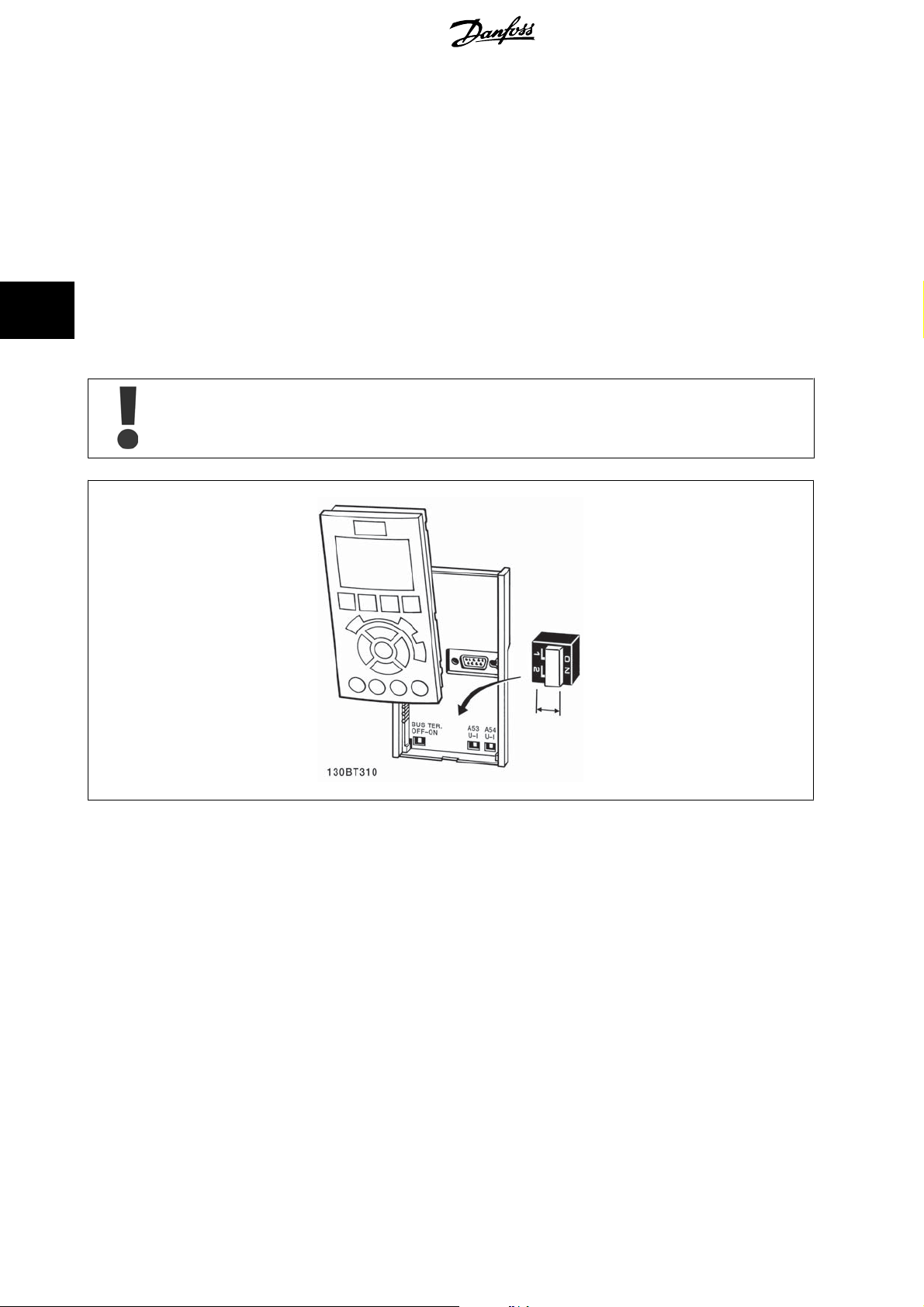
4.3.2 Schalter S201, S202 und S801
Die Schalter S201 (A53) und S202 (A54) dienen dazu, die Betriebsart für Strom (0-20 mA) oder Spannung (-10 bis 10 V) für die Analogeingänge 53 bzw.
54 auszuwählen.
Schalter S801 (BUS TER.) kann benutzt werden, um für die serielle RS-485-Schnittstelle (Klemmen 68 und 69) die integrierten Busabschlusswiderstände
zu aktivieren.
4
Siehe Diagramm mit allen elektrischen Klemmen im Abschnitt
Werkseinstellung:
S201 (A53) = AUS (Spannungseingang)
S202 (A54) = AUS (Spannungseingang)
S801 (Busterminierung) = AUS
Beim Ändern der Funktion der Schalter S201, S202 und S801 darf ein Umschalten nicht mit Gewalt herbeigeführt werden. Nehmen Sie
beim Bedienen der Schalter vorsichtshalber die LCP-Bedieneinheit ab. Die Schalter dürfen nur betätigt werden, wenn der Frequenzumrichter spannungsfrei geschaltet ist.
Elektrische Installation
.
50
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 51

ADAP-KOOL® Drive AKD 102 High Power 4 Elektrische Installation
4.4 Erste Inbetriebnahme und Test
Um die Konfiguration zu testen und sicherzustellen, dass der Frequenzumrichter funktioniert, kann folgendermaßen vorgegangen werden:
1. Schritt: Überprüfen Sie das Motor-Typenschild.
ACHTUNG!
Der Motor verfügt entweder über Sternschaltung (Y) oder Dreieckschaltung (Δ). Diese Informationen befinden sich auf dem MotorTypenschild.
4
2. Schritt: Geben Sie die Motor-Typenschilddaten in der folgenden Reihenfolge in die entsprechenden Parameter ein.
Um diese Liste aufzurufen, drücken Sie erst die Taste [QUICK MENUS]
und wählen Sie dann „Q2 Inbetriebnahme-Menü“.
3. Schritt: Aktivieren Sie die Automatische Motoranpassung
(AMA)
Ausführen einer AMA stellt die optimale Motorleistung sicher. Die AMA misst exakt die elektrischen Ersatzschaltbilddaten des Motors
und optimiert dadurch die interne Regelung.
1. Schließen Sie Klemme 37 an Klemme 12 an (falls Klemme 37 verfügbar ist).
2. Schließen Sie Klemme 27 an Klemme 12 an oder stellen Sie Par. 5-12
Digitaleingang
3. Aktivieren Sie die AMA Par. 1-29
4. Sie können zwischen reduzierter und kompletter AMA wählen. Ist ein Sinusfilter vorhanden, darf nur die reduzierte AMA ausgeführt werden.
Andernfalls ist das Sinusfilter während der AMA zu entfernen.
5. Drücken Sie die [OK]-Taste. Im Display wird „AMA mit [Hand on]-Taste starten“ angezeigt.
6. Drücken Sie die [Hand on]-Taste. Ein Statusbalken stellt den Verlauf der AMA dar.
AMA-Ausführung vorzeitig abbrechen
1. Drücken Sie die [OFF]-Taste: Der Frequenzumrichter zeigt einen Alarm, und am Display wird gemeldet, dass die AMA durch den Benutzer
abgebrochen wurde.
[0]) (eventuell nach Durchführung der Anpassung wieder zurückstellen.)
Autom. Motoranpassung
.
1. Par. 1-20
Par. 1-21
2. Par. 1-22
3. Par. 1-23
4. Par. 1-24
5. Par. 1-25
Klemme 27 Digitaleingang
Motornennleistung [kW]
Motornennleistung [PS]
Motornennspannung
Motornennfrequenz
Motornennstrom
Motornenndrehzahl
auf „Ohne Funktion“ (Par. 5-12
Klemme 27
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
51
Page 52

4
4 Elektrische Installation ADAP-KOOL® Drive AKD 102 High Power
Erfolgreiche AMA
1. Im Display erscheint „AMA mit [OK]-Taste beenden“.
2. Drücken Sie die [OK]-Taste, um die AMA abzuschließen.
Fehlgeschlagene AMA
1. Der Frequenzumrichter zeigt einen Alarm an. Eine Beschreibung des Alarms finden Sie im Abschnitt
2. „Wert“ in [Alarm Log] zeigt die zuletzt vor dem Übergang in den Alarmzustand von der AMA ausgeführte Messsequenz. Diese Nummer zusammen
mit der Beschreibung des Alarms hilft Ihnen bei der Fehlersuche. Geben Sie die Nummer und die Beschreibung des Alarms bei eventuellen
Anrufen beim Danfoss-Service an.
ACHTUNG!
Häufige Ursache für eine fehlgeschlagene AMA sind falsch registrierte Motortypenschilddaten oder auch eine zu große Differenz zwischen Umrichter-/Motor-Nennleistung.
Schritt 4. Drehzahlgrenze und Rampenzeit einstellen.
Warnungen und Alarme
.
Par. 3-02
Par. 3-03
Tabelle 4.2: Stellen Sie die Grenzwerte für Drehzahl und Rampenzeit
gemäß den Anforderungen ein.
Par. 4-11
Minimaler Sollwert
Max. Sollwert
Min. Drehzahl [UPM]
oder Par. 4-12
Min. Fre-
quenz [Hz]
Par. 4-13
Max. Drehzahl [UPM]
oder Par. 4-14
Max Fre-
quenz [Hz]
Par. 3-41
Par. 3-42
Rampenzeit Auf 1
Rampenzeit Ab 1
52
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 53

ADAP-KOOL® Drive AKD 102 High Power 4 Elektrische Installation
4.5 Zusätzliche Verbindungen
4.5.1 Mechanische Bremssteuerung
In Hub- und Vertikalförderanwendungen muss in der Regel eine elektromechanische Bremse gesteuert werden:
• Verwenden Sie zum Steuern der Bremse einen Relais- oder Digitalausgang (Klemme 27 und 29).
• Halten Sie den Ausgang geschlossen (spannungsfrei), so lange der Frequenzumrichter den Motor nicht halten kann, da z. B. die Last zu schwer
ist.
•Wählen Sie
• Die Bremse wird gelüftet, wenn der Motorstrom den in Par. 2-20
• Die Bremse wird geschlossen, wenn die Ausgangsdrehzahl niedriger als die in Par. 2-21
Par. 2-22
Beim Auftreten eines Alarms oder einer Überspannung fällt die mechanische Bremse sofort ein.
4.5.2 Parallelschaltung von Motoren
Der Frequenzumrichter kann mehrere parallel geschaltete Motoren steuern. Der Gesamtstrom der Motoren darf den maximalen Ausgangsnennstrom I
des Frequenzumrichters nicht übersteigen.
M,N
Mechanische Bremsansteuerung
Bremse schließen bei Motorfrequenz
[32] in Par. 5-4* für Anwendungen mit einer elektromechanischen Bremse.
Bremse öffnen bei Motorstrom
eingestellte Drehzahl ist und ein Stoppbefehl anliegt.
eingestellten Wert überschreitet.
Bremse schliessen bei Motordrehzahl
4
oder
ACHTUNG!
Installationen mit gemeinsamem Anschluss wie in der
Abbildung unten werden nur bei kurzen Kabeln empfohlen.
ACHTUNG!
Bei parallel geschalteten Motoren kann Par. 1-29
tom. Motoranpassung
ACHTUNG!
Das elektronisch thermische Relais (ETR) des Frequenzumrichters kann bei parallel geschalteten Motoren
nicht als Motor-Überlastschutz für die einzelnen Motoren des Systems verwendet werden. Ein zusätzlicher
Motorschutz, z. B. Thermistoren oder Thermorelais
sind deshalb vorzusehen (Trennschalter sind als
Schutz nicht geeignet).
Beim Start und bei niedrigen Drehzahlen können möglicherweise Probleme auftreten, wenn die Motorgrößen sehr unterschiedlich sind, da bei kleinen
Motoren der relativ hohe ohmsche Widerstand im Stator eine höhere Spannung beim Start und bei niedrigen Drehzahlen erfordert.
nicht verwendet werden.
Au-
4.5.3 Thermischer Motorschutz
Das elektronisch thermische Relais im Frequenzumrichter hat die UL-Zulassung für Einzelmotorschutz, wenn Par. 1-90
Alarm
und Par. 1-24
Als thermischer Motorschutz kann ebenfalls die PTC-Thermistorkartenoption MCB 112 verwendet werden. Diese Karte ist ATEX-zertifiziert für den Schutz
von Motoren in explosionsgefährdeten Bereichen, Zone 1/21 und Zone 2/22. Weitere Informationen siehe
Motornennstrom
auf Motornennstrom (siehe Motor-Typenschild) eingestellt ist.
Projektierungshandbuch
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Thermischer Motorschutz
.
auf
ETR-
53
Page 54

5
5 Betrieb des Frequenzumrichters ADAP-KOOL® Drive AKD 102 High Power
54
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 55

ADAP-KOOL® Drive AKD 102 High Power 5 Betrieb des Frequenzumrichters
5 Betrieb des Frequenzumrichters
5.1.1 Drei Bedienungsmöglichkeiten
Es gibt für den Frequenzumrichter drei verschiedene Bedienungsmöglichkeiten:
1. Grafische LCP Bedieneinheit LCP 102, siehe 5.1.2
2. Numerische LCP Bedieneinheit LCP 101, siehe 5.1.3
3. Serielle RS-485-Kommunikation oder USB, beide für PC-Anschluss, siehe 5.1.4
Besitzt der Frequenzumrichter die Feldbus-Option, lesen Sie bitte in der entsprechenden Dokumentation nach.
5.1.2 Bedienung der grafischen Bedieneinheit LCP 102Bedienung der grafischen Bedienein-
heit LCP
Die folgenden Anweisungen gelten für das grafische LCP (LCP 102):
Die LCP ist in vier funktionelle Gruppen unterteilt:
1. Grafikanzeige mit Statuszeilen.
2. Menütasten mit Anzeige-LEDs – Modusauswahl, Parameteränderung, Umschalten zwischen Displayfunktionen.
3. Navigationstasten und Kontroll-Anzeigen (LEDs).
4. Bedientasten mit Kontroll-Anzeigen (LEDs).
Grafikdisplay:
Das LCD-Display verfügt über eine Hintergrundbeleuchtung und sechs alphanumerische Zeilen. Alle Datenanzeigen erfolgen auf dem LCP-Display, das
im Zustandsmodus maximal fünf Betriebsvariablen gleichzeitig zeigen kann.
5
Displayzeilen:
a. Statuszeile: Zustandsmeldungen in der Form von Symbolen
und Grafiken.
b. Arbeitsbereich: Je nach Displayanzeigeart Anzeigebereich für
Betriebsvariablen oder für Parameternavigation bzw.-änderung.
Durch Drücken der Taste [Status] kann jeweils eine extra Zeile
hinzugefügt werden.
Statuszeile: Zustandsmeldungen in Textform.
c.
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
55
Page 56

5 Betrieb des Frequenzumrichters ADAP-KOOL® Drive AKD 102 High Power
Die Anzeige ist in 3 Bereiche unterteilt:
Der obere Abschnitt (a) zeigt den Anzeigemodus und enthält Zustandsinformationen und Betriebsvariablen.
5
Der aktive Satz (als Aktiver Satz in Par. 0-10
die Nummer des programmierten Satzes rechts in Klammern angezeigt.
Der Arbeitsbereich (b) zeigt unabhängig vom Zustand bis zu fünf Variablen mit der entsprechenden Einheit an. Bei Alarm/Warnung wird anstatt der
Betriebsvariablen die entsprechende Warnung angezeigt.
Der untere Bereich (c) zeigt den Zustand des Frequenzumrichters an.
Durch Drücken der Taste [Status] können Sie zwischen 3 verschiedenen Anzeigen wechseln.
Jede Anzeige zeigt verschiedene Betriebsvariablen in unterschiedlichen Formaten (siehe unten).
Detaillierte Informationen zu den Betriebsvariablen erhalten Sie, wenn Sie den Parameter der Variablen aufrufen und die [Info]-Taste drücken. Die
anzuzeigenden Werte/Messungen können in Par. 0-20
Par. 0-23
Einstellungen“, „Q3-13 Displayeinstell.“).
Jeder in Par. 0-20
möglichen Dezimalstelle. Durch einen größeren Zahlenwert eines Parameters werden weniger Ziffern nach der Dezimalstelle angezeigt.
Beispiel: Stromanzeige
5,25 A; 15,2 A 105 A.
Anzeige I: 5 Betriebsvariablen
Diese Anzeige erscheint standardmäßig nach Inbetriebnahme oder Initialisierung.
Benutzen Sie [INFO], um Informationen zu den angezeigten Betriebsvariablen 1.1, 1.2, 1.3, 2 und 3 zu erhalten.
Diese Abbildung zeigt das Format der Betriebsvariablen im Display. 1.1,
1.2 und 1.3 sind in kleiner Größe, 2 und 3 in mittlerer Größe gezeigt.
Display Line 2 Large
Display Line 1.1 Small
und Par. 0-24
Active Set-up
Display Line 3 Large
bis Par. 0-24
gewählt) wird angezeigt. Bei Programmierung eines anderen Satzes als dem aktiven Satz wird
Display Line 1.1 Small
definiert werden (Zugriff über [QUICK MENU], „Q3 Funktionssätze“, „Q3-1 Allg.
Display Line 3 Large
, Par. 0-21
ausgewählte Anzeigeparameter hat seine eigene Skala und Ziffern nach einer
Display Line 1.2 Small
1.1
1.2
, Par. 0-22
Display Line 1.3 Small
130BP041.10
,
Anzeige II: 4 Betriebsvariablen
Es werden die Betriebsvariablen (1.1, 1.2, 1.3 und 2) angezeigt.
In diesem Beispiel sind das Drehzahl, Motorstrom, Motorleistung und
Frequenz.
1.1, 1.2 und 1.3 sind in kleiner Größe, 2 ist in großer Größe gezeigt.
2
130BP062.10
1.1
3
1.3
1.3
1.2
2
56
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 57

ADAP-KOOL® Drive AKD 102 High Power 5 Betrieb des Frequenzumrichters
Anzeige III:
Diese Anzeige zeigt das auszuwertende Ereignis und die zugehörige Aktion des Smart Logic Controllers an. Nähere Informationen finden Sie im
Abschnitt
Displaykontrast anpassen
Smart Logic Control
.
130BP063.10
[Status] und [
[Status] und [
Kontroll-Anzeigen (LEDs):
Werden bestimmte Grenzwerte überschritten, leuchtet die Alarm- und/oder Warn-LED auf. Zusätzlich erscheint ein Zustands- oder Alarmtext im Display.
Die On-LED ist aktiv, wenn der Frequenzumrichter an die Netzspannung, eine DC-Zwischenkreisklemme oder eine externe 24 V-Versorgung angeschlossen
ist. Gleichzeitig leuchtet die Hintergrundbeleuchtung.
• ON (Grüne LED): Das Gerät ist betriebsbereit.
• WARN. (Gelbe LED): Zeigt eine Warnung an.
• ALARM (Rot blinkende LED): Zeigt einen Alarmzustand an.
] drücken, um den Kontrast des Displays zu erhöhen.
▲
] drücken, um den Kontrast des Displays zu verringern.
▼
Statuszeile
Arbeitsbereich
Zustandszeile
130BP074.10
5
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
57
Page 58

5
5 Betrieb des Frequenzumrichters ADAP-KOOL® Drive AKD 102 High Power
Tasten
Menütasten
Die Menütasten sind nach Funktionen gruppiert. Die Tasten unter der
Displayanzeige können zur Änderung der Statusanzeige, zum Parametrieren oder für den Zugriff auf den Alarmspeicher genutzt werden.
[Status]
gibt den Zustand des Frequenzumrichters oder des Motors an. Durch Drücken der Taste [Status] können Sie zwischen 3 verschiedenen Anzeigen wählen:
5 Betriebsvariablen, 4 Betriebsvariablen oder Zustand Smart Logic Control
[Status] dient zur Wahl der Displayanzeige oder zum Zurückwechseln aus dem Quick-Menü-Modus, dem Hauptmenü-Modus oder dem Alarm-Modus in
den Anzeigemodus. Die Taste [Status] dient ebenfalls zum Umschalten zwischen der Anzeige von 4 oder 5 Betriebsvariablen.
[Quick Menu]
bietet schnellen Zugang zu verschiedenen Quick-Menüs. Hier können die gebräuchlichsten ADAP-KOOL Drive AKD 102-Funktionen program-
miert werden.
Das [Quick Menu] besteht aus:
-Benutzer-Menü
- Inbetriebnahme-Menü
- Funktionssätze
- Liste geänderter Parameter
-Protokolle
Über die Funktionen ist schneller und einfacher Zugriff auf alle Parameter möglich, die für die Mehrzahl von ADAP-KOOL Drive AKD 102-Anwendungen
erforderlich sind, darunter die meisten VVS- und KLS-Versorgungs- und Rücklaufgebläse, Kühlturmgebläse, Primär-, Sekundär- und Kondenswasserpumpen und anderen Pumpen-, Lüfter- und Verdichteranwendungen. Neben anderen Funktionen umfasst dies auch Parameter für die Auswahl der Variablen,
die am LCP angezeigt werden sollen, digitale Festdrehzahlen, Skalierung von Analogsollwerten, Einzel- und Mehrzonenanwendungen mit PID-Regelung
sowie spezielle Funktionen im Zusammenhang mit Lüftern, Pumpen und Kompressoren.
130BP045.10
Die meisten Quick-Menü-Parameter können direkt über das Bedienfeld geändert werden, sofern über Par. 0-60
to Main Menu w/o Password
Es kann direkt zwischen Quick-Menü-Modus und Hauptmenü-Modus gewechselt werden.
[Main Menu]
dient zum Zugriff und Programmieren aller Parameter. Die meisten Hauptmenü-Parameter können direkt über das Bedienfeld geändert werden, sofern
über Parameter Par. 0-60
, Par. 0-65
Main Menu Password
to Personal Menu w/o Password
wendig, auf die Hauptmenüparameter zuzugreifen, da das Quick-Menü, das Inbetriebnahme-Menü und Funktionssätze den einfachsten und schnellsten
Zugriff auf die typischen erforderlichen Parameter bieten.
Es kann direkt zwischen Hauptmenü-Modus und Quick-Menü-Modus gewechselt werden.
Das 3 Sekunden lange Drücken der Taste [Main Menu] ermöglicht die direkte Eingabe einer Parameternummer. Ein 3 Sekunden langes Drücken der
Taste [Main Menu] ermöglicht dieselbe Funktionalität.
[Alarm Log]
zeigt eine Liste der letzten fünf Alarme an (nummeriert von A1-A5). Um zusätzliche Informationen zu einem Alarmzustand zu erhalten, markieren Sie
mithilfe der Pfeiltasten die betreffende Alarmnummer, und drücken Sie [OK]. Werden beim Auftreten des Alarms Betriebsvariablen gespeichert, können
diese ausgewählt und mit [OK] grafisch angezeigt werden.
Die Taste [Alarm Log] auf dem LCP gibt Zugriff auf Fehlerspeicher und Wartungsprotokoll.
[Back]
bringt Sie zum früheren Schritt oder zur nächsthöheren Ebene in der Navigationsstruktur.
Personal Menu Password
, Par. 0-61
kein Passwort eingerichtet wurde. Für den großen Teil von ADAP-KOOL Drive AKD 102-Anwendungen ist es nicht not-
oder Par. 0-66
Access to Personal Menu w/o Password
Access to Main Menu w/o Password
,Par. 0-65
Main Menu Password
kein Passwort eingerichtet wurde.
Personal Menu Password
, Par. 0-61
oder Par. 0-66
Access
Access
58
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 59

ADAP-KOOL® Drive AKD 102 High Power 5 Betrieb des Frequenzumrichters
[Cancel]
macht die letzte Änderung oder den letzten Befehl rückgängig, solange das Display nicht verändert wurde.
[Info]
liefert Informationen zu einem Befehl, einem Parameter oder einer Funktion im Anzeigefenster. [Info] stellt bei Bedarf detaillierte Informationen zur
Verfügung.
Durch Drücken von [Info], [Back] oder [Cancel] kann der Infomodus beendet werden.
5
Navigationstasten
Die vier Navigationspfeile dienen zum Navigieren zwischen den verschiedenen Optionen, die unter
Log] zur Verfügung stehen. Mit den Navigationstasten wird der Cursor
bewegt.
[Quick Menu], [Main Menu] und [Alarm
[OK] wird benutzt, um einem mit dem Cursor markierten Parameter aus-
zuwählen und um die Änderung einer Parametereinstellung zu bestätigen.
Tasten zur lokalen Bedienung und zur Wahl der Betriebsart befinden
sich unten am Bedienfeld.
130BP046.10
[Hand on]
ermöglicht die Steuerung des Frequenzumrichters über die grafische LCP Bedieneinheit. [Hand on] startet auch den Motor und ermöglicht die Änderung
der Motordrehzahl mittels der Pfeiltasten. Die Taste kann mit Par. 0-40
An den Steuerklemmen sind die folgenden Signale weiter wirksam, auch wenn [Hand on] aktiviert ist:
• [Hand On] - [Off] - [Auto on]
• Reset
• Motorfreilauf Stopp invers
• Reversierung
• Parametersatzauswahl lsb - Parametersatzauswahl msb
• Stoppbefehl über serielle Schnittstelle
•Schnellstopp
• DC-Bremse
[Hand on] Key on LCP aktiviert
[1] oder
deaktiviert
[0] werden.
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
59
Page 60
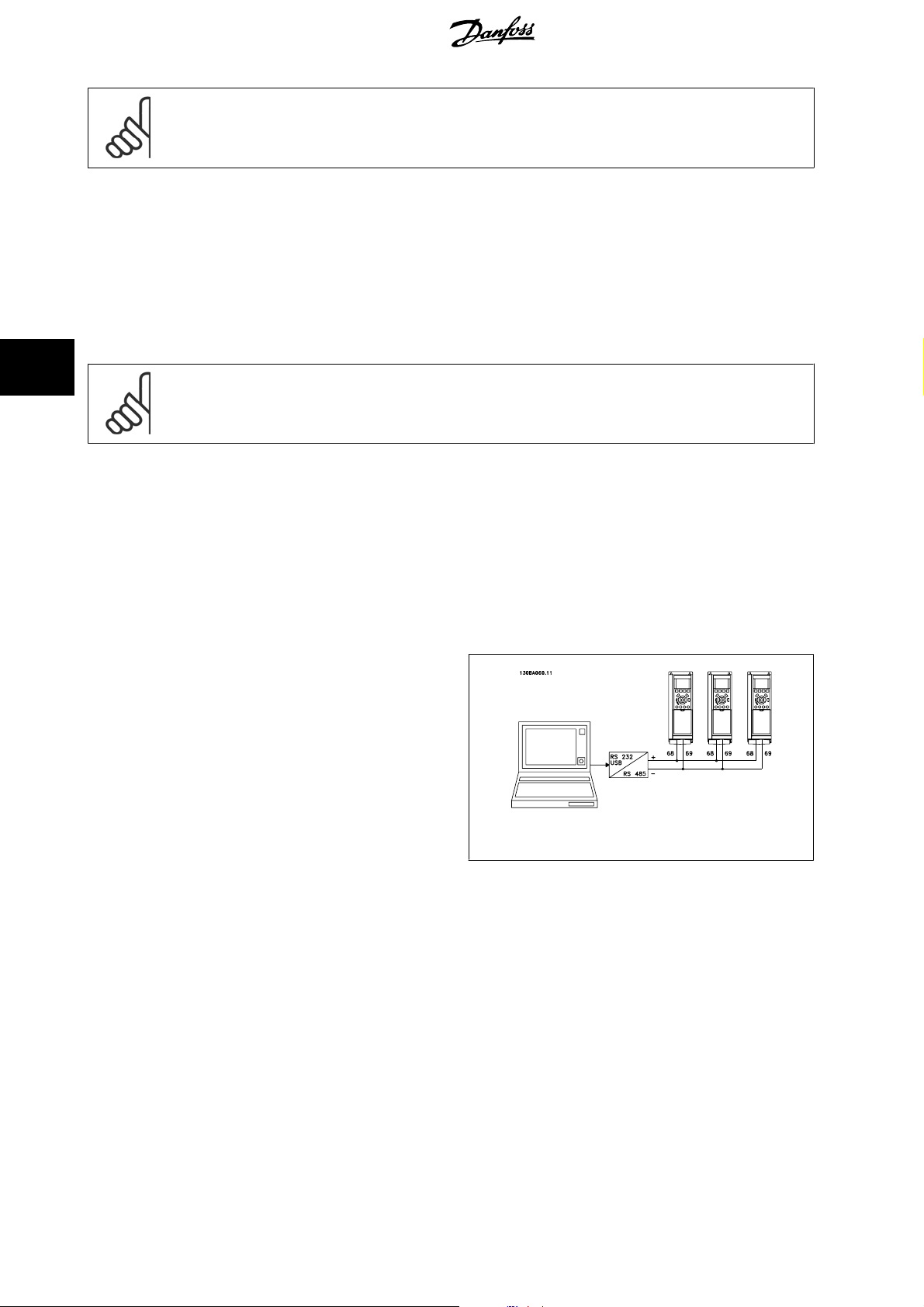
5
5 Betrieb des Frequenzumrichters ADAP-KOOL® Drive AKD 102 High Power
ACHTUNG!
Externe Stoppsignale, die durch Steuersignale oder einen seriellen Bus aktiviert werden, heben einen über das LCP erteilten „Start“Befehl auf.
[Off]
stoppt den angeschlossenen Motor. Die Taste kann mit Par. 0-41
aktiv und die [Off]-Taste inaktiv, kann der Motor nur durch Abschalten der Stromversorgung gestoppt werden.
[Auto on]
wird gewählt, wenn der Frequenzumrichter über die Steuerklemmen und/oder serielle Kommunikation gesteuert werden soll. Wenn ein Startsignal an
den Steuerklemmen und/oder über den Bus angelegt wird, wird der Frequenzumrichter gestartet. Die Taste kann mit Par. 0-42
aktiviert
[1] oder
deaktiviert
ACHTUNG!
Ein aktives HAND-OFF-AUTO-Signal über die Digitaleingänge hat höhere Priorität als die Bedientasten [Hand on] – [Auto on].
[Reset]
dient zum Zurücksetzen des Frequenzumrichters nach einem Alarm (Abschaltung). Die Taste kann mit Par. 0-43
deaktiviert
[0] werden.
[0] werden.
[Off] Key on LCP aktiviert
[1] oder
deaktiviert
[0] werden. Ist keine externe Stoppfunktion
[Auto on] Key on LCP
[Reset] Key on LCP aktiviert
[1] oder
Parameter Shortcut: Ein 3 Sekunden langes Drücken der Taste [Main Menu] ermöglicht die direkte Eingabe einer Parameternummer. Ein 3 Sekunden
langes Drücken der Taste [Main Menu] ermöglicht dieselbe Funktionalität.
5.1.3 RS-485-Busanschluss
Ein oder mehrere Frequenzumrichter können mittels der seriellen Standardschnittstelle an einen RS485-Master oder über Konverter an einen
PC angeschlossen werden. Klemme 68 ist an das P-Signal (TX+, RX+)
und Klemme 69 an das N-Signal (TX-, RX-) anzuschließen.
Sollen mehrere Frequenzumrichter angeschlossen werden, sind die
Schnittstellen parallel zu verdrahten (RS-485-Bus).
Abbildung 5.1: Anschlussbeispiel
Das Anschlusskabel ist geschirmt auszuführen, wobei der Schirm beidseitig aufzulegen und ein großflächiger Potentialausgleich vorzusehen ist. Zur Vermeidung von Potentialausgleichsströmen über die Abschirmung kann der Kabelschirm über Klemme 61 einseitig geerdet werden (Klemme 61: Intern über
RC-Glied mit dem Gehäuse verbunden).
Busabschluss
Der RS-485-Bus muss pro Segment an beiden Endpunkten durch ein Widerstandsnetzwerk abgeschlossen werden. Wenn der Frequenzumrichter das
erste oder das letzte Gerät in der RS-485-Steuerung ist, muss Schalter S801 auf der Steuerkarte auf „ON“ gestellt werden.
Nähere Informationen finden Sie im Abschnitt
Schalter S201, S202 und S801
.
60
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 61

ADAP-KOOL® Drive AKD 102 High Power 5 Betrieb des Frequenzumrichters
5.1.4 Einen PC an den Frequenzumrichter anschließen
Um den Frequenzumrichter von einem PC aus zu steuern oder zu programmieren, installieren Sie das PC-basierte Konfigurationstool MCT 10.
Der Laptop kann über ein Standard-USB-Kabel (Host/Gerät) oder über die RS-485-Schnittstelle angeschlossen werden. Siehe hierzu im ADAP-KOOL Drive
AKD 102
Projektierungshandbuch das Kapitel Installieren > Installation sonstiger Verbindungen.
ACHTUNG!
Die USB-Verbindung ist galvanisch von der Versorgungsspannung (PELV) und anderen Hochspannungsklemmen getrennt. Die USBVerbindung ist an Schutzerde (PE) am Frequenzumrichter angeschlossen. Benutzen Sie nur einen isolierten Laptop als PC-Verbindung
zum USB-Anschluss am Frequenzumrichter.
5
Abbildung 5.2: Informationen zum Anschließen von Steuerkabeln finden Sie im Abschnitt
Steuerklemmen
.
5.1.5 PC-Software Tools
PC-basiertes Konfigurationstool MCT 10
Alle Frequenzumrichter verfügen über eine serielle Kommunikationsschnittstelle. Danfoss bietet ein PC-Tool für den Datenaustausch zwischen PC und
Frequenzumrichter an, das PC-basierte Konfigurationstool MCT 10. Weitere Informationen zu diesem Tool finden Sie im Abschnitt zu
tur
.
MCT 10 Software
MCT 10 wurde als anwendungsfreundliches interaktives Tool zur Konfiguration von Parametern in unseren Frequenzumrichtern entwickelt. zum Download
bereit.
MCT 10 Software ist nützlich für:
• Offline-Planung eines Kommunikationsnetzwerks. MCT 10 enthält eine vollständige Frequenzumrichter-Datenbank
• Online-Inbetriebnahme von Frequenzumrichtern
• Speichern der Einstellungen aller Frequenzumrichter
• Austausch eines Frequenzumrichters in einem Netzwerk.
• Einfache und genaue Dokumentation der Frequenzumrichtereinstellungen nach der Inbetriebnahme.
• Erweiterung bestehender Netzwerke
• Zukünftig entwickelte Frequenzumrichter werden unterstützt.
verfügbarer Litera-
MCT 10-Software unterstützt Profibus DP-V1 über einen Anschluss des Typs Master-Klasse 2. Sie gestattet das Lesen und Schreiben von Parametern in
einem Frequenzumrichter online über das Profibus-Netzwerk. Damit entfällt die Notwendigkeit eines gesonderten Datennetzwerks.
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
61
Page 62
5
5 Betrieb des Frequenzumrichters ADAP-KOOL® Drive AKD 102 High Power
Datensicherung im PC:
1. Schließen Sie einen PC über die USB-Schnittstelle an das Gerät an. (Hinweis: Verwenden Sie einen isolierten PC (z. B. Laptop) in Verbindung
mit der USB-Schnittstelle. Eine Nichtbeachtung kann zu Geräteschäden führen.)
2. Starten Sie die MCT 10 Software.
3. Wählen Sie „Vom Frequenzumrichter lesen“.
4. Wählen Sie im Menü „Datei“ die Option „Speichern unter“, um die Einstellungen auf Ihrem PC zu sichern.
Alle Parameter sind nun gespeichert.
Datenübertragung vom PC zum Frequenzumrichter:
1. Schließen Sie über den USB-Anschluss einen PC an den Frequenzumrichter an.
2. Starten Sie die MCT 10 Software.
3. Wählen Sie im Menü Datei „Öffnen“ - gespeicherte Dateien werden angezeigt.
4. Öffnen Sie die gewünschte Datei.
5. Wählen Sie „Zum Frequenzumrichter schreiben“.
Alle Parameter werden nun zum Frequenzumrichter übertragen.
Ein gesondertes Handbuch für die MCT 10 Software ist verfügbar:
MCT 10 Software-Module
Folgende Module sind im Softwarepaket enthalten:
MCT 10 Software
Parameter einstellen
Kopieren zu/von Frequenzumrichtern
Dokumentation und Ausdruck von Parametereinstellungen einschl. Diagramme
Erw. Benutzerschnittstelle
Vorbeugendes Wartungsprogramm
Uhreinstellungen
Programmierung der Zeitablaufsteuerung
Konfiguration des Smart Logic Controller
Bestellnummer:
Bestellen Sie die CD mit der MCT 10 Software mit der Bestellnummer 130B1000.
MG.10.Rx.yy
.
62
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 63
ADAP-KOOL® Drive AKD 102 High Power 5 Betrieb des Frequenzumrichters
5.1.6 Tipps und Tricks
* Für den großen Teil von HLK-Anwendungen bieten das Quick-Menü, die Kurzinbetriebnahme und die Funktionssätze den ein-
fachsten und schnellsten Zugriff auf alle erforderlichen typischen Parameter.
* Die Durchführung einer AMA, wann immer möglich, gewährleistet optimale Wellenleistung.
*
* Unter [Quick Menu]/[Quick-Menü] und [Liste geänderter Par.] werden alle seit der Werkseinstellung geänderten Parameter
* Halten Sie die [Main Menu]-Taste 3 Sekunden lang gedrückt, um auf den jeweiligen Parameter zuzugreifen.
* Zur besseren Wartung wird empfohlen, alle Parameter in das LCP zu kopieren, weitere Informationen siehe Par. 0-50
Tabelle 5.1: Tipps und Tricks
5.1.7 Sichern von Parametereinstellungen mit grafischem LCP
Wenn die Konfiguration eines Frequenzumrichters abgeschlossen ist, wird empfohlen, die Parametereinstellung im grafischen LCP oder mithilfe der MCT
10 Software auf einem PC zu speichern.
Der Displaykontrast lässt sich durch Drücken von [Status] und [
einen helleren Bildschirm einstellen.
angezeigt.
.
Copy
] für einen dunkleren Bildschirm, oder [Status] und [▼] für
▲
LCP
5
ACHTUNG!
Führen Sie eine Bedienfeldkopie nur im gestoppten Zustand des Motors aus.
Daten im LCP speichern:
1. Gehen Sie zu Par. 0-50
2. Drücken Sie die [OK]-Taste.
3. Wählen Sie „Speichern in LCP“.
4. Drücken Sie die [OK]-Taste.
Alle Parametereinstellungen werden nun im grafischen LCP gespeichert. Der Vorgang kann an einem Statusbalken verfolgt werden. Wenn die Kopie
abgeschlossen wurde, bestätigen Sie mit [OK].
Sie können nun das grafische LCP an einen anderen Frequenzumrichter anschließen und die Parametereinstellungen auf diesen Frequenzumrichter kopieren.
Daten vom LCP zum Frequenzumrichter übertragen:
1. Gehen Sie zu Par. 0-50
2. Drücken Sie die [OK]-Taste.
3. Wählen Sie „Lade von LCP, Alle“.
4. Drücken Sie die [OK]-Taste.
Die im grafischen LCP gespeicherten Parametereinstellungen werden nun zum Frequenzumrichter übertragen. Der Kopiervorgang wird in einem Statusbalken angezeigt. Wenn die Kopie abgeschlossen wurde, bestätigen Sie mit [OK].
LCP Copy
LCP Copy
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
63
Page 64

5 Betrieb des Frequenzumrichters ADAP-KOOL® Drive AKD 102 High Power
5.1.8 Initialisierung auf Werkseinstellung
Die Standardeinstellungen des Frequenzumrichters können auf zwei Arten wiederhergestellt werden:Empfohlene Initialisierung und manuelle Initialisierung..
Beide Arten haben unterschiedliche Auswirkungen. Siehe dazu nachstehende Beschreibung.
5
Empfohlene Initialisierung (über Par. 14-22
1. Wählen Sie Par. 14-22
2. [OK] drücken.
3. Wählen Sie „Initialisierung“ (bei NLCP „2“ wählen)
4. [OK] drücken.
5. Netzversorgung trennen und warten, bis das Display abschaltet.
6. Netzversorgung wieder einschalten - der Frequenzumrichter ist
nun zurückgesetzt. Der erste Start dauert ein paar Sekunden
länger.
7. Drücken Sie [Reset].
ACHTUNG!
Im Par. 0-25
Manuelle Initialisierung
ACHTUNG!
Bei einer manuellen Initialisierung werden auch die Einstellungen der seriellen Kommunikation, EMV-Filter und der Fehlerspeicher
zurückgesetzt.
Entfernt in Par. 0-25
Operation Mode
My Personal Menu
My Personal Menu
Operation Mode
gewählte Parameter bleiben auch bei Werkseinstellung erhalten.
ausgewählte Parameter.
)
Par. 14-22
meter:
Par. 14-50
Par. 8-30
Par. 8-31
Par. 8-32
Par. 8-35
Par. 8-36
Par. 8-37
Par. 15-00
Par. 15-20
Par. 15-30
Operation Mode
initialisiert alles, außer folgende Para-
RFI Filter
FC-Protokoll
Adresse
Baud Rate
Minimum Response Delay
FC-Antwortzeit Max.-Delay
Maximum Inter-Char Delay
Operating Hours
Historic Log: Event
Alarm Log: Error Code
auf Par. 15-05
auf Par. 15-22
auf Par. 15-32
Over Volt's
Historic Log: Time
Alarm Log: Time
1. Netzversorgung trennen und warten, bis das Display abschaltet.
2a. LCP 102: Gleichzeitig [Status] + [Main Menu] + [OK]-Tasten
beim Netz-Ein drücken.
2b. LCP 101: [MENU]-Taste beim Netz-Ein der Bedieneinheit
drücken.
3. Nach ca. 5 s die Tasten loslassen (Lüfter läuft an).
4. Der Frequenzumrichter ist jetzt auf die Werkseinstellung zurückgesetzt.
Dieser Parameter initialisiert alles außer:
Par. 15-00
Par. 15-03
Par. 15-04
Par. 15-05
Operating Hours
Power Up's
Over Temp's
Over Volt's
64
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 65
ADAP-KOOL® Drive AKD 102 High Power 6 Programmieren des Frequenzumrichters
6 Programmieren des Frequenzumrichters
6.1 Programmieren
6.1.1 Parametereinstellung
Gruppe Name Funktion
0- Betrieb und Display Parameter zum Programmieren der grundlegenden Funktionen des Frequenzumrichters und der LCP
1- Motor/Last Parameter zur Konfiguration des Frequenzumrichters für die spezifische Anwendung und den spezifi-
2- Bremsfunktionen Parametergruppe zum Einstellen der elektrischen und mechanischen Bremsfunktionen des Frequen-
3- Sollwert/Rampen Parametergruppe zum Einstellen der minimalen und maximalen Sollwertgrenzwerte für Drehzahl (UPM/
4- Grenzen/Warnungen Parameter zum Programmieren von Betriebsgrenzen und -warnungen: zulässige Motorlaufrichtung, mi-
5- Digit. Ein-/Ausgänge Parameter zum Programmieren der Funktionen aller Digitaleingänge, Digitalausgänge, Relaisausgänge,
6- Analoge Ein-/Ausg. Parameter zum Programmieren der Funktionen der Analogeingänge und -ausgänge der Klemmen an der
8- Optionen und Schnittstellen Parameter zum Konfigurieren und Überwachen von Funktionen im Zusammenhang mit der seriellen
14- Sonderfunktionen Parameter zum Konfigurieren spezieller Funktionen des Frequenzumrichters: Einstellung der Taktfre-
15- Info/Wartung Parameter, die Betriebsdaten und andere Frequenzumrichterinformationen liefern: Betriebs- und Mo-
16- Info/Anzeigen Nur Anzeigeparameter, die Zustand/Wert vieler Betriebsvariablen anzeigen, die auf dem LCP angezeigt
18- Info/Anzeigen Nur Anzeigeparameter, welche die letzten 10 Ereignisse, Aktionen und Zeit des vorbeugenden War-
20- FU PID-Regler Parameter zum Konfigurieren des PI(D)-Reglers, der die Drehzahl von Pumpe, Lüfter oder Verdichter in
Bedieneinheit: Sprachauswahl, Auswahl der Variablen, die an den jeweiligen Displaypositionen angezeigt
werden, (z. B. kann der statische Rohrdruck oder die Wasserrücklauftemperatur des Verflüssigers angezeigt werden, indem der Sollwert in kleinen Ziffern in der oberen Zeile und der Istwert in großen Ziffern
in der Displaymitte dargestellt wird), Aktivierung/Deaktivierung der Tasten der LCP Bedieneinheit, Festlegen von Passwörtern für die LCP Bedieneinheit, Upload und Download der Inbetriebnahmeparameter
über die LCP Bedieneinheit und Einstellen der integrierten Uhr.
schen Motor: Regelung ohne oder mit Rückführung, Anwendungstyp (z. B. Verdichter, Lüfter, Zentrifugalpumpe), Motortypenschilddaten, automatische Abstimmung des Frequenzumrichters auf den Motor
für optimale Leistung, Motorfangschaltung (häufig für Lüfteranwendungen verwendet) und thermischer
Motorschutz.
zumrichters, die zwar in vielen ADAP-KOOL-Anwendungen nicht sehr gebräuchlich sind, aber in Sonderlüfteranwendungen nützlich sein können. Parameter umfassen DC-Bremsen und Widerstandsbremsen.
Hz) bei Drehzahlsteuerung oder in Isteinheiten bei Betrieb ohne Rückführung, digitale/Festsollwerte,
Festdrehzahl (JOG), Definition der einzelnen Sollwertquellen (d. h. an welchem Analogeingang geht das
Sollwertsignal ein), Rampe-Auf- und Rampe-Ab-Zeit und Digitalpotentiometereinstellungen.
nimale und maximale Motordrehzahlen; Drehmoment- und Stromgrenzen zum Schutz der/des motorgetriebenen Pumpe, Lüfters oder Verdichters, Warnungen für niedrige/hohe Stromwerte, Drehzahl,
Sollwert und Istwert, fehlender Motorphasenschutz, Drehzahlbypassfrequenzen, einschließlich halbautomatischer Konfiguration dieser Frequenzen (z. B. zur Vermeidung von Resonanzen an Kühltürmen und
weiteren Lüftern).
Pulseingänge und Pulsausgänge für Klemmen auf der Steuerkarte und allen Optionskarten.
Steuerkarte und der Universal-E/A-Optionskarte (MCB108) (Hinweis: NICHT Analog-E/A-Option
MCB109, siehe Parametergruppe 26-**): Signalausfallfunktion für Analogeingänge (damit kann z. B. im
Falle einer Störung des Sensors für den Wasserrücklauf des Verflüssigers der Lüfter eines Kühlturms bei
maximaler Drehzahl betrieben werden), Skalierung der Analogeingangssignale (z. B. Anpassung des
Analogeingangssignals an mA und Druckbereich eines Sensors für den statischen Rohrdruck, konstante
Filterzeit zum Herausfiltern von elektrischen Störsignalen aus dem Analogsignal (bei der Installation langer Kabel), Funktion und Skalierung der Analogausgänge (z. B. um z. B. einen Analogausgang, der für
Motorstrom oder -leistung steht, für einen Analogeingang eines DDC-Reglers bereitzustellen) und die
Konfiguration der Analogausgänge, die durch das Gebäudemanagementsystem über eine High-LevelSchnittstelle (HLI) gesteuert werden (z. B. zur Steuerung eines Kühlwasserventils). Hierzu gehört auch
die Fähigkeit, einen Standardwert für diese Ausgänge zu definieren, falls die HLI ausfallen sollte.
Schnittstelle/High-Level-Schnittstelle zum Frequenzumrichter.
quenz, um hörbare Störgeräusche vom Motor zu verringern (manchmal für Lüfteranwendungen erforderlich); kinetische Speicherfunktion (besonders für kritische Anwendungen in Halbleiteranlagen
nützlich, in denen fortgesetzte Leistung bei Netzabfall/Netzausfall wichtig ist); Energieoptimierungsparameter (die typisch nicht geändert werden müssen, jedoch Feineinstellung dieser automatischen
Funktion (falls erforderlich) ermöglichen, womit sichergestellt wird, dass die Frequenzumrichter- und
Motorkombination mit optimalem Wirkungsgrad bei Voll- und Teillastbedingungen arbeitet) und Funktionen zur automatischen Leistungsreduzierung (mit denen der Frequenzumrichter den Betrieb unter
extremen Betriebsbedingungen mit reduzierter Leistung fortsetzen kann, womit maximale Betriebszeit
sichergestellt wird).
torlaufstundenzähler; kWh-Zähler; Reset der Motorlaufstunden- und kWh-Zähler; Alarm-/Fehlerspeicher
(in dem die letzten 10 Alarme zusammen mit zugehörigen Werten und Zeit abgelegt werden) und Frequenzumrichter- und Optionskartendaten wie Codenummer und Software-Version.
oder in dieser Parametergruppe angesehen werden können. Diese Parameter können während der Inbetriebnahme bei Anbindung an ein Gebäudemanagementsystem über eine High-Level-Schnittstelle
besonders nützlich sein.
tungsspeichers und den Wert von Analogeingängen und -ausgängen auf der Analog-E/A-Optionskarte
anzeigen, was besonders während der Inbetriebnahme bei Anbindung an ein Gebäudemanagementsystem über eine High-Level-Schnittstelle nützlich ist.
der Betriebsart Prozessregelung mit Rückführung steuert: Definition der Quelle für jedes der 3 möglichen
Istwertsignale (z. B. ein Analogausgang oder die HLI der Gebäudetechnik); Umwandlungsfaktor für jedes
Istwertsignal (z. B. wo ein Drucksignal zur Anzeige eines Durchflusses in einem Klimagerät verwendet
wird oder zur Umwandlung von Druck in Temperatur in einer Verdichteranwendung); technische Einheit
für Sollwert und Istwert (z. B. Pa, kPa, m wg, inch wg, bar, m3/s, m3/h, °C, °F usw.); die Funktion (z.
B. Summe, Differenz, Mittelwert, Minimum oder Maximum), die zur Berechnung des resultierenden Istwerts für Einzonenanwendungen oder das Steuerprinzip für Mehrzonenanwendungen dient; Programmierung von Sollwert(en) und manueller oder automatischer Anpassung der PI(D)-Schleife.
6
Tabelle 6.1: Parametergruppen
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
65
Page 66

6
6 Programmieren des Frequenzumrichters ADAP-KOOL® Drive AKD 102 High Power
Gruppe Name Funktion
21- Erweiterter PID-Regler Parameter zum Konfigurieren der 3 erweiterten PI(D)-Regler, die beispielsweise zur Regelung externer
Stellglieder verwendet werden können (z. B. Kühlwasserventil, um die Zulufttemperatur in einer VLVAnlage aufrecht zu erhalten): technische Einheit für den Soll- und Istwert jedes Reglers (z. B. °C, °F
usw.); Definieren der Quelle jedes Sollwerts und der Istwertsignale (z. B. ein Analogeingang oder die
HLI der Gebäudetechnik); Programmieren des Sollwerts und manuelle oder automatische Anpassung
jedes PI(D)-Reglers.
22- Anwendungsfunktionen Parameter zur Überwachung, zum Schutz und zur Regelung von Pumpen, Lüftern und Verdichtern: Er-
kennung fehlenden Durchflusses und Schutz von Pumpen (einschließlich automatischer Einstellung
dieser Funktion); Trockenpumpenschutz; Kennlinienenderkennung und Schutz von Pumpen; Energiesparmodus (vor allem bei Kühltürmen und Boosterpumpensätzen nützlich); Riemenbrucherkennung
(wird typisch für Lüfteranwendungen verwendet, um fehlenden Luftstrom zu erkennen, statt einen Differenzdruckschalter (für ∆p) zu verwenden, der am Lüfter installiert ist); Kurzzyklus-Schutz von Verdichtern und Pumpendurchflussausgleich des Sollwerts (besonders nützlich für sekundäre Kühlwasserpumpenanwendungen, in denen der Differenzdrucksensor (für ∆p) nah an der Pumpe und nicht an den
am weitesten entfernten, bedeutendsten Lasten im System installiert worden ist. Verwendung dieser
Funktion kann die Sensorinstallation ausgleichen und helfen, maximale Energieeinsparungen zu realisieren).
23- Zeitfunktionen Zeitparameter: Zeitablauffunktionen, um tägliche oder wöchentliche Aktionen basierend auf der integ-
rierten Echtzeituhr zu starten (z. B. die Änderung eines Sollwerts für Nachtabsenkung oder Start/Stopp
des Pumpen-/Lüfter-/Verdichter-Start/Stopps eines externen Geräts); vorbeugende Wartungsfunktionen, die basierend auf Lauf- oder Betriebsstundenzeitintervallen oder an bestimmten Tagen und Uhrzeiten ausgeführt werden können; Energiespeicher (besonders bei Nachrüstanwendungen oder wenn
Informationen der tatsächlichen historischen Belastung (kW) der Pumpe bzw. des Lüfters oder Verdichters von Interesse sind); Trenddarstellung (vor allem in Nachrüstanwendungen oder anderen Anwendungen nützlich, bei denen ein Interesse daran besteht, Betriebsleistung, Strom, Frequenz oder Drehzahl
der Pumpe, des Lüfters oder Verdichters zur Analyse zu speichern) und ein Amortisationszähler.
24- Anwendungsfunktionen 2 Parameter zur Einrichtung des Notfallbetriebs und/oder zur Regelung eines Bypass-Schützes/Starters,
wenn diese im System vorgesehen sind.
25- Verbundregler Parameter zum Konfigurieren und Überwachen des integrierten Kompressorverbundreglers (typischer-
weise für Pumpenboostersätze verwendet).
26- Analog-E/A-Option MCB 109 Parametergruppe zur Konfiguration der Analog-E/A-Karte (MCB 109): Definition der Analogeingangsty-
pen (z. B. Spannung, Pt1000 oder Ni1000) und Skalierung und Definition der Analogausgangsfunktionen
und Skalierung.
28- Kompressorfunktionen Parameter für Kompressoren:
- Austrittstemperatur – Grenzwerte/Überwachung
- Tag/Nacht-Einstellungen
- PO-Optimierung
- Einspritzregelung
Parameterbeschreibungen und Optionen werden bei beiden LCP Bedienteilen im Anzeigebereich angezeigt. (Näheres siehe entsprechenden Abschnitt)
Der Zugriff auf Parameter erfolgt durch Drücken von [Quick Menu] oder [Main Menu] auf der Bedieneinheit. Das Quick-Menü dient vor allem zur Inbetriebnahme des Geräts beim ersten Start, um die für den Startbetrieb notwendigen Parameter zu programmieren. Das Hauptmenü bietet Zugriff auf alle
Parameter für eine Anwendungsprogrammierung im Detail.
Alle Digitalein-/-ausgangs- und Analogein-/-ausgangsklemmen können mehrere Funktionen haben. Alle Klemmen haben Werkseinstellungen mit Funktionen, die sich für die Mehrzahl von ADAP-KOOL-Anwendungen eignen, falls andere Sonderfunktionen benötigt werden, müssen diese jedoch in
Parametergruppe 5 oder 6 programmiert werden.
66
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 67

ADAP-KOOL® Drive AKD 102 High Power 6 Programmieren des Frequenzumrichters
6.1.2 Quick-Menü-Modus
Parameterdaten
Das grafische LCP 102 bietet Zugriff auf alle Parameter unter Quick-Menü-Modus. Parametereinstellung über [Quick Menu]-Taste: Parameterdaten oder Einstellungen müssen in Übereinstimmung mit folgendem
Verfahren eingegeben oder geändert werden:
1. Drücken Sie die Taste Quick Menus.
2.
Navigieren Sie mit den Tasten [
den Sie ändern wollen.
3. [OK] drücken.
4. Wählen Sie die richtige Parametereinstellung mit den Tasten
] und [▼].
[
▲
5. [OK] drücken.
6.
Mit den Pfeiltasten [
einer Parametereinstellung ändern.
7. Der hervorgehobene Bereich zeigt an, welche Ziffer zur Bearbeitung ausgewählt ist.
8. Mit [Cancel] kann die Änderung verhindert werden, mit [OK]
wird die Änderung angenommen und die neue Einstellung eingelesen.
Das [Benutzer-Menü] enthält Parameter, die vom Anwender selbst zusammengestellt werden können. Ein Klimagerät- oder Pumpenhersteller kann diese
z. B. im Benutzer-Menü während der Inbetriebnahme im Werk vorprogrammieren, um die Inbetriebnahme/Feinabstimmung vor Ort einfacher zu machen.
Die Zusammenstellung der Parameter erfolgt im Par. 0-25
] und [▶] können Sie die Ziffern innerhalb
◀
] und [▼] zu dem Parameter,
▲
Benutzer-Menü
Beispiel für die Änderung von Parameterdaten
Parameter 22-60
möchten jedoch den Lüfterriemenzustand - defekt oder nicht defekt überwachen. Gehen Sie dazu wie folgt vor:
1. Drücken Sie [Quick Menu].
2.
Wählen Sie mit der [
3. [OK] drücken.
4.
Wählen Sie mit der [
5. [OK] drücken.
6. [OK] erneut drücken, um zu Lüfterfunktionen zu gelangen.
7. Wählen Sie Riemenbruchfunktion mit [OK].
8.
Wählen Sie mit der [
Der Frequenzumrichter wird jetzt abgeschaltet, wenn ein Bruch des Lüfterriemens erfasst wird.
, das bis zu 20 verschiedene Parameter enthalten kann.
Riemenbruchfunktion
]-Taste Funktionssätze.
▼
]-Taste Anwendungseinstell.
▼
]-Taste die Option [2] Abschaltung aus.
▼
ist auf [Aus] eingestellt. Sie
6
Par. 5-12
Wird an
Wird in
Par. 5-12
Das Menü [Liste geänderte Par.] enthält Listen mit, in Bezug auf die Werkseinstellung, geänderten Parametern:
• Letzte 10 Änderungen: Zeigt die letzten 10 geänderten Parameter.
• Alle Änderungen seit der letzten Werkseinstellung.
[Protokolle] beinhaltet die grafische Darstellung der im Display angezeigten Betriebsvariablen (Par. 0-20, 0-21, 0-22, 0-23 und 0-24).
Nur Anzeigeparameter, die in Par. 0-20 bis 0-24 ausgewählt sind, können angezeigt werden. Im Speicher können bis zu 120 Abtastungen zum späteren
Abruf abgelegt werden.
Effiziente Parametereinstellung für ADAP-KOOL-Anwendungen
Die Parameter lassen sich für die Mehrzahl von ADAP-KOOL-Anwendungen einfach über [Quick Setup] einstellen.
Drücken von [Quick Menus] zeigt die Liste der verschiedenen Auswahlmöglichkeiten des Quick-Menüs. Siehe auch Abbildung 6.1 unten und Tabellen
Q3-1 bis Q3-4 im Abschnitt
[Ohne Funktion] gewählt, ist auch keine +24 V Beschaltung an Klemme 27 notwendig, um den Start zu ermöglichen.
[Motorfreilauf (inv.)] gewählt, ist eine +24 V Beschaltung an Klemme 27 notwendig, um den Start zu ermöglichen.
Funktionssätze
.
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
67
Page 68
6 Programmieren des Frequenzumrichters ADAP-KOOL® Drive AKD 102 High Power
6
Beispiel zur Benutzung des Inbetriebnahme-Menüs
Nehmen Sie an, dass Sie die Rampenzeit Ab auf 100 Sekunden einstellen
wollen.
1. Wählen Sie [Quick Setup]. Der erste Parameter 0-01
erscheint im Inbetriebnahme-Menü.
2.
Mehrmals [
Werkseinstellung 20 Sekunden erscheint.
3. [OK] drücken.
4.
Wählen Sie die dritte Stelle vor dem Komma mit der [
5.
Ändern Sie mit[
6.
Markieren Sie mithilfe von [
7.
Ändern Sie mit [
8. [OK] drücken.
Die neue Rampenzeit Ab ist jetzt auf 100 Sekunden eingestellt.
Es wird empfohlen, die Konfiguration in der aufgelisteten Reihenfolge
auszuführen.
] drücken, bis
▼
] „0“ auf „1“.
▲
] „2“ auf „0“.
▼
ACHTUNG!
Eine vollständige Beschreibung der Funktion finden Sie
in den Abschnitten zu Parametern in diesem Produkthandbuch.
Par. 3-42 Rampenzeit Ab 1
] die Ziffer „2“.
▶
Sprache
mit der
]-Taste.
◀
Mit dem Inbetriebnahme-Menü erhält man Zugriff auf die 13 wichtigsten
Parametersätze des Frequenzumrichters. Nach dem Programmieren ist
der Antrieb in den meisten Fällen betriebsbereit. Die 13* Inbetriebnahme-Menü-Parameter werden in der nachstehenden Tabelle gezeigt. Eine
vollständige Beschreibung der Funktion finden Sie in den Abschnitten zu
Parameterbeschreibungen in diesem Handbuch.
Die Displayanzeige hängt von den Einstellun ge n de r O pti on en i n P ar. 0- 02
und 0-03 ab. Die Werkseinstellung für Par. 0-02 und 0-03 hängt von der
Region der Welt ab, in der der Frequenzumrichter ausgeliefert wird, kann
jedoch nach Bedarf umprogrammiert werden.
Par.
0-01 Sprache
1-03 Drehmomentverhalten der Last
1-20 Motornennleistung [kW]
1-21 Motornennleistung* [PS]
1-22 Motornennspannung [V]
1-23 Motornennfrequenz [Hz]
1-24 Motornennstrom [A]
1-25 Motornenndrehzahl [UPM]
1-39 Motorpolzahl
4-12 Min. Frequenz* [Hz]
4-14 Max. Frequenz* [Hz]
3-02 Minimaler Sollwert
3-03 Max. Sollwert
3-41 Rampenzeit Auf 1 [s]
3-42 Rampenzeit Ab 1 [s]
3-13 Sollwertvorgabe
5-10 Klemme 18 Digitaleingang
1-29 Autom. Motoranpassung
Bezeichnung [Einhei-
ten]
Abbildung 6.1: Quick-Menü-Anzeige.
Tabelle 6.2: Inbetriebnahme-Menü-Parameter
68
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 69

ADAP-KOOL® Drive AKD 102 High Power 6 Programmieren des Frequenzumrichters
0-01 Sprache
Option: Funktion:
Bestimmt die im Display zu verwendende Sprache.
Der Frequenzumrichter kann mit 4 verschiedenen Sprachpaketen geliefert werden. Englisch und
Deutsch sind in allen Paketen enthalten. Englisch kann nicht gelöscht oder geändert werden.
[0] * Englisch Teil der Sprachpakete 1 - 4
[1] Deutsch Teil der Sprachpakete 1 - 4
[2] Französisch Teil des Sprachpakets 1
[4] Spanisch Teil des Sprachpakets 1
[5] Italienisch Teil des Sprachpakets 1
[7] Niederländisch Teil des Sprachpakets 1
1-03 Drehmomentverhalten der Last
Option: Funktion:
[0] * Kompressor CT Zur Drehzahlregelung von Schrauben- und Spiralverdichtern. Stellt eine Spannung bereit, die für
eine konstante Drehmomentlastkennlinie des Motors im gesamten Bereich bis zu 15 Hz optimiert
ist.
[1] Kondensator VT Zur Drehzahlregelung von Kreiselpumpen und -lüftern. Wird außerdem benutzt, wenn mehr als ein
Motor vom selben Frequenzumrichter gesteuert wird (z. B. mehrere Kondensatorlüfter oder Kühlturmgebläse). Stellt eine Spannung bereit, die für eine quadratische Drehmomentlastkennlinie des
Motors optimiert ist.
[2] Kompressor AEO CT
[3] Einzellüfter/-pumpe AEO
Automatische Energieoptimierung Kompressor
von Schrauben- und Spiralverdichtern. Stellt eine Spannung bereit, die für eine konstante Drehmomentlastkennlinie des Motors im gesamten Bereich bis zu 15 Hz optimiert ist, die AEO-Funktion passt
die Spannung jedoch genau an die aktuelle Lastsituation an und verringert damit Verbrauch und
Störgeräusche vom Motor. Um optimale Bedingungen zu erhalten, muss der Motorleistungsfaktor
cos phi richtig eingestellt werden. Dieser Wert wird in Par. 14-43 Motor cos phi eingestellt. Dieser
Parameter hat einen Standardwert basierend auf den programmierten Motordaten. Diese Einstellungen stellen normalerweise eine optimale Motorspannung sicher, aber wenn der Motorleistungsfaktor cos phi eine Neueinstellung benötigt, kann eine AMA-Funktion in Par. 1-29 Automatische
Motoranpassung (AMA) durchgeführt werden. Nur in sehr seltenen Fällen ist es notwendig, den
Motorleistungsfaktor manuell anzupassen.
Autom. Energieoptimierung VT
pumpen und -lüftern. Stellt eine Spannung bereit, die für eine quadratische Drehmomentlastkennlinie des Motors optimiert ist, die AEO-Funktion passt die Spannung jedoch genau an die aktuelle
Lastsituation an und verringert damit Verbrauch und Störgeräusche vom Motor. Um optimale Bedingungen zu erhalten, muss der Motorleistungsfaktor cos phi richtig eingestellt werden. Dieser Wert
wird in Par. 14-43 Motor cos phi eingestellt. Dieser Parameter hat einen Standardwert basierend
auf den programmierten Motordaten. Diese Einstellungen stellen normalerweise eine optimale Motorspannung sicher, aber wenn der Motorleistungsfaktor cos phi eine Neueinstellung benötigt, kann
eine AMA-Funktion in Par. 1-29 Automatische Motoranpassung (AMA) durchgeführt werden. Nur in
sehr seltenen Fällen ist es notwendig, den Motorleistungsfaktor manuell anzupassen.
. Zur optimalen energieeffizienten Drehzahlregelung von Kreisel-
. Zur optimalen energieeffizienten Drehzahlregelung
6
1-20 Motor Power [kW]
Range: Funktion:
4.00 kW* [0.09 - 3000.00 kW] Der Wert der Motornennleistung in kW muss den Angaben auf dem Typenschild des angeschlossenen Motors entsprechen. Die Werkseinstellung entspricht der Typenleistung des Frequenzumrichters.
Dieser Parameter kann nicht bei laufendem Motor geändert werden. Je nach der Einstellung in
Par. 0-03
ausgeblendet.
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Regional Settings
wird Par. 1-20
Motor Power [kW]
oder Par. 1-21
Motor Power [HP]
69
Page 70

6
6 Programmieren des Frequenzumrichters ADAP-KOOL® Drive AKD 102 High Power
1-21 Motor Power [HP]
Range: Funktion:
4.00 hp* [0.09 - 3000.00 hp] Der Wert muss den Angaben auf dem Typenschild des angeschlossenen Motors entsprechen. Die
Werkseinstellung entspricht der Typenleistung des Frequenzumrichters.
Dieser Parameter kann nicht bei laufendem Motor geändert werden.
Je nach der Einstellung in Par. 0-03
Par. 1-21
Motor Power [HP]
ausgeblendet.
1-22 Motor Voltage
Range: Funktion:
500. V* [10. - 1000. V] Der Wert muss den Angaben auf dem Typenschild des angeschlossenen Motors entsprechen. Die
Werkseinstellung entspricht der Typenleistung des Frequenzumrichters.
Dieser Parameter kann nicht bei laufendem Motor geändert werden.
1-23 Motor Frequency
Range: Funktion:
50. Hz* [20 - 1000 Hz] Stellen Sie einen Wert ein, der den Angaben auf dem Typenschild des angeschlossenen Motors
entspricht.Für 87-Hz-Betrieb bei 230/400-V-Motoren die Typenschilddaten für 230 V/50 Hz einstellen. Par. 4-13
Hz-Anwendung angepasst werden
Motor Speed High Limit [RPM]
Regional Settings
und Par. 3-03
wird Par. 1-20
Maximum Reference
Motor Power [kW]
müssen bei der 87-
oder
ACHTUNG!
Dieser Parameter kann nicht bei laufendem Motor geändert werden.
1-24 Motor Current
Range: Funktion:
7.20 A* [0.10 - 10000.00 A] Eingabe des Motornennstroms entsprechend dem Motor-Typenschild. Diese Daten dienen der Berechnung von Drehmoment, thermischem Motorschutz usw.
ACHTUNG!
Dieser Parameter kann nicht bei laufendem Motor geändert werden.
1-25 Motor Nominal Speed
Range: Funktion:
1420. RPM* [100 - 60000 RPM] Geben Sie die auf dem Typenschild des Motors angegebene Nenndrehzahl an. Dieser Wert dient zur
Berechnung des automatischen Schlupfausgleichs.
ACHTUNG!
Dieser Parameter kann nicht bei laufendem Motor geändert werden.
70
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 71

ADAP-KOOL® Drive AKD 102 High Power 6 Programmieren des Frequenzumrichters
1-39 Motor Poles
Range: Funktion:
4. N/A* [2 - 100 N/A] Definiert die Anzahl der Motorpole.
Pole ~n
2 2700 - 2880 3250 - 3460
4 1350 - 1450 1625 - 1730
6 700 - 960 840 - 1153
Die Tabelle zeigt die Anzahl der Pole für normale Drehzahlbereiche verschiedener Motortypen. Für
andere Frequenzen ausgelegte Motoren müssen separat definiert werden. Der angegebene Wert
muss eine gerade Zahl sein, da die Anzahl der Pole und nicht die Anzahl der Polpaare eingegeben
wird. Par. 1-39
Nominal Speed
Dieser Parameter kann nicht bei laufendem Motor geändert werden.
4-12 Motor Speed Low Limit [Hz]
Range: Funktion:
Application
Dependent*
[0 - par. 4-14 Hz] Definiert die absolute Mindestdrehzahl, mit der der Motor laufen soll. Die min. Frequenz kann so
eingestellt werden, dass sie der Mindestausgangsfrequenz der Motorwelle entspricht. Die min.
Drehzahl darf den in Par. 4-14
4-14 Motor Speed High Limit [Hz]
Range: Funktion:
50/60.0
Hz*
[par. 4-12 - par. 4-19 Hz] Eingabe der maximalen Grenze für die Motordrehzahl. Die maximale Drehzahl kann entsprechend
der vom Hersteller empfohlenen maximalen Drehzahl der Motorwelle eingestellt werden. Die maximale Drehzahl darf die Einstellung in Par. 4-12
nach anderen Parametern im Hauptmenü und nach Werkseinstellungen abhängig vom globalen
Standort werden nur Par. 4-11
[Hz]
angezeigt.
bei 50 Hz ~nnbei 60 Hz
n
Motor Poles
automatisch vom Frequenzumrichter angepasst.
wird basierend auf Par. 1-23
Motor Speed High Limit [Hz]
Motor Speed Low Limit [Hz]
Motor Speed Low Limit [RPM]
Motor Frequency
eingestellten Wert nicht überschreiten.
oder Par. 4-12
und Par. 1-25
nicht unterschreiten. Je
Motor Speed Low Limit
Motor
6
ACHTUNG!
Die Ausgangsfrequenz des Frequenzumrichters kann niemals 10 % der Taktfrequenz überschreiten (Par. 14-01
).
cy
3-02 Minimum Reference
Range: Funktion:
0 ReferenceFeedbackUnit*
[-999999.999 - par. 3-03 ReferenceFeedbackUnit]
Eingabe des minimalen Sollwerts. Der minimale Sollwert bestimmt den Mindestwert der Summe aller
Sollwerte. Minimaler Sollwert und Sollwerteinheit entsprechen der Konfiguration in Par. 1-00
figuration Mode
und Par. 20-12
ACHTUNG!
Dieser Parameter wird nur bei Drehzahlsteuerung verwendet.
Reference/Feedback Unit
.
Switching Frequen-
Con-
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
71
Page 72

6
6 Programmieren des Frequenzumrichters ADAP-KOOL® Drive AKD 102 High Power
3-03 Maximum Reference
Range: Funktion:
0 ReferenceFeedbackUnit*
[par. 3-02 - 999999.999 ReferenceFeedbackUnit]
3-41 Ramp 1 Ramp Up Time
Range: Funktion:
10.00 s* [1.00 - 3600.00 s] Geben Sie die Rampenzeit Auf ein, d. h. die Beschleunigungszeit von 0 UPM bis Par. 1-25
3-42 Ramp 1 Ramp Down Time
Range: Funktion:
20.00 s* [1.00 - 3600.00 s] Geben Sie die Rampenzeit Ab ein, d. h. die Verzögerungszeit von Par. 1-25
Eingabe des maximal zulässigen Wertes für den Fernsollwert. Maximaler Sollwert und Sollwerteinheit entsprechen der Konfiguration in Par. 1-00
Feedback Unit
Nominal Speed
Auf den in Par. 4-18
penzeit Ab in Par. 3-42
Par.
bis 0 UPM. Wählen Sie die Rampenzeit Ab so, dass keine Überspannung aufgrund von generatorischem Betrieb des Motors auftritt bzw. der erzeugte Strom den in Par. 4-18
stellten Stromgrenzwert nicht überschreitet. Siehe Rampenzeit Auf in Par. 3-41
Time
Par.
.3 − 41 =
.
.3 − 42 =
.
ACHTUNG!
Bei Betrieb mit der Einstellung PID-Regler [3] in Par. 1-00
muss Par. verwendet werden.
. Wählen Sie die Rampenzeit Auf so, dass der Ausgangsstrom während der Rampe
Current Limit
Ramp 1 Ramp Down Time
tBeschl.×nnorm Par.
tVerz.×nnorm Par.
Sollw. UPM
eingestellten Stromgrenzwert nicht überschreitet. Siehe Ram-
Sollw. UPM
.1 − 25
.1 − 25
s
Configuration Mode
.
s
und Par. 20-12
Configuration Mode
Motor Nominal Speed
Current Limit
Ramp 1 Ramp Up
Reference/
Motor
einge-
5-10 Klemme 18 Digitaleingang
Option: Funktion:
[0] Ohne Funktion Keine Reaktion auf die an die Klemme geführten Signale.
[1] Reset Setzt den Frequenzumrichter nach Abschaltung/Alarm zurück. Nicht alle Alarme können quittiert
werden.
[2] Motorfreilauf (inv.) Motorfreilauf wird ausgeführt. (Logisch „0“ => Freilaufstopp)
(Werkseinstellung Klemme 27): Motorfreilaufstopp, invertierter Eingang (öffnen).
[3] Motorfreilauf/Reset invers Reset und Motorfreilaufstopp, invers (öffnen).
Der Motor verbleibt im Freilauf, und der Frequenzumrichter wird zurückgesetzt. (Logisch „0“ =>
Motorfreilaufstopp und Reset)
[5] DC Bremse (invers) Invertierter Eingang für DC-Bremse (öffnen).
Stoppt den Motor durch Anlegen einer Gleichstromspannung über einen bestimmte Zeitraum. Siehe
Par. 2-01
wenn der Wert in Par. 2-02
[6] Stopp (invers) Stopp, invertierte Funktion. Wenn das Signal an der zugewiesenen Klemme von „1“ auf „0“ wechselt,
wird ein Rampenstopp aktiviert. Der Stopp wird gemäß der gewählten Rampenzeit (Par. 3-42
1 Ramp Down Time
DC Brake Current
ACHTUNG!
Befindet sich der Frequenzumrichter während eines Stoppbefehls in der Momentengrenze, kann dieser aufgrund der internen Regelung eventuell nicht ausgeführt werden. Konfigurieren Sie einen Digitalausgang für
[27], und verbinden Sie diesen mit einem Digitaleingang, der für Motorfreilauf
konfiguriert ist, um eine Abschaltung auch in der Momentengrenze sicherzustellen.
bis Par. 2-03
DC Braking Time
, Par. 3-52
DC Brake Cut In Speed [RPM]
ungleich 0 ist. (Logisch „0“ => DC-Bremsung)
Ramp 2 Ramp Down Time
. Die Funktion ist nur aktiv,
Ramp
, Par. 3-62, Par. 3-72) ausgeführt.
Momentgrenze & Stopp
72
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 73

ADAP-KOOL® Drive AKD 102 High Power 6 Programmieren des Frequenzumrichters
[7] Ext. Verriegelung Hat die gleichen Funktionen wie Motorfreilaufstopp, invers, aber Ext. Verriegelung generiert die
Alarmmeldung „externer Fehler“ auf dem Bildschirm, wenn die programmierte Klemme logisch „0“
ist. Die Alarmmeldung ist auch über die Digitalausgänge und die Relaisausgänge aktiv, wenn diese
auf Ext. Verriegelung programmiert sind. Wenn die Ursache für die externe Verriegelung behoben
wurde, kann der Alarm unter Verwendung eines Digitaleingangs oder der Taste [RESET] zurückgesetzt werden. Eine Verzögerung kann in Par. 22-00
Verriegelung, programmiert werden. Nach Anlegen eines Signals am Eingang wird die oben beschriebene Reaktion um die in Par. 22-00
[8] * Start Wählen Sie Start, um die zugewiesene Klemme für einen Start/Stopp-Befehl zu konfigurieren. (Lo-
gisch „1“ = Start, Logisch „0“ = Stopp)
(Werkseinstellung Klemme 18).
[9] Puls-Start Der Motor wird starten, wenn ein Pulssignal mindestens 2 ms lang angelegt wird. Der Motor stoppt,
wenn Sie Stopp (invers) aktivieren.
[10] Reversierung Ändert die Drehrichtung der Motorwelle. Zum Umkehren logisch „1“ wählen. Das Reversierungs-
signal ändert nur die Drehrichtung. Die Startfunktion wird nicht aktiviert. Beide Richtungen in
Par. 4-10
(Werkseinstellung Klemme 19).
[11] Start + Reversierung Aktiviert einen Startbefehl bei gleichzeitiger Reversierung. Signale beim Start sind nicht gleichzeitig
möglich.
[14] Festdrehzahl JOG Aktiviert für die zugewiesene Klemme die JOG-Funktion. Siehe Par. 3-11
(Werkseinstellung Klemme 29).
[15] Festsollwert ein Dient zum Wechsel zwischen externem Sollwert und Festsollwert. Es wird davon ausgegangen, dass
in Par. 3-04
Sollwert aktiv, bei Logisch „1" ist einer der acht Festsollwerte aktiv.
[16] Festsollwert Bit 0 Erlaubt die Wahl zwischen einem der acht Festsollwerte gemäß der folgenden Tabelle.
[17] Festsollwert Bit 1 Erlaubt die Wahl zwischen einem der acht Festsollwerte gemäß der folgenden Tabelle.
[18] Festsollwert Bit 2 Erlaubt die Wahl zwischen einem der acht Festsollwerte gemäß der folgenden Tabelle.
Motor Speed Direction
Reference Function Externe Anwahl
External Interlock Delay
wählen.
External Interlock Delay
eingestellte Zeitdauer verzögert.
[1] gewählt wurde. Bei Logisch „0" ist der externe
, Verzögerung ext.
Jog Speed [Hz]
.
6
Festsollwertbit
Festsollwert 0 0 0 0
Festsollwert 1 0 0 1
Festsollwert 2 0 1 0
Festsollwert 3 0 1 1
Festsollwert 4 1 0 0
Festsollwert 5 1 0 1
Festsollwert 6 1 1 0
Festsollwert 7 1 1 1
[19] Sollw. speichern Speichert den aktuellen Sollwert. Dieser gespeicherte Wert ist auch der Ausgangspunkt bzw. die
Bedingung für die Verwendung von Drehzahl auf und Drehzahl ab. Wird Drehzahl auf/ab benutzt,
so richtet sich die Drehzahländerung immer nach Rampe 2 (Par. 3-51
Par. 3-52
Ramp 2 Ramp Down Time
mit Rückführung siehe. 20-14, max. Soll-/Istwert).
[20] Drehz. speich. Speichert die aktuelle Ausgangsfrequenz (in Hz). Die gespeicherte Motorfrequenz ist auch der Aus-
gangspunkt bzw. die Bedingung für die Verwendung von Drehzahl auf und Drehzahl ab. Wird
Drehzahl auf/ab benutzt, so richtet sich die Drehzahländerung immer nach Rampe 2
(Par. 3-51
Par. 1-23
[21] Drehzahl auf Digitale Steuerung der Drehzahl auf/ab (Motorpotentiometer) soll erfolgen. Aktivieren Sie diese
Funktion durch Auswahl von Sollwert speichern oder Drehzahl speichern. Wenn Drehzahl Auf weniger als 400 ms aktiviert ist, wird der resultierende Sollwert um 0,1 % erhöht. Wenn Drehzahl auf
länger als 400 ms aktiviert ist, läuft der resultierende Sollwert gemäß Rampe 1 in Par. 3-41
1 Ramp Up Time
Ramp 2 Ramp Up Time
Motor Frequency
ACHTUNG!
Wenn Frequenz speichern aktiv ist, kann der Motor nicht über einen Rampenstopp angehalten werden. Stoppen Sie den Motor über die Funktion Motorfreilauf
(inv.) [2] oder Motorfreilauf/Reset [3].
hoch.
) im Intervall 0 - Par. 3-03
und Par. 3-52
.
2 1 0
Ramp 2 Ramp Up Time
Maximum Reference
Ramp 2 Ramp Down Time
. (Für Regelung
) im Intervall 0 -
und
Ramp
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
73
Page 74

6
6 Programmieren des Frequenzumrichters ADAP-KOOL® Drive AKD 102 High Power
[22] Drehzahl ab Siehe Drehzahl auf [21].
[23] Satzanwahl Bit 0 Einen der vier Sätze auswählen. Par. 0-10 auf Externe Anwahl einstellen.
[24] Satzanwahl Bit 1 Identisch mit Satzanwahl Bit 0 [23].
(Werkseinstellung Klemme 32).
[34] Rampe Bit 0 Wählen Sie die zu verwendende Rampe. Logisch „0“ bewirkt Rampe 1 und logisch „1“ Rampe 2.
[36] Netzausfall (invers) Ist zu wählen, um die in Par. 14-10
Funktion ist bei logisch „0“ aktiv.
[39] Tag-/Nachtsteuerung
[52] Startfreigabe Es muss ein aktives Startsignal über die Klemme vorliegen, über die Startfreigabe programmiert
wurde, bevor ein Startbefehl angenommen werden kann. Startfreigabe verfügt über eine logische
„UND“-Funktion in Bezug auf die Klemme, die für START [8],
speichern
Wenn Startfreigabe auf verschiedenen Klemmen programmiert ist, darf Startfreigabe nur auf einer
der Klemmen logisch „1“ sein, damit die Funktion ausgeführt wird. Das digitale Ausgangssignal für
Startbefehl (
5-3* oder Par. 5-4* programmiert ist, wird von Startfreigabe nicht beeinflusst.
[53] Hand Start Ein angelegtes Signal versetzt den Frequenzumrichter in den Handbetrieb, als ob die [Hand On]-
Taste des LCP gedrückt worden ist, und ein normaler Stoppbefehl wird übergangen. Bei Trennen
des Signals stoppt der Motor. Für andere gültige Startbefehle muss ein anderer Digitaleingang
Start
LCP haben keine Wirkung. Die Taste
Hand Start
Signal an
der angewendet wird. Liegt ein Signal an
Start
Hand Start
[54] Auto Start Ein angelegtes Signal versetzt den Frequenzumrichter in den Autobetrieb, als ob die Taste
On
[55] DigiPot Auf Aktiviert den Eingang als Erhöhungssignal für die Digitalpotentiometerfunktion, in Parametergruppe
3-9* beschrieben.
[56] DigiPot Ab Aktiviert den Eingang als Verminderungssignal für die Digitalpotentiometerfunktion, beschrieben in
Parametergruppe 3-9*.
[57] DigiPot löschen Dieses Signal löscht den Digitalpotentiometer-Sollwert, siehe auch Parametergruppe 3-9*.
[62] Reset Zähler A Eingang zum Reset von Zähler A.
[63] Zähler B (+1) (Nur Klemme 29 und 33) Eingang zum Erhöhen der Zählung im SLC-Zähler.
[65] Reset Zähler B Eingang zum Reset von Zähler B.
[66] Energiesparmodus Versetzt den Frequenzumrichter in den Energiesparmodus (siehe Par. 22-4*).
[78] Reset Wort für vorbeugende War-
tung
[120] Führungspumpenstart Start/Stopp der Führungspumpe (geregelt über AKD 102).
[130] Komp. 1 Verriegelung Das Eingangssignal muss AUS sein, damit der AKD 102 Kompressor 1 starten kann.
[131] Komp. 2 Verriegelung Das Eingangssignal muss AUS sein, damit der AKD 102 Kompressor 2 starten kann.
[132] Komp. 3 Verriegelung Das Eingangssignal muss AUS sein, damit der AKD 102 Kompressor 3 starten kann.
[139] Komp. 1 Inv. Verriegelung Das Eingangssignal muss EIN sein, damit der AKD 102 Kompressor 1 starten kann.
[140] Komp. 2 Inv. Verriegelung Das Eingangssignal muss EIN sein, damit der AKD 102 Kompressor 2 starten kann.
[141] Komp. 3 Inv. Verriegelung Das Eingangssignal muss EIN sein, damit der AKD 102 Kompressor 3 starten kann.
Setzt alle Daten in Par. 16-96
[20] programmiert ist, d. h., zum Start des Motors müssen beide Bedingungen erfüllt sein.
Start
[8],
Festdrehzahl JOG
zugeordnet und an diesen ein Signal angelegt werden. Die Tasten
bzw.
Auto Start
Hand Start
wirksam. Durch Drücken der Taste
am LCP gedrückt wurde. Siehe auch
und
oder
Auto Start
Auto Start
gestoppt.
Mains Failure
Off
werden über die Taste
stoppt der Motor unabhängig von jedem normalen Startbefehl,
Maintenance Word
ausgewählte Funktion zu aktivieren. Netzausfall-
[14] oder
Festdrehzahl JOG
Ausgangsfrequenz speichern
[14] oder
[20]), das in Par.
Freq.
Auto
Hand On
und
Auto On
am LCP setzt Hand Start und Auto Start außer Funktion.
Hand On
bzw.
Auto On
wieder aktiviert. Ohne
Hand Start
Off
und auch
am LCP wird der Motor unabhängig von Signalen an
Auto Start
an, ist die Funktion
Auto
Auto
Hand Start
[53].
auf 0 zurück.
am
74
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 75
ADAP-KOOL® Drive AKD 102 High Power 6 Programmieren des Frequenzumrichters
1-29 Automatic Motor Adaptation (AMA)
Option: Funktion:
Die AMA-Funktion optimiert die dynamische Motorleistung, indem die erweiterten Motorparameter
(Par. 1-30
matisch optimiert werden.
[0] * Off Ohne Funktion
Stator Resistance (Rs)
bis Par. 1-35
Main Reactance (Xh)
) bei stehendem Motor auto-
[1] Enable complete AMA führt eine AMA des Statorwiderstands R
Rotorstreureaktanz X
[2] Enable reduced AMA führt eine reduzierte AMA des Statorwiderstands R
wenn ein LC-Filter zwischen Frequenzumrichter und Motor eingesetzt wird.
Aktivieren Sie die AMA-Funktion durch Drücken von [Hand on] nach Auswahl von [1] oder [2]. Siehe auch Abschnitt
Verläuft die Motoranpassung normal, erscheint im Display: „AMA mit [OK]-Taste beenden“. Nach Drücken der [OK]-Taste ist der Frequenzumrichter
wieder betriebsbereit.
Hinweis:
• Für eine optimale Anpassung des Frequenzumrichters, führen Sie die AMA bei kaltem Motor durch.
• Die AMA kann nicht durchgeführt werden, während der Motor läuft.
ACHTUNG!
Es ist wichtig, dass zuvor die Motorparameter 1-2* richtig eingestellt werden, da sie in den AMA-Algorithmus einfließen. Für eine
optimale dynamische Motorleistung ist eine AMA notwendig. Je nach Motornennleistung kann die Motoranpassung bis zu zehn Minuten
dauern.
ACHTUNG!
Während der AMA darf die Motorwelle nicht angetrieben werden.
und der Hauptreaktanz Xh durch.
2
, des Rotorwiderstands Rr, der Statorstreureaktanz X1, der
S
(nur im System) durch. Wählen Sie diese Option,
s
Automatische Motoranpassung
.
6
Siehe Abschnitt:
ACHTUNG!
Ändert sich eine der Einstellungen in Par. 1-2* Motordaten, Par. 1-30
die Werkseinstellungen der erweiterten Motorparameter wiederhergestellt.
Dieser Parameter kann nicht bei laufendem Motor geändert werden.
ACHTUNG!
Vollständige AMA ist ohne Filter durchzuführen, reduzierte AMA ist mit Filter durchzuführen.
Anwendungsbeispiele > Automatische Motoranpassung
im Projektierungshandbuch.
Stator Resistance (Rs)
zu Par. 1-39
Motor Poles
, dann werden
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
75
Page 76

0
0
0
0
0
0
0
6 Programmieren des Frequenzumrichters ADAP-KOOL® Drive AKD 102 High Power
6.1.3 Funktionssätze
Über die Funktionssätze ist schneller und einfacher Zugriff auf alle Parameter möglich, die für die Mehrzahl von ADAP-KOOL-Anwendungen erforderlich
sind, darunter die meisten VVS- und KLS-Versorgungs- und Rücklaufgebläse, Kühlturmgebläse, Primär-, Sekundär- und Kondenswasserpumpen und
anderen Pumpen-, Lüfter- und Verdichteranwendungen.
Zugriff auf Funktionssätze - Beispiel
Ändern des Ausgangs an „Analogausgang 42“
6
130BT110.1
Abbildung 6.2: Schritt 1: Den Frequenzumrichter einschalten (gelbe LED leuchtet auf).
130BT111.1
Abbildung 6.3: Schritt 2: Taste [Quick Menus] drücken
(Quick-Menü-Optionen werden angezeigt).
130BT112.1
130BT114.1
Abbildung 6.6: Schritt 5: Mit den Auf/Ab-Navigationstasten
zu 03-11
Analogausgang
Abbildung 6.7: Schritt 6: Parameter 6-50
logausgang
wählen. [OK] drücken.
blättern. [OK] drücken.
130BT115.1
Klemme 42 Ana-
130BT116.1
Abbildung 6.4: Schritt 3: Mit den Auf/Ab-Navigationstasten
zu Funktionssätze blättern. [OK] drücken.
130BT113.1
Abbildung 6.5: Schritt 4: Die Optionen zur Einstellung der
Funktionen werden angezeigt. 03-1
len. [OK] drücken.
Die Funktionssatzparameter sind wie folgt gruppiert:
76
Allg. Einstellungen
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Abbildung 6.8: Schritt 7: Die verschiedenen Optionen mit
den Auf/Ab-Navigationstasten wählen. [OK] drücken.
wäh-
Page 77

ADAP-KOOL® Drive AKD 102 High Power 6 Programmieren des Frequenzumrichters
Q3-10 Erw. Motoreinstell. Q3-11 Analogausgang Q3-12 Uhreinstellungen Q3-13 Displayeinstell.
Q3-1 Allg. Einstellungen
1-90 Thermischer Motorschutz 6-50 Klemme 42 Analogausgang 0-70 Datum und Uhrzeit 0-20 Displayzeile 1.1
1-93 Thermistoranschluss 6-51 Kl. 42, Ausgang min. Skalierung 0-71 Datumsformat 0-21 Displayzeile 1.2
1-29 Automatische Motoranpassung 6-52 Kl. 42, Ausgang max. Skalierung 0-72 Uhrzeitformat 0-22 Displayzeile 1.3
14-01 Taktfrequenz 0-74 MESZ/Sommerzeit 0-23 Displayzeile 2
0-76 MESZ/Sommerzeitstart 0-24 Displayzeile 3
0-77 MESZ/Sommerzeitende 0-37 Display Text 1
0-38 Display Text 2
0-39 Displaytext 3
Q3-2 Einstellungen für Drehzahlregelung ohne Rückführung
1-00 Regelverfahren
3-02 Minimaler Sollwert
3-03 Max. Sollwert
3-15 Variabler Sollwert 1
6-10 Klemme 53 Skal. Min.Spannung
6-11 Klemme 53 Skal. Max.Spannung
6-14 Klemme 53 Skal. Min.-Soll/Istwert
6-15 Klemme 53 Skal. Max.-Soll/Istwert
3-10 Festsollwert
Q3-3 PID-Prozesseinstell.
1-00 Regelverfahren
20-00 Istwertanschluss 1
20-12 Soll-/Istwerteinheit
6-20 Klemme 54 Skal. Min. Spannung
6-21 Klemme 54 Skal. Max.Spannung
6-22 Klemme 54 Max. Strom (nur sichtbar, wenn Schalter auf I gestellt ist)
6-23 Klemme 54 Max. Strom (nur sichtbar, wenn Schalter auf I gestellt ist)
6-24 Klemme 54 Skal. Min.-Soll-/Istwert
6-25 Klemme 54 Skal. Max.-Soll/Istwert
3-02 Minimaler Sollwert
3-03 Max. Sollwert
20-21 Sollwert 1
20-93 PID-Proportionalverstärkung
20-94 PID-Integrationszeit
3-13 Sollwertvorgabe
6
Kompressormoment Kondensator Lüfter-/Pumpenfunktionen
22-75 Kurzzyklus-Schutz 22-40 Min. Laufzeit 22-40 Min. Laufzeit
22-76 Intervall zwischen Starts 22-41 Min. Energiespar-Stoppzeit 22-41 Min. Energiespar-Stoppzeit
22-77 Min. Laufzeit 22-42 Energiespar-Startdrehz. [UPM] 22-42 Energiespar-Startdrehz. [UPM]
20-00 Istwertanschluss 1 22-43 Energiespar-Startfreq. [Hz] 22-43 Energiespar-Startfreq. [Hz]
20-01 Istwertumwandl. 1 22-44 Soll-/Istw.-Diff. Energie-Start 22-44 Soll-/Istw.-Diff. Energie-Start
20-02 Istwert 1 Einheit 20-00 Istwertanschluss 1
20-30 Kältemittel 20-01 Istwertumwandl. 1
20-40 Thermostat/Pressostat 20-02 Istwert 1 Einheit
20-41 Abschaltwert 20-30 Kältemittel
20-42 Einschaltwert 20-40 Thermostat/Pressostat
25-00 Verbundregler 20-41 Abschaltwert
25-06 Anzahl der Kompressoren 20-42 Einschaltwert
25-20 Neutralzone
25-21 +Zone
25-22 -Zone
Siehe auch
ADAP-KOOL® Drive AKD102 Programmierungshandbuch
Q3-4 Anwendungseinstell.
für eine detaillierte Beschreibung der Funktionssatz-Parametergruppe.
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
77
Page 78

6
6 Programmieren des Frequenzumrichters ADAP-KOOL® Drive AKD 102 High Power
0-20 Displayzeile 1.1
Option: Funktion:
Auswahl der Variable für die Anzeige in der 1. Zeile, linke Stelle im Display.
[0] Keine Es wurde kein Anzeigewert gewählt.
[37] Displaytext 1 Aktuelles Steuerwort
[38] Displaytext 2 Hiermit kann eine individuelle Textzeichenfolge zur Anzeige am LCP oder zum Auslesen über serielle
Kommunikation geschrieben werden.
[39] Displaytext 3 Hiermit kann eine individuelle Textzeichenfolge zur Anzeige am LCP oder zum Auslesen über serielle
Kommunikation geschrieben werden.
[89] Anzeige Datum/Uhrzeit Zeigt das aktuelle Datum und die aktuelle Uhrzeit an.
[953] Profibus-Warnwort Zeigt das aktuelle Warnwort der Feldbus-Schnittstelle in Hex Code.
[1005] Zähler Übertragungsfehler Zeigt die Anzahl der Übertragungsfehler dieses CAN Controllers seit dem letzten Netz-Ein.
[1006] Zähler Empfangsfehler Zeigt die Anzahl der Empfangsfehler dieses CAN Controllers seit dem letzten Netz-Ein.
[1007] Zähler Bus-Off Dieser Parameter zeigt die Anzahl der „Bus-Off“-Ereignisse seit dem letzten Netz-Ein.
[1013] Warnparameter Zeigt Warnmeldungen via Standardbus oder DeviceNet an. Dieser Parameter ist via LCP nicht ver-
fügbar, aber die Warnmeldung kann durch Auswahl von Com Warnwort als Bildschirmanzeige
gesichtet werden. Jeder Warnung ist ein Bit zugewiesen (siehe Tabelle).
[1115] LON Warnwort Zeigt die LON-spezifischen Warnungen an.
[1117] XIF-Revision Zeigt die Version der externen Schnittstellendatei des Neuron-C-Chip der LON-Option an.
[1118] LON Works-Revision Zeigt die Software-Version des Anwendungsprogramms des Neuron-C-Chip der LON-Option an.
[1501] Motorlaufstunden Gibt die Anzahl der Betriebsstunden des Motors an.
[1502] Zähler-kWh Gibt den Netzstromverbrauch in kWh an.
[1600] Steuerwort Zeigt das aktuell gültige Steuerwort des Frequenzumrichters in Hex Code.
[1601] Sollwert [Einheit] Zeigt den Gesamtsollwert in der Regelgröße gemäß Konfiguration aus 1-00 (Summe aus Analog,
Digital, Bus ...).
[1602] * Sollwert % Der Gesamtsollwert (die Summe aus Digital-/Analog-/Festsollwert/Bus/Sollw. halten/Frequenzkorr.
auf/Frequenzkorr. ab).
[1603] Zustandswort Zeigt das aktuelle Zustandswort an.
[1605] Hauptistwert [%] Zeigt eine oder mehrere Warnungen in Hex-Code an.
[1609] Benutzerdefinierte Anzeige Ansicht der benutzerdefinierten Anzeigen laut Festlegung in Par. 0-30, 0-31 und 0-32.
[1610] Leistung [kW] Zeigt die aktuelle Leistungsaufnahme des Motors in kW an.
[1611] Leistung [PS] Zeigt die aktuelle Leistungsaufnahme des Motors in PS an.
[1612] Motornennspannung Zeigt die aktuelle Frequenzumrichter-Ausgangsspannung (berechnet) an.
[1613] Motornennfrequenz Zeigt die aktuelle Frequenzumrichter-Ausgangsfrequenz an (ohne Resonanzdämpfung).
[1614] Motornennstrom Zeigt den Ausgangsstrom des Frequenzumrichters als gemessenen Effektivwert an.
[1615] Frequenz [%] Zeigt die Motorfrequenz, d. h. die Ausgangsfrequenz des Frequenzumrichters in Prozent an.
[1616] Drehmoment [Nm] Zeigt die aktuelle Motorbelastung im Verhältnis zum Motornennmoment an.
[1617] Drehzahl [UPM] Drehzahl in UPM (Drehzahl der Motorwelle in Umdrehungen pro Minute). Die Exaktheit ist abhängig
von dem eingestellten Schlupfausgleich (Par. 1-62) oder dem Istwert der Motordrehzahl (sofern
verfügbar).
[1618] Therm. Motorschutz Zeigt die berechnete/geschätzte thermische Belastung des Motors. Siehe auch Parametergruppe
1-9* Motortemperatur.
[1622] Drehmoment [%] Zeigt das auf die Motorwelle angewendete prozentuale Drehmoment mit Vorzeichen.
[1630] DC-Spannung Zwischenkreisspannung im Frequenzumrichter.
[1632] Bremsleistung/s Zeigt die aktuelle Bremsleistung, die an einen externen Bremswiderstand übertragen wird, an.
Die Angabe erfolgt in Form eines Augenblickswerts.
[1633] Bremsleist/2 min Zeigt die an einen externen Bremswiderstand übertragene Bremsleistung an. Die Durchschnitts-
leistung wird laufend für die letzten 120 Sekunden berechnet.
78
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 79

ADAP-KOOL® Drive AKD 102 High Power 6 Programmieren des Frequenzumrichters
[1634] Kühlkörpertemp. Aktuelle Kühlkörpertemperatur des Frequenzumrichters. Die Abschaltgrenze liegt bei 95 ± 5 °C, die
Wiedereinschaltgrenze bei 70 ± 5 °C.
[1635] FC Überlast Prozentuale Überlast des Wechselrichters
[1636] Nenn- WR- Strom Zeigt den Typen-Nennstrom des Frequenzumrichters an.
[1637] Max.- WR- Strom Maximaler Ausgangsstrom des Frequenzumrichters.
[1638] SL Contr.Zustand Zeigt den aktuellen Zustand des Smart Logic Controllers an.
[1639] Steuerkartentemp. Zeigt die aktuelle Temperatur der Steuerkarte an.
[1650] Externer Sollwert Zeigt die Summe der externen Sollwerte in % (Summe aus Analog/Puls/Bus) an.
[1652] Istwert [Einheit] Zeigt den resultierenden Istwert mittels der in Par. 3-00, 3-01, 3-02 und 3-03 gewählten Einheit/
Skalierung an.
[1653] DigiPot Sollwert Zeigt den Anteil des digitalen Potentiometers am tatsächlichen Soll-/Istwert.
[1654] Istwert 1 [Einheit] Zeigt den Istwert 1. Siehe Par. 20-0*.
[1655] Istwert 2 [Einheit] Zeigt den Istwert 2. Siehe Par. 20-0*.
[1656] Istwert 3 [Einheit] Zeigt den Istwert 3. Siehe Par. 20-0*.
[1660] Digitaleingänge Zeigt den Zustand der Digitaleingänge an. Signal AUS = 0; Signal EIN = 1.
Die Reihenfolge ist Parameter 16-60 zu entnehmen. Bit 0 befindet sich im äußeren rechten Bereich.
[1661] AE 53 Modus Aktueller Betriebsmodus des Analogeingangs 53, welcher durch einen Schalter auf der Steuerkarte
gewählt werden kann. Strom = 0; Spannung = 1.
[1662] Analogeingang 53 Aktueller Zustand des Analogeingangs 53 in Volt AC.
[1663] AE 54 Modus Aktueller Betriebsmodus des Analogeingangs 54. Strom = 0; Spannung = 1.
[1664] Analogeingang 54 Zeigt den aktuellen Wert des Analogeingangs 54 an.
[1665] Analogausgang 42 [mA] Aktueller Wert in mA an Ausgang 42. Der zu zeigende Wert wird mit Par. 6-50 gewählt.
[1666] Digitalausgänge Aktueller Zustand der Digitalausgänge Kl. 27 und Kl. 29.
[1667] Pulseing. 29 [Hz] Zeigt den aktuellen Wert des Pulseingangs 29 in Hz.
[1668] Pulseing. 33 [Hz] Zeigt den aktuellen Wert des Pulseingangs 33 in Hz.
[1669] Pulsausg. 27 [Hz] Aktuelles Pulssignal an Ausgang 27 in Hz.
[1670] Pulsausg. 29 [Hz] Aktuelles Pulssignal an Ausgang 29 in Hz.
[1671] Relaisausgänge Zeigt die Einstellung aller Relais an.
[1672] Zähler A Zeigt den aktuellen Wert von Zähler A.
[1673] Zähler B Zeigt den aktuellen Wert von Zähler B.
[1675] Analogeingang X30/11 Zeigt den aktuellen Wert des Signals an X30/11 (auf der Universal-E/A Option) an.
[1676] Analogeingang X30/12 Zeigt den aktuellen Wert des Signals an X30/12 (auf der Universal-E/A Option) an.
[1677] Analogausg. X30/8 [mA] Zeigt den aktuellen Wert des Ausgangs X30/8 (Universal-/E/A- Option) an. Der zu zeigende Variable
wird mit Par. 6-60 gewählt.
[1680] Bus Steuerwort 1 Steuerwort (STW), das vom Bus-Master gesendet wird.
[1682] Bus Sollwert 1 Zeigt den aktuellen Hauptsollwert der Feldbus-Schnittstelle in Hex-Code, d. h. gesendet vom Ge-
bäudemanagementsystem, einer SPS oder einem anderen Master.
[1684] Feldbus-Komm. Status Zeigt das erweiterte Zustandswort der Feldbus-Schnittstelle in Binärcode an.
[1685] FC Steuerwort 1 Steuerwort (STW), das vom Bus-Master gesendet wird.
[1686] FC Sollwert 1 Sollwert, der von der seriellen FC Schnittstelle gesendet wird.
[1690] Alarmwort Zeigt einen oder mehrere Alarme in Hex-Code an (benutzt für serielle Kommunikation).
[1691] Alarmwort 2 Zeigt einen oder mehrere Alarme in Hex-Code an (benutzt für serielle Kommunikation).
[1692] Warnwort Eine oder mehr Warnungen im Hex-Code (benutzt für serielle Kommunikation).
[1693] Warnwort 2 Eine oder mehr Warnungen im Hex-Code (benutzt für serielle Kommunikation).
[1694] Erw. Zustandswort Zeigt eine oder mehrere Zustandsbedingungen in Hex-Code (benutzt für serielle Kommunikation).
[1695] Erw. Zustandswort 2 Zeigt eine oder mehrere Zustandsbedingungen in Hex-Code (benutzt für serielle Kommunikation).
[1696] Wartungswort Die Bits spiegeln den Zustand für die programmierten vorbeugenden Wartungsereignisse in Para-
metergruppe 23-1* wieder.
6
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
79
Page 80

6
6 Programmieren des Frequenzumrichters ADAP-KOOL® Drive AKD 102 High Power
[1830] Analogeingang X42/1 Anzeige des Signalwerts, das an Klemme X42/1 der Analog-E/A-Karte angelegt ist.
[1831] Analogeingang X42/3 Anzeige des Signalwerts, das an Klemme X42/3 der Analog-E/A-Karte angelegt ist.
[1832] Analogeingang X42/5 Anzeige des Signalwerts, das an Klemme X42/5 der Analog-E/A-Karte angelegt ist.
[1833] Analogausg. X42/7 [V] Anzeige des Signalwerts, das an Klemme X42/7 der Analog-E/A-Karte angelegt ist.
[1834] Analogausg. X42/9 [V] Anzeige des Signalwerts, das an Klemme X42/9 der Analog-E/A-Karte angelegt ist.
[1835] Analogausg. X42/11 [V] Anzeige des Signalwerts, das an Klemme X42/11 der Analog-E/A-Karte angelegt ist.
[2117] Erw. Sollwert 1 [Einheit] Zeigt den Wert des Sollwerts für den erweiterten PID-Regler 1.
[2118] Erw. Istwert 1 [Einheit] Zeigt den Wert des Istwertsignals für den erweiterten PID-Regler 1.
[2119] Erw. Ausg. 1 [%] Zeigt den Wert des Ausgangs vom erweiterten PID-Regler 1.
[2137] Erw. Sollwert 2 [Einheit] Zeigt den Wert des Sollwerts für den erweiterten PID-Regler 2.
[2138] Erw. Istwert 2 [Einheit] Zeigt den Wert des Istwertsignals für den erweiterten PID-Regler 2.
[2139] Erw. Ausg. 2 [%] Zeigt den Wert des Ausgangs vom erweiterten PID-Regler 2.
[2157] Erw. Sollwert 3 [Einheit] Zeigt den Wert des Sollwerts für den erweiterten PID-Regler 3.
[2158] Erw. Istwert 3 [Einheit] Zeigt den Wert des Istwertsignals für den erweiterten PID-Regler 3.
[2159] Erw. Ausg. 3 [%] Zeigt den Wert des Ausgangs vom erweiterten PID-Regler 3 an.
[2230] No-Flow Leistung Zeigt die berechnete „No Flow“-Leistung für die aktuelle Drehzahl.
[2580] Verbundzustand Betriebszustand des Verbundreglers
[2581] Kompressorzustand Betriebszustand jedes einzelnen Kompressors, der vom Verbundregler geregelt wird.
0-21 Displayzeile 1.2
Die Optionen sind identisch mit den Optionen für Par . 0-20
Displayzeile 1.1
.
Option: Funktion:
Einstellung für die Displayanzeige in der Mitte der 1. Zeile.
0-22 Displayzeile 1.3
Die Optionen sind identisch mit den Optionen für Par . 0-20
Displayzeile 1.1
.
Option: Funktion:
Auswahl für die 1. Zeile, rechte Stelle in der Displayanzeige.
0-23 Displayzeile 2
Die Optionen sind identisch mit den Optionen für Par . 0-20
Displayzeile 1.1
.
Option: Funktion:
Einstellung für die Displayanzeige in der 2. Zeile.
0-24 Displayzeile 3
Die Optionen sind identisch mit den Optionen für Par . 0-20
Displayzeile 1.1
.
Option: Funktion:
Wählen Sie eine Variable zur Anzeige in Zeile 3.
0-37 Display Text 1
Range: Funktion:
0 N/A* [0 - 0 N/A] In diesem Parameter kann eine individuelle Textzeichenfolge zur Anzeige am LCP oder Auslesen
über serielle Kommunikation geschrieben werden. Soll dieser Text permanent angezeigt werden,
wählen Sie in Par. 0-20
Line 1.3 Small
den Pfeiltasten
bewegen. Das vom Cursor markierte Zeichen kann dann geändert werden. Mit den Pfeiltasten
oder ▼ des LCP die Zeichen ändern. Zum Einfügen eines Zeichens setzen Sie den Cursor zwischen
die beiden Zeichen, und drücken Sie
, Par. 0-23
Display Line 1.1 Small
Display Line 2 Large
oder ▼ des LCP die Zeichen ändern. Mit den Pfeiltasten ▲ und ▼ den Cursor
▲
oder ▼.
▲
, Par. 0-21
oder Par. 0-24
Display Line 1.2 Small
Display Line 3 Large
, Par. 0-22
Displaytext 1. Mit
Display
▲
80
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 81

ADAP-KOOL® Drive AKD 102 High Power 6 Programmieren des Frequenzumrichters
0-38 Display Text 2
Range: Funktion:
0 N/A* [0 - 0 N/A] In diesem Parameter kann eine individuelle Textzeichenfolge zur Anzeige am LCP oder Auslesen
über serielle Kommunikation geschrieben werden. Soll dieser Text permanent angezeigt werden,
wählen Sie in Par. 0-20
Line 1.3 Small
den Pfeiltasten
bewegen. Wenn ein Zeichen markiert ist, kann es geändert werden. Zum Einfügen eines Zeichens
setzen Sie den Cursor zwischen die beiden Zeichen, und drücken Sie
, Par. 0-23
0-39 Display Text 3
Range: Funktion:
0 N/A* [0 - 0 N/A] In diesem Parameter kann eine individuelle Textzeichenfolge zur Anzeige am LCP oder Auslesen
über serielle Kommunikation geschrieben werden. Soll dieser Text permanent angezeigt werden,
wählen Sie in Par. 0-20
Line 1.3 Small
den Pfeiltasten
bewegen. Wenn ein Zeichen markiert ist, kann es geändert werden. Zum Einfügen eines Zeichens
setzen Sie den Cursor zwischen die beiden Zeichen, und drücken Sie
, Par. 0-23
Display Line 1.1 Small
Display Line 2 Large
oder ▼ des LCP die Zeichen ändern. Mit den Pfeiltasten ▲ und ▼ den Cursor
▲
Display Line 1.1 Small
Display Line 2 Large
oder ▼ des LCP die Zeichen ändern. Mit den Pfeiltasten ▲ und ▼ den Cursor
▲
, Par. 0-21
oder Par. 0-24
, Par. 0-21
oder Par. 0-24
Display Line 1.2 Small
Display Line 1.2 Small
Display Line 3 Large
oder ▼.
▲
Display Line 3 Large
oder ▼.
▲
, Par. 0-22
Displaytext 2. Mit
, Par. 0-22
Displaytext 3. Mit
Display
Display
6
0-70 Set Date and Time
Range: Funktion:
0 N/A* [0 - 0 N/A] Legt das Datum und die Uhrzeit der internen Uhr fest. Das zu verwendende Format wird in
Par. 0-71
Date Format
und Par. 0-72
Time Format
festgelegt.
0-71 Date Format
Option: Funktion:
Bestimmt das Datumsformat im LCP.
[0] * YYYY-MM-DD
[1] * DD-MM-YYYY
[2] MM/DD/YYYY
0-72 Time Format
Option: Funktion:
Legt das Uhrzeitformat für das LCP fest.
[0] * 24 h
[1] 12 h
0-74 DST/Summertime
Option: Funktion:
Wählt die Handhabung der Sommerzeit. Geben Sie zur manuellen Sommerzeiteingabe das Startdatum und das Enddatum in Par. 0-76
End
ein.
DST/Summertime Start
und Par. 0-77
DST/Summertime
[0] * Off
[2] Manual
0-76 DST/Summertime Start
Range: Funktion:
0 N/A* [0 - 0 N/A] Legt Datum und Uhrzeit des Sommerzeitstarts fest. Das Datum wird im Format aus Par. 0-71
Format
programmiert.
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Date
81
Page 82

6 Programmieren des Frequenzumrichters ADAP-KOOL® Drive AKD 102 High Power
0-77 DST/Summertime End
Range: Funktion:
0 N/A* [0 - 0 N/A] Legt Datum und Uhrzeit des Sommerzeitendes fest. Das Datum wird im Format aus Par. 0-71
Format
programmiert.
1-00 Regelverfahren
Option: Funktion:
[0] * Drehzahlsteuerung Motordrehzahl wird durch Anwenden eines Drehzahlsollwerts oder Einstellung der gewünschten
Drehzahl im Hand-Betrieb bestimmt.
Drehzahlsteuerung wird ebenfalls verwendet, wenn der Frequenzumrichter Teil eines Prozessregelsystems mit Rückführung basierend auf einem externen PID-Regler ist, der ein Drehzahlsollwertsignal als Ausgang liefert.
[3] PID-Regler Motordrehzahl wird durch einen Sollwert vom integrierten PID-Regler bestimmt, der die Motordreh-
zahl als Teil eines Prozessregelsystems mit Rückführung (z. B. konstanter Druck oder konstanter
Durchfluss) ändert. Der PID-Regler muss in Par. 20-**, FU PID-Regler oder über die Funktionssätze,
auf die durch Drücken der [Quick Menus]-Taste zugegriffen wird, konfiguriert werden.
Date
6
Dieser Parameter kann nicht bei laufendem Motor geändert werden.
ACHTUNG!
Bei der Einstellung „PID-Regler“ wird über die Befehle „Reversierung“ und „Start und Reversierung“ keine Änderung der Motor-Drehrichtung erreicht.
1-90 Motor Thermal Protection
Option: Funktion:
Der Frequenzumrichter kann den Motor auf zwei Arten thermisch schützen:
• Über einen Thermistorsensor, der an einen Analog- oder Digitaleingang angeschlossen ist
(Par. 1-93
• Durch Berechnung ((ETR = Elektronisches Thermorelais) ) des thermischen Verhaltens,
basierend auf der Motorbelastung und der Zeit. Die berechnete thermische Belastung wird
mit dem Motornennstrom I
rechnungen wird die bei niedrigeren Drehzahlen herabgesetzte Kühlung eines im Motor
eingebauten Lüfters berücksichtigt.
[0] * No protection Wenn der Motor permanent überlastet ist und keine Warnung oder keine Abschaltung des Fre-
quenzumrichters erfolgen soll.
[1] Thermistor warning Wenn eine Warnung auszugeben ist, falls der angeschlossene Thermistor im Motor auslöst.
[2] Thermistor trip Schaltet den Frequenzumrichter ab, wenn der im Motor angeschlossene Thermistor auslöst.
Thermistor Source
).
und der Motornennfrequenz f
M,N
verglichen. Bei den Be-
M,N
[3] ETR warning 1
[4] * ETR trip 1
[5] ETR warning 2
[6] ETR trip 2
[7] ETR warning 3
[8] ETR trip 3
[9] ETR warning 4
[10] ETR trip 4
Die Funktionen ETR (elektronisch-thermisches Relais) 1-4 berechnen die Last, wenn der Satz, in dem sie ausgewählt wurden aktiv ist. ETR-3 beginnt z.
B. die Berechnung, wenn Satz 3 gewählt wird. Für den nordamerikanischen Markt: Die ETR-Funktionen beinhalten Motor-Überlastschutz der Klasse 20
gemäß NEC.
82
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 83

ADAP-KOOL® Drive AKD 102 High Power 6 Programmieren des Frequenzumrichters
ACHTUNG!
Danfoss empfiehlt die Verwendung von 24 VDC als Thermistor-Versorgungsspannung.
1-93 Thermistor Source
Option: Funktion:
Definiert die Anschlussstelle des Motorthermistors (PTC-Sensor). Die Auswahl einer Analogeingangsoption [1] oder [2] ist nicht möglich, wenn der Analogeingang bereits als Sollwertquelle verwendet
wird (Auswahl in Par. 3-15
rence 3 Source
Bei Verwendung von MCB112 muss immer [0]
[0] * None
[1] Analog input 53
[2] Analog input 54
[3] Digital input 18
[4] Digital input 19
[5] Digital input 32
[6] Digital input 33
ACHTUNG!
Dieser Parameter kann nicht bei laufendem Motor geändert werden.
6
Reference 1 Source
).
, Par. 3-16
Ohne
ausgewählt sein.
Reference 2 Source
oder Par. 3-17
Refe-
ACHTUNG!
Digitaleingang muss in Parameter 5-00 auf [0]
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
PNP - Aktiv bei 24 V
eingestellt werden.
83
Page 84

6
6 Programmieren des Frequenzumrichters ADAP-KOOL® Drive AKD 102 High Power
3-10 Preset Reference
Array [8]
Range: Funktion:
0.00 %* [-100.00 - 100.00 %] Mit diesem Parameter können mittels Array-Programmierung acht (0 - 7) verschiedene Festsollwerte
programmiert werden. Der Festsollwert wird als Prozentsatz des max. Sollwerts Ref
(Par. 3-03
Um die Festsollwerte über Digitaleingänge anzuwählen, müssen Sie an den entsprechenden Digitaleingängen in Parametergruppe 5-1* Digitaleingänge Festsollwert Bit 0, 1 oder 2 ([16], [17] oder
[18]) wählen.
Maximum Reference
, mit Rückführung siehe Par. 20-14
Maximum Reference/Feedb.
angegeben
MAX
).
3-13 Reference Site
Option: Funktion:
Bestimmt, welcher resultierende Sollwert aktiv ist.
[0] * Linked to Hand / Auto Im Handbetrieb den Ortsollwert und im Autobetrieb den Fernsollwert verwenden.
[1] Remote Sowohl im Hand- als auch im Autobetrieb den Fernsollwert verwenden.
[2] Local Sowohl im Hand- als auch im Autobetrieb den Ortsollwert verwenden.
ACHTUNG!
Bei Einstellung auf Ort [2] läuft der Frequenzumrichter nach einem Netz-Aus
wieder mit dieser Einstellung an.
3-15 Reference 1 Source
Option: Funktion:
Bis zu drei variable Sollwertsignale können addiert werden, um den eigentlichen Sollwert zu bilden.
Par. 3-15
diese Sollwertsignale fest. Dieser Parameter bestimmt, welcher Sollwerteingang als Quelle des ersten Sollwertsignals zu behandeln ist. Die Summe dieser Sollwertsignale bildet den resultierenden
Sollwert.
Dieser Parameter kann nicht bei laufendem Motor geändert werden.
[0] No function
[1] * Analog input 53
[2] Analog input 54
[7] Pulse input 29
[8] Pulse input 33
[20] Digital pot.meter
[21] Analog input X30/11
[22] Analog input X30/12
Reference 1 Source
, Par. 3-16
Reference 2 Source
und Par. 3-17
Reference 3 Source
legen
84
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 85

ADAP-KOOL® Drive AKD 102 High Power 6 Programmieren des Frequenzumrichters
[23] Analog Input X42/1
[24] Analog Input X42/3
[25] Analog Input X42/5
[30] Ext. Closed Loop 1
[31] Ext. Closed Loop 2
[32] Ext. Closed Loop 3
6-10 Terminal 53 Low Voltage
Range: Funktion:
0.07 V* [0.00 - par. 6-11 V] Eingabe der Min.-Spannung. Der Wert des Analogeingangs muss dem in Par. 6-14
Ref./Feedb. Value
eingestellten Min.-Sollwert/Istwert entsprechen.
Terminal 53 Low
6-11 Terminal 53 High Voltage
Range: Funktion:
10.00 V* [par. 6-10 - 10.00 V] Parameter zum Skalieren der Max.-Spannung. Dieser Analogeingang-Skalierungswert sollte dem
Max.-Sollwert/Istwert aus Par. 6-15
Terminal 53 High Ref./Feedb. Value
entsprechen.
6
6-14 Terminal 53 Low Ref./Feedb. Value
Range: Funktion:
0.000 N/A* [-999999.999 - 999999.999 N/A] Festlegung des minimalen Soll-/Istwertes als Bezug für den Min.-Wert des Analogeingangs 53
(Par. 6-10
Terminal 53 Low Voltage
und Par. 6-12
Terminal 53 Low Current
).
6-15 Terminal 53 High Ref./Feedb. Value
Range: Funktion:
100.000 N/A* [-999999.999 - 999999.999 N/A] Festlegung des maximalen Soll-/Istwertes als Bezug für den Max.-Wert des Analogeingangs 53
(Par. 6-11
Terminal 53 High Voltage
und Par. 6-13
Terminal 53 High Current
).
6-20 Terminal 54 Low Voltage
Range: Funktion:
0.07 V* [0.00 - par. 6-21 V] Eingabe der Min.-Spannung. Der Wert des Analogeingangs muss dem in Par. 6-24
Ref./Feedb. Value
eingestellten Min.-Sollwert/Istwert entsprechen.
Terminal 54 Low
6-21 Terminal 54 High Voltage
Range: Funktion:
10.00 V* [par. 6-20 - 10.00 V] Parameter zum Skalieren der Max.-Spannung. Dieser Analogeingang-Skalierungswert sollte dem
Max.-Sollwert/Istwert aus Par. 6-25
Terminal 54 High Ref./Feedb. Value
entsprechen.
6-22 Terminal 54 Low Current
Range: Funktion:
4.00 mA* [0.00 - par. 6-23 mA] Parameter zum Skalieren des Min. Stroms. Der angegebene Wert bezieht sich auf die Festlegung in
Par. 6-24
Signalausfall Funktion in Par. 6-01
gültig, wenn der Schalter S202 auf der Steuerkarte auf Strom „I“ steht.
Terminal 54 Low Ref./Feedb. Value
Live Zero Timeout Function
. Der Wert muss >2 mA eingestellt werden, um die
zu aktivieren. Dieser Wert ist nur
6-23 Terminal 54 High Current
Range: Funktion:
20.00 mA* [par. 6-22 - 20.00 mA] Parameter zum Skalieren des Max.-Stroms entsprechend dem Max.-Sollwert/Istwert aus
Par. 6-25
Terminal 54 High Ref./Feedb. Value
.
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
85
Page 86

6
6 Programmieren des Frequenzumrichters ADAP-KOOL® Drive AKD 102 High Power
6-24 Terminal 54 Low Ref./Feedb. Value
Range: Funktion:
-1.000 N/A* [-999999.999 - 999999.999 N/A] Festlegung des minimalen Soll-/Istwertes als Bezug für den Min.-Wert des Analogeingangs 54
(Par. 6-20
6-25 Terminal 54 High Ref./Feedb. Value
Range: Funktion:
Application
Dependent*
[-999999.999 - 999999.999 N/A] Festlegung des maximalen Soll-/Istwertes als Bezug für den Max.-Wert des Analogeingangs 53
(Par. 6-21
6-50 Terminal 42 Output
Option: Funktion:
Dieser Parameter definiert die Funktion von Klemme 42 als analogen Stromausgang. Ein Motorstrom
von 20 mA entspricht I
[0] * No operation
[100] * Output frequency : 0 - 100 Hz, (0-20 mA)
[101] Reference : Minimaler Sollwert - Max. Sollwert, (0-20 mA)
[102] Feedback : -200 % to +200 % in Par. , (0-20 mA)
Terminal 54 Low Voltage
Terminal 54 High Voltage
.
max
bzw. Par. 6-22
und Par. 6-23
Terminal 54 Low Current
Terminal 54 High Current
).
).
[103] Motor current : 0 - Max.-WR- Strom (Par. 16-37
[104] Torque rel to limit : 0 - Drehmomentgrenze (Par. 4-16
[105] Torq relate to rated : 0 - Motornennmoment, (0-20 mA)
[106] Power : 0 - Motornennleistung, (0-20 mA)
[107] * Speed : 0 - Max. Drehzahl (Par. 4-13
[Hz]
), (0-20 mA)
[108] Torque
[109] Max Out Freq
[113] Ext. Closed Loop 1 : 0 - 100%, (0-20 mA)
[114] Ext. Closed Loop 2 : 0 - 100%, (0-20 mA)
[115] Ext. Closed Loop 3 : 0 - 100%, (0-20 mA)
[130] Output freq. 4-20mA : 0 - 100 Hz
[131] Reference 4-20mA : Minimaler Sollwert - Max. Sollwert
[132] Feedback 4-20mA : -200% bis +200% von Par. 20-14
[133] Motor cur. 4-20mA : 0 - Max.-WR- Strom (Par. 16-37
[134] Torq.% lim 4-20 mA : 0 - Moment.grenze (Par. 4-16
[135] Torq.% nom 4-20mA : 0 - Motornenndrehmoment
Motor Speed High Limit [RPM]
Torque Limit Motor Mode
Inv. Max. Current
Torque Limit Motor Mode
Maximum Reference/Feedb.
Inv. Max. Current
), (0-20 mA)
)
)
), (0-20 mA)
und Par. 4-14
Motor Speed High Limit
[136] Power 4-20mA : 0 - Motornennleistung
[137] Speed 4-20mA : 0 - Max. Drehzahl (4-13 und 4-14)
[138] Torque 4-20mA
[139] Bus ctrl. : 0 - 100%, (0-20 mA)
[140] Bus ctrl. 4-20 mA : 0 - 100%
[141] Bus ctrl t.o. : 0 - 100%, (0-20 mA)
[142] Bus ctrl t.o. 4-20mA : 0 - 100%
86
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 87

ADAP-KOOL® Drive AKD 102 High Power 6 Programmieren des Frequenzumrichters
[143] Ext. CL 1 4-20mA : 0 - 100%
[144] Ext. CL 2 4-20mA : 0 - 100%
[145] Ext. CL 3 4-20mA : 0 - 100%
[150] Max Out Fr 4-20 mA
ACHTUNG!
Der minimale Sollwert wird bei Regelung ohne Rückführung in Par. 3-02
Reference/Feedb.
führung in Par. 20-14
eingestellt. Der max. Sollwert wird bei Regelung ohne Rückführung in Par. 3-03
Maximum Reference/Feedb.
eingestellt.
Minimum Reference
6-51 Terminal 42 Output Min Scale
Range: Funktion:
0.00 %* [0.00 - 200.00 %] Dient zum Skalieren des Min.-Analogsignals (0 oder 4 mA) an Klemme 42.
Der Wert kann in Prozent des Gesamtbereichs der in Par. 6-50
Variable festgelegt werden.
und bei Regelung mit Rückführung in Par. 20-13
Maximum Reference
und bei Regelung mit Rück-
Terminal 42 Output
eingestellten
Minimum
6-52 Terminal 42 Output Max Scale
Range: Funktion:
100.00 %* [0.00 - 200.00 %] Dieser Parameter skaliert das Max.-Signal (20 mA) an Ausgangsklemme 42.
Der Wert kann in Prozent des Gesamtbereichs der in Par. 6-50
Variable festgelegt werden.
Es kann ein Skalierungswert unter 20 mA erzielt werden, indem die Werte anhand der folgenden
Formel auf >100 % programmiert werden.
20 mA/
i.e
. 10mA:
Skal. Max. Strom
20
mA
10
mA
× 100 %
× 100 % = 200 %
Terminal 42 Output
6
eingestellten
BEISPIEL 1:
Variabler Wert = AUSGANGSFREQUENZ, Bereich = 0-100 Hz
Erforderlicher Ausgangsbereich = 0-50 Hz
Bei 0 Hz (0 % des Bereichs) ist ein Ausgangssignal von 0 oder 4 mA erforderlich - Par. 6-51
Bei 50 Hz (50 % des Bereichs) ist ein Ausgangssignal von 20 mA erforderlich - Par. 6-52
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Terminal 42 Output Max Scale
Terminal 42 Output Min Scale
auf 50 % setzen
auf 0 % setzen
87
Page 88

6
6 Programmieren des Frequenzumrichters ADAP-KOOL® Drive AKD 102 High Power
BEISPIEL 2:
Variable = ISTWERT, Bereich = -200 % bis +200 %
Erforderlicher Ausgangsbereich = 0-100 %
Bei 0 % (50 % des Bereichs) ist ein Ausgangssignal von 0 oder 4 mA erforderlich - Par. 6-51
Bei 100 % (75 % des Bereichs) ist ein Ausgangssignal von 20 mA erforderlich - Par. 6-52
Terminal 42 Output Min Scale
Terminal 42 Output Max Scale
auf 50 % setzen
auf 75 % setzen
BEISPIEL 3:
Variabler Wert = SOLLWERT, Bereich = Min. Sollwert - Max. Sollwert
Erforderlicher Ausgangsbereich = Min. Sollwert (0 %) - Max. Sollwert (100 %), 0-10 mA
Bei Min. Sollwert ist ein Ausgangssignal von 0 oder 4 mA erforderlich - Par. 6-51
Bei Max. Sollwert (100 % des Bereichs) ist ein Ausgangssignal von 10 mA erforderlich - Par. 6-52
(20 mA / 10 mA x 100 % = 200 %).
Terminal 42 Output Min Scale
auf 0 % setzen
Terminal 42 Output Max Scale
auf 200 % setzen
88
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 89

ADAP-KOOL® Drive AKD 102 High Power 6 Programmieren des Frequenzumrichters
14-01 Switching Frequency
Option: Funktion:
Bestimmt die Taktfrequenz des Wechselrichters. Eine Änderung der Taktfrequenz kann Störgeräusche vom Motor verringern.
ACHTUNG!
Die Ausgangsfrequenz des Frequenzumrichters kann niemals einen Wert höher
Swit-
.
6
[0] 1.0 kHz
[1] 1.5 kHz
[2] 2.0 kHz
[3] 2.5 kHz
[4] 3.0 kHz
[5] 3.5 kHz
[6] 4.0 kHz
[7] * 5.0 kHz
[8] 6.0 kHz
[9] 7.0 kHz
[10] 8.0 kHz
[11] 10.0 kHz
[12] 12.0 kHz
[13] 14.0 kHz
[14] 16.0 kHz
als 1/10 der Taktfrequenz annehmen. Die Taktfrequenz kann in Par. 14-01
ching Frequency
Par. 14-00
bei laufendem Motor angepasst werden. Siehe auch
Switching Pattern
und den Abschnitt
Leistungsreduzierung
20-00 Feedback 1 Source
Option: Funktion:
Bis zu drei verschiedene Istwertsignale können das Istwertsignal für den PID-Regler des Frequenzumrichters bilden.
Dieser Parameter bestimmt, welcher Eingang als Quelle des ersten Istwertsignals betrachtet wird.
Analogeingang X30/11 und Analogeingang X30/12 bezieht sich auf Eingänge auf der Universal-E/
A-Option.
[0] No function
[1] Analog input 53
[2] * Analog input 54
[3] Pulse input 29
[4] Pulse input 33
[7] Analog input X30/11
[8] Analog input X30/12
[9] Analog Input X42/1
[10] Analog Input X42/3
[11] Analog Input X42/5
[100] Bus feedback 1
[101] Bus feedback 2
[102] Bus feedback 3
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
89
Page 90
6
6 Programmieren des Frequenzumrichters ADAP-KOOL® Drive AKD 102 High Power
ACHTUNG!
Wenn die Rückführung nicht benutzt wird, ist die Quelle auf
Verwendungsweise der drei möglichen Istwerte durch den PID-Regler.
20-01 Istwertumwandl. 1
Mit diesem Parameter kann eine Umwandlungsfunktion auf Istwert 1 angewendet werden.
Option: Funktion:
[0] Linear
[1] Radiziert
[2] * Druck zu Temperatur
Linear
[0] hat keine Wirkung auf den Istwert.
Radiziert
[1] wird häufig verwendet, wenn ein Druckgeber einen Durchflussistwert liefert
(
(
Durchfluss ∝Druck
Druck zu Temperatur
über einen Druckgeber zu liefern. Die Temperatur des Kältemittels wird anhand der folgenden Formel berechnet:
Temperatur =
stanten. Das Kältemittel muss in Parameter 20-30 gewählt sein. Über Parameter 20-31 bis 20-33
können Werte für A1, A2 und A3 für ein Kältemittel eingegeben werden, das in Par. 20-30 nicht
aufgelistet ist.
20-02 Istwert 1 Einheit
Dieser Parameter bestimmt die Einheit für diese Istwertquelle, bevor die Istwertumwandlung aus
PID-Regler verwendet diese Einheit nicht. Er wird nur zur Anzeige und Überwachung verwendet.
Option: Funktion:
[70] mbar
[71] * bar
[72] Pa
[73] kPa
[74] m wg
[170] psi
[171]
[172] inch wg
[173] Fuß wg
lb/in
2
Ohne Funktion
).
)
[2] wird in Kompressoranwendungen genutzt, um Temperaturrückführung
A
2
(
ln(Pe
+1)−A1
[0] zu setzen. Par. 20-20
A
3
Dabei sind A1, A2 und A3 kältemittelspezifische Kon-
−
)
Par. 20-01 Istwertumwandl. 1
Feedback Function
angewendet wird. Der
bestimmt die
ACHTUNG!
Der Parameter steht nur bei der Istwertumwandlung Druck zu Temperatur zur Verfügung.
20-12 Soll-/Istwerteinheit
Dieser Parameter bestimmt die Einheit für Sollwert und Istwert, anhand derer der PID-Regler die Ausgangsfrequenz des Frequenzumrichters regelt.
Option: Funktion:
[60] * °C
[160] °F
90
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 91

ADAP-KOOL® Drive AKD 102 High Power 6 Programmieren des Frequenzumrichters
20-21 Setpoint 1
Range: Funktion:
0 ProcessCtrlUnit*
[-999999.999 - 999999.999 ProcessCtrlUnit]
20-30 Kältemittel
Wahl des verwendeten Kältemittels in der Kompressoranwendung. Dieser Parameter muss korrekt angegeben werden, damit die Druck-Temperaturumwandlung genau ist. Wird das verwendete Kältemittel nicht in Optionen [0] bis [6] angezeigt, wählen Sie
A2 und A3 über Par. 20-31, 20-32 und 20-33 für die nachstehende Gleichung an:
A
Temperatur =
(
ln(Pe
2
+1)−A1
A
−
)
Option: Funktion:
[0] * R Benutzer
[1] R12
[2] R22
[3] R134a
[4] R502
[5] R717
[6] R13
[7] R13b1
[8] R23
[9] R500
[10] R503
[11] R114
[12] R142b
[14] R32
[15] R227
[16] R401A
[17] R507
[18] R402A
[19] R404A
[20] R407C
[21] R407A
[22] R407B
[23] R410A
[24] R170
[25] R290
[26] R600
[27] R600a
[28] R744
[29] R1270
[30] R417A
[31] Isceon 29
Bei Regelung mit Rückführung dient Sollwert 1 zur Eingabe eines Sollwertbezugs, der vom PIDRegler des Frequenzumrichters verwendet wird. Siehe Beschreibung von Par. 20-20
Function
.
ACHTUNG!
Der hier eingegebene Sollwertbezug wird zu allen anderen aktivierten Sollwerten
addiert (siehe Par.-Gruppe 3-1*).
Benutzerdefiniert
3
[7]. Geben Sie dann A1,
Feedback
6
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
91
Page 92

6
6 Programmieren des Frequenzumrichters ADAP-KOOL® Drive AKD 102 High Power
20-40 Thermostat-/Pressostatfunktion
Wählen Sie, ob die Thermostat/Pressostat-Funktion aktiv (Ein) oder inaktiv (Aus) ist.
Option: Funktion:
[0] * Aus
[1] Ein
20-41 Abschaltwert
Range: Funktion:
1 bar* [-3000 - Par. 20-42] Definiert den Abschaltwert, bei dem das Stoppsignal aktiviert wird und der Kompressor stoppt.
20-42 Einschaltwert
Range: Funktion:
3 bar* [Par. 20-41 - 3000] Wählt den Einschaltwert, bei dem das Stoppsignal deaktiviert wird und der Kompressor startet.
20-93 PID Proportional Gain
Range: Funktion:
0.50 N/A* [0.00 - 10.00 N/A]
Wenn (Fehler x Verstärkung) mit einem Wert gleich der Einstellung in Par. 20-14
Ausgangsdrehzahl gleich der Einstellung in Par. 4-13
natürlich durch diese Einstellung beschränkt.
Der Proportionalbereich (Fehler, durch den sich der Ausgang von 0-100 % ändert) kann über die folgende Formel berechnet werden:
Motor Speed High Limit [RPM]
Maximum Reference/Feedb.
/Par. 4-14
Motor Speed High Limit [Hz]
springt, versucht der PID-Regler die
zu ändern, ist jedoch praktisch
(
Proportional Verstärkung
ACHTUNG!
Stellen Sie immer erst den gewünschten Wert für Par. 20-14
festlegen.
1
(
×
Max. Sollwert
)
)
Maximum Reference/Feedb.
ein, bevor Sie die Werte des PID-Reglers in Par.-Gruppe 20-9*
20-94 PID Integral Time
Range: Funktion:
30.00 s* [0.01 - 10000.00 s] Mit der Zeit trägt der Integrator mehr und mehr zum Ausgang des PID-Reglers bei, sofern eine
Abweichung zwischen Sollwert- und Istwertsignalen besteht. Dieser Beitrag verhält sich proportional
zur Größe der Abweichung. Damit wird sichergestellt, dass die Abweichung gegen 0 geht.
Eine schnelle Reaktion auf eine Abweichung wird erzielt, indem die Integrationszeit auf einen niedrigen Wert gesetzt wird. Wird der Wert jedoch zu niedrig gewählt, wird die Regelung jedoch
möglicherweise instabil.
Bei dem eingestellten Wert handelt es sich um die Zeit, die der Integrator benötigt, um für eine
bestimmte Abweichung den gleichen Beitrag wie der proportionale Anteil zu leisten.
Wenn der Wert auf 10.000 eingestellt wird, wirkt der Regler als reiner Proportionalregler mit einem
P-Bereich basierend auf der Einstellung in Par. 20-93
vorliegt, ist der Ausgang vom Proportionalregler 0.
PID Proportional Gain
. Wenn keine Abweichung
22-40 Minimum Run Time
Range: Funktion:
10 s* [0 - 600 s] Festlegung der gewünschten minimalen Laufzeit für den Motor nach einem Startbefehl (Klemme
oder Bus) vor Aufruf des Energiesparmodus.
22-41 Minimum Sleep Time
Range: Funktion:
10 s* [0 - 600 s] Festlegung der gewünschten minimalen Zeitdauer für den Energiesparmodus. Dies umgeht alle
Energiestartbedingungen.
92
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 93

ADAP-KOOL® Drive AKD 102 High Power 6 Programmieren des Frequenzumrichters
22-42 Wake-up Speed [RPM]
Range: Funktion:
0 RPM* [par. 4-11 - par. 4-13 RPM] Nur wählbar, wenn Par. 0-02
Par. 1-00
Configuration Mode
muss über einen externen Regler angelegt werden
Festlegung der Solldrehzahl, bei der der Energiesparmodus aufgehoben werden soll.
22-43 Wake-up Speed [Hz]
Range: Funktion:
0 Hz* [par. 4-12 - par. 4-14 Hz] Nur wählbar, wenn Par. 0-02
Par. 1-00
Configuration Mode
muss über einen externen Regler angelegt werden, der den Druck regelt
Festlegung der Solldrehzahl, bei der der Energiesparmodus aufgehoben werden soll.
22-44 Wake-up Ref./FB Difference
Range: Funktion:
10 %* [0 - 100 %] Par. 1-00
rierte PI-Regler muss zur Regelung des Drucks verwendet werden.
Festlegung des zulässigen Druckabfalls in Prozent des Sollwerts für den Druck (Pset) vor Aufhebung
des Energiesparmodus.
Configuration Mode
Motor Speed Unit
muss auf Drehzahlsteuerung eingestellt sein und der Drehzahlsollwert
Motor Speed Unit
muss auf Drehzahlsteuerung eingestellt sein und der Drehzahlsollwert
muss auf Regelung mit Rückführung eingestellt sein und der integ-
auf UPM eingestellt wurde (bei Hz nicht möglich).
auf Hz eingestellt wurde (bei UPM nicht möglich).
6
ACHTUNG!
Wird dieser Parameter in Anwendungen verwendet, in denen der integrierte PI-Regler für inverse Regelung (z. B. Kühlturmanwendungen) in Par. 20-71
automatisch addiert.
PID Performance
programmiert ist, wird der in Par. 22-44
Wake-up Ref./FB Difference
festgelegte Wert
22-75 Kurzzyklus-Schutz
Option: Funktion:
[0] Deaktiviert Der in
[1] Aktiviert Der in
Intervall zwischen Starts
Intervall zwischen Starts
, Par. 22-76, eingestellte Zeitgeber wird deaktiviert.
, Par. 22-76, eingestellte Zeitgeber wird aktiviert.
22-76 Intervall zwischen Starts
Range: Funktion:
300 s* [0 - 3600 s] Legt die gewünschte Minimumzeit zwischen zwei Starts fest. Jeder normale Stoppbefehl (Start/
Festdrehzahl JOG/Speichern) wird ignoriert, bis der Zeitgeber abgelaufen ist.
22-77 Minimum Run Time
Range: Funktion:
0 s* [0 - par. 22-76 s] Legt die als min. Laufzeit gewünschte Zeit nach einem normalen Startbefehl (Start/Festdrehzahl
JOG/Speichern) fest. Jeder normale Stoppbefehl wird ignoriert, bis die eingestellte Zeit abgelaufen
ist. Der Zeitgeber beginnt die Zählung bei einem normalen Startbefehl (Start/Festdrehzahl JOG/
Speichern).
Der Zeitgeber wird durch einen Motorfreilauf (inv.) oder externen Verriegelungsbefehl aufgehoben.
ACHTUNG!
Funktioniert nicht im Verbundreglerbetrieb.
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
93
Page 94
6 Programmieren des Frequenzumrichters ADAP-KOOL® Drive AKD 102 High Power
25-00 Verbundregler
Option: Funktion:
Zum Betrieb von Anlagen mit mehreren Geräten (Kompressoren), in denen die Kapazität über Drehzahlregelung kombiniert mit On/Off-Regelung der Geräte an die aktuelle Last angepasst wird. Zur
Vereinfachung werden nur Kompressorsysteme beschrieben.
[0] * Deaktiviert Der Verbundregler ist nicht aktiv. Alle integrierten Relais, die in der Verbundfunktion Kompressor-
motoren zugeordnet sind, sind abgeschaltet. Ist ein Kompressor mit variabler Drehzahl direkt an
den Frequenzumrichter angeschlossen (nicht durch integriertes Relais gesteuert), wird dieser Kompressor als Einzelkompressorsystem gesteuert.
[1] Aktiviert Der Verbundregler ist aktiv und schaltet Kompressoren abhängig von der Last im System zu und
ab.
ACHTUNG!
Dieser Parameter kann nur auf
Aktiviert
[1] stehen, wenn Parameter 28-00
Kurzzyklus-Schutz
auf
Deaktiviert
[0] steht.
6
25-06 Kompressorzahl
Option: Funktion:
Die Zahl von Kompressoren, die an den Verbundregler angeschlossen sind, enthält auch den Kompressor mit variabler Drehzahl. Ist der variable Drehzahlkompressor direkt am Frequenzumrichter
angeschlossen und werden die anderen konstanten Drehzahlkompressoren (Nachlaufkompressoren) über die zwei integrierten Relais gesteuert, können drei Kompressoren gesteuert werden.
Werden sowohl variable Drehzahlkompressoren als auch konstante Drehzahlkompressoren durch
integrierte Relais gesteuert, können nur zwei Kompressoren angeschlossen werden.
[0] * 2 Kompressoren Wenn
[1] 3 Kompressoren
Fester Führungskompressor
kompressor und ein konstanter Drehzahlkompressor gesteuert über integriertes Relais. Wenn
Führungskompressor
ein konstanter Drehzahlkompressor gesteuert über integriertes Relais.
3 Kompressoren
Zwei konstante Drehzahlkompressoren gesteuert über integrierte Relais.
, Par. 25-05, auf
[1]: Ein Führungskompressor, siehe dazu
, Par. 25-05, auf
Ja
[1] eingestellt ist: ein variabler Drehzahlkompressor und
Nein
[0] eingestellt ist: ein variabler Drehzahl-
Fester Führungskompressor
, Par. 25-05.
Fester
25-20 25-20 Neutralzone [Einheit]
Range: Funktion:
4,00* [0-9999,99] Stellen Sie die Neutralzone unter Berücksichtigung der Druckschwankungen im System ein. In Ver-
bundreglersystemen wird der gewünschte Systemdruck zur Vermeidung häufiger Schaltvorgänge
der Kompressoren mit konstanter Drehzahl in der Regel eher innerhalb einer Zone statt auf einem
festen Niveau gehalten.
Die NZ wird in der in Par. 20-12
Zone oberhalb und unterhalb des System-Sollwerts, in der kein Zu- und Abschalten erfolgt. Bei
einem Sollwert von -20 ˚C und Einstellung der NZ auf 4 ˚C wird z. B. ein Saugdruck gleich einer
Temperatur zwischen - 24 ˚C und -16 ˚C toleriert. Innerhalb dieser Zone erfolgt keine Zu- oder
Abschaltung.
Soll-/Istwerteinheit
gewählten Einheit programmiert. Sie setzt eine
94
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 95

ADAP-KOOL® Drive AKD 102 High Power 6 Programmieren des Frequenzumrichters
25-21 +Zone [Einheit]
Range: Funktion:
3,00* [0-9999,99] Bei einer umfassenden und schnellen Änderung der Systemanforderungen ändert sich der System-
druck rasch, und zur Bewältigung der geänderten Anforderungen ist eine schnellere Zu- oder
Abschaltung eines Kompressors mit konstanter Drehzahl erforderlich. Die +Zone definiert den Bereich, in dem die +Zonenverzögerung aktiv ist.
Liegt die +Zone zu nah an Null, kann dies durch häufiges Zu- oder Abschalten bei kurzzeitigen
Druckänderungen seinen Zweck verlieren. Wird die +Zone auf einen zu hohen Wert eingestellt, kann
ein unzulässig hoher oder niedriger Druck im System die Folge sein, während der +Zonen-Verzögerungszeitgeber (Par. 25-24) läuft. Der Wert der +Zone kann mit zunehmender Vertrautheit mit
dem System weiter optimiert werden. Siehe ++Zonenverzögerung, Par. 25-26.
Zur Vermeidung einer unbeabsichtigten Zu- und Abschaltung während der Initialisierungsphase und
der Feineinstellung des Reglers sollte die +Zone zunächst auf einen großen Wert oberhalb der erwarteten Druckspitze eingestellt werden. Dies deaktiviert die Übersteuerungsfunktion bei Druckspitzen. Nach Abschluss der Feineinstellung sollte die +Zone auf den gewünschten Wert eingestellt
werden. Es wird ein Anfangswert von 3 ˚C empfohlen.
25-22 -Zone [Einheit]
Range: Funktion:
3,00* [0-9999,99] Bei einer umfassenden und schnellen Änderung der Systemanforderungen ändert sich der System-
druck rasch, und zur Bewältigung der geänderten Anforderungen ist eine schnellere Zu- oder
Abschaltung eines Kompressors mit konstanter Drehzahl erforderlich. Die -Zone definiert den Bereich, in dem die -Zonenverzögerung aktiv ist.
Liegt die -Zone zu nah an Null, kann dies durch häufiges Zu- oder Abschalten bei kurzzeitigen
Druckänderungen seinen Zweck verlieren. Wird die -Zone auf einen zu hohen Wert eingestellt, kann
ein unzulässig hoher oder niedriger Druck im System die Folge sein, während der -Zonen-Verzögerungszeitgeber (Par. 25-25) läuft. Der Wert der -Zone kann mit zunehmender Vertrautheit mit dem
System weiter optimiert werden. Siehe --Zonenverzögerung, Par. 25-27.
Zur Vermeidung einer unbeabsichtigten Zu- und Abschaltung während der Initialisierungsphase und
der Feineinstellung des Reglers sollte die -Zone zunächst auf einen großen Wert unterhalb des erwarteten Druckabfalls eingestellt werden. Dies deaktiviert die Übersteuerungsfunktion für Druckabfälle. Nach Abschluss der Feineinstellung sollte die -Zone auf den gewünschten Wert eingestellt
werden. Es wird ein Anfangswert von 3 ˚C empfohlen.
6
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
95
Page 96

6
6 Programmieren des Frequenzumrichters ADAP-KOOL® Drive AKD 102 High Power
6.1.4 Hauptmenümodus
Wählen Sie den Hauptmenümodus durch Drücken der Taste [Main Menu].
Das in Abbildung 6.2 dargestellte Auswahlmenü erscheint im Display des
LCP 102.
Zeilen 2 bis 5 auf dem Display zeigen eine Liste mit Parametergruppen,
die mithilfe der Auf-Ab-Pfeiltasten wählbar sind.
Abbildung 6.9: Displaybeispiel
Jeder Parameter hat eine Bezeichnung und eine Nummer, die unabhängig vom Programmiermodus stets dieselben sind. Im Hauptmenü sind die Parameter
nach Gruppen aufgeteilt. Die 1. Stelle der Parameternummer (von links) gibt die Gruppennummer des betreffenden Parameters an.
Im Hauptmenü können alle Parameter geändert werden. Je nach Konfiguration (Par. 1-00) des Geräts werden Parameter teilweise ausgeblendet. Zum
Beispiel blendet die Auswahl PID-Regler alle Parameter aus, die die Konfiguration der Rückführung betreffen. Sind Optionskarten installiert und aktiviert,
sind entsprechende Gruppen zusätzlich verfügbar.
130BP066.10
6.1.5 Parameterauswahl
Im Hauptmenü sind die Parameter nach Gruppen aufgeteilt. Sie können
eine Parametergruppe mithilfe der Navigationstasten wählen und mit
[OK] aktivieren.
Folgende Parametergruppen sind je nach Systemeinstellung und installierten Optionen verfügbar:
Nach Auswahl einer Parametergruppe (und gegebenenfalls einer Untergruppe), können Sie einen Parameter mithilfe der Navigationstasten wählen.
Der Arbeitsbereich beim grafischen LCP zeigt Parameternummer und namen sowie den Parameterwert.
Gruppennr. Parametergruppe:
0 Betrieb/Display
1Motor/Last
2 Bremsfunktionen
3 Sollwert/Rampen
4 Grenzen/Warnungen
5 Digitalein-/-ausgänge
6 Analogein-/-ausgänge
8 Opt./Schnittstellen
11 AKD Lon*
13 Smart Logic
14 Sonderfunktionen
15 Info/Wartung
16 Info/Anzeigen
18 Info/Anzeigen
20 Interner Regler
21 Erw. PID-Regler
22 Anwendungsfunktionen
23 Zeitfunktionen
25 Verbundregler
26 Analog-E/A-Option MCB 109**
28 Kompressorfunktionen
* Nur bei installierter Option MCA 107 AKLon
**Nur bei installierter Option MCB 109
Tabelle 6.3: Parametergruppen
130BP067.10
Abbildung 6.10: Displaybeispiel
96
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
Page 97

ADAP-KOOL® Drive AKD 102 High Power 6 Programmieren des Frequenzumrichters
6.1.6 Daten ändern
1. Drücken Sie [Quick Menu] oder [Main Menu].
2.
Suchen Sie mit den Tasten [
3. Drücken Sie die [OK]-Taste.
4.
Wählen Sie mit den Tasten [
5. Drücken Sie die [OK]-Taste.
6.
Nehmen Sie mit den Tasten [
numerischen Parameters wechseln. Mit dem Cursor wird die zu ändernde Ziffer anzeigt. Mit [
7. Mit [Cancel] kann die Änderung verhindert werden, mit [OK] wird die Änderung angenommen und die neue Einstellung eingelesen.
] und [▼] die zu bearbeitende Parametergruppe.
▲
] und [▼] den zu bearbeitenden Parameter aus.
▲
] und [▼] die korrekte Parametereinstellung vor. Mit den Pfeiltasten können Sie zwischen den Ziffern eines
▲
] wird der Wert erhöht, mit [▼] verringert.
▲
6
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
97
Page 98

6
6 Programmieren des Frequenzumrichters ADAP-KOOL® Drive AKD 102 High Power
6.1.7 Einen Textwert ändern
Handelt es sich bei dem gewählten Parameter um einen Textwert, so ist
dieser Textwert über die Auf-/Ab-Navigationstasten änderbar.
Mit der Auf-Taste erhöhen Sie den Wert, mit der Ab-Taste verringern Sie
den Wert. Positionieren Sie den Cursor auf dem zu speichernden Wert,
und drücken Sie [OK].
Abbildung 6.11: Displaybeispiel
6.1.8 Eine Gruppe von numerischen Datenwerten ändern
Ist der gewählte Parameter ein numerischer Datenwert, so ändern Sie
diesen mithilfe der [◄]/[►]-Navigationstasten sowie der [
tionstasten. Mit den ◄]/[►]-Navigationstasten bewegen Sie den Cursor
horizontal.
]/[▼]-Naviga-
▲
130BP068.10
130BP069.10
Abbildung 6.12: Displaybeispiel
Mit den [∧]-/[∨]-Navigationstasten wird der Datenwert geändert. Die Taste nach oben erhöht den Datenwert, die Taste nach unten reduziert ihn.
Positionieren Sie den Cursor auf dem zu speichernden Wert, und drücken
Sie [OK].
Abbildung 6.13: Displaybeispiel
6.1.9 Ändern von Datenwert, Schritt-für-Schritt
Bestimmte Parameter lassen sich sowohl schrittweise als auch stufenlos ändern. Dies gilt für Par. 1-20
Par. 1-23
Die Parameter werden sowohl als Gruppe numerischer Datenwerte und als numerische Datenwerte stufenlos geändert.
Motor Frequency
.
Motor Power [kW]
6.1.10 Anzeige und Programmierung von Parametern mit Arrays
, Par. 1-22
130BP070.10
Motor Voltage
und
Parameter mit Arrays erhalten zur Identifizierung einen Index (fortlaufende Nummer).
Par. 15-30
Parameter auswählen, [OK] drücken und mithilfe der Auf/Ab-Navigationstasten durchblättern.
Weiteres Beispiel: anhand von Par. 3-10
Par. 3-10 auswählen, [OK] drücken, und mithilfe der [∧]-/[∨]-Navigationstasten durch die indizierten Werte blättern. Um den Parameterwert zu ändern,
wählen Sie den indizierten Wert, und drücken Sie [OK]. Ändern Sie den Wert mithilfe der [∧]-/[∨]-Tasten. Drücken Sie [OK], um die neue Einstellung zu
übernehmen, Abbruch mit [Cancel] oder [Back], um in die nächsthöhere Menüebene zurückzukehren.
Alarm Log: Error Code
98
bis Par. 15-32
Preset Reference
Alarm Log: Time
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
enthalten einen Fehlerspeicher, der ausgelesen werden kann. Dazu den gewünschten
:
Page 99

ADAP-KOOL® Drive AKD 102 High Power 6 Programmieren des Frequenzumrichters
6.2 Parameterliste
Alle Parameter für den ADAP-KOOL® Drive AKD102 sind zur einfachen Auffindung und Auswahl in verschiedenen Parametergruppen organisiert.
Ein überwiegender Teil von ADAP-KOOL-Anwendungen kann über die Quick Menu-Taste und Auswahl der Parameter unter Inbetriebnahme-Menü und
Funktionssätze programmiert werden.
Beschreibungen und Werkseinstellungen für Parameter sind im Abschnitt Parameterlisten weiter hinten in diesem Handbuch zu finden.
Parametergruppe 0-xx Betrieb und Display
Parametergruppe 1-xx Last und Motor
Parametergruppe 2-xx Bremsfunktionen
Parametergruppe 3-xx Sollwerte und Rampen
Parametergruppe 4-xx Grenzen/Warnungen
Parametergruppe 5-xx Digitalein-/-ausgänge
Parametergruppe 6-xx Analogein-/-ausgänge
Parametergruppe 8-xx Optionen und Schnittstellen
Parametergruppe 11-xx ADAP-KOOL Lon
Parametergruppe 13-xx Smart Logic Controller
Parametergruppe 14-xx Sonderfunktionen
Parametergruppe 15-xx Info/Wartung
Parametergruppe 16-xx Datenanzeigen
Parametergruppe 18-xx Info/Anzeigen
Parametergruppe 20-xx PID-Regler
Parametergruppe 21-xx Erw. PID-Regler
Parametergruppe 22-xx Anwendungsfunktionen
Parametergruppe 23-xx Zeitfunktionen
Parametergruppe 24-xx Anwendungsfunktionen 2
Parametergruppe 25-xx Verbundregler
Parametergruppe 26-xx Analog-E/A-Option MCB 109
28-xx Kompressorfunktionen
6
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
99
Page 100
6
6 Programmieren des Frequenzumrichters ADAP-KOOL® Drive AKD 102 High Power
6.2.1 0-** Betrieb/Display
Par.
Parameterbeschreibung Werkseinstellung 4-Setup (4-Par.
Nr.
0-0* Grundeinstellungen
0-01 Sprache [0] English 1 set-up TRUE - Uint8
0-02 Hz/UPM Umschaltung [1] Hz 2 set-ups FALSE - Uint8
0-03 Ländereinstellungen [0] International 2 set-ups FALSE - Uint8
0-04 Netz-Ein Modus (Hand) [0] Wiederanlauf All set-ups TRUE - Uint8
Ort-Betrieb Einheit [0] Hz/UPM Umschaltung 2 set-ups FALSE - Uint8
0-05
0-1* Parametersätze
0-10 Aktiver Satz [1] Satz 1 1 set-up TRUE - Uint8
0-11 Programm-Satz [9] Aktiver Satz All set-ups TRUE - Uint8
0-12 Satz verknüpfen mit [0] Nicht verknüpft All set-ups FALSE - Uint8
0-13 Anzeige: Verknüpfte Parametersätze 0 N/A All set-ups FALSE 0 Uint16
Anzeige: Prog. sätze/Kanal bearbeiten 0 N/A All set-ups TRUE 0 Int32
0-14
0-2* LCP-Display
0-20 Displayzeile 1.1 ExpressionLimit All set-ups TRUE - Uint16
0-21 Displayzeile 1.2 ExpressionLimit All set-ups TRUE - Uint16
0-22 Displayzeile 1.3 ExpressionLimit All set-ups TRUE - Uint16
0-23 Displayzeile 2 ExpressionLimit All set-ups TRUE - Uint16
0-24 Displayzeile 3 ExpressionLimit All set-ups TRUE - Uint16
0-25 Benutzer-Menü ExpressionLimit 1 set-up TRUE 0 Uint16
0-3* LCP-Benutzerdef
0-30 Einheit [1] % All set-ups TRUE - Uint8
0-31 Freie Anzeige Min.-Wert ExpressionLimit All set-ups TRUE -2 Int32
0-32 Freie Anzeige Max. Wert 100.00 CustomReadoutUnit All set-ups TRUE -2 Int32
0-37 Displaytext 1 0 N/A 1 set-up TRUE 0
0-38 Displaytext 2 0 N/A 1 set-up TRUE 0
Displaytext 3 0 N/A 1 set-up TRUE 0
0-39
0-4* LCP-Tasten
0-40 [Hand On]-LCP Taste [1] Aktiviert All set-ups TRUE - Uint8
0-41 [Off]-LCP Taste [1] Aktiviert All set-ups TRUE - Uint8
0-42 [Auto On]-LCP Taste [1] Aktiviert All set-ups TRUE - Uint8
0-43 [Reset]-LCP Taste [1] Aktiviert All set-ups TRUE - Uint8
0-44 [Off/Reset]-LCP Taste [1] Aktiviert All set-ups TRUE - Uint8
0-45 [Drive Bypass]-LCP Taste [1] Aktiviert All set-ups TRUE - Uint8
0-5* Kopie/Speichern
0-50 LCP-Kopie [0] Keine Kopie All set-ups FALSE - Uint8
0-51 Parametersatz-Kopie [0] Keine Kopie All set-ups FALSE - Uint8
0-6* Passwort
0-60 Hauptmenü Passwort 100 N/A 1 set-up TRUE 0 Uint16
0-61 Hauptmenü Zugriff ohne PW [0] Vollständig 1 set-up TRUE - Uint8
0-65 Benutzer-Menü Passwort 200 N/A 1 set-up TRUE 0 Uint16
0-66 Benutzer-Menü Zugriff ohne PW [0] Vollständig 1 set-up TRUE - Uint8
0-7* Uhreinstellungen
0-70 Datum und Uhrzeit ExpressionLimit All set-ups TRUE 0
0-71 Datumsformat null 1 set-up TRUE - Uint8
0-72 Uhrzeitformat null 1 set-up TRUE - Uint8
0-74 MESZ/Sommerzeit [0] Aus 1 set-up TRUE - Uint8
0-76 MESZ/Sommerzeitstart ExpressionLimit 1 set-up TRUE 0
0-77 MESZ/Sommerzeitende ExpressionLimit 1 set-up TRUE 0
0-79 Uhr Fehler [0] Deaktiviert 1 set-up TRUE - Uint8
0-81 Arbeitstage null 1 set-up TRUE - Uint8
0-82 Zusätzl. Arbeitstage ExpressionLimit 1 set-up TRUE 0
0-83 Zusätzl. Nichtarbeitstage ExpressionLimit 1 set-up TRUE 0
0-89 Anzeige Datum/Uhrzeit 0 N/A All set-ups TRUE 0
Sätze)
Ändern während des Be-
triebs
Konver
-tierungsindex
Typ
VisStr[2
5]
VisStr[2
5]
VisStr[2
5]
TimeOf-
Day
TimeOf-
Day
TimeOf-
Day
TimeOf-
Day
TimeOf-
Day
VisStr[2
5]
100
MG.11.O1.03 - ADAP-KOOL® ist ein eingetragenes Warenzeichen von Danfoss.
 Loading...
Loading...