

Cypress Semiconductor CY7C1410JV18, CY7C1414JV18, CY7C1412JV18, CY7C1425JV18 Specification Sheet
Page 1

36-Mbit QDR™-II SRAM 2-Word
Burst Architecture
CY7C1410JV18, CY7C1425JV18
CY7C1412JV18, CY7C1414JV18
Features
Configurations
■ Separate independent read and write data ports
❐ Supports concurrent transactions
■ 267 MHz clock for high bandwidth
■ 2-word burst on all accesses
■ Double Data Rate (DDR) interfaces on both read and write ports
(data transferred at 534 MHz) at 267 MHz
■ Two input clocks (K and K) for precise DDR timing
❐ SRAM uses rising edges only
■ Two input clocks for output data (C and C) to minimize clock
skew and flight time mismatches
■ Echo clocks (CQ and CQ) simplify data capture in high-speed
systems
■ Single multiplexed address input bus latches address inputs
for both read and write ports
■ Separate port selects for depth expansion
■ Synchronous internally self-timed writes
■ QDR™-II operates with 1.5 cycle read latency when Delay Lock
Loop (DLL) is enabled
■ Operates like a QDR-I device with 1 cycle read latency in DLL
off mode
■ Available in x8, x9, x18, and x36 configurations
■ Full data coherency, providing most current data
■ Core V
■ Available in 165-Ball FBGA package (15 x 17 x 1.4 mm)
■ Offered in both Pb-free and non Pb-free packages
■ Variable drive HSTL output buffers
■ JTAG 1149.1 compatible test access port
■ Delay Lock Loop (DLL) for accurate data placement
= 1.8V (±0.1V); IO V
DD
= 1.4V to V
DDQ
DD
CY7C1410JV18 – 4M x 8
CY7C1425JV18 – 4M x 9
CY7C1412JV18 – 2M x 18
CY7C1414JV18 – 1M x 36
Functional Description
The CY7C1410JV18, CY7C1425JV18, CY7C1412JV18, and
CY7C1414JV18 are 1.8V Synchronous Pipelined SRAMs,
equipped with QDR-II architecture. QDR-II architecture consists
of two separate ports: the read port and the write port to access
the memory array. The read port has data outputs to support read
operations and the write port has data inputs to support write
operations. QDR-II architecture has separate data inputs and
data outputs to completely eliminate the need to “turn-around”
the data bus required with common IO devices. Access to each
port is accomplished through a common address bus. The read
address is latched on the rising edge of the K clock and the write
address is latched on the rising edge of the K
the QDR-II read and write ports are completely independent of
one another. To maximize data throughput, both read and write
ports are provided with DDR interfaces. Each address location
is associated with two 8-bit words (CY7C1410JV18), 9-bit words
(CY7C1425JV18), 18-bit words (CY7C1412JV18), or 36-bit
words (CY7C1414JV18) that burst sequentially into or out of the
device. Because data can be transferred into and out of the
device on every rising edge of both input clocks (K and K
), memory bandwidth is maximized while simplifying
and C
system design by eliminating bus “turn-arounds”.
Depth expansion is accomplished with port selects, which
enables each port to operate independently.
All synchronous inputs pass through input registers controlled by
the K or K
input clocks. All data outputs pass through output
registers controlled by the C or C (or K or K in a single clock
domain) input clocks. Writes are conducted with on-chip
synchronous self-timed write circuitry.
clock. Accesses to
and C
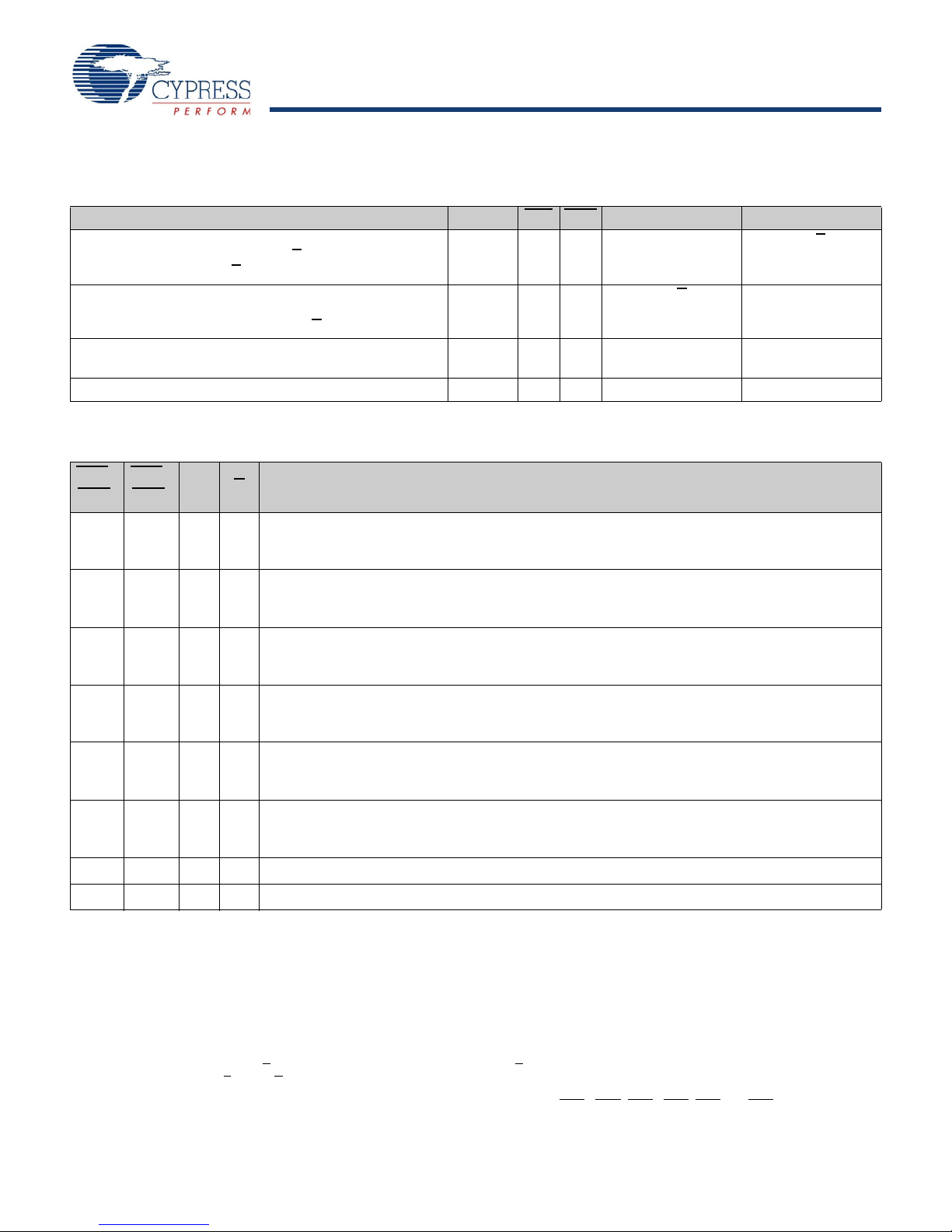
Selection Guide
Description 267 MHz 250 MHz Unit
Maximum Operating Frequency 267 250 MHz
Maximum Operating Current x8 1330 1200 mA
Cypress Semiconductor Corporation • 198 Champion Court • San Jose, CA 95134-1709 • 408-943-2600
Document #: 001-12561 Rev. *D Revised March 10, 2007
x9 1330 1200
x18 1370 1230
x36 1460 1290
[+] Feedback
Page 2

CY7C1410JV18, CY7C1425JV18
CY7C1412JV18, CY7C1414JV18
Logic Block Diagram (CY7C1410JV18)
2M x 8 Array
CLK
A
(20:0)
Gen.
K
K
Control
Logic
Address
Register
D
[7:0]
Read Add. Decode
Read Data Reg.
RPS
WPS
Control
Logic
Address
Register
Reg.
Reg.
Reg.
8
21
16
8
NWS
[1:0]
V
REF
Write Add. Decode
Write
Reg
8
A
(20:0)
21
CQ
CQ
DOFF
Q
[7:0]
8
8
8
Write
Reg
C
C
2M x 8 Array
2M x 9 Array
CLK
A
(20:0)
Gen.
K
K
Control
Logic
Address
Register
D
[8:0]
Read Add. Decode
Read Data Reg.
RPS
WPS
Control
Logic
Address
Register
Reg.
Reg.
Reg.
9
21
18
9
BWS
[0]
V
REF
Write Add. Decode
Write
Reg
9
A
(20:0)
21
CQ
CQ
DOFF
Q
[8:0]
9
9
9
Write
Reg
C
C
2M x 9 Array
Logic Block Diagram (CY7C1425JV18)
Document #: 001-12561 Rev. *D Page 2 of 26
[+] Feedback
Page 3

CY7C1410JV18, CY7C1425JV18
CY7C1412JV18, CY7C1414JV18
Logic Block Diagram (CY7C1412JV18)
1M x 18 Array
CLK
A
(19:0)
Gen.
K
K
Control
Logic
Address
Register
D
[17:0]
Read Add. Decode
Read Data Reg.
RPS
WPS
Control
Logic
Address
Register
Reg.
Reg.
Reg.
18
20
36
18
BWS
[1:0]
V
REF
Write Add. Decode
Write
Reg
18
A
(19:0)
20
CQ
CQ
DOFF
Q
[17:0]
18
18
18
Write
Reg
C
C
1M x 18 Array
512K x 36 Array
CLK
A
(18:0)
Gen.
K
K
Control
Logic
Address
Register
D
[35:0]
Read Add. Decode
Read Data Reg.
RPS
WPS
Control
Logic
Address
Register
Reg.
Reg.
Reg.
36
19
72
36
BWS
[3:0]
V
REF
Write Add. Decode
Write
Reg
36
A
(18:0)
19
CQ
CQ
DOFF
Q
[35:0]
36
36
36
Write
Reg
C
C
512K x 36 Array
Logic Block Diagram (CY7C1414JV18)
Document #: 001-12561 Rev. *D Page 3 of 26
[+] Feedback
Page 4

CY7C1410JV18, CY7C1425JV18
CY7C1412JV18, CY7C1414JV18
Pin Configuration
Note
1. NC/72M, NC/144M and NC/288M are not connected to the die and can be tied to any voltage level.
The pin configuration for CY7C1410JV18, CY7C1412JV18, and CY7C1414JV18 follow.
165-Ball FBGA (15 x 17 x 1.4 mm) Pinout
CY7C1410JV18 (4M x 8)
1234567891011
A CQ
NC/72M A WPS NWS
1
B NC NC NC A NC/288M K NWS
C NC NC NC V
D NC D4 NC V
E NC NC Q4 V
F NC NC NC V
G NC D5 Q5 V
H DOFF
V
REF
V
DDQ
V
J NC NC NC V
K NC NC NC V
L NC Q6 D6 V
M NC NC NC V
N NC D7 NC V
SS
SS
DDQ
DDQ
DDQ
DDQ
DDQ
DDQ
DDQ
SS
SS
AAAVSSNC NC D3
V
SS
V
SS
V
DD
V
DD
V
DD
V
DD
V
DD
V
SS
V
SS
AAAVSSNC NC NC
P NC NC Q7 A A C A A NC NC NC
R TDO TCK A A A C
K NC/144M RPS AACQ
V
SS
V
SS
V
SS
V
SS
V
SS
V
SS
V
SS
V
SS
V
SS
V
V
V
V
V
V
V
V
V
[1]
0
SS
SS
DD
DD
DD
DD
DD
SS
SS
ANCNCQ3
V
V
V
V
V
V
V
V
DDQ
DDQ
DDQ
DDQ
DDQ
DDQ
DDQ
V
SS
SS
NC NC NC
NC D2 Q2
NC NC NC
NC NC NC
V
DDQ
V
REF
NC Q1 D1
NC NC NC
NC NC Q0
NC NC D0
AAATMSTDI
ZQ
CY7C1425JV18 (4M x 9)
1234567891011
A CQ
B NC NC NC A NC/288M K BWS
C NC NC NC V
D NC D5 NC V
E NC NC Q5 V
F NC NC NC V
G NC D6 Q6 V
H DOFF
J NC NC NC V
K NC NC NC V
L NC Q7 D7 V
M NC NC NC V
N NC D8 NC V
NC/72M A WPS NC K NC/144M RPS AACQ
ANCNCQ4
V
V
V
V
V
V
V
V
DDQ
DDQ
DDQ
DDQ
DDQ
DDQ
DDQ
V
SS
SS
NC NC NC
NC D3 Q3
NC NC NC
NC NC NC
V
DDQ
V
REF
NC Q2 D2
NC NC NC
NC NC Q1
NC NC D1
ZQ
V
REF
V
DDQ
V
SS
SS
DDQ
DDQ
DDQ
DDQ
DDQ
DDQ
DDQ
SS
SS
0
AAAVSSNC NC D4
V
SS
V
SS
V
DD
V
DD
V
DD
V
DD
V
DD
V
SS
V
SS
V
SS
V
SS
V
SS
V
SS
V
SS
V
SS
V
SS
V
SS
V
SS
V
SS
V
SS
V
DD
V
DD
V
DD
V
DD
V
DD
V
SS
V
SS
AAAVSSNC NC NC
P NC NC Q8 A A C A A NC D0 Q0
R TDO TCK A A A C
AAATMSTDI
Document #: 001-12561 Rev. *D Page 4 of 26
[+] Feedback
Page 5

CY7C1410JV18, CY7C1425JV18
CY7C1412JV18, CY7C1414JV18
Pin Configuration
The pin configuration for CY7C1410JV18, CY7C1412JV18, and CY7C1414JV18 follow.
165-Ball FBGA (15 x 17 x 1.4 mm) Pinout
CY7C1412JV18 (2M x 18)
1234567891011
A CQ
NC/144M A WPS BWS
1
B NC Q9 D9 A NC K BWS
C NC NC D10 V
D NC D11 Q10 V
E NC NC Q11 V
F NC Q12 D12 V
G NC D13 Q13 V
H DOFF
V
REF
V
DDQ
V
J NC NC D14 V
K NC NC Q14 V
L NC Q15 D15 V
M NC NC D16 V
N NC D17 Q16 V
SS
SS
DDQ
DDQ
DDQ
DDQ
DDQ
DDQ
DDQ
SS
SS
AAAVSSNC Q7 D8
V
SS
V
SS
V
DD
V
DD
V
DD
V
DD
V
DD
V
SS
V
SS
AAAVSSNC NC D1
P NC NC Q17 A A C A A NC D0 Q0
R TDO TCK A A A C
K NC/288M RPS A NC/72M CQ
V
SS
V
SS
V
SS
V
SS
V
SS
V
SS
V
SS
V
SS
V
SS
V
V
V
V
V
V
V
V
V
[1]
(continued)
0
SS
SS
DD
DD
DD
DD
DD
SS
SS
ANCNCQ8
V
V
V
V
V
V
V
V
DDQ
DDQ
DDQ
DDQ
DDQ
DDQ
DDQ
V
SS
SS
NC NC D7
NC D6 Q6
NC NC Q5
NC NC D5
V
DDQ
V
REF
NC Q4 D4
NC D3 Q3
NC NC Q2
NC Q1 D2
AAATMSTDI
ZQ
CY7C1414JV18 (1M x 36)
1234567891011
A CQ
NC/288M NC/72M WPS BWS
B Q27 Q18 D18 A BWS
C D27 Q28 D19 V
D D28 D20 Q19 V
E Q29 D29 Q20 V
F Q30 Q21 D21 V
G D30 D22 Q22 V
H DOFF
V
REF
V
DDQ
V
J D31 Q31 D23 V
K Q32 D32 Q23 V
L Q33 Q24 D24 V
M D33 Q34 D25 V
N D34 D26 Q25 V
SS
SS
DDQ
DDQ
DDQ
DDQ
DDQ
DDQ
DDQ
SS
SS
AAAVSSD16 Q7 D8
V
SS
V
SS
V
DD
V
DD
V
DD
V
DD
V
DD
V
SS
V
SS
AAAVSSQ10 D9 D1
2
3
K BWS
RPS A NC/144M CQ
1
KBWS0AD17Q17Q8
V
SS
V
SS
V
SS
V
SS
V
SS
V
SS
V
SS
V
SS
V
SS
V
SS
V
SS
V
DD
V
DD
V
DD
V
DD
V
DD
V
SS
V
SS
V
V
V
V
V
V
V
V
DDQ
DDQ
DDQ
DDQ
DDQ
DDQ
DDQ
V
SS
SS
Q16 D15 D7
Q15 D6 Q6
D14 Q14 Q5
Q13 D13 D5
V
DDQ
V
REF
D12 Q4 D4
Q12 D3 Q3
D11 Q11 Q2
D10 Q1 D2
ZQ
P Q35 D35 Q26 A A C A A Q9 D0 Q0
R TDO TCK A A A C
AAATMSTDI
Document #: 001-12561 Rev. *D Page 5 of 26
[+] Feedback
Page 6

CY7C1410JV18, CY7C1425JV18
CY7C1412JV18, CY7C1414JV18
Pin Definitions
Pin Name IO Pin Description
D
[x:0]
WPS Input-
,
NWS
0
NWS
1
BWS0,
BWS
,
1
BWS2,
BWS
3
A Input-
Q
[x:0]
RPS Input-
C Input Clock Positive Input Clock for Output Data. C is used in conjunction with C
Input-
Synchronous
Synchronous
Input-
Synchronous
Synchronous
Outputs-
Synchronous
Synchronous
Data Input Signals. Sampled on the rising edge of K and K clocks during valid write operations.
CY7C1410JV18 - D
CY7C1425JV18 - D
CY7C1412JV18 - D
CY7C1414JV18 - D
[7:0]
[8:0]
[17:0]
[35:0]
Write Port Select − Active LOW. Sampled on the rising edge of the K clock. When asserted active, a
write operation is initiated. Deasserting deselects the write port. Deselecting the write port ignores D
Nibble Write Select 0, 1 − Active LOW (CY7C1410JV18 Only). Sampled on the rising edge of the K
and K
clocks during Write operations. Used to select which nibble is written into the device during the
current portion of the Write operations.Nibbles not written remain unaltered. NWS
NWS
controls D
1
All Nibble Write Selects are sampled on the same edge as the data. Deselecting a Nibble Write Select
[7:4]
.
ignores the corresponding nibble of data and it is not written into the device.
Byte Write Select 0, 1, 2, and 3 − Active LOW . Sampled on the rising edge of the K and K clocks during
write operations. Used to select which byte is written into the device during the current portion of the write
operations. Bytes not written remain unaltered.
CY7C1425JV18 − BWS
CY7C1412JV18 − BWS
CY7C1414JV18 − BWS
D
[35:27].
All the Byte Write Selects are sampled on the same edge as the data. Deselecting a Byte Write Select
controls D
0
controls D
0
controls D
0
[8:0]
, BWS1 controls D
[8:0]
, BWS1 controls D
[8:0]
.
[17:9]
,BWS2 controls D
[17:9]
ignores the corresponding byte of data and it is not written into the device.
Address Inputs. Sampled on the rising edge of the K (Read address) and K
active read and write operations. These address inputs are multiplexed for both read and write operations.
Internally, the device is organized as 4M x 8 (2 arrays each of 2M x 8) for CY7C1410JV18, 4M x 9 (2
arrays each of 2M x 9) for CY7C1425JV18, 2M x 18 (2 arrays each of 1M x 18) for CY7C1412JV18 and
1M x 36 (2 arrays each of 512K x 36) for CY7C1414JV18. Therefore, only 21 address inputs are needed
to access the entire memory array of CY7C1410JV18 and CY7C1425JV18, 20 address inputs for
CY7C1412JV18 and 19 address inputs for CY7C1414JV18. These inputs are ignored when the appropriate port is deselected.
Data Output Signals. These pins drive out the requested data during a read operation. Valid data is
driven out on the rising edge of both the C and C
clock mode. When the read port is deselected, Q
CY7C1410JV18 − Q
CY7C1425JV18 − Q
CY7C1412JV18 − Q
CY7C1414JV18 − Q
[7:0]
[8:0]
[17:0]
[35:0]
clocks during read operations, or K and K when in single
are automatically tri-stated.
[x:0]
Read Port Select − Active LOW . Sampled on the rising edge of positive input clock (K). When active, a
read operation is initiated. Deasserting deselects the read port. When deselected, the pending access is
allowed to complete and the output drivers are automatically tri-stated following the next rising edge of
the C clock. Each read access consists of a burst of two sequential transfers.
the device. C and C
can be used together to deskew the flight times of various devices on the board back
to the controller. See Application Example on page 9 for further details.
[x:0]
controls D
0
and BWS3 controls
[26:18]
[3:0]
and
(Write address) clocks during
to clock out the read data from
.
C
Input Clock Negative Input Clock for Output Data. C is used in conjunction with C to clock out the read data from
the device. C and C
to the controller. See Application Example on page 9 for further details.
K Input Clock Positive Input Clock In put. The rising edge of K is used to capture synchronous inputs to the device
and to drive out data through Q
edge of K.
K
Input Clock Negative Input Clock Input. K is used to capture synchronous inputs being presented to the device and
to drive out data through Q
Document #: 001-12561 Rev. *D Page 6 of 26
can be used together to deskew the flight times of various devices on the board back
when in single clock mode. All accesses are initiated on the rising
[x:0]
when in single clock mode.
[x:0]
[+] Feedback
Page 7

CY7C1410JV18, CY7C1425JV18
CY7C1412JV18, CY7C1414JV18
Pin Definitions (continued)
Pin Name IO Pin Description
CQ Echo Clock CQ is Referenced with Respect to C. This is a free - running clock and is synchronized to the Input
clock for output data (C) of the QDR-II. In the single clock mode, CQ is generated with respect to K. The
timings for the echo clocks is shown in the Switching Characteristics on page 22.
CQ
ZQ Input Output Impedance Matching Input. This input is used to tune the device outputs to the system data bus
DOFF
TDO Output TDO for JTAG.
TCK Input TCK Pin for JTAG.
TDI Input TDI Pin for JTAG.
TMS Input TMS Pin for JTAG.
NC N/A Not Connected to the Die. Can be tied to any voltage level.
NC/72M N/A Not Connected to the Die. Can be tied to any voltage level.
NC/144M N/A Not Connected to the Die. Can be tied to any voltage level.
NC/288M N/A Not Connected to the Die. Can be tied to any voltage level.
V
REF
V
DD
V
SS
V
DDQ
Echo Clock CQ is Referenced with Respect to C. This is a free - running clock and is synchronized to the Input
Input DLL Turn Off − Active LOW . Connecting this pin to ground turns off the DLL inside the device. The timing
Input-
Reference
Power Supply Power Supply Inputs to the Core of the Device.
Ground Ground for the Device.
Power Supply Power Supply Inputs for the Outputs of the Device.
clock for output data (C
timings for the echo clocks is shown in the Switching Characteristics on page 22.
impedance. CQ, CQ, and Q
between ZQ and ground. Alternatively, this pin can be connected directly to V
minimum impedance mode. This pin cannot be connected directly to GND or left unconnected.
in the DLL turned off operation differs from those listed in this data sheet. For normal operation, this pin
can be connected to a pull up through a 10-Kohm or less pull up resistor. The device behaves in DDR-I
mode when the DLL is turned off. In this mode, the device can be operated at a frequency of up to 167
MHz with QDR-I timing.
Reference Voltage Input. Static input used to set the reference level for HSTL inputs, outputs, and AC
measurement points.
) of the QDR-II. In the single clock mode, CQ is generated with respect to K. The
output impedance are set to 0.2 x RQ, where RQ is a resistor connected
[x:0]
, which enables the
DDQ
Document #: 001-12561 Rev. *D Page 7 of 26
[+] Feedback
Page 8

CY7C1410JV18, CY7C1425JV18
CY7C1412JV18, CY7C1414JV18
Functional Overview
The CY7C1410JV18, CY7C1425JV18, CY7C1412JV18, and
CY7C1414JV18 are synchronous pipelined Burst SRAMs with a
read port and a write port. The read port is dedicated to read
operations and the write port is dedicated to write operations.
Data flows into the SRAM through the write port and flows out
through the read port. These devices multiplex the address
inputs to minimize the number of address pins required. By
having separate read and write ports, the QDR-II completely
eliminates the need to “turn-around” the data bus and avoids any
possible data contention, thereby simplifying system design.
Each access consists of two 8-bit data transfers in the case of
CY7C1410JV18, two 9-bit data transfers in the case of
CY7C1425JV18, two 18-bit data transfers in the case of
CY7C1412JV18, and two 36-bit data transfers in the case of
CY7C1414JV18 in one clock cycle.
This device operates with a read latency of one and half cycles
when DOFF
connected to VSS then the device behaves in QDR-I mode with
a read latency of one clock cycle.
Accesses for both ports are initiated on the rising edge of the
positive input clock (K). All synchronous input timing is
referenced from the rising edge of the input clocks (K and K
all output timing is referenced to the rising edge of the output
clocks (C and C,
All synchronous data inputs (D
controlled by the input clocks (K and K). All synchronous data
outputs (Q
rising edge of the output clocks (C and C, or K and K when in
single clock mode).
All synchronous control (RPS
through input registers controlled by the rising edge of the input
clocks (K and K
CY7C1412JV18 is described in the following sections. The same
basic descriptions apply to CY7C1410JV18, CY7C1425JV18,
and CY7C1414JV18.
Read Operations
The CY7C1412JV18 is organized internally as two arrays of 1M
x 18. Accesses are completed in a burst of two sequential 18-bit
data words. Read operations are initiated by asserting RPS
active at the rising edge of the positive input clock (K). The
address is latched on the rising edge of the K clock. The address
presented to the address inputs is stored in the read address
register. Following the next K clock rise the corresponding lowest
order 18-bit word of data is driven onto the Q
output timing reference. On the subsequent rising edge of C, the
next 18-bit data word is driven onto the Q
data is valid 0.45 ns from the rising edge of the output clock (C
and C or K and K when in single clock mode).
Synchronous internal circuitry automatically tri-states the outputs
following the next rising edge of the output clocks (C/C
allows for a seamless transition between devices without the
insertion of wait states in a depth expanded memory.
pin is tied HIGH. When DOFF pin is set LOW or
or K and K when in single clock mode).
) pass through input registers
[x:0]
) pass through output registers controlled by the
[x:0]
, WPS, BWS
) inputs pass
[x:0]
).
using C as the
[17:0]
. The requested
[17:0]
). This
) and
Write Operations
Write operations are initiated by asserting WPS active at the
rising edge of the positive input cl ock (K). On the same K clock
rise, the data presented to D
lower 18-bit write data register, provided BWS
is latched and stored into the
[17:0]
[1:0]
are both
asserted active. On the subsequent rising edge of the negative
input clock (K
presented to D
BWS
[1:0]
), the address is latched and the information
is stored into the write data register, provided
[17:0]
are both asserted active. The 36 bits of data are then
written into the memory array at the specified location. When
deselected, the write port ignores all inputs after completion of
pending write operations.
Byte Write Operations
Byte write operations are supported by the CY7C1412JV18. A
write operation is initiated as described in the Write Operations
section. The bytes that are written are determined by BWS
and
0
BWS1, which are sampled with each 18-bit data word. Asserting
the byte write select input during the data portion of a write
latches the data being presented and writes it into the device.
Deasserting the byte write select input during the data portion of
a write allows the data stored in the device for that byte to remain
unaltered. This feature can be used to simplify read, modify, or
write operations to a byte write operation.
Single Clock Mode
The CY7C1412JV18 can be used with a single clock that
controls both the input and output registers. In this mode, the
device recognizes only a single pair of input clocks (K and K) that
control both the input and output registers. This operation is
identical to the operation if the device had zero skew between
and C/C clocks. All timing parameters remain the same
the K/K
in this mode. To use this mode of operation, the user must tie C
HIGH at power on. This function is a strap option and not
and C
alterable during device operation.
Concurrent Transactions
The read and write ports on the CY7C1412JV18 operate
independently of one another. As each port latches the address
inputs on different clock edges, the user can read or write to any
location, regardless of the transaction on the other port. The user
can start reads and writes in the same clock cycle. If the ports
access the same location at the same time, the SRAM delivers
the most recent information associated with the specified
address location. This includes forwarding data from a write
cycle that was initiated on the previous K clock rise.
Depth Expansion
The CY7C1412JV18 has a port select input for each port. This
enables for easy depth expansion. Both port selects are sampled
on the rising edge of the positive input clock only (K). Each port
select input can deselect the specified port. Deselecting a port
does not affect the other port. All pending transactions (read and
write) are completed prior to the device being deselected.
Document #: 001-12561 Rev. *D Page 8 of 26
[+] Feedback
Page 9

CY7C1410JV18, CY7C1425JV18
CY7C1412JV18, CY7C1414JV18
Programmable Impedance
R = 250ohms
Vt
R
R = 250ohms
Vt
Vt
R
Vt = Vddq/2
R = 50ohms
R
CC#
D
A
SRAM #2
R
P
S
#
W
P
S
#
B
W
S
#
ZQ
CQ/CQ#
Q
K#
CC#
D
A
K
SRAM #1
R
P
S
#
W
P
S
#
B
W
S
#
ZQ
CQ/CQ#
Q
K#
BUS
MASTER
(CPU
or
ASIC)
DATA IN
DATA OUT
Address
RPS#
WPS#
BWS#
Source K
Source K#
Delayed K
Delayed K#
CLKIN/CLKIN#
K
An external resistor, RQ, must be connected between the ZQ pin
on the SRAM and V
to allow the SRAM to adjust its output
SS
driver impedance. The value of RQ must be 5x the value of the
intended line impedance driven by the SRAM. The allowable
range of RQ to guarantee impedance matching with a tolerance
of ±15% is between 175Ω and 350Ω
, with V
=1.5V. The
DDQ
output impedance is adjusted every 1024 cycles upon power up
to account for drifts in supply voltage and temperature.
Echo Clocks
Echo clocks are provided on the QDR-II to simplify data capture
on high-speed systems. Two echo clocks are generated by the
QDR-II. CQ is referenced with respect to C and CQ
is referenced
with respect to C. These are free-running clocks and are
synchronized to the output clock (C/C) of the QDR-II. In single
Application Example
Figure 1 shows two QDR-II used in an application.
Figure 1. Application Example
clock mode, CQ is generated with respect to K and CQ
is
generated with respect to K. The timing for the echo clocks is
shown in the Switching Characteristics on page 22.
DLL
These chips utilize a Delay Lock Loop (DLL) that is designed to
function between 120 MHz and the specified maximum clock
frequency. During power up, when the DOFF
DLL is locked after 1024 cycles of stable clock. The DLL can also
be reset by slowing or stopping the input clock K and K for a
minimum of 30 ns. However, it is not necessary to reset the DLL
to lock to the desired frequency. The DLL automatically locks
1024 clock cycles after a stable clock is presented. The DLL may
be disabled by applying ground to the DOFF
is turned off, the device behaves in QDR-I mode (with one cycle
latency and a longer access time). For information refer to the
application note DLL Considerations in QDRII/DDRII.
is tied HIGH, the
pin. When the DLL
Document #: 001-12561 Rev. *D Page 9 of 26
[+] Feedback
Page 10
CY7C1410JV18, CY7C1425JV18
CY7C1412JV18, CY7C1414JV18
T ruth Table
Notes
2. X = “Don't Care,” H = Logic HIGH, L = Logic LOW,
↑represents rising edge.
3. Device powers up deselected with the outputs in a tri-state condition.
4. “A” represents address location latched by the devices when transaction was initiated. A + 0, A + 1 represents the internal address sequence in the burst.
5. “t” represents the cycle at which a Read/Write operation is started. t + 1, and t + 2 are the first, and second clock cycles respectively succeeding the “t” clock cycle.
6. Data inputs are registered at K and K
rising edges. Data outputs are delivered on C and C rising edges, except when in single clock mode.
7. It is recommended that K = K
and C = C = HIGH when clock is stopped. This is not essential, but permits most rapid restart by overcoming transmission line charging
symmetrically.
8. Is based on a write cycle that was initiated in accordance with the Write Cycle Descriptions table. NWS
0
, NWS1,BWS0, BWS1,BWS2 and BWS3 can be altered on
different portions of a write cycle, as long as the setup and hold requirements are achieved.
The truth table for CY7C1410JV18, CY7C1425JV18, CY7C1412JV18, and CY7C1414JV18 follows.
Operation K RPS WPS DQ DQ
Write Cycle:
Load address on the rising edge of K
input write data on K and K
rising edges.
Read Cycle:
;
L-H X L D(A + 0) at K(t) ↑ D(A + 1) at K(t) ↑
L-H L X Q(A + 0) at C
Load address on the rising edge of K;
wait one and a half cycle; read data on C
and C rising edges.
NOP: No Operation L-H H H D = X
Q = High-Z
Standby: Clock Stopped Stopped X X Previous State Previous State
[2, 3, 4, 5, 6, 7]
(t + 1) ↑ Q(A + 1) at C(t + 2) ↑
D = X
Q = High-Z
Write Cycle Descriptions
The write cycle description table for CY7C1410JV18 and CY7C1412JV18 follows.
BWS0/
NWS
0
BWS1/
NWS
K
1
K
L L L–H – During the data portion of a write sequence:
CY7C1410JV18 − both nibbles (D
CY7C1412JV18 − both bytes (D
) are written into the device.
[7:0]
) are written into the device.
[17:0]
L L – L-H During the data portion of a write sequence:
CY7C1410JV18 − both nibbles (D
CY7C1412JV18 − both bytes (D
) are written into the device.
[7:0]
) are written into the device.
[17:0]
L H L–H – During the data portion of a write sequence:
CY7C1410JV18 − only the lower nibble (D
CY7C1412JV18 − only the lower byte (D
[3:0]
[8:0]
L H – L–H During the data portion of a write sequence:
CY7C1410JV18 − only the lower nibble (D
CY7C1412JV18 − only the lower byte (D
[3:0]
[8:0]
H L L–H – During th e data portion of a write sequence:
CY7C1410JV18 − only the upper nibble (D
CY7C1412JV18 − only the upper byte (D
[7:4]
[17:9]
H L – L–H During the data portion of a write sequence:
CY7C1410JV18 − only the upper nibble (D
CY7C1412JV18 − only the upper byte (D
[7:4]
[17:9]
H H L–H – No data is written into the devices during this portion of a write operation.
H H – L–H No data is written into the devices during this portion of a write operation.
[2, 8]
Comments
) is written into the device, D
) is written into the device, D
) is written into the device, D
) is written into the device, D
) is written into the device, D
) is written into the device, D
) is written into the device, D
) is written into the device, D
remains unaltered.
[7:4]
remains unaltered.
[17:9]
remains unaltered.
[7:4]
remains unaltered.
[17:9]
remains unaltered.
[3:0]
remains unaltered.
[8:0]
remains unaltered.
[3:0]
remains unaltered.
[8:0]
Document #: 001-12561 Rev. *D Page 10 of 26
[+] Feedback
Page 11

CY7C1410JV18, CY7C1425JV18
CY7C1412JV18, CY7C1414JV18
Write Cycle Descriptions
The write cycle description table for CY7C1425JV18 follows.
[2, 8]
BWS
L L–H – During the Data portion of a write sequence, the single byte (D
L – L–H During the Data portion of a write sequence, the single byte (D
K K Comments
0
) is written into the device.
[8:0]
) is written into the device.
[8:0]
H L–H – No data is written into the device during this portion of a write operation.
H – L–H No data is written into the device during this portion of a write operation.
Write Cycle Descriptions
The write cycle description table for CY7C1414JV18 follows.
BWS0BWS1BWS2BWS3K K Comments
LLLLL–H–During the Data portion of a write sequence, all four bytes (D
the device.
LLLL–L–HDuring the Data portion of a write sequence, all four bytes (D
the device.
L H H H L–H – During the Data portion of a write sequence, only the lower byte (D
into the device. D
L H H H – L–H During the Data portion of a write sequence, only the lower byte (D
into the device. D
H L H H L–H – During the Data portion of a write sequence, only the byte (D
the device. D
H L H H – L–H During the Data portion of a write sequence, only the byte (D
the device. D
H H L H L–H – During the Data portion of a write sequence, only the byte (D
the device. D
H H L H – L–H During the Data portion of a write sequence, only the byte (D
the device. D
H H H L L–H – During the Data portion of a write sequence, only the byte (D
the device. D
H H H L – L–H During the Data portion of a write sequence, only the byte (D
the device. D
HHHHL–H–No data is written into the device during this portion of a write operation.
HHHH–L–HNo data is written into the device during this portion of a write operation.
[2, 8]
[35:9]
[35:9]
and D
[8:0]
and D
[8:0]
and D
[17:0]
and D
[17:0]
remains unaltered.
[26:0]
remains unaltered.
[26:0]
remains unaltered.
remains unaltered.
remains unaltered.
[35:18]
remains unaltered.
[35:18]
remains unaltered.
[35:27]
remains unaltered.
[35:27]
[35:0]
[35:0]
[17:9]
[17:9]
[26:18]
[26:18]
[35:27]
[35:27]
) are written into
) are written into
) is written
[8:0]
) is written
[8:0]
) is written into
) is written into
) is written into
) is written into
) is written into
) is written into
Document #: 001-12561 Rev. *D Page 11 of 26
[+] Feedback
Page 12

CY7C1410JV18, CY7C1425JV18
CY7C1412JV18, CY7C1414JV18
IEEE 1149.1 Serial Boundary Scan (JTAG)
These SRAMs incorporate a serial boundary scan Test Access
Port (TAP) in the FBGA p ackage. This part is fully compliant with
IEEE Standard #1149.1-2001. The TAP operates using JEDEC
standard 1.8V IO logic levels.
Disabling the JTAG Feature
It is possible to operate the SRAM without using the JTAG
feature. To disable the TAP controller, TCK must be tied LOW
(VSS) to prevent clocking of the device. TDI and TMS are internally pulled up and may be unconnected. They may alternatively
be connected to V
unconnected. Upon power up, the device comes up in a reset
state, which does not interfere with the operation of the device.
Test Access Port—Test Clock
The test clock is used only with the TAP controller. All inputs are
captured on the rising edge of TCK. All outputs are driven from
the falling edge of TCK.
Test Mode Select (TMS)
The TMS input is used to give commands to the TAP controller
and is sampled on the rising edge of TCK. This pin may be left
unconnected if the TAP is not used. The pin is pulled up internally, resulting in a logic HIGH level.
Test Data-In (TDI)
The TDI pin is used to serially input information into the registers
and can be connected to the input of any of the registers. The
register between TDI and TDO is chosen by the instruction that
is loaded into the TAP instruction register. For information on
loading the instruction register, see the TAP Controller State
Diagram on page 14. TDI is internally pulled up and can be
unconnected if the TAP is unused in an application. TDI is
connected to the most significant bit (MSB) on any register.
Test Data-Out (TDO)
The TDO output pin is used to serially clock data out from th e
registers. The output is active, depending upon the current state
of the TAP state machine (see Instruction Codes on page 17).
The output changes on the falling edge of TCK. TDO is
connected to the least significant bit (LSB) of any register.
Performing a TAP Reset
A Reset is performed by forcing TMS HIGH (VDD) for five rising
edges of TCK. This Reset does not affect the operation of th e
SRAM and can be performed while the SRAM is operating. At
power up, the TAP is reset internally to ensure that TDO comes
up in a high-Z state.
TAP Registers
Registers are connected between the TDI and TDO pins to scan
the data in and out of the SRAM test circuitry. Only one register
can be selected at a time through the instruction registers. Data
is serially loaded into the TDI pin on the rising edge of TCK. Data
is output on the TDO pin on the falling edge of TCK.
through a pull up resistor. TDO must be left
DD
Instruction Register
Three-bit instructions can be serially loaded into the instructi on
register. This register is loaded when it is placed between the TDI
and TDO pins, as shown in TAP Controller Block Diagram on
page 15. Upon power up, the instruction register i s loaded with
the IDCODE instruction. It is also loaded with the IDCODE
instruction if the controller is placed in a reset state, as described
in the previous section.
When the TAP controller is in the Capture-IR state, the two least
significant bits are loaded with a binary “01” pattern to allow for
fault isolation of the board level serial test path.
Bypass Register
To save time when seri ally shifting data through registers, it is
sometimes advantageous to skip certain chips. The bypass
register is a single-bit register that can be placed between TDI
and TDO pins. This enables shifting of data through the SRAM
with minimal delay. The bypass register is set LOW (V
the BYPASS instruction is executed.
Boundary Scan Register
The boundary scan register is connected to all of th e input and
output pins on the SRAM. Several No Connect (NC) pins are also
included in the scan register to reserve pins for higher density
devices.
The boundary scan register is loaded with the contents of the
RAM input and output ring when the TAP controller is in the
Capture-DR state and is then placed between the TDI and TDO
pins when the controller is moved to the Shift-DR state. The
EXTEST, SAMPLE/PRELOAD, and SAMPLE Z instructions can
be used to capture the contents of the input and output ring.
The Boundary Scan Order on page 18 shows the order in which
the bits are connected. Each bit corresponds to one of the bumps
on the SRAM package. The MSB of the register is connected to
TDI, and the LSB is connected to TDO.
Identification (ID) Register
The ID register is loaded with a vendor-specific, 32-bit code
during the Capture-DR state when the IDCODE command is
loaded in the instruction register. The IDCODE is hardwired into
the SRAM and can be shifted out when the TAP controller is in
the Shift-DR state. The ID register has a vendor code and other
information described in Identification Register Definitions on
page 17.
SS
) when
TAP Instruction Set
Eight different instructions are possible with the three-bit
instruction register. All combinations are listed in Instruction
Codes on page 17. Three of these instructions are listed as
RESERVED and must not be used. The other five instructions
are described in this section in detail.
Instructions are loaded into the TAP controller during the Shift-IR
state when the instruction register is placed between TDI and
TDO. During this state, instructions are shifted through the
instruction register through the TDI and TDO pins. To execute
the instruction after it is shifted in, the TAP controller must be
moved into the Update-IR state.
Document #: 001-12561 Rev. *D Page 12 of 26
[+] Feedback
Page 13
CY7C1410JV18, CY7C1425JV18
CY7C1412JV18, CY7C1414JV18
IDCODE
The IDCODE instruction loads a vendor-specific, 32-bit code into
the instruction register. It also places the instruction register
between the TDI and TDO pins and shifts the IDCODE out of the
device when the TAP controller enters the Shift-DR state. The
IDCODE instruction is loaded into the instruction register at
power up or whenever the TAP controller is given a
Test-Logic-Reset state.
SAMPLE Z
The SAMPLE Z instruction connects the boundary scan register
between the TDI and TDO pins when the TAP controller is in a
Shift-DR state. The SAMPLE Z command puts the output bus
into a High-Z state until the next command is given during the
Update IR state.
SAMPLE/PRELOAD
SAMPLE/PRELOAD is a 1149.1 mandatory instruction. When
the SAMPLE/PRELOAD instructions are loaded into the
instruction register and the TAP controller is in the Capture-DR
state, a snapshot of data on the input and output pins is captured
in the boundary scan register.
The user must be aware that the TAP controller clock can only
operate at a frequency up to 20 MHz, while the SRAM clock
operates more than an order of magnitude faster. Because there
is a large difference in the clock frequencies, it is possible that
during the Capture-DR state, an input or output undergoes a
transition. The TAP may then try to capture a signal while in
transition (metastable state). This does not harm the device, but
there is no guarantee as to the value that is captured.
Repeatable results may not be possible.
To guarantee that the boundary scan register captures the
correct value of a signal, the SRAM signal must be stabilized
long enough to meet the TAP controller's capture setup plus hold
times (t
correctly if there is no way in a design to stop (or slow) the clock
during a SAMPLE/PRELOAD instruction. If this is an issue, it is
still possible to capture all other signals and simply ignore the
value of the CK and CK
After the data is captured, it is possible to shift out the data by
putting the T AP into the Shift-DR state. This places the boundary
scan register between the TDI and TDO pins.
PRELOAD places an initial data pattern at the latched parallel
outputs of the boundary scan register cells before the selection
of another boundary scan test operation.
The shifting of data for the SAMPLE and PRELOAD phases can
occur concurrently when required, that is, while the data
captured is shifted out, the preloaded data can be shifted in.
and tCH). The SRAM clock input might not be captured
CS
captured in the boundary scan register.
BYPASS
When the BYPASS instruction is loaded in the instruction register
and the TAP is placed in a Shift-DR state, the bypass register is
placed between the TDI and TDO pins. The advantage of the
BYPASS instruction is that it shortens the boundary scan path
when multiple devices are connected together on a board.
EXTEST
The EXTEST instruction drives the preloaded data out through
the system output pins. This instruction also connects the
boundary scan register for serial access between the TDI and
TDO in the Shift-DR controller state.
EXTEST OUTPUT BUS TRI-ST ATE
IEEE Standard 1149.1 mandates that the TAP controller be able
to put the output bus into a tri-state mode.
The boundary scan register has a special bit located at bit #108.
When this scan cell, called the “extest output bus tri-state,” is
latched into the preload register during the Update-DR state in
the TAP controller, it directly controls the state of the output
(Q-bus) pins, when the EXTEST is entered as the current
instruction. When HIGH, it enables the output buffers to drive the
output bus. When LOW, this bit places the output bus into a
High-Z condition.
This bit can be set by entering the SAMPLE/PRELOAD or
EXTEST command, and then shifting the desired bit into that cell,
during the Shift-DR state. During Update-DR, the value loaded
into that shift-register cell latches into the preload register. When
the EXTEST instruction is entered, this bit directly controls the
output Q-bus pins. Note that this bit is pre-set LOW to enable the
output when the device is powered up, and also when the TAP
controller is in the Test-Logic-Rese t state.
Reserved
These instructions are not implemented but are reserved for
future use. Do not use these instructions.
Document #: 001-12561 Rev. *D Page 13 of 26
[+] Feedback
Page 14

CY7C1410JV18, CY7C1425JV18
CY7C1412JV18, CY7C1414JV18
TAP Controller State Diagram
TEST-LOGIC
RESET
TEST-LOGIC/
IDLE
SELECT
DR-SCAN
CAPTURE-DR
SHIFT-DR
EXIT1-DR
PAUSE-DR
EXIT2-DR
UPDA TE-DR
1
0
1
1
0
1
0
1
0
0
0
1
1
1
0
1
0
1
0
0
0
1
0
1
1
0
1
0
0
1
1
0
SELECT
IR-SCAN
CAPTURE-IR
SHIFT-IR
EXIT1-IR
PAUSE-IR
EXIT2-IR
UPDA TE-IR
Note
9. The 0/1 next to each state represents the value at TMS at the rising edge of TCK.
The state diagram for the TAP controller follows.
[9]
Document #: 001-12561 Rev. *D Page 14 of 26
[+] Feedback
Page 15

CY7C1410JV18, CY7C1425JV18
CY7C1412JV18, CY7C1414JV18
TAP Controller Block Diagram
0
012..29
3031
Boundary Scan Register
Identification Register
012..
.
.108
012
Instruction Register
Bypass Register
Selection
Circuitry
Selection
Circuitry
TA P Controller
TDI
TDO
TCK
TMS
Notes
10.These characteristics pertain to the TAP inputs (TMS, TCK, TDI and TDO). Parallel load levels are specified in the Electrical Characteristics table.
11.Overshoot: V
IH
(AC) < V
DDQ
+ 0.85V (Pulse width less than t
CYC
/2), Undershoot: VIL(AC) > −1.5V (Pulse width less than t
CYC
/2).
12.All Voltage referenced to Ground.
TAP Electrical Characteristics
Over the Operating Range
Parameter Description Test Conditions Min Max Unit
V
OH1
V
OH2
V
OL1
V
OL2
V
IH
V
IL
I
X
Output HIGH Voltage I
Output HIGH Voltage I
Output LOW Voltage IOL = 2.0 mA 0.4 V
Output LOW Voltage IOL = 100 μA0.2V
Input HIGH Voltage 0.65VDDV
Input LOW Voltage –0.3 0.35V
Input and Output Load Current GND ≤ VI ≤ V
[10, 11, 12]
= −2.0 mA 1.4 V
OH
= −100 μA1.6 V
OH
DD
–5 5 μA
+ 0.3 V
DD
DD
V
Document #: 001-12561 Rev. *D Page 15 of 26
[+] Feedback
Page 16

CY7C1410JV18, CY7C1425JV18
CY7C1412JV18, CY7C1414JV18
TAP AC Switching Characteristics
t
TL
t
TH
(a)
TDO
C
L
= 20 pF
Z
0
= 50
Ω
GND
0.9V
50
Ω
1.8V
0V
ALL INPUT PULSES
0.9V
Test Clock
Test Mode Select
TCK
TMS
Test Data In
TDI
Test Data Out
t
TCYC
t
TMSH
t
TMSS
t
TDIS
t
TDIH
t
TDOV
t
TDOX
TDO
Notes
13.t
CS
and tCH refer to the setup and hold time requirements of latching data from the boundary scan register.
14.Test conditions are specified using the load in TAP AC Test Conditions. t
R/tF
= 1 ns.
Over the Operating Range
Parameter Description Min Max Unit
t
TCYC
t
TF
t
TH
t
TL
TCK Clock Cycle Time 50 ns
TCK Clock Frequency 20 MHz
TCK Clock HIGH 20 ns
TCK Clock LOW 20 ns
Setup Times
t
TMSS
t
TDIS
t
CS
TMS Setup to TCK Clock Rise 5 ns
TDI Setup to TCK Clock Rise 5 ns
Capture Setup to TCK Rise 5 ns
Hold Times
t
TMSH
t
TDIH
t
CH
TMS Hold after TCK Clock Rise 5 ns
TDI Hold after Clock Rise 5 ns
Capture Hold after Clock Rise 5 ns
Output Times
t
TDOV
t
TDOX
TCK Clock LOW to TDO Valid 10 ns
TCK Clock LOW to TDO Invalid 0 ns
[13, 14]
TAP Timing and Test Conditions
Figure 2 shows the TAP timing and test conditions.
Figure 2. TAP Timing and Test Conditions
[14]
Document #: 001-12561 Rev. *D Page 16 of 26
[+] Feedback
Page 17

CY7C1410JV18, CY7C1425JV18
CY7C1412JV18, CY7C1414JV18
Identification Register Definitions
Instruction Field
Revision Number
(31:29)
Cypress Device ID
(28:12)
Cypress JEDEC ID
(11:1)
ID Register
Presence (0)
CY7C1410JV18 CY7C1425JV18 CY7C1412JV18 CY7C1414JV18
001 001 001 001 Version number.
11010011010000111 11010011010001111 11010011010010111 110100110101001 11 Defines the type of
00000110100 00000110100 00000110100 00000110100 Allows unique
1111Indicates the
Value
Description
SRAM.
identification of
SRAM vendor.
presence of an ID
register.
Scan Register Sizes
Register Name Bit Size
Instruction 3
Bypass 1
ID 32
Boundary Scan 109
Instruction Codes
Instruction Code Description
EXTEST 000 Captures the input and output ring contents.
IDCODE 001 Loads the ID register with the vendor ID code and places the register between TDI and TDO.
This operation does not affect SRAM operation.
SAMPLE Z 010 Captures the input and output contents. Places the boundary scan register between TDI and
TDO. Forces all SRAM output drivers to a High-Z state.
RESERVED 011 Do Not Use: This instruction is reserved for future use.
SAMPLE/PRELOAD 100 Captures the input and output ring contents. Places the boundary scan register between TDI
RESERVED 101 Do Not Use: This instruction is reserved for future use.
RESERVED 110 Do Not Use: This instruction is reserved for future use.
BYPASS 111 Places the bypass register between TDI and TDO. This operation does not affect SRAM
and TDO. Does not affect the SRAM operation.
operation.
Document #: 001-12561 Rev. *D Page 17 of 26
[+] Feedback
Page 18

CY7C1410JV18, CY7C1425JV18
CY7C1412JV18, CY7C1414JV18
Boundary Scan Order
Bit # Bump ID Bit # Bump ID Bit # Bump ID Bit # Bump ID
0 6R 28 10G 56 6A 84 1J
16P299G575B852J
2 6N 30 11F 58 5A 86 3K
3 7P 31 11G 59 4A 87 3J
47N329F605C882K
5 7R 33 10F 61 4B 89 1K
6 8R 34 11E 62 3A 90 2L
7 8P 35 10E 63 2A 91 3L
8 9R 36 10D 64 1A 92 1M
9 11P 37 9E 65 2B 93 1L
10 10P 38 10C 66 3B 94 3N
11 10N 39 11D 67 1C 95 3M
12 9P 40 9C 68 1B 96 1N
13 10M 41 9D 69 3D 97 2M
14 11N 42 11B 70 3C 98 3P
15 9M 43 11C 71 1D 99 2N
16 9N 44 9B 72 2C 100 2P
17 11L 45 10B 73 3E 101 1P
18 11M 46 11A 74 2D 102 3R
19 9L 47 10A 75 2E 103 4R
20 10L 48 9A 76 1E 104 4P
21 11K 49 8B 77 2F 105 5P
22 10K 50 7C 78 3F 106 5N
23 9J 51 6C 79 1G 107 5R
24 9K 52 8A 80 1F 108 Internal
25 10J 53 7A 81 3G
26 11J 54 7B 82 2G
27 11H 55 6B 83 1H
Document #: 001-12561 Rev. *D Page 18 of 26
[+] Feedback
Page 19
CY7C1410JV18, CY7C1425JV18
CY7C1412JV18, CY7C1414JV18
Power Up Sequence in QDR-II SRAM
~
~
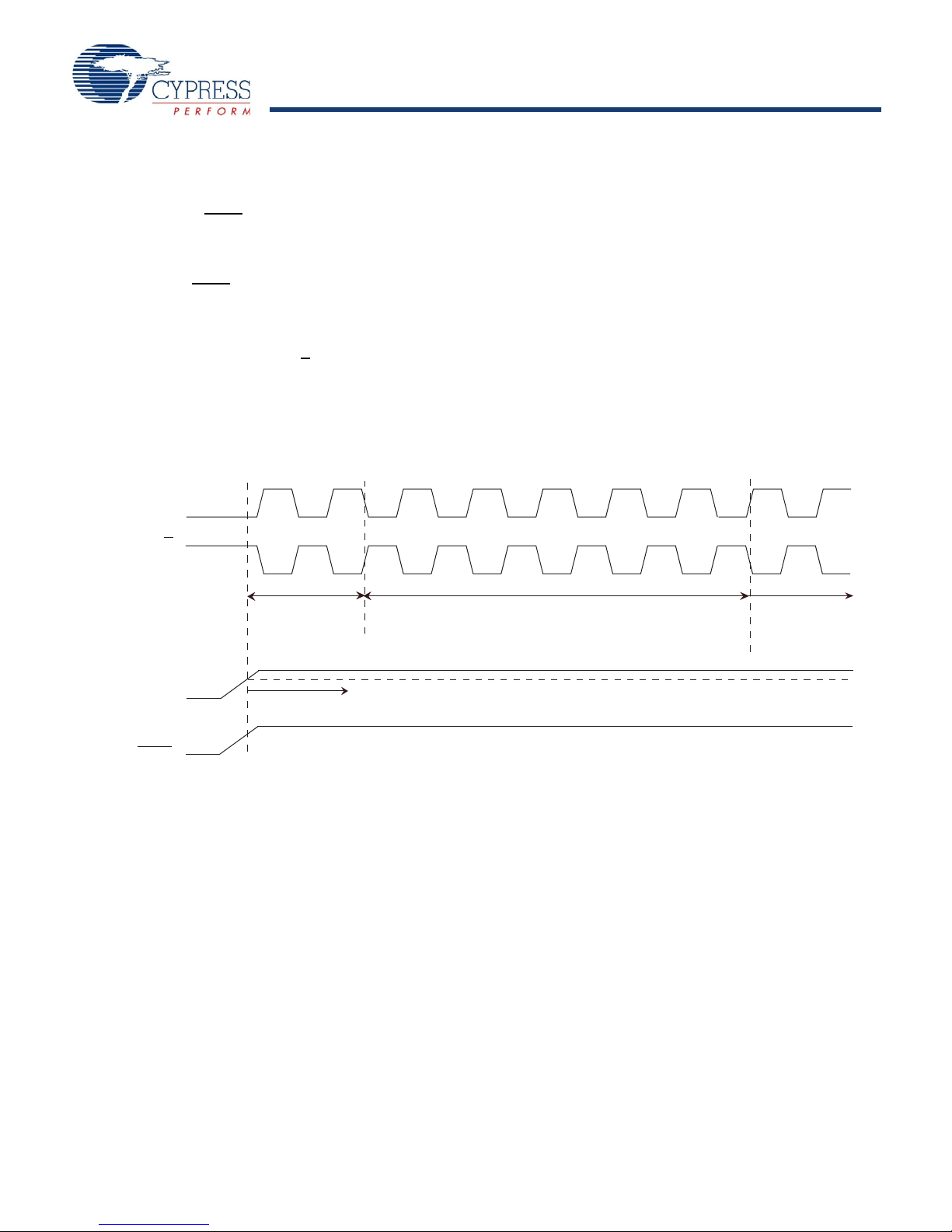
QDR-II SRAMs must be powered up and initialized in a
predefined manner to prevent undefined operations. During
Power Up, when the DOFF is tied HIGH, the DLL gets locked
after 1024 cycles of stable clock.
Power Up Sequence
■ Apply power with DOFF tied HIGH (All other inputs can be
HIGH or LOW)
❐ Apply V
❐ Apply V
■ Provide stable power and clock (K, K) for 1024 cycles to lock
the DLL.
before V
DD
DDQ
before V
DDQ
or at the same time as V
REF
REF
Power Up Waveforms
K
DLL Constraints
■ DLL uses K clock as its synchronizing input. The input must
have low phase jitter, which is specified as t
■ The DLL functions at frequencies down to 120 MHz.
■ If the input clock is unstable and the DLL is enabled, then the
DLL may lock onto an incorrect frequency, causing unstable
SRAM behavior. To avoid DLL locking provide 1024 cycles
stable clock to relock to the desired clock frequency.
~
KC Var
.
K
~
Unstable Clock
> 1024 Stable clock
Start Normal
Operation
/
Clock Start
/
V
V
DD
DDQ
(Clock Starts after Stable)
/
V
V
DD
DDQ
DOFF
V
V
DD
DDQ
Stable (< +/- 0.1V DC per 50ns )
Fix High (or tied to V
DDQ
)
Document #: 001-12561 Rev. *D Page 19 of 26
[+] Feedback
Page 20

CY7C1410JV18, CY7C1425JV18
CY7C1412JV18, CY7C1414JV18
Maximum Ratings
Notes
15.Power up: Assumes a linear ramp from 0V to V
DD
(min) within 200 ms. During this time V
IH
< V
DD
and V
DDQ
< VDD.
16.Output are impedance controlled. IOH = −(V
DDQ
/2)/(RQ/5) for values of 175 ohms <= RQ <= 350 ohms.
17.Output are impedance controlled. I
OL
= (V
DDQ
/2)/(RQ/5) for values of 175 ohms <= RQ <= 350 ohms.
18.V
REF
(min) = 0.68V or 0.46V
DDQ
, whichever is larger, V
REF
(max) = 0.95V or 0.54V
DDQ
, whichever is smaller.
Exceeding maximum ratings may impair the useful life of th e
device. These user guidelines are not tested.
Storage Temperature .................................–65°C to +150°C
Ambient Temperature with Power Applied.... –10°C to +85°C
Supply Voltage on VDD Relative to GND........–0.5V to +2.9V
Supply Voltage on V
DC Applied to Outputs in High-Z ........–0.5V to V
DC Input Voltage
Relative to GND.......–0.5V to +V
DDQ
[11]
..............................–0.5V to VDD + 0.3V
DDQ
DD
+ 0.3V
Current into Outputs (LOW) ........................................20 mA
Static Discharge Voltage (MIL-STD-883, M. 3015).. > 2001V
Latch-up Current ................................................... > 200 mA
Operating Range
Range
Temperature (TA) V
Commercial 0°C to +70°C 1.8 ± 0.1V 1.4V to
Industrial –40°C to +85°C
Ambient
DD
[15]
V
DDQ
V
DD
Electrical Characteristics
DC Electrical Characteristics
Over the Operating Range
Parameter Description Test Conditions Min Typ Max Unit
V
DD
V
DDQ
V
OH
V
OL
V
OH(LOW)
V
OL(LOW)
V
IH
V
IL
I
X
I
OZ
V
REF
I
DD
I
SB1
Power Supply Voltage 1.7 1.8 1.9 V
IO Supply Voltage 1.4 1.5 V
Output HIGH Voltage Note 16 V
Output LOW Voltage Note 17 V
Output HIGH Voltage I
Output LOW Voltage IOL = 0.1 mA, Nominal Impedance V
Input HIGH Voltage V
Input LOW Voltage –0.3 V
Input Leakage Current GND ≤ VI ≤ V
Output Leakage Current GND ≤ VI ≤ V
Input Reference Voltage
VDD Operating Supply V
Automatic Power down
Current
[12]
DD
/2 – 0.12 V
DDQ
/2 – 0.12 V
DDQ
= −0.1 mA, Nominal Impedance V
OH
DDQ
Output Disabled −5 5 μA
= 1/t
DDQ,
CYC
267MHz (x8) 1330 mA
(x9) 1330
(x18) 1370
[18]
Typical Value = 0.75V 0.68 0.75 0.95 V
= Max,
DD
I
= 0 mA,
OUT
f = f
MAX
– 0.2 V
DDQ
SS
+ 0.1 V
REF
−5 5 μA
/2 + 0.12 V
DDQ
/2 + 0.12 V
DDQ
DDQ
0.2 V
+ 0.3 V
DDQ
– 0.1 V
REF
(x36) 1460
250MHz (x8) 1200 mA
(x9) 1200
(x18) 1230
(x36) 1290
Max VDD,
Both Ports Deselected,
≥ VIH or VIN ≤ VIL
V
IN
f = f
Inputs Static
MAX
= 1/t
CYC,
267MHz (x8) 375 mA
(x9) 375
(x18) 380
(x36) 385
250MHz (x8) 345 mA
(x9) 345
(x18) 350
(x36) 350
[15]
V
V
Document #: 001-12561 Rev. *D Page 20 of 26
[+] Feedback
Page 21

CY7C1410JV18, CY7C1425JV18
CY7C1412JV18, CY7C1414JV18
AC Electrical Characteristics
1.25V
0.25V
R = 50Ω
5pF
INCLUDING
JIG AND
SCOPE
ALL INPUT PULSES
Device
R
L
= 50Ω
Z
0
= 50Ω
V
REF
= 0.75V
V
REF
= 0.75V
[19]
0.75V
Under
Test
0.75V
Device
Under
Test
OUTPUT
0.75V
V
REF
V
REF
OUTPUT
ZQ
ZQ
(a)
Slew Rate = 2 V/ns
RQ =
250
Ω
(b)
RQ =
250
Ω
Note
19.Unless otherwise noted, test conditions are based on signal transition time of 2V/ns, timing reference levels of 0.75V, Vref = 0.75V, RQ = 250Ω, V
DDQ
= 1.5V, input
pulse levels of 0.25V to 1.25V, and output loading of the specified I
OL/IOH
and load capacitance shown in (a) of AC Test Loads and Waveforms.
Over the Operating Range
Parameter Description Test Conditions Min Typ Max Unit
V
IH
V
IL
Input HIGH Voltage V
Input LOW Voltage – – V
[11]
+ 0.2 – – V
REF
– 0.2 V
REF
Capacitance
Tested initially and after any design or process change that may affect these parameters.
Parameter Description Test Conditions Max Unit
C
Input Capacitance TA = 25°C, f = 1 MHz, VDD = 1.8V, V
IN
C
CLK
C
O
Clock Input Capacitance 4 pF
Output Capacitance 5pF
= 1.5V 5 pF
DDQ
Thermal Resistance
Tested initially and after any design or process change that may affect these parameters.
Parameter Description Test Conditions
Θ
JA
Θ
JC
Thermal Resistance
(Junction to Ambient)
Thermal Resistance
(Junction to Case)
Test conditi ons follow standard test methods and
procedures for measuring thermal impedance, in
accordance with EIA/JESD51.
165 FBGA
Package
17.2 °C/W
3.2 °C/W
Unit
AC Test Loads and Waveforms
Document #: 001-12561 Rev. *D Page 21 of 26
[+] Feedback
Page 22

CY7C1410JV18, CY7C1425JV18
CY7C1412JV18, CY7C1414JV18
Switching Characteristics
Notes
20.When a part with a maximum frequency above 250 MHz is operating at a lower clock frequency, it requires the input timing of the frequency range in which it is being
operated and outputs data with the output timings of that fre quency range.
21.This part has a voltage regulator internally; t
POWER
is the time that the power is suppli ed a bove VDD minimum initially before a read or write operation can be initiated.
22.These parameters are extrapolated from the input timing parameters (t
KHKH
- 250 ps, where 250 ps is the internal jitter. An input jitter of 200 ps (tKC Var) is already
included in the t
KHKH
). These parameters are only guaranteed by design and are not tested in production.
23.t
CHZ
, t
CLZ
, are specified with a load capacitance of 5 pF as in part (b) of AC Test Loads and Waveforms on page 21. Transition is measured ± 100 mV from steady
state voltage.
24.At any voltage and temperature t
CHZ
is less than t
CLZ
and t
CHZ
less than tCO.
Over the Operating Range
Cypress
Parameter
t
POWER
t
CYC
t
KH
t
KL
t
KHKH
t
KHCH
Consortium
Parameter
t
KHKH
t
KHKL
t
KLKH
t
KHKH
t
KHCH
Setup Times
t
SA
t
SC
t
SCDDR
t
SD
t
AVKH
t
IVKH
t
IVKH
t
DVKH
Hold Times
t
HA
t
HC
t
HCDDR
t
HD
t
KHAX
t
KHIX
t
KHIX
t
KHDX
Output Times
t
CO
t
DOH
t
CCQO
t
CQOH
t
CQD
t
CQDOHtCQHQX
t
CQH
t
CQHCQHtCQHCQH
t
CHZ
t
CLZ
t
CHQV
t
CHQX
t
CHCQV
t
CHCQX
t
CQHQV
t
CQHCQL
t
CHQZ
t
CHQX1
DLL Timing
t
KC Var
t
KC lock
t
KC ResettKC Reset
t
KC Var
t
KC lock
[19, 20]
VDD(Typical) to the first access
K Clock and C Clock Cycle Time 3.75 8.4 4.0 8.4 ns
Input Clock (K/K and C/C) HIGH 1.5–1.6– ns
Input Clock (K/K and C/C) LOW 1.5 – 1.6 – ns
K Clock Rise to K Clock Rise and C to C Rise (rising edge to rising edge) 1.68 – 1.8 – ns
K/K Clock Rise to C/C Clock Rise (rising edge to rising edge) 0 1.68 0 1.8 ns
Address Setup to K Clock Rise 0.3 –0.35– ns
Control Setup to K Clock Rise (RPS, WPS) 0.3 –0.35– ns
DDR Control Setup to Clock (K/K) Rise (BWS0, BWS1, BWS3, BWS4) 0.3 –0.35– ns
D
Setup to Clock (K/K) Rise 0.3 –0.35– ns
[X:0]
Address Hold after K Clock Rise 0.3 – 0.35 – ns
Control Hold after K Clock Rise (RPS, WPS) 0.3 –0.35– ns
DDR Control Hold after Clock (K/K) Rise (BWS0, BWS1, BWS3,BWS4) 0.3 –0.35– ns
D
Hold after Clock (K/K) Rise 0.3 – 0.35 – ns
[X:0]
C/C Clock Rise (or K/K in Single Clock Mode) to Data Valid – 0.45 – 0.45 ns
Data Output Hold after Output C/C Clock Rise (Active to Active) –0.45 – –0.45 – ns
C/C Clock Rise to Echo Clock Valid – 0.45 – 0.45 ns
Echo Clock Hold after C/C Clock Rise –0.45 – –0.45 – ns
Echo Clock High to Data Valid – 0.27 – 0.30 ns
Echo Clock High to Data Invalid –0.27 – –0.30 – ns
Output Clock (CQ/CQ) HIGH
CQ Clock Rise to CQ Clock Rise
Clock (C/C) Rise to High-Z (Active to High-Z)
Clock (C/C) Rise to Low-Z
Clock Phase Jitter – 0.20 – 0.20 ns
DLL Lock Time (K, C) 1024 – 1024 – Cycles
K Static to DLL Reset 30 – 30 – ns
Description
[21]
[22]
(rising edge to rising edge)
[23, 24]
[23, 24]
[22]
267 MHz 250 MHz
Min Max Min Max
Unit
11ms
1.43 – 1.55 – ns
1.43 – 1.55 – ns
– 0.45 – 0.45 ns
–0.45 – –0.45 – ns
Document #: 001-12561 Rev. *D Page 22 of 26
[+] Feedback
Page 23
CY7C1410JV18, CY7C1425JV18
CY7C1412JV18, CY7C1414JV18
Switching Waveforms
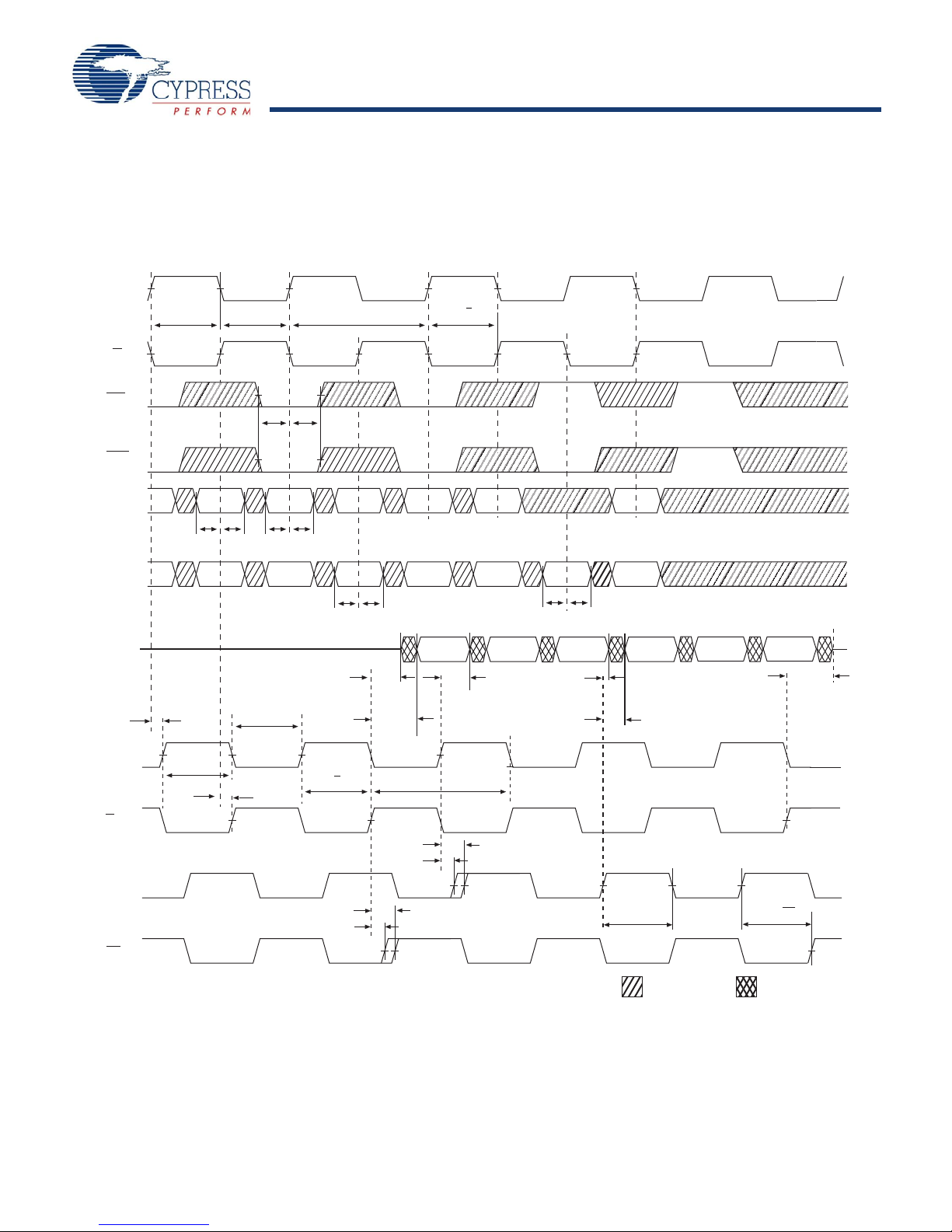
Notes
25.Q00 refers to output from address A0. Q01 refers to output from the next internal burst address following A0, that is, A0+1.
26.Outputs are disabled (High-Z) one clock cycle after a NOP.
27.In this example, if address A2 = A1, then data Q20 = D10 and Q21 = D11. Write dat a is forwar ded immediately as read resu lts. This note applies t o the whole diagram.
Figure 3. Read/Write/Deselect Sequence
[25, 26, 27]
READ READ WRITE WRITEWRITE
1
K
K
RPS
WPS
A0
A
D
Q
2
t
KH
A1
tSAt
HA
D11D10 D60
t
KHCH
34
t
KL
tt
SC
A2
tSAt
D30 D50 D51 D61
t
KL
t
HA
HC
t
CYC
A3 A4
D31
t
SD
t
CLZ
t
CO
t
HD
5
t
KHKH
Q00 Q01
t
DOH
NOPREAD
t
SD
t
CQDOH
7
t
HD
Q20
6
WRITE NOP
8
A6A5
Q21
t
CQD
9
Q40
t
10
Q41
CHZ
C
C
CQ
CQ
t
KH
t
KHCH
t
KHKH
t
CQOH
t
CQOH
t
t
CCQO
CYC
t
CCQO
t
CQH
DON’T CARE
t
CQHCQH
UNDEFINED
Document #: 001-12561 Rev. *D Page 23 of 26
[+] Feedback
Page 24

CY7C1410JV18, CY7C1425JV18
CY7C1412JV18, CY7C1414JV18
Ordering Information
Not all of the speed, package and temperature ranges are ava ilable. Please contact your local sales representative or
visit www.cypress.com for actual products offered.
Speed
(MHz)
267 CY7C1410JV18-267BZC 51-85195 165-Ball Fine Pitch Ball Grid Array (15 x 17 x 1.4 mm) Commercial
CY7C1425JV18-267BZC
CY7C1412JV18-267BZC
CY7C1414JV18-267BZC
CY7C1410JV18-267BZXC 51-85195 165-Ball Fine Pitch Ball Grid Array (15 x 17 x 1.4 mm) Pb-Free
CY7C1425JV18-267BZXC
CY7C1412JV18-267BZXC
CY7C1414JV18-267BZXC
CY7C1410JV18-267BZI 51-85195 165-Ball Fine Pitch Ball Grid Array (15 x 17 x 1.4 mm) Industrial
CY7C1425JV18-267BZI
CY7C1412JV18-267BZI
CY7C1414JV18-267BZI
CY7C1410JV18-267BZXI 51-85195 165-Ball Fine Pitch Ball Grid Array (15 x 17 x 1.4 mm) Pb-Free
CY7C1425JV18-267BZXI
CY7C1412JV18-267BZXI
CY7C1414JV18-267BZXI
250 CY7C1410JV18-250BZC 51-85195 165-Ball Fine Pitch Ball Grid Array (15 x 17 x 1.4 mm) Commercial
CY7C1425JV18-250BZC
CY7C1412JV18-250BZC
CY7C1414JV18-250BZC
CY7C1410JV18-250BZXC 51-85195 165-Ball Fine Pitch Ball Grid Array (15 x 17 x 1.4 mm) Pb-Free
CY7C1425JV18-250BZXC
CY7C1412JV18-250BZXC
CY7C1414JV18-250BZXC
CY7C1410JV18-250BZI 51-85195 165-Ball Fine Pitch Ball Grid Array (15 x 17 x 1.4 mm) Industrial
CY7C1425JV18-250BZI
CY7C1412JV18-250BZI
CY7C1414JV18-250BZI
CY7C1410JV18-250BZXI 51-85195 165-Ball Fine Pitch Ball Grid Array (15 x 17 x 1.4 mm) Pb-Free
CY7C1425JV18-250BZXI
CY7C1412JV18-250BZXI
CY7C1414JV18-250BZXI
Ordering Code
Package
Diagram
Package Type
Operating
Range
Document #: 001-12561 Rev. *D Page 24 of 26
[+] Feedback
Page 25

CY7C1410JV18, CY7C1425JV18
CY7C1412JV18, CY7C1414JV18
Package Diagram
A
1
PIN 1 CORNER
17.00±0.10
15.00±0.10
7.00
1.00
Ø0.50 (165X)
Ø0.25 M C A B
Ø0.05 M C
B
A
0.15(4X)
0.35±0.06
1.40 MAX.
SEATING PLANE
0.53±0.05
0.25 C
0.15 C
PIN 1 CORNER
TOP VIEW
BOTTOM VIEW
2345678910
10.00
14.00
B
C
D
E
F
G
H
J
K
L
M
N
11
1110986754321
P
R
P
R
K
M
N
L
J
H
G
F
E
D
C
B
A
C
1.00
5.00
0.36
+0.14
-0.06
SOLDER PAD TYPE : NON SOLDER MASK DEFINED (NSMD)
NOTES :
PACKAGE WEIGHT : 0.65g
JEDEC REFERENCE : MO-216 / DESIGN 4.6C
PACKAGE CODE : BB0AD
51-85195-*A
Figure 4. 165-ball FBGA (15 x 17 x 1.40 mm), 51-85195
Document #: 001-12561 Rev. *D Page 25 of 26
[+] Feedback
Page 26
CY7C1410JV18, CY7C1425JV18
CY7C1412JV18, CY7C1414JV18
Document History Page
Document Title: CY7C1410JV18/CY7C1425JV18/CY7C1412JV18/CY7C1414JV18, 36-Mbit QDR™-II SRAM 2-Word
Burst Architecture
Document Number: 001-12561
REV. ECN NO.
ISSUE
DATE
** 808457 See ECN VKN New Data Sheet
*A 1061960 See ECN VKN Removed 300MHz speed bin
*B 1397384 See ECN VKN Added 267MHz speed bin
*C 1462587 See ECN VKN/AESA Converted from preliminary to final
*D 2189567 See ECN VKN/AESA Minor Change-Moved to the external web
ORIG. OF
CHANGE
DESCRIPTION OF CHANGE
Removed 200MHz speed bin
Updated I
Changed DLL minimum operating frequency from 80MHz to 120MHz
Changed t
specs
DD/ISB
max spec to 8.4ns for all speed bins
CYC
© Cypress Semiconductor Corporation, 2007-2008. The information contained herein is subject to change without notice. Cypress Semiconductor Corporation assumes no responsibility for the use
of any circuitry other than circuitry embodied in a Cypress product. Nor does it convey or imply any license under patent or other rights. Cypress products are not warranted nor intended to be used
for medical, life support, life sa vin g, critical control or safety applications, unless pursuant to an express written agreem ent with Cypress. Furthermore, Cypress does not a uthor i ze i ts products for use
as critical components in life-support systems where a malfunction or failure may reasonably be expected to result in significant injury to the user. The inclusion of Cypress products in life-support
systems application implies that the manufacturer assumes all risk of such use and in doing so indemnifies Cypress against all charges.
Any Source Code (software and/or firmware) is owned by Cypress Semiconductor Corporation (Cypress) and is protected by and subject to worldwide patent protection (United States and foreign),
United States co pyright la ws and inte rnatio na l tre aty prov isi ons. Cyp ress he reby g rant s to lice nsee a p erson al, no n-ex clusi ve, non-tra nsferable license to copy, use, modify, create derivative works of,
and compile the Cypress Source Code and derivative works for the sole purpo se of creating custom sof tware and or firm ware in support of licen see product to be use d only in conjunction with a Cypress
integrated circuit as specified in th e applicable agreement. Any reproductio n, modification, translation, co mpilation, o r representati on of this Sour ce Code except as specified above is prohibited without
the express written permission of Cypress.
Disclaimer: CYPRESS MAKES NO WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, WITH REGARD TO THIS MATERIAL, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES
OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE. Cypress reserves the right to make changes without further notice to the materials described herein. Cypress does not
assume any liability arising out of the ap plicati on or u se o f any pr oduct o r circui t descri bed h erein. Cypr ess does not aut horize it s product s for use a s critical compo nent s in life-support systems whe re
a malfunction or failure may reasonab ly be expected to resu lt in significant injury t o the user. The inclusion of Cypress’ prod uct in a life-support systems application implies that the manufacturer
assumes all risk of such use and in doing so indemnifies Cypress against all charges.
Use may be limited by and subject to the applicable Cypress software license agreement.
Document #: 001-12561 Rev. *D Revised March 10, 2007 Page 26 of 26
QDR RAMs and Quad Data Rate RAMs comprise a new family of products developed by Cypress, IDT, NEC, Renesas, and Samsung. All product and company names mentioned in this document
are the trademarks of their respective holders.
[+] Feedback
 Loading...
Loading...