

Page 1

CY8CKIT-044
PSoC
®
4 M-Series Pioneer Kit Guide
Document Number: 001-96598 Rev. *E
Cypress Semiconductor
198 Champion Court
San Jose, CA 95134-1709
www.cypress.com
Page 2

CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 2
Copyrights
© Cypress Semiconductor Corporation, 2015-2019. This document is the property of Cypress Semiconductor Corporation
and its subsidiaries (“Cypress”). This document, including any software or firmware included or referenced in this document
(“Software”), is owned by Cypress under the intellectual property laws and treaties of the United States and other countries
worldwide. Cypress reserves all rights under such laws and treaties and does not, except as specifically stated in this
paragraph, grant any license under its patents, copyrights, trademarks, or other intellectual property rights. If the Software is
not accompanied by a license agreement and you do not otherwise have a written agreement with Cypress governing the
use of the Software, then Cypress hereby grants you a personal, non-exclusive, nontransferable license (without the right to
sublicense) (1) under its copyright rights in the Software (a) for Software provided in source code form, to modify and
reproduce the Software solely for use with Cypress hardware products, only internally within your organization, and (b) to
distribute the Software in binary code form externally to end users (either directly or indirectly through resellers and
distributors), solely for use on Cypress hardware product units, and (2) under those claims of Cypress’s patents that are
infringed by the Software (as provided by Cypress, unmodified) to make, use, distribute, and import the Software solely for
use with Cypress hardware products. Any other use, reproduction, modification, translation, or compilation of the Software is
prohibited.
TO THE EXTENT PERMITTED BY APPLICABLE LAW, CYPRESS MAKES NO WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, WITH REGARD TO THIS DOCUMENT OR ANY SOFTWARE OR ACCOMPANYING HARDWARE, INCLUDING,
BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
PURPOSE. No computing device can be absolutely secure. Therefore, despite security measures implemented in Cypress
hardware or software products, Cypress shall have no liability arising out of any security breach, such as unauthorized access
to or use of a Cypress product. CYPRESS DOES NOT REPRESENT, WARRANT, OR GUARANTEE THAT CYPRESS
PRODUCTS, OR SYSTEMS CREATED USING CYPRESS PRODUCTS, WILL BE FREE FROM CORRUPTION, ATTACK,
VIRUSES, INTERFERENCE, HACKING, DATA LOSS OR THEFT, OR OTHER SECURITY INTRUSION (collectively,
“Security Breach”). Cypress disclaims any liability relating to any Security Breach, and you shall and hereby do release
Cypress from any claim, damage, or other liability arising from any Security Breach. In addition, the products described in
these materials may contain design defects or errors known as errata which may cause the product to deviate from published
specifications. To the extent permitted by applicable law, Cypress reserves the right to make changes to this document
without further notice. Cypress does not assume any liability arising out of the application or use of any product or circuit
described in this document. Any information provided in this document, including any sample design information or
programming code, is provided only for reference purposes. It is the responsibility of the user of this document to properly
design, program, and test the functionality and safety of any application made of this information and any resulting product.
“High-Risk Device” means any device or system whose failure could cause personal injury, death, or property damage.
Examples of High-Risk Devices are weapons, nuclear installations, surgical implants, and other medical devices. “Critical
Component” means any component of a High-Risk Device whose failure to perform can be reasonably expected to cause,
directly or indirectly, the failure of the High-Risk Device, or to affect its safety or effectiveness. Cypress is not liable, in whole
or in part, and you shall and hereby do release Cypress from any claim, damage, or other liability arising from any use of a
Cypress product as a Critical Component in a High-Risk Device. You shall indemnify and hold Cypress, its directors, officers,
employees, agents, affiliates, distributors, and assigns harmless from and against all claims, costs, damages, and expenses,
arising out of any claim, including claims for product liability, personal injury or death, or property damage arising from any
use of a Cypress product as a Critical Component in a High-Risk Device. Cypress products are not intended or authorized
for use as a Critical Component in any High-Risk Device except to the limited extent that (i) Cypress’s published data sheet
for the product explicitly states Cypress has qualified the product for use in a specific High-Risk Device, or (ii) Cypress has
given you advance written authorization to use the product as a Critical Component in the specific High-Risk Device and you
have signed a separate indemnification agreement.
Cypress, the Cypress logo, Spansion, the Spansion logo, and combinations thereof, WICED, PSoC, CapSense, EZ-USB, FRAM, and Traveo are trademarks or registered trademarks of Cypress in the United States and other countries. For a more
complete list of Cypress trademarks, visit cypress.com. Other names and brands may be claimed as property of their
respective owners.
Page 3

CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 3
Contents
Safety Information .................................................................................................................................................................. 6
1. Introduction .................................................................................................................................................................... 7
1.1 Kit Contents ........................................................................................................................................................... 7
1.2 Board Details ......................................................................................................................................................... 9
1.3 PSoC Creator ...................................................................................................................................................... 10
1.3.1 PSoC Creator Code Examples ............................................................................................................... 11
1.3.2 Kit Code Examples ................................................................................................................................. 11
1.3.3 PSoC Creator Help ................................................................................................................................ . 12
1.4 Getting Started .................................................................................................................................................... 12
1.5 Additional Learning Resources ............................................................................................................................ 12
1.6 Technical Support ................................................................................................................................................ 13
1.7 Document Conventions ....................................................................................................................................... 13
1.8 Acronyms ............................................................................................................................................................ 14
2. Installation.................................................................................................................................................................... 15
2.1 Before You Begin ................................................................................................................................................ 15
2.2 Install Software .................................................................................................................................................... 15
2.3 Uninstall Software ................................................................................................................................................ 17
3. Kit Operation ................................................................................................................................................................ 18
3.1 Theory of Operation ............................................................................................................................................. 18
3.2 KitProg ................................................................................................................................................................. 21
3.3 Programming and Debugging PSoC 4200M Device ............................................................................................ 21
3.3.1 Programming using PSoC Creator ......................................................................................................... 21
3.3.2 Debugging using PSoC Creator ............................................................................................................. 22
3.3.3 Programming using PSoC Programmer ................................................................................................. 22
3.4 USB-UART Bridge ............................................................................................................................................... 22
3.5 USB-I2C Bridge ................................................................................................................................................... 22
3.6 Mass Storage Programmer.................................................................................................................................. 22
3.7 Updating the KitProg Firmware ............................................................................................................................ 22
4. Code Examples ............................................................................................................................................................ 23
4.1 Using the Kit Code Examples .............................................................................................................................. 23
4.2 Deep-Sleep Blinky ............................................................................................................................................... 25
4.2.1 Project Description .................................................................................................................................. 25
4.2.2 Hardware Connections ........................................................................................................................... 25
4.2.3 Verify Output ........................................................................................................................................... 25
4.3 CapSense Proximity ............................................................................................................................................ 26
Page 4

Contents
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 4
4.3.1 Project Description .................................................................................................................................. 26
4.3.2 Hardware Connections ........................................................................................................................... 26
4.3.3 Verify Output ........................................................................................................................................... 26
4.4 Proximity Gestures .............................................................................................................................................. 27
4.4.1 Project Description .................................................................................................................................. 27
4.4.2 Hardware Connections ........................................................................................................................... 28
4.4.3 Verify Output ........................................................................................................................................... 29
4.5 Touch Gestures ................................................................................................................................................... 30
4.5.1 Project Description .................................................................................................................................. 30
4.5.2 Hardware Connections ........................................................................................................................... 32
4.5.3 Verify Output ........................................................................................................................................... 32
4.6 Accelerometer ..................................................................................................................................................... 33
4.6.1 Project Description .................................................................................................................................. 33
4.6.2 Hardware Connections ........................................................................................................................... 34
4.6.3 Verify Output ........................................................................................................................................... 34
4.7 Sensor Hub.......................................................................................................................................................... 35
4.7.1 Project Description .................................................................................................................................. 35
4.7.2 Hardware Connections ........................................................................................................................... 36
4.7.3 Verify Output ........................................................................................................................................... 36
4.8 Raspberry Pi ........................................................................................................................................................ 38
4.8.1 Project Description .................................................................................................................................. 38
4.8.2 Hardware Connections ........................................................................................................................... 38
4.8.3 Setting Up Raspberry Pi ......................................................................................................................... 38
4.8.4 Verify Output ........................................................................................................................................... 38
A. Appendix ...................................................................................................................................................................... 39
A.1 Schematics .......................................................................................................................................................... 39
A.2 Hardware Functional Description ......................................................................................................................... 43
A.2.1 PSoC 4200M .......................................................................................................................................... 43
A.2.2 PSoC 5LP ............................................................................................................................................... 43
A.2.3 Power System ........................................................................................................................................ 44
A.2.4 Expansion Connectors ............................................................................................................................ 46
A.2.5 USB Mini-B Connector ............................................................................................................................ 47
A.2.6 CapSense Circuit .................................................................................................................................... 47
A.2.7 Pioneer Board LEDs ............................................................................................................................... 47
A.2.8 Push Buttons .......................................................................................................................................... 47
A.2.9 Cypress Ferroelectric RAM (F-RAM) ...................................................................................................... 47
A.2.10 3-Axis Accelerometer .............................................................................................................................. 47
A.2.11 PWM Temperature Sensor ..................................................................................................................... 48
A.2.12 Ambient Light Sensor ............................................................................................................................. 48
A.2.13 Serial Interconnection Between PSoC 5LP and PSoC 4200M ............................................................... 48
A.2.14 Raspberry Pi Compatible Header ........................................................................................................... 49
A.2.15 Level Translators .................................................................................................................................... 50
A.2.16 Test Points .............................................................................................................................................. 51
A.3 Using FM24V10 F-RAM ...................................................................................................................................... 52
A.3.1 Address Selection ................................................................................................................................... 52
A.3.2 Write/Read Operation ............................................................................................................................. 52
Page 5

Contents
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 5
A.4 Migrating Projects Across Different Pioneer Series Kits ...................................................................................... 54
A.4.1 Arduino Uno Compatible Headers .......................................................................................................... 54
A.4.2 Onboard Peripherals ............................................................................................................................... 56
A.5 KitProg Status LED States .................................................................................................................................. 57
A.6 Bill of Materials .................................................................................................................................................... 58
Revision History ................................................................................................................................................................... 62
Page 6
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 6
Safety Information
The CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit is intended for use as a development platform for hardware or software in
a laboratory environment. The board is an open system design, which does not include a shielded enclosure. For this reason,
the board may cause interference with other electrical or electronic devices in close proximity. In a domestic environment,
this product may cause radio interference. In such cases, the user may be required to take adequate preventive measures.
Also, this board should not be used near any medical equipment or RF devices.
Attaching additional wiring to this product or modifying the product operation from the factory default may affect its
performance and cause interference with other apparatus in the immediate vicinity. If such interference is detected, suitable
mitigating measures should be taken.
The CY8CKIT-044 as shipped from the factory has been verified to meet with the requirements of CE as a Class A product.
The CY8CKIT-044 board contains electrostatic discharge (ESD) sensitive devices.
Electrostatic charges readily accumulate on the human body and any equipment which can
cause a discharge without detection. Permanent damage may occur to devices subjected to
high-energy discharges. Proper ESD precautions are recommended to avoid performance
degradation or loss of functionality. Store unused CY8CKIT-044 boards in the protective
shipping package.
End-of-Life/Product Recycling
The end-of-life cycle for this kit is five years from the date of manufacture mentioned on the
back of the box. Contact the nearest recycler to discard the kit.
General Safety Instructions
ESD Protection
ESD can damage boards and associated components. Cypress recommends that the user perform procedures only at an
ESD workstation. If an ESD workstation is not available, use appropriate ESD protection by wearing an antistatic wrist strap
attached to a grounded metal object.
Handling Boards
CY8CKIT-044 board is sensitive to ESD. Hold the board only by its edges. After removing the board from its box, place it on
a grounded, static-free surface. Use a conductive foam pad if available. Do not slide the board over any surface.
Page 7
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 7
1. Introduction
Thank you for your interest in the CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit. The PSoC 4 M-Series Pioneer Kit enables
customers to evaluate and develop projects using the PSoC 4200M device family.
PSoC 4200M device family is an expansion to the PSoC 4 device family that offers more flash, GPIOs, and programmable
analog and digital blocks. PSoC 4200M device is a true programmable embedded system-on chip, integrating custom analog
and digital peripheral functions, memory, and an Arm® Cortex®-M0 microcontroller on a single chip. The programmable analog
and digital peripheral functions allow higher flexibility, in-field tuning of the design, and faster time-to-market.
The PSoC 4 M-Series Pioneer Kit offers footprint-compatibility with Arduino™ Shields, 6-pin Digilent® Pmod™ Peripheral
Modules, and Raspberry Pi boards. This kit features two CapSense® Proximity headers, a CapSense Gesture Pad, an
ambient light sensor, a 3-Axis accelerometer, a PWM temperature sensor, an RGB LED, a push button switch, an onboard
programmer/debugger and USB-UART/I2C bridge functionality block (KitProg), and a Cypress F-RAM™. This kit supports
operating voltages of 3.3 V or 5 V.
You will use PSoC Creator™ to develop and debug your PSoC 4200M device projects. PSoC Creator is Cypress’ standard
integrated design environment (IDE). If you are new to PSoC Creator, see the documentation on the PSoC Creator home
page. You can also refer the application note AN79953 – Getting Started with PSoC 4, which gives an introduction to the
PSoC 4 device.
1.1 Kit Contents
The CY8CKIT-044 PSoC 4 M-Series Pioneer Kit contains the following, as shown in Figure 1-1.
PSoC 4 M-Series Pioneer board
USB Standard-A to Mini-B cable
Four jumper wires (4 inches each)
Two proximity sensor wires (5 inches each)
Quick Start Guide
Page 8

Introduction
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 8
Figure 1-1. Kit Contents
Inspect the contents of the kit; if you find any part missing, contact your nearest Cypress sales office for help:
www.cypress.com/support.
Page 9
Introduction
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 9
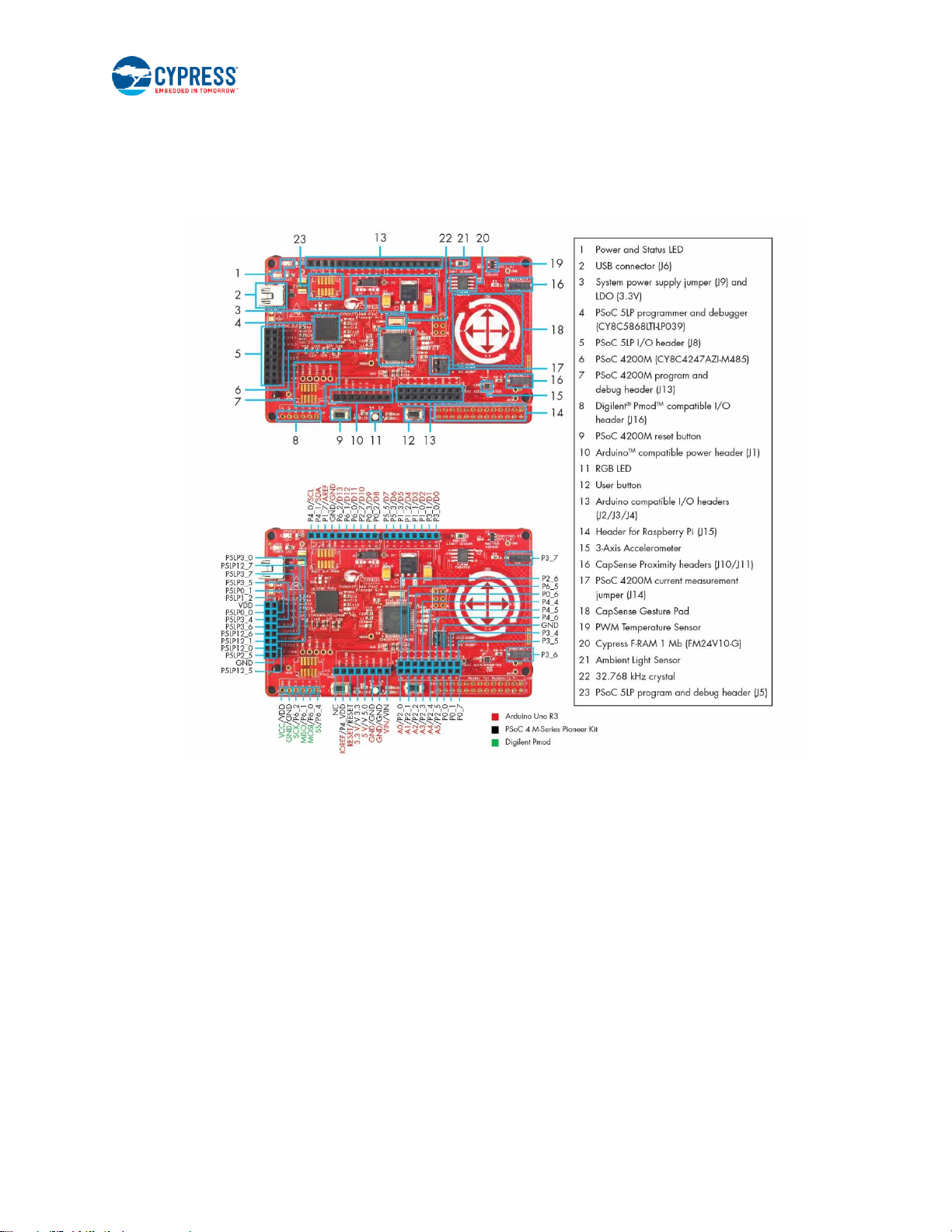
1.2 Board Details
The PSoC 4 M-Series Pioneer Kit consists of the following blocks, as shown in Figure 1-2. It also shows the pin mapping of
all headers.
Figure 1-2. PSoC 4 M-Series Pioneer Kit Markup
Page 10
Introduction
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 10
1.3 PSoC Creator
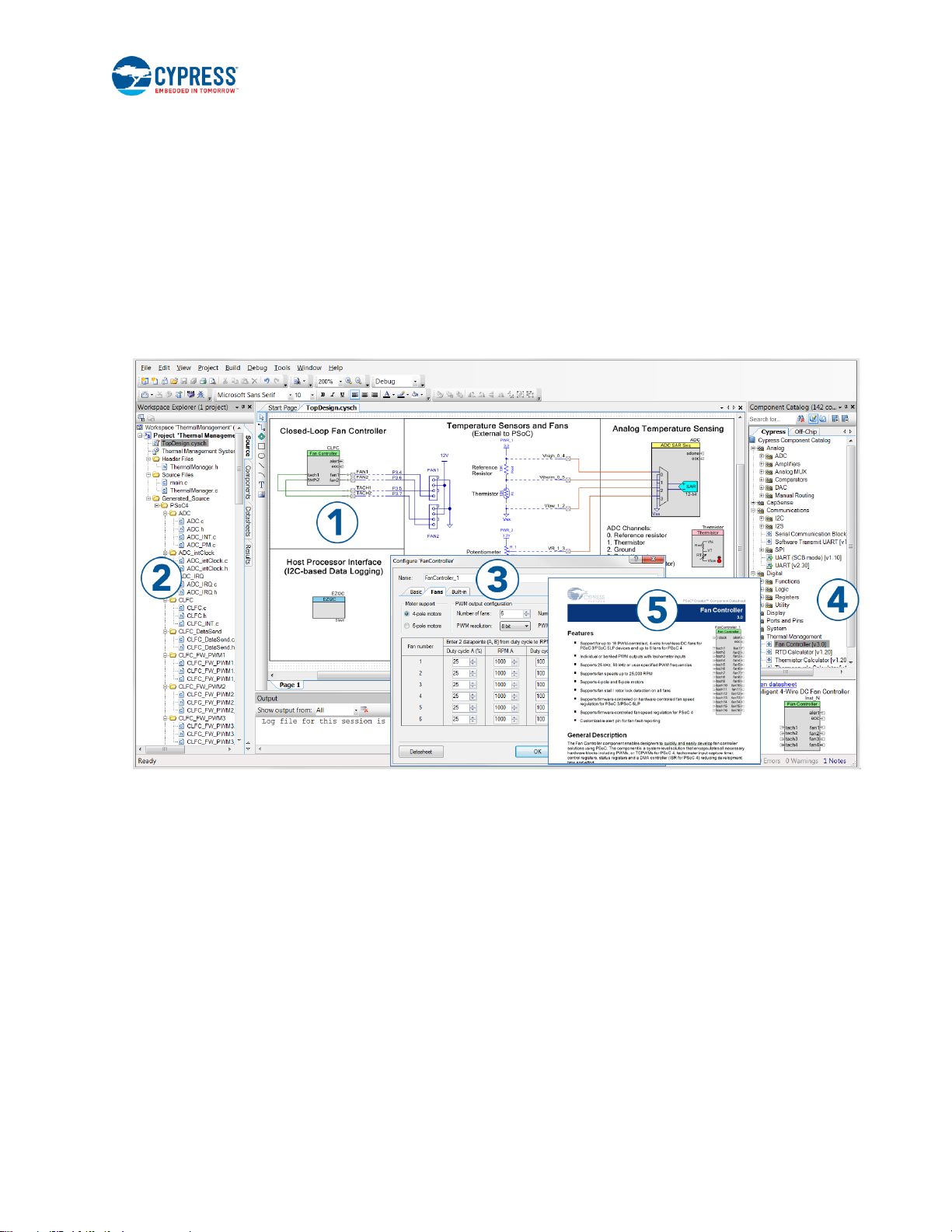
PSoC Creator is a state-of-the-art, easy-to-use IDE. It introduces revolutionary hardware and software codesign, powered by
a library of preverified and precharacterized PSoC Components™, as shown in Figure 1-3. With PSoC Creator, you can:
Drag and drop Components to build your hardware system design in the main design workspace
Co-design your application firmware with the PSoC hardware
Configure Components using configuration tools
Explore the library of 100+ Components
Access Component datasheets
Figure 1-3. PSoC Creator Features
PSoC Creator also enables you to tap into an entire tool ecosystem with integrated compiler chains and production
programmers for PSoC devices.
For more information, visit www.cypress.com/psoccreator.
Page 11
Introduction
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 11
1.3.1 PSoC Creator Code Examples
PSoC Creator includes a large number of code examples. These
examples are accessible from the PSoC Creator Start Page, as
shown in Figure 1-4.
Code examples can speed up your design process by starting
you off with a complete design, instead of a blank page. The code
examples also show how to use PSoC Creator Components for
various applications. Code examples and documentation are
included, as shown in Figure 1-5.
In the Find Code Example dialog shown in Figure 1-5, you have
several options:
Filter for examples based on device family or keyword.
Select from the list of examples offered based on the Filter
Options.
View the project documentation for the selection (on the
Documentation tab).
View the code for the selection. You can also copy and
paste code from this window to your project, which can help
speed up code development.
Figure 1-4. Code Examples in PSoC Creator
Create new workspace for the code example. This can speed up your design process by starting you off with a
complete, basic design. You can then adapt that design to your application.
Figure 1-5. Sample Code Example
1.3.2 Kit Code Examples
You can access the installed kit code examples from the PSoC Creator Start Page. To access these code examples, expand
the Kits under the section Start; then, expand the specific kit to see the code examples. Refer to the Using the Kit Code
Examples section for a detailed explanation on how to access the kit code examples.
Page 12

Introduction
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 12
1.3.3 PSoC Creator Help
Launch PSoC Creator and navigate to the following items:
Quick Start Guide: Choose Help > Documentation > Quick Start Guide. This guide gives you the basics for developing
PSoC Creator projects.
Simple Component code examples: Choose File > Code Example. These code examples demonstrate how to
configure and use PSoC Creator Components. To access code examples related to a specific Component, place the
Component on the TopDesign schematic and right-click on the Component. Select the Find Code Example option in the
context menu that appears.
System Reference Guide: Choose Help > System Reference Guide. This guide lists and describes the system
functions provided by PSoC Creator.
Component Datasheets: Right-click a Component and select Open Datasheet. Visit the PSoC 4 Component
Datasheets page for a list of all PSoC 4 Component datasheets.
1.4 Getting Started
This guide will help you be acquainted with the CY8CKIT-044 PSoC 4 M-Series Pioneer Kit:
The Installation chapter describes the installation of the kit software. This includes the PSoC Creator IDE to develop and
debug the applications, and PSoC Programmer to program the .hex files on to the device.
The Kit Operation chapter describes the major features of the PSoC 4 M-Series Pioneer Kit and functionalities such as
programming, debugging, and the USB-UART and USB-I2C bridges.
The Code Examples chapter describes multiple PSoC 4200M code examples that will help you understand how to create
your own PSoC 4 projects.
The Appendix provides the detailed hardware description, method to use the onboard F-RAM, kit schematics, and the
bill of materials (BOM).
1.5 Additional Learning Resources
Cypress provides a wealth of data at www.cypress.com to help you to select the right PSoC device for your design, and to
help you to quickly and effectively integrate the device into your design. For a comprehensive list of resources, see
KBA86521, How to Design with PSoC 3, PSoC 4, and PSoC 5LP. The following is an abbreviated list for PSoC 4:
Overview: PSoC Portfolio and PSoC Roadmap.
Product Selectors: PSoC 4 Product Selector. In addition, PSoC Creator includes a device selection tool.
Datasheets: Describe and provide electrical specifications for the PSoC 4000, PSoC 4100, PSoC 4200, PSoC 4100M,
and PSoC 4200M device families.
CapSense Design Guide: Learn how to design capacitive touch-sensing applications with the PSoC 4 family of devices.
Application Notes and Code Examples: Cover a broad range of topics, from basic to advanced. Many of the application
notes include code examples. Visit the PSoC 3/4/5 Code Examples web page for a list of all available PSoC Creator
code examples. To access code examples from within PSoC Creator – see PSoC Creator Code Examples.
Technical Reference Manuals (TRM): Provide detailed descriptions of the architecture and registers in each PSoC 4
device family.
Development Kits:
CY8CKIT-042 and CY8CKIT-040 are easy-to-use and inexpensive development platforms. These kits include
connectors for Arduino compatible Shields and Digilent Pmod Peripheral Modules.
CY8CKIT-049 is a low-cost prototyping platform for sampling PSoC 4 devices.
CY8CKIT-001 is a common development platform for all PSoC family devices.
MiniProg3 device provides an interface for flash programming and debug.
Knowledge Base Articles (KBA): Provide design and application tips from experts on using the device. For instance,
KBA93541 explains how to use CY8CKIT-049 to program another PSoC 4.
Page 13

Introduction
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 13
PSoC Creator Training: Visit www.cypress.com/training for a comprehensive list of video trainings on PSoC Creator.
Learning from Peers: Visit www.cypress.com/forums to meet enthusiastic PSoC developers discussing the next
generation embedded systems on Cypress Developer Community Forums.
1.6 Technical Support
For assistance, visit Cypress Support or contact customer support at +1(800) 541-4736 Ext. 3 (in the USA) or +1 (408) 9432600 Ext. 3 (International).
1.7 Document Conventions
Table 1-1. Document Conventions for Guides
Convention
Usage
Courier New
Displays file locations, user-entered text, and source code:
C:\ ...cd\icc\
Italics
Displays file names and reference documentation:
Read about the sourcefile.hex file in the PSoC Creator User Guide.
[Bracketed, Bold]
Displays keyboard commands in procedures:
[Enter] or [Ctrl] [C]
File > Open
Represents menu paths:
File > Open > New Project
Bold
Displays commands, menu paths, and icon names in procedures:
Click the File icon and then click Open.
Times New Roman
Displays an equation:
2 + 2 = 4
Text in gray boxes
Describes Cautions or unique functionality of the product.
Page 14
Introduction
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 14
1.8 Acronyms
Table 1-2. Acronyms Used in this Document
Acronym
Description
ADC
Analog-to-Digital Converter
ESD
Electrostatic Discharge
F-RAM
Ferroelectric Random Access Memory
GPIO
General Purpose Input/Output
I2C
Inter-Integrated Circuit
IDE
Integrated Development Environment
ILO
Internal Low-speed Oscillator
IMO
Internal Main Oscillator
LDO
Low Drop Out (voltage regulator)
LED
Light-Emitting Diode
LFCLK
Low-frequency Clock
LSB
Least Significant Byte
MSB
Most Significant Byte
PSoC
Programmable Systems-on-Chip
PWM
Pulse Width Modulation
RGB
Red Green Blue
SAR
Successive Approximation Register
SPI
Serial Peripheral Interface
SWD
Serial Wire Debug
UART
Universal Asynchronous Receiver Transmitter
USB
Universal Serial Bus
Page 15
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 15
2. Installation
This chapter describes the steps to install the software tools and packages on a PC for using the CY8CKIT-044 PSoC 4 MSeries Pioneer Kit. This includes the IDE on which the projects will be built and used for programming.
2.1 Before You Begin
To install Cypress software, you will require administrator privileges. However, they are not required to run the software that
is already installed. Before you install the kit software, close any other Cypress software that is currently running.
2.2 Install Software
Follow these steps to install the CY8CKIT-044 PSoC 4 M-Series Pioneer Kit software:
1. Download the PSoC 4 M-Series Pioneer Kit software from www.cypress.com/CY8CKIT-044. The kit software is available
in three different formats for download.
a. CY8CKIT-044 Kit Complete Setup: This installation package contains the files related to the kit. However, it does
not include the Windows Installer or Microsoft .NET framework packages. If these packages are not on your
computer, the installer directs you to download and install them from the Internet.
b. CY8CKIT-044 Kit Only: This executable file installs only the kit contents, which include kit code examples, hardware
files, and user documents. This package can be used if all the software prerequisites (listed in step 5) are installed
on your PC.
c. CY8CKIT-044 DVD ISO: This file is a complete package, stored in a DVD-ROM image format, which you can use
to create a DVD or extract using an ISO extraction program such as WinZip® or WinRAR. The file can also be
mounted like a virtual CD/DVD using virtual drive programs such as Virtual CloneDrive and MagicISO. This file
includes all the required software, utilities, drivers, hardware files, and user documents.
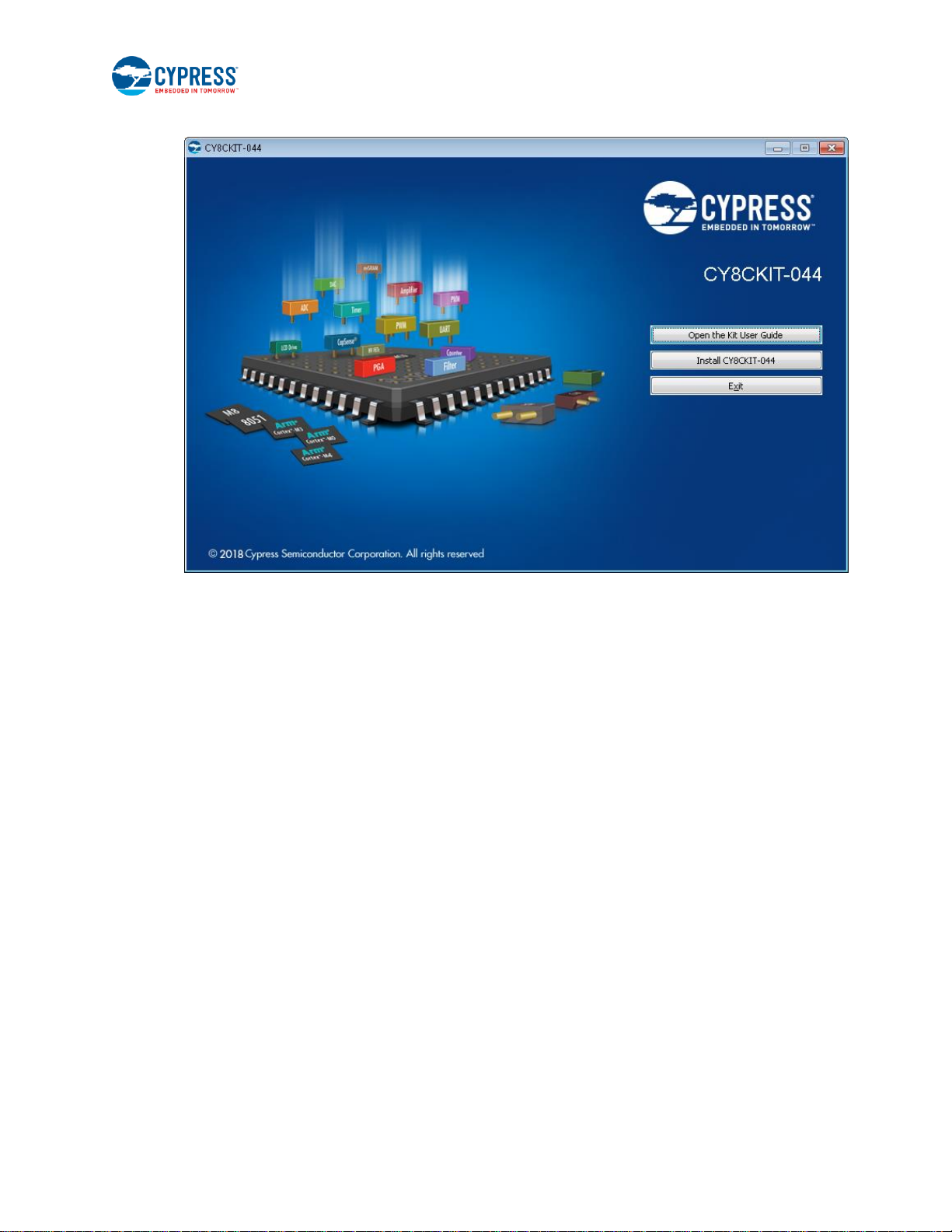
2. If you have downloaded the ISO file, mount it in a virtual drive. Extract the ISO contents if you do not have a virtual drive
to mount. Double-click cyautorun.exe in the root directory of the extracted content or the mounted ISO if “Autorun from
CD/DVD” is not enabled on the PC. The installation window will appear automatically.
Note: If you are using the “Kit Complete Setup” or “Kit Only” file, then go to step 4 for installation.
3. Click Install CY8CKIT-044 to start the kit installation, as shown in Figure 2-1.
Page 16
Installation
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 16
Figure 2-1. Kit Installer Screen
4. Select the folder in which you want to install the CY8CKIT-044 kit-related files. Choose the directory and click Next.
5. When you click Next, the CY8CKIT-044 installer automatically installs the required software, if it is not present on your
computer. Following is the required software:
a. PSoC Creator 4.2: This software is available for download separately at www.cypress.com/psoccreator.
PSoC Creator 4.2 installer automatically installs the following additional software:
- PSoC Programmer 3.27.1
- Peripheral Driver Library 3.0.1
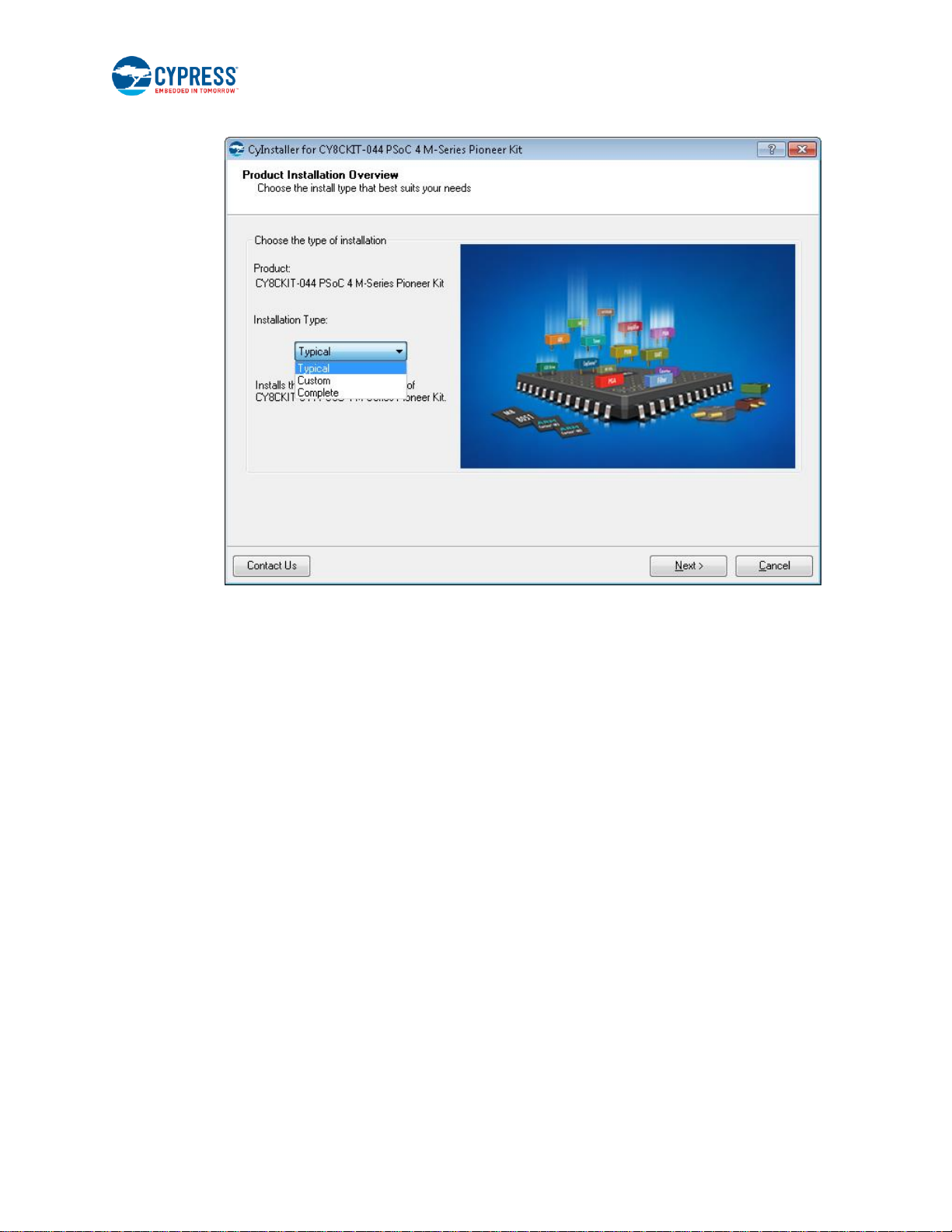
6. Choose the Typical/Custom/Complete installation type in the Product Installation Overview window, as shown in Figure
2-2. Click Next after you select the installation type.
Page 17
Installation
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 17
Figure 2-2. Product Installation Overview
7. Read the License agreement and select I accept the terms in the license agreement to continue with installation. Click
Next.
8. When the installation begins, a list of packages appears on the installation page. A green check mark appears next to
each package after successful installation.
9. Enter your contact information or select the check box Continue Without Contact Information. Click Finish to complete
the CY8CKIT-044 kit software installation.
10. After the installation is complete, the kit contents are available at the following location:
<Install_Directory>\CY8CKIT-044 PSoC 4 M-Series Pioneer Kit
Default location:
Windows 7 (64-bit): C:\Program Files (x86)\Cypress\CY8CKIT-044 PSoC 4 M-Series Pioneer Kit
Windows 7 (32-bit): C:\Program Files\Cypress\CY8CKIT-044 PSoC 4 M-Series Pioneer Kit
Note: For Windows 7/8/8.1/10 users, the installed files and the folder are read only. To use the installed code examples,
follow the steps outlined in the Code Examples chapter. These steps will create an editable copy of the example in a path
that you choose so the original installed example is not modified.
2.3 Uninstall Software
The software can be uninstalled using one of the following methods:
Go to Start > All Programs > Cypress > Cypress Update Manager and select the Uninstall button that corresponds
to the kit software.
Go to Start > Control Panel > Programs and Features for Windows 7 or Add/Remove Programs for Windows XP;
select the Uninstall/Change button.
Page 18
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 18
3. Kit Operation
This chapter introduces you to the PSoC 4 M-Series Pioneer Kit features.
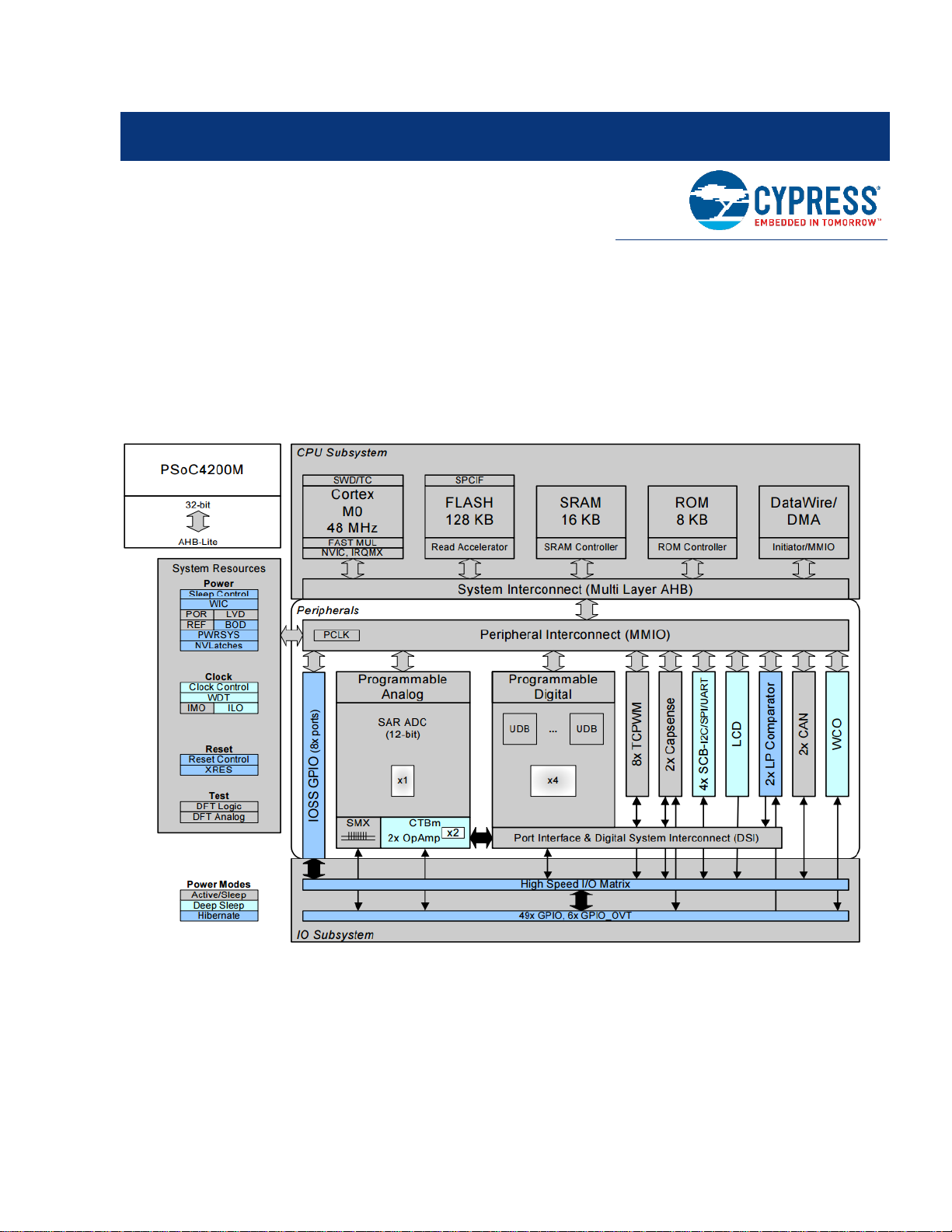
3.1 Theory of Operation
The PSoC 4 M-Series Pioneer Kit is built around the PSoC 4200M device. Figure 3-1 shows the block diagram of the
PSoC 4200M device. Refer to the PSoC 4200M datasheet for details on the device features.
Figure 3-1. PSoC 4200M Block Diagram
Page 19
Kit Operation
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 19
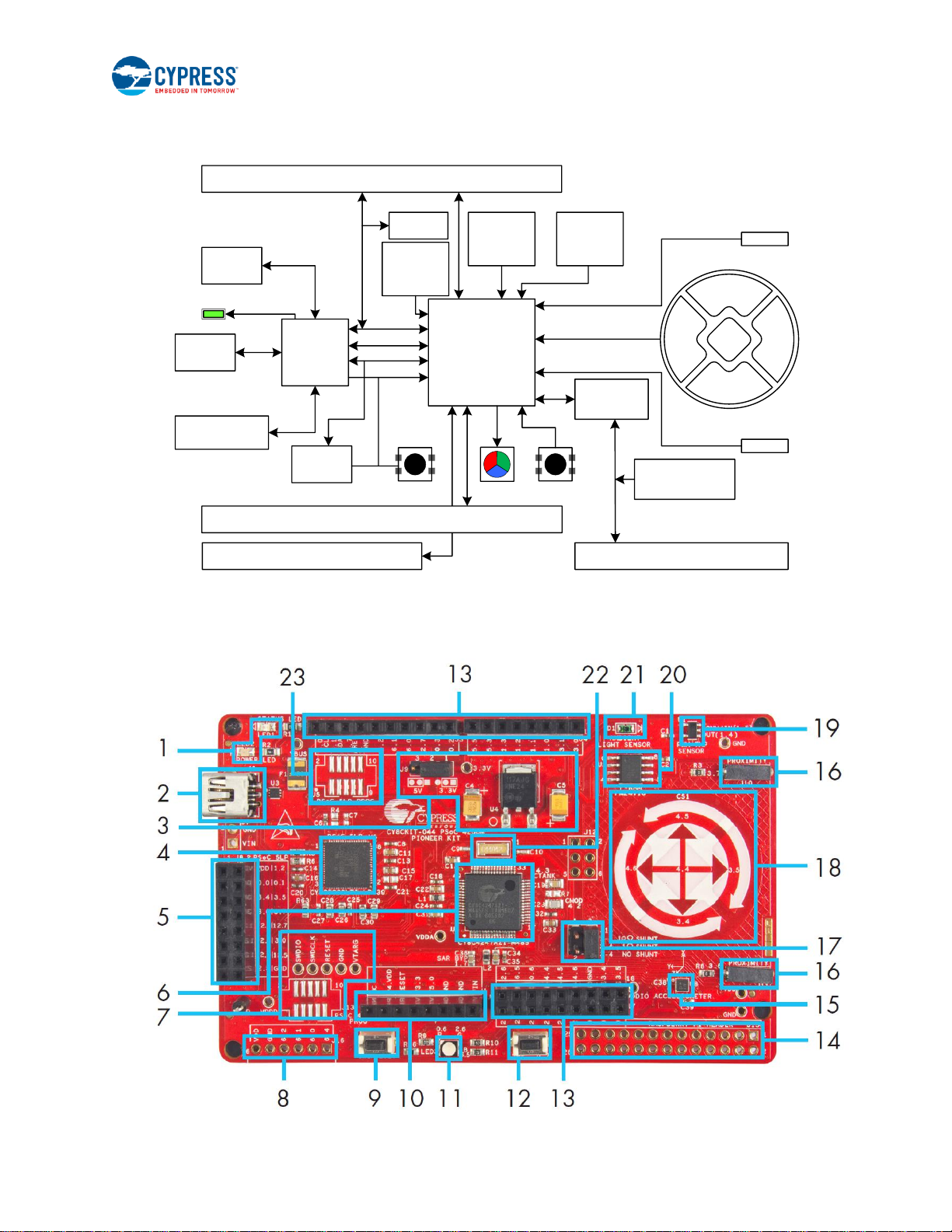
Figure 3-2 shows the block diagram for the PSoC 4 M-Series Pioneer Kit.
Figure 3-2. Block Diagram of PSoC 4 M-Series Pioneer Kit
PSoC 4200M Arduino Compatible Input/Output Headers
USB
Mini-B
KitProg I/O
Header
PSoC 4200M Arduino Compatible Input/Output Headers
KitProg PSoC 4200M
Rapsberry Pi Compatible Header
10-pin
Debug
10-pin
Debug
PWM
Temp
Sensor
Ambient
Light
Sensor
F-RAM
3-Axis
Accelerometer
Status LED
Reset Button RGB LED Push Button
Level
Translator
Reset
SWD
USB-I2C
USB-UART
Proximity
Proximity
Gesture Pad
Digilent Pmod Compatible Header
32kHz
Crystal
Figure 3-3. PSoC 4 M-Series Pioneer Kit Board Diagram
Page 20

Kit Operation
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 20
This kit has the following peripherals:
1. Power and Status LED: The amber power LED is turned on when the kit is connected to a power source. The green
status LED indicates the status of the KitProg.
2. USB Mini-B connector: The USB cable provided along with the PSoC 4 M-Series Pioneer Kit connects between this
connector and the PC.
3. Power Supply: The kit can operate at two voltage levels: 3.3 V and 5 V. The power selection jumper J9 is used to select
between the two voltage levels. The kit has an onboard 3.3-V Low Drop Out (LDO) regulator that converts the 5-V input
to 3.3 V.
4. KitProg: The KitProg is a multi-functional system, which includes a programmer, debugger, USB-I2C bridge, and a USB-
UART bridge. Refer to the KitProg User Guide in the installation folder <Install_Directory>\CY8CKIT-044 PSoC
4 M-Series Pioneer Kit\<version>\Documentation\KitProg_User_Guide.pdf for more details on the
KitProg.
5. KitProg (PSoC 5LP) I/O Header: This header brings out a few Input/Output lines of the onboard PSoC 5LP device. This
includes the KitProg USB-I2C bridge lines and USB-UART bridge lines. The additional PSoC 5LP pins are direct
connections to the internal programmable analog logic of PSoC 5LP. You can use these pins as General-purpose
input/output (GPIO) also. For more details on the KitProg functionality, refer to the KitProg User Guide.
6. PSoC 4200M: This kit is designed to highlight the features of PSoC 4200M.
7. 10-pin programming header for PSoC 4200M: This header allows you to program/debug the PSoC 4200M using an
external programmer such as MiniProg3. PSoC 4 M-Series Pioneer Kit also has through-hole test points to allow you to
program and debug external PSoC 4 and PSoC 5LP devices using the KitProg. You must remove the zero-ohm resistors
R51, R53, and R55 to disconnect the connection between KitProg and the onboard PSoC 4200M device before
programming an external PSoC.
8. Digilent Pmod Peripheral Module compatible header: This header allows you to connect to the PSoC 4200M device to
Pmod Peripheral Modules through I2C and SPI interfaces.
9. Reset Button: This button is used to reset the PSoC 4200M device.
10. Arduino Uno Shield compatible power header: This header powers third-party Arduino Shields. This header also has a
provision to power the PSoC 4 M-Series Pioneer Kit through the VIN input on the header.
11. RGB LED: The onboard RGB LED can be controlled from the PSoC 4200M device.
12. User Button: This button can be used to provide input to the PSoC 4200M. Note that the switch connects the PSoC
4200M pin to ground when pressed, so you need to configure the PSoC 4200M pin as resistive pull-up for detecting the
switch press.
13. Arduino Uno Shield compatible I/O headers: The PSoC 4 M-Series Pioneer Kit is compatible and operates flawlessly with
third-party Arduino Shields.
14. Raspberry Pi compatible header: A header which is compatible with Raspberry Pi Model B is included on the kit for
enabling advanced embedded systems. A Raspberry Pi can communicate to the PSoC 4200M device using I2C, SPI, or
UART communication protocols. One of the applications of this header is to enable the PSoC 4200M to act as an analog
input processor for Raspberry Pi. The PSoC 4200M, with its CapSense capability, can also enable user interface functions
such as gesture and proximity detection.
15. 3-Axis Accelerometer: This kit features a 3-Axis digital accelerometer device from Kionix® (KXTJ2-1009). The
accelerometer is interfaced to the PSoC 4200M using the I2C protocol.
16. CapSense Proximity Headers: These headers are located on both sides of the CapSense Gesture Pad. They can be
used as individual proximity sensors or can be used together to detect CapSense proximity gestures. The code example
included with this kit demonstrates the detection of wave up and wave down proximity gestures. Remember to connect
wires into the proximity headers before using the proximity functionality. Note that if these inputs are not used for proximity
sensing, then the connectors and the associated I/Os are available for general-purpose use.
17. Current Measurement Jumper: This jumper can be used to measure the current consumed by the PSoC 4200M device
by connecting an ammeter between the pins 3 and 4 of the jumper. Remember to connect the jumper between pin 3 and
pin 4 if the current measurement functionality is not used.
18. CapSense Gesture Pad: The CapSense Gesture Pad is a five-element CapSense peripheral specifically intended for
touch gesture recognition. This peripheral can be used to detect swipe left, swipe right, swipe up, swipe down, clockwise
swipe, and counter-clockwise swipe gestures.
Note: The Gesture Pad can also be used as five individual capacitive touch buttons. The Gesture Pad is not intended to
be used as a radial slider.
Page 21

Kit Operation
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 21
19. PWM Temperature Sensor: The kit features a digital temperature sensor from Analog Devices (TMP05). This sensor
measures the ambient temperature and reports it to the PSoC 4200M device by varying the duty cycle of the PWM output
generated by the sensor.
20. F-RAM: This kit features a Cypress F-RAM device of 1 Mb capacity. The F-RAM is connected to the I2C interface of the
PSoC 4200M device. The Cypress F-RAM device can be used similar to an external EEPROM memory for data logging
operations. The F-RAM can also be used for bootloading the PSoC 4200M device.
21. Ambient Light Sensor: This is a photodiode connected in photoconductive mode to detect variations in the ambient light
intensity. The conductivity of this sensor increases when the ambient light intensity increases and results in a higher
current flow through the sensor. The PSoC 4200M internal opamps are used to implement a current to voltage converter
to detect these current variations. The resultant output voltage is measured using the internal SAR ADC of the PSoC
4200M device to determine the ambient light intensity. Refer to the TEMD6200FX01 datasheet from Vishay®
Semiconductors for more information on the electrical characteristics of the sensor.
22. 32-kHz Crystal Oscillator: The PSoC 4 M-Series Pioneer Kit has a 32-kHz crystal oscillator to provide an accurate low-
frequency clock for the PSoC 4200M device.
23. 10-pin programming header for PSoC 5LP: This header is used to program/debug the PSoC 5LP using an external
programmer such as MiniProg3.
The subsequent sections explain the method to interface the PSoC 4 M-Series Pioneer Kit to a PC.
3.2 KitProg
The KitProg is a multi-functional system, which includes a programmer, debugger, USB-I2C bridge, and a USB-UART bridge.
The PSoC 4 M-Series Pioneer Kit also supports Mass Storage Programming using KitProg. Cypress PSoC 5LP device is
used to implement KitProg functionality. The KitProg is integrated in most PSoC development kits. For more details on the
KitProg functionality, refer to the KitProg User Guide in the kit installation directory: <Install_Directory>\CY8CKIT-044
PSoC 4 M-Series Pioneer Kit\<version>\Documentation\ KitProg_User_Guide.pdf.
3.3 Programming and Debugging PSoC 4200M Device
The PSoC 4 M-Series Pioneer Kit can be programmed and debugged using the KitProg. Before programming the device,
ensure that PSoC Creator and PSoC Programmer software are installed on the PC. See the Install Software section for more
information.
3.3.1 Programming using PSoC Creator
1. Connect the USB cable into the USB connector, J6, as shown in Figure 3-4. The kit enumerates as a composite device
if you are plugging in the PSoC 4 M-Series Pioneer Kit to your PC for the first time.
Figure 3-4. Connect USB Cable to J6
Page 22

Kit Operation
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 22
2. Open the desired project in PSoC Creator. For this, go to File > Open > Project/Workspace. This provides the option
to browse to and open your saved project.
3. Select the option Build > Build <Project Name> or pressing [Shift] [F6] to build the project.
4. If there are no errors during build, program the firmware into the kit by choosing Debug > Program or pressing [Ctrl]
[F5]. This programs the device on the PSoC 4 M-Series Pioneer Kit.
3.3.2 Debugging using PSoC Creator
PSoC Creator has an integrated debugger. You can start the debugger by selecting Debug > Debug or by pressing [F5].
Refer to section 3.2 of the KitProg User Guide for a detailed explanation on how to debug using PSoC Creator.
3.3.3 Programming using PSoC Programmer
PSoC Programmer (3.27.1 or later) can be used to program existing .hex files on to the PSoC 4 M-Series Pioneer Kit. Refer
to section 3.3 of the KitProg User Guide for a detailed explanation on how to program using PSoC Programmer.
3.4 USB-UART Bridge
The KitProg on the PSoC 4 M-Series Pioneer Kit can act as a USB-UART bridge. The UART lines between the PSoC 4200M
and the KitProg are hard-wired on the board, with UART_RX assigned to P7[0] and UART_TX assigned to P7[1] on PSoC
4200M. For more details on the KitProg USB-UART functionality, refer to the KitProg User Guide.
3.5 USB-I2C Bridge
The KitProg can function as a USB-I2C bridge and communicate with the software utility Bridge Control Panel (BCP). The
I2C lines on PSoC 4200M device are P4[1] (SDA) and P4[0] (SCL), which are hardwired on the board to the I2C lines of the
KitProg. The USB-I2C supports I2C speeds of 50 kHz, 100 kHz, 400 kHz, and 1 MHz. For more details on the KitProg USBI2C functionality, refer to the KitProg User Guide.
3.6 Mass Storage Programmer
The KitProg in PSoC 4 M-Series Pioneer Kit supports programming through a USB Mass Storage interface. This interface
allows you to program the PSoC 4200M by copying .hex files into an emulated USB Mass Storage device. For more details
on KitProg Mass Storage Programmer, refer to the KitProg User Guide.
3.7 Updating the KitProg Firmware
The KitProg firmware normally does not require any update. You can use the PSoC Programmer software to update the
KitProg firmware. Refer to the KitProg User Guide for a detailed explanation on how to update the KitProg firmware.
Page 23

CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 23
4. Code Examples
The CY8CKIT-044 PSoC 4 M-Series Pioneer Kit includes seven code examples. This chapter explains how to use these code
examples.
4.1 Using the Kit Code Examples
To access the code examples, download and install the CY8CKIT-044 PSoC 4 M-Series Pioneer Kit setup file from the kit
web page. After installation, the code examples are available in the Firmware folder in the installation directory.
Follow these steps to open and use the code examples.
1. Launch PSoC Creator from Start > All Programs > Cypress > PSoC Creator <version> > PSoC Creator <version>.
2. On the Start page, click CY8CKIT-044 under Start > Kits. A list of code examples appears, as shown in Figure 4-1.
3. Click on the desired code example, select a location to save the project and click OK.
Figure 4-1. Open Code Example from PSoC Creator
4. Build the code example by choosing Build > Build <Project Name>. A .hex file is generated after the build process.
5. Connect the PSoC 4 M-Series Pioneer Kit to the PC using the USB cable connected to connector J6 as shown in Figure
3-4, to program the kit with this code example.
6. Choose Debug > Program in PSoC Creator.
Page 24

Code Examples
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 24
7. If the device is already acquired, programming will complete automatically – the result will appear in the PSoC Creator
status bar at the bottom left of the screen. If the device is yet to be acquired, the Select Debug Target window will appear.
Select KitProg/<serial_number> and click the Port Acquire button, as shown in Figure 4-2.
Figure 4-2. Port Acquire
8. After the device is acquired, it is shown in a tree structure below the KitProg/<serial_number>. Click the Connect button
and then OK to exit the window and start programming, as shown in Figure 4-3.
Figure 4-3. Connect Device From PSoC Creator and Program
Page 25

Code Examples
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 25
4.2 Deep-Sleep Blinky
4.2.1 Project Description
This code example demonstrates the Deep-Sleep low-power mode of the PSoC 4200M device. The PSoC 4200M device is
configured to be in Deep-Sleep power mode and wakes-up once every second. The PSoC 4200M toggles the state of the
GPIO each time the device wakes up from Deep-Sleep power mode. The GPIO is connected to the LED on the kit which
turns on and off depending upon the GPIO state. The project also demonstrates the method to calibrate the ILO clock based
on the IMO clock signal for better ILO accuracy. The calibrated LFCLK is used to source the Watchdog Timer.
4.2.2 Hardware Connections
No specific hardware connections are required for this project. All connections are hardwired on the board.
4.2.3 Verify Output
To verify the Deep-Sleep Blinky code example, follow these steps.
1. Power the PSoC 4 M-Series Pioneer Kit through USB connector J6.
2. Program the PSoC 4 M-Series Pioneer Kit with the CY8CKIT_044_Deep_Sleep_Blinky code example.
3. After programming successfully, you will see the green LED toggling state every one second.
4. Power off the PSoC 4 M-Series Pioneer Kit by unplugging the USB cable. Remove the jumper shunt from power
measurement jumper of PSoC 4200M on the PSoC 4 M-Series Pioneer Kit (J14).
5. Connect an ammeter across the terminals 3 and 4 of the power measurement header, as shown in Figure 4-4.
Figure 4-4. Current Measurement When Powered From USB Port
6. Plug in the USB cable back to power the PSoC 4 M-Series Pioneer Kit.
7. Observe the average power consumed by the PSoC 4200M device on the ammeter. The measured average power must
be less than 260 µA at 3.3V.
Note: Detailed explanation on the power measurement header terminals is provided in the Current Measurement Jumper
section.
Page 26

Code Examples
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 26
4.3 CapSense Proximity
4.3.1 Project Description
This code example demonstrates the proximity sensing capability of the PSoC 4200M device. The CapSense scans for an
approaching hand every 100ms and enters a low-power mode if proximity is not detected. This allows the PSoC 4200M to
operate at lower average power levels. The scanning interval is increased and the CapSense scan is performed every 30ms
if proximity is detected.
The PSoC 4200M gradually increases the brightness of the green LED as the hand approaches the proximity sensor. If
proximity is not detected for a period more than 3s, the PSoC 4200M increases the CapSense scanning interval to 100ms.
Note: The time periods of 30ms and 100ms are dependent on the LFCLK accuracy. These time periods can be inaccurate
up to 60% when ILO is used as the clock source for LFCLK. Use the ILO Trim Component as demonstrated in the Deep-
Sleep Blinky project to achieve higher accuracy with ILO.
4.3.2 Hardware Connections
Connect the five-inch wire (provided with this kit) to proximity header J10 on the PSoC 4 M-Series Pioneer Kit, as shown in
Figure 4-5.
Figure 4-5. Proximity Sensor Connection on PSoC 4 M-Series Pioneer Kit
4.3.3 Verify Output
To verify the CapSense Proximity code example, follow these steps:
1. Power the PSoC 4 M-Series Pioneer Kit through USB connector J6.
2. Program the PSoC 4 M-Series Pioneer Kit with the CY8CKIT_044_CapSense_Proximity code example.
3. Plug in the proximity sensor wire to the proximity sensor header as shown in Figure 4-5, and press the reset switch (SW1)
of the kit. You should bend the wire to form a loop, as shown in Figure 4-5 to get better proximity range.
Figure 4-6. Bring Hand Close to the Proximity Sensor
Green LED
fades
Green LED
brightens
Page 27

Code Examples
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 27
4. Bring the hand closer to the proximity sensor, as shown in Figure 4-6. You will see the green LED turn ON.
5. As you move your hand closer to the proximity sensor, the brightness of the LED increases. As you move your hand
away from the proximity sensor, the brightness of the LED decreases.
You will get a proximity range of approximately 6cm with the wire supplied with this kit. You can achieve higher proximity
range by using a larger wire loop.
Power consumed by PSoC 4200M for this project can be measured using an ammeter as described in the Deep-Sleep
Blinky project.
4.4 Proximity Gestures
4.4.1 Project Description
This code example demonstrates the proximity gesture detection capability of the PSoC 4200M device using CapSense. The
PSoC 4 M-Series Pioneer Kit has two headers which are used to connect proximity wires. These wires are used as proximity
sensors to detect an approaching hand.
The firmware gangs both proximity sensors and scans them as a single proximity sensor every 200ms by default. If the
ganged proximity sensor detects the presence of an approaching hand then PSoC 4200M checks the magnitude of the signal
produced by the proximity sensor. If the proximity signal is less than the threshold value, the RGB LED on the kit is maintained
at a minimum brightness. If the proximity signal is greater than the threshold value, the brightness of the RGB LED on the kit
is varied according to the magnitude of the proximity signal. CapSense scanning interval is changed to 20 ms when the
proximity is detected. The project has a proximity range of approximately 5cm.
If proximity is detected, the firmware checks for hand gestures. Two types of gestures are recognized by the firmware – UP
gesture and DOWN gesture. Figure 4-7 shows the UP and DOWN gestures. The color of the RGB LED is changed based on
the recognized gesture. The RGB LED turns off if proximity is not detected for more than 3 seconds. CapSense scanning
interval is changed to 200ms when the proximity is not detected.
Note: The gesture is registered only when the hand moves completely from one end to the other over the proximity sensors.
Note: The time periods of 20ms and 200ms are dependent on the LFCLK accuracy. These time periods can be inaccurate
up to 60% when ILO is used as the clock source for LFCLK. Use the ILO Trim Component as demonstrated in the Deep-
Sleep Blinky project to achieve higher accuracy with ILO.
Figure 4-7. Proximity Gesture Recognition with PSoC 4 M-Series Pioneer Kit (Wave DOWN gesture)
With each
wave DOWN gesture,
RGB LED color changes
in the order Red > Blue
> Green > Red.
Page 28

Code Examples
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 28
Figure 4-8. Proximity Gesture Recognition with PSoC 4 M-Series Pioneer Kit (Wave UP gesture)
Table 4-1. Gestures and Actions
Gesture
Action (LED Color Change)
UP
Red > Green > Blue > Red
DOWN
Red > Blue > Green > Red
4.4.2 Hardware Connections
Connect five-inch wires (provided with this kit) to proximity headers J10 and J11 on the PSoC 4 M-Series Pioneer Kit, as
shown in Figure 4-9.
Figure 4-9. Proximity Sensor Connection on PSoC 4 M-Series Pioneer Kit
With each wave
UP gesture, RGB
LED color changes
in the order Red >
Green > Blue >
Red.
Page 29

Code Examples
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 29
4.4.3 Verify Output
To verify the Proximity Gestures code example, follow these steps:
1. Power the PSoC 4 M-Series Pioneer Kit through USB connector J6.
2. Program the PSoC 4 M-Series Pioneer Kit with the CY8CKIT_044_Proximity_Gestures code example.
3. Connect the proximity sensor wires as shown in Figure 4-9, and press the reset switch of the kit (SW1). You should bend
the wire to form a loop, as shown in Figure 4-9 to get better proximity range.
4. Bring your hand close to the proximity sensors. The RGB LED will turn ON with white color.
5. The brightness of the LED will increase as you bring your hand closer to the proximity sensors.
6. Wave the hand at a close proximity from the bottom sensor to the top sensor (UP gesture) to see the LED color change
in the order Red > Green > Blue > Red, one color at a time with each wave.
7. Wave the hand at a close proximity from the top sensor to the bottom sensor (DOWN gesture) to see the LED color
change in the order Red > Blue >Green > Red, one color at a time with each wave.
Power consumed by PSoC 4200M for this project can be measured using an ammeter as described in the Deep-Sleep
Blinky project.
Page 30

Code Examples
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 30
4.5 Touch Gestures
4.5.1 Project Description
This code example demonstrates the touch gesture recognition capability of the PSoC 4200M device using the CapSense
Gesture Pad. This Gesture Pad has five buttons arranged similar to a joystick. Figure 4-10 shows the CapSense Gesture Pad
on the PSoC 4 M-Series Pioneer Kit.
Figure 4-10. CapSense Button Pattern
1
4
35
2
The project gangs all the five CapSense elements of the Gesture Pad and scans them together as a single proximity sensor
every 100ms by default. When the ganged proximity sensor detects an approaching finger, PSoC 4200M turns on the RGB
LED and decreases the scanning interval to 10ms. When a finger touch is detected, the firmware tries to recognize if the
finger has performed any touch gestures. The PSoC 4200M changes the color of the onboard RGB LED in different patterns
depending on the detected gestures. Table 4-2 shows the different gestures recognized by the firmware and the
corresponding output action for each gesture.
Table 4-2. CapSense Touch Gestures
Gesture Name
Gesture Example
Action
Swipe Clockwise
4
31 5
2
Violet > Indigo > Blue > Green > Yellow >
Orange > Red > Violet
Swipe Counter-clockwise
4
31 5
2
Red > Orange > Yellow > Green > Blue >
Indigo > Violet > Red
Page 31

Code Examples
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 31
Gesture Name
Gesture Example
Action
Swipe Right
4
31 5
2
Red > Green > Blue > Red
Swipe Left
4
31 5
2
Red > Blue > Green > Red
Swipe Down
4
31 5
2
Decrease Light Intensity
Swipe Up
4
31 5
2
Increase Light Intensity
If a touch is not detected for more than 3 seconds, the PSoC 4200M turns off the RGB LED. The CapSense scanning interval
is changed to 200ms when the proximity is not detected.
Note: The time periods of 10ms and 100ms are dependent on the LFCLK accuracy. These time periods can be inaccurate
up to 60% when ILO is used as the clock source for LFCLK. Use the ILO Trim Component as demonstrated in the Deep-
Sleep Blinky project to achieve higher accuracy with ILO.
Note: Clockwise and counter-clockwise gestures can be initiated from any sensor except sensor 5.
Page 32

Code Examples
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 32
4.5.2 Hardware Connections
No specific hardware connections are required for this project. All connections are hardwired on the board.
4.5.3 Verify Output
1. Power the PSoC 4 M-Series Pioneer Kit through USB connector J6.
2. Program the PSoC 4 M-Series Pioneer Kit with CY8CKIT_044_Touch_Gestures project.
3. Bring your finger closer to the Gesture Pad to see the RGB LED turn ON with white color.
4. Move your finger on the Gesture Pad on PSoC 4 M-Series Pioneer Kit as mentioned in Table 4-2 to observe the
corresponding LED color and intensity changes. The RGB LED changes the color once after the completion of a gesture.
For example, if you complete a clockwise gesture, the RGB LED changes the color to Indigo if the previous color was
Violet.
Figure 4-11. Verify CapSense Touch Gestures
5. Clockwise and counter-clockwise gestures are used to make fine color changes. Swipe-left and swipe-right gestures are
used to make coarse color changes. The swipe up and swipe down gestures are used to change the brightness of the
LED. See Table 4-2 for details on how the LED behaves for each gesture.
Note: It requires one full circular swipe (clockwise or counter-clockwise) on the Gesture Pad to see the change in LED
color. However, if the swipe is stopped halfway through the circle and the finger is removed from the board, no gesture
is detected by the PSoC 4200M.
Note: You might get erroneous results if you pick up the PSoC 4 M-Series Pioneer Kit in your hand and try to validate
the output. This is because the PSoC 4200M pins connected to the CapSense Gesture Pad are also connected to the
header J2 and can cause false touches if these pins are touched. You must touch all the required sensors in the right
order as provided in Table 4-2 for the firmware to detect gestures correctly.
Note: If you hold the finger in close proximity to the Gesture Pad (without touching the sensors) you will observe that the
RGB LED blinks every 3 seconds. This is because, the PSoC 4200M firmware switches to the 100ms scan interval mode
if touch is not detected for more than 3 seconds and turns off the LED. Since the finger is in the range of proximity sensor
after this event, PSoC 4200M turns the LED back on and switches to the 10ms scan interval mode.
Power consumed by PSoC 4200M for this project can be measured using an ammeter as described in the Deep-Sleep
Blinky project.
Page 33

Code Examples
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 33
4.6 Accelerometer
4.6.1 Project Description
This code example shows a method to interface the onboard digital accelerometer with the PSoC 4200M device. The
accelerometer is assigned with the I2C address 0x0F.
The firmware configures the accelerometer to generate an interrupt if motion is detected. PSoC 4200M reads the
accelerometer data whenever the accelerometer generates an interrupt. This information is used to change the color and
intensity of the onboard RGB LED depending on the direction of motion of the kit. Table 4-3 shows the RGB LED color
corresponding to the direction of motion. The intensity of the RGB LED is directly proportional to the magnitude of acceleration
experienced by the sensor. Figure 4-12 shows the accelerometer orientation with respect to the kit.
Figure 4-12. Accelerometer Movement in X-Axis
Figure 4-13 Accelerometer Movement in Y-Axis
Page 34

Code Examples
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 34
Figure 4-14 Accelerometer Movement in Z-axis
Table 4-3. LED Color Corresponding to Direction of Motion
Direction of Motion
RGB LED Color
x-axis
Red
y-axis
Green
z-axis
Blue
Note: If the kit is moved in multiple axes, the PSoC 4200M modulates the intensity of RGB LED color corresponding to each
axis depending on the acceleration detected on that axis. For example, if the kit is moved in both x- and y- axis, the RGB LED
shows a combination of red and green colors.
4.6.2 Hardware Connections
No specific hardware connections are required for this project. All connections are hardwired on the board.
4.6.3 Verify Output
1. Power the PSoC 4 M-Series Pioneer Kit through USB connector J6.
2. Program the PSoC 4 M-Series Pioneer Kit with CY8CKIT_044_Accelerometer project.
3. Move the PSoC 4 M-Series Pioneer Kit in different directions to see the RGB LED glow as described in Table 4-3.
4. Open the serial terminal software on your PC, such as Tera Term or PuTTY, and connect to the KitProg USBUART.
Refer to the KitProg User Guide to learn how to use the KitProg USB-UART Bridge with COM terminal software.
5. Set the baud rate for communication as “115200”. Set the number of Data bits as ‘8’, Parity option to ‘None’, number of
Stop bits as ‘1’, and Flow Control option to ‘None’. Observe that the accelerometer data displayed on the serial terminal,
as shown in Figure 4-15.
Page 35

Code Examples
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 35
Figure 4-15. Accelerometer Data on Serial Terminal
4.7 Sensor Hub
4.7.1 Project Description
This code example demonstrates the capability of the PSoC 4200M device to function as a sensor hub device. The
PSoC 4200M can interface with multiple digital and analog sensors. In this code example, the PSoC 4200M interfaces an
I2C-based accelerometer, a PWM-based temperature sensor, and an ambient light sensor. The firmware measures the
ambient temperature, ambient light, and the accelerometer values from the sensors and implements Real-Time Clock (RTC)
functionality.
The firmware also logs the temperature and acceleration data along with the RTC timestamp information onto the onboard FRAM device every one second. Data is stored in the format [timestamp hours, timestamp minutes, timestamp seconds,
ambient light sensor data, temperature data integer part, temperature data fractional part, x-axis acceleration MSB, x-axis
acceleration LSB, y-axis acceleration MSB, y-axis acceleration LSB, z-axis acceleration MSB, z-axis acceleration LSB]. If the
F-RAM is full, the firmware rewrites the data from the beginning of the F-RAM.
The firmware also reads back the data logged to the F-RAM every one second and sends it through a UART. This data can
be read using the KitProg USB-UART bridge. Refer to the KitProg User Guide to learn how to use the KitProg USB-UART
bridge.
Page 36

Code Examples
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 36
4.7.2 Hardware Connections
No specific hardware connections are required for this project. All connections are hardwired on the board.
4.7.3 Verify Output
1. Power the PSoC 4 M-Series Pioneer Kit through USB connector J6.
2. Program the PSoC 4 M-Series Pioneer Kit with the CY8CKIT_044_Sensor_Hub project.
3. Open the serial terminal software on your PC, such as Tera Term or PuTTY, and connect to the KitProg USB-UART.
Refer to the KitProg User Guide to learn how to use the KitProg USB-UART Bridge with COM terminal software.
4. Set the baud rate for communication as “115200”. Set the number of Data bits as ‘8’, Parity option to ‘None’, number of
Stop bits as ‘1’, and Flow Control option to ‘None’. Observe that the sensor data written to the F-RAM is read back and
displayed in the serial terminal, as shown in Figure 4-16.
Figure 4-16. F-RAM Data Read by PSoC 4200M
5. Vary the light intensity falling on the ambient light sensor to observe the change in ambient light intensity shown on the
serial terminal.
6. Move the kit in different directions to observe the accelerometer data change on the serial terminal.
7. You can read the data logged by the PSoC 4200M to the F-RAM using the Bridge Control Panel (BCP) software and
KitProg. Refer to Chapter 5 of the KitProg User Guide to learn how to use KitProg USB-I2C bridge with BCP. Type in the
following command in BCP to access the F-RAM data from address location 0x0000 of the F-RAM:
w 50 00 00 r 50 x x x x x x x x x x x x x p
You can read from any address location of F-RAM by modifying the above command. For example, to read 13 bytes from
address location 0x1234 of F-RAM, use the following command:
w 50 12 34 r 50 x x x x x x x x x x x x x p
Page 37

Code Examples
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 37
Refer to the Appendix A.3 to understand how the F-RAM communicates with an I2C master.
The ambient light sensor and accelerometer data corresponding to each axis are 2 bytes long. Since the complete data
packet is 13 bytes long, the last few locations in each F-RAM page are not written. The F-RAM pages are switched if a
complete data packet cannot fit in to the same F-RAM page.
Note: This project is not configured to operate in an I2C multi-master environment. The firmware may fail to log the
data in F-RAM if you use Bridge Control Panel tool to read the F-RAM data.
Page 38

Code Examples
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 38
4.8 Raspberry Pi
4.8.1 Project Description
This code example is similar to the Sensor Hub code example, except that the UART data is sent to the Raspberry Pi interface
instead of the USB-UART Bridge interface. This example demonstrates the capability of the PSoC 4200M device to function
as a sensor hub and output the values to a Raspberry Pi. In this code example, the PSoC 4200M interfaces an I2C-based
accelerometer, a PWM-based temperature sensor, an I2C-based F-RAM, and an ambient light sensor.
The firmware writes the timestamp information from the RTC, ambient temperature from the temperature sensor, and the
accelerometer values to the F-RAM. These values are read back from the F-RAM and then transmitted through the UART to
the Raspberry Pi.
Minicom is a text-based terminal emulation program running on the Raspberry Pi. This code example uses Minicom to view
the UART output on the Raspberry Pi.
4.8.2 Hardware Connections
You must populate the Raspberry Pi compatible header (J15) on the PSoC 4 M-Series Pioneer Kit and connect a Raspberry
Pi to the header, as shown in Figure A-12. Refer to the following section for instructions on how to setup the Raspberry Pi for
viewing the output.
4.8.3 Setting Up Raspberry Pi
1. Setup the Raspberry Pi hardware, as explained in this tutorial.
2. Login to the Raspberry Pi using the default User ID: pi and Password: raspberry (unless you have explicitly changed it
while setting up the Raspberry Pi).
3. Type “startx” at the command prompt to enter the graphical user interface.
4. Double-click on LXTerminal on the desktop to open the terminal program.
5. Install Minicom to view the serial data coming from CY8CKIT-044 by typing “sudo apt-get install minicom”.
6. Wait until the minicom gets installed.
4.8.4 Verify Output
1. Power the PSoC 4 M-Series Pioneer Kit through USB connector J6.
2. Program the PSoC 4 M-Series Pioneer Kit with CY8CKIT_044_Raspberry_Pi project.
3. Connect a Raspberry Pi and login as specified in step 2 in Setting Up Raspberry Pi.
4. Launch Minicom by typing “sudo minicom -b 115200 -o -D /dev/ttyAMA0” in LXTerminal.
5. The Minicom terminal opens and the UART data is displayed similar to Figure 4-16.
6. To stop Minicom, press CTRL-A and then press Z. The Minicom help screen is displayed.
7. Press Q to quit the Minicom.
8. Minicom pops-up a window to confirm quitting without reset. Press Enter to confirm and quit.
Note: If you did not follow the steps in Setting Up Raspberry Pi to setup the Raspberry Pi, refer to the online tutorials for
details on accessing UART, since the above settings/options may change depending on the installation.
Page 39

CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 39
A. Appendix
A.1 Schematics
Figure A-1. PSoC 4200M Schematic
Page 40

Appendix
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 40
Figure A-2. KitProg (PSoC 5LP) and Programming Interface Schematic
Page 41

Appendix
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 41
Figure A-3. Power Supply and Power Monitoring Circuit Schematic
Page 42

Appendix
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 42
Figure A-4. Peripheral Schematic
Page 43

Appendix
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 43
A.2 Hardware Functional Description
This section provides detailed explanation on individual hardware blocks of the PSoC 4 M-Series Pioneer Kit. Complete
schematic of the PSoC 4 M-Series Pioneer Kit can be accessed from the PSoC 4 M-Series Pioneer Kit web page or the kit
install directory.
Figure A-5. Board Highlight of Hardware Components
A.2.1 PSoC 4200M
This kit uses the PSoC 4200M (CY8C4247AZI-M485) family device (marked 6 in Figure A-5). PSoC 4 is a scalable and
reconfigurable platform architecture for a family of programmable embedded system controllers with an Arm Cortex-M0 CPU.
It combines programmable and reconfigurable analog and digital blocks with flexible automatic routing. The PSoC 4200M
device family, based on this platform architecture, is a combination of a microcontroller with digital programmable logic,
programmable analog, programmable interconnect, high-performance analog-to-digital conversion, opamps with comparator
mode, and standard communication and timing peripherals. The PSoC 4200M products will be fully compatible with members
of the PSoC 4 platform for new applications and design needs. The programmable analog and digital subsystems allow
flexibility and in-field tuning of the design. For more information, refer to the PSoC 4200M web page and the PSoC 4200M
Family Datasheet.
A.2.2 PSoC 5LP
An onboard PSoC 5LP (CY8C5868LTI-LP039) is used to program and debug the PSoC 4200M device (marked 4 in Figure
A-5). The PSoC 5LP connects to the USB port of the PC through a USB Mini-B connector and to the SWD interface of the
PSoC 4200M device. PSoC 5LP is a true system-level solution providing MCU, memory, analog, and digital peripheral
functions in a single chip. The CY8C58LP family offers a modern method of signal acquisition, signal processing, and control
with high accuracy, high bandwidth, and high flexibility. Analog capability spans the range from thermocouples (near DC
voltages) to ultrasonic signals.
For more information, visit the PSoC 5LP web page. Also, refer to the CY8C58LP Family Datasheet.
Page 44

Appendix
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 44
A.2.3 Power System
The power supply system on this board is versatile, allowing the input supply to come from the following sources:
5-V power from onboard USB connector
5-V to 12-V VIN power from Arduino Shield
5-V power from the Raspberry Pi
The PSoC 4 M-Series Pioneer Kit is powered at 5 V directly from the USB power supply. An LDO is used to output 3.3 V to
power the PSoC 4200M device (marked 3 in Figure A-5). These voltages are selected through the J9 jumper, as shown in
Figure A-6.
Figure A-6. Schematics of LDO and Power Selection Jumper
The input to the LDO can be from either the USB or the VIN pin in the Arduino header.
Protection Circuits
The power supply rail has reverse-voltage, overvoltage, short circuit, and excess current protection features, as shown in
Figure A-7.
Figure A-7. Power Supply Block Diagram with Protection Circuits
I/O Header
USB
PSoC
4200M
5V
Vin
3.3V
KitProg
VBUS
KitProg 10-Pin
Prog. Header
PTC
ADJ LDO
ESD
Protection
PSoC 4200M 10-Pin
Prog. Header
Current measurement
header
Raspberry Pi
Header
5V
Power Selection
jumper
RPi 5V
A PTC resettable fuse is connected to protect the computer's USB Mini-B connectors from shorts and over current.
ORing diodes prevent damage to components when the board is powered from different voltage sources at the same
time.
ESD protection is provided for the USB Mini-B connector.
Page 45

Appendix
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 45
Current Measurement Jumper
To measure the PSoC 4200M power consumption, a header is populated in series with the power supply to the PSoC 4200M,
which can be used to measure current using an ammeter without the need to de-solder any components from the board
(marked 17 in Figure A-5).
Figure A-8. Schematics of Current Measurement Jumper
The following two methods are supported for measuring the current consumption of the PSoC 4200M device.
When the board is powered through the USB Mini-B connector (J6), remove jumper J14 and connect an ammeter
between terminals 3 and 4, as shown in Figure A-9.
Figure A-9. Current Measurement When Powered From USB Connector
When the PSoC 4 M-Series Pioneer Kit is powered from an external voltage supply, remove the USB cable from J6.
Connect the positive terminal of the external voltage supply to the positive terminal of the ammeter and the negative
terminal of the ammeter to pin 4 of J14. Connect the negative terminal of the external voltage supply to a GND pin on the
board. Figure A-10 shows the required connections.
Page 46

Appendix
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 46
Figure A-10. Current Measurement When Powered Separately
VOLTAGE SOURCE
- +
Note: When the PSoC 4200M is powered separately and not through the USB, remove the resistors R63 and R64 to avoid
leakage while measuring current.
A.2.4 Expansion Connectors
Arduino Compatible Headers (J1, J2, J3, J4, and J12—unpopulated)
This kit has five Arduino compatible headers—J1, J2, J3, J4, and J12. Header J1 is marked 10 and header J2, J3, and J4 are
marked 13 in Figure A-5. You can develop applications based on the Arduino Shield’s hardware.
The J1 header contains I/O pins for reset, I/O reference voltage (IOREF), and power supply line. The J2 header is an analog
port that contains I/O pins for SAR ADC, comparator, and opamp. The J3 header also has I/O pins that can connect to the
PSoC 4200M CAN. The J3 header is primarily a digital port that contains I/O pins for PWM, I2C, SPI, and analog reference.
The J4 header is also a digital port that contains I/O pins for UART and PWM. The J12 header is an Arduino ICSP compatible
header for the SPI interface and is not populated. Refer to the “No Load Components” section of the Bill of Materials for the
header part number.
Note: Pin P1[7] has a 1.0-uF capacitor connected to it. This is provided as a bypass capacitor for the PSoC 4200M SAR
ADC. Remember to remove this capacitor if you are planning to use this pin for any other purposes.
Additional Functionality of Header J2
The J2 header is a 9×2 header that supports Arduino Shields. Some pins from port 0, port 2, port 3, port 4, and port 6 of PSoC
4200M are brought to this header. The port 3 and port 4 pins also connect to the onboard CapSense Gesture Pad through
560-ohm resistors. When the CapSense feature is not used, you may remove these resistors if necessary to help ensure
better performance with these pins.
Functionality of Unpopulated Header J12
The J12 header is a 2×3 header that supports Arduino Shields. This header is used on a small subset of Shields and is
unpopulated on the PSoC 4 M-Series Pioneer Kit.
Pmod Connector – Digilent Pmod Compatible (J16—unpopulated)
This port supports Digilent Pmod Peripheral Modules (marked 8 in Figure A-5). Pmods are small I/O interfaces that connect
with embedded control boards through either 6 or 12-pin connectors. The PSoC 4 M-Series Pioneer Kit supports the 6-pin
Pmod type 2 (SPI) interface. For Digilent Pmod Peripheral Modules, go to www.digilentinc.com.
This header is not populated on the PSoC 4 M-Series Pioneer board. You must populate this header before connecting Pmod
Peripheral Modules. Refer to the “No Load Components” section of the Bill of Materials for the header part number.
Page 47

Appendix
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 47
PSoC 5LP GPIO Header (J8)
An 8×2 header is provided on the board to bring out several pins of the PSoC 5LP to support advanced features such as a
low-speed oscilloscope and a low-speed digital logic analyzer (marked 5 in Figure A-5). This header also contains the USBUART bridge pins and USB-I2C bridge pins that can be used when these pins are not accessible on the Arduino headers
because a Shield is connected.
A.2.5 USB Mini-B Connector
The PSoC 5LP connects to the USB port of a PC through a USB Mini-B connector (marked 2 in Figure A-5), which can also
be used to power the PSoC 4 M-Series Pioneer Kit. A resettable polyfuse is used to protect the computer's USB port from
shorts and over current. If more than 500mA is drawn from the USB Mini-B connector, the fuse will automatically break the
connection until the short or overload is removed.
A.2.6 CapSense Circuit
CapSense Gesture Pad
The kit has a five element capacitive Gesture Pad on the board, which is connected to the PSoC 4200M module pins (marked
18 in Figure A-5). The CMOD and CTANK capacitors essential for CapSense functionality are connected on the board. A 2.2-
nF capacitor is present on the CMOD pin, P4[2], for CapSense operation. This kit also supports CapSense designs that
enable waterproofing. On this kit, the Shield is connected to the pin or to ground by resistors R57 and R58, respectively. By
default, R58 is mounted on the board, which connects the Shield to ground. Remove R58 and populate R57 when evaluating
waterproofing designs, which will connect the Shield to the designated pin, P0[1].
Proximity Header
The PSoC 4 M-Series Pioneer board contains two headers (J10 and J11) for CapSense Proximity sensor connection (marked
16 in Figure A-5). If the proximity functionality is not being used, these can be used as standard GPIO pins. A.2.7 Pioneer Board LEDs
The Pioneer board has three LEDs. A green LED (LED1) indicates the status of the KitProg. See A.5 KitProg Status LED
States for more information on LED states. An amber LED (LED2) indicates the status of power supplied to the board. The
kit also has a general-purpose RGB LED (LED3) for user applications (marked 1 and 11 in Figure A-5).
A.2.8 Push Buttons
The board contains a reset push button and a user push button (marked 9 and 12 in Figure A-5). The reset push button is
connected to the XRES pin of PSoC 4200M and is used to reset the device. The user push button is connected to P0[7] of
the PSoC 4200M device. Both the push buttons connect to ground on activation (active low).
A.2.9 Cypress Ferroelectric RAM (F-RAM)
The PSoC 4 M-Series Pioneer Kit contains an F-RAM device (FM24V10-G) (marked 20 in Figure A-5) that can be accessed
through I2C lines P4[0] and P4[1] of the PSoC 4200M device. The F-RAM has a capacity of 1-Mbit (128 KB) with an I2C
speed up to 1 Mbps. The I2C slave address of the F-RAM device is 7 bits wide, and the two least significant bits are
configurable through physical pins. These pins are hardwired to 00 on the board. By default, the address of the F-RAM device
used on the kit is 0x50. This address can be modified by changing the R21/R20 and R23/R22 resistor pairs. The operating
voltage range of the F-RAM is between 2 V and 3.6 V. To prevent the F-RAM from operating at voltages greater than 3.6V,
the power supply to the F-RAM is derived from the output of the 3.3-V regulator. The I2C lines are connected to the 3.3 V
side of the onboard level translator to help the F-RAM communicate with PSoC 4200M operating at 5 V.
A.2.10 3-Axis Accelerometer
The PSoC 4 M-Series Pioneer Kit has a 3-Axis accelerometer (marked 15 in Figure A-5). The acceleration change detected
by this device can be used to determine the direction of motion of the kit. The PSoC 4200M communicates with the
accelerometer through an I2C interface.
Note that the I2C accelerometer is connected on to the same I2C bus on which the KitProg USB-I2C bridge and the F-RAM
is connected. The accelerometer is assigned with the I2C address 0x0F.
Refer to the KXTJ2-1009 Datasheet for more information on how to configure the accelerometer.
Page 48

Appendix
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 48
A.2.11 PWM Temperature Sensor
A PWM temperature sensor is included on the PSoC 4 M-Series Pioneer Kit (marked 19 in Figure A-5). This sensor is also
known as a TMP05 sensor and can indicate the measured temperature by varying the duty cycle of the PWM output generated
by the sensor.
Refer to the TMP05 Datasheet for more details on the operation of this sensor. Note that the sensor is configured to operate
in daisy-chain mode.
A.2.12 Ambient Light Sensor
The PSoC 4 M-Series Pioneer Kit includes an analog ambient light sensor (marked 21 in Figure A-5). This is a photodiode
configured in photoconductive mode for detecting the changes in the ambient light intensity.
The photodiode is intended to be connected to the input of a transimpedance amplifier. A 220-KΩ resistor and a 0.1-uF
capacitor are connected across the pins P5[1] and P5[2] to implement a transimpedance amplifier. Refer to the
TEMD6200FX01 datasheet for the electrical characteristics of the photodiode.
A.2.13 Serial Interconnection Between PSoC 5LP and PSoC 4200M
In addition to use as an onboard programmer, the PSoC 5LP is used as a USB-Serial interface for the USB-UART bridge and
USB-I2C bridge, as shown in Figure A-11. The I2C bus contains firmware-controlled resistive pull-ups using FETs, which can
be enabled or disabled using the PSoC 5LP pins. The USB-Serial pins of the PSoC 5LP are also available on the Arduino
header; therefore, the PSoC 5LP can be used to control Arduino Shields with an SPI/I2C/UART interface.
Note: The KitProg does not support USB-SPI bridge functionality. The SPI pins of the PSoC 4200M are connected to the
PSoC 5LP for enabling SPI communication between PSoC 5LP and PSoC 4200M for custom PSoC 5LP applications.
Figure A-11. Schematics of Serial Interface Connections and I2C Pull-Up via FET
Page 49

Appendix
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 49
A.2.14 Raspberry Pi Compatible Header
The PSoC 4 M-Series Pioneer Kit has a Raspberry Pi compatible header (marked 14 in Figure A-5). This header (J15) is not
populated by default. Refer to the “No Load Components” section of the Bill of Materials for the header part number.
Alternately, you may use the header from Samtec Inc. (part number: ESQ-113-44-G-D). All the serial communication pins are
brought onto this header. Note that the GPIO pins of the Raspberry Pi are not connected to the PSoC 4 M-Series Pioneer Kit
using this interface.
The Raspberry Pi pins are intolerant to voltages above 3.3 V. A level translator is included on the board to automatically
convert the digital logic voltages to the 3.3-V domain regardless of the power settings on the PSoC 4 M-Series Pioneer Kit.
Figure A-12. PSoC 4 M-Series Pioneer Kit Connected to a Raspberry Pi Model B
Page 50

Appendix
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 50
A.2.15 Level Translators
The PSoC 4 M-Series Pioneer Kit has two level translators. The level translators are used on this kit to translate digital 5-V
logic signals to 3.3 V. One level translator connects the I2C and UART signals from PSoC 4200M to the Raspberry Pi
compatible header. It also connects to the I2C bus of the accelerometer as shown in Figure A-13.
The level translator, which connects the I2C and UART interfaces to the Raspberry Pi is always on. This ensures that you
can read the accelerometer data without connecting a Raspberry Pi. This level translator also connects to the 3-Axis
accelerometer and the Cypress F-RAM device. The level translator, which interfaces SPI lines of PSoC 4200M to the
Raspberry Pi, is switched on automatically when a Raspberry Pi is connected to the PSoC 4 M-Series Pioneer Kit.
Figure A-13. Level Translators on PSoC 4 M-Series Pioneer Kit
PSoC
4200M
Level
Translator 1
Level
Translator 2
Raspberry Pi
3-Axis
Accelerometer
SPI SPI
I2C
UART
I2C
UART
(ON when Raspberry Pi
is connected)
(Always ON)
F-RAM
KitProg
Page 51

Appendix
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 51
A.2.16 Test Points
The SWD programming pins for the PSoC 4200M are brought out as test points on the PSoC 4 M-Series Pioneer Kit. You
can solder standard 100-mil connectors to these test points to program an external PSoC device using the onboard PSoC
5LP.
Note: You must remove the zero ohm resistors R51, R53, and R55 before programming an external PSoC device.
Figure A-14. SWD Programming Pins Brought as Test Points
All power domains (VDDA, VDDD, and VDDIO) including VIN, 3.3V and GND are also brought as test points for easy probing.
Page 52

Appendix
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 52
A.3 Using FM24V10 F-RAM
The PSoC 4 M-Series Pioneer board has an onboard ferroelectric RAM chip that can hold up to 1 Mb of data. The chip
provides an I2C communication interface for data access. It is hardwired to the I2C interface (P4[0] and P4[1] of the PSoC
4200M); the same lines are routed to the PSoC 5LP I2C interface. Because the F-RAM device is an I2C slave, it can be
accessed or shared among various I2C masters on the same lines. For more details on the F-RAM device, refer to the device
datasheet.
A.3.1 Address Selection
The slave address of the F-RAM device consists of three parts, as shown in Figure A-15: slave ID, device select, and page
select. Slave ID is an F-RAM family-specific ID provided in the datasheet of the particular F-RAM device. For the device used
on the PSoC 4 M-Series Pioneer board (FM24V10), the slave ID is 1010b. Device select bits are set using the two physical
pins A2 and A1 in the device. The setting of these two pins in PSoC 4 M-Series Pioneer board is controlled by resistors
R21/R20 (A1) and R23/R22 (A2). Because the memory location in F-RAM is divided into two pages of 64 KB each, the page
select bit is used to refer to one of the two pages in which the read or write operations will take place.
Figure A-15. F-RAM I2C Address Byte Structure
A.3.2 Write/Read Operation
The F-RAM device datasheet includes details on how to perform a write/read operation with the F-RAM. Figure A-16 and
Figure A-17 provide a snapshot of the write/read packet structure as a quick reference.
Figure A-16. F-RAM Single-Byte and Multiple-Byte Write Packet Structure
Page 53

Appendix
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 53
Figure A-17. F-RAM Read Packet Structure
As the figures show, operations start with the slave address followed by the memory address. For write operations, the bus
master sends the slave address and memory address followed by one or more data bytes. Each byte of data is written to
consecutive locations in the memory, and the memory generates an acknowledgement condition.
For ‘Current Address Read’ and ‘Sequential Read’, the bus master sends only the slave address. The memory address used
is the same address that was set by the previous ‘Write’ or ‘Selective Read’ operation. For ‘Selective Read’ operations, after
receiving the complete slave address and memory address, the memory will begin shifting data from the current address on
the next clock
Note: The code example Sensor Hub uses the onboard F-RAM. See the Sensor Hub project to understand how to
communicate with the F-RAM device using PSoC 4200M device. You can also communicate with the F-RAM using the Bridge
Control Panel (BCP) software similar to the way you communicate with any other I2C slave device. Refer to the KitProg User
Guide for more details on how to use the BCP to communicate with an I2C slave device.
Page 54

Appendix
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 54
A.4 Migrating Projects Across Different Pioneer Series Kits
All Cypress Pioneer series kits are Arduino Uno compatible and have some common onboard peripherals such as RGB LED,
CapSense and User Switch. However, the pin mapping in each of the boards is different due to differences in pin functions
of the PSoC device used. This section lists the pin mapping of the Pioneer series kits to allow for easy migration of projects
across different kits.
In some cases, the pins available on the Pioneer kit headers are a superset of the standard Arduino Uno pins. For example,
J2 contains only one row of pins on the Arduino Uno pin layout while it contains two rows of pins on many of the Pioneer
series kits.
Figure A-18. Pioneer series kits pin map
Pioneer series kits
J1
J2
J3
J4
18
1
2
11
8
10
17
18
11
12
CY8CKIT-040
CY8CKIT-042-BLE
CY8CKIT-042 & CY8CKIT-044
6x1 header
6x2 header
9x2 header
Arduino compatible
I/O headers
Arduino compatible
power header
A.4.1 Arduino Uno Compatible Headers
Table A-1. J1 Arduino Compatible Header Pin Map
#
Arduino Pin
Pioneer Series Kits
CY8CKIT-042
CY8CKIT-040
CY8CKIT-042-BLE
CY8CKIT-044
1
VIN
VIN
VIN
VIN
VIN
2
GND
GND
GND
GND
GND
3
GND
GND
GND
GND
GND
4
5V
V5.0
V5.0
V5.0
V5.0
5
3.3V
V3.3
V3.3
V3.3
V3.3
6
RESET
RESET
RESET
RESET
RESET
7
IOREF
P4.VDD
P4.VDD
BLE.VDD
P4.VDD
8
NC
NC
NC
NC
NC
Page 55

Appendix
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 55
Table A - 2. J2 Arduino Compatible Header Pin Map
#
Arduino Pin
Pioneer Series Kits
CY8CKIT-042
CY8CKIT-040
CY8CKIT-042-BLE
CY8CKIT-044
1
A0
P2[0]
P0[0]
P3[0]
P2[0]
2 ⎯ P0[2]* ⎯ P2[0]
P2[6]*
3
A1
P2[1]
P0[1]
P3[1]
P2[1]
4 ⎯ P0[3]* ⎯ P2[1]*
P6[5]*
5
A2
P2[2]
P0[2]*
P3[2]
P2[2]
6 ⎯ P4.VDD ⎯ P2[2]*
P0[6]*
7
A3
P2[3]
P0[4]*
P3[3]
P2[3]
8 ⎯ P1[5]* ⎯ P2[3]*
P4[4]*
9
A4
P2[4]
P1[3]
P3[4]
P2[4]
10 ⎯ P1[4]* ⎯ P2[4]*
P4[5]*
11
A5
P2[5]
P1[2]
P3[5]
P2[5]
12 ⎯ P1[3]* ⎯ P2[5]*
P4[6]*
13 ⎯ P0[0]
⎯
⎯
P0[0]
14 ⎯ GND
⎯
⎯
GND
15 ⎯ P0[1]
⎯
⎯
P0[1]
16 ⎯ P1[2]*
⎯
⎯
P3[4]*
17 ⎯ P1[0]
⎯
⎯
P0[7]*
18 ⎯ P1[1]*
⎯
⎯
P3[5]*
* These pins are also used for onboard peripherals. Refer to the tables in the Onboard Peripherals section for connection
details.
Table A - 3. J3 Arduino Compatible Header Pin Map
#
Arduino Pin
Pioneer Series Kits
CY8CKIT-042
CY8CKIT-040
CY8CKIT-042-BLE
CY8CKIT-044
1
D8
P2[6]
P1[4]
P0[5]
P0[2]
2
D9
P3[6]
P1[5]
P0[4]
P0[3]
3
D10
P3[4]
P1[6]
P0[2]
P2[7]
4
D11
P3[0]
P1[1]*
P0[0]
P6[0]
5
D12
P3[1]
P3[1]
P0[1]
P6[1]
6
D13
P0[6]
P1[7]
P0[3]
P6[2]
7
GND
GND
GND
GND
GND
8
AREF
P1[7]
NC
VREF
P1[7]
9
SDA
P4[1]
P1[3]
P3[4]
P4[1]
10
SCL
P4[0]
P1[2]
P3[5]
P4[0]
* These pins are also used for onboard peripherals. Refer to the tables in the Onboard Peripherals section for connection
details.
Page 56

Appendix
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 56
Table A - 4. J4 Arduino Compatible Header Pin Map
#
Arduino Pin
Pioneer Series Kits
CY8CKIT-042
CY8CKIT-040
CY8CKIT-042-BLE
CY8CKIT-044
1
D0
P0[4]
P0[5]
P1[4]
P3[0]
2
D1
P0[5]
P0[6]
P1[5]
P3[1]
3
D2
P0[7]*
P0[7]
P1[6]
P1[0]
4
D3
P3[7]
P3[2]*
P1[7]
P1[1]
5
D4
P0[0]
P0[3]
P1[3]
P1[2]
6
D5
P3[5]
P3[0]
P1[2]
P1[3]
7
D6
P1[0]
P1[0]
P1[1]
P5[3]
8
D7
P2[7]
P2[0]*
P1[0]
P5[5]
* These pins are also used for onboard peripherals. Refer to the tables in the Onboard Peripherals section for connection
details.
A.4.2 Onboard Peripherals
Table A - 5. CapSense Pin Map
#
Arduino Pin
Pioneer Series Kits
CY8CKIT-042
CY8CKIT-040
CY8CKIT-042-BLE
CY8CKIT-044
1
CapSense
Sensor 1
P1[1] ⎯ P2[1]
P4[4]
2
CapSense
Sensor 2
P1[2] ⎯ P2[2]
P4[5]
3
CapSense
Sensor 3
P1[3] ⎯ P2[3]
P4[6]
4
CapSense
Sensor 4
P1[4] ⎯ P2[4]
P3[4]
5
CapSense
Sensor 5
P1[5] ⎯ P2[5]
P3[5]
6
CMOD
P4[2]
P0[4]
P4[0]
P4[2]
7
CTANK
P4[3]
P0[2]
P4[1]
P4[3]
Table A - 6. Proximity header Pin Map
#
Arduino Pin
Pioneer Series Kits
CY8CKIT-042
CY8CKIT-040
CY8CKIT-042-BLE
CY8CKIT-044
1
PROXIMITY
⎯
P2[0]
P2[0]
P3[7]
2
⎯ ⎯ ⎯
P3[6]
Table A - 7. RGB LED Pin Map
#
Arduino Pin
Pioneer Series Kits
CY8CKIT-042
CY8CKIT-040
CY8CKIT-042-BLE
CY8CKIT-044
1
Red
P1[6]
P3[2]
P2[6]
P0[6]
2
Green
P0[2]
P1[1]
P3[6]
P2[6]
3
Blue
P0[3]
P0[2]
P3[7]
P6[5]
Table A - 8. User Switch Pin Map
#
Arduino Pin
Pioneer Series Kits
CY8CKIT-042
CY8CKIT-040
CY8CKIT-042-BLE
CY8CKIT-044
1
SW2
P0[7] ⎯ P2[7]
P0[7]
Page 57

Appendix
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 57
A.5 KitProg Status LED States
The KitProg Status LED on the PSoC 4 M-Series Pioneer Kit indicates the status of the KitProg operation using different blink
rates. Table A - 9 shows the KitProg LED States and the corresponding status of the KitProg.
Table A - 9. Meaning of KitProg LED Indications
User Indication
Scenario
Action Required by User
LED blinks fast:
Frequency = 4.00 Hz
LED starts blinking at power
up, if bootloadable file is
corrupt.
Bootload the KitProg.cyacd file: In PSoC Programmer,
connect to the kit, go to the Utilities tab, and press the
Upgrade Firmware button.
LED blinks slow:
Frequency = 0.67 Hz
Entered Bootloader mode by
holding the Reset button
during kit power-up.
Release the Reset button and re-plug the kit if you entered
this mode by mistake. If the mode entry was intentional,
bootload the new .cyacd file using the Bootloader Host tool
available in PSoC Creator.
LED blinks very fast:
Frequency = 15.0 Hz
SWD or I2C operation is in
progress.
The Kit's COM port connect /
disconnect event (only one
blink).
In PSoC Programmer, watch the log window for status
messages for SWD operations. In the BCP, the LED blinks on
I2C command requests.
In BCP or any other serial port terminal program, distinguish
the kit's COM port number by the blinking LED when the port
is connected or disconnected.
LED is ON
USB enumeration successful.
Kit is in the idle state waiting
for commands.
PSoC Creator, PSoC Programmer, BCP, and any serial port
terminal program can use the kit functions.
LED is OFF
Power LED is ON
This means that the USB enumeration was unsuccessful.
This may happen if the kit is not powered from the USB host.
Verify the USB cable and check if PSoC Programmer is
installed on the PC.
Page 58

Appendix
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 58
A.6 Bill of Materials
Item
Qty
Reference
Value
Description
Manufacturer
Mfr Part Number
1 1 600-60221-01 REV03
⎯
PCB, 98.66 mm x 61.70
mm, High Tg, ENIG
finish, 4 layer, Color =
RED, Silk = WHITE
Cypress
Semiconductor
600-60221-01
2
25
C1,C2,C3,C6,C8,C13,C14,C
18,C20,C21,C24,C25,C27,C
32,C35,C37,C38,C39,C40,C
42,C44,C45,C46,C49,C50
0.1 uFd
CAP .1UF 16V
CERAMIC X5R 0402
TDK Corporation
C1005X5R1A104K050BA
3 1 C4
22 uFd 16v
CAP TANT 22UF 16V
10% 1210
AVX Corporation
TPSB226K016R0600
4 1 C5
10 uFd 20v
CAP TANT 10UF 20V
10% 1210
AVX Corporation
TAJB106K020RNJ
5 1 C9
18 pF
CAP CER 18PF 50V
1% NP0 0402
Murata Electronics
GRM1555C1H180FA01D
6 1 C10
36 pF
CAP CER 36PF 50V
5% NP0 0402
Murata Electronics
GRM1555C1H360JA01D
7
14
C11,C12,C15,C16,C22,C26,
C28,C29,C30,C31,C33,C34,
C36,C47
1.0 uFd
CAP CERAMIC 1.0UF
25V X5R 0603 10%
Taiyo Yuden
TMK107BJ105KA-T
8 1 C19
10000 pFd
CAP CER 10000PF
50V 5% NP0 0805
Murata
GRM2195C1H103JA01D
9 1 C23
2200 pFd
CAP CER 2200PF 50V
5% NP0 0805
Murata
GRM2165C1H222JA01D
10 1 C41
0.1 uF
CAP CER 0.1UF 16V
10% X7R 0603
Murata
GRM188R71C104KA01D
11 1 C43
0.01 uFd
CAP 10000PF 16V
CERAMIC 0402 SMD
TDK Corporation
C1005X7R1C103K050BA
12 1 D1
TEMD6200FX01
AMBIENT LIGHT
SENSOR 0805 SMD
Vishay
Semiconductor
TEMD6200FX01
13
10
D2,D3,D4,D5,D6,D7,D8,D9,
D10,D11
MBR0520L
DIODE SCHOTTKY
0.5A 20V SOD-123
Fairchild
Semiconductor
MBR0520L
14 1 F1
FUSE
PTC RESETTABLE
.50A 15V 1812
Bourns
MF-MSMF050-2
15 2 J1,J4
8x1 RECP
CONN HEADER
FEMALE 8POS .1"
GOLD
Protectron
Electromech
P9401-08-21
16 1 J2
9x2 RECP
CONN HEADER FMAL
18PS.1" DL GOLD
Protectron
Electromech
P9403-18-21
17 1 J3
10x1 RECP
CONN HEADER
FMALE 10POS .1"
GOLD
Protectron
Electromech
P9401-10-21
18 1 J6
USB MINI B
MINI USB RCPT R/A
DIP
Molex Inc
0548190519
19 1 J8
8x2 RECP
CONN HEADER FMAL
16PS.1" DL GOLD
Protectron
Electromech
P9403-16-21
20 1 J9
3p_jumper
CONN HEADR
BRKWAY .100 3POS
STR
Protectron
Electromech
P9101-03-12-1
Page 59

Appendix
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 59
Item
Qty
Reference
Value
Description
Manufacturer
Mfr Part Number
21 2 J10,J11
1X1 RECP
CONN RCPT 1POS
.100" SNGL HORZ
Samtec Inc
BCS-101-L-S-HE
22 1 J14
2X2 RECP
CONN HEADER .100
DUAL STR 4POS
Protectron
Electromech
P9103-04-12-1
23 1 LED1
Status LED
Green
LED GREEN CLEAR
0805 SMD
Chicago Miniature
CMD17-21VGC/TR8
24 1 LED2
Power LED
Amber
LED 595NM AMB DIFF
0805 SMD
Avago
Technologies
HSMA-C170
25 1 LED3
RGB LED
LED
RED/GREEN/BLUE
PLCC4 SMD
Cree, Inc.
CLV1A-FKBCJ1M1F1BB7R4S3
26 2 L1,L2
330 ohm @
100MHz
FILTER CHIP 330 OHM
1.5A 0603
Murata Electronics
BLM18SG331TN1D
27 1 R1
820 ohm
RES 820 OHM 1/8W
5% 0805 SMD
Panasonic - ECG
ERJ-6GEYJ821V
28 1 R2
560 ohm
RES 560 OHM 1/8W
5% 0805 SMD
Panasonic - ECG
ERJ-6GEYJ561V
29
21
R3,R8,R16,R17,R19,R20,R2
2,R24,R26,R31,R34,R38,R4
0,R42,R44,R51,R53,R55,R5
9,R63,R64
ZERO
RES 0.0 OHM 1/10W
0603 SMD
Panasonic - ECG
ERJ-3GEY0R00V
30 2 R5,R6
22E
RES 22 OHM 1/10W
1% 0603 SMD
Panasonic - ECG
ERJ-3EKF22R0V
31 3 R9,R30,R35
2.2K
RES 2.2K OHM 1/10W
5% 0603 SMD
Panasonic - ECG
ERJ-3GEYJ222V
32 2 R10,R11
1.5K
RES 1.5K OHM 1/10W
5% 0603 SMD
Panasonic - ECG
ERJ-3GEYJ152V
33 3 R12,R61,R65
10K
RES 10K OHM 1/10W
5% 0603 SMD
Panasonic - ECG
ERJ-3GEYJ103V
34 1 R13
220K
RES SMD 220K OHM
5% 1/10W 0603
Panasonic - ECG
ERJ-3GEYJ224V
35 2 R14,R15
10K
RES 10K OHM 1/16W
5% 0402 SMD
Yageo
RC0402JR-0710KL
36 1 R18
100K
RES 100K OHM 1/10W
5% 0402 SMD
Panasonic - ECG
ERJ-2GEJ104X
37 1 R28
120 ohm
RES 120 OHM 1/10W
1% 0603 SMD
Panasonic - ECG
ERJ-3EKF1200V
38 2 R29,R36
30K
RES 30K OHM 1/10W
5% 0603 SMD
Panasonic - ECG
ERJ-3GEYJ303V
39 1 R32
220 ohm
RES SMD 220 OHM
1% 1/10W 0603
Panasonic - ECG
ERJ-3EKF2200V
40 2 R33,R39
15K
RES 15K OHM 1/10W
5% 0603 SMD
Panasonic - ECG
ERJ-3GEYJ153V
41
3
R37,R58,R60
ZERO
RES 0.0 OHM 1/8W
0805 SMD
Panasonic-ECG
ERJ-6GEY0R00V
42 5 R46,R48,R50,R52,R54
560 ohm
RES 560 OHM 1/10W
5% 0603 SMD
Panasonic - ECG
ERJ-3GEYJ561V
43 1 R62
10 ohm
RES SMD 10 OHM 1%
1/4W 1206
Stackpole
Electronics Inc
RMCF1206FT10R0
44 1 R67
1 ohm
RES SMD 1 OHM 1%
1/4W 1206
Stackpole
Electronics Inc
RMCF1206FT1R00
Page 60

Appendix
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 60
Item
Qty
Reference
Value
Description
Manufacturer
Mfr Part Number
45 2 SW1,SW2
SW
PUSHBUTTON
SWITCH TACTILE
SPST-NO 0.05A 12V
Panasonic - ECG
EVQ-PE105K
46 1 TP8
BLACK
TEST POINT PC MINI
.040"D Black
Keystone
Electronics
5001
47 1 U1
TMP05
IC PWM TEMP SNSR
CMOSTTL SOT23-5
Analog Devices
Inc
TMP05ARTZ-500RL7
48 1 U2
F-RAM
F-RAM 1-Mbit (128K X
8) I2C interface
Cypress
Semiconductor
FM24V10-G
49 1 U3
PUSBM12VX4TL,115
TVS DIODE 5.5VWM
12VC 6HXSON
NXP
Semiconductors
PUSBM12VX4-TL,115
50 1 U4
NCP1117DTARK
G
IC REG LDO ADJ 1A
DPAK
ON Semiconductor
NCP1117DTARKG
51 1 U5
PSoC 5LP
68QFN PSoC 5LP chip
for USB debug channel
and USB-Serial
interface
Cypress
Semiconductor
CY8C5868LTI-LP039
52 1 U6
PSoC 4200M
68TQFP PSoC 4M
Cypress
Semiconductor
CY8C4247AZI-M485
53 2 U7,U10
TXS0104ERGYR
IC 4BIT NON-INV
TRANSLTR 14-QFN
Texas Instruments
TXS0104ERGYR
54 1 U8
KXTJ2-1009
IC DIGITAL (I2C)
ACCELEROMETER
TRI-AXIS 12-LGA
Kionix Inc
KXTJ2-1009
55 1 U9
DUAL PMOS
MOSFET 2P-CH 20V
430MA SOT-563
ON Semiconductor
NTZD3152PT1G
56 1 Y1
32.768KHz
CRYSTAL 32.768KHZ
12.5PF SMD
ECS Inc
ECS-.327-12.5-39-TR
57 4 N/A
N/A
BUMPON
CYLINDRICAL
.312X.215 BLACK
3M
SJ61A6
58 1 J9
Install jumper
across pins 1 and
2
Rectangular Connectors
MINI JUMPER GF
6.0MM CLOSE TYPE
BLACK
Kobiconn
151-8010-E
59 1 J14
Install jumper
across pins 3 and
4
Rectangular Connectors
MINI JUMPER GF
6.0MM CLOSE TYPE
BLACK
Kobiconn
151-8010-E
No load components
60 2 J5,J13
50MIL KEYED
SMD
CONN HEADER 10 PIN
50MIL KEYED SMD
Samtec
FTSH-105-01-L-DV-K
61 1 J7
2 PIN HDR
CONN HEADER
FEMALE 2POS .1"
GOLD
Sullins Connector
Solutions
PPPC021LFBN-RC
62 1 J12
3x2 RECPT
CONN HEADER FMAL
6PS .1" DL GOLD
Sullins Connector
Solutions
PPPC032LFBN-RC
63 1 J15
CONNECTOR
EDGE 13x2
STACKING HEADER,
RASPBERRY PI
Samtec Inc
ESQ-113-44-G-D
64 1 J16
6X1 RECP RA
CONN FEMALE 6POS
.100" R/A GOLD
Sullins Connector
Solutions
PPPC061LGBN-RC
65 2 C7,C48
0.1 uFd
CAP .1UF 16V
CERAMIC Y5V 0402
TDK Corporation
C1005X5R1A104K050BA
66 1 C17
1.0 uFd
CAP CERAMIC 1.0UF
25V X5R 0603 10%
Taiyo Yuden
TMK107BJ105KA-T
Page 61

Appendix
CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 61
Item
Qty
Reference
Value
Description
Manufacturer
Mfr Part Number
67
9
R21,R23,R25,R27,R43,R45,
R47,R49,R66
Zero Ohm
RES 0.0 OHM 1/10W
0603 SMD
Panasonic - ECG
ERJ-3GEY0R00V
68 2 R4,R41
4.7K
RES 4.7K OHM 1/10W
5% 0603 SMD
Panasonic - ECG
ERJ-3GEYJ472V
69 3 TP8,TP9,TP14
BLACK
TEST POINT 43 HOLE
65 PLATED BLACK
Keystone
Electronics
5001
70
10
TP1,TP3,TP4,TP5,TP6,TP7,
TP10,TP11,TP12,TP13
RED
TEST POINT 43 HOLE
65 PLATED RED
Keystone
Electronics
5000
71 2 TVS1,TVS2
5V 350W
TVS UNIDIR 350W 5V
SOD-323
Diodes Inc.
SD05-7
72 3 R7,R56,R57
ZERO
RES 0.0 OHM 1/8W
0805 SMD
Panasonic-ECG
ERJ-6GEY0R00V
Page 62

CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide, Document Number: 001-96598 Rev. *E 62
Revision History
Document Title: CY8CKIT-044 PSoC® 4 M-Series Pioneer Kit Guide
Document Number: 001-96598
Revision
Issue Date
Description of Change
**
02/26/2015
Initial version of the kit guide
*A
04/02/2015
Updated the Code Examples section.
Updated the kit name to PSoC 4 M-Series Pioneer Kit.
Updated all images with high resolution images.
Updated links and cross references.
Updated the Project Description section.
Updated the Verify Output section.
Added “Migrating Projects Across Different Pioneer Series Kits” section.
Updated the Expansion Connectors sub section in Appendix section.
Updated the kit schematics and BOM in Appendix section.
*B
05/29/2015
Updated KitProg.
Added Mass Storage Programmer.
Updated the Action for Swipe Right and Swipe Left in Table 4-2.
Updated the second Note in 4.5.3 Verify Output.
Added a Note, and updated Steps 12 and 13 in 4.7.3 Verify Output.
Added 4.8 Raspberry Pi.
Updated Table A - 9.
Updated Figure A-22.
*C
05/11/2017
Updated the Cypress logo and copyright information.
*D
03/12/2018
Updated PSoC Creator images
Changed “example projects” to “code examples”
*E
12/10/2019
Updated Figure 1-1 and Figure 1-2
Added serial terminal figures Figure 4-15 and Figure 4-16
 Loading...
Loading...