

Page 1
r
CY7C63413C
CY7C63513C
CY7C63613C
Low-S peed High I/O, 1.5-Mbps USB Controlle
Features
• Low-cost solution for low-speed applications with high
I/O requirements such as keyboards, keyboards with
integrated pointing device, gamepads, and many
others
• USB Specification Compliance
— Conforms to USB Specification, V ersions 1.1 and 2.0
— Conforms to USB HID Specification, Version 1.1
— Supp orts 1 device address and 3 data endpoints
— Integrated USB transceiver
• 8-bit RISC microcontroller
— Harvard architecture
— 6-MHz external ceramic resonator
— 12-MHz internal CPU clock
• Internal memory
— 256 bytes of RAM
— 8 Kbytes of EPROM
• Interface can auto-configure to operate as PS2 or USB
•I/O port
— The CY7C63413C/513C have 24 General Purpose I/O
(GPIO) pins (Port 0 to 2) cap able of sinking 7 mA per
pin (typical)
— The CY7C63613C has 12 General Purpose I/O (GPIO)
pins (Port 0 to 2) capable of sinking 7 mA per pin
(typical)
— The CY7C63413C/513C have eight GPIO pins (Port
3) capable of sinking 12 mA per pin (typical) which
can drive LEDs
— The CY7C63613C has four GPIO pins (Port 3) capable
of sinking 12 mA per pin (typical) which can driv e
LEDs
— Higher current drive is available by connecting
multiple GPIO pins together to drive a common
output
— Each GPIO port can be configured as inputs with
internal pull-ups or open drain outputs or traditional
CMOS outputs
— The CY7C63513C has an additional eight I/O pins on
a DAC port which has programmable current sink
outputs
— Mask able interrupts on all I/O pins
• 12-bit free-running timer with one microsecond clock
ticks
• Watch Dog Timer (WDT)
• Internal Power-On Reset (POR)
• Improved output drivers to reduce EMI
• Operating voltage from 4.0V to 5.5V DC
• Operating temperature from 0 to 70 degrees Celsius
• CY7C63413C available in 40-pin PDIP , 48-pin SSOP, 48pin SSOP - Tape reel, all in Lead-Free versions for
production
• CY7C63513C available in 48-pin SSOP Lead-Free
packages for production
• CY7C63613C available in 24-pin SOIC Lead-Free
packages for production
• Industry-standard programmer support
Functional Overview
The CY7C63413C/513C/613C are 8-bit RISC One Time
Programmable (OTP) microcontrollers. The instruction set has
been optimized specifically for USB operations, although the
microcontrollers can be used for a variety of non-USB
embedded applications.
The CY7C63413C/513C features 32 General-Purpose I/O
(GPIO) pins to support USB and other applications. The I/O
pins are grouped into four ports (Port 0 to 3) where each port
can be configured as inputs with internal pull -ups, open drain
outputs, or traditional CMOS outputs. The CY7C63413C/513C
have 24 GPIO pins (Ports 0 to 2) that are rated at 7 mA typical
sink current. The CY7C63413C/513C has 8 GPIO pins (Port
3) that are rated at 12 mA typical sink current, which allows
these pins to drive LEDs.
The CY7C63613C features 16 General-Purpose I/O (GPIO)
pins to support USB and other applications. The I/O pins are
grouped into four ports (Port 0 to 3) where each port can be
configured as inputs with internal pull-ups, open drain outputs,
or traditional CMOS outputs. The CY7C63613C has 12 GPIO
pins (Ports 0 to 2) that are rated at 7 mA typical sink current.
The CY7C63613C has 4 GPIO pins (Port 3) that are rated at
12 mA typical sink current, which allows these pins to drive
LEDs.
Multiple GPIO pins can be connected together to drive a single
output for more dri ve current capacity. Additionally, each I/O
pin can be used to generate a GPIO interrupt to the microcontroller. Note the GPIO interrupts all share the same “GPIO”
interrupt vector.
The CY7C63513C features an additional 8 I/O pins in the DAC
port. Every DAC pin includes an integrated 14-Kohm pull-up
resistor. When a “1” is written to a DAC I/O pin, the output
current sink is disabled and the output pin is driven high by the
internal pull-up resistor. When a “0” is written to a DAC I/O pin,
the internal pull-up is disabled and the output pin provides the
programmed amount of sink
current. A DAC I/O pin can
be used as an input with an
internal pull-up by writing a
“1” to the pin.
Cypress Semiconductor Corporation • 198 Champion Court • San Jose, CA 95134-1709 • 408-943-2600
Document #: 38-08027 Rev. *B Revised January 6, 2006
[+] Feedback
Page 2

CY7C63413C
CY7C63513C
CY7C63613C
The sink current for each DAC I/O pin can be individually
programmed to one of sixteen values using dedicated Isink
registers. DAC bits [1:0] can be used as high current outputs
with a programmable sink current range of 3.2 to 16 mA
(typical). DAC bits [7:2] have a programmable current sink
range of 0.2 to 1.0 mA (typical). Again, multiple DAC pins can
be connected together to drive a single output that requires
more sink current capacity. Each I/O pin can be used to
generate a DAC interrupt to the microcontroller and the
interrupt polarity for each DAC I/O pin is individually programmable. The DAC port interrupts share a separate “DAC”
interrupt vector.
The Cypress microcontrollers use an external 6-MHz ceramic
resonator to provide a reference to an internal clock generator.
This clock generator reduces the clock-related noise
emissions (EMI). The clock generator provide s the 6 a nd 12MHz clocks that remain internal to the microcontroller.
The CY7C63413C/513C/613C are offered with single EPROM
options. The CY7C63413C, CY7C63513C and the
CY7C63613C have 8 Kbytes of EPROM.
These parts include Power-on Reset logic, a Watch Dog Timer ,
a vectored interrupt controller, and a 12-bit free-running timer.
The Power-On Reset (POR) logic detects when power is
applied to the device, resets the logic to a known state, and
begins executing instructions at EPROM address 0x0000. The
Watch Dog Timer can be used to ensure the firmware never
gets stalled for more than approximately 8 ms. The firmware
can get stalled for a variety of reasons, including errors in the
code or a hardware failure such as waiting for an interrupt that
never occurs. The firmware should clear the Watch Dog Timer
periodically. If the Watch Dog Timer is not cleared for approximately 8 ms, the microcontroller will generate a hardware
watch dog reset.
The microcontroller supports eight maskable interrupts in the
vectored interrupt controller. Interrupt sources include the USB
Bus-Reset, the 128-µs and 1.024-ms outputs from the freerunning timer, three USB endpoints, the DAC port, and the
GPIO ports. The timer bits cause an interrupt (if enabled) when
the bit toggles from LOW “0” to HIGH “1.” The USB endpoints
interrupt after either the USB host or the USB controller sends
a packet to the USB. The DAC ports have an additional level
of masking that allows the user to select which DAC inputs can
cause a DAC interrupt. The GPIO ports also have a level of
masking to select which GPIO inputs can cause a GPIO
interrupt. For additional flexibility, the input transition polarity
that causes an interrupt is programmable for each pin of the
DAC port. Input transition polarity can be programmed for
each GPIO port as part of the port configuration. The interrupt
polarity can be either rising edge (“0” to “1”) or falling edge (“1”
to “0”).
The free-running 12-bit timer clocked at 1 MHz provides two
interrupt sources as noted above (128-µs and 1.024-ms). The
timer can be used to measure the duration of an event under
firmware control by reading the timer twice: once at the start
of the event, and once after the event is complete. The
difference between the two readings indicates the durati on of
the event measured in microseconds. The upper four bits of
the timer are latched into an internal register when the
firmware reads the lower eight bits. A read from the upper four
bits actually reads data from the internal register, instead of the
timer. This feature eliminates the need for firmware to attempt
to compensate if the upper four bits happened to incre ment
right after the lower 8 bits are read.
The CY7C63413C/513C/613C include an integrated USB
serial interface engine (SIE) that supports the integrated
peripherals. The hardware supports one USB device address
with three endpoints. The SIE allows the USB host to communicate with the function integrated into the microcontroller.
Finally, the CY7C63413C/513C/613C support PS/2 operation.
With appropriate firmware the D+ and D– USB pins can also
be used as PS/2 clock and data signals. Products utilizing
these devices can be used for USB and/or PS/2 operation with
appropriate firmware.
Document #: 38-08027 Rev. *B Page 2 of 32
[+] Feedback
Page 3
CY7C63413C
CY7C63513C
CY7C63613C
.
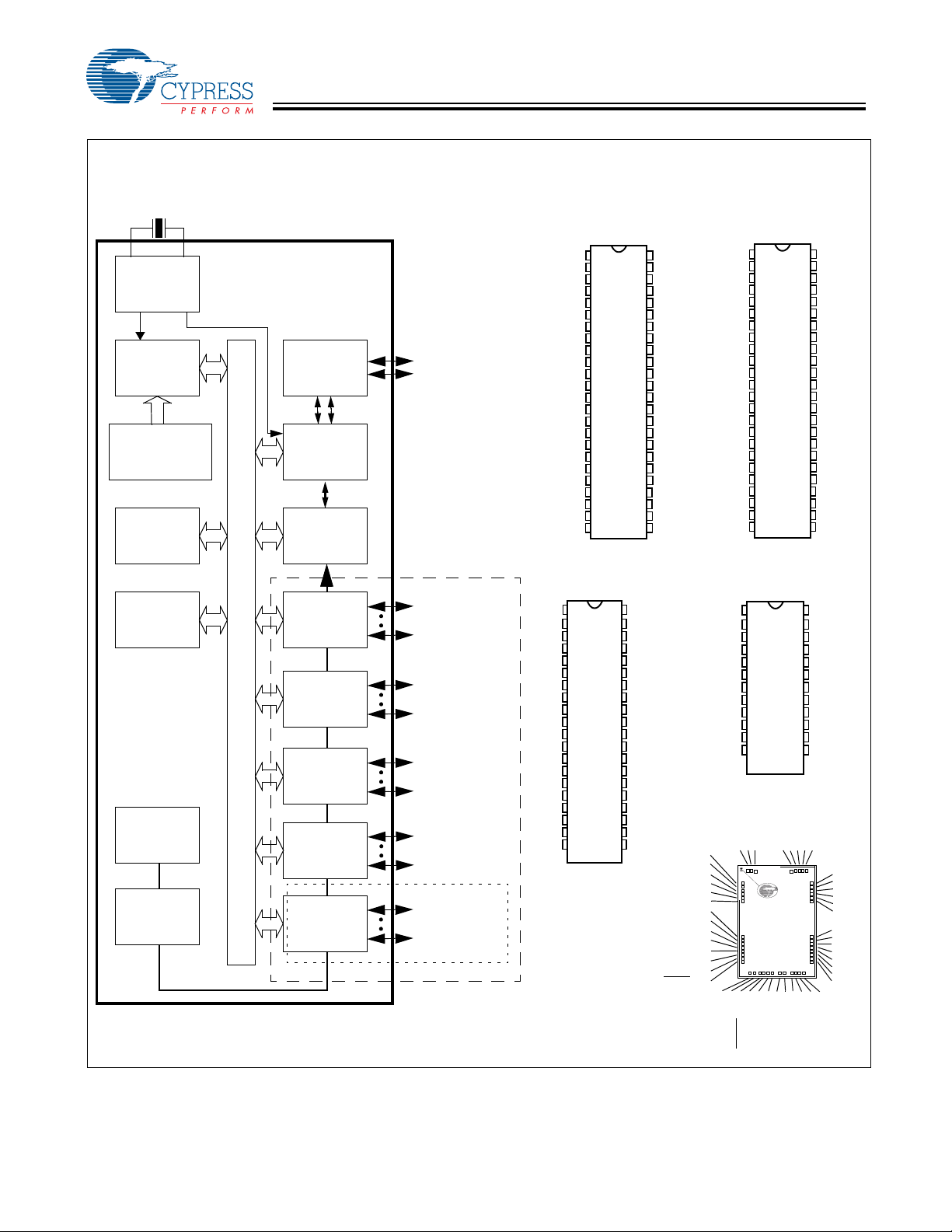
Logic Block Diagram
6-MHz ceramic resonator
OSC
12 MHz
4/6/8 Kbyte
6 MHz
12-MHz
8-bit
CPU
EPROM
RAM
256 byte
8-bit Bus
12-bit
Timer
Watch Dog
Timer
Power-on
Reset
USB
Transceiver
USB
SIE
Interrupt
Controller
GPIO
PORT 0
GPIO
PORT 1
GPIO
PORT 2
GPIO
PORT 3
DAC
PORT
USB
D+
PS/2
D–
PORT
See Note 1
P0[0]
P0[7]
P1[0]
P1[7]
P2[0]
P2[7]
P3[0]
High Current
Outputs
P3[7]
DAC[0]
CY7C63513C only
DAC[7]
Pin Configuration
CY7C63513C
48-pin SSOP
1
D+
D–
P3[7]
P3[5]
P3[3]
P3[1]
P2[7]
P2[5]
P2[3]
P2[1]
P1[7]
P1[5]
P1[3]
P1[1]
DAC[7]
DAC[5]
P0[7]
P0[5]
P0[3]
P0[1]
DAC[3]
DAC[1]
V
PP
Vss
CY7C63413C
40-pin PDIP
D+
1
D–
2
P3[7]
3
P3[5]
4
P3[3]
5
P3[1]
6
P2[7]
7
P2[5]
8
P2[3]
9
P2[1]
10
P1[7]
11
P1[5]
12
P1[3]
13
P1[1]
14
P0[7]
15
P0[5]
16
P0[3]
17
P0[1]
18
V
19
PP
20
Vss
48
2
47
46
3
4
45
5
44
43
6
7
42
8
41
9
40
39
10
11
38
12
37
13
36
35
14
15
34
16
33
17
32
18
31
19
30
20
29
21
28
22
27
23
26
24
25
40
V
39
V
38
P3[6]
37
P3[4]
36
P3[2]
35
P3[0]
34
P2[6]
33
P2[4]
32
P2[2]
31
P2[0]
30
P1[6]
29
P1[4]
28
P1[2]
27
P1[0]
26
P0[6]
25
P0[4]
24
P0[2]
23
P0[0]
22
XTAL
21
XTAL
CY7C63413C
48-pin SSOP
V
CC
Vss
P3[6]
P3[4]
P3[2]
P3[0]
P2[6]
P2[4]
P2[2]
P2[0]
P1[6]
P1[4]
P1[2]
P1[0]
DAC[6]
DAC[4]
P0[6]
P0[4]
P0[2]
P0[0]
DAC[2]
DAC[0]
XTAL
XTAL
OUT
IN
P3[7]
P3[5]
P3[3]
P3[1]
P2[7]
P2[5]
P2[3]
P2[1]
P1[7]
P1[5]
P1[3]
P1[1]
NC
NC
P0[7]
P0[5]
P0[3]
P0[1]
NC
NC
V
Vss
D+
D–
PP
48
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
V
CC
Vss
47
46
P3[6]
P3[4]
45
P3[2]
44
P3[0]
43
P2[6]
42
P2[4]
41
P2[2]
40
39
P2[0]
P1[6]
38
P1[4]
37
P1[2]
36
35
P1[0]
NC
34
NC
33
P0[6]
32
31
P0[4]
30
P0[2]
P0[0]
29
NC
28
NC
27
XTAL
26
25
XTAL
OUT
IN
CY7C63613C
24-pin SOIC
1
2
3
4
5
6
7
9
10815
11
12
24
V
CC
23
V
SS
22
P3[6]
21
P3[4]
20
P1[2]
19
P1[0]
18
P0[6]
17
P0[4]
16
P0[2]
P0[0]
14
XTAL
XTAL
OUT
IN
13
P3[7]
P3[5]
P1[3]
P1[1]
P0[7]
P0[5]
P0[3]
P0[1]
V
Vss
D+
D–
PP
CC
SS
CY7C63413C
48-Pad Die
OUT
IN
0
P3[3]
P3[1]
P2[7]
P2[5]
P2[3]
P2[1]
P1[7]
P1[5]
P1[3]
P1[1]
DAC[7]
DAC[5]
P0[7]
P0[5]
P3[5]
P0[3]
P0[1]
DAC[3]
CC
V
Vss
D+
P3[7]
D–
PP
V
DAC[1]
P3[4]
P3[6]
P3[2]
P3[0]
P2[6]
P2[4]
P2[2]
P2[0]
P1[6]
P1[4]
P1[2]
P1[0]
DAC[6]
DAC[4]
P0[6]
IN
OUT
Vss
XTAL
XTAL
P0[4]
P0[2]
P0[0]
DAC[0]
DAC[2]
0
Note:
1. CY7C63613C is not bonded out for all GPIO pins shown in Logic Block Diagram. Refer to pin configuration diagram for bonded out pins. See note on page 12
for firmware code needed for unused GPIO pins.
.
Document #: 38-08027 Rev. *B Page 3 of 32
[+] Feedback
Page 4
CY7C63413C
CY7C63513C
CY7C63613C
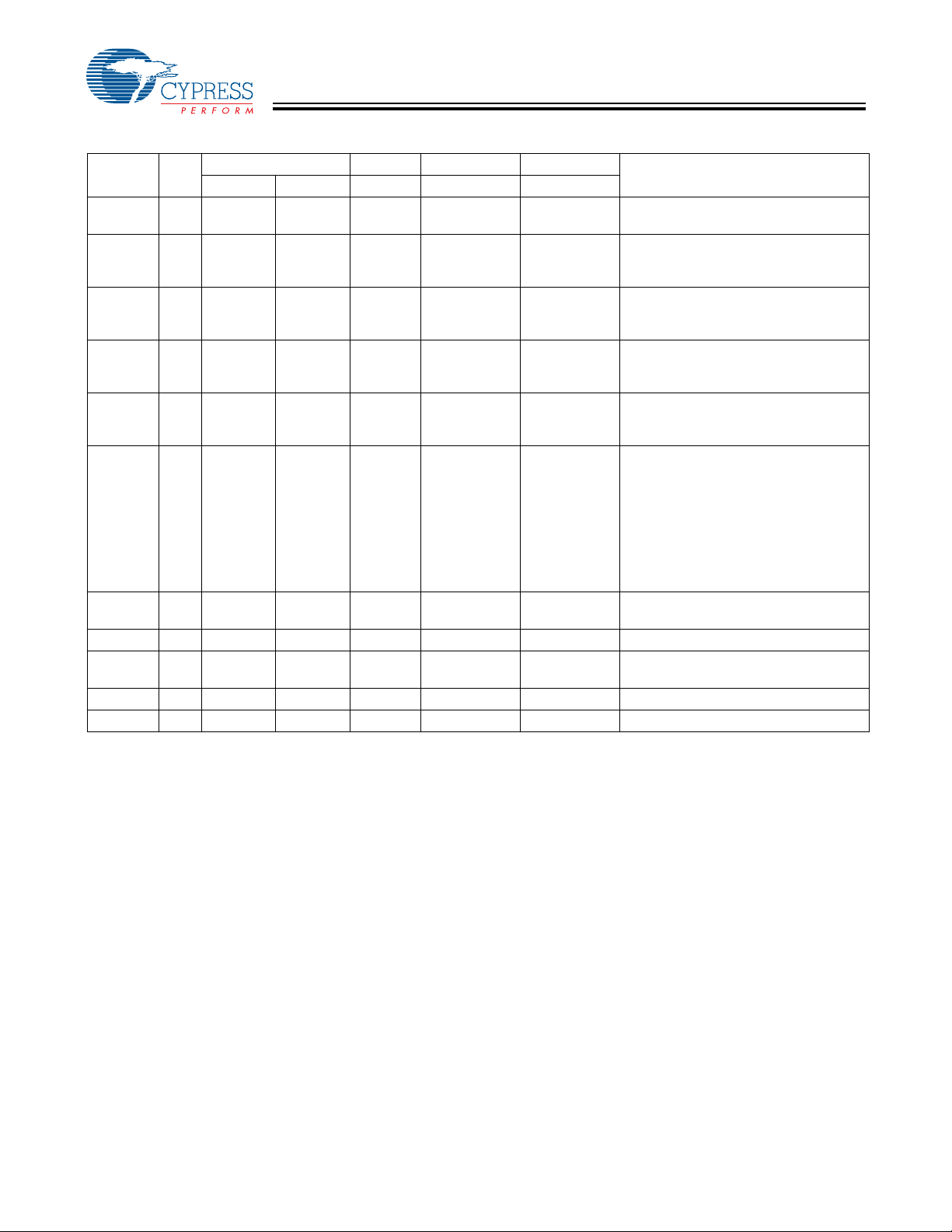
Pin Definitions
CY7C63413C CY7C63513C CY7C63613C
Name I/O
D+, D– I/O 1,2 1,2 1,2 1,2 1,2 USB differential data; PS/2 clock and
P0[7:0] I/O 15,26,16
25,17,24
18,23
P1[3:0] I/O 11,30,12,
P2 I/O 7,34,8,
P3[7:4] I/O 3,38,4,
DAC I/O n/a n/a 15,34,16,
XTAL
IN
XTAL
OUT
V
PP
V
CC
Vss 20,39 24,47 24,47 24,47 12, 23 Ground
29,13,28,
14,27
33,9,32,
10,31
37,5,36,
6,35
21 25 25 25 13 6-MHz ceramic resonator or external
IN
OUT 22 26 26 26 14 6-MHz ceramic resonator
19 23 23 23 11 Programming voltage supply, ground
40 48 48 48 24 Voltage supply
17,32,18
31,19,30
20,29
11,38,12,
37,13,36,
14,35
7,42,8,
41,9,40,
10,39
3,46,4,
45,5,44,
6,43
17,32,18,
31,19,30,
20,29
1 1,38,12,
37,13,36,
14,35
7,42,8,
41,9,40,
10,39
3,46,4,
45,5,44,
6,43
33,21,28,
22,27
17,32,18,31,
19,30,20,29
1 1,38,12,37,
13,36,14,35
7,42,8,41,9,
40,10,39
3,46,4,45,5,
44,6,43
15,34,16,33,
21,28,22,27
7, 18, 8, 17, 9,
16, 10, 15
5, 20, 6, 19 GPIO Port 1 capable of sinking 7 mA
n/a GPIO Port 2 capable of sinking 7 mA
3, 22, 4, 21 GPIO Port 3 capable of sinking 12 mA
n/a DAC I/O Port with programmable
Description40-Pin 48-Pin Die 48-Pin 24-Pin
data signals
GPIO port 0 capable of sinking 7 mA
(typical)
(typical).
(typical).
(typical).
current sink outputs. DAC[1:0] offer a
programmable range of 3.2 to 16 mA
typical. DAC[7:2] have a programmable sink current range of 0.2 to 1.0
mA typical. DAC I/O Port not bonded
out on CY7C63613C. See note on
page 12 for firmware code needed for
unused pins.
clock input
during operation
Programming Model
14-bit Program Counter (PC)
The 14-bit Program Counter (PC) allows access for up to 8
kilobytes of EPROM using the CY7C63413C/513C/613C
architecture. The program counter is cleared during reset,
such that the first instruction executed after a reset is at
address 0x0000. This is typically a jump instruction to a reset
handler that initializes the application.
The lower eight bits of the program counter are incremented
as instructions are loaded and executed. The upper six bits of
the program counter are incremented by executing an XPAGE
instruction. As a result, the last instruction executed within a
256-byte “page” of sequential code should be an XPAGE
instruction. The assembler directive “XPAGEON” will cause
the assembler to insert XPAGE instructions automatically. As
instructions can be either one or two bytes long, the assembler
may occasionally need to insert a NOP followed by an XPAGE
for correct execution.
The program counter of the next instruction to be executed,
carry flag, and zero flag are saved as two bytes on the program
stack during an interrupt acknowledge or a CALL instruction.
The program counter, carry flag, and zero flag are restored
from the program stack only during a RETI instruction.
Document #: 38-08027 Rev. *B Page 4 of 32
Please note the program counter cannot be accessed directly
by the firmware. The program stack can be examined by
reading SRAM from location 0x00 and up.
8-bit Accumulator (A)
The accumulator is the general purpose, do everything
register in the architecture where results are usually calculated.
8-bit Index Register (X)
The index register “X” is available to the firmware as an
auxiliary accumulator. The X register also allows the processor
to perform indexed operations by loading an index value into
X.
8-bit Program Stack Pointer (PSP)
During a reset, the Program Stack Pointer (PSP) is set to zero.
This means the program “stack” starts at RAM address 0x00
and “grows” upward from there. Note the program stack
pointer is directly addressable under firmware con trol, using
the MOV PSP,A instruction. The PSP supports interrupt
service under hardware control and CALL, RET, and RETI
instructions under firmware control.
[+] Feedback
Page 5

CY7C63413C
CY7C63513C
CY7C63613C
During an interrupt acknowledge, interrupts are disabled and
the 14-bit program counter, carry flag, and zero flag are written
as two bytes of data memory. The first byte is stored in the
memory addressed by the program stack pointer, then the
PSP is incremented. The second byte is stored in memory
addressed by the program stack pointer and the PSP is incremented again. The net effect is to store the program counter
and flags on the program “stack” and increment the program
stack pointer by two.
The Return From Interrupt (RETI) instruction decrements the
program stack pointer, then restores the second byte from
memory addressed by the PSP. The program stack pointer is
decremented again and the first byte is restored from memory
addressed by the PSP. After the program counter and flags
have been restored from stack, the interrupts are enabled. The
effect is to restore the program counter and flags from the
program stack, decrement the program stack pointer by two,
and re-enable interrupts.
The Call Subroutine (CALL) instruction stores the program
counter and flags on the program stack and increments the
PSP by two.
The Return From Subroutine (RET) instruction restores the
program counter, but not the flags, from program stack and
decrements the PSP by two.
8-bit Data Stack Pointer (DSP)
The Data Stack Pointer (DSP) supports PUSH and POP
instructions that use the data stack for temporary storage. A
PUSH instruction will pre-decrement the DSP, then write data
to the memory location addressed by the DSP. A POP
instruction will read data from the memory location addressed
by the DSP, then post-incre ment the DSP.
During a reset, the Data Stack Pointer will be set to zero. A
PUSH instruction when DSP equal zero will write data at the
top of the data RAM (address 0xFF). This would write data to
the memory area reserved for a FIFO for USB endpoint 0. In
non-USB applications, this works fine and is not a problem.
For USB applications, it is strongly recommended that the
DSP is loaded after reset just below the USB DMA buffers.
Address Modes
The CY7C63413C/513C/613C microcontrollers support three
addressing modes for instructions that require data operands:
data, direct, and indexed.
Data
The “Data” address mode refers to a data operand that is
actually a constant encoded in the instruction. As an example,
consider the instruction that loads A with the constant 0xE8:
• MOV A,0E8h
This instruction will require two bytes of code where the first
byte identifies the “MOV A” instruction with a data operand as
the second byte. The second byte of the ins truction will be the
constant “0xE8”. A constant may be referred to by name if a
prior “EQU” statement assigns the constant value to the name.
For example, the following code is equivalent to the example
shown above:
• DSPINIT: EQU 0E8h
• MOV A,DSPINIT
Direct
“Direct” address mode is used when the data operand is a
variable stored in SRAM. In that case, the one byte address of
the variable is encoded in the instruction. As an example,
consider an instruction that loads A with the contents of
memory address location 0x10:
• MOV A, [10h]
In normal usage, variable names are assigned to variable
addresses using “EQU” statements to improve the readability
of the assembler source code. As an example, the following
code is equivalent to the example shown above:
• buttons: EQU 10h
• MOV A,[buttons]
Indexed
“Indexed” address mode allows the firmware to manipulate
arrays of data stored in SRAM. The address of the data
operand is the sum of a constant encoded in the instruction
and the contents of the “X” register. In normal usage, the
constant will be the “base” address of an array of data and the
X register will contain an index that indicates which element of
the array is actually addressed:
• array: EQU 10h
•MOV X,3
• MOV A,[x+array]
This would have the effect of loading A with the fourth element
of the SRAM “array” that begins at address 0x10. The fourth
element would be at address 0x13.
Document #: 38-08027 Rev. *B Page 5 of 32
[+] Feedback
Page 6
CY7C63413C
CY7C63513C
CY7C63613C
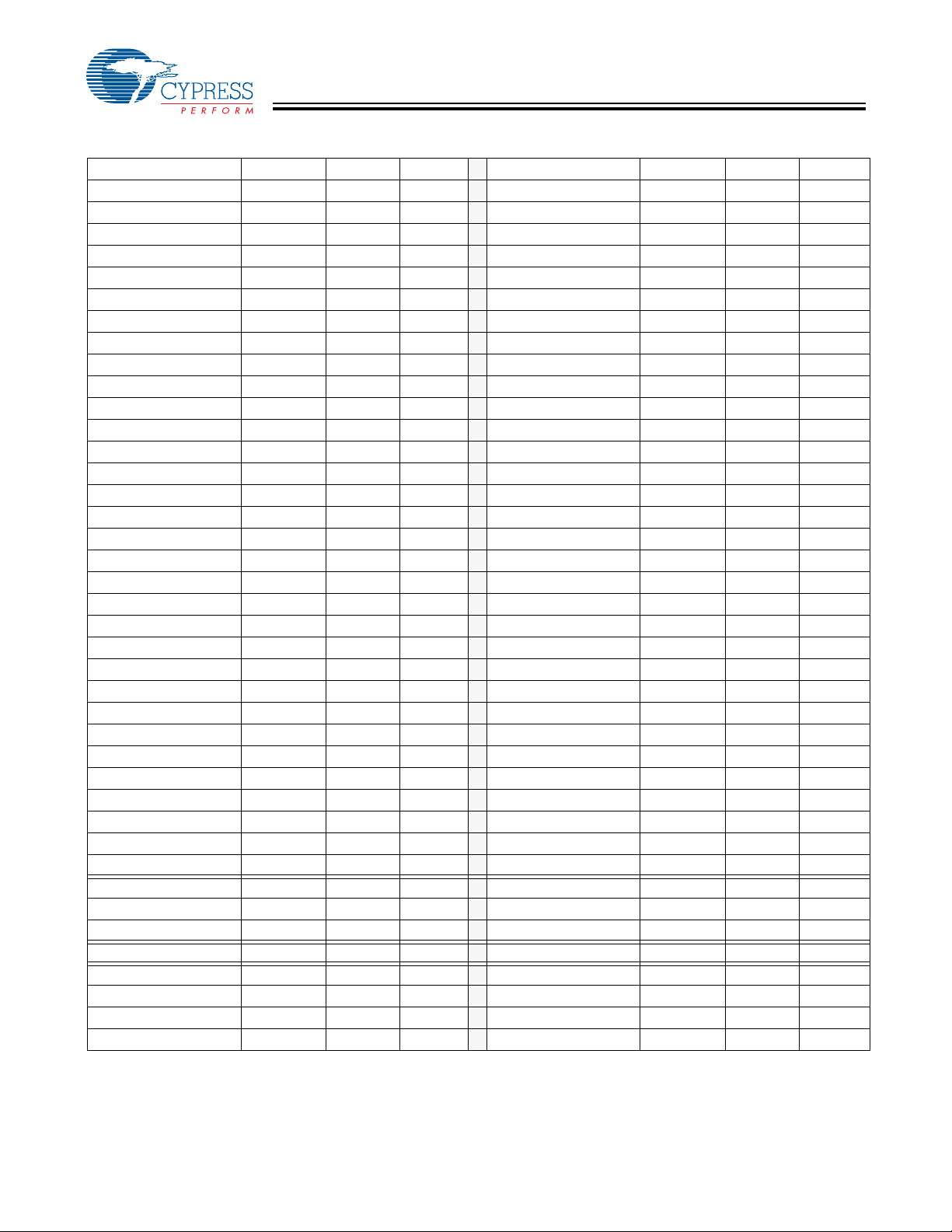
Instruction Set Summary
MNEMONIC operand opcode cycles MNEMONIC operand opcode cycles
HALT 00 7
ADD A,expr data 01 4 INC A acc 21 4
ADD A,[expr] direct 02 6
ADD A,[X+expr] index 03 7 INC [expr] direct 23 7
ADC A,expr data 04 4
ADC A,[expr] direct 05 6
ADC A,[X+expr] index 06 7 DEC X x 26 4
SUB A,expr data 07 4
SUB A,[expr] direct 08 6
SUB A,[X+expr] index 09 7 IORD expr address 29 5
SBB A,expr data 0A 4
SBB A,[expr] direct 0B 6
SBB A,[X+expr] index 0C 7
OR A,expr data 0D 4
OR A,[expr] direct 0E 6
OR A,[X+expr] index 0F 7 SWAP A,X 2F 5
AND A,expr data 10 4
AND A,[expr] direct 11 6
AND A,[X+expr] index 12 7 MOV [X+expr],A index 32 6
XOR A,expr data 13 4
XOR A,[expr] direct 14 6
XOR A,[X+expr] index 15 7 AND [expr],A direct 35 7
CMP A,expr data 16 5
CMP A,[expr] direct 17 7
CMP A,[X+expr] index 18 8 XOR [X+expr] ,A index 38 8
MOV A,expr data 19 4
MOV A,[expr] direct 1A 5
MOV A,[X+expr] index 1B 6 ASL 3B 4
MOV X,expr data 1C 4
MOV X,[expr] direct 1D 5
reserved 1E
XPAGE 1F 4
MOV A,X 40 4
MOV X,A 41 4
MOV PSP,A 60 4
CALL addr 50-5F 10
JMP addr 80-8F 5 JC addr C0-CF 5
CALL addr 90-9F 10
JZ addr A0-AF 5 JACC addr E0-EF 7
JNZ addr B0-BF 5
NOP 20 4
INC X x 22 4
INC [X+expr] index 24 8
DEC A acc 25 4
DEC [expr] direct 27 7
DEC [X+expr] index 28 8
IOWR expr address 2A 5
POP A 2B 4
POP X 2C 4
PUSH A 2D 5
PUSH X 2E 5
SWAP A,DSP 30 5
MOV [expr],A direct 31 5
OR [expr],A direct 33 7
OR [X+expr],A index 34 8
AND [X+expr],A index 36 8
XOR [expr],A direct 37 7
IOWX [X+expr] index 39 6
CPL 3A 4
ASR 3C 4
RLC 3D 4
RRC 3E 4
RET 3F 8
DI 70 4
EI 72 4
RETI 73 8
JNC addr D0-DF 5
INDEX addr F0-FF 14
Document #: 38-08027 Rev. *B Page 6 of 32
[+] Feedback
Page 7
Memory Organization
Program Memory Organization
after reset Address
14-bit PC 0x0000 Program execution begins here after a reset
0x0002 USB Bus Reset interrupt vector
0x0004 128-µs timer interrupt vector
0x0006 1.024-ms timer interrupt vector
0x0008 USB address A endpoint 0 interrupt vector
0x000A USB address A endpoint 1 interrupt vector
0x000C USB address A endpoint 2 interrupt vector
0x000E Reserved
CY7C63413C
CY7C63513C
CY7C63613C
0x0010 Reserved
0x0012 Reserved
0x0014 DAC interrupt vector
0x0016 GPIO interrupt vector
0x0018 Reserved
0x001A Program Memory begins here
(8K - 32 bytes)
0x1FDF 8-KB PROM ends here (CY7C63413C, CY7C63513C, CY7C63613C)
Figure 1. Program Memory Space with Interrupt Vector Table
Document #: 38-08027 Rev. *B Page 7 of 32
[+] Feedback
Page 8
CY7C63413C
CY7C63513C
CY7C63613C
Data Memory Organization
The CY7C63413C/513C/613C microcontrollers provide 256
bytes of data RAM. In normal usage, the SRAM is partitioned
after reset Address
8-bit PSP 0x00 Program Stack begins here and grows upward
8-bit DSP user Data Stack begins here and grows downward
The user determines the amount of memory required
User Variables
0xE8
USB FIFO for Address A endpoint 2
0xF0
USB FIFO for Address A endpoint 1
0xF8
USB FIFO for Address A endpoint 0
Top of RAM Memory 0xFF
into four areas: program stack, data stack, user variables and
USB endpoint FIFOs as shown below:
Document #: 38-08027 Rev. *B Page 8 of 32
[+] Feedback
Page 9
CY7C63413C
CY7C63513C
CY7C63613C
I/O Register Summary
I/O registers are accessed via the I/O Read (IORD) and I/O
Write (IOWR, IOWX) instructions. IORD reads the selected
port into the accumulator. IOWR writes data from the accumu-
Table 1. I/O Register Summary
Register Name I/O Address Read/Write Function
Port 0 Data 0x00 R/W GPIO Port 0
Port 1 Data 0x01 R/W GPIO Port 1
Port 2 Data 0x02 R/W GPIO Port 2
Port 3 Data 0x03 R/W GPIO Port 3
Port 0 Interrupt Enable 0x04 W Interrupt enable for pins in Port 0
Port 1 Interrupt Enable 0x05 W Interrupt enable for pins in Port 1
Port 2 Interrupt Enable 0x06 W Interrupt enable for pins in Port 2
Port 3 Interrupt Enable 0x07 W Interrupt enable for pins in Port 3
GPIO Configuration 0x08 R/W GPIO Ports Configurations
USB Device Address A 0x10 R/W USB Device Address A
EP A0 Counter Register 0x11 R/W USB Address A, Endpoint 0 counter register
EP A0 Mode Register 0x12 R/W USB Address A, Endpoint 0 configuration register
EP A1 Counter Register 0x13 R/W USB Address A, Endpoint 1 counter register
EP A1 Mode Register 0x14 R/C USB Address A, Endpoint 1 configuration register
EP A2 Counter Register 0x15 R/W USB Address A, Endpoint 2 counter register
EP A2 Mode Register 0x16 R/C USB Address A, Endpoint 2 configuration register
USB Status & Control 0x1F R/W USB upstream port traffic status and control register
Global Interrupt Enable 0x20 R/W Global interrupt enable register
Endpoint Interrupt Enable 0x21 R/W USB endpoint interrupt enables
Timer (LSB) 0x24 R Lower eight bits of free-running timer (1 MHz)
Timer (MSB) 0x25 R Upper four bits of free-running timer that are latched
WDR Clear 0x26 W Watch Dog Reset clear
DAC Data 0x30 R/W DAC I/O
DAC Interrupt Enable 0x31 W Interrupt enable for each DAC pin
DAC Interrupt Polarity 0x32 W Inte rrupt polari ty for each DAC pin
DAC Isink 0x38-0x3F W One four bit sink current register for each DAC pin
Processor Status & Control 0xFF R/W Microprocessor status and control
Note:
2. DAC I/O Port not bonded out on CY7C63613C. See note on page 12 for firmware code needed for unused GPIO pins.
lator to the selected port. Indexed I/O Write (IOWX) adds the
contents of X to the address in the instruction to form the port
address and writes data from the accumulator to the specified
port. Note that specifying address 0 (e.g., IOWX 0h) means
the I/O port is selected solely by the contents of X.
when the lower eight bits are read.
[2]
Document #: 38-08027 Rev. *B Page 9 of 32
[+] Feedback
Page 10
Clock Distribution
clk1x
(to USB SIE)
clk2x
(to Microcontroller)
Clock
Doubler
30 pF
Figure 2. Clock Oscillator On-chip Circuit
30 pF
CY7C63413C
CY7C63513C
CY7C63613C
XTALOUT
XTALIN
Clocking
The XTALIN and XTAL
troller. The user can connect a low-cost ceramic resonator or
an external oscillator can be connected to these pins to
provide a reference frequency for the internal clock distribution
and clock doubler.
An external 6-MHz clock can be applied to the XTAL
the XTAL
XTAL
tively shorted to ground.
pin is left open. Please note that grounding the
OUT
pin is not permissible as the internal clock is effec-
OUT
are the clock pins to the microcon-
OUT
IN
pin if
Reset
The USB Controller supports three types of resets. All
registers are restored to their default states during a reset. The
USB Device Addresses are set to 0 and all interrupts are
disabled. In addition, the Program Stack Pointer (PSP) and
Data Stack Pointer (DSP) are set to 0x00. For USB applications, the firmware should set the DSP below 0xE8 to avoid a
memory conflict with RAM dedicated to USB FIFOs. The
assembly instructions to do this are shown below:
Mov A, E8h ; Move 0xE8 hex into Accumulator
Swap A,dsp ; Swap accumulator value into dsp register
The three reset types are:
1. Power-On Reset (POR)
2. Watch Dog Reset (WDR)
3. USB Bus Reset (non hardware reset)
The occurrence of a reset is recorded in the Processor Status
and Control Register located at I/O address 0xFF. Bits 4, 5,
and 6 are used to record the occurrence of POR, USB Reset,
and WDR respectively. The firmware can interrogate these bits
to determine the cause of a reset.
The microcontroller begins execution from ROM address
0x0000 after a POR or WDR reset. Although this looks like
interrupt vector 0, there is an important difference. Reset
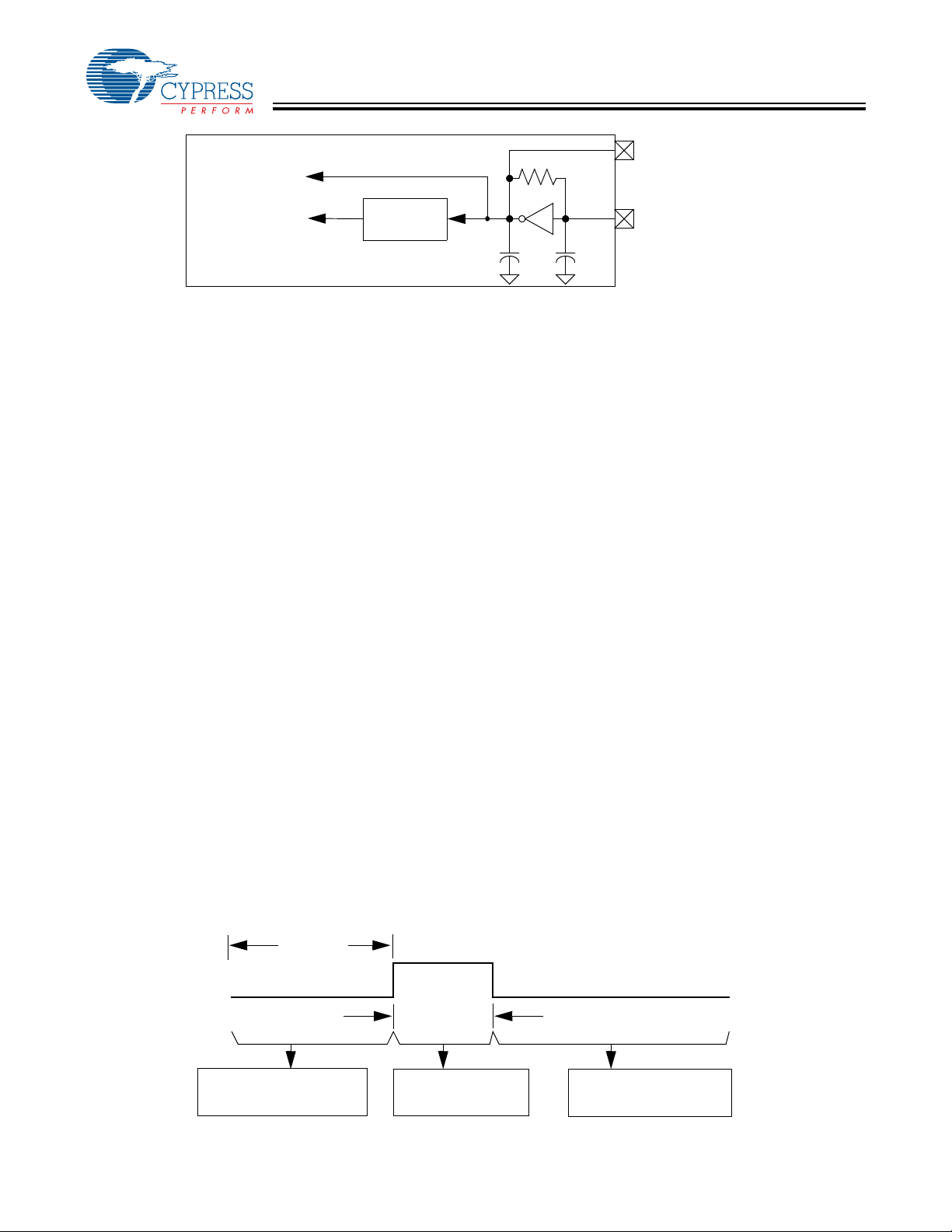
8.192 ms
to 14.336 ms
processing does NOT push the program counter, carry flag,
and zero flag onto program stack. That means the reset
handler in firmware should initialize the hardware and begin
executing the “main” loop of code. Attempting to execute either
a RET or RETI in the reset handler will cause unpredictable
execution results.
Power-On Reset (POR)
Power-On Reset (POR) occurs every time the V
the device ramps from 0V to an internally defined trip voltage
(Vrst) of approximately 1/2 full supply voltage. In addition to the
normal reset initialization noted under “Reset,” bit 4 (PORS) of
the Processor Status and Control Register is set to “1” to
indicate to the firmware that a Power-On Reset occurred. The
POR event forces the GPIO ports into input mode (high
impedance), and the state of Port 3 bit 7 is used to control how
the part will respond after the POR releases.
If Port 3 bit 7 is HIGH (pulled to V
the idle state (DM HIGH and DP LOW) the part will go into a
semi-permanent power down/suspend mode, waiting for the
USB IO to go to one of Bus Reset, K (resume) or SE0. If Port
3 bit 7 is still HIGH when the part comes out of suspend, then
a 128-µs timer starts, delaying CPU operation until the ceramic
resonator has stabilized.
If Port 3 bit 7 was LOW (pulled to V
ms timer, delaying CPU operation until V
then continuing to run as reset.
Firmware should clear the POR Status (PORS) bit in register
0xFF before going into suspend as this status bit selects the
128-µs or 96-ms start-up timer value as follows: IF Port 3 bit 7
is HIGH then 128-µs is always used; ELSE if PORS is HIGH
then 96-ms is used; ELSE 128-µs is used.
Watch Dog Reset (WDR)
The Watch Dog Timer Reset (WDR) occurs when the Most
Significant Bit (MSB) of the 2-bit Watch Dog Timer Register
transitions from LOW to HIGH. In addition to the normal reset
) and the USB IO are at
CC
) the part will start a 96-
SS
CC
voltage to
CC
has stabilized,
2.048 ms
At least 8.192 ms
since last write to WDT
Document #: 38-08027 Rev. *B Page 10 of 32
WDR goes high
for 2.048 ms
Figure 3. Watch Dog Reset (WDR)
Execution begins at
Reset Vector 0X00
[+] Feedback
Page 11

CY7C63413C
CY7C63513C
CY7C63613C
initialization noted under “Reset,” bit 6 of the Processor Status
and Control Register is set to “1” to indicate to the firmware
that a Watch Dog Reset occurred.
The Watch Dog Timer is a 2-bit timer clocked by a 4.096-ms
clock (bit 11) from the free-running timer. Writing any value to
the write-only Watch Dog Clear I/O port (0x26) will clear the
Wat ch Dog Timer.
In some applications, the Watch Dog Timer may be cleared in
the 1.024-ms timer interrupt service routine. If the 1.024-ms
timer interrupt service routine does not get executed for 8.192
ms or more, a Watch Dog Timer Reset will oc cur . A Watch Dog
Timer Reset lasts for 2.048 ms after which the microcontroller
begins execution at ROM address 0x0000. The USB transmitter is disabled by a Watch Dog Reset because the USB
Device Address Register is cleared. Otherwise, the USB
Controller would respond to all address 0 transactions. The
USB transmitter remains disabled until the MSB of the USB
address register is set.
GPIO
CFG
Internal
Data Bus
Data
Out
Latch
General Purpose I/O Ports
Ports 0 to 2 provide 24 GPIO pins that can be read or written.
Each port (8 bits) can be configured as inputs with internal pullups, open drain outputs, or traditional CMOS outputs. Please
note an open drain output is also a high-impedance (no pullup) input. All of the I/O pins within a given port have the same
configuration. Ports 0 to 2 are considered low current drive
with typical current sink capability of 7 mA.
The internal pull-up resistors are typically 7 kΩ. Two factors
govern the enabling and disabling of the internal pull-up
resistors: the port configuration selected in the GPIO Configuration register and the state of the output data bit. If the GPIO
Configuration selected is “Resistive” and the output data bit is
“1,” then the internal pull-up resistor is e nabled for that GPIO
pin. Otherwise, Q1 is turned off and the 7-kΩ pull-up is
disabled. Q2 is “ON” to sink current whenever the output data
bit is written as a “0.” Q3 provides “HIGH” source current when
the GPIO port is configured for CMOS outputs and the output
data bit is written as a “1”. Q2 and Q3 are sized to sink and
source, respectively, roughly the same amount of current to
support traditional CMOS outputs with symmetric drive.
V
CC
mode
2 bits
Q1
Q3
7 kΩ
Q2
to Interrupt
Controller
ESD
GPIO
Pin
Interrupt
Enable
Port Write
Internal
Buffer
Control
Port Read
Control
Figure 4. Block Diagram of a GPIO Line
.
Table 2. Port 0 Data
Addr: 0x00 Port 0 Data
P0[7] P0[6] P0[5] P0[4] P0[3] P0[2] P0[1] P0[0]
R/W R/W R/W R/W R/W R/W R/W R/W
Table 3. Port 1 Data
Addr: 0x01 Port 1 Data
P1[7] P1[6] P1[5] P1[4] P1[3] P1[2] P1[1] P1[0]
R/W R/W R/W R/W R/W R/W R/W R/W
Table 4. Port 2 Data
Addr: 0x02 Port 2 Data
P2[7] P2[6] P2[5] P2[4] P2[3] P2[2] P2[1] P2[0]
R/W R/W R/W R/W R/W R/W R/W R/W
Document #: 38-08027 Rev. *B Page 11 of 32
[+] Feedback
Page 12

CY7C63413C
CY7C63513C
CY7C63613C
Table 5. Port 3 Data
Addr: 0x03 Port 3 Data
P3[7] P3[6] P3[5] P3[4] P3[3] P3[2] P3[1] P3[0]
R/W R/W R/W R/W R/W R/W R/W R/W
Table 6. DAC Port Data
Addr: 0x30 DAC Port Data
Low current outputs
0.2 mA to 1.0 mA typical
DAC[7] DAC[6] DAC[5] DAC[4] DAC[3] DAC[2] DAC[1] DAC[0]
R/W R/W R/W R/W R/W R/W R/W R/W
High current outputs
3.2 mA to 16 mA typical
Port 3 has eight GPIO pins. Port 3 (8 bits) can be configured
as inputs with internal pull-ups, open drain outputs, or traditional CMOS outputs. An open drain output is also a highimpedance input. Port 3 offers high current drive with a typical
current sink capability of 12 mA. The internal pull-up resistors
are typically 7 kΩ.
Note: Special care should be exercised with any unused GPIO
data bits. An unused GPIO data bit, either a pin on the chip or
a port bit that is not bonded on a particular package, must not
be left floating when the device enters the suspend state. If a
GPIO data bit is left floating, the leakage current caused by the
floating bit may violate the suspend current limitation specified
by the USB Specification. If a ‘1’ is written to the unused data
bit and the port is configured with open drain outputs, the
unused data bit will be in an indeterminate state. Therefore, if
an unused port bit is programmed in open-drain mode, it must
be written with a ‘0.’ Notice that the CY7C63613C will always
require that data bits P1[7:4], P2[7:0], P3[3:0] and DAC[7:0] be
written with a ‘0’.
Table 7. Port 0 Interrupt Enable
Addr: 0x04 Port 0 Interrupt Enable
P0[7] P0[6] P0[5] P0[4] P0[3] P0[2] P0[1] P0[0]
W W W W W W W W
Table 8. Port 1 Interrupt Enable
Addr: 0x05 Port 1 Interrupt Enable
P1[7] P1[6] P1[5] P1[4] P1[3] P1[2] P1[1] P1[0]
W W W W W W W W
During reset, all of the bits in the GPIO to a default configuration of Open Drain output, positive interrupt polarity for all
GPIO ports.
GPIO Interrupt Enable Ports
During a reset, GPIO interrupts are disabled by clearing all of
the GPIO interrupt enable ports. Writing a “1” to a GPIO
Interrupt Enable bit enables GPIO interrupts from the corresponding input pin.
GPIO Configuration Port
Every GPIO port can be programmed as inputs with internal
pull-ups, open drain outputs, and traditional CMOS outputs. In
addition, the interrupt polarity for each port can be programmed. With positive interrupt polarity, a rising edge (“0” to
“1”) on an input pin causes an interrupt. With negative polarity,
a falling edge (“1” to “0”) on an input pin causes an interrupt.
As shown in the table below, when a GPIO port is configured
with CMOS outputs, interrupts from that port are disabled. The
GPIO Configuration Port register provides two bits per port to
program these features. The possible port configurations are
as shown in Table 11.
Table 9. Port 2 Interrupt Enable
Addr: 0x06 Port 2 Interrupt Enable
P2[7] P2[6] P2[5] P2[4] P2[3] P2[2] P2[1] P2[0]
W W W W W W W W
Table 10.Port 3 Interrupt Enable
Addr: 0x07 Port 3 Interrupt Enable
P3[7] P3[6] P3[5] P3[4] P3[3] P3[2] P3[1] P3[0]
W W W W W W W W
Document #: 38-08027 Rev. *B Page 12 of 32
[+] Feedback
Page 13

CY7C63413C
CY7C63513C
CY7C63613C
Table 11.Possible Port Configurations
Port Configuration bits Pin Interrupt Bit Driver Mode Interrupt Polarity
11 X Resistive 10 0 CMOS Output disabled
10 1 Open Drain disabled
01 X Open Drain 00 X Open Drain + (default)
In “Resistive” mode, a 7-kΩ pull-up resistor is conditionally
enabled for all pins of a GPIO port. The resistor is enabled for
any pin that has been written as a “1.” The resistor is disabled
on any pin that has been written as a “0.” An I/O pin will be
driven high through a 7-kΩ pull-up resistor when a “1” has
been written to the pin. Or the output pin will be driven LOW,
with the pull-up disabled, when a “0” has been written to the
pin. An I/O pin that has been written as a “1” can be used as
an input pin with an integrated 7-kΩ pull-up resistor. Resistive
mode selects a negative (falling edge) interrupt polarity on all
pins that have the GPIO interrupt enabled.
In “CMOS” mode, all pins of the GPIO port are outputs that are
actively driven. The current source and sink capacity are
roughly the same (symmetric output drive). A CMOS port is not
a possible source for interrupts.
A port configured in CMOS mode has interrupt generation
direction. If a port’s associated Interrupt Mask bits are cleared,
those port bits are strictly outputs. If the Interrupt Mask bits are
set then those bits will be open drain inputs. As open drain
inputs, if their data output values are ‘1’ those port pins will be
CMOS inputs (HIGH Z output).
In “Open Drain” mode the internal pull-up resistor and CMOS
driver (HIGH) are both disabled. An I/O pin that has been
written as a “1” can be used as either a high-impedance input
or a three-state output. An I/O pin that has been written as a
“0” will drive the output LOW. The interrupt polarity for an open
drain GPIO port can be selected as either positive (rising
edge) or negative (falling edge).
During reset, all of the bits in the GPIO Configuration Register
are written with “0.” This selects the default configuration:
Open Drain output, positive interrupt polarity for all GPIO
ports.
disabled, yet the interrupt mask bits serve to control port
Addr: 0x08 GPIO Configuration Register
7 6 5 4 3 2 1 0
Port 3
Config Bit 1
Port 3
Config Bit 0
Port 2
Config Bit 1
Port 2
Config Bit 0
Port 1
Config Bit 1
Port 1
Config Bit 0
Port 0
Config Bit 1
W W W W W W W W
Table 12.GPIO Configuration Register
DAC Port
Port 0
Config Bit 0
V
CC
Internal
Data Bus
Interrupt
Enable
Interrupt
Polarity
DAC Write
Internal
Buffer
Data
Out
Latch
DAC Read
Isink
Register
Interrupt Logic
4 bits
Isink
DAC
to Interrupt
Controller
Q1
14 KΩ
DAC
I/O Pin
ESD
Figure 5. Block Diagram of DAC Port
Document #: 38-08027 Rev. *B Page 13 of 32
[+] Feedback
Page 14

CY7C63413C
CY7C63513C
CY7C63613C
Table 13.DAC Port Data
Addr: 0x30 DAC Port Data
Low current outputs
0.2 mA to 1.0 mA typical
DAC[7] DAC[6] DAC[5] DAC[4] DAC[3] DAC[2] DAC[1] DAC[0]
R/W R/W R/W R/W R/W R/W R/W R/W
The DAC port provides the CY7C63513C with 8 programmable current sink I/O pins. Writing a “1” to a DAC I/O pin
disables the output current sink (Isink DAC) and drives the I/O
pin HIGH through an integrated 14 Kohm resistor. When a “0”
is written to a DAC I/O pin, the Isink DAC is enabled and the
pull-up resistor is disabled. A “0” output will cause the Isink
DAC to sink current to drive the output LOW. The amount of
sink current for the DAC I/O pin is programmable over 16
values based on the content s of the DAC Isink Register f or that
output pin. DAC[1:0] are the two high current outputs that are
programmable from a minimum of 3.2 mA to a maximum of 16
mA (typical). DAC[7:2] are low current outputs that are
programmable from a minimum of 0.2 mA to a maximum of 1.0
mA (typical).
When a DAC I/O bit is written as a “1,” the I/O pin is either an
output pulled high through the 14 Kohm resistor or an input
with an internal 14 Kohm pull-up resistor. All DAC port data bits
are set to “1” during reset.
DAC Port Interrupts
A DAC port interrupt can be enabled/disabled for each pin
individually. The DAC Port Interrupt Enable register provides
this feature with an interrupt mask bit for each DAC I/O pin.
Writing a “1” to a bit in this register enables interrupts from the
corresponding bit position. Writing a “0” to a bit in the DAC Port
Interrupt Enable register disables interrupts from the corresponding bit position. All of the DAC Port Interrupt Enable
register bits are cleared to “0” during a reset.
As an additional benefit, the interrupt polarity for each DAC pin
is programmable with the DAC Port Interrupt Polarity register.
Writing a “0” to a bit selects negative polarity (falling edge) that
will cause an interrupt (if enabled) if a falling edge tra nsition
occurs on the corresponding input pin. Writing a “1” to a bit in
this register selects positive polarity (rising edge) that will
cause an interrupt (if enabled) if a rising edge transition occurs
on the corresponding input pin. All of the DAC Port Interrupt
Polarity register bits are cleared during a reset.
DAC Isink Registers
Each DAC I/O pin has an associated DAC Isink register to
program the output sink current when the output is driven
LOW. The first Isink register (0x38) controls the current for
DAC[0], the second (0x39) for DAC[1], and so on until the Isink
register at 0x3F controls the current to DAC[7].
High current outputs
3.2 mA to 16 mA typical
Table 14.DAC Port Interrupt Enable
Addr: 0x31 DAC Port Interrupt Enable
DAC[7] DAC[6] DAC[5] DAC[4] DAC[3] DAC[2] DAC[1] DAC[0]
W W W W W W W W
Table 15.DAC Port Interrupt Polarity
Addr: 0x32 DAC Port Interrupt Polarity
DAC[7] DAC[6] DAC[5] DAC[4] DAC[3] DAC[2] DAC[1] DAC[0]
W W W W W W W W
Table 16.DAC Port Isink
Addr: 0x38-0x3F DAC Port Interrupt Polarity
Reserved Isink Value
Isink[3] Isink[2] Isink[1] Isink[0]
W W W W
Document #: 38-08027 Rev. *B Page 14 of 32
[+] Feedback
Page 15

CY7C63413C
CY7C63513C
CY7C63613C
USB Serial Interface Engine (SIE)
The SIE allows the microcontroller to communicate with the
USB host. The SIE simplifies the interface between the microcontroller and USB by incorporating hardware that handles the
following USB bus activity independently of the microcontroller:
• Bit stuffing/unstuffing
• Checksum generation/checking
•ACK/NAK
• Token type identification
• Address checking
Firmware is required to handle the rest of the USB interface
with the following tasks:
• Coordinate enumeration by responding to set-up packets
• Fill and empty the FIFOs
• Suspend/Resume coordination
• Verify and select Data toggle values
USB Enumeration
The enumeration sequence is shown below:
1. The host computer sends a Setup packet followed by a
Data packet to USB address 0 requesting the Device descriptor.
2. The USB Controller decodes the request and retrieves its
Device descriptor from the program memory space.
3. The host computer performs a control read sequence and
the USB Controller responds by sending the Device
descriptor over the USB bus.
4. After receiving the descriptor, the host computer sends a
Setup packet followed by a Data packet to address 0
assigning a new USB address to the device.
5. The USB Controller stores the new address in its USB
Device Address Register after the no-data control
sequence is complete.
6. The host sends a request for the Device descriptor using
the new USB address.
Table 17.USB Status and Control Register
Addr:0x1F USB Status and Control Register
7 6 5 4 3 2 1 0
Reserved Reserved D+ D– Bus Activity Control
R R R/W R/W R/W R/W
7. The USB Controller decodes the request and retrieves the
Device descriptor from the program memory .
8. The host performs a control read sequence and the USB
Controller responds by sending its Device descriptor over
the USB bus.
9. The host generates control reads to the USB Controller to
request the Configuration and Report descriptors.
10.The USB Controller retrieves the descriptors from its
program space and returns the data to the host over the
USB.
PS/2 Operation
PS/2 operation is possible with the CY7C63413C/513C/613C
series through the use of firmware and several operating
modes. The first enabling feature:
1. USB Bus reset on D+ and D− is an interrupt that can be
disabled;
2. USB traffic can be disabled via bit 7 of the USB register;
3. D+ and D− can be monitored and driven via firmware as
independent port bits.
Bits 5 and 4 of the Upstream Status and Control register are
directly connected to the D+ and D− USB pins of the
CY7C63413C/513C/613C. These pins constantly monitor the
levels of these signals with CMOS input thresholds. Firmware
can poll and decode these signals as PS/2 clock and data.
Bits [2:0] defaults to ‘000’ at reset which allows the USB SIE
to control output on D+ and D−. Firmware can override the SIE
and directly control the state of these pins via these 3 control
bits. Since PS/2 is an open drain signaling protocol, these
modes allow all 4 PS/2 states to be generated on the D+ and
D− pins
USB Port Status and Control
USB status and control is regulated by the USB Status and
Control Register located at I/O address 0x1F as shown in
Figure 17. This is a read/write register. All reserved bits must
be written to zero. All bits in the register are cleared during
reset.
Control
Bit 2
Bit 1
Control
Bit 0
Document #: 38-08027 Rev. *B Page 15 of 32
[+] Feedback
Page 16

CY7C63413C
CY7C63513C
CY7C63613C
The Bus Activity bit is a “sticky” bit that indicates if any non-idle
USB event has occurred on the USB bus. The user firmware
should check and clear this bit periodically to detect any loss
of bus activity . Writing a “ 0” to the Bus Activity bit clears it while
writing a “1” preserves the current value. In other words, the
firmware can clear the Bus Activity bit, but only the SIE can set
it. The 1.024-ms timer interrupt service routine is normally
used to check and clear the Bus Activity bit. The following table
shows how the control bits are encoded for this register.
Control
Bits Control Action
000 Not forcing (SIE controls driver)
001 Force K (D+ HIGH, D– LOW)
010 Force J (D+ LOW, D– HIGH)
011 Force SE0 (D+ LOW, D– LOW)
100 Force SE0 (D− LOW, D+ LOW)
101 Force D− LOW, D+ HiZ
110 Force D− HiZ, D+ LOW
111 Force D− HiZ, D+ HiZ
USB Device
USB Device Address A includes three endpoints: EPA0, EP A1,
and EPA2. End Point 0 (EPA0) allows the USB host to
recognize, set up, and control the device. In particular, EPA0
is used to receive and transmit control (including set-up)
packets.
USB Ports
The USB Controller provides one USB device address with
three endpoints. The USB Device Address Register contents
are cleared during a reset, setting the USB device address to
zero and marking this address as disabled. Figure 18 shows
the format of the USB Address Register.
Bit 7 (Device Address Enable) in the USB Device Address
Register must be set by firmware before the serial interface
engine (SIE) will respond to USB traffic to this address. The
Device Address in bits [6:0] must be set by firmware during the
USB enumeration process to an address assigned by the USB
host that does not equal zero. This register is cleare d by a
hardware reset or the USB bus reset.
Device Endpoints (3)
The USB controller communicates with the host using
dedicated FIFOs, one per endpoint. Each endpoint FIFO is
implemented as 8 bytes of dedicated SRAM. There are three
endpoints defined for Device “A” that are labeled “EPA0,”
“EPA1,” and EPA2.”
All USB devices are required to have an endpoint number 0
(EPA0) that is used to initialize and control the USB device.
End Point 0 provides access to the device configuration information and allows generic USB status and control accesses.
End Point 0 is bidirectional as the USB controller can both
receive and transmit data.
The endpoint mode registers are cleared during reset. The
EPA0 endpoint mode register uses the format shown in T able
19.
Bits[7:5] in the endpoint 0 mode registers (EPA0) are “sticky”
status bits that are set by the SIE to report the type of token
that was most recently received. The sticky bits must be
cleared by firmware as part of the USB processing.
The endpoint mode registers for EPA1 and EPA2 do not use
bits [7:5] as shown in Table 20.
Table 18.USB Device Address Register
Addr:0x10 USB Device Address Register
Device
Address
Enable
R/W R/W R/W R/W R/W R/W R/W R/W
Table 19.USB Device EPA0, Mode Register
Addr:0x12 USB Device EPA0, Mode Register
Endpoint 0
Set-up
Received
R/W R/W R/W R/W R/W R/W R/W R/W
Table 20.USB Device Endpoint Mode Register
Addr: 0x14, 0x16 USB Device Endpoint Mode Register
Reserved Reserved Reserved Acknowledge Mode
R/W R/W R/W R/W R/W R/W R/W R/W
Device
Address
Bit 6
Endpoint 0
In
Received
Device
Address
Bit 5
Endpoint 0
Out
Received
Device
Address
Bit 4
Acknowledge Mode
Device
Address
Bit 3
Bit 3
Bit 3
Device
Address
Bit 2
Mode
Bit 2
Mode
Bit 2
Device
Address
Bit 1
Mode
Bit 1
Mode
Bit 1
Device
Address
Bit 0
Mode
Bit 0
Mode
Bit 0
Document #: 38-08027 Rev. *B Page 16 of 32
[+] Feedback
Page 17

CY7C63413C
CY7C63513C
CY7C63613C
The ‘Acknowledge’ bit is set whenever the SIE engages in a
transaction that completes with an ‘ACK’ packet.
The ‘set-up’ PID status (bit[7]) is forced HIGH from the start of
the data packet phase of the set-up transaction, until the start
of the ACK packet returned by the SIE. The CPU is prevented
from clearing this bit during this interval, and subsequently
until the CPU first does an IORD to this endpoint 0 mode
register.
Bits[6:0] of the endpoint 0 mode register are locked from CPU
IOWR operations only if the SIE has updated one of these bits,
which the SIE does only at the end of a packet transaction (setup... Data... ACK, or Out... Data... ACK, or In... Data... ACK).
The CPU can unlock these bits by doing a subsequent I/O read
of this register.
Firmware must do an IORD after an IOWR to an endpoint 0
register to verify that the contents have changed and that the
SIE has not updated these values.
Table 21.USB Device Counter Registers
Addr: 0x11, 0x13, 0x15 USB Device Counter Registers
Data 0/1
Toggle
R/W R/W R/W R/W R/W R/W R/W R/W
Data Valid Reserved Reserved Byte count
While the ‘set-up’ bit is set, the CPU cannot write to the DMA
buffers at memory locations 0xE0 through 0xE7 and 0xF8
through 0xFF. This prevents an incoming set-up transaction
from conflicting with a previous In data buffer filling operation
by firmware.
The mode bits (bits [3:0]) in an Endpoint Mode Register control
how the endpoint responds to USB bus traffic. The mode bit
encoding is shown in Section .
The format of the endpoint Device counter registers is shown
in Table 21.
Bits 0 to 3 indicate the number of data bytes to be transmitted
during an IN packet, valid values are 0 to 8 inclusive. Data
Valid bit 6 is used for OUT and set-up tokens only. Data 0/1
Toggle bit 7 selects the DATA packet’s toggle state: 0 for
DATA0, 1 for DATA1.
Bit 3
Byte count
Bit 2
Byte count
Bit 1
Byte count
Bit 0
Document #: 38-08027 Rev. *B Page 17 of 32
[+] Feedback
Page 18

CY7C63413C
CY7C63513C
CY7C63613C
12-bit Free-running Timer
The 12-bit timer provides two interrupts (128 µs and 1.024 ms)
and allows the firmware to directly time events that are up to
4 ms in duration. The lower 8 bits of the timer can be read
directly by the firmware. Reading the lower 8 bits latches the
Timer (LSB)
Table 22.Timer Register
Addr: 0x24 Timer Register (LSB)
Timer
Bit 7
R R R R R R R R
Timer (MSB)
Table 23.Timer Register
Addr: 0x25 Timer Register (MSB)
Reserved Reserved Reserved Reserved Timer
Timer
Bit 6
Timer
Bit 5
Timer
Bit 4
upper 4 bits into a temporary register. When the firmware
reads the upper 4 bits of the timer, it is actually reading the
count stored in the temporary register. The effect of this logic
is to ensure a stable 12-bit timer value can be read, even when
the two reads are separated in time.
Timer
Bit 3
Bit 11
R R R R
Timer
Bit 2
Timer
Bit 10
Timer
Bit 1
Timer
Bit 9
1.024-ms interrupt
128-
µs interrupt
Timer
Bit 0
Timer
Bit 8
10 9 78
L1 L0L2L3
D3 D2 D1 D0 D7 D6 D5 D4 D3 D2 D1 D0
6432
5
1 011
1-MHz clock
To Timer Register
8
Figure 6. Timer Block Diagram
Processor Status and Control Register
Table 24.Processor St atus and Control Register
Addr: 0xFF Processor Status and Control Register POR Default: 0x0101
7 6 5 4 3 2 1 0
IRQ
Pending
R R/W R/W R/W R/W R R/W R/W
The “Run” (bit 0) is manipulated by the HALT instruction. When
Halt is executed, the processor clears the run bit and halts at
the end of the current instruction. The processor remains
Watch Dog
Reset
USB Bus
Reset
Power-on
Reset
Suspend, Wait
for Interrupt
halted until a reset (Power On or Watch Dog). Notice, when
writing to the processor status and control register, the run bit
should always be written as a “1.”
Interrupt
Mask
WDC Reset: 0x41
Single Step Run
Document #: 38-08027 Rev. *B Page 18 of 32
[+] Feedback
Page 19

CY7C63413C
CY7C63513C
CY7C63613C
The “Single Step” (bit 1) is provided to support a hardware
debugger. When single step is set, the processor will execute
one instruction and halt (clear the run bit). This bit must be
cleared for normal operation.
The “Interrupt Mask” (bit 2) shows whether interrupts are
enabled or disabled. The firmware has no direct control over
this bit as writing a zero or one to this bit position will have no
effect on interrupts. Instructions DI, EI, and RETI manipulate
the internal hardware that controls the state of the interrupt
mask bit in the Processor Status and Control Register.
Writing a “1” to “Suspend, Wait for Interrupts” (bit 3) will halt
the processor and cause the microcontroller to enter the
“suspend” mode that significantly reduces power
consumption. A pending interrupt or bus activity will cause the
device to come out of suspend. After coming out of suspend,
the device will resume firmware execution at the instruction
following the IOWR which put the part into suspend. An IOWR
that attempts to put the part into suspend will be ignored if
either bus activity or an interrupt is pending.
The “Power-on Reset” (bit 4) is only set to “1” during a powe r
on reset. The firmware can check bits 4 and 6 in the reset
handler to determine whether a reset was caused by a Power
On condition or a Watch Dog Timeout. PORS is used to
determine suspend start-up timer value of 128 µs or 96 ms.
The “USB Bus Reset” (bit 5) will occur when a USB bus reset
is received. The USB Bus Reset is a singled-ended zero (SE0)
that lasts more than 8 microseconds. An SE0 is defined as the
condition in which both the D+ line and the D– line are LOW
at the same time. When the SIE detects this condition, the
USB Bus Reset bit is set in the Processor Status and Control
register and an USB Bus Reset interrupt is generated. Please
note this is an interrupt to the microcontroller and does n ot
actually reset the processor.
The “Watch Dog Reset” (bit 6) is set during a reset initiated by
the Watch Dog Timer. This indicates the Watch Dog Timer
went for more than 8 ms between watch dog clears.
The “IRQ Pending” (bit 7) indicates one or more of the interrupts has been recognized as active. The interrupt
acknowledge sequence should clear this bit until the next
interrupt is detected.
During Power-on Reset, the Processor Status and Control
Register is set to 00010001, which indicates a Power-on Reset
(bit 4 set) has occurred and no interrupts are pending (bit 7
clear) yet.
During a Watch Dog Reset, the Processor St atus and Control
Register is set to 01000001, which indicates a Watch Dog
Reset (bit 6 set) has occurred and no interrupts are pending
(bit 7 clear) yet.
Interrupts
All interrupts are maskable by the Global Interrupt Enable
Register and the USB End Point Interrupt Enable Register.
Writing a “1” to a bit position enables the interrupt associated
with that bit position. During a reset, the contents the Global
Interrupt Enable Register and USB End Point Interrupt Enable
Register are cleared, effectively disabling all interrupts.
Pending interrupt requests are recognized during the last clock
cycle of the current instruction. When servicing an interrupt,
the hardware will first disable all interrupts by clearing the
Interrupt Enable bit in the Processor Status and Control
Register. Next, the interrupt latch of the current interrupt is
cleared. This is followed by a CALL instruction to the ROM
address associated with the interrupt being serviced (i.e., the
Interrupt Vector). The instruction in the interrupt table is
typically a JMP instruction to the address of the Interrupt
Service Routine (ISR). The user can re-enable interrupts in the
interrupt service routine by executing an EI instruction. Interrupts can be nested to a level limited only by the available
stack space.
The Program Counter value as well as the Carry and Zero
flags (CF , ZF) are automatically stored onto the Program Stack
by the CALL instruction as part of the interrupt acknowledge
process. The user firmware is responsible for insuring that the
processor state is preserved and restored during an interrupt.
The PUSH A instruction should be used as the first command
in the ISR to save the accumulator value and the POP A
instruction should be used just before the RETI instruction to
restore the accumulator value. The program counter CF and
ZF are restored and interrupts are enabled when the R ETI
instruction is executed.
Table 25.Global Interrupt Enable Register
Addr: 0x20 Global Interrupt Enable Register
7 6 5 4 3 2 1 0
Reserved Reserved GPIO
Interrupt
Enable
R/W R/W R/W R/W R/W
Table 26.USB End Point Interrupt Enable Register
Addr: 0x21 USB End Point Interrupt Enable Register
7 6 5 4 3 2 1 0
Reserved Reserved Reserved Reserved Reserved EPA2
Document #: 38-08027 Rev. *B Page 19 of 32
DAC
Interrupt
Enable
Reserved 1.024-ms
Interrupt
Enable
Interrupt
Enable
R/W R/W R/W
128-µsec
Interrupt
Enable
EPA1
Interrupt
Enable
USB Bus RST
Interrupt
Enable
EPA0
Interrupt
Enable
[+] Feedback
Page 20

CY7C63413C
CY7C63513C
CY7C63613C
Interrupt Vectors
The Interrupt Vectors supported by the USB Controller are
listed in Table 27. Although Reset is not an interrupt, per se,
the first instruction executed after a reset is at PROM address
Table 27.Interrupt Vector Assignments
Interrupt Vector Number ROM Address Function
not applicable 0x0000 Execution after Reset begins here
1 0x0002 USB Bus Reset interrupt
2 0x0004 128-µs timer interrupt
3 0x0006 1.024-ms timer interrupt
4 0x0008 USB Address A Endpoint 0 interrupt
5 0x000A USB Address A Endpoint 1 interrupt
6 0x000C USB Address A Endpoint 2 interrupt
7 0x000E Reserved
8 0x0010 Reserved
9 0x0012 Reserved
10 0x0014 DAC interrupt
11 0x0016 GPIO interrupt
12 0x0018 Reserved
Interrupt Latency
Interrupt latency can be calculated from the following
equation:
Interrupt Latency =(Number of clock cycles remaining in the
current instruction)
+ (10 clock cycles for the CALL instruction)
+ (5 clock cycles for the JMP instruction)
For example, if a 5 clock cycle instruction such as JC is being
executed when an interrupt occurs, the first instruction of the
Interrupt Service Routine will execute a min. of 16 clocks
(1+10+5) or a max. of 20 clocks (5+10+5) after the interrupt is
issued. Remember that the interrupt latches are sampled at
the rising edge of the last clock cycle in the current instruction.
USB Bus Reset Interrupt
The USB Bus Reset interrupt is asserted when a USB bus
reset condition is detected. A USB bus reset is indicated by a
single ended zero (SE0) on the upstream port for more than 8
microseconds.
Timer Interrupt
There are two timer interrupts: the 128-µs interrupt and the
1.024-ms interrupt. The user should disable both timer interrupts before going into the suspend mode to avoid possible
conflicts between servicing the interrupts first or the suspend
request first.
USB Endpoint Interrupts
There are three USB endpoint interrupts, one per endpoint.
The USB endpoints interrupt after the either the USB host or
the USB controller sends a packet to the USB.
0x0000—which corresponds to the first entry in the Interrupt
Vector Table. Because the JMP instruction is 2 bytes long, the
interrupt vectors occupy 2 bytes.
DAC Interrupt
Each DAC I/O pin can generate an interrupt, if enabled.The
interrupt polarity for each DAC I/O pin is programmable. A
positive polarity is a rising edge input while a negative polarity
is a falling edge input. All of the DAC pins share a single
interrupt vector, which means the firmware will need to read
the DAC port to determine which pin or pins caused an
interrupt.
Please note that if one DAC pin triggered an interrupt, no other
DAC pins can cause a DAC interrupt until that pin has returned
to its inactive (non-trigger) state or the corresponding interrupt
enable bit is cleared. The USB Controller does not assign
interrupt priority to different DAC pins and the DAC Interrupt
Enable Register is not cleared during the interrupt
acknowledge process.
GPIO Interrupt
Each of the 32 GPIO pins can generate an interrupt, if enabled.
The interrupt polarity can be programmed for each GPIO port
as part of the GPIO configuration. All of the GPIO pins share
a single interrupt vector, which means the firmware will need
to read the GPIO ports with enabled interrupts to determine
which pin or pins caused an interrupt.
Please note that if one port pin triggered an interrupt, no other
port pins can cause a GPIO interrupt until that port pin has
returned to its inactive (non-trigger) state or its corresponding
port interrupt enable bit is cleared. The USB Controller does
not assign interrupt priority to different port pins and the Port
Interrupt Enable Registers are not cleared during the interrupt
acknowledge process.
Document #: 38-08027 Rev. *B Page 20 of 32
[+] Feedback
Page 21

CY7C63413C
CY7C63513C
CY7C63613C
Truth Tables
Table 28.USB Register Mode Encoding
Mode Encoding Setup In Out Comments
Disable 0000 ignore ignore ignore Ignore all USB traffic to this endpoint
Nak In/Out
0001
Status Out Only 0010 accept stall check For Control endpoints
Stall In/Out 0011 accept stall stall For Control endpoints
Ignore In/Out 0100 accept ignore ignore For Control endpoints
Isochronous Out
0101
Status In Only 0110 accept TX 0 stall For Control Endpoints
Isochronous In
0111
Nak Out 1000 ignore ignore NAK An ACK from mode 1001 --> 1000
Ack Out 1001 ignore ignore ACK This mode is changed by SIE on issuance of ACK --> 1000
Nak Out - Status In 1010 accept TX 0 NAK An ACK from mode 1011 --> 1010
Ack Out - Status In 1011 accept TX 0 ACK This mode is changed by SIE on issuance of ACK --> 1010
Nak In 1100 ignore NAK ignore An ACK from mode 1101 --> 1100
Ack In 1101 ignore TX cnt ignore This mode is changed by SIE on issuance of ACK --> 1100
Nak In - Status Out 1110 accept NAK check An ACK from mode 1111 --> 1110 NAck In - Status Out
Ack In - Stat us Out 1111 accept TX cnt Check This mode is changed by SIE on issuance of ACK -->1110
accept NAK NAK Forced from Set-up on Control endpoint, from modes other
than 0000
ignore ignore always Available to low speed devices, future USB spec
enhancements
ignore TX cnt ignore Available to low speed devices, future USB spec
enhancements
The ‘In’ column represents the SIE’s response to the token
type.
A disabled endpoint will remain such until firmware changes it,
and all endpoints reset to disabled.
Any Setup packet to an enabled and accepting endpoint will
be changed by the SIE to 0001 (NAKing). Any mode which
indicates the acceptance of a Setup will acknowledge it.
Most modes that control transactions involving an ending ACK
will be changed by the SIE to a corresponding mode which
NAKs follow on packets.
A Control endpoint has three extra status bits for PID (Setup,
In and Out), but must be placed in the correct mode to function
as such. Also a non-Control endpoint can be made to act as a
Control endpoint if it is placed in a non appropriate mode.
A ‘check’ on an Out token during a Status transaction checks
to see that the Out is of zero length and has a Data Toggle
(DTOG) of 1.
Document #: 38-08027 Rev. *B Page 21 of 32
[+] Feedback
Page 22

CY7C63413C
CY7C63513C
CY7C63613C
Figure 7. Decode table forTable 29: “Details of Modes for Differing Traffic Conditions”
Properties of incoming packet
Encoding Status bits What the SIE does to Mode bits
PID Status bits Interrupt?
End Point
Mode
3
2 1 0 Token count buffer dval DTOG DVAL COUNT
Setup
In
Out
The validity of the received data
The quality status of the DMA buffer
The number of received bytes
Setup
In Out ACK 3 210
Acknowledge phase completed
End Point
Mode
ResponseInt
Legend:
UC: unchanged TX: transmit
x: don’t care RX: receive
available for Control endpoint only
The response of the SIE can be summarized as follows:
1. the SIE will only respond to valid transactions, and will ignore non-valid ones;
2. the SIE will generate IRQ when a valid transaction is
completed or when the DMA buffer is corrupted
3. an incoming Data packet is valid if the count is <= 10 (CRC
inclusive) and passes all error checking;
4. a Setup will be ignored by all non-Control endpoints (in
appropriate modes);
5. an In will be ignored by an Out configured endpoint and vice
versa.
The In and Out PID status is updated at the end of a tran saction.
TX0: transmit 0-length packet
The Setup PID status is updated at the beginning of the Data
packet phase.
The entire EndPoint 0 mode and the Count register are locked
to CPU writes at the end of any transaction in which an ACK
is transferred. These registers are only unlocked upon a CPU
read of these registers, and only if that read happens after the
transaction completes. This represents about a 1-µs window
to which to the CPU is locked from register writes to these USB
registers. Normally the firmware does a register read at the
beginning of the ISR to unlock and get the mode register information. The interlock on the Mode and Count registers
ensures that the firmware recognizes the changes that the SIE
might have made during the previous transaction.
Document #: 38-08027 Rev. *B Page 22 of 32
[+] Feedback
Page 23

CY7C63413C
CY7C63513C
CY7C63613C
Table 29.Details of Modes for Differing Traffic Conditions
End Point Mode PID Set End Point Mode
3 2 1 0 token count buffer dval DTOG DVAL COUNT Setup In Out ACK 3 2 1 0 response int
Setup Packet (if accepting)
See Table 28 Setup <= 10 data valid updates 1 updates 1 UC UC 1 0 0 0 1 ACK yes
See Table 28 Setup > 10 junk x updates updates updates 1 UC UC UC NoChange ignore yes
See Table 28 Setup x junk invalid updates 0 updates 1 UC UC UC NoChange ignore yes
Disabled
0 0 0 0 x x UC x UC UC UC UC UC UC UC NoChange ignore no
Nak In/Out
0 0 0 1 Out x UC x UC UC UC UC UC 1 UC NoChange NAK yes
0 0 0 1 In x UC x UC UC UC UC 1 UC UC NoChange NAK yes
Ignore In/Out
0 1 0 0 Out x UC x UC UC UC UC UC UC UC NoChange ignore no
0 1 0 0 In x UC x UC UC UC UC UC UC UC NoChange ignore no
Stall In/Out
0 0 1 1 Out x UC x UC UC UC UC UC 1 UC NoChange Stall yes
0 0 1 1 In x UC x UC UC UC UC 1 UC UC NoChange Stall yes
Control Write
Normal Out/premature status In
1 0 1 1 Out <= 10 data valid updates 1 updates UC UC 1 1 1 0 1 0 ACK yes
1 0 1 1 Out > 10 junk x updates updates updates UC UC 1 UC NoChange ignore yes
1 0 1 1 Out x junk invalid updates 0 updates UC UC 1 UC NoChange ignore yes
1 0 1 1 In x UC x UC UC UC UC 1 UC 1 NoChange TX 0 yes
NAK Out/premature status In
1 0 1 0 Out <= 10 UC valid UC UC UC UC UC 1 UC NoChange NAK yes
1 0 1 0 Out > 10 UC x UC UC UC UC UC UC UC NoChange ignore no
1 0 1 0 Out x UC invalid UC UC UC UC UC UC UC NoChange ignore no
1 0 1 0 In x UC x UC UC UC UC 1 UC 1 NoChange TX 0 yes
Status In/extra Out
0 1 1 0 Out <= 10 UC valid UC UC UC UC UC 1 UC 0 0 1 1 Stall yes
0 1 1 0 Out > 10 UC x UC UC UC UC UC UC UC NoChange ignore no
0 1 1 0 Out x UC invalid UC UC UC UC UC UC UC NoChange ignore no
0 1 1 0 In x UC x UC UC UC UC 1 UC 1 NoChange TX 0 yes
Control Read
Normal In/premature status Out
1 1 1 1 Out 2 UC valid 1 1 updates UC UC 1 1 NoChange ACK yes
1 1 1 1 Out 2 UC valid 0 1 updates UC UC 1 UC 0 0 1 1 Stall yes
1 1 1 1 Out !=2 UC valid updates 1 updates UC UC 1 UC 0 0 1 1 Stall yes
1 1 1 1 Out > 10 UC x UC UC UC UC UC UC UC NoChange ignore no
1 1 1 1 Out x UC invalid UC UC UC UC UC UC UC NoChange ignore no
1 1 1 1 In x UC x UC UC UC UC 1 UC 1 1 1 1 0 ACK (back) yes
Nak In/premature status Out
1 1 1 0 Out 2 UC valid 1 1 updates UC UC 1 1 NoChange ACK yes
1 1 1 0 Out 2 UC valid 0 1 updates UC UC 1 UC 0 0 1 1 Stall yes
1 1 1 0 Out !=2 UC valid updates 1 updates UC UC 1 UC 0 0 1 1 Stall yes
1 1 1 0 Out > 10 UC x UC UC UC UC UC UC UC NoChange ignore no
1 1 1 0 Out x UC invalid UC UC UC UC UC UC UC NoChange ignore no
1 1 1 0 In x UC x UC UC UC UC 1 UC UC NoChange NAK yes
Status Out/extra In
0 0 1 0 Out 2 UC valid 1 1 updates UC UC 1 1 NoChange ACK yes
0 0 1 0 Out 2 UC valid 0 1 updates UC UC 1 UC 0 0 1 1 Stall yes
Document #: 38-08027 Rev. *B Page 23 of 32
[+] Feedback
Page 24

CY7C63413C
CY7C63513C
CY7C63613C
Table 29.Details of Modes for Differing Traffic Conditions (continued)
End Point Mode PID Set End Point Mode
3 2 1 0 token count buffer dval DTOG DVAL COUNT Setup In Out ACK 3 2 1 0 response int
0 0 1 0 Out !=2 UC valid updates 1 updates UC UC 1 UC 0 0 1 1 Stall yes
0 0 1 0 Out > 10 UC x UC UC UC UC UC UC UC UC UC UC UC ignore no
0 0 1 0 Out x UC invalid UC UC UC UC UC UC UC UC UC UC UC ignore no
0 0 1 0 In x UC x UC UC UC UC 1 UC UC 0 0 1 1 Stall yes
Out endpoint
Normal Out/erroneous In
1 0 0 1 Out <= 10 data valid updates 1 updates UC UC 1 1 1 0 0 0 ACK yes
1 0 0 1 Out > 10 junk x updates updates updates UC UC 1 UC NoChange ignore yes
1 0 0 1 Out x junk invalid updates 0 updates UC UC 1 UC NoChange ignore yes
1 0 0 1 In x UC x UC UC UC UC UC UC UC NoChange ignore no
NAK Out/erroneous In
1 0 0 0 Out <= 10 UC valid UC UC UC UC UC 1 UC NoChange NAK yes
1 0 0 0 Out > 10 UC x UC UC UC UC UC UC UC NoChange ignore no
1 0 0 0 Out x UC invalid UC UC UC UC UC UC UC NoChange ignore no
1 0 0 0 In x UC x UC UC UC UC UC UC UC NoChange ignore no
Isochronous endpoint (Out)
0 1 0 1 Out x updates updates updates updates updates UC UC 1 1 N oChange RX yes
0 1 0 1 In x UC x UC UC UC UC UC UC UC NoChange ignore no
In endpoint
Normal In/erroneous Out
1 1 0 1 Out x UC x UC UC UC UC UC UC UC NoChange ignore no
1 1 0 1 In x UC x UC UC UC UC 1 UC 1 1 1 0 0 ACK (back) yes
NAK In/erroneous Out
1 1 0 0 Out x UC x UC UC UC UC UC UC UC NoChange ignore no
1 1 0 0 In x UC x UC UC UC UC 1 UC UC NoChange NAK yes
Isochronous endpoint (In)
0 1 1 1 Out x UC x UC UC UC UC UC UC UC NoChange ignore no
0 1 1 1 In x UC x UC UC UC UC 1 UC UC NoChange TX yes
Document #: 38-08027 Rev. *B Page 24 of 32
[+] Feedback
Page 25

CY7C63413C
CY7C63513C
CY7C63613C
Absolute Maximum Ratings
Storage Temperature ................................................................ .................................... ......................................–65°C to +150°C
Ambient Temperature with Power Applied...............................................................................................................–0°C to +70°C
Supply Voltage on V
DC Input Voltage........................................................................................................................................... –0.5V to +V
DC Voltage Applied to Outputs in High Z State..................................... ....................................................... –0.5V to + V
Max. Output Current into Port 0,1,2,3 and DAC[1:0] Pins................................................................................................... 60 mA
Max. Output Current into DAC[7:2] Pins............................................... .................................. .. .......................................... 10 mA
Power Dissipation...................... ............................................................................................. ................................. ... ... ...300 mW
Static Disc harge Voltage .................................. .. ..................................... ............................. .. .......................................> 2000V
Latch-up Current ........................................................................................................................................................... > 200 mA
DC Characteristics Fosc = 6 MHz; Operating Temperature = 0 to 70°C
General
V
CC (1)
V
CC (2)
I
CC1
I
CC2
I
SB1
V
PP
T
start
t
int1
t
int2
t
watch
I
il
I
sm
Power-On Reset
t
vccs
USB Interface
V
oh
V
ol
V
di
V
cm
V
se
C
in
I
lo
R
pu
R
pu
R
pd
General Purpose I/O Interface
R
up
V
ith
Notes:
3. Qualified with JEDEC EIA/JESD22-A114-B test method.
4. Functionality is guaranteed of the V
5. USB transmitter functionality is guaranteed over the V
6. Total current cumulative across all Port pins flowing to V
7. Port 3 bit 7 controls whether the parts goes into suspend after a POR event or waits 128 ms to begin running.
8. POR will re-occur whenever V
Operating Voltage 4.0 5.5 V Non USB activity (note 4)
Operating Voltage 4.35 5.25 V USB activity (note 5)
VCC Operating Supply Current 40 mA V
VCC = 4.35V 15 mA
Supply Current - Suspend Mode 30 µA Oscillator off, D– > Voh min
Programming Voltage (disabled) –0.4 0.4 V
Resonator Start-up Interval 256 µsVCC = 5.0V, ceramic resonator
Internal Timer #1 Interrupt Period 128 128 µs
Internal Timer #2 Interrupt Period 1.024 1.024 ms
Watch Dog Timer Period 8.192 14.33 ms
Input Leakage Current 1 µA Any pin
Max ISS IO Sink Current 60 mA Cumulative across all ports (note 6)
VCC Reset Slew 0.001 200 ms Linear ramp: 0 to 4.35V (notes 7,8)
Static Output HIGH 2.8 3.6 V 15k ± 5% ohms to Gnd (note 5)
Static Output LOW 0.3 V
Differential Input Sensitivity 0.2 V |(D+)–(D–)|
Differential Input Common Mode Range 0.8 2.5 V 9-1
Single-Ended Receiver Threshold 0.8 2.0 V
Transceiver Capacitance 20 pF
Hi-Z State Data Line Leakage –10 10 µA0 V < Vin<3.3 V
Bus Pull-up Resistance (VCC option) 7.35K 7.65 kΩ 7.5 kΩ ± 2% to VCC
Bus Pull-up Resistance (Ext. 3.3V option) 1.425 1.575 kΩ 1.5 kΩ ± 5% to 3.0–3.6V
Bus Pull-down Resistance 14.25 15.75 kΩ 15 kΩ ± 5%
Pull-up Resistance 4.9K 9.1K Ohms
Input Threshold Voltage 45% 65% V
relative to VSS................................................................ .................................. ..................–0.5V to +7.0V
CC
CC
CC
Parameter Min. Max. Unit Conditions
= 5.5V
CC
All ports, LOW to HIGH edge
CC
range, except USB transmitter and DACs.
CC (1)
drops to approximately 2.5V.
CC
range, as well as DAC outputs.
CC (2)
is limited to minimize Ground-Drop noise effects.
SS
+0.5V
+0.5V
[3]
Document #: 38-08027 Rev. *B Page 25 of 32
[+] Feedback
Page 26

DC Characteristics Fosc = 6 MHz; Operating Temperature = 0 to 70°C (continued)
Parameter Min. Max. Unit Conditions
V
H
I
ol
I
ol
I
oh
R
up
I
sink0(0)
I
sink0(F)
I
sink1(0)
I
sink1(F)
I
range
I
lin
t
sink
T
ratio
Input Hysteresis Voltage 6% 12% V
CC
Sink Current 7.2 16.5 mA Port 3, Vout = 1.0V (note 4)
Sink Current 3.5 10.6 mA Port 0,1,2, Vout = 2.0V (note 4)
Source Current 1 .4 7.5 mA Voh = 2.4V (all ports 0,1,2,3) (note 4)
DAC Interface
Pull-up Resistance 8.0K 20.0K Ohms (note 14)
DAC[7:2] Sink Current (0)
DAC[7:2] Sink Current (F)
DAC[1:0] Sink Current (0)
DAC[1:0] Sink Current (F)
[15]
[15]
[15]
[15]
0.1 0.3 mA Vout = 2.0 VDC (note 5)
0.5 1.5 mA Vout = 2.0 DC (note 5)
1.6 4.8 mA Vout = 2.0 VDC (note 5)
8 24 m A Vout = 2.0 VDC (note 5)
Programmed Isink Ratio: max/min 4 6 Vout = 2.0 VDC (notes 5,12)
Differential Nonlinearity 0.5 lsb Any pin (note 10)
Current Sink Response Time 0.8 µs Full scale transition
Tracking Ratio DAC[1:0] to DAC[7:2] 14 21 Vout = 2.0V (note 11)
CY7C63413C
CY7C63513C
CY7C63613C
All ports, HIGH to LOW edge
Switching Characteristics
Parameter Description Min. Max. Unit Conditions
Clock
t
CYC
t
CH
t
CL
USB Driver Characteristics
t
r
t
r
t
f
t
f
t
rfm
V
crs
USB Data Timing
t
drate
t
djr1
t
djr2
t
deop
t
eopr1
t
eopr2
t
eopt
t
udj1
t
udj2
Notes:
9. Per Table 7-7 of revision 1.1 of USB specification, for C
10.Measured as largest step size vs. nominal according to measured full scale and zero programmed values.
11. T
ratio
12.Irange: Isinkn(15)/ Isinkn(0) for the same pin.
13.Measured at crossover point of differential data signals.
14.Limits total bus capacitance loading (C
15.DAC I/O Port not bonded out on CY7C63613C. See note on page 12 for firmware code needed for unused pins.
Input Clock Cycle Time 165.0 168.3 ns
Clock HIGH Time 0.45 t
Clock LOW Time 0.45 t
CYC
CYC
ns
ns
Transition Rise Time 75 ns CLoad = 50 pF
Transition Rise Time 300 ns CLoad = 600 pF
Transition Fall Time 75 ns CLoad = 50 pF
Transition Fall Time 300 ns CLoad = 600 pF
Rise/Fall Time Matching 80 125 % tr/t
[5, 9]
f
Output Signal Crossover Voltage 1.3 2.0 V Notes 5 and 9
Low Speed Data Rate 1.4775 1.5225 Mbs Ave. Bit Rate (1.5 Mb/s ± 1.5%)
Receiver Data Jitter Tolerance –75 75 ns To Next Transition
Receiver Data Jitter Tolerance –45 45 ns For Paired Transitions
Differential to EOP Transition Skew –40 100 ns Note 6
EOP Width at Receiver 330 ns Rejects as EOP
EOP Width at Receiver 675 ns Accepts as EOP
Source EOP Width 1.25 1.50 µs
Differential Driver Jitter –95 95 ns To next transition, Figure 12
Differential Driver Jitter –150 150 ns To paired transition, Figure 12
of 50–600 pF.
LOAD
= Isink1[1:0](n)/Isink0[7:2](n) for the same n, programmed.
) to 400 pF per section 7.1.5 of revision 1.1 of USB specification.
LOAD
[5, 9]
5, 9]
[5, 9]
[5, 9]
[13]
[13]
[13]
[13]
Document #: 38-08027 Rev. *B Page 26 of 32
[+] Feedback
Page 27

CY7C63413C
CY7C63513C
CY7C63613C
.
t
CYC
t
CH
CLOCK
t
CL
Figure 8. Clock Timing
T
PERIOD
Differential
Data Line s
90%
t
f
10%
t
D+
V
oh
V
crs
V
ol
10%
D−
r
90%
Figure 9. USB Data Signal Timing
TJR
Consecutive
Transitions
N * T
PERIOD
+ T
JR1
Paired
Transitions
N * T
PERIOD
+ T
JR2
T
JR1
T
JR2
Figure 10. Receiver Jitter Tolerance
Document #: 38-08027 Rev. *B Page 27 of 32
[+] Feedback
Page 28

T
PERIOD
Differential
Data Lines
T
Differential
Data Lines
PERIOD
Crossover Po i nt
Crossover
Point
Diff. Data to
SE0 Skew
+ T
N * T
PERIOD
DEOP
Figure 11. Differential to EOP Transition Skew and EOP Width
Crossover
Points
Extended
Source EOP Width: T
Receiver EOP Width: T
CY7C63413C
CY7C63513C
CY7C63613C
EOPT
, T
EOPR2
EOPR1
Consecutive
Transitions
+ T
N * T
PERIOD
xJR1
Transitions
N * T
Paired
PERIOD
+ T
xJR2
Figure 12. Differential Data Jitter
Ordering Information
Ordering Code
Size
CY7C63413C-PVXC 8 KB SP48 48-Lead Shrunk Small Outline Package Commercial
CY7C63413C-PVXCT 8 KB SP48 48-Lead SSOP Lead-Free Tape-reel Commercial
CY7C63413C-PXC 8 KB P2 40-pin (600 mil) PDIP Lead-Free Commercial
CY7C63513C-PVXC 8 KB SP48 48-Lead SSOP Lead-Free Commercial
CY7C63613C-SXC 8 KB SZ24.3 24-lead (300 mil) SOIC Lead-Free Commercial
CY7C63413C-XC 8KB - Die Lead-Free Commercial
EPROM
Package
Name Package Type
Operating
Range
Document #: 38-08027 Rev. *B Page 28 of 32
[+] Feedback
Page 29

CY7C63413C
CY7C63513C
CY7C63613C
Die Pad Locations
Table 30.DIe Pad Locations (in microns)
Pad # Pin Name X Y Pad # Pin Name X Y
1 D+ 1496.95 2995.00 48 V
2 D- 467.40 2995.00 47 V
3 Port3[7] 345.15 3023.60 46 Port3[6] 1823.10 3023.60
4 Port3[5] 242.15 3023.60 45 Port3[4] 1926.10 3023.60
5 Port3[3] 98.00 2661.25 44 Port3[2] 2066.30 2657.35
6 Port3[1] 98.00 2558.25 43 Port3[0] 2066.30 2554.35
7 Port2[7] 98.00 2455.25 42 Port2[6] 2066.30 2451.35
8 Port2[5] 98.00 2352.25 41 Port2[4] 2066.30 2348.35
9 Port2[3] 98.00 2249.25 40 Port2[2] 2066.30 2245.35
10 Port2[1] 98.00 2146.25 39 Port2[0] 2066.30 2142.35
11 Por1[7] 98.00 1134.25 38 Port1[6] 2066.30 1130.35
12 Por1[5] 98.00 1031.25 37 Port1[4] 2066.30 1027.35
13 Por1[3] 98.00 928.25 36 Port1[2] 2066.30 924.35
14 Por1[1] 98.00 825.25 35 Port1[0] 2066.30 821.35
15 DAC7 98.00 721.05 34 DAC6 2066.30 719.55
16 DAC5 98.00 618.05 33 DAC4 2066.30 616.55
17 Port0[7] 98.00 516.25 32 Port0[6] 2066.30 512.35
18 Port0[5] 98.00 413.25 31 Port0[4] 2066.30 409.35
19 Port0[3] 306.30 98.00 30 Port0[2] 1858.00 98.00
20 Port0[1] 442.15 98.00 29 Port0[0] 1718.30 98.00
21 DAC3 593.40 98.00 28 DAC2 1618.50 98.00
22 DAC1 696.40 98.00 27 DAC0 1513.50 98.00
23 V
24 V
PP
SS
824.25 98.00 26 XtalOut 1301.90 98.00
949.65 98.00 25 XtalIn 1160.50 98.00
CC
SS
1619.65 3023.60
1719.65 3023.60
Document #: 38-08027 Rev. *B Page 29 of 32
[+] Feedback
Page 30

Package Diagrams
48-Lead Shrunk Small Outline Package SP48
CY7C63413C
CY7C63513C
CY7C63613C
40-Lead (600-Mil) Molded DIP P2
51-85061-*C
51-85019-*A
Document #: 38-08027 Rev. *B Page 30 of 32
[+] Feedback
Page 31

Package Diagrams (continued)
112
24-Lead (300-Mil) SOIC S24.3/SZ24.3
NOTE :
PIN 1 ID
0.291[7.391]
0.300[7.620]
1. JEDEC STD REF MO-119
2. BODY LENGTH DIMENSION DOES NOT INCLUDE MOLD PROTRUSION/END FLASH,BUT
DOES INCLUDE MOLD MISMATCH AND ARE MEASURED AT THE MOLD PARTING LINE.
MOLD PROTRUSION/END FLASH SHALL NOT EXCEED 0.010 in (0.254 mm) PER SIDE
3. DIMENSIONS IN INCHES
4. PACKAGE WEIGHT 0.65gms
0.394[10.007]
0.419[10.642]
*
CY7C63413C
CY7C63513C
CY7C63613C
MIN.
MAX.
13 24
0.597[15.163]
0.615[15.621]
0.050[1.270]
TYP.
0.013[0.330]
0.019[0.482]
0.026[0.660]
0.032[0.812]
0.004[0.101]
0.0118[0.299]
0.092[2.336]
0.105[2.667]
*
S24.3 STANDARD PKG.
SZ24.3 LEAD FREE PKG.
SEATING PLANE
0.004[0.101]
PART #
0.015[0.381]
0.050[1.270]
51-85025-*C
All products and company names mentioned in this document may be the trademarks of their respective holders.
0.0091[0.231]
0.0125[0.317]
*
Document #: 38-08027 Rev. *B Page 31 of 32
© Cypress Semiconductor Corporation, 2006. The information contained herei n is subject to change without notice. Cypress S em icon duct or Corpo ration assu mes no resp onsib ility for th e u se
of any circuitry other than circuitry embodied in a Cypress product. Nor does it convey or imply any license under patent or other rights. Cypress products are not warranted nor intended to be
used for medical, life support, life saving, critical control or safety applications, unless pursuant to an express written agreement with Cypress. Furthermore, Cypres s does not auth orize its
products for use as critical components in life-support systems where a malfunction or failure may reasonably be expected to result in significant injury to the user. The inclusion of Cypress
products in life-support systems application implies that the manufacturer assumes all risk of such use and in doing so indemnifies Cypress against all charges.
[+] Feedback
Page 32

CY7C63413C
CY7C63513C
CY7C63613C
Document History Page
Document Title: CY7C63413C, CY7C63513C, CY7C63613C Low-speed High I/O, 1.5 -Mbps USB Controller
Document Number: 38-08027
REV. ECN NO.
** 116224 06/12/02 DSG Change from Spec number: 38-00754 to 38-08027
*A 237148 SEE ECN KKU Removed 24 pin package, CY7C63411/12, CY7C63511/12 and
*B 418699 See ECN TYJ Part numbers updated with MagnaChip offerings
Issue
Date
Orig. of
Change Description of Chang e
CY7C636XX parts
Added Lead-Free part numbers to section 20.0
Added USB Logo.
Document #: 38-08027 Rev. *B Page 32 of 32
[+] Feedback
 Loading...
Loading...