

Page 1

Manual
08/16 MN040023EN
PowerXL
™
DC1…E1
Variable Frequency Drives
Installation Manual
Page 2
All proprietary names and product designations are brand names or trademarks
registered to the relevant title holders.
Break-Down Service
Please call your local representative:
http://eaton.com/moeller/aftersales
or
Hotline After Sales Service:
+49 (0) 180 5 223822 (de, en)
AfterSalesEGBonn@eaton.com
For customers in US/Canada contact:
EatonCare Customer Support Center
Call the EatonCare Support Center if you need assistance with placing an order,
stock availability or proof of shipment, expediting an existing order, emergency
shipments, product price information, returns other than warranty returns, and
information on local distributors or sales offices.
Voice: 877-ETN-CARE (386-2273) (8:00 a.m. – 6:00 p.m. EST)
After-Hours Emergency: 800-543-7038 (6:00 p.m. – 8:00 a.m. EST)
Drives Technical Resource Center
Voice: 877-ETN-CARE (386-2273) option 2, option 6
(8:00 a.m. – 5:00 p.m. Central Time U.S. [UTC-6])
email: TRCDrives@Eaton.com
www.eaton.com/drives
Original operating manual
The German-language edition of this document is the original operating manual.
Translation of the original operating manual
All editions of this document other than those in German language are translations of
the original operating manual.
1. Edition 2016, publication date 08/16
© 2016 by Eaton Industries GmbH, 53105 Bonn
Authors: Jörg Randermann, Heribert Joachim
Redaction: René Wiegand
All rights reserved, also for the translation.
No part of this manual may be reproduced, stored in a retrieval system, or
transmitted in any form or by any means, electronic, mechanical, photocopying,
micro-filming, recording or otherwise, without the prior written permission of
Eaton Industries GmbH, Bonn.
Subject to alteration.
Page 3

Danger!
Dangerous electrical voltage!
Before commencing the installation
• Disconnect the power supply of the device.
• Ensure that devices cannot be accidentally retriggered.
• Verify isolation from the supply.
• Ground and short-circuit.
• Cover or enclose neighbouring units that are live.
• Follow the engineering instructions (IL) of the device
concerned.
• Only suitably qualified personnel in accordance with
EN 50110-1/-2 (VDE 0105 Part 100) may work on this device/
system.
• Before installation and before touching the device ensure
that you are free of electrostatic charge.
• The functional earth (FE) must be connected to the
protective earth (PE) or to the potential equalizing.
The system installer is responsible for implementing this
connection.
• Connecting cables and signal lines should be installed so
that inductive or capacitive interference do not impair the
automation functions.
• Install automation devices and related operating elements
in such a way that they are well protected against unintentional operation.
• Suitable safety hardware and software measures should
be implemented for the I/O connection so that a cable or
wire breakage on the signal side does not result in
undefined states in the automation device.
• Ensure a reliable electrical isolation of the low voltage for
the 24 V supply. Only use power supply units complying
with IEC 60364-4-41 or HD 384.4.41 S2 (VDE 0100 part 410).
• Deviations of the mains voltage from the nominal value
must not exceed the tolerance limits given in the technical
data, otherwise this may cause malfunction and
dangerous operation.
• Emergency-Stop devices complying with IEC/EN 60204-1
must be effective in all operating modes of the automation
devices. Unlatching the emergency switching off devices
must not cause restart.
• Built-in devices for enclosures or cabinets must only be
run and operated in an installed state, desk-top devices or
portable devices only when the housing is closed.
• Measures should be taken to ensure the proper restart of
programs interrupted after a voltage dip or failure. This
Eaton Industries GmbH
should not cause dangerous operating states even for a
Safety instructions
short time. If necessary, emergency switching off devices
should be implemented.
• Wherever faults in the automation system may cause
damage to persons or property, external measures must
be implemented to ensure a safe operating state in the
event of a fault or malfunction (for example, by means of
separate limit switches, mechanical interlocks, etc.).
• During operation, and depending on their degree of
protection, variable frequency drives may have live,
uninsulated, moving, and/or rotating parts, as well as hot
surfaces.
• The impermissible removal of the required cover,
improper installation or incorrect operation of the motor or
variable frequency drive can cause the failure of the
device and serious injury and/or material damage.
• Comply with all applicable national accident prevention
regulations (e.g. BGV A3) when working with energized
variable frequency drives.
• The electrical installation must be carried out in
accordance with the relevant regulations (e.g. with regard
to cable cross sections, fuses, PE).
• All transport, installation, commissioning and maintenance work must only be carried out by trained personnel
(observe IEC 60364, HD 384 or DIN VDE 0100 and national
accident prevention regulations).
• If applicable, systems in which variable frequency drives
are installed must be equipped with additional monitoring
and protective devices in accordance with the applicable
safety regulations, e.g., the German Equipment and
Product Safety Act, accident prevention regulations, etc.
Making changes to the variable frequency drives by using
the operating software is allowed.
• Keep all covers and doors closed during operation.
• When designing the machine, the user must incorporate
mechanisms and measures that limit the consequences of
a drive controller malfunction or failure (an increase in
motor speed or the motor?9s sudden stop) so as to prevent
hazards to people and property, e.g.:
– Additional stand-alone devices for monitoring parame-
ters that are relevant to safety (speed, travel, end
positions, etc.)
– Electrical and non-electrical safety devices (interlocks
or mechanical locks) for mechanisms that protect the
entire system
– Due to the possibility of there being capacitors that are
still holding a charge, do not touch live device parts or
terminals immediately after disconnecting the variable
frequency drives from the supply voltage. Heed the
corresponding labels on the variable frequency drives
I
Page 4

II
Page 5

Content
0 About this manual ..................................................................... 5
0.1 Target group................................................................................. 6
0.2 List of revisions ............................................................................ 6
0.2.1 Writing conventions ..................................................................... 7
0.2.2 Hazard warnings of material damages ......................................... 7
0.2.3 Hazard warnings of personal injury .............................................. 7
0.2.4 Tips............................................................................................... 7
0.3 Documents with additional information ....................................... 8
0.4 Abbreviations ............................................................................... 8
0.5 Mains supply voltages.................................................................. 9
0.6 Units of measurement ................................................................. 9
1 DC1 device series ....................................................................... 11
1.1 Introduction .................................................................................. 11
1.2 System overview ......................................................................... 12
1.3 Checking the Delivery .................................................................. 13
1.4 Rated operational data ................................................................. 14
1.4.1 Rated operational data on the nameplate .................................... 14
1.4.2 Catalog number selection ............................................................ 16
1.4.3 Features ....................................................................................... 17
1.5 Description ................................................................................... 24
1.5.1 IP20 degree of protection (FS1 to FS4)........................................ 24
1.5.2 IP66 degree of protection (FS1 to FS3)........................................ 25
1.6 Voltage categories........................................................................ 26
1.7 Selection Criteria .......................................................................... 28
1.8 Output reduction (derating) .......................................................... 29
1.9 Proper use.................................................................................... 31
1.10 Maintenance and inspection ........................................................ 32
1.11 Storage......................................................................................... 32
1.12 Charging the internal DC link capacitors ...................................... 33
1.13 Service and warranty.................................................................... 33
2 Engineering................................................................................. 35
2.1 Introduction .................................................................................. 35
2.2 Electrical power network ............................................................. 37
2.2.1 Mains terminal and configuration................................................. 37
2.2.2 Mains voltage and frequency ....................................................... 38
2.2.3 Voltage balance ............................................................................ 38
2.2.4 Total Harmonic Distortion (THD) .................................................. 39
2.2.5 Reactive power compensation devices ....................................... 39
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 1
Page 6

2.3 Cable cross-sections.................................................................... 39
2.4 Safety and switching.................................................................... 40
2.4.1 Disconnecting device................................................................... 40
2.4.2 Fuses ........................................................................................... 40
2.4.3 Residual current circuit-breaker (RCD)......................................... 41
2.4.4 Mains contactors ......................................................................... 41
2.5 Mains chokes............................................................................... 42
2.6 Radio interference suppression filter........................................... 43
2.7 Braking resistances...................................................................... 44
2.8 Motor chokes............................................................................... 47
2.9 Sine filter...................................................................................... 48
2.10 Switching to the output side........................................................ 49
2.10.1 Contactors.................................................................................... 49
2.10.2 switch-disconnectors................................................................... 50
2.10.3 Bypass circuit............................................................................... 51
2.10.4 Connecting Motors in Parallel...................................................... 52
2.11 Three-phase motors..................................................................... 54
2.11.1 Motor Selection ........................................................................... 54
2.11.2 Circuit types with three-phase motors......................................... 55
2.11.3 Permanent magnet motor (PM motor), ....................................... 56
2.11.4 Brushless DC motors (BLDC motors).......................................... 56
2.11.5 Synchronous reluctance motor (SynRM) ..................................... 57
2.11.6 Single-phase AC motors .............................................................. 58
2.11.7 Connecting EX motors................................................................. 58
3 Installation.................................................................................. 59
3.1 Introduction.................................................................................. 59
3.2 Mounting position........................................................................ 59
3.3 Mounting ..................................................................................... 60
3.3.1 Mounting position........................................................................ 61
3.3.2 Cooling measures ........................................................................ 61
3.3.3 fixing ............................................................................................ 64
3.4 IP66 / NEMA4X degree of protection .......................................... 67
3.5 EMC installation........................................................................... 68
3.5.1 EMC measures in the control panel............................................. 68
3.5.2 Earthing........................................................................................ 70
3.5.3 Internal filters (EMC and VAR screws)......................................... 71
3.5.4 Screen earth kit............................................................................ 73
3.5.5 EMC cable brackets ..................................................................... 74
3.5.6 General installation diagram......................................................... 76
3.6 Electrical Installation .................................................................... 77
3.6.1 Connection to power section....................................................... 78
3.6.2 Connection on control section ..................................................... 89
3.6.3 Thermistor connection................................................................. 100
2 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 7

3.7 Block diagrams............................................................................. 101
3.7.1 DC1-1D… ..................................................................................... 102
3.7.2 DC1-12…...................................................................................... 103
3.7.3 DC1-32…, DC1-34… (in FS1, FS2, FS3)....................................... 104
3.7.4 DC1-32…, DC1-34… (in FS4) ....................................................... 105
3.7.5 DC1-1D…Nx-A6S… ..................................................................... 106
3.7.6 DC1-1D…Nx-A66…...................................................................... 108
3.7.7 DC1-12…-A6S… .......................................................................... 109
3.7.8 DC1-12…-A66…........................................................................... 110
3.7.9 DC1-32…-A6S…, DC1-34…-A6S….............................................. 111
3.7.10 DC1-32…-A66…, DC1-34…-A66… .............................................. 113
3.8 Insulation testing.......................................................................... 114
3.9 Protection against electric shock ................................................. 115
4 Operational ................................................................................. 117
4.1 Checklist for commissioning ........................................................ 117
4.2 Operational hazard warnings........................................................ 118
4.3 Commissioning with control signal terminals (default settings)... 120
4.4 Commissioning with local controls .............................................. 122
4.5 Handling the keypad..................................................................... 124
4.5.1 Operating unit elements .............................................................. 124
4.5.2 Parameter structure ..................................................................... 126
4.5.3 Keypad usage examples .............................................................. 127
4.6 Help leaflets ................................................................................. 129
5 Error Messages........................................................................... 133
5.1 Introduction .................................................................................. 133
5.2 Fault History ................................................................................. 133
5.2.1 Acknowledge error message (Reset)........................................... 133
5.2.2 Fault log........................................................................................ 133
5.3 Fault list........................................................................................ 134
5.4 Fault diagnostics .......................................................................... 136
6 Technical Data ............................................................................ 137
6.1 General rating data ....................................................................... 137
6.2 Specific rated operational data ..................................................... 141
6.2.1 DC1-1D…device series ............................................................... 142
6.2.2 DC1-12…device series................................................................. 143
6.2.3 DC1-32… device series................................................................ 144
6.2.4 DC1-34…device series................................................................. 146
6.3 Dimensions .................................................................................. 148
6.3.1 Sizes FS1 to FS3 in IP20 .............................................................. 148
6.3.2 Size FS4 in IP20 ........................................................................... 149
6.3.3 Sizes FS1 to FS3 in IP66 .............................................................. 150
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 3
Page 8

6.4 Cable cross-sections.................................................................... 151
6.5 Fuses ........................................................................................... 153
6.6 Mains contactors ......................................................................... 156
6.7 Mains chokes............................................................................... 159
6.8 Radio interference suppression filter........................................... 161
6.9 Braking resistances...................................................................... 165
6.10 Motor chokes............................................................................... 169
6.11 Sine filter...................................................................................... 171
7 Accessories................................................................................. 173
7.1 Device-specific accessories......................................................... 173
7.1.1 DXC-EXT-IO… coupling module................................................... 174
7.1.2 DXC-EXT-2RO output expansion.................................................. 176
7.1.3 DXC-EXT-2RO1AO output expansion .......................................... 178
7.1.4 DXC-EXT-LOCSIM simulator........................................................ 180
7.2 General accessories (List)............................................................ 181
Index ........................................................................................... 183
4 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 9

0 About this manual
0 About this manual
This manual (MN040023EN) goes over the DC1 variable frequency drives
belonging to the DC1-…E1 model series. These models are enhanced
versions (E = Enhanced) of the basic DC1-…-N version described in manual
MN04020003Z.
Some of the most important enhancements include:
• Coated boards (DC1-…-CE1):
This refers to units in which a conformal coating has been applied to the
printed circuit board (PCB). This conformal coating provides enhanced
protection from moisture and soiling and helps extend the device’s life.
• Vector mode:
In addition to standard V/Hz control, DC1-…E1 variable frequency drives
also feature a vector control mode for normal induction motors
(asynchronous motors) and high-efficiency motors (PM = Permanent
magnet motors, BLDC = Brushless DC motors, SyncRM = Synchronous
reluctance motors).
• Additional parameters:
The number of P00-… display parameters has been expanded to 50,
while the extended parameter set (P-17 =101) has been expanded to
include up to parameter P-59. Moreover, an additional parameter set for
high-efficiency motors has been incorporated for vector control
(P-17 = 201).
• Fire mode:
Fire mode refers to a special operating mode available on DC1-…E1
variable frequency drives that ensures that fan and pump motors will
continue to run even in the event of a fire.
• Optional accessories:
For cases in which an external keypad needs to be connected to a
DC1-…E1 variable frequency drive, either model DX-KEY-LED2 or
DX-KEY-OLED with a software update is required. Meanwhile,
DX-COM-STICK2 is the model required when a parameter memory
storage device and/or PC communications with Bluetooth are needed.
DX-KEY-LED and DX-COM-STICK will not work with DC1-…E1 variable
frequency drives!
→
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 5
This manual (MN040023EN) describes firmware version 2.00
and higher.
Page 10
0 About this manual
0.1 Target group
0.1 Target group
→
This MN040023EN manual is intended for engineers and electricians.
Electrical engineering and physics-related knowledge and skills will be
required in order to be able to commission the corresponding devices.
We assume that you have a good knowledge of engineering basics and that
you are familiar with handling electrical systems and machines, as well as
with reading technical drawings.
“Parameter manual”
A separate manual – MN040022EN (“Parameter Manual”) –
goes over how to configure the parameters for DC1-...E1
variable frequency drives and provides application examples as
well.
This manual is available on the Eaton website at:
http://www.eaton.de/EN/EatonDE/ProdukteundLoesungen/Electrical/
Kundensupport/DownloadCenter/index.htm
Customer support Download Center –
Documentation
In the Quick Search box, enter “MN040022EN”.
Then click on Search.
0.2 List of revisions
The following significant amendments have been introduced since previous
issues:
Publication
date
08/16 Initial issue
Page Keyword new modified deleted
6 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 11

0.2.1 Writing conventions
Symbols with the following meaning are used in this manual:
Indicates instructions to be followed.
0.2.2 Hazard warnings of material damages
NOTICE
Warns about the possibility of material damage.
0.2.3 Hazard warnings of personal injury
CAUTION
0 About this manual
0.2 List of revisions
0.2.4 Tips
→
→
Warns of the possibility of hazardous situations that may
possibly cause slight injury.
WARNING
Warns of the possibility of hazardous situations that could result
in serious injury or even death.
DANGER
Warns of hazardous situations that result in serious injury or
death.
Indicates useful tips.
In order to make it easier to understand some of the figures
included in this manual, the variable frequency drive housing, as
well as other safety-relevant parts, has been left out. However,
it is important to note that the variable frequency drive must
always be operated with its housing in its proper place, as well
as with all required safety-relevant parts.
→
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 7
All the specifications in this manual refer to the hardware and
software versions documented in it.
Page 12
0 About this manual
0.3 Documents with additional information
0.3 Documents with additional information
0.4 Abbreviations
→
on the Internet under:
www.eaton.eu/powerxl
as well as in EATON Download Center:
More information on the devices described here can be found
http://www.eaton.de/EN/EatonDE/ProdukteundLoesungen/Electrical/
Kundensupport/DownloadCenter/index.htm
In the Quick Search box, enter the document name
(“MN040022”, for example).
The following abbreviations are used in this manual:
dec Decimal (base-10 numeral system)
DS Default settings
EMC Electromagnetic compatibility
FE Functional earth
FS Frame Size
FWD Forward run (clockwise rotating field)
GND Ground (0-V-potential)
hex
ID
IGBT Insulated gate bipolar transistor
LED
OLED
PC
PDS Power Drive System
PE Protective earth
PES EMC connection to PE for screened lines
PNU Parameter number
REV Reverse run (anticlockwise rotation field active)
ro Read Only (read access only)
rw Read/Write (read/write access)
SCCR Short Circuit Current Rating
UL
Hexadecimal (base-16 numeral system)
Identifier (unique ID)
Light Emitting Diode (LED)
Organic Light Emitting Diode
Personal Computer
Underwriters Laboratories
8 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 13
0.5 Mains supply voltages
0 About this manual
0.5 Mains supply voltages
The rated operating voltages stated in the following table are based on the
standard values for networks with a grounded star point.
In ring networks (as found in Europe) the rated operating voltage at the
transfer point of the power supply companies is the same as the value in the
consumer networks (e.g. 230 V, 400 V).
In star networks (as found in North America), the rated operating voltage at
the transfer point of the utility companies is higher than in the consumer
network.
Example: 120 V 115 V, 240 V 230 V, 480 V 460 V.
The DC1 variable frequency drive’s wide tolerance range takes into account a
permissible voltage drop of 10% (i.e. U
category, it takes into account the
North American mains voltage of
480 V + 10 % (60 Hz).
The rated mains voltage operational data is always based on mains
frequencies of 50/60 Hz within a range of 48 to 62 Hz.
- 10%) while, in the 400-V
LN
0.6 Units of measurement
Designation US-American
Length inch 1 in (’’) 25.4 mm 0.0394
Performance
Torque pound-force inches 1 lbf in 0.113 Nm 8.851
temperature
Rotational speed Revolutions per minute 1rpm 1min
Weight pound 1lb 0.4536 kg 2.205
Flow rate cubic feed per minute 1 cfm 1.698 m3/min 0.5889
→
in Section 1.4.3 ”Features”, page 17.
Every physical dimension included in this manual uses international metric
system units, otherwise known as SI (Système International d’Unités) units.
For the purpose of the equipment’s UL certification, some of these
dimensions are accompanied by their equivalents in imperial units.
Table 1: Unit conversion examples
US-American value SI value Conversion value
Designation
horsepower 1HP=1.014PS 0.7457 kW 1.341
Fahrenheit 1°F (TF) -17.222 °C (TC) TF=TC×9/5+32
The permissible power supply for the DC1 series can be found
-1
1
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 9
Page 14

0 About this manual
0.6 Units of measurement
10 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 15
1 DC1 device series
L
1/L
L2
/N
L3
DC-
U
DC+
BR
V
W
1
2
3
4
5
6
7
8
9
10
11
PWR
OFF
ON
REV
FWD
0
1.1 Introduction
1 DC1 device series
1.1 Introduction
Due to their ease of use and high reliability, DC1 PowerXL™ variable
frequency drives are ideal for general applications involving three-phase
motors. In addition, an integrated radio interference suppression filter and a
flexible interface ensure that the inverters meet a number of important
needs in the machine building industry when it comes to the optimization of
production and manufacturing processes.
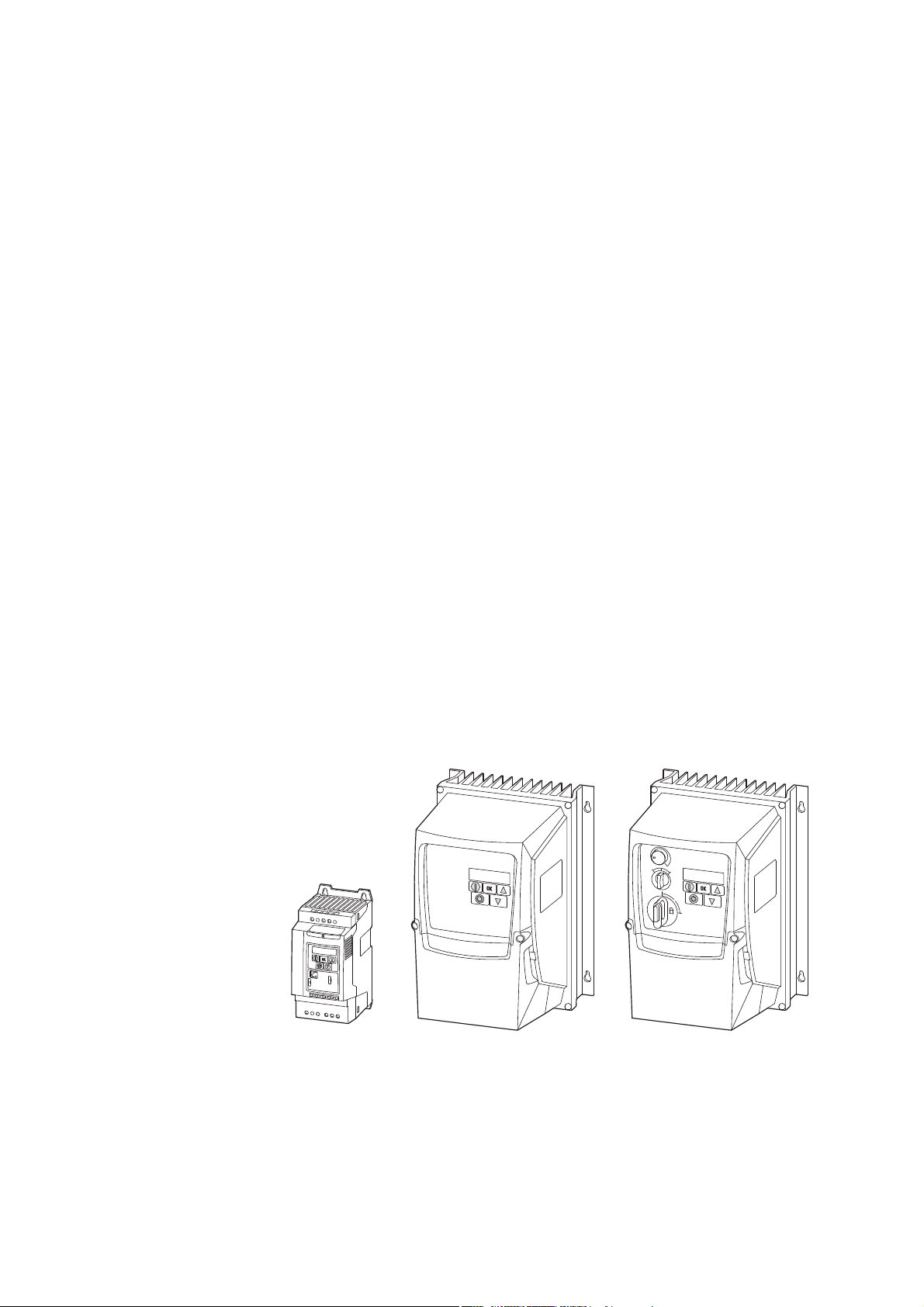
For installations in control panels, devices with a performance range of 0.37
(for 230 V) to 22 kW (for 400 V) are available in a compact and sturdy design
featuring three available sizes (FS1, FS2, FS3, FS4) and a degree of
protection of IP20.
For distributed local installations, there are three sizes covering a
performance range of 0.37 (for 230 V) to 7.5 kW (for 400 V) and featuring a
degree of protection of IP66. These models come in two versions: with and
without local controls. These local controls include a setpoint potentiometer,
a selector switch for switching operating directions, and a lockable main
switch on the mains side.
The computer-based drivesConnect parameter configuration program
ensures data integrity and reduces the time required for commissioning and
maintenance.
In addition, the comprehensive accessories available increase the inverters’
flexibility in all scopes of application.
IP20 degree of
protection
Figure 1: Designs and enclosure versions
IP66 degree of protection IP66 degree of protection, with local
controls
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 11
Page 16
1 DC1 device series
1.2 System over view
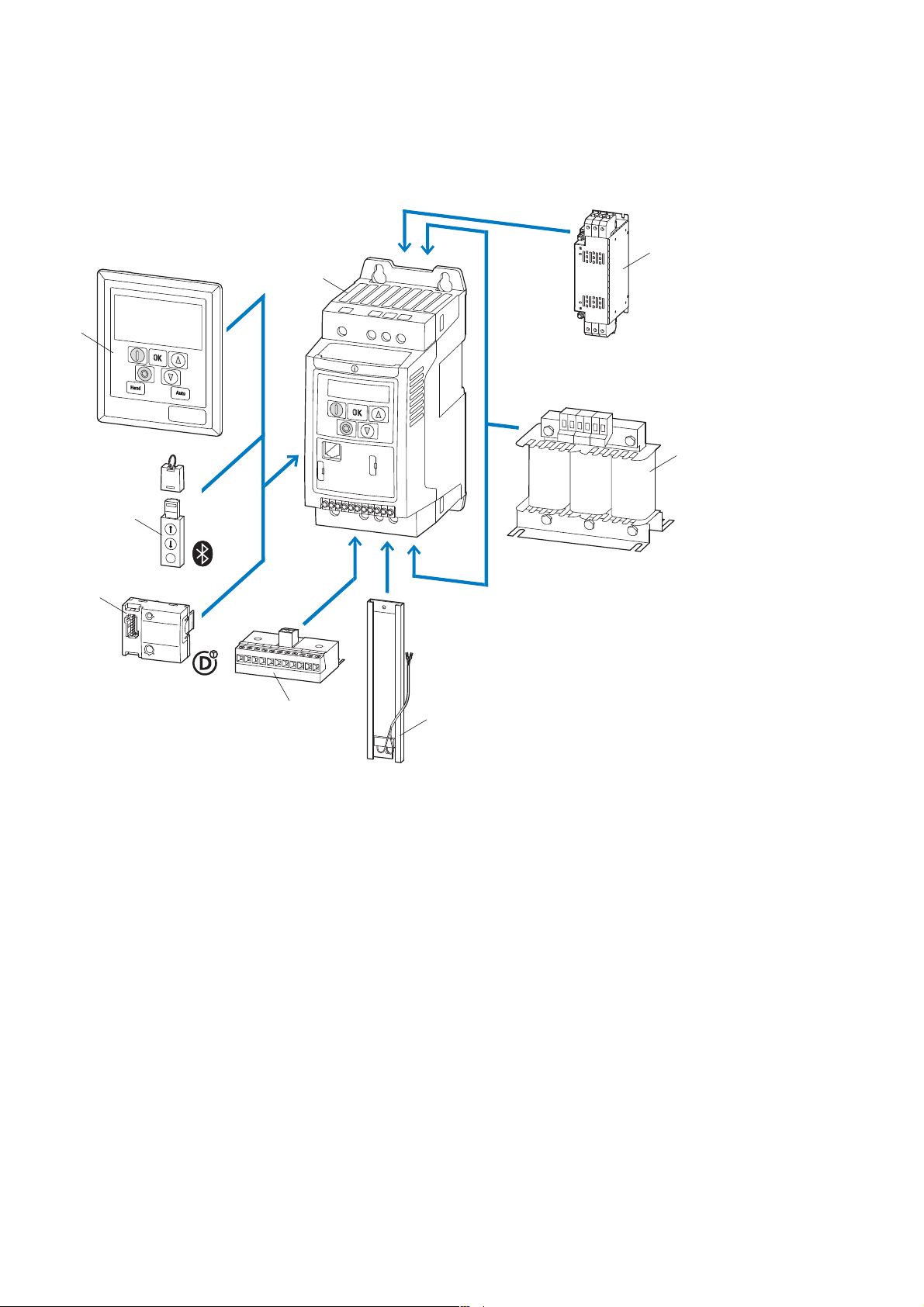
1.2 System overview
⑧
⑦
①
②
L1/L
L2/N
L3
③
1
2
3
4
5
6
7
8
9
10
11
U
V
W
⑥
Read
y
I
A
O
⑤
④
Figure 2: System overview (example: size FS1, degree of protection IP20)
a DC1-… variable frequency drives
b Extern radio interference suppression filter DX-EMC…
c DX-LN… mains choke, DX-LM3-… motor choke, DX-SIN3-… sine filter
d DX-BR… braking resistance
e DXC-EXT-… expansion module
f DX-NET-SWD3 SmartWire-DT interface
g DX-COM-STICK communication module and accessories (e. g. DX-CBL-… connection cable)
h DE-KEY-… keypad (external)
12 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 17
1.3 Checking the Delivery
L1/L
L2/N
L3
U
V
W
1
2
3
4
5
6
7
8
9
10
11
1 DC1 device series
1.3 Checking the Delivery
→
to make sure that you received the correct variable frequency
drive.
Before opening the package, please check the nameplate on it
The DC1 series variable frequency drives are carefully packaged and
prepared for delivery. The devices should be shipped only in their original
packaging with suitable transportation materials. Please take note of the
labels and instructions on the packaging, as well as of those meant for the
unpacked device.
Open the packaging with adequate tools and inspect the contents
immediately after receipt in order to ensure that they are complete and
undamaged.
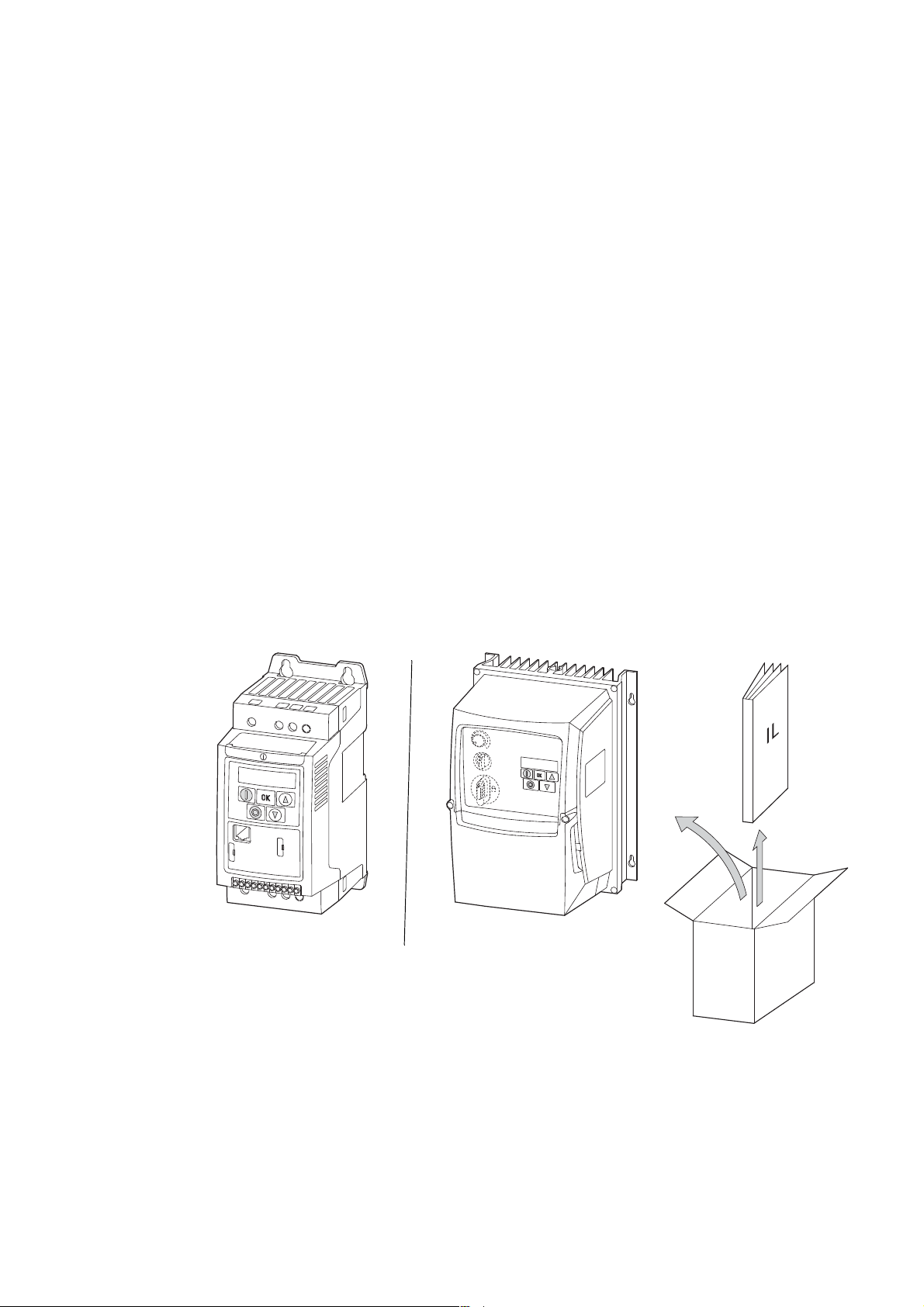
The packaging must contain the following parts:
• DC1 series variable frequency drive,
• an instructional leaflet
• IL04020009Z for devices with an IP20 degree of protection
• IL040024ZU for devices with IP20 degree of protection with size
FS4
• IL04020013Z for devices with an IP66 degree of protection
Figure 3: Equipment supplied (example: devices with IP20 / IP66 degree of protection with
instruction leaflet)
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 13
Page 18
1 DC1 device series
1.4 Rated operational data
1.4 Rated operational data
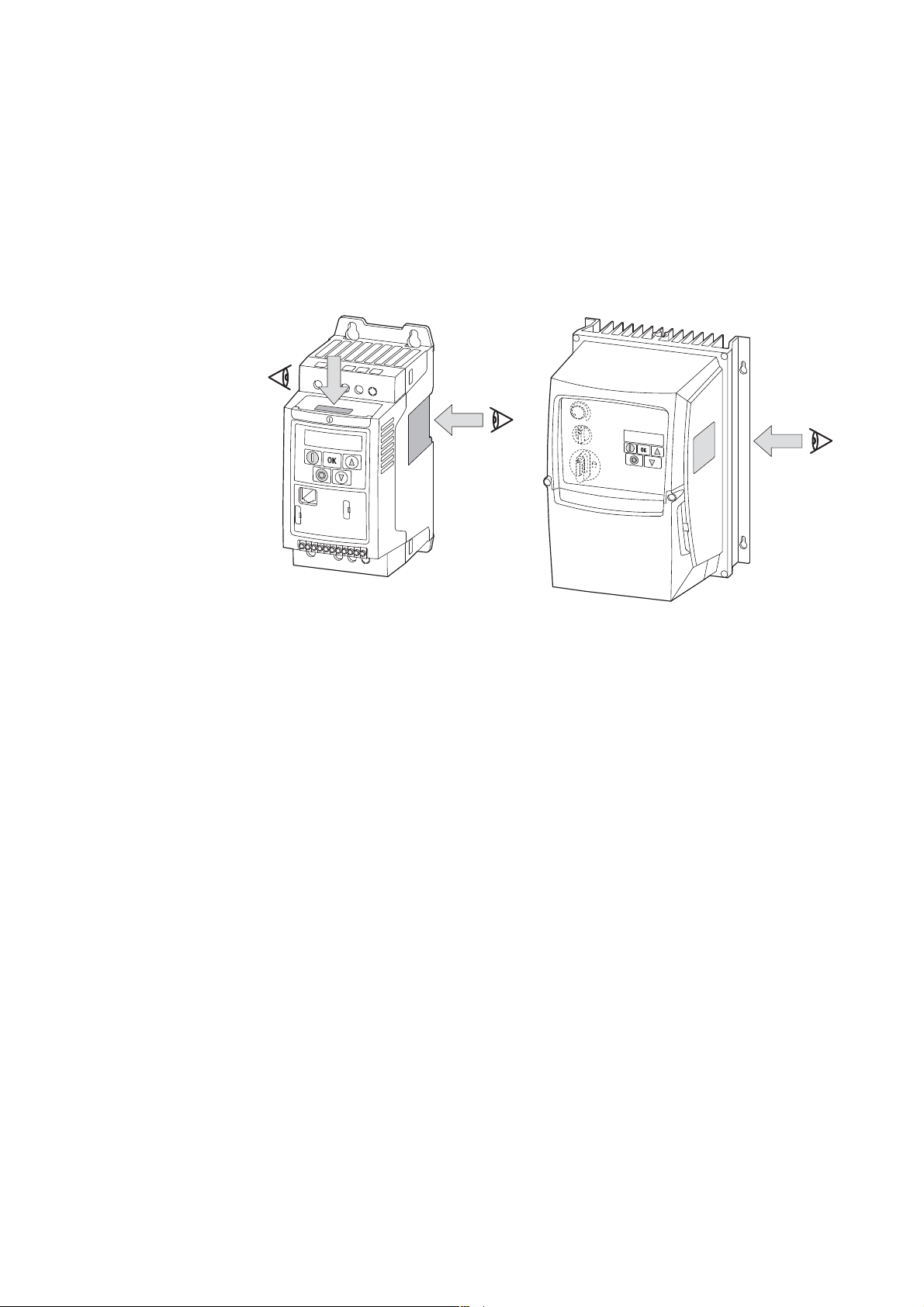
1.4.1 Rated operational data on the nameplate
The device-specific rated operational data of the DC1 variable frequency
drive is listed on the nameplate of the device.
L1/L
L2/N
L3
1
2
3
4
5
6
7
8
9
10
11
U
V
W
Figure 4: Nameplate location
The nameplate on top (nameplate ) is a simplified version that can be
used to clearly identify the device if the main nameplate (nameplate
)
is blocked by other devices.
14 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 19
1 DC1 device series
a
1.4 Rated operational data
Nameplate inscription
The inscription of the nameplate has the following meaning (example):
Inscription Meaning
DC1-344D1FB-A20CE1 Part no.:
Input
Output
Serial No.:
IP20
Software Software version (2.0)
25072016 Manufacturing date: 07-25-2016
Max amb. 50 °C Maximum permissible ambient air temperature (50 °C)
DC1 = DC1 series variable frequency drive
3 = Three-phase mains connection / three-phase motor connection
4 = 400 V mains voltage category
4D1 = 4.1 A rated operational current (4-decimal-1, output current)
F = Integrated radio interference suppression filter
B = Integrated brake chopper
A = LED display (7-segment text display)
20 = IP20 degree of protection
C = Coated boards
E1 = Expansion, version 1
Rated operational data of mains connection
Three-phase AC voltage (U
380 - 480 V voltage, 50/60 Hz frequency, input phase current (5.6 A).
Load side (motor) rated operational data:
Three-phase AC voltage (0 - U
(0 - 500 Hz)
Assigned motor output:
1.5 kW with a voltage of 400 V/2 HP with a voltage of 460 V for a four-pole,
internally cooled or surface-cooled three-phase asynchronous motor (1500 rpm at
50 Hz/1800 rpm at 60 Hz)
Serial number
Degree of protection of the housing: IP 20, UL (cUL) Open Type
Variable frequency drive is an electrical apparatus.
Read the manual (in this case MN040023EN) before making any electrical
connections and commissioning.
3~ AC),
e
), output phase current (4.1 A), output frequency
e
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 15
Page 20
1 DC1 device series
1.4 Rated operational data
1.4.2 Catalog number selection
The catalog no. or part no. for the DC1 series of variable frequency drives is
made up of four sections.
Series – Power section – Model – Version
The following figure shows it in greater detail:
DC1- 124D1FN-A20CE
1 Explanation
Type
E1 = Extended functionality (enhancement), version 1
C = Additional PCB protection (coated board)
Degree of protection
20 = IP20 / NEMA 0
66 = IP66 / NEMA 4X
6S = IP66 with switch / NEMA 4X, switched
Display unit (display)
A = LED display
Brake Chopper
N = No internal brake chopper
B = Brake chopper
EMC (radio interference suppression filter)
N = No internal RFI filter
F = Internal RFI filter
Rated operational current (examples)
2D2 = 2.2 A
4D1 = 4.1 A
046 = 46 A
Mains voltage category
1 = 115 V (110 - 115 V ±10 %)
2 = 230 V (200 - 240 V ±10 %)
4 = 400 V (380 - 480 V ±10 %)
D = 115 V input / 230 V output (voltage doubler)
Connection in power section
1 = Single-phase mains connection / three-phase motor
3 = Three-phase mains connection / three-phase motor
S = Single-phase mains connection / single-phase motor
Device series
DC1 = variable frequency drive, compact, Series 1
(D = Drives, C = Compact, 1 = Series)
Figure 5: Catalog number selection
16 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 21
1.4.3 Features
1.4.3.1 DC1-1D…device series
Mains voltage: 1 AC 110 - 115 V (±10 %), 50/60 Hz
Output voltage: 3 AC 230 V, 50/60 Hz
1 DC1 device series
1.4 Rated operational data
→
Part no.
rated operational
I
e
A kW HP
DC1-1D2D3NN-A20CE1 2.3 0.37 1/2 LED – – IP20 FS1 –
DC1-1D2D3NN-A66CE1 2.3 0.37 1/2 LED – – IP66_x FS1 –
DC1-1D2D3NN-A6SCE1 2.3 0.37 1/2 LED ✓ – IP66_x FS1 –
DC1-1D4D3NN-A20CE1 4.3 0.75 1 LED – – IP20 FS1 –
DC1-1D4D3NN-A66CE1 4.3 0.75 1 LED – – IP66_x FS1 –
DC1-1D4D3NN-A6SCE1 4.3 0.75 1 LED ✓ – IP66_x FS1 –
DC1-1D5D8NN-A20CE1
DC1-1D5D8NN-A66CE1
DC1-1D5D8NN-A6SCE1
1) As per IEC standards
2) As per UL 61800-5-1, Table DVE.1, March 6, 2015
5.8 1.1 1-1/2 LED – – IP20 FS2 ✓
5.8 1.1 1-1/2 LED – – IP66_x FS2 ✓
5.8 1.1 1-1/2 LED ✓ – IP66_x FS2 ✓
Assigned Instance
Motor Power
current
P
(230 V,
50 Hz)
1)
voltage to 230 V (output voltage).
Display
2)
P
(230 V,
60 Hz)
(operating unit)
Local
controls
Radio interference
suppression filter
Degree of protection
Size
An internal voltage doubler will increase the mains supply
Brake chopper
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 17
Page 22

1 DC1 device series
1.4 Rated operational data
1.4.3.2 DC1-12…device series
Mains voltage: 1 AC 220 - 240 V (±10 %), 50/60 Hz
Output voltage: 3 AC 220 - 240 V, 50/60 Hz
Part no.
Assigned Instance
Motor Power
rated operational
current
I
e
1)
P
(230 V,
50 Hz)
2)
P
(220 - 240 V,
60 Hz)
Display
(operating unit)
Local
controls
Radio interference
suppression filter
Degree of protection
Size
A kW HP
DC1-122D3NN-A20CE1 2.3 0.37 1/2 LED – – IP20 FS1 –
DC1-122D3FN-A20CE1 2.3 0.37 1/2 LED – ✓ IP20 FS1 –
DC1-122D3NN-A66CE1 2.3
DC1-122D3FN-A66CE1 2.3
DC1-122D3NN-A6SCE1 2.3
DC1-122D3FN-A6SCE1 2.3
3)
3)
3)
3)
0.37 1/2 LED – – IP66_x FS1 –
0.37 1/2 LED – ✓ IP66_x FS1 –
0.37 1/2 LED ✓ – IP66_x FS1 –
0.37 1/2 LED ✓ ✓ IP66_x FS1 –
DC1-124D3NN-A20CE1 4.3 0.75 1 LED – – IP20 FS1 –
DC1-124D3FN-A20CE1 4.3 0.75 1 LED – ✓ IP20 FS1 –
DC1-124D3NN-A66CE1 4.3
DC1-124D3FN-A66CE1 4.3
DC1-124D3NN-A6SCE1 4.3
DC1-124D3FN-A6SCE1
DC1-127D0NN-A20CE1
DC1-127D0FN-A20CE1
DC1-127D0NB-A20CE1
3)
4.3
3)
3)
3)
0.75 1 LED – – IP66_x FS1 –
0.75 1 LED – ✓ IP66_x FS1 –
0.75 1 LED ✓ – IP66_x FS1 –
0.75 1 LED ✓ ✓ IP66_x FS1 –
7 1.5 2 LED – – IP20 FS1 –
7 1.5 2 LED – ✓ IP20 FS1 –
7 1.5 2 LED – – IP20 FS2 ✓
DC1-127D0FB-A20CE1 7 1.5 2 LED – ✓ IP20 FS2 ✓
DC1-127D0NN-A66CE1 7
DC1-127D0FN-A66CE1 7
DC1-127D0NB-A66CE1
DC1-127D0FB-A66CE1
DC1-127D0NN-A6SCE1 7
DC1-127D0FN-A6SCE1 7
DC1-127D0NB-A6SCE1 7
DC1-127D0FB-A6SCE1 7
DC1-12011NB-A20CE1
DC1-12011FB-A20CE1 10.5
DC1-12011NB-A66CE1 10.5
DC1-12011FB-A66CE1
3)
3)
3)
7
3)
7
3)
3)
3)
3)
10.5
10.5
1.5 2 LED – – IP66_x FS1 –
1.5 2 LED – ✓ IP66_x FS1 –
1.5 2 LED – – IP66_x FS2 ✓
1.5 2 LED – ✓ IP66_x FS2 ✓
1.5 2 LED ✓ – IP66_x FS1 –
1.5 2 LED ✓ ✓ IP66_x FS1 –
1.5 2 LED ✓ – IP66_x FS2 ✓
1.5 2 LED ✓ ✓ IP66_x FS2 ✓
6)
6)
3)
3)
2.2 3 LED – – IP20 FS2 ✓
2.2 3 LED – ✓ IP20 FS2 ✓
2.2 3 LED – – IP66_x FS2 ✓
2.2 3 LED – ✓ IP66_x FS2 ✓
Brake chopper
18 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 23
1 DC1 device series
1.4 Rated operational data
Part no.
Assigned Instance
Motor Power
rated operational
current
I
e
1)
P
(230 V,
50 Hz)
2)
P
(220 - 240 V,
60 Hz)
Display
(operating unit)
Local
controls
Radio interference
suppression filter
A kW HP
DC1-12011NB-A6SCE1 10.5
DC1-12011FB-A6SCE1 10.5
DC1-12015NB-A20CE1 15.3
DC1-12015NB-A66CE1 15.3
DC1-12015NB-A6SCE1 15.3
3)
3)
5)
5)
5)
2.2 3 LED ✓ – IP66_x FS2 ✓
2.2 3 LED ✓ ✓ IP66_x FS2 ✓
4 5 LED – – IP20 FS3 ✓
4 5 LED – – IP66_x FS3 ✓
4 5 LED ✓ – IP66_x FS3 ✓
1) As per IEC standards
2) As per UL 61800-5-1, Table DVE.1, March 6, 2015
3) Rated operational current at switching frequencies of up to 16 kHz and ambient temperatures of up to +40 °C
4) Rated operational current at switching frequencies of up to 8 kHz and ambient temperatures of up to +50 °C
5) Rated operational current at switching frequencies of up to 8 kHz and ambient temperatures of up to +40 °C
6) For UL conformity: Rated operational current at ambient temperatures of up to +45 °C over a period of 24 hours
Degree of protection
Size
Brake chopper
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 19
Page 24
1 DC1 device series
1.4 Rated operational data
1.4.3.3 DC1-32… device series
Mains voltage: 3 AC 220 - 240 V (±10 %), 50/60 Hz
Output voltage: 3 AC 220 - 240 V, 50/60 Hz
Part no.
Assigned Instance
Motor Power
rated operational
current
I
e
1)
P
(230 V,
50 Hz)
2)
P
(220 - 240 V,
60 Hz)
Display
(operating unit)
Local
controls
Radio interference
suppression filter
Degree of protection
Size
A kW HP
DC1-322D3NN-A20CE1 2.3 0.37 1/2 LED – – IP20 FS1 –
DC1-322D3NN-A66CE1 2.3
DC1-322D3NN-A6SCE1 2.3
3)
3)
0.37 1/2 LED – – IP66_x FS1 –
0.37 1/2 LED ✓ – IP66_x FS1 –
DC1-324D3NN-A20CE1 4.3 0.75 1 LED – – IP20 FS1 –
DC1-324D3NN-A66CE1 4.3
DC1-324D3NN-A6SCE1 4.3
3)
3)
0.75 1 LED – – IP66_x FS1 –
0.75 1 LED ✓ – IP66_x FS1 –
DC1-327D0NN-A20CE1 7 1.5 2 LED – – IP20 FS1 –
DC1-327D0NB-A20CE1 7 1.5 2 LED – – IP20 FS2 ✓
DC1-327D0FB-A20CE1 7 1.5 2 LED – ✓ IP20 FS2 ✓
DC1-327D0NN-A66CE1 7
DC1-327D0NB-A66CE1 7
DC1-327D0FB-A66CE1
DC1-327D0NN-A6SCE1
DC1-327D0NB-A6SCE1
DC1-327D0FB-A6SCE1
DC1-32011NB-A20CE1 10.5
DC1-32011FB-A20CE1 10.5
DC1-32011NB-A66CE1 10.5
DC1-32011FB-A66CE1
DC1-32011NB-A6SCE1
DC1-32011FB-A6SCE1 10.5
3)
3)
3)
7
3)
7
3)
7
3)
7
10.5
10.5
1.5 2 LED – – IP66_x FS1 –
1.5 2 LED – – IP66_x FS2 ✓
1.5 2 LED – ✓ IP66_x FS2 ✓
1.5 2 LED ✓ – IP66_x FS1 –
1.5 2 LED ✓ – IP66_x FS2 ✓
1.5 2 LED ✓ ✓ IP66_x FS2 ✓
6)
6)
6)
6)
6)
6)
2.2 3 LED – – IP20 FS2 ✓
2.2 3 LED – ✓ IP20 FS2 ✓
2.2 3 LED – – IP66_x FS2 ✓
2.2 3 LED – ✓ IP66_x FS2 ✓
2.2 3 LED ✓ – IP66_x FS2 ✓
2.2 3 LED ✓ ✓ IP66_x FS2 ✓
DC1-32018NB-A20CE1 18 4 5 LED – – IP20 FS3 ✓
DC1-32018FB-A20CE1 18 4 5 LED – ✓ IP20 FS3 ✓
18
5)
5)
5)
5)
4 5 LED – – IP66_x FS3 ✓
4 5 LED – ✓ IP66_x FS3 ✓
4 5 LED ✓ – IP66_x FS3 ✓
4 5 LED ✓ ✓ IP66_x FS3 ✓
DC1-32018NB-A66CE1 18
DC1-32018FB-A66CE1
DC1-32018NB-A6SCE1 18
DC1-32018FB-A6SCE1 18
Brake chopper
20 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 25
1 DC1 device series
1.4 Rated operational data
Part no.
Assigned Instance
Motor Power
rated operational
current
I
e
1)
P
(230 V,
50 Hz)
2)
P
(220 - 240 V,
60 Hz)
Display
(operating unit)
Local
controls
Radio interference
suppression filter
Degree of protection
Size
A kW HP
DC1-32024NB-A20CE1 24 5.5 7-1/2 LED – – IP20 FS3 ✓
DC1-32024FB-A20CE1 24 5.5 7-1/2 LED – ✓ IP20 FS3 ✓
DC1-32030NB-A20CE1 30 7.5 10 LED – – IP20 FS4 ✓
DC1-32030FB-A20CE1 30 7.5 10 LED – ✓ IP20 FS4 ✓
DC1-32046NB-A20CE1 46 11 15 LED – – IP20 FS4 ✓
DC1-32046FB-A20CE1 46 11 15 LED – ✓ IP20 FS4 ✓
1) As per IEC standards
2) As per UL 61800-5-1, Table DVE.1, March 6, 2015
3) Rated operational current at switching frequencies of up to 16 kHz and ambient temperatures of up to +40 °C
4) Rated operational current at switching frequencies of up to 8 kHz and ambient temperatures of up to +50 °C
5) Rated operational current at switching frequencies of up to 8 kHz and ambient temperatures of up to +40 °C
6) For UL conformity: Rated operational current at ambient temperatures of up to +45 °C over a period of 24 hours
Brake chopper
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 21
Page 26
1 DC1 device series
1.4 Rated operational data
1.4.3.4 DC1-34…device series
Mains voltage: 3 AC 380 - 480 V (±10 %), 50/60 Hz
Output voltage: 3 AC 380 - 480 V, 50/60 Hz
Part no.
Assigned Instance
Motor Power
rated operational
current
I
e
1)
P
(400 V,
50 Hz)
2)
P
(440 - 480 V,
60 Hz)
Display
(operating unit)
Local
controls
Radio interference
suppression filter
Degree of protection
Size
A kW HP
DC1-342D2NN-A20CE1 2.2 0.75 1 LED – – IP20 FS1 –
DC1-342D2FN-A20CE1 2.2 0.75 1 LED – ✓ IP20 FS1 –
DC1-342D2NN-A66CE1 2.2
DC1-342D2FN-A66CE1 2.2
DC1-342D2NN-A6SCE1 2.2
DC1-342D2FN-A6SCE1 2.2
3)
3)
3)
3)
0.75 1 LED – – IP66_x FS1 –
0.75 1 LED – ✓ IP66_x FS1 –
0.75 1 LED ✓ – IP66_x FS1 –
0.75 1 LED ✓ ✓ IP66_x FS1 –
DC1-344D1NN-A20CE1 4.1 1.5 2 LED – – IP20 FS1 –
DC1-344D1NB-A20CE1 4.1 1.5 2 LED – – IP20 FS2 ✓
DC1-344D1FN-A20CE1 4.1 1.5 2 LED – ✓ IP20 FS1 –
DC1-344D1FB-A20CE1 4.1 1.5 2 LED – ✓ IP20 FS2 ✓
DC1-344D1NN-A66CE1 4.1
DC1-344D1NB-A66CE1
DC1-344D1FN-A66CE1
DC1-344D1FB-A66CE1
DC1-344D1NN-A6SCE1
DC1-344D1NB-A6SCE1 4.1
DC1-344D1FN-A6SCE1 4.1
DC1-344D1FB-A6SCE1 4.1
DC1-345D8NB-A20CE1
DC1-345D8FB-A20CE1
DC1-345D8NB-A66CE1 5.8
DC1-345D8FB-A66CE1 5.8
DC1-345D8NB-A6SCE1 5.8
DC1-345D8FB-A6SCE1 5.8
DC1-349D5NB-A20CE1
3)
4.1
4.1
4.1
4.1
3)
3)
3)
3)
3)
3)
3)
1.5 2 LED – – IP66_x FS1 –
1.5 2 LED – – IP66_x FS2 ✓
1.5 2 LED – ✓ IP66_x FS1 –
1.5 2 LED – ✓ IP66_x FS2 ✓
1.5 2 LED ✓ – IP66_x FS1 –
1.5 2 LED ✓ – IP66_x FS2 ✓
1.5 2 LED ✓ ✓ IP66_x FS1 –
1.5 2 LED ✓ ✓ IP66_x FS2 ✓
5.8 2.2 3 LED – – IP20 FS2 ✓
5.8 2.2 3 LED – ✓ IP20 FS2 ✓
3)
3)
3)
3)
2.2 3 LED – – IP66_x FS2 ✓
2.2 3 LED – ✓ IP66_x FS2 ✓
2.2 3 LED ✓ – IP66_x FS2 ✓
2.2 3 LED ✓ ✓ IP66_x FS2 ✓
9.5 4 5 LED – – IP20 FS2 ✓
DC1-349D5FB-A20CE1 9.5 4 5 LED – ✓ IP20 FS2 ✓
Brake chopper
22 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 27
1 DC1 device series
1.4 Rated operational data
Part no.
Assigned Instance
Motor Power
rated operational
current
I
e
1)
P
(400 V,
50 Hz)
2)
P
(440 - 480 V,
60 Hz)
Display
(operating unit)
Local
controls
Radio interference
suppression filter
Degree of protection
Size
A kW HP
DC1-349D5NB-A66CE1 9.5
DC1-349D5FB-A66CE1 9.5
DC1-349D5NB-A6SCE1 9.5
DC1-349D5FB-A6SCE1 9.5
DC1-34014NB-A20CE1 14
DC1-34014FB-A20CE1 14
DC1-34014NB-A66CE1
DC1-34014FB-A66CE1 14
DC1-34014NB-A6SCE1 14
DC1-34014FB-A6SCE1 14
DC1-34018NB-A20CE1 18
DC1-34018FB-A20CE1 18
DC1-34018NB-A66CE1 18
DC1-34018FB-A66CE1 18
DC1-34018NB-A6SCE1 18
DC1-34018FB-A6SCE1
DC1-34024NB-A20CE1 24
DC1-34024FB-A20CE1 24
DC1-34030NB-A20CE1
DC1-34030FB-A20CE1
DC1-34030NB-A20CE1
3)
14
18
3)
3)
3)
4)
4)
4)
4)
4)
4)
4)
4)
5)
5)
5)
5)
4)
4)
4 5 LED – – IP66_x FS2 ✓
4 5 LED – ✓ IP66_x FS2 ✓
4 5 LED ✓ – IP66_x FS2 ✓
4 5 LED ✓ ✓ IP66_x FS2 ✓
5.5 10 LED – – IP20 FS3 ✓
5.5 10 LED – ✓ IP20 FS3 ✓
5.5 10 LED – – IP66_x FS3 ✓
5.5 10 LED – ✓ IP66_x FS3 ✓
5.5 10 LED ✓ – IP66_x FS3 ✓
5.5 10 LED ✓ ✓ IP66_x FS3 ✓
7.5 10 LED – – IP20 FS3 ✓
7.5 10 LED – ✓ IP20 FS3 ✓
7.5 10 LED – – IP66_x FS3 ✓
7.5 10 LED – ✓ IP66_x FS3 ✓
7.5 10 LED ✓ – IP66_x FS3 ✓
7.5 10 LED ✓ ✓ IP66_x FS3 ✓
11 15 LED – – IP20 FS3 ✓
11 15 LED – ✓ IP20 FS3 ✓
30 15 20 LED – – IP20 FS4 ✓
30 15 20 LED – ✓ IP20 FS4 ✓
30 18.5 25 LED – – IP20 FS4 ✓
DC1-34030FB-A20CE1 30 18.5 25 LED – ✓ IP20 FS4 ✓
DC1-34046NB-A20CE1 46 22 30 LED – – IP20 FS4 ✓
DC1-34046FB-A20CE1 46 22 30 LED – ✓ IP20 FS4 ✓
1) As per IEC standards
2) As per UL 61800-5-1, Table DVE.1, March 6, 2015
3) Rated operational current at switching frequencies of up to 16 kHz and ambient temperatures of up to +40 °C
4) Rated operational current at switching frequencies of up to 8 kHz and ambient temperatures of up to +50 °C
5) Rated operational current at switching frequencies of up to 8 kHz and ambient temperatures of up to +40 °C
Brake chopper
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 23
Page 28
1 DC1 device series
L1/L
L2/N
L3
U
V
W
1
2
3
4
5
6
7
8
9
10
11
⑧
⑦
⑥
⑤
①
②
③
④
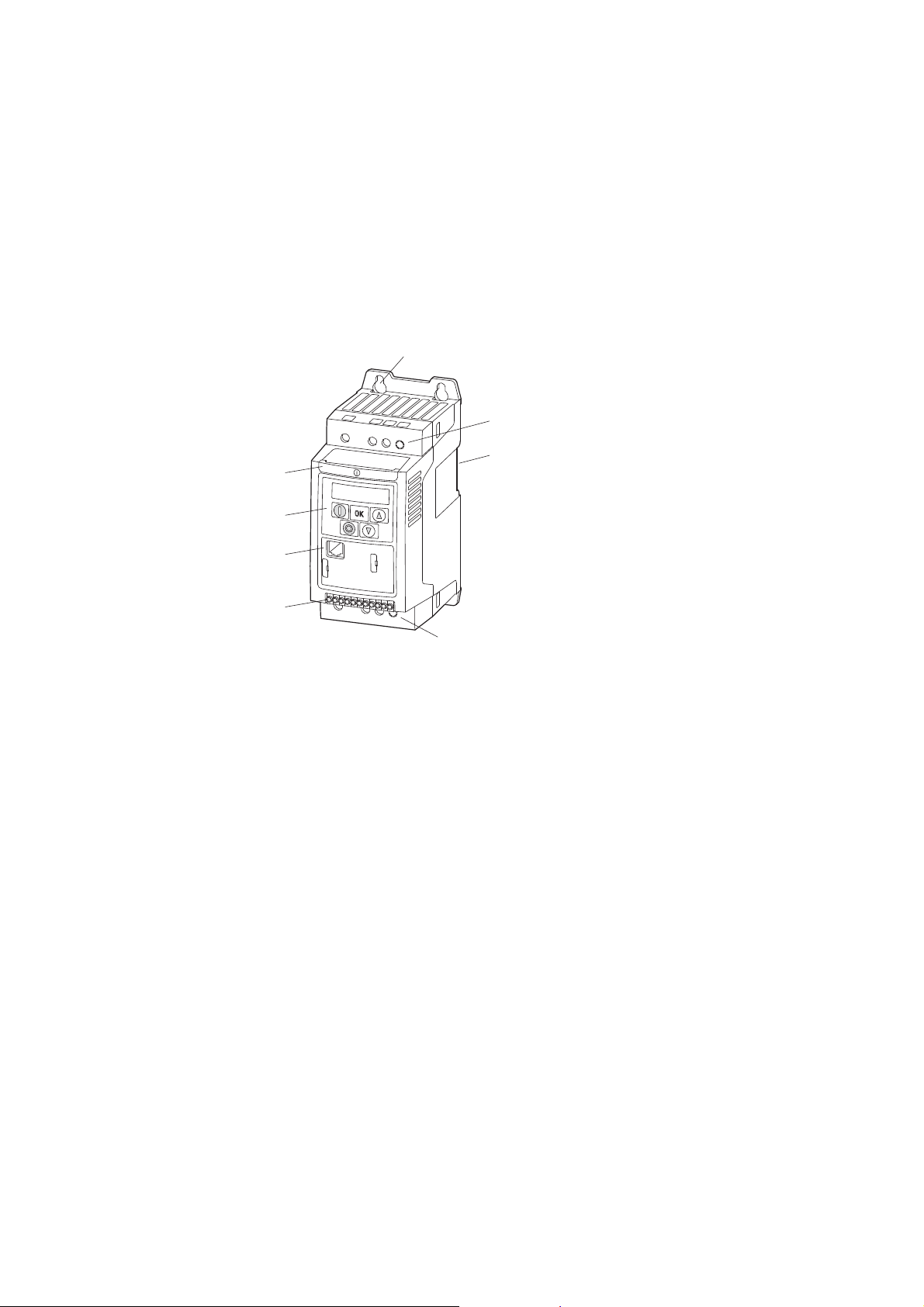
1.5 Description
1.5 Description
1.5.1 IP20 degree of protection (FS1 to FS4)
The following drawing serves as an example showing the designations used
for the elements in DC1 variable frequency drives with an IP20 degree of
protection and a size of FS1.
Figure 6: DC1 description (FS1, IP20)
a Fixing holes (screw fastening)
b Connection terminals in power section (mains side)
c Cutout for mounting on mounting rail
d Connection terminals in power section (motor feeder)
e Control signal terminals (plug-in)
f Communication interface (RJ45)
g Keypad with 5 control buttons and LED display
h Info card
24 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 29
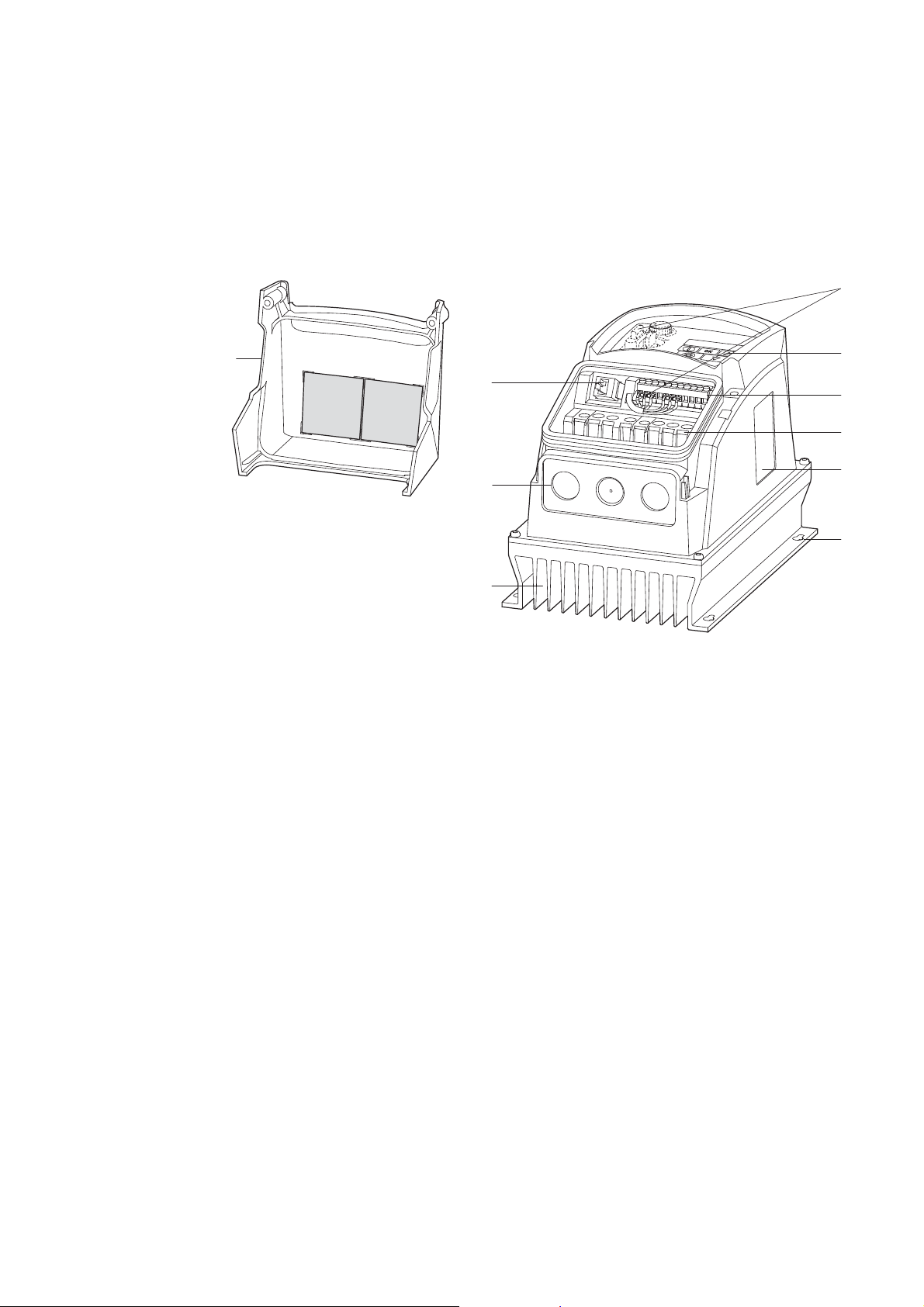
1.5.2 IP66 degree of protection (FS1 to FS3)
The following drawing serves as an example showing the designations used
for the elements in DC1 variable frequency drives with an IP66 degree of
protection and a size of FS1.
1 DC1 device series
1.5 Description
①
⑩
⑨
⑧
⑦
Figure 7: Description (IP66)
a Local controls with connection (DC1-…-A6SN only)
b Keypad with 5 control buttons and LED display
c Control terminal (plug-in)
d Connection terminals in power section
e Nameplate
f Fixing holes
g Heat sink
h Opening for cable gland
i Communication interface (RJ45)
j Cover for connection terminals, featuring info cards
②
1 2
3 4 5 6
7
8 9 10 11
1 2
3
L1
N
4 5 6 7 8 9 10
L2
N
L3
U
V
W
③
④
⑤
⑥
The info cards are found on the inside of the lower cover , which features
three additional knockouts for cable glands leading to the control section.
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 25
Page 30
1 DC1 device series
a
Motor
L1
N
PE
U
V
W
L1/L
L2/N
M
3 ∼
I
e
BRDC+
FS1, FS2
Brake Chopper
(FS2)
230 V (U
LN
= 1 ~ 230 V)
1.6 Voltage categories
1.6 Voltage categories
DC1 variable frequency drives are divided into three voltage categories:
• 115 V: 110 - 115 V ±10 %
• 200 V: 200 - 240 V ±10 %
• 400 V: 380 - 480 V ±10 %
DC1-1D
DC1-12…, DC1-32…
DC1-34…
For more information on how to run single-phase AC motors
using the DC1 variable frequency drive, please refer to
Application Note AP040037EN, "DC1 Variable Frequency Drives
– Operating Single-Phase Motors."
ftp://ftp.moeller.net/DRIVES/POWERXL/01_APPLICATION_NOTE/
Deutsch/DC1/AP040037DE_DC1_Betrieb_von_Einphasenmotoren.pdf
• DC1-1D…
• Single-phase mains connection, rated operating voltage of 115 V
with internal voltage doubler
• U
= 1~, 110 - 115 V ±10 %, 50/60 Hz
LN
• Ie = 2.3 - 5.8 A
• Motor: 0.37 - 1.1 kW (230 V, 50 Hz), 1/2 - 1-1/2 HP (230 V, 60 Hz)
Figure 8: DC1-1D…
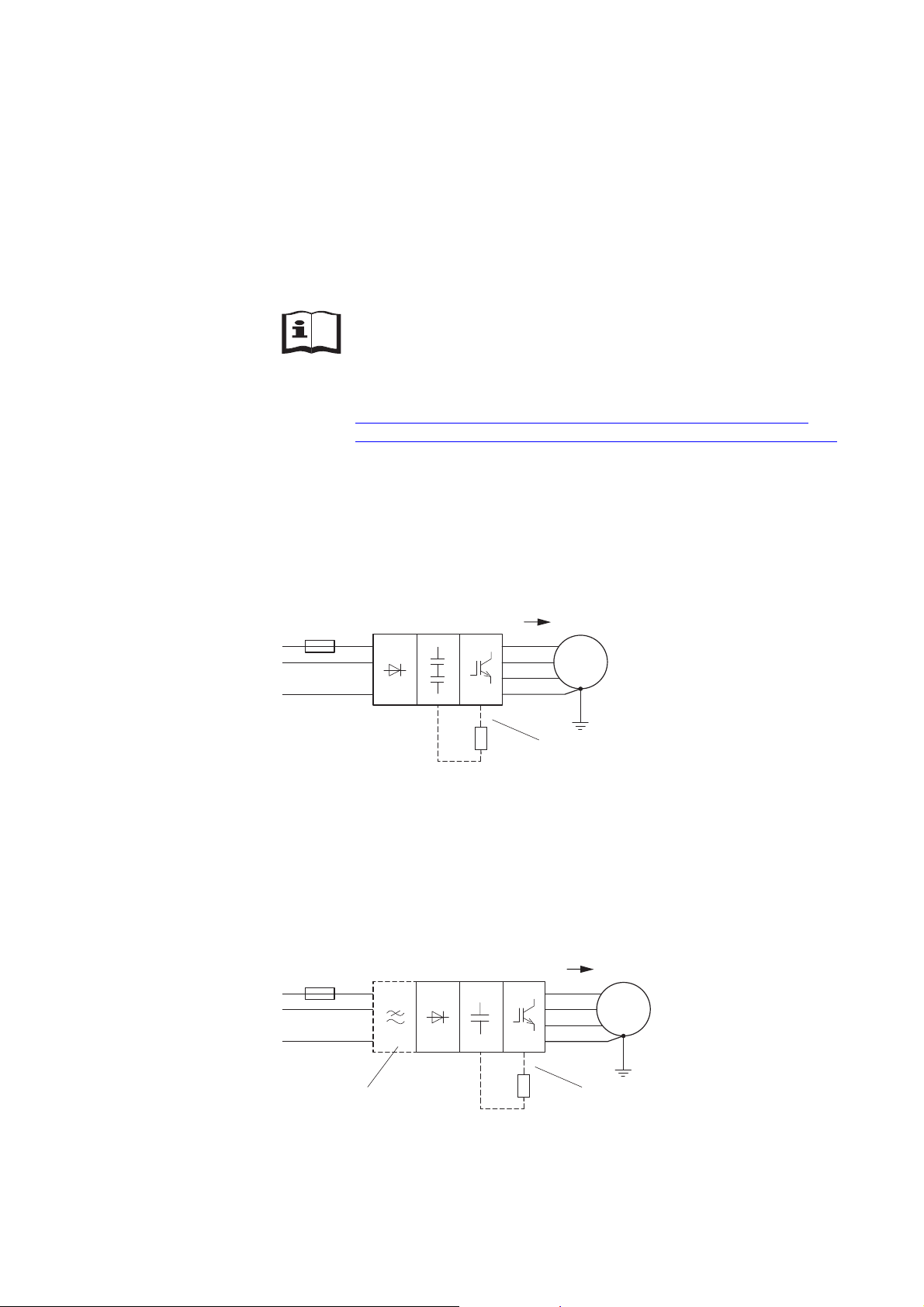
• DC1-12…
• Single-phase mains connection, rated operating voltage 230 V
• U
• I
= 1~, 200 - 240 V ±10 %, 50/60 Hz
LN
= 2.3 - 15.3 A
e
Motor: 0.37 - 4 kW (230 V, 50 Hz), 1/2 - 5 HP (230 V, 60 Hz)
I
e
FS1, FS2, FS3
L1/L
L2/N
EMC Filter
L1
N
PE
Figure 9: DC1-12…
26 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
U
V
W
BRDC+
Motor
M
3 ∼
Brake Chopper
(FS2, FS3)
230 V (U
= 1 ~ 230 V)
LN
Page 31

1 DC1 device series
1.6 Voltage categories
• DC1-32…
• Three-phase power supply, rated operating voltage 230 V
• U
• I
• Motor: 0.37 - 11 kW (230 V, 50 Hz), 1/2 - 15 HP (230 V, 60 Hz)
L1
L2
L3
PE
= 3~, 200 - 240 V ±10 %, 50/60 Hz
LN
= 2.3 - 46 A
e
FS1, FS2, FS3, FS4
L1/L
L2/N
L3
U
V
W
BRDC+
I
e
Motor
M
3 ∼
230 V (U
= 3 ~ 230 V)
LN
EMC Filter
Brake Chopper
(FS2, FS3, FS4)
Figure 10:DC1-32…
• DC1-34…
• Three-phase power supply, rated operating voltage 400/480 V
• U
• I
= 3~, 380 - 480 V ±10 %, 50/60 Hz
LN
= 2.2 - 46 A
e
• Motor: 0.75 - 22 kW (400 V, 50 Hz), 1 - 30 HP (460 V, 60 Hz)
I
e
FS1, FS2, FS3, FS4
L1
L2
L3
PE
L1/L
L2/N
L3
EMC Filter
Figure 11:DC1-34…
U
V
W
BRDC+
Motor
M
3 ∼
Brake Chopper
(FS2, FS3, FS4)
400 V (U
460 V (U
= 3 ~ 400 V)
LN
= 3 ~ 480 V)
LN
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 27
Page 32

1 DC1 device series
1.7 Selection Criteria
1.7 Selection Criteria
Select the variable frequency drive according to the supply voltage ULN of
the supply system and the rated operational current of the assigned motor.
The circuit type ( / ) of the motor must be selected according to the
supply voltage.
The variable frequency drive’s rated output current I
must be greater than or
e
equal to the rated motor current.
cos ϕ 0.79
-1
P-08
50 Hz
P-09
L1/L
L2/N
L3
1
2
3
4
5
6
7
8
9
1
0
11
U
V
W
Figure 12:Selection criteria
P-07
230/400 V 3.2/1.9 A
0,75 KW
1410 min
P-10
When selecting the drive, the following criteria must be known:
• Mains voltage = rated operating voltage of the motor (e. g. 3~ 400 V),
• Type of motor (e.g., three-phase asynchronous motor)
• Rated motor current (recommended value, dependent on the circuit type
and the power supply)
• Ambient conditions: ambient temperature, control cabinet installation
with IP20 degree of protection or direct local installation with IP66
degree of protection.
Example based on figure 12
• Mains voltage: 3~ 400 V, 50 Hz
• Star-connected circuit (400 V)
• Rated operational current: 1.9 A (400 V)
• Control panel installation
IP20 degree of protection
• Ambient air temperature max. 50 °C without output reduction, IP20
Variable frequency drive that should be selected: DC1-342D2FN-A20CE1
• DC1-34…: 3-phase main terminal, rated operating voltage: 400 V
• DC1-…2D2…: 2.2 A – The variable frequency drive’s rated operational
current (output current) guarantees that the motor will be supplied with
the required rated operational current (1.9 A).
28 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 33

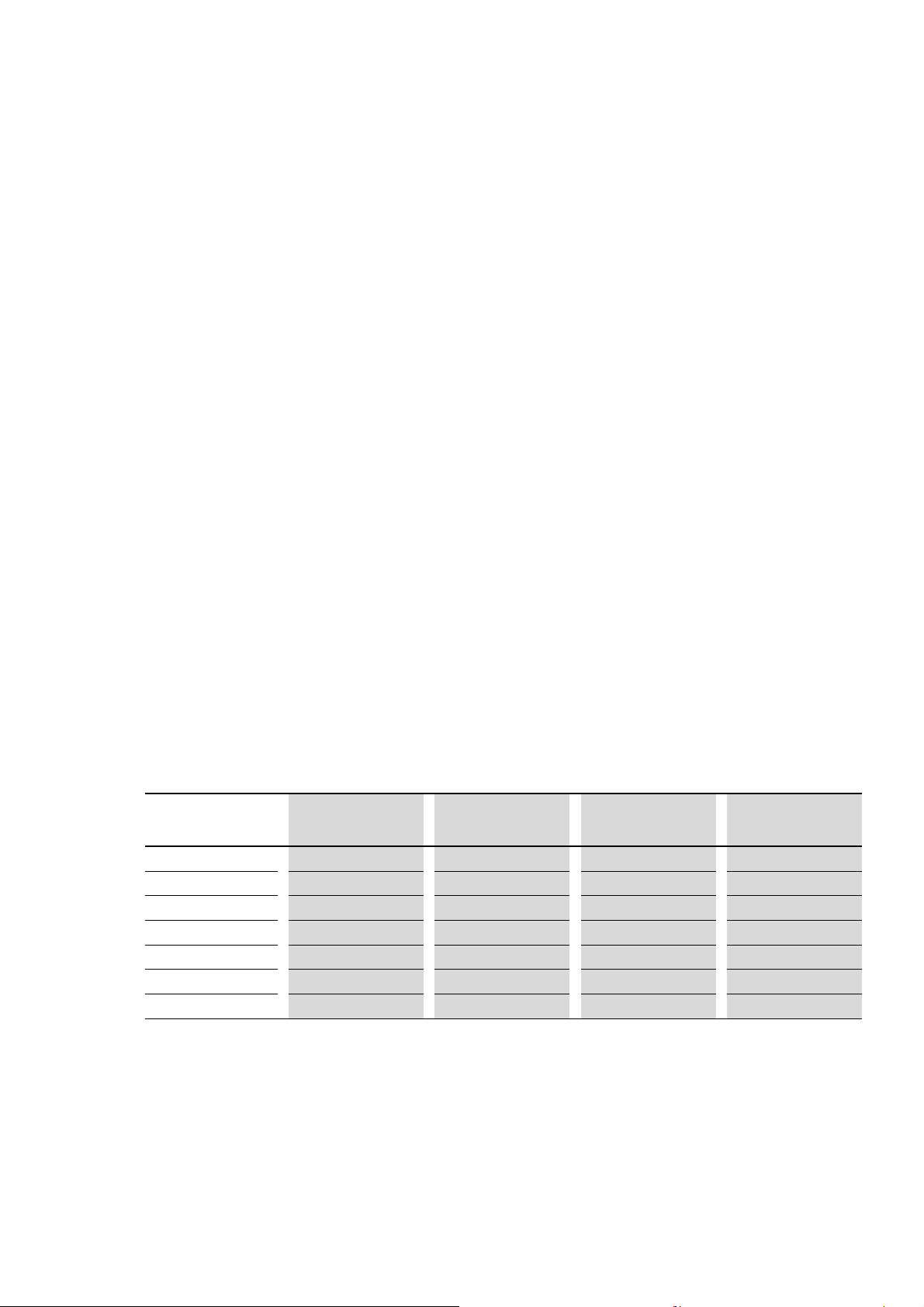
1.8 Output reduction (derating)
a
Derating the DC1 variable frequency drive / limiting the maximum continuous
output current (I
• The ambient air temperature is higher than 40 °C
• An installation altitude of 1,000 m is exceeded
• The effective switching frequency is higher than the minimum value
The following tables specify the factors that need to be applied when
selecting a DC1 variable frequency drive if the drive will be run outside these
conditions:
Derating for ambient temperature
1 DC1 device series
1.8 Output reduction (derating)
) will generally be necessary if, during operation:
2
Enclosure degree
of protection
IP20 50 °C 50 °C
IP66 40 °C 50 °C 2.5 % per K
1) 45 °C for continuous operation for 24 hours, as per UL, for DC1-12011…B-A20N and DC1-32011…B-A20N
Maximum permissible ambient air temperature Derate
without
derating
with
derating
1)
none
Derating for installation altitude
Enclosure degree
of protection
IP20, IP66 1000 m 2000 m – with UL Certification
permissible altitude Derate
without
derating
with
derating
1 % per 100 m
4000 m maximum – without UL
Certification
Derating for switching frequency
Enclosure degree
of protection
Switching frequency (P-17), setting (audible)
1)
4 kHz 8 kHz 12 kHz 16 kHz 24 kHz 32 kHz
IP20 none none 20 % 30 % 40 % 50 %
IP66 none 10 % 25 % 35 % 50 % 50 %
1) The switching frequency’s effective rms value will be approximately half the value set with parameter P-17
(double modulation).
For more information on the subject of derating, please refer
to Application Note AP040038EN, “DC1 Variable Frequency
Drives – Dependency of the output current on switching
frequency and ambient air temperature”.
ftp://ftp.moeller.net/DRIVES/POWERXL/01_APPLICATION_NOTE/
Deutsch/DC1/AP040038DE_DC1_Derating.pdf
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 29
Page 34

1 DC1 device series
1.8 Output reduction (derating)
Examples showing how to apply derating factors
2.2 kW motor (400 V, 5 A), installation altitude of 2,000 m above sea level,
ambient temperature of 45 °C, wall-mounted in mechanical room, required
switching frequency of 16 kHz.
a)
Selected variable frequency drive: DC1-349D5FB-A6SCE1, rated operational
current of 9.5 A, switching frequency of 8 kHz (default setting).
Required derating factors:
• For the 16 kHz switching frequency: 35 %
• For the 2,000 m installation altitude: 10 % (1% per 100 m above
• For the 45 °C ambient temperature: 12.5 % (2.5% per kelvin,
9.5 A - 35 % - 10 % - 12.5 % = (9.5 x 0.65 x 0.9 x 0.875) A = 4.86 A
The DC1’s permissible continuous rated operational current of 4.86 A is
lower than the motor’s required rated operational current (5 A).
1,000 m, 2,000 m - 1,000 m = 1,000 m, 1,000 m/100 m = 10)
45 °C - 40 °C = 5 K, IP66 degree of protection)
By using the default switching frequency instead (default setting: 8 kHz), the
motor can be operated continuously at an altitude of 2,000 m (9.5 A - 10% -
12.5% = 6.73 A).
→
b)
In order to be able to work with the required switching frequency of 16 kHz,
a larger variable frequency drive would be needed. Selected variable
frequency drive: DC1-34014FB-A6SCE1, rated operational current of 14 A.
Required derating factors:
• For the 16 kHz switching frequency: 35 %
• For the 2,000 m installation altitude: 10 % (1% per 100 m above
1,000 m, 2,000 m - 1,000 m = 1,000 m, 1,000 m/100 m = 10)
• For the 45 °C ambient temperature: 12.5 %
(2.5% per kelvin, 45 °C - 40 °C = 5 K, IP66 degree of protection).
14 A - 35 % - 10 % - 12.5 % = (14 x 0.65 x 0.9 x 0.875) A = approx. 7.2 A
The DC1-34014FB-A6SCE1 variable frequency drive meets the necessary
operating conditions.
Use a variable frequency drive belonging to a higher output
class and repeat the calculations in order to ensure that a
sufficiently high output current will be available continuously.
30 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 35

1.9 Proper use
1 DC1 device series
1.9 Proper use
The DC1 variable frequency drives are electrical devices for controlling
variable speed drives with three-phase motors. They are designed for
installation in machines or for use in combination with other components
within a machine or system.
The DC1 variable frequency drives are not domestic appliances. They are
designed only for industrial use as system components.
If the variable frequency drive is installed in a machine, it is prohibited to
place it into operation until it has been determined that the corresponding
machine meets the safety and protection requirements set forth in
Machinery Safety Directive 2006/42/EC (e.g., by complying with EN 60204).
The user of the equipment is responsible for ensuring that the machine use
complies with the relevant EU Directives.
The CE markings on DC1 variable frequency drives confirm that the devices
meet the
EMC Directives (Directives 2014/35/EU, 2014/30/EU and ROHS 2011/65/EU)
when used in their typical drive configuration.
requirements set forth in the European Union’s Low Voltage and
In the described system configurations,
suitable for use in public and non-public networks.
A connection of a DC1 variable frequency drive to IT networks (networks
without reference to earth potential) is permissible only to a limited extent,
since the device’s built-in filter capacitors connect the network with the earth
potential (enclosure).
In unearthed networks, this can result in hazardous situations or damage to
the device (insulation monitoring is required!).
→
→
To the output (terminals U, V, W) of the DC1 variable frequency
drive you must not:
• connect a voltage or capacitive loads (e.g. phase
compensation capacitors),
• Connect multiple variable frequency drives in parallel
• make a direct connection to the input (bypass).
Always observe the technical data and connection conditions!
For additional information, refer to the equipment nameplate or
label at the variable frequency drive and the documentation.
Any other use will be considered to be an improper use of the
device.
DC1 variable frequency drives are
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 31
Page 36

1 DC1 device series
1.10 Maintenance and inspection
1.10 Maintenance and inspection
DC1 series variable frequency drives will be maintenance-free as long as the
general rated operational data (see annex) is adhered to and the specific
technical data (see annex) for the corresponding ratings is taken into account.
Please note, however, that external influences may affect the operation and
lifespan of a DC1 variable frequency drive.
We therefore recommend that the devices are checked regularly and the
following maintenance measures are carried out at the specified intervals.
Table 2: Recommended maintenance for DC1 variable frequency drives
Maintenance Measure Maintenance interval
Clean cooling vents (cooling slits) please enquire
Check to make sure that the fan and the
7-segment display are working properly
(press all five buttons simultaneously,
starting with the Stop button)
Check the filter in the control panel doors
(see the manufacturer’s specifications)
Check all earth connections to make sure they
are intact
Check the tightening torques of the terminals
(control terminals, power terminals)
Check connection terminals and all metallic
surfaces for corrosion
Motor cables and shield connection (EMC)
Charge capacitors 12 months
6 - 24 months (depending on the environment)
6 - 24 months (depending on the environment)
On a regular basis, at periodic intervals
On a regular basis, at periodic intervals
6 - 24 months; when stored, no more than 12 months later
(depending on the environment)
According to manufacturer specifications, no later than 5 years
(→ Section 1.12, “Charging the internal DC link capacitors“)
1.11 Storage
There are no plans for replacing or repairing individual components of DC1
variable frequency drives!
If the DC1 variable frequency drive is damaged by external influences, repair
is not possible.
Dispose of the device according to the applicable environmental laws and
provisions for the disposal of electrical or electronic devices.
If the DC1 variable frequency drive is stored before use, suitable ambient
conditions must be ensured at the site of storage:
• Storage temperature: -40 - +60 °C,
• Relative average air humidity: < 95 %, non condensing (EN 50178),
• To prevent damage to the variable frequency drive’s internal DC link
capacitors, it is not recommended to store the variable frequency drive
for more than 12 months ( Section 1.12, “Charging the internal DC
link capacitors“).
32 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 37

1.12 Charging the internal DC link capacitors
After extended storage times or extended downtimes during which no
power is supplied (> 12 months), the capacitors in the internal DC link must
be recharged in a controlled manner in order to prevent damage. To do this,
the DC1 variable frequency drive must be supplied with power, with a
controlled DC power supply unit, via two mains connection terminals (e.g. L1
and L2).
In order to prevent the capacitors from having excessively high leakage
currents, the inrush current should be limited to approximately 300 to 800
mA (depending on the relevant rating). The variable frequency drive must not
be enabled during this time (i.e. no start signal). After this, the DC voltage
must be set to the magnitudes for the corresponding DC link voltage
(U
1.41 x Ue) and applied for one hour at least (regeneration time).
DC
1 DC1 device series
1.12 Charging the internal DC link capacitors
1.13 Service and warranty
• DC1-12…, DC1-32…: about 324 V DC at U
• DC1-34…: about 560 V DC at U
→
In the unlikely event that you have a problem with your DC1 variable
frequency drive, please contact your local sales office.
When you call, have the following data ready:
• The
• the date of purchase
• a detailed description of the problem which has occurred with the
variable frequency drive.
If some of the information printed on the rating plate is not legible, please
state only the data which are clearly legible.
Information concerning the guarantee can be found in the Terms and
Conditions Eaton Industries GmbH.
Due to the internal voltage doubler circuit, the capacitors in
DC1-1D… variable frequency drives cannot be reformed using
the connection terminals!
Please contact your local sales office.
exact variable frequency drive part number (see nameplate),
= 400 V AC
e
= 230 V AC
e
Break-Down Service
Please contact your local office:
http://www.eaton.eu/aftersales
Or
Hotline After Sales Service
+49 (0) 180 5 223822 (de, en)
AfterSalesEGBonn@eaton.com
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 33
Page 38

1 DC1 device series
1.13 Service and warranty
34 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 39

2 Engineering
2.1 Introduction
2 Engineering
2.1 Introduction
This chapter describes the most important features in the energy circuit of a
magnet system (PDS = Power Drive System), which you should take into
consideration in your project planning.
It contains instructions that must be followed when determining which
device to use with which rated motor output, as well as when selecting
protection devices and switchgear, selecting cables, cable entries, and
operating the DC1 variable frequency drive.
All applicable laws and local standards must be complied with when planning
and carrying out the installation. Not following the recommendations
provided may result in problems what will not be covered by the warranty.
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 35
Page 40

ϑ
n
BDM
M, n
PDS
CDM
⑥
⑦
⑤
④
③
②
①
2 Engineering
2.1 Introduction
An example for a magnet system
a Electrical supply system
(mains connection, grounding system
configuration, mains voltage, frequency,
voltage balance, THD, compensation
systems)
b Overall system – consisting of motor and
load systems
c PDS = Power drive system
d Safety and switching
(disconnecting devices, fuses, cable crosssectional areas, residual current circuitbreakers, mains contactors)
e CDM = Complete drive module:
Variable frequency drive with auxiliary
equipment (mains and motor chokes, radio
interference suppression filter, brake
resistor, sine filter)
BDM = Basic drive module:
DC1 variable frequency drive
f Motor and sensor
(Temperature, motor speed)
g Load system:
Driven system equipment (process, speed,
torque)
Figure 13: Magnet system example (overall system as its own system or as part of a larger system)
36 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 41

2.2 Electrical power network
L2
N
L1
L3
PE
L2
N
L1
L3
2.2.1 Mains terminal and configuration
DC1 variable frequency drives can be connected to and run on all neutral
point-grounded AC supply systems (TN-S, TN-C, TT grounding systems;
please refer to IEC 60364) without any limitations.
TN-S TN-C TT
Figure 14: AC supply systems with earthed center point
2 Engineering
2.2 Electrical power network
L1
L2
L3
PEN
→
The connection and operation of variable frequency drives to asymmetrically
grounded TN networks (phase-grounded delta network “Grounded Delta”,
USA) or non-grounded or high-resistance grounded (over 30 ) IT networks is
only conditionally permissible (internal radio interference suppression filters).
→
→
DC1-…-A20CE1 variable frequency drives can be connected to cornergrounded systems or IT grounding systems (not grounded, insulated). When
versions featuring an internal radio interference suppression filter (DC1-…FN-
A20CE1, DC1-…FB-A20CE1) are connected to one of these systems, the
EMC screw(s) needs to be removed and the internal radio interference
suppression filter needs to be disconnected
While planning the project, consider a symmetrical distribution
to the three main phase conductors, if multiple variable
frequency drives with single-phase supplies are to be
connected.The total current of all single phase consumers is not
to cause an overload of the neutral conductor (N-conductor).
Operation on non-earthed networks (IT) requires the use of
suitable insulation monitoring relays (e.g. pulse-code
measurement method)
In networks with an earthed phase conductor, the maximum
phase-earth voltage must not exceed 300 V AC.
→
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 37
Measures for electromagnetic compatibility are mandatory in a
power drive system, to meet the legal standards for EMC- and
Low Voltage Directive.Good earthing measures are a
prerequisite for the effective Use of further measures such as
screen earth kit or filters here. Without respective grounding
measures, further steps are superfluous.
Page 42

2 Engineering
2.2 Electrical power network
2.2.2 Mains voltage and frequency
The standardized rated operating voltages (IEC 60038, VDE 017-1) of power
utilities guarantee the following conditions at the connection point:
• Deviation from the rated value of voltage: maximum ±10 %
• Deviation in voltage phase balance: maximum ±3 %
• Deviation from rated value of the frequency: maximum ±4 %
The broad
rated value for
European as (EU: U
American as (USA: U
• 115 V, 50 Hz (EU) and 115 V, 60 Hz (USA) for DC1-1D…,
110 V -10% - 115 V +10% (99 V -0% - 126 V +0%)
The internal voltage doubler will increase the mains voltage of 115 V to
produce an output voltage of 230 V (motor voltage).
• 230 V, 50 Hz (EU) and 240 V, 60 Hz (USA) at DC1-12…, DC1-32…
200 V -10 % - 240 V +10 % (180 V -0 % - 264 V +0 %)
• 400 V, 50 Hz (EU) and 480 V, 60 Hz (USA) at DC1-34…
380 V -10 % - 480 V +10 % (342 V -0 % - 528 V +0 %)
tolerance band of the DC1 variable frequency drive considers the
= 230 V/400 V, 50 Hz) and
LN
= 240 V/480 V, 60 Hz) standard voltages:
LN
2.2.3 Voltage balance
The permissible frequency range for all voltage categories is 50/60 Hz
(48Hz-0%-62Hz+0%).
Unbalanced voltages and deviations from the ideal voltage shape may occur
in three-phase AC supply systems if the conductors are loaded unevenly and
if large output loads are connected directly. These supply voltage unbalances
may cause the diodes in the variable frequency drive’s rectifier bridge
converter to be loaded unevenly, resulting in premature diode failure.
→
→
In the project planning for the connection of three-phase
supplied variable frequency drives (DC1-3…), consider only AC
supply systems that handle permitted asymmetric divergences
in the mains voltage +3 %.
If this condition is not fulfilled, or symmetry at the connection
location is not known, the use of an assigned main choke is
recommended.
For the rated mains contactors for DC1 variable frequency
drives, please refer to Section 2.5, “Mains chokes“,
page 42.
38 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 43

2.2.4 Total Harmonic Distortion (THD)
The THD value (THD = Total Harmonic Distortion) is defined in standard
IEC/EN 61800-3 as the ratio of the rms value of all harmonic components to
the rms value of the fundamental frequency.
2 Engineering
2.3 Cable cross-sections
→
In order to reduce the THD value (up to 30%), it is
recommended to use a DX-LN… mains choke
( Section 2.5, “Mains chokes“, page 42).
2.2.5 Reactive power compensation devices
Compensation on the power supply side is not required for the variable
frequency drives of the DC1 series. From the AC power supply network they
only take on very little reactive power of the fundamental harmonics
(cos ~ 0.98).
→
In the AC supply systems with non-choked reactive current
compensation devices, current deviations can enable parallel
resonance and undefinable circumstances.
In the project planning for the connection of variable frequency
drives to AC supply systems with undefined circumstances,
consider using mains chokes.
2.3 Cable cross-sections
The mains cables and motor cables must be sized as required by local
standards and by the load currents that will be involved.
The PE conductor’s cross-sectional area must be the same as the phase
conductors’ cross-sectional area. The connection terminals marked with
must be connected to the earth-current circuit.
NOTICE
The specified minimum PE conductor cross-sections
(EN 61800-5-1) must be maintained.
If there are leakage currents greater than 3.5 mA, a reinforced earthing (PE)
must be connected, as required by standard EN 61800-5-1. The cable crosssection must be at least 10 mm
separately connected earthing cables.
→
→
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 39
Section 6.2, “Specific rated operational data“, page 141
provides the leakage currents for the individual models.
Section 3.5, “EMC installation“, page 68 goes over the EMC
requirements for the motor cables.
2
, or the earthing system must consist of two
Page 44

2 Engineering
2.4 Safety and switching
A symmetrical, fully screened (360°), low-impedance motor cable must be
used. The length of the motor cable depends on the RFI class and the
environment.
For US installations, UL-listed cables (AWG) should be used exclusively.
These cables must have a temperature rating of 70 °C (158 °F), and will often
require installation inside a metal conduit (please consult the applicable local
standards).
2.4 Safety and switching
2.4.1 Disconnecting device
In the European Union, this disconnecting device must be one of the
following devices in order to comply with European Directives as per
standard EN 60204-1, “Safety of machinery”:
• An AC-23B utilization category disconnector (EN 60947-3)
• A disconnector with an auxiliary contact that in all cases will disconnect
• A circuit-breaker designed to disconnect the circuit as per EN 60947-2
→
→
the load circuit before the disconnector’s main contacts open
(EN 60947-3)
For the rated cable cross-sectional areas for DC1 variable
frequency drives, please refer to Section 6.4, “Cable crosssections“, page 151.
Install a manual disconnecting device between the mains
connection and the DC1 variable frequency drive. This
disconnecting device must be designed in such a way that it can
be interlocked in its open position for installation and
maintenance work.
In all other regions, the applicable national and local safety regulations must
be complied with.
2.4.2 Fuses
The DC1 variable frequency drive and the corresponding supply cables must
be protected from thermal overload and short-circuits.
→
→
The fuses will protect the supply cable in the event of a short-circuit, limit any
damage to the variable frequency drive, and prevent damage to upstream
devices in the event of a short-circuit in the variable frequency drive.
40 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
The fuse ratings and cable cross-sectional areas (wire gauges)
for the connection on the mains side will depend on the DC1
variable frequency drive’s input current I
For the recommended fuse sizing and assignments, please
refer to Section 6.5, “Fuses“, page 153.
LN
.
Page 45

2.4.3 Residual current circuit-breaker (RCD)
When using variable frequency drives (DC1-3…) that work with a threephase power supply (L1, L2, L3), make sure to use type B AC/DC sensitive
residual current devices exclusively.
When using variable frequency drives that work with a single-phase power
supply (L, N) (DC1-12… and DC1-1D…), you may use type A and type B
residual current protective devices (RCD).
NOTICE
Residual current circuit-breakers (RCD = residual current device)
should
supply system supplying power) and the DC1 variable frequency
drive – but not at the output to the motor!
The leakage currents’ magnitude will generally depend on:
• length of the motor cable
• shielding of the motor cable
• height of the switching frequency (switching frequency of the inverter),
• design of the radio interference suppression filter
• grounding measures at the site of the motor.
2 Engineering
2.4 Safety and switching
only be installed between the power feed system (the AC
2.4.4 Mains contactors
Other protective measures against direct and indirect contact can be used for
DC1 variable frequency drives, including isolating them from the supply
system with the use of a transformer.
The mains contactor enables an operational switching on and off of the
supply voltage for the variable frequency drive and switching off in case of a
fault. The mains contactor is designed based on the mains-side input current
I
of the DC1 variable frequency drive for utilization category AC-1
LN
(IEC 60947) and the ambient air temperature at the location of use.
→
→
While planning the project, please make sure that inching
operation is not done via the mains contactor of the variable
frequency drive on frequency-controlled drives, but through a
controller input of the variable frequency drive.
The maximum permissible mains voltage switch-on frequency
for the
(normal operation).
For UL-compliant installation and during operation, the mains
side switching devices must allow for a 1.25 times higher input
current.
DC1 variable frequency drive is once every 30 seconds
→
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 41
For the rated mains contactors for DC1 variable frequency
drives, please refer to Section 6.6, “Mains contactors“,
page 156.
Page 46

2 Engineering
2.5 Mains chokes
2.5 Mains chokes
Mains chokes reduce the total harmonic distortion, the mains feedback and
improve the power factor. The apparent current on the mains side is then
reduced by around 30 %.
Towards the variable frequency drive, the main chokes dampen the
interference from the supply network. This increases the electric strength of
the variable frequency drive and lengthens the lifespan (diodes of the mains
power rectifier, internal DC link capacitors).
→
→
For the operation of the DC1 variable frequency drive, the
application of main chokes is not necessary.
However, we recommend using a mains choke if the electrical
supply system’s quality is not known:
• Large voltage peaks (e.g., when switching large loads
directly)
• Correction systems (without series inductors)
• Power supplied via conductor bar or slip ring systems
(e.g., overhead cranes)
While planning the project, consider
assigned to a single variable frequency drive for decoupling.
When using an adapting transformer (assigned to a single variable
frequency drive), a main choke is not necessary.
Mains chokes are designed based on the mains-side input current
(ILN) of the variable frequency drive.
When the variable frequency drive is running at its rated current
limit, the mains choke with a u
the variable frequency drive’s maximum possible output voltage
to be reduced to about 96 % of the mains voltage ULN.
U
2
that a mains choke is only
value of around 4 % will cause
K
T
→
42 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
For the rated mains contactors for DC1 variable frequency
drives, please refer to Section 2.5, “Mains chokes“,
page 42.
Page 47

2.6 Radio interference suppression filter
DC1-12xxxF…, DC1-32xxxF…, and DC1-34xxxF… variable frequency drives
feature an internal radio interference suppression filter. When combined with
a motor cable that is screened and earthed 360° on both ends, they make it
possible to comply with the stringent EMC limits for conducted interference
corresponding to category C in the 1st environment (IEC/EN 61800-3).
This requires installation in accordance with EMC requirements, as well as
not exceeding permissible motor cable lengths.
• 1 m for category C1 in the 1st environment (only DC1-12…),
• 5 m for category C2 in the 1st and 2nd environment,
• 25 m for category C3 in the 2nd environment.
2 Engineering
2.6 Radio inter ference suppression filter
→
Longer motor cable lengths can be used if additional external radio
interference suppression filters (DX-EMC…) are used.
→
→
Additional measures used to reduce EMC limits and use longer motor cable
lengths are possible in combination with motor chokes and sine filters.
→
DC1-32… and DC1-34… three-phase variable frequency drives
can be operated within category C1 in the 1st environment only
if an external radio interference suppression filter is used.
For the rated radio interference suppression filters for DC1
variable frequency drives, please refer to Section 2.6, “Radio
interference suppression filter“, page 43.
The unscreened cable length between the radio interference
suppression filter and the variable frequency drive should not
exceed 300 mm (maximum of 500 mm depending on the setup
inside the metal-enclosed control panel).
In the case of power drive systems (PDS) with variable
frequency drives, electromagnetic compatibility (EMC)
measures must already be taken into account during the
engineering stage, as making changes during assembly and
installation and retroactively fixing things will be more
expensive.
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 43
Page 48

2 Engineering
2.7 Braking resistances
2.7 Braking resistances
In certain operating states, the motor may run as a generator in certain
applications (regenerative braking operation).
Examples include:
• Lowering in hoisting gear and conveyor applications
• Controlled speed reduction in the case of large load inertias
(flywheels)
• A fast speed reduction in dynamic travel drives
When the motor operates as a generator, its braking energy will be fed into
the variable frequency drive’s DC link via the inverter. DC link voltage U
DC
will be increased as a result. If the voltage value is too high, the DA1 variable
frequency drive will disable its inverter, after which the motor will coast
uncontrolled.
If there is a braking chopper and a connected braking resistance R
, the
B
braking energy fed back into the variable frequency drive can be dissipated in
order to limit the DC link voltage.
DC1-…B-A… variable frequency drives (frame sizes FS2, FS3, and FS4)
feature an integrated braking chopper. The brake resistors are connected to
the internal braking transistor with terminals DC+ and BR so that they will be
connected in parallel to the DC link. In addition to this, the braking chopper
must be enabled using parameter P-34 (= 1 or = 2).
The braking chopper will be switched on automatically if the braking energy
being fed back causes the DC link voltage to increase to the switch-on
voltage’s magnitude.
Device series Mains
connection
DC1-12… Single-phase 230V 390V 378V
DC1-32…
DC1-34…
Three-phase 230V 390V 378V
Three-phase 400V 780V 756V
Voltage class Braking chopper onBraking chopper
off
For example, in the case of DC1-34… variable frequency drives, the braking
chopper will be switched on at a DC link voltage of approximately 780 V DC
and then back off at 756 V DC. During this stage, the braking transistor and
the brake resistor will be active continuously.
44 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 49

2 Engineering
M
Motor
Mains
R
B
BRDC+
=
~
~
=
U
DC
2.7 Braking resistances
In the case of units with a frame size of FS2 or FS3, brake resistor DX-BR3100 (P
parameter P-34 must be set to a value of 1 in order to protect against thermal
overloads (braking chopper activated with electronic overload protection).
= 200 W) can be inserted underneath the heat sink. In addition,
D
Figure 15: DC1 variable frequency drive with a frame size of FS2 and a DX-BR3-100 brake
resistor
It is often difficult to specify a suitable brake resistor for specific applications.
This is due to the fact that not all of the application conditions required for
sizing will be available when the engineering stage starts. Because of this,
and as a simplification, brake resistors are instead usually classified for two
load groups:
• Low duty: Low load with short braking duration and low duty factor
(up to about 25 %), e.g., for horizontal conveyors and handling
equipment for bulk cargo and general cargo, end carriages, sliding doors,
and turbomachinery (centrifugal pumps, fans).
• High duty: High load with long braking duration and high duty factor
(at least 30 %), e.g., for elevators, downhill conveyors, winders,
centrifuges, flywheel motors, and large fans.
n
P
P
PEAK
t
P
RD
t
Brems
t
OFF
t
C
t
Brems
t
Figure 16: Braking cycle, fast motor stop with external brake resistor
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 45
Page 50

2 Engineering
2.7 Braking resistances
Selecting brake resistors
Brake resistors are selected based on continuous power dissipation P
maximum peak pulse power P
Peak
.
DB
and
The brake resistor must be adequate for both powers.
The maximum pulse power is defined by the braking torque – kinetic energy
during braking – that is fed back by the motor during braking. A
W
kin
simplified method that can be used is to take the variable frequency drive’s
braking power P
for sizing purposes, since the mechanical braking power will be
P
Peak
or the rated motor output and use it as peak pulse power
max
reduced by the motor’s and inverter’s efficiency.
W
P
∼ P
max
=1x
2t
Peak
The required rated power / continuous rating for braking resistance P
calculated using braking energy W
and cycle time tC:
kin
PDB=
W
kin
Braking
is
DB
kin
t
C
If the kinetic energy is not known, you will need the ratio of braking time
t
to cycle time tC:
Braking
DF[%] =
t
Braking
t
x 100 %
C
The required continuous rating for a duty factor of 10% (= DF[%]), for
example, can be calculated as follows:
PDB=P
Peak
x10 %
This means that the brake resistor’s continuous rating P
lower than maximum pulse power P
Resistance R
permissible resistance R
must be at least as high as the breaking transistor’s minimum
B
.
min
by the DF[%] factor.
Peak
Use brake resistors with the recommended R
→
values for the DC1 variable frequency drives’ ratings.
For the rated braking resistances for DC1 variable frequency
→
drives, please refer to Section 2.7, “Braking resistances“,
page 44.
will always be
DB
resistance
Brec
46 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 51

2.8 Motor chokes
M
3 ~
DX-LM3...
U
max
f
PWM
f
2
Mains
Motor
a
2 Engineering
2.8 Motor chokes
It is recommended to use a motor choke if using long cable lengths and/or
connecting several motors in parallel. The motor reactor is in the output of
the variable frequency drive. Its rated operational current must always be
greater than/equal to the rated operational current of variable frequency
drive.
For DC1 variable frequency drives, it is recommended to use a motor choke
for motor cable lengths of 100 meters or more. Doing so may result in the
following improvements:
• Longer maximum permissible screened motor cable length, up
to 200 m,
• Current smoothing and du/dt value (kV/s) attenuation, providing
additional protection for the winding insulation inside the motor,
• Motor noise and heat build-up will be reduced.
→
Figure 17: DX-LM3… rated operational data:
lengths for the relevant EMC interference category.
max
U
U
= 750 V, f2 = 0 - 400 Hz, f
max
= 8 - 32 kHz (P-17 setting on DC1)
PWM
It is also recommended to use a motor choke at the variable frequency
drive’s output if several motors with identical or different rated operational
data are being run in parallel (V/Hz control only). In this case, the motor choke
will compensate for the total resistance and total inductance decreases
caused by the parallel circuit and will attenuate the cables’ higher stray
capacitance.
For the rated motor chokes for DC1 variable frequency drives,
Take into account the maximum permissible motor cable
→
please refer to Section 2.8, “Motor chokes“, page 47.
For more information and technical data on DX-LM3…
motor chokes, please refer to instruction leaflet
IL00906003Z.
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 47
Page 52

2 Engineering
2.9 Sine filter
2.9 Sine filter
Sine filters are connected between a variable frequency drive’s output and
the motor. The voltage output by a sine filter will be virtually sinusoidal,
ensuring that:
• Conducted and radiated emissions will be reduced (EMC)
• Irritating noise levels and motor losses will be reduced
• Potential insulation damage will be minimized, extending the motor’s life
as a result
→
→
→
→
Sine filters require for the variable frequency drive to modulate
the output voltage with V/Hz control.
In order to meet this requirement, parameter P-60 on DC1-…E1
variable frequency drives needs to be set to a value of 1 (this is
the default setting).
When there is a load-dependent or thermal overload, DC1
variable frequency drives will automatically reduce the carrier
frequency (f
modulation, effective rms value of 4 kHz)
When used with a DX-SIN3… sine filter, the minimum
permissible carrier frequency (f
frequency drive must be set to 8 kHz using parameter P-17.
For the rated sine filters DX-SIN3… for DC1 variable frequency
drives, please refer to the technical data chapter in
Section 6.11, “Sine filter“, page 171.
) to a minimum value of 8 kHz (double
PWM
) on the DC1 variable
PWM
48 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 53
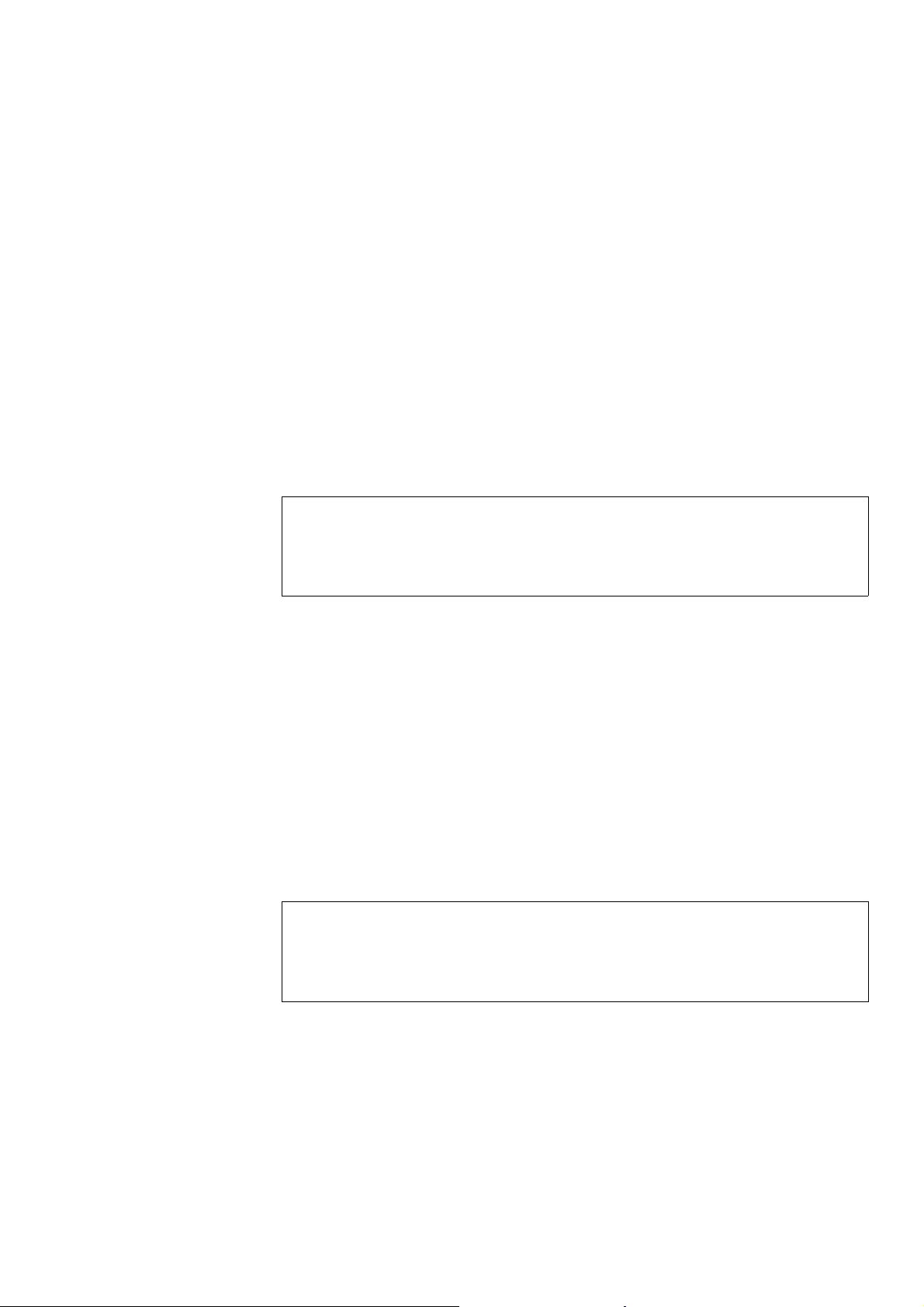
2.10 Switching to the output side
Typical applications for switching at the DC1 variable frequency drive’s
output include:
• Cases in which a bypass circuit is implemented.
• Cases in which it must be possible to switch on various motors as
necessary.
• Cases in which several motors are connected in parallel and need to be
switched individually.
• Cases in which the motor must be de-energized quickly in the event of
an emergency switching off (safety shutdown).
When an individual motor is switched off, the inverter needs to be disabled
first (the FWD/REV enable signal must be switched off) before the contacts
(contactor, switch-disconnector) on the variable frequency drive’s output side
are opened.
2 Engineering
2.10 Switching to the output side
NOTICE
Switching off during operation in vector mode (P-60 = 0 / 2 / 3 / 4)
is not permissible and may result in damage to the switching
device and the variable frequency drive.
2.10.1 Contactors
In cases in which the output is switched to a running motor, parameter P-33
must have a value of 1 (flying restart circuit enabled). When this condition is
met, the DC1 variable frequency drive will be automatically synchronized
with the running motor with the enable signal (FWD/REV).
The contactors on the output side of DC1 variable frequency drives need to
be sized based on utilization category AC-3 (IEC/EN 60947-4-1) for the
assigned rated motor current and the corresponding rated operating voltage.
When a motor is being switched off, the DC1 variable frequency drive’s
output (inverter) must be disabled (the FWD/REV enable signal must be
switched off) before the contacts are opened.
NOTICE
Switching off during operation in vector mode (P-60 = 0 / 2 / 3 / 4)
is not permissible and may result in damage to the contactor and
the variable frequency drive.
→
Vacuum contactors should not be used at a variable frequency
drive’s output, as they are not suitable for switching at low
frequencies.
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 49
Page 54

2 Engineering
a
2.10 Switching to the output side
2.10.2 switch-disconnectors
Switch-disconnectors are used as repair and maintenance switches in
industrial, trade, and building service management applications. At the output
of variable frequency drives, they are primarily used to locally switch off
motors (pumps, fans) that pose a risk of unintended starting during
maintenance or repairs. In order to provide greater safety, these switchdisconnectors can be locked out with the use of padlocks, meaning they
have characteristics comparable to those of main switches as defined in
EN 60204.
Eaton T0…/MSB/…, P1…/MSB/…, and P3…/MSB/… enclosed switchdisconnectors are designed for local installation with an IP65 degree of
protection. The internal screening plate ensures that screened motor cables
can be easily connected in a way that meets EMC requirements.
For more information and technical data on T0…/MSB/
…, P1…/MSB/…, and P3…/MSB/… switchdisconnectors, please refer to instruction leaflets
IL008020ZU and IL008037ZU.
The switch-disconnectors on the output side of DC1 variable frequency
drives need to be sized based on utilization category AC-23A
(IEC/EN 60947-3) for the assigned rated motor current and the corresponding
rated operating voltage.
When a motor is being switched off, the DC1 variable frequency drive’s
output (inverter) must be disabled (the FWD/REV enable signal must be
switched off) before the contacts are opened.
NOTICE
Switching off during operation in vector mode (P-60 = 0 / 2 / 3 / 4)
is not permissible and may result in damage to the switchdisconnector and the variable frequency drive.
50 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 55

2.10.3 Bypass circuit
Q1 F1
I>I>I
>
Q11
S1
M1
F2
T1
M
3∼
L1
L2
L3
UVW
①
②
②
2 Engineering
2.10 Switching to the output side
WARNING
terminals U, V, and W to the power feed system (L1, L2, L3).
Connecting the mains voltage to the output terminals can result
in the variable frequency drive being irreparably damaged.
If a bypass is required, use mechanically linked switches or contactors or
electrically interlocked contactors in order to ensure that the motor terminals
will not be simultaneously connected to the mains connection and to the
variable frequency drive’s output terminals.
a Q1 thermal overload and short-circuit protection
b F1 fuse and F2 overload relay (alternative to ①)
Q1 Mains contactor
T1 DC1 variable frequency drive
S1 Interlocked switching between variable frequency drive
and bypass
F2 Motor protection (overload relay, alternative to ①)
M1 Three-phase motor
Never connect the DC1 variable frequency drive’s output
Figure 18: Bypass motor control (example)
When the motor is being switched off, the output (U, V, W) of variable
frequency drive T1 must be disabled (the FWD/REV enable signal must be
switched off) before the contacts at S1 are opened.
NOTICE
Switching off during operation in vector mode (P-60 = 0 / 2 / 3 / 4)
is not permissible and may result in damage to the switching
device and the variable frequency drive.
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 51
Page 56

2 Engineering
2.10 Switching to the output side
2.10.4 Connecting Motors in Parallel
→
Connecting motors in parallel will reduce the load resistance at the variable
frequency drive’s output. This will cause the total stator inductance to
decrease and the cables’ stray capacitance to increase, resulting in greater
harmonic distortion when compared to a single-motor circuit.
In order to reduce the amount of current distortion, it is recommended to use
a motor choke or a sine filter at the variable frequency drive’s output when
there are three motors or more.
→
→
If multiple motors are connected in parallel, the total of their
motor currents must be lower than the DC1 variable frequency
drive’s rated operational current.
When running multiple motors in parallel with a single variable
frequency drive, the individual motors’ outputs should not be
more than three output classes apart.
If several motors are being run in parallel, you will not be able to
use the variable frequency drive’s electronic motor protection.
As a result, each individual motor must be protected with
thermistors and/or an overload relay.Within a frequency range of
20 to 120 Hz, the PKE electronic motor-protective circuitbreaker can be used for motor protection at a DC1 variable
frequency drive’s output as well.
→
→
NOTICE
If multiple motors are being run simultaneously using a single
variable frequency drive, make sure to size the individual
motors’ contactors as required for utilization category AC-3.
The
motor contactors must be selected according to the rated
operational currents of the motors that will be connected.
The total of the motor currents in operation, plus, for example,
the inrush current of a motor being added, must be less than
the rated operational current of the variable frequency drive.
In applications with motors that will be connected and
disconnected, we recommend using a motor choke or a sine
filter.
Connecting multiple motors in parallel requires for the variable
frequency drive to modulate the output voltage with V/Hz
control. In order to meet this requirement, parameter P-60 on
DC1-…E1 variable frequency drives needs to be set to a value of
1 (= default setting).
52 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 57

2 Engineering
2.10 Switching to the output side
→
output classes can be connected (e.g., calendar drive).
When using vector mode with P-60 = 2, 3 or 4, it is not
When using vector mode (P-60 = 0), two motors with identical
→
Q11
F1
M1
permissible to run multiple motors connected in parallel!
①
Q12
U1 V1 W1 U1 V1 W1 U1 V1 W1
M
3
˜
F2
M2
M
3
˜
Q13
F3
M3
a Motor choke (DX-LM3…) or sine filter
(DX-SIN3…)
Q11, Q12, Q13, …: Motor protection
(utilization category AC-3)
F1, F2, F3, …: Overload relay (bimetallic relay
or PKE)
M
3
˜
Figure 19: Example: Parallel connection of several motors to one variable frequency drive
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 53
Page 58

2 Engineering
2.11 Three-phase motors
2.11 Three-phase motors
DC1-…E1 variable frequency drives can be used to drive the following
three-phase AC motors with sensorless control:
• Three-phase asynchronous motor (DAM),
• Permanent magnet motor (PM),
• Brushless DC motors (BLDC)
• Synchronous reluctance motor (SynRM).
When used with their default settings, DC1-…E1 variable frequency drives
are configured for V/Hz modulation for the rated motor output of a threephase asynchronous motor, i.e., this is the intended application for “out-ofthe-box operation” without configuring any parameters.
2.11.1 Motor Selection
→
→
Configurations such as the ones used in outrunner motors and slip-ring
motors also fall under the three-phase asynchronous motor category (which
in turn is also referred to as the “squirrel-cage rotor” or “standard motor”
category). These motors can also be run with DC1 variable frequency drives,
but will normally require additional engineering, modifying the various
parameters, and detailed information from the motor manufacturer.
General recommendations for motor selection:
• Only use motors that have insulation class F (maximum steady state
temperature of 155 °C ) at least.
• Choose 4 pole motors preferably (synchronous speed: 1500 min
50 Hz and 1800 min
• Take
• Do not oversize the motor, i.e., the motor should not be more than one
rating level higher than the rated motor output.
• In the case of undersized motors, the motor output for continuous
operation should not be more than one rating level lower than the rated
rating level (in order to ensure that the motor will be protected).
• When running tests or commissioning a system with significantly lower
motor outputs, the motor’s rated operational current must be adjusted
using parameter P-08 (“rated motor current”).
Vector mode, as well as running PM, BLDC, or SyncRM motors,
will need for parameters P-60 and P-61 on DC1 variable
frequency drives to be configured accordingly.
Check whether the DC1 variable frequency drive you selected
and the AC motor you will be using are compatible with each
other as per the corresponding voltage (mains and motor
voltage) and rated operational current.
-1
at
-1
at 60 Hz).
the operating conditions into account for S1 operation (IEC 60034-1).
54 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 59
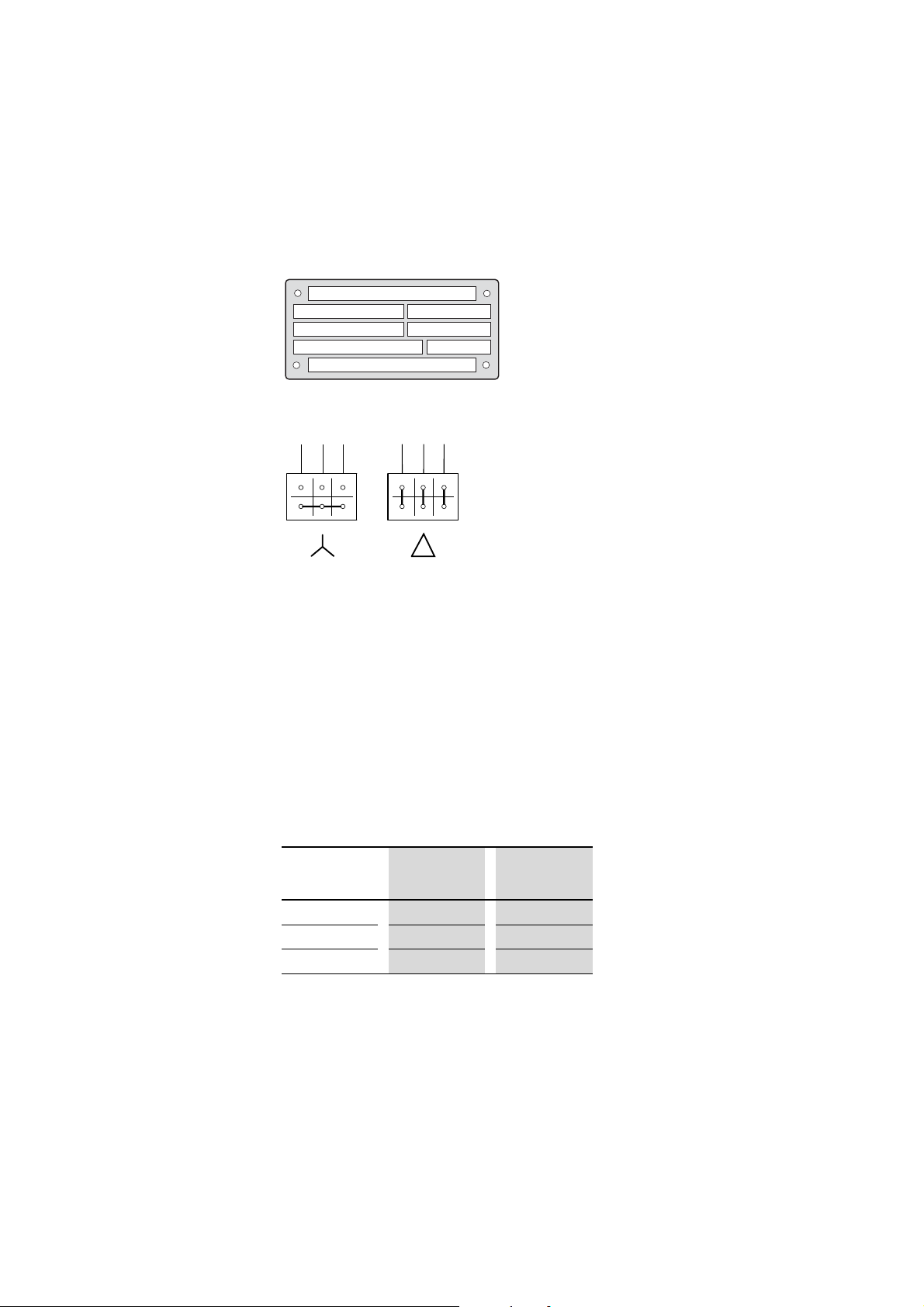
2.11.2 Circuit types with three-phase motors
1410 min
230/400 V 3.2/1.9 A
50 Hz
-1
0,75 KW
cos ϕ 0.79
U1 V1 W1
W2 U2 V2
U1 V1 W1
W2 U2 V2
A three-phase motor’s stator winding can be connected in a star connection
or delta circuit as per the mains voltage (U
rated operational data on the motor’s nameplate (rating plate).
2 Engineering
2.11 Three-phase motors
= output voltage U2) and the
LN
Figure 20: Example of a nameplate (rating plate)
Figure 21: Configuration types:
for a three-phase asynchronous motor
Star-connected circuit (left), Delta circuit (right)
Examples based on figures 20 and 21
Motor in star connection,
mains voltage: three-phase 400 V; output voltage: three-phase 400 V
DC1-342D2…
Motor in delta circuit,
mains voltage: single-phase 230 V; output voltage: three-phase 230 V
DC1-124D3…
Motor connection
DC1 variable
frequency drive
U U1 (-U2) T1 (-T4)
V
CO
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 55
according to
IEC
V1 (-V2) T2 (-T5)
W1 (-W2) T3 (-T6)
according to
UL
Page 60

2 Engineering
2.11 Three-phase motors
2.11.3 Permanent magnet motor (PM motor),
PM motors are three-phase motors that are excited by permanent magnets
and have a speed that is directly proportional to the supply frequency.
Together with a high-pole-count, three-phase stator winding, the permanent
magnets on the rotor make it possible to produce large torques at low
speeds, which in turn makes it possible to forgo the use of a gearbox in
many applications.
By combining high efficiency and good power factor characteristics with a
lightweight and compact construction, PM motors make for a compelling
choice when compared to asynchronous motors. Accordingly, these highefficiency motors are primarily found in roller and press drives, agitator and
mill drives, drives for extruder screws, and drives used by the crane industry
for a variety of applications.
→
In order to use vector control with permanent magnet motors,
the values for parameters P-60, P-61, and P-62 on DC1 variable
frequency drives need to be changed:
• Change the value for P-60 to 2 (“PM motor speed control”).
• Change the value for P-61 to 1 (“Motor identification”).
Automatic autotune to determine the motor parameters
when the motor is stationary.
• P-62 (“MSC gain”). Adjust the gain factor for the speed
controller.
2.11.4 Brushless DC motors (BLDC motors)
Contrary to what their name might seem to imply, brushless DC motors
(BLDC, also referred to as “EC motors”) do not have the same configuration
as a DC motor, but are instead put together the same way as three-phase
synchronous motors. The three-phase AC field coil in brushless DC motors
generates a rotating magnetic field that pulls the permanently excited rotor
along. When using vector control, the rotor position is determined based on
the back-EMF generated in the stator’s coils. This means that the variable
frequency drive’s output voltage must always be live in all three phases
(block voltage control), even when the rotor is stationary. If this condition is
met, short current pulses will be generated when the system is stationary –
these pulses will not move the motor, but they will have an effect on the
rotor’s magnetic field.
The control response for BLDC motors is to a large extent the same as that
for a shunt DC motor. BLDC motors are primarily used in drive systems for
machine tools, servo drives in conveyor systems, and compressors and
metering pumps.
56 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 61

2 Engineering
2.11 Three-phase motors
→
In order to use vector control with brushless DC motors, the
values for parameters P-60, P-61, and P-62 on DC1 variable
frequency drives need to be changed:
• Change the value for P-60 to 3 (“Brushless DC motor speed
control”).
• Change the value for P-61 to 1 (“Motor identification”).
Automatic autotune to determine the motor parameters
when the motor is stationary.
• P-62 (“MSC gain”). Adjust the gain factor for the speed
controller.
2.11.5 Synchronous reluctance motor (SynRM)
Synchronous reluctance motors have the same configuration as a threephase asynchronous motor. In order to prevent eddy currents, their rotor is
made of a soft magnetic material such as electrical steel, and in general
terms can have one of two different sheet cross-sections.
In the case of reluctance motors intended to be run as grid-connected
systems, the rotor additionally features a rotor cage (similar to that used in
asynchronous motors). This cage makes it possible for the motor to start
asynchronously on the grid until it synchronizes (“falls into step”) to it and is
able to follow the rotating field.
In the case of reluctance motors with a rotor that features salient poles with
flux directing sections and flux barrier sections, a variable frequency drive
with sensorless vector control is required (DC1-…E1). This combination
makes it possible to have a rotor speed that is synchronous with the rotating
field and achieve optimum operation even when there are load changes. The
losses in the rotor will be practically negligible within this context.
Synchronous reluctance motors have better efficiency than conventional
asynchronous motors and, in contrast to them, can meet the requirements
for the IE4 international efficiency class. Synchronous reluctance motors are
primarily used in turbomachinery (rotating equipment) in process
engineering, where they are used to drive pumps, fans, compressors, and
turbines, as well as mixers, centrifuges, and conveyor systems.
→
In order to use vector control with synchronous reluctance
motors, the values for parameters P-60, P-61, and P-62 on DC1
variable frequency drives need to be changed:
• Change the value for P-60 to 4 (“SyncRel motor speed
control”).
• Change the value for P-61 to 1 (“Motor identification”).
Automatic autotune to determine the motor parameters
when the motor is stationary.
• P-62 (“MSC gain”). Adjust the gain factor for the speed
controller.
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 57
Page 62
2 Engineering
a
2.11 Three-phase motors
2.11.6 Single-phase AC motors
It is strictly prohibited to use the DC1 variable frequency drives described in
this manual to run single-phase AC motors (induction motors), single-phase
asynchronous motors (capacitor motors), shaded-pole motors, etc.
There are other DC1 variable frequency drive models designed for use with
these motors: DC1-S1… and DC1-S2… with IP20 and IP66 degrees of
protection.
2.11.7 Connecting EX motors
The following aspects must be taken into account when connecting
hazardous location motors:
For more information on how to run single-phase AC motors
using the DC1 variable frequency drive, please refer to
Application Note AP040037EN, “DC1 Variable Frequency Drives
– Operating Single Phase Motors”.
ftp://ftp.moeller.net/DRIVES/POWERXL/01_APPLICATION_NOTE/
Deutsch/DC1/AP040037DE_DC1_Betrieb_von_Einphasenmotoren.pdf
• A DC1 variable frequency drive can be installed in an explosion-proof
enclosure within the hazardous location or in a control panel outside the
hazardous location.
• All applicable industry-specific and country-specific regulations for
hazardous locations (ATEX 100a) must be complied with.
• The specifications and instructions provided by the motor’s
manufacturer with regard to operation with a variable frequency drive –
e.g., whether motor reactors (dV/dt limiting) or sine filters are required –
must be taken into account.
• Temperature sensors in the motor windings (thermistor, Thermo-Click)
must not be connected directly to the variable frequency drive, but
instead must be connected through a relay approved for the hazardous
location (e.g. EMT6).
58 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 63

3 Installation
3.1 Introduction
3 Installation
3.1 Introduction
This chapter provides a description of the installation and the electrical
connections for the variable frequency drive DC 1 series.
3.2 Mounting position
→
→
→
DC1-…CE1 variable frequency drives have a conformal coating on their
printed circuit boards (coated boards) that provides enhanced protection from
moisture and soiling.
DC1 variable frequency drives are available with two enclosure versions:
While installing and/or assembling the variable frequency drive,
cover all ventilation slots in order to ensure that no foreign
bodies can enter the device.
Perform all installation work with the specified tools and without
the use of
For more information on how to install DC1 variable frequency
drives with the various available degrees of protection and
frame sizes, please refer to the following instruction leaflets:
• IL04020009Z (IP20 in FS1, FS2, FS3)
• IL04020024ZU (IP20 in FS4)
• IL04020013Z (IP66 in FS1, FS2, FS3)
excessive force.
/
• IP20
• IP66
Without the required additional measures, using the device in the following
environments is strictly prohibited:
• Explosion-proof Ranges
• Environments with damaging substances:
• Environments with mechanical vibration and impact loads that go
• Areas in which the variable frequency drive takes care of safety
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 59
NEMA 0 degree of protection: for use in control panels.
/
NEMA 4X protection type: This enclosure version protects against
moisture and dust and is designed for use in harsh conditions.
• Oils and acids
• Gases and fumes
• Dust
• Radiated noise
beyond the requirements in EN 50178.
functions that must guarantee machine and personnel protection.
Page 64

3 Installation
3.3 Mount in g
3.3 Mounting
The engineering instructions in this section are meant to show how to install
the device in a suitable enclosure for devices with degree of protection IP20
in compliance
regulations.
• The enclosures must be made of a material with high thermal
conductivity.
• If a control panel with ventilation openings is used, the openings must
be located above and below the variable frequency drive in order to allow
for proper air circulation. Air should be delivered from the bottom and
conveyed outwards through the top.
• If the environment outside the control panel contains dirt particles (e.g.,
dust), a suitable particle filter must be placed on the ventilation openings
and forced ventilation must be used.The filters must be maintained and
cleaned if necessary.
• An appropriate enclosed control panel (without ventilation openings)
must be used in environments containing large percentages or amounts
of humidity, salt, or chemicals.
with standard EN 60529 and/or any other applicable local
→
Figure 22: Surface mounting on metal plate
IP66 DC1 variable frequency drives must be installed as required by the local
conditions for this degree of protection.
Install the DC1 variable frequency drive only on a nonflammable
mounting base (e.g., on a metal plate).
60 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 65

3.3.1 Mounting position
≦ 30º
≦ 30º
≦ 30º
≦ 30º
3 Installation
3.3 Mount in g
DC1 series variable frequency drives are designed to be mounted vertically.
The maximum permissible inclination is 30°.
3.3.2 Cooling measures
Figure 23: Mounting position
To ensure that there is sufficient air circulation, appropriate thermal
clearances must be maintained, with these clearances depending on the size
of the specific variable frequency drive.
c
a
1234567891011 1234567891011
c
b
c
a
a
c
b
0
REV FWD
OFF
PWR
ON
a
Figure 24: Clearances for air cooling (left: IP20; right: IP66)
The variable frequency drives can be mounted side by side
→
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 61
without any lateral clearance between them.
Page 66

3 Installation
cc
V
V
VAR
EMC
3.3 Mount in g
When variable frequency drives with internal fans are installed vertically over
each other, an air baffle must be placed between the devices. Failure to do
so may expose the device on top to a thermal overload caused by the guided
air flow (device fan).
Figure 25: Deflector due to increased circulation caused by device fan
Devices with high magnetic fields (e. g. reactors or
→
transformers) should not be installed close to the variable
frequency drive.
Table 3: Recommended values for minimum clearances and required cooling air
(see fig. 24, 25)
Size a b c Airflow
mm in mm in mm in m3/h ft3/min
For degree of protection IP20
FS1
FS2 50 1.97 46 1.81 75 2.95 37.38 22
2)
FS3
FS4
For degree of protection IP66
FS1 10 0.39 12.5 0.49 200 7.87 – –
FS2
2)
FS3
1) ft3/min = CFM (cubic foot per minute)
2) For UL conformity, the maximum permissible ambient air temperature over a period of 24 hours is limited to
+45 °C for the DC1-127D0…, DC1-32011…, and DC1-32018… variable frequency drives.
50 1.97 33 1.3 50 1.97 18.69 11
50 1.97 52 2.05 100 3.94 101.94 60
50 1.97 52 2.05 100 3.94 203.88 120
10 0.39 12.0 0.47 200 7.87 – –
10 0.39 13.0 0.51 200 7.87 – –
1)
62 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 67

3 Installation
①
Figure 26: Minimum required clearance in front of the
variable frequency drive when installed in an
enclosure (control panel)
Size with IP20 degree of protection
Minimum clearance ①
FS1, …, FS4 ≧ 15 mm (≧ 0.59 inch)
FS1, …, FS4 with DX-NET-SWD3 and
SWD4-8SF2-5
≧ 50 mm (≧ 1.97 inch)
3.3 Mount in g
The values specified in Table 3 are recommended values for an ambient
temperature of up to +50 °C with an IP20 degree of protection or +40 °C
with an IP66 degree of protection, an installation altitude of up to 1000 m,
and a switching frequency of up to 8 kHz.
→
Typical heat loss makes up about 3% of the operational load
conditions.
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 63
Page 68

3 Installation
3.3 Mount in g
3.3.3 fixing
All DC1 variable frequency drive frame sizes can be mounted with screws.
Moreover, frame sizes FS1 to FS3 with an IP20 degree of protection can be
mounted on a mounting rail as well.
3.3.3.1 Fixing with screws
→
→
a1
Dimension and weight specifications for the DC1 variable
frequency drive can be found in the
Section 6.3, “Dimensions“, page 148.
Use screws with a washer and split washer with the
permissible tightening torque in order to protect the enclosure
and safely and reliably mount the device.
1
a1
b1
b1
2
3
Figure 27: Mounting dimensions
First fit the screws at the specified positions, mount the variable
frequency drive and then fully tighten all screws.
Table 4: Installation dimensions, screws, tightening torques
Size Degree of
protection
FS
FS1 IP20 NEMA 0 50 1.97 170 6.69 4 M4 1 8.85
FS1 IP66_x NEMA 4X 184.5 5.85 189 7.44 4 M4 1.2 - 1.5 10.62 - 13.27
FS2 IP20 NEMA 0 75 2.95 215 8.46 4 M4 1 8.85
FS2 IP66_x NEMA 4X 176 6.93 200 7.87 4 M4 1.2 - 1.5 10.62 - 13.27
FS3 IP20 NEMA 0 100 3.94 255 10.04 4 M4 1 8.85
FS3 IP66_x NEMA 4X 198 7.78 252 9.9 4 M4 1.2 - 1.5 10.62 - 13.27
FS4 IP20 NEMA 0 125 4.92 400 15.75 4 M6 4 35.4
1 in = 1’’ = 25.4 mm; 1 mm = 0.0394 in
IP NEMA mm in mm in Quantity Size N/m lb-in
a1 b1 Screw Tightening torque
64 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 69

3.3.3.2 Fixing on a mounting rail
35
1
7.5
15
1.38”
0.04”
0.29”
0.59”
As an alternative to screw fixing, DC1 variable frequency drives with sizes
FS1, FS2 and FS3 and a degree of protection of IP20 can also be mounted on
a mounting rail as per IEC/EN 60715.
3 Installation
3.3 Mount in g
→
Figure 28: Mounting rail conforming with IEC/EN 60715
mounting rail (15 mm) preferably.
If you use EMC mounting adapters (DX-EMC-MNT-…), use a tall
If you use EMC mounting adapters (DX-EMC-MNT-…), use a tall
→
mounting rail (15 mm) preferably.
To do this, place the variable frequency drive on the mounting rail from
above [1] and press it down until it snaps into place [2].
1
EMC
VAR
EMC
VAR
2
Figure 29: Fixing on a mounting rail
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 65
Page 70

3 Installation
2
1
3
VAR
EMC
f 5 mm
(f 0.197“)
3.3 Mount in g
Dismantling from mounting rails
To remove the device, push down the spring-loaded clip. A cutout
marked on the lower edge of the device is provided for this purpose.
A flat-bladed screwdriver (blade width 5 mm) is recommended for
pushing down the clip.
Figure 30: Dismantling from mounting rails
66 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 71

3.4 IP66 / NEMA4X degree of protection
= 4 x M4
1 Nm (8.85 lb-in)
FS1, FS2, FS3
IP66 DC1 variable frequency drives are available in two versions:
• DC1-…-A66N: Activation via control signal terminals
• DC1-…-A6SN: Controlled with controls on the front and/or control signal
terminals
3 Installation
3.4 IP66 / NEMA4X degree of protection
0
R
E
V
F
W
D
OF
P
F
W
R
ON
DC1-…-A66N DC1-…-A6SN
Figure 31: IP66 variants
The units must be mounted, with four screws and in a vertical position, on a
wall or panel that is made of nonflammable material and is stable enough to
hold the variable frequency drive’s weight.
Figure 32: Openings for fixing
screws
On the DC1-…-A6SN version, the main disconnect switch can be locked in
the OFF position with a standard padlock.
OFF
PWR
Figure 33: DC1-…-A6SN with
padlock
0
REV FWD
ON
OFF
PWR
ON
⌀ = 5 mm → 2 x
Push on the center of
the switch in order to
open the opening for
the padlock.
( = 0.20" → 2 x)
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 67
Page 72

3 Installation
3.5 E MC i ns tal lat ion
3.5 EMC installation
The responsibility to comply with the legally stipulated limit values and thus
the provision of electromagnetic compatibility is the responsibility of the end
user or system operator. This operator must also take measures to minimize
or remove emission in the environment concerned. He must also utilize
means to increase the interference immunity of the devices of the system.
→
The technology and system of a variable frequency drive cause the flow of
high frequency leakage current during operation. Because of this, all earthing
elements must be low-impedance elements connected in such a way as to
establish an electrical contact across a large surface area.
With leakage currents greater than 3.5 mA, in accordance with VDE 0160 or
EN 60335, either
• the cable cross-section of the protective conductor must be 10 mm
• the protective conductor must be open-circuit monitored, or
• the second protective conductor must be fitted.
For an EMC-compliant installation, we recommend the following measures:
• installation of the variable frequency drive in a metallically conductive
housing
with a good connection to ground,
• screened motor cables (short cables).
In a magnet system (PDS) with variable frequency drives, you
should take measures for electromagnetic compatibility (EMC)
while doing your engineering, since changes or improvements
to the installation site, which are required in the installation or
while mounting, are normally associated with additional higher
costs as well.
2
,
→
Ground all conductive components and housings in a drive
system
possible cross-section (Cu-braid).
using as short a line as possible with the greatest
3.5.1 EMC measures in the control panel
In order to have an installation that meets EMC requirements, make sure to
connect all the metallic parts in the devices and in the control panel to each
other across a large area and in a way that will make it possible to conduct
high frequencies. Mounting plates and control panel doors should be
connected to the panel by means of short drain wires with an electrical
contact established across a large surface area.
→
68 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Do not make connections to painted surfaces (electrolytic
oxidation, yellow chromated).
Page 73

3 Installation
≧ 100 mm
(≧ 3.34“)
②①
3.5 E MC i ns tal lat ion
→
→
→
Install the variable frequency drive as directly as possible
(without spacers) on a metal plate (mounting plate).
Route mains and motor cables in the control cabinet as close to
the ground potential as possible. This is because free moving
cables act as antennas.
If routed in parallel, cables carrying high frequencies (e.g.,
screened motor cables) and clean cables (e.g., mains supply
cable, control and signal cables) should be installed at a distance
of at least 100 mm from each other in order to avoid
electromagnetic interference. You should also use separate
cable entries if there is a great difference in voltage potentials.
If control cables and power cables need to cross, they should
always do so at a right angle (90°).
Figure 34: Cable routing
→
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 69
Do not route the control and signal cables in the same
conduit as the power cables .
Analog signal cables (measured values, setpoints, and
correction values) must be routed inside screened conduit.
Page 74

3 Installation
a
b
a
b
3.5 E MC i ns tal lat ion
3.5.2 Earthing
Figure 35: Separate routing
a Power cable: mains voltage, motor connection
b Control and signal lines, fieldbus connections
The protective earth (PE) in the control panel should be connected from the
mains supply to a central earth point (mounting plate, system earth). The PE
conductor’s cross-sectional area must be at least as large as that of the
incoming mains supply cable. If there are leakage currents greater than
3.5 mA, the PE conductor must have a minimum cross-sectional area of
10 mm2.
3.5.2.1 Protective earth
Every variable frequency drive must be individually connected to the power
supply system’s protective earth directly at the location of installation
(system earthing). This protective earth must not pass through any other
devices.
All protective conductors should be routed in a star topology starting from
the central earth point, and all of the magnet system’s conductive
components (e.g. variable frequency drive, sine filter) should be connected.
The earth-fault loop impedance must comply with all locally applicable
industrial safety regulations. In order to meet UL requirements, UL-listed ring
cable lugs must be used for all earth wiring connections.
→
This refers to the legally required protective earth for a variable frequency
drive. An earthing terminal on the variable frequency drive, or the system
earth, must be connected to a neighboring steel element in the building
(beam, ceiling joist), an earth electrode in the ground, or a mains earth bus.
The earth points must meet the requirements set forth by the applicable
national and local industrial safety regulations and/or regulations for electrical
systems.
Avoid ground loops when installing multiple variable frequency
drives in one control panel. Make sure that all metallic devices
are to be grounded have a broad area connection with the
that
mounting plate.
70 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 75

3.5.2.2 Motor earthing
EMC
L3
U
L2/N
L1/L
VAR
PH1
M3
20 mm (0.79")
EMC
VAR
The motor earthing must be connected to one of the earthing terminals on
the variable frequency drive, as well as to the central earth point on the
power drive system (PDS). Earth connections to a neighboring steel element
in the building (e.g., beam, ceiling joist), a ground rod in the ground, or a
mains earth bus must meet the requirements set forth in the applicable
national and regional industrial safety regulations and/or regulations for
electrical systems.
3.5.2.3 Earth-fault protection
A fault current to earth can be produced by variable frequency drives due to
their system characteristics. DC1 series variable frequency drives have been
designed in such a way that the smallest possible fault current will be
produced in compliance with standards applicable worldwide. In the case of
devices powered with a three-phase supply (DC1-3…), this fault current
must be monitored by an AC/DC-sensitive type B residual current device
(RCD).
3 Installation
3.5 E MC i ns tal lat ion
3.5.3 Internal filters (EMC and VAR screws)
FS1 to FS3 DC1 variable frequency drives with an IP20 degree of protection
feature two screws on the left side that are labeled EMC and VAR.
Figure 36: EMC and VAR screw
In the case of units with a frame size of FS4, there will be two screws
labeled EMC: one next to the main terminals and another one next to the
motor terminals.
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 71
Page 76

3 Installation
3.5 E MC i ns tal lat ion
3.5.3.1 EMC screw
PH2
≧ 40 mm (≧ 1.57")
L2
L1
10 mm 2 x
M4
L3
EMC
L1
L2
L3
EMC
DC-
DC+
BR
EMC
1
2
3
4
5
6
7
8
9
1
0
11
WVU
E
MC
D
C+
B
R
D
C-
U
V
W
Figure 37: Two EMC screws on devices with a frame size of FS4
NOTICE
The screw labeled EMC must not be manipulated as long as the
variable frequency drive is connected to the mains or there is a
DC link voltage.
The EMC screw galvanically connects the EMC filter’s mains-
→
side capacitors to the earthing (PE). The screw must be
screwed in all the way to the stop (factory setting) in order for
the variable frequency drive to comply with EMC standards.
In the case of units with a frame size of FS4, the DC link filter (Y class
capacitors) is galvanically connected to the earthing (PE) via the two EMC
screws (motor connection side).
NOTICE
In the case of units with a frame size of FS4, both EMC screws
must be either installed or removed, i.e., it is not permissible for
one of them to remain installed while the other one is removed.
Due to their system characteristics, variable frequency drives with an internal
EMC filter will produce a larger fault current to earth than devices without a
filter. For applications in which this larger leakage current may cause
malfunction messages or disconnections (residual current device), the EMC
filter’s internal protective earth can be disconnected (remove the EMC screw
to do this).
72 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 77

3.5.3.2 VAR screw
3 Installation
3.5 E MC i ns tal lat ion
Local EMC regulations must be taken into account when doing so.
If necessary, a specific low-leakage-current EMC filter (DX-EMC...-L) must be
connected upstream.
In connections to isolated power sources (IT networks), the EMC and VAR
screw should be removed. The earth fault monitors required for IT networks
must be suitable for operation with power electronic devices (IEC 61557-8).
DC1 variable frequency drives with a frame size of FS1 to FS3 and an IP20
degree of protection are equipped with an overvoltage filter for the input
supply voltage. This overvoltage filter is designed to protect the devices from
noise pulses and high voltage magnitudes in the mains voltage. Pulse spikes
are typically caused by lightning strikes or by switching operations in other
high-power devices on the same supply.
If high potential tests are performed on a system, these overvoltage
protection components may cause the system to fail the test. In order to
make it possible to perform this type of hipot tests, the overvoltage
protection components can be disconnected by removing the VAR screw.
The screw must be screwed back in after the high potential tests are
performed and the test must then be repeated. The system must then fail
the test, indicating that the overvoltage protection components have been
reconnected.
3.5.4 Screen earth kit
NOTICE
The screw labeled VAR ( Figure 36, page 71) must not be
manipulated as long as the variable frequency drive is
connected to the mains or there is a DC link voltage.
Cables that are not screened work like antennas (sending, receiving).
→
The effectiveness of the cable screen depends on a good screen connection
and a low screen impedance.
→
For a proper EMC connection, cables emitting interference (e.g.
motor cables) and susceptible cables (analog signal and
measured values) must be screened and laid separately from
each other.
Use only screens with tinned or nickel-plated copper braiding.
Screens made of steel braids or metal conduits are either not
suitable or suitable only to a limited extent (depending on the
EMC environment).
→
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 73
Control and signal lines (analog, digital) should always be
grounded on one end, in the immediate vicinity of the supply
voltage source (PES).
Page 78
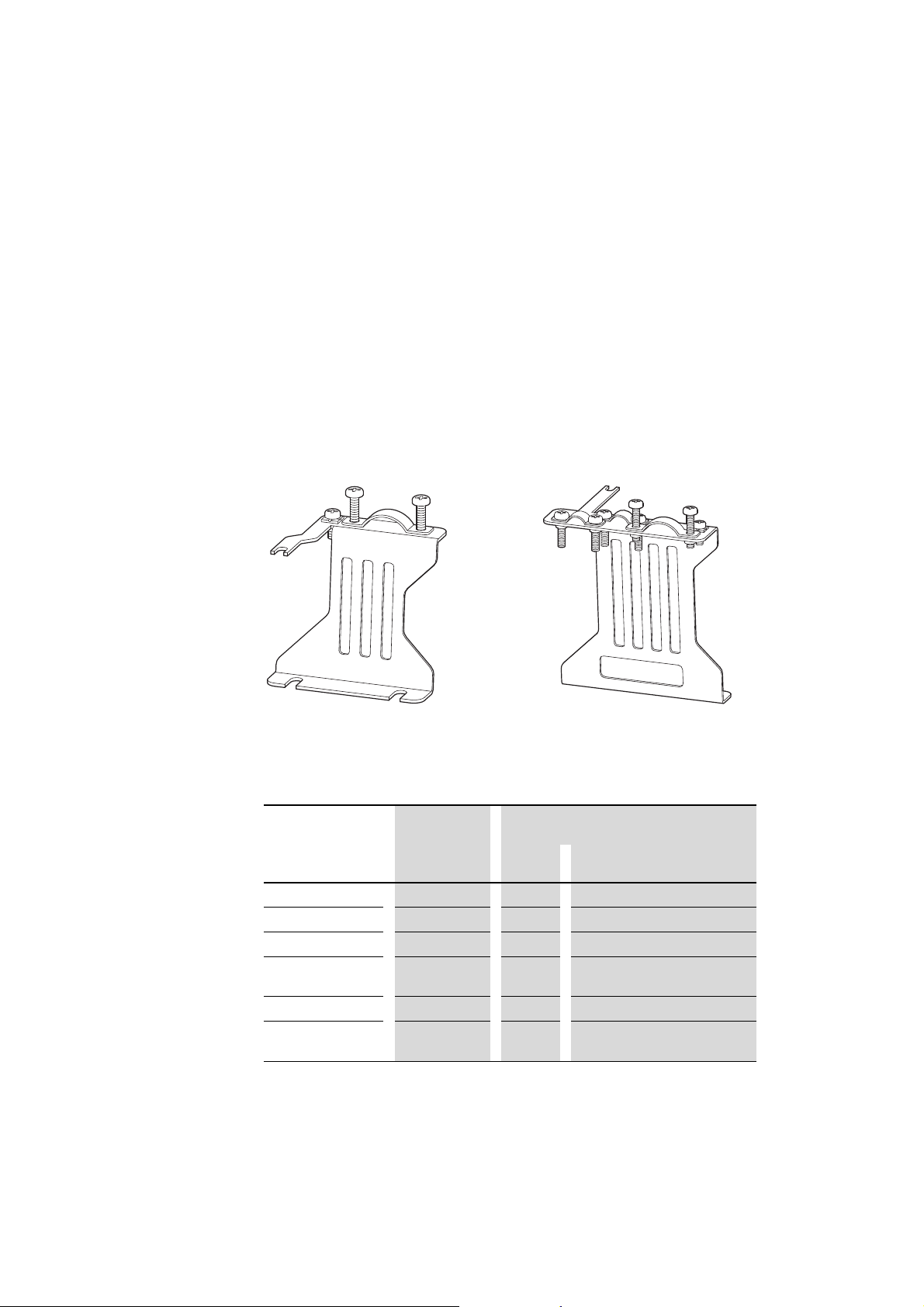
3 Installation
3.5 E MC i ns tal lat ion
3.5.5 EMC cable brackets
Frame-size-specific DX-EMC-MNT-… cable brackets can be used to easily
route and secure cables in the connection area of a DC1 variable frequency
drive with a frame size of FS1 to FS3 and an IP20 degree of protection.
These cable brackets are mounted on the variable frequency drive’s mains
connection side (DX-EMC-MNT-…N) and motor side (DX-EMC-MNT-…M)
using the corresponding mounting holes, and are then connected to the
drive’s earthing.
The cable brackets’ integrated hole pattern (M4 screw tread) makes it
possible to secure the cables being connected and relieve any strain on them
by using the corresponding gland plates. It also makes it possible to have a
good 360° EMC connection (PES) in the case of screened cables.
These cable brackets are made of galvanized sheet steel.
Figure 38: DX-EMC-MNT-...N (left), net and
Table 5: Cable brackets
Cable bracket
DX-EMC-MNT-1N FS1 1 Mains connection
DX-EMC-MNT-1M FS1 2 Control cables, motor connection
DX-EMC-MNT-2N
DX-EMC-MNT-2M FS2 3 Control cables, motor connection,
DX-EMC-MNT-3N
DX-EMC-MNT-3M FS3 3 Control cables, motor connection,
DX-EMC-MNT-...M (right), motor, cable brackets
Size DC1 in
IP20
FS2 1 Mains connection
FS3 1 Mains connection
Gland plates
Quantity Designation
external braking resistance
external braking resistance
We recommend connecting the DX-EMC-MNT-… cable
→
brackets to the variable frequency drive before installing it.
74 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 79

3 Installation
1.3 Nm
(11.5 lb-in)
FS1, FS2: = 4 x M4
FS3: = 4 x M5
DX-EMC-MNT ... N
DX-EMC-MNT ... M
3.5 E MC i ns tal lat ion
→
EMC cable brackets, please refer to instruction leaflet
IL040010ZU.
DX-EMC-MNT-… EMC cable brackets are sold as individual
For more information and technical data on DX-EMC-MNT-…
→
units. There are different brackets for each DC1 variable
frequency drive size (FS1 to FS3).
The gland plates and their fixing screws are included in the
equipment supplied with the cable brackets.
Connection example
Figure 39: EMC cable brackets (example: FS2 frame size)
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 75
Page 80

3 Installation
3.5 E MC i ns tal lat ion
3.5.6 General installation diagram
PE
AB AB
BA
⑥
⑤
①
12345678910111213
COM
DC+ BR U V W
~ AC
②
L2/N L3DC- L1/L
③
14 15 16 17 18
PES
PES
④
PE
PES
UVW
PES
PE
≧ 100 mm
(≧ 3.34“)
UVW
Figure 40: EMC installation
a Mains connection: Supply voltage, central earthing connection for control panel and machine
b External radio interference suppression filter: Optional DX-EMC… radio interference suppression
filter for longer motor cables or use in a different EMC environment
c Control connection: Connection for the digital and analog control cables and communication via RJ45
plug-in connection
d Motor connection: Connection (PES) between the screened motor cable and the motor’s terminal box,
made according to EMC requirements, with metal cable gland or with gland plate in the terminal box.
e Cable routing: Power cables (A) and control cables (B) spatially routed separately from each other.
If different potential levels need to cross, they should do so at a right angle as far as possible.
f Cable routing: Do not route power cables and control cables parallel to each other in a single cable
duct. If they need to be routed in parallel, they should be in separate metal cable ducts (in order to
meet EMC requirements).
76 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 81

3.6 Electrical Installation
3 Installation
3.6 Electrical Installation
CAUTION
Carry out wiring work only after the variable frequency drive has
been correctly mounted and secured.
DANGER
Electric shock hazard - risk of injuries!
Carry out wiring work only if the unit is de-energized.
NOTICE
Fire hazard!
Only use cables, circuit-breakers, and contactors that feature
the indicated permissible nominal current value.
NOTICE
On DC1 variable frequency drives, earth leakage currents can be
greater than 3.5 mA (AC).
Accordingly, as per IEC/EN 61800-5-1, an additional protective
conductor must be connected or the protective conductor’s
cross-sectional area must be at least 10 mm2.
→
DANGER
The components in the variable frequency drive’s power section
remain energized up to five (5) minutes after the supply voltage
has been switched off (intermediate circuit capacitor discharging
time).
Pay attention to hazard warnings!
Complete the following steps with the specified tools and
without using force.
.
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 77
Page 82

3 Installation
L
1/L
L2/N
L3
U
V
W
1
2
3
4
5
6
7
8
9
1
0
11
3.6 Electrical Installation
3.6.1 Connection to power section
The connection to the power section is normally made via the connection
terminals:
• L1/L, L2/N, L3, PE for
The phase sequence does not matter.
• DC+, DC-, PE for DC link coupling or if the device is being supplied with
DC voltage
• U, V, W, PE for the connection to the motor
• BR, DC+, PE for an external brake resistor
the mains-side supply voltage.
Figure 41: Connection in power section (schematic)
The number and the arrangement of the connection terminals used depend
on the variable frequency drive’s size and model.
NOTICE
The variable frequency drive must always be connected with
ground potential via a grounding conductor (PE).
78 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 83

3.6.1.1 Terminals in power section for units with IP20 degree of protection
L1/L L2/N L3
LN
PE
L1/L L2/N L3
L1 L2PEL3
UVW
PES
M
3
DC- L1/L L2/N L3
LN
PE
DC- L1/L L2/N L3
L1 L2PEL3
Table 6: Terminals (IP20)
Size
FS1 Connection with single-phase supply voltage:
Connection terminals Description
• DC1-1D… (115 V)
• DC1-12… (230 V)
Note:
Connection to terminal L3 not permissible!
Connection with three-phase supply voltage:
• DC1-32… (230 V)
• DC1-34… (400 V, 480 V)
Motor connection for three-phase motors:
• DC1-1D… (230 V)
• DC1-12… (230 V)
• DC1-32… (230 V)
• DC1-34… (400 V, 460 V)
3 Installation
3.6 Electrical Installation
FS2, FS3
PES
DC+ BR U V W
R
B
Connection with single-phase supply voltage (115 V, 230 V):
• DC1-1D (115 V)
• DC1-12 (230 V)
Note:
Connection to terminal L3 not permissible!
DC-: Negative DC link connection if using an external DC power supply
or DC link coupling.
The terminal’s plastic cover can be removed if necessary.
Connection with three-phase supply voltage:
• DC1-32… (230 V)
• DC1-34… (400 V, 480 V)
Note:
DC-: Negative DC link connection if using an external DC power supply
or DC link coupling.
The terminal’s plastic cover can be removed if necessary.
Motor connection for three-phase motors:
• DC1-1D… (230 V)
• DC1-12… (230 V)
• DC1-32… (230 V)
• DC1-34… (400 V, 460 V)
Note:
DC+: Positive DC link connection if using an external DC power supply,
M
3
DC link coupling, or braking chopper.
The terminal’s plastic cover can be removed if necessary.
BR: Terminal for brake resistor (braking chopper output).
The terminal’s plastic cover can be removed if necessary.
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 79
Page 84

3 Installation
PE L1 L2 L3
L2 L3EMC L1
PES
M
3 ~
VWDC+ UBR DC-
3.6 Electrical Installation
Size
FS4 Connection with three-phase supply voltage:
Connection terminals Description
• DC1-32… (230 V)
• DC1-34… (400 V, 480 V)
Motor connection for three-phase motors:
• DC1-32… (230 V)
• DC1-34… (400 V, 480 V)
Note:
, DC-: DC link connection if using an external DC power supply or DC
DC+
link coupling.
The terminals’ plastic cover can be removed if necessary.
DC+
, BR: Connection for external brake resistors (BR = braking chopper
output).
The terminals’ plastic cover can be removed if necessary.
80 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 85

3.6.1.2 Terminals in power section for units with IP66 degree of protection
On units with an IP66 degree of protection, the connection area is located
behind the lower enclosure cover.
To open the cover, release the two latches by turning them
counterclockwise (90 degrees) so that they are in a vertical position [1].
Once the latches are released, you can lift the cover off [2].
1
PZ 2
3 Installation
3.6 Electrical Installation
Control
③
Figure 42: Removing the lower housing cover
2
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 81
Page 86

3 Installation
L1/L L2/N L3
LN
PE
L1/L L2/N
L1 L2PEL3
L3
UVW
PES
M
3
L1/L L2/N L3
LN
PE
L1/L L2/N
L1 L2PEL3
L3
3.6 Electrical Installation
Table 7: Terminals (IP66)
Size
FS1 Connection with single-phase supply voltage:
Connection terminals Description
• DC1-1D… (115 V)
• DC1-12… (230 V)
Note:
Connection to terminal L3 not permissible!
Connection with three-phase supply voltage:
• DC1-32… (230 V)
• DC1-34… (400 V, 480 V)
Motor connection for three-phase motors:
• DC1-1D… (230 V)
• DC1-12… (230 V)
• DC1-32… (230 V)
• DC1-34… (400 V, 460 V)
FS2, FS3 Connection with single-phase supply voltage (115 V, 230 V):
• DC1-1D (115 V)
• DC1-12 (230 V)
Note:
Connection to terminal L3 not permissible!
Connection with three-phase supply voltage:
• DC1-32… (230 V)
• DC1-34… (400 V, 480 V)
Motor connection for three-phase motors:
UVW+BR
• DC1-1D… (230 V)
• DC1-12… (230 V)
• DC1-32… (230 V)
• DC1-34… (400 V, 460 V)
PES
M
3 ~
Note:
R
B
, BR: Connection for external brake resistors
+
(BR = Output Brake Chopper).
The terminals’ plastic cover can be removed if necessary.
Terminal + has the same function as terminal DC+ in devices with an
IP20 degree of protection.
82 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 87
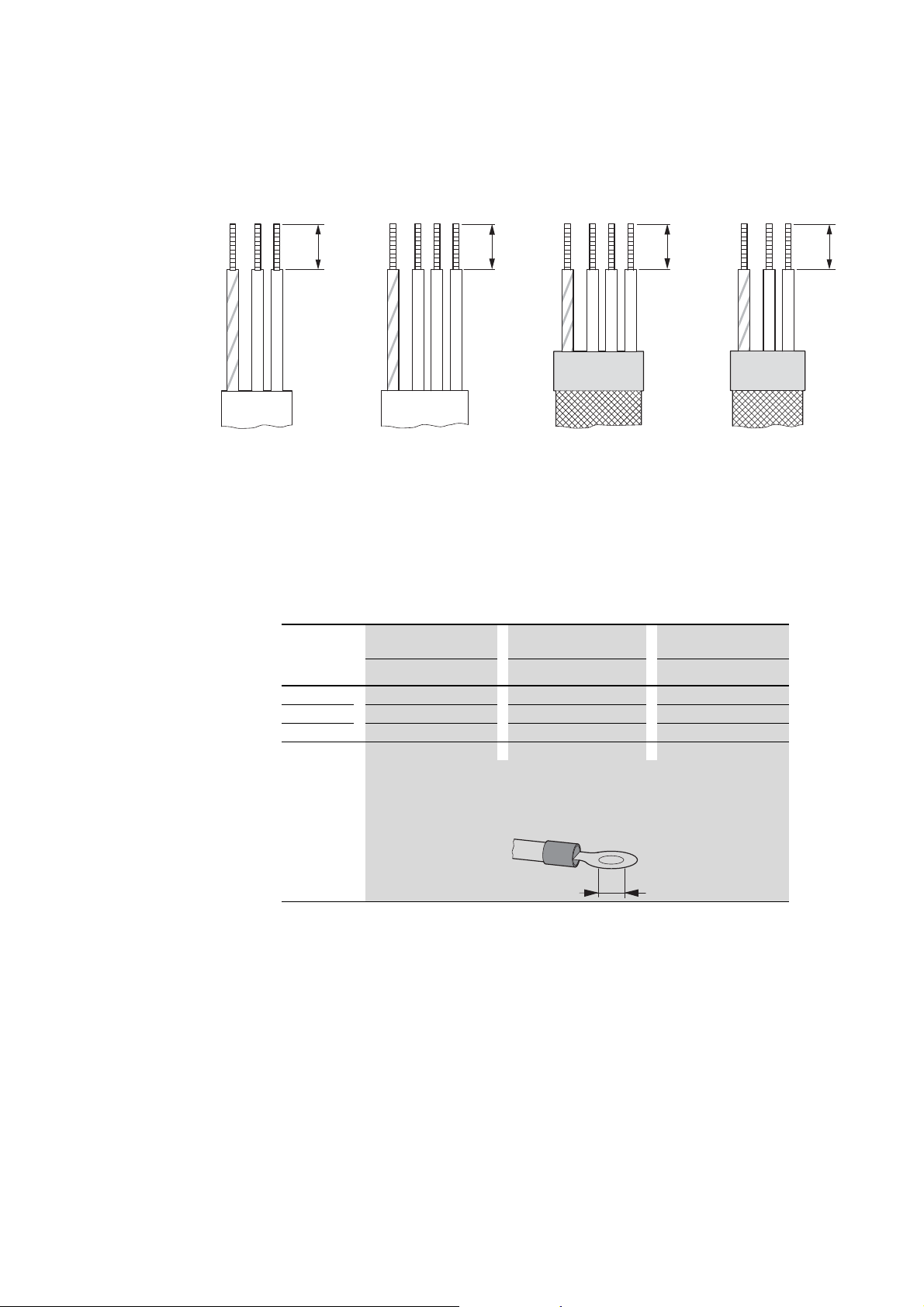
3.6.1.3 Stripping lengths and tightening torques
PE
A1
PE
3 Installation
3.6 Electrical Installation
PE
A1
Mains 1~ Mains 3~ Motor DC-Link, Brake Resistor
Figure 43: Stripping lengths in the power section
Mains = Electrical power network (supply voltage)
Motor = Motor connection
DC link = Internal DC link (DC link coupling)
Brake Resistor = Braking resistance (connection to brake chopper)
Table 8: Terminal capacities and tightening torques
Size A1 Maximum terminal
PE
A1
mm in mm
PE
capacity
2
A1
Tightening torque
AWG N/m lb-in
FS1 8 0.3 8 8 1 8.85
FS2
FS3
FS4
10 0.39 8 8 1 8.85
10 0.39 8 8 1 8.85
10 - 11 0.39 - 0.43 16 5 2.1 19
PE connection: Ring terminal with a diameter of 6.3
mm (0.25")
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 83
Page 88

3 Installation
a
b
PES
3.6 Electrical Installation
3.6.1.4 Connecting the motor cable
The screened cables between the variable frequency drive and the motor
should be as short as possible.
Figure 44: Connection on motor side
Connect the screening, on both sides and across a large area (360°
overlap), to the protective earth (PE) .The power screening’s
protective earth (PES) connection should be in the immediate proximity
of the variable frequency drive.and directly on the motor terminal box.
Prevent the screen earth kit from becoming unbraided, i.e. by pushing
the separated plastic covering over the end of the shielding or with a
rubber grommet on the end of the shielding. Terminate the cable screen
across a large area at the end (PES).
Alternatively, you can twist the screen braid and connect it to the
protective earth with a cable lug. In order to prevent EMC interference,
this twisted screen connection should be as short as possible
(recommended value for the twisted cable screen: b 1/5 a).
15 mm
(0.59’’)
PES
Figure 45: Screened connection cable in motor circuit
Screened, four-wire cable is recommended for the motor cables. The greenyellow conductor in these cables must be used to connect the motor’s and
variable frequency drive’s PE terminals, minimizing the loads on the cable
screen (high equalizing currents).
84 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 89

3 Installation
b
a
e
d
c
3.6 Electrical Installation
The following figure shows the construction of a four-wire, screened motor
line (recommended specifications).
Figure 46: Four-core, screened motor supply cable
a Cu shield braid
b PVC outer casing
c Flexible wire (copper strands)
d PVC core insulation, 3 x black, 1 x green–yellow
e Textile and PVC fillers
If there are additional subassemblies in a motor feeder (such as motor
contactors, overload relays, motor chokes, sine filters or terminals), the
shielding of the motor cable can be interrupted close to these subassemblies
and connected to the mounting plate (PES) with a large area connection.
Free or non-shielded connection cables should not be any longer than about
300 mm (max. 500 mm).
In the case of units with a frame size of FS1, FS2, or FS3, the
→
screened motor cable can also be connected using an EMC
cable bracket (DX-EMC-MNT…M) Section 3.5.5, “EMC
cable brackets“, page 74.
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 85
Page 90

3 Installation
③
Control
3.6 Electrical Installation
3.6.1.5 Cable glands IP66
In the case of units with an IP66 degree of protection, a total of six cable
glands can be installed. The lower section will come with two knockouts for
cable glands that have already been removed and that are intended for the
connections in the power section (Mains
center knockout in the lower section, which will not yet have been removed,
is intended for an external brake resistor. In addition, the upper enclosure
cover will feature three additional knockouts for routing control and bus
cables. If necessary, the corresponding plastic covers can be removed
(Control
).
, Motor
). Meanwhile, the
→
Figure 47: Punching out the knockouts (Example)
Insert a plastic gland into the knockout on the left – which could already have
been punched out at the factory – in order to thread in the power supply
cord. Due to EMC reasons, you should use an metallic EMC cable gland in
the knockout on the right in order to connect the motor cable screen across a
large area and ground it.
Make sure not to damage any terminal box parts on the inside
when breaking through the plastic covers.
86 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 91

Figure 48: Installing the cable glands
L2N
L3
U
V
W
L1N
1 2 3 4 5 6 7 8 9 10
1 2 3 4 5 6 7 8 9 10 11
Mains
Motor
①
②
3 Installation
3.6 Electrical Installation
→
Table 9: Cable glands that can be used (figures 47, 48)
Range Size Hole size PG-gland Metric gland
Control
section
Control ③
Power
section
Mains ①
Motor ②
protection.
FS1
FS2
FS3
FS1 3x22mm 3 x PG 13.5 3 x M20
FS2 1x22mm
FS3
2 x 22 mm 2 x PG 13.5
1 x PG 16
1 x PG 13.5
2x25mm
2 x PG 16
2 x M20
1 x M25
1 x M20
2 x M25
The EMC cable gland must be earthed properly – e.g., with a metal lock nut
that is then connected to the PE terminal.
Make sure that the cable glands have at least an IP66 degree of
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 87
Page 92

3 Installation
1 2 3 4 5 6 7 8 9 10 11
UVWL1/N L2/N L3
3.6 Electrical Installation
Figure 49: Grounding the EMC cable gland
Figure 50: Example: diagram of EMC gland assembly
88 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 93
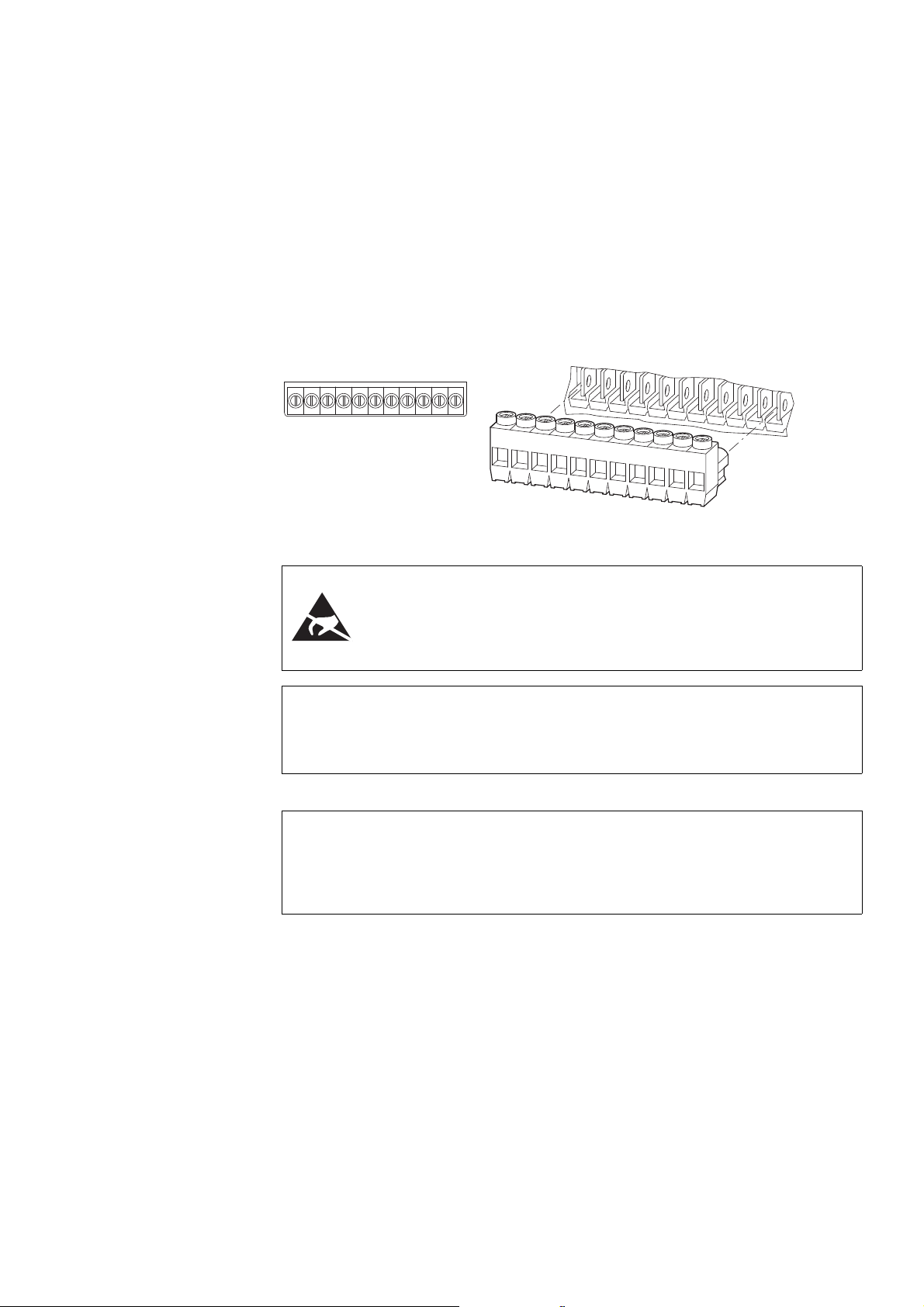
3.6.2 Connection on control section
1234567891011
+24 V
DI1
AI1
0 V
DI2
DI3
AO1
0 V
K13
K14
+10 V
1 2 3 4 5 6 7 8 9 10 11
The connection to the control section is made using the plug-in connection
terminals:
• Terminals 1, 5, 7, 9: Control voltage output (+24V, +10V, 0V),
• Terminals 2, 3, 4, 6: for digital and analog input signals
• Terminal 8: for a digital or analog output signal
• Terminals 10, 11: for a potential-free relay output
Figure 51: Control signal terminal layout and factory designations
3 Installation
3.6 Electrical Installation
→
ESD measures
Discharge yourself on a grounded surface before touching the
control terminals and the circuit board to prevent damage
through electrostatic discharge.
NOTICE
Do not connect an external voltage source to control signal
terminal 1 (+24 V)!
DANGER
Before touching or handling the wired control signal terminals,
check to make sure that the terminals (terminals 10 and 11) are
de-energized.
The relay contact (terminals 10, 11) may be wired to a higherlevel control circuit that has a dangerous voltage (e.g., 110 V AC,
230 V AC) even when the variable frequency drive is deenergized.
→
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 89
When using more than one control voltage, we recommend
using separate cables.
Example
24 V DC at control signal terminals 1, 2, 3, 4, 6, and 8 and
110 or 230 V AC at control signal terminals 10 and 11.
Page 94

3 Installation
3.6 Electrical Installation
3.6.2.1 Terminal capacities and stripping lengths
The terminal capacities and stripping lengths are listed in the following table.
Table 10: Control signal terminal sizes and designs
M3
2
mm
0.2 - 2.5 0.2 - 1.5 24 - 12 5 0.2 0.5 0.42 0.4 x 2.5
mm
2
AWG mm in N/m ft-lbs mm
3.6.2.2 Control signal terminal connection information and functions
The functions that are set in the ex-factory and the electrical connection data
of all control signal terminals are listed in the following table.
Table 11: Factory-set functions of the control signal terminal
Connection
terminal
1 +24 V Control voltage for DI1
2DI1 Digital Input 1 +8 - +30 V (High, Ri>6kΩ) Start enable FWD
3DI2
4DI3
AI2
5 +10 V
6AI1
DI4
7 0V Reference potential 0 V = connection terminal 9 –
8AO1
DO1
9 0V Reference potential 0 V = connection terminal 7 –
10 K13 Relay 1, N/O Maximum switching load:
11 K14
Signal Description Default Setting
Maximum load 100 mA,
- DI4, output (+24 V)
Digital input 2 +8 - +30 V (High, Ri>6kΩ) Start enable REV
Digital Input 3
Analog Input 2
Reference voltage,
Output (+10 V)
Analog Input 1
Digital Input 4
Analog output 1
Digital output 1
Relay 1, N/O Maximum switching load:
Reference potential 0 V
Notice:
Do not connect an external voltage
source!
• digital: +8 - +30 V (high)
• Analog: 0 - +10 V (R
0/4 - 20 mA (R
Can be switched with parameter P-16
•1 - 10kΩ
Maximum load: 10 mA
Reference potential: 0 V
• Analog: 0 - +10 V (Ri>72kΩ)
0/4 - 20 mA (R
Can be switched with parameter P-16
•1 - 10kΩ
• digital: +8 - +30 V (high)
• Analog: 0 - +10 V, maximum 20 mA
Can be switched with parameter P-25
• digital: 0 - +24 V
250 V AC/6 A or 30 V DC/5 A
250 V AC/6 A or 30 V DC/5 A
=500Ω)
B
=500Ω)
B
> 72 kΩ)
i
–
Fixed frequency FF1
–
Frequency Reference
(fixed frequency)
Output Frequency
RUN
RUN
90 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 95

3 Installation
5 6
7
1 2
3
+10 V AI1
0 V
+24 V DI1
DI2
PE
PES
PES
M
4K7
R1
M
FWD REV
ZB4-102-KS1
15 mm
(0.59”)
M4
2
Cu 2.5 mm
1
2
3
≦ 20 m
(≦ 65.62 ft)
15 mm
(0.59’’)
PES
3.6 Electrical Installation
3.6.2.3 Connection example
→
The control terminals’ functions and electrical parameters can
be changed with
• Parameter,
• Expansion modules DXC-EXT-…
( Section 7.1.2, “DXC-EXT-2RO output expansion“,
page 176 and Section 7.1.3, “DXC-EXT-2RO1AO output
expansion“, page 178).
Figure 52: Simple connection example
• Two operating directions:
• FWD = clockwise rotating field
• REV = anticlockwise rotating field
• R1: External reference value potentiometer, frequency reference value
max
(P-01)
0- f
The control cables should be screened and twisted for the external
connection. The screening is applied on one side in the proximity of the
variable frequency drive (PES).
Figure 53: Screen termination at one end (PES) close to the variable frequency drive
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 91
Page 96

3 Installation
2
DI1
FWD
24 V
3
DI2
REV
4
DI3
(AI2)
FF1
6
AI1
(DI4)
f-Soll
1
+24 V Out
< 100 mA
8
AO
(DO)
f-Out
CPU
0...+10 V/20 mA
0...+10 V/20 mA
3.6 Electrical Installation
Alternatively, in addition to the broad area gland plate, you can twist the
screen braid at the end and connect to the protective earth with a cable lug.
To prevent EMC disturbance, this twisted shielding connection should be
made as short as possible
Prevent the screen from becoming unbraided at the other end of the control
cable, e.g. by using a rubber grommet. The screen braid must not make any
connection with the protective ground here because this would cause
problems with an interference loop.
Control signal terminals
The DC1 variable frequency drive has four control inputs (control terminals 2,
3, 4, and 6). Two of these are parameterizable as digital control inputs;
while the others can be set to work as digital or analog control inputs.
The variable frequency drive comes with the following default setting:
• Control signal terminal 2 as digital input 1 (DI1),
• Control signal terminal 3 as digital input 2 (DI2),
• Control signal terminal 4 as digital input 3 (DI3),
• Control signal terminal 6 as analog input 1 (AI1).
Control signal terminal 8 can be used as a digital or as an analog output.It is
used as an analog output (AO) in the default configuration that comes with
the variable frequency drive when it is delivered.
Figure 54: Control signal terminals (D = digital / A = analog)
92 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
Page 97

3.6.2.4 Digital Input Signals
Control terminals 2, 3, 4, and 6 all have the same function and mode of
operation as digital inputs (DI1 to DI4).
A logic level of +24 V (positive logic) is used:
• 8 - 30 V = High (logic “1”)
• 0 - 4 V = Low (logic “0”)
The internal control voltage from control signal terminal 1 (+24 V, maximum
100 mA) or an external voltage source (+24 V) can be used for this.
The permissible residual ripple must be less than ±5 % U
3 Installation
3.6 Electrical Installation
/ Ua.
a
→
→
Optional modules DXC-EXT-IO110 and DXC-EXT-IO230 can be used to
optically isolate the digital inputs (DI1 to DI4) and integrate them directly into
control circuits with 110 V / 230 V. Values of 80 to 110/230 V AC will be
recognized as a high signal, Section 7.1.1, “DXC-EXT-IO… coupling
module“, page 174.
If you use an external voltage source, make sure to connect the
0-V potentials of the externalvoltage source to the 0-V potentials
of the variable frequency drive.
Control terminals 7 and 9 are the common 0 V reference
potential for all analog and digital input signals.
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 93
Page 98

3 Installation
3.6 Electrical Installation
3.6.2.5 Digital Output (Transistor)
When using the device’s default configuration, control signal terminal 8 will
be configured as an analog output (AO).
It can be set to work as a digital output instead (DO) with parameter P-25:
Table 12: Control signal terminal 8 (DO)
P-25
0 RUN Enable (FWD/REV)
1 Ready Ready for operation. No fault signal
2 Actual value =
3
4 f-Out ≧ P-19 The output frequency (f-Out) is greater than or equal to the value set in P-19
5
6
Signal
1 = High (+24 V)
Setpoint value
Error (Fault) Fault (not ready).
I-Out ≧ P-19 The output current (I-Out) is greater than or equal to the value set in P-19 (RO1
f-Out < P-19 The output frequency (f-Out) is less than the value set in P-19 (RO1 upper limit).
Description
The output frequency (f-Out) or speed is equal to the setpoint value (REF).
(RO1 upper limit).
upper limit).
7 I-Out < P-19 The output current (I-Out) is less than the value set in P-19 (RO1 upper limit).
10
11 Actual value ≠
Digital output DO: Accuracy ≧ 1% relative to maximum value
Not Enable No enable signal (FWD/REV)
The output frequency (f-Out) / speed is not equal to the setpoint value (REF).
Setpoint value
Transistor output DO uses control signal terminal 8 to switch the device’s
internal control voltage (+24 V) as a digital signal (1 = High). The maximum
permissible load current is 20 mA.
+ 24 V
< 20 mADOOV
8 9
+
Figure 55: Connecting example (interposing relay with free-wheel diode ETS4-VS3)
Control terminals 7 and 9 are the common 0 V reference
→
94 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
potential for all analog and digital input signals.
Page 99

3.6.2.6 Analog input signals
Depending on how parameters P-12 and P-15 are set, control terminals 4
(AI2) and 6 (AI1) can be connected to analog signals.
Table 13: Control signal terminal 6 (AI1)
P-16
0 0 - +10 V Frequency reference value / Speed reference value.
1 -10 - 0 - +10 V Frequency reference value/speed reference value with operating direction
2
3 4 - 20 mA Current signal with open-circuit monitoring (< 3 mA)
4
5
6
7
Analog input AI1: Resolution: 12-bit, response time: < 16 ms
3 Installation
3.6 Electrical Installation
Signal Description
Manipulated variable range from minimum (P-02) to maximum (P-01) value.
Default settings.
change based on the setpoint polarity
0 - 20 mA Current signal
→ Shutdown with fault message.
4 - 20 mA Current signal with open-circuit monitoring (< 3 mA)
→ No shutdown if a fault is detected
Operation will continue with fixed frequency/fixed speed 1 (P-20)
20 - 4 mA Inverted current signal with open-circuit monitoring (< 3 mA)
→ Shutdown with fault message
20 - 4 mA Inverted current signal with open-circuit monitoring (< 3 mA)
→ No shutdown if a fault is detected
Operation will continue with fixed frequency/fixed speed 1 (P-20)
+10 - 0 V Inverted voltage signal
Table 14: Control signal terminal 4 (AI2)
P-47
0 0 - +10 V Voltage signal
1 0 - 20 mA Current signal
2 4 - 20 mA Current signal with open-circuit monitoring (< 3 mA)
3
4
5
6
Analog input AI2: Resolution: 12-bit, response time: < 16 ms
The way control terminal 4 works (DI3 AI2) can be changed with P-15 = 4 and P-12 = 6.
Signal Description
→ Shutdown with fault message.
4 - 20 mA Current signal with open-circuit monitoring (< 3 mA)
→ No shutdown if a fault is detected
Operation will continue with fixed frequency/fixed speed 1 (P-20)
20 - 4 mA Inverted current signal with open-circuit monitoring (< 3 mA)
→ Shutdown with fault message
20 - 4 mA Inverted current signal with open-circuit monitoring (< 3 mA)
→ No shutdown if a fault is detected
Operation will continue with fixed frequency/fixed speed 1 (P-20)
Ptc-th Thermistor connection (→ Section 3.6.3, “Thermistor connection“, page 100)
Control terminals 7 and 9 are the common 0 V reference
→
potential for all analog and digital input signals.
DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com 95
Page 100

3 Installation
3.6 Electrical Installation
3.6.2.7 Analog output signal
When the device is used with its default settings, there will be an analog
voltage signal (0 - 10 V) available at control signal terminal 8. This value will
correspond to 0 to 100% of P-01 (maximum frequency / speed). The output
can handle a maximum load of 20 mA.
Parameter P-25 is used to configure whether this output signal will be
provided at the terminal:
Table 15: Control signal terminal 8 (AO)
P-25 Signal
8 f-Out Output frequency (f-Out) / speed
9
12 P-Out Output power (P-Out)
Analog output AO: Accuracy ≧ 1% relative to maximum value; resolution: 10-bit
Description
(0 - +10 V)
0 - 100 % of P-01
Resolution: 0.1 Hz
I-Out Output current (I-Out) / motor current
0 - 100 % of P-08
Resolution: 0.1 A
0 - 200% relative to the DC1’s rated motor output
3.6.2.8 Relay contact
AO
< 20 mA
OV
8
9
f-Out
0...+10 V
+
Figure 56: Analog output (AO)
-
(connecting example)
Control terminals 7 and 9 are the common 0 V reference
→
potential for all analog and digital input signals.
Control signal terminals 10 and 11 are connected to the DC1 variable
frequency drive’s internal relay contact (N/O) in a potential-free manner.
The relay function can be configured with parameter P-18:
96 DC1-…E1 Variable Frequency Drives 08/16 MN040023EN www.eaton.com
 Loading...
Loading...