

Page 1
INSTALLATION INSTRUCTIONS FOR THE LPM 560
PERFORMANCE CHARACTERISTICS @ 10 ± 0.01 VDC, 25°c
(Preliminary, based on limited test data)
Parameter Min. Typ. Max. Units Excitation* ----- 10 12 VDC Null shift, 25 to 0°, 25 to 50°C ----- ±0.5 ---- mV Null offset -30 0 +30 mV Linearity (BFSL)** ---- ±0.5 ---- %Span Sensitivity shift 25 to 0°, 25 to 50°C ---- ±5.0 --- %Span Sensitivity ---- 0.24 ---- mV/grf Repeatability ---- ±0.2 ---- %Span Response time ---- ---- 1.0 msec Input resistance ---- 5.0K ---- ohms Output resistance ---- 5.0K ---- ohms Plunger deflection ---- 30 ---- microns Weight ---- 2.0 ---- Grams ESD (direct contact – terminals and plunger)
*Non-compensated force sensors, excited by constant current (1.5 mA) instead of voltage, exhibit partial temperature compensation of
Span.
**BFSL: Best Fit Straight Line.
ENVIRONMENTAL SPECIFICATIONS
Operating temperature -40 to 85°C (-40 to +185°F)
Storage temperature -55 to 105°C (-67 to +221°F)
Shock Qualification tested to 150 g
Vibration Qualification tested to 0 to 2 kHz, 20 g sine
Note: All force related specifications are established using dead weight of compliant force.
DESCRIPTION
Catalog Listing Force Range(grams) Min Sapn* mV Typ Max Overforce grams Max
LPM 560 1,500 290 360 430 5,500
* Span: the algebraic difference between the output end points.
SOLDERING
Soldering temperature should not exceed 2.5 seconds per not exceed 315°.
Soldering duration should not exceed 2.5 seconds per lead. When PC board
mounting, provide terminal stand-off clearance of at least 0.040” from the soldering
surface. Heat sinking is also recommended.
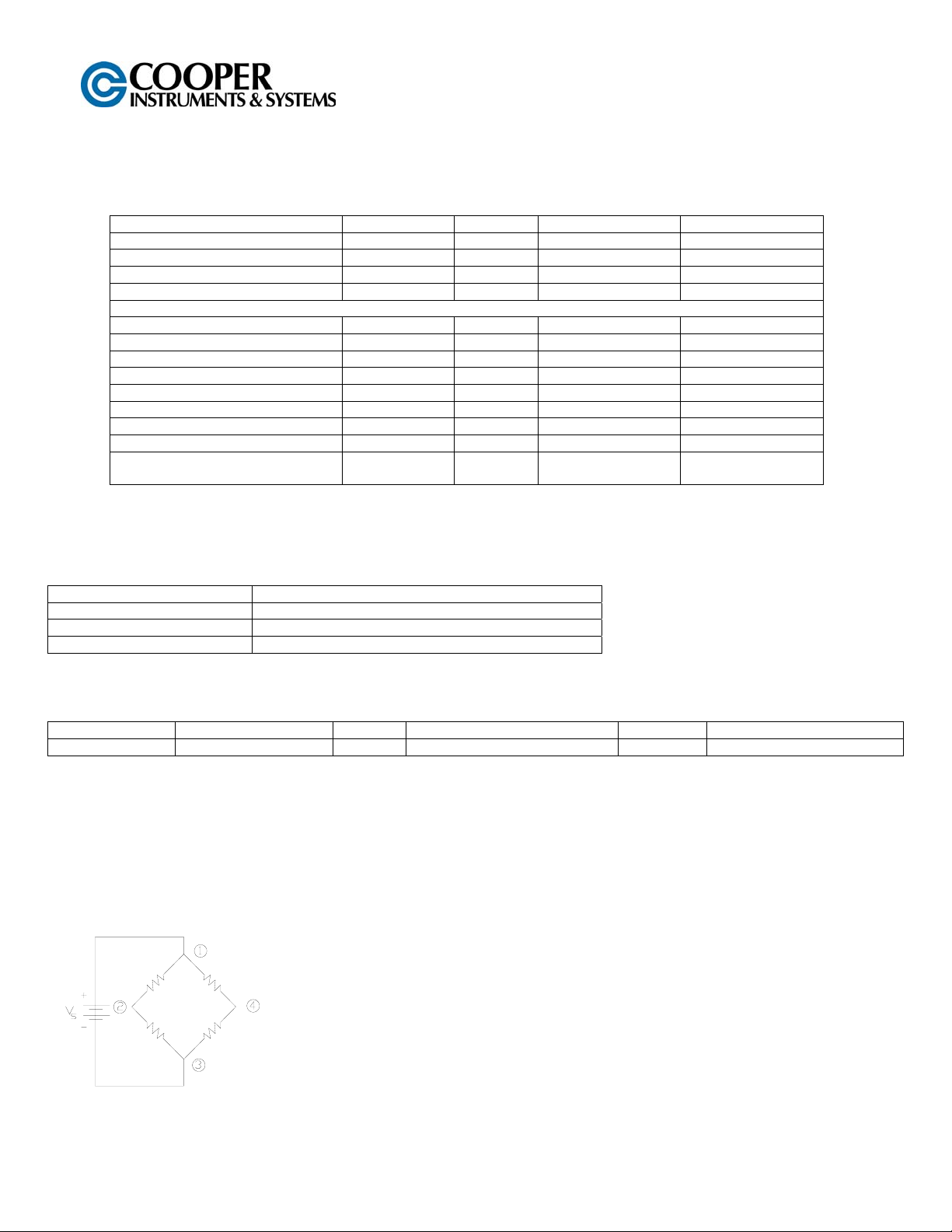
EXCITATION SCHEMATIC
10 --- --- kVolts
CLEANING
Proper cleaning fluids should be selected,
based on the contaminants to be removed.
Alcohols are recommended.
CF39 06/21/02
Page 2
LPM 560 CIRCUIT
1. Circled numbers refer to sensor terminals (pins). Pin 1 is designated with a notch. The color designation is in reference to use
of the optional cable supplied as part number 560-1.
Pin 1 = Supply Vs(+) = Red
Pin 2 = Output, (+) = White
Pin 3 = Ground, (-) = Black
Pin 4 = Output, (-) = Green
2. The force sensor may be powered by voltage or current. Maximum supply voltage is not to exceed 12 volts. Maximum supply
current is not to exceed 1.6 mA. Power is applied across Pin 1 and Pin 3.
3. The sensor output should be measured as a differential voltage across Pin 2 and Pin 4 (V
ratiometric to the supply voltage. Shifts in supply voltage will cause shifts in output. Neither Pin 2 nor Pin 4 should be tied to
ground or voltage supply.
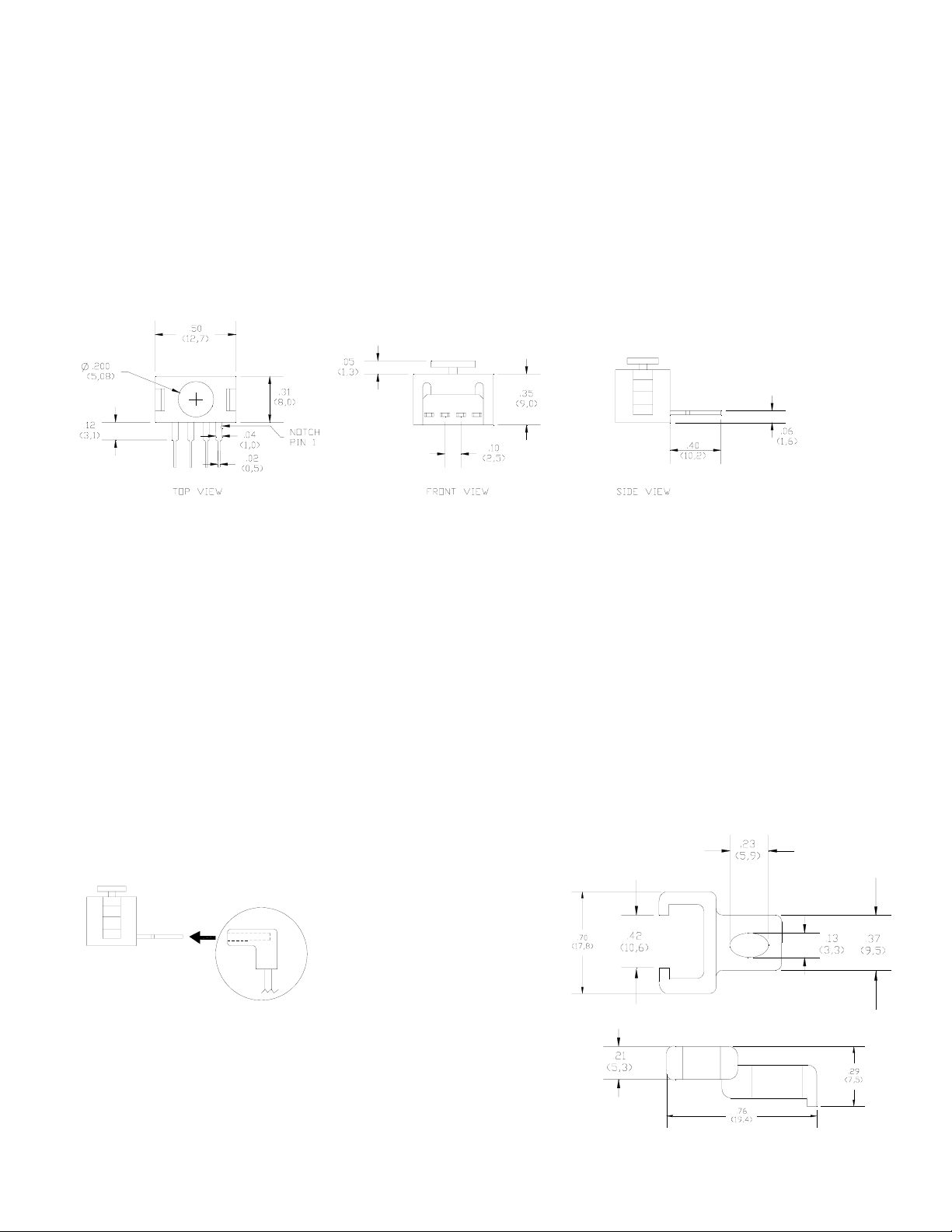
MOUNTING DEMINSIONS
(for reference only)
MOUNTING
Sensor output characteristics do not change with respect to mounting orientation. Care should be taken not to obstruct the vent hole in
bottom of housing. Improper venting may result in unstable output.
Mounting bracket mounting torque: 2-5 in.lb. (0,21-0,56 Nm).
APPLYING FORCE
Evaluation of the sensor is to be performed using dead-weight or compliant force. Application of a rigid, immobile force will result in
output drift (decrease) as elastometric seals relax. Off-center plunger loading has minimal effect on sensor performance and maintains
operation within design specifications.
Specifications may change without notice. The information we supply is believed to be accurate and reliable as of this printing.
However, we assume no responsibility for its use.
ACCESSORIES Catalog Listing Description
560-1 Optional cable assembly
560-2 Plastic mounting bracket
Optional Cable: Part 560-1
The “L” connector must always be plugged with the orientation described
below. Plugging in the connector in a different way will align the pin sockets in
a wrong configuration and would change the wire code.
= V2 – V4). The output is
o
Optional Clip: Part 560-2
CF39 06/21/02
 Loading...
Loading...