

Page 1

TIME/Versalift
Digger Derrick
Control System
Installation and Operations Manual
Issue 10
March 21, 2000
2000 OMNEX Control Systems Inc.
All rights reserved.
Page 2

Contents
1. Introduction..........................................................................................................................1
1.1. Part Numbers...........................................................................................................1
2. Physical Mounting................................................................................................................4
3. Considerations for Electrowelding.......................................................................................5
4. Electrical Connections.........................................................................................................6
5. Fuses, Configuration Jumpers ............................................................................................11
5.1. R1300 Board..........................................................................................................11
5.2. S20 Board...............................................................................................................11
6. Setting Up the Radio Receiver..................................................................................................12
6.1. Unique Identifier (Radio ID)......................................................................................12
6.2. No-Link Data Mode...................................................................................................13
6.3. Changing Switch Settings...........................................................................................13
7. Operations..........................................................................................................................14
7.1. Receiver/Controller................................................................................................14
7.1.1. Error Codes................................................................................................14
7.2. T45 Radio Transmitter ...........................................................................................14
7.2.1. Switching The Transmitter ON and OFF....................................................14
7.2.2. Operator Controls:......................................................................................15
7.2.3. Tilt Failsafe.................................................................................................15
7.2.4. Low Battery Indicator................................................................................16
7.2.5. Battery Charging and Replacement...........................................................16
7.2.6. Transmitter Light Summary .......................................................................16
7.2.7. Numeric Display.........................................................................................17
7.3. T47 Cable Remote .................................................................................................18
7.4. Emergency Override Panel....................................................................................18
8. Proportional Drive Adjustments.........................................................................................19
9. Factory Parameters............................................................................................................24
9.1. Types of Factory Parameters.................................................................................24
9.2. Changing the Factory Parameters..........................................................................24
9.3. List of Factory Parameters.....................................................................................25
PWM Drive Frequency Parameters.......................................................................28
Boom Load Moment Limit ....................................................................................28
Boom Derating Factors..........................................................................................28
Emergency Override Panel Function Speed ..........................................................28
Auger Shake Speed ................................................................................................28
Digger Transmission Type......................................................................................28
10. Warranty.................................................................................................................................29
ii
Page 3
1. Introduction
The TIME/Versalift Digger Derrick Control System consists of a custom
Controller/Receiver (grey box), an optional T45 Radio Transmitter and/or an optional
T47 Cable Remote. An interface is also provided for an optional user-supplied
Emergency Override Panel. The main components of the Controller/Receiver are an
R1300+ (APCB-1225-10) circuit board, a PWM/V Converter Board, an S20 (APCB1458-xx) board, and a REX-900 radio receiver.
The Controller/Receiver’s software is custom-designed for the Digger Derrick
application. Various sensors mounted on the machine chassis se nd feedba ck information
to the Controller/Receiver. This feedback information together with the operator
commands determine the drive outputs to the Apitech™ electric-over-hydraulic valves.
A sophisticated computer program, permanently encoded into the firmware chips of the
Controller/Receiver, governs the mapping of inputs to outputs.
Features of the computer program include safety interlocks to prevent injury to
personnel as well as damage t o the machine. The program inc orporate s a “ resta rt” c heck
which ensures that functions do not act uate unexpec tedly due to ope rator pa nel switches
being left “on” by accident.
All wiring to the Controller/Receiver is through waterproof circular M.S.
connect ors on the outside of the fibregla ss enclosure, to ensure tha t the NEMA 4X rating
of the enclosure is preserved. This manual describes considerations which should be
taken during inst alla tion and operation, and gives procedures for “ tuning” the system to
match the exact characteristics of your hydraulic valves.
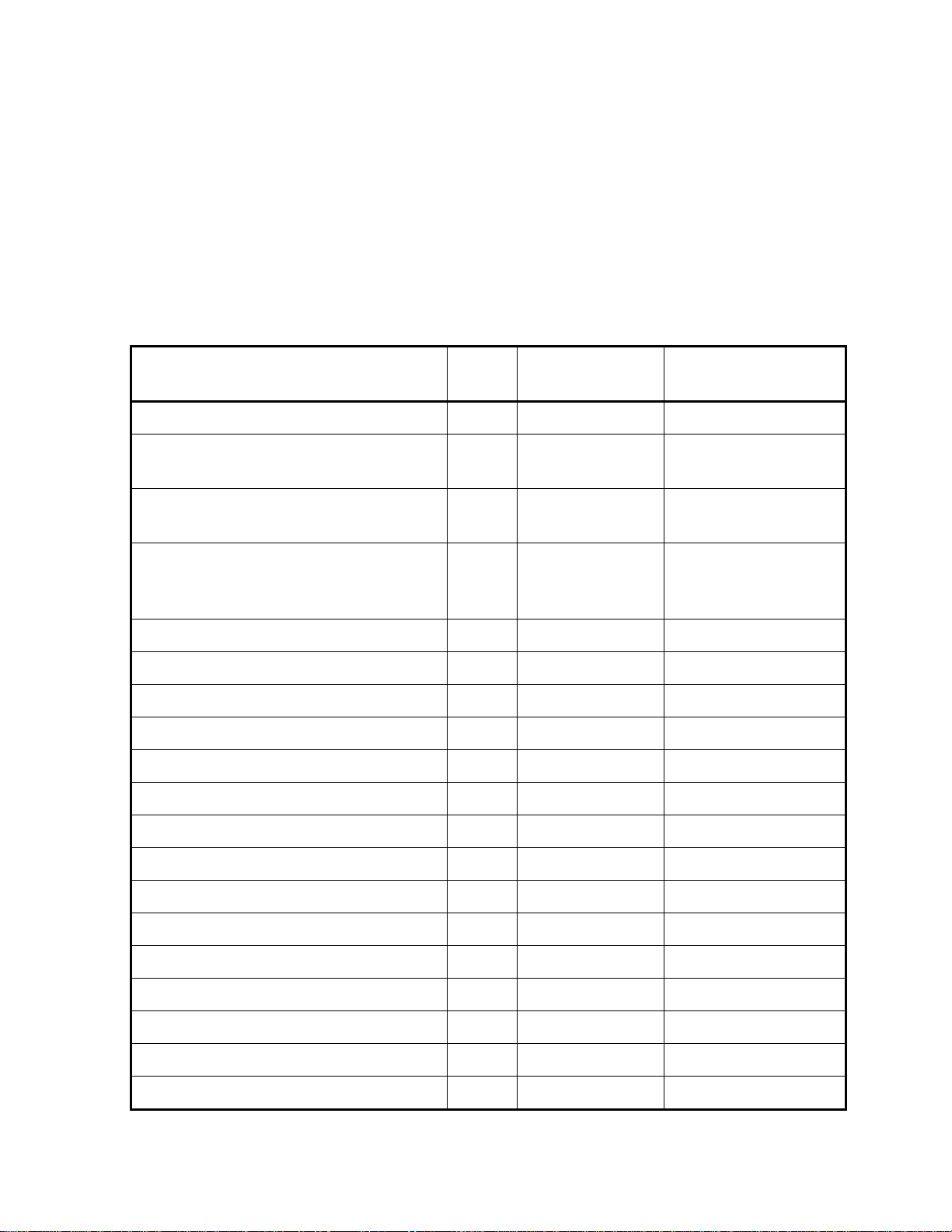
1.1. Part Numbers
The list below gives the part numbers of the major components of the Digger
Derrick Control System. You will need these numbers when ordering spare parts.
Component OMNEX Part
Number
R1302 Controller (works with T47 and
T247 only)
R1300+ Board, 12V (main board) TPCB-1225-10 —
Firmware (EPROM chip) for R1300+
board
PWM/V Converter Board TPCB-1496-05 —
S20 Board TPCB-1458-03 —
R1305 Receiver (supports T45, T47 and
T247)
R1300+ Board, 12V (main board) TPCB-1225-10 —
Firmware (EPROM chip) for R1300+ AFRM-1438-30 —
ASSY-1732-01 19423-1
AFRM-1438-30 —
ASSY-1732-02 19290-1
Versalift Part
Number
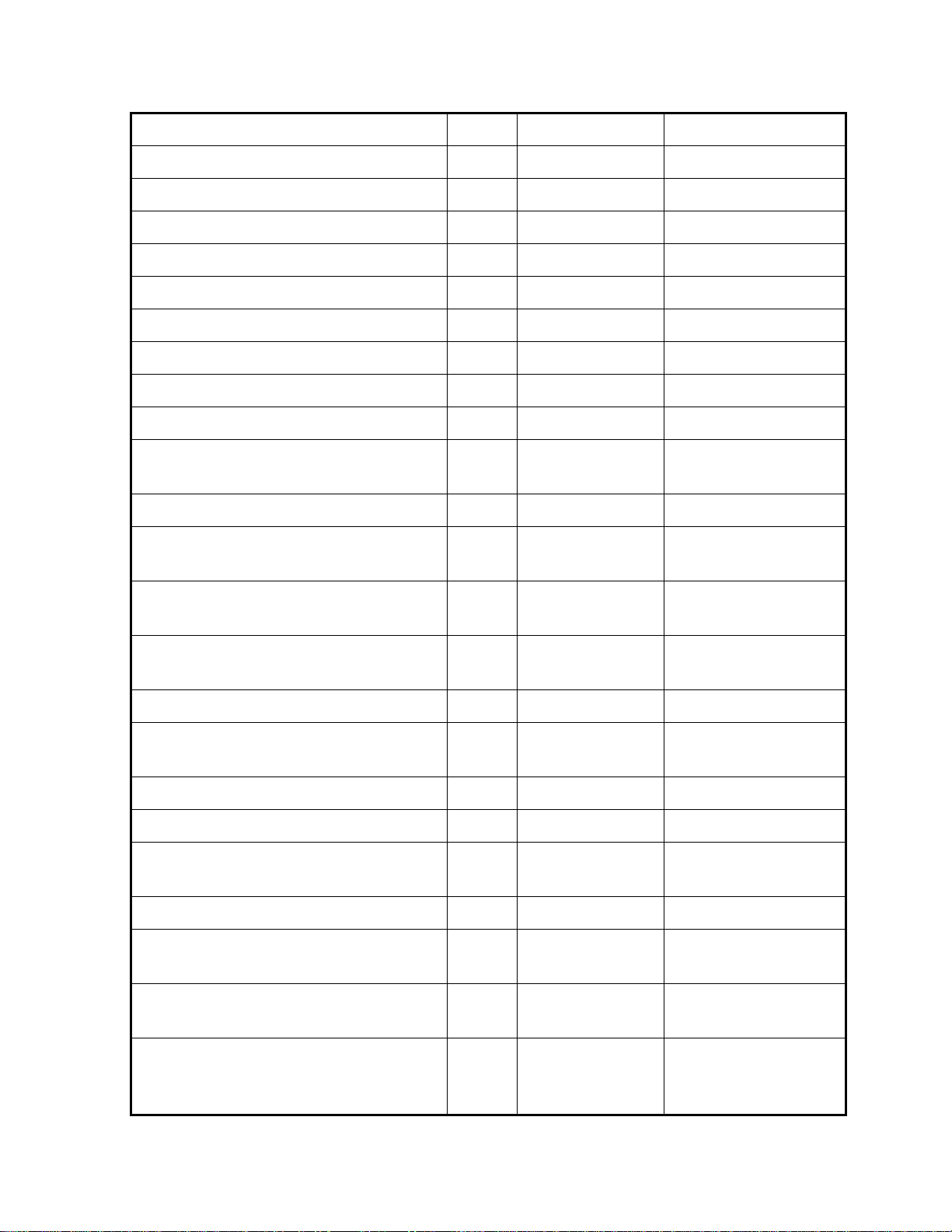
Page 4
board
S20 Board TPCB-1458-03 —
PWM/V Converter Board TPCB-1496-05 —
Radio Transmitter Board TPCB-1756-01 —
REX-900 Radio Receiver ASSY-1190-01 —
R2305 Receiver (supports T245, T47 and
ASSY-1732-02 19425-1
T247)
R1300+ Board, 12V (main board) TPCB-1225-10 —
Firmware (EPROM chip) for R1300+
AFRM-1438-?? —
board
S20 Board TPCB-1458-03 —
DEX-900 Radio Receiver —
Factory Key for Controller/Receiver ACAB-1355-02
User Key for Controller/Receiver ACAB-1355-01
Shock Mount Kit for
AKIT-1498-01
Controller/Receiver
Output Cable with 54-pin Connector, 6
ACAB-1733-01 —
feet
Emergency Override Panel Interface
ACAB-1734-01 —
Cable with 16-pin Connector, 6 feet
Custom Output Harness ACAB-1974-01 19293-1
Custom Emergency Override Panel
ACAB-1975-01 19388-1
Harness
Engine Interface Module, Navistar
®
T45 Radio Transmitter ASSY-1326-25 19291-1
TX50 Board (long board) TPCB-1185-01 —
Interface Board (small board) TPCB-1302-01 —
Display Board TPCB-1736-01 —
T245 Radio Transmitter ASSY-1993-01 19291-1
TX50 Board (long board) TPCB-1847-01 —
Interface Board (small board) TPCB-1302-01 —
Display Board TPCB-1966-02 —
Platform Magnet for T45/T245
T47 Cable Remote (no display) ASSY-1312-15 —
UMB Board (long board) TPCB-1235-01 —
Interface Board (small board) TPCB-1302-01 —
2
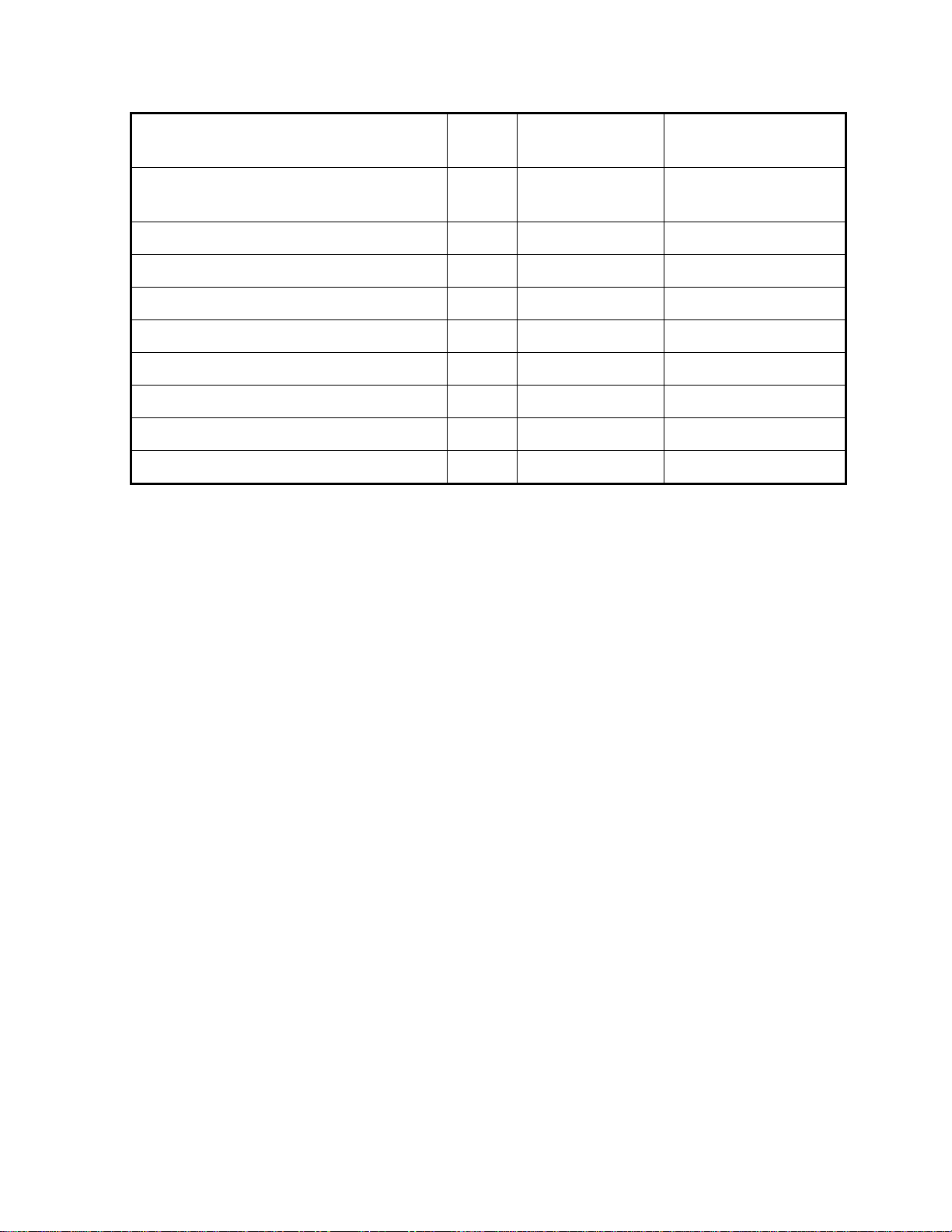
Page 5
T247 Cable Remote 19424-1
UMB Board (long board) TPCB-1235-01 —
Interface Board (small board) TPCB-1302-01 —
Display Board TPCB-1736-02 —
Umbilical Cable for T47 or T247, 20 feet
Dual-Axis Joystick with Trigger-Style
Deadman Button
Dual-Axis Joystick with Trigger-Style
Deadman Button
Boot Kit for Dual-Axis Joystick AKIT-9033-02
Paddle-Style Joystick AKIT-1610-01
T45/T245 Battery B0001 —
Battery Charger, 120VAC B0008 —
Battery Charger, 12V with Cigar
Lighter Plug
Installation and Operations Manual DMAN-1976-01
for RIGHT joystick
for LEFT joystick
AKIT-9048-01
AKIT-9048-02
B0007 —
3
Page 6
2. Physical Mounting
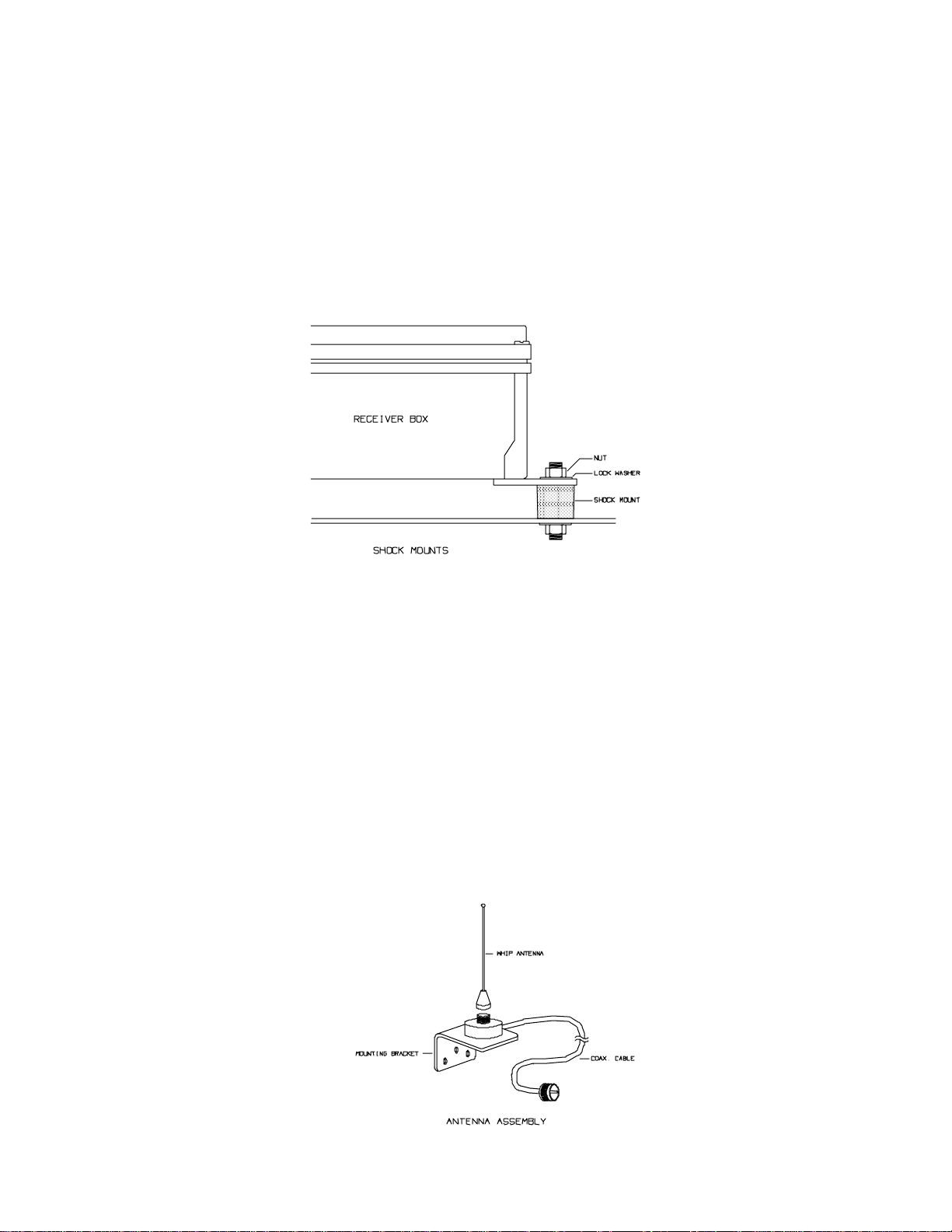
The Controller/Receiver should be mounted with the connectors down, and in a
location so that the enclosure door may be opened conveniently for access to the inside.
Shock mounts must be used to mount the enc losure !
should the enclosure be directly bolted to the machine. Figure 1 below illus t ra t e s ho w t h e
shock mounts should be installed:
Figure 1
The Controller/Receiver enclosure is sealed and has a NEMA-4 rating. When
inst a llin g, e n su r e t ha t n o t hin g is done to c ompromise the wate rtightness of the enc losure.
When performing maintenance it may be necessary to gain access to the inside of the
enclosure; take care to re-close the door securely when you are done.
Enclosure Mounting
Under no circumstances
The receiver antenna should be mounted pointing up and as high as possible,
preferably with a large metal surface below it but no metal above or to the side. The
antenna must be mounted on the outside of the machine; do not mount it inside an
operator’s ca b or in a toolbox. Assemble the ante nna as shown in Figure 2 below, and
thread (finger-tight only) the connector onto the matching receptacle on the
Controller/Receiver.
Figure 2
Antenna Assembly
4
Page 7

3. Considerations for Electrowelding
The electronics in the Digger Derrick Control System can be damaged by the high
currents and voltages employed in electrowelding. If ele ctrowelding must be performed
after the Control System has been installed, observe the following precautions to reduce
the risk of damage:
• Do not connect the ground clip to a point on the chassis close to the
enclosures.
• Disconnect the harnesses to the enclosures and sensors at the M.S. connectors.
Also disconnect the battery (PTO switch) and ground connections going into
the enclosures.
• Do not strike an arc close to the enclosures and sensors, or wiring leading into
the enclosures and sensors.
• Do not weld to the sensors.
5
Page 8
4. Electrical Connections
The Receiver/Controller has two circular M.S. connect ors for connection to your
chassis wiring. A 54-pin M.S. c onnector is used for power and function outputs. A 16pin M.S. connector is provided for connection to the T47 Cable Remote or Emergency
Override Panel. The following tables specify the assignment of each pin, with
corresponding markings on the circuit boards for reference. The wire numbers refer to
the old-style Output Cable and not the new Custom Output Harness.
Main Connector (Power and Functions):
Function Wire # 54-pin (32A10P)
M.S. Pin
Ground 48,38 A, AF J15 (R1300), J3 (S20)
Power for Electronics (Battery
Positive)
Power for Function Outputs (Batt. +) yellow
Dump Valve Output (drives power out
when radio signal is being received
from transmitter)
Engine START 24 D D2 (R1300)
Engine STOP 47 E D1 (R1300)
Winch DOWN 29 F 1+ (R1300)
Winch UP 25 G 1- (R1300)
Digger DIG 46 H 2+ (R1300)
Digger CLEAN 45 J 2- (R1300)
39 AG J12 (R1300), J1 (S20)
B J14 (R1300)
+green
49 C J13 (R1300), J2 (S20)
Board References
Lower Boom LOWER 5 K 3+ (R1300)
Lower Boom RAISE 14 L 3- (R1300)
Intermediate Boom EXTEND 23 M 4+ (R1300)
Intermediate Boom RETRACT 26 N 4- (R1300)
Upper Boom EXTEND 3 O 5+ (R1300)
Upper Boom RETRACT 22 P 5- (R1300)
Pole Guide/Platform LOWER 44 R 6+ (R1300)
Pole Guide/Platform RAISE 30 S 6- (R1300)
Boom Rotate CCW 6 T O1 (S20)
6
Page 9
Boom Rotate CW 13 U O2 (S20)
Pole Guide/Platform OPEN 12 V O3 (S20)
Pole Guide/Platform CLOSE 21 W O4 (S20)
Digger Shift HIGH 27 X O5 (S20)
Digger Shift LOW 4 Y O6 (S20)
Auger LATCH 2 Z D4 (R1300)
Auger UNLATCH 20 a D5 (R1300)
Throttle UP 31 b D6 (R1300)
Throttle DOWN 7 c D7 (R1300)
Emergency Power 9 d D3 (R1300)
Electronic Throttle Output (0 to 5V) 1 e O9 (S20) via PWM/V
Converter Board
Hydraulic Tool Valve 43 f D8 (R1300)
Upper Boom Extended Switch (N.O.
contact)
Intermediate Boom Retracted Switch
(N.O. contact)
Upper Boom Retracted Switch (N.O.
contact)
(not used) — k —
Auger Overstow Switch (N.O. contact)
Input
(spare switch input) 15 n J2 pin 3 (R1300)
(spare switch input) 17 p J2 pin 4 (R1300)
Boom Stowed Switch (N.O. Contact)
Input
+5V Power for N.O. Switches 42 r J2 pin 1 (R1300)
+5V for Proportional Pressure and
Angle Sensors
32 g J2 pin 6 (R1300)
28 h J2 pin 7 (R1300)
8 j J2 pin 8 (R1300)
33 m J2 pin 2 (R1300)
11 q J2 pin 5 (R1300)
34 s J3 pin 1 (R1300)
Angle Sensor Input
(-20.00° = 0.2V, +73.12° = 5.0V)
Lift Cylinder Piston-Side Pressure
Sensor Input (0 PSI = 0.5V, 3000 PSI =
4.5V)
16 t J3 pin 3 (R1300)
10 u J3 pin 4 (R1300)
7
Page 10
Lift Cylinder Rod-Side Pressure Sensor
Input (0 PSI = 0.5V, 3000 PSI = 4.5V)
19 v J3 pin 5 (R1300)
Ground for Proportional Pressure and
Angle Sensors
(spare 0-5V proportional input) — x J40 pin 2 (R1300)
(spare 0-5V proportional input) — y J40 pin 3 (R1300)
(spare 0-5V proportional input) — z J40 pin 4 (R1300)
(spare 0-5V proportional input) 18 AA J40 pin 5 (R1300)
(spare pulse input) 36 AB P1 (S20)
(spare pulse input) 41 AC P2 (S20)
Turret Brake Release 37 AD O7 (S20)
(not available) 40 AE O8 (S20)
There are two separat e power (+12V) and ground pins on the Main Connector. If
you are using the old-st yle Output Cable or are making your own wire harness, the two
ground pins (A and AF) should be connected t o a good ground point a t the batt ery or on
the chassis. The two power pins (AG and B) should be connecte d to a good switched
source, usually at the vehicle’s PTO switch. While the Controller/Receiver contains
internal fusing, it is highly recomme nded that in-line fuses be used to protect the wiring
harness in case of short circuits;
use a 3A fuse for pin AG, and a 15A fuse for pin B
35 w J3 pin 6 (R1300)
.
The Dump Valve Output (pin C) is a safety feat ure, and must be used to c ontrol a
dump valve in the hydraulic pressure circuit.
energized, the dump valve must divert the hydraulic flow back to tank
hydraulically-powered movements stop. Only when this output is energized (driving
+12V out) should the machine have hydraulic power.
The rest of the output functions except for the E lectronic Throttle Output (pin e)
are designed to drive either proportional or on/off sole noids at up to 3A each. Note that
the total simultaneous load must not, of course, exceed the ratings of the power fuses
(both inside the Controller/Receiver and your harness fuses). As the power distribution is
complex, please contact OMNEX for information before changing the fuse ratings from
their original values.
To control the engine throttle, use pin e for electronic throttles which take 0 to 5V,
or wire pins b and c to direction-control relays for motor-driven throttles.
The Switch Inputs (pins m, n, p and q) are best switched to the +5V Power
supplied from pin r, although they will wor k fin e if swit c h e d t o + 1 2 V. The +5 V fr om p in
r is preferred because it is already protected against short circuits. Do not feed +12V
back into pin r.
The proportional sensors must be powered from pin s (+5V) and pin w
(ground).
Do not power them from +12V or any other ground.
Whenever this output becomes de-
so that all
8
Page 11

T47 Cable Control / Override Panel Connector:
Function Wire # 16-pin (24-5S)
M.S. Pin
Ground 14 A J15 (R1300), J3 (S20)
Power to T47 13 B J41 (R1300)
Wired Remote Interface A 4 C J1 pin 5 (R1300),
Wired Remote Interface B 5 D J1 pin 2 (R1300),
E-Stop A 11 E J41 (R1300)
E-Stop B 15 F CN8 pin 8 (S20)
T47 ON Switch /
Override Panel ENABLE Button
Ground 10 H J15 (R1300), J3 (S20)
Override Panel Boom Rotate CCW 3 J J10 pin 2 (R1300)
Override Panel Boom Rotate CW 1 K J10 pin 3 (R1300)
6 G CN8 pin 4 (S20), CN3
Board References
CN4 pin 4 (S20)
CN4 pin 3 (S20)
pin 2 (S20),
J2 pin 9 (R1300)
Override Panel Intermediate Boom
EXTEND
Override Panel Intermediate Boom
RETRACT
Override Panel Upper Boom EXTEND 9 N J10 pin 6 (R1300)
Override Panel Upper Boom
RETRACT
Override Panel Lower Boom LOWER 8 R J10 pin 8 (R1300)
Override Panel Lower Boom RAISE 7 S J10 pin 9 (R1300)
16 L J10 pin 4 (R1300)
2 M J10 pin 5 (R1300)
17 P J10 pin 7 (R1300)
9
Page 12

In systems which include a T47 Cable Remote, the 16-pin conne ctor is used for
connection to the T47. However, in T45-only systems, a truck-mounted Emergency
Override Panel must be provided; use either the old-style Emergency Override Panel
Interface Cable or the new Custom Emergency Override Panel Harness to make
connect ions from the 16-pin connector to t his P anel.
must provide a normall y-close d Emergenc y-Stop button across pins E and F.
emergency-stop circuit must be closed to operate the machine.
Override Panel must also provide a momentary, normally-open contact between pin
B and pin G; this is the override button which the operator must press and hold to
override the T45 Radio Transmitter.
switches (pins J through S). Pins C and D are not used for the Emergency Override
Panel.
Pin B is also the common to all the override
The Emergency Override Panel
The
The Emergency
10
Page 13

5. Fuses, Configuration Jumpers
The R1300+ and S20 circuit boards have a number of fuses and configuration
jumpers which must be specific values for operation.
5.1. R1300 Board
F2 = 10A
F3 = 15A
F4 = 1A
F5 = (omit)
JP1 (MAIN BYPASS) = OFF
JP4 (RADIO STATUS) = OFF
JP2 (INPUTS 1) = GND
JP3 (INPUTS 2) = GND
J25/J29/J34 = (no jumper installed)
J26 (PWM PWR) jumpered to J22
J28 (OUT PWR) jumpered to J23
J27 (DIGITAL PWR) jumpered to J24
SW1 = (all positions OFF)
SW2 = (all positions OFF)
5.2. S20 Board
F4 = 10A
F5 = 1A
F6 = 1A
11
Page 14

6. Setting Up the Radio Receiver
If you have purchased the optional Radio Transmitter and Receiver, you will need
to verify that the Radio Receiver is set up to respond to your particular Radio
Transmitter. This section describes how to set the configuration switches (see Figure 3)
on the front of the DEX-900 Radio Receiver (mounted to the S20 Board inside the
enclosure lid).
Figure 3
Radio Receiver
6.1. Unique Identifier (Radio ID)
Each T45 Ra dio Transmitter is identifie d by a unique Radio ID. The DEX-900 in
your Receiver must be set up to match the ID of your transmitter. On the bac k plate (to
which the metal guard is attached) is affixed a serial number and ID Code label, an
example of which is shown in Figure 4. The ID code consists of two parts, SW 1 and
SW 2, c orresponding to switch ba nks labelled “ID” 1 through 8 (SW 1) and 9 t hrough 16
(SW 2) on the REX-900.
Figure 4
The ID Code is punched as holes in the label, with the position of the hole
indicating the position of each of the small switch handles on the DEX-900. Left t o right
corresponds to 1 through 8, and 9 through 16. On the label, “1” means ON and “0”
means OFF. On the DEX-900, ON is towards the ANTENNA connec tor (as marked on
each bank of switches), and OFF is towards the EXPANSION connector. Thus, to match
the DEX-900 t o the transmitter ID code given in t he exa mple label of Figure 4, you must
Radio Transmitter ID Label
12
Page 15

set switches 1 through 8 to OFF, ON, ON, OFF, OFF, ON, OFF, ON, and switches 9
through 16 to ON, ON, ON, ON, OFF, OFF, OFF, ON.
6.2. No-Link Data Mode
The last bank of switches (“MODE”) on the DEX-900 is used to select various
features on DEX-900.
be ON.
signal from the Radio Transmitter of the right ID.
This sets the DEX-900 to clear all its output data whenever there is no link or
For the Versalift Controller/Receiver, only position 5 should
6.3. Changing Switch Settings
To change the switch settings, use a ballpoint pen or small screwdriver to move
the switch levers. When you have set the levers to t he right positions, turn t he system
power off (usually by shutting off the vehicle’s PTO switch) and back on again. The
DEX-900 will ta ke a bout 5 seconds to proce ss your changes and then turn on its re d ON
lamp.
switches, for the changes to take effect.
You must switch the power off and on whenever you change the DEX-900
13
Page 16

7. Operations
This chapter briefly describes how to operate t he Digger Derrick Control System.
These instructions are intended to give you an understanding of basic operating
principles; this is not a complete Operator’s Manual. Once installation has been
completed and c hecked, we recommend that you read this section care fully and ope rate
the system to become accustomed to the controls.
7.1. Receiver/Controller
The Receiver/Controller does not contain an on/off switch. It is functional as
soon as power is applied; power should be switched though an external swit ch, such as
the vehicle’s PTO switch.
7.1.1. Error Codes
The Receiver/Controller constantly monitors its safety systems. If a fault is
detected, the Receiver/Controller will disa ble all c ont ro l fun ct ions a nd begin flas hing a ll
of the VALUE lights in its Configuration Panel (see Figure 6) together with one of the
numbered OUTPUT lights. The codes are as follows:
OUTPUT Light Flashing Fault Indicated and Remedy
1_ One or both power relay contacts have welded closed.
Replace both relays if they are the plug-in types; if not, the
R1300+ board must be replaced.
2_ DEX-900 receiver stop-circuitry fault. Replace the
DEX-900.
7.2. T45 Radio Transmitter
A description of transmitter operation follows.
7.2.1. Switching The Transmitter ON and OFF
The Versalift T45 Radio Transmitter has three LED lights to indicate its operating
status, and a toggle switch to turn it on and off. It has built-in safety features to both
protect you against unexpected movement of the controlled machine, and self-check its
emergency stop circuit, when powering up. The operation of its status lights and poweron sequence is as follows:
To switch ON the transmitter:
STOP
1. Move the POWER switch to the ON position. The red
indicate you must test the EMERGENCY STOP button.
light will flash to
14
Page 17

2. The EMERGENCY STOP button test is two-part; the transmitter needs to see
both states (pressed and released) of the button before it will allow you to
STOP
operate. If the
button. If the
light is flashing slowly, press the EMERGENCY STOP
STOP
light is flashing quickly, release the EMERGENCY STOP
button. When the test is done, the button will be released.
3. The transmitter now checks to ensure that all switches and joysticks are in
their “off” or “neutral” positions. If they are not, the green
and red
STOP
lights will flash together to indicate that you must switch off any
(transmit) light
functions which are on.
4. During normal operation, the green
light is on solid if no functions are
switched on, and flashes if one or more functions are active.
Be sure to switch off the transmitter when you are finished operating. Besides
depleting the battery, an active, unattended transmitter is a safety hazard!
7.2.2. Operator Controls:
Once the transmitter is switched on and the green light is on, a ll joysticks and
toggle switches are active. The label indicates which machine functions are affected by
each control. To ope rat e the dual-axi s joystic k f unc tions or the c entr e paddl e, you must
press and hold one of the joystick deadman triggers.
The DIGGER SHIFT function behaves slightly differently depending on whet her
you have a Two-Speed digger transmission or a Hydrasync digger. With a Hydrasync
digger, you can shift “ on the fly” and the shift occurs immediately when you activate
DIG GE R SHIF T (t h e C on t r ol Syst em will t o ggle b e t we e n HI GH a nd L OW sp e e d ). W it h
a Two-Speed digger, activating DIGGER SHIFT will start an automatic 3-second shift
sequence: The digger motor is stopped (if it is moving) for 1 second, a shift command is
applied to the transmission for 1 second, and another 1-second delay occurs before the
digger motor can be restarte d. You do not need to hold the toggle switch for the entire
sequence. Thus, you can be digging with the DIG/CLEAN paddle, toggle DIGGER
SHIFT a nd t h e a uge r will a u t o ma t ic a lly s top, shift, and resume with you ha ving to let go
of the DIG/CLEAN paddle.
7.2.3. Tilt Failsafe
The transmitter is equipped with a tilt sensor which automatically engages the
EMERGENCY STOP if the transmitter is tipped more than 90° from its normal horizontal
operating position. This is a failsafe mechanism which protect s the opera tor in case he or
she falls or is struck by the machine itself. To resume operation from a tilt condition,
press and release the EMERGENCY STOP button after righting the transmitter.
15
Page 18

7.2.4. Low Battery Indicator
The
(batte ry) light is the “ low batte ry” indicator. When t he bat tery voltage
is acceptable, the lamp will be off . I f the vo lt a ge b e c o me s t o o low , t h e la mp will b e gin t o
blink and the ba tte ry should be rec harged, or re placed, as soon as possible . The control
syst e m will not be co me e rra tic with a lo w ba tt ery ; it will s imply cease to operate when
the voltage falls below the minimum operating level.
7.2.5. Battery Charging and Replacement
®
The transmitter is powered by a Makita
9.6V rechargeable power tool battery,
and a standard Makita charger has been supplied with the system. Please follow the
instructions included with the charger. To remove the battery from the transmitter, grasp
the lip on the battery door and pull it down and out to open the door. Tilt the case to
allow the batte ry t o slide out. The bat tery is keyed to prevent incorrec t installat ion (see
Figure 5 below).
Figure 5
Battery Replacement
7.2.6. Transmitter Light Summary
The following table describes all the conditions indicated by va rious sta tes of the
three transmitter lights. Note that the transmitter performs some self-diagnostics, and can
indicate joystick and radio failures in addition to the “usual” operating status.
Legend: ! = LED on, " = LED flashing slowly,# = LED flashing quickly,
$ = LED off, N/A = Not Applicable
STOP
Description Action Required
LED LED
$$ $
LED
Battery Dead; Power Off Charge Battery; Turn Power On
16
Page 19

$$ "
$$ #
N/A
N/A
N/A
N/A
"
"" #
"# "
""
!$
"$
$/"
N/A N/A Low Battery Replace/Recharge Battery
!
E-Stop Test Press E-STOP Button
E-Stop Test Part two Release E-STOP Button
Functions not all off on
EMERGENCY STOP
release
All Okay, all functions off OK, continue as required
All Okay, 1+ functions on OK, continue as required
Emergency Stop E-STOP Button Pressed
Module failure: Joystick Cycle Power--if not remedied, call
Module failure: Radio Cycle Power--if not remedied, call
Set all functions off
service
service
7.2.7. Numeric Display
The transmitter contains a three-digit numeric display to further indicate operating
status. It can display numbers between 0.0 and 99.9, and is lighted for night viewing.
There are several quantities that the display can show, indicated by “pointers” to three
marks (LOAD %, BOOM ANGLE, DI AG) at the right edge of the display:
Mark Pointed To Quantity Shown
LOAD % Percentage of allowable boom load.
BOOM ANGLE The absolute value of the boom angle, in degrees.
DIAG The voltage, 0.0 to 5.0, at the piston-side pressure sensor.
BOOM ANGLE and
The voltage, 0.0 to 5.0, at the rod-side pressure sensor.
DIAG2
(none) This special mode shows the Boom Derating Factor being
adjusted and will only appear in Factory Setup mode. Please
see
9. Factory Parameters
for more information.
To change between these displays, press the DISP LAY button. The display will
always start at LOAD % after releasing the transmitter’s EMERGENCY STOP.
The display will only work when the transmitter is switched on and its
STOP
EMERGENCY STOP is released (the
light must not be on or flashing); otherwise, the
disp la y will sh o w t h re e d a sh e s ( “- - -” ) in p lace of numbers. If the T47 Cable Remote is
plugged in and swit che d on, the display on the T45 Transmitte r will st op wo r kin g a nd t h e
information will be displayed on the T47’s display instead.
The d isplay in t h e T4 5 w ill op e r a t e wit h in a 100-foot (approximate) radius of the
Receiver/Controller’s antenna; however, the remote control of the machine will ope rat e
much farther. Should the display stop working because you are too far from the machine,
you can still safely operate the controls but you will not be able to read the status
information.
17
Page 20

7.3. T47 Cable Remote
If you have purchased the optional T47 Cable Remote, you may operate the
Digger Derrick Control System with all of the electronic safety features afforded with the
Radio Transmitter, but via a hardwire (cable). To activate the T47 Cable Remote, release
the red E mergency St op button a nd switch on the T47’s POWER switch—the control of
the machine is now ta ken away from the Radio Transmitter and given to the T47 Cable
Remote. All control functions operate as in the T45 Transmitter.
Note that for safety, the Cable Remote’s Emergency Stop button must be released
even when operating from the Radio Transmitter; this allows someone to stop the
machine at the Cable Remote.
The numeric display in the T47 Cable Remote does not have any distance
limita tio n as in the T45. The display will wo rk a s lon g as t he T47’ s ca ble is connected,
the T47’s POWER switch is turned on and the EMERGENCY STOP is released.
7.4. Emergency Override Panel
If you have not purchased the T47 Cable Remote, you must have an Emergency
Override Panel connected in place of the Cable Remote. To operate from the Emergency
Override Panel, make sure the Emergency St op button on t he P anel is released and press
and hold the ENABLE button while operating the toggle switches on the Panel.
18
Page 21

8. Proportional Drive Adjustments
Each proportional valve output can be adjusted to match the characteristics of the
individual valve. There are proportional functions which come out of the R1300 circuit
board, as well as out of the S20.
The proportional outputs from the S20 are numbered O1 through O16, and the
proportional outputs from the R1300 are numbered 1+ through 6-; their assigned
functions are indicated in the table below.
Proportional
Output
1+ (R1300) Solid 1+ Winch DOWN
1- (R1300) Solid 1- Winch UP
2+ (R1300) Solid 2+ Digger DIG
2- (R1300) Solid 2- Digger CLEAN
3+ (R1300) Solid 3+ Lower Boom LOWER
3- (R1300) Solid 3- Lower Boom RAISE
4+ (R1300) Solid 4+ Intermediate Boom EXTEND
4- (R1300) Solid 4- Intermediate Boom RETRACT
5+ (R1300) Solid 5+ Upper Boom EXTEND
5- (R1300) Solid 5- Upper Boom RETRACT
6+ (R1300) Solid 6+ Pole Guide/Platform LOWER
6- (R1300) Solid 6- Pole Guide/Platform RAISE
O1 (S20) Flashing 1+ Boom Rotate CCW
Set-Up Panel
Indicator
Function
O2 (S20) Flashing 1- Boom Rotate CW
O3 (S20) Flashing 2+ Pole Guide/Platform OPEN
O4 (S20) Flashing 2- Pole Guide/Platform CLOSE
O5 (S20) Flashing 3+ Digger Shift HIGH (normally set for on/off behaviour)
O6 (S20) Flashing 3- Digger Shift LOW (normally set for on/off behaviour)
O7 (S20) Flashing 4+ (Do not adjust—used for Turret Brake Release)
O8 (S20) Flashing 4- (spare proportional output)
O9 (S20) Flashing 5+ Electronic Throttle (0 to 5V output PWM/V Board)
O10 (S20) Flashing 5- (not used)
19
Page 22

O11 (S20) Flashing 6+ (not used)
O12 (S20) Flashing 6- (not used)
O13 (S20) Solid 1 (not used)
O14 (S20) Solid 2 (not used)
O15 (S20) Solid 3 (not used)
O16 (S20) Solid 4 (not used)
Built-in to the R1300 is a Se t-Up Panel (see Figure 6) consisting of t hree c olumns
of indicat or lights, se ven push buttons, and a socket for a plug-in “ke y”. As shown in the
diagram below, there are five configurable parameters (centre column of lights) for each
proportional (pulse-width modulation, PWM) output : Threshold, Start PWM, Max PWM,
Ramp Up, and Ramp Down.
The Se t-Up P anel has “Output ” lights 1+ to 6- which correspond directly to the
proportional outputs of the R1300. For adjustment of the proportional outputs of the S20,
the Output lights are re-used as per the “ Set-Up Panel Indicator” column in the above
table.
The 12 R1300 proportional outputs are indicated by the lights in the “Output”
column as follows: When the “ 1_” and “+” lights are solidly on, the 1+ parameter is
being output is being adjusted. The “ 1_” and “-” light s indicate 1-, and so on. The table
above lists these as “Solid 1+” through “Solid 6-“.
The first 12 S20 proportional outputs (O1 through O12) are indicated by flashing
“1+” through flashing “6-”. The table above lists these as “Flashing 1+” through
“Flashing 6-”.
The last 4 outputs (O13 through O16) of the S20 are indicated by the “1_”
through “4_” lights solidly on with bot h the “+ ” a nd “ -” lights off. The table above lists
these as “Solid 1” through “Solid 4”.
20
Page 23

$%
()
!"#
&'
Figure 6
R1300 Set-Up Panel
The Ramp parameters cont rol how fa st the output builds up or down to the final
value according to a first-order difference equation. The separate Ramp Up and
Ramp Down time constants allow you t o tune the valve response for smooth, non-jerky
actuation. The Threshold, Start PWM, and Max PWM parameters control the transferfunction from input (joystick posit ion) to PWM-output value, as shown in Figure 7. The
joystick position can go from 0 to 127. The threshold is simply the deadband beyond
which the joystick must move in order to actuate the PWM output. The PWM output
starts at Start PWM as soon as the joystick has exceeded the threshold, and maps linearly
with joystick position up to Max PWM.
*
*
+
Figure 7
Proportional (PWM) Output Function
21
,)-./--#
Page 24

In order to customize various parameters for the PWM output s, t he configuration
panel must be “ena bled” by plugging in the Fac tory Key or User Key (supplied); you will
then be in Proportional Drive Setup mode. The display will initially be displaying
“Output” 1 +, no “Param” lights will be illuminated, and the “Value” lights will be
displa ying the Start PWM and Max PW M as solid lights, and t he actual function output
va lue as a flashin g light. The flash ing light will move as the corresponding joystick is
moved, and you will also see the gr ee n light n ext to th e 1+ ou tp ut o n J6 go brigh te r an d
dimmer.
To select the output pin you want to change parameters for, press the buttons
under the “Output” light s. To change a parameter, press the but tons under the “ P aram”
lights until the desired parameter is lit up (Thre shold, St art P WM, Max PW M, Ramp Up,
Ramp Down). The “Value” lights will now indicate where the selected parameter is
currently set, in relation to the MAX and MIN values allowed for that particular
parameter (see table below). Press the butt ons below the “ Value” lights to raise or lower
the parameter; if the value of the parameter is “in between” two lights, the two adjacent
lights will bot h b e o n at on ce , each with relative brightness corresponding to how far in
between t he two lights the value is. To change a parameter a long way, press and hold
the button and it will auto-repeat as on a computer keyboard.
The table below indicates the minimum, maximum, and increment values for each
of the proportiona l drive a djustments. The default values for each parameter are specific
to each proportional output and are not listed.
Parameter Minimum Maximum Increment
Threshold 0 (out of 127) 40 (out of 127) 1
Start PWM 0% lesser of 100% and
Max PWM
Minimum setting
Max PWM greater of 0% and
Start PWM
Maximum setting
Ramp Up 0 ms 1054 ms 34 ms
Ramp Down 0 ms 1054 ms 34 ms
100% 1%
1%
22
Page 25

As you are adjusting any of the parameters, you can “ try” the new setting right
away by moving the joystick and watching the hydraulic/pneumatic response. A very
good way to tune the proportional parameters is to have someone watch the override
handles on the hydraulic va lves (or the cylinde r or bellows in a pne umatic system) as you
operate the joystick from “just-on” to “ full-on”; for best metering action, adjust the Start
PWM and Max PWM such tha t the whole trave l of the joystick corresponds to full travel
of the override handle, with no “ dead” region at the start or end of the joystick travel.
Note: It is very important that the proportional drive frequency be correct for the
type of valve installed in your system. Please see the next chapter for information on
how to set the drive frequency, and make sure it is correct before attempting to
adjust the PWM output parameters.
When you are happy with the way the parameters are set up, press the “ Store”
button. All of the lights will come on to indicate that the new parameters have been
stored. If you wish not to save the changes you have made, simply unplug the key. Then,
you can plug the key back in and start again from the original settings. If you have stored
a s e t of n e w p a ra me t e r s w hic h a r e so fa r o ff f ro m v a lue s wh ic h t h e ma c h ine w ill op e r a t e
with, press and hold the “ Store” button until all the lights begin to flash. Release the
button and all of the Proportional Drive parameters will be reset to factory-default values.
Important
set-up procedure. Leaving the key in may allow someone to change the parameters
accidentally, as well as allow the long-term vibration of the vehicle to damage the key.
: The key should not be left plugged in after you have comple ted the
23
Page 26

9. Factory Parameters
The Digger Derrick Control System has 10 “ Factory Para meters” which may be
configured to match the model of valves installed in the machine, and to set the load limit.
They are called “Factory Parameters” because they are usually set at your factory be fore
the machine is shipped to the end customer. In the Digge r Derrick application, the first 4
Factory Pa rameters are P WM drive frequencies for the various “banks” of proportional
outputs, and the re st of the Fac tory P ara meters set boom load moment limit s an d sp ee ds
of special functions.
In the general discussion below, reference is made to “up to 48 Factory
Parameters”, which means 38 more parameters may be added in the future, if required.
9.1. Types of Factory Parameters
There are only two types of factory parameters. The first type of paramete r is a
“multiple-choice” selection; the “PWM Drive Frequency for S20 Proportional Outputs
O1 through O8” paramete r is a n example of a multiple-choice para meter—you set it by
selecting one of 5 different frequencies.
The second type of factory parameter is a “variable-value” adjustment with a
minimum and ma ximum va lue. E xamp les of suc h a pa rame ter are th e Boom De rat ing
factors; you set between 20% and 150% in 2% increments.
9.2. Changing the Factory Parameters
To change or view the Factory Parameters, use the following procedure:
1. Plug t h e Fa c t o r y K e y ( t h e User Ke y will n o t a llow you to ent er Fact ory Setup Mode)
into the R1300 Controller board’s Set-up Panel; you will be in Proportional Drive
Setup mode. Enter Factory Setup mode by simultaneously pressing the two lower
left-hand buttons; the light display will change.
2. There can be up to 48 Factory Parameters. Pressing the up and down buttons at the
bottom of the “Output” column changes the parameter you are accessing. The first
12 are indicated by the lights in the “Output” column as follows: When the “1_” and
“+” lights are on, the first parameter is being accessed. The “1_” and “-” lights
indicate the second parameter, “2+” indicates the third, “2-” indicates the fourth, etc.
down to “6-” which is the 12th parameter. The next 12 parameters are indicated by
flashing “1+” through flashing “6-”.
The next 6 parameters are indicated by the “1_” through “6_” lights solidly on with
both the “+” and “-” lights off. The next 6 are indicated by “1_” through “6_” solidly
on with both the “+” and “-” lights on.
The next 6 parameters are indicated by flashing “1_” through flashing “6_” with both
the “+” and “-” lights off. The last 6 parameters are indicated by flashing “1_”
through flashing “6_” with both the “+” and “-” lights also flashing.
24
Page 27

3. To change or view a particular Factory Parameter, press the up or down Output
buttons until you reach the desired parameter (see table below). Note that if you
press the up button when you are already at the “top” (parameter 1, solid “1+”), the
display will “wrap around” to the last parameter (parameter 48, flashing “6±”). A
similar wrap-around happens when you press the down button when you are already
at the last parameter.
4. The display will show one light on in the “Param” column if the selected parameter is
a “multiple-choice” type, or one or two lights in the “Value” bar graph if the
parameter is a “variable-value” type. You change the multiple-choice selection using
the buttons under the “Param” lights, and the variable-value using the buttons under
the “Value” lights. For multiple-choice parameters, the top Param light (“Threshold”)
through the bottom light (“Ramp Down”) are referred to in the table as choices “A”
through “E”.
When changing a variable-value parameter, note that the top Value light (“MAX”)
corresponds to the maximum value allowed for that parameter (see table below), and
the bottom (“MIN”) corresponds to the minimum value allowed. Each single press of
the Value up or down buttons will change the parameter by the increment value for
that parameter. Holding down either button will cause it to automatically repeat, and
is useful when you need to change a value a long way from where it is.
If you are adjusting either of the Boom Derating Factors, the numeric display on the
T45 or T47 will show the value (in percent) of the parameter you are adjusting, with
no pointers (LOAD %, DIAG1, DIA G2) showing.
5. When you are done changing the parameters, press the Store button to save the new
Factory Parameters. If you do not want to save your changes, remove the Factory
Key. If you want to restore the Factory Parameters to the preprogrammed factorydefault settings, press and hold the Store button until all the lights begin flashing; only
the Factory Parameters are affected--the Proportional Drive Settings can only be reset
by holding the Store button in Proportional Drive Setup Mode.
6. You can now remove the Factory Key or simultaneously press the two lower-left
hand buttons again to get back to Proportional Drive Setup mode.
9.3. List of Factory Parameters
The following table lists the Digger Derrick Control System Factory Parameters.
For each parameter, the corresponding light display in the Output column is shown,
together with the Minimum, Maximum, Adjustment Increment, and Default Value. The
last two columns in the table indicate other adjustment restrictions for the parameter;
some parameters may be constrained by the values of other parameters.
An explanation of the parameters whose function is not immediately obvious
follows the table.
25
Page 28

Parameter Display Type Min. Max. Increm. Default Cannot Go Below Cannot Go Above
PWM Drive Frequency
for R1300 Proportional
Outputs 1+/- through
4+/-
PWM Drive Frequency
for R1300 Proportional
Outputs 5+/- and 6+/-
PWM Drive Frequency
for S20 Proportional
Outputs O1 through O8
PWM Drive Frequency
for S20 Proportional
Outputs O9 through O16
Solid 1+ Mult.-
Choice
Solid 1- Mult.-
Choice
Solid 2+ Mult.-
Choice
Solid 2- Mult.-
Choice
A = 33 Hz
B = 50 Hz
C = 80 Hz
D = 125 Hz
E = 250 Hz
A = 33 Hz
B = 50 Hz
C = 80 Hz
D = 125 Hz
E = 250 Hz
A = 33 Hz
B = 50 Hz
C = 80 Hz
D = 125 Hz
E = 250 Hz
A = 33 Hz
B = 50 Hz
C = 80 Hz
D = 125 Hz
E = 250 Hz
AN/A N/A
AN/A N/A
AN/A N/A
EN/A N/A
Boom Load Moment
Limit
Boom Derating Factor,
Ground Operation (%)
Solid 3+ Mult.-
Choice
Solid 3- Variable
Value
A = 2500000 inch-lbs A N/A N/A
20 150 2 84 N/A N/A
26
Page 29

Boom Derating Factor,
Platform Operation (%)
Solid 4+ Variable
Value
20 150 2 66 N/A N/A
Emergency Override
Panel Function Speed
(%)
Auger Shake Speed (%) Solid 5+ Variable
Digger Transmission
Type
Solid 4- Variable
Value
Value
Solid 5- Mult.-
Choice
5 100 5 25 N/A N/A
5 100 5 100 N/A N/A
A = Two-Speed
B = Hydrasync
AN/A N/A
27
Page 30

PWM Drive Frequency Parameters
These 4 parameters allow you to use the Receiver/Controller in heterogeneous
valve systems. Grouping valves requiring different drive frequencies into separate banks,
you can provide each valve with the drive frequency most suited to it.
Boom Load Moment Limit
This parameter allows you to select from up to five load moment limits, to match
the exact model of digger derrick on which you are installing the Control System.
Boom Derating Factors
These parameters are used to multiply (in percent) the Boom Load Moment
Limit to determine the actual load limit for the boom. There are two separate factors;
one is for ground operation and the other for platform operation.
When you are adjusting these parameters, the T45 or T47 numeric display will
show the value (in percent) of the parameter you are adjusting, with no pointers
(LOAD %, DIAG1, DIAG2) showing
Emergency Override Panel Function Speed
This parameter determines the speed of the proportional functions when operated
from the toggle switches on the Emergency Override Panel.
Auger Shake Speed
This parameter determines the speed of the digger when operated from the Auger
Shake toggle switch.
Digger Transmission Type
This parameter is used to determine if the auger must be stopped while shifting
speeds. Hydrasync diggers can be shifted “on the fly”, while two-speed diggers cannot.
When the Two-Speed digger is selected, the DIGGER SHIFT functions will automatically
stop the auger, perform a shift, and then restart the auger.
28
Page 31

10. Warranty
OMNEX Control Systems Inc. (“OMNEX”) warrants, to the original purchaser,
that the OMNEX Control System is free from defects in materials and workmanship,
subject to normal use and service, for a period of ONE YEAR from the original date of
delivery as evidenced by a copy of the sales invoice. This warranty covers parts
(excluding crystals, parts subjected to unauthorized repair or modification, and wear and
tear on switches, knobs, and joysticks) and labour.
OMNEX’s entire liability and your exclusive remedy shall be, at OMNEX’s
option, either the repair or replacement
returned with a copy of the original sales invoice to OMNEX freight prepaid. If failure
resulted from accident, abuse or misapplication, OMNEX shall have no responsibility to
repair or replace the Control System. Under no circumstances shall OMNEX be
responsible for incidental or consequential damage or loss caused by defects in its
products, whether such damage or loss occurs or is discovered before or after
replacement or repair, and whether or not such damage may be caused by the negligence
of OMNEX Control Systems Inc.
Neither OMNEX nor its Distributor shall be liable for any delay or failure in the
performance of any of its obligations under this agreement caused by acts of God, strikes,
other labour disturbances, embargoes, boycotts, shortage of parts or any cause beyond its
reasonable control.
of the OMNEX Control System, which must be
29
 Loading...
Loading...