


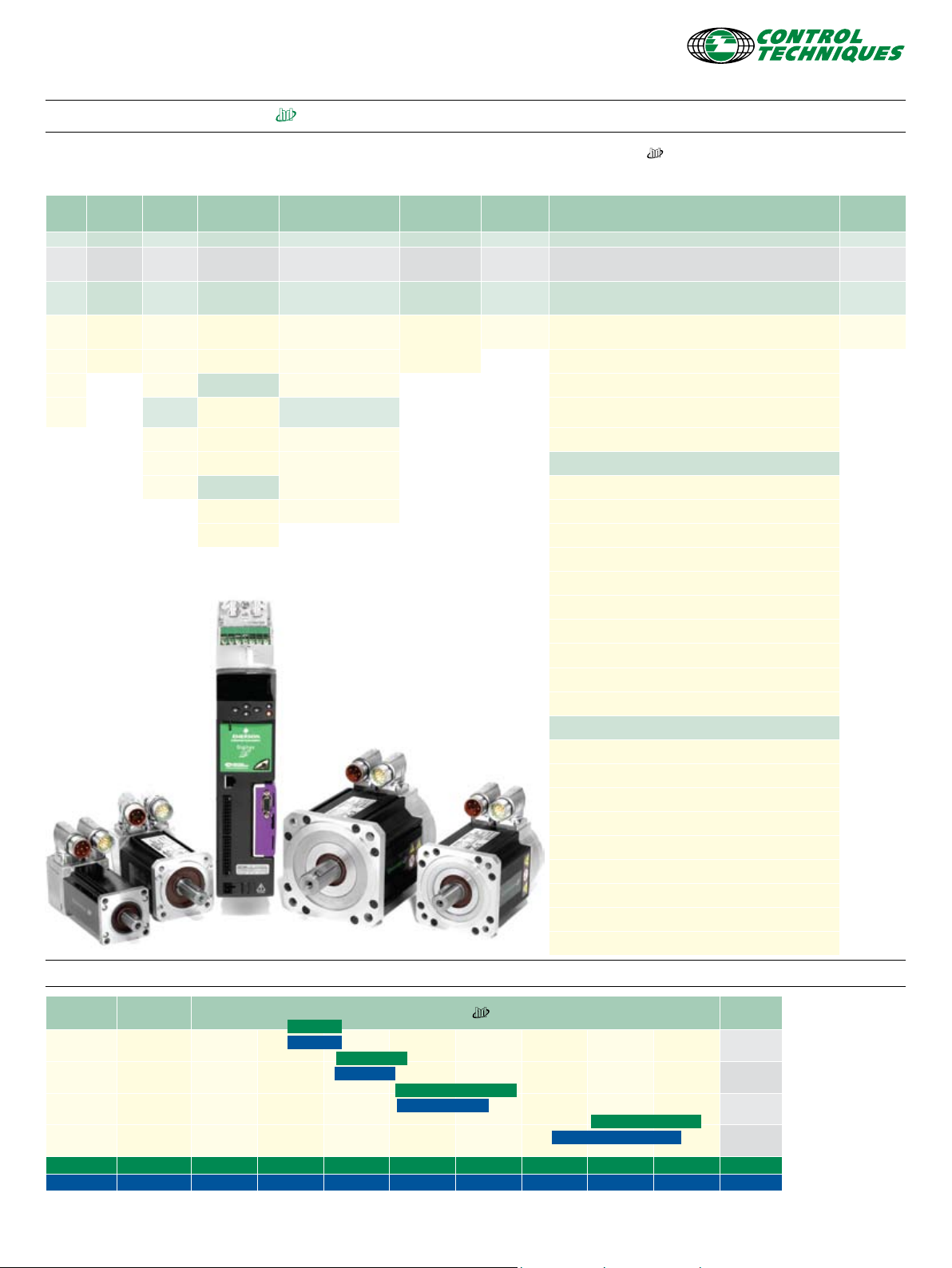
Unimotor
Produktdaten
Hochdynamischer bürstenloser
AC-Servomotor für den Einsatz mit
Control Techniques-Umrichtern
Baugrößen 055 bis 115
0,72 Nm bis 18,8 Nm
(56,4 Nm Spitze)
www.controltechniques.com www.controltechniques.com
32
QUALITY
MANAGEMENT
003
Kompakter Servomotor für anspruchsvolle Anwendungen
Unimotor ist die neue, Reihe hochdynamischer bürstenloser
AC-Servomotoren von Control Techniques, die für den Einsatz
mit Digitax ST-, Unidrive SP- und Epsilon EP-Umrichtern konzipiert
wurde. Unimotor
niedriger Eigenträgheit für Anwendungen, bei denen höchste
Dynamik erforderlich ist. Das Drehmomentprol des Unimotor
ist auf die Digitax ST-Servoantriebe abgestimmt und liefert
Spitzenüberlastwerte von bis zu 300 % für maximale Dynamik.
bietet eine äußerst kompakte Lösung mit
Spitzenleistung in Konstruktion, Innovation und
Zuverlässigkeit
Der Unimotor ist die Entwicklung eines spezialisierten Teams,
das Produktinnovation, Leistung und Zuverlässigkeit als Designziele
in den Mittelpunkt seiner Arbeit stellte. Mithilfe verschiedener intern
entwickelter Entwicklungs- und Konstruktionssoftware konnten neue
Ideen im Designprozess in kürzester Zeit bewertet, in Prototypen
umgesetzt und getestet werden. Daraus folgt, dass der Unimotor
eine Reihe einzigartiger leistungssteigernder Eigenschaften
beinhaltet, für die bereits Patente angemeldet wurden. Unimotor
setzt neue Maßstäbe bezüglich Leistung und Qualität.
Hauptmerkmale
Aufgrund seines umfassenden Angebots an Merkmalen eignet sich
der Unimotor
➜ Drehmomentbereich: 0,72 Nm bis 18,8 Nm
➜ Hohes Drehmoment/Trägheitsverhältnis zur Gewährleistung einer
hohen Dynamik
➜ Kompakt, aber leistungsstark
➜ Haltebremsen mit hohem Energieverzehr
➜ IP65-Konformität: bei Montage und Anschluss gegen Spritzwasser
und Staub geschützt
➜ Segmentierter Stator
➜ Leistung von Weltklasse
➜ Unterstützt durch strenge Tests für Leistung und Zuverlässigkeit
➜ Windungen für 400 V und 220 V
➜ Nenndrehzahlen von 2000 min-1, 3000 min-1, 4000 min-1 und
6000 min-1
➜ Größere Wellen zur Erhöhung der Torsionssteigkeit
für eine Vielzahl industrieller Anwendungen
Perfekt aufeinander abgestimmte Motor- und
Umrichterkombinationen
Antriebs-/Motorkombinationen von Control Techniques liefern in Bezug
auf Leistungsfähigkeit, Kostengünstigkeit und Anwenderfreundlichkeit
optimierte Systeme. Während des Herstellungsprozesses werden
bei Unimotor
-Motoren, mit hochauösenden SinCos- oder
Absolutgebern, Daten auf das „elektronische Typenschild”
geladen. Diese Daten können zur automatischen Optimierung der
Motorparameter von Control Techniques-Servoantrieben ausgelesen
werden. Dieses Leistungsmerkmal vereinfacht Inbetriebnahme und
Wartung, gewährleistet Performance und spart Zeit.
Weitere Informationen über die Control
Techniques Servo-Antriebe nden Sie in den
Broschüren über Digitax ST und Unidrive SP.
Genauigkeit und Auflösung passend zu Ihren Anwendungen
Die Auswahl des richtigen Encoders für Ihre Anwendung ist
ein kritischer Faktor, wenn es darum geht, optimale Leistung
zu erhalten. Der Unimotor
verfügt über eine Reihe von
Rückführungsoptionen, die verschiedene Genauigkeiten und
Auösung bieten, um den meisten Anwendungen gerecht zu werden:
➜ Resolver: robustes Messsystem für extreme Anwendungen und
Bedingungen: niedrige Genauigkeit, mittlere Auösung
➜ Inkrementeller Encoder: hohe Genauigkeit, mittlere Auösung
➜ Induktiver-Absolut-Encoder: mittlere Genauigkeit, mittlere
Auösung, als Single- und Multiturn-Encoder
➜ Optischer SinCos-Absolut-Encoder: hohe Genauigkeit, hohe
Auösung, als Single- und Multiturn-Encoder
➜ Die Protokolle Hiperface (SICK) und EnDAT (Heidenhain) werden
unterstützt
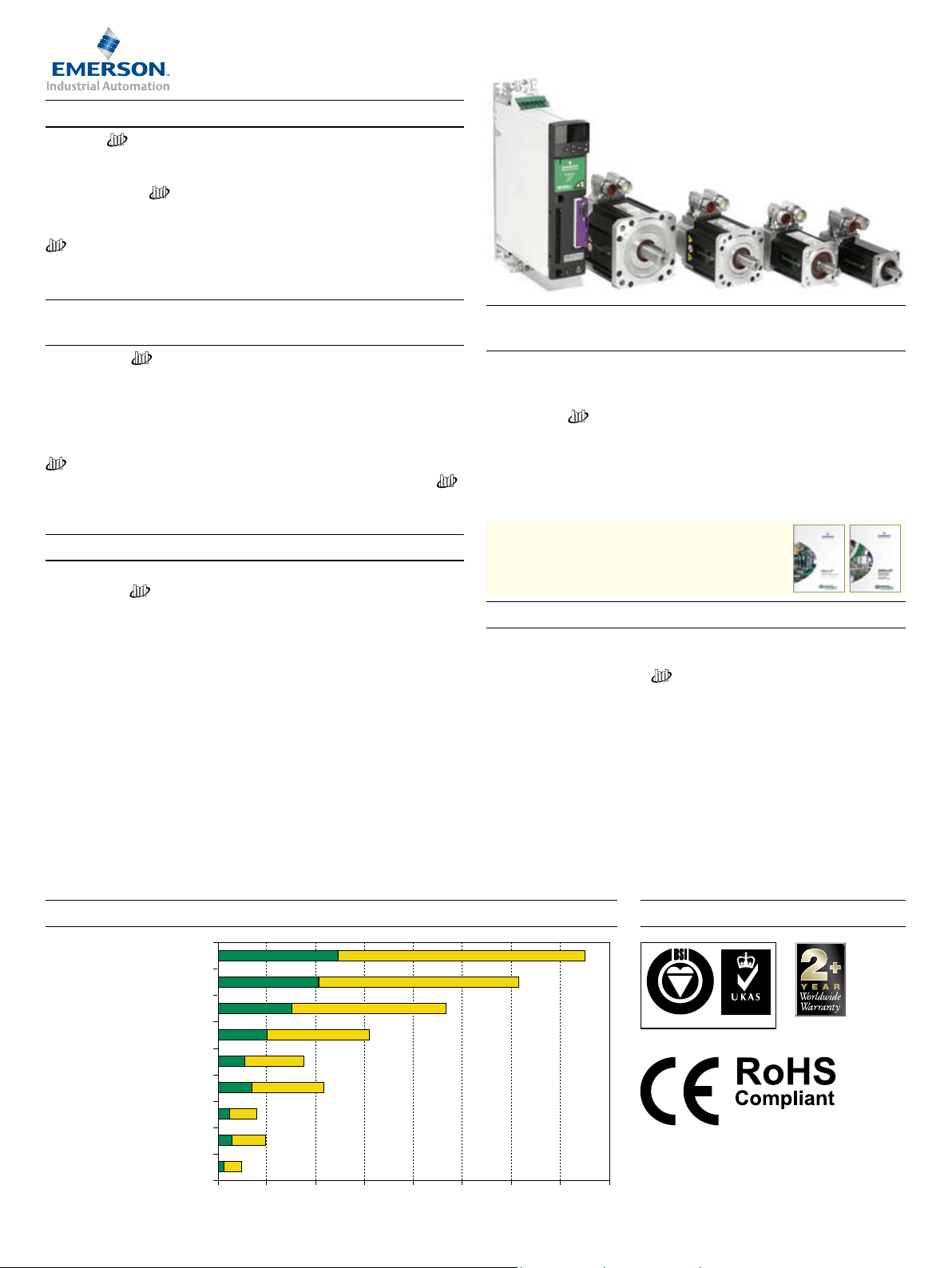
Konformität und NormenDrehmomentbereiche ■ Stillstandsmoment ■ Spitzendrehmoment (3000 min-1)
115UDC300 + DST1405
115UDB300 + DST1405
089UDC300 + DST1404
089UDB300 + DST1403
089UDA300 + DST1402
067UDC300 + DST1402
067UDA300 + DST1401
055UDC300 + DST1401
055UDA300 + DST1401
0 205 2510 3015 35 40
Drehmoment (Nm)
FM 30610
32
32
Bestellcodes für Unimotor
Verwenden Sie die Angaben in der untenstehenden Tabelle, um einen Bestellcode für einen Unimotor zu erstellen.
Die unterlegten Einzelheiten stellen ein Bestellbeispiel dar.
089 UD B 30 5 B A CA A
Bau-
Motor-
größe
spannung
055 ED = 220 V A 30 = 3 000 min -1 0 = Nicht montiert (Std)
067 UD = 400 V B 60 = 6 000 min-1 1 = Haltebremse CR = Inkrementeller Encoder (Renco)
089 C 089-Gehäuse X = Sonderzubehör EM = Induktiver absoluter Multiturn-Encoder
115
Kurzreferenz-Tabelle
Stator-
055-089-
Gehäuse
Gehäuse
Nenndrehzahl Bremse (24 V) Anschlusstyp Welle Rückführungsmodul Trägheit
länge
055-067Gehäuse
115-
30 = 3 000 min-1 067-115-Gehäuse
B 40 = 4 000 min-1 0 = Nicht montiert (Std) XX = Sonderzubehör
C 60 = 6 000 min -1
D 115-Gehäuse AE = Reso lver
20 = 2 000 min-1 X = Sonderzubehör CA = Inkrementeller Encoder (SICK)
30 = 3 000 min-1 CR = Inkrementeller Encoder (Renco)
055-Gehäuse 055-067-Gehäuse
B = Leistung und
Signal 90°
drehbar
5 = Haltebremse mit
hoher
Energieaufnahme
A = Welle mit
Paßfeder
AR = Reso lver A = Standard
FM = Induktiver absoluter Singleturn-
Encoder
EB = Optischer absoluter Multiturn-Encoder
FB = Optischer absoluter Singleturn-Encoder
EC = Induktiver absoluter Multiturn-Encoder
FC = Induktiver absoluter Singleturn-Encoder
RA = Optischer Sincos-Multiturn-Encoder
SA = Optischer Sincos-Singleturn-Encoder
XX = Sonderzubehör
AE = Reso lver
CA = Inkrementeller Encoder (SICK)
EB = Optischer absoluter Multiturn-Encoder
FB = Optischer absoluter Singleturn-Encoder
EC = Induktiver absoluter Multiturn-Encoder
FC = Induktiver absoluter Singleturn-Encoder
RA = Optischer Sincos-Multiturn-Encoder
SA = Optischer Sincos-Singleturn-Encoder
XX = Sonderzubehör
4 096 ppr (R35i)
EQI 1130
ECI 1118
089-Gehäuse
4 096 ppr (CFS50)
4 096 ppr (R35i)
EQN 1325
ECN 1313
EQI 1331
ECI 1319
SRM 50 (GEN 2)
SRS 50 (GEN 2)
115-Gehäuse
4 096 ppr (CFS50)
EQN 1325
ECN 1313
EQI 1331
ECI 1319
SRM 50 (GEN 2)
SRS 50 (GEN 2)
Baugröße
055 63
067 75
089 100
115 130
Stillstand 0 0,5 1,0 3,0 5,0 8,0 10,0 15,0 20,0 (Nm)
Trägheit 0 0,1 0,2 0,7 1,5 2,5 6,5 8,0 9,0 (kgcm
Lochkreis
(PCD) (mm)
0,72
0,14
1,65
0,36
1,45
0,30
0,75
3,70
3,20
0,87
Unimotor
2,34
8,00
4,41
10,2
8,38
18,80
Seite Nr.
4
5
6
7
2
)
www.controltechniques.com www.controltechniques.com
54
Baugröße 055 Für 3-Phasen VPWM-Umrichter
F
G
E
Optionaler
Schlüssel
K
L
A
N
H
C
∅M
BD
4 Bohrungen ∅R (H14)
in gleichem Abstand
auf einerm Montage-Lochkreis ∅S
P
T
Gewindegröße
der Wellenbohrung
I zu Tiefe J
Motor-Baugröße (mm) 055ED 055UD
Spannung (Vrms)
Gehäuselänge A B C A B C
Dauer-Stillstandsmoment (Nm)
Spitzendrehmoment (Nm)
Trägheit (kgcm2)
Thermische Zeitkonstante der Wicklung (s)
Motorgewicht, ohne Haltebremse (kg)
Motorgewicht, mit Haltebremse (kg)
Anzahl der Pole
Drehzahl 3000
(min-1)
Drehzahl 6000
(min-1)
Kt (Nm/A) =
Ke (V/1000 min-1) =
Nennmoment (Nm)
Stillstandsstrom (A)
Nennleistung (kW)
R (ph-ph) (Ω)
L (ph-ph) (mH)
Kt (Nm/A) =
Ke (V/1000 min-1) =
Nennmoment (Nm)
Stillstandsstrom (A)
Nennleistung (kW)
R (ph-ph) (Ω)
L (ph-ph) (mH)
200-240 380-480
0,72 1,18 1,65 0,72 1,18 1,65
2,88 4,72 6,60 2,88 4,72 6,60
0,14 0,25 0,36 0,14 0,25 0,36
34,0 38,0 42,0 34,0 38,0 42,0
1,20 1,50 1,80 1,20 1,50 1,80
1,60 1,90 2,20 1,6 1,90 2,20
8 8 8 8 8 8
0,74
0,87
0,91
0,74
45,00
52,50
55,00
0,70 1,05 1,48 0,70 1,05 1,48
0,97 1,36 1,81 0,97 0,79 1,00
0,22 0,33 0,46 0,22 0,33 0,46
28,00 14,12 9,53 28,00 45,00 31,00
50,00 32,00 23,00 50,00 100,00 75,00
0,45
0,43
26,00
0,48
29,00
27,00
0,68 0,90 1,20 0,68 0,90 1,20
1,61 2,74 3,44 0,97 1,49 1,99
0,43 0,57 0,75 0,43 0,57 0,75
8,50 3,55 2,38 28,00 10,70 7,80
16,00 8,20 6,30 50,00 25,00 20,00
45,00
0,74
45,00
1,49
90,00
0,79
47,50
1,65
100,00
0,83
50,00
∆t= 100°C Wicklung 40°C max. Umgebungstemp.
Alle Angaben unterliegen +/-10 % Toleranz
Stillstandsmoment, Nenndrehmoment und Leistung beziehen sich auf
maximalen Dauerbetrieb, getestet bei 20 °C Umgebungstemperatur und einer
Umrichtertaktfrequenz von 12 kHz.
Alle übrigen Zahlen beziehen sich auf eine Motortemperatur von 20 °C.
Die maximale intermittierende Wicklungstemperatur beträgt 140 °C.
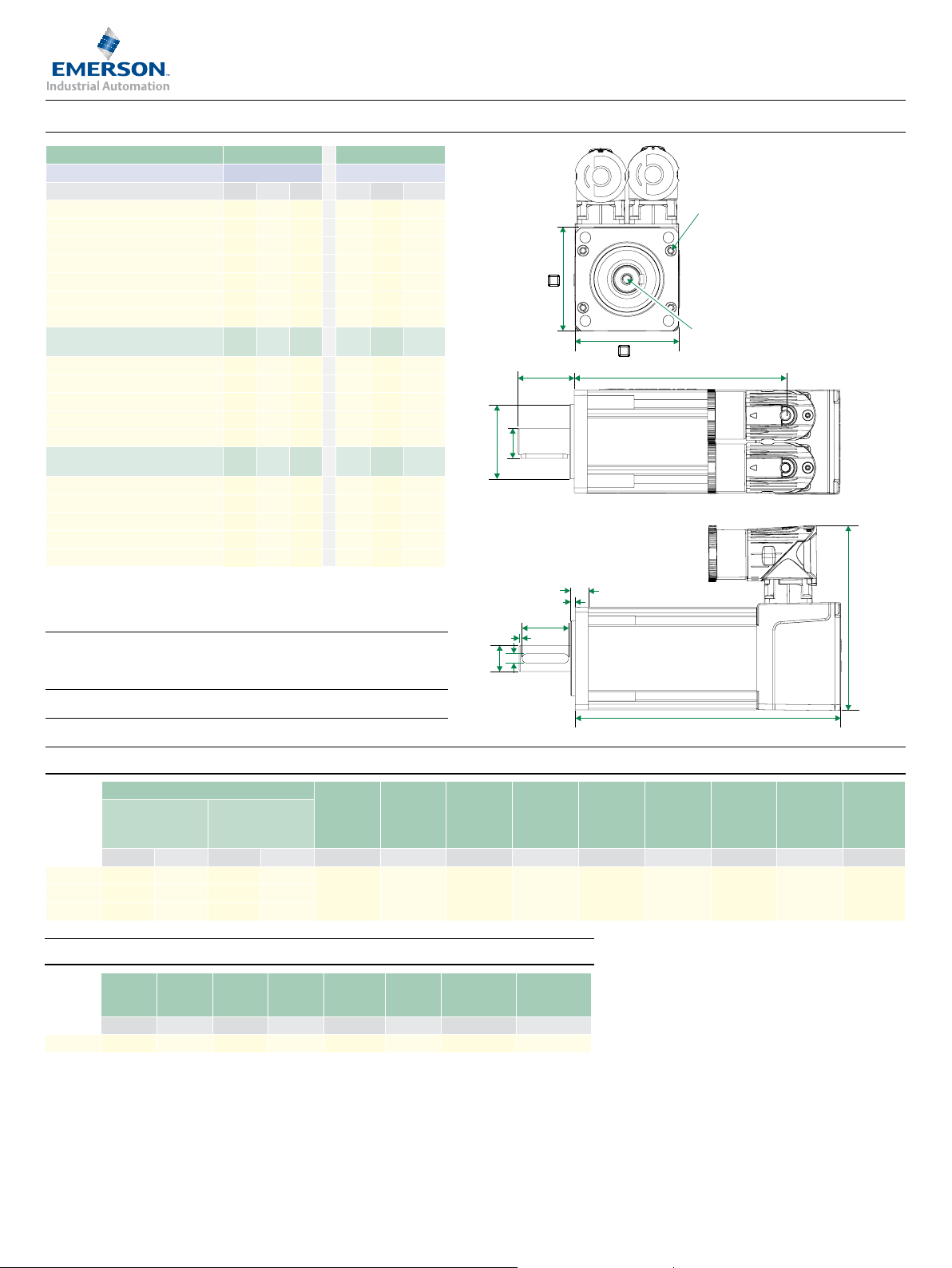
Motorabmessung (mm) Zeichnung-Nummer: GM496400
055A
055B
055C
Rückführung AR, CR, EM/FM
Länge ohne
Haltebremse
A B A B K L M (j6) N P R (H14) S T
118,0 90,0 158,0 130,0
142,0 114,0 182,0 154,0
166,0 138,0 206,0 178,0
Länge mit
Haltebremse
Flanschdicke
Zentrierring-
Dicke
7,0 2,5 40,0 99,0 55,0 5,8 63,0 55,0 M5
Zentrierring-
Durchmesser
Gesamthöhe
Flanschqua-
drat
Durchmesser
Befesti-
gungsboh-
rung
Lochkreis-
durchmesser
Motorge-
häuse
Motorwellen-Abmessungen (mm)
14,0 Std
Motorwel-
lendurch-
Motorwel-
messer
lenlänge
C (j6) D E F G H (h9) I J
14 30,0 16,0 25,0 1,5 5,0 M5 12,5
Passfeder-
höhe
Passfeder-
länge
Passfeder
bis Wellen-
ende"
Passfeder-
breite
Gewindegrö-
ße der Wellen-
bohrung
Tiefe der Wel-
lenbohrung
Schrauben-
größe

54
54
Baugröße 067 Für 3-Phasen VPWM-Umrichter
Optionaler
Schlüssel
4 Bohrungen ∅R (H14)
in gleichem Abstand
auf einerm Montage-Lochkreis ∅S
T
P
K
L
A
N
E
∅M
F
G
H
∅C
B
D
Gewindegröße
der Wellenbohrung
I zu Tiefe J
Motor-Baugröße (mm) 067ED 067UD
Spannung (Vrms)
Gehäuselänge A B C A B C
Dauer-Stillstandsmoment (Nm)
Spitzendrehmoment (Nm)
Trägheit (kgcm2)
Thermische Zeitkonstante der Wicklung (s)
Motorgewicht, ohne Haltebremse (kg)
Motorgewicht, mit Haltebremse (kg)
Anzahl der Pole
Drehzahl 3000
(min-1)
Drehzahl 6000
(min-1)
Kt (Nm/A) =
Ke (V/1000 min-1) =
Nennmoment (Nm)
Stillstandsstrom (A)
Nennleistung (kW)
R (ph-ph) (Ω)
L (ph-ph) (mH)
Kt (Nm/A) =
Ke (V/1000 min-1) =
Nennmoment (Nm)
Stillstandsstrom (A)
Nennleistung (kW)
R (ph-ph) (Ω)
L (ph-ph) (mH)
200-240 380-480
1,45 2,55 3,70 1,45 2,55 3,70
4,35 7,65 11,10 4,35 7,65 11,10
0,30 0,53 0,75 0,30 0,53 0,75
54 61 65 54 61 65
2,00 2,60 3,20 2,00 2,60 3,20
2,70 3,3 3,90 2,70 3,3 3,90
10 10 10 10 10 10
0,93
57,00
1,40 2,45 3,50 1,40 2,45 3,50
1,56 2,74 3,98 1,81 1,59 2,31
0,44 0,77 1,10 0,44 0,77 1,10
15,20 4,86 3,33 11,92 15,20 10,70
45,43 17,40 12,70 35,18 54,40 40,80
0,47
28,50
1,30 2,20 1,30 2,20 3,10
3,12 5,48 1,81 3,19 4,63
0,82 1,38 0,82 1,38 1,95
3,76 1,22 11,92 3,79 2,68
11,06 4,35 35,18 13,60 10,20
0,80
49,00
1,60
98,00
0,8
49,00
1,60
98,00
∆t= 100°C Wicklung 40°C max. Umgebungstemp.
Alle Angaben unterliegen +/-10 % Toleranz
Stillstandsmoment, Nenndrehmoment und Leistung beziehen sich auf
maximalen Dauerbetrieb, getestet bei 20 °C Umgebungstemperatur und einer
Umrichtertaktfrequenz von 12 kHz.
Alle übrigen Zahlen beziehen sich auf eine Motortemperatur von 20 °C.
Die maximale intermittierende Wicklungstemperatur beträgt 140 °C.
Motorabmessung (mm) Zeichnung-Nummer: IM/0694/GA
Rückführung AR, CR, EM/FM
Länge ohne Halte-
bremse
(± 1,1) B (± 1,0) A (± 1,1) B (± 1,0) K (± 0,5) L (± 0,1) M (j6) N (± 0,3) P (± 0,3) R (H14) S (± 0,4) T (± 0,4)
A
142,7 108,8 177,7 143,8
067A
172,7 138,8 207,7 173,8
067B
Motorwellen-Abmessungen (mm)
202,7 168,8 237,7 203,8
067C
Motorwel-
lendurch-
messer
(j6) D (± 0,45) E (+0,0 / -0,13) F (± 0,25) G (± 1,1) H (h9) I J (± 0,1)
C
14,0 Std
14,0 30,0 16,0 22,0 3,6 5,0 M5 x 0.8 13,5
Länge mit Halte-
Motor-
wellen-
länge
bremse
Passfederhöhe
Flanschdicke
7,5 2,50 60,0 111,5 70,0 5,8 75,0 67,00 M5
Passfeder-
länge
Zentrierring-
Dicke
Passfeder
bis Wellen-
ende"
Zentrierring-
Durchmesser
Passfeder-
breite
Gesamthöhe
Gewindegrö-
ße der Wellenbohrung
Flanschqua-
drat
Tiefe der Wel-
lenbohrung
Durchmesser
Befestigungs-
bohrung
Lochkreis-
durchmesser
Motorge-
häuse
Schrauben-
größe

www.controltechniques.com www.controltechniques.com
76
Baugröße 089 Für 3-Phasen VPWM-Umrichter
F
G
E
Optionaler
Schlüssel
K
L
A
N
H
∅C
∅M
B
D
4 Bohrungen ∅R (H14)
in gleichem Abstand
auf einerm Montage-Lochkreis ∅S
P
T
Gewindegröße
der Wellenbohrung
I zu Tiefe J
Motor-Baugröße (mm) 089ED 089UD
Spannung (Vrms)
Gehäuselänge A B C A B C
Dauer-Stillstandsmoment (Nm)
Spitzendrehmoment (Nm)
Trägheit (kgcm2)
Thermische Zeitkonstante der Wicklung (s)
Motorgewicht, ohne Haltebremse (kg)
Motorgewicht, mit Haltebremse (kg)
Anzahl der Pole
Drehzahl 3000
(min-1)
Drehzahl 4000
(min-1)
Drehzahl 6000
(min-1)
∆t= 100°C Wicklung 40°C max. Umgebungstemp.
Kt (Nm/A) =
Ke (V/1000 min-1) =
Nennmoment (Nm)
Stillstandsstrom (A)
Nennleistung (kW)
R (ph-ph) (Ω)
L (ph-ph) (mH)
Kt (Nm/A) =
Ke (V/1000 min-1) =
Nennmoment (Nm)
Stillstandsstrom (A)
Nennleistung (kW)
R (ph-ph) (Ω)
L (ph-ph) (mH)
Kt (Nm/A) =
Ke (V/1000 min-1) =
Nennmoment (Nm)
Stillstandsstrom (A)
Nennleistung (kW)
R (ph-ph) (Ω)
L (ph-ph) (mH)
Alle Angaben unterliegen +/-10 % Toleranz
Stillstandsmoment, Nenndrehmoment und Leistung beziehen sich auf
maximalen Dauerbetrieb, getestet bei 20 °C Umgebungstemperatur und einer
Umrichtertaktfrequenz von 12 kHz.
Alle übrigen Zahlen beziehen sich auf eine Motortemperatur von 20 °C.
Die maximale intermittierende Wicklungstemperatur beträgt 140 °C.
Motorabmessung (mm) Zeichnung-Nummer: IM/0688/GA
089A
089B
089C
Rückführung EC/FC
Länge ohne Halte-
bremse
(± 0,9) B (± 1,0) A (± 0,9) B (± 1,0) K (± 0,5) L (± 0,1) M (j6) N (± 1,0) P (± 0,28) R (H14) S (± 0,4) T (± 0,7)
A
147,8 110,5 187,9 150,6
177,8 140,5 217,9 180,6
207,8 170,5 247,9 210,6
Länge mit Halte-
200-240 380-480
3,20 5,50 8,00 3,20 5,50 8,00
9,60 16,50 24,00 9,60 16,50 24,00
0,87 1,61 2,34 0,87 1,61 2,34
85 93 98 85 93 98
3,30 4,40 5,50 3,30 4,40 5,50
4,30 5,40 6,50 4,30 5,40 6,50
10 10 10 10 10 10
0,93
57,00
3,00 4,85 6,90 3,00 4,85 6,90
3,44 5,91 8,60 2,00 3,44 5,00
0,94 1,52 2,17 0,94 1,52 2,17
3,28 1,54 0,89 10,32 5,05 3,21
21,55 11,37 7,09 67,65 38,36 24,93
0,70
42,75
2,90 4,55 6,35 2,90 4,55 6,35
4,57 7,86 11,43 2,67 4,58 6,67
1,21 1,91 2,66 1,21 1,91 2,66
2,04 0,78 0,45 6,04 2,99 1,75
13,20 5,97 3,66 38,51 21,90 14,03
2,65 3,80 5,00 2,65 3,80 5,00
6,88 11,83 17,20 4,00 6,88 10,00
1,67 2,39 3,14 1,67 2,39 3,14
0,96 0,38 0,23 2,58 1,27 0,80
6,11 2,84 1,89 16,91 9,59 6,23
0,47
28,50
1,60
98,00
1,2
73,5
0,8
49
Flanschdicke
bremse
10,3 2,20 80,0 130,5 91,0 7,00 100,0 89,0 M6
Zentrierring-
Dicke
Zentrierring-
Durchmesser
Gesamthöhe
Flanschqua-
drat
Durchmesser
Befestigungs-
bohrung
Lochkreis-
durchmesser
Motorge-
häuse
Schrauben-
größe
Rückführung FB, EB/CA/
ohne Halte-
bremse
089A
089B
089C
Länge
(± 0,9) A (± 0,9) A (± 0,9) A (± 0,9)
A
160,8 200,9 137,8 177,9
190,8 230,9 167,8 207,9
220,8 260,9 197,8 237,9
SA, RA
mit Halte-
bremse
Länge
Rückführung AE/CR
ohne Halte-
bremse
Länge
mit Halte-
bremse
Länge
Motorwellen-Abmessungen (mm)
Motorwellen-
durch-
messer
19,0 Std
Motorwellen-
länge
(j6) D (± 0,45) E (+ 0,009 / -0,134) F (± 0,25) G (± 1,1) H (h9) I J (± 0,1)
C
19,0 40,0 21,5 32,0 3,7 6,0 M6 x 1,0 17,0
Passfederhöhe
derlänge
Passfe-
Passfeder
bis
Wellen-
ende"
Passfe-
derbreite
Gewindegrö-
ße der Wellenbohrung
Tiefe der Wel-
lenbohrung

76
76
Baugröße 115 Für 3-Phasen VPWM-Umrichter
D
F
G
E
Optionaler
Schlüssel
4 Bohrungen ∅R (H14)
in gleichem Abstand
auf einerm Montage-Lochkreis ∅S
P
T
Gewindegröße
der Wellenbohrung
I zu Tiefe J
K
L
A
N
H
∅C
∅M
B
Motor-Baugröße (mm) 115ED 115UD
Spannung (Vrms)
Gehäuselänge B C D B C D
Dauer-Stillstandsmoment (Nm)
Spitzendrehmoment (Nm)
Trägheit (kgcm2)
Thermische Zeitkonstante der Wicklung (s)
Motorgewicht, ohne Haltebremse (kg)
Motorgewicht, mit Haltebremse (kg)
Drehzahl 2000
(min-1)
Drehzahl 3000
(min-1)
Anzahl der Pole
Kt (Nm/A) =
Ke (V/1000 min-1) =
Nennmoment (Nm)
Stillstandsstrom (A)
Nennleistung (kW)
R (ph-ph) (Ω)
L (ph-ph) (mH)
Kt (Nm/A) =
Ke (V/1000 min-1) =
Nennmoment (Nm)
Stillstandsstrom (A)
Nennleistung (kW)
R (ph-ph) (Ω)
L (ph-ph) (mH)
200-240 380-480
10,20 14,60 18,80 10,20 14,60 18,80
30,60 43,80 56,40 30,60 43,80 56,40
4,41 6,39 8,38 4,41 6,39 8,38
164 168 175 164 168 175
7,20 8,90 10,70 7,20 8,90 10,70
8,70 10,40 12,20 8,70 10,40 12,20
10 10 10 10 10 10
1,40
85,50
8,60 11,90 15,60 8,60 11,90 15,60
7,29 10,43 13,43 4,25 6,08 7,83
1,80 2,49 3,27 1,80 2,49 3,27
1,40 0,77 0,58 4,41 2,41 1,80
12,84 7,87 6,15 40,60 24,69 19,45
0,93
57,00
7,70 10,50 7,70 10,50 13,60
10,97 15,70 6,38 9,13 11,75
2,42 3,30 2,42 3,30 4,27
0,58 0,38 1,83 1,16 0,75
5,40 3,85 16,93 11,88 8,11
2,4
147
1,60
98,00
∆t= 100°C Wicklung 40°C max. Umgebungstemp.
Alle Angaben unterliegen +/-10 % Toleranz
Stillstandsmoment, Nenndrehmoment und Leistung beziehen sich auf
maximalen Dauerbetrieb, getestet bei 20 °C Umgebungstemperatur und einer
Umrichtertaktfrequenz von 12 kHz.
Alle übrigen Zahlen beziehen sich auf eine Motortemperatur von 20 °C.
Die maximale intermittierende Wicklungstemperatur beträgt 140 °C.
Motorabmessung (mm) Zeichnung-Nummer: IM/0689/GA
115B
115C
115D
115B
115C
115D
Rückführung EC/FC
Länge ohne Halte-
bremse
A
(± 0,9) B (± 1,0) A (± 0,9) B (± 1,0) K (± 0,5) L (± 0,1) M (j6) N (± 1,0) P (± 0,31) R (H14) S (± 0,4) T (± 0,7)
193,8 154,0 230,9 191,1
223,8 184,0 260,9 221,1
253,8 214,0 290,9 251,1
Rückführung FB, EB/CA/
SA, RA
ohne Halte-
bremse
Länge
A
(± 0,9) A (± 0,9) A (± 0,9) A (± 0,9)
206,8 243,9 183,8 220,9
236,8 273,9 213,8 250,9
266,8 303,9 243,8 280,9
Länge mit Halte-
mit Halte-
bremse
Länge
bremse
ohne Halte-
Flanschdicke
Rückführung AE
bremse
Länge
13,2 2,70 110,0 156,5 116,0 10,00 130,0 115,0 M8
mit Halte-
bremse
Länge
Zentrierring-
Dicke
Motorwellen-Abmessungen (mm)
24,0 Std
Zentrierring-
Durchmesser
Gesamt-
höhe
Flanschqua-
drat
Motorwel-
len-durch-
messer
C
24,0 50,0 27,0 40,0 5,3 8,0 M8 x 1,25 20,0
Motor-
wellen-
länge
(j6) D (± 0,45) E (+0,009 / -0,294) F (± 0,25) G (± 1,1) H (h9) I J (± 0,1)
Passfederhöhe
Durchmesser
Befestigungs-
bohrung
Passfeder
Passfe-
derlänge
durchmesser
bis
Wellen-
ende"
Lochkreis-
Passfe-
derbreite
Motorge-
häuse
Gewindegrö-
ße der Wellenbohrung
Schrauben-
größe
Tiefe der
Wellen-
bohrung

www.controltechniques.com www.controltechniques.com
98
Motorauswahl
Platte
Welle
Motor
Dynamometer
Thermo-Isolator
Leistungsreduzierung des Motors
Bei allen davon abweichenden Betriebsbedingungen muss die Motorleistung
reduziert werden. Hierzu gehören: Umgebungstemperatur über
40 °C, Einbaulage des Motors, Taktfrequenz des Umrichters oder
Überdimensionierung des Umrichters gegenüber dem Motor.
Umgebungstemperaturen
Die den Motor umgebende Temperatur muss berücksichtigt werden.
Bei Umgebungstemperaturen über 40 °C muss das Drehmoment mit folgender
Formel als Richtlinie reduziert werden. (Hinweis: Gilt nur für Motoren mit
2000/3000 min-1 und setzt überwiegend Kupferverluste voraus)
Neues reduziertes Drehmoment = Angegebenes Drehmoment x
√ [1-((Umgebungstemperatur - 40°C) / 100)]
Bei einer Umgebungstemperatur von 76 °C entspricht das neue reduzierte
Drehmoment beispielsweise dem 0,8-Fachen des angegebenen
Drehmoments.
Einbaulagen
Das Motordrehmoment muss reduziert werden, wenn die Anbauäche von
einer externen Quelle, wie etwa einem Getriebe, aufgeheizt wird. Der Motor
ist an einen schlechten thermischen Leiter angeschlossen. Der Motor ist mit
den Anschlüssen an der Seite oder vertikal montiert. Der Motor bendet sich
in einem engen Raum mit wenig Luftzirkulation.
Taktfrequenz des Umrichters
Die meisten Nennströme von Unidrive
und Digitax ST werden wegen
der höheren Taktfrequenzen reduziert. Einzelheiten hierzu nden Sie in der
Betriebsanleitung zu Digitax ST oder Unidrive .
Die untenstehende Tabelle zeigt die Reduzierungsfaktoren für Motoren.
Diese Werte stellen nur eine allgemeine Leitlinie dar.
(Hinweis: Gilt nur für Motoren bis zu 3000 min-1 und setzt überwiegend Kupferverluste voraus)
Taktfrequenz
3kHz
4kHz
6kHz
8kHz
12 / 16kHz
055 067 089 115
0,92 0,93 0,89 0,89
0,93 0,94 0,91 0,92
0,95 0,95 0,95 0,96
0,96 0,98 0,97 0,98
1 1 1 1
Motortyp/Baugröße
Thermische Testbedingungen
Die dargestellten Leistungsdaten wurden unter folgenden Bedingungen
aufgezeichnet. Bei einer Umgebungstemperatur von 20 °C wird der Motor an
einer thermisch isolierten Aluminiumplatte, wie unten dargestellt, montiert.
Motortyp/Baugröße Aluminium-Kühlkörper
055 mm
067-089 mm
115 mm
110 x 110 x 27 mm
250 x 250 x 15 mm
350 x 350 x 20 mm
Thermischer Schutz
Thermistor-Schutz (145°C) ist in die Motorwicklungen integriert und spricht
bei Übertemperaturen an. Das Installationspersonal muss den Thermistor an
den Umrichter anschließen. Ein Nichtbeachten dieser Anweisung kann dazu
führen, dass die Gewährleistung des Motors wegen einer durchgebrannten
Motorwicklung außer Kraft tritt.
Umgebungsbedingungen
Jegliche Flüssigkeiten oder Gase, die mit dem Motor in Kontakt kommen,
müssen überprüft werden, um sicherzustellen, dass sie den korrekten
internationalen Normen entsprechen.
Bremsenspezifikation
Statisches Drehmoment
Versor-
Motor-
Baugröße
Baugröße V DC Wat t Nm Nm ms nom kgcm² * Grad**
055
067
089
115
*Hinweis: 1 kgcm² = 1x10-4 kgm² **Der unter „Spiel“ angegebene Wert steigt mit der
Betriebsdauer
Ein-
gangs-
leis-
tung
Standard-
Haltebremse
gung
(V)
24 6,3 1,8 n,b 22 0,03 0,73
24 10,2 n,b 4 <50 0,073 0,75
24 23,35 n,b 10 <50 0,115 0,75
24 19,5 n,b 25 120 0,327 0,75
(01)
HochenergieHaltebremse
(05)
Zeit für
Bremse
öffnen
Trägheits-
moment
Verdreh-
spiel
➜ Die Bremsen sind nur für den Stillstand vorgesehen und nicht für den
dynamischen Betrieb oder als Sicherheitsbremse geeignet
➜ Im spannungslosen Zustand rastet die Bremse ein.
➜ Wenn für Ihre Anwendung eine dynamische Bremsung für Notsituationen
erforderlich ist, erkundigen Sie sich bei Ihrem Drive Centre oder Händler.
➜ Zum Schutz der Bremsenbaugruppe wird empfohlen, eine Diode an
den Ausgangsklemmen der elektronischen Relais oder Relaiskontakte
anzuschließen.
➜ Die Abbildungen beziehen sich auf eine Umgebungstemperatur
von 20° C. Wenn die Motortemperatur über 100 °C beträgt, ist ein
Reduzierungsfaktor von 0,7 auf die Standard-Bremskurven anzuwenden.

98
98
Rückführung
Artikelnummer des
Encodersystems
AR
CR
EM (Multiturn-
Encoder)
FM (Singleturn-
Encoder)
AE
CA
EC (Multiturn-
Encoder)
FC (Singleturn-
Encoder)
RA (Multiturn-
Encoder)
SA (Singleturn-
Encoder)
EB (Multiturn-
Encoder)
FB (Singleturn-
Encoder)
Encoder-Typ
Resolver
Inkrementeller
Encoder
Induktiver
Absolut-Encoder
EnDat 2.1
Resolver
Inkrementeller
Encoder
Induktiver
Absolut-Encoder
EnDat 2.1
Optischer SinCos-
Encoder
Hiperface
Optischer
Absolut-Encoder
EnDat 2.2
Anschluss-
spannung für
Encoder¹
7V RMS
Erregung 5kHz 16 384 (14 Bit) +/- 600”
5Vdc 4 096 16 384 (14 Bit) +/- 150”
5 Vdc 16
6 V RMS
Erregung 6 kHz 16 384 (14 Bit) +/- 720”
5Vdc 4 096 16 384 (14 Bit) +/- 60”
7 - 10 Vdc 32
7 - 12 Vdc 1 024
3,6 - 14 Vdc 2 048
Sincosperioden
oder inkremen-
telle Impulse pro
Umdrehung
055-067-Motoren
1
089-115-Motoren
1
Auflösung für
Lageregelschleife²
Mittel Gering
Mittel Mittel
Hoch Mittel
2,62x10^5 (18 Bit) +/- 480”
Mittel Mittel
Mittel Hoch
Mittel Mittel
Absolute Position
524 288
(19 Bit)
Sehr hoch Hoch
1.04x10^6
(20 Bit)
Sehr hoch Sehr hoch
2.08x10^6
(21 Bit)
Genauigkeit des
und
³
Encodersystems
+/- 280”
Bei SinCos Integrale
Nichtlinearität +/- 45”
Bei SinCos Differenzielle
Nichtlinearität +/- 7”
(Absolute Genauigkeit
+/-52")
+/-20”
(Differenzielle Nichtline-
arität +/- 1% Signalpe-
riode)
Hinweise:
1
1) Der Ausgang des Resolvers ist analog. Die
Auflösung wird durch den verwendeten Analog-/
Digitalwandler bestimmt. Der dargestellte Wert
wird erreicht, wenn ein Resolver in Verbindung
mit dem SM-Resolver-Modul verwendet wird.
2) Die Sinus- und Cosinus-Ausgänge der optischen
SinCos-Encoder sind Analogausgänge. Bei
Unidrive
und Digitax ST werden die oben
angegebenen Auflösungen erreicht, wenn der
Encodertyp entweder auf SC Endat oder SC Hiper
gesetzt wird, abhängig vom jeweiligen Encoder.
3) Die Daten werden vom Hersteller des Encoders
geliefert und beziehen sich auf ein autonomes
Gerät. Die Werte können sich ändern, wenn
der Encoder im Motor installiert und an einen
Umrichter angeschlossen wird.
Diese Werte wurden von CT Dynamics nicht
überprüft.
Resolver
Ein passiv gewickeltes Gerät, das aus Stator- und Rotorelementen besteht,
die von einer externen Quelle, wie etwa einem SM-Resolver, erregt werden.
Der Resolver erzeugt zwei Ausgangssignale, die dem Sinus- und Cosinuswinkel
der Motorwelle entsprechen. Hierbei handelt es sich um ein robustes absolutes
Messsystem geringer Genauigkeit, das hohen Temperaturen und hohen
Schwingungen standhalten kann. Die Positionsdaten sind absolut innerhalb
einer Drehung - d. h. die Position geht nicht verloren, wenn der Umrichter
ausgeschaltet wird.
Inkrementeller Encoder
Ein elektronisches Gerät, das eine optische Auswertung nutzt. Die Position
wird durch Zählen von Schritten oder Impulsen bestimmt. Zwei Impulsfolgen
mit quadratischen Signalen werden für die Richtungsbestimmung verwendet
und die 4-fache (Impulszahl pro Umdrehung) Auflösung wird im Umrichter
verwendet. Ein Nullimpuls tritt einmal pro Umdrehung auf und wird verwendet,
um den Positionszähler auf Null zu stellen. Der Encoder liefert außerdem
Kommutierungssignale, die benötigt werden, um die absolute Position während
des Motorphasentests zu bestimmen. Dieses Messsystem ist mit 4096, 2048 und
1024 Strichen erhältlich. Die Positionsdaten sind nicht absolut - d. h. die Position
geht verloren, wenn der Umrichter ausgeschaltet wird.
SinCos-Absolut-Encoder
Es stehen folgende Typen zur Verfügung: Optisch oder induktiv - Hier werden
Single- oder Multiturn-Encoder unterschieden.
1) Optisch: Ein elektronisches Gerät, das eine optische Auswertung nutzt.
Ein Absolut-Encoder mit hoher Auösung, der eine Kombination aus
absoluten Daten, übertragen über eine serielle Verbindung, und Sinus/
Cosinus-Signalen mit inkrementeller Technik verwendet.
2) Induktiv: Ein elektronisches Gerät mit induktiv gekoppelten Platinen.
Ein Absolut-Encoder mit mittlerer Auösung, der eine Kombination aus
absoluten Daten, übertragen über eine serielle Verbindung, und Sinus/CosinusSignalen mit inkrementeller Technik verwendet. Dieser Encoder kann mit
dem Umrichter entweder über Sinus-/Cosinuswerte oder nur über absolute
serielle Werte betrieben werden. Die Positionsdaten sind absolut innerhalb
von 4096 Umdrehungen - d. h. die Position geht nicht verloren, wenn der
Umrichter ausgeschaltet wird.
Multiturn-Encoder: Wie vorher, aber mit zusätzlichen
Übersetzungszahnrädern, so dass der Ausgang für jede Wellenposition
eindeutig ist und der Encoder die zusätzliche Fähigkeit hat, vollständige
Umdrehungen der Motorwelle bis zu 4096 Umdrehungen zu zählen.
Elektronisches Typenschild.
Das elektronische Typenschild ist bei beiden Encodertypen verfügbar und
ermöglicht eine schnelle Konguration, da die Motordaten im Encoder
„on-board“ gespeichert sind (gilt nur für 075-115-Motoren).

www.controltechniques.com www.controltechniques.com
1110
Kabeldaten
PS B A H A 015
Kabeltyp Mantel
PS = Leistungskabel (Standard) B = PUR H* = 1,0 mm² 10A
PB = Leistungskabel (mit
Bremse)
* Nur verfügbar in OFS
Kabeltyp
C = OFS G = 1,5 mm² 16A
PS steht für Motoren ohne Bremse, PB für Motoren mit
Leiter und PE:
Kabelquerschnitt
A = 2,5 mm² 22A
B = 4,0 mm² 30A X = Offene Kabelenden
Bremse.
Mantel
B steht für einen äußeren Kabelmantel aus PUR und ist
die Standard-Auswahl.
C steht für einen äußeren Kabelmantel aus OFS und ist
die Kabelauswahl für feste Verlegung.
Kabelquerschnitt
Bitte den Kabelquerschnitt anhand des
STILLSTANDSSTROMS des Motors auswählen. Die
Nennwerte gelten für offen verlegte Einzelkabel
(nicht miteinander verschnürt) bei einer Temperatur
von bis zu 40 °C - bitte Toleranzen entsprechend
berücksichtigen.
SI B A A A 015
Anschlussdetails Umrichterseite Anschlussdetails Motorseite Kabellänge
C = Erweiterungsstecker für Leistungskabel,
6-polig
F = Unidrive
H = Ringkabelschuhe für Digitax ST und
Unidrive SP0
(Größe 1-2) Aderendhülsen
Anschlussdetails
Umrichterseite
Anschlussdetails
Motorseite
Länge
A = 055 - 115 Unimotor
-Leistungsanschluss
X = Offene Kabelenden
Bitte den richtigen Anschluss für den verwendeten
Umrichter auswählen.
Bitte den richtigen Anschluss für den verwendeten
Motor auswählen.
Die Zahlen stehen für die erforderliche Kabellänge in
Min = 002 (1m)
Max = 100 (100m)
Metern.
Kabeltyp Mantel Spezielle Optionen Anschlussdetails Motorseite Kabellänge*
SI = Hyperboloid-Stifte für inkrementelle
Encoder
SR = Resolver C**= OFS E = Verdrilltes, geschirmtes SS-Kabel B = Resolver-Anschluss Max = 100 (100m)
SS = Sin/Cos-Encoder L = SI-Kabel mit 8,5 mm Durchmesser C = Sin/Cos-Anschluss (Hiperface)
SE = Geteilte Stifte für inkrementelle
Encoder
Anschlussdetails Umrichterseite G = 90° Resolver-Anschluss
A = 15-poliger Stecker für Digitax ST/Unidrive
B = Resolver / Sin/Cos-Aderendhülsen N = Sin/Cos-Anschluss (EnDat)
F = 26-poliger Stecker für Epsilon Encoder O = 90° Sin/Cos-Anschluss (EnDat)
H = 15-poliger Stecker für Digitax ST/Unidrive
I = Stifte für Erweiterungsstecker
X = Offene Kabelenden
* Max. Kabellänge - 50m mit SIBA/SICA in Standardausführung, nur 100 m, wenn +5V-Toleranz beibehalten werden kann.
* Max. Kabellänge - 10 m bei SIBL.
* Max. Kabellänge - Heidenhain EC/FC 20 m EB/FB 30 m beim SSBA-Kabel,EC/FC 20m EB/FB 100 m beim SSBE-Kabel.
** OFS nur beim SI-Encoderkabel verfügbar.
Kabeltyp
Bitte den Kabeltyp für das jeweilige Gebersystem
auswählen.
Mantel
B steht für einen äußeren Kabelmantel aus PUR
und ist die Kabelauswahl für exible Verlegung
(Schleppkette). C steht für einen äußeren
Kabelmantel aus OFS und ist die Kabelauswahl für
feste Verlegung.
B = PUR A = Standardkabel A = Encoder-Anschluss Min = 001 (1m)
E = 17-poliger Erweiterungsstecker
F = 90° Encoder-Anschluss
/Epsilon EP Encoder
Sin/Cos
Anschlussdetails
Umrichterseite
Anschlussdetails
Motorseite
Länge
H = 90° Sin/Cos-Anschluss (Hiperface)
X = Offene Kabelenden
Bitte den richtigen Anschluss für den verwendeten
Umrichter auswählen.
Bitte den richtigen Anschluss an der Motorseite für
das verwendete Rückführungsmodul auswählen.
Die Zahlen stehen für die erforderliche Kabellänge in
Metern.
Spezielle Optionen
A steht für das Standardkabel. L steht für das günstige
inkrementelle Kabel (8,5 mm).

1110
1110
1 5
6
42
3
1
10
9
8
12
13
1415
16
17
7
6
5
11
4
3
2
1
10
9
8
12
7
6
5
11
4
3
2
Motorstecker Details
Leistungsanschluss
055-115 mit Bremse 055-114 ohne Bremse
Stift Funktion Funktion
1
2
3
4
5
6
Mantel
Signalstecker
Phase U (R) Phase U (R)
Phase V (S) Phase V (S)
Erdung Erdung
Phase W (T) Phase W (T)
Bremse -
Bremse -
Schirm Schirm
Inkrementeller Encoder
(CR,CA)
Heidenhain-Absolut-Encoder
(EM, FM, EC, FC, EB, FB)
Resolver
(AR, AE)
Stift Funktion Funktion Funktion Funktion
1 Thermistor Thermistor Erregung high REF Cos
2 Thermistor Thermistor Erregung low +Daten
3 - Schirm (nur optische Encoder) Cos high -Daten
4 S1 - Cos low +Cos
5 S1 invertiert - Sin high +Sin
6 S2 - Sin low REF Sin
7 S2 invertiert - Thermistor Thermistor
8 S3 + Takt Thermistor Thermistor
9 S3 invertiert - Takt - Schirm
10 Kanal A + Cos - 0 Volt
11 Index + Daten - -
12 Index invertiert - Daten - + Volt
13 Kanal A invertiert - Cos - -
14 Kanal B + Sin - -
15 Kanal B invertiert - Sin - -
16 + Volt + V - -
17 0 Volt 0 Volt - -
Gehäuse Schirm Schirm Schirm Schirm
Sick|Stegmann Sin/Cos-Encoder
(RA, SA)

ÜBERALL AUF DER WELT...
Control Techniques Drive- und Applikationscenter
AUSTRALIEN
Melbourne Application Centre
T: +613 973 81777
controltechniques.au@emerson.com
Sydney Drive Centre
T: +61 2 9838 7222
controltechniques.au@emerson.com
ÖSTERREICH
Linz Drive Centre
T: +43 7229 789480
controltechniques.at@emerson.com
BELGIEN
Brüssel Drive Centre
T: +32 1574 0700
controltechniques.be@emerson.com
BRASILIEN
São Paulo Application Center
T: +55 11 3618 6688
controltechniques.br@emerson.com
KANADA
Toronto Drive Centre
T: +1 905 949 3402
controltechniques.ca@emerson.com
Calgary Drive Centre
T: +1 403 253 8738
controltechniques.ca@emerson.com
CHINA
Shanghai Drive Centre
T: +86 21 5426 0668
controltechniques.cn@emerson.com
Peking Application Centre
T: +86 10 856 31122 DW 820
controltechniques.cn@emerson.com
TSCHECHISCHE REPUBLIK
Brno Drive Centre
T: +420 511 180111
controltechniques.cz@emerson.com
DÄNEMARK
Kopenhagen Drive Centre
T: +45 4369 6100
controltechniques.dk@emerson.com
FRANKREICH*
Angoulême Drive Centre
T: +33 5 4564 5454
controltechniques.fr@emerson.com
DEUTSCHLAND
Bonn Drive Centre
T: +49 2242 8770
controltechniques.de@emerson.com
Chemnitz Drive Centre
T: +49 3722 52030
controltechniques.de@emerson.com
Darmstadt Drive Centre
T: +49 6251 17700
controltechniques.de@emerson.com
GRIECHENLAND*
Athen Application Centre
T: +0030 210 57 86086/088
controltechniques.gr@emerson.com
NIEDERLANDE
Rotterdam Drive Centre
T: +31 184 420555
controltechniques.nl@emerson.com
HONGKONG
Hong Kong Application Centre
T: +852 2979 5271
controltechniques.hk@emerson.com
INDIEN
Chennai Drive Centre
T: +91 44 2496 1123/
2496 1130/2496 1083
controltechniques.in@emerson.com
Pune Application Centre
T: +91 20 2612 7956/2612 8415
controltechniques.in@emerson.com
New Delhi Application Centre
T: +91 112 2581 3166
controltechniques.in@emerson.com
IRLAND
Newbridge Drive Centre
T: +353 45 448200
controltechniques.ie@emerson.com
ITALIEN
Milano Drive Centre
T: +39 02575 751
controltechniques.it@emerson.com
Reggio Emilia Application Centre
T: +39 02575 751
controltechniques.it@emerson.com
Vicenza Drive Centre
T: +39 0444 933400
controltechniques.it@emerson.com
KOREA
Seoul Application Centre
T: +82 2 3483 1605
controltechniques.kr@emerson.com
MALAYSIA
Kuala Lumpur Drive Centre
T: +603 5634 9776
controltechniques.my@emerson.com
REPUBLIK
SÜDAFRIKA
Johannesburg Drive Centre
T: +27 11 462 1740
controltechniques.za@emerson.com
Kapstadt Application Centre
T: +27 21 556 0245
controltechniques.za@emerson.com
RUSSLAND
Moskau Application Centre
T: +7 495 981 9811
controltechniques.ru@emerson.com
SINGAPUR
Singapur Drive Centre
T: +65 6891 7600
controltechniques.sg@emerson.com
SLOVAKISCHE REPUBLIK
EMERSON A.S
T: +421 32 7700 369
controltechniques.sk@emerson.com
SPANIEN
Barcelona Drive Centre
T: +34 93 680 1661
controltechniques.es@emerson.com
Bilbao Application Centre
T: +34 94 620 3646
controltechniques.es@emerson.com
Valencia Drive Centre
T: +34 96 154 2900
controltechniques.es@emerson.com
SCHWEDEN*
Stockholm Application Centre
T: +468 554 241 00
controltechniques.se@emerson.com
SCHWEIZ
Lausanne Application Centre
T: +41 21 637 7070
controltechniques.ch@emerson.com
Zürich Drive Centre
T: +41 56 201 4242
controltechniques.ch@emerson.com
TAIWAN
Taipeh Application Centre
T: +886 22325 9555
controltechniques.tw@emerson.com
THAILAND
Bangkok Drive Centre
T: +66 2962 2092 99
controltechniques.th@emerson.com
TÜRKEI
Istanbul Drive Centre
T: +90 216 4182420
controltechniques.tr@emerson.com
VEREINIGTE ARABISCHE EMIRATE*
Emerson FZE
T: +971 4 8118100
ct.dubai@emerson.com
GROSSBRITANNIEN
Telford Drive Centre
T: +44 1952 213700
controltechniques.uk@emerson.com
USA
California Drive Centre
T: +1 562 943 0300
controltechniques.us@emerson.com
Charlotte Application Centre
T: +1 704 393 3366
controltechniques.us@emerson.com
Chicago Application Centre
T: +1 630 752 9090
controltechniques.us@emerson.com
Cleveland Drive Centre
T: +1 440 717 0123
controltechniques.us@emerson.com
Florida Drive Centre
T: +1 239 693 7200
controltechniques.us@emerson.com
Verkaufsniederlassung Lateinamerika
T: +1 305 818 8897
controltechniques.us@emerson.com
Minneapolis US Headquarters
T: +1 952 995 8000
controltechniques.us@emerson.com
Oregon Drive Centre
T: +1 503 266 2094
controltechniques.us@emerson.com
Providence Drive Centre
T: +1 401 541 7277
controltechniques.us@emerson.com
Utah Drive Centre
T: +1 801 566 5521
controltechniques.us@emerson.com
Control Techniques Distributoren
ARGENTINIEN
Euro Techniques SA
T: +54 11 4331 7820
eurotech@eurotechsa.com.ar
BAHRAIN
Emerson FZE
T: +971 4 8118100
ct.bahrain@emerson.com
BULGARIEN
BLS - Automation Ltd
T: +359 32 968 007
info@blsautomation.com
CHILE
Ingeniería Y Desarrollo
Tecnológico S.A
T: +56 2 719 2200
rdunner@idt.cl
KOLUMBIEN
Artikel-Nr.: 0702-0022-04 10/10
Sistronic LTDA
T: +57 2 555 60 00
luis.alvarez@sistronic.com.co
Redes Electricas S.A.
T: +57 1 364 7000
alvaro.rodriguez@redeselectricas.com
KROATIEN
Zigg-Pro d.o.o
T: +385 1 3463 000
zigg-pro@zg.htnet.hr
© Control Techniques 2010. Der Inhalt der vorliegenden Produktinformation gilt zur Zeit der Drucklegung als
richtig. Der Hersteller behält sich das Recht vor, Änderungen ohne Ankündigung im Sinne des technischen
Fortschrittes durchzuführen.
ZYPERN
Acme Industrial Electronic
Services Ltd
T: +3572 5 332181
acme@cytanet.com.cy
ÄGYPTEN
Samiram
T: +202 29703868/+202 29703869
samiramz@samiram.com
EL SALVADOR
Servielectric Industrial S.A. de C.V.
T: +503 2278 1280
aeorellana@gruposervielectric.com
FINNLAND
SKS Control
T: +358 207 6461
control@sks.
GUATEMALA
MICE, S.A.
T: +502 5510 2093
mice@itelgua.com
HONDURAS
Temtronics Honduras
T: +504 550 1801
temtronics@amnethn.com
UNGARN
Control-VH Kft
T: +361 431 1160
info@controlvh.hu
ISLAND
Samey ehf
T: +354 510 5200
samey@samey.is
INDONESIEN
Pt Apikon Indonesia
T: +65 6468 8979
info.my@controltechniques.com
Pt Yua Esa Sempurna Sejahtera
T: +65 6468 8979
info.my@controltechniques.com
ISRAEL
Dor Drives Systems Ltd
T: +972 3900 7595
info@dor1.co.il
KENIA
Kassam & Bros Co. Ltd
T: +254 2 556 418
kassambros@africaonline.co.ke
KUWAIT
Emerson FZE
T: +971 4 8118100
ct.kuwait@emerson.com
LETTLAND
EMT
T: +371 760 2026
janis@emt.lv
LIBANON
Black Box Automation & Control
T: +961 1 443773
info@blackboxcontrol.com
LITAUEN
Elinta UAB
T: +370 37 351 987
sigitas@elinta.lt
MALTA
Mekanika Limited
T: +35621 442 039
mfrancica@gasan.com
MEXIKO
MELCSA S.A. de CV
T: +52 55 5561 1312
jcervera@melcsa.com
MAROKKO
Cietec
T: +212 22 354948
cietec@cietec.ma
NEUSEELAND
Advanced Motor Control. 500690 3-ph.
T: +64 (0) 274 363 067
info.au@controltechniques.com
PERU
Intech S.A.
T: +51 1 224 9493
artur.mujamed@intech-sa.com
* Büro der Schwestergesellschaft
PHILIPPINEN
Control Techniques beruhen
Singapore Ltd
T: +65 6468 8979
info.my@controltechniques.com
POLEN
APATOR CONTROL Sp. z o.o
T: +48 56 6191 207
info@acontrol.com.pl
PORTUGAL
Harker Sumner S.A
T: +351 22 947 8090
drives.automation@harker.pt
PUERTO RICO
Motion Industries Inc.
T: +1 787 251 1550
roberto.diaz@motion-ind.com
KATA R
Emerson FZE
T: +971 4 8118100
ct.qatar@emerson.com
RUMÄNIEN
C.I.T. Automatizari
T: +40212550543
ofce@citautomatizari.ro
SAUDI-ARABIEN
A. Abunayyan Electric Corp.
T: +9661 477 9111
aec-salesmarketing@
abunayyangroup.com
SERBIEN UND MONTENEGRO
Master Inzenjering d.o.o
T: +381 24 551 605
ofce@masterinzenjering.rs
SLOVENIEN
PS Logatec
T: +386 1 750 8510
ps-log@ps-log.si
TUNESIEN
SIA Ben Djemaa & CIE
T: +216 1 332 923
bendjemaa@planet.tn
URUGUAY
SECOIN S.A.
T: +5982 2093815
jose.barron@secoin.com.uy
VENEZUELA
Digimex Sistemas C.A.
T: +58 243 551 1634
digimex@digimex.com.ve
VIETNAM
N.Duc Thinh
T: +84 8 9490633
infotech@nducthinh.com.vn
 Loading...
Loading...