


Unimotor
Dati di prodotto
Servomotore brushless in c.a.
ad alte prestazioni
per convertitori Control Techniques
Flange da 055 a 115
da 0,72 Nm a 136 Nm
(picco di 56.4 Nm)

www.controltechniques.com www.controltechniques.com
32
QUALITY
MANAGEMENT
003
Servomotore compatto per applicazioni altamente
dinamiche
Unimotor è una nuova gamma di servomotori brushless in c.a.
ad alte prestazioni di Control Techniques progettata per operare
con i convertitori Digitax ST, Unidrive SP ed Epsilon EP. Unimotor
rappresenta una soluzione a bassa inerzia ed eccezionalmente
compatta per le applicazioni dove è richiesto un alto picco di coppia
durante l'esecuzione di rapidi proli di velocità. Il prolo di coppia di
'Unimotor
si abbina ai servoazionamenti Digitax ST per offrire un
sovraccarico di picco no a 300% per il massimo rendimento dinamico.
Eccellenza di ingegnerizzazione, innovazione e affidabilità
Unimotor è stato sviluppato da un team dedicato, utilizzando
un processo di progettazione proprietario, che ha come priorità
progettuale l'innovazione, le prestazioni e l'afdabilità del prodotto.
Questo processo consente di implementare le novità, la creazione
del prototipo e di effettuare i test, in tempi progettuali ridotti,
grazie anche all'utilizzo di una suite di tool di sviluppo software
dedicati. Il risultato è che Unimotor
incorpora innumerevoli
miglioramenti in termini di prestazioni e caratteristiche di progetto
in attesa di brevetto. Unimotor
hd raggiunge l'eccellenza in
termini di prestazioni e qualità.
Funzioni principali
Grazie alle numerose opzioni disponibili, Unimotor è adatto a
una vasta gamma di applicazioni industriali
➜ Range di coppia: da 0,72 Nm a 136 Nm
➜ Alto rapporto coppia/inerzia per applicazioni ad alta dinamica
➜ Compatto e potente
➜ Freni ad alta energia
➜ Conformità IP65: a totale tenuta contro la polvere e i getti
d'acqua quando installato
➜ Progetto statorico segmentato
➜ Prestazioni di massimo livello
➜ Prestazioni e afdabilità assicurate da test rigorosi
➜ Avvolgimenti per tensioni di 400 V e 220 V
➜ Le velocità nominali comprendono 2000 rpm, 3000 rpm,
4000 rpm e 6000 rpm
➜ Alberi motore maggiorati per aumentare la rigidità torsionale
Abbinamenti motore e convertitore
Le combinazioni di convertitore e motore di Control Techniques
assicurano un sistema ottimizzato in termini di valori nominali,
prestazioni, costo e facilità d'uso. I motori Unimotor
sono
equipaggiati con encoder SinCos o Assoluto precaricati della
“targa elettronica motore”, che viene scritta durante il processo
di produzione. Questa targa fornisce i dati motore letti dai
servoazionamenti abbinati ed utilizzata per ottimizzare le prestazioni
dedicate all'applicazione. Questa funzionalità semplica le operazioni
di messa in servizio e manutenzione, assicura uniformità delle
prestazioni ed un notevole risparmio di tempo.
Per ulteriori informazioni sui servoazionamenti
di Control Techniques fare riferimento alle
brochure di Digitax ST e Unidrive SP.
Precisione e risoluzione adeguate ai requisiti richiesti dalla
vostra applicazione
La scelta del dispositivo di retroazione ideale per la propria
applicazione è fondamentale per ottenere prestazioni ottimali.
Unimotor
può essere equipaggiato con una vasta gamma di
dispositivi di retroazione che forniscono vari livelli di precisione e
risoluzione, per adattarsi alla maggior parte delle applicazioni:
➜ Resolver: per applicazioni in ambiente gravoso - bassa precisione,
risoluzione media
➜ Encoder incrementale: alta precisione, risoluzione media
➜ Assoluto induttivo: media precisione, risoluzione media, singolo
giro e multigiro
➜ Ottico SinCos/assoluto: alta precisione, risoluzione alta, singolo
giro e multigiro
➜ Protocolli Hiperface (SICK) ed EnDAT (Heidenhain) supportati
Conformità e standardRendimento coppia ■ Coppia di stallo ■ Coppia di picco (3000 rpm)
115UDC300 + DST1405
115UDB300 + DST1405
089UDC300 + DST1404
089UDB300 + DST1403
089UDA300 + DST1402
067UDC300 + DST1402
067UDA300 + DST1401
055UDC300 + DST1401
055UDA300 + DST1401
0 205 2510 3015 35 40
Coppia (Nm)
FM 30610

32
32
Codici d'ordine per Unimotor hd
Usare le informazioni contenute nella tabella seguente per creare un codice d'ordine per Unimotor .
I dettagli nella prima riga sono un esempio di ordine.
089 UD B 30 5 B A CA A
Tensione
Flangia
del motore
055 ED = 220V A 30 = 3000 rpm
067 UD = 400V B 60 = 6000 rpm
089 C flangia 089 X = Speciale EM = A ssoluto induttivo multigiro
115 flangia 115 30 = 3000 rpm flangia 067-115 FM = A ssoluto induttivo singolo giro
Lunghezza
statore
Flangia
055-089
B 40 = 4000 rpm
C 60 = 6000 rpm
D flangia 115 AE = Resolver
Velocità
nominale
Flangia 055-067 Flangia 055 Flangia 055-067
20 = 2000 rpm X = Speciale CA = Encoder incrementale (SICK)
30 = 3000 rpm CR = Encoder incrementale (Renco)
Freno (24V)
0 = Non installato
(Std)
1 = Freno di
stazionamento
0 = Non installato
(Std)
5 = Freni di staziona-
mento ad alta
dissipazione di
energia
Tipo di
connessione
B = Alimentazione
e segnale 90°
ruotabili
Albero uscita Dispositivo di retroazione Inerzia
A = Con
chiavetta
AR = Resolver A = Di serie
CR = Encoder incrementale (Renco)
XX = Speciale
EB = Assoluto ottico multigiro
FB = Assoluto ottico singolo giro
EC = A ssoluto induttivo multigiro
FC = Assoluto induttivo singolo giro
RA = SinCos ottico multigiro
SA = SinCos ottico singolo giro
XX = Speciale
AE = Resolver
CA = Encoder incrementale (SICK)
EB = A ssoluto ottico multigiro
FB = A ssoluto ottico singolo giro
EC = A ssoluto induttivo multigiro
FC = Assoluto induttivo singolo giro
RA = SinCos ottico multigiro
SA = SinCos ottico singolo giro
XX = Speciale
flangia 089
Flangia 115
Tabella di riferimento rapido
4096 impulsi/giro (R35i)
EQI 1130
ECI 1118
4096 impulsi/giro (CFS50)
4096 impulsi/giro (R35i)
EQN 1325
ECN 1313
EQI 1331
ECI 1319
SRM 50 (GEN 2)
SRS 50 (GEN 2)
4096 impulsi/giro (CFS50)
EQN 1325
ECN 1313
EQI 1331
ECI 1319
SRM 50 (GEN 2)
SRS 50 (GEN 2)
Taglia del
telaio
055 63
067 75
089 100
115 130
Stallo 0 0.5 1.0 3.0 5.0 8.0 10.0 15.0 20.0 (Nm)
Inerzia 0 0.1 0.2 0.7 1.5 2.5 6.5 8.0 9.0 (kgcm
PCD (mm)
0.72
0.14
1.65
0.36
1.45
0.30
0.75
3.70
Unimotor
3.20
0.87
2.34
8.00
4,41
10,2
18,80
8,38
Pagina n.
4
5
6
7
2
)
www.controltechniques.com www.controltechniques.com
54
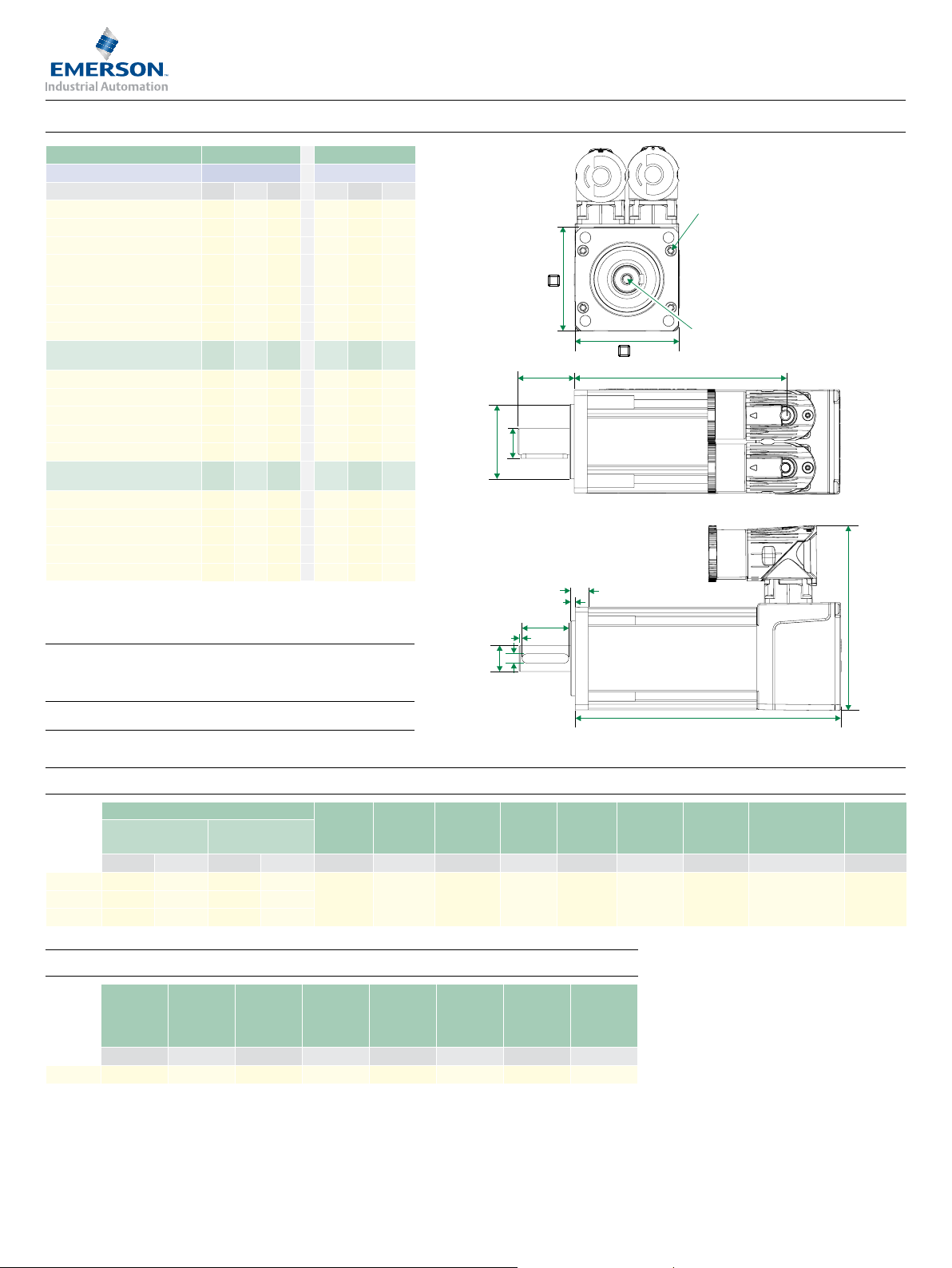
Taglia 055 Per convertitori PWM trifase
F
G
E
Chiavetta
opzionale
K
L
A
N
H
C
∅M
BD
4 fori ∅R (H14)
equidistanti su un
PCD di montaggio ∅S
P
T
Dimensione filettatura
foro maschiato
da I a profondità J
Taglia motore (mm) 055ED 055UD
Tensione (V efcaci)
Lunghezza flangia A B C A B C
Coppia di stallo continua (Nm)
Coppia di picco (Nm)
Costante temporale termica
avvolgimento (s)
Peso motore senza freno (kg)
Peso motore con freno (kg)
Velocità 3000 (rpm)
Coppia nominale (Nm)
Corrente di stallo (A)
Potenza nominale (kW)
Velocità 6000 (rpm)
Coppia nominale (Nm)
Corrente di stallo (A)
Potenza nominale (kW)
Inerzia (kgcm2)
Numero di poli
Kt (Nm/A) =
Ke (V/krpm) =
R (ph-ph) (Ω)
L (ph-ph) (mH)
Kt (Nm/A) =
Ke (V/krpm) =
R (ph-ph) (Ω)
L (ph-ph) (mH)
200-240 380-480
0,72 1,18 1,65 0,72 1,18 1,65
2,88 4,72 6,60 2,88 4,72 6,60
0,14 0,25 0,36 0,14 0,25 0,36
34,0 38,0 42,0 34,0 38,0 42,0
1,20 1,50 1,80 1,20 1,50 1,80
1,60 1,90 2,20 1,6 1,90 2,20
8 8 8 8 8 8
0,74
0,87
0,91
0,48
0,74
45,00
0,74
45,00
45,00
52,50
55,00
0,70 1,05 1,48 0,70 1,05 1,48
0,97 1,36 1,81 0,97 0,79 1,00
0,22 0,33 0,46 0,22 0,33 0,46
28,00 14,12 9,53 28,00 45,00 31,00
50,00 32,00 23,00 50,00 100,00 75,00
0,45
0,43
27,00
26,00
29,00
0,68 0,90 1,20 0,68 0,90 1,20
1,61 2,74 3,44 0,97 1,49 1,99
0,43 0,57 0,75 0,43 0,57 0,75
8,50 3,55 2,38 28,00 10,70 7,80
16,00 8,20 6,30 50,00 25,00 20,00
1,49
90,00
0,79
47,50
1,65
100,00
0,83
50,00
∆t= avvolgimento 100°C ambiente max 40°C
Tutti i dati sono soggetti a una tolleranza di +/-10%
La coppia di stallo, la coppia e la potenza nominali si riferiscono a esercizio
continuo massimo testato in un ambiente con temperatura di 20°C e
frequenza di commutazione convertitore di 12kHz.
Tutti gli altri valori si riferiscono a una temperatura motore di 20°C.
La temperatura di avvolgimento intermittente massima è 140°C.
Dimensioni motore (mm) Numero disegno: GM496400
Retroazione AR, CR, EM/FM
Lunghezza senza
freno
A B A B K L M (j6) N P R (H14) S T
055A
055B
055C
Dimensioni albero (mm)
14,0 Std
118,0 90,0 158,0 130,0
142,0 114,0 182,0 154,0
166,0 138,0 206,0 178,0
Diametro
albero
Lunghezza
albero
C (j6) D E F G H (h9) I J
14 30,0 16,0 25,0 1,5 5,0 M5 12,5
Lunghezza con
freno
Altezza
chiavetta
foro
Diametro
foro di
fissaggio
PCD foro di
fissaggio
Alloggiamento
motore
Spessore
flangia
Lunghezza
chiavetta
Lunghezza
registro
7,0 2,5 40,0 99,0 55,0 5,8 63,0 55,0 M5
Dalla
chiavetta
all'estremità
dell'albero
Diametro
registrato
Larghezza
chiavetta
Altezza
totale
Dimensione
filettatura
foro
maschiato
Quadro
flangia
Profondità
maschiato
Viti di
montaggio

54
54
Taglia 067 Per convertitori PWM trifase
Chiavetta
opzionale
4 fori ∅R (H14)
equidistanti su un
PCD di montaggio ∅S
T
P
K
L
A
N
E
∅M
F
G
H
∅C
B
D
Dimensione filettatura
foro maschiato
da I a profondità J
Taglia motore (mm) 067ED 067UD
Tensione (V efcaci)
Lunghezza flangia A B C A B C
Coppia di stallo continua (Nm)
Coppia di picco (Nm)
Inerzia (kgcm2)
Costante temporale termica
avvolgimento (s)
Peso motore senza freno (kg)
Peso motore con freno (kg)
Numero di poli
Velocità 3000
(rpm)
Velocità 6000
(rpm)
Kt (Nm/A) =
Ke (V/krpm) =
Coppia nominale (Nm)
Corrente di stallo (A)
Potenza nominale (kW)
R (ph-ph) (Ω)
L (ph-ph) (mH)
Kt (Nm/A) =
Ke (V/krpm) =
Coppia nominale (Nm)
Corrente di stallo (A)
Potenza nominale (kW)
R (ph-ph) (Ω)
L (ph-ph) (mH)
200-240 380-480
1,45 2,55 3,70 1,45 2,55 3,70
4,35 7,65 11,10 4,35 7,65 11,10
0,30 0,53 0,75 0,30 0,53 0,75
54 61 65 54 61 65
2,00 2,60 3,20 2,00 2,60 3,20
2,70 3,3 3,90 2,70 3,3 3,90
10 10 10 10 10 10
0,93
57,00
1,40 2,45 3,50 1,40 2,45 3,50
1,56 2,74 3,98 1,81 1,59 2,31
0,44 0,77 1,10 0,44 0,77 1,10
15,20 4,86 3,33 11,92 15,20 10,70
45,43 17,40 12,70 35,18 54,40 40,80
0,47
28,50
1,30 2,20 1,30 2,20 3,10
3,12 5,48 1,81 3,19 4,63
0,82 1,38 0,82 1,38 1,95
3,76 1,22 11,92 3,79 2,68
11,06 4,35 35,18 13,60 10,20
0,80
49,00
1,60
98,00
0,8
49,00
1,60
98,00
∆t= avvolgimento 100°C ambiente max 40°C
Tutti i dati sono soggetti a una tolleranza di +/-10%
La coppia di stallo, la coppia e la potenza nominali si riferiscono a esercizio
continuo massimo testato in un ambiente con temperatura di 20°C e
frequenza di commutazione convertitore di 12kHz.
Tutti gli altri valori si riferiscono a una temperatura motore di 20°C.
La temperatura di avvolgimento intermittente massima è 140°C.
Dimensioni motore (mm) Numero disegno: IM/0694/GA
Spessore
flangia
7,5 2,50 60,0 111,5 70,0 5,8 75,0 67,00 M5
Lunghezza
registro
Diametro
registro
Altezza
totale
Quadro
flangia
Diametro
foro di
fissaggio
PCD foro di
fissaggio
Alloggiamento
motore
Retroazione AR, CR, EM/FM
Lunghezza senza
freno
A
(± 1,1) B (± 1,0) A (± 1,1) B (± 1,0) K (± 0,5) L (± 0,1) M (j6) N (± 0,3) P (± 0,3) R (H14) S (± 0,4) T (± 0,4)
142,7 108,8 177,7 143,8
067A
172,7 138,8 207,7 173,8
067B
202,7 168,8 237,7 203,8
067C
Lunghezza con
freno
Dimensioni albero (mm)
14,0 Std
Diametro
albero
C
14,0 30,0 16,0 22,0 3,6 5,0 M5 x 0.8 13,5
Lunghezza
albero
(j6) D (± 0.45) E (+0.0 / -0.13) F (± 0.25) G (± 1.1) H (h9) I J (± 0.1)
Altezza
chiavetta
Lunghezza
chiavetta
Dalla chiavetta
all'estremità
dell'albero
Larghezza
chiavetta
Dimensione
filettatura foro
maschiato
Profondità
foro
maschiato
Viti di
montaggio

www.controltechniques.com www.controltechniques.com
76
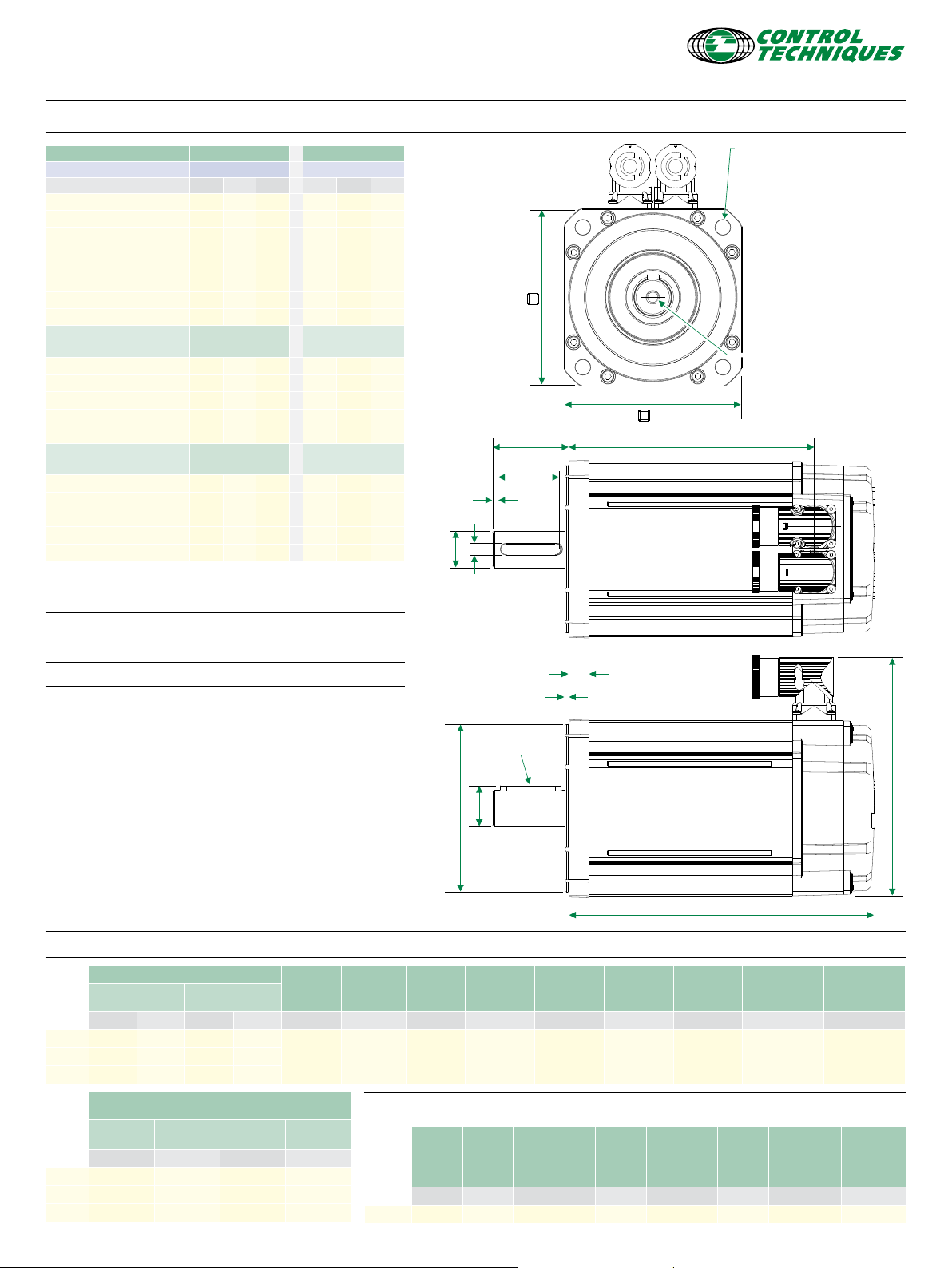
Taglia 089 Per convertitori PWM trifase
F
G
E
Chiavetta
opzionale
K
L
A
N
H
∅C
∅M
B
D
4 fori ∅R (H14)
equidistanti su un
PCD di montaggio ∅S
P
T
Dimensione filettatura
foro maschiato
da I a profondità J
Taglia motore (mm) 089ED 089UD
Tensione (V efcaci)
Lunghezza flangia A B C A B C
Coppia di stallo continua (Nm)
Coppia di picco (Nm)
Inerzia (kgcm2)
Costante temporale termica
avvolgimento (s)
Peso motore senza freno (kg)
Peso motore con freno (kg)
Numero di poli
Velocità 3000
(rpm)
Velocità 4000
(rpm)
Velocità 6000
(rpm)
Kt (Nm/A) =
Ke (V/krpm) =
Coppia nominale (Nm)
Corrente di stallo (A)
Potenza nominale (kW)
R (ph-ph) (Ω)
L (ph-ph) (mH)
Kt (Nm/A) =
Ke (V/krpm) =
Coppia nominale (Nm)
Corrente di stallo (A)
Potenza nominale (kW)
R (ph-ph) (Ω)
L (ph-ph) (mH)
Kt (Nm/A) =
Ke (V/krpm) =
Coppia nominale (Nm)
Corrente di stallo (A)
Potenza nominale (kW)
R (ph-ph) (Ω)
L (ph-ph) (mH)
∆t= avvolgimento 100°C ambiente max 40°C
Tutti i dati sono soggetti a una tolleranza di +/-10%
La coppia di stallo, la coppia e la potenza nominali si riferiscono a esercizio
continuo massimo testato in un ambiente con temperatura di 20°C e
frequenza di commutazione convertitore di 12kHz.
200-240 380-480
3,20 5,50 8,00 3,20 5,50 8,00
9,60 16,50 24,00 9,60 16,50 24,00
0,87 1,61 2,34 0,87 1,61 2,34
85 93 98 85 93 98
3,30 4,40 5,50 3,30 4,40 5,50
4,30 5,40 6,50 4,30 5,40 6,50
10 10 10 10 10 10
0,93
57,00
3,00 4,85 6,90 3,00 4,85 6,90
3,44 5,91 8,60 2,00 3,44 5,00
0,94 1,52 2,17 0,94 1,52 2,17
3,28 1,54 0,89 10,32 5,05 3,21
21,55 11,37 7,09 67,65 38,36 24,93
0,70
42,75
2,90 4,55 6,35 2,90 4,55 6,35
4,57 7,86 11,43 2,67 4,58 6,67
1,21 1,91 2,66 1,21 1,91 2,66
2,04 0,78 0,45 6,04 2,99 1,75
13,20 5,97 3,66 38,51 21,90 14,03
0,47
28,50
2,65 3,80 5,00 2,65 3,80 5,00
6,88 11,83 17,20 4,00 6,88 10,00
1,67 2,39 3,14 1,67 2,39 3,14
0,96 0,38 0,23 2,58 1,27 0,80
6,11 2,84 1,89 16,91 9,59 6,23
1,60
98,00
1,2
73,5
0,8
49
Tutti gli altri valori si riferiscono a una temperatura motore di 20°C.
La temperatura di avvolgimento intermittente massima è 140°C.
Dimensioni motore (mm) Numero disegno: IM/0688/GA
089A
089B
089C
089A
089B
089C
Retroazione EC/FC
Lunghezza senza
freno
A
(± 0,9) B (± 1,0) A (± 0,9) B (± 1,0) K (± 0,5) L (± 0,1) M (j6) N (± 1,0) P (± 0,28) R (H14) S (± 0,4) T (± 0,7)
147,8 110,5 187,9 150,6
177,8 140,5 217,9 180,6
207,8 170,5 247,9 210,6
Retroazione FB, EB/CA/
SA, RA
Lungh,senza
freno
(± 0,9) A (± 0,9) A (± 0,9) A (± 0,9)
A
160,8 200,9 137,8 177,9
190,8 230,9 167,8 207,9
220,8 260,9 197,8 237,9
Lunghezza con
Lungh,
con freno
freno
Lungh. senza
Spessore
flangia
10,3 2,20 80,0 130,5 91,0 7,00 100,0 89,0 M6
Retroazione AE/CR
freno
Lungh,con
freno
Lunghezza
registro
Diametro
registro
Altezza
totale
Quadro
flangia
Diametro
foro di
fissaggio
PCD foro di
fissaggio
Alloggiamento
motore
Dimensioni albero (mm)
Dimensione
filettatura
foro
maschiato
19,0 Std
Diametro
albero
Lungh.
albero
(j6) D (± 0,45)
C
19,0 40,0 21,5 32,0 3,7 6,0 M6 x 1,0 17,0
Altezza
chiavetta
E (+ 0,009 /
-0,134)
chiavetta
F (± 0,25) G (± 1,1) H (h9) I J (± 0,1)
Lungh.
Dalla chiavetta
all'estremità
dell'albero
Largh,
chiavetta
Viti di
montaggio
Profondità
foro
maschiato
76
76
Taglia 115 Per convertitori PWM trifase
D
F
G
E
Chiavetta
opzionale
4 fori ∅R (H14)
equidistanti su un
PCD di montaggio ∅S
P
T
Dimensione filettatura
foro maschiato
da I a profondità J
K
L
A
N
H
∅C
∅M
B
Taglia motore (mm) 115ED 115UD
Tensione (V efcaci)
Lunghezza flangia B C D B C D
Coppia di stallo continua (Nm)
Coppia di picco (Nm)
Inerzia (kgcm2)
Costante temporale termica
avvolgimento (s)
Peso motore senza freno (kg)
Peso motore con freno (kg)
Numero di poli
Velocità 2000
(rpm)
Velocità 3000
(rpm)
Kt (Nm/A) =
Ke (V/krpm) =
Coppia nominale (Nm)
Corrente di stallo (A)
Potenza nominale (kW)
R (ph-ph) (Ω)
L (ph-ph) (mH)
Kt (Nm/A) =
Ke (V/krpm) =
Coppia nominale (Nm)
Corrente di stallo (A)
Potenza nominale (kW)
R (ph-ph) (Ω)
L (ph-ph) (mH)
200-240 380-480
10,20 14,60 18,80 10,20 14,60 18,80
30,60 43,80 56,40 30,60 43,80 56,40
4,41 6,39 8,38 4,41 6,39 8,38
164 168 175 164 168 175
7,20 8,90 10,70 7,20 8,90 10,70
8,70 10,40 12,20 8,70 10,40 12,20
10 10 10 10 10 10
1,40
85,50
8,60 11,90 15,60 8,60 11,90 15,60
7,29 10,43 13,43 4,25 6,08 7,83
1,80 2,49 3,27 1,80 2,49 3,27
1,40 0,77 0,58 4,41 2,41 1,80
12,84 7,87 6,15 40,60 24,69 19,45
0,93
57,00
7,70 10,50 7,70 10,50 13,60
10,97 15,70 6,38 9,13 11,75
2,42 3,30 2,42 3,30 4,27
0,58 0,38 1,83 1,16 0,75
5,40 3,85 16,93 11,88 8,11
2,4
147
1,60
98,00
∆t= avvolgimento 100°C ambiente max 40°C
Tutti i dati sono soggetti a una tolleranza di +/-10%
La coppia di stallo, la coppia e la potenza nominali si riferiscono a esercizio
continuo massimo testato in un ambiente con temperatura di 20°C e
frequenza di commutazione convertitore di 12kHz.
Tutti gli altri valori si riferiscono a una temperatura motore di 20°C.
La temperatura di avvolgimento intermittente massima è 140°C.
Dimensioni motore (mm) Numero disegno: IM/0689/GA
115B
115C
115D
115B
115C
115D
Retroazione EC/FC
Lunghezza senza
freno
(± 0,9) B (± 1,0) A (± 0,9) B (± 1,0) K (± 0,5) L (± 0,1) M (j6) N (± 1,0) P (± 0,31) R (H14) S (± 0,4) T (± 0,7)
A
193,8 154,0 230,9 191,1
223,8 184,0 260,9 221,1
253,8 214,0 290,9 251,1
Retroazione FB, EB/CA/
SA, RA
Lungh. senza
freno
(± 0,9) A (± 0,9) A (± 0,9) A (± 0,9)
A
206,8 243,9 183,8 220,9
236,8 273,9 213,8 250,9
266,8 303,9 243,8 280,9
Lunghezza con
Lungh,
con freno
freno
Lungh. senza
freno
Spessore
flangia
13,2 2,70 110,0 156,5 116,0 10,00 130,0 115,0 M8
Retroazione AE
Lungh. con
freno
Lunghezza
registro
Diametro
registro
Dimensioni albero (mm)
Diametro
albero
(j6) D (± 0,45) E (+0,009 / -0,294) F (± 0,25) G (± 1,1) H (h9) I J (± 0,1)
C
24,0 Std
24,0 50,0 27,0 40,0 5,3 8,0 M8 x 1,25 20,0
Altezza
totale
Lungh.
albero
Quadro
flangia
Altezza
chiavetta
Diametro foro
di fissaggio
Lungh.
chiavetta
PCD foro di
fissaggio
Dalla
chiavetta
all'estremità
dell'albero
Alloggiamento
Largh.
chiavetta
motore
Dimensione
filettatura
foro
maschiato
Viti di
montaggio
Profondità
foro
maschiato

www.controltechniques.com www.controltechniques.com
98
Selezione motore
Piastra
Albero
Motore
Dinamometro
Isolatore termico
Riduzione motore
In tutti i casi di funzionamento in condizioni gravose è necessario ridurre le
prestazioni del motore. Tali condizioni includono: temperatura ambiente
oltre i 40°C, posizione di montaggio del motore, frequenza di switching del
convertitore o conver titore troppo grande per il motore.
Temperature ambientali
È necessario tener conto della temperatura ambiente intorno al motore.
Per temperature ambientali superiori ai 40°C è necessario ridurre la coppia
usando come linea guida la seguente formula. (Nota: applicabile solo ai motori
2000/3000 rpm e presupponendo predominanza delle perdite di rame)
Nuova coppia ridotta = coppia specicata x √ [1-((temperatura ambientale -
40°C) / 100)]
Ad esempio, nel caso di temperatura ambientale di 76°C la nuova coppia ridotta
sarà 0,8 x la coppia specicata.
Configurazioni di montaggio
La coppia del motore deve essere ridotta se la supercie di montaggio del
motore è riscaldata da una sorgente esterna, ad esempio, un riduttore. Il
motore è connesso a un conduttore termico inadeguato. Il motore è montato
con i connettori sul lato o in verticale. Il motore si trova in uno spazio angusto
con scarsa ventilazione.
Frequenza di switching del convertitore
La maggior parte dei valori di corrente nominale di Digitax ST / Unidrive
vengono ridotti per le maggiori frequenze di switching. Per ulteriori
informazioni, vedere il manuale di Digitax ST o Unidrive .
Per i fattori di declassamento dei valori del motore, vedere la seguente tabella.
Le cifre sono solo indicative.
(Nota: applicabile solo ai motori no a 3000 rpm e presupponendo predominanza delle perdite
di rame)
Frequenza di
commutazione
3 kHz
4kHz
6 kHz
8kHz
12/16kHz
055 067 089 115
0,92 0,93 0,89 0,89
0,93 0,94 0,91 0,92
0,95 0,95 0,95 0,96
0,96 0,98 0,97 0,98
1 1 1 1
Tipo motore/flangia
Condizioni per la verifica termica
I dati prestazionali riportati sono stati registrati nelle seguenti condizioni.
Temperatura ambiente di 20°C, con il motore montato su una piastra di
alluminio termicamente isolata come indicato di seguito.
Tipo motore/flangia Piastra dissipatore in alluminio
055 mm
067-089mm
115mm
110 x 110 x 27 mm
250 x 250 x 15 mm
350 x 350 x 20mm
Protezione termica
La protezione del termistore (145°C) è integrata negli avvolgimenti del
motore e indica gravi problemi di surriscaldamento. L'installatore deve
collegare il termistore al convertitore. La mancata osservanza di questa
istruzione rende nulla la garanzia del motore in caso di bruciatura di un
avvolgimento.
Condizioni ambientali
Convalidare tutti i liquidi e i gas che entrano in contatto con il motore per
assicurare la conformità con gli standard internazionali appropriati.
Specifiche freno di stazionamento
Coppia statica
Volt
Taglia
alimenta-
motore
Taglia Vcc Wa tt Nm Nm ms nom kgcm² * Gradi**
055
067
089
115
*Nota 1 kgcm² = 1x10-4kgm² **Il valore del gioco aumenta con il tempo
Potenza
zione
24 6,3 1,8 N/D 22 0,03 0,73
24 10,2 N/D 4 <50 0,073 0,75
24 23,35 N/D 10 <50 0,115 0,75
24 19,5 N/D 25 120 0,327 0,75
di
ingresso
Freno di
staziona-mento
standard (01)
Freno di
staziona-
mento
ad alta
energia (05)
Tempo di
rilascio
Momento
di inerzia
➜ I freni sono stati studiati per lo stazionamento nel ciclo di lavoro e non
per utilizzi dinamici o di sicurezza.
➜ Il freno si inserisce quando viene tolta l'alimentazione.
Gioco
➜ Rivolgersi al Drive Centre o al proprio distributore se l'applicazione
richiede un sistema di frenatura dinamico in condizioni di emergenza.
➜ Per proteggere il circuito di controllo del freno si consiglia di collegare un
diodo sui terminali di uscita dei dispositivi dei contatti relé o dello stato
solido.
➜ Le cifre si riferiscono alla temperatura ambiente di 20°C. Se la
temperatura del motore supera i 100°C, applicare un fattore di riduzione
di 0,7 ai valori standard della coppia del freno.

98
98
Retroazione
Codice dispositivo
di retroazione
AR
CR
EM (multi-giro)
FM (singolo giro)
AE
CA
EC (multi-giro)
FC (singolo giro)
RA (multi-giro)
SA (singolo giro)
Tipo di
retroazione
Resolver
Encoder
incrementale
Encoder assoluto
induttivo EnDat
2,1
Resolver
Encoder
incrementale
Encoder assoluto
induttivo EnDat
2,1
Encoder ottico
SinCos
Hiperface
Tensione di
alimentazione
encoder¹
7 V rms
Eccitazione
5kHz
5 Vcc 4096 16384 (14 bit) +/- 150”
5 Vcc 16
6 V rms
Eccitazione 6kHz 16384 (14 bit) +/- 720”
5 Vcc 4096 16384 (14 bit) +/- 60”
7 - 10 Vcc 32
7 - 12 Vcc 1024
Cicli SinCos
o impulsi
incrementali per
giro
motori 055-067
1
motori 089-115
1
Risoluzione
disponibile
per anello di
posizione²
Media Bassa
16384 (14 bit) +/- 600”
Media Media
Alta Media
2,62x10^5 (18 bit) +/- 480”
Media Media
Media Alta
Media Media
Posizione assoluta
524288
(19 bit)
Molto alta Alta
1,04x10^6
(20 bit)
Precisione retroazione
&
³
+/- 280”
Errore di linearità integrale
dell'encoder SinCos +/- 45"
Errore di linearità
differenziale dell'encoder
SinCos +/- 7"
(Accuratezza totale+/-52”)
Note:
1
1) L'uscita del resolver è di tipo analogico. La
risoluzione è determinata dal convertitore
analogico-digitale in uso. Il valore indicato si
riferisce all'uso del resolver in combinazione
con SM-Resolver.
2) Le uscite seno e coseno degli encoder ottici
SinCos sono di tipo analogico. Con Unidrive
e Digitax ST le risoluzioni sopra citate
SP
si ottengono quando il tipo di encoder è
impostato di SC Endat o SC Hiper, in base
all'encoder.
3) Le informazioni sono fornite dal produttore
del dispositivo di retroazione e si riferiscono
ad esso come dispositivo autonomo. I valori
possono variare se montato sul motore e
connesso a un convertitore.
Valori forniti dai Costruttori degli encoder.
Molto alta Molto alta
EB (multi-giro)
FB (singolo giro)
Encoder ottico
assoluto EnDat
2,2
3,6 - 14 Vcc 2048
2,08x10^6
(21 bit)
Resolver
È un dispositivo passivo ad avvolgimento composto da elementi statorici e
rotorici eccitato da una sorgente esterna, quale ad esempio un SM-Resolver,
che produce due segnali di uscita che corrispondono all'angolo seno e coseno
dell'albero motore. Si tratta di un dispositivo assoluto robusto di bassa
precisione, in grado di sopportare temperature elevate e forti vibrazioni.
L'informazione di posizione è assoluta entro un giro, ovvero la posizione non
viene persa con lo spegnimento del convertitore.
Encoder incrementale
È un dispositivo elettronico che utilizza un disco ottico. La posizione viene
determinata tramite il conteggio dei passi o impulsi. Vengono utilizzate due
sequenze di impulsi in quadratura per determinare la rilevazione direzionale
e utilizzare 4 x (impulsi per giro) per la risoluzione nel convertitore. Ad ogni
giro viene generato un impulso marcatore che viene utilizzato per azzerare il
conteggio di posizione. L'encoder fornisce inoltre segnali di commutazione,
necessari per determinare la posizione assoluta durante il controllo di fasatura
del motore. Questo dispositivo è disponibile nelle versioni a 4096, 2048 e 1024
impulsi/giro (ppr). L'informazione di posizione non è assoluta, ovvero la posizione
viene persa allo spegnimento del convertitore.
+/-20”
(Errore di linearità
differenziale +/- 1% periodo
segnale)
Encoder assoluti/SinCos
Sono disponibili i tipi: Ottico o induttivo, che può essere singolo giro o multi-giro.
1) Ottico: È un dispositivo elettronico che utilizza un disco ottico. Un encoder
assoluto con alta risoluzione che impiega una combinazione di informazioni
assolute, trasmesse tramite collegamento seriale e segnali seno/coseno con
tecniche incrementali.
2) Induttivo: Dispositivo elettronico che utilizza PCB ad accoppiamento
induttivo. Encoder assoluto con risoluzione media che usa una combinazione
di informazioni assolute, trasmesse tramite collegamento seriale, e segnali
seno/coseno con tecniche incrementali. Questo encoder può operare
con il convertitore utilizzando solo i valori seno/coseno o assoluti (seriali).
L'informazione di posizione è assoluta entro 4096 giri, ovvero la posizione non va
persa allo spegnimento del convertitore.
multi-giro: Come il precedente, ma con l'inclusione di ingranaggi supplementari
in modo che l'uscita sia esclusiva per ogni posizione dell'albero e che l'encoder
abbia la capacità supplementare di contare le rotazioni complete dell'albero
motore no a 4096 giri.
Targhetta elettronica dei dati caratteristici
Disponibile su entrambi i tipi di encoder, consente di sveltire i tempi di
congurazione in quanto le informazioni relative al motore sono memorizzate
sulla scheda dell'encoder (solo motori 067-115).

www.controltechniques.com www.controltechniques.com
1110
Unimotor Dati di prodotto
(N.B. Prodotto per il mercato estero. Per l'Italia richiedere informazioni al Drive Centre)
Informazioni cavo
PS B A H A 015
Tipo cavo Rivestimento
PS = Potenza (Standard) B = PUR H* = 1,0mm² 10A C = Connettore prolunga alimentazione a 6 vie
PB = Potenza (con freno) C = OFS G = 1,5mm² 16A
* Disponibile solo su OFS
Tipo cavo
Rivestimento
PS per i motori senza freni, PB per i motori con freno.
B indica la guaina PUR ed è la scelta standard.
C indica la guaina OFS ed è la scelta per cavo statico.
Sezione conduttore
Selezionare la sezione dei conduttori in base alla
CORRENTE DI STALLO dei motori. I valori nominali
Fase e messa a terra:
sezione conduttore
A = 2,5mm² 22A H = Digitax ST e fusibili extrarapidi Unidrive SP0 X = Estremità tagliata
B = 4,0mm² 30A X = Estremità tagliata
Dettagli collegamento lato convertitore
F = Fusibili extrarapidi Unidrive
(1-2)
Dettaglio connessione
lato convertitore
Dettaglio connessione
lato motore
Lunghezza
si intendono per i singoli cavi (non legati insieme) a
Dettagli collegamento lato
motore
A = 055 - 115
Connettore alimentazione
Unimotor
Lunghezza cavo
Min = 001 (1m)
Max = 100 (100m)
Selezionare la connessione terminale lato
convertitore corretta per il convertitore in uso.
Selezionare la connessione lato motore corretta per
il motore in uso.
I numeri rappresentano la lunghezza del cavo richiesta
espressa in metri.
temperatura in aria libera no a 40°C, tenendo conto
delle situazioni.
SI B A A A 015
Tipo cavo Rivestimento Opzioni speciali Dettagli collegamento lato motore Lunghezza cavo*
SI = Pin a iperboloide encoder incrementale B = PUR A = Cavo standard A = Connettore encoder Min = 001 (1m)
SR = Resolver C**= OFS E = Cavo SS schermato ritorto B = Connettore resolver Max = 100 (100m)
SS = Encoder Sin/Cos L = Cavo SI 8.5 mm dia C = Connettore Sin/Cos (Hiper face)
SE = Pin a split encoder incrementale E = Connettore prolunga a 17 vie
F = 90° Connettore encoder
Dettagli collegamento lato convertitore G = 90° Connettore resolver
A = Connettore a 15 pin encoder Digitax ST/Unidrive
B = Fusibili extrarapidi Sin/Cos / Resolver N = Connettore Sin/Cos (EnDat)
F = Connettore a 26 pin encoder Epsilon O = 90° Connettore Sin/Cos (EnDat)
H = Connettore a 15 pin Sin/Cos Digitax ST/Unidrive
I = Pin maschi connettore prolunga
X = Estremità tagliata
* Lunghezza cavo max: 50m con SIBA/SIC A di serie, 100m solo se è possibile mantenere una tolleranza di +5V.
* Lunghezza cavo max: 10m con SIBL.
* Lunghezza cavo max: Heidenhain EC/FC 20m, EB/FB 30m con cavo SSBA, EC/FC 20m EB/FB 100m con cavo SSBE.
** OFS disponibile solo su cavo encoder SI.
/Epsilon EP
H = 90° Connettore Sin/Cos (Hiperface)
X = Estremità tagliata
Tipo cavo
Rivestimento
Opzioni speciali
Scegliere il tipo di cavo adatto al dispositivo di
retroazione.
B indica la guaina PUR ed è la scelta per cavo
dinamico. C indica la guaina OFS ed è la scelta per
cavo statico.
A indica cavo standard. L indica cavo economico
incrementale da 8.5mm.
Dettaglio connessione
lato convertitore
Dettaglio connessione
lato motore
Lunghezza
Selezionare la connessione terminale lato
convertitore corretta per il convertitore in uso.
Selezionare la connessione lato motore corretta per
il dispositivo di retroazione del motore in uso.
I numeri rappresentano la lunghezza del cavo richiesta
espressa in metri.
1110
1110
1 5
6
42
3
1
10
9
8
12
13
1415
16
17
7
6
5
11
4
3
2
1
10
9
8
12
7
6
5
11
4
3
2
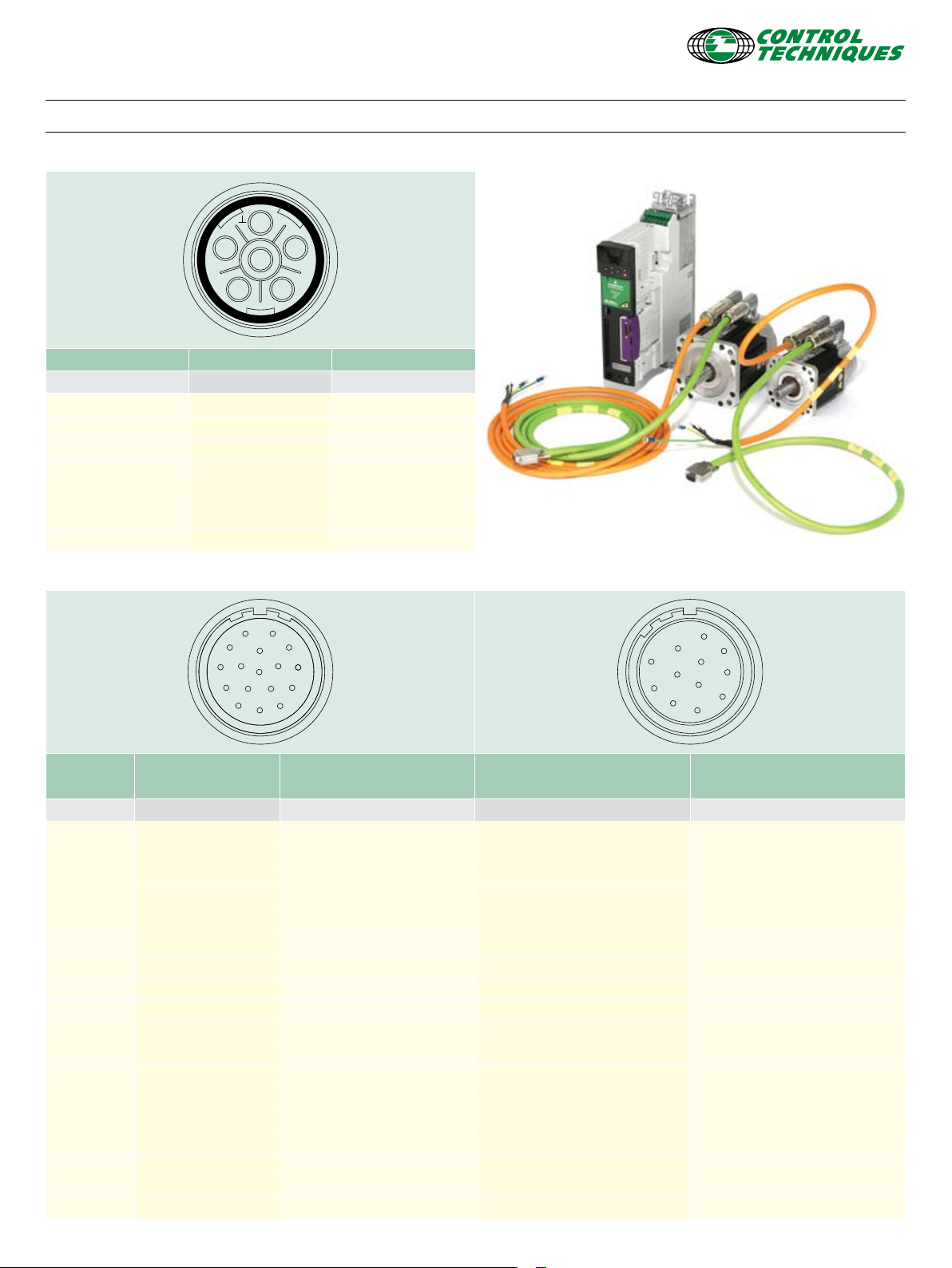
Dettagli connettore motore
Connettore alimentazione
055 -115 con freno 055 -115 senza freno
Pin Funzione Funzione
1
2
3
4
5
6
Involucro
Connettore segnale
Fase U (R) Fase U (R)
Fase V (S) Fase V (S)
Ter ra Te rr a
Fase W (T) Fase W (T)
Freno -
Freno -
Schermo Schermo
Encoder incrementale
(CR,CA)
Encoder assoluti Heidenhain
(EM, FM, EC, FC, EB, FB)
Resolver
(AR, AE)
Encoder Sin/Cos Sick|Stegmann
Pin Funzione Funzione Funzione Funzione
1 Termistore Termistore Eccitazione alta RIF Cos
2 Termistore Termistore Eccitazione bassa +Dati
3 - Schermo (solo encoder ottico) Cos alto -Dati
4 S1 - Cos basso +Cos
5 S1 Inverso - Sin alto +Sin
6 S2 - Sin basso RIF Sin
7 S2 Inverso - Termistore Termistore
8 S3 + Orologio Termistore Termistore
9 S3 Inverso - Orologio - Schermo
10 Canale A + Cos - 0 Volt
11 Indice + Dati - -
12 Indice inverso - Dati - + Volt
13 Canale A Inverso - Cos - -
14 Canale B + Sin - -
15 Canale B Inverso - Sin - -
16 + Volt + V - -
17 0 Volt 0 Volt - -
Corpo Schermo Schermo Schermo Schermo
(RA, SA)

DRIVING THE WORLD...
AUSTRALIA
Melbourne Application Centre
Tel: +613 973 81777
controltechniques.au@emerson.com
Sydney Drive Centre
Tel: +61 2 9838 7222
controltechniques.au@emerson.com
AUSTRIA
Linz Drive Centre
Tel: +43 7229 789480
controltechniques.at@emerson.com
BELGIO
Brussels Drive Centre
Tel: +32 1574 0700
controltechniques.be@emerson.com
BRASILE
São Paulo Application Centre
Tel: +55 11 3618 6688
controltechniques.br@emerson.com
CANADA
Toronto Drive Centre
Tel: +1 905 949 3402
controltechniques.ca@emerson.com
Calgary Drive Centre
Tel: +1 403 253 8738
controltechniques.ca@emerson.com
CINA
Shanghai Drive Centre
Tel: +86 21 5426 0668
controltechniques.cn@emerson.com
Beijing Application Centre
Tel: +86 10 856 31122 ext 820
controltechniques.cn@emerson.com
REPUBBLICA CECA
Brno Drive Centre
Tel: +420 511 180111
controltechniques.cz@emerson.com
DANIMARCA
Copenhagen Drive Centre
Tel: +45 4369 6100
controltechniques.dk@emerson.com
FRANCIA*
Angoulême Drive Centre
Tel: +33 5 4564 5454
controltechniques.fr@emerson.com
GERMANIA
Bonn Drive Centre
Tel: +49 2242 8770
controltechniques.de@emerson.com
Chemnitz Drive Centre
Tel: +49 3722 52030
controltechniques.de@emerson.com
Darmstadt Drive Centre
Tel: +49 6251 17700
controltechniques.de@emerson.com
GRECIA*
Athens Application Centre
Tel: +0030 210 57 86086/088
controltechniques.gr@emerson.com
OLANDA
Rotterdam Drive Centre
Tel: +31 184 420555
controltechniques.nl@emerson.com
HONG KONG
Hong Kong Application Centre
Tel: +852 2979 5271
controltechniques.hk@emerson.com
INDIA
Chennai Drive Centre
Tel: +91 44 2496 1123/
2496 1130/2496 1083
controltechniques.in@emerson.com
Pune Application Centre
Tel: +91 20 2612 7956/2612 8415
controltechniques.in@emerson.com
New Delhi Application Centre
Tel: +91 112 2581 3166
controltechniques.in@emerson.com
Drive e Application Centres di Control Techniques
IRLANDA
Newbridge Drive Centre
Tel: +353 45 448200
controltechniques.ie@emerson.com
ITALIA
Milan Drive Centre
Tel: +39 02575 751
controltechniques.it@emerson.com
Reggio Emilia Application Centre
Tel: +39 02575 751
controltechniques.it@emerson.com
Vicenza Drive Centre
Tel: +39 0444 933400
controltechniques.it@emerson.com
COREA
Seoul Application Centre
Tel: +82 2 3483 1605
controltechniques.kr@emerson.com
MALAYSIA
Kuala Lumpur Drive Centre
Tel: +603 5634 9776
controltechniques.my@emerson.com
REPUBBLICA DEL
SUDAFRICA
Johannesburg Drive Centre
Tel: +27 11 462 1740
controltechniques.za@emerson.com
Cape Town Application Centre
Tel: +27 21 556 0245
controltechniques.za@emerson.com
RUSSIA
Moscow Application Centre
Tel: +7 495 981 9811
controltechniques.ru@emerson.com
SINGAPORE
Singapore Drive Centre
Tel: +65 6891 7600
controltechniques.sg@emerson.com
SLOVACCHIA
EMERSON A.S
Tel: +421 32 7700 369
controltechniques.sk@emerson.com
SPAGNA
Barcelona Drive Centre
Tel: +34 93 680 1661
controltechniques.es@emerson.com
Bilbao Application Centre
Tel: +34 94 620 3646
controltechniques.es@emerson.com
Valencia Drive Centre
Tel: +34 96 154 2900
controltechniques.es@emerson.com
SVEZIA*
Stockholm Application Centre
Tel: +468 554 241 00
controltechniques.se@emerson.com
SVIZZERA
Lausanne Application Centre
Tel: +41 21 637 7070
controltechniques.ch@emerson.com
Zurich Drive Centre
Tel: +41 56 201 4242
controltechniques.ch@emerson.com
TAIWAN
Taipei A pplication Centre
Tel: +886 22325 9555
controltechniques.tw@emerson.com
TAILANDIA
Bangkok Drive Centre
Tel: +66 2962 2092 99
controltechniques.th@emerson.com
TURCHIA
Istanbul Drive Centre
Tel: +90 216 4182420
controltechniques.tr@emerson.com
UAE*
Emerson FZE
Tel: +971 4 8118100
ct.dubai@emerson.com
REGNO UNITO
Telford Drive Centre
Tel: +44 1952 213700
controltechniques.uk@emerson.com
USA
California Drive Centre
Tel: +1 562 943 0300
controltechniques.us@emer son.com
Charlotte Application Centre
Tel: +1 704 393 3366
controltechniques.us@emer son.com
Chicago Application Centre
Tel: +1 630 752 9090
controltechniques.us@emer son.com
Cleveland Drive Centre
Tel: +1 440 717 0123
controltechniques.us@emer son.com
Florida Drive Centre
Tel: +1 239 693 7200
controltechniques.us@emer son.com
Latin America Sales Ofce
Tel: +1 305 818 8897
controltechniques.us@emer son.com
Minneapolis US Headquarters
Tel: +1 952 995 8000
controltechniques.us@emer son.com
Oregon Drive Centre
Tel: +1 503 266 2094
controltechniques.us@emer son.com
Providence Drive Centre
Tel: +1 401 541 7277
controltechniques.us@emer son.com
Utah Drive Centre
Tel: +1 801 566 5521
controltechniques.us@emer son.com
Distributori Control Techniques
ARGENTINA
Euro Techniques SA
Tel: +54 11 4331 7820
eurotech@eurotechsa.com.ar
BAHREIN
Emerson FZE
Tel: +971 4 8118100
ct.bahrain@emerson.com
BULGARIA
BLS - Automation Ltd
Tel: +359 32 968 007
info@blsautomation.com
CILE
Ingeniería Y Desarrollo
Tecnológico S.A
Tel: +56 2 719 2200
rdunner@idt.cl
COLOMBIA
Sistronic LTDA
Tel: +57 2 555 60 00
luis.alvarez@sistronic.com.co
P.N. 0702-0021-04 10/10
Redes Electricas S.A.
Tel: +57 1 364 7000
alvaro.rodriguez@redeselectricas.com
CROAZIA
Zigg-Pro d.o.o
Tel: +385 1 3463 000
zigg-pro@zg.htnet.hr
© Control Techniques 2010. Le informazioni contenute in questa brochure sono da considerarsi indicative e corrette
al momento della stampa, ma non vincolanti in fase contrattuale. Nella costante ricerca di miglioramento del prodotto,
Control Techniques si riser va il diritto di modicare le speciche senza alcun obbligo di notica.
CIPRO
Acme Industrial Electronic
Services Ltd
Tel: +3572 5 332181
acme@cytanet.com.cy
EGITTO
Samiram
Tel: +202 29703868/+202
29703869
samiramz@samiram.com
EL SALVADOR
Servielectric Industrial S.A. de C.V.
Tel: +503 2278 1280
aeorellana@gruposervielectric.com
FINLANDIA
SKS Control
Tel: +358 207 6461
control@sks.
GUATEMALA
MICE, S.A.
Tel: +502 5510 2093
mice@itelgua.com
HONDURAS
Temtronics Honduras
Tel: +504 550 1801
temtronics@amnethn.com
UNGHERIA
Control-VH Kft
Tel: +361 431 1160
info@controlvh.hu
ISLANDA
Samey ehf
Tel: +354 510 5200
samey@samey.is
INDONESIA
Pt Apikon Indonesia
Tel: +65 6468 8979
info.my@controltechniques.com
Pt Yua Esa Sempurna Sejahtera
Tel: +65 6468 8979
info.my@controltechniques.com
ISRAELE
Dor Drives Systems Ltd
Tel: +972 3900 7595
info@dor1.co.il
KENYA
Kassam & Bros Co. Ltd
Tel: +254 2 556 418
kassambros@africaonline.co.ke
KUWAIT
Emerson FZE
Tel: +971 4 8118100
ct.kuwait@emerson.com
LETTONIA
EMT
Tel: +371 760 2026
janis@emt.lv
LIBANO
Black Box Automation & Control
Tel: +961 1 443773
info@blackboxcontrol.com
LITUANIA
Elinta UAB
Tel: +370 37 351 987
sigitas@elinta.lt
MALTA
Mekanika Limited
Tel: +35621 442 039
mfrancica@gasan.com
MESSICO
MELCSA S.A. de CV
Tel: +52 55 5561 1312
jcervera@melcsa.com
MAROCCO
Cietec
Tel: +212 22 354948
cietec@cietec.ma
NUOVA ZELANDA
Advanced Motor Control. Ph.
Tel: +64 (0) 274 363 067
info.au@controltechniques.com
PERÙ
Intech S.A.
Tel: +51 1 224 9493
artur.mujamed@intech-sa.com
* Gestito da consociata
FILIPPINE
Control Techniques
Singapore Ltd
Tel: +65 6468 8979
info.my@controltechniques.com
POLONIA
APATOR CONTROL Sp. z o.o
Tel: +48 56 6191 207
info@acontrol.com.pl
PORTOGALLO
Harker Sumner S.A
Tel: +351 22 947 8090
drives.automation@harker.pt
PORTO RICO
Motion Industries Inc.
Tel: +1 787 251 1550
roberto.diaz@motion-ind.com
QATAR
Emerson FZE
Tel: +971 4 8118100
ct.qatar@emerson.com
ROMANIA
C.I.T. Automatizari
Tel: +40212550543
ofce@citautomatizari.ro
ARABIA SAUDITA
A. Abunayyan Electric Corp.
Tel: +9661 477 9111
aec-salesmarketing@
abunayyangroup.com
SERBIA E MONTENEGRO
Master Inzenjering d.o.o
Tel: +381 24 551 605
ofce@masterinzenjering.rs
SLOVENIA
PS Logatec
Tel: +386 1 750 8510
ps-log@ps-log.si
TUNISIA
SIA Ben Djemaa & CIE
Tel: +216 1 332 923
bendjemaa@planet.tn
URUGUAY
SECOIN S.A.
Tel: +5982 2093815
jose.barron@secoin.com.uy
VENEZUELA
Digimex Sistemas C.A.
Tel: +58 243 551 1634
digimex@digimex.com.ve
VIETNAM
N.Duc Thinh
Tel: +84 8 9490633
infotech@nducthinh.com.vn
 Loading...
Loading...