


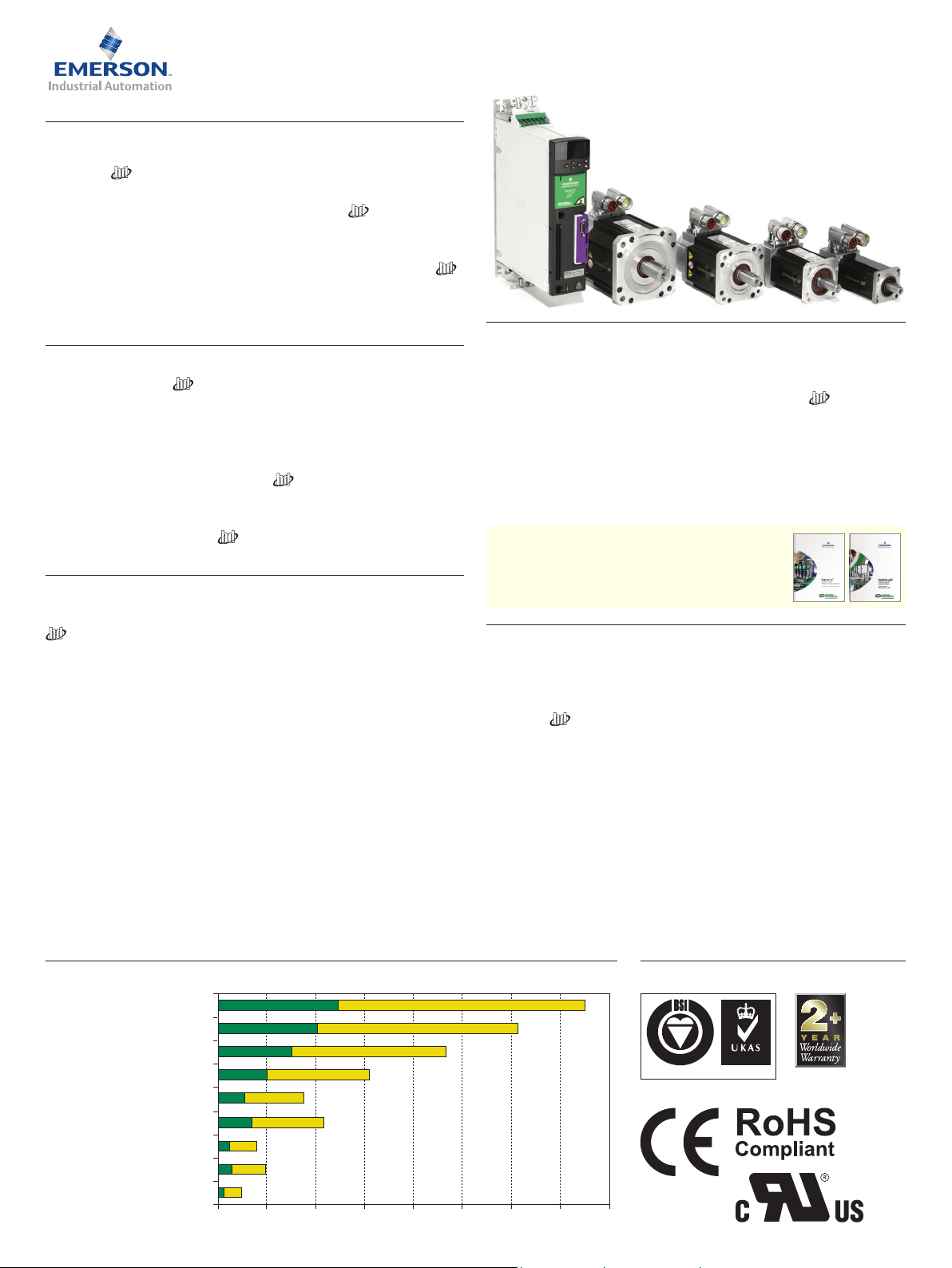
Unimotor
Données techniques
Servomoteur AC à haute dynamique
pour variateurs Control Techniques
Tailles 055 à 115
0,72 Nm à 18,8 Nm
(couple de crête 56,4 Nm)
www.controltechniques.com www.controltechniques.com
32
QUALITY
MANAGEMENT
003
Servomoteur compact pour applications exigeantes
Unimotor est la nouvelle gamme de servomoteurs AC haute
dynamique de Control Techniques, conçus pour les variateurs
Digitax ST, Unidrive SP et Epsilon EP. Unimotor
solution ultra compacte et à faible inertie, idéale dans les
applications nécessitant des couples très élevés lors d’accélérations
et de décélérations rapides. La courbe de couple de l’Unimotor
est adaptée aux servovariateurs Digitax ST qui fournit jusqu’à 300 %
de surcharge crête pour des performances dynamiques maximales.
Maîtrise technique, innovation et fiabilité
La gamme Unimotor a été mise au point par une équipe de
spécialistes qui s’est appuyée sur notre processus de conception
garantissant innovation, performance et abilité. Celui-ci permet aux
nouvelles idées d’être rapidement évaluées, prototypées et testées
grâce aux outils logiciels internes de développement et de simulation.
En conséquence, la gamme Unimotor
bénécie de performances
uniques mettant en valeur les principes de conception qui font l’objet
de plusieurs brevets. Que ce soit sur le plan des performances ou de la
qualité, la gamme Unimotor
« redénit l’excellence ».
Principales caractéristiques
offre une
Combinaison parfaite entre moteurs et variateurs
La combinaison des moteurs et des variateurs Control Techniques
procure un système optimal en termes de capacités, de performances,
de coût et de simplicité d’utilisation. Pour les Unimotor
codeur haute résolution SinCos ou absolu, les informations relatives à
la plaque signalétique moteur sont préprogrammées lors du processus
de fabrication dans l’électronique du codeur. Ces données peuvent ainsi
être lues par les servovariateurs de Control Techniques pour optimiser
automatiquement leurs paramètres. Cette fonctionnalité simplie la
mise en service, garantit des performances et facilite la maintenance.
Pour en savoir plus sur les servovariateurs
Control Techniques, consultez les brochures
Digitax ST et Unidrive SP.
équipés du
Avec leurs fonctionnalités exceptionnelles, les servomoteurs Unimotor
sont adaptés à de nombreuses applications industrielles :
➜ Plage de couple : 0,72 Nm à 18,8 Nm
➜ Rapport couple-inertie élevé pour une dynamique importante
➜ Compact et puissant
➜ Frein à haute dissipation d’énergie
➜ Conformité IP65 : étanchéité à l’eau et à la poussière une fois
installés et connectés
➜ Stator segmenté
➜ Performances haut de gamme
➜ Performances et abilité conrmées par des tests rigoureux
➜ Bobinages pour 220 Vac et 400 Vac
➜ Les vitesses nominales sont 2000 min-1, 3000 min-1, 4000 min-1
et 6000 min-1
➜ Diamètre d’arbre augmenté pour une rigidité torsionnelle supérieure
115UDC300 + DST1405
115UDB300 + DST1405
089UDC300 + DST1404
089UDB300 + DST1403
089UDA300 + DST1402
067UDC300 + DST1402
067UDA300 + DST1401
055UDC300 + DST1401
055UDA300 + DST1401
0 205 2510 3015 35 40
Précision et résolution afin de répondre aux exigences de vos
applications
Le choix du capteur de retour est essentiel pour obtenir des
performances optimales qui conviennent à l’application. La gamme
Unimotor propose plusieurs options capteur avec différents
niveaux de précision et de résolution dans le but de satisfaire à la
plupart des applications:
➜ Résolveur : Capteur robuste pour les applications et conditions
extrêmes, faible précision, résolution moyenne
➜ Codeur incrémental : haute précision, résolution moyenne
➜ Codeur absolu inductif : mono-tour et multi-tours, précision
moyenne, résolution moyenne
➜ Codeur absolu/SinCos optique : mono-tour et multi-tours, haute
précision, haute résolution
➜ Protocoles Hiperface (SICK) et EnDAT (Heidenhain) supportés
Conformité et normesPerformances en couple ■ Couple au calage ■ Couple crête (3000 min-1)
FM 30610

32
32
Informations relatives aux références de commande de l’Unimotor
Utilisez les informations gurant sur l’illustration ci-après pour créer une référence de commande Unimotor .
Les informations gurant dans le bandeau sont un exemple de référence de commande.
089 UD B 30 5 B A CA A
Taille
moteur
Tension
moteur
055 ED = 220V A 30 = 3000 rpm 0 = Non monté (Std)
067 UD = 400V B 60 = 6000 rpm 1 = Frein de parking
089 C Taille 089 X = Spécial EM = A bsolu inductif multi-tours
115 Taille 115 30 = 3000 rpm Tailles 067-115 FM = A bsolu inductif mono-tour
Longueur
du stator
Tailles
055-089
Vitesse nomi-
nale
Tailles 055-067 Taille 055 Tailles 055-067
B 40 = 4000 rpm 0 = Non monté (Std) XX = Spécial
C 60 = 6000 rpm
D Taille 115 AE = Résolveur
20 = 2000 rpm X = Spécial CA = Codeur incrémental (SICK)
30 = 3000 rpm CR = Codeur incrémental (Renco)
Frein (24 V)
5 = Frein de parking couple
fort
Type de
raccordement
B = Puissance
et Signal à
90°
orientables
Arbre de
sortie
A = Keyed AR = Résolveur A = Standard
B = Arbre
plein
CR = Codeur incrémental (Renco)
EB = Absolu optique multi-tours
FB = Absolu optique mono-tour
EC = A bsolu inductif multi-tours
FC = Absolu inductif mono-tour
RA = SinCos optique multi-tours
SA = SinCos optique mono-tour
XX = Spécial
AE = Résolveur
CA = Codeur incrémental (SICK)
EB = A bsolu optique multi-tours
FB = A bsolu optique mono-tour
EC = A bsolu inductif multi-tours
FC = Absolu inductif mono -tour
RA = SinCos optique multi-tours
SA = SinCos optique mono-tour
XX = Spécial
Retour codeur Inertie
4096 ppt (R35i)
EQI 1130
ECI 1118
Taille 089
4096 ppt (CFS50)
4096 ppt (R35i)
EQN 1325
ECN 1313
EQI 1331
ECI 1319
SRM 50 (GEN 2)
SRS 50 (GEN 2)
Taille 115
4096 ppt (CFS50)
EQN 1325
ECN 1313
EQI 1331
ECI 1319
SRM 50 (GEN 2)
SRS 50 (GEN 2)
Tableau de désignation rapide
Taille moteur Diamètre de centrage Primitif (mm)
1,65
055 63
067 75
089 100
115 130
Stall 0 0,5 1,0 3,0 5,0 8,0 10,0 15,0 20,0 (Nm)
Inertia 0 0,1 0,2 0,7 1,5 2,5 6,5 8,0 9,0 (kgcm
0,72
0,14
0,36
1,45
0,30
0,75
3,70
3,20
0,87
Unimotor
2,34
8,00
4,41
10,2
18,80
8,38
Page N°
4
5
6
7
2
)
www.controltechniques.com www.controltechniques.com
54
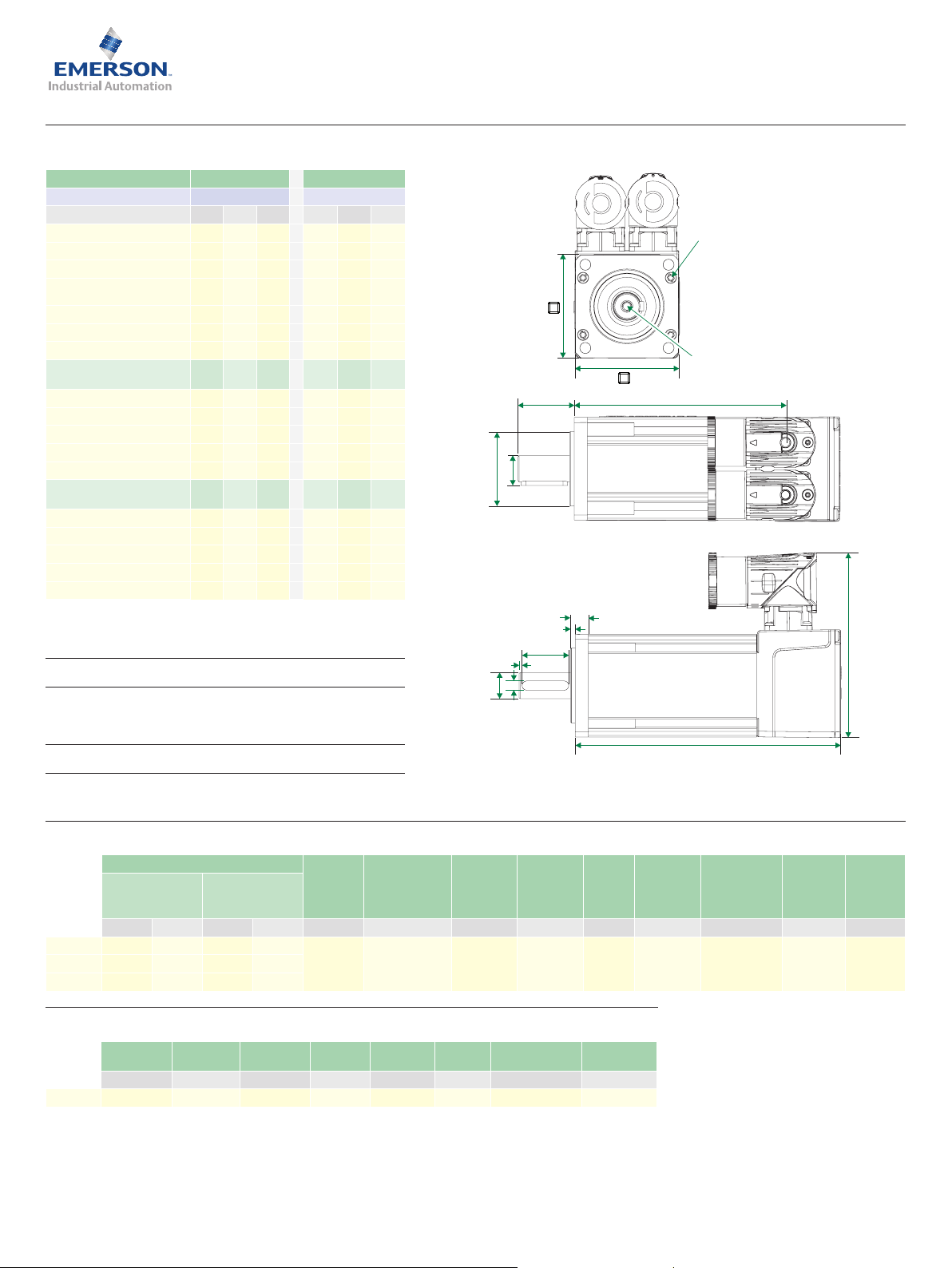
Dimensions de la gamme 055
F
G
E
Clavette
en option
K
L
A
N
H
C
∅M
BD
4 trous ∅R (H14)
équidistants sur un
PCD de fixation ∅S
P
T
Diamètre du trou fileté
I x la profondeur J
Taille moteur (mm) 055ED 055UD
Tension (Vrms)
Longueur stator A B C A B C
Couple permanent au calage (Nm)
Couple crête (Nm)
Inertie (kgcm2)
Constante de temps thermique du
Poids du moteur sans frein (kg)
Poids du moteur avec frein (kg)
Vitesse 3000 min-1
Puissance nominale (kW)
Vitesse 6000 min-1
Puissance nominale (kW)
bobinage (s)
Nombre de pôles
Kt (Nm/A) =
Ke (V/kmin-1) =
Couple nominal (Nm)
Courant au calage (A)
R (ph-ph) (Ω)
L (ph-ph) (mH)
Kt (Nm/A) =
Ke (V/kmin-1) =
Couple nominal (Nm)
Courant au calage (A)
R (ph-ph) (Ω)
L (ph-ph) (mH)
∆t= 100 °C au bobinage avec une température ambiante
maximale de 40 °C
200-240 380-480
0,72 1,18 1,65 0,72 1,18 1,65
2,88 4,72 6,60 2,88 4,72 6,60
0,14 0,25 0,36 0,14 0,25 0,36
34,0 38,0 42,0 34,0 38,0 42,0
1,20 1,50 1,80 1,20 1,50 1,80
1,60 1,90 2,20 1,6 1,90 2,20
8 8 8 8 8 8
0,74
0,87
0,91
0,74
1,49
45,00
52,50
55,00
45,00
0,70 1,05 1,48 0,70 1,05 1,48
0,97 1,36 1,81 0,97 0,79 1,00
0,22 0,33 0,46 0,22 0,33 0,46
28,00 14,12 9,53 28,00 45,00 31,00
50,00 32,00 23,00 50,00 100,00 75,00
0,45
0,43
0,48
27,00
26,00
29,00
0,68 0,90 1,20 0,68 0,90 1,20
1,61 2,74 3,44 0,97 1,49 1,99
0,43 0,57 0,75 0,43 0,57 0,75
8,50 3,55 2,38 28,00 10,70 7,80
16,00 8,20 6,30 50,00 25,00 20,00
0,74
45,00
90,00
0,79
47,50
1,65
100,00
0,83
50,00
Toutes les données sont soumises à une tolérance de +/-10 %
Le couple au calage, le couple nominal et la puissance sont donnés pour
un fonctionnement continu à température ambiante de 20 °C, avec une
fréquence de découpage du variateur de 12 kHz.
Toutes les autres valeurs sont données pour une température moteur de 20 °C.
La température du bobinage maximale intermittente est de 140 °C.
Dimensions du moteur (mm) N° de schéma : GM496400
Avec codeur AR, CR, EM/FM
sans frein
A B A B K L M (j6) N P R (H14) S T
Longueur totale
055A
055B
055C
118,0 90,0 158,0 130,0
142,0 114,0 182,0 154,0
166,0 138,0 206,0 178,0
Longueur totale
avec frein
Épaisseur
de bride
7,0 2,5 40,0 99,0 55,0 5,8 63,0 55,0 M5
Profondeur
d’emboîtement
Diamètre de
centrage
Hauteur
avec
connecteur
Carré de
la bride
Diamètre
des trous de
fixation
Trou de fixation
PCD (Diamètre
de centrage
primitif)
Largeur
carter
Dimensions bout d’arbre (mm)
14,0 Std
Diamètre
bout d'arbre
C (j6) D E F G H (h9) I J
14 30,0 16,0 25,0 1,5 5,0 M5 12,5
Longueur
bout d'arbre
Hauteur avec
clavette
Longueur
de clavette
Clavette à
bout d'arbre
Largeur de
clavette
Diamètre du trou
bout d'arbre
Profondeur du
trou fileté
Boulons
de fixation

54
54
Dimensions de la gamme 067
Clavette
en option
4 trous ∅R (H14)
équidistants sur un
PCD de fixation ∅S
T
P
K
L
A
N
E
∅M
F
G
H
∅C
B
D
Diamètre du trou fileté
I x la profondeur J
Taille moteur (mm) 067ED 067UD
Tension (Vrms)
Longueur stator A B C A B C
Couple permanent au calage (Nm)
Couple crête (Nm)
Inertie (kgcm2)
Constante de temps thermique du
Poids du moteur sans frein (kg)
Poids du moteur avec frein (kg)
Vitesse 3000 min-1
Puissance nominale (kW)
Vitesse 6000 min-1
Puissance nominale (kW)
bobinage (s)
Nombre de pôles
Kt (Nm/A) =
Ke (V/kmin-1) =
Couple nominal (Nm)
Courant au calage (A)
R (ph-ph) (Ω)
L (ph-ph) (mH)
Kt (Nm/A) =
Ke (V/kmin-1) =
Couple nominal (Nm)
Courant au calage (A)
R (ph-ph) (Ω)
L (ph-ph) (mH)
∆t= 100 °C au bobinage avec une température ambiante
maximale de 40 °C
Toutes les données sont soumises à une tolérance de +/-10 %
Le couple au calage, le couple nominal et la puissance sont donnés pour
un fonctionnement continu à température ambiante de 20 °C, avec une
fréquence de découpage du variateur de 12 kHz.
200-240 380-480
1,45 2,55 3,70 1,45 2,55 3,70
4,35 7,65 11,10 4,35 7,65 11,10
0,30 0,53 0,75 0,30 0,53 0,75
54 61 65 54 61 65
2,00 2,60 3,20 2,00 2,60 3,20
2,70 3,3 3,90 2,70 3,3 3,90
10 10 10 10 10 10
0,93
57,00
1,40 2,45 3,50 1,40 2,45 3,50
1,56 2,74 3,98 1,81 1,59 2,31
0,44 0,77 1,10 0,44 0,77 1,10
14,92 4,88 3,33 11,69 15,20 10,70
45,43 17,40 12,70 35,18 54,20 40,80
0,47
28,50
1,30 2,20 1,30 2,20 3,10
3,12 5,48 1,81 3,19 4,63
0,82 1,38 0,82 1,38 1,95
3,86 1,22 11,69 3,79 2,68
11,06 4,35 35,18 13,60 10,20
0,80
49,00
1,60
98,00
0,8
49,00
1,60
98,00
Toutes les autres valeurs sont données pour une température moteur de 20 °C.
La température du bobinage maximale intermittente est de 140 °C.
Dimensions du moteur (mm) N° de schéma : IM/0694/GA
067A
067B
067C
avec frein
Épaisseur
de bride
7,5 2,50 60,0 111,5 70,0 5,8 75,0 67,00 M5
Profondeur
d’emboîtement
Diamètre de
centrage
Hauteur
avec
connecteur
Carré de
la bride
Diamètre
des trous de
fixation
Trou de fixation
PCD (Diamètre
de centrage
primitif)
Avec codeur AR, CR, EM/FM
Longueur totale
sans frein
(± 1,1) B (± 1,0) A (± 1,1) B (± 1,0) K (± 0,5) L (± 0,1) M (j6) N (± 0,3) P (± 0,3) R (H14) S (± 0,4) T (± 0,4)
A
142,7 108,8 177,7 143,8
172,7 138,8 207,7 173,8
202,7 168,8 237,7 203,8
Longueur totale
Largeur
carter
Dimensions bout d’arbre (mm)
14,0 Std
Diamètre
bout d'arbre
(j6) D (± 0,45) E (+0,0 / -0,13) F (± 0,25) G (± 1,1) H (h9) I J (± 0,1)
C
14,0 30,0 16,0 22,0 3,6 5,0 M5 x 0,8 13,5
Longueur
bout d'arbre
Hauteur avec
clavette
Longueur
de clavette
Clavette à
bout d'arbre
Largeur de
clavette
Diamètre du trou
bout d'arbre
Profondeur du
trou fileté
Boulons
de fixation

www.controltechniques.com www.controltechniques.com
76
Dimensions de la gamme 089
F
G
E
Clavette
en option
K
L
A
N
H
∅C
∅M
B
D
4 trous ∅R (H14)
équidistants sur un
PCD de fixation ∅S
P
T
Diamètre du trou fileté
I x la profondeur J
Taille moteur (mm) 089ED 089UD
Tension (Vrms)
Longueur stator A B C A B C
Couple permanent au calage (Nm)
Couple crête (Nm)
Inertie (kgcm2)
Constante de temps thermique du
Poids du moteur sans frein (kg)
Poids du moteur avec frein (kg)
Vitesse 3000 min-1
Puissance nominale (kW)
Vitesse 4000 min-1
Puissance nominale (kW)
Vitesse 6000 min-1
Puissance nominale (kW)
bobinage (s)
Nombre de pôles
Kt (Nm/A) =
Ke (V/kmin-1) =
Couple nominal (Nm)
Courant au calage (A)
R (ph-ph) (Ω)
L (ph-ph) (mH)
Kt (Nm/A) =
Ke (V/kmin-1) =
Couple nominal (Nm)
Courant au calage (A)
R (ph-ph) (Ω)
L (ph-ph) (mH)
Kt (Nm/A) =
Ke (V/kmin-1) =
Couple nominal (Nm)
Courant au calage (A)
R (ph-ph) (Ω)
L (ph-ph) (mH)
∆t= 100 °C au bobinage avec une température ambiante
maximale de 40 °C
Toutes les données sont soumises à une tolérance de +/-10 %
Le couple au calage, le couple nominal et la puissance sont donnés pour
un fonctionnement continu à température ambiante de 20 °C, avec une
fréquence de découpage du variateur de 12 kHz.
200-240 380-480
3,20 5,50 8,00 3,20 5,50 8,00
9,60 16,50 24,00 9,60 16,50 24,00
0,87 1,61 2,34 0,87 1,61 2,34
85 93 98 85 93 98
3,30 4,40 5,50 3,30 4,40 5,50
4,30 5,40 6,50 4,30 5,40 6,50
10 10 10 10 10 10
0,93
57,00
3,00 4,85 6,90 3,00 4,85 6,90
3,44 5,91 8,60 2,00 3,44 5,00
0,94 1,52 2,17 0,94 1,52 2,17
3,28 1,57 0,89 10,10 5,05 2,68
21,55 11,84 7,09 65,17 38,36 21,72
0,70
42,75
2,90 4,55 6,35 2,90 4,55 6,35
4,57 7,86 11,43 2,67 4,58 6,67
1,21 1,91 2,66 1,21 1,91 2,66
2,04 0,79 0,54 6,16 2,47 1,75
13,20 5,97 4,38 39,78 18,80 14,03
0,47
28,50
2,65 3,80 5,00 2,65 3,80 5,00
6,88 11,83 17,20 4,00 6,88 10,00
1,67 2,39 3,14 1,67 2,39 3,14
0,98 0,39 0,23 2,52 1,27 0,83
6,24 2,96 1,89 16,29 9,59 6,66
1,60
98,00
1,2
73,50
0,8
49,00
Toutes les autres valeurs sont données pour une température moteur de 20 °C.
La température du bobinage maximale intermittente est de 140 °C.
Dimensions du moteur (mm) N° de schéma : IM/0688/GA
089A
089B
089C
Avec codeur AR, CR, EM/FM
Longueur totale
sans frein
(± 0,9) B (± 1,0) A (± 0,9) B (± 1,0) K (± 0,5) L (± 0,1) M (j6) N (± 1,0) P (± 0,28) R (H14) S (± 0,4) T (± 0,7)
A
147,8 110,5 187,9 150,6
177,8 140,5 217,9 180,6
207,8 170,5 247,9 210,6
Longueur totale
avec frein
Épaisseur
de bride
10,3 2,20 80,0 130,5 91,0 7,00 100,0 89,0 M6
Profondeur
d’emboîtement
Diamètre
de
centrage
Hauteur
avec
connecteur
Carré de
la bride
Diamètre
des trous de
fixation
Trou de fixation
PCD (Diamètre de
centrage primitif)
Largeur
carter
Avec codeur FB, EB/CA/SA, RA Avec codeur AE/CR
089A
089B
089C
Longueur
totale
sans frein
A
160,8 200,9 137,8 177,9
190,8 230,9 167,8 207,9
220,8 260,9 197,8 237,9
Longueur totale
avec frein
(± 0,9) A (± 0,9) A (± 0,9) A (± 0,9)
Longueur
totale
sans frein
Longueur
totale
avec frein
Dimensions bout d’arbre (mm)
Diamètre
19,0 Std
Longueur
bout
d'arbre
C
19,0 40,0 21,5 32,0 3,7 6,0 M6 x 1,0 17,0
bout
d'arbre
(j6) D (± 0,45) E (+ 0,009 / -0,134) F (± 0,25) G (± 1,1) H (h9) I J (± 0,1)
Hauteur avec
clavette
Longueur
de clavette
Clavette
à bout
d'arbre
Largeur
de
clavette
Diamètre
du trou bout
d'arbre
Boulons
de fixation
Profondeur
du trou fileté

76
76
Dimensions de la gamme 115
D
F
G
E
Clavette en option
4 trous ∅R (H14)
équidistants sur un
PCD de fixation ∅S
P
T
Diamètre du trou fileté
I x la profondeur J
K
L
A
N
H
∅C
∅M
B
Taille moteur (mm) 115ED 115UD
Tension (Vrms)
Longueur stator B C D B C D
Couple permanent au calage (Nm)
Couple crête (Nm)
Inertie (kgcm2)
Constante de temps thermique du
Poids du moteur sans frein (kg)
Poids du moteur avec frein (kg)
Vitesse 2000 min-1
Puissance nominale (kW)
Vitesse 3000 min-1
Puissance nominale (kW)
bobinage (s)
Nombre de pôles
Kt (Nm/A) =
Ke (V/kmin-1) =
Couple nominal (Nm)
Courant au calage (A)
R (ph-ph) (Ω)
L (ph-ph) (mH)
Kt (Nm/A) =
Ke (V/kmin-1) =
Couple nominal (Nm)
Courant au calage (A)
R (ph-ph) (Ω)
L (ph-ph) (mH)
∆t= 100 °C au bobinage avec une température ambiante
maximale de 40 °C
Toutes les données sont soumises à une tolérance de +/-10 %
200-240 380-480
10,20 14,60 18,80 10,20 14,60 18,80
30,60 43,80 56,40 30,60 43,80 56,40
4,41 6,39 8,38 4,41 6,39 8,38
164 168 175 164 168 175
7,20 8,90 10,70 7,20 8,90 10,70
8,70 10,40 12,20 8,70 10,40 12,20
10 10 10 10 10 10
1,40
85,50
8,60 11,90 15,60 8,60 11,90 15,60
7,29 10,43 13,43 4,25 6,08 7,83
1,80 2,49 3,27 1,80 2,49 3,27
1,40 0,77 0,61 4,41 2,41 1,80
12,84 7,87 6,62 40,59 24,69 19,45
0,93
57,00
7,70 10,50 7,70 10,50 13,60
10,97 15,70 6,38 9,13 11,75
2,42 3,30 2,42 3,30 4,27
0,58 0,39 1,83 1,21 0,78
5,40 4,01 16,93 12,72 8,65
2,4
147,00
1,60
98,00
Le couple au calage, le couple nominal et la puissance sont donnés pour
un fonctionnement continu à température ambiante de 20 °C, avec une
fréquence de découpage du variateur de 12 kHz.
Toutes les autres valeurs sont données pour une température moteur de 20 °C.
La température du bobinage maximale intermittente est de 140 °C.
Dimensions du moteur (mm) N° de schéma : IM/0689/GA
115B
115C
115D
115B
115C
115D
Avec codeur AR, CR, EM/FM
Longueur totale
sans frein
(± 0,9) B (± 1,0) A (± 0,9) B (± 1,0) K (± 0,5) L (± 0,1) M (j6) N (± 1,0) P (± 0,31) R (H14) S (± 0,4) T (± 0,7)
A
193,8 154,0 230,9 191,1
223,8 184,0 260,9 221,1
253,8 214,0 290,9 251,1
Avec codeur FB, EB/CA/SA, RA Avec codeur AE/CR
Longueur
totale
sans frein
A
206,8 243,9 183,8 220,9
236,8 273,9 213,8 250,9
266,8 303,9 243,8 280,9
Longueur totale
(± 0,9) A (± 0,9) A (± 0,9) A (± 0,9)
avec frein
Longueur totale
avec frein
Longueur
totale
sans frein
Épaisseur
de bride
13,2 2,70 110,0 156,5 116,0 10,00 130,0 115,0 M8
Longueur
totale
avec frein
Profondeur
d’emboîtement
Dimensions bout d’arbre (mm)
24,0 Std
Diamètre
centrage
de
Hauteur
avec
connecteur
Carré de
la bride
Diamètre
des trous de
fixation
Trou de fixation
PCD (Diamètre de
centrage primitif)
Largeur
carter
Diamètre
Longueur
bout
d'arbre
C
24,0 50,0 27,0 40,0 5,3 8,0 M8 x 1,25 20,0
bout
d'arbre
(j6) D (± 0,45) E (+0,009 / -0,294) F (± 0,25) G (± 1,1) H (h9) I J (± 0,1)
Hauteur avec
clavette
Longueur
de clavette
Clavette
à bout
d'arbre
Largeur
de
clavette
Diamètre
du trou bout
d'arbre
Boulons
de fixation
Profondeur
du trou fileté

www.controltechniques.com www.controltechniques.com
98
Sélection du moteur
Plaque
Arbre
Moteur
Dynamomètre
Isolation thermique
Déclassement du moteur
Dans des conditions de fonctionnement difciles, il est nécessaire de déclasser
le moteur, Ces conditions incluent notamment une température ambiante
supérieure à 40 °C, la position de montage du moteur, la fréquence de
découpage du variateur et le surdimensionnement du variateur pour le moteur,
Températures ambiantes
La température ambiante autour du moteur doit être prise en compte, Au-delà
de 40 °C, le couple doit être déclassé à l’aide de la formule suivante, (Remarque
: Concerne uniquement les moteurs à régime de 2000/3000 min-1 avec des
pertes cuivre dominantes)
Couple déclassé = Couple spécié x √ [1-((Température ambiante - 40°C) / 100)]
Par exemple, si la température ambiante est de 76 °C, le couple déclassé
correspondra à 0,8 x le couple spécié
Types de montage
Le couple moteur doit être déclassé si la surface de montage est chauffée
par une source externe, telle qu’un réducteur ; si le moteur est raccordé à
un conducteur thermique de mauvaise qualité ; si le moteur est monté avec
les connecteurs sur le côté ou à la verticale, ou s’il est monté dans un espace
conné où la circulation de l’air est limitée,
Fréquence de découpage du variateur
Dans la plupart des cas, le courant nominal du Digitax ST / de l’Unidrive
est réduit avec des fréquences de découpage élevées, Pour en savoir plus,
consultez le manuel du Digitax ST ou de l’Unidrive
,
Pour connaître les facteurs de déclassement des moteurs, reportez-vous au
tableau ci-après, Ces valeurs sont données à titre indicatif uniquement,
(Remarque : Concerne uniquement les moteurs jusqu’à 3000 min-1 avec des pertes cuivre
dominantes)
Fréquence de
découpage
3kHz
4kHz
6kHz
8kHz
12/16kHz
055 067 089 115
0,92 0,93 0,89 0.89
0.93 0.94 0.91 0.92
0,95 0,95 0,95 0,96
0,96 0,98 0,97 0,98
1 1 1 1
Taille moteur
Conditions d’essais thermiques
Les caractéristiques sont issues d’essais réalisés dans les conditions suivantes :
température ambiante de 20 °C, avec moteur monté sur une plaque en
aluminium thermiquement isolée du châssis, comme illustré ci-dessous,
Taille moteur Plaque de montage en aluminium
055mm
067-089mm
115mm
Protection thermique
110 x 110 x 27mm
250 x 250 x 15mm
350 x 350 x 20mm
La protection thermique (145 °C) est intégrée aux bobinages des moteurs
et fournit des informations relatives à d’éventuels problèmes de surchauffe,
L’installateur doit raccorder la sonde thermique au variateur, faute de quoi la
garantie du moteur est annulée en cas d’endommagement du bobinage,
Conditions environnementales
En cas de contact du moteur avec un liquide ou un environnement gazeux,
assurez-vous de la conformité aux normes internationales en vigueur,
Caractéristiques du frein
Tension
Gamme
moteur
Taille Vdc Watts Nm Nm ms nom kgcm² * Degrés**
055
067
089
115
* Notez que 1 kgcm² = 1x10-4 kgm² **La valeur du jeu angulaire peut augmenter au fil
du temps
Puis-
d’ali-
sance
menta-
absor-
tion
bée
24 6,3 1,8 S/O 22 0,03 0,73
24 10,2 S/O 4 <50 0,073 0,75
24 23,35 S/O 10 <50 0,115 0,75
24 19,5 S/O 25 120 0,327 0,75
Couple statique
Frein de par-
king standard
(01)
Frein de parking
couple fort (05)
Temps
Moment
de
d'inertie
réaction
Jeu
angulaire
➜ Les freins sont des freins de parking et ne sont pas destinés à être utilisés
comme des freins dynamiques ou de sécurité,
➜ Le frein est activé en cas de coupure de l’alimentation,
➜ Contacter le Drive Centre ou le distributeur local si votre application
nécessite l’utilisation d’un dispositif de freinage dynamique dans les
conditions d’urgence
➜ Pour doter le circuit de contrôle de freinage d’une protection, il est
recommandé de raccorder une diode entre les bornes de sortie du relais,
➜ Les valeurs correspondent à une température ambiante de 20°,
Appliquez un facteur de déclassement de 0,7 à la valeur nominale du
couple de freinage si la température du moteur excède 100 °C,

98
98
Codeur
Code de référence
du codeur
AR
CR
EM (Multi-tours)
FM (Mono-tour)
AE
CA
EC (Multi-tours)
FC (Mono-tour)
RA (Multi-tours)
SA (Mono-tour)
EB (Multi-tours)
FB (Mono-tour)
Type
de codeur
Résolveur
Codeur
incrémental
Codeur inductif
absolu EnDat 2.1
Résolveur
Codeur
incrémental
Codeur inductif
absolu EnDat 2.1
Codeur optique
SinCos
Hiperface
Codeur optique
absolu EnDat 2.2
Tension
d'alimentation
du codeur¹
7V rms
Excitation 5 kHz 16384 (14 bits) +/- 600”
5 VDC 4096 16384 (14 bits) +/- 150”
5 VDC 16
6V rms
Excitation 6 kHz 16384 (14 bits) +/- 720”
5 VDC 4096 16384 (14 bits) +/- 60”
7-10 Vdc 32
7-12 Vdc 1024
3,6-14 Vdc 2048
Résolution(s)
Sincos ou
incrémentales
Moteurs 055-067
1
Tailles 089-115
1
Résolution
disponible pour
la boucle de
Position absolue
&
position²
2,62 x 10^5
Très élevée Élevée
1,04 x 10^6
Très élevée Très élevée
2,08 x 10^6
³
Moyenne Basse
Moyenne Moyenne
Élevée Moyenne
(18 bits)
Moyenne Moyenne
Moyenne Élevée
Moyenne Moyenne
524288
(19 bits)
(20 bits)
(21 bits)
Précision
du codeur
+/- 480”
+/- 280”
Pour codeur SinCos avec
non-linéarité globale
+/- 45"
Pour codeur SinCos
avec non-linéarité
différentielle +/- 7"
(Précision totale +/- 52”)
+/-20”
(Non-linéarité
différentielle +/- 1 % de
la période du signal)
Remarques :
1
1) La sortie du résolveur est une sortie
analogique. La résolution est déterminée par
le convertisseur analogique/logique utilisé.
La valeur affichée correspond à la combinaison
du résolveur et du module optionnel
SM-Resolver.
2) Les sorties sinus et cosinus des codeurs optiques
SinCos sont des sorties analogiques. Avec
l’Unidrive
et le Digitax ST, les résolutions
ci-dessus sont applicables lorsque le type de
codeur est réglé sur SC Endat ou SC Hiper, selon
le codeur utilisé.
3) Ces valeurs sont fournies par le fabricant du
codeur et s’appliquent lorsque celui-ci est utilisé
en tant que dispositif autonome. Elles peuvent
changer lorsque le codeur est monté sur le
moteur et raccordé au variateur.
Ces valeurs n’ont pas été contrôlées par
CT Dynamics.
Résolveur
Le résolveur est un dispositif de bobinage passif, constitué d’un stator et
d’un rotor, excités par une source externe, telle qu’un module optionnel
SM-Resolver. Il produit des signaux de sortie correspondant à l’angle sinus
et cosinus de l’arbre moteur. Il s’agit d’un dispositif absolu robuste, de faible
précision, capable de résister à des températures élevées et à des niveaux de
vibrations importants. Les informations de positionnement fournies sont des
valeurs absolues sur un tour, ce qui signifie qu’en cas d’arrêt du résolveur, les
données de position ne sont pas perdues.
Codeur incrémental
Dispositif électronique utilisant un disque optique. Il détermine la position
par des incréments de comptage ou des impulsions. Deux séquences
d’impulsions en quadrature sont utilisées pour la détection de la direction
et 4 x (impulsions par tour) pour la résolution du variateur. Il y a un Top
tour, lequel est utilisé pour le réglage du zéro de position. L’encodeur
génère également des signaux de commutation, qui sont nécessaires pour
déterminer la position absolue lors du test de phase du moteur. Ce codeur est
disponible en : 4096, 2048 et 1024 ppt. Les informations de positionnement
ne sont pas absolues, ce qui signifie qu’en cas de perte d’alimentation du
variateur, les données de position sont perdues.
Codeurs SinCos/Absolus
Les types suivants sont disponibles : Optique ou Inductif, mono-tour ou
multi-tours.
1) Optique : Dispositif électronique utilisant un disque optique. Codeur
absolu haute résolution utilisant des informations absolues transmises via
une liaison série, et des signaux sinus/cosinus combinés à des techniques
incrémentales.
2) Inductif : Dispositif électronique couplé à un circuit inductif. Codeur de
résolution moyenne qui utilise des informations absolues, transmises via
une liaison série, et des signaux sinus/cosinus combinés à des techniques
incrémentales. Pour permettre le fonctionnement de ce codeur avec le
variateur, seules des valeurs sinus/cosinus ou des valeurs absolues (série)
doivent être utilisées. Les données de positionnement sont absolues sur
4096 tours, ce qui signie qu’en cas de perte d’alimentation du variateur, les
données de position sont conservées.
Multi-tours : Conformément à ce qui précède, mais avec des engrenages
supplémentaires, de sorte que la sortie est unique pour chaque position
d’arbre. De plus, le codeur est en mesure de compter des tours complets de
l’arbre moteur jusqu’à 4096 tours.
Plaque signalétique électronique
Disponible sur ces deux types de codeurs. La plaque signalétique
électronique accélère la conguration dans la mesure où les données du
moteur sont directement stockées sur le codeur (Disponible sur les tailles
067-115 uniquement).

www.controltechniques.com www.controltechniques.com
1110
Désignation des câbles
PS B A H A 015
Type de câble
PS = Puissance (standard) B = PUR H* = 1,0 mm² 10A C = Connecteur de puissance à 6 broches
PB = Puissance (avec frein) C = OFS G = 1,5 mm² 16A
* Uniquement disponible en OFS
Type de câble
Isolant
externe
Le type PS est utilisé pour les moteurs sans frein, et le
type PB pour les moteurs avec frein.
Isolant externe
Le type B correspond à une gaine PUR et à la sélection
standard.
Le type C correspond à une gaine OFS et à la sélection
d’un câble (statique).
Section des câbles
Sélectionnez la taille des conducteurs en
Phase et terre :
Section des câbles
A = 2,5 mm² 22A H = Digitax ST et Unidrive SP0 avec embouts X = Extrémité coupée
B = 4,0 mm² 30A K = Embouts Epsilon EP
Finition du câble, côté variateur Finition du câble, côté moteur Longueur du câble
A = 055 - 115 Connecteur de
F = Unidrive
X = Cut end
(1-2) avec embouts
Finition du câble,
côté variateur
Finition du câble,
puissance
Sélectionnez le connecteur adapté au variateur
utilisé.
Sélectionnez le connecteur adapté au moteur utilisé.
côté moteur
Longueur
Les valeurs indiquent la longueur de câble en mètres.
Min. = 001 (1 m)
Max = 100 (100 m)
fonction du COURANT AU CALAGE des moteurs.
Les dimensionnements concernent des câbles
individuels (non raccordés entre eux) avec une
température ambiante maximale de 40 °C. Si besoin,
effectuez les déclassements nécessaires.
SI B A A A 015
Type de câble
SI = Broches hyperboloïdes pour codeur
incrémental
SR = Résolveur C**= OFS E = Câble SS blindé torsadé B = Connecteur du résolveur à 12 broches Max = 100 (100 m)
SS = Codeur Sin/Cos
SE = Broches split pour codeur incrémental E = Connecteur d’extension à 17 broches
Finition du câble, côté variateur G = Connecteur du résolveur 90° à 12 broches
A = Connecteur 15 broches pour codeur compatible Digitax ST/Unidrive
B = Résolveur / Sin/Cos avec embouts N = Connecteur Sin/Cos à 17 broches (EnDat)
F = Connecteur 26 broches pour codeur Epsilon
H = Connecteur Sin/Cos 15 broches pour Digitax ST/Unidrive
I = Broches mâles du connecteur d'extension
X = Extrémité coupée
* Longueur max. de câble : 50 m avec SIBA/SICA en standard, 100 m seulement si une tolérance de +5 V peut être maintenue.
* Longueur max. de câble : 10 m avec SIBL.
* Longueur max. de câble : avec câble SSBA et terminaison Heidenhain EC/FC 20 m, EB/FB 30 m ou avec câble SSBE et terminaison EC/FC 20 m, EB/FB 100 m.
** OFS uniquement disponible sur le câble de codeur SI.
Isolant
externe
B = PUR A = Câble standard A = Connecteur du codeur à 17 broches Min = 001 (1 m)
Options spéciales Finition du câble, côté moteur Longueur du câble*
L = Câble SI de 8,5 mm de
diamètre
/Epsilon EP
C = Connecteur du Sin/Cos à 12 broches
(Hiperface)
F = Connecteur du codeur 90° à 17 broches
H = Connecteur Sin/Cos 90° à 12 broches
(Hiperface)
O = Connecteur Sin/Cos 90° à 17 broches
(EnDat)
X = Extrémité coupée
Type de câble
Isolant externe
Options spéciales
Choisissez le type de câble adapté en fonction du
retour codeur.
Le type B correspond à une gaine PUR et à la
sélection d'un câble (dynamique). Le type C
correspond à une gaine OFS et à la sélection d'un
câble (statique).
Le type A correspond à un câble standard et le type L
au câble incrémental de 8,5 mm à faible coût.
Finition du câble,
côté variateur
Finition du câble,
côté moteur
Longueur
Sélectionnez le connecteur adapté au variateur
utilisé.
Sélectionnez côté moteur le connecteur adapté au
codeur utilisé.
Les valeurs indiquent la longueur de câble en mètres.

1110
1110
1 5
6
42
3
1
10
9
8
12
13
1415
16
17
7
6
5
11
4
3
2
1
10
9
8
12
7
6
5
11
4
3
2
Caractéristiques des raccordements
Raccordement de la puissance
055-115 avec frein 055-115 sans frein
Broche Fonction Fonction
1
2
3
4
5
6
Corps de connecteur
Raccordement des codeurs
Phase U (R) Phase U (R)
Phase V (S) Phase V (S)
Ter re Ter re
Phase W (T) Phase W (T)
Frein Frein -
Blindage Blindage
Codeur incrémental
(CR,CA)
Codeurs absolus Heidenhain
(EM, FM, EC, FC, EB, FB)
Résolveur
(AR, AE)
Codeurs Sin/Cos Sick|Stegmann
Broche Fonction Fonction Fonction Fonction
1 Sonde thermique Sonde thermique Excitation (haute) REF Cos
2 Sonde thermique Sonde thermique Excitation (basse) +Data
3 - Blindage (codeur optique uniquement) Cos (haut) -Data
4 S1 - Cos (bas) +Cos
5 S1 complémenté - Sin (haut) +Sin
6 S2 - Sin (bas) REF Sin
7 S2 complémenté - Sonde thermique Sonde thermique
8 S3 + Clock Sonde thermique Sonde thermique
9 S3 complémenté - Clock - Blindage
10 Voie A + Cos - 0 Volt
11 Top 0 + Data - -
12 Top 0 complémenté - Data - + Volts
13 Voie A complémentée - Cos - 14 Voie B + Sin - 15 Voie B complémentée - Sin - 16 + Volts + V - 17 0 Volt 0 Volt - -
Corps de connecteur Blindage Blindage Blindage Blindage
(RA, SA)

LES VARIATEURS QUI PILOTENT LE MONDE...
Drive Centres et Application Centres Control Techniques
AUSTRALIE
Application Centre de Melbourne
Tél. : +613 973 81777
controltechniques.au@emerson.com
Drive Centre de Sydney
Tél. : +61 2 9838 7222
controltechniques.au@emerson.com
AUTRICHE
Drive Centre de Linz
Tél. : +43 7229 789480
controltechniques.at@emerson.com
BELGIQUE
Drive Centre de Bruxelles
Tél. : +32 1574 0700
controltechniques.be@emerson.com
BRÉSIL
Application Centre de São Paulo
Tél. : +55 11 3618 6688
controltechniques.br@emerson.com
CANADA
Drive Centre de Toronto
Tél. : +1 905 949 3402
controltechniques.ca@emerson.com
Drive Centre de Calgary
Tél. : +1 403 253 8738
controltechniques.ca@emerson.com
CHINE
Drive Centre de Shanghai
Tél. : +86 21 5426 0668
controltechniques.cn@emerson.com
Application Centre de Pékin
Tél. : +86 10 856 31122 post. 820
controltechniques.cn@emerson.com
RÉPUBLIQUE TCHÈQUE
Drive Centre de Brno
Tél. : +420 511 180111
controltechniques.cz@emerson.com
DANEMARK
Drive Centre de Copenhague
Tél. : +45 4369 6100
controltechniques.dk@emerson.com
FRANCE*
Drive Centre d'Angoulême
Tél. : +33 5 4564 5454
controltechniques.fr@emerson.com
ALLEMAGNE
Drive Centre de Bonn
Tél. : +49 2242 8770
controltechniques.de@emerson.com
Drive Centre de Chemnitz
Tél. : +49 3722 52030
controltechniques.de@emerson.com
Drive Centre de Darmstadt
Tél. : +49 6251 17700
controltechniques.de@emerson.com
GRÈCE*
Application Centre d'Athènes
Tél. : +0030 210 57 86086/088
controltechniques.gr@emerson.com
PAYS-BAS
Drive Centre de Rotterdam
Tél. : +31 184 420555
controltechniques.nl@emerson.com
HONG KONG
Application Centre de Hong Kong
Tél. : +852 2979 5271
controltechniques.hk@emerson.com
INDE
Drive Centre de Chennai
Tél. : +91 44 2496 1123/
2496 1130/2496 1083
controltechniques.in@emerson.com
Application Centre de Pune
Tél. : +91 20 2612 7956/2612 8415
controltechniques.in@emerson.com
Application Centre de New Delhi
Tél. : +91 112 2581 3166
controltechniques.in@emerson.com
IRLANDE
Drive Centre de Newbridge
Tél. : +353 45 448200
controltechniques.ie@emerson.com
ITALIE
Drive Centre de Milan
Tél. : +39 02575 751
controltechniques.it@emerson.com
Application Centre de Reggio Emilia
Tél. : +39 02575 751
controltechniques.it@emerson.com
Drive Centre de Vicenza
Tél. : +39 0444 933400
controltechniques.it@emerson.com
CORÉE
Application Centre de Séoul
Tél. : +82 2 3483 1605
controltechniques.kr@emerson.com
MALAISIE
Drive Centre de Kuala Lumpur
Tél. : +603 5634 9776
controltechniques.my@emerson.com
RÉPUBLIQUE
D'AFRIQUE DU SUD
Drive Centre de Johannesburg
Tél. : +27 11 462 1740
controltechniques.za@emerson.com
Application Centre du Cap
Tél. : +27 21 556 0245
controltechniques.za@emerson.com
RUSSIE
Application Centre de Moscou
Tél. : +7 495 981 9811
controltechniques.ru@emerson.com
SINGAPOUR
Drive Centre de Singapour
Tél. : +65 6891 7600
controltechniques.sg@emerson.com
SLOVAQUIE
EMERSON A.S
Tél. : +421 32 7700 369
controltechniques.sk@emerson.com
ESPAGNE
Drive Centre de Barcelone
Tél. : +34 93 680 1661
controltechniques.es@emerson.com
Application Centre de Bilbao
Tél. : +34 94 620 3646
controltechniques.es@emerson.com
Drive Centre de Valencia
Tél. : +34 96 154 2900
controltechniques.es@emerson.com
SUÈDE*
Application Centre de Stockholm
Tél. : +468 554 241 00
controltechniques.se@emerson.com
SUISSE
Application Centre de Lausanne
Tél. : +41 21 637 7070
controltechniques.ch@emerson.com
Drive Centre de Zurich
Tél. : +41 56 201 4242
controltechniques.ch@emerson.com
TAÏWAN
Application Centre de Taipei
Tél. : +886 22325 9555
controltechniques.tw@emerson.com
THAÏLANDE
Drive Centre de Bangkok
Tél. : +66 2962 2092 99
controltechniques.th@emerson.com
TURQUIE
Drive Centre d'Istanbul
Tél. : +90 216 4182420
controltechniques.tr@emerson.com
ÉMIRATS ARABES UNIS*
Emerson FZE
Tél. : +971 4 8118100
ct.dubai@emerson.com
ROYAUME-UNI
Drive Centre de Telford
Tél. : +44 1952 213700
controltechniques.uk@emerson.com
ÉTATS-UNIS
Drive Centre de Californie
Tél. : +1 562 943 0300
controltechniques.us@emerson.com
Application Centre de Charlotte
Tél. : +1 704 393 3366
controltechniques.us@emerson.com
Application Centre de Chicago
Tél. : +1 630 752 9090
controltechniques.us@emerson.com
Drive Centre de Cleveland
Tél. : +1 440 717 0123
controltechniques.us@emerson.com
Drive Centre de Floride
Tél. : +1 239 693 7200
controltechniques.us@emerson.com
Agence commerciale d'Amérique
Latine
Tél. : +1 305 818 8897
controltechniques.us@emerson.com
Siège É-U Minneapolis
Tél. : +1 952 995 8000
controltechniques.us@emerson.com
Drive Centre d'Oregon
Tél. : +1 503 266 2094
controltechniques.us@emerson.com
Drive Centre de Providence
Tél. : +1 401 541 7277
controltechniques.us@emerson.com
Drive Centre d'Utah
Tél. : +1 801 566 5521
controltechniques.us@emerson.com
Distributeurs Control Techniques
ARGENTINE
Euro Techniques SA
Tél. : +54 11 4331 7820
eurotech@eurotechsa.com.ar
BAHREÏN
Emerson FZE
Tél. : +971 4 8118100
ct.bahrain@emerson.com
BULGARIE
BLS - Automation Ltd
Tél. : +359 32 968 007
info@blsautomation.com
CHILI
Ingeniería Y Desarrollo
Tecnológico S.A
Tél. : +56 2 719 2200
rdunner@idt.cl
COLOMBIE
Sistronic LTDA
Tél. : +57 2 555 60 00
luis.alvarez@sistronic.com.co
Réf. 0702-0023-05 01/11
Redes Electricas S.A.
Tél. : +57 1 364 7000
alvaro.rodriguez@redeselectricas.com
CROATIE
Zigg-Pro d.o.o
Tél. : +385 1 3463 000
zigg-pro@zg.htnet.hr
© Control Techniques 2011. Les informations fournies dans la présente brochure sont données à titre indicatif uniquement et ne constituent en aucun cas une clause d'un quelconque contrat. Control Techniques n'offre aucune garantie
concernant l'exactitude de ces informations compte tenu de son processus de développement continu et se réserve le
droit de modier les caractéristiques des produits décrits sans préavis.
CHYPRE
Acme Industrial Electronic
Services Ltd
Tél. : +3572 5 332181
acme@cytanet.com.cy
ÉGYPTE
Samiram
Tél. : +202 29703868/+202
29703869
samiramz@samiram.com
EL SALVADOR
Servielectric Industrial S.A. de C.V.
Tél. : +503 2278 1280
aeorellana@gruposervielectric.com
FINLANDE
SKS Control
Tél. : +358 207 6461
control@sks.
GUATEMALA
MICE, S.A.
Tél. : +502 5510 2093
mice@itelgua.com
HONDURAS
Temtronics Honduras
Tél. : +504 550 1801
temtronics@amnethn.com
HONGRIE
Control-VH Kft
Tél. : +361 431 1160
info@controlvh.hu
ISLANDE
Samey ehf
Tél. : +354 510 5200
samey@samey.is
INDONÉSIE
Pt Apikon Indonesia
Tél. : +65 6468 8979
info.my@controltechniques.com
Pt Yua Esa Sempurna Sejahtera
Tél. : +65 6468 8979
info.my@controltechniques.com
ISRAËL
Dor Drives Systems Ltd
Tél. : +972 3900 7595
info@dor1.co.il
KENYA
Kassam & Bros Co. Ltd
Tél. : +254 2 556 418
kassambros@africaonline.co.ke
KOWEÏT
Emerson FZE
Tél. : +971 4 8118100
ct.kuwait@emerson.com
LETTONIE
EMT
Tél. : +371 760 2026
janis@emt.lv
LIBAN
Black Box Automation & Control
Tél. : +961 1 443773
info@blackboxcontrol.com
LITUANIE
Elinta UAB
Tél. : +370 37 351 987
sales@elinta.lt
MALTE
Mekanika Limited
Tél. : +35621 442 039
mfrancica@gasan.com
MEXIQUE
MELCSA S.A. de CV
Tél. : +52 55 5561 1312
jcervera@melcsa.com
MAROC
Cietec
Tél. : +212 22 354948
cietec@cietec.ma
NOUVELLE-ZÉLANDE
Advanced Motor Control. Ph.
Tél. : +64 (0) 274 363 067
info.au@controltechniques.com
PÉROU
Intech S.A.
Tél. : +51 1 224 9493
artur.mujamed@intech-sa.com
* Par société afliée
PHILIPPINES
Control Techniques
Singapour Ltd
Tél. : +65 6468 8979
info.my@controltechniques.com
POLOGNE
APATOR CONTROL Sp. z o.o
Tél. : +48 56 6191 207
info@acontrol.com.pl
PORTUGAL
Harker Sumner S.A
Tél. : +351 22 947 8090
drives.automation@harker.pt
PORTO RICO
Motion Industries Inc.
Tél. : +1 787 251 1550
roberto.diaz@motion-ind.com
QATAR
Emerson FZE
Tél. : +971 4 8118100
ct.qatar@emerson.com
ROUMANIE
C.I.T. Automatizari
Tél. : +40212550543
ofce@citautomatizari.ro
ARABIE SAOUDITE
A. Abunayyan Electric Corp.
Tél. : +9661 477 9111
aec-salesmarketing@
abunayyangroup.com
SERBIE ET MONTÉNÉGRO
Master Inzenjering d.o.o
Tél. : +381 24 551 605
ofce@masterinzenjering.rs
SLOVÉNIE
PS Logatec
Tél. : +386 1 750 8510
ps-log@ps-log.si
TUNISIE
SIA Ben Djemaa & CIE
Tél. : +216 1 332 923
bendjemaa@planet.tn
URUGUAY
SECOIN S.A.
Tél. : +5982 2093815
jose.barron@secoin.com.uy
VENEZUELA
Digimex Sistemas C.A.
Tél. : +58 243 551 1634
digimex@digimex.com.ve
VIÊTNAM
N.Duc Thinh
Tél. : +84 8 9490633
infotech@nducthinh.com.vn
 Loading...
Loading...