

Page 1

User Guide
Mentor MP
High performance DC drive
25A to 7400A, 480V to 690V
Two or four quadrant operation
Part Number: 0476-0000-04
Issue: 4
www.controltechniques.com
Page 2

General Information
The manufacturer accepts no liability for any consequences resulting from inappropriate, negligent or incorrect
installation or adjustment of the optional operating parameters of the equipment or from mismatching the variable speed
drive with the motor.
The contents of this guide are believed to be correct at the time of printing. In the interests of a commitment to a policy
of continuous development and improvement, the manufacturer reserves the right to change the specification of the
product or its performance, or the contents of the guide, without notice.
All rights reserved. No parts of this guide may be reproduced or transmitted in any form or by any means, electrical or
mechanical including photocopying, recording or by an information storage or retrieval system, without permission in
writing from the publisher.
Drive software version
This product is supplied with the latest software version. If this drive is to be connected to an existing system or machine,
all drive software versions should be verified to confirm the same functionality as drives of the same model already
present. This may also apply to drives returned from a Control Techniques Service Centre or Repair Centre. If there is
any doubt please contact the supplier of the product.
The software version of the drive can be checked by looking at Pr 11.29 (di14/0.49) and Pr 11.34. This takes the form
of xx.yy.zz where Pr 11.29 (di14/0.49) displays xx.yy and Pr 11.34 displays zz. (e.g. for software version 01.01.00,
Pr 11.29 (di14/0.49) = 1.01 and Pr 11.34 displays 0).
Environmental statement
Control Techniques is committed to minimising the environmental impacts of its manufacturing operations and of its
products throughout their life cycle. To this end, we operate an Environmental Management System (EMS) which is
certified to the International Standard ISO 14001. Further information on the EMS, our Environmental Policy and other
relevant information is available on request, or can be found at www.greendrives.com.
The electronic variable-speed drives manufactured by Control Techniques have the potential to save energy and
(through increased machine/process efficiency) reduce raw material consumption and scrap throughout their long
working lifetime. In typical applications, these positive environmental effects far outweigh the negative impacts of product
manufacture and end-of-life disposal.
Nevertheless, when the products eventually reach the end of their useful life, they must not be discarded but should
instead be recycled by a specialist recycler of electronic equipment. Recyclers will find the products easy to dismantle
into their major component parts for efficient recycling. Many parts snap together and can be separated without the use
of tools, while other parts are secured with conventional fasteners. Virtually all parts of the product are suitable for
recycling.
Product packaging is of good quality and can be re-used. Large products are packed in wooden crates, while smaller
products come in strong cardboard cartons which themselves have a high recycled fibre content. If not re-used, these
containers can be recycled. Polythene, used on the protective film and bags for wrapping product, can be recycled in the
same way. Control Techniques' packaging strategy prefers easily-recyclable materials of low environmental impact, and
regular reviews identify opportunities for improvement.
When preparing to recycle or dispose of any product or packaging, please observe local legislation and best practice.
REACH legislation
EC Regulation 1907/2006 on the Registration, Evaluation, Authorisation and restriction of Chemicals (REACH) requires
the supplier of an article to inform the recipient if it contains more than a specified proportion of any substance which is
considered by the European Chemicals Agency (ECHA) to be a Substance of Very High Concern (SVHC) and is
therefore listed by them as a candidate for compulsory authorisation.
For current information on how this requirement applies in relation to specific Control Techniques products, please
approach your usual contact in the first instance. Control Techniques position statement can be viewed at:
http://www.controltechniques.com/REACH
Copyright © August 2010 Control Techniques Ltd
Issue Number: 4
Software: 01.05.01 onwards
Page 3

Contents
1 Safety Information .................................5
1.1 Warnings, Cautions and Notes .............................5
1.2 Electrical safety - general warning ........................5
1.3 System design and safety of personnel ................5
1.4 Environmental limits ..............................................5
1.5 Access ..................................................................5
1.6 Fire protection .......................................................5
1.7 Compliance with regulations .................................5
1.8 Motor .....................................................................5
1.9 Adjusting parameters ............................................5
1.10 Electrical installation .............................................5
2 Product information ..............................6
2.1 Ratings ..................................................................6
2.2 Model number .......................................................7
2.3 Compatible encoders ............................................8
2.4 Nameplate description ..........................................8
2.5 Drive features and options ....................................9
2.6 Items supplied with the drive ...............................12
3 Mechanical Installation .......................13
3.1 Safety ..................................................................13
3.2 Planning the installation ......................................13
3.3 Terminal cover removal ......................................14
3.4 Mounting method ................................................17
3.5 Installing and removing the terminal shrouds .....24
3.6 Enclosure ............................................................26
3.7 Heatsink fan operation ........................................27
3.8 IP rating (Ingress Protection) ..............................27
3.9 Electrical terminals ..............................................28
3.10 Routine maintenance ..........................................31
4 Electrical installation ..........................32
4.1 Electrical connections .........................................33
4.2 Ground connections ............................................35
4.3 AC supply requirements ......................................36
4.4 Line reactors .......................................................37
4.5 Control 24Vdc supply ..........................................37
4.6 Cable and fuse size ratings .................................38
4.7 External suppressor resistor ...............................44
4.8 Ground leakage ..................................................46
4.9 EMC (Electromagnetic compatibility) ..................46
4.10 Serial communications connections ....................48
4.11 Shield connections ..............................................49
4.12 Connecting the fan on size 2C and 2D drives .....49
4.13 Control connections ............................................50
4.14 General ...............................................................51
4.15 Connecting an encoder .......................................54
5 Getting started .....................................56
5.1 Understanding the display ..................................56
5.2 Keypad operation ................................................56
5.3 Menu 0 (sub block) .............................................58
5.4 Pre-defined sub blocks .......................................59
5.5 Menu 0 (linear) ....................................................60
5.6 Menu structure ....................................................60
5.7 Advanced menus ................................................61
5.8 Saving parameters ..............................................61
5.9 Restoring parameter defaults ..............................61
5.10 Differences between European and
USA defaults .......................................................62
5.11 Displaying parameters with non-default
values only ..........................................................62
5.12 Displaying destination parameters only ..............62
5.13 Parameter access level and security ..................62
5.14 Serial communications ........................................63
6 Basic parameters ................................64
6.1 Full descriptions ..................................................65
7 Running the motor ..............................72
7.1 Quick start commissioning / start-up (from
European defaults) ..............................................73
7.2 Quick start commissioning / start-up
(from USA defaults) ............................................75
7.3 CTSoft software commissioning /
start-up tool .........................................................76
7.4 Setting up a feedback device ..............................77
8 Optimization .........................................78
8.1 Armature current .................................................78
8.2 Speed feedback ..................................................78
8.3 Field current ........................................................78
8.4 Current loop gains self-tuning .............................78
8.5 Speed loop gains tuning .....................................79
8.6 Current limit tapers ..............................................80
9 SMARTCARD operation ......................81
9.1 Introduction .........................................................81
9.2 Easy saving and reading .....................................81
9.3 Transferring data .................................................81
9.4 Data block header information ............................83
9.5 SMARTCARD parameters ..................................83
9.6 SMARTCARD trips .............................................84
10 Onboard PLC .......................................86
10.1 Onboard PLC and SYPT Lite ..............................86
10.2 Benefits ...............................................................86
10.3 Limitations ...........................................................86
10.4 Getting started ....................................................87
10.5 Onboard PLC parameters ...................................87
10.6 Onboard PLC trips ..............................................88
10.7 Onboard PLC and the SMARTCARD .................88
Mentor MP User Guide 3
Issue : 4 www.controltechniques.com
Page 4

11 Advanced parameters .........................89
11.1 Menu 1: Speed reference ....................................94
11.2 Menu 2: Ramps ...................................................98
11.3 Menu 3: Speed feedback and speed control .....101
11.4 Menu 4: Torque and current control ..................104
11.5 Menu 5: Motor and field control .........................108
11.6 Menu 6: Sequencer and clock ...........................112
11.7 Menu 7: Analog I/O ...........................................114
11.8 Menu 8: Digital I/O ............................................116
11.9 Menu 9: Programmable logic, motorized
pot and binary sum ............................................120
11.10 Menu 10: Status and trips .................................123
11.11 Menu 11: General drive set-up ..........................124
11.12 Menu 12: Threshold detectors,
variable selectors and brake control function ....125
11.13 Menu 13: Position control ..................................130
11.14 Menu 14: User PID controller ............................134
11.15 Menus 15, 16 and 17: Solutions Module slots ..137
11.16 Menu 18: Application menu 1 ............................138
11.17 Menu 19: Application menu 2 ............................138
11.18 Menu 20: Application menu 3 ............................138
11.19 Menu 21: Second motor parameters .................139
11.20 Menu 22: Additional Menu 0 set-up ..................139
11.21 Menu 23: Header selections .............................139
11.22 Advanced features ............................................140
12 Technical data ....................................145
12.1 Drive technical data ...........................................145
12.2 Cable and fuse size ratings ...............................151
12.3 Optional external EMC filters ............................166
13 Diagnostics ........................................167
13.1 Trip indications ..................................................167
13.2 Trip categories ..................................................174
13.3 Alarm indications ...............................................175
13.4 Status indications ..............................................175
13.5 Displaying the trip history ..................................175
13.6 Behavior of the drive when tripped ....................175
13.7 Trip masking ......................................................175
14 UL information ...................................176
14.1 Common UL Information ...................................176
14.2 AC supply specification .....................................176
14.3 Maximum continuous output current .................176
14.4 Safety label .......................................................176
14.5 UL Listed accessories .......................................176
4 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 5
Safety
WARNING
CAUTION
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
1 Safety Information
1.1 Warnings, Cautions and Notes
A Warning contains information which is essential for
avoiding a safety hazard.
A Caution contains information which is necessary for
avoiding a risk of damage to the product or other equipment.
A Note contains information which helps to ensure correct operation of
the product.
1.2 Electrical safety - general warning
The voltages used in the drive can cause severe electrical shock and/or
burns, and could be lethal. Extreme care is necessary at all times when
working with or adjacent to the drive.
Specific warnings are given at the relevant places in this Guide.
1.3 System design and safety of
The drive is intended as a component for professional incorporation into
complete equipment or system. If installed incorrectly, the drive may
present a safety hazard.
The drive uses high voltages and currents, carries a high level of stored
electrical energy, and is used to control equipment which can cause
injury.
System design, installation, commissioning / start-up and maintenance
must be carried out by personnel who have the necessary training and
experience. They must read this safety information and this guide
carefully.
The STOP and START controls or electrical inputs of the drive must
not be relied upon to ensure safety of personnel. They do not
isolate dangerous voltages from the output of the drive or from any
external option unit. The supply must be disconnected by an
approved electrical isolation device before gaining access to the
electrical connections.
The drive is not intended to be used for safety-related functions.
Careful consideration must be given to the function of the drive which
might result in a hazard, either through its intended behaviour or through
incorrect operation due to a fault. In any application where a malfunction
of the drive or its control system could lead to or allow damage, loss or
injury, a risk analysis must be carried out, and where necessary, further
measures taken to reduce the risk - for example, an over-speed
protection device in case of failure of the speed control, or a fail-safe
mechanical brake in case of loss of motor braking.
personnel
1.4 Environmental limits
Instructions within the supplied data and information within the Mentor
MP User Guide regarding transport, storage, installation and the use of
the drive must be complied with, including the specified environmental
limits. Drives must not be subjected to excessive physical force.
1.5 Access
Access must be restricted to authorized personnel only. Safety
regulations which apply at the place of use must be complied with.
1.6 Fire protection
The drive enclosure is not classified as a fire enclosure. A separate fire
enclosure must be provided.
1.7 Compliance with regulations
The installer is responsible for complying with all relevant regulations,
such as national wiring regulations, accident prevention regulations and
electromagnetic compatibility (EMC) regulations. Particular attention
must be given to the cross-sectional areas of conductors, the selection
of fuses and other protection, and protective ground (earth) connections.
The Mentor MP User Guide contains instructions for achieving
compliance with specific EMC standards.
Within the European Union, all machinery in which this product is used
must comply with the following directives:
2006/42/EC: Safety of machinery
2004/108/EC: Electromagnetic compatibility
1.8 Motor
Ensure the motor is installed in accordance with the manufacturer's
recommendations. Ensure the motor shaft is not exposed.
Low speeds may cause the motor to overheat because the cooling fan
becomes less effective. The motor should be installed with a protection
thermistor. If necessary, an electric forced ventilation fan should be
used.
The values of the motor parameters set in the drive affect the protection
of the motor. The default values in the drive should not be relied upon.
It is essential that the correct value is entered into Pr 5.07 (SE07, 0.28),
Motor rated current. This affects the thermal protection of the motor.
1.9 Adjusting parameters
Some parameters have a profound effect on the operation of the drive.
They must not be altered without careful consideration of the impact on
the controlled system. Measures must be taken to prevent unwanted
changes due to error or tampering.
1.10 Electrical installation
1.10.1 Electric shock risk
The voltages present in the following locations can cause severe electric
shock and may be lethal:
• AC supply cables and connections
• Output cables and connections
• Many internal parts of the drive, and external option units
Unless otherwise indicated, control terminals are single insulated and
must not be touched.
1.10.2 Stored charge
The drive contains capacitors that remain charged to a potentially lethal
voltage after the AC supply has been disconnected. If the drive has been
energized, the AC supply must be isolated at least ten minutes before
work may continue.
Mentor MP User Guide 5
Issue: 4 www.controltechniques.com
Page 6
Safety
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
2 Product information
Table 2-1 Model to frame size cross reference
Model
480V
EN/IEC
cULus
MP25A4(R) MP25A5(R)
MP75A4(R) MP75A5(R)
MP105A4(R) MP105A5(R)
MP210A4(R) MP210A5(R)
MP350A4(R) MP350A5(R) MP350A6(R)
MP420A4(R)
MP550A4(R)
MP700A4(R) MP700A5(R) MP700A6(R)
MP900A4(R)
MP1200A4 MP1200A5 MP1200A6
MP1850A4 MP1850A5 MP1850A6
MP1200A4R MP1200A5R MP1200A6R
MP1850A4R MP1850A5R MP1850A6R
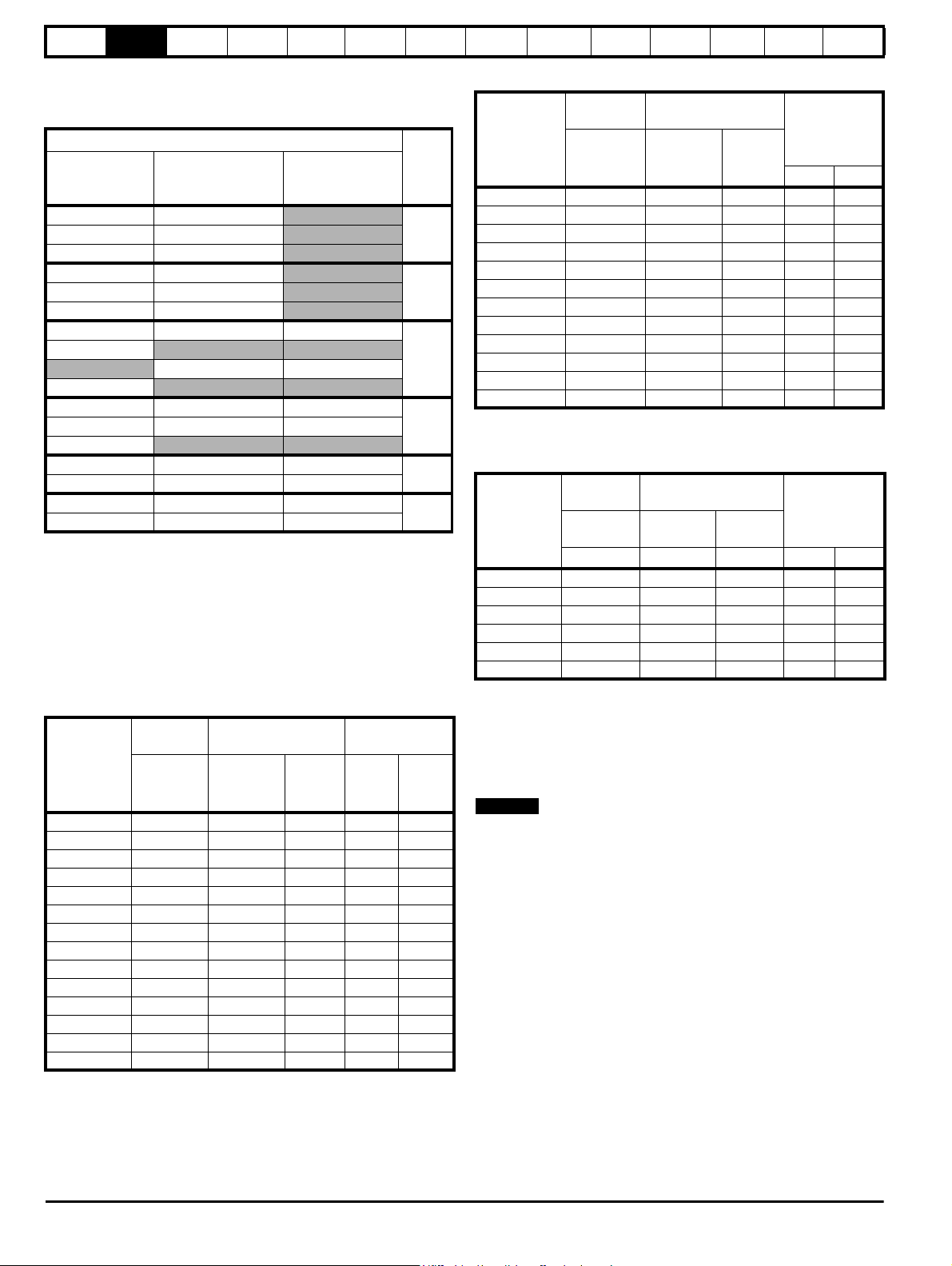
2.1 Ratings
The power ratings for the 480V, 575V and 690V configurations are
shown in Table 2-2, Table 2-3 and Table 2-4.
The continuous current ratings given are for a maximum ambient
temperature of 40°C (104°F) and an altitude of 1000m. For operation at
higher temperatures and altitudes de-rating is required.
For further information see Chapter 12 Technical data on page 145.
Table 2-2 480V current ratings
AC input
current
Model
MP25A4(R) 22 25 37.5 9 15
MP45A4(R) 40 45 67.5 15 27
MP75A4(R) 67 75 112.5 27 45
MP105A4(R) 94 105 157.5 37.5 60
MP155A4(R) 139 155 232.5 56 90
MP210A4(R) 188 210 315 75 125
MP350A4(R) 313 350 525 125 200
MP420A4(R) 376 420 630 150 250
MP550A4(R) 492 550 825 200 300
MP700A4(R) 626 700 1050 250 400
MP825A4(R) 738 825 1237.5 300 500
MP900A4(R) 805 900 1350 340 550
MP1200A4(R) 1073 1200 1800 450 750
MP1850A4(R) 1655 1850 2775 700 1150
Continuous Continuous
575V
EN/IEC
cULus to 600V
690V
EN/IEC
Frame
1AMP45A4(R) MP45A5( R)
1BMP155A4(R) MP155A5(R)
MP470A5(R) MP470A6(R)
2A
2BMP825A4(R) MP825A5(R) MP825A6(R)
2C
2D
DC output current
150%
overload
AAAkWhp
Typ i cal m otor
power
@
400Vdc@ 500Vdc
Table 2-3 575V current ratings
AC input
current
Model
MP25A5(R) 22 25 37.5 14 18
MP45A5(R) 40 45 67.5 25 33
MP75A5(R) 67 75 112.5 42 56
MP105A5(R) 94 105 157.5 58 78
MP155A5(R) 139 155 232.5 88 115
MP210A5(R) 188 210 315 120 160
MP350A5(R) 313 350 525 195 260
MP470A5(R) 420 470* 705 265 355
MP700A5(R) 626 700 1050 395 530
MP825A5(R) 738 825* 1237.5 465 620
MP1200A5(R) 1073 1200 1800 680 910
MP1850A5(R) 1655 1850 2775 1045 1400
Continuous Continuous
AAAkWhp
DC output current
150%
overload
Typ i cal m oto r
power
(With Vdc =
630V)
* For this rating at 575V, 150% overload time is 20s at 40°C and 30s at
35°C.
Table 2-4 690V current ratings
AC input
current
Model
MP350A6(R) 313 350 525 240 320
MP470A6(R) 420 470* 705 320 425
MP700A6(R) 626 700 1050 480 640
MP825A6(R) 738 825* 1237.5 650 850
MP1200A6(R) 1073 1200 1800 850 1150
MP1850A6(R) 1655 1850 2775 1300 1750
Continuous Continuous
AAAkWhp
DC output Current
150%
Overload
Typ i cal m otor
power (With
Vdc = 760V)
* For this rating at 690V, 150% overload time is 20s at 40°C and 30s at
35°C.
Maximum continuous input current
The values of maximum continuous input current are given to aid the
selection of cables and fuses. These values are stated for worst-case
condition.
For current ratings above 1850A then parallel connection of the drives is
required. However, this function is not implemented on firmware
versions V01.05.01 and earlier.
6 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 7
Safety
100
105
110
115
120
125
130
135
140
145
150
155
160
0
10
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160
170
180
200
overload duration (seconds)
overload
(%)
NOTE
Mentor product line
MP
:
Continuous armature current rating (A)
Vol t age r a t ing
4 = 480V 24V to 480V -20% +10%
5 = 575V 500V to 575V -10% +10%
6 = 690V 500V to 690V -10% +10%
Mentor Platform
MP 2 0 01 4 R
R
Blank
-
4 quadrant operation
- 2 quadrant operation
A
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
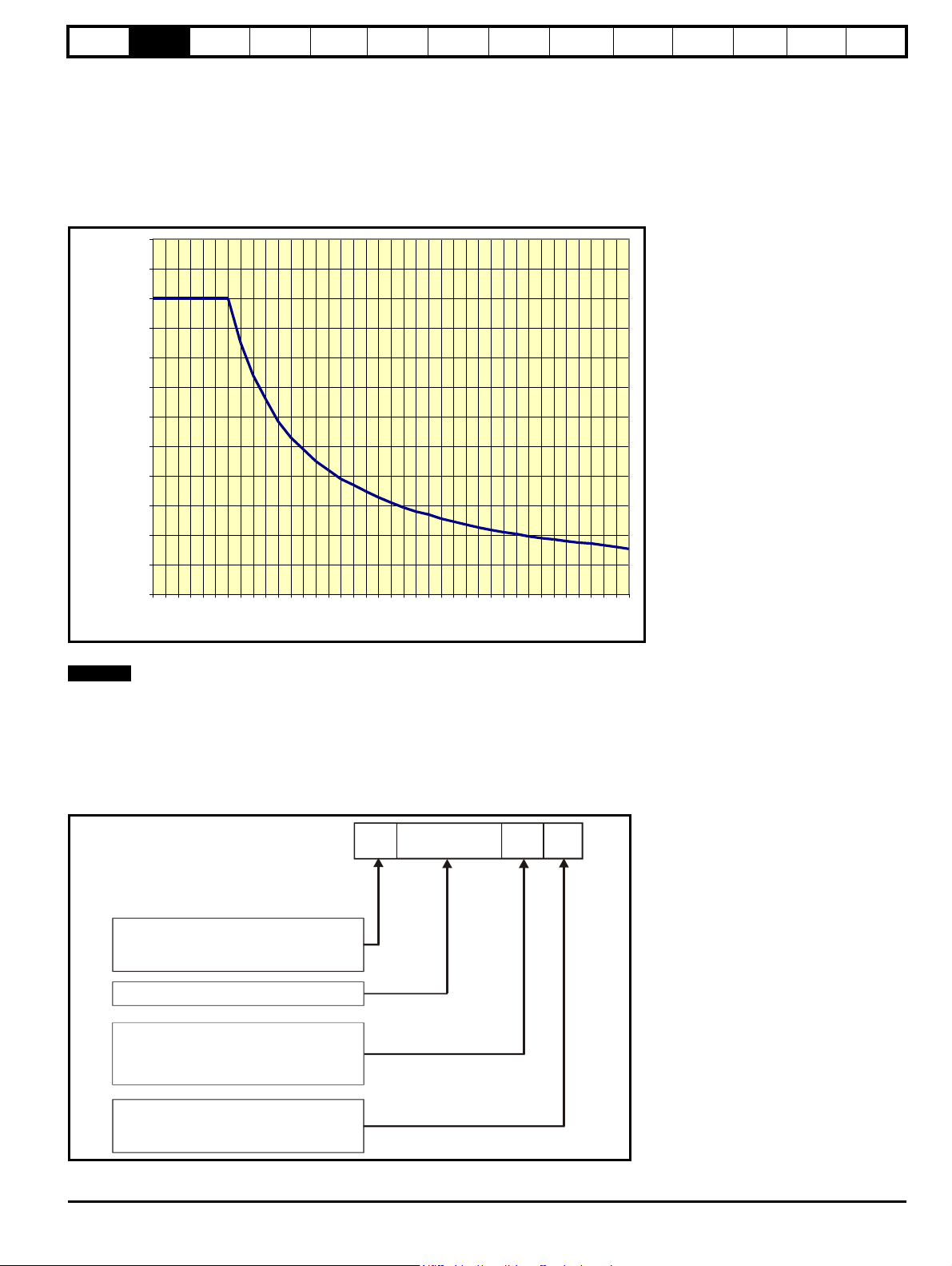
2.1.1 Typical short-term overload limits
The maximum percentage overload limit changes depending on the
selected motor.
Variations in motor rated current will result in changes in the maximum
possible overload as detailed in the Mentor MP Advanced User Guide.
Figure 2-1 can be used to determine the maximum overload duration
available for overloads between 100% and 150%. For example the
maximum overload available for a period of 60 seconds is 124%.
Figure 2-1 Maximum overload duration available
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
Overload of 150% for 30s is available up to a maximum of 10 repetitions
per hour.
2.2 Model number
The way in which the model numbers for the Mentor MP range are formed is described in Figure 2-2.
Figure 2-2 Model number
Mentor MP User Guide 7
Issue: 4 www.controltechniques.com
Page 8
Safety
Model
Auxiliary input voltage/
frequency/current
Field output
voltage current
Line input voltage/
frequency/current
Armature output voltage/
current/overload
Rating
Customer and
date code
Approvals
Serial number
IP Rating
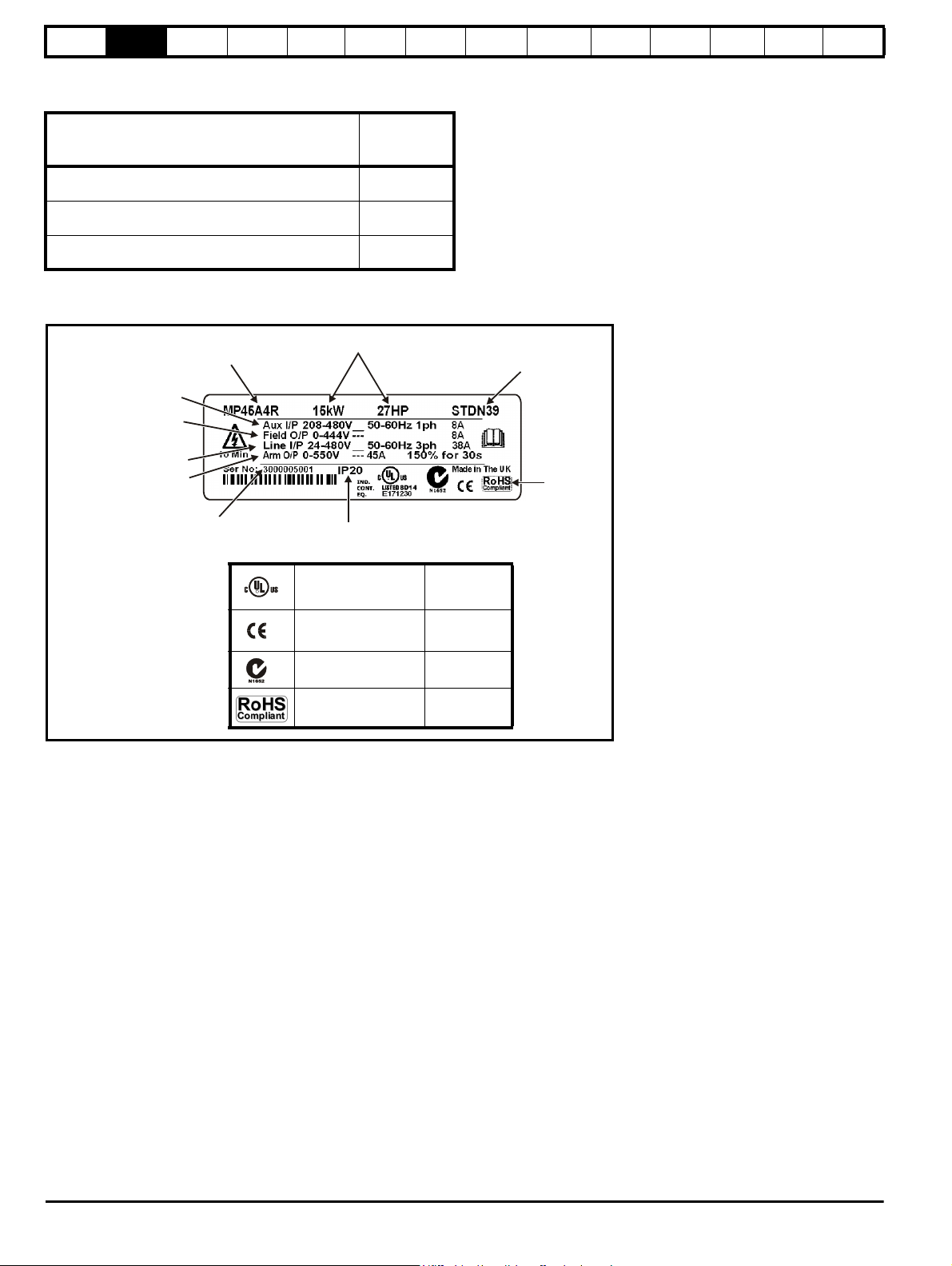
Key to approvals
UL approval Worldwide
CE approval Europe
C Tick approval Australia
RoHS compliant Europe
R
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
2.3 Compatible encoders
Table 2-5 Encoders compatible with Mentor MP
Encoder type
Quadrature incremental encoders with or without
marker pulse
Frequency and direction incremental encoders with
or without marker pulse
Forward / reverse incremental encoders with or
without marker pulse
2.4 Nameplate description
Figure 2-3 Typical drive rating label
Basic
parameters
Pr 3.38
(Fb07, 0.77)
setting
Running the
Ab (0)
Fd (1)
Fr (2)
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
2.4.1 Output current
The continuous output current ratings given on the rating label are for maximum 40°C (104°F) and 1000m altitude. Derating is required for higher
ambient temperatures >40°C (104°F) and higher altitude. For derating information, refer to section 12.1.12 Altitude on page 150.
2.4.2 Input current
The input current is affected by the supply voltage, frequency and load inductance. The input current given on the rating label is the typical input
current.
8 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 9
Safety
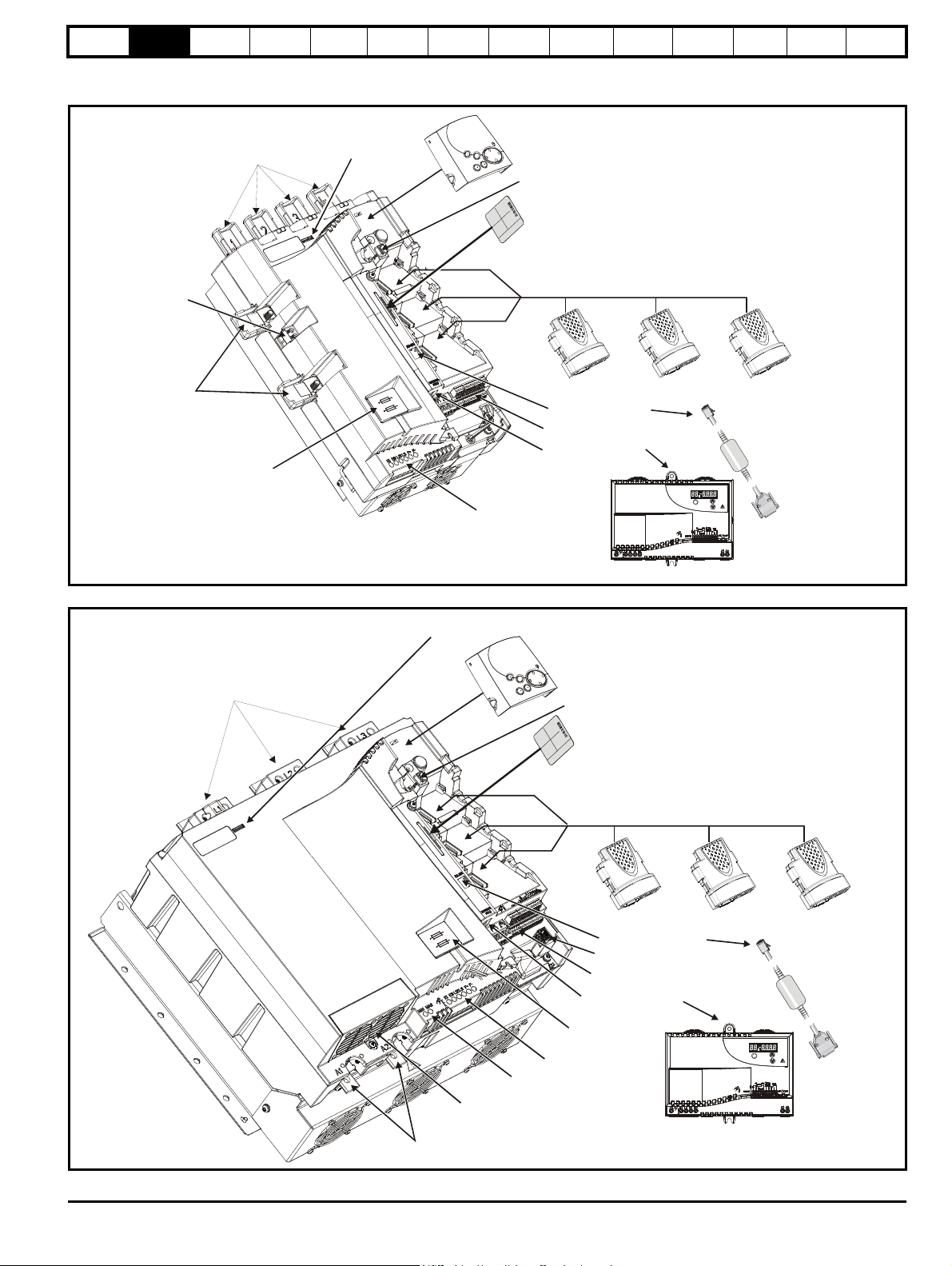
SM-Keypad /
MP-Keypad
Automation Fieldbus
Feedback
SMARTCARD*
Keypad
connection
Slot 1
Slot 2
Slot 3
Solutions Modules
Serial port connector
Control terminals
FXMP25 connection
Auxiliary connections
and field
Field fuses
DC
terminals
AC terminals
CT Comms cable
Identification
marker rail
Machine
feedback
terminals
FXMP25
M
STORED CHARGE
10 min
Mode /Reset
FXMP25 Field regulator
Automation
Fieldbus
Feedback
SMARTCARD*
SM-Keypad /
MP-Keypad
Keypad
connection
Slot 1
Slot 2
Slot 3
Solutions Modules
Serial port connector
Control terminals
FXMP25 connection
Auxiliary connections
and field
Field fuses
AC terminals
CT Comms cable
Identification
marker rail
Machine
feedback
terminals
DC
terminals
Paralleling port
FXMP25
M
STORED CHARGE
10 min
Mode /Reset
Internal
fans
FXMP25 Field regulator
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
2.5 Drive features and options
Figure 2-4 Drive features and options on size 1
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
Figure 2-5 Drive features and options for size 2
* A SMARTCARD is provided as standard. For further information, refer to Chapter 9 SMARTCARD operation on page 81.
Mentor MP User Guide 9
Issue: 4 www.controltechniques.com
Page 10
Safety
Inputs Outputs
• Incremental encoders • Quadrature
• SinCos encoders • Frequency and direction
• SSI encoders • SSI simulated outputs
• EnDat encoders
• Digital inputs x 3
• Analog output (voltage) x 1
• Digital I/O x 3 • Relay x 2
• Analog inputs (voltage) x 2
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
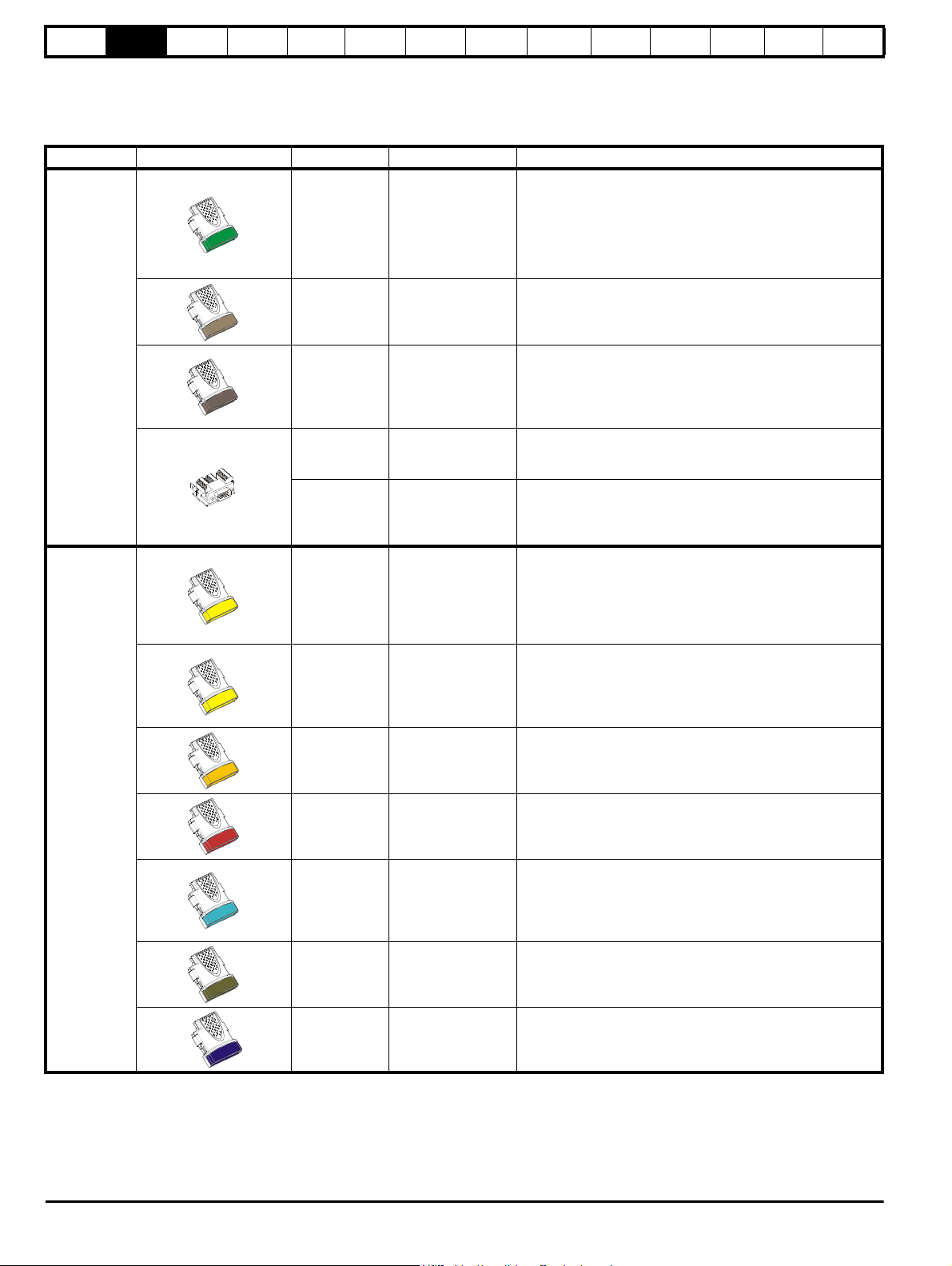
2.5.1 Options available for Mentor MP
All Solutions Modules are color-coded in order to make identification easy. The following table shows the color-code key and gives further details on
their function.
Table 2-6 Solutions Module identification
Type Solutions Module Color Name Further Details
Universal Feedback interface
Feedback interface for the following devices:
Light Green
Brown SM-Encoder Plus
Feedback
Dark Brown
N/A
N/A
Yellow SM-I/O Plus
SM-Universal
Encoder Plus
SM-Encoder Output
Plus
15-way D-type
converter
Single ended
encoder interface
(15V or 24V)
Incremental encoder interface
Feedback interface for incremental encoders without
commutation signals.
No simulated encoder outputs available
Incremental encoder interface
Feedback interface for incremental encoders without
commutation signals.
Simulated encoder output for quadrature, frequency and
direction signals
Drive encoder input converter
Provides screw terminal interface for encoder wiring and spade
terminal for shield
Single ended encoder interface
Provides an interface for single ended ABZ encoder signals,
such as those from hall effect sensors. 15V and 24V versions
are available.
Extended I/O interface
Increases the I/O capability by adding the following to the
existing I/O in the drive:
Automation
(I/O
Expansion)
Yellow SM-I/O 32
Dark Yellow SM-I/O Lite
Dark Red SM-I/O Timer
Turquoise SM-I/O PELV
Olive SM-I/O 120V
Cobalt Blue
SM-I/O 24V
Protected
Extended I/O interface
Increase the I/O capability by adding the following to the
existing I/O in the drive:
• High speed digital I/O x 32
• +24V output
Additional I/O
1 x Analog input (± 10V bi-polar or current modes)
1 x Analog output (0 to 10V or current modes)
3 x Digital input and 1 x Relay
Additional I/O with real time clock
As per SM-I/O Lite but with the addition of a Real Time Clock
for scheduling drive running
Isolated I/O to NAMUR NE37 specifications
For chemical industry applications
1 x Analog input (current modes)
2 x Analog outputs (current modes)
4 x Digital input / outputs, 1 x Digital input, 2 x Relay outputs
Additional I/O conforming to IEC 61131-2 120Vac
6 digital inputs and 2 relay outputs rated for 120Vac operation
Additional I/O with overvoltage protection up to 48V
2 x Analog outputs (current modes)
4 x Digital input / outputs, 3 x Digital inputs, 2 x Relay outputs
10 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 11
Safety
FXMP25
M
STORED CHARGE
10 min
Mode /Reset
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
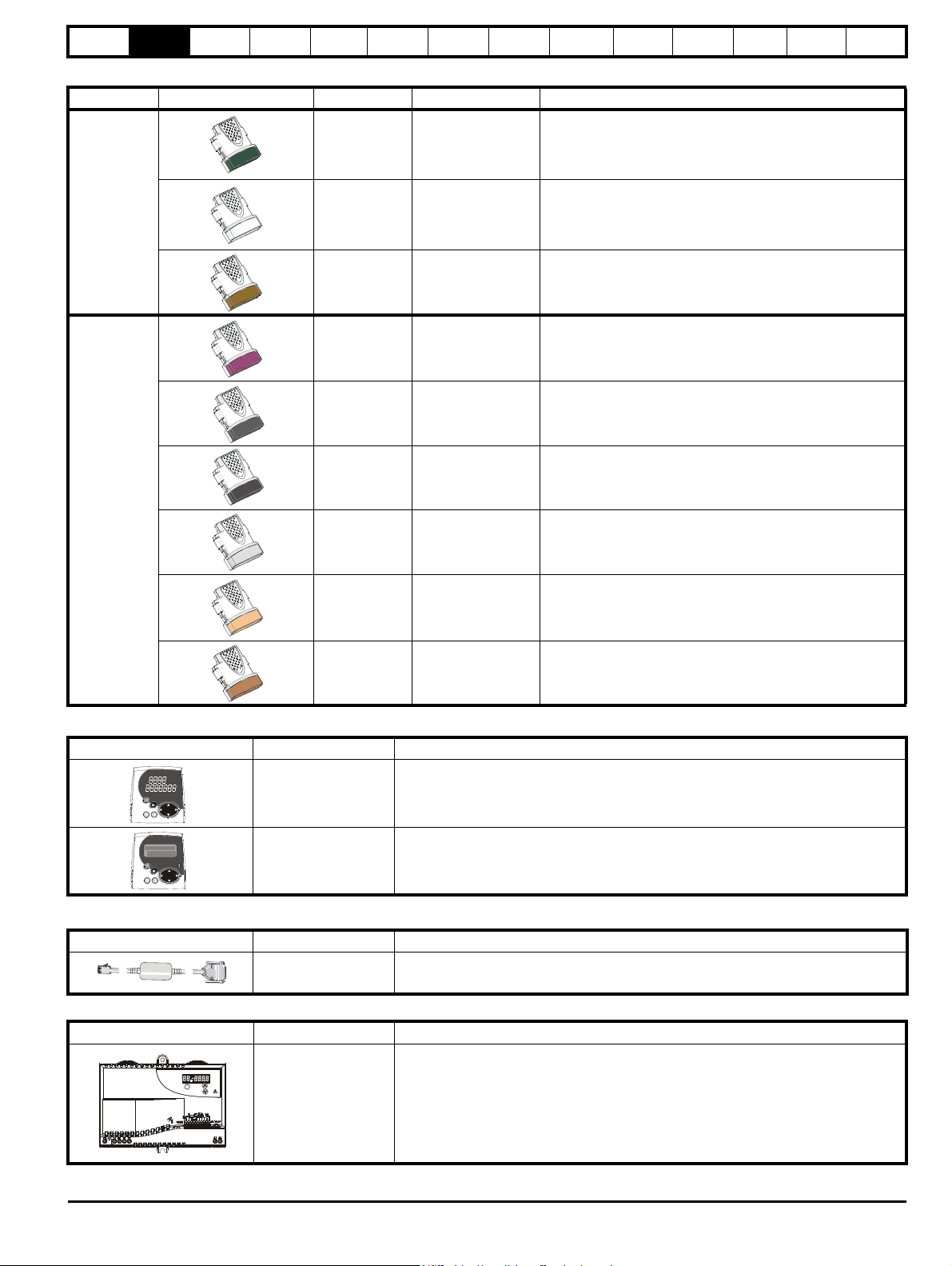
Table 2-6 Solutions Module identification
Type Solutions Module Color Name Further Details
Applications Processor (with CTNet)
Moss Green
SM-Applications
Plus
nd
2
processor for running pre-defined and /or customer created
application software with CTNet support. Enhanced
performance over SM-Applications
Applications Processor
Automation
(Applications)
White
SM-Applications Lite
V2
nd
2
processor for running pre-defined and /or customer created
application software. Enhanced performance over SMApplications Lite
Applications Processor
Golden brown SM-Register
nd
2
processor for running position capture functionality with
CTNet support.
Technical
data
Diagnostics
UL
information
Fieldbus
Table 2-7 Keypad identification
Keypad Name Further Details
SM-Keypad
Purple
SM-PROFIBUS DP-V1Profibus option
Medium Grey SM-DeviceNet
Dark Grey SM-INTERBUS
Light Grey SM-CANopen
Beige SM-Ethernet
Brown Red SM-EtherCAT
LED keypad option
Keypad with a LED display
PROFIBUS DP adapter for communications with the drive
DeviceNet option
Devicenet adapter for communications with the drive
Interbus option
Interbus adapter for communications with the drive
CANopen option
CANopen adapter for communications with the drive
Ethernet option
10 base-T / 100 base-T; Supports web pages, SMTP mail and
multiple protocols: DHCP IP addressing; Standard RJ45
connection
EtherCAT option
EtherCAT adapter for communications with the drive
MP-Keypad
LCD keypad option
Keypad with an alpha-numeric LCD display with Help function
Table 2-8 Serial comms lead
Serial comms lead Name Further Details
CT Comms cable
CT EIA (RS) -232 (4500-0087)
CT USB (4500-0096)
Table 2-9 External field control
External field controller Name Further Details
FXMP25
Mentor MP User Guide 11
For external control of field windings up to 25A, with field reversal capability. For further
information, please see the FXMP25 User Guide.
Issue: 4 www.controltechniques.com
Page 12
Safety
CAUTION
Risk of Electric Shock
Power down unit 10minutes
before removing cover
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
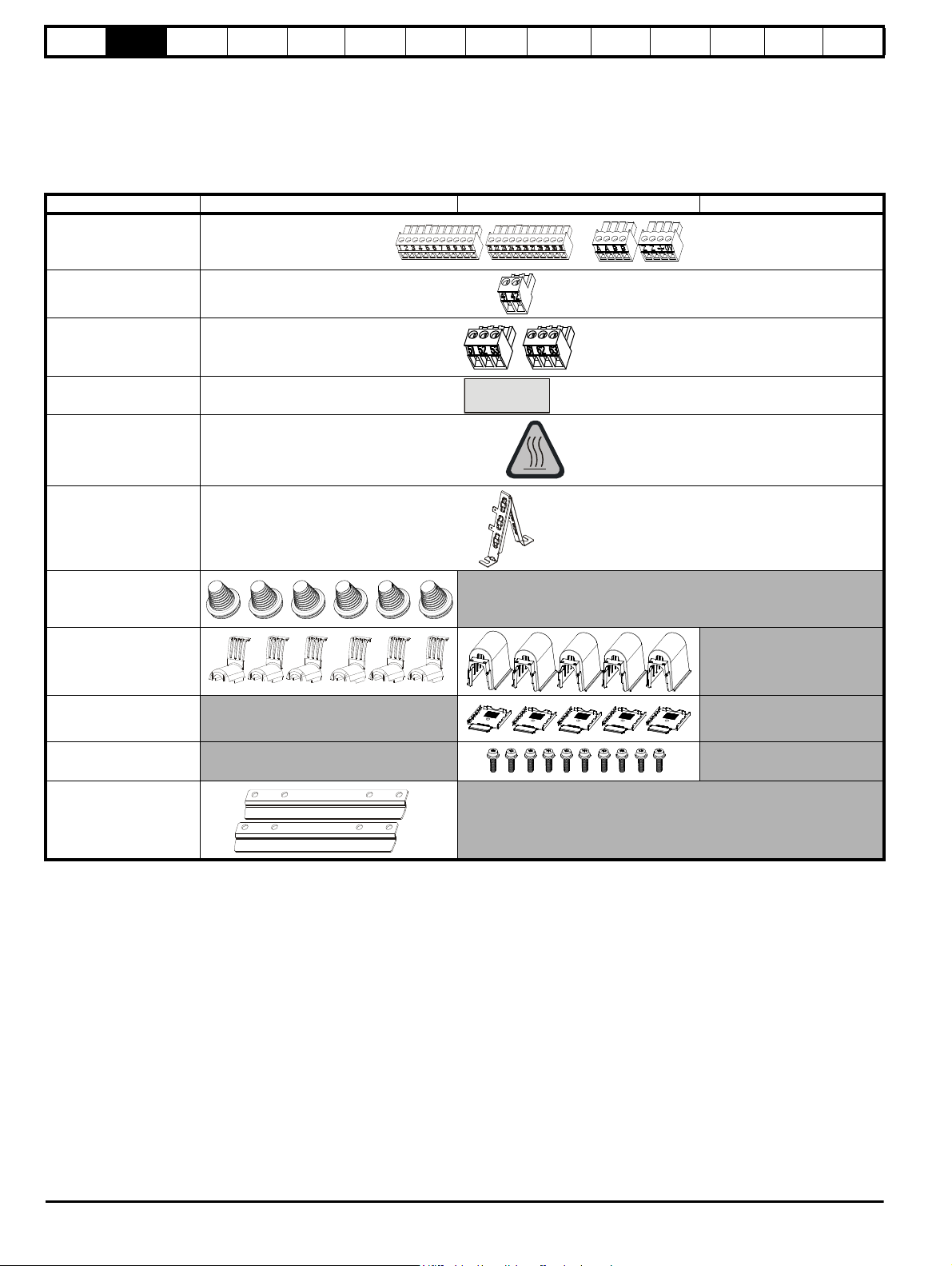
2.6 Items supplied with the drive
The drive is supplied with a printed manual, a SMARTCARD, a safety
information booklet, the Certificate of Quality, an accessory kit box
including the items shown in Table 2-10, and a CD ROM containing all
related product documentation and software tools.
Table 2-10 Parts supplied with the drive
Description Size 1 Size 2A / 2B Size 2C / 2D
Control connectors
Tacho connector
Relay connectors
UL warning label
UL warning label for
heatsink temperature
Diagnostics
UL
information
Grounding bracket
Terminal cover grommets
Terminal shrouds
Terminal shroud base
covers
M4 Screws
Mounting feet bracket
12 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 13
Safety
WARNING
WARNING
WARNING
WARNING
WARNING
WARNING
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
3 Mechanical Installation
3.1 Safety
Follow the instructions
The mechanical and electrical installation instructions must
be adhered to. Any questions or doubt should be referred to
the supplier of the equipment. It is the responsibility of the
owner or user to ensure that the installation of the drive and
any external option unit, and the way in which they are
operated and maintained, comply with the requirements of
the Health and Safety at Work Act in the United Kingdom or
applicable legislation and regulations and codes of practice
in the country in which the equipment is used.
Competence of the installer
The drive must be installed by professional assemblers who
are familiar with the requirements for safety and EMC. The
assembler is responsible for ensuring that the end product or
system complies with all the relevant laws in the country
where it is to be used.
If the drive has been used at high load levels for a period of
time, the heatsink can reach temperatures in excess of 70°C
(158°F). Human contact with the heatsink should be
prevented.
Enclosure
The drive is intended to be mounted in an enclosure which
prevents access except by trained and authorized
personnel, and which prevents the ingress of contamination.
It is designed for use in an environment classified as
pollution degree 2 in accordance with IEC 60664-1. This
means that only dry, non-conducting contamination is
acceptable.
3.2.3 Cooling
The heat produced by the drive must be removed without its specified
operating temperature being exceeded. Note that a sealed enclosure
gives much reduced cooling compared with a ventilated one, and may
need to be larger and/or use internal air circulating fans.
For further information, refer to section 3.6.2 Enclosure sizing on
page 26.
3.2.4 Electrical safety
The installation must be safe under normal and fault conditions.
Electrical installation instructions are given in Chapter 4 Electrical
installation on page 32.
3.2.5 Electromagnetic compatibility
If it is necessary to meet strict emission limits, or if it is known that
electromagnetically sensitive equipment is located nearby, then full
precautions must be observed. The use of an external EMC filter may be
required at the drive inputs, which must be located very close to the
drives.
Space must be made available for the filters and allowance made for
carefully segregated wiring. Both levels of precautions are covered in
Table 12-42 Drive power stage terminals on size 2 drives on page 164.
3.2.6 Hazardous areas
The drive must not be located in a classified hazardous area unless it is
installed in an approved enclosure and the installation is certified.
The drive enclosure is not classified as a fire enclosure. A
separate fire enclosure must be provided.
Many of the drives in this product range weigh in excess of
15kg (33lb). Use appropriate safeguards when lifting these
models.
See section 3.4 Mounting method on page 17.
3.2 Planning the installation
The following considerations must be made when planning the
installation:
3.2.1 Access
Access must be restricted to personnel only. Safety regulations which
apply at the place of use must be complied with.
3.2.2 Environmental protection
The drive must be protected from:
• moisture, including dripping water or spraying water and
condensation. An anti-condensation heater may be required, which
must be switched off when the drive is running
• contamination with electrically conductive material
• contamination with any form of dust which may restrict the fan, or
impair airflow over various components
• temperature beyond the specified operating and storage ranges
• corrosive gasses
Mentor MP User Guide 13
Issue: 4 www.controltechniques.com
Page 14
Safety
WARNING
WARNING
Pozi Pz2
1
2
All sizes
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
3.3 Terminal cover removal
Isolation device
The AC supply must be disconnected from the drive using an
approved isolation device before any cover is removed from
the drive or before any servicing work is performed.
Stored charge
The drive contains capacitors that remain charged to a
potentially lethal voltage after the AC supply has been
disconnected. If the drive has been energized, the AC
supply must be isolated at least ten minutes before work
may continue.
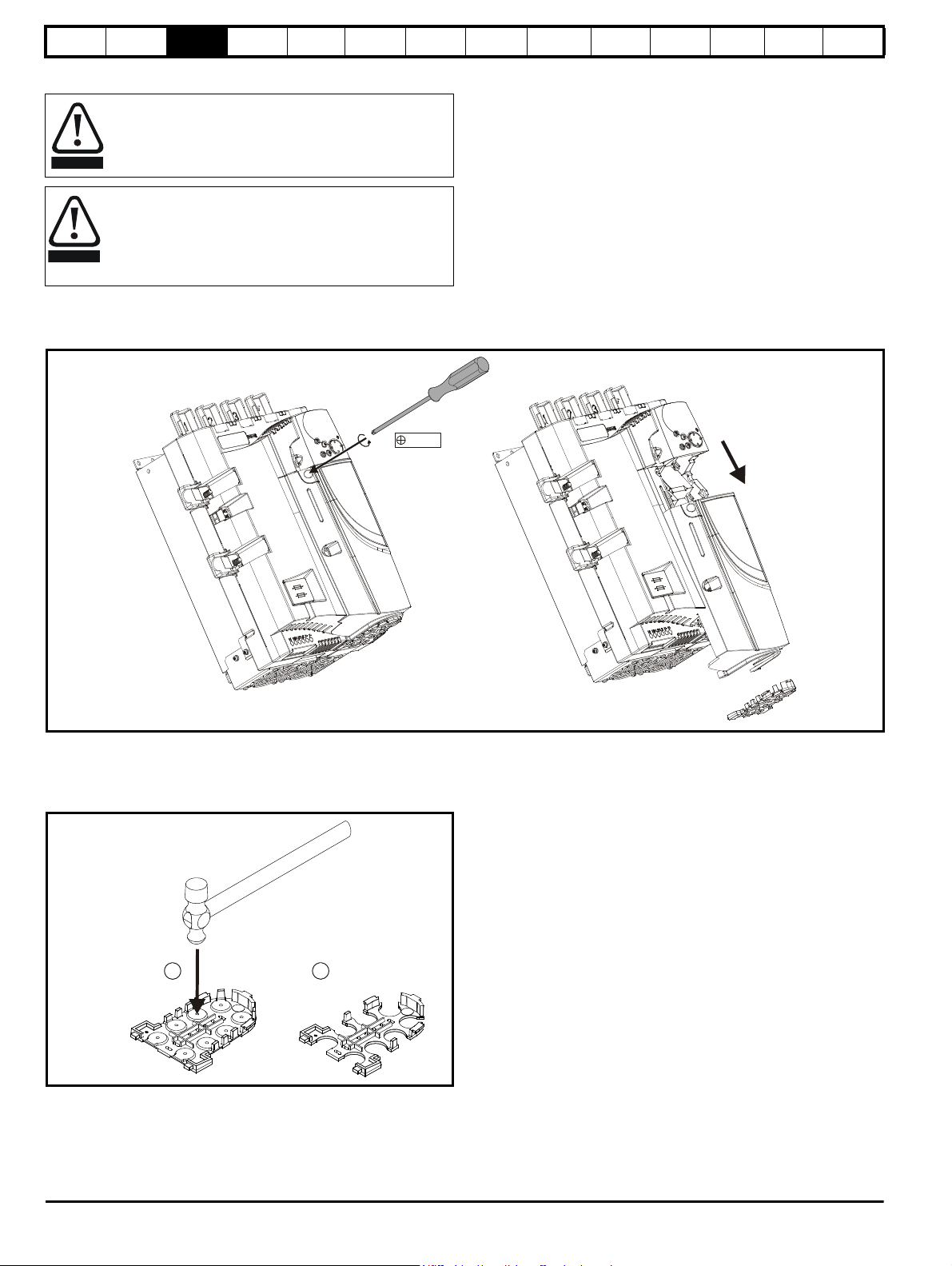
3.3.1 Removing the terminal covers
The drive is installed with one control terminal cover.
Figure 3-1 Removing the control terminal cover (size 1 shown)
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
To remove the terminal cover, undo the screw and slide the terminal cover downwards.
When replacing the terminal covers the screw should be tightened with a maximum torque of 1 Nm (0.7 Ib ft).
3.3.2 Removing the finger-guard and break-outs
Figure 3-2 Removing the finger-guard break-outs
Place finger-guard on a flat solid surface and hit relevant break-outs with
hammer as shown (1). Continue until all required break-outs are removed
(2). Remove any flash / sharp edges once the break-outs are removed.
14 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 15
Safety
CAUTION
A
B
Solutions Module
in slot 1
Solutions Module
in slot 2
Solutions Module
in slot 3
A
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
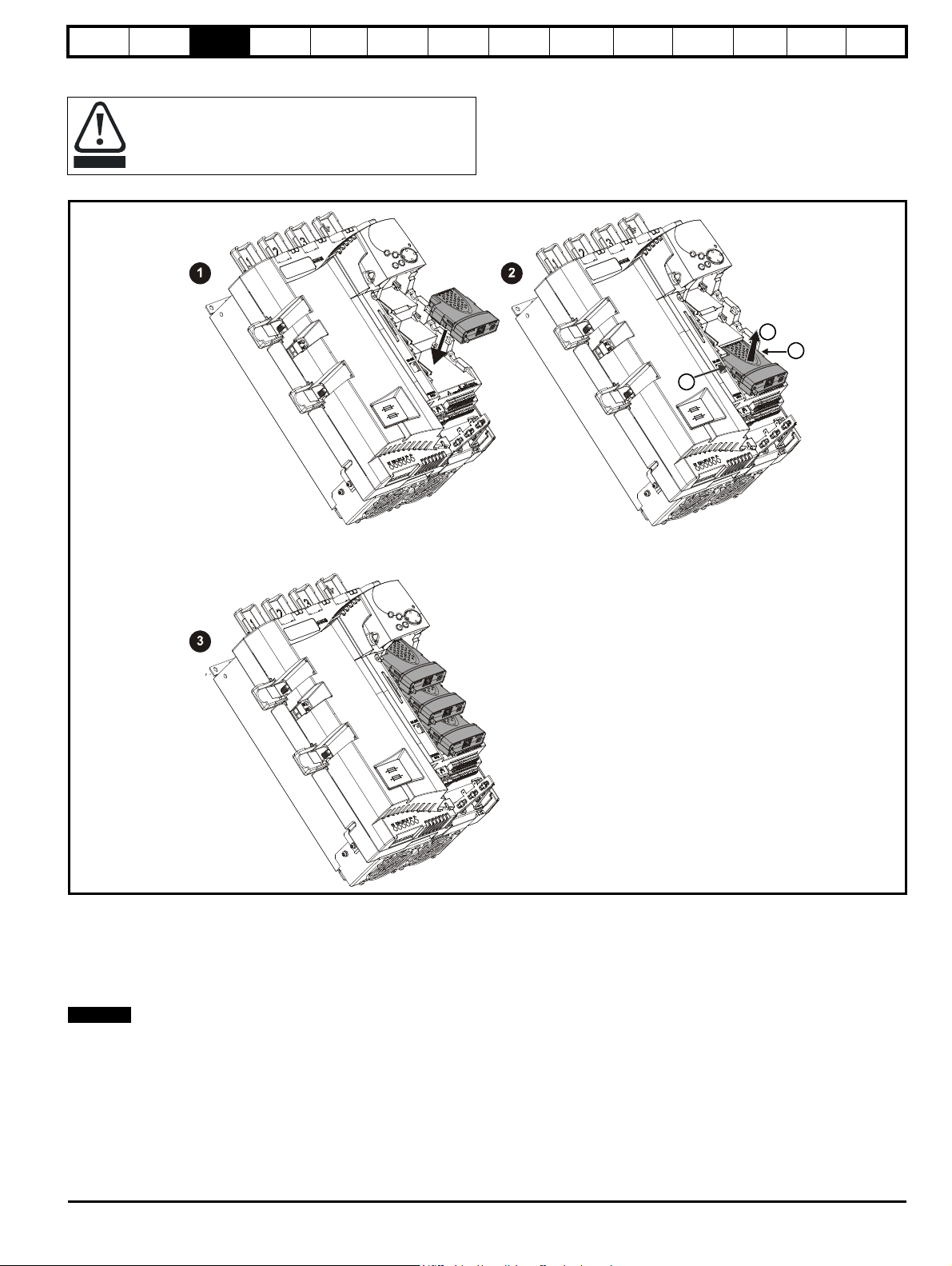
3.3.3 Installation and removal of a Solutions Module
Please power down the drive before removing / installing the
Solutions Module. Failure to do so may cause damage to
product
Figure 3-3 Installation and removal of the Solutions Module
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
1. To install the Solutions Module, press down in the direction shown
above until it clicks into place.
2. To remove the Solutions Module, press inwards at the points shown
(A) and pull in the direction shown (B).
3. The drive has the facility for all three Solutions Module slots to be
used at the same time, as illustrated.
It is recommended that the Solutions Module slots are used in the
following order: slot 3, slot 2 and slot 1.
Mentor MP User Guide 15
Issue: 4 www.controltechniques.com
Page 16
Safety
B
B
C
A
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
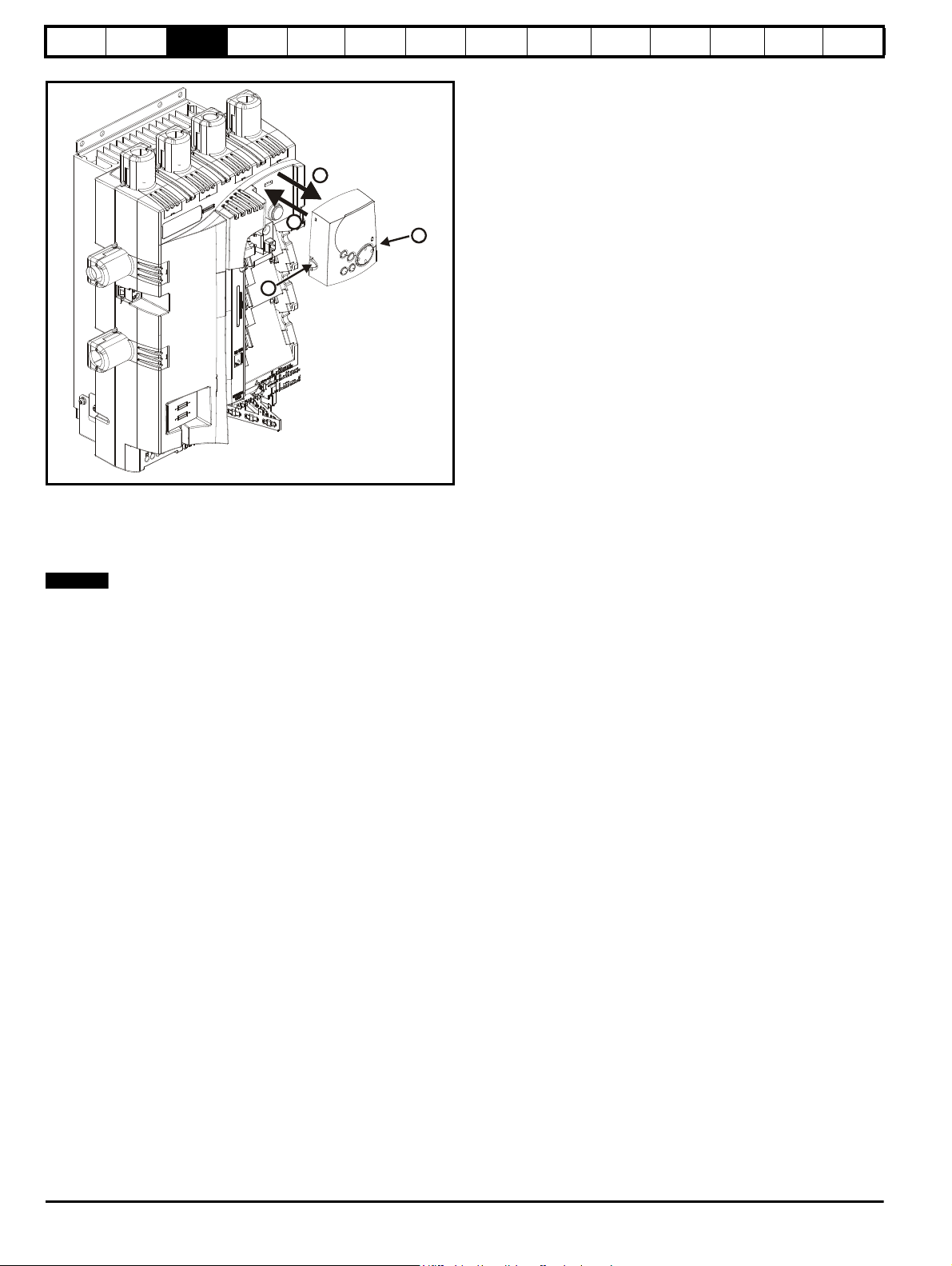
Figure 3-4 Removal and installation of a keypad
To fit, align the MP-Keypad and press gently in the direction shown until
it clicks into position (A).
To remove, while pressing the tabs inwards (B), gently lift the MPKeypad in the direction indicated (C).
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
The keypad can be installed / removed while the drive is powered up and
running a motor, providing that the drive is not operating in keypad
mode.
16 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 17
Safety
WARNING
WARNING
293mm (11.54in)
250mm (9.84in)
444mm
(17.48in)
222mm
(8.74in)
95mm
(3.74in)
222mm (8.74in)
170mm (6.69in)
6.5mm (0.26in)
250mm (9.84in)
40mm
(1.58in)
22mm
(0.87in)
380mm
(14.96in)
4 holes to
suit M6
1
1
1
1
MA1
MA2
NOTE
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
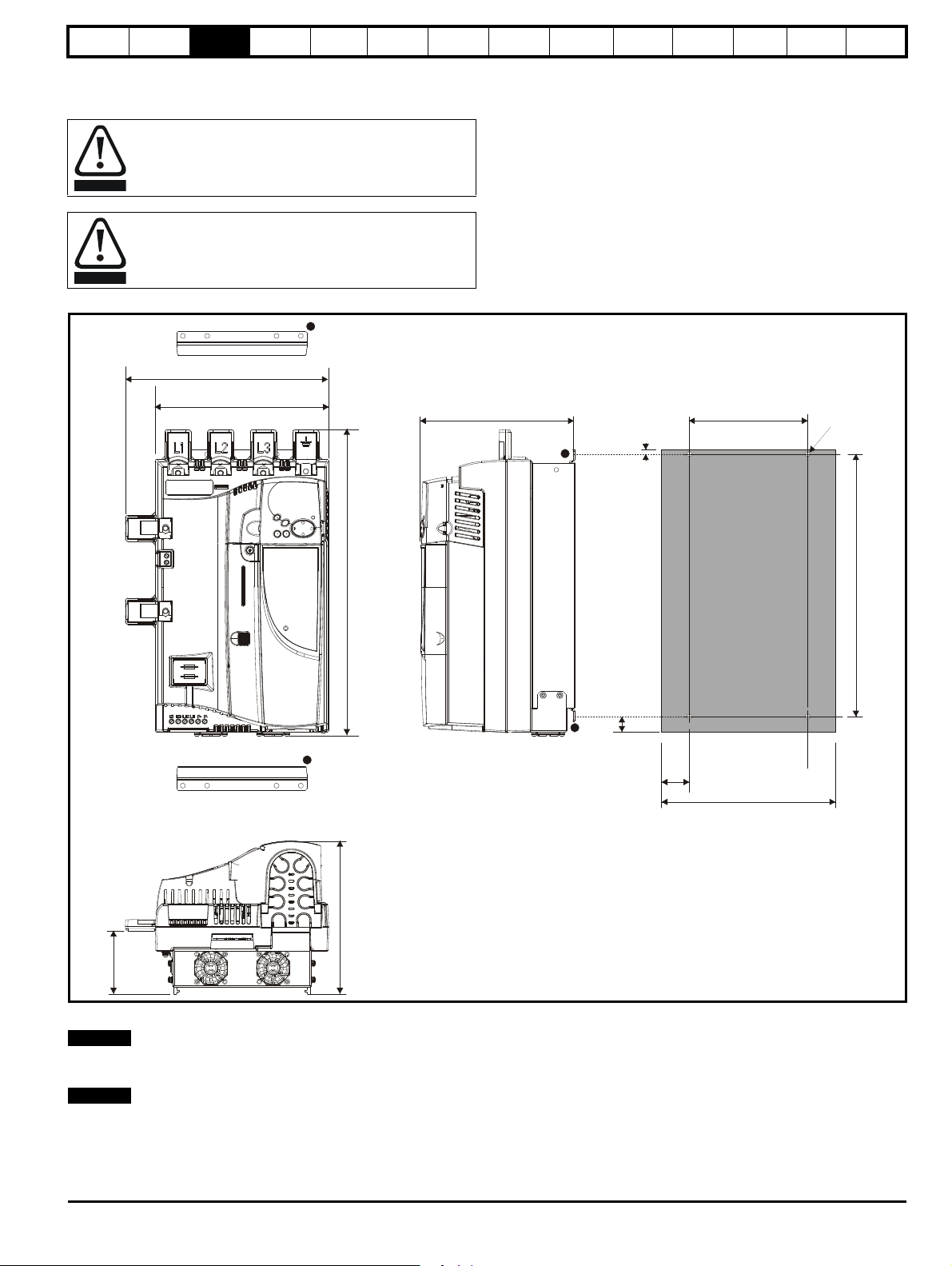
3.4 Mounting method
The Mentor MP can only be surface mounted.
If the drive has been used at high load levels for a period of
time, the heatsink can reach temperatures in excess of 70°C
(158°F). Human contact with the heatsink should be
prevented.
Many of the drives in this product range weigh in excess of
15kg (33lb). Use appropriate safeguards when lifting these
models.
Figure 3-5 Overall size 1A dimensions
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
1. The two outer holes must be used for mounting the Mentor MP.
With the SMARTCARD installed to the drive, the depth measurement
increases by 7.6mm (0.30 in).
Fans are only installed to the MP75A4(R) and MP75A5(R).
Mentor MP User Guide 17
Issue: 4 www.controltechniques.com
Page 18
Safety
293mm (11.54in)
250mm (9.84in)
444mm
(17.48in)
251mm
(9.88in)
124mm
(4.88in)
170mm (6.69in)
6.5mm (0.26in)
250mm (9.84in)
40mm
(1.58in)
22mm
(0.87in)
380mm
(14.96in)
4 holes to
suit M6
1
1
1
1
1
MA1
MA2
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
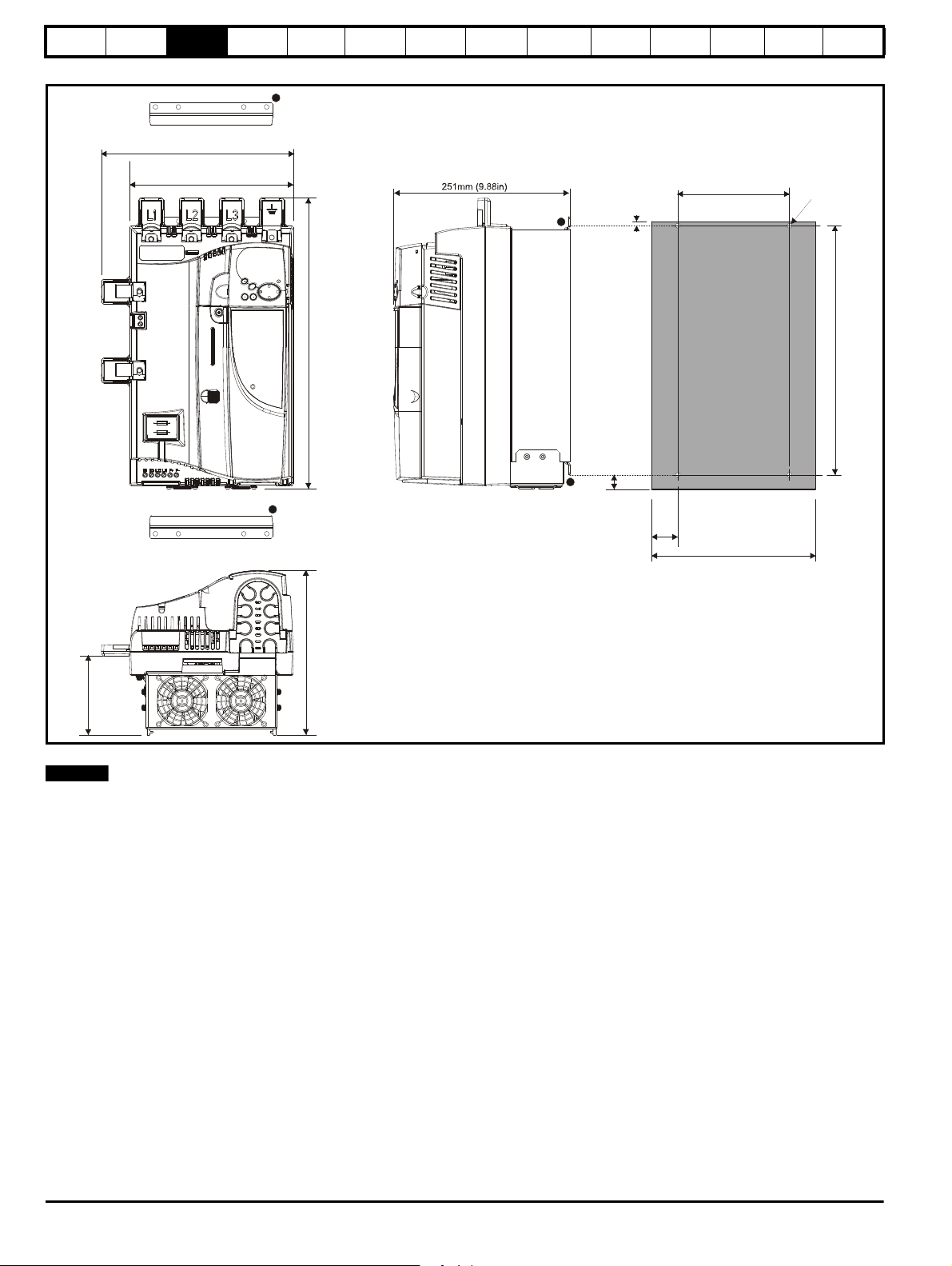
Figure 3-6 Overall size 1B dimensions
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
1. The two outer holes must be used for mounting the Mentor MP.
With the SMARTCARD installed to the drive, the depth measurement increases by 7.6mm (0.30 in).
18 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 19
Safety
1
1
2
MA1
MA2
453mm (17.84in)
495mm (19.49in)
640mm
(25.20in)
85mm
(3.35in)
301mm (11.85in)
472mm (18.58)
68mm
(2.68in)
126mm
(4.96in)
11.5mm (0.45in)
495mm (19.49in)
80mm
(3.15in)
80mm
(3.15in)
65mm
(2.56in)
8 holes to
suit M8
302mm
(11.89in)
93mm
(3.66in)
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
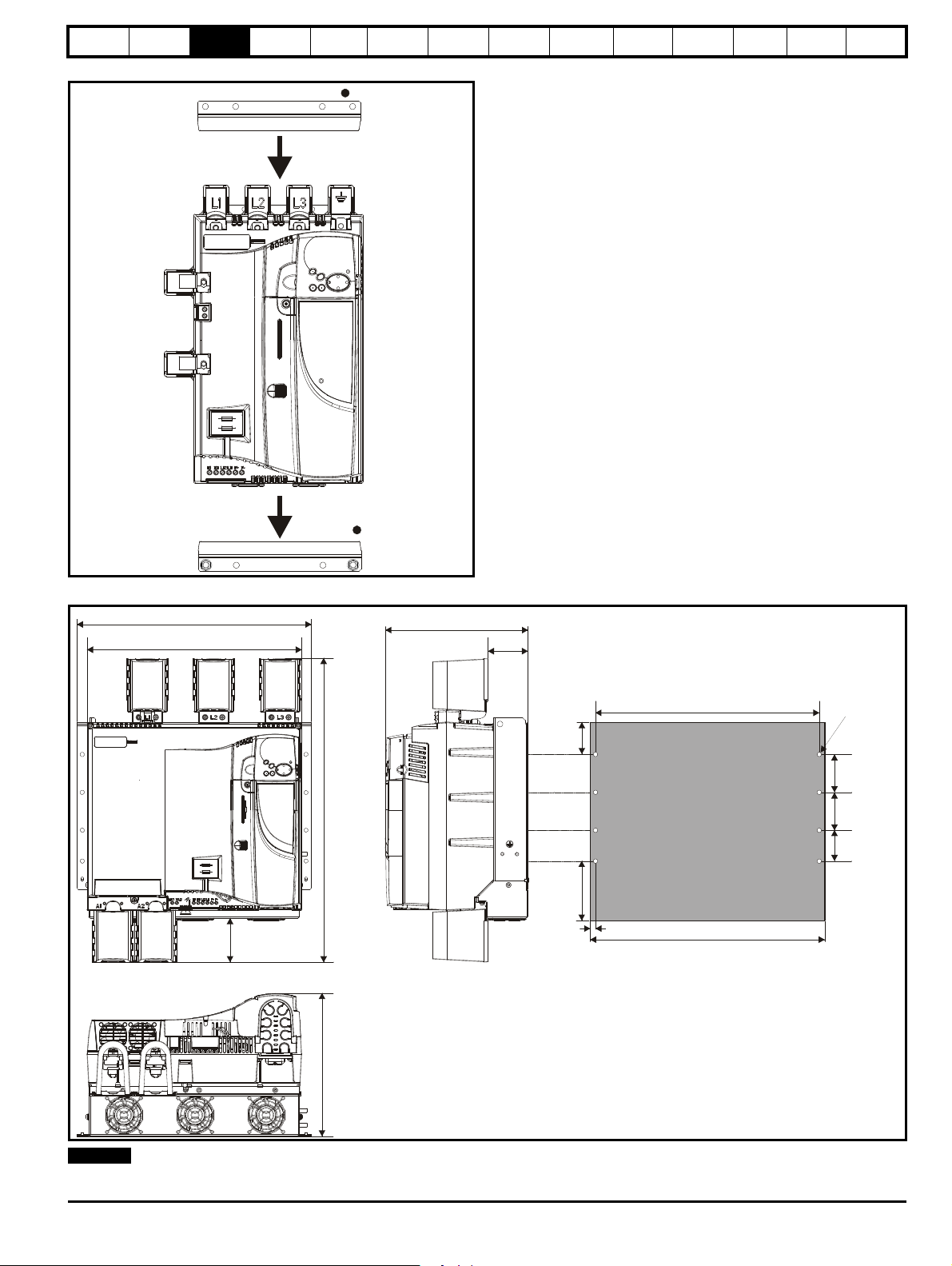
Figure 3-7 Installing the mounting feet bracket on size 1 drives
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
The bottom mounting bracket (1) should be installed to the back plate first
with the screws fully tightened. The drive should then be lowered onto the
bracket and slotted in. The top mounting bracket (2) should then be slotted
into the drive and the top holes marked for mounting (380mm [14.96 in]
from the centre of the holes on the bottom mounting bracket). Once the
holes have been drilled, fix the top mounting bracket accordingly and
tighten the screws.
It is not necessary to tighten the bottom mounting brackets with the drive in
place. The brackets are designed to clamp the drive heatsink against the
back plate.
UL
information
Figure 3-8 Overall size 2A / 2B dimensions
With the SMARTCARD installed to the drive, the depth measurement increases by 7.6mm (0.30 in).
Mentor MP User Guide 19
Issue: 4 www.controltechniques.com
Page 20
Safety
6mm (0.24in)
175mm (6.9in)
5mm
(0.2in)
175mm (6.9in)
405mm (15.94)
248mm (9.76in)
202mm (7.95in)
321mm (12.64in)
605mm (23.82in)
124mm
(4.89in)
175mm (6.9in)
555mm (21.85in)
452mm (17.8in)
2
0
2
mm (7.95in)
390mm (15.35in)
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
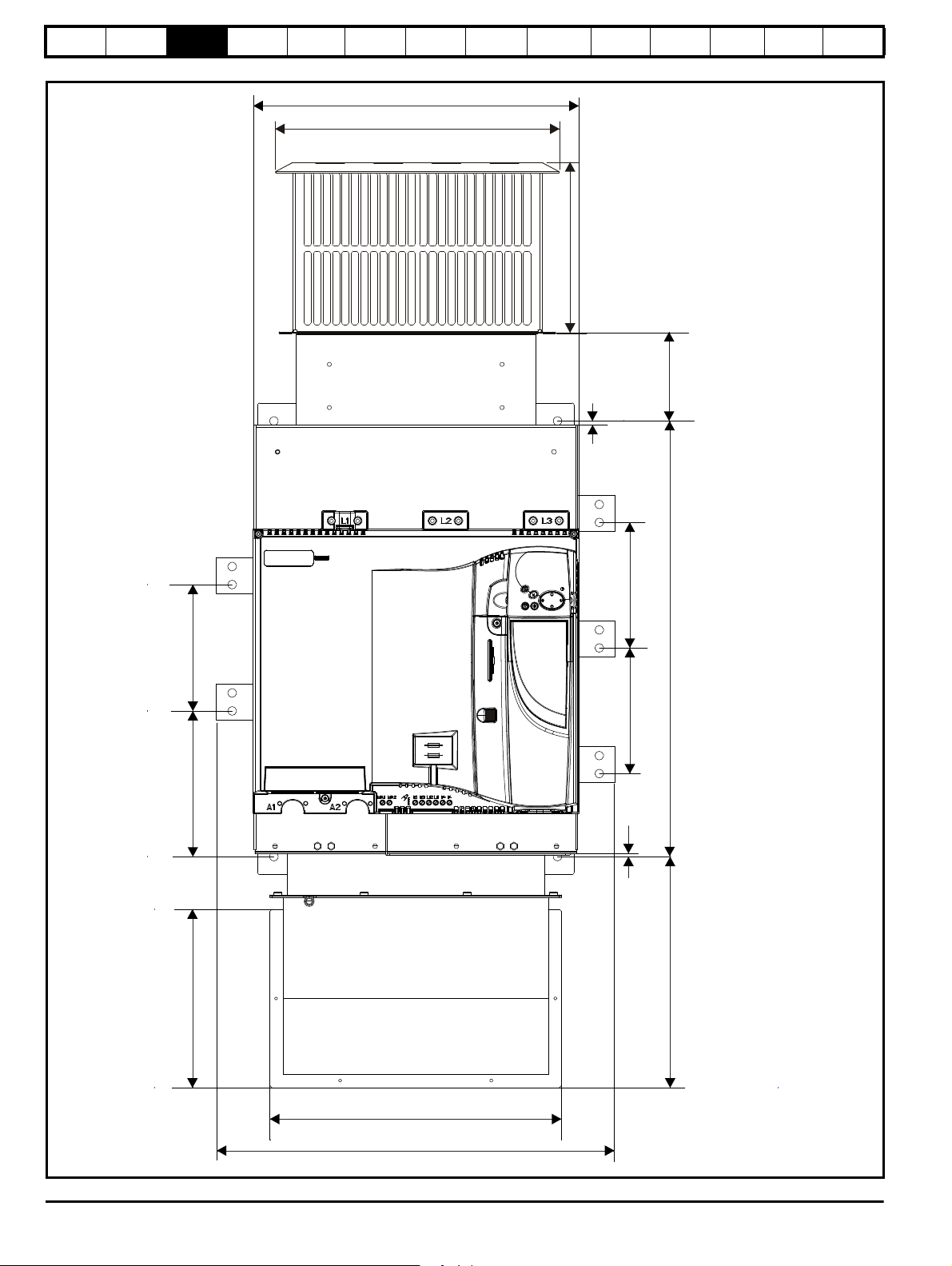
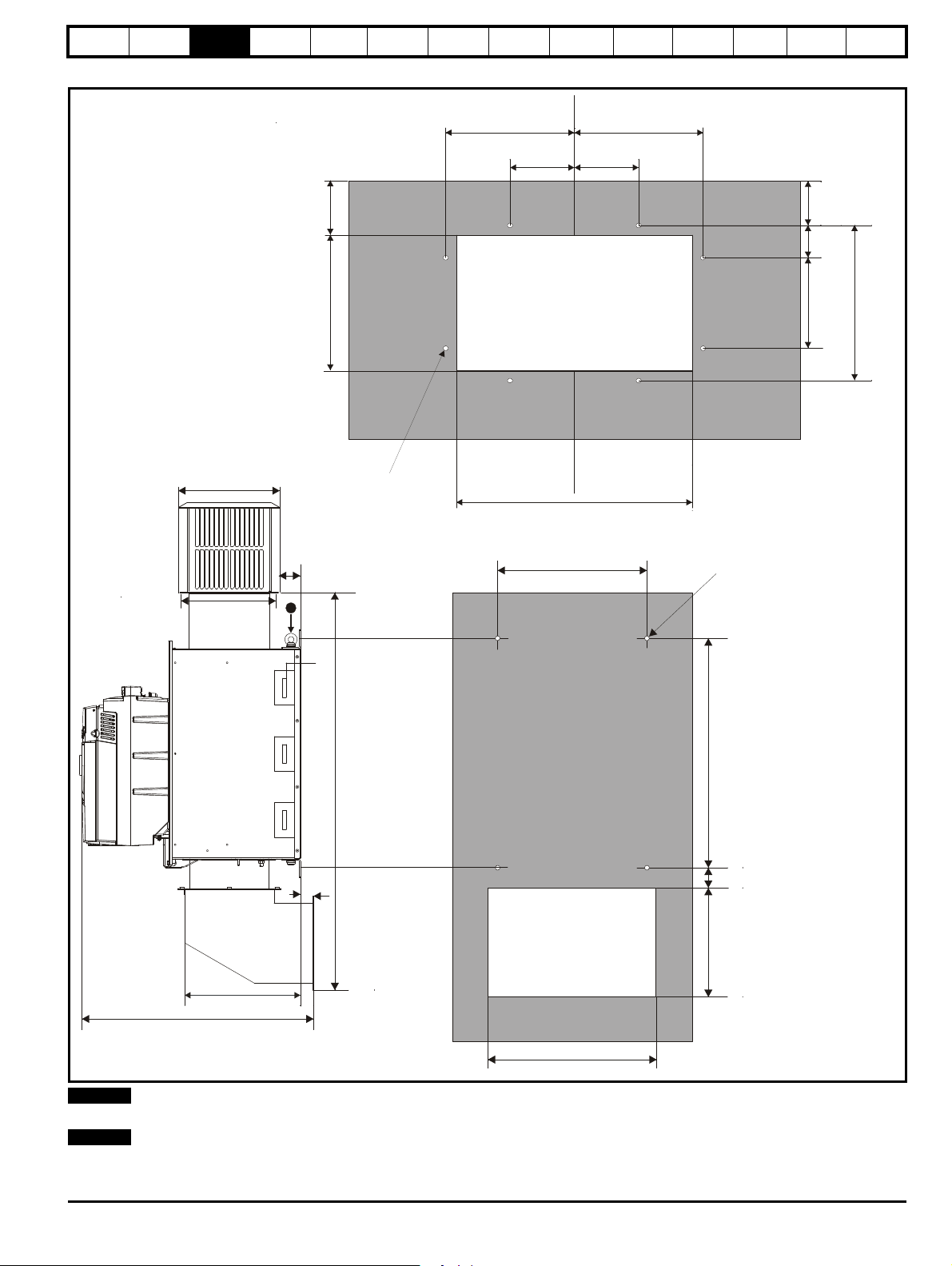
Figure 3-9 Size 2C front view and mounting dimensions
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
20 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 21
Safety
394mm (15.51in)
605mm
(23.82in)
53mm
(2.09in)
288mm
(11.34in)
450mm (17.72in)
1050mm (41.34in)
306mm (12.05in)
611mm (24.05in)
35mm
(1.38in)
38mm (1.5in)
59mm
(2.32in)
270mm
(10.63in)
4 holes
to suit M10
260mm
(10.24in)
180mm (7.09in)
180mm (7.09in)
90mm
(3.54in)
90mm
(3.54in)
68.5mm
(2.70in)
50mm
(1.97in)
190mm
(7.48in)
240mm
(9.45in)
333mm (13.11in)
83.5
(3.29in)
210mm
(8.27in)
Rear
Front
8 holes
∅
7mm
1
NOTE
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
parameters
Figure 3-10 Size 2C back-plate and mounting detail
Basic
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
1. M10 eye-bolts can be inserted in the location shown for lifting the drive. These are not supplied with the drive.
With the SMARTCARD installed in the drive, the depth measurement increases by 7.6mm (0.30 in).
Mentor MP User Guide 21
Issue: 4 www.controltechniques.com
Page 22
Safety
124m
m
(4.88
in)
6mm
(0.24in)
1065mm (41.93in)
356mm (14.02in)
248mm (9.76in)
405mm (15.94in)
4mm
(0.16in)
321mm (12.64in)
330mm (13.0in)
555mm (21.85in)
330mm (13.0in)
330mm (13.0in)
452mm (17.8in)
202mm (7.95in)
390mm (15.35in)
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
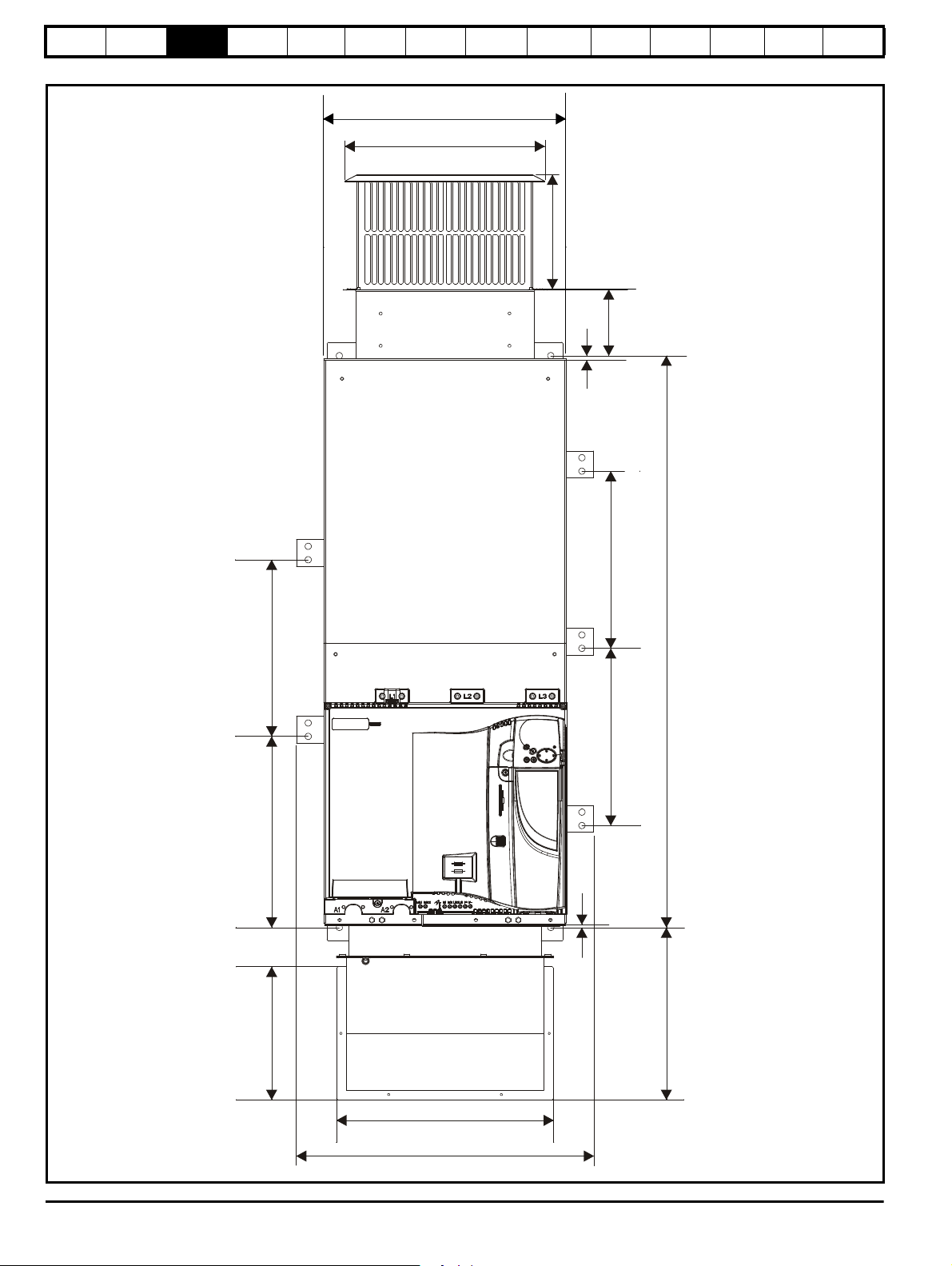
Figure 3-11 Size 2D front view and mounting dimensions
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
22 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 23
Safety
53mm
(2.09in)
1065mm (41.93in)
288mm (11.34in)
450mm (17.72in)
394mm (15.51in)
1510mm (59.45in)
611mm (24.06in)
306mm (12.05in)
4 holes
to suit M10
35mm
(1.38in)
260mm
(10.24in)
180mm (7.09in)
180mm (7.09in)
90mm
(3.54in)
90mm
(3.54in)
68.5mm
(2.70in)
50mm
(1.97in)
190mm
(7.48in)
240mm
(9.45in)
333mm (13.11in)
8 holes
∅
7mm
83.5mm
(3.29in)
210mm
(8.27in)
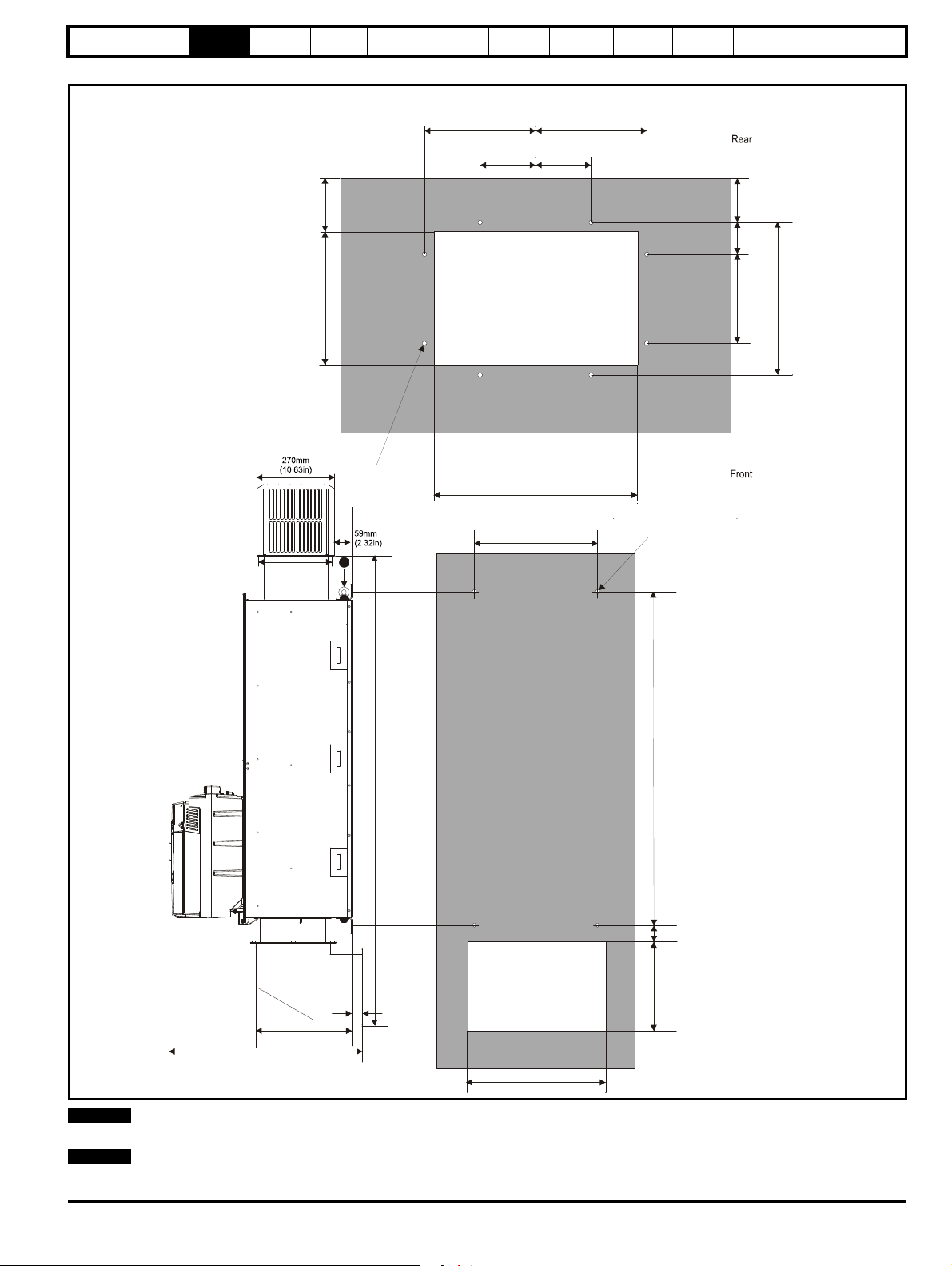
1
NOTE
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
parameters
Figure 3-12 Size 2D back-plate and mounting detail
Basic
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
1. M10 eye-bolts can be inserted in the location shown for lifting the drive. These are not supplied with the drive.
With the SMARTCARD installed to the drive, the depth measurement increases by 7.6mm (0.30 in).
Mentor MP User Guide 23
Issue: 4 www.controltechniques.com
Page 24
Safety
NOTE
1
2
3
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
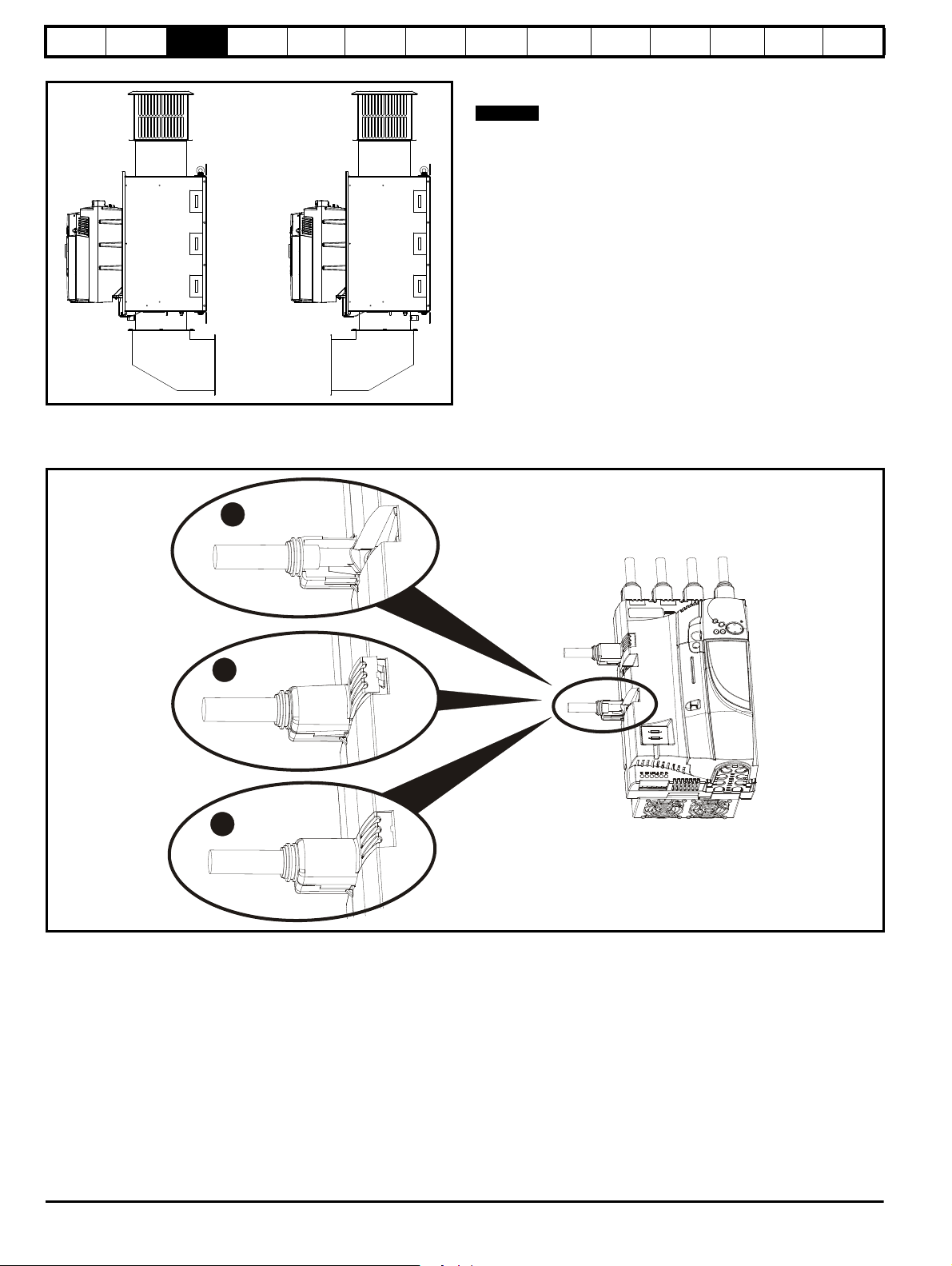
Figure 3-13 Mounting methods of size 2C / 2D air duct The Mentor MP size 2C and 2D air duct can be turned 180° to suit the
customers infrastructure.
There is no seal provided with this product for sealing off the gap around
the air duct when mounted.
3.5 Installing and removing the terminal shrouds
Figure 3-14 Installing the terminal shrouds on size 1 drives
1. Thread the AC supply and DC output connectors through the grommets provided and connect them to the drive.
2. Place the terminal shroud over the top of the connectors and click into place (3).
24 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 25
Safety
1
2
L1 L2
L3
A1 A2
1
2
3
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
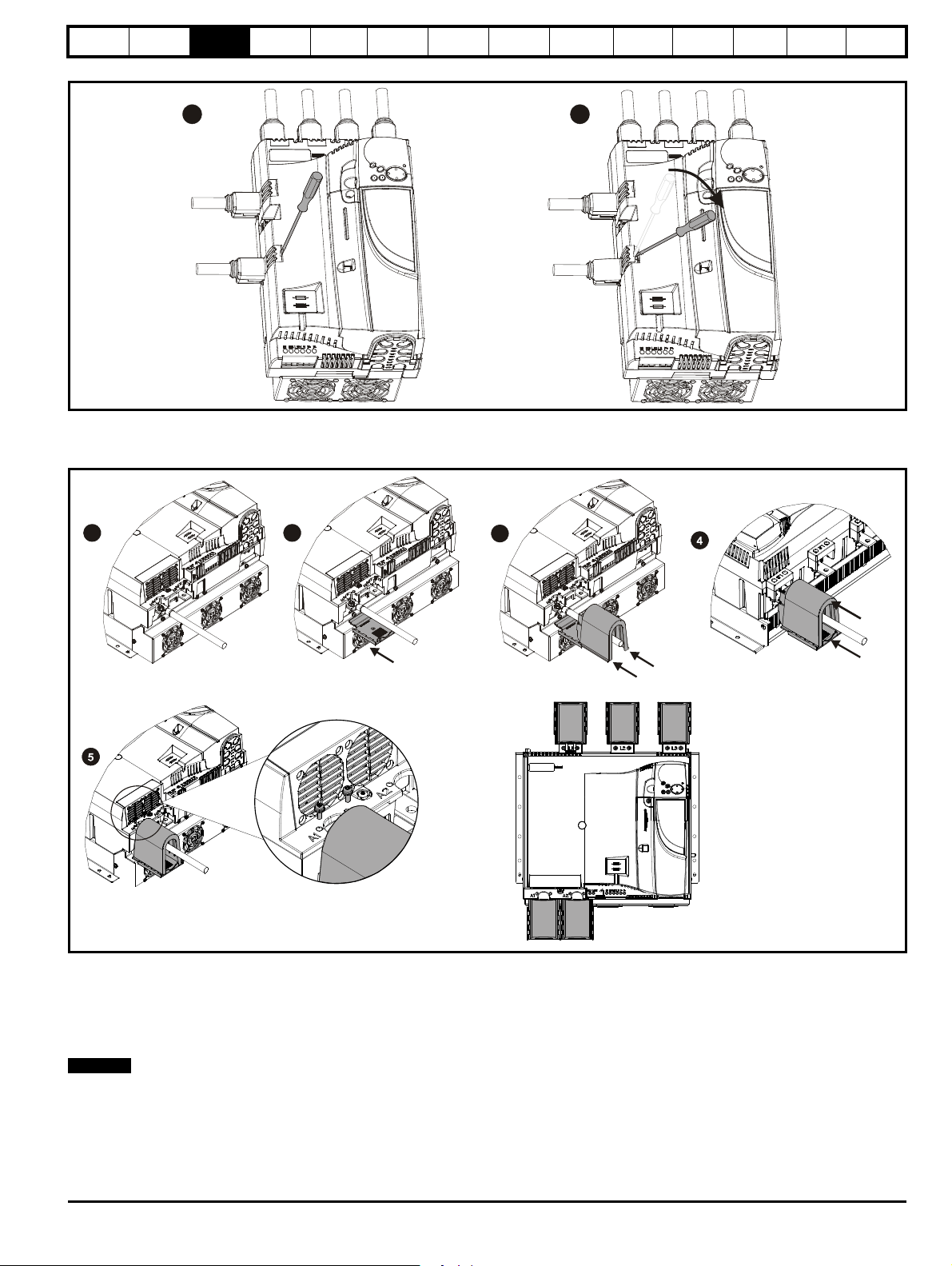
Figure 3-15 Removing the terminal shrouds on size 1 drives
1. Insert the screwdriver as shown.
2. Lever in the direction shown to unclip the terminal shroud and remove.
Figure 3-16 Installing the terminal shrouds on size 2 drives
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
1. Assemble the cable to the busbar.
2. Place the terminal shroud base cover underneath the cable in the orientation shown.
3. Place the terminal shroud over the cable in the orientation shown, slide the terminal shroud on to the base cover in the direction shown until it
clicks in to place.
4. For all power connections slide in the terminal shroud sub-assembly in the direction as shown.
5. Insert the 2 x M4 x 16 screws using a pozi drive screwdriver.
To remove the terminal shrouds, please reverse the process above.
Mentor MP User Guide 25
Issue: 4 www.controltechniques.com
Page 26
Safety
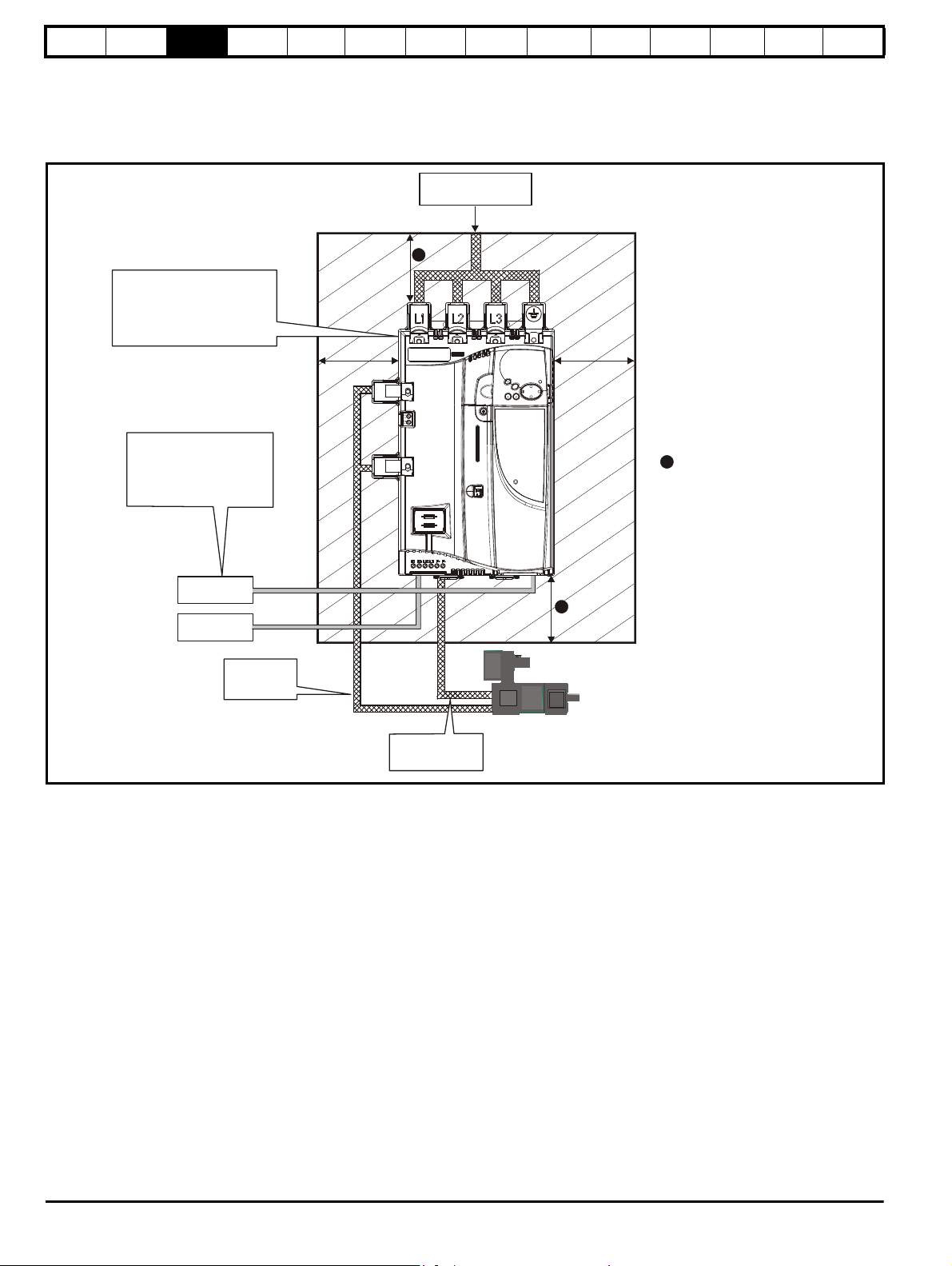
Enclosure
AC supply contactor,
line chokes and fuses
External
controller
Ensure minimum clearances
are maintained for the drive.
Forced or convection air-flow
must not be restricted by any
object or cabling
Auxillary
supply
Signal cables
Plan for all signal cables
to be routed at least
300mm (12in) from the
drive and any power cable
Armature
connection
cable
Field
connection cable
≥
100mm(4in)
≥
100mm
(4in)
A
A
MA1
MA2
Note
For EMC compliance:
1) Power cabling must be at
least 100mm (4in) from the
drive in all directions
2) Ensure direct metal contact
at drive and filter mounting
points (any paint must be
removed)
100mm for Size 1 drives
200mm for Size 2A/2B drives
A
Note
For Size 2C/2D drives
leave a clearance of 100mm
around the drive.
A
e
P
kT
intText
–()
----------------------------------------
=
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
3.6 Enclosure
3.6.1 Enclosure layout
Please observe the clearances in the diagram below taking into account any appropriate notes for other devices / auxiliary equipment when planning
the installation.
Figure 3-17 Enclosure layout
3.6.2 Enclosure sizing
Refer to section 12.1.2 Typical short-term overload limits on page 145
for drive losses.
Add the dissipation figures for each drive that is to be installed in the
enclosure.
Add the power dissipation figures for each EMC filter that is to be
installed in the enclosure.
Calculate the total heat dissipation (in Watts) of any other equipment to
be installed in the enclosure.
Add the figures of all of the above to get a total heat dissipation figure (in
Watts) for the equipment in the enclosure.
Calculating the size of a sealed enclosure
The enclosure transfers internally generated heat into the surrounding
air by natural convection. The larger the surface area of the enclosure
walls, the better is the dissipation capability. Only the surfaces of the
enclosure that are not in contact with a wall or floor can dissipate heat.
Calculate the minimum required unobstructed surface area A
enclosure from:
for the
e
Where:
Unobstructed surface area in m2 (1 m2 = 10.9 ft2)
A
e
T
ext
Maximum expected temperature in oC outside the
enclosure
int
P Power in Watts dissipated by all heat sources in the
k Heat transmission coefficient of the enclosure material
Example
To calculate the size of an enclosure for the following:
enclosure
enclosure
2/o
in W/m
C
Maximum permissible temperature in oC inside the
T
• Two MP25A4 models operating under full load conditions
• Maximum ambient temperature inside the enclosure: 40°C
• Maximum ambient temperature outside the enclosure: 30°C
Dissipation of each drive: 125W
Dissipation from other heat generating equipment in the enclosure. 11W
(max).
Total dissipation: 2 x (125 + 11) = 272W
26 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 27
Safety
W
H
D
A
e
272W
5.5 40 30–()
---------------------------------
=
W
A
e
2HD–
HD+
--------------------------
=
W
4.945 2 2× 0.6×()–
20.6+
-----------------------------------------------------
=
V
3kP
T
intText
–
---------------------------
=
P
o
P
l
-------
V
31.3× 549×
40 30–
----------------------------------
=
WARNING
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
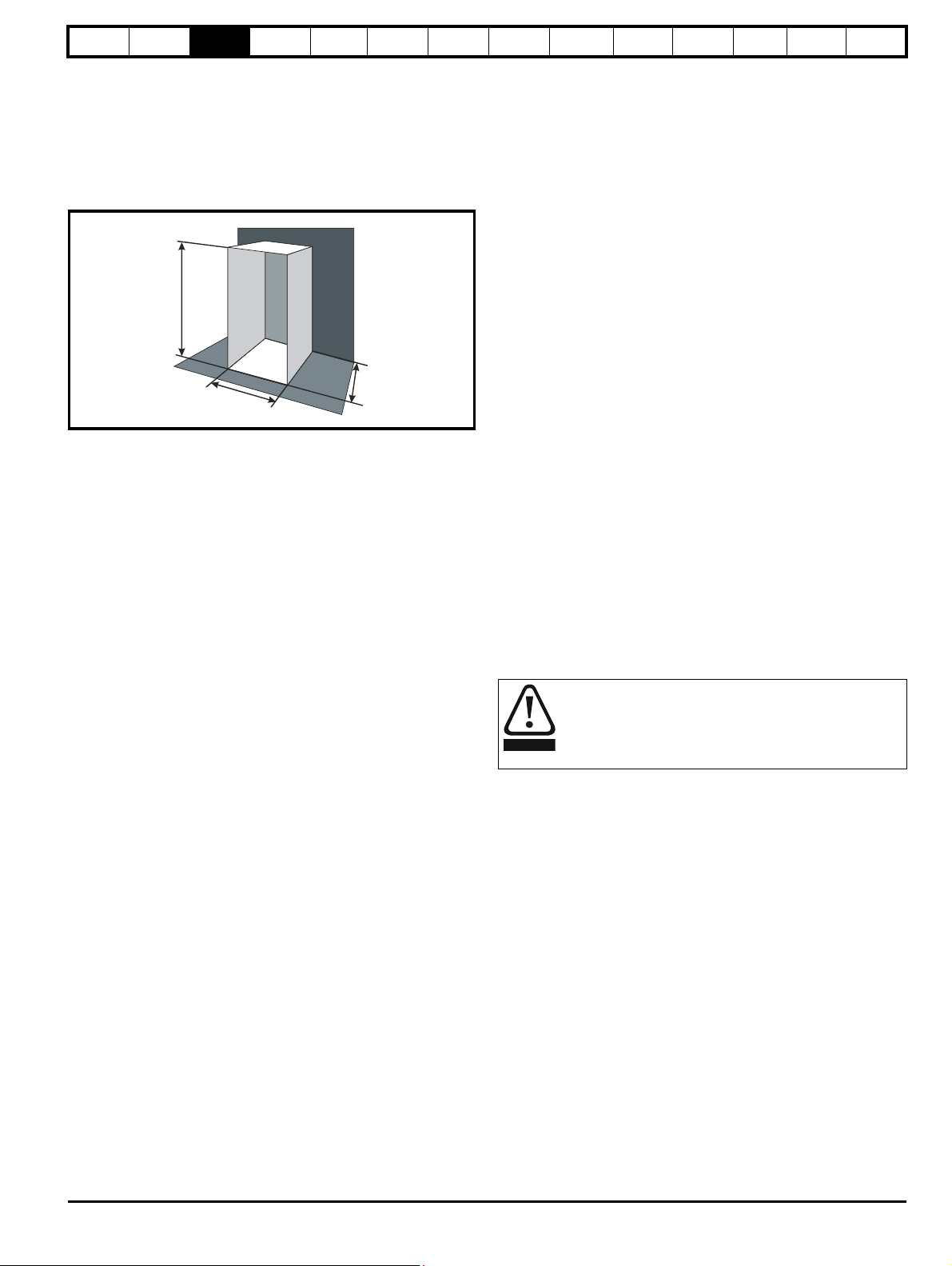
The enclosure is to be made from painted 2mm (0.079in) sheet steel
having a heat transmission coefficient of 5.5 W/m
2/o
C. Only the top,
front, and two sides of the enclosure are free to dissipate heat.
The value of 5.5 W/m
2
/ºC can generally be used with a sheet steel
enclosure (exact values can be obtained by the supplier of the material).
If in any doubt, allow for a greater margin in the temperature rise.
Figure 3-18 Enclosure having front, sides and top panels free to
dissipate heat
Insert the following values:
T
40°C
int
30°C
T
ext
k 5.5
P 272W
The minimum required heat conducting area is then:
2
= 4.945 m
(53.90 ft2) (1 m2 = 10.9 ft2)
Estimate two of the enclosure dimensions - the height (H) and depth (D),
for instance. Calculate the width (W) from:
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
information
Where:
P
is the air pressure at sea level
0
is the air pressure at the installation
P
I
Typically use a factor of 1.2 to 1.3, to allow also for pressure-drops in
dirty air-filters.
Example
To calculate the size of an enclosure for the following:
• Three MP45A4 models operating under full load conditions
• Maximum ambient temperature inside the enclosure: 40°C
• Maximum ambient temperature outside the enclosure: 30°C
Dissipation of each drive: 168W
Dissipation from other heat generating equipment. 15 W
Total dissipation: 3 x (168 + 15) = 549W
Insert the following values:
40°C
T
int
T
30°C
ext
k 1.3
P 549W
Then:
= 214.1 m
3
/hr (126.3 ft3 /min) (1 m3/ hr = 0.59 ft3/min)
3.7 Heatsink fan operation
Mentor MP drive rated 75A and above are ventilated by internally
supplied fans.
Ensure the minimum clearances around the drive are maintained to
allow the air to flow freely.
The drive controls the fan operation based on the temperature of the
heatsink and the drives thermal model system.
UL
Inserting H = 2m and D = 0.6m, obtain the minimum width:
=0.979 m (38.5 in)
If the enclosure is too large for the space available, it can be made
smaller only by attending to one or all of the following:
• Reducing the ambient temperature outside the enclosure, and/or
applying forced-air cooling to the outside of the enclosure
• Reducing the number of drives in the enclosure
• Removing other heat-generating equipment
Calculating the air-flow in a ventilated enclosure
The dimensions of the enclosure are required only for accommodating
the equipment. The equipment is cooled by the forced air flow.
Calculate the minimum required volume of ventilating air from:
Where:
V Air-flow in m
T
Maximum expected temperature in °C outside the
ext
enclosure
T
Maximum permissible temperature in °C inside the
int
enclosure
P Power in Watts dissipated by all heat sources in the
enclosure
3
per hour (1 m3/hr = 0.59 ft3/min)
3.8 IP rating (Ingress Protection)
IP rating
It is the installer’s responsibility to ensure that any enclosure
which allows access to drives from frame sizes 2A to 2D
while the product is energized, provides protection against
contact and ingress to the requirements of IP20.
An explanation of IP rating is provided in section 12.1.13 IP rating on
page 150.
Mentor MP User Guide 27
Issue: 4 www.controltechniques.com
k Ratio of
Page 28
Safety
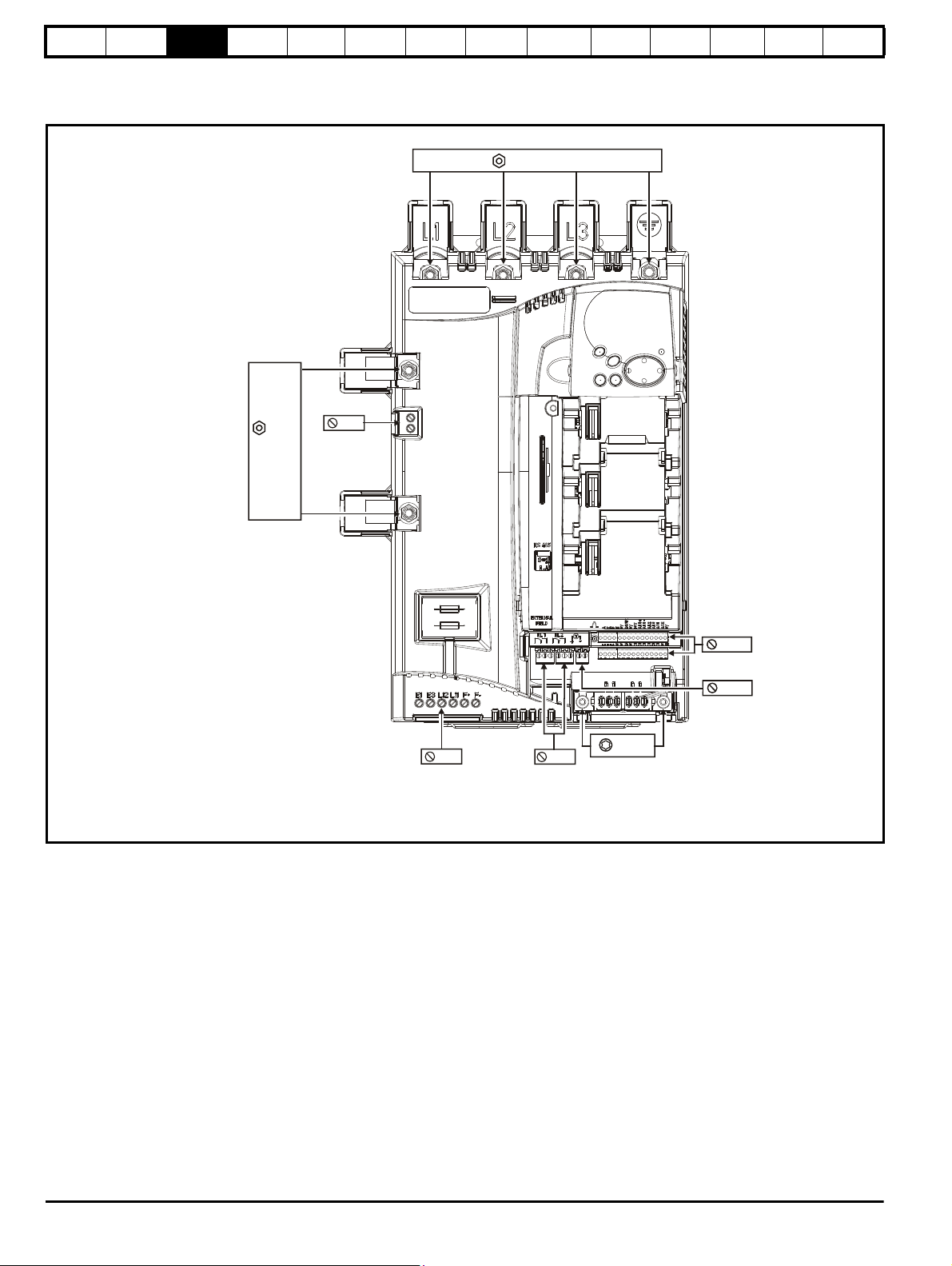
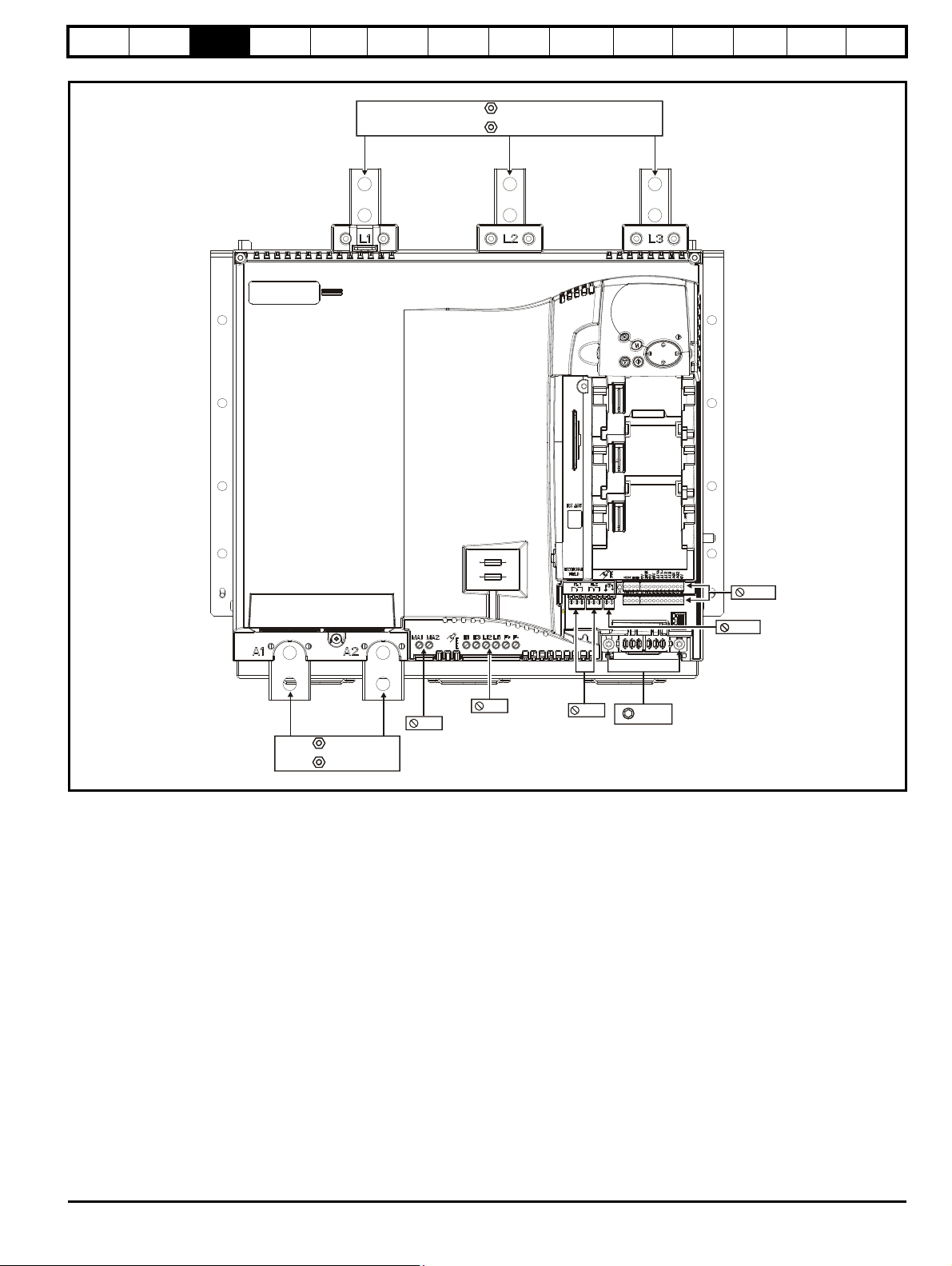
M8 nut / 13 mm AF
AC input
M8 nut
13mm AF
DC output
T25 Torx
Ground
connections
Tac h o
connections
3.5 mm
Relay
connections
3.5mm
5mm
Auxiliary
connections
Control and
encoder
connections
2.5 mm
5mm
Machine
feedback
terminals
MA1
MA2
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
3.9 Electrical terminals
3.9.1 Location of the power and ground terminals
Figure 3-19 Location of the power and ground terminals on size 1 drives
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
28 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 29
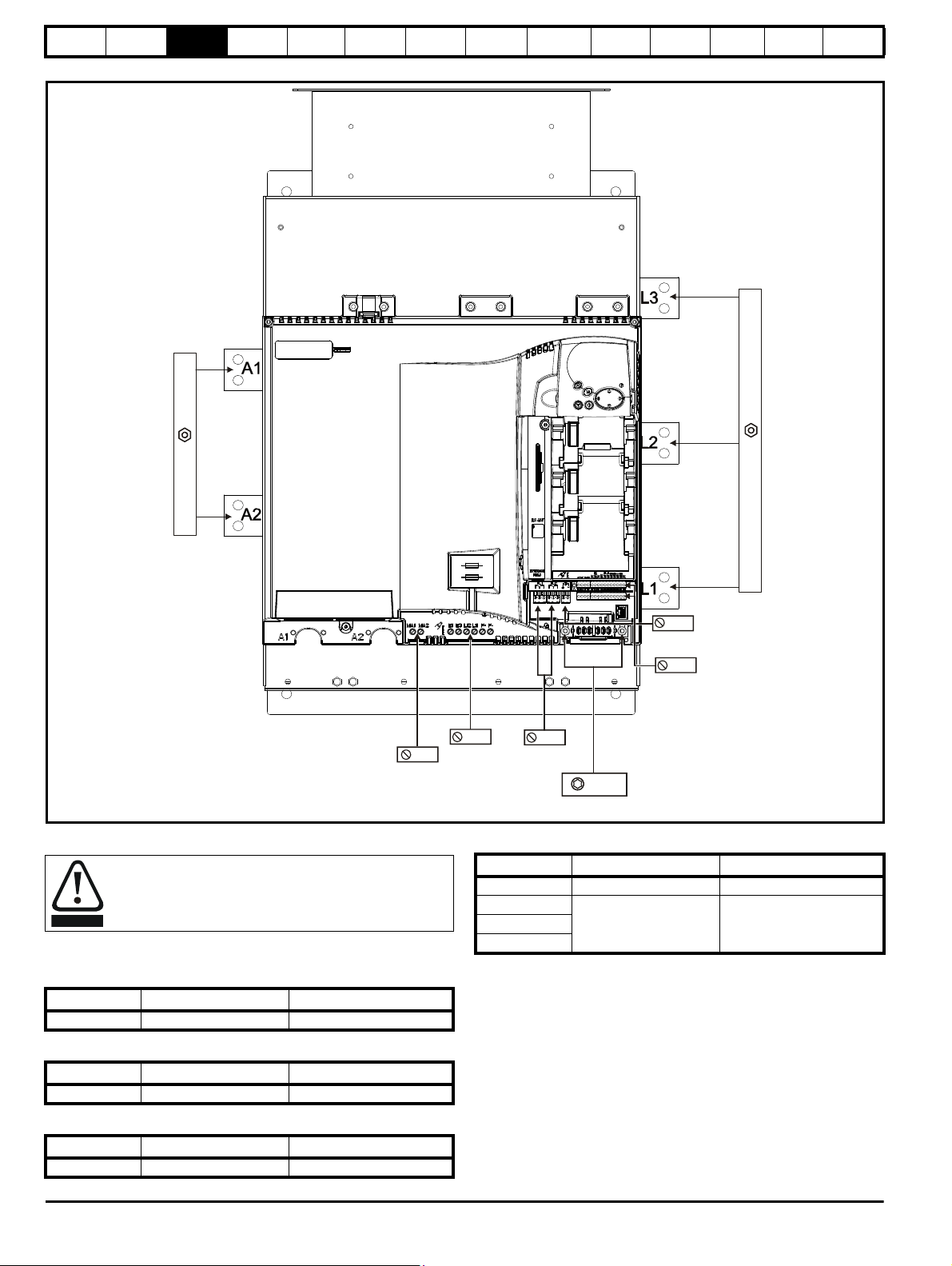
Safety
5mm
Machine
feedback
terminals
Tac h o
connections
5mm
Auxiliary
connections
Control and
encoder
connections
2.5 mm
Relay
connections
3.5mm
3.5 mm
T25 Torx
Ground
connections
M12 nut 19
mm AF
DC output
Size 2A:
Size 2B:
M10 nut 17
mm AF
AC input
M12 nut 19mm AF
Size 2A:
Size 2B:
M10 nut 17mm AF
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
Figure 3-20 Location of the power and ground terminals on size 2A and 2B drives
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
Mentor MP User Guide 29
Issue: 4 www.controltechniques.com
Page 30
Safety
Control and
encoder
connections
2.5mm
Size 2C / 2D:
M12 nut 19mm AF
5mm
Machine
feedback
terminals
5mm
Auxiliary
connections
Relay
connections
3.5mm
T25 Torx
Ground
connections
Ta ch o
connections
3.5mm
Size 2C / 2D:
M12 nut 19mm AF
AC Input
DC Output
WARNING
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
Figure 3-21 Location of the power and ground terminals on size 2C and 2D drives
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
3.9.2 Terminal sizes and torque settings
To avoid a fire hazard and maintain validity of the UL listing,
adhere to the specified tightening torques for the power and
ground terminals. Refer to the following tables.
Table 3-4 Drive power stage terminals on size 2 drives
Model Connection type Torque setting
Size 2A M10 stud 15 Nm (133.0 lb in)
Size 2B
M12 stud 30 Nm (266.0 Ib in)Size 2C
3.9.3 Torque settings
Size 2D
Table 3-1 Drive control, status relay and encoder terminal data
Model Connection type Torque setting
All Plug-in terminal block 0.5 Nm 4.5 lb in
Table 3-2 Drive auxiliary and machine armature terminal data
Model Connection type Torque setting
All Terminal block 0.5 Nm 4.5 lb in
Table 3-3 Drive power stage terminals on size 1 drives
Model Connection type Torque setting
All M8 stud 10 Nm 89.0 lb in
30 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 31

Safety
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
3.10 Routine maintenance
The drive should be installed in a cool, clean, well ventilated location.
Contact of moisture and dust with the drive should be prevented.
Regular checks of the following should be carried out to ensure drive /
installation reliability are maximized:
Environment
Ambient temperature
Dust
Moisture
Enclosure
Enclosure door
filters
Electrical
Screw connections Ensure all screw terminals remain tight
Crimp terminals
Cables Check all cables for signs of damage
Ensure the enclosure temperature remains at
or below maximum specified
Ensure the drive remains dust free – check that
the heatsink and drive fan are not gathering
dust. The lifetime of the fan is reduced in dusty
environments.
Ensure the drive enclosure shows no signs of
condensation
Ensure filters are not blocked and that air is free
to flow
Ensure all crimp terminals remains tight –
check for any discoloration which could indicate
overheating
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
Mentor MP User Guide 31
Issue: 4 www.controltechniques.com
Page 32

Safety
WARNING
WARNING
WARNING
WARNING
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
4 Electrical installation
Many cable management features have been incorporated into the
product and accessories, this chapter shows how to optimize them. Key
features include:
• EMC compliance
• Product rating, fusing and cabling information
• External suppressor resistor details (selection / ratings)
Electric shock risk
The voltages present in the following locations can cause
severe electric shock and may be lethal:
• AC supply cables and connections
• DC cables, and connections
• Many internal parts of the drive, and external option units
Unless otherwise indicated, control terminals are single
insulated and must not be touched.
Isolation device
The AC supply must be disconnected from the drive using
an approved isolation device before any cover is removed
from the drive or before any servicing work is performed.
STOP function
The STOP function does not remove dangerous voltages
from the drive, the motor or any external option units.
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
Drives are suitable for use on supplies of installation
category III and lower, according to IEC 60664-1. This
means they may be connected permanently to the supply at
its origin in a building, but for outdoor installation additional
over-voltage suppression (transient voltage surge
suppression) must be provided to reduce category IV to
category III.
32 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 33
Safety
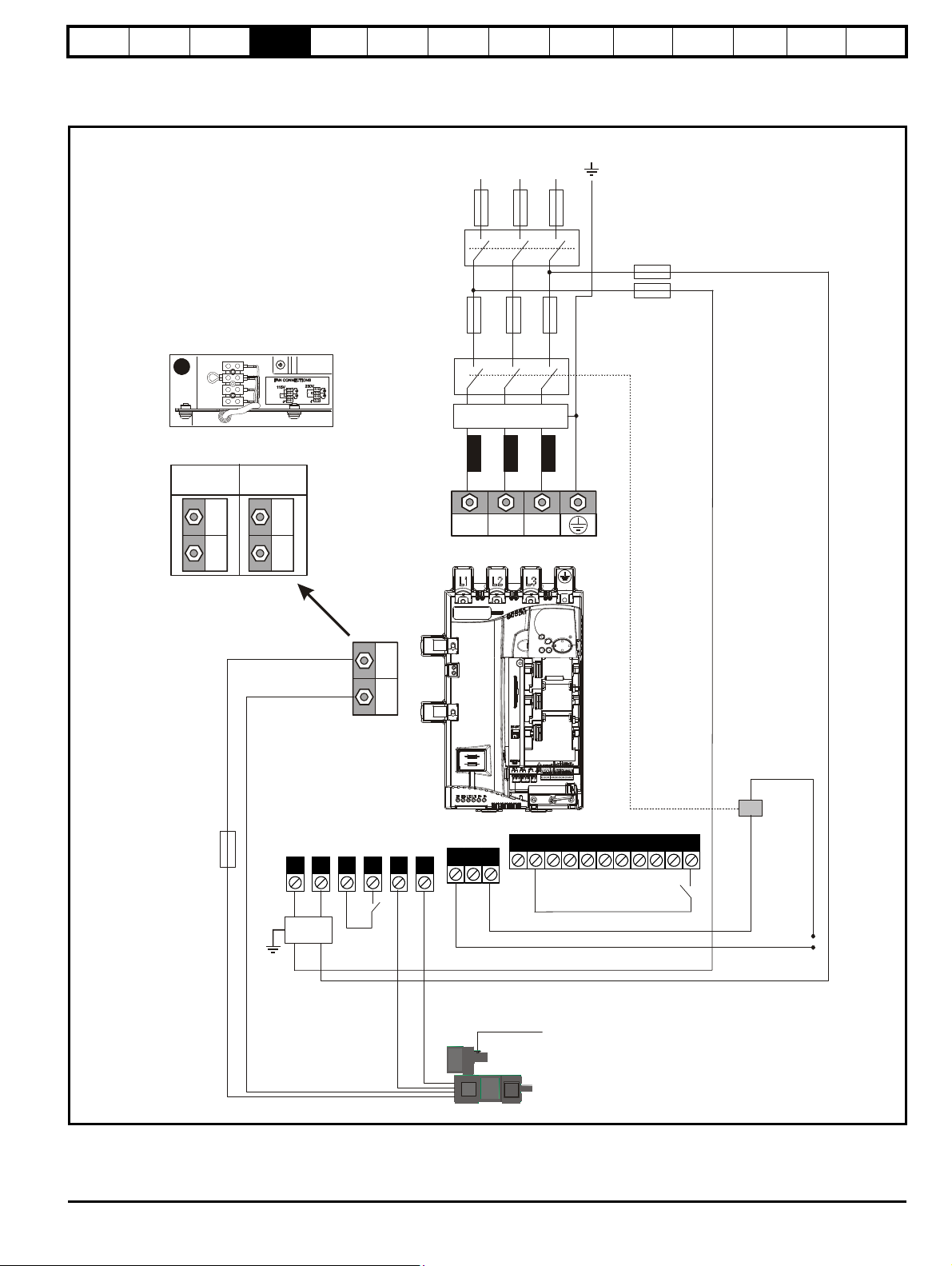
***
Main
AC Supply
Semiconductor
fuses
L1 L2
L3
L1 L2 L3
Isolator
E1
E3
L12 L11
F+
F-
Line
reactor
616263
RLY2
A1
A2
DC fuse
for 4Q only
Field
on / off
2122232425262728293031
24V
Drive
enable
Line
contactor
Input power
terminals
Armature
terminals
Auxiliary connections
Control connections
Motor
Fan supply (where applicable)
Line
contactor
coil
250Vac
maximum
10A
10A
***
Branch
fuses
Branch
fuses
**Optional
EMC
field
filter
**Optional EMC
armature filter
MA1
MA2
1
A1
A2
A1
A2
2 Quadrant
Drives
4 Quadrant
Drives
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
4.1 Electrical connections
Refer to Figure 4-1 and Figure 4-2 to understand the function of the different power connections
Figure 4-1 Power connections for 480V drive
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
1. End user must provide 230 / 115Vac supply for the internal fans on frame sizes C and D, see section 4.12 on page 49.
* For fuse ratings refer to section 4.6 Cable and fuse size ratings on page 38.
**For further information on EMC filters, see section 4.9.3 EMC filter information on page 47.
Mentor MP User Guide 33
Issue: 4 www.controltechniques.com
Page 34

Safety
***
Main
AC Supply
Semiconductor
fuses
L1 L2
L3
L1 L2 L3
Isolator
E1
E3
L12 L11
F+
F-
Line
reactor
616263
RLY2
A1
A2
DC fuse
for 4Q only
Field
on / off
2122232425262728293031
24V
Drive
enable
Line
contactor
Input power
terminals
Armature
terminals
Auxiliary connections
Control connections
Motor
Fan supply (where applicable)
Line
contactor
coil
250Vac
maximum
***
575 / 690Vac
480Vac
maximum
10A
10A
**
Branch
fuses
Branch
fuses
MA1
MA2
1
A1
A2
A1
A2
2 Quadrant
Drives
4 Quadrant
Drives
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Figure 4-2 Power connections for 575V / 600V / 690V drives
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
1. End user must provide 230 / 115Vac supply for the internal fans on frame sizes C and D, see section 4.12 on page 49.
* For fuse ratings refer to section 4.6 Cable and fuse size ratings on page 38.
** The transformer must have zero phase delay.
34 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 35

Safety
WARNING
WARNING
Ground
connection
MA1
MA2
Ground
connections
Ground connection
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
4.2 Ground connections
The drive must be connected to the system ground of the AC supply.
The ground wiring must conform to local regulations and codes of
practice.
Where there is a possibility of temporary condensation or
corrosion occurring, the ground connection should be
protected from corrosion by suitable jointing compound.
Ground loop impedance
The ground loop impedance must conform to the
requirements of local safety regulations.
The drive must be grounded by a connection capable of
carrying the prospective fault current until the protective
device (fuse, etc,) disconnects the AC supply.
The ground connections must be inspected and tested at
appropriate intervals.
Figure 4-3 Location of ground connection on size 1 drives
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
Figure 4-4 Location of ground connections on size 2A / 2B drives
Figure 4-5 Location of ground connections on size 2C / 2D drives
Mentor MP User Guide 35
Issue: 4 www.controltechniques.com
Page 36

Safety
WARNING
1
2
3
4
5
WARNING
1
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
4.3 AC supply requirements
The standard drive is rated for a nominal supply voltage up to 480Vrms.
An optional rating of 575Vrms is available for size 1 drives.
An optional rating of 575Vrms and 690Vrms is available for size 2 drives.
Grounded delta supplies exceeding 575V are not permitted
for drives up to and including 210A. Grounded delta supplies
exceeding 600V are not permitted for drives rated 350A and
above.
4.3.1 Supply types
Drives rated for supply voltages of up to 575V (rated up to 210A) and
600V (350A and above), are suitable for use with any supply type i.e.
TN-S, TN-C-S, TT, IT with grounding at any potential i.e neutral, centre
or corner (“Grounded delta”).
Grounded delta supplies >575V are not permitted for drives rated up to
and including 210A. Grounded delta supplies >600V are not permitted
for drives rated 350A and above.
4.3.2 Supply fault current
The maximum fault current level of the supply to all circuits is 100kA
subject to the capability of the semiconductor fuse fitted.
4.3.3 MOV ground disconnect
The facility for disconnecting the jumper (link) between varistors and
ground is provided for special circumstances, where a sustained high
voltage may be present between lines and ground, for example during a
high potential test or in certain situations with IT supplies and multiple
generators. If the jumper (link) is disconnected then the immunity of the
drive to high voltage impulses is reduced. It is then only suitable for use
with supplies having overvoltage category II, i.e. not for connection at
the origin of the low voltage supply within a building.
Figure 4-6 Removing the MOV ground connection on size 1 drives
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
Figure 4-7 Removing the MOV ground connection on size 2A / 2B
drives
The method for disconnecting the MOV ground connection on size 2A /
2B drives is shown below:
1. Remove the M4 x 30 screw using T20 Torx driver .
If re-fitting the M4 x 30 screw using T20 Torx driver, the screw must be
tightened to a torque of 2.5Nm (1.84 Ib ft).
Figure 4-8 Removing the MOV ground connection on size 2C / 2D
drives
The method for disconnecting the MOV ground connection on size 1
drives is shown below:
1. Remove the M4 x 16 screw using T20 Torx driver.
2. Remove the M4 x 12 screw using T20 Torx driver.
3. Remove the plate.
4. Re-fit the M4 x 12 screw using T20 Torx driver and tighten to a
The method for disconnecting the MOV ground connection on size 2C /
2D drives is shown in Figure 4-8 above:
1. Remove the M4 x 30 screw using T20 Torx driver .
If re-fitting the M4 x 30 screw using T20 Torx driver, the screw must be
tightened to a torque of 2.5Nm (1.84 Ib ft).
torque of 0.6 Nm (0.44 Ib ft).
5. Fit a M4 x 16 nylon screw (not supplied) and tighten to a torque of
0.25 Nm (0.18 Ib ft).
The M4 x 16 screw (1) should not be re-used if the plate (3)
is not re-installed. Instead a nylon screw should be used.
36 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 37

Safety
NOTE
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
4.3.4 Main AC supply (L1, L2, L3)
Table 4-1 Three phase AC supply
Specification
Product voltage variant
480V 575V 690V
Maximum nominal supply 480V 575V 690V
Tolerance +10%
Minimum nominal supply 24V 500V
Tolerance -20% -10%
4.4 Line reactors
The Mentor MP, in common with all naturally commutated thyristor
drives, causes voltage notches at the input supply terminals. In order to
avoid disturbance to other equipment using the same supply, the
addition of external line inductance is strongly recommended in order to
restrict the depth of the notches imposed on the shared supply. This is
generally not necessary where a dedicated transformer is used to supply
the drive.
The following recommendations for added line inductance, have been
calculated based on the power drive systems standard: EN 618003:2004 “Adjustable speed electrical power drive systems – Part 3: EMC
requirements and specific test methods”.
The current ratings specified in Table 4-2 are for typical motor currents
where the motor current ripple is no more than 50% of drive rating.
Table 4-2 Minimum required line inductance for a typical
Drive
rated
current
1200 21 25 31 36 1004 1073
1850 18 23 29 32 1548 1655
1. The above assumes the supply has 1.5% impedance.
2. Assumes a minimum supply rating of 5kA and a maximum rating of
application (50% ripple content)
System voltage Typical
400V 480V 575V 690V
current
rating
Maximum
current
rating
A μH μH μH μHA A
25 220 260 320
45 220 260 320
75 220 260 320
105 220 260 320
155 160 190 230
210 120 140 170
21 22
38 40
63 67
88 94
130 139
176 188
350 71 85 110 120 293 313
420 59 71
470
550 45 54
80 91 393 420
351 375
460 492
700 36 43 53 61 586 626
825
900 28 33
45 52 690 738
753 805
60kA.
4.4.1 Auxiliary AC supply and connections
Table 4-3 Terminal functions
Ter min als Function
E1, E3 Supply for control electronics and field controller.
Field on / off. When L11 and L12 are open the supply is
L11, L12
disconnected to the field regulator so there will be no field
current.
F+, F- Field supply to the motor.
These terminals are used to provide feedback from the
motor armature terminals. This is required when the user
MA1, MA2
has a contactor in the main DC armature connection.
When the contactor is opened the drive will still be
receiving armature feedback. This allows the field
regulator to function correctly when the contactor is open.
Table 4-4 Line to line supply
Specification Val ue
Maximum nominal supply 480V
Tolerance +10%
Minimum nominal supply 208V
Tolerance -10%
Each drive has an onboard field controller with the following current
ratings.
Table 4-5 Current ratings
Model
MP25A4(R) MP25A5(R)
M P 4 5 A 4 ( R ) M P 4 5 A 5 ( R )
MP75A4(R) MP75A5(R)
MP105A4(R) MP105A5(R)
MP155A4(R) MP155A5(R)
MP210A4(R) MP210A5(R)
MP350A4(R) MP350A5(R) MP350A6(R)
MP420A4(R)
MP470A5(R) MP470A6(R)
MP550A4(R)
MP700A4(R) MP700A5(R) MP700A6(R)
MP825A4(R) MP825A5(R) MP825A6(R)
MP900A4(R)
MP1200A4 MP1200A5 MP1200A6
M P 1 8 5 0 A 4 M P 1 8 5 0 A 5 M P 1 8 5 0 A 6
MP1200A4R MP1200A5R MP1200A6R
MP1850A4R MP1850A5R MP1850A6R
Maximum
auxiliary
supply input
current
A
13 8
23 20
Maximum
continuous
field current
rating
A
4.4.2 Supply requirements
Maximum supply in-balance: 2% negative phase sequence (equivalent
to 3% voltage in-balance between phases)
Frequency range: 45 to 65Hz (maximum rate of frequency change is
7Hz/s).
4.5 Control 24Vdc supply
The 24Vdc input has three main functions.
• It can be used to supplement the drive's own internal 24V when
multiple SM-Universal Encoder Plus, SM-Encoder Output Plus, SMI/O Plus, or SM-I/O 32 modules are being used and the current
drawn by these modules is greater than the drive can supply. (If too
much current is drawn from the drive, the drive will initiate a 'PS.24V'
trip)
Mentor MP User Guide 37
Issue: 4 www.controltechniques.com
Page 38
Safety
WARNING
NOTE
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
• It can be used as a back-up power supply to keep the control circuits
of the drive powered up when the line power supply is removed. This
allows any fieldbus modules, application modules, encoders or serial
communications to continue to operate.
• It can be used to commission the drive when the line power supply is
not available, as the display operates correctly. However, the drive
will be in the UV trip state unless the line power supply is enabled,
therefore diagnostics may not be possible. (Power down save
parameters are not saved when using the 24V back-up power
supply input.)
The working voltage range of the 24V power supply is as follows:
Maximum continuous operating voltage: 30.0V
Minimum continuous operating voltage: 19.2V
Nominal operating voltage: 24.0V
Minimum start up voltage: 21.6V
Maximum power supply requirement at 24V: 60W
Recommended fuse: 3 A, 50Vdc
Minimum and maximum voltage values include ripple and noise. Ripple
and noise values must not exceed 5%.
4.6 Cable and fuse size ratings
The selection of the correct fuse is essential to ensure the
safety of the installation
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
Table 4-6 Typical cable sizes for size 1 drives
4mm
10mm
25mm
35mm
70mm
95mm
[1]
UL508C/NEC
2
8 AWG 8 AWG
2
4 AWG 4 AWG
2
1 AWG 1/0 AWG
2
1/0 AWG 1/0 AWG
2
3/0 AWG 4/0 AWG
2
300kcmil 350kcmil
Model
MP25A4(R) MP25A5(R)
MP45A4(R) MP45A5(R)
MP75A4(R) MP75A5(R)
MP105A4(R) MP105A5(R)
MP155A4(R) MP155A5(R)
MP210A4(R) MP210A5(R)
1. The maximum cable size is defined by the power terminal housing
IEC 60364-5-52
Input Output Input Output
2
2.5mm
2
10mm
2
16mm
2
25mm
2
50mm
2
95mm
[2]
using 90°C (194°F) rated cables as per Table A.52-5 of the standard.
2. Assumes the use of 75°C rated cables, as per Table 310.16 of the
National Electrical Code.
The use of higher temperature rated cable would allow a reduction on
the minimum recommended cable size for Mentor MP shown above. For
high temperature cable sizing, please refer to the data supplied by the
manufacturer of the high temperature cable.
Maximum continuous input currents are given in section 2.1 Ratings on
page 6 to aid the selection of fuses and cabling. The maximum input
current is dependent on the ripple content of the output current. A value
of 100% ripple has been assumed for the given ratings.
The cable sizing selected when installing a Mentor MP must comply with
the local wiring regulations. The information provided in this section is
provided for guidance purposes only.
The power terminals on Mentor MP frame size 1 drives have been
designed to accommodate a maximum cable size of 150mm
2
(350kcmil)
with a temperature of 90°C (194°F).
The power terminals on Mentor MP frame size 2A drives have been
2
designed to accommodate a maximum cable size of 2 x 150mm
(2 x
350kcmil) with a temperature of 75°C (167°F).
The power terminals on Mentor MP frame size 2B drives have been
designed to accommodate 2 x 240mm
2
with a temperature of 90°C
(194°F). The use of cables sized using the US national electrical code as
shown in Table 4-8 requires the use of a terminal adaptor.
The power terminals on Mentor MP frame size 2C and 2D drives have
been designed for use with busbars. The drive can be used with cables
as shown in Table 4-8 with the use of a terminal adaptor.
The actual cable size depends on a number of factors including:
• Actual maximum continuous current
• Ambient temperature
• Cable support, method and grouping
• Cable voltage drop
In applications where the motor used is of a reduced rating, the cable
sizing selected can be appropriate for that motor. To protect the motor
and the output cabling the drive must be programmed with the correct
motor rated current.
When using reduced cable sizes, the branch circuit protection fuse rating
needs to be reduced in line with the cable size selected.
The following table shows typical cable sizes based on USA and
International standards, assuming 3 conductors per raceway/conduit, an
ambient temperature of 40°C (104°F) and applications with high output
current ripple content.
38 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 39

Safety
NOTE
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
Table 4-7 Auxiliary wiring for size 1 drives
IEC 60364-5-52 Table A52-4 Column B2
Column B2 derated by 0,87 of PVC at 40
UL 508C
E1, E3 size F+, F- , L11 & L12 size E1, E3 size F+, F- , L11 & L12 size
mm
² mm² mm² mm²
Frame
size
Maximum
input
current
Continuous
output
current
AA
1 13 8 2.5 1.5 14 AWG 14 AWG
Notes for IEC 60364:
IEC 60364-5-52 use installation method B2, table A.52-4 for three loaded conductors, PVC insulation 30°C and apply derating factor for 40°C from
table A.52-14 (0.87 for PVC).
Notes for UL508C:
Either 60°C or 75°C cable can be used. Ampacities as per table 40.3 as described in the UL508C standard.
Table 4-8 Typical cable sizes for size 2 drives
IEC 60364-5-52 Table A52-
12 Column 5 derated by
Model
Maximum
input
current
Continuous
output current
AA
0.91 for 40°C XLPE cables
(IEC 60364-5-52 table A52-
14) and 0.77 for cables
bunching (IEC 60364-5-52
table A52-17 item 4)
90°C cables at 40°C
ambient
Input size
mm²
Output size
mm²
Input cables
US National
Electrical Code
75°C cable at 40°C ambient
Output cables
Kcmil
Kcmil
MP350A4(R) MP350A5(R) MP350A6(R) 313 350 120 150 350 400
MP420A4(R) 375 420 150 185 400 500
MP470A5(R) MP470A6(R) 420 470 185 240 500 600
MP550A4(R) 492 550 300 2 x 185 2 x 300 2 x 350
MP700A4(R) MP700A5(R) MP700A6(R) 626 700 2 x 150 2 x 150 2 x 500 2 x 600
MP825A4(R) MP825A5(R)
MP825A6(R) 738 825 2 x 185 2 x 240 2 x 600 3 x 350
MP900A4(R) 805 900 2 x 185 2 x 240 3 x 350 3 x 400
MP1200A4(R) MP1200A5(R) MP1200A6(R) 1073 1200 2 x 300 3 x 240 3 x 600 4 x 400
MP1850A4(R) MP1850A5(R) MP1850A6(R) 1655 1850 4 x 240 4 x 300 * *
* Values are beyond the mechanical design of the drive. At this power level it may be prudent to consider bus-bars.
Notes for IEC 60364:
1. IEC 60364-5-52 table A 52-12 F method column 5 = Single core cable in free air.
2. IEC 60364-5-52 table A52-14 correction factor for ambient air temperature others than 30°C.
3. IEC 60364-5-52 table A52-17 item 4 correction factor for groups of more than one circuit or more than one multi-core cable placed on a single
layer on a perforated tray.
Notes for US National Electrical Code:
1. Table 310.17 allowable ampacities of single-insulated conducted rated 0 through 2000V in free air, based on ambient air temperature of 30°C
(87°F).
2. Derating factor of 0.88 is applied for 40°C to the 75°C cable column. Table 310.17 is based on 30°C (86°F) ambient air temperature.
3. NEC 2005 edition table 310.15(B)(2)(a) shows the adjustment factors for more than three current-carrying conductors in a race way or cable, for
4-6 current-carrying conductors 0.80 derating factor is applied.
Table 4-9 Auxiliary wiring for size 2 drives
IEC 60364-5-52 Table A52-4 Column B2
Column B2 derated by 0,87 of PVC at 40
UL 508C
E1, E3 size F+, F- , L11 & L12 size E1, E3 size F+, F- , L11 & L12 size
mm
² mm² mm² mm²
Frame size
Maximum
input
current
Continuous
output
current
AA
2 23 20 6 4 10 AWG 10 AWG
Notes for IEC 60364:
IEC 60364-5-52 use installation method B2, table A.52-4 for three loaded conductors, PVC insulation 30°C and apply derating factor for 40°C from
table A.52-14 (0.87 for PVC).
Notes for UL508C: Either 60°C or 75°C cable can be used. Ampacities as per table 40.3 as described in the UL508C standard.
Mentor MP User Guide 39
Issue: 4 www.controltechniques.com
Page 40

Safety
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
4.6.1 Ferraz Shawmut fuses
Ferraz Shawmut fuses are recommended for the Mentor MP.
Table 4-10 Ferraz Shawmut semiconductor fusing for size 1 drives
Model
Field fuses
MP25A4
MP25A5
MP45A4
MP45A5
MP75A4
MP75A5
MP25A4R
MP25A5R
MP45A4R
MP45A5R
MP75A4R
MP75A5R
MP105A4
MP105A5
MP155A4
MP155A5
MP210A4
MP210A5
MP105A4R
MP105A5R
MP155A4R
MP155A5R
MP210A4R
MP210A5R
Description Catalogue number Ref number Description Catalogue number Ref number
10 x 38mm
Ferrule
22 x 58mm
Ferrule
Size 30
Square Body
Fuse
Size 70
Square Body
Fuse
International USA
FR10GB69V12.5 H330011 10 x 38mm Ferrule FR10GB69V12.5 H330011
FR22GC69V32 A220915
FR22GC69V63 X220912
FR22GC69V100 W220911
FR22GC69V32 A220915
FR22GC69V63 X220912
FR22GC69V100 W220911
PC30UD69V160EF M300092
PC30UD69V200EF N300093
PC30UD69V315EF Q300095
PC70UD13C160EF T300604
PC70UD13C200EF V300605
PC70UD12C280EF L300712
A50QS Series American Round Fuse A50QS60-4 A218937
A50QS Series American Round Fuse A50QS80-4 L201513
A50QS Series American Round Fuse A50QS125-4 K218417
A70QS Series American Round Fuse A70QS60-4 H219473
A70QS Series American Round Fuse A70QS80-4 X212816
A70QS Series American Round Fuse A70QS125-4 Q216375
A50QS Series American Round Fuse A50QS175-4 A222663
A50QS Series American Round Fuse A50QS250-4 W211251
A50QS Series American Round Fuse A50QS350-4 T215343
A70QS Series American Round Fuse A70QS175-4 A223192
A70QS Series American Round Fuse A70QS250-4 L217406
A70QS Series American Round Fuse A70QS350-4 M211266
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
A50QS series are only rated up to 500Vac.
Table 4-11 Ferraz Shawmut branch circuit protection fusing for size 1 drives
Model
Description Catalogue number Ref number Catalogue number
International USA
Auxiliary 21 x 57mm Cylindrical HSJ15 D235868 AJT10
MP25A4 MP25A5
FR22GG69V25 N212072 AJT30
MP45A4 MP45A5 FR22GG69V50 P214626 AJT45
MP75A4 MP75A5 FR22GG69V80 Q217180 AJT70
MP25A4R MP25A5R FR22GG69V25 N212072 AJT30
22 x 58mm Ferrule
MP45A4R MP45A5R FR22GG69V50 P214626 AJT45
MP75A4R MP75A5R FR22GG69V80 Q217180 AJT70
MP105A4 MP105A5 NH 00 Knife Blade NH00GG69V100 B228460 AJT125
MP155A4 MP155A5
MP210A4 MP210A5 NH1GG69V200 G228488 AJT225
NH 1 Knife Blade
NH1GG69V160 F228487 AJT175
MP105A4R MP105A5R NH 00 Knife Blade NH00GG69V100 B228460 AJT125
MP155A4R MP155A5R
MP210A4R MP210A5R NH1GG69V200 G228488 AJT225
NH 1 Knife Blade
NH1GG69V160 F228487 AJT175
40 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 41

Safety
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Table 4-12 Ferraz Shawmut DC protection fusing for size 1 drives
International USA
Model
MP25A4R
MP25A5R
MP45A4R
MP45A5R
MP75A4R
MP75A5R
MP105A4R
MP105A5R
MP155A4R
MP155A5R
MP210A4R
MP210A5R
Description Catalogue number Ref number Description
20 x 127mm
Cylindrical
36 x 127mm
Cylindrical
20 x 127mm
Cylindrical
Size 120
Square Body
Size 121
Square Body
Size 122
Square Body
FD20GB100V32T F089498
FD36GC100V80T A083651
FD20GC100V63T x 2
connected in parallel.
F083656 x 2
connected in parallel.
D120GC75V160TF R085253
D121GC75V250TF Q085252
D122GC75V315TF M085249
Optimization
SMARTCARD
operation
Onboard
PLC
A70QS Series
American Round Fuse
A70QS Series
American Round Fuse
A70QS Series
American Round Fuse
A70QS Series
American Round Fuse
A70QS Series
American Round Fuse
A70QS Series
American Round Fuse
Advanced
parameters
Technical
data
Diagnostics
Catalogue
number
A70QS60-4 H219473
A70QS80-4 X212816
A70QS125-4 Q216375
A70QS175-4 A223192
A70QS250-4 L217406
A70QS350-4 M211266
UL
information
Ref number
DC fusing is required on four quadrant (R) drives only.
Mentor MP User Guide 41
Issue: 4 www.controltechniques.com
Page 42

Safety
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
Table 4-13 Ferraz Shawmut semiconductor fusing for size 2 drives
Model
Field fuses
MP350A4
Description Catalogue number Ref number Description Catalogue number Ref number
10 x 38mm
Ferrule
International USA
FR10GB69V25 L330014 10 x 38mm Ferrule FR10GB69V25 L330014
PC30UD69V500TF W300399
A50QS450-4
A7OQS450-4
EQ16871
MP350A4R PC71UD11V500TF F300523 A7OQS450-4 F214848
MP350A5
MP350A6
MP350A5R
MP350A6R
MP420A4 PC32UD69V630TF M300069
PC31UD69V500TF T300006
PC72UD13C500TF D300498
A70QS450 F214848
A50QS600-4
A70QS600-4
Q219457
Y219993
MP420A4R PC272UD13C630TF W300721 A70QS600-4 Y219993
MP470A5
MP470A6
MP470A5R
PC272UD13C700TF X300722
2 x A70QS400
in parallel
J214345 (x2)
MP470A6R
MP550A4 PC33UD69V700TF Y300079
A50QS700-4
A70QS700-4
N223181
E202772
MP550A4R PC272UD13C700TF X300722 A70QS700-4 E202772
MP700A4 PC32UD69V1000TF S300074
A50QS900-4
2 x A70QS500-4
in parallel
R212282
A218431 (x2)
MP700A4R PC72UD10C900TF G300869
MP700A5
MP700A6
MP700A5R
MP700A6R
MP825A4 PC32UD69V1100TF M300759
MP825A5
Square Body
Fuses
MP825A6
PC32UD69V1000TF S300074
PC73UD12C900TF T300512
PC33UD69V1100TF C300083
MP825A4R
MP825A5R
PC73UD95V800TFB W300514
American Round
Fuses Form 101
Range A70QS
2 x A70QS500
in parallel.
A50QS1200-4
2 x A70QS600-4
in parallel
2 x A7OQS600-4
in parallel
A218431 (x2)
C217904
Y219993 (x2)
Y219993 (x2)
MP825A6R
MP900A4 PC33UD69V1250TF D300084
MP900A4R PC73UD95V800TFB W300514
A 50 QS 12 0 0- 4
2 x A7OQS600-4
in parallel
2 x A7OQS600-4
in parallel
C217904
Y219993 (x2)
Y219993 (x2)
2 x A5OQS800-4
MP1200A4 PC33UD60V1600TF Z300586
in parallel.
2 x A70QS800-4
C202287 (x2)
Z213830 (x2)
in parallel
MP1200A4R PC273UD11C16CTF J302228
MP1200A5
MP1200A6
MP1200A5R
MP1200A6R
PC232UD69V16CTD W300215
PC273UD11C16CTF J302228
2 x A70QS800-4
in parallel
Z213830 (x2)
2 x A5OQS1000-4
MP1850A4
MP1850A4R
MP1850A5
MP1850A6
MP1850A5R
**7,5 URD 44 PPSAF
2200
in pa ralle l.
*3 x A7OQS700-4
in parallel
**K235184
*3 x A7OQS700-4
in parallel
B217391 (x2)
*E202772 (x3)
*E202772 (x3)
MP1850A6R
F214848
UL
information
A50QS series are only rated up to 500Vac.
*Application overload limited to infrequent overloads to avoid fuse wear out
**Fuse limits applications to those operating at rated current. No cyclic overloads permitted.
42 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 43

Safety
NOTE
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
Table 4-14 Ferraz Shawmut branch circuit protection fusing for size 2 drives
Model
Description Catalogue number Ref number Description Catalogue number Ref number
International USA
25A 600Vac
Auxiliary
High Speed
HSJ205 G235871J
Class J
MP350A4(R)
MP350A5(R)
MP350A6(R)
NH2GG69V355 Y228503
MP420A4(R) NH3GG69V400 D228508 A6D500R P217294
MP470A5(R)
MP470A6(R)
MP550A4 (R)
MP700A4(R)
MP825A4(R)
MP825A5(R)
MP825A6(R)
MP700A5(R)
MP700A6(R)
General
purpose IEC
(square body)
NH4GG69V630-8
NH4AGG69V630-8
NH4GG69V630-8
NH4AGG69V630-8
NH4GG69V800-8
NH4AGG69V800-8
NH4GG69V800-8
NH4AGG69V800-8
E215537
W222107
E215537
W222107
K216554
M222858
K216554
M222858
MP900A4R)
MP1200A4(R)
MP1850A4(R)
MP1200A5(R)
MP1200A6(R)
MP1850A5(R)
MP1850A6(R)
General
purpose IEC
(round body)
MF76GG69V1250 E302753
MF114GG69V2000 G302755 A4BQ2000 B223101
SMARTCARD
operation
25A 600Vac
High Speed
General purpose
US (round body)
Onboard
PLC
Class J
Advanced
parameters
Technical
data
AJT25R X21160J
A6D400R B216776
A6D600R T217804
A4BQ800 Z219373
A4BQ1000 P216282
A4BQ1200 R216790
Diagnostics
UL
information
USA fuses are only rated up to 600Vac.
Table 4-15 Ferraz Shawmut DC protection fusing for size 2 drives
International USA
Model
MP350A4R
MP350A5R
MP350A6R
Description Catalogue number Ref number Description
D123GB75V630TF C098557
American round fuse
Catalogue
number
Ref number
A70QS600-4 Y219993
A100P600-4 A217373
MP420A4R D123GB75V800TF J220946 A70QS800-4 Z213830
MP470A5R
MP470A6R
MP550A4R A70QS450-4 (x2) F214848 (x2)
MP700A4R
MP700A5R
Square Body fuse
MP700A6R
MP825A4R
MP825A5R
MP825A6R
MP900A4R D2123GB75V14CTF B090483
MP1200A4R
MP1200A5R
MP1200A6R
MP1850A4R
MP1850A5R
MP1850A6R
Square Body fuses
3 in parallel
Square Body fuses
4 in parallel
D2122GD75V900TF T220955
D2123GB75V12CTF D098558
PC73UD13C630TF
(x3)
PC73UD13C700TF
(x4)
Q300509 (x3)
R300510 (x4)
American round fuses
2 in parallel
American round fuse A100P1200-4 N218397
American round fuses
2 in parallel
American round fuse A100P1200-4 N218397
American round fuses
3 in parallel
American round fuses
3 in parallel
American round fuses
5 in parallel
A100P1000-4 (x2) Y217371 (x2)
A70QS600-4 (x2) Y219993 (x2)
A70QS800-4 (x2) Z213830 (x2)
A70QS600-4 (x3) Y219993 (x3)
A70QS700-4 (x3) E202772 (x3)
A100P700-4 (x3) T223163 (x3)
A70QS600-4 (x5) Y219993 (x5)
A100P600-4 (x5) A217373 (x5)
The use of the A100P series fuses is limited to applications with L/R time constants of 30ms or less.
DC fusing is only required on four quadrant (R) drives.
4.6.2 Alternative fusing
Please refer to section 12.2.2 Alternative fusing on page 157.
Mentor MP User Guide 43
Issue: 4 www.controltechniques.com
Page 44
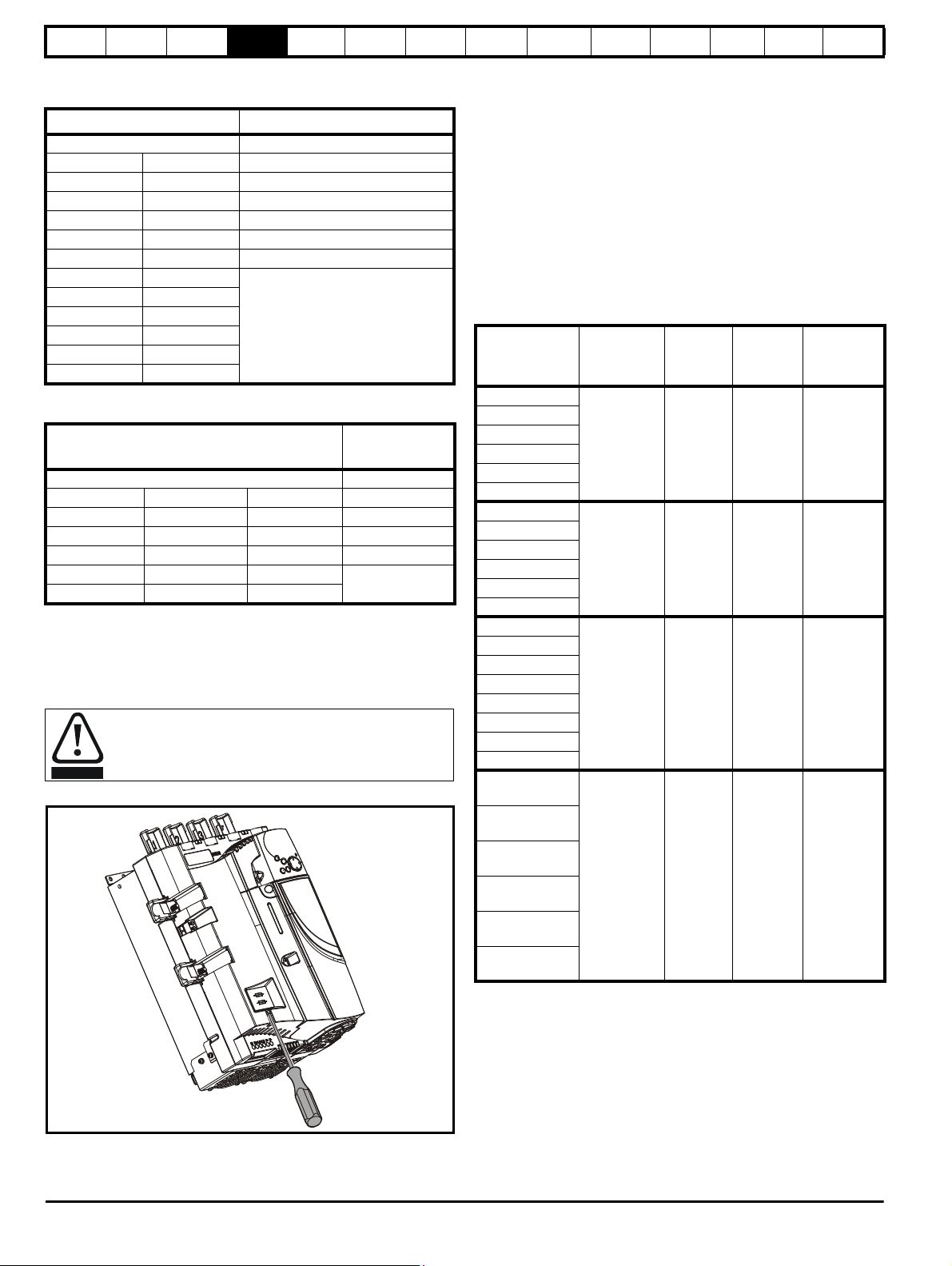
Safety
WARNING
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
Table 4-16 Mentor MP size 1 drive thyristor I2t rating for
semiconductor fusing
Model
Thyristor I
2
t (A2s)
Field fuses 400
MP25A4 MP25A5 1030
MP45A4 MP45A5 3600
MP75A4 MP75A5 15000
MP25A4(R) MP25A5(R) 1030
MP45A4(R) MP45A5(R) 3600
MP75A4(R) MP75A5(R) 15000
MP105A4 MP105A5
MP155A4 MP155A5
MP210A4 MP210A5
MP105A4(R) MP105A5(R)
80000
MP155A4(R) MP155A5(R)
MP210A4(R) MP210A5(R)
Table 4-17 Mentor MP size 2 drive thyristor I
2
t ratings for
semiconductor fusing
2
Model
Thyristor I
(A
t
2
s)
Field fuses 400
MP350A4(R) MP420A4(R) MP550A4(R) 320000
MP350A6(R) MP470A5(R) MP470A6(R) 281000
MP700A4(R) MP825A4(R) MP900A4(R) 1050000
MP700A6(R) MP825A5(R) MP825A6(R) 1200000
MP1200A4(R) MP1200A5(R) MP1200A6(R)
MP1850A4(R) MP1850A5(R) MP1850A6(R)
2720000
4.6.3 Internal field fuses
The internal field fuses provide protection to the field controller. The
fuses can rupture if there is a fault in the field circuit. The user should
check the internal field fuses if the drive is tripping field loss (FdL) and
the field controller is enabled.
Isolate the power before removing the internal field fuses.
Figure 4-9 Removing the internal field fuses
4.7 External suppressor resistor
The Mentor MP range of drives provide internal suppression of the
voltage overshoots created by commutation of the thyristors in the power
stage during the operation of the product. The internal suppression is
suitable for typical applications using recommended line reactors as
defined in section 4.4 Line reactors on page 37. The Mentor MP drives
provide the facility to allow for extra suppression for applications at the
boundaries of the drive's operating area. Applications which may require
an external suppression resistor to be installed have some or all the
following characteristics:
1. Supplies rated ≥10kA with less than the recommend line reactance.
2. High line-to-line voltage
The recommended external suppressor resistor selections are shown in
Table 4-18.
Table 4-18 Recommended external suppressor resistors
Power
rating
Model
Resistance
kΩ WVVrms
MP25A4(R)
MP45A4(R)
MP75A4(R)
MP105A4(R)
8.2 150 1100 2500
MP155A4(R)
MP210A4(R)
MP25A5(R)
MP45A5(R)
MP75A5(R)
MP105A5(R)
15 150 1400 2500
MP155A5(R)
MP210A5(R)
MP350A4(R)
MP420A4(R)
MP550A4(R)
MP700A4(R)
MP825A4(R)
4.1 300 1100 2500
MP900A4(R)
MP1200A4(R)
MP1850A4(R)
MP350A5(R)
MP350A6(R)
MP470A5(R)
MP470A6(R)
MP700A5(R)
MP700A6(R)
MP825A5(R)
8.6 300 1600 2500
MP825A6(R)
MP1200A5(R)
MP1200A6(R)
MP1850A5(R)
MP1850A6(R)
The following diagram shows the location of the external suppressor
resistor terminals above the L1 and L2 terminals:
Vol tag e
rating
Isolation
voltage
Insert a flat-head screwdriver into the groove as shown above and lever
downwards to remove the fuse cover. Refer to section 4.6.1 Ferraz
Shawmut fuses on page 40 for fuse types.
44 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 45
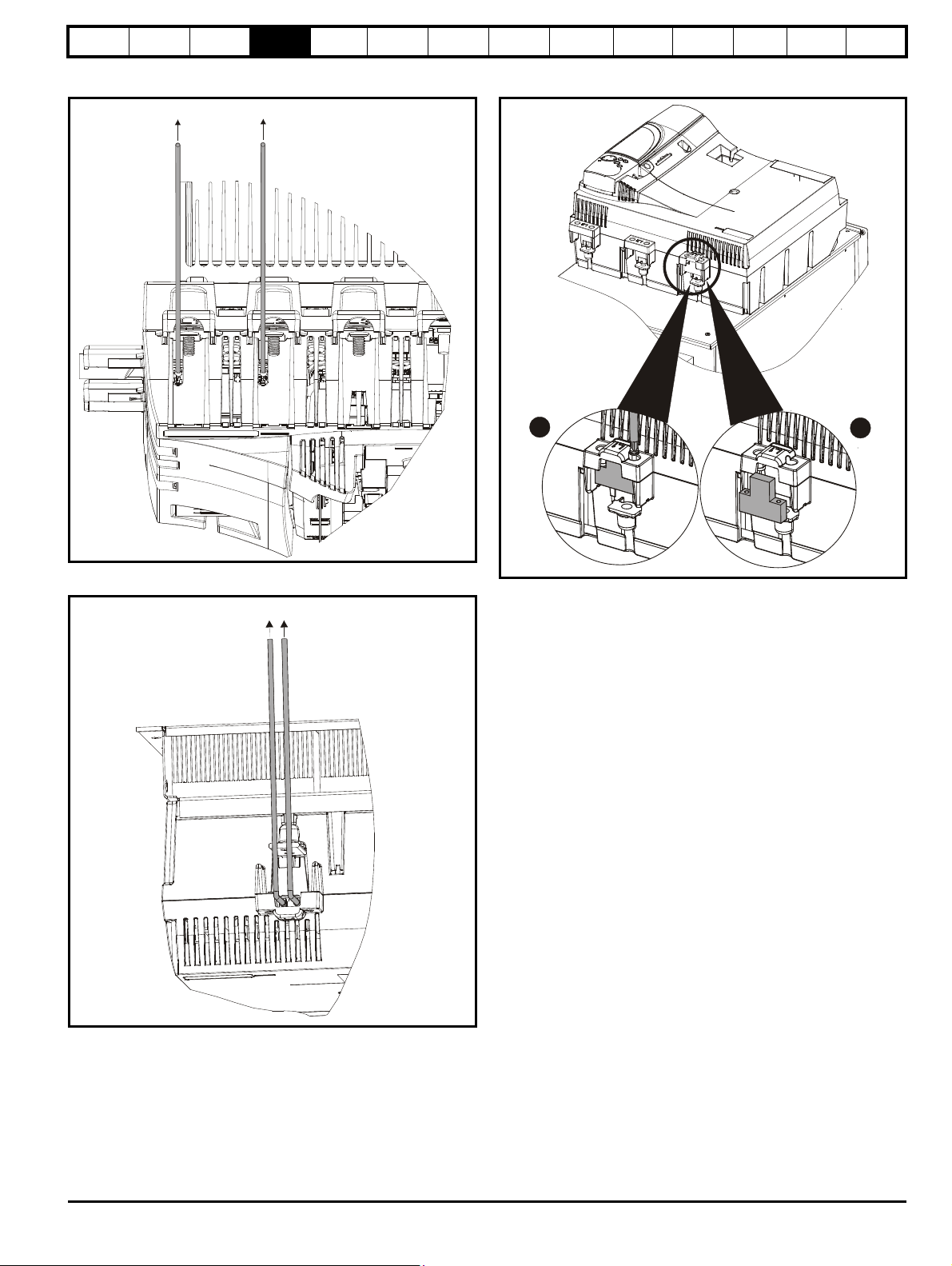
Safety
To external suppression resistor
To external suppression resistor
1
2
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Figure 4-10 Location of external suppressor resistor terminals on
size 1 drives
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
information
Figure 4-12 Removal of bucket suppressor terminals cover on
size 2C and 2D
UL
Figure 4-11 Location of external suppressor resistor terminals on
size 2 drives
1. Remove the 2 x M4 x 16 screws using a pozi drive screwdriver.
2. Remove the bucket suppressor terminal cover.
Shielded cable should be used for bucket suppressor connections. For
UL applications the cable should comply with UL1063 in accordance
with UL508a.
For applications where the external suppressor resistance is chosen to
be less than the recommended value for reasons of economy, it is
essential that the resistance is not less than the minimum resistance
shown in Table 4-19. However selecting a resistance less than the
recommended value requires a more complex installation. The power
rating of the resistor can be selected by the user according to the
dissipation required for the application, up to a maximum of the values
specified in Table 4-19.
Mentor MP User Guide 45
Issue: 4 www.controltechniques.com
Page 46

Safety
WARNING
WARNING
L1
L2
L3
L1
L2
L3
Drive
Main contactor
supply
Start/Reset
Thermal protection
device
External
resistor
connections
WARNING
NOTE
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
Table 4-19 Minimum allowable external suppression resistance
Model
Resistance
MP25A4(R) MP25A5(R)
MP45A4(R) MP45A5(R)
MP75A4(R) MP75A5(R)
MP105A4(R) MP105A5(R)
500 (maximum 150W)
MP155A4(R) MP155A5(R)
MP210A4(R) MP210A5(R)
MP350A4(R)
MP420A4(R)
MP350A5(R)
MP350A6(R)
MP470A5(R)
MP470A6(R)
MP550A4(R)
MP700A4(R)
MP825A4(R)
MP700A5(R)
MP700A6(R)
MP825A5(R)
MP825A6(R)
500 (maximum 300W)
MP900A4(R)
MP1200A4(R)
MP1850A4(R)
MP1200A5(R)
MP1200A6(R)
MP1850A5(R)
MP1850A6(R)
Overload Protection
When using an external suppressor resistor of a resistance or
power rating less than the recommended rating, it is essential
that an overload protection device is incorporated in the
resistor circuit (refer to Figure 4-13).
External suppressor resistor protection parameter settings
The software provided by the Mentor MP provides overload
protection. Failure to correctly configure Pr 11.62, Pr 11 .63
and Pr 11.6 4, as described in the Mentor MP Advanced User
Guide could lead to the resistor being overloaded.
Figure 4-13 Protection circuit for an external suppression resistor
4.8 Ground leakage
The ground leakage current depends on whether an external EMC filter
Ω
is installed. Ground leakage currents for external EMC filters can be
obtained from the manufacturers data sheet for the filter being used.
With no external EMC filter:
<1mA
4.8.1 Use of residual current device (RCD)
There are three common types of ELCB / RCD:
1. AC - detects AC fault currents
2. A - detects AC and pulsating DC fault currents (provided the DC
current reaches zero at least once every half cycle)
3. B - detects AC, pulsating DC and smooth DC fault currents
• Type’s A and AC should never be used with Mentor MP drives.
• Type B must be used with all Mentor MP drives.
Only type B ELCB / RCD are suitable for use with Mentor
If an external EMC filter is used, a delay of at least 50ms should be
incorporated to ensure spurious trips are not seen. The leakage current
is likely to exceed the trip level if all of the phases are not energized
simultaneously.
The installer of the drive is responsible for ensuring compliance with the
EMC regulations that apply where the drive is to be used.
MP drives.
4.9 EMC (Electromagnetic compatibility)
The Mentor MP meets immunity requirements (specified in Table 1243 Immunity compliance on page 164) with no special precautions.
N
Some special measures may be required in certain applications where
the control cables are long or pass outside the building. See section
4.9.4 Surge immunity of control circuits - long cables and connections
outside a building on page 47.
Radio frequency noise emission can occur from any of the power
connections i.e. main and auxiliary A.C connections, armature and field
output terminals.
For many applications in heavy industrial environments the noise
emission is not sufficient to cause interference to other equipment.
When radio frequency emission must be limited the method used should
be chosen to suit the situation.
4.9.1 Power drive systems standard
Compliance with the EMC standard for power drive systems (PDS) IEC
61800-3, EN 61800-3:2004 category C3
To meet this standard a standard armature filter and a standard field filter
must be installed. See Table 4-20 Mentor MP and EMC filter cross
references on page 47 for EMC filter cross references.
Shielded cables must be used for the field and armature and the shields
must be clamped to ground at both ends. The standard is met for cable
lengths up to 100m.
4.9.2 Generic standard and PDS category C2
Compliance with the generic emission standards for industrial
environments category IEC 61000-6-4 and EN 61000-6-4:2007, and the
PDS standard category C2.
To meet this standard a standard field filter and a high performance
armature filter must be installed. See Table 4-20 Mentor MP and EMC
filter cross references on page 47 for EMC filter cross references.
Shielded cables must be used for the field and armature and the shields
must be clamped to ground at both ends. The standard is met for cable
lengths up to 100m.
46 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 47

Safety
CAUTION
CAUTION
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
4.9.3 EMC filter information
Refer to Figure 4-1 on page 33 for the location of the optional EMC filter. See Table 4-20 for EMC filters that can be sourced directly from Epcos and
Schaffner.
It is essential that line reactors be connected between the
filter terminals and the power input terminals, as shown in
Figure 4-1. Failure to observe this requirement could result in
destruction of the thyristors.
Table 4-20 Mentor MP and EMC filter cross references
Manufacturers part number
Model
MP25A4(R)
MP45A4(R)
Schaffner armature
standard
Schaffner armature
high performance
FN3270H-80-35 FN3258-75-52
Epcos
armature
high performance
B84143-A66-R105
MP75A4(R) *B84143-A90-R105
MP105A4(R)
FN3270H-200-99 FN3258H-180-40 B84143BO250S080MP155A4(R)
MP210A4(R)
MP350A4(R)
MP420A4(R)
MP550A4(R)
MP700A4(R)
FN3359-800-99
MP825A4(R)
MP900A4(R)
MP1200A4(R)
MP1850A4(R)
FN3359-1600-99
* This filter is required if the input current to the Mentor MP will be greater than 66 Amperes.
Table 4-21 Emission compliance
Filter
Model
None
Field: Standard
Armature: Standard
Field: Standard
Armature:High
performance
MP25A4(R)
MP45A4(R)
MP75A4(R)
MP105A4(R)
C3
MP155A4(R)
MP210A4(R)
MP350A4(R)
MP420A4(R)
C4
C2
MP550A4(R)
MP700A4(R)
MP825A4(R)
MP900A4(R)
MP1200A4(R)
MP1850A4(R)
Key (shown in decreasing order of permitted emission level):
C4 EN 61800-3:2004 second environment, restricted distribution
(Additional measures may be required to prevent interference)
C3 EN 61800-3:2004 second environment, unrestricted distribution
C2 Industrial generic standard EN 61000-6-4:2007
EN 61800-3:2004 first environment restricted distribution (The
following caution is required by EN 61800-3:2004)
C1 Residential generic standard EN 61000-6-3:2007
EN 61800-3:2004 first environment unrestricted distribution
EN 61800-3:2004 defines the following:
• The first environment is one that includes residential premises. It
also includes establishments directly connected without intermediate
transformers to a low-voltage power supply network which supplies
buildings used for residential purposes.
• The second environment is one that includes all establishments
other than those directly connected to a low-voltage power supply
network which supplies buildings used for residential purposes.
• Restricted distribution is defined as a mode of sales distribution in
which the manufacturer restricts the supply of equipment to
suppliers, customers or users who separately or jointly have
technical competence in the EMC requirements of the application of
drives.
4.9.4 Surge immunity of control circuits - long
cables and connections outside a building
The input/output ports for the control circuits are designed for general
use within machines and small systems without any special precautions.
In applications where they may be exposed to high-energy voltage
surges, some special measures may be required to prevent malfunction
or damage. Surges may be caused by lightning or severe power faults in
association with grounding arrangements which permit high transient
voltages between nominally grounded points. This is a particular risk
where the circuits extend outside the protection of a building.
As a general rule, if the circuits are to pass outside the building where
the drive is located, or if cable runs within a building exceed 30m, some
additional precautions are advisable. One of the following techniques
should be used:
1. Galvanic isolation, i.e. do not connect the control 0V terminal to
This is a product of the restricted distribution class according
to IEC 61800-3. In a residential environment this product may
cause radio interference in which case the user may be
required to take adequate measures.
ground. Avoid loops in the control wiring, i.e. ensure every control
wire is accompanied by its return (0V) wire.
2. Shielded cable with additional power ground bonding. The cable
shield may be connected to ground at both ends, but in addition the
Schaffner standard
field filter
Epcos standard
field filter
FN3280H-8-29 W62400-T1262D004
FN3280H-8-29
Mentor MP User Guide 47
Issue: 4 www.controltechniques.com
Page 48
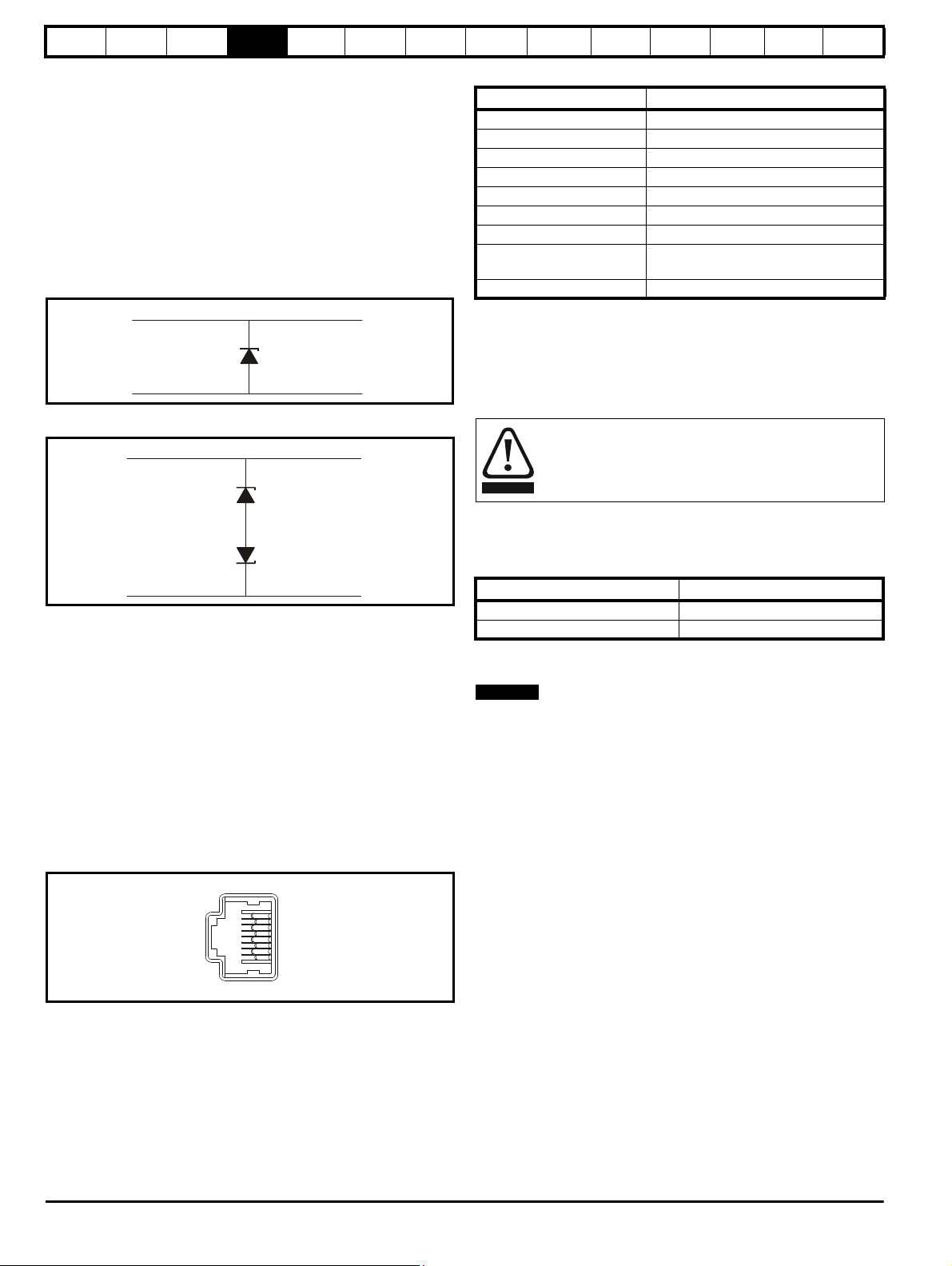
Safety
Signal from plant Signal to drive
0V 0V
30V zener diode
e.g. BZW50-15
Signal from plant Signal to drive
0V 0V
2 x 15V zener diode
e.g. 2xBZW50-15
1
8
WARNING
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
ground conductors at both ends of the cable must be bonded
together by a power ground cable (equipotential bonding cable) with
cross-sectional area of at least 10mm
2
, or 10 times the area of the
signal cable shield, or to suit the electrical safety requirements of the
plant. This ensures that fault or surge current passes mainly through
the ground cable and not in the signal cable shield. If the building or
plant has a well-designed common bonded network this precaution
is not necessary.
3. Additional over-voltage suppression - for the analog and digital
inputs and outputs, a zener diode network or a commercially
available surge suppressor may be connected in parallel with the
input circuit as shown in Figure 4-14 and Figure 4-15.
Figure 4-14 Surge suppression for digital and unipolar inputs and
outputs
Figure 4-15 Surge suppression for analog and bipolar inputs and
outputs
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
Table 4-22 RJ45 connections
Pin Function
1 120Ω Termination resistor
2RX TX
3 0V isolated
4 +24V (100 mA)
5 0V isolated
6 TX enable
7RX\ TX\
8
RX\ TX\(if termination resistors are
required, jumper (link) to pin 1)
Shell 0V isolated
The communications port applies a two-unit load to the communications
network. Connectors 2, 3, 7 and shield must always be made to the
serial communications port. Shielded cable must be used at all times.
4.10.1 Isolation of the serial communications port
The serial PC communications port is double insulated and meets the
requirements for SELV in EN 50178:1998.
In order to meet the requirements for SELV in IEC 60950 (IT
equipment) it is necessary for the control computer to be
grounded. Alternatively, when a lap-top or similar device is
used which has no provision for grounding, an isolation
device must be incorporated in the communications lead.
An isolated serial communications lead has been designed to connect
the drive to IT equipment (such as lap-top computers), and is available
from the supplier of the drive. See Table 4-23 for details.
Table 4-23 Isolated serial comms lead details
Part number Description
Surge suppression devices are available as rail-mounting modules, e.g.
from Phoenix Contact:
Unipolar TT-UKK5-D/24 DC
Bipolar TT-UKK5-D/24 AC
These devices are not suitable for encoder signals or fast digital data
networks because the capacitance of the diodes adversely affects the
signal. Most encoders have galvanic isolation of the signal circuit from
the motor frame, in which case no precautions are required. For data
networks, follow the specific recommendations for the particular
network.
4.10 Serial communications connections
The Mentor MP has a serial communications port (serial port) as
standard supporting two wire EIA(RS)-485 communications. See Table
4-22 for the connection details for the RJ45 connector.
Figure 4-16 Serial communications port
The “isolated serial communications” lead has reinforced insulation as
defined in IEC 60950 for altitudes up to 3,000m.
When using the CT EIA232 Comms cable the available baud rate is
limited to 19.2k baud.
4.10.2 Multi-drop network
The drive can be used on a 2 wire EIA485 multi-drop network using the
drive's serial communications port when the following guidelines are
adhered to.
Connections
The network should be a daisy chain arrangement and not a star,
although short stubs to the drive are allowed.
The minimum connections are pins 2 (RX TX), 3 (isolated 0V), 7 (RX\
4500-0087 CT EIA232 Comms cable
4500-0096 CT USB Comms cable
N
TX\) and the shield.
Pin 4 (+24V) on each drive can be connected together but there is no
power sharing mechanism between drives and therefore the maximum
power available is the same as a single drive. (If pin 4 is not linked to the
other drives on the network and has an individual load then the
maximum power can be taken from pin 4 of each drive.)
Termination resistors
If a drive is on the end of the network chain then pins 1 and 8 should be
linked together. This will connect an internal 120Ω termination resistor
between RXTX and RX\TX\. (If the end unit is not a drive or the user
wishes to use their own termination resistor, a 120Ω termination resistor
should be connected between RXTX and RX\TX\ at the end unit.)
If the host is connected to a single drive then termination resistors
should not be used unless the baud rate is high.
CT Comms cable
The CT Comms cable can be used on a multi-drop network but should
only be used occasionally for diagnostic and set up purposes. The
48 Mentor MP User Guide
www.controltechniques.com Issue: 4
network must also be made up entirely of Mentor MPs.
Page 49

Safety
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
If the CT Comms cable is to be used, then pin 6 (TX enable) should be
connected on all drives and pin 4 (+24V) should be linked to at least 1
drive to supply power to the converter in the cable.
Only one CT Comms cable can be used on a network.
4.11 Shield connections
These instructions must be followed to ensure suppression of radiofrequency emission and good noise immunity in the encoder circuit. It is
recommended that the instructions for the connection of the encoder
cable be followed closely and, to use the grounding bracket and
grounding clamp supplied with the drive, to terminate the shields at the
drive.
4.11.1 Motor cables
Use of a motor cable with an overall shield for the armature and field
circuits may be needed if there is a critical EMC emissions requirement.
Connect the shield of the motor cable to the ground terminal of the motor
frame using a jumper (link) that is as short as possible and not
exceeding 50mm (2in) long. A full 360° termination of the shield to the
terminal housing of the motor is beneficial.
4.11.2 Encoder cable
To get the best results from shielding use cable with an overall shield
and separate shields on individual twisted pairs. Refer to section
4.15 Connecting an encoder on page 54.
4.11.3 Control cables
It is recommended that signal cables should be shielded. This is
essential for encoder cables, and strongly recommended for analog
signal cables. For digital signals it is not necessary to use shielded
cables within a panel, but this is recommended for external circuits,
especially for inputs where a momentary signal causes a change of state
(i.e. latching inputs).
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
information
A faston tab is located on the grounding bracket for the purpose of
connecting the drive 0V to ground should the user wish to do so.
Figure 4-18 Grounding of signal cable shields using the
grounding bracket
UL
4.11.4 Grounding hardware
The drive is supplied with a grounding bracket, to facilitate EMC
compliance. This provides a convenient method for direct grounding of
cable shields without the use of "pig-tails". Cable shields can be bared
and clamped to the grounding bracket using metal clips, clamps or cable
ties. Note that the shield must in all cases be continued through the
clamp to the intended drive terminal in accordance with the connection
details for the specific signal.
Figure 4-17 Fitting of grounding bracket
Loosen the ground connection (2 x M5 x 10) screws using T25 Torx
driver and slide the grounding bracket in the direction shown. Once in
place, re-tighten the ground connection M5 x 10 screws to 3Nm (2.21 Ib
ft).
4.12 Connecting the fan on size 2C and 2D drives
A supply needs to be connected to the dual fan unit enclosed within the
lower duct on Mentor MP size 2C and 2D. The fans can be configured
for a 230Vac (factory setting) or 115Vac supply as shown below on the
label next to the fan connections. When connecting the fan supply, the
screws should be tightened with a maximum torque of 1.2 Nm (0.88 Ib ft)
to 2 Nm (1.47 Ib ft).
Figure 4-19 Fan connection
Mentor MP User Guide 49
Issue: 4 www.controltechniques.com
Page 50
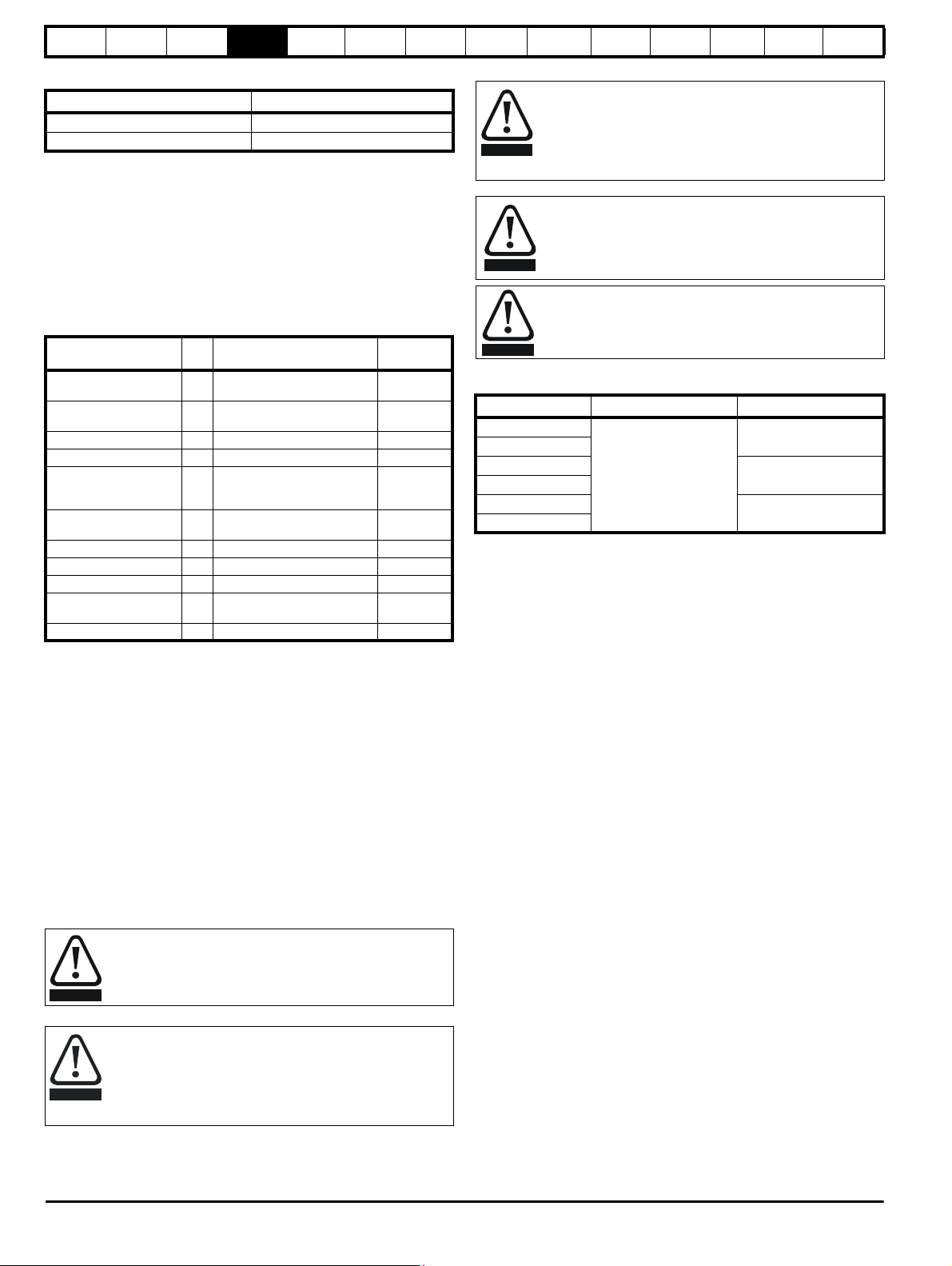
Safety
WARNING
CAUTION
WARNING
WARNING
WARNING
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
Table 4-24 Fan supply specification
Fan configuration Supply specification
230V 230V ±10%
115V 115V ±10%
Cabling should be 300V rated. Rated for at least 3A continuous in line
with local wiring regulations. Cabling should be protected 3A non time
delay fuses i.e. gG, Class CC or Class J and rated for at least 300V, in
accordance with local wiring regulations.
4.13 Control connections
Refer to Figure 4-20 to understand the connection of the different power
connections.
4.13.1 General
Table 4-25 The control connections consist of:
Function Qty Control parameters available
Differential analog input 1
Single ended analog
input
Analog output 2 Source, mode, scaling, 9,10
Digital input 3 Destination, invert, logic select 27, 28, 29
Digital input / output 3
Relay 2 Source, invert
Drive enable 1 Logic select 31
+10V User output 1 4
+24V User output 1 22
0V common 6
+24V External input 1 2
Destination, offset, invert,
scaling
Mode, offset, scaling, invert,
2
destination
Input / output mode select,
destination / source, invert,
logic select
Key:
Destination
parameter:
Source
parameter:
Mode
parameter:
Indicates the parameter which is being controlled by the
terminal / function
Indicates the parameter being output by the terminal
Analog - indicates the mode of operation of the terminal,
i.e. voltage 0-10V, current 4-20mA etc.
Digital - indicates the mode of operation of the terminal,
i.e. positive / negative logic, open collector.
All analog terminal functions can be programmed in menu 7.
All digital terminal functions (including the relays) can be programmed in
menu 8.
The setting of Pr 6.04 can cause the function of digital inputs T25 to T27
to change. For more information, refer to section 11.22.5 Start / stop
logic modes on page 143.
Ter min al
number
5,6
7,8
24, 25, 26
51, 52, 53
61, 62, 63
1, 3, 11, 21,
23, 30
The control circuits are isolated from the power circuits in the
drive by basic insulation (single insulation) only. The installer
must ensure that the external control circuits are insulated
from human contact by at least one layer of insulation
(supplementary insulation) rated for use at the AC supply
voltage.
Status relay contacts are over-voltage category II.
A fuse or other over-current protection should be installed to
the relay circuit.
Table 4-26 Control connection recommended cable sizes
Terminal Minimum cable size Maximum cable size
Machine armature
Auxiliary
Control I/O
Encoder
Tachogenerator
Status relays
0.5mm
2
20 AWG
5mm
1.31mm
2.5mm
2
10 AWG
2
16 AWG
2
12 AWG
If the control circuits are to be connected to other circuits
classified as Safety Extra Low Voltage (SELV) (e.g. to a
personal computer), an additional isolating barrier must be
included in order to maintain the SELV classification.
If any of the digital inputs (including the drive enable input)
are connected in parallel with an inductive load (i.e.
contactor or motor brake) then suitable suppression (i.e.
diode or varistor) should be used on the coil of the load. If no
suppression is used then over voltage spikes can cause
damage to the digital inputs on the drive.
50 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 51

Safety
Analog speed reference 1
Single-ended
signal
Differential signal
Analog input 2
Analog input 1
1
2
5
6
3
2122232425262728293031
At speed
Reset
Run forward
Run reverse
Analog input 1/
input 2 select
Jog forward select
Speed
4
7
11910
8
Armature
current
Analog input 3
(Motor thermistor)
0V
+24V input
0V
Non-inverting input
Inverting input
0V
Non-inverting input
Inverting input
+10V output
Analog input 2
Analog input 3*
Analog output 1
Analog output 2
0V
0V
+24V output
0V
Digital I/O 1
Digital I/O 2
Digital I/O 3
Digital input 4
Digital input 5
Digital input 6
0V
Drive enable
Analog speed
reference 2
Polarized signal
connectors
Status
relay 1
Ta ch o
41
42
51 52 53
Status
relay 2
61 62 63
1
21
11
31
A A\ B
B\
Z Z\ + 0
Encoder
+
_
Arm
current
MA1
MA2
Information
Product
information
Mechanical
Installation
Electrical
installation
Figure 4-20 Default terminal functions
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
4.14 General
4.14.1 Control terminal specification
1 0V common
Function
2 +24V external input
Function
Nominal voltage +24.0Vdc
Minimum continuous operating
voltage
Maximum continuous operating
voltage
Minimum start-up voltage 21.6Vdc
Recommended power supply 60W 24Vdc nominal
Recommended fuse 3A, 50Vdc
3 0V common
Function
Common connection for all external
devices
To supply the control circuit
without providing a supply to the
power stage
+19.2Vdc
+30.0Vdc
Common connection for all external
devices
Diagnostics
UL
information
* Thermistor disabled by USA defaults.
Mentor MP User Guide 51
Issue: 4 www.controltechniques.com
4 +10V user output
Function Supply for external analog devices
Voltage tolerance ±1%
Nominal output current 10mA
Protection Current limit and trip @12mA
Precision reference analog input 1
5 Non-inverting input
6 Inverting input
Default function Speed reference
Type of input
Full scale voltage range ±10.0V ±1.5%
Absolute maximum
voltage range
Working common mode voltage
range
Input resistance
Resolution 14-bit plus sign
Monotonic Yes
Dead band None
Jumps None
Maximum offset ±5mV
Maximum non linearity ±0.05% of Full scale voltage range
Maximum gain asymmetry ±0.2%
Input filter bandwidth single pole ~1kHz
Sampling period
Bipolar differential analog
(For single-ended use, connect terminal 6
to terminal 3)
+30V, -18V relative to 0V
±16V
Ω
94k
μs if configured with the destination as
250
Pr 1.36, Pr 1.37, Pr 3.19 and Pr 4.08. 4ms
for all other destinations
Page 52

Safety
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
7 Analog input 2
Default function Speed reference
Type of input Unipolar voltage and current
Mode controlled by... Pr 7.11
Operating in Voltage mode
Full scale voltage range ±10.0V ±0.5%
Maximum offset ±33mV
Absolute maximum voltage ±36V relative to 0V
Input resistance
Operating in current mode
Current ranges
Maximum offset
Absolute maximum voltage ±36V
Equivalent input resistance
Common to all modes
Resolution 10 bit plus sign
Sampling period
Ω
>94k
0 to 20mA ±5%, 20 to 0mA ±5%,
4 to 20mA ±5%, 20 to 4mA ±5%
μA
120
~100
Ω
250
μs if configured with the destination as
Pr 1.36, Pr 1.37, Pr 3.19 and Pr 4.08. 4ms
for all other destinations
8 Analog input 3
Default function Thermistor
Type of input
Input mode controlled by... Pr 7.15 (in01, 0.81)
Operating in Voltage mode
Voltage range ±10.0V ±0.5%
Maximum offset ±33mV
Absolute maximum voltage range ±36V relative to 0V
Input resistance
Operating in current mode
Current ranges
Maximum offset
Absolute maximum voltage ±36V max
Equivalent input resistance
Operating in thermistor input mode
Internal pull-up voltage <5V
Trip threshold resistance
Reset resistance
Short-circuit detection resistance
Common to all modes
Resolution 10 bit + sign
Sampling period
Unipolar voltage, unipolar current and
thermistor
Ω
>94k
0 to 20mA ±5%, 20 to 0mA ±5%,
4 to 20mA ±5%, 20 to 4mA ±5%
μA
120
~100
Ω
Ω ±10%
3.3k
Ω ±10%
1.8k
Ω ±40%
50
250
μs if configured with the destination as
Pr 1.36, Pr 1.37, Pr 3.19 and Pr 4.08. 4ms
for all other destinations
9 Analog output 1
10 Analog output 2
Terminal 9 default function Speed feedback
Terminal 10 default function Current feedback
Type of output
Mode controlled by...
Operating in Voltage mode (default)
Full scale voltage range ±10V ±5%
Maximum offset ±40mV
Maximum output current ±35mA
Load resistance
Protection 35mA max. Short circuit protection
Operating in current mode
Current ranges
Maximum offset
Open circuit voltage +15V
Load resistance
Common to all modes
Resolution 10-bit plus sign
Sampling period
Bipolar single-ended voltage or unipolar
single-ended current
Ω min
1k
0 to 20mA ±5%
4 to 20mA ±5%
μA
350
Ω max
600
250
μs if configured with the destination as
Pr 1.36, Pr 1.37, Pr 3.19 and Pr 4.08. 4ms
for all other destinations
11 0V common
Function
Common connection for all external
devices
21 0V common
Function
Common connection for all external
devices
22 +24V user output
Function Supply for external digital devices
Nominal output current 200mA (including all digital I/O)
Maximum output current 240mA (including all digital I/O)
Protection Current limit and trip
23 0V common
Function
Common connection for all external
devices
52 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 53

Safety
WARNING
WARNING
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
24 Digital I/O 1
25 Digital I/O 2
26 Digital I/O 3
Terminal 24 default function AT SPEED output
Terminal 25 default function DRIVE RESET input
Terminal 26 default function RUN FORWARD input
Type
Input / output mode controlled by... Pr 8.31, Pr 8.32 and Pr 8.33
Operating as an input
Logic mode controlled by... Pr 8.29
Absolute maximum applied voltage
range
Impedance
Input thresholds 10.0V ±0.8V
Operating as an output
Open collector outputs selected Pr 8.30
Nominal maximum output current 200mA (total including terminal 22)
Maximum output current 240mA (total including terminal 22)
Common to all modes
Voltage range 0V to +24V
Sampling period
Positive or negative logic digital inputs,
positive or negative logic push-pull outputs
or open collector outputs
+30V, -18V relative to 0V
6k
Ω
μs if configured with the destination as
250
Pr 6.35 or Pr 6.36. 4ms for all other
destinations
27 Digital input 4
28 Digital input 5
29 Digital input 6
Terminal 27 default function RUN REVERSE input
Terminal 28 default function LOCAL/REMOTE select
Terminal 29 default function JOG SELECT input
Type of input Negative or positive logic digital inputs
Logic mode controlled by... Pr 8.29
Voltage range 0V to +24V
Absolute maximum applied voltage
range
Impedance
Input thresholds 10.0V ±0.8V
Sampling period
+30V, -18V relative to 0V
Ω
6k
250
μs if configured with the destination as
Pr 6.35 or Pr 6.36. 4ms for all other
destinations
30 0V common
Function
Common connection for all external
devices
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
information
Drive commissioning output
Function
Type of output Unipolar single-ended voltage
Full scale voltage range 10V ±5% (10V = 2 x Motor rated current)
Maximum offset 7mV
Protection
Model
MP25A4(R) MP25A5(R)
MP45A4(R) MP45A5(R)
MP75A4(R) MP75A5(R)
MP105A4(R) MP105A5(R)
MP155A4(R) MP155A5(R)
MP210A4(R) MP210A5(R)
MP350A4(R) MP350A5(R) MP350A6(R)
MP420A4(R)
MP470A5(R) MP470A6(R)
MP550A4(R)
MP700A4(R) MP700A5(R) MP700A6(R)
MP825A4(R) MP825A5(R) MP825A6(R)
MP900A4(R)
MP1200A4(R) MP1200A5(R) MP1200A6(R)
MP1850A4(R) MP1850A5(R) MP1850A6(R)
Instantaneous armature current
feedback
~25mA max. Short circuit protection to
ground (0V).
Full scale range of drive
commissioning output
2.29 x Drive rated current
(Pr 11.3 2)
2.30 x Drive rated current
(Pr 11.3 2)
2.42 x Drive rated current
(Pr 11.3 2)
2.29 x Drive rated current
(Pr 11.3 2)
2.30 x Drive rated current
(Pr 11.3 2)
2.41 x Drive rated current
(Pr 11.3 2)
2.73 x Drive rated current
(Pr 11.3 2)
2.27 x Drive rated current
(Pr 11.3 2)
3.34 x Drive rated current
(Pr 11.3 2)
2.85 x Drive rated current
(Pr 11.3 2)
2.24 x Drive rated current
(Pr 11.3 2)
2.46 x Drive rated current
(Pr 11.3 2)
2.25 x Drive rated current
(Pr 11.3 2)
3.44 x Drive rated current
(Pr 11.3 2)
2.23 x Drive rated current
(Pr 11.3 2)
41 Tachogenerator positive input
42 Tachogenerator negative input
Function
Maximum voltage 300V
Feedback scaling controlled by Pr 3.51 (Fb02, 0.72)
Sampling period 4ms
Speed feedback inputs for
tachogenerator feedback device
UL
31 ENABLE
Function Drive enable
Type Positive or negative logic digital input
Absolute maximum applied voltage
range
Input threshold 10.0V ±0.8V
Sampling period 4ms
+30V, -18V relative to 0V
Status relay contacts are over-voltage category II.
A fuse or other over-current protection should be installed to
the relay circuit.
Mentor MP User Guide 53
Issue: 4 www.controltechniques.com
Page 54

Safety
NOTE
NOTE
NOTE
Twisted
pair
cable
Twisted pair shield
Cable
Cable overall shield
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
51 Relay 1 common
52 Relay 1 normally closed
53 Relay 1 normally open
Default function Drive OK indicator
Contact voltage rating 240Vac, installation over-voltage category II
Contact maximum current rating
Contact minimum recommended
rating
Default contact position Closed when power on and drive OK
Sampling period 4ms
5A AC 240V
5A DC 30V resistive load
0.5A DC 30V inductive load (L/R = 40ms)
12V, 100mA
61 Relay 2 common
62 Relay 2 normally closed
63 Relay 2 normally open
Default function Contactor enable
Contact voltage rating 240Vac, installation over-voltage category II
Contact maximum current rating
Contact minimum recommended
rating
Default contact position
Sampling period 4ms
5A AC 240V
5A DC 30V resistive load
0.5A DC 30V inductive load (L/R = 40ms)
12V, 100mA
Closed when AC or DC contactor is
required to be closed.
The relays are not UL rated when used with inductive loads.
Feedback device connections
Ab, Fd, Fr encoders
A Channel A, Frequency or Forward inputs
A\ Channel A\, Frequency\ or Forward\ inputs
B Channel B, Direction or Reverse inputs
B\ Channel B\, Direction\ or Reverse\ inputs
Z Marker pulse channel Z
Z\ Marker pulse channel Z\
Type EIA 485 differential receivers
Maximum input frequency 500kHz
Line loading <2 unit loads
Line termination components
Working common mode range +12V to –7V
Absolute maximum applied voltage
relative to 0V
Absolute maximum applied differential
voltage
Ω for 2 - 5V range (switchable)
100
±25V
±25V
4.15 Connecting an encoder
Additional measures to prevent unwanted emission of radio frequency
noise are only required where the installation is subject to specific
requirements for radio frequency emission.
Encoder connections:
To ensure suppression of radio frequency emission, observe the
following:
• Use an encoder with the correct impedance
• Use a cable with individually shielded twisted pairs.
• Connect the cable shields to 0V at both the drive and the encoder,
using the shortest possible links (pig-tails).
• The cable should not be interrupted. If interruptions are unavoidable,
ensure the absolute minimum length of "pig-tail" in the shield
connections at each interruption. Use a connection method that
provides substantial metallic clamps for the cable shield
terminations.
The above applies where the encoder body is isolated from the motor
and where the encoder circuit is isolated from the encoder body. Where
there is no isolation between the encoder circuits and motor body, and in
case of doubt, the following additional requirements must be observed to
give the best possible noise immunity.
• The shields must be directly clamped to the encoder and to the
drives grounding bracket. This may be achieved by clamping of the
individual shields or by providing an additional overall shield that is
clamped.
The recommendations of the encoder manufacturer should also be
adhered to for the encoder connections.
In order to guarantee maximum noise immunity for any application
double shielded cable as shown should be used.
In some cases single shielding of each pair of differential signals cables,
or a single overall shield with individual shield on the thermistor
connections is sufficient. In these cases all the shields should be
connected to ground and 0V at both ends.
If the 0V is required to be left floating a cable with individual shields and
an overall shield must be used.
Figure 4-21 and Figure 4-22 illustrate the preferred construction of cable
and the method of clamping. The outer sheath of the cable should be
stripped back enough to allow the clamp to be installed. The shield must
not be broken or opened at this point. The clamps should be installed
close to the drive or feedback device, with the ground connections made
to a ground plate or similar metallic ground surface.
Figure 4-21 Feedback cable, twisted pair
N
+ + supply
0V 0V
54 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 55

Safety
Cable
Cable
shield
Twis ted
pair
shield
Cable
shield
Twis ted
pair
shield
Connection
at motor
Connection
at drive
Ground clamp
on shield
Shield
connection
to 0V
Shield
connection
to 0V
Information
Product
information
Mechanical
Installation
Electrical
installation
Figure 4-22 Feedback cable connections
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
Table 4-27 Encoder types
Pr 3.38
(Fb07, 0.77)
setting
Ab (0)
Fd (1)
Fr (2)
Quadrature incremental encoder with or without marker
pulse
Incremental encoder with frequency pulses and
direction, with or without marker pulse
Incremental encoder with forward pulses and reverse
pulses, with or without marker pulse
Description
Mentor MP User Guide 55
Issue: 4 www.controltechniques.com
Page 56

Safety
Upper display
Lower display
Mode (black) button
Joypad
User defined Rev (blue) button
Stop/reset (red) button
Start (green) button
Control buttons
Mode (black) button
Joypad
Stop/reset (red) button
Start (green) button
Control buttons
Help button
User defined Rev (blue) button
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
5 Getting started
This chapter introduces the user interfaces, menu structure and security level of the drive.
5.1 Understanding the display
There are two types of keypad available for the Mentor MP. The SM-Keypad has an LED display, and the MP-Keypad has an LCD display.
5.1.1 SM-Keypad (LED)
The display consists of two horizontal rows of 7 segment LED displays.
The upper display shows the drive status or the current menu and
parameter number being viewed.
The lower display shows the parameter value or the specific trip type.
Figure 5-1 SM-Keypad Figure 5-2 MP-Keypad
The red stop button is also used to reset the drive.
5.1.2 MP-Keypad (LCD)
The display consists of three lines of text.
The top line shows the drive status or the current menu and parameter
number being viewed on the left, and the parameter value or the specific
trip type on the right.
The lower two lines show the parameter name or the help text.
UL
information
5.2 Keypad operation
Control buttons
The keypad consists of:
1. Joypad - used to navigate the parameter structure and change
parameter values.
2. Mode button - used to change between the display modes –
parameter view, parameter edit, status.
3. Three control buttons - used to control the drive if keypad mode is
selected.
4. Help button (MP-Keypad only) - displays text briefly describing the
selected parameter.
The Help button toggles between other display modes and parameter
help mode. The up and down functions on the joypad scroll the help text
to allow the whole string to be viewed. The right and left functions on the
joypad have no function when help text is being viewed.
The display examples in this section show the SM-Keypad, seven
segment, LED display. The examples are the same for the MP-Keypad,
The exceptions is that the information displayed on the lower row on the
SM-Keypad is displayed on the right hand side of the top row on the MPKeypad.
56 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 57

Safety
Use
* keys
to select parameter for editing
To enter Edit Mode,
press key
Status
Mode
(Display
not
flashing)
Parameter
Mode
(Upper
display
flashing)
Edit Mode
(Character to be edited in lower line of display flashing)
Change parameter values
using keys.
When returning
to Parameter
Mode use the
keys to select
another parameter
to change, if
required
To exit Edit Mode,
press key
To enter Parameter
Mode, press key or
*
Temporary
Parameter
Mode
(Upper display
flashing)
Timeout**
Timeout**
Timeout**
To return to
Status Mode,
press
key
RO
parameter
R/W
parameter
Pr value
5.05
Menu 5. Parameter 5
Trip type (UV = undervolts)
Drive status = tripped
Trip StatusAlarm Status
Parameter
View Mode
Healthy Status
Status Mode
WARNING
NOTE
NOTE
Information
Product
information
Mechanical
Installation
Figure 5-3 Display modes
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
Figure 5-4 Mode examples
When changing the values of parameters, make a note of the new
values in case they need to be entered again.
For new parameter-values to apply after the AC supply to the drive is
interrupted, new values must be saved (section 5.8 Saving
parameters on page 61).
* Can only be used to move between menus if L2 access has been enabled Pr 11 .44 (SE14, 0.35)
**Time-out defined by Pr 11.4 1 (default value = 240s).
Do not change parameter values without careful
consideration; incorrect values may cause damage or a
safety hazard.
Mentor MP User Guide 57
Issue: 4 www.controltechniques.com
Page 58
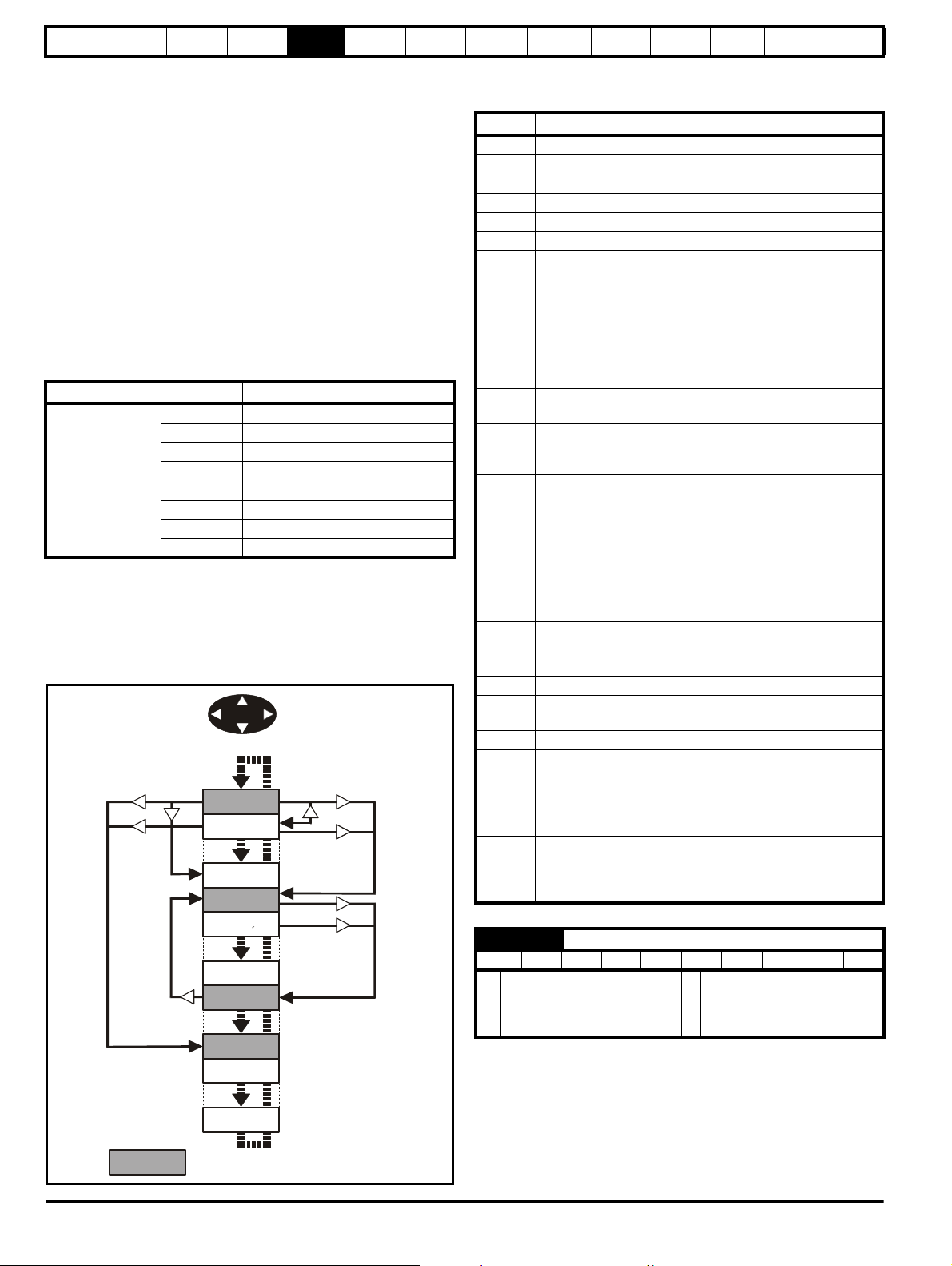
Safety
SEt UP
diAGnoS
inPut
Headers
triPS
SE00
SE13
di01
di14
in01
in10
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
5.3 Menu 0 (sub block)
Menu 0 can be accessed by 2 methods:
1. Pr 11.4 4 (SE14, 0.35) = 0. Sub block mode.
2. Pr 11.4 4 (SE14, 0.35) <>0. Linear mode.
Menu 23 contains the parameters to allow menu 0 to be customized in
sub block mode. The first sub block is a user defined area (USEr) which
is configured by the parameters in menu 22. As default there are no
parameters configured to the user sub block and so it is empty. The next
7 sub blocks are pre-defined. Access to the pre-defined blocks is
enabled or disabled by Pr 23.03 to Pr 23.09.
Movement between sub blocks is achieved with the left and right keys.
Pr 23.01 contains all the sub block headers.
Table 5-1 and Figure 5-5 show the result of the direction keys when
Pr 11.44 (SE14, 0.35) is set to L1 (0). When Pr 11.4 4 (SE14, 0.35)is not
0 the left and right keys will allow access to the advance parameter set
and menu 0 will become a linear menu.
Table 5-1 Keypad navigation
Starting location Action Finishing location
Right Next header
Header
Parameter
When moving to the user block header, the user block header is only
displayed if there are some valid parameters in the block. When moving
between pre-defined header blocks the pre-defined header block is only
displayed if the pre-defined block is enabled.
When moving between parameters within a block, only valid parameters
are displayed.
Figure 5-5 Sub block navigation
Left Previous header
Up First parameter in header block
Down Last parameter in header block
Right Next header
Left Previous header
Up Next parameter in header block
Down Previous parameter in header block
Coding
The coding defines the attributes of the parameter as follows.
Coding Attribute
{X.XX} Copied Mneu 0 or advanced parameter
Bit 1 bit parameter: ‘On’ or ‘OFF’ on the display
Bi Bipolar parameter
Uni Unipolar parameter
Txt Text: the parameter uses text strings instead of numbers.
SP Spare: not used
Filtered: some parameters which can have rapidly changing
FI
values are filtered when displayed on the drive keypad for
easy viewing.
Destination pointer parameter: This parameter can be used
DE
to set up the location (i.e. menu/parameter number) where
the destination data is to be routed.
Variable maximum: the maximum of this parameter can
VM
vary.
Decimal place: indicates the number of decimal places used
DP
by this parameter.
No default: when defaults are loaded (except when the drive
ND
is manufactured or on EEPROM failure) this parameter is
not modified.
Rating dependant: this parameter is likely to have different
values and ranges with drives of different voltage and
current ratings. Parameters with this attribute will not be
transferred to the destination drive by a SMARTCARD when
the rating of the destination drive is different from the source
RA
drive if the drive voltage ratings are different or the file is a
parameter file. However, the value will be transferred if only
the current rating is different and the file is a differences
from default type file.
Not copied: not transferred to or from SMARTCARD during
NC
copying.
NV Not visible: not visible on the keypad.
PT Protected: cannot be used as a destination.
User save: saved in drive EEPROM when the user initiates
US
a parameter save.
RW Read/write: can be written by the user.
RO Read only: can only be read by the user
Bit default one/unsigned: Bit parameters with this flag set to
one have a default of one (all other bit parameters have a
BU
default of zero. Non-bit parameters are unipolar if this flag is
one.
Power-down save: parameter automatically saved in drive
EEPROM when the under volts (UV) trip occurs. Power-
PS
down save parameters are also saved in the drive when the
user initiates a parameter save.
23.01 Sub block headers
RO Txt NC PT BU
USEr (0), SEt UP (1),
diAGnoS (2), triPS (3), SP
Ú
LOOP (4), Fb SP (5), SintEr
(6), inPut (7)
Ö
USEr (0)
Defines the sub block headers. Can be used by the MP-Keypad to
display the same strings as the SM-Keypad.
58 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 59

Safety
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
23.02 Bianry sum of pre-defined sub block enables
RO NC PT BU
Ú
0 to 127
Ö
0
The OR of Pr 23.03 to Pr 23.09. To be used by the MP-Keypad.
Parameter Value
23.03 1
23.04 2
23.05 4
23.06 8
23.07 16
23.08 32
23.09 64
23.03 - 23.09 Pre-defined sub block enable
RW Bit US BU
Ú
0 to1
Ö
1
When this parameter is set to 1 the associated pre-defined sub block is
accessible. When this parameter is 0 the associated pre-defined block is
bypassed.
Parameter Description Display
23.03 Set up SEt UP
23.04 Diagnostic diAGnoS
23.05 Trips triPS
23.06 Speed loop SP LOOP
23.07 Serial interface SintEr
23.08 Speed feedback Fb SP
23.09 IO InPut
5.4 Pre-defined sub blocks
Menu 0 Parameter Description Display
0.01 to
0.20
Set-up
Menu 0 Parameter Description Display
0.21 1.00 Parameter 0 SE00
0.22 1.07 Minimum reference clamp SE01
0.23 1.06 Maximum reference clamp SE02
0.24 2.11 Acceleration rate SE03
0.25 2.21 Deceleration rate SE04
0.26 1.14 Reference selector SE05
0.27 5.09 Armature rated voltage SE06
0.28 5.07 Motor rated current SE07
0.29 5.08 Base speed SE08
0.30 11.42 Parameter copying SE09
0.31 5.70 Rated field current SE10
0.32 5.73 Rated field voltage SE11
0.33 5.77 Enable field control SE12
0.34 5.12 Autotune SE13
0.35 11.44 Security status SE14
Configured by Pr 22.01 to
Pr 22.20
Diagnostic
Menu 0 Parameter Description Display
0.36 1.01 Speed reference selected di01
0.37 1.03 Pre-ramp reference di02
0.38 2.01 Post ramp reference di03
0.39 3.01 Final speed reference di04
0.40 3.02 Speed feedback di05
0.41 3.04 Speed controller output di06
0.42 4.03 Torque demand di07
0.43 4.01 Current magnitude di08
0.44 5.56 Field current feedback di09
0.45 5.02 Armature voltage di10
0.46 1.11 Reference enabled indicator di11
0.47 1.12 Reverse selected indicator di12
0.48 1.13 Jog selected indicator di13
0.49 11.29 Software version di14
0.50 0.00 Spare
Trips
Menu 0 Parameter Description Display
0.51 10.20 Trip 0 tr01
0.52 10.21 Trip 1 tr02
0.53 10.22 Trip 2 tr03
0.54 10.23 Trip 3 tr04
0.55 10.24 Trip 4 tr05
0.56 10.25 Trip 5 tr06
0.57 10.26 Trip 6 tr07
0.58 10.27 Trip 7 tr08
0.59 10.28 Trip 8 tr09
0.60 10.29 Trip 9 tr10
Speed loop
Menu 0 Parameter Description Display
0.61 3.10
0.62 3.11
0.63 3.12
Speed controller
proportional gain
Speed controller integral gain
Speed controller differential
feedback gain
0.64 0.00 Spar e
0.65 0.00 Spar e
Serial interface
Menu 0 Parameter Description Display
0.66 11.25 Baud rate Si01
0.67 11.23 Serial address Si02
0.68 0.00 Spare
0.69 0.00 Spare
0.70 0.00 Spare
SP01
SP02
SP03
Mentor MP User Guide 59
Issue: 4 www.controltechniques.com
Page 60

Safety
Menu 0
0.04
0.05
0.06
Menu 2
2.21
Menu 1
1.14
Menu 4
4.07
5
0
150
0
150
5
Menu 22 Menu 23Menu 0 Menu 1 Menu 2
Pr
22.00
Pr
23.00
Pr
0.00
Pr
1.00
Pr
2.00
Pr
22.01
Pr
23.01
Pr
0.01
Pr
1.01
Pr
2.01
Pr
22.02
Pr
23.02
Pr
0.02
Pr
1.02
Pr
2.02
Pr
22.38
Pr
23.09
Pr
0.88
Pr
1.49
Pr
2.39
Pr
22.39
Pr
23.10
Pr
0.89
Pr
1.50
Pr
2.40
Pr
22.40
Pr
23.11
Pr
0.90
Pr
1.51
Pr
2.41
Moves
between
parameters
Moves between Menus
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
Speed feedback
Menu 0 Parameter Description Display
0.71 3.26 Speed feedback selector Fb01
0.72 3.51
Tachometer rating (V/
1000rpm)
Fb02
0.73 3.53 Tachometer input mode Fb03
0.74 3.52
0.75 3.34
Tachometer speed
feedback
Drive encoder lines per
revolution
Fb04
Fb05
0.76 3.36 Encoder supply Fb06
0.77 3.38 Encoder type Fb07
0.78 3.39 Encoder termination select Fb08
0.79 3.27 Encoder speed feedback Fb09
0.80 0.00 Spare
IO
Menu 0 Parameter Description Display
0.81 7.15 Analog input 3 mode in01
0.82 7.01 Analog input 1 in02
0.83 7.02 Analog input 2 in03
0.84 7.03 Analog input 3 in04
0.85 8.01 I/O state 1 in05
0.86 8.02 I/O state 2 in06
0.87 8.03 I/O state 3 in07
0.88 8.04 I state 4 in08
0.89 8.05 I state 5 in09
0.90 8.06 I state 6 in10
For more information on the sub block function please refer to the
Mentor MP Advanced User Guide.
5.6 Menu structure
The drive parameter structure consists of menus and parameters.
The drive initially powers up in sub menu mode. Once Level 2 access
(L2) has been enabled (refer to Pr 11.44 (SE14, 0.35)) the left and right
buttons are used to navigate between numbered menus.
For further information, refer to section 5.13 Parameter access level and
security on page 62.
Figure 5-7 Menu structure
The menus and parameters roll over in both directions.
For example:
• If the last parameter is displayed, a further press will cause the
display to roll-over and show the first parameter.
• When changing between menus the drive remembers which
parameter was last viewed in a particular menu and will display that
parameter. The menus and parameters roll over in both directions.
5.5 Menu 0 (linear)
Menu 0 is used to bring together various commonly used parameters for
basic easy set up of the drive.
Appropriate parameters are copied from the advanced menus into menu
0 and thus exist in both locations.
For further information, refer to section 5.3 Menu 0 (sub block) on
page 58.
Figure 5-6 Menu 0 copying
60 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 61

Safety
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
5.7 Advanced menus
The advanced menus consist of groups or parameters appropriate to a
specific function or feature of the drive. Menus 0 to 23 can be viewed on
both keypads. Menus 40 and 41 are specific to the MP-Keypad (LCD).
Menus 70 to 91 can be viewed with an MP-Keypad (LCD) only when an
SM-Applications module is installed.
Table 5-2 Advanced menu descriptions
Menu Description LED LCD
Commonly used basic set up parameters for quick
0
/ easy programming
1 Speed reference 99
2 Ramps 99
3 Speed feedback and speed control 99
4 Torque and current control 99
5 Motor control including field regulator 99
6 Sequencer and clock 99
7 Analog I/O 99
8 Digital I/O 99
Programmable logic, motorized pot and binary
9
sum
10 Status and trips 99
11 General drive set-up 99
12 Threshold detectors and variable selectors 99
13 Position control 99
14 User PID controller 99
15 Solutions Module set-up 99
16 Solutions Module set-up 99
17 Solutions Module set-up 99
18 Application menu 1 99
19 Application menu 2 99
20 Application menu 3 99
21 Second motor parameters 99
22 Menu 0 set-up - user area 99
23 Menu 0 sub block control 99
40 Keypad configuration menu X 9
41 User filter menu X 9
70 PLC registers X 9
71 PLC registers X 9
72 PLC registers X 9
73 PLC registers X 9
PLC registers X 9
74
75 PLC registers X 9
85 Timer function parameters X 9
86 Digital I/O parameters X 9
88 Status parameters X 9
90 General parameters X 9
91 Fast access parameters X 9
Key: 9= Available
X = Not available
99
99
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
Table 5-3 Menu 40 parameter descriptions
Parameter
Range(
Ú)
40.00 Parameter 0 0 to 32767
40.01 Language selection
40.02 Software version
40.03 Save to flash
40.04 LCD contrast
English (0), Custom (1), French (2),
German (3), Spanish (4), Italian (5)
999999
Idle (0), Save (1), Restore (2),
Default (3)
0 to 31
Drive and attribute
40.05
database upload was
Updated (0), Bypass (1)
bypassed
Browsing favourites
40.06
control
40.07 Keypad security code
Communication
40.08
channel selection
40.09 Hardware key code
Drive node ID
40.10
(Address)
Flash ROM memory
40.11
size
String database
40.19
version number
Screen saver strings
40.20
and enable
40.21 Screen saver interval
Turbo browse time
40.22
interval
Normal (0), Filter (1)
0 to 999
Disable (0), Slot1 (1), Slot2 (2),
Slot3 (3), Slave (4), Direct (5)
0 to 999
0 to 255
4Mbit (0), 8Mbit (1)
0 to 999999
None (0), Default (1), User (2)
0 to 600
0 to 200ms
Unidrive SP (0),
40.23 Product identification
Commander SK (1), Mentor MP (2),
Affinity (4), Digitax ST (5)
Table 5-4 Menu 41 parameter descriptions
Parameter
Range(
Ú)
41.00 Parameter 0 0 to 32767
41.01 to
Browsing filter source F01 to
41.50
F50
Pr 0.00 to Pr 22.99
41.51 Browsing favourites control Normal (0), Filter (1)
5.8 Saving parameters
When changing a parameter in Menu 0, the new value is saved when
pressing the Mode button to return to parameter view mode from
parameter edit mode.
If parameters have been changed in the advanced menus, then the
change will not be saved automatically. A save function must be carried
out.
Procedure
1. Enter SAVE in Pr xx.00
2. Either:
• Press the red reset button
• Toggle the reset digital input, or
• Carry out a drive reset through serial communications by
setting Pr 10.38 to 100 (ensure that Pr xx.00 returns to 0).
5.9 Restoring parameter defaults
Restoring parameter defaults by this method saves the default values in
the drive’s memory. (Pr 11.44 (SE14, 0.35) and Pr 11.30 are not affected
by this procedure).
Procedure
1. Ensure the drive is not enabled, i.e. terminal 31 is open or Pr 6.15 is
OFF (0)
2. Select Eur or USA in Pr xx.00.
Mentor MP User Guide 61
Issue: 4 www.controltechniques.com
Page 62
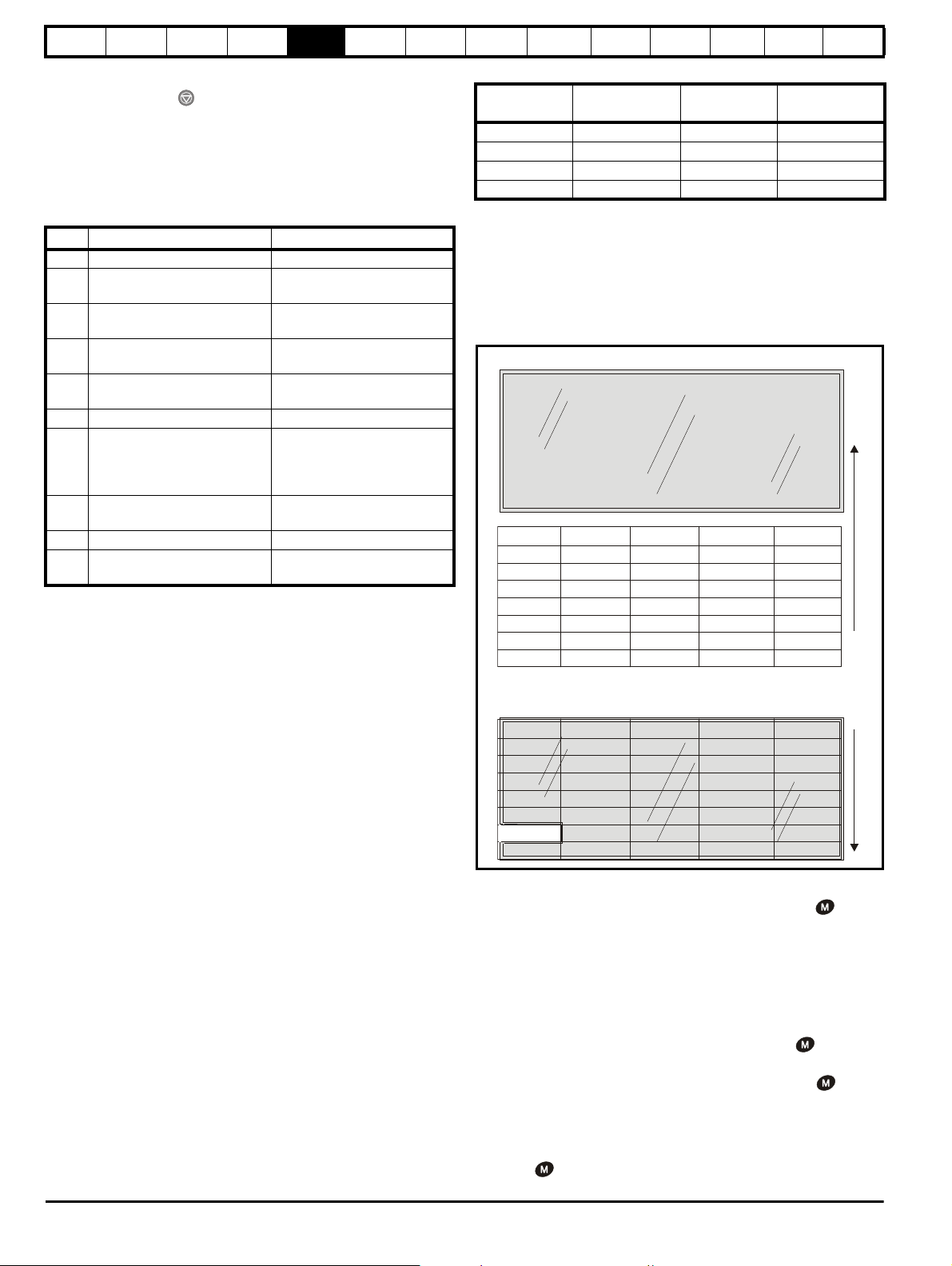
Safety
Pr 0.00
Pr 0.01
Pr 0.02
Pr 0.03
Pr 0.90
Pr 1.00
Pr 1.01
Pr 1.02
Pr 1.03
Pr 1.50
Pr 1.51
............
............
............
............
............
............
............
............
Pr 0.00
Pr 0.01
Pr 0.02
Pr 0.03
Pr 0.89
Pr 0.90
Pr 1.00
Pr 1.01
Pr 1.02
Pr 1.03
Pr 1.50
Pr 1.51
Pr 23.00
Pr 23.01
Pr 23.02
Pr 23.03
Pr 23.10
Pr 23.11
............
............
............
............
............
............
............
............
User security open
- All parameters: Read / Write access
User security closed
- All parameters: Read Only access
(except Pr ( )
11.44 SE14, 0.35
Pr 23.00
Pr 23.01
Pr 23.02
Pr 23.03
Pr 23.10
Pr 23.11
Pr 0.49
Pr 22.00
Pr 22.01
Pr 22.02
Pr 22.03
Pr 22.39
Pr 22.40
Pr 22.00
Pr 22.01
Pr 22.02
Pr 22.03
Pr 22.39
Pr 22.40
Information
3. Either:
• Press the red reset button
• Toggle the reset digital input, or
• Carry out a drive reset through serial communications by
Product
information
setting Pr 10.38 to 100 (ensure that Pr. xx.00 returns to 0).
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
5.10 Differences between European and USA defaults
Pr Description Default
2.06 S ramp enable Eur: OFF (0), USA: On (1)
Tachometer voltage rating
3.51
(Fb02, 0.72)
5.09,
Armature rated voltage
21.09
(SE06, 0.27)
Field weakening
5.28
compensation disable
5.59,
Back emf set point 480V drive Eur: 440, USA:500
21.08
5.65 Economy timeout Eur: OFF (0), USA: On (1)
5.70,
Rated field current
21.24
(SE10, 0.31)
5.73,
Rated field voltage
21.23
(SE11, 0.32)
5.75 Field voltage mode Eur: OFF (0), USA: On (1)
Analog input 3 mode
7.15
(in01, 0.81)
Eur: 60.00, USA: 50.00
480V drive Eur: 440, USA:500
Eur: OFF (0), USA On (1)
Size 1: Eur: 2.00, USA: 8.00
Size 2A & B Eur: 3.00, USA:
20.00 Size 2C & D Eur: 5.00,
USA 20.00
Eur: 360, USA: 300
Eur: th (8), USA: VOLt (6)
Optimization
Table 5-5 User security and parameter access levels
RW = Read / write access RO = Read only access
The default settings of the drive are parameter access level L1 and User
Security Open, i.e. read / write access to Menu 0 with the advanced
menus, not visible
SMARTCARD
operation
Parameter
access level
L1 Open Sub block RW Not visible
L1 Closed Sub block RO Not visible
L2 Open Linear RW RW
L2 Closed Linear RO RO
Onboard
User security Menu 0 status
PLC
Advanced
parameters
Technical
data
Diagnostics
Advanced
menus status
UL
information
5.13.1 User security
The user security, when set, prevents write access to any of the
parameters (other than Pr
Figure 5-8 User security open
11.44 (SE14, 0.35
) Access Level) in any menu.
5.11 Displaying parameters with nondefault values only
Select dIS.dEf in Pr xx.00, the only parameters that will be visible to the
user will be those containing a non-default value. This function does not
require a drive reset to become active. To deactivate this function, return
to Pr xx.00 and enter a value of 0.
Please note that this function can be affected by the access level
enabled. You must refer to section 5.13 Parameter access level and
security for more information regarding access level.
5.12 Displaying destination parameters
only
Select dIS.dESt in Pr xx.00, the only parameters that will be visible to
the user will be destination parameters. This function does not require a
drive reset to become active. To deactivate this function, return to
Pr xx.00 and enter a value of 0.
Please note that this function can be affected by the access level
enabled You must refer to section 5.13 Parameter access level and
security for further information regarding access levels.
5.13 Parameter access level and security
The parameter access levels determine whether the user has access to
Menu 0 (in sub block mode) only or to all of the advanced menus (Menus
1 to 23), in addition to Menu 0 (in linear mode).
The user security determines whether the access to the user is read only
or read write.
The user security and the parameter access level can operate
independently of each other as shown in Table 5-5 .
62 Mentor MP User Guide
www.controltechniques.com Issue: 4
5.13.2 Setting user security
Enter a value between 1 and 999 in Pr 11. 30 and press the button;
the security code has now been set to this value. To activate the security,
the access level must be set to Loc in Pr 11.44 (SE14, 0.35). When the
drive is reset, the security code will have been activated and the drive
returns to access level L1. The value of Pr 11.30 will return to 0 in order
to hide the security code. At this point, the only parameter that can be
changed by the user is the access level Pr 11.44 (SE14, 0.35).
5.13.3 Unlocking user security
Select a read write parameter to be edited and press the button; the
upper display will now show CodE.
Use the arrow buttons to set the security code and press the button.
With the correct security code entered, the display will revert to the
parameter selected in edit mode. If an incorrect security code is entered
the display will revert to parameter view mode.
To lock the user security again, set Pr 11. 44 (SE14, 0.35) to Loc and
press the reset button.
Page 63

Safety
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
5.13.4 Disabling user security
Unlock the previously set security code as detailed above. Set Pr 11. 30
to 0 and press the button. The user security has now been
disabled, and will not have to be unlocked each time the drive is
powered up to allow read / write access to the parameters.
5.14 Serial communications
5.14.1 Introduction
The Mentor MP has a standard 2-wire EIA485 interface (serial
communications interface) which enables all drive set-up, operation and
monitoring to be carried out with a PC or controller if required. Therefore,
it is possible to control the drive entirely by serial communications
without the need for a keypad or other control cabling. The drive
supports two protocols selected by parameter configuration:
• Modbus RTU
• CT ANSI
Modbus RTU has been set as the default protocol, as it is used with the
PC-tools commissioning/start-up software as provided on the CD ROM.
The serial communications port of the drive is a RJ45 socket, which is
isolated from the power stage and the other control terminals (see
section 4.10 Serial communications connections on page 48 for
connection and isolation details).
The communications port applies a 2 unit load to the communications
network.
USB/EIA232 to EIA485 Communications
An external USB/EIA232 hardware interface such as a PC cannot be
used directly with the 2-wire EIA485 interface of the drive. Therefore a
suitable converter is required.
Suitable USB to EIA485 and EIA232 to EIA485 isolated converters are
available from Control Techniques as follows:
• CT USB Comms cable (CT Part No. 4500-0096)
• CT EIA232 Comms cable (CT Part No. 4500-0087)
When using one of the above converters or any other suitable converter
with the Mentor MP, it is recommended that no terminating resistors be
connected on the network. It may be necessary to 'link out' the
terminating resistor within the converter depending on which type is
used. The information on how to link out the terminating resistor will
normally be contained in the user information supplied with the
converter.
5.14.2 Serial communications set-up parameters
The following parameters need to be set according to the system
requirements.
11.24 Serial mode
RW Txt US
AnSI (0), rtU (1), Lcd (2)
Ú
Ö
This parameter defines the communications protocol used by the 485
comms port on the drive. This parameter can be changed via the drive
keypad, via a Solutions Module or via the comms interface itself. If it is
changed via the comms interface, the response to the command uses
the original protocol. The master should wait at least 20ms before
sending a new message using the new protocol. (Note: ANSI uses 7
data bits, 1 stop bit and even parity; Modbus RTU uses 8 data bits, 2
stops bits and no parity.)
Comms value String Communications mode
0AnSI ANSI
1 rtU Modbus RTU protocol
2Lcd
Modbus RTU protocol, but with a MPKeypad only
rtU (1)
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
ANSIx3.28 protocol
Full details of the CT ANSI communications protocol are in the Mentor
MP Advanced User Guide.
Modbus RTU protocol
Full details of the CT implementation of Modbus RTU are given in the
Mentor MP Advanced User Guide.
Modbus RTU protocol, but with an MP-Keypad only
This setting is used for disabling communications access when the MPKeypad is used as a hardware key.
Si01
{0.66/11.25}
Baud rate
RW Txt US
300 (0), 600 (1), 1200 (2),
2400 (3), 4800 (4), 9600 (5),
Ú
19200 (6), 38400 (7),
Ö
19200 (6)
57600 (8)*, 115200 (9)*
Used in all comms modes to define the baud rate.
Parameter value String/baud rate
0 300
1 600
2 1200
3 2400
4 4800
5 9600
6 19200
7 38400
8* 57600
9* 115200
* Only applicable to Modbus RTU mode
This parameter can be changed via the drive keypad, via a Solutions
Module or via the comms interface itself. If it is changed via the comms
interface, the response to the command uses the original baud rate. The
master should wait at least 20ms before sending a new message using
the new baud rate.
When using the CT EIA232 Comms cable the available baud rate is
limited to 19.2k baud.
Si02
{0.67/11.23}
Serial address
RW Txt US
Ú
0 to 247
Ö
1
Used to define the unique address for the drive for the serial interface.
The drive is always a slave.
ANSI
When the ANSI protocol is used the first digit is the group and the
second digit is the address within a group. The maximum permitted
group number is 9 and the maximum permitted address within a group is
9. Therefore, Pr 11. 23 (Si02, 0.67) is limited to 99 in this mode. The
value 00 is used to globally address all slaves on the system, and x0 is
used to address all slaves of group x, therefore these addresses should
not be set in this parameter.
Modbus RTU
When the Modbus RTU protocol is used addresses between 0 and 247
are permitted. Address 0 is used to globally address all slaves, and so
this address should not be set in this parameter.
Mentor MP User Guide 63
Issue: 4 www.controltechniques.com
Page 64

Safety
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
6 Basic parameters
The pre-defined sub blocks contain commonly used parameters for basic set-up of the Mentor MP. All parameters in the pre-defined sub blocks
appear in other menus in the drive. (Denoted by {x.xx} in Table 6-1.)
Table 6-1 Pre-defined sub block parameters
Parameter
SE00 Parameter zero {0.21, x.00} 0 to 32,767 0 RW Uni
SE01 Minimum reference clamp {0.22, 1.07} ±SPEED_LIMIT_MAX rpm 0.0 RW Bi PT US
SE02 Maximum reference clamp {0.23, 1.06} SPEED_LIMIT_MAX rpm 1000.0 RW Bi US
SE03 Acceleration rate {0.24, 2.11}
SE04 Deceleration rate {0.25, 2.21}
SE05 Reference selector {0.26, 1.14}
SE06 Armature rated voltage {0.27, 5.09} 0 to ARMATURE_VOLTAGE_MAX Vdc
SE07 Motor rated current {0.28, 5.07} 0 to RATED_CURRENT_MAX A RATED_CURRENT_MAX RW Uni RA US
SE08 Base speed {0.29, 5.08} 0.0 to 10,000.0 rpm 1000.0 RW Uni US
SE09 Parameter copying {0.30, 11.42}
SE10 Rated field current {0.31, 5.70} 0 to FIELD_CURRENT_SET_MAX
SE11 Rated field voltage {0.32, 5.73} 0 to 500 Vdc Eur: 360, USA: 300 RW Uni PT US
SE12 Enable field control {0.33, 5.77} OFF (0) or On (1) OFF (0) RW Txt US
SE13 Autotune {0.34, 5.12} 0 to 3 0 RW Uni NC
SE14 Security status {0.35, 11.44} L1 (0), L2 (1), Loc (2) L1 (0) RW Txt PT US
di01 Speed reference selected {0.36, 1.01} ±MAX_SPEED_REF rpm RO Bi NC PT
di02 Pre-ramp reference {0.37, 1.03} ±MAX_SPEED_REF rpm
di03 Post ramp reference {0.37, 1.03} ±SPEED_MAX rpm
di04 Final speed reference {0.39, 3.01} ±SPEED_MAX rpm
di05 Speed feedback {0.40, 3.02} ±SPEED_MAX rpm
di06 Speed controller output {0.41, 3.04}
di07 Torque demand {0.42, 4.03}
di08 Current magnitude {0.43, 4.01} 0 to DRIVE_CURRENT_MAX A
di09 Field current feedback {0.44, 5.56} ±50.00A
di10 Armature voltage {0.45, 5.02}
di11 Reference enabled indicator {0.46, 1.11} OFF (0) or On (1)
di12 Reverse selected indicator {0.47, 1.13} OFF (0) or On (1)
di13 Jog selected indicator {0.48, 1.14} OFF (0) or On (1)
di14 Software version {0.49, 11.29} 1.00 to 99.99
tr01 Trip 0 {0.51, 10.20}
tr02 Trip 1 {0.52, 10.21} RO Txt NC PT
tr03 Trip 2 {0.53, 10.22} RO Txt NC PT
tr04 Trip 3 {0.54, 10.23} RO Txt NC PT
tr05 Trip 4 {0.55, 10.24} RO Txt NC PT
tr06 Trip 5 {0.56, 10.25} RO Txt NC PT
tr07 Trip 6 {0.57, 10.26} RO Txt NC PT
tr08 Trip 7 {0.58, 10.27} RO Txt NC PT
tr09 Trip 8 {0.59, 10.28} RO Txt NC PT
tr10 Trip 9 {0.60, 10.29} RO Txt NC PT
(Kp1) Speed controller
SP01
proportional gains
(Ki1) Speed controller
SP02
integral gains
(Kd1) Speed controller
SP03
differential feedback gains
Si01 Serial comms baud rate {0.61, 11.25}
Si02 Serial comms address {0.67, 11.23} 0 to 247 1 RW Uni US
Fb01 Speed feedback selector {0.71, 3.26}
Fb02 Tachometer voltage rating {0.72, 3.51} 0 to 300.00 V/1000 rpm Eur: 60.00, USA: 50.00 RW Uni US
Fb03 Tachometer input mode {0.73, 3.53} DC (0), DC Filt (1), AC (2) DC (0) RW Txt US
Fb04 Tachometer speed feedback {0.74, 3.52} ±SPEED_MAX rpm
Drive encoder lines per
Fb05
revolution
{0.61, 3.10} 0.0000 to 6.5535 (1 / (rad/s)) 0.0300 RW Uni US
{0.62, 3.11} 0.00 to 655.35 (s / (rad/s)) 0.10 RW Uni US
{0.63, 3.12}
{0.75, 3.34} 1 to 50,000 1,024 RW Uni US
s/(SE02 [Pr 0.23, 1.06] or Pr 2.39)
s/(SE02 [Pr 0.23, 1.06] or Pr 2.39)
A1.A2 (0), A1.Pr (1), A2.Pr (2), Pr (3), PAd
nonE (0), rEAd (1), ProG (2), Auto (3),
300 (0), 600 (1), 1200 (2), 2400 (3), 4800 (4),
9600 (5), 19200 (6), 38400 (7), 57600 (8)**,
drv (0), Slot1 (1), Slot2 (2), Slot3 (3), tACHO
Range(
Ú) Default(Ö)
0 to MAX_RAMP_RATE
0 to MAX_RAMP_RATE
(4), Prc (5), PAd rEF (6)
boot (4)
±TORQUE_PRODUCT_
CURRENT_MAX rpm
±TORQUE_PROD_
CURRENT_MAX %
±ARMATURE_VOLTAGE_
MAX V
0 to 229
0.00000 to 0.65535
(1/s / (rad/s))
115200 (9)**
(4), Est SPEED (5)
5.000 RW Uni US
5.000 RW Uni US
A1.A2 (0) RW Txt US
For 480V drive: 440 Eur 500 USA
For 575V drive: 630 Eur 630 USA
For 690V drive: 760 Eur 760 USA
nonE (0) RW Txt * NC
Size 1: Eur 2A, USA 8A
Size 2A/B: Eur 3A, USA 20A
Size 2C/D: Eur 5A, USA 20A
0.00000 RW Uni US
19200 (6) RW Txt US
Est SPEED (5) RW Txt US
RW Uni RA US
RW Uni PT US
RO Bi NC PT
RO Bi NC PT
RO Bi FI NC PT
RO Bi FI NC PT
RO Bi FI NC PT
RO Bi FI NC PT
RO Uni FI NC PT
RO Bi FI NC PT
RO Bi FI NC PT
RO Bit NC PT
RO Bit NC PT
RO Bit NC PT
RO Uni NC PT
RO Txt NC PT
RO Bi FI NC PT
Typ e
64 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 65

Safety
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
Parameter
Fb06 Drive encoder supply voltage {0.76, 3.36} 5V (0), 8V (1), 15V (2), 24V (3) 5V (0) RW Txt US
Fb07 Drive encoder type {0.77, 3.38} Ab (0), Fd (1), Fr (2) Ab (0) RW Txt US
Drive encoder termination select
Fb08
Drive encoder speed feedback
Fb09
in01 Analog input 3 mode {0.81, 7.15}
in02 Analog input 1 {0.82, 7.01} ±100.00 %
in03 Analog input 2 {0.83, 7.02} ±100.0 %
in04 Analog input 3 {0.84, 7.03} ±100.0 %
in05 T24 digital I/O 1 state {0.85, 8.01}
in06 T25 digital I/O 2 state {0.86, 8.02} RO Bit NC PT
in07 T26 digital I/O 3 state {0.87, 8.03} RO Bit NC PT
in08 T27 digital input 4 state {0.88, 8.04} RO Bit NC PT
in09 T28 digital input 5 state {0.89, 8.05} RO Bit NC PT
in10 T29 digital input 6 state {0.90, 8.06} RO Bit NC PT
{0.78, 3.39} 0 to 2 1 RW Uni US
{0.79, 3.27} ±10,000.0 rpm RW Bi FI NC PT US
0-20 (0), 20-0 (1), 4-20.tr (2), 20-4.tr (3), 4-20
(4), 20-4 (5), VOLt (6), th.SC (7), th (8), th.
* Modes 1 and 2 are not user saved, Modes 0, 3 and 4 are user saved.
** Only applicable to Modbus RTU mode.
Key:
Coding Attribute
{X.XX} Copied Menu 0 or advanced parameter
RW Read/write: can be written by the user
RO Read only: can only be read by the user
Bit 1 bit parameter: ‘On’ or ‘OFF’ on the display
Bi Bipolar parameter
Uni Unipolar parameter
Txt Text: the parameter uses text strings instead of numbers.
Filtered: some parameters which can have rapidly changing
FI
values are filtered when displayed on the drive keypad for
easy viewing.
Destination: This parameter selects the destination of an
DE
input or logic function.
Rating dependent: this parameter is likely to have different
values and ranges with drives of different voltage and
current ratings. Parameters with this attribute will not be
transferred to the destination drive by SMARTCARDs when
RA
the rating of the destination drive is different from the
source drive and the file is a parameter file. However, the
value will be transferred if only the current rating is different
and the file is a differences from default type file.
Not copied: not transferred to or from SMARTCARDs
NC
during copying.
PT Protected: cannot be used as a destination.
User save: parameter saved in drive EEPROM when the
US
user initiates a parameter save.
Power-down save: parameter automatically saved in drive
EEPROM when the under volts (UV) trip occurs. Power-
PS
down save parameters are also saved in the drive when the
user initiates a parameter save.
Range(
Ú) Default(Ö)
diSp (9)
OFF (0) or On (1)
th (8) RW Txt US
RO Bi NC PT
RO Bi NC PT
RO Bi NC PT
RO Bit NC PT
Pr x.00 is available in all menus and has the following functions.
Value String Action
0 No Act No action
1 SAUE Save parameters
2 rEAd 1* Transfer SMART card data block 1 to the drive
3 PrOg 1*
Transfer drive parameters as difference from
default to SMART card block number 1
4 rEAd 2* Transfer SMART card data block 2 to the drive
5 PrOg 2*
Transfer drive parameters as difference from
default to SMART card block number 2
6 rEAd 3* Transfer SMART card data block 3 to the drive
7 PrOg 3*
Transfer drive parameters as difference from
default to SMART card block number 3
8 diS.diFF Display non-default values only
9 diS.dESt Display destination parameters only
10 Eur Load European defaults
11 USA Load USA defaults
12 rES OP Reset all Solution Modules
1000 1000 Save parameters
1070 1070 Reset all Solution Modules
1233 1233 Load European defaults
1244 1244 Load USA defaults
1255 1255 Load European defaults (excluding menus 15 to 20)
1256 1256 Load USA defaults (excluding menus 15 to 20)
Transfer drive parameter to a card and create a
2001 2001*
bootable difference from default SMART card block
with data block number 1 and clear parameter
11.42. If data block 1 exists it is over written.
3yyy 3yyy*
4yyy 4yyy*
5yyy 5yyy*
Transfer drive parameters to SMART card block
number yyy
Transfer drive parameters as difference from
default to SMART card block number yyy
Transfer Onboard Applications Lite ladder
program to SMART card block number yyy
6yyy 6yyy* Transfer SMART card data block yyy to the drive
7yyy 7yyy* Erase SMART card data block yyy
Typ e
8yyy 8yyy* Compare drive data with SMART card block yyy
6.1 Full descriptions
6.1.1 Parameter x.00
SE00 {x.00} Parameter zero
RW Uni
Ú
0 to 32,767
Ö
0
9555 9555* Clear SMART card warning suppression flag
9666 9666* Set SMART card warning suppression flag
9777 9777* Clear SMART card read-only flag
9888 9888* Set SMART card read-only flag
9999 9999* Erase SMART card
12000** 12000** Display non-default values only
12001** 12001** Display destination parameters only
* See Chapter 9 SMARTCARD operation on page 81 for more
information of these functions.
** These functions do not require a drive reset to become active. All
other functions require a drive reset to initiate the function.
Mentor MP User Guide 65
Issue: 4 www.controltechniques.com
Page 66

Safety
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
6.1.2 Parameter x.00 reset
When an action is started by setting Pr x.00 to one of the above values
and initiating a drive reset this parameter is cleared when the action is
completed successfully. If the action is not started, e.g. because the
drive is enabled and an attempt is made to load defaults, etc., Pr x.00 is
not cleared and no trip is produced. If the action is started and then fails
for some reason a trip is always produced and Pr x.00 is not cleared. It
should be noted that parameter saves etc. can also be initiated with the
copying parameter (Pr 11.42 (SE09, 0.30)). If actions that can be
initiated by either parameter are started and then completed successfully
Pr x.00 is cleared and Pr 11.42 (SE09, 0.30) is cleared if it has a value of
less than 3.
It should be noted that there could be some conflict between the actions
of Pr x.00 and Pr 11.42 (SE09, 0.30) Parameter copying when the drive
is reset. If Pr 11.42 (SE09, 0.30) has a value of 1 or 2 and a valid action
is required from the value of Pr x.00 then only the action required by
Pr x.00 is performed. Pr x.00 and Pr 11.42 (SE09, 0.30) are then reset to
zero. If Pr 11.42 (SE09, 0.30) has a value of 3 or 4 it will operate
correctly causing parameters to be save to a SMARTCARD each time a
parameter save is performed.
6.1.3 Set-up
SE01
{0.22, 1.07}
RW Bi PT US
±SPEED_LIMIT_MAX rpm
Ú
(When the drive is jogging, this parameter has no effect.)
Set
SE01
directions of rotation. The drive speed reference is scaled between
(Pr
0.22, 1.07) and
SE02
{0.23, 1.06}
RW Bi US
Ú
(The drive has additional over-speed protection.)
Set
SE02
directions of rotation. The drive speed reference is scaled between
(Pr
0.22, 1.07) and
SE03
{0.24, 2.11}
RW Uni US
Ú
Set SE03 (Pr 0.03, 2.11) at the required rate of acceleration.
Note that larger values produce lower acceleration. The rate applies in
both directions of rotation.
SE04
{0.25, 2.21}
RW Uni US
Ú
Set Pr SE04 (Pr 0.25, 2.21) at the required rate of deceleration.
Note that larger values produce lower deceleration. The rate applies in
both directions of rotation.
Minimum reference clamp
Ö
(Pr
0.22, 1.07) at the required minimum motor speed for both
SE02
(Pr
0.23, 1.06).
0.0
Maximum reference clamp
SPEED_LIMIT_MAX rpm
(Pr
0.23, 1.06
) at the required maximum motor speed for both
SE02
(Pr
0.23, 1.06
Ö
).
1000.0
Acceleration rate
0 to MAX_RAMP_RATE
s/(SE02 [Pr 0.23, 1.06] or
Ö
5.000
Pr 2.39)
Deceleration rate
0 to MAX_RAMP_RATE
s/(SE02 [Pr 0.23, 1.06] or
Ö
5.000
Pr 2.39)
SE01
SE01
SE05
{0.26, 1.14}
Reference selector
RW Txt US
A1.A2 (0), A1.Pr (1), A2.Pr (2),
Pr (3), PAd (4), Prc (5), PAd
Ú
Ö
A1.A2 (0)
rEF (6)
Defines how the value of Pr 1.49 is derived as follows:
Val ue o f
Pr 1.14
0
1
2
Display String Pr 1.49
A1.A2 (Analog ref 1. Analog
ref 2)
A1.Pr (Analog ref 1. Preset
speeds)
A2.Pr (Analog ref 2. Preset
speeds)
*Selected by
terminal input
3 Pr (Preset speeds) 3
4 Pad (Keypad reference) 4
5 Prc (Precision reference) 5
6 Pad rEF 6
*Pr 1.41 to Pr 1.44 and Pr 1.52 can be controlled by digital inputs to force
the value of Pr 1.49:
When all bits = 0, Pr 1.49 =1
Pr 1.41 = 1 then Pr 1.49 = 2
Pr 1.42 = 1 then Pr 1.49 = 3
Pr 1.43 = 1 then Pr 1.49 = 4
Pr 1.44 = 1 then Pr 1.49 = 5
Pr 1.52 = 1 then Pr 1.49 = 6
The bit parameters with lower numbers have priority over those with
higher numbers.
Pr 1.49 and Pr 1.50 then define the reference as follows:
Pr 1.49 Pr 1.50 Reference
1 1 Analog reference 1 (Pr 1.36)
1 >1 Preset defined by Pr 1.50 (Pr 1.21 to Pr 1.28)
2 1 Analog reference 2 (Pr 1.37)
2 >1 Preset defined by Pr 1.50 (Pr 1.21 to Pr 1.28)
3 x Preset defined by Pr 1.50 (Pr 1.21 to Pr 1.28)
4 x Keypad reference (Pr 1.17)
5 x Precision reference (Pr 1.18 and Pr 1.19)
6 x Keypad reference only
x = any value
Keypad reference
If Keypad reference is selected the drive sequencer is controlled directly
by the keypad keys and the keypad reference parameter (Pr 1.17) is
selected. The sequencing bits, Pr 6.30 to Pr 6.34, have no effect and jog
is disabled.
SE06
{0.27, 5.09}
Armature rated voltage
RW Uni RA US
For 480V drive: 440 Eur,
0 to
ARMATURE_VOLTAGE_MAX
Ú
Vdc
Ö
500 USA
For 575V drive: 630 Eur,
630 USA
For 690V drive: 760 Eur,
760 USA
1
2
66 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 67

Safety
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
SE07
{0.28, 5.07}
Motor rated current
RW Uni RA US
0 to RATED_CURRENT_MAX
Ú
A
RATED_CURRENT_MAX
Ö
The rated current should be set at the motor nameplate value for rated
current. The value of this parameter is used in the following:
• Current limits
• Motor thermal protection
SE08
{0.29, 5.08}
Base speed
RW Uni US
Ú
0.0 to 10,000.0 rpm
Ö
1000.0
The rated speed defines the base speed of the motor. It is also to
determine the speed used in the auto tuning inertia test (see
[Pr
0.34, 5.12
SE09
{0.30, 11.42}
]).
Parameter copying
SE13
RW Txt NC *
nonE (0), rEAd (1), ProG (2),
Ú
Auto (3), boot (4)
Ö
nonE (0)
* Modes 1 and 2 are not user saved, Modes 0, 3 and 4 are user saved.
If SE09 (Pr 0.30, 11.4 2) is equal to 1 or 2 this value is not transferred to
the EEPROM or the drive. If SE09 (Pr 0.30, 11.42 ) is set to a 3 or 4 the
value is transferred.
Pr
String
Pr
value
Comment
nonE 0 Inactive
rEAd 1 Read parameter set from the SMARTCARD
ProG 2 Programming a parameter set to the SMARTCARD
Auto 3 Auto save
boot 4 Boot mode
For further information, refer to Chapter 9 SMARTCARD operation on
page 81.
SE10
{0.31, 5.70}
Rated field current
RW Uni PT US
Ú
FIELD_CURRENT_SET_MAX
0 to
Size 1: Eur 2A, USA 8A
Size 2A/B: Eur 3A, USA 20A
Ö
Size 2C/D: Eur 5A, USA 20A
This parameter will be set to the field current of the motor and will define
the rated field current for the field controller.
SE11
{0.32, 5.73}
Rated field voltage
RW Uni PT US
Ú
0 to 500 Vdc
Ö
Eur: 360, USA: 300
The maximum voltage the field controller is allowed to generate.
SE12
{0.33, 5.77}
Enable field control
RW Txt US
Ú
OFF (0) or On (1)
Ö
OFF (0)
When this parameter is set to 0 the internal and external field controllers
are disabled. Setting the parameter to 1 enables the internal or external
field controller.
SE13
{0.34, 5.12}
Autotune
RW Uni NC
Ú
0 to 3
Ö
0
If this parameter is set to a non-zero value, the drive is enabled and a
run command is applied in either direction the drive performs an autotune test. All tests that rotate the motor are carried out in the forward
direction if di12 (Pr 0.47, 1.12) = 0 or the reverse direction if di12
(Pr 0.47, 1.12) = 1. For example, if the test is initiated by applying run
reverse (Pr 6.32 = 1) the test is performed in the reverse direction. The
test will not start unless the drive is disabled before the test is initiated by
applying the enable or run, i.e. it will not start if the drive is in the stop
state. It is not possible to go into the stop state if di12 (Pr 0.47, 1.12) has
a non-zero value.
When the test is completed successfully the drive is disabled and will
enter the inhibit state. The motor can only be restarted if the enable is
removed either from the enable input, or Pr 6.15 is set to zero or from
the control word (Pr 6.42) if it is active.
Value
Autotune function
0 None
1 Static autotune for current loop gains
2 Spinning autotune for motor saturation break points
3 Spinning autotune for inertia measurement
Static autotune for current loop gains
When this operation is performed, the drive will estimate the following,
with respect to the selected motor map, and store the values:
Motor constant (Pr 5.15)
Continuous proportional gain (Pr 4.13)
Continuous integral gain (Pr 4.14)
Discontinuous integral gain (Pr 4.34)
Back EMF set point (Pr 5.59)
Armature resistance (Pr 5.61)
Flux loop I gain (Pr 5.72)
Spinning autotune for motor saturation break points
When this operation is performed, the drive will estimate the following,
with respect to the selected motor map, and store the values:
Motor saturation break points (Pr 5.29, Pr 5.30), by spinning the
motor at 25% of it’s base speed (Pr 5.06)
Field current compensation factor (Pr 5.74)
Spinning autotune for inertia measurement
The drive can measure the total inertia of the load and motor. This is
used to set the speed loop gains. See Pr 3.17 Speed controller setup
method = 1 (bandwidth setup). During the inertia measurement test the
drive attempts to accelerate the motor to
3
/4 rated speed then back to a
standstill. Several attempts may be made, starting with rated torque/16,
and then increasing the torque progressively to x
1
/8, x1/4, x1/2, and x 1
rated torque if the motor cannot be accelerated to the required speed. If
the required speed is not achieved on the final attempt the test is
aborted and a tuNE 1 trip is initiated. If the test is successful the
acceleration and deceleration times are used to calculate the motor and
load inertia and a value is written to Pr 3.18 Motor and load inertia.
Mentor MP User Guide 67
Issue: 4 www.controltechniques.com
Page 68

Safety
Filter
defined
by Pr
3.42
16ms
filter
From the drive
encoder port
Speed
controller
Drive encoder
reference
system
di05
0.40, 3.02
Fb09
0.79, 3.27
(Pr )
and
(Pr )
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
SE14
{0.35, 11.44}
Security status
RW Txt PT US
Ú
L1 (0), L2 (1), Loc (2)
Ö
L1 (0)
This parameter controls access via the drive keypad as follows:
Value String Action
0 L1 Only menu 0 can be accessed
1 L2 All menus can be accessed
2 Loc
Lock user security when drive is reset.
(This parameter is set to L1 after reset.)
The keypad can adjust this parameter even when user security is set.
6.1.4 Diagnostic
di01
{0.36, 1.01}
RO Bi NC PT
Ú
di02
{0.37, 1.03}
RO Bi NC PT
Ú
Speed reference selected
±MAX_SPEED_REF rpm
Pre-ramp reference
±MAX_SPEED_REF rpm
Ö
Ö
Position feedback device ELPR
Ab number of lines per revolution
Fd, Fr number of lines per revolution / 2
For example a 4096 line Ab type encoder gives a ripple level of 0.23rpm.
The 16ms sliding window filter is always applied to the value
shown in di05 (Pr 0.40, 3.02), but this sliding window filter is not
normally applied to the actual speed feedback used by the speed
controller or the drive encoder reference system (Pr 3.43 to
Pr 3.46). The user may apply a filter to the speed controller input and the
drive encoder reference system input if required by setting Pr 3.42 to the
required filter time. The encoder ripple seen by the speed controller is
given by:
Encoder speed ripple = 60 / Filter time / (ELPR x 4)
If Pr 3.42 is set to zero (no filter) the ripple seen by the speed controller
and drive encoder reference system is given by:
Encoder speed ripple = 60 / 250μs / (ELPR x 4)
Figure 6-1 Speed feedback filter arrangement
di03
{0.38, 2.01}
Post ramp reference
RO Bi NC PT
Ú
{0.39, 3.01}
±SPEED_MAX rpm
di04
Final speed reference
Ö
RO Bi FI NC PT
Ú
±SPEED_MAX rpm
Ö
This is the final speed demand at the input to the speed regulator formed
by the sum of the ramp output and the hard speed reference (if the hard
speed reference is enabled). If the drive is disabled this parameter will
show 0.0.
di05
{0.40, 3.02}
Speed feedback
RO Bi FI NC PT
Ú
±SPEED_MAX rpm
Ö
The speed feedback can be taken from the drive encoder port or
tachometer or armature voltage or a position feedback module installed
in any slot as selected with Fb01 (Pr 0.71, 3.26). di05 (Pr 0.40, 3.02)
shows the level of the speed feedback selected for the speed controller.
Display filtering is active when this parameter is viewed with one of the
drive keypads. The value held in the drive parameter (accessible via
comms or an option module) does not include this filter, but is a value
that is obtained over a sliding 16ms period to limit the ripple seen in this
parameter value. The speed feedback value includes encoder
quantization ripple given by the following equation:
Ripple in di05 (Pr 0.40, 3.02) = 60 / 16ms / (ELPR x 4)
Where ELPR is the equivalent encoder lines per revolution as defined
overleaf:
Figure 6-1 shows the filter arrangement. It should be noted that the
same filtering is provided at the speed controller input and for di05
(Pr 0.40, 3.02) when the feedback is obtained from an option module,
but the variable length window filter is controlled by Pr x.19.
It is not advisable to set the speed feedback filter too high unless it is
specifically required for high inertia applications with high controller
gains because the filter has a non-linear transfer function. It is preferable
to use the current demand filters (see Pr 4.12 or Pr 4.23) as these are
linear first order filters that provide filtering on noise generated from both
the speed reference and the speed feedback. It should be noted that any
filtering included within the speed controller feedback loop, either on the
speed feedback or the current demand, introduces a delay and limits the
maximum bandwidth of the controller for stable operation.
The speed ripple can be quite high, for example with a 4096 line encoder
the speed ripple is 14.6rpm, but this does not define the resolution of the
speed feedback which is normally much better and depends on the
length of the measuring period used to obtain the feedback. This is
shown in the improved resolution of the value accessible in di05
(Pr
0.40, 3.02) which is measured over 16ms, i.e. a resolution of
0.23rpm with a 4096 line encoder. The speed controller itself
accumulates all pulses from the encoder, and so the speed controller
resolution is not limited by the feedback, but by the resolution of the
speed reference. If a SINCOS encoder is used from an option the
encoder speed ripple is reduced by a factor of 2
(2-Interpolation bits)
. For
example with the nominal 10 bits of interpolation information, the speed
ripple is reduced by a factor of 256. This shows how a SINCOS encoder
can reduce noise caused by encoder quantization without any filtering in
the speed feedback or the current demand, so that high gains may be
used to give high dynamic performance and a very stiff system.
68 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 69

Safety
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
di06
{0.41, 3.04}
RO Bi FI NC PT
Ú
The output of the speed regulator is a torque demand given as a
percentage of rated motor torque. This is then modified to account for
changes in motor flux if field weakening is active, and then used as the
torque producing current reference.
di07
{0.42, 4.03}
RO Bi FI NC PT
Ú
The torque demand can be derived from the speed controller and/or the
torque reference and offset. The units of the torque demand are a % of
rated torque.
di08
{0.43, 4.01}
RO Uni FI NC PT
0 to DRIVE_CURRENT_MAX
Ú
The current feedback signal is derived from internal current
transformers. It is used for closed loop control and indication of the
armature current, and to initiate motor protection.
di09
{0.44, 5.56}
RO Bi FI NC PT
Ú
Indicates the field current feedback in 0.01 amperes.
di10
{0.45, 5.02}
RO Bi FI NC PT
±ARMATURE_VOLTAGE_
Ú
The average measured DC output voltage seen across the drive A1 and
A2 terminals or the average measured DC output voltage seen across
the motor. Selected by Pr 5.14.
The armature voltage feedback has a resolution of 10-bit plus sign.
di11
{0.46, 1.11}
di12
{0.47, 1.13}
di13
{0.48, 1.14}
RO Bit NC PT
Ú
These parameters are controlled by the drive sequencer as defined in
Menu 6. They select the appropriate reference as commanded by the
drive logic. di11 (Pr 0.46, 1.11) will be active if a run command is given,
the drive is enabled and the drive is ok. This parameter can be used as
an interlock in a Onboard PLC or SM-Applications program to show that
the drive is able to respond to a speed or torque demand.
Speed controller output
±TORQUE_PRODUCT_
CURRENT_MAX rpm
Torque demand
±TORQUE_PROD_
CURRENT_MAX %
Current magnitude
A
Field current feedback
±50.00A
Armature voltage
MAX V
Reference enabled indicator
Reverse selected indicator
Jog selected indicator
OFF (0) or On (1)
Ö
Ö
Ö
Ö
Ö
Ö
di14
{0.49, 11.29}
RO Uni NC PT
Ú
The parameter displays the software version of the drive.
Software version
1.00 to 99.99
Ö
6.1.5 Trips
tr01
{0.51, 10.20}
tr02
{0.52, 10.21}
tr03
{0.53, 10.22}
tr04
{0.54, 10.23}
tr05
{0.55, 10.24}
tr06
{0.56, 10.25}
tr07
{0.57, 10.26}
tr08
{0.58, 10.27}
tr09
{0.59, 10.28}
tr10
{0.60, 10.29}
RO Txt NC PT PS
Ú
Contains the last 10 drive trips. tr01 (Pr 0.51, 10.20) is the most recent
trip and tr10 (Pr 0.60, 10.29) the oldest. When a new trip occurs all the
parameters move down one, the current trip is put in tr01 (Pr 0.51,
10.20) and the oldest trip is lost from the bottom of the log. Descriptions
of the trips are given in Table 13-1 on page 167. All trips are stored,
including HF trips numbered from 20 to 29. (HF trips with numbers from
1 to 16 are not stored in the trip log.) Any trip can be initiated by the
actions described or by writing the relevant trip number to Pr 10.38. If
any trips shown as user trips are initiated the trip string is "txxx", where
xxx is the trip number.
Trip 0
Trip 1
Trip 2
Trip 3
Trip 4
Trip 5
Trip 6
Trip 7
Trip 8
Trip 9
0 to 229
Ö
6.1.6 Speed loop
SP01
{0.61, 3.10}
RW Uni US
0.0000 to 6.5535 (1 / (rad/s))
Ú
SP01 (Pr 0.61/3.10) operates in the feed-forward path of the speedcontrol loop in the drive. See Figure 11-3 on page 102 for a schematic of
the speed controller. For information on setting up the speed controller
gains, refer to Chapter 8 Optimization on page 78.
SP02
{0.62, 3.11}
RW Uni US
0.00 to 655.35 (s / (rad/s))
Ú
SP02 (Pr 0.62, 3.11) operates in the feed-forward path of the speed-
control loop in the drive. See Figure 11-3 on page 102 for a schematic of
(Kp1) Speed controller proportional gains
Ö
(Ki1) Speed controller integral gains
Ö
0.0300
0.1
Mentor MP User Guide 69
Issue: 4 www.controltechniques.com
Page 70

Safety
Information
the speed controller. For information on setting up the speed controller
gains, refer to Chapter 8 Optimization on page 78.
{0.63, 3.12}
RW Uni US
Ú
SP03 (Pr 0.63, 3.12) operates in the feed-forward path of the speed-
control loop in the drive. See Figure 11-3 on page 102 for a schematic of
the speed controller. For information on setting up the speed controller
gains, refer to Chapter 8 Optimization on page 78.
Product
information
SP03
(Kd1) Speed controller differential feedback gains
0.00000 to 0.65535
(1/s / (rad/s))
Mechanical
Installation
Electrical
installation
Ö
Getting
started
Basic
parameters
0.00000
Running the
motor
6.1.7 Serial interface
Si01
{0.61, 11.25}
RW Txt US
2400 (3), 4800 (4), 9600 (5),
Ú
* only applicable to Modbus RTU mode
This parameter can be changed via the drive keypad, via a Solutions
Module or via the comms interface itself. If it is changed via the comms
interface, the response to the command uses the original baud rate. The
master should wait at least 20ms before send a new message using the
new baud rate.
Si02
{0.67, 11.23}
RW Uni US
Ú
Used to define the unique address for the drive for the serial interface.
The drive is always a slave.
Modbus RTU
When the Modbus RTU protocol is used addresses between 0 and 247
are permitted. Address 0 is used to globally address all slaves, and so
this address should not be set in this parameter
ANSI
When the ANSI protocol is used the first digit is the group and the
second digit is the address within a group. The maximum permitted
group number is 9 and the maximum permitted address within a group is
9. Therefore, Si02 (Pr 0.67, 11.23) is limited to 99 in this mode. The
value 00 is used to globally address all slaves on the system, and x0 is
used to address all slaves of group x, therefore these addresses should
not be set in this parameter.
Serial comms baud rate
300 (0), 600 (1), 1200 (2),
19200 (6), 38400 (7),
57600 (8)*, 115200 (9)*
Serial comms address
0 to 247
Ö
Ö
19200 (6)
1
6.1.8 Speed feedback
Fb01
{0.71, 3.26}
RW Txt US
drv (0), Slot1 (1), Slot2 (2),
Ú
0, drv: Drive encoder
The position feedback from the encoder connected to the drive itself
is used to derive the speed feedback for the speed controller and to
calculate the motor rotor flux position.
1, Slot1: Solutions Module in slot 1
The position feedback from the Solutions Module in Solutions
Module slot 1 is used to derive the speed feedback for the speed
Speed feedback selector
Slot3 (3), tACHO (4), Est
SPEED (5)
Ö
Est SPEED (5)
Optimization
2, Slot2: Solutions Module in slot 2
3, Slot3: Solutions Module in slot 3
4, tACHO: Tachometer
5, ESt.SPEED: Estimated speed
Ú
Defines the rating of the tachometer installed to the motor. This
parameter should be set slightly above or below the nominal value if the
user wishes to trim out the tolerance build ups in the feedback
electronics.
Ú
The input electronics for the tachometer input can be configured in 3
ways.
Ú
Provided the tachometer voltage rating parameter for the tachometer is
correct this parameter shows the tachometer speed in rpm.
SMARTCARD
operation
controller and to calculate the motor rotor flux position. If a position
feedback category Solutions Module is not installed in slot 1 the
drive produces an EnC9 trip.
Fb02
{0.72, 3.51}
RW Uni US
0 to 300.00 V/1000 rpm
Fb03
{0.73, 3.53}
RW Txt US
DC (0), DC Filt (1), AC (2)
Value Text Action
0 DC DC tachometer
1 DC Filt DC tachometer with input filter
2 AC AC tachometer
Fb04
{0.74, 3.52}
RO Bi FI NC PT
±SPEED_MAX rpm
Fb05
{0.75, 3.34}
RW Uni US
Ú
When Ab, Fd, Fr are used the equivalent number of encoder lines per
revolution must be set-up correctly in Fb05 (Pr 0.75, 3.34) to give the
correct speed and position feedback. This is particularly important if the
encoder is selected for speed feedback with Fb01 (Pr 0.71, 3.26). The
equivalent number of encoder lines per revolution (ELPR) is defined as
follows.:
Position feedback device ELPR
Ab number of lines per revolution
Fd, Fr number of lines per revolution / 2
The incremental (A/B) signal frequency should not exceed 500kHz. If
Fb05 is changed the encoder is re-initialized.
Onboard
Tachometer voltage rating
Tachometer input mode
PLC
Advanced
parameters
Ö
Technical
data
Eur: 60.00, USA: 50.00
Ö
Tachometer speed feedback
Ö
Drive encoder lines per revolution
1 to 50,000
Ö
Diagnostics
DC (0)
1,024
UL
information
70 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 71

Safety
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
Fb06
{0.76, 3.36}
RW Txt US
5V (0), 8V (1), 15V (2), 24V (3)
Ú
The encoder supply voltage present on the drive encoder connector is
defined by this parameter as 0 (5V), 1 (8V), 2 (15V) or 3 (24V)
Fb07
{0.77, 3.38}
RW Txt US
Ú
The following encoders can be connected to the drive encoder port.
0, Ab: Quadrature incremental encoder, with or without marker pulse.
1, Fd: Incremental encoder with frequency and direction outputs, with or
without marker pulse.
2, Fr: Incremental encoder with forward and reverse outputs, with or
without marker pulse.
Fb08
{0.78, 3.39}
RW Uni US
Ú
The terminations may be enabled/disabled by this parameter as follows:
Encoder
input
A-A\ Disabled Enabled Enabled
B-B\ Disabled Enabled Enabled
Z-Z\ Disabled Disabled Enabled
Fb09
{0.79, 3.27}
RW Bi FI NC PT US
Ú
Provided the set-up parameters for the drive encoder are correct this
parameter shows the encoder speed in rpm.
It should be noted that the value shown by this parameter is measured
over a 16ms sliding window period (in the same way as di05 (Pr 0.40,
3.02)), and so the ripple in this parameter accessible via comms or by an
option module is as defined for di05 (Pr 0.40, 3.02). The FI attribute for
this parameter is set, and so further filtering is applied when this
parameter is viewed with one of the drive keypads.
Drive encoder supply voltage
Ö
Drive encoder type
Ab (0), Fd (1), Fr (2)
Drive encoder termination select
0 to 2
Fb08
{0.78, 3.39} = 0
Drive encoder speed feedback
±10,000.0 rpm
Ö
Ö
{0.78, 3.39} = 1
Ö
Fb08
5V (0)
Ab (0)
1
Fb08
{0.78, 3.39} = 2
6.1.9 I/O
in01
{0.81, 7.15}
RW Txt US
0-20 (0), 20-0 (1), 4-20.tr (2),
20-4.tr (3), 4-20 (4), 20-4 (5),
Ú
VOLt (6), th.SC (7), th (8), th.
The following modes are available for the analog input 3. A current loop
loss trip is generated if the input current falls below 3mA. In modes 4 and
5 the analog input level goes to 0.0% if the input current falls below 3mA.
Analog input 3 mode
diSp (9)
Eur: th (8), USA: VOLt (6)
Ö
Parameter
value
0 0-20 0 - 20mA
1 20-0 20 - 0mA
2 4-20.tr
3 20-4.tr
44-20
5 20-4
6 VOLt Voltage mode
7th.SC
8th
9th.diSp
In modes 2 and 4 the destination parameter is at a value equivalent to
0.0% when the input current is less than 4mA. In modes 3 and 5 the
destination parameter is at a value equivalent to 100.0% when the input
current is less than 4mA.
in02
{0.82, 7.01}
RO Bi NC PT
Ú
in03
{0.83, 7.02}
RO Bi NC PT
Ú
in04
{0.84, 7.03}
RO Bi NC PT
Ú
When analog input 3 is in thermistor mode the display indicates the
resistance of the thermistor as a percentage of 10kΩ.
in05
{0.85, 8.01}
in06
{0.86, 8.02}
in07
{0.87, 8.03}
in08
{0.88, 8.04}
in09
{0.89, 8.05}
in10
{0.90, 8.06}
RO Bit NC PT
Ú
Parameter
string
4 -20mA with trip on
20 - 4mA with trip on
4 - 20mA with no trip
20 - 4mA with no trip
Thermistor with short
Thermistor without
short circuit detection
Thermistor display
Analog input 1
±100.00 %
Analog input 2
±100.0 %
Analog input 3
±100.0 %
T24 digital I/O 1 state
T25 digital I/O 2 state
T26 digital I/O 3 state
T27 digital input 4 state
T28 digital input 5 state
T29 digital input 6 state
OFF (0) or On (1)
Mode Comments
loss
loss
on loss
on loss
circuit detection
only with no trip
Trip if I < 3mA
Trip if I < 3mA
0.0% if I < 4mA
TH trip if R > 3k3
TH reset if R < 1k8
THS trip if R < 50R
TH trip if R > 3k3
TH reset if R < 1k8
Ö
Ö
Ö
Ö
OFF (0) = Terminal inactive
On (1) = Terminal active
Mentor MP User Guide 71
Issue: 4 www.controltechniques.com
Page 72

Safety
WARNING
CAUTION
CAUTION
WARNING
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
7 Running the motor
This chapter takes the new user through all the essential steps to
running a motor for the first time, in each of the possible operating
modes.
Ensure that no damage or safety hazard could arise from the
motor starting unexpectedly.
The values of the motor parameters affect the protection of
the motor.
The default values in the drive should not be relied upon.
It is essential that the correct value is entered in Pr 5.07
(SE07, 0.28) Motor rated current. This affects the thermal
protection of the motor.
If the keypad mode has been used previously, ensure that
the keypad reference has been set to 0 using the
buttons as if the drive is started using the keypad it will run to
the speed defined by the keypad reference (Pr 1.17).
If the intended maximum speed affects the safety of the
machinery, additional independent over-speed protection
must be used.
Running
the motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
Table 7-1 Minimum control connection requirements for each
control mode
Drive control method Requirements
Drive enable
Terminal mode
Speed reference
Run forward or run reverse
command
Keypad mode Drive enable
Serial communications
Drive enable
Serial communications link
Refer to Figure 4-1 Power connections for 480V drive on page 33 for
minimum connections to get a motor running.
72 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 73

Safety
NOTE
Mot X XXXXXXXXX
No XXXXXXXXXX kg
XXXXXXXXXXXXXXXXXXXXXXXXXX
XXXXXXXXX
XXXXXXX
XXX
XXXXX
XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX
XXXXXXXXXXXXXXXXXXXXXXXXXX
XXXXXXXXXXXXXXXXXXXXXXXXXX
XXXXXXXXXXXXXXXXXXXXXXXXXX
Setting the encoder voltage supply too high for the encoder could result in damage to the feedback
device.
CAUTION
NOTE
NOTE
SE02
t
SE02
SE03
t
SE04
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running
the motor
Optimization
SMARTCARD
operation
Onboard
PLC
parameters
7.1 Quick start commissioning / start-up (from European defaults)
Action Detail
Ensure:
• Drive Enable signal is not given (terminal 31)
Before power-up
Power-up the
drive
Enter motor
nameplate
details
• Run signal is not given
• Motor connected
• Tacho connected if one is being used
• Encoder connected if one is being used
Ensure:
• Drive displays ‘inh’
The drive will trip ‘th’ (Motor thermistor trip) if no motor thermistor is connected to analog input 3 (terminal 8). If
the motor protection is not connected to the drive, the ‘th’ trip can be disabled by setting Pr 7.15 (in01, 0.81)
(analog input 3 mode) to VOLt.
For drive trips, see Chapter 13 Diagnostics on page 167.
Enter:
• Armature rated voltage in Pr 5.09 (SE06, 0.27) (V)
• Motor rated current in Pr 5.07 (SE07, 0.28) (A)
• Motor rated speed (base speed) in Pr 5.08 (SE08, 0.29) (rpm)
• Field rated current in Pr 5.70 (SE10, 0.31) (A)
• Field rated voltage in Pr 5.73 (SE11, 0.32) (V)
Incremental encoder basic set-up
Enter:
• Drive encoder type in Pr 3.38 (Fb07, 0.77) = Ab (0): Quadrature encoder
Advanced
Technical
data
Diagnostics
UL
information
Set motor
feedback
parameters
Set maximum
speed
Set acceleration /
deceleration
rates
Enable the field
controller
• Encoder power supply in
If output voltage from the encoder is >5V, then the termination resistors must be disabled
(Fb08, 0.78)
Pr 3.36 (Fb06, 0.76)
to 0.
= 5V (0), 8V (1), 15V (2) or 24V (3)
Pr 3.39
• Drive encoder lines per revolution (LPR) in Pr 3.34 (Fb05, 0.75) (set according to encoder)
• Drive encoder termination resistor setting in Pr 3.39 (Fb08, 0.78)
0 = A-A\, B-B\, Z-Z\ termination resistors disabled
1 = A-A\, B-B\, termination resistors enabled, Z-Z\ termination resistors disabled
2 = A-A\, B-B\, Z-Z\ termination resistors enabled
Tachometer set-up
Enter:
• Tachometer voltage rating Pr 3.51 (Fb02, 0.72) (V/1000 rpm)
• Tachometer input mode Pr 3.53 (Fb03, 0.73)
Enter:
• Maximum speed in Pr 1.06 (SE02, 0.23) (rpm)
•Set Pr 5.64 = On If field weakening is required
For field weakening in Estimated Speed Mode please refer to Chapter8 Optimization on page 78
Enter:
• Acceleration rate in Pr 2.11 (SE03, 0.24) (time to accelerate to maximum speed)
• Deceleration rate in Pr 2.21 (SE04, 0.25) (time to decelerate from maximum speed)
Field controller set-up
• Select field mode by setting Pr 5.78 = IntrnL (Internal field controller is used), Etrnl (External half control),
E FULL (External in full control).
•Set Pr 5.77 (SE12, 0.33) = On to enable the field.
Mentor MP User Guide 73
Issue: 4 www.controltechniques.com
Page 74

Safety
NOTE
NOTE
A rotating autotune will cause the motor to accelerate up to 1/4 base speed in the direction selected
regardless of the reference provided. Once complete the motor will coast to a stop. The enable
signal must be removed before the drive can be made to run at the required reference.
The drive can be stopped at any time by removing the run signal or removing the drive enable.
WARNING
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running
the motor
Action Detail
Mentor MP is able to perform either a static, rotating or continuous autotune. The motor must be at a standstill
before an autotune is enabled.
Static autotune for current loop gains
When this operation is performed the drive will perform an estimation of Motor constant (Pr 5.15), Continuous
proportional gain (Pr 4.13), Continuous integral gain (Pr 4.14), Discontinuous integral gain (Pr 4.34), Back
EMF set point (Pr 5.59), Armature resistance (Pr 5.61) and Flux loop I gain (Pr 5.72) with respect to the
Static autotune
selected motor map and store the values.
To perform a static autotune:
•Set Pr 5.12 (SE13, 0.34)= 1
• Close the Drive Enable signal (terminal 31). The drive will display ‘rdY’
• Close the run signal (terminal 26 or 27). The lower display will flash ‘Auto’ and ‘tunE’ alternatively, while
the drive is performing the autotune
• Remove the enable signal when the autotune has finished
• Remove the run signal
• Close the enable signal. Close the run signal (terminal 26 or 27). Provide speed reference to run the drive
up to a low speed, the drive will regulate its own estimated speed.
• Check that the feedback device is functioning correctly:
For encoder speed feedback - Check encoder speed feedback Pr 3.27 (Fb09, 0.79).
Checking speed
feedback
For tachometer speed feedback - Check tachometer speed feedback Pr 3.52 (Fb04, 0.74).
• When the feedback device being used is seen to be functioning correctly, stop the drive and select the
correct feedback device using Pr 3.26 (Fb01, Pr 0.71)
For improved estimated speed accuracy and torque control in the field weakening range a rotating autotune is
recommended to determine the motor flux characteristics Pr 5.12 (SE13, 0.34) = 2
Mentor MP is able to perform either a static, rotating or continuous autotune. The motor must be at a standstill
before an autotune is enabled.
A rotating autotune cannot be carried out in Estimated speed mode.
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
Rotating
autotune
Save parameters
Run
Rotating autotune for motor field flux set-up
When selected the drive will determine the rated field compensation factor (Pr 5.74) for rated flux and the
motor field winding saturation break-points (Pr 5.29 and Pr 5.30), by spinning the motor at 25% of its base
speed (Pr 5.08) with respect to the selected motor map and store the values.
To perform an autotune:
•Set Pr 5.12 (SE13, 0.34) = 2 for a rotating autotune
• Close the Drive Enable signal (terminal 31). The drive will display ‘rdY’
• Close the run signal (terminal 26 or 27). The lower display will flash ‘Auto’ and ‘tunE’ alternatively, while
the drive is performing the autotune
• Wait for the drive to display ‘inh’ and for the motor to come to a standstill
If the drive trips, see Chapter 13 Diagnostics on page 167.
• Remove the drive enable and run signal from the drive.
Select SAVE in Pr xx.00 (SE00, 0.21)
Press the red reset button or toggle the reset digital input (ensure Pr xx.00 (SE00, 0.21) returns to ‘no Act’).
Drive is now ready to run
• Close enable signal
• Close run signal
• Provide speed reference
74 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 75
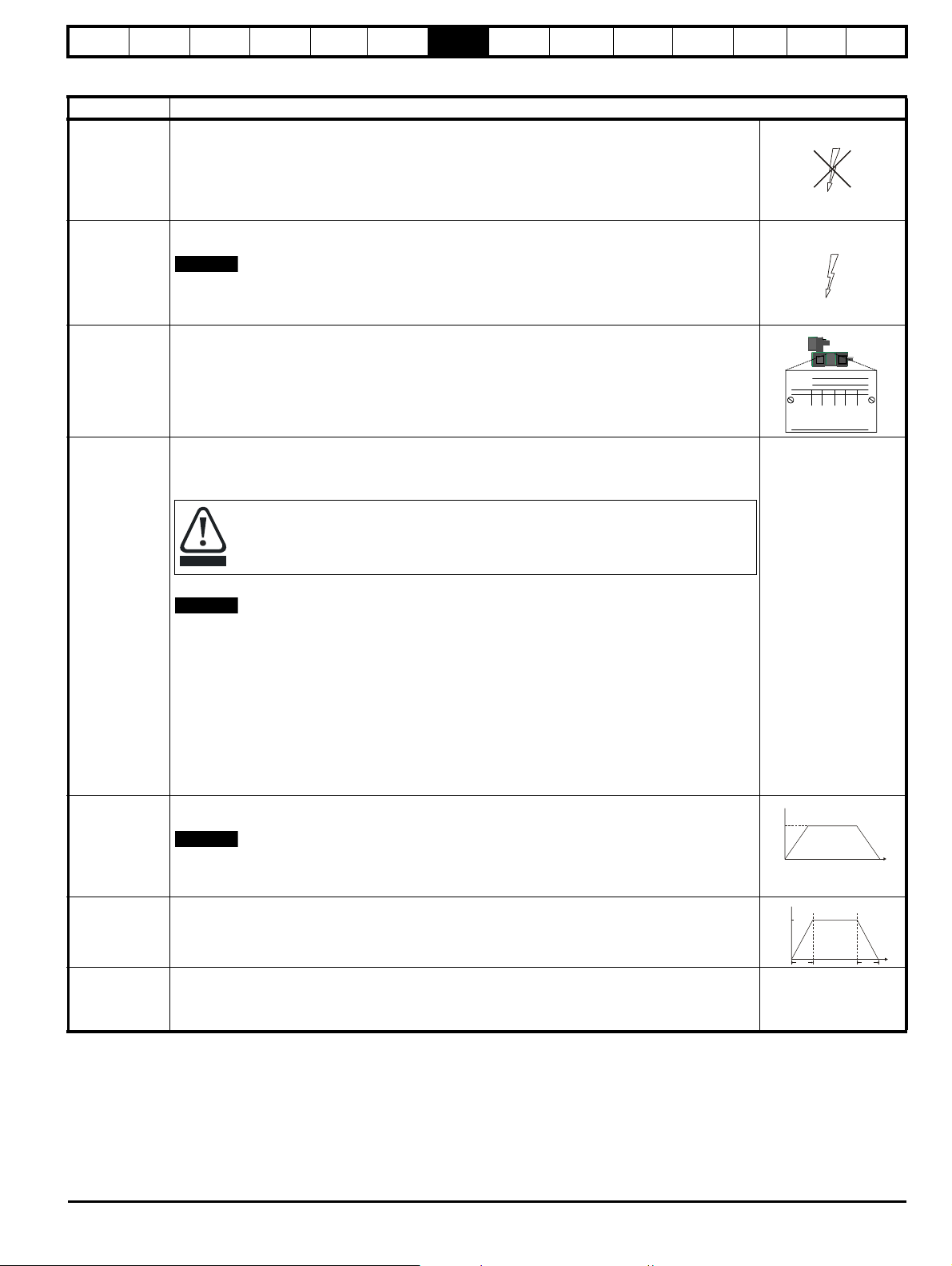
Safety
NOTE
Mot X XXXXXXXXX
No XXXXXXXXXX kg
XXXXXXXXXXXXXXXXXXXXXXXXXX
XXXXXXXXX
XXXXXXX
XXX
XXXXX
XXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXXX
XXXXXXXXXXXXXXXXXXXXXXXXXX
XXXXXXXXXXXXXXXXXXXXXXXXXX
XXXXXXXXXXXXXXXXXXXXXXXXXX
Setting the encoder voltage supply too high for the encoder could result in damage to the feedback
device.
CAUTION
NOTE
NOTE
SE02
t
SE02
SE03
t
SE04
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running
the motor
Optimization
SMARTCARD
operation
Onboard
7.2 Quick start commissioning / start-up (from USA defaults)
Action Detail
Ensure:
• Drive Enable signal is not given (terminal 31)
Before power-up
Power-up the
drive
• Run signal is not given
• Motor connected
• Tacho connected if one is being used
• Encoder connected if one is being used
Ensure:
• Drive displays ‘inh’
Motor thermistor input is disabled by default. If motor thermistor is available the thermistor should be used.
The protection is enabled with Pr 7.15 (in01, 0.81).
For drive trips, see Chapter 13 Diagnostics on page 167.
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
Enter motor
nameplate
details
Set motor
feedback
parameters
Set maximum
speed
Enter:
• Armature rated voltage in Pr 5.09 (SE06, 0.27) (V)
• Motor rated current in Pr 5.07 (SE07, 0.28) (A)
• Motor rated speed (base speed) in Pr 5.08 (SE08, 0.29) (rpm)
• Field rated voltage in Pr 5.73 (SE11, 0.32) (V)
Incremental encoder basic set-up
Enter:
• Drive encoder type in Pr 3.38 (Fb07, 0.77) = Ab (0): Quadrature encoder
• Encoder power supply in
If output voltage from the encoder is >5V, then the termination resistors must be disabled
(Fb08, 0.78)
Pr 3.36 (Fb06, 0.76)
to 0.
= 5V (0), 8V (1), 15V (2) or 24V (3)
Pr 3.39
• Drive encoder lines per revolution (LPR) in Pr 3.34 (Fb05, 0.75) (set according to encoder)
• Drive encoder termination resistor setting in Pr 3.39 (Fb08, 0.78)
0 = A-A\, B-B\, Z-Z\ termination resistors disabled
1 = A-A\, B-B\, termination resistors enabled, Z-Z\ termination resistors disabled
2 = A-A\, B-B\, Z-Z\ termination resistors enabled
Tachometer set-up
Enter:
• Tachometer voltage rating Pr 3.51 (Fb02, 0.72) (V/1000 rpm)
• Tachometer input mode Pr 3.53 (Fb03, 0.73)
Enter:
• Maximum speed in Pr 1.06 (SE02, 0.23) (rpm)
For field weakening the field controller needs to be set-up in current control by setting Pr 5.75 = OFF, setting
the rated field current into Pr 5.70 (SE10, 0.31)and setting Pr 5.64 to On.
For field weakening in Estimated Speed Mode please refer to Chapter 8 Optimization on page 78.
Set acceleration /
deceleration
rates
Enter:
• Acceleration rate in Pr 2.11 (SE03, 0.24) (time to accelerate to maximum speed)
• Deceleration rate in Pr 2.21 (SE04, 0.25) (time to decelerate from maximum speed)
Field controller set-up
Enable the field
controller
• Select field mode by setting Pr 5.78 = IntrnL (Internal field controller is used), Etrnl (External half control),
E FULL (External in full control).
•Set Pr 5.77 (SE12, 0.33) = On to enable the field.
Mentor MP User Guide 75
Issue: 4 www.controltechniques.com
Page 76
Safety
NOTE
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running
the motor
Action Detail
Mentor MP is able to perform either a static, rotating or continuous autotune. The motor must be at a standstill
before an autotune is enabled.
Static autotune for current loop gains
When this operation is performed the drive will perform an estimation of Motor constant (Pr 5.15), Continuous
proportional gain (Pr 4.13), Continuous integral gain (Pr 4.14), Discontinuous integral gain (Pr 4.34), Back
EMF set point (Pr 5.59), Armature resistance (Pr 5.61) and Flux loop I gain (Pr 5.72) with respect to the
selected motor map and store the values.
To perform a static autotune:
Static autotune
•Set Pr 5.12 (SE13, 0.34)= 1
• Close the Drive Enable signal (terminal 31). The drive will display ‘rdY’
• Close the run signal (terminal 26 or 27). The lower display will flash ‘Auto’ and ‘tunE’ alternatively, while
the drive is performing the autotune
• Remove the enable signal when the autotune has finished
• Remove the run signal
A rotating autotune Pr 5.12 (SE13, 0.34) = 2 should not be carried out when the field controller is in voltage
mode, Pr 5.75 = On (USA default).
• Close the enable signal. Close the run signal (terminal 26 or 27). Provide speed reference to run the drive
up to a low speed, the drive will regulate its own estimated speed.
Checking speed
feedback
• Check that the feedback device is functioning correctly:
For encoder speed feedback - Check encoder speed feedback Pr 3.27 (Fb09, 0.79).
For tachometer speed feedback - Check tachometer speed feedback Pr 3.52 (Fb04, 0.74).
• When the feedback device being used is seen to be functioning correctly, stop the drive and select the
correct feedback device using Pr 3.26 (Fb01, Pr 0.71).
Save parameters
Select SAVE in Pr xx.00 (SE00, 0.21)
Press the red reset button or toggle the reset digital input (ensure Pr xx.00 (SE00, 0.21) returns to ‘no Act’).
Drive is now ready to run
Run
• Close enable signal
• Close run signal
• Provide speed reference
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
7.3 CTSoft software commissioning / start-up tool
CTSoft can be used for commissioning / start-up and monitoring, drive parameters can be uploaded, downloaded and compared, and simple or
custom menu listings can be created. Drive menus can be displayed in standard list format or as live block diagrams. CTSoft includes a migration
wizard that allows Mentor II parameters to be migrated to the Mentor MP. CTSoft is able to communicate with a single drive or a network.
CT Soft can be found on the CD which is supplied with the drive and is also available for download from the website www.controltechniques.com (file
size approximately 100MB).
7.3.1 CTSoft system requirements:
1. Pentium IV 1000MHz or better recommended.
2. Windows Vista, Windows XP or Windows 2000 (Including the latest Service Packs) only.
3. Internet Explorer V5 or later should also be installed.
4. Microsoft .Net Framework 2.0 must also be installed.
5. Absolute minimum of 800 x 600 screen resolution. A resolution of 1024 x 768 or above is recommended.
6. Adobe Acrobat 5.05 or later (for parameter help).
7. 256MB RAM
You must have administration rights under Windows NT/2000/XP/Vista to install.
7.3.2 To install CTSoft from the CD
1. Ensure that any previous copies of CTSoft have been uninstalled before proceeding with the installation (existing projects will not be lost).
2. Insert the CD. The auto-run software should start up the front-end screen from which CTSoft can be selected. User guides for the supported drive
models are included with CTSoft application. When help is requested, CTSoft links to the parameter in the Mentor MP Advanced User Guide.
76 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 77

Safety
NOTE
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running
the motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
7.4 Setting up a feedback device
This section shows more detailed information on parameter settings that must be made to each of the compatible encoder types with Mentor MP. For
more information on the parameters listed here please refer to the Mentor MP Advanced User Guide.
7.4.1 Detailed feedback device commissioning/start-up information
Standard quadrature encoder with or without marker pulse
Encoder type
Encoder power supply voltage
Encoder number of lines per
revolution
Pr 3.38
(Fb07, 0.77)
Pr 3.36
(Fb06, 0.76)
Pr 3.34
(Fb05, 0.75)
Encoder marker mode Pr 3.35
Encoder termination selection
Pr 3.39
(Fb08, 0.78)
Encoder error detection level Pr 3.40
Incremental encoder with frequency and direction, or forward reverse signals, with or without marker pulse
Encoder type
Encoder power supply voltage
Encoder number of lines per
revolution
Pr 3.38
(Fb07, 0.77)
Pr 3.36
(Fb06, 0.76)
Pr 3.34
(Fb05, 0.75)
Encoder marker mode Pr 3.35
Encoder termination selection
Pr 3.39
(Fb08, 0.78)
Encoder error detection level Pr 3.40
Ab (0) Standard quadrature incremental encoder with or without marker pulse
5V (0), 8V (1) or 15V (2) or 24V (3)
If the voltage from the encoder is >5V, then the termination resistors must be disabled Pr
(Fb08, 0.78)
3.39
to 0
Set to the number of lines per revolution of the encoder
0 = The marker system operates in a conventional manner, 1 = the marker causes a full position
reset.
0 = A, B, Z termination resistors disabled, 1 = A, B termination resistors enabled and Z termination
resistors disabled, 2 = A, B, Z termination resistors enabled
0 = No wire break detect, 1 = Wire break detect on A and B (need termination enabled for 5V
signals), 2 = Wire break detect on A, B and Z (need termination enabled for 5V signals)
Fd (2) Incremental encoder with frequency and direction outputs, with or without marker pulse,
Fr (3) Incremental encoder with forward and reverse outputs, with or without marker pulse
5V (0), 8V (1) or 15V (2) or 24V (3)
If the voltage from the encoder is >5V, then the termination resistors must be disabled Pr
(Fb08, 0.78)
3.39
to 0
Set to the number of lines per revolution of the encoder divide by 2
0 = The marker system operates in a conventional manner, 1 = the marker causes a full position
reset.
0 = A, B, Z termination resistors disabled, 1 = A, B termination resistors enabled and Z termination
resistors disabled, 2 = A, B, Z termination resistors enabled
0 = No wire break detect, 1 = Wire break detect on A and B (need termination enabled for 5V
signals), 2 = Wire break detect on A, B and Z (need termination enabled for 5V signals)
Mentor MP User Guide 77
Issue: 4 www.controltechniques.com
Page 78

Safety
NOTE
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
8 Optimization
Before attempting to tune the drive the following data is required
• Armature full load current
• Armature voltage
• Field current
• Field voltage
• Base speed
• Maximum speed
In the following worked example the data below has been used
• Armature full load current = 67A with an overload of 90A for up to 30
seconds
• Armature voltage = 500V
• Field current = 1.85A
• Field voltage = 300V
• Base speed = 1750 rpm
• Maximum speed = 2500rpm
8.1 Armature current
• Set the motor rated current in Pr 5.07 (SE07, 0.28) to 67A.
• Set current limits in Pr 4.05 and Pr 4.06 to 90/67 x 100 = 134%
• Set the motor thermal time constant in Pr 4.15 = -30 / ln(1 - (1.05 /
8.2 Speed feedback
8.2.1 Estimated speed feedback
For estimated speed feedback set Pr 3.26 (Fb01, 0.71) to ESt SPd. This
uses an estimated speed feedback based on the motor back emf, motor
rated speed, motor rated voltage, armature resistance, armature current
and field flux feedback.
8.2.2 Tachometer speed feedback
For tachometer speed feedback set Pr 3.26 (Fb01, 0.71) to tACHO. Set
the tachometer voltage rating in V/1000rpm in Pr 3.51 (Fb02, 0.72) and
the tachometer input mode Pr 3.53 (Fb03, 0.73) to suit the type of
tachometer used.
8.2.3 Encoder speed feedback
For encoder speed feedback set Pr 3.26 (Fb01, 0.71) to drv. Set the
lines per revolution (Pr 3.34 (Fb05, 0.75)), encoder supply voltage
(Pr 3.36 (Fb06, 0.76)) and encoder type (Pr 3.38 (Fb07, 0.77)).
8.2.4 Solutions Module speed feedback
If an Solutions Module is being used to provide speed feedback then
Pr 3.26 (Fb01, 0.71) should be set to SLot1, SLot2, or SLot3.
8.3 Field current
The rated field current is set in Pr 5.70 (SE10, 0.31). When the field
current equals the compensated rated field current (see Pr 5.74), 100%
field flux is produced.
8.3.1 Field weakening with a speed feedback device
If field weakening is required the field compensation factor (Pr 5.74), the
motor saturation breakpoints (Pr 5.29, Pr 5.30) and the voltage at which
field weakening is required to begin (Pr 5.59) must be set.
Setting up the drive in field weakening is straightforward when a speed
feedback device is available. The rotating autotune (Pr 5.12 (SE13,
0.34) = 2) automatically sets up the parameters above. Follow the quick
start commissioning / start-up (from European defaults) as shown in
Table 6-1 on page 64 to set up the drive. Enable field weakening
(Pr 5.64 = On). Save parameters.
For field weakening from USA defaults Pr 5.75 Field voltage mode
should be set to OFF. Pr 5.28 Field weakening compensation disable
should be set to OFF. Follow the quick start commissioning / start-up
(from European defaults) as shown in Table 6-1 on page 64 to set up the
drive. Enable field weakening (Pr 5.64 = On). Save parameters.
1.34)
2
) = 31.5
8.3.2 Field weakening in estimated speed mode (no speed feedback device)
The Rotating Autotune (Pr 5.12 (SE13, 0.34) = 2) sets up the field
controller for more accurate flux control and open loop speed accuracy.
The rotating autotune needs to know the motor speed and so a speed
feedback device has to be connected to the drive before a rotating
autotune can be carried out. In some applications a speed feedback
device may not be required and so the procedure below allows the user
to manually adjust the field controller parameters to achieve better open
loop speed control.
• Follow the quick start commissioning / start-up (from European
defaults) as shown in Table 6-1 Pre-defined sub block
parameters on page 64 until a static autotune (Pr 5.12 (SE13, 0.34)
= 1) has been carried out.
•Set Pr 5.64 Field weakening enable to On.
• Ensure that Pr 5.29 , Pr 5.30, Pr 5.68 and Pr 5.74 are set to their
default values of 50%, 75%, 100% and 100% respectively.
• Set the speed demand to 1/4 of Base speed (Pr 5.08 (SE08, 0.29))
and run the machine up to speed and check the speed of the
machine using a hand held device.
• If the machine speed is lower than 1/4 of base speed (which is
normally the case) adjust the Field compensation factor (Pr 5.74)
down until the correct machine speed is reached. If the machine
speed is higher than
nameplate field current is low), adjust the rated field current (Pr 5.70
(SE10, 0.31)) up until the correct machine speed is reached.
•Set Pr 5.68 Maximum flux to 75% and measure the actual speed of
the machine (speed 75)
•Set Pr 5.68 Maximum flux to 50% and measure the actual speed of
the machine (speed 50).
• Stop the machine and set Pr 5.68 Maximum flux back to 100%.
•Set Pr 5.29 Motor saturation breakpoint 1 = 50 x set speed / actual
speed (Speed 50)
•Set Pr 5.30 Motor saturation breakpoint 2 = 75 x set speed / actual
speed (speed 75).
• Save parameters.
For field weakening from USA defaults Pr 5.75 Field voltage mode
should be set to OFF. Pr 5.28 Field weakening compensation disable
should be set to OFF. The procedure above should then be followed to
set up the drive for field weakening.
1
/4 of base speed (only possible if the motor
8.3.3 Field economy
Field economy can be used to keep the field energized, at a low level of
current (to prevent overheating), when the motor is not running to
prevent condensation forming in the motor. The field economy level and
the timeout can be adjusted.
To use this function it is necessary to set:
•Set Pr 5.65 to enable the field economy timeout
•Set Pr 5.67 to the percentage of full field that you want to use in
economy mode e.g 10%.
•Set Pr 5.66 to the time after the drive enable signal is removed to the
field current reducing to the economy level.
8.4 Current loop gains self-tuning
For optimum performance the current loop must be set-up. The
dynamics of the current loop are principally a function of the electrical
characteristics of a particular motor.
The drive determines the electrical characteristics of the motor by
injecting current into the armature winding.
8.4.1 Static autotune for current loop gains
If Pr 5.12 (SE13, 0.34) is set to a 1, the drive is enabled and a run
command is applied in either direction the drive performs a static
autotune test. The test will not start unless the drive is disabled and
before the test is initiated by applying the enable or run, i.e. it will not
start unless the drive is in a stop state.
78 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 79
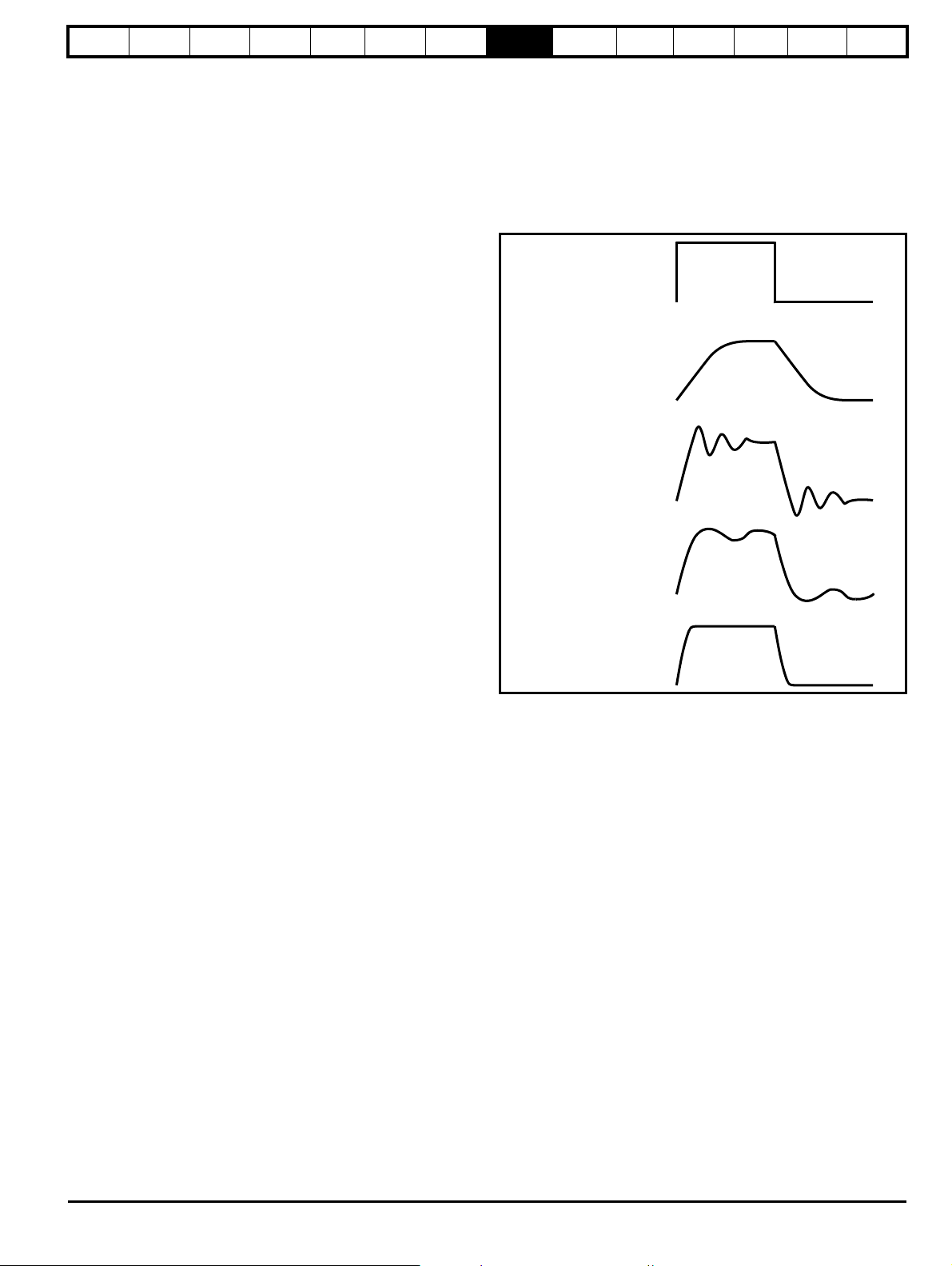
Safety
Speed demand
Insufficient
proportional
gain
Excessive proportional
gain
Excessive integral gain
Ideal response
Information
When this operation is performed the drive will determine the Motor
constant (Pr 5.15), Continuous proportional gain (Pr 4.13), Continuous
integral gain (Pr 4.14), Discontinuous integral gain (Pr 4.34), Back EMF
set point (Pr 5.59), Armature resistance (Pr 5.60) and Flux loop I gain
(Pr 5.72) with respect to the selected motor map and store the values.
8.4.2 Continuous autotune for current loop gains
In the static autotune the armature current loop gains are set up with no
flux in the motor. In some motors the inductance of the armature
changes significantly when flux is present in the machine. If this is the
case, a continuous autotune can be enabled to correct the gains for the
fluxed machine.
When Pr 5.26 is set to On, the continuous autotune is enabled which
continuously monitors the motor ripple and adjusts Motor constant
(Pr 5.15), Continuous proportional gain (Pr 4.13) and Discontinuous
integral gain (Pr 4.34) for optimum performance.
The static autotune should still be carried out because Continuous
integral gain (Pr 4.14) is not set by the continuous autotune.
Calculation of the gains is suspended when the voltage field weakening
loop becomes active so that the gains are not increased when the field is
weakened (less flux in the machine).
This function does not operate when the drives are set-up in serial 12
pulse.
8.4.3 Drive commissioning output
The Mentor MP has a test pin that gives instantaneous armature current
feedback. The pin is identified by a half sign wave symbol and is located
to the right of the tachometer terminals. An oscilloscope probe can be
attached to this pin to monitor the armature current.
8.5 Speed loop gains tuning
The speed loop gains control the response of the speed controller to a
change in speed demand. The speed controller includes proportional
(Kp) and integral (Ki) feed forward terms, and a differential (Kd)
feedback term. The drive holds two sets of these gains and either set
may be selected for use by the speed controller with Pr 3.16
Pr 3.16 may be changed when the drive is enabled or disabled.
• If Pr 3.16 = 0 - gains Kp1, Ki1 and Kd1 are used
• If Pr 3.16 = 1 - gains Kp2, Ki2 and Kd2 are used
8.5.1 Proportional gain (Kp) Pr 3.10 (SP01, 0.61) and
If Kp has a value and the integral gain Ki is set to zero the controller will
only have a proportional term, and there must be a speed error to
produce a torque reference. Therefore as the motor load increases there
will be a difference between the reference and actual speeds.
This effect, called regulation, depends on the level of the proportional
gain, the higher the gain the smaller the speed error for a given load.
If the proportional gain is too high either the acoustic noise produced by
speed feedback quantization becomes unacceptable, or the stability limit
is reached.
8.5.2 Integral gain (Ki) Pr 3.11 (SP02, 0.62) and
The integral gain is provided to prevent speed regulation. The error is
accumulated over a period of time and used to produce the necessary
torque demand without any speed error. Increasing the integral gain
reduces the time taken for the speed to reach the correct level and
increases the stiffness of the system, i.e. it reduces the positional
displacement produced by applying a load torque to the motor.
Unfortunately increasing the integral gain also reduces the system
damping giving overshoot after a transient. For a given integral gain the
damping can be improved by increasing the proportional gain. A
compromise must be reached where the system response, stiffness and
damping are all adequate for the application. The term is implemented in
the form of
the controller is active without causing large torque demand transients.
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Pr 3.13
Pr 3.14
Σ(Ki x error), and so the integral gain can be changed when
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
8.5.3 Differential gain (Kd) Pr 3.12 (SP03, 0.63) and Pr 3.15
The differential gain is provided in the feedback of the speed controller to
give additional damping. The differential term is implemented in a way
that does not introduce excessive noise normally associated with this
type of function. Increasing the differential term reduces the overshoot
produced by under-damping, however, for most applications the
proportional and integral gains alone are sufficient.
8.5.4 Manually setting up the speed loop gains
Figure 8-1 Responses
There are two methods of tuning the speed loop gains dependant on the
setting of Pr 3.17:
1. Pr 3.17 = 0, User set-up.
This involves the connecting of an oscilloscope to analog output 1 to
monitor the speed feedback. Give the drive a step change in speed
reference and monitor the response of the drive on the oscilloscope.
The proportional gain (Kp) should be set up initially. The value should be
increased up to the point where the speed overshoots and then reduced
slightly.
The integral gain (Ki) should then be increased up to the point where the
speed becomes unstable and then reduced slightly.
It may now be possible to increase the proportional gain to a higher
value and the process should be repeated until the system response
matches the ideal response as shown.
Figure 8-1 shows the effect of incorrect P and I gain settings as well as
the ideal response.
2. Pr 3.17 = 1, Bandwidth set-up
If bandwidth based set-up is required, the drive can calculate Kp and Ki
if the following parameters are set up correctly:
Pr 3.18 - Motor and load inertia - it is possible to measure the load inertia
as part of the auto-tuning process (see Pr 5.12 (SE13, 0.34)).
Pr 3.20 - Required bandwidth,
Pr 3.21 - Required damping factor,
Pr 5.32 - Motor torque per amp (Kt).
Mentor MP User Guide 79
Issue: 4 www.controltechniques.com
Page 80

Safety
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
8.5.5 Speed loop gains for very high inertia
Pr 3.17 = 2 - Kp gain times 16
If this parameter is set to 2 the Kp gain (from whichever source), is
multiplied by 16. This is intended to boost the range of Kp for
applications with very high inertia. It should be noted that if high values
of Kp are used it is likely that the speed controller output will need to be
filtered, see (Pr 3.42). If the feedback is not filtered it is possible that the
output of the speed controller will be a square wave that changes
between the current limits causing the integral term saturation system to
malfunction.
8.6 Current limit tapers
With some motors the commutation limit of the motor requires that the
maximum armature current be reduced at higher speeds, the current
limit tapers can be used to provide this speed dependent current limit.
For more information refer to section 11.22.4 Current limit tapers on
page 142.
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
80 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 81

Safety
P
a
r
a
m
e
t
e
r
P
r
0
.
3
0
r
E
A
d
+
A
u
t
o
+
P
r
o
g
+
b
o
o
t
+
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
9 SMARTCARD operation
9.1 Introduction
This is a standard feature that enables simple configuration of
parameters in a variety of ways. The SMARTCARD can be used for:
• Parameter copying between drives
• Saving whole drive parameter sets
• Saving ‘differences from default‘ parameter sets
• Storing Onboard PLC programs
• Automatically saving all user parameter changes for maintenance
purposes
• Loading complete motor map parameters.
Refer to Figure 9-1 for installing the SMARTCARD. Ensure the
SMARTCARD is inserted with the MP arrow pointing upwards.
The drive only communicates with the SMARTCARD when commanded
to read or write, this means that the card may be ‘hot swapped’.
Figure 9-1 Installation of the SMARTCARD
9.2 Easy saving and reading
The SMARTCARD has 999 individual data block locations. Each
individual location from 1 to 499 can be used to store data.
The drive can support SMARTCARDS that have a capacity of between
4kB and 512kB.
The usage of the data block locations in the SMARTCARD are shown in
Table 9-1.
Table 9-1 SMARTCARD data blocks
Data block Type Example of usage
1 to 499 Read / Write Application set-up
500 to 999 Read Only Macros
Parameter sets labelled as ‘Differences from default‘ will be much
smaller than whole parameter sets. Therefore they use a lot less
memory because most applications only require a few parameters to be
changed from the default setting.
The whole card may be protected from writing or erasing by setting the
read-only flag as shown in section 9.3.9 9888 / 9777 - Set / clear the
SMARTCARD read only flag on page 83.
Either of these indications will tell the user that data is being transferred
to or from the SMARTCARD:
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
• SM-Keypad: The decimal point after the fourth digit in the upper
display will flash.
• MP-Keypad: The symbol 'CC' will appear in the lower left hand
corner of the display.
The card should not be removed during data transfer because the drive
will trip. If a trip occurs you must either try to transfer the data again or, in
the case of a card-to-drive transfer, the default parameters should be
loaded.
9.3 Transferring data
When a code is entered into Pr xx.00 and the drive is subsequently
reset, the drive will carry out the actions listed in Table 9-2.
Table 9-2 Transferring data
Codes Actions
Pr x.00 = rEAd 1 Transfer SMARTCARD data block 1 to the drive.
Pr x.00 = rEAd 2 Transfer SMARTCARD data block 2 to the drive.
Pr x.00 = rEAd 3 Transfer SMARTCARD data block 3 to the drive.
Pr x.00 = PrOg 1
Pr x.00 = PrOg 2
Pr x.00 = PrOg 3
Pr x.00 = 2001
Pr x.00= 3yyy
Pr x.00 = 4yyy
Pr x.00= 5yyy
Pr x.00 = 6yyy Transfer SMARTCARD data block yyy to the drive.
Pr x.00 = 7yyy Erase SMARTCARD data block yyy.
Pr x.00 = 8yyy Compare drive parameters with data block yyy.
Pr x.00 = 9555 Clear SMARTCARD warning suppression flag.
Pr x.00 = 9666 Set SMARTCARD warning suppression flag.
Pr x.00= 9777 Clear SMARTCARD read-only flag.
Pr x.00 = 9888 Set SMARTCARD read-only flag.
Pr x.00 = 9999 Erase SMARTCARD.
Pr 11.42 (SE09,
0.30) = Read
Pr 11.42 (SE09,
0.30) = Prog
Pr 11.42 (SE09,
0.30) = Auto
Pr 11.42 (SE09,
0.30) = boot
Where yyy indicates the data block number 001 to 999, refer to Table 91 for restrictions on data block numbers.
If the read only flag is set then only codes 6yyy or 9777 are effective.
9.3.1 Writing to the SMARTCARD
3yyy - Transfer data to the SMARTCARD
The data block contains the complete parameter data from the drive, i.e.
all user-save (US) parameters except parameters with the NC coding bit
set. Power-down save (PS) parameters are not transferred to the
SMARTCARD.
Transfer drive parameters as difference from default
to SMARTCARD data block number 1.
Transfer drive parameters as difference from default
to SMARTCARD data block number 2.
Transfer drive parameters as difference from default
to SMARTCARD data block number 3.
Transfer drive parameters as difference from
defaults to a bootable SMARTCARD data block with
block number 1. This will clear data block 1 on the
card if it already exists.
Transfer drive parameters to a SMARTCARD data
block number yyy.
Transfer drive data as difference from defaults to
SMARTCARD data block number yyy.
Transfer drive user program to SMARTCARD data
block number yyy.
Transfer SMARTCARD data block 1 to the drive
provided it is a parameter file.
Transfer drive parameters to a SMARTCARD data
block number 1.
Transfer drive parameters to a SMARTCARD data
block with data block number 1 provided.
Pr 11.42 (SE09, 0.30) has been changed since
power-up.
Mentor MP User Guide 81
Issue: 4 www.controltechniques.com
Page 82

Safety
NOTE
NOTE
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
4yyy - Write default differences to a SMARTCARD
The data block only contains the parameter differences from the last
time default settings were loaded.
Six bytes are required for each parameter difference. The data density is
not as high as when using the 3yyy transfer method as described in the
section 3yyy - Transfer data to the SMARTCARD but in most cases the
number of differences from default is small and the data blocks are
therefore smaller. This method can be used for creating drive macros.
PS parameters are not transferred to the SMARTCARD.
Writing a parameter set to the SMARTCARD
Setting Pr 11.42 (SE09, 0.30) to Prog (2) and resetting the drive will save
the parameters to the SMARTCARD, i.e. this is equivalent to writing
3001 to Pr xx.00. All SMARTCARD trips apply except 'C.Chg'. If the data
block already exists it is automatically overwritten.
When the action is complete this parameter is automatically reset to
nonE (0).
9.3.2 Reading from the SMARTCARD
6yyy - Read default differences from a SMARTCARD
When the data is transferred back to a drive, using 6yyy in Pr xx.00, it is
transferred to the drive RAM and the drive EEPROM. A parameter save
is not required to retain the data after power-down. Set-up data for any
Solutions Modules installed are stored on the card and are transferred to
the destination drive. If the Solutions Modules are different between the
source and destination drive, the menus for the slots where the
Solutions Module categories are different are not updated from the card
and will contain their default values after the copying action.
The drive will produce a 'C.Optn' trip if the Solutions Modules installed to
the source and destination drive are different or are in different slots. If
the data is being transferred to a drive of a different voltage or current
rating a 'C.rtg' trip will occur.
Table 9-3 lists the rating dependent parameters (RA coding bit set) that
will not be written to the destination drive and will contain their default
values after the copying action.
Table 9-3 Rating dependent parameters
Parameter Function
4.05 Current limit
4.06 Current limit
4.07 Current limit
4.24 User current maximum scaling
5.07 (SE07, 0.28) Motor rated current
5.09 (SE06, 0.27) Armature rated voltage
Reading a parameter set from the SMARTCARD
Setting Pr 11.42 (SE09, 0.30) to rEAd (1) and resetting the drive will
transfer the parameters from the card into the drive parameter set and
the drive EEPROM, i.e. this is equivalent to writing 6001 to Pr xx.00. All
SMARTCARD trips apply. Once the parameters are successfully copied
this parameter is automatically reset to nonE (0). Parameters are saved
to the drive EEPROM after this action is complete.
This operation is only performed if data block 1 on the card is a full
parameter set (3yyy transfer) and not a default difference file (4yyy
transfer). If data block 1 does not exist a 'C.dAt' trip occurs.
9.3.3 Auto saving parameter changes
This setting causes the drive to automatically save any changes made to
Menu 0 parameters on the drive to the SMARTCARD. The latest Menu 0
parameter set in the drive is therefore always backed up on the
SMARTCARD.
Changing Pr 11.42 (SE09, 0.30) to Auto (3) and resetting the drive will
immediately save the complete parameter set from the drive to the card,
i.e. all User Save (US) parameters except parameters with the NC
coding bit set. Once the whole parameter set is stored only the individual
modified menu 0 parameter setting is updated.
Advanced parameter changes are only saved to the card when Pr xx.00
is set to a 1000 and the drive reset.
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
All SMARTCARD trips apply, except ‘C.Chg’. If the data block already
contains information it is automatically overwritten.
If the card is removed when Pr 11.42 (SE09, 0.30) is set to 3, Pr 11.42
(SE09, 0.30) is then automatically set to nonE (0).
When a new SMARTCARD is installed Pr 11.42 (SE09, 0.30) must be
set back to Auto (3) by the user and the drive reset so the complete
parameter set is rewritten to the new SMARTCARD if auto mode is still
required.
When Pr 11.42 (SE09, 0.30) is set to Auto (3) and the parameters in the
drive are saved, the SMARTCARD is also updated, therefore the
SMARTCARD becomes a copy of the drives stored configuration.
At power up, if Pr 11.42 (SE09, 0.30) is set to Auto (3), the drive will save
the complete parameter set to the SMARTCARD. The drive will display
‘cArd’ during this operation. This is done to ensure that if a user puts a
new SMARTCARD in during power down the new SMARTCARD will
have the correct data.
When Pr 11.42 (SE09, 0.30) is set to Auto (3) the setting of Pr 11.42
(SE09, 0.30) itself is saved to the drive EEPROM but NOT to the
SMARTCARD.
9.3.4 Booting up from the SMARTCARD on every power up (Pr 11.42 (SE09, 0.30) = boot (4))
When Pr 11.42 (SE09, 0.30) is set to boot (4) the drive operates the
same as Auto mode, except when the drive is powered up. The
parameters on the SMARTCARD will be automatically transferred to the
drive at power-up if the following are true:
• A card is inserted in the drive
• Parameter data block 1 exists on the card
• The data in block 1 is type 1 to 5 (as defined in Pr 11.38)
•Pr 11.42 (SE09, 0.30) on the card set to boot (4)
The drive will display 'boot' during this operation. If the drive mode is
different from that on the card, the drive gives a 'C.Typ' trip and the data
is not transferred.
If 'boot' mode is stored on the copying SMARTCARD this makes the
copying SMARTCARD the master device. This provides a very fast and
efficient way of re-programming a number of drives.
If data block 1 contains a bootable parameter set and data block 2
contains an Onboard PLC program (type 17 as defined in Pr 11 .38), then
the onboard PLC program will be transferred to the drive at power up
along with the parameter set in data block 1.
“Boot” mode is saved to the card, but when the card is read, the value of
Pr 11.42 (SE09, 0.30) is not transferred to the drive.
9.3.5 Booting up from the SMARTCARD on every power up (Pr xx.00 = 2001)
It is possible to create a difference from default bootable file by setting
Pr xx.00 to 2001 and resetting the drive. This type of file causes the
drive to behave in the same way at power-up as a file created with boot
mode set up with Pr 11.42 (SE09, 0.30). The difference from the default
file is that it has the added advantage of including Menu 20 parameters.
Setting Pr xx.00 to 2001 will overwrite data block 1 on the card, if it
already exists.
If a data block 2 exists and contains an Onboard PLC program (type 17
as defined in Pr 11. 38 ), this will also be loaded after the parameters have
been transferred.
A bootable difference from default file can only be created in one
operation and parameters cannot be added as they are saved via Menu
0.
9.3.6 Comparing drive full parameter set with the SMARTCARD values
Setting 8yyy in Pr xx.00, will compare the SMARTCARD file with the
data in the drive:
• If the compare is successful Pr xx.00 is simply set to 0
• If the compare fails a ‘C.cpr’ trip is initiated
82 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 83

Safety
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
9.3.7 7yyy / 9999 - Erasing data from the SMARTCARD
Data can be erased from the SMARTCARD one data block at a time or
with data blocks 1 to 499 in selected together.
• Setting 7yyy in Pr xx.00 will erase SMARTCARD data block yyy
• Setting 9999 in Pr xx.00 will erase SMARTCARD data blocks 1 to
499
9.3.8 9666 / 9555 - Set / clear SMARTCARD warning suppression flag
1. If the Solutions Module(s) installed to the source and destination
drive are different, or are in different slots, the drive will produce a
'C.Optn' trip.
2. If the data is being transferred to a drive of a different voltage or
current rating a 'C.rtg' trip will occur.
It is possible to suppress these trips by setting the warning suppression
flag. If this flag is set the drive will not trip if the Solutions Module(s) or
drive ratings are different between the source and the destination drives.
The Solutions Module or rating dependent parameters will not be
transferred.
• Setting 9666 in Pr xx.00 will set the warning suppression flag
• Setting 9555 in Pr xx.00 will clear the warning suppression flag
9.3.9 9888 / 9777 - Set / clear the SMARTCARD read
only flag
The SMARTCARD may be protected from writing or erasing by setting
the read only flag. If an attempt is made to write or erase a data block
when the read only flag is set, a 'C.rdo' trip is initiated.
When the read only flag is set only codes 6yyy or 9777 are effective.
• Setting 9888 in Pr xx.00 will set the read only flag
• Setting 9777 in Pr xx.00 will clear the read only flag
9.4 Data block header information
Each data block stored on a SMARTCARD has header information
detailing the following:
• A number which identifies the data block (Pr 11.37)
• Type of data stored in the data block (Pr 11.38)
• Drive mode if the data is parameter data (Pr 11.38)
• Version number (Pr 11.39)
• Checksum (Pr 11.40)
• Read-only flag
• Warning suppression flag
The header information for each data block that has been used can be
viewed in Pr
number set in Pr
If Pr 11. 37 is set to 1000: the checksum parameter (Pr 11.40) shows the
number of bytes left on the card in 16 byte pages.
If Pr 11. 37 is set to 1001: the checksum parameter (Pr 11.40) shows the
total capacity of the card in 16 byte pages. Therefore, for a 4kB card this
parameter would show 254.
If Pr 11. 37 is set to 1002: the checksum parameter (Pr 11.40) shows the
state of the read-only (bit 0) and warning suppression flags (bit 1).
If there is no data on the card: Pr 11. 37 can only have values of 0 or
1000 to 1002.
11.38
to Pr
11.37
11.40
by increasing or decreasing the data block
.
9.5 SMARTCARD parameters
11.36 SMARTCARD parameter data previously loaded
RO Uni NC PT US
Ú
0 to 999
Ö
0
11.37 SMARTCARD data number
RW Uni NC
Ú
This parameter shows the data blocks that are stored on a
SMARTCARD with header information, including a number to identify
the data block.
11.38 SMARTCARD data type/mode
RO Txt NC PT
Ú
This parameter gives the type/mode of the data block selected with
Pr 11.37 as shown in the following table.
Table 9-4 Pr 11.38 types and modes
Pr 11.38 String Type/Mode
0 FrEE Value when Pr 11.37 = 0
13C.SE
2 3OpEn.LP Open-loop mode parameter file
3 3CL.VECt Closed-loop vector mode parameter file
4 3SErVO Servo mode parameter file
5 3REGEn Regen mode parameter file
6 3DC DC mode parameter file
7 3Un Unused
8 3Un Unused
94C.SE
10 4OpEn.LP Open-loop mode difference from default file
11 4CL.VECt
12 4SErVO Servo mode difference from default file
13 4REGEn Regen mode difference from default file
14 4DC DC Mode difference from default file
15 & 16 4Un Unused
17 LAddEr Onboard Application Lite user program file
18 Option
11.39 SMARTCARD data version
RW Uni NC
Ú
This parameter gives the version number of the data block.
11.40 SMARTCARD data checksum
RO Uni NC PT
Ú
This parameter gives the checksum of the data block, space left on the
card, the total space on the card or the card flags. Refer to Pr 11. 37 for
information.
0 to 1002
0 to 18
0 to 9999
0 to 65335
Ö
Ö
Commander SE mode parameter file
(not used)
Commander SE mode difference from default
file (not used)
Closed-loop vector mode difference from
default file
A file containing user defined data (the file is
normally created by an SM-Applications
Solutions Module)
Ö
Ö
0
0
0
This parameter shows the number of the data block last parameter or
difference from default data block transferred from a SMARTCARD to
the drive.
Mentor MP User Guide 83
Issue: 4 www.controltechniques.com
Page 84

Safety
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
11. 42
(SE09, 0.30)
Parameter copying
RW Txt NC US*
Ú
* Mode 1 and Mode 2 are not saved when the drive parameters are
0 to 4
Ö
0
saved. This parameter can only be saved to EEPROM if it has a value of
0, 3 or 4.
Table 9-5 Pr 11.38 actions
Actions Value Result
None 0 Inactive
Reading 1
Programming 2
Read parameter set from
SMARTCARD
Program parameter set to the
SMARTCARD
Auto 3 Auto save
Boot 4 Boot mode
9.6 SMARTCARD trips
After an attempt to read, write or erase data to or from a SMARTCARD a trip may occur if there has been a problem with the command. Table 9-6 lists
the trip indications and conditions that will cause the SMARTCARD to trip,
Table 9-6 Trip conditions
Trip Condition
C.boot
177
C.BUSy
178
C.Chg SMARTCARD trip: Data location already contains data
179 An attempt has been made to store data in a SMARTCARD data block that already exists.
C.Optn SMARTCARD trip: Solutions Modules installed are different between source drive and destination drive
180
C.Rdo SMARTCARD trip: SMARTCARD has the Read Only bit set
181
C.Err SMARTCARD trip: SMARTCARD data is corrupted
182
C.dat SMARTCARD trip: Data location specified does not contain any data
183
C.FULL SMARTCARD trip: SMARTCARD full
184 An attempt has been made to create a data block on a SMARTCARD, but there is not enough space on the card.
C.Acc SMARTCARD trip: SMARTCARD Read / Write fail
185
C.rtg SMARTCARD trip: The voltage and/or current rating of the source and destination drives are different
186
C.Typ SMARTCARD trip: SMARTCARD parameter set not compatible with drive
187
C.cpr SMARTCARD trip: The values stored in the drive and the values in the data block on the SMARTCARD are different
188
SMARTCARD trip: The menu 0 parameter modification cannot be saved to the SMARTCARD because the necessary
file has not been created on the SMARTCARD
A write to a Menu 0 parameter has been initiated with the keypad by exiting edit mode and Pr 11.42 (SE09, 0.30) is set for
auto or boot mode. However the necessary boot file has not been created on the SMARTCARD to take the new parameter
value. This occurs when Pr 11.42 (SE09, 0.30) is changed to auto or boot mode, but the drive is not subsequently reset.
SMARTCARD trip: SMARTCARD can not perform the required function as it is being accessed by a Solutions
Module
An attempt has been made to access a SMARTCARD. However an Solutions Module is already accessing the
SMARTCARD.
Parameter data or default difference data is being transferred from a SMARTCARD to the drive, but the Solutions Module
categories are different between source and destination drives. This trip does not stop the data transfer, but is a warning that
the data for the Solutions Modules that are different will be set to the default values and not the values from the card. This trip
also applies if a compare is attempted between the data block and the drive.
An attempt has been made to modify a read-only SMARTCARD (i.e. erase the card, erase a file or create a file). A
SMARTCARD is read-only if the read-only flag has been set or the card contains data blocks with numbers from 500 to 999.
Attempting to create data blocks with numbers from 500 to 999 will always cause a trip.
An attempt has been made to transfer a data block from a SMARTCARD to the drive or to compare a SMARTCARD data
block and the checksum is incorrect or the data structure on the card is incorrect.
An attempt has been made to transfer a data block from a SMARTCARD to the drive or to compare a SMARTCARD data
block and the block does not exist.
An attempt has been made to access a SMARTCARD, but a card is not present or communications failure has occurred
between the drive and the card. This trip is also produced if an attempt is made to access a data block that has already been
opened by an Solutions Module.
Parameter data or default difference data is being transferred from a SMARTCARD to the drive, but the current and /or
voltage ratings are different between source and destination drives. This trip does not stop the data transfer, but is a warning
that the data for the Solutions Modules that are different will be set to the default values and not the values from the card. This
trip also applies if a compare is attempted between the data block and the drive.
This trip is produced during a compare if the drive mode in the data block is different from the current drive mode and the file
is a parameter or defaults differences file. This trip is also produced if an attempt is made to transfer parameters from a
parameter or default difference to the drive if the drive mode in the data block is outside the allowed range of drive modes for
the drive.
A compare has been carried out between a data block on a SMARTCARD and the drive and the compare has failed. This trip
only occurs if the compare has not already failed with the following trips: C.Typ, C.rtg, C.Optn, C.BUSy, C.Acc or C.Err.
84 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 85

Safety
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Table 9-7 SMARTCARD status indications
Lower
display
Description
boot
A parameter set is being transferred from the SMARTCARD to the
drive during power-up. For further information please refer to section
9.3.4 Booting up from the SMARTCARD on every power up (Pr 11.42
(SE09, 0.30) = boot (4)) on page 82.
cArd
The drive is writing a parameter set to the SMARTCARD during powerup. For further information please refer to section 9.3.3 Auto saving
parameter changes on page 82.
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
Mentor MP User Guide 85
Issue: 4 www.controltechniques.com
Page 86

Safety
0
12864
Time
(milliseconds)
Major
drive
functions
User
program
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
parameters
10 Onboard PLC
10.1 Onboard PLC and SYPT Lite
The Mentor MP has the ability to store and execute a 6kB Onboard PLC
ladder logic program without the need for additional hardware in the form
of a Solutions Module.
The ladder logic program is written using SYPT Lite, a Windows™
based ladder diagram editor allowing the development of programs for
execution in SM-Applications Plus.
Advantages of SYPT Lite:
• SYPT Lite is designed to be easy to use and to make program
development as simple as possible. The features provided are a
sub-set of those in the SYPT program editor.
• SYPT Lite programs are developed using ladder logic, a graphical
language widely used to program PLCs (IEC 61131-3).
• SYPT Lite allows the user to draw a ladder diagram representing a
program.
• SYPT Lite provides a complete environment for the development of
ladder diagrams. Ladder diagrams can be created, compiled into
user programs and downloaded to SM-Applications Plus for
execution, via the RJ45 serial communications port on the front of
the drive.
• The run-time operation of the compiled ladder diagram on the target
can also be monitored using SYPT Lite and facilities are provided to
interact with the program on the target by setting new values for
target parameters.
• SYPT Lite is available on the CD that is supplied with the drive.
10.2 Benefits
The combination of the Onboard PLC and SYPT Lite means that Mentor
MP can replace nano and some micro PLCs in many applications. The
Onboard PLC programs can consist of up to a maximum of 50 ladder
logic rungs (up to 7 function blocks and 10 contacts per rung). The
Onboard PLC program can also be transferred to and from a
SMARTCARD for backup or quick commissioning / start-up.
In addition to the basic ladder symbols, SYPT Lite contains a sub-set of
the function from the full version of SYPT. These include:
• Arithmetic blocks
• Comparison blocks
•Timers
• Counters
• Multiplexers
•Latches
• Bit manipulation
Typical applications for the Onboard PLC include,
• Ancillary pumps
• Fans and control valves
• Interlocking logic
• Sequences routines
• Custom control words.
10.3 Limitations
Compared with the SM-Applications Plus or SM-Applications Lite V2
modules when programmed with SYPT, the Onboard PLC program has
the following limitations:
• The maximum program size is 6080 bytes including header and
optional source code.
• The Mentor MP is rated for 100 program downloads. This limitation
is imposed by the flash memory used to store the program within the
drive.
• The user cannot create user variables. The user is only able to
manipulate the drive parameter set.
• The program cannot be downloaded or monitored over CTNet. The
program is only accessible via the drives RJ45 serial
communications port.
Basic
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
• There are no real-time tasks, i.e. the scheduling rate of the program
cannot be guaranteed. SM-Applications Plus tasks such as Clock,
Event, Pos0 or Speed are not available.
• The Onboard PLC should not be used for time-critical applications.
For time-critical applications either the SM-Applications Plus or SMApplications Lite V2 Solutions Modules should be used.
The program runs at a low priority. The Mentor MP provides a single
background task in which to run a ladder diagram. The drive is prioritized
to perform its major functions first, e.g. motor control, and will use any
remaining processing time to execute the ladder diagram as a
background activity. As the drive's processor becomes more heavily
loaded, less time is spent executing the program.
Figure 10-1 Mentor MP Onboard PLC program scheduling
The user program is scheduled for a short period approximately once
every 64ms. The time for which the program is scheduled will vary
between 0.2ms and 2ms depending on the loading of the drive's
processor.
When scheduled, several scans of the user program may be performed.
Some scans may execute in microseconds. However, when the main
drive functions are scheduled there will be a pause in the execution of
the program causing some scans to take many milliseconds. SYPT Lite
displays the average execution time calculated over the last 10 scans of
the user program.
The Onboard PLC and SYPT Lite form the first level of functionality in a
range of programmable options for Mentor MP.
• SYPT Lite can be used with either the Onboard PLC or with SMApplications Lite V2 to create ladder logic programs.
• SYPT can be used with either the SM-Applications Lite V2 or SMApplications Plus to create fully flexible programs using ladder logic,
function blocks or DPL script.
86 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 87
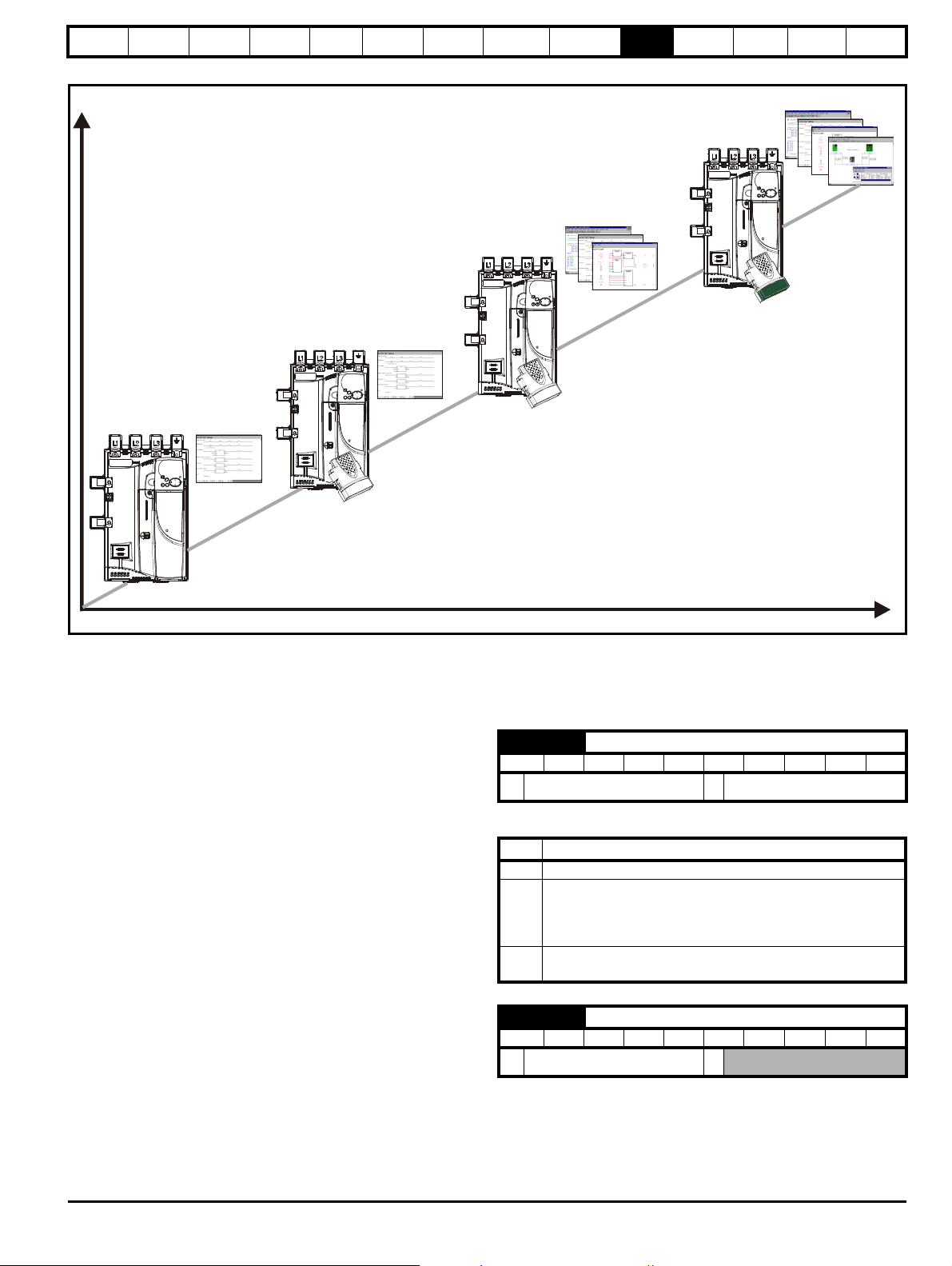
Safety
FUNCTIONALITY
CAPABILITY
Level 1
Onboard PLC with SYPTLite software
Level 3
SM-Applications Lite V2
with SYPT software
Level 4
SM-Applications
Plus with SYPT
software
Level 2
SM-Applications Lite V2 with
SYPTLite software
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Figure 10-2 Programming options for Mentor MP
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
10.4 Getting started
SYPTLite can be found on the CD which is supplied with the drive.
SYPTLite system requirements
• Windows 2000/XP/Vista. Windows 95/98/98SE/Me/NT4 are not
supported
• Pentium III 500MHz or better recommended
• 128MB RAM
• Minimum of 800 x 600 screen resolution. 1024 x 768 is
recommended
• Adobe Acrobat 5.10 or later (for viewing User Guides)
• Microsoft Internet Explorer V5.0 or later
• RS232 to RS485, RJ45 communications lead to connect the PC to
the drive
• Administrator rights are required to install the software
To install SYPTLite, insert the CD and the auto-run facility should start
up the front-end screen, from which SYPTLite can be selected.
See the SYPTLite help file for more information regarding using
SYPTLite, creating ladder diagrams and the available function blocks.
10.5 Onboard PLC parameters
The following parameters are associated with the Onboard PLC
program.
11.47 Drive Onboard PLC program enable
RW Uni US
Ú
0 to 2
Ö
This parameter is used to start and stop the drive Onboard PLC program.
Value Description
0 Halt the drive Onboard PLC program.
Run the drive Onboard PLC program (if installed). Any out-ofrange parameter writes attempted will be clipped to the
1
maximum / minimum values valid for that parameter before
being written.
Run the drive Onboard PLC program (if installed). Any out-of-
2
range parameter writes attempted will cause a ‘UP ovr’ trip.
11.48 Drive Onboard PLC program status
RO Bi NC PT
Ú
-128 to +127
Ö
The drive Onboard PLC program status parameter indicates to the user
the actual state of the drive Onboard PLC program.
2
Mentor MP User Guide 87
Issue: 4 www.controltechniques.com
Page 88

Safety
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
Value Description
Onboard PLC program caused a drive trip due to an error
-n
condition while running rung n. Note that the rung number is
shown on the display as a negative number.
0 Onboard PLC program is not installed.
1 Onboard PLC program is installed but stopped.
2 Onboard PLC program is installed and running.
When an Onboard PLC program is installed and running, the lower
display of the drive flashes ‘PLC’ once every 10s.
11. 49 Drive Onboard PLC programming events
RO Uni NC PT PS
Ú
0 to 65,535
Ö
The drive Onboard PLC programming events parameter holds the
number of times an Onboard PLC program download has taken place
and is 0 on dispatch from the factory. The drive is rated for one hundred
ladder program downloads. This parameter is not altered when defaults
are loaded.
11. 50 Drive Onboard PLC program average scan time
RO Uni NC PT
Ú
0 to 65,535 ms
Ö
This parameter is updated once per second or once per Onboard PLC
program scan whichever is the longest. If more than one program scan
occurs within the one second update period the parameter shows the
average scan time. If the program scan time is longer than one second
the parameter shows the time for the last program scan.
11. 51 Drive Onboard PLC program first run
RO Bit NC PT
Ú
OFF (0) or On (1)
Ö
The Drive Onboard PLC program first run parameter is set for the
duration of program scan from the stopped state. This enables the user
to perform any required initialisation every time the program is run. This
parameter is set every time the program is stopped.
10.6 Onboard PLC trips
The following trips are associated with the Onboard PLC program.
Trip Diagnosis
UP ACC
Onboard PLC program: Cannot access Onboard
PLC program file on drive
Disable drive - write access is not allowed when the
98
drive is enabled.
Another source is already accessing Onboard PLC
program - retry once the other action is complete.
UP div0 Onboard PLC program attempted divide by zero
90 Check program
Onboard PLC program variables and function
UP OFL
block calls using more than the allowed RAM
space (stack overflow)
95 Check program
UP ovr
Onboard PLC program attempted out of range
parameter write
94 Check program
UP PAr
Onboard PLC program attempted access to a nonexistent parameter
91 Check program
UP ro
Onboard PLC program attempted write to a readonly parameter
92 Check program
UP So
Onboard PLC program attempted read of a writeonly parameter
93 Check program
UP udF Onboard PLC program undefined trip
97 Check program
UP uSEr Onboard PLC program requested a trip
96 Check program
10.7 Onboard PLC and the SMARTCARD
The Onboard PLC program in a drive may be transferred from the drive
to a SMARTCARD and vice versa.
• To transfer an Onboard PLC program from the drive to a
SMARTCARD, set Pr xx.00 to 5yyy and reset the drive
• To transfer an Onboard PLC program from the SMARTCARD to a
drive, set Pr xx.00 to 6yyy and reset the drive.
(Where yyy is the data block location, see Table 9-1 SMARTCARD data
blocks on page 81 for restrictions on block numbers).
If an attempt is made to transfer an Onboard PLC program from a drive
to the SMARTCARD when the drive contains no program, the block is
still created on the SMARTCARD but it will contain no data. If this data
block is then transferred to a drive, the destination drive will then have
no Onboard PLC program.
The smallest SMARTCARD compatible with Mentor MP has a capacity
of 4064 bytes and each block can be up to 4064 bytes in size. The
maximum size of a user program is 4032 bytes so it is guaranteed that
any Onboard PLC program downloaded to a Mentor MP will fit on to an
empty SMARTCARD. A SMARTCARD can contain a number of
Onboard PLC programs until the capacity of the card is used.
88 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 89

Safety
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
11 Advanced parameters
This is a quick reference to all parameters in the drive showing units,
ranges, limits etc, with block diagrams to illustrate their function. Full
parameter descriptions can be found in the Mentor MP Advanced User
Guide on the supplied CD ROM.
These advanced parameters are listed for reference purposes only. The
lists in this chapter do not include sufficient information for adjusting
these parameters. Incorrect adjustment can affect the safety of the
system, and damage the drive and or external equipment. Before
attempting to adjust any of these parameters, refer to the Mentor MP
Advanced User Guide.
Table 11-1 Menu descriptions
Menu Function
1 Speed reference selection, limits and filters
2Ramps
3 Speed feedback and speed control
4 Torque and current control
5 Motor and field control
6 Sequencer and clock
7 Analog I/O
8 Digital I/O
9 Programmable logic and motorized pot
10 Drive status and trip information
11 General drive set-up
12
13 Position control
14 User PID controller
15 Slot 1 Solutions Module menu
16 Slot 2 Solutions Module menu
17 Slot 3 Solutions Module menu
18 User application menu 1 (saved in drive EEPROM)
19 User application menu 2 (saved in drive EEPROM)
20 User application menu 3 (not saved in drive EEPROM)
21 Second motor parameters
22 Additional Menu 0 set up
23 Header selections
Default abbreviations:
Eur> European default value
USA> USA default value
Parameter numbers shown in brackets {...} are the equivalent sub block/
Menu 0 parameters.
In some cases, the function or range of a parameter is affected by the
setting of another parameter; the information in the lists relates to the
default condition of such parameters.
Threshold detectors, variable selectors and brake
control function
Coding
The coding defines the attributes of the parameter as follows.
Table 11-2 Key to parameter table coding
Coding Attribute
{X.XX} Copied Mneu 0 or advanced parameter
Bit 1 bit parameter: ‘On’ or ‘OFF’ on the display
Bi Bipolar parameter
Uni Unipolar parameter
Txt Text: the parameter uses text strings instead of numbers.
SP Spare: not used
Filtered: some parameters which can have rapidly changing
FI
values are filtered when displayed on the drive keypad for
easy viewing.
Destination pointer parameter: This parameter can be used
DE
to set up the location (i.e. menu/parameter number) where
the destination data is to be routed.
Variable maximum: the maximum of this parameter can
VM
vary.
Decimal place: indicates the number of decimal places used
DP
by this parameter.
No default: when defaults are loaded (except when the drive
ND
is manufactured or on EEPROM failure) this parameter is
not modified.
Rating dependant: this parameter is likely to have different
values and ranges with drives of different voltage and
current ratings. Parameters with this attribute will not be
transferred to the destination drive by a SMARTCARD when
the rating of the destination drive is different from the source
RA
drive if the drive voltage ratings are different or the file is a
parameter file. However, the value will be transferred if only
the current rating is different and the file is a differences
from default type file.
Not copied: not transferred to or from SMARTCARD during
NC
copying.
NV Not visible: not visible on the keypad.
PT Protected: cannot be used as a destination.
User save: saved in drive EEPROM when the user initiates
US
a parameter save.
RW Read/write: can be written by the user.
RO Read only: can only be read by the user
Bit default one/unsigned: Bit parameters with this flag set to
one have a default of one (all other bit parameters have a
BU
default of zero. Non-bit parameters are unipolar if this flag is
one.
Power-down save: parameter automatically saved in drive
EEPROM when the under volts (UV) trip occurs. Power-
PS
down save parameters are also saved in the drive when the
user initiates a parameter save.
Mentor MP User Guide 89
Issue: 4 www.controltechniques.com
Page 90
Safety
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
Table 11-3 Feature look-up table
Feature Related parameters (Pr)
Acceleration rates 2.10 2.11 to 2.19 2.32 2.33 2.34 2.02
Analog speed reference 1 1.36 7.10 7.01 7.07 7.08 7.09 7.25 7.26 7.30
Analog speed reference 2 1.37 7.14 1.41 7.02 7.11 7.12 7.13 7.28 7.31
Analog I/O
Menu
7
Analog input 1 7.01 7.07 7.08 7.09 7.10 7.25 7.26 7.30
Analog input 2 7.02 7.11 7.12 7.13 7.14 7.28 7.31
Analog input 3 7.03 7.15 7.16 7.17 7.18 7.29 7.32
Analog output 1 7.19 7.20 7.21 7.33
Analog output 2 7.22 7.23 7.24
Application menu Menu 18 Menu 19 Menu 20
At speed indicator bit 3.06 3.07 3.09 10.06 10.05 10.07
Auto reset 10.34 10.35 10.36 10.01
Autotune 4.13 4.14 4.34 5.12 5.15 5.23 5.24 5.29 5.30 5.59 5.61 5.70 5.72 5.74
Binary sum 9.29 9.30 9.31 9.32 9.33 9.34
Bipolar speed 1.10
Brake control 12.40 to 12.49
Catch a spinning motor 6.09
Coast to stop 6.01
Comms 11.23 to 11.26
Copying 11.42 11.36 to 11.40
Cost - per kWh electricity 6.16 6.17 6.24 6.25 6.26 6.40
Current controller 4.13 4.14 4.34 5.15
Current feedback 4.01 4.02 4.16 4.19 4.20 4.27 4.28 4.29 4.30 4.31 4.32 10.08 10.17
Current limits 4.05 4.06 4.07 4.18 5.07 10.09
Deceleration rates 2.20 2.21 to 2.29 2.04 2.35 to 2.37 2.02 2.08 6.01
Defaults 11.46
Digital I/O
Menu
8
Digital I/O read word 8.20
Digital I/O T24 8.01 8.11 8.21 8.31
Digital I/O T25 8.02 8.12 8.22 8.32
Digital I/O T26 8.03 8.13 8.23 8.33
Digital input T27 8.04 8.14 8.24
Digital input T28 8.05 8.15 8.25 8.39
Digital input T29 8.06 8.16 8.26 8.39
Digital lock 13.10 13.01 to 13.09 13.11 13.12 13.16 3.22 3.23 13.19 to 13.23
Direction 10.13 6.30 6.31 3.01 3.02 10.14 8.03 8.04
Display timeout 11.41
Drive active 10.02
Drive OK 10.01 8.27 8.07 8.17 10.36
Electronic nameplate 3.49
Enable 6.15 8.09 8.10
Encoder reference 3.43 3.44 3.45 3.46
Encoder set up 3.33 3.34 to 3.42 3.47 3.48
External trip 10.32 8.10 8.07
Fan speed 6.45
Filter change 6.19 6.18
Hard speed reference 3.22 3.23
I/O sequencer 6.04 6.30 6.31 6.32 6.33 6.34 6.42 6.43 6.40
Inertia compensation 2.38 5.12 4.22 3.18
Jog reference 1.05 2.19 2.29
Keypad reference 1.17 1.14 1.43 1.51 6.12 6.13
Limit switches 6.35 6.36
Line power supply loss 6.03 5.05
Local position reference 13.20 to 13.23
Logic function 1 9.01 9.04 9.05 9.06 9.07 9.08 9.09 9.10
Logic function 2 9.02 9.14 9.15 9.16 9.17 9.18 9.19 9.20
Marker pulse 3.32 3.31
Maximum speed 1.06
Menu 0 set up 22.01 to 22.21 Menu 22
Minimum speed 1.07 10.04
Modules - number of 11.35
90 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 91

Safety
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
Feature Related parameters (Pr)
Motor map 5.07 5.08 5.09 5.70 5.73
Motor map 2 Menu 21 11.45
Motorized potentiometer 9.21 9.22 9.23 9.24 9.25 9.26 9.27 9.28
Offset speed reference 1.04 1.38 1.09
Onboard PLC 11.47 to 11.51
Open collector digital outputs 8.30
Orientation 13.10 13.13 to 13.15
Output 5.01 5.02 5.03
Overspeed threshold 3.08
PID controller Menu 14
Position feedback - drive 3.28 3.29 3.30 3.50
Positive logic 8.29
Power up parameter 11.22 11.21
Precision reference 1.18 1.19 1.20 1.44
Preset speeds 1.15 1.21 to 1.28 1.16 1.14 1.42 1.45 to 1.48 1.50
Programmable logic
Menu
9
Regenerating 10.10
Relative jog 13.17 to 13.19
Relay output 8.07 8.17 8.27 8.40 8.50 8.60
Reset 10.33 8.02 8.22 10.34 10.35 10.36 10.01
S ramp 2.06 2.07
Security code 11.30 11.44
Serial comms 11.23 to 11.26
Skip speeds 1.29 1.30 1.31 1.32 1.33 1.34 1.35
SMARTCARD 11.36 to 11.40 11.42
Software version 11.29 11.34
Speed controller 3.10 to 3.17 3.20 3.21
Speed feedback 3.02 3.03
Speed feedback - drive 3.26 3.27 3.28 3.29 3.31 3.42 3.52 3.55 3.56 3.57 3.58
Speed reference selection 1.14 1.15 1.49 1.50 1.01
Status word 10.40
Supply 5.05
Thermal protection - drive 7.04 7.34 10.18
Thermal protection - motor 4.15 5.07 4.19 4.16 4.25 7.15
Thermistor input 7.15 7.03
Threshold detector 1 12.01 12.03 to 12.07
Threshold detector 2 12.02 12.23 to 12.27
Time - filter change 6.19 6.18
Time - powered up log 6.20 6.21 6.28
Time - run log 6.22 6.23 6.28
Torque 4.03 4.26 5.32
Torque mode 4.08 4.11 4.09 4.10
Trip detection 10.20 to 10.29
Trip log 10.20 to 10.29 10.41 to 10.51 6.28
Under voltage 5.05
Variable selector 1 12.08 to 12.15
Variable selector 2 12.28 to 12.35
Velocity feed forward 1.39 1.40
Voltage rating 11.33 5.09 5.05
Warning 10.19 10.17 10.18 10.40
Zero speed indicator bit 3.05 10.03
data
Diagnostics
UL
information
Mentor MP User Guide 91
Issue: 4 www.controltechniques.com
Page 92

Safety
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Parameter ranges and variable maximums:
The two values provided define the minimum and maximum values for
the given parameter. In some cases the parameter range is variable and
dependant on either:
• other parameters
• the drive rating
• or a combination of these
The values given in Table 11-4 are the variable maximums used in the
drive.
Table 11-4 Definition of parameter ranges & variable maximums
Maximum Definition
Maximum speed reference
MAX_SPEED_REF
[10000.0rpm]
SPEED_LIMIT_MAX
[10000.0rpm]
SPEED_MAX
[10000.0rpm]
MAX_RAMP_RATE
MAX_RAMP_RATE_M2
[3200.000]
RATED_CURRENT_MAX
[9999.99A]
DRIVE_CURRENT_MAX
[9999.99A]
MOTOR1_CURRENT_LIMIT_MAX
[1000.0%]
MOTOR2_CURRENT_LIMIT_MAX
[1000.0%]
TORQUE_PROD_CURRENT_MAX
[1000.0%]
USER_CURRENT_MAX
[1000.0%]
If Pr 1.08 = 0: MAX_SPEED_REF = Pr 1.06 (SE02, 0.23)
If Pr 1.08 = 1: MAX_SPEED_REF is Pr 1.06 (SE02, 0.23) or – Pr 1.07 (SE01, 0.22) whichever is the largest
(If the second motor map is selected Pr 21.01 is used instead of Pr 1.06 (SE02, 0.23) and Pr 21.02 instead of
Pr 1.07 (SE01, 0.22))
Maximum applied to speed reference limits
A maximum limit may be applied to the speed reference to prevent the nominal encoder frequency from
exceeding 500kHz. The maximum is defined by
SPEED_LIMIT_MAX (in rpm) = 500kHz x 60 / ELPR = 3.0 x 10
10,000 rpm.
ELPR is equivalent encoder lines per revolution and is the number of lines that would be produced by a
quadrature encoder.
Quadrature encoder ELPR = number of lines per revolution
F and D encoder ELPR = number of lines per revolution / 2
This maximum is defined by the device selected with the speed feedback selector (Pr 3.26 (Fb01, 0.71)) and
the ELPR set for the position feedback device.
Maximum speed
This maximum is used for some speed related parameters in menu 3. To allow headroom for overshoot etc. the
maximum speed is twice the maximum speed reference.
SPEED_MAX = 2 x MAX_SPEED_REF
Maximum ramp rate
If (Pr 1.06 (SE02, 0.23) [Pr 21.01] >= 1000 and Pr 2.39 = 0) or Pr 2.39 >= 1000 then
MAX_RAMP_RATE = 3200.000
Else if Pr 2.39 = 0
MAX_RAMP_RATE = 3200 * Pr 1.06 (SE02, 0.23) [Pr 21.01] / 1000.0
Else
MAX_RAMP_RATE = 3200 * Pr 2.39 / 1000.0
End if
Maximum motor rated current
Maximum drive current
The maximum drive current is the current at the over current trip level and is given by:
DRIVE_CURRENT_MAX = RATED_CURRENT_MAX x 2
Maximum current limit settings for motor map 1
This maximum current limit setting is the maximum applied to the current limit parameters in motor map 1. See
introduction to Menu 4 for the definition.
Maximum current limit settings for motor map 2
This maximum current limit setting is the maximum applied to the current limit parameters in motor map 2. See
introduction to Menu 4 for the definition.
Maximum torque producing current
This is used as a maximum for torque and torque producing current parameters. It is
MOTOR1_CURRENT_LIMIT_MAX or MOTOR2_CURRENT_LIMIT_MAX depending on which motor map is
currently active.
Current parameter limit selected by the user
The user can select a maximum for Pr 4.08 (torque reference) and Pr 4.20 (percentage load) to give suitable
scaling for analog I/O with Pr 4.24. This maximum is subject to a limit of CURRENT_LIMIT_MAX.
USER_CURRENT_MAX = Pr 4.24
Optimization
SMARTCARD
operation
Onboard
Advanced
PLC
parameters
7
/ ELPR subject to an absolute maximum of
Technical
data
Diagnostics
UL
information
92 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 93

Safety
NOTE
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Maximum Definition
Maximum armature voltage
Vac x 1.35 (√2 x 3 / π)
ARMATURE_VOLTAGE_MAX
[1025]
480 +10% drive: 720
575 +10% drive: 860
690 +10% drive: 1025
For 4 quadrant drives maximum armature voltage = Vac x 1.15
Quadrant maximum
QUADRANT_MAX
0 for a 2 quadrant drive.
1 for a 4 quadrant drive.
Maximum power in kW
POWER_MAX
[9999.99kW]
The maximum power has been chosen to allow for the maximum power that can be output by the drive with
maximum DC output voltage and maximum controlled current.
Therefore:
POWER_MAX = ARMATURE_VOLTAGE_MAX x DRIVE_CURRENT_MAX
The values given in square brackets indicate the absolute maximum value allowed for the variable maximum.
Advanced
parameters
Technical
data
Diagnostics
UL
information
Mentor MP User Guide 93
Issue: 4 www.controltechniques.com
Page 94
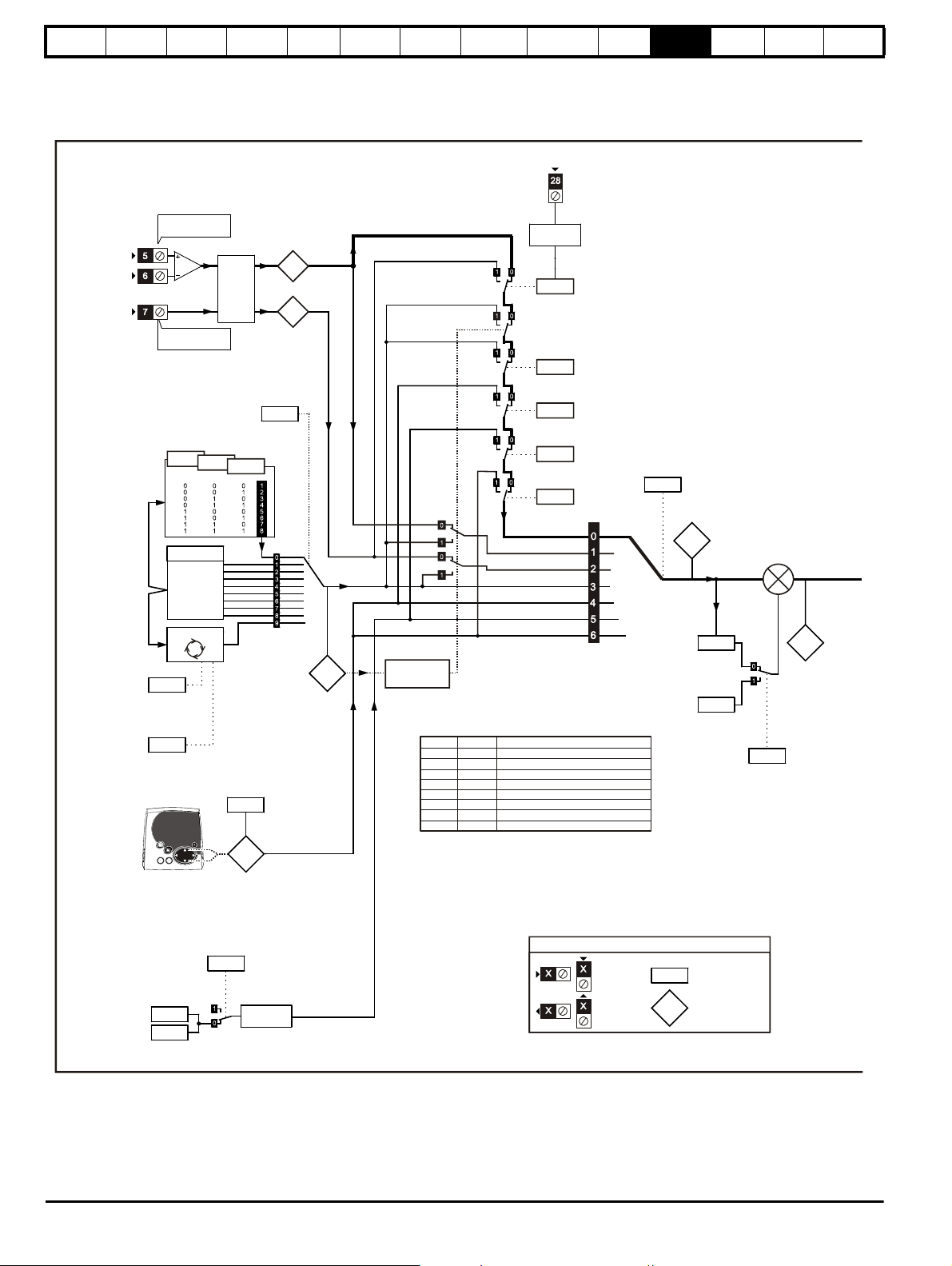
Safety
Preset reference
*selector
Preset
reference
scan time
Keypad
Reference
Precision
reference
Precision- reference
update disable
Analog
reference 1
Analog
reference 2
Analog reference 2
select
Preset reference select bits 1 ~ 3
Preset reference
Scan-timer reset
Analog input 1
Analog input 2
Memory
Menu 7
1.36
1.37
1.41
1.16
1.48
1.15
1.17
1.20
1.18
Precision
reference trim
1.19
Preset
reference
select
Keypad
reference
select
Precision
reference
select
LOCAL/REMOTE
Menu 8
Level
of
reference
selected
Reference
offset
Reference
offset mode
select
Reference
*selector
Reference
selected
indicator
1.49
1.14
1.09
1.04
Reference
percentage
trim
1.38
1.01
Analog reference
Preset reference
Keypad reference
Precision reference
+
+
0.XX
0.XX
Key
Read-write
(RW)
parameter
Read-only (RO)
parameter
Input
terminals
Output
terminals
The parameters are all shown in their default settings
1.51
Power-up keypad
control mode
reference
1.20
Preset
reference
selected
indicator
Preset
references
1 to 8
1.21 ~ 1.28
Scan timer
1.47
1.46
1.45
1.44
1.43
1.42
Pr set to
greater than 1
1.50
1.50
Pr 1.49
1
1
2
2
3
4
5
6
Pr 1.50
1
>1
1
>1
x
x
x
x
Reference being used
1.50
1.50
Analog reference 1
Preset reference defined by Pr
Analog reference 2
Preset reference defined by Pr
Keypad reference
Precision reference
Keypad reference only
Preset reference defined by Pr
1.50
Keypad only
select
1.52
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
11.1 Menu 1: Speed reference
Menu 1 controls the main reference selection.
Figure 11-1 Menu 1 logic diagram
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
94 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 95
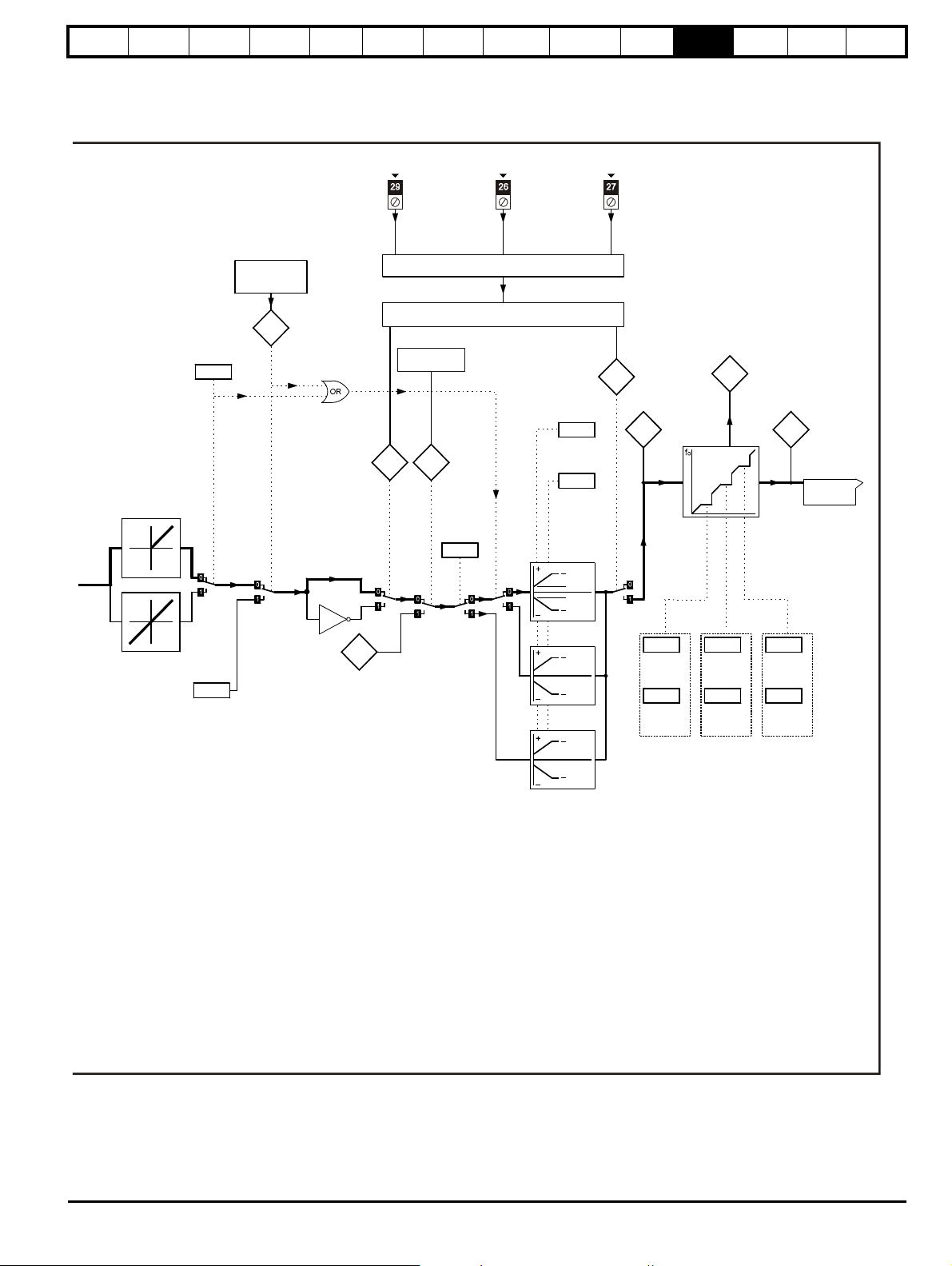
Safety
Jog
reference
Bipolar
reference
select
Jog selected
indicator
Menu 6
Sequencer
1.10
1.05
1.13
Pre-filter
reference
Pre-ramp
reference
Maximum
speed
"clamp"
Minimum
speed
"clamp"
(Maximum
reverse
speed)
Negative
minimum
speed
select
Reference
enabled
indicator
Reverse
selected
indicator
Skip
speed 1
Reference in skip
speed band
indicator
Velo city
feed-forward
reference
Feed-forward
selected
indicator
1.12
x(-1)
1.39
1.40
1.08
[1.06]
[1.07]
[1.07]
[1.06]
[1.06]
[1.06]
[1.06]
[1.07]
1.06
1.07
1.11
Sequencer (Menu 6)
1.02
1.03
Menu 2Skip speed
2
Skip
speed
3
Skip
speed
band
1
Skip
speed
band
2
Skip
speed
band
3
1.29
1.30
1.31
1.32
1.33
1.34
1.35
Menu 8
JOG
RUN
FORWARD RUN REVERSE
Menu 13
Position control
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
*Refer to Pr 1.14 (SE05, 0.26)
Mentor MP User Guide 95
Issue: 4 www.controltechniques.com
Page 96

Safety
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
Parameter
1.01 Speed reference selected {di01, 0.36}
1.02 Pre-skip filter reference RO Bi NC PT
1.03 Pre-ramp reference {di02, 0.37} RO Bi NC PT
1.04 Reference offset ±10,000.0 rpm
1.05 Jog reference 0 to 1,000.0 rpm RW Uni US
1.06 Maximum reference clamp {SE02, 0.23} SPEED_LIMIT_MAX rpm 1000.0 RW Uni US
1.07 Minimum reference clamp {SE01, 0.22} ±SPEED_LIMIT_MAX rpm* 0.0 RW Bi PT US
Negative minimum reference
1.08
clamp enable
1.09 Reference offset select RW Bit US
1.10 Bipolar reference enable RW Bit US
1.11 Reference enabled indicator {di11, 0.46}
1.12 Reverse selected indicator {di12, 0.47} RO Bit NC PT
1.13 Jog selected indicator {di13, 0.48} RO Bit NC PT
1.14 Reference selector {SE05, 0.26} 0 to 6 0 (A1.A2) RW Txt US
1.15 Preset selector 0 to 9 0 RW Uni US
Preset reference selector
1.16
timer
1.17 Keypad control reference ±MAX_SPEED_REF rpm
1.18 Precision reference coarse ±MAX_SPEED_REF rpm RW Bi US
1.19 Precision reference fine 0.0 to 0.099 rpm 0.000 RW Uni US
Precision reference update
1.20
disable
1.21 Preset reference 1
1.22 Preset reference 2 RW Bi US
1.23 Preset reference 3 RW Bi US
1.24 Preset reference 4 RW Bi US
1.25 Preset reference 5 RW Bi US
1.26 Preset reference 6 RW Bi US
1.27 Preset reference 7 RW Bi US
1.28 Preset reference 8 RW Bi US
1.29 Skip reference 1 0 to 10,000 rpm 0 RW Uni US
1.30 Skip reference band 1 0 to 250 rpm 5 RW Uni US
1.31 Skip reference 2 0 to 10,000 rpm 0 RW Uni US
1.32 Skip reference band 2 0 to 250 rpm 5 RW Uni US
1.33 Skip reference 3 0 to 10,000 rpm 0 RW Uni US
1.34 Skip reference band 3 0 to 250 rpm 5 RW Uni US
1.35 Reference in rejection zone OFF (0) or On (1)
1.36 Analog reference 1
1.37 Analog reference 2 RO Bi NC
1.38 Percentage trim ±100.00% 0.00 RW Bi NC
1.39 Velocity feed forward ±10,000.0 rpm
1.40 Velocity feed forward select
1.41 Reference select flag 1
1.42 Reference select flag 2 RW Bit NC
1.43 Reference select flag 3 RW Bit NC
1.44 Reference select flag 4 RW Bit NC
1.45 Reference select flag 5 RW Bit NC
1.46 Reference select flag 6 RW Bit NC
1.47 Reference select flag 7 RW Bit NC
1.48 Reference timer reset flag RW Bit NC
1.49 Reference selected indicator 1 to 6
Preset reference selected
1.50
indicator
Power-up keyboard control
1.51
mode reference
1.52 Reference select flags OFF (0) or On (1) OFF (0) RW Bit NC
Range(
Ú) Default(Ö)
±MAX_SPEED_REF rpm
0.0
OFF (0)
OFF (0) or On (1)
0 to 400.0s 10.0 RW Uni US
0.0
OFF (0) or On (1) OFF (0) RW Bit NC
±MAX_SPEED_REF rpm 0.0
±MAX_SPEED_REF rpm 0
OFF (0) or On (1)
1 to 8
0 to 2 0 RW Txt US
OFF (0)
RO Bi NC PT
RW Bi US
RW Bit US
RO Bit NC PT
RO Bi NC PT PS
RW Bi US
RO Bit NC PT
RO Bi NC
RO Bi NC PT
RO Bit NC PT
RW Bit NC
RO Uni NC
RO Uni NC PT
Type
*The range shown for Pr 1.07 shows the range used for scaling purposes (i.e. for routing to an analog output etc.). Further range restrictions are
applied depending on the settings of Pr 1.08 and Pr 1.10.
RW Read / Write RO Read only Uni Unipolar Bi Bi-polar Bit Bit parameter Txt Text string
FI Filtered DE Destination NC Not copied RA Rating dependent PT Protected US User save PS Power down save
96 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 97

Safety
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
Mentor MP User Guide 97
Issue: 4 www.controltechniques.com
Page 98

Safety
0 0 0
0 0 1
0 1 0
0 1 1
1 0 0
1 0 1
1 1 0
1 1 1
Acceleration rate select bits
2.11
Acceleration rate 1
2.12
Acceleration rate 2
2.13
Acceleration rate 3
2.14
Acceleration rate 4
2.15
Acceleration rate 5
2.16
Acceleration rate 6
2.17
Acceleration rate 7
2.18
Acceleration rate 8
Acceleration rates 1 ~ 8
1.50
3
4
1
2
7
5
6
Preset reference
selected indicator
2.19
Jog acceleration
rate
1.13
Jog selected
indicator
1.03
Pre-ramp speed
reference
2.03
Ramp hold
NtN
t
Acceleration
Reverse
accel. rate
Forward
accel. rate
Ramp control
2.10
Acceleration
rate selector
2.34
2.32
2.33
2.32
0.XX
0.XX
Key
Read-write (RW)
parameter
Read-only (RO)
parameter
Input
terminals
Output
terminals
The parameters are all shown at their default settings
8
2.40
2.41
S-Ramp time
S-Ramp mode
2.39
Ramp rate speed units
2.30
Acceleration
ramp selected
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
11.2 Menu 2: Ramps
The pre-ramp speed reference passes through the ramp block controlled by menu 2 before being used by the drive to produce input to the speed
controller. The ramp block includes: linear ramps, and an S ramp function for ramped acceleration and deceleration.
Figure 11-2 Menu 2 logic diagram
98 Mentor MP User Guide
www.controltechniques.com Issue: 4
Page 99
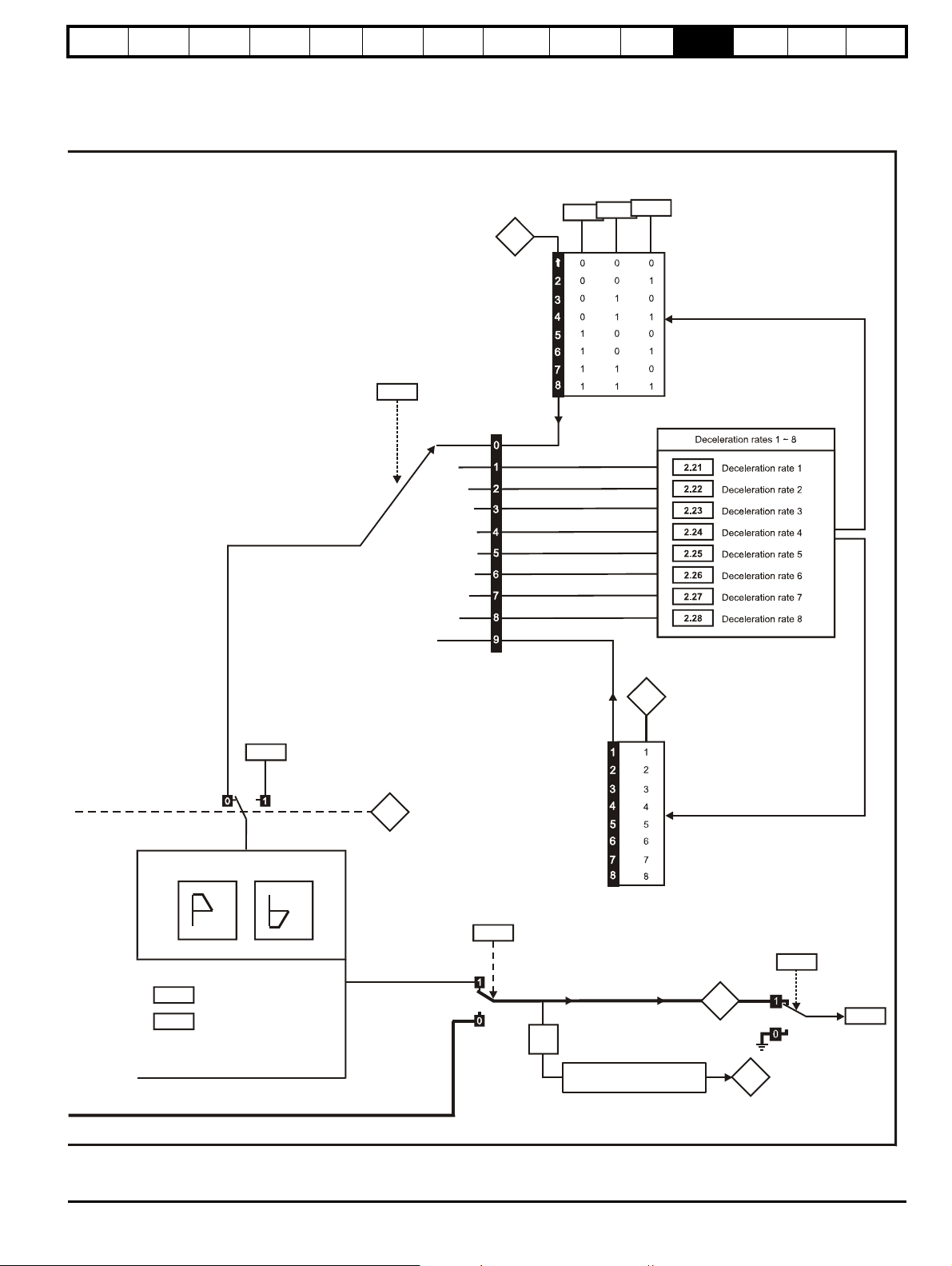
Safety
2.06
S-Ramp enable**
2.07
S-Ramp acceleration
limit
Ramp control
N
t
N
t
Deceleration
Forward
Decel. rate
Reverse
Decel. rate
2.02
Ramp
enable
Deceleration rate select bits
2.37
1.50
Preset reference
selected indicator
2.29
Jog deceleration
rate
1.13
Jog selected
indicator
2.38
Inertia compensation
torque
d/dt
2.20
Deceleration
rate selector
2.36
2.35
Pr = Motor and load inertia
Pr =
3.18
5.32
Motor torque per amp
Post-ramp
reference
2.01
2.05
Ramp output
selector
Menu 3
2.31
Deceleration
ramp selected
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
** For more information refer to Chapter 11.22 Advanced features on page 140 section in the Mentor MP User Guide.
Mentor MP User Guide 99
Issue: 4 www.controltechniques.com
Page 100

Safety
Information
Product
information
Mechanical
Installation
Electrical
installation
Getting
started
Basic
parameters
Running the
motor
Optimization
SMARTCARD
operation
Onboard
PLC
Advanced
parameters
Technical
data
Diagnostics
UL
information
Parameter
Ú) Default(Ö)
Range(
Typ e
2.01 Post ramp reference {di03, 0.38} ±SPEED_MAX rpm RO Bi NC PT
2.02 Ramp enable
2.03 Ramp hold 0 RW Bit US
2.05 Ramp output selector On (1) RW Bit US
OFF (0) or On (1)
On (1) RW Bit US
2.06 S ramp enable 0 Eur: 0, USA: 1 RW Bit US
2.07 S ramp acceleration limit
0 to 100.000 s
2
/1000rpm
3.600 RW Uni US
2.10 Acceleration rate selector 0 to 9 0 RW Uni US
2.11 Acceleration rate 1 {SE03, 0.24}
RW Uni US
2.12 Acceleration rate 2 RW Uni US
2.13 Acceleration rate 3 RW Uni US
2.14 Acceleration rate 4 RW Uni US
2.15 Acceleration rate 5 RW Uni US
2.16 Acceleration rate 6 RW Uni US
0 to MAX_RAMP_RATE s /
(Pr 1.06 OR Pr 2.39)
5.000
2.17 Acceleration rate 7 RW Uni US
2.18 Acceleration rate 8 RW Uni US
2.19 Jog acceleration rate RW Uni US
2.20 Deceleration rate selector 0 to 9 0 RW Uni US
2.21 Deceleration rate 1 {SE04, 0.25}
RW Uni US
2.22 Deceleration rate 2 RW Uni US
2.23 Deceleration rate 3 RW Uni US
2.24 Deceleration rate 4 RW Uni US
2.25 Deceleration rate 5 RW Uni US
2.26 Deceleration rate 6 RW Uni US
0 to MAX_RAMP_RATE s /
(Pr 1.06 OR Pr 2.39)
5.000
2.27 Deceleration rate 7 RW Uni US
2.28 Deceleration rate 8 RW Uni US
2.29 Jog deceleration rate 10.000 RW Uni US
2.30 Acceleration ramp selected
2.31 Deceleration ramp selected RO Uni NC PT
1 to 8
2.32 Acceleration select bit 0
RO Uni NC PT
RW Bit NC
2.33 Acceleration select bit 1 RW Bit NC
2.34 Acceleration select bit 2 RW Bit NC
2.35 Deceleration select bit 0 RW Bit NC
OFF (0) or On (1)
2.36 Deceleration select bit 1 RW Bit NC
2.37 Deceleration select bit 2 RW Bit NC
Inertia compensation
2.38
torque
± 1,000.0 % RO Bi NC PT
2.39 Ramp rate speed units 0 to 10000rpm 0 RW Uni US
2.40 Time of S ramp 0 to 100.000s 1.250 RW Uni US
2.41 S ramp mode OFF (0) or On (1) On (1) RW Bit US
RW Read / Write RO Read only Uni Unipolar Bi Bi-polar Bit Bit parameter Txt Text string
FI Filtered DE Destination NC Not copied RA Rating dependent PT Protected US User save PS Power down save
100 Mentor MP User Guide
www.controltechniques.com Issue: 4
 Loading...
Loading...