

Page 1
BASR
Versatile Building Automation Appliance
BAS Remote
User Manual
# TD040300-0MF
(for firmware version 3.1.x)
Page 2
Contemporary Control Systems, Inc.
Tel:
+1-630-963-7070
2431 Curtiss Street
Fax:
+1-630-963-0109
Downers Grove, Illinois 60515 USA
E-mail:
info@ccontrols.com
WWW:
http://www.ccontrols.com
Contemporary Controls Ltd
Tel:
+44 (0)24 7641 3786
14 Bow Court
Fax:
+44 (0)24 7641 3923
Fletchworth Gate
E-mail:
info@ccontrols.co.uk
Coventry CV5 6SP UK
WWW:
http://www.ccontrols.co.uk
Contemporary Controls Ltd
Tel:
+44 (0)24 7641 3786
14 Bow Court
Fax:
+44 (0)24 7641 3923
Fletchworth Gate
E-mail:
info@ccontrols.co.uk
Coventry CV5 6SP UK
WWW:
http://www.ccontrols.eu
Contemporary Controls GmbH
Tel:
+49 (0)341 520359 0
Fuggerstraße 1 B
Fax:
+49 (0)341 520359 16
D-04158 Leipzig Deutschland
E-mail:
info@ccontrols.de
WWW:
http://www.ccontrols.eu
WARNING — This is a Class A product as defined in EN55022.
In a domestic environment this product may cause radio interference
in which case the user may be required to take adequate measures.
Trademarks
Contemporary Controls and CTRLink are registered trademarks of Contemporary Control Systems, Inc.
BACnet is a registered trademark of the American Society of Heating, Refrigerating and Air-Conditioning
Engineers, Inc. Powered by Sedona Framework is a trademark of Tridium, Inc. Other product names
may be trademarks or registered trademarks of their respective companies.
Copyright
© Copyright 2012, by Contemporary Control Systems, Inc. All rights reserved. No part of this publication
may be reproduced, transmitted, transcribed, stored in a retrieval system, or translated into any language
or computer language, in any form or by any means, electronic, mechanical, magnetic, optical, chemical,
manual, or otherwise, without the prior written permission of:
Disclaimer
Contemporary Control Systems, Inc. reserves the right to make changes in the specifications of the
product described within this manual at any time without notice and without obligation of Contemporary
Control Systems, Inc. to notify any person of such revision or change.
TD040300-0MF
2
Page 3

1 Table of Contents
1 TABLE OF CONTENTS ..................................................................................................... 3
2 INTRODUCTION ................................................................................................................. 6
2.1 Features and Benefits ...................................................................................................... 8
2.2 Software .......................................................................................................................... 9
2.3 Product Image (Master Module) ..................................................................................... 9
3 SPECIFICATIONS ............................................................................................................. 10
3.1 Universal Input/Outputs — Channels 1–6 .................................................................... 10
3.2 Relay Outputs — Channels 7–8 .................................................................................... 10
3.3 Communications ........................................................................................................... 10
3.4 Protocol Compliance ...................................................................................................... 11
3.5 Power Requirements ..................................................................................................... 11
3.6 General Specifications .................................................................................................. 11
3.7 LED Indicators ............................................................................................................... 12
3.8 Electromagnetic Compatibility ..................................................................................... 12
3.9 Field Connections ......................................................................................................... 13
3.10 Ordering Information .................................................................................................... 13
3.11 Dimensional Drawing ................................................................................................... 14
3.12 PICS Statement ............................................................................................................. 15
4 INSTALLATION ................................................................................................................ 16
4.1 Power Supply ................................................................................................................ 16
4.1.1 Power Supply Precautions ........................................................................................ 17
4.1.2 Limited Power Sources ............................................................................................. 17
4.2 Connecting Expansion Equipment ................................................................................ 18
4.2.1 BAS Remote Expansion Module Connections ......................................................... 18
4.2.2 Modbus Serial Bus Connections ............................................................................... 19
4.2.3 Cabling Considerations ............................................................................................. 20
5 FIELD CONNECTIONS .................................................................................................... 21
5.1 Sample BAS Remote Wiring Diagram ......................................................................... 21
5.2 Thermistors ................................................................................................................... 22
5.3 Contact Closure ............................................................................................................. 22
5.4 Pulse Inputs ................................................................................................................... 24
5.5 Analog Input ................................................................................................................. 25
5.6 Analog Output ............................................................................................................... 26
TD040300-0MF
3
Page 4

6 OPERATION ...................................................................................................................... 27
6.1 General Considerations ................................................................................................. 27
6.1.1 Ethernet Port on the Master Module ......................................................................... 27
6.1.2 LEDs ......................................................................................................................... 27
6.1.3 Accessing and Configuring the Web Server on the Master Unit .............................. 28
6.1.4 Web Server Screen Overview ................................................................................... 35
6.1.5 On-Screen Help ......................................................................................................... 36
6.2 Input/Output Channels (I/O) ....................................................................................... 37
6.2.1 Universal I/Os ........................................................................................................... 37
6.2.2 Relay Outputs ............................................................................................................ 37
6.3 Channel Configuring ..................................................................................................... 38
6.3.1 Analog Voltage Input Configuring ........................................................................... 38
6.3.2 Analog Voltage Output Configuring ........................................................................ 39
6.3.3 Binary Input Configuring .......................................................................................... 40
6.3.4 Current Input Configuring ........................................................................................ 41
6.3.5 Current Output Configuring ...................................................................................... 42
6.3.6 Thermistor Input Configuring ................................................................................... 43
6.3.7 Pulse Input Configuring ............................................................................................ 44
6.3.8 Relay Output Configuring ......................................................................................... 46
6.4 Channel Forcing ............................................................................................................ 47
6.4.1 Analog Input Forcing ................................................................................................ 47
6.4.2 Binary Input Forcing ................................................................................................. 48
6.4.3 Current Input Forcing ............................................................................................... 48
6.4.4 Thermistor Input Forcing .......................................................................................... 49
6.4.5 Relay Output Forcing ................................................................................................ 49
6.5 Instance Numbers.......................................................................................................... 50
6.6 Flash File System and Custom Web Pages ................................................................... 50
6.7 Web Services ................................................................................................................ 51
6.8 Set Time ........................................................................................................................ 51
7 APPENDIX .......................................................................................................................... 52
7.1 Troubleshooting Ethernet Connectivity of the Master Unit ......................................... 52
7.2 BACnet Object Model .................................................................................................. 52
7.2.1 Device ....................................................................................................................... 52
7.2.2 Analog Input .............................................................................................................. 53
7.2.3 Analog Output ........................................................................................................... 53
7.2.4 Analog Value ............................................................................................................ 53
7.2.5 Binary Input .............................................................................................................. 54
7.2.6 Binary Output ............................................................................................................ 54
TD040300-0MF
4
Page 5

7.2.7 BIBBs ........................................................................................................................ 55
7.3 Sedona for Control ........................................................................................................ 57
7.3.1 Getting Started with a Sedona Tool .......................................................................... 57
7.3.2 Virtual Points ............................................................................................................ 59
7.4 Modbus Server Operation ............................................................................................. 60
7.4.1 Modbus Register Organization ................................................................................. 61
7.4.2 Modbus Function Codes ........................................................................................... 64
7.5 Mapping Modbus Variables to BACnet/IP ................................................................... 64
7.5.1 General Mapping Principles...................................................................................... 64
7.5.2 Mapping Scheme ...................................................................................................... 64
7.5.3 Project Builder .......................................................................................................... 65
7.5.4 Viewing the Mapping Status in the BAS Remote .................................................... 71
7.6 Modbus Utility .............................................................................................................. 72
7.7 Linux License................................................................................................................ 74
TD040300-0MF
5
Page 6

2 Introduction
The BAS Remote Master provides the ultimate in flexibility. It can be used for
Expansion I/O at remote locations where an Ethernet connection exists. Its built-in
router and gateway capability addresses unique integration needs where more than one
communications protocol is involved. It can function as a controller with its resident
Sedona Virtual Machine. Powered by a Linux engine, the BAS Remote Master can
operate as BACnet/IP or Modbus TCP remote I/O, Sedona controller, Modbus Serial to
Modbus TCP router, Modbus Serial to BACnet gateway, and Modbus master to
attached Modbus slaves – all at the same time. The BAS Remote also supports web
services. You can customize the unit via custom web pages that utilize special java
applets provided in the device. A 10/100 Mbps Ethernet port allows connection to IP
networks and popular building automation protocols such as Modbus TCP, BACnet/IP,
and Sedona SOX. Six universal I/O points and two relay outputs can be configured
through resident web pages using a standard web browser and without the need of a
special programming tool. A 2-wire Modbus serial port can greatly expand the I/O count
with built-in routing to Modbus TCP clients. If BACnet mapping is preferred, the unit
incorporates a Modbus serial to BACnet/IP gateway. Additional universal I/O can be
achieved with the simple addition of BAS Remote Expansion modules. The BAS
Remote Master PoE has the same capabilities as the BAS Remote Master except it is
powered over the Ethernet connection — thereby providing a “One Cable Solution.”
Both the BAS Remote Master and BAS Remote Expansion modules have the same
I/O capability. Six universal input/output points are provided on each module.
Depending upon configuration, each unit can accommodate a contact closure from a
digital point, a thermistor, voltage or current analog input from a field transmitter or
supervisory controller. Analog inputs can range from 0–5 VDC, 0–10 VDC or 0–20 mA.
Inputs can be scaled to accommodate ranges such as 1–5 VDC, 2–10 VDC, and 4–20
mA. Input point resolution is 10-bits.
Type II and III 10 kΩ thermistor calibration curves are resident in the BAS Remote. Singlepoint calibration of temperature is accomplished using the internal web server. Inputs can
accept pulse trains in the range of 0–40 Hz (50% duty cycle) to measure flow rates.
Analog outputs can be 0–10 VDC or 0–20 mA. However, scaling for 2–10 V, 0–5 V,
1–5 V and 4–20 mA is possible. LED indicators identify the state of I/O points. Output
point resolution is 12 bits.
There are two relay outputs available with both normally open (NO) and normally closed
(NC) contacts. The relay output rating is 30 VAC/VDC, 2A.
There are two non-isolated 2-wire EIA-485 Expansion ports on the Master module. The
downstream port (DN) is intended for Expansion modules while the Modbus (MB) port
functions as either a Modbus TCP router or Modbus serial to BACnet gateway — allowing
for the attachment of Modbus 2-wire or 3-wire EIA-485 serial devices. On BAS Remote
Expansion modules, the two ports are marked UP and DN, and are dedicated for
communication with the BAS Remote Master module and other Expansion modules.
All field connectors are removable — making field replacement of units quick and simple.
A single RJ-45 shielded connector provides the 10/100 Mbps twisted-pair Ethernet
connection. The unit supports auto-negotiation of data rate and duplex. A resident web
TD040300-0MF
6
Page 7

server facilitates commissioning and troubleshooting. Configuration is accomplished via
Ethernet. Java must be enabled in the browser used to access the BAS Remote.
Power for the BAS Remote can be derived from a 24 VAC Class 2 transformer capable
of delivering 17 VA or from a 24 VDC power supply capable of at least 10 W. Since the
unit incorporates a half-wave rectified power supply, attached I/O points and the power
supply can share a common ground. Therefore, the BAS Remote can be powered by
the same control transformer used to power other half-wave rectified control equipment.
The BAS Remote can be DIN-rail mounted into a control panel. If panel mounting is
required, use the supplied mounting tabs.
The BAS Remote conforms to the BACnet/IP standard and therefore allows field I/O to
be directly accessed via Ethernet without the need of a router. A standard web browser
with Java enabled is used for commissioning and troubleshooting. The BAS Remote
adheres to the BACnet Application Specific Controller (B-ASC) profile.
TD040300-0MF
7
Page 8
2.1 Features and Benefits
Versatile Control Device — remote I/O, router, gateway and controller
Web-page configuration
BACnet/IP Remote I/O
Modbus TCP Remote I/O
Modbus Serial to Modbus TCP Router
Modbus Serial to BACnet/IP Gateway
Modbus Master to Attached Modbus Slaves
Powered by Sedona Controller
Power over Ethernet (PoE)
Java Applets for customisable web pages
Web Services
Flexible Input/Output — expandable by adding modules
Six universal input/output points — web-page configurable
Two relay outputs
Thermistor, voltage, current, contract closure and pulse inputs
Voltage, current and relay outputs
2-wire Modbus Serial Expansion port
2-wire Expansion port for up to three Expansion modules
TD040300-0MF
8
Page 9

I/O Ports 1–3
I/O Ports 4–6
Reset
24 V Loop Supply
Input Power
Output Relays
Ethernet Port
DIN-rail Release Tab
Expansion Ports
2.2 Software
The provided CD-ROM contains:
This User Manual
A copy of the Installation Guide that is packaged with the product
Additional information of interest
2.3 Product Image (Master Module)
Figure 1 — BAS Remote Master Module Main Features
TD040300-0MF
9
Page 10
Configured As
Limits
Analog Input
0–5 VDC, 0–10 VDC or 0–20 mA scalable by user. 10-bit resolution.
Input impedance 100 kΩ on voltage and 250 Ω on current.
Temperature Input
Type II or Type III thermistors
+40°F to +110°F (+4.4°C to +44°C)
Contact closure input
Excitation current 2 mA. Open circuit voltage 24 VDC.
Sensing threshold 0.3 VDC. Response time 20 ms.
Pulse input
0–10 VDC scalable by user. User adjustable threshold.
40 Hz maximum input frequency with 50% duty cycle.
Analog Output
0–10 VDC or 0–20 mA scalable by user. 12-bit resolution.
Maximum burden 750 Ω when using current output.
Limits
Form “C” contact with both NO and NC contacts available.
30 VAC/VDC 2 A. Class 2 circuits only.
Protocol
Data Link and Physical Layers
BACnet/IP
— Master only
ANSI/IEEE 802.3 10/100 Mbps Ethernet.
10BASE-T, 100BASE-TX, auto-negotiation of speed and duplex.
Auto-MDIX. 100 m maximum segment length.
Default IP address is 192.168.92.68/24.
Modbus TCP
— Master only
Expansion Bus
(UP/DN)
Modified Modbus serial protocol. 2-wire non-isolated EIA-485
57.6 kbaud. Maximum segment length 100 m.
Modbus Serial
— Master only
(MB Bus)
Modbus serial ASCII or RTU protocol.
2-wire non-isolated EIA-485.
2.4, 4.8, 9.6, 19.2, 38.4, 57.6, 115.2 kbps.
Max segment length 100 m.
Jumper selectable bias and termination.
3 Specifications
3.1 Universal Input/Outputs — Channels 1–6
3.2 Relay Outputs — Channels 7–8
3.3 Communications
TD040300-0MF
10
Page 11
Protocol
Compliance
BACnet/IP
ASHRAE 135-2008 annex J.
Application specific controller device profile B-ASC.
Modbus TCP
Modbus Application Protocol Specification V1.1b Dec. 28, 2006, Modbus.org.
Modbus Messaging on TCP/IP Implementation Guide V1.0b October 24, 2006,
Modbus.org.
Modbus serial
Modbus over Serial Line Specification and Implementation Guide V1.02 December
20, 2006, Modbus.org.
Item
Limits
Input power
Master module: 24 VAC/VDC ± 10%, 47–63 Hz, 17 VA
Master PoE module: 48 VDC ± 10% 10 W
Expansion module: 24 VAC/VDC ± 10%, 47–63 Hz, 17 VA
Loop supply
+24 VDC nom, 150 mA maximum
Item
Description
Protection
All inputs and outputs (except for relay outputs and communications ports) are
over-voltage protected up to 24 VAC and short-circuit protected.
Environmental
Operating temperature 0° to +60°C.
Storage temperature –40°C to +85°C.
Relative humidity 10 to 95%, non-condensing.
Weight
0.6 lbs. (0.27 kg).
3.4 Protocol Compliance
3.5 Power Requirements
3.6 General Specifications
TD040300-0MF
11
Page 12
LED Indicator
Indication
I/O 1–6 configured as
Analog input
Green: > 1% of range, otherwise off
I/O 1–6 configured as
Temperature input
Green: sensor detected
Red: open
I/O 1–6 configured as
Contact input
Green: contact closed, otherwise off
I/O 1–6 configured as
Pulse input
Green: pulse sensed, otherwise off
I/O 1–6 configured as
Analog output
Green: commanded output
Red: expected output not within 40 mV on voltage or 0.2 mA on current
Status
Red: device in reset
Green flashing: booting up
Green: running application
Green flashing: Modbus serial activity after application is running —
Master only
Ethernet — Master
module only
Yellow: 10Mbps; flashes with activity
Green: 100 Mbps; flashes with activity
Network — Expansion
module only
Green flashing: Expansion bus activity
Standard
Test Method
Description
Test Levels
EN 55024
EN 61000-4-2
Electrostatic Discharge
6 kV contact
EN 55024
EN 61000-4-3
Radiated Immunity
10 V/m, 80 MHz to 1 GHz
EN 55024
EN 61000-4-4
Fast Transient Burst
1 kV clamp & 2 kV direct
EN 55024
EN 61000-4-5
Voltage Surge
1 kV L-L & 2 kV L-Earth
EN 55024
EN 61000-4-6
Conducted Immunity
10 V (rms)
EN 55024
EN 61000-4-11
Voltage Dips & Interruptions
1 Line cycle, 1–5 s @100% dip
EN 55022
CISPR 22
Radiated Emissions
Class A
EN 55022
CISPR 22
Conducted Emissions
Class B
CFR 47, Part 15
ANSI C63.4
Radiated Emissions
Class A
3.7 LED Indicators
3.8 Electromagnetic Compatibility
TD040300-0MF
12
Page 13
Terminal
Power — Master Module*
Power — Expansion Module
HI
High AC or DC +
High AC or DC +
COM
AC or DC common
AC or DC common
Earth
Optional earthing connection
No connection
Model
Description
BASR-8M
BAS Remote Master with eight I/O points
BASR-8X
BAS Remote Expansion with eight I/O points
BASR-8M/P
BAS Remote Master PoE with eight I/O points
Terminal
Universal I/Os 1 – 3
I/O 1 A
Universal I/O point 1 high
I/O 1 B
Universal I/O point 1 low
I/O 2 A
Universal I/O point 2 high
I/O 2 B
Universal I/O point 2 low
I/O 3 A
Universal I/O point 3 high
I/O 3 B
Universal I/O point 3 low
Terminal
Universal I/Os 4 – 6
I/O 4 A
Universal I/O point 4 high
I/O 4 B
Universal I/O point 4 low
I/O 5 A
Universal I/O point 5 high
I/O 5 B
Universal I/O point 5 low
I/O 6 A
Universal I/O point 6 high
I/O 6 B
Universal I/O point 6 low
Terminal
Relay Outputs
OUT 8 NC
Output 8 normally-closed contact
OUT 8 C
Output 8 common
OUT 8 NO
Output 8 normally-open contact
OUT 7 NC
Output 8 normally-closed contact
OUT 7 C
Output 8 common
OUT 7 NO
Output 8 normally-open contact
Terminal
+24 VDC @ 150 mA Loop Supply
1
+24 VDC
2
+24 VDC
3
+24 VDC
4
+24 VDC
5
+24 VDC
6
+24 VDC
Terminal
Expansion Ports — Master Module
Terminal
Expansion Ports — Expansion Module
MB-D+
Modbus Serial Bus positive terminal
UP-D+
Upstream Expansion positive terminal
MB-D–
Modbus Serial Bus negative terminal
UP-D–
Upstream Expansion negative terminal
SC
Modbus signal common
SC
Not used
DN-D+
Downstream Expansion positive terminal
DN-D+
Downstream Expansion positive terminal
DN-D–
Downstream Expansion negative terminal
DN-D–
Downstream Expansion negative terminal
3.9 Field Connections
* BASR-M model only
3.10 Ordering Information
TD040300-0MF
13
Page 14
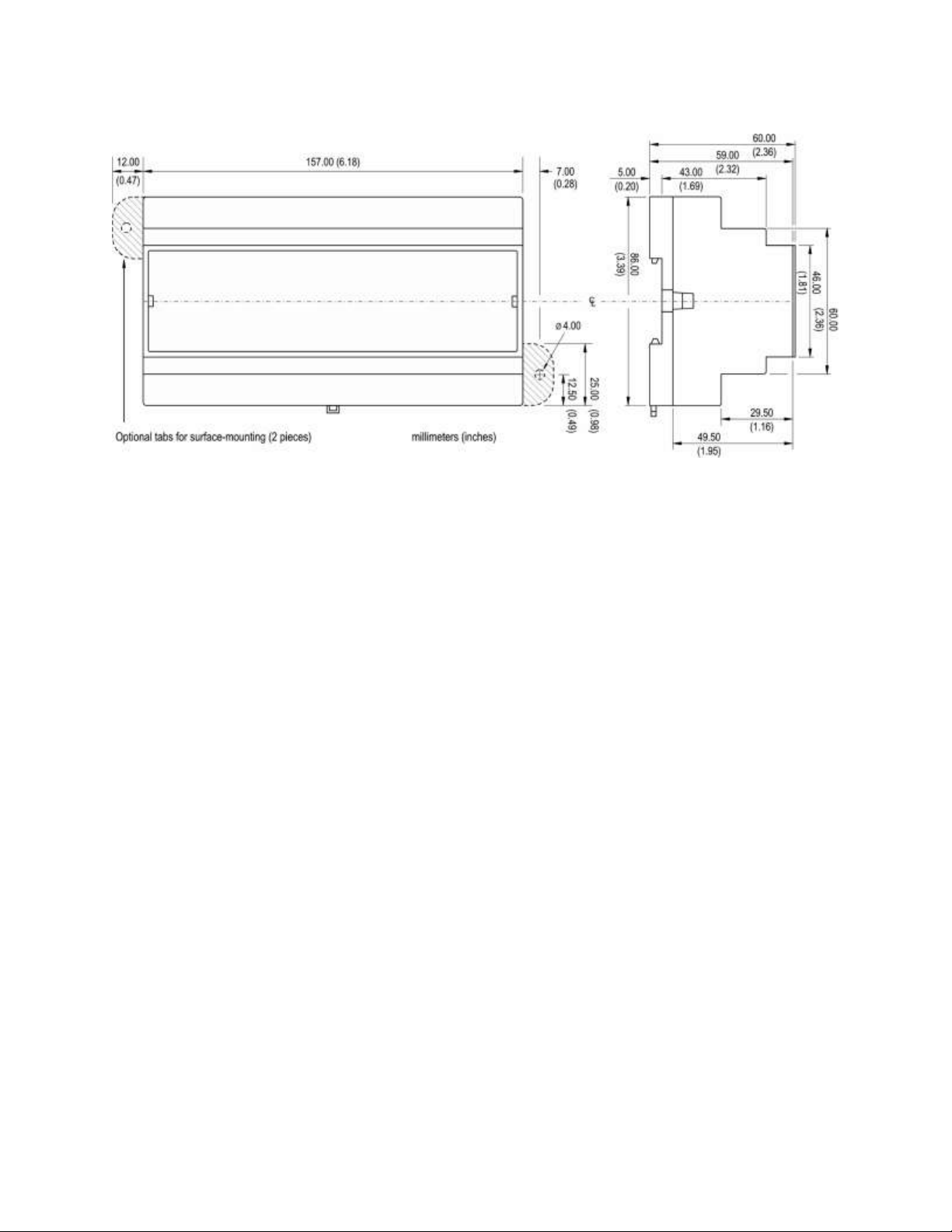
3.11 Dimensional Drawing
Figure 2 — BAS Remote Dimensions
TD040300-0MF
14
Page 15
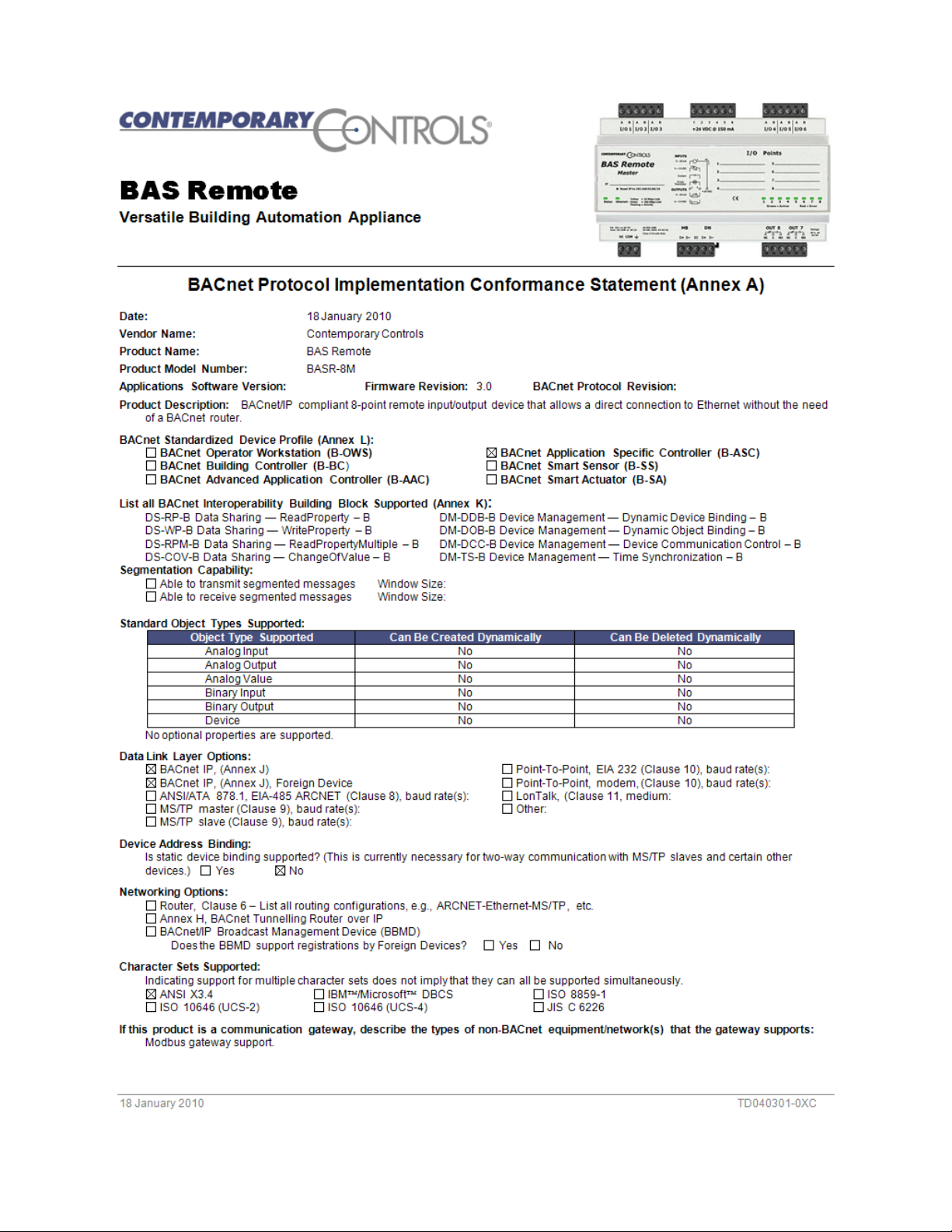
3.12 PICS Statement
TD040300-0MF
15
Page 16

4 Installation
The BAS Remote is intended to be mounted in an industrial enclosure or wiring closet
on 35-mm DIN-rail or panel-mounted with screws (not provided). The panel-mounting
tabs are packaged in a plastic bag within the shipping box. To use these tabs, Figure 3
illustrates how the two studs of each tab are press fitted into their respective holes in
opposing corners of the case.
Figure 3 — Attaching Panel-Mounting Tabs
4.1 Power Supply
The power source for the internal supply is applied via the three terminals labelled
Earth, COM, and HI. Earth allows external connection to earth if better EMC
compliance is needed. COM is for the power source return and also serves as the BAS
Remote common ground connection. Primary 24 VAC/VDC (± 10%) power is applied to
HI and COM. HI connects to a diode accomplishes half-wave rectified power — while
providing reverse input voltage protection.
Internally, the BAS Remote provides the 24 VDC loop supply to power external devices
attached as inputs to the BAS Remote — you do not need a separate loop supply.
Since the BAS Remote can source current via its analog outputs, an internal source of
24 VDC is provided for powering outputs. Collectively, the sum of input and output
power cannot exceed 150 mA.
Maximum current draw for any I/O channel is 20 mA — yielding a total draw of 120 mA
for all six channels. Analog output current sources from the same internal supply, so an
external source of 24 VDC is unneeded — but a return common is. Six +24 VDC pins
are present to serve external transmitters, so they do not need a separate loop supply.
However, the power supply must serve only its own BAS Remote module.
The BAS Remote requires 24 VDC or VAC from a source via a three-pin removable keyed
connector. The proper connections for various power options are shown in Figure 4.
Note that the BAS Remote Master PoE derives its power from the Ethernet cable and
therefore no internal connection exists for the HI pin on the input power connector.
The recommended size for power conductors is 16–18 AWG (solid or stranded). Ground
is directly connected to zero volts. Input connections are reverse-polarity protected.
NOTE: This device is intended for use with Class 2 circuits.
TD040300-0MF
16
Page 17
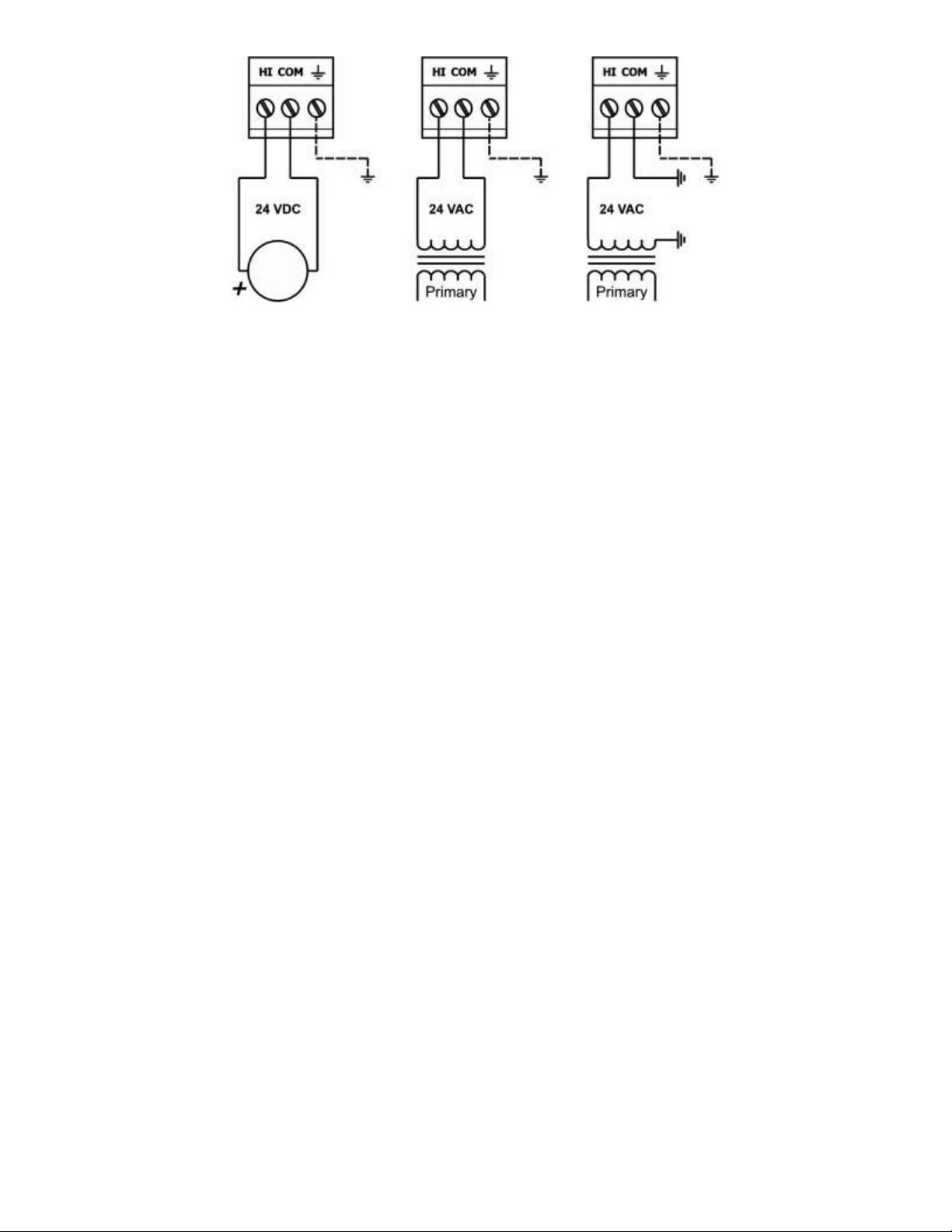
Figure 4 — Power Options
WARNING: Powering devices can present hazards. Read the next two sections carefully.
4.1.1 Power Supply Precautions
Internally, the BAS Remote utilizes a half-wave rectifier and therefore can share the
same AC power source with other half-wave rectified devices. Sharing a common DC
power source is also possible. Sharing AC power with full-wave rectified devices is
NOT recommended. Full-wave rectified devices usually require a dedicated AC power
source that has a secondary elevated above ground. Both secondary connections are
considered HOT. AC power sources that power several half-wave devices have a
common secondary connection called COMMON, LO, or GROUND. This connection
might be tied to earth. The other side of the secondary is considered the HOT or HI
side of the connection. Connect the HOT side of the secondary to the HI input on the
BAS Remote and the LO side to COM on the BAS Remote. All other half-wave devices
sharing the same AC power source need to follow the same convention. When using a
DC power source, connect its positive terminal to the HI input on the BAS Remote and the
negative terminal to COM on the BAS Remote. Reversing polarity to the BAS Remote
will not damage the BAS Remote.
WARNING: Devices powered from a common AC source could be damaged if a mix of
half-wave and full-wave rectified devices exist. If you are not sure of the type of rectifier
used by another device, do not share the AC source with it.
4.1.2 Limited Power Sources
The BAS Remote should be powered by a limited power source complying with the
requirements of the National Electric Code (NEC) article 725 or other international
codes meeting the same intent of limiting the amount of power of the source. Under
NEC article 725, a Class 2 circuit is that portion of the wiring system between the load
side of a Class 2 power source and the connected equipment. For AC or DC voltages
up to 30 volts, the power rating of a Class 2 power source is limited to 100 VA. The
transformer or power supply complying with the Class 2 rating must carry a
corresponding listing from a regulatory agency such as Underwriters Laboratories (UL).
TD040300-0MF
17
Page 18

4.2 Connecting Expansion Equipment
Input/output points beyond those available from the BAS Remote Master module can
be increased by adding BAS Remote Expansion modules or by attaching Modbus serial
devices to the MB bus. The MB port is used for connecting to 2-wire Modbus serial
devices while the DN port is used for connecting to BAS Remote Expansion modules.
Both ports are non-isolated EIA-485 compatible.
When installing equipment, make a record that identifies the power source, equipment
locations, IP and MAC ID numbers, protocol in use, baud rate, cable colour coding, etc.
— anything that will be helpful for future staff.
4.2.1 BAS Remote Expansion Module Connections
Expansion modules are intended to occupy positions to the right or left of the Master
module on the same DIN-rail or on additional DIN-rails within the same control panel. In
this situation only a short 2-wire twisted-pair cable is needed for making connections
between DN on the Master module and UP on the first Expansion module. Up to three
Expansion modules can attach to the Master module using a daisy-chain wiring
scheme. The second Expansion module has its UP port connected to the preceding
Expansion module’s DN port. The last Expansion module will have a vacant UP port.
The D+ terminal on one device must attach to the D+ terminal on the other. The same
applies to the D– terminals. Bias and termination exists on the UP terminals. See
Figure 6 for wiring details. For short connections, unshielded cable can be used.
Expansion modules are automatically assigned Modbus addresses beginning with 2
based upon its position to the Master within the daisy-chain wiring.
4.2.1.1 Bias and Termination
Each Master and Expansion module has two Expansion ports. The Master ports are
labelled MB and DN; the Expansion ports are UP and DN. These are shared buses
where only one device drives the bus at any one time. When no device is driving the
bus, the bus floats. To prevent noise from being interpreted as data, the bus must be
biased to a valid state. (The Modbus Serial specification calls this polarization.) With
no data on the bus, the D+ pin is biased to be more positive than the D– pin. Bias is
applied at only one point on the bus: the Master provides bias internally on its MB port,
the Expansion does so on its UP port.
4.2.1.2 Communicating from Master to Expansion Modules
The Master uses the downstream port DN to communicate to the upstream port UP on
the Expansion. If additional Expansion modules are used, they are cascaded such that
the DN port of the Expansion module nearest the Master is connected to the UP port on
the added Expansion module. Commands received by an Expansion module’s UP port
are relayed to its DN port while being read by the module itself. Similarly, a response
received at the DN port is transferred to the UP port — eventually arriving at the Master.
Thus all connections (Master-Expansion and Expansion-Expansion) are point-to-point
with termination and bias in each UP transceiver. DN ports have termination only.
TD040300-0MF
18
Page 19
4.2.2 Modbus Serial Bus Connections
The Modbus serial Expansion port (MB) on the BAS Remote Master module is nonisolated EIA-485 compatible. When connecting to other non-isolated devices, care
must be exercised to ensure that all non-isolated Modbus devices share the same
ground reference (COM) with the BAS Remote Master module. This is usually
accomplished by sharing the same power source. Configure the Modbus baudrate and
protocol using the BAS Remote Modbus port web page.
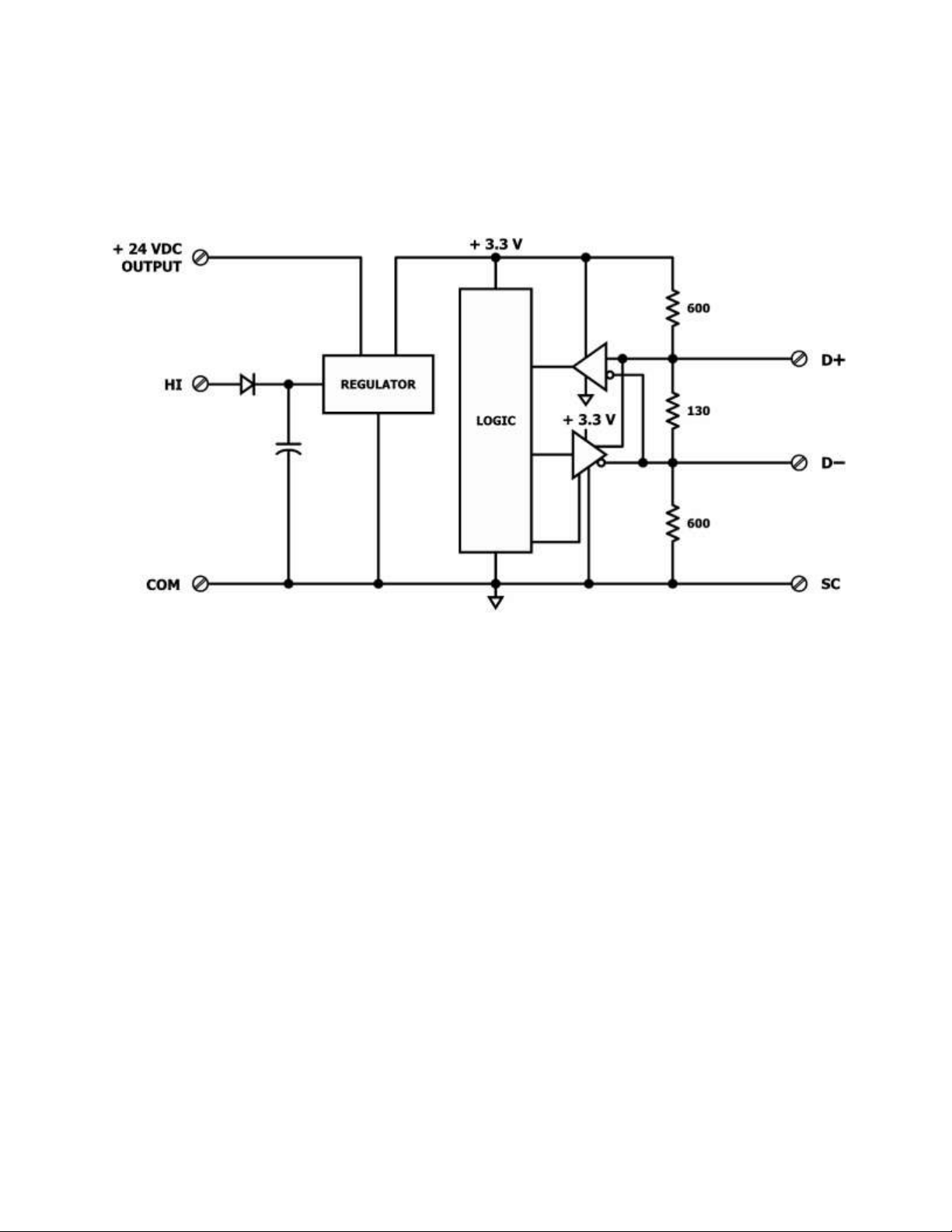
Figure 5 — Internal Termination and Bias
When connecting to an isolated 3-wire Modbus device, the signal common of the
isolated device must be connected to the SC pin between the MB and DN ports. This ties
the two reference points together for reliable communications. Refer to Figure 6 for wiring
details.
Modbus serial device can only be attached to the MB port on the Master module. Refer
to Figure 5 for details on the bias and termination network present on the MB port.
Together, these resistors approximate one 120 Ω terminating resistor. Terminal D+
represents the more positive connection for the EIA-485 Modbus serial network while
D– represents the less positive connection. Make corresponding connections to
Modbus serial devices. The last device on the bus should have applied bias and
termination or just termination. A shielded twisted-pair cable should be used with
interconnecting devices. Connect the shields together and attached to chassis at only
one point. Refer to Figure 6 for wiring details.
TD040300-0MF
19
Page 20
Function
Signalling and
Data Rate
Minimum Required Cable
Maximum Segment Distance
Ethernet
10BASE-T
10 Mbps
Category 3 UTP
100 m (328 ft)
Ethernet
100BASE-TX
100 Mbps
Category 5 UTP
100 m (328 ft)
I/O
Unspecified
Solid: 16–22 AWG
Stranded: 16–18 AWG
Unspecified
Expansion
Unspecified
Belden® 9841 or equivalent*
100 m (328 ft)
Modbus
Varied
Belden® 3106A or equivalent*
100 m (328 ft)
4.2.3 Cabling Considerations
When attaching cables to the BAS Remote, Table 1 should be considered.
Table 1 — Cabling Considerations
* If using shielded cable, connect to chassis at only one point.
NOTE: Wire size may be dictated by electrical codes for the area where the equipment
is being installed. Consult local regulations.
Observe in Table 1 that 10BASE-T segments can successfully use Category 3, 4 or 5
cable — but 100BASE-TX segments must use Category 5 cable. Category 5e cable is
highly recommended as the minimum for new installations.
The Ethernet port of the BAS Remote employs Auto-MDIX technology so that either
straight-through or crossover cables can be used to connect to the network.
TD040300-0MF
20
Page 21
5 Field Connections
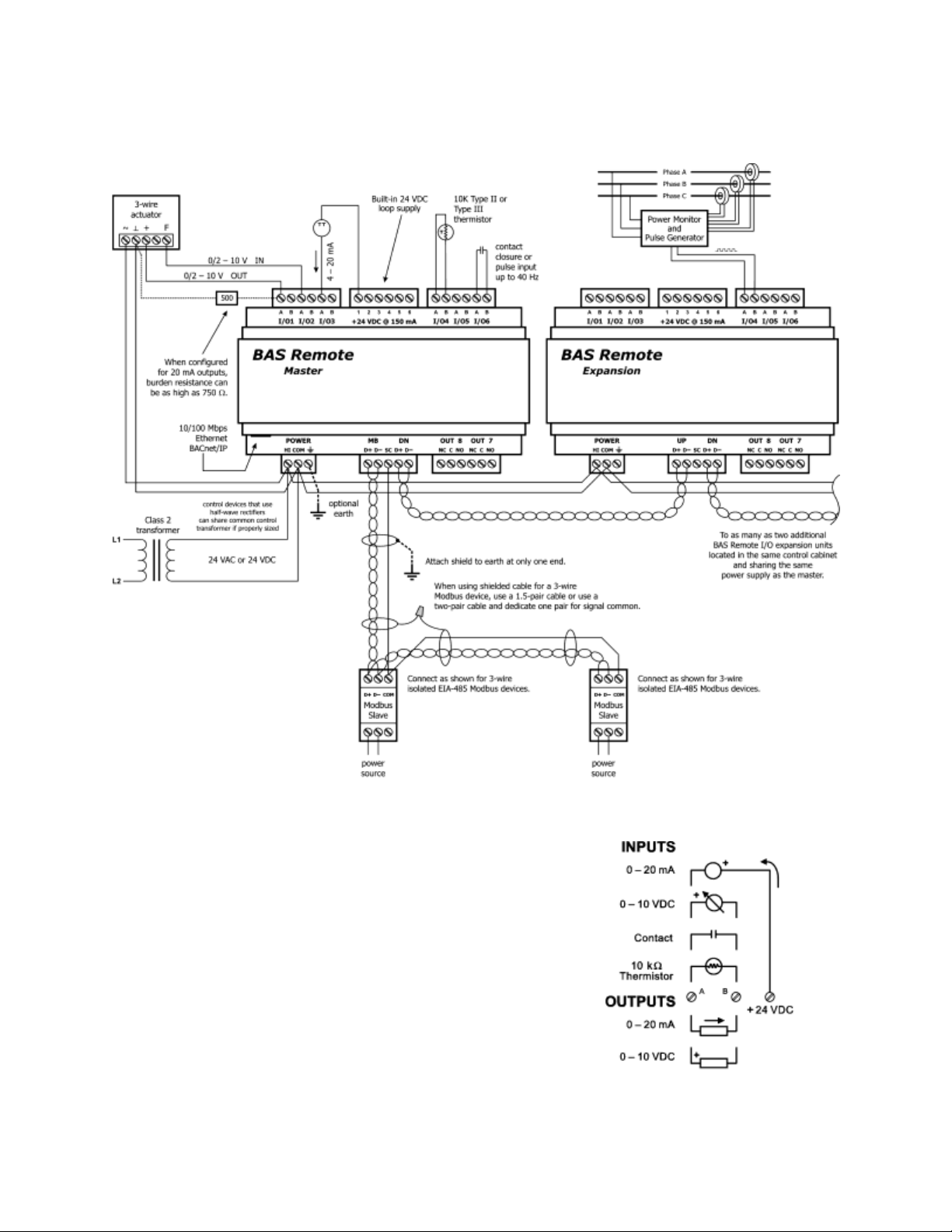
5.1 Sample BAS Remote Wiring Diagram
Figure 6 — Sample BAS Remote Wiring Diagram
Wire Channels 1–6 so the most positive wire goes to
the “A” terminal and the most negative wire to the “B”
terminal.
The wiring options for Channels 1–6 are shown in
Figure 7. For each case in which polarity matters,
proper polarity is indicated.
Considerations in making field connections for various
types of input and output devices are discussed in the
following pages.
Figure 7 — I/O Options (Channels 1–6)
TD040300-0MF
21
Page 22
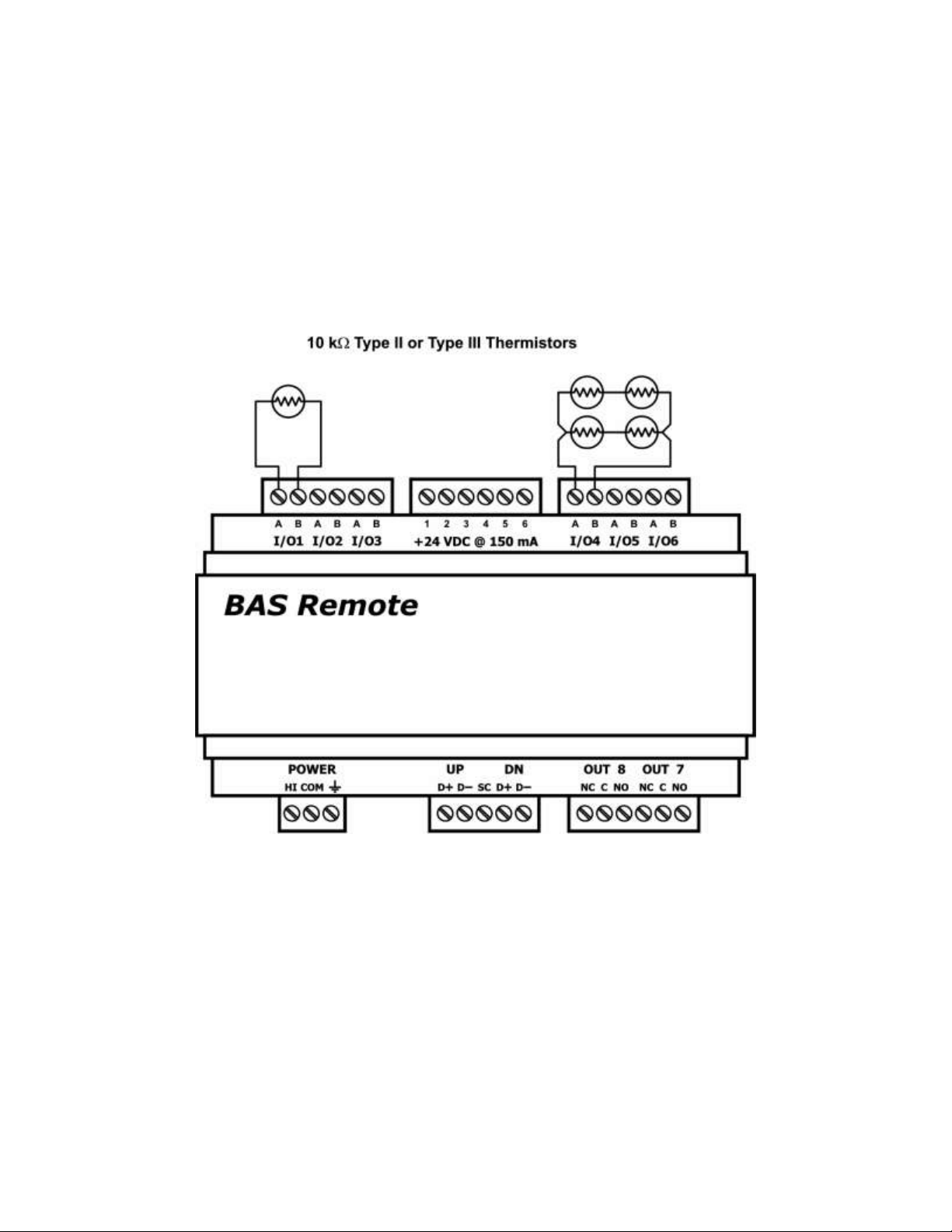
5.2 Thermistors
The BAS Remote has built-in calibration curves for 10 kΩ Type II or Type III thermistors.
These devices have a non-linear with a negative coefficient of resistance to temperature
and provide a nominal resistance of 10 kΩ at 25°C. Using the web server, configure an
input for either Type II or Type III thermistor. As shown in Figure 8, connect the twowire thermistor to points A and B. Polarity is not an issue. If averaging of temperature
is desired, connect multiple thermistors in a series-parallel combination so that the nominal
resistance remains at 10 kΩ as shown. Make sure that all devices are of the same type.
The effective range of temperature measurement is from +40° to +110°F (+4.4° to
+44°C). An open input results in a fault condition that produces a red LED indication for
that channel.
Figure 8 — Thermistor Connections
5.3 Contact Closure
The BAS Remote can sense the make or break of a contact from a relay or push-button.
The contacts being sensed must be absent of any applied source of energy, and be
rated for low-voltage, low-current switching. The BAS Remote will provide the electrical
energy to be sensed. Using the web server, configure an input for contact closure. As
shown in Figure 9, simply connect the contacts between points A and B. For common
mechanical contacts, polarity is not an issue. The open-circuit voltage is 24 VDC and the
short-circuit current is 2 mA.
TD040300-0MF
22
Page 23

Figure 9 — Contact Closure Connections
For solid-state switches, there are further concerns. It is recommended that a solidstate device have an opto-isolated open-collector NPN transistor output stage with a
collector-emitter output voltage (Vce) of at least 30 V. Output sinking current should be
greater than 5 mA. The collector-emitter saturation voltage should be less than 0.2 V
when sinking 2 mA. The emitter should be connected to point B and the collector to
point A which is the more positive point. This polarity must be observed when using
solid-state devices. When an input is configured for a contact closure, the BAS Remote
sets the low-threshold to 2 V and the high-threshold to 3 V. When a contact is made or
the solid-state switch is on (resulting in a saturated output), the voltage at point A is
close to zero volts. The corresponding LED for that channel will be on. If the contact is
opened or the solid-state switch is turned off, the voltage at point B will quickly begin to
rise towards 24 V. Once the voltage passes the 3 V high-threshold, the input channel
will sense the “off” state. To return to the “on” state, this voltage needs to return to 2 V.
The one-volt difference is called hysteresis. There is no need to add an external pull-up
resistor when using a contact closure input.
Contact closure inputs are sampled every 10 ms and for a change of state to be
recognized, the input state must be stable for two consecutive samples. Therefore,
contact closure response is from 20–30 ms.
TD040300-0MF
23
Page 24
5.4 Pulse Inputs
A variation on contact closure inputs is pulse inputs. In this situation speed is critical so
the input filtering that limits the time response is removed. When an input is configured
for Pulse Input, a pulse rate up to 40 Hz can be measured, assuming a 50% duty cycle.
The pulse device could have an opto-isolated open-collector NPN transistor output
stage like the one identified under Contact Closure, or it could provide an active
sinusoidal output signal that needs to be detected. Data can be in the form of frequency
or pulse count.
The Pulse Input voltage range is 0–10 VDC and the installer can set both the lowthreshold and high-threshold on the Pulse Input web page. The difference in the two
thresholds is the hysteresis. You can detect sinusoidal input signals by setting the high
threshold below the positive peak and the low threshold above the negative peak.
Setting the two thresholds well toward the centre of the sinusoidal waveform (rather than
near its peaks) offers some noise immunity. It is not necessary for the input signal to
swing from zero to 10 V. Any substantial swing within this range can be detected. The
input impedance using Pulse Input is 100 kΩ. Connect the output of the pulse device to
point A and the common to BAS Remote common as shown in Figure 10.
Figure 10 — Pulse Input Connections
The pulse output could be sinusoidal with no DC offset so the BAS Remote could
experience both positive and negative excursions of the signal. The BAS Remote can
only detect positive voltages so the negative excursions will be ignored. It is still
possible to detect the input signal by only sensing the positive excursions.
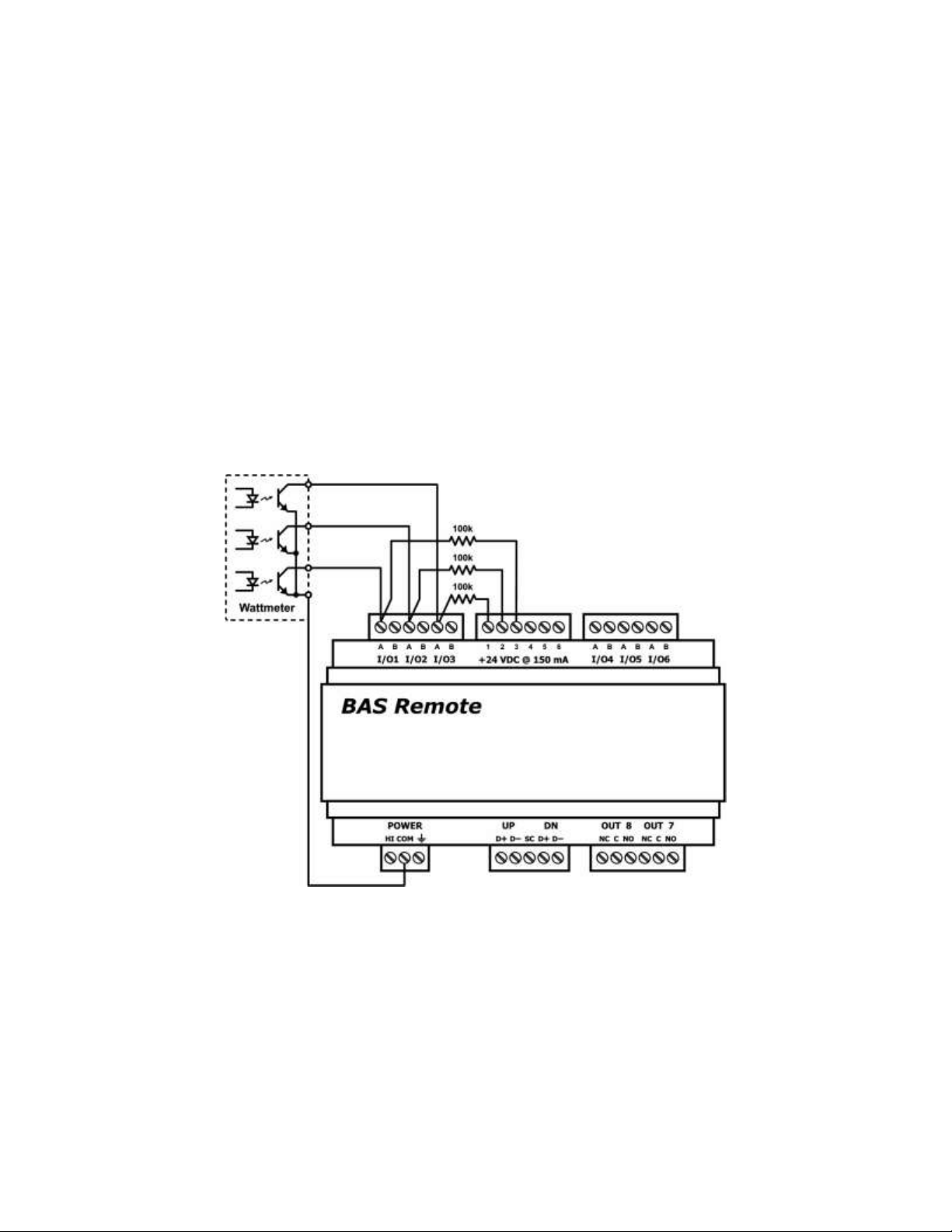
When interfacing to a pulse device that has an opto-isolated open-collector output, a pull-up
resistor must be added to the device output. In Figure 10, a 3-phase wattmeter has three
opto-isolated open-collector outputs, each requiring an external pull-up resistor. Since
TD040300-0MF
24
Page 25

each of the opto-isolators is rated for 60 VDC, install a 100 kΩ pull-up resistor between
each output and the +24 V loop supply. The common of the opto-isolators connects to
the common of the BAS Remote. Since each BAS Remote input has a 100 kΩ input
impedance, the resulting voltage divider sets the off-state voltage to 12 V. Even though
the BAS Remote input range is 0–10 VDC, this will not harm it. Set the two thresholds
to 2 V and 3 V. The threshold points on digital signals are not critical. Consult the pulse
device manual for more guidance.
5.5 Analog Input
An analog input can measure voltage in the range of 0–5 VDC or 0–10 VDC or it can
measure current in the range of 0–20 mA. Transmitters that produce an elevated “zero”
such as 1–5 VDC, 2–10 VDC or 4–20 mA can be measured as well. Using the web
page, configure the input for either voltage or current and select an appropriate range.
Scaling the input is accomplished by assigning the low and high points to engineering
units. When set as a voltage input, the input impedance is 100 kΩ and for a current
input, the impedance is 250 Ω.
With voltage measurement, connect the more positive voltage to point B and the less
positive to BAS Remote common as shown in Figure 11. On three-wire devices such
as damper actuators, the output signal is referenced to the damper’s power supply
common. That common must be at the same reference as the BAS Remote common.
Notice the connections in the diagram. In this situation it is only necessary to attach the
transmitter output to point A on the BAS Remote input.
Figure 11 — Analog Input Connections
TD040300-0MF
25
Page 26

When measuring current, remember the BAS Remote sinks current to ground. A 250 Ω
impedance is effectively applied between points A and B on the input. To measure
current, it must be driven into point A with respect to point B. For two-wire current
transmitters, the more positive point on the transmitter attaches to the +24 V on the BAS
Remote loop supply or it can attached to an external loop supply as long as that loop
supply has a common connection with the BAS Remote. The less positive connection
is made to point A on the input.
Care should be exercised when connecting to a three-wire current transmitter. These
are usually non-isolated devices between the power source and signal output. The BAS
Remote will sink current from its input to ground so the transmitter must source current
from a positive potential to ground. If the three-wire transmitter works in this manner, it
can be accommodated.
Four-wire transmitters usually have isolation between power supply and signal output so
their output stage can usually be treated as a two-wire transmitter.
5.6 Analog Output
Either voltage in the range of 0–10 VDC or current in the range of 0–20 mA can be
outputted by assigning analog outputs. Configure an output using a web page. Select
the appropriate range. For DC voltage, the output voltage is applied to point A with
respect to common. For DC current, the output current is sourced from point A to
common so there is no need for a loop supply. A current output can
source up to 20 mA into a resistive load not exceeding 750 Ω. Verify the
burden that a current output device will present. The BAS Remote cannot
generate enough voltage to drive loads with higher resistance.
Figure 12 — Analog Output Connections
Figure 12 illustrates connections to a three-wire damper actuator. The damper requires
a 0–10 V command signal which can easily be accomplished by the BAS Remote.
However, if a current output is desired it is possible to set the BAS Remote analog
output to 4–20 mA and install an external 500 Ω resistor that will convert the 4–20 mA
signal to 2–10 V.
TD040300-0MF
26
Page 27

If the I/O channel is …
Green indicates …
Red indicates …
a Relay output
the coil is energized.
(not used for relay output.)
an Analog output
the command is greater than zero.
10% deviation from command
a Contact input
the contact is made.
(not used for contact input.)
a Pulse input
the input state changed.
(not used for pulse input.)
a Thermistor
current flow is detected
No current flow detected
an Analog input
the signal is greater than 1% of span.
(not used for analog input.)
6 Operation
6.1 General Considerations
Configuration is accomplished while the unit is connected to a computer running a web
browser (Java-enabled) that accesses the unit’s built-in web server.
6.1.1 Ethernet Port on the Master Module
Auto-Negotiation
The Ethernet port on the BAS Remote Master unit offers full auto-negotiation. A single
cable links two Ethernet devices. When these devices auto-negotiate, the data rate will
be 100 Mbps only if both are capable of that speed. Likewise, full-duplex will only be
selected if both can support it. If only one device supports auto-negotiation, then it will
default to half-duplex mode and match the data rate of the non-auto-negotiating device.
Auto-MDIX (Auto-Crossover)
The Ethernet port offers Auto-MDIX. When interconnecting two Ethernet devices, a
straight-through cable or crossover cable can be used — but if one device uses AutoMDIX, the cable wiring does not matter; Auto-MDIX adjusts for either type.
Reset Switch
To reset the Master module to its default values of the IP address (192.168.92.68),
gateway address (192.168.92.1) and netmask (/24 or 255.255.255.0), use a paperclip
or similar tool to press the reset switch (see Figure 1 for location) while the unit is
repowered and until the reboot is complete. Once the Status LED stops flashing,
release the reset switch. T he unit will now use the default values.
6.1.2 LEDs
To aid in troubleshooting, several LEDs have been provided.
The Status LED flashes green during boot up — then glows solid green while operation is
fault-free. If a fault occurs, the LED glows solid red. On the Master module, this LED
flashing green (after boot up) indicates Modbus serial activity.
The Master module has an Ethernet LED that glows green when properly linked to
equipment operating at 100 Mbps (yellow for 10 Mbps) and indicates activity by flashing.
The Expansion module has a Network LED that flashes green to indicate data transfers.
I/O LEDs 1–8 follow the behaviour described in the chart below :
TD040300-0MF
27
Page 28

6.1.3 Accessing and Configuring the Web Server on the Master Unit
6.1.3.1 Web Browser
The Master contains an interactive web server, accessible from any Internet-compatible
PC on the local network. It is compatible with recent versions of Internet Explorer (5.0 or later,
suggested) or Netscape Navigator (7.1 or later, required). It is factory-programmed with
a default IP address of 192.168.92.68 and a Class C subnet mask of 255.255.255.0.
Once configured, changing the BAS Remote IP address is strongly encouraged.
6.1.3.2 Initial Access
The hardware arrangement for initially setting the Master
IP address appears in Figure 13. The PC should be
temporarily disconnected from the Ethernet LAN in
case the Master’s default address matches that of a
device on the existing LAN. The procedure for altering
the IP address creates a temporary LAN composed of
nothing but the Master, the PC used to configure it and
a CAT5 cable connecting the two. Since the Master
supports Auto-MDIX, either straight-through or crossover
cable can be used.
For initial configuration, the PC chosen for the
procedure should temporarily have its IP address
modified as shown in Figure 14 — which employs a
Windows® 2000 example.
Figure 13 — Setup for Initial IP Address
Configuration by Web Browser
Figure 14 — Steps for Changing the IP Address of the PC Used for Setup
TD040300-0MF
28
Page 29

Figure 14 suggests an IP address for the PC of 192.168.92.69, but the final quad of the
address could be any value from 1 to 254 — except for 68 which is used by the Master.
After the IP address of the PC has been set to the same LAN as the Master, a browser
can access the Master’s default IP address. The Master does not support DHCP.
Figure 15 displays just the relevant upper portion of the screen that appears when you
access the Master. Just beneath the device image is a link named “Configure Settings”.
Clicking this link opens another window where you can configure the values discussed
in the next four sections (see Figures 17–20).
Figure 15 — Master Main Page (Partial View)
Figure 16 — Expansion Main Screen (Partial View)
Figure 16 displays a view of a main screen (for one of three Expansion units) that is
faded — except for those elements that differ from the Master screen.
TD040300-0MF
29
Page 30

6.1.3.3 System Configuration
Four tabs exist on the configuration screen. Select System if it is not already highlighted.
System Name Give your system any name you wish.
IP Address Changing the default value of 192.168.92.68 is recommended.
Subnet Mask The default value of 255.255.255.0 is adequate for most users.
Gateway Address If your Ethernet LAN has a gateway (router) enter its address here.
Main Unit Name Give your Master module any name you wish.
Expansion Units Choose from the default of 0 to as many as 3 units. This value will
set the number of tabs that you see atop the main screen.
NOTE: Whether you are configuring System, BACnet,
Modbus or Virtual values, clicking “UPDATE” will save
your values to internal memory, but you must reboot
the Master module by cycling power before the new
values will apply!
After the Master has been given its initial configuration, it will be ready for use in the full
original Ethernet network. The temporary Ethernet network constructed in Figure 13
should be dismantled and the PC re-configured to restore its original IP address.
Figure 17 — Configuring System in the Master Module
TD040300-0MF
30
Page 31

6.1.3.4 BACnet Configuration
Device Instance This is a 22-bit value (0–4,194,303). Each BACnet network device
must have a unique device instance. The default value is 2749.
UDP Port The default value of 0xBAC0 should usually not be changed.
BBMD IP Address Enter the address of the BBMD with which the BAS Remote will
perform Foreign Device Registration (FDR) if the BBMD is not
located on the same subnet as the BAS Remote.
BBMD Reg Time Enter the interval (in seconds) between successive foreign device
registrations.
Figure 18 — Configuring BACnet in the Master Module
TD040300-0MF
31
Page 32

6.1.3.5 Modbus Configuration
Modbus configuration (see Figure 19) is only required if Modbus serial devices are
attached to the MB bus. Communication settings between the Master module and the
Expansion modules are preset and cannot be changed.
Modbus Address Address 1 is pre-assigned to the Master module while
Expansion modules are assigned addresses 2, 3 and 4
assuming Expansion units exist. The actual Expansion
address depends upon the order of cabling to the Master.
In addition to address 1, the Master module is also preassigned addresses 8 and 9 for internal functions. It is
best to assume that addresses 1 through 9 are reserved
for BAS Remote equipment so assign addresses from 10
to 247 to attached Modbus devices.
Baudrate All Modbus devices attached to the MB bus must have the
same baud rate. Baud rates range from 2,400 to 115,200.
The default is 19,200.
Protocol All Modbus devices attached to the MB bus must use the
same protocol. The choices are RTU and ASCII. The
default is RTU.
Parity All Modus devices attached to the MB bus must use the
same parity. The choices are NONE, ODD or EVEN. The
default is EVEN.
Command Timeout Set how long the Master will wait for a slave to respond.
The range is 50–3000 ms with a default of 1,000. If a
device fails to respond, it is placed into an offline queue.
Devices in this queue are checked every offline poll period.
Inter Scan Delay Set the desired delay between each poll cycle from 100-
30,000 ms. The default is 2,000.
Offline Poll Period Set how often the Master will check to see if a slave device
is back online. The range is 2,000-30,000 ms. The default
is 15,000.
Consecutive Read Delay Sets the delay between back-to-back accesses of the
same slave device. The range is 0-100 ms and the default
is 0.
Inter-Character Gap This maximum (1.5 character times) is what Modbus allows
between characters. If a device exceeds the allowable
time, set this to the highest possible value for the device.
The default of 0 is recommended, but settings between 0
and 10 ms are possible.
TD040300-0MF
32
Page 33

Figure 19 — Configuring Modbus in the Master Module
TD040300-0MF
33
Page 34

6.1.3.6 Virtual Point Configuration
The BAS Remote can store data independent of I/O Channel values. These stored
values are called Virtual Points because they are not required to be related to physical
I/O points. These virtual points can be treated as Modbus registers, BACnet objects or
Sedona Framework components. See Section 7.3.2 for more information.
Instance This read-only number is created from the BACnet Type. It is of the
form 8xyyyy, where the x defaults to 4 (register) but after the Apply
Object Changes button is clicked it will become 0 if the Type is
Binary Output or 1 if the Type is Binary Input. The value of yyyy is
automatically incremented as objects are added to the list of Virtual
Points in the left side of Figure 20. This virtual object can be written
or read via its Modbus/TCP address. Its address will be 8 and the
register number will be YYYY. The binary input/output can be
written/read via 0YYY or 1YYY.
Object Name Give the Virtual Point any name you wish. This will be the BACnet
object name for this virtual object.
BACnet Description Give the BACnet channel any name you wish.
BACnet Type Select the Type from the drop-down menu. Below, check the
“Retentive” box to preserve counts despite a power failure. “Float”
indicates how this virtual object will be accessed via Modbus/TCP.
If checked, this object will be accessed as a 32-bit float value. If
unchecked, it will be accessed as a 16-bit register. NOTE: Analog
Value, Analog Input and Binary Input types will not be writeable via
BACnet. Analog output and Binary Input can be written via BACnet.
BACnet Unit Group Select the Unit Group from the drop-down menu.
BACnet Unit Value Select the Unit Value from the drop-down menu.
BACnet COV Increment Once the channel value changes by this amount (up or down), a
COV message is sent to subscribers.
Figure 20 — Configuring Virtual Points in the Master Module
TD040300-0MF
34
Page 35

6.1.4 Web Server Screen Overview
From the Web Server Screen (Figure 21) you can configure all I/O channels, view their
status or force them as part of a commissioning process. (The figure uses the Master unit
as an example, but the Expansion unit appears very similar and functions the same.)
Immediately beneath the right side of the banner, the following links are displayed:
Help displays a new window (Figure 23) with context-sensitive information.
Visit Our Website links to our WWW home page for further helpful information.
Figure 21 — Web Server Page
The Configure Settings button (just below the device image) provides access to the basic
device configuration fields already discussed (Figure 17).
The BAS Remote image includes graphic representations of each I/O Channel. Each of the
8 channels has two icons ( and ) that open additional windows used for configuring
or forcing each Channel. The use of these links is discussed in Section 6.3.
TD040300-0MF
35
Page 36

Other buttons located beneath and to the right of the device image are:
Map This accesses the Modbus Mapping function (Section 7.5) which shows
the status of all mapped objects — including mapped Modbus variables,
virtual objects and all points within the BAS Remote.
Modbus Utility This accesses the Modbus Utility function (Section 7.6).
Set Time This accesses the Set Time window where you can manually set the
values of time and date.
The large grey section at the bottom of the screen labelled Current Settings is the device
“Monitor” — a read-only display of information for the BAS Remote module currently
selected. The tab in bold face near the top of the screen indicates the module selected.
Figure 22 below is an example in which Expansion Unit 2 has been selected.
NOTE: The number of tabs displayed is determined by the number of
Expansion Units selected in the Master Configuration Screen (Figure 17).
Figure 22 — The Tab in Bold Face Indicates the Selected Module
In the upper-left portion of the Monitor shown in Figure 21, two values (Unit Name and
Modbus Address) are displayed for the currently selected module.
To the right of the Modbus Address value is a box which reports one of two possible
pieces of information — depending on the type of BAS Remote module currently selected.
When the Master is selected, the box will display the BACnet Device Instance of the
Master. If an Expansion module is selected, the box will report the module’s status: It will
be ONLINE if its connection to the Master is valid or OFFLINE if the connection is invalid.
An OFFLINE report usually means the Expansion module cannot communicate with the
Master due to a cabling issue.
In the upper-right portion of the Monitor, the status of each channel (point) is reported with
the Override indicators and the LED Status indicators. All of these LEDs are refreshed at
the rate of once per second.
The lower portion of the Monitor displays the Channel Names and their Present Values.
6.1.5 On-Screen Help
There are several screens used in the BAS Remote. The upper-right portion of each
screen displays a Help option. Clicking this option launches another browser window
with helpful information about the current screen.
Figure 23 — Help Window
TD040300-0MF
36
Page 37

6.2 Input/Output Channels (I/O)
6.2.1 Universal I/Os
Six identical universal I/O channels allow any mix of inputs and outputs requiring only
two connections labelled A and B. Pin A is always more positive than pin B. Channels
are labelled I/O 1 through I/O 6 and are divided equally between two six-pin terminal
blocks. One terminal block is for I/O 1–3 and the other is for I/O 4–6. Configuring is
done via the built-in web server. Input resolution is 10 bits; output resolution is 12 bits.
Schottky barrier diodes protect the electronics from over-voltage faults on inputs A and
B. Also, a PPTC (polymeric positive temperature coefficient) resettable fuse protects
terminal B from over-voltage when driven to ground.
Pin A can be an input or output. Pin B can be an input or ground. A D/A converter is
used for generating analog voltage or current outputs, and for providing excitation
current for contact closure sensing and for thermistor measurement.
In current output mode, pin B is grounded. The output burden applied to pins A and B
can range from 0 to 750 Ω. Since the internal burden is 250 Ω, the output voltage at pin
A can range from 0–20 volts when driving 20 mA.
When measuring input voltages, pin A receives input while pin B is held at ground. Any
DC voltage in the range of 0–5 V or 0–10 V can be measured.
When measuring current, pin B is unused and the input on pin A sees a 250 Ω load.
To sense contact closure, 2 mA is output at pin A while pin B is grounded. Then the
voltage at pin A is measured. Any value below 0.3 volts (150 Ω) is considered a closed
circuit. Dry-contact or solid-state switches being sensed must withstand an opensource voltage of 24 VDC and a current of 2 mA. For solid-state switches, the most
positive connection is at pin A and a saturation voltage under 0.3 V is required.
A 10 kΩ thermistor is applied between pins A and B. Thermistors are non-linear heat
sensing devices with a negative temperature coefficient of resistance. At nominal room
temperature (77 °F), the resistance of a Type II or Type III thermistor is 10 kΩ. Both
have curves with an accuracy of ±0.36 °F from 32 °F to 158 °F. Because higher
resistance thermistors (such as 10 kΩ) introduce error due to the self-heating effect, lower
thermistor current is used — thus minimizing self-heat and measurement inaccuracy.
6.2.2 Relay Outputs
There are two independent SPDT relay outputs. For each output, both the NO and NC
contacts are brought out to a six-pin terminal block. Contacts are rated at 2A at 30 VAC
and 2A at 30 VDC. Wiring to the BAS Remote should only be Class 2. To control
higher voltages, the safer approach is to connect the coils of Class 2 interposing relays
to the contacts of the BAS Remote and have the contacts of the interposing relays
connect to the Class 1 circuits. These interposing relays should be further from the
BAS Remote and closer to the Class 1 equipment.
TD040300-0MF
37
Page 38

6.3 Channel Configuring
To configure a channel, access the Web Server Page, click on the icon for the channel
of interest and make adjustments in the new screen that appears. Your selected channel is
confirmed by the large number on the left side of the new screen. As Figure 24 shows,
clicking on the Save button is confirmed by the button briefly changing from light blue to dark
blue. If you attempt to set an illegal value, the button will not change colour.
6.3.1 Analog Voltage Input Configuring
You can define any channel 1–6 as “INPUT: 0–10V Analog” or “INPUT: 0–5V Analog” (As an
example, Figure 24 uses Channel 1 and 0–10V). Such a channel can accept an input voltage in
the range of 0–10 volts or 0–5 volts. The channel BACnet type will be Analog Input. On this
screen, you can adjust these parameters:
BACnet Unit Group The Electrical default can be set to any option in the list.
Channel Name You can rename the channel using no more than 63 characters.
This will be the object name for this channel (followed by the
channel number). For example, “Analog Input-1”.
BACnet Unit Group The Electrical default can be set to any option in the list.
BACnet Unit Value The VOLTS default can be set to any option in the list. The available
options depend on the BACnet Unit Group you specify.
BACnet COV Increment Once the channel value changes by this amount (up or down), a
COV message is sent to subscribers.
BACnet Description You can enter any string using no more than 63 characters.
ACTUAL HIGH This specifies the highest value within the range.
ACTUAL LOW This specifies the lowest value within the range.
SCALED HIGH You can set a physical value corresponding to the high value.
SCALED LOW You can set a physical value corresponding to the low value.
Figure 24 — Analog Input Configuration
TD040300-0MF
38
Page 39

6.3.2 Analog Voltage Output Configuring
You can set any channel 1–6 as type “OUTPUT: 0–10V Analog” as shown in Figure 25, using
Channel 1 as an example. Such a channel can supply an output voltage in the range of 0–10 V.
The channel BACnet type will be Analog Output. On this screen, you can adjust any of the
following parameters.
Channel Name You can rename the channel using no more than 63 characters.
This will be the object name for this channel (followed by the
channel number). For example, “Analog Output-1”.
BACnet Unit Group The Electrical default can be set to any option in the list.
BACnet Unit Value The VOLTS default can be set to any option in the list. The available
options depend on the BACnet Unit Group you specify.
BACnet COV Increment Once the channel value changes by this amount (up or down), a
COV message is sent to subscribers.
BACnet Description You can enter any string using no more than 63 characters.
ACTUAL HIGH This specifies the highest value within the range.
ACTUAL LOW This specifies the lowest value within the range.
SCALED HIGH You can set a physical value corresponding to the high value.
SCALED LOW You can set a physical value corresponding to the low value.
Initial Value (Scaled) The Off default outputs 0, but you can preset a Scaled value.
Figure 25 — Analog Output Configuration
TD040300-0MF
39
Page 40

6.3.3 Binary Input Configuring
You can define any channel 1–6 as type “INPUT: Binary” as shown in Figure 26 which uses
Channel 1 as an example. The channel BACnet type will be Binary Input. On this screen, you
can adjust the following parameters.
Channel Name You can name the channel using no more than 63 characters. This
will be the object name for this channel (followed by the channel
number). For example, “Binary Input-1”.
BACnet Unit Group The Others default can be set to any option in the list.
BACnet Unit Value The NO_UNITS default can be set to any option in the list. The
available options depend on the BACnet Unit Group you specify.
BACnet Description You can enter any string using no more than 63 characters.
Figure 26 — Binary Input Configuration
TD040300-0MF
40
Page 41

6.3.4 Current Input Configuring
You can define any channel 1–6 as type “INPUT: 0–20 mA“ as shown in Figure 27 which uses
Channel 1 as an example. Such a channel accepts an input current in the range of 0–20 mA.
The channel BACnet type will be Analog Input. On this screen, you can adjust any of the
following parameters.
Channel Name You can rename the channel using no more than 63 characters.
This will be the object name for this channel (followed by the
channel number). For example, “Current Input-1”.
BACnet Unit Group The Electrical default can be set to any option in the list.
BACnet Unit Value The MILLIAMPERES default can be set to any option in the list. The
available options depend on the BACnet Unit Group you specify.
BACnet COV Increment Once the channel value changes by this amount (up or down), a
COV message is sent to subscribers.
BACnet Description You can enter any string using no more than 63 characters.
ACTUAL HIGH This specifies the highest value within the range.
ACTUAL LOW This specifies the lowest value within the range.
SCALED HIGH You can set a physical value corresponding to the high value.
SCALED LOW You can set a physical value corresponding to the low value.
Figure 27 — Current Input Configuration
TD040300-0MF
41
Page 42

6.3.5 Current Output Configuring
You can define any channel 1–6 as type “OUTPUT: 0–20 mA“ as shown in Figure 28 which
uses Channel 1 as an example. Such a channel provides an output current in the range of 0–20
mA. The channel BACnet type will be Analog Output. On this screen, you can adjust any of the
following parameters.
Channel Name You can rename the channel using no more than 63 characters.
This will be the object name for this channel (followed by the
channel number). For example, “Current Input-1”.
BACnet Unit Group The Electrical default can be set to any option in the list.
BACnet Unit Value The MILLIAMPERES default can be set to any option in the list. The
available options depend on the BACnet Unit Group you specify.
BACnet COV Increment Once the channel value changes by this amount (up or down), a
COV message is sent to subscribers.
BACnet Description You can enter any string using no more than 63 characters.
ACTUAL HIGH This specifies the highest value within the range.
ACTUAL LOW This specifies the lowest value within the range.
SCALED HIGH You can set a physical value corresponding to the high value.
SCALED LOW You can set a physical value corresponding to the low value.
Figure 28 — Current Output Configuration
TD040300-0MF
42
Page 43

6.3.6 Thermistor Input Configuring
You can define any channel 1–6 as a Type II or III thermistor input as shown in Figure 29 which
uses a Type 3 thermistor and Channel 1 as an example. The channel BACnet type will be
Analog Input. On this screen, you can adjust any of the following parameters.
Channel Type You can select a Type II or Type III thermistor profile.
Channel Name You can name the channel using no more than 63 characters. This
will be the object name for this channel (followed by the channel
number). For example, “Thermistor Input-1”.
BACnet Unit Group The Temperature default can be set to any option in the list.
BACnet Unit Value Set the DEGREES_FAHRENHEIT default to any option in the list.
Available options depend on the BACnet Unit Group you specify.
BACnet COV Increment Once the channel value changes by this amount (up or down), a
COV message is sent to subscribers.
BACnet Description You can enter any string using no more than 63 characters.
Offset You can specify a (+) or (–) number of degrees offset — if, for
example, the thermistor in use is known to be delivering an
inaccurate reading. Either type of thermistor can normally measure
from 40º and +110º Fahrenheit.
Temp Units The Fahrenheit default scale can be changed to Celsius.
Figure 29 — Thermistor Input Configuration
TD040300-0MF
43
Page 44

6.3.7 Pulse Input Configuring
You can define any channel 1–6 as type “INPUT: Pulse” as shown in Figure 30 which uses
Channel 1 as an example. Such a channel can accept a pulse train in the range of 0–40 Hz.
The channel BACnet type will be Analog Value.
NOTE: The value reported by this channel via BACnet will be a 32-bit float as this is an Analog
Value. To provide accurate values when counting input pulses, this value will rollover at 224–1.
To reset the pulse input value, you can (via BACnet) take the channel out of service and write a
desired value — such as 0 — and then put the channel back in service to allow pulse counting
to continue. This value can also be reset by writing a new value to it using one of the following
four methods:
via the map web page — displayed by clicking the Map button (Figure 15)
via Modbus/TCP
via Web Services
via a custom webpage (which can write to the instance associated with this channel)
On the screen of Figure 30, you can adjust any of the following parameters.
Channel Name You can rename the channel using no more than 63 characters.
This will be the object name for this channel (followed by the
channel number). For example, “Pulse Input-1”.
BACnet Unit Group The Others default can be set to any option in the list.
BACnet Unit Value Set the NO_UNITS default to any option in the list. The available
options depend on the BACnet Unit Group you specify.
BACnet COV Increment Once the channel value changes by this amount (up or down), a
COV message is sent to subscribers.
BACnet Description You can enter any string using no more than 63 characters.
ACTUAL HIGH This specifies the highest value within the range.
ACTUAL LOW This specifies the lowest value within the range.
SCALED HIGH You can set a physical value corresponding to the high value.
SCALED LOW You can set a physical value corresponding to the low value.
Period If the “Rate” option has been selected, this specifies the period in
seconds — otherwise, this field is not present on the screen.
Rate This specifies that the rate of the input is being obtained.
Accumulate This specifies that the input pulses are being accumulated (absolute
count) — with no limit to the time during which pulses are counted.
High Level (V) You can specify a value from 10 down to (but more than) the “Low Level”.
Low Level (V) You can specify a value from 0 up to (but less than) the “High Level”.
TD040300-0MF
44
Page 45

Figure 30 — Pulse Input Configuration
TD040300-0MF
45
Page 46

6.3.8 Relay Output Configuring
Channels 7 and 8 are fixed as type “OUTPUT: Relay” as shown in Figure 31 which uses
Channel 8 as an example. Each channel provides a relay contact rated at 30 VAC/DC, 2A.
Each relay has a normally-open and a normally-closed set of contacts. The channel BACnet
type will be Binary Output. On this screen, you can adjust the following parameters.
Channel Name You can name the channel using no more than 63 characters. This
will be the object name for this channel (followed by the channel
number). For example, “Relay Output-1”.
BACnet Unit Group The Others default can be set to any option in the list.
BACnet Unit Value The NO_UNITS default can be set to any option in the list. The
available options depend on the BACnet Unit Group you specify.
BACnet Description You can enter any string using no more than 63 characters.
ACTUAL HIGH The default value of 1 is unchangeable.
ACTUAL LOW The default value of 0 is unchangeable.
SCALED HIGH The default value of 1 is unchangeable.
SCALED LOW The default value of 0 is unchangeable.
Initial Value (Scaled) The Off default outputs 0, but you may set a 0 or a 1.
Figure 31 — Relay Output Configuration
TD040300-0MF
46
Page 47

Status OK
Input Shorted or Open
Range High
Settings Applied
Input Open
Range Low
Output Overload
Input Shorted
6.4 Channel Forcing
To force a channel, access the Web Server Page, click on the icon for the channel of
interest and make adjustments in the new screen that appears. Your selected channel
is confirmed by the large number on the left side of the new screen. If you apply an
override value, the override condition will be indicated by a simulated LED on the main
Web Server Screen — as described in Section 6.1.4. Also the BACnet status flag
overridden will be true for the BACnet object which represents this channel. A forced
channel will show up as “offline” in Sedona.
For any channel type selected, the “Forcing” screen reports information for the following
read-only fields:
Channel Type This reports the type that you have defined for this channel.
Channel Name This reports the name that you have specified for this channel. This
will be the object name for this channel (followed by the channel number).
For example, “Analog Input-1”.
Status This reports any of the following conditions:
6.4.1 Analog Input Forcing
In addition to type, name and status — this screen displays the following fields.
Input Value This reports the Input Value (read-only).
Override Value You can specify an Override Value.
Override Checking this box will put the Override Value in effect — after the
Apply button is clicked. To remove the Override Value, uncheck the
Override checkbox and click the Apply button.
Figure 32 — Analog Input Forcing
TD040300-0MF
47
Page 48

6.4.2 Binary Input Forcing
In addition to type, name and status — this screen displays the following fields.
Input Value This reports the Input Value (read-only) as ON or OFF.
Override Value You can specify an Override Value as ON or OFF.
Override Checking this box will put the Override Value in effect — after the
Apply button is clicked. To remove the Override Value, uncheck the
Override checkbox and click the Apply button.
Figure 33 — Binary Input Forcing
6.4.3 Current Input Forcing
In addition to type, name and status — this screen displays the following fields.
Input Value This reports the Input Value (read-only).
Override Value You can specify an Override Value.
Override Checking this box will put the Override Value in effect — after the
Apply button is clicked. To remove the Override Value, uncheck the
Override checkbox and click the Apply button.
Figure 34 — Current Input Forcing
TD040300-0MF
48
Page 49

6.4.4 Thermistor Input Forcing
In addition to type, name and status — this screen displays the following fields.
Input Value This read-only temperature value will be meaningless if no thermistor
is connected as in Figure 8 (and Status will report Range LOW).
Override Value You can specify an Override Value.
Override Checking this box will put the Override Value in effect — after the
Apply button is clicked. To remove the Override Value, uncheck the
Override checkbox and click the Apply button.
Figure 35 — Thermistor Input Forcing
6.4.5 Relay Output Forcing
In addition to type, name and status — this screen displays the following fields.
Input Value This reports the Input Value (read-only) as ON or OFF.
Override Value You can specify an Override Value as ON or OFF.
Override Checking this box will put the Override Value in effect — after the
Apply button is clicked. To remove the Override Value, uncheck the
Override checkbox and click the Apply button.
Figure 36 — Relay Output Forcing
TD040300-0MF
49
Page 50

6.5 Instance Numbers
In several locations in the manual we instruct the use of instance numbers. The
instance numbers of the 8 channels of I/O within the BAS Remote will equal their
channel numbers. The instance number of the 1st connected expansion module will be
9. The last instance number of channel 8 be 32 (assuming three expansion modules
are connected). The instance numbers of virtual objects will be provided in the
configuration screen. The instance number of Modbus mapped I/O will be provided in
the project.
6.6 Flash File System and Custom Web Pages
An onboard 1 MB of Flash is set aside for your use. Using the default IP address as an
example, your Flash area is accessible at http://192.168.92.68/user/. A User ID of
“admin” and Password of “ctrlink” allow you to access the user folder, but you cannot
create subfolders within the user folder.
Upload your custom webpage files to the BAS Remote by placing them in the folder named:
/data/user
The names of your html files must be user.html, user1.html ... user9.html. The other
file names can be whatever you want (up to 255 characters).
By uploading web pages and images to your Flash space, you can view the BAS Remote
status in a graphical format of your own design. Via these custom webpage Java
applets, you can access the current status of a channel, virtual object or mapped
Modbus variable. NOTE: The part of each applet file name shown below in red will vary
by release date.
The Binary Applet displays status by a coloured square which will be red for a
value of 0 and green for a value of 1. The size of the displayed square in pixels
is specified in your HTML code — with a maximum size of 500 x 500. The applet
has two parameters: Instance (the instance number of the object to be read) and
TimerMsDelay (the time between reads of this value on the BAS Remote). The
applet file name is:
binary-applet-2010.03.08.08.48.29.jar
The Channel Set Applet writes to a channel or instance using the value specified
in the text box. The applet has one parameter: Instance. The applet file name is:
channel-set-applet-2010.03.08.08.48.29.jar
The Channel View Applet reads a channel or instance. The applet has two
parameters: Instance and TimerMsDelay. The applet file name is:
channel-view-applet-2010.03.08.08.48.29.jar
After studying an example web page (http://192.168.92.68/user.html) that shows you
how to use the three applets, you can erase it and replace it with your own design.
TD040300-0MF
50
Page 51

6.7 Web Services
The BAS Remote provides a simple Web Service to support reading/writing of channels,
virtual objects and mapped Modbus variables. On receiving a write request, it writes
data to the data server for changing the I/O status of the BAS Remote. On receiving a
read request, it communicates with the data server and returns the status of the
requested channel or Modbus variable.
A Web Services Description Language (WSDL) file in the BAS Remote documents the
services provided. The file is loaded at http://192.168.92.68/basremote.wsdl where
the default IP address of 192.168.92.68 is replaced by the actual IP address of the BAS
Remote. This allows applications such as Visual Basic, Visual C++, etc. to read/write
BAS Remote channels and Modbus mapped variables.
An example Visual Basic program which demonstrates use of the BAS Remote’s Web
Service functionality will be available on the following webpage:
www.ccontrols.com/exe/brwsdemo.zip
6.8 Set Time
The BAS Remote Master has a Set Time Screen (Figure 37) which allows you to set
the unit’s time and date. This feature is most useful in Sedona control strategies.
To manually adjust the date and time, click the Set Time button on the Web Server
Screen (see Figure 21) and the screen of Figure 37 appears. After you have set the
current date and time, click the Update button when done.
Figure 37 — Set Time Screen
The Time and Date can be read via Telnet. The time can also be set by the BACnet Time
Synchronization service (Section 7.2.7.8).
TD040300-0MF
51
Page 52

Property Identifier
Property Datatype
Code
Value
Object_Identifier
BACnetObjectIdentifier
R
(Device, Instance 2749)
Object_Name
CharacterString
R
“BAS System Building 1”
Object_Type
BACnetObjectType
R
DEVICE
System_Status
BACnetDeviceStatus
R
(OPERATIONAL)
Vendor_Name
CharacterString
R
“Contemporary Controls”
Vendor_Identifier
Unsigned16
R
245
Model_Name
CharacterString
R
“BASR-8M”
Firmware_Revision
CharacterString
R
“1.0”
Application_Software_Version
CharacterString
R
“1.0”
Protocol_Version
Unsigned
R
2
Protocol_Revision
Unsigned
R
Protocol_Services_Supported
BACnetServicesSupported
R
(List of Services)
Protocol_Object_Types_Supported
BACnetObjectTypesSupported
R
(List of Object Types)
Object_List
BACnetARRAY[N]of ..Identifier
R
(List of all the objects)
Max_APDU_Length_Accepted
Unsigned
R
1476
Segmentation_Supported
BACnetSegmentation
R
(NO SEGMENT)
APDU_Timeout
Unsigned
R
(3000 MSEC)
Number_Of_APDU_Retries
Unsigned
R
0
Device_Address_Binding
List of BACnetAddressBinding
R
Database_Revision
Unsigned
R
1
7 Appendix
7.1 Troubleshooting Ethernet Connectivity of the Master Unit
When troubleshooting Ethernet connectivity for the BAS Remote Master unit, as with
any IP device, first try pinging the IP address of the Master. The ping function is
typically run as a command line operation in a DOS window. This simple test,
performed from any IP-enabled end station, quickly determines if the unit is accessible
via the TCP/IP protocol. The ping result (positive or negative) will guide the nature of
subsequent troubleshooting efforts.
7.2 BACnet Object Model
The BAS Remote complies with ANSI/ASHRAE Standard 135-2008.
7.2.1 Device
Object Identifier (comprised of the object type DEVICE and an instance number) must be
unique within the complete BACnet network. The default instance (2749) is changed during
commissioning. Object Name can be set to some meaningful description (e.g.: device location).
The remaining fields are set by the manufacturer.
TD040300-0MF
52
Page 53

Property Identifier
Property Datatype
Code
Remarks
Object_Identifier
BACnetObjectIdentifier
R Object_Name
CharacterString
R Object_Type
BACnetObjectType
R Present_Value
REAL
W
Status_Flags
BACnetStatusFlags
R
Status flags will display the status of the channel fault = false
for normal conditions. Overridden = false if the channel is not
forced.
Event_State
BACnetEventState
R
Always normal. Check status flags for real condition.
Out_Of_Service
BOOLEAN
R/W
Units
BACnetEngineeringUnits
R Priority Array
BACnetPriorityArray
R Relinquish_Default
REAL
R COV_Increment
REAL
R
Property Identifier
Property Datatype
Code
Remarks
Object_Identifier
BACnetObjectIdentifier
R
Object_Name
CharacterString
R
Object_Type
BACnetObjectType
R Present_Value
REAL
R
Status_Flags
BACnetStatusFlags
R
Status flags will display the status of the channel fault =
false for normal conditions. Overridden = false if the
channel is not forced. If the channel is a thermistor input
and the thermistor is disconnected, the fault flag will be true.
Event_State
BACnetEventState
R
Always normal. Check status flags for real condition.
Out_Of_Service
BOOLEAN
R/W
Units
BACnetEngineeringUnits
R
Property Identifier
Property Datatype
Code
Remarks
Object_Identifier
BACnetObjectIdentifier
R Object_Name
CharacterString
R
Object_Type
BACnetObjectType
R
Present_Value
REAL
W
Status_Flags
BACnetStatusFlags
R
Status flags will display the status of the channel fault =
false for normal conditions. Overridden = false if the
channel is not forced.
Event_State
BACnetEventState
R
Always normal. Check status flags for real condition.
Out_Of_Service
BOOLEAN
R/W
Units
BACnetEngineeringUnits
R
Priority Array
BACnetPriorityArray
R Relinquish_Default
REAL
R
7.2.2 Analog Input
7.2.3 Analog Output
7.2.4 Analog Value
* After the channel is configured as a Pulse Input, its object type will be Analog Value.
TD040300-0MF
53
Page 54

Property Identifier
Property Datatype
Code
Remarks
Object_Identifier
BACnetObjectIdentifier
R Object_Name
CharacterString
R Object_Type
BACnetObjectType
R Present_Value
BACnetBinaryPV
W
Status_Flags
BACnetStatusFlags
R
Status flags will display the status of the channel fault =
false for normal conditions. Overridden = false if the
channel is not forced.
Event_State
BACnetEventState
R
Always normal. Check status flags for real condition.
Out_Of_Service
BOOLEAN
R Polarity
BACnetPolarity
R
Property Identifier
Property Datatype
Code
Remarks
Object_Identifier
BACnetObjectIdentifier
R Object_Name
CharacterString
R
Object_Type
BACnetObjectType
R
Present_Value
BACnetBinaryPV
R
Status_Flags
BACnetStatusFlags
R
Status flags will display the status of the channel fault =
false for normal conditions. Overridden = false if the
channel is not forced.
Event_State
BACnetEventState
R
Always normal. Check status flags for real condition.
Out_Of_Service
BOOLEAN
R/W
Polarity
BACnetPolarity
R
7.2.5 Binary Input
7.2.6 Binary Output
BAS Remotes comply with the BACnet Application Specific Controller (B-ASC) profile of the six
possible standardized BACnet devices. A B-ASC device can do the following:
Data Sharing
Ability to provide the values of any of its BACnet objects
Ability to allow modification of some or all of its BACnet objects by another device
Alarm and Event Management
No requirement
Scheduling
No requirement
Trending
No requirement
Device and Network Management
Ability to respond to queries about its status
Ability to respond to request for information about any of its objects
Ability to respond to communication control messages
TD040300-0MF
54
Page 55

B-ASC
BIBB
Data Sharing
DS-RP-B
DS-WP-B
DS-RPM-B
DS-COV-B
Device and Network Management
DM-DDB-B
DM-DOB-B
DM-DCC-B
BACnet Service
Initiate
Execute
ReadProperty X
BACnet Service
Initiate
Execute
WriteProperty X
BACnet Service
Initiate
Execute
ReadPropertyMultiple
X
BACnet Service
Initiate
Execute
SubscribeCOV
X
ConfirmedCOVNotification
X UnconfirmedCOVNotification
X
Based upon the above requirements, a B-ASC must comply with the following BACnet
Interoperability Building Blocks (BIBBs).
7.2.7 BIBBs
BIBBs are collections of one or more BACnet services between devices on a BACnet network.
An “A” device is generally the user of the service or client while the “B” device is the provider of
the service or the server. These references are necessary when understanding the BIBBs.
7.2.7.1 DS-RP-B Data Sharing — ReadProperty — B
The BAS Remote functions as the B device and is a provider of data to an A device.
7.2.7.2 DS-WP-B Data Sharing — WriteProperty — B
The BAS Remote functions as the B device and allows a value to be changed by the A device.
7.2.7.3 DS-RPM-B Data Sharing — ReadPropertyMultiple — B
The BAS Remote functions as the B device and is a provider of data to an A device.
7.2.7.4 DS-COV-B Data Sharing — ChangeOfValue — B
The BAS Remote functions as the B device and is a provider of data to an A device.
TD040300-0MF
55
Page 56

BACnet Service
Initiate
Execute
Who-Is X
I-Am X
BACnet Service
Initiate
Execute
Who-Has X
I-Have
X
BACnet Service
Initiate
Execute
DeviceCommunicationControl
X
BACnet Service
Initiate
Execute
TimeSynchronization
X
7.2.7.5 DM-DDB Device Management — Dynamic Device Binding — B
The BAS Remote functioning as the B device provides information about its device attributes and
responds to requests to identify itself.
7.2.7.6 DM-DOB-B Device Management — Dynamic Object Binding — B
The BAS Remote functioning as the B device provides address information about its objects upon request.
7.2.7.7 DM-DCC-B Device Management — Device Communication Control — B
The BAS Remote functions as a B device and responds to communication control exercised by an A device.
7.2.7.8 DM-TS-B Device Management — Time Synchronization – B
The BAS Remote functions as a B device and interprets time synchronization messages from the A device.
Time Synchronization can set the Time and Date within the BAS Remote Master.
Before these parameters are set with this service (or through the Set Time Screen in
Section 6.8), the Time Set virtual object (instance 910001) will be false. Once these
parameters are set, the Time Set virtual object will be true.
TD040300-0MF
56
Page 57

7.3 Sedona for Control
Tridium has made available the open-source Sedona Framework with which devices
can provide user programmable control. Control scheme programming is done using
Tridium’s Sedona Workbench or Niagara Workbench.
The BAS Remote can execute the Sedona Virtual Machine (SVM) to implement control
schemes designed with Sedona Workbench and downloaded to the BAS Remote via
the SVM. The SVM executes these two files:
an scode file containing the Sedona application
an SAB file containing the control scheme
The Sedona application is a program (written in the Sedona language) that contains
executable code for each Sedona component. The SAB file determines how the
components are executed.
The SAB file included with the BAS Remote contains a basic structure similar to that
provided by Tridium (although blank). This structure provides a folder that contains a
wiresheet. You double click this folder to begin your control scheme design.
As you design your scheme, all changes are immediately sent to the BAS Remote for
execution and for monitoring via Sedona Workbench. This only affects the currently
executing control scheme stored in RAM. If you store your control scheme to nonvolatile memory, it will over-write the SAB file in the BAS Remote.
7.3.1 Getting Started with a Sedona Tool
The best way to begin is to connect either a Sedona Workbench or Niagara Workbench
tool to a BAS Remote using an Ethernet connection. The BAS Remote is shipped with
a pre-installed SVM, a kits.scode file and an app.sab file that represents a blank wire
sheet. If you are using Niagara Framework you will need version 3.5.24 or later.
Expand the Niagara folder loaded on a Windows PC and you will find a Sedona folder.
In this folder is a kits folder with additional folders — one of which should be a BAS
Remote folder. Also in the Sedona folder is a manifests folder that should also have a
BAS Remote folder. Both of these are necessary before using the workbench with the
BAS Remote. You will find instructions and necessary files on the controls website, at:
www.ccontrols.com/tech/sedona.htm
Sedona Framework is IP-based so it is necessary to gain access to the BAS Remote
over the same IP-subnet where the BAS Remote resides. Using your web browser,
access the BAS Remote webpage. In the navigation pane example shown in Figure 38,
the BAS Remote is located at private address
192.168.92.68. Pointing your browser to this
location brings up the BAS Remote webpage
which verifies that the PC and the BAS
Remote are properly communicating over the
same subnet. You should be able to reach
the BAS Remote with the Sedona or Niagara
workbench as well.
Figure 38 — Workbench Navigation Screen
TD040300-0MF
57
Page 58

Figure 41 — Sample Property Sheet
Figure 39 — Open Sedona Dialog
Figure 40 — Expanded Navigation Tree
Launch Sedona or Niagara Workbench. If the
BAS Remote was accessed earlier, you
should see its IP address in the navigation
pane (192.168.92.68 in our example shown in
Figure 38). However, if this is the first time the
BAS Remote is being accessed, use the menu
bar to execute the following options:
File > Open > Open Sedona (sox)
You should see an Open Sedona dialog box.
As shown in Figure 39, the Host setting
should be “IP” and the Port setting should be
“1876”. In the box to the right of “IP” enter the
IP address of the BAS Remote (which is
192.168.92.68 in this example). You must
enter a Username and Password for the tool.
In the example we accepted the default username “admin”, then entered no password
— and finally we checked the box to “Remember these credentials”.
If you are successful in connecting, there will
be no error messages. On the left side under
the navigation pane (as shown in Figure 40),
expand the computer icon that lists the BAS
Remote IP address then expand some more
by clicking the Sedona sox icon. This will
open the navigation tree so that you can see
the App (application) directory. Click on App
and you will see a property sheet as shown in
Figure 41. On the lower left side, the Sedona
Palette will be filled in. To save the wiresheet
to BAS Remote non-volatile memory, right click
on App and select Actions and then Save.
On the property sheet you can enter a name
for your application under “App Name”. You
will also notice a “Scan Period” setting with a
default time of 100 which is in milliseconds.
The “Scan Period” indicates how often the
Sedona logic is solved which is once every
scan period. During its sleep time, the BAS
Remote CPU is allowed to do other tasks.
By increasing the “Scan Period”, Sedona
logic is solved less frequently — allowing
other tasks (such as the web server) to
perform work.
TD040300-0MF
58
Page 59

On the navigation pane of Figure 40, the expansion of the App directory allows you to
see two folders named “service” and “sheet”. Click on “sheet” to obtain a blank Wire
Sheet. This is where components will be assembled into an application. Under Sedona
Palette, select the “control” container to see all the components that are included in the
control kit. The “basremote” option displays the BAS Remote kit. To connect the BAS
Remote component to the appropriate channel or virtual object, you will need to
configure its instance number. These screens are illustrated in Figure 40. To access
the components, simply drag one of the components onto the wire sheet. You will be
required to provide a unique seven character ASCII name for the component.
Information on the contents of the various kits and Sedona Framework in general can
be found on our website at:
www.ccontrols.com/basautomation/sedona.htm
Figure 42 — Accessing the Sedona Palette and the BAS Remote Kit
7.3.2 Virtual Points
Sedona creates a necessity for Virtual Points that do not represent real I/O. Virtual
Points are placed in the Sedona control scheme and allow applications or devices to
access a scheme. An example of a Virtual Point is a temperature set point.
There are five types of Virtual Points:
analog-input
analog-output
analog-value
binary-input
binary-output
Virtual Points are visible via BACnet, Modbus/TCP, custom webpage java applets and
Web services — and can be used to share data between Modbus/TCP, BACnet and
Web services systems.
Each Virtual Point has a unique instance number in one of the ranges below:
840001–840050 Analog Inputs, Analog Outputs and Analog Value
810001–810025 Binary Inputs
800001–800025 Binary Outputs
Virtual points are always present, support COV and have a 0 value if not used.
TD040300-0MF
59
Page 60

7.3.3 Email Alerts
You can configure the BASremote to transmit an email alert based on a Sedona event.
Figure 43 displays your server configuration options.
Figure 43 — Sedona Email Configuration O
Figure 44 displays your options for message delivery, subject and triggering event. If
desired, you can specify additional emails to trigger on different events and/or target
different email recipients.
Figure 44 — Sedona Email Detail Screen
TD040300-0MF
60
Page 61

7.4 Modbus Server Operation
The BAS Remote Master functions as a Modbus TCP server accepting commands
from a Modbus TCP client through reserved port 502. As a Modbus TCP server, the
BAS Remote Master and its attached Expansion modules appear as Modbus serial
devices with each module assigned a unique Modbus device address from 1 through 4
with addresses 8 and 9 reserved for the Master. In a similar fashion, third-party Modbus
serial devices can be attached to the BAS Remote Master’s MB port allowing these
devices the ability to be accessed by a Modbus TCP client. All attached serial devices
must be assigned unique valid Modbus addresses that do not conflict with those
assigned to the BAS Remote modules.
From a Modbus serial point-of-view, the BAS Remote is the Modbus master within the
system, but it actually functions as a proxy to Modbus TCP clients. Since the BAS
Remote Master has its own I/O points, it functions as both the Modbus master and
Modbus slave. All BAS Remote Expansion modules function as Modbus slaves as do
devices attached to the BAS Remote Master’s MB Expansion port. Enabling the BAS
Remote Master to function as a Modbus TCP server does not preclude the BAS
Remote Master and its Expansion modules to simultaneously function as BACnet
devices.
The easiest way to understand Modbus server operation is to consider the BAS
Remote Master as also functioning as the Modbus master for attached Modbus slaves.
As a master, it does not require a Modbus address. Only Modbus slaves have
addresses. The BAS Remote Master, receives requests from one or more Modbus
TCP clients attached to the Ethernet network. The BAS Remote Master receives these
requests and sends them to the attached Modbus slave devices as commands. From
the Modbus slave’s point-of-view, these commands came from the BAS Remote
Master, and the slave is unaware that a Modbus TCP server even exists.
The BAS Remote Master also has some I/O points that are considered Modbus slave
points at Modbus address 1. Each of the attached BAS Remote Expansion modules
require a single Modbus slave address. If a Modbus command is addressed to any of
the BAS Remote modules, it is sent to the appropriate module for execution. If the
address is outside the range of BAS Remote module addresses, the command is then
sent to the MB port assuming that the intended Modbus slave is connected to this serial
Expansion bus. The command is unmodified as it passes through the BAS Remote
Master. If there is no response from the slave, the BAS Remote Master will send a
GATEWAY_TIMEOUT message to the Modbus TCP client. It should be remembered
that the BAS Remote Master utilizes slave addresses 8 and 9 for internal functions and
should not be used by any attached Modbus serial devices.
7.4.1 Modbus Register Organization
While the Modbus Data model consists of four types – discrete input, coils, input
registers and holding registers, the BAS Remote I/O points appear as holding registers
with four holding registers assigned to each channel beginning with register location
40001. For each point there is status, two inputs, and one output register. There are
eight points of I/O per module, and the register locations are the same in both the
Master and Expansion modules. It is the Modbus device address that distinguishes
points on one module versus another. Holding registers represent 16-bit read/write
TD040300-0MF
61
Page 62

Channel
Status
Input
Output
1
40001
40101–40102
40201
2
40002
40103–40104
40202
3
40003
40105–40106
40203
4
40004
40107–40108
40204
5
40005
40109–40110
40205
6
40006
40111–40112
40206
7
40007
40113–40114
40207
8
40008
40115–40116
40208
Register
Bits
Value
Description
4000X
0:7
0
Channel operating within limits
4000X
0:7
2
Analog current output has no load
4000X
0:7
6
Thermistor value out of range
4000X
0:7
9
Analog output deviates by ±60 mV
4000X
8:11
1
Channel LED is red
4000X
8:11
2
Channel LED is green
4000X
8:11
3
Channel LED is off
4000X
12:15
0
Channel is in automatic operation
4000X
12:15
2
Channel value is being overridden
words, but in the Modbus application protocol they are sent as two-byte transfers.
However, the input data registers for each I/O point are represented as 32-bit registers
regardless if they represent an analog or digital point. On input registers, the least
significant word occupies the odd address while the most significant word occupies the
even address. Output data registers require only one register per point. What follows
are the register locations for universal I/O points 1–6 and for relay outputs 7 and 8.
Table 2 — Register Mapping for Input/Output Channels 1–8
7.4.1.1 Status Registers
Each of the eight BAS Remote I/O points has one 16-bit status register. Register
location 40001 corresponds to channel 1 while register 40008 corresponds to channel
8. The value of the status register depends upon how the I/O point is configured. For
example, an out-of-range indication only applies to those channels configured for
thermistor inputs. A similar situation applies to analog voltage outputs and analog
voltage inputs. All channels operating within their limits will report a 0x00 when reading
the lower 8-bits of the status register.
Table 3 — Status Registers
Figure 45 — Status Register Depicted Graphically
TD040300-0MF
62
Page 63

Register
Bits
Value
Description
401YX
0:15
0x0000 to 0x1388
0–5000 mV on 0–5 V scale*
401YX
0:15
0x0000 to 0x2710
0–10000 mV on 0–10 V scale*
401YX
0:15
0x0000 to 0x07D0
0–2000 hundredths of mA on current
401YX
0:15
0xFEA2 to 0x044C
–350 to 1110 tenths of °F (2’s comp.)
401YX
0:15
0xFE8E to 0x01B8
–370 to 440 tenths of °C (2’s comp.)
401YX
0:15
0x0000
Contact off (relay de-energized)
401YX
0:15
0x0001
Contact on (relay energized)
Register
Bits
Value
Description
401YX
0:15
0x0000 to 0xFFFF
0–16,777,215 counts
401YX+1
0:15
0x0000 to 0x00FF
Register
Bits
Value
Description
4020X
0:15
0x0000 to 0x2710
0–10000 mV on voltage
4020X
0:15
0x0000 to 0x07D0
0–2000 tenths of mA on current
40207
0:15
0x0000
De-energize channel 7 relay
40207
0:15
0x0001
Energize channel 7 relay
40208
0:15
0x0000
De-energize channel 8 relay
40208
0:15
0x0001
Energize channel 8 relay
7.4.1.2 Read Channel Data Registers
Two 16-bit registers are assigned to each of the eight channels for reading input data.
Adding an extra register was done to accommodate accumulator values when
measuring pulse inputs. The least significant word resides at the register base address
while the most significant word resides one register location above the base address.
The base register address for channel 1 is 40101 so its most significant word is at
40102. Similarly, channel 8’s base address is at 40115 so its most significant word is at 40116.
* Resolution on 0–5 V scale is 5 mV, and on the 0–10 V scale 10 mV.
Table 4 — Read Channel Data Registers Least Significant Word
Table 5 — Read Channel Data Registers Accumulator
7.4.1.3 Write Channel Data Registers
Unlike input data registers, output data registers only require one register per channel.
Output channel 1 is located at register location 40201 and output channel 8 is located at
register location 40208. Since channel 8 is a relay output, outputting a 0x0001 to
register 40208 will energize the relay coil.
Table 6 — Write Channel Data Registers
TD040300-0MF
63
Page 64

Registers
Coils
Modbus Variable :
read/write
read-only
read/write
read-only
maps to
maps to
maps to
maps to
BACnet Object :
analog-output
analog-input
binary-output
binary-input
7.4.2 Modbus Function Codes
There are many Modbus function codes but the BAS Remote only responds to three
which involve holding registers. These function codes are described below. If other
than one of these three function calls are received from the Modbus TCP client, an
ILLEGAL_FUNCTION error message is returned by the BAS Remote. The BAS
Remote Master does not monitor the function calls sent to the MB Expansion bus.
7.4.2.1 03 (0x03) Read Holding Registers
This function code is used to read the contents of a contiguous block of holding
registers within the BAS Remote Master or BAS Remote Expansion module.
7.4.2.2 06 (0x06) Write Single Register
This function code is used to write a single holding register to the BAS Remote Master
or BAS Remote Expansion module.
7.4.2.3 16 (0x10) Write Multiple Registers
This function code is used to write a block of contiguous registers (1 to 123 registers) to
a BAS Remote Master or BAS Remote Expansion module.
7.5 Mapping Modbus Variables to BACnet/IP
7.5.1 General Mapping Principles
The BAS Remote acts as a gateway between Modbus devices and BACnet/IP devices.
It is the master on the Modbus network and a server on the BACnet/IP network. It will
poll for specified Modbus variables (coils or registers) and will map these to specified
BACnet/IP objects.
Modbus addresses: When communication occurs between a Modbus TCP host and
the slaves devices attached to the BAS Remote, you can use all legal Modbus
addresses (except that 1–9 are always reserved for the BAS Remote Master module).
Due to the large range of instance numbers in, BACnet, it was decided to have the BAS
Remote normally map the Modbus address/register or coil to a 22-bit BACnet instance
using the first 2 positions as the Modbus device address (10–39) and the next 5 digits
as the Modbus register or coil number. For example, 1040001 will be device 10 and
register 40001. This gives a range of 1,000,001 to 3,949,999. The maximum number of
mapped Modbus variables is 1000.
7.5.2 Mapping Scheme
Each Modbus register is read and converted into a BACnet floating point value. Each
coil is converted to a binary value. All such values are readable and some are
writeable. A value is accessible in the present_value property of the object being
mapped. A present_value that is written will be passed to the Modbus device only if its
priority is sufficient to force a change.
Each Modbus variable maps to one BACnet object as follows:
TD040300-0MF
64
Page 65

Modbus Device Address (ID)
BACnet Instance
Modbus Variable Number
BACnet Object Type
Modbus Variable Type (Register or Coil)
BACnet Object Name
16-bit signed
32-bit signed
16-bit unsigned
32-bit unsigned
32-bit float
To accomplish mapping, the BAS Remote Master module is loaded (via FTP) with a
user-generated CSV file (bas_cfg.csv) that specifies the following:
The Modbus register types are the following:
The 32-bit values are constructed from two consecutive 16-bit registers that have their
high and low words defined.
7.5.3 Project Builder
Microsoft® Excel® spreadsheets have been developed to provide you with a means of
loading Modbus device profiles into the BAS Remote. You can access these files at …
www.ccontrols.com/basautomation/m2bsoft/
… where you will find the Project Builder file and various Modbus Device Profiles for
downloading to any convenient location on your local hard drive. You will use these
files to build a Project that will contain the Modbus Device Profiles you choose to install.
The first step in the process is to download:
M2B_ProjectBuilder_A1.xls
When you save and open the above file, the following Excel worksheet appears:
Figure 46 — Project Builder Worksheet (Excel)
As the above sheet loads, the Project Name is checked. If none is found, a dialog
appears and prompts you to enter a Project Name which will then appear in the upper
left portion of the sheet. Because this will also be the name of the Project file that will
be saved with an XLS extension in a new directory of the same name, you must only
use characters that are allowed in Windows filenames. After the Project Name has
been accepted (this may take several seconds), you may work with the Project Builder.
Double clicking a column header (just below the blue row) will display information about
that column. (Red column headers identify columns that you can edit.)
The next step in building a project is to add one or more Modbus Device Profile(s) to the
Project Builder. If you have a valid Internet connection, clicking the Contemporary
Controls logo in the top row of the worksheet will take you to the same web page from
TD040300-0MF
65
Page 66

which you downloaded the Project Builder file. At this page you can access the list of
online profiles and download any profile that your project needs. These files can be
saved to any location on your hard drive, but it is convenient if they are in the same
location as your Project Builder file.
After the desired profiles have been downloaded, click the Add Modbus Profile button in
Figure 46. A window will appear and prompt you for a file to load. Navigate to the
location where you saved the file(s) that you downloaded, and select a file. After
specifying the file to be loaded, that device’s Modbus to BACnet Profile Sheet (M2BPS)
will appear — then a dialog will open and prompt you to Enter Device Description or
Location for this profile that you are adding to your project. You can enter up to 12
characters. (Leaving this field blank is allowable but not recommended.) After
specifying the Device Description or Location, another dialog will open and prompt you
for the Modbus Slave ID (the Modbus address of the device in question). This dialog
box also displays the available address values from which you may choose. Make your
choice and click OK. After the Modbus address value has been accepted, the profile
sheet closes and you once again see the Project Builder sheet of Figure 46.
Note: What was the top-most blank line of the Project Builder worksheet will now be
numbered and populated with data from the profile you loaded. The easiest way to edit
data for Column 3, 4 or 5 is to double click the cell in question. But in a project with
many devices, you may prefer to click one of the Edit buttons (above the blue row) then
use the Device number from Column 1 to specify the device to be edited. The Project
Builder columns are discussed below.
Note: Although Excel identifies columns by letters, in this discussion the columns of the
Project Builder worksheet are identified by numerals. This makes it is easier to distinguish
references to a column in the Project Builder worksheet from references to a column in a
Profile worksheet (where columns are identified by letters).
Column 1 (Device) This is an automatically generated number. Each Device number
corresponds to a profile that has been added to the Project. You must
reference this number if you use one of the Edit buttons to edit this
device’s profile or delete it from your project. If you simply double click a
cell to be edited, this Device number is not needed.
Column 2 (Modbus Profile Name) This name was specified in the Modbus Profile
and cannot be changed.
Column 3 (Description or Location) This was the text describing the device
description or location that you entered when you loaded the profile.
Column 4 (Modbus ID) This unique value (10–39) is the Modbus Slave address that
you specified when the device profile was loaded.
Column 5 (Worksheet Name to Configure Poll & COVs) This is a combination of the
values from Columns 3, 2 and 4. Double clicking this cell (or the button
atop Column 5) opens the M2BPS for this device as a new editable sheet
in your project and the Worksheet Name appears on the worksheet tab.
Column 6 (Configured Polls/COVs) This reports how many Polls and COVs are
configured in each M2BPS. Initially, this column will display “0/0” for each
profile that you have added to your project. (By default, each Modbus Profile
will have the Poll function set to FALSE (off) for each of its variables.)
TD040300-0MF
66
Page 67

7.5.3.1 Editing Modbus to BACnet Profile Sheets
After you add a Modbus to BACnet Profile Sheet (M2BPS) to your project, you must edit
it and set the Poll function to TRUE for each variable that you want polled. A M2BPS
must be edited before its associated device can communicate via the BAS Remote. A
sample M2BPS is shown in Figure 47.
Figure 47 — Sample Modbus to BACnet Profile Sheet (Excel)
Note: The M2BPS in Figure 47 has standard column and row headings, but rows 1–6
are not shown. This is because rows 1–6 have been reserved for special use and are
therefore hidden. The list of profile variables begins with row 10. The various features
of this sheet are explained below.
Cell A7 This is the number of profile variables which have Poll set TRUE as
reported by the Project Builder (Figure 46). Changes made in the profile
sheet of Figure 47 will not be reported in Cell A7 until the sheet is closed,
causing Column 6 of the Project Builder to be updated. Subsequently
reopening the view in Figure 47 will display the updated value.
Cell B7 This is the number of profile variables which have COV set TRUE as
reported by the Project Builder. Like Cell A7, changes made in the
profile sheet of will not be reported in Cell B7 until the sheet is closed, and
Column 6 of the Project Builder is updated. Subsequently reopening the
view in Figure 47 will display the updated value.
Column A Set the drop-down menu option to TRUE if you want to include this
variable (row) in your project. Note: If you do not set any row to Poll =
TRUE, this profile cannot become part of your built project.
Column B If you set a variable (row) to be polled, set this option to YES if you want a
COV message sent to the subscribing BACnet device. If you set this
option to YES but do not set Poll = TRUE for the same variable (row), this
option will have no effect.
Column C If you set a cell in Column B to YES, you are prompted for the COV increment
value that must occur before the COV message will be sent. If a Column
B cell is left at NO, the Column C default value will stay at 999999.9.
Column D If you entered a Description or Location when the profile was loaded, it
registered in Column 3 of the Project Builder and also appears in this
column. Note: Any cell in Column D can be edited, but the entire column
will be reset by any edits to Column 3 in the Project Builder worksheet.
Therefore, if you wish add special text to a variable, do it in Column E.
TD040300-0MF
67
Page 68

Column E This is pre-filled with the variable name supplied by the manufacturer of
the device. Any cell in this column can be individually edited if you wish
rename the variable to something more meaningful in your installation.
Column F This is the Modbus ID (address) you set when the profile loaded. You can
edit a cell in this column, but don’t. Remember, every variable (row) in
the profile of a single device must have the same value in this column.
Column G The Variable Type may be either a Register or Coil.
Column H The Variable Number is a value from 0001 through 9999.
Column I The Data Format is one of those described Section 7.5.2.
Column J This specifies the variable as Read-Only or Read-Write.
Column K This is the BACnet Object that corresponds to the Modbus Variable as
described in Section 7.5.2.
Column L The BACnet Instance is a calculated value that you cannot edit. It is the
concatenation of the values from Columns F, G and H. For example, a
Modbus register 40001 (Variable Type 4 + Variable Number 0001) at
address 10 will be mapped to BACnet Instance 1040001.
Column M Many standard BACnet Unit Groups are supported in the drop-down menu.
Column N The Unit Value options depend on your selection in Column M.
Row 9 Double clicking any cell in this row will display helpful information about
the column in question.
TD040300-0MF
68
Page 69

7.5.3.2 Building and Viewing a Project
After you have edited each M2BPS that you have added to your project, you are ready
to build the project by clicking the Build Project button. Once you click this button, the
Project Builder will create a CSV file that you will later load into the BAS Remote.
Building the CSV can take some time — the more devices in your project, the longer it
will take. Each device profile will take a few seconds to render into CSV. When the
build is complete, a new window will open and confirm the build.
After the project is built, see the results by clicking the View Built Project button in the
upper-right portion of Figure 46. In response to your click, a new worksheet opens to
display the contents of the CSV file that was just built. A sample screen is shown in
Figure 48 and is discussed below.
Figure 48 — Sample Built Project
Each row in the worksheet displays how one Modbus Variable has been mapped to a
BACnet Object. The information in the columns is as follows:
Column A This is how the COV flag was set — either NO or YES.
Column B This is the chosen COV Increment value (999999.9 if COV is set to NO).
Column C This BACnet Object Name is a concatenation of two values from the
M2BPS (Description or Location and Name) and a third value generated by
Project Builder. This third value takes the form of mxxxx, which is the letter
m plus four digits appended to assure that the Object Name is unique.
Column D This is the Modbus Address (ID).
Column E This is the Modbus Register value.
Column F This is the Modbus Register Type (number format).
Column G This is the BACnet Object to which the Modbus Variable was mapped.
Column H This is the BACnet Instance that was created by Project Builder.
Column I This is the unit of measure that was selected.
Note: Six more columns (J–O) are present, but are reserved for future use.
TD040300-0MF
69
Page 70

You can also print a report of your project. To do this, click the View Documented
Project button in the upper-right portion of Figure 46. In response to your click, a new
worksheet opens to display the most important parameters of the project that was just
built. Unlike the CSV file of Figure 48 which has parameters sequenced for proper
mapping, the sample Documented Project of Figure 49 has parameters displayed in a
sequence more meaningful to humans. As shown below, typical Print Preview and Print
functions have their respective buttons on the left of the screen.
Figure 49 — Sample Documented Project for Printing
7.5.3.3 Loading Your Project into the BAS Remote
Once your bas_cfg.csv file is ready, use an FTP client to copy it to the BAS Remote in
the following directory:
/data/config/
The User Name is admin and the Password is ctrlink. Once the bas_cfg.csv file has
been copied to the BAS Remote, reboot the unit to implement your mapping scheme.
TD040300-0MF
70
Page 71

7.5.4 Viewing the Mapping Status in the BAS Remote
To view the Mapping in the BAS Remote, click on the Map button on the Web Server
Page (just under the device image in Figure 21). Then a screen similar to that of Figure
50 appears. But your screen will display more “Address” lines in the Unit Status box —
where each additional line corresponds to one of the Modbus addresses of your map.
This window not only displays the Modbus mapped variables, it also displays all
instances in the BAS Remote — for example, the 8 I/O channels of the BAS Remote
and many of their parameters. It also allows you to view or change the preset value of
most instances within the BAS Remote. This is particularly useful when you want to
clear a pulse counter. It also displays the BACnet status of each instance. Having the
full list of instances is handy when doing Sedona programming.
Note the following considerations:
The screen of Figure 50 displays the situation of a BAS Remote with no Expansion
Modules installed. If one Expansion Module were installed and working, the Unit Status
box would list “Address 2 Online”. If two Expansion Modules were installed, the Unit
Status window would list “Address 2 Online” and “Address 3 Online”. And you would
see “Address 4 Online”, if you had installed a third Expansion Module.
If a Modbus device (or an Expansion Module) has been installed but is reported as
“Offline” because the Master Module has detected a communication failure and listed the
questionable device as “Offline”. In such a case, you may notice that periodically the
“Offline” report briefly changes to “Online”. This brief “Online” report is due to the
Master Module attempt to contact the questionable device every scan cycle. Due to
other considerations, the actual frequency of this “Online” report cannot be predicted —
thus, you should expect brief “Online” reports at irregular intervals (but no more often
than the scan cycle set by the parameters in Section 6.1.3.5).
Because Addresses 5, 6 and 7 are reserved for future use, you will not see these three
addresses displayed in the Unit Status box.
Figure 50 — Map Screen (Unpopulated)
TD040300-0MF
71
Page 72

7.6 Modbus Utility
This is an embedded utility that allows direct access to the Modbus registers within the
BAS Remote Master, BAS Remote Expansion modules and any attached Modbus
serial slave devices. It functions as a Modbus TCP client and it is an excellent utility to
verify that the BAS Remote is communicating with any attached slave devices. With a
web browser and an IP connection to the BAS Remote you can remotely examine and
alter various Modbus register values. Access the utility by clicking the Modbus Utility
button on the BAS Remote Master web page. Once the connection is made, the
following screen appears.
Figure 51 — Modbus Utility Screen
As shown above, this screen has 5 fields, 9 radio buttons and a pair of read/write buttons.
The five fields are:
Connect Status It initially reports "Connected to target" then awaits your first register
access. As this is a Java applet, it executes on your computer. When it
successfully connects to the BAS Remote, it will report “connected to target”.
NOTE: If you have uploaded a bas-cfg.csv file to the BAS Remote, you
will only be able to read/write the Modbus values of the devices listed in
the file. You will still be able to read/write all the Modbus registers/coils
of devices not listed in the CSV file.
Slave Address This is 1 by default. Enter the Modbus address of the device you wish
to access. To avoid erroneous results, it must be one of the following:
the BAS Remote Master
a BAS Remote Expansion module
a Modbus slave device attached to the Modbus Expansion port of
the BAS Remote Master
TD040300-0MF
72
Page 73

Register Number This is 1 by default. Enter only the least three significant digits of the
address of the register you wish to access. The two most significant
digits will be added automatically with a value that depends on whether
you click the Read button or the Write button.
Value This field is used to read or write values for the register specified in the
Register Number field. When writing a value, match the number format
of the selected radio button or an error will result. If an error occurs, its
description will be displayed in this field.
Status This read-only field reports the status of the most recent Modbus action.
If your attempt to read or write a register is successful, the reported
status is "Success" and the Value field displays the value in question. If
the attempt to access a register is unsuccessful, the Value field reports
the type of error that was generated.
The five radio buttons on the left specify which number format is displayed in the Value
field. The choices are:
0X:Coil Use this button if the addressed device is a Binary Output that has only two
possible state values (0 or 1) — as is the case for a coil.
1X:Coil Use this button if the addressed device is a Binary Input that has only two
possible state values (0 or 1) — as is the case for a coil.
4X:16-Bit This button displays the specified 16-bit register value in raw-number format.
4X:32-Bit This button displays the specified 32-bit value of a register pair in raw-number
format and enables the four radio buttons on the right (see below).
Scaled If the specified register represents a BAS Remote I/O point, engineering units
can be displayed by selecting this button. But if the register is not one of the
BAS Remote I/O points, an error will result.
The four radio buttons on the right specify the number format of a 32-bit value. The
choices are:
Integer This button specifies a whole value with no fractional content.
Float This button specifies a single-precision floating point value.
LOW:HIGH This specifies Little Endian format whereby the low word occupies the
base register and the high word occupies the next-higher register.
HIGH:LOW This specifies Big Endian format whereby the high word occupies the
base register and the low word occupies the next-higher register.
Read and Write buttons Clicking one of these buttons causes the specified action to occur.
TD040300-0MF
73
Page 74

7.7 Linux License
GNU GENERAL PUBLIC LICENSE
Version 2, June 1991
Copyright (C) 1989, 1991 Free Software Foundation, Inc.,
51 Franklin Street, Fifth Floor, Boston, MA 02110-1301 USA
Everyone is permitted to copy and distribute verbatim copies
of this license document, but changing it is not allowed.
Preamble
The licenses for most software are designed to take away your freedom to share and change it. By
contrast, the GNU General Public License is intended to guarantee your freedom to share and change
free software--to make sure the software is free for all its users. This General Public License applies to
most of the Free Software Foundation’s software and to any other program whose authors commit to
using it. (Some other Free Software Foundation software is covered by the GNU Lesser General Public
License instead.) You can apply it to your programs, too.
When we speak of free software, we are referring to freedom, not price. Our General Public Licenses are
designed to make sure that you have the freedom to distribute copies of free software (and charge for this
service if you wish), that you receive source code or can get it if you want it, that you can change the
software or use pieces of it in new free programs; and that you know you can do these things.
To protect your rights, we need to make restrictions that forbid anyone to deny you these rights or to ask
you to surrender the rights. These restrictions translate to certain responsibilities for you if you distribute
copies of the software, or if you modify it.
For example, if you distribute copies of such a program, whether gratis or for a fee, you must give the
recipients all the rights that you have. You must make sure that they, too, receive or can get the source
code. And you must show them these terms so they know their rights.
We protect your rights with two steps: (1) copyright the software, and (2) offer you this license which gives
you legal permission to copy, distribute and/or modify the software.
Also, for each author’s protection and ours, we want to make certain that everyone understands that there
is no warranty for this free software. If the software is modified by someone else and passed on, we
want its recipients to know that what they have is not the original, so that any problems introduced by
others will not reflect on the original authors’ reputations.
Finally, any free program is threatened constantly by software patents. We wish to avoid the danger that
redistributors of a free program will individually obtain patent licenses, in effect making the program
proprietary. To prevent this, we have made it clear that any patent must be licensed for everyone’s free
use or not licensed at all.
The precise terms and conditions for copying, distribution and modification follow.
TD040300-0MF
74
Page 75

GNU GENERAL PUBLIC LICENSE
TERMS AND CONDITIONS FOR COPYING,
DISTRIBUTION AND MODIFICATION
0. This License applies to any program or other work which contains a notice placed by the copyright
holder saying it may be distributed under the terms of this General Public License. The “Program”, below,
refers to any such program or work, and a “work based on the Program” means either the Program or any
derivative work under copyright law: that is to say, a work containing the Program or a portion of it, either
verbatim or with modifications and/or translated into another language. (Hereinafter, translation is
included without limitation in the term “modification”.) Each licensee is addressed as “you”.
Activities other than copying, distribution and modification are not covered by this License; they are outside
its scope. The act of running the Program is not restricted, and the output from the Program is covered only
if its contents constitute a work based on the Program (independent of having been made by running the
Program). Whether that is true depends on what the Program does.
1. You may copy and distribute verbatim copies of the Program’s source code as you receive it, in any
medium, provided that you conspicuously and appropriately publish on each copy an appropriate
copyright notice and disclaimer of warranty; keep intact all the notices that refer to this License and to the
absence of any warranty; and give any other recipients of the Program a copy of this License along with
the Program.
You may charge a fee for the physical act of transferring a copy, and you may at your option offer
warranty protection in exchange for a fee.
2. You may modify your copy or copies of the Program or any portion of it, thus forming a work based on
the Program, and copy and distribute such modifications or work under the terms of Section 1 above,
provided that you also meet all of these conditions:
a) You must cause the modified files to carry prominent notices stating that you changed the files and
the date of any change.
b) You must cause any work that you distribute or publish, that in whole or in part contains or is derived
from the Program or any part thereof, to be licensed as a whole at no charge to all third parties under
the terms of this License.
c) If the modified program normally reads commands interactively when run, you must cause it, when
started running for such interactive use in the most ordinary way, to print or display an announcement
including an appropriate copyright notice and a notice that there is no warranty (or else, saying that you
provide a warranty) and that users may redistribute the program under these conditions, and telling the
user how to view a copy of this License. (Exception: if the Program itself is interactive but does not
normally print such an announcement, your work based on the Program is not required to print an
announcement.)
These requirements apply to the modified work as a whole. If identifiable sections of that work are not
derived from the Program, and can be reasonably considered independent and separate works in
themselves, then this License, and its terms, do not apply to those sections when you distribute them as
separate works. But when you distribute the same sections as part of a whole which is a work based on
the Program, the distribution of the whole must be on the terms of this License, whose permissions for
other licensees extend to the entire whole, and thus to each and every part regardless of who wrote it.
Thus, it is not the intent of this section to claim rights or contest your rights to work written entirely by you;
rather, the intent is to exercise the right to control the distribution of derivative or collective works based
on the Program.
In addition, mere aggregation of another work not based on the Program with the Program (or with a work
based on the Program) on a volume of a storage or distribution medium does not bring the other work
under the scope of this License.
TD040300-0MF
75
Page 76

3. You may copy and distribute the Program (or a work based on it, under Section 2) in object code or
executable form under the terms of Sections 1 and 2 above provided that you also do one of the following:
a) Accompany it with the complete corresponding machine-readable source code, which must be
distributed under the terms of Sections 1 and 2 above on a medium customarily used for software
interchange; or,
b) Accompany it with a written offer, valid for at least three years, to give any third party, for a charge no
more than your cost of physically performing source distribution, a complete machine-readable copy of
the corresponding source code, to be distributed under the terms of Sections 1 and 2 above on a
medium customarily used for software interchange; or,
c) Accompany it with the information you received as to the offer to distribute corresponding source
code. (This alternative is allowed only for noncommercial distribution and only if you received the
program in object code or executable form with such an offer, in accord with Subsection b above.)
The source code for a work means the preferred form of the work for making modifications to it. For an
executable work, complete source code means all the source code for all modules it contains, plus any
associated interface definition files, plus the scripts used to control compilation and installation of the
executable. However, as a special exception, the source code distributed need not include anything that
is normally distributed (in either source or binary form) with the major components (compiler, kernel, and
so on) of the operating system on which the executable runs, unless that component itself accompanies
the executable.
If distribution of executable or object code is made by offering access to copy from a designated place,
then offering equivalent access to copy the source code from the same place counts as distribution of the
source code, even though third parties are not compelled to copy the source along with the object code.
4. You may not copy, modify, sublicense, or distribute the Program except as expressly provided under
this License. Any attempt otherwise to copy, modify, sublicense or distribute the Program is void, and will
automatically terminate your rights under this License.
However, parties who have received copies, or rights, from you under this License will not have their
licenses terminated so long as such parties remain in full compliance.
5. You are not required to accept this License, since you have not signed it. However, nothing else
grants you permission to modify or distribute the Program or its derivative works. These actions are
prohibited by law if you do not accept this License. Therefore, by modifying or distributing the Program
(or any work based on the Program), you indicate your acceptance of this License to do so, and all its
terms and conditions for copying, distributing or modifying the Program or works based on it.
6. Each time you redistribute the Program (or any work based on the Program), the recipient automatically
receives a license from the original licensor to copy, distribute or modify the Program subject to these terms
and conditions. You may not impose any further restrictions on the recipients’ exercise of the rights granted
herein. You are not responsible for enforcing compliance by third parties to this License.
TD040300-0MF
76
Page 77

7. If, as a consequence of a court judgment or allegation of patent infringement or for any other reason
(not limited to patent issues), conditions are imposed on you (whether by court order, agreement or
otherwise) that contradict the conditions of this License, they do not excuse you from the conditions of
this License. If you cannot distribute so as to satisfy simultaneously your obligations under this License
and any other pertinent obligations, then as a consequence you may not distribute the Program at all.
For example, if a patent license would not permit royalty-free redistribution of the Program by all those
who receive copies directly or indirectly through you, then the only way you could satisfy both it and this
License would be to refrain entirely from distribution of the Program.
If any portion of this section is held invalid or unenforceable under any particular circumstance, the
balance of the section is intended to apply and the section as a whole is intended to apply in other circumstances.
It is not the purpose of this section to induce you to infringe any patents or other property right claims or
to contest validity of any such claims; this section has the sole purpose of protecting the integrity of the
free software distribution system, which is implemented by public license practices. Many people have
made generous contributions to the wide range of software distributed through that system in reliance on
consistent application of that system; it is up to the author/donor to decide if he or she is willing to
distribute software through any other system and a licensee cannot impose that choice.
This section is intended to make thoroughly clear what is believed to be a consequence of the rest of this License.
8. If the distribution and/or use of the Program is restricted in certain countries either by patents or by
copyrighted interfaces, the original copyright holder who places the Program under this License may add
an explicit geographical distribution limitation excluding those countries, so that distribution is permitted
only in or among countries not thus excluded. In such case, this License incorporates the limitation as if
written in the body of this License.
9. The Free Software Foundation may publish revised and/or new versions of the General Public License
from time to time. Such new versions will be similar in spirit to the present version, but may differ in detail
to address new problems or concerns.
Each version is given a distinguishing version number. If the Program specifies a version number of this
License which applies to it and “any later version”, you have the option of following the terms and
conditions either of that version or of any later version published by the Free Software Foundation. If the
Program does not specify a version number of this License, you may choose any version ever published
by the Free Software Foundation.
10. If you wish to incorporate parts of the Program into other free programs whose distribution conditions
are different, write to the author to ask for permission. For software which is copyrighted by the Free
Software Foundation, write to the Free Software Foundation; we sometimes make exceptions for this.
Our decision will be guided by the two goals of preserving the free status of all derivatives of our free
software and of promoting the sharing and reuse of software generally.
NO WARRANTY
11. BECAUSE THE PROGRAM IS LICENSED FREE OF CHARGE, THERE IS NO WARRANTY FOR THE
PROGRAM, TO THE EXTENT PERMITTED BY APPLICABLE LAW. EXCEPT WHEN OTHERWISE STATED IN
WRITING THE COPYRIGHT HOLDERS AND/OR OTHER PARTIES PROVIDE THE PROGRAM “AS IS” WITHOUT
WARRANTY OF ANY KIND, EITHER EXPRESSED OR IMPLIED, INCLUDING, BUT NOT LIMITED TO, THE
IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE. THE ENTIRE
RISK AS TO THE QUALITY AND PERFORMANCE OF THE PROGRAM IS WITH YOU. SHOULD THE PROGRAM
PROVE DEFECTIVE, YOU ASSUME THE COST OF ALL NECESSARY SERVICING, REPAIR OR CORRECTION.
12. IN NO EVENT UNLESS REQUIRED BY APPLICABLE LAW OR AGREED TO IN WRITING WILL ANY
COPYRIGHT HOLDER, OR ANY OTHER PARTY WHO MAY MODIFY AND/OR REDISTRIBUTE THE PROGRAM
AS PERMITTED ABOVE, BE LIABLE TO YOU FOR DAMAGES, INCLUDING ANY GENERAL, SPECIAL,
INCIDENTAL OR CONSEQUENTIAL DAMAGES ARISING OUT OF THE USE OR INABILITY TO USE THE
PROGRAM (INCLUDING BUT NOT LIMITED TO LOSS OF DATA OR DATA BEING RENDERED INACCURATE OR
LOSSES SUSTAINED BY YOU OR THIRD PARTIES OR A FAILURE OF THE PROGRAM TO OPERATE WITH
ANY OTHER PROGRAMS), EVEN IF SUCH HOLDER OR OTHER PARTY HAS BEEN ADVISED OF THE
POSSIBILITY OF SUCH DAMAGES.
END OF TERMS AND CONDITIONS
TD040300-0MF
77
Page 78

How to Apply These Terms to Your New Programs
If you develop a new program, and you want it to be of the greatest possible use to the public, the best
way to achieve this is to make it free software which everyone can redistribute and change under these
terms.
To do so, attach the following notices to the program. It is safest to attach them to the start of each
source file to most effectively convey the exclusion of warranty; and each file should have at least the
“copyright” line and a pointer to where the full notice is found.
<one line to give the program’s name and a brief idea of what it does.>
Copyright (C) <year> <name of author>
This program is free software; you can redistribute it and/or modify it under the terms of the GNU
General Public License as published by the Free Software Foundation; either version 2 of the License,
or (at your option) any later version.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without
even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See
the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program; if not, write
to the Free Software Foundation, Inc., 51 Franklin Street, Fifth Floor, Boston, MA 02110-1301 USA.
Also add information on how to contact you by electronic and paper mail.
If the program is interactive, make it output a short notice like this when it starts in an interactive mode:
Gnomovision version 69, Copyright (C) year name of author Gnomovision comes with ABSOLUTELY
NO WARRANTY; for details type `show w’. This is free software, and you are welcome to redistribute it
under certain conditions; type `show c’ for details.
The hypothetical commands `show w’ and `show c’ should show the appropriate parts of the General
Public License. Of course, the commands you use may be called something other than `show w’ and
`show c’; they could even be mouse-clicks or menu items—whatever suits your program.
You should also get your employer (if you work as a programmer) or your school, if any, to sign a
“copyright disclaimer” for the program, if necessary. Here is a sample; alter the names:
Yoyodyne, Inc., hereby disclaims all copyright interest in the program `Gnomovision’ (which makes
passes at compilers) written by James Hacker.
<signature of Ty Coon>, 1 April 1989
Ty Coon, President of Vice
This General Public License does not permit incorporating your program into proprietary programs. If
your program is a subroutine library, you may consider it more useful to permit linking proprietary
applications with the library. If this is what you want to do, use the GNU Lesser General Public License
instead of this License.
TD040300-0MF
78
 Loading...
Loading...