

Page 1

Quadrocopter
„500X-S“
Best.-Nr. / Item No. / N° de commande / Bestelnr.: 23 96 63
GAUI
Version 05/12
Bedienungsanleitung Seite 2 - 22
Operating Instructions Page 23 - 43
Notice d’emploi Page 44 - 64
Gebruiksaanwijzing Pagina 65 - 85
Page 2

2
Inhaltsverzeichnis
Seite
1. Einführung ...................................................................................................................................................... 2
2. Bestimmungsgemäße Verwendung ................................................................................................................... 3
3. Produktbeschreibung ....................................................................................................................................... 4
4. Lieferumfang ................................................................................................................................................... 4
5. Sicherheitshinweise.......................................................................................................................................... 5
a) Allgemein ................................................................................................................................................... 5
b) Vor der Inbetriebnahme .............................................................................................................................. 5
c) Während des Betriebs ................................................................................................................................. 6
6. Batterie- und Akku-Hinweise............................................................................................................................. 6
a) Senderakkus/-batterien ............................................................................................................................... 6
b) Flugakkus ................................................................................................................................................... 7
7. Allgemeine Hinweise zum Aufbau der Mechanik ................................................................................................. 8
8. Aufbau der Mechanik ....................................................................................................................................... 9
9. Systemeinstellungen ...................................................................................................................................... 13
10. Programmierung der Drehzahlsteller ............................................................................................................... 17
11. Transport und Ausrüstmöglichkeiten................................................................................................................ 19
12. Ersatzteilübersicht ......................................................................................................................................... 21
13. Wartung und Pflege ....................................................................................................................................... 21
14. Entsorgung ................................................................................................................................................... 22
a) Allgemein ................................................................................................................................................. 22
b) Batterien und Akkus .................................................................................................................................. 22
15. Technische Daten .......................................................................................................................................... 22
Page 3
3
1. Einführung
Sehr geehrte Kundin, sehr geehrter Kunde,
wir bedanken uns für den Kauf dieses Produkts.
Dieses Produkt erfüllt die gesetzlichen, nationalen und europäischen Anforderungen.
Um diesen Zustand zu erhalten und einen gefahrlosen Betrieb sicherzustellen, müssen Sie als Anwender diese Bedienungs-
anleitung beachten!
Diese Bedienungsanleitung gehört zu diesem Produkt. Sie enthält wichtige Hinweise zur Inbetriebnahme und
Handhabung. Achten Sie hierauf, auch wenn Sie dieses Produkt an Dritte weitergeben.
Heben Sie deshalb diese Bedienungsanleitung zum Nachlesen auf!
Alle enthaltenen Firmennamen und Produktbezeichnungen sind Warenzeichen der jeweiligen Inhaber. Alle Rechte vorbehalten.
Bei technischen Fragen wenden Sie sich bitte an:
Deutschland: Tel.: 0180/5 31 21 11
Fax: 0180/5 31 21 10
E-Mail: Bitte verwenden Sie unser Formular im Internet: www.conrad.de, unter der Rubrik „Kontakt“.
Mo. bis Fr. 8.00-18.00 Uhr
Österreich: www.conrad.at
www.business.conrad.at
Schweiz: Tel.: 0848/80 12 88
Fax: 0848/80 12 89
E-Mail: support@conrad.ch
Mo. bis Fr. 8.00-12.00, 13.00-17.00 Uhr
2. Bestimmungsgemäße Verwendung
Bei diesem Produkt handelt es sich um ein modellhubschrauberähnliches Modell, das für den privaten Einsatz im Modellbaubereich und für die damit verbundenen Betriebszeiten ausgelegt ist. Für die Steuerung des Modells muss eine geeignete
Fernsteueranlage mit 4 – 5 Kanälen (nicht mit im Lieferumfang) verwendet werden.
Eine andere Verwendung als zuvor beschrieben, kann zur Beschädigung des Produktes mit den damit verbundenen Gefahren wie z.B. Kurzschluss, Brand, elektrischer Schlag etc. führen. Die Sicherheitshinweise sind unbedingt zu befolgen!
Das Produkt darf nicht feucht oder nass werden.
Das Produkt ist nicht für Kinder unter 14 Jahren geeignet.
Beachten Sie alle Sicherheitshinweise dieser Bedienungsanleitung. Diese enthalten wichtige Informationen zum
Umgang mit dem Produkt.
Sie allein sind für den gefahrlosen Betrieb des Modells verantwortlich!
Page 4
4
3. Produktbeschreibung
Der Quadrocopter wird als Bausatz in Einzelteilen geliefert und beinhaltet alle Komponenten, die zum Aufbau der Mechanik
erforderlich sind. Weiterhin befinden sich vier bürstenlose Elektromotoren, vier Drehzahlsteller und ein 3-Achs-Kreiselsystem mit im Lieferumfang.
Die Montage der Mechanik sowie der Einbau der erforderlichen Antriebs- und Fernsteuerkomponenten sind vom Anwender
selbst durchzuführen. Aus diesem Grund setzt dieses Modell für die Fertigstellung und den anschließenden Betrieb fundierte
Kenntnisse im Umgang mit Modellen voraus. Modellbaueinsteigern empfehlen wir bei Fragen zum Aufbau und für den
Erstflug einen erfahrenen Modellpiloten zu Rate zu ziehen.
Das Modell kann in Hallen oder an windstillen bzw. schwachwindigen Tagen auch im Freien betrieben werden.
Für Kinder ist der Quadrocopter nicht geeignet!
4. Lieferumfang
• Quadrocoptermechanik
• 4 Antriebsmotoren mit 4 Drehzahlstellern
• 3-Achs-Kreiselsystem „GU-344 GYRO“
• Innensechskantschraubendreher
• Transporttasche
• Hersteller-Handbuch mit Montageskizzen
• Montageanleitung
Eine genaue Übersicht aller zur Mechanik gehörenden Teile können Sie auf der 2. Seite des beiliegenden Hersteller-Handbuches finden.
Zum Betrieb des Modells ist eine einfache 4 - 5 Kanal-Fernsteueranlage, ein 2 - 4zelliger LiPo-Flugakku mit 3 mm
Goldkontaktsteckern sowie ein passendes LiPo-Ladegerät mit LiPo-Balancer erforderlich.
Page 5
5
5. Sicherheitshinweise
Bei Schäden, die durch Nichtbeachtung dieser Bedienungsanleitung verursacht werden, erlischt
die Gewährleistung/Garantie. Für Folgeschäden übernehmen wir keine Haftung!
Bei Sach- oder Personenschäden, die durch unsachgemäße Handhabung oder Nichtbeachten der
Sicherheitshinweise verursacht werden, übernehmen wir keine Haftung! In solchen Fällen erlischt
die Gewährleistung/Garantie.
Von der Gewährleistung und Garantie ausgeschlossen sind ferner normaler Verschleiß bei Betrieb und Unfallschäden (z.B. gebrochene Chassisteile oder Propeller).
Sehr geehrte Kundin, sehr geehrter Kunde, diese Sicherheitshinweise dienen nicht nur zum Schutz des Produkts,
sondern auch zu Ihrer eigenen Sicherheit und der anderer Personen. Lesen Sie sich deshalb dieses Kapitel sehr
aufmerksam durch, bevor Sie das Produkt in Betrieb nehmen!
a) Allgemein
Achtung, wichtiger Hinweis!
Beim Betrieb des Modells kann es zu Sach- und/oder Personenschäden kommen. Achten Sie deshalb unbedingt
darauf, dass Sie für den Betrieb des Modells ausreichend versichert sind, z.B. über eine Haftpflichtversicherung.
Falls Sie bereits eine Haftpflichtversicherung besitzen, so informieren Sie sich vor Inbetriebnahme des Modells bei
Ihrer Versicherung, ob der Betrieb des Modells mitversichert ist.
Beachten Sie: In verschiedenen Ländern der EU besteht eine Versicherungspflicht für alle Flugmodelle!
• Aus Sicherheits- und Zulassungsgründen (CE) ist das eigenmächtige Umbauen und/oder Verändern des Produkts nicht
gestattet.
• Das Produkt ist kein Spielzeug, es ist nicht für Kinder unter 14 Jahren geeignet.
• Das Produkt darf nicht feucht oder nass werden.
• Sollten Sie noch nicht über ausreichende Kenntnisse über den Umgang mit ferngesteuerten Modellen verfügen, so wenden Sie sich bitte an einen erfahrenen Modellsportler oder an einen Modellbau-Club.
• Lassen Sie das Verpackungsmaterial nicht achtlos liegen, dieses könnte für Kinder zu einem gefährlichen Spielzeug
werden.
• Das Produkt wurde für den Betrieb bei einer Umgebungstemperatur zwischen +10 °C und +40 °C und einer in Mitteleuropa normalen Luftfeuchtigkeit bei trockenem Wetter entwickelt. Bei einem Betrieb außerhalb dieser genannten Bedingungen kann es zu veränderten (Material-) Eigenschaften und daraus resultierend auch zu Beschädigungen des Produkts
kommen!
• Das max. Abfluggewicht von 2200 g darf nicht überschritten werden. Bei einem höheren Abfluggewicht können die
Propeller im Betrieb beschädigt werden und so einen Absturz verursachen!
• Sollten sich Fragen ergeben, die nicht mit Hilfe der Bedienungsanleitung abgeklärt werden können, so setzen Sie sich bitte
mit uns (Kontaktinformationen siehe Kapitel 1) oder einem anderen Fachmann in Verbindung.
b) Vor der Inbetriebnahme
• Halten Sie sich bei der Inbetriebnahme der Fernsteueranlage strikt an die vom Hersteller vorgegebene Reihenfolge. Im
Regelfall muss immer zuerst der Sender und anschließend unmittelbar danach der Flugakku des Flugmodells an den
Drehzahlsteller angeschlossen werden.
Falls Sie das Modell nicht mit einer 2,4 GHz Fernsteueranlage betreiben, achten Sie darauf, dass kein weiterer Sender
zeitgleich auf dem gleichen Fernsteuerkanal betrieben wird.
• Überprüfen Sie die Funktionssicherheit Ihres Modells und der Fernsteueranlage. Achten Sie dabei auf sichtbare Beschädigungen, wie z.B. defekte Steckverbindungen oder beschädigte Kabel. Sämtliche beweglichen Teile am Modell müssen
leichtgängig funktionieren, dürfen jedoch kein Spiel in der Lagerung aufweisen.
• Der zum Betrieb erforderliche Flugakku sowie eventuell im Fernsteuersender eingesetzte Akkus sind entsprechend den
Herstellerangaben aufzuladen.
Page 6
6
• Vor jeder Inbetriebnahme müssen die Einstellungen der Trimmung am Sender für die verschiedenen Steuerrichtungen
kontrolliert und ggf. eingestellt werden.
• Wählen Sie ein geeignetes Gelände zum Betrieb Ihres Modells aus.
• Führen Sie vor jeder Inbetriebnahme gemäß den Herstellerangaben einen Reichweitentest der Fernsteueranlage durch.
c) Während des Betriebs
• Gehen Sie bei Betrieb des Produkts kein Risiko ein! Ihre eigene Sicherheit und die Ihres Umfeldes hängen alleine von
Ihrem verantwortungsbewussten Umgang mit dem Modell ab.
• Der unsachgemäße Betrieb kann schwerwiegende Personen- und Sachschäden verursachen! Achten Sie deshalb beim
Flugbetrieb auf einen ausreichenden Sicherheitsabstand zur Personen, Tieren und Gegenständen.
• Fliegen Sie nie direkt auf Zuschauer oder auf sich selbst zu.
• Fliegen Sie mit Ihrem Modell nur dann, wenn Ihre Reaktionsfähigkeit uneingeschränkt gegeben ist. Müdigkeit, Alkoholoder Medikamenten-Einfluss können zu Fehlreaktionen führen.
• Sowohl die Motoren, die Drehzahlsteller und der Flugakku können sich beim Betrieb erhitzen. Machen Sie aus diesem
Grund eine Pause von 5 - 10 Minuten, bevor Sie den Flugakku wieder laden, bzw. mit einem eventuell vorhandenen
Ersatzflugakku weiterfliegen.
• Lassen Sie die Fernsteuerung (Sender) immer eingeschaltet, solange das Modell in Betrieb ist. Schließen Sie nach der
Landung immer zuerst den Flugakku vom Drehzahlsteller ab. Erst danach darf die Fernsteuerung ausgeschaltet werden.
• Schalten Sie während des Betriebs niemals den Sender aus, ohne vorher den Flugakku vom Drehzahlsteller zu trennen.
• Bei einem Defekt oder einer Fehlfunktion ist zuerst die Ursache der Störung zu beseitigen, bevor Sie Ihr Modell wieder
starten.
• Setzen Sie Ihr Modell und die Fernsteueranlage nicht über längere Zeit der direkten Sonneneinstrahlung oder großer Hitze
aus.
6. Batterie- und Akku-Hinweise
Obwohl der Umgang mit Batterien und Akkus im täglichen Leben heute eine Selbstverständlichkeit ist, bestehen zahlreiche
Gefahren und Probleme. Speziell bei LiPo-/LiIon-Akkus mit ihrem hohen Energieinhalt (im Vergleich zu herkömmlichen NiCdoder NiMH-Akkus) sind diverse Vorschriften unbedingt einzuhalten, da andernfalls Explosions- und Brandgefahr besteht.
Beachten Sie deshalb unbedingt die nachfolgend genannten Informationen und Sicherheitshinweise zum Umgang mit
Batterien und Akkus.
a) Senderakkus/-batterien
• Batterien/Akkus gehören nicht in Kinderhände.
• Lassen Sie Batterien/Akkus nicht offen herumliegen, es besteht die Gefahr, dass diese von Kindern oder Haustieren
verschluckt werden. Suchen Sie in einem solchen Fall sofort einen Arzt auf!
• Batterien/Akkus dürfen niemals kurzgeschlossen, zerlegt oder ins Feuer geworfen werden. Es besteht Explosionsgefahr!
• Ausgelaufene oder beschädigte Batterien/Akkus können bei Berührung mit der Haut Verätzungen verursachen, benutzen
Sie deshalb in diesem Fall geeignete Schutzhandschuhe.
• Herkömmliche Batterien dürfen nicht aufgeladen werden. Es besteht Brand- und Explosionsgefahr! Laden Sie ausschließlich dafür vorgesehene Akkus; verwenden Sie dazu geeignete Akkuladegeräte. Batterien (1,5V) sind nur für den einmaligen Gebrauch vorgesehen und müssen ordnungsgemäß entsorgt werden, wenn sie leer sind.
• Achten Sie beim Einlegen von Batterien/Akkus bzw. beim Anschluss eines Akkupacks oder eines Ladegerätes auf die
richtige Polung (Plus/+ und Minus/- beachten). Bei Falschpolung werden nicht nur der Sender, das Flugmodell und die
Akkus beschädigt. Es besteht zudem Brand- und Explosionsgefahr.
Page 7
7
• Bei längerem Nichtgebrauch (z.B. bei Lagerung) entnehmen Sie die in der Fernsteuerung eingelegten Batterien (bzw.
Akkus), um Schäden durch auslaufende Batterien/Akkus zu vermeiden.
• Laden Sie NiMH- bzw. NiCd-Akkus etwa alle 3 Monate nach, da es andernfalls durch die Selbstentladung zu einer sog.
Tiefentladung kommen kann, wodurch die Akkus unbrauchbar werden können.
• Wechseln Sie immer den ganzen Satz Batterien bzw. Akkus aus. Mischen Sie nicht volle mit halbvollen Batterien/Akkus.
Verwenden Sie immer Batterien bzw. Akkus des gleichen Typs und Herstellers.
• Mischen Sie niemals Batterien mit Akkus! Verwenden Sie entweder Batterien oder Akkus.
b) Flugakkus
Achtung!
Nach dem Flug ist der Flugakku von der Elektronik des Quadrocopters zu trennen. Lassen Sie den Flugakku nicht
am Modell angesteckt, wenn Sie es nicht benutzen (z.B. bei Transport oder Lagerung). Andernfalls kann der LiPoFlugakku tiefentladen werden, dadurch wird er zerstört/unbrauchbar! Zudem besteht die Gefahr von Fehlfunktionen durch Störimpulse. Die Propeller könnten ungewollt anlaufen und Schäden oder Verletzungen verursachen.
• Laden Sie den Flugakku niemals unmittelbar nach dem Gebrauch. Lassen Sie den Flugakku immer erst abkühlen (mindestens 5-10 Minuten).
• Verwenden Sie zum Laden von LiPo-Akkus ein geeignetes LiPo-Ladegerät sowie einen LiPo-Equalizer/-Balancer.
• Laden Sie nur intakte und unbeschädigte Akkus. Sollte die äußere Isolierung des Akkus beschädigt sein bzw. der Akku
verformt bzw. aufgebläht sein, darf er auf keinen Fall aufgeladen werden. In diesem Fall besteht akute Brand und
Explosionsgefahr!
• Beschädigen Sie niemals die Außenhülle des Flugakkus, zerschneiden Sie die Folienumhüllung nicht, stechen Sie nicht mit
scharfen Gegenständen in den Flugakku. Es besteht Brand- und Explosionsgefahr!
• Entnehmen Sie den Flugakku zum Laden aus dem Modell und legen Sie ihn auf einen feuerfesten Untergrund. Halten Sie
Abstand zu brennbaren Gegenständen.
• Laden Sie Akkus immer mit der vom Hersteller angegebenen Stromstärke und achten Sie dabei darauf, dass die zulässigen
Maximalwerte nicht überschritten werden.
• Da sich sowohl das Ladegerät als auch der Flugakku während des Ladevorgangs erwärmen, ist es erforderlich, auf eine
ausreichende Belüftung zu achten. Decken Sie das Ladegerät und den Flugakku niemals ab! Dies gilt selbstverständlich
auch für andere Ladegeräte und andere Akkus.
• Laden Sie Akkus niemals unbeaufsichtigt.
• Trennen Sie den Flugakku vom Ladegerät, wenn dieser vollständig aufgeladen ist.
• Ladegeräte und Akkus dürfen nicht feucht oder nass werden. Es besteht Lebensgefahr durch einen elektrischen Schlag,
außerdem besteht Brand- und Explosionsgefahr durch den Akku!
Achtung!
Gerade LiPo-Akkus sind durch die darin enthaltenen Chemikalien sehr feuchtigkeitsempfindlich!
Setzen Sie das Ladegerät und den LiPo-Flugakku keinen hohen/niedrigen Temperaturen sowie direkter Sonnen-
einstrahlung aus. Beachten Sie beim Umgang mit LiPo-Akkus die speziellen Sicherheitshinweise des Akkuherstellers!
Page 8

8
7. Allgemeine Hinweise zum Aufbau der Mechanik
Bevor Sie mit dem Aufbau der Mechanik beginnen, sollten Sie sich über einige wichtige Hinweise informieren:
• Jeder Quadrocopter ist nur so gut, wie er montiert wurde. Aus diesem Grund sollten Sie die Montage gewissenhaft und
genau nach Anleitung durchführen. Fehlerhaft oder gar falsch montierte Quadrocopter können nicht nur deutlich schlechter fliegen, sie stellen auch ein erhebliches Sicherheitsrisiko dar.
• Halten Sie sich beim Zusammenbau genau an die Montageskizzen im Hersteller-Handbuch. Beachten Sie dabei, dass
Metallverschraubungen mit einem speziellen Schraubensicherungslack (nicht im Lieferumfang) fixiert werden müssen. In
der Praxis hat es sich bewährt, für alle zu sichernden Verschraubungen leicht- bis mittelfesten Sicherungslack zu verwenden. Um im Servicefall die gesicherten Schraubverbindungen wieder lösen zu können, raten wir von der Verwendung von
hochfestem Sicherungslack ab.
• Öffnen Sie die jeweiligen Verpackungsbeutel erst dann, wenn die Bauteile auch wirklich für den jeweiligen Bauabschnitt
benötigt werden. Legen Sie dazu die einzelnen Komponenten in einen separaten Bauteilebehälter (leere Gefrierdose o.ä.).
• Führen Sie die einzelnen Montageschritte erst durch, wenn Sie alle anstehenden Tätigkeiten verstanden haben und genau
wissen, welches Bauteil wo zu befestigen ist.
• Die beiliegenden Schrauben haben unterschiedliche Längen und unterschiedliche Köpfe. Achten Sie darauf, dass Sie
jeweils die richtigen Schrauben montieren.
• Verwenden Sie nur das dem Bausatz beiliegende Material und versuchen Sie nicht das Modell durch zusätzliches und
ungeeignetes Montagematerial zu verändern. Bei einem Defekt tauschen Sie betroffene Teile und Komponenten nur durch
Originalteile aus der Ersatzteilliste aus.
• Verwenden Sie hochwertiges Montagewerkzeug wie z.B. Innensechskantschlüssel mit exakt geschliffenen und gehärteten
Schraubenantrieben. Billiges Werkzeug neigt zum Überdrehen und dadurch werden die Schraubenköpfe beschädigt.
• Montieren Sie den Quadrocopter auf einer geeigneten Unterlage (weiches Baumwolltuch o. ä.), um die Mechanik vor
Kratzern und Beschädigungen zu schützen.
Page 9
9
8. Aufbau der Mechanik
Nehmen Sie das Hersteller-Handbuch mit den Montageskizzen zur Hand und beginnen Sie mit dem Aufbau des Quadrocopters
gemäß den Zeichnungen ab Seite P.1.
Seite P.1
Obere Abbildung:
Nehmen Sie die Bodenplatte des Zentralrahmens und schrauben die vier inneren Auslegerhalter mit den Drehlagern entsprechend der Abbildung fest. Halten Sie sich dabei exakt an die Herstellerzeichnung. Die Zapfen für die Auslegerrohrarretierung müssen sich jeweils unten bei der Bodenplatte befinden.
Wichtig!
Ziehen Sie die Schrauben (Ø 3 x 8) nur so fest an, dass sich die Auslegerhalter noch um die Lagerungspunkte
drehen lassen.
Untere Abbildung:
Setzen Sie die Deckplatte des Zentralrahmens auf die Drehlager der vier Auslegerhalter auf und schrauben Sie die Platte mit
vier Schrauben (Ø 3 x 8) fest. Auch danach müssen sich die Auslegerhalter noch um ihre Lagerungspunkte bewegen lassen.
Setzen Sie die 6 Distanzbolzen (2 x 3,5 x 22 mm) zwischen die beiden Rahmenplatten und schrauben die Platten mit zwölf
Schrauben M2 x 5 fest. Verwenden Sie für die Verschraubung leichtfesten Sicherungslack.
Seite P.2
Obere Abbildung:
Schieben Sie die vier äußeren Auslegerhalter entsprechend der Abbildung zwischen die Rahmenplatten und befestigen Sie
die Auslegerhalter von oben mit vier Schrauben (Ø 3 x 8).
Wichtig!
Setzen Sie die Auslegerhalter so ein, dass jeweils das größere Loch für den Kopf der Spannschraube nach oben
ausgerichtet ist (siehe auch obere Abbildung Seite P.7).
Untere Abbildung:
Die unteren vier Schrauben (Ø 3 x 8) werden mit jeweils einem Distanzring (3 x 4 x 1 mm) montiert. Setzen Sie danach die
vier Dämpfungsgummis für die GYRO-Trägerplatte ein.
Seite P.3
Obere Abbildung:
Setzen Sie die Landebeinfeder in eine der beiden Motorgondelhälften ein und schrauben Sie die Gondelhälften entsprechend der Abbildung zusammen. Ziehen Sie Schrauben aber noch nicht fest an.
Untere Abbildung:
Setzen Sie den Motor entsprechend der Abbildung in die Motorgondel ein und schrauben Sie ihn mit vier Schrauben
(M3 x 4) leicht an. Verwenden Sie dazu mittelfesten Schraubensicherungslack und ziehen Sie die Schrauben noch nicht fest
an.
Page 10
10
Seite P.4
Obere Abbildung:
Verbinden Sie die drei Motoranschlussleitungen mit den Anschlussleitungen der Drehzahlsteller.
Wichtig!
Bei den Motoren 1 und 3 werden immer die Kabel/Stecker mit der gleichen Farbe miteinander verbunden.
Bei den Motoren 2 und 4 müssen die roten und schwarzen Kabel/Stecker gegeneinander vertauscht verbunden
werden, damit die Motoren eine umgekehrte Drehrichtung aufweisen.
Die genaue Zuordnung der Motoren können Sie der unteren Abbildung auf Seite P.7 entnehmen. Beschriften Sie die einzelnen Motorgondeln mit den Ziffern 1 - 4 (siehe auch obere Abbildung auf Seite P.6).
Untere Abbildung:
Um den Drehzahlsteller leicht in das Auslegerrohr einschieben zu können, sollten Sie ein wenig Schmiermittel am Schrumpfschlauch des Drehzahlstellers aufbringen.
Achten Sie beim Einschieben des Auslegerrohres darauf, dass die Kerbe im Rohr seitlich ausgerichtet ist. Schieben Sie das
Auslegerrohr bis zum Anschlag in die Motorgondel. Der Zapfen in der Motorgondel greift dann in die Kerbe, sodass sich das
Auslegerrohr in der Motorgondel nicht drehen kann.
Seite P.5
Obere Abbildung:
Wenn Sie das Auslegerrohr richtig in die Motorgondel geschoben haben, ziehen Sie die Schrauben der Motorgondel und die
Befestigungsschrauben des Motors fest.
Setzen Sie danach die untere Motorgondelabdeckung ein und schieben die Abdeckkappe auf den Haltezapfen für den
Sicherungsring.
Untere Abbildung:
Der Hersteller bietet den Quadrocopter 500X auch ohne Antriebsset an und hat deshalb einen Hinweis auf das Antriebsset
vom Quadrocopter 330X-S in die Montage-Anleitung des 500X mit aufgenommen:
Falls Sie die Motoren und die 10 A Drehzahlsteller vom GAUI Quadrocopter „330 X-S“ verwenden, so müssen die Stromanschlüsse der Drehzahlsteller verlängert werden. Dies kann in Eigenregie oder durch Verwendung eines optional erhältlichen
Verlängerungskabel mit der GAUI-Nummer: 222170 erfolgen.
Bei den Motoren 1 und 3 müssen die Kabel mit der gleichen Farbe miteinander verbunden werden. Bei den Motoren 2
und 4 müssen das rote und das schwarze Kabel gegeneinander vertauscht angeschlossen werden, damit die Motoren eine
umgekehrte Drehrichtung aufweisen. Die Steckverbindungen müssen danach mit einem Klebstreifen gesichert werden.
Seite P.6
Obere Abbildung:
Die Abbildung zeigt die vier montierten Auslegerarme mit der Beschriftung 1 - 4.
Untere Abbildung:
Legen Sie den Zentralrahmen entsprechend der Abbildung so auf den Tisch, dass die eingekerbte Öffnung in der Deckplatte
(„Mark“) nach rechts (in Flugrichtung des Modells) zeigt.
Schieben Sie den Auslegerarm mit der Nummer 1 von rechts unten in die beiden kreisrunden Auslegerhalter ein.
Wichtig!
Achten Sie darauf, dass der Zapfen des inneren Auslegerhalters exakt in die Kerbe des Auslegerrohres greift. Die
dadurch entstehende leichte Schrägstellung der Motorwellen um ca. 6° ist bewusst so gewollt und kein Verarbeitungsfehler der Auslegerrohre.
Page 11
11
Seite P.7
Obere Abbildung:
Die dreiadrige Anschlussleitung mit dem Servostecker wird durch die Zentralbohrung der Deckplatte nach außen geführt.
Die beiden Stromzuführungsleitungen werden durch die Zentralbohrung der Bodenplatte nach außen geführt.
Die Spannschraube (Ø 3 x 8) des äußeren Auslegerhalters wird von oben eingesetzt und fest angezogen. Die Spannschraube (Ø 3 x 8) des inneren Auslegerhalters wird von unten durch einen Schlitz in der Bodenplatte eingesetzt und fest
angezogen.
Untere Abbildung:
Befestigen Sie die restlichen drei Auslegerarme nach derselben Methode. Achten Sie dabei darauf, dass Sie die Ausleger
entsprechend der Beschriftung einsetzen. Eine gedachte Mittellinie zwischen den Motorauslegern 1 und 4 entspricht später
beim Betrieb des Modells der Flugrichtung nach vorne.
Richten Sie die vier Auslegerarme entsprechend der Abbildung im 90°-Winkel zueinander aus und drehen Sie die obere
Befestigungsschraube des äußeren Auslegerhalters fest.
Seite P.8
Obere Abbildung:
Schrauben Sie die vier Trägerzapfen an der GYRO-Trägerplatte mit Hilfe der Schrauben M2 x 3,2 fest. Verwenden Sie dabei
leichtfesten Schraubensicherungslack.
Kleben Sie an die Unterseite des 3-Achs-Kreiselsystems „GU-344 GYRO“ vier Schaumstoff-Pads an. Bitte verwenden Sie nur
die dem „GU-344 GYRO“ beiliegenden Pads. Da die Schaumstoffpads bei einer etwaigen Demontage beschädigt werden,
liegt dem „GU-344 GYRO“ eine ausreichende Anzahl an Ersatzpads bei.
Wichtig!
Die Befestigung des 3-Achs-Kreiselsystems „GU-344 GYRO“ ist vom verwendeten Empfänger abhängig:
Sollte der Empfänger seitlich ausgerichtete Servoanschlüsse aufweisen, wird er zusammen mit dem GYRO entsprechend
der Abbildung auf der GYRO-Trägerplatte montiert. Die Montage des Empfängers kann mit doppelseitigem Klebeband
(Servotape) oder selbstklebendem Klettband erfolgen.
Sollte der Empfänger nach oben ausgerichtete Servoanschlüsse aufweisen (siehe untere Abbildung Seite P.9), würde die
Abdeckhaube nicht mehr passen. In diesem Fall wird der Empfänger auf der Deckplatte des Zentralrahmens befestigt und
das 3-Achs-Kreiselsystems „GU-344 GYRO“ mittig auf der GYRO-Trägerplatte montiert.
Untere Abbildung:
Die obere der beiden Zeichnungen zeigt Ihnen den Anschluss des Empfängers.
• Der Stecker mit dem 3adrigen Kabel muss mit dem Empfängerausgang für die Querruder-/Roll-Funktion (AILE) verbunden werden.
• Der Stecker mit dem roten Kabel muss mit dem Empfängerausgang für die Höhenruder-/Nick-Funktion (ELEV) verbunden
werden.
• Der Stecker mit dem orangen Kabel muss mit dem Empfängerausgang für die Gas-/Pitch-Funktion (THRO) verbunden
werden.
• Der Stecker mit dem gelben Kabel muss mit dem Empfängerausgang für die Seitenruder-/Heck-Funktion (RUDD) verbunden werden.
• Der Stecker mit dem grünen Kabel muss mit dem Empfängerausgang für die Fahrwerk-/Kreisel-Funktion (GEAR/GAIN)
verbunden werden.
Sollten Sie für die Steuerung eine 4-Kanal-Anlage verwenden, so lassen Sie den Stecker mit dem grünen Kabel unbenutzt.
Die Einstellung der Kreiselempfindlichkeit erfolgt dann direkt am „GU-344 GYRO“ (siehe auch Seite P.12).
Die untere der beiden Zeichnungen zeigt Ihnen den Anschluss der vier Drehzahlsteller am 3-Achs-Kreiselsystems GU-344
GYRO. Verbinden Sie die vier Drehzahlsteller entsprechend der Abbildung mit dem „GU-344 GYRO“. Die genaue Nummerierung
der Motoren können Sie den Abbildungen auf Seite P.7 oder P.9 entnehmen.
Wichtig!
Achten Sie auf die korrekte Polung der Anschlussstecker. Das Kabel mit dem Minuspol (-) muss oben und das
Kabel für die Steuersignale (S) muss unten angeschlossen sein!
Page 12
12
Seite P.9
Obere Abbildung:
Setzen Sie die vier Trägerzapfen der GYRO-Trägerplatte in die Gummipuffer der Deckplatte ein. Achten Sie dabei unbedingt
auf die Flugrichtung des Quadrocopters. Bei korrekter Montage ist der Pfeil auf der Oberseite des GU-344 GYROs parallel
zur Flugrichtung nach vorne (gedachte Mittellinie zwischen Auslegerarm 1 und 4) ausgerichtet.
Untere Abbildung:
Die Abbildung zeigt Ihnen die Montage des GU-344 GYROS und des Empfängers, wenn der Empfänger nach oben ausgerichtete Servoanschlüsse aufweist. Nur so hat die Abdeckhaube des Zentralrahmens ausreichend Platz.
Seite P.10
Obere Abbildung:
Ziehen Sie die Stromzuführungsleitungen der vier Drehzahlsteller entsprechend der Abbildung seitlich aus dem Zentralrahmen und schließen die beiden 4 in 1-Spannungsverteiler an.
Schneiden Sie vom Hakenteil des beiliegenden Klettbandes zwei Streifen ab und kleben die Stücke an die Unterseite des
Zentralrahmens.
Untere Abbildung:
Kleben Sie den flauschigen Teil des Klettbandes auf den Flugakku und sichern Sie den montierten Flugakku mit dem
beiliegenden schmalen Klettstreifen. Der Klettstreifen wird dazu durch die beiden schlitzförmigen Öffnungen der Bodenplatte gezogen.
Wichtig!
Beim Einsatz großer und schwerer Akkus empfehlen wir Ihnen anstelle des schmalen Klettstreifens breite KlettKabelbinder zu verwenden, um eine ausreichende Befestigung des Akkus zu gewährleisten.
Seite P.11
Obere Abbildung:
Befestigen Sie die Propellermitnehmer auf den Motorwellen. Die Madenschrauben der Propellermitnehmer müssen dabei in
die vorbereitete Nut der Motorwelle greifen. Verwenden Sie leichtfesten Schraubensicherungslack um die Madenschrauben
zu fixieren.
Wichtig!
Achten Sie bei der Montage der Propeller darauf, dass die Propeller an den Motoren 2 und 4 im Uhrzeigersinn
(Beschriftung 10B) und die Propeller an den Motoren 1 und 3 entgegen dem Uhrzeigersinn (Beschriftung 10A)
drehen.
Befestigen Sie anschließend die beiliegenden gelben Aufkleber an die in Flugrichtung nach vorne ausgerichteten Auslegerarme 1 und 4, um beim Fliegen eine optische Anzeige über die momentane Ausrichtung des Quadrocopters zu erhalten.
Untere Abbildung:
Die Ausrichtung der Propeller ist nicht absolut horizontal! Die leichte Schrägstellung der Propeller von 6° (siehe Abbildung)
ist bewusst so gewollt und verbessert die Flugeigenschaften des Quadrocopters.
Die Abdeckhaube des Zentralrahmens wird zum Abschluss des Aufbaus von oben auf die Auslegerarme aufgesetzt. Das spitz zulaufende Teil sollte dabei in Flugrichtung nach vorne ausgerichtet sein.
Page 13
13
9. Systemeinstellungen
Seite P.12
1. Modellauswahl
Falls der von Ihnen benutzte Fernsteuersender die Umschaltung zwischen Hubschrauber und Flächenmodellen ermöglicht,
wählen Sie den Modelltyp „Flugmodell“ aus, da der Quadrocopter senderseitig keine Mischfunktionen benötigt.
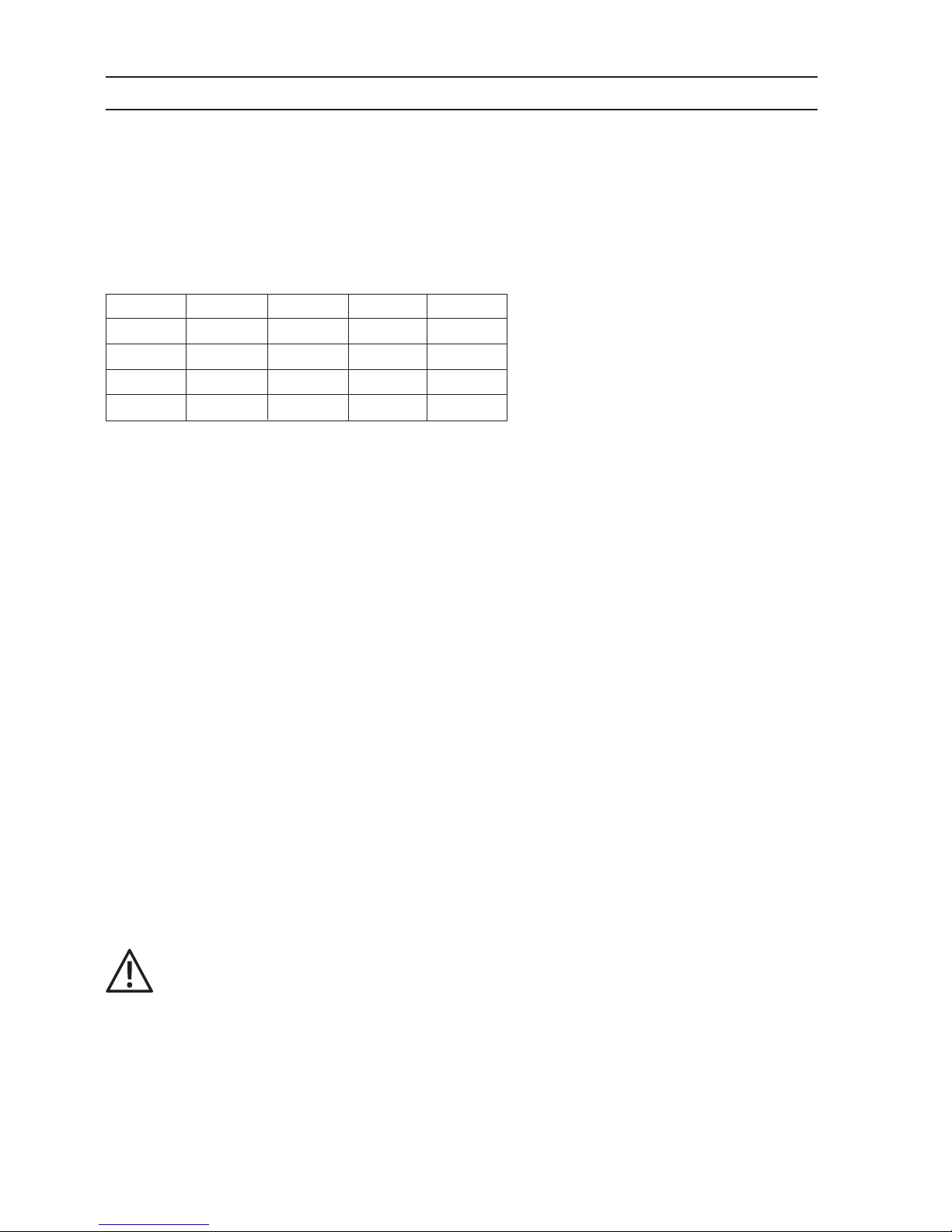
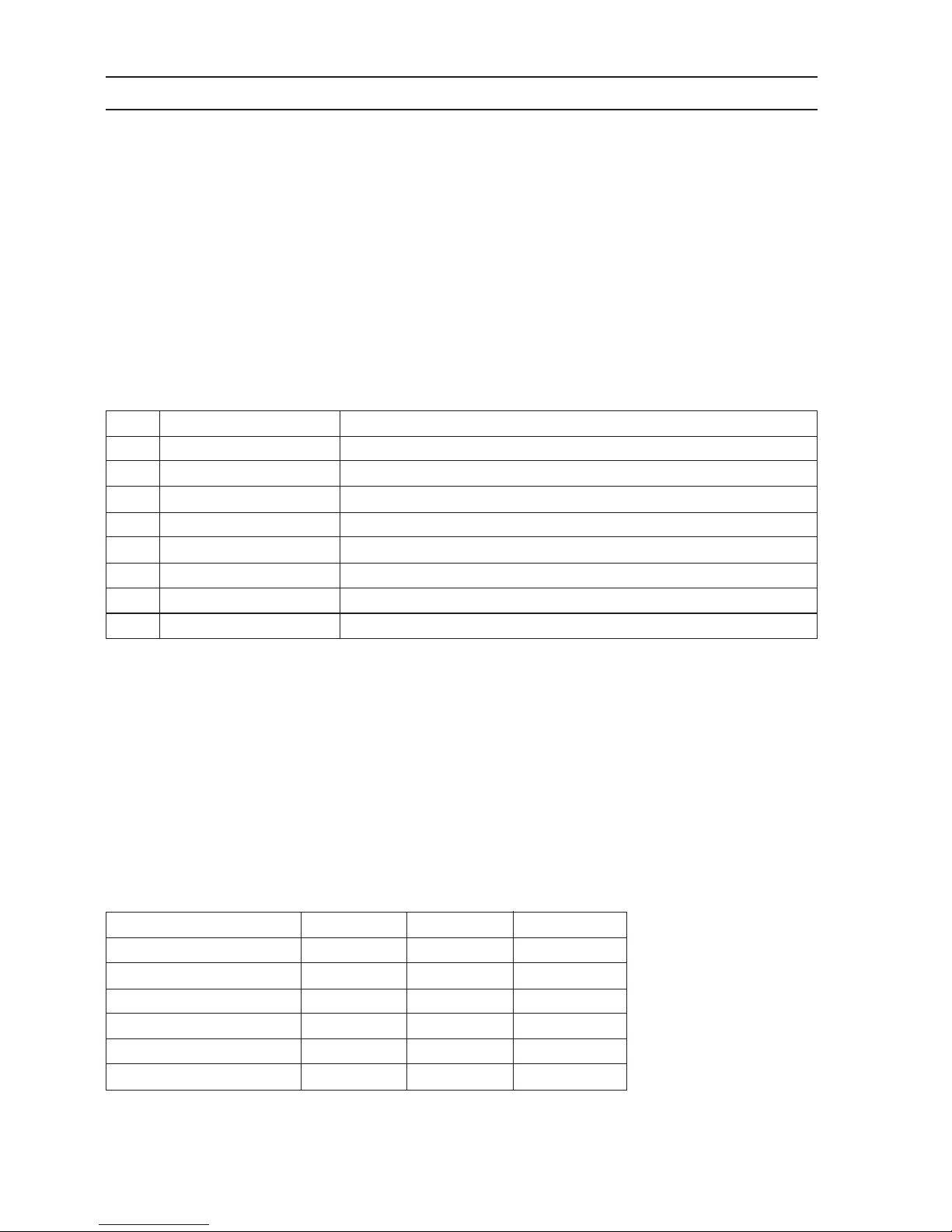
2. Auswahl der Richtungs-Funktionen
Falls Sie einen der in der Tabelle angegebenen Sender verwenden, können Sie bereits jetzt die erforderliche RichtungsFunktion der vier Steuerkanäle einstellen (NOR = normale Funktionsrichtung; REV = umgekehrte Funktionsrichtung).
GAUI Futaba JR Hitech
AILE NOR NOR REV NOR
ELEV NOR NOR REV REV
THRO REV REV NOR NOR
RUDD NOR NOR REV NOR
Falls Sie einen Sender von einem nicht aufgeführten Hersteller verwenden, so müssen Sie die erforderlichen RichtungsFunktionen durch praktische Tests ermitteln (siehe Seite P.13 bis P.15).
3. Einstellmöglichkeiten am 3-Achs-Kreiselsystem „GU-344 GYRO“
Das 3-Achs-Kreiselsystem „GU-344 GYRO“ kann entweder mit Hilfe eines Einstellreglers und DIP-Schaltern oder per Fernsteuerung eingestellt werden.
a) Einstellen des „GU-344 GYRO“ per Hand
Wenn der Stecker mit dem grünen Anschlusskabel nicht am Empfänger angeschlossen ist, sind der Einstellregler „A“ und
der DIP-Schalter „1“ am „GU-344 GYRO“ aktiviert.
• Drehen Sie den Einstellregler „A“ vom linken Anschlag (Minimum = Stellung 4:30 Uhr) um 90° nach rechts, um die
Grundeinstellung (Stellung 7:30 Uhr) der Kreiselempfindlichkeit für die ersten Testflüge zu erhalten. Verwenden Sie dazu
einen geeigneten Minischraubendreher. Je weiter der Drehregler nach rechts gedreht wird, desto größer ist die stabilisierende Wirkung des 3-Achskreisels.
Das 3-Achs-Kreiselsystem „GU-344 GYRO“ verfügt zudem über 2 unterschiedliche Flug-Einstellungen, die mit Hilfe des
DIP-Schalters „1“ ausgewählt werden können.
• Wird der DIP-Schalter „1“ mit einem Minischraubendreher in die obere Stellung „CRU“ geschaltet, leuchtet die KontrollLED rot und der Quadrocopter verhält sich wie ein normaler Modellhubschrauber. Diese Einstellung ist für erfahrene
Modellhubschrauber-Piloten empfohlen.
• Wird der DIP-Schalter „1“ in die untere Stellung „HOV“ geschaltet, leuchtet die Kontroll-LED grün und der Quadrocopter
eignet sich ideal für Einsteiger, um den Schwebeflug zu erlernen. In dieser Einstellung werden durch das 3-Achs-Kreiselsystem die Steuersignale des Senders leicht reduziert und ein Exponential-Anteil mit beigemischt (siehe Diagramme in der
Mitte auf Seite P.12). Dies ermöglicht eine feinfühligere Steuerung des Quadrocopters im Schwebeflug.
Mit dem DIP-Schalter „2“ können zwei unterschiedliche Flugausrichtungen des Quadrocopters eingestellt werden.
• Wird der DIP-Schalter „2“ in die obere Stellung geschaltet, ist die X-Flugausrichtung aktiviert. Die Mitte zwischen Motorauslegerarm 1 und 4 ist in Flugrichtung gesehen vorne.
• Wird der DIP-Schalter „2“ in die untere Stellung geschaltet, ist die Kreuz-Flugausrichtung aktiviert.
Achtung, wichtig!
Da der Quadrocopter „500X-S“ nur für die X-Flugausrichtung ausgelegt ist, muss sich der DIP-Schalter „2“ immer
in der oberen Stellung befinden und darf auch nicht umgeschaltet werden (siehe auch Seite P.16).
Page 14
14
b) Einstellen des „GU-344 GYRO“ per Fernsteuerung
Wenn der Stecker mit dem grünen Anschlusskabel am Empfänger angeschlossen ist, sind der Einstellregler „A“ und der DIPSchalter „1“ am „GU-344 GYRO“ deaktiviert. Die Einstellung der Kreiselempfindlichkeit und die Umschaltung der Flugeinstellung können nur noch über den Sender erfolgen. Als Steuergeber am Sender kann entweder ein Schalter, Schiebe- oder
Drehregler verwendet werden, der mit dem entsprechenden Empfängerausgang (Stecker mit dem grünen Anschlusskabel)
gekoppelt ist.
• Je nach dem, in welche Richtung der Steuergeber betätigt wird, kann zwischen der Flugeinstellung „CRU“ und „HOV“
umgeschaltet werden.
In der Stellung „CRU“ leuchtet die Kontroll-LED rot und der Quadrocopter verhält sich wie ein normaler Modellhubschrauber.
Diese Einstellung ist für erfahrene Modellhubschrauber-Piloten empfohlen.
• In der Stellung „HOV“ leuchtet die Kontroll-LED grün und der Quadrocopter eignet sich ideal für Einsteiger, um den
Schwebeflug zu erlernen.
Die erforderliche Kreiselempfindlichkeit kann an der Fernsteuerung über die EPA- bzw. Travel-Funktion (Servoweg-Begrenzung) eingestellt werden. Als Grundeinstellung empfehlen wir Ihnen den Servoweg auf beiden Seiten des Steuergebers, und somit für beide Flugeinstellungen, auf 50% zu reduzieren. Durch Vergrößern oder Verringern des eingestellten Wertes können Sie für jede Flugeinstellung eine individuelle Kreiselempfindlichkeit einstellen.
Im Gegensatz zur manuellen Einstellung werden bei Umschaltung per Fernsteuerung die Steuersignale des Senders nicht reduziert und auch nicht mit einem Expo-Anteil versehen (siehe Skizze unten rechts). Bei Bedarf sind
die erforderlichen EPA- und EXPO-Einstellungen der Steuerkanäle direkt am Sender durchzuführen.
Seite P.13
Einstellen der Drehzahlsteller
Obere Abbildung:
Für eine korrekte und gleichmäßige Funktion der Motoren ist es erforderlich jeden einzelnen Drehzahlsteller an die Steuersignale des Senders anzupassen.
Wichtig:
Für die Einstellung ist es erforderlich, das 3-Achs-Kreiselsystem „GU-344 GYRO“ außer Betrieb zu nehmen. Entfernen Sie dazu, falls angeschlossen, den Stecker mit dem grünen Kabel für die Fahrwerk-/Kreisel-Funktion (GEAR/
GAIN) aus dem Empfänger und drehen Sie den Einstellregler „A“ mit einem Minischraubendreher auf den linken
Anschlag (Minimum = Stellung 4:30 Uhr).
• Schalten Sie danach den Sender ein und stellen Sie die Trimmfunktionen aller Kanäle in die Mittelstellung. Der Gasweg am
Sender sollte auf 100% eingestellt sein.
• Bewegen Sie danach den Steuerknüppel für die Gas-/Pitch-Funktion in die oberste Stellung.
Die Abbildungen auf dieser und den folgenden Seiten zeigen einen Sender in Mode 1, wo die Gas-/Pitch-Steuerung mit dem rechten Steuerknüppel erfolgt. Falls Sie die Gas-/Pitch-Steuerung mit dem linken Steuerknüppel
betätigen (Mode 2 oder 4), ist demzufolge der linke Steuerknüppel in die oberste Stellung zu bringen.
Untere Abbildung:
• Schließen Sie den Flugakku am Quadrocopter an. Der Motor gibt daraufhin drei Töne mit steigender Tonhöhe und danach
zwei Einzeltöne ab.
• Bewegen Sie unmittelbar danach den Steuerknüppel für die Gas-/Pitch-Funktion in die unterste Stellung. Der Motor gibt
daraufhin zwei kurze und nach einer kleinen Pause einen längeren Ton ab.
• Die Programmierung auf das Sendersignal ist abgeschlossen und der Flugakku kann wieder abgesteckt werden.
Sollte beim Anschließen des Flugakkus nach den 5 Tönen noch ein sechster, siebter oder achter Ton (2-, 3- oder
4zelliger LiPo-Flugakku) zu hören sein, schließen Sie den Flugakku unverzüglich wieder ab und betätigen am
Sender die Reverse-Funktion für den Gas-/Pitch-Steuerknüppel. Wiederholen Sie anschließend den Einlernvorgang erneut.
Sollte der Motor nach den drei Tönen mit steigender Tonhöhe ununterbrochen kurze Töne in schneller Folge abgeben, hat
der Regler kein Sendersignal erhalten oder der Steuerknüppel für die Gas-/Pitch-Funktion befindet sich nicht in der Endposition.
Damit Sie genau erkennen, ob der Drehzahlsteller die Sendersignale richtig eingelernt hat, sollten Sie den Einlernvorgang an
jedem Drehzahlsteller einzeln vornehmen.
Page 15

15
Wenn Sie den Einlernvorgang an allen vier Drehzahlstellern durchgeführt haben, schließen Sie den Stecker mit dem grünen
Kabel für die Fahrwerk-/Kreisel-Funktion (GEAR/GAIN) wieder am Empfänger an und drehen den Einstellregler „A“ mit
einem Minischraubendreher um 90° nach rechts in die Ausgangsposition (Stellung 7:30 Uhr).
Seite P.14
Funktionstest vor dem ersten Flug
Obere Abbildung:
• Schieben Sie den Steuerknüppel für die Gas-/Pitch-Funktion in die unterste Stellung und schalten Sie den Sender ein.
• Schließen Sie den Flugakku am Quadrocopter an und bewegen Sie das Modell solange nicht, bis Sie die Einschalttonfolge
hören. Bei der Einschalttonfolge geben die Motoren zunächst drei Töne mit steigender Tonhöhe, danach zwei, drei oder
vier Einzeltöne (je nach Zellenzahl des LiPo-Akkus) in gleichbleibender Tonhöhe und zum Abschluss noch einen Einzelton
ab.
• Der Quadrocopter ist nun startbereit.
• Schieben Sie den Steuerknüppel für die Gas-/Pitch-Funktion leicht nach vorne bis die Motoren anlaufen und überprüfen
Sie anhand der Abbildung die korrekte Drehrichtung der einzelnen Propeller. Sollte ein Motor die verkehrte Drehrichtung
aufweisen, so sind zwei der drei Motor-Anschlusskabel untereinander zu tauschen.
Je nach benutztem Fernsteuer-Mode können die tatsächlich erforderlichen Knüppelbewegungen von den in der
Anleitung gezeigten Knüppelbewegungen abweichen.
Untere Abbildung:
Obere Zeichnung:
Bewegen Sie den Steuerknüppel für die Höhenruder-/Nick-Funktion etwas nach vorne und überprüfen Sie, ob sich der
Quadrocopter leicht nach vorne neigt. Falls der Quadrocopter genau entgegengesetzt reagiert, muss am Sender die ReverseFunktion für die Nick-Steuerung umgeschaltet werden.
Obere Zeichnung:
Wenn Sie den Steuerknüppel für die Seitenruder-/Heck-Funktion nach rechts bewegen, muss sich der Quadrocopter von
oben gesehen im Uhrzeigersinn drehen. Falls der Quadrocopter genau entgegengesetzt reagiert, muss am Sender die
Reverse-Funktion für die Heck-Steuerung umgeschaltet werden.
Seite P.15
Obere Abbildung:
Bewegen Sie den Steuerknüppel für die Querruder-/Roll-Funktion etwas nach rechts und überprüfen Sie, ob sich der
Quadrocopter leicht nach rechts neigt. Falls der Quadrocopter genau entgegengesetzt reagiert, muss am Sender die ReverseFunktion für die Roll-Steuerung umgeschaltet werden.
Untere Abbildung:
Nachdem Sie die korrekte Bewegungsrichtung des Quadrocopters auf die Steuerbefehle geprüft bzw. korrigiert haben,
können Sie den Steuerknüppel für die Gas-/Pitch-Funktion so weit nach vorne bewegen, bis der Quadrocopter in ca. 30 cm
Höhe schwebt. Wenn das Modell dabei schaukelt oder pendelt, erhöhen Sie die Kreiselempfindlichkeit und somit die Flugstabilität. Die genaue Vorgehensweise kann auf Seite P.12 nachgelesen werden.
Page 16
16
Seite P.16
Wichtige Hinweise:
• Die Neutrallage des 3-Achs-Kreiselsystems „GU-344 GYRO“ kann u. U. ein wenig abweichen. In diesem Fall ist eine
Feinabstimmung mit Hilfe der Trimmung bzw. Subtrimmung am Fernsteuersender durchzuführen.
• Es ist gut, wenn der Steuerweg für die Gas-/Pitchfunktion nicht mehr als 80% beträgt, damit das 3-Achs-Kreiselsystem
beim Stabilisieren der Fluglage auch bei maximaler Pitchsteuerung nicht aus dem Regelbereich gerät. Deshalb sollten Sie
nach dem Einstellen der Drehzahlsteller die Gas-/Pitch-Funktion von 100% auf 75% reduzieren.
• Achten Sie auf die Restkapazität des Flugakkus. Ein zu tief entladener Akku wird geschädigt und macht den Quadrocopter
unkontrollierbar.
• Eine hoch eingestellte Kreiselstabilität sorgt für einen stabilen Schwebeflug. Eine niedrigere Kreiselstabilität verschlechtert
zwar die Flugstabilität, erhöht jedoch die Agilität des Quadrocopters.
Untere Abbildung:
Das 3-Achs-Kreiselsystem „GU-344 GYRO“ bietet die Möglichkeit von X- auf Kreuz-Ausrichtung umzuschalten.
Wichtig!
Da der Quadrocopter „500X-S“ jedoch nur für die X-Ausrichtung ausgelegt ist, kann die Umschaltung der Ausrichtung nur beim Quadrocopter „330X-S“, der auch in der Abbildung zu sehen ist, genutzt werden.
Page 17
17
10. Programmierung der Drehzahlsteller
Seite P.17
1. Programmiermodus aufrufen
Schalten Sie den Sender ein und bewegen Sie den Gas-Steuerknüppel in die Vollgasstellung.
Schließen Sie den Akku am Drehzahlregler an. Der am Regler angeschlossene Motor gibt 3 kurze Töne mit steigender
Tonhöhe und nach zwei Sekunden zwei kurze Einzeltöne ab.
Nach weiteren 5 Sekunden gibt der angeschlossene Motor 5 kurze Töne mit steigender Tonhöhe ab.
Der Regler befindet sich nun im Programmiermodus.
2. Menüpunkt aufrufen
Im Programmiermodus hören Sie nun 8 Gruppen unterschiedlicher Signaltöne, die sich in einer Schleife ständig wiederholen. Nach der letzten Tonfolge (2 x lang) sind wieder die 5 kurzen Töne in steigender Tonhöhe zu hören, bevor die Schleife
erneut beginnt.
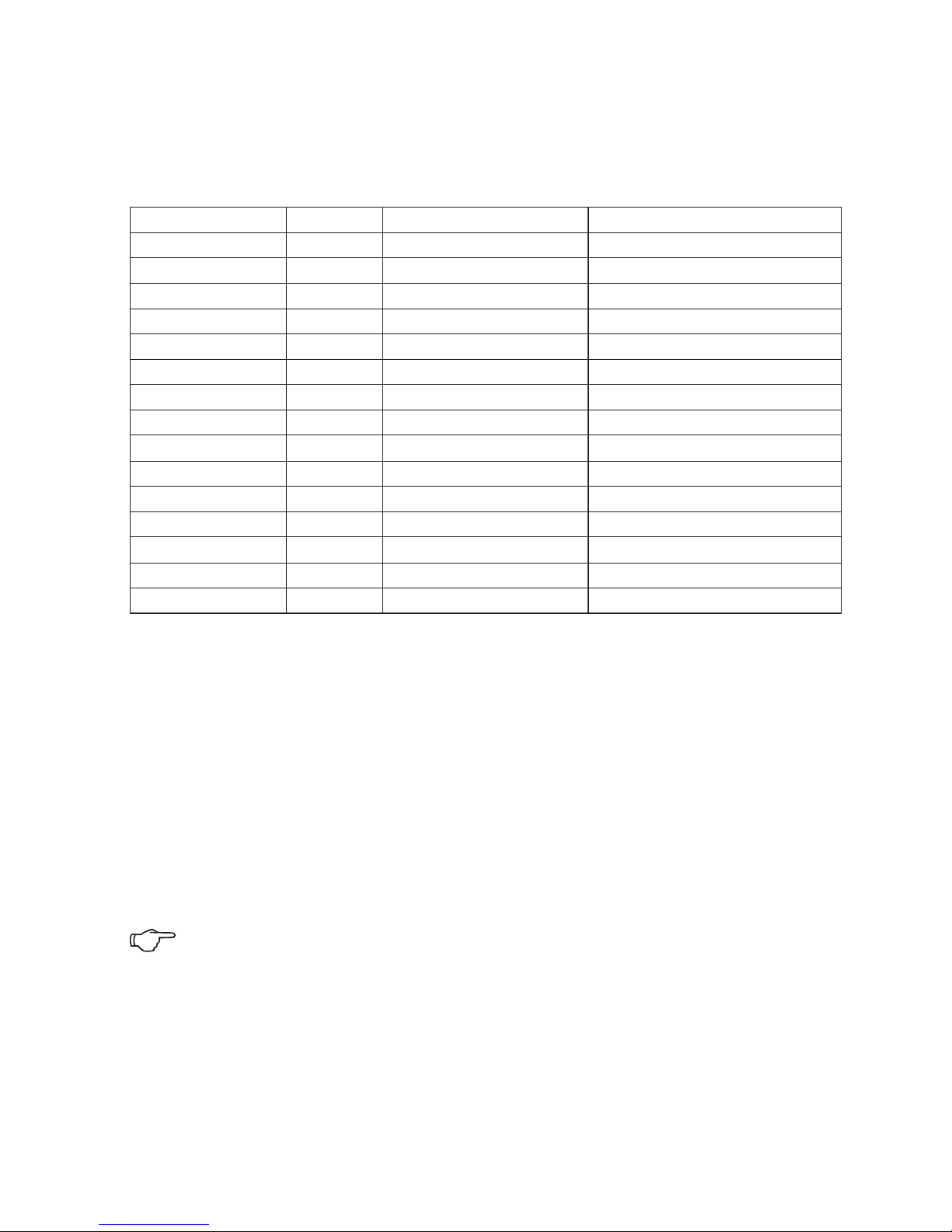
Die Zuordnung der jeweiligen Signaltöne zu den Menüpunkten können Sie der nachfolgenden Tabelle entnehmen.
Nr. Tonfolge Menüpunkt bzw. Funktion
1 1 x kurz Bremsfunktion
2 2 x kurz Akkutyp
3 3 x kurz Cutoff-Mode (Abschalt-Mode)
4 4 x kurz Cutoff-Schaltschwelle
5 1 x lang Start-Mode
6 1 x lang, 1 x kurz Timing
7 1 x lang, 2 x kurz Standardeinstellungen aufrufen
8 2 x lang Programmiermodus verlassen
Um einen bestimmten Menüpunkt aufrufen zu können, schieben Sie den Gas-Steuerknüppel innerhalb von 2 Sekunden nach
dem jeweiligen Tonsignal von der Vollgasstellung in die unterste Stellung (Motor aus).
Der Drehzahlregler wechselt dadurch in den Einstellmodus des aufgerufenen Menüpunktes.
3. Werte verändern
Im Einstellmodus hören Sie nun ebenfalls unterschiedliche Signaltöne (siehe oberste Zeile in der unten angefügten Tabelle),
die sich in einer Schleife ständig wiederholen. Ab wann die Tonfolge erneut beginnt, ist vom aufgerufenen Menüpunkt
abhängig, da nur die Töne abgegeben werden, die auch einen Einstellwert hinterlegt haben.
Wenn das Tonsignal für den gewünschten Einstellwert zu hören war, schieben Sie den Gas-Steuerknüppel unverzüglich von
der untersten Stellung (Motor aus) in die Vollgasstellung.
Als Bestätigung für den gespeicherten Wert sind 4 Töne (hoch, tief, hoch, tief) zu hören.
Der Drehzahlregler wechselt zurück in den Programmiermodus, wo Sie bei Bedarf den nächsten Menüpunkt aufrufen und
einstellen können.
1 x kurz 2 x kurz 3 x kurz
Bremsfunktion Aus Ein
Akkutyp Lithium NiMH/NiCd
Cutoff-Mode zurückregeln abschalten
Cutoff-Schaltschwelle niedrig mittel hoch
Start-Mode normal weich sehr weich
Timing niedrig mittel hoch
Page 18

18
4. Programmiermodus verlassen
Wenn sich der Regler im Programmiermodus befindet, warten Sie bis der Menüpunkt 8 akustisch angezeigt wird und
schieben dann den Gas-Steuerknüppel innerhalb von 3 Sekunden nach dem Tonsignal von der Vollgasstellung in die unterste Stellung (Motor aus). Je nach Zellenzahl ertönen 2 – 3 kurze Töne gefolgt von einem etwas längeren Ton. Der Regler ist
nun betriebsbereit.
Nach der Aktivierung der Werkseinstellung verlässt der Regler im Anschluss ebenfalls den Programmiermodus.
Wenn sich der Regler im Einstellmodus befindet und Sie einen Wert neu abgespeichert haben, ziehen Sie den Gas-Steuerknüppel unmittelbar nach der Bestätigungs-Tonfolge zurück in die unterste Stellung (Motor aus). Je nach Zellenzahl ertönen
2 – 3 kurze Töne, gefolgt von einem etwas längeren Ton. Der Regler ist nun betriebsbereit.
Page 19

19
11. Transport und Ausrüstmöglichkeiten
Seite P.18
Obere Abbildung:
Damit der Quadrocopter beim Transport oder bei der Lagerung nur wenig Platz benötigt, können die vorderen und hinteren
Auslegerarme zusammengeklappt werden.
Lösen Sie dazu die oberen Befestigungsschrauben der äußeren Auslegerhalter, klappen die Arme zusammen und drehen die
Schrauben wieder fest.
Untere Abbildung:
Für den Transport des Quadrocopters in der Tragetasche, sind die Propellermitnehmer inkl. Propeller von den Motorwellen
zu entfernen und in der seitlichen Tasche zu verstauen.
Seite P.19
Obere Abbildung:
Bei Bedarf können Sie den Quadrocopter mit einem Sicherheitsrahmen ausstatten, um so eine Berührung der Propeller mit
Personen oder Gegenständen zu vermeiden.
Verbinden Sie die vier Fiberglas-Stäbe mit Hilfe der beiliegenden Kunststoff-Verbinder zu einem Ring. Die vier Alurohre
dienen als Abstandshalter und werden ebenfalls in die Kunststoffverbinder geschoben.
Untere Abbildung:
Entfernen Sie an den Motorgondeln die Abdeckkappen der Haltezapfen und schieben die Alurohre des Sicherheitsrahmens
über die Zapfen.
Seite P.20
Obere Abbildung:
Für die Ausrüstung des Quadrocopters mit einer Kamera, besteht die Möglichkeit eine optionale Kamerahalterung mit der
GAUI-Nummer: 210705 und Landebeine mit den GAUI-Nummern: 210910 sowie 222231 einzusetzen. Die Abbildung zeigt
die Montage der jeweiligen Komponenten.
Untere Abbildung:
Die Abbildung zeigt die Montage einer Miniaturkamera für FPV-Flüge. Das Kameramodul, die Elektronik und der Videosender werden dazu auf einer speziellen Trägerplatte montiert, die an die Bodenplatte des Zentralrahmens geschraubt wird.
Die Linse der Kamera blickt bei dieser Montage durch eine Öffnung der Abdeckhaube.
Seite P.21
Obere Abbildung:
Die Abbildung zeigt die Montage des optionalen LED-Beleuchtungs-Sets. Die Kabel zu den jeweiligen Motorgondeln werden
mit Hilfe eines Metalldrahtes in die Rohre der Ausleger eingezogen. Nach der Montage der LEDs mit doppelseitigem Klebeband müssen die vorhandenen Motorgondelabdeckungen gegen transparente Exemplare getauscht werden. Die Blinkelektronik
wird an dem Empfänger angeschlossen und zwischen den beiden Zentralrahmenplatten verstaut.
Untere Abbildung:
Die Abbildung zeigt die Montage der optional erhältlichen Trägerplattform mit der GAUI-Nummer: 222202, die mit vier
Abstandshaltern an der Deckplatte des Zentralrahmens befestigt wird.
Page 20
20
Seite P.22
Gewichts-/Leistungsübersicht
Der Quadrocopter kann ohne Zuladung problemlos mit einem 2zelligen LiPo-Akku mit 1400 - 2000 mAh geflogen werden.
Wenn jedoch das Abfluggewicht über 900 g liegt, sollte ein 3zelliger LiPo-Akku verwendet werden. Die nachfolgende Tabelle
ermöglicht Ihnen eine Übersicht bezüglich Abfluggewicht und Leistungsaufnahme, um den passenden Akku für den jeweiligen Einsatz auszuwählen.
Abfluggewicht (g) Akku Leistungsaufnahme (W) Gewichts-/Leistungsverhältnis (g/W)
800 2S 80 10
900 2S 92 9,8
1000 3S 113 8,8
1100 3S 129 8,5
1200 3S 146 8,2
1300 3S 163 8,0
1400 3S 182 7,7
1500 3S 202 7,4
1600 3S 219 7,3
1700 3S 238 7,1
1800 4S 276 6,5
1900 4S 306 6,2
2000 4S 329 6,1
2100 4S 343 6,1
2200 4S 370 6,0
Das Gewicht des Quadrocopters ohne Akku beträgt rund 670 g.
Berechnung der zu erwartenden Flugzeit:
Wenn der Quadrocopter eine Kamera mit 350 g tragen soll und der verwendete Akku (3S 2000 mAh) 150 g wiegt, liegt die
Zuladung bei 500 g. Das Gesamtfluggewicht liegt dann bei 1170 g und die Leistungsaufnahme beträgt entsprechend der
Tabelle ca. 141 W. Die Flugzeit lässt sich nun wie folgt berechnen:
Akkuspannung (11,1 V) x Stromstärke (2 A) x Entladezeit 60 (min) = 1332 (Wmin)
(1332 Wmin/141 W) x 75% (Nutzbare Kapazität) = 7,1 min
Die zu erwartende Flugzeit beträgt rund 7,1 Minuten.
Wird zur Flugzeitverlängerung ein zweiter Akku (3S 2000 mAh) parallel geschaltet, so erhöht sich das Abfluggewicht auf
1320 g und die Leistungsaufnahme auf 167 W. Die neue Flugzeit berechnet sich wie folgt:
Akkuspannung (11,1 V) x Stromstärke (4 A) x Entladezeit 60 (min) = 2664 (Wmin)
(2664 Wmin/167 W) x 75% (Nutzbare Kapazität) = 12,0 min
Die zu erwartende Flugzeit beträgt rund 12 Minuten.
Die Berechnungen beziehen sich auf einen normalen Rundflug. Die Leistungsabgabe der Drehzahlsteller kann
aber um 3 bis 4 Mal höher liegen, wenn die maximale Steigleistung gesteuert wird. Tasten Sie sich langsam an die
erreichbaren Flugzeiten heran und überprüfen Sie nach jedem Flug die Restkapazität des Akkus, um eine Tiefentladung während des Fluges in jedem Fall zu vermeiden. Dies würde zu einer Beschädigung des Akkus und zum
Absturz des Quadrocopters führen.
Page 21
21
12. Ersatzteilübersicht
Seite P.23
Auf den Seiten P.23 und P.24 finden Sie die vom Hersteller erhältlichen Ersatzteile mit den jeweiligen Bezeichnungen und
den dazugehörigen Ersatzteilnummern.
Achtung!
Bitte beachten Sie, dass die 6stelligen Nummern im Hersteller-Handbuch keine Conrad-Bestellnummern sind!
Eine aktuelle Liste der Ersatzteile mit den entsprechenden Conrad Electronic-Bestellnummern finden Sie auf www.conrad.de
im Download-Bereich des Modells.
13. Wartung und Pflege
Um die Betriebssicherheit Ihres Modells zu gewährleisten, sind regelmäßige Kontrollen und Wartungsarbeiten durchzuführen.
1. Überprüfen Sie, ob sich Schrauben gelockert haben oder Bauteile nicht mehr fest verschraubt oder verklebt sind.
2. Achten Sie auf den sauberen Rundlauf und auf einen festen Sitz der Propeller. Die Propeller dürfen keine sichtbaren
Beschädigungen aufweisen.
3. Überprüfen Sie die Leichtgängigkeit der Motoren. Wird bei der Drehung von Hand ein „rollendes“ oder „knirschendes“
Gefühl erzeugt, ist der betreffende Motor zu tauschen.
4. Überprüfen Sie den korrekten und sicheren Sitz der Klebepads des 3-Achs-Kreiselsystems. Ein lockeres oder wackeliges
Kreiselsystem führt zu unkontrollierten Bewegungen des Quadrocopters.
5. Überprüfen Sie die komplette Verkabelung. Achten Sie dabei besonders auf die Verbindungen zwischen den Drehzahlstellern und den Motoren.
Wichtig!
Müssen beschädigte oder verschlissene Teile erneuert werden, so setzen Sie nur Original-Ersatzteile in Ihrem
Quadrocopter ein.
Die Ersatzteilliste finden Sie auf unserer Internetseite www.conrad.com im Download-Bereich zum jeweiligen Produkt.
Alternativ können Sie die Ersatzteilliste auch telefonisch anfordern. Die Kontaktdaten finden Sie am Anfang dieser Bedie-
nungsanleitung im Kapitel „Einführung“.
Page 22
22
14. Entsorgung
a) Allgemein
Entsorgen Sie das Produkt am Ende seiner Lebensdauer gemäß den geltenden gesetzlichen Vorschriften.
b) Batterien und Akkus
Sie als Endverbraucher sind gesetzlich (Batterieverordnung) zur Rückgabe aller gebrauchten Batterien und Akkus verpflichtet; eine Entsorgung über den Hausmüll ist untersagt!
Schadstoffhaltige Batterien/Akkus sind mit nebenstehendem Symbol gekennzeichnet, das auf das Verbot der
Entsorgung über den Hausmüll hinweist. Die Bezeichnungen für das ausschlaggebende Schwermetall sind:
Cd=Cadmium, Hg=Quecksilber, Pb=Blei (Bezeichnung steht auf Batterie/Akku z.B. unter dem links abgebildeten
Mülltonnen-Symbol).
Ihre verbrauchten Batterien/Akkus können Sie unentgeltlich bei den Sammelstellen Ihrer Gemeinde, unseren Filialen oder
überall dort abgeben, wo Batterien/Akkus verkauft werden.
Sie erfüllen damit die gesetzlichen Verpflichtungen und leisten Ihren Beitrag zum Umweltschutz.
15. Technische Daten
Rumpf-Abmessungen (Ø x H) .................................................. 500 x 120 mm
Propeller-Ø ............................................................................. 254 mm
Leergewicht (ohne Akku) ........................................................ ca. 670 g
Maximales Abfluggewicht (inkl. Akku) ...................................... ca. 2200 g
Empfohlener Flugakku ............................................................ (2S 1400 mAh) - (4S 2000 mAh)
Erforderliche Fernsteuerung .................................................... 4 - 5 Kanäle
Page 23

23
Table of Contents
Page
1. Introduction .................................................................................................................................................. 24
2. Intended Use ................................................................................................................................................ 24
3. Product Description........................................................................................................................................ 25
4. Scope of Delivery ........................................................................................................................................... 25
5. Safety Information ......................................................................................................................................... 26
a) General Information .................................................................................................................................. 26
b) Before Commissioning ............................................................................................................................... 26
c) During Operation ...................................................................................................................................... 27
6. Notes on Batteries and Rechargeable Batteries ................................................................................................ 27
a) Rechargeable Batteries/Batteries for Transmitter ......................................................................................... 27
b) Flight Batteries ......................................................................................................................................... 28
7. General Notes on Mechanics Setup ................................................................................................................. 29
8. Mechanics Setup ............................................................................................................................................ 30
9. System Settings ............................................................................................................................................. 34
10. Programming the Speed Controllers ................................................................................................................ 38
11. Transport and Equipment Options ................................................................................................................... 40
12. Spare Parts Overview ..................................................................................................................................... 42
13. Maintenance and Care ................................................................................................................................... 42
14. Disposal ........................................................................................................................................................ 43
a) General Information .................................................................................................................................. 43
b) Batteries and Rechargeable Batteries ......................................................................................................... 43
15. Technical Data ............................................................................................................................................... 43
Page 24
24
1. Introduction
Dear Customer,
Thank you for purchasing this product.
This product complies with the statutory national and European requirements.
To maintain this status and to ensure safe operation, you as the user must observe these operating instructions!
These operating instructions are part of this product. They contain important notes on commissioning and handling. Also consider this if you pass on the product to any third party.
Therefore, retain these operating instructions for reference!
All company names and product names are trademarks of their respective owners. All rights reserved.
If there are any technical questions, contact:
Germany: Tel. no.: +49 9604 / 40 88 80
Fax. no.: +49 9604 / 40 88 48
E-mail: tkb@conrad.de
Mon. to Thur. 8.00am to 4.30pm
Fri. 8.00am to 2.00pm
2. Intended Use
This product is a model helicopter-like model designed for private use in the model construction area and the connected
operating times. Control of the model requires a suitable remote control system with 4 – 5 channels (not included).
Any use other than the one described above may damage the product. Moreover, it would involve dangers such as short
circuit, fire, electric shock, etc. Observe the safety information under all circumstances!
The product must not become damp or wet.
The product is not suitable for children under 14 years of age.
Observe all safety information in these operating instructions. They contain important information on handling of
the product.
You alone are responsible for the safe operation of the model!
Page 25
25
3. Product Description
The quadrocopter is delivered in components as a construction set and contains everything needed to assemble the
mechanics. The delivery also includes four brushless electrical motors, four speed controllers and a 3-axis gyro system.
Assembly of the mechanics and installation of the required drive and remote control components must be performed by the
user. Therefore, this model requires thorough experience in handling of models for completion and subsequent use. We
recommend that model construction beginners consult an experienced model pilot if they have any questions.
The model may be operated in halls or outside on days without or very little wind.
The quadrocopter is not suitable for children!
4. Scope of Delivery
• Quadrocopter mechanics
• 4 drive motors with 4 speed controllers
• 3-axis gyro system „GU-344 GYRO“
• Hexagon socket screwdriver
• Transport bag
• Manufacturer’s manual with assembly sketches
• Assembly instructions
For a precise overview of all components in the mechanics unit, see the 2nd page of the included manufacturer’s
manual.
To operate the model, a simple 4 - 5 channel remote control, a 2 - 4-cell LiPo flight battery with 3 mm gold contact
plug and a compatible LiPo charging device with LiPo balance charger are required.
Page 26
26
5. Safety Information
In case of damage caused by non-compliance with these operating instructions, the warranty/
guarantee will expire. We do not assume any liability for consequential damage!
We do not assume any liability for damage to property or personal injury caused by improper use or
the failure to observe the safety instructions! In such cases the warranty/guarantee will expire.
Normal wear caused during normal operation or a crash (e.g. broken chassis parts or propeller) are excluded from
the warranty and guarantee.
Dear customer, these safety instructions are not only for the protection of the product but also for your own safety
and that of other people. Therefore, read this chapter very carefully before taking the product into operation!
a) General Information
Caution, important note!
Operating the model may cause damage to property and/or individuals. Therefore, make sure that you are
sufficiently insured when using the model, e.g. by taking out private liability insurance.
If you already have private liability insurance, verify whether or not operation of the model is covered by your
insurance before commissioning your model.
Note: In some EU countries, you are required to have insurance for any flying models!
• The unauthorized conversion and/or modification of the product is prohibited for safety and approval reasons (CE).
• This product is not a toy and not suitable for children under 14 years of age.
• The product must not become damp or wet.
• If you do not have sufficient knowledge yet of how to operate remote-controlled models, please contact an experienced
model sportsman or a model construction club.
• Do not leave packaging material unattended. It may become a dangerous toy for children.
• The product has been designed for operation in an ambient temperature of between +10 ? und +40 ? and under normal
air humidity conditions in Central Europe in dry weather. Operation under different conditions can lead to changed
(material) properties and damage to the product as a result!
• The maximum permissible take-off weight of 2200 g should not be exceeded. A take-off weight in excess of this could lead
to damage to the propellers during operation and may cause a crash!
• Should questions arise that are not answered by these operating instructions, contact us (for contact information, see
chapter 1) or another expert.
b) Before Commissioning
• Strictly comply with the order indicated by the manufacturer for commissioning of the remote control system. Usually, the
transmitter must be connected to the speed controller first, and then the flight model’s flight battery.
If the model is not operated with a 2.4 GHz remove control system, observe that no other transmitter must be operated
at the same remote control channel at the same time.
• Check the functional reliability of your model and of the remote control system. Watch out for any visible damage such as
defective plug connections or damaged cables. All moving parts of the model must run smoothly but should not have any
play in their bearings.
• Charge the flight battery, which is necessary for operation, as well as the rechargeable battery that may be inserted in the
remote control according the manufacturer’s instructions.
• Before operation, always control the trim settings of the on the transmitter for the various steering directions and, if
necessary, adjust them.
• Select suitable ground to operate your model.
• Before every commissioning, perform a range check for your remote control system according to manufacturer information.
Page 27
27
c) During Operation
• Do not take any risks when operating the product! Your own safety and that of your environment depends completely on
your responsible use of the model.
• Improper operation can cause serious damage to people and property! Therefore make sure to keep a sufficiently safe
distance to persons, animals or objects during operation.
• Do not direct your model towards spectators or towards yourself.
• Fly your model only if your ability to respond is unrestricted. The influence of tiredness, alcohol or medication can cause
incorrect responses.
• Motors, speed controller and flight battery can heat during operation. Therefore, take a break of 5 to 10 minutes before
re-charging the flight battery or before flying with a possibly available spare flight battery.
• Never switch off the remote control (transmitter) while the model is in use. After landing, always disconnect the flight
battery from the speed controller first. It is only after this that the remote control may be turned off.
• Never switch off the transmitter during operation before disconnecting the flight battery from the speed controller.
• In case of a defect or a malfunction, remove the problem before using the model again.
• Never expose your model or the remote control to direct sunlight or excessive heat for an extended period of time.
6. Notes on Batteries and Rechargeable Batteries
Despite the fact that handling batteries and rechargeable batteries in daily life nowadays is a matter of fact, there are still
numerous dangers and problems involved. For LiPo/Lion rechargeable batteries in particular, various regulations must be
observed under any circumstances due to their high energy content (in comparison to conventional NiCd or NiMH rechargeable
batteries), because otherwise there is danger of explosion and fire.
Make sure to observe the following information and safety information when handling batteries or rechargeable batteries.
a) Rechargeable Batteries/Batteries for Transmitter
• Keep batteries/rechargeable batteries out of the reach of children.
• Do not leave any batteries/rechargeable batteries lying around openly. There is a risk of batteries being swallowed by
children or pets. If swallowed, consult a doctor immediately!
• Batteries/rechargeable batteries must never be short-circuited, disassembled or thrown into fire. There is a danger of
explosion!
• Leaking or damaged batteries/rechargeable batteries can cause chemical burns to skin at contact; therefore, use suitable
protective gloves.
• Do not recharge normal batteries. There is a risk of fire and explosion! Only charge rechargeable batteries intended for
this purpose. Use suitable battery chargers. Batteries (1.5V) are meant to be used once only and must be properly
disposed of when empty.
• When inserting batteries/rechargeable batteries or when connecting a battery pack or a charger, observe the correct
polarity (note plus/+ and minus/-). Wrong polarity may not only damage the transmitter, flight model and the rechargeable
batteries. There is a risk of fire and explosion.
• If the device is not used for an extended period of time (e.g. storage), remove the inserted batteries (or rechargeable
batteries) from the remote control to avoid damage from leaking batteries/rechargeable batteries.
• Recharge the NiCd or NiMH rechargeable batteries about every 3 months, as otherwise there may be a total discharge due
to self-discharge, which renders the rechargeable batteries useless.
• Always replace the entire set of batteries or rechargeable batteries. Never mix fully charged batteries/rechargeable
batteries with partially discharged ones. Always use batteries or rechargeable batteries of the same type and manufacturer.
• Never mix batteries and rechargeable batteries! Either use batteries or rechargeable batteries.
Page 28

28
b) Flight Batteries
Attention!
After the flight, the flight battery must be disconnected from the electronics system of the quadrocopter. Do not
leave the rechargeable flight battery connected to the model if the latter is not used (e.g. during transport or
storage). Otherwise, the LiPo flight battery may be fully discharged and is thus destroyed/unusable! There is also
a danger of malfunction due to interferences. The propellers could start up inadvertently and cause damage or
injury.
• Never charge the enclosed flight battery immediately after use. Always leave the LiPo flight battery to cool off first (at least
5-10 minutes).
• To charge LiPo rechargeable batteries, always use a LiPo charger and a LiPo equalizer/balancer.
• Only charge intact and undamaged batteries. If the external insulation of the rechargeable battery is damaged or if the
rechargeable battery is deformed or bloated, it must not be charged. In this case, there is immediate danger of fire and
explosion!
• Never damage the flight battery covering, do not cut the foil cover, do not probe the rechargeable battery with sharp
objects. There is a risk of fire and explosion!
• Remove the flight battery that is to be charged from the model and place it on a fire-proof support. Keep a distance to
flammable objects.
• Always charge rechargeable batteries at the current indicated by the manufacturer and observe that the permissible
maximum values are not exceeded.
• As the charger as well as the flight battery heat up during the charging process, it is necessary to ensure sufficient
ventilation. Never cover the charger or the flight battery! Of course, this also applies for all other chargers and rechargeable
batteries.
• Never leave batteries unattended while charging them.
• Disconnect the flight battery from the charger when the rechargeable battery is fully charged.
• Charges and rechargeable batteries must not get damp or wet. The charger and the flight battery must not become damp
or wet!
Attention!
Rechargeable LiPo batteries in particular are very susceptible to moisture due to the chemicals they contain!
Do not expose the charger or LiPo flight battery to high/low temperatures or to direct solar radiation. When
handling LiPo batteries, observe the special safety information of the battery manufacturer!
Page 29

29
7. General Notes on Mechanics Setup
Before starting to set up the mechanics, gather information on some important notes:
• Every quadrocopter is only as good as its assembly. Therefore, assemble it carefully and precisely according to instructions.
Incorrectly or wrongly assembled quadrocopters will not only fly much worse, they also pose a considerable safety risk.
• Comply with the assembly sketches in the manufacturer’s handbook precisely for assembly. Also observe that all metal
screw connections must be fastened with special threadlocker varnish (not included). In practice, however, it has proven
sensible to use light- to medium-hard threadlocker varnish for all screw connections to be secured. To be able to loosen
the screws again for servicing, we advise against using threadlocker varnish with high hardness.
• Open the respective packaging bag only when the components are actually needed for the respective assembly section.
For this, place the individual components in a separate component holder (empty freezer box, etc.).
• Only perform the individual assembly steps after you have understood all the pending activities and know precisely which
component must be attached where.
• The included screws have different lengths and heads. Ensure that you install the right screws in the right places.
• Only use the material included with the construction set. Do not try to modify the model with additional and unsuitable
assembly material. In case of defect, replace the parts and components concerned only with genuine parts from the spare
parts list.
• Use high-quality assembly tools like a hexagon wrench with precisely ground and hardened screw drives. Cheap tools
tend to overturn and damage the screw heads.
• Install the quadrocopter on a suitable underground (soft cotton clock, etc.) to protect the mechanics unit from scratches
and damage.
Page 30

30
8. Mechanics Setup
Take the manufacturer’s manual with the assembly sketches and start assembly of your quadrocopter according to the
drawings starting on page P.1.
Page P.1
Upper figure:
Take the floor plate of the central frame and screw the four inner boom holders with the rotary bearings on according to the
figure. Comply with the manufacturer’s drawing precisely. The pins for the boom tube latch must be at the bottom near the
floor plate.
Important!
Tighten the screws (Ø 3 x 8) only until the boom holders can still be rotated around the bearing points.
Lower figure:
Put the cover plate of the central frame onto the rotating bearings of the four boom holders and screw the plate on with four
screws (Ø 3 x 8). It still must be possible to turn the boom holders around their bearing points.
Put the 6 spacer bolts (2 x 3.5 x 22 mm) between the two frame plates and screw the plates on with twelve screws M2 x 5.
Use low-strength threadlocker varnish for the screw connection.
Page P.2
Upper figure:
Push the four outer boom holders between the frame plates according to the figure and attach the boom holders with four
screws from the top (Ø 3 x 8).
Important!
Insert the boom holders so that the larger hole for the clamping screw head is aligned upwards (see upper figure,
page P.7).
Lower figure:
The four lower screws (Ø 3 x 8) are installed with one spacer ring (3 x 4 x 1 mm) each. Then insert the four dampening
rubbers for the GYRO carrier plate.
Page P.3
Upper figure:
Insert the landing leg spring into one of the two motor gondola halves and screw the gondola halves together according to
the figure. Do not tighten the screws firmly yet.
Lower figure:
Insert the motor in the motor gondola according to the figure and screw it on slightly with four screws
(M3 x 4). Use medium-strength threadlocker varnish and do not tighten the screws firmly yet.
Page 31

31
Page P.4
Upper figure:
Connect the three motor connection lines to the connection lines of the speed controllers.
Important!
Connect the cables/plugs of the same colours for motors 1 and 3.
Swap the red and black cable/plug of motors 2 and 4 so that the motors rotate in opposite directions.
For the precise motor assignment, see the lower figure on page P.7. Label the individual motor gondolas with numbers
1 - 4 (also see top figure on page P.6).
Lower figure:
To easily insert the speed controller into the boom tube, apply a little lubricant to the shrink hose of the speed controller.
When pushing in the boom tube, observe that the groove in the tube is aligned laterally. Push the boom tube into the motor
gondola to the stop. The motor gondola pin then interlocks with the groove so that the motor gondola boom tube cannot
turn.
Page P.5
Upper figure:
When the boom tube is pushed into the motor gondola correctly, tighten the motor gondola screws and the motor attachment
screws.
Then insert the lower motor gondola cover and push the cover flap onto the holding pin for the safety ring.
Lower figure:
The manufacturer offers the quadrocopter 500X without a drive set as well and therefore has included a note regarding the
drive set of the Quadrocopter 330X-S into the assembly instructions of the 500X:
If you use the motors and the 10 A speed controllers of the GAUI quadrocopter „330 X-S“, the power connections of the
speed controllers must be extended. You may do this on your own or by using an optionally available extension cable with
the GAUI number: 222170.
For motors 1 and 3, the cables of the same colour must be connected. Swap the red and black cables of motors 2
and 4 so that the motors rotate in opposite directions. The plug connections then must be secured with an adhesive stripe.
Page P.6
Upper figure:
The figure shows the four installed boom arms with the label 1 - 4.
Lower figure:
Put the central frame on the table according to the figure so that the grooved opening in the cover plate („mark“) points to
the right (in model flight direction).
Push the boom arm with number 1 into the two circular boom holders from the lower right.
Important!
Observe that the pin of the inner boom holder interlocks precisely with the boom tube groove. The resulting slight
slant of the motor shafts by approx. 6° is intended and not a processing error of the boom tubes.
Page 32

32
Page P.7
Upper figure:
The three-wire connection line with the servo plug is guided outward through the central bore of the cover plate. The two
power supply lines are guided outward through the central bore of the floor plate.
The clamping screw (Ø 3 x 8) of the outer boom holder is inserted from above and tightened firmly. The clamping screw (Ø
3 x 8) of the inner boom holder is inserted through a slot in the floor plate from below and tightened firmly.
Lower figure:
Attach the remaining three boom arms according to the same method. Make sure to insert the booms according to the
labels. An imagined centre line between motor booms 1 and 4 corresponds to the forwards flight direction during later
operation of the model.
Align the four boom arms at a 90° angle to each other according to the figure and tighten the upper attachment screw of
the outer boom holder.
Page P.8
Upper figure:
Screw the four carrier pins at the GYRO carrier plate with the screws M2 x 3.2. Use low-strength threadlocker varnish.
Glue four foam pads to the bottom of the 3-axis gyro system „GU-344 GYRO“. Only use the pads included with the „GU-344
GYRO“. Since the foam pads are damaged during disassembly, the „GU-344 GYRO“ has a sufficient number of spare pads
included.
Important!
The attachment of the 3-axis gyro system „GU-344 GYRO“ depends on the receiver used:
If the receiver has laterally aligned servo connections, it is installed on the GYRO carrier plate together with the GYRO
according to the figure. Receiver installation may take place with double-sided adhesive tape (servo tape) or self-adhesive
hook-and-loop tape.
If the receiver has upwards-pointing servo connections (see lower figure, page P.9), the cover hood would no longer fit. In
this case, the receiver is attached to the cover plate of the central frame and the 3-axis gyro system „GU-344 GYRO“ is
installed centrally on the GYRO carrier plate.
Lower figure:
The upper one of the two figures shows connection of the receiver.
• The plug with the 3-wire cable must be connected to the receiver output for the aileron/roll function (AILE).
• The plug with the red cable must be connected to the receiver output for the elevator/nod function (ELEV).
• The plug with the orange cable must be connected to the receiver output for the throttle/pitch function (THRO).
• The plug with the yellow cable must be connected to the receiver output for the rudder/tail function (RUDD).
• The plug with the green cable must be connected to the receiver output for the landing gear/gyro function (GEAR/GAIN).
If you use a 4-channel system for control, leave the plug with the green cable unused. Gyro sensitivity is then set right at the
„GU-344 GYRO“ (also see page P.12).
The lower one of the two figures shows connection of the four speed controllers at the 3-axis gyro system GU-344 GYRO.
Connect the four speed controllers to the „GU-344 GYRO“ according to the drawing. For the precise motor numbering, see
the figures on page P.7 or P.9.
Important!
Ensure correct polarity of the connection plugs. The cable with the minus pole (-) must be connected to the top,
the cable for the control signals (S) to the bottom!
Page 33

33
Page P.9
Upper figure:
Insert the four carrier pins of the GYRO carrier plates into the rubber buffers of the cover plate. Always observe the
quadrocopter’s flight direction. After correct assembly, the arrow on the top of the GU-344 GYRO points forward in parallel
to the flight direction (imagined centre line between boom arm 1 and 4).
Lower figure:
The figure shows assembly of the GU-344 GYRO and receiver when the receiver has servo connections that point upwards.
Only this provides the cover hood of the central frame with sufficient space.
Page P.10
Upper figure:
Pull the power supply lines of the four speed controllers from the central frame laterally according to the figure and connect
the two 4 in 1 voltage distributors.
Cut two strips from the included hook-and-loop tape’s hook part and glue them to the bottom of the central frame.
Lower figure:
Glue the loop part of the hook-and-loop page onto the flight battery and secure the installed flight battery with the included
narrow hook-and-loop strips. The hook-and-loop strip is pulled through the two opening slots in the floor plate.
Important!
When using large and heavy rechargeable batteries, we recommend using wide hook-and-loop binders instead of
the narrow hook-and-loop strip to warrant sufficient attachment of the battery.
Page P.11
Upper figure:
Attach the propeller tappet on the motor shafts. The grub screws of the propeller tappets must interlock with the prepared
groove of the motor shaft. Use low-strength threadlocker varnish to fasten the grub screws.
Important!
When installing the propellers, observe that propellers at motors 2 and 4 turn clockwise (label 10B) and the
propellers at motors 1 and 3 turn counter-clockwise (label 10A).
Then attach the included yellow sticker to the boom arms 1 and 4 that point forwards in flight direction to get a visual display
about the current alignment of the quadrocopter when flying.
Lower figure:
The propeller alignment is not perfectly horizontal! The slight slant of the propellers of 6° (see figure) is intended and
improves the flight characteristics of the quadrocopter.
The cover hood of the central frame is put onto the boom arms from the top for completion. The pointy part should
point forwards in flight direction.
Page 34

34
9. System Settings
Page P.12
1. Model selection
If the remote control transmitter used by you permits switching between helicopter and wing models, select the model type
„flight model“ since the quadrocopter does not need any mixer function in the transmitter.
2. Selection of the direction functions
If one you use one of the transmitters from the table, you may now set the required direction function of the four control
channels (NOR = regular function direction; REV = reverse function direction).
GAUI Futaba JR Hitech
AILE NOR NOR REV NOR
ELEV NOR NOR REV REV
THRO REV REV NOR NOR
RUDD NOR NOR REV NOR
If you use a transmitter from a manufacturer not listed, you need to determine the required direction functions in practical
tests (see page P.13 to P.15).
3. Setting options at the 3-axis gyro system „GU-344 GYRO“
The 3-axis gyro system „GU-344 GYRO“ can be set with a setting controller and DIP switches or by remote control.
a) Setting the „GU-344 GYRO“ Manually
If the plug with the green connection cable is not connected to the receiver, the setting controller „A“ and the DIP switch „1“
at the „GU-344 GYRO“ are active.
• Turn the setting controller „A“ from the left stop (minimum = position 4:30 hours) to the right by 90° to get the basic
setting (position 7:30 hours) of the gyro sensitivity for the first test flights. Use a suitable mini screwdriver for this. The
further the dial is turned to the right, the higher the stabilising effect of the 3-axis gyro.
The 3-axis gyro system „GU-344 GYRO“ also has 2 different flight settings that can be selected with the DIP switch „1“.
• If the DIP switch „1“ is switched to the upper position „CRU“ with the mini screwdriver, the control LED lights up red and
the quadrocopter behaves like a regular model helicopter. This setting is recommended for experienced model helicopter
pilots.
• If the DIP switch „1“ is switched to the lower position „HOV“ with the mini screwdriver, the control LED lights up green and
the quadrocopter is suitable for beginners learning hover flight. In this setting, the 3-axis gyro system receives the control
signals of the transmitter slightly and an exponential share is mixed in (see charts in the middle of page P.12). This permits
finer control of the quadrocopter in hover flight.
Use the DIP switch „2“ to set two different flight alignments of the quadrocopter.
• If the DIP switch „2“ is switched to the upper position, the X-flight alignment is activated. The centre between the motor
boom arms 1 and 4 is at the front in flight direction.
• If the DIP switch „2“ is switched to the lower position, the cross flight alignment is activated.
Attention, important!
Since the Quadrocopter „500X-S“ is only intended for the X-flight alignment, the DIP switch „2“ always has to be
in the upper position and must not be switched (also see page P.16).
Page 35

35
b) Setting the „GU-344 GYRO“ by Remote Control
If the plug with the green connection cable is connected to the receiver, the setting controller „A“ and the DIP switch „1“ at
the „GU-344 GYRO“ are deactivated. The gyro sensitivity settings and switching of the flight settings are only possible via
the transmitter. A switch, slider or dial can be used as control encoder at the transmitter; it must be coupled to the
corresponding receiver output (plug with the greed connection cable).
• Depending on the direction in which the control encoder is operated, you may switch between „CRU“ and „HOV“ flight
settings.
In the „CRU“ position, the control LED lights up red and the quadrocopter behaves like a regular model helicopter. This
setting is recommended for experienced model helicopter pilots.
• In the „HOV“ position, the control LED lights up green and the quadrocopter is suitable for beginners learning hover flight.
The required gyro sensitivity can be set at the remote control using the EPA or travel function (servo path limiter). As basic
setting, we recommend reducing the servo path on either side of the control encoder, and therefore for both flight
settings, to 50%. By increasing or reducing the set value, you may set an individual gyro sensitivity.
In contrast to manual setting, switching by remote control will not reduce the countersignals of the transmitter
and also not apply any expo share (see sketch at the lower right). On demand, the required EPA and EXPO
settings of the control channels must be performed right at the transmitter.
Page P.13
Adjusting the speed controllers
Upper figure:
For correct and even function of the motors, each individual speed controller must be adjusted to the control signals of the
transmitter.
Important:
Setting requires decommissioning of the 3-axis gyro system „GU-344 GYRO“. Disconnect the plug with the green
cable for the landing gear/gyro function (GEAR/GAIN) from the receiver if it was connected and turn the controller
„A“ to the left stop (minimum = position 4:30 hours) with a mini screwdriver.
• Then switch on the transmitter and set the trimming function of all channels to the middle position. The throttle path at
the transmitter should be set to 100%.
• Then move the control lever for the throttle/pitch function to the top-most position.
The figures on this and the following pages show a transmitter in mode 1, where the throttle/pitch control is
performed with the right control lever. If you operate the throttle/pitch control with the left control lever (modes
2 or 4), the left control lever must be put in the top position accordingly.
Lower figure:
• Connect the flight battery to the quadrocopter. The motor issues three sounds in increasing height and then two separate
sounds.
• Move the control lever for the throttle/pitch function to the bottom-most position right after this. The motor then emits
two brief and a longer tone after a short break.
• Programming to the transmitter signal is completed and the flight battery can be disconnected.
If a sixth, seventh or eighth sound is emitted after the 5 sounds upon connection of the flight battery (2-, 3- or 4cell LiPo flight battery), disconnect the flight battery again at once and operate the reverse function of the throttle/
pitch control lever at the transmitter. Then repeat the teaching process.
If the motor issues a quick sequence of brief sounds without interruption after the three sounds of increasing height, the
controller did not review any transmitter signal or the control lever for the throttle/pitch function is not in the end position.
To see if the speed controller has taught in the transmitter signals correctly, teach in each speed controller separately.
Once you have performed teaching in of all four speed controllers, connect the plug with the green cable for the landing
gear/gyro function (GEAR/GAIN) to the receiver again and turn the controller „A“ by 90° to the right to the initial position
(position 7:30 hours) again with a mini screwdriver.
Page 36

36
Page P.14
Function test before the first flight
Upper figure:
• Push the control lever for the throttle/pitch function to the bottom position and switch on the transmitter.
• Connect the flight battery to the quadrocopter and do not move the model until you can hear the activation sequence. For
the activation sound sequence, the motors initially emit three sounds at increasing height, then two, three or four
individual sounds (depending on number of cells of the LiPo battery) at the same height and then one more single sound.
• Now your quadrocopter is ready to start.
• Push the control lever for the throttle/pitch function slightly forward until the motors start up and use the figure to check
the individual propellers for correct rotating direction. If a motor rotates in the wrong direction, two of the three motor
connection cables must be swapped.
Depending on remote control mode used, the actually required level movement may deviate from the ones
indicated in the instructions.
Lower figure:
Upper sketch:
Move the control lever of the elevator/nod function slightly forward and check if the quadrocopter tips forward slightly. If the
quadrocopter reacts precisely reversed, the reverse function of the nod control must be switched at the transmitter.
Upper sketch:
Moving the control lever for the rudder/tail function to the right must lead to the quadrocopter turning clockwise when
viewed from the top. If the quadrocopter reacts precisely reversed, the reverse function for the tail control must be switched
at the transmitter.
Page P.15
Upper figure:
Move the control lever of the aileron/roll function slightly forward and check if the quadrocopter tops to the right slightly. If
the quadrocopter reacts precisely reversed, the reverse function for the roll control must be switched at the transmitter.
Lower figure:
After the correct movement direction of the quadrocopter to the control commands is inspected/corrected, you may move
the throttle/pitch function control lever forward until the quadrocopters hovers at about 30 cm height. If the model swings
or rocks, increase gyro sensitivity and thus flight stability. For the precise procedure, see page P.12.
Page 37

37
Page P.16
Important notes:
• The neutral position of the 3-axis gyro system „GU-344 GYRO“ may deviate a little. In this case, fine adjustment must be
performed using the trimming or subtrimming at the remote control transmitter.
• It is good if the control path for the throttle/pitch function does not exceed 80% so that the 3-axis gyro system does not
leave the control range when stabilising the flight position even at maximum pitch control. Therefore, the throttle/pitch
function should be reduced from 100% to 75% after setting the speed controllers.
• Observe the remaining capacity of the flight battery. If the battery is discharged too far, it will be damaged and the
quadrocopter cannot be controlled anymore.
• High gyro stability ensures stable hover flight. Low gyro stability decreases flight stability but increases the quadrocopter’s
agility.
Lower figure:
The 3-axis gyro system „GU-344 GYRO“ offers the possibility of switching from X to cross alignment.
Important!
Since the quadrocopter „500X-S“ is, however, only intended for X-alignment, alignment switching can be used only
for the quadrocopter „330X-S“, which is also shown in the figure.
Page 38

38
10. Programming the Speed Controllers
Page P.17
1. Call programming mode
Switch on the transmitter and move the throttle control lever to the full throttle position.
Connect the rechargeable battery to the speed controller. The motor connected to the controller emits 3 brief sounds with
increasing pitch and two brief separate sounds after two seconds.
After another 5 seconds, the connected motor emits 5 brief sounds with increasing pitch.
The controller is now in programming mode.
2. Call menu item
In programming mode, you will now hear 8 groups of different signals that are continually repeated in a loop. After the last
sound sequence (2 x long), the 5 brief sounds with increasing tone height will be audible again before the loop starts again.
Assignment of the respective signal sounds to the menu items can be taken from the following table.
No. Sound sequence Menu item or function
1 1 x brief Braking
2 2 x brief Battery type
3 3 x brief Cut-off mode
4 4 x brief Cut-off switching threshold
5 1 x long Start mode
6 1 x long, 1 x brief Timing
7 1 x long, 2 x brief Call default settings
8 2 x long Exit programming mode
To call a specific menu item, slide the throttle control lever to the bottom-most position (motor off) within 2 seconds of the
respective sound signal.
The speed controller thus switches to setting mode for the menu item called.
3. Adjusting values
In the setting mode, you will now also hear different signals (see top line of the following table), which repeat in a
continuous loop. The point where the sequence starts again depends on the menu item called, since only those sounds are
emitted for which a value is stored as well.
After the sound signal for the desired value, slide the throttle control lever from the bottom-most position (motor off) to the
full throttle position at once.
4 sounds (high, low, high, low) are emitted as confirmation for the stored value.
The speed controller returns to the programming mode, where you can call and set the next menu item if required.
1 x brief 2 x brief 3 x brief
Braking Off On
Battery type Lithium NiMH/NiCd
Cut-off mode turn down switch off
Cut-off switching threshold low medium high
Start mode normal soft very soft
Timing low medium high
Page 39

39
4. Leaving the programming mode
If the controller is in programming mode, wait until menu item 8 is acoustically displayed. Then slide the throttle control
lever from the full throttle position to the bottom-most position (motor off) within 3 seconds of the sound signal. Depending
on cell number, 2 – 3 brief sounds are emitted, followed by a slightly longer sound. The controller is now ready for operation.
After activation of the factory settings, the controller then also leaves the programming mode.
Once the controller is in setting mode and you have stored a new value, pull the throttle control lever back to the bottom
position (motor off) right after the confirmation sound sequence. Depending on cell number, 2 – 3 brief sounds are emitted,
followed by a slightly longer sound. The controller is now ready for operation.
Page 40

40
11. Transport and Equipment Options
Page P.18
Upper figure:
For the quadrocopter to need little space during transport or storage, the front and rear boom arms can be folded in.
Loosen the upper attachment screws of the outer boom holders for this, fold in the arms and screw in the screws again.
Lower figure:
For transporting the quadrocopter in the carry bag, remove the propeller tappets, including propellers, from the motor
shafts and put them in the side pocket.
Page P.19
Upper figure:
If required, you may attach a safety frame to the quadrocopter to avoid contact between the propellers and persons or
objects.
Connect the four fibreglass rods into a ring with the included plastic connector. The four aluminium tubes serve as spacers
and are also pushed into the plastic connectors.
Lower figure:
Remove the cover caps of the holding pins at the motor gondolas and push the aluminium tubes of the safety frame over the
pins.
Page P.20
Upper figure:
For equipment of the quadrocopter with a camera, you may install the optional camera holder with the GAUI number:
210705 and landing legs with the GAUI numbers: 210910 and 222231. The figure illustrates mounting of the respective
components.
Lower figure:
The figure shows mounding of a miniature camera for FPV flights. The camera module, electronics and video transmitter are
installed on a special carrier plate that is screwed to the floor plate of the central frame. The camera lens looks out through
a cover hood opening when mounted like this.
Page P.21
Upper figure:
The figure illustrates mounting of the optional LED lighting set. The cables to the respective motor gondolas are pulled into
the boom tubes with a metal wire. After mounting of the LEDs with double-sided adhesive tape, the present motor gondola
covers must be replaced by transparent ones. The flashing electronics is connected to the receiver and stowed between the
two central frame plates.
Lower figure:
The figure shows mounting of the optional carrier platform with the GAUI number: 222202, which is attached to the cover
plate of the central frame with four spacers.
Page 41

41
Page P.22
Weight/power overview
The quadrocopter can be easily flown with a 2-cell LiPo rechargeable battery with 1400 - 2000 mAh. If, however, the takeoff weight is above 900 g, a 3-cell LiPo battery should be used. The following table offers an overview of take-off weight and
power intake to select the matching battery.
Take-off weight (g) Rechargeable Power intake (W) Weight-/power ratio (g/W)
Battery
800 2S 80 10
900 2S 92 9,8
1000 3S 113 8,8
1100 3S 129 8,5
1200 3S 146 8,2
1300 3S 163 8,0
1400 3S 182 7,7
1500 3S 202 7,4
1600 3S 219 7,3
1700 3S 238 7,1
1800 4S 276 6,5
1900 4S 306 6,2
2000 4S 329 6,1
2100 4S 343 6,1
2200 4S 370 6,0
The quadrocopter weight without battery is about 670 g.
Calculation of the expected flight time:
If the quadrocopter is to carry a camera at 350 g and the battery used (3S 2000 mAh) weighs 150 g, the load capacity is 500
g. The total flight weight is then at 1170 g and the power intake is approx. 141 W according to the table. The flight time can
now be calculated as follows:
Battery voltage (11.1 V) x current (2 A) x discharge time 60 (min) = 1332 (Wmin)
(1332 Wmin/141 W) x 75% (useful capacity) = 7,1 min
The expected flight duration is about 7.1 minutes.
If a second battery (3S 2000 mAh) is installed in parallel to extend the flight time, the take-off weight increases to 1320 g
and the power intake to 167 W. The new flight time is calculated as follows:
Battery voltage (11.1 V) x current (4 A) x discharge time 60 (min) = 2664 (Wmin)
(2664 Wmin/167 W) x 75% (useful capacity) = 12,0 min
The expected flight duration is about 12 minutes.
The calculations refer to regular round flight. The power emission of the speed controllers may be 3 to 4 times
higher if the maximum rising output is run. Carefully move towards the flight times that can be achieved and check
the remaining capacity of the battery after each flight to prevent deep discharge during the flight in any case. This
would damage the battery and cause a quadrocopter crash.
Page 42

42
12. Spare Parts Overview
Page P.23
Pages P.23 and P.24 show the spare parts available from the manufacturer with their respective designations and the
associated spare parts numbers.
Attention!
Please observe that the 6-digit numbers in the manufacturer’s manual are no Conrad order numbers!
For the current list of spare parts with the corresponding Conrad Electronic order numbers, see www.conrad.com, in the
download area of the model.
13. Maintenance and Care
To warrant operational safety of your model, regular inspections and maintenance are required.
1. Check if any screws have loosened or components are no longer firmly screwed or glued on.
2. Observe the clean concentric dunning and firm seat of the propellers. The propellers must not show any visible damage.
3. Check that the motors run smoothly. If manual rotation causes a „rolling“ or „gnashing“ feeling, the respective motor
must be replaced.
4. Check the correct and secure fit of the adhesive pads and 3-axis gyro system. Loose or wobbly gyro systems lead to
uncontrolled movements of the quadrocopter.
5. Check all cables. Especially observe the connections between the speed controllers and the motors.
Important!
If you have to replace any damaged or worn parts, only use genuine replacement parts in your quadrocopter.
The spare parts list is located on our website www.conrad.com in the download section to the respective product.
Alternatively, you may also request the spare parts list on the phone. For the contact data, please refer to the top of these
instructions in the chapter „Introduction“.
Page 43

43
14. Disposal
a) General Information
At the end of its service life, dispose of the product according to the relevant statutory regulations.
b) Batteries and Rechargeable Batteries
You as the end user are required by law (Battery Ordinance) to return all used batteries/rechargeable batteries. Disposing
of them in the household waste is prohibited!
Batteries and rechargeable batteries containing hazardous substances are marked with adjacent symbol to indicate
that disposal in the household waste is prohibited. The descriptions for the respective heavy metal are: Cd=cadmium,
Hg=mercury, Pb=lead (the names are indicated on the battery/rechargeable battery e.g. below the rubbish bin
symbol shown to the left).
You may return used batteries/rechargeable batteries free of charge at the official collection points of your community, in
our stores, or wherever batteries/rechargeable batteries are sold.
You thus fulfil your statutory obligations and contribute to the protection of the environment.
15. Technical Data
Fuselage dimensions (Ø x H) ................................................... 500 x 120 mm
Propeller-Ø ............................................................................. 254 mm
Empty weight (without rechargeable battery) ........................... approx. 670 g
Maximum take-off weight (including rechargeable battery)........ approx. 2200 g
Recommended flight battery ................................................... (2S 1400 mAh) - (4S 2000 mAh)
Required remote control.......................................................... 4 - 5 channels
Page 44

44
Table des matières
Page
1. Introduction .................................................................................................................................................. 45
2. Utilisation conforme ....................................................................................................................................... 45
3. Description du produit .................................................................................................................................... 46
4. Étendue de la livraison ................................................................................................................................... 46
5. Consignes de sécurité .................................................................................................................................... 47
a) Généralités ............................................................................................................................................... 47
b) Avant la mise en service ............................................................................................................................ 47
c) Durant le fonctionnement .......................................................................................................................... 48
6. Remarques spécifiques aux piles et batteries ................................................................................................... 48
a) Batteries / piles de l’émetteur .................................................................................................................... 48
b) Batteries de propulsion.............................................................................................................................. 49
7. Remarques générales à propos du montage du mécanisme .............................................................................. 50
8. Montage du mécanisme ................................................................................................................................. 51
9. Paramètres du système .................................................................................................................................. 55
10. Programmation des régulateurs de vitesse ...................................................................................................... 59
11. Transport et équipements optionnels............................................................................................................... 61
12. Vue d’ensemble des pièces de rechange ......................................................................................................... 62
13. Maintenance et entretien ................................................................................................................................ 62
14. Élimination .................................................................................................................................................... 64
a) Généralités ............................................................................................................................................... 64
b) Piles et batteries ....................................................................................................................................... 64
15. Caractéristiques techniques ............................................................................................................................ 64
Page 45

45
1. Introduction
Chère cliente, cher client,
Nous vous remercions pour l’achat du présent produit.
Ce produit est conforme aux exigences légales, nationales et européennes.
Afin de maintenir l’appareil en bon état et d’en assurer un fonctionnement sans danger, l’utilisateur doit impérativement
respecter le présent mode d’emploi !
Le présent mode d’emploi fait partie intégrante du produit. Il contient des remarques importantes pour la mise en
service et la manipulation du produit. Tenez compte de ces remarques, même en cas de cession de ce produit à
un tiers.
Conservez le présent mode d’emploi afin de pouvoir le consulter à tout moment !
Tous les noms d’entreprises et appellations de produits contenus dans ce mode d’emploi sont des marques déposées des
propriétaires respectifs. Tous droits réservés.
Pour toute question technique, veuillez vous adresser à :
France : Tél. : 0892 897 777
Fax : 0892 896 002
e-mail : support@conrad.fr
Du lundi au vendredi de 8h00 à 18h00, le samedi de 8h00 à 12h00
Suisse : Tél. : 0848/80 12 88
Fax : 0848/80 12 89
e-mail : support@conrad.ch
Du lundi au vendredi de 8h00 à 12h00 et de 13h00 à 17h00
2. Utilisation conforme
Ce produit est un modèle réduit similaire à un modèle réduit d’hélicoptère conçu pour une utilisation privée dans le domaine
du modélisme et pour les durées de fonctionnement inhérentes. Une télécommande compatible à 4 ou 5 canaux (non
fournie) est requise pour le pilotage du modèle réduit.
Toute utilisation autre que celle stipulée ci-dessus peut endommager le produit et engendrer des dangers comme par ex.
court-circuit, incendie, électrocution, etc. Impérativement respecter les consignes de sécurité !
Le produit ne doit ni prendre l’humidité ni être mouillé.
Ce produit ne convient pas aux enfants de moins de 14 ans.
Observez toutes les consignes de sécurité stipulées dans le présent mode d’emploi. Celles-ci contiennent des
informations importantes relatives à l’utilisation du produit.
Vous êtes seul responsable de l’utilisation sans danger du modèle réduit !
Page 46

46
3. Description du produit
Le Quadrocopter est livré sous forme de kit de montage en pièces détachées et contient tous les composants requis pour le
montage du mécanisme. Quatre moteurs électriques Brushless, quatre régulateurs de vitesse et un système gyroscopique
à 3 axes sont également fournis.
Le montage du mécanisme ainsi que l’assemblage des composants d’entraînement et de commande à distance sont à la
charge de l’utilisateur. La finalisation et l’utilisation consécutive de ce modèle réduit impliquent donc des connaissances
solides en rapport avec les modèles réduits. Nous recommandons aux débutants en modélisme de faire appel à un pilote de
modèle réduit expérimenté pour les questions liées à l’assemblage et pour le premier vol.
Le modèle réduit est conçu pour une utilisation en salle et peut également être utilisé en plein air à condition qu’il n’y ait pas
ou peu de vent.
Le Quadrocopter ne convient pas pour les enfants !
4. Étendue de la livraison
• Mécanisme du Quadrocopter
• 4 moteurs d’entraînement avec 4 régulateurs de vitesse
• Système gyroscopique à 3 axes « GU-344 GYRO »
• Tournevis pour six pans creux
• Sac de transport
• Manuel du fabricant avec croquis de montage
• Notice de montage
Une vue d’ensemble détaillée de toutes les pièces mécaniques est disponible en page 2. du manuel du fabricant
fourni.
Le fonctionnement du modèle réduit nécessite une télécommande simple à 4 ou 5 canaux, une batterie de
propulsion LiPo à 2 à 4 cellules avec fiches à contacts dorés ainsi qu’un chargeur LiPo approprié avec équilibreur
LiPo.
Page 47

47
5. Consignes de sécurité
Tout dommage résultant du non-respect du présent mode d’emploi entraîne l’annulation de la
garantie légale / du fabricant. Nous déclinons toute responsabilité pour les dommages consécutifs !
De même, nous n’assumons aucune responsabilité en cas de dommages matériels ou corporels
résultant d’une utilisation de l’appareil non conforme aux spécifications ou du non-respect des
présentes consignes de sécurité ! De tels cas entraînent l’annulation de la garantie ou garantie
légale.
La garantie et la garantie légale ne couvrent pas les traces d’usure normales résultant du fonctionnement normal
et des dommages causés par un accident (par ex. pièces du châssis ou hélices cassées).
Chère cliente, cher client, ces mesures de sécurité servent non seulement à la protection du produit, mais également
à assurer votre propre sécurité et celle d’autres personnes. Veuillez donc très attentivement lire ce chapitre avant
la mise en service du produit !
a) Généralités
Attention, remarque importante !
L’utilisation du modèle réduit peut occasionner des dommages matériels et / ou corporels. Veillez donc impérativement
à ce que l’utilisation du modèle réduit soit couverte par votre assurance, par ex. par une assurance responsabilité
civile.
Si vous avez déjà souscrit une assurance responsabilité civile, veuillez vous renseigner auprès de votre compagnie
d’assurance si l’utilisation du modèle réduit est bien couverte par cette assurance avant la mise en service du
modèle réduit.
Veuillez noter : une assurance est obligatoire pour tous les modèles réduits d’avion dans divers pays de l’Union
européenne !
• Pour des raisons de sécurité et d’homologation (CE), il est interdit de transformer et / ou de modifier soi-même le produit.
• Ce produit n’est pas un jouet et ne convient pas aux enfants de moins de 14 ans.
• Le produit ne doit ni prendre l’humidité ni être mouillé.
• Au cas où vous n’auriez pas de connaissances suffisantes concernant l’utilisation de modèles réduits télécommandés,
veuillez vous adresser à un modéliste expérimenté ou à un club de modélisme.
• Ne laissez pas traîner le matériel d’emballage. Il pourrait devenir un jouet dangereux pour les enfants.
• Le produit a été développé pour le fonctionnement à une température ambiante comprise entre +10 °C et +40 °C et pour
une humidité de l’air normale en Europe centrale par temps sec. Un fonctionnement en dehors des conditions mentionnées
peut modifier les propriétés (des matériaux) et donc endommager le produit !
• Ne pas dépasser un poids au décollage de max. 2 200 g. En cas de poids au décollage supérieur, les hélices peuvent être
endommagées durant la marche, ce qui peut causer la chute de l’appareil !
• Au cas où vous auriez des questions auxquelles le mode d’emploi n’a pu répondre, veuillez nous contacter (coordonnées,
voir chapitre 1) ou demandez l’avis d’un autre spécialiste.
b) Avant la mise en service
• Lors de la mise en service de la télécommande, respectez scrupuleusement l’ordre indiqué par le fabricant. En général, il
faut toujours d’abord raccorder l’émetteur puis directement la batterie de propulsion du modèle réduit d’avion au régulateur
de vitesse.
Dans la mesure où vous n’utilisez pas le modèle réduit avec une télécommande 2,4 GHz, veillez à ne pas simultanément
utiliser un autre émetteur sur le même canal de commande à distance.
• Assurez-vous de la sécurité de fonctionnement de votre modèle réduit et de la télécommande. Assurez-vous alors de
l’absence de dommages visibles tels que connecteurs à fiches défectueux ou câbles endommagés. Toutes les pièces
mobiles doivent être facilement manœuvrables, mais ne doivent pas avoir de jeu dans le logement.
• La batterie de propulsion requise pour le fonctionnement et celles éventuellement utilisées dans la télécommande doivent
être rechargées conformément aux instructions du fabricant.
Page 48

48
• Avant chaque mise en service, il faut contrôler et éventuellement ajuster les réglages de le la compensation sur l’émetteur
pour les différentes directions de marche.
• Choisissez un terrain approprié pour l’utilisation de votre modèle réduit.
• Avant chaque mise en service, effectuez un test de portée de la télécommande conformément aux instructions du
fabricant.
c) Durant le fonctionnement
• Ne prenez aucun risque durant l’utilisation du produit ! Votre sécurité personnelle et celle de votre entourage dépendent
exclusivement de votre comportement responsable durant l’utilisation du modèle réduit.
• Une utilisation incorrecte peut provoquer de graves dommages matériels et des dommages corporels ! Pour cette raison,
veillez lors de la mise en service à maintenir une distance suffisante par rapport aux personnes, animaux et objets.
• Ne pilotez jamais le modèle réduit directement vers les spectateurs ou vers vous-même.
• Pilotez uniquement votre modèle réduit lorsque vous êtes en pleine possession de vos moyens. La fatigue, l’alcool et les
médicaments peuvent fausser vos réactions.
• Le moteur, le régulateur de vitesse et la batterie de propulsion peuvent chauffer durant le fonctionnement. Pour cette
raison, effectuez une pause de 5 à 10 minutes avant de recharger la batterie de propulsion ou de poursuivre le vol avec
une batterie de propulsion de rechange le cas échéant.
• Laissez toujours la télécommande (émetteur) allumée tant que le modèle réduit est en service. Après l’atterrissage,
déconnectez toujours d’abord la batterie de propulsion du régulateur de vol. Vous pouvez ensuite éteindre la télécommande.
• N’éteignez jamais l’émetteur pendant le fonctionnement sans déconnecter auparavant la batterie de propulsion du régulateur
de vitesse.
• En présence d’un défaut ou d’un dysfonctionnement, d’abord éliminer la cause de la panne avant de redémarrer le modèle
réduit.
• N’exposez pas votre modèle réduit et la télécommande à un rayonnement solaire direct ou à une chaleur trop élevée
pendant une durée prolongée.
6. Remarques spécifiques aux piles et batteries
Bien que le maniement de piles et de batteries dans la vie quotidienne fasse partie de la normalité de la vie, ceci présente
toutefois de nombreux problèmes et dangers. En particulier avec les batteries LiPo / LiIon et leur contenu énergétique élevé
(en comparaison aux batteries traditionnelles NiCd ou NiMH), différentes consignes doivent impérativement être observées,
sans quoi il y a risque d’explosion et d’incendie.
Pour cette raison, observez impérativement les informations et consignes de sécurité indiquées ci-dessous relatives au
maniement de piles et de batteries.
a) Batteries / piles de l’émetteur
• Maintenez les piles et batteries hors de la portée des enfants.
• Ne laissez pas traîner les piles et batteries, les enfants ou les animaux domestiques risqueraient de les avaler. En tel cas,
consultez immédiatement un médecin !
• Ne court-circuitez ni ne démontez jamais les piles et batteries et ne les jetez jamais dans le feu. Il y a danger d’explosion !
• En cas de contact avec la peau, les piles / batteries qui fuient ou sont endommagées peuvent entraîner des brûlures à
l’acide. En tel cas, veuillez donc utiliser des gants de protection appropriés.
• Les piles conventionnelles ne sont pas rechargeables. Il y a danger d’incendie et d’explosion ! Ne rechargez que les
batteries prévues à cet effet ; n’utilisez que des chargeurs de batteries appropriés. Les piles (1,5V) ne sont conçues que
pour un usage unique. Une fois vides, elles doivent être éliminées comme il se doit.
Page 49

49
• Insérez les piles ou les batteries ou raccordez le pack de batteries ou un chargeur en respectant la polarité correcte (ne
pas inverser plus/+ et moins/-). L’inversion de la polarité endommage non seulement l’émetteur mais aussi le modèle
réduit et les batteries. Il y a également risque d’incendie et d’explosion.
• Si vous n’utilisez pas l’appareil pendant une période prolongée (par ex. en cas de stockage), retirez les piles (ou batteries)
de la télécommande afin d’éviter de l’endommager en cas de fuite des piles ou batteries.
• Rechargez les batteries NiMH ou NiCd environ tous les 3 mois. Le cas contraire, l’autodécharge pourrait provoquer une
décharge totale, susceptible de rendre les batteries inutilisables.
• Remplacez toujours le jeu complet de piles ou batteries. Ne mélangez pas les piles / batteries pleines avec des piles /
batteries à moitié pleines. N’utilisez que des piles ou batteries du même type et du même fabricant.
• Ne mélangez jamais piles et batteries ! Utilisez soit des piles soit des batteries.
b) Batteries de propulsion
Attention !
Après le vol, débranchez la batterie de propulsion du système électronique du Quadrocopter. Ne laissez pas la
batterie de propulsion branchée sur le modèle réduit lorsque vous ne l’utilisez pas (par ex. en cas de transport ou
de stockage). Le cas contraire, la batterie de propulsion LiPo risquerait de totalement se décharger et ainsi d’être
détruite ou de devenir inutilisable ! Il y a également danger de dysfonctionnements liés aux impulsions parasites.
Les hélices peuvent démarrer de manière inopinée et provoquer des dommages ou des blessures.
• Ne rechargez jamais la batterie de propulsion immédiatement après son utilisation. Laissez toujours d’abord refroidir la
batterie de propulsion (pendant au moins 5 à 10 minutes).
• Utilisez un chargeur approprié et un équilibreur / compensateur pour charger les accus LiPo.
• Ne rechargez que des batteries intactes et non endommagées. Si l’isolation externe de la batterie devait être endommagée
ou la batterie déformée ou gonflée, il est absolument interdit de la charger. En tel cas, il y a un risque élevé d’incendie et
d’explosion !
• N’endommagez jamais l’enveloppe extérieure de la batterie de propulsion, ne pas découper le film de protection ni percer
la batterie de propulsion au moyen d’objets tranchants. Il y a danger d’incendie et d’explosion !
• Retirez la batterie de propulsion à charger du modèle réduit et placez-la sur une surface réfractaire. Observez une
distance de sécurité par rapport aux objets inflammables.
• Rechargez uniquement les batteries avec l’intensité de courant indiquée par le fabricant et veillez alors à ne pas dépasser
les valeurs maximales autorisées.
• Le chargeur et la batterie de propulsion s’échauffant pendant la procédure de charge, il est nécessaire d’assurer une
ventilation suffisante. Ne recouvrez jamais le chargeur ni la batterie de propulsion ! Cela vaut naturellement également
pour d’autres chargeurs et batteries.
• Ne rechargez jamais les batteries sans surveillance.
• Débranchez la batterie de propulsion du chargeur dès qu’elle est complètement rechargée.
• Il faut impérativement veiller à ce que les chargeurs et les batteries ne prennent pas l’humidité et ne soient pas mouillés.
Il y a danger de mort par électrocution. De plus, un danger d’incendie et d’explosion émane de la batterie !
Attention !
Les batteries LiPo sont particulièrement sensibles à l’humidité à cause des produits chimiques qu’elles contiennent !
N’exposez pas le chargeur ou la batterie de propulsion LiPo à des températures élevées / basses ni à un rayonnement
solaire direct. Lorsque vous manipulez des accumulateurs LiPo, respectez les consignes de sécurité spéciales du
fabricant de l’accumulateur !
Page 50

50
7. Remarques générales à propos du montage du
mécanisme
Avant de commencer le montage du mécanisme, vous devez prendre connaissances de plusieurs remarques importantes :
• Les performances du Quadrocopter dépendent de la qualité de son assemblage. Le montage doit donc minutieusement
être effectué en respectant à la lettre les instructions fournies dans le manuel. Les Quadrocopter défectueux ou montés de
manière incorrecte ne volent pas seulement plus mal, ils comportent également des risques élevés en matière de sécurité.
• Lors de l’assemblage, respectez à la lettre les croquis de montage fournis dans le manuel du fabricant. Tenez alors
également compte du fait que les raccords vissés métalliques doivent être fixés à l’aide d’un vernis de blocage liquide
spécial (non fourni). L’application de vernis de blocage à adhérence moyenne sur tous les raccords vissés a également fait
ses preuves dans la pratique. Afin de pouvoir desserrer les raccords vissés pour l’entretien, nous vous déconseillons
d’utiliser des vernis de blocage à adhérence élevée.
• N’ouvrez le sachet d’emballage correspondant qu’au dernier moment avant le montage des composants correspondants.
À cet effet, placez les différents composants dans une boîte distincte (boîte de glace vide ou similaire).
• N’effectuez les différentes étapes de montage qu’après avoir compris toutes les opérations à effectuer et lorsque vous
savez exactement où fixer le composant correspondant.
• Les vis fournies ont différentes longueurs et différentes têtes. Veiller à employer les vis adéquates.
• Employez uniquement le matériel fourni avec le kit et n’essayez pas de modifier le modèle réduit à l’aide de matériel de
montage étranger ou non approprié. En présence d’un défaut, remplacez les pièces et composants concernés par des
pièces d’origine figurant dans la liste des pièces détachées.
• Employez des outils de montage de qualité supérieure comme par ex. une clé à six pans creux avec des empreintes
proprement rectifiées et durcies. Les outils bon marché ont tendance à se déformer et peuvent ainsi endommager les
têtes des vis.
• Montez le Quadrocopter sur une surface appropriée (chiffon en coton doux ou similaire) afin de ne pas rayer ni endommager
le mécanisme.
Page 51

51
8. Montage du mécanisme
Consultez le manuel du fabricant avec les croquis de montage et commencez le montage du Quadrocopter conformément
aux illustrations à partir de la page P.1.
Page P.1
Illustration du haut :
Prenez la plaque de fond du cadre central puis vissez les quatre supports intérieurs du balancier avec les coussinets de
pivotement de la manière indiquée sur l’illustration. Respectez alors exactement le schéma du fabricant. Les tenons pour le
dispositif d’arrêt du tube du balancier doivent respectivement se trouver en bas, près de la plaque de fond.
Important !
Serrez les vis (Ø 3 x 8) en veillant à ce que les supports du balancier puissent encore tourner autour des points du
logement.
Illustration du bas :
Positionnez la plaque de recouvrement du cadre central sur les paliers rotatifs des quatre supports du balancier puis vissez
à fond la plaque à l’aide de quatre vis (Ø 3 x 8). Ici aussi, vous devez encore pouvoir déplacer les supports du balancier
autour des points de leur logement.
Intercalez les 6 boulons d’écartement (2 x 3,5 x 22 mm) entre les deux plaques du cadre puis vissez les plaques à l’aide de
douze vis M2 x 5. Appliquez du vernis de blocage à faible résistance sur chaque raccord vissé.
Page P.2
Illustration du haut :
Glissez les quatre supports extérieurs du balancier entre les plaques du cadre de la manière indiquée sur l’illustration puis
fixez les supports du balancier par le haut à l’aide de quatre vis (Ø 3 x 8).
Important !
Insérez les supports du balancier en veillant à ce que le plus grand trou pour la tête de l’embout à œil pointe vers
le haut (voir également illustration du haut en page P.7).
Illustration du bas :
Les quatre vis du bas (Ø 3 x 8) se montent respectivement à l’aide d’une bague d’écartement (3 x 4 x 1 mm). Insérez
ensuite les quatre caoutchoucs d’amortissement pour la plaque-support GYRO.
Page P.3
Illustration du haut :
Insérez les ressorts de la jambe d’atterrissage dans l’une des deux moitiés de la nacelle du moteur puis assemblez les deux
moitiés de la nacelle en les vissant de la manière indiquée sur l’illustration. Ne serrez pas encore les vis à fond.
Illustration du bas :
Installez le moteur dans la nacelle du moteur de la manière indiquée sur l’illustration puis vissez-le légèrement à l’aide de
quatre vis (M3 x 4). Employez ici du vernis de blocage liquide à résistance moyenne et ne serrez pas encore les vis à fond.
Page 52

52
Page P.4
Illustration du haut :
Reliez les trois câbles de raccordement du moteur aux câbles de raccordement des régulateurs de vitesse.
Important !
Pour les moteurs 1 et 3, toujours relier les câbles / fiches de la même couleur.
Pour les moteurs 2 et 4, le câble / la fiche rouge et le câble / la fiche noire doivent être permutés afin que les
moteurs tournent dans le sens inverse.
L’affectation exacte des moteurs est indiquée sur l’illustration du bas en page P.7. Les différentes nacelles du moteur sont
numérotées de 1 à 4 (voir également l’illustration du haut en page P.6).
Illustration du bas :
Pour faciliter l’insertion du régulateur de vitesse dans le tube du balancier, il est recommandé d’appliquer un peu de graisse
sur la gaine rétractable du régulateur de vitesse.
Lors de l’insertion du tube du balancier, veillez à ce que l’encoche sur le tube soit positionnée sur le côté. Enfoncez à fond
le tube du balancier dans la nacelle du moteur. Le tenon dans la nacelle du moteur s’enclenche alors dans l’encoche,
empêchant que le tube du balancier ne tourne dans la nacelle du moteur.
Page P.5
Illustration du haut :
Après l’insertion correcte du tube du balancier dans la nacelle du moteur, serrez à fond les vis de la nacelle du moteur et les
vis de fixation du moteur.
Insérez ensuite le capot du bas de la nacelle du moteur et enfoncez le capuchon sur le tenon d’arrêt pour la bague de
retenue.
Illustration du bas :
Le fabricant propose également le Quadrocopter 500X sans kit d’entraînement. C’est la raison pour laquelle la notice de
montage comporte une remarque à propos du kit d’entraînement du Quadrocopter 330X-S dans la notice de montage du
500X :
Si vous employez les moteurs et les régulateurs de vitesse 10 A du Quadrocopter GAUI « 330 X-S », vous devez prolonger
les raccords électriques des régulateurs de vitesse. Vous pouvez effectuer cette procédure de votre propre chef ou employer
une rallonge disponible en option avec la référence GAUI : 222170.
Pour les moteurs 1 et 3, relier les câbles de la même couleur. Pour les moteurs 2 et 4, le câble rouge et le câble noir doivent
être permutés afin que les moteurs tournent dans le sens inverse. Les raccords enfichables doivent ensuite être fixés à l’aide
d’une bande de ruban adhésif.
Page P.6
Illustration du haut :
L’illustration montre les quatre bras du balancier qui portent les numéros 1 à 4.
Illustration du bas :
Placez le cadre central sur la table de la manière indiquée sur l’illustration en veillant à ce que l’encoche dans la plaque de
recouvrement (« Mark ») pointe vers la droite (dans la direction de vol du modèle réduit).
Glissez le bras du balancier avec le numéro 1 par le bas à droite dans les deux supports ronds du balancier.
Important !
Veillez à ce que le tenon du support du balancier intérieur s’enclenche exactement dans l’encoche du tube du
balancier. La légère inclinaison ainsi générée des arbres moteur d’env. 6° est souhaitée et ne constitue pas un vice
de fabrication des tubes du balancier.
Page 53

53
Page P.7
Illustration du haut :
Le câble de raccordement à trois fils avec la fiche de servo doit ici être inséré dans le trou central de la plaque de recouvrement
vers l’extérieur. Les deux câbles d’alimentation électrique doivent être insérés dans le trou central de la plaque de fond vers
l’extérieur.
La vis de serrage (Ø 3 x 8) du support extérieur du balancier doit être insérée par le haut puis serrée à fond. La vis de
serrage (Ø 3 x 8) du support intérieur du balancier doit être insérée par le bas à travers une fente dans la plaque de fond
puis serrée à fond.
Illustration du bas :
Fixez les trois autres bras du balancier en procédant la même manière. Respectez la numérotation des bras du balancier.
Une ligne médiane imaginaire entre les balanciers des moteurs 1 et 4 correspond, par la suite, à la direction de vol vers
l’avant durant le fonctionnement du modèle réduit.
Orientez les quatre bras du balancier avec un angle de 90° les uns par rapport aux autres de la manière indiquée sur
l’illustration puis serrez à fond la vis de fixation du haut du support du balancier extérieur.
Page P.8
Illustration du haut :
Vissez les quatre tenons des supports sur la plaque-support GYRO à l’aide des vis M2 x 3,2. Utilisez ici du vernis de blocage
liquide à faible résistance.
Collez quatre tapis en mousse sur la face inférieure du système gyroscopique à 3 axes « GU-344 GYRO ». Veuillez uniquement
employer les tapis fournis avec le « GU-344 GYRO ». Comme les tapis en mousse sont endommagés en cas de démontage,
un nombre suffisant de tapis de rechange est fourni avec le « GU-344 GYRO ».
Important !
La fixation du système gyroscopique à 3 axes « GU-344 GYRO » dépend du récepteur employé :
Si le récepteur est muni de raccords de servo sur le côté, il se monte avec le GYRO sur la plaque-support GYRO de la
manière indiquée sur l’illustration. Le récepteur peut être monté à l’aide de ruban adhésif double face (Servotape) ou de
bande auto-agrippante.
Si le récepteur est muni de raccords de servo vers le haut (voir illustration du bas en page P.9), la forme du capot n’est pas
adaptée. En tel cas, le récepteur se fixe sur la plaque de recouvrement du cadre central et le système gyroscopique à 3 axes
« GU-344 GYRO » se monte au centre de la plaque-support GYRO.
Illustration du bas :
L’illustration du haut montre le raccordement du récepteur.
• La fiche du câble à 3 fils doit être branchée sur la sortie du récepteur pour la fonction Aileron / Roulis (AILE).
• La fiche du câble rouge doit être branchée sur la sortie du récepteur pour la fonction Gouverne de profondeur / Tangage
(ELEV).
• La fiche du câble orange doit être branchée sur la sortie du récepteur pour la fonction Gaz / Pas (THRO).
• La fiche du câble jaune doit être branchée sur la sortie du récepteur pour la fonction Gouverne de direction / Arrière
(RUDD).
• La fiche du câble vert doit être branchée sur la sortie du récepteur pour la fonction Train d’atterrissage / Gyroscope
(GEAR/GAIN).
Si vous employez un système à 4 canaux pour la commande, la fiche du câble vert n’est pas requise. Le réglage de la
sensibilité du gyroscope s’effectue alors directement sur le « GU-344 GYRO » (voir également page P.12).
L’illustration du bas montre le raccordement des quatre régulateurs de vitesse sur le système gyroscopique à 3 axes GU344 GYRO. Reliez ensuite les quatre régulateurs de vitesse et le « GU-344 GYRO » de la manière indiquée sur l’illustration.
Les numéros des moteurs sont indiqués sur les illustrations de la page P.7 ou P.9.
Important !
Respectez la polarité des fiches de raccordement. Le câble avec la borne moins (-) doit être raccordé en haut et
le câble pour les signaux de commande (S) doit être raccordé en bas !
Page 54

54
Page P.9
Illustration du haut :
Insérez les quatre tenons des supports de la plaque-support GYRO dans les tampons en caoutchouc de la plaque de
recouvrement. Tenez ici impérativement compte de la direction de vol du Quadrocopter. En cas de montage correct, la flèche
sur le haut du GU-344 GYRO, parallèle à la direction de vol (ligne médiane imaginaire entre les bras 1 et 4 du balancier),
pointe vers l’avant.
Illustration du bas :
L’illustration montre le montage du GU-344 GYRO et du récepteur lorsque les raccords de servo de ce dernier pointent vers
le haut. Le capot du cadre central n’a sinon pas suffisamment pas de place.
Page P.10
Illustration du haut :
Tirez les câbles d’alimentation électrique des quatre régulateurs de vitesse par le côté du cadre central de la manière
indiquée sur l’illustration puis raccordez les deux répartiteurs de tension 4 en 1.
Découpez deux morceaux de l’élément à crochet de la bande auto-agrippante fournie puis collez les morceaux sur la fourni
du cadre central.
Illustration du bas :
Collez la partie rembourrée de la bande auto-agrippante sur la batterie de propulsion puis fixez cette dernière à l’aide de la
bande auto-agrippante fournie. La bande auto-agrippante doit alors être tirée à travers les deux fentes de la plaque de fond.
Important !
En cas d’utilisation de grandes et lourdes batteries, nous recommandons de remplacer la bande auto-agrippante
par un serre-câbles à bande auto-agrippante afin de garantir une fixation suffisante de la batterie.
Page P.11
Illustration du haut :
Fixez le doigt d’entraînement de l’hélice sur les arbres moteur. Les vis sans tête des doigts d’entraînement de l’hélice doivent
alors s’insérer dans la rainure prévue sur l’arbre moteur. Utilisez du vernis de blocage liquide à faible résistance pour fixer les
vis sans tête.
Important !
Lors du montage des hélices, veillez à ce que les hélices des moteurs 2 et 4 tournent dans le sens horaire
(inscription 10B) et les hélices des moteurs 1 et 3 dans le sens antihoraire (inscription 10A).
Fixez ensuite les autocollants jaunes fournis sur les bras 1 et 4 du balancier qui pointent vers l’avant afin d’avoir des points
de repère durant le vol du Quadrocopter.
Illustration du bas :
Les hélices ne sont pas absolument à l’horizontale ! La légère inclinaison des hélices de 6° (voir illustration) est souhaitée et
améliore les caractéristiques de vol du Quadrocopter.
Pour finir, le capot du cadre central doit être posé par le haut sur les bras du balancier. L’élément pointu doit alors
pointer vers l’avant dans la direction de vol.
Page 55

55
9. Paramètres du système
Page P.12
1. Sélection du modèle réduit
Si l’émetteur de votre télécommande permet de basculer entre hélicoptères et modèles réduits surfaciques, sélectionnez le
type de modèle réduit « Modèle réduit d’avion » étant donné que le Quadrocopter ne nécessite aucune fonction mixte côté
émetteur.
2. Sélection des fonctions directionnelles
Si vous utilisez l’un des émetteurs indiqués dans le tableau, vous pouvez, maintenant déjà, définir la fonction directionnelle
des quatre canaux de commande (NOR = sens normal ; REV = sens inverse).
GAUI Futaba JR Hitech
AILE NOR NOR REV NOR
ELEV NOR NOR REV REV
THRO REV REV NOR NOR
RUDD NOR NOR REV NOR
Si vous utilisez un émetteur d’un autre fabricant, vous devez effectuer des essais pratiques afin de déterminer les fonctions
directionnelles (voir pages P.13 à P.15).
3. Possibilités de réglage sur le système gyroscopique à 3 axes « GU-344 GYRO »
Le système gyroscopique à 3 axes « GU-344 GYRO » se règle soit à l’aide d’un bouton de réglage et d’interrupteurs DIP soit
à l’aide de la télécommande.
a) Réglage manuel du « GU-344 GYRO »
Si la fiche du câble de raccordement vert n’est pas branchée sur le récepteur, le bouton de réglage « A » et l’interrupteur
DIP « 1 » sur le « GU-344 GYRO » sont activés.
• Tournez le bouton de réglage « A » de la gauche (minimum = position 4 h 30) de 90° vers la droite pour définir le réglage
de base (position 7 h 30) de la sensibilité du gyroscope pour les premiers essais de vol. Pour ce faire, utilisez un tournevis
miniature approprié. Plus vous tournez le bouton rotatif vers la droite, plus l’effet stabilisateur du gyroscope à 3 axes est
important.
Le système gyroscopique à 3 axes « GU-344 GYRO » est également équipé de 2 différents réglages de vol qui se
sélectionnent à l’aide de l’interrupteur DIP « 1 ».
• Si l’interrupteur DIP « 1 » est commuté en position haute « CRU » à l’aide d’un tournevis miniature, la DEL de contrôle
passe au rouge et le Quadrocopter se comporte comme un modèle réduit d’hélicoptère normal. Ce réglage est recommandé
pour les pilotes expérimentés de modèle réduit d’hélicoptère.
• Si l’interrupteur DIP « 1 » est commuté en position haute « HOV », la DEL de contrôle passe au vert et le Quadrocopter
constitue alors un choix idéal pour les débutants qui souhaitent apprendre le vol stationnaire. Avec ce réglage, le système
gyroscopique à 3 axes atténue légèrement les signaux de commande de l’émetteur et une part exponentielle y est ajoutée
(voir diagrammes au centre de la page P.12). Cela permet de piloter le Quadrocopter avec une plus grande précision en
vol stationnaire.
L’interrupteur DIP « 2 » permet de définir deux différents alignements de vol du Quadrocopter.
• Si l’interrupteur DIP « 2 » est commuté en position haute, l’alignement de vol X est activé. Le centre entre les bras 1 et 4
du balancier du moteur se trouve à l’avant dans la direction de vol.
• Si l’interrupteur DIP « 2 » est commuté en position basse, l’alignement de vol Croix est activé.
Attention, important !
Comme le Quadrocopter « 500X-S » a uniquement été conçu pour l’alignement de vol X, l’interrupteur DIP « 2 »
doit toujours se trouver en position haute et ne doit pas non plus être commuté (voir également page P.16).
Page 56

56
b) Réglage du « GU-344 GYRO » à l’aide de la télécommande
Si la fiche du câble de raccordement vert est branchée sur le récepteur, le bouton de réglage « A » et l’interrupteur DIP
« 1 » sur le « GU-344 GYRO » sont désactivés. Le réglage de la sensibilité du gyroscope et la commutation du réglage de
vol peuvent uniquement être effectués par le biais de l’émetteur. Un interrupteur, un curseur de réglage ou un bouton rotatif
peuvent être employés comme émetteur de commande. Ils doivent être couplés à la sortie correspondante du récepteur
(fiche du câble de raccordement vert).
• En fonction du sens dans lequel l’émetteur de commande est actionné, il est possible de commuter entre les réglages de
vol « CRU » et « HOV ».
En position « CRU », la DEL de contrôle passe au rouge et le Quadrocopter se comporte comme un modèle réduit
d’hélicoptère normal. Ce réglage est recommandé pour les pilotes expérimentés de modèle réduit d’hélicoptère.
• En position « HOV », la DEL de contrôle passe au vert et le Quadrocopter constitue alors un choix idéal pour les débutants
qui souhaitent apprendre le vol stationnaire.
La sensibilité du gyroscope requise se règle sur la télécommande via la fonction EPA ou Travel (limitation de la courses de
servo). Comme réglage de base, nous vous recommandons de réduire la course de servo à 50 % des deux côtés de
l’émetteur de commande et donc pour les deux réglages de vol. En augmentant ou en réduisant la valeur réglée, vous
pouvez définir une sensibilité individuelle du gyroscope pour chaque réglage de vol.
Contrairement au réglage manuel, les signaux de commande ne sont pas atténués et ne sont pas non plus
pourvus d’une part exponentielle lors de la commutation à l’aide de la télécommande (voir croquis en bas à
droite). Le cas échéant, les réglages EPA et EXPO requis pour les canaux de commande doivent directement être
effectués sur l’émetteur.
Page P.13
Réglage des régulateurs de vitesse
Illustration du haut :
Pour un fonctionnement correct et homogène des moteurs, chaque régulateur de vitesse doit être adapté aux signaux de
commande de l’émetteur.
Important :
Pour le réglage, il est indispensable de mettre hors service le système gyroscopique à 3 axes « GU-344 GYRO ».
Le cas échéant, débranchez la fiche du câble vert pour la fonction Train d’atterrissage / Gyroscope (GEAR/GAIN)
du récepteur puis tournez le bouton de réglage « A » complètement à gauche (minimum = position 4 h 30) à
l’aide d’un tournevis miniature.
• Allumez ensuite l’émetteur puis ajustez les fonctions de compensation pour tous les canaux en position médiane. La
course d’accélération sur l’émetteur devrait alors être définie à 100 %.
• Déplacez ensuite le levier de commande pour la fonction Gaz / Pas en position haute.
Les illustrations sur cette page et les pages suivantes montrent un émetteur en mode 1, où la commande Gaz /
Pas s’effectue à l’aide du levier de commande de droite. Si vous actionnez la commande Gaz / Pas à l’aide du
levier de commande de gauche (mode 2 ou 4), le levier de commande gauche doit donc être déplacé vers le haut.
Illustration du bas :
• Raccordez la batterie de propulsion au Quadrocopter. Le moteur émet alors 3 tonalités à volume croissant puis 2 tonalités
individuelles.
• Déplacez ensuite directement le levier de commande pour la fonction Gaz / Pas en position basse. Le moteur émet alors
deux tonalités brèves puis une tonalité longue après une petite pause.
• La programmation sur le signal de l’émetteur est terminée et la batterie de propulsion peut à nouveau être débranchée.
Si une sixième, septième ou huitième tonalité (batterie de propulsion LiPo à 2, 3 ou 4 cellules) est encore audible
après les 5 tonalités qui suivent le raccordement de la batterie de propulsion, débranchez immédiatement la
batterie de propulsion puis sélectionnez la fonction Reverse sur l’émetteur pour le levier de commande Gaz / Pas.
Répétez ensuite la procédure d’apprentissage.
Lorsque le moteur émet des tonalités brèves rapides après les trois tonalités à volume croissant, le bouton de réglage n’a
pas reçu de signal de l’émetteur ou le levier de commande pour la fonction Gaz / Pas ne se trouve pas en position finale.
Pour savoir si le régulateur de vitesse a correctement appris les signaux de l’émetteur, il est recommandé d’effectuer
séparément la procédure d’apprentissage sur chaque régulateur de vitesse.
Page 57

57
Après avoir effectué la procédure d’apprentissage sur tous les quatre régulateurs de vitesse, rebranchez la fiche du câble
vert pour la fonction Train d’atterrissage / Gyroscope (GEAR/GAIN) sur le récepteur puis tournez le bouton de réglage « A »
de 90° vers la droite en position initiale (position 7 h 30) à l’aide d’un tournevis miniature.
Page P.14
Test de fonctionnement avant le premier vol
Illustration du haut :
• Poussez le levier de commande pour la fonction Gaz / Pas en position basse puis allumez l’émetteur.
• Raccordez la batterie de propulsion au Quadrocopter puis attendez la séquence sonore de mise en circuit avant de
déplacer le modèle réduit. Durant la séquence sonore de mise en circuit, les moteurs émettent d’abord trois tonalités à
différentes hauteurs, puis deux, trois ou quatre tonalités individuelles (en fonction du nombre de cellules du pack LiPo) de
même hauteur puis une tonalité individuelle pour finir.
• Le Quadrocopter est maintenant prêt à décoller.
• Poussez légèrement le levier de commande pour la fonction Gaz / Pas vers l’avant jusqu’à ce que les moteurs démarrent
et contrôlez le sens de rotation correct à l’aide de l’illustration. Si le sens de rotation d’un moteur est incorrect, vous devez
permuter deux des trois câbles de raccordement des moteurs.
En fonction du mode employé pour la télécommande, les affectations réelles du levier de commande peuvent
diverger de celles indiquées dans le manuel.
Illustration du bas :
Illustration du haut :
Déplacez légèrement le levier de commande pour la fonction Gouverne de profondeur / Tangage vers l’avant puis assurez-
vous que le Quadrocopter s’incline légèrement vers l’avant. Si le Quadrocopter réagit exactement à l’inverse, vous devez
commuter la fonction Reverse pour la commande du tangage sur l’émetteur.
Illustration du haut :
Si vous déplacez le levier de commande pour la fonction Gouverne de direction / Arrière vers la droite, le Quadrocopter doit
tourner dans le sens horaire vu d’en haut. Si le Quadrocopter réagit exactement à l’inverse, vous devez commuter la
fonction Reverse pour la commande de l’arrière sur l’émetteur.
Page P.15
Illustration du haut :
Déplacez légèrement le levier de commande pour la fonction Aileron / Roulis vers la droite puis assurez-vous que le Quadrocopter s’incline légèrement vers la droite. Si le Quadrocopter réagit exactement à l’inverse, vous devez commuter la fonction
Reverse pour la commande du roulis sur l’émetteur.
Illustration du bas :
Après avoir contrôlé ou corrigé le sens de déplacement du Quadrocopter par rapport aux instructions de pilotage, vous
pouvez pousser le levier de commande pour la fonction Gaz / Pas vers l’avant jusqu’à ce que le Quadrocopter plane à env.
30 cm du sol. Si le modèle réduit balance ou oscille, augmentez la sensibilité du gyroscope et ainsi la stabilité de vol. La
procédure exacte est décrite en page P.12.
Page 58

58
Page P.16
Remarques importantes :
• Dans certaines circonstances, la position neutre du système gyroscopique à 3 axes « GU-344 GYRO » peut légèrement
diverger. En tel cas, un ajustage fin doit être effectué sur l’émetteur de la télécommande à l’aide du compensateur ou du
sous-compensateur.
• La course de commande pour la fonction Gaz / Pas est optimale lorsqu’elle est supérieure à 80 % et permet ainsi d’éviter
que le système gyroscopique à 3 axes ne quitte pas la plage de réglage, même lorsque le pas est au maximum, durant la
stabilisation de l’assiette. C’est la raison pour laquelle il est recommandé de réduire la fonction Gaz / Pas de 100 % à 75 %
après le réglage des régulateurs de vitesse.
• Surveillez la capacité restante de la batterie de propulsion. Une batterie exposée à une décharge trop profonde peut être
endommagée et rendre le Quadrocopter incontrôlable.
• Une grande stabilité du gyroscope garantit un vol stationnaire stable. Une stabilité plus faible du gyroscope diminue certes
la stabilité de vol, mais augmente l’agilité du Quadrocopter.
Illustration du bas :
Le système gyroscopique à 3 axes « GU-344 GYRO » permet de commuter entre l’alignement X et à croix.
Important !
Comme le Quadrocopter « 500X-S » est toutefois uniquement conçu pour l’alignement X, la commutation de
l’alignement fonctionne uniquement avec le Quadrocopter « 330X-S » représenté sur l’illustration.
Page 59

59
10. Programmation des régulateurs de vitesse
Page P.17
1. Activation du mode de programmation
Allumez l’émetteur puis déplacez le levier de commande des gaz en position Plein gaz.
Raccordez la batterie au régulateur de vitesse. Le moteur raccordé au régulateur émet 3 tonalités brèves toujours plus
aiguës puis deux tonalités individuelles brèves au bout de deux secondes.
Après 5 secondes supplémentaires, le moteur raccordé émet 5 tonalités brèves toujours plus aiguës.
Le régulateur se trouve maintenant en mode de programmation.
2. Sélection d’une rubrique du menu
En mode de programmation, vous entendez maintenant 8 groupes de différentes tonalités qui se répètent constamment en
boucle. Après la dernière séquence de tonalités (2 longues), 5 tonalités brèves toujours plus aiguës sont à nouveau audibles
avant que la boucle ne recommence au début.
L’affectation des tonalités respectives aux différentes rubriques du menu est indiquée dans le tableau ci-dessous.
N° Séquence Rubrique ou fonction du menu
1 1 brève Fonction de freinage
2 2 brèves Type de batterie
3 3 brèves Mode Cutoff (mode de déconnexion)
4 4 brèves Seuil de commutation Cutoff
5 1 longue Mode de démarrage
6 1 longue, 1 brève Synchronisation
7 1 longue, 2 brèves Chargement des réglages standards
8 2 longues Quitter le mode de programmation
Pour sélectionner une rubrique précise du menu, déplacez le levier de commande des gaz de la position Plein gaz en position
basse (arrêt moteur) dans les 2 secondes qui suivent la tonalité correspondante.
Le régulateur de vitesse bascule ainsi en mode de réglage de la rubrique du menu sélectionnée.
3. Modification des valeurs
En mode de configuration, vous entendez également différentes tonalités (voir ligne du haut dans le tableau ci-dessous) qui
se répètent constamment en boucle. Le début de la séquence dépend de la rubrique du menu sélectionnée étant donné que
seules les tonalités qui correspondent à une valeur enregistrée sont émises.
Après avoir entendu la tonalité pour le réglage souhaité, déplacez immédiatement le levier de commande des gaz de la
position basse (arrêt moteur) en position Plein gaz.
4 tonalités confirment alors la valeur enregistrée (aigu, grave, aigu, grave).
Le régulateur de vitesse retourne en mode de programmation qui permet alors, le cas échéant, de sélectionner et de définir
la rubrique suivante du menu.
1 x court 2 x court 3 x court
Fonction de freinage Arrêt Marche
Type de batterie Lithium NiMH/NiCd
Mode Cutoff Ralentir Déconnecter
Seuil de commutation Cutoff Bas Moyen Élevé
Mode de décollage Normal Souple Très souple
Synchronisation Basse Moyenne Élevée
Page 60

60
4. Quitter le mode de programmation
Lorsque le bouton de réglage se trouve en mode de programmation, attendez que la rubrique 8 du menu soit signalisée par
la tonalité correspondante puis déplacez le levier de commande des gaz de la position Plein gaz en position basse (arrêt
moteur) dans les 3 secondes qui suivent la tonalité. 2 à 3 tonalités brèves suivies d’une tonalité longue sont émises en
fonction du nombre de cellules. Le régulateur de vitesse est maintenant opérationnel.
Après activation des réglages d’usine, le bouton de réglage quitte ensuite également le mode de programmation.
Lorsque le bouton de réglage se trouve en mode de configuration et que vous avez enregistré une nouvelle valeur, tirez à
nouveau le levier de commande des gaz en position basse (arrêt moteur) immédiatement après la séquence de confirmation.
2 à 3 tonalités brèves suivies d’une tonalité longue sont émises en fonction du nombre de cellules. Le régulateur de vitesse
est maintenant opérationnel.
Page 61

61
11. Transport et équipements optionnels
Page P.18
Illustration du haut :
Pour réduire l’encombrement du Quadrocopter pour le transport ou le stockage, les bras avant et arrière du balancier
peuvent être rabattus.
Pour ce faire, desserrez les vis de fixation du haut des supports extérieurs du balancier, rabattez les bras puis serrez à fond
les vis.
Illustration du bas :
Pour le transport du Quadrocopter dans le sac de transport, les doigts d’entraînement de l’hélice doivent être retirés des
arbres moteur avec les hélices puis rangés dans le compartiment latéral.
Page P.19
Illustration du haut :
Le cas échéant, vous pouvez équiper le Quadrocopter avec un cadre de sécurité afin d’éviter tout contact des hélices avec
les personnes ou objets.
Reliez les tiges en fibre de verre sous forme d’un anneau à l’aide du raccord en plastique fourni. Les quatre tubes en
aluminium servent d’écarteurs et doivent également être glissés dans les raccords en plastique.
Illustration du bas :
Retirez les capuchons des nacelles du moteur des tenons d’arrêt puis glissez les tubes en aluminium du cadre de sécurité sur
les tenons.
Page P.20
Illustration du haut :
Pour fixer une caméra sur le Quadrocopter, vous pouvez employer le support de caméra optionnel avec la référence GAUI :
210705 et les jambes d’atterrissage avec les références GAUI : 210910 et 222231. L’illustration montre le montage des
différents composants.
Illustration du bas :
L’illustration montre le montage d’une caméra miniature pour les vols FPV (en immersion). Le module de la caméra,
l’électronique et l’émetteur vidéo doivent alors être montés sur une plaque-support spéciale qui se visse sur la plaque de
fond du cadre central. La lentille de la caméra pointe alors à travers un trou du capot.
Page P.21
Illustration du haut :
L’illustration montre le montage du kit d’éclairage à DEL optionnel. Les câbles vers les différentes nacelles du moteur se
tirent dans les tubes du balancier à l’aide d’un fil métallique. Après le montage des DEL à l’aide de ruban adhésif double face,
les capots existants des nacelles du moteur doivent être remplacés par des capots transparents. Les clignotants doivent être
raccordés au récepteur et insérés entre les deux plaques du cadre central.
Illustration du bas :
L’illustration montre le montage des de la plate-forme optionnelle avec la référence GAUI : 222202 qui se fixe à l’aide de
quatre écarteurs sur la plaque de recouvrement du cadre central.
Page 62

62
Page P.22
Vue d’ensemble poids / puissance
Sans charge supplémentaire, le Quadrocopter vole de manière impeccable avec une batterie LiPo à 2 cellules de 1 400 à
2 000 mAh. Si le poids au décollage est toutefois supérieur à 900 g, il est recommandé d’utiliser une batterie LiPo à
3 cellules. Le tableau suivant vous donne un aperçu du poids au décollage et de la puissance absorbée afin de déterminer
la batterie adéquate pour les différents usages.
Poids au décollage (g) Batterie Puissance absorbée (W) Rapport poids / puissance (g/W)
800 2S 80 10
900 2S 92 9,8
1000 3S 113 8,8
1100 3S 129 8,5
1200 3S 146 8,2
1300 3S 163 8,0
1400 3S 182 7,7
1500 3S 202 7,4
1600 3S 219 7,3
1700 3S 238 7,1
1800 4S 276 6,5
1900 4S 306 6,2
2000 4S 329 6,1
2100 4S 343 6,1
2200 4S 370 6,0
Sans batterie, le Quadrocopter pèse environ 670 g.
Calcul de la durée de vol probable :
Si le Quadrocopter doit transporter une caméra d’un poids de 350 g et que la batterie employée (3S 2 000 mAh) pèse
150 g, la charge supplémentaire pèse 500 g. Le poids de vol total s’élève alors à 1 170 g et la puissance absorbée s’élève
à env. 141 W selon le tableau. Le temps de vol se calcule à l’aide de la formule suivante :
Tension de la batterie (11,1 V) x Intensité du courant (2 A) x Temps de décharge 60 (min) = 1332 (Wmin)
(1 332 Wmin/141 W) x 75 % (capacité utile) = 7,1 min
Le temps de vol estimé s’élève à environ 7,1 minutes.
En cas de montage en parallèle d’une seconde batterie (3S 2000 mAh), le poids au décollage passe alors à 1320 g et la
puissance absorbée à 167 W. Le nouveau temps de vol se calcule de la manière suivante :
Tension de la batterie (11,1 V) x Intensité du courant (4 A) x Temps de décharge 60 (min) = 2664 (Wmin)
(2664 Wmin/167 W) x 75 % (capacité utile) = 12,0 min
Le temps de vol estimé s’élève à environ 12 minutes.
Les calcules se réfèrent à un circuit de vol normal. La puissance absorbée des régulateurs de vitesse peut cependant
être 3 ou 4 fois supérieure lorsque la puissance maximale est requise. Approchez-vous lentement des temps de
vol possibles et contrôlez, après chaque vol, la capacité restante de la batterie afin d’impérativement éviter une
décharge complète durant le vol. Cela endommagerait la batterie et provoquerait un crash du Quadrocopter.
Page 63

63
12. Vue d’ensemble des pièces de rechange
Page P.23
Les pièces de rechange disponibles auprès du fabricant avec les désignations et numéros de pièce de rechange correspondants
sont indiquées sur les pages P.23 et P.24.
Attention !
Veuillez noter que le numéro à 6 chiffres dans le manuel du fabricant ne correspond pas à la référence Conrad !
Une liste actuelle des pièces détachées avec les références Conrad Electronic correspondantes est disponible sur
www.conrad.de dans la rubrique Téléchargement du modèle réduit.
13. Maintenance et entretien
Afin de garantir la sécurité de fonctionnement de votre modèle réduit, effectuez régulièrement les contrôles et travaux de
maintenance.
1. Assurez-vous que les vis ne se soient pas desserrées et que les composants soient toujours solidement vissés ou collés.
2. Veillez à ce que la concentricité soit correcte et que les hélices soient solidement fixées. Les hélices ne doivent pas
comporter de dommages apparents.
3. Contrôlez la souplesse des moteurs. En cas de sensation de roulement ou de grincement durant la rotation manuelle,
remplacer le moteur correspondant.
4. Assurez-vous que le tapis adhésif du système gyroscopique à 3 axes soit correctement fixé. Un système gyroscopique
détaché ou branlant provoque des déplacements incontrôlés du Quadrocopter.
5. Contrôlez l’intégralité du câblage. Contrôlez alors notamment les raccords entre les régulateurs de vitesse et les moteurs.
Important !
Si vous devez remplacer des pièces endommagées ou usées, n’utilisez que des pièces de rechange d’origine pour
votre Quadrocopter.
La liste des pièces de rechange est disponible sur notre site web www.conrad.com dans la rubrique Téléchargement du
produit correspondant.
Vous pouvez également demander la liste des pièces de rechange par téléphone. Nos coordonnées sont indiquées au début
de ce mode d’emploi, dans le chapitre « Introduction ».
Page 64

64
14. Élimination
a) Généralités
En fin de vie, éliminez le produit conformément aux consignes légales en vigueur.
b) Piles et batteries
Le consommateur final est légalement tenu (ordonnance relative à l’élimination des piles usagées) de rapporter toutes les
piles et batteries usagées, il est interdit de les jeter dans les ordures ménagères !
Les piles et batteries qui contiennent des substances toxiques sont identifiées à l’aide des symboles ci-contre qui
indiquent l’interdiction de les jeter dans les ordures ménagères. Les désignations pour le métal lourd prépondérant
sont : Cd = cadmium, Hg = mercure, Pb = plomb (la désignation est indiquée sur la pile / batterie, par ex. audessous des symboles de poubelles figurant à gauche).
Vous pouvez rapporter gratuitement vos piles et batteries usagées aux centres de récupération de votre commune, à nos
succursales ou à tous les points de vente de piles et de batteries.
Vous répondez ainsi aux exigences légales et contribuez à la protection de l’environnement.
15. Caractéristiques techniques
Dimensions du fuselage (Ø x H) .............................................. 500 x 120 mm
Ø hélice ................................................................................. 254 mm
Poids à vide (sans batterie) ..................................................... env. 670 g
Poids maximal au décollage (avec batterie) .............................. env. 2 200 g
Batterie de propulsion recommandée ....................................... (2S 1 400 mAh) - (4S 2 000 mAh)
Télécommande requise ........................................................... 4 ou 5 canaux
Page 65

65
Inhoudsopgave
Pagina
1. Inleiding........................................................................................................................................................ 66
2. Voorgeschreven gebruik ................................................................................................................................. 66
3. Productbeschrijving ....................................................................................................................................... 67
4. Leveringsomvang........................................................................................................................................... 67
5. Veiligheidsvoorschriften.................................................................................................................................. 68
a) Algemeen ................................................................................................................................................. 68
b) Voor de ingebruikname ............................................................................................................................. 68
c) Tijdens het gebruik ................................................................................................................................... 69
6. Voorschriften voor batterijen en accu´s ........................................................................................................... 69
a) Zenderaccu’s/-batterijen ............................................................................................................................ 69
b) Vliegaccu’s................................................................................................................................................ 70
7. Algemene voorschriften bij de montage van de mechaniek ............................................................................... 71
8. Montage van de mechaniek ............................................................................................................................ 72
9. Systeeminstellingen ....................................................................................................................................... 76
10. Toerentalteller programmeren......................................................................................................................... 80
11. Transport en uitrustingmogelijkheden ............................................................................................................. 82
12. Overzicht reserveonderdelen .......................................................................................................................... 84
13. Onderhoud en verzorging ............................................................................................................................... 84
14. Afvoer ........................................................................................................................................................... 85
a) Algemeen ................................................................................................................................................. 85
b) Batterijen en accu´s.................................................................................................................................. 85
15. Technische gegevens ..................................................................................................................................... 85
Page 66

66
1. Inleiding
Geachte klant,
Hartelijk dank voor de aanschaf van dit product.
Dit product voldoet aan de voorwaarden van de nationale en Europese wetgeving.
Volg de instructies van de gebruiksaanwijzing op om deze status van het apparaat te handhaven en een ongevaarlijke
werking te garanderen!
Deze gebruiksaanwijzing hoort bij dit product. Deze bevat belangrijke instructies voor de ingebruikname en
bediening. Let hierop, ook wanneer u dit product aan derden doorgeeft.
Bewaar deze handleiding om haar achteraf te raadplegen!
Alle vermelde bedrijfs- en productnamen zijn handelsmerken van de respectievelijke eigenaren. Alle rechten voorbehouden.
Bij technische vragen kunt u zich wenden tot onze helpdesk.
Voor meer informatie kunt u kijken op www.conrad.nl of www.conrad.be.
2. Voorgeschreven gebruik
Bij dit product gaat het om een model, gelijkaardig aan een modelhelikopter, dat voor privaat gebruik als modelbouwtoestel
en de daarmee verbonden bedrijfstijden is ontworpen. Voor de besturing van het model moet een geschikte afstandsbediening
met 4 – 5 kanalen (niet meegeleverd) worden gebruikt.
Een ander gebruik dan hier beschreven kan de beschadiging van het product en de hiermee verbonden gevaren zoals bv.
kortsluiting, brand, elektrische schokken, enz. tot gevolg hebben. de veiligheidsaanwijzingen moeten absoluut worden
opgevolgd!
Het product mag niet vochtig of nat worden.
Het product is niet geschikt voor kinderen onder 14 jaar.
Volg alle veiligheidsinstructies in deze gebruiksaanwijzing op. Deze bevat belangrijke informatie voor het gebruik
van het product.
U alleen bent verantwoordelijk voor een veilige werking van het model!
Page 67

67
3. Productbeschrijving
De Quadrocopter wordt als bouwpakket in afzonderlijke onderdelen geleverd en bevat alle onderdelen die voor de montage
van de mechaniek nodig zijn. Verder bevinden zich vier brushloze elektrische motoren, vier toerentaltellers en een 3-asgyroscoop in de leveringsomvang.
De montage van de mechaniek en het inbouwen van de nodige aandrijf- en afstandsbedieningsonderdelen moeten door de
gebruiker zelf worden uitgevoerd. Daarom vereist dit model voor de ingebruikstelling en het aansluitend gebruik omvangrijke
en fundamentele kennis in de omgang met modellen. Beginners in modelbouw raden wij aan om bij vragen rond de opbouw
en eerste vlucht, advies te vragen aan ervaren modelbouwpiloten.
Het model kan in overdekte ruimtes of bij windstille dagen of dagen met weinig wind ook in open lucht worden gebruikt.
De Quadrocopter is niet geschikt voor kinderen!
4. Leveringsomvang
• Quadrocoptermechaniek
• 4 aandrijfmotoren met 4 toerentaltellers
• 3-as-gyroscoop „GU-344 GYRO“
• Inbusschroevendraaier
• Transporttas
• Handboek van de fabrikant met montageschetsen
• Montagehandleiding
Een precies overzicht van bij de mechaniek horende onderdelen vindt u op de tweede pagina van de bijgevoegde
gebruiksaanwijzing.
Voor de aandrijving van het model is een eenvoudige afstandsbediening met 4 - 5 kanalen, een LiPo-vliegaccu met
2 - 4 cellen met gouden contactstekkers van 3 mm en een passend LiPo-oplaadapparaat met LiPo-balancer nodig.
Page 68

68
5. Veiligheidsvoorschriften
Bij beschadigingen veroorzaakt door het niet opvolgen van deze gebruiksaanwijzing vervalt ieder
recht op garantie. Voor vervolgschade die hieruit ontstaat, zijn wij niet aansprakelijk!
Voor materiële schade of persoonlijk letsel, veroorzaakt door ondeskundig gebruik of het niet
opvolgen van de veiligheidsaanwijzingen, aanvaarden wij geen aansprakelijkheid! In zulke gevallen
vervalt de garantie.
Ook normale slijtage bij het gebruik en schade door ongevallen (bv. gebroken chassisonderdelen of propellers)
vallen niet onder de garantie.
Geachte klant: deze veiligheidsvoorschriften hebben niet enkel de bescherming van het product, maar ook de
bescherming van uw gezondheid en die van andere personen tot doel. Lees daarom dit hoofdstuk zeer aandachtig
door voordat u het product gebruikt!
a) Algemeen
Let op, belangrijk!
Bij gebruik van het model kan het tot materiële schade of lichamelijke letsels komen. Houd rekening met het feit
dat u voor het gebruik van het model voldoende verzekerd bent, bijv. via een aansprakelijkheidsverzekering.
Informeer indien u reeds beschikt over een aansprakelijkheidsverzekering voor u het model in bedrijf neemt bij uw
verzekering of het gebruik van het model mee verzekerd is.
Let op: In sommige landen van de EU bestaat een verzekeringsplicht voor alle vliegmodellen!
• Om veiligheids- en keuringsredenen (CE) is het eigenhandig ombouwen en/of wijzigen van het product niet toegestaan.
• Het product is geen speelgoed. Het is niet geschikt voor kinderen onder de 14 jaar.
• Het product mag niet vochtig of nat worden.
• Wendt u zich tot een ervaren modelsporter of een modelbouwclub als u nog niet genoeg kennis heeft voor het gebruik van
op afstand bediende modellen.
• U mag het verpakkingsmateriaal niet zomaar laten rondslingeren. Dit is gevaarlijk speelgoed voor kinderen.
• Het product werd ontwikkeld voor het gebruik bij een omgevingstemperatuur tussen +10 °C en +40 °C en een in MiddenEuropa normale luchtvochtigheid bij droog weer. Bij een gebruik buiten deze genoemde condities kunnen veranderde
(materiaal-)eigenschappen optreden, wat ook beschadigingen van het product tot gevolg kan hebben!
• Het max. vlieggewicht van 2.200 g mag niet overschreden worden. Bij een hoger vlieggewicht kunnen de rotoren tijdens
het vliegen worden beschadigd en zodanig het neerstorten van het model veroorzaken!
• Wendt u zich tot ons (zie hoofdstuk 1 voor de contactgegevens) of een andere vakman indien u vragen heeft die niet met
behulp van deze gebruiksaanwijzing opgehelderd kunnen worden.
b) Voor de ingebruikname
• Houdt u zich bij de ingebruikname van de afstandsbediening strikt aan de door de fabrikant opgegeven volgorde. In regel
moet altijd eerst de zender en aansluitend onmiddellijk daarna de vliegaccu van het modelvliegtuig aan de toerentalteller
worden aangesloten.
Als u het model niet met een 2,4 GHz afstandsbediening gebruikt, dient u op te letten dat geen andere zender tegelijk op
hetzelfde afstandsbedieningskanaal wordt gebruikt.
• Controleer de technische veiligheid van uw model en het afstandsbedieningssysteem. Let hierbij op zichtbare beschadigingen,
zoals defecte steekverbindingen of beschadigde kabels. Alle bewegende onderdelen van het model moeten soepel werken en de lagers mogen geen speling vertonen.
• De vliegaccu die voor de werking nodig is en de accu´s die eventueel in de zender geplaatst zijn, moeten volgens de
aanwijzingen van de fabrikant opgeladen worden.
• Vóór elk gebruik moeten de instellingen van de trimming van de zender voor de verschillende stuurrichtingen gecontroleerd
en indien nodig aangepast worden.
• Kies een geschikt terrein voor het gebruik van uw model.
• Voer voor elke ingebruikname in overeenstemming met de fabrikantengegevens een bereiktest van de afstandsbediening
uit.
Page 69

69
c) Tijdens het gebruik
• Neem geen risico bij het gebruik van het model! Uw eigen veiligheid en die van uw omgeving is afhankelijk van uw
verantwoord gebruik van het model.
• Een verkeerd gebruik van het product kan zware letsels en beschadigingen tot gevolg hebben! Let daarom bij het vliegen
op voldoende veiligheidsafstand t.o.v. personen, dieren en voorwerpen.
• Vlieg nooit rechtstreeks op toeschouwers of op uzelf af.
• U mag het model alleen besturen als uw reactievermogen niet verminderd is. Vermoeidheid of beïnvloeding door alcohol
of medicijnen kunnen verkeerde reacties tot gevolg hebben.
• Zowel de motoren, de toerentaltellers als de vliegaccu kunnen bij gebruik heet worden. Pauzeer daarom 5 - 10 minuten
vooraleer u de vliegaccu opnieuw oplaadt of met een reserve vliegaccu verder vliegt.
• Laat de afstandsbediening (zender) steeds ingeschakeld zolang het model in gebruik is. Koppel na de landing steeds eerst
de vliegaccu van de toerentalregelaar los. Pas daarna mag de afstandsbediening worden uitgeschakeld.
• Schakel tijdens het gebruik de zender nooit uit zonder vooraf de vliegaccu van de toerentalregelaar te ontkoppelen.
• In geval van een defect of een verkeerde werking moet eerst de oorzaak van de storing verholpen worden voordat u het
model weer start.
• Stel het model en de afstandsbediening niet gedurende langere tijd bloot aan direct zonlicht of grote hitte.
6. Voorschriften voor batterijen en accu´s
Het gebruik van batterijen en accu´s is vandaag de dag weliswaar vanzelfsprekend, maar er bestaan toch tal van gevaren
en problemen. Vooral bij LiPo en Li-ion accu´s met hun hoge energie-inhoud (in vergelijking met gewone NiCd of NiMH
accu´s) moeten er diverse voorschriften in acht genomen worden aangezien er anders explosie- en brandgevaar bestaat.
Neem altijd de volgende informatie en veiligheidsvoorschriften in acht bij het gebruik van batterijen en accu´s.
a) Zenderaccu’s/-batterijen
• Houd batterijen/accu´s buiten het bereik van kinderen.
• U mag batterijen/accu´s niet zomaar laten rondslingeren wegens het gevaar dat kinderen of huisdieren ze inslikken. In dit
geval dient u onmiddellijk een arts te raadplegen!
• Zorg dat batterijen/accu´s niet worden kortgesloten, doorboord of in vuur worden geworpen. Er is explosiegevaar!
• Lekkende of beschadigde batterijen/accu´s kunnen bij huidcontact bijtende wonden veroorzaken; draag in dit geval
veiligheidshandschoenen.
• Gewone batterijen mogen niet opgeladen worden. Er bestaat brand- en explosiegevaar! U mag alleen accu´s opladen die
hiervoor geschikt zijn. Gebruik geschikte opladers. Batterijen (1,5V) zijn bestemd voor eenmalig gebruik. Lege batterijen
moeten volgens de geldende wettelijke voorschriften worden ingeleverd.
• Let bij het plaatsen van de batterijen/accu´s resp. bij de aansluiting van een accupack of een laadapparaat op de juiste
polariteit (plus/+ en min/-). Bij een omgekeerde polariteit worden niet alleen de zender, maar ook het vliegmodel en de
accu’s beschadigd. Er bestaat brand- en explosiegevaar.
• Als u het product langere tijd niet gebruikt (bijv. als u het opbergt), moet u de batterijen (of accu´s) uit de afstandsbediening
nemen om beschadigingen door lekkende batterijen/accu´s te voorkomen.
• Laad NiCd- resp. NiMH-accu´s ongeveer om de 3 maanden op, aangezien anders door de zelfontlading een zogenaamde
diepontlading kan optreden waardoor de accu´s onbruikbaar zullen worden.
• Vervang steeds de volledige set batterijen of accu’s. U mag geen volle en halfvolle batterijen of accu´s door elkaar
gebruiken. Gebruik steeds batterijen of accu´s van hetzelfde type en dezelfde fabrikant.
• U mag nooit batterijen en accu´s door elkaar gebruiken! Gebruik ofwel batterijen ofwel accu’s.
Page 70

70
b) Vliegaccu’s
Let op!
Na het vliegen moet u de vliegaccu van de elektronica van de Quadrocopter loskoppelen. Laat de vliegaccu niet op
het model aangesloten als u deze niet gebruikt (b.v. bij het transport of de opslag). Anders kan de LiPo-vliegaccu
diepontladen worden. Hierdoor gaat deze kapot en wordt onbruikbaar! Bovendien bestaat het gevaar van
functiestoringen door storende impulsen. De propellers zouden onbedoeld kunnen gaan draaien en schade of
verwondingen veroorzaken.
• U mag de vliegaccu nooit direct na het gebruik opladen. Laat de LiPo-vliegaccu altijd eerst afkoelen (tenminste 5-10
minuten).
• Gebruik voor het laden van LiPo-accu’s een geschikt LiPo-laadapparaat en een LiPo-equalizer/balancer.
• U mag enkel intacte accu´s opladen die niet beschadigd zijn. Als de uitwendige isolatie van de accu beschadigd is of als
deze een andere vorm heeft of bol staat, mag de accu in geen geval opgeladen worden. In dit geval bestaat er een acuut
gevaar voor brand en explosies!
• U mag de omhulling van de vliegaccu nooit beschadigen, de folie niet doorknippen of met scherpe voorwerpen in de accu
prikken. Er bestaat brand- en explosiegevaar!
• Neem de accu voor het opladen uit het model en leg deze op een vuurvaste ondergrond. Zorg voor voldoende afstand
t.o.v. brandbare voorwerpen.
• Laad accu’s altijd met de door de fabrikant aangegeven stroomsterkte op en let daarbij op dat u de toegelaten maximale
waarden niet overschrijdt.
• Omdat zowel het laadapparaat als de accupack warm worden tijdens het opladen, moet er voor voldoende ventilatie
gezorgd worden. Dek het oplaadtoestel en de vliegaccu nooit af! Dit geldt vanzelfsprekend ook voor andere laadapparaten
en andere accu’s.
• U mag accu’s nooit onbewaakt laten tijdens het opladen.
• Koppel de vliegaccu los van het laadapparaat als de accu volledig opgeladen is.
• Laadapparaten en accu’s mogen niet vochtig of nat worden. Er bestaat levensgevaar door een elektrische schok en
bovendien brand- of explosiegevaar door de accu!
Let op!
Juist LiPo-accu’s zijn door de intern aanwezige chemicaliën uiterst vochtgevoelig!
Stel het laadapparaat en de LiPo-vliegaccu niet bloot aan hoge/lage temperaturen en direct zonlicht. Let bij de
omgang met LiPo-accu’s op de speciale veiligheidsaanwijzingen van de fabrikant!
Page 71

71
7. Algemene voorschriften bij de montage van de
mechaniek
Voor u met de montage van de mechaniek begint, moet u zich over enkele belangrijke voorschriften informeren:
• Elke Quadrocopter is slechts zo goed als hij werd gemonteerd. Daarom moet u de montage correct en nauwkeurig
volgens de handleiding uitvoeren. Foutieve of verkeerd gemonteerde Quadrocopters kunnen niet alleen duidelijk slechter
vliegen, maar zijn ook een aanzienlijk veiligheidsrisico.
• Houdt u zich daarom bij de montage nauwkeurig aan de montageschetsen in het handboek van de fabrikant. Let daarbij
ook op dat alle metalen schroefverbindingen met een speciale borglak (niet meegeleverd) moeten worden vastgemaakt.
De praktijk heeft echter uitgewezen dat het voor alle vast te maken schroefverbindingen nuttig is om een borglak van
middelmatige sterkte te gebruiken. Om in geval van onderhoud met borglak vastgemaakte schroefverbindingen opnieuw
te kunnen losmaken, raden wij het gebruik van vaste borglak af.
• Open telkens de verpakking pas wanneer u de onderdelen ook werkelijk voor de overeenkomstige bouwfase nodig hebt.
Leg de afzonderlijke onderdelen daarom in een afzonderlijke onderdeelcontainer (lege vriesdoos, etc.).
• Voer de afzonderlijke montagestappen pas uit wanneer u alle handelingen hebt begrepen en precies weet, waar welk
onderdeel moet worden bevestigd.
• De meegeleverde schroeven hebben verschillende lengtes en koppen. Let op dat u telkens de juiste schroeven monteert.
• Gebruik alleen het in het bouwpakket meegeleverde materiaal en probeer niet om het model met aanvullend en ongeschikt
montagemateriaal te wijzigen. Bij een defect vervangt u de betrokken onderdelen alleen door originele onderdelen uit de
vervangonderdelenlijst.
• Gebruik hoogwaardig montagegereedschap, zoals vb. inbussleutels met nauwkeurig geslepen en geharde
schroefaandrijvingen. Goedkoop gereedschap heeft de neiging om te overdraaien waardoor de schroefkoppen worden
beschadigd.
• Monteer de Quadrocopter op een geschikte ondergrond (zachte wollen doek, etc.) om de mechaniek tegen krassen en
beschadigingen te beschermen.
Page 72

72
8. Montage van de mechaniek
Neem het handboek van de fabrikant met de montageschetsen en begin met de montage van de Quadrocopter in
overeenstemming met de tekeningen vanaf pagina P.1.
Pagina P.1
Bovenste afbeelding:
Neem de bodemplaat van het centrale frame en schroef de vier binnenste armhouders met de draailagers in overeenstemming
met de afbeelding vast. Houdt u zich daarbij precies aan de fabrikanttekening. De pennen voor de armbuisarretering
moeten zich telkens onderaan bij de bodemplaat bevinden.
Belangrijk!
Trek de schroeven (Ø 3 x 8) slechts zo vast aan dat de armhouders nog rond de lagerpunten kunnen worden
gedraaid.
Onderste afbeelding:
Plaats de dekplaat van het centrale frame op de draailagers van de vier armhouders en schroef de plaat met vier schroeven
(Ø 3 x 8) vast. Ook daarna moeten de armhouders nog rond hun lageringspunten kunnen worden bewogen.
Plaats de 6 afstandsschroeven (2 x 3,5 x 22 mm) tussen de beide frameplaten en schroef de platen met twaalf schroeven
M2 x 5 vast. Gebruik bij de schroefverbinding lichte borglak.
Pagina P.2
Bovenste afbeelding:
Schuif de vier buitenste armhouders in overeenstemming met de afbeelding tussen de frameplaten en bevestig de armhouders
van bovenaf met vier schroeven (Ø 3 x 8).
Belangrijk!
Plaats de armhouders zo dat het grotere gat telkens voor de kop van de spanschroef naar boven is gericht (zie ook
bovenste afbeelding pagina P.7).
Onderste afbeelding:
De onderste vier schroeven (Ø 3 x 8) worden telkens met een afstandsring (3 x 4 x 1 mm) gemonteerd. Plaats daarna de
vier dempingsrubbers voor de GYRO-dragerplaat in.
Pagina P.3
Bovenste afbeelding:
Plaats de landingsbeenveren in een van beide motorgondelhelften en schroef de gondelhelften in overeenstemming met de
afbeelding samen. Span de schroeven echter nog niet stevig aan.
Onderste afbeelding:
Plaats de motor in overeenstemming met de afbeelding in de motorgondel en schroef hem met vier schroeven
(M3 x 4) lichtjes vast. Gebruik daarvoor borglak van middelmatige sterkte en span de schroeven nog niet stevig aan.
Page 73

73
Pagina P.4
Bovenste afbeelding:
Verbind de drie motoraansluitkabels met de aansluitkabels van de toerentaltellers.
Belangrijk!
Bij de motoren 1 en 3 worden altijd kabels/stekkers van dezelfde kleur met elkaar verbonden.
Bij motoren 2 en 4 moeten de rode en zwarte kabels/stekkers met elkaar worden omgewisseld zodat de motoren
een omgekeerde draairichting vertonen.
De precieze nummering van de motoren vindt u in de onderstaande afbeelding op pagina P.7. Voorzie de afzonderlijke
motorgondels de nummers met getallen van 1 - 4 (zie ook bovenste afbeelding op pagina P.6).
Onderste afbeelding:
Om de toerentalteller makkelijk in de armbuis te kunnen schuiven, moet u een beetje smeermiddel in de krimpkous van de
toerentalteller aanbrengen.
Let bij het inschuiven van de armbuis op dat de inkeping in de buis naar de zijkant is gericht. Schuif de armbuis tot de
aanslag in de motorgondel. De pinnen in de motorgondel grijpt dan in de inkeping zodat de armbuis niet in de motorgondel
kan draaien.
Pagina P.5
Bovenste afbeelding:
Wanneer u de armbuis correct in de motorgondel hebt geschoven, spant u de schroeven van de motorgondel en de
bevestigingsschroeven van de motor aan.
Plaats daarna de onderste motorgondelafdekking en schuif de afdekkap op de houderpinnen voor de beveiligingsring.
Onderste afbeelding:
De fabrikant biedt de Quadrocopter 500X ook zonder motorset aan en heeft daarom een richtlijn op de motorset van de
Quadrocopter 330X-S in de montagehandleiding van de 500X opgenomen:
Als de motoren en de 10 A toerentalteller van de GAUI Quadrocopter „330 X-S“ gebruiken dan moeten de stroomaansluitingen
van de toerentalteller worden verlengd. Dit kunt u zelf doen of met behulp van een optioneel verkrijgbare verlengkabel met
het GAUI-nummer: 222170.
Bij de motoren 1 en 3 worden altijd kabels van dezelfde kleur met elkaar verbonden. Bij motoren 2
en 4 moeten de rode en zwarte kabels met elkaar worden omgewisseld zodat de motoren een omgekeerde draairichting
vertonen. De stopcontacten moeten daarna met een strook kleefband worden vastgemaakt.
Pagina P.6
Bovenste afbeelding:
De afbeelding toont de vier gemonteerde armen met het opschrift 1 - 4.
Onderste afbeelding:
Plaats het centrale frame in overeenstemming met de afbeelding zodanig op de tafel dat de ingekerfde opening in de
dekplaat („Mark“) naar rechts (in de vliegrichting van het model) wijst.
Schuif de arm met het nummer 1 van rechtsonder in de beide cirkelvormige armhouders.
Belangrijk!
Let op dat de pinnen van de binnenste armhouder precies in de inkeping van de armbuis grijpt. De daardoor
ontstane lichte schuine opstelling van de motorassen met ca. 6° is bewust zo gekozen en geen fout van de
armbuizen.
Page 74

74
Pagina P.7
Bovenste afbeelding:
De drieaderige aansluitkabel met de servostekker wordt daarbij door het centrale boorgat van de dekplaat naar buiten
gevoerd. Beide stroomtoevoerleidingen worden door het centrale boorgat van de bodemplaat naar buiten gevoerd.
De spanschroef (Ø 3 x 8) van de buitenste armhouder wordt van bovenaf geplaatst en vast aangespannen. De spanschroef
(Ø 3 x 8) van de binnenste armhouder wordt van onderaf door een gleuf in de bodemplaat geplaatst en vast aangespannen.
Onderste afbeelding:
Bevestig de overige drie armen volgens dezelfde methode. Let daarbij op dat u de armen in overeenstemming met het
opschrift gebruikt. Een denkbeeldige middellijn tussen de motorarmen 1 en 4 komt later overeen met het gebruik van het
model in de voorwaartse vliegrichting.
Stel de vier armen in overeenstemming met de afbeelding in een hoek van 90° t.o.v. elkaar af en draai de bovenste
bevestigingsschroef van de buitenste armhouder vast.
Pagina P.8
Bovenste afbeelding:
Schroef de vier dragerpinnen aan de GYRO-dragerplaat met behulp van de schroeven M2 x 3,2 vast. Gebruik daarbij een
borglak van middelmatige sterkte.
Kleef op de onderzijde van de 3-as-gyroscoop „GU-344 GYRO“ vier schuimplastic pads. Gebruik uitsluitend de pads bij de
„GU-344 GYRO“ werden geleverd. Opdat de schuimplastic pads bij een eventuele demontage kunnen worden beschadigd,
werd een voldoende aantal reservepads bij de „GU-344 GYRO“ meegeleverd.
Belangrijk!
De bevestiging van de 3-as-gyroscoop „GU-344 GYRO“ is afhankelijk van de gebruikte ontvanger:
Als de ontvanger zijdelings afgestelde servoaansluitingen heeft, wordt hij samen met de GYRO in overeenstemming met de
afbeelding op de GYRO-dragerplaat gemonteerd. De montage van de ontvanger kan met dubbelzijdige kleefband (servotape)
of zelfklevende klittenband gebeuren.
Als de ontvanger naar boven gerichte servoaansluitingen heeft (zie onderste afbeelding pagina P.9), zal de afdekkap niet
meer passen. In dit geval wordt de ontvanger op de dekplaat van het centrale frame bevestigd en de 3-as-gyroscoop „GU344 GYRO“ in het midden op de GYRO-dragerplaat gemonteerd.
Onderste afbeelding:
De bovenste van beide tekeningen toont u de aansluiting van de ontvanger.
• De stekker met de 3-aderige kabel moet met de ontvangeruitgang voor de dwarsroer-/rollfunctie (AILE) worden verbonden.
• De stekker met de rode kabel moet met de ontvangeruitgang voor de hoogteroer-/nickfunctie (ELEV) worden verbonden.
• De stekker met de oranje kabel moet met de ontvangeruitgang voor de gas-/pitchfunctie (THRO) worden verbonden.
• De stekker met de gele kabel moet met de ontvangeruitgang voor de richtingsroer-/heckfunctie (RUDD) worden verbonden.
• De stekker met de groene kabel moet met de ontvangeruitgang voor de onderstel-/gyroscoopfunctie (GEAR/GAIN) worden verbonden.
Als u voor de besturing een 4-kanaalsapparaat gebruikt, moet u de stekker met de groene kabel ongebruikt laten. De
instelling van de gyroscoopgevoeligheid gebeurt dan rechtstreeks aan de „GU-344 GYRO“ (zie ook pagina P.12).
De onderste van beide tekeningen toont u de aansluiting van de vier toerentaltellers op de 3-as-gyroscoop GU-344 GYRO.
Verbind de vier toerentaltellers met de „GU-344 GYRO“ in overeenstemming met de afbeelding. De precieze nummering van
de motoren vindt u in de afbeeldingen op pagina P.7 of P.9.
Belangrijk!
Let op de juiste polariteit van de aansluitstekker. De kabel met de minpool (-) moet bovenaan en de kabel voor de
stuursignalen (S) onderaan aangesloten zijn!
Page 75

75
Pagina P.9
Bovenste afbeelding:
Plaats de vier dragerpinnen van de GYRO-dragerplaat in de rubberstoppen van de dekplaat. Let hierbij nadrukkelijk op de
vliegrichting van de Quadrocopter. Bij een correcte montage is de pijl op de bovenzijde van de GU-344 GYRO parallel met
de vliegrichting naar voor (denkbeeldige middellijn tussen armen 1 en 4) gericht.
Onderste afbeelding:
De afbeelding toont u de montage van de GU-344 GYRO en de ontvanger als de ontvanger naar boven gerichte
servoaansluitingen heeft. Alleen op deze manier heeft de afdekkap van het centrale frame voldoende plaats.
Pagina P.10
Bovenste afbeelding:
Trek de stroomtoevoerleidingen van de vier toerentaltellers in overeenstemming met de afbeelding opzij uit het centrale
frame en sluit beide 4-in-1 stroomverdelers aan.
Snijd twee stroken af van het gehaakte deel van de meegeleverde klittenband en kleef de stukken aan de onderzijde van het
centrale frame.
Onderste afbeelding:
Kleef het pluizige deel van de klittenband op de vliegaccu en maak de gemonteerde vliegaccu met de meegeleverde smalle
klittenband vast. De klittenband wordt daarvoor door beide gleufvormige openingen van de bodemplaat getrokken.
Belangrijk!
Bij het gebruik van grote en zware accu’s raden wij u aan om in de plaats van een smalle strook klittenband, brede
klittenband kabelbinders te gebruiken om voldoende bevestiging van de accu te waarborgen.
Pagina P.11
Bovenste afbeelding:
Bevestig de propellermeenemer op de motorassen. De tapeinden van de propellermeenemers moeten daarbij in de voorbereide
moer van de motoras grijpen. Gebruik een borglak van middelmatige sterkte om de tapeinden vast te maken.
Belangrijk!
Let bij de montage van de propellers op dat de propellers aan motoren 2 en 4 in de richting van de wijzers van de
klok (opschrift 10B) en de propellers aan motoren 1 en 3 tegen de richting van de wijzers van de klok (opschrift
10A) draaien.
Bevestig vervolgens de meegeleverde gele stickers aan de in de vliegrichting naar voor gerichte armen 1 en 4 om bij het
vliegen een optische aanduiding over de huidige richting van de Quadrocopter te verkrijgen.
Onderste afbeelding:
De afstelling van de propellers is niet helemaal horizontaal! De lichte schuine stand van de propellers met 6° (zie afbeelding)
is bewust zo gekozen en verbetert de vliegeigenschappen van de Quadrocopter.
De afdekkap van het centrale frame wordt tot slot van de montage van bovenaf op de armen geplaatst. Het spitse
deel moet daarbij in de vliegrichting naar voor zijn gericht.
Page 76

76
9. Systeeminstellingen
Pagina P.12
1. Modelkeuze
Indien de door u gebruikte afstandsbedieningszender de omschakeling tussen helikopter en terreinmodel mogelijk maakt,
selecteert u het modeltype „modelvliegtuig“ aangezien de Quadrocopter aan zenderzijde geen mengfunctie nodig heeft.
2. Keuze van de richtingsfuncties
Indien u een in de tabel aangegeven zender gebruikt, kunt u nu reeds de nodige richtingsfunctie van de vier stuurkanalen
instellen (NOR = normale functierichting; REV = omgekeerde functierichting).
GAUI Futaba JR Hitech
AILE NOR NOR REV NOR
ELEV NOR NOR REV REV
THRO REV REV NOR NOR
RUDD NOR NOR REV NOR
Indien u een zender van een niet vermelde fabrikant gebruikt, moet u de nodige richtingsfuncties aan de hand van praktische tests bepalen (zie pagina P.13 tot P.15).
3. Instelmogelijkheden op 3-as-gyroscoop „GU-344 GYRO“
De 3-as-gyroscoop „GU-344 GYRO“ kan ofwel met behulp van een instelregelaar en DIP-schakelaars of aan de hand van de
afstandsbediening worden ingesteld.
a) „GU-344 GYRO“ met de hand instellen
Wanneer de stekker niet met de groene aansluitkabel aan de ontvanger is aangesloten, zijn de instelregelaar „A“ en de DIPschakelaar „1“ op de „GU-344 GYRO“ geactiveerd.
• Draai de instelregelaar „A“ van de linker aanslag (minimum = stand 4.30 uur) 90° naar rechts om de basisinstelling (stand
7.30 uur) van de gyroscoopgevoeligheid voor de eerste testvluchten te behouden. Gebruik hiervoor een geschikte
minischroevendraaier. Hoe verder de draairegelaar naar rechts wordt gedraaid, hoe groter de stabiliserende werking van
de 3-as-gyroscoop.
De 3-as-gyroscoop „GU-344 GYRO“ beschikt bovendien over 2 verschillende vlieginstellingen die met behulp van de DIPschakelaar „1“ kunnen worden geselecteerd.
• Als DIP-schakelaar „1“ met een minischroevendraaier in de bovenste stand „CRU“ wordt geschakeld, licht de controle-LED
rood op en gedraagt de Quadrocopter zich als een normale modelhelikopter. Deze instelling is aangewezen voor ervaren
modelhelikopterpiloten.
• Als de DIP-schakelaar „1“ in de onderste stand „HOV“ wordt geschakeld, licht de controle-LED groen op en is de Quadrocopter ideaal geschikt voor beginners om het zweefvliegen te leren. In deze instelling worden de stuursignalen van de
zender door de 3-as-gyroscoop lichtjes verminderd en een exponentieel aandeel mee gemengd (zie diagrammen in het
midden op pagina P.12). Dit maakt een fijnere besturing van de Quadrocopter tijdens het zweefvliegen mogelijk.
Met de DIP-schakelaar „2“ kunnen twee verschillende vliegafstellingen van de Quadrocopter worden ingesteld.
• Als de DIP-schakelaar „2“ in de bovenste stand wordt geschakeld, is de X-vliegrichting geactiveerd. Het midden tussen
motorarm 1 en 4 is gezien vanaf de vliegrichting, vooraan.
• Als de DIP-schakelaar „2“ in de onderste stand wordt geschakeld, is de kruisvliegrichting geactiveerd.
Opgelet! Belangrijk!
Omdat de Quadrocopter „500X-S“ uitsluitend geschikt is voor de X-vliegrichting, moet de DIP-schakelaar „2“ zich
altijd in de bovenste stand bevinden en mag hij niet worden omgeschakeld (zie ook pagina P.16).
Page 77

77
b) „GU-344 GYRO“ met de afstandsbediening instellen
Wanneer de stekker niet met de groene aansluitkabel aan de ontvanger is aangesloten, zijn de instelregelaar „A“ en de DIPschakelaar „1“ op de „GU-344 GYRO“ gedeactiveerd. De instelling van de gyroscoopgevoeligheid en de omschakeling van
de vlieginstelling kunnen uitsluitend via de zender gebeuren. Als stuurgever op de zender kan ofwel een schakelaar, schuifof draairegelknop worden gebruikt die aan de overeenkomstige ontvangeruitgang (stekker met de groene aansluitkabel) is
gekoppeld.
• Naargelang de richting waarin de stuurgever wordt gebruikt, kan tussen de vlieginstelling „CRU“ en „HOV“ worden
omgeschakeld.
In de stand „CRU“ licht de controle-LED rood op en de Quadrocopter gedraagt zich als een normale modelhelikopter. Deze
instelling is aangewezen voor ervaren modelhelikopterpiloten.
• In de stand „HOV“ licht de controle-LED groen op en is de Quadrocopter ideaal geschikt voor beginners om het zweefvliegen
te leren.
De benodigde gyroscoopgevoeligheid kan via de EPA- of Travel-functie (servowegbegrenzing) op de afstandsbediening
worden ingesteld. Als basisinstelling raden wij u aan om de servoweg op beide zijden van de stuurgever en zo voor beide
vlieginstellingen met 50% te verminderen. Door de ingestelde waarde te verhogen of verlagen kunt u voor elke vlieginstelling
een individuele gyroscoopgevoeligheid instellen.
In tegenstelling tot de manuele instelling worden bij omschakeling via afstandsbediening de stuursignalen van de
zender niet verminderd en ook niet van een expo-aandeel voorzien (zie schets rechtsonder). Indien nodig moeten
de nodige EPA- en EXPO-instellingen van de stuurkanalen onmiddellijk op de zender worden uitgevoerd.
Pagina P.13
Instellen van de toerentalteller
Bovenste afbeelding:
Voor een correcte en gelijkmatige werking van de motoren is het nodig elke afzonderlijke toerentalteller aan de stuursignalen
van de zender aan te passen.
Belangrijk:
Voor de instelling is het nodig de 3-as-gyroscoop „GU-344 GYRO“ buiten gebruik te stellen. Verwijder daartoe,
indien aangesloten, de stekker met de groene kabel voor de onderstel-/gyroscoopfunctie (GEAR/GAIN) uit de
ontvanger en draai de instelregelknop „A“ met een minischroevendraaier naar de linker aanslag (minimum =
stand 4.30 uur).
• Schakel daarna de zender in en stel de trimfuncties van alle kanalen in de middelste stand. De gasweg op de zender moet
op 100% zijn ingesteld.
• Beweeg daarna de stuurknuppel voor de gas-/pitch-functie in de bovenste stand.
De afbeeldingen op deze en de volgende pagina’s tonen een zender in mode 1, waarbij de gas-/pitchsturing met
de rechter stuurknuppel gebeurt. Indien u de gas-/pitchsturing met de linker stuurknuppel activeert (mode 2 of 4)
moet dientengevolge de linker stuurknuppel in de bovenste stand worden geplaatst.
Onderste afbeelding:
• Sluit de vliegaccu aan de Quadrocopter aan. De motor geeft daarop drie signalen in stijgende hoogte en daarna twee
individuele signalen weer.
• Beweeg onmiddellijk daarna de stuurknuppel voor de gas-/pitch-functie in de onderste stand. De motor geeft daarop
twee korte en na een kleine pauze een langere toon weer.
• De programmering op het zendersignaal is afgesloten en de vliegaccu kan opnieuw worden afgekoppeld.
Als bij het aansluiten van de vliegaccu na de 5 signalen nog een zesde, zevende of achtste signaal (LiPo-vliegaccu
met 2, 3 of 4 cellen) te horen is, sluit u de vliegaccu onmiddellijk opnieuw af en activeert u de reverse-functie voor
de gas-/pitch-stuurknuppel op de zender. Herhaal vervolgens het leerproces.
Als de motor na de drie signalen in stijgende hoogte ononderbroken snel opeenvolgende korte signalen weergeeft, heeft de
regelaar geen zendersignaal ontvangen of bevindt de stuurknuppel voor de gas-/pitch-functie zich niet in de eindpositie.
Opdat u precies herkent of de toerentalteller de zendersignalen juist heeft geleerd, moet u het leerproces aan elke toerentalteller
afzonderlijk uitvoeren.
Page 78

78
Als u het leerproces aan alle vier toerentaltellers hebt uitgevoerd, sluit u de stekker met de groene kabel voor de onderstel/gyroscoopfunctie (GEAR/GAIN) opnieuw aan de ontvanger aan en draait u de instelregelknop „A“ met een
minischroevendraaier 90° naar rechts in de uitgangspositie (stand 7.30 uur).
Pagina P.14
Functietest voor de eerste vlucht
Bovenste afbeelding:
• Duw de stuurknuppel voor de gas-/pitchfunctie in de onderste stand en schakel de zender in.
• Sluit de vliegaccu aan de Quadrocopter aan en beweeg het model niet tot u de inschakeltoon hoort. Bij de
inschakeltoonvolgorde geven de motoren eerst drie signalen in stijgende toon en daarna twee, drie of vier afzonderlijke
signalen (naargelang het cellenaantal van de LiPo-accu) bij gelijke toon en tot slot nog een afzonderlijk signaal weer.
• De Quadrocopter is nu startklaar.
• Schuif de stuurknuppel voor de gas-/pitchfunctie lichtjes naar voor tot de motoren aanlopen en controleer aan de hand
van de afbeelding de correcte draairichting van de afzonderlijke propellers. Als een motor de verkeerde draairichting
vertoont, moeten twee van de drie motoraansluitkabels worden omgewisseld.
Naargelang de gebruikte afstandsbedieningsmodus kunnen de daadwerkelijk benodigde knuppelbewegingen van
de in de handleiding getoonde knuppelbewegingen afwijken.
Onderste afbeelding:
Bovenste tekening:
Beweeg de stuurknuppel voor de hoogteroer-/nickfunctie een beetje naar voor en controleer of de Quadrocopter lichtjes
naar voor helt. Als de Quadrocopter precies op de tegenovergestelde manier reageert, moet de reverse-functie voor de nickbesturing op de zender omgeschakeld worden.
Bovenste tekening:
Als u de stuurknuppel voor de richtingsroer-/heckfunctie naar rechts beweegt, moet de Quadrocopter van bovenaf gezien in
de richting van de wijzers van de klok draaien. Als de Quadrocopter precies op de tegenovergestelde manier reageert, moet
de reverse-functie voor de heck-besturing op de zender omgeschakeld worden.
Pagina P.15
Bovenste afbeelding:
Beweeg de stuurknuppel voor de dwarsroer-/rollfunctie een beetje naar voor en controleer of de Quadrocopter lichtjes naar
rechts overhelt. Als de Quadrocopter precies op de tegenovergestelde manier reageert, moet de reverse-functie voor de
roll-besturing op de zender omgeschakeld worden.
Onderste afbeelding:
Nadat u de correcte bewegingsrichting van de Quadrocopter op de stuurbevelen hebt gecontroleerd of gecorrigeerd, kunt
u de stuurknuppel voor de gas-/pitchfunctie zover naar voor bewegen tot de Quadrocopter op ca. 30 cm hoogte zweeft. Als
het model daarbij naar beneden slingert of schommelt, verhoogt u de gyroscoopgevoeligheid en zo de vliegstabiliteit. De
precieze werkwijze kunt u op pagina P.12 vinden.
Page 79

79
Pagina P.16
Belangrijke opmerkingen:
• De neutrale stand van de 3-as-gyroscoop „GU-344 GYRO“ kan evt. een beetje afwijken. In dit geval moet een fijnafstemming
met behulp van de trimming of subtrimming op de afstandsbedieningszender worden uitgevoerd.
• Het is goed als de stuurweg voor de gas-/pitchfunctie niet meer dan 80% bedraagt opdat de 3-as-gyroscoop bij het
stabiliseren van de vliegtoestand ook bij maximale pitchbesturing niet uit het regelbereik raakt. Daarom moet u na het
instellen van de toerentalteller de gas-/pitchfunctie van 100% tot 75% verminderen.
• Let op het restvermogen van de vliegaccu. Een te diep ontladen accu wordt beschadigd en maakt de Quadrocopter
oncontroleerbaar.
• Een hoog ingestelde gyroscoopstabiliteit zorgt voor een stabiele zweefvlucht. Een lage gyroscoopstabiliteit verslecht de
vliegstabiliteit, maar verhoogt de wendbaarheid van de Quadrocopter.
Onderste afbeelding:
De 3-as-gyroscoop „GU-344 GYRO“ biedt de mogelijkheid om van X- naar kruisafstelling om te schakelen.
Belangrijk!
Omdat de Quadrocopter „500X-S“ echter uitsluitend geschikt is voor de X-afstelling, kan de omschakeling van de
afstelling uitsluitend bij de Quadrocopter „330X-S“ die ook in de afbeelding te zien is, worden gebruikt.
Page 80

80
10. Toerentalteller programmeren
Pagina P.17
1. Programmeermodus oproepen
Schakel de zender in en beweeg de gas-stuurknuppel in de volgasstand.
Sluit de accu op de toerentalregelaar aan. De aan de regelaar aangesloten motor geeft 3 korte stijgende signalen en na
twee seconden twee korte enkelvoudige signalen weer.
Na 5 seconden geeft de aangesloten motor 5 korte stijgende signalen weer.
De regelaar bevindt zich nu in de programmeermodus.
2. Menupunt oproepen
In de programmeermodus hoort u nu 8 groepen verschillende signalen die zich in een lus voortdurend herhalen. Na de
laatste signalen (2 x lang) zijn opnieuw 5 kort signalen in stijgende toon te horen voor de lus opnieuw begint.
De toewijzing van de signalen aan de menupunten vindt u in de volgende tabel.
Nr. signaal menupunt of functie
1 1 x kort remfunctie
2 2 x kort accutype
3 3 x kort cutoff-modus (uitschakelmodus)
4 4 x kort cutoff-schakeldrempel
5 1 x lang start-modus
6 1 x lang, 1 x kort timing
7 1 x lang, 2 x kort standaardinstellingen oproepen
8 2 x lang programmeermodus verlaten
Om een bepaald menupunt te kunnen oproepen, schuift u de gas-stuurknuppel binnen de 2 seconden na elk signaal van de
volgasstand naar de onderste stand (motor uit).
De toerentalregelaar gaat daardoor naar de instelmodus van het opgeroepen menupunt.
3. Waarden wijzigen
In de instelmodus hoort u nu eveneens verschillende signalen (zie bovenste regel in de onderste bijgevoegde tabel) die zich
in een lus voortdurend herhalen. Vanaf wanneer de toonvolgorde opnieuw begint, is afhankelijk van het opgeroepen
menupunt, aangezien alleen de signalen worden weergegeven, die ook een instelwaarde hebben ontvangen.
Wanneer het signaal voor de gewenste instelwaarde te horen was, schuift u de gas-stuurknuppel onmiddellijk van de
onderste stand (motor uit) in de volgasstand.
Als bevestiging voor de opgeslagen waarde hoort u 4 signalen (hoog, laag, hoog, laag).
De toerentalregelaar gaat terug naar de programmeermodus, waarbij u indien nodig het volgende menupunt kunt oproepen
en instellen.
1 x kort 2 x kort 3 x kort
remfunctie Uit Aan
accutype Lithium NiMH/NiCd
cutoff-modus terugregelen uitschakelen
cutoff-schakeldrempel laag gemiddeld hoog
start-modus normaal zacht zeer zacht
timing laag gemiddeld hoog
Page 81

81
4. Programmeermodus verlaten
Wanneer de regelaar zich in de programmeermodus bevindt, wacht u tot menupunt 8 akoestisch wordt weergegeven en
schuift u dan de gas-stuurknuppel binnen de 3 seconden na het signaal van de volgas- naar de onderste stand (motor uit).
Naargelang het cellenaantal weerklinken 2 – 3 korte tonen, gevolgd door een iets langere toon. De regelaar is nu gebruiksklaar.
Na de activering van de fabrieksinstelling verlaat de regelknop in de aansluiting eveneens de programmeermodus.
Wanneer de regelaar zich in de instelmodus bevindt en u een waarde opnieuw heeft opgeslagen, trekt u de gas-stuurknuppel
onmiddellijk na het bevestigingssignaal terug in de onderste stand (motor uit). Naargelang het cellenaantal weerklinken
2 – 3 korte tonen, gevolgd door een iets langere toon. De regelaar is nu gebruiksklaar.
Page 82

82
11. Transport en uitrustingmogelijkheden
Pagina P.18
Bovenste afbeelding:
Opdat de Quadrocopter bij het transport of bij de opslag weinig plaats zou nodig hebben, kunnen de voorste en achterste
armen worden samengeklapt.
Maak daarom de bovenste bevestigingsschroeven van de buitenste armhouders los, klap de armen samen en draai de
schroeven opnieuw vast.
Onderste afbeelding:
Voor het transport van de Quadrocopter in de draagtas, moeten de propellermeenemers incl. propellers van de motorassen
worden verwijderd en in de zijdelingse tas worden gestopt.
Pagina P.19
Bovenste afbeelding:
Indien nodig kunt u de Quadrocopter met een veiligheidsframe uitrusten om te voorkomen dat iets of iemand de propellers
raakt.
Verbind de vier fiberglasstaafjess met behulp van de meegeleverde kunststof verbinders in een ring. De vier alubuizen
dienen als afstandshouder en worden eveneens in de kunststof verbinders geschoven.
Onderste afbeelding:
Verwijder de afdekkappen van de houderpinnen aan de motorgondels en schuif de alubuizen van het veiligheidskader over
de pinnen.
Pagina P.20
Bovenste afbeelding:
Voor de uitrusting van de Quadrocopter met een camera, bestaat de mogelijkheid een optionele camerahouder met GAUInummer: 210705 en een landingsgestel met het GAUI-nummer: 210910 en 222231 te gebruiken. De afbeelding toont de
montage van de overeenkomstige componenten.
Onderste afbeelding:
De afbeelding toont de montage van een miniatuurcamera voor FPV-vluchten. De cameramodule, elektronica en videozender
worden daartoe op een speciale dragerplaat gemonteerd die aan de bodemplaat van het centrale frame wordt geschroefd.
De lens van de camera kijkt in deze montage door een opening van de afdekkap.
Pagina P.21
Bovenste afbeelding:
De afbeelding toont de montage van de optionele LED-verlichtingsset. De kabels naar de overeenkomstige motorgondels
worden met behulp van een metaaldraad in de buizen van de armen getrokken. Na de montage van de LED’s met dubbelzijdige
kleefband moeten de aanwezige motorgondelafdekkingen door transparante exemplaren worden vervangen. De
knipperelektronica wordt aan de ontvanger aangesloten en tussen beide centrale frameplaten gestopt.
Onderste afbeelding:
De afbeelding toont de montage van het optioneel verkrijgbare dragerplatform met GAUI-nummer: 222202, die met vier
afstandshouders aan de dekplaat van het centrale frame wordt bevestigd.
Page 83

83
Pagina P.22
Gewichts-/vermogensoverzicht
De Quadrocopter kan zonder beschikbare lading probleemloos met een LiPo-accu met 2 cellen met 1400 - 2000 mAh
worden gevlogen. Als echter het startgewicht boven de 900 g ligt, moet een LiPo-accu met 3 cellen worden gebruikt. De
onderstaande tabel maakt het u mogelijk om een overzicht met betrekking tot het startgewicht en de vermogensopname
om de passende accu voor het betrokken gebruik te selecteren.
Startgewicht (g) Accu Vermogensopname (W) Gewichts-/vermogensverhouding (g/W)
800 2S 80 10
900 2S 92 9,8
1000 3S 113 8,8
1100 3S 129 8,5
1200 3S 146 8,2
1300 3S 163 8,0
1400 3S 182 7,7
1500 3S 202 7,4
1600 3S 219 7,3
1700 3S 238 7,1
1800 4S 276 6,5
1900 4S 306 6,2
2000 4S 329 6,1
2100 4S 343 6,1
2200 4S 370 6,0
Het gewicht van de Quadrocopter zonder accu bedraagt rond de 670 g.
Berekening van de te verwachten vliegtijd:
Als de Quadrocopter een camera van 350 g moet dragen en de gebruikte accu (3S 2000 mAh) 150 g weegt, ligt de lading
rond de 500 g. Het totale vlieggewicht ligt dan rond de 1170 g en de vermogensopname bedraagt dan in overeenstemming
met de tabel ca. 141 W. De vliegtijd kan nu als volgt worden berekend:
accuspanning (11,1 V) x stroomsterkte (2 A) x ontlaadtijd 60 (min) = 1332 (Wmin)
(1332 Wmin/141 W) x 75% (nuttig vermogen) = 7,1 min
De te verwachten vliegtijd bedraagt rond de 7,1 minuten.
Als een tweede accu (3S 2000 mAh) parallel wordt geschakeld om de vliegtijd te verlengen, verhoogt het startgewicht met
1320 g en de vermogensopname tot 167 W. De nieuwe vliegtijd wordt als volgt berekend:
accuspanning (11,1 V) x stroomsterkte (4 A) x ontlaadtijd 60 (min) = 2664 (Wmin)
(2664 Wmin/167 W) x 75% (nuttig vermogen) = 12,0 min
De te verwachten vliegtijd bedraagt rond de 12 minuten.
De berekeningen hebben betrekking tot een normale rondvlucht. Het afgegeven vermogen van de toerentalteller
kan echter 3 tot 4 keer hoger liggen als het maximale stijgvermogen wordt gestuurd. Tast langzaam de bereikbare
vliegtijden af en controleer na elke vlucht de restcapaciteit van de accu om een diepontlading tijdens het vliegen
in elk geval te vermijden. Dit zou tot een beschadiging van de accu en het neerstorten van de Quadrocopter
leiden.
Page 84

84
12. Overzicht reserveonderdelen
Pagina P.23
Op de pagina’s P.23 en P.24 vindt u de bij de fabrikant verkrijgbare reserveonderdelen met telkens de omschrijvingen en de
daarbijhorende reserveonderdeelnummers.
Let op!
Denk eraan dat de 6-cijferige nummers in het handboek van de fabrikant geen Conrad-bestelnummers zijn!
Een actuele lijst met vervangonderdelen met de overeenkomstige Conrad Electronic-bestelnummers vindt u in het downloadbereik op www.conrad.de.
13. Onderhoud en verzorging
Om de bedrijfszekerheid van uw model te garanderen, zijn regelmatige controles en onderhoudswerkzaamheden noodzakelijk.
1. Controleer of schroeven zijn losgekomen of bouwonderdelen niet meer zijn vastgeschroefd of -gekleefd.
2. Let op het zuiver rondlopen en op de vaste zitting van de propellers. De propellers mogen geen zichtbare beschadigingen
tonen.
3. Controleer of de motoren vlot draaien. Als bij draaiing met de hand een „rollend“ of „knisperend“ merkbaar is, dient de
betreffende motor worden omgeruild.
4. Controleer de correcte en veilige zitting van het kleefpad van de 3-as-gyroscoop. Een losse of wankele gyroscoop leidt tot
ongecontroleerde bewegingen van de Quadrocopter.
5. Controleer de volledige bekabeling. Let daarbij in het bijzonder op de verbindingen tussen de toerentaltellers en de
motoren.
Belangrijk!
Indien u beschadigde of versleten onderdelen moet vernieuwen, gebruik dan voor uw Quadrocopter alleen originele
vervangonderdelen.
De reserveonderdelenlijst vindt u op onze internetpagina www.conrad.com in het downloadgedeelte van het betreffende
product.
U kunt de reserveonderdelenlijst ook telefonisch aanvragen. De contactgegevens vindt u aan het begin van deze
gebruiksaanwijzing in het hoofdstuk „Inleiding“.
Page 85

85
14. Afvoer
a) Algemeen
Verwijder het onbruikbaar geworden product volgens de geldende wettelijke voorschriften.
b) Batterijen en accu´s
U bent als eindverbruiker volgens de KCA-voorschriften wettelijk verplicht alle lege batterijen en accu’s in te leveren;
verwijdering via het huisvuil is niet toegestaan!
Batterijen/accu´s die schadelijke stoffen bevatten, zijn gemarkeerd met nevenstaand symbool. Deze mogen niet
via het huisvuil worden afgevoerd. De aanduidingen voor irriterend werkende, zware metalen zijn: Cd=cadmium,
Hg=kwik, Pb=lood (betekenis staat op de batterij/accu, bijv. onder de hiernaast afgebeelde containersymbolen).
Lege batterijen en niet meer oplaadbare accu´s kunt u gratis inleveren bij de verzamelplaatsen van uw gemeente, onze
filialen of andere verkooppunten van batterijen en accu´s.
Zo voldoet u aan de wettelijke verplichtingen voor afvalscheiding en draagt u bij aan de bescherming van het milieu.
15. Technische gegevens
Rompafmetingen (Ø x H) ........................................................ 500 x 120 mm
Propeller-Ø ............................................................................. 254 mm
Leeg gewicht (zonder accu) .................................................... ca. 670 g
Maximum startgewicht (incl. accu)........................................... ca. 2.200 g
Aanbevolen vliegaccu.............................................................. (2S 1400 mAh) - (4S 2000 mAh)
Noodzakelijke afstandsbediening ............................................. 4 - 5 kanalen
Page 86

86
Page 87

87
Page 88

Impressum
Diese Bedienungsanleitung ist eine Publikation der Conrad Electronic SE, Klaus-Conrad-Str. 1, D-92240 Hirschau (www.conrad.com).
Alle Rechte einschließlich Übersetzung vorbehalten. Reproduktionen jeder Art, z. B. Fotokopie, Mikroverfilmung, oder die Erfassung
in elektronischen Datenverarbeitungsanlagen, bedürfen der schriftlichen Genehmigung des Herausgebers. Nachdruck, auch
auszugsweise, verboten.
Diese Bedienungsanleitung entspricht dem technischen Stand bei Drucklegung. Änderung in Technik und Ausstattung vorbehalten.
© Copyright 2012 by Conrad Electronic SE.
Legal Notice
These operating instructions are a publication by Conrad Electronic SE, Klaus-Conrad-Str. 1, D-92240 Hirschau (www.conrad.com).
All rights including translation reserved. Reproduction by any method, e.g. photocopy, microfilming, or the capture in electronic data
processing systems require the prior written approval by the editor. Reprinting, also in part, is prohibited.
These operating instructions represent the technical status at the time of printing. Changes in technology and equipment reserved.
© Copyright 2012 by Conrad Electronic SE.
Information légales
Ce mode d'emploi est une publication de la société Conrad Electronic SE, Klaus-Conrad-Str. 1, D-92240 Hirschau (www.conrad.com).
Tous droits réservés, y compris de traduction. Toute reproduction, quelle qu'elle soit (p. ex. photocopie, microfilm, saisie dans des
installations de traitement de données) nécessite une autorisation écrite de l'éditeur. Il est interdit de le réimprimer, même par
extraits.
Ce mode d'emploi correspond au niveau technique du moment de la mise sous presse. Sous réserve de modifications techniques et
de l'équipement.
© Copyright 2012 by Conrad Electronic SE.
Colofon
Deze gebruiksaanwijzing is een publicatie van de firma Conrad Electronic SE, Klaus-Conrad-Str. 1, D-92240 Hirschau (www.conrad.com).
Alle rechten, vertaling inbegrepen, voorbehouden. Reproducties van welke aard dan ook, bijvoorbeeld fotokopie, microverfilming of
de registratie in elektronische gegevensverwerkingsapparatuur, vereisen de schriftelijke toestemming van de uitgever. Nadruk, ook
van uittreksels, verboden.
Deze gebruiksaanwijzing voldoet aan de technische stand bij het in druk bezorgen. Wijziging van techniek en uitrusting voorbehouden.
© Copyright 2012 by Conrad Electronic SE.
V1_0512_01
 Loading...
Loading...