

Concurrent Technologies VP 110/01x VME Pentium III-M Single, VP 110/01 Series, VP 110/010, VP 110/012 Technical Reference Manual
Page 1

Technical Reference Manual
for VP 110/01x
VME Pentium
®
III-M Single
Board Computer
Manual Order Code 550 0014 Rev 02 August 2002
Concurrent Technologies Inc
3840 Packard Road
Suite 130
Ann Arbor, MI 48108
USA
Tel: (734) 971 6309
Fax: (734) 971 6350
E-mail: info@gocct.com http://www.gocct.com
Concurrent Technologies Plc
4 Gilberd Court
Newcomen Way
Colchester, Essex CO4 9WN
United Kingdom
Tel: (+44) 1206 752626
Fax: (+44) 1206 751116
Page 2

NOTES
Information furnished by Concurrent Technologies is believed to be accurate and reliable.
However, Concurrent Technologies assumes no responsibility for any errors contained in this
document and makes no commitment to update or to keep current the information contained in
this document. Concurrent Technologies reserves the right to change specifications at any time
without notice.
Concurrent Technologies assumes no responsibility either for the use of this document or for any
infringements of the patent or other rights of third parties which may result from its use. In
particular, no license is either granted or implied under any patent or patent rights belonging to
Concurrent Technologies.
Some parts of this document are reproduced with the permission of and remain copyright
Phoenix Technologies Ltd, 1997.
No part of this document may be copied or reproduced in any form or by any means without the
prior written consent of Concurrent Technologies.
All companies and product names are trademarks of their respective companies.
CONVENTIONS
Throughout this manual the following conventions will apply:
#or*or
h denotes a hexadecimal number. e.g. FF45h
byte represents 8-bits
word represents 16-bits
dword represents 32-bits
over a name represents an active low signal. e.g. INIT* or INIT or INIT#
ii VP 110/01x
Page 3

GLOSSARY OF TERMS
BIOS ·····Basic Input Output System
BIST ·····Built In Self Test
BSB······Back Side Bus
CCT······Concurrent Technologies
CPU ·····Central Processing Unit
CRT······Cathode Ray Tube
DDC ·····Display Data Channel
DIB ······Dual Independent Bus
DFP······Digital Flat Panel
DMA ·····Direct Memory Access
ECC ·····Error Checking and Correcting
ECP······Extended Capabilities Port
EIDE ·····Enhanced Integrated Drive Electronics
EPP······Enhanced Parallel Port
EPROM· · · Electrically Programmable Read Only Memory
FSB······Front Side Bus
ISA ······Industry Standard Architecture
LDT······Long Duration Timer
LFM······Linear Feet per Minute
LPC······LowPinCount
NMI······NonMaskable Interrupt
PCI ······Peripheral Component Interconnect
PIT ······Programmable Interval Timer
PMC ·····PCIMezzanine Card
POST ····Power-on Self Test
RFU······Reserved for Future Use
RTC······Real Time Clock
SCC ·····Serial Communications Controller
SCSI ·····Small Computer Systems Interface
SDRAM · · · Synchronous Dynamic Random Access Memory
SODIMM · · Small Outline Dual Inline Memory Module
TTL······Transistor-Transistor Logic
UART ····Universal Asynchronous Receiver Transmitter
USB······Universal Serial Bus
VP 110/01x iii
Page 4

NOTATIONAL CONVENTIONS
NOTE Notes provide general additional information.
WARNING Warnings provide indication of board malfunction if they are not observed.
CAUTION Cautions provide indications of board or system damage if they are not observed.
iv VP 110/01x
Page 5

Revision Revision History Date
01 Initial Release July 2002
02 Added clarifications to several sections August 2002
VP 110/01x v
Page 6

Table of Contents
1. Introduction and Overview ·················1-1
1.1 General ·························1-1
1.2 The VP 110/01x - Main Features ··················1-2
1.2.1 Central Processor ······················1-2
1.2.2 Cache Memories·······················1-2
1.2.3 Chipset··························1-2
1.2.4 SDRAM ·························1-3
1.2.5 PCI Busses ························1-3
1.2.6 EPROM ·························1-3
1.2.7 Battery Backed SRAM ·····················1-3
1.2.8 Application Flash EPROM ····················1-3
1.2.9 EIDE Controllers ·······················1-3
1.2.10 USB···························1-3
1.2.11 PMC Interface ·······················1-3
1.2.12 Ethernet Controllers ······················1-3
1.2.13 VME Interface ·······················1-3
1.2.14 Floppy Disk ························1-4
1.2.15 Serial Communication ·····················1-4
1.2.16 Keyboard & Mouse ······················1-4
1.2.17 Real Time Clock (RTC)·····················1-4
1.3 Additional Board Options ····················1-5
2. Hardware Installation ···················2-1
2.1 General ·························2-1
2.2 Unpacking and Inspection ····················2-2
2.3 Default Jumper Settings ···················2-3
2.4 Front Panel Indicators and Controls ·················2-4
2.4.1 Run LED (R) Green ······················2-4
2.4.2 POST LED (P) Yellow ·····················2-4
2.4.3 Ethernet Speed LEDs (Speed) Yellow ················2-4
2.4.4 Link/Activity LEDs (LK/ACT) Green ·················2-4
2.4.5 Battery Status LED (B) Yellow (optional) ···············2-4
2.4.6 Reset/NMI Switch ······················2-4
2.4.7 External Reset ·······················2-5
2.5 Installation of On-Board Mass Storage ················2-6
2.5.1 Hard Disk Storage Kit (AD CP1/DR1) ················2-7
2.5.2 CompactFlash Storage Kit (AD 200/001) ···············2-8
2.6 Adding or Replacing DRAM Modules ················2-9
2.7 Installing and Replacing the Battery ················2-10
2.8 Installing or Removing a PMC Module················2-12
2.9 Installing the Board in a VME Backplane ···············2-14
2.9.1 Installing the board······················2-14
2.9.2 Removing the board ·····················2-14
3. Software Installation ···················3-1
3.1 Starting up for the first time ···················3-1
3.2 Bootloading from CD-ROM ···················3-2
3.3 Installing Windows NT
3.4 Installing Windows
3.5 Installing RedHat
3.6 Using VxWorks 5.4 with Tornado 2 ·················3-6
®
4. Mass Storage Interfaces ··················4-1
4.1 Floppy Disk Interface ·····················4-1
4.2 EIDE Interfaces ·······················4-2
vi VP 110/01x
®
4.0···················3-3
®
2000 ····················3-4
Linux®7.2···················3-5
Page 7

4.3 ROM Disk ·························4-3
4.4 RAM Disk ·························4-4
5. VME Interface ······················5-1
5.1 VME Bus Interface Features ···················5-1
5.2 VME Byte Swapping ·····················5-2
5.3 VME Bus Error Interrupt ····················5-3
5.4 VME Address Capture ·····················5-3
5.4.1 VME Address Capture Read Register (Read Only) ············5-4
5.4.2 VME Address Capture Control Register (Write Only) ···········5-6
6. Other Interfaces ·····················6-1
6.1 Serial Port ·························6-1
6.2 Keyboard and Mouse Ports ···················6-2
6.3 Ethernet Controllers ······················6-3
6.4 Real-Time Clock ·······················6-4
6.5 Universal Serial Bus (USB) ···················6-5
6.6 Power On Self Test LED/Speaker ·················6-6
7. Memory························7-1
7.1 SDRAM ·························7-2
7.2 Flash EPROM ·······················7-3
7.3 Application Flash EPROM ····················7-4
7.4 Battery backed SRAM ·····················7-5
8. Additional Local I/O Functions ················8-1
8.1 Status & Control Register 0 (I/O address 210h) ·············8-3
8.2 Status & Control Register 2 (I/O address 211h) ·············8-4
8.3 Status & Control Register 1(I/O address 212h) ·············8-5
8.4 Watchdog Timer ·······················8-6
8.4.1 Watchdog Status & Control Register (I/O address 214h) ··········8-7
8.4.2 Watchdog Configuration ····················8-8
8.4.3 Using the Watchdog······················8-8
8.4.4 Programming the Watchdog ···················8-9
8.5 Status & Control Register 4 (I/O address 215h) ·············8-11
8.6 Memory Page and Status Register (I/O address 216h) ··········8-12
8.7 Status & Control Register 3 (I/O address 217h) ·············8-13
8.8 Long Duration Timer/Periodic Interrupt Timer ·············8-14
8.8.1 Long Duration Timer/Periodic Interrupt Timer Low Byte ··········8-15
8.8.2 Long Duration Timer/Periodic Interrupt Timer Mid-low Byte ·········8-15
8.8.3 Long Duration Timer/Periodic Interrupt Timer Mid-high Byte ·········8-15
8.8.4 Long Duration Timer/Periodic Interrupt Timer High Byte ··········8-15
8.8.5 LDT/PIT Status & Control Register ·················8-16
8.8.6 Programming the LDT/PIT ···················8-17
8.9 Port 80 ·························8-20
9. PCBIOS························9-1
9.1 Entering the PC BIOS ·····················9-1
9.2 The PC BIOS Startup Sequence ··················9-3
9.3 Boot device selection ·····················9-4
9.4 PCI Bus Resource Management ··················9-5
9.4.1 PCI Resource Allocation ····················9-5
9.4.2 PCI Device IDs ·······················9-7
10. VME System Architecture Test Handler ·············10-1
10.1 Introduction ························10-1
10.2 The VSA Environment ····················10-1
VP 110/01x vii
Page 8

10.2.1 Slot Numbering ·······················10-1
10.2.2 VSA Console Devices·····················10-1
10.2.3 Starting the Master Test Handler ·················10-2
10.2.4 Remote Testing from the System Controller ··············10-2
10.2.5 Bootloading the BIOS ·····················10-2
10.2.6 BIST Execution ·······················10-3
10.3 MTH Command Reference ···················10-4
10.3.1 Help Screens ·······················10-4
10.3.2 General Commands ·····················10-4
10.3.3 Utility Commands ······················10-6
11. VSA Mode Diagnostics ··················11-1
11.1 Initialization Checks ·····················11-1
11.1.1 Check 16: CPU Alive Check ···················11-1
11.1.2 Check 18: Scratchpad RAM Check ················11-1
11.2 BIST Descriptions ······················11-2
11.2.1 Test 1: Test Initialization Routine ·················11-2
11.2.2 Test 2: PROM Check ·····················11-2
11.2.3 Test 4: Numeric Coprocessor Test ·················11-2
11.2.4 Test 6: Interconnect Image Check ·················11-3
11.2.5 Test 7: Off-board Interconnect Access ···············11-3
11.2.6 Test 9: 8254 PIT Test ·····················11-3
11.2.7 Test 10: 8259A PIC Test ····················11-3
11.2.8 Test 12: Local RAM Fixed Pattern Test ···············11-4
11.2.9 Test 13: SCC Access Test ···················11-4
11.2.10 Test 19: NMI Test ······················11-4
11.2.11 Test 20: Universe NMI Test ···················11-5
11.2.12 Test 22: RAM Data and Address Bus Test ··············11-5
11.2.13 Test 23: Local RAM Read/Write Test ················11-5
11.2.14 Test 25: Local RAM Dual Address Test ···············11-6
11.2.15 Test 27: Local RAM Execution Test ················11-6
11.2.16 Test 28: SCC Interrupt Test ···················11-7
11.2.17 Test 29: SCC Internal Loopback Test ················11-7
11.2.18 Test 30: SCC External Loopback ·················11-7
11.2.19 Test 33: Universe PCI−>VME Test ·················11-7
11.2.20 Test 34: Universe PCI Config Utility ················11-8
11.2.21 Test 35: Universe VME Config Utility ················11-8
11.2.22 Test 36: VME Bus Byte Swapping ·················11-8
11.2.23 Test 37: Bus Error Detection Test ·················11-9
11.2.23.1 Sub-Test 1: VME Bus Error Detection [by polling] ············11-9
11.2.23.2 Sub-Test 2: VME Bus Error Detection [by interrupt] ···········11-9
11.2.23.3 Sub-Test 3: VME Bus Error Address Capture ·············11-9
11.2.24 Test 39: Watchdog Test····················11-10
11.2.24.1 Sub-Test 1: Watchdog NMI Test ·················11-10
11.2.24.2 Sub-Test 2: Watchdog Reset Test ················11-10
11.2.25 Test 40: LDT and PIT Test ···················11-11
11.2.26 Sub-Test 1: Standard LDT / PIT Functional Test ············11-11
11.2.27 Sub-Test 2: Enhanced LDT / PIT Functional Test ············11-11
11.2.28 Test 41: StrataFlash Test ···················11-12
11.2.29 Test 42: Non-Volatile RAM Test ·················11-13
11.2.29.1 Sub-test 1: Non-destructive NVRAM Read/Write Test ··········11-13
11.2.29.2 Sub-test 2: NVRAM Data retention Pattern, Setup ···········11-13
11.2.29.3 Sub-test 3: NVRAM Data Retention Pattern Check ···········11-13
11.2.30 Test 56: IDE Controller Test ··················11-14
11.2.30.1 Register Access Test ····················11-14
11.2.30.2 Controller Diagnostics Test···················11-14
11.2.30.3 Identify Disk Drive ·····················11-14
11.2.31 Test 58: IDE Fixture Test ···················11-15
11.2.32 Test 63: PS/2 Mouse Test ···················11-16
viii VP 110/01x
Page 9

11.2.33 Test 64: PC Keyboard Test···················11-17
11.2.34 Test 68: Real Time Clock Test··················11-18
11.2.35 Test 69: 82559ER Test ····················11-19
11.2.35.1 Sub-Test 0 – Default Tests ···················11-19
11.2.35.2 Sub-Test 1 – Device Checks ··················11-19
11.2.35.3 Sub-Test 2 – Internal Loopback ·················11-19
11.2.35.4 Sub-Test 3 – External Loopback @ 10Mb/sec ·············11-19
11.2.35.5 Sub-Test 4 – External Loopback @ 100Mb/sec ············11-19
11.2.35.6 Sub-Test 5 – Display Programmed Ethernet Address ··········11-19
11.2.36 Test 70: Maxim 1617 Thermal Sensor Test··············11-20
11.2.36.1 Basic Functionality ·····················11-20
11.2.36.2 Temperature Readout ····················11-20
11.2.36.3 Set Alarms ························11-20
11.2.36.4 Change Update Frequency ··················11-21
11.2.36.5 Full Readout ·······················11-22
11.2.37 Test 71: 82559ER Interface Test ·················11-23
11.2.38 Test 80: SCSI Based PMC Site Test ················11-23
11.2.39 Test 85: Floppy Disk Drive Test ·················11-23
11.2.39.1 Controller Access Test ····················11-23
11.2.39.2 Diskette Access Test ····················11-23
11.2.39.3 Disk Checksum Test ·····················11-23
11.2.40 Test 101: Display Memory Utility ·················11-24
11.2.41 Test 102: Fill Memory Utility ··················11-24
11.2.42 Test 103: I/O Read Utility ···················11-24
11.2.43 Test 104: I/O Write Utility ···················11-25
11.2.44 Test 105: Interconnect Read Utility ················11-25
11.2.45 Test 106: Interconnect Write Utility ················11-25
11.2.46 Test 107: Cache Control Utility ·················11-26
11.2.47 Test 120: PCI Configuration Utility ················11-26
11.2.48 Test 121: PCI Read Utility ···················11-27
11.2.49 Test 122: PCI Write Utility ···················11-27
11.2.50 Test 126: Display Board Configuration ···············11-27
11.2.51 Test 127: Retrieve BIST Information ················11-27
A. Specifications······················A-1
A.1 Functional Specification ····················A-1
A.2 Environmental Specification ···················A-2
A.2.1 Temperature Range ·····················A-2
A.2.2 Humidity ·························A-2
A.3 Dimensions ························A-2
A.4 Electrical Specification ·····················A-2
A.4.1 Power Supply Requirements ···················A-2
A.5 Connectors ·······················A-3
A.5.1 VME Interface (P1) Pin-outs ···················A-4
A.5.2 Auxiliary Connector (P2) Pin-outs ·················A-5
A.5.3 PMC I/O Connector (P0) Pin-outs ·················A-6
A.5.4 Keyboard and Mouse Header (LK1) Pin-outs ··············A-7
A.5.5 Serial Interface (J9) Pin-outs ···················A-8
A.5.6 Ethernet Interface (J15 and J16) Pin-outs ···············A-9
A.5.7 On-Board Mass Storage Option Connector (S1) Pin-outs··········A-10
A.5.8 PMC Site 1 Connectors (J11, J12, J13 and J14) Pin-outs ·········A-11
A.5.9 PMC Site 2 Connectors (J21, J22, J23 and J24) Pin-outs ·········A-15
A.5.10 Processor Debug Port (J1) Pin-outs ················A-19
A.5.11 Port 80 (J3) Pin-outs ····················A-20
B. Breakout Modules ····················B-1
B.1 Introduction ························B-1
B.2 Breakout Modules List ·····················B-1
B.3 AD VP2/004-10 ·······················B-2
VP 110/01x ix
Page 10

B.3.1 Layout ··························B-2
B.3.2 Pin-out Tables ·······················B-2
B.4 AD VP2/004-20 ·······················B-3
B.4.1 Layout ··························B-3
B.4.2 Pin-out Tables ·······················B-3
B.5 AD VP2/005-00 ·······················B-4
B.5.1 Layout ··························B-4
B.5.2 Pin-out Tables ·······················B-4
B.6 Header/Connector Configuration Tables ···············B-5
x VP 110/01x
Page 11

Table of Figures
Figure 1-1 Overview ························1-1
Figure 2-1 Default Jumper and Switch Settings ················2-3
Figure 2-2 Front Panel Indicators and Controls ················2-4
Figure 2-3 Front Panel Reset and NMI Switch ················2-5
Figure 2-4 Mass Storage Connector and Fixing Holes ··············2-6
Figure 2-5 Disk Drive Cable Installation ··················2-7
Figure 2-6 CompactFlash Carrier Module Installation ··············2-8
Figure 2-7 DRAM Module Replacement ··················2-9
Figure 2-8 Battery Fitting and CMOS Clear Jumper ··············2-10
Figure 2-9 PMC Installation Diagram ···················2-12
Figure 2-10 PMC V(I/O) Jumper ·····················2-13
Figure 6-1 Console Mode Switch·····················6-1
Figure 7-1 Memory Map ·······················7-1
Figure 7-2 Flash Program Jumper ····················7-4
Figure 7-3 SRAM Backup Power Jumper ··················7-5
Figure 8-1 Watchdog Timer Switch ····················8-6
Figure 9-1 Mode Switch ·······················9-1
Figure A-1 Connector Layout ······················A-3
Figure A-2 Front Panel Connectors ····················A-3
Figure A-3 Keyboard and Mouse Header LK1 Polarization·············A-7
Figure A-4 Serial Port RJ45 Connector (Front View)···············A-8
Figure A-5 Ethernet RJ-45 Connector (Front View) ···············A-9
Figure A-6 Port 80 Connector ·····················A-20
Figure B-1 AD VP2/004-10 P2 Breakout Connectors ··············B-2
Figure B-2 AD VP2/004-20 P2 Breakout Connectors ··············B-3
Figure B-3 AD VP2/005-00 P2 Breakout Connectors ··············B-4
VP 110/01x xi
Page 12

Table of Tables
Table 1-1 VME P2 Breakout Interfaces ··················1-5
Table 5-1 VME Address Capture Read Register················5-4
Table 5-2 VME Address Modifier Codes ··················5-5
Table 5-2 VME Address Modifier Codes (Continued) ··············5-6
Table 8-1 I/O Address Map ······················8-1
Table 9-1 Configurable PCI Bus Interrupts ·················9-6
Table 9-2 PCI Device Numbers ·····················9-7
Table A-1 VME Interface Pin-outs ····················A-4
Table A-2 P2 Connector Pin-outs (64 PMC I/O Signals) ·············A-5
Table A-3 PMC I/O Connector (P0) Pin-outs ·················A-6
Table A-4 Keyboard and Mouse Header (LK1) Pin-outs ·············A-7
Table A-5 Serial Port Cable Connections ··················A-8
Table A-6 Serial Port Cable Connections ··················A-8
Table A-7 Ethernet RJ-45 Connector Pin-outs ················A-9
Table A-8 On-Board Mass Storage Option Interface Pin-outs ···········A-10
Table A-9 PMC J11 Connector Pin-outs ··················A-11
Table A-10 PMC J12 Connector Pin-outs ··················A-12
Table A-11 PMC J13 Connector Pin-outs ··················A-13
Table A-12 PMC J14 Connector Pin-outs ··················A-14
Table A-13 PMC J21 Connector Pin-outs ··················A-15
Table A-14 PMC J22 Connector Pin-outs ··················A-16
Table A-15 PMC J23 Connector Pin-outs ··················A-17
Table A-16 PMC J24 Connector Pin-outs ··················A-18
Table A-17 30-way Debug Connector Pin-outs ················A-19
Table A-18 Port 80 Connector Pin-outs ··················A-20
Table B-1 Breakout Modules List ····················B-1
Table B-2 Floppy 34-way IDC Header ···················B-5
Table B-3 EIDE 40-way IDC Header ···················B-5
Table B-4 USB Connector Pin-outs····················B-6
Table B-5 PMC I/O 1-32 IDC Header Pin-outs ················B-6
Table B-6 PMC I/O 33-64 IDC Header Pin-outs ················B-6
Table B-7 P5 68-way D-type Connector Pin-outs ···············B-7
xii VP 110/01x
Page 13

1.1 General
2
This manual is a guide and reference handbook for engineers and system integrators who wish
to use the Concurrent Technologies’ VP 110/01x ultra high-performance Pentium III
Processor-M (Pentium III-M) single board computer. The board has been designed for
high-speed multiprocessing applications using a PC-AT™ architecture operating in a VME Bus
environment.
The VP 110/01x board is available in several different variants which differ by the amount of
fitted memory and processor configuration. Currently the board is available with either an
800MHz or a 1.2GHz Pentium III-M processor, designated by VP 110/010 and VP 110/012
respectively. The boards may be supplied with one of a range of SDRAM sizes, as specified by
a two-digit suffix to the board name; refer to the product data sheet for further details. Further
details of other board options are given in Section 1.3. References to the board in this document
will use the name VP 110/01x unless they apply only to a specific variant, in which case the full
name will be used.
The information contained in this manual has been written to provide users with all the
information necessary to configure, install and use the VP 110/01x as part of a system. It
assumes that the user is familiar with the VME bus and PC-AT bus architectures and features.
Introduction and Overview
Header
Keyboard
Interface
Real-Time
Clock
3V
Battery
Backed
SRAM
Floppy
Disk
Interface
Header
Mouse
Interface
BIOS
Flash
EPROM
Application
Flash
EPROM
CF
or
TM
EIDE
Interfaces
EIDE
1xRS232
Serial
Interface
Bridge
Low Power
Pentium III
Processor
Serial Bus
10/100Mbps
82559ER
32-bit PCI Bus
CPU
Bus
USB
Universal
x Ethernet
2x
Intel
ServerWorks
ServerSet III LE™
S-DRAM
PMC
PMC Module
P2
PMC
Optional
P0
PMC Module
PMC
Expansion
64-bit PCI Bus
Universe II
Byte
Swap
VME
VP 110/01x 1-1
Figure 1-1 Overview
Page 14

Introduction and Overview
1.2 The VP 110/01x - Main Features
The VP 110/01x is a member of the Concurrent Technologies range of single-board computers
for the VME bus architecture. It has been designed as a powerful single board computer based
upon the Pentium III Processor-M (Pentium III-M) incorporating the following features:
up to 1 Gbyte 133MHz SDRAM
l
two IEEE P1386.1 PMC sites
l
two 82559ER 10/100 Ethernet controllers
l
up to 2 Mbytes of Battery backed SRAM
l
up to 64 Mbytes of Intel®StrataFlash
l
on-board mass storage
l
VME 8/16/32/64bit with data Endian translation
l
and standard PC-AT based peripherals.
1.2.1 Central Processor
The central processor used on this board is an ultra high performance low power Intel Pentium
III-M 32-bit microprocessor, operating internally at 800MHz or 1.2GHz. The processor supports
the Dual Independent Bus (DIB) architecture with the backside bus connected to the on die
Level 2 cache and the frontside bus connected to the memory controller at 133MHz. The
processor is capable of addressing 4 Gbytes of physical memory all of which is cacheable, and
64 Terabytes of virtual memory. The Pentium III-M is upwardly code-compatible with the other
members of the x86 family of microprocessors.
The processor has an in-built floating point coprocessor for compatibility with 486 and 386/387
designs.
The processor features Data Prefetch Logic that speculatively fetches data to the Level 2 cache
before a Level 1 cache request occurs. This reduces latency resulting in improved performance.
®
1.2.2 Cache Memories
The Level 1 and Level 2 caches are both implemented on the processor die for maximum
performance. The Level 1 cache is 32 Kbytes in size and the Level 2 cache is 512 Kbytes.
The Level 1 cache is organized as 4-way set associative with a 32-byte line size. It is split into a
16 Kbyte instruction cache and a 16 Kbyte write-back data cache.
The Level 2 cache is organized as 8-way set associative with a 32-byte line size. It operates at
the core frequency and is based on Intel’s Advanced Transfer Cache architecture. The Level 2
cache data is ECC protected.
1.2.3 Chipset
The VP 110/01x uses the ServerWorks ServerSet™ III LE chipset. This is comprised of the
CNB30LE North Bridge and the CSB5 South Bridge.
The CNB30LE interfaces to the CPU host bus. It provides an SDRAM memory controller and two
PCI bus bridges. It supports concurrent CPU and PCI bus operations. Pentium III burst and
pipelining modes are supported to achieve a transfer rate of up to 425 Mbytes/s from SDRAM.
The CSB5 South Bridge provides a variety of peripheral functions including EIDE controllers,
USB controller, LPC (Low Pin Count) Bus bridge, interrupt controller and other legacy PC-AT
architectural functions. It is connected to the CNB30LE primary PCI bus.
The LPC Bus is used to connect to the PC87417 Super I/O Controller. This device implements
the floppy disk controller, the serial port, keyboard and mouse controller and the real-time clock.
1-2 VP 110/01x
Page 15

1.2.4 SDRAM
The on-board SDRAM operates at 133MHz and features ECC data protection. The board is
fitted with 512 Mbytes of soldered-on SDRAM. A 144-pin SODIMM socket is provided for
memory expansion. This accepts a standard PC133 SDRAM module having a capacity up to
512 Mbytes. Hence a maximum of 1 Gbyte of SDRAM may be fitted to the board.
1.2.5 PCI Busses
There are two on-board PCI busses supported by the CNB30LE North Bridge. The secondary
PCI bus is 64-bits wide and provides a high performance, up to 528 Mbytes/s, connection
between the CNB30LE controller, the PMC sites and PMC expansion carrier board. The
Primary PCI bus is 32-bits wide and provides a lower performance, up to 132 Mbytes/s,
connection between the CNB30LE, PC-AT peripherals, VME bus, and Ethernet controllers.
1.2.6 EPROM
The board contains two 512 Kbyte Flash EPROMs, one for the BIOS firmware and the other for
the factory test (VSA) firmware. The EPROMs have 8-bit data paths and are connected to the
CSB5 X-Bus interface.
1.2.7 Battery Backed SRAM
The board can be fitted with 512 Kbytes to 2 Mbytes of Static RAM. This SRAM is non volatile as
data is automatically retained via on board battery when the board is not powered. The memory
is connected to the CSB5 X-Bus interface and is accessible via two memory windows; a paged
512 Kbyte window and a full 2 Mbyte window. The 512 Kbyte window is shared with the
StrataFlash, both the page and memory type are selected via dedicated registers.
Introduction and Overview
1.2.8 Application Flash EPROM
Intel StrataFlash memory is provided for use by application software, and has capacities from 16
Mbytes to 64 Mbytes. The memory is connected to the CSB5 X-Bus interface and is accessible
via a paged 512 Kbyte window. This window is shared with the battery backed SRAM, the page
and memory type being selected via dedicated registers.
1.2.9 EIDE Controllers
The VP 110/01x has two EIDE/Ultra ATA100 interfaces. One EIDE interface is available via the
P2 connector, the other via an on-board connector for use by the optional on-board disk drive or
CompactFlash
™
module.
1.2.10 USB
A USB 1.0 channel is provided via the P2 interface, and associated Breakout Module.
1.2.11 PMC Interface
Two IEEE P1361.1 standard PMC sites are available supporting 64 or 32-bit operation at 66 or
33MHz. A 3.3V or 5V PCI signaling environment is supported.
The PMC interface will also accept dual function PMC modules and Processor PMC modules.
The latter will operate in non-Monarch modes.
1.2.12 Ethernet Controllers
Two independent Intel 82559ER 10/100 Mbit Ethernet controllers are used to provide high
performance PCI to Ethernet interfaces. Both controllers support 10 and 100 Mbits/s operation.
Those interfaces are made available on RJ45 connectors on the front panel.
1.2.13 VME Interface
The VP 110/01x VME interface is provided by a Tundra®Universe II™VME to PCI bridge. The
VME interface supports transfers up to 64-bits wide. Hardware Endian swapping is configurable
under software control.
VP 110/01x 1-3
Page 16

Introduction and Overview
1.2.14 Floppy Disk
A floppy disk interface is provided by the Super I/O Controller for up to two floppy drives and is
connected via the P2 connector.
1.2.15 Serial Communication
The VP 110/01x has one RS232 serial data communication channel, accessible via a front panel
mounted RJ45 connector. This connects to channel 1 of the Super I/O Controller providing a
16550 compatible Serial Communications Controller.
The baud rate clock is generated internally by the Super I/O Controller.
1.2.16 Keyboard & Mouse
PS/2™type keyboard and mouse interfaces are available via an on board header. See Section
6.2 for more information about these ports.
1.2.17 Real Time Clock (RTC)
A battery backed RTC device provides PC-AT clock, calendar and configuration RAM functions.
The RTC and BIOS are year 2000 compliant.
1-4 VP 110/01x
Page 17

1.3 Additional Board Options
Two on-board mass storage options are available, namely;
A 2.5” EIDE hard disk drive of at least 10 Gbyte capacity.
l
A CompactFlash carrier that supports the IBM®Microdrive™.
l
Only one of these mass storage options may be fitted at a time. Refer to the VP 110/01x
datasheet for ordering information.
The VP 110/01x board may be ordered with one of a few different VME P2 and P0 connector
breakout or adapter modules. Appendix B gives details of all these breakout modules.
Table 1-1 summarizes the interfaces available using each of these VME P2 breakouts.
Introduction and Overview
Breakout
VME P2 Connector Pins
AD VP2/004-10 96 4
AD VP2/004-20 160 4444
AD VP2/005-00 160 44444
EIDE
Floppy
USB
PMC Site 1 Rear I/O (P2)
PMC Site 2 Rear I/O (P0)
Table 1-1 VME P2 Breakout Interfaces
VP 110/01x 1-5
Page 18

Introduction and Overview
This page has been left intentionally blank
1-6 VP 110/01x
Page 19

2.1 General
This chapter contains general information on unpacking and inspecting the VP 110/01x after
shipment, and information on how to configure board options and install the board into a VME
chassis.
Hardware Installation
CAUTION It is strongly advised that, when handling the VP 110/01x and its associated
The list below outlines the steps necessary to configure and install the board. Each entry in the
list refers to a section in this chapter which will provide more details of that stage of the
procedure.
1) Unpack the board - see Section 2.2.
2) Check the board jumper and switch settings match the required operating mode - see
Section 2.3.
3) Locate the board’s indicators and switches - see Section 2.4.
4) Fit any optional mass storage or SDRAM modules - see Sections 2.5 and 2.6.
5) Fit the battery if required - see Section 2.7.
6) Fit PMC modules if required - see Section 2.8.
7) Install the board - see Section 2.9.
components, the user should at all times wear an earthing strap to prevent
damage to the board as a result of electrostatic discharge.
VP 110/01x 2-1
Page 20

Hardware Installation
2.2 Unpacking and Inspection
Immediately after the board is delivered to the user’s premises the user should carry out a
thorough inspection of the package for any damage caused by negligent handling in transit.
CAUTION If the packaging is badly damaged or water-stained the user must insist on the
Once unpacked, the board should be inspected carefully for physical damage, loose
components etc. In the event of the board arriving at the customer’s premises in an obviously
damaged condition, Concurrent Technologies or its authorized agent should be notified
immediately.
carrier’s agent being present when the board is unpacked.
2-2 VP 110/01x
Page 21

2.3 Default Jumper Settings
Hardware Installation
1
2
3
4
Not Used
Front Panel Switch Function - Reset
Section 2.4.6
1
2
3
4
VGA Console Mode
Mode - BIOS
User Switch - ‘1’
Watchdog - Disabled
Section 6.1 & 6.2
Section 9.1
Section 8.1
Section 8.4
LK4 PMC V(I/O)
5V
Section 2.8
LK5 CMOS Clear
Normal
Section 2.7
LK2 Flash Program
Enabled
Figure 2-1 Default Jumper and Switch Settings
LK3 SRAM
Backup Power
Battery
Section 7.4Section 7.3
VP 110/01x 2-3
Page 22

Hardware Installation
2.4 Front Panel Indicators and Controls
When installing or removing the board for the first time, or when checking it’s operation, it can be
very useful to note the behavior of the LEDs on the front panel. Figure 2-2 shows the location of
the LEDs, and their purpose is outlined below.
PMC Site 2
Figure 2-2 Front Panel Indicators and Controls
2.4.1 Run LED (R) Green
The run LED indicates that activity is occurring on the primary internal PCI bus. This allows the
user to quickly assess how active the PCI bus is.
2.4.2 POST LED (P) Yellow
The POST LED is used to indicate that a power on self test has failed. This LED will also flash
when outputting sound on the speaker.
2.4.3 Ethernet Speed LEDs (Speed) Yellow
These LEDs indicate the operating speed of the corresponding front panel Ethernet interfaces,
as follows:
l
Off = 10 Mbits/s.
l
Steady On = 100 Mbits/s.
PMC Site 1
Ethernet CH0
Ethernet CH1
Ground
COM1
External
Reset
Battery (Yellow)
LED
Reset/NMI
Switch
Run (Green)
LED
POST (Yellow)
LED
2.4.4 Link/Activity LEDs (LK/ACT) Green
These LEDs light when connection has been made on the corresponding Ethernet interface.
They will flash to indicate link activity, and during periods of high Ethernet activity the LEDs may
switch off for several seconds.
2.4.5 Battery Status LED (B) Yellow (optional)
This LED lights if the on board battery voltage has fallen below the level required for data
retention and must be replaced.
2.4.6 Reset/NMI Switch
The front panel switch may be configured to generate a local NMI or board reset.
The reset or NMI function is selected by the setting of the Front Panel Reset and NMI Switch DIL
switches shown in Figure 2-3.
2-4 VP 110/01x
Page 23

Hardware Installation
1
2
OFF
3
4
Switch 3 - Front Panel Switch Function
ON - Reset (Default)
OFF - No Action
Switch 4 - Front Panel Switch Function
ON - NMI
OFF - No Action (Default)
Figure 2-3 Front Panel Reset and NMI Switch
ON
Selecting the Reset jumper position will cause the board to be reset when the front panel switch
is operated. If the board is in the System Controller Slot, it will also assert RST# on the VME
backplane and hence reset the other boards in the chassis. If the board is operating in any other
slot, it will respond to front panel resets and also to the assertion of the VME SYSRST
Selecting the NMI jumper position configures the switch to generate NMI when operated. No
reset is generated in this case. The board will still be reset by the VME backplane SYSRST
EXTRST
signals if they are asserted.
2.4.7 External Reset
The External Reset input is also available on a front panel connector. This will cause a board
reset in the same way as the front panel switch. This input consists of two small sockets one for
connection of the reset input and the other ground reference. This input can be driven from an
open collector TTL output (or discrete transistor) or normally open switch/relay contacts. To
initiate the reset connect these inputs. This input is filtered, and protected from polarity and
overshoots/undershoots so no external contact debouncing is required.
signal.
or
VP 110/01x 2-5
Page 24

Hardware Installation
S
2.5 Installation of On-Board Mass Storage
If an on-board mass storage option has been ordered, it will be necessary to install the option at
this time.
The mass storage option plugs into the 44-way header S1 and is secured via screws and
spacers using the four mounting holes as shown in Figure 2-4 below.
Mass Storage
Option Mounting Holes
Outline of Mass
Storage Option
Mass
Option Connector
torage
EIDE Header S1
Figure 2-4 Mass Storage Connector and Fixing Holes
2-6 VP 110/01x
Page 25
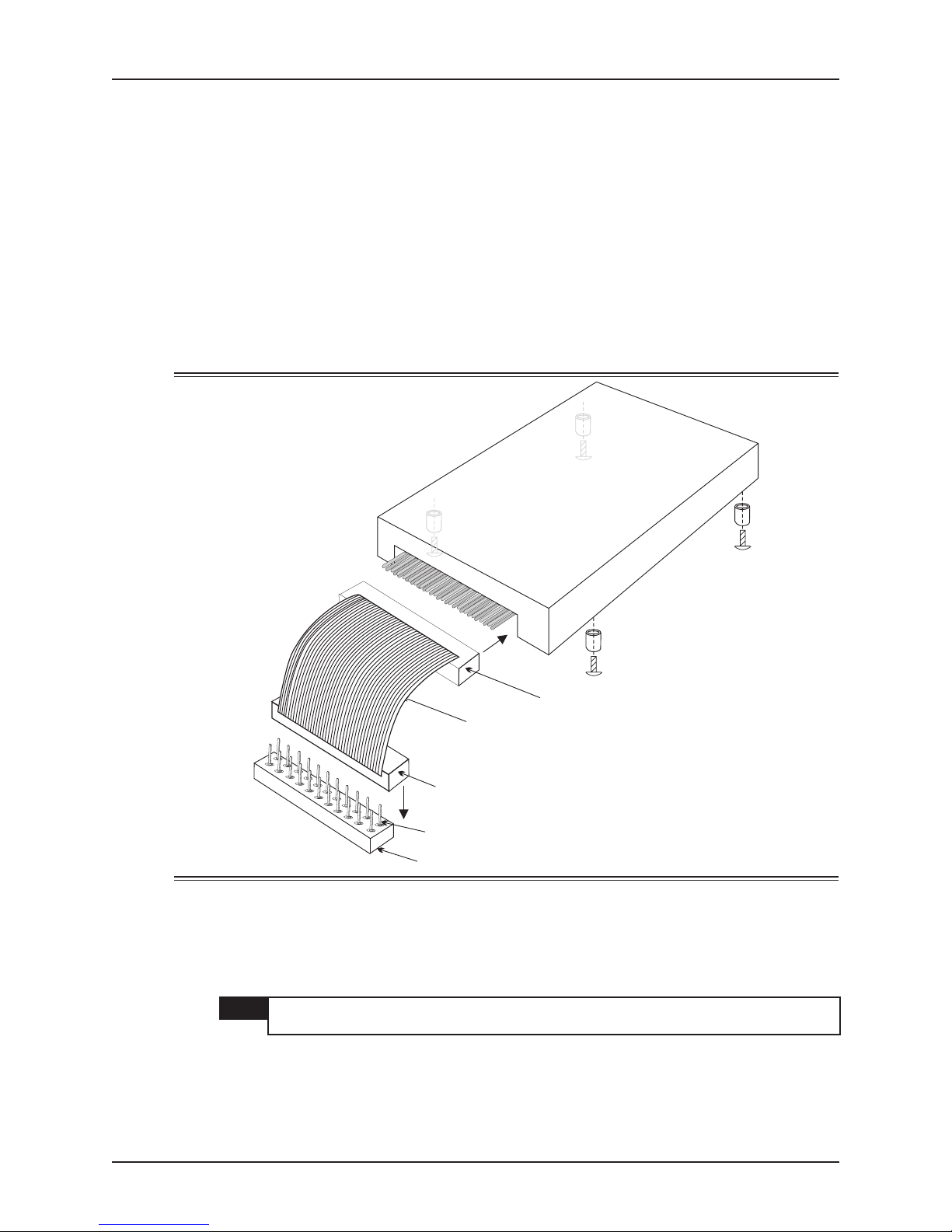
2.5.1 Hard Disk Storage Kit (AD CP1/DR1)
S
The option kit comprises:
A 2.5” EIDE disk drive.
l
A ribbon cable assembly.
l
Four M3 x 10mm screws.
l
Four M3 x 5mm spacers.
l
The ribbon cable assembly has a 50-way connector at one end and a 44-way connector at the
other end. The 50-way connector plugs into the disk drive and the 44-way plugs into S1 on the
VP 110/01x.
1) Plug the 50-way connector into the disk drive as shown in Figure 2-5 below, note the
orientation.
Hardware Installation
50-way Connector
Stripe
44-way Connector
Pin 1
1
Figure 2-5 Disk Drive Cable Installation
2) Plug the 44-way header S1, note the orientation.
3) Fix the disk drive into position using the four screws and spacers provided. Do not over
tighten the screws.
NOTE If the board is likely to be subjected to mechanical vibration a suitable thread lock
compound applied to the screws should be considered.
VP 110/01x 2-7
Page 26

Hardware Installation
C
2.5.2 CompactFlash Storage Kit (AD 200/001)
The option kit comprises:
A CompactFlash carrier module.
l
Four M3 panhead screws.
l
CompactFlash Sites
ompactFlashCarrier Module
Site 1
Pillars
Site 2
S1
Figure 2-6 CompactFlash Carrier Module Installation
1) The M3 panhead screws may be loosely screwed into the end of the pillars, if so unscrew
them.
NOTE Do not unscrew the countersunk screws attaching the pillars to the circuit board.
2) Position the connector of the CompactFlash carrier module over P2. Ensure that the pins
are correctly aligned, then press the module down on to the pins of S1 until the four pillars
are touching the VP 110/01x circuit board.
3) Fix the module into position using the four panhead screws referred to earlier. Do not over
tighten the screws.
NOTE If the board is likely to be subjected to mechanical vibration a suitable thread lock
compound applied to the screws should be considered.
The CompactFlash sites are labeled CompactFlash 1 and CompactFlash 2.
If a single CompactFlash card is fitted, it should always go into site 1. Site 2 should be used only
when two CompactFlash cards are fitted.
The CompactFlash card(s) may be retained in position by fitting short M3 screws and spacers
into the holes near the long edge of the carrier. This will protect against accidental removal due
to vibration or deliberate but unauthorized removal.
NOTE If more than one CompactFlash module is fitted, the module in the CompactFlash
2 site must support operation as a Slave device.
2-8 VP 110/01x
Page 27

2.6 Adding or Replacing DRAM Modules
The VP 110/01x accepts standard 144-pin SODIMM modules fitted with 3.3V PC133 DRAM.
One socket is provided and will accommodate SODIMMs of 256 Mbytes and 512 Mbytes
capacities.
NOTE SODIMMs using 256Mbit DRAMs with 8K refresh are required.
Figure 2-7 shows shows the way in which SODIMMs are fitted or removed. No other changes
are necessary when a SODIMM is added or removed.
Hardware Installation
SODIMM
SODIMM
Figure 2-7 DRAM Module Replacement
VP 110/01x 2-9
Page 28
Hardware Installation
g
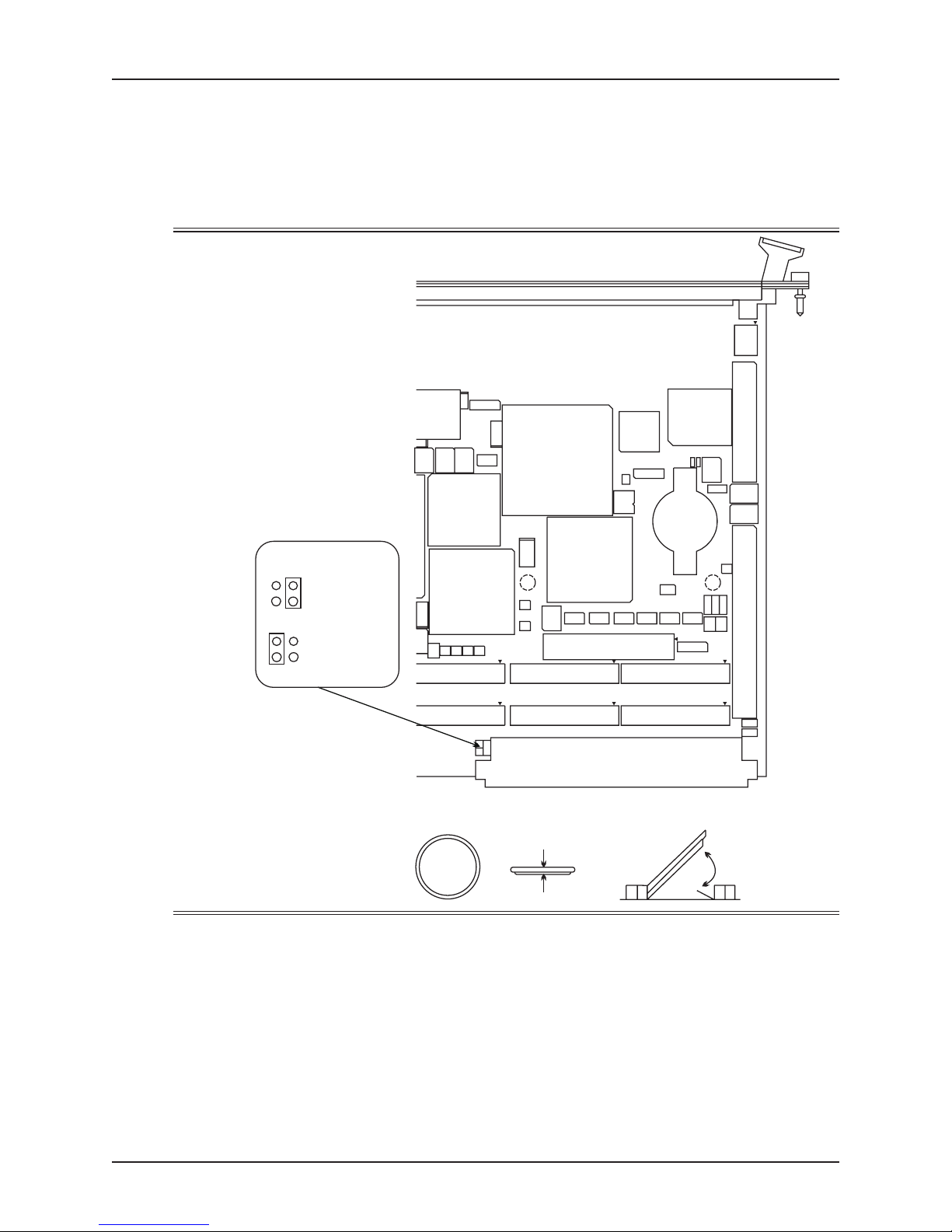
2.7 Installing and Replacing the Battery
The on-board Real-Time Clock, CMOS memory and Non-volatile SRAM are powered by a 3.3V
Lithium battery when the board is powered off. It is advisable, though not essential, for the
battery to be fitted prior to using the board. Figure 2-8 shows how to do this. One battery is
supplied with the board, but it is not normally fitted.
LK5 CMOS Clear
Clear
RAM
Normal
Operation
snap in /
lever out
+
BR2032
Top is marked positive
Bottom is ne
ative
Figure 2-8 Battery Fitting and CMOS Clear Jumper
The battery should be replaced when the voltage falls below 2.6V. If data retention is important
during this process the board must have at least the VME 5V Standby supply available during
the change. In order to reset the battery monitoring circuitry the battery must be removed for at
least 7 seconds and replaced.
Depending on the way in which the board is operated and stored, battery life should be in excess
of 2 years. The life expectancy will fall if the battery is subjected to long periods at temperatures
o
of 45
C or above. It will also fall if the battery is fitted to a board that is stored in it’s conductive
bag even at room temperature.
2-10 VP 110/01x
Page 29

Hardware Installation
CAUTION When replacing the battery, proper anti-static precautions must be observed.
WARNING Dispose of battery properly. DO NOT BURN.
If the battery is disconnected with out any other power, the date and time settings will need to be
initialized and SRAM data will be lost.
If the BIOS setup screens have been used to set up the board for an invalid configuration, or in
other fault conditions, it may be useful to be able to reset the contents of the CMOS RAM and
Real-Time Clock. In this case, the CMOS Clear Jumper can be used.
To clear the CMOS RAM to a known state, fit the CMOS Clear jumper and apply power. When
the board is next powered down remove the jumper, otherwise CMOS RAM will again be reset.
See Section 7.4 for additional information regarding the battery powered SRAM also fitted to this
board.
VP 110/01x 2-11
Page 30

Hardware Installation
Screws
C
2.8 Installing or Removing a PMC Module
Before installing a PMC module, check that the VP 110/01x board PMC V(I/O) voltage is
configured to match the requirements of the PMC module. If two PMC modules are fitted, their
V(I/O) requirements must be the same.
CAUTION If the VP 110/01x is not correctly configured to match the PMC module V(I/O)
requirements, it may result in damage to the module or the VP 110/01x.
Setting the the correct PMC V(I/O) voltage on the VP 110/01x requires the positioning of a
detachable polarizing key for each PMC site, and the setting of a board jumper. Figure 2-9
shows the location of the key for both 5V and 3.3V V(I/O) configurations, and how to fit the PMC
module to the VP 110/01x board. Figure 2-10 shows the location and settings for the PMC
V(I/O) jumper.
NOTE The PMC V(I/O) voltage is determined by a combination of the PMC polarizing key
position and the V(I/O) Jumper. The PMC V(I/O) will be set for which ever gives
the highest voltage setting. It is recommended that the polarizing keys and the
jumper are set for the same voltage.
NOTE It is not possible to fit the polarizing key in the 3.3V position for PMC site 2. When
a PMC module requiring 3.3V V(I/O) is fitted to PMC site 2, the V(I/O) setting is
determined only by the V(I/O) Jumper setting.
Module
PM
VP 110/01x
Front Panel
1
2
3.3 Volt Key
10mm
CMC Bezel
3
4 x M2.5 x 6mm
Standoff
5 Volt Key
Only one key
must be fitted
Figure 2-9 PMC Installation Diagram
2-12 VP 110/01x
Page 31

Hardware Installation
LK4 PMC V(I/O)
5V =
3.3V =
3.3V V(I/O) Key
or 5V keys
or 3.3V key
5V V(I/O) Key
Figure 2-10 PMC V(I/O) Jumper
VP 110/01x 2-13
Page 32

Hardware Installation
2.9 Installing the Board in a VME Backplane
Before the board is installed in a VME chassis, check the following points:
For backplanes that do not have P0 fitted:-
If you have a variant of the VP 110/01x fitted with a P0 connector, then check to see that
l
no strengthening bars or other tall objects are present on the backplane before inserting
the board. If bars or other objects are present then verify that the P0 connector and/or
the backplane will not be damaged when the board is fully seated in the slot.
The Power Supply Unit current capabilities. The board draws current primarily from the
l
+5V rail, and the details are provided in Section A.4.
If your system requires the use of the EMC spring contact strips provided, fit strips into
l
the slots on the long edges of the front panel.
The board can be installed in any standard VME slot. When installed in the first occupied slot
the board will become the system controller.
2.9.1 Installing the board
The board is installed and powered up as follows:
1) Make sure that system power is turned OFF.
2) Slide the board into the designated slot, making sure that the board fits neatly into the
runners.
3) Push the board into the card-cage until the P0, P1 and P2 connectors are firmly located.
Use the ejector handles for the final push.
4) Screw the ejector handle retaining bolts into the holes in the chassis.
5) Connect the I/O cables to the connectors on the board’s front panel and fix in place with the
connectors’ retaining screws.
6) If using a Breakout Module, install it at the rear of the backplane and connect the I/O
cables.
7) Power-up the system. The following sequence of events should then occur:
l
The green “RUN” LED and the yellow “POST” LED on the front panel will light.
l
The yellow “POST” LED will switch OFF.
If power-up does not follow the sequence described above this will indicate that the board is not
operational.
NOTE This sequence of events assumes the VP 110/01x has Concurrent Technologies
standard BIOS firmware and that the board is configured to the factory setting
described in Section 2.3.
2.9.2 Removing the board
To remove the board, shut down the application and operating system software before powering
down the system, unscrewing the ejector handle retaining bolts, opening the ejector handles and
extracting the board.
NOTE The VP 110/01x is not hot swappable. The system power must be off before
attempting to install or remove the board.
2-14 VP 110/01x
Page 33

In most cases, installing operating system software on the VP 110/01x board follows the same
sequence as installing on a PC. However, there are some additional points to note. The sections
below summarize the special actions required for a few common operating systems. All but
VxWorks require that a PMC VGA adapter is fitted for the duration of the installation process.
3.1 Starting up for the first time
Many operating systems running on the board will want to use the standard Real-Time Clock
hardware. To maintain the date and time settings, and several other settings recorded by the
PC BIOS, the battery must be fitted. When the board is first powered up, or at the first power-up
after changing the battery, carry out the following steps to set up the board.
1) Fit a battery as shown in Section 2.7.
2) Make sure that the Console Mode switch is set to the correct state for the console device
which will be used (VGA monitor and keyboard, or serial terminal). Most operating systems
which install on the target hardware will require a monitor and keyboard during installation,
even if they can subsequently be re-configured to use only a serial terminal. See Section
6.1 for details of how to configure the board for this option.
3) Connect any additional modules and peripherals especially any mass storage devices.
4) Connect the console device and power up the board. Wait for the PC BIOS to sign on and
run its memory test.
5) When the test finishes, the BIOS may report a setup or date/time setting error. If this
occurs, press the <F2> key as soon as possible after the error is reported, and carry out the
following:
a) Set the time and date by using the cursor keys to move around the screen and reading
the help information in the right-hand screen panel.
b) When the time and date have been set, move the cursor to any other field on the same
screen, then press the <F4> key to exit.
c) Press the ‘y’ key to accept the changes and restart.
The BIOS will then completely restart and re-run its memory test. This time it should complete
and begin bootloading. To proceed with software installation, check that all necessary mass
storage devices are connected before continuing with one of the sequences below.
Software Installation
VP 110/01x 3-1
Page 34

Software Installation
3.2 Bootloading from CD-ROM
Operating systems which install on the target hardware will generally install from CD-ROM, or
may require both a CD-ROM and floppy disk. Bootloading from floppy disk requires no special
steps other than to connect the drive using an appropriate cable. To bootload from CD-ROM,
use the following procedure:
1) While the BIOS is running its memory test, press the <ESC> key.
2) Wait for the pop-up boot device menu to be displayed.
3) Select the CD-ROM drive using the cursor keys, then press the <Enter> key.
3-2 VP 110/01x
Page 35

3.3 Installing Windows NT®4.0
To install Windows NT from CD-ROM, set up the board initially using the steps outlined in
Sections 3.1 and 3.2 above, ensuring that all the necessary drives are connected. Then follow
the procedure below.
1) Obtain the Ethernet driver from the Intel web site, starting from the following address:
http://developer.intel.com/design/network/drivers
and selecting the 82551ER and 82559ER NDIS4 drivers. Download the driver file and run
it to extract the contents to a diskette.
2) Power up the system and insert the Windows NT CD.
3) Allow Windows to boot and wait for the “Welcome to Setup” screen to appear. When
prompted, press S to skip automatic detection of mass storage controllers and select “IDE
CD-ROM (ATAPI 1.2)/PCI IDE Controller”. Press <Enter> to continue.
4) Setup will continue and report that it is loading drivers for the appropriate mass storage
devices. Press <Enter> again to resume the normal Windows Setup sequence.
5) Allow Windows Setup to continue with the normal setup procedure up to the point where
Windows prompts to know if “the computer will participate on a network”.
6) Select “this computer will participate on a network” then click the “Next” button.
7) When the Network Adapter screen is displayed click the “Select From List” button.
8) On the Select Network Adapter screen click the “Have Disk” button.
9) Insert the floppy disk containing the Intel 82559ER driver and click the “OK” button.
10) When the Select OEM Options screen is displayed select the “Intel GD82559ER Fast
Ethernet Adapter” from the list then click the “OK” button.
11) When returned to the Network Adapter screen click the “Next” button.
12) Continue with the installation of Windows NT in the normal way.
Software Installation
VP 110/01x 3-3
Page 36

Software Installation
3.4 Installing Windows®2000
To install Windows 2000 from CD-ROM, set up the board initially using the steps outlined in
Sections 3.1 and 3.2 above, ensuring that all the necessary drives are connected. Then follow
the procedure below.
1) Obtain the Ethernet driver from the Intel web site, starting from the following address:
http://developer.intel.com/design/network/drivers
and selecting the 82551ER and 82559ER NDIS4 drivers. Download the driver file and run
it to extract the contents to a diskette.
2) Power up the system and insert the Windows 2000 CD.
3) Start the Windows 2000 installation by booting from the CD-ROM, and continue with the
normal setup procedure up to the point where Windows restarts.
4) Logon, right-click “My Computer” and select “Properties”.
5) Select the “Hardware” tab and click the “Device Manager” button.
6) On the Device Manager tree view, double-click the first Ethernet device located in the
“Other Devices” branch.
7) Click “Reinstall Driver” to start the Device Driver Wizard.
8) Click the “Next” button when the Welcome screen is displayed.
9) Choose the “Search” option and click the “Next” button.
10) Select the Floppy disk drive option on the Locate Driver screen and click the “Next” button.
11) When prompted, insert the floppy disk containing the Intel 82559ER driver, then click
the“OK” button.
12) The necessary files will be installed and the Device Driver Wizard will display a
“Completed” message. Click the “Finish” button.
13) Repeat the above procedure for the second Ethernet device.
14) Restart Windows 2000.
15) When Windows 2000 has restarted, open the Device Manager again and test that the Intel
82559ER Ethernet devices, now located in the “Network adapter” branch, are operational.
3-4 VP 110/01x
Page 37

3.5 Installing RedHat®Linux®7.2
To install RedHat Linux 7.2 from CD-ROM, set up the board initially using the steps outlined in
Sections 3.1 and 3.2 above, ensuring that all the necessary drives are connected. Then follow
the procedure below.
1) Follow the standard RedHat installation instructions, but at the screen following the
selection of monitor type, ensure that a “Text” login type is selected. This prevents the
system from automatically starting the X11 window software.
2) Proceed through the remaining installation sequence. The installer will not allow
configuration of the network adapters at this stage.
3) After the installation is complete and the board has been rebooted, login as the super user
(login name root).
4) At the command prompt type netconfig, and fill in the forms for network parameters
appropriately for the network being used. When this is complete, reboot the operating
system to enable the new settings.
5) For full control of the system configuration use the linuxconf utility. This is not installed
by the RedHat installer but can be manually installed from the RedHat CD.
NOTE It is not essential to install the linuxconf utility.
To install the linuxconf utility, insert CD 2 of 2 into the CD-ROM drive and enter the
following commands:
mount /dev/cdrom
cd /mnt/cdrom/RedHat/RPMS
rpm -i linuxconf-1*
When the linuxconf installation is complete, the CD can be unmounted and removed
from the drive:
umount /mnt/cdrom
Type linuxconf and follow the on screen forms and help for system configuration.
Software Installation
VP 110/01x 3-5
Page 38

Software Installation
3.6 Using VxWorks 5.4 with Tornado 2
Applications using this operating system are not developed on the target hardware. Concurrent
Technologies can supply on request a separate Board Support Package (BSP) for this board
and many others. Read the “readme” file provided with this package for details of how to
configure and run VxWorks on the VP 110/01x board.
3-6 VP 110/01x
Page 39

The VP 110/01x board has three interfaces which can be used to attach mass storage devices:
a floppy disk interface is accessible via the VME P2 connector.
l
a Primary EIDE (ATA100) interface is accessible via the VME P2 connector.
l
a Secondary EIDE (ATA100) interface supporting on-board Mass Storage option kits.
l
In addition, the Application Flash EPROM may be configured to operate as a ROM disk and the
Battery Backed SRAM configured to operate as a RAM disk.
The order in which the PC BIOS firmware tries to bootload from these drives can be changed via
the BIOS Setup screen for Boot.
4.1 Floppy Disk Interface
The floppy disk interface supports up to two drives of 360 Kbytes, 720 Kbytes, 1.2 Mbytes or
1.44 Mbytes capacities. It connects via the VME P2 connector of the VP 110/01x board or
through the Breakout Module.
Mass Storage Interfaces
VP 110/01x 4-1
Page 40

Mass Storage Interfaces
4.2 EIDE Interfaces
The board supports two EIDE (ATA100) interfaces.
The Primary EIDE interface connects via the CompactPCI J5 connector of the PP 110/01x
board, or through the Transition Module. Up to two EIDE peripherals may be connected to this
interface. The BIOS Setup screens, for Main | Primary Master and Main | Primary
Slave allow the user to see what is connected to this interface, and to select some
characteristics of the drives manually. Normally the PC BIOS firmware will automatically
determine the drive characteristics from the drives themselves.
The Secondary EIDE interface connects only to the optional Hard Disk or CompactFlash Storage
Kits. The Hard Disk kit will appear as the Secondary Master drive, and the CompactFlash cards
on the CompactFlash kit will appear as the Secondary Master and Secondary Slave drives. The
BIOS Setup screens for Main | Secondary Master and Main | Secondary Slave
allow the user to see what is connected to this interface, and to select some characteristics of
the drives manually.
Note that when using faster EIDE drives the overall cable length from the PP 110/01x board to
the drive furthest from the board must be kept as low as possible, and in any case no more than
18 inches or 450 mm. If this is not practical, it may be necessary to reduce the interface
performance using the UltraDMA Mode and Transfer Mode fields of the BIOS Setup screens
indicated above.
To achieve the faster speeds (above ATA33) via the Primary EIDE Interface it will also be
necessary to use the correct (80-way) type of EIDE cable, and to manually select the User and
UDMA 4 or UDMA 5 speeds for the drive using the BIOS Setup screens for Main|Primary
Master and Main|Primary Slave as appropriate. Selection of the fastest speed for the
Secondary (on-board) EIDE interface is automatic.
4-2 VP 110/01x
Page 41

4.3 ROM Disk
The BIOS can optionally provide a ROM disk, which uses the Application Flash Memory to store
user code and data in a robust, but easily accessible format.
Either Drive A: or B: may be configured as a ROM disk via the BIOS Setup screen:
Main|ROM/RAM Disk (A:) or Main|ROM/RAM Disk (B:).
When Drive A: is configured as a ROM disk it may also be configured as a boot device using the
Boot Device Selection menu (see Section 9.3), the original floppy Drive A: will be promoted to
Drive B: but will no longer be bootable. If Drive B: has been configured as a RAM disk, the
original floppy Drive A: will be further promoted to Drive C: provided that there are no hard disk
drives attached.
Software for generating and programming ROM disk images is available from Concurrent
Technologies as a board support package.
Mass Storage Interfaces
VP 110/01x 4-3
Page 42

Mass Storage Interfaces
4.4 RAM Disk
The BIOS can optionally provide a RAM disk, which uses the Battery-Backed SRAM to store
user code and data in a robust, but easily accessible format that is also writeable without the
need to erase and program flash memory.
Drive B: may be configured as a RAM disk via the BIOS Setup screen: Main|ROM/RAM Disk
(B:). The original floppy Drive B: will no longer be accessible.
4-4 VP 110/01x
Page 43
The VP 110/01x board is fitted with a Tundra Universe II PCI-to-VME bus bridge device together
with additional support logic. This hardware implements a flexible interface to and from the VME
bus with the following key characteristics.
5.1 VME Bus Interface Features
The VP 110/01x can be programmed as a VME master supporting off-board VME memory
addressing accessible by any PCI bus master.
The VP 110/01x can also be programmed as a VME slave allowing other VME masters to
access any PCI bus slave.
This access is achieved by programming the appropriate Universe II device register. “PCI slave”
registers are used for VP 110/01x master accesses and “VME slave” registers for VME accesses
to the VP 110/01x.
The VME interface supports A32/A24/A16/MBLT64 addressing modes and D64/D32/D16/D08
(EO) data widths in both user and supervisor address space.
The VME interface performs auto-syscon detect at power up to provide system controller
functionality, if the board is located in the first VME slot. As system controller the Universe II will
arbitrate VME mastership of the bus using DEMAND request mode.
The VP 110/01x can act as an interrupt controller for any combination of VME interrupts and can
be an interrupter generating either a software interrupt or any of the Universe’s internal interrupt
sources on any IRQ level. All VME interrupts are directly mapped between the Universe II
registers and the VME bus backplane. Of the PCI LINT lines only LINT0 is mapped into the PCI
interrupt and with LINT1 mapped to NMI.
The Universe II device uses the linear incrementing mode when being accessed by a PCI
master.
The Universe II supports VME mailbox interrupts. See Universe II data sheet for further details.
VME Interface
WARNING VME bus access is allowed to the full VP 110/01x memory map. Care must be
The PC BIOS firmware fitted to this board includes up to 4 setup screens which allow up to 4
PCI Slave and VME Slave access windows to be configured. The configuration is retained in
Flash EPROM and is programmed automatically into the Universe II chip when the board starts
up. This allows basic access to or from the VME bus to be established without the need to write
any operating software for the board, or for the Universe II chip.
For further details, refer to the BIOS setup screens for the Universe, Universe II | PCI
Slave and Universe II | VME Slave options.
taken to ensure that no accesses are made to areas that will corrupt the system
memory or the configuration of any of the interfaces.
VP 110/01x 5-1
Page 44
VME Interface
5.2 VME Byte Swapping
The VP 110/01x provides hardware that performs fast byte swapping for aligned D16, D32 and
D64 VME transfers. Byte swapping can be enabled separately for master and slave transfers
under software control, using Status & Control Register 0 (see Section 9.1 for further details).
Swapping is performed as follows:-
D16 (Double Byte2-3):
D[31...24] < - > D[23...16]
D[23...16] < - > D[31...24
D16 (Double Byte0-1):
D[15....8] < - > D[7.....0]
D[7.....0] < - > D[15....8]
D32 (Quad Byte0-3):
D[31...24] < - > D[7....0]
D[23...16] < - > D[15....8]
D[15....8] < - > D[23...16]
D[7.....0] < - > D[31...24]
D64 (Octal Byte0-7):
D[63...56] < - > D[39...32]
D[55...48] < - > D[47...40]
D[47...40] < - > D[55...48]
D[39...32] < - > D[63...56]
D[31...24] < - > D[7.....0]
D[23...16] < - > D[15....8]
D[15....8] < - > D[23...16]
D[7.....0] < - > D[31...24]
The hardware decodes the VME transfer taking place to see if it is swappable, checks to see if
swapping is enabled and then configures a set of multiplexors to perform the required data
swap. For master and slave read cycles the byte swap hardware imposes negligible delay on
the VME bus cycle since the decode and configuration occur before the data is valid. For write
cycles the hardware imposes an approximate delay of 50ns in order to provide the required
setup time before the data strobes are asserted. The delay applies to single cycle transfers and
the first cycle of block transfers.
NOTE The delay can be turned off under software control, but only if the user can
guarantee that only swappable cycles will be run across the VME interface.
5-2 VP 110/01x
Page 45

5.3 VME Bus Error Interrupt
The VP 110/01x contains hardware to detect bus errors for VME bus cycles in which the
Universe is the bus master. The hardware is controlled by Status and Control Register 1 (see
Section 8.3). The bus error interrupt is connected to the Universe LINT0 interrupt, so software to
deal with the VME bus error interrupt can be added to the normal Universe interrupt handler.
5.4 VME Address Capture
The VP 110/01x provides hardware that captures the VME address and upon a VME Bus Error
cycle. The captured data consists of the A31-A0, DS1-0, AM5-0, LWord and WR signal states.
A single I/O register controls this function. The register provides access to the captured
information via a series of read cycles as shown in Table 5-1. Three control bits are also
defined, which permit the capture mode to be enabled, the read sequence to be reset and a
capture to be aborted.
The Bus Error event may be detected by means of the Bus Error Interrupt or by polling the VME
Address Capture status bit. When using the Bus Error Interrupt with the VME Address Capture,
these functions must be enabled together and outside the monitored transfer. This will permit
both functions to detect the Bus Error event.
The VME Bus Error Interrupt does not have to be enabled for the VME Address Capture to
operate. The VME Address Capture Function must be enabled via bit 0 of the VME Address
Capture Control register.
To ensure the VME address information is read from the start following a capture, the read data
sequence must be reset back to the start prior to the read activity. The internal read sequence
counter is advanced for every read of the VME Address Capture Status register. To reset the
read sequence a write of 0x02 is performed to the control register.
The VME address information is valid when the Capture Status bits indicates Idle following a
Bus Error event. A read of the VME address at any other time or following a capture abort is
invalid.
VME Interface
VP 110/01x 5-3
Page 46

VME Interface
5.4.1 VME Address Capture Read Register (Read Only)
76543210
|________|________|_________|________|_________|_________|_________|_________|
||| || | | |
CAPTURE RFU RFU RFU SD3 SD2 SD1 SD0
STATUS
Bit 3-0: Captured Address
The VME address is sequentially read as follows following a captured bus error event.
SD3 SD2 SD1 SD0 Read Cycle
A31 A30 A29 A28 1
A27 A26 A25 A24 2
A23 A22 A21 A20 3
A19 A18 A17 A16 4
A15 A14 A13 A12 5
A11 A10 A09 A08 6
A07 A06 A05 A04 7
A03 A02 A01 LWORD
DS1
AM03 AM02 AM01 AM00 10
WR XX XX XX 11
XX XX XX XX 12
XX XX XX XX 13
XX XX XX XX 14
XX XX XX XX 15
XX XX XX XX 16
DS0 AM05 AM04 9
8
Table 5-1 VME Address Capture Read Register
The sequence will repeat for subsequent read accesses and is only readable after a bus error
address capture.
The sequence will repeat for subsequent read accesses and is only readable after a bus error
address capture.
Bits A31 - A01 form the most significant 31 bits of the address which caused the bus error. All
these bits are valid even for A24 or A16 bus cycles. Bits DS0 and DS1 indicate the state of the
high and low byte enables on the VME bus. In conjunction with the LWORD bit these bits
identify which of the four byte lanes of the VME data bus were used in the faulty cycle.
Bits AM05 to AM00 form the address modifier code and are decoded as shown in Table 5-2.
Bits 6-4: Reserved
Bit 7: Capture Status
0 = idle
1 = capture in progress
5-4 VP 110/01x
Page 47

VME Interface
AM05 AM04 AM03 AM02 AM01 AM00 Hex Access Type
0 0 0 0 0 0 00 A64 64-bit MBLT
0 0 0 0 0 1 01 A64 single transfer
0 0 0 0 1 0 02 RFU
0 0 0 0 1 1 03 A64 BLT
0 0 0 1 0 0 04 A64 lock command (LCK)
0 0 0 1 0 1 05 A32 lock command (LCK)
0 0 0 1 1 0 06 RFU
0 0 0 1 1 1 07 RFU
0 0 1 0 0 0 08 A32 non-privileged 64-bit MBLT
0 0 1 0 0 1 09 A32 non-privileged data
0 0 1 0 1 0 0A A32 non-privilege program
0 0 1 0 1 1 0B A32 non-privileged BLT
0 0 1 1 0 0 0C A32 supervisory 64-bit MBLT
0 0 1 1 0 1 0D A32 supervisory data
0 0 1 1 1 0 0E A32 supervisory program
0 0 1 1 1 1 0F A32 supervisory BLT
0 1 0 0 0 0 10 User-defined
0 1 0 0 0 1 11 User-defined
0 1 0 0 1 0 12 User-defined
0 1 0 0 1 1 13 User-defined
0 1 0 1 0 0 14 User-defined
0 1 0 1 0 1 15 User-defined
0 1 0 1 1 0 16 User-defined
0 1 0 1 1 1 17 User-defined
0 1 1 0 0 0 18 User-defined
0 1 1 0 0 1 19 User-defined
0 1 1 0 1 0 1A User-defined
0 1 1 0 1 1 1B User-defined
0 1 1 1 0 0 1C User-defined
0 1 1 1 0 1 1D User-defined
0 1 1 1 1 0 1E User-defined
0 1 1 1 1 1 1F User-defined
1 0 0 0 0 0 20 RFU
1 0 0 0 0 1 21 RFU
1 0 0 0 1 0 22 RFU
1 0 0 0 1 1 23 RFU
1 0 0 1 0 0 24 RFU
1 0 0 1 0 1 25 RFU
1 0 0 1 1 0 26 RFU
1 0 0 1 1 1 27 RFU
1 0 1 0 0 0 28 RFU
VP 110/01x 5-5
Table 5-2 VME Address Modifier Codes
Page 48

VME Interface
AM05 AM04 AM03 AM02 AM01 AM00 Hex Access Type
1 0 1 0 0 1 29 A16 non-privileged
1 0 1 0 0 0 2A RFU
1 0 1 0 0 1 2B RFU
1 0 1 1 1 0 2C A16 lock command (LCK)
1 0 1 1 1 1 2D A16 supervisory
1 0 1 1 1 0 2E RFU
1 0 1 1 1 1 2F Control/Status register
1 1 0 0 0 0 30 RFU
1 1 0 0 0 1 31 RFU
1 1 0 0 1 0 32 A24 lock command (LCK)
1 1 0 0 1 1 33 RFU
1 1 0 1 0 0 34 RFU
1 1 0 1 0 1 35 RFU
1 1 0 1 1 0 36 RFU
1 1 0 1 1 1 37 RFU
1 1 1 0 0 0 38 A24 non-privileged 64-bit MBLT
1 1 1 0 0 1 39 A24 non-privileged data
1 1 1 0 1 0 3A A24 non-privileged program
1 1 1 0 1 1 3B A24 non-privileged BLT
1 1 1 1 0 0 3C A24 supervisory 64-bit MBLT
1 1 1 1 0 1 3D A24 supervisory data
1 1 1 1 1 0 3E A24 supervisory program
1 1 1 1 1 1 3F A24 supervisory BLT
Table 5-2 VME Address Modifier Codes (Continued)
5.4.2 VME Address Capture Control Register (Write Only)
765 43 2 1 0
|________|________|_________|________|_________|_________|_________|_________|
||| || | | |
RFU RFU RFU RFU RFU ABORT RESET ENABLE
Bit 0: Enable Capture
0 = no action
1 = enable capture for a subsequent VME bus error
NOTE It is recommended that the bus error interrupt is used to give notification of the bus
error event.
Bit 1: Reset Read Sequence
0 = no action
1 = reset captured address read access sequence to entry 1
Bit 2: Abort Capture
0 = no action
1 = Abort Current Capture (following this action all VME address information is invalid)
Bits 7- 3: Reserved
CAPTURE READ CAPTURE
SEQUENCE
5-6 VP 110/01x
Page 49

Many additional standard interfaces are provided on the VP 110/01x board. These interfaces
consist primarily of those found in a regular desktop or mobile PC, and are outlined below.
6.1 Serial Port
A single RS232 serial interface is provided, and connects via the front panel The front panel
connector is an RJ45 type, and an adapter cable is required to convert to a D-type connector of
the appropriate size and gender. There are several commercial types available, but the wiring
required for one typical cable is detailed in Section A.5.5. The serial port is implemented in the
PC chipset used on the board, using a standard 16550 style device. The serial line may be
configured for speeds up to 115kbaud.
With some operating systems, or in some applications, it is preferable to use a serial terminal as
an operator console device for the board. In this case, it will be necessary to configure the board
for operation with a Serial Console. When configured in this mode, the PC BIOS firmware will
re-direct its output to the COM1 port, and similarly will take its input from this port, rather than
using a VGA PMC adapter and PC keyboard. A board DIL switch must be set to select this
mode. The state of the switch can be read from Status & Control register 0 (see Section 8.1).
The serial line speed used for the Serial Console mode may be selected from the BIOS Setup
screen for Main configuration.
Other Interfaces
1
2
OFF
3
4
Switch 1 - Console Mode
ON - Serial (Default)
OFF-KBD&VGA
ON
Figure 6-1 Console Mode Switch
VP 110/01x 6-1
Page 50

Other Interfaces
6.2 Keyboard and Mouse Ports
A single 8-way x 0.1 inch, board mounted header provides connections for a PC keyboard and a
PS/2 mouse. The pin-out of the front panel connector is detailed in Section A.5.4.
Power for the keyboard and mouse interfaces is protected by a 0.75A self-resetting current
limiting circuit. To reset this circuit power the board off, remove and replace the faulty keyboard
or mouse device, then power up again.
NOTE External devices that derive power from the keyboard/mouse interface may be
used provided that the total current taken by all devices is less than 0.75A.
6-2 VP 110/01x
Page 51

6.3 Ethernet Controllers
The VP 110/01x supports two 10/100Mbits Ethernet interfaces via two RJ45 connectors on the
front panel. The interfaces are provided by two Intel 82559ER devices. These interfaces are
pre-configured in the factory with unique IEEE addresses which are identified by two labels fixed
to the board. Two LEDs are associated with each interface to indicate connection speed (yellow
LED) and link activity (green LED). 100Mbit/s connection is indicated by the speed LED lighting
and link connection/activity is denoted by the green LED lighting/flashing. See Section 2.4 for
the location of these connectors and LEDs, and further details of the LED indications.
Other Interfaces
VP 110/01x 6-3
Page 52

Other Interfaces
6.4 Real-Time Clock
A conventional PC Real-Time Clock is included on this board. This is Year 2000 compliant and
can be powered by an additional Lithium battery when main power to the board is removed. See
Section 2.7 for more details of how to fit or replace the battery. The Clock device also provides
256 bytes of CMOS RAM, in which the PC BIOS keeps much of its setup screen data and other
information.
6-4 VP 110/01x
Page 53

6.5 Universal Serial Bus (USB)
A single USB 1.0 interface is provided on this board, and is accessed via the VME P2 connector
or a Breakout Module. This channel can operate at 1.5Mbits/s or 12Mbits/s.
Other Interfaces
VP 110/01x 6-5
Page 54

Other Interfaces
6.6 Power On Self Test LED/Speaker
The Power On Self Test (POST) LED is connected to the PC Speaker port. The LED will light
when the speaker port is driven. The VP 110/01x is not fitted with an audio/speaker output.
6-6 VP 110/01x
Page 55

The board supports several combinations of the following memory:
FFFFFFFFh
00000000
SDRAM
l
BIOS/VSA Flash EPROM
l
StrataFlash EPROM
l
Battery backed SRAM
l
The specific memory provision is determined by suffixes to the part number.
512K BIOS/VSA
FFF80000h
FFF00000h
FFE00000h
FFC00000h
To p o f D RA M
512to1024
Mbytes
00100000h
000A0000h
h
Flash EPROM
512K SRAM/Strata
Flash EPROM
Unused
2MbyteSRAM
PCI Free Memory
SDRAM
up to 1024 Mbytes
PC Shadow area and
Graphics Memory
SDRAM
Memory
Figure 7-1 Memory Map
VP 110/01x 7-1
Page 56

Memory
7.1 SDRAM
The VP 110/01x board supports a large amount of ECC SDRAM. 512 Mbytes is soldered onto
the board, and a single 144-pin SODIMM site allows an additional 256 Mbytes or 512 Mbytes to
be fitted either at the factory or in the field, giving a maximum size of 1 Gbyte. Section 2.6
describes how to fit this SODIMM, and details the types supported. The SDRAM can be
accessed from both the local PCI bus and the VME backplane.
7-2 VP 110/01x
Page 57

7.2 Flash EPROM
The VP 110/01x has two Flash EPROM parts: the first is installed in a socket and is programmed
at the factory with PC BIOS firmware. This EPROM will not normally be reprogrammed by the
user, but Concurrent Technologies has programming software which allows BIOS updates to be
carried out in the field when necessary, perhaps to add new features. Contact Concurrent
Technologies for a copy of this software, and for the BIOS reprogramming information, if you
believe that such an update is required.
The second Flash EPROM part is soldered to the board and is used at the factory for test
purposes. It is currently reserved for future use by Concurrent Technologies.
The BIOS and Test Firmware EPROMs are co-resident, that is they occupy the same CPU
address range. A special-purpose control bit is used to select which of the EPROMs is
addressed at any given time. The state of this bit is controlled by the VSA Mode switch (see
Section 9.1) and can be read from a bit in Status & Control Register 2 (see Section 8.2).
Memory
VP 110/01x 7-3
Page 58

Memory
7.3 Application Flash EPROM
The board is fitted with between 16 and 64 Mbytes of Intel StrataFlash EPROM which is free for
use by application software. The memory is connected to the CSB5 X-Bus interface and is
accessible in protected mode via a paged 512 Kbyte window (refer to Figure 7-1). This window is
shared with the battery backed SRAM. Memory allocated to the window is selected via a
combination of device and page within that device. Two dedicated I/O registers provide these
functions. The page memory and type are selected via the Memory Page and Status register.
The specific device is selected via Status & Control Register 4. The device selection gives
access to each of up to four 16 Mbyte devices, thus the first 16 Mbyte is device 0, and so forth.
The Application Flash EPROM may be write-protected using a jumper, shown in Figure 7-2.
Write and erase cycles are permitted only when the jumper is in the Enabled position.
If required, the Application Flash Memory can be programmed with a disk image and configured
via BIOS Setup screens to operate as a ROM disk, replacing either Drive A: or B:. Refer to
Section 4.3 for further details.
LK2 Flash Program
Enabled
Disabled
Figure 7-2 Flash Program Jumper
7-4 VP 110/01x
Page 59
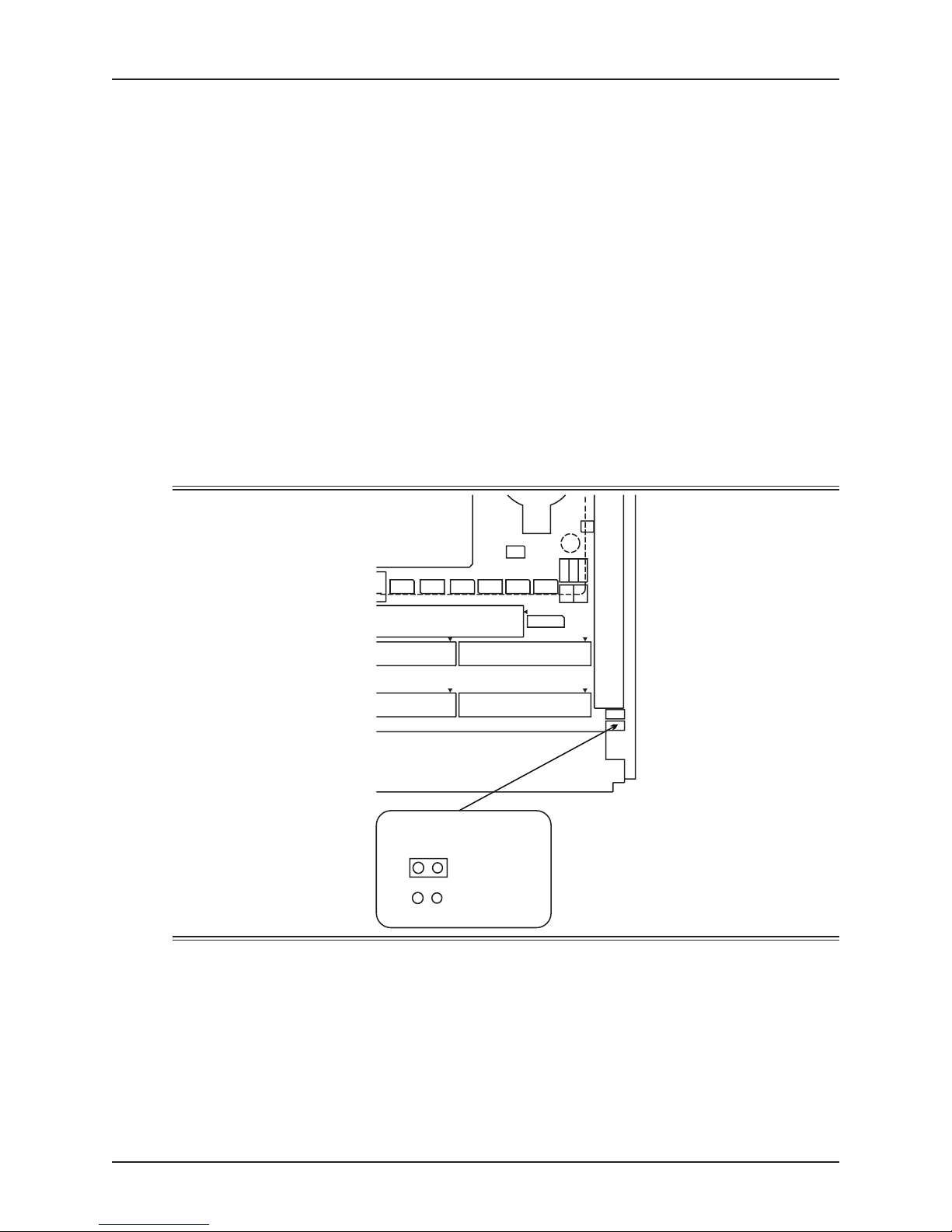
7.4 Battery backed SRAM
The board can be fitted with 512K to 2 Mbytes of Static RAM. This SRAM is non volatile as data
can be automatically retained via the on-board battery when the board is not powered. The
memory is connected to the CSB5 X-Bus interface and is accessible via a paged 512 Kbyte
window (refer to Figure 7-1). Memory allocated to the window is selected via a combination of
device and page within that device. Two dedicated registers provide these functions. The page
memory and type are selected via the Memory Page and Status register. The specific device is
selected via Status & Control Register 4. The device selection gives access to each of up to four
16 Mbyte devices, thus the first 16MB is device 0, and so forth. An additional 2 Mbyte window is
also provided specifically for SRAM to permit easy access to the entire 2 Mbytes space. Refer to
Figure 7-1.
A jumper is provided (see Figure 7-3) to disconnect the backup supply to the SRAM to extend
the battery life for CMOS settings. The jumper must be fitted to permit data retention. When the
board is installed in a VME backplane which provides power via the 5V STANDBY pin, this
supply will be used in place of the on-board battery supply. However, the jumper must still be
fitted to enable this supply.
If required, the Battery Backed SRAM can be programmed with a disk image and configured via
BIOS Setup screens to operate as a RAM disk, replacing drive B:. Refer to section 4.4 for further
details.
Memory
VP 110/01x 7-5
LK3 SRAM
Backup Power
Battery
None
Figure 7-3 SRAM Backup Power Jumper
Page 60

Memory
This page has been left intentionally blank
7-6 VP 110/01x
Page 61

Additional Local I/O Functions
The VP 110/01x supports a variety of I/O functions whose addresses are summarized in Table
8-1.
I/O Address Range Description
0000-000Fh Master DMA Controller (CSB5 LPC host)
0020-0021h Master Interrupt Controller (CSB5)
002E-002Fh Configuration Index & Data Registers (Super I/O)
0040-0043h Timers 0-2 (CSB5)
0060h Keyboard Controller (Super I/O)
0061h NMI Status (CSB5)
0064h Keyboard Controller (Super I/O)
0070h NMI Enable/RTC Address (CSB5)
0078-007Bh BIOS Timer (CSB5)
0080h Debug Port
0092h Port 92 (CSB5)
00A0-00A1h Slave Interrupt Controller (CSB5)
00C0-00DFh Slave DMA Controller (CSB5 LPC host)
00F0h Math Coprocessor Error
0210-021Ch Control & Status Registers & LDT
03F0-03F7h Floppy Controller (Super I/O)
03F8-03FFh COM1 Serial (Super I/O)
04D0-04D1h Interrupt Control (CSB5)
0C00-0C01h Interrupt Address Index & Redirection (CSB5)
0C06-0C08h Black Box (CSB5)
0C14h PCI Error Status (CSB5)
0C6Fh Flash EPROM Write Protect (CSB5)
0C50-0C51h Client Management & Security (CSB5)
0CD6-0CD7h Power Management Index & Data Port (CSB5)
0CF8-0CFFh PCI Configuration Registers (CNB30LE)
0F50-0F58h General Purpose Chip Selects (CSB5)
0D00-FFFFh PCI Free I/O Space
Most of the addresses are standard PC-AT compatible values, but at addresses 0210-021Ch the
board provides custom Status & Control registers for the board specific features.
VP 110/01x 8-1
Table 8-1 I/O Address Map
Page 62
Additional Local I/O Functions
There are 13 byte wide status and control registers. They are accessed at the following I/O
addresses:
210h for Status & Control Register 0;
l
211h for Status & Control Register 2;
l
212h for Status & Control Register 1;
l
213h for VME Address Capture Data & Control Registers; (refer to note)
l
214h for Watchdog Status & Control Register;
l
215h for Control and Status Register 4;
l
216h for Memory Page and Status Register;
l
217h for Status & Control Register 3;
l
218h for Long Duration Timer LS byte;
l
219h for Long Duration Timer Mid Low byte;
l
21Ah for Long Duration Timer Mid High byte;
l
21Bh for Long Duration Timer MS byte;
l
21Ch for Long Duration Timer Status & Control Register;
l
NOTE The functions provided by the VME Address Capture Data & Control registers are
described in Chapter 5. The functions of the remaining registers in this block are
detailed in the following sections.
8-2 VP 110/01x
Page 63

Additional Local I/O Functions
8.1 Status & Control Register 0 (I/O address 210h)
765 43 2 1 0
|________|________|_________|________|_________|_________|_________|_________|
||| || | | |
CONSOLE USER BYTE BYTE BYTE BOARD BOARD BOARD
SWITCH SWITCH SWAP SWAP SWAP REV 2 REV 1 REV 0
Bits2-0:Hardware Revision Strapping (Read Only)
000 = Rev A
001 = Rev B Etc...
Bits5-3:VMEHardware Byte Swapping (Read/Write)
Bit 3: VME Byte Swapping for Master (0=off, 1=on)
Bit 4: VME Byte Swapping for Slave (0=off, 1=on)
Bit 5: VME Fast Byte Swapping i.e Partial Cycle Type Decode (0=off, 1=on)
Byte swapping is only supported for aligned transfers. When swapping is enabled, the hardware
will normally decode the VME cycle type as it takes place to determine if swapping is possible. It
then configures a set of multiplexors to perform the swap. To meet the VME bus timing
specifications for write cycles it is necessary to delay the cycle while the multiplexors are
configured. Setting bit 5 of this register turns off the delay, but should only be done if all VME
cycles are guaranteed swappable.
Bit 6: User Switch (Read Only)
Available for user defined purposes in BIOS mode. In VSA mode this switch is used for factory
test.
0 = Switch off
1 = Switch on
Bit 7: Console Switch (Read Only)
Used to define the BIOS default standard input/output mode. This bit indicates the setting of the
Console Mode switch (see Section 6.1).
0 = Input/output via COM 1
1 = Input via keyboard/output via VGA PMC adapter
VP 110/01x 8-3
Page 64

Additional Local I/O Functions
8.2 Status & Control Register 2 (I/O address 211h)
NOTE Bit 4 of this register is device locked.
765 43 2 1 0
|________|________|_________|________|_________|_________|_________|_________|
||| || | | |
PC BUS BIOS THERM SPEED DEV DEV DEV DEV
CLOCK VSA ALERT STEP UNLOCK UNLOCK UNLOCK UNLOCK
Bits3-0:Device Lock (Write Only)
These bits control the Device Lock function. The device lock forces various Status and Control
Register bits to the clear (i.e. Zero) state following a power-on or reset. To unlock the device,
software should write 0X5h then 0XAh to this register.
Bit 4: SpeedStep (Read/Write Once)
0 = Low speed (battery optimized mode)
1 = High speed (performance mode)
This bit controls the logic that changes the processor operating frequency and voltage. This bit
will only respond to the first write to this register following a power-on or reset. Subsequent
writes to this register will not affect this bit.
SELECT ENABLE 3210
NOTE This feature is reserved for use by the BIOS only. User software may read this bit
(to determine the operating frequency) but may not change it.
Bit 5: Therm Alert Enable (Read/Write once)
0 = Therm Alert Disabled (Default)
1 = Therm Alert Enabled
This bit controls the logic that will turn the processor off if an over temperature condition occurs
in the processor chip. The MAX1617 which monitors the processor temperature is preset by the
BIOS to trip at a safe maximum level. The trip level should not be changed.
Bit 6: BIOS/VSA Select (Read/Write )
0 = BIOS ROM selected
1 = VSA ROM selected
This bit controls the selection of the BIOS or VSA ROMs. Normal operation requires that the
BIOS ROM be selected. VSA ROM selection is used for factory test.
Bit 7: P2 PCI Bus Speed (Read Only).
0 = 33MHz operation (VIO=5V)
1 = 66MHz operation (VIO=3.3V)
This bit directly reflects status of the P2_M66EN pin of the PMC PCI bus (bus 1).
8-4 VP 110/01x
Page 65
8.3 Status & Control Register 1(I/O address 212h)
765 43 2 1 0
|________|________|_________|________|_________|_________|_________|_________|
||| || | | |
FRONT UNIVERSE VME BUS VME BUS PCI PCI PMC PMC
PANEL LINT1 ERROR ERROR EXP’N EXP’N SITE 2 SITE 1
NMI NMI FLAG INTERRUPT SLOT 2 SLOT 1
ENABLE
Bits3-0:PMCMode 1 Status of PMC Modules (Read Only)
Bit0and1=OnBoard PMC Site 1 & 2; Bits 3 and 2 = Expansion PMC Sites
0 = PCI compliant module not fitted
1 = PCI compliant module fitted
Bit 4: VME Bus Error Interrupt Enable (Read/Write)
0 = VME bus error interrupt disabled
1 = VME bus error interrupt enabled
Bit 5: VME Bus Error Flag (Read/Clear)
The flag is set by a bus error occurring during a cycle in which the Universe is the VME bus
master. The bit can be cleared by writing to the register with a zero in this bit position. This
should be done as part of the VME bus error interrupt routine.
0 = VME bus error has not occurred
1 = VME bus error has occurred
Additional Local I/O Functions
Bit 6: LINT1 from the Universe is the cause of NMI (Read Only)
This bit is set by the Universe and should be cleared by writing to the appropriate Universe
register.
0 = LINT1 has not occurred
1 = LINT1 has occurred
Bit 7: Front Panel Switch is the cause of NMI (Read/Clear)
This bit can be cleared by writing to the register with a zero in this bit position.
0 = FP Switch NMI has not occurred
1 = FP Switch NMI has occurred
VP 110/01x 8-5
Page 66

Additional Local I/O Functions
8.4 Watchdog Timer
The VP 110/01x board includes a hardware Watchdog timer which can be used by the operating
software to monitor the normal operation of the system. The timer is enabled by a board switch
(see Figure 8-1) and controlled by software. Once enabled it must be restarted at regular
intervals. If it is not restarted for a period of approximately 1 second, the timer will expire and
cause a Non-Maskable Interrupt or reset to the local processor. See Section 8.4.3 for further
details of watchdog timer operation.
1
2
OFF
3
4
Switch4-Watchdog Timer
OFF - Enabled
ON - Disabled
ON
Figure 8-1 Watchdog Timer Switch
The watchdog timer facility is provided by a Maxim MAX705 power-on reset supervisor chip and
additional hardware.
8-6 VP 110/01x
Page 67

Additional Local I/O Functions
8.4.1 Watchdog Status & Control Register (I/O address 214h)
765 43 2 1 0
|________|________|_________|________|_________|_________|_________|_________|
||| || | | |
RFU SYSTEM S/W ENABLE STATUS NMI PAT PAT
Bits 1- 0: Watchdog Restart Bits (Read/Write)
Refer to the following description on watchdog configuration.
Bit 2: Select Watchdog Action (Read/Write)
This bit selects the following actions when the watchdog times out.
0 = Generate an NMI (default)
1 = Generate a board reset
Bit 3: Watchdog Status (Read Only)
0 = Watchdog timed out
1 = Watchdog OK
This bit can be used to determine if the watchdog was the source of an NMI or reset.
A valid watchdog restart will set this bit to ‘Watchdog OK’ if the watchdog had previously timed
out.
RESET ENABLE LINK RESET 1 2
ENABLE
Bit 4: Watchdog Enable Jumper Status (Read Only)
0 = Watchdog is under software control
1 = Watchdog disabled in hardware
Bit 5: Watchdog Software Enable (Read/Write)
0 = Watchdog disabled (default)
1 = Watchdog enabled
Bit 6: Watchdog System Reset Enable (Read/Write)
0 = Local reset only (Default)
1 = Local and system reset
Watchdog action (Bit 2) must be set to ‘1’ for this bit to have any effect.
Bit 7: Reserved, Read as ‘0’
VP 110/01x 8-7
Page 68

Additional Local I/O Functions
8.4.2 Watchdog Configuration
The watchdog circuitry contains features to safeguard against accidental use through faulty or
unintended software actions. To enable the watchdog the following sequence of events needs
to be performed.
1) Read the watchdog register. Check the status of the watchdog enable jumper (bit 4). If it
reads ‘low’ then proceed to step 2. If it reads ‘high’ then the watchdog cannot be enabled in
software.
2) Set bits 1 & 0 to the complement of each other (i.e. 0,1 or 1,0) and at the same time set bit
5 ‘high’.
3) Write the new value back.
4) Complement bits1&0. Write the new value to the watchdog register
5) Repeat step 4.
Once the watchdog has been enabled, it can be disabled by repeating the above procedure with
bit 5 set ‘low’.
8.4.3 Using the Watchdog
Once enabled, the watchdog timer must be restarted at regular intervals to prevent it expiring.
The maximum interval is pre-set to 1 second. This is a function of the watchdog chip and cannot
be changed. If the watchdog timer is not restarted within this time it will time out and cause a
reset or NMI depending on the state of bit 2 of the Watchdog Status & Control register. To
restart the watchdog the complement of the lower two bits needs to be written into the Watchdog
Status & Control register. These two bits must also be the complement of each other i.e. 0,1 or
1,0. Writing any other value or the same value will not restart the watchdog.
If the watchdog time-out is configured to generate a board reset and a time-out occurs the
watchdog circuit will also be reset. The watchdog must be enabled to be re-enabled after a reset
has occurred. This has been done to allow operating systems software to boot after a reset
without having to keep the watchdog from timing out during this period. The watchdog status bit
will not be cleared; this must to be done by enabling and restarting the watchdog. The reason
for this is to preserve the status of the watchdog timeout to allow software to determine the
source of an NMI or if a reset was caused by the watchdog.
NOTE Once an erroneous value has been written into the watchdog register it will take
NOTE The actual time-out of the watchdog chip can vary between 1s and 2.25s. To
two further writes using the correct values to restart the watchdog again.
Therefore, when changing any bit in the register when the watchdog has been
enabled, bits1&0should be complemented.
guarantee correct operation on all boards the restart interval should be less than
1s.
8-8 VP 110/01x
Page 69

8.4.4 Programming the Watchdog
The following functions show how to use the watchdog facility available through the Status and
Control registers.
It is worth noting that the Software Enable bit in the Watchdog Status and Control register does
not read back the value last written; it is the output from the error checking logic, so it will not
read back as enabled until two watchdog restarts have been performed (equally it will not display
disabled until two further restarts have been performed).
/* Status and control registers */
#define STATCTL_BASE 0x0210
#define WATCHDOG_STATCTL (STATCTL_BASE + 4)
#define WD_PAT_MASK 0x03
#define WD_PAT_1 0x02
#define WD_PAT_2 0x01
#define WD_ACTION_MASK 0x04
#define WD_ACTION_NMI 0x00
#define WD_ACTION_RST 0x04
#define WD_STATUS 0x08
#define WD_HW_DISABLE 0x10
#define WD_SW_ENABLE 0x20
Additional Local I/O Functions
/*****************************************************************************
* vEnableWatchdog: configure the watchdog for NMI or RESET on timeout
*
* RETURNS: none
*/
void vEnableWatchdog
(
UINT8 bTimeoutAction /* action on timeout: NMI or Reset */
)
{
UINT8 bTemp;
bTemp = inbyte (WATCHDOG_STATCTL);
bTemp &= ~WD_ACTION_MASK; /* set watchdog timeout action */
bTemp |= bTimeoutAction;
bTemp |= WD_SW_ENABLE; /* software enable of watchdog */
bTemp &= ~WD_PAT_MASK; /* clear the pat bits */
outbyte (WATCHDOG_STATCTL, bTemp | WD_PAT_1); /* set and pat twice */
outbyte (WATCHDOG_STATCTL, bTemp | WD_PAT_2);
outbyte (WATCHDOG_STATCTL, bTemp | WD_PAT_1);
} /* vEnableWatchdog () */
/*****************************************************************************
* vDisableWatchdog: de-configure the watchdog and disable
*
* RETURNS: none
*/
void vDisableWatchdog (void)
{
UINT8 bTemp;
VP 110/01x 8-9
Page 70

Additional Local I/O Functions
bTemp = inbyte (WATCHDOG_STATCTL);
bTemp &= ~WD_ACTION_MASK; /* set watchdog action to NMI */
bTemp |= WD_ACTION_NMI;
bTemp &= ~WD_SW_ENABLE; /* software disable the watchdog */
outbyte (WATCHDOG_STATCTL, bTemp | WD_PAT_1); /* set and pat twice */
outbyte (WATCHDOG_STATCTL, bTemp | WD_PAT_2);
outbyte (WATCHDOG_STATCTL, bTemp | WD_PAT_1);
} /* vDisableWatchdog () */
/*****************************************************************************
* vPatWatchdog: restart the watchdog to prevent timeout
*
* Bits 1:0 of the Watchdog status / control register are inverted before
* writing back.
*
* RETURNS: none
*/
void vPatWatchdog (void)
{
UINT8 bTemp;
UINT8 bPat;
bTemp = inbyte (WATCHDOG_STATCTL);
bPat = (~bTemp) & WD_PAT_MASK; /* get complement of bits 1:0 */
bTemp &= ~WD_PAT_MASK; /* clear the bits 1:0 in data */
bTemp |= bPat; /* set new bits */
outbyte (WATCHDOG_STATCTL, bTemp);
} /* vPatWatchdog () */
8-10 VP 110/01x
Page 71

Additional Local I/O Functions
8.5 Status & Control Register 4 (I/O address 215h)
765 43 2 1 0
|________|________|_________|________|_________|_________|_________|_________|
||| || | | |
PMC SITE PMC SITE RFU RFU RFU BATTERY BANK BANK
2 1 STATUS SELECT 1 SELECT 0
EREADY EREADY
Bits 0,1: Select Flash Bank (Read/Write)
Bit 1 Bit 0 Bank/Device
000
011
102
113
Bit 2: Backup Battery Status (Read Only)
0 = Backup battery power is normal
1 = Backup battery is below level for data retention
Bits5-3:Reserved
Bit 6 PMC Site 1 Non Monarch Boot Status
0 = Not ready,
1 = Ready
Bit 7 PMC Site 2 Non Monarch Boot Status
0 = Not ready,
1 = Ready
VP 110/01x 8-11
Page 72

Additional Local I/O Functions
8.6 Memory Page and Status Register (I/O address 216h)
765 43 2 1 0
|________|________|_________|________|_________|_________|_________|_________|
||| || | | |
FLASH MEMORY PAGE 5 PAGE 4 PAGE 3 PAGE 2 PAGE 1 PAGE 0
PROG/EN SELECT
STATUS
Bits5-0:Application Flash and SRAM page select (read/write)
NOTE The Flash devices used are 128 Mbits (16 Mbytes), using page bits 0 to 4. Up to
four 16 Mbyte devices can be fitted and are selected via the bank select bits of
Control and Status Register 4. Page bit 5 is unused.
Bit 6: Memory Select (Read/Write)
0 = Application Flash
1 = Non Volatile SRAM
Bit 7: Application Flash Program Status (Read Only)
0 = Device ready
1 = Device busy
8-12 VP 110/01x
Page 73

Additional Local I/O Functions
8.7 Status & Control Register 3 (I/O address 217h)
765 43 2 1 0
|________|________|_________|________|_________|_________|_________|_________|
||| || | | |
MODE VME GAP VID4 VID3 VID2 VID1 VID0
JUMPER SYSTEM
Bits4-0:VME64x slot number (Read Only)
These bits indicate the state of the VME Geographic Address pins (GA4-GA0) of the VME P1
connector. They will read as ‘1’ if the board is installed in a backplane which does not support
these signals.
Bit 5: VME64x slot number parity (Read Only)
These bits indicate the state of the VME Geographic Address parity pin (GAP) of the VME P1
connector. It will read as ‘1’ if the board is installed in a backplane which does not support this
signal.
Bit 6: VME System Reset Enable (Read Only)
This bit controls the SYSRST# input from the VME Bus.
0 = System Reset is disabled (default)
1 = System Reset is enabled
RESET
ENABLE
Bit 7: Mode Switch (Read Only)
This bit is used to select the operating mode for the board firmware as determined by the setting
of the MODE switch (see Section 9.1). See Chapter 9 for more information about the BIOS
operating mode, and Chapters 10 and 11 for further details of the VSA operating mode.
0 = BIOS mode
1 = VSA mode
VP 110/01x 8-13
Page 74

Additional Local I/O Functions
8.8 Long Duration Timer/Periodic Interrupt Timer
The Long Duration Timer (LDT) consists of a 32-bit free running counter with a 32-bit holding
register and a Status & Control register. The counter bytes are laid out in little-endian format to
permit multi-byte read/write operations. The Status & Control register controls the operation of
the LDT.
A 32-bit holding register is provided to ensure stable count values are read. Read operations
return the holding register byte values. A read operation on the low byte of the counter causes
the count value to be transferred to the holding register. Hence, the low byte should be read first
to ensure a stable count value.
The counter may be preset by writing to the registers. The counter bytes may be written
independently. The counter should be stopped before writing to it or the outcome may be
indeterminate. The counter registers are cleared at power-on, but not by subsequent reset
operations. If necessary, the LDT can be cleared by writing zero to all four counter bytes.
The LDT clock frequency is selectable from 2 sources: 1) SIO HF clock and 2) SIO LF clock.
The SIO (PC87417) HF clock frequency is selectable from an internally generated 48MHz clock
via a programmable divider. It is further divided by 4 in the LDT before being used. The LF
clock is derived from the 32kHz RTC clock. The following clock frequencies are available:-
HF Clock/4: 12, 6, 4, 3, 2, 1.5, 1, 0.75MHz
LF Clock: 32.768kHz
NOTE 1 1MHz is selected by the BIOS as the default clock frequency (SIO set to 4MHz) as
NOTE 2 Although the LFCLK can be configured to 1Hz it also drives other circuitry. It is
The clock mark/space ratio can be any value that meets the minimum high /low pulse widths of
40ns.
An interrupt may be generated when the counter rolls over (from FFFFFFFFh to zero). This
occurs approximately every 72 minutes (1MHz clock).
The LDT doubles as a simple Periodic Interrupt Timer (PIT). It offers 7 fixed interrupt rates,
namely: 100, 200, 500, 1,000, 2,000, 5,000 and 10,000Hz (1MHz clock). The mode/ interrupt
rate is set by three bits in the LDT Status & Control register. Scale the rates accordingly
depending on the chosen clock frequency with respect to a clock of 1MHz e.g. for a 2MHz clock
the interrupt rates will be: 200, 400, 1,000, 2,000, 4,000, 10,000 and 20,000Hz.
In PIT mode, the counter counts up to a pre-determined maximum value and then goes back to
zero. To ensure a full first interval, the low and mid-low bytes of the counter should be cleared
before the counter is started.
The LDT interrupt is always enabled when the timer is running. If this is not convenient, the
interrupt can be masked externally in the South Bridge PIC. The LDT/PIT interrupt service
routine must clear the interrupt flag using a read/modify/write sequence of accesses to the LDT
Status & Control register.
this is the clock frequency used on other Concurrent Technologies boards.
recommended that the LFCLK be left at 32.768kHz for future compatibility.
8-14 VP 110/01x
Page 75

Additional Local I/O Functions
8.8.1 Long Duration Timer/Periodic Interrupt Timer Low Byte
765 43 2 1 0
|________|________|_________|________|_________|_________|_________|_________|
||| || | | |
LDT7 LDT6 LDT5 LDT4 LDT3 LDT2 LDT1 LDT0
Bits7-0:LowByte of LDT/PIT (Read/Write)
Reading this register causes the current value of the LDT to be transferred to a holding register.
This allows a stable 4-byte count to be read. The low byte of the holding register is returned by
the read.
Writing to this register loads a value into the low byte of the LDT/PIT counter. The counter
should be stopped when writing or the result will be indeterminate.
8.8.2 Long Duration Timer/Periodic Interrupt Timer Mid-low Byte
765 43 2 1 0
|________|________|_________|________|_________|_________|_________|_________|
||| || | | |
LDT15 LDT14 LDT13 LDT12 LDT11 LDT10 LDT9 LDT8
Bits7-0:Mid-low Byte of LDT/PIT (Read/Write)
Reading this register returns the mid-low byte of the holding register.
Writing this register loads a value into the mid-low byte of the LDT/PIT counter.
The counter should be stopped when writing or the result will be indeterminate.
8.8.3 Long Duration Timer/Periodic Interrupt Timer Mid-high Byte
765 43 2 1 0
|________|________|_________|________|_________|_________|_________|_________|
||| || | | |
LDT23 LDT22 LDT21 LDT20 LDT19 LDT18 LDT17 LDT16
Bits7-0:Mid-high Byte of LDT (Read/Write)
Reading this register returns the mid-high byte of the holding register.
Writing to this register loads a value into the mid-high byte of the LDT counter. The counter
should be stopped when writing or the result will be indeterminate.
8.8.4 Long Duration Timer/Periodic Interrupt Timer High Byte
765 43 2 1 0
|________|________|_________|________|_________|_________|_________|_________|
||| || | | |
LDT31 LDT30 LDT29 LDT28 LDT27 LDT26 LDT25 LDT24
Bits7-0:High Byte of LDT (Read/Write)
Reading this register returns the high byte of the holding register.
Writing to this register loads a value into the high byte of the LDT counter. The counter should
be stopped when writing or the result will be indeterminate.
VP 110/01x 8-15
Page 76

Additional Local I/O Functions
8.8.5 LDT/PIT Status & Control Register
765 43 2 1 0
|________|________|_________|________|_________|_________|_________|_________|
||| || | | |
RFU RFU CLOCK INTERRUPT MODE MODE MODE RUN
Bit 0: LDT/PIT Run (Read/Write)
This bit controls whether the LDT/PIT runs or is stopped.
0 = stop (default)
1 = run
Bits3-1:LDT/PIT Mode (Read/Write)
These bits set the mode of the timer as follows:
000 = LDT
001 = PIT 100Hz
010 = PIT 200Hz
011 = PIT 500Hz
100 = PIT 1,000Hz
101 = PIT 2,000Hz
110 = PIT 5,000Hz
111 = PIT 10,000Hz
All frequencies are with a 1MHz clock source selected via bits 6 and 5.
SELECT FLAG 2 1 0
Bit 4: LDT/PIT Interrupt Flag (Read/Clear)
This bit is set if the LDT RUN bit is set AND either the LDT rolls over or the PIT interval expires.
This bit can be cleared by writing to the register with a zero in its bit position. This should be
done in the LDT/PIT interrupt service routine.
0 = LDT/PIT interrupt has not occurred
1 = LDT/PIT interrupt has occurred
Bits 5: Clock Source Select (Read/Write)
These bits select the clock source for the LDT/PIT as follows:
0 = HFCLK/4
1 = LFCLK
Bit 6-7: Reserved
8-16 VP 110/01x
Page 77

8.8.6 Programming the LDT/PIT
The following code fragments illustrate how the system software, by using the on-board
hardware, can create accurate time delays and measure elapsed times, accurate to 1µs,
irrespective of the CPU’s operating frequency.
The LDT and PIT control registers and operational modes are defined thus:
#define TIMER_BYTE_0 (0x0218U)
#define TIMER_BYTE_1 (0x0219U)
#define TIMER_BYTE_2 (0x021AU)
#define TIMER_BYTE_3 (0x021BU)
#define CONTROL_STATUS (0x021CU)
#define INTERRUPT_MASK (0x10U)
#define INTERRUPT_ENABLE (0x10U)
#define INTERRUPT_DISABLE (0x00U)
#define INTERRUPT_SET (0x10U)
#define INTERRUPT_RESET (0x00U)
#define TIMER_ROLLOVER (0x10U)
#define MODE_MASK (0x0EU)
#define MODE_PIT_10000Hz (0x0EU)
#define MODE_PIT_5000Hz (0x0CU)
#define MODE_PIT_2000Hz (0x0AU)
#define MODE_PIT_1000Hz (0x08U)
#define MODE_PIT_500Hz (0x06U)
#define MODE_PIT_200Hz (0x04U)
#define MODE_PIT_100Hz (0x02U)
#define MODE_LDT (0x00U)
Additional Local I/O Functions
#define MODE_RUN_MASK (0x01U)
#define MODE_RUN_GO (0x01U)
#define MODE_RUN_STOP (0x00U)
The following code fragment illustrates how a simple delay of 10ms is implemented.
outbyte (CONTROL_STATUS, MODE_RUN_STOP);
outbyte (TIMER_BYTE_0, 0);
outbyte (TIMER_BYTE_1, 0);
outbyte (TIMER_BYTE_2, 0);
outbyte (TIMER_BYTE_3, 0);
outbyte (CONTROL_STATUS, MODE_PIT_100Hz | MODE_RUN_GO);
/* wait until the PIT rolls over ... */
while (inbyte (CONTROL_STATUS) & TIMER_ROLLOVER) == 0)
; /* do nothing ... */
/* reset the PIT "rollover" flag ... */
outbyte (CONTROL_STATUS, MODE_RUN_STOP);
VP 110/01x 8-17
Page 78

Additional Local I/O Functions
It is possible to implement delays of 5ms, 2ms, 1ms, 500µs, 200µs and 100µs by utilizing other
PIT modes.
The PIT can generate an interrupt whenever the PIT rolls over. The system programmer must
initialize the interrupt vector, enable PIC interrupts, etc. The following code fragment shows the
basic interrupt handling function.
static volatile signed long int dCounter;
#pragma interrupt (vInterruptHandler)
static void far vInterruptHandler (void)
{
/*
* clear the source of the interrupt by resetting the rollover
* flag, thus:
*/
outbyte (CONTROL_STATUS, inbyte (CONTROL_STATUS) & ~INTERRUPT_MASK);
/*
* perform the relevant actions to acknowledge the interrupt
* in the PIC, etc ...
*/
dCounter--;
}
The following code fragment used in conjunction with the previous code fragment illustrates
another method of implementing a timed delay. The dCounter variable is declared to be volatile
which prevents any C compilers, which conform to the ANSI standard, from optimizing accesses
to the dCounter variable.
outbyte (CONTROL_STATUS, MODE_RUN_STOP);
outbyte (TIMER_BYTE_0, 0);
outbyte (TIMER_BYTE_1, 0);
outbyte (TIMER_BYTE_2, 0);
outbyte (TIMER_BYTE_3, 0);
outbyte (CONTROL_STATUS, MODE_PIT_100Hz | MODE_RUN_GO);
dCounter = 500; /* 500 * (1 / 100) == 5 seconds */
/*
* install the interrupt for the PIT counter, modify the
* PIC settings, etc. and ensure interrupts are enabled.
*/
while (dCounter > 0)
; /* do nothing ... */
outbyte (CONTROL_STATUS, MODE_RUN_STOP);
The following code fragment uses the LDT to measure the elapsed time to a resolution of 1µs.
In this example, the LDT is zeroed at the start of the test and so there is no need to subtract the
LDT’s initial value from its final value.
static UINT32 dElapsedTime;
outbyte (CONTROL_STATUS, MODE_RUN_STOP);
outbyte (TIMER_BYTE_0, 0);
outbyte (TIMER_BYTE_1, 0);
outbyte (TIMER_BYTE_2, 0);
outbyte (TIMER_BYTE_3, 0);
outbyte (CONTROL_STATUS, MODE_LDT | MODE_RUN_GO);
/*
* perform action to be timed ...
*/
8-18 VP 110/01x
Page 79

Additional Local I/O Functions
outbyte (CONTROL_STATUS, MODE_STOP);
dElapsedTime = (UINT32) inbyte (TIMER_BYTE_0);
dElapsedTime |= ((UINT32) inbyte (TIMER_BYTE_1)) << 8;
dElapsedTime |= ((UINT32) inbyte (TIMER_BYTE_2)) << 16;
dElapsedTime |= ((UINT32) inbyte (TIMER_BYTE_3)) << 24;
printf ("Elapsed time = %u.%06u seconds\n",
The TIMER_BYTE_0, TIMER_BYTE_1, TIMER_BYTE_2 and TIMER_BYTE_3 control
registers are at successive addresses and form a 32-bit register in “little endian” format. It is
possible to read and write the timer’s value in a single 32-bit I/O operation. For example, to read
the timer’s value, the following C statement suffices.
DCounterValue = inlong (TIMER_BYTE_0);
dElapsedTime / 1000000U, dElapsedTime % 1000000U);
VP 110/01x 8-19
Page 80

Additional Local I/O Functions
8.9 Port 80
A header has been provided for monitoring data written to I/O Port 80. The PC BIOS writes
status bytes to Port 80 that indicate a boot progress status and/or highlight any faults found.
Data written to this port can be monitored using a Logic State Analyzer (LSA) or seven segment
hexadecimal displays. See Section A.5.11 for details of the connector used for this port.
After boot-up this port can be used to monitor other status bytes written to Port 80, which can be
useful for debug purposes.
8-20 VP 110/01x
Page 81

The VP 110/01x board is fitted with PC BIOS firmware that performs many of the functions of a
standard desktop PC. It also includes additional features specifically tailored for the VME bus
environment. In addition to the core BIOS firmware, the board is fitted with BIOS Extensions for
remote bootload capability via either of the on-board Ethernet channels. To improve the
flexibility of the board, some of these features may be selectively enabled or disabled by an
operator using BIOS setup menus. Many of the features provided by the PC BIOS are unlikely
to be adjusted by the user, but there are several options which many users will find helpful.
Some of these are already referenced in other sections of this manual, but the remainder of this
chapter will describe some other commonly-used options. More information about each of the
options available is provided in the Help box of the BIOS setup menus.
9.1 Entering the PC BIOS
The startup mode of the board may be selected using the MODE switch, but can be either of the
following: PC BIOS mode (the factory default setting), which generally follows the behavior of a
desktop PC, and VSA mode (a more flexible and comprehensive testing mode), which can be
used for system or board testing. VSA mode operation and features are described in more detail
in Chapters 10 and 11 of this manual. Figure 9-1 shows the location of the switch on the board
and its settings.
PC BIOS
1
2
OFF
3
4
Switch 2 - Mode
OFF - BIOS
ON - VSA
ON
Figure 9-1 Mode Switch
VSA mode may be exited either by operator command, or by allowing the board to proceed
through the VSA startup sequence without intervention. In either case, the board will enter PC
BIOS mode and continue as if this mode had been selected with the switch. When the board is
reset, it will generally restart in the switch-selected operating mode. However, a reset caused by
a keyboard <CTRL-ALT-DEL> keystroke combination, or by a programmed reset using one of
several different I/O access sequences, will only cause a PC BIOS restart. A complete board or
system reset (using the front panel switch or through the VME bus EXTRST signal) will cause
the board to restart in the mode selected by the MODE switch setting.
Operator communication with the PC BIOS is usually through a VGA display connected to a
PMC module and a separate keyboard. This can be reconfigured with a board switch to use a
serial terminal connected to the COM1 port. Section 6.1 describes the location and settings for
VP 110/01x 9-1
Page 82

PC BIOS
this switch. A VT100-compatible serial terminal or emulator program should be used. By default
the serial line is programmed to operate at 9600 Baud with 8 data bits, 1 stop bit and no parity
(8N1). There is no flow control. For fast terminals, the baud rate can be increased via the
Serial Console Baud Rate field of the Main Setup menu.
9-2 VP 110/01x
Page 83

9.2 The PC BIOS Startup Sequence
When the board starts up without operator intervention, it will run a basic Power-On Self-Test
(POST) sequence, including ECC DRAM initialization and a DRAM test. The full DRAM test will
be omitted on subsequent restarts if the BIOS configuration settings have not been changed.
Once the DRAM test has completed, the board will try to bootload application software from any
attached mass storage medium or through one or both of the Ethernet interfaces.
When the PC BIOS starts after changing the battery, losing battery power or after using the
CMOS CLEAR jumper, it may report a CMOS Checksum Error or some other problem. This will
be following by a prompt to the operator to press <F1> to continue or <F2> to enter Setup mode.
If no key is pressed within approximately five seconds, the PC BIOS will continue with its normal
startup sequence. It will also re-calculate the CMOS Checksum to prevent this error occurring
again at a subsequent restart.
Pressing the <F2> key at any time during the PC BIOS startup sequence will result in the BIOS
Setup menu being entered. The Setup menu is quite extensive, and is provided with
context-sensitive help information which is displayed in the right-hand panel on screen.
PC BIOS
NOTE When the <F2> key is pressed, a few seconds may elapse before the BIOS Setup
menu appears. The PC BIOS will always run BIOS Extensions for any PMC
modules it detects before responding to the keypress.
VP 110/01x 9-3
Page 84

PC BIOS
9.3 Boot device selection
The order in which the PC BIOS searches for a bootable medium is pre-configured but may be
altered by the operator using the Boot setup menu. When the order is changed using this menu
it will be retained in non-volatile memory so that the order is maintained after a restart. It is also
possible to specify a one-time override of the boot device when the board starts, by pressing the
<ESC> key. This will result in a pop-up menu appearing. The appropriate boot device may be
selected from a list by using the cursor keys and pressing <ENTER>, but this is not retained in
non-volatile memory, so the correct device must be re-selected if necessary at a subsequent
restart.
NOTE When the <ESC> key is pressed, a few seconds may elapse before the boot
device selection menu appears. The PC BIOS will always run BIOS Extensions
for any PMC modules it detects before responding to the keypress.
The on-board PMC Sites and Ethernet channels require their BIOS Extension firmware to be
enabled before they can be used as boot devices. BIOS setup options are provided to control
whether or not the board runs the BIOS Extensions for the Ethernet channels or the on-board
PMC sites. The Option ROM Scan field of the appropriate device menu must be used to
enable or disable the BIOS Extension. The device menus are accessible from:
Ethernet channel 0 Advanced | PCI Device Configuration | Ethernet Channel 0
Ethernet channel 1 Advanced | PCI Device Configuration | Ethernet Channel 1
On-board PMC site 1 Advanced | PCI Device Configuration | PMC Site 1
On-board PMC site 2 Advanced | PCI Device Configuration | PMC Site 2
The Ethernet boot firmware allows remote booting using BOOTP and TFTP, and is based on the
“Etherboot” software available from http://etherboot.sourceforge.net. Further information on the
capabilities of this software is available at this site.
NOTE The BIOS has limited space available for Extension ROMs. If a PMC module
containing extension firmware is fitted to the board, it may be necessary to disable
one or more of the on-board firmware extensions before the PMC firmware can be
loaded.
9-4 VP 110/01x
Page 85

9.4 PCI Bus Resource Management
The local bus structure of the VP 110/01x is quite complex, and is based around two
independent PCI busses. In some cases the user may need to understand this structure and in
particular how the PC BIOS firmware allocates addresses and interrupt signals to the available
hardware resources. The following sections outline this allocation process and provide further
details of the PCI bus configuration.
There are two on-board PCI busses: a 64-bit bus which connects to the PMC site and the PMC
expansion sockets, and a second 32-bit bus which connects to the remaining on-board
peripherals (Ethernet, VME). Associated with these busses are a number of interrupt lines. The
64-bit bus is configurable for 5V or 3.3V switching levels (see Section 2.8) and can support
33MHz or 66MHz devices. The 32-bit bus operates at 33MHz only.
9.4.1 PCI Resource Allocation
The PC BIOS initializes all devices on the local PCI bus, and allocates appropriate memory
address ranges, I/O address ranges, and interrupt routings for all these devices. This process is
automatic as part of the BIOS “Plug-and-play” setup. Devices on the VME bus may also have
memory, I/O or interrupt resources, but these are not configured by the PC BIOS. Only four PCI
bus interrupt request lines are available, and must be shared between both the on-board PCI
bus devices and any Universe II VME bus interrupts. The ServerWorks chipset allows for a
flexible allocation of many PCI bus interrupts to the available interrupt inputs on the
PC-compatible interrupt controllers provided on the board. The PC BIOS uses this feature to
program default settings which it considers appropriate for the combination of on-board devices
and any device fitted to the PMC site. In some configurations, depending on the operating
system being used and the capability of the relevant device drivers, it may be necessary for the
user to modify this default configuration, to minimize the sharing of interrupt lines. The PC BIOS
Setup screen for Advanced | PCI Device Configuration allows this.
This screen allows the user to override the PC BIOS default selections for interrupt allocation,
but care must be taken when doing this to avoid conflicts which may result in operating system
or even BIOS “crashes”. To allow maximum flexibility of choice for the user, the PC BIOS
performs limited checks on the user’s interrupt allocation. In the event that there is a problem, it
may be necessary to clear the CMOS memory (see Section 2.7), or even to reset the Extended
System Configuration Data via the Reset Configuration Data field of the BIOS Setup
screen for Advanced configuration settings. The PC BIOS does not allow the user to override
the allocation of memory and I/O address ranges.
PC BIOS
NOTE When reallocating interrupts using the BIOS Setup screens, try to avoid allocating
the PMC interrupts to ones also allocated to other devices. This sharing of
interrupts can cause problems with some operating systems where device drivers
do not correctly handle shared interrupts.
VP 110/01x 9-5
Page 86

PC BIOS
Table 9-1 lists the configurable interrupts for this board. The actual allocation of PCI bus
interrupts to available interrupt controller inputs will depend on both the default “Plug-and-play”
settings programmed by the PC BIOS, and the way in which the user has overridden them using
the Setup screens. When more than one PCI bus interrupt is routed to the same interrupt
controller input, that input will remain active while any of the sources connected to it are active.
PMC Expansion INTA
PMC Expansion INTB
PMC Expansion INTC
PMC Expansion INTD
PMC 1 INTA
PMC 1 INTB
PMC 1 INTC
PMC 1 INTD
PMC 2 INTA
PMC 2 INTB
PMC 2 INTC
PMC 2 INTD
Ethernet Channel 0
Ethernet Channel 1
Universe II LINT0#/VME BERR
Table 9-1 Configurable PCI Bus Interrupts
9-6 VP 110/01x
Page 87

9.4.2 PCI Device IDs
Each PCI bus, and each device on an individual PCI bus, has a unique ID. For the VP 110/01x,
the bus and device IDs are listed in Table 9-2. The ServerWorks chipset includes two PCI bus
bridges to interface to the 64-bit and 32-bit on-board PCI busses, and these bridges are
identified by the same PCI device ID but with different function codes.
PC BIOS
PCI Bus Number
00 0
00 1
04 0
06 0
07 0
015 0
015 1
015 2
015 3
015 4
015 5
015 6
18 0
19 0
110 0
111 0
114 0
PCI Device ID PCI Function Code Device Description
Bridge to PCI bus 0 (32-bits)
Bridge to PCI bus 1 (64-bits)
Universe II
Ethernet channel 0
Ethernet channel 1
South Bridge
EIDE controller
USB controller
LPC bus controller
XIOAPIC0 (interrupt controller)
XIOAPIC1 (interrupt controller)
XIOAPIC2 (interrupt controller)
PMC site 1 primary function
PMC site 1 secondary function
PMC site 2 primary function
PMC site 2 secondary function
PMC Expansion Carrier
Table 9-2 PCI Device Numbers
VP 110/01x 9-7
Page 88

PC BIOS
This page has been left intentionally blank
9-8 VP 110/01x
Page 89

VME System Architecture Test Handler
10.1 Introduction
The VME System Architecture (VSA) Test Handler firmware provides an environment where
interactive testing may be performed on one or more Concurrent Technologies’ VME CPU
boards.
The level of testing provided by VSA is more comprehensive than that provided by the BIOS
POST, and testing can also be looped to aid diagnosis of intermittent faults. Failing tests provide
diagnostic information that can be used to identify the cause of the problem.
VSA mode also provides an interactive command-line interface, with a range of commands and
tests through which memory and I/O may be examined or modified. PCI devices can also be
identified and their configuration registers displayed and changed.
VSA allows all Concurrent Technologies’ boards in a system to be tested from a single console
connected to the System Controller. This console can be a standard VGA screen connected via
a PMC module and a keyboard, or a serial terminal connected to COM1.
10.2 The VSA Environment
Boards configured for VSA mode of operation can be installed in any slots in the VME chassis.
When the system starts up, those boards running in VSA mode will carry out an arbitration
sequence on the VME backplane using shared memory on each board involved. One board,
normally the board in the slot nearest to or in the System Controller slot, will win this arbitration
and act as the Master Test Handler. Other boards which lost the arbitration sequence will
operate in a Slave Test Handler mode.
10.2.1 Slot Numbering
Throughout the VSA firmware, boards are identified by their logical slot number. This number
does not represent the physical backplane slot. The logical slot number is assigned by the
Master Test Handler when it detects a board capable of participating in system testing.
Therefore boards from other manufacturers, boards not configured for VSA mode and boards
that are seriously damaged will not be detected and included in the numbering scheme. The
board which will act as the Master Test Handler will be assigned slot number zero.
In a system containing a faulty board, which is unable to enter its Slave Test Handler, the logical
slot numbers will not match the board positions in the rack. The faulty board can be isolated by
executing a short BIST (e.g. BIST 126) on each board in turn. The USER LED is illuminated
while the BIST is executing allowing the faulty board to be quickly identified.
10.2.2 VSA Console Devices
VSA can use a VGA compatible display interface and keyboard for the console device, or a
serial terminal may be used connected to COM1. VSA automatically detects the users choice of
console when the attention, “U” keystroke is entered at the prompt.
For serial consoles VSA will auto-detect the baud rate, though it is recommended that 19,200
Baud or 9,600 Baud be used. The auto-baud function may require the attention key to be
pressed more than once in noisy environments, or when lower rates than the recommended
ones are used.
Console I/O will only be provided by the Master Test Handler.
VP 110/01x 10-1
Page 90

VME System Architecture Test Handler
10.2.3 Starting the Master Test Handler
VSA mode is selected by setting the Mode switch to the VSA position as indicated in Figure 9-1.
The board will enter VSA mode before the BIOS starts displaying sign-on text, so the first
console output will be the VSA user attention prompt.
When VSA starts, it outputs attention characters to all possible console devices simultaneously;
i.e. a video adapter and the COM1 port. On the video adapter this will appear as a series of
asterisks “*”, on a serial console the appearance of the character will depend on the console’s
baud rate.
Only the board in the system controller slot can provide console output. This is the Master Test
Handler (MTH); if other boards are present they will automatically enter their Slave Test
Handlers (STH) and await test execution requests from the Master.
When the attention prompt is displayed, pressing “U” (uppercase ”u”) on the desired console
device will display an option menu. From here the Master Test Handler can be entered, or the
board booted back to BIOS mode.
The tests available in VSA mode are described as Built-In Self-Tests (BISTs).
10.2.4 Remote Testing from the System Controller
In a system comprising more than one Concurrent Technologies’ CPU board, only the system
controller board will provide a console interface; however, this board can be used to test the
other VSA configured boards through their Slave Test Handlers.
During system startup, the VSA configured system controller will detect all other functional, VSA
configured boards. These boards will be identified via the VSA startup screen, together with their
logical slot ID.
The default test slot is initially set as slot zero (the system controller). This can be changed using
the SLOT command to any valid logical slot. When the default slot is changed, all tests will run
on the slave board and the TESTMENU command will return the list of valid BISTs for that
board.
10.2.5 Bootloading the BIOS
The board can be booted to BIOS mode from VSA mode using the BPHASE command. Once in
BIOS mode, warm boots will confine execution to the BIOS firmware; however, if a cold boot is
generated without changing the VSA switch, the board will re-enter VSA mode.
If the system controller board is booted to VSA mode and the “U” command is not entered, the
firmware will proceed to boot the board back to BIOS mode.
10-2 VP 110/01x
Page 91

10.2.6 BIST Execution
BIST execution is started using the TEST command. While a test is executing, no further
commands may be entered.
It is possible to specify more than one BIST for execution using the “;” separator, for example:
T14;T15;T20,4 Execute Test 14, Test 15 and Test 20. Test 20 has a command
BISTs may be executed more than once, automatically, using the iteration count. Using an
iteration count of zero will execute the BIST until the break “Ctrl-C” command is pressed, for
example:
10<T14> Execute T14 ten times.
0<T5> Execute T5 “forever”.
The iteration counter can also be used to execute a sequence of tests more than once, for
example:
5<T14;T15;T16> Execute T14, T15 and T16 five times.
VME System Architecture Test Handler
parameter.
VP 110/01x 10-3
Page 92

VME System Architecture Test Handler
10.3 MTH Command Reference
This section details all of the commands available from the MTH (Master Test Handler) prompt.
Commands are divided into General and Utility sections. The list below shows the commands in
uppercase letters only, but lowercase letters may also be used.
Where numbers are entered decimal notation is assumed unless the value ends in ‘H’ or ‘h’ In
this case the value is assumed to use hexadecimal notation.
10.3.1 Help Screens
Typing HELP at the MTH prompt will give general help for the MTH commands. Help for the
utility commands is available with the UTILHELP command.
10.3.2 General Commands
The general commands control BIST execution on the local or a remote test slot.
BPHASE [Short command B]
Boot the BIOS firmware on the default slot.
BPHASE # [Short command B]
# - slot number
Boot the BIOS firmware on the specified slot.
CLEARSUM [Short command C]
Clears the pass and fail counts for all BISTs on the default slot.
ID [No short command]
Displays a list of boards in the system, their status and the active default slot number. Boards
are identified by logical slot number. Only Concurrent Technologies boards, configured for VSA
mode will be identified by this command.
PRINT [Short command PR]
Toggles the BIST printing flag. When PRINT is off BIST diagnostic messages are not displayed
during testing, only the pass or fail and error code are displayed.
RESET [Short command R]
This command can only be applied to a slave board, which can be made to reset and reboot into
its Slave Test Handler.
SLOT [Short command S]
Displays the default test slot, i.e. the slot on which BISTs will execute. The slot number does not
relate to the physical backplane slot, it is a logical slot number assigned by the test handler.
SLOT # [Short command S]
# - slot number
Changes the default slot number. The slot number does not relate to the physical backplane slot,
it is a logical slot number assigned by the test handler.
It is possible to specify an unoccupied slot number with this command; however, a warning
message will be displayed and confirmation of the change requested.
10-4 VP 110/01x
Page 93

VME System Architecture Test Handler
SUM [No short command]
Prints the pass and fail counts for all BISTs available on the default slot.
SUM # [No short command]
# - test number, in the range 0-255
Prints the pass and fail count, for the BIST indicated, on the default slot.
TEST # [Short command T]
# - test number, in the range 0-255
Starts BIST execution on the default slot. The test is run without parameters. Further command
input is prevented until the BIST completes (or a BIST time-out is generated for a remote slot).
TEST #,p1,p2,… [Short command T]
# - test number, in the range 0-255
p1,p2 - test parameters (see individual BIST descriptions for details)
Starts test execution on the default slot, the supplied parameters are passed to the BIST
TESTMENU [Short command TM]
Displays a list of available BISTs for the default slot, together with their associated test number.
UTILHELP [Short command U]
Displays the help screen for the utility commands, described below.
VERSION [Short command V]
Prints the firmware version number on the default slot.
VP 110/01x 10-5
Page 94

VME System Architecture Test Handler
10.3.3 Utility Commands
IRO, IRR, ICR, ICW
These commands are reserved for factory testing. They report and modify the state of the VSA
board communication data structures.
INB port_address read a byte from the specified I/O address
INW port_address read a word from the specified I/O address
IND port_address read a dword from the specified I/O address
OUTB port_address,data write a byte to the specified I/O address
OUTW port_address,data write a word to the specified I/O address
OUTD port_address,data write a dword to the specified I/O address
DB address,length read a byte from the specified memory address
DW address,length read a word from the specified memory address
DD address,length read a dword from the specified memory address
DQ address,length read a qword (64-bits) from the specified memory address
SB address,data write a byte to the specified memory address
SW address,data write a word to the specified memory address
SD address,data write a dword to the specified memory address
NOTE The I/O and memory read and write functions only operate on the local slot, i.e.
TEA toggle Test Error Action flag between QUIT and CONTINUE
SEA toggle Sequence Error Action flag between QUIT and CONTINUE
The last two commands prevent looped BIST execution from halting if an error occurs.
the Test Master. To read or write I/O and memory on the slave boards: change the
default slot number and use the equivalent BIST functions TEST 101 through
TEST 104.
10-6 VP 110/01x
Page 95

This chapter describes the board’s initialization into VSA mode and the Tests that can be run
from VSA mode. For details of the VSA command line interface, refer to Chapter 10.
Some of these tests are described to be run when the board is fitted with additional test
hardware at the factory, or in conjunction with other boards. When these tests are run by the
user, they may fail simply because this additional hardware is not available.
Some of the text descriptions below refer to “interconnect” registers. These are locations in
shared memory on the Concurrent Technologies boards operating in VSA mode, and are used
extensively for inter-board communication and control.
Several of the descriptions refer to a Soak Test Master board, which is a specialized product
used in factory testing of the boards. Tests requiring this board will not usually produce valid
results when they are run in the application systems.
11.1 Initialization Checks
The board will always start executing PC BIOS firmware; however, if the MODE switch is set to
the VSA position the BIOS will transfer control to the VSA firmware once it has completed
chipset initialization, cache and memory sizing.
The VSA firmware performs additional hardware initialization and some basic functional checks
before switching to Protected Mode and entering its master or slave test handler. These
functional checks are described below.
11.1.1 Check 16: CPU Alive Check
VSA Mode Diagnostics
To test the basic CPU-interconnect access path, the CPU writes the ID of this test to the BIST
TEST ID Interconnect register, then reads it back to verify that it was correctly written.
The test fails if the value read is not the same as the value written.
11.1.2 Check 18: Scratchpad RAM Check
The first 192 Kbytes of RAM, the scratchpad, are used by the BIST firmware. This memory area
is tested by writing and verifying two rotating test patterns across the scratchpad address range.
The first pattern is 0AA55h, the second 055AAh. Each pattern is rotated left two bit positions for
each increment of the address; this ensures that consecutive addresses have unique data
patterns whether they use 16-, 32- or 64-bit bus fetches.
NOTE This is the only test carried out on this area of RAM - all other BISTs test only the
remaining RAM area.
VP 110/01x 11-1
Page 96

VSA Mode Diagnostics
11.2 BIST Descriptions
The following is a list of the tests that are available in the firmware set installed on this board,
together with an overview of the function of each test.
A description of each possible error condition, with its code, is given for each test.
11.2.1 Test 1: Test Initialization Routine
This pseudo-test performs no actual testing of the board. It sets up in RAM several data values,
such as RAM size, that are used by later tests. This BIST should always be run at the start of a
test session before any other tests are run.
This test will be executed at power-up, and may be invoked thereafter by a Master Test Handler.
11.2.2 Test 2: PROM Check
This BIST performs a checksum test over the VSA firmware EPROM. By default, the range
tested is from 0FFF80100h to 0FFFF7FFFh.
The test range is configurable by the user of the board: the parameters that control the test are
stored in three consecutive 32-bit words at the start of the VSA firmware, i.e. starting at address
0FFF80000h. The parameters are as follows:
0FFF80000h: Checksum Area Start Address
0FFF80004h: Checksum Area Length (in bytes)
0FFF80008h: Expected Checksum Value
A feature of the test is that if the expected checksum value is set to a value of 0FFFFFFFFh
(-1 in decimal) then the test will always pass, but will report the actual checksum value to the test
master. This is useful for discovering the new checksum value of a modified range.
Note that if the checksum area is defined to cover the three words that control the test, it will not
be possible to calculate an expected checksum value.
Error codes:
0300h: The checksum test failed.
11.2.3 Test 4: Numeric Coprocessor Test
This BIST performs checks on the functions of the numeric coprocessor component of the CPU.
At the start of the test, the coprocessor is re-initialized using an FINIT instruction and the
required operating mode set up. Basic arithmetic functions are checked and a deliberate division
by zero is attempted in order to generate an exception condition and the associated interrupt.
If the results of the arithmetic operations are incorrect or result in an exception, or if no divide by
zero exception is generated the test fails.
Error codes:
0401h - Error in re-initializing floating-point processor
0402h - Computation generated an exception or incorrect result
0403h - Exception occurred in floating-point comparison
0404h - Divide by zero failed to generate the correct exception status
11-2 VP 110/01x
Page 97

11.2.4 Test 6: Interconnect Image Check
This BIST reads and verifies the vendor ID and the board name from the Header Record of the
local Interconnect Template. The interconnect template is a data structure used by VSA to
communicate between boards.
Error codes:
0300h - Image check failed
11.2.5 Test 7: Off-board Interconnect Access
This BIST searches for a known interconnect record in the interconnect template of the System
Controller board. The interconnect template is a data structure used by VSA to communicate
between boards.
Error codes:
0300h - Test failed
11.2.6 Test 9: 8254 PIT Test
This BIST checks the PC compatible, Programmable Interval Timers within the CSB5. To test
the secondary PIT (PIT2) see Test 40.
Each timer in turn is initialized with a start count value, then monitored to make sure that it
counts successfully.
Error codes:
0401h - Timer 0 failed to count
0402h - Timer 1 failed to count
0403h - Timer 2 failed to count
VSA Mode Diagnostics
11.2.7 Test 10: 8259A PIC Test
This BIST checks the functionality of the PC compatible Programmable Interrupt Controllers on
the board.
Error codes:
0402h - Interrupt did not occur
0412h - Incorrect interrupt occurred
VP 110/01x 11-3
Page 98

VSA Mode Diagnostics
11.2.8 Test 12: Local RAM Fixed Pattern Test
This BIST performs a short test on local RAM. The range of memory to be tested depends upon
the test handler from which the BIST was invoked.
When the test is executed from the power-up test handler, it is necessary to limit execution time;
therefore the test range is limited to the block of RAM before the video memory hole, i.e. 30000H
to 9FFFFH.
When the test is executed from the slave test handler, e.g. during soak testing, the test range is
limited to 64 Mbytes; however, each time the BIST is executed it tests a different block.
Therefore, over the duration of a soak-test run, the whole of memory will be tested a number of
times, but the overall test coverage will be improved for large memory capacity boards.
When the test is executed from the master test handler, the test range is from 1 Mbyte to the top
of fitted memory. However, BIST parameters can be used to specify a different test range. Note
that the video memory hole between A0000h and BFFFFh must be avoided.
First, the memory under test is initialized to 00000000. Then two “marches” are made through
memory with patterns as follows:
pass 1 new=FFFFFFFF old=00000000
pass 2 new=00000000 old=FFFFFFFF
During the march through the memory range, for every 32-bit word location, first the old pattern
is verified, then the new pattern is written and verified.
To reduce execution time this BIST runs from DRAM; however, the area of memory from which
the test code executes is first tested by the ROM-based version of the routine.
Error codes:
0300h - Test failed. For details see accompanying message.
11.2.9 Test 13: SCC Access Test
This BIST performs a read-after-write test on the serial channel of the board.
The serial controller’s scratch register is used for this test. A write-then-read of a shifting one
value is used to test access to the device. The value is written then read and verified.
Error codes:
0480h - Failure on channel. Accompanying message gives further details
11.2.10 Test 19: NMI Test
This test checks NMI interrupt from front panel switch. The switch “Front Panel Switch Function”
on the board must be set to NMI position.
Error codes:
0401h - no interrupt
0402h - wrong interrupt
0403h - wrong interrupt source.
11-4 VP 110/01x
Page 99

11.2.11 Test 20: Universe NMI Test
This BIST checks the ability of the universe to generate a NMI to the processor using the
software generated interrupt via LINT1.
Error codes:
0406h - no interrupt generated or spurious interrupt
11.2.12 Test 22: RAM Data and Address Bus Test
This BIST checks RAMs data and address bus.
First part of the BIST checks data bus wiring for each memory row in specified memory range. It
tests each bit of data bus with walking ones and zeros.
Second part of BIST checks address bus wiring.
Default memory range is from 1 Mbyte to the top of fitted memory.
Error codes:
0401h - Error on data bus
0402h - Error on address bus
0403h - Memory was not filled with zeros
11.2.13 Test 23: Local RAM Read/Write Test
This BIST is a simple non-destructive read-complement-write test. The range of memory to be
tested depends upon the test handler from which the BIST was invoked.
When the test is executed from the slave test handler, e.g. during soak testing, the test range is
limited to 64 Mbytes; however, each time the BIST is executed it tests a different block.
Therefore, over the duration of a soak-test run the whole of memory will be tested a number of
times, but the overall test coverage will be improved for large memory capacity boards.
When the test is executed from the master test handler, the test range is from 1 Mbyte to the top
of fitted memory. However, BIST parameters can be used to specify a different test range. Note
that the video memory hole between A0000h and BFFFFh must be avoided.
The test operates on double words throughout the range selected. During the test, PCI Bus Error
interrupts are enabled. If one of these should occur the test is aborted and a diagnostic message
displayed.
To reduce execution time this BIST runs from DRAM; however, the area of memory from which
the test code executes is first tested by the ROM-based version of the routine.
Error codes:
0300h - Test failed. For details see accompanying message
0402h - PCI bus error occurred
0403h - PSB Error occurred
VSA Mode Diagnostics
VP 110/01x 11-5
Page 100

VSA Mode Diagnostics
11.2.14 Test 25: Local RAM Dual Address Test
This BIST checks for Dual Addressing in the RAM. The range of memory to be tested depends
upon the test handler from which the BIST was invoked.
When the test is executed from the slave test handler, e.g. during soak testing, the test range is
limited to 64 Mbytes; however, each time the BIST is executed it tests a different block.
Therefore, over the duration of a soak-test run the whole of memory will be tested a number of
times, but the overall test coverage will be improved for large memory capacity boards.
When the test is executed from the master test handler, the test range is from 1 Mbyte to the top
of fitted memory. However, BIST parameters can be used to specify a different test range. Note
that the video memory hole between A0000h and BFFFFh must be avoided.
The BIST proceeds to write the memory address, rotated two bit positions, to each Dword
location. When the whole test region has been written, the memory is read back and compared
against the expected value. By using the memory address as test data, any incorrect values will
identify the dual-addressed memory location.
During the test, the PCI Bus Error interrupts are enabled. If one of these should occur, the test is
aborted and a diagnostic message displayed.
To reduce execution time this BIST runs from DRAM; however, the area of memory from which
the test code executes is first tested by the ROM-based version of the routine.
Error codes:
0300h - Test failed; associated message gives details
0402h - PCI bus error occurred
0403h - PSB Error occurred
11.2.15 Test 27: Local RAM Execution Test
This BIST executes code from RAM in the selected test region. The range of memory to be
tested depends upon the test handler from which the BIST was invoked.
When the test is executed from the slave test handler, e.g. during soak testing, the test range is
limited to 64 Mbytes; however, each time the BIST is executed it tests a different block.
Therefore, over the duration of a soak-test run the whole of memory will be tested a number of
times, but the overall test coverage will be improved for large memory capacity boards.
When the test is executed from the master test handler, the test range is from 1 Mbyte to the top
of fitted memory. However, BIST parameters can be used to specify a different test range. Note
that the video memory hole between A0000h and BFFFFh must be avoided.
This test copies a small string of code into the selected RAM area and executes out of that RAM.
The buffer is first filled with INT3 opcodes, and then the sequence of instructions is copied to the
beginning of the buffer. A jump is made to the code, which copies itself to the next available
location in the buffer, then overwrites the old copy with INT3 instructions once more. If an error
occurs such that it the code jumps into a location outside the instruction sequence, this is
trapped via the INT3 instructions.
When the test code reaches the end of the buffer, it returns to the caller and the test has passed.
During the test, the PCI Bus Error interrupts are enabled. If one of these should occur, the test is
aborted and a diagnostic message displayed.
Error codes:
0300h - Test failed: for details see accompanying message
0402h - PCI bus error occurred
0403h - PSB Error occurred
11-6 VP 110/01x
 Loading...
Loading...