

Page 1
.
GR712RC
Dual-Core LEON3FT SPARC V8 Processor.
2018 User's Manual
The most important thing we build is trust
Quick Start Guide for GR712RC-BOARD
GR712RC-QSG 1 www.cobham.com/gaisler
November 2018, Version 1.0
Page 2

GR712RC-QSG
November 2018, Version 1.0
2 www.cobham.com/gaisler
Table of Contents
1. Introduction ............................................................................................................................. 3
1.1. Overview ...................................................................................................................... 3
1.2. References .................................................................................................................... 3
2. Board Configuration .................................................................................................................. 4
2.1. Overview ...................................................................................................................... 4
2.2. Clock Sources ................................................................................................................ 4
2.3. I/O Switch Matrix .......................................................................................................... 5
2.4. UART .......................................................................................................................... 6
2.5. PROM .......................................................................................................................... 6
3. GRMON hardware debugger ...................................................................................................... 7
3.1. Overview ...................................................................................................................... 7
3.2. Debug-link alternatives .................................................................................................... 7
3.2.1. Connecting via the FTDI USB/JTAG interface .......................................................... 7
3.2.2. Connecting via SpaceWire RMAP interface .............................................................. 7
3.3. First steps ..................................................................................................................... 7
3.4. Connecting to the board .................................................................................................. 8
4. Software ................................................................................................................................ 15
4.1. Overview .................................................................................................................... 15
4.2. Bare C Cross-Compiler System ....................................................................................... 15
4.2.1. Overview .......................................................................................................... 15
4.2.2. Compiling with BCC .......................................................................................... 15
4.2.3. Running and debugging with GRMON .................................................................. 16
4.3. RTEMS Real Time Operating System .............................................................................. 17
4.3.1. Overview .......................................................................................................... 17
4.3.2. Installing RCC ................................................................................................... 17
4.3.3. Building an RTEMS sample application ................................................................. 17
4.3.4. Running and debugging with GRMON .................................................................. 18
4.4. MKPROM2 ................................................................................................................. 19
4.4.1. Overview .......................................................................................................... 19
4.4.2. Usage of MKPROM2 ......................................................................................... 19
4.5. VxWorks ..................................................................................................................... 20
4.5.1. Overview .......................................................................................................... 20
5. Frequently Asked Questions / Common Mistakes / Know Issues ...................................................... 21
5.1. Clock gating ................................................................................................................ 21
5.2. GRMON issues ............................................................................................................ 21
5.3. Clock problems ............................................................................................................ 21
5.4. Switch Matrix Configuration Problems ............................................................................. 21
5.5. GPIO .......................................................................................................................... 21
5.6. SDRAM configuration ................................................................................................... 21
5.7. Multiprocessor & legacy support ..................................................................................... 21
5.8. Interrupts ..................................................................................................................... 22
5.9. GRMON Debug Link Limitations .................................................................................... 22
5.10. MIL-1553 .................................................................................................................. 22
5.11. CAN multiplexing ....................................................................................................... 22
5.12. Concurrent CAN and Ethernet ....................................................................................... 22
5.13. Hardware behavior at CPU reset and power management ................................................... 23
6. Support ................................................................................................................................. 24
Page 3
GR712RC-QSG
November 2018, Version 1.0
3 www.cobham.com/gaisler
1. Introduction
1.1. Overview
This document is a quick start guide for the GR712RC Development Board.
The purpose of this document is to get users quickly started using the board.
For a complete description of the board please refer to the GR712RC Development Board User Manual.
The GR712RC system-on-chip is described in the GR712RC User Manual.
This quick start guide does not contain as many technical details and is instead how-to oriented. However, to make
the most of the guide the user should have glanced through the aforementioned documents and should ideally also
be familiar with the GRMON debug monitor.
1.2. References
Table 1.1. References
RD-1 GR712RC Development Board User Manual
RD-2 GR712RC User Manual [http://gaisler.com/doc/gr712rc-usermanual.pdf]
RD-3 GR712RC Data Sheet [http://www.gaisler.com/doc/gr712rc-datasheet.pdf]
RD-4 GRMON User's Manual [http://www.gaisler.com/doc/grmon3.pdf]
RD-5 RTEMS homepage [http://www.rtems.org]
RD-6 RTEMS Cross Compilation System (RCC) [http://www.gaisler.com/index.php/products/op-
erating-systems/rtems]
RD-7 RCC User's manual [http://gaisler.com/anonftp/rcc/doc]
RD-8 Cobham Gaisler RTEMS driver documentation [http://gaisler.com/anonftp/rcc/doc]
RD-9 GRTOOLS homepage [http://www.gaisler.com/index.php/downloads/grtools]
RD-10 Bare C Cross-Compilation System [http://www.gaisler.com/index.php/products/operat-
ing-systems/bcc]
RD-11 BCC User Manual [http://www.gaisler.com/doc/bcc2.pdf]
RD-12 MKPROM2 User Manual [http://gaisler.com/doc/mkprom.pdf]
The referenced documents can be downloaded from http://www.gaisler.com.
Page 4
GR712RC-QSG
November 2018, Version 1.0
4 www.cobham.com/gaisler
2. Board Configuration
2.1. Overview
The primary source of information for board configuration is the GR712RC Development Board User Manual.
The board requires some hardware configuration to fit with the customer requirements. In particular, the number of
the GR712RC-BOARD's processor I/O pins limits the simultaneously available connections to external interfaces.
To overcome this limitation, the SoC features an internal switch matrix, and a set of jumpers must be configured
accordingly to route the signals to the appropriate headers on the board. The internal switch matrix is configured
by enabling the respective interfaces via software. Additionally, clock selection might need to be configured by
a set of jumpers and possibly the insertion of custom oscillators.
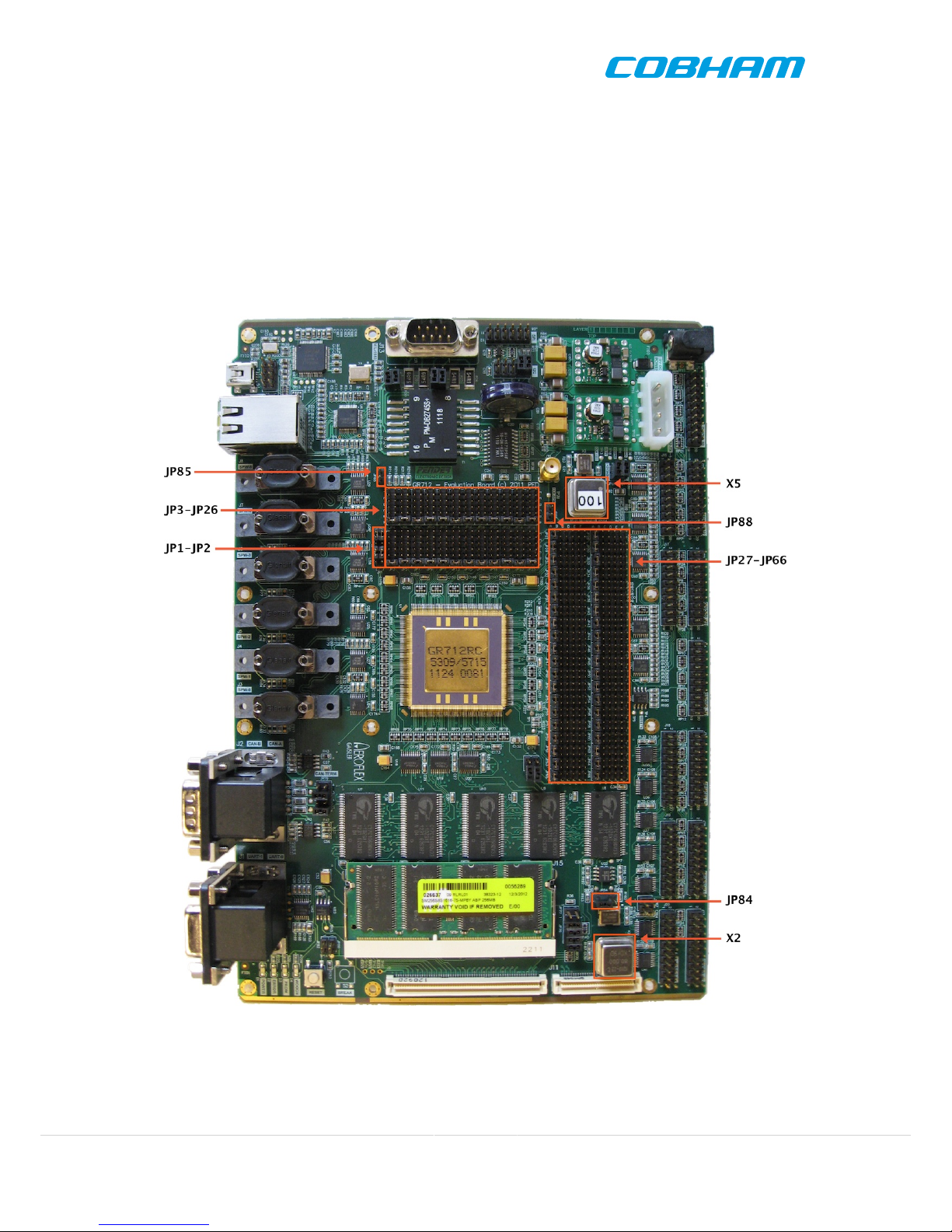
Figure 2.1. GR712RC-BOARD default configuration as delivired
2.2. Clock Sources
The minimum requirement in order for the board to work and to be able to connect to it, is that the clock sources
are properly configured. The 80 MHz oscillator in socket X2 provided by default with the board is connected to
Page 5
GR712RC-QSG
November 2018, Version 1.0
5 www.cobham.com/gaisler
the system clock input through the JP84 jumper in the default configuration 2-3. The on-board soldered 48 MHz
oscillator can be used instead by positioning the JP84 jumper on pins 1-2. Alternatively a custom oscillator can
be installed in X2.
The SpaceWire clock is, by default, driven by an on board additional 100 MHz oscillator. If the user wants to use
the system clock configured in the paragraph above as the source of the SpaceWire clock, then jumper JP88 must
be inserted and the oscillator in socket X5 must be removed.
Refer to Section 2.14 of [RD-1] for further information about oscillators and clock inputs and more information
about the system and SpaceWire clock.
Once the external clock sources are selected, further clock configuration can be done in software. The SpaceWire
external clock source can be used as 1X, 2X or 4X, or the external system clock can be used in its place. This
selection is done by configuring the SoC's General Purpose Register (GPREG). At reset the 1X SpaceWire clock
received from the board is used internally.
For in depth information about configuring the SpaceWire and MIL-STD-1553 clocks through the GPREG, please
refer to Chapter 3 and Chapter 13 of [RD-2].
2.3. I/O Switch Matrix
To overcome the limitation on the number of SoC pins, an internal switch matrix selects the input/output signals
to connect to the pad. Additionally the chip I/O pins are connected to the board's I/O ports through an array of
jumpers. One UART and two SpaceWire interfaces are routed independently of the internal switch matrix and the
jumpers JP3 through JP66. In the default position A of jumpers JP3 through JP66, all multiplexed switch matrix
signals are connected to the board's GPIO pins.
Six basic example configurations are provided to respond to typical use cases, as seen in Table 2.1. To use one of
these configurations, the user has to insert jumpers JP3 through JP66 in the position described in the table. Refer
to [RD-1] and GR712RC Development Board Schematic for more information on signal and GPIO configuration.
Table 2.1. Typical configurations
Cfg. description I/O enabled
Jumper
position
CPU for GEO applications
UART0, UART1, UART2, UART3, UART4, UART5
SpaceWire-0, SpaceWire-1, SpaceWire-2, SpaceWire-3,
SpaceWire-4, SpaceWire-5
Mil-Std-1553-A, Mil-Std-1553-B
SPI
I2C
B
CPU for TMTC applications UART0, UART1, UART2, UART3
SpaceWire-0, SpaceWire-1, SpaceWire-2, SpaceWire-3
SDRAM with optional Reed-Solomon
CCSDS/ECSS TC & TM
C
CPU for LEO applications UART0, UART1, UART2, UART3, UART4, UART5
SpaceWire-0, SpaceWire-1
SDRAM with optional Reed-Solomon
ASCS16
CAN-A, CAN-B
SLINK
I2C
D
Instrument Controller, type A UART0, UART1, UART2, UART3, UART4, UART5
SpaceWire-0, SpaceWire-1
SDRAM with optional Reed-Solomon
CAN-A, CAN-B
SLINK
I2C
E
Page 6
GR712RC-QSG
November 2018, Version 1.0
6 www.cobham.com/gaisler
Cfg. description I/O enabled
Jumper
position
Instrument Controller, type B UART0, UART1, UART2, UART3, UART4, UART5
SpaceWire-0, SpaceWire-1, SpaceWire-2, SpaceWire-3
SDRAM with optional Reed-Solomon
Ethernet
SPI
I2C
F
Once the board's jumpers are properly connected, the internal switch matrix must be driven by a set of enabling
conditions. It is important to note that to obtain a proper functioning system, the I/O interfaces of the required
configurations have to be enabled or clock ungated by software. See Chapter 2 and Table 9 of [RD-2] for further
details on the switch matrix.
The I/O matrix is not limited to these pre-defined configurations. Jumpers can be custom configured according to
the user requirements. See Section 2.4 of [RD-1] for further details.
2.4. UART
Jumpers JP1 and JP2 are used to select the output standard of the UART0 and UART1 interfaces between RS232
and RS422, and to route the signals to the J1 and J16 connectors respectively. In the default configuration the
interfaces are connected to the J1 connectors UART-0 and UART-1 using the RS232 standard. While UART0 is
not affected by the internal switch matrix, UART1 Rx is multiplexed and JP3 must be set to 3-4 in order to use
it. Refer to the GR712RC Development Board Schematic for more information on how to configure UART0 and
UART1 to use the RS422 standard.
2.5. PROM
The PROM width and PROM EDAC conditions are set by the state of the GPIO[3] and GPIO[1] pins at power up
of the Processor. These pins are provided with pull-down resistors to set the default mode to 8 bit with no EDAC.
If EDAC operation of the Flash PROM is desired, then jumper JP85 should be installed, to pull-up GPIO[1].
Page 7

GR712RC-QSG
November 2018, Version 1.0
7 www.cobham.com/gaisler
3. GRMON hardware debugger
3.1. Overview
GRMON is a debug monitor used to develop and debug GRLIB/LEON systems. The CPU and its peripherals are
accessed on the AMBA bus through a debug-link connected to the PC. GRMON has GDB support which makes
C/C++ level debugging possible by connecting GDB to the GRMON's GDB socket. With GRMON one can for
example:
• Inspect LEON and peripheral registers
• Upload applications and/or program the FLASH
• Control execution flow by starting applications (run), continue execution (cont), single-stepping (step), inserting breakpoints/watchpoints (bp) etc.
• Inspect the current CPU state listing the back-trace, instruction trace and disassemble machine code.
The first step is to set up a debug link in order to connect to the board. The following section outlines which
debug interfaces are available and how to use them on the GR712RC Development Board, after that a basic first
inspection of the board is exemplified.
Several of the SoC's peripherals may be clock gated off. GRMON will enable all clocks if started with the flag cginit. Within GRMON, the command grcg enable all will have the same effect.
GRMON is described on the homepage [http://www.gaisler.com/index.php/products/debug-tools] and in detail in
[RD-4].
3.2. Debug-link alternatives
3.2.1. Connecting via the FTDI USB/JTAG interface
Please see GRMON User's Manual for how to set up the required FTDI driver software. Then connect the PC
and the board using a standard USB cable into the USB-mini J12 USB-JTAG connector and issue the following
command:
grmon -ftdi
3.2.2. Connecting via SpaceWire RMAP interface
GRMON has support for connecting to boards with SpaceWire interfaces as long as the SpaceWire has RMAP
and automatic link start. An Ethernet to SpaceWire bridge (GRESB) is required to tunnel SpaceWire packets from
the Ethernet network over to SpaceWire.
Please see the [RD-4] for information about connecting through a GRESB and optional parameters. Connect
the GRESB SpW0 connector and the GR712RC-BOARD's J3 (SPW-0) or J4 (SPW-1) connector, then issue the
following command:
grmon -gresb
3.3. First steps
The previous sections have described which debug-links are available and how to start using them with GRMON.
The subsections below assume that GRMON, the host computer and the GR712RC-BOARD board have been set
up so that GRMON can connect to the board.
When connecting to the board for the first time it is recommended to get to know the system by inspecting the
current configuration and hardware present using GRMON. With the info sys command more details about the
system is printed and with info reg the register contents of the I/O registers can be inspected. Below is a list of
items of particular interest:
• AMBA system frequency is printed out at connect, if the frequency is wrong then it might be due to noise
in auto detection (small error). See -freq flag in [RD-4].
• Memory location and size configuration is found from the info sys output. If the board has both SRAM
and SDRAM interfaces, SDRAM can be mapped at the SRAM base address using the -nosram option of
GRMON. See [RD-4] for further details.
Page 8

GR712RC-QSG
November 2018, Version 1.0
8 www.cobham.com/gaisler
• The GR712RC has a clock-gating unit which is able to disable/enable clocking and control reset signals.
Clocks must be enabled for all cores that LEON software or GRMON will be using. The grcg command is
described in [RD-4].
3.4. Connecting to the board
In the following example the FTDI debug-link is used to connect to the board. The auto-detected frequency,
memory parameters and stack pointer are verified by looking at the GRMON terminal output below.
daniel@daniel:~$ grmon -ftdi
GRMON2 LEON debug monitor v2.0.35 professional version
Copyright (C) 2012 Aeroflex Gaisler - All rights reserved.
For latest updates, go to http://www.gaisler.com/
Comments or bug-reports to support@gaisler.com
Parsing -ftdi
Commands missing help:
debug
datacache
JTAG chain (1): GR712RC
Detected system: GR712RC
Detected frequency: 80 MHz
Component Vendor
LEON3-FT SPARC V8 Processor Aeroflex Gaisler
LEON3-FT SPARC V8 Processor Aeroflex Gaisler
JTAG Debug Link Aeroflex Gaisler
GR Ethernet MAC Aeroflex Gaisler
SatCAN controller Aeroflex Gaisler
GRSPW2 SpaceWire Serial Link Aeroflex Gaisler
GRSPW2 SpaceWire Serial Link Aeroflex Gaisler
GRSPW2 SpaceWire Serial Link Aeroflex Gaisler
GRSPW2 SpaceWire Serial Link Aeroflex Gaisler
GRSPW2 SpaceWire Serial Link Aeroflex Gaisler
GRSPW2 SpaceWire Serial Link Aeroflex Gaisler
AMBA Wrapper for Core1553BRM Aeroflex Gaisler
CCSDS Telecommand Decoder Aeroflex Gaisler
CCSDS Telemetry Encoder Aeroflex Gaisler
SLINK Master Aeroflex Gaisler
Memory controller with EDAC Aeroflex Gaisler
AHB/APB Bridge Aeroflex Gaisler
LEON3 Debug Support Unit Aeroflex Gaisler
AHB/APB Bridge Aeroflex Gaisler
OC CAN AHB interface Aeroflex Gaisler
Generic FT AHB SRAM module Aeroflex Gaisler
Generic UART Aeroflex Gaisler
Multi-processor Interrupt Ctrl. Aeroflex Gaisler
Modular Timer Unit Aeroflex Gaisler
SPI Controller Aeroflex Gaisler
CAN Bus multiplexer Aeroflex Gaisler
General Purpose Register Aeroflex Gaisler
ASCS Master Aeroflex Gaisler
General Purpose I/O port Aeroflex Gaisler
General Purpose I/O port Aeroflex Gaisler
AMBA Wrapper for OC I2C-master Aeroflex Gaisler
Clock gating unit Aeroflex Gaisler
AHB Status Register Aeroflex Gaisler
Generic UART Aeroflex Gaisler
Generic UART Aeroflex Gaisler
Generic UART Aeroflex Gaisler
Generic UART Aeroflex Gaisler
Generic UART Aeroflex Gaisler
Timer Unit with Latches Aeroflex Gaisler
Use command 'info sys' to print a detailed report of attached cores
grmon2> info sys
cpu0 Aeroflex Gaisler LEON3-FT SPARC V8 Processor
AHB Master 0
cpu1 Aeroflex Gaisler LEON3-FT SPARC V8 Processor
AHB Master 1
ahbjtag0 Aeroflex Gaisler JTAG Debug Link
AHB Master 2
greth0 Aeroflex Gaisler GR Ethernet MAC
AHB Master 3
Page 9

GR712RC-QSG
November 2018, Version 1.0
9 www.cobham.com/gaisler
APB: 80000E00 - 80000F00
IRQ: 14
satcan0 Aeroflex Gaisler SatCAN controller
AHB Master 4
AHB: FFF20000 - FFF20100
IRQ: 14
grspw0 Aeroflex Gaisler GRSPW2 SpaceWire Serial Link
AHB Master 5
APB: 80100800 - 80100900
IRQ: 22
Number of ports: 1
grspw1 Aeroflex Gaisler GRSPW2 SpaceWire Serial Link
AHB Master 6
APB: 80100900 - 80100A00
IRQ: 23
Number of ports: 1
grspw2 Aeroflex Gaisler GRSPW2 SpaceWire Serial Link
AHB Master 7
APB: 80100A00 - 80100B00
IRQ: 24
Number of ports: 1
grspw3 Aeroflex Gaisler GRSPW2 SpaceWire Serial Link
AHB Master 8
APB: 80100B00 - 80100C00
IRQ: 25
Number of ports: 1
grspw4 Aeroflex Gaisler GRSPW2 SpaceWire Serial Link
AHB Master 9
APB: 80100C00 - 80100D00
IRQ: 26
Number of ports: 1
grspw5 Aeroflex Gaisler GRSPW2 SpaceWire Serial Link
AHB Master 10
APB: 80100D00 - 80100E00
IRQ: 27
Number of ports: 1
b1553brm0 Aeroflex Gaisler AMBA Wrapper for Core1553BRM
AHB Master 11
AHB: FFF00000 - FFF01000
IRQ: 14
grtc0 Aeroflex Gaisler CCSDS Telecommand Decoder
AHB Master 12
AHB: FFF10000 - FFF10100
IRQ: 14
grtm0 Aeroflex Gaisler CCSDS Telemetry Encoder
AHB Master 13
APB: 80000B00 - 80000C00
IRQ: 29
adev14 Aeroflex Gaisler SLINK Master
AHB Master 14
APB: 80000800 - 80000900
IRQ: 13
mctrl0 Aeroflex Gaisler Memory controller with EDAC
AHB: 00000000 - 20000000
AHB: 20000000 - 40000000
AHB: 40000000 - 80000000
APB: 80000000 - 80000100
8-bit prom @ 0x00000000
32-bit static ram: 1 * 8192 kbyte @ 0x40000000
32-bit sdram: 2 * 128 Mbyte @ 0x60000000
col 10, cas 2, ref 7.8 us
apbmst0 Aeroflex Gaisler AHB/APB Bridge
AHB: 80000000 - 80100000
dsu0 Aeroflex Gaisler LEON3 Debug Support Unit
AHB: 90000000 - A0000000
AHB trace: 256 lines, 32-bit bus
CPU0: win 8, hwbp 2, itrace 256, V8 mul/div, srmmu, lddel 1, GRFPU
stack pointer 0x407ffff0
icache 4 * 4 kB, 32 B/line lru
dcache 4 * 4 kB, 16 B/line lru
CPU1: win 8, hwbp 2, itrace 256, V8 mul/div, srmmu, lddel 1, GRFPU
stack pointer 0x407ffff0
icache 4 * 4 kB, 32 B/line lru
dcache 4 * 4 kB, 16 B/line lru
apbmst1 Aeroflex Gaisler AHB/APB Bridge
AHB: 80100000 - 80200000
occan0 Aeroflex Gaisler OC CAN AHB interface
AHB: FFF30000 - FFF31000
IRQ: 5
cores: 2
ahbram0 Aeroflex Gaisler Generic FT AHB SRAM module
AHB: A0000000 - A0100000
APB: 80100000 - 80100100
Page 10

GR712RC-QSG
November 2018, Version 1.0
10 www.cobham.com/gaisler
32-bit static ram: 256 kB @ 0xa0000000
uart0 Aeroflex Gaisler Generic UART
APB: 80000100 - 80000200
IRQ: 2
Baudrate 38461
irqmp0 Aeroflex Gaisler Multi-processor Interrupt Ctrl.
APB: 80000200 - 80000300
EIRQ: 12
gptimer0 Aeroflex Gaisler Modular Timer Unit
APB: 80000300 - 80000400
IRQ: 8
16-bit scalar, 4 * 32-bit timers, divisor 48
spi0 Aeroflex Gaisler SPI Controller
APB: 80000400 - 80000500
IRQ: 13
FIFO depth: 16, no slave select lines
Maximum word length: 32 bits
Controller index for use in GRMON: 0
adev25 Aeroflex Gaisler CAN Bus multiplexer
APB: 80000500 - 80000600
grgpreg0 Aeroflex Gaisler General Purpose Register
APB: 80000600 - 80000700
adev27 Aeroflex Gaisler ASCS Master
APB: 80000700 - 80000800
IRQ: 16
gpio0 Aeroflex Gaisler General Purpose I/O port
APB: 80000900 - 80000A00
gpio1 Aeroflex Gaisler General Purpose I/O port
APB: 80000A00 - 80000B00
i2cmst0 Aeroflex Gaisler AMBA Wrapper for OC I2C-master
APB: 80000C00 - 80000D00
IRQ: 28
grcg0 Aeroflex Gaisler Clock gating unit
APB: 80000D00 - 80000E00
GRMON did NOT enable clocks during initialization
ahbstat0 Aeroflex Gaisler AHB Status Register
APB: 80000F00 - 80001000
IRQ: 1
uart1 Aeroflex Gaisler Generic UART
APB: 80100100 - 80100200
IRQ: 17
Baudrate 38461
uart2 Aeroflex Gaisler Generic UART
APB: 80100200 - 80100300
IRQ: 18
Baudrate 38461
uart3 Aeroflex Gaisler Generic UART
APB: 80100300 - 80100400
IRQ: 19
Baudrate 38461
uart4 Aeroflex Gaisler Generic UART
APB: 80100400 - 80100500
IRQ: 20
Baudrate 38461
uart5 Aeroflex Gaisler Generic UART
APB: 80100500 - 80100600
IRQ: 21
Baudrate 38461
grtimer0 Aeroflex Gaisler Timer Unit with Latches
APB: 80100600 - 80100700
IRQ: 7
8-bit scalar, 2 * 32-bit timers, divisor 48
grmon2> info reg
GR Ethernet MAC
0x80000e00 Control register 0x04000080
0x80000e04 Status register 0x0000000a
0x80000e08 MAC address MSB 0x00000412
0x80000e0c MAC address LSB 0x10884440
0x80000e10 MDIO register 0x7849084a
0x80000e14 Tx descriptor register 0x10004000
0x80000e18 Rx descriptor register 0xc8000000
0x80000e1c EDCL IP register 0x00000000
GRSPW2 SpaceWire Serial Link
0x80100800 Control register 0xa0010002
0x80100804 Status/Interrupt-source 0x00600000
0x80100808 Node address 0x000000fe
0x8010080c Clock divisor 0x00000000
0x80100810 Destination key 0x00000000
0x80100814 Time 0x00000000
0x80100818 Timer and Disconnect 0x00000000
0x80100820 DMA Channel 0 control/status 0x00000000
0x80100824 DMA Channel 0 rx maximum length 0x00431000
Page 11

GR712RC-QSG
November 2018, Version 1.0
11 www.cobham.com/gaisler
0x80100828 DMA Channel 0 tx desc. table address 0x40004000
0x8010082c DMA Channel 0 rx desc. table address 0x00000000
GRSPW2 SpaceWire Serial Link
0x80100900 Control register 0xa0010002
0x80100904 Status/Interrupt-source 0x00200000
0x80100908 Node address 0x000000fe
0x8010090c Clock divisor 0x00000000
0x80100910 Destination key 0x00000000
0x80100914 Time 0x00000000
0x80100918 Timer and Disconnect 0x00000000
0x80100920 DMA Channel 0 control/status 0x00000010
0x80100924 DMA Channel 0 rx maximum length 0x00820000
0x80100928 DMA Channel 0 tx desc. table address 0x00000000
0x8010092c DMA Channel 0 rx desc. table address 0x02000000
GRSPW2 SpaceWire Serial Link
0x80100a00 Control register 0x20000100
0x80100a04 Status/Interrupt-source 0x00800000
0x80100a08 Node address 0x000000fe
0x80100a0c Clock divisor 0x00000000
0x80100a10 Destination key 0x00000000
0x80100a14 Time 0x00000000
0x80100a18 Timer and Disconnect 0x00000000
0x80100a20 DMA Channel 0 control/status 0x00000000
0x80100a24 DMA Channel 0 rx maximum length 0x00100040
0x80100a28 DMA Channel 0 tx desc. table address 0x15000000
0x80100a2c DMA Channel 0 rx desc. table address 0x80000000
GRSPW2 SpaceWire Serial Link
0x80100b00 Control register 0x20000000
0x80100b04 Status/Interrupt-source 0x00a00000
0x80100b08 Node address 0x000000fe
0x80100b0c Clock divisor 0x00000000
0x80100b10 Destination key 0x00000000
0x80100b14 Time 0x00000000
0x80100b18 Timer and Disconnect 0x00000000
0x80100b20 DMA Channel 0 control/status 0x00000014
0x80100b24 DMA Channel 0 rx maximum length 0x00323084
0x80100b28 DMA Channel 0 tx desc. table address 0x5c406400
0x80100b2c DMA Channel 0 rx desc. table address 0xa701b800
GRSPW2 SpaceWire Serial Link
0x80100c00 Control register 0x20000000
0x80100c04 Status/Interrupt-source 0x00a00000
0x80100c08 Node address 0x000000fe
0x80100c0c Clock divisor 0x00000000
0x80100c10 Destination key 0x00000000
0x80100c14 Time 0x00000000
0x80100c18 Timer and Disconnect 0x00000000
0x80100c20 DMA Channel 0 control/status 0x00000000
0x80100c24 DMA Channel 0 rx maximum length 0x01410104
0x80100c28 DMA Channel 0 tx desc. table address 0x488b0800
0x80100c2c DMA Channel 0 rx desc. table address 0x20aaf800
GRSPW2 SpaceWire Serial Link
0x80100d00 Control register 0x20000200
0x80100d04 Status/Interrupt-source 0x00a00000
0x80100d08 Node address 0x000000fe
0x80100d0c Clock divisor 0x00000000
0x80100d10 Destination key 0x00000000
0x80100d14 Time 0x00000000
0x80100d18 Timer and Disconnect 0x00000000
0x80100d20 DMA Channel 0 control/status 0x00000004
0x80100d24 DMA Channel 0 rx maximum length 0x0040032c
0x80100d28 DMA Channel 0 tx desc. table address 0x01800000
0x80100d2c DMA Channel 0 rx desc. table address 0x06002000
AMBA Wrapper for Core1553BRM
0xfff00100 B1553BRM status/control register 0xc5040001
0xfff00104 B1553BRM interrupt settings 0xc5040001
0xfff00108 AHB page address register 0xc5040001
CCSDS Telecommand Decoder
0xfff10000 Global reset register 0x00000000
0xfff10004 Global control register 0x00000000
0xfff1000c Spacecraft Identifier Register 0x00000000
0xfff10010 Frame acceptance report register 0x00000000
0xfff10014 CLCW register 1 0x00000000
0xfff10018 CLCW register 2 0x00000000
0xfff1001c Physical Interface Register 0x00000000
0xfff10020 Control Register 0x00000000
0xfff10024 Status Register 0x00000000
0xfff10028 Address Space Register 0x00000000
0xfff1002c Receive Read Pointer Register 0x00000000
0xfff10030 Receive Write Pointer Register 0x00000000
CCSDS Telemetry Encoder
0x80000b00 DMA control register 0x00000004
0x80000b04 DMA status register 0x00000000
0x80000b08 DMA length register 0x00400002
Page 12

GR712RC-QSG
November 2018, Version 1.0
12 www.cobham.com/gaisler
0x80000b0c DMA descriptor pointer register 0x00000000
0x80000b14 DMA revision register 0x00010001
0x80000b80 Control register 0x00000000
0x80000b84 Status register 0x00000000
0x80000b88 Configuration register 0x001affdf
0x80000b90 Physical layer register 0x00000000
0x80000b94 Coding sub-layer register 0x00000000
0x80000b98 Attached Synchronization Marker 0x352ef853
0x80000ba0 All frames generation register 0x00000000
0x80000ba4 Master frame generation register 0x00000000
0x80000ba8 Idle frame generation register 0x00000000
0x80000bd0 OCF register 0x00000000
Memory controller with EDAC
0x80000000 Memory config register 1 0x0003c0ff
0x80000004 Memory config register 2 0x8ac05460
0x80000008 Memory config register 3 0x08174000
LEON3 Debug Support Unit
0x90000024 Debug mode mask register 0x00000003
0x90000000 CPU 0 Control register 0x000000ef
0x90400020 CPU 0 Trap register 0x000000b0
0x90100000 CPU 1 Control register 0x6911d034
0x90500020 CPU 1 Trap register 0x6911d034
Generic FT AHB SRAM module
0x80100000 Configuration Register 0x00200000
Generic UART
0x80000104 UART Status register 0x00000086
0x80000108 UART Control register 0x80000003
0x8000010c UART Scaler register 0x0000009b
Multi-processor Interrupt Ctrl.
0x80000200 Interrupt level register 0x00000000
0x80000204 Interrupt pending register 0x00000000
0x80000210 Interrupt status register 0x180c0002
0x80000240 Interrupt mask register 0 0x00000000
0x80000244 Interrupt mask register 1 0x00000000
0x80000280 Interrupt force register 0 0x00000000
0x80000284 Interrupt force register 1 0x00000000
Modular Timer Unit
0x80000300 Scalar value register 0x0000002f
0x80000304 Scalar reload value register 0x0000002f
0x80000308 Configuration register 0x00000144
0x80000310 Timer 0 Value register 0xffffffff
0x80000314 Timer 0 Reload value register 0xffffffff
0x80000318 Timer 0 Control register 0x00000043
0x80000320 Timer 1 Value register 0x00000000
0x80000324 Timer 1 Reload value register 0x00000000
0x80000328 Timer 1 Control register 0x00000040
0x80000330 Timer 2 Value register 0x00000000
0x80000334 Timer 2 Reload value register 0x00000000
0x80000338 Timer 2 Control register 0x00000040
0x80000340 Timer 3 Value register 0xfa16f3e8
0x80000344 Timer 3 Reload value register 0xfffffffe
0x80000348 Timer 3 Control register 0x00000040
SPI Controller
0x80000400 Capability register 0x01001002
0x80000420 Mode register 0x00000000
0x80000424 Event register 0x00000000
0x80000428 Mask register 0x00000000
0x8000042c Command register 0x00000000
0x80000430 Transmit register 0x00000000
0x80000434 Receive register 0x20880021
General Purpose Register
0x80000600 GR712RC general purpose register 0x00000000
General Purpose I/O port
0x80000900 I/O port data register 0x419ff955
0x80000904 I/O port output register 0x00000000
0x80000908 I/O port direction register 0x00000000
0x8000090c I/O interrupt mask register 0x00000000
0x80000910 I/O interrupt polarity register 0x00000058
0x80000914 I/O interrupt edge register 0x00001100
0x80000918 I/O bypass register 0x00000000
General Purpose I/O port
0x80000a00 I/O port data register 0xfff19ad9
0x80000a04 I/O port output register 0x00000000
0x80000a08 I/O port direction register 0x00000000
0x80000a0c I/O interrupt mask register 0x00000000
0x80000a10 I/O interrupt polarity register 0x00000001
0x80000a14 I/O interrupt edge register 0x0000e00c
0x80000a18 I/O bypass register 0x00000000
AMBA Wrapper for OC I2C-master
0x80000c00 Clock prescale register 0x0000005f
0x80000c04 Control register 0x00000000
0x80000c08 Receive register 0x00000000
0x80000c0c Status register 0x00000000
Page 13

GR712RC-QSG
November 2018, Version 1.0
13 www.cobham.com/gaisler
Clock gating unit
0x80000d00 Unlock register 0x00000000
0x80000d04 Clock enable register 0x00000007
0x80000d08 Reset register 0x00000ff8
AHB Status Register
0x80000f00 Status register 0x00000012
0x80000f04 Failing address register 0x80000f04
Generic UART
0x80100104 UART Status register 0x00000086
0x80100108 UART Control register 0x80000003
0x8010010c UART Scaler register 0x0000009b
Generic UART
0x80100204 UART Status register 0x00000086
0x80100208 UART Control register 0x80000003
0x8010020c UART Scaler register 0x0000009b
Generic UART
0x80100304 UART Status register 0x00000086
0x80100308 UART Control register 0x80000003
0x8010030c UART Scaler register 0x0000009b
Generic UART
0x80100404 UART Status register 0x00000086
0x80100408 UART Control register 0x80000003
0x8010040c UART Scaler register 0x0000009b
Generic UART
0x80100504 UART Status register 0x00000086
0x80100508 UART Control register 0x80000003
0x8010050c UART Scaler register 0x0000009b
Timer Unit with Latches
0x80100600 Scalar value register 0x0000002f
0x80100604 Scalar reload value register 0x0000002f
0x80100608 Configuration register 0x0000003a
0x8010060c Latch configuration register 0x00000000
0x80100610 Timer 0 Value register 0xffffffff
0x80100614 Timer 0 Reload value register 0xffffffff
0x80100618 Timer 0 Control register 0x00000043
0x8010061c Timer 0 Latch register 0x00000000
0x80100620 Timer 1 Value register 0xa0080048
0x80100624 Timer 1 Reload value register 0xa0080048
0x80100628 Timer 1 Control register 0x00000040
0x8010062c Timer 1 Latch register 0x00000000
One can limit the output to certain cores by specifying the core(s) name(s) to the info sys and info reg commands.
As seen below the memory parameters, first UART and first Timer core information is listed.
grmon2> info sys mctrl0
mctrl0 Aeroflex Gaisler Memory controller with EDAC
AHB: 00000000 - 20000000
AHB: 20000000 - 40000000
AHB: 40000000 - 80000000
APB: 80000000 - 80000100
8-bit prom @ 0x00000000
32-bit static ram: 1 * 8192 kbyte @ 0x40000000
32-bit sdram: 2 * 128 Mbyte @ 0x60000000
col 10, cas 2, ref 7.8 us
grmon2> info sys uart0 gptimer0
uart0 Aeroflex Gaisler Generic UART
APB: 80000100 - 80000200
IRQ: 2
Baudrate 38461
gptimer0 Aeroflex Gaisler Modular Timer Unit
APB: 80000300 - 80000400
IRQ: 8
16-bit scalar, 4 * 32-bit timers, divisor 80
The GR712RC has a clock-gating unit which can disable and enable clock gating and generate reset signals of
certain cores in the SOC. With the GRMON grcg command the current setting of the clock-gating unit can be
inspected and changed, the command line switch -cginit also affects the clock-gating unit. See [RD-4] for
more information. Below is an example where the GRETH Ethernet core's clocks are turned on (not gated).
grmon2> grcg
GRCLKGATE GR712RC info:
Unlock register: 0x00000000
Clock enable register: 0x00000006
Reset register: 0x00000ff9
GR712RC decode of values:
+------+----------+----------------------------+----------+---------+-------+
| Gate | Core(s) | Description | Unlocked | Enabled | Reset |
+------+----------+----------------------------+----------+---------+-------+
| 0 | GRETH | 10/100 Ethernet MAC | 0 | 0 | 1 |
Page 14

GR712RC-QSG
November 2018, Version 1.0
14 www.cobham.com/gaisler
| 1 | GRSPW | Spacewire link 0 | 0 | 1 | 0 |
| 2 | GRSPW | Spacewire link 1 | 0 | 1 | 0 |
| 3 | GRSPW | Spacewire link 2 | 0 | 0 | 1 |
| 4 | GRSPW | Spacewire link 3 | 0 | 0 | 1 |
| 5 | GRSPW | Spacewire link 4 | 0 | 0 | 1 |
| 6 | GRSPW | Spacewire link 5 | 0 | 0 | 1 |
| 7 | CAN | CAN core 1 & 2 | 0 | 0 | 1 |
| 8 | SatCAN | SatCAN controller | 0 | 0 | 1 |
| 9 | GRTM | Telemetry Encoder | 0 | 0 | 1 |
| 10 | GRTC | Telecommand Decoder | 0 | 0 | 1 |
| 11 | B1553BRM | MIL-STD-1553 BRM | 0 | 0 | 1 |
+------+----------+----------------------------+----------+---------+-------+
grmon2> grcg enable 0
grmon2> grcg
GRCLKGATE GR712RC info:
Unlock register: 0x00000000
Clock enable register: 0x00000007
Reset register: 0x00000ff8
GR712RC decode of values:
+------+----------+----------------------------+----------+---------+-------+
| Gate | Core(s) | Description | Unlocked | Enabled | Reset |
+------+----------+----------------------------+----------+---------+-------+
| 0 | GRETH | 10/100 Ethernet MAC | 0 | 1 | 0 |
| 1 | GRSPW | Spacewire link 0 | 0 | 1 | 0 |
| 2 | GRSPW | Spacewire link 1 | 0 | 1 | 0 |
| 3 | GRSPW | Spacewire link 2 | 0 | 0 | 1 |
| 4 | GRSPW | Spacewire link 3 | 0 | 0 | 1 |
| 5 | GRSPW | Spacewire link 4 | 0 | 0 | 1 |
| 6 | GRSPW | Spacewire link 5 | 0 | 0 | 1 |
| 7 | CAN | CAN core 1 & 2 | 0 | 0 | 1 |
| 8 | SatCAN | SatCAN controller | 0 | 0 | 1 |
| 9 | GRTM | Telemetry Encoder | 0 | 0 | 1 |
| 10 | GRTC | Telecommand Decoder | 0 | 0 | 1 |
| 11 | B1553BRM | MIL-STD-1553 BRM | 0 | 0 | 1 |
+------+----------+----------------------------+----------+---------+-------+
Page 15

GR712RC-QSG
November 2018, Version 1.0
15 www.cobham.com/gaisler
4. Software
4.1. Overview
Cobham Gaisler provides a comprehensive set of software tools to run several different operating systems. The
LEON platform supports the following workflows:
Table 4.1.
BCC the Bare C Cross-Compiler System is a toolchain to compile bare C or C++ applications di-
rectly on top of the processor without the servises provided by an operating system
RTEMS a hard Real Time Operating System. Cobham Gaisler provides RCC, a toolchain to develop
and compile RTEMS applications specifically for the LEON
Linux the open source operating system. Board Support Packages and tools to ease the compilation
and deployment of the kernel are provided
VxWorks an embedded real-time operating system developed by WindRiver. Cobham Gaisler provides
a LEON architectural port (HAL) and a Board Support Package (BSP) in full source code
Hardware simulators for the LEON platform are available in the form of TSIM and GRSIM. The TSIM simulator
emulates a mono-processor computer system based on either the ERC32 or LEON processors. It can be extended
to emulate custom I/O functions through loadable modules. The GRSIM simulator emulates a multi-processor
LEON2 or LEON3 system, and has a more accurate modelling of the on-chip IP cores and AMBA buses. It is
time-based rather that instruction-based (as TSIM), and can be attached to other simulation frameworks such as
System-C.
Developer tools are generally provided for both Linux and Windows operating systems. Cobham Gaisler also
provides an integrated, easy-to-use solution to help programmers with the task of developing for the LEON. The
LEON Integrated Development Environment for Eclipse (LIDE) is an Eclipse plug-in integrating compilers, software and hardware debuggers in a graphical user interface. The plugin makes it possible to cross-compile C and
C++ application for LEON and ERC32, and to debug them on either simulator and target hardware (TSIM or
GRMON).
The recommended method to load software onto a LEON board is by connecting to a debug interface of the board
through the GRMON hardware debugger. Execution of programs by a PROM-loaded bootloader, like u-boot, is
also possible. Cobham Gaisler provides the free MKPROM2 tool to encapsulate BCC or RTEMS applications in
a simple boot-loader.
Currently u-boot for the GR712RC Development Board is not provided by Cobham Gaisler
4.2. Bare C Cross-Compiler System
4.2.1. Overview
The Bare C Cross-Compiler (BCC for short) is a GNU-based cross-compilation system for LEON processors. It
allows cross-compilation of C and C++ applications for LEON2, LEON3 and LEON4. This section gives the reader
a brief introduction on how to use BCC together with the GR712RC Development Board. It will be demonstrated
how to install BCC, build an existing sample project and run it on the board using GRMON.
The BCC toolchain includes the GNU C/C++ cross-compiler 7.2.0, GNU Binutils, Newlib embedded C library,
the Bare-C run-time system with LEON support and the GNU debugger (GDB). The toolchain can be downloaded
from [RD-10] and is available for both Linux and Windows. Further information about BCC can be found in
[RD-11].
The installation process of BCC is described in [RD-11]. The rest of this chapter assumes that sparc-gaisler-elf-
gcc is available in the PATH variable.
4.2.2. Compiling with BCC
The following command shows an example of how to compile a typical Hello world program with BCC.
Page 16

GR712RC-QSG
November 2018, Version 1.0
16 www.cobham.com/gaisler
sparc-gaisler-elf-gcc -O2 -g hello.c -o hello.elf
All GCC options are described in the gcc manual, but some useful options are reported below:
Table 4.2. BCC's GCC compiler relevant options
-g generate debugging information - must be used for debugging with gdb
-msoft-float emulate floating-point - must be used if no FPU exists in the system
-O2 optimize for speed
-Os optimize for size
-qsvt use the single-vector trap model
-mflat enable flat register window model. The compiler will not emit SAVE and RESTORE
instructions.
It is recommended to use the options
-qbsp=gr712rc -mcpu=leon3 -mfix-gr712rc
with GR712RC. For more details on, see [RD-10].
4.2.3. Running and debugging with GRMON
Once your application is compiled, connect to your GR712RC-BOARD with GRMON. The following log shows
how to load and run an application. Note that the console output is redirected to GRMON by the use of the -u
command line switch, so that the application standard output is forwarded to the GRMON console.
[andrea@localhost Desktop]$ grmon -ftdi -u
GRMON2 LEON debug monitor v2.0.42 professional version
Copyright (C) 2013 Aeroflex Gaisler - All rights reserved.
For latest updates, go to http://www.gaisler.com/
Comments or bug-reports to support@gaisler.com
Parsing -ftdi
Parsing -u
[...]
grmon2> load hello.elf
40000000 .text 23.6kB / 23.6kB [===============>] 100%
40005E70 .data 2.7kB / 2.7kB [===============>] 100%
Total size: 26.29kB (803.58kbit/s)
Entry point 0x40000000
Image /home/andrea/Desktop/hello.elf loaded
grmon2> run
Hello world!
CPU 0: Program exited normally.
CPU 1: Power down mode
To debug the compiled program you can insert breakpoints, step and continue execution directly from the GRMON
console. Compilation symbols are loaded automatically by GRMON once you load the application. An example
is provided below.
grmon2> load hello.elf
40000000 .text 23.6kB / 23.6kB [===============>] 100%
40005E70 .data 2.7kB / 2.7kB [===============>] 100%
Total size: 26.29kB (806.59kbit/s)
Entry point 0x40000000
Image /home/andrea/Desktop/hello.elf loaded
grmon2> bp main
Software breakpoint 1 at <main>
grmon2> run
CPU 0: breakpoint 1 hit
0x40001928: b0102000 mov 0, %i0 <main+4>
CPU 1: Power down mode
grmon2> step
Page 17

GR712RC-QSG
November 2018, Version 1.0
17 www.cobham.com/gaisler
0x40001928: b0102000 mov 0, %i0 <main+4>
grmon2> step
0x4000192c: 11100017 sethi %hi(0x40005C00), %o0 <main+8>
grmon2> cont
Hello world!
CPU 0: Program exited normally.
CPU 1: Power down mode
grmon2> Exiting GRMON
Alternatively you can run GRMON with the -gdb command line option and then attach a gdb session to it. For
further information see Chapter 3 of [RD-11].
4.3. RTEMS Real Time Operating System
4.3.1. Overview
RTEMS is a real time operating system maintained at [RD-5] that supports the LEON CPU family. Cobham Gaisler
distributes a precompiled RTEMS toolchain for LEON called RCC [RD-6]. This section gives the reader a brief
introduction on how to use RTEMS together with the GR712RC Development Board. It will be demonstrated how
to install RCC and build an existing sample RTEMS project from RCC and run it on the board using GRMON.
The RCC toolchain includes a prebuilt toolchain with GNU BINUTILS, GCC, NewlibC and GDB for Linux and
Windows (mingw). It also contains prebuilt RTEMS kernels for the LEON2, LEON3/4 BSPs single-core and for
multi-core development, see [RD-7] for more information. The LEON BSP specific drivers are documented in
[RD-8].
Samples RTEMS projects are available within the toolchain package, installed into rtems-x.y/src/sam-
ples.
4.3.2. Installing RCC
The RCC toolchain is downloadable from the RCC homepage at [RD-6]. The full installation procedure is found
in the RCC manual [RD-7]. Windows users are recommended to install the UNIX-like environment MSYS before
proceeding.
The installation process of RCC is straight forward by first extracting the toolchain into C:\opt or /opt on Lin-
ux, then extracting the source distribution into the /opt/rtems-x.y/src/ directory. In order for the compiler
to be found one has to add the binary directory /opt/rtems-x.y/bin into the PATH variable as below:
$ cd /opt
$ tar -xf sparc-rtems-4.10-...-linux.tar.bz2
$ cd rtems-4.10/src
$ tar -xf rtems-4.10-...-src.tar.bz2
$ export PATH=$PATH:/opt/rtems-4.10/bin
NOTE: The GRTOOLS package [RD-9] includes a set of UNIX tools together with a MSYS environment suitable
for RCC.
4.3.3. Building an RTEMS sample application
Once the toolchain is set up, you can compile and link a sample RTEMS application by doing:
sparc-rtems-gcc -g -O2 rtems-hello.c -o rtems-hello
RCC's gcc creates executables for LEON3/4 by default. The default load address is at the start of the RAM, i.e.
0x40000000. All compilation options are described in [RD-7], but some useful options are reported below:
Table 4.3. RCC's GCC compiler relevant options
-g generate debugging information - must be used for debugging with gdb
-msoft-float emulate floating-point - must be used if no FPU exists in the system
Page 18

GR712RC-QSG
November 2018, Version 1.0
18 www.cobham.com/gaisler
-mcpu=v8 generate SPARC V8 mul/div instructions - needs hardware multiply and divide
-O2 or -O3 optimize code maximum performance and minimal code size
-qleon3std generate LEON3/4 executable without driver manager startup initialization
-qleon3mp generate LEON3/4 Multiprocessor executable (AMP)
4.3.4. Running and debugging with GRMON
Once your executable is compiled, connect to your GR712RC-BOARD with GRMON. The following log shows
how to load and run an executable. Note that the console output is redirected to GRMON by the use of the -u
command line switch, so that printf output is shown directly in the GRMON console.
[andrea@localhost samples]$ grmon -ftdi -u
GRMON2 LEON debug monitor v2.0.42 internal version
Copyright (C) 2013 Aeroflex Gaisler - All rights reserved.
For latest updates, go to http://www.gaisler.com/
Comments or bug-reports to support@gaisler.com
Parsing -ftdi
Parsing -u
[...]
grmon2> load rtems-hello
40000000 .text 136.4kB / 136.4kB [===============>] 100%
400221A0 .data 4.4kB / 4.4kB [===============>] 100%
40023350 .jcr 4B [===============>] 100%
Total size: 140.83kB (780.05kbit/s)
Entry point 0x40000000
Image /home/andrea/Desktop/samples/rtems-hello loaded
grmon2> run
Hello World
CPU 0: Program exited normally.
CPU 1: Power down mode
To debug the compiled program you can insert break points, step and continue directly from the GRMON console.
Compilation symbols are loaded automatically by GRMON once you load the executable. An example is provided
below.
grmon2> load rtems-hello
40000000 .text 136.4kB / 136.4kB [===============>] 100%
400221A0 .data 4.4kB / 4.4kB [===============>] 100%
40023350 .jcr 4B [===============>] 100%
Total size: 140.83kB (781.11kbit/s)
Entry point 0x40000000
Image /home/andrea/Desktop/samples/rtems-hello loaded
grmon2> bp Init
Software breakpoint 1 at <Init>
grmon2> run
CPU 0: breakpoint 1 hit
0x400011f8: 1110007f sethi %hi(0x4001FC00), %o0 <Init+4>
CPU 1: Power down mode
grmon2> step
0x400011f8: 1110007f sethi %hi(0x4001FC00), %o0 <Init+4>
grmon2> step
0x400011fc: 4000003b call 0x400012E8 <Init+8>
grmon2> cont
Hello World
CPU 0: Program exited normally.
CPU 1: Power down mode
grmon2> Exiting GRMON
Alternatively you can run GRMON with the -gdb command line option and then attach a gdb session to it. For
further information see Chapter 3 of [RD-7].
Page 19

GR712RC-QSG
November 2018, Version 1.0
19 www.cobham.com/gaisler
4.4. MKPROM2
4.4.1. Overview
To run application from the on-board PROM, it's necessary to create a bootable PROM image file. MKPROM2
is a utility program to create boot-images for programs compiled with the BCC or RTEMS cross-compiler. It
encapsulates the application in a loader suitable to be placed in a boot PROM. The application is compressed with
a modified LZSS algorithm, typically achieving a compression factor of 2.
The boot loader operates in the following steps:
• The register files of IU and FPU (if present) are initialized.
• The memory controller, UARTs and timer unit are initialized according to the specified options.
• The application is decompressed and copied into RAM.
• Finally, the application is started, setting the stack pointer to the top of RAM.
4.4.2. Usage of MKPROM2
The MKPROM2 tool can be downloaded from the Cobham Gaisler website [http://gaisler.com/index.php/downloads/compilers]. No installation is required, but the directory containing the executable must be included in
the system's PATH, together with a valid SPARC toolchain ( sparc-gaisler-elf, sparc-elf, sparc-
rtems or sparc-linux).
To generate a boot PROM for a GR712RC Development Board and running your program from SRAM:
mkprom2 -leon3 -freq 80 -rmw -ramsize 8192 -romsize 8192 -baud 38400 -ramws 2 -o hello.prom hello.exe
This example command will work for a board in the default configuration at delivery, with a system clock frequency of 80 MHz. The -ramsize and -romsize options are expressed in KiB. The former value is 8MiB,
the size of the SRAM. The latter value is 8 MiB as well, and represents the size of the on-board flash. Finally the
-ramws option sets the number of wait states during SRAM access to 2, needed when running the system at 80
MHz, but might be a lower value at lower frequencies.
To generate a boot PROM for a GR712RC Development Board and running your program from SDRAM:
mkprom2 -leon3 -freq 80 -rmw -nosram -sdram 128 -romsize 8192 -baud 38400 -o hello.prom hello.exe
This example command will, again, work for a board in the default configuration at delivery. The -nosram option
will disable the SRAM and the -sdram option sets the size of the available SDRAM. This value is 128 MiB,
which is the value for the SODIMM provided by default with the board.
NOTE: When SRAM is disabled, the SDRAM address range is moved from 0x60000000 to 0x40000000, therefore
not requiring recompilation of executables. To run your program in SDRAM without disabling SRAM, you need
to link your program to the 0x60000000 address at compilation time. See the manual of your toolchain for more
information.
It's required that the MKPROM2 command line parameters match your system configuration. For more information about command line options, please refer to [RD-12].
If EDAC is enabled on the board's PROM, then the -bch8 flag must be included in the command line. The
generated PROM image that needs to be flashed on the device in this case would be hello.prom.bch8.
Once the PROM file is generated, it can be loaded onto the board with GRMON. Once GRMON is attached to
the board, run the following commands to program the PROM.
flash
flash erase all
flash load hello.prom
verify hello.prom
For further information about connecting to the board with GRMON, see Chapter 3.
Page 20

GR712RC-QSG
November 2018, Version 1.0
20 www.cobham.com/gaisler
4.5. VxWorks
4.5.1. Overview
VxWorks is an embedded real-time operating system developed by WindRiver. Cobham Gaisler provides a LEON
architectural port (HAL) and a Board Support Package (BSP) in full source code for VxWorks.
The VxWorks package includes a quick start guide and technical support. Contact support@gaisler.com for more
information.
Page 21

GR712RC-QSG
November 2018, Version 1.0
21 www.cobham.com/gaisler
5. Frequently Asked Questions / Common Mistakes / Know Issues
5.1. Clock gating
Several of the design's peripherals may be clock gated off. GRMON will enable all clocks if started with the flag
-cginit. Within GRMON, the command grcg enable all will have the same effect.
Alternatively, if a boot loader is used instead of GRMON to load an executable, then clock gating must be setup
via the General Purpose register. Clock source/divider selection must also be setup for the MIL-1553, SpaceWire
and TM cores. See Chapter 13 of [RD-2].
5.2. GRMON issues
When connected to the board, the message "stack pointer not set" will be shown by the command info sys in case
GRMON doesn't find any memory.
5.3. Clock problems
Ensure that the jumper JP84, selecting the clock source, is always present. A combination of its absence and the
presence of jumper JP88, can lead to unexpected processor behavior.
When jumper JP88 is present, the oscillator in socket X5, which is provided by default, must be disconnected or
it will short with the main clock source, leading to possible damage to the oscillators and unexpected behavior.
5.4. Switch Matrix Configuration Problems
Ensure that the jumper array is properly configured and that any I/O peripheral required is clock ungated or enabled.
The internal switch matrix routing is explained more in depth in Chapter 2 of GR712RC User Manual.
If an IP core behaves correctly, as seen from software, but does not receive/transmit any data from the outside,
first check that the jumper array is properly configured. The problem might also arise when conflicting cores are
enabled. Check Table 8 from [RD-2] for further information on conflicting cores.
5.5. GPIO
Some of the GPIOs have special meaning on power-up, GPIO[1] and GPIO[3] configure the PROM area of the
memory controller and GPIO[42], GPIO[40], GPIO[37] and GPIO[34] are used for the SPW clock divider reset
value.
These pins are provided with pull-down resistors by default. If measuring the state of these GPIO pins, please take
into account the effect of these pull-down resistors. Conversely, if an external signal is connected to the GPIO[3]
and GPIO[1] pins, this may override the expected state of the pin at power up.
See Section 2.3.2 and Section 2.6.2 of [RD-1] for more information.
5.6. SDRAM configuration
SDRAM is, by default, not configured on the board. Ensure that the switch matrix jumper configuration is correctly
set as to enable SDRAM. If in doubt, you can use a default configuration that supports SDRAM. See Section 2.3
for more details.
Only half of the installed SDRAM will be available in the system, as reported by GRMON's info sys command.
This limitation is due to the fact that the SODIMM provides 64 bit data paths, but in the standard LEON model
only 32 bits of the SDRAM are used, plus 16 additional data bits for the RS/EDAC memory bits.
5.7. Multiprocessor & legacy support
Code compiled for the single core LEON3 will generally be able to run unmodified on the GR712RC. The second
core is inactivated after reset and unless it's activated (by writing a specific bit in the IRQ controller) it will remain
inactivated and the chip will behave as a single-CPU system.
Page 22

GR712RC-QSG
November 2018, Version 1.0
22 www.cobham.com/gaisler
5.8. Interrupts
When using a multiprocessor OS like RTEMS-AMP, Linux or VxWorks the default IRQ for interprocessor crosscalls, IRQ 14, clashes with the MIL-1553, Ethernet and Telecommand IP cores. The OS may need to be reconfigured by changing the IRQ value, which is usually a define, in the source code of your operating system and
rebuilding it. This should not be an issue with single-core RTEMS.
5.9. GRMON Debug Link Limitations
The GR712RC does not support debugging over Ethernet. EDCL is not included in the Ethernet core design. Refer
to Chapter 3 for an introduction to the supported debug links.
5.10. MIL-1553
The 1553 IP core in the GR712RC is an Actel Core1553BRM with an AMBA adapter developed by Cobham
Gaisler. Actel's core is documented on Actel's website [http://www.actel.com/ipdocs/Core1553BRM_HB.pdf],
while the wrapper is documented in [RD-2].
The correct RTEMS driver to use for the MIL-1553 core is B1553BRM. This should not be confused with
GR1553B which is the driver for Cobham Gaisler's in-house developed core. To use the core, users need to set up
clock gating and clock selection with the general purpose register.
NOTE: There are some restrictions on what clock frequencies can be used, see Section 3.3 of [RD-2].
Users also need to set a register inside the Core1553BRM to match the BRM frequency used. This is usually done
by the driver in the RTEMS/VxW case (default is 24 MHz). Below is provided an example routine for setting up
GR712RC clocking to external 24 MHz clock. This routine can be used, for instance, as mkprom2 bdinit. In this
case it needs to be compiled with -O2 to avoid using stack.
static void gr712_init(void)
{
volatile unsigned long *p;
/* Select external 1553 clk through GPREG */
p = (volatile unsigned long *)0x80000600;
*p |= 0x20;
/* Ungate 1553 clock and reset */
p = (volatile unsigned long *)0x80000D00;
p[0] = (1<<11);
p[2] = (1<<11);
p[1] = (1<<11);
p[2] = 0;
p[0] = 0;
/* Set Core1553BRM to 24 MHz operation */
p = (volatile unsigned long *)0xFFF00000;
p[32] |= 3;
}
5.11. CAN multiplexing
The CAN bus outputs are disabled at reset and should be enabled before use by programming the CAN multiplexer.
To enable OC-CAN1 on CAN bus A and OC-CAN2 on CAN bus B, the following GRMON2 command can be
used:
wmem 0x80000500 3
There is also an RTEMS driver named canmux for the CAN bus multiplexor distributed with the RCC distribution.
The multiplexer is programmed by opening the file "/dev/canmux" and requestiong an IOCTL. An example of this
is provided in the RCC example src/samples/gr712/rtems-satcan.c.
5.12. Concurrent CAN and Ethernet
Ethernet and CAN pins are conflicting in the GR712RC switch matrix so the functions can not be used concurrently. It is possible to switch between the interfaces at run-time.
The conflict comes from a set of pins which are activated when the CAN interface is enabled. These pins are
described as "proprietary" in the rightmost column of [RD-2], table named I/O switch matrix pin description. The
Page 23

GR712RC-QSG
November 2018, Version 1.0
23 www.cobham.com/gaisler
"proprietary" interface is obsolete and not part of the public interface of the GR712RC but are still part of the
I/O switch matrix.
When the CAN interface is enabled, the pins 191, 190, 185, 184 and 172 are also driven with "random values"
unless these pins are assigned to an interface with higher I/O switch matrix priority, such as when the MILSTD-1553B interface is enabled. Of these pins, 191, 190 and 185 are shared with Ethernet (RMII) and there is
the conflict.
Ethernet has lower switch matrix priority than CAN. So when CAN is enabled, the pins 191, 190 and 185 are not
driven by the Ethernet controller.
GPIO bits 13...16 are unavailable when CAN or SPW-2 is enabled. GPIO pins always has lowest priority in the
switch matrix.
How a particular device is "enabled" with regard to the switch matrix is described in [RD-2], Table 9. Most devices
are I/O-enabled by the clock gating unit and some are enabled via device control registers.
5.13. Hardware behavior at CPU reset and power management
GR712RC has the following behavior with regard to how the power-down mode and program counter (PC) is
managed:
• At GR712RC power-on, and at system reset issued by asserting RESETN (including watchdog), the following
is done:
• CPU0 sets PC=0 and starts execution.
• CPU1 sets PC=0 and is powered down.
• A CPU enters power-down mode by writing to its own CPU local register %ASR19. The local PC is set to
the instruction following the %ASR19 write.
• A CPU can not power down another CPU.
• Any CPU can read the power-down status of any other CPU by reading the Multiprocessor status register
in the interrupt controller.
• Any CPU can resume execution on any other CPU by writing to the Multiprocessor status register in the
interrupt controller.
• When a CPU is being resumed (powered up) by a write to the Multiprocessor status register, it continues
executing at its current PC.
• If an (unmasked) interrupt occurs on a powered down CPU, then the target CPU resumes execution on the
current PC.
The above behavior has some implications with regard to how processors have to cooperate on software initiated
restart.
At power-on, the RESETN signal is engaged and thus the PC for CPU1 has a good known value. No specific
preparations on CPU1 has to be performed for power-on.
For a software-initiated restart of the system, all processors need to synchronize before issuing the restart. All
processors except for CPU0 should typically be powered down and the other processors should resume execution
in memory which is guaranteed to exist as soon as they are resumed. This is because the currently executed application and its data (in RAM) will typically disappear when CPU0 performs low-level initialization initialization
of memory controller and clearing RAM.
To solve this for the secondary processors, a dedicated “parking routine” in ROM could be entered by secondary
processors before CPU0 performs the software-initiated restart.
Page 24

GR712RC-QSG
November 2018, Version 1.0
24 www.cobham.com/gaisler
6. Support
For support contact the Cobham Gaisler support team at support@gaisler.com.
When contacting support, please identify yourself in full, including company affiliation and site name and address.
Please identify exactly what product that is used, specifying if it is an IP core (with full name of the library
distribution archive file), component, software version, compiler version, operating system version, debug tool
version, simulator tool version, board version, etc.
The support service is only for paying customers with a support contract.
Page 25

GR712RC-QSG
November 2018, Version 1.0
25 www.cobham.com/gaisler
Cobham Gaisler AB
Kungsgatan 12
411 19 Gothenburg
Sweden
www.cobham.com/gaisler
sales@gaisler.com
T: +46 31 7758650
F: +46 31 421407
Cobham Gaisler AB, reserves the right to make changes to any products and services described
herein at any time without notice. Consult Cobham or an authorized sales representative to verify that
the information in this document is current before using this product. Cobham does not assume any
responsibility or liability arising out of the application or use of any product or service described herein,
except as expressly agreed to in writing by Cobham; nor does the purchase, lease, or use of a product
or service from Cobham convey a license under any patent rights, copyrights, trademark rights, or any
other of the intellectual rights of Cobham or of third parties. All information is provided as is. There is no
warranty that it is correct or suitable for any purpose, neither implicit nor explicit.
Copyright © 2018 Cobham Gaisler AB
 Loading...
Loading...