

CLS ARGOS User Manual
Manuel utilisateur Argos © 2007-2008 CLS Dernière mise à jour, le 14 octobre 2008

Table des matières
1. Introduction.......................................................................................................................................... 1
2 - Les composantes du système Argos ................................................................................................. 2
2.1 Vue d'ensemble ............................................................................................................................. 2
2.2 Les plates-formes .......................................................................................................................... 2
2.3 Satellites ........................................................................................................................................ 3
2.4 Les stations de réception............................................................................................................... 5
2.5 Les centres de traitement .............................................................................................................. 6
2.6 Les Bureaux utilisateurs à travers le monde ................................................................................. 7
3 - La localisation..................................................................................................................................... 9
3.1 Vue d'ensemble ............................................................................................................................. 9
3.2 Principe de la localisation Argos.................................................................................................... 9
3.3 Transmettre des positions GPS via Argos................................................................................... 11
3.4 Les classes de localisation .......................................................................................................... 12
3.5 Service Plus/Auxiliary Location Processing................................................................................. 13
3.6 Informations supplémentaires pour caractériser les estimations d’erreur pour les localisations de
classe 0,1,2,3..................................................................................................................................... 13
3.6.1 Comment accéder à ses informations................................................................................... 14
Rayon d’erreur ............................................................................................................................ 15
Demi-grand axe .......................................................................................................................... 15
Demi-petit axe............................................................................................................................. 15
Angle d'ellipse............................................................................................................................. 15
GDOP ......................................................................................................................................... 15
3.7 Informations supplémentaires pour caractériser les Classes A et B........................................... 15
4 - Le traitement des données............................................................................................................... 16
4.1 Vue d'ensemble ........................................................................................................................... 16
4.1.1 Le traitement par message vs. par observation.................................................................... 16
4.1.2 Le traitement multi-format ..................................................................................................... 17
4.2 La reconnaissance du format de message.................................................................................. 17
4.3 Le découpage du message ......................................................................................................... 18
Un élément régulier ........................................................................................................................ 18
Un checksum.................................................................................................................................. 18
Un bloc ........................................................................................................................................... 18
ii

Table des matières
4.4 Le décodage des données .......................................................................................................... 19
4.5 Le traitement des observations.................................................................................................... 20
4.5.1 Les avantages des observations........................................................................................... 20
4.5.2 La distribution des observations............................................................................................ 21
4.6 Que choisir : observations ou messages ?.................................................................................. 22
4.6.1 Les observations ................................................................................................................... 22
1. Interpréter simplement les mesures ................................................................................ 22
2. Partager les données avec les partenaires ..................................................................... 22
3. Déclencher des alertes, avertir........................................................................................ 23
4.6.2 Les messages ....................................................................................................................... 23
1. Examiner le processus de transmission et vérifier les performances des plates-formes 23
2. Rester compatible avec des logiciels existant................................................................. 23
3. Traiter des formats complexes ou variant dans le temps................................................ 23
4. Pour garder un historique des données brutes ............................................................... 23
Courbe B1.......................................................................................................................................... 23
Courbe B2.......................................................................................................................................... 24
Courbe B3.......................................................................................................................................... 24
Courbe B4.......................................................................................................................................... 25
5 - Souscrire au service Argos .............................................................................................................. 26
5.1 Obtenir un programme................................................................................................................. 26
5.1.1 Renseigner un formulaire SUA et un formulaire de demande de numéro ID ....................... 26
5.1.2 Choisir les services (catalogue des tarifs) ............................................................................ 27
5.1.3 Compléter le bon de commande........................................................................................... 27
5.1.4 Recevoir la confirmation de la création d'un programme...................................................... 27
5.2 Gérer un programme ................................................................................................................... 27
5.2.1 Tester et déployer les plates-formes..................................................................................... 27
5.2.2 Accéder aux données ........................................................................................................... 28
5.2.3 Choisir les services à valeur ajoutée..................................................................................... 28
5.2.4 Acquitter les factures............................................................................................................. 29
5.3 Modifier les paramètres d'un programme Argos.......................................................................... 29
5.4 Terminer un programme .............................................................................................................. 30
6 - Comment obtenir les données ......................................................................................................... 31
6.1 Vue d'ensemble ........................................................................................................................... 31
iii

Manuel utilisateur Argos
6.2 ArgosWeb .................................................................................................................................... 31
6.2.1 Les avantages d'ArgosWeb .................................................................................................. 31
6.2.2 Les fonctionnalités d’ArgosWeb............................................................................................ 31
Afficher les localisations sur une carte ....................................................................................... 32
Accéder aux données................................................................................................................. 33
Gérer des programmes et des plates-formes............................................................................. 33
Autres fonctionnalités ................................................................................................................. 34
6.3 ArgosServer ................................................................................................................................. 34
6.3.1 L'accès aux données Argos par Telnet................................................................................. 34
6.3.2 Les formats de données........................................................................................................ 36
6.3.3 La liste des commandes ....................................................................................................... 36
6.3.4 Consulter vos derniers résultats : La commande COM........................................................ 37
6.3.5 Consulter les résultats des 9 derniers jours plus le jour en cours : commande PRV ........... 39
6.3.5.1 La commande PRV,,DS : tous les messages reçus par le satellite ............................... 39
6.3.5.2 La commande PRV,TX : le message le plus significatif par passage satellite............... 41
6.3.6 Obtenir un diagnostic des résultats : commandes DIAG et PRV/A : .................................... 42
6.3.6.1 La commande DIAG ....................................................................................................... 43
6.3.6.2 La commande PRV/A ..................................................................................................... 45
6.3.6.3 Interprétation de X et Y dans les résultats DIAG et PRV/A............................................ 48
6.3.7 Option de compression des résultats /C ............................................................................... 48
6.3.8 Connexion sécurisée SSH .................................................................................................... 49
6.4 ArgosDirect .................................................................................................................................. 49
6.4.1 Les avantages d'ArgosDirect ................................................................................................ 50
6.4.2 Fréquence et moyens d'envoi ............................................................................................... 50
6.4.3 Formats d'envoi de données................................................................................................. 50
6.4.4 Envoi sécurisé....................................................................................................................... 52
6.5 ArgosShare .................................................................................................................................. 52
6.5.1 Les avantages d’ArgosShare................................................................................................ 52
6.5.2 Les critères de mise en copie des données entre utilisateurs Argos.................................... 52
6.5.3 Configurer ArgosShare ......................................................................................................... 53
6.6 ArgosMonitor................................................................................................................................ 53
6.6.1 Les avantages d’ArgosMonitor.............................................................................................. 54
6.6.2 Service d’alerte...................................................................................................................... 54
iv

Table des matières
6.6.3 Comment configurer ArgosMonitor ....................................................................................... 54
6.7 Chaîne de traitement SMT (Système Mondial de Télécommunications) .................................... 54
6.7.1 Les avantages de la chaîne de traitement SMT ................................................................... 54
6.7.2 Configurer le GTS ................................................................................................................. 55
Glossaire................................................................................................................................................ 56
v


1. Introduction
Argos est un système mondial de localisation et de collecte de données par satellite dédié à l'étude et
à la protection de l'environnement de notre planète.
Il permet de localiser à l'échelle mondiale tout mobile équipé d'un émetteur compatible. Il offre aussi la
possibilité de collecter les données de capteurs de mesure connectés à cet émetteur. Les règles du
système Argos réservent son utilisation aux programmes d'étude et de protection de l'environnement,
de protection de la vie humaine et aux programmes présentant un intérêt gouvernemental déclaré.
Le système Argos est issu d'une coopération franco-américaine entre :
• Le
• la
•
Depuis 2006, Eumetsat (Organisation météorologique européenne) a rejoint le Comité des
Opérations.
CNES (Centre National d'Etudes Spatiales),
NOAA (National Oceanic and Atmospheric Administration), avec appui de la NASA
(National Aeronautics and Space Administration),
CLS (Collecte Localisation Satellites), exploitant du système.
© CLS
1

2 - Les composantes du système Argos
2.1 Vue d'ensemble 1/ Les plates-formes Argos émettent automatiquement des messages qui sont reçus par des satellites
en orbite polaire basse.
2/ Les satellites transfèrent ensuite les messages vers des stations de réception terrestres.
3/ Les stations terrestres transfèrent automatiquement les messages vers les Centres de Traitement
Argos. Les Centres de Traitement calculent la position des émetteurs, traitent les données mesurées
par les capteurs.
4/ Enfin, les Centres de Traitement mettent automatiquement les résultats à la disposition des
utilisateurs. Plusieurs moyens pour accéder aux données sont disponibles :
o la connexion sécurisée au site web,
o la distribution automatique ArgosDirect (e-mail, ftp, télécopie ou sur un réseau de
transmission de données), le courrier (cd-rom),
o la connexion à un réseau de transmission,
o ou encore des envois spécifiques (archivage de toutes les données pendant douze
mois, au cours desquels elles peuvent être envoyées sur demande).
ArgosWeb (www.argos-system.org),
ArgosServer (telnet),
2.2 Les plates-formes
2
2 - Les composantes du système Argos
On entend par plate-forme tout équipement intégrant un émetteur certifié Argos. Chaque plate-forme
est caractérisée par un numéro d'identification qui est propre à son électronique de transmission. Une
plate-forme émet périodiquement un message caractérisé par les paramètres suivants :
•
la fréquence d'émission (401.650 MHz ± 30 kHz), qui doit être stable, car le calcul de la
localisation est basé sur la mesure de l'effet Doppler (voir Chapitre 1.2.1).
la période de répétition est l'intervalle de temps entre deux envois de message consécutifs.
•
Elle varie de 90 à 200 secondes selon l'utilisation de la plate-forme,
le numéro d'identification de la plate-forme,
•
les données transmises.
•
La durée de transmission de chaque message est inférieure à une seconde.
2.3 Satellites
L'instrument Argos est embarqué sur des satellites de la famille des POES (Polar Orbiting
Environmental Satellites)
famille
(
MetOp de l'Organisation européenne pour l'exploitation des satellites météorologiques
Eumetsat), dont le premier a été lancé le 19 octobre 2006.
de la NOAA (National Oceanic and Atmospheric Administration) et sur la
Les prochains instruments seront embarqués sur les deux satellites MetOp (prévus en 2010 et 2014)
ainsi que sur NOAA N' (prévu pour 2009). Des projets de coopération avec d'autres agences spatiales
sont actuellement à l'étude.
Les messages Argos sont reçus par le satellite puis sont simultanément :
1) stockés sur l'enregistreur embarqué, et retransmis vers le sol chaque fois que le
satellite passe au-dessus de l'une des trois stations de réception principales : Wallops
Island (Virginie, Etats-Unis), Fairbanks (Alaska, Etats-Unis) et Svalbard (Norvège),
ou
2) retransmis vers le sol, et peuvent être ainsi reçus par les stations en visibilité.
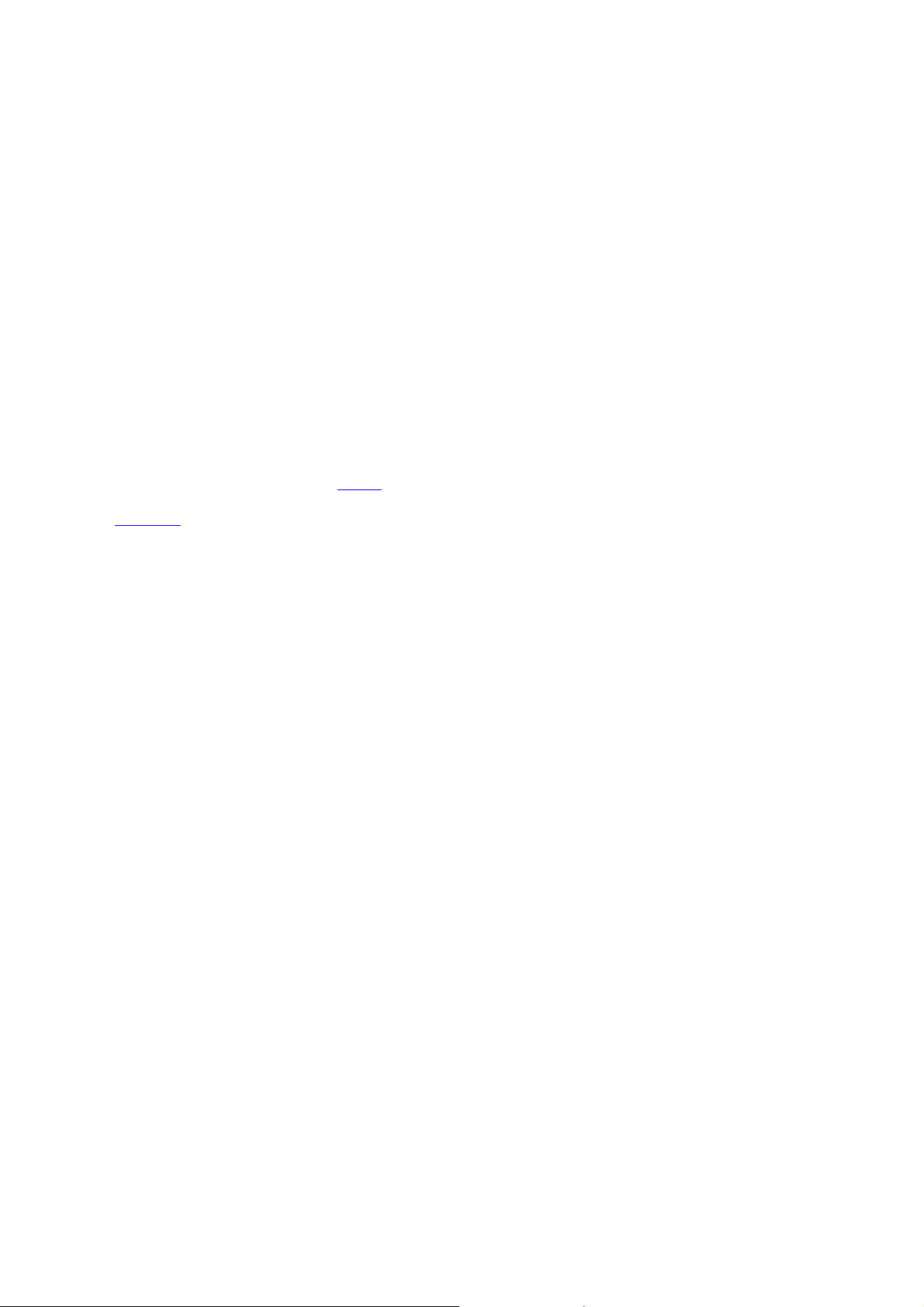
Les satellites décrivent
Nord et Sud à chaque révolution. Les plans d'orbites tournent autour de l'axe des pôles à la même
vitesse que la Terre autour du Soleil, soit une révolution par an. Chaque orbite coupe le plan de
l'équateur à des heures solaires locales fixes.
une orbite polaire à 850 km d'altitude : ils passent au-dessus des pôles
3
Manuel utilisateur Argos
Les orbites sont héliosynchrones,
peu près à la même heure locale tous les jours.
chaque satellite passe en visibilité d'une plate-forme donnée à
La période d'une orbite, c'est-à-dire le temps
nécessaire à chaque satellite pour effectuer une rotation complète autour de la Terre, est voisine de
100 minutes.
4
2 - Les composantes du système Argos
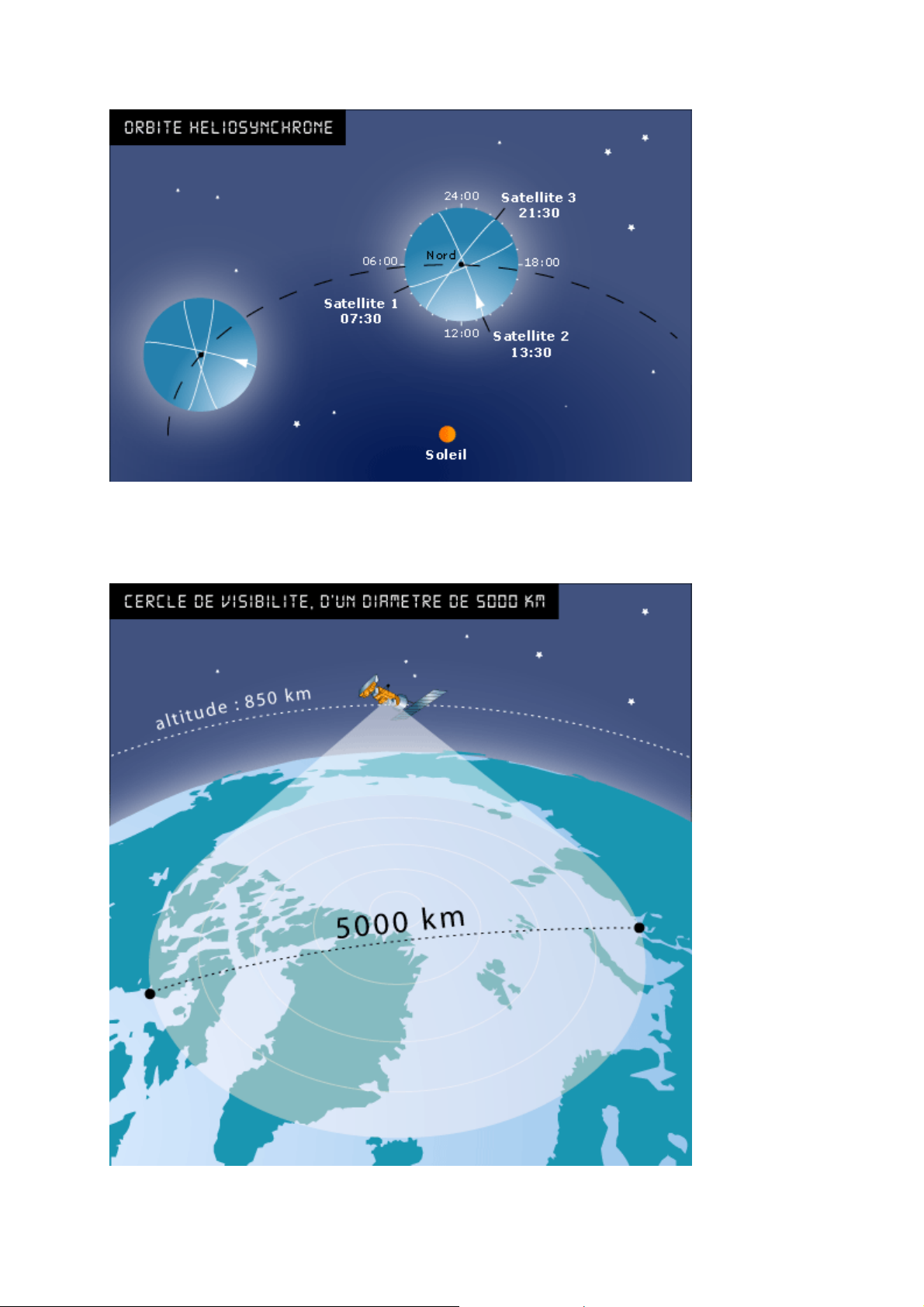
Chaque satellite voit simultanément et à tout moment toutes les plates-formes situées à
l'intérieur d'un cercle d'un diamètre de 5 000 km
de ce cercle forme une bande de
les pôles Nord et Sud.
5 000 km de large qui s'enroule autour de la Terre en passant par
. Avec le déplacement du satellite, la trace au sol
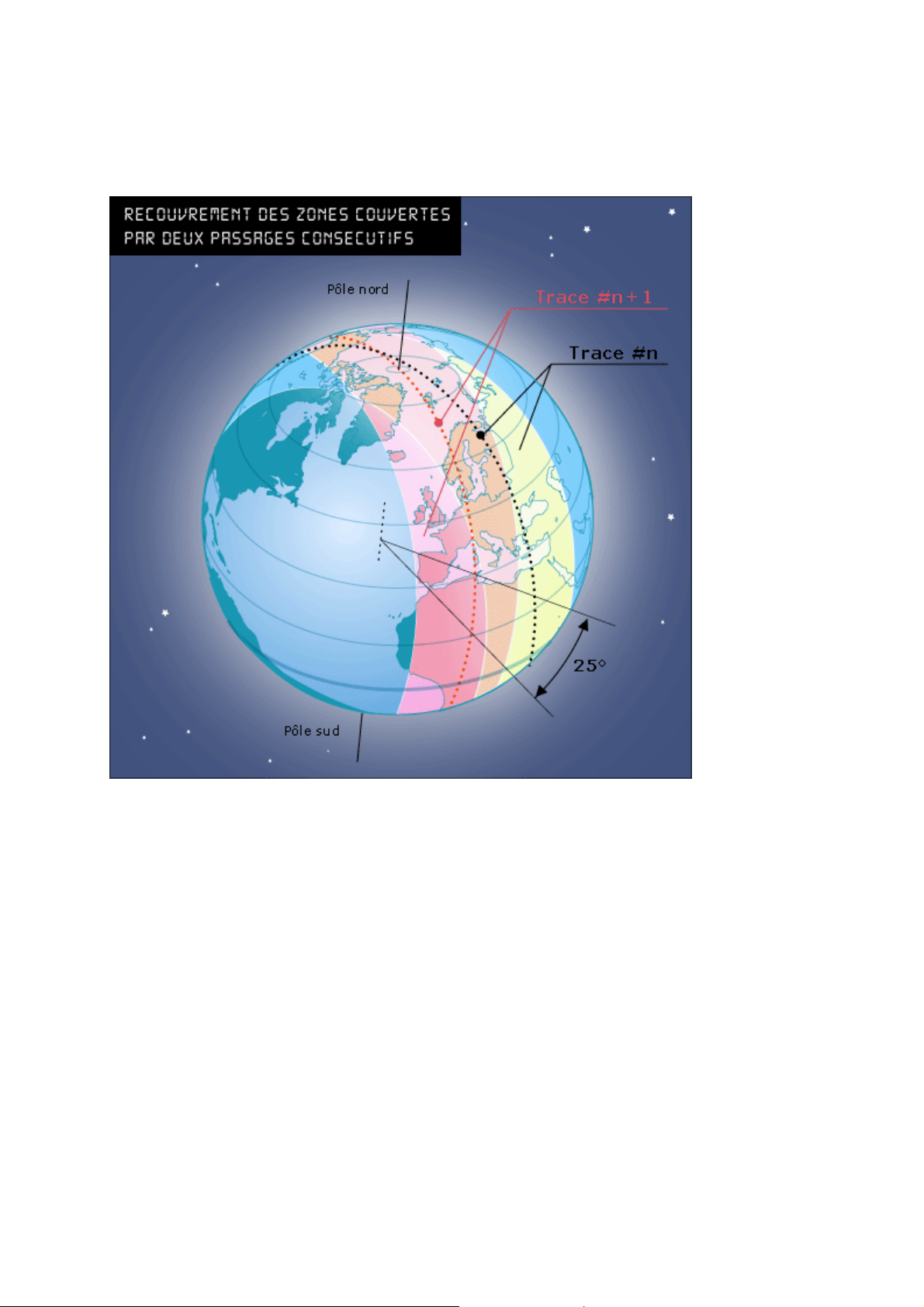
En raison de la rotation de la Terre, cette bande se décale à chaque révolution du satellite de 25°
environ vers l'Ouest, autour de l'axe des pôles (ce qui correspond à un décalage de 2 800 km au
niveau de l'équateur). Ainsi, deux bandes au sol successives se recouvrent partiellement.
Du fait du recouvrement de plus en plus important des bandes de visibilité, quand la latitude
augmente, le nombre de passages quotidiens au dessus d'une plate-forme dépend de la latitude de
celle-ci. Ainsi, aux pôles,
jour par satellite.
La durée de visibilité d'une plate-forme par le satellite (on parle aussi de la durée du passage du
satellite en vue d'une plate-forme) est le temps pendant lequel le satellite peut recevoir les messages
de cette plate-forme. Elle est de
les satellites voient les plates-formes à chaque passage, soit 14 fois par
10 minutes en moyenne.
2.4 Les stations de réception
Près de 50 stations reçoivent les données envoyées par les satellites en temps réel et les
retransmettent vers des centres de traitement.
5
Manuel utilisateur Argos
Ce réseau d'antennes en bande L, distribué de façon à obtenir une couverture mondiale, est un
élément clé du service Argos.
Stations de réception principales
Les trois stations de réception principales récupèrent la totalité des messages enregistrés par les
satellites tout au long d'une orbite et confèrent donc au système sa couverture mondiale. Ces trois
stations sont Wallops Island et Fairbanks aux Etats-Unis, et Svalbard, Norvège.
Les stations régionales reçoivent en temps réel les données provenant des plates-formes qui sont
reçues par le satellite lorsque celui-ci est en visibilité de la station. Les stations de réception
principales reçoivent également des données en temps réel.
2.5 Les centres de traitement
Deux centres de traitement redondants, l'un à Washington, D.C, aux Etats-Unis, et l'autre à
Toulouse en France, traitent la totalité des données reçues. Les calculateurs procèdent alors au
calcul des localisations et au traitement des données reçues.
Les traitements réalisés dans un centre de traitement global sont les suivants :
• contrôle de la qualité des messages, du niveau de la réception, de la datation (time-tag), du
numéro d'identification de l'émetteur, des longueurs de message capteurs et de la valeur de la
fréquence reçue (pour le calcul de la localisation) ;
• datation des messages en temps universel (UTC) ;
• classement des messages par plate-forme et par ordre chronologique ;
• traitement des données.
Tous ces résultats sont archivés et mis à la disposition des utilisateurs.
6
2 - Les composantes du système Argos
© Christian Rivière
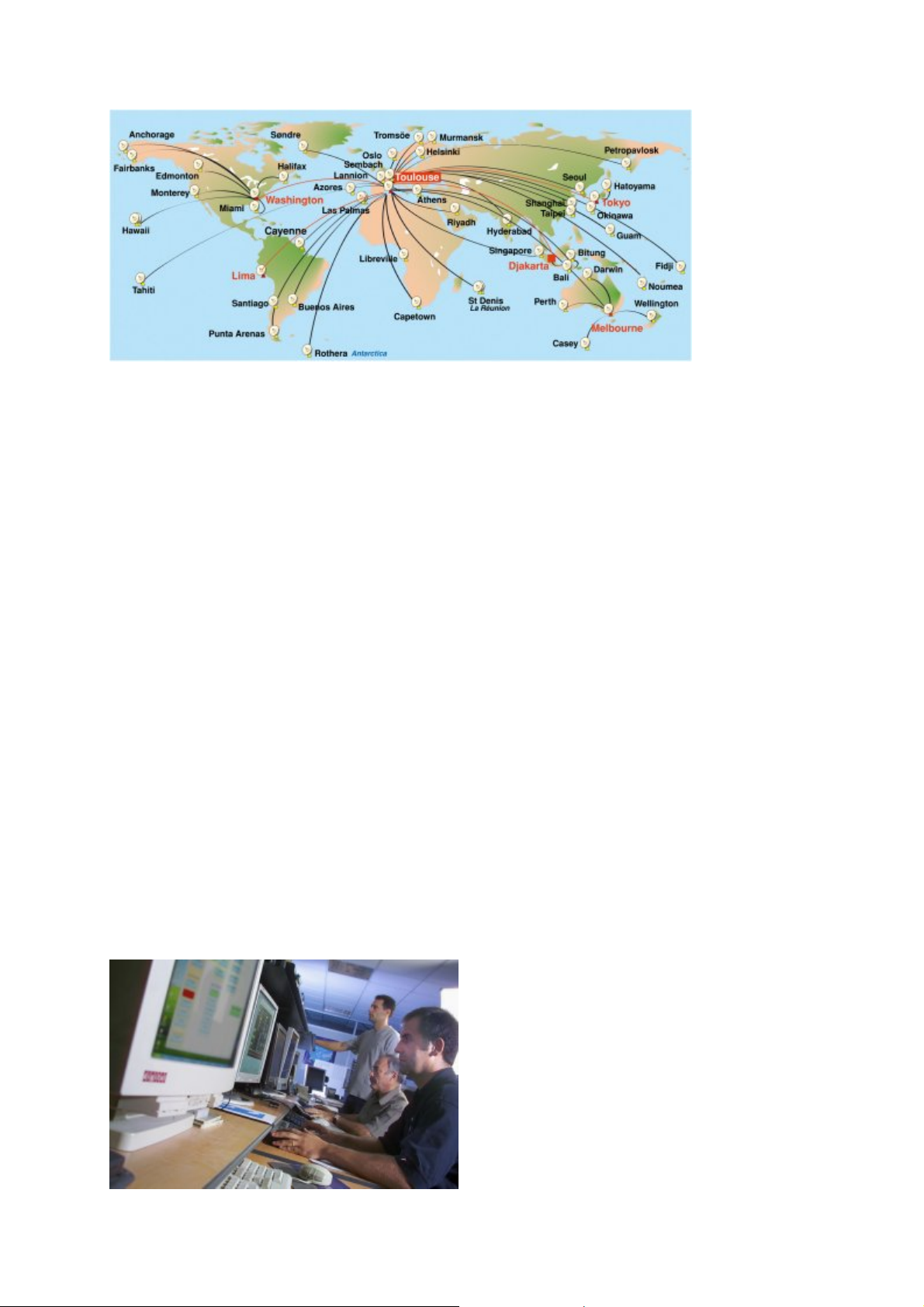
2.6 Les Bureaux utilisateurs à travers le monde
Les équipes des Bureaux utilisateurs gèrent les déclarations dans la base de données pour permettre
à l'utilisateur d'obtenir correctement ses données. Elles sont donc les points de contact privilégiés
pour toute demande de changement ou de support technique. Si elles ne peuvent pas répondre
directement aux besoins des utilisateurs, elles les orientent vers les experts qui sauront apporter une
réponse adaptée.
Amérique du Nord
CLS America Inc.
1441 McCormick Drive, Suite 1050
Largo, Maryland 20774
Tél: +1 301 925 4411
Fax: +1 301 925 8995
Email: userservices@clsamerica.com
Japon
Cubic-I Ltd
Bluebell bldg.7F
2-15-9 Nishi-Gotanda
Shinagawa-ku - Tokyo 141-0031
Tél: +81 3 3779 5506
Fax: +81 3 3779 5783
Email: argos@cubic-i.co.jp
Australie et Pacifique Sud
CLS Argos / Australie-Nouvelle Zélande-Pacifique
Sud
(Satellite IT Pty Ltd)
Suite 706, 1 Queens Road
Melbourne
Victoria 3004
Tél: +61 3 9863 9650
Fax: +61 3 9863 9675
Email: guan@clsargos.com.au
Amérique du Sud
CLS Perú
Jr. Trinidad Moran 639
Lince, Lima
Peru
Tél: +51 1 440 2717
Fax: +51 1 421 2433
Email: gsirech@clsperu.com.pe
Asie Sud
PT CLS Argos Indonesia
JI Jend Gatot Subroto, Kav 56
Kuningan Timur, Setiabundi
Jakarta, Selatan, 12950, Indonesia
7
Manuel utilisateur Argos
Tél: +62 215 264 266
Fax: +62 215 264 265
Email: sales@clsargos.co.id
Monde
CLS
8-10, rue Hermès
Parc Technologique du Canal
31520 Ramonville Saint-Agne
France
Tél: +33 (0)5 61 39 47 20
Fax: +33 (0)5 61 39 47 97
Email: useroffice@cls.fr
8
3 - La localisation
3.1 Vue d'ensemble
Les plates-formes Argos émettent automatiquement des messages qui sont ensuite reçus par les
satellites et retransmis aux centres de traitement Argos pour calcul et mise à disposition des résultats.
Les localisations sont calculées à partir de l'ensemble des messages reçus au cours d'un passage
satellite. L'utilisateur du système Argos bénéficie de deux modes de localisation indépendants :
La localisation Argos. Les positions sont calculées en utilisant les propriétés de l'effet
•
Doppler affectant les fréquences d'émission des balises.
La localisation GPS (Global Positioning System). A la demande de l'utilisateur, un module de
•
traitement particulier permet d'extraire les positions GPS intégrées dans les messages, de les
valider et de les distribuer au même format que les positions Argos.
Dans les deux cas, les coordonnées utilisées sont la latitude et la longitude, et le système de
référence est le WGS 84 (World Geodetic System 1984).
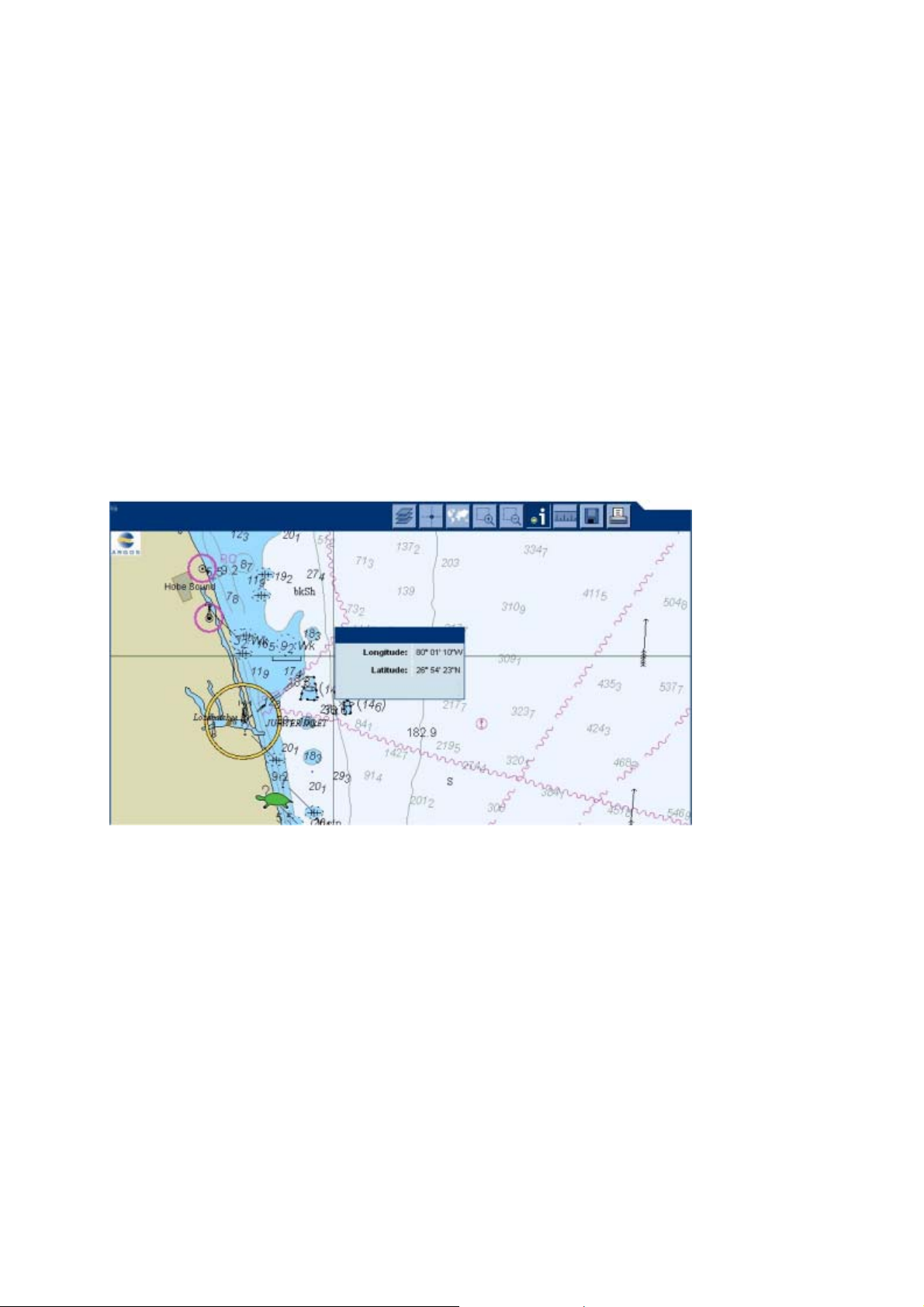
Une plate-forme localisée sur une carte et visualisée avec ArgosWeb.
3.2 Principe de la localisation Argos
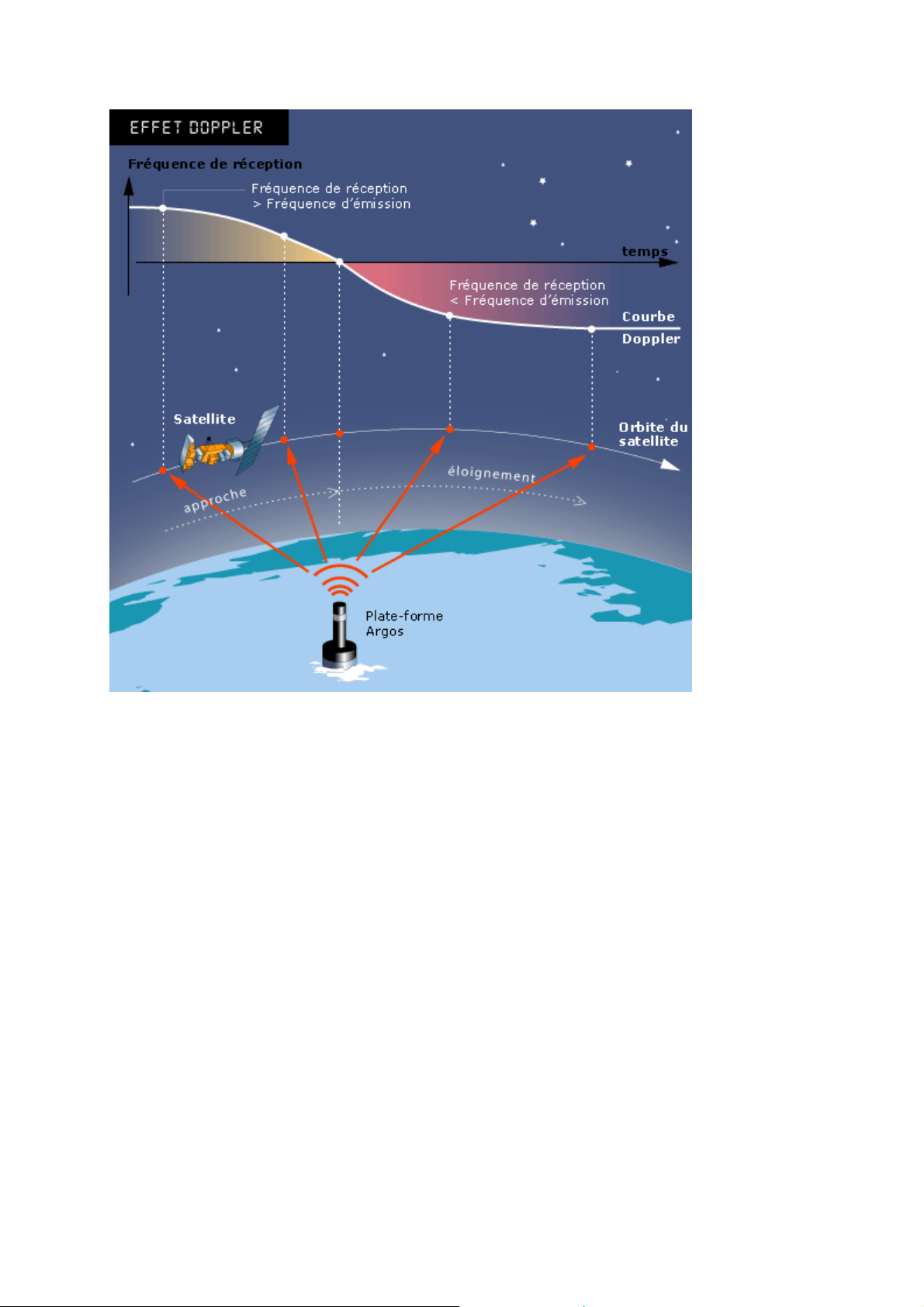
La localisation réalisée par le système Argos est basée sur la mesure de l'effet Doppler-Fizeau.
Cet effet se traduit par le changement de fréquence d'une onde sonore ou électromagnétique lorsque
la source des vibrations et l'observateur sont en mouvement l'un par rapport à l'autre.
L'effet Doppler
C'est un phénomène bien connu, et l'exemple le plus classique est celui du changement de la
"tonalité" du son émis par une locomotive selon qu'elle se rapproche (son aigu) ou qu'elle s'éloigne
(son grave) de l'observateur.
Lorsque le satellite se "rapproche" de la plate-forme, la fréquence des ondes électromagnétiques
mesurées par l'équipement embarqué est supérieure à la fréquence réelle d'émission ; le phénomène
est inversé lorsque le satellite s'éloigne de la plate-forme.
9
Manuel utilisateur Argos
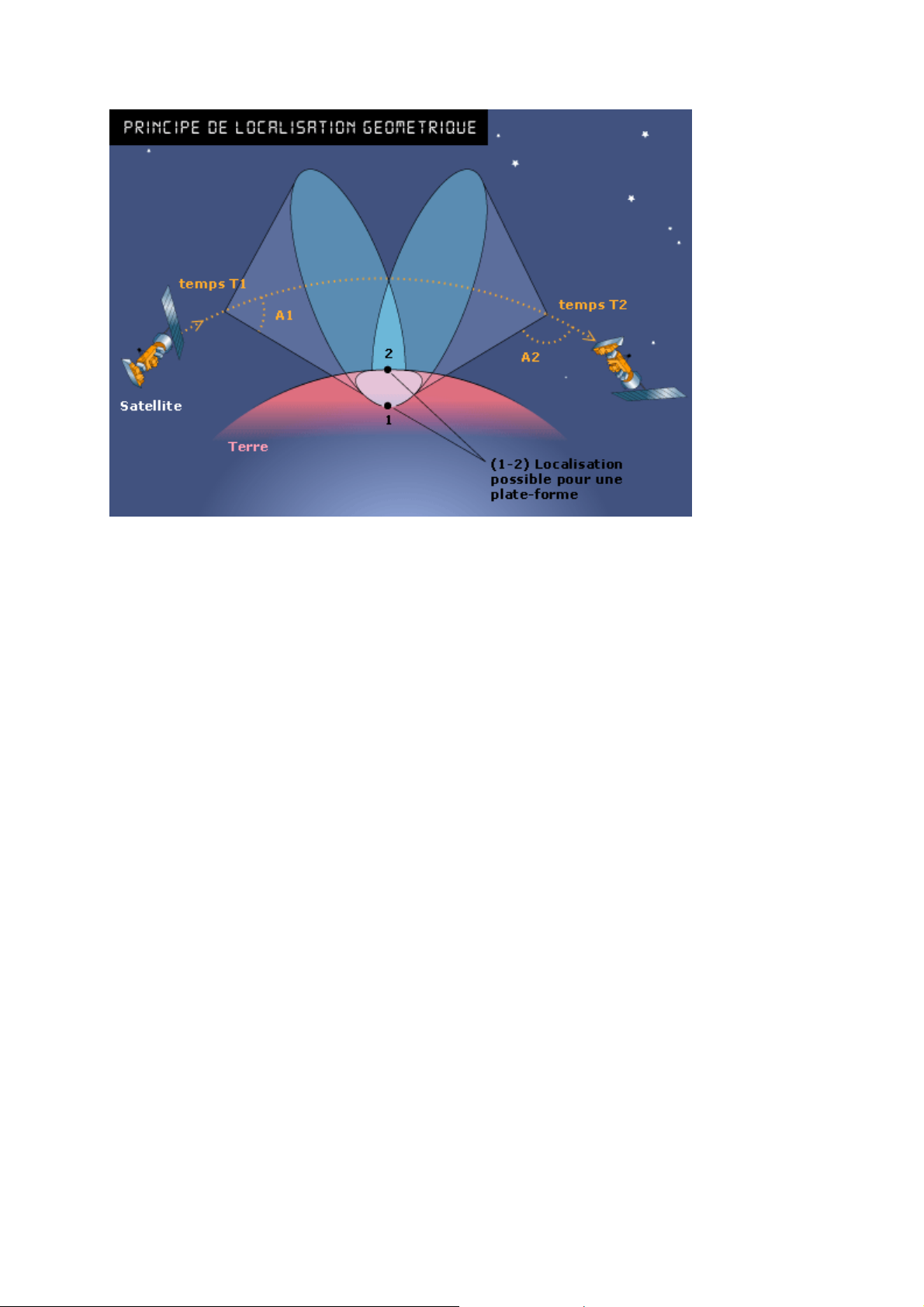
A chaque réception de message, l'équipement embarqué Argos effectue une mesure de la fréquence
et date l'arrivée de ce message. Pour chaque message, le lieu des positions possibles de l'émetteur
est un cône dont le sommet est la position du satellite à la réception du message et l'ouverture
fonction de l'écart entre la fréquence reçue et la fréquence de l'émetteur.
Calculs de localisations
Une première estimation de la position de la plate-forme est calculée à partir des premiers et derniers
messages collectés au cours d'un même passage satellite et de la dernière fréquence calculée de
l'émetteur. L'intersection des deux cônes correspondant à ces deux messages et du globe terrestre,
augmenté de l'altitude de l'émetteur, donne deux positions possibles.
10
3 - La localisation
Pour chacune de ces deux positions, la résolution de l'ensemble des équations (il y a autant
d'équations que de messages reçus au cours du passage) de mesure par
carrés permet d'estimer la position de l'émetteur ainsi que sa fréquence d'émission
Contrôles de vraisemblance
La solution est choisie en fonction de la précision obtenue, puis caractérisée selon les quatre
contrôles de vraisemblance suivants :
valeur minimale du résidu des moindres carrés,
•
meilleure continuité de la fréquence calculée,
•
distance minimum parcourue depuis la dernière localisation,
•
vitesse de déplacement inférieure à la vitesse maximale déclarée.
•
Elle sera ensuite distribuée si au moins deux contrôles de vraisemblance sont passés avec succès.
La prise en compte de l'altitude
Les calculs de localisation sont extrêmement sensibles aux variations d'altitude. Une erreur d'altitude
importante peut considérablement dégrader la précision d'une localisation, surtout dans le cas où la
configuration géométrique d'observation est défavorable. Pour améliorer la précision de la localisation,
un modèle numérique de terrain (MNT) est automatiquement intégré dans tous les calculs de
localisation pour les mobiles terrestres et les oiseaux. Décomposé en carrés de 30 secondes d'arc de
côté (soit 900 mètres à l'équateur), le MNT est utilisé pour estimer l'altitude de la plate-forme. Ce MNT
est construit à l'aide des données du modèle GTOPO30 de l'USGS.
la méthode des moindres
.
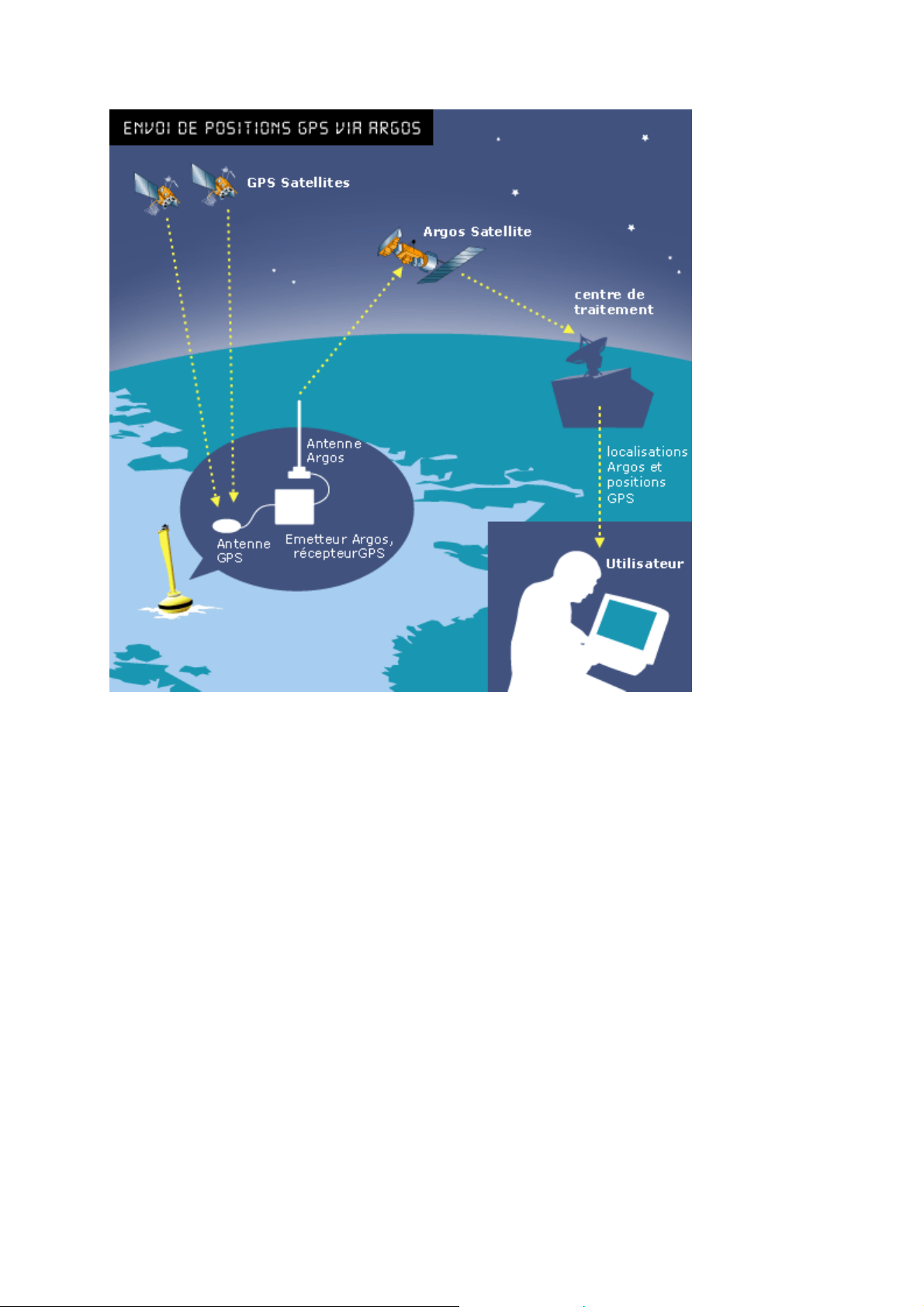
3.3 Transmettre des positions GPS via Argos
11
Manuel utilisateur Argos
La transmission de positions GPS par le système Argos offre les avantages suivants :
• les
• les l
Les positions GPS sont transmises dans les messages Argos. Pour que les positions GPS soient
traitées et présentées sous forme de localisation, leur décodage doit être déclaré au Bureau
Utilisateurs (Voir Chapitre 5).
localisations sont plus précises, et ne dépendent pas de la qualité de l'émetteur,
ocalisations peuvent être réparties plus régulièrement dans la journée.
3.4 Les classes de localisation
Depuis les débuts du Service Argos, les localisations ont été classées selon les critères suivants:
le type de localisation (Argos ou GPS),
•
l'estimation de l'erreur*,
•
le nombre de messages reçus pendant le passage.
•
Pour chaque localisation pour laquelle au moins quatre messages ont été reçu lors du passage
satellite, une estimation de l'erreur est calculée. L'erreur sur les positions Argos est supposée
isotropique et donc caractérisée par un seul chiffre, le rayon d'erreur. Ce rayon correspond à une
déviation standard (sigma) de l'erreur estimée de localisation ; la classe de localisation est attribuée à
12
3 - La localisation
partir de ce rayon d'erreur. Pour la majorité des applications du système Argos, la classe de
localisation et l'erreur associée suffisent pour faire du suivi et interpréter les trajectoires.
Pourtant, l'erreur de localisation n'est pas strictement isotrophique, et qu'il est plus réaliste d'associer
l'erreur à un ellipse qu'à un cercle. Les utilisateurs souhaitant une meilleure caractérisation de l'erreur
de le localisation, afin d'assimiler les positions dans un modèle de mouvement animalier, par exemple,
peuvent maintenant accéder à des informations relatives à l'ellipse d'erreur (voir Manuel Utilisateur,
Chapitre 3,6 et 3,7).En parallèle, la description classique de l'erreur, basée sur la classe de
localisation et le rayon d'erreur est toujours disponible pour tous les utilisateurs.
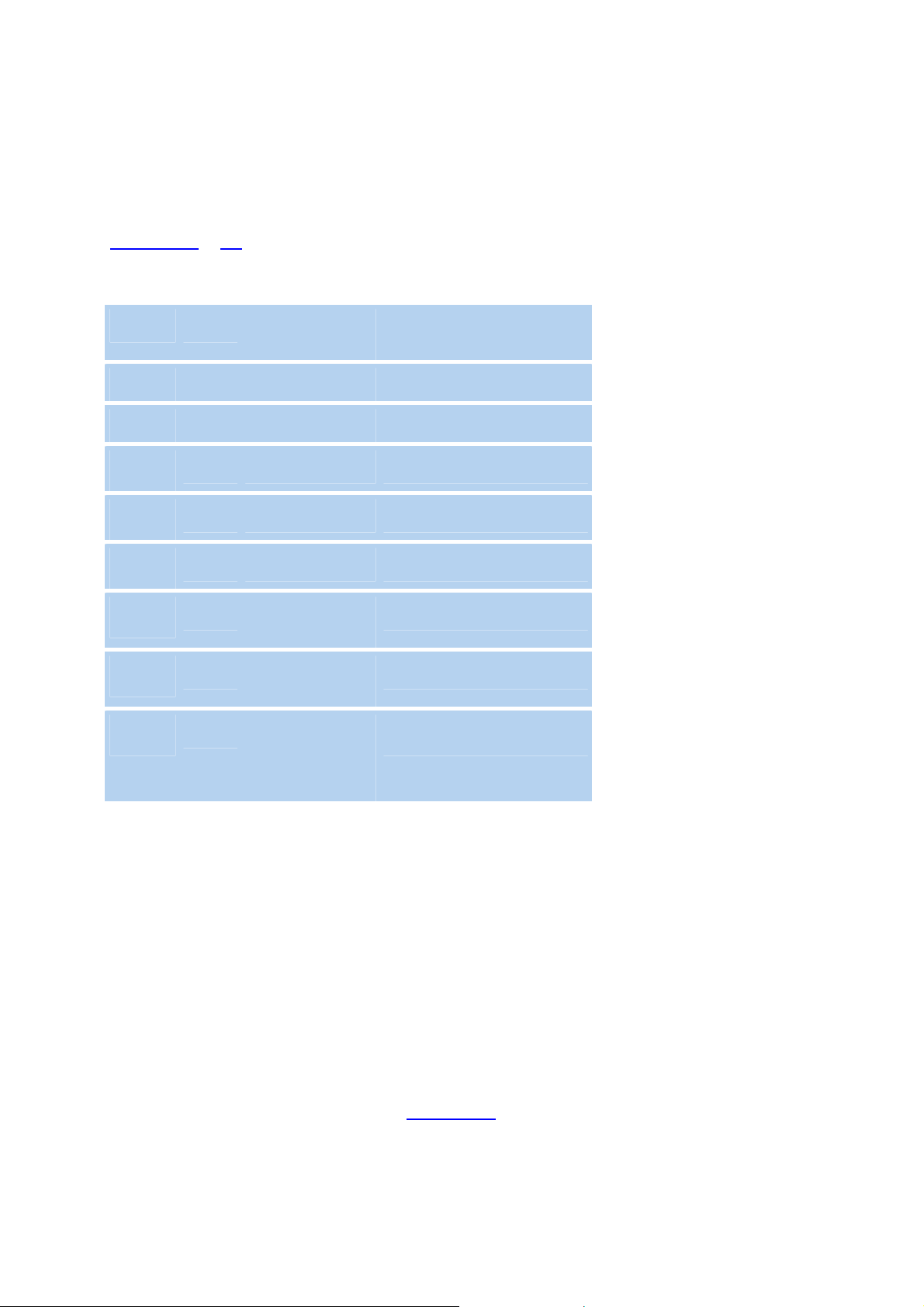
Class Type Estimation de
l’erreur
Nombre de messages
reçus par passage satellite
G
3
2
1
0*
A
B
Z
GPS < 100m 1 message et plus
Argos < 250m 4 messages et plus
Argos 250m < < 500m 4 messages et plus
Argos 500m < < 1500m 4 messages et plus
Argos > 1500m 4 messages et plus
Argos Pas d’estimation
de précision
Argos Pas d’estimation
de précision
Argos Localisation
invalidée par
l'algorithme de
calcul
* Classe 0 uniquement sur demande.
3 messages
2 messages
3.5 Service Plus/Auxiliary Location Processing
Ce service à valeur ajoutée fournit des informations complémentaires concernant les
performances de l'émetteur et les localisations non standard
calculées à partir de moins de quatre messages (classes A, B et les localisations rejetées Z) ou celles
qui ne sont pas validées par les tests de vraisemblances. Le service plus est activé par défaut pour
certaines applications, notamment le suivi d'animaux.
, par exemple, celles qui sont
3.6 Informations supplémentaires pour caractériser les estimations d’erreur pour les localisations de classe 0,1,2,3
En réalité, l’erreur de positionnement Argos est mieux représentée par une ellipse que par un cercle, à
cause de l’orbite polaire des satellites (voir
fournir des classes de localisation, basées sur le cercle d’incertitude, nous sommes également en
mesure de fournir des informations spécifiques qui permettent de quantifier l’ellipse d’erreur.
Chapitre 3.4). Aujourd’hui, alors que CLS continue à
13
Manuel utilisateur Argos
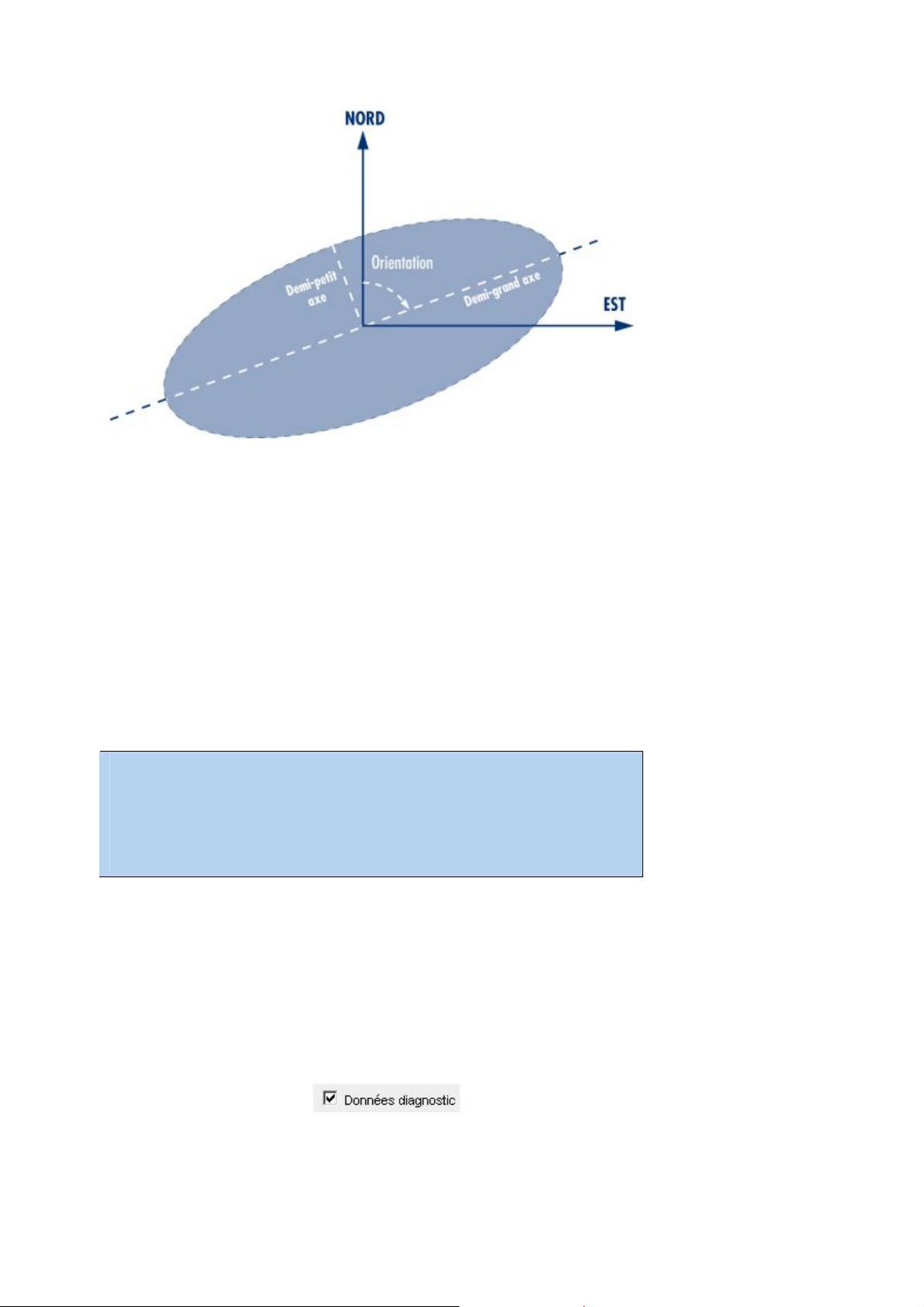
Pour les Classes 0,1,2,3, CLS fournit les valeurs suivantes qui correspondent à l’ellipse d’erreur :
• Le rayon d'erreur calculé
Le longueur du demi-petit axe
•
Le longueur du demi-grand axe
•
L’angle de l'ellipse (exprimé comme un angle avec le nord, en partant vers l’est)
•
GDOP* (Geometric Dilution of Precision)
•
Ces informations sont disponibles dans les Données Diagno stiqu es d'ArgosWeb et distribuées aux
utilisateurs par ArgosDirect
UNIQUEMENT au format tabulaire.
*Geometric Dilution of Precision (GDOP) est une mesure de l’impact de
la géométrie de la configuration entre le satellite et l’émetteur sur la
précision de la localisation. La précision de la localisation Argos dépend de
la valeur du GDOP ainsi que de la qualité de l’émetteur (stabilité de
fréquence). En règle générale, plus la valeur du GDOP est petite, plus la
position est précise.
3.6.1 Comment accéder à ses informations
Ces informations sont disponibles dans les
Données Diagnostiques.
Avec ArgosWeb
Les utilisateurs peuvent recevoir les nouvelles informations sur la précision des localisations
(paramètres de l’ellipse) en se connectant sur ArgosWeb. Il suffit d'afficher les données diagnostiques
en format tabulaire à travers les écrans
Données
en cochant l'option . Les informations sont contenues dans des
Consultation/Données ou Consultation / Téléchargement
colonnes clairement identifiées (voir ci-dessous). Pour des informations complémentaires, veuillez
consulter les aides en ligne sur ArgosWeb.
Avec ArgosDirect
14
3 - La localisation
Pour recevoir ces valeurs par ArgosDirect, les utilisateurs doivent impérativement les demander
auprès de leur bureau utilisateur. Les informations distribuées au format tabulaire sont contenues
dans des colonnes clairement identifiées (voir ci-dessous).
Désignation Rayon
d’erreur
Unité
mètres mètres mètres Degrés (par
Demi-grand axe
Demi-petit axe
Angle d'ellipse
rapport au
nord en
tournant vers
l’est)
GDOP
m/Hz
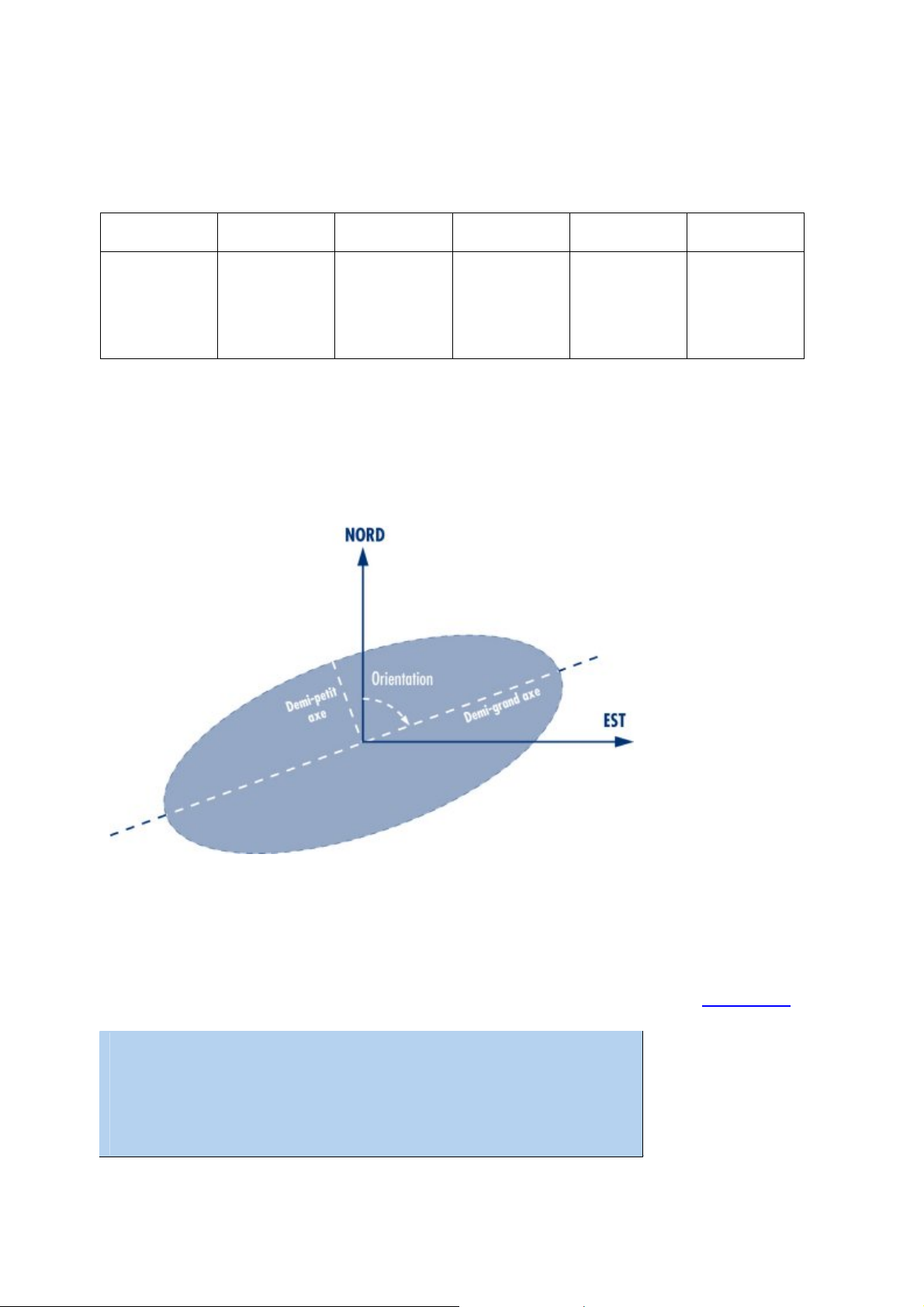
3.7 Informations supplémentaires pour caractériser les Classes A et B
Pour les classes de localisation A et B, pour lesquelles les utilisateurs ne disposaient d’aucune
information permettant de caractériser la précision auparavant, CLS fournit :
• l’angle de l’ellipse
• le GDOP* (Geometric Dilution of Precision)
Ces informations sont disponibles dans les Données Diagno stiqu es d'ArgosWeb et distribuées aux
utilisateurs par ArgosDirect
Pour plus d'informations sur comment accéder à ces paramètres, veuillez consulter le
*Geometric Dilution of Precision (GDOP) est une mesure de l’impact de
la géométrie de la configuration entre le satellite et l’émetteur sur la
précision de la localisation. La précision de la localisation Argos dépend de
la valeur du GDOP ainsi que de la qualité de l’émetteur (stabilité de
fréquence). En règle générale, plus la valeur du GDOP est petite, plus la
position est précise.
UNIQUEMENT au format tabulaire.
Chapitre 3,6.
15
 Loading...
Loading...