


INTERMEDIATE TENSION CONTROLLER
MWP – 12663
Instruction Manual
AO-70174 (Rev BA)

Table Of Contents
General Description .............................................................................................................4
Intermediate Drive System ...................................................................................................................4
Quickstart ............................................................................................................................. 5
Installation ............................................................................................................................ 6
Cabinet Installation ...............................................................................................................................6
PCB Link Positions ..............................................................................................................6
Controller Connections........................................................................................................ 7
Transducer Connections ..................................................................................................... 8
Intrinsically Safe Transducer Connections for Hazardous Area Installations.......................................8
Machine Sequence Logic and Connections, Digital Inputs ..................................................................9
Digital Output Connections ...................................................................................................................9
Power Supply Connections.................................................................................................................10
Tacho Connections .............................................................................................................................10
Encoder Connections .........................................................................................................................10
Length Counter ...................................................................................................................................10
Batch Hold ..........................................................................................................................................10
System Set Up .................................................................................................................... 11
Machine Parameters........................................................................................................... 12
Language ............................................................................................................................................13
Unit system .........................................................................................................................................13
Transducers before or after main motor .............................................................................................13
Output trim only...................................................................................................................................13
Output range .......................................................................................................................................13
Start in control screen .........................................................................................................................13
Enable MAN / AUTO / OFF keys ........................................................................................................13
Dual tension range..............................................................................................................................13
Minimum tension.................................................................................................................................13
Output level bias .................................................................................................................................14
Output level limit .................................................................................................................................14
Set point ramp rate .............................................................................................................................14
Display damping time .........................................................................................................................14
Display precision.................................................................................................................................14
Right transducer..................................................................................................................................14
Line Tacho or Encoder * .....................................................................................................................14
Calibrate Tension ...............................................................................................................14
Calibration of the Total Tension Analog Output............................................................... 15
Calibrate Speed .................................................................................................................. 15
Product Parameters ........................................................................................................... 16
Controller Tuning ...............................................................................................................17
PI Stability Settings .............................................................................................................................17
Maximum Trim ....................................................................................................................................17
Soft Start............................................................................................................................. 17
Operating ............................................................................................................................ 18
Change Passwords ............................................................................................................ 18
Safety and EMC ..................................................................................................................18
AO-70174 2 Revision BA

Table Of Contents
Additional Information ....................................................................................................... 19
External tension set point input...........................................................................................................19
Tension set point output .....................................................................................................................19
Adjusting the screen contrast .............................................................................................................19
Troubleshooting .................................................................................................................19
Installation Record Sheet................................................................................................... 20
AO-70174 3 Revision BA

WebPro Intermediate Tension Controller
General Description
The WebPro Digital Tension Controller is part of a closed loop tension control system with transducer
feedback. The Controller continuously controls the web tension to the TENSION SET POINT value and
displays the true web tension on an LCD screen, either as a percentage or in engineering units. The
screen will display the tension applied to each transducer separately by pressing the < LEFT tension or >
RIGHT tension key. The sum of the LEFT and RIGHT tensions is displayed when the < > TOTAL key is
pressed. The Controller will control to the TOTAL tension value even when the LEFT or RIGHT tension is
being displayed. The Controller also has a dual range tension indication feature.
The measurement of actual web tension is made by sensing, with strain gauge transducers (sometimes
referred to as "load cells"), the force on a sensing roller caused by the tension in the web. The electrical
signal from the transducers is a combination of tension force and sensing roller weight. The weight of the
sensing roller is zeroed out electrically, leaving the tension force only to be displayed on the screen.
For wide web applications two transducers are recommended, one on each end of the sensing roller; for
narrow web, wire, cable and filaments one transducer can usually be used.
Intermediate Drive System
With the Controller in automatic mode the
measured tension is compared with the
desired tension. Any tension error is multiplied
by the incoming line speed making the
correction speed proportional. This multiplied
tension error is then conditioned by the PI
then added to the line speed signal and used
as a speed demand to the controlled ( slave )
drive. This is described in the Machine
Parameter menu as; Output Trim only - NO.
Alternatively the trim signal only may be
output as +/- 2V or as +/- 10V maximum. This
is described in the Machine Parameter menu
as; Output Trim only - YES. When this mode
is used the controlled drive will usually require
a line speed input in addition to the trim input.
The transducers and the controlled drive may be before the master drive or after, this is selected in the
Machine Parameter menu. Both the master drive and the controlled drive should be four quadrant
regenerative types to prevent overhauling.
All drive electronics MUST be isolated from any supply voltage and the electronics common (0V) should
be earthed. If the drive electronics are not isolated consult CMC Inc BEFORE use.
N
0
0
1
AO-70174 4 Revision BA

WebPro Intermediate Tension Controller
Quickstart
The Controller is supplied with the software loaded for the application as ordered but it will require
commissioning before use.
For more detailed information refer to the various sections later in this manual.
1. Carefully unpack the Controller, remove the rear cover and detach the bag containing the accessories.
Attach the cable gland to the large hole in the rear cover. Mount the Controller in the operators panel
using the two keyhole brackets provided.
2. Position the links LK1 to LK5 on the Printed Circuit Board correctly for the type of transducer used.
Ensure that the mains voltage selector is set correctly.
3. Thread the mains supply cable through the gland and connect to the orange two part connector.
Thread the transducer cables, machine interlock cables, output cable and any other cables through the
most convenient of the four smaller holes and connect to the terminal strips. If an encoder is to be used,
thread the encoder cable through the rear cover and connect to the header using the crimps provided.
Additional holes may be drilled and extra glands for the cables may be fitted by the user.
Ensure that the encoder is connected correctly to prevent damage to the power supply.
4. Fix the rear cover to the Controller and tighten the gland to retain the mains cable for safety purposes.
5. Switch on, the POWER LED will light, the company logos will be shown briefly then the Introduction
screen will be shown.
6. Press 4, Commissioning, enter the default password, by pressing 5678 then press the ENTER key.
Press 1, Machine parameters, then scroll through and enter the parameters for the installation.
By default only one transducer, the LEFT transducer, is enabled. For installations with two transducers,
which is the normal situation for web applications, the RIGHT transducer must be enabled.
If a tacho is used the MAXIMUM input voltage is +10V DC.
If an encoder is used the number of pulses per second at maximum machine speed must be entered.
To accept and save the Machine parameters the CONFIRM key MUST be pressed.
7. Calibration for the sensing roller weight and maximum tension to be used is required; calibration for the
speed of the machine may also be required.
8. The default Product number is 1 with a PI stability of SLOW. This should be sufficient to put the
machine into service. To change the stability, open the Adjust PI stability screen from the Commissioning
menu, start the machine and observe the bar graph. Reduce the PI stability to MEDIUM or FAST until the
bar graph fluctuations just start to increase, then press CONFIRM.
AO-70174 5 Revision BA
55
380
(
)
WebPro Intermediate Tension Controller
Installation
The following parts are supplied:-
1. Controller, with software loaded for the application but requiring commissioning by the user.
2. Two keyhole mounting brackets.
3. Cable gland to be fitted to the rear cover and header connector kit for encoders.
4. Cabinet, if ordered.
5. Manual (this document).
Transducers and cables may also be supplied to complete the system
The Controller should be installed using 'best practice' and in accordance with all relevant regulations.
The Controller must be installed in a dry, non-hazardous location. A panel cut out 8.27in (210mm) wide X
7.01in (178mm) high is required. The Controller is 3.94in (100mm) deep, additional space for the cables
is needed.
The Controller is retained by two mounting brackets. Remove the four screws securing the mounting
brackets to the Controller. Insert the Controller into the cut out in the panel. Refit the four screws, attach
the mounting brackets to the Controller and tighten the two nylon screws to retain the Controller.
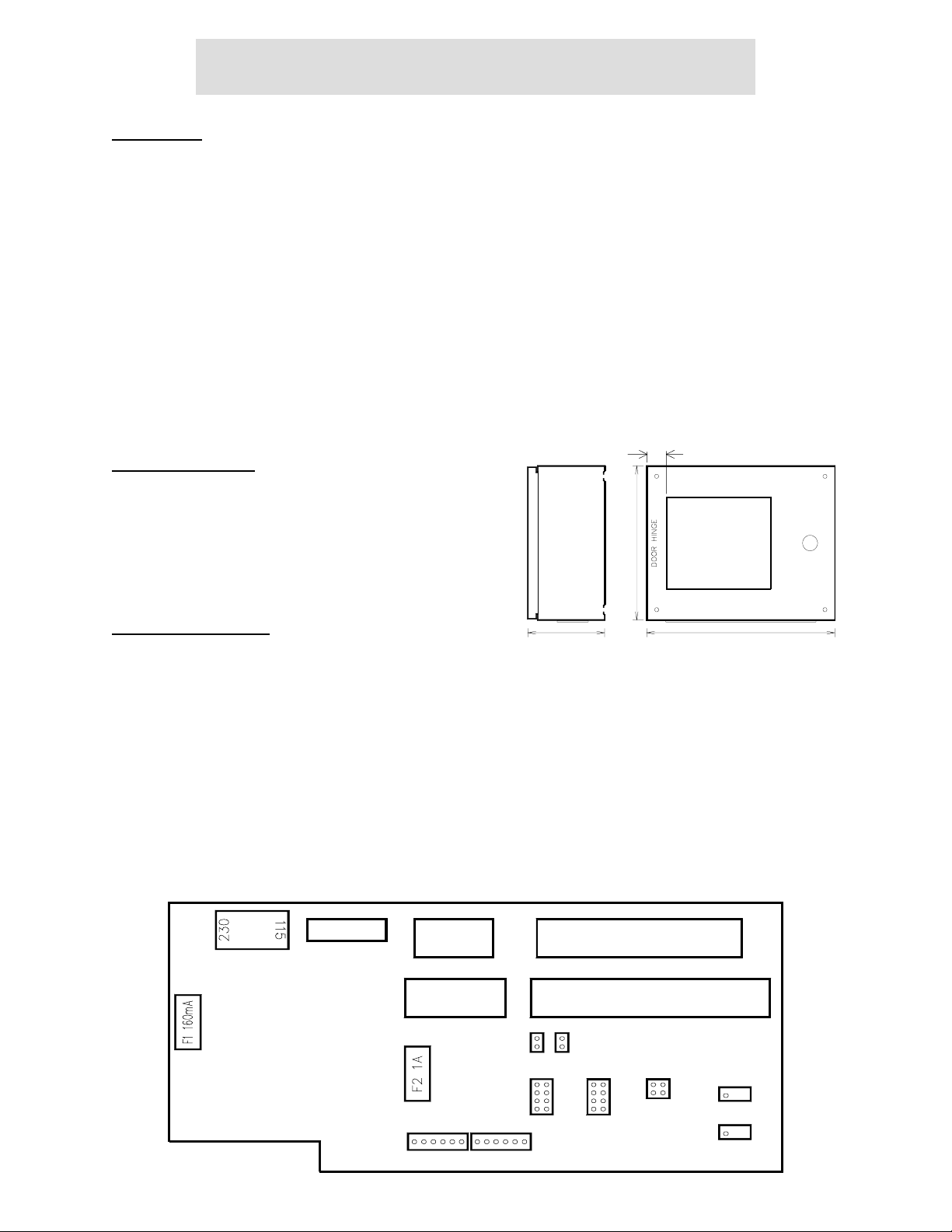
Cabinet Installation
The cabinet has rear mounting holes for M8 fixing. When
the Controller is supplied as a cabinet version the mains
11.8 in
300mm
supply is terminated inside the cabinet on a three way
terminal block. The incoming mains cable should be
securely fastened by the gland plate cord grip.
PCB Link Positions
The links LK1 to LK5 MUST be in the proper positions for
1
6 in.
(155mm)
correct operation. It may be found more convenient to position the links before connecting the Controller.
LK1 Excitation Voltage Position B This gives 5.6V for Cleveland-Kidder transducers
LK1 Excitation Voltage Position A This gives 10V for ACDF and foil transducers
LK2 and LK3 IN For Cleveland-Kidder transducers to complete the bridge
LK2 and LK3 OUT For full bridge transducers, the bridges are complete
LK4 and LK5 Gain Position A Normal gain for Cleveland-Kidder transducers
LK4 and LK5 Gain Position B High gain for Cleveland-Kidder transducers
LK4 and LK5 Gain Position C Normal gain for ACDF and foil transducers
LK4 and LK5 Gain Position D High gain for ACDF and foil transducers
The high gain positions providing three times the normal gain are used if the transducers are oversized
and there is insufficient signal level for accurate calibration.
LEN 312 541
TB1
TB2
TB5
2 in. (50mm)
CUT OUT
8.27 in. x 7.01 in.
210 X 178
(210x178mm)
ENTRY GLAND PLATE
10965423 87131211
15 in.
(380mm)
LOCK
1
TB3
HD2 HD1
6 16 1
AO-70174 6 Revision BA
3245687 9 10 1411 12 13 15
132 456
TB4
LK2
LK3
LK4
A
B
C
D D
LK1LK5
A
B
C
AB
VR2 SPAN
VR1 ZERO

WebPro Intermediate Tension Controller
Controller Connections
WARNING - Disconnect the Controller completely before any electric welding is undertaken on the
machine. Failure to carry out this precaution could damage the Controller and will invalidate the warranty.
WARNING - The PCB uses devices sensitive to electrostatic voltages. Do NOT touch any components
without first using proper electrostatic discharge ESD precautions.
The Controller uses Wago Cage Clamp terminals, it is recommended that the correct tool is used when
inserting the cables. Wago part number 210-120 is available from Wago or CMC Inc.
Do NOT strain the terminals or the PCB. The terminals are suitable for cable sizes 12-24 AWG, 0.1-
2.5sqmm. The cable ends should be terminated with ferrules or crimp tags.
It is necessary to remove the rear cover to connect the Controller, set the links and select the mains
supply voltage. Remove the rear cover and fit the cable gland (supplied loose) to the rear cover. Feed the
mains cable through the cable gland and connect to the two part connect as shown. Feed the transducer
cables and other cables through the most convenient holes in the rear cover and connect to the terminals.
Replace the rear cover and secure the cable gland to retain the mains cable for safety purposes.
All the Controller 0V commons, analog and digital, are connected to earth E and to the metal case.
TB4 – Analog I/O TB5 – Digital I/O
Connections for a typical Intermediate drive system
AO-70174 7 Revision BA

WebPro Intermediate Tension Controller
Transducer Connections
The Controller may be used with one half bridge transducer, two half bridge transducers, one full bridge
transducer or two full bridge transducers. The strain gauges may be semiconductor with 5.6V or 10V DC
excitation, each half bridge resistance 230S minimum; or foil with 10V DC excitation, each bridge
resistance 350S minimum.
For systems with a single transducer connect the transducer to TB3 Left and disable the Right
transducer, see Machine Parameters; Right transducer - Disabled/Enabled.
WHITE
BLACK
WHITE
BLACK
Cleveland-Kidder Transducers ACDF Transducers
Intrinsically Safe Transducer Connections for Hazardous Area Installations
CMC Inc tension transducers can be
located in a hazardous area to provide an
Intrinsically Safe installation to EN 50039
when a proprietary Zener Barrier module,
Part Number 4503
transducers are passive components and
are classified as simple apparatus by EN
50014. Strain gauge transducers (load
, is used. Tension
WHITE
BLACK
cells) will be damaged if subjected to the
500 volt insulation test required by EN
50020. To comply with Intrinsic Safety
regulations the body of the transducer must
be bonded to the I.S. earth using 4 square
millimetre green/yellow insulated cable.
WHITE
BLACK
Consult CMC Inc for connections to ACDF
transducers in I.S. installations.
I.S. connections for Cleveland-Kidder transducers
NOTE It is the responsibility of the user to ensure that all relevant safety regulations are complied with.
The integrity of all connections particularly the I.S. earth should form part of any maintenance procedure.
AO-70174 8 Revision BA

WebPro Intermediate Tension Controller
Machine Sequence Logic and Connections, Digital Inputs
WARNING - Do NOT connect the digital inputs to a negative or AC supply, this will cause damage and
will invalidate the warranty.
The digital inputs are opto-isolated and over voltage protected. The maximum input voltage is +24V DC.
The AUTO/OFF functions may be selected from the keypad if Enable AUTO/OFF keys is Enabled. The
full range of Machine Sequence Logic is selected externally, see Machine Parameters.
Option A
Disabled, the input is inactive.
0V=OFF, requires the input to be open to 0V with a volt free contact closure or logic switch - Option A,
or alternatively taken high ( +5 to +24V ) with a pull down resistor R< 1KS to function - Option C.
0V=ON, requires the input to be taken to 0V with a volt free contact closure or logic switch - Option B,
or alternatively open to high ( +5 to +24V ) with a pull down resistor R< 1KS to function - Option D.
Machine Start, this toggles between AUTO and tension OFF, 'Soft Start' and 'Soft Stop' features apply.
Select Auto, a pulse greater than 100mS will put the Controller into the Automatic control mode.
Select Manual, a pulse greater than 100mS will put the Controller into the Manual control mode.
Select Off, a pulse greater than 100mS will put the Controller into the tension OFF mode.
Diameter Hold, this will hold the current reel diameter value.
Diameter Reset, a pulse greater than 100mS will reset the held diameter value to the full reel value.
Batch Hold, this will hold the current output value and start from this value when released.
Enable Ext SP, this will allow an external tension set point to be used and will disable the keypad setting.
Select Auto; Select Man; Select Off; the Controller will remain in the selected mode until an alternative
input is selected even after the primary contact closure or logic level is removed. However, if the contact
is maintained closed this will override any other contact or key.
Digital Output Connections
Option B
The digital input is shown in the OFF position
Option C
Option D
The digital outputs use open drain mosfets. The maximum that each output
can switch is +24V DC at 100mA. The output may be used as a TTL output
with a suitable pull up resistor. A freewheel diode should be connected
across any load inductance to prevent damage to the mosfet and to
suppress EMI.
When the low tension range is selected by pressing the LOW key the digital
output on TB4/11 will be switched OFF, switched ON in high tension range.
When mains powered, the total current that can be taken from the Controller 24V DC supply by the digital
outputs is 50mA maximum. When 24V DC powered this current will depend on the users supply.
AO-70174 9 Revision BA

WebPro Intermediate Tension Controller
Power Supply Connections
The Controller may be powered by 110-120V, 220-240V 50/60Hz AC at 15VA or by 22-26V DC at 1A.
Before connecting the Controller to the mains ensure that the mains voltage selector switch is set
correctly. The mains supply is terminated on TB1, a two part connector. The mains fuse F1 is 160mA.
The 24V DC supply must be smooth and free from noise. The 24V supply is terminated on TB4; positive
to pin 1, negative to pin 2. Pin 2 is connected to ground and the metal case. The 24V fuse F2 is 1A.
WARNING - Under no circumstances apply a voltage in excess of 36V between TB4/1 and 0V ground,
this will cause serious damage and will invalidate the warranty.
Do not connect the AC mains and the 24V DC supplies to the Controller at the same time.
Tacho Connections
The Controller accepts a tacho input of +10V DC MAXIMUM. If the
tacho voltage is higher than this, insert a resistor of appropriate
value and dissipation in series with the Controller input. The
Controller input resistance is 100KS. The input common 0V is
connected to earth.
The tachos must be Enabled, see Machine Parameters.
+
_
Encoder Connections
Low pass filters should not be included in the encoder signal
leads, these may degrade the pulse edges and introduce
errors. The line speed encoder is terminated on header HD1.
A +5V DC supply at 100mA is provided by the Controller on the
headers, the Controller +24V DC supply may also be used.
Encoders of 100 to 1000 pulses per revolution are suggested.
The maximum input frequency of the Controller is 100kHz.
The encoder must be Enabled, see Machine Parameters.
The encoder wires MUST be crimped correctly using the proper
tool to ensure reliable operation.
Length Counter
If an encoder is available for the line speed this may be used as the input to the Length Counter feature.
The length is counted up. If the Length Outputs in the Product Parameter menu is enabled, at the
Preceding Length coincidence the output from TB5/10 is switched OFF, at the Full Length coincidence
the output from TB5/11 is also switched OFF, see Digital Output above for more details. These outputs
may be used to slow and then stop the machine. NOTE the Preceding Length is the value before the Full
Length, for example if the Full Length is 500 metres and the machine needs to slow down at 480 metres,
set the Preceding Length to 20 metres. Encoder compliment outputs are not necessary for the Length
Counter feature. The count may be reset manually at any time by pressing the RESET LENGTH key. The
maximum number of pulses allowed is 9999 pulses/metre or 3000 pulses/foot.
Batch Hold
This feature does not operate with the Intermediate Controller.
AO-70174 10 Revision BA

WebPro Intermediate Tension Controller
System Set Up
The system must be set up before the Controller is used for the first time. The on screen prompts are very
easy to follow and will guide the user through the Controller system set up and commissioning. The
parameters can be easily changed later if necessary.
Press the SYSTEM SET UP key (called SET UP) to cancel an action or entry and return to the previous
screen. Press the CONFIRM key when finished with a screen to confirm the entries. If the CONFIRM key
is not pressed, the entries will not be saved to the memory and the existing parameters will be used.
Pressing CONFIRM will also exit that screen and return to the previous screen.
When entering Commissioning values and Product Parameters, some values are entered by the numeric
keys, some are entered by the +/- keys; this will be shown in the relevant sections later.
Use the Scroll keys to move the cursor up or down the menus. Enter a value using the ENTER key, the
cursor will move down to the next item. The CONFIRM key must be pressed to save values to memory.
When the Controller is switched on, the program is loaded, the company logos are shown briefly then the
Introduction screen below is shown. This sequence can be changed, see "Start in control screen" later.
CMC Advanced Digital Tension Controller
1. Control
2. Change Product
3. Product Parameters
4. Commissioning
Press 1 This will show the Control screen. To exit the Control screen press SET UP.
Press 2 Enter a product number (1-20). Product 1 is the default.
Press 3 Enter the SET UP password 1234 ( factory default ) and then press ENTER.
Product # Parameters (SET UP = cancel)
Length outputs Disabled, Enabled
Preceding length ( if a line encoder is available )
Full length ( if a line encoder is available )
PI stability setting *
Maximum trim ( Output trim only - NO )
Current tension set point ( The last tension value used )
An asterisk * indicates that a further menu will open if this item is selected.
Press 4 Commissioning password 5678 ( factory default ) and then press ENTER .
Commissioning Menu
1. Machine Parameters *
2. Calibrate tension *
3. Calibrate speed *
4. Adjust PI stability *
5. Change Passwords *
6. Diagnostics *
An asterisk * indicates that a further menu will open if this item is selected.
AO-70174 11 Revision BA

WebPro Intermediate Tension Controller
Machine Parameters
From the Commissioning Menu; press 1 to show the Machine Parameters screen
Machine Parameters (SET UP = cancel)
changed
by using
default
value
Language English Deutsch Français Italiano Español
Unit system S.I. / Metric kgf / Pound/foot / Percent
Controller application Intermediate
Transducers before Before / After
or after main motor
Output trim only Yes / No
Output range +/- 2V / +/- 10V
Start in control screen No / Yes
Enable MAN/AUTO/OFF keys No / Yes
Dual tension range No / Yes
Full scale (low) Enter a value
Full scale (normal) Enter a value
Minimum tension 3% minimum, 20% maximum
Output level bias 20% maximum
Output level limit 100% maximum
Set point ramp rate 1% per second, 100% per second
Display damping time 0.1 seconds, 3 seconds
Display precision 0.1, 0.5, 1, 5, 10
Digital inputs
MACHINE START Disabled, 0V=OFF, 0V=ON
SELECT AUTO Disabled, 0V=OFF, 0V=ON
SELECT MANUAL Disabled, 0V=OFF, 0V=ON
SELECT OFF Disabled, 0V=OFF, 0V=ON
DIAMETER HOLD Disabled, 0V=OFF, 0V=ON
DIAMETER RESET Disabled, 0V=OFF, 0V=ON
BATCH HOLD Disabled, 0V=OFF, 0V=ON
ENABLE EXT SP Disabled, 0V=OFF, 0V=ON
Show internal calibration * No / Yes
Right transducer Disabled, Enabled
Line tacho or encoder * Disabled, Tacho, Encoder
An asterisk * indicates that a further menu will open if this item is selected.
Remember to press the CONFIRM key, otherwise the parameters will not be saved to the memory.
Note Start in Control Screen
The Controller is despatched with this item set to "No". We recommend that after all commissioning is
finished that this is then set to "Yes". When the Controller is now switched on, the program is loaded, the
company logos are shown briefly and then the Control or operating screen ready for use by the operator.
Note
The Controller will not accept an invalid input value which is outside the limits of operation. If an invalid
input is attempted the Controller will revert to the previous valid input.
+/ +/-
+/-
+/ +/ +/ +/ +/ numeric key
numeric key
numeric key
numeric key
numeric key
numeric key
numeric key
numeric key
+/ +/ +/ +/ +/ +/ +/ +/-
+/ +/ +/-
English
S.I.
before
No
0-10V
No
No
No
5000N
5000N
6%
0%
100%
5%/sec
2 secs
1
Disabled
Disabled
Disabled
Disabled
Disabled
Disabled
Disabled
Disabled
No
Disabled
Disabled
AO-70174 12 Revision BA

WebPro Intermediate Tension Controller
Language
(English, Deutsch, Français, Italiano, Español)
The default language is English. If changed, all text shown on the Controller will be changed to
that language and an extra item "5 - Translations" will be added to the Introduction screen.
Unit system
Transducers before or after main motor
Output trim only
Output range
(SI (newtons), Kgf, pounds/foot, percent)
Select a unit system. All items which use units will be changed accordingly.
(Before / After)
Select as required
(Yes / No)
Output trim only - No; this will combine the tension trim signal with the line speed signal to output
the speed demand to the controlled drive. This combined signal will always be positive.
Output trim only - Yes; this will output a +/- signal depending on the difference between the
measured tension and the tension set point.
(+/- 2V / +/- 10V For Output trim only – Yes)
Select as required. Note, a line speed signal 0 to +10V to the controlled drive will usually be
required, the Controller trim signal inputting to an auxiliary direct speed input.
Start in control screen
(No / Yes)
The Controller is despatched from the factory with this set to "No". We recommend that after all
commissioning and set up is finished that this is then set to "Yes". When the Controller is now
switched on, the program is loaded, the company logos are shown briefly and then the Control or
operating screen is shown ready for use by the operator.
Enable MAN / AUTO / OFF keys
(No / yes)
When using the Digital Inputs to control the sequence of the system, this item should be set to
"No" to prevent accidental operation.
Dual tension range
(No / Yes)
Select "Yes" if required. Enter two values of tension. The (normal) value must be the same value
as entered during Calibrate tension. The (low) value should not be less than one third of the
(normal) value. Terminal TB4/11 is switched OFF when LOW is selected from the front panel.
See Digital Output Connections for more details.
Minimum tension
Enter a value, the minimum tension is 3%, the maximum is 20%. The system may not function
correctly and may be unsafe if it is operated at zero tension.
AO-70174 13 Revision BA

Output level bias
(For Output trim only – NO)
This item will output a signal at all times, for example to overcome friction in the controlled drive.
The value of this item will reduce as the line speed increases so that at maximum line speed the
bias is reduced to zero, this is because a maximum of 10V only can be output from the Controller.
This bias does not operate with Output trim only - YES, the controlled drive should provide this.
Output level limit
This item will scale the output signal for both trim only and combined trim and line speed. This
item should be set according to the controlled drive maximum speed input voltage, for example if
the drive max speed is 10V set this item to 100%, if the drive max speed is 5V set this to 50%.
Set point ramp rate
It may cause an unacceptable disturbance and be unsafe if the tension is changed too quickly.
Enter a value which is slightly slower than the PI stability rate so that the system can maintain the
desired tension value as the set point is changed.
Display damping time
If the tension is fluctuating enter a value between 0.1 and 3 seconds so that the display is steady.
The Display Damping operates on the analog bar graph and the digital display.
Display precision
WebPro Intermediate Tension Controller
(1, 5, 10 ( 0.1, 0.5 and 1 for percent units ))
Enter a value so the display can be read easily and the tension set point easily entered. This item
also sets the resolution of the tension set point value.
Right transducer
Disabled, Enabled
Select "Disabled" when a single transducer is used, for example in wire and cable or narrow web
applications. The single transducer must be connected to the "Left" terminals using TB3.
Line Tacho or Encoder *
If an encoder is selected enter the maximum number of pulses per second when the machine is
at maximum speed. This allows for the encoder pulses per revolution and the gear ratio used.
Enter the number of pulses per metre or foot if the Length Counter feature is required. The
maximum number of pulses allowed is 999 pulses/metre or 3000 pulses/foot.
The tacho or encoder must be Enabled in order to function
All Machine Parameters and Product Parameters, including the current TENSION SET POINT value are
saved to non-volatile memory. This ensures that when the Controller is switched off or if the power is
removed, the parameters are saved.
Calibrate Tension
To calibrate the Controller correctly a spring balance or weights to provide the required tension force and
some flat webbing or rope to simulate the web will be required. If the force is insufficient for the maximum
required tension value, the Controller may be calibrated proportionally. The force should be no lower than
25% of the maximum or the accuracy of tension measurement will be reduced.
Switch on and allow to thoroughly warm up.
From the Commissioning Menu; press 2 to show the Calibrate tension screen.
AO-70174 14 Revision BA

WebPro Intermediate Tension Controller
Follow the on screen prompts. Note The Tension must be
calibrated before the Speed is calibrated.
The Auto zero will compensate for the sensing roller weight
and for any of the other analog zero offset voltages. Ensure
that the line speed and reel speed signals and the external
tension set point (if used) are at zero.
The Controller will calibrate both transducers
simultaneously.
The rope must be in the exact center of the web path so that
each transducer is equally loaded.
After calibrating the tension, return to the Control screen and verify that the display shows zero when no
tension is being measured and that the display shows the correct tension value when the weight or spring
balance force is applied.
On first calibration two or three load applications may be necessary to "seat" the transducers.
Possible error messages:
Calibration has failed. Either the weight or spring balance force was
much too small for accurate calibration, or the transducers are not
operating correctly.
Press the SET UP key to return to the Commissioning menu
Calibration aborted
This is shown if the SET UP key is pressed during the calibration. The Controller will return to the
Commissioning Menu screen.
The controller has not been calibrated or the settings are no longer
valid. Press any key to continue.
Calibration of the Total Tension Analog Output
The Total Tension analog output provides 0 to +10V at 2mA for a remote meter or chart recorder.
Make sure that no tension is being measured, then adjust VR1 until zero volts are measured at TB4/12.
Using a known weight or spring balance apply the maximum tension and adjust VR2 to give +10V.
The output is not damped. These adjustments must be done with the rear cover removed.
Calibrate Speed
From the Commissioning Menu; press 3 to show the Speed calibration screen.
Follow the on screen prompts. Note the Tension must be calibrated before the Speed is calibrated.
AO-70174 15 Revision BA

WebPro Intermediate Tension Controller
Possible error messages:
Calibration has failed. Either the speed was much too low for accurate
calibration, or the tachos and/or encoders are not operating correctly.
Press the SET UP key to return to the Commissioning menu
Calibration aborted.
This is shown if the SET UP key is pressed. The Controller will return to the Commissioning Menu screen.
Tension must be calibrated before speed.
Select Calibrate tension from the menu.
The controller has not been calibrated or the settings are no longer
valid. Press any key to continue.
Product Parameters
The default is Product Number 1.
Product # Parameters (SET UP = cancel)
Length outputs Disabled, Enabled
Preceding length ( if a line encoder is available )
Full length ( if a line encoder is available )
PI stability setting *
Maximum trim ( Output trim only - No )
An asterisk * indicates that a further menu will open if this item is selected.
If an encoder is available enable the Length Outputs and set the Preceding Length and Full Length.
The procedure for the PI stability settings is explained in Controller Tuning, below.
AO-70174 16 Revision BA

WebPro Intermediate Tension Controller
Controller Tuning
It is essential that all motor drives are correctly set in accordance with the suppliers instructions BEFORE
the Controller is commissioned. The Controller will not compensate for incorrectly set drives.
PI Stability Settings
There are two methods of setting the PI stability; through the Product Parameter menu with the machine
at rest or through the Adjust PI stability menu with the machine running.
PRODUCT NUMBER
PI STABILITY
PROPORTIONAL BAND
INTEGRAL REPEAT
MAX TRIM
MEDIUM
800%
10%
1
*
8S
TENSION S.P.
45 N
%OUTPUT
Access the Adjust PI stability menu from the Commissioning menu. Run the machine with the Controller
in Auto at a Tension Set Point of approximately 50%. Use the SCROLL keys to select the parameter to be
changed and adjust the parameter using the numeric keys or the +/- keys. Press the CONFIRM key to
implement and save the change. An asterisk alongside the Product Number indicates that a parameter
has been changed and that the CONFIRM key must be pressed to implement and save the change.
When the best performance is achieved stop the machine, remember to press CONFIRM and then press
SET UP to return to the Commissioning menu.
To simplify the tuning there are five factory set PI values. One of these values should be suitable for most
applications. If it is found necessary to apply different PI values, select Custom and starting from PI
values that gave stable but sluggish operation, reduce the P band % value and reduce the I time value
until the desired performance is achieved. Remember to press the CONFIRM key before exiting the
Product Parameter or the Adjust PI stability menus in order to implement and save any changes.
The five preset PI values are:
very slow slow medium fast very fast
Proportional band 2000% 1200% 800% 500% 200%
Integral time 20 sec 12 sec 8 sec 5 sec 2 sec
Maximum Trim
(For Output trim only - NO.)
The amount of trim may be selected in the Product parameter or Adjust PI stability menus, a rigid material
will require less trim than an extensible material.
Soft Start
The Controller is switched to automatic control immediately the Machine Start or Select Auto contacts are
operated or the Auto key is pressed. The Controller is switched off immediately these contacts are
released or the Tension OFF key is pressed.
AO-70174 17 Revision BA

WebPro Intermediate Tension Controller
Operating
A typical Control screen is shown below.
The Set Taper and Manual features do not operate with the Intermediate Controller.
The Auto Tension set point may be set with the numeric keys followed by ENTER or by the +/- keys.
The analog tension set point triangle is only visible when the Controller is in Auto control. The measured
tension analog bar graph and the set point triangle should coincide when in control.
Change Passwords
From the Commissioning Menu; press 4 to show the Change Passwords screen.
Commissioning password: Enter the number and press ENTER
Enter new set up password: Enter up to four digits and press ENTER
New password again Enter the same number and press ENTER
** Password changed **
New commissioning password: Enter up to four digits and press ENTER
New password again Enter the same number and press ENTER
** Password changed **
The factory default SET UP password is 1234
The factory default COMMISSIONING password is 5678
A password may be up to nine digits long, alternatively a single digit is a valid password.
Safety and EMC
Safety is paramount at all times.
The Controller has a number of built in safety features; password protection for the Product Parameters, a
different password for Commissioning, the MAN/AUTO/OFF keys may be disabled, the Controller may
only be changed to LOW tension when the tension is OFF and all SET UP keys are disabled when MAN
or AUTO are selected. The KEY LED will confirm if any key is pressed. The Controller will not accept an
invalid input value which is outside the limits of operation; if an invalid input is attempted the Controller will
revert to the previous valid input. The Controller has been designed to meet UL and CSA requirements.
The Controller is self certified as compliant with the EC Low Voltage Directive 73/23 and is CE marked.
The Controller is self certified as compliant with the EC EMC Directive 89/336. However the EMC
performance will depend on the installation and environment and CMC Inc can give no guarantee that the
installation will be free of problems. The Controller must be installed using best EMC practice and in
particular the earth connection must provide a good EMC path to earth.
AO-70174 18 Revision BA

WebPro Intermediate Tension Controller
Additional Information
The CCFL ( cold cathode fluorescent light ) has a minimum expected life of 20,000 hours.
The non-volatile memory is battery backed. The battery has an expected life of one year without a
recharge. The battery will recharge when the Controller is powered.
During power up the Controller may output a signal which may cause the machine to move if the
controlled drive is powered and enabled.
External tension set point input
This is an analog signal of 0 to +10V DC, for Master - Slave applications. The input resistance is 100KS.
The EXT SET POINT must be enabled in Machine Parameters to use this feature.
Tension set point output
This is an analog signal of 0 to +10V DC at 2mA maximum, for Master - Slave applications.
Adjusting the screen contrast
There are two unmarked keys, one below the CONFIRM key the other below the TENSION OFF key.
Press both together and release, the KEY LED will flicker. Whilst flickering press one or the other
unmarked key as required to adjust the screen contrast, release and allow the flickering to terminate.
Troubleshooting
With the exception of the fuses, F1 - 160mA and F2 - 1A, there are no user replaceable or serviceable
parts in the Controller. If a fuse is ruptured the cause should be investigated before replacement.
1. If the POWER LED is lit, the incoming supply and fuses F1 rated at 160mA and F2 rated at 1A are
correct. If the screen is blank or the backlight is not functioning the Controller must be returned to CMC
Inc.
2. Check that the transducers are wired correctly and that the excitation voltage between TB2 (1 and 4),
and between TB3 (2 and 5) is correct for the type of transducers used. Reset link LK1 if required.
3. Check that the Machine Sequencing switching is wired correctly and enabled from the Machine
Parameters screen.
4. Check that the Output Level Limit or Max Trim are not set to zero, 0%.
5. Observe if the tension bar graph is fluctuating while in AUTO mode. If the fluctuation is greater than +/5% of maximum tension, investigate the motor and drive to confirm that it is of a type suitable for tension
control with adequate torque rating and this torque is constant as it rotates, that all shafts and rollers are
concentric and rotate freely, and the web speed is constant.
AO-70174 19 Revision BA

WebPro Intermediate Tension Controller
Installation Record Sheet
Installation Date:
Customer Address Machine name
Controller
Application
Ramp
Rate
Product
Number
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
Passwords Set Up .................... Commissioning ....................
Supply Voltage Language
Please copy and return to CMC Inc. for warranty, assistance and registration purposes.
Stop
Time
Material
System
Units
Damping
Time
Stability
Prop Integral
Output
Range
Display
Precision
or type
Tension Range
Low High
Friction
Static Dynamic
Diameter
Core Full
Purchase
Order No.
Minimum
Tension
Tacho
Yes / No
Length
Pre Full
CMC Inc
Order number
Output
Bias Limit
Encoder
Pulses per length
Inertia
Time Coef
Trim
%
AO-70174 20 Revision BA
 Loading...
Loading...