

Page 1
C H A P T E R ➆
The information in this chapter will enable you to:
❏ Use this chapter as a quick-reference for system performance specifications
Z600 Electrical Specifications
Electrical specifications for the Z Drive’s input and output power are
provided in this section.
Input Power
❏ Voltage (Nominal) 120VAC (1 or 3-phase) or 240VAC (1 or 3-phase )
❏ Voltage (Range) 92-130VAC (1 or 3-phase) or 205-252VAC (1 or 3-phase)
❏ Frequency (Range) 47-66 Hz
❏ Current (Max. cont.) 15A (rms) 3-phase or 26A (rms) 1-phase
❏ Power (Max. cont.) 6.2 KVA
❏ Fuses 20A slow blow—Not user accessible
❏ Isolation transformer Not required
The actual input power and current is a function of the motor's operating
point (speed and torque) and the duty cycle. You can de-rate the fuses and
isolation transformer by scaling the above numbers by your actual
requirements. The numbers above reflect the servo motor and drive
operating at rated speed and rated torque at 100% duty.
Hardware Reference
Output Power
❏ Voltage 405 VDC (maximum)
❏ Frequency 0 - 400Hz fundamental (7 kHz PWM)
❏ Current 20A continuous per phase sinusoidal (14.14Arms)
❏ Regen/power dump Optional accessory
Z600 Motor/Drive Configuration
The Z600's hardware is pre-configured to control Z600 motors. The Z600 series
drives only Z600 motors, the Z800 series drives only Z800 motors, and the Z900
series drives only Z900 motors. Be sure that your drive type matches your motor type
(Z600, Z800, or Z900). If you have questions about the Z motor/drive configuration,
call your local Automation Technology Center (ATC) or distributor.
40A peak per phase sinusoidal (28.3Arms)
Chapter ➆ Hardware Reference
85
Page 2
Z600 Technical Data
Continuous Stall Torque*
Peak Torque (±10%)
Rated Torque (±10%)
Rated Power
Rated Speed
Rated Current (line)
Peak Current (3.3 seconds max)
Max. Cont. AC Input Current
(3 phase 240VAC)
Rotor Inertia
Motor Weight
Shipping Weight
Z600 Series Indexer/Drive Performance Specifications
Positional Repeatability
Repeatability: ±0.088 degrees, unloaded
Units Z-605 Z-606 Z-610 Z-620 Z-630 Z-635 Z-640
oz-in
lb-in
lb-ft
Nm
oz-in
lb-in
lb-ft
Nm
oz-in
lb-in
lb-ft
Nm
hp
kWatts
rpm
rps
A (rms) 5.0 5.3 14.1 14.1 14.1 14.1 14.1
A (rms) 16.6 17.2 28.2 28.2 28.2 28.2 28.2
A (rms) 6 6 15 15 15 15 15
oz-in2 (mass)
2
oz-in-sec
Kg-m2 x 1E-6
lbs
kg(f)
lbs
kg(f)
346
22
1.8
2.4
1083
68
5.6
7.7
321
20
1.7
2.3
2.0
1.5
6200
103
5.45
0.01
99.6
10
5
51
23
633
40
3.3
4.5
1954
122
10.2
13.8
576
36
3.0
4.1
2.1
1.5
3600607000
9.45
0.02
172.9
13
55
25
867
54
4.5
6.1
1733
108
9.0
12.2
616
39
3.2
4.4
4.3
3.2
117
13.73
0.04
251.2
16
6
58
26
7
1743
12.3
3486
18.2
24.6
1538
10.9
3700622500423000501600
35.87
0.09
656.0
109
9.1
218
96
8.0
5.6
4.2
29
13
70
32
2475
155
12.9
17.5
4951
309
25.8
35.0
2172
136
11.3
15.3
5.4
4.0
50.79
0.13
929.0
32
15
73
33
2458
154
12.8
17.4
7008
438
36.5
49.5
2054
128
10.7
14.5
6.1
4.5
56.21
0.146
1028.0
37
16
78
35
4114
257
21.4
29.1
8228
514
42.9
58.1
3729
233
19.4
26.3
5.9
4.4
27
111.21
0.29
2034.0
51
23
92
42
Positional Accuracy
Resolver Accuracy: ±7 arc minutes
Resolver-to-Digital Converter Accuracy: ±8 arc minutes (For finer
accuracies, contact Compumotor—800-722-2282.)
Motor/Drive Compatibility
Different motors can take different amounts of current and require different
tuning parameters for typical loads. The CMTR (Configure Motor Type)
command sets up a drive for a particular motor. By issuing CMTR, motor
current levels and default parameters are recalled from memory. Do not
exceed the current level specified for the motor, excessive current levels will
damage the motor. The following information is provided in case you must
modify the motor/drive configuration.
The following commutation procedure causes violent motor motion. All loads should
be removed from the motor shaft before you begin this procedure.
☞
Helpful Hint:
This command sequence
sets up a drive for a
particular motor size and
performs the commutation.
Command Description
> 1OFF Turns drive off
> 1CMTRxxx Sets drive for the motor; xxx = 605, 606, 610, 620, 630, 635, or 640
> 10N Enables the drive
Motor Brakes
Motor brakes are mounted directly behind the motor and are pre- assembled at the
factory. When ordering the brake option, specify the motor type.
Brake Characteristics Z605/606/610 Z620/630 Z640 Units
Supply voltage 24 24 24 VDC
Supply current 0.57 0.93 1.27 A
Static braking torque 960 1152 6720 oz-in
Z600 Motor Brake Characteristics
WARNING
Motor Data
86
Z Drive User Guide
The data reflecting motor torque does not assume operation from a Z600 drive. The
torque specifications reflect the motor's capabilities. In most cases, the motor
windings match the drive's output power with an additional safety margin.
Page 3
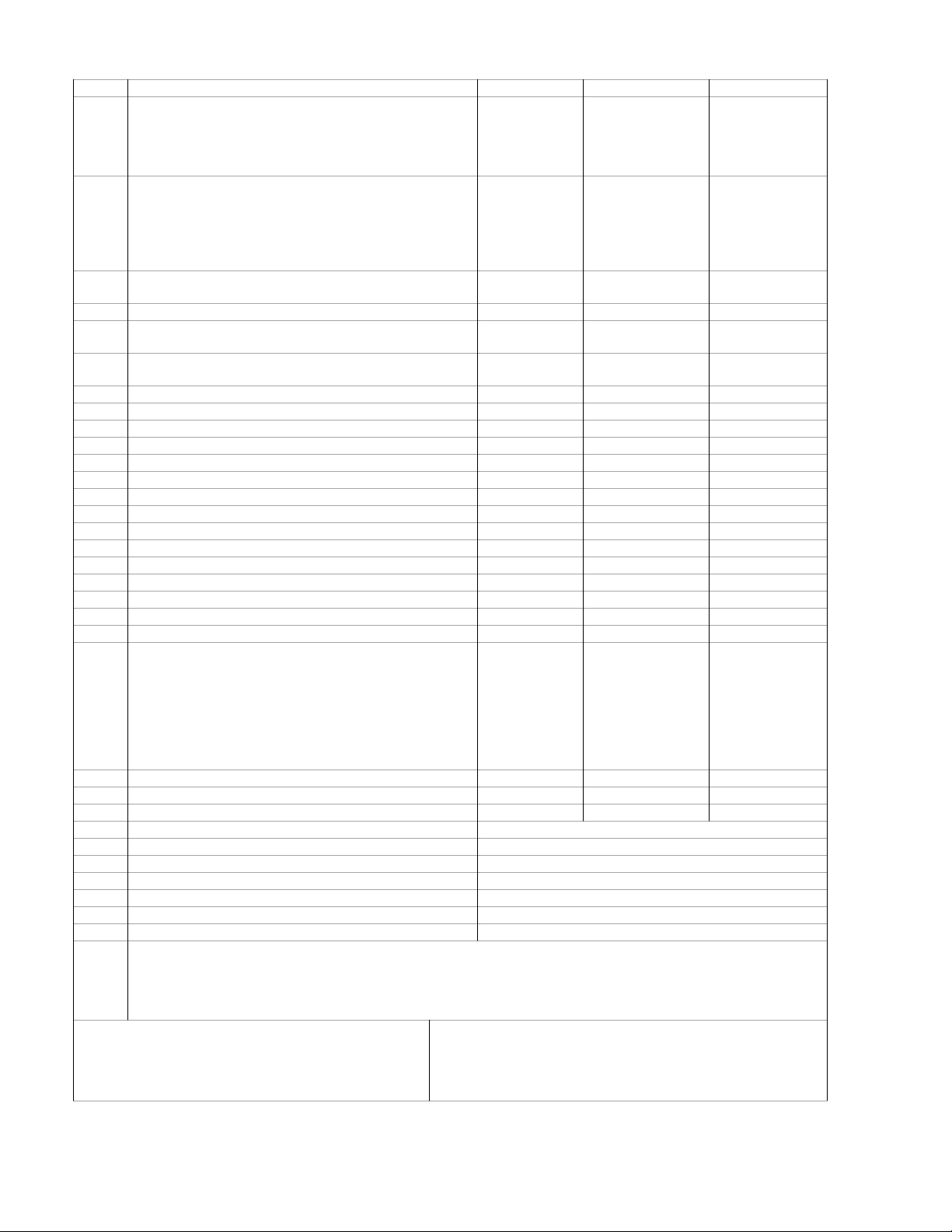
Motor Size: Z605 Value Units Tolerance
1
Constant (s): Torque
2
3
4
5
Torque (s): Continuous, Stall
6
7
8
9
10
11
Voltage (Sinusodial)
Electrical Time
Mechanical Time
Thermal
Continuous, Stall
Continuous, Rated
Peak, Max w/o Saturation
Static Friction
Ripple (of Rated Torque)
1213Speed: Rated
Maximum
68.7
29.4
10.68
1.46
32
367
346
321
1085
0.96
5
6200
6200
oz-in/A rms
V rms/Krpm
milliseconds
milliseconds
minutes
oz-in
oz-in
oz-in
oz-in
oz-in
percent
rpm
rpm
± 10%
± 10%
nominal
nominal
nominal
min. [1]
min. [2]
min. [2]
min. [1]
max.
max. [3]
reference
reference
14 Frequency Rated 207 Hz max.
1516Current: Rated
Peak
1718Voltage: Rated
Max
5
16.6
240
250
A rms
A rms
V rms
V rms
max. [1]
nominal
reference
maximum
19 Output Power Rated 1.5 (2.0) kWatts (hp) min. [1]
20 Inductance Terminal (line-line) 25 mH ± 30%
21 D.C. Resistance Terminal (line-line) 2.3 ohms ± 10 % [1]
22 Acceleration at Rated Torque 76870 rads/sec
2
Theoretical
23 Rotor Inertia 99.6 kgm2 * 1E-6 nominal
24 Damping 0.96 oz-in / krpm nominal
25 Weight 10 lbs. max.
26 Winding Temperature 170 [4] °C (Celsius) max.
27 Winding Temperature Rise (Above Ambient) [1] 145 °C (Celsius) reference
28 Insulation Class H — reference
29 Thermostat TRIP Temperature 170 °C (Celsius) ± 5° C
30 Thermostat RESET Temperature 135 °C (Celsius) ± 10° C
31 Dielectric Strength, (Winding-to-Frame) 1750 VAC min.
32 Winding Capacitance-to-Frame 0.00122 µF max.
33 IP Classification 65 [8] rated standard
34
Shaft: Radial-Play (Front to Back)
35
36
37
Material [5]
Magnet Type
Loading [6] 1000 rpm
2000 rpm
3000 rpm
4000 rpm
5000 rpm
1.4E-5/8E-6
RC-#30
NdFeB
85.4
67.8
59.1
53.8
50
in/lb
—
—
lbs.
lbs.
lbs.
lbs.
lbs.
reference
reference
—
max. [7]
max. [7]
max. [7]
max. [7]
max. [7]
38 Bearing Class, Internal/External 1/Class 3 ABEC/AFBMA reference
39 Bearing Grease SRI #2 Manufacturer reference
40 Shaft Seal Pressure 0.21 (3) kg/cm2 (psi) max.
41 Basic Motor Design 3 phase
wye
connected 2(P/2)
42 Stator Phase Sequence A-C-B (viewed from front face plate)
43 Vendor/Supplier Industrial Drives B-202-C
44 Resolver Type/Accuracy Single-Speed; Rotor-Excited; ± 7 arc min.
45 Resolver Manufacturer/Model # Fasco # 21-BRCX-335-J39
46 Standard Resolver Cable Part Number 71-011777-xx
47 Standard Motor Cable Part Number 71-011774-xx
48 Options: Brake—24VDC (0.57A)—960 oz-in Holding Torque
IP67 Classification
Incremental Encoder
Tachometer
No Keyway
[1] 25°C Ambient
[2] 40°C Ambient
[3] Measured at 60 rpm (1 rps) in Velocity Mode
[4] Rated for 20,000 Hours or 40,000 Hours @ 155° C
[5] Rotor steel is rated as
fatigue proof
[6] Loads centered 1 inch from mounting flange
[7] Loads may be radial and axial such that the sum of the
radial and two times the axial does not exceed this figure.
[8] Motor shaft is IP30 rated.
Z605 Motor Specifications
Chapter ➆ Hardware Reference
87
Page 4
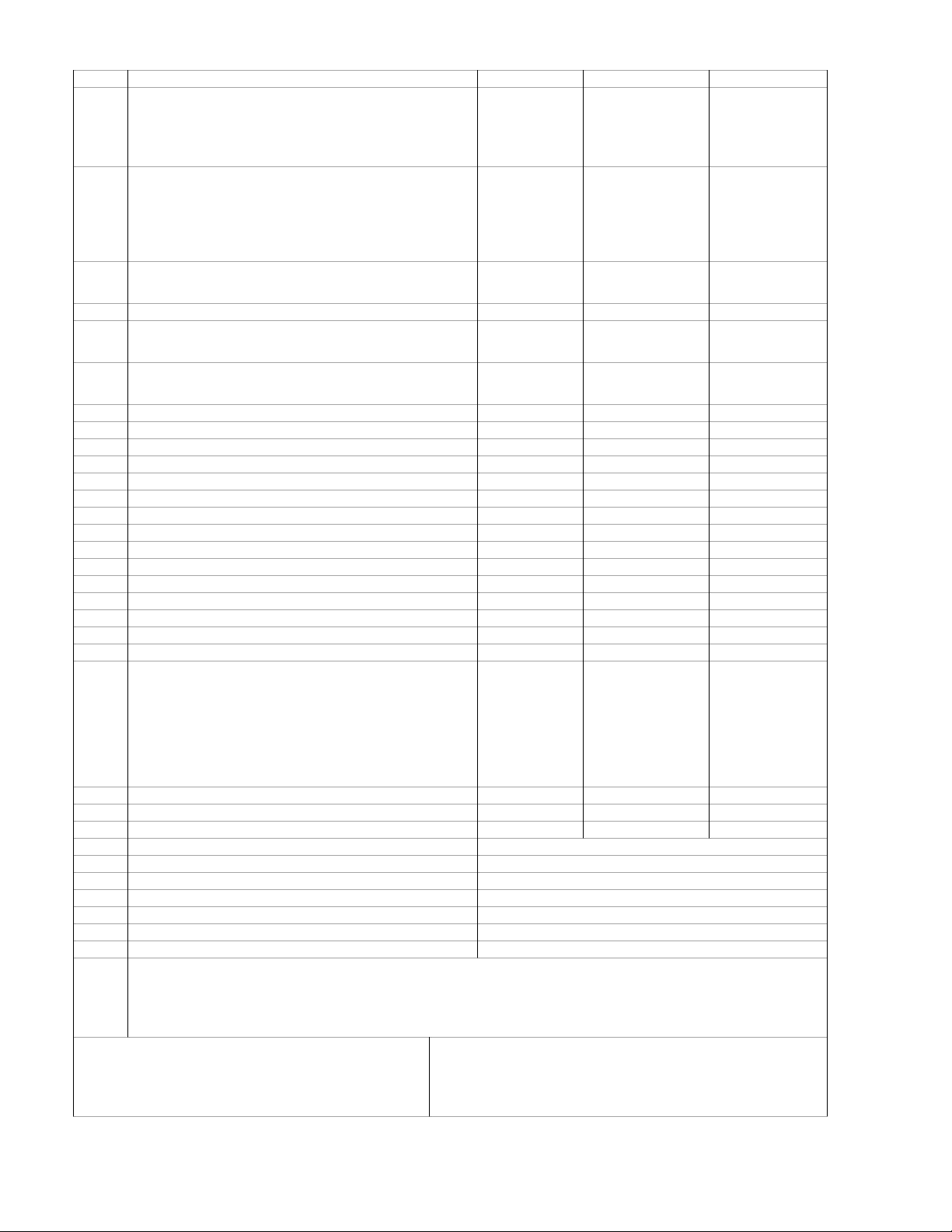
Motor Size: Z606 Value Units Tolerance
1
Constant (s): Torque
2
3
4
5
Torque (s): Continuous, Stall
6
7
8
9
10
11
Voltage (sinusodial)
Electrical Time
Mechanical Time
Thermal
Continuous, Stall
Continuous, Rated
Peak, Max w/o Saturation
Static Friction
Ripple (of Rated Torque)
1213Speed: Rated
Maximum
120
51.2
15.32
0.896
34
672
634
576
1957
0.96
5
3600
3600
oz-in/A rms
V rms/Krpm
milliseconds
milliseconds
minutes
oz-in
oz-in
oz-in
oz-in
oz-in
percent
rpm
rpm
± 10%
± 10%
nominal
nominal
nominal
min. [1]
min. [2]
min. [2]
min. [1]
max
max. [3]
reference
reference
14 Frequency Rated 120 Hz max.
1516Current: Rated
Peak
5.3
17.2
A rms
A rms
max. [1]
nominal
1718Voltage: Rated
Max
240
250
V rms
V rms
reference
maximum
19 Output Power: Rated 1.6 (2.1) kWatts (hp) min. [1]
20 Inductance: Terminal (line-line) 38 mH ± 30%
21 D.C. Resistance Terminal (line-line) 2.48 ohms ± 10 % [1]
22 Acceleration at Rated Torque 80000 rads/sec
2
Theoretical
23 Rotor Inertia 172.9 kgm2 * 1E-6 nominal
24 Damping 1.344 oz-in / krpm nominal
25 Weight 13.4 lbs. max.
26 Winding Temperature 170 [4] °C (Celsius) max.
27 Winding Temperature Rise (Above Ambient) [1] 145 °C (Celsius) reference
28 Insulation Class H — reference
29 Thermostat TRIP Temperature 170 °C (Celsius) ± 5 °C
30 Thermostat RESET Temperature 135 °C (Celsius) ± 10 °C
31 Dielectric Strength, (Winding-to-Frame) 1750 VAC min.
32 Winding Capacitance to Frame 0.00201 µF max.
33 IP Classification 65 [8] rated standard
34
Shaft: Radial-Play (front to back)
35
36
37
Material [5]
Magnet Type
Loading [6] 1000 rpm
2000 rpm
3000 rpm
4000 rpm
5000 rpm
1.4E-5/8E-6
RC-#30
NdFeB
90.1
71.6
62.4
N/A
N/A
in/lb
—
—
lbs.
lbs.
lbs.
lbs.
lbs.
reference
reference
—
max. [7]
max. [7]
max. [7]
max. [7]
max. [7]
38 Bearing Class, Internal/External 1/Class 3 ABEC/AFBMA reference
39 Bearing Grease SRI #2 Manufacturer reference
40 Shaft Seal Pressure 0.21 (3) kg/cm2 (psi) max.
41 Basic Motor Design 3 phase
wye
connected 2(P/2)
42 Stator Phase Sequence A-C-B (viewed from front face plate)
43 Vendor/Supplier Industrial Drives B-204-B
44 Resolver Type/Accuracy Single-Speed; Rotor-Excited; ± 7 arc min.
45 Resolver Manufacturer/Model # Fasco # 21-BRCX-335-J39
46 Standard Resolver Cable Part Number 71-011777-xx
47 Standard Motor Cable Part Number 71-011774-xx
48 Options: Brake—24VDC (0.57A)—960 oz-in Holding Torque
IP67 Classification
Incremental Encoder
Tachometer
No Keyway
[1] 25°C Ambient
[2] 40°C Ambient
[3] Measured at 60 rpm (1 rps) in Velocity Mode
[4] Rated for 20,000 Hours or 40,000 Hours @ 155° C
[5] Rotor steel is rated as
fatigue proof
[6] Loads centered 1 inch from mounting flange
[7] Loads may be radial and axial such that the sum of the
radial and two times the axial does not exceed this figure.
[8] Motor shaft is IP30 rated.
Z606 Motor Specifications
88
Z Drive User Guide
Page 5

Motor Size: Z610 Value Units Tolerance
1
Constant (s): Torque
2
3
4
5
Torque (s): Continuous, Stall
6
7
8
9
10
11
Voltage (Sinusodial)
Electrical Time
Mechanical Time
Thermal
Continuous, Stall
Continuous, Rated
Peak, Max w/o Saturation
Static Friction
Ripple (of Rated Torque)
1213Speed: Rated
Maximum
61.4
26.2
13.16
0.762
36
977
921.6
653
2630
0.96
5
7000
7000
oz-in/A rms
V rms/Krpm
milliseconds
milliseconds
minutes
oz-in
oz-in
oz-in
oz-in
oz-in
percent
rpm
rpm
± 10%
±10%
nominal
nominal
nominal
min. [1]
min. [2]
min. [2]
min. [1]
max
min. [3]
reference
reference
14 Frequency Rated 233 Hz max.
1516Current: Rated
Peak
1718Voltage: Rated
Max
15
45
230
250
A rms
A rms
V rms
V rms
max. [1]
nominal
reference
maximum
19 Output Power: Rated 3.3 (4.5) kWatts (hp) min. [1]
20 Inductance: Terminal (line-line) 5 mH ± 30%
21 D.C. Resistance Terminal (line-line) 0.38 Ohms ± 10 % [1]
22 Acceleration at Rated Torque 73934 rads/sec
2
Theoretical
23 Rotor Inertia 251.2 kgm2 * 1E-6 nominal
24 Damping 1.728 oz-in / krpm nominal
25 Weight 16.35 lbs. max.
26 Winding Temperature 170 [4] °C (Celsius) max.
27 Winding Temperature Rise (Above Ambient) [1] 145 °C (Celsius) reference
28 Insulation Class H — reference
29 Thermostat TRIP Temperature 170 °C (Celsius) ± 5 °C
30 Thermostat RESET Temperature 135 °C (Celsius) ± 10 °C
31 Dielectric Strength, (Winding-to-Frame) 1750 VAC min.
32 Winding Capacitance-to-Frame 0.00205 µF max.
33 IP Classification 65 [8] rated standard
34
Shaft: Radial-Play (front to back)
35
36
37
Material [5]
Magnet Type
Loading [6] 1000 rpm
2000 rpm
3000 rpm
4000 rpm
5000 rpm
1.4E-5/8E-6
RC-#30
NdFeB
93.5
74.2
64.8
59
54.7
in/lb
—
—
lbs.
lbs.
lbs.
lbs.
lbs.
reference
—
max. [7]
max. [7]
max. [7]
max. [7]
max. [7]
max. [7]
38 Bearing Class, Internal/External 1/Class 3 ABEC/AFBMA reference
39 Bearing Grease SRI #2 Manufacturer reference
40 Shaft Seal Pressure 0.21 (3) kg/cm2 (psi) max.
41 Basic Motor Design 3 phase
wye
connected 2(P/2)
42 Stator Phase Sequence A-C-B (viewed from front face plate)
43 Vendor/Supplier Industrial Drives B-206-D
44 Resolver Type/Accuracy Single-Speed; Rotor-Excited; ± 7 arc min.
45 Resolver Manufacturer/Model # Fasco # 21-BRCX-335-J39
46 Standard Resolver Cable Part Number 71-011777-01
47 Standard Motor Cable Part Number 71-011775-01
48 Options: Brake—24VDC (0.57A)—960 oz-in Holding Torque
IP67 Classification
Incremental Encoder
Tachometer
No Keyway
[1] 25°C Ambient
[2] 40°C Ambient
[3] Measured at 60 rpm (1 rps) in Velocity Mode
[4] Rated for 20,000 Hours or 40,000 Hours @ 155° C
[5] Rotor steel is rated as
fatigue proof
[6] Loads centered 1 inch from mounting flange
[7] Loads may be radial and axial such that the sum of the
radial and two times the axial does not exceed this figure.
[8] Motor shaft is IP30 rated.
Z610 Motor Specifications
Chapter ➆ Hardware Reference
89
Page 6

Motor Size: Z620 Value Units Tolerance
1
Constant (s): Torque
2
3
4
5
Torque (s): Continuous, Stall
6
7
8
9
10
11
Voltage (Sinusodial)
Electrical Time
Mechanical Time
Thermal
Continuous, Stall
Continuous, Rated
Peak, Max w/o Saturation
Static Friction
Ripple (of Rated Torque)
1213Speed: Rated
Maximum
124.2
53
23.4
0.82
40
1974
1862
1632
5299
25
4.5
3700
3700
oz-in/A rms
V rms/Krpm
milliseconds
milliseconds
minutes
oz-in
oz-in
oz-in
oz-in
oz-in
percent
rpm
rpm
± 10%
± 10%
nominal
nominal
nominal
min. [1]
min. [2]
min. [2]
min. [1]
max.
min. [3]
reference
reference
14 Frequency Rated 123 Hz max.
1516Current: Rated
Peak
1718Voltage: Rated
Max
15
45
230
250
A rms
A rms
V rms
V rms
max. [1]
nominal
reference
maximum
19 Output Power: Rated 4.5 (6) kWatts (hp) min. [1]
20 Inductance: Terminal (line-line) 15 mH ± 30%
21 D.C. Resistance Terminal (line-line) 0.64 Ohms ± 10 % [1]
22 Acceleration at Rated Torque 57025 rads/sec
2
Theoretical
23 Rotor Inertia 656 kgm2 * 1E-6 nominal
24 Damping 2.496 oz-in / krpm nominal
25 Weight 29 lbs. max.
26 Winding Temperature 170 [4] °C (Celsius) max.
27 Winding Temperature Rise (Above Ambient) [1] 145 °C (Celsius) reference
28 Insulation Class H — reference
29 Thermostat TRIP Temperature 170 °C (Celsius) ± 5 °C
30 Thermostat RESET Temperature 135 °C (Celsius) ± 10 °C
31 Dielectric Strength, (Winding-to-Frame) 1750 VAC min.
32 Winding Capacitance-to-Frame 0.0034 µF max.
33 IP Classification 65 [8] rated standard
34
Shaft: Radial-Play
35
36
37
Material [5]
Magnet Type
Loading [6] 1000 rpm
2000 rpm
3000 rpm
4000 rpm
5000 rpm
2E-5/7E-6
RC-#30
NdFeB
154.7
122.8
107.2
N/A
N/A
in/lb
—
lbs.
lbs.
lbs.
lbs.
lbs.
reference
reference
—
max. [7]
max. [7]
max. [7]
max. [7]
max. [7]
38 Bearing Class, Internal/External 1/Class 3 ABEC/AFBMA reference
39 Bearing Grease SRI #2 Manufacturer reference
40 Shaft Seal Pressure 0.21 (3) kg/cm2 (psi) max.
41 Basic Motor Design 3 phase
wye
connected 2(P/2)
42 Stator Phase Sequence A-C-B (viewed from front face plate)
43 Vendor/Supplier Industrial Drives B-404-D
44 Resolver Type/Accuracy Single-Speed; Rotor-Excited; ± 7 arc min.
45 Resolver Manufacturer/Model # Fasco # 21-BRCX-335-J39
46 Standard Resolver Cable Part Number 71-011777-xx
47 Standard Motor Cable Part Number 71-011775-xx
48 Options: Brake—24VDC (0.93A)—1140 oz-in Holding Torque
IP67 Classification
Incremental Encoder
Tachometer
No Keyway
[1] 25°C Ambient
[2] 40°C Ambient
[3] Measured at 60 rpm (1 rps) in Velocity Mode
[4] Rated for 20,000 Hours or 40,000 Hours @ 155° C
[5] Rotor steel is rated as
fatigue proof
[6] Loads centered 1 inch from mounting flange
[7] Loads may be radial and axial such that the sum of the
radial and two times the axial does not exceed this figure.
[8] Motor shaft is IP30 rated.
Z620 Motor Specifications
90
Z Drive User Guide
Page 7

Motor Size: Z630 Value Units Tolerance
1
Constant (s): Torque
2
3
4
5
Torque (s): Continuous, Stall
6
7
8
9
10
11
Voltage (Sinusodial)
Electrical Time
Mechanical Time
Thermal
Continuous, Stall
Continuous, Rated
Peak, Max w/o Saturation
Static Friction
Ripple (of Rated Torque)
1213Speed: Rated
Maximum
175.3
74.9
26.7
0.68
43
2788
2630
2304
7488
40.7
4.5
2500
2500
oz-in/A rms
V rms/Krpm
milliseconds
milliseconds
minutes
oz-in
oz-in
oz-in
oz-in
oz-in
percent
rpm
rpm
± 10%
± 10%
nominal
nominal
nominal
min. [1]
min. [2]
min. [2]
min. [1]
max.
min. [3]
reference
reference
14 Frequency Rated 83 Hz max.
1516Current: Rated
Peak
1718Voltage: Rated
Max
15
45
230
250
A rms
A rms
V rms
V rms
max. [1]
nominal
reference
maximum
19 Output Power: Rated 4.3 (5.7) kWatts (hp) min. [1]
20 Inductance: Terminal (line-line) 20 mH ± 30%
21 D.C. Resistance Terminal (line-line) 0.75 Ohms ± 10 % [1]
22 Acceleration at Rated Torque 56934 rads/sec
2
Theoretical
23 Rotor Inertia 929 kgm2 * 1E-6 nominal
24 Damping 2.88 oz-in / krpm nominal
25 Weight 32 lbs. max.
26 Winding Temperature 170 [4] °C (Celsius) max.
27 Winding Temperature Rise (Above Ambient) [1] 145 °C (Celsius) reference
28 Insulation Class H — reference
29 Thermostat TRIP Temperature 170 °C (Celsius) ± 5 °C
30 Thermostat RESET Temperature 132 °C (Celsius) ± 5 °C
31 Dielectric Strength, (Winding-to-Frame) 1750 VAC min.
32 Winding Capacitance to Frame 0.0038 µF max.
33 IP Classification 65 [8] rated standard
34
Shaft: Radial-Play
35
36
37
Material [5]
Magnet Type
Loading [6] 1000 rpm
2000 rpm
3000 rpm
4000 rpm
5000 rpm
2E-5/7E-6
RC-#30
NdFeB
160
127.1
N/A
N/A
N/A
in/lb
—
—
lbs.
lbs.
lbs.
lbs.
lbs.
reference
reference
—
max. [7]
max. [7]
max. [7]
max. [7]
max. [7]
38 Bearing Class, Internal/External 1/Class 3 ABEC/AFBMA reference
39 Bearing Grease SRI #2 Manufacturer reference
40 Shaft Seal Pressure 0.21 (3) kg/cm2 (psi) max.
41 Basic Motor Design 3 phase
wye
connected 2(P/2)
42 Stator Phase Sequence—CW rotor rotation A-C-B (viewed from front face plate)
43 Vendor/Supplier Industrial Drives B-406-D
44 Resolver Type/Accuracy Single-Speed; Rotor-Excited; ± 7 arc min.
45 Resolver Manufacturer/Model # Fasco # 21-BRCX-335-J39
46 Standard Resolver Cable Part Number 71-011777-xx
47 Standard Motor Cable Part Number 71-011775-xx
48 Options: Brake—24VDC (0.93A)—8.0 Nm Holding Torque
IP67 Classification
Incremental Encoder
Tachometer
No Keyway
[1] 25°C (Celsius) ambient
[2] 40°C (Celsius) ambient
[3] Measured at 60 rpm (1 rps) in velocity mode
[4] Rated for 20,000 hours or 40,000 hours @ 155° C
[5] Rotor steel is rated as
fatigue proof
[6] Loads centered 1 inch from mounting flange
[7] Loads may be radial and axial such that the sum of the
radial and two times the axial does not exceed this figure.
[8] Motor shaft is IP30 rated.
Z630 Motor Specifications
Chapter ➆ Hardware Reference
91
Page 8

Motor Size: Z635 Value Units Tolerance
1
Constant (s): Torque
2
3
4
5
Torque (s): Continuous, Stall
6
7
8
9
10
11
Voltage (Sinusodial)
Electrical Time
Mechanical Time
Thermal
Continuous, Stall
Continuous, Rated
Peak, Max w/o Saturation
Static Friction
Ripple (of Rated Torque)
1213Speed: Rated
Maximum
175.3
70
0.77
20.8
28
2605
2458
2054
7008
69
4.5
3000
3000
oz-in/A rms
V rms/Krpm
milliseconds
milliseconds
minutes
oz-in
oz-in
oz-in
oz-in
oz-in
percent
rpm
rpm
± 10%
± 10%
nominal
nominal
nominal
min. [1]
min. [2]
min. [2]
min. [1]
max.
min. [3]
reference
reference
14 Frequency Rated 150 Hz max.
1516Current: Rated
Peak
1718Voltage: Rated
Max
15
45
230
250
A rms
A rms
V rms
V rms
max. [1]
nominal
reference
maximum
19 Output Power: Rated 4.5 (6.1) kWatts (hp) min. [1]
20 Inductance: Terminal (line-line) 14 mH ± 30%
21 D.C. Resistance Terminal (line-line) 0.647 Ohms ± 10 % [1]
22 Acceleration at Rated Torque 48945 rads/sec
2
Theoretical
23 Rotor Inertia 1028 kgm2 * 1E-6 nominal
24 Damping 2.88 oz-in / krpm nominal
25 Weight 37 lbs. max.
26 Winding Temperature 170 [4] °C (Celsius) max.
27 Winding Temperature Rise (Above Ambient) [1] 145 °C (Celsius) reference
28 Insulation Class H — reference
29 Thermostat TRIP Temperature 170 °C (Celsius) ± 5 °C
30 Thermostat RESET Temperature 135 °C (Celsius) ± 5 °C
31 Dielectric Strength, (Winding-to-Frame) 1750 VAC min.
32 Winding Capacitance to Frame 0.0038 µF max.
33 IP Classification 65 rated standard
34
Shaft: Radial-Play
35
36
37
Material [5]
Magnet Type
Loading [6] 1000 rpm
2000 rpm
3000 rpm
4000 rpm
5000 rpm
2E-5/7E-6
RC-#30
NdFeB
243.5
193.3
168.8
N/A
N/A
in/lb
—
—
lbs.
lbs.
lbs.
lbs.
lbs.
reference
reference
—
max. [7]
max. [7]
max. [7]
max. [7]
max. [7]
38 Bearing Class, Internal/External 1/Class 3 ABEC/AFBMA reference
39 Bearing Grease SRI #2 Manufacturer reference
40 Shaft Seal Pressure 0.21 (3) kg/cm2 (psi) max.
41 Basic Motor Design 3 phase
wye
connected 2(P/2)
42 Stator Phase Sequence—CW rotor rotation A-C-B (viewed from front face plate)
43 Vendor/Supplier Industrial Drives B-406-D
44 Resolver Type/Accuracy Single-Speed; Rotor-Excited; ± 7 arc min.
45 Resolver Manufacturer/Model # Fasco # 21-BRCX-335-J39
46 Standard Resolver Cable Part Number 71-011777-xx
47 Standard Motor Cable Part Number 71-011775-xx
48 Options: Brake—24VDC (0.93A)—8.0 Nm holding torque
IP67 Classification
Incremental Encoder
Tachometer
No Keyway
[1] 25°C Ambient
[2] 40°C Ambient
[3] Measured at 60 rpm (1 rps) in Velocity Mode
[4] Rated for 20,000 hours or 40,000 hours @ 155° C
Z635 Motor Specifications
[5] Rotor steel is rated as
fatigue proof
[6] Loads centered 1 inch from mounting flange
[7] Loads may be radial and axial such that the sum of the
radial and two times the axial does not exceed this figure.
92
Z Drive User Guide
Page 9

Motor Size: Z640 Value Units Tolerance
1
Constant (s): Torque
2
3
4
5
Torque (s): Continuous, Stall
6
7
8
9
10
11
1213Speed: Rated
14 Frequency Rated 80 Hz max.
1516Current: Rated
1718Voltage: Rated
19 Output Power: Rated 4.7 (6.3) kWatts (hp) min. [1]
20 Inductance: Terminal (line-line) 20 mH ± 30%
21 D.C. Resistance Terminal (line-line) 0.763 Ohms ± 10 % [1]
22 Acceleration at Rated Torque 43667 rads/sec
23 Rotor Inertia 2034 kgm2 * 1E-6 nominal
24 Damping 15.36 oz-in / krpm nominal
25 Weight 51 lbs. max.
26 Winding Temperature 170 [4] °C (Celsius) max.
27 Winding Temperature Rise (Above Ambient) [1] 145 °C (Celsius) reference
28 Insulation Class H — reference
29 Thermostat TRIP Temperature 170 °C (Celsius) ± 5 °C
30 Thermostat RESET Temperature 135 °C (Celsius) ± 10 °C
31 Dielectric Strength, (Winding-to-Frame) 1750 VAC min.
32 Winding Capacitance to Frame 0.0082 µF max.
33 IP Classification 65 [8] rated standard
34
Shaft: Radial-Play
35
36
37
38 Bearing Class, Internal/External 1/Class 3 ABEC/AFBMA reference
39 Bearing Grease SRI #2 Manufacturer reference
40 Shaft Seal Pressure 0.21 (3) kg/cm2 (psi) max.
41 Basic Motor Design 3 phase
42 Stator Phase Sequence—CW rotor rotation A-C-B (viewed from front face plate)
43 Vendor/Supplier Industrial Drives B-604-D
44 Resolver Type/Accuracy Single-Speed; Rotor-Excited; ± 7 arc min.
45 Resolver Manufacturer/Model # Fasco # 21-BRCX-335-J39
46 Standard Resolver Cable Part Number 71-011777-xx
47 Standard Motor Cable Part Number 71-011776-xx
48 Options: Brake—24VDC (1.27A)—6816 oz-in Holding Torque
[1] 25°C (Celsius) ambient
[2] 40°C (Celsius) ambient
[3] Measured at 60 rpm (1 rps) in velocity mode
[4] Rated for 20,000 hours or 40,000 hours @ 155° C
Z640 Motor Specifications
Voltage (Sinusodial)
Electrical Time
Mechanical Time
Thermal
Continuous, Stall
Continuous, Rated
Peak, Max w/o Saturation
Static Friction
Ripple (of Rated Torque)
Maximum
Peak
Max
Material [5]
Magnet Type
Loading [6] 1000 rpm
2000 rpm
3000 rpm
4000 rpm
5000 rpm
IP67 Classification
Incremental Encoder
Tachometer No Keyway
[5] Rotor steel is rated as
[6] Loads centered 1 inch from mounting flange
[7] Loads may be radial and axial such that the sum of the
[8] Motor shaft is IP30 rated.
291.5
124.5
26.2
0.55
33
4640
4378
3955
12461
73
4.5
1600
1600
15
45
230
250
1E-5/4E-6
RC-#30
NdFeB
255.6
N/A
N/A
N/A
N/A
wye
oz-in/A rms
V rms/Krpm
milliseconds
milliseconds
minutes
oz-in
oz-in
oz-in
oz-in
oz-in
percent
rpm
rpm
A rms
A rms
V rms
V rms
2
in/lb
—
—
lbs.
lbs.
lbs.
lbs.
lbs.
connected 3(P/2)
± 10%
± 10%
nominal
nominal
nominal
min. [1]
min. [2]
min. [2]
min. [1]
max.
max. [3]
reference
reference
max. [1]
nominal
reference
maximum
Theoretical
reference
reference
—
max. [7]
max. [7]
max. [7]
max. [7]
max. [7]
fatigue proof
radial and two times the axial does not exceed this figure.
Chapter ➆ Hardware Reference
93
Page 10

Speed/Torque Curves
The following speed/torque curves represent the available shaft torque at different
operating speeds. Operation at 120VAC and 240VAC is shown for each motor size.
Actual motor torque may vary ±10% due to motor manufacturing variances. For
operation from a 1-phase 120VAC, the output torque stays relatively constant and the
top-end speed falls off at the ratio of the input voltage (i.e., A Z610 operating at 240VAC
has a rated speed of 7000 rpm; operating at 120VAC, it will have a rated speed of 3500
rpm).
☞
Helpful Hint:
Continuous Duty
means steady state
operation for drive
ambient temperatures
of 0°C to 50°C.
Intermittent Duty
means operation for
3.3 seconds or less.
Torque
( oz-in )
15 00
13 50
12 00
10 50
900
750
600
450
300
150
Torque
(oz-in)
2500
2250
2000
1750
1500
1250
1000
750
500
250
Torqu e
(oz-in)
25 00
22 50
20 00
17 50
15 00
12 50
10 00
750
500
250
Intermit tent
Dut y Region
Cont inu ous
Duty Regio n
0
0
12 00 24 00 3600
Intermittent
Duty Region
Co ntinuous
Duty Region
0
500
0
Intermitt ent
Dut y Region
Continuous
Dut y Regio n
0
0
Z6 05 a t 1 20 V AC
4800
6000 72 00
Speed (rpm)
Z606 at 1 20V A C
1000 1500 2000 2500 300 0 350 0
Speed ( rpm)
Z610 at 1 20 V AC
20 00 40 00 60 00
Speed (rp m)
4000
800 0
Torque
(oz-in)
150 0
135 0
120 0
105 0
90 0
75 0
60 0
45 0
30 0
15 0
Torque
(oz-in)
3000
27 00
24 00
21 00
18 00
15 00
12 00
900
600
300
Torque
(oz-in)
2500
2250
2000
1750
1500
1250
1000
750
500
250
Z60 5 at 24 0V AC
In t ermit t en t Dut y Region
Cont inuous Duty Region
0
0
1200 24 00 3600 4 800 6000 7200
Speed ( rpm)
Z60 6 at 24 0V AC
Intermittent Duty Region
Continu o us Dut y Regio n
0
0
0
0
1000 20 00 3000 4000
Speed (rpm)
Z61 0 at 24 0V AC
Intermit tent Duty Region
Contin uous Duty Region
20 00
400 0
Speed (rpm)
60 00 80 00
94
Z Drive User Guide
Page 11

Torque
(oz-in)
500 0
450 0
400 0
350 0
300 0
250 0
200 0
150 0
100 0
50 0
Torque
(oz-in)
700 0
630 0
560 0
490 0
420 0
350 0
280 0
210 0
140 0
700
Torque
(oz-in)
700 0
630 0
560 0
490 0
420 0
350 0
280 0
210 0
140 0
700
Torque
(oz-in)
10000
900 0
800 0
700 0
600 0
500 0
400 0
300 0
200 0
100 0
Intermittent
Duty Region
Continuous
Duty Region
0
0
Intermittent
Duty Region
Continuous
Duty Region
0
0
Intermittent
Duty Region
Continuous
Duty Region
0
0
Intermittent
Duty Region
0
0
Z620 at 120VAC
100 0 200 0 3000 400 0 50 0 0
Speed (rpm)
Z630 at 120VAC
600
120 0
1800
240 0
30 00
Speed (rp m)
Z635 at 120VAC
600
1200
1800
240 0
Speed (rp m)
30 00
Z640 at 120VAC
Continuous
Duty Region
40 0 80 0
12 00 16 00
Speed (rpm)
200 0 2400
360 0
360 0
Torque
(oz-in)
500 0
450 0
400 0
350 0
300 0
250 0
200 0
150 0
100 0
500
Torque
(oz-in)
700 0
630 0
560 0
490 0
420 0
350 0
280 0
210 0
140 0
700
Torque
(oz-in)
7000
6300
5600
4900
4200
3500
2800
2100
1400
700
Torque
(oz-in)
10000
9000
8000
7000
6000
5000
4000
3000
2000
1000
Intermittent Duty Region
Continuous Duty Region
0
0
100 0 200 0 300 0 4000
Intermittent Duty Region
Continuous Duty Region
0
0 600
Intermittent Duty Region
Continuous Duty Region
0
0
600
Intermittent Duty Region
Continuous Duty Region
0
0
400
Z620 at 240VAC
Speed (rpm)
Z630 at 240VAC
120 0
18 00
2400 300 0 360 0
Speed (rpm )
Z635 at 240VAC
120 0 180 0
Speed (rpm)
2400
Z640 at 240VAC
800
120 0 160 0 200 0 240 0
Speed ( rpm)
300 0
50 00
36 00
Chapter ➆ Hardware Reference
95
 Loading...
Loading...