

Page 1
CS89712
High-Performance, Low-Power System-on-Chip with 10BASE-T Ethernet Controller
Features
l ARM720T (ARM7 TDMI) processor
– 8 Kbytes of four-way set-associative cache
– MMU with 64-entry TLB
– Write Buffe r
– Thumb code support enabled
l Dynamically clocked at 18, 36, 49 or 74 MHz
l 10 Mbit Ethernet Controller with integrated PHY
l Comprehensive Suite of Software Drivers
l On-Chip Transmit and Receive RAM Buffers
l 10BASE-T Port with Analog Filters provides
automatic polarity detection and correction
l Programmable Transmit Features:
– Automatic Re-transmission on Collision
– Automatic Padding and CRC Generation
l Programmable Receive Features:
– Early Interrupts for Frame Pre-Processing
– Automatic Rejection of Erroneous Packets
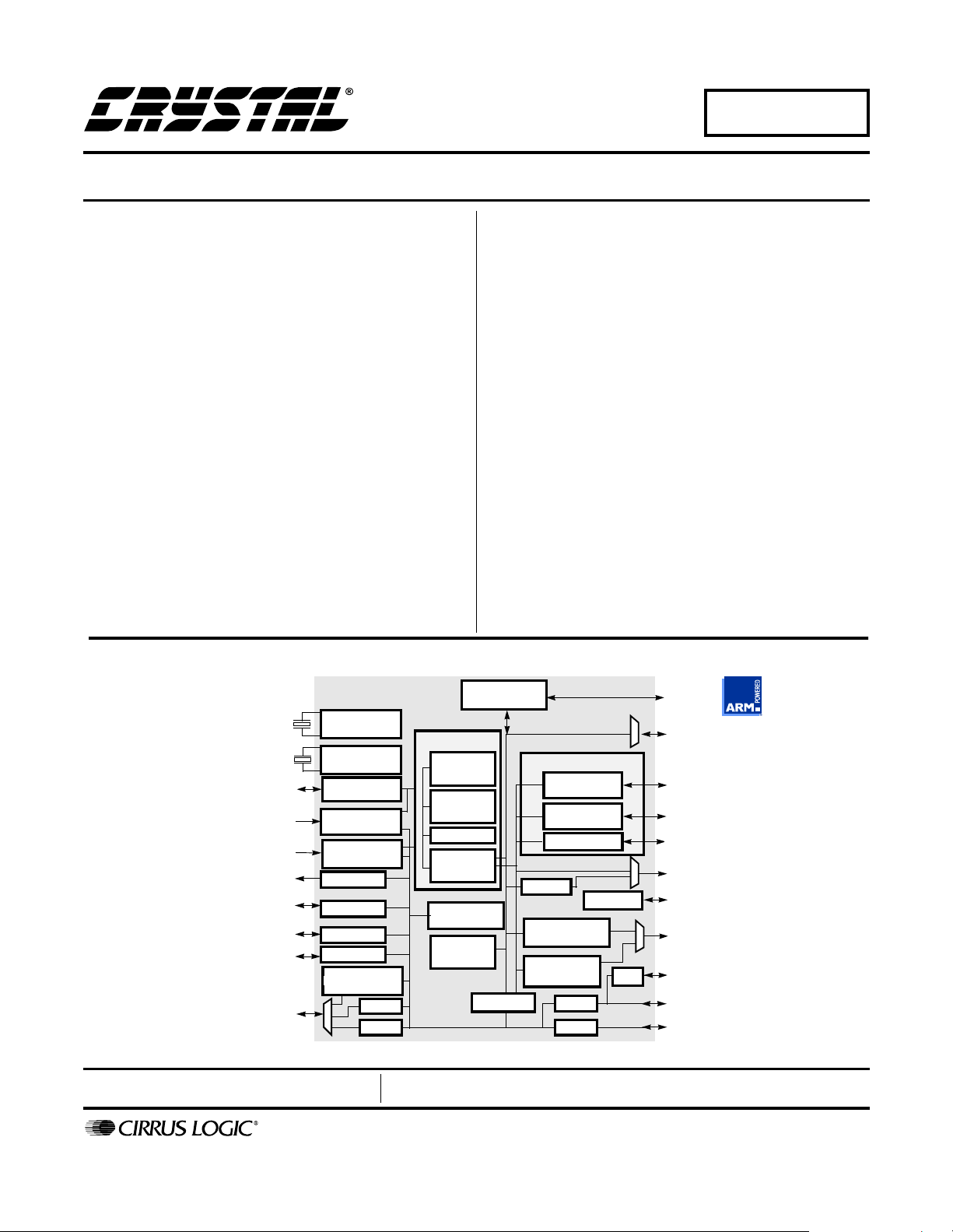
Description
The low-power high-perform ance CS89712 is de signed
for ultra-low-power com munic ation appl icati ons suc h as
VoIP telephones, industrial control, data acquisition,
special purpose servers and RF to Ethernet bridges. The
core-logic functi onality of the device is built around a n
ARM720T processor with 8 Kbytes of four-way set-associative unified cache and a write buffer. Incorporated into
the ARM720T is an enhanced memory management unit
(MMU) which allows for support of sophisticated operating systems like embedded Linux.
The CS89712 Ethernet port includes on-chip RA M and
10BASE-T transmit and receive filters.
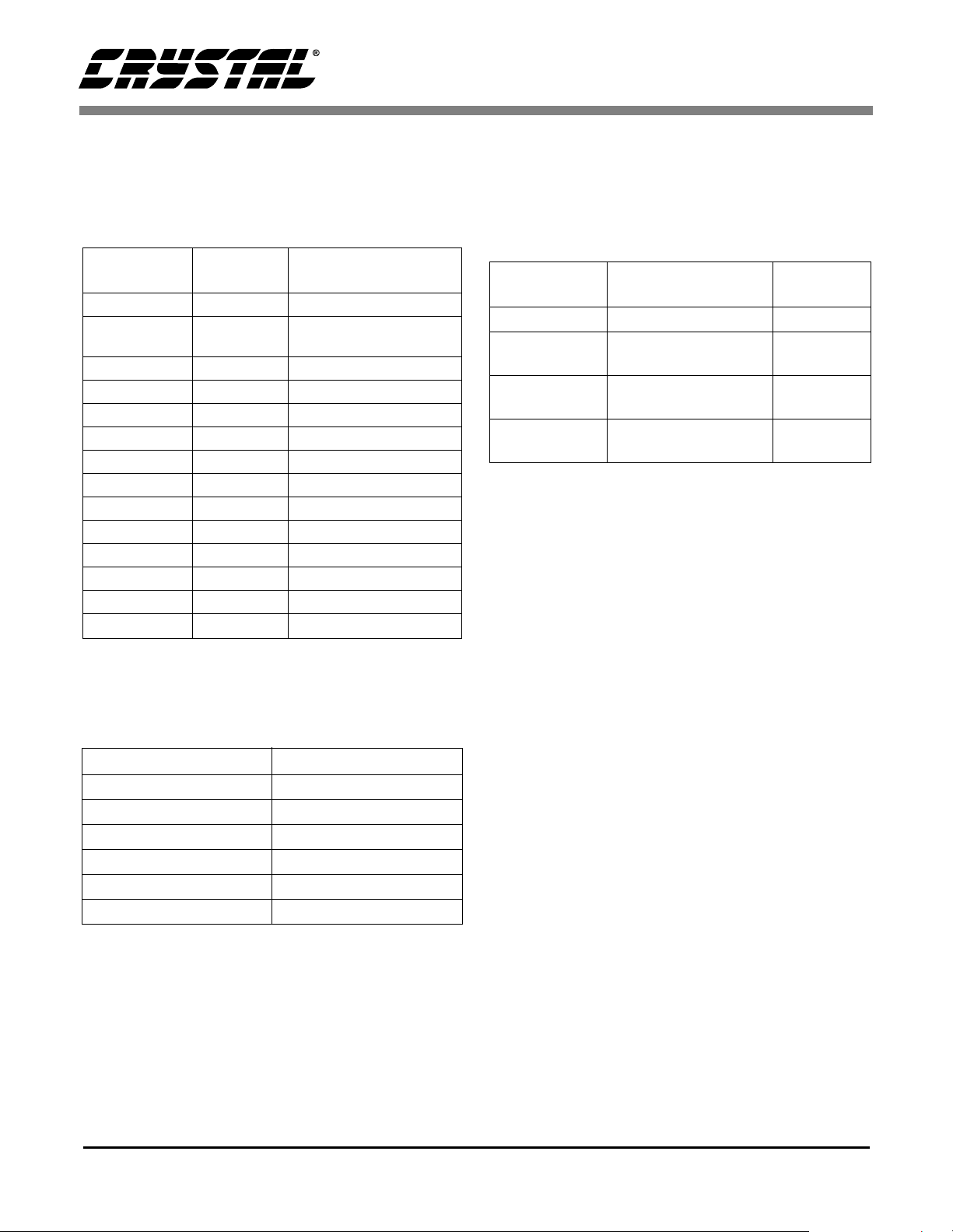
ORDERING INFO
CS89712-CB 0 to 70° C
256 Ball PBGA 17x17 mm
3.6864 MHZ
32.768 KHZ
NPOR, RUN,
RESET, WAKEUP
BATOK, EXPWR
PWRFL, BATCHG
EINT[1-2], FIQ,
MEDCHG
FLASHING LED DRIVE
PORTS A, B, D (8-BIT)
PORT E (3-BIT)
KEYBD DRIVERS (0–7)
BUZZER DRIVE
DC-TO-DC
SSI (ADC)
INTERFACE
DAI / SSI / ADC
INTERFACE
PLL
32.768-KHZ
OSCILLATOR
STATE CNTRL
POWER
MANAGEMENT
INTERRUPT
CONTROLLER
RTC
GPIO
PWM
SSI1 (ADC)
DAI
Preliminary Product Information
P.O. Box 17847, Austin, Texas 78760
(512) 445 7222 FAX: (512) 445 7581
http://www.cirrus.com
10BASE-T
ETHERNET
SSI2
CODE
ARM720T
ARM7TD
8-KBYTE
CACHE
MMU
WRITE
BUFFER
TIMER
ON-CHIP
BOOT ROM
EPB BUS
INTERNAL DATA BUS
MEMORY CO NT RO L LER
EXPANSION
SDRAM CNTRL
INTERNAL ADDRESS BUS
LCD
LCD
CONTROLLER
ON-CHIP SRAM
48K BYTES
EPB
CL-PS6700
INTFCE.
CONTROL
ICE-JTAG
UART
UART
IrDA
D[0-31]
PB[0:1], NCS[4:5]
EXPCLK, WORD,
NCS[0:3], EXPRDY ,
WRITE
MOE, MWE, SDCLK,
SDQM[0:1], SDRAS,
SDCAS
A[0-27],
DRA[0-14]
TES T AND
DEVELOPMENT
LCD DRIVE
LED AND
PHOTODIODE
ASYNC
INTERFACE 1
ASYNC
INTERFACE 2
This document contains information for a new product.
Cirrus Logic reserves the right to modify this product without notice.
Copyright Cirrus Logic, Inc. 2001
(All Rights Reserved)
FEB ‘01
DS502PP2
1
Page 2

Table Of Contents
1. OVERVIEW ............................................................................................................................... 4
2. FUNCTIONAL DESCRIPTION ................................................................................................. 7
2.1 CPU Core ............................................................................................................................7
2.2 State Control ....................................................................................................................... 7
2.3 Power-Up Sequence .........................................................................................................10
2.4 Resets ...............................................................................................................................10
2.5 Ethernet Port Reset and Initialization ................................................................................ 11
2.6 Ethernet EEPROM Configurations .................................................................................... 12
2.7 Clocks ...............................................................................................................................16
2.8 Interrupt Controller ............................................................................................................17
2.9 Boot ROM .........................................................................................................................21
2.10 Memory Map ...................................................................................................................21
2.11 Memory and I/O Expansion Interface .............................................................................. 23
2.12 SDRAM Controller ...........................................................................................................23
2.13 SDRAM Initialization .......................................................................................................26
2.14 CL-PS6700 PC Card Interface ........................................................................................26
2.15 Endianness .....................................................................................................................29
2.16 Internal UARTs and SIR Encoder ................................................................................... 30
2.17 Synchronous Serial Interfaces ........................................................................................31
2.18 LCD Controller ................................................................................................................39
2.19 Timer Counters ...............................................................................................................41
2.20 Real-Time Clock ..............................................................................................................43
2.21 Dedicated LED Flasher ...................................................................................................43
2.22 PWM Interfaces ...............................................................................................................43
2.23 Ethernet Port Architecture ............................................................................................... 44
2.24 Ethernet Port Functional Description ..............................................................................45
2.25 Programming the EEPROM ............................................................................................46
2.26 Ethernet LEDs ................................................................................................................. 48
2.27 Media Access Control Engine .........................................................................................48
2.28 Encoder/Decoder (ENDEC) ............................................................................................53
2.29 10BASE-T Transceiver ................................................................................................... 54
2.30 Basic Transmit Operation ................................................................................................ 56
2.31 Basic Receive Operation ................................................................................................. 56
2.32 Managing Interrupts & Status Queue .............................................................................. 57
2.33 Basic Receive Operation ................................................................................................. 57
2.34 Receive Frame Address Filtering .................................................................................... 63
2.35 Transmit Operation .........................................................................................................66
2.36 Full Duplex Considerations .............................................................................................69
2.37 Auto-Negotiation Considerations .................................................................................... 69
CS89712
Contacting Cirrus Logic Support
For a complete listing of Direct Sales, Distributor, and Sales Representative contacts, visit the Cirrus Logic web site at:
http://www.cirrus.com/corporate/contacts/sales.cfm
Preliminary product inf o rmation describes products whi c h are i n production, but for whi ch f ul l char act er i zat i on da t a i s not yet available. Advance p rodu ct i nformation describes products which are in development and subject to development changes. Cirrus Logic, Inc. has made best efforts to ensure that the information
contained in this document is accurate and reli able. However , t he infor mation is subje ct to chang e without noti ce and is provi d ed “AS IS” withou t warran ty of
any kind (express or implied). No responsibility is assumed by Cirrus Logic, Inc. for the use of this information, nor for infringements of patents or other rights
of third parties. This document is the pro perty of Cirrus Logi c, Inc. and implie s no licen se under pat ents, copyright s, tr ademarks, or trade secr ets. No part of
this publication may be copied, reproduced , stored in a retrieval system, or transmitted, in any form or by any means (electro nic, mechanical, photographic, or
otherwise) without the pr i or writ ten consent of Cirrus Logic, Inc. Items from any Cirrus Logic website or di sk may be printed for use by the user. However, no
part of the printout or electronic files may be copied, reproduced, stored in a retrieval system, or transmitted, in any form or by any means (electronic, mechanical,
photographic, or otherwise) without the prior written consent of Cirrus Logic, Inc.Furthermore, no part of this publication may be used as a basis for manufacture
or sale of any items without the prior written consent of Cirrus Logic, Inc. The names of products of Cirrus Logic, Inc. or other vendors and suppliers appearing
in this document may be trademarks or service marks of their respective owners which may be registered in some jurisdictions. A list of Cirrus Logic, Inc. trademarks and service marks can be found at http://www.cirrus.com.
2 DS502PP2
Page 3

CS89712
3. REGISTER SET ...................................................................................................................... 70
3.1 Internal Registers .............................................................................................................. 70
3.2 Accessing Ethernet Port Registers ................................................................................... 73
3.3 Ethernet Port Internal Memory Map .................................................................................. 77
3.4 I/O Port Data Registers ..................................................................................................... 78
3.5 System Control Registers ................................................................................................. 79
3.6 Interrupt Registers ............................................................................................................ 89
3.7 Expansion Memory Configuration Registers ..................................................................... 92
3.8 Timer / Counter Registers ................................................................................................. 95
3.9 Miscellaneous Registers ................................................................................................... 95
3.10 UART Registers .............................................................................................................. 98
3.11 LCD Registers ............................................................................................................... 100
3.12 SSI Register .................................................................................................................. 103
3.13 End Of Interrupt Locations ............................................................................................ 104
3.14 State Control Registers ................................................................................................. 105
3.15 SS2 Registers ............................................................................................................... 106
3.16 DAI Registers ................................................................................................................ 106
3.17 Ethernet Bus Interface Registers .................................................................................. 117
3.18 Ethernet Port Status/Control Registers ......................................................................... 117
4. TEST & DEBUG MODES ..................................................................................................... 137
4.1 Entering test modes ........................................................................................................137
4.2 Boundary Scan ............................................................................................................... 139
4.3 In-Circuit Emulation ......................................................................................................... 140
5. MECHANICAL INFORMATION .......................... ....... ...... ...... ....... ...... ....... ...... ....... .............. 142
5.1 256-PBGA Pin Diagram .................................................................................................. 142
5.2 256-Ball PBGA Ball Listing ............................................................................................. 143
5.3 External Signal Functions .......................................................................................... 147
5.4 Output Bi-Directional Pins ............................................................................................... 151
5.5 256 PBGA Package Dimensions .................................................................................... 153
6. ELECTRICAL/THERMAL INFO ........................................................................................... 154
6.1 Absolute Maximum Ratings ............................................................................................ 154
6.2 DC Characteristics .......................................................................................................... 154
6.3 AC Characteristics .......................................................................................................... 157
6.4 I/O Buffer Strength & Characteristics .............................................................................. 169
7. ORDERING INFORMATION .............................................................. ....... ...... ..................... 170
DS502PP2 3
Page 4
1. Overview
CS89712
CRYSTAL
CRYSTAL
PC CARD
SOCKET
SDRAM
SDRAM
EXTERNAL MEMOR YMAPPED EXPANSION
ADDITIONAL I/O
CL-PS6700
PC CARD
CONTROLLER
× 16
FLASH
× 16
FLASH
BUFFERS
BUFFERS
LATCHES
ETHERNET
CRYSTAL
× 16
FLASH
× 16
FLASH
AND
MOSCIN
RTCIN
CS[4]
PB0
EXPCLK
D[31:0]
A[27:0]
SDQM[3:0]
SDCS0
SDCS1
SDCAS
SDRAS
NCS[0]
NCS[1]
MOE
WRITE
CS[n]
WORD
CS[2]
CS[3]
EXTL1
EXTL2
DD[3:0]
CL1
CL2
FM
M
COL[7:0]
PA[7:0]
PB[7:0]
PD[7:0]
PE[2:0]
POR
PWRFL
BATOK
EXTPWR
BATCHG
CS89712
RUN
WAKEUP
DRIVE[1:0]
FB[1:0]
SSICLK
SSITXFR
SSITXDA
SSIRXDA
LEDDRV
PHDIN
RxD1/2
TxD1/2
DSR
CTS
DCD
ADCCLK
ADCCS
ADCOUT
ADCIN
SMPCLK
RXD-
RXD+
TXD-
TXD+
LCD MODULE
KEYBOARD
POWER
SUPPLY UNIT
AND
COMPARATORS
DC-TO-DC
CONVERTERS
CODEC/SSI2/
DAI
IR LED AND
PHOTODIODE
2× RS-232
TRANSCEIVERS
ADC
DIGITIZER
ETHERNET
TRANSFORMER
DC
INPUT
BATTERY
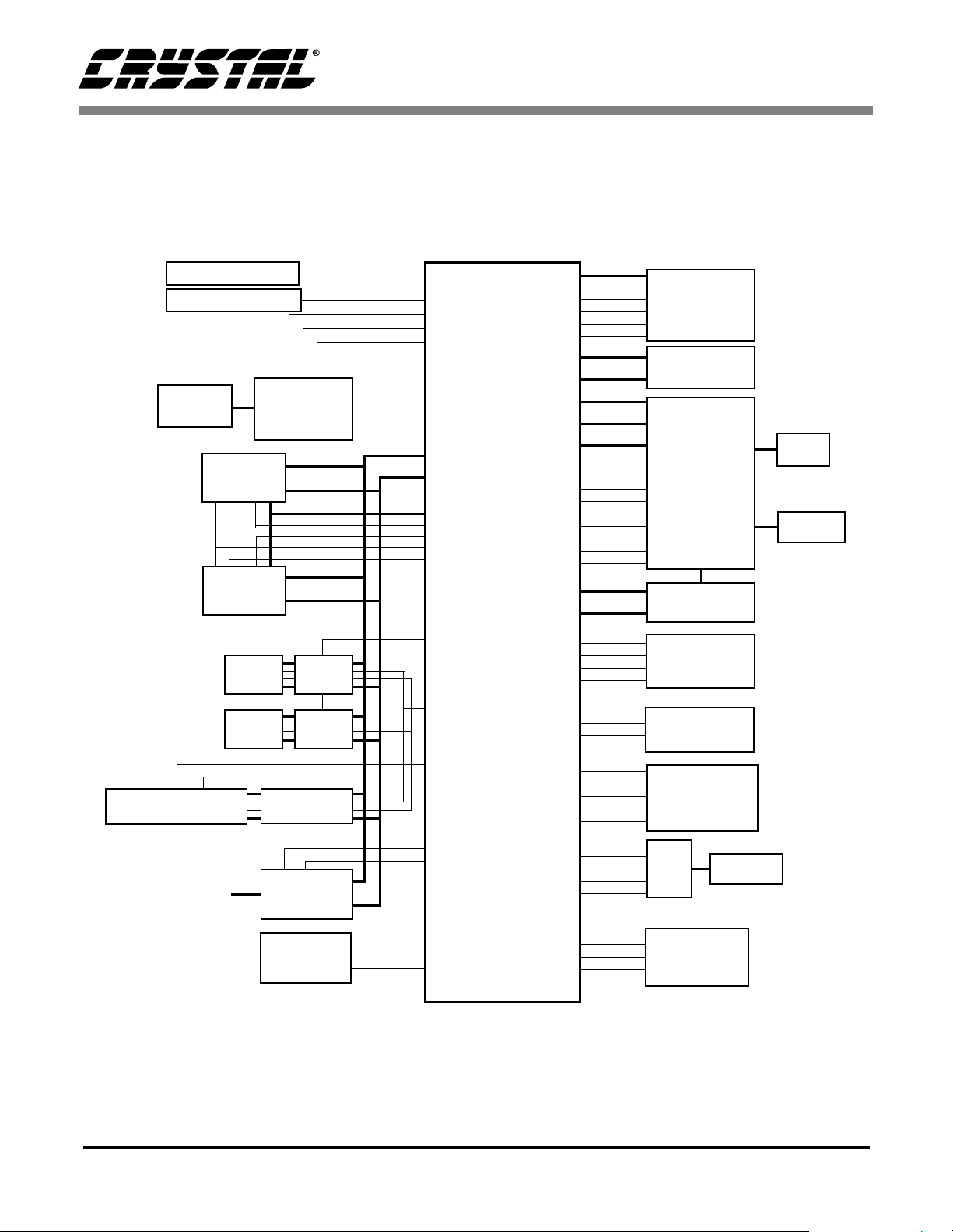
Figure 1. A CS89712–Based System
4 DS502PP2
Page 5

CS89712
The CS89712 contains a single-chip embedded
controller designed to be used in low-cost and ultra-low-power applications. Operating at 74 MHz,
the CS89712 delivers about 66 Dhrystone
2.1 MIPS sustained (74 MIPS peak).
The CS89712 contains the following features:
• ARM720T processor with:
- ARM7TDMI CPU core (supporting the
Thumb instruction set and with enhanced
multiplier) running at a dynamic clock
speeds of 18, 36, 49, or 74 MHz
- Advanced power management
- Memory Management Unit compatible
with the ARM710 core (and a 64-entry
translation lookaside buffer) with added
support for Windows CE
- 8 kbytes of unified instruction/data cache
with a four-way set associative controller
- Write buffer
- JTAG, core debug and full embedded ICE
• Full 10BaseT Ethernet port, with all the analog
& digital circuitry needed for a c omplete Ethernet circuit, having:
- Media Access Control (MAC) IEEE 802.3
compliant full-duplex engine. It handles all
aspects of Ethernet frame transmission and
reception, including: collision detection,
preamble generation and detection, and
CRC generation and test. Features include
automatic retransmission on collision, and
automatic padding of transmitted frames.
- 4 kbyte page of on-chip memory, eliminat-
ing external memory chips.
- serial EEPROM interface allowing config-
uration information storage for automatic
load at power-up.
It provides on-chip LED drivers for link status, bus status, and Ethernet line activity.
- 10BASE-T transceiver including drivers,
receivers, and analog filters, for direct connection to low-cost isolation transformers.
- very low noise emission, shortening EMI
testing and qualification time.
• 48k bytes of on-chip SRAM sharable between
the LCD controller and general applications
• Low power operation. Typical power dissipated is 270 mW at 74 MHz in the Operating State
and 160 mW in the Idle State (clock to the C PU
stopped, everything else running), with
<150 uW in the Standby State (realtime clock
‘on’, everything else stopped). The Ethernet
block has a Software Suspend state, disabling
the receiver and dropping current to the microampere range.
• Advanced audio decoder / decompression supports multiple audio decompressi on alg orit hms
at all standard sample & bit rates. MPEG 1, 2,
and 2.5 layer 3 audio decoding is supported, including ISO compliant MPEG 1 and 2 layer 3
support. Adaptive bit rates are supported.
• Up to 64 MHz of SDRAM can operate at up to
36.864 MHz with 16- or 32-bit wide accesses.
• ROM / SRAM / FLASH Memory controller decodes up to 5 separate memory segments each
up to 256 Mbytes. Each segment can be configured as 8, 16, or 32 bits wide with page-mode
access support and programmable access times.
Supports removable FLASH card interface for
addition of expansion FLASH modules.
• 27 general-purpose I/O bits; three 8-bit and one
3-bit port support scanning keyboard matrix.
• Digital Audio Interface (DAI) for interfacing to
CD-quality DACs and CODECs.
- A Manchester encoder/decoder, clock recovery circuit, and 10BASE-T transceiver.
DS502PP2 5
• Interrupt controller.
• IrDA 115.2 kbps SIR protocol controller.
Page 6

CS89712
• LCD controller interfaces directly to a singlescan panel monochrome LCD. Panel width size
is programmable from 32 to 1024 pixels in 16pixel increments. Video frame buffer size programmable up to 128 kbytes with 1, 2, or 4 bits
per pixel supports 15-level grayscale operation.
• Programmable frame buffer address allows a
system with only internal SRAM for memory.
• On-chip boot ROM programmed with serial
load boot sequence.
• Two 16-bit general purpose timer counters.
• 32-bit Real-Time Clock and comparator.
• Dedicated LED flasher pin driven from the
RTC with programmable duty ratio (multiplexed with a GPIO pin).
• Two 16550 type UARTs:
- support bit rates up to 115.2 kbps
- contain two 16-byte FIFOs for TX and RX
- UART1 supports modem control signals
• Two synchronous serial interfaces for Microwire (128 kbps) or SPI peripherals such as
ADCs, one supporting both master/slave mode
and the other supporting master mode only.
• PWM interface provides two 96 kHz clocks
with programmable 1/16 to 15/16 duty cycle
for driving a DC to DC converter.
• An interface to one or two Cirrus Logic CLPS6700 PC Card controller devices to support
two PC Card slots.
• Oscillator and phase-locked loop (PLL) to generate the core clock speeds of 18.432 MHz,
36.864 MHz, 49.152 MHz, and 73.728 MHz
from an external 3.6864 MHz crystal.
• A low-power 32.768 kHz oscillator.
• Suite of software drivers for immediate use
with most industry standard network operating
systems. In addition, complete evaluation kits
and manufacturing packages significantly reduce production cost and time.
• Commercial 0 - 70C operating temperature.
The CS89712 design is optimized for low power
dissipation and is fabricated on a fully static
0.25 micron CMOS process. It is available in a
256-ball PBGA package.
A maximum configured system using the CS89712
is shown in Figure 1. This system assumes all of the
DRAMs and ROMs are 16-bit wide devices. The
keyboard may be connected to more GPIO bits than
shown to allow greater than 64 keys, however these
extra pins will not be wired into the WAKEUP pin
functionality. Note that only one of the CODEC,
SSI2, or DAI interfaces may be used at a time.
6 DS502PP2
Page 7
CS89712
2. FUNCTIONAL DESCRIPTION
2.1 CPU Core
The ARM720T consists of an ARM7TDMI 32-bit
RISC processor, a unified 8 kbyte cache, and a
memory management unit (MMU). The cache is
four-way set associative organized as 512 lines
with each line being 16 bytes. The cache is directly
connected to the ARM7TDMI, and therefore caches the virtual address from the CPU. When the
cache misses, the MMU translates the virtual address into a physical address. A 64-entry translation
lookaside buffer (TLB) is utilized to speed the address translation process and reduce bus traffic necessary to read the page table. The MMU saves
power by only translating cache misses.
See the ARM720T Data sheet for a complete description of the various logic blocks that make up
the processor, as well as all internal registers.
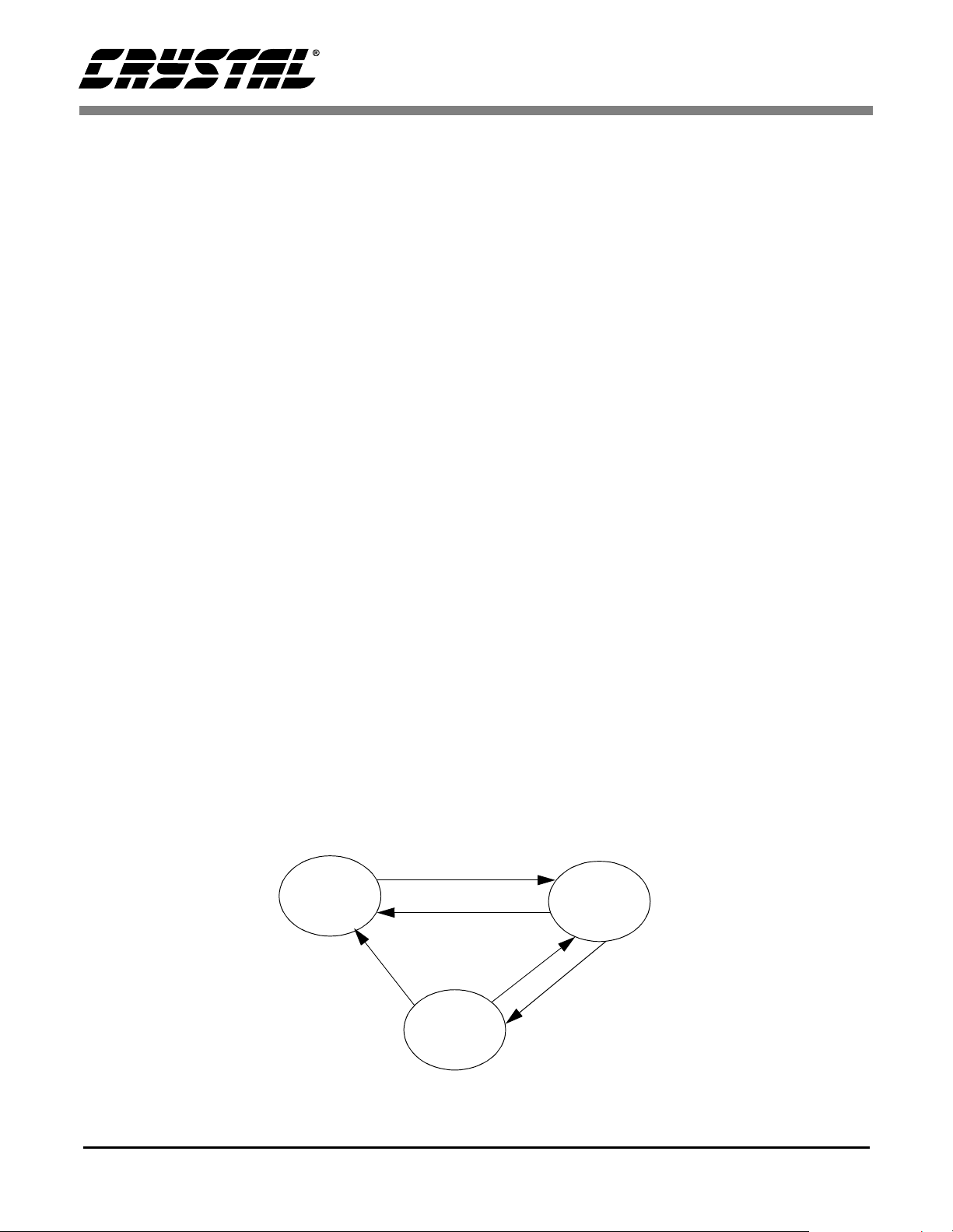
2.2 State Control
The CS89712 supports the following Power Management States: Operating, Idle, and Standby (see
Figure 2). There is also a state called the Doze
State, however it is a temporary execution state.
The normal program execution state i s th e Operat ing State, which is a full performance state where
all of the clocks and peripheral logic are enabled.
The Idle State is the sam e as the Operating State
with the exception of the CPU clock being halted,
and only an external interrupt will return it back to
the Operating State. The Standby State has the lowest power consumption of the three states. By selecting this mode the main oscillator shuts down,
leaving only the Real-Time Clock and its associated logic powered. When the CS89712 is in Standby
all power and ground pins should remain connected
to power and ground in order to have a proper system wake-up. The only state that Standby can transition to is the Operating State.
2.2.1 Standby State
The Standby State equates to the system being
switched "off" (i.e., no display, and the main oscillator is shut down). The PLL will be shut down.
In the Standby State, all the system memory and
state is maintained and the system time is kept upto-date. The PLL/on-chip oscillator or external oscillator is disabled and the system is static, except
for the low-power watch crystal (32 kHz) oscillator
and divider chain to the RTC and LED flasher. The
RUN signal is driven low, therefore this signal can
be used externally in the system to power down
other system modules.
Whenever the CS89712 is in the Standby State, the
external address and data buses are forced low internally by the RUN signa l. This i s do ne to preve nt
peripherals that are powered down from draining
Interrupt or r ising wakeup
Standby
Write to standby location,
power fail, or user reset
r
e
t
n
nPOR, power fail,
or user reset
Idle
Figure 2. State Diagram
DS502PP2 7
I
Operating
t
up
r
Write to halt location
Page 8
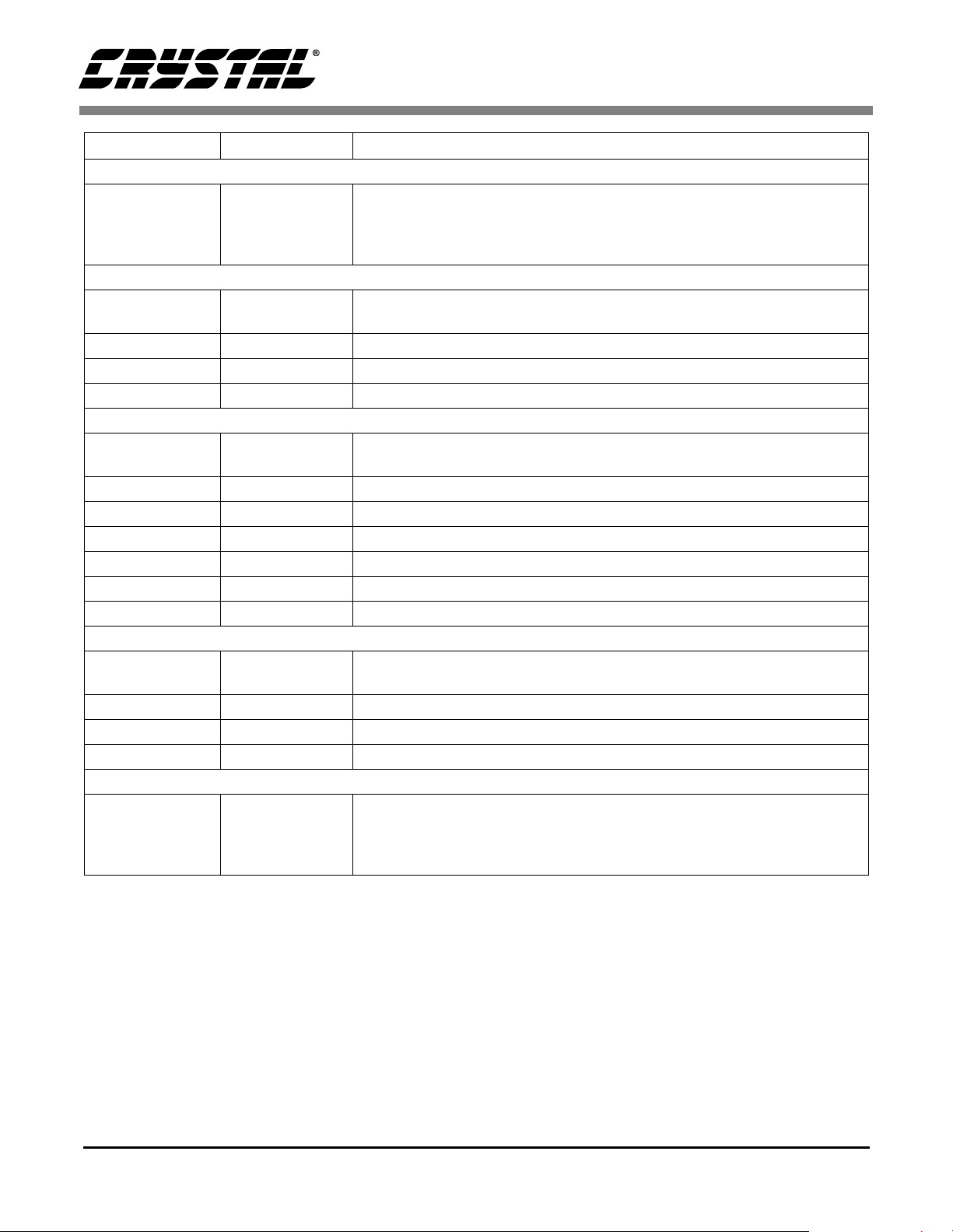
CS89712
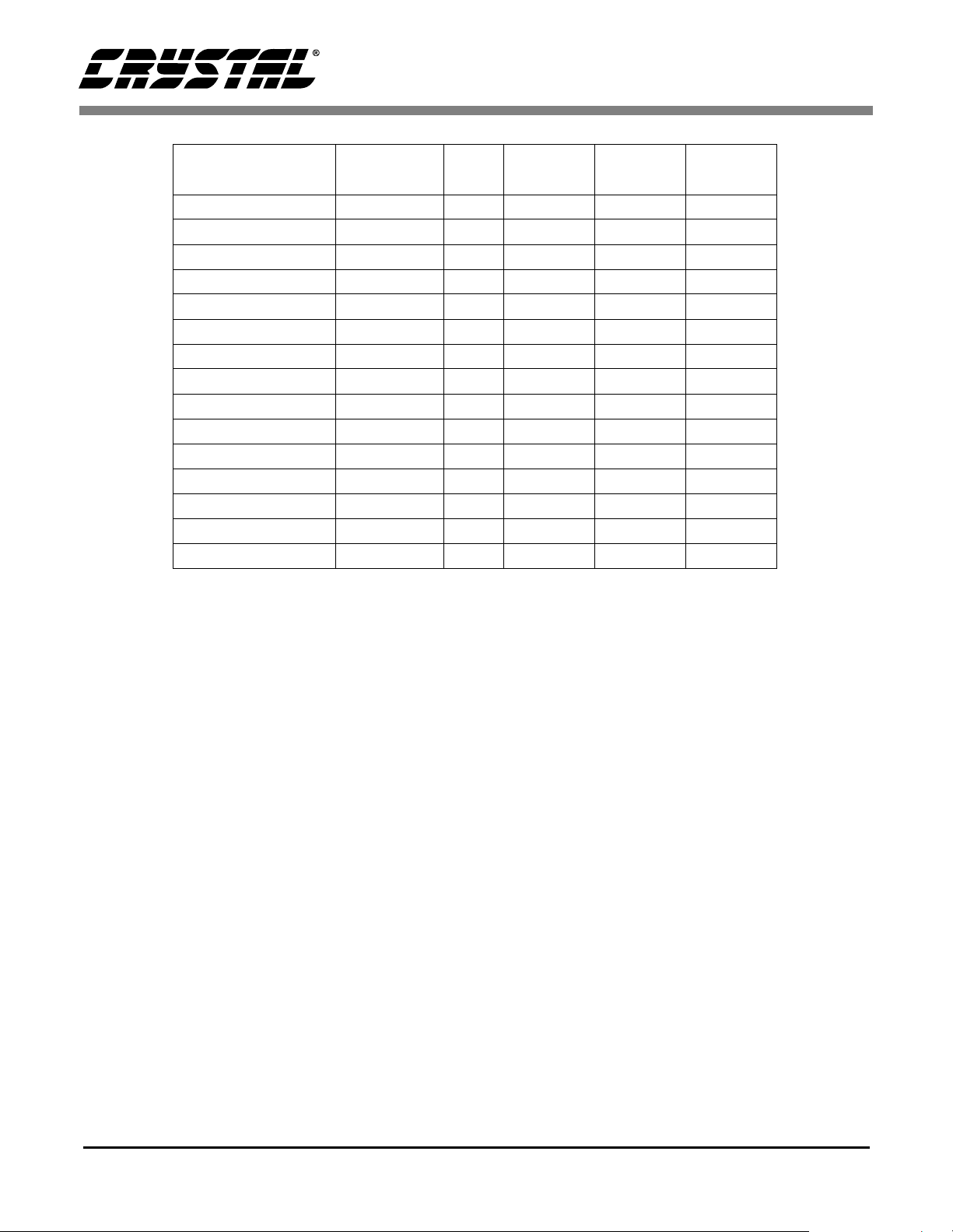
Address (W/B) Operating Idle Standby
SDRAM Control On On SELFREF Off N/A
UARTs On On Off Reset Reset
LCD FIFO On On Reset Reset Reset
LCD On On Off Reset Reset
ADC Interface On On Off Reset Reset
SSI2 Interface On On Off Reset Reset
DAI Interface On On Off Reset Reset
CODEC On On Off Reset Reset
Timers On On Off Reset Reset
RTC On OnOnOnOn
LED Flasher On On On Reset Reset
DC-to-DC On On Off Reset Reset
CPU On Off Off Reset Reset
Interrupt Control On On On Reset Reset
PLL/CLKEN Signal On On Off Off Off
Table 1. Peripheral Status in Different Power Management States
nPOR
RESET
nURESET
RESET
current. Also, the internal peripheral’s signals get
set to their Reset State.
When first powered, or reset by the nPOR (Power
On Reset, active low) signal, the CS89712 is forced
into the Standby State. This is known as a cold reset, and when leaving the Standby State after a cold
reset, external wake up is the only way to wake up
the device. When leaving the Standby State after
non-cold reset conditions (i.e., the software has
forced the device into the Standby State), the transition to the Operating State can be caused by a rising edge on the WAKEUP input signal or by an
enabled interrupt. Normally, when entering the
Standby State from the Operating State, the software will leave some interrupt sources enabled.
Note: The CPU cannot be awakened by the TINT,
WEINT, and BLINT interrupts when in the
Standby State.
Typically, software writes to the Standby internal
memory location to cause the transition from the
Operating State to the Standby State. Before enter-
ing the Standby State, if external I/O devices (such
as the CL-PS6700s connected to nCS[4] or nCS[5])
are in use, the software must ensure that they ar e
idle before writing to the Standby State location.
Before entering the Standby State, the software
must properly disable the DAI. Failing to do so will
result in higher than expected power consumption
in the Standby State, as well as unpredictable operation of the DAI. The DAI ca n be r e-enabled afte r
transitioning back to the Operating State.
The system can also be forced into the Standby
State by hardware if the nPWRFL or nURESET inputs are forced low. The only exit from the Standby
State is to the Operating State.
The system will only transition to the Operating
State from the Standby State under the following
conditions: when the nPWRFL input pin is high,
when the nEXTPWR input pin is low, or when the
BATOK input pin is high. This prevents the system
from starting when the power supply is inadequate
8 DS502PP2
Page 9

CS89712
(i.e., the main batteries are low), corresponding to
a low level on nPWRFL or BATOK.
From the Standby State, if the WAKEUP signal is
applied with no clock except the 32 kHz clock running, the CS89712 will be initialized into a state
where it is ready to start and is waiting for the CPU
to start receiving its clock. The CPU will still be
held in reset at this point . After the first cloc k is applied, there will be a delay of about eight clock cycles before the CPU is enabled. This delay allows
the CPU clock to settle.
2.2.1.1 UART in Standby State
During the Standby State, the UARTs are disabled
and cannot detect any activity (i.e., start bit) on the
receiver. If this functionality is required then this
can be accomplished in software by the following
method:
1) Permanently connect the RX pin to one of the
active low external interrupt pins.
2) Ensure that on entry to the Standby State, the
chosen interrupt source is not masked, and the
UART is enabled.
3) Send a preamble that consists of one start bit,
8 bits of zero, and one stop bit. This will cause
the CS89712 to wake and execute the enabled
interrupt vector.
The UART will automatically be re-enabled when
the processor re-enters the Operating State, and the
preamble will be received. Since the UART was
not awake at the start of the pream ble, the timing of
the sample point will be off-center during the preamble byte. However, the next byte transmitted
will be correctly aligned. Thus, the actual first real
byte to be received by the UART will be correct.
2.2.2 Idle State
If in the Operating State, the I dle State can be entered by writing to a special internal memory location (HALT) in the CS89712. If an interrupt occurs,
the CS89712 will return immediately back to the
Operating State and execute the next instruction.
The WAKEUP signal can not be used to exit the
Idle State. It is only used to exit the Standby State.
In the Idle State, the device functions just like it
does when in the Operating State. However, the
CPU clock is halted while it wa its for an event such
as a key press to generate an interrupt. The PLL always remains active in the Idle State.
2.2.3 Keyboard Interrupt Wakeup
For the case of the keyboard interrupt, the following options are available and are selectable according to bits 1 and 3 of the SYSCON2 register (refer
to Section 3.5.2 for register details).
• If the KBWEN bit (SYSCON2 bit 3) is set low,
then a keypress will cause a transition from a
power saving state only if the keyboard inter rupt is non-masked (i.e., the interrupt mask register 2 (INTMR2 bit 0) is high).
• When KBWEN is high, a keypress will cause
the device to wake up regardless of the state of
the interrupt mask register. This is called the
“Keyboard Direct Wakeup’ mode. In this
mode, the interrupt request may not get serviced. If the interrupt is masked (i.e., the interrupt mask register 2 (INTMR2 bit 0) is low),
the processor simply starts re-executing code
from where it left off before it entered the power saving state. If the interrupt is non-masked,
then the processor will service the interrupt.
• When the KBD6 bit (SYSCON2 bit 1) is low,
all 8 Port A inputs are OR’ed together to produce the internal wakeup signal and keyboard
interrupt request. This is the default reset state.
• When the KBD6 bit (SYSCON2 bit 1) is high,
only the lowest 6 bits of Port A are OR’ed together to produce the internal wakeup signal
and keyboard interrupt request. The two most
significant bits of Port A are available as GPIO
when this bit is set high.
DS502PP2 9
Page 10

CS89712
When both KBWEN and INTMR2 bit 0 are low,
the device can be awakened only by the external
WAKEUP pin or another enabled interrupt source.
The keyboard interrupt capability allows use of a
polled and/or interrupt-driven keyboard routine.
Notes:The keyboard interrupt is NOT deglitched.
2.2.4 Ethernet Port Software Suspend
The Ethernet port power features work in a different manner than detailed above. Suspend modemay be entered via software. During this mode, all
internal Ethernet circuits are shut off except the I/O
Base Address register (Ethernet Port offset address
0020h) and the SelfCTL register.
To enter Suspend mode, the SWSuspend bit (SelfCTL Register, bit 8) is set. To exit SW Suspend,
software must write to the CS89712 Ethernet (used
only to wake the Ethernet port, the W rite data is ignored). Upon exit, the CS89712 Ethernet performs
a complete reset, and then goes through a normal
initialization procedure.
2.3 Power-Up Sequence
The following sequence should be followed to ensure proper start up. If any of the timing sequences
recommended below are violated, then the part
may not start up properly, requiring a hard reset to
recover.
1) Upon power, the signal nPOR must be held active (LOW) for a minimum of 100us, after V
has become settled.
2) After nPOR goes HIGH, the CS89712 will enter the Standby State (and only this state). In
this state, the PLL and CPU are not enabled.
The only method that can be used to allow the
CS89712 to exit the Standby State into the Operating State is by the WAKEUP signal going
active (HIGH).
Note: It is not a requirement to use the nURESET
signal. If not used, the nURESET signal
must be HIGH, and it must have gone
HIGH prior to nPOR going HIGH. This is
DD
due to the fact that nURESET is latched
into the device by the rising edge of nPOR.
When nURESET is LOW on the rising edge
of nPOR, it can force the device into one of
its Test Mode states.
3) After nPOR goes HIGH, the WAKEUP signal
cannot be detected as going HIGH, until after at
least two seconds. After two seconds, the
WAKEUP signal can become active, and it
must be HIGH for at least 125 us.
4) Before the WAKEUP signal is detected internally, it must go through a deglitching circuit.
This is why is must be active for at least 125us.
Then the PLL gets enabled. WAKEUP is ignored immediately after waking up the system.
It also ignores it while in the Idle or Operating
State. It can constantly toggle with no affect on
the device. It will only be read again if nPOR
goes low and then high again, or if software has
forced the device back into the Standby State.
5) A maximum of 250 msec will pass before the
CPU starts to fetch the first instruction.
2.4 Resets
There are three asynchronous resets to the
CS89712: nPOR (Power On Reset), nPWRFL, and
nURESET. If an y of these are a ctive, a system reset
is generated internally. This will reset all internal
registers in the CS89712 except the RTC data and
match registers. These registers are only cleared by
nPOR allowing the system time to be preserved
through a user reset or power fail condition.
NOTE: The Ethernet Port has different reset conditions
and considerat ions than describ ed in this section. Refer to the following section for resetting
the Ethernet Port.
Any reset will also reset the CPU and cause it to
start execution at the reset vector when the
CS89712 returns to the Operating State.
Three signals are used to internally reset storage elements. These are nPOR, nSYSRES (System Reset) and nSTBY. nPOR is an external signal.
nSTBY is equivalent to the external RUN signal.
10 DS502PP2
Page 11

CS89712
nPOR is the highest priority reset signal. When active (low), it will reset all storage elements in the
CS89712. nPOR active forces nSYSRES and nSTBY active. nPOR will only be active after the
CS89712 is first powered up and not during any
other resets. nPOR active clears all flags in the status register except for the cold reset flag (CLDFLG) bit (SYSFLG, bit 15), which is set.
nSYSRES is generated internally in the CS89712 if
either nPOR, nPWRFL, or nURESET are active. It
is the second highest priority reset signal, used to
asynchronously reset most internal registers.
nSYSRES activation forces nSTBY and RUN low,
and resets the CS89712 leaving it in the Standby
State.
The nSTBY and RUN signals are high when the
CS89712 is in the Operating or Idle States and low
when in the Standby State. The m a in system c l ock
is valid when nSTBY is high. The nSTBY signal
will disable any peripheral block that is clocked
from the master clock source (i.e., everything except for the RTC). However, when in Snooze State,
the LCD controller and the DC to DC converter interface peripherals will NOT be disabled.
In general, a system reset will clear all registers and
nSTBY will disable all peripherals that require a
main clock, with the exception of the Snooze State
operation as described above. The following peripherals are always disabled by a low level on
nSTBY: two UARTs and IrDA SIR encoder, timer
counters, telephony codec, and the two SSI interfaces. In addition, when in the Standby State, the
LCD controller and PWM drive are also disabled.
2.5 Ethernet Port Reset and Initialization
Different considerations apply to resetting and initializing the Ethernet Port.
2.5.1 Reset
Three different conditions cause the Ethernet port
to reset its Ethernet internal registers and circuits.
2.5.1.1 Power-Up Reset
When power is applied, the Ethernet port maintains
reset until the voltage at the supply pins reaches approximately 2.5 V. The Ethernet port comes out of
reset once Vcc is greater than approximately 2.5 V
and the crystal oscillator has stabilized.
2.5.1.2 Software Initiated Reset
There is a chip-wide reset whenever the RESET bit
(SelfCTL Register, Bit 6) is set.
2.5.1.3 Software Suspend
Whenever the Ethernet port enters Software Suspend mode, all registers and circuits are reset.
Upon exit, there is a chip-wide reset.
2.5.2 Allowing Time for Reset Operation
After a reset, the Ethernet port goes through a self
configuration. This includes calibrating on-chip
analog circuitry, and reading EEPROM for validity
and configuration. Time required for the reset calibration is typically 10 ms. Software drivers should
not access registers internal to the CS89712 Ethernet during this time. When calibration is done, bit
INITD in the Self Status Register is set indicating
that initialization is complete, and the SIBUSY bit
in the same register is cleared indicating the EEPROM is no longer being read.
2.5.3 Initialization
After each reset (except EEPROM Reset), the
CS89712’s Ethernet port checks the sense of the
EEDataIn pin to see if an external EEPROM is
present. EEDI high indicates presence of an EEPROM and the Ethernet port automatically loads
the configuration data stored in the EEPROM into
its internal registers (see next section). If EEDI is
low, an EEPROM is not present and the Ethernet
port resets with the register values in Table 2.
An optional low-cost serial EEPROM can be used
to store configuration information that is automati-
DS502PP2 11
Page 12
CS89712
cally loaded into the Ethernet port after each reset
(except EEPROM reset).
The CS89712 Ethernet operates with any of six
standard EEPROMs shown in Table 3.
Ethernet Port
Address
0020h 0300h I/O Base Address
0022h XXXX XXXX
0102h 0003h RxCFG Register
0104h 0005h RxCTL Register
0106h 0007h TxCFG Register
0108h 0009h TxCMD Register
010Ah 000Bh BufCFG Register
010Ch Undefined Reserved
010Eh Undefined Reserved
0110h Undefined Reserved
0112h 00013h LineCTL Register
0114h 0015h SelfCTL Register
0116h 0017h BusCTL Register
0118h
Note: I/O base address is unaffected by Software
Suspend mode.
EEPROM Type Size (16-bit words)
‘C46 (non-sequential) 64
‘CS46 (sequential) 64
‘C56 (non-sequential) 128
‘CS56 (sequential) 128
‘C66 (non-sequential) 256
‘CS66 (sequential) 256
Table 3. Supported EEPROM Types
Register
Contents
XXXX X100
0019h
Table 2. Default Configuration
Register Descriptions
Interrupt Number
TestCTL Regi ste r
2.6 Ethernet EEPROM Configurations
2.6.1 EEPROM Interface
The EEPROM interface uses the signals shown in
Table 4.
Ethernet port
Pin
EECS EEPROM Chip Select Chip Select
EESK 1 MHz EEPROM
EEDO EEPROM Data Out
EEDI EEPROM Data in
Table 4. EEPROM Interface
Ethernet port
Function
Serial Clock output
(data to EEPROM)
(data from EEPROM)
EEPROM
Pin
Clock
Data In
Data Out
2.6.2 EEPROM Memory Organization
If an EEPROM is used to store initial configuration
information for the Ethernet port, the EEPROM is
organized in one or more blocks of 16-bit words.
The first block in EEPROM, referred to as the Configuration Block, is used to configure the Ethernet
port after reset. An example of a typical Configuration Block is shown in Table 5. Additional blocks
containing user data may be stored in the EEPROM. However, the Configuration Block must
always start at address 00h and be stored in contiguous memory locations.
2.6.3 Reset Configuration Block
The first block in EEPROM, the Reset Configuration Block, is used to automatically program the
Ethernet port with an initial configuration after a
reset. Additional user data may also be stored in the
EEPROM if space is ava ilable . The additiona l data
are stored as 16-bit words and can occupy any EEPROM address space beginning immediately after
the end of the Reset Configuration Block up to address 7Fh, depending on EEPROM size. This additional data can only be accessed through software
control (refer to Section 2.24 for more information). Address space 80h to AFh is reserved.
12 DS502PP2
Page 13
Word Address Value Description
FIRST WORD in DATA BLOCK
00h A120h Configuration Block Header.
The high byte, A1h, indicates a ‘C46 EEPROM is attached. The Link
Byte, 20h, indicates the number of bytes to be used in this block of configuration data.
FIRST GROUP of WORDS
01h 2020h Group Header for first group of words.
Three words to be loaded, beginning at 0020h in Ethernet Port memory.
02h 0300h I/O Base Address
03h 0003h Interrupt Number
04h 0001h DMA Channel Number
SECOND GROUP of WORDS
05h 502Ch Group Header for second group of words.
Six words to be loaded, beginning at 002Ch in Ethernet Port memory.
06h E000h Memory Base Address - low word
07 000Fh Memory Base Address - high word
08h 0000h Boot PROM Base Address - low word
09h 000Dh Boot PROM Base Address - high word
0Ah C000h Boot PROM Address Mask - low word
0Bh 000Fh Boot PROM Address Mask - high word
THIRD GROUP of WORDS
0Ch 2158h Group Header for third group of words.
Three words to be loaded, beginning at 0158 in Ethernet Port memory.
0Dh 0010h Individual Address - Octet 0 and 1
0Eh 0000h Individual Address - Octet 2 and 3
0Fh 0000h Individual Address - Octet 4 and 5
CHECKSUM Value
10h 2800h The high byte, 28h, is the Checksum Value. In this example, the check-
sum includes word addresses 00h through 0Fh. The hexadecimal sum of
the bytes is D8h, resulting in a 2’s complement of 28h. The low byte, 00h,
provides a pad to the word boundary.
CS89712
Note: FFFFh is a special code indicating that there are no more words in the EEPROM.
Table 5. EEPROM Configuration Block Example
2.6.3.1 Reset Configuration Block Structure
The Reset Configuration Block is a block of contiguous 16-bit words starting at EEPROM address
00h. It can be divided into three logical sections: a
header, one or more groups of configuration data
DS502PP2 13
words, and a checksum value. All words in the Reset Configuration Block are read sequentially by
the Ethernet port after each reset, start ing with the
header and ending with the checksum. Each group
of configuration data is used to program an Ether-
Page 14

CS89712
net Port regis ter (or s et of Ethe rnet Port re giste rs in
some cases) with an initial non-default value.
2.6.3.2 Reset Configuration Block Header
The header (first word of the block located at EE PROM address 00h) specifies the type of EEPROM used, if a Reset Configuration block is
present, and if so, how many bytes of configuration
data are stored in the Reset Configuration Block.
2.6.3.3 Determining the EEPROM Type
The LSB of the high byte of the header indicates
the type of EEPROM attached: sequential or nonsequential. An LSB of 0 (XXXX-XXX0) indicates
a sequential EEPROM, with a 1 (XXXX-XXX1)
indicating non-sequential EEPROM. The Ethernet
port functions with either type of EEPROM. The
Ethernet port will automatically generate sequential addresses while reading the Reset Configuration Block if a non-sequential EEPROM is used.
2.6.3.4 EEPROM Reset Configuration Block
The read-out of either a binary 101X-XXX0 or
101X-XXX1 from the high byte of the header indicates the presence of configuration data. Any other
readout value terminates initialization from t he EEPROM. If an EEPROM is attached but not used for
configuration, the high byte of the first word should
be programmed with 00h in order to ensure that the
Ethernet port will not attempt to read configuration
data from the EEPROM.
2.6.3.5 Determining Number of Bytes in the
Reset Configuration Block
grammed with a Reset Configuration Block containing 4 bytes of configuration data. This Reset
Configuration Block occupies 6 bytes (3 words) of
EEPROM space (2 bytes for the header and 4 bytes
of configuration data).
2.6.4 Groups of Configuration Data
Configuration data is arranged as groups of words.
Each group contains one or more words of data that
are to be loaded into Ethernet Port re gisters. The
first word of each group is referred to as the Group
Header. The Group Header indicates the number of
words in the group and the address of the Ethernet
Port register where the first data word in the group
is to be loaded. Any remaining words in the group
are stored in successive Ethernet Port registers.
2.6.4.1 Group Header
Bits F through C of the Group Header specify the
number of words in each group that are to be transferred to Ethernet Port registers (see Figure 3 for
the format). This value is two less than the total
number of words in the group, including the Group
Header. For example, if bits F through C contain
0001, there are three words in the group (a Group
Header and two words of configuration data).
Bits 8 through 0 of the Group Header specify a 9bit Ethernet Port Address. This address defines the
Ethernet Port register that will be loaded with the
first word of configuration data from the group.
Bits B though 9 of the Group Header are forced to
0, restricting the destination address range to the
first 512 bytes of Ethernet Port memory.
The low byte of the Reset Configuration Block
header is known as the link byte. The value of the
Link Byte represents the number of bytes of configuration data in the Reset Configuration Block. The
two bytes used for the header are excluded when
calculating the Link Byte value.
For example, a Reset Configuration Block header
of A104h indicates a non-sequential EEPROM pro-
14 DS502PP2
2.6.5 Reset Configuration Block Checksum
A checksum is stored in the high byte position of
the word immediately following the last group of
data in the Reset Configuration Block. (The EEPROM address of the checksum value can be determined by dividing the value stored in the Link Byte
by two.) The checksum value is the 2’s complement of the 8-bit sum (any carry out of eighth bit is
Page 15

CS89712
ignored) of all the bytes in the Reset Configuration
Block, excluding the checksum byte. This sum includes the Reset Configuration Block header at address 00h. Since the checksum is calculated as the
2’s complement of the sum of all preceding bytes in
the Reset Configuration Block, a total of 0 should
result when the checksum value is added to the sum
of the previous bytes.
2.6.6 EEPROM Example
Table 5 shows an example of a Reset Configuration
Block stored in a C46 EEPROM. Note that littleendian word ordering is used, i.e., the least significant word of a multiword datum is located at the
lowest address.
2.6.7 EEPROM Read-out
If the EEDI pin is asserted high at the end of reset,
the Ethernet port reads the first word of E EPROM
data by:
2.6.7.1 Determining EEPROM Size
The Ethernet port determines the size of the EEPROM by checking the sense of EEDI on the tenth
rising edge of EESK. If EEDI is low, the EEPROM
is a ’C46 or ’CS46. If EEDI is high, the EEPROM
is a ’C56, ’CS56, ’C66, or ’CS66.
2.6.7.2 Loading Configuration Data
The Ethernet port reads in the first word from the
EEPROM to determine if configuration data is contained in the EEPROM. If configuration data is not
stored in the EEPROM, the Ethernet port terminates initialization from EEPROM and operates using its default configuration (See Table 2). If
configuration data is stored in EEPROM, the Ethernet port automatically loads all configuration data
stored in the Reset Configuration Block into its internal Ethernet Port registers.
2.6.8 EEPROM Read-out Completion
1) Asserting EECS.
2) Clocking out a Read-Register-00h command
on EEDO (EESK provides a 1 MHz serial
clock signal).
3) Clocking the data in on EEDI.
If the EEDI pin is low at the end of the reset signal,
the Ethernet port does not perform an EEPROM
read-out (uses its default configuration).
First Word of a Group of Words
F
E
98
BADC
0
0
0
Once all the configuration data are transferred to
the appropriate Ethernet Port registers, the Ethernet
port performs a checksum calculation to verify the
Reset Configuration Blocks data are valid. If the resulting total is 0, the read-out is considered valid.
Otherwise, the Ethernet port initiates a partial reset
to restore the default configuration.
If the read-out is valid, the EEPROMOK bit
(SelfST register, bit A) is set. EEPROMOK is
10
3
25
76
4
Number of Words
in Group
Figure 3. Group Header
DS502PP2 15
9-bit PacketPage Address
Page 16

CS89712
cleared if a checksum error is detected. In this case,
the Ethernet port performs a partial reset and is restored to its default. Once ini tializat ion is compl ete
(configuration loaded from EEPROM or reset to
default configuration) the INITD bit (SelfST register, bit 7) is set .
2.7 Clocks
The clock source is the on-chip PLL, enabled by
strapping Port E pin 2 (PE[2]) low. This pin’s state
is latched at the rising edge of nPOR (power-up).
After power-up, PE[2] can be used as a GPIO.
The CS89712 contains several separate sections of
logic, each clocked according to its own clock frequency requirements. See each peripheral device
section for more details. The section below describes the clocking for both the ARM720T and address/data bus.
2.7.1 On-Chip PLL
The ARM720T clock can be programmed to
18.432 MHz, 36.864 MHz, 49.152 MHz, or
73.728 MHz with the PLL running at 147456 MHz,
twice the highest possible CPU clock frequency.
The PLL uses an external 3.6864 MHz crystal. By
default, the address/data buses run at 18.432 MHz.
When the clock frequency is selected to be
36 MHz, both the ARM720T and the address/data
buses are clocked at 36 MHz. When the cl ock frequency is selected higher than 36 MHz, only the
ARM720T gets clocked at this higher speed. The
address/data will be fixed at 36 MHz. The clock
frequency used is selected by programming the
CLKCTL[1:0] bits in the SYSCON3 register. The
clock frequency selection does not effect the EPB
(external peripheral bus). Therefore, all the periph-
eral clocks are fixed, regardless of the clock speed
selected for the ARM720T.
Note: After modifying the CLKCTL[1:0] bits, the next
instruction should always be a ‘NOP’.
2.7.1.1 Characteristics of the PLL Interface
When connecting a crystal to the on-chip PLL interface pins (i.e. MOSCIN and MOSCOUT), the
crystal and circuit should conform to the following
requirements:
• A 3.6864 MHz fundamental mode crystal
should be used.
• A start-up resistor is not necessary, since one is
provided internally.
• Start-up loading capacitors may be placed on
each side of the external crystal and ground.
Their value should be in the range of 10 pF.
However, their values should be selected based
upon the crystal specifications. The total sum of
the capacitance of the traces between the
CS89712’s clock pins, the capacitors, and the
crystal leads should be subtracted from the
crystal’s specifications when determining the
values for the loading capacitors.
• The crystal frequency drift should be less than
100 ppm over the operating temperature range.
Alternatively, a digital clock source can be used to
drive the MOSCIN pin of the CS89712. With this
approach, the voltage levels of the clock source
should match that of the VDD supply for the
CS89712’s pads (i.e. the supply voltage level used
to drive all of the non-VDD core pins on the
CS89712). The output clock pin (i.e., MOSCOUT)
should be left floating.
16 DS502PP2
Page 17
CS89712
2.7.2 Dynamic Clock Switching
The clock frequency used for the CPU and the buses is controlled by programming the CLKCTL[1:0]
bits in the SYSCON3 register. When this register is
written, clock switching logic waits until the clock
that is currently in use and the newly programmed
clock source are both low, and then switches from
the previous clock frequency to the new clock without a glitch on the clocks.
2.7.3 Ethernet Port Clock Oscillator
A 20 MHz quartz crystal or CMOS clock input is
required by the Ethernet port. If a CMOS clock input is used, it should be connected the to XTAL1
pin, with the XTAL2 pin left open. The clock signal should be 20 MHz ±0.01% with a duty cycle
between 40% and 60%. The specifications for the
crystal are described in Section 5.3.
2.8 Interrupt Controller
When unexpected events arise during the execution
of a program (i.e., interrupt or memory fault) an exception is usually generated. When these exceptions occur at the same time, a fixed priority system
determines the order in which they are handled.
Table 6 shows the priority order of the exceptions.
Priority Exception
Highest Reset
. Data Abort
.FIQ
.IRQ
. Prefetch Abort
Lowest Undefined Instruction,
Software Interrupt
Table 6. Exception Priority Handling
The CS89712 interrupt controller has two interrupt
types: interrupt request (IRQ) and fast interrupt request (FIQ). The interrupt controller has t he abil ity
to control interrupts from 22 different FIQ and IRQ
sources. Of these, seventeen are mapped to the IRQ
input and five sources are mapped to the FIQ input.
FIQs have a higher priority than IRQs. If two interrupts are received from within the same group (IRQ
or FIQ), the order in which they are serviced must
be resolved in software. All interrupts are level sensitive; that is, they must conform to the following
sequence:
1) The interrupting device (either external or internal) asserts the appropriate interrupt.
2) If the appropriate bit is set in the inte rrupt mask
register, then either a FIQ or an IRQ will be as-
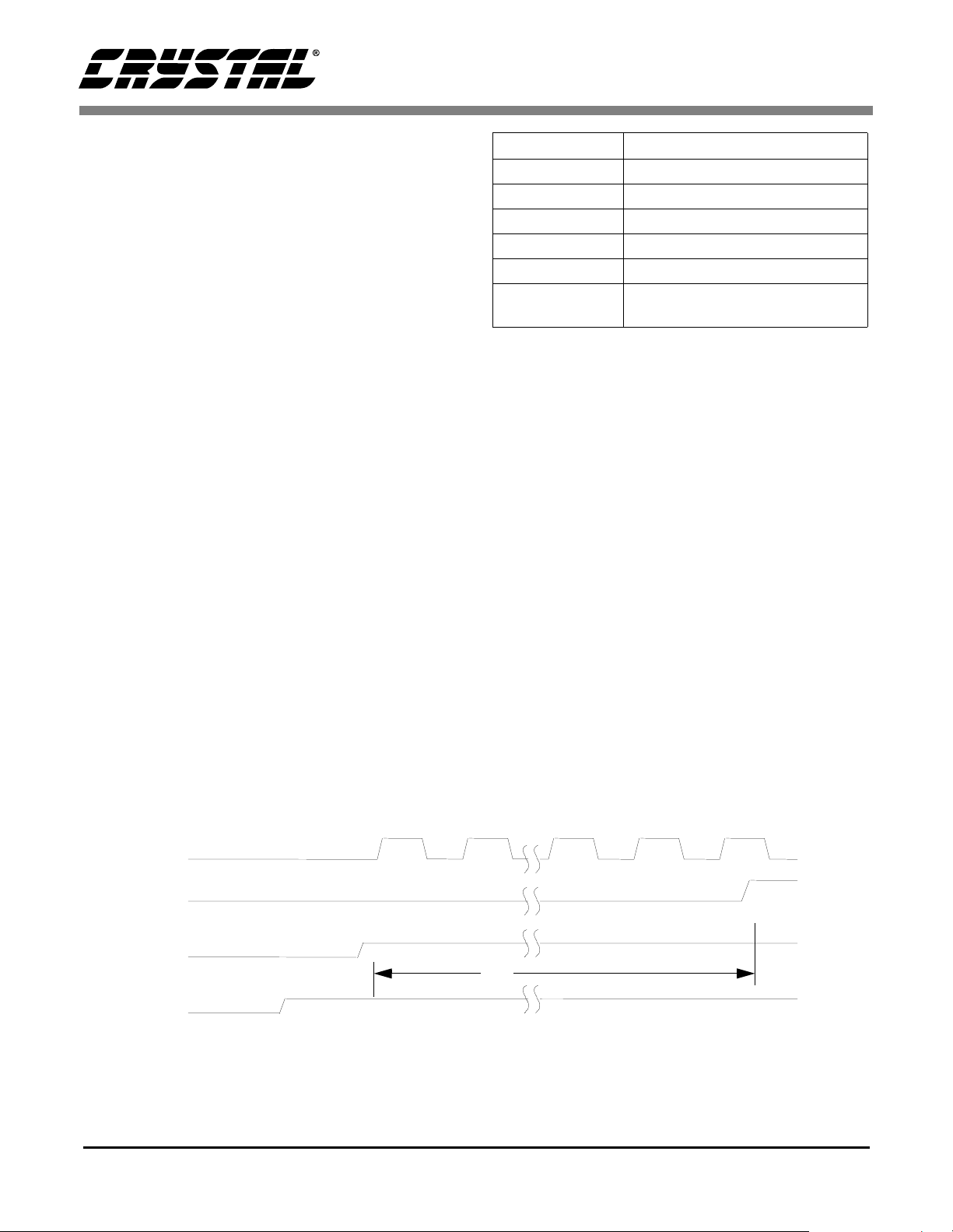
EXPCLK
(internal)
RUN
CLKEN
Interrupt /
WAKEUP
Note: t42=0.125 sec. to 0.25 sec.
Figure 4. CLKEN Timing Exiting the Standby State
DS502PP2 17
t42
Page 18
CS89712
serted by the interrupt controller. (A description for each bit in this register can be found in
Section 3.6.1.
3) If interrupts are enabled the processor will
jump to the appropriate address.
4) Interrupt dispatch software reads the interrupt
status register to establish the source(s) of the
interrupt and calls the appropriate interrupt service routine(s).
5) Software in the interrupt service routine will
clear the interrupt source by some action specific to the device requesting the interrupt (i.e.,
reading the UART RX register).
The interrupt service routine may then re-enable interrupts, and any other pending interrupts will be
serviced in a similar way. Alternately, it may return
to the interrupt dispatch code, which can check for
any more pending interrupts and dispatch them ac-
cordingly. The “End of Interrupt” type interrupts
are latched. All other interrupt sources (i.e., external interrupt source) must be held active until its respective service routine starts executing. See
Section 3.13, “End Of Interrupt Locations” for
more details.
Table 7, Table 8, and Table 9 show the names and
allocation of interrupts in the CS89712.
18 DS502PP2
Page 19
CS89712
Interrupt Bit in INTMR1 and
INTSR1
FIQ 0 EXTFIQ External fast interrupt input (nEXTFIQ pin)
FIQ 1 BLINT Battery low interrupt
FIQ 2 WEINT Tick Watchdog expired interrupt
FIQ 3 MCINT Media changed interrupt
IRQ 4 CSINT Codec sound interrupt
IRQ 5 EINT1 External interrupt input 1 (nEINT[1] pin)
IRQ 6 EINT2 External interrupt input 2 (nEINT[2] pin)
IRQ 8 TC1OI TC1 underflow interrupt
IRQ 9 TC2OI TC2 underflow interrupt
IRQ 10 RTCMI RTC compare match interrupt
IRQ 11 TINT 64 Hz tick interrupt
IRQ 12 UTXINT1 Internal UART1 transmit FIFO empty interrupt
IRQ 13 URXINT1 Internal UART1 receive FIFO full interrupt
IRQ 14 UMSINT Internal UART1 modem status changed interrupt
IRQ 15 SSEOTI Synchronous serial interface 1 end of transfer interrupt
Table 7. Interrupt Allocation in the First Interrupt Register
Name Comment
Interrupt Bit in INTMR2 and
INTSR2
IRQ 0 KBDINT Key press interrupt
IRQ 1 SS2RX Master / slave SSI 16 bytes received
IRQ 2 SS2TX Master / slave SSI 16 bytes transmitted
IRQ 12 UTXINT2 UART2 transmit FIFO empty interrupt
IRQ 13 URXINT2 UART2 receive FIFO full interrupt
Table 8. Interrupt Allocation in the Second Interrupt Register
Interrupt Bit in INTMR3 and
INTSR3
FIQ 0 DAIINT DAI interface interrupt
Table 9. Interrupt Allocation in the Third Interrupt Register
DS502PP2 19
Name Comment
Name Comment
Page 20

CS89712
2.8.1 Interrupt Latencies
2.8.1.1 Operating State
The ARM720T core checks for a low level on its
FIQ and IRQ inputs at each instruction boundary.
The interrupt latency is there fore directly re lated to
the amount of time it takes to complete execution
of the current instruction when the interrupt condition is detected. First, there is a one to two clock cycle synchronization penalty. For the case where the
CS89712 is operating with a 16-bit external memory system, and the program stored in one wait
state FLASH memory, the worst-case interrupt latency is 251 clock cycles. This includes a delay for
cache line fills for instruction prefetches, and a data
abort occurring at the end of the LDM instruction,
and the LDM being non-quad word aligned. In addition, the worst-case interrupt latency assumes
that LCD DMA cycles to support a panel size of
320 x 240 at 4 bits-per-pixel, 60 Hz refresh rate, is
in progress. This would give a worst-case interrupt
latency of about 3.4 µs for 74 MHz operation. For
operation at different frequencies and/or with
32 bit wide external memory, the latency will
change accordingly.
For the nMEDCHG signal, this figure is substantially increased by the maximum time required to
pass through the deglitcher, approximately 125 µs
(2 cycles of the 16.384 kHz clock derived from the
RTC oscillator). This results in an absolute worstcase latency of approximately 128 µs. Refer to
Table 10 for a summary.
2.8.1.2 Idle State
When leaving the Idle State as a result of an interrupt, the CPU clock is restarted after approximately
two clock cycles. However, there is st ill potentially
up to a 251 clock latency as described in the first
section above, unless the code is written to include
at least two single cycle instructions immediately
after the write to the IDLE register (in which case
the latency drops to a few microseconds). This is
important, as the Idle State can only be left because
of a pending interrupt, which has to be synchronized by the processor before it can be serviced.
2.8.1.3 Standby State
In the Standby State, the latency will depend on
whether the system clock is shut down and if the
FASTWAKE bit in the SYSCON3 register is set. If
the system is configured to run from the internal
PLL clock, then the PLL will always be shut down
when in the Standby State. In this case, if the
FASTWAKE bit is cleared, then there will be a latency of between 0.125 sec to 0.25 sec. If the
FASTWAKE bit is set, then there will be a latency
of between 250 µsec to 500 µsec.
Whenever the CS89712 is in the Standby State, the
external address and data buses are driven low. The
RUN signal is used internally to force these buses
to be driven low. This prevents de-powered peripherals from draining current. Also, the inter nal pe-
ripheral’s signals are set to their Reset State.
2.8.1.4 Snooze State
All the serial data transfer peripherals included in
the CS89712 (except for the master-only SSI1)
have local buffering to ensure a reasonable interrupt latency response requirement for the OS of <
1 ms. This assumes that the design data rates do not
exceed the data rates described in this specifica tion.
If the OS cannot meet this requirement, there will
be a risk of data over/underflow occurring.
20 DS502PP2
In Snooze State, the latency will be reduced to the
same as for the Idle State described above. This is
true at any frequency because the PLL or exte rnal
clock source is not stopped. All clocks except the
minimum required for LCD refresh from the internal SRAM are disabled to save further power.
To drastically reduce the potential worst ca se latency when leaving Snooze State to a few microseconds, ensure that the code contains two single cycle
Page 21
CS89712
instructions immediately after the write to the
SNOOZE register location.
2.8.1.5 Doze State
Since Doze State can be considered a preliminary
state between Snooze State and Operating State,
the only requirement for existing this state into the
Operating State is for a few instructions to be executed. Therefore, the latency is based solely upon
the time required to execute these instructions.
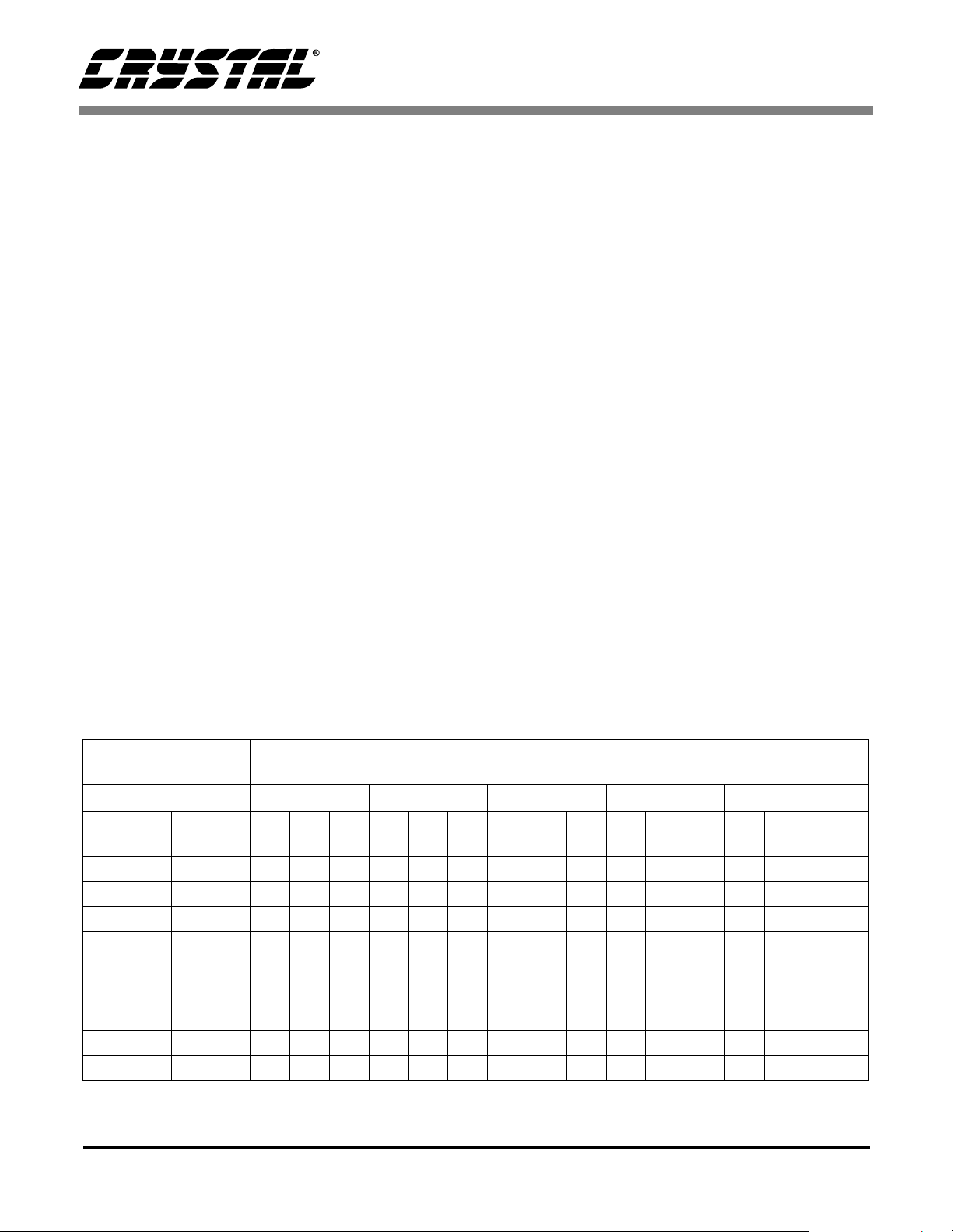
Table 10 summarizes the five external interrupt
sources and their effect on the processor interrupts.
2.9 Boot ROM
The 128 bytes of on-chip Boot ROM contain an instruction sequence that initializes the device and
then configures UART1 to receive 2048 bytes of
serial data that will then be placed in the on-chip
SRAM. Once the download is complete, execution
jumps to the start of the on-chip SRAM. This
would allow, for example, code to be downloaded
to program system FLASH during a product’s
manufacturing process. See Section , “Appendix B:
Boot Code” for details of the ROM Boot Code with
comments to describe the stages of execution.
Selection of the Boot ROM option is determined by
the state of the nMEDCHG pin during a power on
reset. If nMEDCHG is high while nPOR is active,
then the CS89712 will boot from an external memory device connected to CS[0] (normal boot mode).
If nMEDCHG is low, then the boot will be from the
on-chip ROM. Note that in both cases, following
the de-assertion of nPOR, the CS89712 will be in
the Standby State and require a low-to-high transition on the external WAKEUP pin in order to actually start the boot sequence.
The effect of booting from the on-chip Boot ROM
is to reverse the decoding for all chip selects internally. Table 11 shows this decoding. The control
signal for the boot option is latched by nPOR,
which means that the remapping of addresses and
bus widths will continue to apply until nPOR is asserted again. After booting from the Boot ROM,
the contents of the Boot ROM can be read back
from address 0x0000.0000 onwards, and in normal
state of operation the Boot ROM contents can be
read back from address range 0x7000.0000.
2.10 Memory Map
The lower 2 GByte of the address space is allocated
to memory. The 512 MBytes of address space from
Interrupt
Pin
nEXTFIQ Not de glitched; must be
nEINT1–2 Not deglitched Worst-case 3.4 µsec
nMEDCHG Deglitched by 16 kHz
DS502PP2 21
Input State Operating State
Worst-case 3.4 µsec
active for 251 clock
cycles to ensure detection
clock; must be active
for at least 125 µs to be
detected
at 74 MHz
at 74 MHz
Worst-case latency
of 128 µsec at 74
MHz
Table 10. External Interrupt Source Latencies
Latency
Idle State
Latency
Worst-case 251
clocks: if only
single cycle
instructions, less
than 1 µsec
As above As above
Worst-case
80 µsec: if only
single cycle
instructions,
125 µsec
Including PLL / osc. settling time, ~
0.25 sec when FASTWAKE = 0, or
approx. 500 µsec when FASTWAKE = 1
As above
Standby State Latency
Page 22
0xC000.0000 to 0xDFFF.FFFF is allocated to
Address Range Chip Select
0000.0000–0FFF.FFFF CS[7]
(Internal only)
1000.0000–1FFF.FFFF CS[6]
(Internal only)
2000.0000–2FFF.FFFF nCS[5]
3000.0000–3FFF.FFFF nCS[4]
4000.0000–4FFF.FFFF nCS[3]
5000.0000–5FFF.FFFF nCS[2]
6000.0000–6FFF.FFFF nCS[1]
7000.0000–7FFF.FFFF nCS[0]
Table 11. Chip Select Address Ranges After Boot From
On-Chip Boot ROM
SDRAM. The 1.5 GByte, less 8 kbytes for internal
registers, is not accessible in the CS89712. The
CS89712
MMU should be programmed to generate an abort
exception for access to this area.
Internal peripherals are addressed through a set of
internal registers from address 0x8000.0000 to
0x8000.3FFF.
Table 12 shows how the 4-Gbyte address range of
the ARM720T processor (as configured within this
chip) is mapped. The memory map shown assumes
that two CL-PS6700 PC Card controllers are connected. If this functionality is not required, then the
nCS[4] and nCS[5] memory is available. The external boot ROM is not fully decoded (i.e., the boot
code will repeat within the 256 Mbyte space from
0x7000.0000 to 0x8000.0000).
When booted from on chip boot ROM, the SRAM
is fully decoded up to 128 kbytes. Access to any location above this range will wrap within the range.
Address Contents Size
0xF000.0000 Reserved 256 Mbytes
0xE000.0000 Reserved 256 Mbytes
0xD000.0000 Reserved 256 Mbytes
0xC000.0000 SDRAM 64 Mbytes
0x8000.4000 Unused ~1 Gbyte
0x8000.2000 Internal registers 8 kbytes
0x8000.0000 Internal registers 8 kbytes
0x7000.0000 Boot ROM (nCS[7]) 128 bytes
0x6000.0000 SRAM (nCS[6]) 48k bytes
0x5000.0000 PCMCIA-1 (nCS[5]) 4 x 64 Mbytes
0x4000.0000 PCMCIA-0 (nCS[4]) 4 x 64 Mbytes
0x2000.0000-0x2000.02FF Expansion (nCS[2])
0x2000.0300-0x2000.030F Ethernet Port (on nCS[2])
0x2000.0310-0x2FFF.FFFF Expansion (nCS[2]) cont.
22 DS502PP2
0x3000.0000 Expansion (nCS[3]) 256 Mbytes
0x1000.0000 ROM Bank 1 (nCS[1]) 256 Mbytes
0x0000.0000 ROM Bank 0 (nCS[0]) 256 Mbytes
256 Mbytes
Table 12. CS89712 Memory Map in External Boot Mode
Page 23

CS89712
2.11 Memory and I/O Expansion Interface
Six separate linear memory or expansion segments
are decoded by the CS89712, two of which can be
reserved for two PC Cards, each interfacing to a
separate single CL-PS6700 device. Each segment
is 256 Mbytes in size. Two additional segments (in
addition to these six) are dedicated to the on-chip
SRAM and ROM. The on-chip ROM space is fully
decoded, and the SRAM space is decoded up to the
maximum size of the video frame buffer programmed in the LCDCON register (128 kbytes).
Beyond this address range the SRAM space is not
fully decoded (i.e., any accesses beyond 128 kbyte
range get wrapped around to within 128 kbyte
range). Any of the six segments are configured to
interface to a conventional SRAM-like interface,
and can be individually programmed to be 8-, 16-,
or 32-bits wide, to support page mode access, and
to execute from 1 to 8 wait states for non-sequential
accesses and 0 to 3 for burst mode accesses. The
zero wait state sequential access feature is designed
to support burst mode ROMs. For writable memory
devices which use the nMWE pin, zero wait state
sequential accesses are not permitted and one wait
state is the minimum which should be programmed
in the sequential field of the appropriate MEMCFG
register. Bus cycles can also be extended using the
EXPRDY input signal.
Page mode access is accomplished by setting
SQAEN = 1, enabling accesses of one random address followed by three sequential addresses, etc.,
while keeping nCS asserted. These sequential
bursts can be up to four words long before nCS is
released to allow DMA and refreshes to take place.
This can significantly improve bus bandwidth to
devices such as ROMs which support page mode.
When SQAEN = 0, all accesses to m emory are by
random access without nCS being de-asserted between accesses. Again nCS is de-asserted after four
consecutive accesses to allow DMA.
Bits 5 and 6 of the SYSCON2 register independently enable the interfaces to the CL-PS6700 (PC Card
slot drivers). When either of these interfaces are enabled, the corresponding chip select (nCS4 and/or
nCS5) becomes dedicated to that CL-PS6700 interface. The state of SYSCON2 bit 5 determines the
function of chip select nCS4 (i.e., CL-PS6700 interface or standard chip select functionality); bit 6
controls nCS5 in a similar way. There is no interaction between these bits.
For applications that require a display buffer smaller than 48k bytes, the on-chip SRAM can be used
as the frame buffer.
Before entering the Snooze State, the SRAM at
0x6000.0000 must be updated, under program control, with data to be displayed during the Snooze
State. In a system using the on-chip SRAM as the
frame buffer in normal operation, Snooze State can
be entered without requiring any data transfer first,
assuming data is stored in the on-chip SRAM in 1bit -per-pixel format.
The width of the boot device can be chosen by selecting values of PE[1] and PE[0] during power on
reset. The inputs in Table 13 are latched by the rising edge of nPOR to select the boot option.
PE[1] PE[0] Boot Block
(nCS0)
0 0 32-bit
0 1 8-bit
1 0 16-bit
1 1 Undefined
Table 13. Boot Options
2.12 SDRAM Controller
The SDRAM controller provides all the connections to directly interface to up to two banks of
SDRAM, and the width of the memory interface is
programmable from 16 to 32 bits wide. Both banks
have to be of the same width. Each of the two banks
supported can be up to 256 Mbits in size. The sig-
DS502PP2 23
Page 24
CS89712
nals nRAS nCAS, and nWE are provided for
SDRAM. Two chip selects are provided for supporting up to 2 rows of SDRAMs. The SDRAM
devices are put into self-refresh mode when the
SDRAM controller is put into standby. The
SDRAM clock is halted as well.
The controller supports read, write, refresh, precharge and mode register write requests to the
SDRAM. Data is transferred to and from the
SDRAM as unbroken quad accesses (either quad
word or for 16 bit memory, quad halfword), which
is a convenient data packet size for the ARM cache
line fills. For the CPU to read smaller than a quad
access, the SDRAM controller will discard t he extra data. For CPU writes smaller than a quad access, the SDQM pins (SDRAM data byte mask
selects) are used to force the SDRAMs to ignore invalid data. For CPU access sizes lar ger than a qu ad
access, multiple quad accesses are issued to the
SDRAM.
The SDRAM controller can access a total memory
size of 2-64 Mbytes. Each individual SDRAM
should be NEC or compatible SDRAM memory in
sizes of 16-256 Mbits, arranged as shown in
Table 14 and Table 15.
Chip selects for row 1 SDRAMs should be connected to nSDCS[0]. If row 2 is used, these devices
should connect to nSDCS[1].
For 32-bit memory access, four SDQM data byte
mask selects are provided to control individual byte
lanes within each row. For 16-bit memory access
only, SDQM[1:0] are used. For a 32-bit memory
access configuration with each row containing two
16-bit wide SDRAMs, the high order SDRAM
should have UDQM (upper SDQM) connected to
SDQM[3] and LDQM (lower SDQM) connected to
SDQM[2]. The low order SDRAM follows the
same convention: USDQM is connected to
SDQM[1], and LDQM is connected to SDQM[0].
Memory address line multiplexing is done internally so that the address mapping is contiguous.
Table 16 indicates how the SDRAM address pins
are connected to the CPU’s address pins. Note that
small SDRAM devices will not use all of these
pins. For example, A[12:11] may not be required.
However, the bank select pins BA[1:0], are required by all SDRAMs. Smaller devices may only
have one bank, so BA1 may not be needed.
Arrangement of SDRAMs
SDRAM details
Density
(Mbits)
16 4 818
64 4 81 8
128 4
24 DS502PP2
Width
(bits) CRDCRDCRDCRDCR D
8414
16 2 1 2
8 41442 8
16 212224
32 111122
8 41 4
Table 14. SDRAM Configurations (SDRAM 32-Bit Memory Interface)
(C = # Columns of SDRAM, R = # Rows of SDRAM, D = # of SDRAMs)
4 Mbytes 8 Mbytes 16 Mbytes 32 Mbytes 64 Mbytes
Page 25
16 21222 4
256 4
8
16 21 2
Table 14. SDRAM Configurations (SDRAM 32-Bit Memory Interface)
SDRAM Details Arrangement of SDRAMs
(C = # Columns of SDRAM, R = # Rows of SDRAM, D = # of SDRAMs)
2 Mbytes 4 Mbytes 8 Mbytes 16 Mbytes 32 Mbytes 64 Mbytes
CS89712
Density
(Mbits)
16 4 414
64 4 414428
128 4 414
256 4
Width
(bits)
8 212
16 111
8 212224
16 111122
8 212224
16 111122
8 212
16 111122
CRDCRDCRDCRDCRDCRD
Table 15. SDRAM Configurations (SDRAM 16-Bit Memory Interface)
DS502PP2 25
Page 26
CS89712
SDRAM Address
Pins
A0.
A1.
A2.
A3.
A4.
A5.
A6.
A7.
A8.
A9.
A10.
A1 1.
A12.
BA0.
BA1.
Table 16. SDRAM Address Pin Connections
CS89712 Pin Names
a27/dra0
a26/dra1
a25/dra2
a24/dra3
a23/dra4
a22/dra5
a21/dra6
a20/dra7
a19/dra8
a18/dra9
a17/dra10
a16/dra11
a15/dra12
a14/dra13
a13/dra14
2.13 SDRAM Initialization
The SDRAM is initialized in the power-on sequence as follows:
3) Once the precharge is complete, and the minimum tRP is satisfied, the mode register can be
programmed. After the mode register set cycle,
tRSC (2 CLK minimum) pause must be satisfied as well. (Only required for NEC SDRAM)
4) Eight or more refresh cycles must be performed.
2.14 CL-PS6700 PC Card Interface
Two of the expansion memory areas are dedicated
to supporting up to two CL-PS6700 PC Card controller devices. These are selected by nCS4 and
nCS5 (must first be enabled by bits 5 and 6 of
SYSCON2). For efficient, low power operation,
both address and data are carried on the lower 16
bits of the CS89712 data bus. Accesses are initiated
by a write or read from the area of memory allocated for nCS4 or nCS5. The memory map within
each of these areas is segmented to allow different
types of PC Card accesses to take place, for attribute, I/O, and common memory space. The CLPS6700 internal registers are memory mapped
within the address space as shown in Table 17.
Note: Due to the operating speed of the CL-PS6700,
this interface is supported only for a processor
speed of 18 MHz.
1) To stabilize internal circuits when power is applied, a 200+ µs pause must precede any signal
toggling.
2) After the pause, all banks must be precharged
using the Precharge command (including the
precharge all banks command).
A complete description of the protocol and AC timing characteristics can be found in the CL-PS6700
data sheet. A transaction is initiated by an access to
the nCS4 or nCS5 area. The chip select is asserted,
and on the first clock, the upper 10 bits of the PC
Card address, along with 6 bits of size, space, and
slot information are put out onto the lower 16 bits
Access Type Addresses for CL-PS6700 Interface 1 Addresses for CL-PS6700 Interface 2
Attribute 0x4000.0000–0x43FF.FFFF 0x5000.0000– 0x53FF.FFFF
I/O 0x4400.0000–0x47FF.FFFF 0x5400.0000–0x57FF.FFFF
Common memory 0x4800.0000–0x4BFF.FFFF 0x5800.0000–0x5BFF.FFFF
CL-PS6700 registers 0x4C00.0000–0x4FFF.FFFF 0x5C00.0000–0x5FFF.FFFF
Table 17. CL-PS6700 Memory Map
26 DS502PP2
Page 27
CS89712
of the CS89712’s data bus. Only word (i.e., 4-byte)
and single-byte accesses are supported, and the slot
field is hardcoded to 11, since the slot field is defined as a ‘Reserved field’ by the CL-PS6700. The
chip selects are used to select the device to be accessed. The space field is made directly from the
A26 and A27 CPU address bits, according to the
decode shown in Table 18. The size field is forced
to 11 if a word access is required, or to 00 if a byte
access is required. This avoids the need to configure the interface after a reset. On the second clock
cycle, the remaining 16 bits of the PC Card address
are multiplexed out onto the lower 16 bits of the
data bus. If the transaction selected is a CL-PS6700
register transaction, or a write to the PC Car d (assuming there is space available in the CL-PS6700’s
internal write buffer) then the access will continue
on the following two clock cycles. During these
following two clock cycles the upper and lower
halves of the word to be read or written will be put
onto the lower 16 bits of the main data bus.
The ‘ptype’ signal on the CL-PS6700s should be
connected to the CS89712’s WRITE output pin.
During PC Card accesses, the polarity of this pin
changes, and it becomes low to signify a write and
high to signify a read. It is valid with the first half
word of the address. During the second half word
of the address, it is always forced high to indicate
to the CL-PS6700 that the CS89712 has initiated
either the write or read.
The PRDY signals from each of the two CLPS6700 devices are connected to Port B bits 0 and
1, respectively. When the PC CARD1 or PC
CARD2 control bits in the SYSCON2 register are
de-asserted, these port bits are available for GPIO.
When asserted, these port bits are used as the
PRDY signals. When the PRDY signal is de-asserted (i.e., low), it indicates that the CL-PS6700 is
busy accessing its card. If a PC CARD access is attempted while the device is busy, the PRDY signal
will cause the CS89712’s CPU to be stalled. The
CS89712’s CPU will have to wait for the card to
become available. DMA transfers to the LCD can
still continue in the background during this period
of time (as described below). The CS89712 can access the registers in the CL-PS6700, regardless of
the state of the PRDY signal. If the CS89712 needs
to access the PC CARD via the CL-PS6700, it
waits until the PRDY signal is high before initiating a transfer request. Once a request is sent, the
PRDY signal indicates if data is available.
In the case of a PC Card write, write s can be posted
to the CL-PS6700 device, with the same timing as
CL-PS6700 internal register writes. Writes will
normally be completed by the CL-PS6700 device
independent of the CS89712 processor activity. If a
posted write times out, or fails to complete for any
other reason, then the CL-PS6700 will issue an interrupt (i.e., a WR_FAIL interrupt). In the case
where the CL-PS6700 write buffer is already full,
the PRDY signal will be de-asserted (i.e., driven
low) and the transaction will be stalled pending an
available slot in the buffer. In this case, the
CS89712’s CPU will be stalled until the write can
Space Field Value PC CARD Memory Space
00 Attribute
01 I/O
10 Common memory
11 CL-PS6700 registers
Table 18. Space Field Decodi ng
DS502PP2 27
Page 28

CS89712
be posted successfully. While the PRDY signal is
de-asserted, the chip select to the CL-PS6700 will
be de-asserted and the main bus will be released so
that DMA transfers to the LCD controller can continue in the background.
In the case of a PC Card read, the PRDY signal
from the CL-PS6700 will be de-asserted until the
read data is ready. At this point, it will be reasserted
and the access will be completed in the same way
as for a register ac cess. In t he case of a byt e access,
only one 16-bit data transfer will be required to
complete the access. While the PRDY signal is deasserted, the chip select to the CL-PS6700 will be
de-asserted, and the main bus will be released so
that DMA transfers to the LCD controller can continue in the background.
The CS89712 will re-arbitrate for the bus when the
PRDY signal is reasserted to indicate that the read
or write transaction can complete. The CPU will
stall until the PC Card access is completed.
select, and data is transferred on the next two
clocks if a word read (one clock if a byte read).
There is no support within the CS89712 for detecting time-outs. The CL-PS6700 device must be programmed to force the cycle to be completed (with
invalid data for a read) and then generate an interrupt if a read or write access has timed out (i.e.,
RD_FAIL or WR_FAIL interrupt). The system
software can then determine which access was not
successfully completed by reading the status registers within the CL-PS6700.
The CL-PS6700 has support for DMA data transfers. However, DMA is supported only by software
emulation because the DMA address generator
built into the CS89712 is dedicated to the LCD
controller interface. If DMA is enabled within the
CL-PS6700, it will assert its PDREQ signal to
make a DMA request. This can be connected to one
of the CS89712’s external interrupts and be used to
interrupt the CPU for servicing the DMA request.
A card read operation may be split into a request
cycle and a data cycle, or it may be combined i nto
a single request/data transfer cycle. This depends
on whether the requested data is available in the internal CL-PS6700 prefetch buffer.
The request portion of the cycle, for a card read, is
similar to the request phase for a card write (described above). If the requested data is available in
the prefetch buffer, the CL-PS6700 asserts the
PRDY signal before the rising edge of the third
clock and the CS89712 continues the cycle to read
the data. Otherwise, the PRDY signal is de-asserted, and the request cycle is stalled. The CS89712
may then allow the DMA addres s genera tor to gain
control of the bus, to allow LCD refreshes to continue. When the CL-PS6700 is ready with the data,
it asserts the PRDY signal. The CS89712 then arbitrates for the bus and, once the request is gra nted,
the suspended read cycle is resumed. The CS89712
resumes the cycle by asserting the appropriate chip
Each of the CL-PS6700 devices can generate an interrupt PIRQ. Since the PIRQ signal is an open
drain on the CL-PS6700 devices, two CL-PS6700
devices may be wired OR’ed to the same interrupt.
The circuit can then be connected to one of the
CS89712’s active low external interrupt sources.
On the receipt of an interrupt, the CPU can read the
interrupt status registers on the CL-PS6700 devices
to determine the cause of the interrupt.
All transactions are synchronized to the EXPCLK
output from the CS89712 in 18.432 MHz mode.
The EXPCLK should be permanently enabled, by
setting the EXCKEN bit in the SYSCON1 register,
when the CL-PS6700 is used. The reason for this is
that the PC Card interface and CL-PS6700 internal
write buffers need to be clocked after the CS89712
has completed its bus cycles.
A GPIO signal from the CS89712 can be connected
to the PSLEEP pin of the CL-PS6700 devices to allow them to be put into a power saving state before
the CS89712 enters the Standby State. It is essen-
28 DS502PP2
Page 29
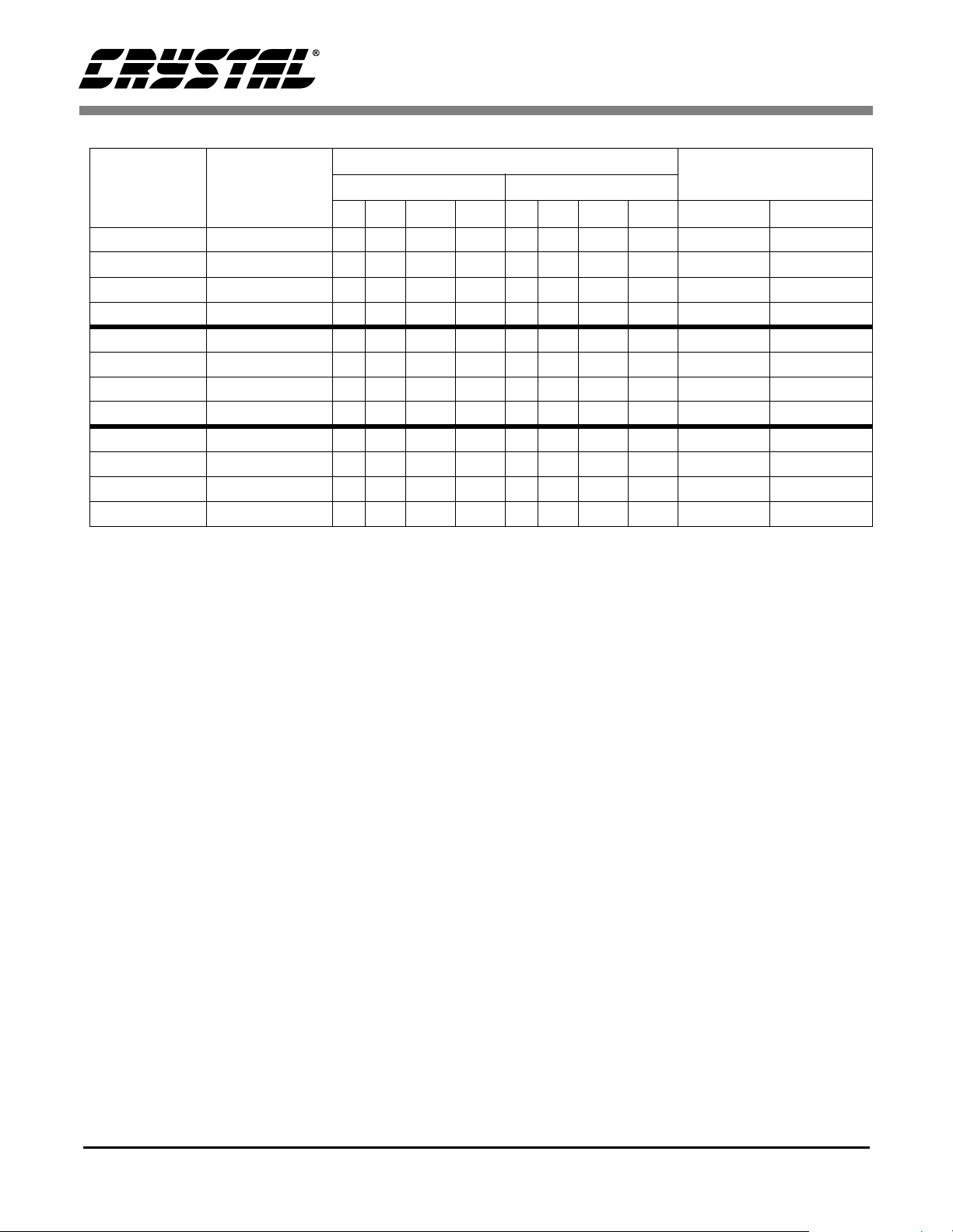
CS89712
Address (W/B) Data in Memory
(as seen by the
CS89712)
Word + 0 (W) 11223344 44 33 22 11 44 33 22 11 11223344 11223344
Word + 1 (W) 11223344 44 33 22 11 44 33 22 11 44112233 44112233
Word + 2 (W) 11223344 44 33 22 11 44 33 22 11 33441122 33441122
Word + 3 (W) 11223344 44 33 22 11 44 33 22 11 22334411 22334411
Word + 0 (H) 11223344 dc dc 22 11 44 33 dc dc 00001122 00003344
Word + 1 (H) 11223344 dc dc 22 11 44 33 dc dc 22000011 44000033
Word + 2 (H) 11223344 44 33 dc dc dc dc 22 11 00003344 00001122
Word + 3 (H) 11223344 44 33 dc dc dc dc 22 11 44000033 22000011
Word + 0 (B) 11223344 dc dc dc 11 44 dc dc dc 00000011 00000044
Word + 1 (B) 11223344 dc dc 22 dc dc 33 dc dc 00000022 00000033
Word + 2 (B) 11223344 dc 33 dc dc dc dc 22 dc 00000033 00000022
Word + 3 (B) 11223344 44 dc dc dc dc dc dc 11 00000044 00000011
Note: dc = don’t care
Byte Lanes to Memory / Ports / Registers R0 Contents
Big Endian Memory Little Endian Memory
7:0 15:8 23:16 31:24 7:0 15:8 23:16 31:24 Big Endian Little Endian
Table 19. Effect of Endianness on Read Operations
tial that software monitors the appropriate status
registers within the CL-PS6700s to ensure that
there are no pending posted bus transactions before
the Standby State is entered. Failure to do this will
result in incomplete PC Card accesses.
2.15 Endianness
The CS89712 uses a little endian configuration for
internal registers. However, it is possible to connect the device to a big endian external memory
system. The big-endian / little-endian bit in the
ARM720T control register sets whether the
CS89712 treats words in memory as being stored in
big endian or little endian format. Memory is
viewed as a linear collection of bytes numbered upwards from zero. Bytes 0 to 3 hold the first stored
word, bytes 4 to 7 the second, and so on. In the little
endian scheme, the lowest numbered byte in a word
is considered to be the least significant byte of the
word and the highest numbered byte is the most
significant. Byte 0 of the memory system should be
connected to D[7:0] in this case. In the big endian
scheme the most significant byte of a word is stored
at the lowest numbered byte, and the least significant byte is stored at the highest numbered byte.
Therefore, byte 0 of the memory system should be
connected to D[31:24]. Load and store are the only
instructions affected by the Endianness.
Table 19 and Table 20 demonstrate the behavior of
the CS89712 for read and write operations, including the effect of performing non-aligned word ac cesses. The register definition section defines the
behavior of the internal CS89712 registers in the
big endian mode in more detail. For further infor-
mation, refer to ARM Application Note 61, “Big
and Little Endian Byte Addressing”.
DS502PP2 29
Page 30
CS89712
Address
(W/B)
Word + 0 (W) 11223344 44 33 22 11 44 33 22 11
Word + 1 (W) 11223344 44 33 22 11 44 33 22 11
Word + 2 (W) 11223344 44 33 22 11 44 33 22 11
Word + 3 (W) 11223344 44 33 22 11 44 33 22 11
Word + 0 (H) 11223344 44 33 44 33 44 33 44 33
Word + 1 (H) 11223344 44 33 44 33 44 33 44 33
Word + 2 (H) 11223344 44 33 44 33 44 33 44 33
Word + 3 (H) 11223344 44 33 44 33 44 33 44 33
Word + 0 (B) 11223344 44 44 44 44 44 44 44 44
Word + 1 (B) 11223344 44 44 44 44 44 44 44 44
Word + 2 (B) 11223344 44 44 44 44 44 44 44 44
Word + 3 (B) 11223344 44 44 44 44 44 44 44 44
Note: Bold indicates active byte lane.
Register
Contents
Byte Lanes to Memory / Ports / Registers
Big Endian Memory Little Endian Memory
7:0 15:8 23:16 31:24 7:0 15:8 23:16 31:24
Table 20. Effect of Endianness on Write Operations
2.16 Internal UARTs and SIR Encoder
The CS89712 contains two built-in UARTs that offers similar functionality to National Semiconduc-
tor’s 16C550A device. Both UARTs can support
bit rates of up to 115.2 kbits/s and include two 16byte FIFOs: one for receive and one for transmit.
One of the UARTs (UART1) supports the three
modem control input signals CTS, DSR, and DCD.
The additional RI input, and RTS and DTR output
modem control lines are not explicitly supported
but can be implemented using GPIO ports in the
CS89712. UART2 has only the RX and TX pins.
UART operation and line speeds are controlled by
the UBLCR1 (UART bit rate and line control).
Three interrupts can be generated by UART1: RX,
TX, and modem status interrupts. Only two can be
generated by UART2: RX and TX. The RX interrupt is asserted when the RX FIFO becomes half
full or if the FIFO is non-empty for longer than
three character length times with no more charac-
ters being received. The TX interrupt is asserted if
the TX FIFO buffer reaches half empty. The modem status interrupt for UART1 is generated if any
of the modem status bits change state. Framing and
parity errors are detected as ea ch byte is received
and pushed onto the RX FIFO. An overrun error
generates an RX interrupt immediately. All error
bits can be read from the 11-bit wide data register.
The FIFOs can also be programmed to be one byte
depth only (i.e., like a conventional 16450 UART
with double buffering).
The CS89712 also contains an IrDA (Infrared Data
Association) SIR protocol encoder as a post-processing stage on the output of UART1. This encoder can be optionally switched into the TX and RX
signals of UART1, so that these can be used to
drive an infrared interface dire ctly. If the SIR pr otocol encoder is enabled, the UART TXD1 line is
held in the passive state and transitions of the
RXD1 line will have no effect. The IrDA output pin
30 DS502PP2
Page 31

CS89712
is LEDDRV, and the input from the photodiode is
PHDIN. Modem status lines will cause an interrupt
(which can be masked) irrespective of whether the
SIR interface is being used.
Both the UARTs operate in a similar manner to t he
industry standard 16C550A. When CTS is deasserted on the UART, the UART does not stop shifting the data. It relies on software to make an
appropriate response to the interrupt generated.
Baud rates supported for both the UARTs are dependent on frequency of operation. When operating from the internal PLL, the interface supports
various baud rates from 115.2 kbits/s downwards.
The master clock frequency is chosen so that most
of the required data rates are obtainable exactly.
2.17 Synchronous Serial Interfaces
The CS89712 has the synchronous serial interfaces
shown in Table 21. Three sets of serial interface
(DAI, CODEC, and SSI2) pins are multiplexed together. On power up, both the DAISEL and SERSEL register bits are low, enabling the master /
slave SSI2 to these pins (and configuring it for
slave mode operation to avoid external contention).
Table 22 contains pin definition information for the
three multiplexed interfaces.
The internal names given to each of the t hree inter-
faces are unique to help differentiate them from
each other. The sections below that describe each
of the three interfaces will use their respective
unique internal pin names for clarity.
Type Comments Referred To As Max. Transfer Speed
SPI / Microwire 1 Master mode only ADC Interface 128 kbits/s
SPI / Microwire 2 Master / slave mode SSI2 Interface 512 kbits/s
DAI Interface CD quality DACs and ADCs DAI Interface 1.536 Mbits/s
CODEC Interface CODEC
Interface
Table 21. Serial Interface Options
64 kbits/s
BGA
Ball
External
Pin Name
SSICLK SSICLK = serial bit
SSITXFR SSITXFR = TX
SSITXDA SSITXDA = TX
SSIRXDA SSIRXDA = RX
SSIRXFR SSIRXFR = RX
SSI2
Slave Mode
(Internal Name)
clock; Input
frame sync; Input
data; Output
data; Input
frame sync; Input
SSI2
Master Mode
Output PCMCLK =
Output PCMSYNC = Output LRCK = Output 1
Output PCMOUT = Output SDOUT = Output 1
Input PCMIN = Input SDIN = Input
Output p/u
CODEC
Internal Name
Output
(use a 10k pull-up)
DAI
Internal Name
SCLK =
Output
MCLK 1
Strength
1
Table 22. Serial-Pin Assignments
DS502PP2 31
Page 32

CS89712
2.17.1 Codec Sound Interface
The codec interface allows direct connection of a
telephony type codec to the CS89712. It provides
all the necessary clocks and timing pulses. It also
performs a parallel to serial conversion or vice versa on the data stream to or from the external codec
device. The interface is full duplex and contains
two separate data FIFOs (16 deep by 8-bits, one for
the receive data, another for the transmit data).
Data is transferred to or from the codec at
64 kbits/s. The data is either written to or read from
the appropriate 16-byte FIFO. If enabled, a codec
interrupt (CSINT) will be generated after every
8 bytes are transferred (FIFO half full/empty). This
means the interrupt rate will be every 1 msec, with
a latency of 1 msec.
Transmit and receive modes are enabled by asserting high both the CDENRX and CDENTX codec
enable bits in the SYSCON1 register.
Note: Both the CDENRX and CDENTX enable bits
should be asserted in tandem for data to be
transmitted or received. The reason for this is
that the interrupt generation will occur 1 msec
after one of the FIFOs is enabled. For example:
If the receive FIFO gets enabled first and the
transmit FIFO at a later time, the interrupt will
occur 1 msec after the receive FIFO is enabled.
After the first interrupt occurs, the receive FIFO
will be half full. However, it will not be possible
to know how full the transmit FIFO will be since
it was enabled at a later time. Thus, it is
possible to unintentionally overwrite data
already in the transmit FIFO (See Figure 5).
2.17.1.1 Codec Interrupt Timing
After the CDENRX and CDENTX enable bits are
asserted, the corresponding FIFOs become enabled. When both FIFOs are disabled, the FIFO status flag CRXFE is set and CTX FF is clear ed so that
the FIFOs appear empty. Additionally, if the
CDENTX bit is low, the PCMOUT output is disabled. Asserting either of the enable bits causes the
sync and interrupt generation logic to activate; otherwise they are disabled to conserve power.
Data is loaded into the transmit FIFO by writing to
the CODR register. At the beginning of a transmit
cycle, this data is loaded into a shift/load register.
CDENRX
CDENTX
CSINT
1 ms
Interrupt occurs
Figure 5. Codec Interrupt Timing
32 DS502PP2
1 ms
Interrupt occurs
1 ms
Interrupt occurs
Page 33

CS89712
Just prior to the byte being transferred out, PCMSYNC goes high for one PCMCLK cycle. Then the
data is shifted out serially to PCMOUT, MSB first,
(with the MSB valid at the same time PCMSYNC
is asserted). Data is shifted on the rising edge of the
PCMCLK output.
Receiving of data is performed by taking data in serially through PCMIN, again MSB first, shifting it
through the shift/load register and loading the complete byte into the receive FIFO. If there is no data
available in the transmit FIFO, then a zero will be
loaded into the shift/load register. Input data is
sampled on the falling edge of PCMCLK. Data is
read from the CODR register.
Note: After data is transmitted, the speaker amplifier
should be turned off to avoid audible noise. This
is needed because the CS89712 will continue
to transmit data from the FIFO even though it is
empty, thus causing noise. This will occur even
when receiving.
2.17.2 Digital Audio Interface
The DAI interface provides a high quality digital
audio connection to DAI compatible audio devices.
The DAI is a subset of I2S audio format that is supported by a number of manufacturers.
The DAI interface produces one 128-bit frame at
the audio sample frequency using a bit clock and
frame sync signal. Digital audio data is transferred,
full duplex, via separate transmit and receive data
lines. The bit clock frequency is programmable to
64 fs or 128 fs. The sample frequency (fs) is now
programmable from 8-48Khz using either the onchip PLL (73.728MHz) or the external 11.2896
Mhz clock.
The DAI interface contains separat e transmit and
receive FIFO’s. The transmit FIFO’s are 8 audio
samples deep and the receive FIFO’s are 12 audio
samples deep.
DAI programming centers around the selection of
the desired sample frequency (fs). All three clocks
(MCLK, LRCK, SCLK) become a multiple of the
selected sample frequency as illustrated on the previous page. The DAI share the same output with the
CODEC and SSI as shown in Figure 6. Please see
Table 23 for the MUX programming matrix.
2.17.2.1 DAI Operation
Following reset, the DAI logic is disabled. To enable the DAI, the applications program should first
clear the emergency underflow and overflow status
bits, which are set following the reset, by writing a
1 to these register bits (in the DAISR register).
Next, the DAI control register should be programmed with the desired mode of operation using
a word write. The transmit FIFOs can either be
“primed” by writing up to eight 16-bit values each,
or can be filled by the normal interrupt service routine which handles the DAI FIFOs. Finally, the
FIFOs for each channel must be enabled via writes
to DAIDR2. At this point, transmission/reception
of data begins on the transmit (SDOUT) and re-
DAI 128/64 fs
CODEC
SSI2
Figure 6. Portion of the CS89712 Block Diagram Showing Multiplexed Feature
DS502PP2 33
SSICLK,
SSITXFR,
SSITXDA,
SSIRXDA
SSIRSFR
,
Page 34

CS89712
ceive (SDIN) pins. This is synchronously controlled by either the PLL or the external clock.
These fixed frequencies pass through a program-
7), but must be complemented by SYSCON3 bit 9
which will enable/disable 128 fs. To enable one
rate, you must disable the other.
mable divider network which will create the appropriate values for SCLK, LRCLK, and MCLK for
the desired sample frequency. Examples of sample
frequencies are shown in Table 24. Register
DAI64Fs enables/disables the bit clock frequency
of 64 fs (and the other features as shown in Figure
FEATURE SYSCON3 DAIR (DAI) DAI64 fs SYSCON2
DAI –128 fs DAISEL[3] (H) DAIEN[16] (H) I2SF64[0] (L) (X)
128Fs[9] (H)
DAI-64 fs DAISEL[3] (H) DAIEN[16] (H) I2SF64[0] (H) (X)
128Fs[9] (L)
SSI2 DAISEL[3] (L) DAIEN[16] (L) (X) SERSEL[0] (L)
CODEC DAISEL[3] (L) DAIEN[16] (L) (X) SERSEL[0] (H)
2.17.2.2 DAI Frame Format
Each DAI frame is 128 bits long and comprises one
audio sample. Of this 128-bit frame, only 32 bits
are used for digital audio data. The remaining bits
are output as zeros. The LRCK signal is used as a
Table 23. Matrix for Programming the MUX
Note: To connect the port to any of the 4 features shown above, a minimum software configuration shown in the
table above must be observed. Each register column contains the bit name (bit #) that must be cleared or
set for each feature as shown in the column. This table does not complete the programming for each of the
features, but allows access to the port only. The interrupt masks for these features will have to be
programmed as well.
128 fs
Audio Bit
Clock (MHz)
1.0240 0.5120 73.728 8 36 72
1.4112 0.7056 11.2896 11.025 8 16
1.5360 0.7680 73. 728 16 18 36
2.8224 1.4112 11.2896 22.025 4 8
3.0720 1.5360 73. 728 24 12 24
4.0960 2.0480 73.728 32 9 18
5,6448 2.8224 11.2896 44.1 2 4
64 fs
Audio Bit
Clock (MHz)
Clock Source
(MHz)
Sample
Frequency (KHz)
128 fs Divisor
(AUDDIV)
64 fs Divisor
(AUDDIV)
6.1440 3.0720 73.728 48 6 12
Table 24. Relatio nship between Audio Clocks / Clock Source / Sample Frequencies
34 DS502PP2
Page 35

PLL
(73.728MHz)
EXTCLK
(11.2896)
MUX
(AUDCLKSRC)
/2
Programmable Divide
(AUDIV)
128(fs)
256Fs
/32
DAI
7-bit
counter
fixed at 4
Audio Bit Clo ck 128/64(fs)
Figure 7. Di gital Audio Cloc k Generation
128 SCLKs
BUZZ
Audio
Sample
Frequency
(fs)
MCLK
CS89712
Audio
Data
FIFO
Control
SCLK
LRCLK(Fs)
BUZZ-PIN
LRCK
SCLK
O
SDATA +3 +2 +1+5 +4-1 -2 -3 -4 -5 +3 +2 +1+5 +4-1 -2 -3 -4SDATA +3 +2 +1+5 +4-1 -2 -3 -4 -5 +3 +2 +1+5 +4-1 -2 -3 -4
SDATAI +3 +2 +1+5 +4
MSB
MSB
-1 -2 -3 -4 -5
Left Channel
LSB
LSB
MSB
MSB
-1 -2 -3 -4
Figure 8. CS89712 - Digital Audio Interface Timing – MSB / Left Justified format
frame synchronization. Each transition of LRCK
delineates the left and right halves of an audio sample. When LRCK transitions from high-to-low the
next 16 bits make up the right side of a sample.
When LRCK transitions from low-to-high the next
16 bits make up the left side of a sample.
2.17.2.3 DAI Signals
MCLK is used as an input to the CS89712 for generating the DAI timing. This signal is also usually
used as an input to a DAC/ADC as an oversampled
clock. This signal is fixed at 256 times the audio
sample frequency.
The SCLKbit clock is used as the bit clock input
into the DAC/ADC. This signal is fixed at 128 or
64 times the audio sample frequency.
LRCK is used as a frame synchronization input to
the DAC/ADC. This signal is fixed at the audio
sample frequency. This signal is clocked out on the
negative going edge of SCLK.
SDOUT is used for sending playback data to a
DAC. This signal is clocked out on the negative going edge of the SCLK output.
SDIN is used for receiving record data from an
ADC. This signal is latched by the CS89712 on the
positive going edge of SCLK.
RightChannel
+3 +2 +1+5 +4
LSB
LSB
DS502PP2 35
Page 36

CS89712
2.17.3 ADC Interface - SSI1 Master Only
The first synchronous serial interface allows interfacing to the following peripheral devices:
• In the default mode, the device is compatible
with the MAXIM MAX148/9 in external clock
mode. Similar SPI- or Microwire-compatible
devices can connect directly to the CS89712.
• In the extended mode and with negative-edge
triggering selected (the ADCCON and ADCCKNSEN bits are set, respectively, in the
SYSCON3 register), this device can be interfaced to Analog Devices’ AD7811/12 chip using nADCCS as a common RFS/TFS line.
• Other features of the devices, including power
management, can be utilized by software and
the use of the GPIO pins.
The clock output frequency is programmable and
only active during data transmissions to save power. There are four output frequencies selectable.
The required frequency is selected by programming the corresponding bits 16 and 17 in the
SYSCON1 register. The sample clock (SMPCLK)
always runs at twice the frequency of the shift
clock (ADCCLK). The output channel is fed by an
8-bit shift register when the ADCCON bit of
SYSCON3 is clear. When ADCCON is set, up to
16 bits of configuration command can be sent, as
specified in the SYNCIO register. The input channel is captured by a 16-bit shift register. The clock
and synchronization pulses are activated by a write
to the output shift register. During transfers the
SSIBUSY (synchronous serial interface busy) bit
in the system status flags register is set. When the
transfer is complete and valid data is in the 16-bit
read shift register, the SSEOTI inte rrupt is asserte d
and the SSIBUSY bit is cleared.
An additional sample clock (SMPCLK) can be en-
abled independently and is set at twice the transfer
clock frequency.
This interface has no local buffering capability and
is only intended to be used with low bandwidth in-
terfaces, such as for a touch-screen ADC interface.
2.17.4 SSI2 with Master / Slave operation
A second SPI / Microwire interface with full mas-
ter/slave capability is provided by the CS89712.
Data rates in slave mode are theoretically up to
512 kbits/s, full duplex, although continuous oper-
ation at this data rate will give an interrupt rate of
2 kHz, too fast for many operating systems. This
would require a worst-case interrupt response time
of less than 0.5 msec and would cause loss of data
through TX underruns and RX overruns.
The interface is fully capable of being clocked at
512 kHz when in slave mode. However, it is antic-
ipated that external hardware will be used to frame
the data into packets. Therefore, although the data
would be transmitted at a rate of 512 kbits/s, the
sustained data rate would in fact only be
85.3 kbits/s (i.e., 1 byte every 750 µsec). At this
SYSCON1
bit 17
00 4
01 16
10 64
11 128
Table 25. ADC Interface Operation Frequencies
36 DS502PP2
SYSCON1
bit 16
18.432–73.728 MHz Operation
ADCCLK Frequency (kHz)
Page 37

CS89712
data rate, the required interrupt rate will be greate r
than 1 msec, which is acceptable.
There are separate half-word-wide RX and TX
FIFOs (16 half-words each) and corresponding in-
terrupts which are generated when the FIFO’s are
half-full or half-empty as appropriate. The interrupts are called SS2RX and SS2TX, respectively.
Register SS2DR is used to access the FIFOs.
There are five pins to support this SSI port: SSIRXDA, SSITXFR, SSICLK, SSITXDA, and SSIRXFR. The SSICLK, SSIRXDA, SSIRXFR, and
SSITXFR signals are inputs and the SSITXDA signal is an output in slave mode. In the master mode,
SSICLK, SSITXDA, SSITXFR, and SSIRXFR are
outputs, and SSIRXDA is an input. Master mode is
enabled by writing a one to the SS2MAEN bit
(SYSCON2[9]). When the master / slave SSI is not
required, it can be disabled to save power by writing a zero to the SS2TXEN and the SS2RXEN bits
(SYSCON2[4] [7]). When set, these two bits independently enable the transmit and receive sides of
the interface. The master/slave SSI is synchronous,
full duplex, and capable of supporting serial data
transfers between two nodes. Although the interface is byte-oriented, data is loaded in blocks of
two bytes at a time. Each data byte to be transferred
is marked by a frame sync pulse, lasting one clock
period, and located one clock prior to the first bit
being transferred. Direction of the SSI2 ports, in
slave and master mode, is shown in Figure 9.
Data on the link is sent MSB first and coincides
with an appropriate frame sync pulse, one clock in
duration, located one clock prior to the first data bit
(MSB). It is not possible to send data LSB first.
When operating in master mode, the clock frequency is selected to be the same as the ADC interface’s
(master mode only SSI1) — that is, the frequencies
are selected by the same bits 16 and 17 of the
SYSCON1 register (i.e., the ADCKSEL bits).
Thus, the maximum frequency in master mode is
128 kbits/s. The interface will support continuous
transmission at this rate assuming that the OS can
respond to the interrupts within 1 msec to prevent
over/underruns.
Note: To allow synchronization to the incoming slave
clock, the interface enable bits will not take
effect until one SSICLK cycle after they are
written and the value read back from
SYSCON2. The enable bits reflect the real
status of the enables internally. Hence, there
will be a delay before the new value
programmed to the enable bits can be read
back.
The timing diagram for this interface can be found
in Section 6.3.
Slave 721 1
SSIRXFR
SSITXFR
SSICLK
SSIRXDA
SSITXDA
Figure 9. SSI2 Port Directions in Slave and Master Mode
DS502PP2 37
Master 7211
SSIRXFR
SSITXFR
SSICLK
SSITXDA
SSIRXDA
Page 38

CS89712
2.17.4.1 Read Back of Residual Data
All writes to the transmit FIFO must be in halfwords (i.e., in units of two bytes at a time). On the
receive side, it is possible that an odd number of
bytes will be received. Bytes are always loaded into
the receive FIFO in pairs. Conse quently, in the case
of a single residual byte remaining at the end of a
transmission, it will be necessary to read the byte
separately. This is done by reading the status of two
bits in the SYSFLG2 register to determine the validity of the residual data. These two bits (RESVAL, RESFRM) are both set high when a residual
is valid. RESVAL is cleared on either a new transmission or on reading of the residual bit by software. RESFRM is cleared only on a new
transmission. By popping the residual byte into the
RX FIFO and then reading the status of the se bits it
is possible to determine if a residual bit has been
correctly read.
Figure 10 illustrates this procedure. The sequence
is as follows: read the RESVAL bit, if t his is a 0, no
action needs to be taken. If this is a 1, then pop the
residual byte into the FIFO by writing to the
SS2POP location. Then read back the two status
bits RESVAL and RESFRM. If these bits read back
01, then the residual byte popped into the FIFO is
valid and can be read back from the SS2DR register. If the bits are not 01, then there has been anoth-
er transmission received since the residual read
procedure has been started. The data item that has
been popped to the top of the FIFO will be invalid
and should be ignored. In this case, the correct byte
will have been stored in the most significant byte of
the next half-word to be clocked into the FIFO.
Note: All the writes / reads to the FIFO are done word
at a time (data on the lower 16 bits is valid and
upper 16 bits are ignored).
Software manually pops the residual byte into the
RX FIFO by writing to the SS2POP location (the
value written is ignored). This write will strobe the
RX FIFO write signal, causing the residual byte to
be written into the FIFO.
2.17.4.2 Support for Asymmetric Traffic
The interface supports asymmetric traffic (i.e., unbalanced data flow). This is accomplished through
separate transmit and receive frame sync control
lines. In operation, the receiving node receives a
byte of data on the eight clocks following the assertion of the receive frame sync control line . In a similar fashion, the sending node can transmit a byte of
data on the eight clocks following the assertion of
the transmit frame sync pulse. There is no correlation in the frequency of assertions of the RX and
TX frame sync control lines (SSITXFR and
SSIRXFR). Hence, the RX path may bear a greater
data throughput than the TX path, or vice versa.
Residual bit valid
00
New RX byte received
New RX byte
received
Figure 10. Residual Byte Reading
38 DS502PP2
01
11
Pop FIFO
Page 39

CS89712
Both directions, however, have an absolute maximum data throughput rate determined by the maximum possible clock frequency, assuming that the
interrupt response of the target OS is quick enough.
2.17.4.3 Continuous Data Transfer
Data bytes may be sent/received in a contiguous
manner without interleaving clocks between bytes.
The frame sync control line(s) are eight clocks
apart and aligned with the clock representing bit D0
of the preceding byte (i.e. one bit before the MSB).
2.17.4.4 Discontinuous Clock
In order to save power during the idle times, the
clock line is put into a static low state. The master
is responsible for putting the link into the Idle State.
The Idle State will begin one clock, or more, after
the last byte transferred a nd will resume at least o ne
clock prior to the first frame sync assertion. To disable the clock, the TX section is turned off.
In Master mode, the CS89712 does not support the
discontinuous clock.
into the receiving device on the falling edge of the
clock. The TX pin is held in a tristate condition
when not transmitting.
2.18 LCD Controller
The LCD controller provides all the necessary control signals to interface directly to a single panel
multiplexed LCD.
The panel size is programmable and can be any
width (line length) from 32 to 1024 pixels in 16pixel increments. The total video frame buffer size
is programmable up to 128 kbytes. This equates to
a theoretical maximum panel size of 1024 x
256 pixels in 4 bits-per-pixel mode. The video
frame buffer can be located in any portion of memory controlled by the chip selects. Its start address
will be fixed at address 0x0000.0000 within each
chip select. The start address of the LCD video
frame buffer is defined in the FBADDR[3:0] register. These bits become the most significant nibble
of the external address bus. The default start address is 0xC000.0000 (FBADDR = 0xC).
2.17.4.5 Error Conditions
RX FIFO overflows are detected and conveyed via
a status bit in the SYSFLG2 register. This register
should be accessed at periodic intervals by the application software. The status register should be
read each time the RX FIFO interrupts are generated. At this time the error condition (i.e., overrun
flag) will indicate that an error has occurred but
cannot convey which byte contains the error. Writing to the SRXEOF register location clears the
overrun flag. TX FIFO underflow condition is detected and conveyed via a bit in the SYSFLG2 register, which is accessed by the application software.
A TX underflow error is cleared by writing data to
be transmitted to the TX FIFO.
2.17.4.6 Clock Polarity
Clock polarity is fixed. TX data is presented on the
bus on the rising edge of the clock. Data is latched
A system built using the on-chip SRAM (OCSR),
will then serve as the LCD video frame buffer and
miscellaneous data store. The LCD video frame
buffer start address should be set to 0x6 in this option. Programming of the register FBADDR is only
permitted when the LCD is disabled (this is to
avoid possible cycle corruption when changing the
register contents while a LCD DMA cycle is in
progress). There is no hardware protection to prevent this. It is necessary to disable the LCD controller before reprogramming the FBADDR register.
Full address decoding is provided for the OCSR, up
to the maximum video frame buffer size programmable into the LCDCON register. Beyond this, the
address is wrapped around. The frame buffer start
address must not be programmed to 0x4 or 0x5 if
either CL-PS6700 interface is in use (PCMEN1 or
PCMEN2 bits in the SYSCON2 register are enabled). FBADDR should never be programmed to
DS502PP2 39
Page 40

CS89712
0x7 or 0x8, as these are the locations for the onchip Boot ROM and internal registers.
During Snooze State, the shift clock (CL2), FRM,
and line (CL1) signals are on for the entire display.
The SNZDISP register is used to disable the data
path through the LCD controller after the required
data has been displayed, to save further power. After the word address stored in the SNZDISP register is reached, the data output pins DD[3:0] will be
blanked to 0 or 1 as defined by the SNZPOL bit,
which is at Bit 10 of the SYSCON2 register. Sections of the SRAM not used for the display data in
Snooze State can be used for other data storage.
In Snooze State, the LCD controller (if enabled via
the LCDEN bit in the SYSCON1 register) will automatically fetch data from the on-chip SRAM in
1-bit-per-pixel mode. Before entering Snooze
State, the required display buffer must be transferred into the on-chip SRAM in a 1-bit-per-pixel
format. On entry to Snooze State, the video frame
size field is reinterpreted for 1-bit-per-pixel data,
and the grey scale mode bits are ignored.
On exit from Snooze State, the CS89712 enters the
Doze State. In Doze State, all of the CS89712, except the LCD controller, is operating normally.
The DRAM is taken out of self-refresh and normal
CAS before RAS (CBR ) r efr eshes star t. The CP U
is active and takes interrupts at normal speed. In
Doze State, display data continues to be fetched
from the OCSR, as for th e Snooz e Stat e. DMA for
the display is active only while the number of lines
programmed into the SNZDISP register are displayed and DMA/CPU arbitration is carried out
during this time. For the rest of the time, the LCD
controller displays “pixel fill” data on the LCD.
During the Doze State, if some of the OCSR memory space is not being used to store the video buffer,
the remaining section can be used by the CPU for
general purpose data storage. The remaining section is fully address decoded.
Note: The only way to enter the Doze State is by exit
from the Snooze State. Also, the Snooze State
cannot exit directly to the Operating State; it
must go through the Doze State first.
In an application, the CS89712 would spend most
of its time in snooze mode. On interrupt or wakeup, it moves into Doze State. At this point the OS
identifies the cause of the interrupt and decides
whether it can stay in Doze State (e.g., update a
clock on the display) or if it is woken up because
the user wants to perform a function requiring the
full display. In the latter case, the OS will set the
LCDSNZE bit low and the CS89712 will switch to
the Operating State. In the Operating State, the display will be automatically switched to the main
frame buffer on the next frame sync. The full LCD
controller is used and data fetched from the buffer
pointed to by the FBADDR register (if LCDSNZE
is low). To ensure correct synchronization it is not
possible to program the LCDSNZE bit to high with
software, this is done automatically as part of the
process of entering the Snooze State. It can, however, be set low from software. This is how the display is changed back to the main display after exit
from the Snooze State, if this is required.
It is likely that system software would normally
wake up from the Snooze State for two reasons: 1)
to perform minor OS functions like updating a time
display or polling the keyboard, and 2) to wake up
completely because the user has pressed a key. In
the former case, the LCDSNZE bit would be left
high and the Snooze State re-entered by writing to
the SNOOZE location in the normal way. The c hip
would continue to output data from the on-chip
SRAM throughout (which could have been updated
while out of Snooze State). In the second case,
software should write to the LCDSNZE location
soon after exiting from Snooze State. Then the
LCD controller will be re-enabled and the display
cleanly switched across to the ma in frame buffer as
pointed to by the address in the FBADDR register.
The screen is mapped to the video frame buffer as
one contiguous block where each horizontal line of
40 DS502PP2
Page 41

CS89712
pixels is mapped to a set of consecutive bytes or
words in the video RAM. The video frame buffer
can be accessed word wide as pixel 0 is mapped to
the LSB in the buffer such that the pixels are arranged in a little endian manner.
The pixel bit rate, and hence the LCD refresh rate,
can be programmed from 18.432 MHz to 576 kHz.
The LCD controller is programmed by writing to
the LCD control register (LCDCON). The LCDCON register should not be reprogrammed while
the LCD controller is enabled.
The LCD controller also contains two 32-bit palette
registers, which allow any 4-, 2-, or 1-bit pixel value to be mapped to any of the 15 grayscale values
available. The palette registers are bypassed in
Snooze State.
The required DMA bandwidth to support a ½ VGA
panel displaying 4 bits-per-pixel data at an 80 Hz
refresh rate is approximately 6.2 Mbytes/sec. Assuming the frame buffer is stored in a 32-bit wide
the maximum theoretical bandwidth available is
86 Mbytes/sec at 36.864 MHz.
The LCD controller uses a nine stage 32-bit wide
FIFO to buffer display data. The LCD controller requests new data when there are five words remaining in the FIFO. This means that for a ½ VGA
display at 4 bits-per-pixel and 80 Hz refresh ra te,
the maximum allowable DMA latency is approximately 3.25 µsec ((5 words x 8 bits/byte) / (640 x
240 x 4 bpp x 80 Hz)) = 3.25 µsec). The worst-case
latency is the total nu mber of cycl es from when t he
DMA request appears to when the first DMA data
word actually becomes available at the FIFO.
DMA has the highest priority, so it will always happen next in the system. The maximum number of
cycles required is 36 from the point at which the
DMA request occurs to the point at which the STM
is complete, then another 6 cycles before the data
actually arrives at the FIFO from the first DMA
read. This creates a total of 42 cycles assuming the
frame buffer is located in 32-bit wide memory.
With 16-bit wide memory, the worst-case latency
will double. In this case, the maximum permissible
display size may be halved, to approximately 320 x
240 pixels, depending on required pixel depth and
refresh rate. If 18 MHz mode is selected with 32-bit
wide memory, then the worst-case latency will be
2.26 µsec (i.e., 42 cycles x 54 nsec/cycle). If
36 MHz mode is selected, and 32-bit wide, then the
worst-case latency drops down to 1.49 µs. If the
frame buffer is to be stored in static memory, then
further calculations must be performed. This calculation is a little more comple x for 36 MHz mode of
operation. The total number of cycles = (12 x 4) +
7 = 55. Thus, 55 x 27 ns = ~1.49 µsec.
Figure 11 shows the organization of the video map
for all combinations of bits-per-pixel.
The refresh rate is not affected by the number of
bits-per-pixel; however the LCD controller fetches
twice the data per refr esh for 4 bit s-per- pixe l compared to 2 bits-per-pixel. The main reason for reducing the number of bits-per-pixel is to reduce the
power consumption of the memory where the video
frame buffer is mapped.
2.19 Timer Counters
Two identical timer counters are integrated into the
CS89712. These are referred to as TC1 a nd TC2.
Each timer counter has an associated 16-bit read /
write data register and some control bi ts in the system control register. Each counter is loaded with
the value written to the data register immediately.
This value will then be decremented on the second
active clock edge to arrive after the write (i.e., after
the first complete period of the clock). When the
timer counter under flows (i.e., reaches 0), it will
assert its appropriate interrupt. The timer counters
can be read at any time. The clock source and mode
are selectable by writing to bits in the system control register. 512 kHz and 2 kHz rates are provided.
The timer counters can operate in two modes: free
running or pre-scale.
DS502PP2 41
Page 42

CS89712
2.19.1 Free Running Mode
In the free running mode, the counter will wrap
around to 0xFFFF when it under flows and it will
continue to count down. Any value written to TC1
or TC2 will be decremented on the second edge of
the selected clock.
2.19.2 Prescale Mode
In the prescale mode, the value written to TC1 or
TC2 is automatically re-loaded when the counter
Pixel 1 Pixel 2 Pixel 3 Pixel 4
Gray scale
Bit 0 Bit 1 Bit 2 Bit 3 Bit 4 Bit 5 Bit 6 Bit 7
4 Bits per pixel
under flows. Any value written to TC1 or TC2 will
be decremented on the second edge of the selected
clock. This mode can be used to produce a programmable frequency to drive the buzzer (i.e., with
TC1) or generate a periodic interrupt. The formula
is F=(500 kHz) / (n+1).
2.20 Real-Time Clock
The CS89712 contains a 32-bit Real-Time Clock
(RTC). This can be written to and read from in the
Gray scale
Pixel 1 Pixel 2 Pixel 3 Pixel 4
Gray scale Gray scale
Bit 0 Bi t 1 Bit 2 Bit 3 Bit 4 Bit 5 Bit 6 Bit 7
2 Bits per pixel
Pixel 1 Pixel 2 Pixel 3 Pixel 4
Gray scale Gray scale
Bit 0 Bit 1 Bit 2 Bit 3 Bit 4 Bit 5 Bit 6 Bit 7
Figure 11. Video Buffer Mapping
Gray scale Gray scale
Gray scale Gray scale
1 Bit per pixel
42 DS502PP2
Page 43

CS89712
same way as the timer counters, but is 32 bits wide.
The RTC is always clocked at 1 Hz, generated from
the 32.768 kHz oscillator. It also contains a 32-bit
output match register, this can be programmed to
generate an interrupt when the count in the RTC
matches a specific value written to this register.
The RTC can only be reset by an nPOR cold reset.
Because the RTC data register is updated from the
1 Hz clock derived from the 32 kHz source, which
is asynchronous to the main memory system clock,
the data register should always be read twice to ensure a valid and stable reading. This also applies
when reading back the RTCDIV field of the
SYSCON1 register, which reflects the status of the
six LSBs of the RTC counter.
2.20.1 RTC Interface Characteristics
When connecting a crystal to the RTC interface
pins (i.e., RTCIN and RTCOUT), the crystal and
circuit should conform to the following:
• The 32.768 kHz frequency should be created
by the crystals fundamental tone (i.e., it should
be a fundamental mode crystal)
• A start-up resistor is not necessary, since one is
provided internally.
• Start-up loading capacitors may be placed on
each side of the external crystal and ground.
Their value should be in the range of 10 pF.
However, their values should be selected based
upon the crystal specifications. The total sum of
the capacitance of the traces between the
CS89712’s clock pins, the capacitors, and the
crystal leads should be subtracted from the
crystal’s specifications when determining the
values for the loading capacitors.
• The crystal should have a maximum 5 ppm frequency drift over the chip’s operating temperature range.
• The voltage for the crystal must be 2.5 V + 0.2 V.
Alternatively, a digital clock source can be used to
drive the RTCIN pin of the CS89712. With this approach, the voltage levels of the clock source
should match that of the VDD supply for the
CS89712’s pads (i.e., the supply voltage level used
to drive all of the non-VDD core pins on the
CS89712) (i.e., RTCOUT). The output clock pin
should be left floating.
2.21 Dedicated LED Flasher
The LED flasher feature enables an external pin
(PD[0] / LEDFLSH) to be toggled at a programmable rate and duty ratio for connection to an LED.
This module is driven from the RTCs 32.768 kHz
oscillator and works in all running modes because
no CPU intervention is needed once its rate and
duty ratio have been configured (via the LEDFLSH
register). The LED flash rate period can be programmed for 1, 2, 3, or 4 seconds. The duty ratio
can be programmed such that the mark portion can
be 1/16 to 16/16 of the full cycle.
2.22 PWM Interfaces
Two Pulse Width Modulator (PWM) duty ratio
clock outputs are provided in the CS89712. When
the device is operating from the internal PLL, the
PWM will run at a frequency of 96 kHz. These signals are intended for use as drives for external DCto-DC converters in the Power Supply Unit (PSU)
subsystem. External input pins that would normally
be connected to the output from comparators monitoring the external DC-to-DC converter output are
also used to enable these clocks. These are the
FB[1:0] pins. The duty ratio (and hence PWMs on
time) can be programmed from 1 in 16 to 15 in 16.
The sense of the PWM drive signal (active high or
low) is determined by latching the state of this
drive signal during power on reset (i.e., a pull-up on
the drive signal will result in a active low drive output, and visa versa). This allows either positive or
negative voltages to be generated by the external
DC-to-DC converter.The DC to DC converter
channels remain enabled in Snooze State. In
DS502PP2 43
Page 44

CS89712
Snooze State these are the only peripherals apart
from the LCD controller and on-chip SRAM to remain enabled. If either or both of the converters are
not required, they should be switched off before entering Snooze State to save power. PWMs are disabled by writing zeros into the drive ratio fields in
the PMPCON Pump Control register.
Note: To maximize power savings, the drive ratio
fields should be used to disable the PWMs,
instead of the FB pins. The clocks that source
the PWMs are disabled when the drive ratio
fields are zeroed.
2.23 Ethernet Port Overview
The Ethernet port provides a flexible set of performance features and configuration options, allowing
designers to develop Ethernet circuits that meet
their system requirements.
The Ethernet Port performs two basic functions:
Ethernet packet transmission and reception. Before
transmission or reception is possible, the Ethernet
Port must be configured.
to be transmitted and when to start transmission
(i.e. after 5, 381, 1021 or all bytes have been transferred). Following the Transmit Command is the
Transmit Length, indicating how much buffer
space is required. When buffer space is a vailable,
the Ethernet frame is written into the Ethernet
port’s internal memory.
In the second phase of transmission, the Ethernet
port converts the frame into an Ethernet packet then
transmits it onto the network. The second phase begins with the Ethernet port transmitting the preamble and Start-of-Frame delimiter as soon as the
proper number of bytes has been transferred into its
transmit buffer (5, 381, 1021 bytes or full frame,
depending on configuration). The preamble and
Start-of-Frame delimiter are followed by the Destination Address, Source Address, Length field and
LLC data (all software supplied). If the frame is
less than 64 bytes, including CRC, the Ethernet
port adds pad bits if so configured. Finally, the
Ethernet port appends the proper 32-bit CRC value.
2.23.1 Configuration
The Ethernet port must be configured for packet
transmission and reception at power-up or reset.
Parameters must be written to its internal Configuration and Control registers. Configuration data can
either be written to the Ethernet port by software or
loaded automatically from an external EEPROM.
Section 2.24, “Programming the EEPROM” and
Section 2.6, “Ethernet EEPROM Configurations”
describe the configuration process in detail. Section 3.2.3, “Ethernet Status/Control Registers”
provides a detailed description of the bits in the
Configuration and Control Registers.
2.23.2 Packet Transmission
Packet transmission occurs in two phases. In the
first phase, the Ethernet frame is moved into the
Ethernet port’s buffer memory. The first phase begins with the issuance of a Transmit Command.
This informs the Ethernet port both that a frame is
Section 2.34, “Transmit Operation” provides a de-
tailed description of packet transmission.
2.23.3 Packet Reception
Like packet transmission, packet reception occurs
in two phases. In the first phase, the E thernet port
receives an Ethernet packet and stores it in on-chip
memory. The first phase of packet reception begins
with the receive frame passing through the analog
front end and Manchester decoder where Manchester data is converted to NRZ data. Next, the preamble and Start-of-Frame delimiter are stripped off
and the receive frame is sent through the address
filter. If the frame’s Destination Address matches
the criteria programmed into the address filter, the
packet is stored in the Ethernet port’s internal
memory. The Ethernet port then checks the CRC,
and depending on the configuration, informs the
processor that a frame has been received. In the
second phase, the receive frame is tran sferred into
host memory.
44 DS502PP2
Page 45

CS89712
Section 2.32, “Basic Receive Operation” and Section 2.32.7, “Receive Ethernet Port Locations”
provide a detailed description of packet reception.
2.24 Programming the EEPROM
After initialization, software can access the EEPROM through the Ethernet port by writing one of
seven commands to the EEPROM Command register. Figure 12 shows the format of the EEPROM
Command register.
2.24.1 EEPROM Commands
The seven commands used to access the EEPROM
are: Read, Write, Erase, Erase/Write Enable,
Erase/Write Disable, Erase-All, and Write-All.
They are described in Table 26.
2.24.2 EEPROM Command Execution
During the execution of a command, the two Opcode bits, followed by the six bits of address (for a
’C46 or ’CS46) or eight bits of address (for a ’C56,
’CS56, ’C66 or ’CS66), are shifted out of the Ether-
net port, int o the EEPROM. If the comman d is a
Write, the data in the EEPROM Data register
(Ethernet Port offset address 0042h) follows. If the
command is a Read, the data in the specified EEPROM location is written into the EEPROM Data
register. If the command is an Erase or Erase-All ,
no data is transferred to or from the EEPROM Data
register. Before issuing any command, the SIBUSY bit (Register 16, SelfST, bit 8) must clear.
After each command has been issued, software
must wait again for SIBUSY to clear.
2.24.3 Enabling Access to the EEPROM
The Erase/Write Enable command provides protection from accidental writes to the EEPROM. The
software must write an Erase/Write Enable command before it attempts to write to or erase any EEPROM memory location. Once the software has
finished altering the contents of the EEPROM, it
must write an Erase/Write Disable command to
prevent unwanted modification of the EEPROM.
AD7 - AD0 used with ’C56,
’CS56, ’C66 and ’C S66
FXEXDXCXB
Bit Name Description
[F:B] Reserved
[A] ELSEL External Logic Select: When clear, the EECS pin is used to select the EEPROM.
When set, the ELCS pin is used to select the external LA decode circuit.
[9:8] OP1, OP0 Opcode: Indicates what command is being executed (see next section).
[7:0] AD7 to AD0 EEPROM Address: Address of EEPROM word being accessed.
Figure 12. EEPROM Command Register Format
A98
X ELSEL OP1 OP0
AD7 AD6
5476
AD5 AD4
AD5 - AD0 used with
’C46 and ’CS46
1032
AD1 AD0AD3 AD2
DS502PP2 45
Page 46

CS89712
Opcode
Command
Read Register 1,0 word address yes all 25 µs
Write Register 0,1 word address yes all 10 ms
Erase Register 1.1 word address no all 10 ms
Erase/Write Enable 0,0 XX11-XXXX no ‘CS46, ‘C46 9 µs
Erase/Write Disable 0,0
Erase-All Registers 0,0
Write-All Register 0,0
(bits 9,8)
0,0
0,0
0,0
2.24.4 Writing and Erasing the EEPROM
To write data to the EEPROM, the software must
execute the following series of commands:
1) Issue an Erase/Write Enable command.
EEPROM Address
(bits 7 to 0) Data EEPROM Type
11XX-XXXX no ‘CS56, ‘C56, ‘CS66, ‘C66 9 µs
XX00-XXXX no ‘CS46, ‘C46 9 µs
00XX-XXXX no ‘CS56, ‘C56, ‘CS66, ‘C66 9 µs
XX10-XXXX no ‘CS46, ‘C46 10 ms
10XX-XXXX no ‘CS56, ‘C56, ‘CS66, ‘C66 9 µs
XX01-XXXX yes ‘CS46, ‘C46 10 ms
01XX-XXXX yes ‘CS56, ‘C56, ‘CS66, ‘C66 10 ms
Ta ble 26. EEPROM Commands
2.25.2 LINKLED or HC0
LINKLED or HC0 can be controlled by either the
Ethernet port or the software. When controlled by
the Ethernet port, LINKLED is low whenever the
Execution
Ethernet port receives valid 10BASE-T link pulses.
2) Load the data into the EEPROM Data register.
3) Issue a Write command.
4) Issue an Erase/Write Disable command.
To configure this pin for software control, the
HC0E bit (SelfCTL register, Bit C) must be clear.
When controlled by the software, LINKLED is low
when the HCB0 bit (SelfCTL register, Bit E) is set.
During the Erase command, the Ethernet port
writes FFh to the specified EEPROM location.
To configure it for software control, the HC0E bit
must be set. Table 27 summarizes this operation.
During the Erase-All command, the Ethernet port
writes FFh to all locations.
2.25 Ethernet LEDs
The Ethernet port provides three output pins that
can be used to control LEDs or external logic.
2.25.1 LANLED
HC0E
(Bit C)
0N/A
HCB0
(Bit E)
Pin Function
Pin configured as LINKLED
Output is low when valid
10BASE-T link pulses are
detected. Output is high if valid
link pulses are not detected
Time
:
LANLED goes low whenever the Ethernet port
transmits or receives a frame, or when it detects a
collision. LANLED remains low until there has
been no activity for 6 ms (i.e. each transmission, re-
10
11
Pin configured as HC0
Output is high
Pin configured as HC0
Output is low
:
:
ception, or collision produces a pulse lasting a minimum of 6 ms).
46 DS502PP2
Table 27. LINKLED
/HC0 Pin Operation
Page 47

CS89712
2.25.3 LED Connection
Each LED output is capable of sinking 10 mA to
drive an LED directly through a series resistor. The
output voltage of each pin is less than 0.4 V when
the pin is low.
2.26 Media Access Control Engine
2.26.1 Overview
The CS89712’s Ethernet Media Access Control
(MAC) engine is fully compliant with the IEEE
802.3 Ethernet standard (ISO/IEC 8802-3, 1993). It
handles all aspects of Ethernet frame transmission
and reception, including: collision detection, preamble generation and detection, and CRC generation and test. Programmable MAC features include
automatic retransmission on collision, and padding
of transmitted frames. The primary functions of the
MAC are: frame encapsulation and decapsulation;
error detection and handling; and, media access
management.
2.26.2 Frame Encapsulation/Decapsulation
The Ethernet port’s MAC engine automatically assembles transmit packets and disassembles receive
packets. It also determines if transmit and receive
frames are of legal minimum size.
2.26.2.1 Transmission
Once the proper number of bytes have been transferred to the Ethernet port’s memory (either 5, 381,
1021 bytes, or full frame), and providing that access to the network is permitted, the MAC autom atically transmits the 7-byte preamble (1010101b...),
followed by the Start-of-Frame Delimiter (SFD,
10101011b), and then the serialized frame data. It
then transmits the Frame Check Sequence (FCS).
The data after the SFD and before the FCS (Destination Address, Source Address, Length, and data
field) is supplied by the software. FCS generation
by the Ethernet port may be disabled by setting the
InhibitCRC bit (TxCMD register, bit C).
Figure 13 shows the Ethernet frame format.
2.26.2.2 Reception
The MAC receives the incom ing pac ket as a se ri al
stream of NRZ data from the Manchester encoder/decoder. It begins by checking for the SFD.
Once the SFD is detected, the MAC assumes all
subsequent bits are frame data. It reads the DA and
compares it to the criteria progra mme d into the address filter (see Section 2.32.7, “Receive Ethernet
Port Locations” for a description of Address Filtering). If the DA passes the address f ilter, the frame
is loaded into the Ethernet port’s memory. If the
BufferCRC bit (RxCFG register, bit B) is set, the
received FCS is also loaded into memory. Once the
entire packet has been received, the MAC validates
the FCS. If an error is detected, the CRCerr or bit
(RxEvent register, Bit C) is set.
Packet
1 byteup to 7 bytes 6 bytes 6 bytes 2 bytes
alternating 1s / 0s
preamble
Direction of Transmission
SFD = Start of Frame Delim iter
DA = Destination Address
SA = Source Address
DS502PP2 47
SFD
DA
Figure 13. Ethernet Frame Format
SA
Frame
Length Field
frame l ength
min 64 bytes
max 1518 b ytes
LLC = Logical Link Co ntrol
FCS = F rame Chec k S equence (also
called Cyclic Redundancy Check, or CRC)
LLC data Pad
4 bytes
FCS
Page 48

CS89712
2.26.2.3 Enforcing Minimum Frame Size
The MAC provides minimum frame size enforcement of both transmit and receive packets. When
the TxPadDis bit (TxCMD register, Bit D) is c lear,
transmit frames will be padded with additional bits
to ensure that the receiving station receives a legal
frame (64 bytes, including CRC). When TxPadDis
is set, the Ethernet port will not add pad bits and
will transmit frames less that 64 bytes. If a fram e is
received that is less than 64 bytes (including CRC),
the Runt bit (RxEvent regist er, Bit D) will be set indicating the arrival of an illegal frame.
2.26.3 Transmit Error Detection/Handling
The MAC engine monitors Ethernet activity and
reports and recovers from a number of error conditions. For transmission, the MAC reports the following errors in TxEvent (Register 8) and
BufEvent (Register C):
2.26.3.1 Out-of-Window (Late) Collision
If a collision is detected after the first 512 bits have
been transmitted, the MAC reports a late collision
by setting the Out-of-window bit (TxEvent register, Bit 9). The MAC then forces a bad CRC and
terminates the transmission. If the Out-of-windowiE bit (TxCFG register, Bit 9) is set, an interrupt is
generated. A late collision may indicate an illegal
network configuration.
2.26.3.2 Jabber Error
If a transmission continues longer than about
26 ms, the MAC disables the transmitter and sets
the Jabber bit (TxEvent register, Bit A). The output
of the transmitter returns to idle and remains there
until the software issues a new Transmit Command. If the JabberiE bit (TxCFG register, Bit A) is
set, an interrupt is generated. A Jabber condition indicates a possible error in the Ethernet port transmit
function. To prevent possible network faults, the
software should clear the transmit buffer. Possible
options include:
• Reset the chip with either software or hardware
reset (see Section 2.24, “Programming the EE-
PROM”).
• Issue a Force Transmit Command by setting the
Force bit (TxCMD register, bit 8).
• Issue a Transmit Command with the TxLength
field set to zero.
2.26.3.3 Transmit Collision
The MAC counts the number of times an individual
packet must be retransmitted due to network collisions. The collision count is stored in bits B
through E of the TxEvent register. If the packet collides 16 times, transmission of that packet is terminated and the 16coll bit (TxEvent register, Bit F) is
set. If the 16colliE bit (TxCFG register, Bit F) is
set, an interrupt is generated on the 16th collision.
A running count of transmit collisions is recorded
in the TxCOL register.
2.26.3.4 Transmit Underrun
If the Ethernet port starts transmission of a packet
but runs out of data before reaching the end of
frame, the TxUnderrun bit (BufEvent register, Bit
9) is set. The MAC then forces a bad CRC and ter-
minates the transmission. If the TxUnderruniE bit
(BufCFG bit 9) is set, an interrupt is generated.
2.26.4 Receive Error Detection/Handling
The following receive errors are reported in the RxEvent register:
2.26.4.1 CRC Error
If a frame is received with a bad CRC, the CRCerror bit (RxEvent register, Bit C) is set. If the
CRCerrorA bit (RxCTL register, Bit C) is set, the
frame will be buffered by Ethernet port. If the
CRCerroriE bit (RxCFG register. Bit C) is set, an
interrupt is generated.
48 DS502PP2
Page 49

CS89712
2.26.4.2 Runt Frame
If a frame is received that is shorter than 64 bytes,
the Runt bit (RxEvent register, Bit D) is set. If the
RuntA bit (RxCTL register, Bit D) is set, the frame
will still be buffered by Ethernet port. If the RuntiE
bit (RxCFG bit D) is set, an interrupt is generated.
2.26.4.3 Extra Data
If a frame is received that is longer than 1518 bytes,
the Extradata bit (RxEvent register, Bit E) is set. If
the ExtradataA bit (RxCTL register, Bit E) is set,
the first 1518 bytes of the frame will still be buffered by Ethernet port. If the ExtradataiE bit (RxCFG register Bit E) is set, an int errupt is generated.
2.26.4.4 Dribble Bits and Alignment Error
Under normal operating conditions, the MAC may
detect up to 7 additional bits after the last full byte
of a receive packet. These bits, known as dribble
bits, are ignored. If dribble bits are detected, the
Dribblebit bit (RxEvent register, Bit 7) is set. If
both the Dribblebits bit and CRCerror bit (RxEvent
register Bit C) are set at the same time, an alignment error has occurred.
2.26.5 Media Access Management
The Ethernet network topology is a single shared
medium with several attached stations. The Ethernet protocol is designed to allow each station equal
access to the network at any given time. Any node
can attempt to gain access to the network by first
completing a deferral process (described below) after the last network activity, and then transmitting a
packet that will be received by all other stations. If
two nodes transmit simultaneously, a collision occurs and the colliding packets are corrupted. Two
primary tasks of the MAC are to avoid network collisions, and then recover when they occur.
2.26.5.1 Collision Avoidance
The MAC continually monitors network traffic by
checking for the presence of carrier activity (carrier
activity is indicated by the assertion of the internal
Carrier Sense signal generated by the ENDEC). If
carrier activity is detected, the network is assumed
busy and the MAC must wait until the current
packet is finished before attempting transmission.
The Ethernet port supports two schemes for determining when to initiate transmission: Two-Part Deferral, and Simple Deferral. Selection of the
deferral scheme is determined by the 2-partDefDis
bit (LineCTL register bit D). If the 2-partDefDis bit
is clear, the MAC uses a two-part deferral process
defined in section 4.2.3.2.1 of the Ethernet standard
(ISO/IEC 8802-3, 1993). If the 2-partDefDis bit is
set, the MAC uses a simplified deferral scheme.
Both schemes are described below:
2.26.5.2 Two-Part Deferral
In the two-part deferral process, the 9.6 µs Inter
Packet Gap (IPG) timer is started whenever the internal Carrier Sense signal is deasserted. If activity
is detected during the first 6.4 µs of the IPG timer,
the timer is reset and then re start ed once the a ctivity has stopped. If there is no activity during the first
6.4 µs of the IPG timer, the IPG timer is allowed to
time out (even if network activity is detec ted during
the final 3.2 µ s). The MAC then begins transmission if a transmit packet is ready and if it is not in
Backoff (Backoff is described later in this section).
If no transmit packet is pending, the MAC continues to monitor the network. If activity is detected
before a transmit frame is ready, the MAC defers to
the transmitting station and resumes monitoring the
network.
The two-part deferral scheme was developed to
prevent the possibility of the IPG being shortened
due to a temporary loss of carrier. Figure 14 diagrams the two-part deferral process.
2.26.5.3 Simple Deferral
In the simple deferral scheme, the IPG timer is
started whenever Carrier Sense is deasserted. Once
the IPG timer is finished (after 9.6 µs), if a transmit
DS502PP2 49
Page 50

Start Monitoring
Figure 14. Two-Part Deferral
Network Activity
Yes
Network
Active?
Start Monitoring
Networ k A c ti vity
Yes
Network
Active?
No
CS89712
Wait
3.2
Tx
Frame
and
Ready
in Backoff?
Yes
No
Start IPG
Timer
Yes
µ
s
IPG
Timer =
6.4
µ
No
Network
Active?
Yes
s?
No
Frame
Ready
in Back
Yes
T
x
and
Not
off?
No
Wait
9.6
µ
s
No
Network
Active?
Transmit
Frame
Yes
Figure 15. Simple Deferral
Not
No
No
Network
Active?
Yes
frame is pending and if the MAC is not in Backoff,
transmission begins the 9.6 µs IPG). If no transmit
packet is pending, the MAC continues to monitor
the network. If activity is detected before a transm it
frame is ready, the MAC defers to the transmitting
Transmit
Frame
station and resumes monitoring the network. Fig-
ure 15 diagrams the simple deferral process.
2.26.5.4 Collision Resolution
If a collision is detected while the Ethernet port is
transmitting, the MAC responds in one of three
ways depending on whether it is a normal collision
(within the first 512 bits of transmission) or a late
collision (after the first 512 bits of transmission):
50 DS502PP2
Page 51

CS89712
2.26.5.5 Normal Collisions
If a collision is detected before the end of the preamble and SFD, the MAC finishes the preamble
and SFD, transmits the jam sequence (32-bit pat-
tern of all 0’s), and then initiates Backoff. If a collision is detected after the transmission of the
preamble and SFD but before 512 bit times, the
MAC immediately terminates transmission, transmits the jam sequence, and then initiates Backoff.
In either case, if the Onecoll bit (TxCMD register
bit 9) is clear, the MAC will attempt to transmit a
packet a total of 16 times (the initial att empt plus 15
retransmissions) due to normal collisions. On the
16th collision, it sets the 16coll bit (TxEvent register bit F) and discards the packet. If the Onecoll bit
is set, the MAC discards the packet without attempting any retransmission.
2.26.5.6 Late Collisions
If a collision is detected after the first 512 bits have
been transmitted, the MAC immediately terminate s
transmission, transmits the jam sequence, discards
the packet, and sets the Out-of-window bit (TxEvent bit 9). The Ethernet port does not initiate
backoff or attempt to retransmit the frame. For additional information about Late Collisions, see Section 2.26.3.1, “Out-of-Window (Late) Collision” in
this section.
2.26.5.7 Backoff
After the MAC has completed transmitting the ja m
sequence, it must wait, or "Back off", before attempting to transmit again. The amount of time it
must wait is determined by one of two Backoff algorithms: the Standard Backoff algorithm
(ISO/IEC 4.2.3.2.5) or the Modified Backoff algorithm. The algorithm used is selected by the ModBackoffE bit (LineCTL register bit B).
2.26.5.8 Standard Backoff
The Standard Backoff algorithm, also called the
"Truncated Binary Exponential Backoff", is described by the equation:
0 ≤ r ≤ 2
k
where r (a random integer) is the number of slot
times the MAC must wait (1 slot time = 512 bit
times), and k is the smaller of n or 10, where n is the
number of retransmission attempts.
2.26.5.9 Modified Backoff
The Modified Backoff is described by the equation:
0 ≤ r ≤ 2
k
where r (a random integer) is the number of slot
times the MAC must wait, and k is 3 for n < 3 and
k is the smaller of n or 10 for n ≥ 3, where n is the
number of retransmission attempts.
The advantage of the Modified Backoff algorithm
over the Standard Backoff algorithm is that it reduces the possibility of multiple collisions on the
first three retries. The disadvantage is that it extends the maximum time needed to gain access to
the network for the first three retries.
The software may choose to disable the Backoff algorithm altogether by setting the DisableBackoff
bit (TestCTL register bit B). When disabled, the
Ethernet port only waits the 9.6 µs IPG time before
starting transmission.
2.27 Encoder/Decoder (ENDEC)
The Ethernet port’s integrated encoder/decoder
(ENDEC) circuit is compliant with the relevant
portions of section 7 of the Ethernet standard
(ISO/IEC 8802-3, 1993). Its primary functions include: Manchester encoding of transmit data; informing the MAC when valid receive data is
present (Carrier Detection); and, recovering the
clock and NRZ data from incoming Manchesterencoded data.
DS502PP2 51
Page 52

CS89712
Figure 16 provides a diagram of the ENDEC and its
interface to the MAC and 10BASE-T transceiver.
2.27.1 Encoder
The encoder converts NRZ data from the MAC and
a 20 MHz Transmit Clock signal into a serial
stream of Manchester data. The Transmit Clock is
produced by an on-chip oscillator circuit that is
driven by either an external 20 MHz quartz crystal
or a TTL-level CMOS clock input. The encoded
signal is routed to the 10BASE-T transceiver.
2.27.2 Carrier Detection
The internal Carrier Detection circuit informs the
MAC that valid receive data is present by asserting
the internal Carrier Sense signal as soon it detects a
valid bit pattern (1010b or 0101b for 10BASE-T.
During normal packet reception, Carrier Sense re mains asserted while the frame is being received,
and is deasserted 1.3 to 2.3 bit times after the last
low-to-high transition of the End-of-Frame (EOF)
sequence. Whenever the receiver is idle (no receive
activity), Carrier Sense is deasserted. The CRS bit
(LineST register bit E) reports the state of the Carrier Sense signal.
2.27.3 Clock and Data Recovery
When the receiver is idle, the phase-lock loop
(PLL) is locked to the i nternal cl ock signal. The assertion of the Carrier Sense signal interrupts the
PLL. When it restarts, it locks on the incoming data. The receive clock is the n compared to the incoming data at the bit cell center and any phase
difference is corrected. The PLL remains locked as
long as the receiver input signal is valid. Once the
PLL has locked on the incoming data, the ENDEC
converts the Manchester data to NRZ and passes
the decoded data and the recovered clock to the
MAC for further processing.
2.28 10BASE-T Transceiver
The Ethernet port includes an integrated 10BASET transceiver that is compliant with the relevant
portions of section 14 of the Ethernet standard
(ISO/IEC 8802-3, 1993). It includes all analog and
digital circuitry needed to interface the Ethernet
port directly to a simple isolation transformer (see
the Characteristics/Specifications section for a connection diagram). Figure 17 provides a block diagram of the 10BASE-T transceiver.
2.28.1 10BASE-T Filters
The CS89712’s 10BASE-T transceiver includes integrated low-pass transmit and rece ive filters, elim-
ENDEC
Carrier Sense
RX CLK
MAC
52 DS502PP2
RX NRZ
TXCLK
TX NRZ
TEN
Port Select
Carrier
Detector
Decoder
& PLL
Encoder
Clock
Figure 16. ENDEC
RX
MUX
TX
MUX
RXSQL
RX
TX
10BASE-T
Transceiver
Page 53

CS89712
+
inating the need for external filters or a
filter/transformer hybrid. On-chip filters are gm/c
implementations of fifth-order Butterworth lowpass filters. Internal tuning circuits keep the gm/c
ratio tightly controlled, even when large temperature, supply, and IC process variations occur. The
nominal 3 dB cutoff frequency of the filters is
16 MHz, and the nominal attenuation at 30 MHz
(3rd harmonic) is -27 dB.
2.28.2 Transmitter
When configured for 10BASE-T operation,
Manchester encoded data from the ENDEC is fed
into the transmitter’s predistortion circuit where
initial wave shaping and preequalization is performed. The output of the predistortion circuit is
LinkOK
(to MAC)
Link Pulse
Detector
RXSQL
RX
ENDEC
fed into the transmit filter where final wave shaping
occurs and unwanted noise is removed. The signal
then passes to the differenti al driver whe re it is amplified and driven out of the TXD+/TXD- pins.
In the absence of transmit packets, the transmitter
generates link pulses in accordance with section
14.2.1.1. of the Ethernet standard. Transmitted link
pulses are positive pulses, one bit time wide, typically generated at a rate of one every 16 ms. The
16 ms timer starts whenever the transmitter completes an End-of-Frame (EOF) sequence. Thus,
there is a link p ulse 16 ms after an EOF unless there
is another transmitted packet. Figure 18 dia grams
the operation of the Link Pulse Generator.
10BASE - T Transceiver
RX Squelch
RX
Comparator
RX Filters
RXDRXD
TX
Time Link
TX Pre-
Distortion
Figure 17. 10BASE-T Transceiver
TX Filters
Filter Tuni ng
TX Drivers
Pulse
TXDTXD+
Link
Pulse
Packet Packet
Less Than
16ms
Figure 18. Link Pulse Transmission
DS502PP2 53
16ms16ms
Page 54

CS89712
If no link pulses are being received on the receiver,
the 10BASE-T transmitter is internally forced to an
inactive state unless bit DisableLT in the Test Control register is set to one.
2.28.3 Receiver
The 10BASE-T receive section consists of the receive filter, squelch circuit, polarity detection and
correction circuit, and link pulse detector.
2.28.3.1 10BASE-T Squelch Circuit
This circuit determines when valid data is present
on the RXD+/RXD- pair. Incoming signals passing
through the receive filter are tested by the squelch
circuit. Any signal with amplitude less than the
squelch threshold (either positive or negative, depending on polarity) is rejected.
2.28.3.2 Extended Range
The CS89712 supports an Extended Range feature
that reduces the 10BASE-T receive squelch threshold by approximately 6 dB. This allows the
CS89712 to operate with 10BASE-T cables that are
longer than 100 meters (100 meters is the maximum length specified by the Ethernet standard).
The exact additional distance depends on the quality of the cable and the amount of electromagnetic
noise in the surrounding environment. To activate
this feature, the software must set the LoRxSquelch
bit (LineCTL register bit E).
2.28.4 Link Pulse Detection
To prevent disruption of network operation due to
a faulty link segment, the Ethernet port continually
monitors the 10BASE-T receive pair (RXD+/
RXD-) for packets and link pulses. After each
packet or link pulse is received, an internal LinkLoss timer is started. As long as a packet or link
pulse is received before the Link -Loss timer finishes (between 25 and 150 ms), the Ethernet port
maintains normal operation. If no receive activity is
detected, the Ethernet port disables packet transmission to prevent "blind" transmissions onto the
network (link pulses are still sent while packet
transmission is disabled). To reactivate transmission, the receiver must detect a single packet (the
packet itself is ignored), or two link pulses separated by more than 2 to 7 ms and no more than 25 to
150 ms (see the Characteristics / Specifications
section for 10BASE-T timing).
The state of the link segment is reported in the
LinkOK bit (LineST register bit 7). If the HC0E bit
(SelfCTL register bit D) is clear, it is also indicated
by the LINKLED output pin. If the link is "good",
the LinkOK bit is set and the LINKLED pin is driven low. If the link is "bad" the LinkOK bit is clear
and the LINKLED pin is high. To disable this feature, the DisableLT bit (TestCTL register bit 7)
must be set. If DisableLT is set, the Ethernet port
will transmit and receive packets independent of
the link segment.
2.28.5 Receive Polarity Detection/Correction
The Ethernet port checks the polarity of the receive
half of the twisted pair cable. If the polarity is correct, the PolarityOK bit (LineST register bit C) is
set. If the polarity is reversed, the Polarit yOK bit is
clear. If the PolarityDis bit (LineCTL register bit
C) is clear, the Ethernet port autom atically c orrects
a reversal. If the PolarityDis bit is set, the port does
not correct a reversal. The PolarityOK bit and the
PolarityDis bit are independent.
To detect a reversed pair, the receiver examines received link pulses and the End-of-Frame (EOF) sequence of incoming packets. If it detects at least
one reversed link pulse and at least four frames in a
row with negative polarity after the EOF, the receive pair is considered reversed. Data received before the correction of the reversal is ignored.
2.28.6 Collision Detection
If half-duplex operation is selected (FDX bit E is
clear), the Ethernet port detects a 10BASE-T collision whenever the receiver and transmitter are ac tive simultaneously. When a collision is present,
54 DS502PP2
Page 55

CS89712
the Collision Detection circuit informs the MAC by
asserting the internal Collision signal (see Section
2.26, “Media Access Control Engine” for collision
handling).
2.29 Basic Transmit Operation
Transmit operations occur in the following order
(using interrupts):
1) Software bids for storage of the frame by writing the Transmit Command to the TxCMD Port
and the transmit frame length to the TxLength
Port.
2) Software reads the BusST register to see if the
Rdy4TxNOW bit (Bit 8) is set. To read the
BusST register, the software must first set the
Ethernet Port Po inte r at the cor rect loc ati on b y
writing 0138h to the Ethernet Port Pointer Port
(offset address 000Ah). It can then read the
BusST register from the Ethernet Port Data
Port (offset address 000Ch). If Rdy4TxNOW is
set, the frame can be writ ten. If clear, th e software must wait for Ethernet port buffer memory to become available. If Rdy4TxiE (bit 8 of
BufCFG) is set, an interrupt is generated when
Rdy4Tx (bit 8 of BufEvent) becomes set. If the
TxBidErr bit (BusST register bit 7) is set, the
transmit length is not valid.
3) Once the Ethernet port is ready to accept the
frame, software executes repetitive write instructions (REP OUT) to the Receive/Transmit
Data Port to transfer the entire frame from host
RAM to the Ethernet port’s memory.
For a more detailed description of transmit, see
Section 2.34, “Transmit Operation”.
2.30 Basic Receive Operation
Receive operations occur in the following order (in
this example, interrupts are enabled to signal the
presence of a valid receive frame):
1) A frame is received by the CS89712, triggering
an enabled interrupt.
2) The software reads the Interrupt Status Queue
Port and is informed of the receive frame.
3) The software reads the frame data by executing
repetitive read instructions from the Receive/Transmit Data Port to transfer the frame
from Ethernet port memory to host RAM. Preceding the frame data are the contents of the
RxStatus register and the RxLength register.
For a more detailed description of receive, see Section 2.32, “Basic Receive Operation”.
2.31 Managing Interrupts & Status Queue
The Interrupt Status Queue (ISQ) is used by the
Ethernet port to communicate Event reports.
Whenever an event occur s th at t r iggers a n ena bled
interrupt, the Ethernet port sets the appropriate
bit(s) in one of five registers, maps the contents of
that register to the ISQ, and drives the selected interrupt request pin high (if an earlier interrupt is
waiting in the queue, the interrupt request pin will
already be high). When the software services the
interrupt, it must first read the ISQ to learn the nature of the interrupt. It can then process the interrupt (the first read to the ISQ causes the interrupt
request pin to go low.)
Three of the registers mapped to the IS Q a re ev ent
registers: RxEvent, TxEvent, and BufEvent. The
other two registers are counter-overflow reports:
RxMISS and TxCOL. There may be more than one
RxEvent report and/or more than one TxEvent report in the ISQ at a time. However, there may be
only one BufEvent report, one RxMISS report and
one TxCOL report in the ISQ at a time.
Event reports stored in the ISQ are re ad out in the
order of priority, with RxEvent first, followed by
TxEvent, BufEvent, RxMiss, and then TxCOL.
The software only needs to read from one location
to get the interrupt currently at the front of the
queue. It is located at offset address 0008h. Each
time the software reads the ISQ, the bits i n the c or-
DS502PP2 55
Page 56

CS89712
responding register are cleared and the next report
in the queue moves to the front.
When the software starts reading the ISQ, it must
read and process all Event reports in the queue. A
read-out of a null word (0000h) indicates that all interrupts have been read.
The ISQ is read as a 16-bit word. The lower six bits
(0 through 5) contain the register number (4, 8, C,
10, or 12). The upper ten bits (6 through F) contain
the register contents. The software must always
read the entire 16-bit word.
The active interrupt pin (INTRQx) is selected via
the Interrupt Number register (Et hernet Port offset
address 22h). As an additional option, all of the interrupt pins can be 3-Stated using the same registers; see Section 3.17 for more details.
An event triggers an interrupt only when the EnableIRQ bit (17) of the Bus Control register is set.
After the CS89712 has generated an interrupt, the
first read of the ISQ makes the INTRQ output pin
go low (inactive). INTRQ remains low until the
null word (0000h) is read from the ISQ, or for
1.6µs, whichever is longer.
2.32 Basic Receive Operation
2.32.1 Overview
Once an incoming packet has passed through the
analog front end and Manchester decoder, it goes
through the following three-step receive process:
1) Pre-Processing
2) Temporary Buffering
3) Transfer to system RAM
As shown in the figure, all receive frames go
through the same pre-processing and temporary
buffering phases, regardless of transfer method
Once a frame has been pre-processed and buffered,
it can be accessed by the software.
2.32.2 Receive Configuration
After each reset, the CS89712 Ethernet port must
be configured for receive operation. This can be
done automatically using an attached EEPROM or
by writing configuration commands to the
CS89712’s internal registers (see Section 2.6,
“Ethernet EEPROM Configurations”). The items
that must be configured include:
• which types of frames to accept;
• which receive events cause interrupts; and,
2.32.2.1 Configuring the Physical Interface
Configuring the physical interface consists of enabling the receive logic for serial reception. This is
done via the LineCTL register. Bit 6 enables reception and bit E is used to reduce squelch.
2.32.2.2 Choosing Acceptable Frame Types
The RxCTL register selects which frame types will
be accepted by the Ethernet port. Bits 6 through E
of RxCTL are used for this. Refer to Section 2.32.7,
“Receive Ethernet Port Locations” for a detailed
description of Destination Address filtering, and
Section 3.18.4 on page 119 for RxCTL details.
2.32.2.3 Selecting Interrupt Events
The RxCFG and BufCFG registers are used to determine which receive events will cause interrupts
to the processor. Bits 8, C, D and E of BufCFG are
used for this, and A, B, D and F of BufCFG. See
Section 3.18.2 and Section 3.18.8 for details. Note
that the DA filter must be passsed before there is an
interrupt.
2.32.3 Receive Frame Pre-Processing
The CS89712 pre-processes all receive frames using a four step process:
1) Destination Address filtering;
2) Early Interrupt Generation;
3) Acceptance filtering; and,
56 DS502PP2
Page 57

An enabled interrupt occurs.
The selected interrup t
request pin is driv en high
(active) if not already high.
The host reads the ISQ.
The selected interrupt
request pin is driven low.
CS89712
EXIT.
Interrupts
re-enabled.
(Interrupts
will be
disabled
for at least
1.6 us.)
Yes
ISQ = 0000 h?
No
Which
Event
report
type?
RxEvent
TxEvent
BufEvent
RxMISS
TxCOL
None of the above
TxEvent bits: 16coll, Jabber,
Process applicable BufEvent
bits: RxDest, Rx128, RxMiss,
Process applicable
RxEvent bits: Extradata,
Runt, CRCerror, RxOK.
Process applicable
Out-of-window, TxOK.
TxUnderrun, Rdy4Tx,
RxDMAFrame, SWint.
Process RxMISS counter.
Process TxCOL counter.
Service
Default
Figure 19. Interrupt Status Queue
DS502PP2 57
Page 58

CS89712
4) Normal Interrupt Generation.
Figure 20 diagrams frame pre-processing.
2.32.3.1 Destination Address Filtering
All incoming frames are passed through the Destination Address filter (DA filter). If the frame’s DA
passes the DA filter, the frame is pass ed on for further pre-processing. If it fails the DA filter, the
frame is discarded. See Section 2.32.7, “Receive
Ethernet Port Locations” for a more detailed description of DA filtering.
2.32.3.2 Early Interrupt Generation
The Ethernet port supports the following two early
interrupts for frame reception.
• RxDest
The RxDest bit (bit F of BufEvent register) is
set as soon as the Destination Address (DA) of
the incoming frame passes the DA filter. If the
RxDestiE bit (BufCFG register bit F) is set, the
CS89712 generates a corresponding interrupt.
Once RxDest is set, the software is allowed to
read the incoming frame's DA (the first 6 bytes
of the frame).
• Rx128
The Rx128 bit (BufEvent register bit B) is set
as soon as the first 128 bytes of the incoming
frame have been received. If the Rx128iE bit
(BufCFG register bit B) is set, the CS89712
generates a corresponding interrupt. Once the
Rx128 bit is set, the RxDest bit is cleared and
the software is allowed to read the first 128
bytes of the incoming frame. The Rx128 bit is
cleared by the software reading the BufEvent
register (either directly or through the Interrupt
Status Queue) or by the CS89712 detecting the
incoming frame’s End-of-Frame (EOF) sequence.
Status of receive
frame reported in
RxEvent register,
frame accepted
into on-chip RAM
Receive Frame
Destination
Address Filter
Check:
- PromiscuousA?
- IAHashA?
- MulticastA ?
- IndividualA?
- BroadcastA?
Pass
DA Filter?
Generate Early
Interrupts if Enabled
(see next figure)
Acceptance Filter
Check:
- RxOKA?
- ExtradataA?
- RuntA?
- CRCerrorA?
Yes No
Pass
Accept.
Filter?
Generate Interrupts
Check:
- RxOKiE?
- ExtradataiE?
- CRCerror iE?
- RuntiE?
Pre-Processing
Complete
No
Yes
Discard Frame
Status of receive
frame reported in
RxEvent register,
frame discarded.
Like all Event bits, RxDest and Rx128 are set by
the whenever the appropriate event occurs. Unlike
Figure 20. Receive Frame Pre-Processing
other Event bits, RxDest and Rx128 may be cleared
58 DS502PP2
Page 59

CS89712
by the Ethernet port without software intervention.
All other event bits are cleared only by the software
reading the appropriate event register, either directly or through the Interrupt Status Queue (ISQ).
(RxDest and Rx128 can also be cleared by the software reading the BufEvent register, either directly
or through the Interrupt Status Queue).
2.32.3.3 Acceptance Filtering
The third step of pre-processing is to determine
whether or not to accept the frame by comparing
the frame with the criteria program med into the RxCTL register. If the r eceive frame passes the Acceptance filter, the frame is buffered on chip. If t he
frame fails the Acceptance filter, it is discarded.
The results of the Acceptance filter are reported in
the RxEvent register.
2.32.3.4 Normal Interrupt Generation
The final step of pre-processing is to generate any
enabled interrupts that are triggered by the incoming frame. Interrupt generation occurs when the entire frame has been buffered (up to the first
1518 bytes). For more information about interrupt
generation, see Section 2.31, “Managing Inter-
rupts & Status Queue”.
2.32.4 Buffering Held Receive Frames
If space is available, an incoming frame will be
temporarily stored in on-chip RAM, where it
awaits processing by the software. Although this
receive frame now occupies on-chip memory, the
Ethernet port does not commit the m emory space to
it until one of the following two conditions is true:
1) The entire frame has been received and the software has learned about the frame by reading the
RxEvent register, either directly or through the
ISQ.
come set, and the software has learned about
the receive frame by reading the BufEvent register, either directly or through the ISQ.
When the CS89712 commits buffer space to a particular held receive frame (termed a committed received frame), no data from subsequent frames can
be written to that buffer space until the frame is
freed from commitment. (The committed received
frame may or may not have been received error
free.)
A received frame is freed from commitment by any
one of the following conditions:
1) The software reads the entire frame sequentially in the order that it was received (first byte in,
first byte out).
or:
2) The software reads part or none of the frame,
and then issues a Skip command by setting the
Skip_1 bit (RxCFG register bit 6).
or:
3) The software reads part of the fr ame and then
reads the RxEvent register, either directly or
through the ISQ, and learns of another receive
frame. This condition is called an "implied
Skip". Ensure that the software does not do
“implied skips.”
Both early inter rupts are disabl ed whenever there is
a committed receive frame waiting to be processed
by the software.
There are three possible ways that the software can
learn the status of a particular frame. It can:
1) Read the Interrupt Status Queue;
2) Read the RxEvent register directly ; or
3) Read the RxStatus register.
or:
2) The frame has been partially rece ived, causing
either the RxDest bit (BufEvent register bit F)
or the Rx128 bit (BufEvent register bit B) to be-
DS502PP2 59
2.32.5 Receive Frame Visibility
Only one receive frame is visible to the software at
a time. The receive frame's status can be read from
Page 60

CS89712
the RxStatus register, and its length can be read
from the RxLength register.
2.32.6 Receive Frame Byte Counter
The receive frame byte counter describes the number of bytes received for the current frame. The
counter is incremented in real time as bytes are received from the Ethernet. The byte counter can be
used by the driver to determine how many bytes are
available for reading out of the Ethernet port. Maximum Ethernet throughput can be achieved by dedicating the CPU to reading this counter, and using
the count to read the frame out of the Ethernet port
at the same time it is being received by the
CS89712 from the Ethernet (parallel frame-reception and frame-read-out tasks).
Following an RxDest or Rx128 interrupt the register contains the number of bytes which are available to be read by the CPU. When the end of frame
is reached, the count contains the final count value
for the frame, including the allowance for the BufferCRC option. When this final count is read by the
CPU the count register is set to zero. There fore to
read a complete frame using the byte count register,
the register can be read and the data moved until a
count of zero is detected. Then the RxEvent register can be read to determine the final frame status.
The sequence is as follows:
1) At the start of a frame, the byte counter matches
the incoming character counter. The byte
counter will have an even value prior to the end
of the frame.
2) At the end of the frame, the final count, including the allowance for the CRC (if the BufferCRC option is enabled), is held until the byte
counter is read.
3) When a read of the byte counter returns a count
of zero, the previous count was the final count.
The count may now have an odd value.
4) RxEvent should be read to obtain a final status
of the frame, followed by a Skip command to
complete the operation.
Note that all RxEvents should be processed before
using the byte counter. The byte counter should be
used following a BufEvent when RxDest or Rx128
interrupts are enabled.
2.32.7 Receive Ethernet Port Locations
The receive status/length/fram e locations are read
through repetitive reads from one Ethernet port at
the I/O base address.
Random access is not needed. However, the first
118 bytes of the receive frame can be accessed randomly if word reads, on even word boundaries, are
used. Beyond 118 bytes, the memory reads must be
sequential. Byte reads, or reads on odd-word
boundaries, can be performed only in sequential
read mode.
The RxStatus word reports the status of the current
received frame. RxEvent has the same contents as
the RxStatus register, except RxEvent is cleared
when read.
The RxLength (receive length) word is the length,
in bytes, of the data to be transferred to the host
RAM. The register describes the length from the
start of Destination Address to the end of CRC, assuming that CRC has been selected (via RxCFG
register bit BufferCRC). If CRC has not been selected, then the length does not include the CRC,
and the CRC is not present in the receive buffer.
After the RxLength has been read, the receive
frame can be read. When some portion of the frame
is read, the entire frame should be read before reading the RxEvent register either directly or through
the ISQ register. Reading the RxEvent register signals to the Ethernet port that the software is finished with the current frame, and wants to start
processing the next frame. In this case, the current
frame will no longer be accessible. The current
frame will also become inacc essible if a Skip c om-
60 DS502PP2
Page 61

CS89712
mand is issued, or if the entire frame has been read.
See Section 2.32, “Basic Receive Operation”.
2.33 Receive Frame Address Filtering
The Ethernet port is equipped with a De stination
Address (DA) filter used to determine which receive frames will be accepted. The DA filter can be
configured to accept the following frame types:
2.33.1 Individual Address Frames
For all Individual Address frames, the first bit of
the DA is a "0" (DA[0] = 0), indicating that the address is a Physical Address. The addre ss filter accepts Individual Address frames whose DA
matches the Individual Address or whose hash-filtered DA matches one of the bits programmed into
the Logical Address Filter (the hash filter is described later in this section).
2.33.2 Multicast Frames
For Multicast Frames, the first bit of the DA is a "1"
(DA[0] = 1), indicating that the frame is a Logical
Address. The address filter accepts Multicast
frames whose hash-filtered DA matches one of the
bits programmed into the Logical Address Filter
(the hash filter is described later is this sec tion). As
shown in Table 28, Broadcast Frames can be accepted as Multicast frames under a very s pecific set
of conditions.
2.33.3 Broadcast Frames
Frames with DA equal to FFFF.FFFF.FFFFh are
broadcast frames. In addition, the CS89712 can be
configured for Promiscuous Mode, in which case it
will accept all receive frames, irrespective of DA.
2.33.4 Destination Address Filter
The DA filter is configured by five DA filter bits in
the RxCTL register: IAHashA, PromiscuousA,
MulticastA, IndividualA, and BroadcastA. Four of
these bits are associated with four status bits in the
RxEvent register: IAHash, Hashed, IndividualAdr,
and Broadcast. The RxEvent register reports the re-
sults of the DA filter for a given receive frame. See
Section 3.18.4 on page 119 for RxCTL details.
The IAHashA, MulticastA, IndividualA, and
BroadcastA bits are used independently. As a re sult, many DA filter combinations are pos sible. For
example, if MulticastA and IndividualA are set,
then all frames that are either Multicast or Individual Address frames are accepted. The PromiscuousA bit, when set, overrides the other four DA
bits, and allows all valid frames to be accepted.
Table 29 summarizes the configuration options
available for DA filtering.
It may become necessary for the software to change
the Destination Address (DA) filter criteria without
resetting the Ethernet port. This can be done as follows:
1) Clear SerRxON (LineCTL register bit 6) to prevent any additional receive frames while the filter is being changed.
2) Modify the DA filter bits (B, A, 9, 7, and 6) in
the RxCTL register. Modify the Logical Address Filter, if necessary.
3) Set SerRxON to re-enable the receiver.
Because the receiver has been disabled, the
CS89712 will ignore frames while the software is
changing the DA filter.
2.33.5 Hash Filter
The hash filter is used to help determine which
Multicast frames and which Individual Address
frames should be accepted by the CS89712.
2.33.5.1 Hash Filter Operation
See Figure 21. The DA of the incoming frame is
passed through the CRC logic, generating a 32-bit
CRC value. The six most-significant bits of the
CRC are latched into the 6-bit hash register (HR).
The contents of the HR are passed through a 6-to64-bit decoder, asserting one of the decoder’s outputs. The asserted output is compared with a corresponding bit in the 64-bit Logical Address Filter,
DS502PP2 61
Page 62

CS89712
Address
Type of
Received
Frame
Individual
Address
Multicast
Address
Broad-
cast
Address
Erred
Frame?
no yes Hash Table Index 1 1 1
no no ExtraData Runt CRC
yes don’t care ExtraData Runt CRC
no yes Hash table index 1 1 0
no no ExtraData Runt CRC
yes don’t care ExtraData Runt CRC
no yes
no yes
no no ExtraData Runt CRC
yes don’t care ExtraData Runt CRC
Passes
Hash
Filter?
(Note 1)
(Note 2)
Bits F-A Bit 9
Error
Error
Error
Error
ExtraData Runt CRC
Error
(actual value X00010)
ExtraData Runt CRC
Error
Error
Error
Contents of RxEvent
Broadcast Individual
Adr
Broadcast Individual
Adr
Broadcast Individual
Adr
Broadcast Individual
Adr
Broadcast Individual
Adr
Broadcast Individual
Adr
Broadcast Individual
Adr
Broadcast Individual
Adr
Bit 8
Hashed
010
000
010
000
110
010
010
000
RxOK
Bit 6
IAHash
Notes: 1. Broadcast frames are accepted as Multicast frames if and only if all the following conditions are met
simultaneously:
a) the Logical Address Filter is programmed as: (MSB) 0000 8000 0000 0000h (LSB). Note that this
LAF value corresponds to a Multicast Addresses of both all 1s and 03-00-00-00-00-01.
b) the Rx Control Register (register 5) is programmed to accept IndividualA, MulticastA, RxOK-only,
and the following address filters were enabled: IAHashA and BroadcastA.
2. NOT (Note 1).
Table 28. Contents of RxEvent Upon Various Conditions
IAHashA PromiscuousAMulticastA IndividualA BroadcastA Frames Accepted
0 0 0 1 0 Individual Address frames with
DA matching the IA at Ethernet
Port offset address 0158h
1 0 0 0 0 Individual Address frames with
DA that pass the hash filter
(DA[0] must be “0”)
0 0 1 0 0 Multicast frames with DA that
pass the hash filter (DA[0] must
be “1”)
0 0 0 0 1 Broadcast frames
X 1 X X X All frames
Table 29. Destination Address Filtering Options
62 DS502PP2
Page 63

CS89712
located at Ethernet Port offset address 0150h. If the
decoder output and the Logical Address Filter bit
match, the frame passes the hash filter and the
Hashed bit (RxEvent register bit 9) is set. If the two
do not match, the frame fails the filter and the
Hashed bit is clear.
Whenever the hash filter is passed by a "good"
frame, the RxOK bit (RxEvent register bit 8) is set
and the bits in the HR are mapped to the Hash Table
Index bits (RxEvent register, bits A through F).
2.33.6 Broadcast Frame Hashing Exception
Table 28 describes in detail the content of the Rx-
Event register for each output of the hash and address filters, and describes an exception to normal
processing. That exception can occur when the
hash-filter Broadcast address matches a bit in the
Logical Address Filter. To properly account for this
exception, the software driver should use the following test to determine if the RxEvent register
contains a normal RxEvent (meaning bits E-A are
used for Extra data, Runt, CRC Error, Broadcast
and IndividualAdr) or a hash-table RxEvent (meaning bits F-A contain the Hash Table Index).
If bit Hashed =0, or bit RxOK=0, or (bits F-A = 02h
and the destination address is all ones) then RxEvent contains a normal RxEvent, else RxEvent
contained a hash RxEvent.
2.34 Transmit Operation
2.34.1 Overview
Packet transmission occurs in two phases. In the
first phase, the Ethernet frame is moved into the
Ethernet port’s buffer memory. This phase begins
with the software issuing a Transmit Command.
This informs the CS89712 that a frame is to be
transmitted and tells the chip when (i.e. after 5,
381, or 1021 bytes have been transferred or after
the full frame has been transferred to the CS89712)
and how the frame should be sent (i.e. with or without CRC, with or without pad bits, etc.). The software follows the Transmit Command with the
Transmit Length, indicating how much buffer
space is required. When buffer space is a vailable,
the software writes the Ethernet frame into the
Ethernet port’s internal memory.
In the second phase of transmission, the Ethernet
port converts the frame into an Ethernet packet then
transmits it onto the network. The second phase begins with the Ethernet port transmitting the preamble and Start-of-Frame delimiter as soon as the
proper number of bytes has been transferred into its
transmit buffer (5, 381, 1021 bytes or full frame,
depending on configuration). The preamble and
Start-of-Frame delimiter are followed by the data
transferred into the on-chip buffer by the software
Destination Address (DA)
from incoming frame
to
Hashed
bit
64-input
OR gate
DS502PP2 63
1
Figure 21. Hash Filter Operation
CRC
Logic
6-to-64 decoder
64-bit Logical Address Filter ( LAF)
Written into PacketPage base + 150h
(MSB)
32-bit CRC value
6-bit Hash Register (HR)
[Hash Table Index]
(LSB)
64
Page 64

CS89712
(Destination Address, Source Address, Length
field and LLC data). If the frame is less than 64
bytes, including CRC, the CS89712 adds pad bits if
configured to do so. Finally, the CS89712 appends
the proper 32-bit CRC value.
2.34.2 Transmit Configuration
After each reset, the Ethernet por t must be configured for transmit operation. This can be done automatically using an attached EEPROM, or by
writing configuration commands to the Ethernet
port’s internal registers (see Section 2.6, “Ethernet
EEPROM Configurations”). The items that must
be configured include which physical interface to
use and which transmit events cause interrupts.
2.34.2.1 Configuring the Physical Interface
Configuring the Physical Interface is accomplished
via the LineCTL register. Bit 6 enables reception
and bit 9 enables transmission, while bits B and D
control backoff and deferral. See Section 3.18.12
on page 127 for LineCTL details.
Note that the CS89712 transmits in 10BASE-T
mode when no link pulses are being received only
if bit DisableLT is set in the Test Control register.
If the LineCTL register bits are changed after initialization, the ModBackoffE bit and any receive
related bit (LoRxSquelch, SerRxON) may be
changed at any time.
2.34.4 Enabling CRC Generation/Padding
Whenever the software issues a Transmit Request
command, it must indicate whether or not the Cyclic Redundancy Check (CRC) value should be appended to the transmit frame, and whether or not
pad bits should be added (if needed). Bits C and D
of TxCMD are used, refer to Table 3.18.7 on
page 122.
2.34.5 Individual Packet Transmission
Whenever the software has a packet to transmit, it
must issue a Transmit Request to the Ethernet port
consisting of the following three operations in the
exact order shown:
1) The software must write a Transmit Command
to the TxCMD register. The contents of the TxCMD register may be read back from the TxCMD register.
2) The software must write the fr ame’s length to
the TxLength register.
2.34.2.2 Selecting Interrupt Events
The TxCFG and BufCFG registers are used to determine which transmit events will cause interrupts. TxCFG [B:8] and F, and BufCFG [9:8] and
C are used. Refer to Section 3.18.5 and
Section 3.18.8 for details.
2.34.3 Changing the Configuration
When software configures these registers it does
not need to change them for subsequent packet
transmissions. The TxCFG or BufCFG register bits
may be changed at any time. The effects of the
change are noticed immediately. Any changes in
the Interrupt Enable (iE) bits may affect the packet
currently being transmitted.
64 DS502PP2
3) Software must read the BusST register.
The information written to the TxCMD register
tells the Ethernet port how to transmit the next
frame. Appropriate bits in TxCMD are 6:9, C and
D. Refer to Table 3.19 on page 133.
For each individual packet transmission, software
must issue a comp lete Transmit Request. Furthermore, the software must write to the TxCMD register before each packet transmission, even if the
contents of the TxCMD register do not change.
2.34.6 Transmit in Poll Mode
In poll mode, Rdy4TxiE bit (BufCFG register bit 8)
must be clear (Interrupt Disabl ed). The transmit operation occurs in the following order:
Page 65

CS89712
1) Software bids for frame storage by writing the
Transmit Command to the TxCMD register.
2) Software writes the transmit frame length to t he
TxLength register. If the transmit length is erroneous, the command is discarded and the TxBidErr bit (BusST register bit 7) is set.
3) The BusST register is read. The software must
first set the Ethernet Port Pointer at the correct
location by writing 0138h to the Ethernet Port
Pointer Port. Software can the n read th e Bu sST
register from the Ethernet Port Data Port.
4) After the read, Rdy4TxNOW (bit 8) is checked.
If set, the frame can be written. If c lear, the software must continue reading the BusST register
and checking Rdy4TxNOW until set.
When the CS89712 is ready to accept the frame,
software transfers the frame from host RAM to
Ethernet port memory Receive/Transmit Da ta Port.
2.34.7 Transmit in Interrupt Mode
4) When the Ethernet port is ready to accept the
frame, the software transfers the entire frame
from host memory to Ethernet port memory to
Receive/Transmit Data Port.
2.34.8 Completing Transmission
When the CS89712 successfully completes transmitting a frame, it sets the TxOK bit (TxEvent register bit 8). If the TxOKiE bit (TxCFG register bit
8) is set, an interrupt is generated.
2.34.9 Rdy4TxNOW vs. Rdy4Tx
The Rdy4TxNOW bit (BusST register bit 8) is used
to indicate the Ethernet port is ready to accept a
frame for transmission. This bit is used during the
Transmit Request process or after the Transmit R equest process to signal the software that space has
become available when interrupts are not being
used (i.e. Rdy4TxiE, bit 8 of Register B, is not set).
Also, the Rdy4Tx bit is used with interrupts and requires the Rdy4TxiE bit be set.
In interrupt mode, Rdy4TxiE bit (BufCFG register
bit 8) must be set for transmit operation. Transmit
operation occurs in the following order:
1) The software bids for frame storage by wr iting
the Transmit Command to the TxCMD register.
2) The software writes the transmit frame length
to the TxLength register. If the transmit length
is erroneous, the command is discarded and the
TxBidErr, bit 7, in BusST register is set.
3) The BusST register is read. If the Rdy4TxNOW
bit is set, the frame can be written to Ethernet
port memory. If Rdy4TxNOW is clear, software will have to wait for the Ethernet port
buffer memory to become available at which
time an interrupt is generated. On interrupt, the
interrupt service routine reads ISQ register and
checks the Rdy4Tx bit (bit 8). If Rdy4Tx is
clear then the software wait s for th e next i nt er rupt. If Rdy4Tx is set, then the Ethernet port is
ready to accept the frame.
2.34.10 Committing Buffer Space to a Frame
When the software issues a transmit request, the
Ethernet port checks the length of the transmit
frame to see if there is sufficient on-chip buffer
space. If there is, the Ethernet port sets the
Rdy4TxNOW bit. If not, and the Rdy4TxiE bit is
set, the Ethernet port waits for buffer space to free
up and then sets the Rdy4Tx bit.
Even though transmit buffer space may be a vailable, the Ethernet port does not commit buffer
space to a transmit frame until all of the following
are true:
1) The software must issues a Transmit Request;
2) The Transmit Request must be successful; and,
3) Either the software reads that the Rdy4TxNOW
bit (BusST register bit 8) is set, or the software
reads that the Rdy4Tx bit (BufEvent register bit
8) is set.
DS502PP2 65
Page 66

CS89712
If the CS89712 commits buffer space to a particular
transmit frame, it will not all ow subse quen t frames
to be written to that buffer space as long as the
transmit frame is committed.
After buffer space is committed, the frame is subsequently transmitted unless any of the following
occur:
1) The software completely writes the frame data,
but transmission failed on the Ethernet line.
There are three such failures, and these are indicated by three bits in the TxEvent register:
16coll, Jabber, or Out-of-Window.
or:
2) The software aborts the transmission by setting
the Force (TxCMD register bit 8) bit. In this
case, the committed transmit frame, as well as
any yet-to-be-transmitted frames queued in the
on-chip memory, are cleared and not transmitted. The software should make TxLength = 0
when using the Force bit.
or:
3) There is a transmit under-run while the TxUnderrun bit (BufEvent register bit 9) is set.
Successful transmission is indicated when the
TxOK bit (TxEvent register bit 8) is set.
2.34.11 Transmit Frame Length
The length of the frame transmitted is determined
by the value written into the TxLength register
during the Transmit Request. The length of the
transmit frame may be modified by the configuration of the TxPadDis bit (TxCMD register bit D)
and the InhibitCRC bit (TxCMD register bit C).
Table 30 defines how these bits affect the length of
the transmit frame, and details which frames will
be sent.
2.35 Full Duplex Considerations
The driver should not bid to transmit a long frame
(i.e., a frame greater than 118 bytes) if the prior
transmit frame is still being transmitted. The end of
the transmission of this pr ior fr am e is i ndicated by
a TxOK bit being set in the TxEvent register.
TxCMD register Software specified transmit length at 0146h (in bytes)
TxPadDis
(Bit D)
0 0 Pad to 60 and add
0 1 Pad to 60 and send
1 0 Send without pads,
1 1 Send without pads
Notes: 1. If the TxPadDis bit is clear and InhibitCRC is set and the CS89712 is commanded to send a frame of
66 DS502PP2
InhibitCRC
(Bit C)
length less than 60 bytes, the CS89712 pads.
2. The CS89712 will not send a frame with TxLength less than 3 bytes.
3 < TxLength
< 60
CRC
without CRC
and add CRC
and without CRC
Table 30. Transmit Frame Length
60 < TxLength
< 1514
Send frame and add
CRC [Normal Mode]
Send frame without
CRC
Send frame and add
CRC
Send frame without
CRC
1514 < TxLength
TxLength
< 1518
Will not send Will not send
Send frame
without CRC
Will not send Will not send
Send frame
without CRC
> 1518
Will not send
Will not send
Page 67

CS89712
2.36 Auto-Negotiation Considerations
The original IEEE 802.3 specification requires the
MAC to wait until 4 valid link-pulses are received
before asserting Link-OK. Any time an invalid
link-pulse is received, the count is restarted. When
auto-negotiation occurs, a transmitter sends FLP
(Fast Link Pulse) bursts instead of the original
IEEE 802.3 NLP (Normal Link Pulses).
If the hub is attempting to auto-negotiate with the
CS89712, the CS89712 will never get more than 1
"valid" link pulse (valid NLP). This is not a problem if the CS89712 is already sending link-pulses,
because when the hub receives NLPs from the
CS89712, the hub is required to stop sending FLPs
and start sending NLPs. The NLP transmitted by
the hub will put the CS89712 into Link-OK.
However, if the CS89712 is in Auto-Switch mode,
the CS89712 will never send any link-pulses, and
the hub will never change from sending FLPs to
sending NLPs.
DS502PP2 67
Page 68

CS89712
3. REGISTER SET
The 89712 contains multiple register ranges.
An 8 kbyte segment of memory in the range
0x8000.0000 to 0x8000.3FFF is for registers that
control non-Ethernet functions. Section 3.1 gives
an overview of these while Sections 3.3 through
3.16 provide register bit details.
Ethernet port registers are accessed through two
separate ranges: a 16 byte window of eight registers
and a 4 Kbyte page of registers. Section 3.2 explains Ethernet Port register access, and Sections
3.17 to 3.20 give bit details.
3.1 Non-Ethernet Registers
Table 31 shows the internal non-Ethernet registers
of the CS89712 when the CPU is configured to a
little endian memory system. Table 32 shows the
differences that occur when the CPU is configured
to a big endian memory system for byte-wide access to Ports A, B, and D. All the internal registers
are inherently little endian (i.e., the least significant
byte is attached to bits 7 to 0 of the data bus).
Hence, the system Endianness affects the addresses
required for byte accesses to the inter nal registers,
resulting in a reversal of the byte address required
to read/write a particular byte within a register.
There is no effect on the register addresses for word
accesses. Bits A[1:0] of the internal address bus are
only decoded for Ports A, B, and D (to allow
read/write to individual ports). For all other registers, bits A[1:0] are not decoded, so that byte reads
will return the whole register contents onto the
CS89712’s internal bus, from where the appropriate byte (according to the endianness) will be read.
To avoid the additional complexity, it is preferable
to perform all internal register accesses as word operations, except for ports A to D which are explic-
itly designed to operate with byte accesses, as well
as with word accesses.
Writes to bits that are not explicitly defined in the
internal area are legal and will have no effect.
Reads from bits not explicitly defined in the internal area are legal but will read undefined values.
All the internal addresses should only be acce ssed
as 32-bit words and are always on a word boundary, except for the PIO port registers, which can be
accessed as bytes. Address bits in the range A[0:5]
are not decoded (except for Ports A–D), this means
each internal register is valid for 64 bytes (i.e., the
SYSFLG1 register appears at locations
0x8000.0140 to 0x8000.017C). There are some
gaps in the register map but registers located next
to a gap are still only decoded for 64 bytes.
The GPIO port registers are byte-wide and can be
accessed as a word but not as a half-word. These
registers additionally decode A[1:0].
Note: All byte-wide registers should be accessed as
words (except Port A to Port D registers, which are
designed to work in both word and byte modes).
All register bit alignment starts from the LSB of the
register (i.e., they are all right shift justified).
The registers which interact with the 32 kHz clock or
which could change during readback (i.e., RTC data
registers, SYSFLG1 register (lower 6-bits only), the
TC1D and TC2D data registers, port registers, and
interrupt status registers), should be read twice and
compared to ensure that a stable value has been read.
All internal registers are reset to zero by a system
reset (i.e., nPOR, nURESET, or nPWRFL signals
becoming active), except for the DRAM refresh period register (DPFPR), the Real-Time Clock data
register (RTCDR), and the match register (RTCMR), which are only reset by nPOR becoming active. This ensures that the DRAM contents and
system time are preserved through a user reset or
power fail condition.
68 DS502PP2
Page 69

CS89712
Address Name Default RD/WR Size Comments
0x8000.0000 PADR 0 RW 8 Port A data register.
0x8000.0001 PBDR 0 RW 8 Port B data register.
0x8000.0002 — — 8 Reserved.
0x8000.0003 PDDR 0 RW 8 Port D data register.
0x8000.0040 PADDR 0 RW 8 Port A data direction register.
0x8000.0041 PBDDR 0 RW 8 Port B data direction register.
0x8000.0042 — — 8 Reserved.
0x8000.0043 PDDDR 0 RW 8 Port D data direction register.
0x8000.0080 PEDR 0 RW 3 Port E data register.
0x8000.00C0 PEDDR 0 RW 3 Port E data direction register.
0x8000.0100 SYSCON1 0 RW 32 System control register 1.
0x8000.0140 SYSFLG1 0 RD 32 System status flags register 1.
0x8000.0180 MEMCFG1 0 RW 32 Expansion memory configuration register 1.
0x8000.01C0 MEMCFG2 0 RW 32 Expansion memory configuration register 2.
0x8000.0200 0 RW 32 Reserved.
0x8000.0240 INTSR1 0 RD 32 Interrupt status register 1.
0x8000.0280 INTMR1 0 RW 32 Interrupt mask register 1.
0x8000.02C0 LCDCON 0 RW 32 LCD control register.
0x8000.0300 TC1D 0 RW 16 Read / Write register sets and reads data to TC1.
0x8000.0340 TC2D 0 RW 16 Read / Write register sets and reads data to TC2.
0x8000.0380 RTCDR — RW 32 Real Time Clock data register.
0x8000.03C0 RTCMR — RW 32 Real Time Clock match register.
0x8000.0400 PMPCON 0 RW 12 PWM pump control register.
0x8000.0440 CODR 0 RW 8 CODEC data I/O register.
0x8000.0480 UARTDR1 0 RW 16 UART1 FIFO data register.
0x8000.04C0 UBLCR1 0 RW 32 UART1 bit rate and line control register.
0x8000.0500 SYNCIO 0 RW 32 Synchronous serial I/O data register for master
only SSI.
0x8000.0540 PALLSW 0 RW 32 Least significant 32-bit word of LCD palette register.
0x8000.0580 PALMSW 0 RW 32 Most significant 32-bit word of LCD palette register.
0x8000.05C0 STFCLR — WR — Write to clear all start up reason flags.
0x8000.0600 BLEOI — WR — Write to clear battery low interrupt.
0x8000.0640 MCEOI — WR — Write to clear media changed interrupt.
0x8000.0680 TEOI — WR — Write to clear tick and watchdog interrupt.
0x8000.06C0 TC1EOI — WR — Write to clear TC1 interrupt.
0x8000.0700 TC2EOI — WR — Write to clear TC2 interrupt.
0x8000.0740 RTCEOI — WR — Write to clear RTC match interrupt.
Table 31. CS89712 Internal Registers (Little Endian Mode)
DS502PP2 69
Page 70

CS89712
Address Name Default RD/WR Size Comments
0x8000.0780 UMSEOI — WR — Write to clear UART modem status changed inter-
rupt.
0x8000.07C0 COEOI — WR — Write to clear CODEC so und int er rupt.
0x8000.0800 HALT — WR — Write to enter the Idle State.
0x8000.0840 STDBY — WR — Write to enter the Standby State.
0x8000.0880–
0x8000.0FFF
0x8000.1000 FBADDR 0xC RW 4 LCD frame buffer start address.
0x8000.1100 SYSCON2 0 RW 16 System control register 2.
0x8000.1140 SYSFLG2 0 RD 24 System status register 2.
0x8000.1240 INTSR2 0 RD 16 Interrupt status register 2.
0x8000.1280 INTMR2 0 RW 16 Interrupt mask register 2.
0x8000.12C0–
0x8000.147F
0x8000.1480 UARTDR2 0 RW 16 UART2 Data register.
0x8000.14C0 UBLCR2 0 RW 32 UART2 bit rate and line control register.
0x8000.1500 SS2DR 0 RW 16 Master / slave SSI2 data register.
0x8000.1600 SRXEOF — WR — Write to clear RX FIFO overflow flag.
0x8000.16C0 SS2POP — WR — Write to pop SSI2 residual byte into RX FIFO.
0x8000.1700 KBDEOI — WR — Write to clear keyboard interrupt.
0x8000.1800 Reserved — WR — Do not write to this location. A write will cause the
0x8000.1840–
0x8000.1FFF
0x8000.2000 DAIR 0 RW 32 DAI control register.
0x8000.2040 DAIR0 0 RW 32 DAI data register 0.
0x8000.2080 DAIDR1 0 RW 32 DAI data register 1.
0x8000.20C0 DAIDR2 0 WR 21 DAI data register 2.
0x8000.2100 DAISR 0 RW 32 DAI status register.
0x8000.2200 SYSCON3 0 RW 16 System control register 3.
0x8000.2240 INTSR3 0 RD 32 Interrupt status register 3.
0x8000.2280 INTMR3 0 RW 8 Interrupt mask register 3.
0x8000.22C0 LEDFLSH 0 RW 7 LED Flash register.
Reserved Write will have no effect, read is undefined.
Reserved Write will have no effect, read is undefined. .
processor to go into an unsupported power state.
Reserved — Write will have no effect, read is undefined.
Table 31. CS89712 Internal Registers (Little Endian Mode) (Continued)
Big Endian Mode Name Default RD/WR Size Comments
0x8000.0003 PADR 0 RW 8 Port A Data register
Table 32. CS89712 Internal Registers (Big Endian Mode)
70 DS502PP2
Page 71

CS89712
Big Endian Mode Name Default RD/WR Size Comments
0x8000.0002 PBDR 0 RW 8 Port B Data register
0x8000.0001 — — 8 Reserved
0x8000.0000 PDDR 0 RW 8 Port D Data register
0x8000.0043 PADDR 0 RW 8 Port A data Direction register
0x8000.0042 PBDDR 0 RW 8 Port B Data Direction register
0x8000.0041 — — 8 Reserved
0x8000.0040 PDDDR 0 RW 8 Port D Data Direction register
0x8000.0083 PEDR 0 RW 3 Port E Data Register
0X8000.00C3 PEDDR 0 RW 3 Port E Data Direction register
Table 32. CS89712 Internal Registers (Big Endian Mode)
1. The following register descriptions refer to Little Endian Mode Only.
3.2 Accessing Ethernet Port Registers
Registers for the Ethernet port are accessed through
two memory ranges; first, a 16-byte window of
eight 16-bit registers (shown in Figure 33) located
at address 0x2000.0300; and additional registers in
a 4 Kbyte internal memory page listed in Figure 36.
The registers at 0x2000.0300 are always immediately accessable, however registers mapped into
the 4 Kbyte page must be accessed through an index using the Ethernet Port pointer and Ethernet
Data Ports.
Memory Location Type Description
0x2000.0300 Read/Write Receive/Transmit Data (Port 0)
0x2000.0302 Read/Write Receive/Transmit Data (Port 1)
0x2000.0304 Write-only TxCMD (Transmit Command)
0x2000.0306 Write-only TxLength (Transmit Length)
0x2000.0308 Read-only Interrupt Status Queue
0x2000.030A Read/Write Ethernet Port Pointer
0x2000.030C Read/Write Ethernet Port Data (Port 0)
0x2000.030E Read/Write Ethernet Port Data (Port 1)
This is done by writing the offset of the target register to the Ethernet Port Point er. For exampl e, the
EEPROM data register has an offset of 0042h. The
contents of the target register are then mapped into
the Ethernet Data Port.
If the software needs to access a sequential block of
registers, the MSB of the Ethernet Port address of
the first word to be accessed should be set to "1".
The Ethernet Port Pointer will then move to the
next word location automatically, eliminating the
need to setup the Ethernet Port Pointer between
successive accesses (see Figure 22).
Table 33. Ethernet Port Register Window
DS502PP2 71
Page 72

CS89712
3.2.1 Ethernet Port Register Window
This section refers to the eight 2-byte registers residing in the 16-byte window at 0x2000.3000.
These registers are always immediately available.
3.2.1.1 Receive/Transmit Data Ports 0 & 1
These two ports are used when transferring transmitting/receving data to/from the CS89712. Port 0
is used for 16-bit operations and Ports 0 and 1 are
for 32-bit operations (lower-order word in Port 0).
3.2.1.2 TxCMD Port
Software writes the Trans mit Command (TxCM D)
to this port at the start of each transmit operation.
The Transmit Command indicates that the software
has a frame to be transmitted, as well as how that
frame should be transmitted. See Section 3.2.3,
“Ethernet Status/Control Registers” for more information.
3.2.1.3 TxLength Port
The length of the frame to be transmitt ed is writt en
here immediately after the Transmit Command is
written.
3.2.1.4 Interrupt Status Queue Port
This port contains the current value of the Interrupt
Status Queue (ISQ). For a more detailed description of the ISQ, see Section 2.31, “Managing Inter-
rupts & Status Queue”.
3.2.1.5 Ethernet Port Pointer
The Ethernet Port Pointer is written in order to access any of the Ethernet port indexed registers
(which reside in the 4 Kbyte memory page). The
first 12 bits (bits 0 through B) of the pointer provide
the offset of the target register to be accessed during the current operation. The next three bits (C, D,
and E) are read-only and will always read as 011b.
Any convenient value may be written to these bits
when writing to the Ethernet Port Pointe r Port. The
last bit (Bit F) indicates whether or not the Ethernet
Port Pointer should be auto-incremented to the next
word location. Figure 22 shows the structure of the
Ethernet Port Pointer.
3.2.1.6 Ethernet Port Data Ports 0 and 1
The Ethernet Port Data Ports are used to transfer
data to and from any of the CS89712’s internal registers. Port 0 is used for 16-bit operations and Port
0 and 1 are used for 32-bit operations (lower-order
word in Port 0).
base + 000Bh base + 000Ah
1032547698BADCFE
Register Address
BitF: 0=Pointerremainsfixed
1 = Auto-Increments to next word location
Figure 22. Ethernet Port Pointer
72 DS502PP2
Page 73

CS89712
3.2.2 Ethernet Port Indexed Registers
Central to the Ethernet port architecture is a
4 Kbyte page of integrated RAM, which is used for
temporary storage of transmit and receive frames,
and for additional registers. These registers are accessed by use with the Ethernet Data Pointer and
Data Ports. These registers are organized int o the
following sections:
3.2.2.1 Bus Interface Registers
The Bus Interface Registers contain Etherne t Port
interrupt enables, EEPROM control and data, and
receive frame information.
3.2.2.2 Status and Control Registers
The Status and Control registers are the primary
means of controlling and reading status of the
Ethernet port. They are detailed in Section 3.2.3,
“Ethernet Status/Control Registers”.
use of buffer memory and better overall network
performance. As a result of this dynamic allocation, only one receive frame and one transmit frame
are directly accessible.
3.2.3 Ethernet Status/Control Registers
The Status and Control registers are the primary
registers used to control and check the status of the
Ethernet port in the CS89712. They are organized
into two groups: Configuration/Control Registers
and Status/Event Registers. All Status and Control
Registers are 16-bit words as shown in Figure 23.
Bit 0 indicates whether it is a Configuration/Control Register (Bit 0 = 1) or a Status/Event Register
(Bit 0 = 0). Bits 0 through 5 provide an internal address code that describes the exact function of the
register. Bits 6 through F are the actual Configuration/Control and Status/Event bits.
3.2.4 Configuration and Control Registers
3.2.2.3 Initiate Transmit Registers
The TxCMD/TxLength registers are used to initiate
Ethernet frame transmission. These are detailed in
Section 3.19, “Initiate Transmit Registers”. (Also
see Section 2.34, “Transmit Operation” for a description of frame transmission.)
3.2.2.4 Address Filter Registers
The Filter registers store the Individual Address filter and Logical Address filter used by the Destination Address filter. These registe rs a r e describe d in
more detail in Section 3.20, “Address Fi lter Regis-
ters”. For a description of the DA filter, see Section
2.32.7, “Receive Ethernet Port Locations”.
3.2.2.5 Receive/Transmit Frame Locations
The Receive and Transmit Frame Ethernet Port locations are used to transfer Ethernet frames to and
from the host RAM. The software simply writes to
and reads from these locations and internal buffer
memory is dynamically allocated between transmit
and receive as needed. This provides more efficient
Configuration and Control registers are used to setup the following:
• how frames will be transmitted and received;
• which frames will be transmitted and received;
• which events will cause interrupts to the processor; and,
• Configuration of the Ethernet physical interface.
These registers are read/write and are designated
by odd numbers (e.g. Register 1, Register 3, etc.).
The Transmit Command Register (TxCMD) is a
special type of register. It appears in two separate
locations in the Ethernet Port memory map. The
first location, Ethernet Port offset address 0108h, is
within the block of Configuration/Control Registers and is read-only. The second location, Ethernet
Port offset address 0144h, is where the actual transmit commands are issued and is write-only. See
Section 3.2.7, “Status/Control Register Summary”
and Section 2.34, “Transmit Operation” for a more
detailed description of the TxCMD register.
DS502PP2 73
Page 74

CS89712
3.2.5 Status and Event Registers
Status and Event registers report the status of transmitted and received frames, as well as information
about the configuration of the CS89712. They are
read-only.
The Interrupt Status Queue (ISQ) is a special type
of Status/Event register. It is located at Ethernet
Port offset address 0120h and is the first register
the software reads when responding to an Interrupt.
16-bit Register Word
Bit Number
F
E
BADC
98
A more detailed description of the ISQ can be
found in Section 2.31, “Managing Interrupts &
Status Queue”.
Three 10-bit counters are included with the Status
and Event registers. RxMISS counts missed receive frames, TxCOL counts transmit collisions.
Table 34 summarizes Ethernet Port Register types.
3.2.6 Status and Control Bit Definitions
This section provides a description of the special
bit types used in the Status and Control registers.
1
0325476
Internal Address
(bits 0 - 5)
1 = Control/Configuration
0 = Status/Event
10 Register Bits
Figure 23. Status and Control Register Format
Suffix Type Description Comments
CMD Read/Write Command: Written once per frame to initiate transmit.
CFG Read/Write Configuration: Written at setup and used to determine
what frames will be transmitted and received and what
events will cause interrupts.
CTL Read/Write Control: Written at setup and used to determine what
frames will be transmitted and received and how the physical interface will be configured.
Event Read-only Event: Reports the status of transmitted and received
frames.
ST Read-only Status: Reports information about the configuration of the
CS89712.
Read-only Counters: Counts missed receive frames and collisions.
Provides time domain for locating coax cable faults.
cleared when read
cleared when read
Table 34. Ethernet Port Register Types
74 DS502PP2
Page 75

CS89712
Section 3.2.7, “Status/Control Register Summary”
provides a detailed description of each register.
3.2.6.1 Act-Once Bits
There are four bits that cause a certai n action only
once when set. These "Act-Once" bits are: Skip_1
(RxCFG register bit 6), RESET (SelfCTL register
bit 6), ResetRxDMA (BusCTL register bit 6), and
SWint-X (BufCFG register bit 6). To cause the action again, the software m ust s et the bit ag ain. ActOnce bits are always read as clear.
3.2.6.2 Temporal Bits
Temporal bits are bits that are set and cleared by the
Ethernet port automatically. This includes all status
bits in the three status registers (LineST, SelfST,
and BusST), the RxDest bit (BufEvent bit F), and
the Rx128 bit (BufEvent bit B). Like all Event bits,
RxDest and Rx128 are cleared when read by the
software.
3.2.6.3 Interrupt Enable Bits and Events
Interrupt Enable bits end with the suffix iE and are
located in three Configuration registers: RxCFG,
TxCFG, and BufCFG. Each Interrupt Enable bit
corresponds to a specific event. If an Interrupt Enable bit is set and its corresponding event occurs,
the Ethernet port generates an interrupt.
The bits that report when various events occur are
located in three Event registers and two counters.
The Event registers are RxEvent, TxEvent, and
BufEvent. The counters are RxMISS and TxCOL.
Each Interrupt Enable bit and it s associated Event
are identified in Table 35.
An Event bit will be set whenever the specified
event happens, whether or not the associated Interrupt Enable bit is set. All Event registers are clea red
upon read-out by the software.
3.2.6.4 Accept Bits
There are nine Accept bits located in the RxCTL
register, each of which is followed by the suffix A.
Interrupt Enable Bit
(register name)
ExtradataiE (RxCFG) Extradata (RxEvent)
RuntiE (RxCFG) Runt (RxEvent)
CRCerroriE (RxCFG) CRCerror (RxEvent)
RxOKiE (RxCFG) RxOK (RxEvent)
16colliE (TxCFG) 16coll (TxEvent)
AnycolliE (TxCFG) “Number-of Tx-colli-
JabberiE (TxCFG) Jabber (TxEvent)
Out-of-windowiE (TxCFG) Out-of-window (TxEvent)
TxOKiE (TxCFG) TxOK (TXEvent)
MissOvfloiE (BufCFG) RxMISS counter over-
TxColOvfloiE (BufCFG) TxCOL counter overflows
RxDestiE (BufCFG) RxDest (BufEvent)
Rx128iE (BufCFG) Rx128 (BufEvent)
RxMissiE (BufCFG) RxMISS (BufEvent)
TxUnderruniE (BufCFG) TxUnderrun (BufEvent)
Rdy4TxiE (BufCFG) Rdy4Tx (BufEvent)
Table 35. Interrupt Enable Bits and Events
Event Bit or Counter
(register name)
sions” counter is incre-
mented (TxEvent)
flows past 1FFh
past 1FFh
Accept bits indicate which types of frames will be
accepted by the CS89712. Four of these bits have
corresponding Interrupt Enable (iE) bits. An Accept bit and an Interrupt Enable bit are independent
operations. It is possible to set either, neither, or
both bits. The four corresponding pairs of bits are:
IE Bit in RxCFG A Bit in RxCTL
ExtradataiE ExtradataA
RuntiE RuntA
CRCerroriE CRCerrorA
RxOKiE RxOKA
If one of the above Interrupt Enable bits is set and
the corresponding Accept bit is clear, the CS89712
DS502PP2 75
Page 76

CS89712
generates an interrupt when the associated r eceive
event occurs, but then does not accept the r eceive
frame (the receive frame length is set to zero).
The other five Accept bits in RxCTL ar e used for
destination address filtering (see Section 2.32.7,
“Receive Ethernet Port Locations”). The Accept
mechanism is explained in more detail in Section
2.32, “Basic Receive Operation”.
3.2.7 Status/Control Register Summary
This section gives a detailed description of each
Status and Control register. Bits marked “RSVD”
are reserved and must be written with a zero for
proper operation of the device.
76 DS502PP2
Page 77

3.3 Ethernet Port 4 Kbyte Memory Register Map
The following Table shows the CS89712 Ethernet Port internal register map:
CS89712
Internal
Offset
Bus Interface Registers
0000h 4 Reserved
0004h 28 - Reserved Note 2
0022h 2 RW Master Interrupt Enable Section 3.,
0038h 8 - Reserved Note 2
0040h 2 RW EEPROM Command Section 2.24,
0042h 2 RW EEPROM Data Section 2.24,
0044h 12 - Reserved Note 2
0050h 2 RD Received Frame Byte
0052h 174 - Reserved Note 2
Status and Control Registers
0102 2 RW Receive Configuration Section 3.2.3,
0104 2 RW Receive Control see above
0106 2 RW Transmit Configuration see above
0108 2 RW Transmit Command see above
010A 2 RW Buffer Configuration see above
0112 2 RW Line Control see above
0114 2 RW Self Control see above
0116 2 RW Bus Control see above
0118 2 RW Test Control see above
0120 2 RD Interrupt Status Queue
0124 2 RD Receive Event
0124 2 RD alternate Receive Event
0128 2 RD Transmit Event
012C 2 RD Buffer Event
0130 2 RD Receive Miss
0132 2 RD Transmit Collision
0134 2 RD Line St atus
0136 2 RD Self Status
# of
Bytes Type Description Cross Reference
Section 3.17,
isters”
Section 3.17,
isters”
Section 3.17,
isters”
Section 3.17,
Counter
isters”
Section 2.32,
Registers”
“REGISTER SET”
“Ethernet Bus Interface Reg-
“Programming the EEPROM”
“Ethernet Bus Interface Reg-
“Programming the EEPROM”
“Ethernet Bus Interface Reg-
“Ethernet Bus Interface Reg-
,
“Basic Receive Operation”
“Ethernet Status/Control
,
,
,
Table 36. Ethernet Port 4 Kbyte Memory Register Address Map
DS502PP2 77
Page 78

CS89712
Internal
Offset
0138 2 RD Bus Status
0140h 4 - Reserved Note 2
Initiate Transmit Registers
0144h 2 WR TxCMD (transmit
0146h 2 WR TxLength (transmit length) Section 3.19,
0148h 8 - Reserved Note 2
Address Filter Registers
0150h 8 RW Logical Address Filter
0158h 6 RW Individual Address Section 3.20,
015Eh 674 - Reserved Note 2
Frame Location
0400h 2 RD RXStatus (receive status) Section 3.18,
0402h 2 Read-only RxLength (receive length,
0404h - Read-only Receive Frame Location Section 3.18,
0A00 - Write-only Transmit Frame Location Section 3.18,
# of
Bytes Type Description Cross Reference
Section 3.19,
command)
(hash table)
in bytes)
Section 2.34,
Section 2. 34,
Section 3.20,
Section 2.32.7,
Locations”
Section 2.32.7,
Locations”
Registers”
Section 2.32,
Section 3.18,
Registers”
Section 2.32,
Registers”
Section 2.32,
Registers”
Section 2.34,
“Initiate Transmit Registers”
“Transmit Operation”
“Initiate Transmit Registers”
“Transmit Operation”
“Address Filter Registers”
“Receive Ethernet Port
“Address Filter Registers”
“Receive Ethernet Port
“Ethernet Port Status/Control
,
“Basic Receive Operation”
“Ethernet Port Status/Control
,
“Basic Receive Operation”
“Ethernet Port Status/Control
,
“Basic Receive Operation”
“Ethernet Port Status/Control
,
“Transmit Operation”
,
,
,
,
Table 36. Ethernet Port 4 Kbyte Memory Register Address Map (Continued)
Notes: 1. All registers are accessed as 16-bit only.
2. Read operation from the reserved location provides undefined data. Writing to a reserved location or
undefined bits may result in unpredictable operation.
3.4 I/O Port Data Registers
3.4.1 PADR Port A Data Register (address 0x8000.0000)
Values written to this 8-bit read / write register will be output on Port A pins if the corresponding data direction bits are set high (port output). Values read from this register reflect the external state of Port A, not necessarily the value written to it. All bits are cleared by a system reset.
3.4.2 PBDR Port B Data Register (address 0x8000.0001)
Values written to this 8-bit read / write register will be output on Port B pins if the corresponding data direction bits are set high (port output). Values read from this register reflect the external state of Port B, not necessarily the value written to it. All bits are cleared by a system reset.
78 DS502PP2
Page 79

3.4.3 PDDR Port D Data Register (address 0x8000.0003)
Values written to this 8-bit read / write register will be output on Port D pins if the corresponding data direction bits are set low (port output). Values read from this register reflect the external state of Port D, not necessarily the value written to it. All bits are cleared by a system reset.
3.4.4 PADDR Port A Data Direction Register (address 0x8000.0040)
Bits set in this 8-bit read / write register will select the corresponding pin in Port A to become an output, clearing a bit sets the pin to input. All bits are cleared by a system reset.
3.4.5 PBDDR Port B Data Direction Register (address 0x8000.0041)
Bits set in this 8-bit read / write register will select the corresponding pin in Port B to become an output, clearing a bit sets the pin to input. All bits are cleared by a system reset.
3.4.6 PDDDR Port D Data Direction Register (address 0x8000.0043)
Bits cleared in this 8-bit read / write register will select the corresponding pin in Port D to become an output,
setting a bit sets the pin to input. All bits are cleared by a system reset so that Port D is output by default.
3.4.7 PEDR Port E Data Register (address 0x8000.0080)
Values written to this 3-bit read / write register will be output on Port E pins if the corresponding data direction bits are set high (port output). Values read from this register reflect the external state of Port E, not necessarily the value written to it. All bits are cleared by a system reset.
CS89712
3.4.8 PEDDR Port E Data Direction Register (address 0x8000.00C0)
Bits set in this 3-bit read / write register will select the corresponding pin in Port E to become an output, while
the clearing bit sets the pin to input. All bits are cleared by a system reset so that Port E is input by default.
3.5 System Control Registers
3.5.1 SYSCON1 The System Control Register 1 (address 0x8000.0100)
23:21 20 19 18 17:16 15
Reserved IRTXM WAKEDIS EXCKEN ADCKSEL SIREN
14 13 12 11 10 9
CDENRX CDENTX LCDEN DBGEN BZMOD BZTOG
876543:0
UART1EN TC2S TC2M TC1S TC1M Keyboard scan
The system control register is a 21-bit read / write register which controls all the general configuration of the
CS89712, as well as modes etc. for peripheral devices. All bits in this register are cleared by a system reset. The
bits in the system control register SYSCON1 are defined in Table 37.
DS502PP2 79
Page 80

CS89712
Bit Description
0:3 Keyboard scan: This 4-bit field defines the state of the keyboard column drives. The following
table defines these states.
Keyboard Scan Column
0 All driven high
1 All driven low
2–7 All high impedance (tristate)
8 Column 0 only driven high all others high impedance
9 Column 1 only driven high all others high impedance
10 Column 2 only driven high all others high impedance
11 Column 3 only driven high all others high impedance
12 Column 4 only driven high all others high impedance
13 Column 5 only driven high all others high impedance
14 Column 6 only driven high all others high impedance
15 Column 7 only driven high all others high impedance
4 TC1M: Timer counter 1 mode. Setting this bit sets TC1 to prescale mode, clearing it sets free run-
ning mode.
5 TC1S: Timer counter 1 clock source. Setting this bit sets the TC1 clock source to 512 kHz, clear-
ing it sets the clock source to 2 kHz.
6 TC2M: Timer counter 2 mode. Setting this bit sets TC2 to prescale mode, clearing it sets free run-
ning mode.
7 TC2S: Timer counter 2 clock source. Setting this bit sets the TC2 clock source to 512 kHz, clear-
ing it sets the clock source to 2 kHz.
8 UART1E N: Internal UART enable bit. Setting this bit enables the internal UART.
9 BZTOG: Bit to drive (i.e., toggle) the buzzer output directly when software mode of operation is
selected (i.e., bit BZMOD = 0). See the BZMOD and BUZFREQ (SYSCON1) bits for more
details.
10 BZMOD: This bit selects the buzzer drive mode. When BZMOD = 0, the buzzer drive output pin
is connected directly to the BZTOG bit. This is the software mode. When BZMOD = 1, the buzzer
drive is in the hardware mode. T wo hardware sources are available to drive the pin. They are the
TC1 or a fixed internally generated clock source. The selection of which source is used to drive
the pin is determined by the state of the BUZFREQ bit in the SYSCON2 register. If the TC1 is
selected, then the buzzer output pin is connected to the TC1 under flow bit. The buzzer output
pin changes every time the timer wraps around. The frequency depends on what was programmed into the timer. See the description of the BUZFREQ and BZTOG bits (SYSCON2) for
more details.
Table 3 7. SYS CO N1
80 DS502PP2
Page 81

CS89712
Bit Description
11 DBGEN: Setting this bit will enable the debug mode. In this mode, all internal accesses are out-
put as if they were reads or writes to the expansion memory addressed by nCS5. nCS5 will still
be active in its standard address range. In addition, the internal interrupt request and fast interrupt request signals to the ARM720T processor are output on Port E, bits 1 and 2. Note that
these bits must be programmed to be outputs before this functionality can be observed. The
clock to the CPU is output on Port E, Bit 0 to delineate individual accesses. For example, in
debug mode:
nCS5 = nCS5 or internal I/O strobe
PE0 = CLK
PE1 = nIRQ
PE2 = nFIQ
12 LCDEN: LCD enable bit. Setting this bit enables the LCD controller.
13 CDENTX: Codec interface enable TX bit. Setting this bit enables the codec interface for data
transmission to an external codec device.
14 CDENRX: Codec interface enable RX bit. Setting this bit enables the codec interface for data
reception from an external codec device.
Note: Both CDENRX and CDENTX need to be enabled / disabled in tandem, otherwise data may
be lost.
15 SIREN: HP SIR protocol encoding enable bit. This bit will have no effect if the UART is not
enabled.
16:17 ADCKSEL: Microwire / SPI peripheral clock speed select. This two-bit field selects the frequency
of the ADC sample clock, which is twice the frequency of the synchronous serial ADC interface
clock. The table below shows the available frequencies for operation when in PLL mode. These
bits are also used to select the shift clock frequency for the SSI2 interface when set into master
mode.
ADCKSEL ADC Sample Frequency
(kHz) — SMPCLK
00 8 4
01 32 16
10 128 64
11 256 128
18 EXCKEN: External expansion clock enable. If this bit is set, the EXPCLK is enabled continuously
as a free running clock with the same frequency and phase as the CPU clock, assuming that the
main oscillator is running. This bit should not be left set all the time for power consumption reasons. If the system enters the Standby State, the EXPCLK will become undefined. If this bit is
clear, EXPCLK will be active during memory cycles to expansion slots that have external wait
state generation enabled only.
19 WAKEDIS: Setting this bit disables waking up (exiting) from the Standby State, from either the
WAKEUP input pin or a keypress after one of the following signals became active: nPWRFL,
BATOK, nEXTPWR.
Note: Even though a keypress will not wake the device, a keypress interrupt will still be generated,
if the keyboard interrupt is not masked, and this can be used to wake the device.
Table 37. SYSCON1 (Continued)
ADC Clock Frequency
(kHz) — ADCCLK
DS502PP2 81
Page 82

CS89712
Bit Description
20 IRTXM: IrDA TX mode bit. This bit controls the IrDA encoding strategy. Clearing this bit means
that each zero bit transmitted is represented as a pulse of width 3/16th of the bit rate period. Setting this bit means each zero bit is represented as a pulse of width 3/16th of the period of
115,200-bit rate clock (i.e., 1.6 µsec regardless of the selected bit rate). Setting this bit will use
less power, but will probably reduce transmission distances.
Table 37. SYSCON1 (Continued)
82 DS502PP2
Page 83

CS89712
3.5.2 SYSCON2 System Control Register 2 (address 0x8000.1100)
15 14 13 12 11:10 9 8
Reserved BUZFREQ CLKENSL OSTB Reserved SS2MAEN UART2EN
7 6543210
SS2RXEN PC CARD2 PC CARD1 SS2TXEN KBWEN DRAMSZ KBD6 SERSEL
This is an extension of SYSCON1, containing additional control for the CS89712. The bits of this second system
control register are defined below. The SYSCON2 register is reset to all 0s on power up.
Bit Description
0 SERSEL:The only affect of this bit is to select either SSI2 or the codec to interface to the external
pins. See the table below for the selection options.
NOTE: If the DAI bit of SYSCON3 is set, then it overrides the state of the SERSEL bit, and thus
the external pins are connected to the DAI interface.
SERSEL Value Selected Serial Device to
External Pins
0 Master / slave SSI2
1 Codec
1 KBD6 : The state of this bit determines how many of the Port A inputs are OR’ed together to cre-
ate the keyboard interrupt. When zero (the reset state), all eight of the Port A inputs will generate
a keyboard interrupt. When set high, only Port A bits 0 to 5 will generate an interrupt from the
keyboard. It is assumed that the keyboard row lines are connected into Port A.
2 DRAM Z: This bit determines the width of the DRAM memory interface, where: 0=32-bit DRAM
and 1=16-bit DRAM.
3 KBWEN: When the KBWEN bit is high, the CS89712 will awaken from a power saving state into
the Operating State when a high signal is on one of Port A’s inputs (irrespective of the state of the
interrupt mask register). This is called the Keyboard Direct Wakeup mode. In this mode, the interrupt request does not have to get serviced. If the interrupt is masked (i.e., the interrupt mask register 2 (INTMR2) bit 0 is low), the processor simply starts re-executing code from where it left off
before it entered the power saving state. If the interrupt is non-masked, then the processor will
service the interrupt.
4 SS2TXEN: Transmit enable for the synchronous serial interface 2. The transmit side of SSI2 will
be disabled until this bit is set. When set low, this bit also disables the SSICLK pin (to save
power) in master mode, if the receive side is low.
5 PC CARD1: Enable for the interface to the CL-PS6700 device for PC Card slot 1. The main effect
of this bit is to reassign the functionality of Port B, bit 0 to the PRDY input from the CL-PS6700
devices, and to ensure that any access to the nCS4 address space will be according to the
CL-PS6700 interface protocol.
6 PC CARD2: Enable for the interface to the CL-PS6700 device for PC Card slot 2. The main effect
of this bit is to reassign the functionality of Port B, bit 1 to the PRDY input from the CL-PS6700
devices and to ensure that any access to the nCS5 address space will be according to the
CL-PS6700 interface protocol.
Table 3 8. SYS CO N2
DS502PP2 83
Page 84

CS89712
Bit Description
7 SS2RXEN: Receive enable for the synchronous serial interface 2. The receive side of SSI2 will
be disabled until this bit is set. When both SSI2TXEN and SSI2RXEN are disabled, the SSI2
interface will be in a power saving state.
8 UART2E N: Internal UART2 enable bit. Setting this bit enables the internal UART2.
9 SS2MAEN: Master mode enable for the synchronous serial interface 2. When low, SSI2 will be
configured for slave mode operation. When high, SSI2 will be configured for master mode opera-
tion. This bit also controls the directionality of the interface pins.
10 SNZPOL: Snooze State LCD data polarity bit. When low, the LCD controller will put out ‘0000’ on
the DD[3:0] outputs during the blanked parts of the display in Snooze State. When high, ‘1111’
will be output instead. This is to allow the connection of displays with inverse polarity. During nor-
mal Operating State, an inverse polarity display is handled by appropriate programming of the
palette, and this bit will have no effect.
11 LCDSNZE: This bit is normally set low, but will be automatically set high on entering Snooze
State. While this bit is high, data will be fetched from the on-chip SRAM for the display. When
Snooze State is exited, this bit will have been set high and this will have the effect of causing the
LCD controller to continue to fetch data from the on-chip SRAM, in 1-bit-per-pixel mode, irrespec-
tive of the contents of the LCDCON register. This ensures that the display does not change on
exit from Snooze State, so that if the exit is for a simple update-on-interrupt operation the display
need not be affected. Additional arbitration is included so that the on-chip SRAM can be written to
while the LCDSNZE bit is set after Snooze State. If the exit from Snooze State has occurred
because the device was to be completely woken up, including switching to the main LCD frame
buffer, (whose start address is defined in the FBADDR register) then this can be achieved by writ-
ing a 0 to the LCDSNZE bit, which will cause the CL-CS89712 to start fetching DMA data from
the main buffer and sync up the display at the end of the following frame. The LCDSNZE bit can
never be programmed to 1 by the CPU — the value ‘1’ will be ignored.
12 Reserved: This bit should be set low.
13 CLKENSL: CLKEN select. When low, the CLKEN signal will be output on the RUN/CLKEN pin.
When high, the RUN signal will be output on RUN/CLKEN.
14 BUZFREQ: The BUZFREQ bit is used to select which hardware source will be used as the
source to drive the buzzer output pin. When BUZFREQ = 0, the buzzer signal generated from the
on-chip timer (TC1) is output. When BUZFREQ = 1, a 500 Hz clock is output. See the BZMOD
and the BZTOG bits (SYSCON2) for more details.
Table 38. SYSCON2 (Continued)
84 DS502PP2
Page 85

CS89712
3.5.3 SYSCON3 System Control Register 3 (address 0x8000.2200)
15 14 13 12 11 10 9 8
Reserved Reserved Reserved Reserved Reserved ENPD67 128Fs FASTWAKE
76543210
VERSN[2]
Reserved
This register allows additional control for the CS89712. The bits of this register are defined in Table 38.
Bit Description
0 ADCCON: Determines whether the ADC Configuration Extension field SYNCIO(31:16) is to be
1:2 CLKCTL(1:0): Determines the frequency of operation of the processor and Wait State scaling.
VERSN[1]
Reserved
used for ADC configuration data. When this bit = 0 (default state) the ADC Configuration Byte
SYNCIO(7:0) only is used for compatibility with the CL-PS7111. When this bit = 1, the ADC Configuration Extension field in the SYNCIO register is used for ADC Configuration data and the
value in the ADC Configuration Byte (SYNCIO(6:0)) selects the length of the data (8-bit to 16-bit).
The table below lists the available options.
CLKCTL(1:0)
Value
VERSN[0]
Reserved
00 18.432 MHz 18.432 MHz 1
01 36.864 MHz 36.864 MHz 2
10 49.152 MHz 36.864 MHz 2
11 73.728 MHz 36.864 MHz 2
ADCCKNSEN DAISEL CLKCTL1 CLKCTL0 ADCCON
Processor
Frequency
Memory Bus
Frequency
Wait State Scaling
Note: To determine the number of wait states programmed refer to Table 46 and Table 47. Under
no circumstances should the CLKCTL bits be changed using a buffered write.
3 DAIS EL: When set selects the DAI Interface. When cleared selects either the SSI or telephony
codec interface (i.e., DAISEL bit is default low).
4 ADCCKNSEN: When set, configuration data is transmitted on ADCOUT at the rising edge of the
ADCCLK, and data is read back on the falling edge on the ADCIN pin. When clear (default), the
opposite edges are used.
5:7 VERSN[0:2]: Additional read-only version bits — will read ‘000’
8 Reserved. This bit must be set to zero
9 128Fs: When set, this selects the 128 fs mode. Cleared by default to enable 64 fs operation.
10 ENPD67: Pd[6-7] control the byte mask of the SDRAM interface. Setting of this bit allows their
use as GPIO bits for applications not using SDRAM.
Table 3 9. SYS CO N3
DS502PP2 85
Page 86

CS89712
3.5.4 SYSFLG1 — The System Status Flags Register (address 0x8000.0140)
31:30 29282726
VERID ID BOOTBIT1 BOOTBIT0 SSIBUSY
25 24 23 22 21:16
CTXFF CRXFE UTXFF1 URXFE1 RTCDIV
15 14 13 12 11
CLDFLG PFFLG RSTFLG NBFLG UBUSY1
7:4 3 2 1 0
DID WUON WUDR DCDET MCDR
The system status flags register is a 32-bit read only register, which indicates various system information. The bits
in the system status flags register SYSFLG1 are defined in Table 40.
Bit Description
0 MCDR: Media changed direct read. This bit reflects the INVERTED non-latched status of the
media changed input.
1 DCDET: This bit will be set if a non-battery operated power supply is powering the system (it is
the inverted state of the nEXTPWR input pin).
2 WUDR: Wake up direct read. This bit reflects the non-latched state of the wakeup signal.
3 WUON: This bit will be set if the system has been brought out of the Standby State by a rising
edge on the wakeup signal. It is cleared by a system reset or by writing to the HALT or STDBY
locations.
4:7 DID: Display ID nibble. This 4-bit nibble reflects the latched state of the four LCD data lines. The
state of the four LCD data lines is latched by the LCDEN bit, and so it will always reflect the last
state of these lines before the LCD controller was enabled.
8 CTS: This bit reflects the current status of the clear to send (CTS) modem control input to
UART1.
9 DSR: This bit reflects the current status of the data set ready (DSR) modem control input to
UART1.
10 DCD: This bit reflects the current status of the data carrier detect (DCD) modem control input to
UART1.
11 UBUSY1: UART1 transmitter busy. This bit is set while UART1 is busy transmitting data, it is
guaranteed to remain set until the complete byte has been sent, including all stop bits.
12 NBFLG: New battery flag. This bit will be set if a low to high transition has occurred on the
nBA TCHG input, it is cleared by writing to the STFCLR location.
13 RSTFLG: Reset flag. This bit will be set if the RESET button has been pressed, forcing the
nURESET input low. It is cleared by writing to the STFCLR location.
14 PFFLG: Power Fail Flag. This bit will be set if the system has been reset by the nPWRFL input
pin, it is cleared by writing to the STFCLR location.
15 CLDFLG: Cold start flag. This bit will be set if the CS89712 has been reset with a power on reset,
it is cleared by writing to the STFCLR location.
Table 40. SYSFLG
86 DS502PP2
Page 87

CS89712
Bit Description
16:21 RTCDIV: This 6-bit field reflects the number of 64 Hz ticks that have passed since the last incre-
ment of the RTC. It is the output of the divide by 64 chain that divides the 64 Hz tick clock down
to 1 Hz for the RTC. The MSB is the 32 Hz output, the LSB is the 1 Hz output.
22 URXFE1: UART1 receiver FIFO empty. The meaning of this bit depends on the state of the UFI-
FOEN bit in the UART1 bit rate and line control register. If the FIFO is disabled, this bit will be set
when the RX holding register is empty. If the FIFO is enabled, the URXFE bit will be set when the
RX FIFO is empty.
23 UTXFF1: UART1 transmit FIFO full. The meaning of this bit depends on the state of the UFI-
FOEN bit in the UART1 bit rate and line control register. If the FIFO is disabled, this bit will be set
when the TX holding register is full. If the FIFO is enabled, the UTXFF bit will be set when the TX
FIFO is full.
24 CRXFE: Codec RX FIFO empty bit. This will be set if the 16-byte codec RX FIFO is empty.
25 CTXFF: Codec TX FIFO full bit. This will be set if the 16-byte codec TX FIFO is full.
26 SSIBUSY: Synchronous serial interface busy bit. This bit will be set while data is being shifted in
or out of the synchronous serial interface, when clear data is valid to read.
27:28 BOOTBIT0–1: These bits indicate the default (power-on reset) bus width of the ROM interface.
See
Memory Configuration Registers
of these bits reflect the state of Port E[0:1] during power on reset, as shown in the table below.
for more details on the ROM interface bus width. The state
PE[1]
(BOOTBIT1)
0 0 32-bit
0 1 8-bit
1 0 16-bit
11Reserved
29 ID: Will always read ‘1’ for the CS89712 device.
30:31 VERID: Version ID bits. These 2 bits determine the version id for the CS89712. Will read ‘10’ for
the initial version.
PE[0]
(BOOTBIT0)
Ta ble 40. SYSFLG (Continued)
Boot option
DS502PP2 87
Page 88

CS89712
3.5.5 SYSFLG2 System Status Register 2 (address 0x8000.1140)
23 22 21:12 11 10:7 6
UTXFF2 URXFE2 Reserved UBUSY2 Reserved CKMODE
543210
SS2TXUF SS2TXFF SS2RXFE RESFRM RESVAL SS2RXOF
This register is an extension of SYSFLG1, containing status bits for backward compatibility with CL-PS7111. The
bits of the second system status register are defined in Table 41.
Bit Description
0 SS2RXOF: Master / slave SSI2 RX FIFO overflow. This bit is set when a write is attempted to a
full RX FIFO (i.e., when RX is still receiving data and the FIFO is full). This can be cleared in one
of two ways:
1. Empty the FIFO (remove data from FIFO) and then write to SRXEOF location.
2. Disable the RX (affects of disabling the RX will not take place until a full SSI2 clock cycle after
it is disabled)
1 RES VAL: Master / slave SSI2 RX FIFO residual byte present, cleared by popping the residual
byte into the SSI2 RX FIFO or by a new RX frame sync pulse.
2 RESFRM: Master / slave SSI2 RX FIFO residual byte present, cleared only by a new RX frame
sync pulse.
3 SS2RXFE: Master / slave SSI2 RX FIFO empty bit. This will be set if the 16 x 16 RX FIFO is
empty.
4 SS2TXFF: Master / slave SSI2 TX FIFO full bit. This will be set if the 16 x 16 TX FIFO is full. This
will get cleared when data is removed from the FIFO or the CS89712 is reset.
5 SS2TXUF: Master / slave SSI2 TX FIFO Underflow bit. This will be set if there is attempt to trans-
mit when TX FIFO is empty. This will be cleared when FIFO gets loaded with data.
6 CKMODE: This bit reflects the status of the CLKSEL (PE[2]) input, latched on power on reset.
This bit should be low.
11 UBUSY2: UART2 transmitter busy. This bit is set while UART2 is busy transmitting data; it is
guaranteed to remain set until the complete byte has been sent, including all stop bits.
22 URXFE2: UART2 receiver FIFO empty. The meaning of this bit depends on the state of the UFI-
FOEN bit in the UART2 bit rate and line control register. If the FIFO is disabled, this bit will be set
when the RX holding register contains is empty. If the FIFO is enabled, the URXFE bit will be set
when the RX FIFO is empty.
23 UTXFF2: UART2 transmit FIFO full. The meaning of this bit depends on the state of the UFI-
FOEN bit in the UART2 bit rate and line control register. If the FIFO is disabled, this bit will be set
when the TX holding register is full. If the FIFO is enabled, the UTXFF bit will be set when the TX
FIFO is full.
Table 41. SYSFLG2
88 DS502PP2
Page 89

CS89712
3.6 Interrupt Registers
3.6.1 INTSR1 Interrupt Status Register 1 (address 0x8000.0240)
15 14 13 12 11 10 9 8
SSEOTI UMSINT URXINT1 UTXINT1 TINT RTCMI TC2OI TC1OI
7 6543210
EINT3 EINT2 EINT1 CSINT
The interrupt status register is a 32-bit read only register. The interrupt status register reflects the current state of
the first 16 interrupt sources within the CS89712. Each bit is set if the appropriate interrupt is active. The interrupt
assignment is given in Table 42.
Bit Description
0 EXTFIQ: External fast interrupt. This interrupt will be active if the nEXTFIQ input pin is forced low and is
mapped to the FIQ input on the ARM720T processor.
1 BLINT: Battery low interrupt. This interrupt will be active if no external supply is present (nEXTPWR is
high) and the battery OK input pin BATOK is forced low. This interrupt is deglitched with a 16 kHz clock,
so it will only generate an interrupt if it is active for longer than 125 µsec. It is mapped to the FIQ input
on the ARM720T processor and is cleared by writing to the BLEOI location.
Note: BLINT is disabled during Snooze/the Standby States.
2 WEINT: Tick Watch dog expired interrupt. This interrupt will become active on a rising edge of the peri-
odic 64 Hz tick interrupt clock if the tick interrupt is still active (i.e., if a tick interrupt has not been serviced for a complete tick period). It is mapped to the FIQ input on the ARM720T processor and the TEOI
location.
Notes: 1. WEINT is disabled during Snooze/the Standby States.
2. Watch dog timer tick rate is 64 Hz.
3. Watchdog timer is turned off during Snooze/the Standby States.
3 MCINT: Media changed interrupt. This interrupt will be active after a rising edge on the nMEDCHG input
pin has been detected, This input is deglitched with a 16 kHz clock so it will only generate an interrupt if
it is active for longer than 125 µsec. It is mapped to the FIQ input on the ARM7TDMI processor and is
cleared by writing to the MCEOI location. On power-up, the Media change pin (nMEDCHG) is used as
an input to force the processor to either boot from the internal Boot ROM, or from external memory.
After power-up, the pin can be used as a general purpose FIQ interrupt pin.
4 CSINT: Codec sound interrupt, generated when the data FIFO has reached half full or empty (depend-
ing on the interface direction). It is cleared by writing to the COEOI location.
5 EINT1: External interrupt input 1. This interrupt will be active if the nEINT1 input is active (low). It is
cleared by returning nEINT1 to the passive (high) state.
6 EINT2: External interrupt input 2. This interrupt will be active if the nEINT2 input is active (low). It is
cleared by returning nEINT2 to the passive (high) state.
7 EINT3: Interrupt input 3 (Ethernet port). This interrupt will be active if the Ethernet port requests an
interrupt. It is cleared by returning EINT3 to the passive (low) state.
8 TC1OI: TC1 under flow interrupt. This interrupt becomes active on the next falling edge of the timer
counter 1 clock after the timer counter has under flowed (reached zero). It is cleared by writing to the
TC1EOI location.
MCINT WEINT BLINT EXTFIQ
Table 42. INTSR1
DS502PP2 89
Page 90

CS89712
Bit Description
9 TC2OI: TC2 under flow interrupt. This interrupt becomes active on the next falling edge of the timer
counter 2 clock after the timer counter has under flowed (reached zero). It is cleared by writing to the
TC2EOI location.
10 RTCMI: RTC compare match interrupt. This interrupt becomes active on the next rising edge of the
1 Hz Real-Time Clock (one second later) after the 32-bit time written to the Real-Time Clock match register exactly matches the current time in the RTC. It is cleared by writing to the RTCEOI location.
11 TINT: 64 Hz tick interrupt. This interrupt becomes active on every rising edge of the internal
64 Hz clock signal. This 64 Hz clock is derived from the 15-stage ripple counter that divides the
32.768 kHz oscillator input down to 1 Hz for the Real-Time Clock. This interrupt is cleared by writing to
the TEOI location.
Note: TINT is disabled / turned off during Snooze/the Standby States.
12 UTXINT1: Internal UART1 transmit FIFO half-empty interrupt. The function of this interrupt source
depends on whether the UART1 FIFO is enabled. If the FIFO is disabled (FIFOEN bit is clear in the
UART1 bit rate and line control register), this interrupt will be active when there is no data in the UART1
TX data holding register and be cleared by writing to the UART1 data register. If the FIFO is enabled
this interrupt will be active when the UART1 TX FIFO is half or more empty, and is cleared by filling the
FIFO to at least half full.
13 URXINT1: Internal UART1 receive FIFO half full interrupt. The function of this interrupt source depends
on whether the UART1 FIFO is enabled. If the FIFO is disabled this interrupt will be active when there is
valid RX data in the UART1 RX data holding register and be cleared by reading this data. If the FIFO is
enabled this interrupt will be active when the UART1 RX FIFO is half or more full or if the FIFO is non
empty and no more characters have been received for a three character time out period. It is cleared by
reading all the data from the RX FIFO.
14 UMSINT: Internal UART1 modem status changed interrupt. This interrupt will be active if either of the
two modem status lines (CTS or DSR) change state. It is cleared by writing to the UMSEOI location.
15 SSEOTI: Synchronous serial interface end of transfer interrupt. This interrupt will be active after a com-
plete data transfer to and from the external ADC has been completed. It is cleared by reading the ADC
data from the SYNCIO register.
Table 42. INTSR1 (Continued)
3.6.2 INTMR1 Interrupt Mask Register 1 (address 0x8000.0280)
15 14 13 12 11 10 9 8
SSEOTI UMSINT URXINT UTXINT TINT RTCMI TC2OI TC1OI
7 6543210
EINT3 EINT2 EINT1 CSINT
This interrupt mask register is a 32-bit read / write register, which is used to selectively enable any of the first 16
interrupt sources within the CS89712. The four shaded interrupts all generate a fast interrupt request to the
ARM720T processor (FIQ), this will cause a jump to processor virtual address 0000.0001C. All other interrupts will
generate a standard interrupt request (IRQ), this will cause a jump to processor virtual address 0000.00018. Setting
the appropriate bit in this register enables the corresponding interrupt. All bits are cleared by a system reset. Please
refer to Section 3.6,
90 DS502PP2
“Interrupt Registers”
for individual bit details.
MCINT WEINT BLINT EXTFIQ
Page 91

CS89712
3.6.3 INTSR2 Interrupt Status Register 2 (address 0x8000.1240)
15:14 13 12 11:3 2 1 0
Reserved URXINT2 UTXINT2 Reserved SS2TX SS2RX KBDINT
This register is an extension of INTSR1, containing status bits for backward compatibility with CL-PS7111. The interrupt status register also reflects the current state of the new interrupt sources within the CS89712. Each bit is set
if the appropriate interrupt is active. The interrupt assignment is given in Table 43.
Bit Description
0 KBDINT: Keyboard interrupt. This interrupt is generated whenever a key is pressed, from the log-
ical OR of the first 6 or all 8 of the Port A inputs (depending on the state of the KBD6 bit in the
SYSCON2 register. The interrupt request is latched and can be de-asserted by writing to the
KBDEOI location.
Note: KBDINT is not deglitched.
1 SS2RX: Synchronous serial interface 2 receives FIFO half or greater full interrupt. This is gener-
ated when RX FIFO contains 8 or more half-words. This interrupt is cleared only when the RX
FIFO is emptied or one SSI2 clock after RX is disabled.
2 SS2TX: Synchronous serial interface 2 transmit FIFO less than half empty interrupt. This is gen-
erated when TX FIFO contains fewer than 8 byte pairs. This interrupt gets cleared by loading the
FIFO with more data or disabling the TX. One synchronization clock required when disabling the
TX side before it takes effect.
12 UTXINT2: UART2 transmit FIFO half empty interrupt. The function of this interrupt source
depends on whether the UART2 FIFO is enabled. If the FIFO is disabled (FIFOEN bit is clear in
the UART2 bit rate and line control register), this interrupt will be active when there is no data in
the UART2 TX data holding register and be cleared by writing to the UART2 data register. If the
FIFO is enabled, this interrupt will be active when the UART2 TX FIFO is half or more empty and
is cleared by filling the FIFO to at least half full.
13 URXINT2: UART2 receive FIFO half full interrupt. The function of this interrupt source depends
on whether the UART2 FIFO is enabled. If the FIFO is disabled, this interrupt will be active when
there is valid RX data in the UART2 RX data holding register and be cleared by reading this data.
If the FIFO is enabled, this interrupt will be active when the UART2 RX FIFO is half or more full or
if the FIFO is non-empty, and no more characters have been received for a three-character timeout period, t is cleared by reading all the data from the RX FIFO.
Table 43. INSTR2
3.6.4 INTMR2 Interrupt Mask Register 2 (address 0x8000.1280)
15:14 13 12 11:3 2 1 0
Reserved URXINT2 UTXINT2 Reserved SS2TX SS2RX KBDINT
This register is an extension of INTMR1, containing interrupt mask bits for the backward compatibility with the CLPS7111. Please refer to INTSR2 for individual bit details.
DS502PP2 91
Page 92

CS89712
3.6.5 INTSR3 Interrupt Status Register 3 (address 0x8000.2240)
7:1 0
Reserved DAIPINT
This register is an extension of INTSR1 and INTSR2 containing status bits for the new features of the CS89712.
Each bit is set if the appropriate interrupt is active. The interrupt assignment is given in Table 44.
Bit Description
0 DAIINT: DAI interface interrupt. The cause must be determined by reading the DAI status regis-
ter. It is mapped to the FIQ interrupt on the ARM720T processor
Table 44. INTSR3
3.6.6 INTMR3 Interrupt Mask Register 3 (address 0x8000.2280)
7:1 0
Reserved DAIINT
This register is an extension of INTMR1 and INTMR2, containing interrupt mask bits for the new features of the
CS89712. Please refer to INTSR3 for individual bit details.
3.7 Expansion Memory Configuration Registers
3.7.1 MEMCFG1 Memory Configuration Register 1 (address 0x8000.0180)
31:24 23:16 15:8 7:0
nCS[3] configuration nCS[2] configuration nCS[1] configuration nCS[0] configuration
Expansion and ROM space is selected by one of eight chip selects. One of the chip selects (nCS[6]) is used internally for the on-chip SRAM, and the configuration is hardwired for 32-bit-wide, minimum- wait-state operation.
nCS[7] is used for the on-chip Boot ROM and the configuration field is hardwired for 8-bit-wide, minimum-wait-state
operation. Data written to the configuration fields for either nCS[6] or nCS7 will be ignored. Two of the chip selects
(nCS[4:5]) can be used to access two CL-PS6700 PC CARD controller devices, and when either of these interfaces
is enabled, the configuration field for the appropriate chip select in the MEMCFG2 register is ignored. When the PC
CARD1 or 2 control bit in the SYSCON2 register is disabled, then nCS[4] and nCS[5] are active as normal and can
be programmed using the relevant fields of MEMCFG2, as for the other four chip selects. All of the six external chip
selects are active for 256 Mbytes and the timing and bus transfer width can be programmed individually. This is accomplished by programming the six-byte-wide fields contained in two 32-bit registers, MEMCFG1 and MEMCFG2.
All bits in these registers are cleared by a system reset (except for the nCS[6] and nCS[7] configurations).
The Memory Configuration Register 1 is a 32-bit read / write register which sets the configuration of the four expansion and ROM selects nCS[0:3]. Each select is configured with a 1-byte field starting with expansion select 0.
92 DS502PP2
Page 93

CS89712
3.7.2 MEMCFG2 Memory Configuration Register 2 (address 0x8000.01C0)
31:24 23:16 15:8 7:0
(Boot ROM) (Local SRAM) nCS[5] configuration nCS[4] configuration
76 5:2 1:0
CLKENB SQAEN Wait States Field Bus width
The Memory Configuration Register 2 is a 32-bit read / write register which sets the configuration of the two expansion and ROM selects nCS[4:5]. Each select is configured with a 1-byte field starting with expansion select 4.
Each of the six non-reserved byte fields for chip select configuration in the memory configuration registers are identical and define the number of wait states, the bus width, enable EXPCLK output during accesses and enable sequential mode access. This byte field is defined below. This arrangement applies to nCS[0:3], and nCS[4:5] when
the PC CARD enable bits in the SYSCON2 register are not set. The state of these bits is ignored for the Boot ROM
and local SRAM fields in the MEMCFG2 register.
Table 45 defines the bus width field. Note that the effect of this field is dependent on the two BOOTBIT bits that can
be read in the SYSFLG1 register. All bits in the memory configuration register are cleared by a system reset, and
the state of the BOOTBIT bits are determined by Port E bits 0 and 1 on the CS89712 during power-on reset. The
state of PE[1] and PE[0] determine whether the CS89712 is going to boot from either 32-bit-wide, 16-bit-wide or 8bit-wide ROMs.
Table 46 shows the values for the wait states for random and sequential wait states at 18 MHz bus. At 36 MHz bus
rate, the encoding becomes more complex. Table 47 preserves compatibility with the previous devices, while allowing the previously unused bit combinations to specify more variations of random and sequential wait states.
Bus Width Field BOOTBIT1 BOOTBIT0 Expansion Transfer Mode Port E bits 1,0 during
NPOR reset
00 0 0 32-bit wide bus access Low, Low
01 0 0 16-bit wide bus access Low, Low
10 0 0 8-bit wide bus access Low, Low
11 0 0 Reserved Low, Low
00 0 1 8-bit wide bus access Low, High
01 0 1 Reserved Low , High
10 0 1 32-bit wide bus access Low, High
11 0 1 16-bit wide bus access Low, High
00 1 0 16-bit wide bus access High, Low
01 1 0 32-bit wide bus access High, Low
10 1 0 Reserved High, Low
11 1 0 8-bit wide bus access High, Low
Table 45. Values of the Bus Width Field
Note: See
The memory area decoded by CS[6] is reserved for the on-chip SRAM, hence this does not require a configuration
field in MEMCFG2. It is automatically set up for 32-bit-wide, no-wait-state accesses. For the Boot ROM, it is automatically set up for 8-bit, no wait state accesses.
Chip selects nCS[4] and nCS[5] are used to select two CL-PS6700 PC CARD controller devices. These have a multiplexed 16-bit wide address / data interface, and the configuration bytes in the MEMCFG2 register have no meaning
when these interfaces are enabled.
AC Characteristics
for more detail on bus timing.
DS502PP2 93
Page 94

CS89712
Value No. of Wait States
Random
00 4 3
01 3 2
10 2 1
11 1 0
Table 46. Values of the Wait State Field at 18 MHz
Bit 3 Bit 2 Bit 1 Bit 0 Wait States
0 000 8 3
0 001 7 3
0 010 6 3
0 011 5 3
0 100 4 2
0 101 3 2
0 110 2 2
0 111 1 2
1 000 8 1
1 001 7 1
1 010 6 1
1 011 5 1
1 100 4 0
1 101 3 0
1 110 2 0
1 111 1 0
No. of Wait States
Sequential
Random
Wait States
Sequential
Table 47. Values of the Wait State Field at 36 MHz
Bit Description
6 SQAEN: Sequential access enable. Setting this bit will enable sequential accesses that are on a
quad word boundary to take advantage of faster access times from devices that support page
mode. The sequential access will be faulted after four words (to allow video refresh cycles to
occur), even if the access is part of a longer sequential access. In addition, when this bit is not
set, non-sequential accesses will have a single idle cycle inserted at least every four cycles so
that the chip select is de-asserted periodically between accesses for easier debug.
7 CLKENB: Expansion clock enable. Setting this bit enables the EXPCLK to be active during
accesses to the selected expansion device. This will provide a timing reference for devices that
need to extend bus cycles using the EXPRDY input. Back-to-back (but not necessarily page
mode) accesses will result in a continuous clock.
Table 48. MEMCFG
94 DS502PP2
Page 95

3.8 Timer / Counter Registers
3.8.1 TC1D Timer Counter 1 Data Register (address 0x8000.0300)
The timer counter 1 data register is a 16-bit read / write register which sets and reads data to TC1. Any value
written will be decremented on the next rising edge of the clock.
3.8.2 TC2D Timer Counter 2 Data Register (address 0x8000.0340)
The timer counter 2 data register is a 16-bit read / write register which sets and reads data to TC2. Any value
written will be decremented on the next rising edge of the clock.
3.8.3 RTCDR Real-Time Clock Data Register (address 0x8000.0380)
The Real-Time Clock data register is a 32-bit read / write register, which sets and reads the binary time in
the RTC. Any value written will be incremented on the next rising edge of the 1 Hz clock. This register is
reset only by nPOR.
3.8.4 RTCMR Real-Time Clock Match Register (address 0x8000.03C0)
The Real-Time Clock match register is a 32-bit read / write register, which sets and reads the binary match
time to RTC. Any value written will be compared to the current binary time in the RTC, if they match it will
assert the RTCMI interrupt source. This register is reset only by nPOR.
CS89712
3.9 Miscellaneous Registers
3.9.1 LEDFLSH Register (address 0x8000.22C0)
6 5:2 1:0
Enable Duty ratio Flash rate
The output is enabled whenever LEDFLSH[6] = 1. When enabled, PDDDR[0] needs to be configured as an output
pin and the bit cleared to ‘0’ (See Section 3.4.6,
When the LED Flasher is disabled, the pin defaults to being used as Port D bit 0. Thus, this will ensure that the LED
will be off when disabled.
The flash rate is determined by the LEDFLSH[1:0] bits, in the following way:
LEDFLSH[5:2] Duty Ratio
0000 01:15 1000 09:07
0001 02:14 1001 10:06
0010 03:13 1010 11:05
LEDFLSH[1:0] Flash Period (sec)
(time on: time off)
“PDDDR Port D Data Direction Register (address 0x8000.0043)”
00 1
01 2
10 3
11 4
Table 49. LED Flash Rates
).
LEDFLSH[5:2] Duty Ratio
(time on: time off)
Table 50. LED Duty Ratio
DS502PP2 95
Page 96

CS89712
LEDFLSH[5:2] Duty Ratio
(time on: time off)
0011 04:12 1011 12:04
0100 05:11 1100 13:03
0101 06:10 1101 14:02
0110 07:0 9 1110 15:01
0111 08:08 1111 16:00 (continually on)
Table 50. LED Duty Ratio (Continued)
LEDFLSH[5:2] Duty Ratio
(time on: time off)
3.9.2 SDCONF SDRAM Control Register (address 0x8000.2300)
31:11 10 9 8:7 6:5 4:2 1:0
Reserved SDACTIVE CLKCTL SDWIDTH SDSIZE Reserved CASLAT
Bit Description
1:0. How many clock cycles after CAS before the device is ready for reading or writing. . . ‘00’ =>
Reserved. . . , ‘01’ => Reserved, ‘10’ => CAS Latency = 2, ‘11’ => CAS Latency = 3. . . . . . . . . . .
The default value is ‘10’ for CAS latency = 2.
4:2. Reserved.
6:5. The capacity of each SDRAM. The values are: ‘00’=>16Mits, ‘01’=>64Mbits, ‘10’=>128Mbits,
‘11’=>256Mbits.
8:7. The width of each SDRAM. ‘00’=>4bits, ‘01’=>8bits, ‘10’=>16 bits, ‘11’=>32 bits.
9. Control over the SDRAM clock. ‘0’=> SDRAM clock is permanently enabled except when in
standby mode. ‘1’=>SDRAM clock stops when the CS89712 is put into inactive mode i.e.,
SDACTIVE = ‘0’, or when in standby mode.
10. Enables the SDRAM controller: ‘0’ disables, ‘1’ enables. The SDRAM controller will only initialize
if SDACTIVE is set to 1. After initialization, resetting this parameter will cause the SDRAM con-
troller to enter an inactive state. It will remain in this state until SDACTIVE is set to 1.
31:11. Reserved.
3.9.3 SDRFPR SDRAM Refresh Period Register (address 0x8000.2340)
31:16 15:0
Reserved REFRATE
This 16-bit read/write register sets the interval between SDRAM refresh commands. The value programmed is the
interval in BLCK cycles e.g. for a 16
-6
16x10
The refresh timer is set to 256 by nPOR to ensure a refresh time of better than 16
programmed to a value below 2 otherwise the internal bus may become locked.
This register replaces DPFPR, which is no longer active. Writes to this register are ignored. Reads from this register
will produce unpredicta ble resu lts .
96 DS502PP2
* 36x106 = 576
µs refresh period with a BCLK of 36 MHz, the following value should be used:
µs. This register should not be
Page 97

CS89712
3.9.4 PMPCON Pump Control Register (address 0x8000.0400)
11:8 7:4 3:0
Drive 1 pump ratio Drive 0 from AC source ratio Drive 0 from battery ratio
The Pulse Width Modulator (PWM) pump control register is a 16-bit read / write register which sets and controls the
variable mark space ratio drives for the two PWMs. All bits in this register are cleared by a system reset. (The top
four bits are unused. They should be written as zeroes, and will read as undefined).
The state of the output drive pins is latched during power on reset, this latched value is used to determine the polarity
of the drive output. The sense of the PWM control lines is summarized in Table 51.
Initial State of Drive 0 or
Drive 1 During Power on Reset
Low Active high +ve
High Active low -ve
Table 51. Sense of PWM control lines
External input pins that would normally be connected to the output from comparators monitoring the PWM output
are also used to enable these clocks. These are the FB[0:1] pins. When FB[0] is high, the PWM is disabled. The
same applies to FB[1]. They are read upon power-up.
Note: To maximize power savings, the drive ratio fields should be used to disable the PWMs, instead of the FB
pins. The clocks that source the PWMs are disabled when the drive ratio fields are zeroed.4.
Sense of Drive 0
or Drive 1
Polarity of Bias
Voltage
Bit Description
0:3 Drive 0 from battery: This 4-bit field controls the “on” time for the Drive 0 PWM pump while the
system is powered from batteries. Setting these bits to 0 disables this pump, while setting these
bits to 1 allows the pump to be driven in a 1:16 duty ratio, 2 in a 2:16 duty ratio etc. up to a 15:16
duty ratio. An 8:16 duty ratio results in a square wave of 96 kHz when operating with an
18.432 MHz master clock.
4:7 Drive 0 from AC: This 4-bit field controls the “on” time for the Drive 0 DC to DC pump, while the
system is powered from a non-battery type power source. Setting these bits to 0 disables this
pump, setting these bits to 1 allows the pump to be driven in a 1:16 duty ratio, 2 in a 2:16 duty
ratio, etc. up to a 15:16 duty ratio. An 8:16 duty ratio results in a square wave of 96 kHz when
operating with an 18.432 MHz master clock.
Note: The CS89712 monitors the power supply input pins (i.e., BATOK and NEXTPWR) to
determine which of the above fields to use.
8:11 Drive 1 pump ratio: This 4-bit field controls the “on” time for the drive1 PWM pump. Setting
these bits to 0 disables this pump, while setting these bits to 1 allows the pump to be driven in a
1:16 duty ratio, 2 in a 2:16 duty ratio, etc. up to a 15:16 duty ratio. An 8:16 duty ratio results in a
square wave of 96 kHz when operating with an 18.432 MHz master clock.
Table 52. PMPCON
3.9.5 CODR — The CODEC Interface Data Register (address 0x8000.0440)
The CODR register is an 8-bit read / write register, to be used with the codec interface. This is selected by
the appropriate setting of bit 0 (SERSEL) of the SYSCON2 register. Data written to or read from this register
is pushed or popped onto the appropriate 16-byte FIFO buffer. Data from this buffer is then serialized and
sent to or received from the codec sound device. When the codec is enabled, the codec interrupt CSINT is
DS502PP2 97
Page 98

CS89712
generated repetitively at 1/8th the byte transfer rate and the FIFO state can be read in the system flags register. The net data transfer rate to / from the codec device is 8 kBytes/s, giving an interrupt rate of 1 kHz.
3.9.6 STFCLR Clear all “Start Up Reason” Flags Location (address 0x8000.05C0)
A write to this location will clear all the “Start Up Reason” flags in the system flags status register SYSFLG.
The ‘Start Up Reason’ flags should first read to determine the reason why the chip was started (i.e., a new
battery was installed). Any value may be written to this location.
3.10 UART Registers
3.10.1 UARTDR1–2, UART1–2 Data Registers (address 0x8000.0480 and 0x8000.1480)
10 9 8 7:0
OVERR PARERR FRMERR RX data
The UARTDR registers are 11-bit read and 8-bit write registers for all data transfers to or from the internal UARTs
1 and 2.
Data written to these registers is pushed onto the 16-byte data TX holding FIFO if the FIFO is enabled. If not it is
stored in a one byte holding register. This write will initiate transmission from the UART.
The UART data read registers are made up of the 8-bit data byte received from the UART together with three bits
of error status. If the FIFO is enabled, data read from this register is popped from the 16 byte data RX FIFO. If the
FIFO is not enabled, it is read from a one byte buffer register containing the last byte received by the UART. If it is
enabled, data received and error status is automatically pushed onto the RX FIFO. The RX FIFO is 10-bits wide by
16 deep.
Note: These registers should be accessed as words.
8 FRMERR: UART framing error. This bit is set if the UART detected a framing error while receiv-
9 PARERR: UART parity error. This bit is set if the UART detected a parity error while receiving the
10 OVERR: UART over-run error. This bit is set if more data is received by the UART and the FIFO
Bit Description
ing the associated data byte. Framing errors are caused by non-matching word lengths or bit
rates.
data byte.
is full. The overrun error bit is not associated with any single character and so is not stored in the
FIFO. If this bit is set, the entire contents of the FIFO is invalid and should be cleared. This error
bit is cleared by reading the UARTDR register.
Table 53. UARTDR1-2 UART1-2
98 DS502PP2
Page 99

CS89712
3.10.2 UBRLCR1–2 UART1–2 Bit Rate and Line Control Registers (address 0x8000.04C0 and 0x8000.14C0)
31:19 18:17 16 15 14 13 12 11:0
WRDLEN FIFOEN XSTOP EVENPRT PRTEN BREAK Bit rate divisor
The bit rate divisor and line control register is a 19-bit read / write register. Writing to these registers sets the bit rate
and mode of operation for the internal UARTs.
Bit Description
0:11 Bit rate divisor: This 12-bit field sets the bit rate. If the system is operating from the PLL clock,
then the bit rate divider is fed by a clock frequency of 3.6864 MHz, which is then further divided
internally by 16 to give the bit rate. The formula to give the divisor value for any bit rate when
operating from the PLL clock is: Divisor = 230400 / (bit rate divisor + 1). A value of zero in this
field is illegal when running from the PLL clock. T he t ables below show some exa mp le b it rat es
with the cor respond ing divi sor val ue.The table below shows the bit rates available for 18.432 MHz
operation.
Divisor Value Bit Rate Running
From the PLL Clock
0 —
1 115200
2 76800
3 57600
5 38400
11 19200
15 14400
23 9600
95 2400
191 1200
2094 110
12 BREAK: Setting this bit will drive the TX output active (high) to generate a break.
13 PRTEN: Parity enable bit. Setting this bit enables parity detection and generation
14 EVENPRT: Even parity bit. Setting this bit sets parity generation and checking to even parity,
clearing it sets odd parity. This bit has no effect if the PRTEN bit is clear.
15 XSTOP: Extra stop bit. Setting this bit will cause the UART to transmit two stop bits after each
data byte, while clearing it will transmit one stop bit after each data byte.
16 FIFOEN: Set to enable FIFO buffering of RX and TX data. Clear to disable the FIFO (i.e., set its
depth to one byte).
DS502PP2 99
Page 100

CS89712
Bit Description
17:18 WRDLEN: This two bit field selects the word length according to the table below.
WRDLEN Word Length
00 5 bits
01 6 bits
10 7 bits
11 8 bits
Table 54. UBRLCR1-2 UART1-2 (Continued)
3.11 LCD Registers
3.11.1 LCDCON — The LCD Control Register (address 0x8000.02C0)
31 30 29:25 24:19 18:13 12:0
GSMD2 GSMD1 AC prescale Pixel prescale Line length Video buffer size
The LCD control register is a 32-bit read / write register that controls the size of the LCD screen and the operating
mode of the LCD controller. Refer to the system description of the LCD controller for more information on video buffer mapping, and for details of how to program the LCD control register for use in Snooze State.
The LCDCON register should only be reprogrammed when the LCD controller is disabled.
Bit Description
0:12 Video buffer size: The video buffer size field is a 13-bit field that sets the total number of bits x
128 (quad words) in the video display buffer. This is calculated from the formula:
Video buffer size = (Total bits in video buffer / 128) – 1
i.e., for a 640 x 240 LCD and 4 bits-per-pixel, the size of the video buffer is equal to
614400 bits.
Video buffer = 640 x 240 x 4=614400 bits
Video buffer size field = (614400 / 128) – 1 = 4799 or 0x12BF hex.
If Snooze State is to be used with the LCD controller enabled, then the value programmed into
this register should not be less than 3. The minimum value allowed is 3 for this bit field.
13:18 Line length: The line length field is a 6-bit field that sets the number of pixels in one complete
line. This field is calculated from the formula:
line length = (Number of pixels in line / 16) – 1
i.e., for 640 x 240 LCD Line length = (640 / 16) – 1 = 39 or 0x27 hex.
The minimum value that can be programmed into this register is a 1 (i.e., 0 is not a legal value).
Table 55. LCDCON
100 DS502PP2
 Loading...
Loading...