


EVD ice
Superheat control
for unipolar electronic expansion valve
User manual
High Efficiency Solutions
NO POWER
& SIGNAL
CABLES
TOGETHER
READ CAREFULLY IN THE TEXT!


ENG
WARNINGS
CAREL bases the development of its products on decades of experience
in HVAC, on the continuous investments in technological innovations
to products, procedures and strict quality processes with in-circuit and
functional testing on 100% of its products, and on the most innovative
production technology available on the market. CAREL and its subsidiaries
nonetheless cannot guarantee that all the aspects of the product and the
software included with the product respond to the requirements of the nal
application, despite the product being developed according to start-of-theart techniques. The customer (manufacturer, developer or installer of the nal
equipment) accepts all liability and risk relating to the conguration of the
product in order to reach the expected results in relation to the specic nal
installation and/or equipment. CAREL may, based on specic agreements, acts
as a consultant for the positive commissioning of the nal unit/application,
however in no case does it accept liability for the correct operation of the nal
equipment/system.
The CAREL product is a state-of-the-art product, whose operation is specied
in the technical documentation supplied with the product or can be
downloaded, even prior to purchase, from the website www.carel.com.
Each CAREL product, in relation to its advanced level of technology, requires
setup/conguration/programming/commissioning to be able to operate in
the best possible way for the specic application. The failure to complete such
operations, which are required/indicated in the user manual, may cause the
nal product to malfunction; CAREL accepts no liability in such cases.
Only qualied personnel may install or carry out technical service on the
product.
The customer must only use the product in the manner described in the
documentation relating to the product.
In addition to observing any further warnings described in this manual, the
following warnings must be heeded for all CAREL products:
• prevent the electronic circuits from getting wet. Rain, humidity and all
types of liquids or condensate contain corrosive minerals that may damage
the electronic circuits. In any case, the product should be used or stored
in environments that comply with the temperature and humidity limits
specied in the manual;
• do not install the device in particularly hot environments. Too high
temperatures may reduce the life of electronic devices, damage them and
deform or melt the plastic parts. In any case, the product should be used
or stored in environments that comply with the temperature and humidity
limits specied in the manual;
• do not attempt to open the device in any way other than described in the
manual;
• do not drop, hit or shake the device, as the internal circuits and mechanisms
may be irreparably damaged;
• do not use corrosive chemicals, solvents or aggressive detergents to clean
the device;
• do not use the product for applications other than those specied in the
technical manual.
DISPOSAL
INFORMATION FOR USERS ON THE CORRECT
HANDLING OF WASTE ELECTRICAL AND ELEC-
TRONIC EQUIPMENT (WEEE)
In reference to European Union directive 2002/96/EC issued on 27 January
2003 and the related national legislation, please note that:
1. WEEE cannot be disposed of as municipal waste and such waste must be
collected and disposed of separately;
2. the public or private waste collection systems dened by local legislation must
be used. In addition, the equipment can be returned to the distributor at
the end of its working life when buying new equipment;
3. the equipment may contain hazardous substances: the improper use or
incorrect disposal of such may have negative eects on human health
and on the environment;
4. the symbol (crossed-out wheeled bin) shown on the product or on the
packaging and on the instruction sheet indicates that the equipment has
been introduced onto the market after 13 August 2005 and that it must
be disposed of separately;
5. in the event of illegal disposal of electrical and electronic waste, the penalties
are specied by local waste disposal legislation.
Warranty on the materials: 2 years (from the date of production, excluding
consumables).
Approval: the quality and safety of CAREL INDUSTRIES products are
guaranteed by the ISO 9001 certied design and production system, as well
as by the marks (*).
All of the above suggestions likewise apply to the controllers, serial boards,
programming keys or any other accessory in the CAREL product portfolio.
CAREL adopts a policy of continual development. Consequently, CAREL
reserves the right to make changes and improvements to any product
described in this document without prior warning.
The technical specications shown in the manual may be changed without
prior warning.
The liability of CAREL in relation to its products is specied in the CAREL general
contract conditions, available on the website www.carel.com and/or by
specic agreements with customers; specically, to the extent where allowed
by applicable legislation, in no case will CAREL, its employees or subsidiaries
be liable for any lost earnings or sales, losses of data and information, costs of
replacement goods or services, damage to things or people, downtime or any
direct, indirect, incidental, actual, punitive, exemplary, special or consequential
damage of any kind whatsoever, whether contractual, extra-contractual or
due to negligence, or any other liabilities deriving from the installation, use or
impossibility to use the product, even if CAREL or its subsidiaries are warned
of the possibility of such damage.
CAUTION: separate as much as possible the probe and digital input signal
cables from the cables carrying inductive loads and power cables to avoid
possible electromagnetic disturbance.
Never run power cables (including the electrical panel wiring) and signal
cables in the same conduits.
NO POWER
& SIGNAL
CABLES
TOGETHER
READ CAREFULLY IN THE TEXT!
3
“EVD ice” +0300038EN - rel. 1.1 - 23.04.2018


Content
1. INTRODUCTION 7
1.1 Models ............................................................................................................ 7
1.2 Functions and main characteristics ............................................................. 7
1.3 Accessories ....................................................................................................... 7
2. INSTALLATION 8
2.1 Dimensions - mm (in) ................................................................................... 8
2.2 Assembly on the evaporator ........................................................................ 8
2.3 Application diagrams ...................................................................................... 9
2.4 Wiring description ......................................................................................... 10
2.5 Wiring .............................................................................................................. 10
3. USER INTERFACE 11
3.1 Keypad.............................................................................................................11
3.2 Display and visualisation ............................................................................ 11
3.3 Programming mode ..................................................................................... 11
3.4 Restore default parameters (factory) ........................................................ 11
ENG
4. COMMISSIONING 12
4.1 Commissioning procedure ......................................................................... 12
4.2 Parameters first configuration .................................................................... 12
5. FUNCTIONS 13
5.1 Control ............................................................................................................. 13
5.2 Special control function: smooth lines ..................................................... 14
5.3 Service parameters ....................................................................................... 14
6. PROTECTORS 15
6.1 Protectors ........................................................................................................ 15
7. PARAMETERS TABLE 17
8. NETWORK CONNECTION 18
8.1 RS485 serial configuration .......................................................................... 18
8.2 Network connection for commissioning via PC .................................... 18
8.3 Visual parameter manager .......................................................................... 18
8.4 Restore default parameters ......................................................................... 19
8.5 Setup by direct copy ..................................................................................... 19
8.6 Setup using configuration file .................................................................... 20
8.7 Read the configuration file on the controller ........................................ 20
8.8 Variables accessible via serial connection .............................................. 21
8.9 Control states ................................................................................................. 22
8.10 Special control states .................................................................................... 23
9. ALARMS 24
9.1 Types of alarms ..............................................................................................24
9.2 Probe alarms .................................................................................................. 24
9.3 Control alarms ............................................................................................... 24
9.4 Valve emergency closing procedure .........................................................24
9.5 Network alarm ............................................................................................... 24
9.6 Alarm table .................................................................................................... 25
10. TROUBLESHOOTING 25
11. TECHNICAL SPECIFICATIONS 26
5
“EVD ice” +0300038EN - rel. 1.1 - 23.04.2018


1. INTRODUCTION
ENG
EVD ice is an electronic superheat controller for Carel unipolar expansion
valves. EVD ice has been specially designed to be installed near the valve,
directly on the refrigerant circuit, simplifying installation and making
electronic expansion valve technology available directly on board the
unit.
The plastic cover material on EVD ice guarantees total protection,
allowing the controller to operate in particularly dicult environmental
conditions, such as low temperatures and high humidity (condensation).
EVD ice can be installed directly on a unit cooler/evaporator inside a cold
room.
The controller is already tted with sensors, signal and power cables:
to complete the system, simply select the most suitable valve body
and pressure transducer for the required cooling capacity from the
compatible Carel product range.
EVD ice controls refrigerant superheat and optimises refrigerant circuit
eciency. It allows considerable system exibility, being compatible
with various types of refrigerants, in applications with refrigerators and
chiller/air-conditioners. It features low superheat protection (LowSH),
high evaporation pressure (MOP) and low evaporation pressure (LOP)
functions.
The device also has a user interface that displays the instant superheat
value at all times, signals any alarms, and above all can be used to set the
operating parameters.
When installing the controller, only three initial parameters are required
to start controlling the valve in the system:
- type of refrigerant
- operating mode (cold room, showcase, etc.)
- superheat set point.
EVD ice can easily be accessed via an RS485 serial connection (Modbus
protocol), for supervision of operating parameters and alarms in real time.
The serial connection can also be used to set the operating parameters
over a remote connection; in this case, combination with other Carel
controllers is recommended (supervisors and cold room controllers).
1.3 Accessories
Ratiometric pressure probe P/N SPKT0013P0 (-1 to 9.3 bars)
The ratiometric pressure probe specied as default for assembly is P/N
SPKT0013P0, with an operating range from -1 to 9.3 barg. Alternatively,
other probes can be installed, setting the corresponding parameter
accordingly. See the “Functions” chapter.
Fig. 1.a
1 2
P/N Type Photo nr.
SPKT0053P0 -1…4.2 barg 1
SPKT0013P0 -1…9.3 barg
SPKT0043P0 0…17.3 barg
SPKT0033P0 0…34.5 barg
SPKT00B6P0 0…45 barg
SPKT00E3P0 -1…12.8 barg
SPKT00F3P0 0…20.7 barg
SPKT00G1S0 0…60 barg 2
SPKT00L1S0 0…90 barg
Tab. 1.b
Unipolar valve body
The valve body, to be purchased separately, is assembled using the stator
supplied with EVD ice. For the part numbers, see the CAREL product
catalogue.
1.1 Models
P/N Description
EVDM011R3* EVD ice 115/230 V, E2V stator, display
EVDM011R1* EVD ice 115/230 V, E2V stator, display, Ultracap module
connector
EVDM011R4* EVD ice 115/230 V, E3V stator, display
EVDM011R2* EVD ice 115/230 V, E3V stator, display, Ultracap module
connector
(*): 0/1=single/multiple package (10 pcs)
Tab. 1.a
1.2 Functions and main characteristics
In summary:
• superheat control with LowSH, MOP, LOP functions;
• compatibility with various types of refrigerants;
• guided setup procedures rst, entering just three parameters on the
user interface: refrigerant (Gas), type of control (Mode) and superheat
set point (Superheat);
• activation/deactivation of control via digital input or remote control
via serial connection;
• controller and valve power supply incorporated (230 V/115 V);
• RS485 serial communication incorporated (Modbus protocol);
• IP65/IP67;
• operating conditions: -30T40C° (-22T104°F);
• compatible with Carel E2V and E3V single-pole valves.
Fig. 1.b
Ultracap module (P/N EVDMU**R**)
The module guarantees temporary power to the driver in the event of
power failures, for enough time to immediately close the connected
electronic valve. It avoids the need to install a solenoid valve. The module
is made using Ultracap storage capacitors, which ensure reliability in
terms of much longer component life than a module made with lead
batteries.
Fig. 1.c
From the software revision 1.7 the Smooth lines function has been
introduced.
7
“EVD ice” +0300038EN - rel. 1.1 - 23.04.2018

ENG
79.4 (3.1)
92.4 (3.6)
∅
4.5 (0.2)
170 (6.7)
45.5 (1.8)
61.3 (2.4)
40.7(1.6)
19.6 (0.8)
~230 (9.1)
GAS Type
Mode
Super Heat
2.1 Dimensions - mm (in)
2. INSTALLATION
Cable (*) Length (±5%)
Power supply 500 (19.7)
RS485 500 (19.7)
Pressure probe 800 (31.5) --> E2V
1800 (70.9) --> E3V
NTC probe 1800 (70.9)
E2V/ E3V valve 600 (23.6)
Ultracap 100 (3.9)
Fig. 2.a
2.2 Assembly on the evaporator
Important:
• install EVD ice on the evaporator away from the places where
ice forms;
• connect the power and serial cables in the IP65 junction box;
• for assembly of the E2V/ E3V valve, see the “ ExV system” guide
(+030220810).
Condenser
Liquid
separator
Filter
Liquid
indicator
M
Solenoid
valve
E2V/ E3V Unipolar
expansion valve
EVD ice
Compressor
P T
(*)= for standard CAREL part numbers
EVD ice can be installed directly on the evaporator. Mark the position and
drill the holes (Ø <4.5 mm). Then tighten the fastening screws.
Fig. 2.c
WALL
NTC temp. probe
Ratiometric pressure transducer
Evaporator unit
“EVD ice” +0300038EN - rel. 1.1 - 23.04.2018
Evaporator
Fig. 2.b
8

2.3 Application diagrams
WITH SOLENOID VALVE
ENG
N
L
ON / OFF
COLD ROOM
Electrical panel
Regulator
OUT
Solenoid
valve
M
COLD ROOM
IN
Evaporator
Evaporator
unit
EEV
P T
IP65
230 V input
EVD ICE
driver
230 V
N
L
COLD ROOM
OUT
Condenser
Condenser
unit
Compressor
WITHOUT SOLENOID VALVE, WITH ULTRACAP MODULE
COLD ROOM
OUT
Electrical panel
Regulator
ON / OFF
L
Fig. 2.d
COLD ROOM
Evaporator
IN
Evaporator
unit
EEV
P T
IP65
230 V input
EVD ICE
driver
230 V
L
N
EVD ICE
ULTRACAP
COLD ROOM
OUT
Condenser
Condenser
unit
N
Compressor
Fig. 2.e
9
“EVD ice” +0300038EN - rel. 1.1 - 23.04.2018

ENG
digital input to start
the regulation
230 Vac
2.4 Wiring description
The driver for superheat control requires the use of an evaporation pressure
probe S1 and suction temperature probe S2, which will be tted downstream
of the evaporator, and a digital input to trigger control. Alternatively, the signal
to trigger control can be sent via a remote serial connection.
Note: input S1 is programmable. See the “Functions” chapter
The following are already wired on EVD ice:
• pressure probe and temperature probe cables;
• electronic expansion valve stator;
• Ultracap module connection cable (on models where featured);
• power and serial line cables.
The power and serial line connections are identied by the colours of
the wires.
Note: for probe installation see “Guide to EEV system”, (+03022811).
B
CAREL E V/ E V
² ³
unipolar valve
0,3 Nm
Non rimuovere
il cappuccio
di protezione A!
Do not remove
the protection cap A!
Valve stator
ULTRACAP
Module
C
NTC
A
S2
S1
GAS Type
Mode
Super Heat
A
ratiometric
pressure
transducer
D
pasta conduttiva/ conductive cream
fascetta di ssaggio/ fastening band
fascia elastica/ elastic band
EF
Fig. 0.a
marrone/ brown - L
blu/ blue - N
nero/ black - DI
Tab. 0.a
verde/ green - GND
bianco/ white - Tx/Rx+
nero/ black - Tx/Rx-
PC
1
VPM
CVSTDUM0R0
pCO
Modbus®
RS485
2
shield shield
Rif Cable Description
A ExV Unipolar electronic valve connection
B Ultracap Ultracap module connection (accessory)
C Probe S2 NTC temperature probe
D probe S1 Ratiometric pressure probe
E Power supply
L: brown Phase 230 V
N: blue Neutral 230 V
DI: black 230 V digital input to enable control
F Serial
Tx/ Rx +: white RS485 connection
Tx/ Rx -: black
GND: green
1 - Computer for conguration
2 - USB– RS485 converter (for computer)
2.5 Wiring
For installation, proceed as shown below, with reference to the wiring
diagrams and the technical specications table:
1. connect the pressure probe that suits the refrigerant. For details on
refrigerant ---> suggested pressure probe, see the chapter on
“Commissioning”;
2. connect the power cable and the digital input cable: for the maximum
length, see the technical specications;
3. power on the driver: the display will light up, and the driver will await the
commissioning parameters. See the chapter on “Commissioning”;
4. program the driver, if necessary: see the “User interface” chapter.
Note: if connecting to a serial network, see the previous diagram for
details on connecting the shield to earth.
Installation environment
Important: avoid installing the drivers in environments with the
following characteristics:
• strong vibrations or knocks;
• exposure to aggressive and polluting atmospheres (e.g.: sulphur
and ammonia fumes, saline mist, smoke) to avoid corrosion and/or
oxidation;
• strong magnetic and/or radio frequency interference (therefore avoid
installing the devices near transmitting antennae);
• exposure of the drivers to direct sunlight and to the elements in
general.
Important: the following warnings must be observed when
connecting the drivers:
• if the driver is used in a way that is not specied in this user manual,
protection cannot be guaranteed;
• incorrect power connections may seriously damage the driver;
• separate as much as possible (at least 3 cm) the probe and digital input
cables from cables to electrical loads, to avoid possible electromagnetic
disturbance. Never run power cables (including the electrical panel
cables) and probe signal cables in the same conduits;
• do not run probe signal cables in the immediate vicinity of power
devices (contactors, circuit breakers, etc.). Reduce the path of probe
cables as much as possible, and avoid spiral paths that enclose power
devices;
• *EVD ice is a controller to be incorporated into the nal equipment; it
must not be wall-mounted;
• * DIN VDE 0100: protective separation must be guaranteed between
the SELV circuits (Safety Extra Low Voltage) and the other circuits. The
requirements of DIN VDE 0100 must be complied with. To prevent
disruption of the protective separation (between the SELV circuits and
the other circuits) ensure additional fastening near the terminations.
This additional fastening must secure the insulation and not the wires.
“EVD ice” +0300038EN - rel. 1.1 - 23.04.2018
10

3. USER INTERFACE
-99 --->
ENG
The user interface comprises the two-digit display and keypad with three
buttons that, pressed alone or in combination, are used to perform all the
conguration and programming operations on the driver.
2
GAS Type
Super Heat
1 2
3
1
Mode
4
Fig. 3.a
Key
1 Parameter label (for commissioning/setup)
2 Keypad
3 LED status digital input start/stop control
4 Two-digit display
blink/OFF = DI closed/open
(*) when digital input is closed the LED blinks and control is active.
During commissioning/setup, the parameter label shows the meaning
of the segments displayed in the rst digit, corresponding to the three
parameters being set:
A. GAS Type: type of refrigerant;
B. Mode: operating mode;
C. Superheat: superheat set point.
Commissioning
See the “
GAS Type
Mode
Super Heat
A. Refrigerant B. Mode (operating mode) C. Superheat set point
” chapter.
GAS Type
Mode
Super Heat
GAS Type
Mode
Super Heat
3.1 Keypad
Key Description
UP / DOWN
PRG/Set
• Increases/decreases the value of the set point or
other selected parameter
• At the end of the commissioning procedure, if
pressed for 2 s, exits the menu and control starts;
• Enter/ exit programming mode, saving the
parameters;
• Reset E8 alarm.
Tab. 2.a
123 --->
GAS Type
Mode
Super Heat
GAS Type
Mode
Super Heat
GAS Type
Mode
Super Heat
GAS Type
Mode
Super Heat
Fig. 3.b
Note: the decimal point in the digit on the right indicates the status
of the digital start/stop adjustment input. With the input closed the dot
is lit ashing.
3.3 Programming mode
The parameters can be modied using the front keypad.
Important: modify the control parameters, ONLY AFTER having
completed the guided commissioning procedure, described in chapter 4.
Modifying the Service parameters
The Service parameters include, in addition to the parameters for the
conguration of input S1, those corresponding to the network address,
probe readings, protectors and manual positioning. See the parameter
table.
Procedure:
1. press UP and DOWN together and hold for more than 5 s: the rst
parameter is displayed: P1 = probe S1 reading;
2. press UP/ DOWN until reaching the desired parameter;
3. press PRG/ Set to display the value;
4. press UP/ DOWN to modify the value;
5. press PRG/ Set to conrm and return to the parameter code;
6. repeat steps 2 to 5 to modify other parameters;
7. (when the parameter code is displayed) press PRG/Set and hold for more
than 2 s to exit the parameter setting procedure.
GAS Type
Mode
Super Heat
Fig. 3.c
3.2 Display and visualisation
During normal operation, the two-digit display shows the superheat
measure and any alarms.
The display interval for the superheat value is -5 to 55 K (-9 to 99 °F).
In general, values between -99 and 999 are displayed as follows:
1. values from 0 to 10 are displayed with decimal point and decimals;
2. values greater than 99 are displayed in two steps:
- rst, the hundreds, followed by “H”
- then the tens and units.
3. values less than -9 are displayed in two steps:
- rst the “-“sign;
- then the tens and units.
Note: if no button is pressed, after around 30 s the display
automatically returns to standard visualisation.
3.4 Restore default parameters (factory)
The driver can be reset to the default parameter values.
Procedure:
when the display is on standby, press all three buttons together . After
5 seconds, the display shows “rS”. The reset procedure can be conrmed
within 10 seconds, by pressing PRG/SET for 3 seconds. If no button is
pressed during this time, the procedure will be cancelled.
At the end the display shows two hyphens and then awaits the
commissioning parameters.
11
“EVD ice” +0300038EN - rel. 1.1 - 23.04.2018

ENG
GAS Type
Mode
Super Heat
GAS Type
Mode
Super Heat
4. COMMISSIONING
Important: if the refrigerant is not available among the refrigerant
parameter options, contact CAREL service to:
1. conrm that the system: (c.pCO/Ultracella,...)+ EVD ice + CAREL electronic
expansion valve is compatible with the desired refrigerant (Gas
type=custom);
2. identify the values that dene the custom refrigerant and enter them for
parameters: “Dew a…f high/low” . See the variables accessible via
serial connection.
4.1 Commissioning procedure
Once the electrical connections have been completed (see the chapter
“Installation”) and the power supply has been connected, the operations
required for commissioning the driver depend on the type of interface
used, however essentially involve setting just 3 parameters: refrigerant,
functioning mode, superheat setpoint.
5. Press Down to move to the next parameter: Mode, indicated by the
bar in the middle;
6. Repeat steps 2,3,4,5, to set the values of the other parameters: Mode,
Superheat set point;
GAS Type
Mode
Important:
• until the commissioning procedure has been completed, control
will not be active;
• (only during commissioning) changing the gas involves changing
the value of the ratiometric probe parameter.
After powering up the driver, the display lights and the driver waits the
control parameters, indicated by the hyphens. The default parameters
are:
1. Refrigerant = R404A;
2. Type of control = multiplexed showcase/cold room
3. Superheat set point = 11 K.
Procedure:
1. The controller displays the bar at the top: refrigerant (GAS Type);
GAS Type
Mode
Super Heat
2. Press PRG/Set: the refrigerant setting is shown = 3: R404A
GAS Type
Mode
Super Heat
Super Heat
7. Press PRG/Set for 2 seconds to exit the commissioning procedure
and start control. The standard display is shown.
4.2 Parameters rst conguration
Important: ONLY DURING commissioning, changing the gas
involves changing the value of the ratiometric probe parameter; if not
specied in the table, the type of ratiometric probe is -1...9.3 barg.
Parameter/ description Def.
Gas Type = refrigerant
0 Custom
1 R22 15 R422D 28 R1234ze(-1...4.2 barg)
2 R134a 16 R413A 29 R455A (-1...12.8 barg)
3 R404A 17 R422A 30 R170 (0...17.3 barg)
4 R407C 18 R423A 31 R442A (-1...12.8 barg)
5 R410A 19 R407A 32 R447A (-1...12.8 barg)
6 R507A 20 R427A 33 R448A
7 R290 21 R245FA 34 R449A
8 R600(-1...4.2 barg) 22 R407F 35 R450A (-1...4.2 barg)
9 R600a (-1...4.2 barg) 23 R32 (0...17.3 barg) 36 R452A (-1...12.8 barg)
10 R717 24 HTR01 37 R508B (-1...4.2 barg)
11 R744 (0...45 barg) 25 HTR02 38 R452B
12 R728 26 R23 39 R513A (-1...4.2 barg)
13 R1270 27 R1234yf 40 R454B
14 R417A 41 R458A
Note: if the refrigerant is not available among the refrigerant
options, “GAS Type=refrigerant”:
1. set any refrigerant (for example R404);
2. select the type of operating mode (Mode), the superheat set point
and complete the commissioning procedure;
3. use the VPM program (Visual Parameter Manager, see the chapter
“Network connection” ) and set the refrigerant type “0= Custom” and
the parameters “Dew a...f high/low” which dene the refrigerant (see
variables accessible via serial connection);
4. start control, for example by closing the digital input contact to
enable operation.
3 =
R404A
Tab. 4.a
3. Press UP/Down to change the value
GAS Type
Mode
Super Heat
4. Press PRG/Set to save and return to the refrigerant parameter code
(bar at the top)
“EVD ice” +0300038EN - rel. 1.1 - 23.04.2018
Mode = operating mode
1 Multiplexed cabinet/cold room
2 Air-conditioner/chiller with plate heat exchanger
3 Air-conditioner/chiller with tube bundle heat exchanger
4 Air-conditioner/chiller with nned coil heat exchanger
5 Reserved
6 Reserved
7 Cabinet/cold room with subcritical (R744) CO2
Superheat setpoint 11 K(20°F)
Note: consider the unit of measure (°C/°F) when setting the
superheat setpoint (Si parameter).
12
1 = Multiplexed
cabinet/
cold room
Tab. 4.b

5. FUNCTIONS
C
5.1 Control
EVD ice is a superheat controller. The type of refrigeration unit can be
selected using the “Operating mode” parameter.
ENG
Parameter/description Def.
Operating mode
1 Multiplexed cabinet/cold room
2 Air-conditioner/chiller with plate heat exchanger
3 Air-conditioner/chiller with tube bundle heat exchanger
4 Air-conditioner/chiller with nned coil heat exchanger
5 Reserved
6 Reserved
7 Banco frigo/cella con CO2 (R744) sub-critica
1 = multiplexed cabinet/
cold room
Tab. 5.a
Based on the operating mode setting , the driver automatically sets a
series of control parameters.
Operating mode PID: pro-
port. gain
1 Multiplexed cabinet/cold room 15 150 11 5 15 -50 0 50 20
2 Air-conditioner/chiller with plate heat exchanger 3 40 6 2 2,5 -50 4 50 10
3 Air-conditioner/chiller with tube bundle heat exchanger 5 60 6 2 2,5 -50 4 50 10
4 Air-conditioner/chiller with nned coil heat exchanger 10 100 6 2 10 -50 10 50 20
5 Reserved - - - - - - - - 6 Reserved - - - - - - - - 7 Banco frigo/cella con CO2 (R744) sub-critica
PID: integra-
tion time
20 400 13 7 15 -50 0 50 20
Superheat
set point
LowSH protection LOP protection MOP protection
threshold Integra-
tion time
threshold Integra-
tion time
thre-
shold
Integra-
tion time
Tab. 5.b
Superheat
The primary purpose of the electronic valve is ensure that the ow-rate
of refrigerant that ows through the nozzle corresponds to the ow-rate
required by the compressor. In this way, the evaporation process will take
place along the entire length of the evaporator and there will be no liquid
at the outlet (consequently in the branch that runs to the compressor). As
liquid is not compressible, it may cause damage to the compressor and even
breakage if the quantity is considerable and the situation lasts some time.
A low superheat temperature in fact corresponds to a situation of probable
instability due to the turbulent evaporation process approaching the
measurement point of the probes. The expansion valve must therefore
be controlled with extreme precision and a reaction capacity around
the superheat set point, which will almost always vary from 3 to 14 K.
Set point values outside of this range are quite infrequent and relate to
special applications.
Superheat control
The parameter that the control of the electronic valve is based on is
the superheat temperature, which eectively tells whether or not there
is liquid at the end of the evaporator. The superheat temperature is
calculated as the dierence between: superheated gas temperature
(measured by a temperature probe located at the end of the evaporator)
and the saturated evaporation temperature (calculated based on the
reading of a pressure transducer located at the end of the evaporator and
using the Tsat(P) conversion curve for each refrigerant).
Superheat =
(*) suction
Superheated gas
temperature
(*)
If the superheat temperature is high it means that the evaporation
process is completed well before the end of the evaporator, and therefore
ow-rate of refrigerant through the valve is insucient. This causes a
reduction in cooling eciency due to the failure to exploit part of the
evaporator. The valve must therefore be opened further. Vice-versa, if
the superheat temperature is low it means that the evaporation process
has not concluded at the end of the evaporator and a certain quantity
of liquid will still be present at the inlet to the compressor. The valve
must therefore be closed further. The operating range of the superheat
temperature is limited at the lower end: if the ow-rate through the valve
is excessive the superheat measured will be near 0 K. This indicates the
presence of liquid, even if the percentage of this relative to the gas cannot
be quantied. There is therefore un undetermined risk to the compressor
that must be avoided. Moreover, a high superheat temperature as
mentioned corresponds to an insucient ow-rate of refrigerant. The
superheat temperature must therefore always be greater than 0 K and
have a minimum stable value allowed by the valve-unit system.
Saturated evaporation
–
temperature
L
S2
S1
F
CP
S
M
E
EEV
V
P
T
Fig. 5.a
Key
CP compressor EEV electronic expansion valve
C condenser V solenoid valve
L liquid receiver E evaporator
F dewatering lter P pressure probe (transducer)
S liquid indicator T temperature probe
For the wiring, see
“Wiring description”
.
13
“EVD ice” +0300038EN - rel. 1.1 - 23.04.2018

ENG
PID parameters
Superheat control uses a PID algorithm. The control output is calculated
as the sum of separate contributions: proportional and integral.
• the proportional action opens or closes the valve proportionally to
the variation in the superheat temperature. Thus the greater the K
(proportional gain) the higher the response speed of the valve. The
proportional action does not consider the superheat set point, but
rather only reacts to variations. Therefore if the superheat value does
not vary signicantly, the valve will essentially remain stationary and
the set point cannot be reached;
• the integral action is linked to time and moves the valve in proportion
to the deviation of the superheat value from the set point. The greater
the deviations, the more intense the integral action; in addition, the
lower the value of Ti (integral time), the more intense the action
will be. The integral time, in summary, represents the intensity of the
reaction of the valve, especially when the superheat value is not near
the set point.
See the “EEV system guide” +030220810 for further information on
calibrating PID control.
Par. Description Def. Min. Max. UoM
- Superheat set point
PID proport. gain 15 0 800 -
CP
PID integral time 150 0 999 s
ti
Note: when selecting the type of Mode, the PID control values
suggested by CAREL will be automatically set for each application.
LowSH: threshold 55 (99) K(°F)
11(20)
Protector control parameters
See the chapter “Protectors”.
SH_set+
Smooth_line
SH set
t
Temp. set
t
Fig. 5.b
Key
SH set Superheat set point t time
Temp.set Temperature set point
Note: the temperature setting based on the corresponding set
point is managed by the master controller, while superheat control is
managed by the EVD ice.
5.3 Service parameters
The other conguration parameters, to be set where necessary before
starting the controller, concern :
• the type of ratiometric pressure probe;
• the serial address for network connection;
• the type of unit of measure;
• enabling change in type of control (Mode);
• the number of steps (480/960) to control valve position.
5.2 Special control function: smooth lines
Note: the Smooth_line parameter is only accessible via the
supervisor.
The smooth lines function optimises evaporator capacity based on actual
cooling demand, allowing more eective and stable control. The function
completely eliminates traditional on/o control cycles, modulating
the temperature exclusively using the electronic valve; superheat set
point is controlled through a precise PI control algorithm based on
the actual control temperature. The master controller (connected via
serial to EVD mini), through dynamic management of the Smooth_line
parameter, modies the superheat set point for management of the
electronic expansion valve, from a minimum (SH_SET) to a maximum
(SH_SET + Smooth_line): this consequently acts directly on the PID
control algorithm that modies the valve position. This is useful when
the control temperature approaches the set point; the Smooth_line
parameter is used to prevent the valve from closing, by reducing the
evaporator’s cooling capacity. In order to use this function, the digital
input must be congured as BACKUP. The Smooth_line parameter thus
allows the control set point to be adjusted instantly. In the event where
there is no network connection, the Smooth_line parameter is reset so as
to resume normal control (START/STOP from digital input and SH_SET as
the superheat set point). The main eects are:
• no swings in temperature and superheat due to the set point being
reached;
• stable temperature and superheat control;
• maximum energy savings due to load stabilisation.
Par. Description Def. Min. Max. U.M.
di
Smooth_line
DI conguration
1=start/stop
2=control backup
A: superheat set point
oset for smooth lines
1 1 2 -
0 -99(-55) 99(55) K/°F
Type of pressure probe (par. S1)
S1 is used to select the type of ratiometric pressure probe.
Par. Description Def. Min. Max. UoM
S1
type of probe S1
1 = -1…4.2 barg
2 = 0.4…9.3 barg
3 = -1…9.3 barg
4 = 0…17.3 barg
5 = 0.85…34.2 barg
6 = 0…34.5 barg
7 = 0…45 barg
8 = -1…12.8 barg
9 = 0…20.7 barg
10 = 1.86…43.0 barg
11 = Reserved
12 = 0...60 barg
13 = 0...90 barg
Note: when setting the probe type, the maximum and minimum
limits for the pressure alarm are automatically dened. See “Variables
aaccessible via serial connection”.
3 1 13 -
Network address (par. n1)
See the “Network connection” chapter.
Unit of measure (par. Si)
It is possible to select the measure system of the driver:
• international (°C, K, barg);
• imperial (°F, psig).
Par. Description Def. Min. Max. UoM
Si Unit of measure: 1=°C/K/barg; 2=°F/psig 1 1 2 -
Note: the unit of measure K relates to degrees Kelvin adopted for
measuring the superheat and the related parameters.
When changing the unit of measure, all the values of the parameters
saved on the driver and all the measurements read by the probes will
be recalculated. This means that when changing the units of measure,
control remains unaltered.
“EVD ice” +0300038EN - rel. 1.1 - 23.04.2018
14

ENG
Example 1: The pressure read is 20 barg this will be immediately
converted to the corresponding value of 290 psig.
Example 2: The “superheat set point” parameter set to 10 K will be
immediately converted to the corresponding value of 18 °F.
Access to the Mode (operating mode) parameter (par. IA)
To avoid accidental modication of the controller’s operating mode, it is
possible to disable the access to the corresponding parameter.
Par. Description Def. Min. Max. UoM
IA Enable operating mode modication
0/1 = yes/ no
0 0 1 -
Number of control steps (par. U3)
Total number of steps between the valve fully closed and fully open
position
Par. Description Def. Min. Max. UoM
U3 Number of valve control steps
1 / 2 = 480/960 steps
1 1 2 -
6. PROTECTORS
These are additional functions that are activated in specic situations that
are potentially dangerous for the unit being controlled. They feature an
integral action, that is, the action increases gradually when moving away
from the activation threshold. They may add to or overlap (disabling)
normal PID superheat control. By separating the management of these
functions from PID control, the parameters can be set separately, allowing,
for example, normal control that is less reactive yet much faster in
responding when exceeding the activation limits of one of the protectors.
6.1 Protectors
The protectors are 3:
• LowSH, low superheat;
• LOP, low evaporation temperature;
• MOP, high evaporation temperature;
The protectors have the following main features:
• activation threshold: depending on the operating conditions of the
controlled unit, this is set in Service programming mode;
• integration time, which determines the intensity (if set to 0, the
protector is disabled): set automatically based on the type of main
control;
• alarm, with activation threshold (the same as the protector) and
timeout (if set to 0 disables the alarm signal).
Note: The alarm signal is independent from the eectiveness of
the protector, and only signals that the corresponding threshold has
been exceeded. If a protector is disabled (null integration time), the
relative alarm signal is also disabled.
Each protector is inuenced by the proportional gain parameter (CP) of
PID superheat control. The higher is the value of CP, the more intensely
the protection will react.
Characteristics of the protectors
Protection Reaction Reset
LowSH Intense closing Immediate
LOP Intense opening Immediate
MOP Moderate closing Controlled
Tab. 6.a
Reaction: summary description of the type of action in controlling the
valve.
Reset: summary description of the type of reset following the activation
of the protector. Reset is controlled to avoid swings around the activation
threshold or immediate reactivation of the protector.
Digital input
The function of the digital input can be set by parameter:
Par. Description Def. Min. Max. UoM
di DI conguration
1=Start/Stop regulation
2=Regulation backup
Start/stop regulation:
• digital input closed: control active;
• digital input open: control in standby (see the paragraph “Control
states”).
Important: this setting excludes activation/deactivation of control
via the network. See the following function.
Regulation backup: if there is a network connection and communication
fails, the driver checks the status of the digital input to determine whether
control is active or in standby.
Note: all alarms are generated after a xed delay, as shown in the table:
Protectors Delay (s)
LowSH 300
LOP 300
MOP 600
1 1 2 -
LowSH (low superheat)
The protector is activated so as to prevent the low superheat from
causing the return of liquid to the compressor.
Par. Description Def. Min. Max. U.M.
C1 LowSH protection: threshold 5(9) -5(-9) Set point
C2 LowSH protection: integration time 15 0 800 s
When the superheat value falls below the threshold, the system enters low
superheat status, and the intensity with which the valve is closed is increased:
the more the superheat falls below the threshold, the more intensely the
valve will close. The LowSH threshold must be less than or equal to the
superheat set point. The low superheat integration time indicates the
intensity of the action: the lower the value, the more intense the action.
The integration time is set automatically based on the type of main
control.
SH
Low_SH_TH
ON
Low_SH
OFF
ON
A
OFF
D
Fig. 6.a
key:
SH Superheat A Alarm
Low_SH_TH Low_SH protection threshold D Alarm delay
Low_SH Low_SH protection t Time
B Alarm automatic reset
superheat
t
t
t
B
K(°F)
15
“EVD ice” +0300038EN - rel. 1.1 - 23.04.2018

ENG
LOP (low evaporation pressure)
LOP= Low Operating Pressure
The LOP protection threshold is applied as a saturated evaporation
temperature value so that it can be easily compared against the technical
specications supplied by the manufacturers of the compressors. The
protector is activated so as to prevent too low evaporation temperatures
from stopping the compressor due to the activation of the low pressure
switch. The protector is very useful in units with compressors on board
(especially multi-stage), where when starting or increasing capacity the
evaporation temperature tends to drop suddenly. When the evaporation
temperature falls below the low evaporation temperature threshold,
the system enters LOP status and is the intensity with which the valve is
opened is increased. The further the temperature falls below the threshold,
the more intensely the valve will open. The integration time indicates the
intensity of the action: the lower the value, the more intense the action.
Par. Description Def. Min. Max. U.M.
C3 LOP protection: threshold -50
C4 LOP protection: integration time 0 0 800 s
(-58)
-85
(-121)
MOP protec.:
threshold
C(°F)
The integration time is set automatically based on the type of main
control.
Note:
• the LOP threshold must be lower then the rated evaporation
temperature of the unit, otherwise it would be activated unnecessarily,
and greater than the calibration of the low pressure switch, otherwise
it would be useless. As an initial approximation it can be set to a value
exactly half-way between the two limits indicated;
• the protector has no purpose in multiplexed systems (showcases)
where the evaporation is kept constant and the status of the individual
electronic valve does not aect the pressure value;
• the LOP alarm can be used as an alarm to highlight refrigerant leaks by
the circuit. A refrigerant leak in fact causes an abnormal lowering of the
evaporation temperature that is proportional, in terms of speed and
extent, to the amount of refrigerant dispersed.
T_EVAP
LOP_TH
superheat is no longer controlled, and an increase in the superheat
temperature. The protector will thus have a moderate reaction that tends
to limit the increase in the evaporation temperature, keeping it below the
activation threshold while trying to stop the superheat from increasing
as much as possible. Normal operating conditions will not resume based
on the activation of the protector, but rather on the reduction in the
refrigerant charge that caused the increase in temperature. The system
will therefore remain in the best operating conditions (a little below the
threshold) until the load conditions change.
Par. Description Def. Min. Max. U.M.
C5 MOP protection threshold 50
C6 MOP protection integration time 20 0 800 s
(122)
Protection LOP:
threshold
200
(392)
C(°F)
The integration time is set automatically based on the type of main
control.
When the evaporation temperature rises above the MOP threshold, the
system enters MOP status, superheat control is interrupted to allow the
pressure to be controlled, and the valve closes slowly, trying to limit the
evaporation temperature. As the action is integral, it depends directly on
the dierence between the evaporation temperature and the activation
threshold. The more the evaporation temperature increases with
reference to the MOP threshold, the more intensely the valve will close.
The integration time indicates the intensity of the action: the lower the
value, the more intense the action.
T_EVAP
MOP_TH
MOP_TH - 1
MOP
PID
ALARM
ON
OFF
ON
OFF
ON
OFF
t
t
t
LOP
ALARM
ON
OFF
ON
OFF
D
t
t
B
t
Fig. 6.b
Key:
T_EVAP Evaporation temperature D Alarm timeout
LOP_TH Low evaporation temperature protection ALARM Alarm
LOP LOP protection t Time
B Automatic alarm reset
MOP (high evaporation pressure)
MOP= Maximum Operating Pressure.
The MOP protection threshold is applied as a saturated evaporation
temperature value so that it can be easily compared against the technical
specications supplied by the manufacturers of the compressors. The
protector is activated so as to prevent too high evaporation temperatures
from causing an excessive workload for the compressor, with consequent
overheating of the motor and possible activation of the thermal protector.
The protector is very useful in self-contained units if starting with a high
refrigerant charge or when there are sudden variations in the load. The
protector is also useful in multiplexed systems (showcases), as allows all
the utilities to be enabled at the same time without causing problems
of high pressure for the compressors. To reduce the evaporation
temperature, the output of the refrigeration unit needs to be decreased.
This can be done by controlled closing of the electronic valve, implying
“EVD ice” +0300038EN - rel. 1.1 - 23.04.2018
D
t
Fig. 6.c
Key:
T_EVAP Evaporation temperature MOP_TH MOP threshold
PID PID superheat control ALARM Alarm
MOP MOP protection t Time
D Alarm timeout
Important: the MOP threshold must be greater than the rated
evaporation temperature of the unit, otherwise it would be activated
unnecessarily. The MOP threshold is often supplied by the manufacturer
of the compressor. It is usually between 10 °C and 15 °C.
If the closing of the valve also causes an excessive increase in the suction
temperature (S2) above the set threshold – set via parameter (C7), not
on the display - the valve will be stopped to prevent overheating the
compressor windings, awaiting a reduction in the refrigerant charge. If
the MOP protection function is disabled by setting the integral time to
zero, the maximum suction temperature control is also deactivated.
Par. Description Def. Min. Max. U.M.
C7 MOP protection: disabling threshold
30
(86)
-85
(-121)
200
(392)
At the end of the MOP protection function, superheat control restarts
in a controlled manner to prevent the evaporation temperature from
exceeding the threshold again.
16
°C (°F)

ENG
7. PARAMETERS TABLE
Par. Description Def. Min. Max. UoM Type Carel Modbus® R/W Note
BASED (FISRT CONFIGURATION)
GAS
Refrigerant 3 0 40 - I 12 139 R/W
Type
Gas Type = Refrigerant
0 Custom
1 R22 15 R422D 28 R1234ze(-1...4.2 barg)
2 R134a 16 R413A 29 R455A (-1...12.8 barg)
3 R404A 17 R422A 30 R170 (0...17.3 barg)
4 R407C 18 R423A 31 R442A (-1...12.8 barg)
5 R410A 19 R407A 32 R447A (-1...12.8 barg)
6 R507A 20 R427A 33 R448A
7 R290 21 R245FA 34 R449A
8 R600 (-1...4.2 barg) 22 R407F 35 R450A (-1...4.2 barg)
9 R600a (-1...4.2 barg) 23 R32 (0...17.3 barg) 36 R452A (-1...12.8 barg)
10 R717 24 HTR01 37 R508B (-1...4.2 barg)
11 R744 (0...45 barg) 25 HTR02 38 R452B
12 R728 26 R23 39 R513A (-1...4.2 barg)
13 R1270 27 R1234yf 40 R454B
14 R417A 41 R458A
Mode Operating mode
1 Multiplexed cabinet/cold room
2 Air-conditioner/chiller with plate heat exchanger
3 Air-conditioner/chiller with tube bundle heat exchanger
4 Air-conditioner/chiller with nned coil heat exchanger
5 Reserved
6 Reserved
7 Cabinet/cold room with subcritical (R744) CO2
Super
Superheat set point 11
Heat
3 = R404A
1 1 7 - I 13 140 R/W
(20)
LowSH:
protection
threshold
55
(99)
(°F)
K
A 10 9 R/W
SERVICE
P1 S1 probe measurement - -85
P2 S2 probe measurement - -85
tE Evaporation temperature (converted) - -85 (-121) 200 (392) °C(°F) A 4 3 R
tS Suction temperature - -85 (-121) 200 (392) °C(°F) A 3 2 R
Po Valve opening - 0 100 % A 1 0 R
CP PID proportional gain 15 0 800 - A 11 10 R/W
ti PID integral time 150 0 999 s I 17 144 R/W
C1 LowSH protection: threshold 5(9) -5
C2 LowSH protection: integral time 15 0 800 s A 13 12 R/W
C3 LOP protection: threshold -50(-
C4 LOP protection: integral time 0 0 800 s A 15 14 R/W
C5 MOP protection: threshold 50
C6 MOP protection: integral time 20 0 800 s A 17 16 R/W
C7 MOP protection: disabling threshold 30
C8 Low suction temperature alarm threshold -50
S1 S1 probe type
Ratiometric (OUT=0…5V)
1 = -1…4.2 barg 8 = -1…12.8 barg
2 = 0.4…9.3 barg 9 = 0…20.7 barg
3 = -1…9.3 barg 10 = 1.86…43.0 barg
4 = 0…17.3 barg 11 = Reserved
5 = 0.85…34.2 barg 12 = 0…60 barg
6 = 0…34.5 barg 13 = 0…90 barg
7 = 0…45 barg
n1 Network address 99 1 99 - I 10 137 R/W
n2 Baud rate (bit/s)
0 4800, 2 stop bit, parity none 9 4800, 1 stop bit, parity even
1 9600, 2 stop bit, parity none 10 9600, 1 stop bit, parity even
2 19200, 2 stop bit, parity none 11 19200, 1 stop bit, parity even
3 4800, 1 stop bit, parity none 12 4800, 2 stop bit, parity odd
4 9600, 1 stop bit, parity none 13 9600, 2 stop bit, parity odd
5 19200, 1 stop bit, parity none 14 19200, 2 stop bit, parity odd
6 4800, 2 stop bit, parity even 15 4800, 1 stop bit, parity odd
7 9600, 2 stop bit, parity even 16 9600, 1 stop bit, parity odd
8 19200, 2 stop bit, parity even 17 19200, 1 stop bit, parity odd
(-290)
(-121)
(-9)
-85(-121) MOP
58)
LOP pro-
(122)
tection:
threshold
(86)
(-58)
-85
(-121)
-85
(-121)
3 1 11 - I 14 141 R/W
2 0 17 - I 20 147 R/W
200
(2900)
200
(392)
Superheat
set point
protection
threshold
200
(392)
200
(392)
200
(392)
barg (psig) A 6 5 R
°C(°F) A 7 6 R
K
(°F)
°C(°F) A 14 13 R/W
°C(°F) A 16 15 R/W
°C(°F) A 19 18 R/W
°C(°F) A 18 17 R/W
A 12 11 R/W
17
“EVD ice” +0300038EN - rel. 1.1 - 23.04.2018
ENG
Par. Description Def. Min. Max. UoM Type Carel Modbus® R/W Note
Si Unit of measure 1=°C/K/barg ¦ 2=°F/psig 1 1 2 - I 16 143 R/W
IA Enable operating mode modication 0/1 = yes/ no 0 0 1 - I 15 142 R/W
U1 Enable manual valve positioning 0/1 = no/ yes 0 0 1 - D 11 10 R/W
U2 Manual valve position 0 0 999 step I 7 134 R/W
U3 Valve control steps: 1/2 = 480/960 steps 1 1 2 - I 11 138 R/W
U4 Valve opening at start-up (evaporator/valve capacity ratio) 50 0 100 % I 19 146 R/W
Fr Firmware release - - - - A 9 8 R
di DI conguration: 1=start/stop regulation; 2=backup regulation 1 1 2 - I 18 145 R/W
rt Reserved 1 1 1 L1 S1 alarm: Minimum pressure -1 -85(-121) S1 alarm:
H1 S1 alarm: Maximum pressure - S1 alarm:
Min press.
Max pressure
200 (392) barg (psig) A 21 20 R/W
8. NETWORK CONNECTION
barg (psig) A 20 19 R/W
Tab. 7.a
The driver can be connected via a network connection to:
1. a computer running the VPM software, for setting the parameters
before commissioning;
2. a pCO controller, loaded with the application program;
3. a PlantVisor/PlantVisorPRO supervisor, for remote monitoring and
alarm detection.
8.1 RS485 serial conguration
n1 assigns to the controller an address for serial connection to a
supervisory and/or telemaintenance system.
Par. Description Def. Min. Max. UoM
n1 Network address 1 1 99 n2 Baud rate (bit/s)
0 4800, 2 stop bit, parity none
1 9600, 2 stop bit, parity none
2 19200, 2 stop bit, parity none
3 4800, 1 stop bit, parity none
4 9600, 1 stop bit, parity none
5 19200, 1 stop bit, parity none
6 4800, 2 stop bit, parity even
7 9600, 2 stop bit, parity even
8 19200, 2 stop bit, parity even
9 4800, 1 stop bit, parity even
10 9600, 1 stop bit, parity even
11 19200, 1 stop bit, parity even
12 4800, 2 stop bit, parity odd
13 9600, 2 stop bit, parity odd
14 19200, 2 stop bit, parity odd
15 4800, 1 stop bit, parity odd
16 9600, 1 stop bit, parity odd
17 19200, 1 stop bit, parity odd
Important: all controllers connected in a serial network need to be
set with the same communication parameters.
2 0 17 -
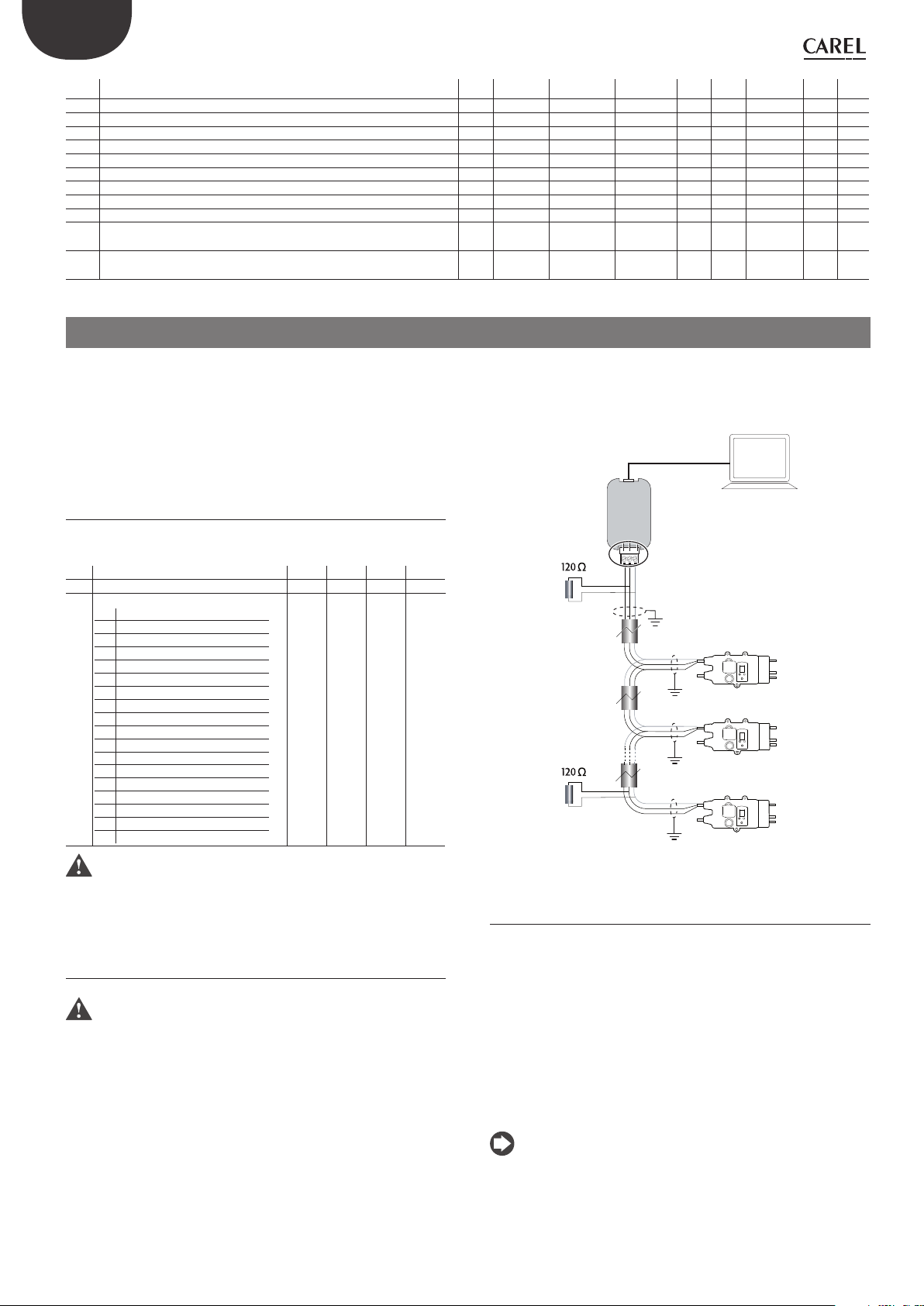
Connect the RS485 converter to controllers and make the connections
as shown in the gure. To assign the serial address, see parameter n1. See
the converter technical leaets for further information.
GND
T+
CVSTDUMOR0
*
*
USB-485
Converter
T -
shield
USB
shield
shield
shield
VPM
EVD ice 1
EVD ice 2
EVD ice ...n
Fig. 8.a
8.2 Network connection for commissioning
via PC
Warnings:
• fasten the converter properly so as to prevent disconnection;
• complete the wiring without power connected;
• keep the CVSTDUMOR0 interface cables separate from the power
cables (power supply);
• in compliance with standards on electromagnetic compatibility, a
shielded cable suitable for RS485 data transmission is used.
The RS485 converter is used to connect a computer running the VPM
software to the EVD ice driver via a serial network, for commissioning the
controllers. The system allows a maximum of 99 units, with a maximum
network length of 500 m. Connection requires the standard accessories
(RS485-USB converter, CAREL P/N CVSTDUMOR0) and a 120 Ω terminating
resistor to be installed on the terminals of the last connected controller.
“EVD ice” +0300038EN - rel. 1.1 - 23.04.2018
8.3 Visual parameter manager
Go to http://ksa.carel.com and follow the instructions below. Select in
sequence:
1. “Software & Support”
2. “Conguration & Updating Softwares”
3. “Parametric Controller Software”
4. “Visual Parametric Manager”
A window will open with the possibility to download two les:
1. VPM_setup_X.Y.Z.W_full.zip: complete program;
2. X.Y.Z.W_VPM_Devices_Upgrade.zip: upgrade for supported devices;
If this is the rst installation, select Setup full, otherwise Upgrade. The
program installs automatically by running setup.exe.
Note: if choosing complete installation (Setup full), uninstall any
previous versions of VPM.
18

ENG
Programming
When opening the program, the device to be congured needs to be
selected: EVD mini. The Home page then opens, oering the choice
between starting a new project or opening an existing project. If using
the program for the rst time, choose new project.
Fig. 8.b
The following options are then available:
1. Directly access the list of parameters saved in EEPROM: select “RS485”;
The operations are performed in real time (ONLINE mode), at the top
right set network address 1 and choose the guided procedure for USB
port recognition, then go to “Device setup”;
8.4 Restore default parameters
To restore the default parameter values on the controller:
1. Establish an RS485 serial connection between the computer and the
driver. The LEDs on the USB/RS485 converter will ash;
Fig. 8.e
2. Select “Update device” and:
a. Click button (A) to open the drop-down menu;
b. Select the list of parameters corresponding to the controller’s
rmware version: “EVDMINI***.hex ”;
c. Click “Update” to load the parameters to the list and immediately
after restore the controller parameters to the default value.
C
A
B
Fig. 8.c
2. Select the model from the range based on the rmware version and list of
conguration parameters (EVDMINI0000E0X_R*.*). These operations
are performed in OFFLINE mode.
Menu
The pages marked 1) can be accessed wither Online or Oine, while
those marked 2) are Online only.
1
2
Fig. 8.d
The operations that can be performed on the pages marked 1) depend
on the rst selection made.
Note: to access the Online help press F1.
Ref. Description
Home Select operating mode
Device setup Read instant values of control
Setup summary Display the default values for the current list of parameters
Custom setup See online help.
Update device Select list of parameters and
Upload
rmware
Synoptic and
graphs
Online Oine
parameters
then Upload to controller
Select rmware and Upload -
Overview with position of
probes and probe and superheat readings in real time
Online à RS485 (rear connector)
Oine à Device model
Select Load to load a list of
project parameters (.hex), modify
and save a new project.
-
-
Tab. 8.a
3. Go to “Device setup”: the program automatically reads the default
parameters saved on the controller.
8.5 Setup by direct copy
1. On the Home page select RS485 (rear connector);
2. Go to “Device setup”;
Fig. 8.f
Fig. 8.g
Fig. 8.h
19
“EVD ice” +0300038EN - rel. 1.1 - 23.04.2018

ENG
a. on the “Rapid conguration” page, set parameters “p_GAS_TYPE” =
refrigerant and “p_SUPER_MAIN_REGULATION”= type of control;
Fig. 8.i
b. on the “Conguration” page, set parameter “p_SH_SET”.
Fig. 8.j
3. Check whether there are other parameters that need to be set (see the
“Functions” chapter);
4. Finally, select “Write” to copy the parameters to the controller.
Create the conguration le
1. Select the “Device setup” page;
2. Set the parameters by double clicking, as shown in the gure:
a. on the “Rapid conguration” page, parameters “p_GAS_TYPE” =
refrigerant and “p_SUPER_MAIN_REGULATION”= type of control;
b. on the “Conguration” page, parameter “p_SH_SET”.
Fig. 8.m
3. Save the list of parameters with a new name, for example “NEW_NAME.
hex”. To load and display a list saved by the user, select “Load” and
navigate to the path where the le is saved. On the other hand,
to load a list of parameters supplied by CAREL, select “Load” and
navigate the following path:
Fig. 8.k
8.6 Setup using conguration le
On the Home page select “Device model”.
Fig. 8.l
The setup procedure comprises three steps:
1. Create the conguration le;
2. Copy the conguration le to the controller;
3. Read the conguration le on the controller.
LoadàPluginsàCommissioning EVD mini àTXTàTXT32.
Save Load
Copy the conguration le to the controller
Select “Update device” and:
a. Click button (A) to open the drop-down menu;
C
NEW_NAME.hex
Fig. 8.n
b. Select the list of parameters corresponding to the project le
created: “NEW_NAME.hex”;
c. Click “Update” to UPLOAD the parameters to the controller.
B
A
8.7 Read the conguration le on the
controller
1. Go to the “Home” page and select RS485 (rear connector);
2. Go to “Device setup” to read the list of parameters on the controller and
make sure the settings are correct.
“EVD ice” +0300038EN - rel. 1.1 - 23.04.2018
20

ENG
8.8 Variables accessible via serial connection
Parameter Description Def. Min Max Type Carel Modbus® R/W Note
Reg_status Device control status 0 0 20 I 1 128 R
Machine_type_SPV Type of unit 0 0 32767 I 2 129 R
Hardware_code_SPV Hardware code 0 0 32767 I 3 130 R
EEV_Positions_steps Valve position 0 0 999 I 4 131 R
Protection_status Protector status 0 0 5 I 5 132 R
Sh_unit_power_percent Cooling capacity 0 0 100 I 6 133 R/W
Man_posit_steps Manual valve position 0 0 999 I 7 134 R/W par. U2
Start_func_test Functional test input variable 0 0 30000 I 8 135 R/W
Func_test_2 Functional test generic variable 0 -32768 32767 I 9 136 R/W
Net_address LAN serial address 99 1 99 I 10 137 R/W par. n1
EEV_steps_doubling Double valve steps 1 1 2 I 11 138 R/W par. U3
Gas_type Refrigerant 3 1 23 I 12 139 R/W Gas Type = refrig.
Super_main_regulation Main control 1 0 6 I 13 140 R/W Operating mode
Super_S1_probe_model Probe S1 3 1 11 I 14 141 R/W par. S1
Inhibit_mode_setting Enable mode parameter setting 0 0 1 I 15 142 R/W par. IA
Unity_measure Unit of measure 1 1 2 I 16 143 R/W par. Si
PID_Ti PID: integral time 150 0 999 I 17 144 R/W par. ti
Par_Digin1_Cong Digital input conguration
Start_eev_opening_ratio Valve position at start-up 50 0 100 I 19 146 R/W par. U4
Net setting Baud rate 2 0 17 I 20 147 R/W par. n2
Reset Default (*) Reset with default parameters 0 |-32768 32767 I 21 148 R/W
Ultracella signature Riservato 0 |-32768 32767 I 22 149 R/W
Control type Control type 1 1 9 I 23 150 R
Gas custom dew_a_h Dew a high -288 -32768 32767 I 24 151 R/W
Gas custom dew_a_l Dew a low -15818 -32768 32767 I 25 152 R/W
Gas custom dew_b_h Dew b high -14829 -32768 32767 I 26 153 R/W
Gas custom dew_b_l Dew b low 16804 -32768 32767 I 27 154 R/W
Gas custom dew_c_h Dew c high -11664 -32768 32767 I 28 155 R/W
Gas custom dew_c_l Dew c low 16416 -32768 32767 I 29 156 R/W
Gas custom dew_d_h Dew d high -23322 -32768 32767 I 30 157 R/W
Gas custom dew_d_l Dew d low -16959 -32768 32767 I 31 158 R/W
Gas custom dew_e_h Dew e high -16378 -32768 32767 I 32 159 R/W
Gas custom dew_e_l Dew e low 15910 -32768 32767 I 33 160 R/W
Gas custom dew_f_h Dew f high -2927 -32768 32767 I 34 161 R/W
Gas custom dew_f_l Dew f low -17239 -32768 32767 I 35 162 R/W
Net_alarm Network alarm 0 0 1 D 1 0 R all. E6
Emergency_closing_alarm Mains power failure 0 0 1 D 2 1 R all. E5
S1_alarm Probe S1 alarm 0 0 1 D 3 2 R all. A1
S2_alarm Probe S2 alarm 0 0 1 D 4 3 R all. A2
Low_sh_alarm Low_SH alarm 0 0 1 D 5 4 R all. E3
LOP_alarm LOP alarm 0 0 1 D 6 5 R all. E2
MOP_alarm MOP alarm
Low_suct_alarm Low suction temperature alarm 0 0 1 D 8 7 R all. E4
Eeprom_alarm EEPROM damaged 0 0 1 D 9 8 R all. EE
Digin1_status Digital input status 0 0 1 D 10 9 R
Manual_posit_enable Enable manual valve 0 0 1 D 11 10 R/W par. U1
Incomplete closing alarm Emergency closing not completed 0 0 1 D 12 11 R/W all. E8
Battery alarm Battery alarm 0 0 1 D 13 12 R
EVD_CAN_GO EVD regulation enable 0 0 1 D 14 13 R/W
S1_Alarm_enable S1 Probe enable 0 0 1 D 15 14 R/W
S2_Alarm_enable S2 Probe enable 0 0 1 D 16 15 R/W
EEV_Position_percent Valve opening 0 0 100 A 1 0 R par. Po
SH_SH Superheat 0 -5(-9) 55(99) A 2 1 R
Sh_Suct_temp Suction temperature 0 -85(-121) 200(392) A 3 2 R par. tS
Sh_Evap_temp Evaporation temperature 0 -85(-121) 200(392) A 4 3 R
Sh_Evap_pres Evaporation pressure 0 -20(-290) 200(2900) A 5 4 R
S1_Value Probe S1 reading 0 -85(-290) 200(2900) A 6 5 R par. P1
S2_Value Probe S2 reading 0 -85(-121) 200(392) A 7 6 R par. P2
Positioning_mode_volt 0 to 10 V input 0 0 10 A 8 7 R
Firm_release Firmware version 0 0 800 A 9 8 R par. Fr
SH_Set Superheat set point 11 Low_Sh_
PID_Kp PID: proportional gain 15 0 800 A 11 10 R/W par. CP
Low_sh_threshold Low superheat: threshold 5 -5
Low_sh_Ti Low superheat: integral time 15 0 800 A 13 12 R/W par. C2
Lop_threshold LOP: threshold -50(-58) -85(-121) MOP_th-
Lop_Ti LOP: integral time 0 0 800 A 15 14 R/W par. C4
MOP_Threshold MOP: threshold 50 LOP_th-
(*) set to 1073 to reset the parameters to default values
MOP_Ti MOP: integral time 20 0 800 A 17 16 R/W par. C6
Low_Suct_alarm_threshold Low suction temp. alarm threshold -50(-58) -85(-121) 200(392) A 18 17 R/W par. C8
Mop_Inhibition_threshold MOP: disabling threshold 30 (86) -85(-121) 200(392) A 19 18 R/W
Par_S1_Alarm_threshold_
low
Par_S1_Alarm_threshold_
high
Tctrl_rev_set Reserved - -85(-121) 200(392) A 22 21 R/W
1=Start/stop control
2=Control backup
PressureS1: alarm MIN value -1 -85(-290) Par_S1_
PressureS1: alarm MAX value 9.3 Par_S1_
1 1 2 I 18 145 R/W
0 0 1 D 7 6 R all. E1
Threshold
(-9)
reshold
Alarm_th-
reshold_low
55 A 10 9 R/W Super heat =
SH set point A 12 11 R/W par. C1
reshold
200
(392)
Alarm_th-
reshold_high
200(2900) A 21 20 R/W
A 14 13 R/W par. C3
A 16 15 R/W par. C5
A 20 19 R/W
Superheat set
point
21
“EVD ice” +0300038EN - rel. 1.1 - 23.04.2018

ENG
t
t
t
t
R
P
S
A
Parameter Description Def. Min Max Type Carel Modbus® R/W Note
Pctrl_rev_set Reserved - -20(-290) 200(2900) A 23 22 R/W
SH_actual_set Reserved 0 -40(-72) 180(324) A 24 23 R
SH_Set_smooth_line Superheat Setpoint-Oset for smooth line 0 -55(-99) 55(99) A 25 24 R/W
S1_value_remote Reserved 0 -20(-290) 200(2900) A 26 25 R/W
8.9 Control states
The electronic valve controller can have six dierent control states,
each of which may correspond to a specic phase in the operation of
the refrigeration unit and a certain status of the driver-valve system. The
states are as follows:
• forced closing: initialisation of the valve position when switching the
instrument on;
• standby: no temperature control, unit OFF (at temp.);
• wait: opening of the valve before starting control, also called pre-
positioning, when powering the unit on;
• control: eective control of the electronic valve, unit ON;
• positioning: step-change in the valve position, corresponding to the
start of control when the cooling capacity of the controlled unit varies
(only EVD connected to a pCO);
• stop: of control with closing of the valve, corresponds to the end of
temperature control of the refrigeration unit, unit OFF (at temp.).
Forced closing
Forced closing is performed after the driver is powered on and corresponds
to the typical number of closing steps for CAREL E2V and E3V unipolar valves.
This is used to realign the valve to the physical position corresponding to
completely closed. The driver and the valve are then ready for control and
both aligned at 0 (zero). At power-on, rst a forced closing is performed,
and then the standby phase starts. The valve is also closed in the event of
a mains power failure if the Ultracap module is connected. In this case, the
“Forced valve closing not completed” parameter is set to 1. On restarting, if
the valve forced closing procedure is not completed successfully:
1. the Master programmable controller (pCO) will check the value of the
parameter, and if equal to 1 will decide the best strategy to adopt,
based on the application;
2. on restarting the driver positions the valve as explained in the paragraph
“Pre-positioning/start control”. The parameter is set to 0 (zero) by the
Master controller (e.g. pCO), or alternatively by pressing the PRG/
Set button on the keypad. Once the parameter has been set to 1,
the driver sets it back to 0 (zero) only if an emergency forced closing
procedure is completed successfully.
Note: lthe user can only select the resolution of the valve control
signal: 480 or 960 steps.
Par. Description Def. Min. Max. UoM
U3 Valve control steps: 1 / 2 = 480/ 960 steps 1
1 2 -
The driver calculates the valve opening based on the required capacity:
If required capacity is 100%:
Opening (%)= (Valve opening at start-up);
If required capacity is less than 100% (capacity control):
Opening (%)= (Valve opening at start-up) x (Current unit cooling
capacity), where the current unit cooling capacity is sent to the driver
via RS485 by the pCO controller. If the driver is stand-alone, this is always
equal to 100%.
Notes:
• this procedure is used to anticipate the movement and bring the valve
signicantly closer to the operating position in the phases immediately
after the unit is powered on;
• if there are problems with liquid return after the refrigeration unit starts
or in units that frequently switch on-o, the valve opening at start-up
must be decreased. If there are problems with low pressure after the
refrigeration unit starts, the valve opening must be increased.
Wait
When the calculated position has been reached, regardless of the time taken
(this varies according to the type of valve and the objective position), there
is a constant 5 second delay before the actual control phase starts. This is to
create a reasonable interval between standby, in which the variables have no
meaning, as there is no ow of refrigerant, and the eective control phase.
Control
The control request can be received by the closing of the digital input
or via network (RS485). The solenoid or the compressor are activated
when the valve, following the pre-positioning procedure, has reached
the calculated position. The following gure represents the sequence of
events for starting control of the refrigeration unit.
ON
OFF
ON
OFF
Tab. 8.b
Standby
Standby corresponds to a situation of rest in which no signals are received
to control the electronic valve: it is closed and manual positioning can be
activated. This status is normally set on the driver when the refrigeration
unit is shutdown manually (e.g. from the supervisor) or when reaching the
control set point. It can also occur when opening the digital input (which
involves closing the valve) or in the event of a probe alarm. In general, it can
be said that the electronic valve driver is in standby when the compressor
stops or the control solenoid valve closes.
Pre-positioning/start control
If during standby a control request is received, before starting control the
valve is moved to a precise initial position. Internally, the pre-positioning time
is set at 6 s and represents the time that the valve is held in a xed position.
By default the valve is opened 50 % when starting (from digital input), so as to
minimise the movement needed to reach the correct position.
Par. Description Def. Min. Max. UoM
U4 Valve opening at start-up 50
This parameter should be set based on the ratio between the rated
cooling capacity of the evaporator and the valve (e.g. rated evaporator
cooling capacity: 3kW, rated valve cooling capacity: 10kW, valve opening
= 3/10 = 33%).
“EVD ice” +0300038EN - rel. 1.1 - 23.04.2018
0 100 %
Key:
A Control request T1 Pre-positioning time
P Pre-positioning W Wait (wait)
S Standby t Time
R Control
Positioning (change cooling capacity)
This control status is only valid for controllers connected to the pCO
via RS485. If there is a change in unit cooling capacity of at least 10%,
sent from the pCO via RS485, the valve is positioned proportionally. In
practice, this involves repositioning starting from the current position in
22
ON
OFF
ON
OFF
T1 W
Fig. 8.o

ENG
t
t
t
t
R
NP
C
A
proportion to how much the cooling capacity of the unit has increased or
decreased in percentage terms. When the calculated position has been
reached, regardless of the time taken, there is a constant 5 second delay
before the actual control phase starts.
Note: if information is not available on the variation in unit cooling
capacity, this will always be considered as operating at 100% and therefore
the procedure will never be used. In this case, the PID control must be
more reactive (see the chapter on Control) so as to react promptly to
variations in load that are not communicated to the driver.
ON
OFF
ON
OFF
ON
OFF
ON
OFF
T3 W
Fig. 8.p
Key:
Control request R Control
A
Change in capacity T3 Repositioning time
C
Repositioning t Time
NP
Wait
W
• recover physical valve position: recover physical valve steps when fully
opened or closed;
• unblock valve: forced valve movement if the driver considers it to be
blocked.
Manual positioning
Manual positioning can be activated at any time during the standby or
control phase. Manual positioning, once enabled, is used to freely set
the position of the valve using the corresponding parameter. Control is
placed on hold, all the system and control alarms are enabled, however
neither control nor the protectors can be activated. Manual positioning
thus has priority over any driver state/protector.
Par. Description Def. Min. Max. UoM
U1 Enable manual valve posit. 0/1=yes/no 0
U2 Manual valve position 0
Notes:
0 1 0 999
step
1. the manual positioning status is NOT saved when restarting after a
power failure.
2. in for any reason the valve needs to be kept stationary after a power
failure, proceed as follows:
• remove the valve stator;
• set the PID proportional gain =0. The valve will remain stopped at
the initial opening position, set by corresponding parameter
Retrieve physical valve position
This procedure is necessary as the stepper motor intrinsically tends to lose
steps during movement. Given that the control phase may last continuously
for several hours, it is probable that from a certain time on the estimated
position sent by the valve driver does not correspond exactly to the physical
position of the movable element. This means that when the driver reaches the
estimated fully closed or fully open position, the valve may physically not be in
that position. The “Synchronisation” procedure allows the driver to perform a
certain number of steps in the suitable direction to realign the valve.
Stop/end control
The stop procedure involves closing the valve from the current position
until reaching 0 steps, plus a further number of steps so as to guarantee
complete closing. Following the stop phase, the valve returns to standby.
ON
A
OFF
ON
S
OFF
ON
ST
OFF
ON
R
OFF
T4
Fig. 8.q
Key:
Control request R Control
A
Standby T4 Stop position time
S
Stop t Time
ST
8.10 Special control states
As well as normal control status, the driver can have three special states
related to specic functions:
• manual positioning: this is used to interrupt control so as to move the
valve, setting the desired position;
t
t
t
t
Note: realignment is in intrinsic part of the forced closing procedure and
is activated whenever the driver is stopped/started and in the standby phase.
Unblock valve
This procedure is only valid when the driver is performing superheat
control. Unblock valve is an automatic safety procedure that attempts
to unblock a valve that is supposedly blocked based on the control
variables (superheat, valve position). The unblock procedure may or may
not succeed depending on the extent of the mechanical problem with
the valve. If for 10 minutes the conditions are such as to assume the valve
is blocked, the procedure is run a maximum of 5 times. The symptoms of
a blocked valve do not necessarily mean a mechanical blockage. They
may also represent other situations:
• mechanical blockage of the solenoid valve upstream of the electronic
valve (if installed);
• electrical damage to the solenoid valve upstream of the electronic valve;
• blockage of the lter upstream of the electronic valve (if installed);
• electrical problems with the electronic valve motor;
• electrical problems in the driver-valve connection cables;
• incorrect driver-valve electrical connection;
• electronic problems with the valve control driver;
• secondary uid evaporator fan/pump malfunction;
• insucient refrigerant in the refrigerant circuit;
• refrigerant leaks;
• lack of subcooling in the condenser;
• electrical/mechanical problems with the compressor;
• processing residues or moisture in the refrigerant circuit.
Note: the valve unblock procedure is nonetheless performed in each
of these cases, given that it does not cause mechanical or control problems.
Therefore, also check these possible causes before replacing the valve.
23
“EVD ice” +0300038EN - rel. 1.1 - 23.04.2018

ENG
9. ALARMS
9.1 Types of alarms
There are two types of alarms:
• system: EEPROM, probe and communication;
• control: low superheat, LOP, MOP, low suction temperature.
The activation of the alarms depends on the setting of the threshold and
activation delay parameters. The EEPROM unit parameters and operating
parameters alarm always shuts down the controller and cannot be reset.
All the alarms are reset automatically, once the causes are no longer
present, except for the “Emergency closing not completed” alarm, which
requires manual reset.
9.2 Probe alarms
The probe alarms are part of the system alarms. When the value measured
by one of the probes is outside of the range of measurement, an alarm is
activated. The alarm limits correspond to the range of measurement. In
the event of a probe alarm, the driver closes the valve, regardless of digital
input status, until the error is no longer present.
Example: the display shows probe alarms A1 and A2 in sequence. The
superheat value has exceeded the maximum limit allowed, and this is
indicated by the two top segments.
GAS Type
Mode
Super Heat
GAS Type
Mode
Super Heat
Fig. 9.a
GAS Type
Mode
Super Heat
Minimum and maximum superheat limits
If a probe alarm occurs, it may be due to the superheat value exceeding
the allowed display range -5…55 K (-9 to 99°F). The display therefore
shows the probe alarm code (A1/A2) and:
1. if the superheat value is less than -5K, the display shows the two bottom
segments;
2. if the superheat value is higher than 55K, the display shows the two top
segments.
GAS Type
Mode
Super Heat
1 2
GAS Type
Mode
Super Heat
Fig. 9.b
9.3 Control alarms
These are alarms that are only activated during control.
Low suction temperature alarm
The low suction temperature alarm is not linked to any protection function.
It features a threshold and a xed delay (300 seconds), and is useful in the
event of probe or valve malfunctions to protect the compressor using
the relay to control the solenoid valve or to simply signal a possible risk.
In fact, incorrect measurement of the evaporation pressure or incorrect
conguration of the type of refrigerant may mean the superheat
calculated is much higher than the actual value, causing an incorrect and
excessive opening of the valve. A low suction temperature measurement
may in this case indicate probable ooding of the compressor, with
corresponding alarm signal. The alarm is reset automatically, with a xed
dierential of 3°C above the activation threshold.
Par. Description Def. Min. Max. UoM
C8 Low suction temperature
alarm threshold
-50
(-58)
-85
(-121)
200
(392)
°C(°F)
9.4 Valve emergency closing procedure
The following description only applies if EVD ice is connected to the
Ultracap module. In the event of a power failure, EVD ice can provide
emergency closing of the valve, thus preventing any refrigerant from
owing to the compressor. In this situation, the driver generates two
alarms: E8 and E5. If the procedure concludes successfully (the valve
closes completely), alarm E8 is cleared, however alarm E5 continues until
the Ultracap module is able to power on the driver.
• E8: failed emergency closing (incomplete closing alarm). Active
during the emergency closing stage and until the valve closes
completely, after which alarm E8 is cleared. If the closing procedure
is not completed (e.g. because the Ultracap module does not have
enough charge), when next restarting the controller, the user must
manually reset the alarm (pressing the PRG/SET button or setting the
corresponding parameter to zero via serial connection);
• E5: emergency closing (emergency force closing alarm). This depends
on a controller power failure and indicates that the emergency
procedure is in progress.
Notes:
• if the voltage measured falls below a certain threshold, the controller,
connected to the Ultracap module, can start the valve emergency
closing procedure;
• during the valve emergency closing procedure, the display is switched
o to save energy (therefore the alarms may not be shown on the
display, or only shown for a brief instant);
• if power returns during the closing procedure, alarms E8 and E5 are
reset and closing is completed in any case.
9.5 Network alarm
The digital input conguration parameter can only be set to control
backup from the supervisor. If there is a communication error between
the pCO controller and driver, the digital input status determines whether
to continue control (input closed = the valve remains in the current
position) or stop (input open).
Protector alarms
The alarms corresponding to the LowSH, LOP and MOP protectors are only
activated during control when the corresponding activation threshold is
exceeded, and only when the delay time dened by the corresponding
parameter has elapsed. If a protector is not enabled (integral time= 0 s),
no alarm will be signalled. If before the expiry of the delay, the protector
control variable returns back inside the corresponding threshold, no
alarm will be signalled.
Note: this is a likely event, as during the delay, the protection
function will have an eect.
“EVD ice” +0300038EN - rel. 1.1 - 23.04.2018
24

ENG
9.6 Alarm table
Alarm Red LED Cause of the alarm Reset Eects on control Checks / Solutions
A1 ashes Probe S1 faulty or set alarm range exceeded automatic Valve closed Check the probe connections.
A2 ashes Probe S2 faulty or set alarm range exceeded automatic Valve closed Check the probe connections.
E1 ashes MOP protection activated automatic Protection action already in progress Check parameter “MOP protection: threshold”
E2 ashes LOP protection activated automatic Protection action already in progress Check parameter “LOP protection: threshold”
E3 ashes LowSH protection activated automatic Protection action already in progress Check parameter “LowSH protection: threshold”
E4 ashes Low suction temperature automatic No eect Check the threshold parameter.
E5 ashes Emergency closing automatic Valve closed
E6 ashes Network error automatic Control based on DI Check the wiring and that the pCO is on and
E7 ashes Ultracap module powered at low voltage or low
E8 ashes Emergency closing not completed Manual Valve closed Press PRG/Set or set the corresponding supervisor
EE on
steady
charge
EEPROM operating and/or unit parameters
damaged
automatic No eect Check the wiring, the power supply and that the
Replace the
driver / Contact service
Total shutdown Replace the driver/Contact service
10. TROUBLESHOOTING
The following table lists a series of possible malfunctions that may occur when starting and operating the driver and the electronic valve. These cover the
most common problems and are provided with the aim of oering an initial response for resolving the problem.
PROBLEM CAUSE SOLUTION
The superheat value measured is incorrect
Liquid returns to the compressor during control
Liquid returns to the
compressor only after defrosting (for multiplexed
cabinets only)
Liquid returns to the compressor only when starting the controller (after
being OFF)
The superheat value
swings around the set
point with an amplitude
greater than 4°C
In the start-up phase with
high evaporator temperatures, the evaporation
pressure is high
The probe does not measure correct values Check that the pressure and the temperature measured are correct and that the probe position
The type of refrigerant set is incorrect Check and correct the type of refrigerant parameter.
The superheat set point is too low Increase the superheat set point. Initially set it to 11 K and check that there is no longer return of
Low superheat protection ineective If the superheat remains low for too long with the valve that is slow to close, increase the low su-
Stator broken Enable the manual positioning and check the opening and closure of the valve.
Valve stuck open Check if the superheating is always low (<2 °C) with the valve position permanently at 0 steps. If
The “valve opening at start-up” parameter is too
high on many cabinets in which the control set
point is often reached (for multiplexed cabinets
only)
The superheat temperature measured by the driver after defrosting and before reaching operating
conditions is very low for a few minutes
The superheat temperature measured by the
driver does not reach low values, but there is still
return of liquid to the compressor rack
Many cabinets defrosting at the same time Stagger the start defrost times. If this is not possible, if the conditions in the previous two points
The valve is signicantly oversized Replace the valve with a smaller equivalent.
The “valve opening at start-up” parameter is set
too high
The condensing pressure swings Check the controller condenser settings, giving the parameters “blander” values (e.g. increase the
The superheat swings even with the valve set in
manual control (in the position corresponding to
the average of the working values)
The superheat does NOT swing with the valve set
in manual control (in the position corresponding
to the average of the working values)
The superheat set point is too low Increase the superheat set point and check that the swings are reduced or disappear. Initially set
MOP protection disabled or ineective Activate the MOP protection by setting the threshold to the required saturated evaporation tem-
Refrigerant charge excessive for the system or
extreme transitory conditions at start-up (for cabinets only).
is correct. Check the selection of pressure probe. Check the correct probe electrical connections.
liquid. Then gradually reduce the set point, always making sure there is no return of liquid.
perheat threshold and/or decrease the low superheat integration time. Initially set the threshold
3 °C below the superheat set point, with an integration time of 3-4 seconds. Then gradually lower
the low superheat threshold and increase the low superheat integration time, checking that there is no return of liquid in any operating conditions.
so, set the valve to manual control and close it completely. If the superheat is always low, check
the electrical connections and/or replace the valve.
Decrease the value of the “Valve opening at start-up” parameter on all the utilities, making sure
that there are no repercussions on the control temperature.
Check that the LowSH threshold is greater than the superheat value measured and that the corresponding protection is activated (integration time >0 s). If necessary, decrease the value of the
integration time.
Set more reactive parameters to bring forward the closing of the valve: increase the proportional
factor to 30, increase the integration time to 250 s.
are not present, increase the superheat set point and the LowSH thresholds by at least 2 °C on
the cabinets involved.
Check the calculation in reference to the ratio between the rated cooling capacity of the evaporator and the capacity of the valve; if necessary, lower the value.
proportional band or increase the integration time). Note: the required stability involves a variation within +/- 0.5 bars. If this is not eective or the settings cannot be changed, adopt electronic
valve control parameters for perturbed systems
Check for the causes of the swings (e.g. low refrigerant charge) and resolve where possible.
As a rst approach , decrease (by 30 to 50 %) the proportional factor. Subsequently try increasing
the integration time by the same percentage. In any case, adopt parameter settings recommended for stable systems.
13 °C, then gradually reduce the set point, making sure the system does not start swinging again
and that the unit temperature reaches the control set point.
perature (high evaporation temperature limit for the compressors) and setting the MOP integration time to a value above 0 (recommended 4 seconds). To make the protection more reactive,
decrease the MOP integration time.
Apply a “soft start” technique, activating the utilities one at a time or in small groups. If this is not
possible, decrease the values of the MOP thresholds on all the utilities.
operating
minimum recharge time has elapsed
variable to 0
Tab. 9.a
25
“EVD ice” +0300038EN - rel. 1.1 - 23.04.2018

ENG
PROBLEM CAUSE SOLUTION
In the start-up phase the
low pressure protection
is activated (only for selfcontained units)
The unit switches o due
to low pressure during
control (only for self-contained units)
The cabinet does not
reach the set temperature, despite the value
being opened to the maximum (for multiplexed
cabinets only)
The cabinet does not
reach the set temperature, and the position of the
valve is always 0 (for multiplexed cabinets only)
The “Valve opening at start-up” parameter is set
too low
The driver in RS485 network does not start control
and the valve remains closed
The driver in stand-alone conguration does not
start control and the valve remains closed
LOP protection disabled Set a LOP integration time greater than 0 s.
LOP protection ineective Make sure that the LOP protection threshold is at the required saturated evaporation temperature
Solenoid blocked Check that the solenoid opens correctly, check the electrical connections.
Insucient refrigerant Check that there are no bubbles in the sight glass upstream of the expansion valve. Check that
The valve is connected incorrectly (rotates in reverse) and is open
Stator broken or connected incorrectly Disconnect the stator from the valve and the cable and measure the resistance of the windings
Valve stuck closed Use manual control after start-up to completely open the valve. If the superheat remains high,
LOP protection disabled Set a LOP integration time greater than 0 s.
LOP protection ineective Make sure that the LOP protection threshold is at the required saturated evaporation temperature
Solenoid blocked Check that the solenoid opens correctly, check the electrical connections and the operation of
Insucient refrigerant Check that there are no bubbles of air in the liquid indicator upstream of the expansion valve.
The valve is signicantly undersized Replace the valve with a larger equivalent.
Stator broken Enable the manual positioning and check the opening and closure of the valve.
Valve stuck closed Use manual control after start-up to completely open the valve. If the superheat remains high,
Solenoid blocked Check that the solenoid opens correctly, check the electrical connections and the operation of the relay.
Insucient refrigerant Check that there are no bubbles of air in the liquid indicator upstream of the expansion valve.
The valve is signicantly undersized Replace the valve with a larger equivalent.
Stator broken Enable the manual positioning and check the opening and closure of the valve.
Valve stuck closed Use manual control after start-up to completely open the valve. If the superheat remains high,
The driver in RS485 network does not start control
and the valve remains closed
The driver in stand-alone conguration does not
start control and the valve remains closed
Check the calculation in reference to the ratio between the rated cooling capacity of the evaporator and the capacity of the valve; if necessary increase the value.
Check the serial connection. Check that the pCO application connected to the driver (where featured) correctly manages the driver start signal. Check that the driver is NOT in stand-alone mode.
Check the connection of the digital input. Check that when the control signal is sent that the
input is closed correctly. Check that the driver is in stand-alone mode.
(between the rated evaporation temperature of the unit and the corresponding temperature at
the calibration of the low pressure switch) and decrease the value of the LOP integration time.
the subcooling is suitable (greater than 5 °C); otherwise charge the circuit.
Check the movement of the valve by placing it in manual control and closing or opening it com-
pletely. One complete opening must bring a decrease in the superheat and vice-versa. If the
movement is reversed, check the electrical connections.
using an ordinary tester. The resistance of both should be around 36 ohms. Otherwise replace
the stator. Finally, check the electrical connections of the cable to the driver (see paragraph 5.1).
check the electrical connections and/or replace the valve.
(between the rated evaporation temperature of the unit and the corresponding temperature at
the calibration of the low pressure switch) and decrease the value of the LOP integration time.
the control relay.
Check that the subcooling is suitable (greater than 5 °C); otherwise charge the circuit.
replace the valve body.
Check that the subcooling is suitable (greater than 5 °C); otherwise charge the circuit.
replace the valve body.
Check the network connections. Check that the pCO application connected to the driver (where fe-
atured) correctly manages the driver start signal. Check that the driver is NOT in stand-alone mode.
Check the connection of the digital input. Check that when the control signal is sent that the
input is closed correctly. Check that the driver is in stand-alone mode.
Tab. 10.a
11. TECHNICAL SPECIFICATIONS
Power supply 115…230 Vac (+10/-15%) 50/60 Hz
Power input max (W) 15
Emergency power supply 13 Vdc +/-10% (
Driver Unipolar valve
Valve connection 6-wire cable AWG 18/22 type, Lmax=1m
Digital input connection digital input 230 V optoisolated. Closing current: 10 mA
Probe
Lmax=10m for residential/industrial environments, 2m for domestic environments
S1 ratiometric pressure probe (0…5 V):
Resolution 0,1 % fs
Measurement error: 2% fs max; 1% typical
S2 low temperature NTC:
10kΩ a 25°C, -50T90°C
RS485 serial connection Modbus, Lmax=500m, shielded cable, earth connection in both side of shielded-cable
Assembly with screw
Dimensions LxHxW= 93 x 230 x 41 mm
Operating conditions -30T40°C (don’t use EVDIS* lower than -20°C); <90% U.R. non-condensing
Storage conditions -35T60°C (don’t store EVDIS* lower than -30°C), humidity 90% U.R. non-condensing
Index of protection IP65/IP67
Measurement error: 1°C in the range -50T50°C; 3°C in the range +50T90°C
Environmental pollution 2
Temperature for glow wire test
850°C
Immunity against voltage surges Category II
Class of insulation II
Software class and structure A
Conformity
Electrical safety: EN 60730-1, UL 60730-1, UL 60730-2-9
Electromagnetic compatibility: EN 61000-6-1, EN 61000-6-2, EN 61000-6-3, EN 61000-6-4
EN61000-3-2, EN55014-1, EN61000-3-3
If it is installed the optional Ultracap module for EVD ice, for EVDM011R1*/EVDM011R2*)
Tab. 11.a
“EVD ice” +0300038EN - rel. 1.1 - 23.04.2018
26


CAREL INDUSTRIES HeadQuarters
Via dell’Industria, 11 - 35020 Brugine - Padova (Italy)
Tel. (+39) 049.9716611 - Fax (+39) 049.9716600
e-mail: carel@carel.com - www.carel.com
Agenzia / Agency:
“EVD ice” +0300038EN - rel. 1.1 - 23.04.2018
 Loading...
Loading...