

Campbell Scientific TX320 User Manual

TX320 Transmitter
Revision: 11/13
Copyright © 2000-2013
Campbell Scientific, Inc.

Warranty
“PRODUCTS MANUFACTURED BY CAMPBELL SCIENTIFIC, INC. are
warranted by Campbell Scientific, Inc. (“Campbell”) to be free from defects in
materials and workmanship under normal use and service for twelve (12)
months from date of shipment unless otherwise specified in the corresponding
Campbell pricelist or product manual. Products not manufactured, but that are
re-sold by Campbell, are warranted only to the limits extended by the original
manufacturer. Batteries, fine-wire thermocouples, desiccant, and other
consumables have no warranty. Campbell's obligation under this warranty is
limited to repairing or replacing (at Campbell's option) defective products,
which shall be the sole and exclusive remedy under this warranty. The
customer shall assume all costs of removing, reinstalling, and shipping
defective products to Campbell. Campbell will return such products by surface
carrier prepaid within the continental United States of America. To all other
locations, Campbell will return such products best way CIP (Port of Entry)
INCOTERM® 2010, prepaid. This warranty shall not apply to any products
which have been subjected to modification, misuse, neglect, improper service,
accidents of nature, or shipping damage. This warranty is in lieu of all other
warranties, expressed or implied. The warranty for installation services
performed by Campbell such as programming to customer specifications,
electrical connections to products manufactured by Campbell, and product
specific training, is part of Campbell’s product warranty. CAMPBELL
EXPRESSLY DISCLAIMS AND EXCLUDES ANY IMPLIED
WARRANTIES OF MERCHANTABILITY OR FITNESS FOR A
PARTICULAR PURPOSE. Campbell is not liable for any special, indirect,
incidental, and/or consequential damages.”

Assistance
Products may not be returned without prior authorization. The following
contact information is for US and international customers residing in countries
served by Campbell Scientific, Inc. directly. Affiliate companies handle
repairs for customers within their territories. Please visit
www.campbellsci.com to determine which Campbell Scientific company serves
your country.
To obtain a Returned Materials Authorization (RMA), contact CAMPBELL
SCIENTIFIC, INC., phone (435) 227-9000. After an application engineer
determines the nature of the problem, an RMA number will be issued. Please
write this number clearly on the outside of the shipping container. Campbell
Scientific's shipping address is:
CAMPBELL SCIENTIFIC, INC.
RMA#_____
815 West 1800 North
Logan, Utah 84321-1784
For all returns, the customer must fill out a "Statement of Product Cleanliness
and Decontamination" form and comply with the requirements specified in it.
The form is available from our web site at www.campbellsci.com/repair. A
completed form must be either emailed to repair@campbellsci.com or faxed to
(435) 227-9106. Campbell Scientific is unable to process any returns until we
receive this form. If the form is not received within three days of product
receipt or is incomplete, the product will be returned to the customer at the
customer's expense. Campbell Scientific reserves the right to refuse service on
products that were exposed to contaminants that may cause health or safety
concerns for our employees.
Table of Contents
PDF viewers: These page numbers refer to the printed version of this document. Use the
PDF reader bookmarks tab for links to specific sections.
1. Introduction.................................................................1
2. Cautionary Statements...............................................1
3. Initial Inspection .........................................................1
3.1 Ships With List.....................................................................................1
4. Quick Start................................................................... 2
4.1 Step 1 – Configure the TX320 .............................................................2
4.1.1 Accessing DevConfig....................................................................2
4.1.2 Setting Editor | Configuration .......................................................3
4.1.3 Setting Editor | GPS ......................................................................5
4.2 Step 2 – Program the Datalogger .........................................................5
4.3 Step 3 – Install the Data Collection Platform (DCP)............................6
5. Overview....................................................................11
5.1 GOES System ....................................................................................12
5.1.1 Orbit............................................................................................12
5.1.2 NESDIS and Transmit−Windows...............................................12
5.1.3 Data Retrieval .............................................................................13
6. Specifications ...........................................................13
7. Installation.................................................................15
7.1 Field Site Requirements .....................................................................15
7.2 TX320 Functions................................................................................15
7.2.1 LED Function..............................................................................15
7.2.2 Communication Ports..................................................................15
7.2.2.1 CS I/O Port.......................................................................15
7.2.2.2 RS-232 Port......................................................................16
7.2.2.3 USB Port ..........................................................................16
7.2.3 RF Connectors ............................................................................16
7.2.3.1 RF Transmission Connector.............................................16
7.2.3.2 GPS Connector.................................................................16
7.2.4 Power Connector.........................................................................16
7.3 Transmission Antenna........................................................................17
7.4 GPS Antenna......................................................................................17
7.4.1 How the GPS Signal is Acquired and Used................................17
7.4.2 GPS Antenna Location................................................................18
7.5 CRBasic Programming.......................................................................18
7.5.1 GoesData() ..................................................................................18
i

Table of Contents
Result Code ..................................................................... 18
7.5.1.1
7.5.1.2 Data Table ....................................................................... 19
7.5.1.3 Table Option.................................................................... 19
7.5.1.4 Buffer Control ................................................................. 19
7.5.1.5 Data Format..................................................................... 19
7.5.1.6 GOESData() Example ..................................................... 20
7.5.2 GoesStatus() ............................................................................... 21
7.5.2.1 GoesStatus Read Time..................................................... 21
7.5.2.2 GoesStatus Read Status ................................................... 22
7.5.2.3 GoesStatus Read Last Message Status............................. 22
7.5.2.4 GoesStatus Read Error Register ...................................... 23
7.5.3 GoesGPS .................................................................................... 24
7.5.4 GoesSetup .................................................................................. 24
7.5.4.1 Result Code ..................................................................... 25
7.5.4.2 Platform ID...................................................................... 25
7.5.4.3 Window ........................................................................... 25
7.5.4.4 Timed Channel ................................................................ 25
7.5.4.5 Timed Baud Rate............................................................. 25
7.5.4.6 Random Channel ............................................................. 25
7.5.4.7 Random Baud Rate.......................................................... 25
7.5.4.8 Timed Interval ................................................................. 25
7.5.4.9 Timed Offset.................................................................... 26
7.5.4.10 Random Offset................................................................. 26
7.5.4.11 GOESSetup() Example.................................................... 26
7.6 Edlog Programming .......................................................................... 26
7.6.1 Deciding How Much Data will be Transmitted and When ........ 27
7.6.2 Deciding What Data Format to Use ........................................... 27
7.6.3 Managing Data, Writing More Data than Will Be Transmitted . 27
7.6.4 Sending Data to the Transmitter (P126)..................................... 28
7.6.4.1 Buffer Control ................................................................. 28
7.6.4.2 Data Format..................................................................... 28
7.6.4.3 P126 Result Codes........................................................... 29
7.6.5 Read Status and Diagnostic Information from the TX320......... 29
7.6.5.1 P127, Command 0: Read Time....................................... 30
7.6.5.2 P127, Command 1: Read Status ..................................... 30
7.6.5.3 P127, Command 2: Read Last Message Status............... 31
7.6.5.4 P127, Command 3: Transmit Random Message............. 32
7.6.5.5 P127, Command 4: Read TX320 Error Registers........... 32
7.6.5.6 P127, Command 5: Clear TX320 Error Registers .......... 33
7.6.5.7 P127, Command 6: Return TX320 to Online Mode....... 33
7.6.6 Edlog Programming Examples................................................... 33
8. Troubleshooting/Diagnostics ..................................34
8.1 Diagnostics Button ............................................................................ 34
8.2 Result Codes...................................................................................... 34
8.3 Error Codes........................................................................................ 35
8.4 Using Device Configuration Utility for Troubleshooting/ Testing.... 38
8.4.1 Setting Editor | GPS ................................................................... 38
8.4.2 Setting Editor | Status................................................................. 39
8.4.3 Terminal ..................................................................................... 40
ii

Table of Contents
Appendices
Information on Eligibility and Getting Onto the
A.
GOES System ....................................................... A-1
A.1 Eligibility ........................................................................................ A-1
A.2 Acquiring Permission...................................................................... A-1
B. Data Conversion Computer Program (written
in BASIC) ............................................................... B-1
C. Antenna Orientation Computer Program
(written in BASIC) ................................................. C-1
D. GOES DCS Transmit Frequencies......................... D-1
E. High Resolution 18-Bit Binary Format.................. E-1
F. Extended ASCII Command Set .............................. F-1
F.1 Command Interface.......................................................................... F-1
F.1.1 Port Interfaces ........................................................................... F-1
F.1.1.1 RS-232 Details ...............................................................F-1
F.1.1.2 Command Protocol......................................................... F-1
F.1.1.3 Command Access Level................................................. F-2
F.2 General Configuration Commands................................................... F-2
F.2.1 Clock Read/Set.......................................................................... F-2
F.2.2 Replacement Character Read/Set.............................................. F-3
F.2.3 Save Configuration ................................................................... F-3
F.2.4 Restore Configuration ............................................................... F-3
F.2.5 Restore Default Configuration .................................................. F-3
F.2.6 Enable Transmissions ............................................................... F-4
F.2.7 Disable Transmissions ..............................................................F-4
F.2.8 Read Configuration ................................................................... F-4
F.2.9 Enable Technician Command Mode......................................... F-5
F.2.10 Enable User Command Mode ................................................... F-5
F.2.11 Set GPS Fix Interval ................................................................. F-5
F.3 GOES Transmission Configuration Commands .............................. F-5
F.3.1 Set GOES DCP Platform ID ..................................................... F-6
F.3.2 Set Self-Timed Transmission Channel Number........................ F-6
F.3.3 Set Self-Timed Transmission Bit Rate...................................... F-6
F.3.4 Set Self-Timed Transmission Interval....................................... F-6
F.3.5 Set Self-Timed transmission First Transmission Time ............. F-7
F.3.6 Set Self-Timed Transmission Transmit Window Length.......... F-7
F.3.7 Enable or Disable Self-Timed Transmission Message
Centering ............................................................................... F-7
F.3.8 Enable or Disable Self-Timed Buffer Empty Message............. F-7
F.3.9 Set Self-timed Transmission Preamble Length......................... F-8
F.3.10 Set Self-Timed Transmission Interleaver Mode ....................... F-8
F.3.11 Set Self-Timed Transmission Data Format............................... F-8
iii

Table of Contents
F.3.12 Set Random Transmission Channel Number.............................F-8
F.3.13 Set Random Transmission Bit Rate...........................................F-9
F.3.14 Set Random Transmission Interval ...........................................F-9
F.3.15 Set Random Transmission Randomizing Percentage................F-9
F.3.16 Set Random Transmission Repeat Count..................................F-9
F.3.17 Enable or Disable Random Transmission Message
Counter ................................................................................F-10
F.4 Data Buffer Loading Commands....................................................F-10
F.4.1 Load Self-Timed Transmission Buffer....................................F-10
F.4.2 Read Number of Bytes in the Self-Timed Transmission
Buffer................................................................................... F-11
F.4.3 Read the Maximum Self-Timed Message Length................... F-11
F.4.4 Clear Self-Timed Transmission Buffer ...................................F-11
F.4.5 Load Random Transmission Buffer ........................................F-11
F.4.6 Read Length of the Message in the Random Transmission
Buffer................................................................................... F-12
F.4.7 Read the Maximum Random Message Length........................F-12
F.4.8 Clear Random Transmission Buffer........................................F-12
F.5 Status and Other Commands ..........................................................F-12
F.5.1 Read Version Information ....................................................... F-13
F.5.2 Read Transmission Status .......................................................F-13
F.5.3 Read Last Transmission Status................................................F-13
F.5.4 Read GPS Status......................................................................F-14
F.5.5 Read GPS Position ..................................................................F-15
F.5.6 Read Audit Log .......................................................................F-15
F.5.7 Read Forward Power............................................................... F-15
F.5.8 Read Reflected Power .............................................................F-16
F.5.9 Read Power Supply .................................................................F-16
F.5.10 Read TCXO Temperature .......................................................F-16
F.5.11 Read Measured Frequency...................................................... F-16
Figures
Tables
4-1. Ports used for computer connection .................................................... 2
4-2. Settings Editor | Configuration in Device Configuration Utility ......... 4
4-3. Yagi antenna........................................................................................ 6
4-4. Alignment Tab in Device Configuration Utility.................................. 7
4-5. Exploded view of the GPS antenna mounted to a crossarm via the
CM220. ............................................................................................ 8
4-6. GPS antenna mounted to a crossarm via the CM220 .......................... 8
4-7. Antenna connectors ............................................................................. 9
4-8. TX320 connectors ............................................................................. 10
4-9. DCP enclosure................................................................................... 11
5-1. Major components of the GOES/DCP system (GPS antenna and solar
panel not shown)............................................................................ 13
8-1. Settings Editor | Status in Device Configuration Utility.................... 38
8-2. Settings Editor | GPS in Device Configuration Utility ...................... 39
7-1. GoesStatus Command 0: Read Time................................................ 22
7-2. GoesStatus Command 1: Read Status............................................... 22
7-3. GoesStatus Command 2: Read Last Message Status........................ 23
7-4. GoesStatus Command 4: Read TX320 Error Registers.................... 23
7-5. P127 Result Codes............................................................................. 30
7-6. P127 Command 0: Read Time.......................................................... 30
iv
Table of Contents
7-7. P127 Command 1: Read Status.........................................................31
7-8. P127 Command 2: Read Last Message Status ..................................31
7-9. P127 Command 3: Initiate Random Transmission............................32
7-10. P127 Command 4: Read TX320 Error Registers ..............................32
7-11. P127 Command 5: Clear Error Registers..........................................33
7-12. P127 Command 6: Force Online Mode.............................................33
8-1. Result Codes Indicating Communication Problems...........................35
8-2. GoesSetup and GoesData Runtime Result Codes ..............................35
8-3. Error Codes ........................................................................................36
v

Table of Contents
vi
TX320 Transmitter
1. Introduction
The TX320 is a high data rate transmitter that supports one-way
communication, via satellite, from a Campbell Scientific datalogger to a
ground receiving station. Satellite telemetry offers a convenient
telecommunication alternative for field stations where phone lines or RF
systems are impractical.
Before installing the TX320, please study
• Section 2, Cautionary Statements
• Section 3, Initial Inspection
• Section 4, Quick Start
Additional information is provided in the following sections.
2. Cautionary Statements
• Although the TX320 is rugged, it should be handled as a precision
scientific instrument.
• A proper antenna connection is required before transmission occurs.
Failure to use a properly matched antenna cable and antenna may cause
permanent damage to the RF amplifiers.
3. Initial Inspection
• Upon receipt of the TX320, inspect the packaging and contents for
damage. File damage claims with the shipping company.
• Check the ships with list to ensure all components are received. Ships
with list is provided in Section 3.1, Ships With List.
3.1 Ships With List
• (1) 17648 USB Cable
• (1) SC12 Serial Cable
• (1) 18133 Power Cable (includes one 18889 7.5 A Fast-Blow Fuse)
• (4) 505 #6-32 x .375 Pan Phillips Screws
• (4) Grommets
1

TX320 Transmitter
4. Quick Start . Quick Start
4.1 Step 1 – Configure the TX320 4.1 Step 1 – Configure the TX320
Use our Device Configuration Utility (DevConfig) to enter the required
Use our Device Configuration Utility (DevConfig) to enter the required
National Environmental Satellite Data and Information Service (NESDIS)
National Environmental Satellite Data and Information Service (NESDIS)
information that is unique to each Data Collection Platform (DCP). DevConfig
information that is unique to each Data Collection Platform (DCP). DevConfig
must be version 2.02 or higher. The TX320 has non-volatile memory to store
must be version 2.02 or higher. The TX320 has non-volatile memory to store
the setup information.
the setup information.
NOTE
Before February 2012 the TX320 was configured using Before February 2012 the TX320 was configured using
SatCommand instead of DevConfig. DevConfig is more
intuitive, included with our datalogger support software, and
available at no charge from our website.
4.1.1 Accessing DevConfig
The following are the steps required for accessing DevConfig:
Connect the TX320 to the PC. A standard 9-pin serial cable is used to
connect the TX320's RS-232 port to the PC’s RS-232 port. Alternatively,
the transmitter can be connected to the PC’s USB port via the 17648 USB
cable (see FIGURE 4-1).
2
RS-232 Port:
Use to connect to a
computer’s 9-pin
serial port
FIGURE 4-1. Ports used for computer connection
Connect the TX320 to a +12 Vdc power source.
In order to obtain GPS coordinates (used for aiming the satellite antenna),
the GPS antenna will also need to be connected to the transmitter.
Click on TX320/TX312 for the device type in DevConfig.
Select the port matching the COM or USB port on the PC in which the
transmitter is connected.
Click on the Connect button on the bottom left of the DevConfig screen.
USB Port:
Use to connect to a
computer’s USB
port

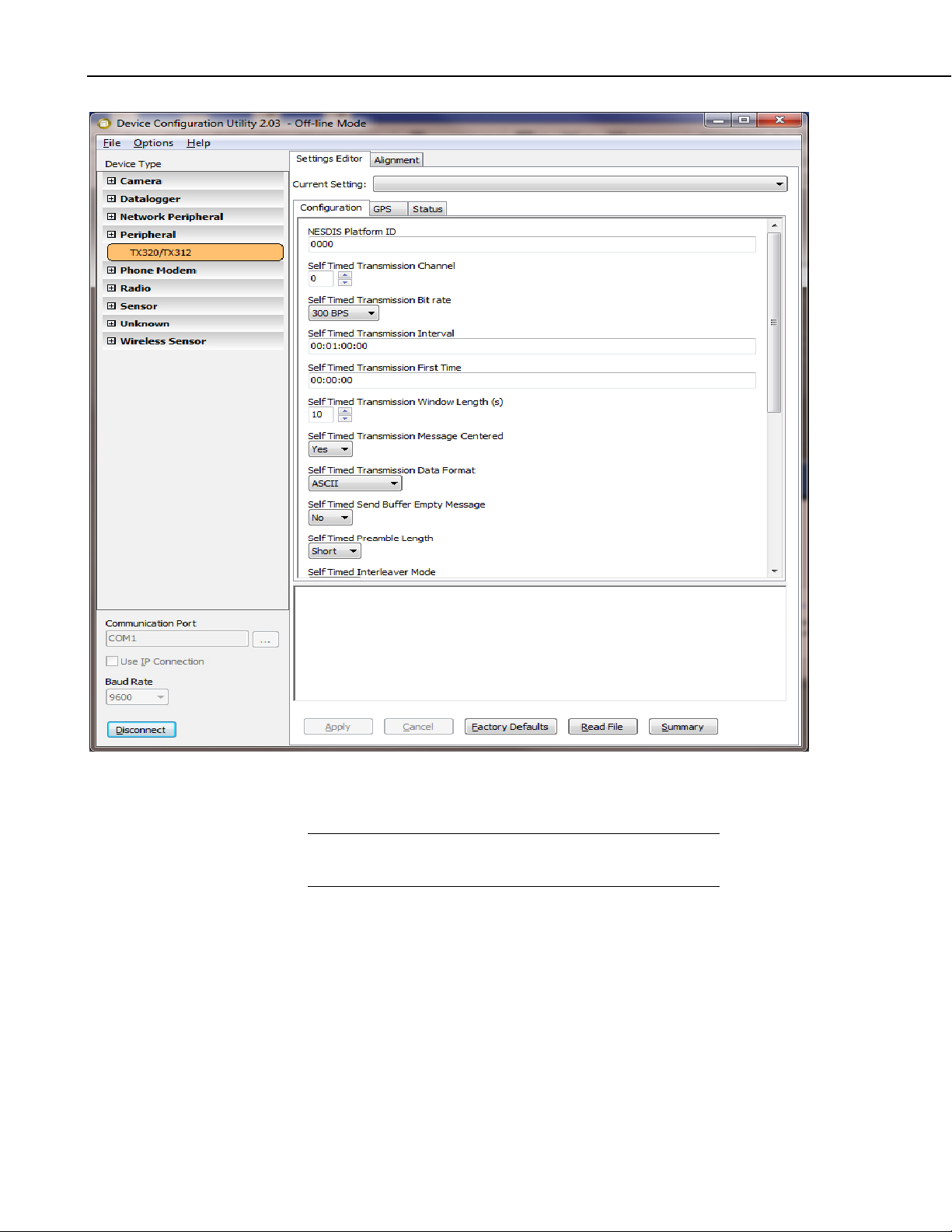
4.1.2 Setting Editor | Configuration
An example of parameters entered in the Configuration tab is provided in
FIGURE 4-2.
NESDIS Platform ID: Type in your NESDIS-assigned ID number. This is an
8-digit hex number.
Self-Timed Transmission Channel: Select the NESDIS-assigned self-timed
transmission channel. For 1200-baud channels, the formal channel designation
is the channel number followed by the letter A, for example: 99A. Setting the
channel number to a value of zero will disable timed transmissions.
Self-Timed Transmission Bit Rate: Select the NESDIS-assigned channel bit
rate (baud rate). This value will be either 300 or 1200 for a CS-2 device.
Self-Timed Transmission Interval: Enter the interval between timed
transmissions (specified as dd:hh:mm:ss). The default value of 00:01:00:00
will transmit the data every hour. The valid range for this setting is 00:00:05:00
to 30:23:59:59.
Self-Timed Transmission First Time: Enter an offset from the Self-Timed
Transmission Interval that specifies when the first transmission will take place;
must be less than the Self-Timed Transmission Interval. Example: Self-Timed
Transmission Interval = 00:01:00:00 (1 hour) and the Self-Timed Transmission
First Time = 00:15:00 (15 min). The transmission pattern starting at midnight
will be the following 00:15:00, 01:15:00, 02:15:00...23:15:00.
TX320 Transmitter
Self-Timed Transmission Window Length(s): Enter the NESDIS-assigned
length of the self-timed transmission window in units of seconds.
Self-Timed Transmission Data Format: Specify whether self-timed data will
be transmitted in ASCII, binary, or pseudo binary formats. This setting does
not change the format of the data; it only changes the flag word. The
datalogger program determines the data format and should match the format
chosen for this setting.
Self-Timed Preamble Length: The default value of Short must be used for
CS-2 devices.
3
TX320 Transmitter
4
NOTE
FIGURE 4-2. Settings Editor | Configuration in Device Configuration
Utility
If NESDIS has not assigned a Random Channel, the following
parameters do not apply.
Random Transmission Channel: Select the NESDIS-assigned random
transmission channel. Setting the channel number to a value of zero will
disabled random transmissions.
Random Transmission Bit Rate: Select the NESDIS-assigned channel bit
rate (baud rate). This value will be either 300 or 1200 for a CS-2 device.
Random Transmission Window Length(s): Specify the randomizing interval
in units of minutes. This value is the interval at which a random transmission
will take place if there is data in the random buffer. The actual interval will be
random but will, on average, occur at this rate.
TX320 Transmitter
Random Transmission Data Format: Specify whether random data will be
transmitted in ASCII, binary, or pseudo binary formats. This setting does not
change the format of the data; it only changes the flag word. The datalogger
program determines the data format and should match the format chosen for
this setting.
NOTE
The default values for the remaining parameters in Settings
Editor | Configuration can be used for many applications.
Refer to the DevConfig help for details about the parameters.
Click Apply after changing settings.
4.1.3 Setting Editor | GPS
GPS Fix Interval: Enter the interval at which the transmitter will attempt to
get a GPS position fix (specified as hh:mm:ss). The GPS fix interval MUST
NOT coincide with the self-timed transmission interval. A GPS fix event must
occur at least two minutes on either side of a self-timed transmission. Click
Apply after changing the setting.
NOTE
The default value of 00:00:00 disables periodic GPS position
fixes although these will still occur at power up and every 24
hours as a side effect of the daily automatic OCXO calibration.
4.2 Step 2 – Program the Datalogger
The CRBasic program needs to include the GoesData() instruction, which tells
the datalogger to send data to the transmitter. Refer to Section 7.5.1,
GoesData(), for programming details and example.
5
TX320 Transmitter
4.3 Step 3 – Install the Data Collection Platform (DCP)
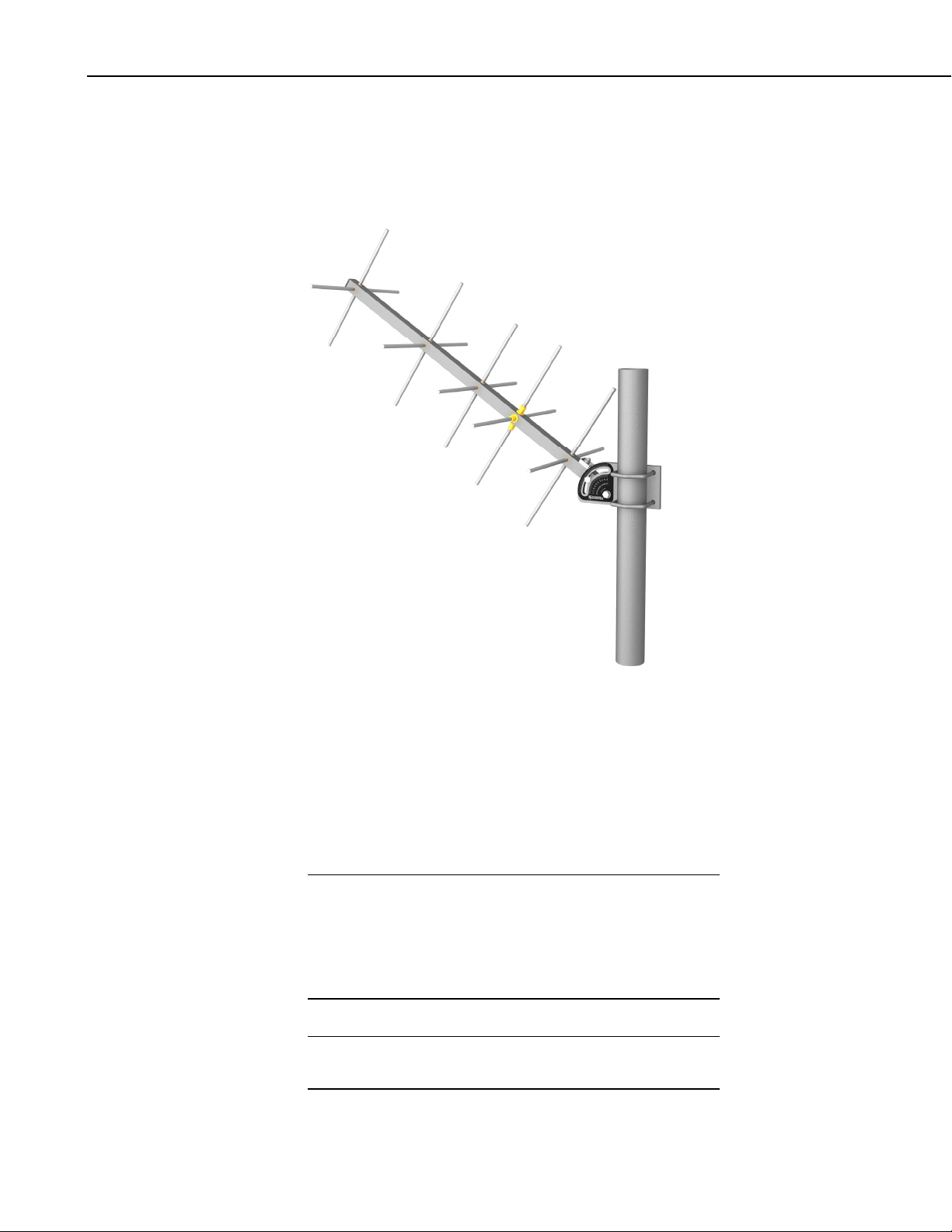
1. Mount the 25316 Yagi antenna to a pole or mast by using the U-bolts
included with the antenna mount (see FIGURE 4-3).
NOTE
NOTE
FIGURE 4-3. Yagi antenna
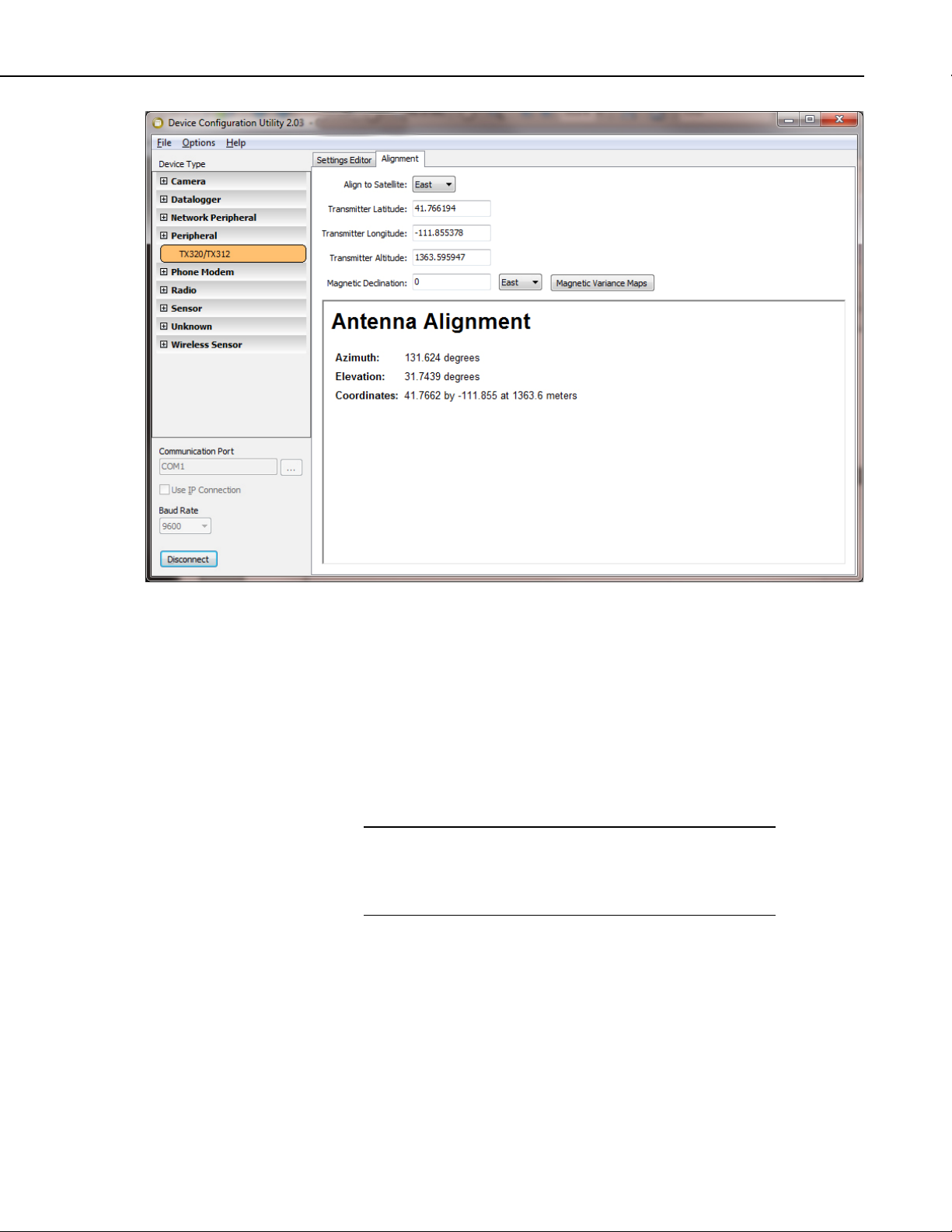
2. Aim the Yagi antenna at the spacecraft; azimuth and elevation angle
positions are included on the bracket label. The Alignment tab in
DevConfig can be used to determine the correct coordinates for the
azimuth and elevation (see FIGURE 4-4). In the Alignment tab, select
either the East or West satellite, enter the transmitter's Latitude,
Longitude, Altitude, and the Magnetic Declination. The correct angles
are then displayed in the lower panel.
Refer to Section 4.1.1, Accessing DevConfig, for information
about accessing DevConfig. The transmitter’s internal GPS can
be used to acquire the azimuth and elevation information. To use
the internal GPS device, connect the GPS antenna (see FIGURE
4-7). The information will be listed in the GPS tab of
DevConfig.
Additional information about the Yagi antenna is provided in
Section 7.3, Transmission Antenna.
6
TX320 Transmitter
CAUTION
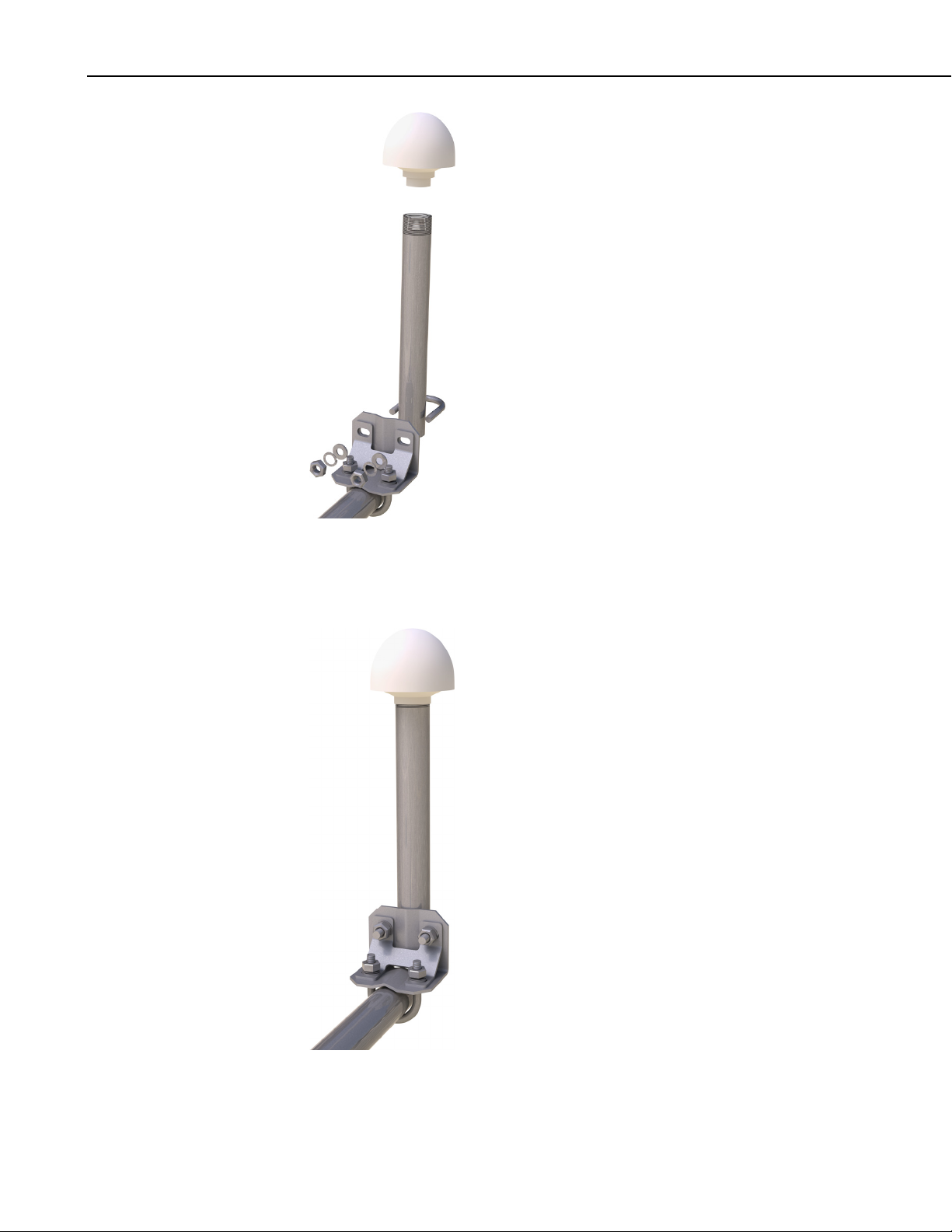
FIGURE 4-4. Alignment Tab in Device Configuration Utility
3. Insert the 7623 3/4 IPS aluminum pipe into the GPS antenna (see FIGURE
4-5).
4. Mount the 7623 3/4 IPS aluminum pipe to a crossarm via a CM220 mount
or NU-RAIL fitting. FIGURE 4-5 and FIGURE 4-6 show the GPS
antenna mounted to a crossarm using a CM220 mount. The ideal location
for the GPS antenna is above everything, with the shortest cable possible.
Refer to Section 7.4, GPS Antenna, for additional information about the
GPS antenna.
The GPS antenna will not receive a GPS signal through
steel roofs or steel walls. Concrete might also be a
problem. Heavy foliage, snow, and ice will attenuate the
GPS signal.
7
TX320 Transmitter
FIGURE 4-5. Exploded view of the GPS antenna mounted to a
crossarm via the CM220.
8
FIGURE 4-6. GPS antenna mounted to a crossarm via the CM220

TX320 Transmitter
5. Mount the TX320, CH100 or CH200 regulator, BP12 or BP24 battery
pack, and CR1000 to the backplate of an ENC16/18 enclosure.
6. Mount the enclosure and solar panel to the pole or tripod.
7. Connect the COAXNTN cable to the Yagi antenna. Then route the
COAXNTN cable through the enclosure conduit and connect it to the
TX320 connector labeled RF Out (see FIGURE 4-7 and FIGURE 4-8).
8. Connect the TNC connector of the 18017-L cable to the GPS antenna.
Route the 18017-L cable through the enclosure conduit and connect it to
the TX320 connector labeled GPS (see FIGURE 4-7 and FIGURE 4-8).
9. Wire the TX320, CH100 or CH200 regulator, BP12 battery, and CR1000
according to FIGURE 4-8 and FIGURE 4-9.
10. Route the solar panel cable through the enclosure conduit and connect the
red and black wires to the CHG terminals on the CH100 or CH200.
Connector for
GPS antenna
Connector for
Yagi antenna
FIGURE 4-7. Antenna connectors
9
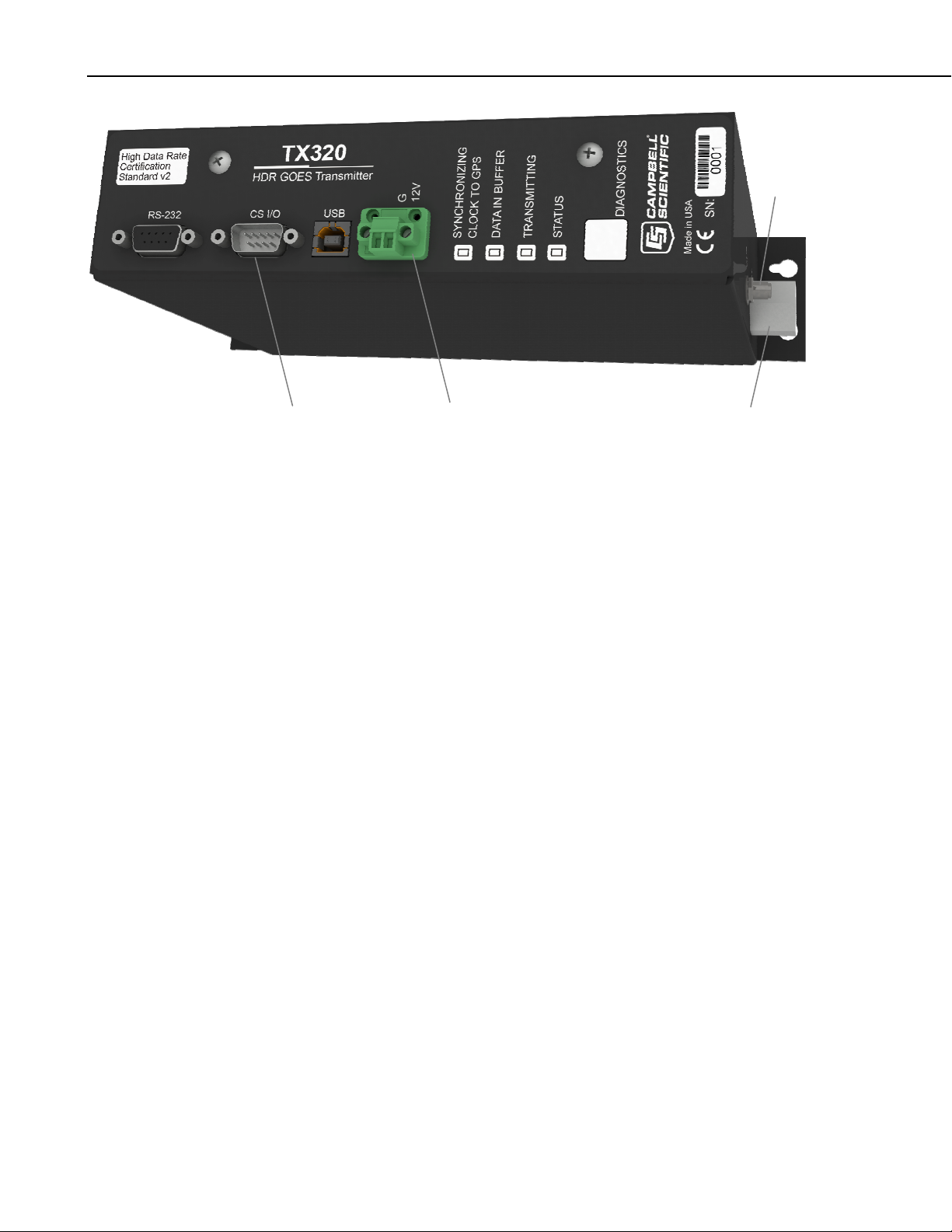
TX320 Transmitter
GPS
Connector
CS I/O:
Used to connect
to the CR1000’s
CS I/O port via
the SC12 cable
Power Port:
The green
connector on the
18133 power
cable connects to
this port
FIGURE 4-8. TX320 connectors
RF Out
Connector
10
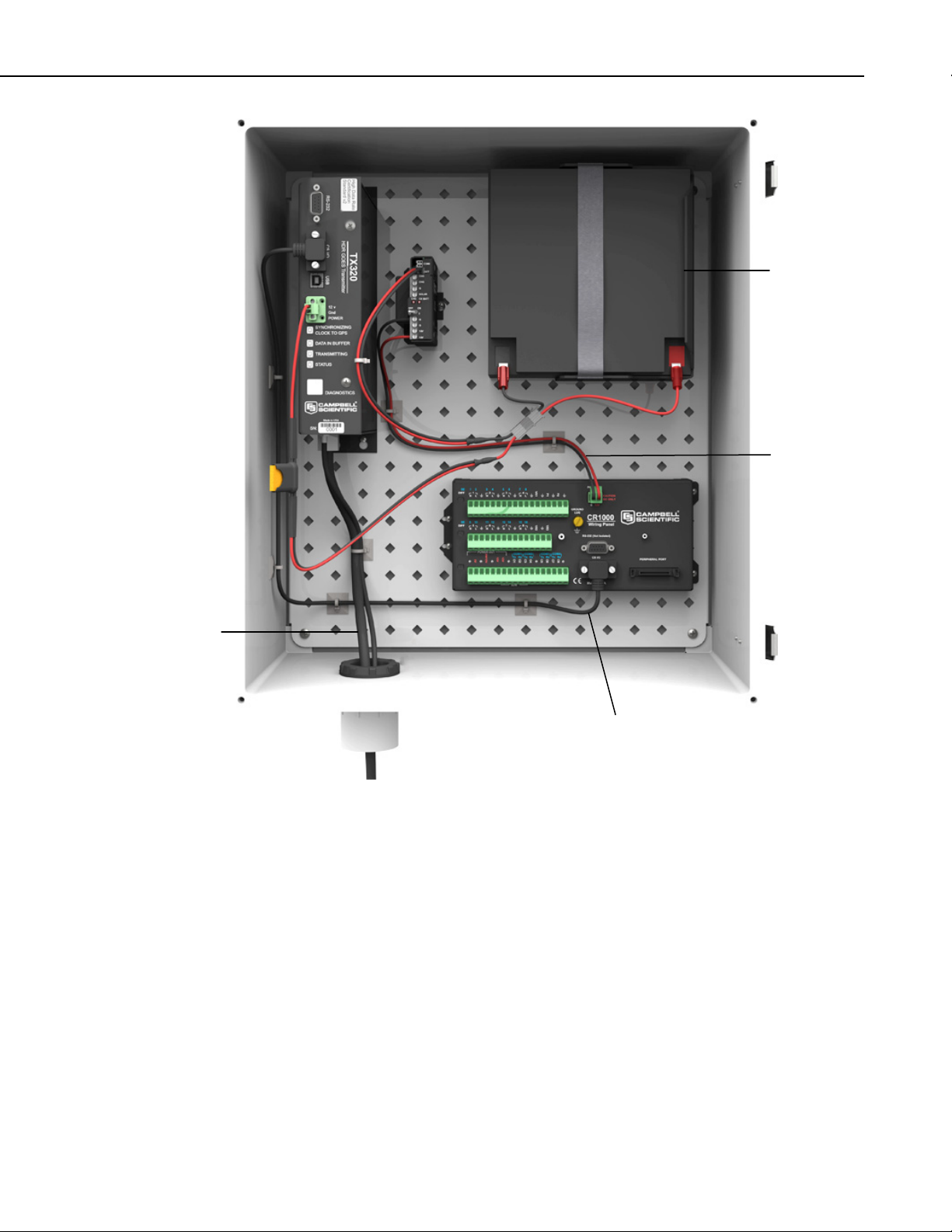
TX320 Transmitter
BP24’s
connector
attaches to
the 18133
Power Cable
28490
Red/Black
power wires
connect to
the 12V and
G terminals
on the
CH200 or
CH100
COAXNTN
Cable
5. Overview
SC12 Cable
FIGURE 4-9. DCP enclosure
The TX320 uses non-volatile memory to store configuration information, such
as platform ID, transmission baud rate, channel number, scheduled
transmission time, offset time and message window length. The TX320 also
has a 15.7 kB RAM buffer for scheduled transmissions and a buffer for random
transmissions. The clock is maintained with a GPS receiver.
The TX320 transmitters that are currently support the:
• GOES Data Collection Platform Radio Set (DCPRS) Certification
Standards at 300 bps and 1200 bps, version 2, effective date: June 2009
(also known as CS2)
• 300/1200 bps DCPRS Certification Standard version 1.0b - March 2000
11
TX320 Transmitter
The TX320 supports High Data Rate specifications. The TX320 includes the
following communication ports:
• CS I/O port for Campbell dataloggers
• RS-232 port for dataloggers and PC communication
• USB port for PC communications
The CS I/O port is a Campbell Scientific Synchronous Device for
Communication (SDC) port, address 4.
NOTE
The 21X and CR7 dataloggers do not support SDC or the
TX320.
5.1 GOES System
Appendix A provides information about getting onto the GOES system and
eligibility.
5.1.1 Orbit
The TX320 transmitter sends data via Geostationary Operational
Environmental Satellites (GOES). GOES satellites have orbits that coincide
with the Earth's rotation, allowing each satellite to remain above a specific
region. This allows a user to point the GOES antenna at a fixed position in the
sky.
There are two satellites, GOES East and GOES West. GOES East is located at
75° West longitude and GOES West is located 135° West longitude. Both
satellites are located over the equator. Within the United States, odd numbered
channels are assigned to GOES East. Only even numbered channels are
assigned to GOES West. Channels used outside the United States are assigned
to either spacecraft.
5.1.2 NESDIS and Transmit−Windows
12
GOES is managed by the National Environmental Satellite Data Information
Service (NESDIS). NESDIS assigns the platform ID, uplink channel number,
and self-timed or random transmit windows. Self-timed windows allow data
transmission only during a predetermined time frame (typically 10 seconds
every hour). The self-timed data is erased from the transmitter's buffer after
each transmission, random data is not. Random windows are for critical
applications (for example, flood reporting) and allow transmission immediately
after a threshold has been exceeded. The transmission is then randomly
repeated to ensure it is received. A combination of self-timed and random
transmission can be executed by the TX320.
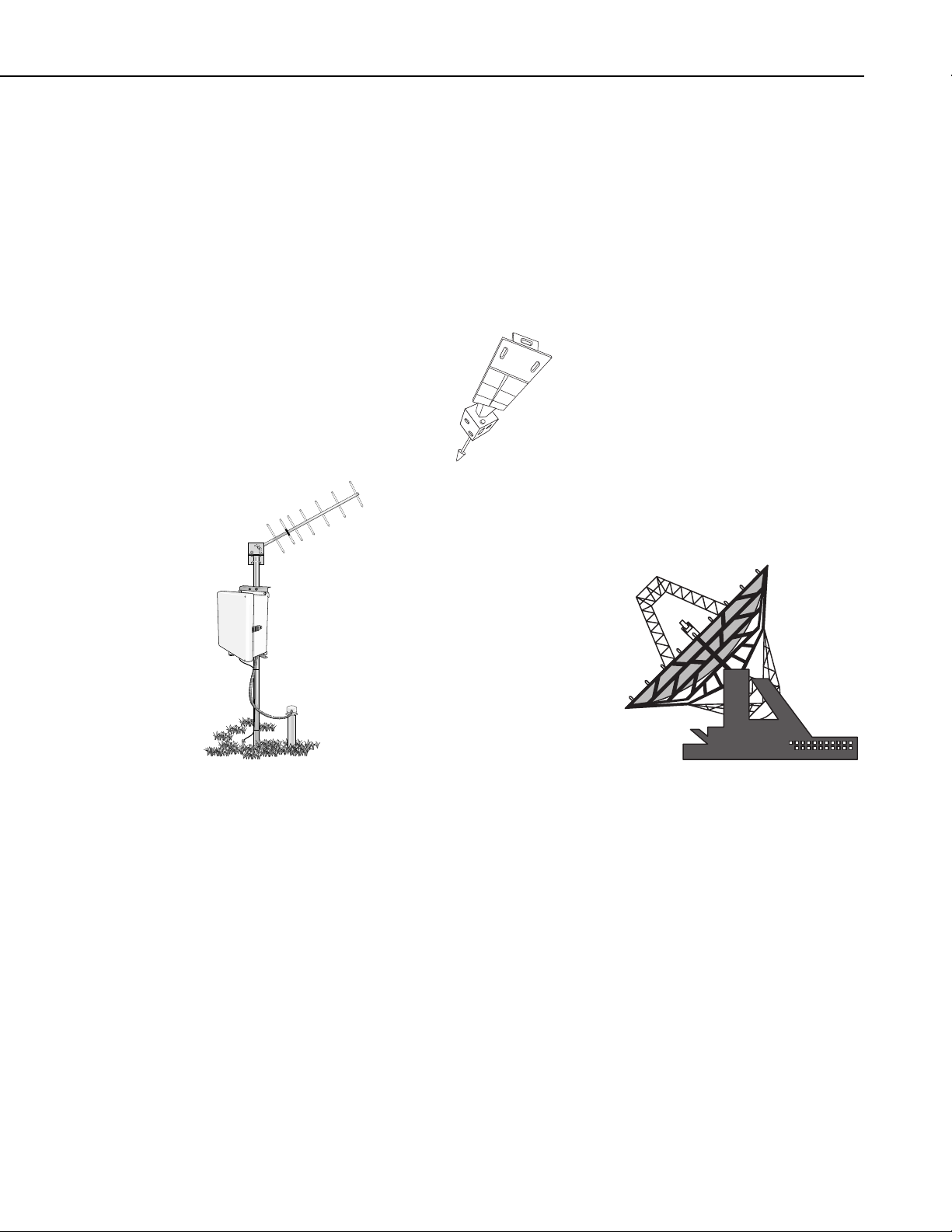
5.1.3 Data Retrieval .1.3 Data Retrieval
Data retrieval via the TX320 and the GOES system is illustrated in FIGURE
Data retrieval via the TX320 and the GOES system is illustrated in FIGURE
5-1. The DAPS User Interface Manual, provided by NOAA/ NESDIS,
5-1. The DAPS User Interface Manual, provided by NOAA/ NESDIS,
describes the process of retrieving the data from the NESDIS ground station.
describes the process of retrieving the data from the NESDIS ground station.
The data are in the form of three-byte ASCII (see Appendix B for a computer
The data are in the form of three-byte ASCII (see Appendix B for a computer
program that converts the data to decimal). You can also retrieve data directly
program that converts the data to decimal). You can also retrieve data directly
from the NESDIS ground station via DOMSAT, LRGS, or LRIT. DOMSAT is
from the NESDIS ground station via DOMSAT, LRGS, or LRIT. DOMSAT is
only practical for organizations with many GOES users. Contact NESDIS for
only practical for organizations with many GOES users. Contact NESDIS for
more information (www.noaasis.noaa.gov/DCS).
more information (www.noaasis.noaa.gov/DCS).
TX320 Transmitter
GOES Satellite
Satellite Antenna
GOES transmitter,
datalogger, and
power supply, also
known as a DCP
Data Collection Platform (DCP)
Ground Receiving Station
FIGURE 5-1. Major components of the GOES/DCP system (GPS
antenna and solar panel not shown)
6. Specifications
On-board Memory:
Transmission Data Rates:
Operating Voltage Range:
25316 Transmit Antenna:
Non-volatile flash for setup parameters
16 kB for data
300 and 1200 bps
10.8 to 16 Vdc
11 dBi gain, right hand circular
polarization, type N female connector,
wind load of ~100 knots
13

TX320 Transmitter
Transmit Power:
Frequency Range:
Frequency Stability
Initial Accuracy:
Short-Term Drift:
Aging:
Vcc + Temperature:
Channel Bandwidth:
Time Keeping:
GPS Antenna:
RS-232 Serial Port
Signal Levels:
Connector:
DCE Command protocols:
USB Port
Connector:
Command protocols:
5.6 W for 300 bps, 11.2 W for 1200 bps
401.701 MHz to 402.1 MHz
±20 Hz disciplined to GPS
±0.04 Hz/s
±0.1 PPM/year
±0.1 PPM
1.5 kHz (300 bps); 3 kHz (1200 bps)
Initial setting accuracy: ± 100 µs
synchronized to GPS; Drift ± 10 ms/day
over operating temperature range; GPS
scheduled updates are one at power up and
once per day there after. Once every 28
days required for continual operation.
3.3 V active; SMA female connector
RS-232C
DB9F
ASCII, binary, field diagnostics,
dataloggers with RS-232 port
Type B
ASCII, binary, field diagnostics
CS I/O Port
Signal Levels:
Command Protocol:
Environmental:
Dimensions (with connectors):
Dimensions (without
connectors):
Weight:
Emission Designators
@ 300 bps:
@ 1200 bps:
Current Drain @12 Vdc
Idle or Sleep:
Transmission:
GPS Fix:
TTL, Connector DB9M
Campbell Scientific Synchronous Device
Communication, address 4, Binary
Command, Campbell Scientific
Dataloggers
Operating: –40° to 60°C; Storage –55º to
70ºC; 0 to 99% RH, non-condensing
17.0 H x 24.9 L x 5.3 W cm
(6.7 in x 10.6 in x 2.1 in)
15.8 H x 24.9 L x 5.3 W cm
(6.2 in x 9.8 in x 2.1 in)
1.02 kg (2.25 lb)
300HG1D
1K20G1D
5 mA
2.6 A
80 mA to 15 mA per day
14
 Loading...
Loading...