

Page 1
KH20
Revision:
Copyright ©
Campbell Scientific, Inc.
Krypton Hygrometer
05/2020
2010 – 2020
Page 2
Table of Contents
PDF viewers: These page numbers refer to the printed version of this document. Use the
PDF reader bookmarks tab for links to specific sections.
1. Introduction................................................................ 1
2. Precautions ................................................................ 1
3. Initial Inspection ........................................................ 1
3.1 Components .........................................................................................1
4. Overview .................................................................... 1
5. Specifications ............................................................ 2
5.1 Measurements ......................................................................................2
5.2 Electrical ..............................................................................................2
5.3 Physical ................................................................................................2
6. Installation ................................................................. 3
6.1 Siting ....................................................................................................3
6.2 Mounting ..............................................................................................3
6.2.1 Parts and Tools Needed for Mounting ..........................................3
6.2.2 Mounting the KH20 Sensor ..........................................................3
6.2.3 Mounting the Electronics Box ......................................................4
6.3 Wiring ..................................................................................................6
6.4 Data Logger Programming ...................................................................7
6.4.1 KH20 Calibration ..........................................................................7
7. Maintenance and Calibration .................................... 7
7.1 Visual Inspection ..................................................................................8
7.2 Testing the Source Tube .......................................................................8
7.3 Testing the Detector Tube ....................................................................8
7.4 Managing the Scaling of KH20 ............................................................8
7.5 Calibration ............................................................................................9
Appendices
A.
Calibrating KH20 .................................................... A-1
A.1 Basic Measurement Theory ............................................................. A-1
A.2 Calibration of KH20 ........................................................................ A-1
B. Example Program .................................................. B-1
i
Page 3

Table of Contents
C. EasyFlux® DL CR6KH20 ........................................ C-1
C.1 Introduction ...................................................................................... C-1
C.2 Precautions ....................................................................................... C-2
C.3 Wiring .............................................................................................. C-2
C.3.1 Required Sensors ...................................................................... C-3
C.3.2 Optional Sensors ....................................................................... C-3
C.3.2.1 VOLT116 Module .......................................................... C-3
C.3.2.2 Barometer ....................................................................... C-4
C.3.2.3 Fine Wire Thermocouple ................................................ C-4
C.3.2.4 GPS Receiver ................................................................. C-5
C.3.2.5 Radiation Measurements Option 1 ................................. C-5
C.3.2.6 Radiation Measurements Option 2 ................................. C-6
C.2.3.7 Precipitation Gage .......................................................... C-8
C.2.3.8 Soil Temperature ............................................................ C-9
C.2.3.9 Soil Water Content ......................................................... C-9
C.3.2.10 Soil Heat Flux Plates .................................................... C-10
C.4 Operation ........................................................................................ C-12
C.4.1 Set Constants in CRBasic Editor and Load Program .............. C-12
C.4.2 Enter Site-Specific Variables with Data Logger Keypad or
LoggerNet ............................................................................ C-14
C.4.3 Data Retrieval ......................................................................... C-19
C.4.4 Output Tables .......................................................................... C-19
C.4.5 Program Sequence of Measurement and Corrections ............. C-36
C.5 References ...................................................................................... C-37
D. Equations and Algorithms of Water Vapor
Density and Water Flux in KH20 Eddy-
Covariance Systems ........................................... D-1
D.1 Fundamental Equation .................................................................... D-1
D.2 Working Equation ........................................................................... D-2
D.3 Eddy-Covariance Water Flux .......................................................... D-2
D.4 Frequency Response of KH20 ......................................................... D-3
D.5 References ....................................................................................... D-4
Figures
6-1. Mounting KH20 to a tripod. .................................................................4
6-2. Proper mounting position of the electronics box. .................................5
6-3. Attaching cables to the electronics box. ...............................................6
A-1. KH20 ln(mV) vs. Vapor Density .................................................... A-2
C-1. Example screen from CRBasic Editor showing user-defined
configuration constants ............................................................... C-13
C-2. Custom keypad menu; arrows indicate submenus .......................... C-14
Tables
6-1. Wire Color, Function, and Data Logger Connection............................6
6-2. KH20 Calibration Ranges ....................................................................7
A-1. Linear Regression Results for KH20 ln(mV) vs. Vapor Density .... A-2
A-2. Final Calibration Values for KH20 ................................................. A-3
C-1. Default Wiring for Required Sensors ............................................... C-3
C-2. Default Wiring for CS106 Barometer .............................................. C-4
C-3. Default Wiring for Fine Wire Thermocouple ................................... C-4
ii
Page 4

C-4. Default Wiring for GPS Receiver .................................................... C-5
C-5. Default Wiring for Radiation Measurement Option 1 ...................... C-5
C-6. Default Wiring for Radiation Measurements Option 2 .................... C-6
C-7. A21REL-12 Wiring .......................................................................... C-8
C-8. CNF4 Wiring .................................................................................... C-8
C-9. Default Wiring for Precipitation Gage ............................................. C-9
C-10. Default Wiring for Soil Thermocouple Probes ................................ C-9
C-11. Default Wiring for Soil Water Content Probes .............................. C-10
C-12. Default Wiring for Non-Calibrating Soil Heat Flux Plates ............ C-10
C-13. Default Wiring for Soil Heat Flux Plates (Self Calibrating) .......... C-11
C-14. Station Variables with Descriptions ............................................... C-15
C-15. microSD Flash Card Fill Times with 10Hz Measurement Rate ..... C-19
C-16. Data Output Tables ........................................................................ C-20
C-17. Data Fields in the Time_Series Data Output Table ........................ C-21
C-18. Data Fields in the Diagnostic Output Table ................................... C-22
C-19. Data Fields in the Monitor_CSAT3B Output Table ....................... C-22
C-20. Data Fields in the Flux_AmeriFluxFormat Output Table .............. C-22
C-21. Data Fields in the Flux_CSFormat Data Output Table .................. C-25
C-22. Data Fields in the Flux_Notes Output Table .................................. C-29
CRBasic Example
B-1. CR3000 Program to Measure Water Vapor Fluctuations ................. B-1
Table of Contents
iii
Page 5
KH20 Krypton Hygrometer
1. Introduction
The KH20 is a highly sensitive hygrometer designed for measurement of rapid
fluctuations in atmospheric water vapor, not absolute concentrations. It is
typically used together with a CSAT3B in eddy-covariance systems.
2. Precautions
• READ AND UNDERSTAND the Safety section at the back of this
manual.
• Although the KH20 is rugged, it should be handled as precision scientific
instrument.
3. Initial Inspection
• Upon receipt of the KH20, inspect the packaging and contents for damage.
• The model number and cable length are printed on a label at the
3.1 Components
The KH20 sensor consist of a sensor head with 2 m (6 ft) cables and an
electronics box. The following are also shipped with the KH20:
File damage claims with the shipping company.
connection end of the cable. Check this information against the shipping
documents to ensure the correct product and cable length are received (see
Section 3.1, Components
• KH20CBL-L25 Power/Signal cable with 8 m (25 ft) length. If a
longer cable is desired, order a KH20CBL-L replacement cable and
specify the desired length after -L (for example KH20CBL-L50).
• 1/2 Unit Desiccant Bag
• Rain Shield
• Horizontal Mounting Boom (51 cm 20 mm DN (20-inch 3/4 IPS)
threaded aluminum pipe)
• 3/4 x 3/4 in. Nu-Rail Crossover Fitting
• 4 mm (5/32 in) Allen Wrench
(p. 1)).
4. Overview
The KH20 is a krypton hygrometer for measuring water vapor fluctuations in
the air. The name KH20 (KH-twenty) was derived from KH2O (K-H
the sensor has been known with this name since 1985. It is typically used with
O), and
2
1
Page 6
KH20 Krypton Hygrometer
NOTE
the CSAT3B 3-D sonic anemometer for measuring latent heat flux (LE), using
eddy-covariance technique.
The KH20 sensor uses a krypton lamp that emits two absorption lines: major
line at 123.58 nm and minor line at 116.49 nm. Both lines are absorbed by
water vapor, and a small amount of the minor line is absorbed by oxygen. The
KH20 is not suitable for absolute water vapor concentration measurements due
to its signal offset drift.
The KH20 heads are sealed and will not suffer damage should they get wet. In
addition, the electronics box and the connectors are housed inside a rain shield
that protects them from moisture. The KH20 is suitable for long-term
continuous outdoor applications.
The KH20 sensor is comprised of two main parts: the sensor head and the
electronics box. The sensor head comes with cables that connect the sensor to
the electronics, a power/signal cable, and mounting hardware.
Discussion on the principles and theory of measurement is
included in Appendix A, Calibrating KH20 (p. A-1).
Features:
5. Specifications
5.1 Measurements
Calibration Range: 1.7 to 19.5 g/m3 (nominal)
Frequency Response: 100 Hz
Operating Temperature Range: –30 to 50 °C
5.2 Electrical
Supply Voltage: 10 V to 16 VDC
Current Consumption: 20 mA max at 12 VDC
Power Consumption: 0.24 Watts
Output Signal Range: 0 to 5 VDC
• High frequency response suitable for eddy-covariance applications
• Well-suited for long-term, unattended applications
• Compatible with Campbell Scientific CRBasic data loggers: CR6,
CR3000, CR1000X, CR800 Series, CR1000, CR5000, and
CR9000(X)
5.3 Physical
Dimensions
Sensor Head: 29 x 23 x 3 cm (11.5 x 9 x 1.25 in)
Electronics Box: 19 x 13 x 5 cm (7.5 x 5 x 2 in)
Rain Shield with Mount: 29 x 18 x 6.5 cm (11.5 x 7 x 2.5 in)
Mounting Pipe: 50 cm (20 in)
Carrying Case: 64 x 38 x 18 cm (25 x 15 x 7 in)
2
Page 7

6. Installation
6.1 Siting
6.2 Mounting
6.2.1 Parts and Tools Needed for Mounting
KH20 Krypton Hygrometer
Weight
Sensor Head: 1.61 kg (3.55 lb)
Electronics Box: 0.6 kg (1.4 lb)
Rain Shield with Mount: 2.2 kg (4.75 lb)
Mounting Pipe with Nu-rail: 0.45 kg (1.0 lb)
Carrying Case: 4.3 kg (9.45 lb)
Shipping: 9.2 kg (20.15 lb)
When installing the KH20 sensor for latent heat flux measurement in an eddycovariance application, proper siting, sensor height, sensor orientation and
fetch are important.
The following user-supplied hardware is required to mount the KH20 sensor:
1. Tripod (CM115 standard) or tower
2. Campbell Scientific crossarm (CM204 standard)
3. 3/4-inch IPS Aluminum Pipe, 12 inches long
4. 3/4-inch-by-1-inch Nu-Rail Crossover Fitting
5. Small Phillips and flat-head screwdrivers
6. 1/2-inch wrench
6.2.2 Mounting the KH20 Sensor
Mount the KH20 sensor head as follows:
1. Attach the 51 cm (20 in) mounting boom to the KH20.
2. Mount a crossarm to a tripod or tower.
3. Mount the 12-inch-long pipe to a crossarm via 1-inch-by-3/4-inch Nu-Rail
Crossover Fitting.
4. Mount the KH20 onto the 30 cm (12 in) pipe using a 3/4-inch-by-3/4-inch
Nu-Rail Crossover Fitting. Mount the KH20 such that the source tube, the
longer of the two tubes, is positioned on top, as shown in FIGURE 6-1.
Use cable ties to secure loose cables to the tripod or tower mast.
3
Page 8
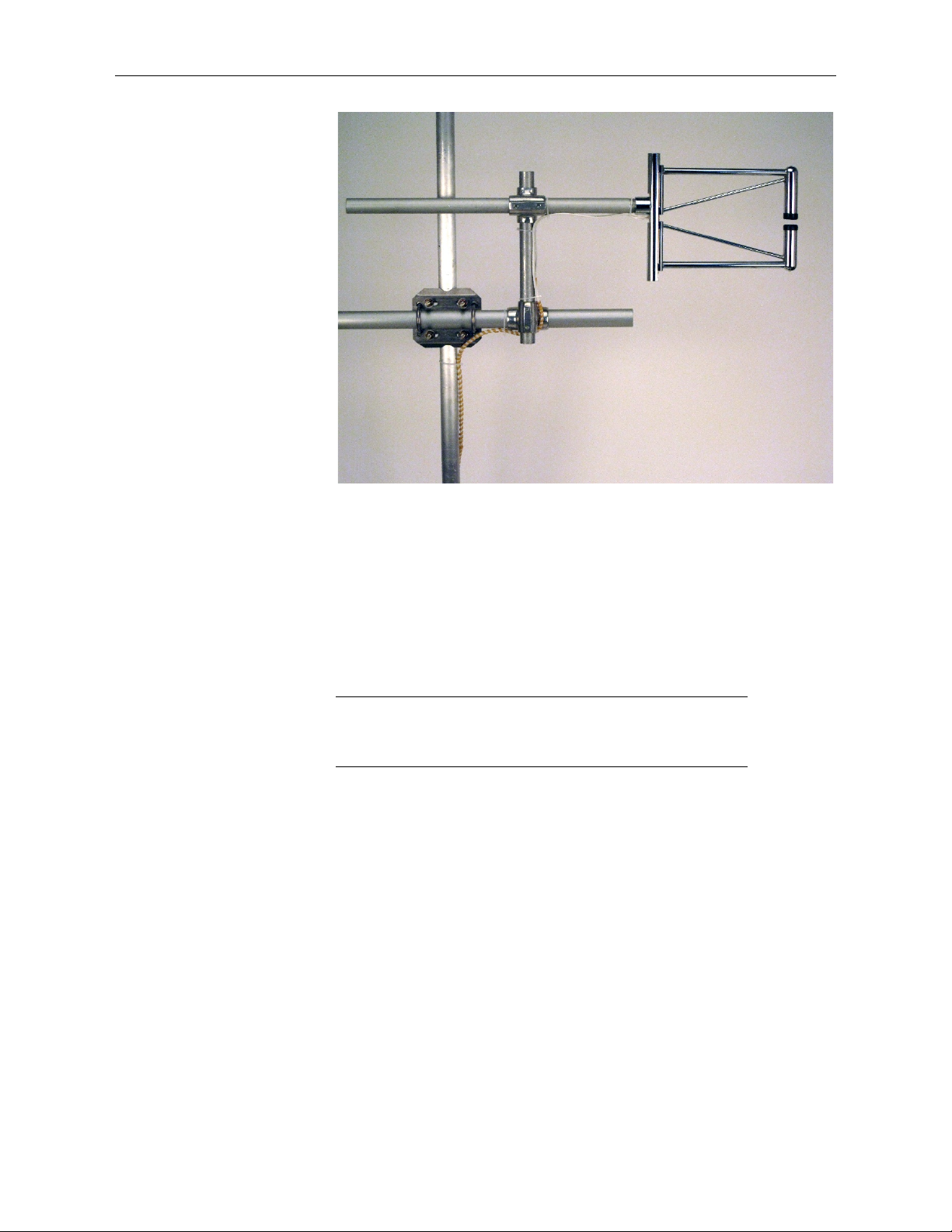
FIGURE 6-1. Mounting KH20 to a tripod.
NOTE
KH20 Krypton Hygrometer
6.2.3 Mounting the Electronics Box
Mount the electronics box as follows:
1. Remove the front cover of the rain shield by loosening the two pan-head
screws on the bottom front of the rain shield, and then pushing the cover
all the way up, and sliding it out.
It will be difficult to mount the rain shield to a mast with the front
cover on, since the 1/2-inch nut holding the bottom U-bolt is
located inside the rain shield.
2. Before mounting the rain shield to a tripod, first mount the electronics box
inside the rain shield. Remove the four pan-head screws from the back
panel of the rain shield. Align the electronics box and use the four panhead screws to secure the electronics box onto the back panel. Make sure
the electronics box is pushed all the way up, and the screws are positioned
at the bottom of the mounting slot on the electronics box (see FIGURE
6-2). This will provide enough room to attach the connectors to the bottom
of the electronics box later.
4
Page 9

KH20 Krypton Hygrometer
NOTE
FIGURE 6-2. Proper mounting position of the electronics box.
If the electronics box is not pushed all the way up during
mounting, you will not have enough room to attach the connectors
to the bottom of the electronics box, as the U-bolt for the rain
shield will block the position of the connectors.
3. Mount the rain shield onto the tripod or tower mast using the U-bolt
provided. Make sure that the distance between the KH20 sensor head and
the rain shield is within 5 feet so that the cables from the sensor head will
be within reach of the electronics box. Also make sure that the rain shield
is mounted vertically with an opening pointing downward so that the rain
will effectively run down the rain shield and not penetrate inside.
5
Page 10
KH20 Krypton Hygrometer
TABLE 6-1. Wire Color, Function, and Data Logger Connection
⏚
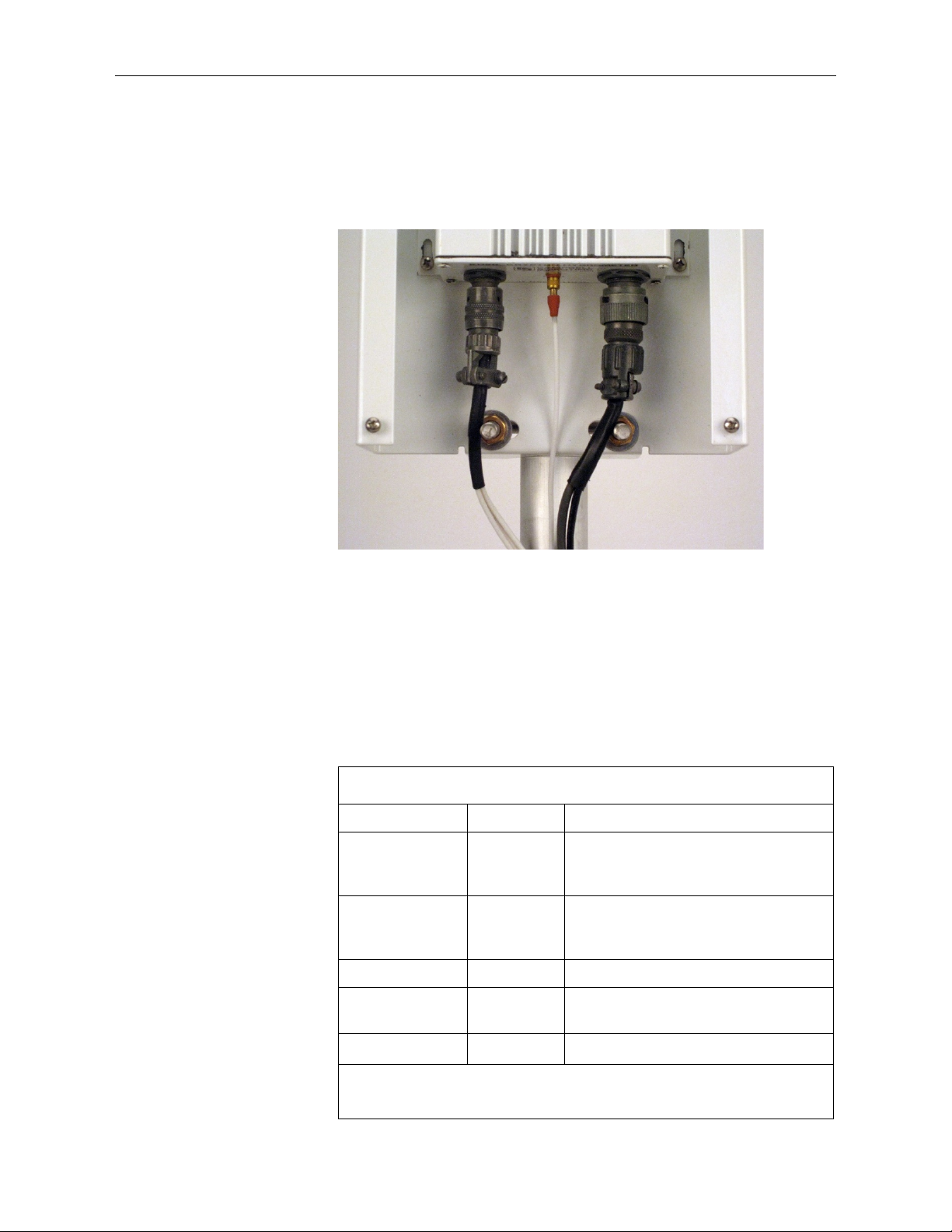
4. Connect the three cables to the bottom of the electronics box around the
U-bolt on the rain shield (see FIGURE 6-3). If there is not enough room
for the connectors around the U-bolt, make sure the electronics box is
mounted at a highest possible position (see step 2).
6.3 Wiring
FIGURE 6-3. Attaching cables to the electronics box.
5. Place the front cover back on the rain shield and tighten the two pan-head
screws to secure it in place.
6. Gather any loose cables and tie them up, using cable ties, onto the tripod or
tower mast.
Wire Wire Label Data Logger Connection Terminal
1, 2
1
,
,
White Signal
Black (from
white/black set)
Signal
Reference
U configured for differential input
DIFF H (differential high, analog-
voltage input)
U configured for differential input
DIFF L (differential low, analog-
2
voltage input)
Red Power 12V 12V
Black (from
red/black set)
Clear Shield
1
U terminals are automatically configured by the measurement instruction.
2
Jumper to ⏚ with a user-supplied wire.
Power
Ground
G
(analog ground)
6
Page 11
6.4 Data Logger Programming
TABLE 6-2. KH20 Calibration Ranges
The KH20 sensor outputs 0 to 5 VDC analog signal. These signals can be
measured using the VoltDiff instruction on the CRBasic data loggers.
Programming basics for CRBasic data loggers are in the following sections.
Complete program examples for select CRBasic data loggers can be found in
Appendix B, Example Program
6.4.1 KH20 Calibration
Each KH20 is calibrated over a vapor range of approximately 2 to 19 g/m3. The
calibration is performed twice under the following two conditions: window
clean, and scaled. The water vapor absorption coefficient for three different
vapor ranges are calculated from the collected calibration data: full range, dry
range, and wet range. TABLE 6-2 shows a sample of the KH20 vapor ranges
over which three different water vapor absorption coefficients are calculated.
See Appendix A, Calibrating KH20
calibration.
KH20 Krypton Hygrometer
(p. B-1).
(p. A-1), for more information on KH20
Ranges Vapor Density (g/m3)
Full Vapor Range 2 – 19
Dry Vapor Range 2 – 9.5
Wet Vapor Range 8.25 – 19
Before the water vapor absorption coefficient, k
logger program for the KH20, the following decisions must be made:
• Will the windows be allowed to scale?
• What vapor range is appropriate for the site?
Once the decision is made, the appropriate k
calibrations sheet. The calibration sheet also contains the path length, x, for a
specific KH20. Using the water vapor absorption coefficient for either the dry
or the wet vapor range will produce more accurate measurements than using
that for the full range. If the vapor range of the site is unknown, or if the vapor
range is on the border line between the dry and the wet vapor ranges, the full
range should be used.
7. Maintenance and Calibration
The KH20 sensor is designed for continuous field application and requires little
maintenance. The tube ends for the KH20 have been sealed with silicone
elastomer using an injection-mold method. Therefore, the tubes are protected
from water damage, and the KH20 continues to make measurements under
rainy or wet conditions. If the water tends to pool up on the tube window and
blocks the signal, turn the sensor head at an angle so as to shed the water off
the tube window. The rain shield protects the electronics box and the
connectors from moisture.
, is entered into the data
w
can be chosen from the
w
7
Page 12
7.1 Visual Inspection
NOTE
• Make sure the optical windows are clean.
• Inspect the cables and connectors for any damage or corrosion. If you see
a discoloration on the white co-axial cable, you may suspect that the cable
has water damage.
7.2 Testing the Source Tube
The source tube is the longer of the two tubes. Check to see if the source tube
is working properly by performing the following test.
First, make sure the UV light is emitted from the source tube. To do this, you
may look into the source tube (the longer of the two tubes), and you should see
a bright blue light emitted from it.
Avoid looking into the source tube for an extended period of time
when the KH20 is powered on to minimize the prolonged
exposure to the UV light.
KH20 Krypton Hygrometer
If you see a faint or flickering blue light, perform the following test.
Check the current drain on the KH20
Typical current drain for the KH20 during normal operation should be
15 ~ 20 mA. The current drain of around 5 mA or less indicates the
problem on the source tube. Obtain an RMA from Campbell Scientific
and send the unit in for repair.
Check the voltage signal output from the KH20
If the voltage output reading is below 50 mV, you may have problems
with either the source tube or the detector tube (Section 7.3, Testing the
Detector Tube
(p. 8)).
7.3 Testing the Detector Tube
If the source tube tests fine but the output from KH20 is still in question,
perform the following test. Prepare a piece of paper and insert it between the
source tube and the detector tube to completely block the optical path. You
should see an immediate decrease in the voltage reading, and it should go close
to zero. No noticeable change in the voltage output, when the optical path is
completely blocked, indicates a problem in the detector tube. If the decrease in
the voltage reading takes place but the reading remains below 50 mV, when the
paper is removed from the optical path, the source tube may be at fault. Obtain
an RMA from Campbell Scientific and send the unit in for repair.
7.4 Managing the Scaling of KH20
The KH20 cannot be used to measure an absolute concentration of water vapor,
because of scaling on the source tube windows caused by disassociation of
atmospheric continuants by the ultra violet photons (Campbell and Tanner,
8
Page 13
KH20 Krypton Hygrometer
NOTE
1985 and Buck, 1976). The rate of scaling is a function of the atmospheric
humidity. In a high humidity environment, scaling can occur within a few
hours. That scaling attenuates the signal and can cause shifts in the calibration
curve. However, the scaling over a typical flux averaging period is small. Thus,
water vapor fluctuation measurements can still be made with the hygrometer.
To see if the source tube window has been scaled, get a clean, dry cotton swab
and slide it across the source tube window. The scale is not visible to the naked
eye, but if the window is scaled, you will feel a slight but noticeable resistance
while you slide the swab across the window. There will be little resistance if
the window is not scaled. If you determine the window is scaled, you can clean
it with a wet cotton swab.
Use distilled water and a clean cotton swab to clean the scaled window. After
cleaning the window, slide a clean, dry swab across the window to confirm the
scale has been removed.
You can use the water vapor absorption coefficient for scaled
window from the calibration sheet if the window will be allowed
to scale during measurements.
7.5 Calibration
For quality assurance of the measured data, Campbell Scientific recommends
the KH20 be recalibrated every two years. Calibrations require a returned
material authorization (RMA) and completion of the “Declaration of
Hazardous Material and Decontamination” form. Refer to the Assistance page
at the end of this manual for more information.
For more information on the calibration process, refer to Appendix A,
Calibrating KH20
(p. A-1).
9
Page 14
ww
xk
eT
ρ
−
=
ww
xk
e
V
V
ρ
−
=
0
)ln(ln
1
0
VV
xk
w
w
−
−
=
ρ
0
lnln VxkV
ww
+−=
ρ
Appendix A. Calibrating KH20
A.1 Basic Measurement Theory
The KH20 uses an empirical relationship between the absorption of the light
and the material through which the light travels. This relationship is known as
the Beer’s law, the Beer-Lambert law, or the Lambert-Beer law. According to
the Beer’s law, the log of the transmissivity is anti-proportional to the product
of the absorption coefficient of the material, k, the distance the light travels, x,
and the density of the absorbing material, ρ. The KH20 sensor uses the UV
light emitted by the krypton lamp: major line at 123.58 nm and the minor line
at 116.49. As the light travels through the air, both the major line and the minor
line are absorbed by the water vapor present in the light path. This relationship
can be rewritten as follows, where k
vapor, x is the path length for the KH20 sensor, and ρ
density.
A-1
is the absorption coefficient for water
w
is the water vapor
w
If we express the transmissivity, T, in terms of the light intensity before and
after passing through the material as measured by the KH20 sensor, V and V
respectively, we obtain the following equation.
Taking the natural log of both sides, and solving for the density, ρ
following equation.
If the path length, x, and the absorption coefficient for water, k
becomes possible to measure the water vapor density ρ
signal output, V, from KH20.
A.2 Calibration of KH20
The KH20 calibration process is to find the absorption coefficient of water
vapor, k
. To do this, we rewrite the equation A-3, and solve for ln(V).
w
,
0
A-2
, yields the
w
A-3
are known, it
w
, by measuring the
w
A-4
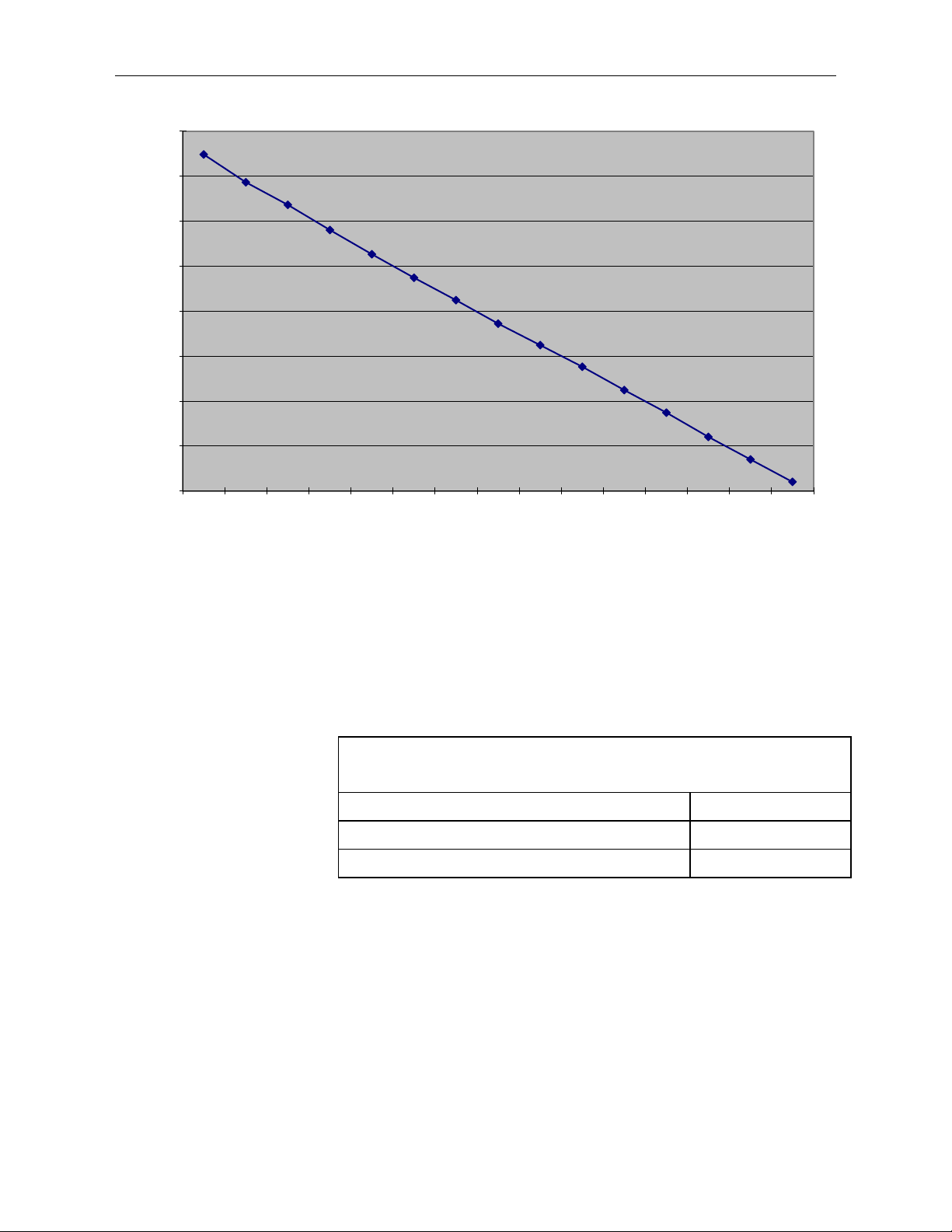
It now becomes obvious from the equation A-4 that there is a linear
relationship between the natural log of the KH20 measurement output, lnV, and
the water vapor density, ρ
after we ran a KH20 over a full calibration vapor range.
. FIGURE A-1 shows the plot of the equation A-4
w
A-1
Page 15
Appendix A. Calibrating KH20
TABLE A-1. Linear Regression Results for KH20 ln(mV)
KH2O Output (mV)
Vapor Density (g/m3)
8
7.5
7
6.5
6
5.5
5
4.5
4
1.74 3.02 4.17 5.44 6.71 7.95 9.2 10.47 11.69 12.9 14.22 15.46 16.78 18.04 19.25
FIGURE A-1. KH20 ln(mV) vs. Vapor Density
We can perform the linear regression on the plot to obtain the slope for the
relationship between the ln(mV) and the vapor density. The slope for the graph
is the coefficient, k
x. TABLE A-1 shows the result of linear regression
w
analysis. The slope is the product of the absorption coefficient of water vapor,
, and the KH20 path length, x.
k
w
vs. Vapor Density
Description Values
Slope (xkw) –0.205
Y Intercept (ln(V0) 8.033
If we substitute these values, along with the measured lnV into equation A-3,
we can obtain the water vapor density, ρ
. Campbell Scientific performs the
w
calibration twice for each KH20: once with the window cleaned, and again
with the window scaled. We then break up the vapor density range into dry and
wet ranges, and compute the k
range. If you know the vapor density range for your site, it is recommended
that you select the coefficient, k
values for each sub range, as well as for the full
w
, that is appropriate for your site, the dry range
w
or the wet range. If the vapor range for the site is unknown, or if the vapor
range is on the border line between the dry and the wet ranges, use the value
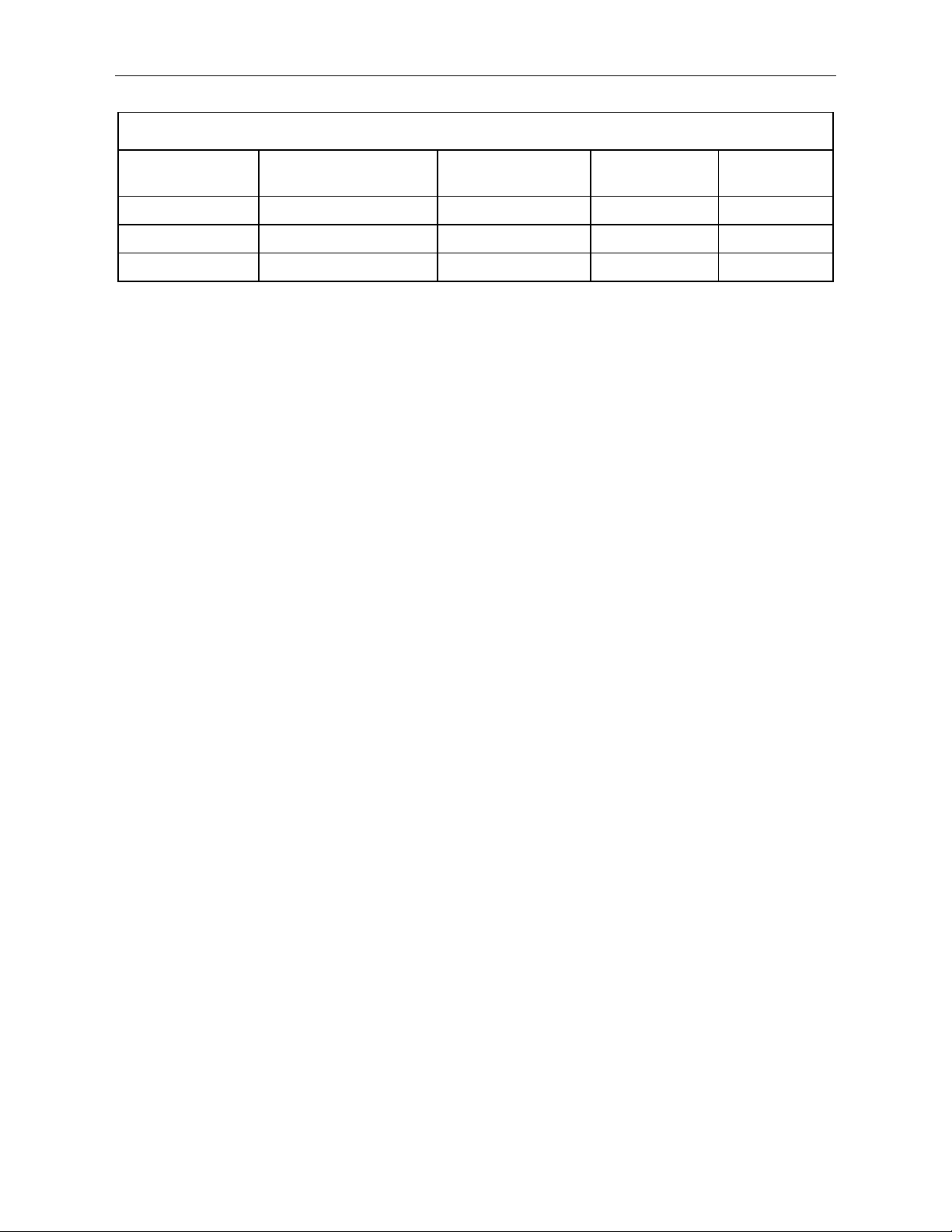
for the full range. TABLE A-2 shows the final calibration values the KH20
calibration certificate contains. The data shown in TABLE A-2 is from an
actual KH20.
A-2
Page 16
Appendix A. Calibrating KH20
TABLE A-2. Final Calibration Values for KH20
Vapor Range
3
)
(g/m
Slope
(xkw)
Y Intercept
ln (V0)
Coefficient
(kw)
Full Range 1.74 ~ 19.25 -0.205 3087 -0.144
Dry Range 1.74 ~ 9.20 -0.216 3259 -0.151
Wet Range 7.95 ~ 19.25 -0.201 2899 -0.141
A-3
Page 17
Appendix B. Example Program
CRBasic Example B-1. CR3000 Program to Measure Water Vapor Fluctuations
'CR3000 Series Data Logger
Units kh_mV = mV
NOTE
'This data logger program measures KH20 Krypton Hygrometer.
'The station operator must enter the constant and the calibration value for the KH20.
'Search for the text string "unique" to find the locations of these constants
'and enter the appropriate values found from the calibration sheet of the KH20.
'*** Unit Definitions ***
'Units Description
'ln_mV ln(mV) (natural log of the KH20 millivolts)
'mV millivolts
'rho_w g/m^3
'*** Wiring ***
'ANALOG INPUT
'1H KH20 signal+ (white)
'1L KH20 signal- (black)
'gnd KH20 shield (clear)
'EXTERNAL POWER SUPPLY
'POS KH20 power+ (red)
' data logger POWER IN 12 (red)
'NEG KH20 power- (black)
' KH20 power shield (clear)
' data logger POWER IN G (black)
PipeLineMode
'*** Constants ***
'Measurement Rate '10 Hz
Const SCAN_INTERVAL = 100 '100 mSec
'Output period
Const OUTPUT_INTERVAL = 30 'Online flux data output interval in minutes.
Const x = 1 'Unique path length of the KH20 [cm].
Const kw = -0.150 'Unique water vapor absorption coefficient [m^3 / (g cm)].
Const xkw = x*kw 'Path length times water vapor absorption coefficient [m^3 / g].
'*** Variables ***
Public panel_temp
Public batt_volt
Public kh(2)
Public rho_w
Alias kh(1) = kh_mV
Alias kh (2) = ln_kh
Units panel_temp = deg_C
Units batt_volt = volts
The following example program measures the KH20 at 10Hz, and stores the
average values into a data table called ‘stats’, as well as the raw data into a data
table called ‘ts_data’.
The KH20 does not monitor absolute water vapor concentration.
B-1
Page 18
Units ln_kh = ln_mV
EndProg
Appendix B. Example Program
Units rho_w = g/m^3
'*** Data Output Tables ***
'Processed data
DataTable (stats,True,-1)
DataInterval (0,OUTPUT_INTERVAL,Min,10)
Minimum (1,batt_volt,FP2,False,False)
Average (1,panel_temp,FP2,False)
Average (2,kh(1),IEEE4,False)
EndTable
'Raw time-series data.
DataTable (ts_data,True,-1)
DataInterval (0,SCAN_INTERVAL,mSec,100)
Sample (1,kh_mV,IEEE4)
EndTable
'*** Program ***
BeginProg
Scan (SCAN_INTERVAL,mSec,3,0)
'data logger panel temperature.
PanelTemp (panel_temp,250)
'Measure battery voltage.
Battery (batt_volt)
'Measure KH20.
VoltDiff (kh_mV,1,mV5000,1,TRUE,200,250,1,0)
ln_kh = LOG(kh_mV)
rho_w = ln_kh/xkw
CallTable stats
CallTable ts_data
NextScan
B-2
Page 19
NOTE
EasyFlux is
Appendix C. EasyFlux® DL CR6KH20
C.1 Introduction
EasyFlux® DL CR6KH20 is a CRBasic program that enables a CR6 data
logger, along with a KH20 and CSAT3B, to collect fully corrected fluxes of
latent heat (H
EC data using commonly used corrections in the scientific literature. The
program can also calculate the ground surface heat flux and energy closure by
adding an optional suite of energy balance sensors. Because the energy balance
sensors require more analog terminals than the CR6 has, the program supports
the addition of a VOLT116 (or CDM-A116) analog terminal expansion
module.
Specifically, the program supports data collection and processing from the
following sensors.
REQUIRED SENSORS:
KH20 Krypton Hygrometer (qty 1)
CSAT3B Sonic Anemometer (qty 1)
Temperature/Relative Humidity (RH) Probe (qty 1). Supported Models:
OPTIONAL SENSORS:
CS106 Barometer (qty 0 to 1)
FW3 Fine Wire Thermocouple (qty 0 to 1)
GPS16X-HVS GPS Receiver (qty 0 to 1)
Radiation measurements
TE525MM Rain Gage (qty 0 to 1)
TCAV Soil Thermocouple Probe (qty 0 to 3)
Soil Water Content Reflectometer (qty 0 to 3)
Soil Heat Flux Plates
O), sensible heat, and momentum. The program processes the
2
o HMP155A
o EE181
o Option 1
− NR-LITE2 Net Radiometer (qty 0 to 1)
− CS301 or CS320 Pyranometer (qty 0 to 1)
− CS310 Quantum Sensor (qty 0 to 1)
− SI-111 Infrared Radiometer (qty 0 to 1)
o Option 2
− SN500SS, or NR01, or CNR4 4-Way Radiometer
(qty 0 to 1; if using CNR4, the CNF4 Ventilation
and Heating Unit is also supported)
o CS650
o CS655
o Option 1: HFP01 plates (qty 0 to 3)
o Option 2: HFP01SC self-calibrating plates (qty 0 to 3)
It may be possible to customize the program for other sensors or
quantities in configurations not described here. Contact Campbell
Scientific for more information.
a registered trademark of Campbell Scientific, Inc.
C-1
Page 20
C.2 Precautions
NOTE
NOTE
NOTE
Appendix C. EasyFlux® DL CR6KH20
The VOLT116 and CDM-A116 are functionally the same,
however their OSes are not interchangeable. If updating an OS,
make sure it is for the correct model.
EasyFlux DL CR6KH20 requires the CR6 to have operating system (OS)
version 09.02 or newer. If using a VOLT116, it must have OS v.01 or
newer, or if using a CDM-A116, it must have v.06 or newer.
The program applies the most common EC corrections to fluxes. However, the
user should determine the appropriateness of the corrections for their site.
Campbell Scientific always recommends saving time-series data in the event
reprocessing of raw data is warranted. Further, the user should determine
the quality and fitness of all data for publication, regardless of whether
said data were processed by EasyFlux DL CR6KH20 or another tool.
As EasyFlux DL CR6KH20 is not encrypted, users have the ability to view and
edit the code. However, Campbell Scientific does not guarantee the
function of an altered program.
C.3 Wiring
When wiring the sensors to the data logger or VOLT116, the default wiring
schemes, along with the number of instruments EasyFlux DL CRKH20
supports, should be followed if the standard version of the program is being
used. TABLE C-1 through TABLE C-13 present the wiring schemes.
A KH20 and CSAT3B are the only required sensors for the program. The
additional sensors described in the following tables are optional, although the
CS106 and FW3 are recommended. Many of the optional sensors are wired to a
VOLT116 (or CDM-A116) module, which effectively increases the CR6
analog terminals. If one or more of the optional sensors are not used, the data
logger or VOLT116 terminals assigned to those sensor wires should be left
unwired.
If the standard data logger program is modified, the wiring
presented in TABLE C-1 may no longer apply. In these cases,
refer directly to the program code to determine proper wiring.
If using an analog expansion module, all wiring and connections
are the same whether using a VOLT116 or a CDM-A116.
Therefore, throughout this appendix, the wiring terminals are only
listed for the VOLT116.
C-2
Page 21

Appendix C. EasyFlux® DL CR6KH20
TABLE C-1. Default Wiring for Required Sensors
⏚
G
3/
⏚
⏚.
C.3.1 Required Sensors
A KH20, CSAT3B, and Temp/RH Probe must be wired to the CR6 for
EasyFlux DL CR6KH20 to be functional. TABLE C-1 shows the default wiring
for these sensors.
Sensor Quantity Wire Description Color Terminal
Signal White U3
Signal Reference Black U41/
KH20 1
CSAT3B 1
Power Cable, Ground
HMP155A/EE1812/
Temp/RH Probe
1/
Wire a user-supplied jumper from U4 to
2/
Wire colors for the HMP155A are shown in normal font, while colors for the EE181 are italicized.
3/
Due to terminal constraints, the Temp/RH Probe is a single-ended (SE) voltage measurement. As an SE
measurement from a sensor that is powered continuously, wire the signal reference and power ground wires
both to G.
1
Power Red 12V
Power Ground Black G (power ground)
Shield Clear
CSAT3BCBL3 CPI
Cable
CSAT3BCBL2
Power Cable, 12V
CSAT3BCBL2
RJ45 Connector
Red 12V
Black G
(analog ground)
CR6 CPI Port (if no
Volt116) or
Volt116 CPI Port
Temp Signal Yellow/Yellow U5
RH Signal Blue/Blue U6
RH Signal Reference White/Black
Shield Clear/Clear
Power Red/Red +12 V
Power Ground Black/None G3/
C.3.2 Optional Sensors
C.3.2.1 VOLT116 Module
Due to the limitations on terminal count of the CR6, a VOLT116 (or
CDM-A116) module is required when adding optional sensors. Prepare the
module as follows:
1. Connect the module to a 10-32 VDC power source.
2. Launch Campbell Scientific Device Configuration Utility software (v2.12
or newer) and select VOLT116. If this is the first time connecting, follow
the instructions on the main screen to download and install the USB driver
to the computer.
3. Select the appropriate COM port and click Connect.
C-3
Page 22

Appendix C. EasyFlux® DL CR6KH20
TABLE C-2. Default Wiring for CS106 Barometer
⏚
⏚
TABLE C-3. Default Wiring for Fine Wire Thermocouple
⏚
4. Once connected, a list of settings is shown. Navigate to CPI Address and
change the value to 1. Press Apply and exit the software.
5. Use an Ethernet cable (included with the module) to connect the module
CPI port to the CR6 CPI port.
C.3.2.2 Barometer
A CS106 Barometer is recommended for increased accuracy due to
calculations and unit conversions that use ambient pressure. TABLE C-2
shows the default wiring for EasyFlux DL CR6KH20.
Sensor Quantity Wire Description Color CR6 Terminal
Signal Blue U7
Signal Reference Yellow
CS106 Barometer 0 or 1
Shield Clear
12V Red 12V
Power Ground Black G
Trigger (not used) Green G
C.3.2.3 Fine Wire Thermocouple
A fine wire thermocouple is recommended for a more accurate and direct
measurement of sensible heat flux. If no fine wire thermocouple is used, an
estimate of sensible heat flux is still given; it is derived using the covariance of
sonic temperature and vertical wind and applying the SND correction. The
EasyFlux DL CR6KH20 can support from zero to one fine-wire thermocouple.
Shown in TABLE C-3 are the available types and default wiring for adding a
fine-wire thermocouple.
VOLT116
Sensor Quantity Wire Description Color
Signal
FW3 Fine Wire
Thermocouple
1/
The FW05 and FW1 may be used instead of the FW3, although they are more fragile and may require more
frequent replacement.
1/
0 or 1
Signal Reference
Shield Clear
Purple
Red
Terminal
Diff 15H
Diff15L
C-4
Page 23

Appendix C. EasyFlux® DL CR6KH20
TABLE C-4. Default Wiring for GPS Receiver
⏚
TABLE C-5. Default Wiring for Radiation Measurement Option 1
Signal
White
CR6 U11
⏚
⏚
C.3.2.4 GPS Receiver
A GPS receiver such as the GPS16X-HVS is optional, but will keep the data
logger clock synchronized to GPS time. If the CR6 clock differs by one
millisecond or more, EasyFlux DL CR6OP will resynchronize the data-logger
clock to match the GPS. The GPS receiver also calculates solar position.
TABLE C-4 shows the default wiring for the GPS16X-HVS.
Sensor Quantity Wire Description Color CR6 Terminal
PPS Grey U1
TXD White U2
Shield Clear
GPS16X-HVS 0 or 1
12V Red 12V
Power Ground Black G
Unused Yellow and Blue G
C.3.2.5 Radiation Measurements Option 1
There are two options for making radiation measurements with
EasyFlux DL CR6KH20 . The program can support a combination of the
sensors described in TABLE C-5. Alternatively, it can support one of the three
types of four-way radiometers described in TABLE C-6. TABLE C-5 gives the
default wiring for Option 1. TABLE C-6 shows the details of the default wiring
for Option 2.
Sensor Quantity Wire Description Color
Radiation Signal Red CR6 U8
NR-LITE2 Net
Radiometer
CS301
Pyranometer
1/
0 or 1
0 or 1
Signal Reference Blue
Shield Black
Signal White VOLT116 Diff 9H
Signal Reference Black VOLT116 Diff 9L2/
Shield Clear
Signal Reference Blue
CS320 Digital
Pyranometer
1/
0 or 1
Shield Clear
12V Power Red CR6 12V
Terminal
CR6 ⏚
CR6 ⏚
VOLT116 ⏚
CR6
CR6
Power Ground Black CR6 G
Signal Red
CS310
Quantum Sensor
0 or 1
Signal Reference Black VOLT116 Diff 10L
Shield Clear
VOLT116 Diff
10H
VOLT116 ⏚
C-5
Page 24

Appendix C. EasyFlux® DL CR6KH20
TABLE C-5. Default Wiring for Radiation Measurement Option 1
TABLE C-6. Default Wiring for Radiation Measurements Option 2
⏚
Sensor Quantity Wire Description Color
Target Temp Signal Red/White
Terminal
VOLT116 Diff
11H
Target Temp Reference Black/Black VOLT116 Diff 11L
SI-111/SI-111SS
Infrared
Radiometer
0 or 1
Sensor Temp Reference Blue/Blue
Shield Clear/Clear
Sensor Temp Signal Green/Green
VOLT116 ⏚
VOLT116 Diff
12H
VOLT116 ⏚
Voltage Excitation White/Red VOLT116 X3
1/
Use only one pyranometer, the CS301 or the CS320. Use the CS320 for applications where a digital,
optionally-heated sensor is preferred.
2/
Jumper to ⏚ with user-supplied wire
C.3.2.6 Radiation Measurements Option 2
Three models of four-way radiometers are compatible with
EasyFlux DL CR6KH20, however only one may be used at a given time. The
default wiring for each of the four-way radiometers is shown in TABLE C-6.
Sensor Quantity Wire Description Color Terminal
SN500SS 4-Way
Radiometer
NR01 4-Way
Radiometer
0 or 1
0 or 1
SDI-12 Signal White CR6 U11
Shield Clear
CR6
Power Red CR6 12V
Power Ground Black G
Pyranometer Up Signal Red (cbl 1) VOLT116 Diff 9H
Pyranometer Up Reference Blue
1/
(cbl 1)
Pyranometer Down Signal White (cbl 1)
Pyranometer Down
Reference
Green
1/
(cbl 1)
Pyrgeometer Up Signal Brown (cbl 1)
Pyrgeometer Up Reference
Yellow
(cbl
1)
1/
Pyrgeometer Down Signal Purple (cbl 1)
Pyrgeometer Down
Reference
Grey
1/
(cbl 1)
PT100 Signal White (cbl 2) VOLT116 Diff 4H
PT100 Reference Green (cbl 2) VOLT116 Diff 4L
VOLT116 Diff
1/
9L
VOLT116 Diff
10H
VOLT116 Diff
1/
10L
VOLT116 Diff
11H
VOLT116 Diff
1/
11L
VOLT116 Diff
12H
VOLT116 Diff
1/
12L
C-6
Page 25

Appendix C. EasyFlux® DL CR6KH20
TABLE C-6. Default Wiring for Radiation Measurements Option 2
Sensor
Quantity
Wire Description
Color
Terminal
⏚
VOLT116 Diff
⏚
⏚
Current Excite Red (cbl 2) VOLT116 X1
Current Return Blue (cbl 2)
VOLT116 ⏚
CNR4 4-Way
Radiometer
1/
Jumper to ⏚ with user-supplied wire
Shields Clear
VOLT116
Pyranometer Up Signal Red VOLT116 Diff 9H
VOLT116 Diff
1/
9L
VOLT116 Diff
10H
VOLT116 Diff
1/
10L
VOLT116 Diff
11H
11L1/
VOLT116 Diff
12H
VOLT116 Diff
1/
12L
0 or 1
Pyranometer Up Reference Blue1/
Pyranometer Down Signal White
Pyranometer Down
Reference
Black
1/
Pyrgeometer Up Signal Grey
Pyrgeometer Up Reference Yellow1/
Pyrgeometer Down Signal Brown
Pyrgeometer Down
Reference
Green
1/
Thermistor Signal White VOLT116 Diff 4H
Thermistor V Excite Red VOLT116 X1
Thermistor Reference Black
Shields Clear
VOLT116
VOLT116
A CNF4 Ventilation and Heater Unit may be used with the CNR4 4-way
Radiometer for more accurate radiation measurements. The CNF4 requires a
solid state relay to control the ventilator and heater. The A21REL-12
4-Channel Relay Driver, sold separately, is recommended. Install the A21REL12 inside the system enclosure near the VOLT116 and data logger. TABLE
C-7 lists the wiring connections needed to power and control the A21REL-12;
a CABLE3CBL-1 or similar 3-conductor 22 AWG cable is recommended for
connections from the A21REL-12 to the VOLT116, and a CABLEPCBL-1 or
similar 16 AWG 2-conductor power cable is recommended for power
connections from the A21REL-12 to system 12V power source. TABLE C-8
lists the wiring for the CNF4.
C-7
Page 26

Appendix C. EasyFlux® DL CR6KH20
A21REL-12 Terminal
Connecting Terminal
Cable/Wire
CABLEPCBL-1,
CABLE3CBL-1,
TABLE C-8. CNF4 Wiring
Sensor
Quantity
Wire Description
Color
Terminal
A21REL-12
TABLE C-7. A21REL-12 Wiring
+12V
System +12V
1/
Ground System GND1/
CTRL 1
CTRL 2
CTRL 3
The +12V terminal on the A21REL-12 needs to be in common with the REL 1 COM, REL 2
COM, and REL 3 COM terminals. To do this, use jumper wires to connect the +12V
terminal to REL 1 COM, and then REL1 COM to REL 2 COM, and finally REL2 Com to
REL 3 COM.
1/
For the A21REL-12 power connections, connect +12V and G to a system or external
power supply. Do not connect to the +12V or G terminals on the CR6 or VOLT116.
VOLT116 SW5V #1
VOLT116 SW5V #2
VOLT116 SW5V #3
CABLEPCBL-1,
red wire
black wire
CABLE3CBL-1,
red wire
black wire
CABLE3CBL-1,
white wire
Tachometer Output Green CR6 U11
CNF4
0 or 1,
only use
with a
CNR4
Tachometer
Reference
Ventilator Power Yellow
Ventilator Ground Brown
Heater #1 Power White
Grey
A21REL-12
REL 1 NO
A21REL-12
A21REL-12
REL 2 NO
CR6 ⏚
REL G
Heater #1 Ground Red
Heater #2 Power Black
Heater #2 Ground Blue
C.2.3.7 Precipitation Gage
EasyFlux DL CR6KH20 can support a single TE525MM tipping rain gage. The
default wiring for the precipitation gage is shown in TABLE C-9.
REL G
A21REL-12
REL 3 NO
A21REL-12
REL G
C-8
Page 27

Appendix C. EasyFlux® DL CR6KH20
TABLE C-9. Default Wiring for Precipitation Gage
⏚
⏚
TABLE C-10. Default Wiring for Soil Thermocouple Probes
VOLT116 Terminal
⏚
⏚
⏚
CAUTION
NOTE
Sensor Quantity Wire Description Color
TE525MM
Tipping Rain
Gage
0 or 1
Pulse Output Black U12
Signal Ground White
Shield Clear
C.2.3.8 Soil Temperature
The TCAV is an averaging soil thermocouple probe used for measuring soil
temperature. EasyFlux DL CR6KH20 can support up to three TCAV probes.
The order of wiring, however, is important. If only one TCAV sensor is used, it
must be wired as described for TCAV #1 in TABLE C-10. A second or third
TCAV sensor would be wired according to TCAV #2 or TCAV #3,
respectively, in TABLE C-10.
If only one TCAV is being used and it is wired according to
TCAV #2 or #3, the data logger will not record any TCAV
measurements.
Sensor Quantity Wire Description Color
Signal Purple Diff 1H
TCAV #1 1
TCAV #2 1
Signal Reference Red Diff 1L
Shield Clear
Signal Purple Diff 2H
Signal Reference Red Diff 2L
Shield Clear
CR6 Terminal
Signal Purple
TCAV#3
1
Signal Reference Red
Shield Clear
The CS650 or CS655 sensors also measure soil temperature. If the
CS650 or CS655 sensors are used but no TCAV probes are used,
EasyFlux DL CR6KH20 will use soil temperature from the CS650
or CS655 to compute ground-surface heat flux. If available, soil
temperature from the TCAV probe is preferred since it provides a
better spatial average. See wiring details for these sensors in
TABLE C-11.
C.2.3.9 Soil Water Content
EasyFlux DL CR6KH20 supports one of two models of soil water content
sensors: the CS650 or CS655; up to three of one model is supported. A soil
Diff 3H
Diff 3L
C-9
Page 28

TABLE C-11. Default Wiring for Soil Water Content Probes
Sensor
Quantity
Wire Description
Color
CR6 Terminal
CS650/CS655
⏚
⏚
U9
G
⏚
G
TABLE C-12. Default Wiring for Non-Calibrating Soil Heat Flux Plates
⏚
CAUTION
SDI-12 address 1
CS650/CS655
SDI-12 address 2
CS650/CS655
SDI-12 address 3
Appendix C. EasyFlux® DL CR6KH20
water content sensor can also be omitted without affecting function. The
default wiring for each is shown in TABLE C-11.
If only one soil water content sensor is being used, wire it
according to the first probe as described in TABLE C-11. If only
one sensor is being used and it is wired according to the second or
third sensor, EasyFlux DL CR6KH20 will not record any
measurements from the soil water content sensor.
SDI-12 Data Green U9
SDI-12 Power Red +12 V
1
1
1
SDI-12 Reference Black G
Shield Clear G
Not Used Orange
SDI-12 Data Green U9
SDI-12 Power Red +12 V
SDI-12 Reference Black G
Shield Clear
Not Used Orange G
SDI-12 Data
SDI-12 Power
SDI-12 Reference
Shield Clear
Not Used
Green
Red
Black
Orange
+12 V
C.3.2.10 Soil Heat Flux Plates
EasyFlux DL CR6KH20 can support from zero to soil heat flux plates. The user
has the option to use one of two supported models: the HFP01 or HFP01SC
(self-calibrating). The default wiring for the HFP01 soil heat flux plates is
shown in TABLE C-12, and the default wiring for the HFP01SC plates is
shown in TABLE C-13.
Sensor Quantity Wire Description Color VOLT116 Terminal
Signal White Diff 5H
HFP01 #1 1
Signal Reference Green Diff 5L
Shield Clear
C-10
Page 29

Appendix C. EasyFlux® DL CR6KH20
TABLE C-12. Default Wiring for Non-Calibrating Soil Heat Flux Plates
Sensor
Quantity
Wire Description
Color
VOLT116 Terminal
⏚
⏚
TABLE C-13. Default Wiring for Soil Heat Flux Plates (Self Calibrating)
Sensor
Quantity
Wire Description
Color
VOLT116 Terminal
⏚
⏚
⏚
⏚
⏚
⏚
Signal White Diff 6H
HFP01 #2 1
Signal Reference Green Diff 6L
Shield Clear
Signal White Diff 7H
HFP01 #3 1
Signal Reference Green Diff 7L
Shield Clear
Signal White Diff 5H
Signal Reference Green Diff 5L
HFP01SC #1 1
Shield Clear
Heater Signal Yellow Diff 13H
Heater Reference Purple Diff 13L
Shield Clear
Heater Power Red SW12-11/
Power Reference Black G
Signal White Diff 6H
Signal Reference Green Diff 6L
Shield Clear
Heater Signal Yellow Diff 14H
HFP01SC #2 1
Heater Reference Purple Diff 14L
Shield Clear
Heater Power Red SW12-11/
Power Reference Black G
Signal White Diff 7H
Signal Reference Green Diff 7L
Shield Clear
Heater Signal Yellow Diff 16H
HFP01SC #3 1
Heater Reference Purple Diff 16L
Shield Clear
Heater Power Red SW12-21/
Power Reference Black G
1/
The SW12 terminals on the VOLT116 are limited to 200mA output. Accordingly, no more than two
HFP01SC sensors may be connected to each terminal. Connect heater power wires from HFP01SC #1 and #2
to SW12-1, and connect heater wires from HFP01SC #3 to SW12-2.
C-11
Page 30

C.4 Operation
C.4.1 Set Constants in CRBasic Editor and Load Program
Appendix C. EasyFlux® DL CR6KH20
Operating EasyFlux DL CR6KH20 requires the user to enter or edit certain
constants and input variables unique to the program or site. Constants are
typically edited only once when first initializing the program, whereas sitespecific variables are edited upon initial deployment and periodically as site
conditions change; for example, canopy height is a variable that may need to be
adjusted throughout a growing season. Appendix C.4.1, Set Constants in
CRBasic Editor and Load Program
constants, and Appendix C.4.2, Enter Site-Specific Variables with Data Logger
Keypad or LoggerNet
Before operating the station, the values for configuration constants should be
verified in the program code using CRBasic Editor.
Open the program in CRBasic Editor. After the introductory comments at the
top is a section titled “USER-DEFINED CONFIGURATION CONSTANTS”
(see FIGURE C-1). Review the constants in this section and modify as needed.
If having difficulty locating the correct lines of code, search the program for
the word “unique”. This will locate all lines of code containing constants that
need to be verified. Look for the text comments on the right side of each line of
code for more explanation of the constant. Generally, the constants fall into
four categories:
(p. C-14), provides details on setting variables.
(p. C-12), provides instructions on setting
1. Program Function Constants
These are constants that determine the timing of code execution,
frequency of writing to output tables, memory allocation, etc. In most
cases, the default constants for these values may be retained.
A program function constant worth mentioning is
ONE_FULL_TABLE. If this is set to TRUE, all of the intermediate
and auxiliary measurements will be included as data fields in the
main FLUX_CSFormat output table, rather than being in a separate
output table called FLUX_NOTES. For more information, see
Appendix C.4.4, Output Tables
2. Sensor Selection Constants
All sensor selection constants begin with the prefix SENSOR. The
value is set to TRUE in the constant table if the system includes the
sensor. For example, if a system has a fine-wire thermocouple, the
constant SENSOR_FW should be set to TRUE. When set to TRUE,
the wiring in TABLE C-13 will apply to the sensor and the data from
that sensor will be included in the data output tables.
If a sensor is not used, ensure the constant is set to FALSE.
3. Sensor Quantity Constants
The value for these constants indicates the number of each type of
sensor in the system. For example, if three soil heat flux (SHF) plates
were being used, the constant NMBR_SHF would be set to 3.
(p. C-19).
4. Sensor Calibration Constants
Some sensors have unique parameters for their measurement
C-12
Page 31

Appendix C. EasyFlux® DL CR6KH20
NOTE
equations; for example, multipliers and/or offsets for linear working
equations that are used to convert their raw measurements into the
values applicable in analysis. Typically, these parameter values are
found on the calibration sheet from the sensor original manufacturer.
For example, if an NR-LITE2 net radiometer is being used, a unique
multiplier is set in the following line of code: Constant
NRLITE_SENSITIVITY = 16. The comments in the code explain
that the value entered is the sensor sensitivity provided in the NRLITE2 calibration sheet.
Constants relating to a particular sensor have been grouped
together and have the sensor selection constant at the beginning,
such that if the sensor selection constant is set to FALSE, the other
constants for that sensor may be ignored. For example, the
constants dealing with the SI-111SS Infrared Radiometer are
grouped together with the SENSOR_SI111 constant at the top. If
a SI-111SS is not being used, SENSOR_SI111 should be set to
FALSE and the next five constants dealing with calibration
coefficients will be ignored in the program.
After all constants are verified, save the program under a new or modified file
name to keep track of different program versions. Finally, send the program to
the CR6 using LoggerNet, PC400, or PC200W software.
FIGURE C-1. Example screen from CRBasic Editor showing user-
defined configuration constants
C-13
Page 32

Appendix C. EasyFlux® DL CR6KH20
System Control
Site Var Settings >
Site Var Settings:
Latitude
Hemisph_NS
Longitude
Hemisph_EW
Altitude
Meas height
Surface Type >
Canopy Height
d, 0 = auto
z0, 0 = auto
Sonic Azmth
KH20 Coord x
KH20 Coord y
FW Coord x
FW Coord y
FW Dim
GPS Height
Bulk Density
C_dry_soil
HFP Depth
Planar Fit Alpha >
Planar Fit Beta >
Footprt Dist Intrst >
Surface Type:
CROP
GRASS
FOREST
SHRUB
BARELAND
WATER
ICE
Planar Fit Alpha:
≤60 or ≥300
>60 & ≤170
>170 & <190
≥190 & <300
Planar Fit Beta:
≤60 or ≥300
>60 & ≤170
>170 & <190
≥190 & <300
Footprt Dist Intrst:
≤60 or ≥300
>60 & ≤170
>170 & <190
≥190 & <300
C.4.2 Enter Site-Specific Variables with Data Logger Keypad or
LoggerNet
After the eddy-covariance station is installed and the data logger is running the
program, connect a CR1000KD Keyboard Display to the CR6 CS-I/O port to
view a custom menu of station-specific variables (FIGURE C-2). Use this
menu to enter, view, and modify these variables. Use the up and down arrow
buttons to navigate to different variables. Press Enter to select a variable or to
set a new value after typing it. Press Esc to return to the previous menu.
FIGURE C-2 depicts the structure of the custom menu. Bypass the custom
menu to interact directly with the data logger through the data logger default
menus. To bypass the custom menus, select < System Menu >. If no
CR1000KD is available, these same variables may be viewed and edited using
the LoggerNet connect screen numeric display of variables from the Public
table.
FIGURE C-2. Custom keypad menu; arrows indicate submenus
Before fluxes are processed correctly, the user must go through each of the
station variables and set or confirm the assigned values. TABLE C-14 gives
short descriptions of each station variable.
C-14
Page 33

Appendix C. EasyFlux® DL CR6KH20
TABLE C-14. Station Variables with Descriptions
The height of the center of the
Distance along the sonic x-axis
Station Variable Units Default Description
Latitude
Hemisph_NS none NORTH
Longitude
Hemisph_EW none WEST
Altitude m 1356 The site altitude altitude
decimal
degrees
decimal
degrees
41.766
111.855
The site latitude in degrees North
or South.
The site latitudinal hemisphere.
Options are NORTH or SOUTH.
The site longitude in degrees
East or West.
The site longitudinal
hemisphere. Options are EAST
or WEST.
Name of variable in
Public Table (in
case no CR1000KD
available)
Latitude
hemisphere_NS
1 = North
–1 = South
Longitude
hemisphere_EW
1 = East
–1 = West
Meas Height m 2
Surf Type none GRASS
Canopy Height m 0.5
d m 0 (Auto)
z0
Sonic Azmth
m 0 (Auto)
decimal
degrees
0
eddy-covariance sensor
measurement volumes above
ground.
Type of surface at the
measurement site. Options are
CROP, GRASS, FOREST,
SHRUB, BARELAND, and
WATER. This is used to
estimate displacement height.
The average height of the
canopy.
Displacement height. Set to zero
(0) for program to auto-calculate.
See the Aerodynamic Height
appendix in the EasyFlux DL
CR6OP manual for details.
Roughness length. Set to zero (0)
for program to auto-calculate.
See the Programmatic Approach
appendix in the EasyFlux DL
CR6OP manual for details.
The compass direction in which
the sonic negative x-axis points
(the compass direction in which
the sonic head is pointing).
height_measurement
surface_type
1 = CROP
2 = GRASS
3 = FOREST
4 = SHRUBLAND
5 = BARELAND
6 = WATER
7 = ICE
height_canopy
displacement_user
roughness_user
sonic_azimuth
KH20 Coord x
m 0.15
between the sonic sampling
volume and KH20 sampling
volume.
separation_x_kh20
C-15
Page 34

Appendix C. EasyFlux® DL CR6KH20
TABLE C-14. Station Variables with Descriptions
Station Variable Units Default Description
Distance along the sonic y-axis
KH20 Coord y
m 0.15
between the sonic sampling
volume and KH20 sampling
volume.
Distance along the sonic x-axis
between the sonic sampling
FW Coord x m 0.01227
volume and fine-wire
thermocouple. If no fine-wire
thermocouple is being used, this
variable is omitted.
Distance along the sonic y-axis
between the sonic sampling
FW Coord y m -0.02408
volume and the fine-wire
thermocouple. If no fine-wire
thermocouple is being used, this
variable is omitted.
Identifies which fine-wire
thermocouple is being used and
loads the appropriate diameter.
For FW05_DIA, FW1_DIA and
FW Dim m FW3_DIA
FW3_DIA, the diameters are
-5
1.27 x 10
x 10
, 2.54 x 10-5, and 7.62
-5
m, respectively. If no finewire thermocouple is being used,
this variable is omitted.
The height of the GPS reciever
GPS Height m 2
above the ground surface. If GPS
is not used, this variable is
omitted.
Average bulk density of soil. If
Bulk Density kg·m-3 1300
energy balance sensors are not
used, this variable is omitted.
Specific heat of dry mineral soil.
C_dry_soil J·kg-1 K-1 870
If energy balance sensors are not
used, this variable is omitted.
Depth of the soil heat flux plates.
HFP Depth m 0.16
If energy balance sensors are not
used, this variable is omitted.
Alpha angle used to rotate the
wind when the mean horizontal
Planar
Fit Alpha
≤ 60
or
≥ 300
decimal
degrees
0
wind is blowing from the sector
of 0 to 60 and 300 to 360
degrees in the sonic coordinate
system (wind blowing into sonic
1/
head).
Name of variable in
Public Table (in
case no CR1000KD
available)
separation_y_kh20
separation_x_FW
separation_y_FW
FW_diameter
height_GPS16X
soil_bulk_density
cds
thick_abv_HFP
alpha_PF_60_300
C-16
Page 35

Appendix C. EasyFlux® DL CR6KH20
TABLE C-14. Station Variables with Descriptions
Alpha angle used to rotate the
Beta angle used to rotate the
Station Variable Units Default Description
Alpha angle used to rotate the
wind when the mean horizontal
Planar
Fit Alpha
> 60
&
≤ 170
decimal
degrees
0
wind is blowing from the sector
of 60 to 170 degrees in the sonic
coordinate system (wind blowing
from the sector left and behind
1/
sonic head).
Alpha angle used to rotate the
wind when the mean horizontal
Planar
Fit Alpha
> 170
&
< 190
decimal
degrees
0
wind is blowing from the sector
of 170 to 190 degrees in the
sonic coordinate system (wind
blowing from behind sonic
1/
head).
Name of variable in
Public Table (in
case no CR1000KD
available)
alpha_PF_60_170
alpha_PF_170_190
Planar
Fit Alpha
Planar
Fit Beta
Planar
Fit Beta
Planar
Fit Beta
≥ 190
&
< 300
≤ 60
or
≥ 300
> 60
&
≤ 170
> 170
&
< 190
decimal
degrees
decimal
degrees
decimal
degrees
decimal
degrees
wind when the mean horizontal
wind is blowing from the sector
0
of 190 to 300 degrees in the
alpha_PF_190_300
sonic coordinate system (wind
blowing from the sector right
1/
and behind sonic head).
wind when the mean horizontal
wind is blowing from the sector
0
of 0 to 60 and 300 to 360
beta_PF_60_300
degrees in the sonic coordinate
system (wind blowing into sonic
1/
head).
Beta angle used to rotate the
wind when the mean horizontal
wind is blowing from the sector
0
of 60 to 170 degrees in the sonic
beta_PF_60_170
coordinate system (wind blowing
from left and behind sonic
1/
head).
Beta angle used to rotate the
wind when the mean horizontal
wind is blowing from the sector
0
of 170 to 190 degrees in the
beta_PF_170_190
sonic coordinate system (wind
blowing from behind sonic
1/
head).
C-17
Page 36

Appendix C. EasyFlux® DL CR6KH20
TABLE C-14. Station Variables with Descriptions
Name of variable in
Public Table (in
case no CR1000KD
Station Variable Units Default Description
available)
Beta angle used to rotate the
wind when the mean horizontal
Planar
Fit Beta
≥ 190
&
< 300
decimal
degrees
0
wind is blowing from the sector
of 190 to 300 degrees in the
sonic coordinate system (wind
beta_PF_190_300
blowing from right and behind
1/
sonic head).
The upwind distance of interest
from the station when the mean
horizontal wind is blowing from
the sector of 0 to 60 and 300 to
360 degrees in the sonic
coordinate system (wind blowing
into sonic head).
Footprint
Dist of
Interest
≤ 60
or
≥ 300
m 100z
Note: The program will report
the percentage of cumulative
dist_intrst_60_300
footprint from within this
distance. The default value is
100 times the aerodynamic
height, z. Recall that z is the
difference between the
measurement height and
displacement height.
The upwind distance of interest
from the station when the mean
Footprint
Dist of
Interest
> 60
&
≤ 170
m 100z
horizontal wind is blowing from
the sector of 60 to 170 degrees in
the sonic coordinate system
dist_intrst_60_170
(wind blowing from left and
behind sonic head).
The upwind distance of interest
from the station when the mean
Footprint
Dist of
Interest
> 170
&
< 190
m 100z
horizontal wind is blowing from
the sector of 170 to 190 degrees
in the sonic coordinate system
dist_instrst_170_190
(wind blowing from behind
sonic head).
The upwind distance of interest
from the station when the mean
Footprint
Dist of
Interest
≥ 190
&
< 300
m 100z
horizontal wind is blowing from
the sector of 190 to 300 degrees
in the sonic coordinate system
dist_intrst_190_300
(wind blowing from right and
behind sonic head).
1/
Leave all planar fit alpha and beta angles set to 0 to use Tanner and Thurtell (1969) method of double coordinate rotations.
C-18
Page 37

The CSAT3B offers a user-enabled correction for transducer wind
TABLE C-15. microSD Flash Card Fill Times with 10Hz Measurement Rate
Fill time with required sensors, FW,
NOTE
NOTE
CAUTION
shadowing. The correction is disabled as a default state but may
be enabled by connecting the CSAT3B to a computer using the
CSAT3B USB Data Cable, launching the Device Configuration
Utility, and changing the setting for correction. For more
information on the correction, see the CSAT3B manual.
C.4.3 Data Retrieval
The program stores a limited amount of data to the internal CPU of the data
logger, so a microSD Flash card should be used with the CR6. TABLE C-15
shows the number of days of data a 2 GB, 8 GB, and 16 GB card will typically
hold before the memory is full and data starts to be overwritten. In cases where
real-time remote monitoring is desired, various telemetry options (for example,
cellular, radio, etc.) are available to transmit the processed flux data. Certain
conditions may also allow remote transmittal of time series data. Contact
Campbell Scientific for more details.
Appendix C. EasyFlux® DL CR6KH20
microSD Flash
card size
Fill time with required
sensors only
CS106, and biomet/energy balance
1/
sensors)
2 GB ~41 days ~35 days
8 GB ~170 days ~141 days
16 GB ~339 days ~281 days
1/
Biomet and energy balance sensors used for this fill time estimate include the following: NR-LITE2, CS301,
CS310, SI-111, TE525MM, TCAV (qty 3), CS616 (qty 3), and HFP01 (qty 3)
microSD Flash cards from various manufacturers may have
slightly different memory sizes on their 2 GB, 8 GB, and 16 GB
cards, respectively. Also, as a card ages some of its sectors may
become unusable, decreasing the available memory. Fill time
estimates given in
TABLE C-15 are approximations for new
cards.
Campbell Scientific recommends and supports only the use
of microSD cards obtained from Campbell Scientific. These
cards are industrial grade and have passed Campbell
Scientific hardware testing. Use of consumer grade cards
substantially increases the risk of data loss.
C.4.4 Output Tables
Besides the standard Public, Status, and TableInfo tables that every data
logger reports, the program has six output tables. TABLE C-16 gives the
names of these output tables, along with a short description, the frequency at
which a record is written to the table, and the amount of memory allocated
from the CPU and microSD card for each table.
C-19
Page 38

Appendix C. EasyFlux® DL CR6KH20
TABLE C-16. Data Output Tables
Table Name
Description
Recording Interval
Memory on
CR6 CPU
Memory on
microSD Card
NOTE
The variable naming conventions used by AmeriFlux and other
flux networks have been adopted in EasyFlux DL CR6KH20.
Additionally, an output table called Flux_AmeriFluxFormat
reports the variables in the order and format prescribed
by AmeriFlux (see
variables/
).
https://ameriflux.lbl.gov/data/aboutdata/data-
If the user would prefer to have the data fields contained in the Flux_Notes
table appended to the end of the Flux_CSFormat table rather than being
placed in a separate output table, this is possible by changing the constant
ONE_FULL_TABLE from FALSE to TRUE (see Appendix C.4.1, Set
Constants in CRBasic Editor and Load Program
(p. C-12), on changing
constants).
Time_Series
Diagnostic
Monitor_CSAT3B
Flux_AmeriFluxFormat
Flux_CSFormat
Flux_Notes
Time series data
(aligned to
account for
electronic delays)
Reports most
recent diagnostic
flags from select
sensors
Reports roll and
pitch of the
CSAT3B, as well
as temp & RH in
CSAT3B sensor
housing
Processed flux
and statistical data
following
reporting
conventions and
order of
AmeriFlux
Processed flux
and statistical data
Intermediate
variables, station
constants, and
correction
variables used to
generate flux
results
SCAN_INTERVAL
(default 100 ms)
SLW_SCN_INTV
(default 6 s)
SLW_SCN_INTV
(default 6 s)
OUTPUT_INTERVAL
(default 30 minutes)
OUTPUT_INTERVAL
(default 30 minutes)
OUTPUT_INTERVAL
(default 30 minutes)
Auto-Allocate
(typically less than
1 hour)
1 record (most
recent scan)
1 day
7 days
7 days
NUM_DAY_CPU
(default 7 days)
See TABLE
C-15 for total
days. Data
broken into
daily files.
0 records
See TABLE
C-15 for total
days. Data
broken into 30-
day files.
See TABLE
C-15 for total
days. Data
broken into 30-
day files.
See TABLE
C-15 for total
days. Data
broken into 30-
day files.
See TABLE
C-15 for total
days. Data
broken into 30-
day files.
C-20
Page 39

Appendix C. EasyFlux® DL CR6KH20
TABLE C-17. Data Fields in the Time_Series Data Output Table
NOTE
NOTE
TABLE C-16 through TABLE C-22 give a description of all data fields found
in each data output table and when each data field is included in the table.
Prior to coordinate rotations, the orthogonal wind components
from the sonic anemometer are denoted as Ux, Uy, and Uz.
Following coordinate rotations, the common denotation of u, v,
and w is used, respectively.
Variables with _R denote that the value was computed after
coordinate rotations were done. Variables with a _F denote that
the value was calculated after frequency corrections were applied.
Similarly, _SND and _WPL refer to variables that have had the
SND correction or the WPL correction applied, respectively.
Data Field
Name
Ux m·s-1 Wind speed along sonic x-axis Always
Uy m·s-1 Wind speed along sonic y-axis Always
Uz m·s-1 Wind speed along sonic z-axis Always
T_SONIC
diag_sonic none Raw sonic diagnostic value (0 indicates no diagnostic flags set) Always
volt_KH20 mV Raw signal voltage from KH20 Always
diag_KH20 none
PA kPa Ambient pressure Always
TA_1_1_1
RH_1_1_1 % Relative humidity measured by the temp/RH probe Always
FW
Units Description
deg
Sonic temperature Always
C
Diagnostic value from KH20 (a non-zero result indicates
volt_KH20 was returned as not a number, less than -10 mV, or
greater than 4500 mV).
deg
Air temperature measured by the temp/RH probe Always
C
deg
Air temperature measured by fine-wire thermocouple
C
Data Field
Included
Always
If FW05, FW1, or
FW3 is used
C-21
Page 40

Appendix C. EasyFlux® DL CR6KH20
TABLE C-18. Data Fields in the Diagnostic Output Table
HFP01SC calibration error flag. Set to
TABLE C-19. Data Fields in the Monitor_CSAT3B Output Table
Data Field Name
Units
Description
Data Field
Included
TABLE C-20. Data Fields in the Flux_AmeriFluxFormat Output Table
Data Field Name
Units
Description
Included
Data Field
Data Field Name Description
Included
sonic_amp_l_f Amplitude low diagnostic flag Always
sonic_amp_h_f Amplitude high diagnostic flag Always
sonic_sig_lck_f Signal lock diagnostic flag Always
sonic_del_T_f_f Delta Temp diagnostic flag Always
sonic_aq_sig_f Acquiring signal diagnostic flag Always
sonic_low_volt_f Low voltage diagnostic flag Always
sonic_trig_f No measurement trigger diagnostic flag Always
sonic_intrnl_hmdty High internal humidity diagnostic flag Always
sonic_cal_err_f Calibration error diagnostic flag Always
diag_kh20_f KH20 diagnostic flag Always
true if the calibration multiplier is
shfp_cal_fail_x_1_1
returned as a non-number or if the
calibrated sensitivity it not within 80%105% of the original sensitivity; x is an
If HFP01SC
used
index identifying the HFP01SC of
concern.
board_temp_sonic deg C Average temperature of the CSAT3B sensor housing Always
board_RH_sonic %
pitch_sonic
roll_sonic
TIMESTAMP_START YYYYMMDDHHMM Start time of the averaging period Always
TIMESTAMP_END YYYYMMDDHHMM End time of the averaging period Always
H2O mmol·mol-1
H2O_SIGMA mmol·mol-1 Standard deviation of H2O Always
LE W·m-2 Latent heat flux after corrections Always
decimal
deg
decimal
deg
Average relative humidity inside the CSAT3B sensor
housing
Degrees between horizontal plane and CSAT3B xaxis
Degrees between horizontal plane and CSAT3B yaxis
Average H
O molar mixing ratio
2
(dry basis)
Always
Always
Always
Data Field
Always
C-22
Page 41

Appendix C. EasyFlux® DL CR6KH20
TABLE C-20. Data Fields in the Flux_AmeriFluxFormat Output Table
Result of steady state and integral
Sensible heat flux after
The change in heat storage in the
Distance upwind where the
Data Field Name Units Description
Result of steady state and integral
LE_SSITC_TEST none
ET mm·hour-1 Evapotranspiration Always
turbulence characteristics for LE
according to Foken et al. (2004)
Data Field
Included
Always
ET_SSITC_TEST none
H W·m-2
H_SSITC_TEST none
G W·m-2
SG W·m-2
FETCH_MAX m
FETCH_90 m
FETCH_55 m
FETCH_40 M
WD decimal degrees Average wind direction Always
WS m·s-1 Average wind speed Always
WS_MAX m·s-1 Maximum wind speed Always
USTAR m·s-1 Friction velocity Always
ZL none Stability Always
TAU kg·m-1·s-2 Momentum Flux Always
TAU_SSITC_TEST none
MO_LENGTH M Monin-Obukhov length Always
U m·s-1 Average streamwise wind Always
turbulence characteristics for ET
according to Foken et al. (2004)
corrections
Result of steady state and integral
turbulence characteristics for FC
according to Foken et al. (2004)
Calculated heat flux at the ground
surface
soil above the soil heat flux plates
during the averaging interval
maximum contribution to the
footprint is found
Upwind distance that contains
90% of cumulative footprint. If
NAN is returned, integration of
the model never reached 90%
within the allowable distance of
integration. See the Footprint
appendix in the EasyFlux DL
CR6OP manual for more details.
Upwind distance that contains
55% of footprint
Upwind distance that contains
40% of footprint.
Result of steady state and integral
turbulence characteristics for FC
according to Foken et al. (2004)
Always
Always
Always
If energy balance
sensors used
If energy balance
sensors used
Always
Always
Always
Always
Always
C-23
Page 42

Appendix C. EasyFlux® DL CR6KH20
TABLE C-20. Data Fields in the Flux_AmeriFluxFormat Output Table
Air temperature from temp/RH
Data Field
Data Field Name Units Description
U_SIGMA m·s-1
V m·s-1 Average crosswind Always
V_SIGMA m·s-1 Standard deviation of crosswind Always
W m·s-1 Average vertical wind Always
W_SIGMA m·s-1
PA kPa Atmospheric Pressure Always
Standard deviation of streamwise
wind
Standard deviation of vertical
wind
Included
Always
Always
TA_1_1_1 deg C
RH_1_1_1 %
T_DP_1_1_1 deg C
VPD hPa Vapor pressure deficit Always
T_SONIC deg C Average sonic temperature Always
T_SONIC_SIGMA deg C
PBLH m
SWC_x_1_1 %
TS_x_1_1 deg C
ALB none Albedo
NETRAD W·m-2 Net radiation
PPFD_IN µmol·m-2·s-1 Photosynthetic photon density If CS310 used
SW_IN W·m-2 Incoming shortwave radiation
SW_OUT W·m-2 Outgoing shortwave radiation
LW_IN W·m-2 Incoming longwave radiation
LW_OUT W·m-2 Outgoing longwave radiation
P mm Precipitation in output interval If TE525 used
T_CANOPY deg C Canopy temperature If SI111 used
probe
Relative humidity from temp/RH
probe
Dewpoint temperature from
temp/RH probe
Standard deviation of sonic
temperature
Estimated planetary boundary
layer height
Soil water content. x is an index
for the number of soil sensors.
Soil temperature. x is an index for
the number of soil temperature
measurements made.
Always
Always
Always
Always
Always
If CS65X used
If TCAV or CS65X
used.
If SN500SS, NR01,
or CNR4 used
If SN500SS, NR01,
CNR4, or NRlit2
used
If SN500SS, NR01,
CNR4, CS301, or
CS320 used
If SN500SS, NR01,
or CNR4 used
If SN500SS, NR01,
or CNR4 used
If SN500SS, NR01,
or CNR4 used
C-24
Page 43

Appendix C. EasyFlux® DL CR6KH20
TABLE C-21. Data Fields in the Flux_CSFormat Data Output Table
Data Field Name
Units
Description
Included
The total number of time series
If energy
Data Field
LE W·m-2 Final corrected latent heat flux Always
LE_QC grade
Overall quality grade for LE
following Foken et al. 2012
Always
LE_samples count
H W·m-2
H_QC grade
H_samples count
H_FW W·m-2
H_FW_samples count
NETRAD W·m-2
G W·m-2 Heat flux at the ground surface
SG W·m-2
samples used in calculation of LE
Final corrected sensible heat flux
derived from sonic sensible heat flux
Overall quality grade for Hs
following Foken et al. 2012
The total number of time series
samples used in calculation of H
Final corrected sensible heat flux
derived from fine-wire thermocouple
measurements
The total number of time series
samples used in calculation of H_FW
Average net radiation (corrected for
wind)
The change in heat storage in the soil
above the soil heat flux plates during
the averaging interval
Always
Always
Always
Always
If FW05,
FW1, or FW3
is used
If FW05,
FW1, or FW3
is used
If NR-LITE2,
SN500SS,
NR01, or
CNR4 used
If energy
balance
sensors are
used
If energy
balance
sensors used
energy_closure fraction
poor_enrg_clsur none
Bowen_ratio fraction
The ratio of sensible and latent heat
fluxes to surface heat flux plus net
radiation
If TRUE, despite favorable
meteorological conditions (adequate
turbulence and no rainfall), energy
closure is poor. Check instruments.
The ratio of final sensible heat flux
over final latent heat flux
TAU kg·m-1·s-2 Final corrected momentum flux Always
TAU_QC grade
USTAR m·s-1
Overall quality grade for tau
following Foken et al. 2012
Friction velocity after coordinate
rotations and frequency corrections
balance
sensors are
If energy
balance
sensors and
TE525 used
Always
Always
Always
used
C-25
Page 44

Appendix C. EasyFlux® DL CR6KH20
TABLE C-21. Data Fields in the Flux_CSFormat Data Output Table
Relative humidity from temp/RH
Average saturated water vapor
Data Field Name Units Description
Scaling temperature after coordinate
TSTAR deg C
rotations, frequency corrections, and
SDN correction
TKE m2·s-2
TA_1_1_1 deg C
Specific turbulence kinetic energy
after coordinate rotations
Average ambient temperature from
temp/RH probe
Data Field
Included
Always
Always
Always
RH_1_1_1 deg C
T_DP_1_1_1 deg C
probe
Average dewpoint temperature from
temp/RH probe
Average water vapor pressure
e kPa
calculated from temp/RH probe and
pressure (from CS106 if used)
e_sat kPa
pressure calculated from temp/RH
probe and pressure (from CS106 if
used)
Average ambient air pressure from
PA kPa
CS106 if used, otherwise the nominal
air pressure entered by user
VPD kPa Vapor pressure deficit Always
Ux m·s-1 Average Ux Always
Ux_SIGMA m·s-1 Standard deviation of Ux Always
Uy m·s-1 Average Uy Always
Uy_SIGMA m·s-1 Standard deviation of Uy Always
Uz m·s-1 Average Uz Always
Uz_SIGMA m·s-1 Standard deviation of Uz Always
T_SONIC deg C Average sonic temperature Always
T_SONIC_SIGMA deg C
sonic_azimuth decimal degrees
Standard deviation of sonic
temperature
Compass direction in which the sonic
negative x-axis points
WS m·s-1 Average wind speed Always
WS_RSLT m·s-1 Average horizontal wind speed Always
WD_SONIC decimal degrees
Average wind direction in the sonic
coordinate system
WD_SIGMA decimal degrees Standard deviation of wind direction Always
WD decimal degrees Average compass wind direction Always
WS_MAX m·s
-1
Maximum wind speed Always
H2O_density mmol·mol-1 Water vapor mass density Always
Always
Always
Always
Always
Always
Always
Always
Always
C-26
Page 45

Appendix C. EasyFlux® DL CR6KH20
TABLE C-21. Data Fields in the Flux_CSFormat Data Output Table
Average net radiation (raw, not
If NR-LITE2
If SN500SS,
Data Field Name Units Description
H2O_density_SIGMA mmol·mol-1
FW deg C
FW_SIGMA deg C
P mm Total precipitation
Standard deviation of water vapor
mass density
Average fine-wire thermocouple
temperature
Standard deviation of fine-wire
thermocouple temperature
Data Field
Included
Always
If FW05,
FW1, or FW3
is used
If FW05,
FW1, or FW3
is used
If TE525MM
is used
NETRAD_meas W·m-2
ALB none Average albedo
SW_IN W·m-2
SW_OUT W·m-2
LW_IN W·m-2
LW_OUT W·m-2
T_nr K Average sensor body temperature
T_nr_in K
T_nr_out K
LW_in_meas W·m-2
LW_out_meas W·m-2
PPFD_IN µmol·s-1·m-2
sun_azimuth decimal degrees Solar azimuth Always
corrected for wind)
Average incoming short wave
radiation
Average outgoing short wave
radiation
Average incoming long wave
radiation
Average outgoing long wave
radiation
Average body temperature of top of
sensor
Average body temperature of bottom
of sensor
Average raw incoming long wave
radiation (not corrected for
temperature)
Average raw outgoing long wave
radiation (not corrected for
temperature)
Average density of photosynthetic
active radiation
is used
If SN500SS,
NR01, or
CNR4
used
NR01,
CNR4,
CS301, or
CS320 used
If SN500SS,
NR01, or
CNR4 used
If SN500SS,
NR01, or
CNR4 used
If SN500SS,
NR01, or
CNR4 used
If NR01 or
CNR4 used
If SN500SS
used
If SN500SS
used
If NR01 or
CNR4 used
If NR01 or
CNR4 used
If CS310
used
C-27
Page 46

Appendix C. EasyFlux® DL CR6KH20
TABLE C-21. Data Fields in the Flux_CSFormat Data Output Table
If SI111 is
Heat flux manifested as heat storage
Data Field
Data Field Name Units Description
sun_elevation decimal degrees Solar elevation Always
hour_angle decimal degrees Solar hour angle Always
sun_declination decimal degrees Solar declination Always
Air mass coefficient: Ratio of the
air_mass_coeff none
daytime fraction
T_CANOPY deg C
path length between the current solar
position to the solar noon
Day time in fraction of an output
interval
Average temperature of targeted
object
Included
Always
Always
If SI111 is
used
T_SI111_body deg C Average temperature of sensor body
Average soil temperature for each
sensor; x is an index for the number
TS_x_1_1 deg C
SWC_x_1_1 m3·m-3
TS_CS65X_x_1_1 deg C
CS65X_EC_x_1_1 dS·m-1
G_plate_x_1_1 W·m-2
G_x_1_1 W·m-2
of sensors. If both TCAV and CS65X
used, this data field defaults to
TCAV, and C65X data is stored in
TS_CS65X_x_1_1.
Average volumetric soil water
content for each CS650 or CS655; x
is an index for the number of sensors.
Average soil temperature from
CS65X probe; x is an index for the
number of sensors.
Average electrical conductivity for
each sensor; x is an index for the
number of CS650 or CS655
Average soil heat flux at plate; x is an
index for the number of HFP01 or
HFP01SC
Average heat flux at ground surface;
x is an index for each soil sensor suite
replicate (suite includes soil
temperature, soil water content, and
soil heat flux)
used
If TCAV,
CS650, or
CS655 used
If CS650 or
CS655 used
If TCAV and
CS65X used
If CS650 or
CS655
used
If HFP01 or
HFP01SC
used
If HFP01 or
HFP01SC,
TCAV, and
CS65X used
SG_x_1_1 W m-2
FETCH_MAX m
FETCH_90 m
in layer between heat flux plate and
soil surface; x is an index for the
number of soil temp and water
content sensor pairs.
Distance upwind where the maximum
contribution to the footprint is found
Upwind distance that contains 90%
of cumulative footprint
If CS65X, or
TCAV and
CS65X, used
Always
Always
C-28
Page 47

Appendix C. EasyFlux® DL CR6KH20
TABLE C-21. Data Fields in the Flux_CSFormat Data Output Table
TABLE C-22. Data Fields in the Flux_Notes Output Table
Data Field Name
Units
Description
Included
Mean streamwise wind speed after
Data Field Name Units Description
FETCH_55 m
FETCH_40 m
UPWND_DIST_INTRST m
FP_DIST_INTRST %
FP_EQUATION text
Upwind distance that contains 55%
of footprint
Upwind distance that contains 40%
of footprint. If NAN is returned,
integration of the model never
reached 90% within the allowable
distance of integration. See the
Footprint appendix in the EasyFlux
DL CR6OP manual for more details.
Upwind distance of interest for the
average wind direction
Percentage of footprint from within
the upwind range of interest
Returns either Kljun or
KormannMeixner; the model of
Kljun et al. (2004) is used for
applicable atmospheric conditions,
else the model of Kormann &
Meixner (2001) is used
Data Field
Included
Always
Always
Always
Always
Always
Data Field
UxUy_cov m2·s-2 Covariance of Ux and Uy Always
UxUz_cov m2·s-2 Covariance of Ux and Uz Always
UyUz_cov m2·s-2 Covariance of Uy and Uz Always
TsUx_cov deg C·m·s-1 Covariance of Ts and Ux Always
TsUy_cov deg C·m·s-1 Covariance of Ts and Uy Always
TsUz_cov deg C·m·s-1 Covariance of Ts and Uz Always
USTAR_R m·s-1
U m·s-1
U_SIGMA m·s-1
V m·s-1
V_SIGMA m·s-1
W m·s-1
Friction velocity after coordinate
rotations
coordinate rotations
Standard deviation of streamwise wind
after coordinate rotations
Average crosswind speed after
coordinate rotations
Standard deviation of crosswind after
coordinate rotations
Average vertical wind speed after
coordinate rotations
Always
Always
Always
Always
Always
Always
C-29
Page 48

Appendix C. EasyFlux® DL CR6KH20
TABLE C-22. Data Fields in the Flux_Notes Output Table
Covariance of streamwise and
Covariance of streamwise wind and
Number of sonic samples where no
Data Field Name Units Description
W_SIGMA m·s-1
UV_cov m·s-1
Standard deviation of vertical wind
after coordinate rotations
Covariance of streamwise and
crosswind after coordinate rotations
Data Field
Included
Always
Always
UW_cov m·s-1
VW_cov m·s-1
UT_SONIC_Cov m·°C·s-1
VT_SONIC_Cov m·°C·s-1
WT_SONIC_Cov m·°C·s-1
UW_Cov_fc m2·s-2
VW_Cov_fc m2·s-2
WT_SONIC_Cov_fc m·°C·s-1
WT_SONIC_Cov_fc_SND m·°C·s-1
sonic_samples count
crosswind after coordinate rotations
Covariance of crosswind and vertical
wind after coordinate rotations
sonic temperature after coordinate
rotations
Covariance of crosswind and sonic
temperature after coordinate rotations
Covariance of vertical wind (after
coordinate rotations) and sonic
temperature
Covariance of streamwise and vertical
wind after coordinate rotations and
frequency corrections
Covariance of cross and vertical wind
after coordinate rotations and frequency
corrections
Covariance of vertical wind and sonic
temperature after coordinate rotations
and frequency corrections
Covariance of vertical wind and sonic
temperature after coordinate rotations,
frequency corrections, and SND
correction
Number of raw sonic samples in
averaging period without diagnostic
flags
Always
Always
Always
Always
Always
Always
Always
Always
Always
Always
no_sonic_head_Tot count
no_new_sonic_data_Tot count
sonic_amp_l_f_Tot count
sonic_amp_h_f_Tot count
sonic_sig_lck_f_Tot count
sonic_del_T_f_Tot count
sonic head was detected
Number of scans where no sonic data
were received
Number of sonic samples with
amplitude low diagnostic flag
Number of sonic samples with
amplitude high diagnostic flag
Number of sonic samples with signal
lock diagnostic flag
Number of sonic samples with delta
temp diagnostic flag
Always
Always
Always
Always
Always
Always
C-30
Page 49

Appendix C. EasyFlux® DL CR6KH20
TABLE C-22. Data Fields in the Flux_Notes Output Table
Number of sonic samples with trigger
Number of sonic samples with
Data Field Name Units Description
sonic_aq_sig_f_Tot count
sonic_low_volt_f_Tot count
Number of sonic samples with
acquiring signal diagnostic flag
Number of sonic samples with low
voltage flag
Data Field
Included
Always
Always
sonic_trig_f_Tot count
sonic_intrnl_hmdty_f_Tot count
sonic_cal_err_f_Tot count
UxH2O_Cov g·m-2·s-1
UyH2O_Cov g·m-2·s-1
UzH2O_Cov g·m-2·s-1
flag
Number of sonic samples with high
internal humidity flag
calibration error diagnostic flag
Covariance of U
density (without O
Covariance of U
density (without O
Covariance of U
density (without O
and water vapor
x
correction)
2
and water vapor
y
correction)
2
and water vapor
z
correction)
2
Covariance of streamwise wind and
O density after coordinate rotations
H
UH2O_Cov g·m-2·s-1
VH2O_Cov g·m-2·s-1
2
and covariance maximization (without
correction)
O
2
Covariance of crosswind and H
O
2
density after coordinate rotations and
covariance maximization (without O
2
correction)
WH2O_Cov g·m-2·s-1
Covariance of vertical wind and H
density after coordinate rotations, O
correction, and covariance
O
2
2
maximization
Covariance of vertical wind and H
O
2
density after coordinate rotations,
WH2O_Cov_fc g·m-2·s-1
oxygen correction, covariance
maximization, and frequency
corrections
O2_crrctn_1 g·m-2·s-1 First KH20 oxygen correction Always
O2_crrctn_2 g·m-2·s-1 Second KH20 oxygen correction Always
H
O flux WPL correction term due to
2
H2O_E_WPL_fc g·m-2·s-1
water vapor flux after coordinate
rotations and frequency corrections
H
O flux WPL correction term due to
2
H2O_T_WPL_fc g·m-2·s-1
sensible heat flux after coordinate
rotations and frequency corrections
H2O_samples count
Number of H
diagnostic flags
O samples without
2
Always
Always
Always
Always
Always
Always
Always
Always
Always
Always
Always
Always
Always
C-31
Page 50

Appendix C. EasyFlux® DL CR6KH20
TABLE C-22. Data Fields in the Flux_Notes Output Table
Covariance of vertical wind and fine-
Data Field Name Units Description
UxFW_Cov deg C·m·s-1
UyFW_Cov deg C·m·s-1
UzFW_Cov deg C·m·s-1
Covariance of U
thermocouple temperature
Covariance of U
thermocouple temperature
Covariance of U
thermocouple temperature
and fine-wire
x
and fine-wire
y
and fine-wire
z
Covariance of streamwise wind and
UFW_Cov deg C·m·s-1
fine-wire thermocouple temperature
after coordinate rotations and
covariance maximization
Covariance of crosswind and fine-wire
VFW_Cov deg C·m·s-1
thermocouple temperature after
coordinate rotations and covariance
maximization
Data Field
Included
If FW05,
FW1, or FW3
is used
If FW05,
FW1, or FW3
is used
If FW05,
FW1, or FW3
is used
If FW05,
FW1, or FW3
is used
If FW05,
FW1, or FW3
is used
If FW05,
FW1, or FW3
is used
WFW_Cov deg C·m·s-1
wire thermocouple temperature after
coordinate rotations and covariance
maximization
Covariance of vertical wind and fine-
If FW05,
FW1, or FW3
is used
WFW_Cov_fc deg C·m·s-1
wire thermocouple temperature after
coordinate rotations, covariance
maximization, and frequency
corrections
FW_samples count
The number of valid fine-wire
thermocouple measurements in the
averaging period from which
covariances may be calculated
If FW05,
FW1, or FW3
is used
Alpha angle used for coordinate
alpha
decimal
degrees
rotations (regardless of planar fit or
double rotation method, angle
Always
convention of Wilczak et al. 2001 used)
Beta angle used for coordinate rotations
beta
decimal
degrees
(regardless of planar fit or double
rotation method, angle convention of
Always
Wilczak et al. 2001 used)
Gamma angle used for coordinate
gamma
decimal
degrees
rotations (regardless of planar fit or
double rotation method, angle
Always
convention of Wilczak et al. 2001 used)
height_measurement m
User entered measurement height of EC
sensors
Always
height_canopy m User entered canopy height Always
surface_type_text text User entered surface type Always
C-32
Page 51

Appendix C. EasyFlux® DL CR6KH20
TABLE C-22. Data Fields in the Flux_Notes Output Table
Number of iterations for recalculating
Longitude; positive for Eastern
Data Field
Data Field Name Units Description
displacement_user m
d m
roughness_user m
z0 m
z m Aerodynamic height Always
MO_LENGTH m Monin-Obukhov length Always
ZL m·m-1 Atmospheric surface layer stability Always
User entered displacement height; 0 for
auto calculation
Displacement height used in
calculations; it will equal
displacement_user if user entered a
non-zero value; if displacement_user is
zero, program will auto calculate
Roughness length entered by user (if
left as 0, the program autocalculates a
value)
Roughness length; if roughness_user =
0, z0 is determined by the program; if
roughness_user ≠ 0, z0 is set to
roughness_user.
Included
Always
Always
Always
Always
iteration_FreqFactor count
latitude
longitude
altitude
UTC_OFFSET h
separation_x_kh20 m
separation_y_kh20 m
separation_lat_dist_kh20 m
separation_lag_dist_kh20 m
separation_lag_scan_kh20 scans
decimal
degrees
decimal
degrees
m Altitude of site above sea level Always
Monin-Obukhov length and frequency
factors
Latitude; positive for Nothern
hemisphere, negative for Southern
hemisphere
hemisphere, negative for Western
hemisphere
Time offset in hours at site relative to
universal time
Separation between sonic and KH20
with respect to sonic x-axis
Separation between sonic and KH20
with respect to sonic y-axis
Separation distance between sonic and
KH20 along the axis perpendicular to
oncoming wind
Separation distance between sonic and
KH20 along the axis parallel to
oncoming wind
Number of scans to lag KH20 data
relative to sonic data to account for
separation along the axis of oncoming
wind and wind velocity
Always
Always
Always
Always
Always
Always
Always
Always
Always
C-33
Page 52

Appendix C. EasyFlux® DL CR6KH20
TABLE C-22. Data Fields in the Flux_Notes Output Table
Data Field Name Units Description
Separation between sonic and fine-wire
separation_x_FW m
thermocouple with respect to sonic xaxis
Separation between sonic and fine-wire
separation_y_FW m
thermocouple with respect to sonic yaxis
FW_diameter m
Effective diameter of fine-wire
thermocouple junction
Separation distance between sonic and
separation_lat_dist_FW m
fine-wire thermocouple along axis
perpendicular to oncoming wind
Separation distance between sonic and
separation_lag_dist_FW m
fine-wire thermocouple along axis
parallel to oncoming wind
Number of scans to lag fine-wire
separation_lag_scan_FW scans
thermocouple data relative to sonic data
to account for separation along axis of
oncoming wind and wind velocity
time_const_FW m
Calculated time constant of the finewire thermocouple
Maximum number of scans to lag
KH20 or fine-wire thermocouple data
with respect to sonic data when doing
MAX_LAG scans
cross correlation for covariance
maximization. For example, if
MAX_LAG = 2, the program will
consider lags of −2, −1, 0, +1, and +2.
The lag applied to KH20 data with
lag_kh20 scans
respect to sonic data that maximizes
covariance
The lag applied to fine-wire
lag_FW scans
thermocouple data with respect to sonic
data that maximizes covariance
FreqFactor_UW_VW number
FreqFactor_WT_SONIC number
FreqFactor_WH2O number
Frequency correction factor applied to
momentum fluxes
Frequency correction factor applied to
wTs covariance
Frequency correction factor applied to
O covariance values
wH
2
Frequency correction factor applied to
FreqFactor_WFW number
fine-wire thermocouple derived wFW
covariance
Data Field
Included
If FW05,
FW1, or FW3
is used
If FW05,
FW1, or FW3
is used
If FW05,
FW1, or FW3
is used
If FW05,
FW1, or FW3
is used
If FW05,
FW1, or FW3
is used
If FW05,
FW1, or FW3
is used
If FW05,
FW1, or FW3
is used
Always
Always
Always
Always
Always
Always
Always
C-34
Page 53

Appendix C. EasyFlux® DL CR6KH20
TABLE C-22. Data Fields in the Flux_Notes Output Table
Specific heat of ambient (moist) air at
Number of seconds CNR4 heater #1
Average incline with respect to sensor
Data Field Name Units Description
rho_d_probe g·m-3
rho_a_probe kg·m-3
Average density of dry air calculated
from temp/RH probe data
Average density of ambient moist air
calculated from temp/RH probe data
Data Field
Included
Always
Always
Cp J·kg
-1·K-1
constant pressure
Lv J·g-1 Latent heat of vaporization Always
T_panel deg C
batt_volt volt
Average temperature of the data-logger
wiring panel
Average battery voltage supplying
power to the data logger
Number of slow sequences during the
slowsequence_Tot count
averaging interval (for example, the
number of times biomet and energy
balance sensors were measured)
nr01_heater_secs s
cnr4_fan_secs s
cnr4_fan_freq_max Hz
cnr4_fan_freq_min Hz
cnr4_heater_1_secs s
cnr4_heater_2_secs s
sn500_heater_secs s
V_CS320 mV
Number of seconds NR01 heater was
powered in interval
Number of seconds CNR4 fan was
powered in interval
Maximum frequency of CNR4 fan in
interval
Minimum frequency of CNR4 fan in
interval
was powered in interval
Number of seconds CNR4 heater #2
was powered in interval
Number of seconds SN500SS heater
was powered in interval
Average raw voltage output from
CS320
If NR01 used
If CNR4 used
If CNR4 used
If CNR4 used
If CNR4 used
If CNR4 used
If SN500SS
If CS320 used
T_CS320 deg C Average temperagure of CS320 If CS320 used
Always
Always
Always
Always
used
X_incline decimal deg
Y_incline decimal deg
Z_incline decimal deg
shfp_cal_x_1_1 W·m
-2·mV-1
x-axis
Average incline with respect to sensor
y-axis
Average incline with respect to sensor
z-axis
Calibration multiplier currently used for
soil heat flux plates; x is an index
indicating the number of sensors
If CS320 used
If CS320 used
If CS320 used
If HFP01 or
HFP01SC
used
C-35
Page 54

Appendix C. EasyFlux® DL CR6KH20
TABLE C-22. Data Fields in the Flux_Notes Output Table
Data Field
Data Field Name Units Description
Included
Result of TRUE indicates HFP01SC
shfp_cal_fail_x_1_1 none
returned an invalid number or the
calibrated sensitivity was not within
If HFP01SC
used
80%-105% of the original sensitivity
process_time ms Average processing time for each scan Always
process_time_Max Ms Maximum processing time for a scan Always
buff_depth_Max Number
Maximum number of records stored in
the buffer
Always
C.4.5 Program Sequence of Measurement and Corrections
The following are the main correction procedures and algorithms implemented
in the program. The oxygen correction is unique to the KH20; see Appendix D,
Equations and Algorithms of Water Vapor Density and Water Flux in KH20
Eddy-Covariance Systems
the theory and implementation may be found in the appendices of the EasyFlux
DL CR6OP manual.
(p. D-1). For the other corrections, more details about
1. Despike and filter 10 Hz data using sonic and KH20 diagnostic codes.
2. Coordinate rotations with an option to use the double rotation method
(Tanner and Thurtell 1969), or planar fit method (Wilczak et al.
2001).
3. Lag CO
maximization of CO
and H2O measurements against sonic wind measurements for
2
and H2O fluxes (Horst and Lenschow 2009,
2
Foken et al. 2012), with additional constraints to ensure lags are
physically possible.
4. Apply oxygen correction to covariances with water density from the
KH20. (See Appendix D, Equations and Algorithms of Water Vapor
Density and Water Flux in KH20 Eddy-Covariance Systems
(p. D-1).)
5. Frequency corrections using commonly used cospectra (Moore 1986,
van Dijk 2002a, Moncrieff et al. 1997) and transfer functions of block
averaging (Kaimal et al. 1989), line/volume averaging (Moore 1986,
Moncrieff et al. 1997, Foken et al. 2012, van Dijk 2002a), time
constants (Montgomery 1947, Shapland et al. 2014, Geankoplis
1993), and sensor separation (Horst and Lenschow 2009, Foken et al.
2012).
6. A modified SND correction (Schotanus et al. 1983) to derive sensible
heat flux from sonic sensible heat flux following the implementation
as outlined in van Dijk 2002b. Additionally, fully corrected real
sensible heat flux computed from fine-wire thermometry may be
provided.
7. Correction for air density changes using WPL equations (Webb et al.
1980).
C-36
Page 55

C.5 References
Appendix C. EasyFlux® DL CR6KH20
8. Data quality qualifications based on steady state conditions, surface-
layer turbulence characteristics, and wind directions following Foken
et al. 2012 (or Foken et al. 2004 for the Flux_AmeriFluxFormat
output table).
9. If energy balance sensors are used, calculation of energy closure based
on energy balance measurements and corrected sensible and latent
heat fluxes.
10. Footprint characteristics are computed using Kljun et al (2004) and
Kormann and Meixner (2001).
Foken et al. (2012) “Eddy Covariance: A Practical Guide to Measurement and
Data Analysis” by Aubinet, Vesala, and Papale from Springer. This book
consists of chapters that are written by specialists in the field. Chapter 4
titled “Corrections and Data Quality Control” is written by Foken et al.
Foken,T,M., Göockede, M., Mauder, L., Mahrt, B., Amiro, W. Munger. 2004.
Post-Field Data Quality Control. Eds: X. Lee, W. Massman, B. Law.
Handbook of Micrometeorology: A Guide for Surface Flux Measurement
and Analysis. Kluwer Academic Publishers. Dordrecht, p. 181-208.
Geankoplis, C.J. 1993. Transportation Processes and Unit Operation. 3rd
Edition. PTR Prentice Hall, New Jersey. pp 114-131 and Appendix.
Horst, T.W., and D.H. Lenschow. 2009. Attenuation of scalar fluxes measured
with spatially-displaced sensors. Boundary-Layer Meteorology 130:275-
300.
Kaimal, J.C., S.F. Clifford, R.J. Lataitis. 1989. Effect of finite sampling on
atmospheric spectra. Boundary-Layer Meteorology 7:827-837.
Moncrieff, J.B., J.M. Massheder, H. de Bruin, J.A. Elbers, T. Friborg, B.
Heusinkveld, P. Kabat, S. Scott, H. Soegaard, A. Verhoef. 1997. A system
to measure surface fluxes of momentum, sensible heat, water vapour and
carbon dioxide. Journal of Hydrology 188-189:589-611.
Montgomery, R.B. 1947. Viscosity and thermal conductivity of air and
diffusivity of water vapor in air. J. Meteor 4:193–196.
Moore, C.J. 1986. Frequency response corrections for eddy correlation
systems. Boundary-Layer Meteorology 37:17-35.
Schotanus, P.S., F.T.M. Nieuwstadt, H.A.R. Debruin. 1983. Temperature
measurement with a sonic anemometer and its application to heat and
moisture flux. Boundary-Layer Meteorology 26:81-93.
Shapland, T.M., R.L. Snyder, K.T. Paw U, A.J. McElrone. 2014.
Thermocouple frequency response compensation leads to convergence of
the surface renewal alpha calibration. Agricultural and Forest Meteorology
189-190:36-47.
C-37
Page 56

Appendix C. EasyFlux® DL CR6KH20
Tanner, C.B., and G.W. Thurtell. 1969. “Anemoclinometer measurements of
Reynolds stress and heat transport in the atmospheric surface layer science
lab”, US Army Electronics Command, Atmospheric Sciences Laboratory
TR ECOM 66-G22-F. pp: R1-R10.
van Dijk, A. 2002a. Extension of 3D of “the effect of linear averaging on scalar
flux measurements with a sonic anemometer near the surface” by
Kristensen and Fitzjarrald. Journal of Atmospheric and Ocean Technology
19:80-19.
van Dijk, A. 2002b. The Principle of Surface Flux Physics. Research Group of
the Royal Netherlands Meteorological Institute and Department of
Meteorology and Air Quality with Agricultural University Wageningen.
65p.
Webb, E.K., G.I. Pearman, R. Leuning. 1980. Correction of flux measurements
for density effects due to heat and water transfer. Quart. J. Met. Soc.
106:85-100.
Wilczak, J.M., S.P. Oncley, S.A. Stage. 2001. Sonic anemometer tilt correction
algorithm. Boundary-Layer Meteorology 99:127-150.
C-38
Page 57

V V xk xk V xk xk
w w o o w w o o
= − − + − −
01 1 1 02 2 2
exp( ) exp( )
ρ ρ ρ ρ
k k
w w1 2
≈
( )
ρ ρ
w
w w
o o
xk
V
xk
V xk
=
− + −
1 1
0
ln ln
Appendix D. Equations and Algorithms of Water Vapor Density and Water Flux in KH20 Eddy-Covariance Systems
D.1 Fundamental Equation
A krypton hygrometer (KH20, Campbell Scientific) is a fast-response water
vapor analyzer to measure the high-frequency fluctuations of water vapor
density in the atmosphere. When the three-dimensional wind speeds are
measured nearby using a fast-response sonic anemometer, the fluctuations are
used for the eddy-covariance methodology to estimate the water flux (latent
heat flux) between ecosystems and the atmosphere.
KH20 has a cylindrical path for measurements (FIGURE 6-1). In the lower end
of the path, a krypton lamp emits a major light at 123.58-nm wavelength
(wavelength 1) along with a minor light at 116.49-nm wavelength (wavelength
2). The lights penetrate the air along the path length of x, in cm, and are
received by the detector in the upper end of the path that outputs voltage (V in
mV). The lights in both wavelengths are absorbed by two air components:
water vapor and oxygen. Without both components along the path, the sensor
outputs voltage V
both of which sum up one voltage output as V
for air free of water vapor and oxygen. Given water vapor density (ρ
-3
) and oxygen density (ρo in gO2 m-3), based on the Beer–Lambert Law
m
(Wallace and Hobbs. 2006), KH20 output V can be theoretically expressed as:
from wavelength 1 and voltage V02 from wavelength 2,
01
(V0 = V01+V02) from the sensor
0
in gH2O
w
where, on wavelengths 1 and 2, k
are the absorption coefficients of water vapor and k
indicating oxygen
similar absorption at both wavelengths (Campbell Scientific Inc. 2010), thus
could be represented by the same value denoted by k
-1.
Similarly, one coefficient also is used by Tanner et al. (1993) and van
cm
Dijk et al. (2003) for the absorption by oxygen at both wavelengths. Thus, the
absorption coefficients for oxygen on both wavelengths (k
represented by the same value denoted by k
equation (1) can be solved for ρ
This is the fundamental equation for KH20 measurements.
(1)
and kw2 with subscript w indicating water
w1
and ko2 with subscript o
o1
are the absorption coefficients of oxygen. Water vapor has
and absorption coefficients of water vapor on both wavelengths
in ln(mV) m3 gH2O-1
w
and ko2) can be
o1
-1
cm-1. Further,
2
w
as:
in ln(mV) m3 gO
o
(2)
D-1
Page 58

Appendix D. Equations and Algorithms of Water Vapor Density
ρ ρ
w
w w
I o oc
O O
xk
V
xk
C xk
C M P
R T
= − + + −
1 1
ln
*
w
w
ρ
w
w
w
w w w
ρ ρ
ρ
= +
' '
(
)
w
xk
w V
kkC M
P
R
T
w
T
w
w
o
w
o o
' ' '
'
*
'
'
ln
ρ
=
− +
1
2
w T
' '
w T
s
' '
D.2 Working Equation
In the field, KH20 measurements output V values. To acquire ρw from
fundamental equation (2), other constants (x and V
and variable (ρ
measured in precision and others are statistically estimated in the calibration
process under the calibration background oxygen density (ρ
Through the process, the working equation is given
In this equation, V, P (high-frequency atmospheric pressure in Pa), and T
(high-frequency air temperature in K) are variables measured/derived in KH20
eddy-covariance water flux systems; k
x, and ρ
KH20 Calibration; k
al (2003) following Tanner et al. (1993) , considered as universal for all KH20
sensors with x around 1.3 cm; C
considered as a constant of 0.2095 in ecosystems (Tanner et al. 1993); M
molar mass of oxygen (32 g mole
K
are parameters and constants from the calibration process, given in
oc
-1
mol-1).
and Water Flux in KH20 Eddy-Covariance Systems
), parameters (kw and ko),
0
) in this equation are needed. In manufacture process, x is
o
in gO2 m-3).
oc
(3)
, CI [termed as “Constant” in ln(mV)],
w
is 0.00345 ln(mV) m3 g-1 cm-1 determined by van Dijk et
o
is the mole fraction of oxygen that is
o
-1
); and R* is universal gas constant (8.3143 J
is the
o
D.3 Eddy-Covariance Water Flux
Water flux is computed from
wind speed and overbar averages the data over an averaging interval. In
practice, it is computed from
(4)
where prime indicates the fluctuation of a given variable away from its mean.
In the right side of this equation, the first term is the eddy-covariance term
which is the covariance of vertical wind speed with water vapor density and the
second term is the WPL term (Webb et al. 1980) which reflects the water flux
caused by changes in air density.
Eddy-covariance term is derived from equation (3) as
The second term on the right side of this equation is the oxygen correction
term.
is temperature flux. It can be directly measured if a fine wiring
(Webb et al. 1980) where w is vertical
(5)
thermocouple is available; otherwise, it is derived from
corrections (van Dijk 2002).
through SND
D-2
Page 59

Appendix D. Equations and Algorithms of Water Vapor Density
( )
w w
T
w T
w
w
w
ρ µσ ρ µσ
ρ
= + +
' ' ' '
1
( )
w V
'
'
ln
w T
' '
T f x u
fx
u
w
VA
ρ
2
2
100
2
_
( , , )
exp
/
= −
and Water Flux in KH20 Eddy-Covariance Systems
The WPL term is given by Webb et al. (1980):
(6)
where µ (1.60802 ) is the ratio of dry air molecular weight (28.97 kg kmol
water molecular weight [18.016 kg kmol
(2006)], σ is mean water vapor mass mixing ratio (ratio of mean water vapor to
mean dry air density computed in the data processing).
As usual in eddy-covariance measurements, the covariance variables:
and
general algorithm and procedure for coordinate rotation and frequency
corrections are addressed in Campbell Scientific Inc (2020), but the equation
for frequency response of a KH20 to water vapor density (lnV) cannot be found
in previous documents from Campbell Scientific.
need coordinate rotation and frequency corrections. The
D.4 Frequency Response of KH20
KH20 measures the water vapor density averaged over a cylindrical light path
that has a diameter of 9.5 mm and length of 11 to 15 mm (see KH20
Calibration). Andreas (1981) derived the power spectra transfer function for
volume averaging [Equation (18) in Andreas (1981)]. His equation includes the
first order Bessel function of the first kind that makes the integration of the
transfer function over the frequency domain in need of more computation time.
Moene (2003) used a simple function to approximate equation (18) of Andreas
(1981). Moene’s (2003) approximation was developed only for a Krypton
Hygrometer with a diameter-ratio of 0.5. Because the cylindrical light path of
KH20 for measurements has a fixed diameter, but changeable length, Moene’s
(2003) approximation only uses the length as a sensor parameter. In his
original equation, the approximation curve matches the curve for a diameterlength ratio between 0.5 and 1.0 when the ratio of Kolmogorov microscale (1
mm in the atmosphere) to the path length is 0.014 [Fig. 2 in Andreas (1981)].
Based on the diameter fixed and length range of KH20 cylindrical light path,
its diameter-length ratio is about 0.63 to 0.86 within the applicable range of
Moene’s (2003) approximation for 0.5 to 1.0 as a diameter-length ratio (see
page 650). This approximation is given by:
-1
, page 466 in Wallace and Hobbs
-1
) to
(7)
where f is natural frequency, u is wind speed in the stream-wise direction, and
100 is used to convert x in cm to m. Its application is the same as the power
spectral transfer function for line averaging in other Campbell Scientific openpath eddy-covariance systems for the EC155 or IRGASON infrared gas
analyzer (Campbell Scientific Inc. 2020)
D-3
Page 60

D.5 References
Appendix D. Equations and Algorithms of Water Vapor Density
and Water Flux in KH20 Eddy-Covariance Systems
Andreas, E.L. 1981. The effects of volume averaging on spectra measured with
Lyman-Alpha hygrometer. Journal of Applied Meteorology 20: 467-475.
Campbell Scientific Inc. 2010. KH20 Krypton Hygrometer, Logan, UT, US.
pp. 10.
Campbell Scientific Inc. 2020. EasyFlux-DL, Logan, UT, US. pp. 10.
Moene, A.F. 2003. Effects of water vapor on the structure parameter of the
refractive index for near-infrared radiation. Boundary-Layer Meteorology
107: 635-653.
Tanner, B.D., E. Swiatek, J.P. Greene. 1993. Density fluctuations and use of
the krypton Hygrometer in surface flux measurement. Management of
Irrigation and Drainage Systems Sponsored by the Irrigation and Drainage
Division/ASCE, Park City, Utah.
van Dijk, A. 2002. The Principle of Surface Flux Physics. Research Group of
the Royal Netherlands Meteorological Institute and Department of
Meteorology and Air Quality with Agricultural University Wageningen.
65p.
van DijK, A, W. Kohsiek, H.A.R. de Bruin. 2003. Oxygen sensitivity of
krypton and Lyman-α hygrometers. Journal of Atmospheric and Oceanic
Technology 20: 143-151.
Wallace, J.M., P.V. Hobbs. 2006. Atmospheric Science: An Introductory
Survey, 2
Webb, E.K., G.I. Pearman, R. Leuning. 1980. Correction of flux measurements
for density effects due to heat and water transfer. Quart. J. Met. Soc. 106:
85-100.
nd
edition. Elsevier, Amsterdam. pp: 483.
D-4
Page 61

Limited Warranty
Products manufactured by Campbell Scientific are warranted by Campbell
Scientific to be free from defects in materials and workmanship under normal
use and service for twelve months from the date of shipment unless otherwise
specified on the corresponding product webpage. See Product Details on the
Ordering Information pages at www.campbellsci.com. Other manufacturer's
products, that are resold by Campbell Scientific, are warranted only to the
limits extended by the original manufacturer.
Refer to www.campbellsci.com/terms#warranty for more information.
CAMPBELL SCIENTIFIC EXPRESSLY DISCLAIMS AND
EXCLUDES ANY IMPLIED WARRANTIES OF MERCHANTABILITY
OR FITNESS FOR A PARTICULAR PURPOSE. Campbell Scientific
hereby disclaims, to the fullest extent allowed by applicable law, any and
all warranties and conditions with respect to the Products, whether
express, implied or statutory, other than those expressly provided herein.
Page 62

Assistance
Products may not be returned without prior authorization.
Refer to www.campbellsci.com/repair for up-to-date repair information.
The following contact information is for US and international customers
residing in countries served by Campbell Scientific, Inc. directly. Campbell
Scientific regional offices handle repairs for customers within their territories.
Please visit www.campbellsci.com/contact to determine which Campbell
Scientific office serves your country.
To obtain a Returned Materials Authorization (RMA) number, contact
CAMPBELL SCIENTIFIC, INC., phone (435) 227-9000. Please write the
issued RMA number clearly on the outside of the shipping container. Campbell
Scientific’s shipping address is:
CAMPBELL SCIENTIFIC, INC.
RMA#_____
815 West 1800 North
Logan, Utah 84321-1784
For all returns, the customer must fill out a “Statement of Product Cleanliness
and Decontamination” form and comply with the requirements specified in it.
The form is available from our website at www.campbellsci.com/repair. A
completed form must be either emailed to repair@campbellsci.com or faxed to
(435) 227-9106. Campbell Scientific is unable to process any returns until we
receive this form. If the form is not received within three days of product
receipt or is incomplete, the product will be returned to the customer at the
customer’s expense. Campbell Scientific reserves the right to refuse service on
products that were exposed to contaminants that may cause health or safety
concerns for our employees.
Page 63

Safety
DANGER — MANY HAZARDS ARE ASSOCIATED WITH INSTALLING, USING, MAINTAINING, AND WORKING ON OR AROUND
TRIPODS, TOWERS, AND ANY ATTACHMENTS TO TRIPODS AND TOWERS SUCH AS SENSORS, CROSSARMS, ENCLOSURES,
ANTENNAS, ETC. FAILURE TO PROPERLY AND COMPLETELY ASSEMBLE, INSTALL, OPERATE, USE, AND MAINTAIN TRIPODS,
TOWERS, AND ATTACHMENTS, AND FAILURE TO HEED WARNINGS, INCREASES THE RISK OF DEATH, ACCIDENT, SERIOUS
INJURY, PROPERTY DAMAGE, AND PRODUCT FAILURE. TAKE ALL REASONABLE PRECAUTIONS TO AVOID THESE HAZARDS.
CHECK WITH YOUR ORGANIZATION'S SAFETY COORDINATOR (OR POLICY) FOR PROCEDURES AND REQUIRED PROTECTIVE
EQUIPMENT PRIOR TO PERFORMING ANY WORK.
Use tripods, towers, and attachments to tripods and towers only for purposes for which they are designed. Do not exceed design limits. Be familiar and
comply with all instructions provided in product manuals. Manuals are available at www.campbellsci.com. You are responsible for conformance with
governing codes and regulations, including safety regulations, and the integrity and location of structures or land to which towers, tripods, and any
attachments are attached. Installation sites should be evaluated and approved by a qualified engineer. If questions or concerns arise regarding installation,
use, or maintenance of tripods, towers, attachments, or electrical connections, consult with a licensed and qualified engineer or electrician.
General
• Protect from over-voltage.
• Protect electrical equipment from water.
• Protect from electrostatic discharge (ESD).
• Protect from lightning.
• Prior to performing site or installation work, obtain required approvals and permits. Comply with all
governing structure-height regulations, such as those of the FAA in the USA.
• Use only qualified personnel for installation, use, and maintenance of tripods and towers, and any
attachments to tripods and towers. The use of licensed and qualified contractors is highly recommended.
• Read all applicable instructions carefully and understand procedures thoroughly before beginning work.
• Wear a hardhat and eye protection, and take other appropriate safety precautions while working on or
around tripods and towers.
• Do not climb tripods or towers at any time, and prohibit climbing by other persons. Take reasonable
precautions to secure tripod and tower sites from trespassers.
• Use only manufacturer recommended parts, materials, and tools.
Utility and Electrical
• You can be killed or sustain serious bodily injury if the tripod, tower, or attachments you are installing,
constructing, using, or maintaining, or a tool, stake, or anchor, come in contact with overhead or
underground utility lines.
• Maintain a distance of at least one-and-one-half times structure height, 20 feet, or the distance required by
applicable law, whichever is greater, between overhead utility lines and the structure (tripod, tower,
attachments, or tools).
• Prior to performing site or installation work, inform all utility companies and have all underground utilities
marked.
• Comply with all electrical codes. Electrical equipment and related grounding devices should be installed by a
licensed and qualified electrician.
Elevated Work and Weather
• Exercise extreme caution when performing elevated work.
• Use appropriate equipment and safety practices.
• During installation and maintenance, keep tower and tripod sites clear of un-trained or non-essential
personnel. Take precautions to prevent elevated tools and objects from dropping.
• Do not perform any work in inclement weather, including wind, rain, snow, lightning, etc.
Maintenance
• Periodically (at least yearly) check for wear and damage, including corrosion, stress cracks, frayed cables,
loose cable clamps, cable tightness, etc. and take necessary corrective actions.
• Periodically (at least yearly) check electrical ground connections.
Internal Battery
• Be aware of fire, explosion, and severe-burn hazards.
• Misuse or improper installation of the internal lithium battery can cause severe injury.
• Do not recharge, disassemble, heat above 100 °C (212 °F), solder directly to the cell, incinerate, or expose
contents to water. Dispose of spent batteries properly.
WHILE EVERY ATTEMPT IS MADE TO EMBODY THE HIGHEST DEGREE OF SAFETY IN ALL CAMPBELL SCIENTIFIC PRODUCTS, THE
CUSTOMER ASSUMES ALL RISK FROM ANY INJURY RESULTING FROM IMPROPER INSTALLATION, USE, OR MAINTENANCE OF
TRIPODS, TOWERS, OR ATTACHMENTS TO TRIPODS AND TOWERS SUCH AS SENSORS, CROSSARMS, ENCLOSURES, ANTENNAS,
ETC.
Page 64

Campbell Scientific regional offices
Australia
Location:
Phone:
Email:
Website:
Brazil
Location:
Phone:
Email:
Website:
Canada
Location:
Phone:
Email:
Website:
China
Location:
Phone:
Email:
Website:
Garbutt, QLD Australia
61.7.4401.7700
info@campbellsci.com.au
www.campbellsci.com.au
São Paulo, SP Brazil
11.3732.3399
vendas@campbellsci.com.br
www.campbellsci.com.br
Edmonton, AB Canada
780.454.2505
dataloggers@campbellsci.ca
www.campbellsci.ca
Beijing, P. R. China
86.10.6561.0080
info@campbellsci.com.cn
www.campbellsci.com.cn
France
Location:
Phone:
Email:
Website:
Vincennes, France
0033.0.1.56.45.15.20
info@campbellsci.fr
www.campbellsci.fr
Germany
Location:
Phone:
Email:
Website:
Bremen, Germany
49.0.421.460974.0
info@campbellsci.de
www.campbellsci.de
India
Location:
Phone:
Email:
Website:
New Delhi, DL India
91.11.46500481.482
info@campbellsci.in
www.campbellsci.in
South Africa
Location:
Phone:
Email:
Website:
Stellenbosch, South Africa
27.21.8809960
sales@campbellsci.co.za
www.campbellsci.co.za
Thailand
Location:
Phone:
Email:
Website:
UK
Location:
Phone:
Email:
Website:
USA
Location:
Phone:
Email:
Website:
Bangkok, Thailand
66.2.719.3399
info@campbellsci.asia
www.campbellsci.asia
Shepshed, Loughborough, UK
44.0.1509.601141
sales@campbellsci.co.uk
www.campbellsci.co.uk
Logan, UT USA
435.227.9120
info@campbellsci.com
www.campbellsci.com
Costa Rica
Location:
Phone:
Email:
Website:
San Pedro, Costa Rica
506.2280.1564
info@campbellsci.cc
www.campbellsci.cc
Spain
Location:
Phone:
Email:
Website:
Barcelona, Spain
34.93.2323938
info@campbellsci.es
www.campbellsci.es
 Loading...
Loading...