

Page 1

Revision: 01/27/2021
Copyright © 2000 – 2021
Campbell Scientific
CSL I.D - 1323
Page 2

Guarantee
This equipment is guaranteed against defects in materials and workmanship.
We will repair or replace products which prove to be defective during the
guarantee period as detailed on your invoice, provided they are returned to us
prepaid. The guarantee will not apply to:
Equipment which has been modified or altered in any way without the
written permission of Campbell Scientific
Batteries
Any product which has been subjected to misuse, neglect, acts of God or
damage in transit.
Campbell Scientific will return guaranteed equipment by surface carrier
prepaid. Campbell Scientific will not reimburse the claimant for costs incurred
in removing and/or reinstalling equipment. This guarantee and the Company’s
obligation thereunder is in lieu of all other guarantees, expressed or implied,
including those of suitability and fitness for a particular purpose. Campbell
Scientific is not liable for consequential damage.
Please inform us before returning equipment and obtain a Repair Reference
Number whether the repair is under guarantee or not. Please state the faults as
clearly as possible, and if the product is out of the guarantee period it should
be accompanied by a purchase order. Quotations for repairs can be given on
request. It is the policy of Campbell Scientific to protect the health of its
employees and provide a safe working environment, in support of this policy a
“Declaration of Hazardous Material and Decontamination” form will be
issued for completion.
When returning equipment, the Repair Reference Number must be clearly
marked on the outside of the package. Complete the “Declaration of
Hazardous Material and Decontamination” form and ensure a completed copy
is returned with your goods. Please note your Repair may not be processed if
you do not include a copy of this form and Campbell Scientific Ltd reserves
the right to return goods at the customers’ expense.
Note that goods sent air freight are subject to Customs clearance fees which
Campbell Scientific will charge to customers. In many cases, these charges are
greater than the cost of the repair.
Campbell Scientific Ltd,
80 Hathern Road,
Shepshed, Loughborough, LE12 9GX, UK
Tel: +44 (0) 1509 601141
Fax: +44 (0) 1509 270924
Email: support@campbellsci.co.uk
www.campbellsci.co.uk
Page 3
About this manual
Please note that this manual was originally produced by Campbell Scientific Inc. primarily for the North
American market. Some spellings, weights and measures may reflect this origin.
Some useful conversion factors:
Area: 1 in2 (square inch) = 645 mm2
Length: 1 in. (inch) = 25.4 mm
1 ft (foot) = 304.8 mm
1 yard = 0.914 m
1 mile = 1.609 km
In addition, while most of the information in the manual is correct for all countries, certain information
is specific to the North American market and so may not be applicable to European users.
Differences include the U.S standard external power supply details where some information (for
example the AC transformer input voltage) will not be applicable for British/European use. Please note,
however, that when a power supply adapter is ordered it will be suitable for use in your country.
Reference to some radio transmitters, digital cell phones and aerials may also not be applicable
according to your locality.
Some brackets, shields and enclosure options, including wiring, are not sold as standard items in the
European market; in some cases alternatives are offered. Details of the alternatives will be covered in
separate manuals.
Part numbers prefixed with a “#” symbol are special order parts for use with non-EU variants or for
special installations. Please quote the full part number with the # when ordering.
Mass: 1 oz. (ounce) = 28.35 g
1 lb (pound weight) = 0.454 kg
Pressure: 1 psi (lb/in2) = 68.95 mb
Volume: 1 UK pint = 568.3 ml
1 UK gallon = 4.546 litres
1 US gallon = 3.785 litres
Recycling information
At the end of this product’s life it should not be put in commercial or domestic refuse but
sent for recycling. Any batteries contained within the product or used during the
products life should be removed from the product and also be sent to an appropriate
recycling facility.
Campbell Scientific Ltd can advise on the recycling of the equipment and in some cases
arrange collection and the correct disposal of it, although charges may apply for some
items or territories.
For further advice or support, please contact Campbell Scientific Ltd, or your local agent.
Campbell Scientific Ltd, 80 Hathern Road, Shepshed, Loughborough, LE12 9GX,
UK Tel: +44 (0) 1509 601141 Fax: +44 (0) 1509 270924
Email: support@campbellsci.co.uk
www.campbellsci.co.uk
Page 4

Safety
DANGER — MANY HAZARD S ARE ASSOCIATED WITH INSTALLING, USING, M AINTAINING, AND WORKING ON
OR AROUND TRIPODS, TOWERS, AND ANY ATTACHMENTS TO TRIPODS AND TOWERS SUCH AS SENSORS,
CROSSARMS, ENCLOSURES, ANTENNAS, ETC. FAILURE TO PROPERLY AND COM P LE TE LY ASS E M BLE ,
INSTALL, OPERATE, USE, AND MAINTAIN TRIPODS, TOWERS, AND ATTACHMENTS, AND FAILURE TO HEED
WARNINGS, INCREASES THE RISK OF DEATH, ACCIDENT, SERIOUS INJURY, PROPERTY DAMAGE, AND
PRODUCT FAILURE. TAKE ALL REASONABLE PRECAUTIONS TO AVOID THESE HAZARDS. CHECK WITH YOUR
ORGANIZATION'S SAFETY COORDINATOR (OR POLICY) FOR PROCEDURES AND REQUIRED PROTECTIVE
EQUIPMENT PRIOR TO PERFORMING ANY WORK.
Use tripods, towers, and attachments to tripods and towers only for purposes for which they are designed. Do not
exceed design limits. Be familiar and comply with all instructions provided in product manuals. Manuals are
available at www.campbellsci.eu or by telephoning +44(0) 1509 828 888 (UK). You are responsible for conformance
with governing codes and regulati ons, including safety regulati ons, and the integrity and locati on of structures or land
to which towers, tripods, and any attachments are attached. Installation sites should be evaluated and approved by a
qualified engineer. If questions or co ncerns arise regarding installation, use, or maintenance of tripods, towers,
attachments, or electrical connections, consult with a licensed and qualified engineer or electrician.
General
• Prior to performing site or installation work, obtain required approvals and permits. Comply with all
governing structure-height regulations, such as those of the FAA in the USA.
• Use only qualified personnel for installation, use, and maintenance of tripods and towers, and any
attachments to tripods and towers. The use of licensed and qualified contractors is highly recommended.
• Read all applicable instructions carefully and understand procedures thoroughly before beginning work.
• Wear a hardhat and eye protection, and take other appropriate safety precautions while working on or
around tripods and towers.
• Do not climb tripods or towers at any time, and prohibit climbing by other persons. Take reasonable
precautions to secure tripod and tower sites from trespassers.
• Use only manufacturer recommended parts, materials, and tools.
Utility and Electrical
• You can be killed or sustain serious bodily injury if the tripod, tower, or attachments you are installing,
constructing, using, or maintaining, or a tool, stake, or anchor, come in contact with overhead o
nderground utility lines.
u
• Maintain a distance of at least one-and-one-half times structure height, or 20 feet, or the distance
r
equired by applicable law, whichever is greater, between overhead utility lines and the structure (tripod,
tower, attachments, or tools).
• Prior to performing site or installation work, inform all utility companies and have all underground utilities
marked.
• Comply with all electrical codes. Electrical equipment and related grounding devices should be installed
by a licensed and qualified electrician.
r
Elevated Work and Weather
• Exercise extreme caution when performing elevated work.
• Use appropriate equipment and safety practices.
• During installation and maintenance, keep tower and tripod sites clear of un-trained or non-essential
personnel. Take precautions to prevent elevated tools and objects from dropping.
• Do not perform any work in inclement weather, including wind, rain, snow, lightning, etc.
Maintenance
• Periodically (at least yearly) check for wear and damage, including corrosion, stress cracks, frayed cables,
loose cable clamps, cable tightness, etc. and take necessary corrective actions.
• Periodically (at least yearly) check electrical ground connections.
WHILE EVERY ATTEMPT IS MADE TO EMBODY THE HIGHEST DEGREE OF SAFETY IN ALL CAMPBELL
SCIENTIFIC PRODUCTS, THE CUSTOMER ASSUMES ALL RISK FROM ANY INJURY RESULTING FROM IMPROPER
INSTALLATION, USE, OR MAINTENANCE OF TRIPODS, TOWERS, OR ATTACHMENTS TO TRIPODS AND TOWERS
SUCH AS SENSORS, CROSSARMS, ENCLOSURES, ANTENNAS, ETC.
Page 5
Table of Contents
1. GRANITE 9/10 data acquisition system components 1
1.1 The GRANITE 9/10 data acquisition system 2
1.1.1 Overview 2
1.1.2 Operations 3
1.1.3 Programs 3
1.2 Sensors 3
2. Wiring panel and terminal functions 5
2.1 Power input 9
2.1.1 Powering a data logger with a vehicle 9
2.1.2 Power LED indicator 10
2.2 Power output 10
2.3 Grounds 11
2.4 Communications ports 12
2.4.1 USB device port 12
2.4.2 USB host port 13
2.4.3 Ethernet port 13
2.4.4 C terminals for communications 13
2.4.4.1 SDI-12 ports 13
2.4.4.2 RS-232, RS-422, RS-485, TTL, and LVTTL ports 14
2.4.4.3 SDM ports 14
2.4.5 CS I/O port 14
2.4.6 CPI/RS-232 port 15
2.4.7 EPI port 16
2.4.8 CAN port (GRANITE 10 only) 17
2.5 Programmable logic control 18
3. Setting up the GRANITE 9/10 20
3.1 Setting up communications with the data logger 20
3.1.1 USB or RS-232 communications 21
3.1.2 Virtual Ethernet over USB (RNDIS) 22
3.1.3 Ethernet communications option 23
3.1.3.1 Configuring data logger Ethernet settings 23
Table of Contents - i
Page 6
3.1.3.2 Ethernet LEDs 24
3.1.3.3 Setting up Ethernet communications between the data logger and
computer 25
3.1.4 Wi-Fi communications 26
3.1.4.1 Configuring the data logger to host a Wi-Fi network 26
3.1.4.2 Connecting your computer to the data logger over Wi-Fi 27
3.1.4.3 Setting up Wi-Fi communications between the data logger and the data
logger support software 27
3.1.4.4 Configuring data loggers to join a Wi-Fi network 28
3.1.4.5 Wi-Fi mode button 29
3.1.4.6 Wi-Fi LED indicator 29
3.2 Testing communications with EZSetup 30
3.3 Making the software connection 31
3.4 Programming quickstart using Short Cut 31
3.5 Sending a program to the data logger 35
4. Working with data 36
4.1 Default data tables 36
4.2 Collecting data 37
4.2.1 Collecting data using LoggerNet 37
4.2.2 Collecting data using RTDAQ 37
4.2.3 Collecting data using an FTP client 38
4.3 Viewing historic data 39
4.4 Data types and formats 39
4.4.1 Variables 40
4.4.2 Constants 41
4.4.3 Data storage 42
4.5 About data tables 43
4.5.1 Table definitions 43
4.5.1.1 Header rows 43
4.5.1.2 Data records 45
4.6 Creating data tables in a program 46
5. Data memory 48
5.1 Data tables 48
5.2 Memory allocation 48
5.3 SRAM 49
5.3.1 USRdrive 50
Table of Contents - ii
Page 7
5.4 DDR-SDRAM 51
5.5 SRAM vs. DDR-SDRAM 51
5.6 SSD - Hard Drive 51
5.7 Flash memory 52
5.7.1 eMMC NAND flash memory 52
5.7.2 NOR flash memory 52
5.7.3 CPU drive 52
5.8 MicroSD (CRD:drive) 52
5.8.1 Formatting microSD cards 53
5.8.2 MicroSDcard precautions 54
5.8.3 Act LED indicator 54
5.9 USB Host (USB: drive) 54
5.9.1 USB Host precautions 55
5.9.2 Act LED indicator 55
5.9.3 Formatting drives 32 GB or larger 55
6. Measurements 56
6.1 Pulse measurements 56
6.1.1 High-frequency measurements 57
6.1.1.1 C terminals 58
6.1.2 Switch-closure and open-collector measurements 58
6.1.2.1 C Terminals 58
6.1.3 Edge timing and edge counting 59
6.1.3.1 Single edge timing 59
6.1.3.2 Multiple edge counting 59
6.1.3.3 Timer input NAN conditions 59
6.1.4 Quadrature measurements 60
6.1.5 Pulse measurement tips 61
6.1.5.1 Input filters and signal attenuation 61
6.1.5.2 Pulse count resolution 62
6.2 Sequential and pipeline processing modes 62
6.2.1 Sequential mode 62
6.2.2 Pipeline mode 63
6.2.3 Slow Sequences 63
7. Communications protocols 65
7.1 General serial communications 66
Table of Contents - iii
Page 8
7.1.1 RS-232 68
7.1.2 RS-485 69
7.1.3 RS-422 70
7.1.4 TTL 71
7.1.5 LVTTL 71
7.1.6 TTL-Inverted 71
7.1.7 LVTTL-Inverted 72
7.2 CPI 72
7.3 EPI 73
7.4 CAN (GRANITE10 only) 73
7.4.1 CRBasic instructions 74
7.4.1.1 CANPortOpen() / CANFDPortOpen 74
7.4.1.2 CANRead() / CANFDRead() 77
7.4.1.3 CANFilterRead() / CANFDFilterRead() 78
7.4.1.4 CANWrite() / CANFDWrite() 78
7.4.2 DBC Signal Support 78
7.4.3 J1979 Legislated PIDS Example 81
7.5 Modbus communications 81
7.5.1 About Modbus 82
7.5.2 Modbus protocols 83
7.5.3 Understanding Modbus Terminology 84
7.5.4 Connecting Modbus devices 84
7.5.5 Modbus master-slave protocol 84
7.5.6 About Modbus programming 85
7.5.6.1 Endianness 85
7.5.6.2 Function codes 86
7.5.7 Modbus information storage 87
7.5.7.1 Registers 87
7.5.7.2 Coils 87
7.5.7.3 Data Types 88
Unsigned 16-bit integer 88
Signed 16-bit integer 88
Signed 32-bit integer 89
Unsigned 32-bit integer 89
32-Bit floating point 89
7.5.8 Modbus tips and troubleshooting 89
7.5.8.1 Error codes 89
Table of Contents - iv
Page 9
Result code -01: illegal function 89
Result code -02: illegal data address 90
Result code -11: COM port error 90
7.6 Internet communications 90
7.6.1 IPaddress 91
7.6.2 HTTPS server 91
7.6.3 FTP server 91
7.7 DNP3 communications 93
7.8 Serial peripheral interface (SPI) and I2C 93
7.9 PakBus communications 93
7.10 SDI-12 communications 94
7.10.1 SDI-12 transparent mode 95
7.10.1.1 Watch command (sniffer mode) 96
7.10.1.2 SDI-12 transparent mode commands 97
7.10.2 SDI-12 programmed mode/recorder mode 97
7.10.3 Programming the data logger to act as an SDI-12 sensor 98
7.10.4 SDI-12 power considerations 98
8. GRANITE 9/10 maintenance 100
8.1 Data logger calibration 100
8.2 Data logger security 101
8.2.1 TLS 102
8.2.2 Security codes 103
8.2.3 Creating a .csipasswd file 104
8.2.3.1 Command syntax 105
8.3 Data logger enclosures 105
8.3.1 Mounting in an enclosure 106
8.4 Internal battery 107
8.4.1 Replacing the internal battery 108
8.5 Electrostatic discharge and lightning protection 109
8.6 Power budgeting 111
8.7 Updating the operating system 111
8.7.1 Sending an operating system to a local data logger 112
8.7.2 Sending an operating system to a remote data logger 113
8.8 File management via powerup.ini 114
8.8.1 Syntax 115
8.8.2 Example powerup.ini files 116
Table of Contents - v
Page 10
9. Tips and troubleshooting 118
9.1 Checking station status 119
9.1.1 Viewing station status 119
9.1.2 Watchdog errors 120
9.1.3 Results for last program compiled 120
9.1.4 Skipped scans 121
9.1.5 Skipped records 121
9.1.6 Variable out of bounds 121
9.1.7 Battery voltage 121
9.2 Understanding NAN and INF occurrences 121
9.3 Timekeeping 122
9.3.1 Clock best practices 122
9.3.2 GPS 123
9.3.3 Time stamps 123
9.3.4 Avoiding time skew 124
9.4 CRBasic program errors 124
9.4.1 Program does not compile 125
9.4.2 Program compiles but does not run correctly 125
9.5 Resetting the data logger 126
9.5.1 Processor reset 126
9.5.2 Program send reset 126
9.5.3 Manual data table reset 127
9.5.4 Formatting drives 127
9.5.5 Full memory reset 127
9.6 Troubleshooting power supplies 127
9.6.1 SDI-12 transparent mode 128
9.6.1.1 Watch command (sniffer mode) 129
9.6.1.2 SDI-12 transparent mode commands 130
9.7 Ground loops 130
9.7.1 Common causes 131
9.7.2 Detrimental effects 131
9.7.3 Severing a ground loop 133
9.8 Field calibration 133
9.9 File system error codes 134
9.10 File name and resource errors 135
9.11 Background calibration errors 135
Table of Contents - vi
Page 11

10. Information tables and settings (advanced) 136
10.1 DataTableInfo table system information 137
10.1.1 DataFillDays 137
10.1.2 DataRecordSize 137
10.1.3 DataTableName 137
10.1.4 RecNum 137
10.1.5 SecsPerRecord 138
10.1.6 SkippedRecord 138
10.1.7 TimeStamp 138
10.2 Status table system information 138
10.2.1 Battery 138
10.2.2 BuffDepth 138
10.2.3 CardStatus 138
10.2.4 CommsMemFree 139
10.2.5 CompileResults 139
10.2.6 ErrorCalib 139
10.2.7 FullMemReset 139
10.2.8 LastSystemScan 139
10.2.9 LithiumBattery 139
10.2.10 Low12VCount 139
10.2.11 MaxBuffDepth 139
10.2.12 MaxProcTime 140
10.2.13 MaxSystemProcTime 140
10.2.14 MeasureOps 140
10.2.15 MeasureTime 140
10.2.16 MemoryFree 140
10.2.17 MemorySize 140
10.2.18 Messages 140
10.2.19 OSDate 141
10.2.20 OSSignature 141
10.2.21 OSVersion 141
10.2.22 PakBusRoutes 141
10.2.23 CPUTemp 141
10.2.24 PortConfig 141
10.2.25 PortStatus 141
10.2.26 ProcessTime 142
10.2.27 ProgErrors 142
Table of Contents - vii
Page 12
10.2.28 ProgName 142
10.2.29 ProgSignature 142
10.2.30 RecNum 142
10.2.31 RevBoard 142
10.2.32 RunSignature 142
10.2.33 SerialNumber 143
10.2.34 SkippedScan 143
10.2.35 SkippedSystemScan 143
10.2.36 StartTime 143
10.2.37 StartUpCode 143
10.2.38 StationName 143
10.2.39 SW12Volts 143
10.2.40 SystemProcTime 144
10.2.41 TimeStamp 144
10.2.42 VarOutOfBound 144
10.2.43 WatchdogErrors 144
10.2.44 WiFiUpdateReq 144
10.3 CPIStatus system information 144
10.3.1 BusLoad 145
10.3.2 ModuleReportCount 145
10.3.3 ActiveModules 145
10.3.4 BuffErr (buffer error) 145
10.3.5 RxErrMax 145
10.3.6 TxErrMax 145
10.3.7 FrameErr (frame errors) 145
10.3.8 ModuleInfo array 146
10.4 Settings 146
10.4.1 Baudrate 146
10.4.2 Beacon 147
10.4.3 CentralRouters 147
10.4.4 CommsMemAlloc 147
10.4.5 DNS 147
10.4.6 EthernetInfo 148
10.4.7 EthernetPower 148
10.4.8 FilesManager 148
10.4.9 FTPEnabled 148
10.4.10 FTPPassword 148
Table of Contents - viii
Page 13
10.4.11 FTPPort
10.4.12 FTPUserName
10.4.13 HTTPEnabled
10.4.14 HTTPPort
10.4.15 HTTPSEnabled
10.4.16 HTTPSPort
10.4.17 IncludeFile
10.4.18 IPAddressEth
10.4.19 IPGateway
10.4.20 IPMaskEth
10.4.21 IPTrace
10.4.22 IPTraceCode
10.4.23 IPTraceComport
10.4.24 IsRouter
10.4.25 MaxPacketSize
10.4.26 Neighbours
10.4.27 PakBusAddress
10.4.28 PakBusEncryptionKey
10.4.29 PakBusNodes
10.4.30 PakBusPort
10.4.31 PakBusTCPClients
10.4.32 PakBusTCPEnabled
10.4.33 PakBusTCPPassword
10.4.34 PingEnabled
10.4.35 pppDial
10.4.36 pppDialResponse
10.4.37 pppInfo
10.4.38 pppInterface
10.4.39 pppIPAddr
10.4.40 pppPassword
10.4.41 pppUsername
10.4.42 RouteFilters
10.4.43 RS232Power
10.4.44 Security(1), Security(2), Security(3)
10.4.45 ServicesEnabled
10.4.46 TCPClientConnections
10.4.47 TCPPort
148
148
149
149
149
149
149
149
149
150
150
150
150
150
151
151
151
151
151
151
152
152
152
152
152
152
153
153
153
153
153
153
154
154
154
154
154
Table of Contents - ix
Page 14
10.4.48 TelnetEnabled 154
10.4.49 TLSConnections (Max TLS Server Connections) 154
10.4.50 TLSPassword 155
10.4.51 TLSStatus 155
10.4.52 UDPBroadcastFilter 155
10.4.53 UTCOffset 155
10.4.54 Verify 155
10.4.55 Wi-Fi settings 155
10.4.55.1 IPAddressWiFi 156
10.4.55.2 IPGatewayWiFi 156
10.4.55.3 IPMaskWiFi 156
10.4.55.4 WiFiChannel 156
10.4.55.5 WiFiConfig 157
10.4.55.6 WiFiEAPMethod 157
10.4.55.7 WiFiEAPPassword 157
10.4.55.8 WiFiEAPUser 157
10.4.55.9 Networks 157
10.4.55.10 WiFiEnable 158
10.4.55.11 WiFiFwdCode (Forward Code) 158
10.4.55.12 WiFiPassword 158
10.4.55.13 WiFiPowerMode 158
10.4.55.14 WiFiSSID (Network Name) 158
10.4.55.15 WiFiStatus 159
10.4.55.16 WiFiTxPowerLevel 159
10.4.55.17 WLANDomainName 159
11. GRANITE 9/10 Specifications 160
11.1 System specifications 160
11.2 Physical specifications 162
11.3 Power requirements 162
11.4 Power output specifications 163
11.4.1 System power out limits (when powered with 12VDC) 163
11.4.2 12 V and SW12 power output terminals 163
11.4.3 5 V fixed output 163
11.4.4 C as power output 164
11.4.5 CSI/O pin 1 164
11.4.6 CSI/O pin 8 164
Table of Contents - x
Page 15
11.5 Pulse measurement specifications 164
11.5.1 Switch closure input 164
11.5.2 High-frequency input 165
11.5.3 Low-level AC input 165
11.6 Digital input/output specifications 165
11.6.1 Switch closure input 166
11.6.2 High-frequency input 166
11.6.3 Edge timing 166
11.6.4 Edge counting 167
11.6.5 Quadrature input 167
11.6.6 Pulse-width modulation 167
11.6.7 Maximum time between counter or timer instructions 167
11.7 Communications specifications 167
11.7.1 Wi-Fi specifications 168
11.8 Standards compliance specifications 169
Appendix A. Glossary 170
Table of Contents - xi
Page 16

1. GRANITE 9/10 data acquisition system components
A basic data acquisition system consists of sensors, measurement hardware, and a computer with
programmable software. The objective of a data acquisition system should be high accuracy,
high precision, and resolution as high as appropriate for a given application.
The components of a basic data acquisition system are shown in the following figure.
Following is a list of typical data acquisition system components:
l Sensors - Electronic sensors convert the state of a phenomenon to an electrical signal (see
Sensors (p. 3) for more information).
1. GRANITE 9/10 data acquisition system components 1
Page 17

l Data logger - The data logger measures electrical signals or reads serial characters. It
converts the measurement or reading to engineering units, performs calculations, and
reduces data to statistical values. Data is stored in memory to await transfer to a computer
by way of an external storage device or a communications link.
l Data Retrieval and Communications - Data is copied (not moved) from the data logger,
usually to a computer, by one or more methods using data logger support software. Most
communications options are bi-directional, which allows programs and settings to be sent
to the data logger. For more information, see Sending a program to the data logger (p. 35).
l Datalogger Support Software - Software retrieves data, sends programs, and sets settings.
The software manages the communications link and has options for data display.
l Programmable Logic Control - Some data acquisition systems require the control of
external devices to facilitate a measurement or to control a device based on measurements.
This data logger is adept at programmable logic control. See Programmable logic control
(p. 18) for more information.
l Measurement and Control Peripherals - Sometimes, system requirements exceed the
capacity of the data logger. The excess can usually be handled by addition of input and
output expansion modules.
l Campbell Distributed Module (CDM) - CDMs increase measurement capability can be
centrally located or distributed throughout the network. Modules are controlled and
synchronized by a single GRANITE 9/10. GRANITE Measurement Modules are one type of
CDM.
1.1 The GRANITE 9/10 data acquisition system
The GRANITE 9/10 data logger provides fast communications, low power requirements, and builtin host and devices USB in a compact size. It includes digital I/O (C) terminals, which allow
connection to virtually any digital or smart sensor. The GRANITE 9/10 in conjunction with
GRANITE Measurement Modules can be collocated in a chassis or distributed over distances of
thousands of feet and all behave as a single unit for the purposes of programming,
synchronization, and data collection and storage.
1.1.1 Overview
The GRANITE 9/10 data logger is the main part of a data acquisition system (see GRANITE 9/10
data acquisition system components (p. 1) for more information). It has a central-processing unit
(CPU), digital measurement inputs, analogue and digital outputs, and memory. An operating
system (firmware) coordinates the functions of these parts in conjunction with the onboard clock
and the CRBasic application program.
1. GRANITE 9/10 data acquisition system components 2
Page 18

The GRANITE 9/10 can simultaneously provide measurement and communications functions. Low
power consumption allows the data logger to operate for extended time on a battery recharged
with a solar panel, eliminating the need for ac power. The GRANITE 9/10 temporarily suspends
operations when primary power drops below 9.6 V, reducing the possibility of inaccurate
measurements.
1.1.2 Operations
The GRANITE 9/10 measures almost any sensor with an electrical response, drives direct
communications and telecommunications, reduces data to statistical values, performs
calculations, and controls external devices. After measurements are made, data is stored in
onboard, nonvolatile memory. Because most applications do not require that every measurement
be recorded, the program usually combines several measurements into computational or
statistical summaries, such as averages and standard deviations.
Distributed measurements are one of the hallmarks of the GRANITE series. All modules are
interconnected using CAT5e Ethernet cable. This makes running cables inexpensive and familiar.
One of the advantage of distributed measurements is to take the GRANITE 9/10 to the sensors
and shorten the sensor cables. This replaces many long sensor cables with a single inexpensive
data cable. It also reduces the distance for signals to travel therefore reducing opportunities for
corruption of the signals by noise.
1.1.3 Programs
A program directs the data logger on how and when sensors are measured, calculations are
made, data is stored, and devices are controlled. The application program for the GRANITE 9/10
is written in CRBasic, a programming language that includes measurement, data processing, and
analysis routines, as well as the standard BASIC instruction set. For simple applications, Short Cut,
a user-friendly program generator, can be used to generate the program. For more demanding
programs, use the full featured CRBasic Editor.
Programs are run by the GRANITE 9/10 in either sequential mode or pipeline mode. In sequential
mode, each instruction is executed sequentially in the order it appears in the program. In
pipeline mode, the GRANITE 9/10 determines the order of instruction execution to maximize
efficiency.
1.2 Sensors
Sensors transduce phenomena into measurable electrical forms by modulating voltage, current,
resistance, status, or pulse output signals. Suitable sensors do this with accuracy and precision.
1. GRANITE 9/10 data acquisition system components 3
Page 19

Smart sensors have internal measurement and processing components and simply output a
digital value in binary, hexadecimal, or ASCII character form.
GRANITE measurement modules allow flexibility both in measurement type and channel count.
Most electronic sensors, regardless of manufacturer, will interface with a measurement module.
The GRANITE data acquisition system can measure or read nearly all electronic sensor output
types.
The following list may not be comprehensive. A library of sensor manuals and application notes
is available at www.campbellsci.eu/support to assist in measuring many sensor types.
l Pulse
o
High frequency
o
Switch-closure
o
Low-level ac
o
Quadrature
l Vibrating wire
l Smart sensors
o
SDI-12
o
RS-232
o
Modbus
o
DNP3
o
TCP/IP
o
RS-422
o
RS-485
1. GRANITE 9/10 data acquisition system components 4
Page 20
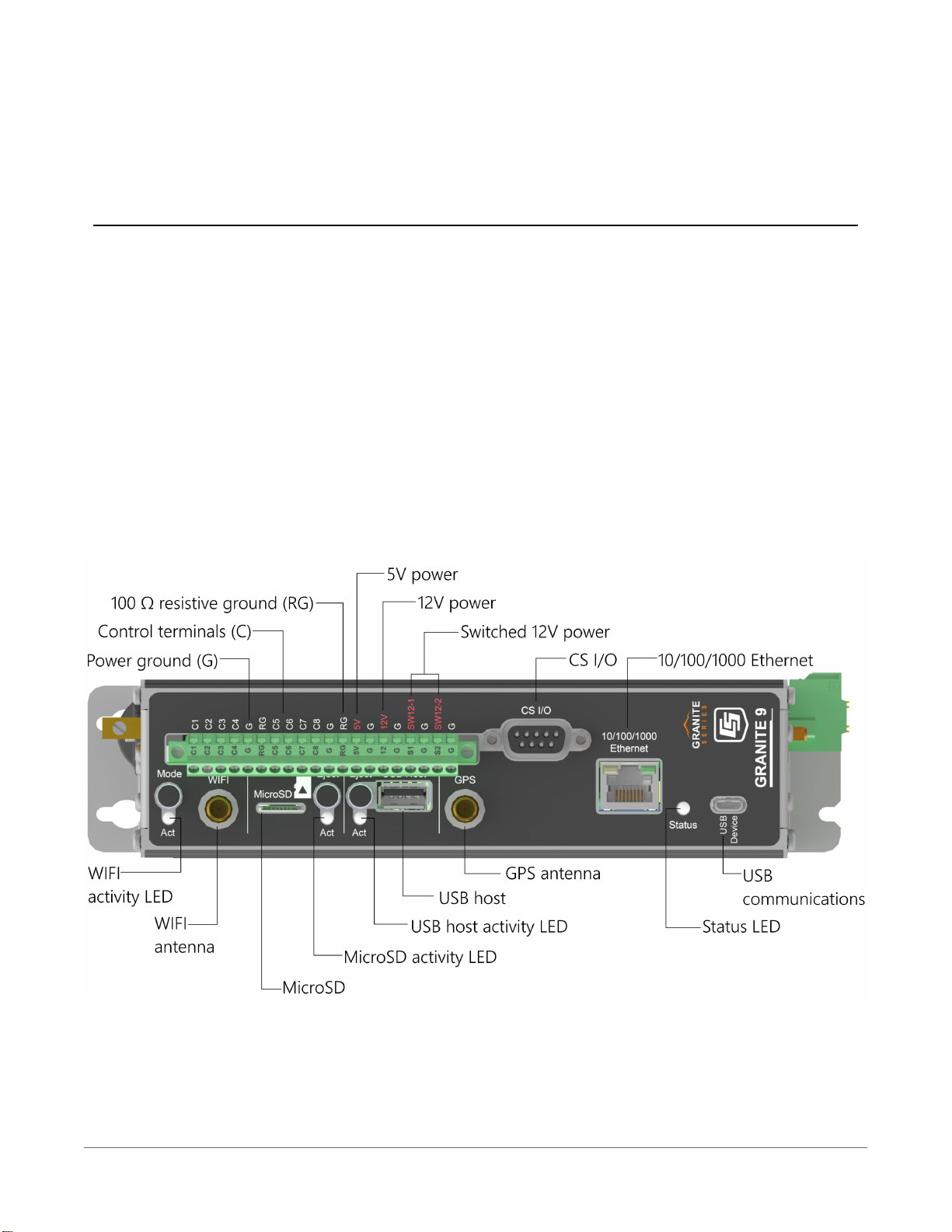
2. Wiring panel and terminal functions
The GRANITE 9/10 wiring panel provides ports and removable terminals for connecting sensors,
power, and communications devices. It is protected against surge, over-voltage, over-current,
and reverse power. The wiring panel is the interface to most data logger functions so studying it
is a good way to get acquainted with the data logger. Functions of the terminals are broken
down into the following categories:
l Pulse counting
l Communications
l Digital I/O
l Power input
l Power output
l Power ground
FIGURE 2-1. GRANITE9 Wiring panel
2. Wiring panel and terminal functions 5
Page 21
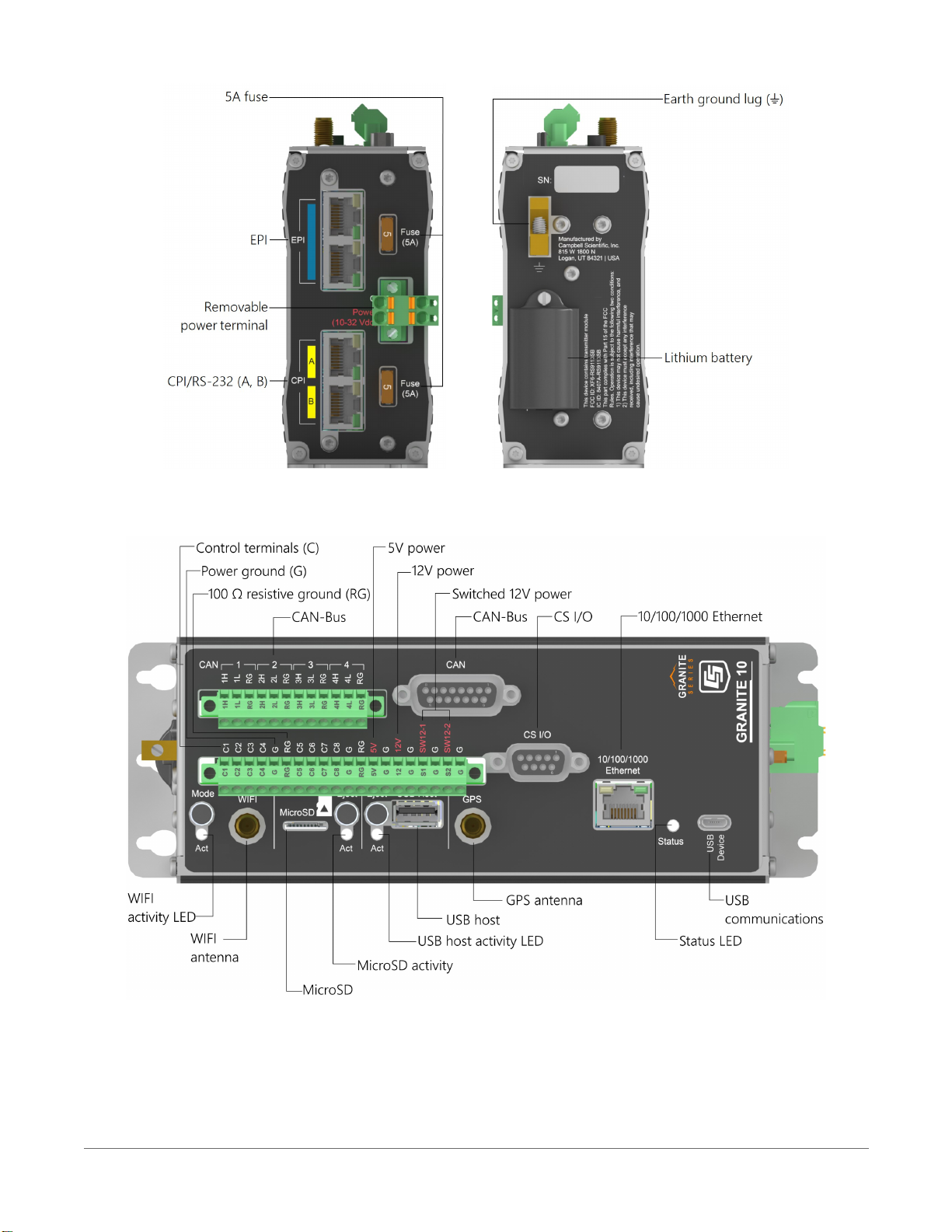
FIGURE 2-2. GRANITE9
FIGURE 2-3. GRANITE10 Wiring panel
2. Wiring panel and terminal functions 6
Page 22
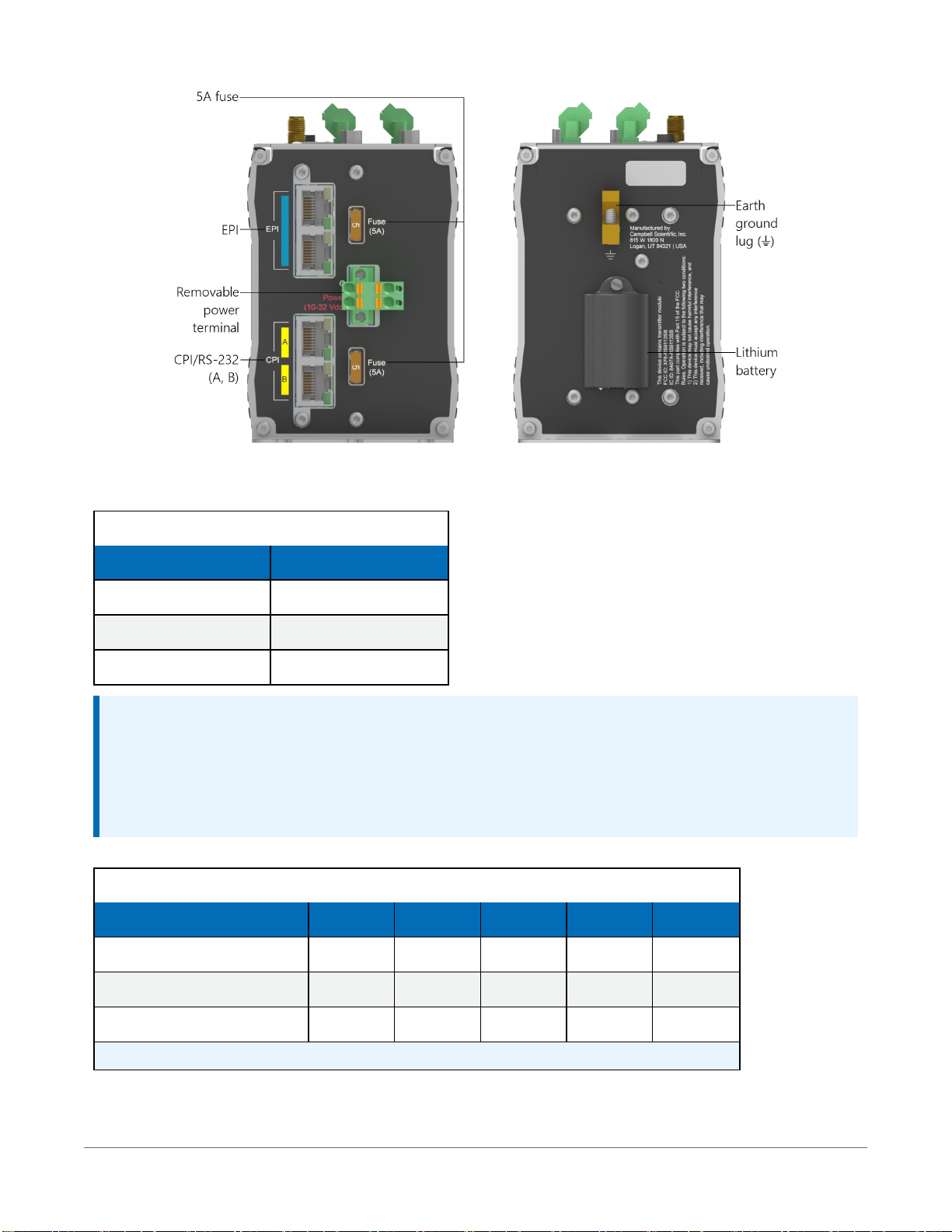
FIGURE 2-4. GRANITE10
Table 2-1: Pulse counting terminal functions
C1-C8
Switch-Closure ✓
High Frequency ✓
Quadrature
NOTE:
Conflicts can occur when a control port pair is used for different instructions (TimerInput(),
PulseCount(), SDI12Recorder(), WaitDigTrig()). For example, if C1 is used for
SDI12Recorder(), C2 cannot be used for TimerInput(), PulseCount(), or
WaitDigTrig().
Table 2-2: Voltage output terminal functions
C1-C8 12V SW12-1 SW12-2 5V
3.3 VDC ✓
5 VDC ✓ ✓
+POWERIN up to 12VDC ✓ ✓ ✓
C terminals have limited drive capacity. Voltage levels are configured in pairs.
2. Wiring panel and terminal functions 7
Page 23
Table 2-3: Communications terminal functions
C1 C2 C3 C4
SDI-12 ✓ ✓ ✓
GPS Time Sync Tx Rx Tx Rx Tx Rx Tx Rx
TTL
Tx Rx Tx Rx Tx Rx Tx Rx
0-5 V
LVTTL
Tx Rx Tx Rx Tx Rx Tx Rx
0-3.3 V
RS-232 Tx Rx Tx Rx Tx Rx Tx Rx ✓
RS-485
A- B+ A- B+ A- B+ A- B+
(Half Duplex)
RS-485
Tx- Tx+ Rx- Rx+ Tx- Tx+ Rx- Rx+
(Full Duplex)
I2C SCL SDA SCL SDA SCL SDA SCL SDA
C5 C6 C7 C8
RS-232/
CPI
GRANITE 10 only
H/L/RG
(1-4)
SPI MOSI SCLK MISO MOSI SCLK MISO
SDM Data Clk Enabl
CPI/
CDM
CAN bus ✓
✓
Table 2-4: Digital I/O terminal functions
C1-C8
General I/O ✓
Pulse-Width Modulation Output ✓
Timer Input ✓
Interrupt ✓
2. Wiring panel and terminal functions 8
Page 24
2.1 Power input
The data logger requires a power supply. It can receive power from a variety of sources, operate
for several months on non-rechargeable batteries, and supply power to many sensors and
devices. The data logger operates with external power connected to the green POWER IN port on
the side of the wiring panel (see Wiring Panel and Terminal Functions). The positive power wire
connects to the Power (10-32 Vdc) terminal. The negative wire connects to G. The power
terminals are internally protected against polarity reversal and high voltage transients.
The primary power source, which is often a transformer, power converter, or solar panel, connects
to the charging regulator, as does a nominal 12 VDC sealed rechargeable battery. A third
connection connects the charging regulator to the 12V and G terminals of the POWER IN port.
UPS (uninterruptible power supply) is often the best power source for long-term installations. If
external alkaline power is used, the alkaline battery pack is connected directly to the POWER IN
port. External UPS consists of a primary-power source, a charging regulator external to the data
logger, and an external battery.
WARNING:
Sustained input voltages in excess of those listed in the , can damage the transient voltage
suppression.
Ensure that power supply components match the specifications of the device to which they are
connected. When connecting power, switch off the power supply, insert the connector, then turn
the power supply on. Troubleshooting power supplies (p. 127)
The GRANITE 9/10 cannot run solely from USB power.
NOTE:
The Status field Battery value and the destination variable from the Battery() instruction
(often called batt_volt in the Public table) reference the external battery voltage. For
information about the internal battery, see Internal battery (p. 107).
2.1.1 Powering a data logger with a vehicle
If a data logger is powered by a motor-vehicle power supply, a second power supply may be
needed. When starting the motor of the vehicle, battery voltage often drops below the voltage
required for data logger operation. This may cause the data logger to stop measurements until
the voltage again equals or exceeds the lower limit. A second supply or charge regulator can be
provided to prevent measurement lapses during vehicle starting.
2. Wiring panel and terminal functions 9
Page 25

In vehicle applications, the earth ground lug should be firmly attached to the vehicle chassis with
12 AWG wire or larger.
2.1.2 Power LED indicator
When the data logger is powered, the Status LED will turn on according to power and program
states:
l Off: No power, no program running.
l Green flash every 1/2 second: Program running
l Solid yellow: Fault
l Solid red: Boot code is active
2.2 Power output
The data logger can be used as a power source for communications devices, sensors and
peripherals. Take precautions to prevent damage to these external devices due to over- or undervoltage conditions, and to minimize errors. Additionally, exceeding current limits causes voltage
output to become unstable. Voltage should stabilize once current is again reduced to within
stated limits. The following are available:
l 12V: regulated 12 VDC. The 12 VDC supply is regulated to within 10% of 12 VDC as long as
the main power supply for the data logger does not drop below the minimum supply
voltage. See Power requirements (p. 162).
l 5V: regulated 5 VDC. The 5 VDC supply is regulated to within a few millivolts of 5 VDC as
long as the main power supply for the data logger does not drop below the minimum
supply voltage. It is intended to power sensors or devices requiring a 5 VDC power supply.
It is not intended as an excitation source for bridge measurements. Current output is
shared with the CSI/O port; so, the total current must be within the current limit.
SW12: program-controlled, regulated switched 12 VDC terminals. Voltage on a SW12
l
terminal will be approximately the same as the 12V terminal. Each SW12 terminal has an
independent current limit. CRBasic instruction SW12()controls the SW12 terminal. See
the CRBasic Editor help for detailed instruction information and program examples:
https://help.campbellsci.eu/crbasic/granite10/,
https://help.campbellsci.eu/crbasic/granite9/.
l CS I/O port: used to communicate with and often supply power to Campbell Scientific
peripheral devices.
2. Wiring panel and terminal functions 10
Page 26
l C terminals: can be set low or high as output terminals . With limited drive capacity, digital
output terminals are normally used to operate external relay-driver circuits. See also Digital
input/output specifications (p. 165).
See also Power output specifications (p. 163).
2.3 Grounds
Proper grounding lends stability and protection to a data acquisition system. Grounding the data
logger with its peripheral devices and sensors is critical in all applications. Proper grounding will
ensure maximum ESD protection and measurement accuracy. It is the easiest and least expensive
insurance against data loss, and often the most neglected. The following terminals are provided
for connection of sensor and data logger grounds:
l Power Ground (G) - return for 3.3 V, 5 V, 12 V, C terminals configured for control, and
digital sensors.
o
6 common terminals
l Resistive Ground (RG) - used for decoupling ground on RS-485 and CANbus (GRANITE10
only) signals. Includes 100 Ω resistance to ground.
o
6 common terminals, GRANITE10
o
2 common terminals, GRANITE9
l Earth Ground Lug ( ) - connection point for heavy-gauge earth-ground wire. A good earth
connection is necessary to secure the ground potential of the data logger and shunt
transients away from electronics. Campbell Scientific recommends 14 AWG wire, minimum.
NOTE:
Several ground wires can be connected to the same ground terminal.
A good earth (chassis) ground will minimize damage to the data logger and sensors by providing
a low-resistance path around the system to a point of low potential. Campbell Scientific
recommends that all data loggers be earth grounded. All components of the system (data
loggers, sensors, external power supplies, mounts, housings) should be referenced to one
common earth ground.
In the field, at a minimum, a proper earth ground will consist of a 5-foot copper-sheathed
grounding rod driven into the earth and connected to the large brass ground lug on the wiring
panel with a 14 AWG wire. In low-conductive substrates, such as sand, very dry soil, ice, or rock, a
single ground rod will probably not provide an adequate earth ground. For these situations,
search for published literature on lightning protection or contact a qualified lightning-protection
consultant.
2. Wiring panel and terminal functions 11
Page 27

In laboratory applications, locating a stable earth ground is challenging, but still necessary. In
older buildings, new VAC receptacles on older VAC wiring may indicate that a safety ground
exists when, in fact, the socket is not grounded. If a safety ground does exist, good practice
dictates to verify that it carries no current. If the integrity of the VAC power ground is in doubt,
also ground the system through the building plumbing, or use another verified connection to
earth ground.
See also:
l Ground loops (p. 130)
2.4 Communications ports
The data logger is equipped with ports that allow communications with other devices and
networks, such as:
l Computers
l Smart sensors
l Modbus and DNP3 networks
l Ethernet
l Modems
l Campbell Scientific PakBus® networks
l Other Campbell Scientific data loggers
l GRANITE Measurement Modules
l Vehicles using CANbus (GRANITE 10 only)
Campbell Scientific data logger communications ports include:
l CS I/O
l CPI/RS-232
l EPI
l CANbus (GRANITE10 only)
l USB Device
l USB Host
l Ethernet
l C terminals
2.4.1 USB device port
One USB device port supports communicating with a computer through data logger support
software or through virtual Ethernet (RNDIS), and provides 5 VDC power to the data logger
(powering through the USB port has limitations - details are available in the specifications). The
2. Wiring panel and terminal functions 12
Page 28

data logger USB device port does not support USBflash or thumb drives. Although the USB
connection supplies 5 V power, a 12 VDC battery will be needed for field deployment.
2.4.2 USB host port
USB host provides portable data storage on a mass storage device (MSD). A single USB thumb
drive can be inserted into the drive and will show up as a drive (USB: ) in file related operations.
Measurement data is stored on USB: as discrete files by using the TableFile() instruction.
Files on USB can be collected by inserting the thumb drive into a computer and copying the files.
USB: can be used in the TableFile() instruction and all file access related instructions in
CRBasic. Because of data-reliability concerns in non-industrial rated drives, this drive is not
intended for long term unattended data storage. USB: is not affected by program recompilation
or formatting of other drives.
2.4.3 Ethernet port
The RJ45 10/100/1000 Ethernet port is used for IP communications.
2.4.4 C terminals for communications
C terminals are configurable for the following communications types:
l SDI-12
l RS-232
l RS-422
l RS-485
l TTL (0 to 5 V)
l LVTTL (0 to 3.3 V)
l SDM
Some communications types require more than one terminal, and some are only available on
specific terminals. This is shown in the data logger specifications.
2.4.4.1 SDI-12 ports
SDI-12 is a 1200 baud protocol that supports many smart sensors. C1, C3, C5, and C7 can be
configured as SDI-12 ports. Maximum cable lengths depend on the number of sensors
connected, the type of cable used, and the environment of the application. Refer to the sensor
manual for guidance.
For more information, see SDI-12 communications (p. 94).
2. Wiring panel and terminal functions 13
Page 29
2.4.4.2 RS-232, RS-422, RS-485, TTL, and LVTTL ports
RS-232, RS-422, RS-485, TTL, and LVTTL communications are typically used for the following:
l Reading sensors with serial output
l Creating a multi-drop network
l Communications with other data loggers or devices over long cables
Configure C terminals as serial ports using Device Configuration Utility or by using the
SerialOpen() CRBasic instruction. C terminals are configured in pairs for TTL, LVTTL, RS-232,
and half-duplex RS-422 and RS-485 communications. For full-duplex RS-422 and RS-485, four C
terminals are required. See also Communications protocols (p. 65).
NOTE:
RS-232 ports are not isolated.
2.4.4.3 SDM ports
SDM is a protocol proprietary to Campbell Scientific that supports several Campbell Scientific
digital sensor and communications input and output expansion peripherals and select smart
sensors. It uses a common bus and addresses each node. CRBasic SDM device and sensor
instructions configure terminals C1, C2, and C3 together to create an SDM port. Alternatively,
terminals C5, C6, and C7 can be configured together to be used as the SDM port by using the
SDMBeginPort() instruction.
See also Communications specifications (p. 167).
2.4.5 CS I/O port
One nine-pin port, labeled CS I/O, is available for communicating with a computer through
Campbell Scientific communications interfaces, modems, and peripherals. Campbell Scientific
recommends keeping CS I/O cables short (maximum of a few feet). See also Communications
specifications (p. 167).
Table 2-5: CS I/O pinout
Pin
Function
Number
1 5 VDC O 5 VDC: sources 5 VDC, used to power peripherals.
2 SG
Input(I)
Description
Output(O)
Signal ground: provides a power return for pin 1 (5V),
and is used as a reference for voltage levels.
2. Wiring panel and terminal functions 14
Page 30
Table 2-5: CS I/O pinout
Pin
Function
Number
3 RING I
4 RXD I
5 ME O
6 SDE O
7 CLK/HS I/O
8 12VDC
Input(I)
Description
Output(O)
Ring: raised by a peripheral to put the GRANITE 9/10 in
the telecom mode.
Receive data: serial data transmitted by a peripheral are
received on pin 4.
Modem enable: raised when the GRANITE 9/10
determines that a modem raised the ring line.
Synchronous device enable: addresses synchronous
devices (SD); used as an enable line for printers.
Clock/handshake: with the SDE and TXD lines addresses
and transfers data to SDs. When not used as a clock, pin
7 can be used as a handshake line; during printer
output, high enables, low disables.
Nominal 12 VDC power. Same power as 12V and SW12
terminals.
Transmit data: transmits serial data from the data logger
to peripherals on pin 9; logic-low marking (0V), logic-
9 TXD O
high spacing (5V), standard-asynchronous ASCII: eight
data bits, no parity, one start bit, one stop bit. User
selectable baud rates: 300, 1200, 2400, 4800, 9600,
19200, 38400, 115200.
2.4.6 CPI/RS-232 port
The data logger includes one RJ45 module jack labeled RS-232/CPI. CPI is a proprietary interface
for communications between Campbell Scientific data loggers and Campbell Distributed
Modules (CDMs) such as the GRANITE-Series peripheral devices and smart sensors. It consists of
a physical layer definition and a data protocol. CDM devices are similar to Campbell Scientific
SDM devices in concept, but the CPI bus enables higher data-throughput rates and use of longer
cables. Some GRANITE devices may require more power to operate in general than do SDM
devices. Consult the manuals for GRANITE modules for more information.
NOTE:
CPI/RS-232 port is not isolated.
2. Wiring panel and terminal functions 15
Page 31

CPI port power levels are controlled automatically by the GRANITE 9/10:
l Off: Not used.
l High power: Fully active.
l Low-power standby: Used whenever possible.
l Low-power bus: Sets bus and modules to low power.
When used with a Campbell Scientific RJ45-to-DB9 converter cable, the CPI/RS-232 port can be
used as an RS-232 port. It defaults to 115200 bps (in autobaud mode), 8 data bits, no parity, and 1
stop bit. Use Device Configuration Utility or the SerialOpen() CRBasic instruction to change
these options.
Table 2-6: RS-232/CPI pinout
Pin Number Description
1 RS-232: Transmit (Tx)
2 RS-232: Receive (Rx)
3 100 Ω Res Ground
4 CPI: Data
5 CPI: Data
6 100 Ω Res Ground
7 RS-232 CTS CPI: Sync
8 RS-232 DTR CPI: Sync
9 Not Used
2.4.7 EPI port
The data logger includes two RJ45 module jacks labeled EPI. Ethernet Peripheral Interface (EPI) is
a proprietary interface for communications between Campbell Scientific data loggers and
Campbell Distributed Modules (CDMs) such as the GRANITE-Series peripheral devices and smart
sensors. EPI expands the functionality or channel count of the GRANITE 9/10. This
communications connection satisfies the tight timing requirements imposed on independent
GRANITE Measurement Modules that are working together as part of a measurement and control
system.
The underlying communications of EPI are built using TCP/IP. More specifically, the IEEE 1588
protocol is implemented at the lowest hardware levels for synchronization of device clocks across
the entire network. This accomplishes tighter device synchronization and 100-times the data
2. Wiring panel and terminal functions 16
Page 32

throughput of CPI. The additional power, cost, and complexity are warranted for fast sampling
applications.
2.4.8 CAN port (GRANITE 10 only)
The CAN (Controller Area Network) physical layer is a differential signal that is generally a
twisted pair. The GRANITE 10 has 4 general purpose CAN ports, CAN 2.0 up to 1 Mbps, or
CANFD up to 5 Mbps. They can be accessed either by the screw terminals, or the 15-pin
connector; they are electrically connected. Wire the differential signal (H and L) into the screw
terminals, or use a custom cable and the 15-pin connector.
Table 2-7: CAN bus pinout
Pin Number Description
1 CAN1 H
2 CAN1 L
3 RG1
4 CAN2 H
5 CAN2 L
6 RG2
7 CAN3 H
8 CAN3 L
9 RG3
10 CAN4 H
11 CAN4 L
12 RG4
13 Not used
2. Wiring panel and terminal functions 17
Page 33

Table 2-7: CAN bus pinout
Pin Number Description
14 Not used
15 Not used
2.5 Programmable logic control
The data logger can control instruments and devices such as:
l Controlling cellular modem or GPS receiver to conserve power.
l Triggering a water sampler to collect a sample.
l Triggering a camera to take a picture.
l Activating an audio or visual alarm.
l Moving a head gate to regulate water flows in a canal system.
l Controlling pH dosing and aeration for water quality purposes.
l Controlling a gas analyzer to stop operation when temperature is too low.
l Controlling irrigation scheduling.
Control decisions can be based on time, an event, or a measured condition. Controlled devices
can be physically connected to C, or SW12 terminals. Short Cut has provisions for simple on/off
control. Control modules and relay drivers are available to expand and augment data logger
control capacity.
C terminals are selectable as binary inputs, control outputs, or communication ports. These
l
terminals can be set low (0 VDC) or high (5 VDC) using the PortSet()or WriteIO()
instructions. See the CRBasic Editor help for detailed instruction information and program
examples: https://help.campbellsci.eu/crbasic/granite10/,
https://help.campbellsci.eu/crbasic/granite9/. Other functions include device-driven
interrupts, asynchronous communications and SDI-12 communications. The high voltage
for these terminals defaults to 5 V, but it can be changed to 3.3 V using the
PortPairConfig()instruction. A C terminal configured for digital I/O is normally
used to operate an external relay-driver circuit because the terminal itself has limited drive
capacity.
l SW12 terminals can be set low (0 V) or high (12 V) using the SW12() instruction (see the
CRBasic help for more information).
2. Wiring panel and terminal functions 18
Page 34

The following image illustrates a simple application wherein a C terminal configured for digital
input, and another configured for control output are used to control a device (turn it on or off)
and monitor the state of the device (whether the device is on or off).
In the case of a cell modem, control is based on time. The modem requires 12 VDC power, so
connect its power wire to a data logger SW12 terminal. The following code snip turns the modem
on for the first ten minutes of every hour using the TimeIsBetween() instruction embedded
in an If/Then logic statement:
If TimeIsBetween (0,10,60,Min)Then
SW12(SW12_1,1,1) 'Turn phone on.
Else
SW12(SW12_1,0,1) 'Turn phone off.
EndIf
2. Wiring panel and terminal functions 19
Page 35

3. Setting up the GRANITE 9/10
The basic steps for setting up your data logger to take measurements and store data are included
in the following sections:
3.1 Setting up communications with the data logger 20
3.2 Testing communications with EZSetup 30
3.3 Making the software connection 31
3.4 Programming quickstart using Short Cut 31
3.5 Sending a program to the data logger 35
3.1 Setting up communications with the data logger
The first step in setting up and communicating with your data logger is to configure your
connection. Communications peripherals, data loggers, and software must all be configured for
communications. Additional information is found in your specific peripheral manual, and the
data logger support software manual and help.
The default settings for the data logger allow it to communicate with a computer via USB, RS232, or Ethernet. For other communications methods or more complex applications, some
settings may need adjustment. Settings can be changed through Device Configuration Utility or
through data logger support software.
You can configure your connection using any of the following options. The simplest is via USB.
For detailed instruction, see:
3.1.1 USB or RS-232 communications 21
3.1.2 Virtual Ethernet over USB (RNDIS) 22
3.1.3 Ethernet communications option 23
3.1.4 Wi-Fi communications 26
For other configurations, see the LoggerNet EZSetup Wizard help. Context-specific help is given
in each step of the wizard by clicking the Help button in the bottom right corner of the window.
For complex data logger networks, use Network Planner. For more information on using the
3. Setting up the GRANITE 9/10 20
Page 36

Network Planner, watch a video at https://www.campbellsci.eu/videos/loggernet-software-
network-planner .
3.1.1 USB or RS-232 communications
Setting up a USB or RS-232 connection is a good way to begin communicating with your data
logger. Because these connections do not require configuration (like an IPaddress), you need
only set up the communications between your computer and the data logger. Use the following
instructions or watch the Quickstart videos at https://www.campbellsci.eu/videos .
Follow these steps to get started. These settings can be revisited using the data logger support
software Edit Datalogger Setup option .
1. Using data logger support software, launch the EZSetup Wizard.
l
LoggerNet users, click Setup , click the View menu to ensure you are in the EZ
(Simplified) view, then click Add Datalogger.
l
RTDAQ users, click Add Datalogger .
2. Click Next.
3. Select your data logger from the list, type a name for your data logger (for example, a site
or project name), and click Next.
4. If prompted, select the Direct Connect connection type and click Next.
5. If this is the first time connecting this computer to a GRANITE 9/10 via USB, click Install
USBDriver, select your data logger, click Install, and follow the prompts to install the
USBdrivers.
6. Plug the data logger into your computer using a USBor RS-232 cable and provide 12V
power. If using RS-232, a CPI/RS-232 RJ45 to DB9 cable is required to connect to the
computer.
7. From the COM Port list, select the COMport used for your data logger.
8. USB and RS-232 connections do not typically require a COM Port Communication Delay this allows time for the hardware devices to "wake up" and negotiate a communications
link. Accept the default value of 00 seconds and click Next.
9. The baud rate and PakBus address must match the hardware settings for your data logger.
The default PakBus address is 1. A USB connection does not require a baud rate selection.
RS-232 connections default to 115200 baud.
10. Set an Extra Response Time if you have a difficult or marginal connection and you want the
data logger support software to wait a certain amount of time before returning a
communication failure error.
3. Setting up the GRANITE 9/10 21
Page 37

11. LoggerNet users can set a Max Time On-Line to limit the amount of time the data logger
remains connected. When the data logger is contacted, communication with it is
terminated when this time limit is exceeded. A value of 0 in this field indicates that there is
no time limit for maintaining a connection to the data logger.
12. Click Next.
13. By default, the data logger does not use a security code or a PakBus encryption key.
Therefore, the Security Code can be set to 0 and the PakBus Encryption Key can be left
blank. If either setting has been changed, enter the new code or key. See Data logger
security (p. 101) for more information.
14. Click Next.
15. Review the Setup Summary. If you need to make changes, click Previous to return to a
previous window and change the settings.
Setup is now complete, and the EZSetup Wizard allows to you click Finish or click Next to test
communications, set the data logger clock, and send a program to the data logger. See Testing
communications with EZSetup (p. 30) for more information.
3.1.2 Virtual Ethernet over USB (RNDIS)
GRANITE 9/10 data loggers support RNDIS (virtual Ethernet over USB). This allows the data
logger to communicate via TCP/IP over USB. Watch a video
https://www.campbellsci.eu/videos/ethernet-over-usb or use the following instructions.
1. Supply power to the data logger. If connecting via USB for the first time, you must first
install USB drivers by using Device Configuration Utility (select your data logger, then on
the main page, click Install USBDriver). Alternately, you can install the USBdrivers using EZ
Setup.
NOTE:
Ensure the data logger is connected directly to the computer USB port (not to a
USBhub). We recommended always using the same USB port on your computer.
3. Setting up the GRANITE 9/10 22
Page 38

2. Physically connect your data logger to your computer using a USB cable, then in Device
Configuration Utility select your data logger.
3. Retrieve your IPAddress. On the bottom, left side of the screen, select IP as the
Connection Type, then click the browse button next to the Server Address box. Note the IP
Address
(default is 192.168.66.1). If you have multiple data loggers in your network, more than one
data logger may be returned. Ensure you select the correct data logger by verifying the
data logger serial number or station name (if assigned).
4. A virtual IP address can be used to connect to the data logger using Device Configuration
Utility or other computer software, or to view the data logger internal web page in a
browser. To view the web page, open a browser and enter linktodevice.eu or the IP
address you retrieved in the previous step (for example, 192.168.66.1) into the address bar.
To secure your data logger from others who have access to your network, we recommend that
you set security. For more information, see Data logger security (p. 101).
NOTE:
Ethernet over USB (RNDIS) is considered a direct communications connection. Therefore, it is
a trusted connection and csipasswd does not apply.
3.1.3 Ethernet communications option
The GRANITE 9/10 offers a 10/100 Ethernet connection. Use Device Configuration Utility to enter
the data logger IPAddress, Subnet Mask, and IPGateway address. After this, use the EZSetup
Wizard to set up communications with the data logger. If you already have the data logger
IPinformation, you can skip these steps and go directly to Setting up Ethernet communications
between the data logger and computer (p. 25). Watch a video
https://www.campbellsci.eu/videos/datalogger-ethernet-configuration or use the following
instructions.
3.1.3.1 Configuring data logger Ethernet settings
1. Supply power to the data logger. If connecting via USB for the first time, you must first
install USB drivers by using Device Configuration Utility (select your data logger, then on
the main page, click Install USBDriver). Alternately, you can install the USBdrivers using EZ
Setup.
2. Connect an Ethernet cable to the 10/100 Ethernet port on the data logger. The yellow and
green Ethernet port LEDs display activity approximately one minute after connecting. If you
do not see activity, contact your network administrator. For more information, see Ethernet
LEDs (p. 24).
3. Setting up the GRANITE 9/10 23
Page 39

3. Using data logger support software (LoggerNet or RTDAQ), open Device Configuration
Utility .
4. Select the GRANITE 9/10 data logger from the list
5. Select the port assigned to the data logger from the Communication Port list. If connecting
via Ethernet, select Use IPConnection.
6. By default, this data logger does not use a PakBus encryption key; so, the PakBus
Encryption Key box can be left blank. If this setting has been changed, enter the new code
or key. See Data logger security (p. 101) for more information.
7. Click Connect.
8. On the Deployment tab, click the Ethernet subtab.
9. The Ethernet Power setting allows you to reduce the power consumption of the data
logger. If there is no Ethernet connection, the data logger will turn off its Ethernet interface
for the time specified before turning it back on to check for a connection. Select Always
On, 1 Minute, or Disable.
10. Enter the IP Address, Subnet Mask, and IP Gateway. These values should be provided by
your network administrator. A static IP address is recommended. If you are using DHCP,
note the IP address assigned to the data logger on the right side of the window. When the
IP Address is set to the default, 0.0.0.0, the information displayed on the right side of the
window updates with the information obtained from the DHCP server. Note, however, that
this address is not static and may change. An IP address here of 169.254.###.### means
the data logger was not able to obtain an address from the DHCP server. Contact your
network administrator for help.
11. Apply to save your changes.
3.1.3.2 Ethernet LEDs
When the data logger is powered, and Ethernet Power setting is not disabled, the 10/100 Ethernet
LEDs will show the Ethernet activity:
l Solid Yellow: Valid Ethernet link.
l No Yellow: Invalid Ethernet link.
l Flashing Yellow: Ethernet activity.
l Solid Green: 100 Mbps link.
l No Green: 10 Mbps link.
3. Setting up the GRANITE 9/10 24
Page 40

3.1.3.3 Setting up Ethernet communications between the data logger and computer
Once you have configured the Ethernet settings or obtained the IPinformation for your data
logger, you can set up communications between your computer and the data logger over
Ethernet. Watch a video https://www.campbellsci.eu/videos/ezsetup-ethernet-connection
or use the following instructions.
This procedure only needs to be followed once per data logger. However, these settings can be
revised using the data logger support software Edit Datalogger Setup option .
1. Using data logger support software, open EZSetup.
l
LoggerNet users, select Setup from the Main category on the toolbar, click the
View menu to ensure you are in the EZ(Simplified) view, then click Add Datalogger.
l
RTDAQ users, click Add Datalogger .
2. Click Next.
3. Select the GRANITE 9/10 from the list, enter a name for your station (for example, a site or
project name), Next.
4. Select the IPPort connection type and click Next.
5. Type the data logger IPaddress followed by a colon, then the port number of the data
logger in the Internet IPAddress box (these were set up through the Ethernet
communications option (p. 23)) step. They can be accessed in Device Configuration Utility
on the Ethernet subtab. Leading 0s must be omitted. For example:
l IPv4 addresses are entered as 192.168.1.2:6785
l IPv6 addresses must be enclosed in square brackets. They are entered as
[2001:db8::1234:5678]:6785
6. The PakBus address must match the hardware settings for your data logger. The default
PakBus address is1.
l Set an Extra Response Time if you want the data logger support software to wait a
certain amount of time before returning a communications failure error.
l LoggerNet users can set a Max Time On-Line to limit the amount of time the data
logger remains connected. When the data logger is contacted, communications with
it is terminated when this time limit is exceeded. A value of 0 in this field indicates
that there is no time limit for maintaining a connection to the data logger. Next.
7. By default, the data logger does not use a security code or a PakBus encryption key.
Therefore the Security Code can be set to 0 and the PakBus Encryption Key can be left
3. Setting up the GRANITE 9/10 25
Page 41

blank. If either setting has been changed, enter the new code or key. See Data logger
security (p. 101). Next.
8. Review the Communication Setup Summary. If you need to make changes, click Previous to
return to a previous window and change the settings.
Setup is now complete, and the EZSetup Wizard allows you Finish or select Next. The Next steps
take you through testing communications, setting the data logger clock, and sending a program
to the data logger. See Testing communications with EZSetup (p. 30) for more information.
3.1.4 Wi-Fi communications
By default, the GRANITE 9/10 is configured to host a Wi-Fi network. The LoggerLink mobile app
for iOS and Android can be used to connect with a GRANITE 9/10. Up to eight devices can
connect to a network created by a GRANITE 9/10. The setup follows the same steps shown in this
video: CR6-WIFI Datalogger - Setting Up a Network .
NOTE:
The user is responsible for emissions if changing the antenna type or increasing the gain.
See also Communications specifications (p. 167).
3.1.4.1 Configuring the data logger to host a Wi-Fi network
By default, the GRANITE 9/10 is configured to host a Wi-Fi network. If the settings have changed,
you can follow these instructions to reconfigure it.
1. Ensure your GRANITE 9/10 is connected to an antenna and power.
2. Using Device Configuration Utility, connect to the data logger.
3. On the Deployment tab, click the Wi-Fi sub-tab.
4. In the Configuration list, select the Create a Network option.
5. Optionally, set security on the network to prevent unauthorized access by typing a
password in the Password box (recommended).
6. Apply your changes.
3. Setting up the GRANITE 9/10 26
Page 42

3.1.4.2 Connecting your computer to the data logger over Wi-Fi
1. Open the Wi-Fi network settings on your computer.
2. Select the Wi-Fi-network hosted by the data logger. The default name is GRANITE 9/10
followed by the serial number of the data logger. In the previous image, the Wi-Fi network
is CRxxx.
3. If you set a password, select the Connect Using a Security Key option (instead of a PIN) and
type the password you chose.
4. Connect to this network.
3.1.4.3 Setting up Wi-Fi communications between the data logger and the data logger support software
1.
Using LoggerNet click Add Datalogger to launch the EZSetup Wizard. For LoggerNet
users, you must first click Setup , then View menu to ensure you are in the EZ
(Simplified) view, then click Add Datalogger .
2. Select the IPPort connection type and click Next.
3. In the Internet IPAddress field, type 192.168.67.1. This is the default data logger
IPaddress created when the GRANITE 9/10 creates a network.
4. Click Next.
5. The PakBus address must match the hardware settings for your data logger. The default
PakBus address is 1.
3. Setting up the GRANITE 9/10 27
Page 43

l Set an Extra Response Time if you want the data logger support software to wait a
certain amount of time before returning a communication failure error. This can
usually be left at 00 seconds.
l You can set a Max Time On-Line to limit the amount of time the data logger remains
connected. When the data logger is contacted, communication with it is terminated
when this time limit is exceeded. A value of 0 in this field indicates that there is no
time limit for maintaining a connection to the data logger.
6. Click Next.
7. By default, the data logger does not use a security code or a PakBus encryption key.
Therefore, the Security Code can be left at 0 and the PakBus Encryption Key can be left
blank. If either setting has been changed, enter the new code or key. See Data logger
security (p. 101) for more information.
8. Click Next.
9. Review the Communication Setup Summary. If you need to make changes, click the
Previous button to return to a previous window and change the settings.
Setup is now complete, and the EZSetup Wizard allows you click Finish or click Next to test
communications, set the data logger clock, and send a program to the data logger. See Testing
communications with EZSetup (p. 30) for more information.
3.1.4.4 Configuring data loggers to join a Wi-Fi network
By default, the GRANITE 9/10 is configured to host a Wi-Fi network. To set it up to join a
network:
1. Ensure your GRANITE 9/10 is connected to an antenna and power.
2. Using Device Configuration Utility, connect to the data logger.
3. On the Deployment tab, click the Wi-Fi sub-tab.
4. In the Configuration list, select the Join a Network option.
5.
Next to the Network Name (SSID) box, click Browse to search for and select a Wi-Fi
network. To join a hidden network, manually enter its SSID.
6. If the network is a secured network, you must enter the password in the Password box and
add any additional security in the Enterprise section of the window.
7. Enter the IP Address, Network Mask, and Gateway. These values should be provided by
your network administrator. A static IP address is recommended.
l Alternatively, you can use an IP address assigned to the data logger via DHCP. To do
this, make sure the IP Address is set to 0.0.0.0. Click Apply to save the
3. Setting up the GRANITE 9/10 28
Page 44

configuration changes. Then reconnect. The IP information obtained through DHCP
is updated and displayed in the Status section of the Wi-Fi subtab. Note, however,
that this address is not static and may change. An IP address here of
169.254.###.### means the data logger was not able to obtain an address from the
DHCP server. Contact your network administrator for help.
8. Apply your changes.
9. For each data logger you want to connect to network, you must follow the instruction in
Setting up Wi-Fi communications between the data logger and the data logger support
software (p. 27), using the IP address used to configure that data logger (step 7 in this
instruction).
3.1.4.5 Wi-Fi mode button
Configure the Wi-Fi mode button using Device Configuration Utility software.
Disable button - When this configuration is selected, pressing the button will have no effect on
the operation of the device. The Wi-Fi network will continue to work as configured.
Temporarily enable Wi-Fi - When this configuration is selected, the normally disabled Wi-Fi
network will be activated temporarily when the button is pressed.
Temporarily create a network - When this configuration is selected, the device will temporarily
create a network when the button is pressed. If the Wi-Fi configuration is set to "Join a Network"
then the temporarily created network will be an open network with the name GRANITE 9/10_
[Serial Number]. If the Wi-Fi configuration is set to "Create a Network" then the configured Wi-Fi
network will normally be disabled, and it will be activated temporarily when the button is
pressed.
NOTE:
When the Wi-Fi configuration is set to "Create a Network" the device behaviour is the same
for both button configurations.
3.1.4.6 Wi-Fi LED indicator
When the data logger is powered, the Wi-Fi LED will turn on according to Wi-Fi communication
states:
l Off: Insufficient power, Wi-Fi disabled, or data logger failed to join or create a network
(periodic retries will occur).
l Solid for 2 seconds: Attempting to join or create a network.
l Flashing: Successfully joined or created a network. Flashes with network activity and once
every four seconds.
3. Setting up the GRANITE 9/10 29
Page 45

3.2 Testing communications with EZSetup
1. Using data logger support software EZSetup, access the Communication Test window. This
window is accessed during EZ Setup (see USB or RS-232 communications (p. 21) for more
information). Alternatively, you can double-click a data logger from the station list to open
the EZ Setup Wizard and access the Communication Test step from the left side of the
window.
2. Ensure the data logger is connected to the computer, select Yes to test communications,
then click Next to initiate the test. To troubleshoot an unsuccessful test, see Tips and
troubleshooting (p. 118).
3. With a successful connection, the Datalogger Clock window displays the time for both the
data logger and the computer.
l The Adjusted Server Date/Time displays the current reading of the clock for the
computer or server running your data logger support software. If the Datalogger
Date/Time and Adjusted Server Date/Time don't match, you can set the data logger
clock to the Adjusted Server Date/Time by clicking Set Datalogger Clock.
l Use the Time Zone Offset to specify a positive or negative offset to apply to the
computer time when setting the data logger clock. This offset will allow you to set
3. Setting up the GRANITE 9/10 30
Page 46

the clock for a data logger that needs to be set to a different time zone than the time
zone of the computer (or to accommodate for changes in daylight saving time).
4. Click Next.
5. The data logger ships with a default GettingStarted program. If the data logger does not
have a program, you can choose to send one by clicking Select and Send Program. Click
Next.
6. LoggerNet only - Use the following instructions or watch the Scheduled/Automatic Data
Collection video :
l The Datalogger Table Output Files window displays the data tables available to be
collected from the data logger and the output file name. By default, all data tables
set up in the data logger program will be included for collection. Make note of the
Output File Name and location. Click Next.
l Check Scheduled Collection Enabled to have LoggerNet automatically collect data
from the data logger on the Collection Interval entered. When the Base Date and
Time are in the past, scheduled collection will begin immediately after finishing the
EZSetup wizard. Click Next twice.
7. Click Finish.
3.3 Making the software connection
Once you have configured your hardware connection (see Setting up communications with the
data logger (p. 20), your data logger and computer can communicate. You'll use the Connect
screen to send a program, set the clock, view real-time data, and manually collect data.
l
LoggerNet users, select Main and Connect on the LoggerNet toolbar, select the data
logger from the Stations list, then Connect .
l
RTDAQ users, select the data logger from the list and click Connect .
To disconnect, click Disconnect .
For more information see the Connect Window Tutorial .
3.4 Programming quickstart using Short Cut
Short Cut is an easy way to program the GRANITE data acquisition system to measure a sensor
and assign wiring terminals. Short Cut is available as a download from
https://www.campbellsci.eu/shortcut. It is also included in installations of LoggerNet and
RTDAQ.
3. Setting up the GRANITE 9/10 31
Page 47

The following procedure shows using Short Cut to program the data logger to measure a type-T
thermocouple on a VOLT 100 series.
1. Open Short Cut and click Create New Program.
2. Double-click your GRANITE data logger.
3. In the Available Sensors and Devices box, start typing GRANITE. You can also locate it in
the Devices folder. Double click the GRANITE Measurement Module you are working with.
Type the serial number located on the VOLT 100 series label. Optionally, type a name in the
Module ID String if you want the module to have an ID. This is useful when multiple VOLT
100 series modules are connected to the GRANITE data logger.
4. In the Available Sensors and Devices box, type Type T. You can also locate the
thermocouple in the Sensors > Temperature folder. Double click Type T Thermocouple.
Type the number of type T thermocouples connected to the VOLT 100 series. The
temperature defaults to degree C. This can be changed by clicking the Temperature units
box and selecting one of the other options.
3. Setting up the GRANITE 9/10 32
Page 48

5. Click on the Wiring tab to see how the sensor is to be wired to the VOLT 100 series. Click
OK after wiring the thermocouple.
6. Repeat steps four and five for other sensors you want to measure. Click Next.
3. Setting up the GRANITE 9/10 33
Page 49

7. In Output Setup, type the scan rate, a meaningful table name, and the Data Output
Storage Interval.
8. Select the measurement and its associated output option.
9. Click Finish and save the program. Send the program just created to the GRANITE data
logger if it is connected to the computer.
10. If the thermocouple is connected to the VOLT 100 series, check the output of the
thermocouple in the data logger support software data display in LoggerNet or RTDAQ to
make sure it is making reasonable measurements.
3. Setting up the GRANITE 9/10 34
Page 50

3.5 Sending a program to the data logger
TIP:
It is good practice is to always retrieve data from the data logger before sending a program;
otherwise, data may be lost. See Collecting data (p. 37) for detailed instruction.
Some methods of sending a program give the option to retain data when possible. Regardless of
the program upload tool used, data will be erased when a new program is sent if any change
occurs to one or more data table structures in the following list:
l Data table name(s)
l Data output interval or offset
l Number of fields per record
l Number of bytes per field
l Field type, size, name, or position
l Number of records in table
Use the following instructions or watch the Quickstart part 3 video .
1. Connect the data logger to your computer (see Making the software connection (p. 31) for
more information).
2. Using your data logger support software, click Send New... or Send Program (located in the
Current Program section on the right side of the window).
3. Navigate to the program, select it, and click Open. For example: navigate to
C:\Campbellsci\SCWin and select MyTemperature.CRB.
4. Confirm that you would like to proceed and erase all data tables saved on the data logger.
The program will send and compile.
5. Review the Compile Results window for errors, messages and warnings.
6. Click Details, select the Table Fill Times tab. Ensure that the times shown are expected for
your application. Click OK.
After sending a program, it is a good idea to monitor the Public Table to make sure sensors are
taking good measurements. See Working with data (p. 36) for more information.
3. Setting up the GRANITE 9/10 35
Page 51

4. Working with data
4.1 Default data tables
By default, the data logger includes three tables: Public, Status, and DataTableInfo. Each of these
tables only contains the most recent measurements and information.
l The Public table is configured by the data logger program, and updated at the scan
interval set within the data logger program, It shows measurement and calculation results
as they are made.
l The Status table includes information about the health of the data logger and is updated
only when viewed.
l The DataTableInfo table reports statistics related to data tables. It also only updates when
viewed.
l User-defined data tables update at the schedule set within the program.
For information on collecting your data, see Collecting data (p. 37).
Use these instructions or follow the Connect Window tutorial to monitor real-time data.
LoggerNet users, select the Main category and Connect on the LoggerNet toolbar, select the
data logger from the Stations list, then click Connect . Once connected, select a table to view
using the Table Monitor.
RTDAQ users, click Connect , then Monitor Data. When this tab is first opened for a data
logger, values from the Public table are displayed. To view data from other tables, click Add ,
select a table or field from the list, then drag it into a cell on the Monitor Data tab. Click Start to
begin monitoring data values. The name of this button then changes to Stop, and it can be
clicked to stop monitoring.
4. Working with data 36
Page 52

4.2 Collecting data
The data logger writes to data tables based on intervals and conditions set in the CRBasic
program (see Creating data tables in a program (p. 46) for more information). After the program
has been running for enough time to generate data records, data may be collected by using data
logger support software. During data collection, data is copied to the computer and still remains
on the data logger. Collections may be done manually, or automatically through scheduled
collections set in LoggerNet Setup. Use these instruction or follow the Collect Data Tutorial .
4.2.1 Collecting data using LoggerNet
1.
From the LoggerNet toolbar, click Main and Connect , select the data logger from the
Stations list, then Connect .
2.
Click Collect Now .
3. After the data is collected, the Data Collection Results window displays the tables collected
and where they are stored on the computer.
4. Select a data file, then View File to view the data. See Viewing historic data (p. 39)
4.2.2 Collecting data using RTDAQ
1.
Click Connect on the main RTDAQ window.
2. Go to the Collect Data tab.
4. Working with data 37
Page 53

3. Leave the default Collection Options:
l Collect Mode should be Data Since Last Collection
l File Mode should be Append to End of File.
l File Format should be ASCII Table Data (TOA5)
4. Select the check boxes for tables in the Table Collection list to indicate which tables will be
collected.
5. Click Start Data Collection.
6. After the data is collected, the Data Collection Results window displays the tables collected
and where they are stored on the computer.
7. Select a data file, then View File to view the data. See Viewing historic data (p. 39)
4.2.3 Collecting data using an FTP client
FTP is an efficient method to retrieve large files from the SSD. Data files created by TableFile()
can be up to 2GB.
1. Ethernet communications option (p. 23)
2. Once connected, go to the Deployment > Network Services tab.
3. Select the check box for FTP Enabled.
4. Enter an FTP User Name and FTP Password, and Confirm FTP Password.
5. Write down the data logger IPaddress. Find it on the Deployment > Ethernet tab.
4. Working with data 38
Page 54

6. Use an FTP Client, such as FileZilla, to copy the files to your computer. You will need the
data logger IPaddress, FTP User Name and FTP Password.
7. Use View Pro to view the data, see Viewing historic data (p. 39)
4.3 Viewing historic data
Open data files using View Pro. View Pro contains tools for reviewing data in tabular form as well
as several graphical layouts for visualization. Use these instructions or follow the View Data
Tutorial .
Once the data logger has had enough time to store multiple records, you should collect and
review the data.
1. To view the most recent data, connect the data logger to your computer and collect your
data (see Collecting data (p. 37) for more information).
2. Open View Pro:
l
LoggerNet users click Data then View Pro on the LoggerNet toolbar.
l
RTDAQ users click View Data Files via View Pro .
3.
Click Open , navigate to the directory where you saved your tables (the default directory
is C:\Campbellsci\[your data logger software application]). For example: navigate to the
C:\Campbellsci\LoggerNet folder and select OneMin.dat.
4.4 Data types and formats
Data takes different formats as it is created and manipulated in the data logger, as it is displayed
through software, and as it is retrieved to a computer file. It is important to understand the
different data types, formats and ranges, and where they are used.
Table 4-1: Data types, ranges and resolutions
Data type Description Range Resolution Where used
Float
IEEE four-byte
floating point
four-byte
Long
signed integer
four-byte
Boolean
signed integer
String ASCII String
+/–1.8 *10^–38 to
+/–3.4 *10^38
–2,147,483,648 to
+2,147,483,647
–1, 0
24 bits
(about 7 digits)
1 bit variables, output
True (–1) or
False ( 0)
variables
variables,
sample output
variables,
sample output
4. Working with data 39
Page 55

Table 4-1: Data types, ranges and resolutions
Data type Description Range Resolution Where used
IEEE four-byte
+/–1.8 *10^–38 to
24 bits
internal calculations,
IEEE4
floating point
IEEE eight-byte
+/–3.4 *10^38
+/–2.23 *10^–308 to
(about 7 digits)
53 bits
output
internal calculations,
IEEE8
floating point
Campbell Scientific
FP2
two-byte floating point
+/–1.8 *10^308
–7999 to +7999
(about 16 digits)
13 bits
(about 4 digits)
output
output
NSEC eight-byte time stamp nanoseconds variables, output
4.4.1 Variables
In CRBasic, the declaration of variables (via the DIM or the PUBLIC statement) allows an
optional type descriptor As that specifies the data type. The data types are Float, Long,
Boolean, and String. The default type is Float.
Example variables declared with optional data types
Public PTemp As Float, Batt_volt
Public Counter As Long
Public SiteName As String * 24
As Float specifies the default data type. If no data type is explicitly specified with the As
statement, then Float is assumed. Measurement variables are stored and calculations are
performed internally in IEEE 4 byte floating point with some operations calculated in double
precision. A good rule of thumb is that resolution will be better than 1 in the seventh digit.
As Long specifies the variable as a 32 bit integer. There are two possible reasons a user would
do this: (1) speed, since the GRANITE 9/10 Operating System can do math on integers faster than
with Floats, and (2) resolution, since the Long has 31 bits compared to the 24 bits in the
Float. A good application of the As Long declaration is a counter that is expected to get very
large.
As Boolean specifies the variable as a 4 byte Boolean. Boolean variables are typically used for
flags and to represent conditions or hardware that have only 2 states (e.g., On/Off, High/Low). A
Boolean variable uses the same 32 bit long integer format as a Long but can set to only one of
two values: True, which is represented as –1, and false, which is represented with 0. When a
Float or Long integer is converted to a Boolean, zero is False (0), any non-zero value will set
the Boolean to True (-1). The Boolean data type allows application software to display it as an
On/Off, True/False, Red/Blue, etc.
4. Working with data 40
Page 56

The GRANITE 9/10 uses –1 rather than some other non-zero number because the AND and OR
operators are the same for logical statements and binary bitwise comparisons. The number -1 is
expressed in binary with all bits equal to 1, the number 0 has all bits equal to 0. When –1 is anded
with any other number the result is the other number, ensuring that if the other number is nonzero (true), the result will be non-zero.
As String * sizespecifies the variable as a string of ASCII characters, NULL terminated,
with an optional size specifying the maximum number of characters in the string. A string is
convenient in handling serial sensors, dial strings, text messages, etc. When size is not specified,
a default of 24 characters will be used (23 usable bytes and 1 terminating byte).
As a special case, a string can be declared As String* 1. This allows the efficient storage of a
single character. The string will take up 4 bytes in memory and when stored in a data table, but it
will hold only one character.
Structures (StructureType/EndStructureType) are an advanced technique used to
organize variables and display data in a structured manner. They can significantly shorten
program code, especially for instructions that output an array of values, such as AVW200(),GPS(),
and SDI12Recorder(). For example, a single StructureTypemay be used to organize
and display data for multiple vibrating wire sensors or many SDI-12 sensors without creating
aliases for each sensor. See the CRBasic Editor help for detailed instruction information and
program examples: https://help.campbellsci.eu/crbasic/granite10/,
https://help.campbellsci.eu/crbasic/granite9/.
4.4.2 Constants
The Constdeclaration is used to assign a name that can be used in place of a value in the data
logger CRBasic program. Once a value is assigned to a constant, each time the value is needed in
the program, the programmer can type in the constant name instead of the value itself. The use
of the Constdeclaration can make the program easier to follow, easier to modify, and more
secure against unintended changes. Unlike variables, constants cannot be changed while the
program is running.
Constants must be defined before they are used in the program. Constants can be defined in a
ConstTable/EndConstTableconstruct allowing them to be changed using the keyboard
display, the C command in terminal mode, or via a custom menu.
Constants can also be typed For example:ConstA as Long = 9999, and ConstB as String =
“MyString”. Valid data types for constants are: Long, Float, Double, and String. Other
data types return a compile error.
When the CRBasic program compiles, the compiler determines the type of the constant (Long,
Float, Double, or String) from the expression. This data type is communicated to the
4. Working with data 41
Page 57

software. The software formats or restricts the input based on the data type communicated to it
by the data logger.
You can declare a constant with or without specifying a data type. If a data type is not specified,
the compiler determines the data type from the expression. For example: Const A = 9999 will
use the Long data type. Const A = 9999.0 will use the Floatdata type.
4.4.3 Data storage
Data can be stored in either IEEE4 or FP2 formats. The format is selected in the program
instruction that outputs the data, i.e. minimum, maximum, etc.
While Float (IEEE 4 byte floating point) is used for variables and internal calculations, FP2 is
adequate for most stored data. Campbell Scientific 2 byte floating point (FP2) provides 3 or 4
significant digits of resolution, and requires half the memory space as IEEE4 (2 bytes per value
vs 4).
Table 4-2: Resolution and range limits of FP2 data
Zero Minimum magnitude Maximum Magnitude
0.000 ±0.001 ±7999.
The resolution of FP2 is reduced to 3 significant digits when the first (left most) digit is 8 or
greater. Thus, it may be necessary to use IEEE4 output or an offset to maintain the desired
resolution of a measurement. For example, if water level is to be measured and output to the
nearest 0.01 foot, the level must be less than 80 feet for FP2 output to display the 0.01 foot
increment. If the water level is expected to range from 50 to 90 feet the data could either be
output in IEEE4 or could be offset by 20 feet (transforming the range to 30 to 70 feet).
Table 4-3: FP2 decimal location
Absolute value Decimal location
0 – 7.999 X.XXX
8 – 79.99 XX.XX
80 – 799.9 XXX.X
800 – 7999. XXXX.
NOTE:
String and Boolean variables can be output with the Sample() instruction. Results of
Sampling a Boolean variable will be either -1 or 0 in the collected Data Table. A Boolean
displays in the Numeric Monitor Public and Data Tables as true or false.
4. Working with data 42
Page 58

4.5 About data tables
A data table is essentially a file that resides in data logger memory (for information on data table
storage, see Data memory (p. 48)). The file consists of five or more rows. Each row consists of
columns, or fields. The first four rows constitute the file header. Subsequent rows contain data
records. Data tables may store individual measurements, individual calculated values, or summary
data such as averages, maximums, or minimums.
Typically, files are written to based on time or event. The number of data tables is limited to 250.
You can retrieve data based on a schedule or by manually choosing to collect data using data
logger support software (see Collecting data (p. 37)).
Table 4-4: Example data
TOA5, MyStation, GRANITE 9/10, 1142, GRANITE 9/10.Std.01, CPU:MyTemperature..CRB, 1958,
OneMin
TIMESTAMP RECORD BattV_Avg PTemp_C_Avg Temp_C_Avg
TS RN Volts Deg C Deg C
Avg Avg Avg
2019-03-08 14:24:00 0 13.68 21.84 20.71
2019-03-08 14:25:00 1 13.65 21.84 20.63
2019-03-08 14:26:00 2 13.66 21.84 20.63
2019-03-08 14:27:00 3 13.58 21.85 20.62
2019-03-08 14:28:00 4 13.64 21.85 20.52
2019-03-08 14:29:00 5 13.65 21.85 20.64
4.5.1 Table definitions
Each data table is associated with descriptive information, referred to as a“table definition,” that
becomes part of the file header (first few lines of the file) when data is downloaded to a
computer. Table definitions include the data logger type and OS version, name of the CRBasic
program associated with the data, name of the data table (limited to 20 characters), and
alphanumeric field names.
4.5.1.1 Header rows
The first header row of the data table is the environment line, which consists of eight fields. The
following list describes the fields using the previous table entries as an example:
4. Working with data 43
Page 59

l
TOA5 - Table output format. Changed via LoggerNet Setup Standard View, Data Files
tab.
l MyStation - Station name. Changed via LoggerNet Setup, Device Configuration Utility, or
CRBasic program.
l GRANITE 9/10 - Data logger model.
l 1142 - Data logger serial number.
l GRANITE 9/10.Std.01 - Data logger OS version.
l CPU:MyTemperature.CRB - Data logger program name. Changed by sending a new
program (see Sending a program to the data logger (p. 35) for more information).
l 1958 - Data logger program signature. Changed by revising a program or sending a new
program (see Sending a program to the data logger (p. 35) for more information).
l OneMin - Table name as declared in the running program (see Creating data tables in a
program (p. 46) for more information).
The second header row reports field names. Default field names are a combination of the
variable names (or aliases) from which data is derived, and a three-letter suffix. The suffix is an
abbreviation of the data process that outputs the data to storage. A list of these abbreviations
follows in Data processing abbreviations (p. 45).
If a field is an element of an array, the field name will be followed by a indices within parentheses
that identify the element in the array. For example, a variable named Values, which is declared
as a two-by-two array in the data logger program, will be represented by four field names:
Values(1,1), Values(1,2), Values(2,1), and Values(2,2). There will be one
value in the second header row for each scalar value defined by the table.
If the default field names are not acceptable to the programmer, the FieldNames()
instruction can be used in the CRBasic program to customize the names. TIMESTAMP, RECORD,
BattV_Avg, PTemp_C_Avg, and Temp_C_Avg are the default field names in the previous
Example data (p. 43).
The third header row identifies engineering units for that field. These units are declared at the
beginning of a CRBasic program using the optional Units() declaration. In Short Cut, units are
chosen when sensors or measurements are added. Units are strictly for documentation. The data
logger does not make use of declared units, nor does it check their accuracy.
The fourth header row reports abbreviations of the data process used to produce the field of
data.
4. Working with data 44
Page 60

Table 4-5: Data processing abbreviations
Data processing name Abbreviation
Totalize
Average
Maximum
Minimum
Sample at Max or Min
Standard Deviation
Moment
Sample No abbreviation
Histogram1
Histogram4D
FFT
Covariance
Level Crossing
Tot
Avg
Max
Min
SMM
Std
MMT
Hst
H4D
FFT
Cov
LCr
WindVector
Median
ET
Solar Radiation (from ET)
Time of Max
Time of Min
WVc
Med
ETsz
RSo
TMx
TMn
4.5.1.2 Data records
Subsequent rows are called data records. They include observed data and associated record
keeping. The first field is a time stamp (TS), and the second field is the record number (RN).
The time stamp shown represents the time at the beginning of the scan in which the data is
written. Therefore, in record number 3 in the previous Example data (p. 43), Temp_C_Avg shows
the average of the measurements taken over the minute beginning at 14:26:01 and ending at
14:27:00. As another example, consider rainfall measured every second with a daily total rainfall
recorded in a data table written at midnight. The record time stamped 2019-03-08 00:00:00 will
contain the total rainfall beginning at 2019-03-07 00:00:01 and ending at 2019-03-08 00:00:00.
4. Working with data 45
Page 61

4.6 Creating data tables in a program
Data is stored in tables as directed by the CRBasic program. In Short Cut, data tables are created
in the Output steps (see Programming quickstart using Short Cut (p. 31)). Data tables are created
within the CRBasic data logger program using the DataTable()/EndTable instructions.
They are placed after variable declarations and before the BeginProg instruction. Between
DataTable() and EndTable() are instructions that define what data to store and under
what conditions data is stored. A data table must be called by the CRBasic program for data
processing and storage to occur. Typically, data tables are called by the CallTable()
instruction once each Scan. These instructions include:
DataTable()
'Output Trigger Condition(s)
'Output Processing Instructions
EndTable
See the CRBasic Editor help for detailed instruction information and program examples: https://
help.campbellsci.eu/crbasic/granite10/, https://help.campbellsci.eu/crbasic/granite9/.
Use the DataTable()instruction to define the number of records, or rows, allocated to a data
table. You can set a specific number of records, which is recommended for conditional tables, or
allow your data logger to auto-allocate table size. With auto-allocation, the data logger balances
the memory so the tables “fill up” (newest data starts to overwrite the oldest data) at about the
same time. It is recommended you reserve the use of auto-allocation for data tables that store
data based only on time (tables that store data based on the DataInterval()instruction).
Event or conditional tables are usually set to a fixed number of records. View data table fill times
for your program on the Station Status > Table Fill Times tab (see Checking station status (p. 119)
for more information). An example of the Table Fill Times tab follows. For information on data
table storage see Data memory (p. 48).
4. Working with data 46
Page 62

4. Working with data 47
Page 63

5. Data memory
The data logger includes five types of memory: DDR-SDRAM, SRAM, eMMC NAND Flash, NOR
Flash, and a solid-state hard drive (SSD). A memory card slot is also available for an optional
microSD card. The USB host port supports mass storage devices (MSD) such as USB flash or
thumb drives.
5.1 Data tables
Measurement data is primarily stored in data tables. Data is usually erased from this area when a
program is sent to the data logger.
During data table initialization, memory sectors are assigned to each data table according to the
parameters set in the program. Program options that affect the allocation of memory include the
Sizeparameter of the DataTable()instruction, the Intervaland Unitsparameters of
the DataInterval()instruction. The data logger uses those parameters to assign sectors in a
way that maximizes the life of its memory. See the CRBasic Editor help for detailed instruction
information and program examples: https://help.campbellsci.eu/crbasic/granite10/,
https://help.campbellsci.eu/crbasic/granite9/.
By default, data memory sectors are organized as ring memory. When the ring is full, oldest data
is overwritten by newest data. Using the FillStopstatement sets a program to stop writing to
the data table when it is full, and no more data is stored until the table is reset. To see the total
number of records that can be stored before the oldest data is overwritten, or to reset tables, go
to Station Status > Table Fill Times in your data logger support software.
Data concerning the data logger memory are posted in the Status and DataTableInfo tables. For
additional information on these tables, see Information tables and settings (advanced) (p. 136).
For additional information on data logger memory, visit the Campbell Scientific blog
article,"How to Know when Your Datalogger Memory is Getting Full."
5.2 Memory allocation
Some data storage tables are allocated in the DDR-SDRAM. Due to its volatile nature, all data
storage done on the DDR-SDRAM, must be duplicated on the non-volatile solid-state hard drive.
All tables that are designated as auto-allocate, use this DDR-SDRAM/SSD combination for data
storage. Tables that specify a fixed number of records are allocated from the SRAM.
5. Data memory 48
Page 64

5.3 SRAM
SRAM holds communications buffers, some final-data memory, and, if allocated, the USR drive.
Data tables that specify a fixed number of records are allocated from SRAM. An internal lithium
battery retains this memory when primary power is removed.
The structure of the data logger SRAMmemory is as follows:
l Static Memory: This is memory used by the operating system, regardless of the running
program. This sector is rebuilt at power-up, program recompile, and watchdog events.
Operating Settings and Properties: Also known as the "Keep" memory, this memory is used
l
to store settings such as PakBus address, station name, beacon intervals, and allowed
neighbour lists. This memory also stores dynamic properties such as known routes and
communications timeouts.
l CRBasic Program Operating Memory: This memory stores the currently compiled and
running user program. This sector is rebuilt on power-up, recompile, and watchdog events.
l Final-Data Memory: This memory stores some data. Data tables with a fixed number of
records fill whatever memory remains after all other demands are satisfied. A compile error
occurs if insufficient memory is available for user-allocated data tables. This memory is
given lowest priority in SRAM memory allocation.
l Communication Memory 1: Memory used for construction and temporary storage of
PakBus packets.
l Communication Memory 2: Memory used to store the list of known nodes and routes to
nodes. Routers use more memory than leaf nodes because routes store information about
other routers in the network. You can increase the Communication Allocation field in
Device Configuration Utility to increase this memory allocation.
5. Data memory 49
Page 65

l USR drive: Optionally allocated. Holds image files. Holds a copy of final-data memory
when TableFile() instruction used. Provides memory for FileRead() and
FileWrite() operations. Managed in File Control. Status reported in Status table fields
USRDriveSize and USRDriveFree.
5.3.1 USRdrive
Battery-backed SRAM can be partitioned to create a FAT USR drive, analogous to partitioning a
second drive on a computer hard disk. Certain types of files are stored to USR to reserve limited
CPU drive memory for data logger programs and calibration files. Partitioning also helps prevent
interference from data table SRAM. The USR drive holds any file type within the constraints of the
size of the drive and the limitations on filenames. Files typically stored include image files from
cameras, certain configuration files, files written for FTP retrieval, HTML files for viewing with web
access, and files created with the TableFile() instruction. Measurement data can also be
stored on USR as discrete files by using the TableFile() instruction. Files on USR can be
collected using data logger support software Retrieve command in File Control, or automatically
using the LoggerNet Setup > File Retrieval tab functions.
USR is not affected by program recompilation or formatting of other drives. It will only be reset if
the USR drive is formatted, a new operating system is loaded, or the size of USR is changed. USR
size is set manually by accessing it in the Settings Editor, or programmatically by loading a
CRBasic program with a USR drive size entered in a SetSetting() instruction. Partition the
USR drive to at least 11264 bytes in 512-byte increments. If the value entered is not a multiple of
512 bytes, the size is rounded up. Maximum size of USR 2990080 bytes.
WARNING:
Partitioning or changing the size of the USRdrive will delete stored data from tables. Collect
data first.
NOTE:
Placing an optional USR size setting in the CRBasic program overrides manual changes to
USR size. When USR size is changed manually, the CRBasic program restarts and the
programmed size for USR takes immediate effect.
Files in the USRdrive can be managed through data logger support software File Control or
through the FileManage() instruction in CRBasic program.
5. Data memory 50
Page 66

5.4 DDR-SDRAM
This high-speed memory is volatile (it is not maintained through a power cycle or recompile) and
has several functions. First, the operating system is copied from the eMMC NAND flash memory
into the DDR-SDRAM where code is executed. This memory is also used for compiling the
CRBasic program, storing variables and constants, intermediate data processing and running
instructions. Some data storage tables are allocated in the DDR-SDRAM as well.
5.5 SRAM vs. DDR-SDRAM
Battery-backed SRAM is used for data tables that are not designated as auto-allocated.
Alternatively, because it is very fast and has a large capacity, DDR-SDRAM is well suited to storing
high volumes of data at sustained and higher rates. The combination of buffering in the DDRSDRAM and copying into the SSD is very powerful for high speed data.
However, there is a window of vulnerability with this DDR-SDRAM/SSD combination. Data
resides on volatile media until it can be transferred to the non-volatile hard drive. If a power fault
or some other failure occurs, all data that is in the DDR-SDRAM prior to being written to the SSD,
will be lost. The slower, less data efficient, battery backed SRAM does not suffer from this window
of vulnerability, a power loss does not result in compromised data. The ideal use of these
different memories is to store slower and/or smaller data sets in the battery backed SRAM and
the high speed, high volume data in the DDR-SDRAM and SSD combination.
5.6 SSD - Hard Drive
This non-volatile memory shows up as SSD (Solid State Drive): in the data logger file system. Data
tables that are auto-allocated are stored in this memory. It can also be used for all file related
operations such as TableFile(), and image storage. This drive with its very fast read/write
speeds is the preferred location for storing large data sets.
NOTE:
Even though the SSD has 64 GB (or 128 GB for XD) of available memory, individual file size is
limited to 2 GB.
Use Tablefile()when more than 2 GB of memory is needed for a given data table. See the
CRBasic Editor help for detailed instruction information and program examples:
https://help.campbellsci.eu/crbasic/granite10/, https://help.campbellsci.eu/crbasic/granite9/.
An alternative method to fill the SSD is to use multiple auto-allocated data tables.
5. Data memory 51
Page 67

TIP:
Use File Control to manually delete files from the SSD.
5.7 Flash memory
5.7.1 eMMC NAND flash memory
The data logger operating system is stored in a separate section of flash memory. To update the
operating system, see Updating the operating system (p. 111).
5.7.2 NOR flash memory
Serial flash memory holds the CPU drive, web page, and data logger settings. Because flash
memory has a limited number of write/erase cycles, care must be taken to avoid continuously
writing to files on the CPU drive.
5.7.3 CPU drive
The serial flash memory CPU drive contains data logger programs and other files. This memory is
managed in File Control.
NOTE:
When writing to files under program control, take care to write infrequently to prevent
premature failure of serial flash memory. Internal chip manufacturers specify the flash
technology used in Campbell Scientific CPU: drives at about 100,000 write/erase cycles. While
Campbell Scientific's in-house testing has found the manufacturers' specifications to be very
conservative, it is prudent to note the risk associated with repeated file writes via program
control.
Also, see System specifications (p. 160) for information on data logger memory.
5.8 MicroSD (CRD:drive)
The data logger has a microSD card slot for removable, supplemental memory. The card can be
configured as an extension of the data logger final-data memory or as a repository of discrete
data files. In data file mode, sub folders are not supported.
Use CardOut() to create a new DataTable saved on a card. When storing high-frequency data,
or when storing data to cards greater than 2 GB, TableFile() with Option 64 may be a better
method to write final storage data to a card.
5. Data memory 52
Page 68

See the CRBasic Editor help for detailed instruction information and program examples: https://
help.campbellsci.eu/crbasic/granite10/, https://help.campbellsci.eu/crbasic/granite9/.
The CRD: drive uses microSD cards exclusively. Campbell Scientific recommends and supports
only the use of microSD cards obtained from Campbell Scientific. These cards are industrialgrade and have passed Campbell Scientific hardware testing. Use of consumer grade cards
substantially increases the risk of data loss. Following are listed advantages Campbell Scientific
cards have over less expensive commercial-grade cards:
l Less susceptible to failure and data loss.
l Match the data logger operating temperature range.
l Provide faster read/write times.
l Include vibration and shock resistance.
l Have longer life spans (more read/write cycles).
A "card controller error"indicates that the data logger has failed to communicate with the card. It
is an error caused by the micro-controller built into the microSD card. If the error repeats itself, try
an industrial-grade card.
A maximum of 30 data tables can be created using CardOut() on a microSD card. When a
data table is sent to a microSD card, a data table of the same name in SRAM is used as a buffer
for transferring data to the card. When the card is present, the Status table will show the size of
the table on the card. If the card is removed, the size of the table in SRAM is shown. For more
information, see File system error codes (p. 134).
When a new program is compiled that sends data to the card, the data logger checks if a card is
present and if the card has adequate space for the data tables. If no card is present, or if space is
inadequate, the data logger will warn that the card is not being used. However, the CRBasic
program runs anyway and data is stored to SRAM. When a card is inserted later, data
accumulated in the SRAM table is copied to the card.
A microSD card can also facilitate the use of powerup.ini (see File management via powerup.ini
(p. 114) for more information).
5.8.1 Formatting microSD cards
The data logger accepts microSD cards formatted as FAT16 or FAT32; however, FAT32 is
recommended. Otherwise, some functionality, such as the ability to manage large numbers of
files (>254) is lost. The data logger formats memory cards as FAT32.
Because of the way the FAT32 card format works, you can avoid long data logger compile times
with a freshly formatted card by first formatting the new card on a computer, then copying a
small file to the card from the computer, and then deleting the file with the computer. When the
small file is copied to the card, the computer updates a sector on the card that allows the data
5. Data memory 53
Page 69

logger program to compile faster. This only needs to be done once when the card is formatted. If
you have the data logger update the card sector, the first data logger program compile with the
card can take up to 10 minutes. After that, compile times will be normal.
5.8.2 MicroSDcard precautions
Observe the following precautions when using optional memory cards:
l Before removing a card from the data logger, disable the card by pressing the Eject button
and wait for the green LED. You then have 15 seconds to remove the card before normal
operations resume.
l Do not remove a memory card while the drive is active, or data corruption and damage to
the card may result.
l Prevent data loss by collecting data before sending a program. Sending a program to the
data logger often erases all data.
l See System specifications (p. 160) for information on maximum card size.
5.8.3 Act LED indicator
When the data logger is powered and a microSD card installed, the Act (Activity) LED will turn on
according to card activity or status:
l Red flash: Card read/write activity
l Solid green: Formatted card inserted, powered up. This LEDalso indicates it is OKto
remove card. The Eject button must be pressed before removing a card to allow the data
logger to store buffered data to the card and then power it off.
l Solid orange: Error
l Dim/flashing orange: Card has been removed and has been out long enough that CPU
memory has wrapped and data is being overwritten without being stored to the card.
5.9 USB Host (USB: drive)
USB host provides portable data storage on a mass storage device (MSD). A single USB thumb
drive can be inserted into the drive and will show up as a drive (USB: ) in file related operations.
Measurement data is stored on USB: as discrete files by using the TableFile() instruction.
Files on USB can be collected by inserting the thumb drive into a computer and copying the files.
USB: can be used in the TableFile() instruction and all file access related instructions in
CRBasic. Because of data-reliability concerns in non-industrial rated drives, this drive is not
intended for long term unattended data storage. USB: is not affected by program recompilation
or formatting of other drives.
5. Data memory 54
Page 70

5.9.1 USB Host precautions
Observe the following precautions when using optional MSD:
l Before removing a MSD from the data logger, disable it by pressing the Eject button and
wait for the green LED. You then have 15 seconds to remove the MSD before normal
operations resume.
l Do not remove a MSD while the drive is active, or data corruption and damage to the MSD
may result.
l Prevent data loss by collecting data before sending a program. Sending a program to the
data logger often erases all data.
5.9.2 Act LED indicator
When the data logger is powered and a USB MSD installed, the Act (Activity) LED will turn on
according to MSD activity or status:
l Red flash: Read/write activity
l Solid green: Formatted MSD inserted, powered up. This LEDalso indicates it is OKto
remove the MSD. The Eject button must be pressed before removing the MSD to allow the
data logger to store buffered data to the MSD and then power it off.
l Solid orange: Error
l Dim/flashing orange: MSD has been removed and has been out long enough that CPU
memory has wrapped and data is being overwritten without being stored to the MSD.
5.9.3 Formatting drives 32 GB or larger
Windows does not support creating a FAT32 partition on a 32 GB or greater drive. The workaround is to use a Windows computer to format the drive as NTFS (NT file system). Then use the
data logger to format the drive as FAT32.
5. Data memory 55
Page 71

6. Measurements
6.1 Pulse measurements 56
6.2 Sequential and pipeline processing modes 62
6.1 Pulse measurements
The output signal generated by a pulse sensor is a series of voltage waves. The sensor couples its
output signal to the measured phenomenon by modulating wave frequency. The data logger
detects the state transition as each wave varies between voltage extremes (high-to-low or low-tohigh). Measurements are processed and presented as counts, frequency, or timing data.
The data logger includes terminals that are configurable for pulse input as shown in the
following image.
6. Measurements 56
Page 72

Table 6-1: Pulse input terminals and the input types they can measure
Input Type Pulse Input Terminal
High-frequency
C (all)
Switch-closure C (all)
Using the PulseCount() instruction, C terminals are configurable for pulse input to measure
counts or frequency. Maximum input frequency is dependent on input voltage. If pulse input
voltages exceed the maximum voltage, third-party external-signal conditioners should be
employed. Do not measure voltages greater than 20 V.
NOTE:
Conflicts can occur when a control port pair is used for different instructions (TimerInput(),
PulseCount(), SDI12Recorder(), WaitDigTrig()). For example, if C1 is used for
SDI12Recorder(), C2 cannot be used for TimerInput(), PulseCount(), or
WaitDigTrig().
Terminals configured for pulse input have internal filters that reduce electronic noise, and thus
reduce false counts. Internal AC coupling is used to eliminate DC offset voltages. For tips on
working with pulse measurements, see Pulse measurement tips (p. 61).
Output can be recorded as counts, frequency or a running average of frequency.
For more information, see Pulse measurement specifications (p. 164).
See the CRBasic Editor help for detailed instruction information and program examples: https://
help.campbellsci.eu/crbasic/granite10/, https://help.campbellsci.eu/crbasic/granite9/.
6.1.1 High-frequency measurements
High-frequency (square-wave) signals can be measured on terminals:
l C
Common sensors that output high-frequency pulses include:
l Photo-chopper anemometers
l Flow meters
Measurement output optionss include counts, frequency in hertz, and running average.
6. Measurements 57
Page 73

The data logger has built-in pull-up and pull-down resistors for different pulse measurements
which can be accessed using the PulseCount()instruction. Note that pull down options are
usually used for sensors that source their own power.
6.1.1.1 C terminals
l CRBasic instructions: PulseCount()
See Pulse measurement specifications (p. 164) for more information.
6.1.2 Switch-closure and open-collector measurements
Switch-closure and open-collector (also called current-sinking) signals can be measured on
terminals:
l C
Mechanical switch-closures have a tendency to bounce before solidly closing. Unless filtered,
bounces can cause multiple counts per event. The data logger automatically filters bounce.
Because of the filtering, the maximum switch-closure frequency is less than the maximum highfrequency measurement frequency. Sensors that commonly output a switch-closure or an opencollector signal include:
l Tipping-bucket rain gauges
l Switch-closure anemometers
l Flow meters
The data logger has built-in pull-up and pull-down resistors for different pulse measurements
which can be accessed using the PulseCount() instruction. Note that pull down options are
usually used for sensors that source their own power.
Data output options include counts, frequency (Hz), and running average.
6.1.2.1 C Terminals
An internal 100 kΩ pull-up resistor pulls an input to 5 VDC with the switch open, whereas a
switch-closure to ground pulls the input to 0 V.
CRBasic instruction: PulseCount(). See the CRBasic Editor help for detailed instruction
l
information and program examples: https://help.campbellsci.eu/crbasic/granite10/,
https://help.campbellsci.eu/crbasic/granite9/.
6. Measurements 58
Page 74

Switch Closure on Terminal Open Collector on Terminal
Switch-closure mode is a special case edge-count function that measures dry-contact switchclosures or open collectors. The operating system filters bounces.
l CRBasic instruction: PulseCount().
See also Pulse measurement specifications (p. 164).
6.1.3 Edge timing and edge counting
Edge time, period, and counts can be measured on C terminals. Feedback control using pulsewidth modulation (PWM) is an example of an edge timing application.
6.1.3.1 Single edge timing
A single edge or state transition can be measured on C terminals. Measurements can be
expressed as a time (µs), frequency (Hz) or period (µs).
CRBasic instruction: TimerInput()
6.1.3.2 Multiple edge counting
Time between edges, time from an edge on the previous terminal, and edges that span the scan
interval can be measured on C terminals. Measurements can be expressed as a time (µs),
frequency (Hz) or period (µs).
l CRBasic instruction: TimerInput()
6.1.3.3 Timer input NAN conditions
NAN is the result of a TimerInput() measurement if one of the following occurs:
l Measurement timer expires
l The signal frequency is too fast
6. Measurements 59
Page 75

For more information, see:
l Pulse measurement specifications (p. 164)
l Digital input/output specifications (p. 165)
6.1.4 Quadrature measurements
The Quadrature() instruction is used to measure shaft or rotary encoders. A shaft encoder
outputs a signal to represent the angular position or motion of the shaft. Each encoder will have
two output signals, an A line and a B line. As the shaft rotates the A and B lines will generate
digital pulses that can be read, or counted, by the data logger.
In the following example, channel A leads channel B, therefore the encoder is determined to be
moving in a clockwise direction. If channel B led channel A, it would be determined that the
encoder was moving in a counterclockwise direction.
Terminals C1-C8 can be configured as digital pairs to monitor the two channels of an encoder.
The Quadrature() instruction can return:
l The accumulated number of counts from channel A and channel B. Count will increase if
channel A leads channel B. Count will decrease if channel B leads channel A.
l The net direction.
l Number of counts in the A-leading-B direction.
l Number of counts in the B-leading-A direction.
Counting modes:
l Counting the increase on rising edge of channel A when channel A leads channel B.
Counting the decrease on falling edge of channel A when channel B leads channel A.
l Counting the increase at each rising and falling edge of channel A when channel A leads
channel B. Counting the decrease at each rising and falling edge of channel A when
channel A leads channel B.
6. Measurements 60
Page 76

l Counting the increase at each rising and falling edge of both channels when channel A
leads channel B. Counting the decrease at each rising and falling edge of both channels
when channel B leads channel A.
For more information, see Digital input/output specifications (p. 165).
6.1.5 Pulse measurement tips
The PulseCount()instruction uses dedicated 32-bit counters to accumulate all counts over
the programmed scan interval. The resolution of pulse counters is one count. Counters are read
at the beginning of each scan and then cleared. Counters will overflow if accumulated counts
exceed 4,294,967,296 (232), resulting in erroneous measurements. See the CRBasic Editor help for
detailed instruction information and program examples:
https://help.campbellsci.eu/crbasic/granite10/, https://help.campbellsci.eu/crbasic/granite9/.
Counts are the preferred PulseCount() output option when measuring the number of tips
from a tipping-bucket rain gauge or the number of times a door opens. Many pulse-output
sensors, such as anemometers and flow meters, are calibrated in terms of frequency (Hz) so are
usually measured using the PulseCount()frequency-output option.
Use the LLAC4 module to convert non-TTL-level signals, including low-level ac signals, to TTL
levels for input to C terminals
Conflicts can occur when a control port pair is used for different instructions (TimerInput(),
PulseCount(), SDI12Recorder(), WaitDigTrig()). For example, if C1 is used for
SDI12Recorder(), C2 cannot be used for TimerInput(), PulseCount(), or
WaitDigTrig().
Understanding the signal to be measured and compatible input terminals and CRBasic
instructions is helpful. See Pulse input terminals and the input types they can measure (p. 57).
6.1.5.1 Input filters and signal attenuation
Terminals configured for pulse input have internal filters that reduce electronic noise. The
electronic noise can result in false counts. However, input filters attenuate (reduce) the amplitude
(voltage) of the signal. Attenuation is a function of the frequency of the signal. Higher-frequency
signals are attenuated more. If a signal is attenuated too much, it may not pass the detection
thresholds required by the pulse count circuitry. See Pulse measurement specifications (p. 164)
for more information. The listed pulse measurement specifications account for attenuation due
to input filtering.
6. Measurements 61
Page 77

6.1.5.2 Pulse count resolution
Longer scan intervals result in better resolution. PulseCount() resolution is 1 pulse per scan.
On a 1 second scan, the resolution is 1 pulse per second. The resolution on a 10 second scan
interval is 1 pulse per 10 seconds, which is 0.1 pulses per second. The resolution on a 100
millisecond interval is 10 pulses per second.
For example, if a flow sensor outputs 4.5 pulses per second and you use a 1 second scan, one
scan will have 4 pulses and the next 5 pulses. Scan to scan, the flow number will bounce back
and forth. If you did a 10 second scan (or saved a total to a 10 second table), you would get 45
pulses. The total is 45 pulses for every 10 seconds. An average will correctly show 4.5 pulses per
second. You wouldn't see the reading bounce on the longer time interval.
6.2 Sequential and pipeline processing modes
The data logger has two processing modes: sequential mode and pipeline mode. In sequential
mode, data logger tasks run more or less in sequence. In pipeline mode, data logger tasks run
more or less in parallel. Mode information is included in a message returned by the data logger,
which is displayed by software when the program is sent and compiled, and it is found in the
Status Table, CompileResults field. The CRBasic Editor pre-compiler returns a similar message.
The default mode of operation is pipeline mode. However, when the data logger program is
compiled, the data logger analyzes the program instructions and automatically determines which
mode to use. The data logger can be forced to run in either mode by placing the
PipeLineMode or SequentialMode instruction at the beginning of the program (before
the BeginProg instruction).
For additional information, visit the Campbell Scientific blog article, "Understanding CRBasic
Program Compile Modes: Sequential and Pipeline."
6.2.1 Sequential mode
Sequential mode executes instructions in the sequence in which they are written in the program.
After a measurement is made, the result is converted to a value determined by processing
arguments that are included in the measurement instruction, and then program execution
proceeds to the next instruction. This line-by-line execution allows writing conditional
measurements into the program.
6. Measurements 62
Page 78

NOTE:
The exact time at which measurements are made in sequential mode may vary if other
measurements or processing are made conditionally, if there is heavy communications
activity, or if other interrupts occur (such as accessing a Campbell Scientific memory card).
6.2.2 Pipeline mode
Pipeline mode handles measurement, most digital, and processing tasks separately, and, in many
cases, simultaneously. Measurements are scheduled to execute at exact times and with the
highest priority, resulting in more precise timing of measurements, and usually more efficient
processing and power consumption.
In pipeline mode, it will take less time for the data logger to execute each scan of the program.
However, because processing can lag behind measurements, there could be instances, such as
when turning on a sensor using the SW12() instruction, that the sensor might not be on at the
correct time to make the measurement.
Pipeline scheduling requires that the program be written such that measurements are executed
every scan. Because multiple tasks are taking place at the same time, the sequence in which the
instructions are executed may not be in the order in which they appear in the program.
Therefore, conditional measurements are not allowed in pipeline mode. Because of the precise
execution of measurement instructions, processing in the current scan (including updating public
variables and data storage) is delayed until all measurements are complete. Some processing,
such as transferring variables to control instructions, like PortSet() , may not be completed
until the next scan.
When a condition is true for a task to start, it is put in a queue. Because all tasks are given the
same priority, the task is put at the back of the queue. Every 1 ms (or faster if a new task is
triggered) the task currently running is paused and put at the back of the queue, and the next
task in the queue begins running. In this way, all tasks are given equal processing time by the
data logger.
6.2.3 Slow Sequences
Priority of a slow sequence (SlowSequence)in the data logger will vary, depending upon
whether the data logger is executing its program in pipeline mode or sequential mode. With the
important exception of measurements, when running in pipeline mode all sequences in the
program have the same priority. When running in sequential mode, the main scan has the
highest priority for measurements, followed by background calibration (which is automatically
run in a slow sequence), then the first slow sequence, the second slow sequence, and so on. The
effects of this priority are negligible; however, since, once the tasks begin running, each task is
6. Measurements 63
Page 79

allotted a 10 msec time slice, after which, the next task in the queue runs for 10 msec. The data
logger cycles through the queue until all instructions for all sequences are complete.
6. Measurements 64
Page 80

7. Communications protocols
Data loggers communicate with data logger support software, other Campbell Scientific data
loggers, and other hardware and software using a number of protocols including PakBus,
Modbus, DNP3, CPI, SPI, and TCP/IP. Several industry-specific protocols are also supported.
CANbus and CANFD are natively supported in GRANITE 10 only. See also Communications
specifications (p. 167).
7.1 General serial communications 66
7.2 CPI 72
7.3 EPI 73
7.4 CAN (GRANITE10 only) 73
7.5 Modbus communications 81
7.6 Internet communications 90
7.7 DNP3 communications 93
7.8 Serial peripheral interface (SPI) and I2C 93
7.9 PakBus communications 93
7.10 SDI-12 communications 94
Some communications services, such as satellite networks, can be expensive to send and receive
information. Best practices for reducing expense include:
l Declare Public only those variables that need to be public. Other variables should be
declared as Dim.
l Be conservative with use of string variables and string variable sizes. Make string variables
as big as they need to be and no more. The default size, if not specified, is 24 bytes, but the
minimum is 4 bytes. Declare string variables Public and sample string variables into data
tables only as needed.
l When using GetVariables() / SendVariables() to send values between data
loggers, put the data in an array and use one command to get the multiple values. Using
one command to get 10 values from an array and swath of 10 is more efficient (requires
only 1 transaction) than using 10 commands to get 10 single values (requires 10
transactions). See the CRBasic Editor help for detailed instruction information and program
7. Communications protocols 65
Page 81

examples: https://help.campbellsci.eu/crbasic/granite10/,
https://help.campbellsci.eu/crbasic/granite9/.
l Set the data logger to be a PakBus router only as needed. When the data logger is a router,
and it connects to another router like LoggerNet, it exchanges routing information with
that router and, possibly (depending on your settings), with other routers in the network.
Network Planner set this appropriately when it is used. This is also set through the IsRouter
setting in the Settings Editor. For more information, see the Device Configuration Settings
Editor Information tables and settings (advanced) (p. 136).
l Set PakBus beacons and verify intervals properly. For example, there is no need to verify
routes every five minutes if communications are expected only every 6 hours. Network
Plannerwill set this appropriately when it is used. This is also set through the Beacon and
Verify settings in the Settings Editor. For more information, see the Device Configuration
Settings Editor Beacon() and Verify() settings.
For information on Designing a PakBus network using the Network Planner tool in LoggerNet,
watch the following video:
7.1 General serial communications
The data logger supports two-way serial communications. These communications ports can be
used with smart sensors that deliver measurement data through serial data protocols, or with
devices such as modems, that communicate using serial data protocols.
CRBasic instructions for general serial communications include:
l
SerialOpen()
l
SerialClose()
l
SerialIn()
l
SerialInRecord()
l
SerialInBlock()
l
SerialOut()
l
SerialOutBlock()
See the CRBasic Editor help for detailed instruction information and program examples: https://
help.campbellsci.eu/crbasic/granite10/, https://help.campbellsci.eu/crbasic/granite9/.
7. Communications protocols 66
Page 82

To communicate over a serial port, it is important to be familiar with protocol used by the device
with which you will be communicating. Refer to the manual of the sensor or device to find its
protocol and then select the appropriate options for each CRBasic parameter. See the application
note Interfacing Serial Sensors with Campbell Scientific Dataloggers for more programming
details and examples.
Configure C terminals as serial ports using Device Configuration Utility or by using the
SerialOpen() CRBasic instruction. C terminals are configured in pairs for TTL, LVTTL, RS-232,
and half-duplex RS-422 and RS-485 communications. For full-duplex RS-422 and RS-485, four C
terminals are required.
FIGURE 7-1. Single-ended full-duplex communications
FIGURE 7-2. Differential-pair full-duplex communications
7. Communications protocols 67
Page 83

FIGURE 7-3. Differential-pair half-duplex communications
Table 7-1: Serial communications summary
RS-232 RS-485 RS-422 TTL LVTTL
Communications
Number of
devices
Mode type Full duplex
Reference
Voltage range
Point to
point
Transmitter
1 Receiver
Single wire
Tx ref to
GND
-25V to
25V
TTL-
INV
Single
Multi-drop
1
32
Transmitters
32 Receivers
Full duplex
Half duplex
Differential pair
TxB+ referenced to TxA-
-5V to 5V -6V to 6V
ended
Multi-drop
1
Transmitter
10 Receivers
Full duplex
Half duplex
Point to
point
1 Tx
1 Rx
Full
duplex
0V to
5V
Point to
point
1 Tx
1 Rx
Full
duplex
Single wire
Tx referenced to GND
0V to
3.3V
Point to
point
1 Tx
1 Rx
Full
duplex
0V to
5V
LVTTL-
INV
Point to
point
1 Tx
1 Rx
Full
duplex
0V to
3.3V
Idle voltage
-25V to -
-0.2V to 5V
5V
-0.2V to
5V 3.3V 0V 0V
6V
7.1.1 RS-232
RS-232 supports point to point communications between one master and one slave device. See
FIGURE 7-1 (p. 67). Data bits are sent from master to slave across the transmit (Tx) line with
respect to DC ground. The Tx line idle state is between -25V and -3V, depending on the
transmitter. The transition from negative voltage to above 3V begins data transmission.
7. Communications protocols 68
Page 84

NOTE:
Most RS-232 devices are also compatible communicating with the data logger using TTLinverted.
NOTE:
The data logger uses about -7 V to represent logic 1, and about 5.8 V to represent logic 0.
FIGURE 7-4. RS-232 Tx voltage with respect to GND
7.1.2 RS-485
RS-485 supports communications between 32 masters and 32 slaves. See FIGURE 7-3 (p. 68) and
FIGURE 7-2 (p. 67). It uses a differential voltage between two lines (A & B) to transmit data. When
the voltage of B with respect to A is between -0.2 V and -6 V that is interpreted as logic 0. When
the differential voltage in the range of positive 0.2 V to 6 V that is interpreted as logic 1.
NOTE:
The GRANITE 9/10 uses about -1 V to represent logic 0, and about 1 V to represent logic 1.
7. Communications protocols 69
Page 85

FIGURE 7-5. RS-485 Voltage B with respect to A
7.1.3 RS-422
RS-422 communications protocol is similar to RS-485. The difference is that RS-422 ranges from 6 V to 6 V instead of -5 V to 5 V. Also, RS-422 only supports communications from 1 master to 10
slaves, but not return communications from all 10 slaves. In full-duplex point-to-point (1 master, 1
slave) RS-422 communications, both devices can transmit and receive. Half-duplex can be used
in cases where sensors broadcast data to a receiving data logger. See FIGURE 7-3 (p. 68) and
FIGURE 7-2 (p. 67).
NOTE:
Use the RS-485 communications type when setting up the data logger for RS-422
communications. Most RS-422 sensors will work with RS-485 protocol.
FIGURE 7-6. RS-422 Voltage B with respect to A
7. Communications protocols 70
Page 86

7.1.4 TTL
TTL supports point to point communications between one master and one slave device. See
FIGURE 7-1 (p. 67). Data bits are sent from master to slave with a voltage between transmit (Tx)
and ground. The transmit line idle state is 5 V (logic 1). Data is sent after one clock cycle once the
voltage is pulled low (to 0 V).
FIGURE 7-7. TTL Tx voltage with respect to GND
7.1.5 LVTTL
The only difference between low-voltage TTL (LVTTL) and TTL is that the voltage range is 0 V to
3.3 V. See FIGURE 7-1 (p. 67).
FIGURE 7-8. LVTTL Tx voltage with respect to GND
7.1.6 TTL-Inverted
The only difference between TTL-inverted and TTL is that the logic is inverted. The idle state for
TTL-inverted is 0 V instead of 5 V. See FIGURE 7-1 (p. 67). Data is sent after the voltage is pulled
high (to 5 V).
7. Communications protocols 71
Page 87

NOTE:
Many RS-232 devices are compatible with this communications protocol.
FIGURE 7-9. TTL-inverted Tx voltage with respect to GND
7.1.7 LVTTL-Inverted
The only difference between LVTTL-inverted and TTL-inverted is that the voltage range is 0 V to
3.3 V. See FIGURE 7-1 (p. 67).
FIGURE 7-10. LVTTL-inverted Tx voltage with respect to GND
7.2 CPI
The data logger includes one RJ45 module jack labeled RS-232/CPI. CPI is a proprietary interface
for communications between Campbell Scientific data loggers and Campbell Distributed
Modules (CDMs) such as the GRANITE-Series peripheral devices and smart sensors. It consists of
a physical layer definition and a data protocol. CDM devices are similar to Campbell Scientific
SDM devices in concept, but the CPI bus enables higher data-throughput rates and use of longer
cables. Some GRANITE devices may require more power to operate in general than do SDM
devices. Consult the manuals for GRANITE modules for more information.
7. Communications protocols 72
Page 88

7.3 EPI
The data logger includes two RJ45 module jacks labeled EPI. Ethernet Peripheral Interface (EPI) is
a proprietary interface for communications between Campbell Scientific data loggers and
Campbell Distributed Modules (CDMs) such as the GRANITE-Series peripheral devices and smart
sensors. EPI expands the functionality or channel count of the GRANITE 9/10. This
communications connection satisfies the tight timing requirements imposed on independent
GRANITE Measurement Modules that are working together as part of a measurement and control
system.
The underlying communications of EPI are built using TCP/IP. More specifically, the IEEE 1588
protocol is implemented at the lowest hardware levels for synchronization of device clocks across
the entire network. This accomplishes tighter device synchronization and 100-times the data
throughput of CPI. The additional power, cost, and complexity are warranted for fast sampling
applications.
7.4 CAN (GRANITE10 only)
The CAN (Controller Area Network) physical layer is a differential signal that is generally a
twisted pair. The GRANITE 10 has 4 general purpose CAN ports, CAN 2.0 up to 1 Mbps, or
CANFD up to 5 Mbps. They can be accessed either by the screw terminals, or the 15-pin
connector; they are electrically connected. Wire the differential signal (H and L) into the screw
terminals, or use a custom cable and the 15-pin connector.
Table 7-2: CAN bus pinout
Pin Number Description
1 CAN1 H
2 CAN1 L
3 RG1
4 CAN2 H
7. Communications protocols 73
Page 89

Table 7-2: CAN bus pinout
Pin Number Description
5 CAN2 L
6 RG2
7 CAN3 H
8 CAN3 L
9 RG3
10 CAN4 H
11 CAN4 L
12 RG4
13 Not used
14 Not used
15 Not used
7.4.1 CRBasic instructions
In the GRANITE 10 program, CAN functionality is accessed with the CANPortOpen(),
CANRead(), CANFilterRead(), CANWrite(), CANFDPortOpen(), CANFDRead(),
CANFDFilterRead(), and CANFDWrite()instructions. Both Short Cut and CRBasic
support DBC files for vehicle CAN integration. If a protocol other than DBC is needed, use
CANRead() and CANWrite() to implement it. See the CRBasic Editor help for detailed
instruction information and program examples: https://help.campbellsci.eu/crbasic/granite10/,
https://help.campbellsci.eu/crbasic/granite9/.
7.4.1.1 CANPortOpen() / CANFDPortOpen
These instruction configure the bit rate and other physical parameters of the specified CAN port.
The instruction only needs to be executed once per port, and should located after BeginProg
(), and before Scan().
CANPortOpen()has the following parameters:
CANPort
BitRate
Specifies which of the 4 CAN ports to use.
Specifies the bit rate in Kbps that is used for communication on the
CAN port.
SilentMode
Specifies whether messages can be received without
7. Communications protocols 74
Page 90

acknowledgment.
Termination
Specifies if the CAN-H and CAN-L signal are terminated with a 120
Ohm resistor.
Prescale
(Optional)
Valid ranges are 2 to 4096. The CAN peripheral is driven by a 50MHz
clock. The prescale scales this clock down to the desired time
segment. For example: a 4 in this parameter will use a 12.5MHz
(80ns period) clock as the fundamental bus time segment
(TimeQuanta).
TimeSeg1
TimeSeg2
SJW
(Optional)
(Optional)
(Optional)
The number of TimeQuanta before the sample point.
The number of TimeQuanta after sample point.
(Synchronization Jump Width) – The maximum number of
TimeQuanta that a bit time can be changed by one
resynchronization. Valid values are 1-4.
CANFDPortOpen() has the following parameters:
CANPort
SlowBitRate
Specifies which of the 4 CAN ports to use.
An integer that specifies the bit rate (Kbps) used for
communications on the CANFD port at the slower CANFD bit
rate.
FastBitRate
Bosh/IsoMode
SilentMode
RestrictMode
An integer that specifies the bit rate (Kbps) used for
communications on the CANFD port at the faster CANFD bit
rate.
Specifies which standard to use:Bosch 1.0 CANFD (released
2012), or ISO 11898-1 CANFD (released 2014).
Specifies whether messages can be received without
acknowledgment.
Specifies whether the CANFD port should use the Restricted
Mode outlined in Section 3.3.2 of the CANFD specification. In
this mode, a CANFD node is able to transmit and receive DATA
FRAMES and REMOTE FRAMES and it gives ACKNOWLEDGE to
valid frames, but it does not send ACTIVE ERROR FRAMES or
OVERLOAD FRAMES. In case of an error condition or overload
condition, it does not send dominant bits, instead it waits for the
occurrence of BUS IDLE condition to resynchronize itself to the
CAN communications.
7. Communications protocols 75
Page 91

Termination
Specifies if the CAN-H and CAN-L signal are terminated with a
120 Ohm resistor.
(Optional)
SlowPrescale
FastPrescale
These parameters only apply when
FastBitRate
is 0.
Valid ranges are 2 to 513 in ISO mode and 2 to 4097 in Bosch
mode. The CAN peripheral is driven by a 160MHz clock. The
SlowBitRate
or
prescale scales this clock down to the desired time segment. For
example: a 4 in this parameter will use a 40MHz (25ns period)
clock as the fundamental bus time segment (TimeQuanta).
SlowTimeSeg1
FastTimeSeg1
SlowTimeSeg2
FastTimeSeg2
SlowSJW
FastSJW
The number of TimeQuanta before the sample point. Valid
ranges are 1 to 256 in ISO mode, and 1 to 64 in Bosch Mode.
The number of TimeQuanta after sample point. Valid ranges are
2 to 257 in ISO mode, and 2 to 65 in Bosch Mode.
(Synchronization Jump Width) – The maximum number of
TimeQuanta that a bit time can be changed by one
resynchronization. Valid values are 1 to 120 in ISO mode and 1 to
16 in Bosch Mode..
For convenience, several bitrates have been predefined. The predefined bitrates have a sample
point of 85-88% in accordance with the CAN-in-Automation user group recommendations. The
predefined baud rates use an SJW setting of 1. If a custom sample point, baud rate, or SJW is
needed, set the baud rate parameter to 0 and use the optional parameters (Prescale,
TimeSeg1, TimeSeg2, and SJW) to define the bitrate. When developing a user-specified
baud rate, the following formulas are used:
Total Quanta = (1.0 + timea + timeb)
samplepoint = (100 * (timea + 1.0)) / Total Quanta
baud = (50,000,000 / (Total Quanta * Prescale))
7. Communications protocols 76
Page 92

The CRBasic pre-compiler will do these and report the baud rate and sample point found from
the entered parameters.
7.4.1.2 CANRead() / CANFDRead()
CANRead() and CANFDRead() are used to read a message on a CAN port and write it to a
CRBasic variable. CANPortOpen() must be declared before CANRead() or CANFDRead()is
allowed. CANRead() / CANFDRead() can be used to read a signal as defined in a DBC file. It
can also be used in conjunction with CANWrite() for other CAN protocols. CANRead() and
CANFDRead() have the same parameters.
Syntax:
CANRead ( Dest, Reps, RunOption, RunOptTimeOut, CANPort, CanID, EXTID,
MessageSize, StartBit, ReadSize, ByteOrder, ValType, MULT,Offset)
CANFDRead ( Dest, Reps, RunOption, RunOptTimeOut, CANPort, CanID, EXTID,
MessageSize, StartBit, ReadSize, ByteOrder, ValType, MULT,Offset)
7. Communications protocols 77
Page 93

7.4.1.3 CANFilterRead() / CANFDFilterRead()
CANFilterRead() and CANFDFilterRead() are used to filter messages based on ID and
when the filter is met, read a message on a CAN port and write it to a CRBasic variable.
CANPortOpen() must be declared before CANFilterRead() / CANFDFilterRead() is
allowed.
CANFilterRead() and CANFDFilterRead() have the same parameters.
Syntax:
CANFilterRead ( Dest, Reps, RunOption, RunOptTimeOut, CANPort, CanID, CANIDMask,
CANIDFilter, EXTID, MessageSize, StartBit, ReadSize, ByteOrder, ValType,
MULT,Offset)
CANFDFilterRead ( Dest, Reps, RunOption, RunOptTimeOut, CANPort, CanID,
CANIDMask, CANIDFilter, EXTID, MessageSize, StartBit, ReadSize, ByteOrder,
ValType, MULT,Offset)
7.4.1.4 CANWrite() / CANFDWrite()
CANWrite() and CANFDWrite() are used to write a message from a CRBasic variable to be
transmitted onto a CAN port. CANPortOpen() must be declared before a CANWrite() /
CANFDWrite() is allowed. CANWrite() / CANFDWrite() can be used to write a signal as
defined in a DBC file. CANFDWrite() has an additional BRS (bit rate switch) parameter.
Syntax:
CANWrite ( OutVar, Reps, PartialFrame, CANPort, CANID, EXTID, MessageSize,
StartBit, WriteSize, ByteOrder, ValType)
CANFDWrite( OutVar, Reps, PartialFrame, CANPort, BRS, CANID, EXTID, MessageSize,
StartBit, WriteSize, ByteOrder, ValType)
A few notes on CANRead() / CANFDRead(), CANFilterRead() / CANFDFilterRead
() and CANWrite() / CANFDWrite(): All of the type conversion is handled by the data
logger. CRBasic variables defined as FLOAT will be transmitted as integers using CANWrite()
(assuming ValType is unsigned or signed integer). The GRANITE10 automatically casts the FLOAT
variable to an integer and transmits it in the CAN frame as specified. When a variable is defined
as a FLOAT and then read as an integer from a CAN frame, the GRANITE10 will cast the integer,
apply the multiplier and offset specified, and store it as a FLOAT.
7.4.2 DBC Signal Support
Both Short Cut and the CRBasic Editor have support for DBC signals.
In Short Cut, after adding a CAN Port Configuration, add a DBC Read Signal or a DBC Write
Signal. Then you will be prompted to open a DBC file.
7. Communications protocols 78
Page 94

After opening a DBC file, select the signals in that DBC file. Click OK.
Click OK again and the program will be set up to read that signal into the variable specified. DBC
Write Signal is similar.
7. Communications protocols 79
Page 95

To access the same information from CRBasic, click Select .DBC Values in the CANWrite() and
CANRead() parameter entry box.
Click OK to automatically enter the required parameters.
7. Communications protocols 80
Page 96

7.4.3 J1979 Legislated PIDS Example
See https://www.campbellsci.eu/downloads/granite10-example-can-j1979 for an example
program to query an ECU (electronic control unit) for the legislated PID (Parameter ID) values
once a second. CANPortOpen()configures CAN 1 for this example. CANWrite()is used to
request each PID, and CANRead()is used to interrupt the response and store the requested
values in CRBasic Variables. This example program can be modified to read other manufacturer
specific PIDs.
7.5 Modbus communications
The data logger supports Modbus RTU, Modbus ASCII, and Modbus TCP protocols and can be
programmed as a Modbus master or Modbus slave. These protocols are often used in SCADA
networks. Data loggers can communicate using Modbus on all available communication ports.
The data logger supports RTU and ASCII communication modes on RS-232 and RS-485
connections.
CRBasic Modbus instructions include:
l
ModbusMaster()
l
ModbusSlave()
l
MoveBytes()
See the CRBasic Editor help for detailed instruction information and program examples: https://
help.campbellsci.eu/crbasic/granite10/, https://help.campbellsci.eu/crbasic/granite9/.
For additional information on Modbus, see:
l About Modbus (p. 82)
l Why Modbus Matters: An Introduction
l How to Access Live Measurement Data Using Modbus
l Using Campbell Scientific Dataloggers as Modbus Slave Devices in a SCADA Network
Because Modbus has a set command structure, programming the data logger to get data from
field instruments can be much simpler than from some other serial sensors. Because Modbus uses
a common bus and addresses each node, field instruments are effectively multiplexed to a data
logger without additional hardware.
When doing Modbus communications over RS-232, the data logger, through Device
Configuration Utility or the Settings editor, can be set to keep communication ports open and
awake, but at higher power usage. Set RS-232Power to Always on. Otherwise, the data logger
goes into sleep mode after 40 seconds of communications inactivity. Once asleep, two packets
are required before it will respond. The first packet awakens the data logger; the second packet is
7. Communications protocols 81
Page 97

received as data. This would make a Modbus master fail to poll the data logger, if not using
retries.
More information on Modbus can be found at:
l www.simplyModbus.ca/FAQ.htm
l www.Modbus.org/tech.php
l www.lammertbies.nl/comm/info/modbus.html
7.5.1 About Modbus
Modbus is a communications protocol that enables communications among many devices
connected to the same network. Modbus is often used in supervisory control and data
acquisition (SCADA) systems to connect remote terminal units (RTUs) with a supervisory
computer - allowing them to relay measurement data, device status, control commands, and
configuration information.
The popularity of Modbus has grown because it is freely available and because its messaging
structure is independent of the type of physical interface or connection that is used. Modbus can
coexist with other types of connections on the same physical interface at the same time. You can
operate the protocol over several data links and physical layers.
Modbus is supported by many industrial devices, including those offered by Campbell Scientific.
Not only can intelligent devices such as microcontrollers and programmable logic controllers
(PLCs) communicate using Modbus, but many intelligent sensors have a Modbus interface that
enables them to send their data to host systems. Examples of using Modbus with Campbell
Scientific data loggers include:
l Interfacing data loggers and Modbus-enabled sensors.
l Sending and retrieving data between data loggers and other industrial devices.
l Delivering environmental data to SCADA systems.
l Integrating Modbus data into PakBus networks, or PakBus data into Modbus networks.
7. Communications protocols 82
Page 98

7.5.2 Modbus protocols
There are three standard variants of Modbus protocols:
l Modbus RTU — Modbus RTU is the most common implementation available for Modbus.
Used in serial communications, data is transmitted in a binary format. The RTU format
follows the commands/data with a cyclic redundancy check checksum.
NOTE:
The Modbus RTU protocol standard does not allow a delay between characters of 1.5
times or more the length of time normally required to receive a character. This is
analogous to “pizza” being understood, and “piz za” being gibberish. It's important to
note that communications hardware used for Modbus RTU, such as radios, must
transfer data as entire packets without injecting delays in the middle of Modbus
messages.
l Modbus ASCII — Used in serial communications, data is transmitted as an ASCII
representation of the hexadecimal values. Timing requirements are loosened, and a simpler
longitudinal redundancy check checksum is used.
l Modbus TCP/IP or Modbus TCP — Used for communications over TCP/IP networks. The
TCP/IP format does not require a checksum calculation, as lower layers already provide
7. Communications protocols 83
Page 99

checksum protection. The packet structure is similar to RTU, but uses a different header.
Devices labeled as Modbus gateways will convert from Modbus TCP to Modbus RTU.
Campbell Scientific data loggers support Modbus RTU, Modbus ASCII, and Modbus TCP
protocols. If the connection is over IP, Campbell Scientific data loggers always use Modbus TCP.
Modbus slave functionality over other comports use RTU. When acting as a master, the data
logger can be switched between ASCII and RTU protocols using an option in the
ModbusMaster() instruction. See the CRBasic Editor help for detailed instruction information
and program examples: https://help.campbellsci.eu/crbasic/granite10/,
https://help.campbellsci.eu/crbasic/granite9/.
7.5.3 Understanding Modbus Terminology
Many of the object types are named from using Modbus in driving relays: a single-bit physical
output is called a coil, and a single-bit physical input is called a discrete input or a contact.
Information is stored in the slave device in up to four different tables. Two tables store on/off
discrete values (coils) and two store numerical values (registers). The coils and registers each have
a read-only table and read/write table.
7.5.4 Connecting Modbus devices
data loggers can communicate with Modbus on all available communication ports.
Consideration should be given to proper surge protection of any cabled connection. Between
systems of significantly different ground potential, optical isolation may be appropriate. For
additional information on grounds, see Grounds (p. 11).
The common serial interface used for Modbus RTU connections is RS-485 half-duplex, or twowire RS-485. This connection uses one differential pair for data, and another wire for a signal
ground. When twisted pair cable is used, the signal can travel long distances. Resistors are often
used to reduce noise. Bias resistors are used to give a clean default state on the signal lines. For
long cable lengths, termination resistors, which are usually 120 ohms, are needed to stop data
corruption due to reflections. Signal grounds are terminated to earth ground with resistors to
prevent ground loops, but allow a common mode signal. The resistors to ground are usually
integral to the equipment. The resistive ground is labeled as RG on Campbell Scientific
equipment.
7.5.5 Modbus master-slave protocol
Modbus is a master-slave protocol. The device requesting the information is called the Modbus
master, and the devices supplying information are Modbus slaves. In a standard Modbus
network, there is one master and up to 247 slaves. A master does not have a Modbus address.
However, each Modbus slave on a shared network has a unique address from 1 to 247.
7. Communications protocols 84
Page 100

A single Modbus master device initiates commands (requests for information), sending them to
one or more Modbus slave devices on the same network. Only the Modbus master can initiate
communications. Modbus slaves, in turn, remain silent, communicating only when responding to
requests from the Modbus master.
Every message from the master will begin with the slave address, followed by the function code,
function parameters, and a checksum. The slave will respond with a message beginning with its
address, followed by the function code, data, and a checksum. The amount of data in the packet
will vary, depending on the command sent to the slave. Slave devices only process one command
at a time. So, the master needs to wait for a response, or timeout before sending the next
command.
A broadcast address is specified to allow simultaneous communications with all slaves. Because
response time of slave devices is not specified by the standard, and device manufacturers also
rarely specify a maximum response time, broadcast features are rarely used. When implementing
a system, timeouts in the master will need to be adjusted to account for the observed response
time of the slaves.
Campbell Scientific data loggers can be programmed to be a Modbus master or Modbus slave or even both at the same time! This proves particularly helpful when your data logger is a part of
two wider area networks. In one it uses Modbus to query data (as a master) from localized
sensors or other data sources, and then in the other, it serves that data up (as a slave) to another
Modbus master.
7.5.6 About Modbus programming
Modbus capability of the data logger must be enabled through configuration or programming.
See the CRBasic Editor help for detailed information on program structure, syntax, and each
instruction available to the data logger.
CRBasic Modbus instructions include:
l
ModbusMaster()
l
ModbusSlave()
l
MoveBytes()
See the CRBasic Editor help for detailed instruction information and program examples: https://
help.campbellsci.eu/crbasic/granite10/, https://help.campbellsci.eu/crbasic/granite9/.
7.5.6.1 Endianness
Endianness refers to the sequential order in which bytes are arranged into larger numerical values
when stored in memory. Words may be represented in big-endian or little-endian format,
7. Communications protocols 85
 Loading...
Loading...